Embed Size (px)
DESCRIPTION
Dezplasador de piezas
Citation preview
Universidad Privada Boliviana
Facultad de Ingeniería y Arquitectura
Diseño de desplazador de Piezas
Automatizado
Asignatura : Sistemas hidráulicos y neumáticos
Fecha de entrega : 07 – 03 – 15
Estudiantes : Pablo Estrada Lucana
Grover Nájera Zegarra
Carrera : Ing. Electromecánica
Cochabamba - Bolivia
2015
Tabla de contenido
1. Definición del problema....................................................................................................4
1.1. Funcionamiento............................................................................................................4
2. Objetivo General..................................................................................................................5
3. Objetivos Específicos..........................................................................................................5
4. Diagrama de Fases y funcionamiento de la maquina.............................................5
4.1. Esquema Secuencial...................................................................................................5
4.2. Diagrama de Fases......................................................................................................6
6. Ingeniería de proyecto.......................................................................................................8
6.1. Cálculo de componentes...........................................................................................8
6.1.1. Cálculo de pinzas angulares............................................................................9
6.1.2. Cálculo actuadores giratorios........................................................................10
6.1.3. Cálculo de actuador lineal con guía............................................................11
6.1.4. Cálculo de actuador sin vástago (riel)........................................................12
6.2. Cálculo de caudales..................................................................................................13
6.3. Selección de válvulas...............................................................................................14
6.4. Lista de equipos.........................................................................................................15
7. Circuito neumático y de control...................................................................................15
7.1. Circuito neumático....................................................................................................16
7.2. Circuito de control.....................................................................................................17
8. Planos del equipo...............................................................................................................18
9. Conclusiones.......................................................................................................................18
10. Anexos...............................................................................................................................19
Lista de Figuras
Figura 1: Transferring....................................................................................................4
Figura 2: Esquema secuencial...................................................................................5
Figura 3: Diagrama de fases.......................................................................................6
Figura 4: Pieza que se quiere mover (chapa perfilada)....................................7
Figura 5: Soporte de la máquina...............................................................................8
Figura 6: Gráfica Fuerza de agarre vs distancia entre el principio de la
pinza y la pieza “r”........................................................................................................10
Figura 7: Circuito neumático....................................................................................16
Figura 8: Circuito de control.....................................................................................17
1.Definición del problema
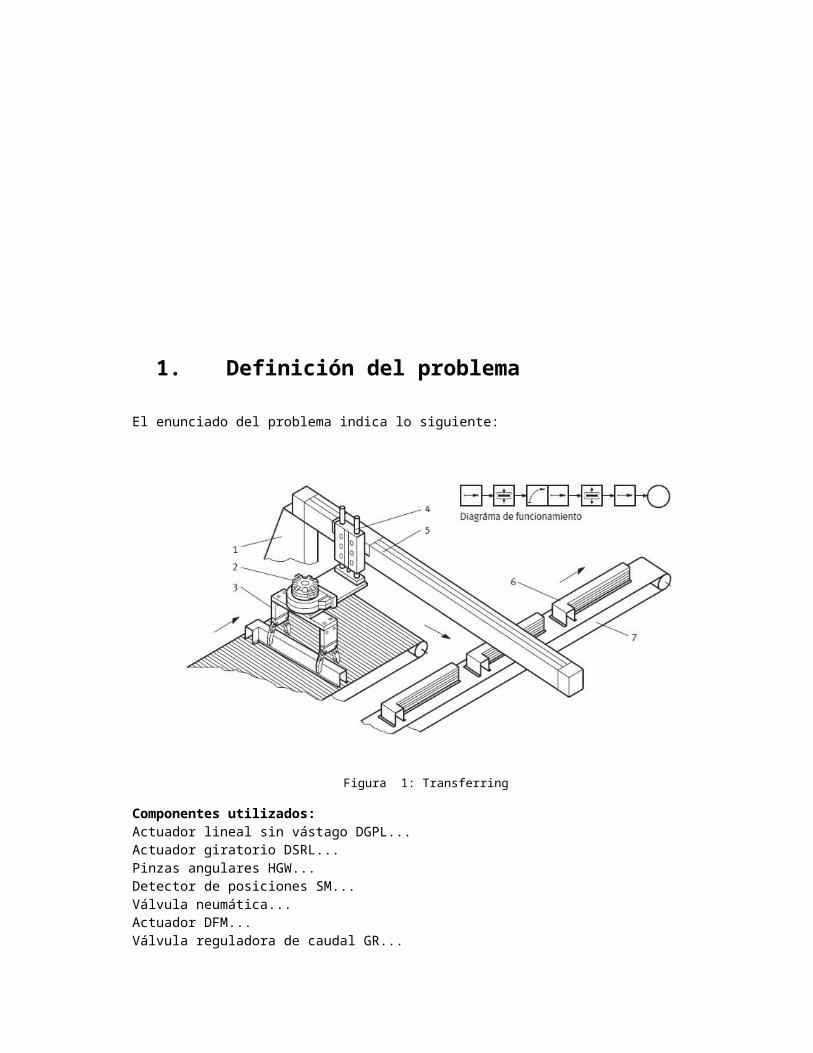
El enunciado del problema indica lo siguiente:
Figura 1: Transferring
Componentes utilizados:Actuador lineal sin vástago DGPL...Actuador giratorio DSRL...Pinzas angulares HGW...Detector de posiciones SM...Válvula neumática...Actuador DFM...Válvula reguladora de caudal GR...Accesorios para el montajeRacores
1.1. Funcionamiento
Se trata de un mecanismo de "transferring", que como su propio nombre indica, consiste en trasladar una pieza de un lado a otro, variando su posición.
En primer lugar, desde la cinta transportadora situada en la izquierda, bajan unas pinzas que entonces agarran la pieza, cuyo fin es formar parte de un radiador. Posteriormente, se rota ésta 90º, y se traslada hasta la otra cinta, gracias a la corredera situada encima de la primera cinta. Se suelta el componente y se vuelve a la situación inicial, para transferir una nueva.
2.Objetivo General
Realizar el diseño del equipo, cumpliendo con los requerimientos del proceso.
3.Objetivos Específicos
- Hacer la selección de actuadores y válvulas mediante cálculos para poder
cumplir la función del equipo.
- Contar con una lista de actuadores.
- Realizar el circuito de control tanto manual como automático.
4.Diagrama de Fases y funcionamiento de la
maquina
4.1. Esquema Secuencial
Debajo de estas líneas, esquema secuencial de la instalación.
Figura 2: Esquema secuencial
1: Baja el dispositivo que alberga las pinzas hasta el nivel de la cinta transportadora, procedente de la línea de producción.
2: Las pinzas sujetan la pieza.
3: Sube la pieza
4: El montaje que las contiene gira 90º.
5: Se desplaza todo el conjunto a través de la corredera situada encima de la línea de producción hasta la segunda cinta transportadora.
6: Las pinzas liberan la pieza.
7: El dispositivo que las contiene sube hasta su posición inicial.
8: Se repite el ciclo.
4.2. Diagrama de Fases
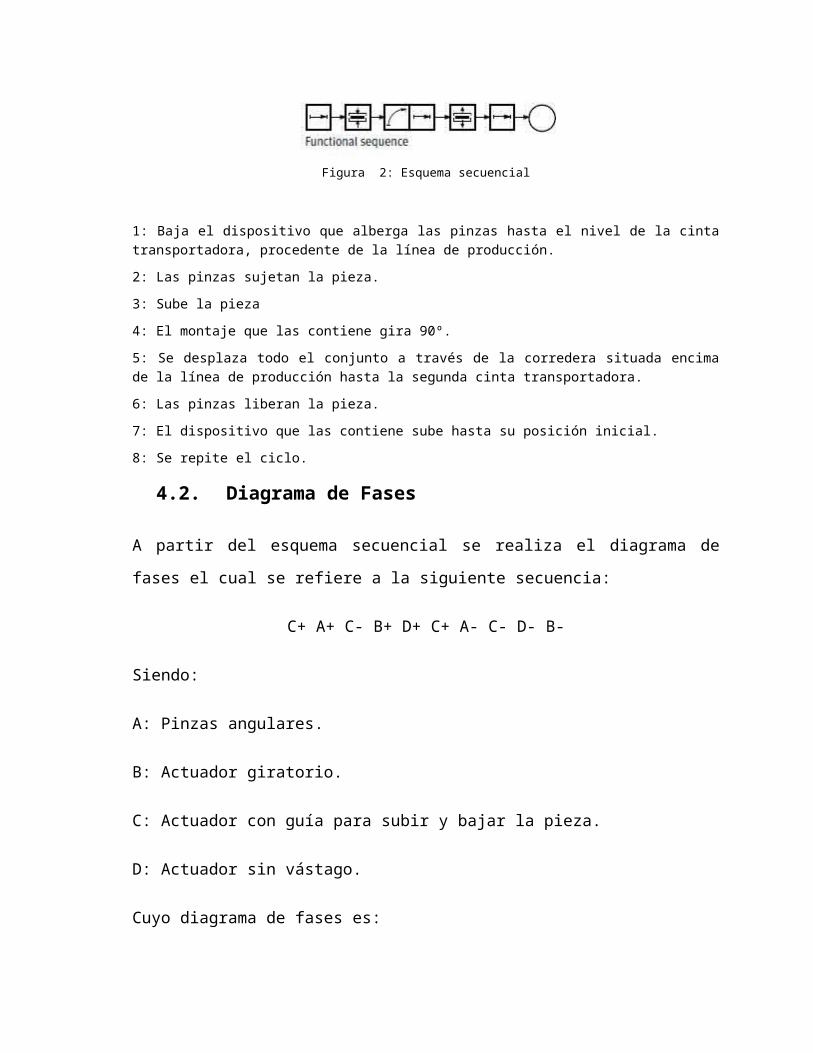
A partir del esquema secuencial se realiza el diagrama de fases el cual
se refiere a la siguiente secuencia:
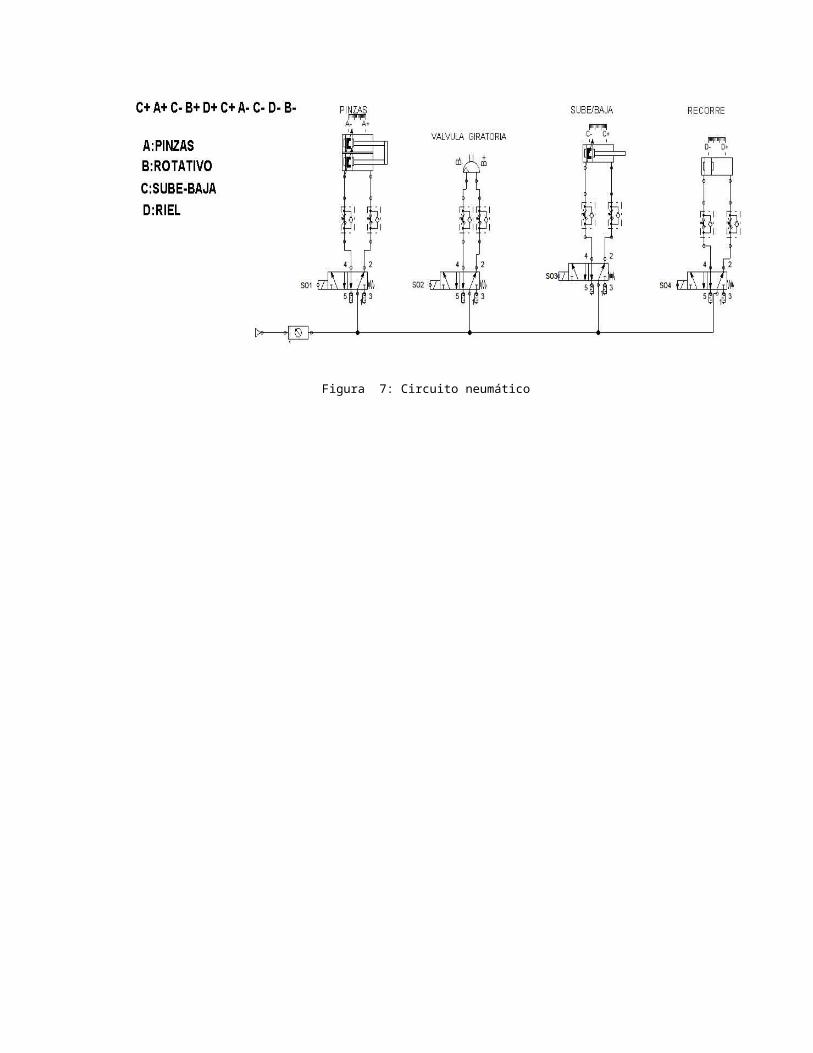
C+ A+ C- B+ D+ C+ A- C- D- B-
Siendo:
A: Pinzas angulares.
B: Actuador giratorio.
C: Actuador con guía para subir y bajar la pieza.
D: Actuador sin vástago.
Cuyo diagrama de fases es:
Figura 3: Diagrama de fases
5.Datos del diseño
En esta parte aclararemos algunas suposiciones que tuvimos en cuenta para realizar el
diseño de la máquina, hay que tomar en cuenta que para una aplicación industrial
estos datos se los debe tomar en el lugar y bajo ciertos requerimientos del consumidor.
Primeramente debemos establecer las dimensiones y el peso de la pieza que se va a
mover.
Figura 4: Pieza que se quiere mover (chapa perfilada)
Según lo investigado y a partir de un trabajo similar las dimensiones de esta pieza son,
400 mm de largo (sección larga), 150 mm (sección corta), 70mm de ancho, 60 mm de
altura, con una saliente de 10 mm y un espesor de 5 mm. Por otro lado suponemos
que el peso de la pieza es de aproximadamente 1 kilogramo.
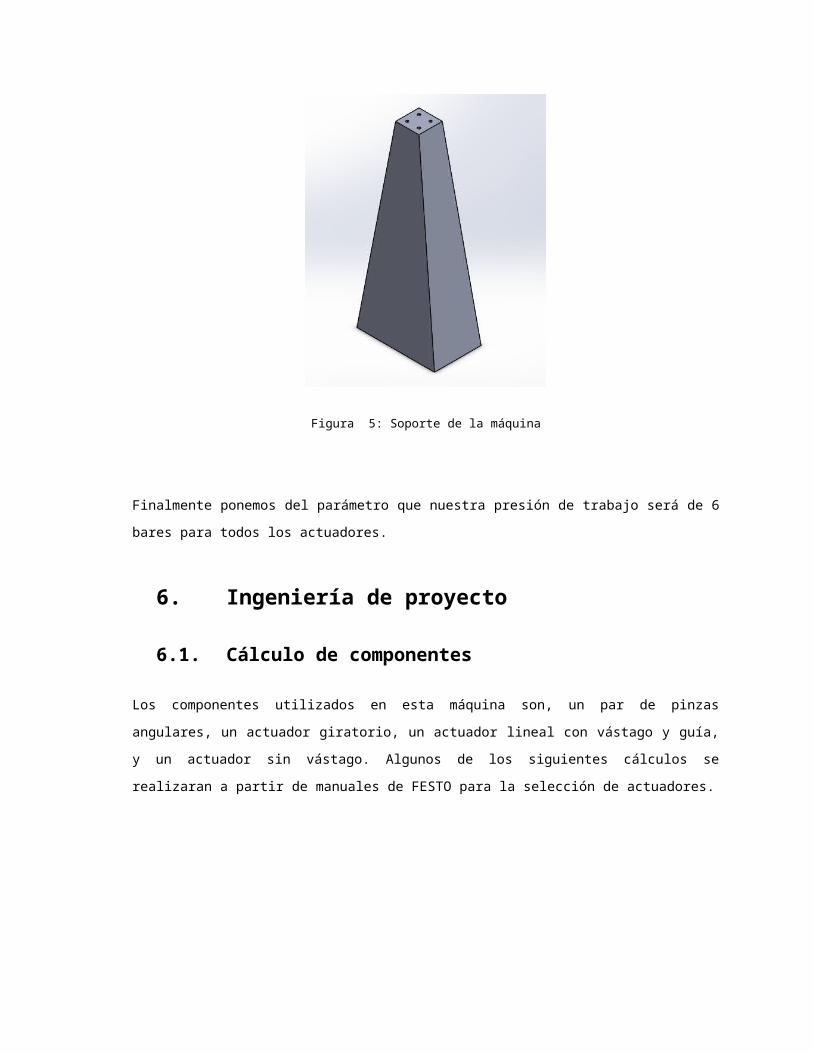
Adicionalmente las dimensiones del soporte se las tomó del mismo lugar que los de la
pieza, y dichas dimensiones son las siguientes: base de 300x500mm tope de
150x150mm, una altura de 1200mm, con 4 taladros de 10mm de diámetro y 30mm de
profundidad con rosca ISO.
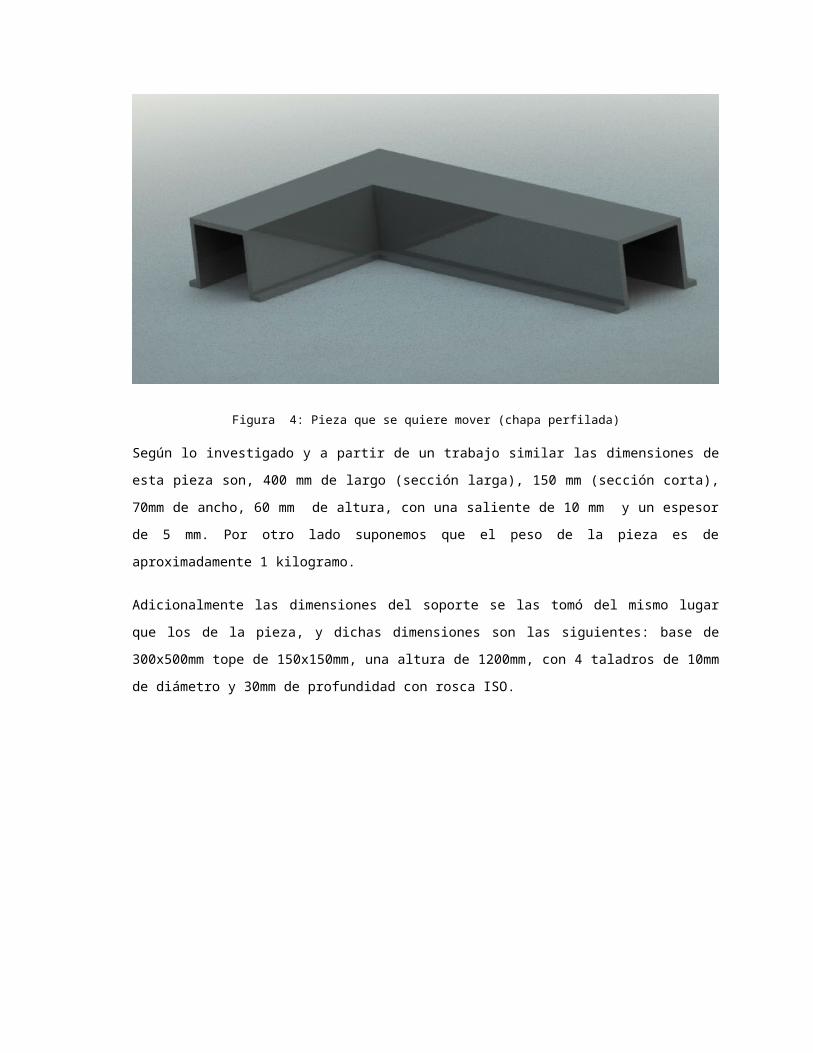
Figura 5: Soporte de la máquina
Finalmente ponemos del parámetro que nuestra presión de trabajo será de 6 bares
para todos los actuadores.
6.Ingeniería de proyecto
6.1. Cálculo de componentes
Los componentes utilizados en esta máquina son, un par de pinzas angulares, un
actuador giratorio, un actuador lineal con vástago y guía, y un actuador sin vástago.
Algunos de los siguientes cálculos se realizaran a partir de manuales de FESTO para la
selección de actuadores.
6.1.1. Cálculo de pinzas angulares
Dónde:
Fg: Fuerza de agarre.
m: masa de la pieza que de desea alzar. (1 Kg)
g: fuerza de gravedad. (10 m/s^2)
a: aceleración del movimiento dinámico. (1 m/s^2)
α: Conicidad del dedo de la pinza. (18º suposición según catálogo)
S: Factor de seguridad (2 según ciertos documentos, un factor de seguridad normal)
Fg=1∗(10+1)
2∗tan (18 º )∗2=7.79[N ]
Entonces con la fuerza de agarre vamos al catálogo de FESTO para pinzas angulares y
existen unas graficas que en función de la presión de trabajo y la fuerza de agarre
podemos determinar la pinza que se va a utilizar y la distancia “r” (FESTO, 2006) entre
el centro de la pieza y el principio de la pinza, y la que más se adecua a la fuerza
requerida es el HGW 16-A (Véase Figura 5)

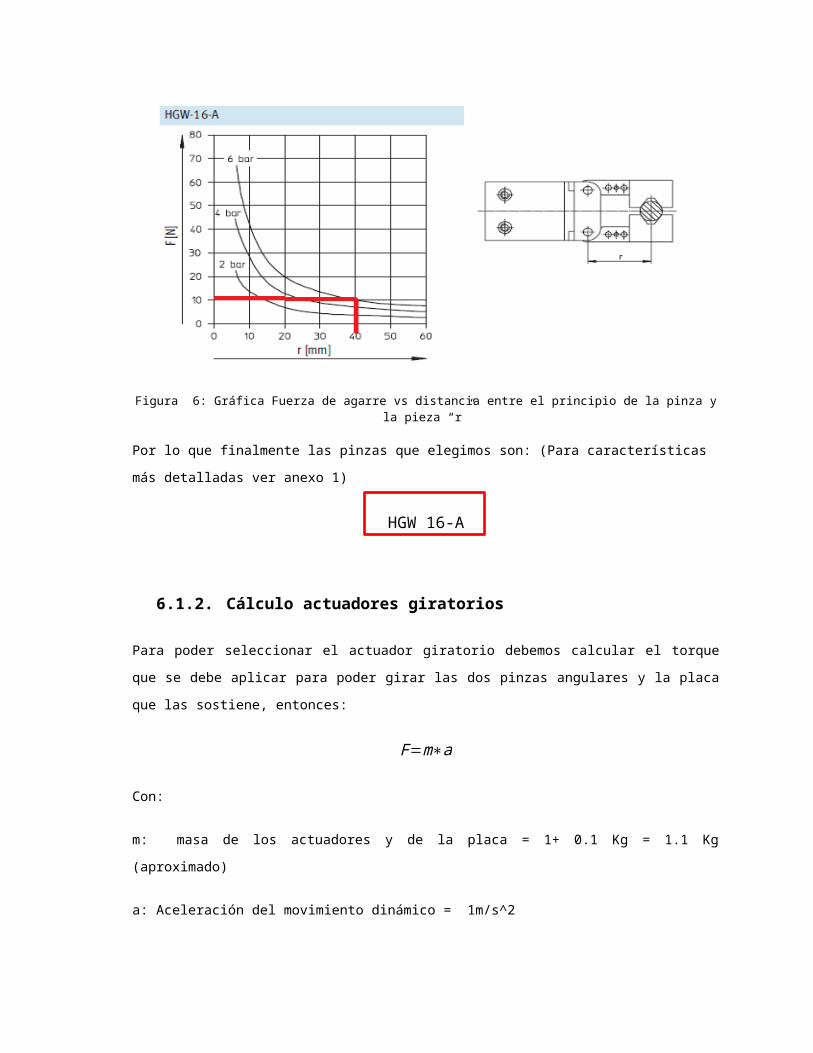
Figura 6: Gráfica Fuerza de agarre vs distancia entre el principio de la pinza y la pieza “r”
Por lo que finalmente las pinzas que elegimos son: (Para características más detalladas
ver anexo 1)
HGW 16-A
6.1.2. Cálculo actuadores giratorios
Para poder seleccionar el actuador giratorio debemos calcular el torque que se debe
aplicar para poder girar las dos pinzas angulares y la placa que las sostiene, entonces:
F=m∗a
Con:
m: masa de los actuadores y de la placa = 1+ 0.1 Kg = 1.1 Kg (aproximado)
a: Aceleración del movimiento dinámico = 1m/s^2
Por otro lado:
T=F∗d
Tomamos una distancia de aproximadamente 15cm (0.15m) del eje del actuador hasta
una pinza angular, por lo tanto:
T=m∗a∗d=1.1∗1∗0.15 = 0.165 [N*m]
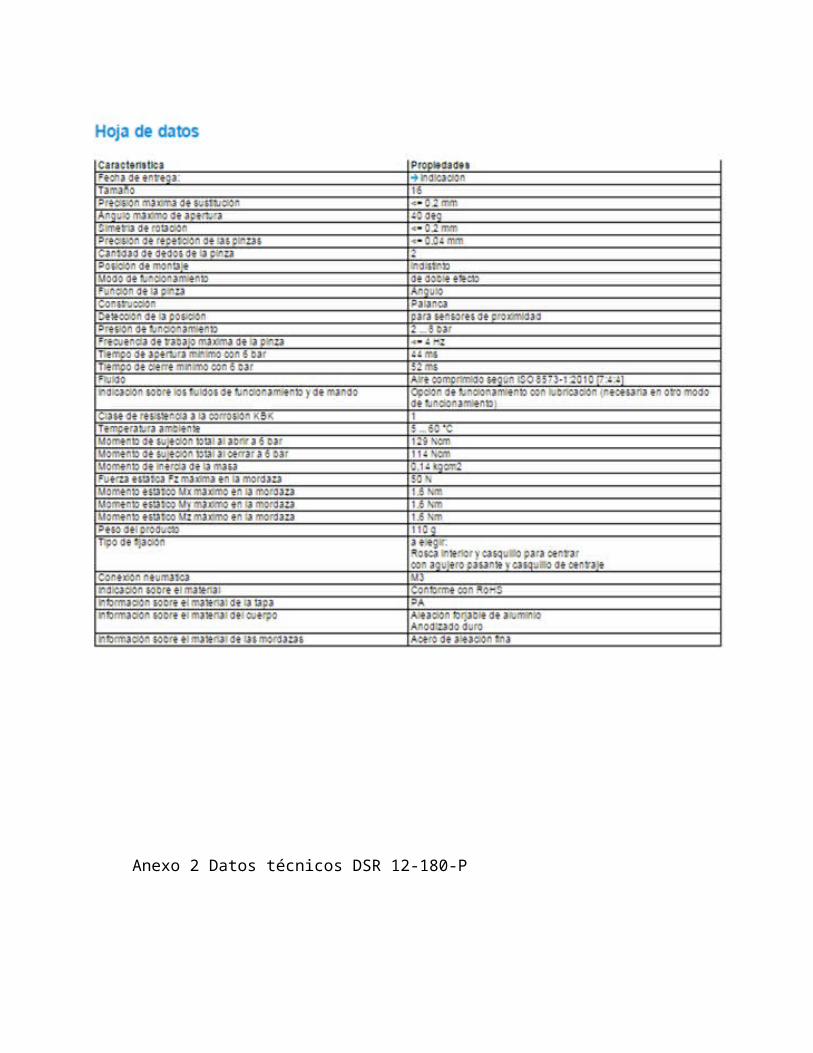
Entonces seleccionamos un actuado DSRL el cual pueda cumplir con el troque calculado,
ya que no hay ningún actuador que genere ese torque tan pequeño, utilizamos el inmediato
superior, lo cual resulta: (Ver datos técnicos anexo 2)
DSR-16-180-P
6.1.3. Cálculo de actuador lineal con guía
El peso que se debe alzar con este actuador es de más o menos 1,6 Kg incluida la pieza
y los actuadores tanto giratorios como las pinzas, por lo que asumimos un peso de 2 Kg
que aproximadamente son 20 N, entonces:
P= FA→ A=F
P
Dónde:
A=π∗D2
4
Entonces:
D=√ 4∗Fπ∗P
Dónde:
F: Fuerza. (20 N)
P: Presión. (6 bar o 600000 N/m)
A: Área del émbolo.
D: Diámetro del émbolo.
D=√ 4∗20π∗600000
=0.0065m=6.5mm
Según catálogo el embolo más pequeño para este tipo de actuadores es de 12 mm y el
vástago tiene un diámetro de vástago de 13.75mm.
Ahora con el factor de pandeo tenemos la longitud de carrera:
Longitud básica = Factor de pandeo * Longitud de carrera
Si tomamos una carrera de 10 mm y un factor de pandeo de 2 (soporte sin guiado
rigido)
Entonces: Longitud básica = 20 mm
Por lo que finalmente elegimos: (Ver anexo 3)
DFM-12-20-B-GF
6.1.4. Cálculo de actuador sin vástago (riel)
La longitud designada para el movimiento va a ser de 1 metro (1000 mm), por otro
lado, el peso aproximado de la mayoría del equipo es de 2.3 Kg por lo que asumimos
un peso de 2.5 Kg, aproximadamente 25 N, entonces:
P= FA→ A=F
P
Dónde:
A=π∗D2
4
Entonces:

D=√ 4∗Fπ∗P
Dónde:
F: Fuerza. (25 N)
P: Presión. (6 bar o 600000 N/m)
A: Área del émbolo.
D: Diámetro del émbolo.
D=√ 4∗25π∗600000
=0.0073m=7.3mm
El diámetro minimo de este tipo de actuadores es de 18mm, por lo tanto el actuador
que vamos a escoger es: (Ver anexo 4)
DGPL 18-1000-PPV-A-B-KF-SH
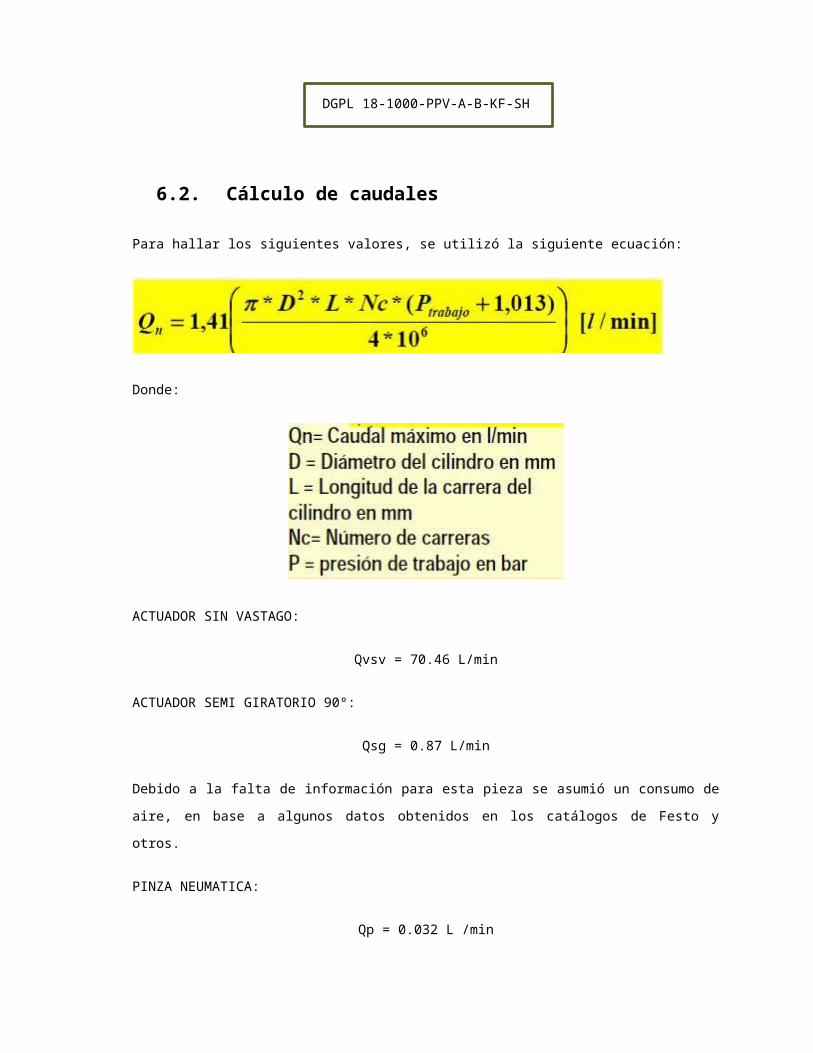
6.2. Cálculo de caudales
Para hallar los siguientes valores, se utilizó la siguiente ecuación:
Donde:
ACTUADOR SIN VASTAGO:
Qvsv = 70.46 L/min
ACTUADOR SEMI GIRATORIO 90º:
Qsg = 0.87 L/min
Debido a la falta de información para esta pieza se asumió un consumo de aire, en
base a algunos datos obtenidos en los catálogos de Festo y otros.
PINZA NEUMATICA:
Qp = 0.032 L /min
ACTUADOR LINEAL CON GUIA:
Qalg = 1.41 L/min
Por lo tanto el consumo total del aire de la maquina será:
Qt = Qvsv + Qsg + Qp + Qalg = 72.77 L/min
6.3. Selección de válvulas
En el circuito neumático utilizamos 4 válvulas 5/2 de control monoestables pilotadas
por solenoide y retorno por muelle, un criterio para la selección de dichas válvulas es la
de conocer el caudal que necesita cada actuador, pero en este caso como los caudales
son demasiado pequeños se elegirá la válvula con el caudal más pequeño para los 4.
Buscando en catálogos de FESTO la válvula que cumple con las especificaciones dadas
es: (Ver anexo 5)
MFH-5-1/8-B
Por otro lado se necesita 4 válvulas de estrangulación antirretono con acople rápido, la
cuales también fueron seleccionadas del catálogo de FESTO: (Ver anexo 6)
GR 1/8-B
6.4. Lista de equipos
En resumen los equipos que se necesitan para poder armar la maquina son las
siguientes:
- 2 pinzas angulares neumáticas HGW 16-A
- Un actuador giratorio DSR-12-180-P
- Un actuador lineal con guía DFM-12-20-B-GF
- Un actuador lineal sin vástago DGPL 18-1000-PPV-A-B-KF-SH
- 4 válvulas MFH-5-1/8-B
- 4 válvulas estranguladoras GR 1/8-B
7.Circuito neumático y de control
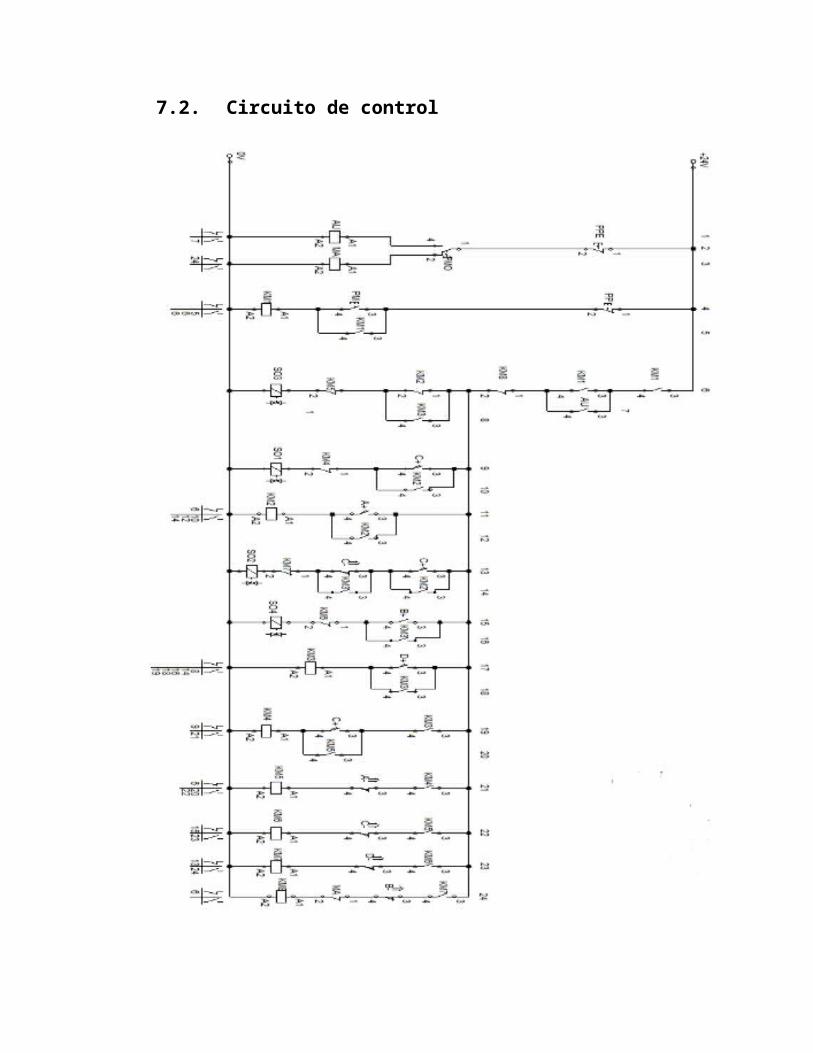
Se realizaron simulaciones utilizando el software FLUIDSIM utilizando electroneumática
para poder cumplir las secuencia de funcionamiento de la máquina, a continuación
mostramos tanto el circuito neumático como el circuito de control, cabe recalcar que el
proceso cuenta con un modo automatico de repetición continuo y uno manual que
realiza el ciclo una sola vez.
7.1. Circuito neumático
Figura 7: Circuito neumático
7.2. Circuito de control
Figura 8: Circuito de control
8.Planos del equipo
Los planos se encuentran en la parte final del documento, las piezas de los actuadores
se consiguieron de la página de FESTO y por otra parte las partes como el soporte y la
pieza que se quiere mover están detallados en los planos así como las piezas de unión
de los actuadores de pinza-giratorio y las de lineal con guía con el giratorio.
9.Conclusiones
En los cálculos realizados para poder llegar al diseño final de la máquina y sus
componentes, si bien se llegaron a dimensionar ciertos componentes, se tomaron
muchos supuestos los cuales hicieron el sobredimensionamiento de los componentes,
generalmente estos supuestos, como se mencionó anteriormente, son datos que se
deben tomar de los requerimiento reales ya con datos exactos para poder hacer un
mejor calculo y selección de elementos, por otro lado, si se revisa bien ciertos cálculos
que se realizaron salen dimensiones muy pequeñas por lo que algunos cálculos de
resistencia de materiales se omitieron por dicha razón y finalmente un motivo por el
cual las dimensiones de los cálculos son muy pequeñas es que la presión de trabajo es
muy grande para ese propósito, pero se decidió utilizar esta presión porque es una
presión común de trabajo.
10. Anexos
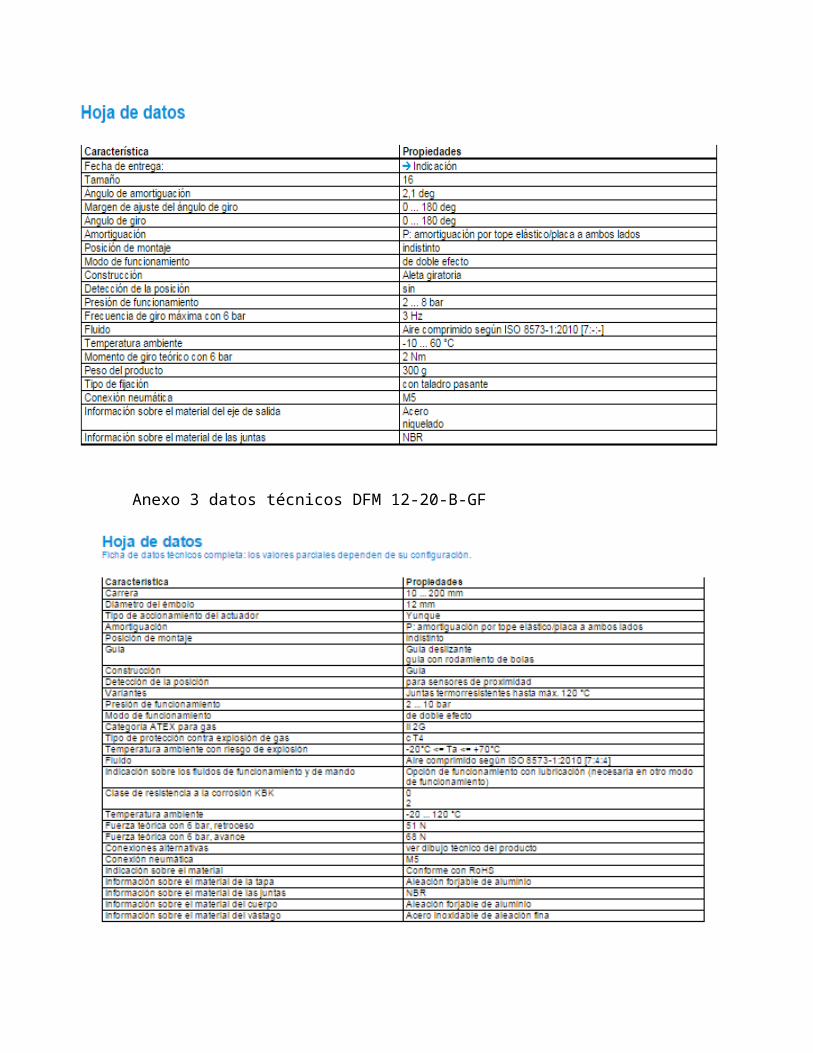
Anexo 1 Datos técnicos HGW 16-A
Anexo 2 Datos técnicos DSR 12-180-P
Anexo 3 datos técnicos DFM 12-20-B-GF
Anexo 4 Datos técnicos DGPL 18-1000-PPV-A-B-KF-SH
Anexo 5 Datos técnicos MFH-5-1/8-B
Anexo 6 Datos técnicos GR 1/8-B
4
PLANO DE DESPIECE: