Embed Size (px)
Citation preview
STATISTICS 479/503TIME SERIES ANALYSIS PART II
Doug WiensApril 12, 2005
Contents
II Time Domain Analysis 38
5 Lecture 5 . . . . . . . . . . . . . . . . . . . 39
6 Lecture 6 . . . . . . . . . . . . . . . . . . . 47
7 Lecture 7 . . . . . . . . . . . . . . . . . . . 56
8 Lecture 8 . . . . . . . . . . . . . . . . . . . 62
9 Lecture 9 . . . . . . . . . . . . . . . . . . . 71
37
10 Lecture 10 . . . . . . . . . . . . . . . . . . 78
11 Lecture 11 . . . . . . . . . . . . . . . . . . 87
12 Lecture 12 . . . . . . . . . . . . . . . . . . 97
13 Lecture 13 . . . . . . . . . . . . . . . . . . 115
14 Lecture 14 (Review) . . . . . . . . . . . . . 126

38
Part II
Time Domain Analysis
39
5. Lecture 5
• Suppose {Xt} is (weakly) stationary (and non-deterministic - Xt is not a non-random function
of Xt−1,Xt−2, ..., i.e. it cannot be predicted ex-actly from the past). Write Xt−µ as Xt. Then
(Wold’s Representation Theorem) we can repre-
sent Xt as
Xt = wt + ψ1wt−1 + ψ2wt−2 + ...
=∞Xk=0
ψkwt−k (with ψ0 = 1) (1)
and∞Xk=1
ψ2k <∞.
Salient feature: Linear function of past and present
(not future) disturbances. Interpretation: con-
vergence in mean square; i.e.
E
⎡⎢⎣⎛⎝Xt −
KXk=0
ψkwt−k
⎞⎠2⎤⎥⎦→ 0 as K →∞.
40
— The conditions ensure that we can take term-
by-term expectations of series of the formP∞k=0ψkXt−k, if the Xt−k have expectations:
E
⎡⎣ ∞Xk=0
ψkXt−k
⎤⎦ = ∞Xk=0
ψkE£Xt−k
¤.
• If (1) holds we say {Xt} is a linear process (alsocalled causal in the text, i.e. doesn’t depend on
the future). Thus Wold’s Representation Theo-
rem can be interpreted as saying that
Stationarity ⇒ Linearity.
41
The converse holds: Assume {Xt} linear; then
(i) E [Xt] = µ+EhXt
i= µ+
∞Xk=0
ψkE£wt−k
¤= µ.
(ii) COV [Xt,Xt+m] = E[XtXt+m]
= E
⎡⎣ ∞Xk=0
ψkwt−k∞Xl=0
ψlwt+m−l
⎤⎦=
∞Xk=0
∞Xl=0
ψkψlE£wt−kwt+m−l
¤=
∞Xk=0
∞Xl=0
ψkψlnσ2wI (l = m+ k)
o= σ2w
∞Xk=0
ψkψk+m.
(In particular, V AR [Xt] = σ2wP∞k=0ψ
2k < ∞.)
Thus
Stationarity ⇔ Linearity.
42
• Backshift operator:
B (Xt) = Xt−1,
B2 (Xt) = B ◦B (Xt) = B (Xt−1) = Xt−2,
etc. Then {Xt} linear ⇒ Xt = ψ(B)wt for the
characteristic polynomial
ψ(B) = 1 + ψ1B + ψ2B2 + ....
This is not really a polynomial, but if it is, i.e.
ψk = 0 for k > q, we say {Xt} is a movingaverage series of order q, written MA(q). We
usually write ψk = −θk. Then
Xt = wt−θ1wt−1−θ2wt−2−...−θqwt−q = θ(B)wt
for
θ(B) = 1− θ1B − ...− θqBq,
the MA(q) characteristic polynomial.
• The above convention, with θ(B) = 1 − θ1B −...− θqBq, is as in ASTSA, and is consistent with
an earlier version of the text and many other texts.
43
The current version of the text uses Xt = wt +
θ1wt−1 + θ2wt−2 + ...+ θqwt−q and θ(B) = 1+θ1B+ ...+ θqBq. To be consistent with ASTSA
I’ll use the former.
• Invertibility: {Xt} is invertible if it can be rep-resented as
Xt = φ1Xt−1+φ2Xt−2+...+wt, where∞Xk=1
|φk| <∞.
Thus, apart from some noise, Xt is a function of
the past history of the process. Generally, only
invertible processes are of practical interest. In
terms of the backshift operator,
wt = Xt − φ1Xt−1 − φ2Xt−2 − ... = φ(B)Xt,
where φ(B) = 1− φ1B − φ2B2− ... is the char-
acteristic polynomial. If it is a true polynomial,
i.e. if φj = 0 for j > p, we say {Xt} is an autore-gressive process of order p, i.e. AR(p). Then
Xt = φ1Xt−1 + φ2Xt−2 + ...+ φpXt−p +wt.
44
— WhenP∞k=1 |φk| < ∞ we say the series is
absolutely summable. The importance of ab-
solute summability is that such series can be
re-arranged - they can be summed in any or-
der. In contrast,P∞k=1
(−1)k+1k = ln 2 ≈
.69, but the series is not absolutely summable:P∞k=1
1k = ∞. The original series can be re-
arranged to give just about anything; for in-
stanceµ1 +
1
3− 12
¶+µ1
5+1
7− 14
¶+ · · ·,
in which two positive terms are always followed
by a negative one, converges to something >
.8.
• When is a stationary (i.e. linear) process invert-ible? Let {Xt} be linear, so Xt = ψ(B)wt
andP∞k=1ψ
2k < ∞. Suppose it is invertible.
Then φ(B)Xt = wt; thus φ(B)ψ(B)wt = wt
and φ(B)ψ(B) = 1. Thus φ(B) = 1/ψ(B),
i.e. 1/ψ(B) has a power series expansion with
absolutely summable coefficients. This makes
ψ(B) quite special.
45
— Example: MA(1); ψ(B) = 1 − θB for some
θ. Then if invertible we must have
1/ψ(B) = 1 + θB + θ2B2 + ...
=∞Xj=0
θjBj; AND
1 + |θ|+¯θ2¯+ ... <∞;
this last point holds iff |θ| < 1. Note that
the root of θ(B) = 0 is B = 1/θ, and then
|θ| < 1 ⇔ |B| > 1, i.e. the MA(1) process
with θ(B) = 1 − θB is invertible iff the root
of θ(B) = 0 satisfies |B| > 1.
— In general, a linear processXt = ψ(B)wt is in-
vertible iff all roots of the characteristic equa-
tion ψ(B) = 0 satisfy |B| > 1 (complex modulus),
i.e. they “lie outside the unit circle in the com-
plex plane”.
— The modulus of a complex number z = a+ ib
is |z| =qa2 + b2 (like the norm of a vector
with coordinates (a, b)).
46
— e.g. Xt = wt − 2wt−1 + 2wt−2; ψ(B) =1 − 2B + 2B2 = 0 for B = .5 ± .5i; |B| =1/√2 ≈ .7 < 1. Non-invertible.
— Similarly, an invertible process is stationary iff
all roots of φ(B) = 0 lie outside the unit circle.
This is called the stationarity condition. E.g.
for an AR(1) the stationarity condition is |φ| <1.
47
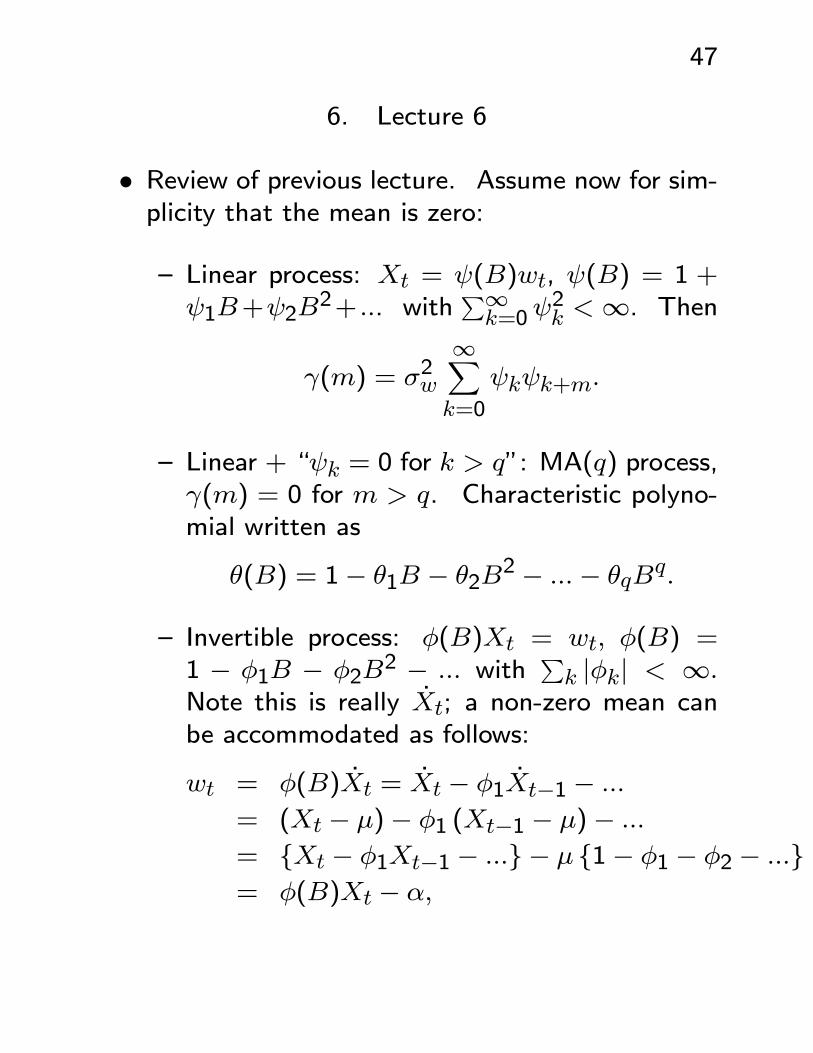
6. Lecture 6
• Review of previous lecture. Assume now for sim-plicity that the mean is zero:
— Linear process: Xt = ψ(B)wt, ψ(B) = 1 +ψ1B+ψ2B
2+ ... withP∞k=0ψ
2k <∞. Then
γ(m) = σ2w
∞Xk=0
ψkψk+m.
— Linear + “ψk = 0 for k > q”: MA(q) process,γ(m) = 0 for m > q. Characteristic polyno-mial written as
θ(B) = 1− θ1B − θ2B2 − ...− θqB
q.
— Invertible process: φ(B)Xt = wt, φ(B) =1 − φ1B − φ2B
2 − ... withPk |φk| < ∞.
Note this is really Xt; a non-zero mean canbe accommodated as follows:
wt = φ(B)Xt = Xt − φ1Xt−1 − ...
= (Xt − µ)− φ1 (Xt−1 − µ)− ...
= {Xt − φ1Xt−1 − ...}− µ {1− φ1 − φ2 − ...}= φ(B)Xt − α,
48
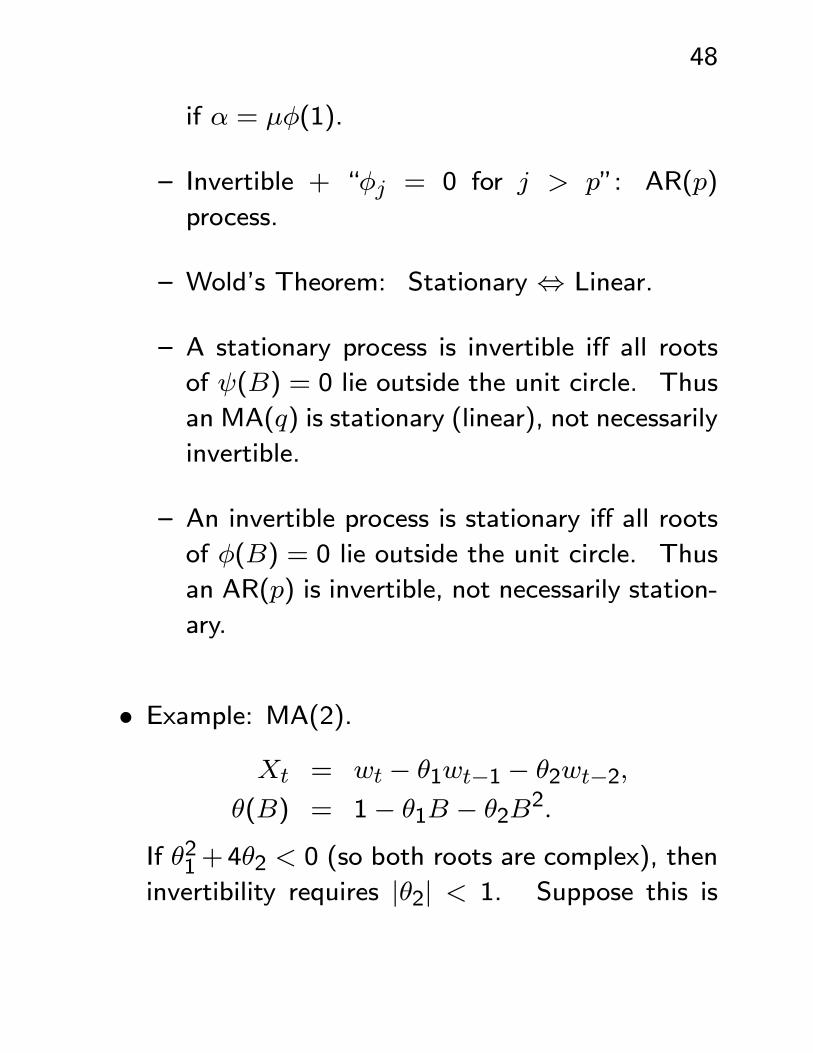
if α = µφ(1).
— Invertible + “φj = 0 for j > p”: AR(p)
process.
— Wold’s Theorem: Stationary ⇔ Linear.
— A stationary process is invertible iff all roots
of ψ(B) = 0 lie outside the unit circle. Thus
an MA(q) is stationary (linear), not necessarily
invertible.
— An invertible process is stationary iff all roots
of φ(B) = 0 lie outside the unit circle. Thus
an AR(p) is invertible, not necessarily station-
ary.
• Example: MA(2).
Xt = wt − θ1wt−1 − θ2wt−2,θ(B) = 1− θ1B − θ2B
2.
If θ21 +4θ2 < 0 (so both roots are complex), then
invertibility requires |θ2| < 1. Suppose this is
49
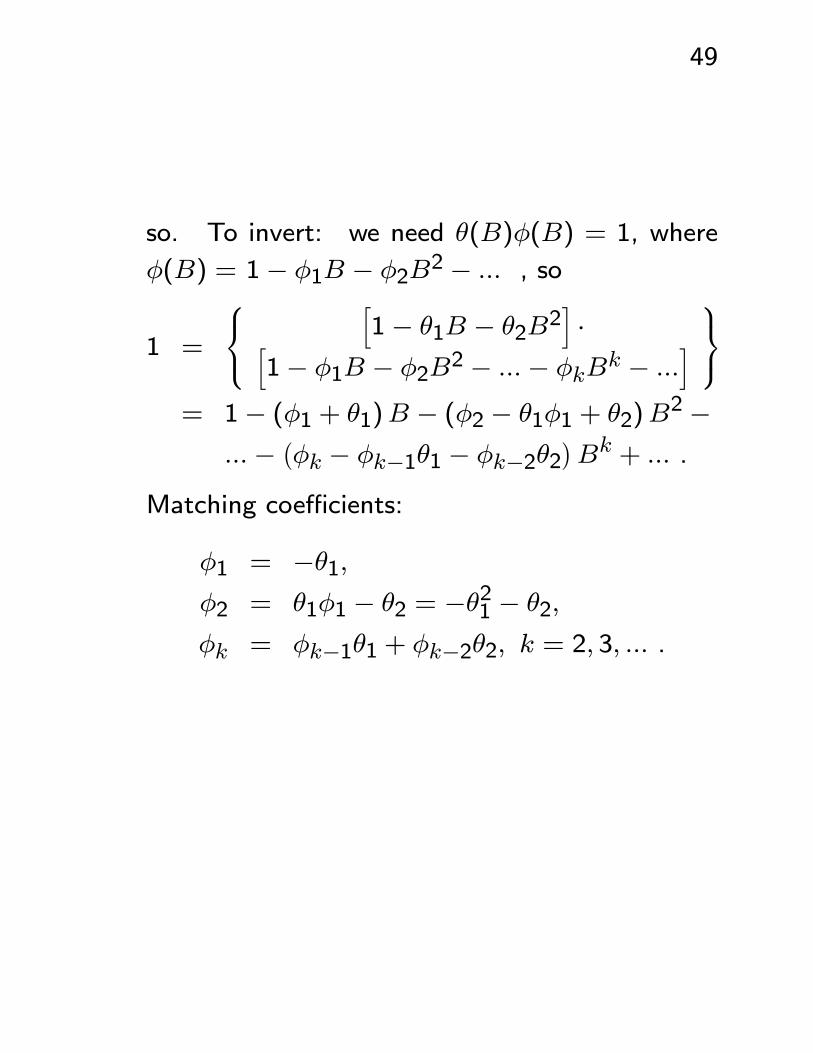
so. To invert: we need θ(B)φ(B) = 1, where
φ(B) = 1− φ1B − φ2B2 − ... , so
1 =
⎧⎨⎩h1− θ1B − θ2B
2i·h
1− φ1B − φ2B2 − ...− φkB
k − ...i ⎫⎬⎭
= 1− (φ1 + θ1)B − (φ2 − θ1φ1 + θ2)B2 −
...−¡φk − φk−1θ1 − φk−2θ2
¢Bk + ... .
Matching coefficients:
φ1 = −θ1,φ2 = θ1φ1 − θ2 = −θ21 − θ2,
φk = φk−1θ1 + φk−2θ2, k = 2, 3, ... .
50
• ARMA models are defined in operator notation
by φ(B)Xt = θ(B)wt; if φ(B) is an AR(p) char-
acteristic polynomial and θ(B) an MA(q), we say
{Xt} is an ARMA(p,q) process. It is station-
ary (linear, causal) if Xt = ψ(B)wt for a series
ψ(z) =Pψkz
k, |z| ≤ 1, with square summable
coefficients. Then the coefficients ψk are deter-
mined from θ(z)/φ(z) = ψ(z). It can be shown
that ψ(z) has the required properties only if all
zeros of φ(z) lie outside the unit circle. Simi-
larly an ARMA(p,q) is invertible only if all zeros
of θ(z) lie outside the unit circle. We also require
that the polynomials have no common factors.
• Example: (Example 2.6 in text)
Xt = .4Xt−1 + .45Xt−2 +wt +wt−1 + .25wt−2⇒
³1− .4B − .45B2
´Xt =
³1 +B + .25B2
´wt
⇒ (1− .9B) (1 + .5B)Xt = (1 + .5B) (1 + .5B)wt
⇒ (1− .9B)Xt = (1 + .5B)wt.
51
Thus series is both stationary and invertible. It
is ARMA(1,1), not ARMA(2,2) as it initially ap-
peared. Students should verify that the above
can be continued as
Xt =
⎡⎣ ∞Xj=0
(.9)j Bj · (1 + .5B)
⎤⎦wt
=h1 + (.9 + .5)B + ...+ (.9)j−1(.9 + .5)Bj + ...
iwt
= ψ(B)wt
where ψ(z) =Pψkz
k and ψ0 = 1, ψk = 1.4(.9)k−1.
• Box-Jenkins methodology:
1. Determine the theoretical ACF (and PACF, to
be defined) for these and other classes of time
series models. Use the sample ACF/PACF to
match the data to a possible model (MA(q),
AR(p), etc.).
52
2. Estimate parameters using a method appropri-
ate to the chosen model, assess the fit, study
the residuals. The notion of residual will re-
quire a special treatment, for now think of
them as Xt − Xt where, e.g., in an AR(p)
model (Xt = φ1Xt−1+φ2Xt−2+...+φpXt−p+wt) we have Xt = φ1Xt−1 + φ2Xt−2 + ... +
φpXt−p. The residuals should then “look
like” white noise (why?). If the fit is inad-
equate revise steps 1. and 2.
3. Finally use model to forecast.
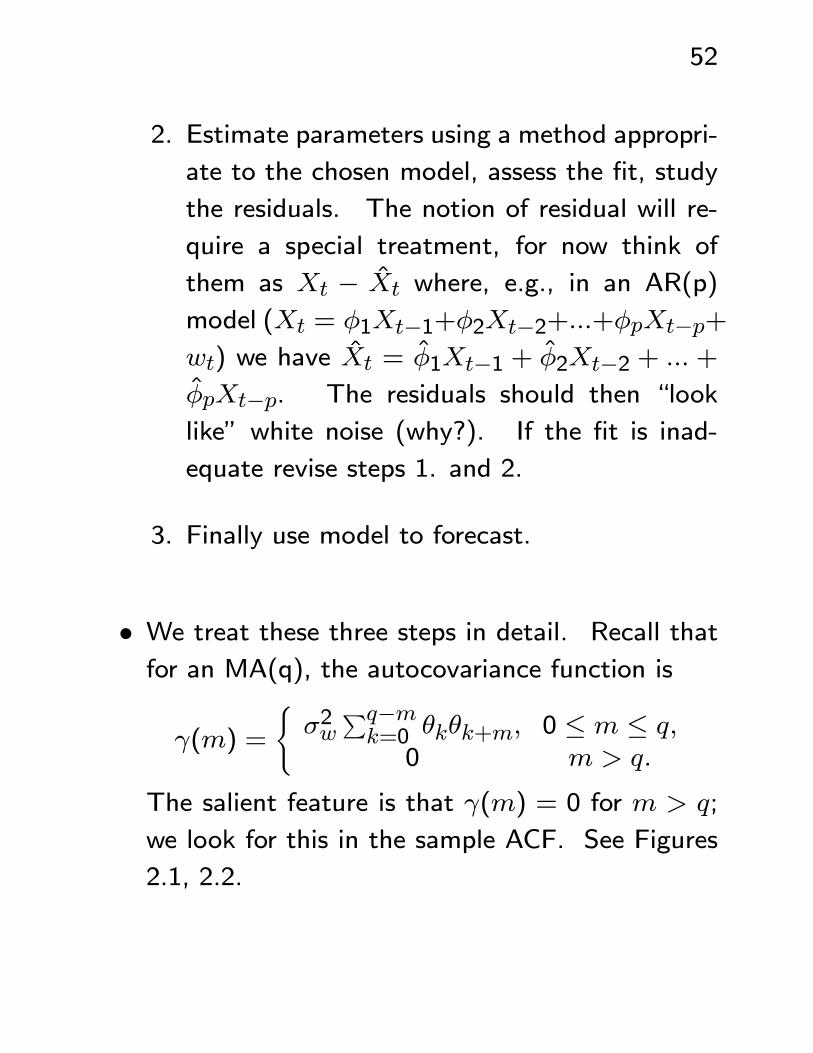
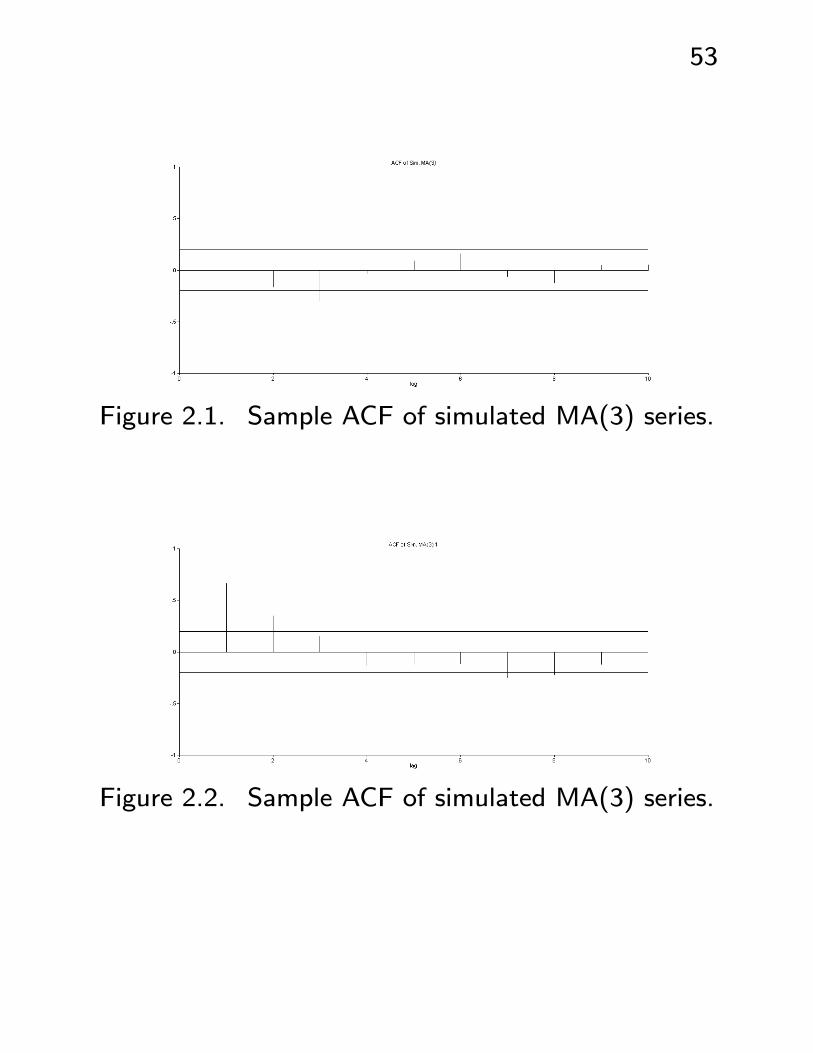
• We treat these three steps in detail. Recall that
for an MA(q), the autocovariance function is
γ(m) =
(σ2w
Pq−mk=0 θkθk+m, 0 ≤ m ≤ q,0 m > q.
The salient feature is that γ(m) = 0 for m > q;
we look for this in the sample ACF. See Figures
2.1, 2.2.
53
Figure 2.1. Sample ACF of simulated MA(3) series.
Figure 2.2. Sample ACF of simulated MA(3) series.
54
• ACF of an AR(p) process: Let j ≥ 0; assumeprocess is stationary. Then
wt = Xt −pX
i=1
φiXt−i
⇒ COV
⎡⎣Xt −pX
i=1
φiXt−i, Xt−j
⎤⎦= COV
hwt, Xt−j
i⇒ γ(j)−
pXi=1
φiγ(j − i) = COVhwt, Xt−j
i.
Under the stationarity condition, Xt−j is a linearcombination wt−j + ψ1wt−j−1 + ψ2wt−j−2 + ..
with
COVhwt, Xt−j
i= COV
"wt, wt−j + ψ1wt−j−1+ψ2wt−j−2 + ..
#= σ2wI(j = 0),
thus
γ(j)−pX
i=1
φiγ(j − i) =
(σ2w, j = 0,0 j > 0.
These are the “Yule-Walker” equations to be solvedto obtain γ(j) for j ≥ 0, then γ(−j) = γ(j).
55
• Example: AR(1). Yule-Walker equations are
γ(j)− φγ(j − 1) =(σ2w, j = 0,0 j > 0.
We get
γ(0) = φγ(1) + σ2w,
γ(j) = φγ(j − 1) for j > 0.
In particular
γ(0) = φγ(1) + σ2w= φ (φγ(0)) + σ2w,
so
γ(0) =σ2w
1− φ2.
Note that 0 < γ(0) = V AR[Xt] < ∞ by the
stationarity condition |φ| < 1.
Iterating γ(j) = φγ(j − 1) gives
γ(j) = φjγ(0), j = 1, 2, 3, ... .
Thus
ρ(j) =γ(j)
γ(0)= φ|j|.
56
7. Lecture 7
• Difficult to identify an AR(p) from its ACF.
• Suppose that a series is AR(1), and consider fore-casting Xt from two previous values Xt−1,Xt−2:
Xt = φXt−1 +wt,
Xt = α1Xt−1 + α2Xt−2.
One suspects that the “best” α’s will be α1 =
φ, α2 = 0. This is in fact true, and is a property
of the “Partial Autocorrelation Function (PACF)”.
• Assume µX = 0; consider the problem of mini-
mizing the function
fm(α1,m, ..., αm,m)
= Eh{Xt − α1,mXt−1 − ...− αm,mXt−m}2
i,
which is the MSE when Xt is forecast by
Xt = α1,mXt−1 + ...+ αm,mXt−m.
57
Let the minimizers be α∗1,m, ..., α∗m,m. The lag-
m PACF value, written φmm, is defined to be
α∗m,m.
• It can also be shown that
φmm = CORRhXt − Xt,Xt−m − Xt−m
i,
where each X denotes the best (i.e. minimum
MSE) predictor which is a linear function of
Xt−1, ...,Xt−m+1.
• To compute: Solve the m equations in m un-
knowns
0 = −12
∂fm
∂αj,m=
EhXt−j · {Xt − α1,mXt−1 − ...− αm,mXt−m}
i=
hγ(j)− α1,mγ(j − 1)− ...− αm,mγ(j −m)
i,
for j = 1, ...,m; i.e.
mXi=1
αi,mγ(j − i) = γ(j).
58
Then
m = 1 : φ11 = ρ(1),
m = 2 : φ22 =ρ(2)− ρ2(1)
1− ρ2(1), etc.
• Note that for an AR(1), ρ(j) = φj and so φ11 =φ, φ22 = 0. See Figure 2.3.
Figure 2.3. Sample PACF from simulated AR(1)
series.
59
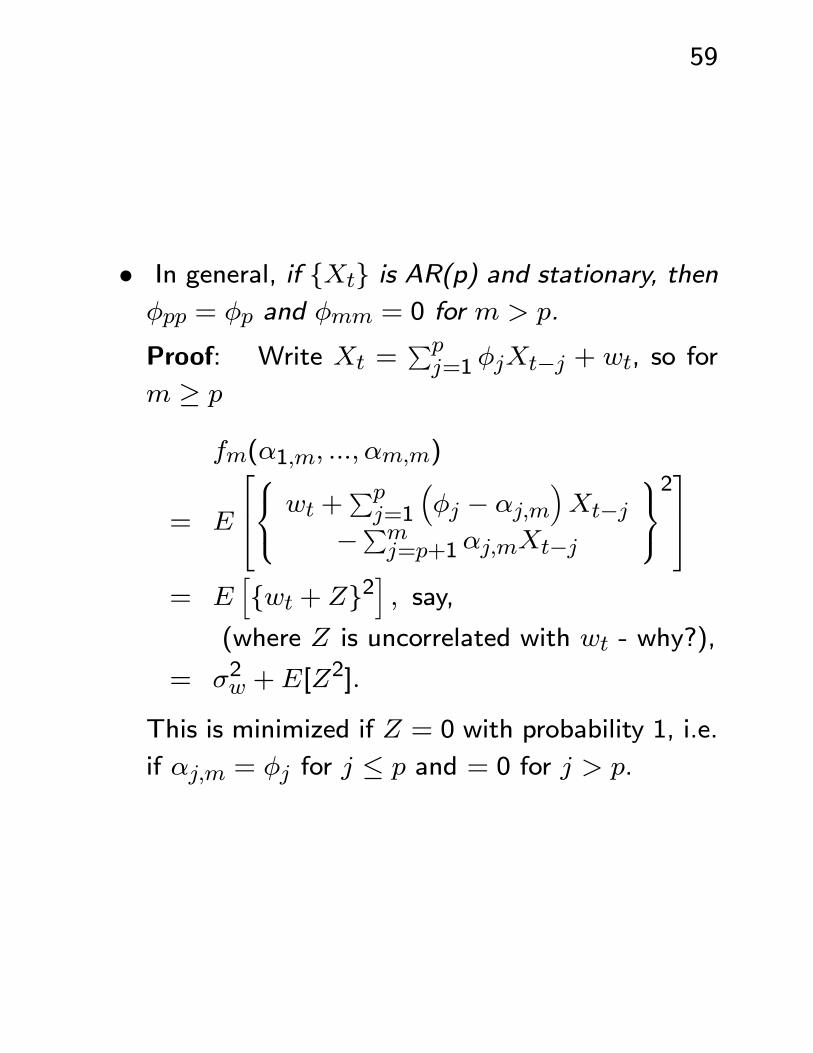
• In general, if {Xt} is AR(p) and stationary, thenφpp = φp and φmm = 0 for m > p.
Proof: Write Xt =Ppj=1 φjXt−j + wt, so for
m ≥ p
fm(α1,m, ..., αm,m)
= E
⎡⎢⎣⎧⎨⎩ wt +
Ppj=1
³φj − αj,m
´Xt−j
−Pmj=p+1αj,mXt−j
⎫⎬⎭2⎤⎥⎦
= Eh{wt + Z}2
i, say,
(where Z is uncorrelated with wt - why?),
= σ2w +E[Z2].
This is minimized if Z = 0 with probability 1, i.e.
if αj,m = φj for j ≤ p and = 0 for j > p.
60
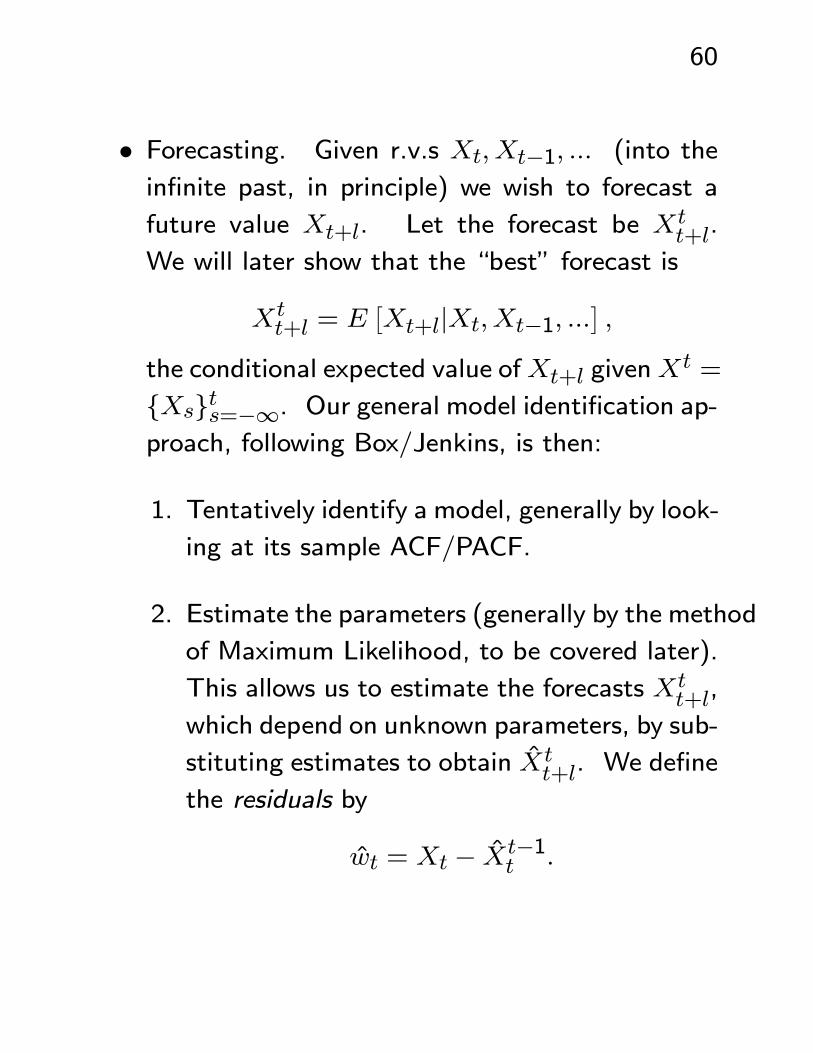
• Forecasting. Given r.v.s Xt,Xt−1, ... (into the
infinite past, in principle) we wish to forecast a
future value Xt+l. Let the forecast be Xtt+l.
We will later show that the “best” forecast is
Xtt+l = E
£Xt+l|Xt,Xt−1, ...
¤,
the conditional expected value ofXt+l givenXt =
{Xs}ts=−∞. Our general model identification ap-proach, following Box/Jenkins, is then:
1. Tentatively identify a model, generally by look-
ing at its sample ACF/PACF.
2. Estimate the parameters (generally by the method
of Maximum Likelihood, to be covered later).
This allows us to estimate the forecasts Xtt+l,
which depend on unknown parameters, by sub-
stituting estimates to obtain Xtt+l. We define
the residuals by
wt = Xt − Xt−1t .
61
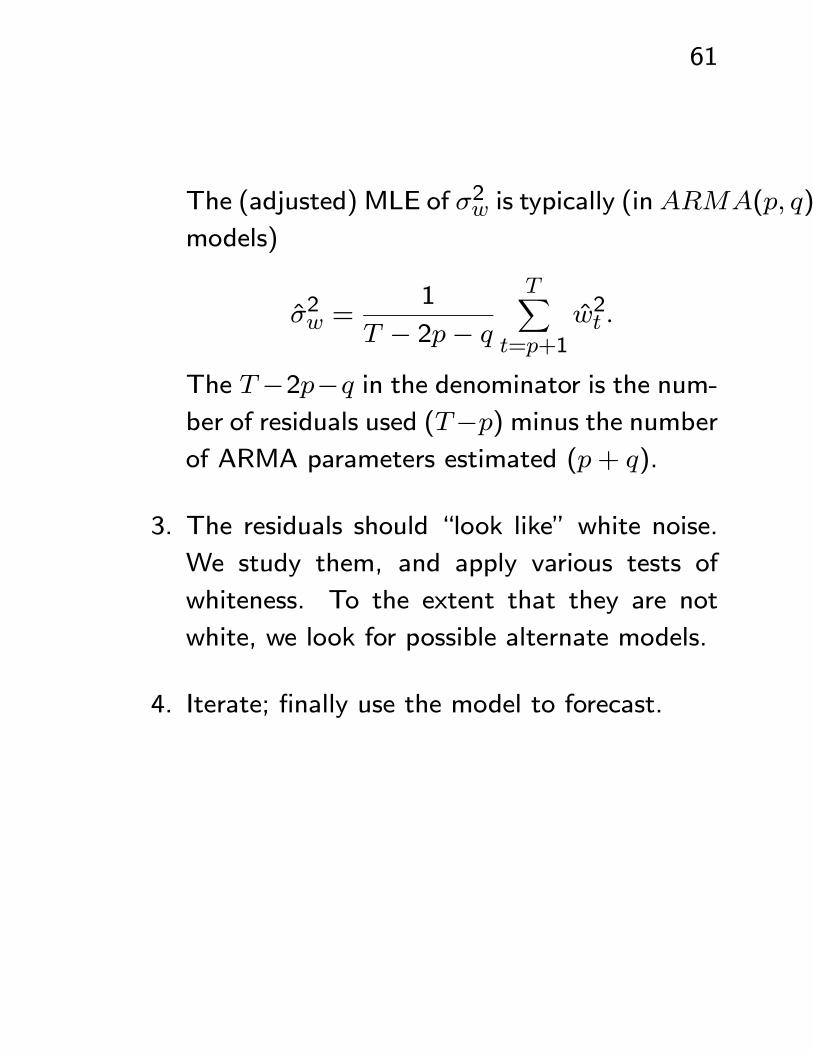
The (adjusted) MLE of σ2w is typically (inARMA(p, q)
models)
σ2w =1
T − 2p− q
TXt=p+1
w2t .
The T−2p−q in the denominator is the num-ber of residuals used (T−p) minus the numberof ARMA parameters estimated (p+ q).
3. The residuals should “look like” white noise.
We study them, and apply various tests of
whiteness. To the extent that they are not
white, we look for possible alternate models.
4. Iterate; finally use the model to forecast.
62
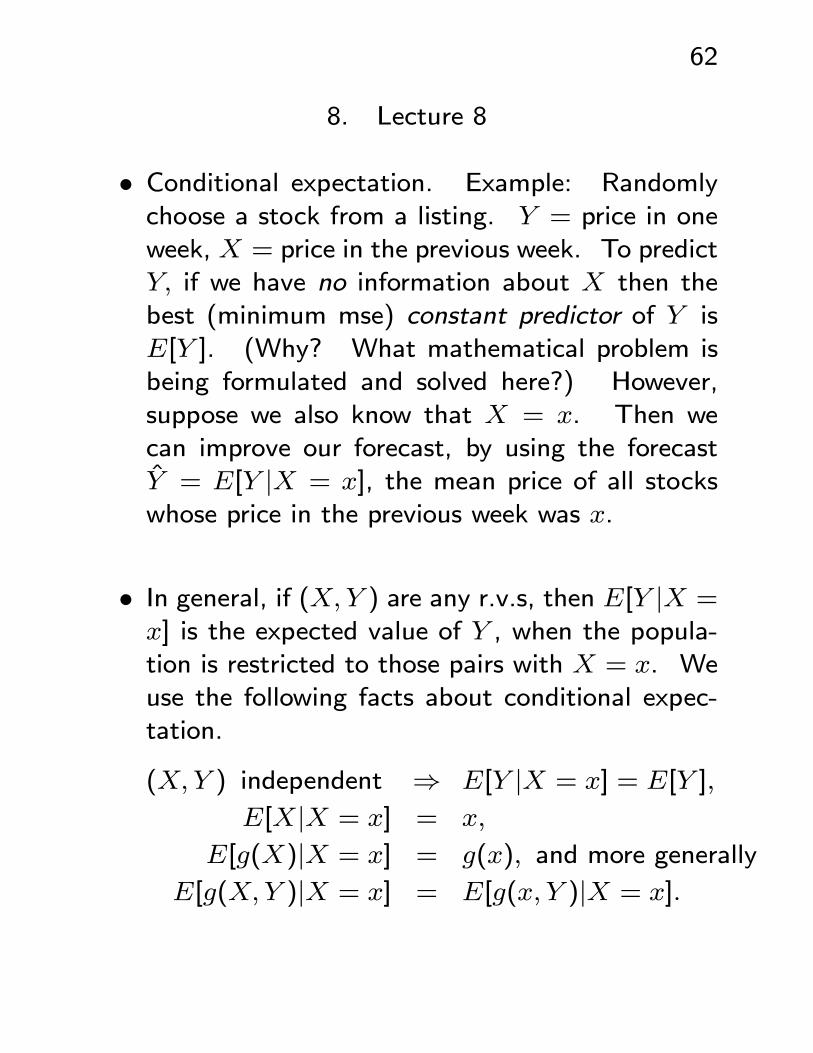
8. Lecture 8
• Conditional expectation. Example: Randomlychoose a stock from a listing. Y = price in oneweek, X = price in the previous week. To predictY, if we have no information about X then thebest (minimum mse) constant predictor of Y isE[Y ]. (Why? What mathematical problem isbeing formulated and solved here?) However,suppose we also know that X = x. Then wecan improve our forecast, by using the forecastY = E[Y |X = x], the mean price of all stockswhose price in the previous week was x.
• In general, if (X,Y ) are any r.v.s, then E[Y |X =x] is the expected value of Y , when the popula-tion is restricted to those pairs with X = x. Weuse the following facts about conditional expec-tation.
(X,Y ) independent ⇒ E[Y |X = x] = E[Y ],
E[X|X = x] = x,
E[g(X)|X = x] = g(x), and more generally
E[g(X,Y )|X = x] = E[g(x, Y )|X = x].
63
In particular,
E[f(X)g(Y )|X = x] = f(x)E[g(Y )|X = x].
• Assume from now on that white noise is Normally
distributed. The important consequence is that
these terms are now independent, not merely un-
correlated, and so
E [ws|wt,wt−1, ...] =
(ws, s ≤ t,0, s > t.
• Put h(x) = E[Y |X = x]. This is a function of
x; when it is evaluated at the r.v. X we call it
h(X) = E[Y |X]. We have the
Double Expectation Theorem:
E {E[Y |X]} = E[Y ].
The inner expectation is with respect to the
conditional distribution and the outer is with re-
spect to the distribution of X; the theorem can
be stated as E[h(X)] = E[Y ], where h(x) is as
above.
64
— Example: Y = house values, X = location
(neighbourhood) of a house. E[Y ] can be
obtained by averaging within neighbourhoods,
then averaging over neighbourhoods.
• Similarly,
EX
nEY |X [g(X,Y )|X]
o= E [g(X,Y )] .
• Minimum MSE forecasting. Consider forecasting
a r.v. Y (unobservable) using another r.v. X (or
set of r.v.s); e.g. Y = Xt+l, X = Xt. We seek
the function g(X) which minimizes the MSE
MSE(g) = Eh{Y − g(X)}2
i.
The required function is g(X) = E[Y |X] (= h(X)).
65
• Proof: We have to show that for any function g,MSE(g) ≥MSE(h). Write
MSE(g)
= Eh{(Y − h(X)) + (h(X)− g(X))}2
i= E
h{Y − h(X)}2
i+E
h{h(X)− g(X)}2
i+2E [(h(X)− g(X)) · (Y − h(X))] .
We will show that the last term = 0; then we have
MSE(g) =MSE(h)+Eh{h(X)− g(X)}2
iwhich
exceeds MSE(h); equality iff g(X) = h(X) with
probability 1. To establish the claim we evaluate
the expected value in stages:
E [(h(X)− g(X)) · (Y − h(X))]
= EX
nEY |X [(h(X)− g(X)) · (Y − h(X))|X]
o.
The inner expectation is (why?)
(h(X)− g(X) ·EY |X [(Y − h(X))|X]= (h(X)− g(X) ·
nEY |X [Y |X]− h(X)
o= 0.
66
• The minimum MSE is
MSEmin = Eh{Y − h(X)}2
i= EX
nEY |X
h{Y − h(X)}2 |X
io= EX {V AR[Y |X]} .
We will show that
V AR[Y ] = EX {V AR[Y |X]}+V AR[E{Y |X}],
i.e.
V AR[Y ] =MSEmin + V AR[h(X)];
thusMSEmin ≤ V AR[Y ]. V AR[Y ] is the MSE
when Y is forecast by its mean and X is ignored;
our result is then that using the information in
X never increases MSE, and results in a strict
decrease as long as V AR[h(X)] > 0, i.e. h(x) is
non-constant. Analogous to within and between
breakdown in ANOVA (e.g. variation in house
prices within and between neighbourhoods).
67
• Proof of claim:
V AR[Y ] = Eh{Y −E[Y ]}2
i= E
h{Y − h(X) + (h(X)−E[Y ])}2
i= E
h{Y − h(X)}2
i+E
h{h(X)−E[Y ]}2
i+2E [{Y − h(X)} {h(X)−E[Y ]}]
= MSEmin + V AR[h(X)]
+2EX
nEY |X [{Y − h(X)} {h(X)−E[Y ]} |X]
o.
The inner expectation is
{h(X)−E[Y ]} ·EY |X [Y − h(X)|X] = 0.
• Students should verify that Y −E[Y |X] is uncor-related with X.
68
• Assume {Xt} is stationary and invertible. We
forecast Xt+l by Xtt+l = E
hXt+l|Xt
i, where
Xt = {Xs}ts=−∞. Note that this forecast is
‘unbiased’ in that E[Xtt+l] = E[Xt+l]. By the
linearity we have that Xt+l can be represented as
Xt+l =∞Xk=0
ψkwt+l−k, (ψ0 = 1)
so that
Xtt+l =
∞Xk=0
ψkE[wt+l−k|Xt].
We haveXt = ψ(B)wt and (by invertibility) wt =
φ(B)Xt where φ(B)ψ(B) = 1 determines φ(B).
Thus conditioning on Xt is equivalent to condi-
tioning on wt = {ws}ts=−∞:
Xtt+l =
∞Xk=0
ψkE[wt+l−k|wt] where
E[wt+l−k|wt] =
(wt+l−k, if l ≤ k,0, otherwise.
(Note that EhXt+l−k|Xt
i= Xt+l−k if l ≤ k.)
69
Thus the forecast is
Xtt+l =
∞Xk=l
ψkwt+l−k,
with forecast error and variance
Xt+l −Xtt+l =
l−1Xk=0
ψkwt+l−k,
V AR[Xt+l −Xtt+l] = σ2w
l−1Xk=0
ψ2k.
Since {wt} is normal, we have
Xt+l −Xtt+l ∼ N
⎛⎝0, σ2w l−1Xk=0
ψ2k
⎞⎠and so a 100(1−α)% prediction (forecast) inter-
val on Xt+l is
Xtt+l ± zα/2σw
vuuut l−1Xk=0
ψ2k.
Interpretation: the probability that Xt+l will lie
in this interval is 1− α.
70
• In practice we must solve for the ψk in terms ofthe AR and MA parameters of {Xt}, then sub-stitute estimates of these parameters to obtain
estimates ψk. Substituting these estimates into
the expressions above results in the forecast Xtt+l;
we also must use an estimate σ2w. The residuals,
or innovations are
wt = Xt − Xt−1t
and typically σ2w =Pw2t /(# of residuals - # of
parameters estimated).
71
9. Lecture 9
• Example 1: AR(1) (and stationary).
Xt = φXt−1 + wt.
Xtt+l = E
hXt+l|Xt
i= E
hφXt+l−1 +wt+l|Xt
i= φE
hXt+l−1|Xt
i+E
hwt+l|wt
i=
(φXt, l = 1,
φXtt+l−1, l > 1.
Iterating:
Xtt+l = φlXt for l ≥ 1.
The calculation of the forecast was easy (it al-ways is for an AR model); determining the fore-cast variance requires us to determine the ψk’s(since V AR[Xt+l−Xt
t+l] = σ2wPl−1k=0ψ
2k). Usu-
ally this is done numerically; in the present caseit can be done explicitly:
(1− φB)Xt = wt, so
Xt = (1− φB)−1wt
=∞Xk=0
ψkwt−k,
72
for ψk = φk. Then
l−1Xk=0
ψ2k =1− φ2l
1− φ2,
leading to the forecast interval
φlXt ± zα/2σw
vuut1− φ2l
1− φ2.
Numerically we replace φ by its estimate φ; then
Xtt+l = φlXt and the residuals are
wt = Xt − Xt−1t = Xt − φXt−1 (t > 1).
Note the similarity with wt = Xt−φXt−1. Thisillustrates the fact that the residual can also be
obtained by writing wt in terms of the data and
parameters, and then replacing the parameters
with estimates. The estimate of the variance
of the noise is
σ2w =TXt=2
w2t /(T − 2).
73
• Example 2. AR(p). Similar to Example 1, Xt =Ppi=1 φiXt−i +wt results in
Xtt+l =
pXi=1
φiXtt+l−i,
where Xtt+l−i = Xt+l−i if l ≤ i. Now solve
(numerically) Xt = (1/φ(B))wt = ψ(B)wt to
get the ψk, then the ψk and the standard errors
of the forecasts. The innovations are obtained
from
Xt−1t =
pXi=1
φiXt−1t−i =
pXi=1
φiXt−i
to get
wt = Xt −pX
i=1
φiXt−i,
with
σ2w =TX
t=p+1
w2t /(T − 2p).
74
• Example 3. MA(1) (and invertible).
Xt = wt − θwt−1 = (1− θB)wt
⇒ wt =∞Xk=0
θkXt−k.
We make the approximation X0 = w0 = 0, and
then
wt =t−1Xk=0
θkXt−k.
Now
Xtt+l = E
hwt+l − θwt+l−1|wt
i=
(−θwt, l = 1,0, l > 1,
with wt obtained from the preceding equation.
This gives residuals
wt =t−1Xk=0
θkXt−k,
and
σ2w =TXt=1
w2t /(T − 1)
75
Trivially, since ψ0 = 1, ψ1 = −θ and ψk = 0 for
k > 1, we have
l−1Xk=0
ψ2k =
(1, l = 1,
1 + θ2, l > 1.
The prediction intervals are⎧⎨⎩ −θwt ± zα/2σw, l = 1,
0± zα/2σw
q1 + θ2, l > 1.
• Students should write out the procedure for aninvertible MA(q) model.
• Example 4. ARMA(1,1), stationary and invert-
ible. In general, when there is an MA compo-
nent we make the approximation X0 = w0 = 0.
The model is (1 − φB)Xt = (1 − θB)wt, i.e.
Xt = φXt−1 +wt − θwt−1, leading to
Xtt+l = φXt
t+l−1 +wtt+l − θwt
t+l−1
=
(φXt − θwt, l = 1,φXt
t+l−1, l > 1.
76
To obtain a value for wt we write
wt = (1− φB)(1− θB)−1Xt
= (1− φB)∞Xk=0
θkBk ·Xt
=
⎛⎝1 + ∞Xk=1
θk−1 (θ − φ)Bk
⎞⎠Xt
with approximation
wt = Xt +t−1Xk=1
θk−1 (θ − φ)Xt−k.
For the forecast variance we reverse φ and θ inthe above:
Xt = (1− θB)(1− φB)−1wt =∞Xk=0
ψkwt−k
with ψk = φk−1 (φ− θ) (and ψ0 = 1); thus
V ARhXt+l −Xt
t+l
i= σ2w
l−1Xk=0
ψ2k
= σ2w
"1 + (φ− θ)2
1− φ2(l−1)
1− φ2
#.
77
Students should verify that obtaining the residualsfrom wt = Xt− Xt−1
t results in the same expres-sion as substituting estimates into the expressionfor wt given above, i.e.
wt = Xt +t−1Xk=1
θk−1³θ − φ
´Xt−k.
Then σ2w =PTt=2 w
2t /(T − 3).
• In general, in an ARMA(p, q) model, the assump-tion X0 = 0 is necessary if we are to be able tocalculate any of the residuals. The resulting ex-pression - of the form wt =
Pt−1k=0 αkXt−k - could
also be used to calculate the first p residuals. Sothere is a trade-off: we could get numerical butapproximate values for w1, ..., wp, or we could justnot bother and calculate the remaining residualsmore accurately. Here we take the latter ap-proach. This gives
σ2w =TX
t=p+1
w2t /(T − 2p− q).
78
10. Lecture 10
• Estimation. One method is the method of mo-
ments, in which we take expressions relating pa-
rameters to expected values, replace the expected
values by series averages, then solve for the un-
known parameters.
— e.g. E[Xt] = µ becomes T−1PTt=1 xt = µ.
— e.g. For an AR(1) model we could replace
γ(k) by the sample autocovariance γ(k) in the
Yule-Walker equations, then solve them as be-
fore to get
γ(0) =σ2w
1− φ2,
γ(1) = φγ(0),
yielding
φ = ρ(1),
σ2w = γ(0)³1− φ2
´.
79
Recall we previously used the (adjusted Max-
imum Likelihood) estimate
σ2w,MLE =TXt=2
w2t /(T − 2).
Students should show that the difference be-
tween these two estimates is of the order (i.e.
a multiple of) 1/T ; in this sense the two es-
timates are asymptotically (i.e. as T → ∞)equivalent.
— The same technique applied to the MA(1) model
starts with ρ(1) = −θ/³1 + θ2
´( |ρ(1)| <
1/2 by invertibility: |θ| < 1), then we solve
ρ(1) = −θ/³1 + θ2
´.
If |ρ(1)| < 1/2 there is a real root θ with
|θ| < 1 and we use it. (Otherwise |θ| = 1 andthe estimated model is not invertible.) But
even when |θ| < 1 the estimate can be quite
inefficient (highly varied) relative to the MLE,
which we consider next.
80
• Maximum Likelihood Estimation. We observe
x = (x1, ..., xT )0; suppose the joint probability
density function (pdf) is f(x|α) for a vector α =(α1, ..., αp)
0 of unknown parameters. E.g. if the
Xt are independent N(µ, σ2) the joint pdf is
TYt=1
⎧⎨⎩³2πσ2´−1/2 e−(xt−µ)2
2σ2
⎫⎬⎭=
³2πσ2
´−T/2e−PT
t=1(xt−µ)2
2σ2 .
When evaluated at the numerical data this is a
function of α alone, denoted L (α|x) and knownas the Likelihood function. The value α which
maximizes L (α|x) is known as the MaximumLikelihood Estimator (MLE). Intuitively, the MLE
makes the observed data “most likely to have oc-
curred”.
— We put l(α) = lnL (α|x), the log-likelihood,and typically maximize it (equivalent to max-
81
imizing L) by solving the likelihood equations³l(α) =
´ ∂
∂αl(α) = 0, i.e.
∂
∂αjl(α) = 0, j = 1, ..., p.
The vector l(α) is called the gradient.
— The MLE has attractive large sample proper-
ties. With α0 denoting the true value, we
typically have that√T (α−α0) has a lim-
iting (as T → ∞) normal distribution, withmean 0 and covariance matrix
C = I−1(α0)
where I(α0) is the information matrix defined
below.
— The role of the covariance matrix is that if a
random vector Y = (Y1, ..., Yp)0 has covari-
ance matrix C, then
COVhYj, Yk
i= Cjk;
in particular V AR[Yj] = Cjj.
82
— The information matrix is given by
I(α0) = limT→∞
½1
TEhl(α0)l(α0)
0i¾ ;a more convenient and equivalent form (for
the kinds of models we will be working with)
is
I(α0) = limT→∞
½1
TEh−l(α0)
i¾,
where l(α) is the Hessian matrix with (j, k)th
element ∂2l(α)/∂αj∂αk.
— To apply these results we estimate I(α0) by
I = I(α).
Denote the (j, k)th element of I−1 by Ijk.Then the normal approximation is that
√T³αj − αj
´is asymptotically normally distributed with mean
zero and variance estimated by Ijj, so that
αj − αj
sj≈ N(0, 1), where sj =
sIjj
T.
83
Then, e.g., the p-value for the hypothesis H0 :
αj = 0 against a two-sided alternative is
p = 2P
ÃZ >
¯¯αjsj
¯¯!,
supplied on the ASTSA printout.
• Example 1. AR(1) with a constant: Xt = φ0 +
φ1Xt−1+wt. As is commonly done for AR mod-
els we will carry out an analysis conditional onX1;
i.e. we act as if X1 is not random, but is the con-
stant x1. We can then carry out the following
steps:
1. Write out the pdf of X2, ...,XT .
2. From 1. the log-likelihood is l(α) = lnL (α|x),where α =
³φ0, φ1, σ
2w
´0.
3. Maximize l(α) to obtain the MLEs³φ0, φ1, σ
2w
´.
4. Obtain the information matrix and its esti-
mated inverse.
84
• Step 1. (Assuming normally distributed white
noise.) Transformation of variables. If the pdf
of w2, ..., wT is g(w|α) and we write the w’s interms of the X’s:
wt = Xt − φ0 − φ1Xt−1
then the pdf of X2, ...,XT is
f(x|α) =g(w|α)¯µ∂w
∂x
¶¯+
where³∂w∂x
´is the matrix of partial derivatives,
with µ∂w
∂x
¶jk=
∂wj
∂xk,
and |·|+ is the absolute value of the determinant.On the right hand side g(w|α) is evaluated byreplacing the w’s with their expressions in terms
of the x’s. In this AR(1) example,
g(w|α) =³2πσ2w
´−(T−1)/2e−PT
t=2w2t
2σ2w
85
and
∂w
∂x=
⎛⎜⎜⎜⎜⎜⎜⎝1 0 0 · · · 0−φ 1 0 . . . ...0 −φ . . . . . . 0... . . . . . . 1 00 · · · 0 −φ 1
⎞⎟⎟⎟⎟⎟⎟⎠with determinant = 1 (why?). Thus
f(x|α) =³2πσ2w
´−(T−1)/2e−PT
t=2(xt−φ0−φ1xt−1)2
2σ2w .
This determinant will always = 1 if we can write
wt as Xt+a function of Xt−1, ...,X1. But (i)
this can always be done in AR models, and (ii)
in models with MA parts to them we assume in-
vertibility + “X0 = 0” , so that this can be done
there as well. So for all models considered in this
course, |∂w/∂x|+ = 1.
86
• Step 2.
l(α)
= ln
⎧⎪⎪⎨⎪⎪⎩³2πσ2w
´−(T−1)/2e−PT
t=2(xt−φ0−φ1xt−1)2
2σ2w
⎫⎪⎪⎬⎪⎪⎭= −T − 1
2lnσ2w −
PTt=2 (xt − φ0 − φ1xt−1)
2
2σ2w+const.
= −T − 12
lnσ2w −S(φ0, φ1)
2σ2w+ const., say.
87
11. Lecture 11
• Step 3. To maximize l over φ0, φ1 we minimize
S(φ0, φ1). Consider a regression model
xt = φ0 + φ1xt−1 + error, t = 2, ..., T.
(*)
In a regression model
yi = φ0 + φ1xi + error, i = 1, ..., n
the least squares estimates of the slope and inter-
cept minimizeP(yi − φ0 − φ1xi)
2 and are
φ0 = y − φ1x,
φ1 =
P(xi − x) (yi − y)P
(xi − x)2
Ã=
γY X(0)
γX(0)
!.
Thus the minimizers of S are the LSEs in the re-
gression model (*); they are obtained numerically
by doing the regression and formulas for them
can (and should, by the students) be written out.
Students should verify that
φ1 ≈ ρ(1), φ0 ≈ x³1− φ1
´.
88
The likelihood equation for σ2w is
0 =∂l
∂σ2w= −T − 1
2σ2w+S(φ0, φ1)
2σ4w,
satisfied by
σ2w =S(φ0, φ1)
T − 1
=
PTt=2
³xt − φ0 − φ1xt−1
´2T − 1
=
PTt=2 w
2t
T − 1.
A usual adjustment for bias is to replace T −1 byT − 3 = (T − 1)− 2 = # of residuals - number
of parameters estimated.
89
• Step 4. Information matrix:
l =
⎛⎜⎜⎜⎜⎝− 12σ2w
∂S∂φ0
− 12σ2w
∂S∂φ1
−T−12σ2w
+ S2σ4w
⎞⎟⎟⎟⎟⎠ ,
−l =
⎛⎜⎜⎜⎜⎝12σ2w
∂2S∂φ0∂φ0
12σ2w
∂2S∂φ1∂φ0
− 12σ4w
∂S∂φ0
∗ 12σ2w
∂2S∂φ1∂φ1
− 12σ4w
∂S∂φ1
∗ ∗ −T−12σ4w
+ Sσ6w
⎞⎟⎟⎟⎟⎠ .
Calculate
∂S
∂φ0= −2
TXt=2
(xt − φ0 − φ1xt−1)
= −2TXt=2
wt, with expectation 0,
∂S
∂φ1= −2
TXt=2
xt−1 (xt − φ0 − φ1xt−1)
= −2TXt=2
xt−1wt,
90
with expectation (why?)
−2TXt=2
COV [Xt−1,wt] = 0,
∂2S
∂φ0∂φ0= 2 (T − 1) ,with expectation
2 (T − 1) ,∂2S
∂φ1∂φ0= 2
TXt=2
xt−1, with expectation
2 (T − 1)µ,∂2S
∂φ1∂φ1= 2
TXt=2
x2t−1, with expectation
2 (T − 1)³γ(0) + µ2
´.
Then using
E[S] = E[TXt=2
w2t ] = (T − 1)σ2w,
91
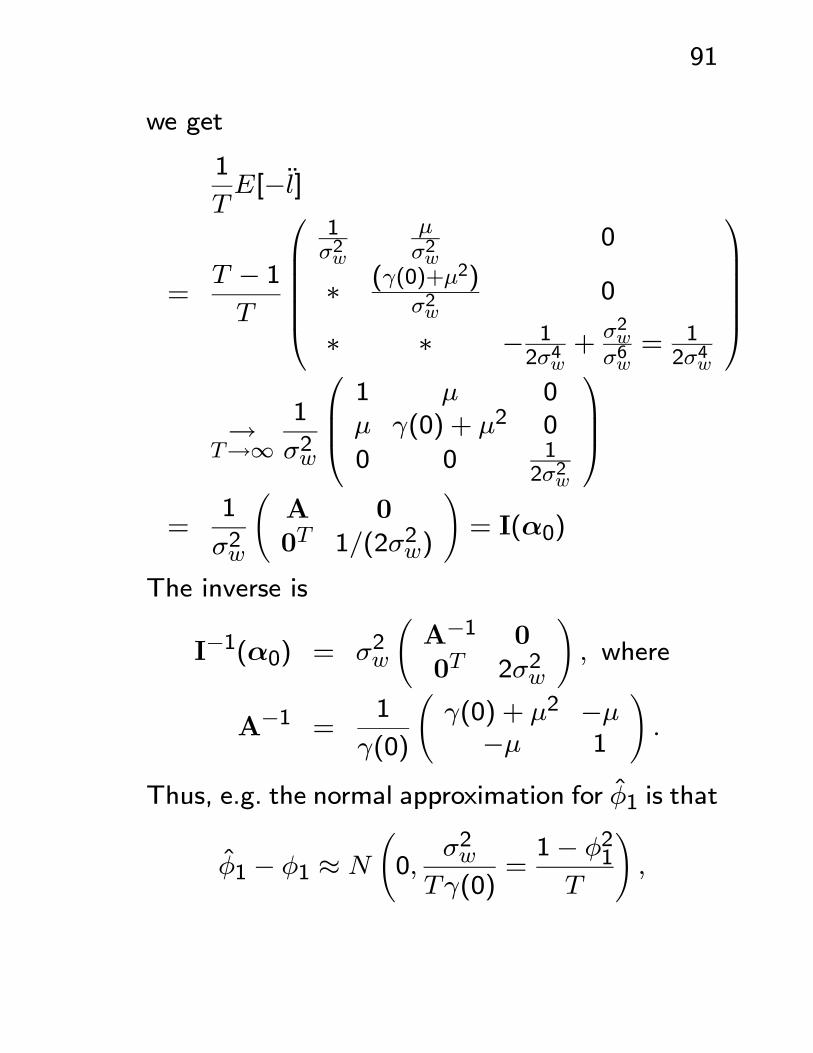
we get
1
TE[−l]
=T − 1T
⎛⎜⎜⎜⎜⎜⎝1σ2w
µσ2w
0
∗ (γ(0)+µ2)σ2w
0
∗ ∗ − 12σ4w
+ σ2wσ6w= 12σ4w
⎞⎟⎟⎟⎟⎟⎠
→T→∞
1
σ2w
⎛⎜⎜⎝1 µ 0µ γ(0) + µ2 0
0 0 12σ2w
⎞⎟⎟⎠=
1
σ2w
ÃA 00T 1/(2σ2w)
!= I(α0)
The inverse is
I−1(α0) = σ2w
ÃA−1 00T 2σ2w
!, where
A−1 =1
γ(0)
Ãγ(0) + µ2 −µ−µ 1
!.
Thus, e.g. the normal approximation for φ1 is that
φ1 − φ1 ≈ N
Ã0,
σ2wTγ(0)
=1− φ21T
!,
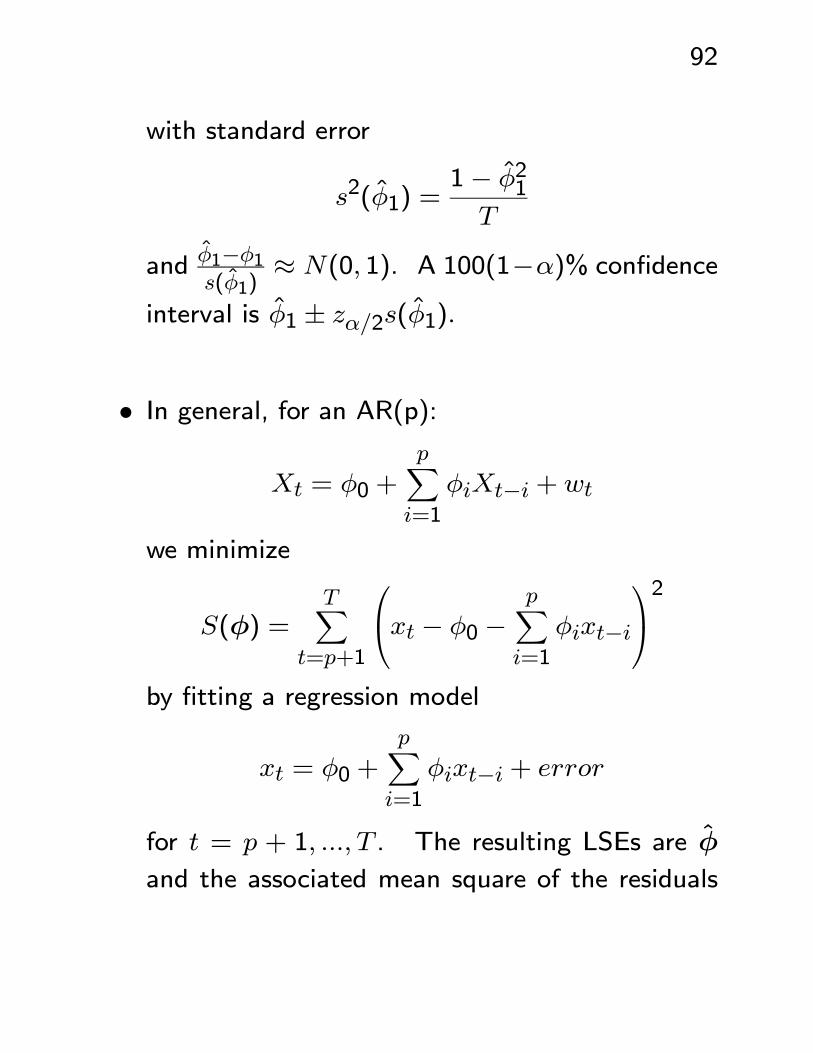
92
with standard error
s2(φ1) =1− φ21T
and φ1−φ1s(φ1)
≈ N(0, 1). A 100(1−α)% confidence
interval is φ1 ± zα/2s(φ1).
• In general, for an AR(p):
Xt = φ0 +pX
i=1
φiXt−i +wt
we minimize
S(φ) =TX
t=p+1
⎛⎝xt − φ0 −pX
i=1
φixt−i
⎞⎠2
by fitting a regression model
xt = φ0 +pX
i=1
φixt−i + error
for t = p + 1, ..., T . The resulting LSEs are φ
and the associated mean square of the residuals
93
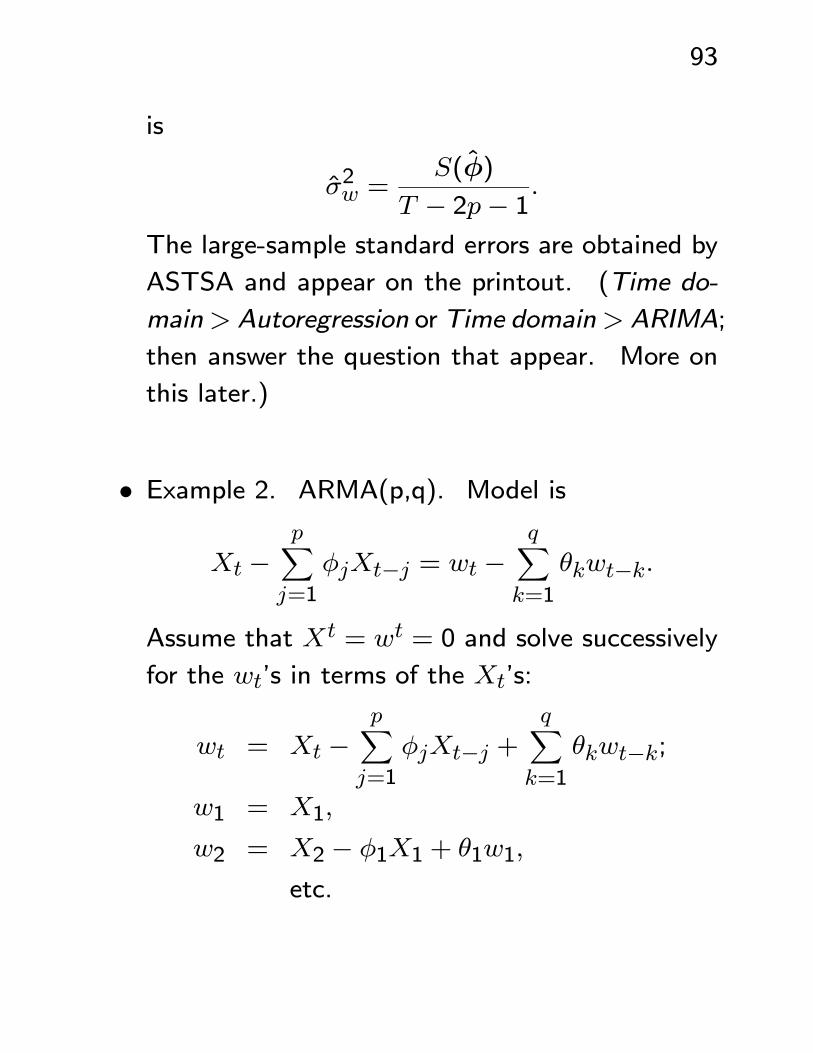
is
σ2w =S(φ)
T − 2p− 1.
The large-sample standard errors are obtained by
ASTSA and appear on the printout. (Time do-
main> Autoregression or Time domain> ARIMA;
then answer the question that appear. More on
this later.)
• Example 2. ARMA(p,q). Model is
Xt −pX
j=1
φjXt−j = wt −qX
k=1
θkwt−k.
Assume that Xt = wt = 0 and solve successively
for the wt’s in terms of the Xt’s:
wt = Xt −pX
j=1
φjXt−j +qX
k=1
θkwt−k;
w1 = X1,
w2 = X2 − φ1X1 + θ1w1,
etc.
94
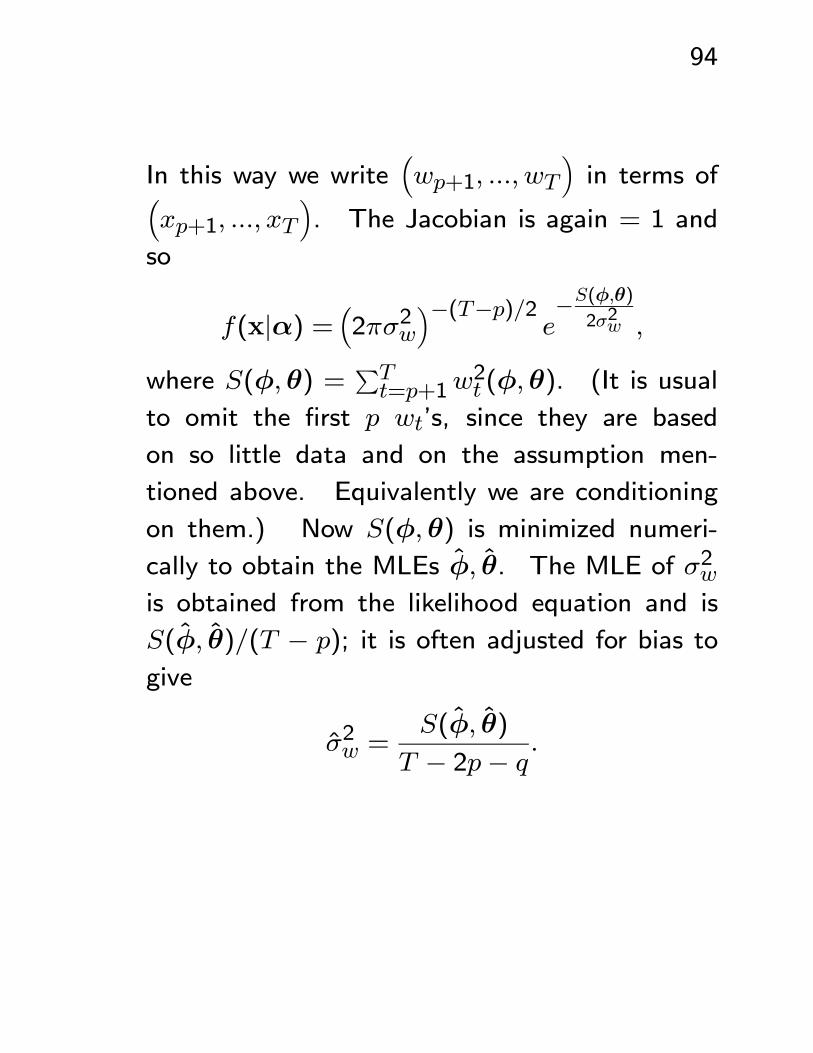
In this way we write³wp+1, ..., wT
´in terms of³
xp+1, ..., xT´. The Jacobian is again = 1 and
so
f(x|α) =³2πσ2w
´−(T−p)/2e−S(φ,θ)
2σ2w ,
where S(φ,θ) =PTt=p+1w
2t (φ,θ). (It is usual
to omit the first p wt’s, since they are based
on so little data and on the assumption men-
tioned above. Equivalently we are conditioning
on them.) Now S(φ, θ) is minimized numeri-
cally to obtain the MLEs φ, θ. The MLE of σ2wis obtained from the likelihood equation and is
S(φ, θ)/(T − p); it is often adjusted for bias to
give
σ2w =S(φ, θ)
T − 2p− q.
95
• The matrix
I(α0) = limT→∞
½1
TEh−l(α0)
i¾is sometimes estimated by the “observed infor-mation matrix” 1
T
³−l(α)
´evaluated at the data
{xt}. This is numerically simpler.
• Students should write out the procedure for anMA(1) model.
• The numerical calculations also rely on a modifi-cation of least squares regression. Gauss-Newtonalgorithm: We are to minimize
S(ψ) =Xt
w2t (ψ),
where ψ is a p-dimensional vector of parameters.The idea is to set up a series of least squares re-gressions converging to the solution. First choosean initial value ψ0. (ASTSA will put all compo-nents = .1 if “.1 guess” is chosen. Otherwise,it will compute method of moments estimates,by equating the theoretical and sample ACF andPACF values. This takes longer.)
96
• Now expand wt(ψ) around ψ0 by the Mean Value
Theorem:
wt(ψ) ≈ wt(ψ0) + w0t(ψ0) (ψ −ψ0) (1)
= “yt − z0tβ”,
where yt = wt(ψ0), zt = −wt(ψ0), β = ψ −ψ0.
Now
S(ψ) ≈Xt
³yt − z0tβ
´2is minimized by regressing {yt} on {zt} to get theLSE β1. We now set
ψ1 = β1 +ψ0,
expand around ψ1 (i.e. replace ψ0 by ψ1 in (1)),
obtain a revised estimate β2. Iterate to conver-
gence.
97
12. Lecture 12
• A class of nonstationary models is obtained by
taking differences, and assuming that the differ-
enced series is ARMA(p,q):
∇Xt = Xt −Xt−1 = (1−B)Xt,
∇2Xt = ∇(∇Xt) = (1−B)2Xt,
etc.
We say {Xt} is ARIMA(p,d,q) (“Integrated ARMA”)if ∇dXt is ARMA(p,q). If so,
φ(B)(1−B)dXt = θ(B)wt
for an AR(p) polynomial φ(B) and an MA(q)
polynomial θ(B). Since φ(B)(1−B)d has roots
on the unit circle, {Xt} cannot be stationary.The differenced series
n∇dXt
ois the one we an-
alyze.
98
• It may happen that the dependence of a serieson its past is strongest at multiples of the sam-
pling unit, e.g. monthly economic data may ex-
hibit strong quarterly or annual trends. To model
this, define seasonal AR(P) and MA(Q) charac-
teristic polynomials
Φ(Bs) = 1−Φ1Bs − Φ2B
2s − ...−ΦPBPs,
Θ(Bs) = 1−Θ1Bs −Θ2B
2s − ...−ΘQBQs.
A seasonal ARMA(P,Q) model, with season s, is
defined by
Φ(Bs)Xt = Θ(Bs)wt.
This can be combined with the hierarchy of or-
dinary ARMA models, and with differencing, to
give the full ARIMA(p,d,q)×(P,D,Q)s model de-fined by
Φ(Bs)φ(B)(1−Bs)D(1−B)dXt = Θ(Bs)θ(B)wt.
99
— Example: the ARIMA(0,1,1)×(0,1,1)12 modelhas Φ(Bs) = 1, φ(B) = 1, d = D = 1,
Θ(Bs) = 1−ΘB12, θ(B) = 1− θB. Thus
(1−B12)(1−B)Xt
=³1−ΘB12
´(1− θB)wt.
Expanding:
Xt = Xt−1 +Xt−12 −Xt−13+wt − θwt−1 −Θwt−12 +Θθwt−13.
This model often arises with monthly economic
data.
— The analysis of the ACF and PACF proceeds
along the same lines as for the previous models
(see below).
100
• Choosing an appropriate model. Some guiding
properties of the ACF/PACF:
— Nonstationarity: ACF drops off very slowly (a
root of the AR characteristic equation with
|B| near 1 will do this too); PACF large (inabsolute value) at 1 (but only at 1 could in-
dicate AR(1)). Try taking differences ∇dXt,
d = 1, 2. Rarely is d > 2. Don’t be too hasty
to take differences; try ARMA models first.
— Seasonal nonstationarity: ACF zero except at
lags s, 2s, ...; decays slowly,or PACF very large
at s. Try ∇dsXt = (1−Bs)dXt.
— AR(p) behaviour: PACF zero for m > p.
— Seasonal AR(P): PACF zero except at m =
s, 2s, ..., Ps.
— MA(q): ACF zero for m > q.
— Seasonal MA(Q): ACF zero except at m =
s, 2, ..., Qs.
101
• Note: Sometimes one fits an MA(q) model, or
an ARMA(p,q) model with q > 0, and finds that
most residuals are of the same sign. This is gen-
erally a sign that µX 6= 0 (recall an MA(q) has
mean zero). A remedy is to fit a constant as well
(possible in ASTSA only in the AR option) or to
subtract the average x from the series before the
analysis is carried out.
• Principle of Parsimony:
We seek the simplest model that is adequate.
We can always “improve” the fit by throwing in
extra terms, but then the model might only fit
these data well.
102
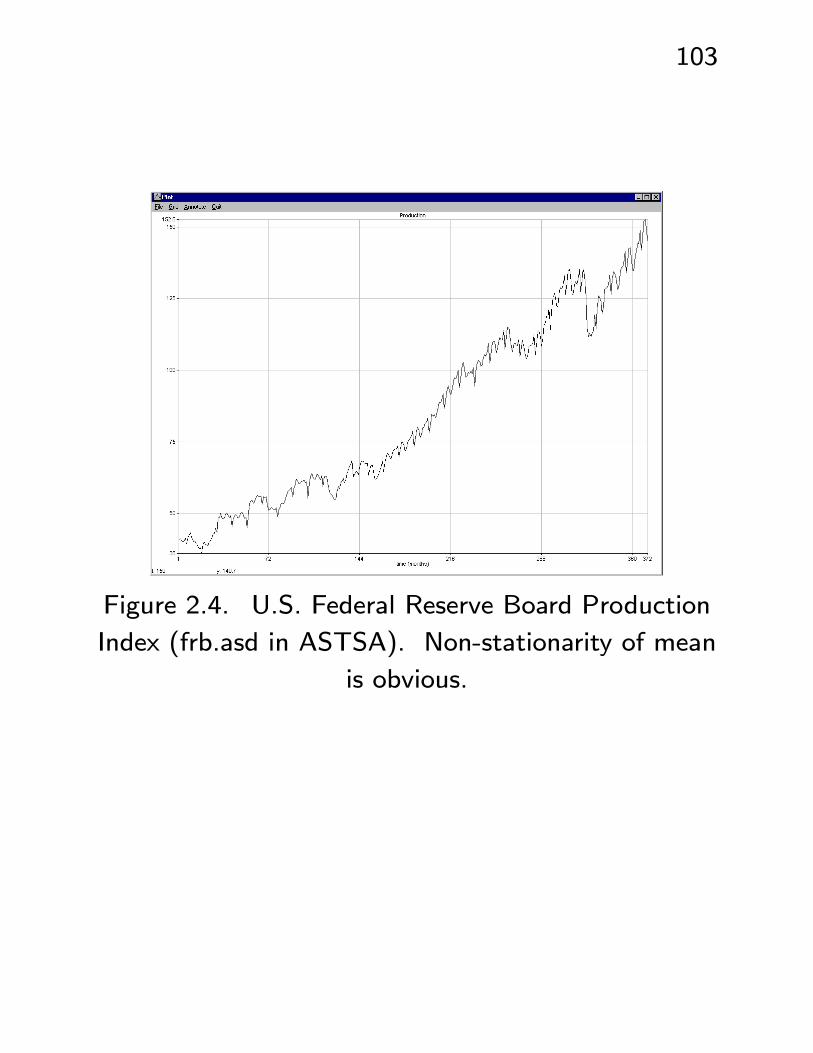
• See Figures 2.4 - 2.11. Example: U.S. Federal
Reserve Board Production Index - an index of eco-
nomic productivity. Plots of data and ACF/PACF
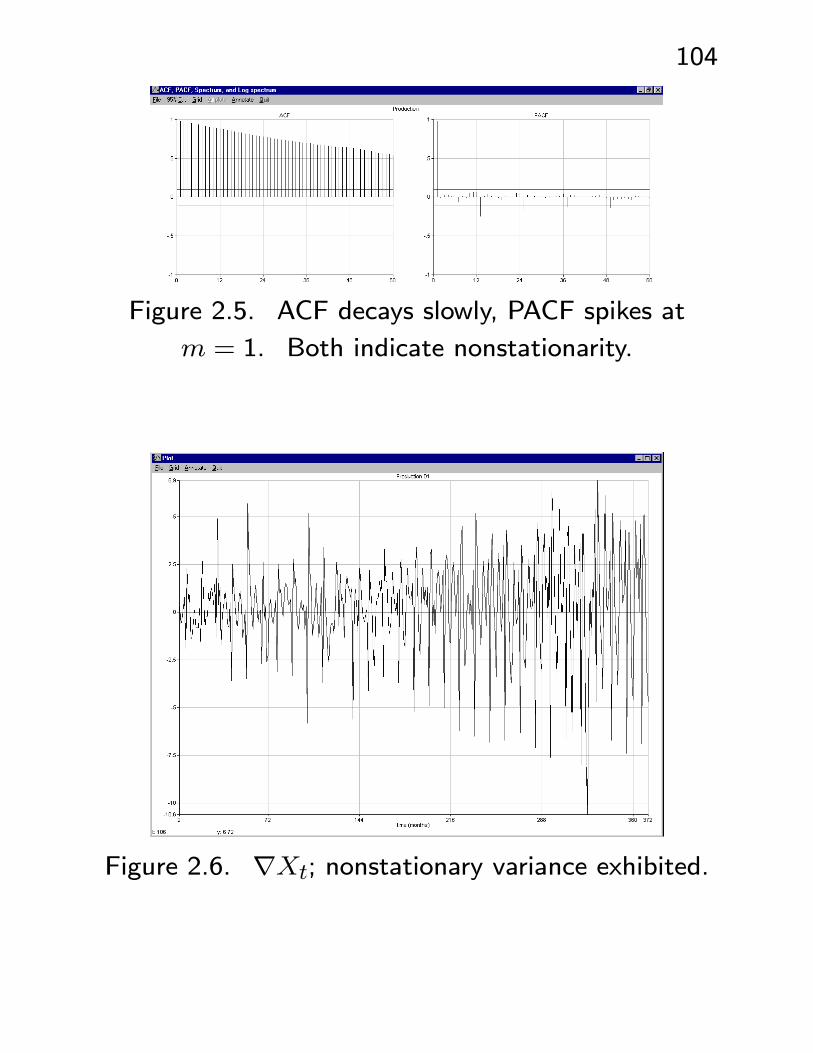
clearly indicate nonstationarity. ACF of ∇Xt in-
dicates seasonal (s = 12) nonstationarity. ACF
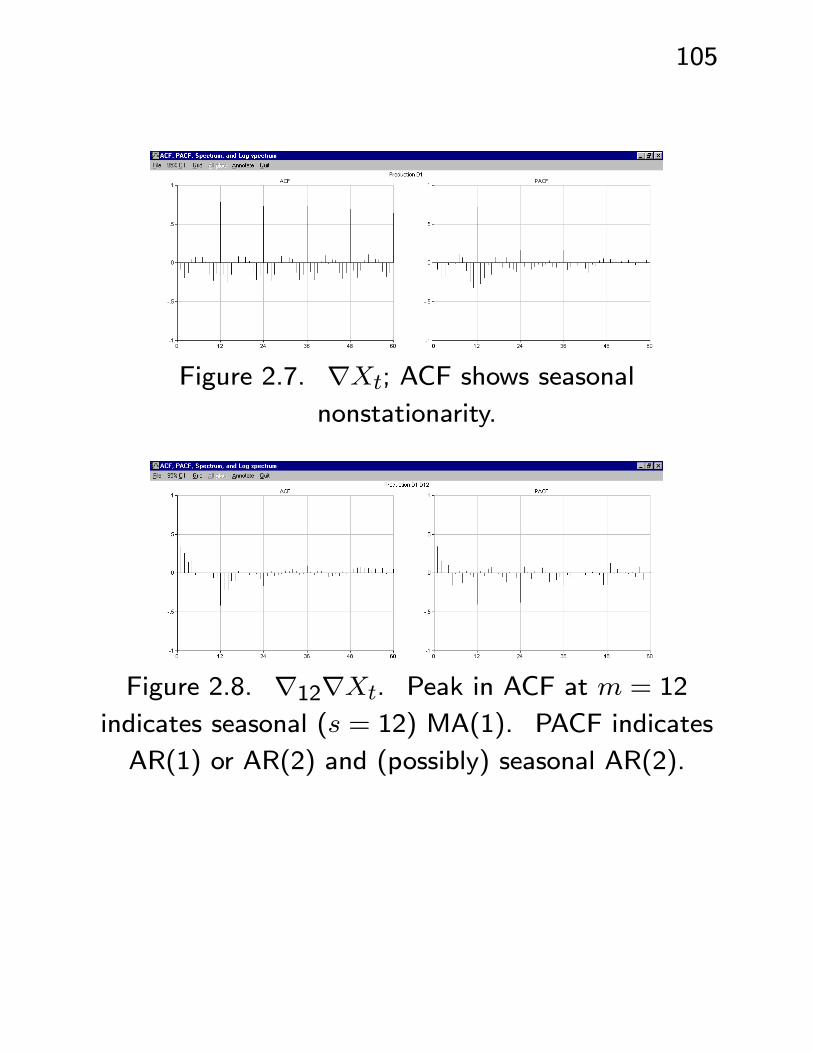
and PACF of ∇12∇Xt shows possible models
ARIMA(p = 1− 2, d = 1, q = 1− 4)×(P = 2,D = 1, Q = 1)s=12.
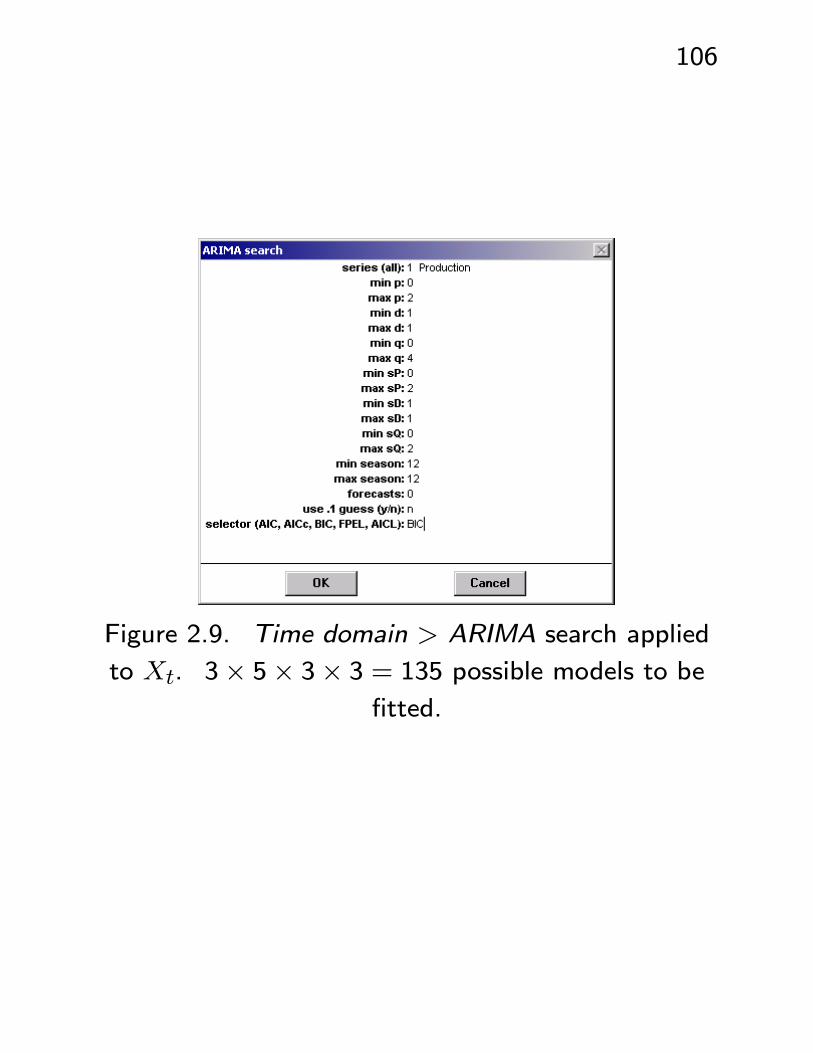
The ARIMA Search facility, using BIC, picks out
ARIMA(1, 1, 0)× (0, 1, 1)12. Note q = P = 0;
the other AR and MA features seem to have ac-
counted for the seeming MA and seasonal AR(2)
behaviour.
103
Figure 2.4. U.S. Federal Reserve Board Production
Index (frb.asd in ASTSA). Non-stationarity of mean
is obvious.
104
Figure 2.5. ACF decays slowly, PACF spikes at
m = 1. Both indicate nonstationarity.
Figure 2.6. ∇Xt; nonstationary variance exhibited.
105
Figure 2.7. ∇Xt; ACF shows seasonal
nonstationarity.
Figure 2.8. ∇12∇Xt. Peak in ACF at m = 12
indicates seasonal (s = 12) MA(1). PACF indicates
AR(1) or AR(2) and (possibly) seasonal AR(2).
106
Figure 2.9. Time domain > ARIMA search applied
to Xt. 3× 5× 3× 3 = 135 possible models to befitted.
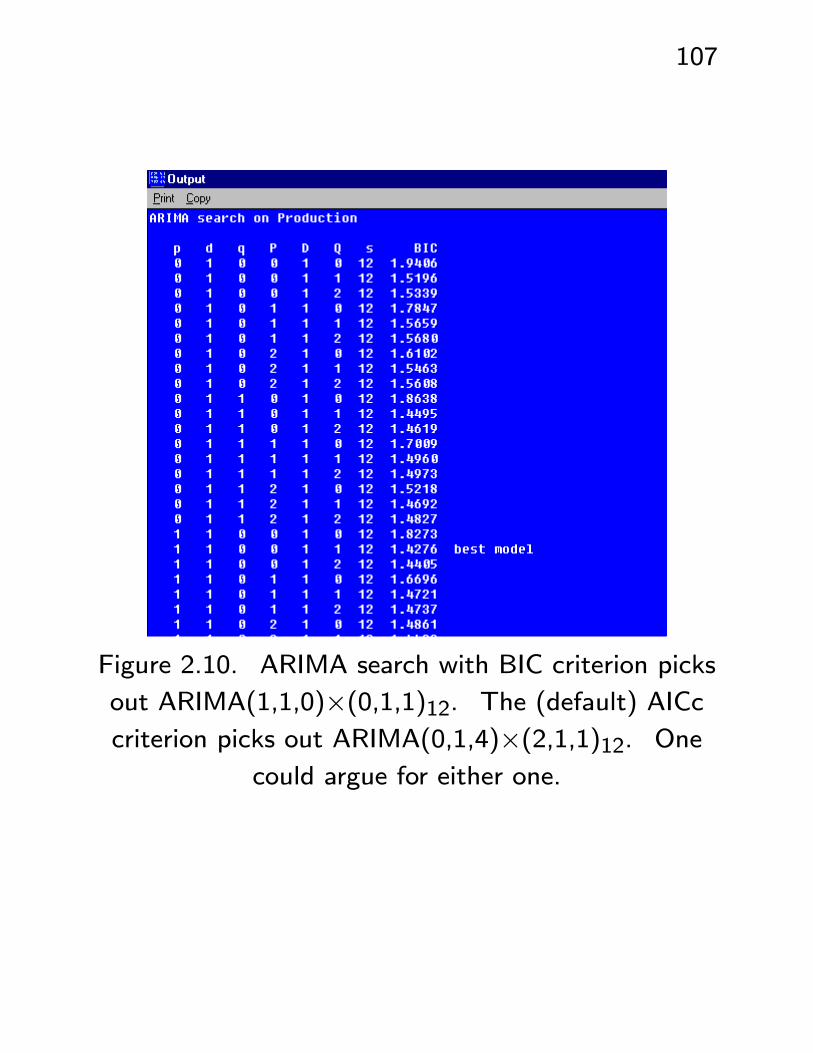
107
Figure 2.10. ARIMA search with BIC criterion picks
out ARIMA(1,1,0)×(0,1,1)12. The (default) AICccriterion picks out ARIMA(0,1,4)×(2,1,1)12. One
could argue for either one.
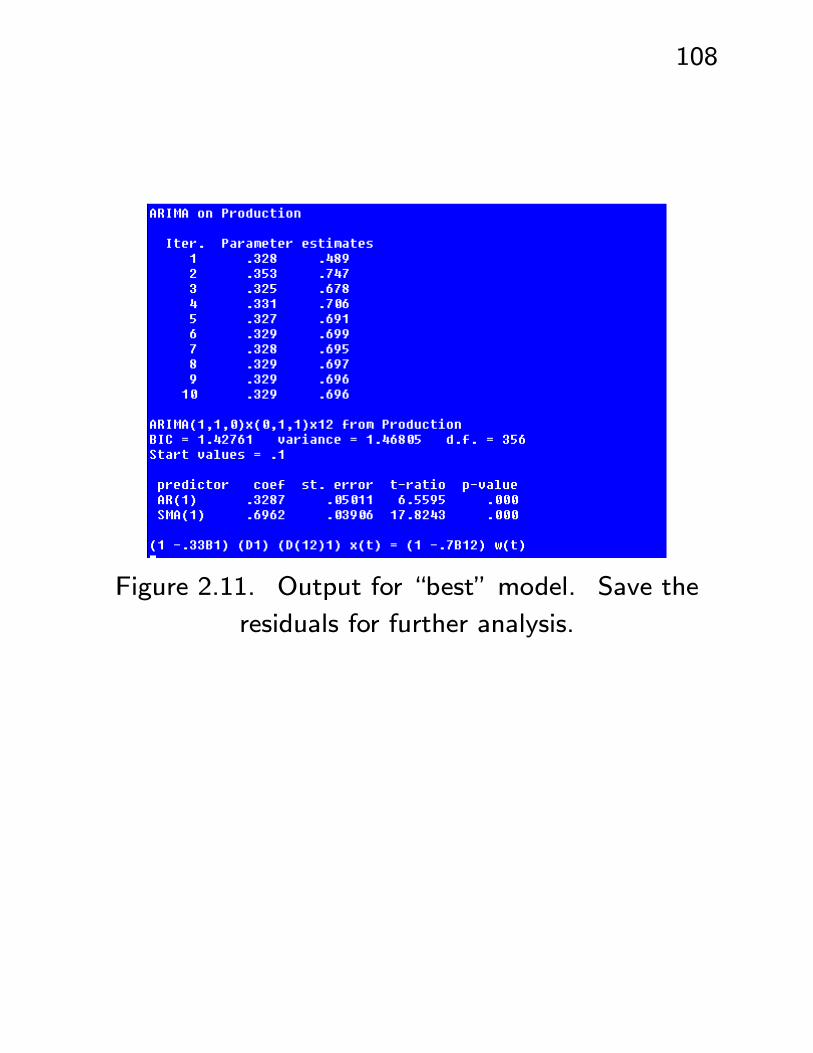
108
Figure 2.11. Output for “best” model. Save the
residuals for further analysis.
109
• There are several “information criteria”. All seekto minimize the residual variation while imposing
penalties for nonparsimonious models. Let K
be the number of AR and MA parameters fitted,
and let σ2w(K) be the estimated variance of the
residual noise. Then
AIC(K) = ln σ2w(K) +2K
T,
AICc(K) = ln σ2w(K) +T +K
T −K − 2,
(small sample modification),
BIC(K) = ln σ2w(K) +K lnT
T, etc.
• See Figures 2.12 - 2.15. Residual analysis. Savethe residuals. Plot their ACF/PACF; none of
the values should be significant (in principle!).
These plots were examined but are not included
here; all satisfactory. Also plot residuals against
∇12∇Xt−1; they should be approximately uncor-related and not exhibit any patterns. (A conse-
quence of the fact that Y −E[Y |X] is uncorre-lated with X is that Xt − Xt−1
t is uncorrelated
110
with Xs for s < t, i.e. except for the fact that
the residuals use estimated parameters, they are
uncorrelated with the predictors. This assumes
stationarity, so here we use the differenced series.)
Click on Graph > Residual tests.
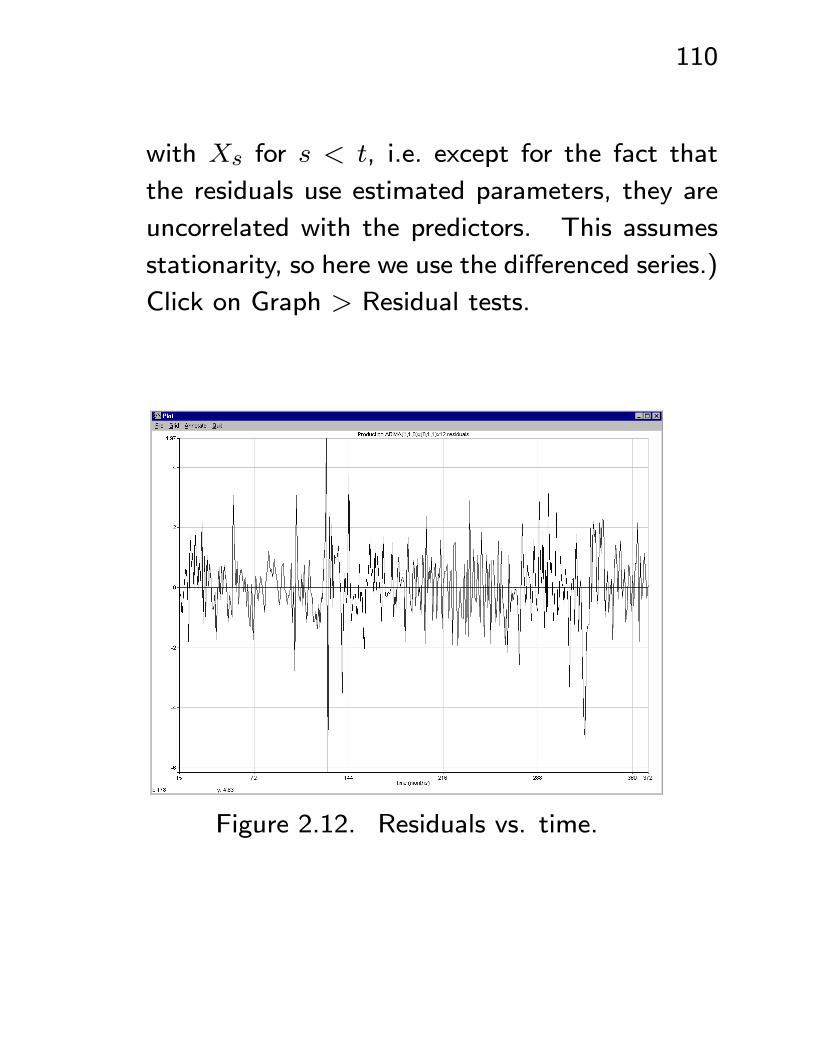
Figure 2.12. Residuals vs. time.
111
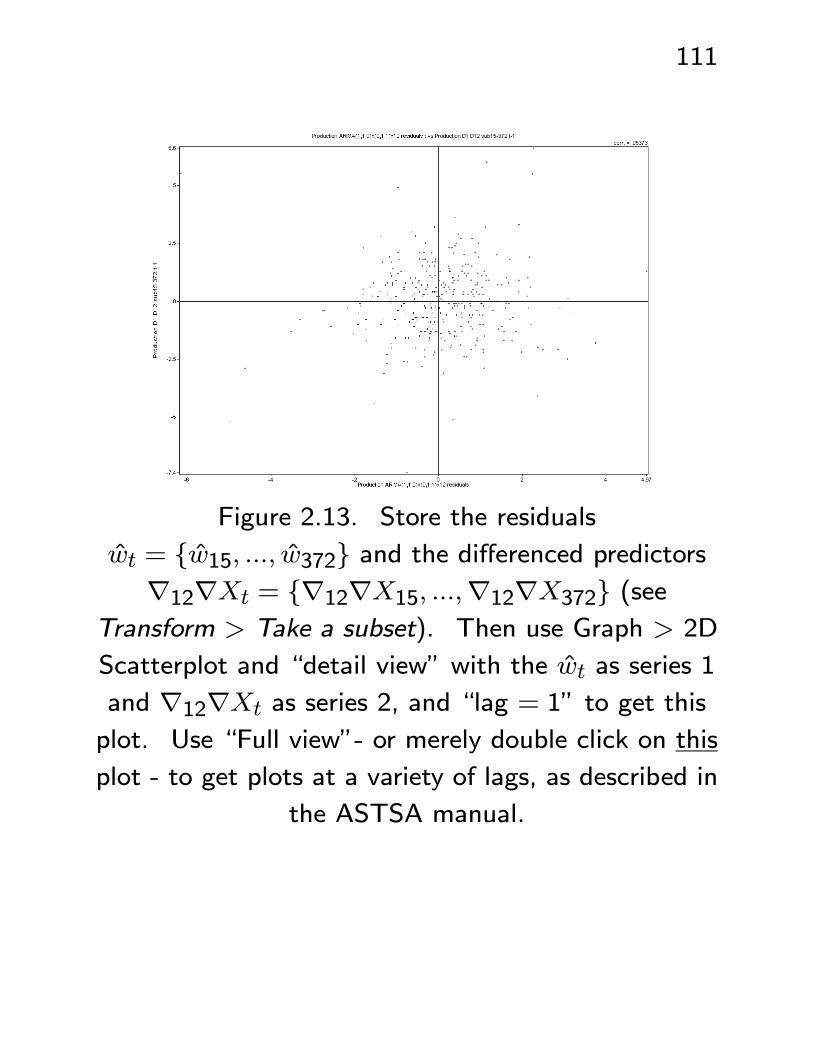
Figure 2.13. Store the residuals
wt = {w15, ..., w372} and the differenced predictors∇12∇Xt = {∇12∇X15, ...,∇12∇X372} (see
Transform > Take a subset). Then use Graph > 2D
Scatterplot and “detail view” with the wt as series 1
and ∇12∇Xt as series 2, and “lag = 1” to get this
plot. Use “Full view”- or merely double click on this
plot - to get plots at a variety of lags, as described in
the ASTSA manual.
112
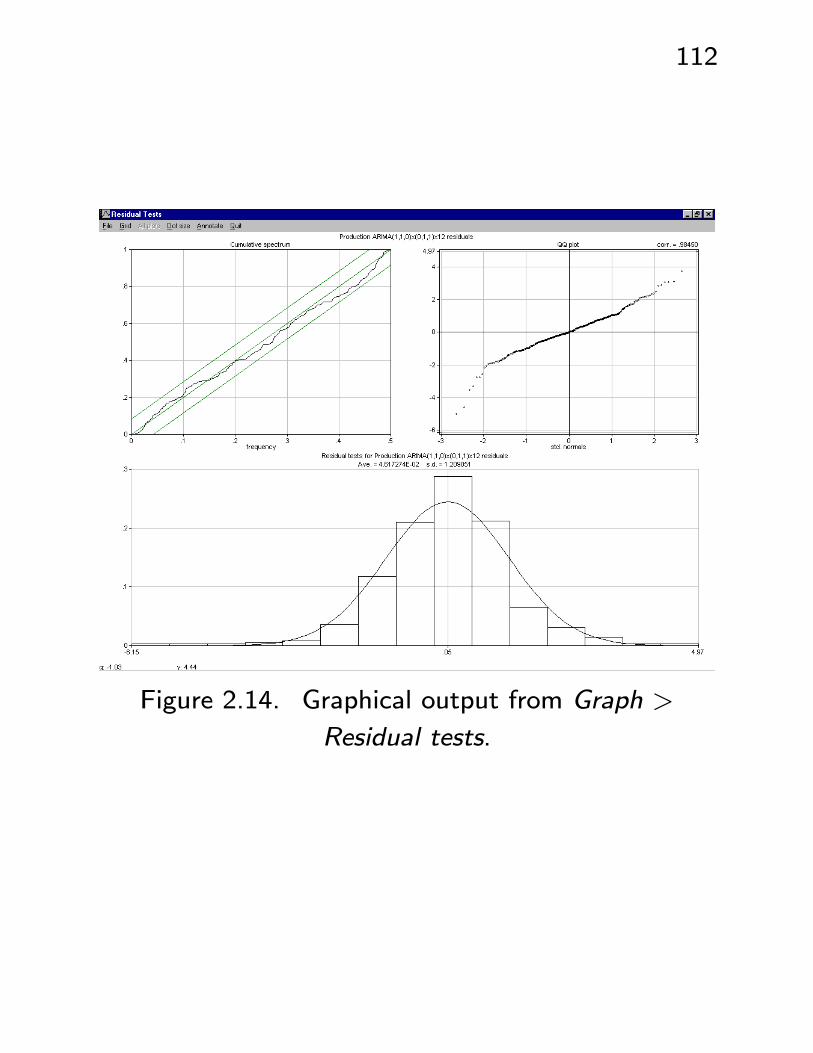
Figure 2.14. Graphical output from Graph >
Residual tests.
113
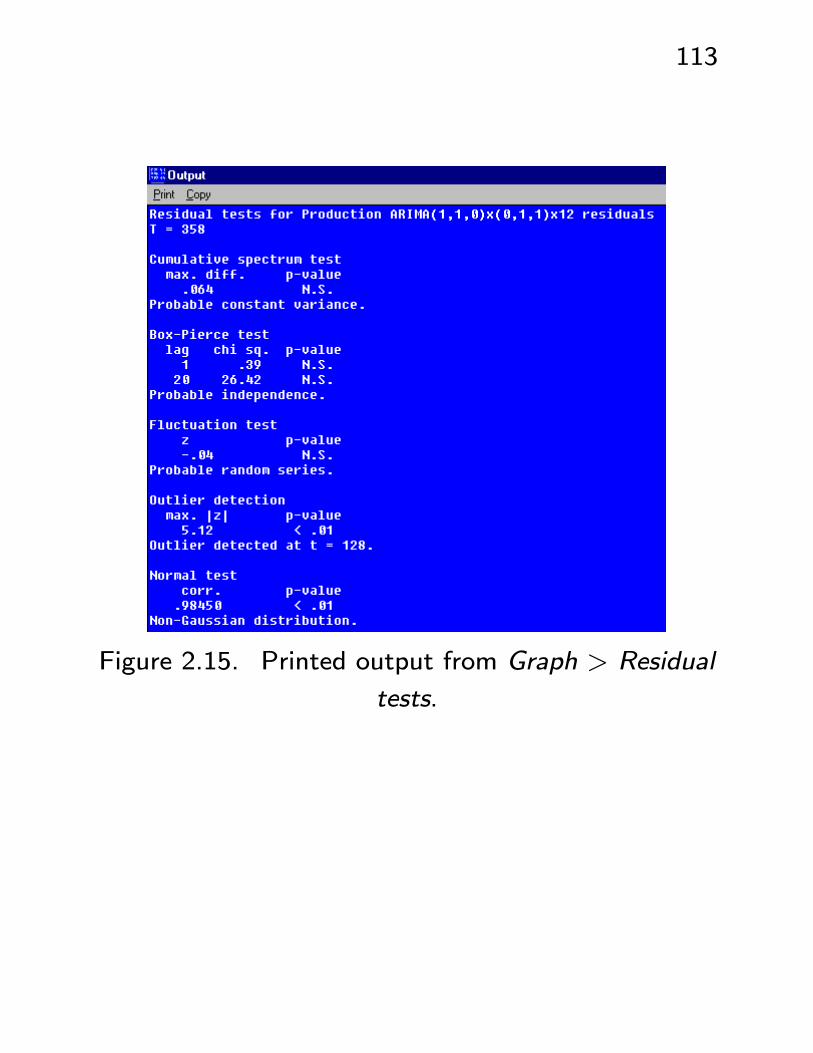
Figure 2.15. Printed output from Graph > Residual
tests.
114
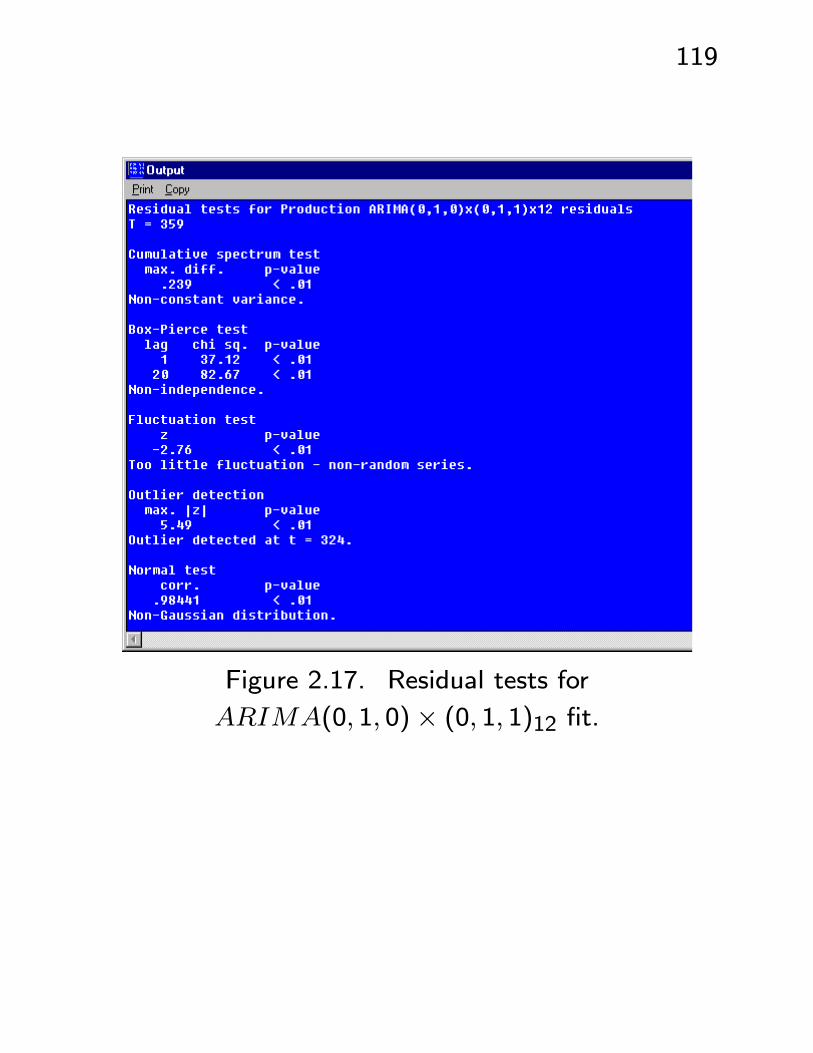
• Cumulative spectrum test. We will see later
that if the residuals {wt} are white noise, thentheir “spectrum” f(ν) is constantly equal to the
variance, i.e. is ‘flat’. Then the integrated, or
cumulative spectrum, is linear with slope = vari-
ance; here it is divided by σ2w/2 and so should
be linear with a slope of 2. Accounting for ran-
dom variation, it should at least remain in a band
around a straight line through the origin, with a
slope of 2. The graphical output confirms this
and the printed output gives a non-significant p-
value to the hypothesis of a flat spectrum.
115
13. Lecture 13
• Box-Pierce test. Under the hypothesis of white-ness we expect ρw(m) to be small in absolute
value for all m; a test can be based on
Q = T (T + 2)MX
m=1
ρ2w(m)
T −m,
which is approximately ∼ χ2M−K under the null
hypothesis. The p-value is calculated and re-
ported for M −K = 1, 20.
• Fluctuations test (= Runs test). Too few or
too many fluctuations, i.e. changes from an up-
ward trend to a downward trend or vice versa)
constitute evidence against randomness. E.g. an
AR(1) (ρ(1) = φ) with φ near +1 will have few
fluctuations, φ near −1 will result in many.
116
• Normal scores (Q-Q) test. The quantiles of
a distribution F = Fw are the values F−1(q),i.e. the values below which w lies with probability
q. The sample versions are the order statistics
w(1) < w(2) < ... < w(T ): the probability of a
value w falling at or below w(t) is estimated by
t/T , so w(t) can be viewed as the (t/T )th sam-
ple quantile. If the residuals are normal then a
plot of the sample quantiles against the standard
normal quantiles should be linear, with intercept
equal to the mean and slope equal to the standard
deviation (follows from F−1(q) = µ+σΦ−1(q) ifF is the N(µ, σ2) df; students should verify this
identity). The strength of the linearity is mea-
sured by the correlation between the two sets of
quantiles; values too far below 1 lead to rejection
of the hypothesis of normality of the white noise.
117
• The residuals from the more complex model cho-
sen by AICc looked no better.
• A log or square root transformation of the originaldata sometimes improves normality; logging the
data made no difference in this case.
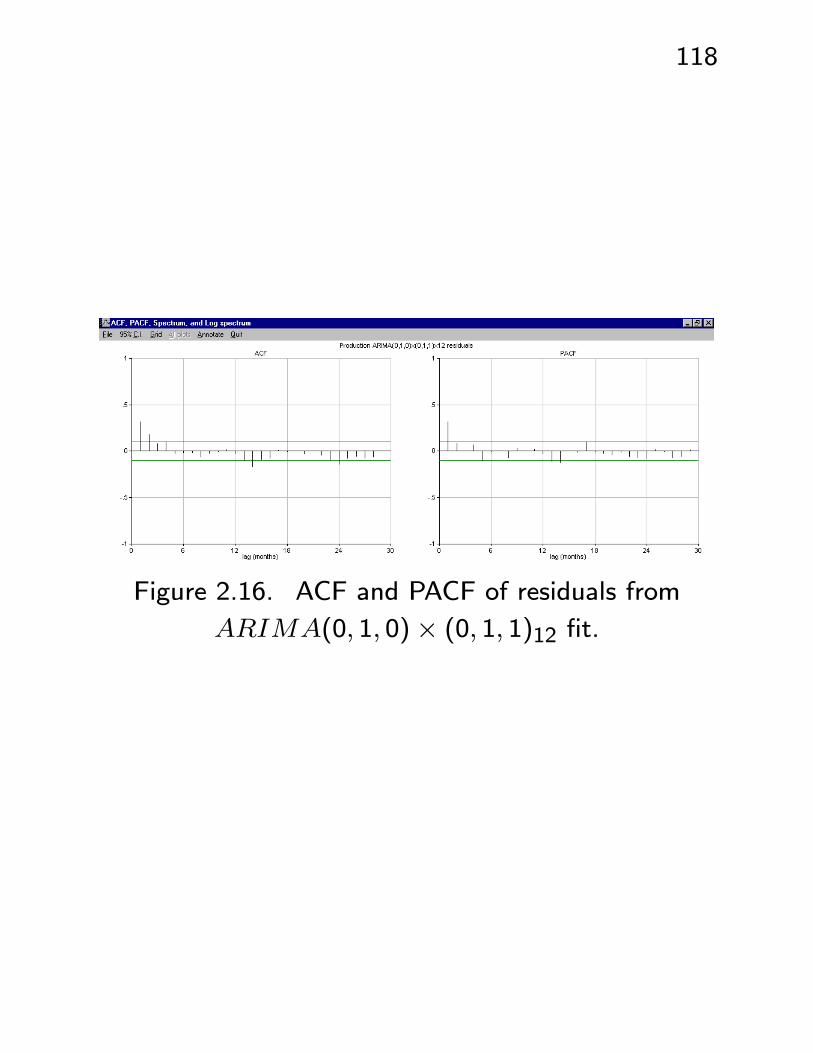
• In contrast, if we fit anARIMA(0, 1, 0)×(0, 1, 1)12,then the ACF/PACF of the residuals clearly shows
the need for the AR(1) component - see Figures
2.16, 2.17. Note also that the largest residual
is now at t = 324 - adding the AR term has ex-
plained the drop at this point to such an extent
that it is now less of a problem than the smaller
drop at t = 128.
118
Figure 2.16. ACF and PACF of residuals from
ARIMA(0, 1, 0)× (0, 1, 1)12 fit.
119
Figure 2.17. Residual tests for
ARIMA(0, 1, 0)× (0, 1, 1)12 fit.
120
Forecasting in the FRB example. Fitted model is
(1− φB)∇∇12Xt =³1−ΘB12
´wt; (1)
this is expanded as
Xt = (1 + φ)Xt−1 − φXt−2 +Xt−12− (1 + φ)Xt−13 + φXt−14 + wt −Θwt−12.(2)
Conditioning on Xt gives
Xtt+l = (1 + φ)Xt
t+l−1 − φXtt+l−2 +Xt
t+l−12− (1 + φ)Xt
t+l−13 + φXtt+l−14 +wt
t+l −Θwtt+l−12.
We consider the case 1 ≤ l ≤ 12 only; l = 13 left as
an exercise. Note that the model is not stationary but
seems to be invertible (since |Θ| = .6962 < 1). Thus
wt can be expressed in terms of Xt and, if we assume
w0 = X0 = 0, we can express Xt in terms of wt by
iterating (2). Then conditioning on Xt is equivalent
to conditioning on wt. Thus Xtt+l−k = Xt+l−k for
k = 12, 13, 14 and wtt+l = 0:
Xtt+l = (1 + φ)Xt
t+l−1 − φXtt+l−2 +Xt+l−12
− (1 + φ)Xt+l−13 + φXt+l−14 −Θwtt+l−12.
121
These become
l = 1 :
Xtt+1 = (1 + φ)Xt − φXt−1 +Xt−11 −
(1 + φ)Xt−12 + φXt−13 −Θwt−11, (3)
l = 2 :
Xtt+2 = (1 + φ)Xt
t+1 − φXt +Xt−10 −(1 + φ)Xt−11 + φXt−12 −Θwt−10,
3 ≤ l ≤ 12 :from previous forecasts and wt−9, ..., wt.
To get wt, .., wt−11 we write (1) as
wt = Θwt−12 +(Xt −
"(1 + φ)Xt−1 − φXt−2+
Xt−12 − (1 + φ)Xt−13 + φXt−14
#)= Θwt−12 + ft, say (4)
and calculate successively, using the assumption w0 =
X0 = 0,
w1 = f1, w2 = f2, , ..., w12 = f12,
w13 = Θw1 + f13, w14 = Θw2 + f14, etc.
122
To get the residuals wt = Xt− Xt−1t put t = t− 1 in
(3):
Xt−1t = (1 + φ)Xt−1 − φXt−2 +Xt−12 −
(1 + φ)Xt−13 + φXt−14 −Θwt−12,
so wt = Xt − Xt−1t = (4) with all parameters esti-
mated and
σ2w =TX
t=15
w2t /(T − 16).
(The first 14 residuals employ the assumption w0 =X0 = 0 and are not used.) The forecast variances andprediction intervals require us to write Xt = ψ(B)wt,and then
PI = Xtt+l ± zα/2σw
s X1≤k<l
ψ2k.
The model is not stationary and so the coefficients ofψ(B) will not be absolutely summable, however underthe assumption that w0 = 0, only finitely many of theψk are needed. Then in (2),(
(1− φB) (1−B)³1−B12
´·
(1 + ψ1B + ψ2B2 + ...+ ψkB
k + ...)
)wt
=³1−ΘB12
´wt,
123
so
(1− (1 + φ)B + φB2 −B12 + (1 + φ)B13 − φB14)·(1 + ψ1B + ψ2B
2 + ...+ ψkBk + ...)
=³1−ΘB12
´.
For 1 ≤ k < 12 the coefficient of Bk is = 0 on the
RHS; on the LHS it is
ψ1 − (1 + φ) (k = 1);
ψk − (1 + φ)ψk−1 + φψk−2 (k > 1).
Thus
ψ0 = 1,
ψ1 = 1 + φ,
ψk = (1 + φ)ψk−1 − φψk−2, k = 2, ..., 11.
• See Figures 2.18 - 2.20.
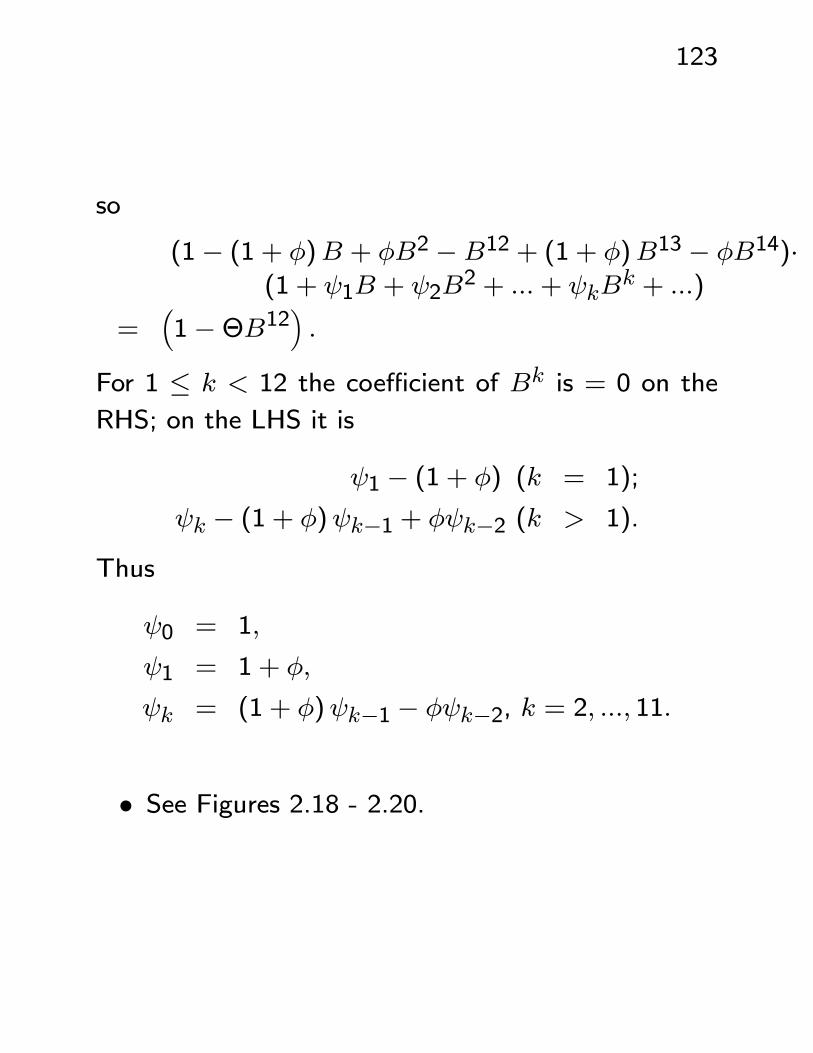
124
Figure 2.18. Time domain > ARIMA, to fit just one
model. (See also Time domain > Autoregression.)
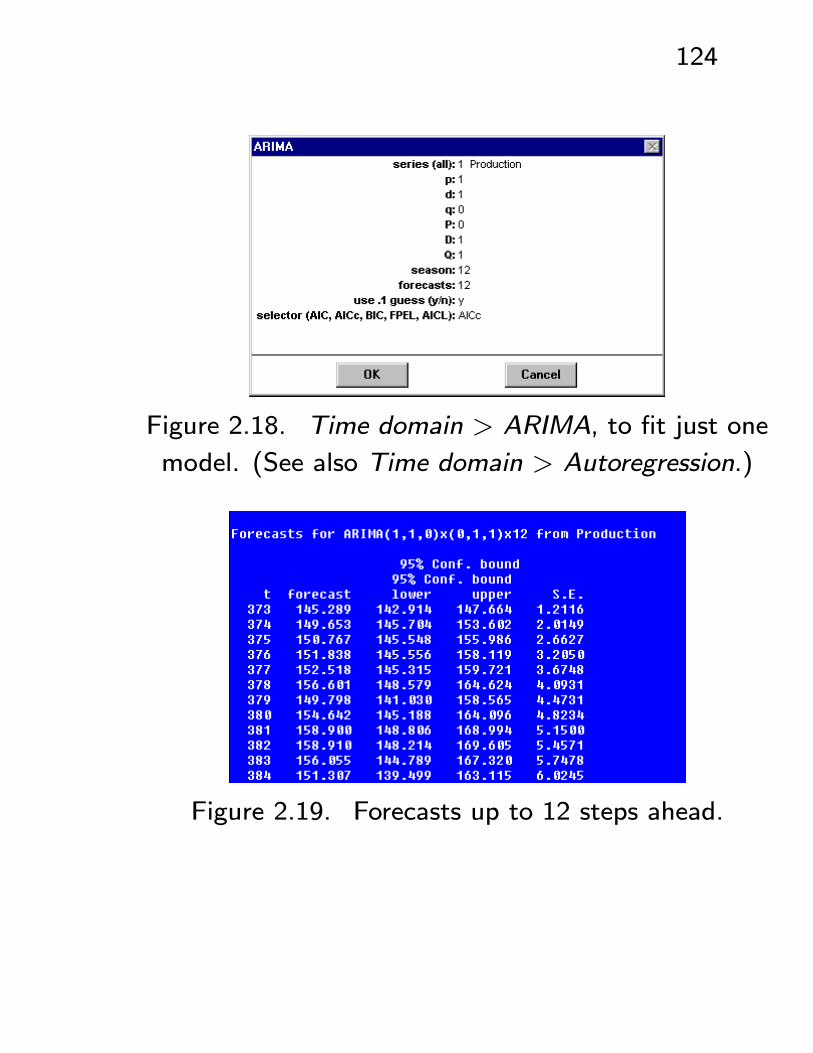
Figure 2.19. Forecasts up to 12 steps ahead.
125
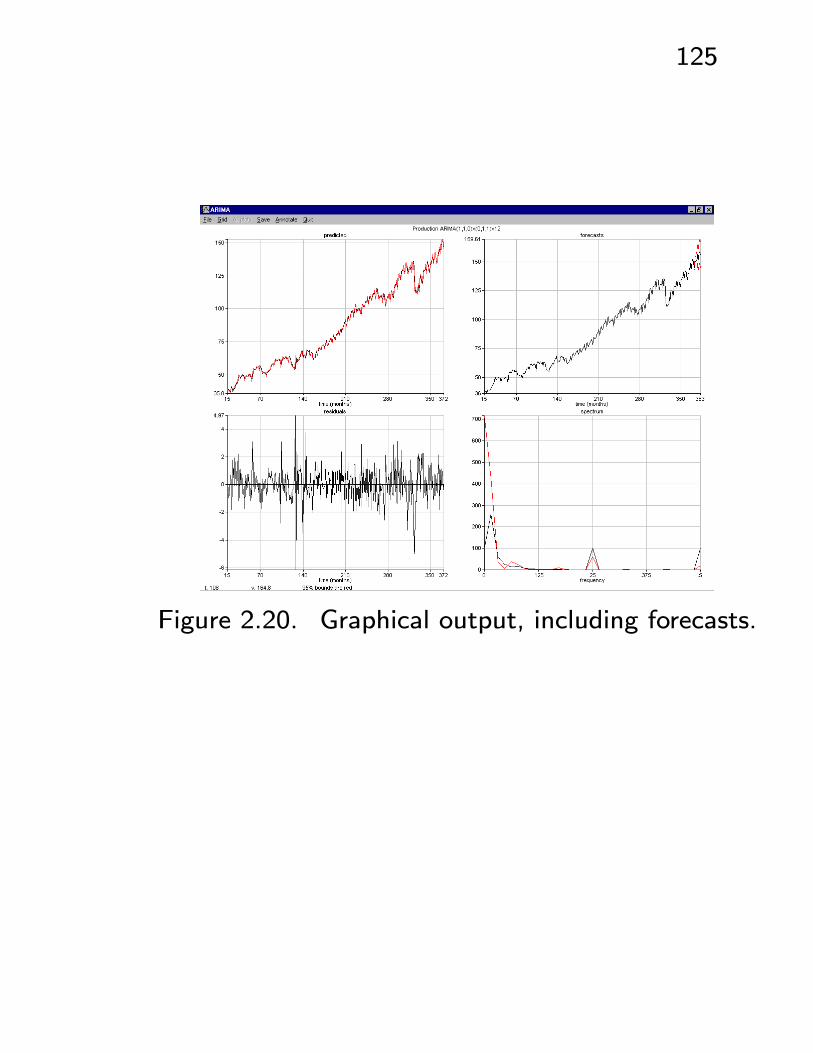
Figure 2.20. Graphical output, including forecasts.
126
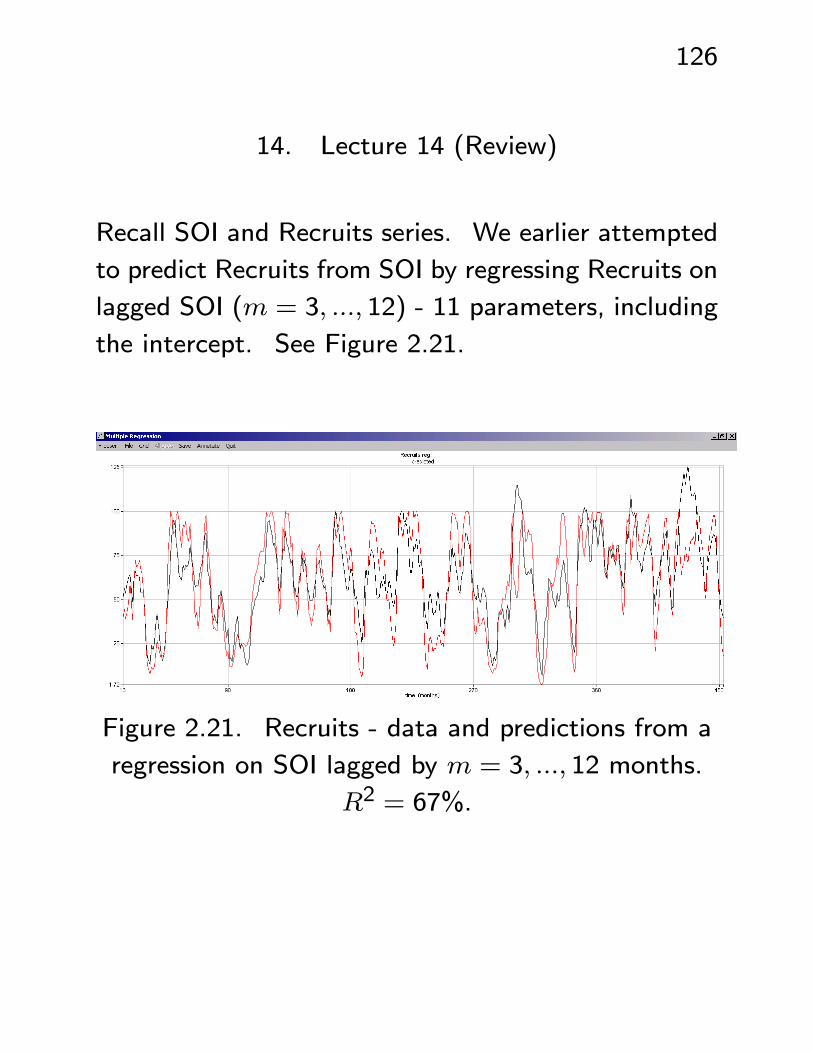
14. Lecture 14 (Review)
Recall SOI and Recruits series. We earlier attempted
to predict Recruits from SOI by regressing Recruits on
lagged SOI (m = 3, ..., 12) - 11 parameters, including
the intercept. See Figure 2.21.
Figure 2.21. Recruits - data and predictions from a
regression on SOI lagged by m = 3, ..., 12 months.
R2 = 67%.
127
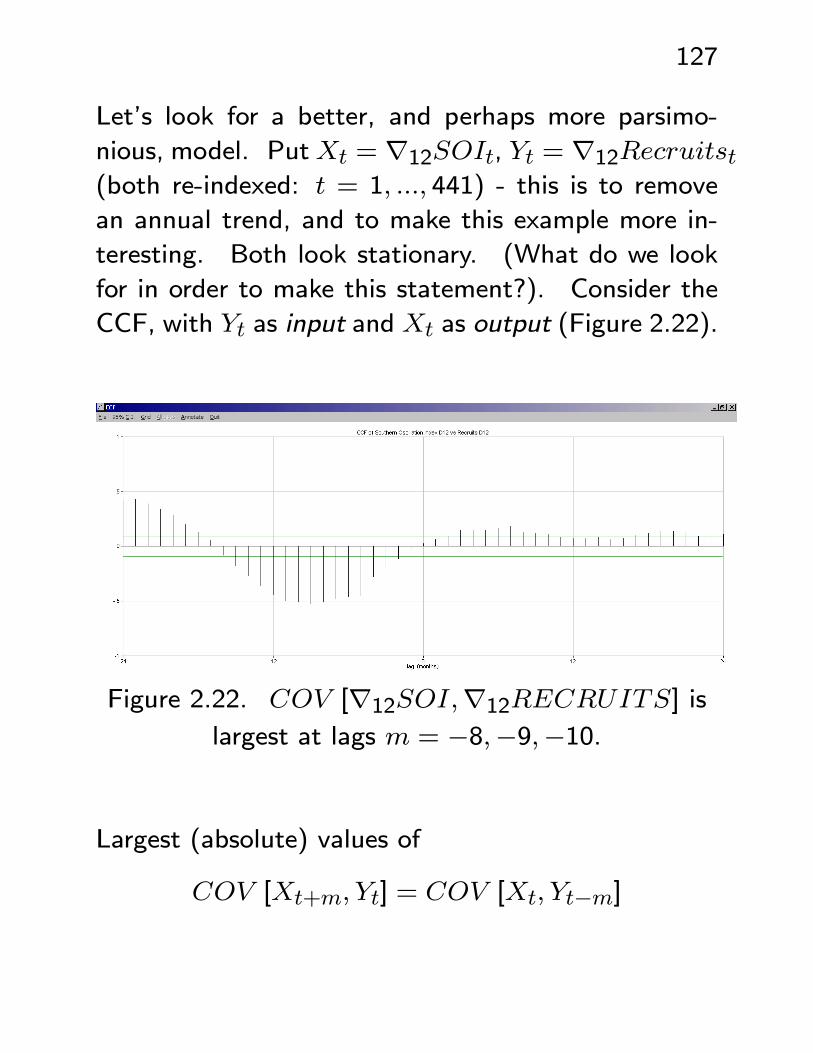
Let’s look for a better, and perhaps more parsimo-
nious, model. PutXt = ∇12SOIt, Yt = ∇12Recruitst(both re-indexed: t = 1, ..., 441) - this is to remove
an annual trend, and to make this example more in-
teresting. Both look stationary. (What do we look
for in order to make this statement?). Consider the
CCF, with Yt as input and Xt as output (Figure 2.22).
Figure 2.22. COV [∇12SOI,∇12RECRUITS] islargest at lags m = −8,−9,−10.
Largest (absolute) values of
COV [Xt+m, Yt] = COV [Xt, Yt−m]
128
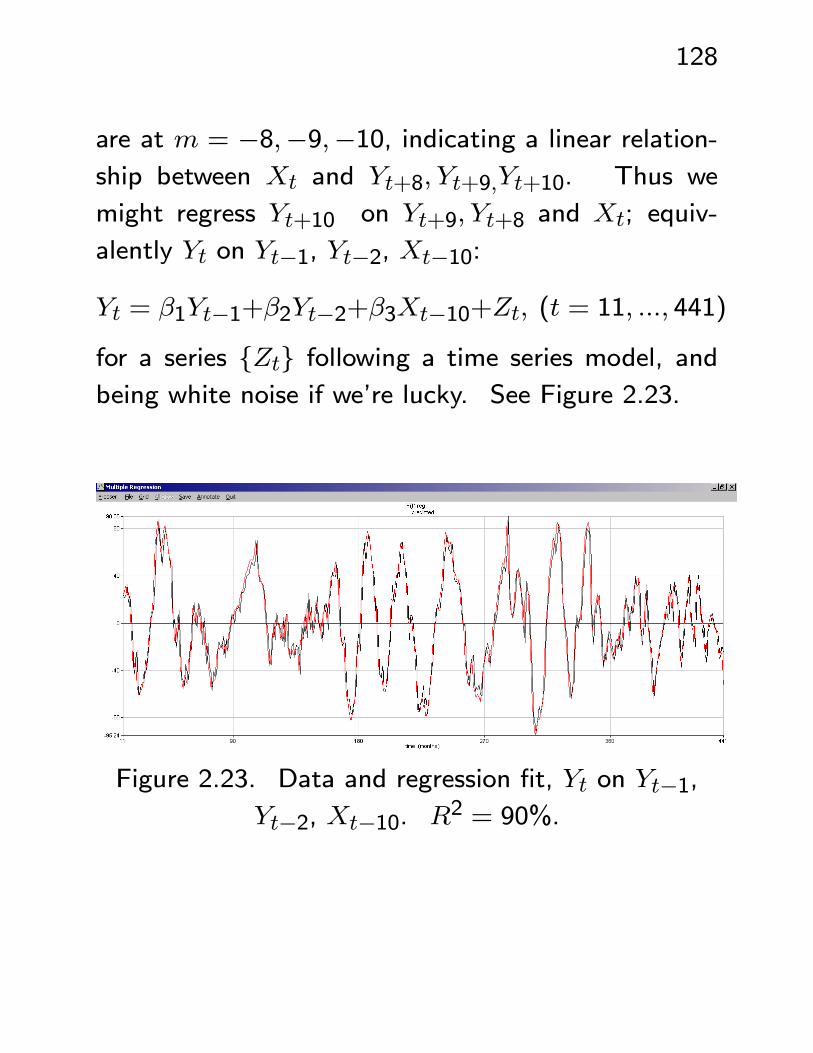
are at m = −8,−9,−10, indicating a linear relation-ship between Xt and Yt+8, Yt+9,Yt+10. Thus we
might regress Yt+10 on Yt+9, Yt+8 and Xt; equiv-
alently Yt on Yt−1, Yt−2, Xt−10:
Yt = β1Yt−1+β2Yt−2+β3Xt−10+Zt, (t = 11, ..., 441)
for a series {Zt} following a time series model, andbeing white noise if we’re lucky. See Figure 2.23.
Figure 2.23. Data and regression fit, Yt on Yt−1,Yt−2, Xt−10. R2 = 90%.
129
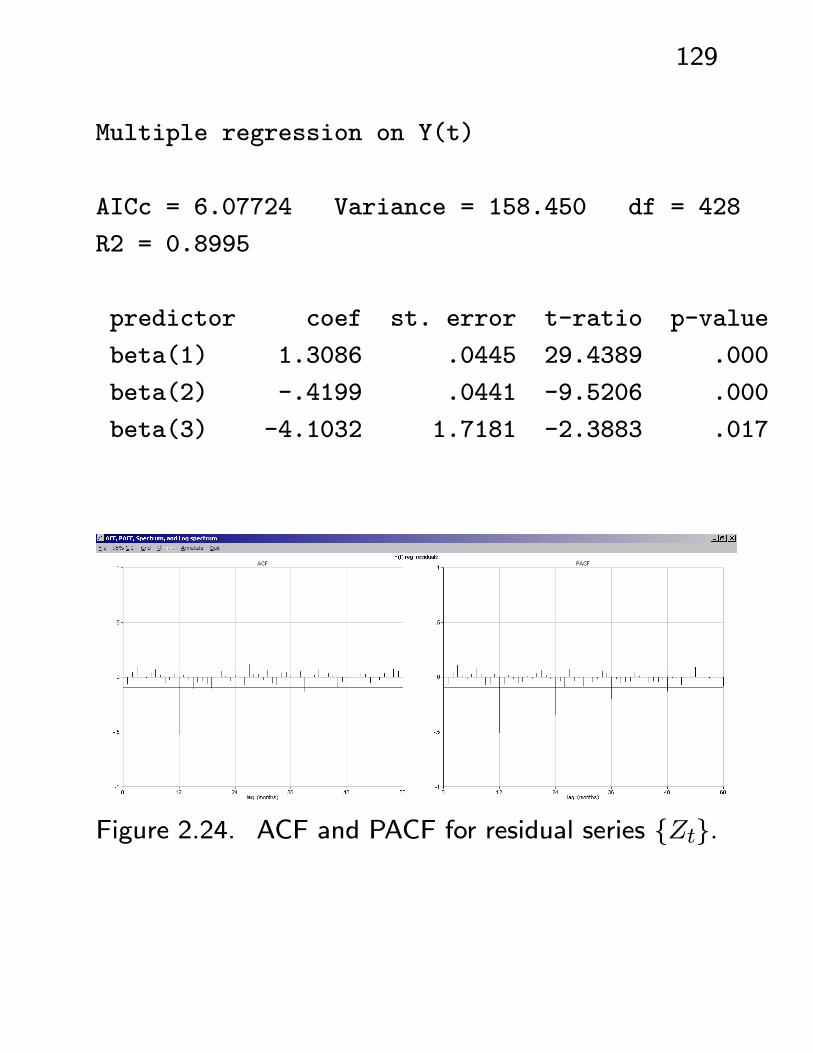
Multiple regression on Y(t)
AICc = 6.07724 Variance = 158.450 df = 428
R2 = 0.8995
predictor coef st. error t-ratio p-value
beta(1) 1.3086 .0445 29.4389 .000
beta(2) -.4199 .0441 -9.5206 .000
beta(3) -4.1032 1.7181 -2.3883 .017
Figure 2.24. ACF and PACF for residual series {Zt}.
130
The residual series {Zt} still exhibits some trends- see Figure 2.24 - seasonal ARMA(4, 1)12? ARIMA
Search, with AICc, selects ARMA(1, 1)12. With
BIC, ARMA(1, 2)12 is selected. Each of these was
fitted. Both failed the cumulative spectrum test, and
the Box-Pierce test with M −K = 1, although the p-
values at M −K = 20 were non-significant. (What
are these, and what do they test for? What does
“p-value” mean?) This suggested adding an AR(1)
term to the simpler of the two previous models.
In terms of the backshift operator (what is it? how
are these polynomials manipulated?):
(1− φB)³1−ΦB12
´Zt =
³1−ΘB12
´wt.
131
ARIMA(1,0,0)x(1,0,1)x12 from Z(t)
AICc = 5.45580 variance = 85.0835 d.f. = 415
Start values derived from ACF and PACF
predictor coef st. error t-ratio p-value
AR(1) -.0852 .04917 -1.7327 .083
SAR(1) -.1283 .05030 -2.5516 .011
SMA(1) .8735 .02635 33.1524 .000
(1 +.09B1) (1 +.13B12) Z(t) = (1 -.87B12) w(t)
See Figure 2.25. All residuals tests were passed, with
the exception of the Normal Scores test (what does
this mean? how does this test work?).
132
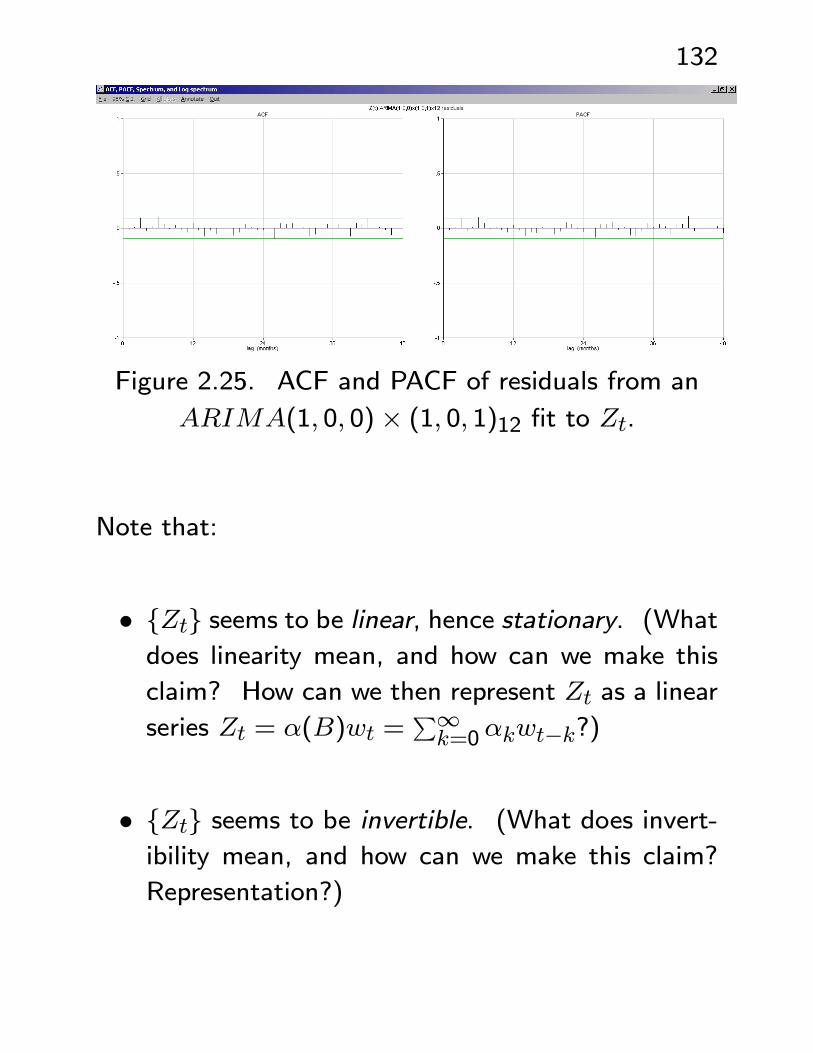
Figure 2.25. ACF and PACF of residuals from an
ARIMA(1, 0, 0)× (1, 0, 1)12 fit to Zt.
Note that:
• {Zt} seems to be linear, hence stationary. (Whatdoes linearity mean, and how can we make this
claim? How can we then represent Zt as a linear
series Zt = α(B)wt =P∞k=0αkwt−k?)
• {Zt} seems to be invertible. (What does invert-ibility mean, and how can we make this claim?
Representation?)
133
The polynomial β(B) = 1 − β1B − β2B2 has zeros
B = 1.34, 1.77. This yields the additional represen-
tation
Yt =β3B
10
β(B)Xt +
α(B)
β(B)wt
= β3γ(B)B10Xt + δ(B)wt,
with 1/β(B) expanded as a series γ(B) and δ(B) =
α(B)/β(B). Assume {wt} independent of {Xt, Yt}.
134
Predictions: You should be sufficiently familiar with
the prediction theory covered in class that you can
follow the following development, although I wouldn’t
expect you to come up with something like this on your
own. (The point of knowing the theory is so that you
can still do something sensible when the theory you
know doesn’t quite apply!)
The best forecast of Yt+l is Ytt+l = E
hYt+l|Y t
i(es-
timated), in the case of a single series {Yt}. (Why?
- you should be able to apply the Double Expectation
Theorem, so as to derive this result. And what does
“best” mean, in this context?)
135
If we think of the data now as consisting of the union
of the series {Xt, Yt} then it follows that the predic-tions are
Y tt+l = E
hYt+l|Xt, Y t
i= E
hβ1Yt+l−1 + β2Yt+l−2|Xt, Y t
i+E
hβ3Xt+l−10|Xt, Y t
i+E
hZt+l|Xt, Y t
i= β1Y
tt+l−1 + β2Y
tt+l−2 + β3X
tt+l−10 +
Xk≥l
αkwt+l−k.
Upon estimating parameters these are
=
⎧⎪⎪⎨⎪⎪⎩β1Yt + β2Yt−1 + β3Xt−9, l = 1,
β1Ytt+1 + β2Yt + β3Xt−8, l = 2,
β1Ytt+l−1 + β2Y
tt+l−2 + β3Xt+l−10 l = 3, ..., 10.
+Xk≥l
αkwt+l−k (= Ztt+l, the forecast from the 2nd fit).
For l > 10 we would need to obtain the forecasts
Xtt+l−10 as well.
136
For l = 1, ..., 10, from
Yt = β3γ(B)B10Xt + δ(B)wt,
we obtain
Yt+l = β3γ(B)Xt+l−10 + δ(B)wt+l,
Y tt+l = β3γ(B)Xt+l−10 +
Xk≥l
δkBkwt+l
and hence
Yt+l − Y tt+l =
Xk<l
δkBkwt+l
=l−1Xk=0
δkwt+l−k,
with V ARhYt+l − Y t
t+l
i= σ2w
Pl−1k=0 δ
2k. This leads
to prediction intervals
Y tt+l ± zα/2σw
vuuut l−1Xk=0
δ2k.
How now are the δk computed?
137
Other theoretical things you should be familiar with:
• Calculations of ACFs (pretty simple for an MA;derive and solve the Yule-Walker equations for an
AR). What is the important property of the ACF
of an MA?
• Calculation of PACFs - define the PACF, then dothe required minimization. What is the impor-
tant property of the PACF of an AR?
• Maximum likelihood estimation
— The end result of our theoretical discussion
was that the MLEs of the AR and MA para-
meters φ and θ are the minimizers of the sum
of squares of the residuals:
S (φ,θ) =X
w2t (φ,θ) .
For a pure AR this is accomplished by a lin-
ear regression of the series on its own past.
138
If there are MA terms then an iterative pro-
cedure (Gauss-Newton) is necessary. As an
example, you should be able to show that, un-
der the usual assumption (what is it?), for an
MA(1) model you get
wt (θ) =t−1Xs=0
θsXt−s,
so that S (θ) is a polynomial in θ, of degree
2 (t− 1), to be minimized.What would you use as the starting estimate,
in the iterative procedure? How would the
iterations then be carried out? Your calcula-
tions should yield the iterative procedure
θk+1 = θk −Pwt (θk) wt (θk)P
w2t (θk).
139
— The usual estimate of the noise variance, ob-
tain by modifying the MLE, is
σ2w =S³φ, θ
´# of residuals − # of parameters
=
P(residuals)2
# of residuals − # of parameters.
— What is the “Information Matrix”, and what
role does it play in making inferences about
the parameters in an ARMA model?






















![[ROBIX] Naruto 479](https://img.pdfslide.tips/doc/110x75/568bdbc71a28ab2034afca6f/robix-naruto-479.jpg)