Embed Size (px)
Citation preview

STAT 200C: High-dimensional Statistics
Arash A. Amini
May 30, 2018
1 / 57

Table of Contents
1 Sparse linear modelsBasis Pursuit and restricted null space propertySufficient conditions for RNS
2 / 57

Linear regression setup
• The data is (y ,X ) where y ∈ Rn and X ∈ Rn×d , and the model
y = Xθ∗ + w .
• θ∗ ∈ Rd is an unknown parameter.
• w ∈ Rn is the vector of noise variables.
• Equivalently,yi = 〈θ∗, xi 〉+ wi , i = 1, . . . , n
where xi ∈ Rd is the nth row of X :
X =
− xT
1 −− xT
2 −...
− xTn −
︸ ︷︷ ︸
d
• Recall 〈θ∗, xi 〉 =∑d
j=1 θ∗j xij .
3 / 57

Sparsity models
• When n < d , no hope of estimating θ∗,
• unless we impose some sort of of low-dimensional model on θ∗.
• Support of θ∗ (recall [d ] = {1, . . . , d}):
supp(θ∗) := S(θ∗) ={j ∈ [d ] : θ∗j 6= 0
}.
• Hard sparsity assumption: s = |S(θ∗)| � d .
• Weaker sparsity assumption via `q balls for q ∈ [0, 1]
Bq(Rq) ={θ ∈ Rd :
d∑j=1
|θj |q ≤ Rq
}.
• q = gives `1 ball.
• q = 0 the `0 ball, same as hard sparsity:
‖θ∗‖0 := |S(θ∗)| = #{j ; θ∗j 6= 0
}4 / 57

(from HDS book)
5 / 57

Basis pursuit
• Consider the noiseless case y = Xθ∗.
• We assume that ‖θ∗‖0 is small.
• Ideal program to solve:
minθ∈Rd
‖θ‖0 subject to y = Xθ
• ‖ · ‖0 is highly non-convex, relax to ‖ · ‖1:
minθ∈Rd
‖θ‖1 subject to y = Xθ (1)
This is called basis pursuit (regression).
• (1) is a convex program.
• In fact, can be written as a linear program1.
• Global solutions can be obtained very efficiently.
1Exercise: Introduce auxiliary variables sj ∈ R and note that minimizing∑
j sj subject to
|θj | ≤ sj gives the `1 norm of θ.6 / 57

Table of Contents
1 Sparse linear modelsBasis Pursuit and restricted null space propertySufficient conditions for RNS
7 / 57

• Define
C(S) = {∆ ∈ Rd : ‖∆Sc‖1 ≤ ‖∆S‖1}. (2)
Theorem 1The following two are equivalent:
• For any θ∗ ∈ Rd with support ⊆ S , the basis pursuit program (1) applied to
the data (y = Xθ∗,X ) has unique solution θ = θ∗.
• The restricted null space (RNS) property holds, i.e.,
C(S) ∩ ker(X ) = {0}. (3)
8 / 57

Proof
• Consider the tangent cone to the `1 ball (of radius ‖θ∗‖1) at θ∗:
T(θ∗) = {∆ ∈ Rd : ‖θ∗ + t∆‖1 ≤ ‖θ∗‖1, for some t > 0.}
i.e., the set of descent directions for `1 norm at point θ∗.
• Feasible set is θ∗ + ker(X ), i.e.
• ker(X ) is the set of feasible directions ∆ = θ − θ∗.• Hence, there is a minimizer other than θ∗ if and only if
T(θ∗) ∩ ker(X ) 6= {0} (4)
• It is enough to show that
C(S) =⋃
θ∗∈Rd : supp(θ∗)⊆ST(θ∗).
9 / 57

B1
•θ∗(1)
T(θ∗(1))•θ∗(2)
T(θ∗(2))
Ker(X)
C(S)
d = 2, [d ] = {1, 2}, S = {2}, θ∗(1)
= (0, 1), θ∗(2)
= (0,−1).
C(S) = {(∆1,∆2) : |∆1| ≤ |∆2|}.
10 / 57
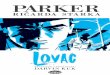
• It is enough to show that
C(S) =⋃
θ∗∈Rd : supp(θ∗)⊆ST(θ∗) (5)
• We have ∆ ∈ T1(θ∗) iff2
‖∆Sc‖1 ≤ ‖θ∗S‖1 − ‖θ∗S + ∆S‖1
• We have ∆ ∈ T1(θ∗) for some θ∗ ∈ Rd s.t. supp(θ∗) ⊂ S iff
‖∆Sc‖1 ≤ supθ∗S∈Rd
[‖θ∗S‖1 − ‖θ∗S + ∆S‖1
]= ‖∆S‖1
2Let T1(θ∗) be the subset of T(θ∗) where t = 1, and argue that w.l.o.g. we can work thissubset.
11 / 57
Table of Contents
1 Sparse linear modelsBasis Pursuit and restricted null space propertySufficient conditions for RNS
12 / 57

Sufficient conditions for restricted nullspace
• [d ] := {1, . . . , d}• For a matrix X ∈ Rd , let Xj be its jth column (for j ∈ [d ]).
• The pairwise incoherence of X is defined as
δPW(X ) := maxi, j∈[d ]
∣∣∣ 〈Xi ,Xj〉n
− 1{i = j}∣∣∣
• Alternative form: XTX is the Gram matrix of X ,
• (XTX )ij = 〈Xi ,Xj〉.
δPW(X ) := ‖XTX
n− Ip‖∞
where ‖ · ‖∞ is the vector `∞ norm of the matrix.
13 / 57

Proposition 1 (HDS Prop. 7.1)
(Uniform) restricted nullspace holds for all S with |S | ≤ s if
δPW(X ) ≤ 1
3s
• Proof: Exercise 7.3.
14 / 57

• A more relaxed condition:
Definition 1 (RIP)
X ∈ Rn×d satisfies a restricted isometry property (RIP) of order s with constantδs(X ) > 0 if
|||XTS XS
n− I |||op ≤ δs(X ), for all S with |S | ≤ s
• PW incoherence is close to RIP with s = 2;
• for example, when ‖Xj/√n‖2 = 1 for all j , we have
δ2(X ) = δPW(X ).
• In general, for any s ≥ 2, (Exercise 7.4)
δPW(X ) ≤ δs(X ) ≤ s δPW(X ).
15 / 57

Definition (RIP)
X ∈ Rn×d satisfies a restricted isometry property (RIP) of order s with constantδs(X ) > 0 if
|||XTS XS
n− I |||op ≤ δs(X ), for all S with |S | ≤ s
• Let xTi be the i th row of X . Consider the sample covariance matrix:
Σ :=1
nXTX =
1
n
n∑i=1
xixTi ∈ Rd×d .
• Then ΣSS = 1nX
TS XS , hence, RIP is
|||ΣSS − I |||op ≤ δ < 1
i.e., ΣSS ≈ Is . More precisely,
(1− δ)‖u‖2 ≤ ‖ΣSSu‖2 ≤ (1 + δ)‖u‖2, ∀u ∈ Rs
16 / 57

• RIP gives sufficient conditions:
Proposition 2 (HDS Prop. 7.2)
(Uniform) restricted null space holds for all S with |S | ≤ s if
δ2s(X ) ≤ 1
3
• Consider a sub-Gaussian matrix X with i.i.d. entries (Exercise 7.7):
• We have
n & s2 log d =⇒ δPW(X ) <1
3s, w.h.p..
n & s log(eds
)=⇒ δ2s <
1
3, w.h.p..
• Sample complexity requirement for RIP is milder.
• Above corresponds to Σ = αI .
• For more general covariance Σ, it is harder to satisfy either PW or RIP.
17 / 57

Neither RIP or PW is necessary
• Consider X ∈ Rn×d with i.i.d. rows Xi ∼ N(0,Σ).
• Letting 1 ∈ Rd be the all-ones vector, and
Σ := (1− µ)Id + µ11T
for µ ∈ [0, 1). (A spiked covariance matrix.)
• We have γmax(ΣSS) = 1 + µ(s − 1)→∞ as s →∞.
• Exercise 7.8,
(a) PW is violated w.h.p. unless µ� 1/s.
(b) RIP is violated w.h.p. unless µ� 1/√s.
In fact δ2s grows like µ√s for any fixed µ ∈ (0, 1).
• However, for any µ ∈ [0, 1), basis pursuit succeeds w.h.p. if
n & s log(eds
).
(A later result shows this.)
18 / 57

19 / 57

Noisy sparse regression
• A very popular estimator is the `1-regularized least-squares:
θ ∈ argminθ∈Rd
[ 1
2n‖y − Xθ‖2
2 + λ‖θ‖1
](6)
• The idea: minimizing `1 norm leads to sparse solutions.
• (6) is a convex program; global solution can be obtained efficiently.
• Other options: constrained form of lasso
min‖θ‖1≤R
1
2n‖y − Xθ‖2
2 (7)
and relaxed basis persuit
minθ∈Rd‖θ‖1 s.t.
1
2n‖y − Xθ‖2
2 ≤ b2 (8)
20 / 57

• For a constant α ≥ 1,
Cα(S) :={
∆ ∈ Rd | ‖∆Sc‖1 ≤ α‖∆S‖1
}.
• A strengthening of RNS is:
Definition 2 (RE condition)
A matrix X satisfies the restricted eigenvalue (RE) condition over S withparameters (κ, α) if
1
n‖X∆‖2
2 ≥ κ‖∆‖22 for all ∆ ∈ Cα(S).
• Intuition: θ minimizes L(θ) := 12n‖Xθ − y‖2.
• Ideally, δL := L(θ)− L(θ∗) is small.
• Want to translate deviation in loss to deviations in parameter θ − θ∗.• Controlled by the curvature of the loss, captured by the Hessian
∇2L(θ) =1
nXTX .
21 / 57

• Ideally would like strong convexity (in all directions):
〈∆,∇2L(θ) ∆〉 ≥ κ‖∆‖2, ∀∆ ∈ Rd \ {0}.
or in the context of regression
1
n‖X∆‖2
2 ≥ κ‖∆‖2, ∀∆ ∈ Rd \ {0}.
22 / 57

• In high-dimensions, cannot guarantee this in all directions,
• the loss is flat over kerX .
23 / 57

Side note: Strong convexity
• A twice differentiable function is strongly convex if ∇2L(θ) � κI for all θ.
• In other words if ∇2L(θ)− κI � 0, for all θ.
• Hessian is uniformly bounded below (in all directions).
• By Taylor expansion, the function will have a quadratic lower bound:
L(θ∗ + ∆) ≥ L(θ∗) + 〈∇L(θ∗),∆〉+κ
2‖∆‖2.
• Alternatively, L(θ) is strongly convex if L(θ)− κ2 ‖θ‖2 is convex.
• In contrast, assuming smoothness, L is strictly convex iff ∇2L(θ) � 0, notnecessarily uniformly lower bounded.
• Example: f (x) = ex on R, strictly convex but not strongly convex.f ′′(x) > 0 for all x but f ′′(x)→ 0 as x →∞.
• Similarly: f (x) = 1/x over (0,∞).
24 / 57

Theorem 2
Assume that y = Xθ∗ + w , where X ∈ Rn×d and θ∗ ∈ Rd , and
• θ∗ is supported on S ⊂ [d ] with |S | ≤ s
• X satisfies RE(κ, 3) over S .
Let us define z = XTwn and γ2 :=
‖w‖22
2n . Then, we have the following:
(a) Any solution of Lasso (6) with λ ≥ 2‖z‖∞ satisfies
‖θ − θ∗‖2 ≤3
κ
√s λ
(b) Any solution of constrained Lasso (7) with R = ‖θ∗‖1 satisfies
‖θ − θ∗‖2 ≤4
κ
√s‖z‖∞
(c) Any solution of relaxed basis pursuit (8) with b2 ≥ γ2 satisfies
‖θ − θ∗‖2 ≤4
κ
√s‖z‖∞ +
2√κ
√b2 − γ2
25 / 57

Example (fixed design regression)• Assume y = Xθ∗ + w where w ∼ N(0, σ2In), and
• X ∈ Rn×d fixed and satisfying RE condition and normalization
maxj=1,...,d
‖Xj‖√n≤ C .
where Xj is the jth column of X .
• Recall z = XTw/n.
• It is easy to show that w.p. ≥ 1− 2e−nδ2/2,
‖z‖∞ ≤ Cσ(√2 log d
n+ δ)
• Thus, setting λ = 2Cσ(√
2 log dn + δ
), Lasso solution satisfies
‖θ − θ∗‖2 ≤6Cσ
κ
√s(√2 log d
n+ δ)
w.p. at least 1− 2e−nδ2/2.
26 / 57

• Taking δ =√
2 log /n, we have
‖θ − θ∗‖2 . σ
√s log d
n
w.h.p. (i.e., ≥ 1− 2d−1).
• This is the typical high-dimensional scaling in sparse problems.
• Had we known the support S in advance, our rate would be (w.h.p.)
‖θ − θ∗‖2 . σ
√s
n.
• The log d factor is the price for not knowing the support;
• roughly the price for searching over(ds
)≤ d s collection of candidate
supports.
27 / 57
Proof of Theorem 2
• Let us simplify the loss L(θ) := 12n‖Xθ − y‖2.
• Setting ∆ = θ − θ∗,
L(θ) =1
2n‖X (θ − θ∗)− w‖2
=1
2n‖X∆− w‖2
=1
2n‖X∆‖2 − 1
n〈X∆,w〉+ const.
=1
2n‖X∆‖2 − 1
n〈∆,XTw〉+ const.
=1
2n‖X∆‖2 − 〈∆, z〉+ const.
where z = XTw/n. Hence,
L(θ)− L(θ∗) =1
2n‖X∆‖2 − 〈∆, z〉. (9)
• Exercise: Show that (9) is the Taylor expansion of L around θ∗.
28 / 57

Proof (constrained version)• By optimality of θ and feasibility of θ∗:
L(θ) ≤ L(θ∗)
• Error vector ∆ := θ − θ∗ satisfies basic inequality
1
2n‖X ∆‖2
2 ≤ 〈z , ∆〉.
• Using Holder inequality
1
2n‖X ∆‖2
2 ≤ ‖z‖∞‖∆‖1.
• Since ‖θ‖1 ≤ ‖θ∗‖1, we have ∆ = θ − θ∗ ∈ C1(S), hence
‖∆‖1 = ‖∆S‖1 + ‖∆Sc‖1 ≤ 2‖∆S‖1 ≤ 2√s‖∆‖2.
• Combined with RE condition (∆ ∈ C3(S) as well)
1
2κ‖∆‖2
2 ≤ 2√s‖z‖∞‖∆‖2.
which gives the desired result.
29 / 57

Proof (Lagrangian version)• Let L(θ) := L(θ) + λ‖θ‖1 be the regularized loss.
• Basic inequality is
L(θ) + λ‖θ‖1 ≤ L(θ∗) + λ‖θ∗‖1
• Rearranging1
2n‖X ∆‖2
2 ≤ 〈z , ∆〉+ λ(‖θ∗‖1 − ‖θ‖1)
• We have
‖θ∗‖1 − ‖θ‖1 = ‖θ∗S‖1 − ‖θ∗S + ∆S‖1 − ‖∆Sc‖1
≤ ‖∆S‖1 − ‖∆Sc‖1
• Since λ ≥ 2‖z‖∞,
1
n‖X ∆‖2
2 ≤ λ‖∆‖1 + 2λ(‖∆S‖1 − ‖∆Sc‖1)
≤ λ( 3‖∆S‖1 − ‖∆Sc‖1 )
• It follows that ∆ ∈ C3(S) and the rest of proof follows.
30 / 57
RE condition for anisotropic design• For a PSD matrix Σ, let
ρ2(Σ) = maxi
Σii .
Theorem 3
Let X ∈ Rn×d with rows i.i.d. from N(0,Σ). Then, there exist universalconstants c1 < 1 < c2 such that
‖Xθ‖22
n≥ c1‖
√Σθ‖2
2 − c2 ρ2(Σ)
log d
n‖θ‖2
1, for all θ ∈ Rd (10)
withe probability at least 1− e−n/32/(1− e−n/32).
• Exercise 7.11: (10) implies RE condition over C3(S) uniformly over allsubsets of cardinality
|S | ≤ c1
32c2
γmin(Σ)
ρ2(Σ)
n
log d
• In other words, s log d . n =⇒ RE condition over C3(S) for all |S | ≤ s.
31 / 57

Examples
• Toeplitz family: Σij = ν|i−j|,
ρ2(Σ) = 1, γmin(Σ) ≥ (1− ν)2 > 0
• Spiked model: Σ := (1− µ)Id + µ11T ,
ρ2(Σ) = 1, γmin(Σ) = 1− µ
• For future applications, note that (10) implies
‖Xθ‖22
n≥ α1‖θ‖2
2 − α2‖θ‖21, ∀θ ∈ Rd .
where α1 = c1γmin(Σ) and α2 = c2ρ2(Σ)
log d
n.
32 / 57

Lasso oracle inequality
• For simplicity, let κ = γmin(Σ) and ρ2 = ρ2(Σ) = maxi Σii
Theorem 4
Under the condition 10, consider the Lagrangian Lasso with regularizationparameter λ ≥ 2‖z‖∞ where z = XTw/n. For any θ∗ ∈ Rd , any optimal
solution θ satisfies the bound
‖θ − θ∗‖22 ≤
144
c21
λ2
κ2|S |︸ ︷︷ ︸
Estimation error
+16
c1
λ
κ‖θ∗Sc‖1 +
32c2
c1
ρ2
κ
log d
n‖θ∗Sc‖2
1︸ ︷︷ ︸ApproximationError
(11)
valid for any subset S with cardinality
|S | ≤ c1
64c2
κ
ρ2
n
log d.
33 / 57

• Simplifying the bound
‖θ − θ∗‖22 ≤ κ1 λ
2|S |+ κ2 λ‖θ∗Sc‖1 + κ3log d
n‖θ∗Sc‖2
1
where κ1, κ2, κ3 are constant dependent on Σ.
• Assume σ = 1 (noise variance) for simplicity.
• Since we ‖z‖∞ .√
log d/n w.h.p., we can take λ of this order:
‖θ − θ∗‖22 .
log d
n|S |+
√log d
n‖θ∗Sc‖1 +
log d
n‖θ∗Sc‖2
1
• Optimizing the bound
‖θ − θ∗‖22 . inf
|S|. nlog d
[log d
n|S |+
√log d
n‖θ∗Sc‖1 +
log d
n‖θ∗Sc‖2
1
]
• An oracle that knows θ∗ can choose the optimal S .
34 / 57

Example: `q-ball sparsity
• Assume that θ∗ ∈ Bq, i.e.,∑d
j=1 |θ∗j |q ≤ 1, for some q ∈ [0, 1].
• Then, assuming σ2 = 1, we have the rate (Exercise 7.12)
‖θ − θ∗‖22 .
( log d
n
)1−q/2
.
Sketch:
• Trick: take S = {i : |θ∗i | > τ} and find a good threshold τ later.
• Show that ‖θ∗Sc‖1 ≤ τ 1−q and |S | ≤ τ−q.
• The bound would be of the form (ε :=√
log d/n)
ε2τ−q + ετ 1−q + (ετ 1−q)2.
• Ignore the last term (assuming ετ 1−q ≤ 1, it is not dominant),
35 / 57

Proof of Theorem 4
• Let L(θ) := L(θ) + λ‖θ‖1 be the regularized loss.
• Basic inequality is
L(θ) + λ‖θ‖1 ≤ L(θ∗) + λ‖θ∗‖1
• Rearranging1
2n‖X ∆‖2
2 ≤ 〈z , ∆〉+ λ(‖θ∗‖1 − ‖θ‖1)
• We have
‖θ∗‖1 − ‖θ‖1 = ‖θ∗S‖1 − ‖θ∗S + ∆S‖1 − ‖∆Sc‖1 + ‖θ∗Sc‖1
≤ ‖∆S‖1 − ‖∆Sc‖1 + ‖θ∗Sc‖1
• Since λ ≥ 2‖z‖∞,
1
n‖X ∆‖2
2 ≤ λ‖∆‖1 + 2λ(‖∆S‖1 − ‖∆Sc‖1 + ‖θ∗Sc‖1)
≤ λ(3‖∆S‖1 − ‖∆Sc‖1 + 2‖θ∗Sc‖1).
36 / 57

• Let s = |S | and b = 2‖θ∗Sc‖1.
• Then, the error satisfies ‖∆Sc‖1 ≤ 3‖∆S‖1 + b.
• That is, ‖∆‖1 ≤ 4‖∆S‖1 + b, hence
‖∆‖21 ≤ (4‖∆S‖1 + b)2
≤ 32‖∆S‖21 + 2b2
≤ 32 s ‖∆S‖22 + 2b2
≤ 32 s ‖∆‖22 + 2b2.
• Bound (10) can be written as (α1, α2 > 0)
‖X∆‖22
n≥ α1‖∆‖2
2 − α2‖∆‖21, ∀∆ ∈ Rd .
• Applying to ∆, we have
‖X∆‖22
n≥ α1‖∆‖2
2 − α2
(32 s ‖∆‖2
2 + 2b2)
= (α1 − 32α2s)‖∆‖22 − 2α2b
2.
37 / 57

• We want α1 − 32α2s to be strictly positive.
• Assume that α1/2 ≥ 32α2s so that α1 − 32α2s ≥ α1/2.
• We obtain
α1
2‖∆‖2
2 − 2α2b2 ≤ λ(3‖∆S‖1 − ‖∆Sc‖1 + 2‖θ∗Sc‖1)
• Drop ‖∆Sc‖1, use ‖∆S‖1 ≤√s‖∆‖2 and rearrange
α1
2‖∆‖2
2 ≤ λ(3√s‖∆‖2 + 2‖θ∗Sc‖1) + 2α2b
2
• This is a quadratic inequality in ‖∆‖2. Using the inequality on next slide
‖∆‖22 ≤
2(3λ√s)2
α21/4
+2(2λ‖θ∗Sc‖1 + 2α2b
2)
α1/2
≤ 72λ2s
α21
+8λ‖θ∗Sc‖1
α1+
16α2‖θ∗Sc‖21
α1
where we used b = 2‖θ∗Sc‖1.
• This proves the theorem with better constants!
38 / 57

• In general, ax2 ≤ bx + c and x ≥ 0 imply
x ≤ b
a+
√c
a
• which itself implies
x2 ≤ 2b2
a2+
2c
a.
39 / 57

Bounds on prediction error
• The following can be thought of as the mean-squared prediction error
1
n‖X (θ − θ∗)‖2
2 =1
n
n∑i=1
(〈xi , θ − θ∗〉)2
• Letting fθ(x) = 〈x , θ〉 be the regression function,
• in prediction we are interested in estimating the function fθ(·).
• Defining the empirical norm
‖f ‖n =(1
n
n∑i=1
f 2(xi ))1/2
• we can write
1
n‖X (θ − θ∗)‖2
2 = ‖fθ − fθ∗‖2n (12)
• For sufficiently regular points, ‖f ‖2n ≈ ‖f ‖2
L2 =∫f 2(x)dx .
• There is another explanation in HDS.
40 / 57

Prediction error bounds
Theorem 5
Consider Lagrangian lasso with λ ≥ 2‖z‖∞ where z = XTw/n:
(a) Any optimal solution θ satisfies
1
n‖X (θ − θ∗)‖2
2 ≤ 12‖θ∗‖1λ
(b) If θ∗ is supported on S with |S | ≤ s and X satisfies (κ, 3)-RE condition overS , they any optimal solution satisfies
1
n‖X (θ − θ∗)‖2
2 ≤9
κsλ2
41 / 57

Example (fixed design regression, no RE)
• Assume y = Xθ∗ + w where w has iid σ-sub-Gaussian entries, and
• X ∈ Rn×d fixed and satisfies C -column normalization
maxj=1,...,d
‖Xj‖√n≤ C .
where Xj is the jth column of X .
• Recalling z = XTw/n, w.p. ≥ 1− 2e−nδ2/2,
‖z‖∞ ≤ Cσ(√2 log d
n+ δ)
• Thus, setting λ = 2Cσ(√
2 log dn + δ
), Lasso solution satisfies
1
n‖X (θ − θ∗)‖2
2 ≤ 24‖θ∗‖1Cσ(√2 log d
n+ δ)
w.p. at least 1− 2e−nδ2/2.
42 / 57

Example (fixed design regression, with RE)
• Assume y = Xθ∗ + w where w has iid σ-sub-Gaussian entries, and
• X ∈ Rn×d fixed and satisfies RE condition and C -column normalization
maxj=1,...,d
‖Xj‖√n≤ C .
where Xj is the jth column of X .
• Recalling z = XTw/n, with probability ≥ 1− 2e−nδ2/2,
‖z‖∞ ≤ Cσ(√2 log d
n+ δ)
• Thus, setting λ = 2Cσ(√
2 log dn + δ
), Lasso solution satisfies
1
n‖X (θ − θ∗)‖2
2 ≤72
κC 2σ2
(2s log d
n+ δ2s
)w.p. at least 1− 2e−nδ
2/2.
43 / 57

• Under very mild assumptions (no RE), slow rate
1
n‖X (θ − θ∗)‖2
2 ≤ 24‖θ∗‖1Cσ(√2 log d
n+ δ)
• Under stronger assumptions (e.g., RE condition), fast rate
1
n‖X (θ − θ∗)‖2
2 ≤72
κC 2σ2
(s
2 log d
n+ δ2s
)• Is RE needed for fast rates?
44 / 57

Proof of part (a)
• Recall the basic inequality, where ∆ = θ − θ∗:
1
2n‖X ∆‖2
2 ≤ 〈z , ∆〉+ λ(‖θ∗‖1 − ‖θ‖1)
• Using λ ≥ 2‖z‖∞, and Holder inequality
|〈z , ∆〉| ≤ ‖z‖∞‖∆‖1 ≤λ
2‖∆‖1 ≤
λ
2(‖θ∗‖1 + ‖θ‖1)
• Putting the pieces together we conclude ‖θ‖1 ≤ 3‖θ∗‖1.
• Triangle inequality gives ‖∆‖1 ≤ 4‖θ∗‖1.
• Since ‖θ∗‖1 − ‖θ‖1 ≤ ‖∆‖1,
1
2n‖X ∆‖2
2 ≤λ
2‖∆‖1 + λ‖∆‖1 ≤
12λ
2‖θ∗‖1
using the blue upper bound.
45 / 57

Proof of part (b)
• As before, we obtain1
n‖X ∆‖2
2 ≤ 3λ√s‖∆‖2
and that ∆ ∈ C3(S).
• We now apply RE condition to the other side
‖X ∆‖22
n≤ 3λ
√s ‖∆‖2 ≤ 3λ
√s
1√κ
‖X ∆‖2
n
• which gives the desired result.
46 / 57

Variable selection using lasso• Can we recover the exact support of θ∗?• Needs the most stringent conditions:
• Lower eigenvalues
γmin
(XTS XS
n
)≥ cmin > 0 (LowEig)
• Mutual incoherence: There exists some α ∈ [0, 1) such that
maxj ∈ Sc
‖(XTS XS)−1XT
S Xj‖1 ≤ α (MuI)
• The expression is the `1 norm of ω where
ω = argminω∈Rs
‖Xj − XSω‖22.
• Letting Σ = 1nX
TX be the sample covariance, we can write (MuI) as
|||Σ−1SS ΣSSc |||1 ≤ α
• Consider the projection matrix, projecting onto [Im(XS)]⊥:
ΠS⊥ = In − XS(XTS XS)−1XT
S
47 / 57

Theorem 6
Consider S-sparse linear model with design X satisfying (LowEig) and (MuI).Let w := w/n and assume that
λ ≥ 2
1− α‖XTSc ΠS⊥w‖∞. (13)
Then the Lagrangian Lasso has the following properties:
(a) There is a unique optimal solution θ.
(b) No false inclusion: S := supp(θ) ⊆ S .
(c) `∞ bounds: The error θ − θ∗ satisfies
‖θS − θ∗S‖∞ ≤ ‖Σ−1SS X
TS w‖∞ + |||Σ−1
SS |||∞λ︸ ︷︷ ︸τ(λ;X )
(14)
(d) No false exclusion: The lasso includes all indices i ∈ S such that
|θ∗i | > τ(λ;X ),
hence is variable selection consistent if mini ∈ S|θ∗i | > τ(λ;X ).
48 / 57

Theorem 7
Consider S-sparse linear model with design X satisfying (LowEig) and (MuI).Assume that noise vector w is zero mean with i.i.d. σ-sub-Gaussian entries.Assume that X is C -column normalized deterministic design.Take the regularization parameter to be
λ =2Cσ
1− α{√2 log(d − s)
n+ δ}
for some δ > 0. Then the optimal solution θ is unique, has support contained inS and satisfies the `∞ error bound
‖θS − θ∗S‖∞ ≤σ√cmin
(√2 log s
n+ δ)
+ |||Σ−1SS |||∞λ
all with probability at least 1− 4e−nδ2/2.
49 / 57

• Need to verify (14): Enough to control
Zj := XTj ΠS⊥w , for j ∈ Sc
• We have ‖ΠS⊥Xj‖2 ≤ ‖Xj‖2 ≤ C√n. (Projections are nonexpansive.)
• Hence, Zj is a sub-Gaussian with squared-parameter ≤ C 2σ2/n. (Exercise.)
• It follows that
P[
maxj∈Sc|Zj | ≥ t
]≤ 2(d − s)e−n t2/(2C 2σ2)
• Choice of λ satisfies (14) with high probability.
• Define ZS = Σ−1S XT
S w . Each Zi = eTi Σ−1S XT
S w is sub-Gaussian withparameter at most
σ2
n|||Σ−1
SS |||op ≤σ2
cminn
• It follows that
P[
maxi=1,...,s
|Zi |︸ ︷︷ ︸‖ZS‖∞
>σ√cmin
(√2 log s
n+ δ)]≤ 2e−nδ
2/2
50 / 57

Exercise
• Assume that w ∈ Rd has independent sub-Gaussian entries,
• with sub-Gaussian squared-parameters ≤ σ2.
• Let x ∈ Rd be a deterministic vector.
• Then, xTw is sub-Gaussian with squared-parameter ≤ σ2‖x‖22.
51 / 57

• Corollary applies to fixed designs.• Similar result holds for Gaussian random design (rows iid from N(0,Σ)),• assuming that Σ satisfies α-incoherence.
• (Exercise 7.19): Then sample covariance Σ satisfies α-incoherence holds if
n & s log(d − s)
52 / 57

Detour: subgradients
• Consider a convex function f : Rd → R.
• z ∈ Rd is a sub-gradient of f at θ, denoted z ∈ ∂f (θ) if
f (θ + ∆) ≥ f (θ) + 〈z ,∆〉, ∀∆ ∈ Rd .
• For a convex function θ minimizes f is equivalent to 0 ∈ ∂f (θ).
• For `1 norm, i.e. f (θ) = ‖θ‖1,
z ∈ ∂‖θ‖1 ⇐⇒ zj = sign(θj)
where sign(·) is the generalized sign, i.e. sign(0) = [−1, 1].
• For Lasso, (θ, z) is primal-dual optimal if θ is a minimizer and z ∈ ∂‖θ‖1.
• Equivalently, primal-dual optimality conditions can be written as
1
nXT (X θ − y) + λz = 0, (15)
z ∈ ∂‖θ‖1 (16)
where (15) is the zero subgradient condition.
53 / 57

Proof of Theorem• Primal-dual witness (PDW) construction:
1. Set θSc = 0.
2. Determine (θS , zS) ∈ Rs × Rs by solving oracle subproblem
θS ∈ argminθS∈Rs
1
2n‖y − XSθS‖2
2 + λ‖θS‖1
and choosing zS ∈ ∂‖θS‖1 s.t. ∇f (θS)θS=θS+ λzS = 0.
3. Solve for zSc ∈ Rd−s via zero subgradient equaltion and check for strict dualfeasibility ‖zSc‖∞ < 1.
Lemma 1
Under condition (LowEig) the success of the PDW construction implies that
(θS , 0) is the unique optimal solution of the Lasso.
• Proof: Only need to show uniqueness, which follows from this: Under strongduality, the set of saddle-points of the Lagrangian form a Cartesian product.I.e., we can mix and match primal and dual parts of two primal-dual pair toalso get primal-dual pairs.
54 / 57

• Using y = Xθ∗ + w and θSc = 0 (by construction) and θ∗Sc = 0 (byassumption) we can write zero sub-gradient condition[
ΣSS ΣSSc
ΣScS ΣScSc
] [θS − θ∗S
0
]−[uSuSc
]+ λ
[zSzSc
]=
[00
]where u = XTw/n so that uS = XT
S w/n and so on.
• Top equation satisfied since (θS , θ∗S) is chosen to solve oracle Lasso.
• Only need to satisfy the bottom EQ. Do so by choosing zSc as needed
zSc = − 1
λΣScS(θS − θ∗S) +
uSc
λ
• Since by assumption ΣSS is invertible, can solve for θS − θ∗S from 1st EQ:
θS − θ∗S = Σ−1SS (uS − λzS).
• Combining
zSc = ΣScS Σ−1SS zS +
1
λ
(uSc − ΣScS Σ−1
SS uS)
55 / 57

• We had
zSc = ΣScS Σ−1SS zS +
1
λ
(uSc − ΣScS Σ−1
SS uS)
• Note that (w = w/n)
uSc − ΣScS Σ−1SS uS = XT
Sc w − ΣScS Σ−1SS X
TS w
= XTSc [I − XS(XT
S XS)−1XTS ]w
= XTSc ΠS⊥w
• Thus, we have
zSc = ΣScS Σ−1SS zS︸ ︷︷ ︸
µ
+XTSc ΠS⊥
( wnλ
)︸ ︷︷ ︸
v
• By (MuI) we have ‖µ‖∞ ≤ α. and by our choice of λ, ‖v‖∞ < 1− α.
• This verifies strict dual feasibility ‖zSc‖∞ < 1, hence the constructed pair isprimal-dual feasible and the primal solution is unique.
56 / 57

• It remains to show the `∞ bound which follows from a applying triangleinequality to
θS − θ∗S = Σ−1SS (uS − λzS).
• leading to
‖θS − θ∗S‖∞ ≤ ‖Σ−1SS uS‖∞ + λ‖Σ−1
SS ‖∞
using sub-multiplicative property of operator norms and ‖z‖∞ ≤ 1.
57 / 57