Embed Size (px)
Citation preview
7/23/2019 SOLUCIÓN CAPITULO 5
http://slidepdf.com/reader/full/solucion-capitulo-5 1/12
1
"Año de la Inversión para el Desarrollo Rural y la Seguridad Alimentaria"
TRABAJO OPCIONAL
ALUMNO : Espinoza Pariona, Gian Carlo Paul Vicente
TEMA : Solución del capítulo 5:
Reguladores PID: esquema básico,
terminología industrial
FACULTAD : Ingeniería
ESPECIALIDAD : Mecánico Eléctrica
CURSO : Sistemas Automáticos de Control
PROFESOR : Dr. Ing. William Ipanaqué Alama
Piura, 08 de mayo de 2013
UNIVERSIDAD DE PIURA
UNIVERSIDAD DE PIURA

7/23/2019 SOLUCIÓN CAPITULO 5
http://slidepdf.com/reader/full/solucion-capitulo-5 2/12
2
SOLUCIÓN CAPITULO 5: Reguladores PID: esquema básico, terminologíaindustrial
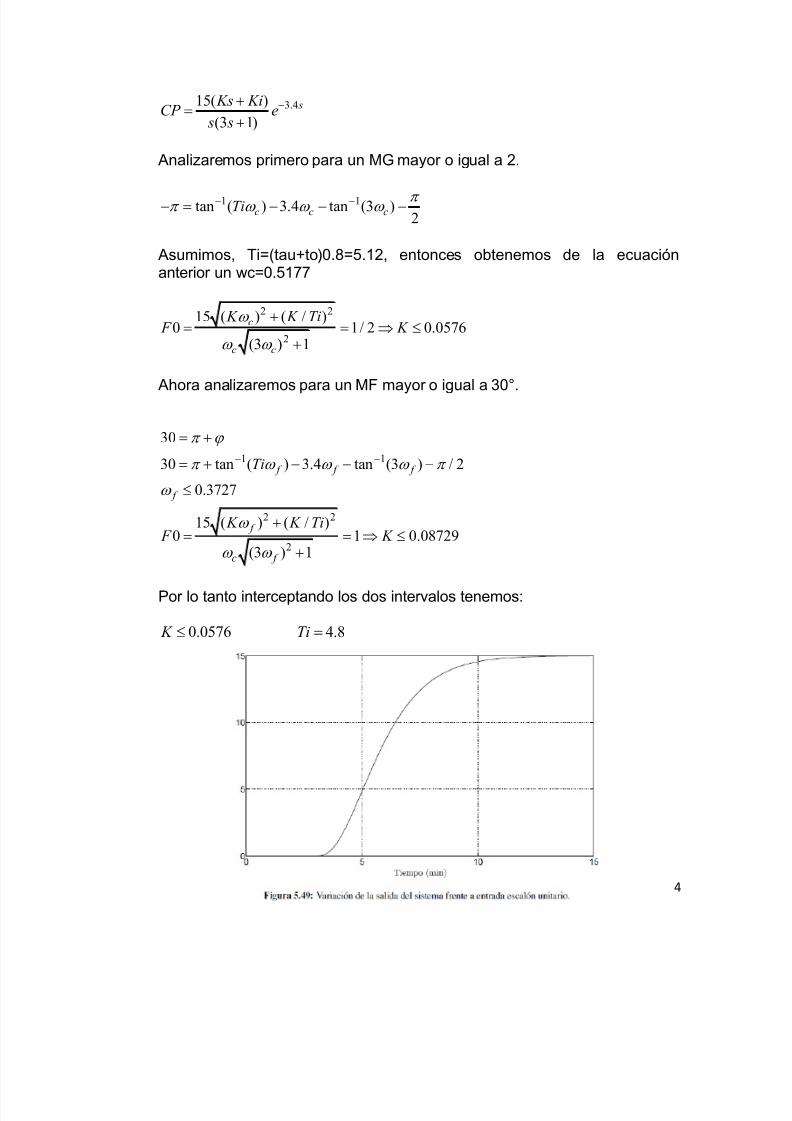
1. En un proceso industrial de transferencia de calor se realiza un experimento
a entrada escalón unitario, la variación de la salida del sistema(temperatura) se ilustra en la Figura 5.49.
a. Encuentre los valores máximos de ganancia proporcional que puedeadquirir un regulador proporcional aplicado al proceso.
Del gráfico obtenemos:
3.4
1
2
15( )
3 1
3.4 tan (3 ) 0.6092 /15
| ( ) | 1 0.5696(3 ) 1
s
c c c
cc c
c
P s e s
rad s K
P s K K
b. El sistema se desea controlar con un PI de manera que el sistema a lazocerrado tenga un comportamiento similar al de un sistema del segundoorden con periodo de oscilación de 8 minutos y con sobreoscilación nomayor del 25%. Verifique bajo qué condiciones Ud. puede resolver este
problema, establezca esas condiciones como hipótesis simplificativas yencuentre los valores del regulador PI.
21
2
8min
0.25
0.25 0.4037 0.5
21 0.90689
4
( )
d n n
T
OV
e
T
KiC s K
s

7/23/2019 SOLUCIÓN CAPITULO 5
http://slidepdf.com/reader/full/solucion-capitulo-5 3/12
3
2 2 2
15(1 3.4 )1 1
3 1
15 15(3.4) 1 15(1 ) 2
3 15(3.4) 3 15(3.4) n n
Ki sCP K
s s
K Ki Ki Num CP s s s s
K K
A partir de esto obtenemos 2 ecuaciones y tenemos dos incógnitas, por lotanto:
*15 51 1 2.72 46.252 61.252 51 1.72
*15 2.467 41.9458 41.9458 15 2.467
K Ki K K Ki
Ki K K Ki
Obtenemos:
K=0.04958Ki=0.025821
Ti=K/Ki=1.92
C(s)=0.04958+0.025821/s
c. Diseñe usando las reglas a lazo cerrado de Ziegler Nichols reguladores P,PI y PID para el proceso Pt.
Kc=0.5696Tc=10.33
K=0.4Kc=0.22784Ti=0.8Tc=8.264
C(s)=0.22784(1+1/(8.264s))
d. Ahora diseñe un regulador PI en la frecuencia, se pone comoespecificaciones un margen de ganancia de por lo menos 2 y un margen defase de por lo menos 30 grados. Establezca los parámetros oportunos delPI para lograr cumplir con esa especificación. Si necesita asumir hipótesisque simplifique el desarrollo, especifíquelas.
7/23/2019 SOLUCIÓN CAPITULO 5
http://slidepdf.com/reader/full/solucion-capitulo-5 4/12
4
3.415( )
(3 1)
s Ks KiCP e
s s
Analizaremos primero para un MG mayor o igual a 2.
1 1tan ( ) 3.4 tan (3 )2
c c cTi
Asumimos, Ti=(tau+to)0.8=5.12, entonces obtenemos de la ecuaciónanterior un wc=0.5177
2 2
2
15 ( ) ( / )0 1/ 2 0.0576
(3 ) 1
c
c c
K K Ti F K
Ahora analizaremos para un MF mayor o igual a 30°.
1 1
2 2
2
30
30 tan ( ) 3.4 tan (3 ) / 2
0.3727
15 ( ) ( / )0 1 0.08729
(3 ) 1
f f f
f
f
c f
Ti
K K Ti F K
Por lo tanto interceptando los dos intervalos tenemos:
0.0576 4.8 K Ti

7/23/2019 SOLUCIÓN CAPITULO 5
http://slidepdf.com/reader/full/solucion-capitulo-5 5/12
5
2. Un proceso tiene una respuesta a escalón como indica la Figura 5.50. Enlos últimos años y en ocasiones diferentes se han hecho varias pruebassobre el proceso para saber su reacción a entradas senoidales, lasobservaciones han concluido que los desfases que se presentan en lasalida están en el rango entre 0 (frecuencias bajas) y 270 grados
(frecuencias altas). Encuentre usted la forma más cercana de un modeloque aproxime en el tiempo y en la frecuencia (su diagrama de Nyquist delmodelo y del proceso sea lo más cercano posible).
Para simplificar considere que el proceso tiene un único polo o polosrepetidos según sea el caso.
Además se pide:
a. Estudiar cuál de los siguientes controladores: K (proporcional) y Ki=s(Integral) sería el más adecuado para garantizar:
2.67
3
2( )
(18.66 1)
s P s e
s
1) Un margen de fase de por lo menos 35 grados y un margen de gananciade por lo menos 2.
K (proporcional)
MG mayor o igual a 2.
1
2 3
2.67 3 tan (18.66 ) 0.07931
2| | 1/ 2 1.4245
( (18.66 ) 1)
c c c
c
K CP K
MF mayor o igual a 35 grados.
1
2 3
72.67 3 tan (18.66 ) 0.05463
36
2| | 1 1.4558
( (18.66 ) 1)
f f f
f
K CP K
Por lo tanto sí se puede realizar con un K menor o igual a 1.4245.
7/23/2019 SOLUCIÓN CAPITULO 5
http://slidepdf.com/reader/full/solucion-capitulo-5 6/12
6
Ki=s (Integral)
MG mayor o igual a 2.
1
2 3
2.67 3 tan (18.66 ) / 2 0.02912
0.8(18.66 2.67) 17.064
2| | 1 6.29
17.064( (18.66 ) 1)
c c c
c
Ti
K CP K
MF mayor o igual a 35 grados.
1
2 3
72.67 3tan (18.66 ) / 2 0.01687
36
2| | 1 9.83
17.064( (18.66 ) 1)
f f f
f
K CP K
Por lo tanto sí se puede realizar con un K menor o igual a 6.29.
El más factible sería el regulador integral, ya que tiene un mayor rangode valores de K aceptables.
2) Error nulo.
K (proporcional)
Nunca dará un error nulo, será un valor constante.
Ki=s (Integral)
No importa los valores que tome, la parte integral siempre nos dará unerror nulo.
El regular que se debe utilizar es el regulador integral ya que es el únicoque cumple con las especificaciones.
b. Determinar para cada controlador cual es el rango posible de valores de sus
parámetros para garantizar por lo menos estabilidad.
K (proporcional)
K menor o igual a 1.4558.

7/23/2019 SOLUCIÓN CAPITULO 5
http://slidepdf.com/reader/full/solucion-capitulo-5 7/12
7
Ki=s (Integral)
K menor o igual a 9.83.
3. Un proceso tiene un diagrama de Bode tal como se indica en la Figura 5.51.

7/23/2019 SOLUCIÓN CAPITULO 5
http://slidepdf.com/reader/full/solucion-capitulo-5 8/12
8
Sintonice adecuadamente un PI y un PID para dicho proceso. Explique elprocedimiento que seguiría para sintonizar un PI teniendo comoespecificaciones un margen de fase y de ganancia.
Del diagrama de Bode se obtiene:
3
1( )
( 1) P s
s
a) Para sintonizar adecuadamente un PI y un PID utilizaremos el métodode Ziegler-Nichols para lazo cerrado, para esto primero hallaremos Kc yTc:
1
3
2
3tan ( ) 1.732 3.628
| 0 | 1 8
1
c c c
cc
c
T
K F K
Con estos valores nos vamos a la tabla:
PI
K=3.2Ti=2.9024
PID
K=4.8Ti=1.814Td=0.4535
b) Cuando nos especifican u margen de ganancia y un margen de fase elprocedimiento es el mismo aplicado para el ejercicio 1 apartado (d).Primero se trabaja con uno en específico. Por ejemplo primeroanalizamos el margen de ganancia:
7/23/2019 SOLUCIÓN CAPITULO 5
http://slidepdf.com/reader/full/solucion-capitulo-5 9/12
9
1
32
0 3tan ( ) / 2 0.57735
1
1
c c
c c
Ti
K K
MGTi
A partir de estas ecuaciones obtenemos un rango de valores de K. Cabeconsiderar que hemos asumido que el Ti es el tau equivalente del proceso.
Ahora analizamos para un margen de fase:
1
32
3tan ( ) / 2
1
1
f f
f f
MF
Ti
K K
Ti
Con esto obtenemos dos intervalos, la intersección de estos dos rangosserán los valores de K que cumplan con las especificaciones de MG y MF.
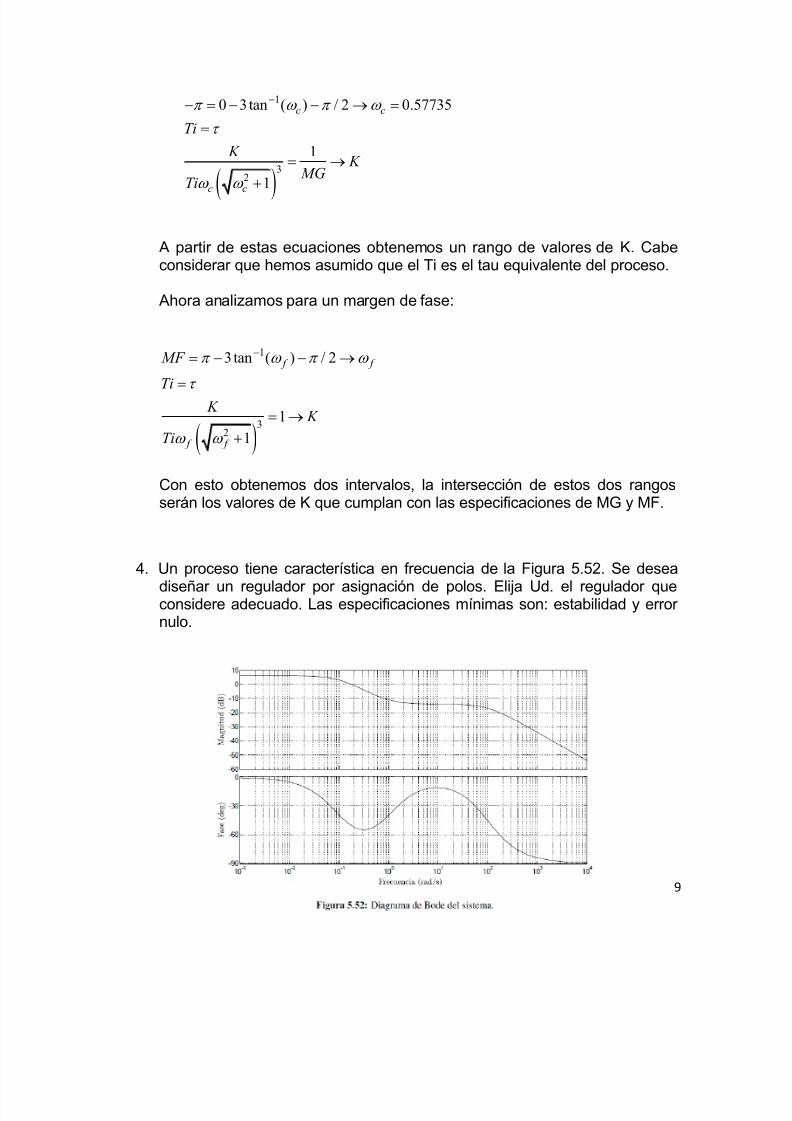
4. Un proceso tiene característica en frecuencia de la Figura 5.52. Se desea
diseñar un regulador por asignación de polos. Elija Ud. el regulador queconsidere adecuado. Las especificaciones mínimas son: estabilidad y errornulo.

7/23/2019 SOLUCIÓN CAPITULO 5
http://slidepdf.com/reader/full/solucion-capitulo-5 10/12
10
Del diagrama de Bode obtenemos:
2
2( 1) 2( 1)( )
(10 1)(0.01 1) 0.1 10.01 1
s s P s
s s s s
Para este proceso se utilizará un regulador PID, ya que cuenta con errornulo y podemos obtener sus parámetros de manera que también cumplacon la estabilidad.
El proceso se puede aproximar a uno de primer orden con un polo de -0.1123, por lo tanto le asignaremos polos cercanos a este valor.
p1= -0.1p2= -0.05p3= -0.08
2
2
3 2 3 2 2
3 2
3 2
( ) /
2 21 ( )* ( ) 1
0.1 10.01 1
0.1 10.01 2 2 2 2 2 21 ( )* ( )
0.1 10.01
(1 ( )* ( )) (0.1 2 ) (10.01 2 2 ) (1 2 2 ) 2
d
d d
d d
C s K Ki s
K s Ks Ki sC s P s
s s s
s s s K s K s Ks Ks Kis KiC s P s
s s s
Num C s P s K s K K s K Ki s K
i
Al remplazar el valor de los polos e igualar a cero:
0.018 0.18 1.8 0
0.00475 0.095 1.9 0.0249875
0.011776 0.1472 1.84 0.0159872
d
d
d
K K Ki
K K Ki
K K Ki
Kd= -5.71
K= -0.594Ki= -0.002265
Por lo tanto se concluye que para este proceso los polos asignados no soncorrectos. Se deben utilizar otros polos de tal manera que los parámetros

7/23/2019 SOLUCIÓN CAPITULO 5
http://slidepdf.com/reader/full/solucion-capitulo-5 11/12
11
hallados sean positivos. El método a utilizar será el mismo que se ha usadoantes.
5. Para un sistema de primer orden con retardo puro. Calcule analíticamente
por las fórmulas del método de Ziegler Nichols a lazo cerrado cual es elmargen de fase resultante.
1( )
1
tos P s e
s
Se analizará para un PID.
1
2
2
2
tan ( )
2 2
1 ( ) 1( ) 1
0.6 ( ) 1
0.25
c c c
c c
c c
c
c c
c
c
c
c
to
T T
K K
K
Ki
Kd
7/23/2019 SOLUCIÓN CAPITULO 5
http://slidepdf.com/reader/full/solucion-capitulo-5 12/12
12
2 2
2 2
0.250.6 ( ) 1
( )
0.250.6 ( ) 1
10
1
cc c
ctosc c
s s
C s s
s s
F e s s
Con estos valores determinamos el margen de fase:
2 2
2
21 1
2
0.25 0.6 ( ) 11
| 0 | 1( ) 1
0.6 ( ) 1tan / 2 tan ( )
0.25
f f cc c
f f f
f c f f
f c c
F
MF to













