Embed Size (px)
Citation preview

7/27/2019 Sitnikov Newton
http://slidepdf.com/reader/full/sitnikov-newton 1/5
sitnikovNewton.m: This function is used in the program 'sitnikovMap.m'. The
caller passes a pair of points, one on each side of the Poincare section where
neither are with in the prescribed tolerence which would allow them to be
considered intersections. The function implements a Newton algorithm
which takes this as the 'initial guess' and then converges to a true
intersection between them.
function varargout=sitnikovNewton(t0, initialPoint, t1, finalPoint,tolerence, N,G,Mass)
%--------------------------------------------------------------------------%-------------------------NOTES--------------------------------------------%--------------------------------------------------------------------------
%INPUT:%This function is passed data about two points, one on each side ofthe%line y=0. Both are points on a trajectory, and 'initialPoint' is theone%that occurs first. The time that each point occurs on the trajectoryis%passed into the functio, but only the difference will matter.Finally, an%error tolerence is passed in as well. This tells the function howclose a%result has to be to the x axis so that the Newton method can beconsidered%to have converged. Ofcourse the mu and G being used should bepassed.
%OUTPUT:%The purpose of the function is to find a point on the trajectorybetween%'initialPoint'and 'finalPoint' which is an intersection with the xaxis%up to the allowed tolerence. This is the 'x' that the functionreturns.
%HOW IT WORKS:%As the name suggeste the function implements a Newton method to findthe%point. However since we want a new trajectory that begins at say%'initialPoint' and flows to the x axis, we only want to find the timethat%'initialPoint' must be flowed. The initila guess is t1-t0. Then the%Newton method is only one dimensional. Since it will only need the
%derivative of the flow with respect to time (and not w.r.t. initial

7/27/2019 Sitnikov Newton
http://slidepdf.com/reader/full/sitnikov-newton 2/5
%conditions) all that is required is an evaluation of the vector field(and%there is no need to integrate the variational equations).
%A STICKY POINT:
%Of the two points 'initialPoint' and 'finalPoint' one will be closerto%the x axis than the other (possibly much closer). Then the progrmawill%pick the point that is closer, and use that as the initial guess forthe%crossing. The subtly is that if 'initialPoint' is closer, then wewant%to examine trajectories begining from 'finalPoint' and flowing backto%'initialPoint', as the one we want is one that flows not quite to%'initialPoint' but intersects the x axis. In this case the equationsof
%motion for the CRTBP are not integrated, but instead the equationsfor the%reverse time problem. Then the function must code two differentNewton%methods and decide which one to use.
%--------------------------------------------------------------------------%----------------------Computation-----------------------------------------%--------------------------------------------------------------------------
%Check while will count the number of times the Newton step excuteswithin%the algorithm. If the step excutes more than say 15 times, then the%method is probably not going to converge. In that case we do notwant to%be stuck in the Newton loop forever. If 'checkWhile' gets biggerthan%'breakWhile' then the Newton algorithm should break and return some%default value 'newtonFailed'. If 'newtonFailed' is some value thatthe%Poincare map will never otherwise take on, then it gives a good count
of%how many times the algorithm failed to converge.checkWhile=0;breakWhile=16;maxTime=8; %If the Newton algorithm is not
%converging the integrationtimes
%may get longer and longer.However
%under reasonable circumstancesthe
%initial time guess should besmall
%and get smaller. Then if t_nis

7/27/2019 Sitnikov Newton
http://slidepdf.com/reader/full/sitnikov-newton 3/5
%getting bigger than say 10,the
%algorithm is almostdeffinitiel
%diverging. Check for this aswell.
newtonFailed=zeros(1, 18); %This is the location of the primary%which is a singularity of the%system. There is no way an%itterate of point could ever
reach%this value, so if we count the%number if times it is returned
then%we get a good count of how
many%times the algorithm failed to%converge.
%Regardless of which point we begin at the time it took to get fromone to%the other is the same. This is the initial guess for the time fromstart%to intersection.
deltaT=t1-t0;t_n=t1-t0;
%Determine which point is closest and find the intersection:if abs(finalPoint(9))<=abs(initialPoint(9))
%In this case 'finalPoint' is the initial guess as to the locationof
%the crossing. Then we begin with trajectories starting at%'initialPoint' and use the forward time dynamics with a Newton%algorithm to refine the guess.
%The initial guess for the location of the crossing is:y_n=finalPoint(9);
%The Forward Time Newton Algorithm: excitue untill tolerence ismet
while abs(y_n) >= tolerenceif (checkWhile < breakWhile) & (t_n < maxTime)%Integrate. fx_n=f_n(endTime,2) is f(x_n) in the Newton
Algorithmtspan=[0 t_n];options=odeset('RelTol',1e-12,'AbsTol',1e-12);[t,f_n] =
ode113('nBodyWpar',tspan,initialPoint,options,flag,N,G,Mass);%Compute 'endTinme':
sizef_n=size(f_n);endTime=sizef_n(1,1);
%Compute fx_nfx_n=f_n(endTime,9);
%Compute Dfx_n = [f(x_n)']^-1 =f_n(endTime, 5):Dfx_n = f_n(endTime, 18);
%Compute the Newton Step
t_n = t_n - fx_n/Dfx_n;%This is the new time estimate. Now compute the new crossing
7/27/2019 Sitnikov Newton
http://slidepdf.com/reader/full/sitnikov-newton 4/5
%estimate:%First Integrate over new time;
tspan=[0 t_n];options=odeset('RelTol',1e-12,'AbsTol',1e-12);[t,f_n] =
ode113('nBodyWpar',tspan,initialPoint,options,flag,N,G,Mass);
%Now y_n is the second component of the end of this:%Recompute 'endTinme':sizef_n=size(f_n);endTime=sizef_n(1,1);y_n=f_n(endTime,9);crossing_n=f_n(endTime,:);timeCorrection=t_n;
%increment 'checkWhile'checkWhile=checkWhile+1;else
crossing_n=newtonFailed;y_n = 0.1*tolerence;timeCorrection=0;
endend %end of while: the Forward time Newton Algorithmelse
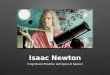
%In this case 'initialPoint' is closer to the x-axis so it is ourfirst
%guess. Then we flow from 'finalPoint' under the backwards time%dynamics, and use a Newton algorithm to refine the guess.
%The initial guess for the location of the crossing is:y_n=initialPoint(9);
%The Backward Time Newton Method: excute untill tollerence is metwhile abs(y_n) >= tolerence
if (checkWhile < breakWhile) & (t_n < maxTime)%Integrate. fx_n=f_n(endTime,2) is f(x_n) in the Newton
Algorithmtspan=[0 t_n];options=odeset('RelTol',1e-12,'AbsTol',1e-12);[t,f_n] =
ode113('BackwardnBodyWpar',tspan,finalPoint,options,flag,N,G,Mass);%Compute 'endTinme':
sizef_n=size(f_n);endTime=sizef_n(1,1);
%Compute fx_nfx_n=f_n(endTime,9);
%Compute Dfx_n = [f(x_n)']^-1 =f_n(endTime, 5):Dfx_n = -f_n(endTime, 18);
%Compute the Newton Stept_n = t_n - fx_n/Dfx_n;
%This is the new time estimate. Now compute the new crossing%estimate:
%First Integrate over new time;tspan=[0 t_n];options=odeset('RelTol',1e-12,'AbsTol',1e-12);[t,f_n] =
ode113('BackwardnBodyWpar',tspan,finalPoint,options,flag,N,G,Mass);%Now y_n is the second component of the end of this:
%Reompute 'endTinme':sizef_n=size(f_n);endTime=sizef_n(1,1);
y_n=f_n(endTime,9);crossing_n=f_n(endTime,:);

7/27/2019 Sitnikov Newton
http://slidepdf.com/reader/full/sitnikov-newton 5/5
timeCorrection=deltaT-t_n;%increment 'checkWhile'checkWhile=checkWhile+1;
elsecrossing_n=newtonFailed;y_n=0.1*tolerence;
timeCorrection=0;end %end of check while if conditionalend %end of while: the backward time Newton Algorithm
end %end of the if then conditional
%Return the point of intersection to the caller
varargout(1,1)={timeCorrection};varargout(1,2)={crossing_n};