Embed Size (px)
DESCRIPTION
This file explains in Croatia how the State Space Model works. Includes application in Economics.
Citation preview
Vremenski nizovi pomoću modela prostora stanja(State Space)

• Stanje vremenskog niza: NEOPAŽEN dinamički proces u vremenu t.
• Model globalne razine:
• Model lokalne razine:
ytt eby 0
yttt eby 0
Model lokalne razine (Local Level Model)
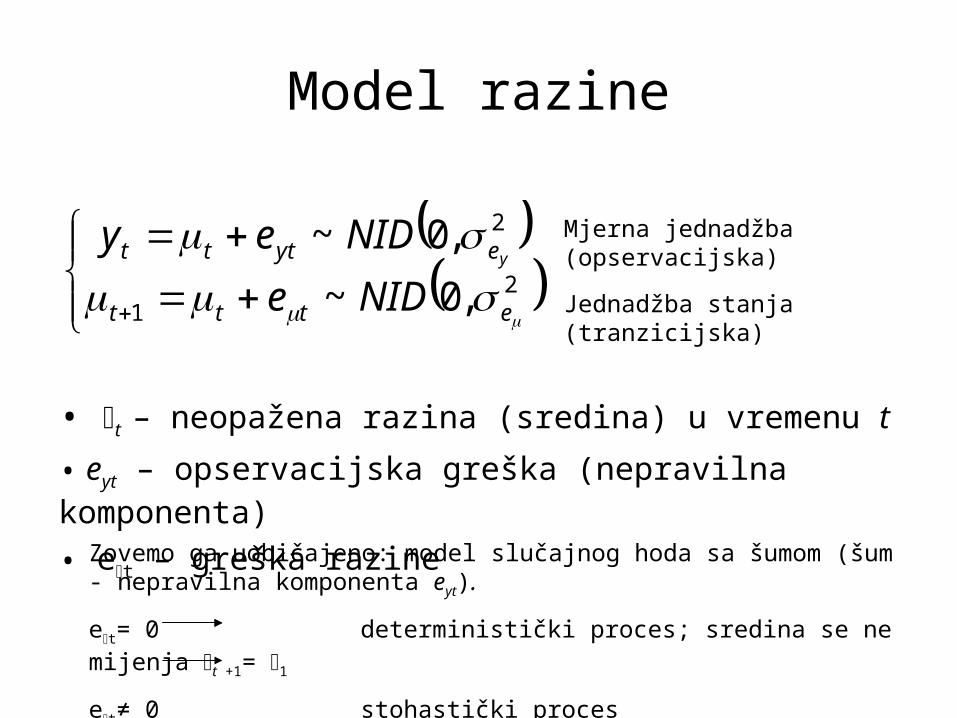
• t – neopažena razina (sredina) u vremenu t
• eyt – opservacijska greška (nepravilna komponenta)
• et – greška razine
Model razine
2
1
2
,0~
,0~
ettt
eyttt
NIDe
NIDeyy
Mjerna jednadžba (opservacijska)
Jednadžba stanja (tranzicijska)
Zovemo ga uobičajeno: model slučajnog hoda sa šumom (šum - nepravilna komponenta eyt).
et= 0 deterministički proces; sredina se ne mijenja t +1= 1
et≠ 0 stohastički proces
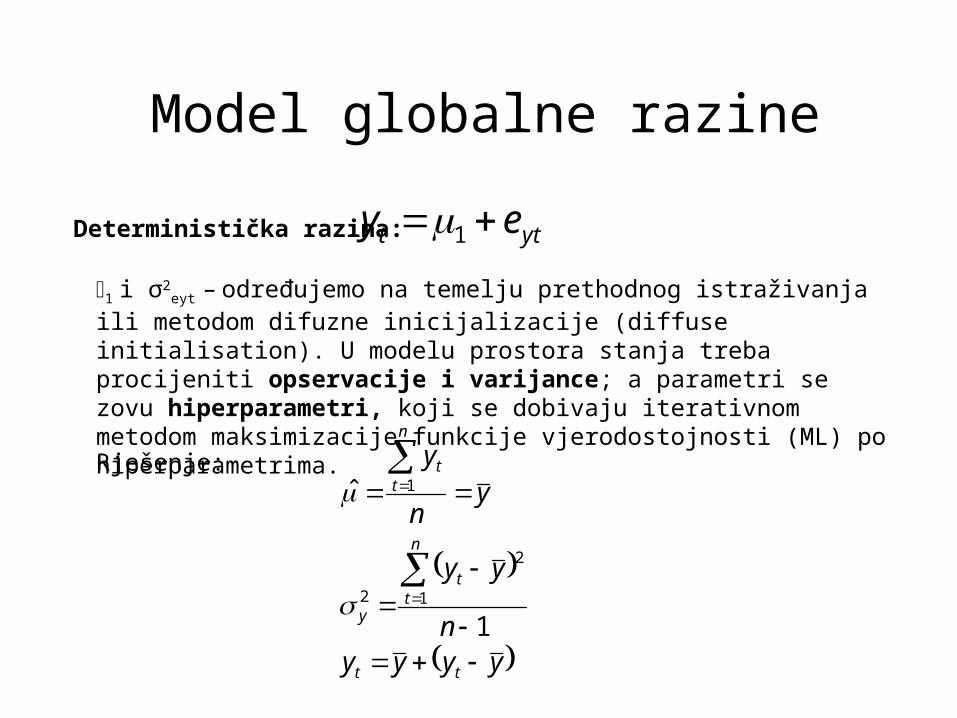
Model globalne razine
Deterministička razina: ytt ey 11 i σ2
eyt – određujemo na temelju prethodnog istraživanja ili metodom difuzne inicijalizacije (diffuse initialisation). U modelu prostora stanja treba procijeniti opservacije i varijance; a parametri se zovu hiperparametri, koji se dobivaju iterativnom metodom maksimizacije funkcije vjerodostojnosti (ML) po hiperparametrima.
Rješenje:
yyyyn
yy
yn
y
tt
n
tt
y
n
tt
1
ˆ
1
2
2
1
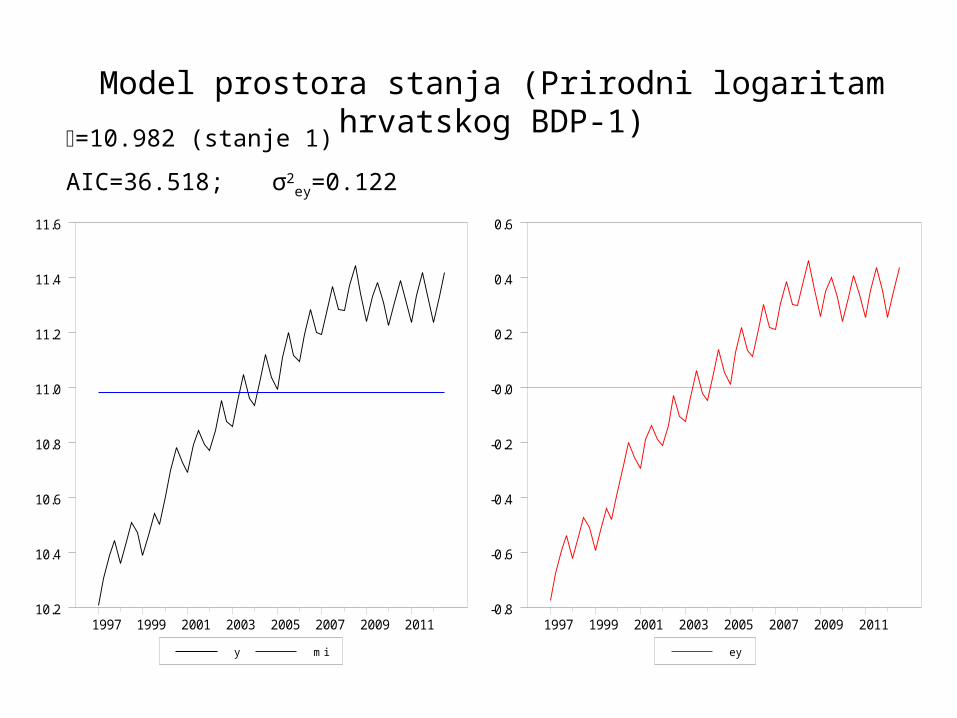
Model prostora stanja (Prirodni logaritam hrvatskog BDP-1)
=10.982 (stanje 1)
AIC=36.518; σ2ey=0.122
y mi
1997 1999 2001 2003 2005 2007 2009 201110.2
10.4
10.6
10.8
11.0
11.2
11.4
11.6
ey
1997 1999 2001 2003 2005 2007 2009 2011-0.8
-0.6
-0.4
-0.2
-0.0
0.2
0.4
0.6
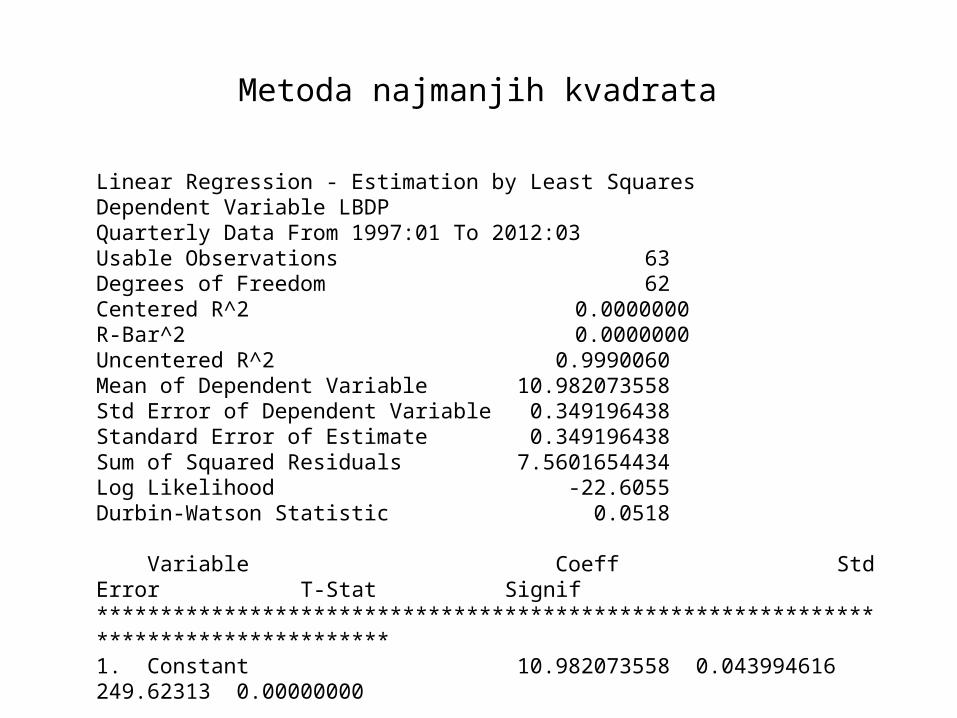
Metoda najmanjih kvadrata
Linear Regression - Estimation by Least SquaresDependent Variable LBDPQuarterly Data From 1997:01 To 2012:03Usable Observations 63Degrees of Freedom 62Centered R^2 0.0000000R-Bar^2 0.0000000Uncentered R^2 0.9990060Mean of Dependent Variable 10.982073558Std Error of Dependent Variable 0.349196438Standard Error of Estimate 0.349196438Sum of Squared Residuals 7.5601654434Log Likelihood -22.6055Durbin-Watson Statistic 0.0518
Variable Coeff Std Error T-Stat Signif************************************************************************************1. Constant 10.982073558 0.043994616 249.62313 0.00000000
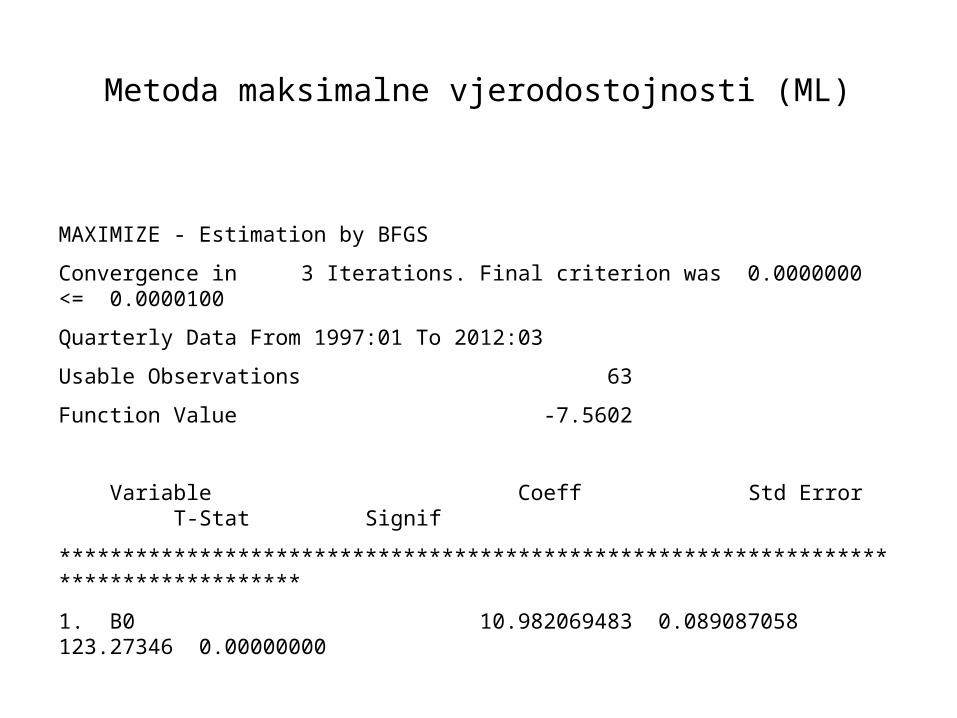
MAXIMIZE - Estimation by BFGS
Convergence in 3 Iterations. Final criterion was 0.0000000 <= 0.0000100
Quarterly Data From 1997:01 To 2012:03
Usable Observations 63
Function Value -7.5602
Variable Coeff Std Error T-Stat Signif
************************************************************************************
1. B0 10.982069483 0.089087058 123.27346 0.00000000
Metoda maksimalne vjerodostojnosti (ML)

Model lokalne razine
Stohastička razina:
ttt
yttt
e
ey
1Slučajni hod
šum
Modeli prostora stanja uspoređuju se AIC testom. Bolji je onaj koji minimizira AIC vrijednost:
wqLdnn
AIC 2ln21
n – broj opažanja
Ld – vrijednost funkcije vjerodostojnosti (ML) u optimumu
q – broj početnih difuznih vrijednosti stanja za procijeniti
w – broj varijanci za procijeniti
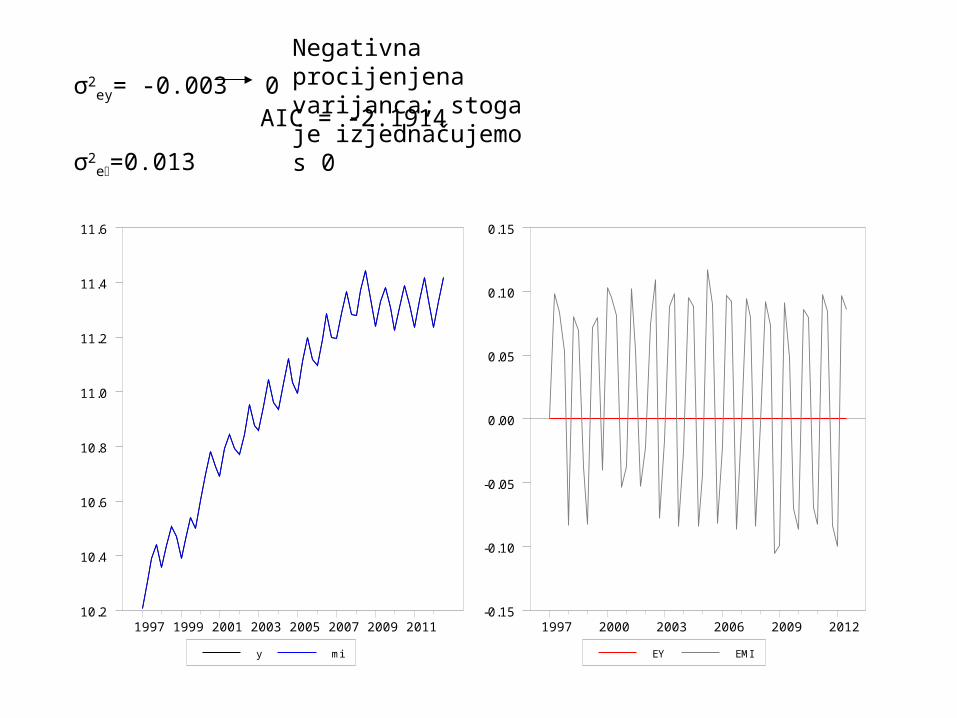
σ2ey= -0.003 0 AIC = -2.1914
σ2e=0.013
y mi
1997 1999 2001 2003 2005 2007 2009 201110.2
10.4
10.6
10.8
11.0
11.2
11.4
11.6
EY EMI
1997 2000 2003 2006 2009 2012-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
Negativna procijenjena varijanca; stoga je izjednačujemo s 0
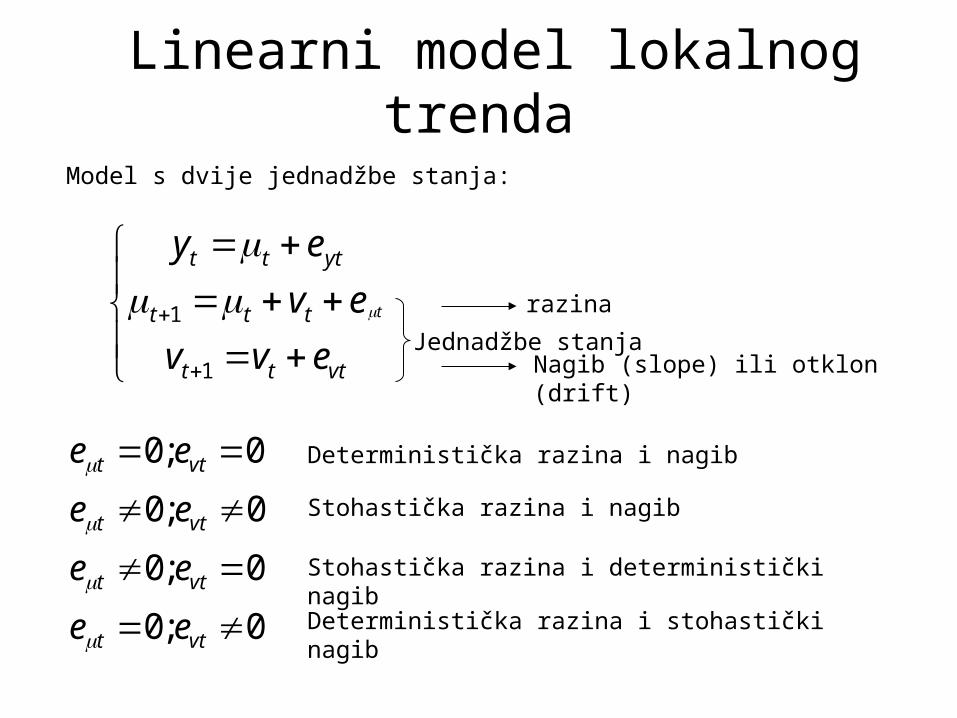
Linearni model lokalnog trenda
Model s dvije jednadžbe stanja:
vttt
ttt
yttt
evv
ev
ey
t
1
1
Jednadžbe stanja
razina
Nagib (slope) ili otklon (drift)
0;0
0;0
0;0
0;0
vtt
vtt
vtt
vtt
ee
ee
ee
ee
Deterministička razina i nagib
Stohastička razina i nagib
Stohastička razina i deterministički nagib
Deterministička razina i stohastički nagib
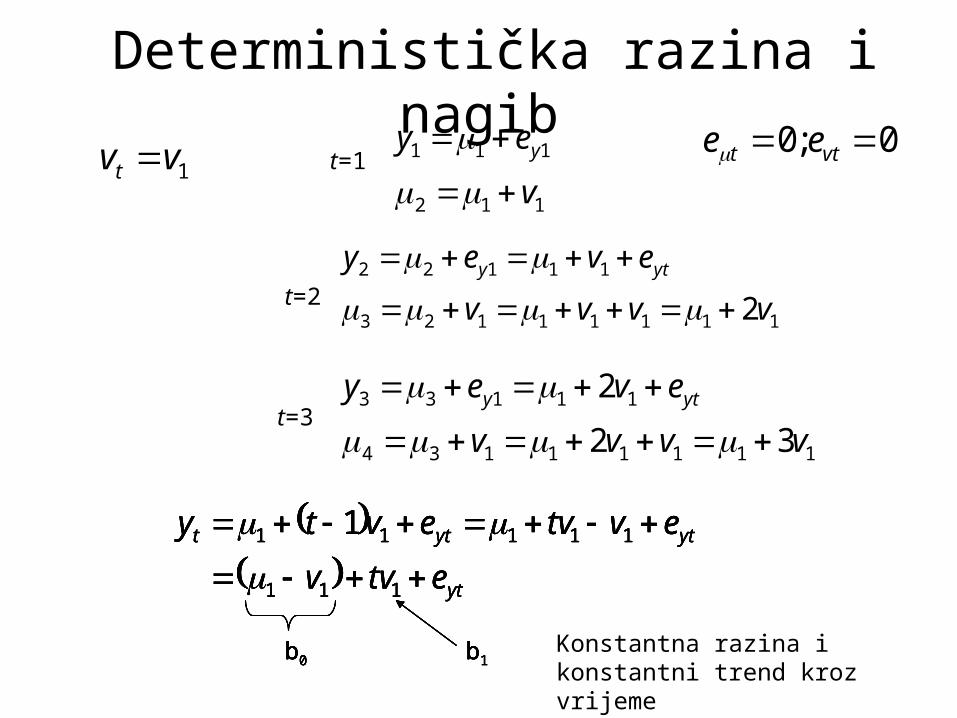
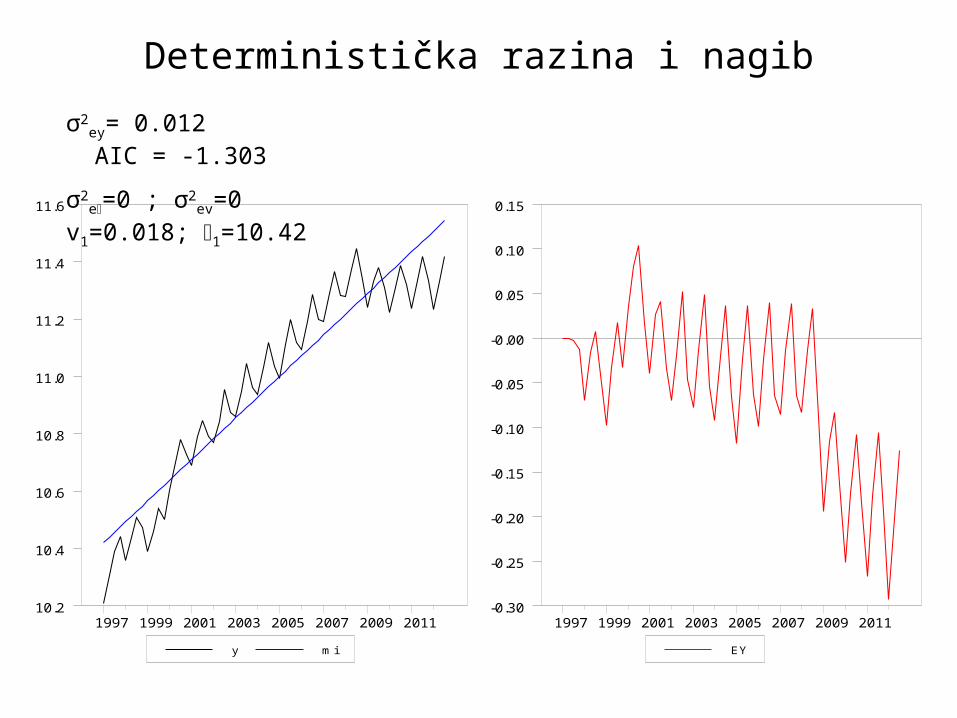
Deterministička razina i nagib
1vvt 112
111
v
ey y
11111123
11122
2vvvv
evey yty
11111134
11133
32
2
vvvv
evey yty
t=1
t=2
t=3
yt
ytytt
etvv
evtvevty
111
11111 1
b0 b1
yt
ytytt
etvv
evtvevty
111
11111 1
b0
yt
ytytt
etvv
evtvevty
111
11111 1
b1b0 b1b0 b1
yt
ytytt
etvv
evtvevty
111
11111 1
b0 b1Konstantna razina i konstantni trend kroz vrijeme
0;0 vtt ee
y m i
1997 1999 2001 2003 2005 2007 2009 201110.2
10.4
10.6
10.8
11.0
11.2
11.4
11.6
EY
1997 1999 2001 2003 2005 2007 2009 2011-0.30
-0.25
-0.20
-0.15
-0.10
-0.05
-0.00
0.05
0.10
0.15
σ2ey= 0.012 AIC = -1.303
σ2e=0 ; σ2
ev=0 v1=0.018; 1=10.42
Deterministička razina i nagib
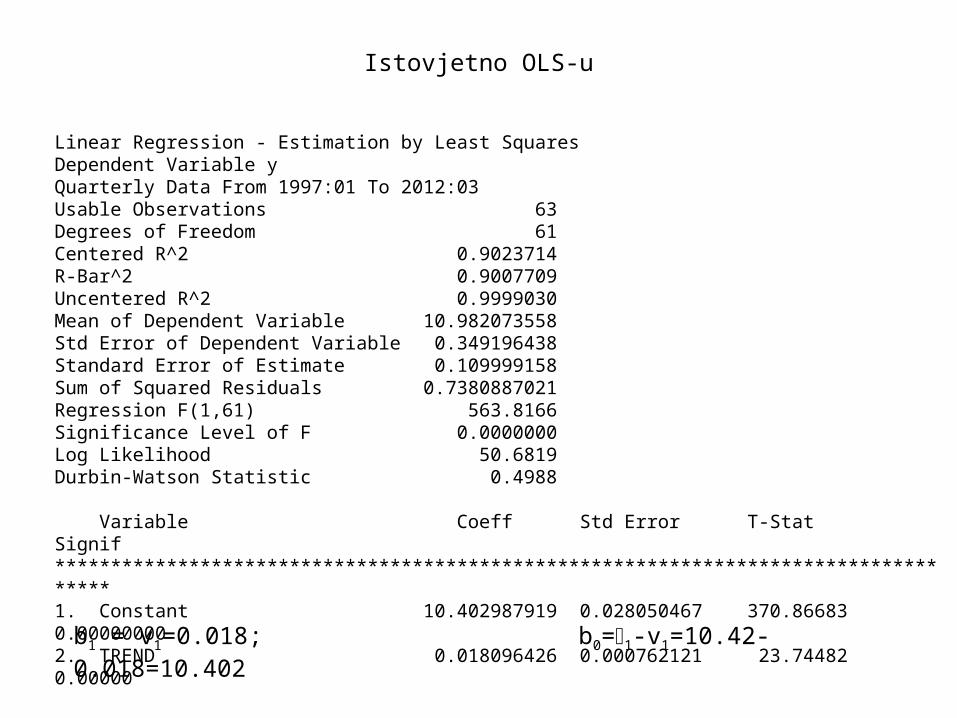
Istovjetno OLS-u
Linear Regression - Estimation by Least SquaresDependent Variable yQuarterly Data From 1997:01 To 2012:03Usable Observations 63Degrees of Freedom 61Centered R^2 0.9023714R-Bar^2 0.9007709Uncentered R^2 0.9999030Mean of Dependent Variable 10.982073558Std Error of Dependent Variable 0.349196438Standard Error of Estimate 0.109999158Sum of Squared Residuals 0.7380887021Regression F(1,61) 563.8166Significance Level of F 0.0000000Log Likelihood 50.6819Durbin-Watson Statistic 0.4988
Variable Coeff Std Error T-Stat Signif************************************************************************************1. Constant 10.402987919 0.028050467 370.86683 0.000000002. TREND 0.018096426 0.000762121 23.74482 0.00000
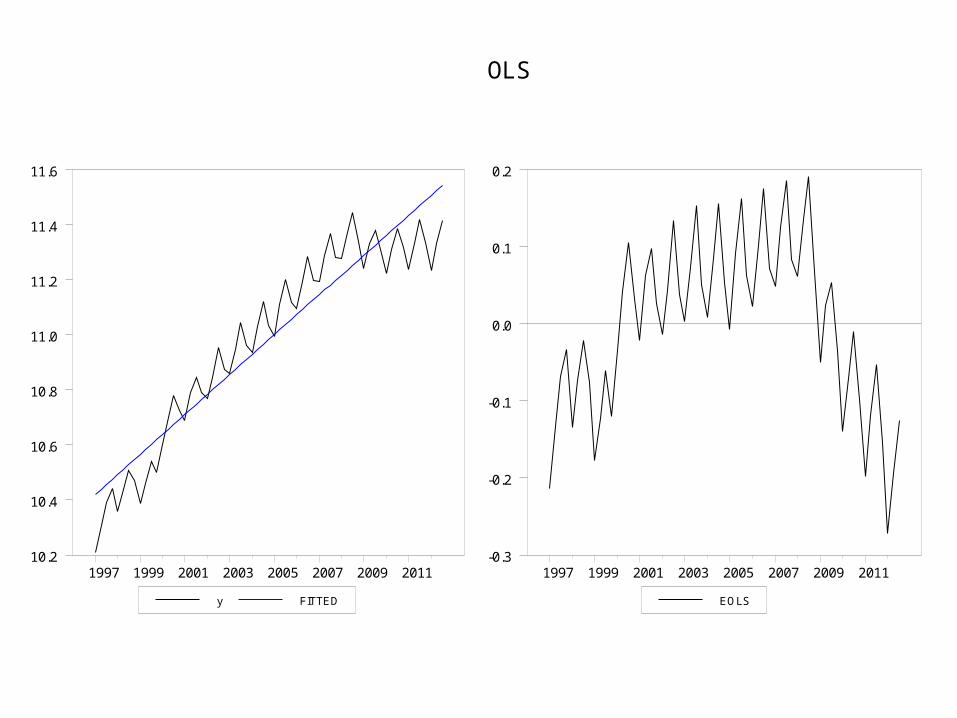
b1 = v1=0.018; b0=1-v1=10.42-0.018=10.402
y FITTED
1997 1999 2001 2003 2005 2007 2009 201110.2
10.4
10.6
10.8
11.0
11.2
11.4
11.6
EOLS
1997 1999 2001 2003 2005 2007 2009 2011-0.3
-0.2
-0.1
0.0
0.1
0.2
OLS
Stohastička razina i deterministički nagib
2
2
11 ,0~
,0~
et
eyyt
tt
yttt
NIDe
NIDe
ev
ey
t
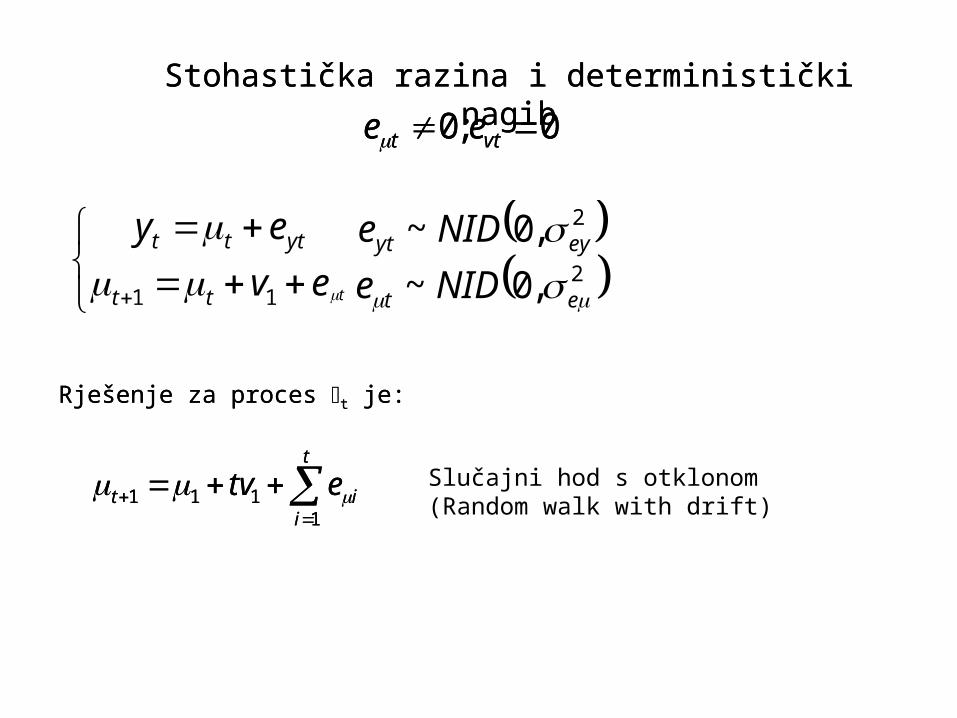
Rješenje za proces t je:
t
iit etv
1111 Slučajni hod s otklonom (Random walk
with drift)
0;0 vtt ee
Stohastička razina i deterministički nagib
0;0 vtt ee
Rješenje za proces t je:
t
iit etv
1111

Stohastička razina i deterministički nagib
σ2ey= 0.003 AIC = -2.205
σ2e=0.001 ; σ2
ev=0 v1=0.01789; u1=10.272
y mi
1997 1999 2001 2003 2005 2007 2009 201110.2
10.4
10.6
10.8
11.0
11.2
11.4
11.6
EY
1997 1999 2001 2003 2005 2007 2009 2011-0.100
-0.075
-0.050
-0.025
-0.000
0.025
0.050
0.075
0.100
Deterministička razina i stohastički nagib
0;0 vtt ee
2
2
1
1
,0~
,0~
evvt
eyyt
vttt
ttt
yttt
NIDe
NIDe
evv
vey
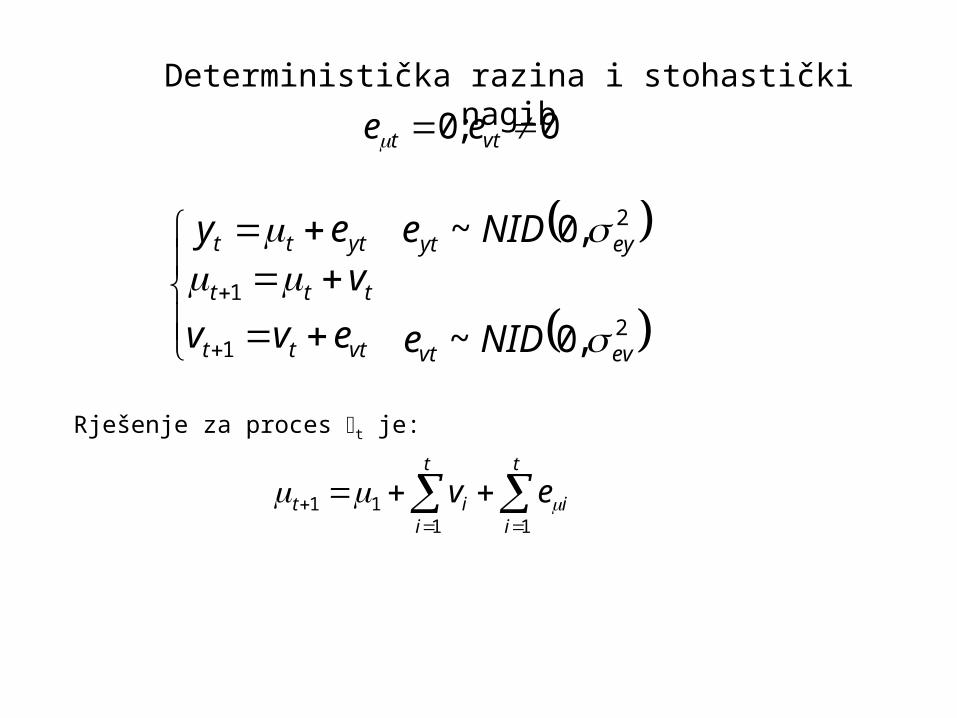
Rješenje za proces t je:
t
ii
t
iit ev
1111

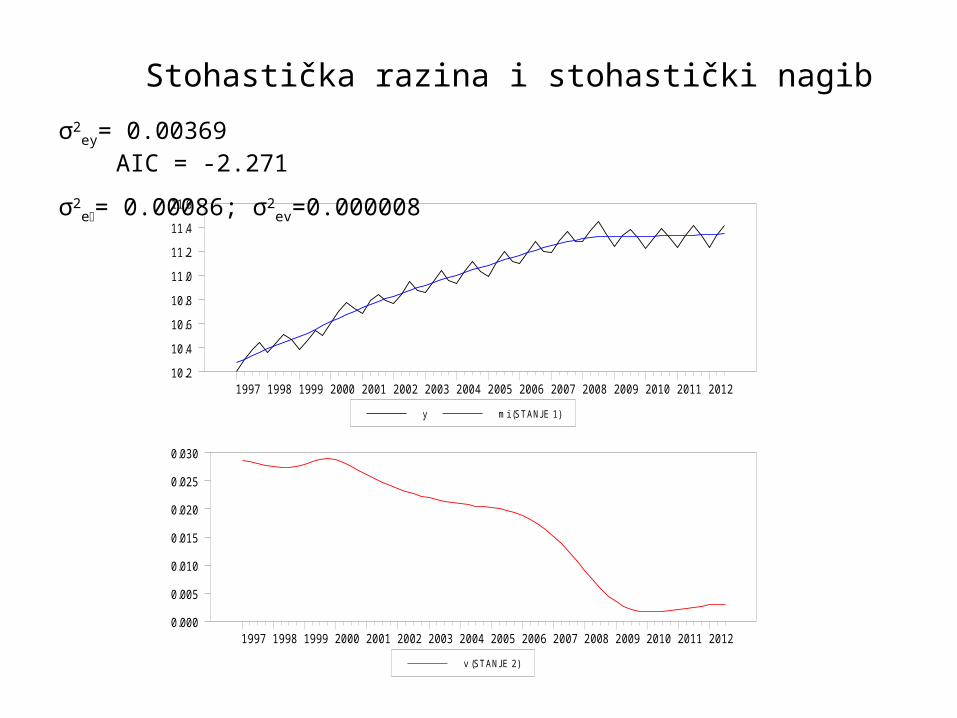
Deterministička razina i stohastički nagib
σ2ey= 0.0038 AIC = -2.270
σ2e= 0; σ2
ev=0.000009 u1=10.277
y mi (STANJE 1)
1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 201210.2
10.4
10.6
10.8
11.0
11.2
11.4
11.6
v (STANJE 2)
1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 20120.000
0.005
0.010
0.015
0.020
0.025
0.030
Usporava rast
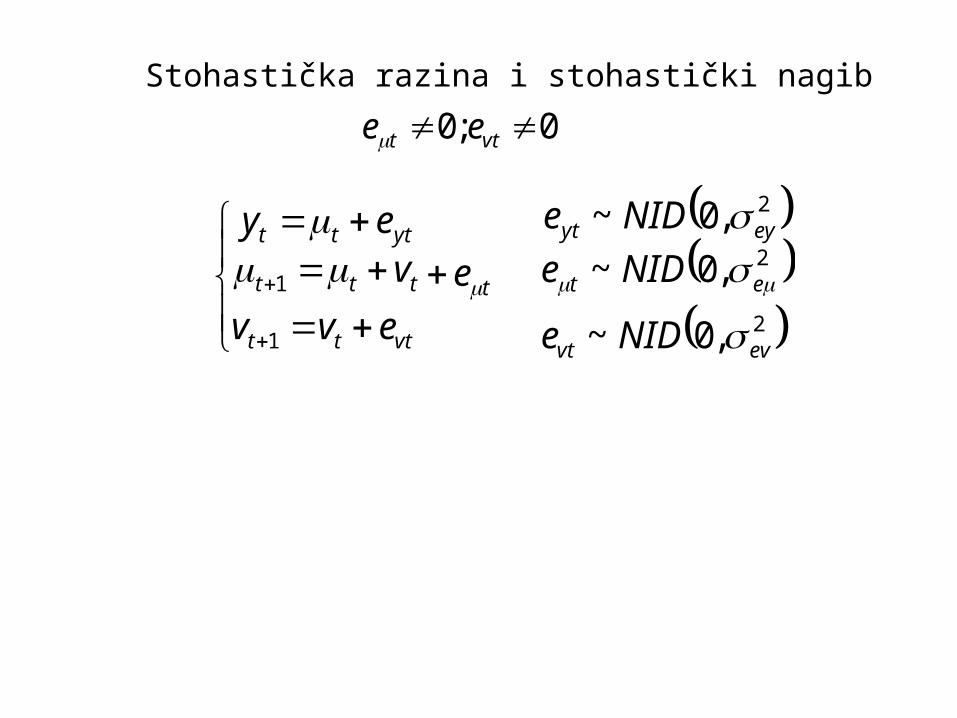
Stohastička razina i stohastički nagib
0;0 vtt ee
2
2
2
1
1
,0~
,0~
,0~
evvt
et
eyyt
t
vttt
ttt
yttt
NIDe
NIDe
NIDe
e
evv
vey
y mi (ST ANJE 1)
1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 201210.2
10.4
10.6
10.8
11.0
11.2
11.4
11.6
v (ST ANJE 2)
1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 20120.000
0.005
0.010
0.015
0.020
0.025
0.030
Stohastička razina i stohastički nagib
σ2ey= 0.00369 AIC = -2.271
σ2e= 0.00086; σ2
ev=0.000008
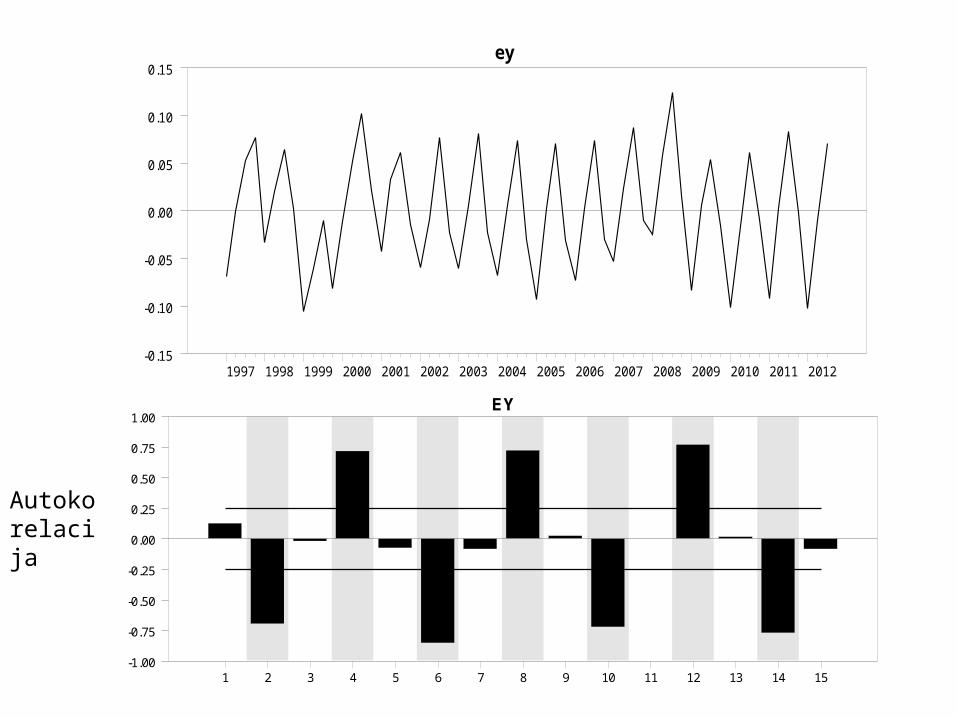
ey
1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
EY
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
Autokorelacija
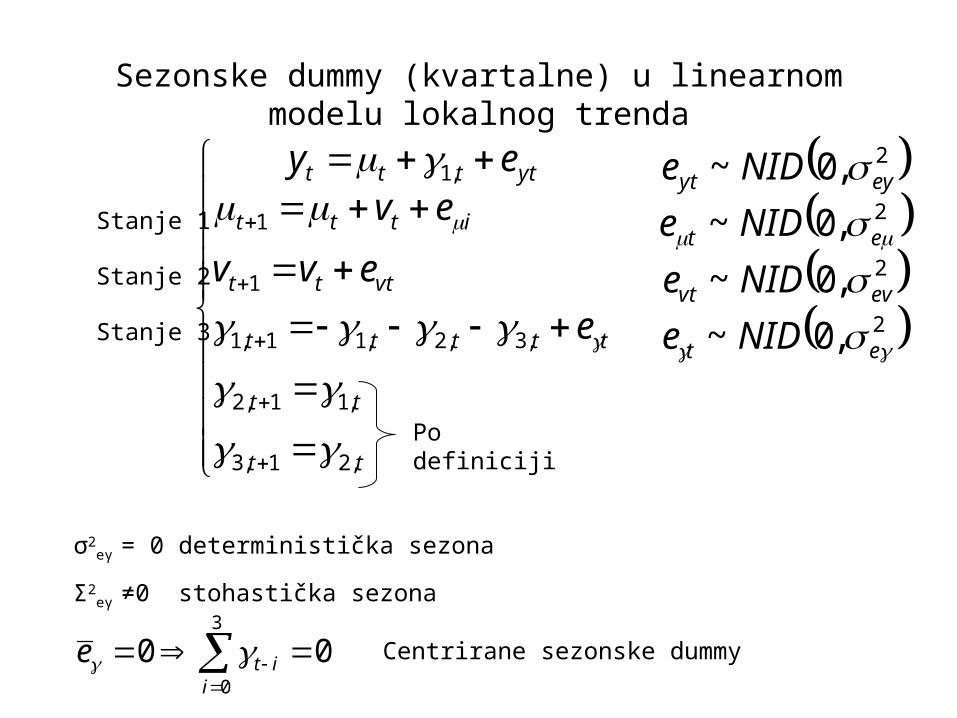
Sezonske dummy (kvartalne) u linearnom modelu lokalnog trenda
2
2
2
2
,21,3
,11,2
,3,2,11,1
1
1
,1
,0~
,0~
,0~
,0~
et
evvt
et
eyyt
tt
tt
ttttt
vttt
ittt
ytttt
NIDe
NIDe
NIDe
NIDe
e
evv
evey
σ2eγ = 0 deterministička sezona
Σ2eγ ≠0 stohastička sezona
Po definiciji
3
0
00i
ite Centrirane sezonske dummy
Stanje 1
Stanje 2
Stanje 3
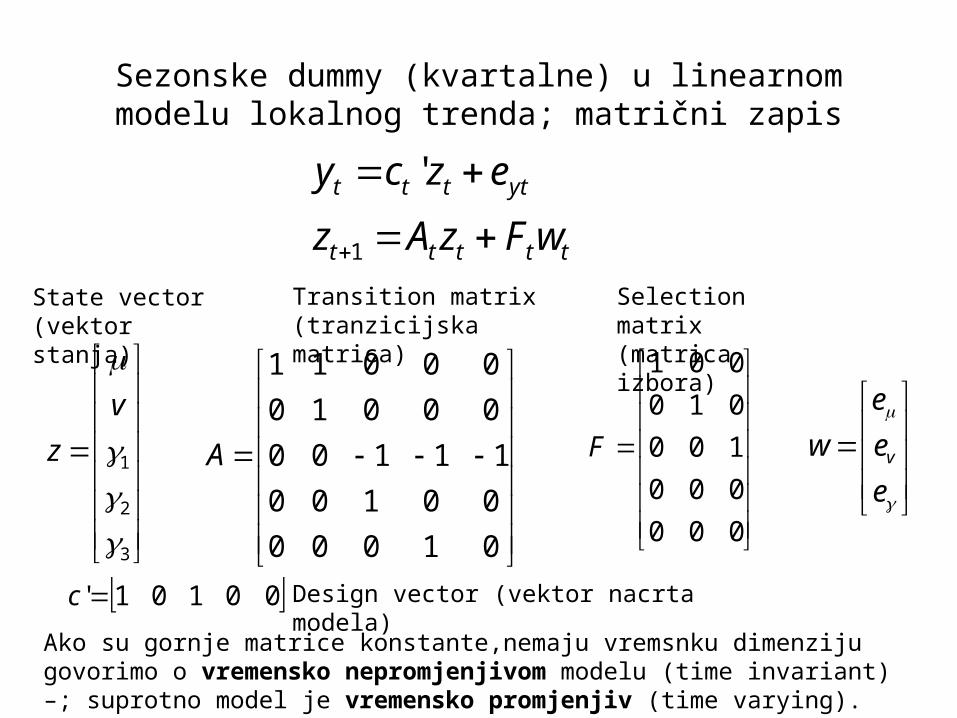
Sezonske dummy (kvartalne) u linearnom modelu lokalnog trenda; matrični zapis
ttttt
ytttt
wFzAz
ezcy
1
'
3
2
1
v
z
00101'c
01000
00100
11100
00010
00011
A
000
000
100
010
001
F
e
e
e
w v
Design vector (vektor nacrta modela)
State vector (vektor stanja)
Transition matrix (tranzicijska matrica)
Selection matrix (matrica izbora)
Ako su gornje matrice konstante,nemaju vremsnku dimenziju govorimo o vremensko nepromjenjivom modelu (time invariant) –; suprotno model je vremensko promjenjiv (time varying). Procijenjeni y zove se signal.

y mi (STANJE 1)
1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 201210.2
10.4
10.6
10.8
11.0
11.2
11.4
11.6
gamma (Stanje 3)
1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012-0.075
-0.050
-0.025
0.000
0.025
0.050
0.075
Stohastička razina i trend; deterministička sezona
AIC = -3.4359102
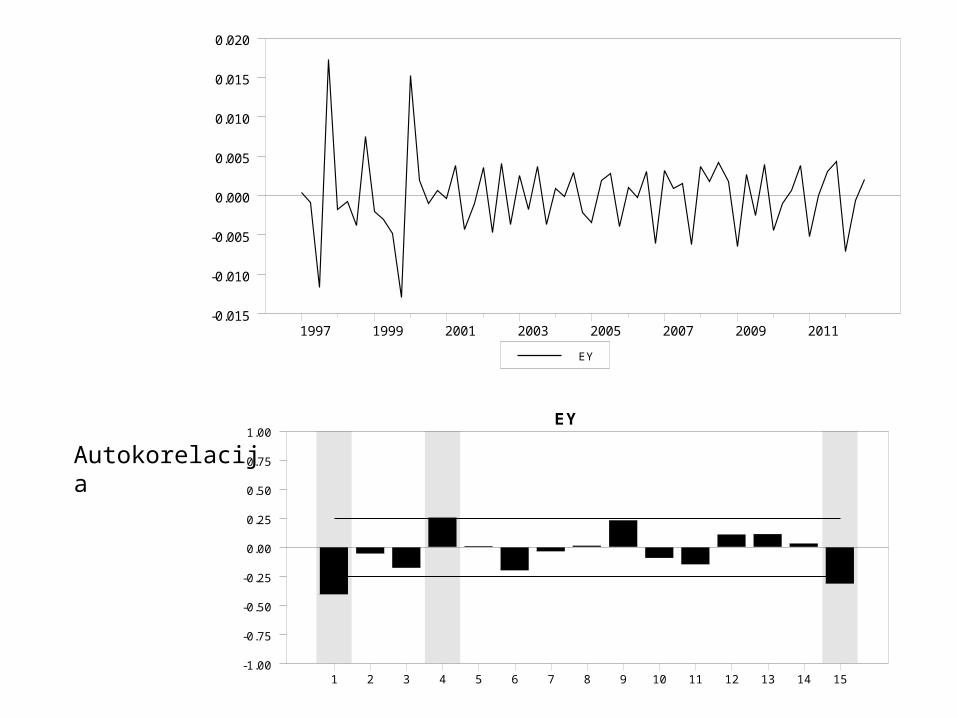
EY
1997 1999 2001 2003 2005 2007 2009 2011-0.015
-0.010
-0.005
0.000
0.005
0.010
0.015
0.020
EY
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
Autokorelacija
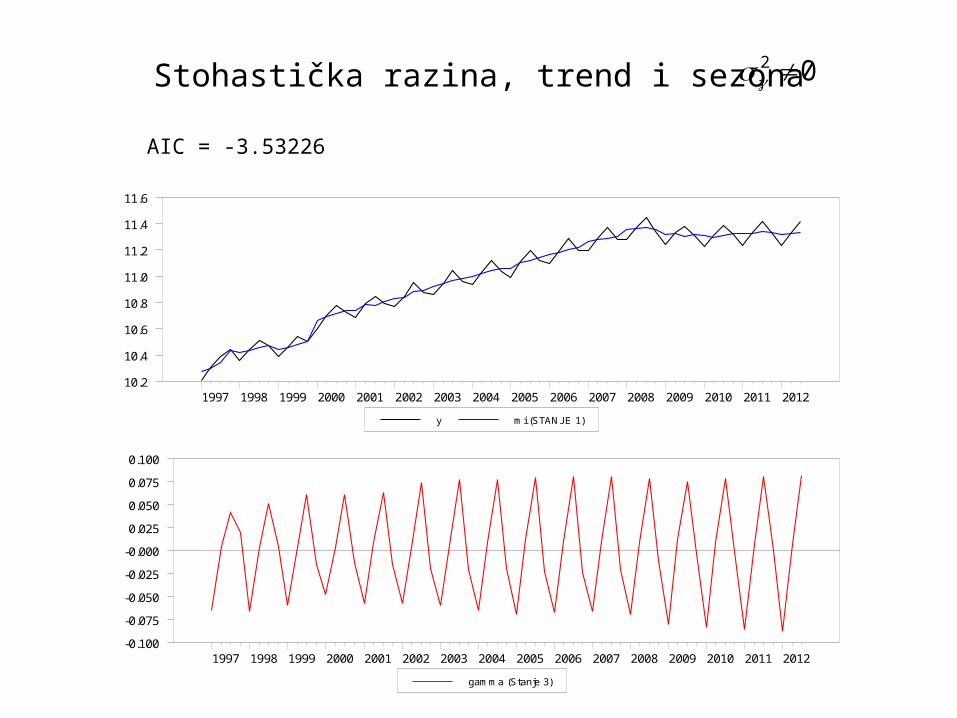
Stohastička razina, trend i sezona 02
y mi (STANJE 1)
1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 201210.2
10.4
10.6
10.8
11.0
11.2
11.4
11.6
gamma (Stanje 3)
1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012-0.100
-0.075
-0.050
-0.025
-0.000
0.025
0.050
0.075
0.100
AIC = -3.53226
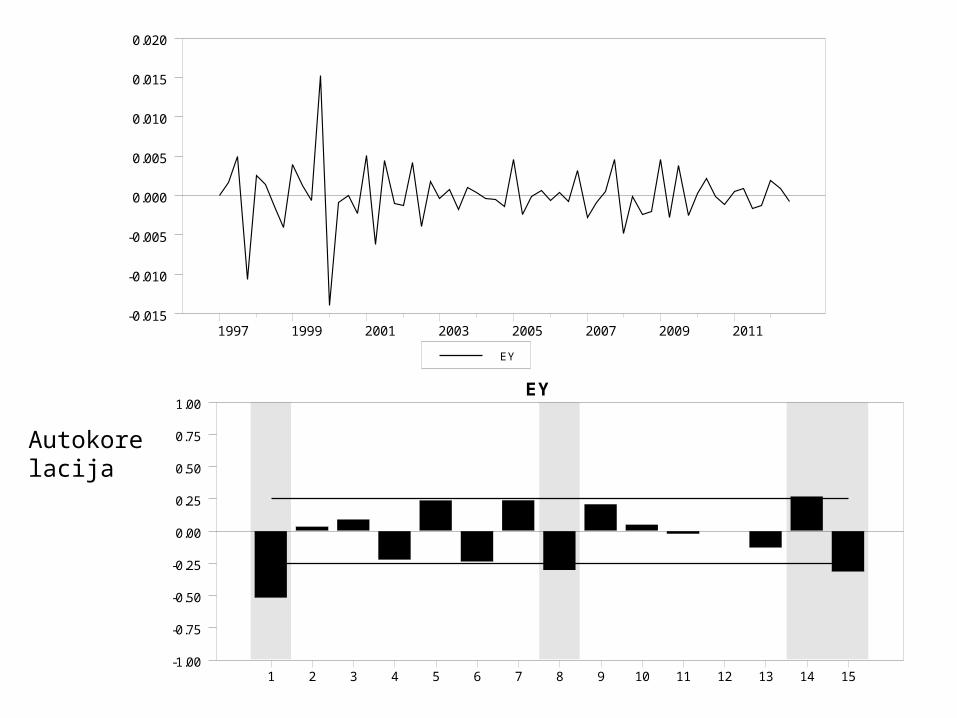
EY
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
EY
1997 1999 2001 2003 2005 2007 2009 2011-0.015
-0.010
-0.005
0.000
0.005
0.010
0.015
0.020
Autokorelacija
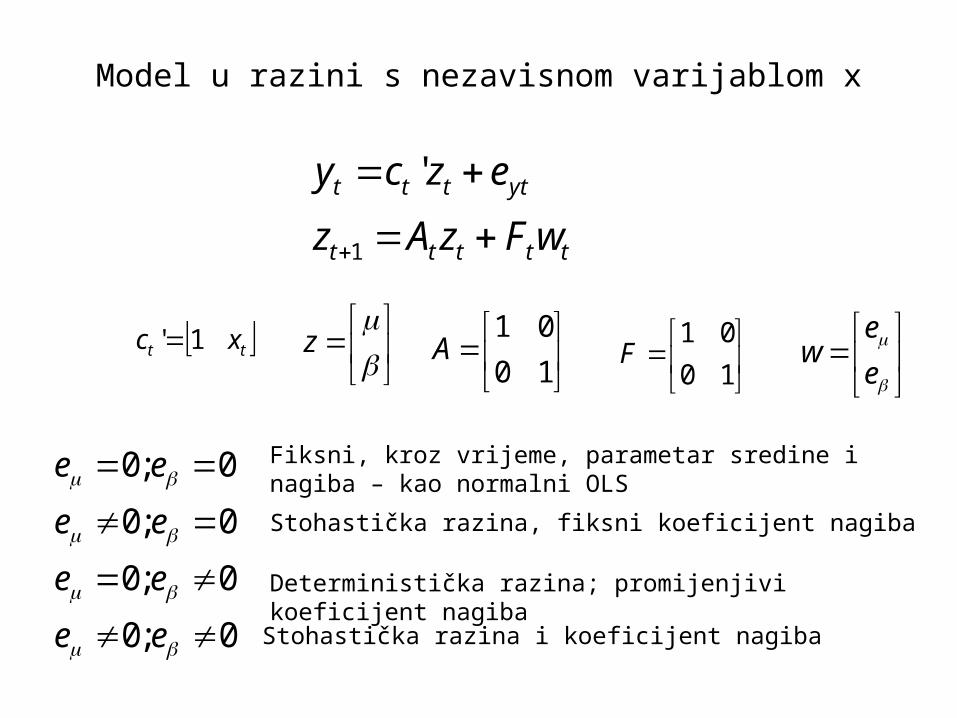
Model u razini s nezavisnom varijablom x
ttttt
ytttt
wFzAz
ezcy
1
'
z tt xc 1'
10
01A
10
01F
e
ew
0;0
0;0
0;0
0;0
ee
ee
ee
ee Fiksni, kroz vrijeme, parametar sredine i nagiba – kao normalni OLS
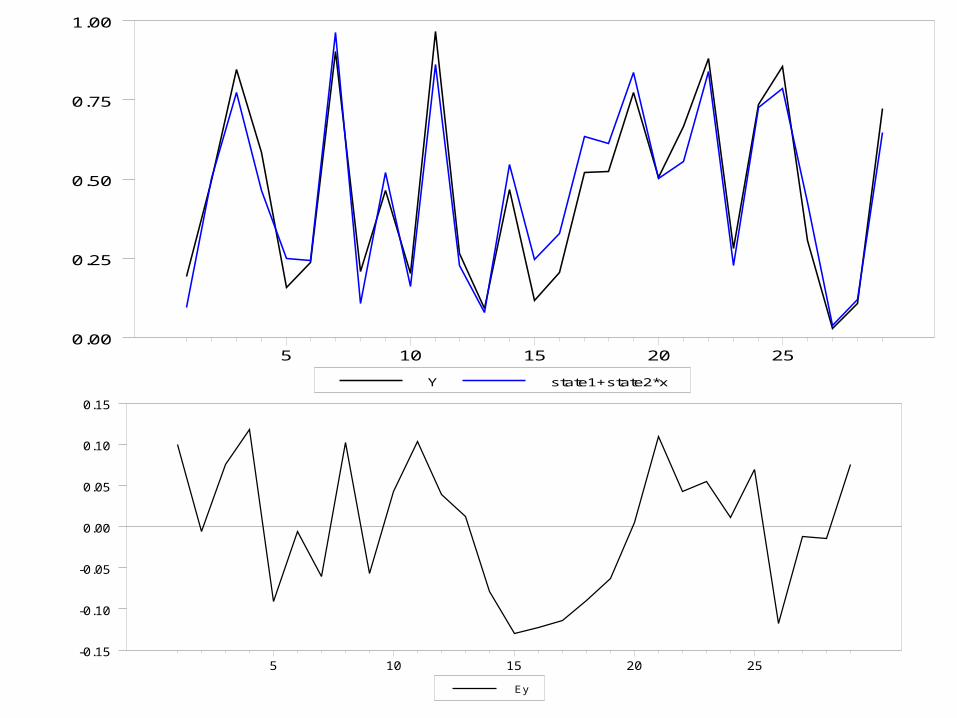
Stohastička razina, fiksni koeficijent nagiba
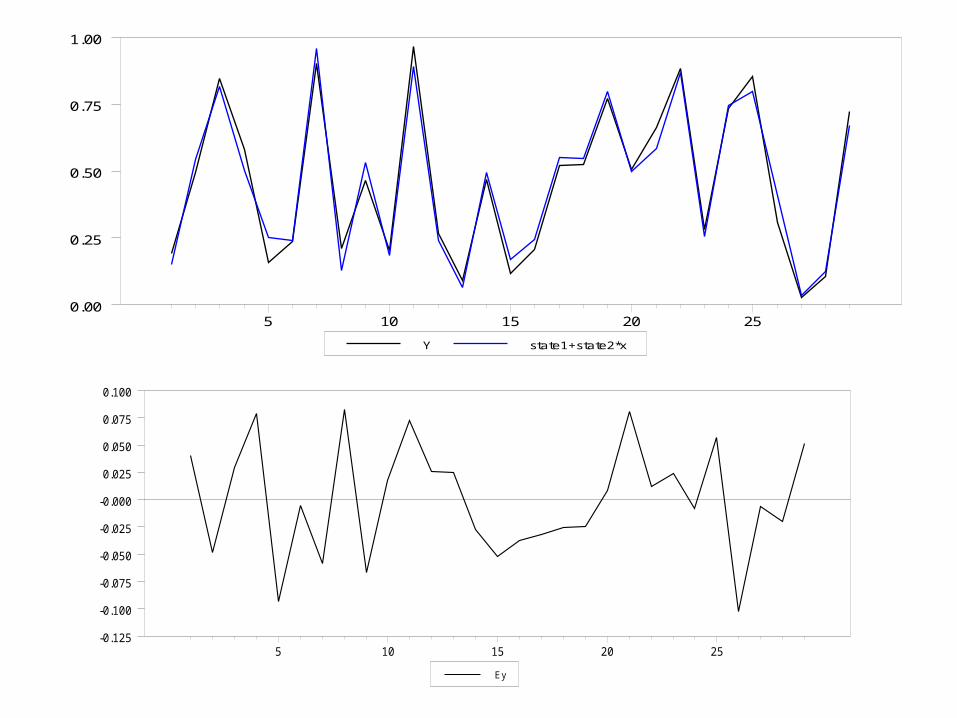
Deterministička razina; promijenjivi koeficijent nagiba
Stohastička razina i koeficijent nagiba
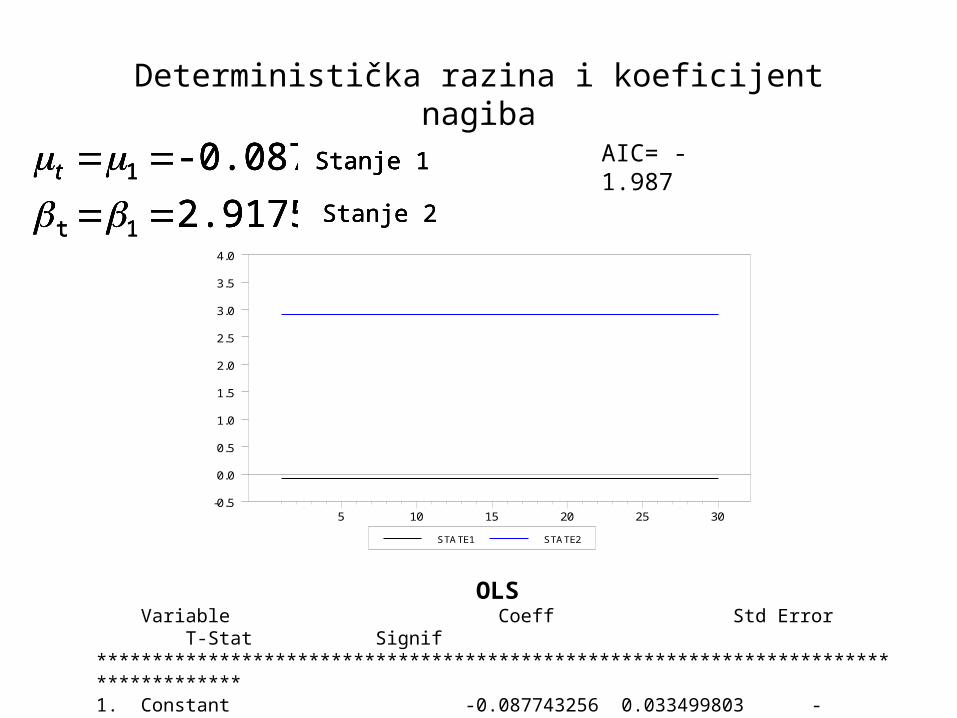
Deterministička razina i koeficijent nagiba
2.9175
-0.0877
1t
1
t Stanje 1
Stanje 2
OLS Variable Coeff Std Error T-Stat Signif************************************************************************************1. Constant -0.087743256 0.033499803 -2.61922 0.014281842. X 2.917494350 0.160185381 18.21324 0.00000000
STATE1 STATE2
5 10 15 20 25 30-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
2.9175
-0.0877
1t
1
t Stanje 1
Stanje 22.9175
-0.0877
1t
1
t Stanje 1 AIC= -1.987
Stanje 22.9175
-0.0877
1t
1
t Stanje 1
Y state1+state2*x
5 10 15 20 250.00
0.25
0.50
0.75
1.00
Ey
5 10 15 20 25-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
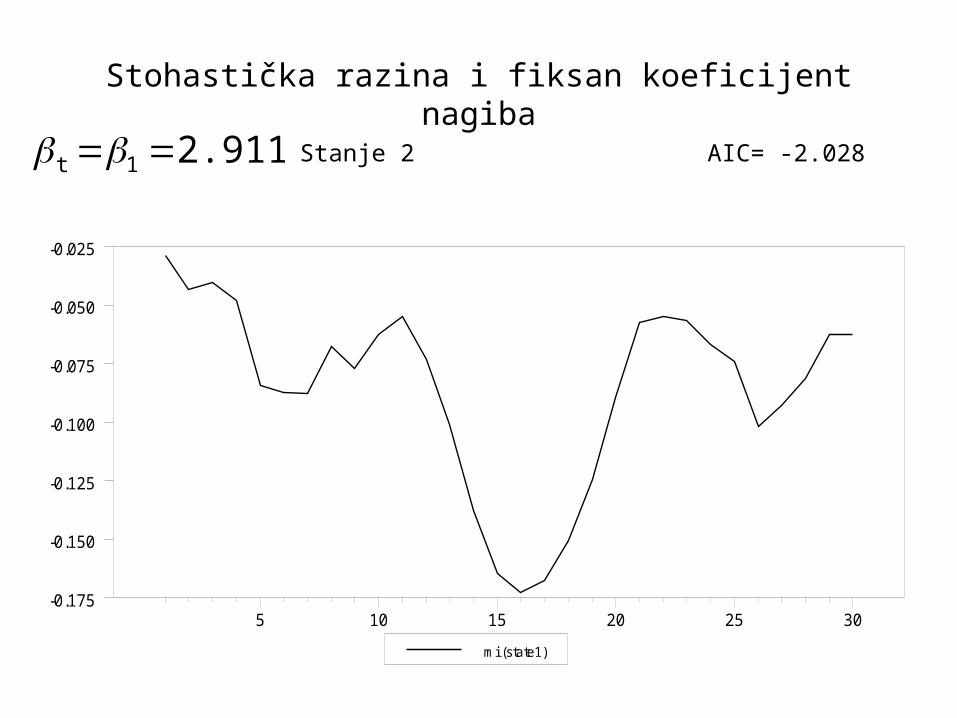
Stohastička razina i fiksan koeficijent nagiba
AIC= -2.028Stanje 22.91141t
mi (state1)
5 10 15 20 25 30-0.175
-0.150
-0.125
-0.100
-0.075
-0.050
-0.025
Y state1+state2*x
5 10 15 20 250.00
0.25
0.50
0.75
1.00
Ey
5 10 15 20 25-0.125
-0.100
-0.075
-0.050
-0.025
-0.000
0.025
0.050
0.075
0.100
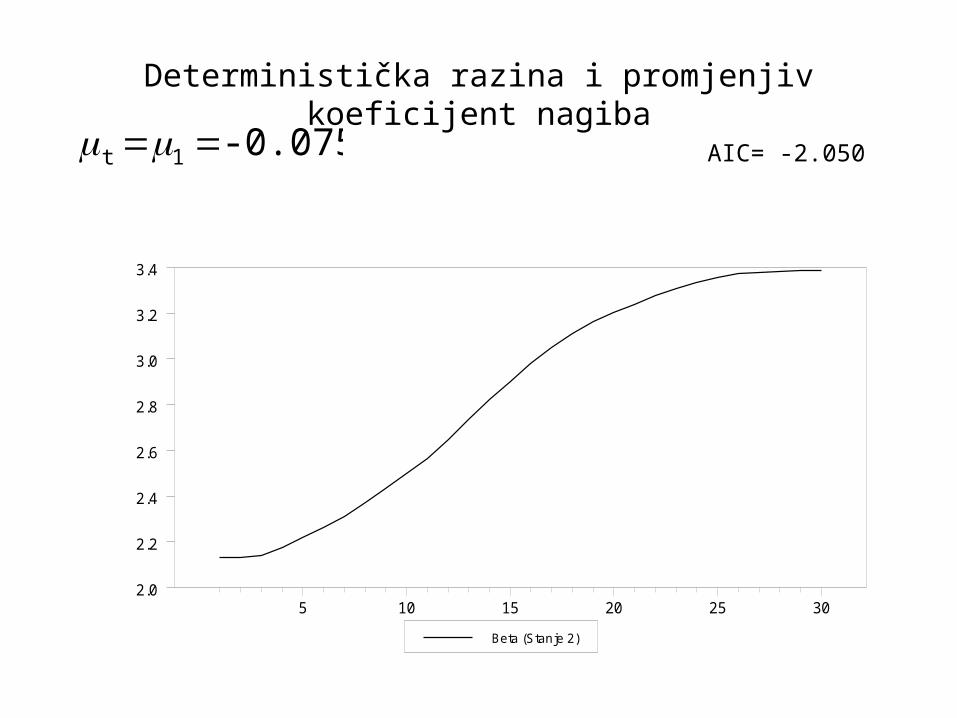
Deterministička razina i promjenjiv koeficijent nagiba
AIC= -2.050-0.07571t
Beta (Stanje 2)
5 10 15 20 25 302.0
2.2
2.4
2.6
2.8
3.0
3.2
3.4
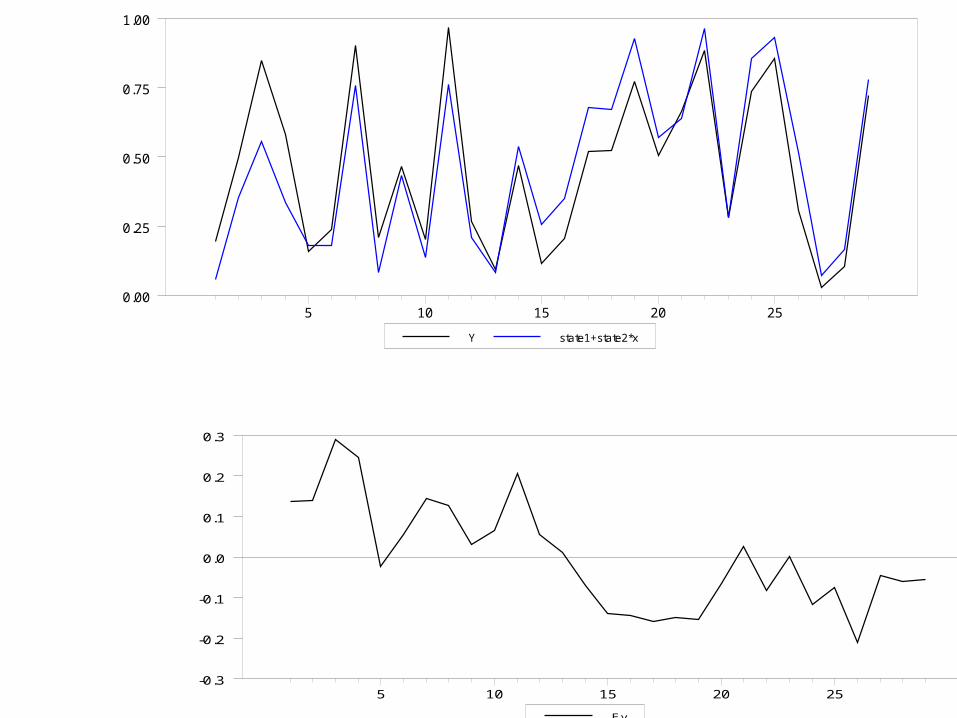
Y state1+state2*x
5 10 15 20 250.00
0.25
0.50
0.75
1.00
Ey
5 10 15 20 25-0.3
-0.2
-0.1
0.0
0.1
0.2
0.3

mi (stanje 1) s 95% intervalima pouzdanosti
1990 1992 1994 1996 1998 2000 2002 2004 2006 2008 2010 2012 2014 2016 2018-0.30
-0.25
-0.20
-0.15
-0.10
-0.05
-0.00
0.05
0.10
Intervali pouzdanosti vektora stanja
2221
1221
tQVCV matrica stanja
22
21
96.12
96.11
state
state
Intervale pouzdanosti (95%) računamo, ako vrijede pretpostavke nezavisnosti, homoskedastičnosti i normalnosti distribucije reziduala, na temelju:
ttttttt
tytytttt
QNIDwwFzAz
HNIDeezcy
,0~
,0~'
1
Multivarijatni model
Ht i Qt su VCV matrice.
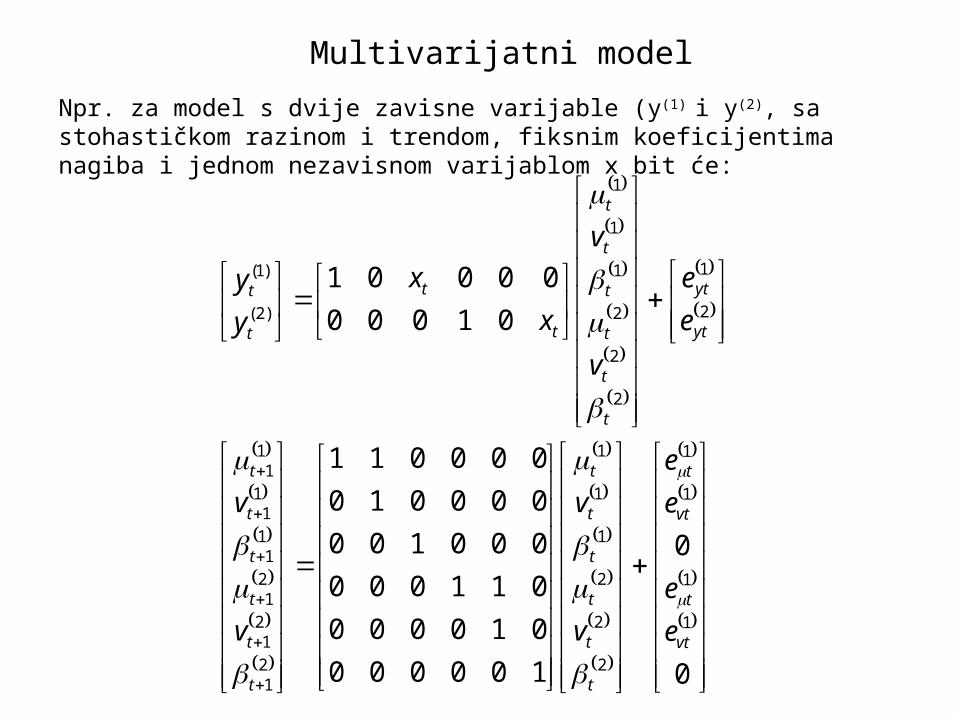
Multivarijatni model
Npr. za model s dvije zavisne varijable (y(1) i y(2), sa stohastičkom razinom i trendom, fiksnim koeficijentima nagiba i jednom nezavisnom varijablom x bit će:
0
0
100000
010000
011000
000100
000010
000011
01000
00001
1
1
1
1
2
2
2
1
1
1
21
21
21
11
11
11
2
1
2
2
2
1
1
1
)2(
)1(
vt
t
vt
t
t
t
t
t
t
t
t
t
t
t
t
t
yt
yt
t
t
t
t
t
t
t
t
t
t
e
e
e
e
v
v
v
v
e
e
v
v
x
x
y
y
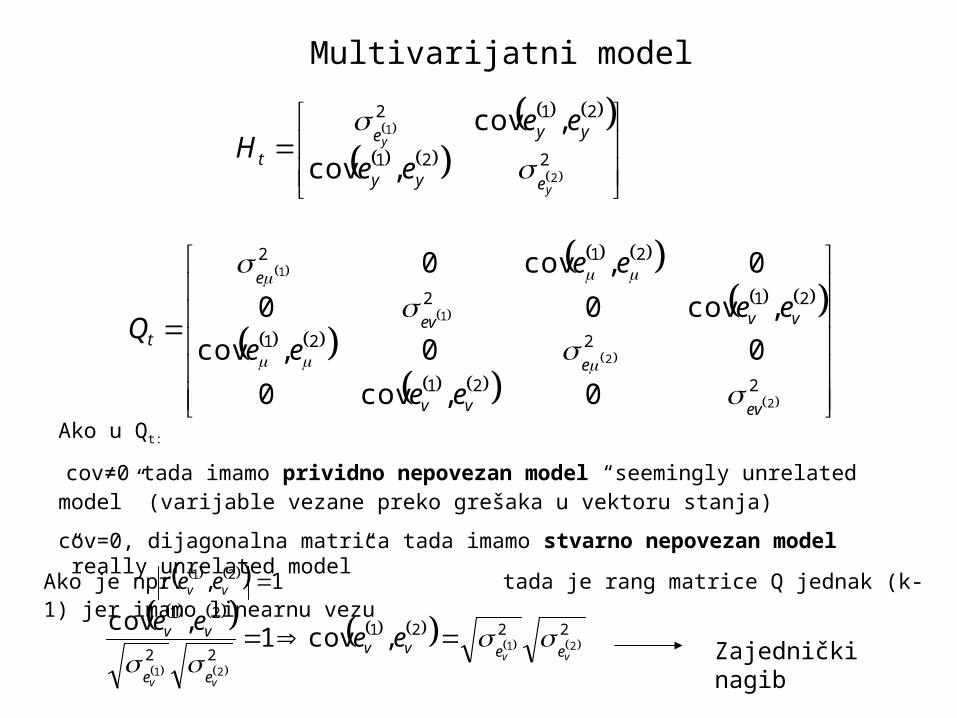
Multivarijatni model
221
212
2
1
,cov
,cov
y
y
eyy
yye
t ee
eeH
221
221
212
212
2
2
1
1
0,cov0
00,cov
,cov00
0,cov0
evvv
e
vvev
e
t
ee
ee
ee
ee
Q
Ako u Qt:
cov≠0 tada imamo prividno nepovezan model “seemingly unrelated model” (varijable vezane preko grešaka u vektoru stanja)
cov=0, dijagonalna matrica tada imamo stvarno nepovezan model ”really unrelated model”
Ako je npr. tada je rang matrice Q jednak (k-1) jer imamo linearnu vezu 1, 21 vv eer
2221
22
21
21
21
,cov1,cov
vv
vv
eevv
ee
vv eeee
Zajednički nagib
Filtriranje i predviđanje
Izglađeno stanje (smoothed state) – procjenjuje se na temelju SVIH (prošlih, tekućih i budućih) opažanja
Filtrirano stanje (filtered state) - procjenjuje se na temelju PROŠLIH i TEKUĆEG opažanja
Predviđeno stanje (predicted state) - procjenjuje se na temelju samo PROŠLIH opažanja.
Procjena vektora stanja činimo u dva koraka:
1. Rekurzijom unaprijed (forward pass) primjenom algoritma Kalmanovog filtara na opažene vremenske nizove;
2. Rekurzijom unazad (backward pass) od t=n,…,1 – koristeći algoritam poznat kao izglađivač stanja i grešaka (state and disturbance smootehers) koji sde primjenjuje nad izlazom Kalmanovog filtera.
Kalmanov filtar
ttttt zyKzz 1
Za lokalni model u razini pojednostavljuje se na:
ttt zyf Greška u predviđanju (one-step forecast (prediction) error), ponekad se zove i inovacija (innovation) jer donosi nove informacije
2
2
t
t
f
ztK
2
tz Procijenjena varijanca greške filtriranog stanja (prošle
vrijednosti)2
tf Procijenjena varijanca one step errora.
tK Kalman gain
Kada je varijanca filtriranog stanja relativno velika u odnosu na varijancu greške u predviđanju onda Kt će težiti jedinici, a kada je varijanca one step errora veća od filtriranog stanja tada će težiti nuli.
ft monotono se s vremenom smanjuje, a za time invariant modele konvergira prema konstantnoj vrijednosti. To vrijedi i za greške filtriranog stanja, što povlači da i Kt također konvergira konstantnoj vrijednosti. Ta činjenica olakšava postupak Kalmanovog filtriranje nakon postignute stabilne ravnoteže.
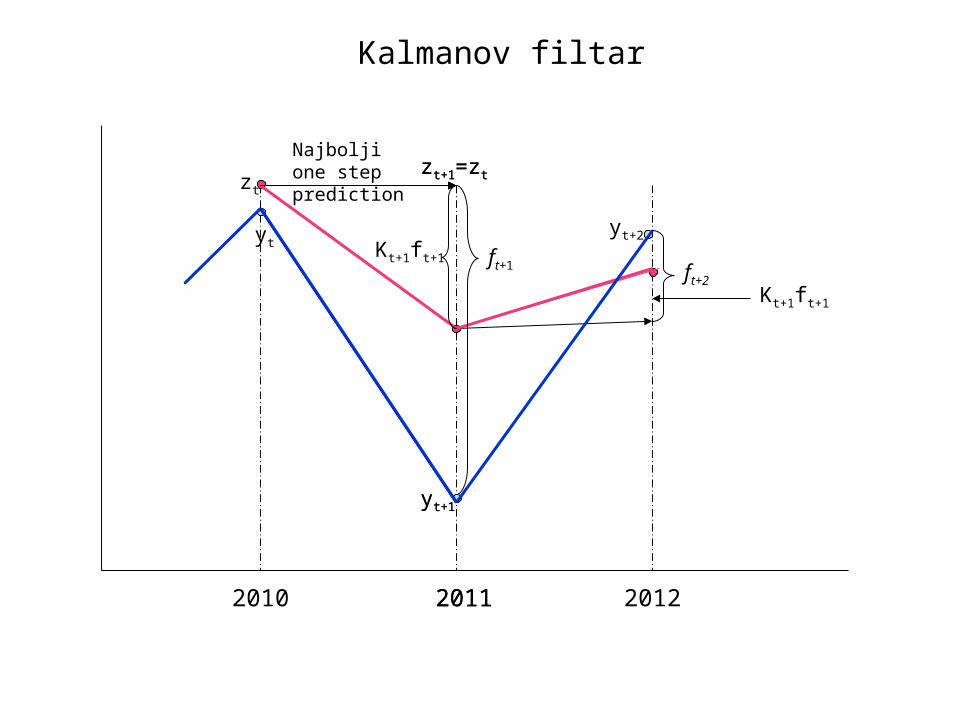
Kalmanov filtar
2010 2011 2012
ytyt+2
yt+1
zt+1=ztzt
Najbolji one step prediction
ft+2
Kt+1ft+1
zt+1=zt
2011
yt+1
ft+1
Kt+1ft+1

Difuzna funkcija vjerodostojnosti (Diffuse log-likelihood)
n
dttftf ff
nKLd
tt1
122 'ln2
12ln
2ln
d - broj difuznih početnih elemenata
Vrijednost gornje funkcije se maksimizira kada se simultano minimiziraju greška u predviđanju (ft) i njezina varijanca .
Za razliku od OLS modela, koji minimizira opservacijske greške et i njihovu varijancu, metoda prostora stanja dobiva vrijednosti procijenjenih hiperparametara putem minimizacije predviđenih grešaka ft i njihove varijance.
Procijena hiperparametara koju maksimihziraju gornju funkciju čini se ili numeričkim putem BFGS (Broyden-Fletcher-Goldfarb-Shannon) algoritma ili EM (Expectation-maximization) algoritmom. BFGS je brži a EM garantira nenegativne hiperparametre i monotonu konvergenciju.
n
dt f
tf
t
t
fnLd
12
22ln
2
12ln
2ln
Za jednu zavisnu varijablu
Za K zavisnih varijabli





























