Embed Size (px)
Citation preview

1STS-127ミッション概要
STSSTS--127127((2J/A2J/A)ミッション概要)ミッション概要
宇宙航空研究開発機構
2009/07/8 改訂版

2STS-127ミッション概要
目次
1. ミッションの目的・特徴
2. 飛行計画
3. 搭載品
4. ミッション概要
5. フライトスケジュール
6. 第19/20次長期滞在中の主要イベント
7. JAXA関連(打上げ/回収)
--------------------Backup Charts

3STS-127ミッション概要
• 「きぼう」日本実験棟の打上げ第3便にあたり、「きぼう」の船外実験プラットフォームと船外パレット※1)をISSに運搬し取り付けます。軌道上で「きぼう」の組立が完了します※2) 。
• 初めて、「きぼう」のロボットアームを使用した作業を実施します。
• 船外実験プラットフォームに実験装置を設置します。「きぼう」の船外実験を開始する準備を行います。
• 若田宇宙飛行士は、約3ヶ月半にわたるISS長期滞在を終了して、
エンデバー号で地上に帰還します。
1.ミッションの目的・特徴
※1)船外パレットには、打上げ時、船外機器や船外実験装置が搭載されています。軌道上で搭載物を船外実験プラットフォー
ムへと移設した後は、船外パレットは地上に回収するため、再びスペースシャトルに搭載されます。
※2)ISSに滞在中の若田光一宇宙飛行士が、ISSのロボットアームを操作して軌道上で「きぼう」を完成させます。

4STS-127ミッション概要
• エンデバー号がISSに到着すると、6名のISS長期滞在クルー※1)
がSTS-127ミッションクルー7名※2)を迎えます。ドッキング中は、
ISSに計13名の宇宙飛行士が滞在することになり、国際色豊かな、
過去 多人数のミッションとなります。
• 米国の曝露機器輸送用キャリアでISSの曝露機器の予備品を運
搬します。
1.ミッションの目的・特徴(続き)
※1)ISS長期滞在クルーの内訳:NASA宇宙飛行士:1名 ロシア宇宙飛行士:2名 ESA宇宙飛行士:1名 CSA宇宙飛行士:1名 JAXA宇宙飛行士:1名
※2)STS-127ミッションクルーの内訳:NASA宇宙飛行士:6名 CSA宇宙飛行士:1名 ESA:欧州宇宙機関 CSA:カナダ宇宙庁

5STS-127ミッション概要
2.飛行計画
項 目 計 画
STSミッション番号 STS-127(通算127回目のスペースシャトルフライト)
ISS組立フライト番号 2J/A(スペースシャトルによる29回目、ロシアのロケットを含めると33回目のISS組立てフライト)
オービタ名称 エンデバー号(OV-105) (エンデバー号としては23回目の飛行)
打上げ予定日
2009年 7月 12日 午前8時39分 (日本時間)
2009年 7月 11日 午後7時39分(米国東部夏時間)
打上げ可能時間帯は5分間
打上げ場所 フロリダ州NASAケネディ宇宙センター(KSC)39A発射台 飛行期間 約16日間(ドッキング期間12日間)
搭乗員
コマンダー : マーク・ポランスキー MS3 : トーマス・マーシュバーン
パイロット : ダグラス・ハーリー MS4 : デイヴィッド・ウルフ
MS1 : クリストファー・キャシディ MS5/ISS長期滞在クルー(打上げ) : ティモシー・コプラ
MS2 : ジュリー・パイエット MS5/ISS長期滞在クルー(帰還) : 若田 光一
軌道 軌道投入高度: 約226 km ランデブ高度: 約350km 軌道傾斜角: 51.6度
帰還予定日2009年 7月28日午前 1時19分 (日本時間)
2009年 7月27日午後 0時19分 (米国東部夏時間)
帰還予定場所
主帰還地 : フロリダ州NASAケネディ宇宙センター(KSC)
代替帰還地 : カリフォルニア州エドワーズ空軍基地内NASAドライデン飛行研究センター(DFRC)
ニューメキシコ州ホワイトサンズ宇宙基地
主搭載品 【貨物室】船外実験プラットフォーム、船外パレット、曝露機器輸送用キャリア 【ミッドデッキ】補給物資、実験機材など
注:公式の打上げ日時は、打上げの約2週間前にNASAから発表される予定です。

6STS-127ミッション概要
2.飛行計画(続き)
クルー船長(Commander)マーク・ポランスキー(Mark Polansky)
宇宙航空学修士。STS-98ミッションのパイロットとして初飛行、STS-116ミッションではコマンダーを務める。
今回が3回目の飛行となる。
ミッション・スペシャリスト(MS)1クリストファー・キャシディ (Christopher Cassidy)
米国海軍中佐。海洋工学修士。今回が初飛行。
本ミッションでは、EVA#3、EVA#4、EVA#5の船外活動ク
ルーを担当する。
※MS(Mission Specialist):搭乗運用技術者 EVA(Extravehicular Activity):船外活動
MS4デイヴィッド・ウルフ (David Wolf)医学博士。STS-58ミッションで初飛行。STS-86ミッションで宇宙ステーション「ミール」に打上げられ119日間ミールに滞在。STS-89ミッションで帰還。STS-112ミッションでは船外活動を担当。今回が4回目の飛行となる。本ミッションでは、EVA#1、EVA#2、EVA#3の船外活動クルーを担当する。
MS2ジュリー・パイエット (Julie Payette)
カナダ宇宙庁(CSA)宇宙飛行士
STS-96で初飛行。今回が2回目の飛行となる。
MS3トーマス・マーシュバーン (Thomas Marshburn)医学博士。物理工学修士。今回が初飛行。本ミッションでは、EVA#2、EVA#4、EVA#5の船外活動クルーを担当する。
パイロット(Pilot)ダグラス・ハーリー(Douglas Hurley)
米国海兵隊大佐。今回が初飛行。
MS5/第18/19/20次長期滞在クルー(帰還)
若田 光一 (Koichi Wakata)(Ph.D.)STS-72およびSTS-92で飛行。STS-119でISSに打ち上げられ
サンドラ・マグナスと交代し、ISSのフライトエンジニアとして約3ヶ月半間滞在。ティモシー・コプラと交代してSTS-127で帰還する。
MS5/第20次長期滞在クルー(打上げ)
ティモシー・コプラ (Timothy Kopra)
米国陸軍大佐。今回が初飛行。
本ミッションではEVA#1の船外活動クルーを担当する。

7STS-127ミッション概要
2.飛行計画(続き)
OBSS:センサ付き検査用延長ブーム、TPS:熱防護システム、SSRMS:ISSのロボットアーム、EF:「きぼう」船外実験プラットフォーム、ELM-ES:「きぼう」船外パレット、ICC-VLD:曝露機器輸送用キャリア、ORU:軌道上交換ユニット、PM:「きぼう」船内実験室、SPDM:「デクスター」特殊目的ロボットアーム、PAS:ペイロード取付けシステム、UCCAS:曝露機器結合システム *船外ペイロードとは、船外実験装置やシステム装置を指します
飛行日 主な作業予定
1日目 打上げ/軌道投入、ペイロードベイ(貨物室)ドアの開放、外部
燃料タンクの画像と翼前縁センサデータの地上への送信、スペースシャトルのロボットアーム(SRMS)の起動、ペイロードへ
のヒータ電力供給開始、ランデブ用軌道制御など
2日目 ペイロードベイ内点検、OBSSを使用したTPSの損傷点検、宇
宙服の点検、ドッキング機器の準備、ランデブ用軌道制御など
3日目 ISSからのシャトルの熱防護システムの撮影(R-bar ピッチ・マヌーバ: RPM)、ISSとのドッキング/入室、ISS長期滞在クルー1名の交代、第1回船外活動準備など
4日目 第1回船外活動(EFの設置準備、ICC-VLDの取出し準備、UCCASの固定など)、EFの結合と起動、物資移送など
5日目 物資移送、広報イベント、「きぼう」ロボットアームの較正、第2回船外活動準備、詳細点検(必要な場合)、ICC-VLDの貨物
室からの取出しなど
6日目 第2回船外活動(ICC-VLD に搭載してきたORU3基の移送、EF への(前方)視覚装置の設置作業)、ICC-VLDの仮設置、
物資移送など
7日目 ELM-ESの取付け、物資の移送、広報イベント、第3回船外活
動準備など
飛行日 主な作業予定
8日目 第3回船外活動(P6トラスのバッテリ交換作業、 ELM-ESで運んだ船外ペイロード*の移送準備作業)、物資移送など
9日目 船外ペイロードのEFへの移設、クルーの自由時間、第4回
船外活動準備など
10日目 第4回船外活動(P6トラスのバッテリ交換作業(続き)、 EF への(後方)視覚装置の設置作業)、ICC-VLDのペイロー
ドベイへの回収、物資移送など
11日目 クルーの自由時間
12日目 ELM-ESのペイロードベイへの回収、軌道上共同記者会見、第5回船外活動準備など
13日目 第5回船外活動(S3トラスのPAS展開など)
14日目 広報イベント、物資移送、ISS退室、ハッチの閉鎖、ランデ
ブツールの点検など
15日目 ISS分離/フライアラウンド、SRMSとOBSSを使用した機体
の後期点検など
16日目 飛行制御システムの点検、船内の片づけ、軌道離脱準備、広報イベント、Kuバンドアンテナ収納
17日目 ペイロードベイドドアの閉鎖、軌道離脱、着陸
注:作業スケジュールは流動的に変更されます。

8STS-127ミッション概要
2.飛行計画(続き)
若田宇宙飛行士の担当業務の概要
FD3 FD4 FD5 FD6 FD7 FD8 FD9 FD10 FD11 FD12 FD13 FD14 FD15 FD16 FD17
• エンデバー号がISSに到着すると、若田宇宙飛行士は、コプラ宇宙飛行士と交代してSTS-127ミッションのミッションスペシャリスト(MS)となります。
• エンデバー号がISSにドッキングしている約12日間の間に、「きぼう」の組立て作業や、ISS長期滞在クルーの業務引継ぎ等を実施します。
• 宇宙に長期間滞在した若田宇宙飛行士は、地上の重力環境に身体を順応させるのを促進するために、エンデバー号到着以降は、通常よりも多目の(2~3時間程度)運動を毎日行います。
• ISS長期滞在
クルーの交代
• 若田宇宙飛行士はSTS-127ミッションのMSとなる
◆「きぼう」船外実験プラットフォームの取付け
(SSRMS主担当)
• 物資の移送
• 船外活動ツールの準備
★「きぼう」ロボットアームの較正
(JEMRMS主担当)
◆船外パレットの取付け
(SSRMS主担当)
• 業務引継ぎなど
★ELM-ESに搭載
してきた船外ペイロードの移送と設置
(JEMRMS主担当:MAXIの設置)
• 酸素の移送
• 業務引継ぎ
• 業務引継ぎ/軌道上共同記者会見
• 業務引継ぎ
• 広報イベント
• ISSクルーとのお別れ
• クルーキャビン片付け
• 帰還
• 帰還に向けた準備作業
◆曝露機器輸送用キャリア(ICC-VLD)の貨物室への回収の補助
ロボット操作
◆ SSRMS★ JEMRMS
★船外活動支援
(JEMRMS主担当)

9STS-127ミッション概要
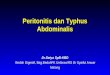
※完成時のISSの構成要素についてはBackup Chart(P75, P76)を参照
STS-127(2J/A)ミッション終了時のISSの外観
STS-119(15A)ミッション終了時の外観
船外実験プラットフォーム
2.飛行計画(続き)

10STS-127ミッション概要
3.搭載品
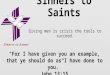
STS-127ミッションのペイロードベイ(貨物室)の搭載状況
船外パレット(ELM-ES)
船外実験プラットフォーム(EF)
センサ付検査用延長ブーム(OBSS)
オービタ・ドッキング・システム
スペースシャトルのロボットアーム(SRMS)
曝露機器輸送用キャリア(ICC-VLD)

11STS-127ミッション概要
3.搭載品‐船外実験プラットフォーム
EFの外観(筑波宇宙センター 宇宙ステーション試験棟)
船外実験プラットフォーム(Exposed Facility:EF)
ISSの大きな特徴である、広い視
野、高真空、微小重力などの宇宙
曝露環境を利用して、科学観測、
地球観測、通信、理工学実験など
を実施することができる多目的実
験スペースです。
「きぼう」のこの部分を構成する要素です。
※船外実験プラットフォームの詳細は、Backup Chart「船外実験プラットフォーム主要諸元」を参照ください。

12STS-127ミッション概要
3.搭載品‐船外パレット
「きぼう」船外実験プラットフォームで
運用する船外実験装置やシステム
機器類などをISSに運ぶためのキャ
リアです。
船外パレット(KSC, SSPF)
船外パレット(Experiment Logistics Module-Exposed Section: ELM-ES)
「きぼう」のこの部分を構成する要素です。
船外ペイロードを搭載した状態
※船外パレットの詳細は、Backup Chart「船外パレット主要諸元」を参照ください。船外パレットで運ぶ船外ペイロードについては7章「JAXA関連」を参照ください。

13STS-127ミッション概要
曝露機器輸送用キャリア(ICC-VLD)は、
ISS船外の機器類をスペースシャトルで輸
送するためのキャリアです。
STS-127ミッションでは、ISSの軌道上交
換ユニット(ORU)3基とP6トラスのバッテリ
6台を運搬します。
ICCは過去のスペースシャトルによるISS組立てミッションでも飛行していますが、今
回初飛行となるICC-VLDは、特徴として、
軌道上でペイロードベイ(貨物室)から取り
外して、ISSの仮置き場所に設置すること
が可能となっています。ICC-VLD:ポンプモジュール、Kuバンドアンテナ、リニア駆動ユニットが搭載されているのが見える。裏側にバッテリORU6台が搭載されている。(KSC, SSPF)
曝露機器輸送用キャリア(Integrated Cargo Vertical Light Deployable:ICC-VLD)
3.搭載品‐曝露機器輸送用キャリア

14STS-127ミッション概要
曝露機器輸送用キャリア(ICC-VLD)で運ぶORU
バッテリORUは、ISSの太陽電池(SAW)で発電した電力を貯めておいて、日陰時の電
力供給に使用するものです。今回運ぶバッテリORU6台は、P6トラスの古くなったバッ
テリORUと交換します。
ISSの高速高容量データ通信を可能にするKuバンドシステムの構成要素です。データ
や映像、クルーの手順書やタイムライン、IP電話、その他の高速通信などは、このKuバ
ンド回線を使用して行われています。
SGANTはZ1トラスに取付けられており、今回運ぶSGANTは予備品です。
ISSの外部能動熱制御システム(External Thermal Control System: ETCS)の冷却
ループで使われている、液体アンモニアを循環させるためのポンプで、ISSでは計2台使
用されています(S1トラスとP1トラス)。 ポンプモジュールが故障すると、ETCS冷却
ループの機能が失われ、ISSの約半分の熱制御機能が失われることになります。
今回運ぶPM2は予備品で、これでISS上の予備品は2台になります。
モービルトランスポータ(台車:MT)*)がトラス上を走行するための駆動用モータです。
今回運ぶLDUは、故障時に備えた予備品です。
*)MTは、モービルベースシステム(MBS)を取り付けた状態で、ISSのロボットアームを乗せてトラ
ス上を移動する台車です。
バッテリORU
Kuバンドアンテナ
Space-to-Ground Antenna (SGANT)
ポンプモジュール2Pump Module 2 (PM2)
リニア駆動ユニット
Linear Drive Unit (LDU)
3.搭載品‐曝露機器輸送用キャリア(続き)

15STS-127ミッション概要
STS-127 Crew
飛行5日目ICC-VLDの取出し
飛行7日目ELM-ESのEF
への取付け
マーク・ポランスキーコマンダー
NASA 宇宙飛行士
ダグラス・ハーリーパイロット
NASA 宇宙飛行士
クリストファー・キャシディ(MS1)
NASA 宇宙飛行士飛行2日目
熱防護システム点検、ドッキング準備
飛行3日目ISSからの熱防護システムの撮影ISSへのドッキング
飛行13日目EVA#5(S3トラスのPASの展開など)
飛行8日目EVA#3(P6トラスのバッテリ交換作業、船外ペイロードのEFへの移送準備)
飛行1日目外部燃料タンク撮影、SRMSの起動・点検など
飛行4日目EVA#1(船外実験プラットフォーム取付け、仮留めしていたUCCASの固定など)
飛行6日目EVA#2(ICC-VLDで運んできた予備品の設置、EF前方VE取付け)
略語EF : Exposed Facility 「きぼう」船外実験プラットフォームELM-ES : Experiment Logistics Module-Exposed Section 「きぼう」船外パレットET : External Tank 外部燃料タンクEVA : Extravehicular Activity 船外活動ICC-VLD : Integrated Cargo Carrier 曝露機器輸送用キャリアJEMRMS :JEM Remote Manipulator System 「きぼう」のロボットアームMS : Mission Specialist 搭乗運用技術者OBSS : Orbiter Boom Sensor System センサ付き検査用延長ブームPAS : Payload Attach System ペイロード取付けシステムVE : Visual Equipment EFの視覚装置UCCAS : Unpressurized Cargo Carrier Attach System 曝露機器結合システム
略語EF : Exposed Facility 「きぼう」船外実験プラットフォームELM-ES : Experiment Logistics Module-Exposed Section 「きぼう」船外パレットET : External Tank 外部燃料タンクEVA : Extravehicular Activity 船外活動ICC-VLD : Integrated Cargo Carrier 曝露機器輸送用キャリアJEMRMS :JEM Remote Manipulator System 「きぼう」のロボットアームMS : Mission Specialist 搭乗運用技術者OBSS : Orbiter Boom Sensor System センサ付き検査用延長ブームPAS : Payload Attach System ペイロード取付けシステムVE : Visual Equipment EFの視覚装置UCCAS : Unpressurized Cargo Carrier Attach System 曝露機器結合システム
飛行12日目
軌道上共同記者会見
飛行9日目ELM-ESからEFへの船外ペイロードの移送・設置
飛行10日目EVA#4(P6トラ
スのバッテリ交換(続き)、EF後部VE取付け)
2009年7月8日更新
注:各飛行日の写真はイメージです。
飛行1日目:打上げ米国フロリダ州 KSC
4. ミッションの概要スペースシャトル「エンデバー号」(STS-127ミッション)飛行概要
飛行17日目: 着陸米国フロリダ州 KSC
飛行14日目
終物資移送、ハッチ閉じ
飛行11日目
クルーの自由時間
STS-127 Crew
デイヴィッド・ウルフ(MS4)
NASA 宇宙飛行士
ジュリー・パイエット(MS2)
CSA宇宙飛行士
帰還
若田 光一JAXA宇宙飛行士
第19次長期滞在クルー
ティモシー・コプラNASA宇宙飛行士
注:予定は今後変更される可能性があります
飛行15日目ISS分離、 熱防護システムの後期点検、帰還準備
飛行16日目
キャビン片付け、帰還準備
打上
トーマス・マーシュバーン(MS3)
NASA 宇宙飛行士
STS-127(2J/A)ミッションの目的・「きぼう」船外実験プラットフォーム、船外パレット、曝露機器輸送用キャリアの運搬・「きぼう」船外実験プラットフォームのISSへの取付け・物資の運搬、回収、ISS滞在クルー1名の交代など
船外活動(5回)EVA#1(飛行4日目) :EF取付け準備作業、仮留めしていたUCCASを正常な状態に固定など
EVA#2(飛行6日目) :ICC-VLDで運んだ予備品の移送作業、EF関連作業
EVA#3(飛行8日目) :P6トラスのバッテリの交換、ELM-ESで運んだ船外ペイロードの移送準備
EVA#4(飛行10日目):P6トラスのバッテリの交換、EF関連作業
EVA#5(飛行13日目):S3トラスのPASの展開など
STS-127(2J/A)ミッションの目的・「きぼう」船外実験プラットフォーム、船外パレット、曝露機器輸送用キャリアの運搬・「きぼう」船外実験プラットフォームのISSへの取付け・物資の運搬、回収、ISS滞在クルー1名の交代など
船外活動(5回)EVA#1(飛行4日目) :EF取付け準備作業、仮留めしていたUCCASを正常な状態に固定など
EVA#2(飛行6日目) :ICC-VLDで運んだ予備品の移送作業、EF関連作業
EVA#3(飛行8日目) :P6トラスのバッテリの交換、ELM-ESで運んだ船外ペイロードの移送準備
EVA#4(飛行10日目):P6トラスのバッテリの交換、EF関連作業
EVA#5(飛行13日目):S3トラスのPASの展開など
オービタ :エンデバー号(OV-105)搭乗員数 :7名打上げ(予定) :2009年7月11日午後7時39分 (米国東部夏時間)
2009年7月12日午前8時39分 (日本時間)帰還(予定) :2009年7月27日午後0時15分(米国東部夏時間)
2009年7月28日午前1時1分(日本時間)飛行期間(予定):約16日間
着陸 :フロリダ州NASAケネディ宇宙センター(KSC)
オービタ :エンデバー号(OV-105)搭乗員数 :7名打上げ(予定) :2009年7月11日午後7時39分 (米国東部夏時間)
2009年7月12日午前8時39分 (日本時間)帰還(予定) :2009年7月27日午後0時19分(米国東部夏時間)
2009年7月28日午前1時19分(日本時間)飛行期間(予定):約16日間
着陸 :フロリダ州NASAケネディ宇宙センター(KSC)

16STS-127ミッション概要
5. フライトスケジュール 1日目
• 打上げ/軌道投入
• ペイロードベイ(貨物室)ドアの開放
• スペースシャトルのロボットアーム起動
• Kuバンドアンテナ展開
• 翼前縁の衝突検知センサデータ、外部燃料
タンク(ET)カメラの画像の地上への送信
• 貨物室内のペイロードへのヒータ電力供給の
開始
• ランデブに向けた軌道制御上昇中の船内の様子(STS-122)
【飛行1日目概要】
スペースシャトルの打上げ(STS-124)

17STS-127ミッション概要
5. フライトスケジュール 2日目
• ペイロードベイ(貨物室)の状態の点検
• スペースシャトルのロボットアーム(SRMS)とセンサ付き延長ブーム(OBSS)を使用し
た熱防護システムの損傷点検スペースシャトルの熱防護システムの点検のイメージ
• 宇宙服(EMU)の点検
• オービタ・ドッキング・システム(ODS)の
点検
• ODSのドッキングリングの伸展とカメラ
の取付け(ドッキング準備)
• ランデブに向けた軌道制御
FD2の作業を行うクルー:左はフライトデッキ、右はミッドデッキ(STS-119)
スペースシャトルのODSドッキングリングの伸展(STS-123)
【飛行2日目概要】

18STS-127ミッション概要
5. フライトスケジュール 3日目
• ランデブに向けた軌道制御
• ISSからのスペースシャトルの熱防護シ
ステムの撮影※1
• ISSとのドッキングおよび入室
• 第19/20次長期滞在クルー1名の交代
• ISSからスペースシャトルへの電力供給
装置(SSPTS)の起動
• 第1回船外活動(EVA)準備など(※船外活動手順確認、およびEVAを行う宇宙飛
行士のキャンプアウト※2など) ※1:Backup Chart(P82)参照※2:キャンプアウトについては次頁(P20)を参照を参照
スペースシャトルのランデブ/ドッキング時の様子(STS-124)
上:フライトデッキの様子
下:スペースシャトルのISSへのドッキング
【飛行3日目概要】

19STS-127ミッション概要
5. フライトスケジュール 3日目(続き)
第20次長期滞在クルー1名の交代
若田宇宙飛行士は、ティモシー・コプラ宇宙飛行士と交代して、約3ヶ月半間にわ
たるISSのフライトエンジニアの任務を終了します※。
ソユーズ宇宙船の個人専用シートライナー(Sokol与圧服も同時に搬入)を、緊急事態に備えて、地上
に帰還するためのロシアのソユーズ宇宙船に取り
付けます。この取付けを終了した時点で、長期滞在
クルーの交代は正式に完了します。
シートライナーは、金属製の座席と与圧服の間に設
置されます。隙間が生じないようにして衝撃を全体
で吸収できるよう、個人毎に型取りされた専用品で
す。 ソユーズTMA-13宇宙船で、若田宇宙飛行士が自身専用のシートライナーを試している様子(STS-119)
※エンデバー号/ISS間のハッチを閉じるまでは、若田宇宙飛行士は交代クルーへの業務引継ぎやISSの各種作業を引き続き行います。

20STS-127ミッション概要
5. フライトスケジュール 3日目(続き)
キャンプアウト(Campout)船外活動を行うクルーが、気圧※を下げた「クエスト」(エアロック)の中で船外活動の前夜滞在することをキャンプアウトと呼んでいます。
低い気圧の中で一晩を過ごすことで、血中の窒素を体外に追い出すことができ、
“ベンズ”と呼ばれる減圧症を予防することが
できます。
睡眠中の時間を利用することにより、船外活動の準備を起床後すぐ始められるため、作業効率を上げることが出来ます。
※エアロック内部の気圧は、10.2psi(約0.7気圧)にまで下げられます。通常はISS内部は14.7psi(1気圧)に保たれています。
「クエスト」内部の様子(STS-121ミッション)注:実際のキャンプアウト中はクルーは普段着で過ごします。

21STS-127ミッション概要
5. フライトスケジュール 4日目
• 第1回船外活動
「きぼう」船内実験室側の船外実験プラットフォーム結合機構(EFBM)の断熱カバーの取外し
「きぼう」ロボットアームの接地ストラップの除去
ペイロードベイ(貨物室)内での作業(船外実験プラットフォーム側のEFBMの断熱カバーの取外し、船外実験プラットフォームと曝露機器輸送用キャリア(ICC-VLD)のヒータ電力ケーブルの取外し、船外実験装置1台(MAXI)の断熱カバーの取外し)
ハーモニー(第2結合部)の共通結合機構(CBM)の窓カバーの開放(HTV到着に向けた準備)
P3トラスの曝露機器結合システム(UCCAS)1基の展開
左舷側のCETAカートの改造
• 「きぼう」船外実験プラットフォーム(EF)の結合と起動*
【飛行4日目概要】
*若田宇宙飛行士の担当する作業
• ISSのロボットアーム(SSRMS)で「きぼう」船外実験プラットフォームをペイロードベイ(貨物室)から取り出し、スペースシャトルのロボットアーム(SRMS)に受け渡します。
• SSRMSで船外実験プラットフォームをSRMSから受け取り、「きぼう」船内実験室に結合させます。

22STS-127ミッション概要
5. フライトスケジュール 4日目(続き)
◆ 担当 :デイヴィッド・ウルフ
ティモシー・コプラ
◆ 実施内容 :
「きぼう」船内実験室側の船外実験プラットフォーム結合機構(EFBM)の断熱
カバーの取外し
第1回船外活動(EVA#1)
船内実験室側のEFBM(STS-124)
「きぼう」船内実験室に船外実験プラットフォームを
結合させる準備として、船内実験室側の船外実験
プラットフォーム結合機構(EFBM)を覆っている断
熱カバーを取り外します。船内実験室側のEFBMの断熱カバーは、STS-126ミッション時にEFBMの動作点検を行うために、1度すべてが取り外され、点検後、真ん中の1枚の断熱カバーのみがEFBMに戻されました。

23STS-127ミッション概要
5. フライトスケジュール 4日目(続き)
「きぼう」ロボットアームの接地ストラップ除去
第1回船外活動(EVA#1)(続き)
STS-124ミッションの船外活動で、「きぼう」ロボットアームの多層断熱材(MLI)カ
バーの取外し作業が実施されましたが、その後、エンドエフェクタのMLIカバーか
ら接地ストラップがはみ出して、エンドエフェクタカメラの視界に入っているのが確
認されました。
この接地ストラップをMLIカバーにたくし込んでベルクロで固定し、カメラ視野から
除去する作業を行います。
接地ストラップのはみ出し エンドエフェクタカメラによる画像 ハレーションが生じている画像

24STS-127ミッション概要
5. フライトスケジュール 4日目(続き)
ペイロードベイ(貨物室)内での作業
船外実験プラットフォーム側のEFBM
ペイロードベイ(貨物室)から船外実験プラットフォームを取り出
す準備として、船外実験プラットフォーム結合機構(EFBM)の断
熱カバーを取り外し、ヒータ電力ケーブルを取り外します。
第1回船外活動(EVA#1)(続き) 右:スペースシャトルのペイロードベイ(貨物室)内で作業する船外活動クルー(STS-102)
翌日のICC-VLD取出しに備えて、ICC-VLDのヒータ電力ケーブル
を取り外します。EFBMの断熱カバーの取外しイメージ
①船外実験プラットフォーム側のEFBMの断熱カバーの取外しと
ヒータ電力ケーブルの取外し
③船外実験装置1台(MAXI)の保護カバーの取外し
②曝露機器輸送用キャリア(ICC-VLD)のヒータ電力ケーブルの取外し
貨物室内の作業中に、船外パレット上の全天X線監視装置(MAXI)の断熱カバーを取り外しておきます。
右:MAXIの断熱カバー
の取外しイメージ

25STS-127ミッション概要
5. フライトスケジュール 4日目(続き)
第1回船外活動(EVA#1)(続き)
今年2009年9月に日本の宇宙ステーション補給機(HTV)の初
号機の打上げが予定されています。HTVは、ISSの下方(地球
方向)から徐々にISSに接近し、 後はISSのロボットアーム
(SSRMS)で把持され、ISSへと結合します。ISSの「ハーモ
ニー」(第2結合部)の地球側の共通結合機構(CBM)に係留す
ることになります。
しかし、もしSTS-128(17A)ミッションの打上げが1ヶ月遅れる
と、HTVミッションと重なる可能性があります。STS-128ミッショ
ンでは、多目的補給モジュール(Multi-Purpose Logistics Module: MPLM)をハーモニーの下側(地球側)のCBMに結合
するため、HTVを暫定的に上部CBMに結合することも考えら
れます。
このような状況から、ハーモニー上部のCBMの窓カバーを開
けておくことになりました。このCBMを使用する場合は、窓に
TVカメラを設置して、結合運用時の位置決めに使用します。
ハーモニー(第2結合部)上部の共通結合機構(CBM)の窓カバーの開放(HTV到着に向けた準備)
接近したHTVをISSのロボットアーム
で把持するイメージ
HTVをISSのロボットアームでハーモニーの地球側のCBMに結合するイメージ
ハーモニーの上部のCBMの窓カバーを開けるイメージ

26STS-127ミッション概要
5. フライトスケジュール 4日目(続き)
P3トラスの曝露機器結合システム(Unpressurized Cargo Carrier Attach System: UCCAS)1基の展開
第1回船外活動(EVA#1)(続き)
このUCCASの展開は、前回のSTS-119ミッションの船外活動で完了する予定でしたが、作業中、トラスに
UCCASのヨーク部を固定するピンがうまく固定できないというトラブルが発生したため、テザーで安全な状態に
仮固定したままとなっています。これを正常な状態に固定する作業を行う予定です。
※このUCCASは、STS-129(ULF3)ミッション
(2009年後半打上げ予
定)でISSに運ばれる輸
送用キャリア
(EXPRESS Logistics Carrier:ELC)2基のうち
の1基の取り付け場所と
なります。 ELCの重量
を支えるためには、正常
な固定が必要となります。
STS-119ミッション時に、一時的な処置として、テザーで仮固定したUCCAS。
青い部分がテザー。
第14次長期滞在クルーが別のUCCASの
展開を行なった時にも、固定に困難が生じましたが、その時は揺らして反動をつけることで所定の位置に固定することができました。上の写真はその時の様子。
青い部分がUCCASの展開部。

27STS-127ミッション概要
5. フライトスケジュール 4日目(続き)
第1回船外活動(EVA#1)(続き)
CETAカートの改造
※青く表示されている部分(2本)がハンドルブレーキです
S3トラスのペイロード取付けシステム(Payload Attach System: PAS)1基の展開
ユニティー(第1結合部)の左舷側の共通結合機構(CBM)の窓カバーの開放(トランクワイリティ(第3結合部)到着に向けた準備)
STS-130ミッションでISSに運ばれる、トランクワイリティ(第3結合部)はユニティーの左舷側のCBMに結合
するため、その結合運用の準備としてCBMの窓カバーを開放しておきます。
ISS左舷側のトラスの端にCETAカートが移動した時に、CETAカートが左舷側のSARJの回転に干渉しないように、CETAカートの足場の収納位置をずらして、ハンドルブレーキ
をワイヤーで固定します。
時間がある場合に実施する予定です。本ミッションの第5回船外活動では、さらに、S3トラスの3基のPASを展開する予定となっています。

28STS-127ミッション概要
5. フライトスケジュール 4日目(続き)
船外実験プラットフォーム(EF)の貨物室からの
取出しと船内実験室への結合
① ISSのロボットアーム(SSRMS)でEFを把持してスペースシャトルのペイロードベイ(貨物室)から取り出す。
② EFをスペースシャトルのロボットアーム(SRMS)に受け渡す。
③ SRMSでEFを把持している間に、SSRMSはハーモニー(第2結合部)からISSトラス左舷側へとベースポジションを移動する。
④ SSRMSで再びEFを受け取り、「きぼう」船内実験室左舷側の結合機構(EFBM)に結合させる。
なお、SSRMSで船外実験プラットフォームを結合機構へと接近・結合させる際は、SSRMS操作担当者(若田宇宙飛行士)はSRMSの手首部のカメ
ラと「きぼう」のロボットアームのカメラの映像で確認しながら操作します。
EFBMの結合と同時に、EFは自動的に電力が投入されます。その後、電
力系、通信制御系、熱制御系といったサブシステムを起動していきます。
①~②
④

29STS-127ミッション概要
5. フライトスケジュール 5日目
• 曝露機器輸送用キャリア(ICC-VLD)のペイロードベイ(貨物室)
からの取り出し
• 広報イベント
• 機体の詳細点検(必要な場合のみ)
• 「きぼう」のロボットアームの較正*
• 第2回船外活動準備(船外活動手順確認およびEVAを行う宇宙飛行士のキャンプアウト)
【飛行5日目概要】
*若田宇宙飛行士の担当する作業
・「きぼう」ロボットアームの較正。

30STS-127ミッション概要
5. フライトスケジュール 5日目(続き)
曝露機器輸送用キャリア(ICC-VLD)のペイロードベイ(貨物室)からの取出し
ICC-VLDのISSへの仮設置に備えて、スペースシャトルのロボットアーム(SRMS)でICC-VLDを貨物室から取り出しておきます。 ※ICC-VLDは、ISSのロボットアームに受け渡す位置で、SRMSに一晩把持された状態で保持されます。
ICC-VLDの仮設置は、翌日(飛行6日目)に実施される予定ですが、機体の詳細検査が必要ないと判断された場合は、この日のうちに、ペイロードベイからの取り出しに続けて、ISSトラス上のモービル・ベース・システム(Mobile Base System: MBS)*への仮設置を実施することになります。
「きぼう」のロボットアームの較正
船外実験プラットフォームのターゲットマーカにロボットアームの先端を接近させ、
その時の各関節角度と設計値で分かっている角度を比較して、較正を行います
(飛行9日目に行う船外ペイロード移設の準備作業)。
SSRMS MBS* MBSについてはP33を参照

31STS-127ミッション概要
5. フライトスケジュール 6日目
• 曝露機器輸送用キャリア(ICC-VLD)のISSへの取付け
• 第2回船外活動
船外実験プラットフォーム(EF)への前方側の視覚装置(Visual Equipment: VE)の取り付け
曝露機器輸送用キャリア(ICC-VLD)に搭載して運んできた軌道上交換ユニット(ORU)の船外保管プラットフォーム3(External Stowage Platform:ESP-3)への移送作業*
【飛行6日目概要】
*若田宇宙飛行士の担当する作業
• 「きぼう」ロボットアームで船外活動時のカメラ視野を確保することで船外活動クルーの作業を支援します。

32STS-127ミッション概要
5. フライトスケジュール 6日目(続き)
曝露機器輸送用キャリア(ICC-VLD)のISSへの取付け
① 前日(FD5)にICC-VLDをスペースシャトルのロボット
アーム(SRMS)でペイロードベイ(貨物室)から取り出
して、SRMSで把持した状態で一晩保持しておきます。
② ISSのロボットアーム(SSRMS)に受け渡します。
③ SSRMSでISSトラス上のモービル・ベース・システム
(Mobile Base System: MBS)のペイロード/軌道上交
換ユニット把持装置(Payload and Orbit Replaceable Unit Accommodation: POA)※に仮設置します。
ICC-VLDに搭載して運んできたISSの曝露機器の予備品は、船外活動クルーによって船外保管プラットフォーム3(ESP-3)に移送・保管されます。移送作業を効率よく行うために、ICC-VLDはISSに仮設置されます。
※MBSとPOAについては次ページを参照
MBS(STS-123)

33STS-127ミッション概要
5. フライトスケジュール 6日目(続き)
【参考】(モービル・ベース・システム(Mobile Base System: MBS)およびペイロード/ORU取付け場所(Payload and Orbit Replaceable Unit Accommodation: POA))
モービル・ベース・システム(MBS)は、ISSのトラス上を移動して機材を輸送するロボットアームシステム(Mobile Servicing System: MSS)の構成要素です。
MSSはISSのロボットアーム(Space Station Remote Manipulator System: SSRMS)、モービルトランスポータ(台車:MT)、MBSから構成されており、MBSは
MTに結合されています。 MBSにはISSのロボットアームの把持部となる電力・通信インタフェース付グラプル・フィクスチャ(Power and Data Grapple Fixture: PDGF)と呼ばれる装置が4個搭載されています。SSRMSがPDGFを把持することにより、ISSからの電力をSSRMSに供給したり、電気信号や映像を中継するこ
とができるようになります。
ペイロード/軌道上交換ユニット把持装置(Payload and Orbital Replacement Unit Accommodation: POA)はMBSに搭載されている機構です。POAの先端は
ISSのロボットアーム(SSRMS)の先端と同様の把持機構で、大型のペイロードやORUを固定して電力やデータを供給することができます。
トラス上を移動
ペイロード/ORU取付け場所(POA)
モービル・ベース・システム(MBS)
モービルトランスポータ(台車:MT)
電力・通信インタフェース付グラプル・フィクスチャ(PDGF)

34STS-127ミッション概要
5. フライトスケジュール 6日目(続き)
第2回船外活動(EVA#2)
曝露機器輸送キャリア(ICC-VLD)に搭載して運んできた軌道上交換ユニット(ORU)3台の移送作業ICC-VLDで運んできた、リニア駆動ユニット(LDU)、ポンプモジュール
(PM)、およびKuバンドアンテナ(SGANT)の予備品を、船外保管プ
ラットフォーム3(ESP-3)に移送・保管します。※ORUの詳細はP67を
参照ください
船外活動クルーは、ISSのロボットアーム(SSRMS)の先端にフットリ
ストレイントを取り付け、そしてORUを持ち抱えてSSRMSに乗った状
態で、ICC-VLDからESP-3までORUをひとつずつ移動させます。
◆ 担当 :デイヴィッド・ウルフ
トーマス・マーシュバーン
◆ 実施内容 :
ORUの移送は、ORUがどこに
も接触しないように十分なクリアランスを保ち、細心の注意を払って行なわれます。
左:ISSの窒素タンク(NTA)を
移送する船外活動クルー(STS-126)
ICC-VLD
ESP-3
SSRMS
船外活動クルーはSSRMSに取り付けたフットリストレイントに足を固定して、ORUを両手で持ち抱えた状態でESP-3まで移動します

35STS-127ミッション概要
5. フライトスケジュール 6日目(続き)
船外実験プラットフォームへの前方側の視覚装置(VE)の取り付け
第2回船外活動(EVA#2)(続き)
【参考】船内実験室外壁の視覚装置
2台のうちの1台の視覚装置(Visual Equipment: VE)を設置します。
船外実験プラットフォーム上に収納してあるVEの断熱カバー、ヒータ電力ケーブ
ル、固定器具を取り外し、ボルトを解除して取り出し、船外実験プラットフォーム前方側のVE取り付け台に設置します。
打上げ時の収納場所 前方側の取付け場所

36STS-127ミッション概要
5. フライトスケジュール 7日目
• 船外パレットの船外実験プラットフォームへの取付け*
• 広報イベント
• 物資移送
• 第3回船外活動 (EVA)準備
(EVA手順確認およびEVA宇宙飛
行士のキャンプアウト)
ISSのロボットアームを操作する若田宇宙飛行士(STS-119)
【飛行7日目概要】
*若田宇宙飛行士の担当する作業
• SRMSで持ち上げた「きぼう」船外パレットをSSRMSで受け取って、EFの先端に結合させます。

37STS-127ミッション概要
5. フライトスケジュール 7日目(続き)
船外パレットの取付け
① スペースシャトルのロボットアーム(SRMS)で
船外パレットを把持して、ペイロードベイ(貨物
室)から取り出す。
② ISSのロボットアーム(SSRMS)で船外パレット
を受け取る。
③ SSRMSで船外パレットを船外実験プラット
フォーム上の取付け場所に取り付ける。
①
②
③

38STS-127ミッション概要
5. フライトスケジュール 8日目
• 第3回船外活動
船外パレットに搭載して運んできた船外ペイロード3台の移設準備
P6トラスのバッテリ交換作業(パート1)
• 業務引き継ぎ
• 物資の移送(続き)
【飛行8日目概要】

39STS-127ミッション概要
5. フライトスケジュール 8日目(続き)
第3回船外活動(EVA#3)
◆ 担当 :デイヴィッド・ウルフ
クリストファー・キャシディ
◆ 実施内容 :
船外パレットに搭載して運んできた船外ペイロード3台の移設準備
「きぼう」ロボットアームで、船外パレット上の船
外ペイロードを船外実験プラットフォームへと移
設する準備を行います。
衛星間通信システム-曝露系サブシステム(ICS-EF)、宇宙環境計測ミッション装置(SEDA-AP)
の断熱カバーを取り外します。*全天X線監視装置(MAXI)の断熱カバーはEVA#1で取り外す予定です。
ICC-EFとSEDA-APの断熱カバーを取り外します。
ICS-EF
SEDA-AP

40STS-127ミッション概要
5. フライトスケジュール 8日目(続き)
P6トラスのバッテリ交換作業(パート1)
第3回船外活動(EVA#3)(続き)
P6トラスは、2000年11月のISS組立ミッション(STS-97(4A)ミッション)でISSに運ば
れたトラスです。そのため、バッテリが寿命に達しており、交換が行われることになり
ました。 今回交換されるのは、P6トラスの半分のバッテリで、残りの6台は、2010年
のSTS-132(ULF-4)ミッションで交換が行われる予定です。
STS-127ミッションではP6トラスの12台のうちの6台のバッテリを交換
しますが、EVA#3では、そのうちの4台を取り外して新品と交換します。 P6トラス
水中訓練の様子
SSRMSでICC-VLDを把持して、
バッテリ交換の作業場所に移動さ
せます。
バッテリORUの交換作業中は、
SSRMS操作担当者は、船外活動
クルーがバッテリORUを取り出し
やすい位置にICC-VLDを移動させ
て、作業を支援します。
P6バッテリ交換の作業場所(番号は交換する順番)
バッテリORU交換するバッテリORU
ICC-VLD
1 23
4

41STS-127ミッション概要
5. フライトスケジュール 9日目
• 船外パレットで運んできた船外ペイ
ロードの船外実験プラットフォーム
への移設*
• 物資移送(続き)
「きぼう」のロボットアームのワークステーションで作業する若田宇宙飛行士(第18次長期滞在)
【飛行9日目概要】
*若田宇宙飛行士の担当する作業
• 「きぼう」ロボットアームを操作して、船外パレットで運んできた船外ペイロード1台(MAXI)の移動と設置を担当します。

42STS-127ミッション概要
5. フライトスケジュール 9日目
船外パレットで運んできた船外ペイロードの船外実験プラットフォームへの移設
「きぼう」ロボットアームを使用して、船外パレットに搭載して運んできた全天X線監視装置(MAXI)、
衛星間通信システム-曝露系サブシステム(ICS-EF)、宇宙環境計測ミッション装置(SEDA-AP)を
船外実験プラットフォームに設置します。若田宇宙飛行士は、MAXIの移設作業を担当します。
「きぼう」のロボットアームで船外実験装置のひとつである「SEDA-AP」を船外パレットから船外実験プラットフォームに移設しているところ
※「MAXI」、「ICS-EF」、「SEDA-AP」の順番で移設される予定

43STS-127ミッション概要
5. フライトスケジュール 10日目
• 第4回船外活動
P6トラスのバッテリ交換作業(パート2)
船外実験プラットフォームへの後方側の視覚装置(VE)の取付け
• 曝露機器輸送用キャリア(ICC-VLD)のペイロードベイへ
の回収*
• 物資移送(続き)
【飛行10日目概要】
*若田宇宙飛行士の担当する作業
• 交換した古いバッテリ6台を載せたICC-VLDをISSのロボットアームからス
ペースシャトルのロボットアームに渡して、スペースシャトルのペイロードベイ(貨物室)に回収します。

44STS-127ミッション概要
5. フライトスケジュール 10日目(続き)
第4回船外活動(EVA#4)◆ 担当 : トーマス・マーシュバーン
クリストファー・キャシディ
◆ 実施内容 :
P6トラスのバッテリ交換作業(続き)
残りの2台のバッテリORUを交換します。
※第3回船外活動実施内容(P40)を参照
船外実験プラットフォームへの後方視覚装置(VE)の取付け作業
※第2回船外活動実施内容(P35)を参照
5
6
バッテリORU交換作業場所(番号は交換する順番)

45STS-127ミッション概要
5. フライトスケジュール 10日目(続き)
曝露機器輸送用キャリア(ICC-VLD)のペイロードベイ(貨物室)
への回収
P6トラスのバッテリ交換を終えると、古い
バッテリORU6基を搭載して地上に持ち
帰るため、ICC-VLDはスペースシャトル
のペイロードベイ(貨物室)に収容されま
す。
ISSのロボットアーム(SSRMS)で把持し
て、スペースシャトルのロボットアーム
(SRMS)に受け渡し、SRMSで貨物室に
格納します。
SSRMSで把持したICC-VLDをSRMSで受け取るイメージ
SRMSでICC-VLDをペイロードベイに格納するイメージ

46STS-127ミッション概要
5. フライトスケジュール 11日目
若田宇宙飛行士はISS交代クルーへの引継ぎ作業を継続して行います。
• スペースシャトルのクルーの休日
• 広報イベント(スペースシャトルのクルー全員参加)
ズヴェズダ(ロシアのサービスモジュール)の窓から外を見ているクルー(STS-119)
ズヴェズダで食事するクルー(STS-119)ハーモニー(第2結合部)で記者の質問に応じるクルー(STS-119)
【飛行11日目概要】

47STS-127ミッション概要
5. フライトスケジュール 12日目
• 船外パレットのペイロードベイ(貨物室)への回収
• 広報イベント(若田、パダルカ、ポランスキー参加)
• 軌道上共同記者会見
• 第5回船外活動(EVA)準備
(EVA手順確認およびEVA宇宙飛行士のキャンプアウト)
【飛行12日目概要】

48STS-127ミッション概要
5. フライトスケジュール 12日目(続き)
船外パレットのペイロードベイ(貨物室)への回収
① ISSのロボットアーム(SSRMS)で船外パレット
を把持して船外実験プラットフォームから取り外
す。
② スペースシャトルのロボットアーム(SRMS)で船
外パレットを受け取る。
③ SRMSで船外パレットをペイロードベイ(貨物室)
に格納する。
①
②
③

49STS-127ミッション概要
5. フライトスケジュール 12日目(続き)
軌道上共同記者会見
今回のミッションでは、ISS計画参加国(15カ国)の5機関から、合計13名の宇
宙飛行士がISSに集まります。軌道上共同記者会見では、軌道上のクルーの
出身国である米国、ロシア、カナダ、欧州、日本のメディアに、それぞれ数分間、
通常より短めの会見時間が割り当てられます。
STS-119ミッションクルーと第18/19次長期滞在クルー(STS-119)

50STS-127ミッション概要
5. フライトスケジュール 13日目
• 第5回船外活動
「デクスター」(特殊目的ロボットアーム)の
断熱カバーの修正
Z1トラスのパッチパネルの切り替え
S3トラスの3基のペイロード取付けシステ
ム(PAS)の展開
S3トラスへのWETAアンテナの取付け
• 物資移送(続き)
【飛行13日目概要】
デクスター(特殊目的ロボットアーム)(STS-124)

51STS-127ミッション概要
5. フライトスケジュール 13日目(続き)
第5回船外活動(EVA#5)◆ 担当 : トーマス・マーシュバーン
クリストファー・キャシディ
◆ 実施内容 :
「デクスター」(特殊目的ロボットアーム)の断熱
カバー取付け部の修正
Z1トラスのパッチパネルの切り替え
前回のミッション(STS-119)でできなかった、デクスターへの断熱カバーの修正作業を
行います。
Z1トラスのパッチパネルの切り替え作業は、STS-123ミッションで交換した新しい遠隔電力制御モジュール(Remote Power Controller Module: RPCM)に配線を切り替えることで、コントロール・モーメント・ジャイロ(Control Moment Gyroscope: CMG)-2への冗長電力を復旧する目的で実施されます。
STS-123ミッションとSTS-119ミッションで、この切り替え作業を試みましたが、Z1トラスの前方パネルのコネクタのひとつ
が外れないという問題が生じたため、延期されていました。現在、CMG-2はもとのRPCMで運用を続けています。
手首部の断熱カバーを修正しているところ(イメージ)

52STS-127ミッション概要
5. フライトスケジュール 13日目(続き)
第5回船外活動(EVA#5)(続き)
S3トラスの3基のペイロード取付けシステム
(PAS)の展開
S3トラスへのWETAアンテナの取付け
S3トラスの残り3基のPASを展開します。
*S3トラスには合計4基のPASが収納されています。1基は本ミッションの第1回船外活動で展開する予定です。
ワイヤレスビデオ送信器(Wireless Video System External Transceiver Assembly:WETA)のアンテナをS3トラスの支柱に取り付けます。
このWETAアンテナの取付け作業は、当初2007年8月のSTS-118ミッションで実施する予定でしたが、ISSからの分離を1日早めるために実施内容を見直
しした結果、将来のミッションへと延期されていたものです。
WETAアンテナ
WETAアンテナを設置しているところ(イメージ)
PASを展開させているところ(イメージ)

53STS-127ミッション概要
5. フライトスケジュール 14日目
• 広報イベント(軌道上クルー全員参加)
• ISSからの分離準備および退室
• ISS/スペースシャトル間のハッチ閉鎖
スペースシャトルのミッドデッキのハッチを閉鎖するクルー(STS-119)
ハッチを閉鎖するため、ISSの与圧結合アダプタ内で準備するクルー(STS-119)
【飛行14日目概要】
別れの挨拶をかわすクルー(STS-119)

54STS-127ミッション概要
5. フライトスケジュール 15日目
• ISSからの分離
• フライアラウンド(ISSを周回しながらの撮影)
• OBSSを使用した熱防護システム(TPS)の後期点検
ISSからの分離(上はISSのPMA-2、下はスペースシャトルのODS)(NASA TV)
ISS分離後、離れて飛行するスペースシャトル(STS-123)
【飛行15日目概要】

55STS-127ミッション概要
5. フライトスケジュール 16日目
• 帰還に備えた飛行制御システムの点検
• 船内の片付け
• 軌道離脱準備
• 広報イベント(スペースシャトルのクルー全員参加)
• 若田宇宙飛行士のリカンベントシートの設置
• Kuバンドアンテナ収納
【飛行16日目概要】

56STS-127ミッション概要
5. フライトスケジュール 16日目(続き)
若田宇宙飛行士のリカンベントシートの設置
リカンベントシートは、宇宙に長期間滞在したクルーが、帰還時に地上の重力環境に移行する際に身体への急激な負荷を軽減するために、横たわった状態で着陸できるように設計された座席です。スペースシャトルのミッドデッキに設置されます。
スペースシャトルのミッドデッキのモックアップ(NASAジョンソン宇宙センター(JSC)の訓練施設)
※座っているのはSTS-128ミッションクルー

57STS-127ミッション概要
5. フライトスケジュール 17日目
• 軌道離脱準備
• 軌道離脱
• 着陸
【飛行17日目概要】
スペースシャトルの着陸(STS-123)

58STS-127ミッション概要
6. 第19/20次長期滞在期間中の主要イベント
44月月 55月月 66月月 77月月 88月月
4月8日にソユーズTMA-13(17S)がISSから分離。第18次長期滞在クルーの帰還。
5月29日にソユーズTMA-15(19S)がISSに到着。ここからISS滞在クルーが6人に増える。
6月5日と6月10日にISSでロシアの船外活動2回を実施予定。
6月19日にSTS-127がISSに到着。ISSクルーの交代を行い、若田宇宙飛行士はSTS-127クルー
として帰還。
8月中旬にSTS-128がISSに到着
予定。
注:上記スケジュールは変更される可能性があります。
ソユーズソユーズTMATMA--1414ドッキングポート変更ドッキングポート変更
(5/13)プログレス補給船(33P)ドッキング
STSSTS--127127ドッキングドッキング
ソユーズソユーズTMATMA--1515ドッキングドッキング
STSSTS--127127分離分離
(7/26)プログレス補給船(34P)ドッキング
STSSTS--128128ドッキングドッキング
(6/5、6/10)ISSステージEVA2回
(5/7)プログレス補給船(32P)分離
ソユーズソユーズTMATMA--1313分離分離
(4/8)ソユーズ(17S)
の分離

59STS-127ミッション概要 59
7.JAXA関連
STS-127ミッションで船外パレットに搭載して運ぶペイロード
全天X線監視装置
(Monitor of All-sky X-ray Image:MAXI)
高感度の広視野X線カメラで宇宙を観測する実験装置です
X線は地球の大気を通り抜けることはできないため、宇宙からの観測が必要です。また
予測できない天体の変動を捉えるには絶えず全天を見張る必要があります。このため、「きぼう」から、全天のX線天体の監視を行います。
宇宙環境計測ミッション装置(Space EnvironmentData Acquisition equipment-Attached Payload:SEDA-AP)
ISSが周回する軌道の宇宙環境を計測する装置です
人工衛星の設計や宇宙での有人活動を行っていくためには、宇宙での様々な環境データを取得することが重要です。このため、ISS周回軌道における宇宙環境(中性子、
重イオン、プラズマ、高エネルギー軽粒子、原子状酸素、ダスト)の定量的計測や材料曝露実験、電子部品評価実験を行い、宇宙機や有人宇宙飛行の安全に役立てます。
衛星間通信システム-曝露系サブシステム(Inter-orbit Communication System- Exposed Facility subsystem:ICS-EF:)
直径約80cmのアンテナで、JAXAのデータ中継技術衛星「こだま」(Data Relay Test Satellite: DRTS)を経由して筑波宇宙センター(TKSC)との間でデータ、画像および音声などの双方向通信を行う日本独自のシステムです
送受信用アンテナおよびその駆動装置、周波数変換器、高出力電力増幅器などの高周波機器、各種センサ(地球センサ、太陽センサ、慣性基準装置)で構成されています。

60STS-127ミッション概要 60
STS-127ミッションで打ち上げる実験用品
Microbe-I(「きぼう」における微生物採集-I)
Biological Rhythms(軌道上における簡易型生体機能モニター装置による医学データ取得)の 補給用消耗品
ワイプや粘着シートを用いて、「きぼう」船内の表面を拭い地上
へ回収します。地上において、ワイプに付着している微生物の
分子生物学的解析を行います。
今回は、宇宙環境で実験しやすいように、表面を保湿する工夫
が施されたワイプを打ち上げます。
写真:微生物サンプリングキット
7.JAXA関連(続き)
デジタルホルター心電計を使用したISS搭乗飛行士の医学データ
取得に必要な補給用消耗品を打ち上げます。打ち上げる消耗品は、
電極、心電データ記録用MMCカード、バッテリー、心電計固定バン
ド(使い捨て型)などです。
心電計に接続する電極

61STS-127ミッション概要 61
STS-127ミッションで回収されるJAXA宇宙実験の成果(1/2)
7.JAXA関連(続き)
宇宙医学実験
※1の医学データ
Dome Gene実験
※2の実験サンプ
ル
文化・人文社会科学利用パイロットミッションの撮影映像
実験で使用したデジタルホルター心電計(左)とHDTVカメラ(右)
DomeGene実験で培養された腎臓細胞
(左:微小重力環境、右:人工重力環境)
飛天プロジェクトを行う若田宇宙飛行士
LEDが点灯し回転しているスパイラルトップ
逢坂卓郎/JAXA(実施)
石黒節子/JAXA(実施)
※1…「軌道上における簡易型生体機能モニター装置の検証」(代表研究者: 向井千秋 JAXA宇宙医学生物学研究室室長)
・Space Clothes※3:
※2…「両生類培養細胞による細胞分化と形態形成の調節 」(代表研究者:浅島誠 東京大学総長室顧問)
※3…「微小重力の身体と衣服設計に関する基礎実験 ―宇宙でのファッショナブルライフ―」(代表研究者: 宮永美知代 東京芸術大学助教)
※4…「飛天プロジェクト」 (代表研究者: 石黒節子 お茶の水女子大学名誉教授)※5…「 Spiral Top 」 (代表研究者: 逢坂卓郎 筑波大学教授)
宇宙に適応(進化)した未来の身体を美術解剖学的な視点から想像し、
未来のファッションを提案することを目的に行われます。
・Hiten※4:仏教絵画で描かれる「飛天」をヒントに、無重力ならではの浮遊環境を生かして、
「飛天」の姿・形をイメージした動きや姿勢を舞踊で表現し、作品化を通じて、地球上の平和を願うメッセージを伝えます。
・Spiral Top※5:「光」をモチーフにしたライトアートの試みです。LEDが点灯する独楽のような回転体を動かすことにより、3次元的な螺旋運動を光で造形化し、今までに見たことのな
い新たな表現世界を創り出します。
ⓒJAXA/東京大学ⓒJAXA/東京大学
若田宇宙飛行士がISS滞在中に、デジタルホルター心電計を用いて24時間連続で心電データを記録するとともに、HDTVカメラで電極装着部位の皮膚の状態を撮影しました。
心電計で取得されたデータが記録されたMMCカードと、HDTVカメラで撮影した映像を収
めたテープを地上に回収します。
アフリカツメガエルの細胞を使って、からだを形つくる組織形成や遺伝子の働きについて、
人工重力のある環境と微小重力環境で比較する実験です。
実験は、「きぼう」の細胞培養装置およびクリーンベンチを使用して行なわれました。
このうち、人工重力下(1G)の実験サンプルを地上に回収します。
下記の3つのテーマで撮影された映像を収めたテープを地上に回収します。

62STS-127ミッション概要
STS-127ミッションで回収されるJAXA宇宙実験の成果(2/2)
7.JAXA関連(続き)
有償利用に関するサンプル、映像等
おもしろ宇宙実験(Try Zero-G)に
関する映像等
ICE供試体
若田飛行士がISS滞在中に実施したおもしろ宇宙実験(Try Zero-G)を撮影した映像を収めたテープを地上に
回収します。
ICE供試体
【1回目】・ラジオ体操、・バック転、・リフティング、・腕立て伏せ、
・側転、・クロール、・スピン(回転)
【2回目】・衣類をたたむ、・魔法のじゅうたん、・水鉄砲、・目薬
第1回の有償利用テーマとして選定された下記の2テーマの実施成果を回収します。
平成21年3月に終了した「氷結晶成長におけるパターン形成」(氷結晶成長実験)
(代表研究者: 北海道大学低温科学研究所 古川義純教授)に使用した供試体につ
いて、温度を制御する機器の不調の原因を解析するために、回収します。
・JEM E-3 Camera Mission:撮影写真を記録した媒体とHDTVカメラで撮影した映像を収めたテープ
・Cosmo Flower 2008 Mission:花の種。HDTVカメラで撮影した映像を収めたテープ。
クロール 魔法のじゅうたん

63STS-127ミッション概要
Backup Charts
• 船外実験プラットフォーム主要諸元
• 船外パレット主要諸元
• ISSの組立要素
• STS-127ミッション打上げ延期の経緯
• スペースシャトルの安全対策
• 略語集

64STS-127ミッション概要
外形 箱型
大きさ 5.0m(幅) x 5.2m(長さ) x 3.8m(高さ)
質量 4.1トン
ペイロード取付け場所 12箇所(システム機器用2箇所、実験装置仮置き用1箇所を含む)
供給される電力大11kW (システム機器用: 大1kW、実験装置用: 大10kW)
120V(直流)
通信制御 16ビット計算機システム(データ伝送速度: 大100Mbps)
環境制御 熱制御ループシステム
電力系: 船内実験室からの電力供給を受け、船外実験プラットフォームの各機器や船外ペイロードに電力を分配。
通信制御系:船外実験プラットフォームに搭載される船外実験プラットフォーム制御装置。「きぼう」制御装置(JCP)と通信を行い、
船外実験プラットフォーム内の機器を制御。また実験データや画像、温度、圧力などのデータをやりとりする。
熱制御系:フロリナートTMという冷却液を循環させることで機器類からの熱を移送する能動熱制御系と断熱材やヒータによって温度を保つ受動熱制御系からなる。宇宙の熱環境から船体を保護し、システム機器類や実験装置のための熱環境を管理する。
構造艤装系:外殻部はアルミ合金のフレームとパネルからなる。打上げ時にスペースシャトルのペイロードベイ(貨物室)に固定しておくためのトラニオンも含まれる。
サブシステム
機構系:船外実験プラットフォーム結合機構、船外実験プラットフォーム装置交換機構、船外実験プラットフォームの軌道上交換ユニットなど。
寿命 10年以上
船外実験プラットフォーム主要諸元
船外実験プラットフォーム主要諸元

65STS-127ミッション概要
船外実験プラットフォームの外部構造(実験装置が設置された状態)
①船外実験プラットフォーム結合機構(Exposed Facility Berthing Mechanism: EFBM)
船外実験プラットフォームと船内実験室を結合する機構。
*詳細はP66を参照
②船外実験プラットフォーム装置交換機構(Equipment Exchange Unit: EEU)
船外実験プラットフォームに船外実験装置を取り付けるための機構。
*詳細はP67を参照
③船外実験プラットフォーム視覚装置
(Visual Equipment: VE)
船外実験プラットフォームのTVカメラと照明。
*詳細はP68を参照
④子アーム保管装置
(Small fine arm Stowage Equipment: SSE)
「きぼう」のロボットアームの子アームの保管装置。
*詳細はP69を参照
⑤船外実験プラットフォームのバス機器と軌道上交換ユニット
(Orbital Replacement Unit: ORU)
電力系、通信・制御系、熱制御系など、船外実験プラットフォームを運用するための機器。
*詳細はP70を参照
⑥トラニオン
(trunnion)
スペースシャトルのペイロードベイ(貨物室)に、船外実験プラットフォームを搭載する際の固定部。
⑦グラプル・フィクスチャ(把持部)国際宇宙ステーション(ISS)、またはスペースシャトルのロボットアームが把持する場所。
①
②
③
④
⑤
⑥
⑦
船外実験プラットフォームの構成要素
船外実験プラットフォーム主要諸元

66STS-127ミッション概要
船外実験プラットフォームの構成要素(続き)
①船外実験プラットフォーム結合機構(Exposed Facility Berthing Mechanism:EFBM)
船外実験プラットフォームと船内実験室を結合
する機構です。
船内実験室には引き込み機構がある能動側の
EFBM(モータの駆動でボルトを締める)、船外
実験プラットフォームには受動側のEFBMが設
置されています。
EFBMの結合と同時に電力系、通信制御系、
熱制御系が接続され、船内実験室から船外実
験プラットフォームへの電力供給や各種データ
のやり取りなどが可能になります。
船内実験室側のEFBM (右)船外実験プラットフォーム側のEFBM
EFBMの拡大写真(宇宙ステーション試験棟)
EF側PM側
引き込み機構
船外実験プラットフォーム主要諸元

67STS-127ミッション概要
船外実験プラットフォームの構成要素(続き)
②船外実験プラットフォーム装置交換機構(Equipment Exchange Unit:EEU)
船外実験装置を取り付けるための機構です。取付
けと同時に電力系、通信制御系、熱制御系が接続
され、実験装置への電力供給、各種データのやり
取り、温度環境の管理等ができるようになります。
EEUは、船外実験プラットフォーム側装置交換機
構(Exposed Facility Unit:EFU)と船外実験装置
側装置交換機構(Payload Interface Unit:PIU)で
構成されています。
船外実験プラットフォーム側装置交換機構(EFU)(宇宙ステーション試験棟)
船外実験プラットフォーム主要諸元

68STS-127ミッション概要
船外実験プラットフォームの構成要素(続き)
③船外実験プラットフォームの視覚装置 (Visual Equipment:VE)
TVカメラと照明です。「きぼう」ロボットアームによる実験装置や軌道上交換ユニット(ORU)の交換等は、この視覚装置からの映像を見ながら行うことになります。 VEは故障した場合に交換が可能なようにORUとして設計されています。VEの打上げ時の収容場所と軌道上での取付け位置を下に示します。
前方VE位置
後方VE位置
打上げ時はここに収容 PM側
VEの取付け位置 船外実験プラットフォーム(宇宙ステーション試験棟)船外実験プラットフォームの視覚装置(VE)
(KSC宇宙ステーション整備施設(SSPF))
船外実験プラットフォーム主要諸元

69STS-127ミッション概要
船外実験プラットフォームの構成要素(続き)
④子アーム保管装置 (Small fine arm Stowage Equipment:SSE)「きぼう」ロボットアームの子アームは、使用しない時には、この保管装置に収納されます。子アームはこの保管装置を通して船外実験プラットフォームからヒータ電力やデータ通信等を受けることができます。子アームは今後の宇宙ステーション補給機(HTV)ミッションでISSに打ち上げられる
予定です。グラプル・フィクスチャ
SSEの位置 船外実験プラットフォーム(宇宙ステーション試験棟) SSEの外部構造
船外実験プラットフォーム主要諸元

70STS-127ミッション概要
船外実験プラットフォームの構成要素(続き)
⑤船外実験プラットフォームのバス機器と軌道上交換ユニット (E-ORU, R-ORU)電力系、通信制御系、熱制御系など、船外実験プラットフォームを運用するためのサブシステム機器類は故障時などに交換が可能なようにORUとして設計されています。
船外実験プラットフォームには、船外活動対応軌道上交換ユニット(Extravehicular Activity ORU:E-ORU)と、ロボティクス対応軌道上交換ユニット(Robot essential ORU:R-ORU)の2種類があります。
E-ORUは船外実験プラットフォームの底側(地球方向)に
取り付けられており、船外活動クルーによって交換が行われます。
R-ORUは 船外実験プラットフォーム上に取り付けられてお
り、「きぼう」ロボットアーム(子アーム)で交換が行われます。
R-ORU(宇宙ステーション試験棟)
E-ORU(KSC SSPF)
船外実験プラットフォーム主要諸元

71STS-127ミッション概要
外形 フレーム型
大きさ 4.9 m(幅) x 2.2m(高さ) x 4.1m(長さ) *高さは実験装置を含む
質量 1.2 t (実験装置含まず)
搭載ペイロード数 船外実験装置3個
供給される電力 大1.0kW 120V(直流)
熱制御方式 ヒータ、断熱材
電力系打上げ時にはスペースシャトルから、軌道上では船外実験プラットフォームから電力の供給を受け、搭載しているペイロードに電力を分配する。
通信制御系船外パレットに搭載された船外パレット制御装置が「きぼう」の制御装置(JCP)と通信を行いながら、船外パレットの
状態や搭載されているペイロードの温度や取付け機構の状態を監視する。また搭載ペイロードの温度制御も行う。
熱制御系全体を断熱材で覆うことで温度の低下を防いでいる。さらに断熱材だけでは温度が低下しすぎる箇所はヒータが設置されており、温度環境を維持できる仕組みになっている。搭載するペイロードにもヒータ電力が供給される。
構造艤装系アルミ合金のパネルとフレームによる格子状の構造。打上げ時にスペースシャトルのペイロードベイ(貨物室)に固定するトラニオンも含まれる。
サブシステム
機構系 船外実験装置取付け機構、装置交換機構など
寿命 10年以上
船外パレット主要諸元
船外パレット主要諸元

72STS-127ミッション概要
①装置交換機構(Payload Interface Unit: PIU)
船外パレットを、船外実験プラットフォームや船内保管室に結合するための機構。
*詳細はP73を参照
②船外実験装置取付け機構(Payload Attachment Mechanism: PAM):
スペースシャトルによる打上げ時に、船外実験装置やシステムペイロードを固定する機構。
*詳細はP74を参照
③グラプル・フィクスチャ(把持部) ISSのロボットアーム、またはスペースシャトルのロボットアームで把持する場所。
④トラニオン
(trunnion)
スペースシャトルのペイロードベイ(貨物室)に、船外パレットを搭載する際、船外パレットを貨物室内に固定するための機構。船外パレットの外部構造(船外ペイロードを搭載した状態)
3.搭載品‐船外パレット(続き)
①
②
③
④
船外パレットの構成要素

73STS-127ミッション概要
船外パレットのPIUを点検するSTS-127ミッションクルー(KSC SSPF)
船外パレットの構成要素(続き)
装置交換機構(Payload Interface Unit:PIU)
船外実験プラットフォーム装置交換機構(EEU)の受動
側にあたります。
船外実験プラットフォーム上で運用する船外ペイロード
はすべてPIUが装備されています。
ペイロードの取付け・取外しは「きぼう」のロボットアーム
を使用して行われます。
PIUとEFUが結合すると、この結合部を通して船外実験
プラットフォームから船外ペイロードへの電力の供給や、
データのやりとりができるようになります。
船外パレットが船外実験プラットフォームのEFUに取り付けられるイメージ
船外パレット主要諸元

74STS-127ミッション概要
船外パレットの構成要素(続き)
船外実験装置取付け機構(Payload Attachment Mechanism: PAM):
船外実験装置や船外ペイロードを固定する機構です。船外実験装置/船外ペイロードにヒータ電力を供給するための電気コネクタが装備されています。
PAMと船外ペイロードの取り付け部の構造PAMの拡大写真(宇宙ステーション試験棟)
SLM
アンビリカル接続機構(UCM)
構造ラッチ機構(SLM)
SLM
SLM
アライメントガイド
アライメントガイド
船外パレット主要諸元

75STS-127ミッション概要
ISSの組立要素
ロシア区画
※P75参照

76STS-127ミッション概要
ISSの組立要素
ISSクルー6人体制に向けた、ソユーズ宇宙船/プログレス補給船の
ドッキングポート
現在、ISSのロシア区画には、ISSの
緊急避難機として、ロシアのソユーズ宇宙船1機が、常時ドッキングしています。
2009年5月末から、ISSクルーが6人体制になるのに伴い、ISSには常時2機のソユーズ宇宙船がドッキングしている必要があります(ソユーズ宇宙船の乗員は3名のため)。
このため、2009年秋頃に小型研究モジュール2(MRM-2)が設置される予
定です。
右図は、ソユーズ宇宙船とプログレス補給機の結合位置を示しています。
ズヴェズダ
ピアース(ロシアのドッ
キング室)
ザーリャ
ソユーズ宇宙船、プログレス補給船、または欧州補給期(ATV)
ソユーズ宇宙船、またはプログレス補給船
ソユーズ宇宙船、またはプログレス補給船
ソユーズ宇宙船、またはプログレス補給船
米国区画
2010年時点のロシア区画の構成 (※ピアース(ロシアのドッキング室)は2011年末頃には多目的実験モジュール(MLM)と交換される予定です)

77STS-127ミッション概要
STS-127ミッション打上げ延期の経緯
打上げ延期の経緯
STS-127ミッションは、当初、米国東部夏時間(EDT)6月13日午前7時17分(日本時間6月13日午後8時17分)に打ち上げられる予定でしたが、打上げ前夜の6月12日午後9時52分(EDT)から開始された外部燃料タンク(ET-127)への燃料
充填作業の 終段階において、水素ガスのベントラインを外部燃料タンクに接続するためのアンビリカル結合プレート(Ground Umbilical Carrier Plate: GUCP)から、打上げ基準値を超えるガス漏れ※が検知されたため、打上げは延期となりました。※水素ガス濃度4%(爆発の危険性があるレベル)
このガス漏れの状況は、STS-119ミッション時の1回目の燃料充填時に生じたガス漏れの状況と類似していたことから、STS-119ミッションで実施して成功した修理法である、アンビリカル結合プレート(GUCP)の内部シールと着脱コネクタ(QD)を交換する方法で対処されることとなりました。
修理後、打上げ日は6月17日午前5時40分に再設定されました。
しかし、6月16日午後11時04分(EDT)から開始された2回目の外部燃料タンクへの燃料充填作業でも、燃料充填開始の約3時間後に、再び同様のガス漏れが発生したことから、STS-127ミッションの打上げは米国時間7月11日以降に延
期されました。
2回目の修理では、GUCPの内部シールを別設計のシールに交換したほか、キャリアプレートの位置のずれを調整し、
燃料充填時の極低温環境下でずれが生じないようにするためにワッシャーを取り付けました。修理結果を確認するため、実際の燃料充填と同じ状態を再現する形で、米国時間7月1日に燃料充填試験が実施されました。
燃料充填試験において、アンビリカル結合プレート(GUCP)からの水素ガス漏れが無いことが確認されたため、打上げは7月11日午後7時39分に再設定されました。

78STS-127ミッション概要
STS-127ミッション打上げ延期の経緯
水素ガスベントラインの概要
水素ガスベントライン
スペースシャトルの打上げには、推進剤として、液体水素と液体酸素が使用されます。
外部燃料タンクに極低温の推進剤が充填されると、液体水素はタンク内部で蒸発して水素ガスが生じます。この余分な水素ガスを安全に射点から排出させるために、スペースシャトル打上げまでの間、外部燃料タンクには水素ガスベントライン(ガス排出管)が接続されます。
発生した水素ガスは、このベントラインを通って、射点から離れた場所まで運ばれて安全に燃やされるようになっています。
今回の外部燃料タンクの燃料充填時に発生した水素ガス漏れは、水素ベントラインを外部燃料タンクに接続するアンビリカル結合プレート(Ground Umbilical Carrier Plate: GUCP)の付近で発生しました。GUCPは打上げの瞬間に下側に落下して外部燃料タンクから外れ
る機構です。

79STS-127ミッション概要
STS-127ミッション打上げ延期の経緯
ガス漏れ原因の概要
着脱コネクタ(QD)の取外し作業
調査の結果、外部燃料タンクキャリアアセンブリ(ETCA)の取付け位置が約0.6度ずれていたことが原因と判明しました。この値(0.6度)は、外部燃料タンク製造時の許容誤差の範囲内とされており、常温におけるヘリウムガスを使用し
たリーク試験では確認できないもので、極低温環境下でのみ発生するものでした。
これを受けて、2回目の修理では、GUCP内部シールを別設計のシールに交換したほか、キャリアプレートの位置のず
れを調整し、燃料充填時に極低温環境下でずれが生じることがないようにワッシャーを取り付けました。
アンビリカル結合プレート(GUCP)内部シールの取外し作業

80STS-127ミッション概要
PALランプ除去後
液体酸素タンクPALランプ液体水素タンクPALランプ
ice/frostランプ(全部で34個)
スペースシャトルの安全対策
• 外部燃料タンク(ET)のPAL(Protuberance Airload)ランプの除去→STS-121ミッション(2006年7月)から実施
断熱材の落下防止対策
・液体酸素供給配管の固定用ブラケット(アルミ製からチタン製に変更)と、Ice/frostランプの改良→STS-124で使用したET-128から改良が行われ、良好な結果が出ています。
液体酸素供給配管

81STS-127ミッション概要
スペースシャトルの安全対策
固体ロケットブースタ(SRB)回収船に搭載
されたレーダ
レーダ、地上追尾カメラにより打上げ・上昇時の様子を観測。
ET取付け
カメラ
SRB取付けカメラ(計6台)
SRBカメラSRBカメラ
機体に搭載した、外部燃料タンク(ET)カメラ、
固体ロケットブースタ(SRB)カメラによって撮影
長距離用追尾カメラ
クルーが手持ちカメラで分離後のETを撮影
オービタ搭載カメラで分離後のETを撮影
打上げ・上昇時の状態監視
STS-123からは
フラッシュを装備

82STS-127ミッション概要
スペースシャトルの安全対策
センサ付き検査用延長ブーム(OBSS)
は、軌道上でスペースシャトルの強化炭素複合材(Reinforced Carbon Carbon: RCC)パネルの破損の有無を
点検したり、損傷箇所を詳しく検査するために開発され、STS-114から装備を
開始しました。
スペースシャトル「コロンビア号」の事故を受けて、NASAは以後の全てのスペースシャト
ルにロボットアームの搭載を義務づけることになりましたが、スペースシャトルのロボットアーム(SRMS)だけでは届く範囲が一部に限られます。このため、新たにOBSSが開発されました。OBSSはSRMSを基に開発されま
したが、関節はないため曲げることは出来ません。
ロボットアーム
OBSS
センサ付き検査用延長ブーム(OBSS)を使用したRCCの損傷点検
OBSSOBSS
OBSS
スペースシャトルのロボットアーム

83STS-127ミッション概要
スペースシャトルの安全対策
項目 仕様
全長 50フィート(約15m)
重量 全重量: 835ポンド(約379Kg)ブームとセンサ: 480ポンド(約218Kg)
関節 無し
テレビカメラ ITVC(Integrated TV Camera)
レーザセンサ LDRI(Laser Dynamic Range Imager)LCS(Laser Camera System)
センサ
デジタルカメラ IDC(Integrated Sensor Inspection System Digital Camera)
検査時間 翼前縁のRCCおよびノーズキャップの検査に約7時間(移動速度4m/min)
ロボットアームで把持するグラプル・フィクスチャ
ロボットアームで把持するグラップル・フィクスチャ
OBSSの主要構成 スペースシャトルに搭載作業中のOBSS
OBSSの仕様
先端のセンサ部
LCS
ITVC
LDRISTS-121ミッションからLCSにデジタルカメラ1台
を追加装備。詳細な検査が必要な時には高解像度で撮影を行います。
センサ付き検査用延長ブーム(OBSS)STS-114(LF1)から使用を開始

84STS-127ミッション概要
スペースシャトルの安全対策
(1) LDRI (Laser Dynamic Range Imager)雲台(Pan/Tilt Unit)上に設置
(2) LCS (Laser Camera System)
レーザ 分解能 大測定距離
LDRI 6.2mm 2.3mLCS 6.2mm 3.3m
レーザ能力
(雲台)
STS-121ミッションで取得された画像(右側の拡大部)ROIは、「気になる部分」という意味。全体の写真は地上で撮影したもの
OBSS搭載レーザの主要緒元

85STS-127ミッション概要
スペースシャトルの安全対策R-bar ピッチ・マヌーバ(RPM)
RPM時に撮影した画像(STS-114ミッション)
ISSからのスペースシャトルの熱防護システム
の撮影
撮影箇所

86STS-127ミッション概要
略語集
ACBM Active Common Berthing Mechanism アクティブ側共通結合機構(CBM)
AL Airlock エアロック
ARED Advanced Resistive Exercise Device 改良型エクササイズ装置
ASI Agenzia Spaziale Italiana イタリア宇宙機関
BCDU Battery Charge/Discharge Unit バッテリ充放電ユニット
BGA Beta Gimbal Assembly ベータ・ジンバル・アセンブリ
CBM Common Berthing Mechanism 共通結合機構
CP Camera Port カメラポート
CSA Canadian Space Agency カナダ宇宙庁
DA Distillation Assembly 蒸留装置 (UPA, WRS)
DDCU DC-DC Converter Unit 直流変圧器
DCSU Direct Current Switching Unit 直流切替器
DTO Development Test Objective 開発試験対象
EEU Equipment Exchange Unit 船外実験プラットフォーム装置交換機構
EF Exposed Facility 「きぼう」船外実験プラットフォーム(EF)
EFBM Exposed Facility Berthing Mechanism 船外実験プラットフォーム結合機構
ELM-PS Experiment Logistics Module-Pressurized Section 「きぼう」船内保管室(JLP)
ELM-ES Experiment Logistics Module-Exposed Section 「きぼう」船外パレット(JLE)

87STS-127ミッション概要
略語集
EMU Extravehicular Mobility Unit 船外活動ユニット(米国の宇宙服)
ESA European Space Agency 欧州宇宙機関
ESP External Stowage Platform 船外保管プラットフォーム
ET External Tank 外部燃料タンク
EV Extravehicular 船外クルー
EVA Extravehicular Activity 船外活動
FD Flight Day X 飛行X日目
GLACIER General Laboratory Active Cryogenic ISS Experiment Refrigerator 実験用冷蔵庫
HR Hand Rail ハンドレール
HTV H-II Transfer Vehicle 宇宙ステーション補給機
ICC-VLD Integrated Cargo Carrier-Linear Drive Unit 曝露機器輸送用キャリア
ICE/FROST RAMP Ice / Frost Ramp アイス・フロスト・ランプ
ICS-ES Inter-orbit Communication System-Exposed Section 「きぼう」衛星間通信システム-曝露系サブシス
テム
IDC Integrated Sensor Inspection System Digital Camera OBSSのデジタルカメラ
ISPR International Standard Payload Rack 国際標準ペイロードラック
ISS International Space Station 国際宇宙ステーション
ISS Expedition International Space Station Expedition ISS長期滞在

88STS-127ミッション概要
略語集(続き)
ISPR International Standard Payload Rack 国際標準ペイロードラック
ISS International Space Station 国際宇宙ステーション
ISS Expedition International Space Station Expedition ISS長期滞在
ITCS Internal Thermal Control System コロンバス(欧州実験棟)の内部熱制御システム)
ITVC Integrated TV Camera OBSS先端のTVカメラ
JAXA Japan Aerospace Exploration Agency 宇宙航空研究開発機構
JEM Japanese Experiment Module 「きぼう」日本実験棟
JEMRMS Japanese Experiment Module Remote Manipulator System 「きぼう」のロボットアーム
JLP JEM Experiment Logistics Module-Pressurized Section 「lきぼう」船内保管室
JPM JEM Pressurized Module 「lきぼう」船内実験室
JSC Johnson Space Center NASAジョンソン宇宙センター
KCS Kennedy Space Center NASAケネディ宇宙センター
LCS Laser Camera System OBSS先端のレーザーセンサ
LDRI Laser Dynamic Range Imager OBSS先端のレーザーセンサ
LDU Linear Drive Unit リニア駆動ユニット(MTのエンジン)
LTA Launch to Activation 打上げから起動までの間
MAXI Monitor of All-sky X-ray Image 全天X線監視装置(「きぼう」船外実験装置)
MCA Mast Canister Assembly マスト・キャニスタ
MLI Multi Layer Insulation 多層断熱材

89STS-127ミッション概要
略語集(続き)
MLM Multipurpose Laboratory Module (ロシア)多目的研究モジュール
MS Mission Specialist 搭乗運用技術者
MSS Mobile Servicing System モービル・サービシング・システム
MT Mobile Transporter モービル・トランスポーター
NASA National Aeronautics and Space Administration アメリカ航空宇宙局
NOSE CAP Nose Cap ノーズキャップ(オービタ前方のRCC部分)
NTA Nitrogen Tank Assembly 窒素タンク
OBSS Obiter Boom Sensor System センサ付き検査用延長ブーム
ODS Orbiter Docking System オービタ・ドッキング・システム
OGS Oxygen Generation System 酸素生成システム
ORU Orbital Replacement Unit 軌道上交換ユニット
PADLES Passive Dosimeter for Life science Experiments in Space パドレス
PALランプ Protuberance Airload Lamp 外部燃料タンク(ET)突起部の空力負荷ランプ
PAO Public Affair Office 広報(広報イベント)
PAS Payload Attach System ペイロード取付けシステム
PAYLOAD BAY Payload Bay スペースシャトルのペイロードベイ(貨物室)
PADLES Passive Dosimeter for Life science Experiments in Space パドレス

90STS-127ミッション概要
略語集(続き)
PAM Payload Attachment Mechanism (「きぼう」船外パレットの)船外実験装置取付け機構
PALランプ Protuberance Airload Lamp 外部燃料タンク(ET)突起部の空力負荷ランプ
PIU Payload Interface Unit (「きぼう」船外パレットの)装置交換機構
POA Payload/ORU Accommodation ペイロード/軌道上交換ユニット仮置き場
PCBM Passive Common Berthing Mechanism パッシブ側共通結合機構(CBM)
PDGF Power and Data Grapple Fixture 電力及びデータ・グラプル・フィクスチャ
PFCS Pump Flow Control System ポンプ制御システム
PM Pressurized Module 「きぼう」船内実験室(JPM)
PM Pump Module ポンプモジュール(アンモニア冷却ループの構成要素)
PMA2 Pressurized Mating Adapter-2 与圧結合アダプター2
PTU Power Transfer Unit (シャトルのSSPTS用)電力分配装置
PTU Pan/Tilt Unit (カメラの)雲台
PV Photovoltaic 太陽電池
PVAA Photovoltaic Array Assembly 太陽電池パドル機構
PVR Photovoltaic Radiator PVラジエータ
PVTCS Photovoltaic Thermal Control System 太陽電池熱制御システム
PTU Power Transfer Unit (シャトルのSSPTS用)電力分配装置
PTU Pan/Tilt Unit (カメラの)雲台

91STS-127ミッション概要
略語集(続き)
PWD Portable Water Distributor 水供給装置
RCC Reinforced Carbon-Carbon 強化炭素複合材
RM Research Module (ロシア)研究モジュール
ROI Region Of Interest 関心領域(気になる部分)
RPCM Remote Power Controller Module 電力遮断装置
RPM R-bar Pitch Maneuver R-bar (Radius Vectorの意味)ピッチ・マヌーバ
SABB Solar Array Blanket Box 太陽電池ブランケット収納箱
SARJ Solar Array Rotary Joint 太陽電池パドル回転機構
SAW Solar Array Wing 太陽電池パドル
SEDA-AP Space Environment Data Acquisition equipment-Attached Payload
宇宙環境計測ミッション装置 (「きぼう」船外実験装置)
SGANT Space to Ground Antenna Kuバンドアンテナ
SLA Super Lightweight Ablator 超軽量アブレータ
SLF Shuttle Landing Facility スペースシャトル着陸施設
SLM Structure Latch Mechanism 構造ラッチ機構 (「きぼう」船外パレットのPAMの構成
要素)
SMILES Superconducting Submilimeter-Wave Limb-Emission Sounder 超伝導サブミリ波リム放射サウンダ
SPDM Special Purpose Dexterous Manipulator 「デクスター」(特殊目的ロボットアーム)
SRB Solid Rocket Booster 固体ロケットブースタ

92STS-127ミッション概要
略語集(続き)
SRMS Shuttle Remote Manipulator System シャトルのロボットアーム
SSPTS Station-to-Shuttle Power Transfer System ISS-シャトル間の電力供給装置(発音はスピッツ)
SSRMS Space Station Remote Manipulator System 「カナダアーム2」(ISSのロボットアーム)
TBA Trundle Bearing Assembly (SARJの)回転ベアリング
TKSC Tsukuba Space Center 筑波宇宙センター
TOCA Total Organic Carbon Analyzer 有機炭素分析器
TPS Thermal Protection System 熱防護システム
TVIS Treadmill Vibration Isolation System 制振装置付きトレッドミル
UCCAS Unpressurized Cargo Carrier Attach System 曝露機器結合システム
UCM Umbilical Connector Mechanism アンビリカル接続機構
UPA Urine Processor Assembly 尿処理装置
ULF Utilization Logistics Flight 利用補給フライト
VE Visual Equipment (「きぼう」船外実験プラットフォームの)視覚装置
WETA Wireless Video System External Transceiver Assembly ワイヤレスビデオ送受信器
WHC Waste and Hygiene Compartment 2つ目のISSトイレ
WLE Wing Leading Edge 翼前縁
WPA Water Processor Assembly 水処理装置
WRS Water Recycle System 水再生システム
ZSR Zero G Stowage Rack ゼロG保管ラック