Embed Size (px)
Citation preview
UNIVERSIDAD CENTROCCIDENTAL
“LISANDRO ALVARADO”
Decanato de Ciencias y TecnologıaLicenciatura en Ciencias Matematicas
Sobre la Geometrıa Riemanniana y las Ecuaciones de
Einstein
Trabajo Especial de Grado presentado por
Br. Adriana V. Araujo S.
como requisito final
para obtener el tıtulo de Licenciado
en Ciencias Matematicas
Area de Conocimiento: Geometrıa Diferencial - Relatividad General
Tutor: Dr. Rommel Guerrero
Co-Tutor: Dr. Sergio Munoz
Barquisimeto - Venezuela
Marzo 2008

i
Agradecimientos
A Dios porque le dio una segunda oportunidad de vida a mi madre y ası hacer posibleque ella viera esto, y por haberme dado la bendicion y capacidad de desarrollarme como unaprofesional. A mi papa porque dıa a dıa salio a trabajar para darme lo mejor y en consecuenciapoder obtener una mejor educacion.
A mi hermano porque su palabra de apoyo nunca falto, a mis abuelos Antonio y Normaporque fueron lo primero que vi en los momentos mas dificiles y su palabra de alegrıa en losde felicidad. A mis profesores Rommel Guerrero, Rafael Omar Rodriguez y Sergio Munoz porhaberme terminado de formar como lo que soy hoy en dıa, gracias por creer en mi y hacerposible este hermozo trabajo el cual representa el comienzo de mi futuro profesional.
Quiero agradecer a todos y cada uno de mis companeros en especial a Eligio Colmenares,quien desde un principio compartio esas ganas de buscar ser lo mejor en cada meta que nostrazabamos, a Maria Linares porque si bien no estuvimos cerca en toda la carrera al final ycuando mas lo necesite estuviste a mi lado, a Dexy por su sencillez, a Jesus, Jorge y Adrian porser tan incondicionales conmigo, a Jessi porque eres el vivo ejemplo de que hay que conocer aalguien para darse cuenta de quien realmente es, a Elifer y Manuel dos de los que empredieronesta travesıa junto a mi y siempre sin importar nada estuvieron junto a mi... A todos Gracias.
A esta casa de estudios UCLA, porque mi brindo sus aulas y su bienestar para poder ser laprofesional integral que soy hoy en dıa.
ii

iii

Resumen
En este trabajo pretendemos estudiar algunos aspectos de la Geometrıa Riemanniana enrelacion con las Ecuaciones de Einstein. El analisis de los diferentes objetos geometricos in-volucrados en la construccion de estas ecuaciones, permitiran verificar que estas estructurassatisfacen rigurosamente las definiciones respectivas. Entre las estructuras analizadas se en-cuentran el tensor de Curvatura de Riemann y el tensor de Einstein. Por otra parte se apelo alLema de Cartan para mostrar que es posible reinterpretar a la divergencia nula del tensor deEinstein como una propiedad topologica del espacio-tiempo.
Por ultimo se considera la solucion de Schwarzschild a las ecuaciones de Einstein en ausenciade materia; correspodiente a una estructura diferencial estatica y con simetrıa esferica.
iv

v

Indice general
Agradecimientos II
Introduccion VIII
1. Variedades y Campos Tensoriales 1
1.1. Variedades Diferenciales y Variedades Riemannianas . . . . . . . . . . . . . . . . 1
2. Curvatura 7
2.1. Curvatura Gaussiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2. Curvatura Riemanniana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.3. Curvatura Seccional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.4. Las Ecuaciones de Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3. La Identidad de Bianchi 15
3.1. El Lema De Cartan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2. Lema de Cartan y la Identidad de Bianchi . . . . . . . . . . . . . . . . . . . . . 17
3.2.1. La forma d∗G como una representacion de ∇G . . . . . . . . . . . . . . 183.2.2. Reescribiendo ∗G como ⋆(dP ∧R) . . . . . . . . . . . . . . . . . . . . . 203.2.3. Representacion en componentes de dR = 0 . . . . . . . . . . . . . . . . . 22
4. La Solucion de Schwarzschild 25
4.1. Movimiento en el Espacio-tiempo de Schwarzschild . . . . . . . . . . . . . . . . 274.2. Analisis del Potencial Efectivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Conclusiones 31
Apendices 32
A. Formas Diferenciales 33
Bibliografıa 34
vi

vii
Introduccion
En la teorıa de la Relatividad General la geometrıa diferencial juega un rol importante.En este trabajo, se analizan los elementos de geometrıa Riemanniana correspodientes a laformulacion matematica y por ende asociados a las ecuaciones de Einstein.
El Capıtulo 1, esta dedicado a la revision de algunos conceptos sobre las variedades diferen-ciales, en particular variedades Riemannianas; entre los cuales se destacan la metrica Rieman-niana, conexion afın, derivada covariante entre otros. Este estudio permite obtener ideas clarassobre el contexto geometrico que maneja la Relatividad General para fundamentar ası las basesmatematicas de las Ecuaciones de Einstein.
Seguidamente, en el Capıtulo 2 se presenta la nocion de curvatura. Se estudia el trabajorealizado por Gauss sobre superficies, el cual se basa en el determinante de la representacionmatricial de la diferencial de Gauss. Posteriormente se introduce la curvatura Seccional, conel fin de extender la nocion de curvatura Gaussiana a dimesiones mayores de las usuales. Enesta parte del Capıtulo, se resalta el hecho de que la curvatura de Riemann puede entendersecomo un multiplo de la curvatuta Gaussiana [1]. Luego, se estudia el tensor de Riemann y suspropiedades con el fin de definir el tensor de Einstein y verificar la divergencia nula de este atraves de la identidad de Bianchi.
En el Capıtulo 3, se presenta un estudio enfocado en la identidad de Bianchi. Veremoscomo algunos conceptos del Analisis Matematico (dominios regulares, variedades con borde,entre otros) forman la base teorica para definir el lema de Cartan. Son muchos los escenariosde la fısica donde este lema pone de manifiesto propiedades topologicas del espacio-tiempo,en particular en el contexto de la gravitacion este lema permite reinterpretar la divergencianula del tensor de Einstein como una consecuencia del principio topologico conocido como “Elprincipio de la frontera de la frontera” de un dominio regular Ω.
Finalmente, en el Capıtulo 4 consideraremos una de las soluciones a las ecuaciones de Eins-tein en el vacıo conocida como la solucion de Schwarzschild que corresponde a un espacio-tiempocon simetrıa esferica y con dos singulariedades muy particulares. Partiendo de la estructurametrica se obtiene la lagrangiana para una partıcula de masa unitaria con el fin de obtener elpotencial efectivo correspodiente y asi indagar en la naturaleza fısica de las singulariedades.
viii

ix
Capıtulo 1
Variedades y Campos Tensoriales
En este capitulo se mostraran los elementos de la teorıa de la Geometrıa Riemanniana queconstituyen las bases matematicas del desarrollo de la teorıa de gravitacion de Einstein.
1.1. Variedades Diferenciales y Variedades Riemannia-
nas
Definicion 1.1 (Variedad Diferencial). Una variedad de dimension n es un conjunto M yuna familia de aplicaciones inyectivas Xα : Uα ⊂ R
n → M Uα de Rn en M tal que:
1.⋃
α Xα(Uα) = M .
2. Para cualquier par α y β con Xα(Uα)∩Xβ(Uβ) =W6= ∅, los conjuntos X−1α (W ), X−1
β (W )
son abiertos en Rn; y las aplicaciones X−1
β Xα son diferenciables.
Definicion 1.2 (Tensor). Un tensor del tipo (k,l) es una aplicacion multilineal:
T : T ∗p M × ... × T ∗
p M × TpM × ... × TpM → R
De k vectores duales y l vectores ordinarios, claramente la aplicacion produce un numero oescalar.
Ahora si ei corresponde a una base del espacio tangente TpM y ej una base del espacioT ∗
p M , entonces
T(ej1 ej2, ..., ejk , ei1 , ei2 , ..., eil) = T j1,...,jki1,...,il (1.1)
Ahora bien, teniendo en cuenta de que manera se expresan las componentes de un tensor deltipo (k, l), tenemos las siguintes dos propiedades de un tensor.
Tensor simetrico T(i1,i2) ≡ 12(Ti1i2 + Ti2i1)
Tensor antisimetrico T[i1,i2] ≡ 12(Ti1i2 − Ti2i1)
1
donde T j1,...,jki1,...,il son las componentes del tensor T.
Definicion 1.3 (Tensor Metrico). El tensor metrico es una aplicacion bilineal simetrica ypositiva denotada por:
g : TP M × TpM → R, es decir un tensor del tipo (0,2); para cada p ∈ M
esto es; un producto interno de vectores sobre el espacio tangente TpM a cada punto p dela variedad M [2].
Observacion 1.1. El tensor metrico o metrica Riemanniana permite medir el desplazamientoinfinitesimal de vectores que yacen en el espacio tangente TpM a la variedad M
Definicion 1.4 (Variedad Riemanniana). Una variedad diferenciable con una metrica Rie-manniana es lo que llamaremos una Variedad Riemanniana; y lo denotaremos por el par (M, g).
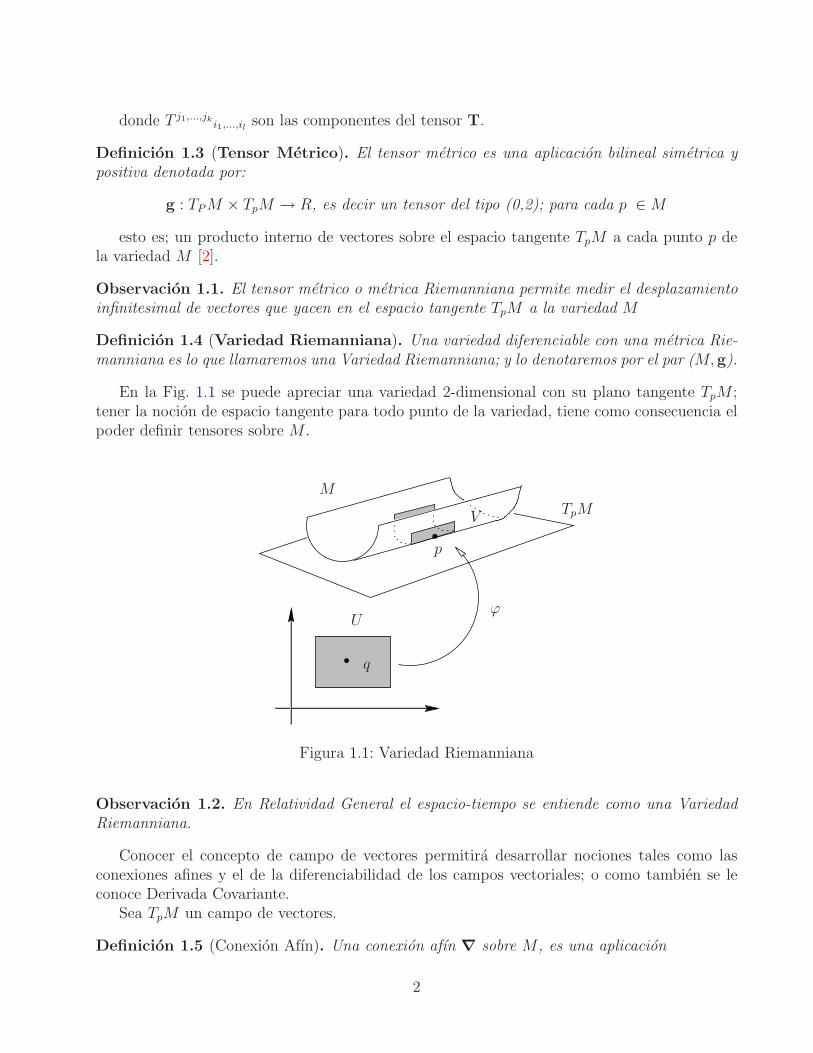
En la Fig. 1.1 se puede apreciar una variedad 2-dimensional con su plano tangente TpM ;tener la nocion de espacio tangente para todo punto de la variedad, tiene como consecuencia elpoder definir tensores sobre M .
p
TpM
U
V
ϕ
M
q
Figura 1.1: Variedad Riemanniana
Observacion 1.2. En Relatividad General el espacio-tiempo se entiende como una VariedadRiemanniana.
Conocer el concepto de campo de vectores permitira desarrollar nociones tales como lasconexiones afines y el de la diferenciabilidad de los campos vectoriales; o como tambien se leconoce Derivada Covariante.
Sea TpM un campo de vectores.
Definicion 1.5 (Conexion Afın). Una conexion afın ∇ sobre M , es una aplicacion
2

∇ : TpM ×Λkl (M) → Λk
l (M)/ ∇XT ≡ ∇(X,T);
con componentes ∇aTb1...bk
p1...plXa, para X ∈ TpM , T ∈ Λk
l (M) y
∇aTb1...bk
p1...pl= ∂aT
b1...bkp1...pl
+∑
i
CbiadT
b1...d...bkp1...pl
−∑
j
Cdapj
T b1...bkp1...d...pl
,
donde Cbap son los coeficientes de conexion afın.
Propiedades: Sean f, h ∈ D(M)
∇(fX + hY,T) = f∇(X,T) + h∇(Y,T),
∇(X,T1 + T2) = ∇(X,T1) + ∇(X,T2),
∇(X, fT) = f∇(X,T) + X(f)T, X(f) = aiei(f) .
donde f, g son funciones de clase C∞ definidas sobre la variedad a valores reales.A continuacion se da a conocer una conexion con caracteristicas muy particulares.
Definicion 1.6 (Conexion Compatible con la Metrica). Sea M una Variedad Diferencia-ble con una metrica Riemanniana y una conexion afın ∇. Una conexion se dice compatible conla metrica cuando:
∇(t, g) = 0 → Ccab ≡ Γc
ab =1
2gcd (∂agbd + ∂bgad − ∂dgab) .
donde t es un vector tangente a γ : I → M .
Definicion 1.7 (Conexion Simetrica). Una conexion afın ∇ en una variedad diferencial Mes llamada simetrica cuando:
∇XY −∇YX = [X,Y] ∀ X,Y ∈ χ(M); donde [X,Y] = XY − YX.
Observacion 1.3. Si X = ej, Y = ei; entonces ∇eiej − ∇ej
ei = 0.
Los anteriores dos conceptos dan una forma optima de hablar de un tipo de conexion muyparticular; ya que como vimos pueden ser muchas las conexiones definidas sobre una variedaddada la generalidad del concepto, pero existe solo una simetrica y compatible con la metrica.
Definicion 1.8. Dados dos operadores diferenciales ∇a, ∇a y un campo de vectores duales wb,existe un campo tensorial Cc
ab tal que:
∇awb = ∇awb − Ccabwc.
con lo anterior tenemos el siguiente teorema:
3

Teorema 1.1 (Existencia y Unicidad de la Conexion). Sea (M, g) una Variedad Rieman-niana, existe un unico operador ∇a en M que satisface
∇agbc = 0. (1.2)
Demostracion. Sea ∇a un operador derivada; probaremos el teorema mostrando que existe unaunica solucion para Cc
ab. Por hipotesis sabemos lo siguiente:
0 = ∇agbc = ∇agbc − Cdabgdc − Cd
acgbd (1.3)
o bien∇agbc = Cd
acgbd + Cdabgdc , (1.4)
∇agbc = Ccab + Cbac , (1.5)
∇bgac = Ccba + Cabc , (1.6)
∇cgab = Cbca + Cacb , (1.7)
sumando (1.5) y (1.6) y luego restando (1.7). Usando la simetrıa de Ccab, encontramos que
2Ccab = ∇agbc + ∇bgac − ∇cgab ; (1.8)
esto es,
Ccab =
1
2gcd
∇agbd + ∇bgad − ∇dgab
. (1.9)
La escongencia de Ccab da solucion a (1.2) y manifiesta la unicidad con lo cual se completa
la prueba.La ecuacion (1.9) nos dice como calcular ∇a en terminos de cualquier otro operador ∇a. Enparticular en terminos de un operador diferencial ordinario ∂a obtenemos que:
Γcab =
1
2gcd ∂agbd + ∂bgad − ∂dgab . (1.10)
Del anterior teorema se desprenden lo siguientes resultados
Una forma de caracterizar una conexion muy especial; una conexion simetrica y compa-tible con la metrica
Obtenemos los llamados coeficientes de conexion o bien Sımbolos de Christoffel.
Observacion 1.4. El teorema nos dice que el operador sera unico siempre que tenga comoSımbolo de Chistoffel a (1.10).
4

Observacion 1.5. Este unico operador diferencial, que ademas presenta simetrıa no es masque el Teorema Fundamental de la Geometrıa Riemanniana Conexion de Levi Civita. [2]
El siguiente concepto representa la generalizacion de la nocion de diferenciabilidad de losespacios Euclıdeos R
n. Por otro lado esta nueva nocion de diferenciabilidad no es mas quela extension a espacios curvos como las variedades de la derivada parcial; no obstante existeuna clara diferencia entre ambas, el orden seguido para calcular este nuevo concepto no esconmutativo y en consecuencia el cambio en el orden genera un resultado distinto; esta nuevanocion es lo que se conoce como Derivada Covariante.
Definicion 1.9 (Derivada Covariante). Sea ∇ una conexion Riemanniana, T un campotensorial y γ una curva con parametro λ. Entonces, DT/dλ es llamada Derivada Covariantede T a lo largo de γ si
Linealidad
D
dλ(T1 + T2) =
D
dλT1 +
D
dλT2 ,
D
dλ(f T) =
Df
dλT + f
D
dλT ,
donde f es una funcin diferenciable en I.
Si T1 es inducido por T2: T1(λ) = T2(γ(λ)), entonces
D
dλT1 = ∇tT2 −→
D
dλT b1...bk
1 p1...pl= ∇aT
b1...bk
2 p1...plta
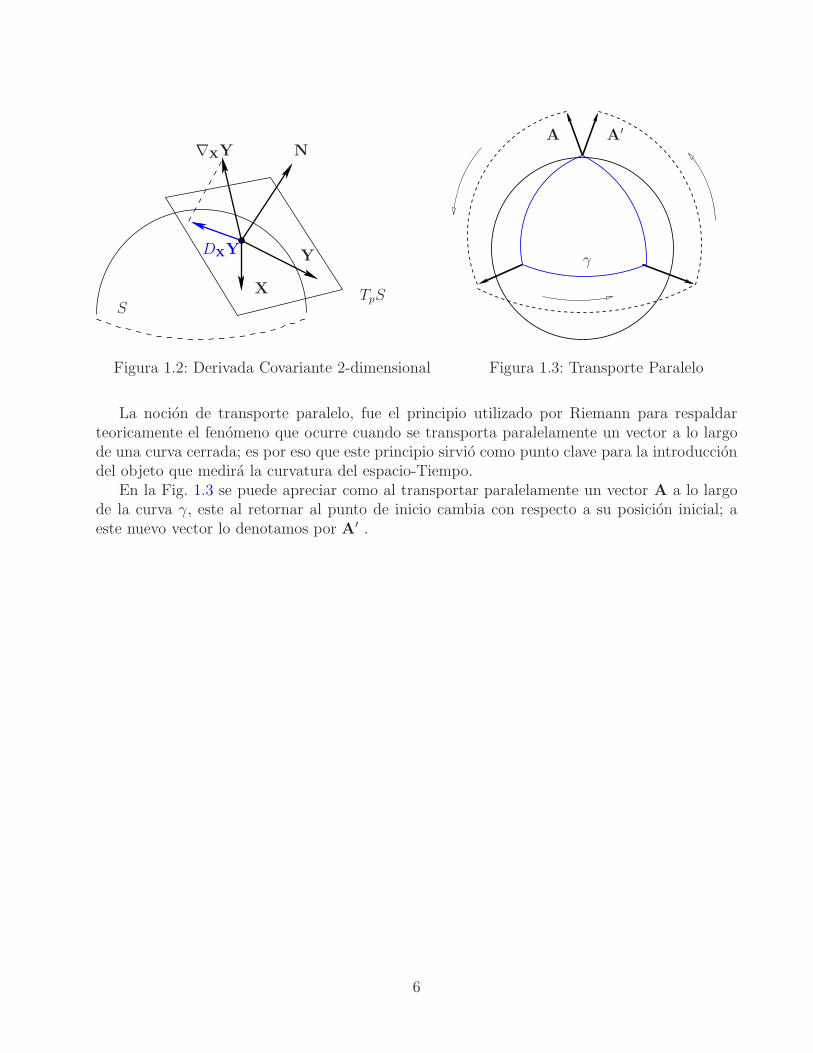
En la Fig. 1.2 se observa que dados dos campos de vectores X,Y tangentes a S se derivanen R
3 y el vector resultante se proyecta sobre S; a dicho vector se le conoce como DerivadaCovariante.
Definicion 1.10 (Transporte Paralelo). Sea ∇ sobre M y un campo vectorial V. Entonces,se dice que V es transportado paralelamente lo largo de una curva γ
∇aVb = 0.
La siguiente propisicion caracteriza la unicidad del transporte paralelo de campos de vecto-res.
Preposicion 1.1. Sea ∇ sobre M y un campo vectorial V0 ∈ Tγ(λ0) M , ∀ λ ∈ I. Entonces,existe un unico transporte paralelo V(λ) de V0 a lo largo de γ tal que V(λ0) = V0.
5
N
TpSX
YDXY
S
∇XY
Figura 1.2: Derivada Covariante 2-dimensional
A A′
γ
Figura 1.3: Transporte Paralelo
La nocion de transporte paralelo, fue el principio utilizado por Riemann para respaldarteoricamente el fenomeno que ocurre cuando se transporta paralelamente un vector a lo largode una curva cerrada; es por eso que este principio sirvio como punto clave para la introducciondel objeto que medira la curvatura del espacio-Tiempo.
En la Fig. 1.3 se puede apreciar como al transportar paralelamente un vector A a lo largode la curva γ, este al retornar al punto de inicio cambia con respecto a su posicion inicial; aeste nuevo vector lo denotamos por A′ .
6
Capıtulo 2
Curvatura
La nocion de curvatura introducida por Bernhard Riemann no es mas que una extension deltrabajo realizado por Carl F Gauss en las superficies, el estudio de la curvatura es consecuenciadel alejamiento de lo Euclıdeo a un espacio curvo y como producto de ello la no preservaciondel quinto postulado de la Geometrıa Euclidiana.
”Dado una lınea recta y un punto fuera de ella, entonces existe una lınea recta que pasa por elpunto y que no coincide con la otra”
En lo que sigue se analizara el concepto de curvatura en las variedades Riemannianas; GaussIntrodujo la Curvatura Gaussiana como una verdadera medida del alejamiento de la Geometrıados-dimensional de lo Euclıdeo, Riemann introdujo el tensor de curvatura para generalizar elconcepto de curvatura a tres o mas dimensiones. La curvatura ha sido objeto de estudio endistintos ambitos; curvas, superficies y variedades, y es precisamente en la variedades dondeestamos interesados en esta investigacion, para ello hablemos primeramente sobre el trabajo deGauss.
2.1. Curvatura Gaussiana
Sea S ⊂ R3, una superficie y U un abierto de R
2.
Definicion 2.1 (Campo de Vectores Normales). Dado una parametrizacionX : U ⊂ R
2 → S ⊂ R3, podemos tomar el vector normal por cada punto de X(U).
N(q) =Xu × Xv
‖Xu × Xv‖(q).
Definicion 2.2 (La Aplicacion de Gauss). Sea S ⊂ R3una superficie con una orientacion
N, la aplicacion N : S → S2 es la aplicacion de Gauss.
A este campo de vectores normales es posible diferenciarlo como sigue:
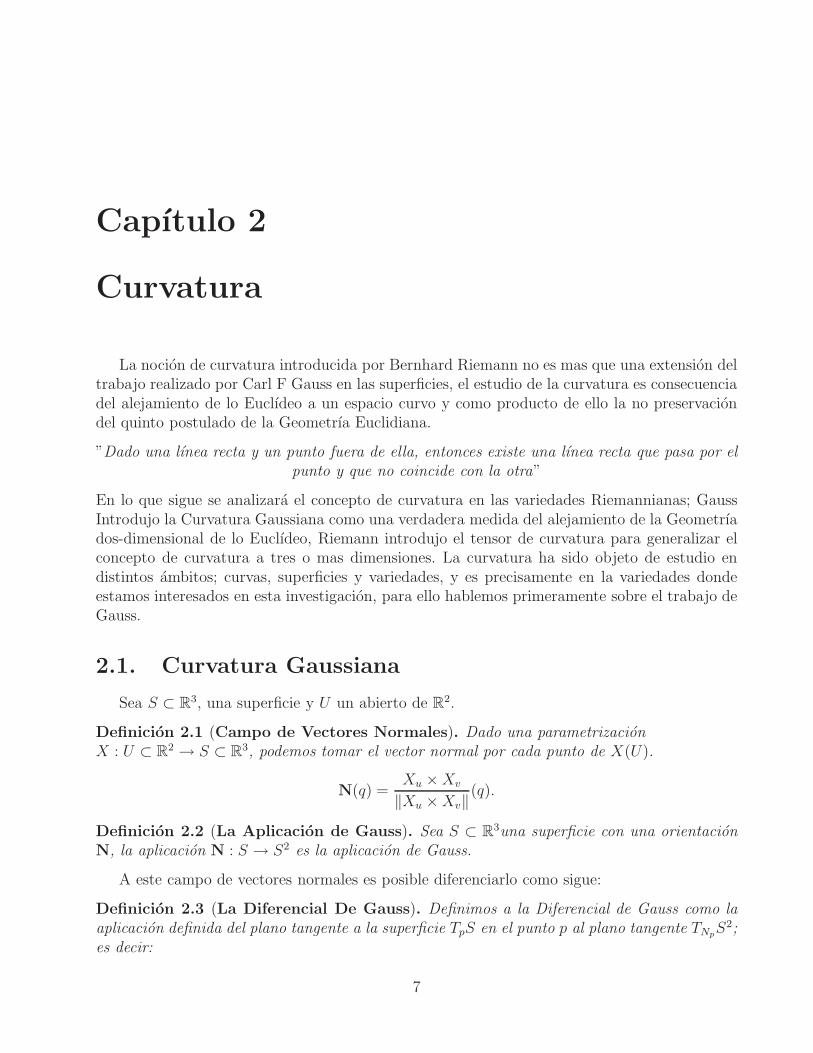
Definicion 2.3 (La Diferencial De Gauss). Definimos a la Diferencial de Gauss como laaplicacion definida del plano tangente a la superficie TpS en el punto p al plano tangente TNp
S2;es decir:
7

dNp : TpS → TNpS2,
que actua como sigue:Dado una curva parametrizada tal que α(0) = p, estudiemos la restriccion del campo de vectoresa valores en la curva α
N(t) = N α(t),
N ′(0) = dNp(α′(0)) ∈ TpS.
Observacion 2.1. El anterior operador diferencial; la diferencial de Gauss fue el objeto queGauss utilizo para medir cuanto cambia el vector normal por el punto p en una vecindad delmismo a lo largo de la superficie; en otras palabras cuanto cambia el vector normal restricto avalores en la curva α(t) por t = 0.
Observacion 2.2. En vista de que los planos tangentes TpS y TNpS2 son paralelos se puede
ver la diferencial Gauss como una aplicacion del plano tangente TpS en si mismo TpS.
dNp : TpS → TpS.
Como la diferencial de Gauss es un operador lineal que va de subespacios 2-dimensionalesen subespacios 2-dimensionales esta tiene asociado una matriz 2 × 2
A =
(a11 a12
a21 a22
),
dicha matriz A se le exigira ser diagonalizable; y en consecuencia:
1. det(A) = a11a22 − a12a21,
2. Tr(A) = a11 + a22;
luego de la diagonalizacion :
A =
(k1 00 k2
),
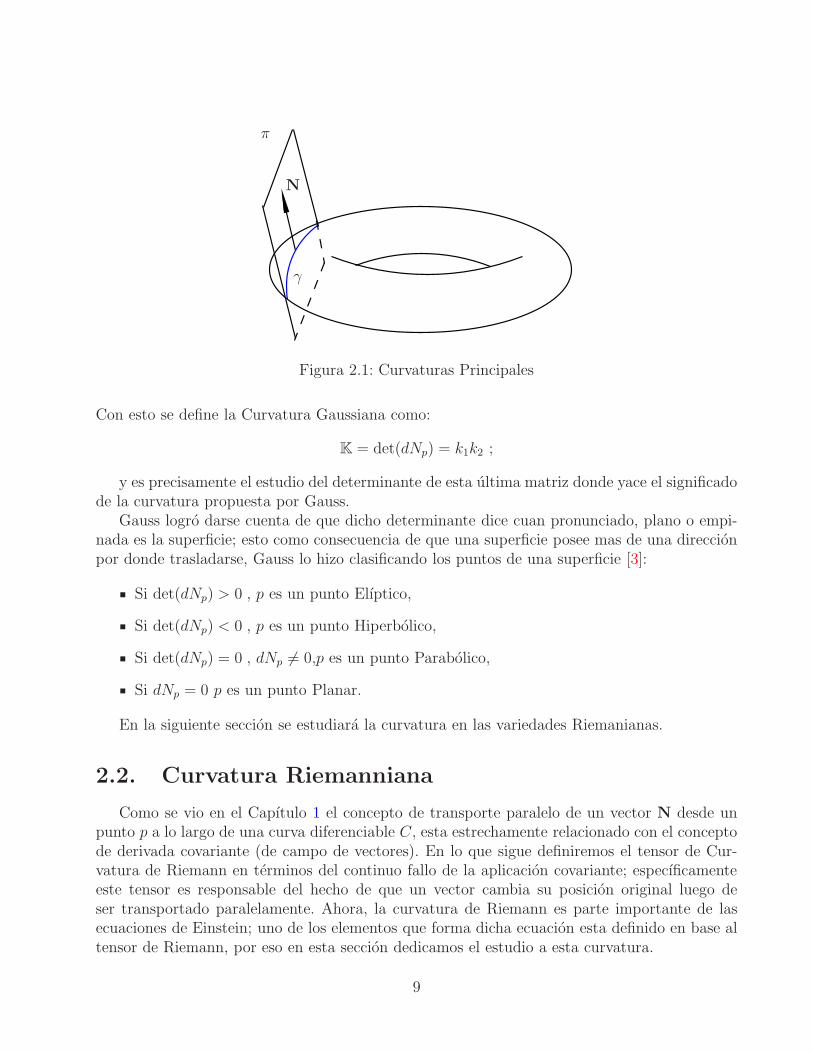
los numeros k1 y k2 presentes en la matriz diagonal son interpretados como las curvaturasmaximas y mınimas de las curvas resultantes de la interseccion de una plano que contenga a unavector normal unitario N con la superficie; ademas cada una de estas curvaturas son curvaturasextrınsecas de las respectivas curvas, sin embargo el producto de ambas si logro ser una nocionintrınseca de la superficie. [3]
En la Fig. 2.1 se observa como el plano π interseca a la superficie generando la curva γ, lascurvaturas k1 y k2 seran las curvaturas maximas y mınimas de las curvas generadas medianteeste proceso.
De la matriz resultante se puede deducir los siguientes resultados:
1. det(dNp) = k1k2,
2. Tr(dNp) = k1 + k2.
8
π
N
γ
Figura 2.1: Curvaturas Principales
Con esto se define la Curvatura Gaussiana como:
K = det(dNp) = k1k2 ;
y es precisamente el estudio del determinante de esta ultima matriz donde yace el significadode la curvatura propuesta por Gauss.
Gauss logro darse cuenta de que dicho determinante dice cuan pronunciado, plano o empi-nada es la superficie; esto como consecuencia de que una superficie posee mas de una direccionpor donde trasladarse, Gauss lo hizo clasificando los puntos de una superficie [3]:
Si det(dNp) > 0 , p es un punto Elıptico,
Si det(dNp) < 0 , p es un punto Hiperbolico,
Si det(dNp) = 0 , dNp 6= 0,p es un punto Parabolico,
Si dNp = 0 p es un punto Planar.
En la siguiente seccion se estudiara la curvatura en las variedades Riemanianas.
2.2. Curvatura Riemanniana
Como se vio en el Capıtulo 1 el concepto de transporte paralelo de un vector N desde unpunto p a lo largo de una curva diferenciable C, esta estrechamente relacionado con el conceptode derivada covariante (de campo de vectores). En lo que sigue definiremos el tensor de Cur-vatura de Riemann en terminos del continuo fallo de la aplicacion covariante; especıficamenteeste tensor es responsable del hecho de que un vector cambia su posicion original luego deser transportado paralelamente. Ahora, la curvatura de Riemann es parte importante de lasecuaciones de Einstein; uno de los elementos que forma dicha ecuacion esta definido en base altensor de Riemann, por eso en esta seccion dedicamos el estudio a esta curvatura.
9

Consideremos ∇a un operador derivada, un campo de vectores duales ωa y f un campoescalar. Estudiemos la accion de dos operadores diferenciales como sigue:
∇a∇b(fωc) = ∇a(ωc∇bf + f∇bωc)
= (∇a∇bf)ωc + ∇bf∇aωc + ∇af∇bωc + f∇a∇bωc.
si restamos ∇b∇a a la expresion anterior nos resulta que:
(∇a∇b −∇b∇a)(fωc) = f(∇a∇b −∇b∇a)ωc
donde ∇b∇a(fωc) es:
∇b∇a(fωc) = ∇b(ωc∇af + f∇aωc)
= (∇b∇af)ωc + ∇bf∇aωc + ∇bf∇aωc + f∇b∇aωc.
Esta expresion define un campo tensorial del tipo (0,3), esto es consecuencia directa de ladefinicion del operador diferencial ∇a o ∇b y en consistencia con la accion con el campo dualobtenemos lo siguiente:
∇a∇bωc −∇b∇aωc = Rabdcωd. (2.1)
De acuerdo con la nocion de transporte paralelo de vectores a lo largo de una curva cerradala diferencia calculada anteriormente, mide precisamente el cambio de direccion del vector alo largo del recorrido, o dicho en otras palabras la falla de la conmutatividad de la aplicacioncovariante consecuencia del espacio-tiempo curvo. A Rabd
cωd se le conoce como el tensor deRiemann o tensor de Curvatura. Este tensor se define como sigue:
Definicion 2.4 (Tensor o Curvatura de Riemann). El tensor de curvatura de Riemann esun tensor que esta dado por la siguiente aplicacion
R : Tp(M) × TpM × Tp(M) × Tp(M) → R; tal que
si consideramos, ei = ∂∂xi
como una base, las componentes del operador son:
R(ea, eb, ec, ed) = Rabcd,
satisfaciendo las siguientes propiedades:
Rabcd = −Rdbac Antisimetrıa.
R[abc]d = 0.
Para el operador derivada ∇a compatible con la metrica,∇agbc = 0, tenemos
Rabcd = −Rabdc.
10
La Identidad de Bianchi:∇[a R bc]d
e = 0.
Observacion 2.3. Una Variedad M es plana si en cada punto de esta Rdabc = 0, de lo contrario
diremos que es curva.
Observacion 2.4. Es importante recalcar que dicho tensor expresa la presencia de curvatura,y en consecuencia la de un campo gravitacional.
El tensor de Riemann puede ser expresado como una parte de traza y una parte libre de traza;es decir consideremos la contraccion [4] de dos de los ındices del tensor de Riemann asociadosa su antisimetrıa ahora bien, en analogıa con la teorıa de matrices esto representa una sumaque es exactamente la traza de una matriz antisimetrica que es nula. Ası Ra
acd = Rcdaa = 0
que corresponde a la parte libre de traza. Por otro, lado aquella parte del Riemann con trazano nula define al tensor de Ricci
Rabcb = Rac. (2.2)
Rabac = Rbc. (2.3)
Al igual que el tensor de Riemann, el tensor de Ricci cumple tambien con propiedades desimetrıa.
Rac = Rca.
Ahora bien, ası como discutimos sobre la traza del tensor de Riemann, estudiaremos la trazadel tensor de Ricci:
R = Raa. (2.4)
a R se le denomina el escalar de Curvatura.Un ultimo tensor se definira en base a las ecuaciones (2.2)y (2.4), es el tensor de Einstein
Gab el cual es definido como sigue:
Gab = Rab − 1
2R gab. (2.5)
Muchas razones justifican la importancia de este tensor, una de ellas es que por ser simetricoGab posee solo una divergencia [5] ∇aGab ; la razon de esta importancia es que esta divergenciaes nula. En efecto veremos como a traves de la identidad de Bianchi se logra probar este hecho:
∇[a R bc]da = 0
=1
3∇aR
abcd −∇bR
aacd + ∇bR
acad
−∇cRabad −∇aR
acbd −∇cR
abad
pero como
Rac = Rabcb y Rab
ad = Rbd,
11

se sigue que
∇aRabcd + ∇bRcd −∇cRbd = 0;
subiendo d con la metrica y contrayendo d y b nos queda:
∇a Rac + ∇b Rb
c − ∇c R = 0,
ahora veamos que lo anterior es equivalente a ∇aGab = 0; en efecto:
∇a Rac + ∇b Rb
c − ∇c R = 0,
2∇aRac −∇cR = 0,
∇aRac −
1
2∇cR = 0;
considerando Rac = gabRbc,
∇a (gab Rcb) − 1
2∇c R = 0;
y haciendo uso del operador diferencial y de la condicion metrica, resulta
∇bGbc = 0. (2.6)
La divergencia nula como tambien se le conoce a la ecuacion (2.6), es consecuencia comose logro ver de la identidad de Bianchi. Por otro lado, son muchos los escenarios de la fısicadonde la obtencion de una identidad como (2.6) expresa la manifestacion de caracteristicasfısicas, geometricas o topologicas. Es por eso que estamos interesados en conocer el significadotopologico de la identidad de Bianchi.
2.3. Curvatura Seccional
La extension del concepto estudiado por Gauss es motivado por la necesidad de conocer deque manera se interpreta la curvatura en espacios mas generales que un espacio euclıdeo, paraello a continuacion se desarrollan un conjuntos de conceptos necesarios para este objetivo:
Definicion 2.5 (Geodesica). Una curva parametrizada γ : I → M es una geodesica por elpunto t0 ∈ I si D
dt(dγ
dt) = 0.
Definicion 2.6 (Mapeo Exponencial). Sea p ∈ M , definiremos una aplicacion; llamadaMapeo Exponencial, que va del plano tangente TpM a la variedad M , tomando cada vectortangente v ∈ TpM en puntos de la variedad, tal que
exp(p, q) = γ(1, p, v) = γ(|v|, q v
|v|)
De las dos anteriores definiciones se tiene lo siguiente:
12
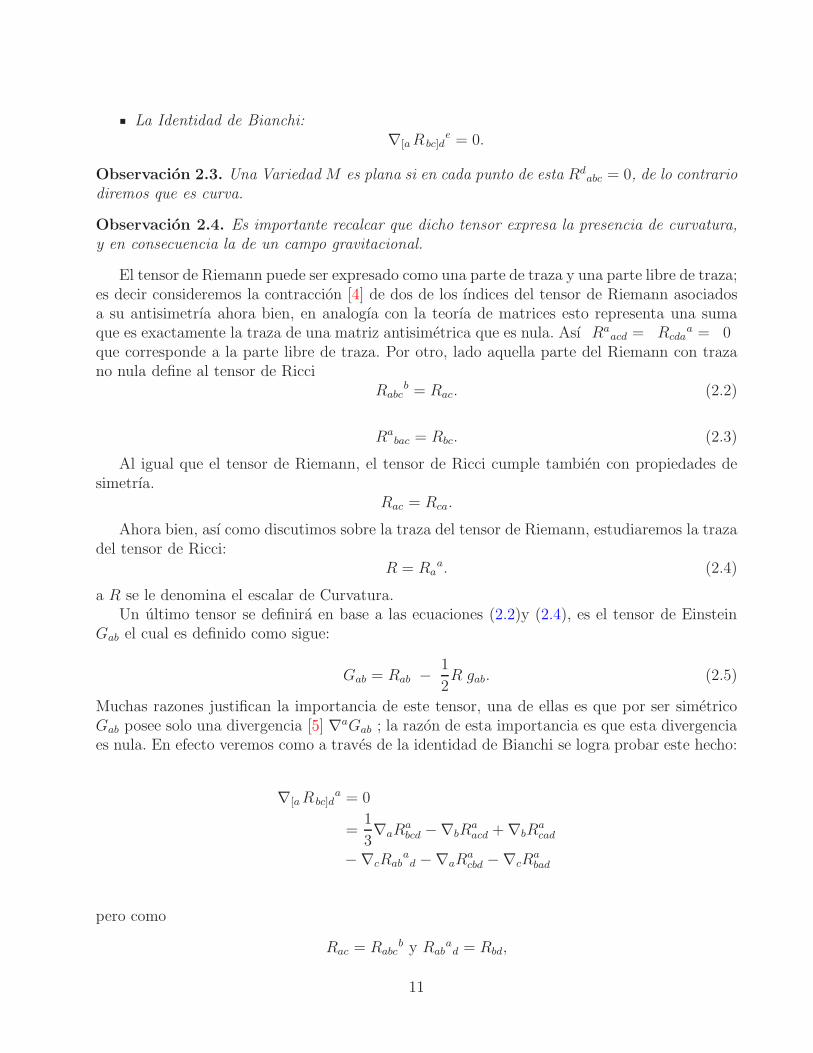
Definicion 2.7 (Curvatura Seccional). Sea p ∈ M un punto de una variedad Riemannianay sea σ ⊂ TpM un subespacio dos-dimensional del espacio tangente TpM de la variedad Rie-manniana. Consideremos todas las geodesicas que comienzan por el punto p ∈ M y que sontangentes a σ. Los segmentos de tales geodesicas en una vecindad del punto p determinan unasubvariedad 2-dimensional S ⊂ M , la curvatura de dicha subvariedad se denoto por K(p, σ); yesta no es mas que la curvatura estudiada por Gauss.
Si consideramos al espacio tangente como un cubo y al subespacio σ un plano como semuestra en la Fig. 2.2 se logra ver de manera facil como parten las geodesicas desde el p adistintas direcciones de TpM formando ası la sub-variedad dos-dimensional como consecuenciade la proyeccion a traves del mapeo exponencial de las curvas sobre la variedad M .
TpM
σ p
Figura 2.2: Curvatura Seccional
Un hecho importante que haremos resaltar es que la curvatura seccional y la curvaturaRiemanniana, concepto que estudiaremos mas adelante estan relacionados; es decir veremosque la curvatura de Riemann es multiplo de la curvatura seccional [1].En efecto:
Consideremos una base del sub-espacio dos-dimensional σ digamos x,y, con esto podemoscalcular el area del paralelogramo que forman estos dos vectores como sigue:
| x × y |=√
| x |2| y |2 − < x,y >2,
luego dado una base del subespacio σ la curvatura seccional vendra dada por:
K(x,y) =1
|x × y|R(y,x,y,x).
donde K(x,y) es la curvatura Gaussiana de la sub-variedad formada como consecuencia delmapeo exponencial de las geodesicas y R(y,x,y,x) es la curvatura Riemanniana estudiada enla seccion anterior. Luego de esta manera si extendemos dicha nocion para todo sub-espacio σde la variedad lo que obtendremos es completar la curvatura de la variedad Riemanniana comosuma de curvaturas Gaussianas; y este hecho es lo que representa la extension de la nocion decurvatura a mayores dimensiones.
13
2.4. Las Ecuaciones de Einstein
En lo que sigue hablaremos de las Ecuaciones de Einstein, las Ecuaciones de Einstein sonunas ecuaciones que describen como la materia crea gravedad y como la gravedad afecta lamateria. Ahora bien, Einstein necesitaba para formular su ecuacion un acoplamiento entre lafuente (materia) representado por el tensor de energıa e impulso y la geometrıa del espacio-tiempo curvo dado por el tensor de Einstein; por eso postulo lo siguiente:
Definicion 2.8 (Las Ecuaciones de Einstein). Las Ecuaciones de Einstein se define comosigue:
Rab −1
2Rgab = Tab. (2.7)
donde Gab = Rab − 12Rgab y Tab es el tensor de energıa-impulso [5]
La formulacion de la ecuacion (2.7) representa la consolidacion del estudio de la curvaturade las variedades Riemannianas; ya que gracias a este estudio definimos los que es el tensor deEinstein y en consecuencia conocer lo que representa la geometrıa de dicha ecuacion.
14
Capıtulo 3
La Identidad de Bianchi
La identidad de Bianchi es una de las cuatro propiedades que satisface el tensor de Riemann,en este Capıtulo se profundizara en el significado topologico de esta identidad, analizaremosaspectos del Analisis Matematico como las variedades con borde, dominios regulares, entre otrosy por ultimo haremos uso de las formas diferenciales para lograr ver de manera mas convenienteel contexto geometrico y topologico de dicha identidad.
3.1. El Lema De Cartan
Definicion 3.1 (Variedad Orientada). Una variedad M se dice que es orientable si podemosescoger un atlas A (Conjunto de cartas) (φi, Ui)i∈I , tal que cualquiera dos cartas del atlasgeneran la misma orientacion; es decir:
det
∂xα
∂xβ
> 0.
Por otro lado, consideremos los siguientes conjuntos:
R(n,k) =
x ∈ R
n : x = (x1, ..., xk, 0, ..., 0)
;
R(n,k) =
x ∈ R
n : x = (x1, ..., xk, 0, ..., 0); x1 ≤ 0
.
En las Fig. 3.1 y Fig. 3.2 se puede observar el significado geometrico de los conjuntos arribadescritos.
Definicion 3.2 (Dominio Regular). Un subconjunto Ω compacto de una variedad n-dimensionales llamado un Dominio Regular k-dimensional, si cada punto p ∈ Ω tiene una de las siguientesdos propiedades:
∃Vp ∈ M y (φ, U) sobre M talque:
φ : U ∩ R(n,k) → V ∩ Ω.
15

n = 3, k = 2x
y
z R2 ⊂ R3
Figura 3.1: Conjunto R(n,k)
n = 3, k = 2x
y
zR2
− ⊂ R2 ⊂ R3
Figura 3.2: Conjunto R(n,k)−
∃Vp ∈ M y (φ, U) sobre M talque:
φ : U ∩ R(n,k) → V ∩ V ∩ Ω y x1 = 0.
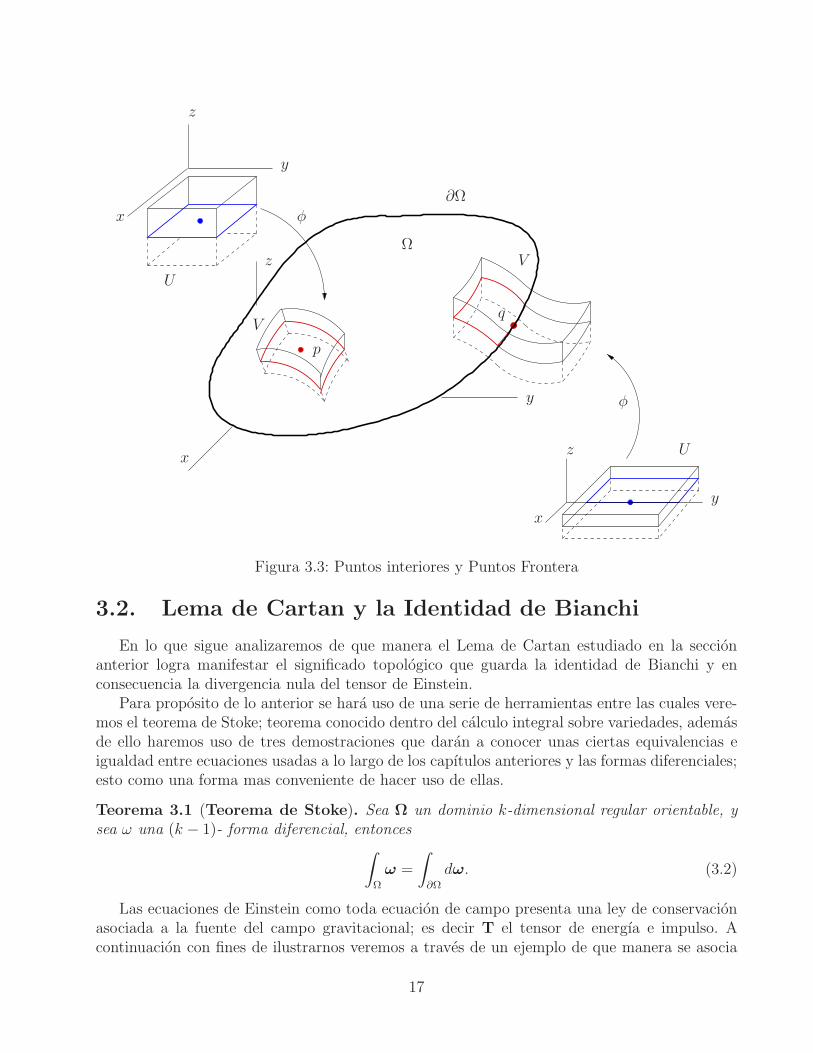
Observacion 3.1. Los puntos que cumplen la primera condicion son llamados puntos interio-res; estos forman una subvariedad k-dimensional Int(Ω).
Observacion 3.2. Los puntos que cumplen la segunda condicion son llamados puntos frontera;estos forman una subvariedad (k-1)-dimensional ∂(Ω).
En la Fig. 3.3 se aprecia la manera como opera la funcion φ dependiendo del conjunto sobreel cual esta actua; con esto se observa de que manera se definen los puntos interiores y fronterade un dominio regular Ω.
El contexto es ahora una variedad orientada y con frontera o borde; la frontera tiene algunascaracterısticas:
∂Ω es un conjunto compacto.
∂Ω es una Subvariedad (k-1) dimensional.
∂Ω es un dominio regular.
Dado que ∂Ω es un dominio regular donde sus puntos son todos interiores; se sigue que ∂(Ω)no tiene frontera; en otras palabras la frontera de la frontera es vacıo
∂(∂Ω) = ∅. (3.1)
Cada una de las anteriores definiciones forman el marco teorico de lo que es el lema de Cartan.Siguiendo [6] el lema de Cartan dice:
Lema 3.1. ”Para un dominio regular Ω”,la frontera ∂Ω es tambien regular, pero si la fronterase anula, entonces :
∂(∂Ω) = ∅.
16
q
p
x
x
x
y
y
y
z
z
z
U
U
V
V
φ
φ
Ω
∂Ω
Figura 3.3: Puntos interiores y Puntos Frontera
3.2. Lema de Cartan y la Identidad de Bianchi
En lo que sigue analizaremos de que manera el Lema de Cartan estudiado en la seccionanterior logra manifestar el significado topologico que guarda la identidad de Bianchi y enconsecuencia la divergencia nula del tensor de Einstein.
Para proposito de lo anterior se hara uso de una serie de herramientas entre las cuales vere-mos el teorema de Stoke; teorema conocido dentro del calculo integral sobre variedades, ademasde ello haremos uso de tres demostraciones que daran a conocer unas ciertas equivalencias eigualdad entre ecuaciones usadas a lo largo de los capıtulos anteriores y las formas diferenciales;esto como una forma mas conveniente de hacer uso de ellas.
Teorema 3.1 (Teorema de Stoke). Sea Ω un dominio k-dimensional regular orientable, ysea ω una (k − 1)- forma diferencial, entonces
∫
Ω
ω =
∫
∂Ω
dω. (3.2)
Las ecuaciones de Einstein como toda ecuacion de campo presenta una ley de conservacionasociada a la fuente del campo gravitacional; es decir T el tensor de energıa e impulso. Acontinuacion con fines de ilustrarnos veremos a traves de un ejemplo de que manera se asocia
17

la ley de conservacion de la densidad de corriente; fuente en las ecuaciones de Maxwell atraves de la aplicacion del lema de Cartan. Partiendo de la ecuaciones de movimiento delElectromagnetismo;
d∗F =∗ J, (3.3)
donde F es el tensor de Maxwell y J la densidad de corriente.Sabemos que dada la consistencia con la formulacion de la ecuacion de campo (3.3) debe
existir la conservacion de la fuente del campo; dJ = 0 veamos que esto se resume a lo siguiente:
dd∗F = d∗J = 0; (3.4)
el primer termino de la ecuacion (3.4) es identicamente nulo por el lema de Poincare (VerApendice A), y de esta manera se obtiene la satisfaccion automatica de la conservacion.
Ahora bien, consideremos lo siguiente:
∫
∂Ω
d∗F =
∫
∂∂Ω
∗F = 0.
En la ultima expresion se aplica el teorema de Stoke sucesivamente y se logra mostrar quela conservacion de la densidad de corriente J se puede reinterpretar como una consecuencia dellema de Cartan.
El trabajo ahora sera extender dicho ejemplo al contexto de la gravitacion o curvatura delespacio-tiempo; veremos como se pone en manifiesto el Lema de Cartan como una herramientapara conocer lo que guarda la divergencia nula del tensor de Einstein.
A lo largo del desarrollo de este trabajo la mayorıa de las expresiones se han escrito con unanotacion muy propia del contexto; notacion componente. En el siguiente desarrollo veremos dosequivalencias y una igualdad de algunas de las ecuaciones utilizadas a lo largo de este trabajocon las formas diferenciales (Ver Apendice A); que no son mas que una manera mas convenientede expresar las anteriores ecuaciones.
3.2.1. La forma d∗G como una representacion de ∇G
Demostracion. Para demostrar dicho hecho haremos uso de varias identidades que satisfacen lasformas diferenciales; partiendo de la representacion en forma diferencial del tensor de Einstein:
Gm = Gmn dxn, (3.5)
por otro lado, el dual de la ecuacion (3.5) viene dado por:
∗G = em∗Gm. (3.6)
Ahora bien, aplicando la derivada exterior a la ecuacion (3.6) nos queda que:
d∗G = d[em∗Gm], (3.7)
18

d∗G = d em ∧ ∗Gm + emd∗Gm; (3.8)
de la ecuacion (3.8) identificamos la siguiente expresion [7]
dem = Γnmrendxr, (3.9)
sustituyendo(3.9) en la ecuacion (3.8) obtenemos que:
d∗G = (Γnmrendxr) ∧ ∗Gm + emd∗Gm; (3.10)
desarrollando parte de la ecuacion (3.10) tenemos que:
d xr ∧∗ Gm =1
3!
√g εnlrq Gnm dxp ∧ dxl ∧ dxr ∧ dxq, (3.11)
teniendo en cuenta que dxp ∧ dxl ∧ dxρ ∧ dxq = εplrq d4x. Con esto (3.11) queda como semuestra:
dxp ∧ ∗Gm =1
3!
√g εnlrq εplrq Gnm d4x; (3.12)
luego por propiedades del tensor de Levi-Civita (Ver Apendice A) la ecuacion (3.12) se reducea:
dxp ∧ ∗Gm =1
3!
√g − 3!δp
n Gnm d4x, (3.13)
dxp ∧ ∗Gm = −√g Gpm d4x. (3.14)
Por otro lado, por la definicion de derivada exterior tenemos:
d∗Gm =1
3!∂s(
√g εnlpq Gmndxs ∧ dxl ∧ dxp ∧ dxq), (3.15)
nuevamente haciendo uso de identidades de los tensores de Levi Civita finalmente, la ecuacion(3.15) nos queda:
d∗Gm = −∂s(√
gGms) d4x. (3.16)
Sustituimos (3.14) y (3.16) en la ecuacion (3.10), simplificando nos queda que:
d∗G = −Γnmp en
√gGpm d4x − em∂s(
√gGsm) d4x, (3.17)
d∗G = −√g en Γn
mp Gmp − (em(∂s(√
g)Gsm +√
g∂s(Gsm)) d4x, (3.18)
identificando de la ecuacion (3.18) la expresion
∂s√
g = 12√
g∂s g =
√g (∂sg
2g) =
√g Γr
rs;
19
luego ordenando convenientemente la ecuacion (3.18) tenemos que:
−(∂sGsn + Γn
mp Gmp + Γssr Grn)
√g en d4x; (3.19)
siendo (3.19)la expresion de la derivada covariante de un tensor de cuarto orden:
−∇s Gsn √g en d4x, (3.20)
d∗G → −∇s Gsn √g en d4x. (3.21)
Finalmente hemos demostrado que d∗G es solo una forma mas conveniente para expresar ladivergencia nula del tensor de Einstein.
En lo que sigue veremos dos demostraciones mas que junto con la anterior completaran lasherramientas necesarias para puntualizar el objetivo de esta seccion.
3.2.2. Reescribiendo ∗G como ⋆(dP ∧R)
Demostracion. Para esta demostracion es importante tener en cuenta de que la aplicacion dual⋆ solo actua sobre la base vectorial de la forma diferencial; ademas introduciremos una nuevamanera de representar al tensor de Riemann:
R =1
4em ∧ en Rmn
ab dxa ∧ dxb. (3.22)
Aplicando la dualidad ⋆ (Ver A.5), a la ecuacion (3.22) obtenemos lo siguiente:
⋆(dP ∧R) =1
4es εmnl
s Rnlab dxm ∧ dxa ∧ dxb; (3.23)
donde dP = esdxs. Realizando convenientes permutaciones con la finalidad de operar lostensores de Levi-Civita (Ver Apendice A) obtenemos las siguientes tres ecuaciones
⋆(dP ∧R) =1
4es εnlm
s Rnlab dxm ∧ dxa ∧ dxb, (3.24)
⋆(dP ∧R) =1
4es εnlm
s Rnlab εmabt d3 Σt, (3.25)
⋆(dP ∧R) =1
4es εnlm
s Rnlab εnlmr grs es d3Σt; (3.26)
ahora bien, de la ecuacion (3.26) identificaremos Gts = es d3 Σt.En efecto:
1
4εabmn Rmn
rs εrsad, (3.27)
20

asociando los Levi-Civita nos queda
1
4(εabmn εrsad) Rmn
rs, (3.28)
aplicando propiedades de los Levi-Civita (A.6)
1
4(−1! δ[abmn]
rsad) Rmnrs, (3.29)
desarrollando la ecuacion (3.29) obtenemos
1
4[−(δbmn
rsd − δmbnrsd + δmnb
rsd − δnmbrsd + δnbm
rsd − δbnmrsd ) Rmn
rs]; (3.30)
ahora bien, distribuyendo cada uno de los delta con respecto a las componentes del tensor deRiemann nos queda:
1
4[−(Rb
d − Rbd + R δb
d + R δbd − Rb
d − Rbd)], (3.31)
1
4[4(Rb
d − 1
2R δb
d)]; (3.32)
con la ecuacion (3.32) podemos concluir que:
1
4εabmn Rmn
rs εrsad = Gbd. (3.33)
Ahora, se quiere mostrar ∗G = Gtsesd3Σt; para ello se hace uso de (3.5):
∗Gm =1
3εqlrs Gqm dxl ∧ dxr ∧ dxs, (3.34)
∗Gm =1
3εqlrs Gqm εlrst d3 Σt, (3.35)
∗Gm =1
3− 3! Gqm d3 Σt, (3.36)
∗Gm = Gqm d3 Σt; (3.37)
luego finalmente por la ecuacion (3.37) podemos concluir que:
⋆(dP ∧R) = es∗Gs. (3.38)
21

3.2.3. Representacion en componentes de dR = 0
Demostracion. Partiendo de la forma diferencial del operador de curvatura
R =1
4em en Rmn
ab dxa ∧ dxb, (3.39)
observando de la ecuacion (3.39) el termino expandido en la base vectorial e interpretandolocomo las componentes de dicha expresion y aplicando la regla Leibniz nos queda que:
dR =1
4d [em ∧ en Rmn
ab] ∧ dxa ∧ dxb +1
4em ∧ Rmn
ab d[dxa ∧ dxb], (3.40)
diferenciando exteriormente nos queda que el segundo termino de la diferenciacion exterior seanula consecuencia del Lema de Poincare (Ver Apendice A), ası entonces:
dR = [dem ∧ en Rmnab + em ∧ den Rmn
ab + em ∧ en ∧ d(Rmnab)] ∧ dxa ∧ dxb, (3.41)
luego de la ecuacion (3.41) identificamos las tres ecuaciones siguientes:
d em = Γnmr en dxr, (3.42)
d en = Γnnr en dxr; (3.43)
por otro lado, haciendo uso de la definicion de la derivada exterior podemos reescribir uno delos terminos de la ecuacion (3.41) como se sigue a continuacion
d Rmnab = ∂s Rmn
ab dxs. (3.44)
Ahora bien, sustituyendo (3.42), (3.43 ) y (3.44) en (3.41) y manipulando los ındices de talmanera poder tener un manejo mas conveniente de la expresion obtenemos que:
dR =1
4em ∧ ev [Γm
ns Rnvab + Γv
ns Rmnab + ∂s Rmv
ab]dxs ∧ dxa ∧ dxb; (3.45)
agregamos a la ecuacion (3.45) dos expresiones que se reducen segun propiedades de antisimetrıa[8] a un cero; hecho que ayuda tanto a completar la prueba como a no alterar la ecuacion.
d R =1
4em ∧ ev [Γm
niRnv
ab + ΓvniR
mnab + ∂iR
mvab]
+[Γs
[iaR b]smv + Γs
[ai R b]smv
]dxi ∧ dxa ∧ dxb,
luego antisimetrizando la expresion anterior en los ındices (i, a, b) y ordenando para poderidentificar la expresion de la derivada covariante de un tensor de cuarto orden nos queda que:
d R =1
4em ∧ ev
[Γm
n[i Rnv
ab] + Γvn[i R
mnab] + ∂[i R
mvab]
]
+[Γs
[iaR b]smv + Γs
[ai R b]smv
]dxi ∧ dxa ∧ dxb,
22

finalmente :
dR =1
4em ∧ en∇[i Rab]r
s dxi ∧ dxa ∧ dxb; (3.46)
es decirdR = 0 → ∇[i Rab]r
s = 0. (3.47)
Haciendo uso de las equivalencias e igualdad anteriormente probadas se conocera el sigini-ficado topologico de la divergencia nula del tensor de Einstein a traves del Lema de Cartan.
Partiendo de la ecuacion (3.21) tenemos que:
d∗G = d∗T = 0 , (3.48)
lo cual se sabe que es identicamente nulo por (3.21). Ahora bien, consideremos lo siguiente∫
Ω
d∗G =
∫
∂Ω
∗G =
∫
∂Ω
dP ∧ R;
donde se ha hecho uso de (3.2) y (3.38). Por otro lado, aplicando la regla de Leibnitz paraformas difereciales (Ver Apendice A) sobre d(P ∧ R) tenemos que:
d(P ∧ R) = dP ∧ R − P ∧ dR,
pero por (3.47) nos queda que:
d(P ∧ R) = dP ∧ R.
Lo que permite ahora poder tener una derivada total de la expresion dP ∧ R; y ası poderaplicar el teorema de Stoke para lo que sigue:
∫
∂Ω
d(P ∧ R) =
∫
∂∂Ω
(P ∧ R) = 0 .
La obtencion del resultado anterior consecuencia del lema de Cartan expresa el principiogeometrico o topologico que guarda la divergencia nula del tensor de Einstein. A traves de estelema se interpreta dicha divergencia no solo como una consecuencia de la identidad de Bianchi;si no como una consecuencia de un principio propio de la geometrıa del campo; un principiotopologico conocido como “El principio de la frontera de la frontera” o Lema de Cartan.
23

24
Capıtulo 4
La Solucion de Schwarzschild
El desarrollo del siguiente Capıtulo representa una de las soluciones a las Ecuaciones deEinstein; dichas ecuaciones representan el aparato predictivo de la Relatividad General, portanto dar solucion a ellas es considerado un hecho muy importante en cuanto al desarrollo deeste trabajo. La metrica de Schwarzschild es una solucion exacta a las ecuaciones de Einstein delcampo gravitatorio provocado por un cuerpo de masa esferica; como por ejemplo una Estrella.
La Solucion se deducira en funcion de las Ecuaciones de Einstein en el vacıo, es decir enausencia de materia, o dicho en otras palabras lejos de la fuente.
Partiendo del tensor de Einstein
Gab = Rab −1
2Rgab; (4.1)
por otro lado,Gab = Tab, (4.2)
igualando (4.1) y (4.2) se obtiene que:
Rab −1
2Rgab = Tab. (4.3)
Ahora bien, contrayendo totalmente con la metrica gab a (4.3)obtenemos que:
R = −T, (4.4)
luego sustituyendo en (4.3) tenemos que:
Rab −1
2(−T )gab = Tab, (4.5)
Rab = Tab +1
2(T )gab, (4.6)
o bien
Rab = (Tab − Tgab); (4.7)
25

finalmente si consideramos la ecuacion (4.7) en ausencia de materia se obtiene:
Rab = 0. (4.8)
La ecuacion (4.8) representa las ecuaciones de Einstein en ausencia de materia.Dar solucion exacta a (4.8) representa un problema tecnico lejos de ser trivial, debido a
que el sistema corresponde a una conjunto de ecuaciones diferenciales altamente no lineal cuyonumero depende de la dimensionalidad del espacio-tiempo. No obstante, siempre es posibleapelar a ciertas simplificaciones relacionadas con la simetrıa del sistema fısico considerado queen principio pueden aliviar las dificultades tecnicas del problema. Este es precisamente el casode la solucion de Schwarzschild.
Las simplificaciones que se consideran para generar esta solucion son:
1. Campo estatico.
2. Simetrıa esferica.
3. Espacio-tiempo vacıo y asintoticamente plano.
Tales caracterısticas se muestran en el tensor metrico respectivo, que en la base
e0 = dt, ei = dr,dθ,dφ,
viene dada por:
gab = A(r)dtadtb − B(r)dradrb − r2dθadθb − r2 sin2 θdφadφb. (4.9)
El objetivo es construir las ecuaciones de Einstein en el vacıo; eso implica deducir cada unade las componentes del tensor de Ricci y en consecuencia cada uno de los sımbolos de Chistoffelnecesario para ello de la manera como se presenta a continuacion:
Rmn = ∂nΓsms − ∂sΓ
smn + Γr
msΓsrn − Γr
mnΓsrs,
Γcab = 1
2gcd ∂agbd + ∂bgad − ∂dgab;
con lo anterior los sımbolos de Chistoffel son:
Γ001 = A′
2A, Γ1
22 = −rB
, Γ100 = A′
2B,
Γ133 = −(r sin2 θ)
B, Γ2
33 = − sin θ cos θ, Γ313 = 1
r,
Γ111 = B′
2B, Γ2
12 = 1r, Γ3
23 = 1tan θ
,
las componentes no nulas del tensor de Ricci son:
R00 =A′
2B− A′
4B(A′
A+
B′
B+
A′
rB), R11 = −A′′
2A+
A′
4A(A′
A− B′
B) +
B′
rB
R22 = − 1
B+ 1 − r
2B(A′
A− B′
B), R33 = R22 sin2 θ.
26

Las cuales representan cuatro ecuaciones diferenciales de primer orden; daremos solucion a ellascon los metodos acostumbrados y haciendo uso de las condiciones iniciales exigidas a (4.9).
Multiplicando por BA
a R00 y sumando lo anterior a R11, obtenemos:
AB = b , (4.10)
donde b es una constante, luego haciendo uso de las condiciones de (4.9) nos queda que:
B =c2
A; (4.11)
tomando el resultado anterior y sustituyendolo en R22 obtenemos que:
d(rA)
dr= c2 , (4.12)
integrando con respecto a r finalmente tenemos:
rA = c2(r + k) , (4.13)
con k como la constante de integracion, obteniendo ası:
A =c2(r + k)
r, B =
(1 +
k
r
)−1
con esto la Solucion de Schwarzschild es:
gab = c2
(1 +
k
r
)dtadtb −
(1 +
k
r
)−1
dradrb − r2dθadθb − r2 sin2 θdφadφb. (4.14)
4.1. Movimiento en el Espacio-tiempo de Schwarzschild
El objetivo en esta parte del trabajo es observar que le ocurre a una partıcula cuando esliberada en el espacio-tiempo dado por (4.14); para ello generaremos el potencial efectivo. Estetrabajo implica contruir la expresion de la energıa total del sistema a traves de la langrangianay con ello poder identificar los terminos cineticos y potenciales.
Partiendo de la metrica de Schwarzschild:
gab =
(1 +
k
r
)dtadtb −
(1 +
k
r
)−1
dradrb − r2(dθadθb + sin2 θdφadφb
); (4.15)
por otro lado,[9]
2L = gab
dxa
ds
dxb
ds= ε (4.16)
donde
ε =
+1 Para partıculas masivas
0 Para partıculas tipo fotones
27

L la langrangiana del sistema y s el parametro afın; siendo este el parametro que parametrizalas curvas geodesicas de las partıculas.
Ahora bien por (4.16) obtenemos la expresion lagrangiana:
L =1
2(1 +
k
r)t2 − 1
2
(1 +
k
r
)−1
r2 − 1
2r2(θ2 + sin2 θφ2). (4.17)
Como la lagrangiana no depende explicitamente de t ni de φ tenemos dos cantidades con-servadas, que son energıa y momento angular respectivamente:
E =∂L
∂t=
(1 +
k
r
)t , Pφ =
∂L
∂φ= −r2 sin2 θφ
donde E es la energıa total del sistema y Pφ es el momento angular. Ası de esta manerafinalmente tenemos que:
t =E(
1 + kr
) , φ =−Pφ
r2 sin2 θ;
luego como existe conservacion del momento angular, la partıcula permanece moviendose enuna plano describiendo trayectorias circulares, fijando θ a un valor de π/2 obtenemos que:
φ =−Pφ
r2. (4.18)
Ahora bien, sustituyendo cada una de las expresiones de las cantidades conservadas en (4.17)con el fin de obtener una expresion dependiendo solo de la coordenada r tenemos que:
1
2E2 =
1
2r2 +
1
2
(1 +
k
r
) (P 2
φ
r2+ ε
); (4.19)
por otro lado, en consistencia con los principios de la mecanica clasica [4]; la energıa total delsistema se expresa como sigue:
E = K + V , (4.20)
donde K representa la energıa cinetica y V la energıa potencial del sistema fısico.Con esto la expresion del potencial efectivo es:
V (r) =1
2
(1 +
k
r
) (P 2
φ
r2+ ε
). (4.21)
28
4.2. Analisis del Potencial Efectivo
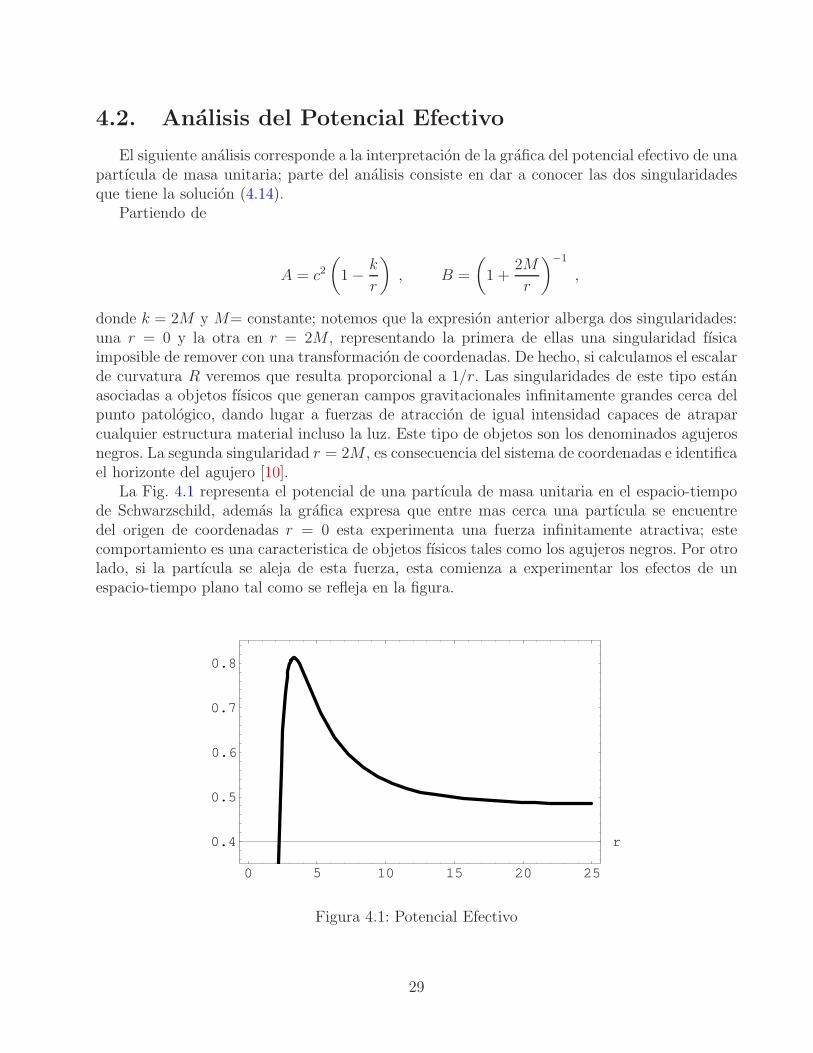
El siguiente analisis corresponde a la interpretacion de la grafica del potencial efectivo de unapartıcula de masa unitaria; parte del analisis consiste en dar a conocer las dos singularidadesque tiene la solucion (4.14).
Partiendo de
A = c2
(1 − k
r
), B =
(1 +
2M
r
)−1
,
donde k = 2M y M= constante; notemos que la expresion anterior alberga dos singularidades:una r = 0 y la otra en r = 2M , representando la primera de ellas una singularidad fısicaimposible de remover con una transformacion de coordenadas. De hecho, si calculamos el escalarde curvatura R veremos que resulta proporcional a 1/r. Las singularidades de este tipo estanasociadas a objetos fısicos que generan campos gravitacionales infinitamente grandes cerca delpunto patologico, dando lugar a fuerzas de atraccion de igual intensidad capaces de atraparcualquier estructura material incluso la luz. Este tipo de objetos son los denominados agujerosnegros. La segunda singularidad r = 2M , es consecuencia del sistema de coordenadas e identificael horizonte del agujero [10].
La Fig. 4.1 representa el potencial de una partıcula de masa unitaria en el espacio-tiempode Schwarzschild, ademas la grafica expresa que entre mas cerca una partıcula se encuentredel origen de coordenadas r = 0 esta experimenta una fuerza infinitamente atractiva; estecomportamiento es una caracteristica de objetos fısicos tales como los agujeros negros. Por otrolado, si la partıcula se aleja de esta fuerza, esta comienza a experimentar los efectos de unespacio-tiempo plano tal como se refleja en la figura.
0 5 10 15 20 25
0.4
0.5
0.6
0.7
0.8
r
Figura 4.1: Potencial Efectivo
29

30

Conclusiones
La discusion presentada en este trabajo se centra fundamentalmente en tres puntos: lacurvatura Seccional, la identidad de Bianchi y la solucion de Schwarzschild.
Luego de presentar una breve revision de la nocion de curvatura, tanto en el caso de su-perficies como de variedades, se determino que a partir de la curvatura de Gauss se define lacurvatura Seccional [2], como la curvatura de una sub-variedad dos-dimensional. Ademas, lageneralizacion de este ultimo concepto a todo sub-espacio dos-dimensional del espacio tangentea todo punto de una variedad, genera la nocion de curvatura de una variedad Riemanniana. Ası,a traves del concepto de curvatura Seccional se logra interpretar a la curvatura Riemannianacomo una suma de curvaturas Gaussianas.
Por otra parte, el estudio de la curvatura de Riemann tambien permitio definir el tensorde Einstein, que de acuerdo a la identidad de Bianchi corresponde a un tensor con divergencianula. Las ecuaciones de Einstein (2.7), son ecuaciones de naturaleza tensorial, donde el tensorde Einstein representa la geometrıa del campo gravitacional y el tensor de energıa-impulso lafuente del campo. La divergencia nula del tensor de energıa-impulso esta asociado a las leyes deconservacion de la energıa y del flujo de momento; mientras que, la divergencia nula del tensorde Einstein se puede reinterpretar como una consecuencia del principio topologico conocidocomo el lema de Cartan: la frontera de una frontera es nula.
Por ultimo, se considero una variedad con simetrıa esferica, dotada de un tensor metricopropio de un espacio-tiempo estatico y asintoticamente plano, para recuperar la solucion deSchwarzschild a las ecuaciones de Einstein. Dicha solucion esta caracterizada por dos singula-ridades, una en el origen del sistema coordenado y la otra a una distancia conocida como elradio de Schwarzschild. Del analisis del potencial efectivo, se tiene que la singularidad en elorigen admite una interpretacion fısica, conocida como agujero negro; mientras que el radio deSchwarzschild no exhibe caracteristicas semejantes.
31

32

Apendice A
Formas Diferenciales
El unico objeto que puede ser integrado de manera natural sobre un dominio k-dimensionales una k-forma diferencial.Este corto suplemento es para introducir una notacion que simplifica el trabajo en este campo. Ellenguaje del calculo exterior es particularmente conveniente para describir objetos geometricossobre una variedad arbitraria, dado que es independiente de los sistemas de coordenados. Losobjetos relevantes son las k-formas diferenciales y la derivada exterior. Una k-forma es unelemento de volumen k-dimensional asociado a un tensor covariante de rango-k totalmenteantisimetrico ([10]),
ω(k) =
1
k!ωm1m2...mk dxm1 ∧ dxm2 ∧ ... ∧ dxmk. (A.1)
El producto cuna (∧), es un producto tensorial antisimetrico [6]; y por tanto una k-forma debeser entendido como una manera de escribir tensores covariantes antisimetricas de cualquier ran-go. Ahora bien, veamos como a partir de la expasion de una tensor en un sistema de coordenadasse puede ver dicha expasion en terminos del producto cuna (∧).
Consideremos F una 2-forma diferencial, luego entonces:
F = Fijdxi ⊗ dxj . (A.2)
es el tensor covariante expandido en la base; por otro lado si consideramos al tensor F anti-simetrico en las componentes i , j tenemos que:
F =1
2(Fijdxi ⊗ dxj − Fjidxj ⊗ dxi). (A.3)
luego considerando que A ∧ B = A ⊗ B − B ⊗ A [6], con A y B dos formas diferencialesrespectivamente; ası (A.3) nos queda que:
F =1
2(Fijdxi ∧ dxj). (A.4)
Todas las k-formas definidas sobre una variedad dada forman un espacio vectorial (Ωk)isomorfas a todos lo tensores antisimetricos de rango k.
A continuacion veremos algunas definiciones y formulas de geometrıa diferencial:
33

Definicion A.1 (La Derivada Exterior). Sea d una aplicacion, tal que su accion sobre unak-forma arbitraria se define como:
dω =1
k!∂m ωn1n2...nk
dxm ∧ dxn1 ∧ dxn2 ∧ ... ∧ dxnk .
Esto es, d es un mapa que asocia a una k-forma una (k+1)-forma:
d : Ωk → Ωk+1;
y satisface la regla de Leibniz
d(ω(k) ∧ u(q)) = dω(k) ∧ u(q) + (−1)k
ω(k) ∧ duq.
Aparte de la anterior propiedad la derivada exterior satisface un importante lema conocidocomo el lema de Poincare.
Lema A.1 (Lema de Poincare).d2 = dd = 0.
Definicion A.2 (Dualidad). Sea ω una k-forma sobre una variedad orientable MD con unametrica g. Entonces la forma dual ∗
ω es la forma (D − k)-forma dada por:
∗ω =
1
(D − k)!k!
√g εn1n2...npm1m2...mD−k
ωn1n2...nk dxm1 ∧ ... ∧ dxmD−k .
Veamos ahora de que manera se entiende la dualidad sobre la base vectorial de una repre-sentacion tensorial.
⋆(en ∧ el ∧ em) = εnlms es. (A.5)
En las anteriores expresiones un nuevo objeto que a continuacion definiremos se hizo presente,dicho objeto de caracter tensorial tiene la particularidad ser totalmente antisimetrico.
Definicion A.3 (Tensor de Levi-Civita). El tensor de Levi-Civita ε es una tensor de 4-rangocompletamente antisimetrico.
εmnlr =
+1 Si (mnlr) difieren de (0123)por un numero par de trasposiciones
0 Si dos ındices cualesquiera coinciden
−1 Si(mnlr) difiere de (0123)por un numero impar de trasposiciones
Ahora bien, conozcamos un poco mas de la naturaleza de este nuevo objeto geometrico;conociendo como aplica dependiendo del numero de ındices contraıdos.
εmnlr εmabg = −1!(δna δl
bδrg − δn
aδrbδ
lg + δr
aδnb δl
g − δraδ
lbδ
ng + δl
aδrbδ
ng − δl
aδnb δr
g). (A.6)
εmnlr εmnab = −2!(δlaδ
rb − (δr
aδlb). (A.7)
εmnlr εmnla = −3!δra. (A.8)
εmnlr εmnlr = −4!. (A.9)
34
Bibliografıa
[1] Loveridge. C. Lee. Phisical and geometry interpretations of riemann tensor, ricci tensorand scalar curvature. arXiv:gr-qc/0401099, 2004.
[2] Do Carmo Manfredo. Riemannian Geometry. Birkhauser Boston, 1992.
[3] Do Carmo Manfredo. Differential Geometry of curves and surfaces. Boston, 1998.
[4] Goldstein. H. Classical Mechanics. Addison-Wesley publishing company, 1950.
[5] Nightingale. J. D. Foster. J. A short course in General Relativity. Springer-Verlag NewYork, 1992.
[6] Felsager. B. Geometry Particles and Fields. Springer-Verlag New York, 1997.
[7] Wheeler. J. A. Misner. C. W, Thorne. K. S. Gravitation. W. H. Freeman and Company,New York, 1999.
[8] Schutz. B. F. A First Course in General Relativity. Cambridge University Press, 1985.
[9] Nilton. O. Santos. III Escuela de Relatividad, Campos y Astrofısica, Espacio Tiempo deLevi-Civita. Facultad de Ciencia ULA, 1995.
[10] Wald M. Robert. General Relativity. University of Chicago Press,Chicago, 1984.
35