Embed Size (px)
Citation preview
UNIVERSITATEA MARITIMĂ CONSTANŢA
Facultatea de Electromecanică Navală
2016
REZUMAT TEZĂ DE DOCTORAT
STUDII ŞI CERCETĂRI PENTRU
OPTIMIZAREA TEHNOLOGIILOR
DE MONTAJ ALE CONDUCTELOR
RIGIDE ÎN DOMENIUL SUBMARIN
Conducător ştiinţific:
Prof. Univ. Dr. Ing. Nicolae BUZBUCHI
Doctorand:
Ing. Iulian RADU

Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
2
Pagină lăsată liberă
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
3
CUPRINS
CAPITOLUL 1.0-NECESITATEA ŞI OPORTUNITATEA LUCRĂRII ........................ 6 1.1 INTRODUCERE ............................................................................................................ 6 1.2 OBIECTIVELE LUCRǍRII ........................................................................................... 6
1.3 GRATITUDINE ............................................................................................................. 7
CAPITOLUL 2.0- STADIUL ACTUAL AL TEHNOLOGIILOR DE CONSTRUCŢIE
OFFSHORE AL CONDUCTELOR SUBMARINE ............................................................ 8 2.1 INTRODUCERE ............................................................................................................ 8 2.1 Consideratii generale despre ingineria conductelor submarine ...................................... 8
2.1.1 Alegerea traseului de instalare al conductei submarine ...................................................................... 8 2.1.2 Alegerea diametrului conductei submarine ......................................................................................... 9
2.9 Stabilitatea conductelor submarine pe fundul ............................................................... 10 2.9.1 Introducere ........................................................................................................................................ 10 2.9.2 Forţa curenţilor provocati de maree asupra stabilităţii conductelor .............................................. 10 2.9.3 Profilul valurilor .............................................................................................................................. 10 2.9.4 Forţele hidrodinamice ..................................................................................................................... 10 2.9.5 Rezistenţa laterală ............................................................................................................................ 11
2.10 Constructia şi lansarea conductelor submarine ........................................................... 12 2.10.1 Introducere ...................................................................................................................................... 12 2.10.2 Intervenţii asupra solului fundului marii ....................................................................................... 13 2.10.3 Suportii conductelor submarine ..................................................................................................... 13 2.10.4 Intersectiile conductelor (crossings) ............................................................................................... 14 2.10.5 Lansarea conductelor (Pipelaying) ................................................................................................. 14
CAPITOLUL 3.0- ELEMENTE TEORETICE ŢINAND DE DINAMICA
MONTAJULUI CONDUCTELOR SUBMARINE ........................................................... 17 3.1 Introducere .................................................................................................................... 17
3.2 Metoda S-Lay................................................................................................................ 18 3.3 Metoda J-Lay ................................................................................................................ 18 3.4 Formularea problemei lansării conductelor submarine................................................. 19
3.4.1 Mecanica procesului de lansare a conductelor submarine ................................................................ 22 3.4.3 Încărcările statice la lansarea conductelor submarine ..................................................................... 24 3.4.4 Interacţiunea dintre conductă şi fundul mării .................................................................................... 26 3.4.5 Încărcări din mediul marin ................................................................................................................ 28
3.5 Ecuaţia lănţişorului natural ........................................................................................... 30
CAPITOLUL 4.0- SIMULAREA NUMERICǍ ŞI OPTIMIZAREA LANSĂRII
CONDUCTELOR SUBMARINE PRIN METODELE S-LAY ŞI J-LAY ...................... 33 4.1 Analiza numerică şi otpimizarea unei lansări prin metoda S-Lay ................................ 33 4.2 Analiza numerică şi otpimizarea unei lansări prin metoda J-Lay ................................. 42
4.2.1 Calculul matematic al forţelor care apar pe traseul conductei la lansare ........................................ 43 4.2.2 Dezvoltarea modelului geometric în ANSYS şi datele de intrare pentru optimizare ......................... 44 4.2.3 Calculul tensiunilor cu elemente finite în conductă la lansare .......................................................... 46
4.3 BIBLIOGRAFIE CAPITOLUL 4................................................................................. 54 5.1 Introducere .................................................................................................................... 54
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
4
5.2 Determinarea suprafeţei de răspuns şi a candidatului optim ........................................ 54 5.2.1 Candidatul Optim ...............................................................................................................................54 5.2.2 Analize de senzitivitate .......................................................................................................................59
5.3 BIBLIOGRAFIE CAPITOLUL 5................................................................................. 61
CAPITOLUL 6.0- VALIDAREA MODELULUI OPTIMIZAT ...................................... 61 6.1 Validarea prin comparaţie a modelului structurii originare şi optimizate pentru lansarea
prin metoda J-Lay ............................................................................................................... 61 6.2 Validarea calitativă a modelării .................................................................................... 63
6.2.1 Lucrarea „A computational system for subsea pipelaying simulation”, autori Danilo Machado
Lawinscky da Silva ş.a- International journal of modeling and simulation for the petroleum industry, vol.
3, no.1, june 2009 ........................................................................................................................................63 6.2.2 Lucrarea „Modeling and Control of Offshore Pipelay operaţions Based on a Finite Strain Pipe
Model” de Gullik Jensen ş.a. în Design and Installation of Marine Pipelines. Blackwell Science Ltd,
2005. ...........................................................................................................................................................64 6.2.3 Lucrarea lui S.Lenci ş.a. „Simple analytical models for the J-lay problem”, Acta Mechanica 178,
23–39 (2005) ...............................................................................................................................................65 6.3 BIBLIOGRAFIE CAPITOLUL 6................................................................................. 67
CAPITOLUL 7.0- CONCLUZII, CONTRIBUŢII PERSONALE ŞI RECOMANDĂRI
PENTRU LUCRĂRILE VIITOARE .................................................................................. 67 7.1 RECOMANDĂRI PENTRU LUCRĂRILE VIITOARE ........................................... 69
BIBLIOGRAFIE ................................................................................................................... 69 BIBLIOGRAFIE CAPITOLUL 2....................................................................................... 69 BIBLIOGRAFIE CAPITOLUL 3....................................................................................... 71
BIBLIOGRAFIE CAPITOLUL 4....................................................................................... 75 BIBLIOGRAFIE CAPITOLUL 5....................................................................................... 75

Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
5
Pagină lăsată liberă
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
6
CAPITOLUL 1.0-NECESITATEA ŞI OPORTUNITATEA LUCRĂRII
1.1 INTRODUCERE
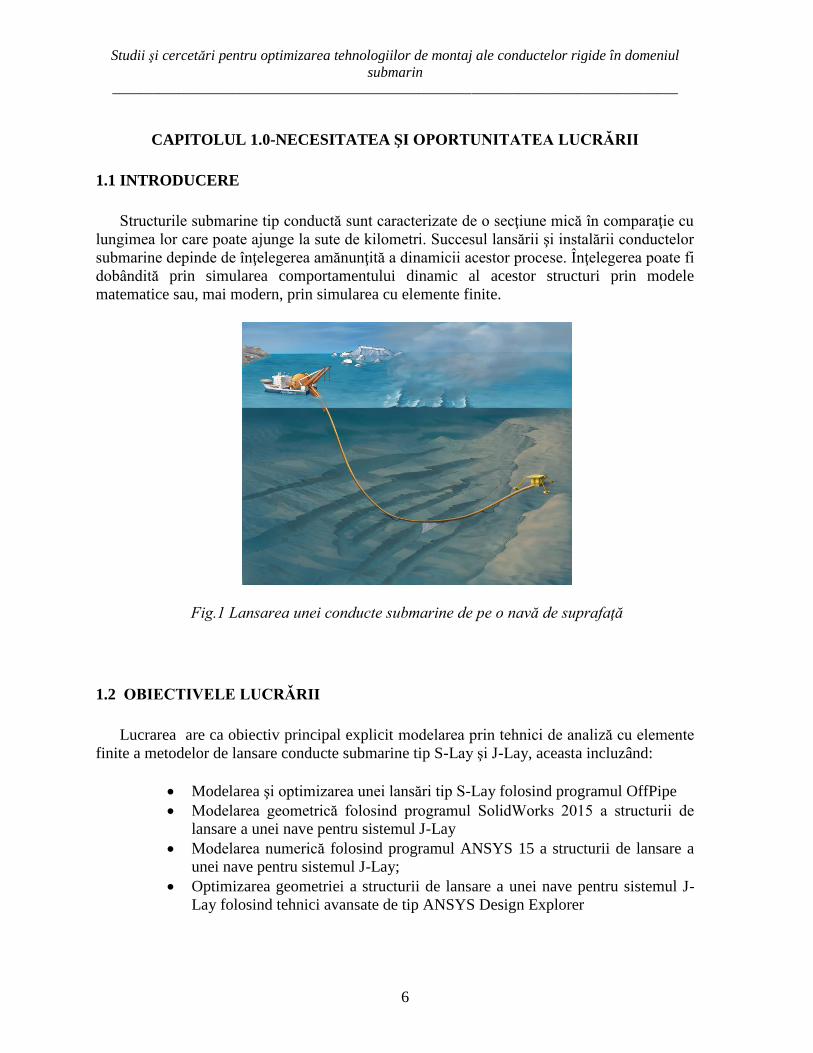
Structurile submarine tip conductă sunt caracterizate de o secţiune mică în comparaţie cu
lungimea lor care poate ajunge la sute de kilometri. Succesul lansării şi instalării conductelor
submarine depinde de înţelegerea amănunţită a dinamicii acestor procese. Înţelegerea poate fi
dobândită prin simularea comportamentului dinamic al acestor structuri prin modele
matematice sau, mai modern, prin simularea cu elemente finite.
Fig.1 Lansarea unei conducte submarine de pe o navă de suprafaţă
1.2 OBIECTIVELE LUCRǍRII
Lucrarea are ca obiectiv principal explicit modelarea prin tehnici de analiză cu elemente
finite a metodelor de lansare conducte submarine tip S-Lay şi J-Lay, aceasta incluzând:
Modelarea şi optimizarea unei lansări tip S-Lay folosind programul OffPipe
Modelarea geometrică folosind programul SolidWorks 2015 a structurii de
lansare a unei nave pentru sistemul J-Lay
Modelarea numerică folosind programul ANSYS 15 a structurii de lansare a
unei nave pentru sistemul J-Lay;
Optimizarea geometriei a structurii de lansare a unei nave pentru sistemul J-
Lay folosind tehnici avansate de tip ANSYS Design Explorer

Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
7
1.3 GRATITUDINE
În elaborarea acestei lucrări m-am bucurat de suportul şi ajutorul cadrelor didactice
din cadrul Universităţii Maritime Constanţa şi nu în cele din urmă, Coordonatorului Stiinţific
al lucrării, Prof.Dr.Ing. Nicolae Buzbuchi, cărora le mulţumesc pe această cale.
Deasemenea, ţin să mulţumesc tuturor colegilor de la GSP pentru suportul, ajutorul şi
înţelegerea arătate.
Dedic această lucrare întregii mele familii.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
8
CAPITOLUL 2.0- STADIUL ACTUAL AL TEHNOLOGIILOR DE CONSTRUCŢIE
OFFSHORE AL CONDUCTELOR SUBMARINE
2.1 INTRODUCERE
Soluţia transportului fluidelor prin conducte submarine este o variantă relativ nouă ;
proiectele de acum 20 de ani au devenit o realitate pe o arie destul de largă în domeniul
exploatărilor petroliere marine.
Principalele direcţii de folosire ale acestora sunt:
transportul fluidelor din zonele de producţie la uscat. Acest lucru se poate efectua
în mai multe etape: de la puţuri la manifoldurile platformelor, de la un manifold
la altul, de la manifolduri la uscat;
direcţionarea gazelor de sondă dintr-o zonă de foraj în alta pentru injectie în
zăcământ în vederea asigurării presiunii de dislocare.
injectarea apei de mare tratate în puţuri în scopul dislocării zăcământului de ţiţei;
separarea CO2 din gazele de sondă şi reinjectarea în zăcământ;
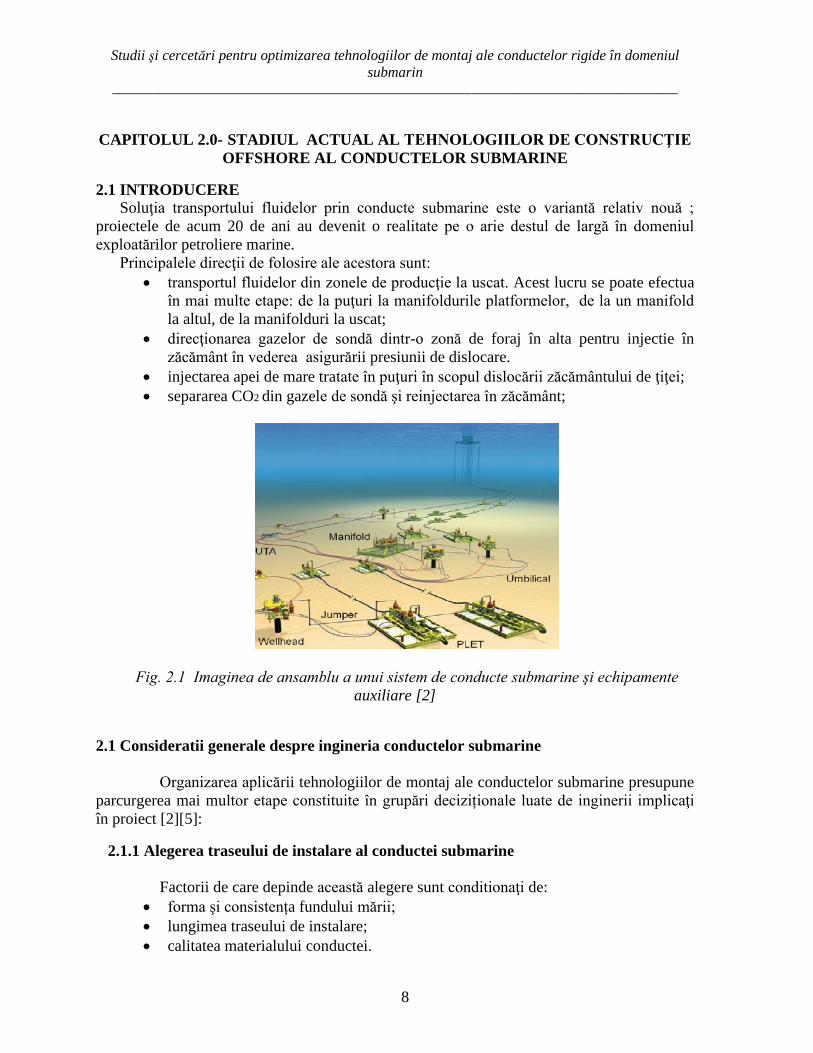
Fig. 2.1 Imaginea de ansamblu a unui sistem de conducte submarine şi echipamente
auxiliare [2]
2.1 Consideratii generale despre ingineria conductelor submarine
Organizarea aplicării tehnologiilor de montaj ale conductelor submarine presupune
parcurgerea mai multor etape constituite în grupări deciziționale luate de inginerii implicaţi
în proiect [2][5]:
2.1.1 Alegerea traseului de instalare al conductei submarine
Factorii de care depinde această alegere sunt conditionaţi de:
forma şi consistența fundului mării;
lungimea traseului de instalare;
calitatea materialului conductei.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
9
2.1.2 Alegerea diametrului conductei submarine
Alegerea diametrului este o problemă de inginerie hidraulică. Pentru diametre
reduse, căderea de presiune între extremitățile traseului conductei sunt mari; pentru diametre
mari, costurile de construcţie ale unui traseu sunt foarte ridicate, ceea ce impune configurarea
lungimii conductei pe două sau mai multe faze cu diametre diferite.
Alegerea grosimii peretelui conductei.
Solicitările la care sunt supuse conductele submarine în timpul lansării, montajului,
testelor de presiune şi exploatării, și anume cele de încovoiere,de presiune internă şi
externă,oboseală,concentratori de eforturi, coroziune chimică şi microbiologică, lovituri
mecanice, impun dimensionarea corespunzătoare a pereţilor conductelor pentru mărirea
rezistenței acestora la aceste solicitări.În funcţie de aceste date, operatorii offshore stabilesc
procedurile de operare şi monitorizare ale stării conductelor în vederea minimalizării
efectelor acestor solicitări.
Tratamentul suprafeței conductei.
Majoritatea conductelor submarine în vederea protectiei anticorozive, sunt supuse
unui tratament de acoperire cu vopsele anticorozive şi antivegetative, combinat cu aplicarea
unor protecții catodice şi a unui strat de ciment în vederea contracarării efectelor loviturilor
mecanice, ale valurilor şi curenţilor marini.
Straturile de vopsea anticorozivă se mai pot aplica şi în interiorul conductelor pentru
protecție dar şi pentru micșorarea rugozităţii suprafețelor în vederea asigurării unei curgeri
laminare a fluidului..
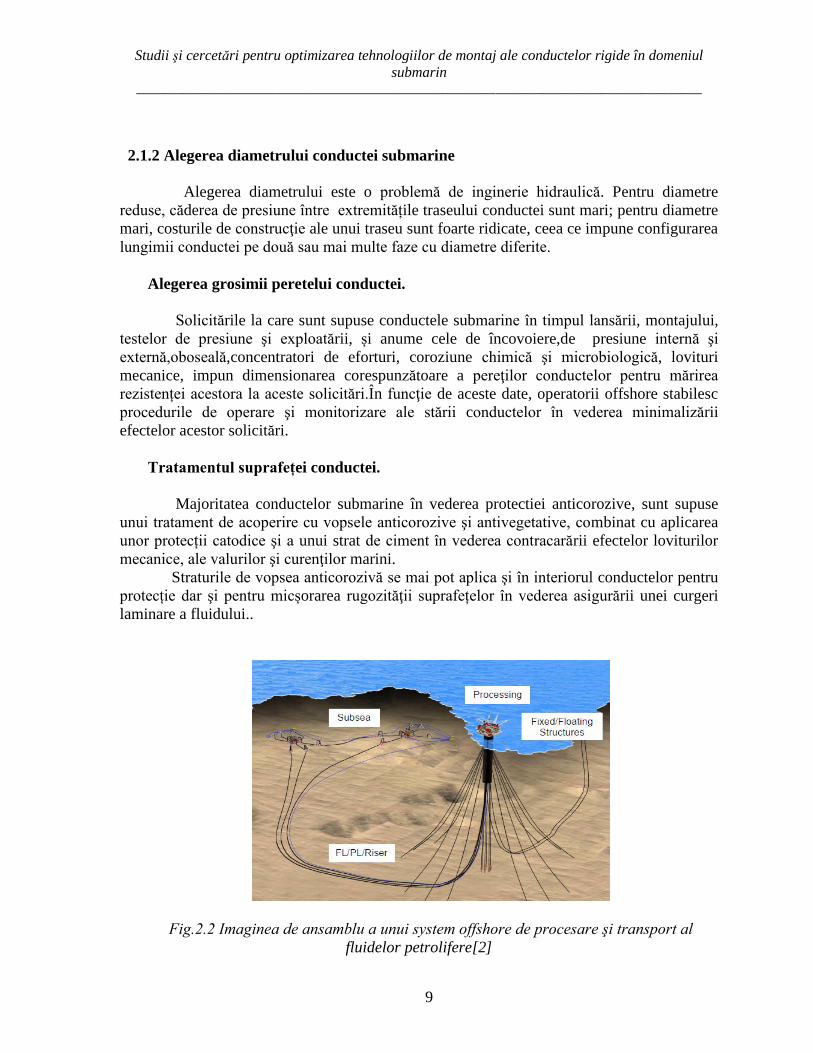
Fig.2.2 Imaginea de ansamblu a unui system offshore de procesare şi transport al
fluidelor petrolifere[2]
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
10
2.9 Stabilitatea conductelor submarine pe fundul mării
2.9.1 Introducere
Conductele submarine trebuie să fie stabile pe fundul mării; dacă sunt ușoare vor fi
mișcate cu ușurință de forța curenţilor şi a valurilor; pe de alta parte dacă sunt grele, costurile
şi dificultătile de fabricație şi montaj vor fi mari.
Modalitățile de creştere ale greutăţii conductelor pot fi după cum urmează :
Adăugarea unui strat exterior de ciment, ceea ce oferă în plus şi o protecţie
mecanică a protecției anticorozive;
Creșterea grosimii pereţilor;
Reducerea forţelor hidrodinamice şi creșterea stabilităţii prin săparea canalelor de
fixare ale conductelor pe fundul mării (trenching);
Adăugarea şi montarea peste traseul de conducte a saltelelor din ciment
(matresses) sau a unor contragreutăți (bolt-on weights).
2.9.2 Forţa curenţilor provocați de maree asupra stabilităţii conductelor
Mareele sunt diferite prin momentul producerii, frecvenței şi dimensiunilor lor.
Curenţii provocați de maree sunt diferiți în funcţie de adâncimi; prin măsurarea forţei unui
curent la o anumită adâncime, se pot estima valorile acestuia la diferite adâncimi în baza legii
lui van Veen power law, prin care puterea unui curent este proportionala cu 1/7 din valoarea
inăltimii față de fundul mării; formula nu poate fi aplicată însă pentru adâncimi foarte mari.
2.9.3 Profilul valurilor
Profilele valurilor sunt înregistrate în bazele de date create în urma măsuratorilor
efectuate de balize (wave-rider buoys) sau instrumente la bordul platformelor petroliere sau
navelor specializate.
Metoda mai des folosită este aprecierea profilului valurilor prin măsuratorile forţei şi
direcţiei vânturilor.
Înregistrarea profilului valurilor se face în urma observațiilor asupra înălțimii şi a
stării generale a suprafeței mării pe intervale bine definite (10 minute la interval de 3 ore) sau
a înregistrării valului de înalțime maximă în același interval.
Valul de înalțime maximă se caracterizează prin doi parametri:
Perioada de revenire Tr ( return period);
Probabilitatea de înregistrare E (encounter probability).
2.9.4 Forţele hidrodinamice
Curenţii marini acționează asupra conductelor prin forţe hidrodinamice; distribuția
vitezelor acestor forţe este determinată de gradientul presiunilor în zona conductei: viteze
mari în zona superioară şi reduse pe fund, cu o stare relativ stabilă în zona de separație
[43][44].
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
11
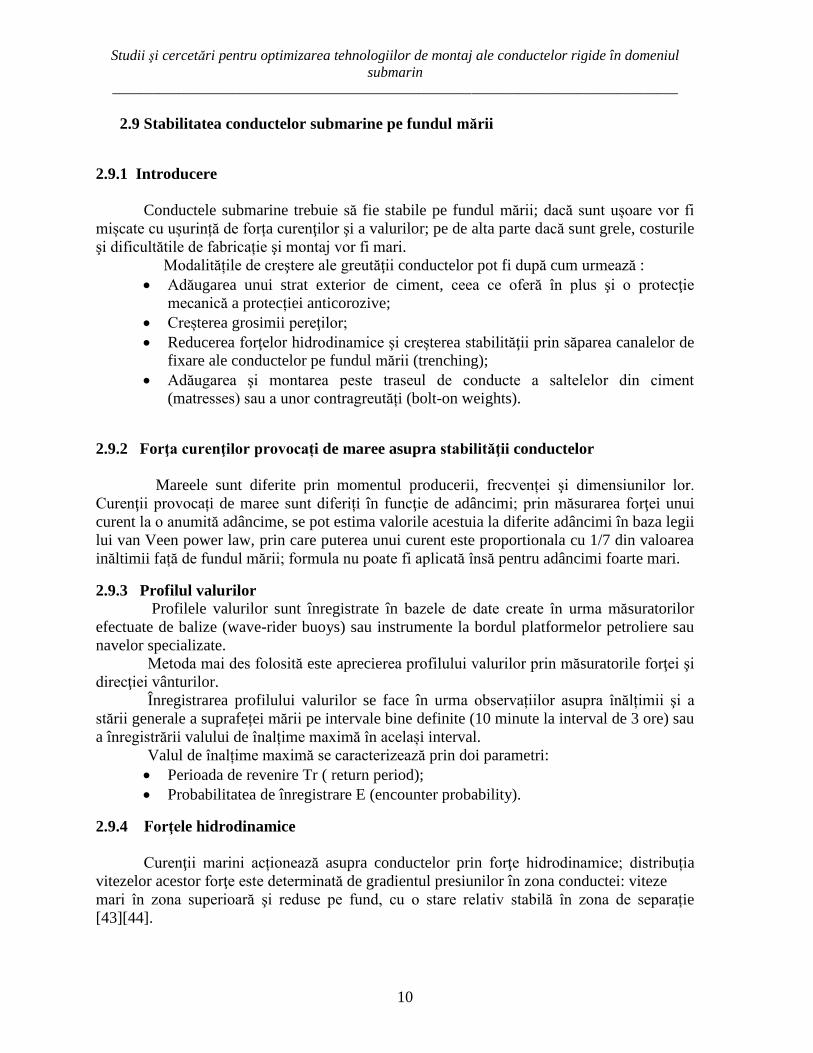
Diferențele de presiuni de o parte şi de alta ale conductelor submarine, pot crea
datorită curenților, erodări ale solului fundului mării ( dacă este nisipos) şi implicit afectarea
stării de stabilitate. Dacă fixarea conductelor se face în șanțuri (trenching), efectul de erodare
al curenţilor se manifestă în zona de presiune minimă cu relocarea poziției conductei spre
marginea erodată a șanțului.
Fig.2.3 Distribuția curenţilor în jurul conductei submarine: conductă așezată pe fundul
mării;conductă situată deasupra fundului marii; conductă în șanțul practicat prin
operaţiunea de trenching;[44]
2.9.5 Rezistenţa laterală
Dacă un sistem de conducte submarine este foarte stabil, greutatea acestuia poate
genera suficientă Rezistenţă laterală împotriva forţelor hidrodinamice.Reacțiunea fundului
mării în conducte are o componentă verticală R şi una orizontală S; condițiile limită ce oferă
stabilitate conductei sunt ilustrate în diagramele de stabilitate ale căror axe sunt R şi S.
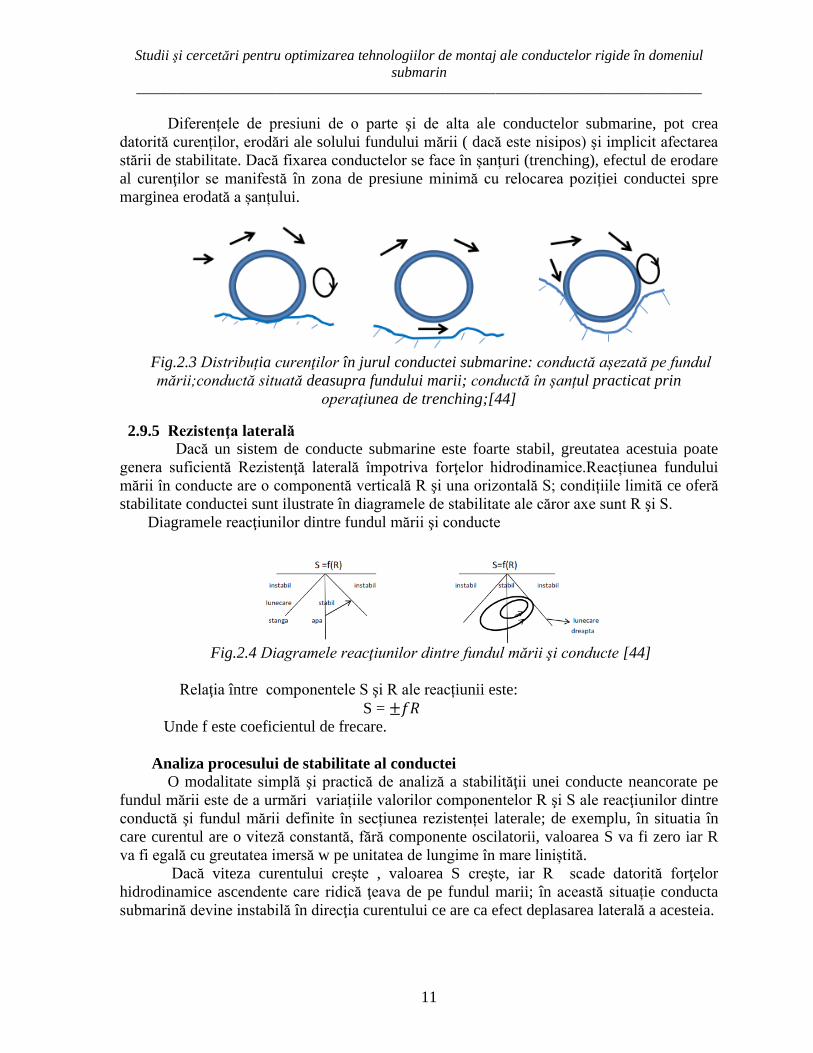
Diagramele reacţiunilor dintre fundul mării şi conducte
Fig.2.4 Diagramele reacţiunilor dintre fundul mării şi conducte [44]
Relaţia între componentele S şi R ale reacțiunii este:
S = ±𝑓𝑅
Unde f este coeficientul de frecare.
Analiza procesului de stabilitate al conductei
O modalitate simplă şi practică de analiză a stabilităţii unei conducte neancorate pe
fundul mării este de a urmări variațiile valorilor componentelor R şi S ale reacţiunilor dintre
conductă şi fundul mării definite în secțiunea rezistenței laterale; de exemplu, în situatia în
care curentul are o viteză constantă, fără componente oscilatorii, valoarea S va fi zero iar R
va fi egală cu greutatea imersă w pe unitatea de lungime în mare liniștită.
Dacă viteza curentului creşte , valoarea S creşte, iar R scade datorită forţelor
hidrodinamice ascendente care ridică ţeava de pe fundul marii; în această situație conducta
submarină devine instabilă în direcţia curentului ce are ca efect deplasarea laterală a acesteia.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
12
În proiectarea construcției conductei este importantă alegerea valorii w în așa fel încât
interacțiunea dintre componentele S şi R să situeze poziția conductei în zona de stabilitate.
Interacţiunea conductelor submarine cu instabilitatea solului fundului mării
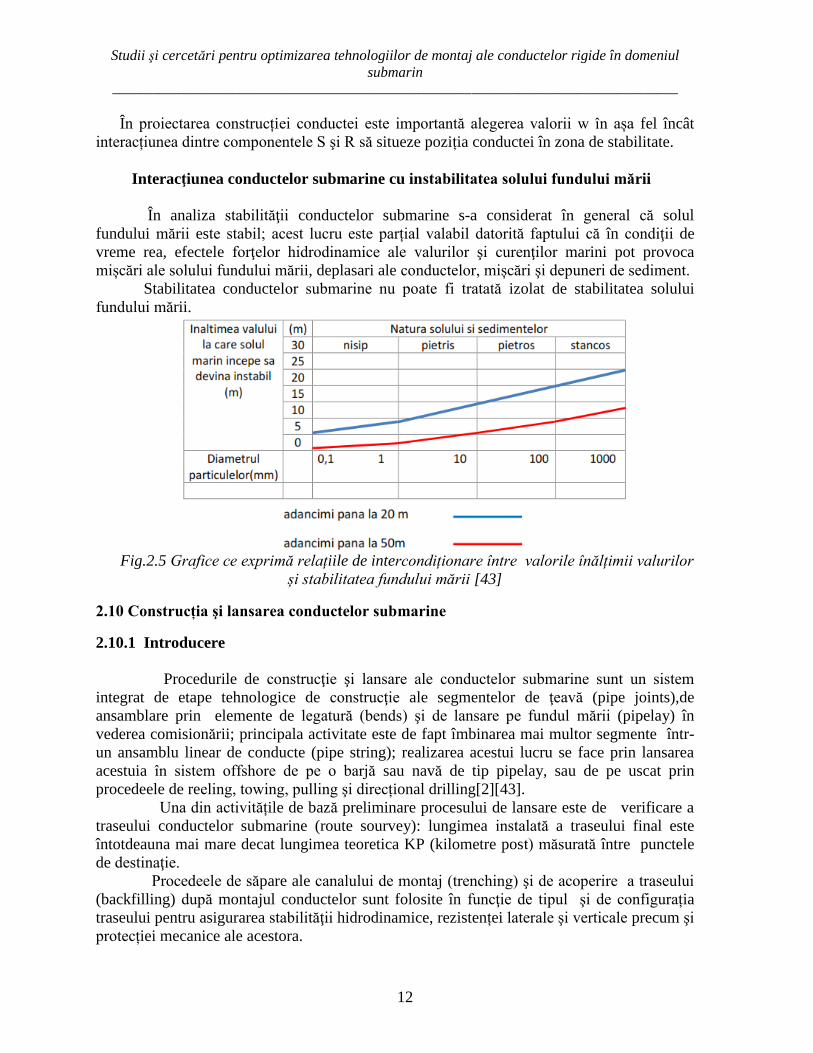
În analiza stabilităţii conductelor submarine s-a considerat în general că solul
fundului mării este stabil; acest lucru este parțial valabil datorită faptului că în condiţii de
vreme rea, efectele forţelor hidrodinamice ale valurilor şi curenţilor marini pot provoca
mișcări ale solului fundului mării, deplasari ale conductelor, mișcări şi depuneri de sediment.
Stabilitatea conductelor submarine nu poate fi tratată izolat de stabilitatea solului
fundului mării.
Fig.2.5 Grafice ce exprimă relațiile de intercondiționare între valorile înălțimii valurilor
și stabilitatea fundului mării [43]
2.10 Construcția şi lansarea conductelor submarine
2.10.1 Introducere
Procedurile de construcţie şi lansare ale conductelor submarine sunt un sistem
integrat de etape tehnologice de construcţie ale segmentelor de ţeavă (pipe joints),de
ansamblare prin elemente de legatură (bends) şi de lansare pe fundul mării (pipelay) în
vederea comisionării; principala activitate este de fapt îmbinarea mai multor segmente într-
un ansamblu linear de conducte (pipe string); realizarea acestui lucru se face prin lansarea
acestuia în sistem offshore de pe o barjă sau navă de tip pipelay, sau de pe uscat prin
procedeele de reeling, towing, pulling şi direcțional drilling[2][43].
Una din activitățile de bază preliminare procesului de lansare este de verificare a
traseului conductelor submarine (route sourvey): lungimea instalată a traseului final este
întotdeauna mai mare decat lungimea teoretica KP (kilometre post) măsurată între punctele
de destinaţie.
Procedeele de săpare ale canalului de montaj (trenching) şi de acoperire a traseului
(backfilling) după montajul conductelor sunt folosite în funcţie de tipul şi de configurația
traseului pentru asigurarea stabilităţii hidrodinamice, rezistenței laterale şi verticale precum şi
protecției mecanice ale acestora.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
13
După finalizarea montării conductelor submarine, se efectuează operaţiunile de
verificare în vederea comisionării şi anume:
Verificarea internă a conductelor (internal gauging);
Verificarea etanșeității conductelor (hydrostatic testing) prin teste de presiune
cu apă; acest procedeu nu se aplică conductelor de transport gaze.
2.10.2 Intervenţii asupra solului fundului mării
Scopul principal al intervenţiilor asupra solului fundului mării este de asigurarea
stabilităţii pe o perioadă lungă de timp a sistemului de conducte submarine.Intervențiile
asupra solului, preliminare montării conductelor submarine presupun urmatoarele proceduri:
Îmbunătațirea proprietăților de fundație ale solului;
Săparea canalelor de instalare ale conductelor;
Protejarea conductelor şi cablurilor existente prin montarea unor saltele din beton
(concrete matresses) în punctele de intersecție sau traversări;
Montarea unor suporţi de susținere ai conductelor în zonele cu denivelari pentru
diminuarea solicitărilor la încovoiere (buckling stress);
Nivelarea profilului solului pe cât posibil pentru reducerea contactelor de presiune
punctiforme cu suprafața conductelor;
Operaţiunile de săpare preliminară (pre-trenching)
Săparea canalelor de instalare ale conductelor submarine sau corectarea profilelor
solului în vederea limitarii defectelor de suprafață se fac de obicei prin operaţiuni de dragare
(dredging).
În funcţie de tipul şi duritatea solului fundului mării, se pot folosi tipuri diferite de
echipamente de dragare : săpare cu cupe, tăiere cu absorbția materialului dragat.
2.10.3 Suporții conductelor submarine
Construcția suporţilor conductelor submarine a apărut ca o alternativă la rectificarea
profilului fundului mării prin adaugarea materialului de adaos în zonele cu denivelari;
suporții pot fi construcții din roci sau pietriș pe întregul traseu al conductelor sau parțial, doar
în segmentele solicitate la încovoiere.
Fig.2.6 Suporţi conducte submarine [2]
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
14
Dimensiunile acestor materiale de construcţie se aleg în funcţie de valorile curenţilor
marini pentru stabilitatea conductelor pe fundul marii.
Asigurarea stabilităţii laterale a conductelor,se realizează în general prin instalarea pe
fundul mării a unor suporţi cilindrici din beton cu suprafața de contact tip potcoavă şi cu
armatură metalică exterioară pentru fixare în solul fundului mării; pentru mărirea stabilităţii
acestor suporti, corpul cilindric se încarcă cu pietriș.
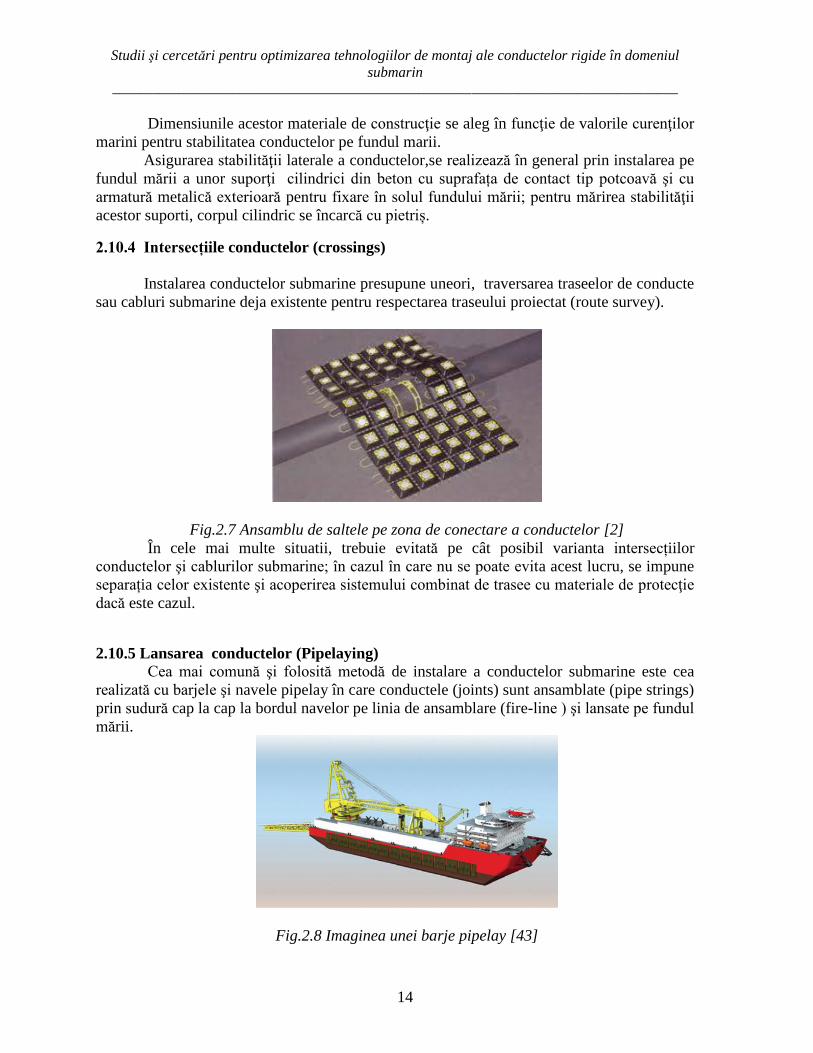
2.10.4 Intersecțiile conductelor (crossings)
Instalarea conductelor submarine presupune uneori, traversarea traseelor de conducte
sau cabluri submarine deja existente pentru respectarea traseului proiectat (route survey).
Fig.2.7 Ansamblu de saltele pe zona de conectare a conductelor [2]
În cele mai multe situatii, trebuie evitată pe cât posibil varianta intersecțiilor
conductelor şi cablurilor submarine; în cazul în care nu se poate evita acest lucru, se impune
separația celor existente şi acoperirea sistemului combinat de trasee cu materiale de protecţie
dacă este cazul.
2.10.5 Lansarea conductelor (Pipelaying)
Cea mai comună şi folosită metodă de instalare a conductelor submarine este cea
realizată cu barjele şi navele pipelay în care conductele (joints) sunt ansamblate (pipe strings)
prin sudură cap la cap la bordul navelor pe linia de ansamblare (fire-line ) şi lansate pe fundul
mării.
Fig.2.8 Imaginea unei barje pipelay [43]
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
15
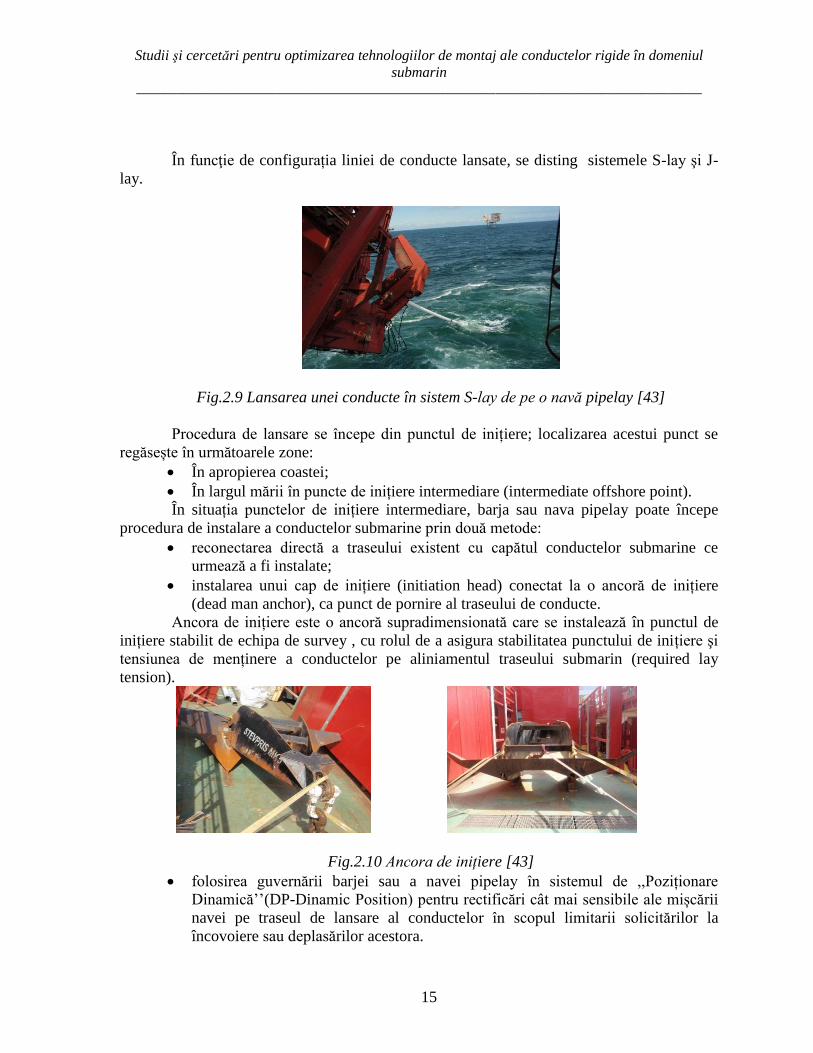
În funcţie de configurația liniei de conducte lansate, se disting sistemele S-lay şi J-
lay.
Fig.2.9 Lansarea unei conducte în sistem S-lay de pe o navă pipelay [43]
Procedura de lansare se începe din punctul de inițiere; localizarea acestui punct se
regăsește în următoarele zone:
În apropierea coastei;
În largul mării în puncte de inițiere intermediare (intermediate offshore point).
În situația punctelor de inițiere intermediare, barja sau nava pipelay poate începe
procedura de instalare a conductelor submarine prin două metode:
reconectarea directă a traseului existent cu capătul conductelor submarine ce
urmează a fi instalate;
instalarea unui cap de inițiere (initiation head) conectat la o ancoră de inițiere
(dead man anchor), ca punct de pornire al traseului de conducte.
Ancora de inițiere este o ancoră supradimensionată care se instalează în punctul de
inițiere stabilit de echipa de survey , cu rolul de a asigura stabilitatea punctului de inițiere şi
tensiunea de menținere a conductelor pe aliniamentul traseului submarin (required lay
tension).
Fig.2.10 Ancora de inițiere [43]
folosirea guvernării barjei sau a navei pipelay în sistemul de ,,Poziționare
Dinamică’’(DP-Dinamic Position) pentru rectificări cât mai sensibile ale mișcării
navei pe traseul de lansare al conductelor în scopul limitarii solicitărilor la
încovoiere sau deplasărilor acestora.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
16
Sistemul DP este mai eficient în zone cu adâncimi mari, spre deosebire de cel al barjelor
ancorate (mooring barges) care se foloseşte la adâncimi mici. Eficiența sistemului DP constă
în faptul că în situația lansării conductelor la adâncimi mari, lungimea suspendată imersă a
ansamblului de conducte permite absorbția deplasărilor mici şi instalarea acestora pe fundul
mării fără încovoieri.
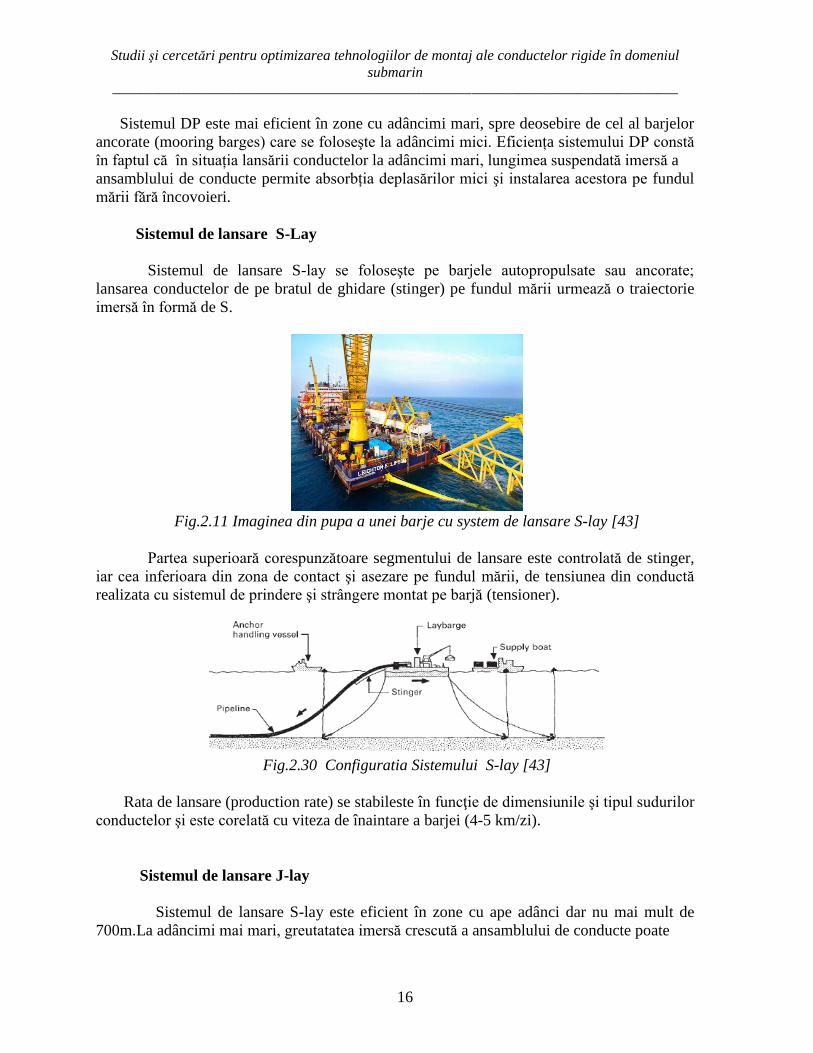
Sistemul de lansare S-Lay
Sistemul de lansare S-lay se foloseşte pe barjele autopropulsate sau ancorate;
lansarea conductelor de pe bratul de ghidare (stinger) pe fundul mării urmează o traiectorie
imersă în formă de S.
Fig.2.11 Imaginea din pupa a unei barje cu system de lansare S-lay [43]
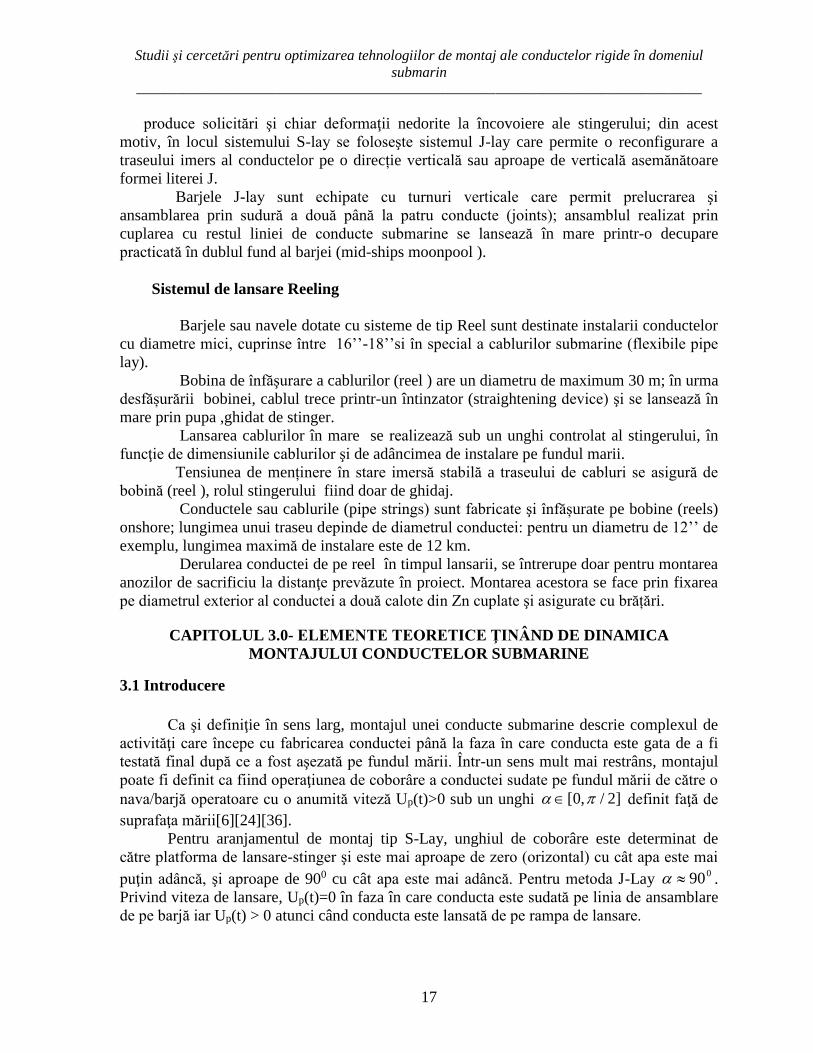
Partea superioară corespunzătoare segmentului de lansare este controlată de stinger,
iar cea inferioara din zona de contact şi asezare pe fundul mării, de tensiunea din conductă
realizata cu sistemul de prindere şi strângere montat pe barjă (tensioner).
Fig.2.30 Configuratia Sistemului S-lay [43]
Rata de lansare (production rate) se stabileste în funcţie de dimensiunile şi tipul sudurilor
conductelor şi este corelată cu viteza de înaintare a barjei (4-5 km/zi).
Sistemul de lansare J-lay
Sistemul de lansare S-lay este eficient în zone cu ape adânci dar nu mai mult de
700m.La adâncimi mai mari, greutatatea imersă crescută a ansamblului de conducte poate
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
17
produce solicitări şi chiar deformaţii nedorite la încovoiere ale stingerului; din acest
motiv, în locul sistemului S-lay se foloseşte sistemul J-lay care permite o reconfigurare a
traseului imers al conductelor pe o direcție verticală sau aproape de verticală asemănătoare
formei literei J.
Barjele J-lay sunt echipate cu turnuri verticale care permit prelucrarea şi
ansamblarea prin sudură a două până la patru conducte (joints); ansamblul realizat prin
cuplarea cu restul liniei de conducte submarine se lansează în mare printr-o decupare
practicată în dublul fund al barjei (mid-ships moonpool ).
Sistemul de lansare Reeling
Barjele sau navele dotate cu sisteme de tip Reel sunt destinate instalarii conductelor
cu diametre mici, cuprinse între 16’’-18’’si în special a cablurilor submarine (flexibile pipe
lay).
Bobina de înfăşurare a cablurilor (reel ) are un diametru de maximum 30 m; în urma
desfășurării bobinei, cablul trece printr-un întinzator (straightening device) şi se lansează în
mare prin pupa ,ghidat de stinger.
Lansarea cablurilor în mare se realizează sub un unghi controlat al stingerului, în
funcţie de dimensiunile cablurilor şi de adâncimea de instalare pe fundul marii.
Tensiunea de menținere în stare imersă stabilă a traseului de cabluri se asigură de
bobină (reel ), rolul stingerului fiind doar de ghidaj.
Conductele sau cablurile (pipe strings) sunt fabricate şi înfășurate pe bobine (reels)
onshore; lungimea unui traseu depinde de diametrul conductei: pentru un diametru de 12’’ de
exemplu, lungimea maximă de instalare este de 12 km.
Derularea conductei de pe reel în timpul lansarii, se întrerupe doar pentru montarea
anozilor de sacrificiu la distanţe prevăzute în proiect. Montarea acestora se face prin fixarea
pe diametrul exterior al conductei a două calote din Zn cuplate şi asigurate cu brățări.
CAPITOLUL 3.0- ELEMENTE TEORETICE ŢINÂND DE DINAMICA
MONTAJULUI CONDUCTELOR SUBMARINE
3.1 Introducere
Ca şi definiţie în sens larg, montajul unei conducte submarine descrie complexul de
activităţi care începe cu fabricarea conductei până la faza în care conducta este gata de a fi
testată final după ce a fost aşezată pe fundul mării. Într-un sens mult mai restrâns, montajul
poate fi definit ca fiind operaţiunea de coborâre a conductei sudate pe fundul mării de către o
nava/barjă operatoare cu o anumită viteză Up(t)>0 sub un unghi ]2/,0[ definit faţă de
suprafaţa mării[6][24][36].
Pentru aranjamentul de montaj tip S-Lay, unghiul de coborâre este determinat de
către platforma de lansare-stinger şi este mai aproape de zero (orizontal) cu cât apa este mai
puţin adâncă, şi aproape de 900 cu cât apa este mai adâncă. Pentru metoda J-Lay 090 .
Privind viteza de lansare, Up(t)=0 în faza în care conducta este sudată pe linia de ansamblare
de pe barjă iar Up(t) > 0 atunci când conducta este lansată de pe rampa de lansare.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
18
Conceptual, metoda S-Lay este potrivită pentru ape de adâncime mică şi medie, iar
J=Lay pentru lansări în ape adânci. După anumiţi autori, apă adâncă în procesul de montaj
înseamnă 300 m, dar după alţii înseamnă 1500 m. În fapt, s-au montat conducte la adâncimi
de 2500 m şi tehnologiile sunt dezvoltate astăzi pentru adâncimi de până la 3500 m.
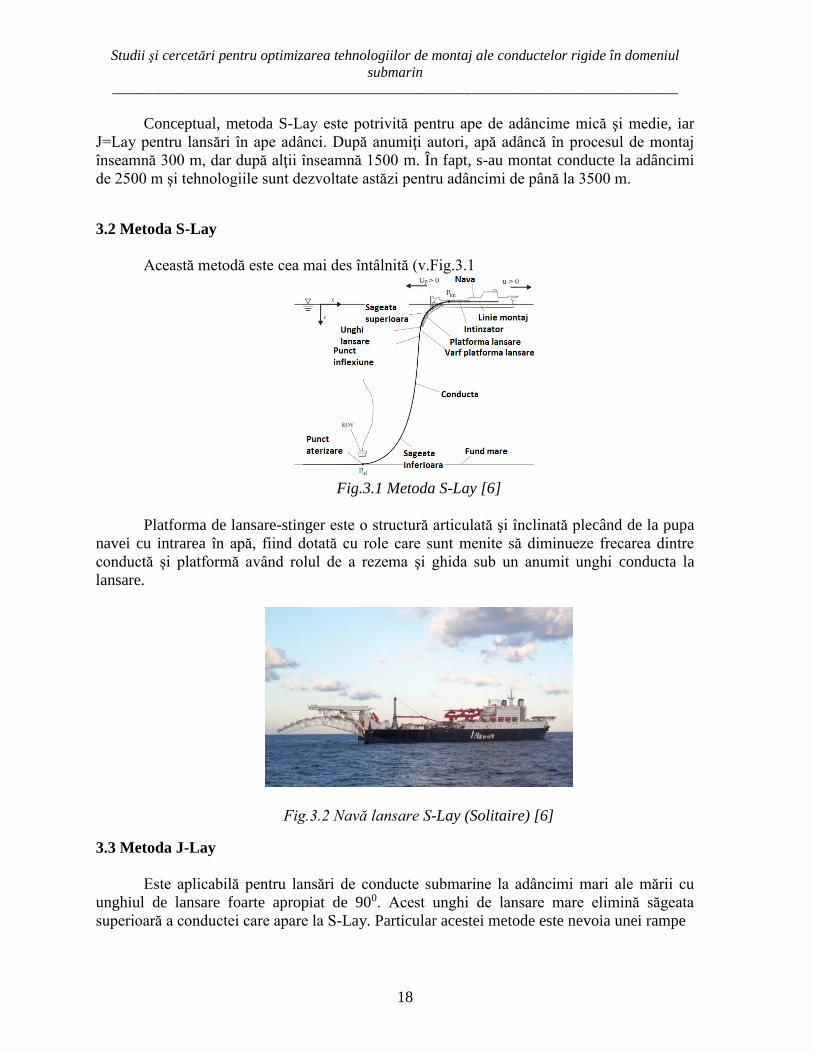
3.2 Metoda S-Lay
Această metodă este cea mai des întâlnită (v.Fig.3.1
Fig.3.1 Metoda S-Lay [6]
Platforma de lansare-stinger este o structură articulată şi înclinată plecând de la pupa
navei cu intrarea în apă, fiind dotată cu role care sunt menite să diminueze frecarea dintre
conductă şi platformă având rolul de a rezema şi ghida sub un anumit unghi conducta la
lansare.
Fig.3.2 Navă lansare S-Lay (Solitaire) [6]
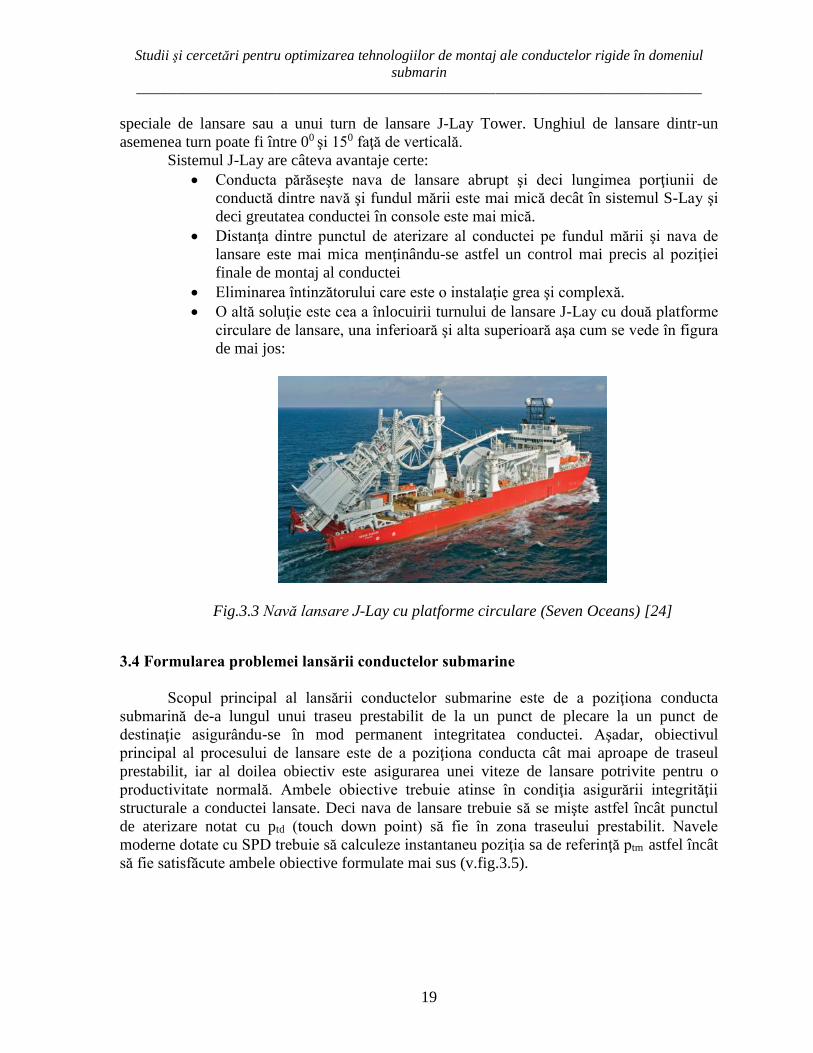
3.3 Metoda J-Lay
Este aplicabilă pentru lansări de conducte submarine la adâncimi mari ale mării cu
unghiul de lansare foarte apropiat de 900. Acest unghi de lansare mare elimină săgeata
superioară a conductei care apare la S-Lay. Particular acestei metode este nevoia unei rampe
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
19
speciale de lansare sau a unui turn de lansare J-Lay Tower. Unghiul de lansare dintr-un
asemenea turn poate fi între 00 şi 150 faţă de verticală.
Sistemul J-Lay are câteva avantaje certe:
Conducta părăseşte nava de lansare abrupt şi deci lungimea porţiunii de
conductă dintre navă şi fundul mării este mai mică decât în sistemul S-Lay şi
deci greutatea conductei în console este mai mică.
Distanţa dintre punctul de aterizare al conductei pe fundul mării şi nava de
lansare este mai mica menţinându-se astfel un control mai precis al poziţiei
finale de montaj al conductei
Eliminarea întinzătorului care este o instalaţie grea şi complexă.
O altă soluţie este cea a înlocuirii turnului de lansare J-Lay cu două platforme
circulare de lansare, una inferioară şi alta superioară aşa cum se vede în figura
de mai jos:
Fig.3.3 Navă lansare J-Lay cu platforme circulare (Seven Oceans) [24]
3.4 Formularea problemei lansării conductelor submarine
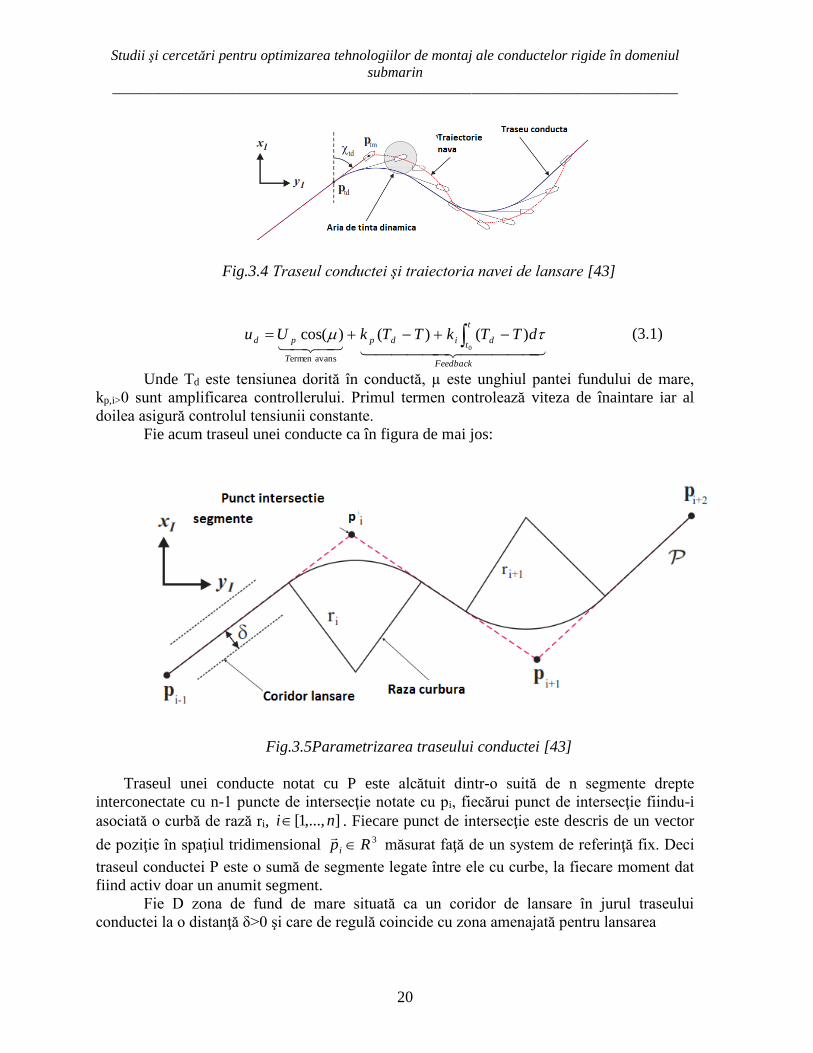
Scopul principal al lansării conductelor submarine este de a poziţiona conducta
submarină de-a lungul unui traseu prestabilit de la un punct de plecare la un punct de
destinaţie asigurându-se în mod permanent integritatea conductei. Aşadar, obiectivul
principal al procesului de lansare este de a poziţiona conducta cât mai aproape de traseul
prestabilit, iar al doilea obiectiv este asigurarea unei viteze de lansare potrivite pentru o
productivitate normală. Ambele obiective trebuie atinse în condiţia asigurării integrităţii
structurale a conductei lansate. Deci nava de lansare trebuie să se mişte astfel încât punctul
de aterizare notat cu ptd (touch down point) să fie în zona traseului prestabilit. Navele
moderne dotate cu SPD trebuie să calculeze instantaneu poziţia sa de referinţă ptm astfel încât
să fie satisfăcute ambele obiective formulate mai sus (v.fig.3.5).
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
20
Fig.3.4 Traseul conductei şi traiectoria navei de lansare [43]
Feedback
t
tdidp
T
pd dTTkTTkUu 0
)()()cos(
avansermen
Unde Td este tensiunea dorită în conductă, µ este unghiul pantei fundului de mare,
kp,i>0 sunt amplificarea controllerului. Primul termen controlează viteza de înaintare iar al
doilea asigură controlul tensiunii constante.
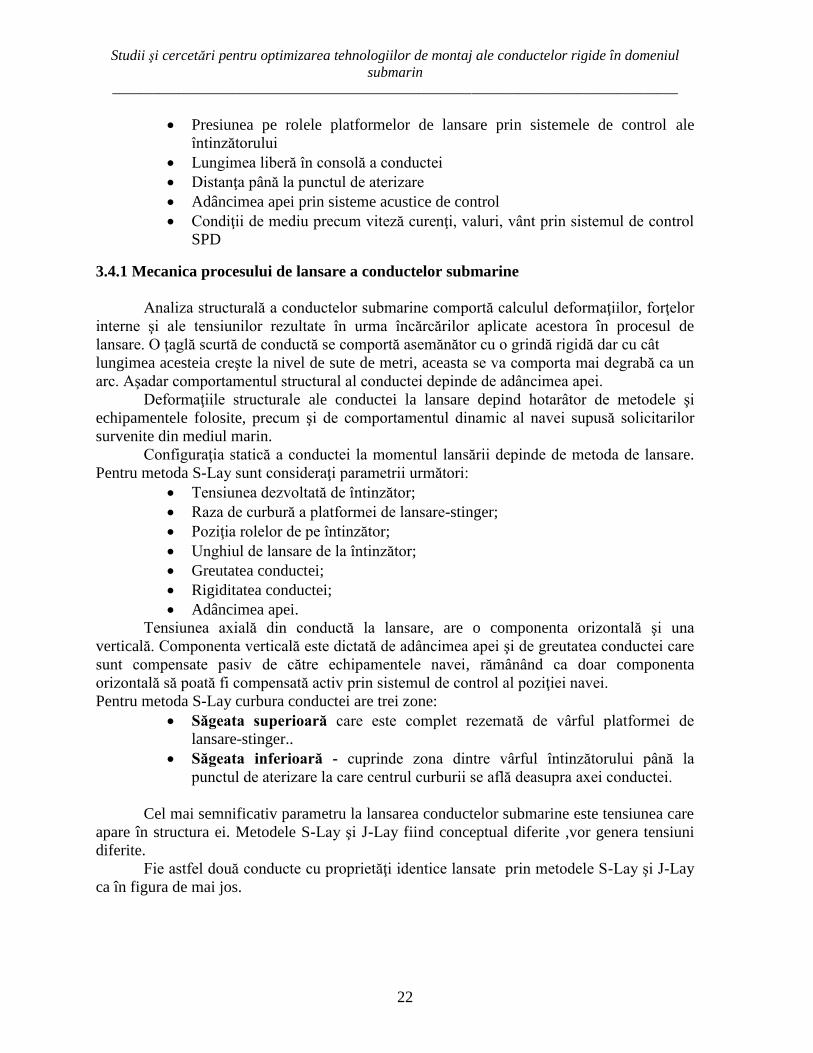
Fie acum traseul unei conducte ca în figura de mai jos:
Fig.3.5Parametrizarea traseului conductei [43]
Traseul unei conducte notat cu P este alcătuit dintr-o suită de n segmente drepte
interconectate cu n-1 puncte de intersecţie notate cu pi, fiecărui punct de intersecţie fiindu-i
asociată o curbă de rază ri, ],...,1[ ni . Fiecare punct de intersecţie este descris de un vector
de poziţie în spaţiul tridimensional 3Rpi
măsurat faţă de un system de referinţă fix. Deci
traseul conductei P este o sumă de segmente legate între ele cu curbe, la fiecare moment dat
fiind activ doar un anumit segment.
Fie D zona de fund de mare situată ca un coridor de lansare în jurul traseului
conductei la o distanţă δ>0 şi care de regulă coincide cu zona amenajată pentru lansarea
(3.1)

Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
21
conductei prin dragare, de pildă (1 la 10 m). În timpul lansării conductei, obiectivul este ca
Dptd iar dacă Dpdt este o condiţie de eroare ce apare în sistemul de control.
Dacă se notează poziţia navei cu ptm, se poate determina un traseu nominal al navei
notat cu V care se poate calcula din condiţii pur cinematice dacă:
Efectele dinamice se neglijează din cauza vitezei mici a navei;
Nu se consideră perturbaţiile din mediu marin;
Adâncimea mării este constantă.
Fie poziţia unui punct oarecare aflat pe traseul P descris prin vectorul de poziţie
RRptd ;)( 2 unde ω este o variabilă scalară. Pentru segmentele drepte poziţia dorită a
navei se poate calcula cu [43]:
)sin(
)cos()(
)2()cos()sin(
)sin()cos()(
0
)()()()()(
ii
ii
td
ii
ii
i
dtdtm
itdtm
y
xp
SOR
ppRpp
Unde dtdtm pp )()(
este distanţa de aterizare dorită, funcţie de tensiunea din
conductă iar αi este orientarea segmentului de conductă faţă de sistemul de referinţă. Dacă
traseul este situat în zone de curbură atunci poziţia navei este [43]:
0
)()())(()()( dtdtm
tdtdtm
ppRpp
Unde noua funcţie )(td este direcţia tangenţială a segmentului curbat.
Ecuaţiile de mai sus pot fi folosite în condiţii de mare puţin adâncă şi liniştită dar nu
se pot folosi în condiţiile reale. În practică nava de lansare se va situa în afara poziţiei ideale
descrisă de aceste ecuaţii ţinta fiind una dinamică astfel încăt Dptd sub condiţia asigurării
integrităţii structurale a conductei.
Proiectarea şi parametrii de integritate structurali sunt bine definiţi de diferite
standarde precum DNV-OS-F101 pentru Marea Nordului, API RP 1111 sau ISO 13623.
În orice caz, calculul traiectoriei şi controlul navei se poate face doar dacă un set de
măsurători şi date esenţiale sunt livrate computerelor navei prin diverse sisteme de
traductoare de măsurare.
Sistemele de traductoare acoperă:
Poziţia şi viteza navei prin sisteme tip GPS sau hidroacustice cu precizii de
până la 0,1 m.
Poziţia punctului de aterizare a conductei prin minisubmersibile specializate
tip ROV (submersibile controlate de la distanţă)
Tensiunea axială din conductă prin diverse traductoare şi celule tensiometrice
Unghiul de lansare prin sistemele de control ale întinzătorului
(3.2)
(3.3)
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
22
Presiunea pe rolele platformelor de lansare prin sistemele de control ale
întinzătorului
Lungimea liberă în consolă a conductei
Distanţa până la punctul de aterizare
Adâncimea apei prin sisteme acustice de control
Condiţii de mediu precum viteză curenţi, valuri, vânt prin sistemul de control
SPD
3.4.1 Mecanica procesului de lansare a conductelor submarine
Analiza structurală a conductelor submarine comportă calculul deformaţiilor, forţelor
interne şi ale tensiunilor rezultate în urma încărcărilor aplicate acestora în procesul de
lansare. O ţaglă scurtă de conductă se comportă asemănător cu o grindă rigidă dar cu cât
lungimea acesteia creşte la nivel de sute de metri, aceasta se va comporta mai degrabă ca un
arc. Aşadar comportamentul structural al conductei depinde de adâncimea apei.
Deformaţiile structurale ale conductei la lansare depind hotarâtor de metodele şi
echipamentele folosite, precum şi de comportamentul dinamic al navei supusă solicitarilor
survenite din mediul marin.
Configuraţia statică a conductei la momentul lansării depinde de metoda de lansare.
Pentru metoda S-Lay sunt consideraţi parametrii următori:
Tensiunea dezvoltată de întinzător;
Raza de curbură a platformei de lansare-stinger;
Poziţia rolelor de pe întinzător;
Unghiul de lansare de la întinzător;
Greutatea conductei;
Rigiditatea conductei;
Adâncimea apei.
Tensiunea axială din conductă la lansare, are o componenta orizontală şi una
verticală. Componenta verticală este dictată de adâncimea apei şi de greutatea conductei care
sunt compensate pasiv de către echipamentele navei, rămânând ca doar componenta
orizontală să poată fi compensată activ prin sistemul de control al poziţiei navei.
Pentru metoda S-Lay curbura conductei are trei zone:
Săgeata superioară care este complet rezemată de vârful platformei de
lansare-stinger..
Săgeata inferioară - cuprinde zona dintre vârful întinzătorului până la
punctul de aterizare la care centrul curburii se află deasupra axei conductei.
Cel mai semnificativ parametru la lansarea conductelor submarine este tensiunea care
apare în structura ei. Metodele S-Lay şi J-Lay fiind conceptual diferite ,vor genera tensiuni
diferite.
Fie astfel două conducte cu proprietăţi identice lansate prin metodele S-Lay şi J-Lay
ca în figura de mai jos.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
23
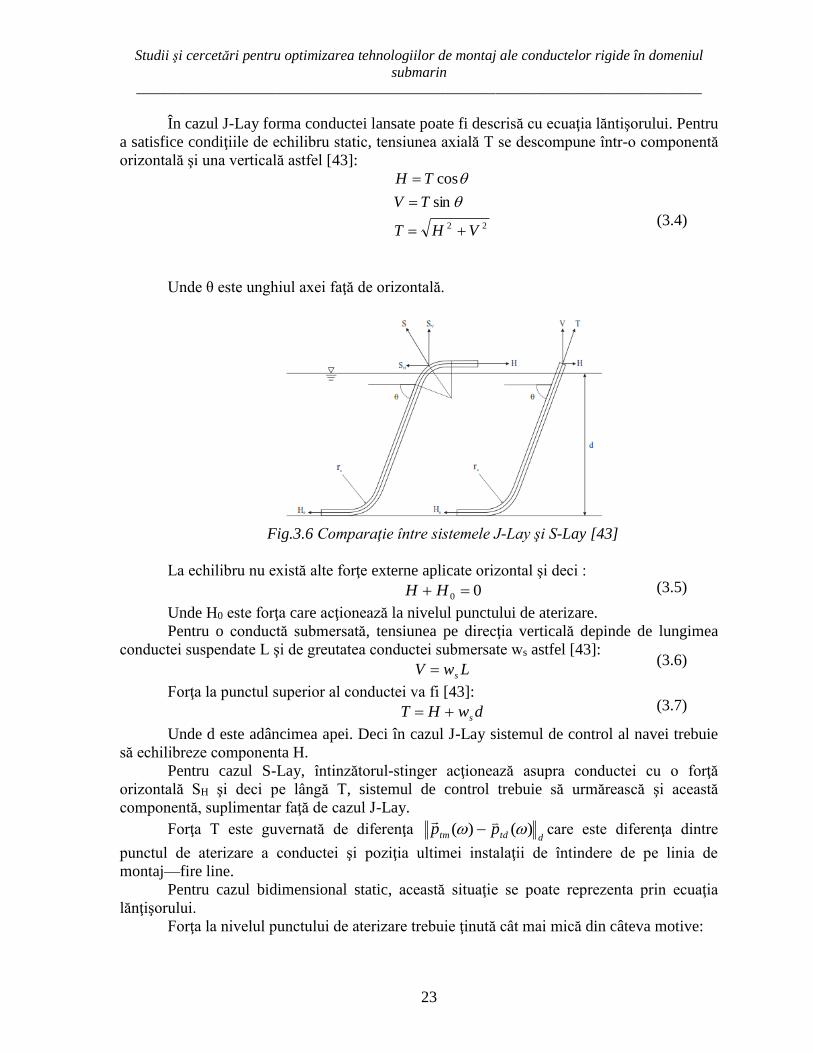
În cazul J-Lay forma conductei lansate poate fi descrisă cu ecuaţia lăntişorului. Pentru
a satisfice condiţiile de echilibru static, tensiunea axială T se descompune într-o componentă
orizontală şi una verticală astfel [43]:
22
sin
cos
VHT
TV
TH
Unde θ este unghiul axei faţă de orizontală.
Fig.3.6 Comparaţie între sistemele J-Lay şi S-Lay [43]
La echilibru nu există alte forţe externe aplicate orizontal şi deci :
00 HH
Unde H0 este forţa care acţionează la nivelul punctului de aterizare.
Pentru o conductă submersată, tensiunea pe direcţia verticală depinde de lungimea
conductei suspendate L şi de greutatea conductei submersate ws astfel [43]:
LwV s
Forţa la punctul superior al conductei va fi [43]:
dwHT s
Unde d este adâncimea apei. Deci în cazul J-Lay sistemul de control al navei trebuie
să echilibreze componenta H.
Pentru cazul S-Lay, întinzătorul-stinger acţionează asupra conductei cu o forţă
orizontală SH şi deci pe lângă T, sistemul de control trebuie să urmărească şi această
componentă, suplimentar faţă de cazul J-Lay.
Forţa T este guvernată de diferenţa dtdtm pp )()(
care este diferenţa dintre
punctul de aterizare a conductei şi poziţia ultimei instalaţii de întindere de pe linia de
montaj—fire line.
Pentru cazul bidimensional static, această situaţie se poate reprezenta prin ecuaţia
lănţişorului.
Forţa la nivelul punctului de aterizare trebuie ţinută cât mai mică din câteva motive:
(3.4)
(3.5)
(3.6)
(3.7)
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
24
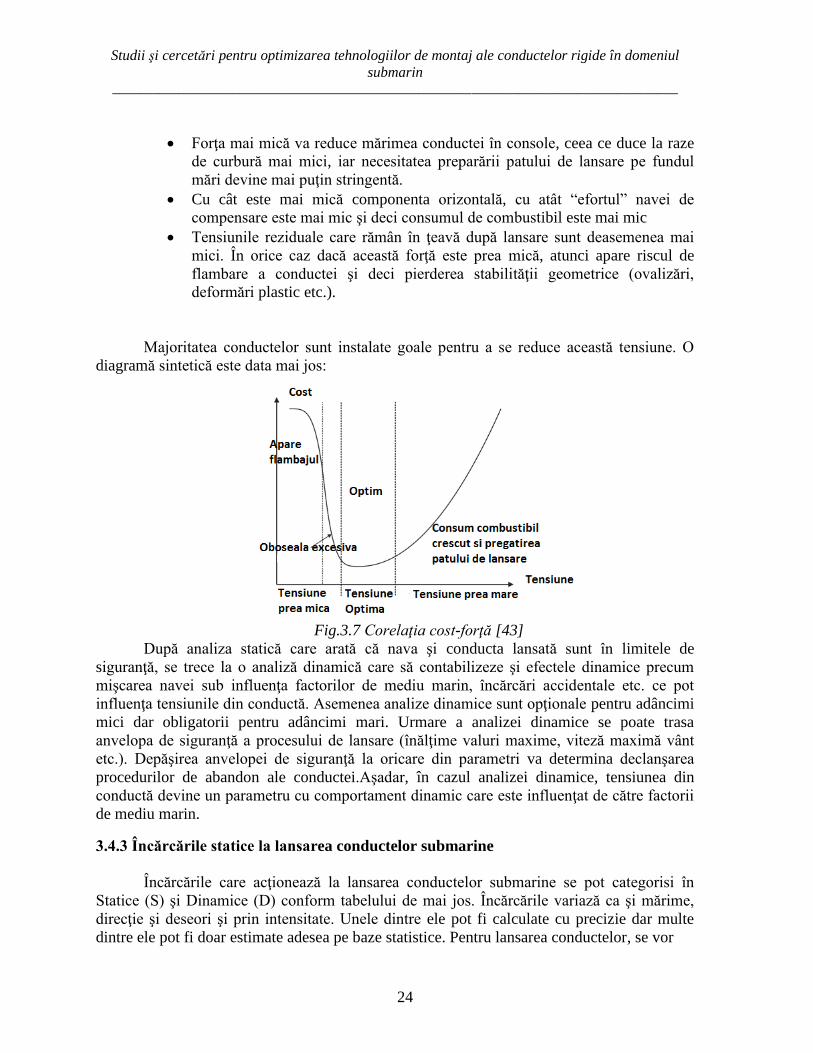
Forţa mai mică va reduce mărimea conductei în console, ceea ce duce la raze
de curbură mai mici, iar necesitatea preparării patului de lansare pe fundul
mări devine mai puţin stringentă.
Cu cât este mai mică componenta orizontală, cu atât “efortul” navei de
compensare este mai mic şi deci consumul de combustibil este mai mic
Tensiunile reziduale care rămân în ţeavă după lansare sunt deasemenea mai
mici. În orice caz dacă această forţă este prea mică, atunci apare riscul de
flambare a conductei şi deci pierderea stabilităţii geometrice (ovalizări,
deformări plastic etc.).
Majoritatea conductelor sunt instalate goale pentru a se reduce această tensiune. O
diagramă sintetică este data mai jos:
Fig.3.7 Corelaţia cost-forţă [43]
După analiza statică care arată că nava şi conducta lansată sunt în limitele de
siguranţă, se trece la o analiză dinamică care să contabilizeze şi efectele dinamice precum
mişcarea navei sub influenţa factorilor de mediu marin, încărcări accidentale etc. ce pot
influenţa tensiunile din conductă. Asemenea analize dinamice sunt opţionale pentru adâncimi
mici dar obligatorii pentru adâncimi mari. Urmare a analizei dinamice se poate trasa
anvelopa de siguranţă a procesului de lansare (înălţime valuri maxime, viteză maximă vânt
etc.). Depăşirea anvelopei de siguranţă la oricare din parametri va determina declanşarea
procedurilor de abandon ale conductei.Aşadar, în cazul analizei dinamice, tensiunea din
conductă devine un parametru cu comportament dinamic care este influenţat de către factorii
de mediu marin.
3.4.3 Încărcările statice la lansarea conductelor submarine
Încărcările care acţionează la lansarea conductelor submarine se pot categorisi în
Statice (S) şi Dinamice (D) conform tabelului de mai jos. Încărcările variază ca şi mărime,
direcţie şi deseori şi prin intensitate. Unele dintre ele pot fi calculate cu precizie dar multe
dintre ele pot fi doar estimate adesea pe baze statistice. Pentru lansarea conductelor, se vor
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
25
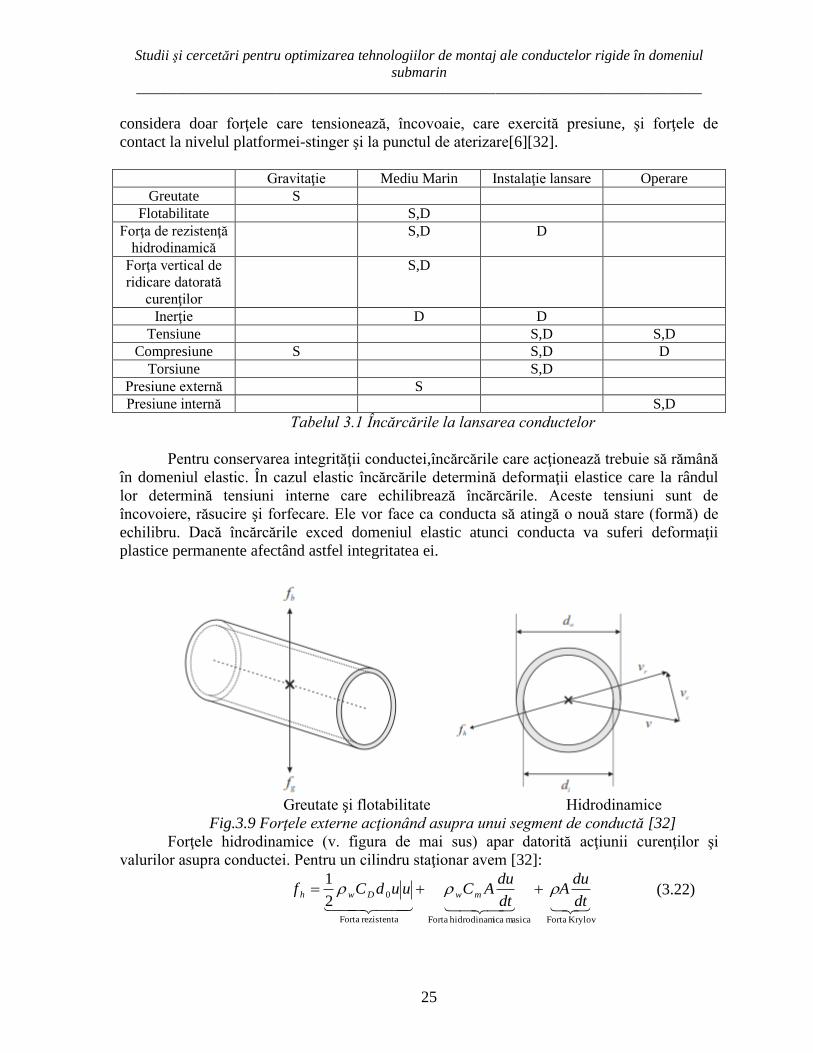
considera doar forţele care tensionează, încovoaie, care exercită presiune, şi forţele de
contact la nivelul platformei-stinger şi la punctul de aterizare[6][32].
Gravitaţie Mediu Marin Instalaţie lansare Operare
Greutate S
Flotabilitate S,D
Forţa de rezistenţă
hidrodinamică
S,D D
Forţa vertical de
ridicare datorată
curenţilor
S,D
Inerţie D D
Tensiune S,D S,D
Compresiune S S,D D
Torsiune S,D
Presiune externă S
Presiune internă S,D
Tabelul 3.1 Încărcările la lansarea conductelor
Pentru conservarea integrităţii conductei,încărcările care acţionează trebuie să rămână
în domeniul elastic. În cazul elastic încărcările determină deformaţii elastice care la rândul
lor determină tensiuni interne care echilibrează încărcările. Aceste tensiuni sunt de
încovoiere, răsucire şi forfecare. Ele vor face ca conducta să atingă o nouă stare (formă) de
echilibru. Dacă încărcările exced domeniul elastic atunci conducta va suferi deformaţii
plastice permanente afectând astfel integritatea ei.
Greutate şi flotabilitate Hidrodinamice
Fig.3.9 Forţele externe acţionând asupra unui segment de conductă [32]
Forţele hidrodinamice (v. figura de mai sus) apar datorită acţiunii curenţilor şi
valurilor asupra conductei. Pentru un cilindru staţionar avem [32]:
Krylov Fortamasica icahidrodinam Fortarezistenta Forta
02
1
dt
duA
dt
duACuudCf mwDwh
(3.22)

Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
26
Unde CD este coeficientul de rezistenţă hidrodinamică, ρw este diametrul exterior al
conductei, A este aria secţiunii conductei, u este viteza fluidului, Cm este coeficientul de
masa hidrodinamici.
Coeficienţii de rezistenţă şi de masa hidrodinamici, depind de o multitudine de
parametrii si anume numărul Reynolds, numărul Keulegan-Carpenter, rugozitatea suprafeţei.
Experimental s-a arătat că pentru un cilindru Cm =1.
Forţa Froude-Krylov este data de gradientul de presiune dezvoltat de un corp în
mişcare accelerata. Astfel [32]:
1 mM CC
Astfel ecuaţia (3.22) poate fi rescrisă astfel [32]:
dt
duACuudCf MwDwh 0
2
1
Care mai este cunoscută şi drept ecuaţia lui Morison. Termenul dt
duACMw descrie
forţa inerţială sau „de masă adăugată” iar CM se mai numeşte şi coeficient inerţial.
În cazul în care atât fluidul dar şi conducta se mişcă ( este chiar cazul la lansare)
atunci forţa hidrodinamică pe unitatea de lungime a conductei este [32]:
0
02
1
dt
dvA
dt
dvACvvdCf cr
MwrrDwh
Unde v este viteza conductei, vc este viteza curentului iar viteza relativă este [32]:
cr vvv
Forţa Krylov este independentă de v fiind asociată de viteza absolută a fluidului iar
cum curenţii oceanici variază lent, avem dvc/dt=0 şi practic această forţă poate fi neglijată.
În aplicaţiile practice de la lansarea conductelor în genere poate fi apreciat că dv/dt=0
şi deci ultimii doi termeni din (3.25) pot fi neglijaţi.
3.4.4 Interacţiunea dintre conductă şi fundul mării
Configuraţia fundului mării în timpul lansării şi instalării, este determinantă pentru
evaluarea interacţiunii dintre conductă şi acesta în timpul lansării. Cele mai semnificative
efecte ale fundului mării sunt:
Capacitatea de rezemare verticală va susţine greutatea conductei
Rezistenţa laterală a solului va determină cum va reacţiona conducta la
perturbaţiile laterale precum curenţii
(3.23)
(3.24)
(3.25)
(3.26)

Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
27
Rezistenţa axială va determina cum va reacţiona conducta la perturbaţiile
axiale precum dilatările termice.
Solul fundului de mare este pregătit prin diverse tehnologii (dragare de pildă) înainte
de a fi lansată conducta. Deseori după lansare, conducta este îngropată pentru un
comportament mai bun în timpul funcţionării.
Capacitatea de rezemare verticală
Această capacitate reacţionează la greutatea conductei. La lansare, solul va ceda până
Rezistenţa dezvoltată în sol și va contrabalansa greutatea conductei. Pentru conducte grele şi
sol slab, conducta poate sfârşi prin a fi complet îngropată încă de la lansare. Ecuaţia de
echilibru va fi [32]:
Vfwvs Rfffw 2
Unde fv este forţa verticală datorată curburii conductei în plan vertical, fw este
greutatea solului aflat deasupra conductei îngropate, ff frecarea în sol datorată forfecării şi RV
este capacitatea de rezemare verticală.
O abordare populară a contactului dintre conductă şi sol este cea propusă de Boom
(1985) la care solul este modelat ca o masă la care se ataşează două arcuri care simulează
elasticitatea solului.
Rezistenţa laterală a solului
Conductele din oţel au o rigiditate torsională mare, ceea ce împiedică conducta să se
rostogolească pe sol. Aşadar doar Rezistenţa solului la patinare a conductei trebuie
considerată. Această rezistenţă laterală poate fi văzută ca fiind alcătuită din:
O parte pur fricţională datorată afundării conductei în sol;
O altă parte datorată presiunii pasive exercitate de sol asupra conductei.
Partea fricţională depinde de componenta verticală a forţei de reacţiune şi de
coeficientul de frecare al solului. În soluri nisipoase de pildă Rezistenţa laterală este [32]:
0
2/3
0
2
0
0
3
2
dH
d
HdRR
u
u
sVH
Unde RH este Rezistenţa laterală a solului, µ coeficientul de frecare sol-conductă, β o
constantă determinată empiric, ρs greutatea unitară a nisipului, Hu înălţimea şanţului în care
este îngropată conducta.
Pentru soluri argiloase [32]:
0
0
0 dH
D
HdCR
u
u
uH
(3.27)
(3.28)
(3.29)

Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
28
Rezistenţa axială a solului
Rezistenţa axială notată cu Ra se poate calcula la nivel de suporţi, considerând
presiunea solului perpendiculară pe axa conductei care pentru nisip este [32]:
sa
Anaa
ftg
dAR
Unde A este aria suprafeţei de conductă în contact cu solul, µa este coeficientul de
frecare axial, σn este presiunea normal a solului, fϕ forţa de frecare superficială şi ϕ unghiul
efectiv de frecare.
În soluri argiloase [32]:
Auca dACfR
3.4.5 Încărcări din mediul marin
Structurile offshore sunt permanent supuse la încărcări venite din mediul marin
precum vântul, valurile şi curenţii[6][42][12].
Vântul
Vântul este definit ca mişcarea maselor de aer în raport cu suprafaţa pământului fiind
caracterizat de direcţie şi viteză. Momentele şi forţele generate asupra unui corp care pluteşte
sunt date de [42]:
0
2
)(
)(
)(
)(
)(
)(
2
1
LAC
HAC
HAC
AC
AC
AC
V
FwrwN
FLwFwrwM
LwLwrwK
wrwZ
LwrwY
FwrwX
rwawind
Unde ρa este densitatea aerului, Vrw este viteza relativă a vântului faţă de structură, γrw
este unghiul relativ de atac al vântului faţă de structură, CX…M sunt coeficienţi adimensionali,
HFw şi HLw sunt centroidele ariilor structurii aflate deasupra apei, iar ariile sunt AFw şi ALw.
Valurile
Încărcarea determinată de valuri asupra structurii, se poate împărţi în încărcări de
prim ordin τwave1 şi de ordin 2 τwave2.
Cele de ordin 1 se calculează pentru frecvenţa medie de oscilaţie zero, iar de ordin 2
pentru frecvenţă de oscilaţie medie diferită de zero cu o variaţie a forţei de derivă mică.
(3.30)
(3.31)
(3.32)

Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
29
Deci:
21 wavewavewave
Efectul valurilor scade exponential cu adâncimea apei şi ca regulă simplă, se acceptă
că valurile nu produc încărcări dacă adâncimea apei este mai mare de jumătate din lungimea
de undă a valurilor. Pentru un val tipic cu perioada T=15 sec, şi lungimea de undă λ=351 m,
valurile n-au efect decât dacă adâncimea apei este mai mare de 175 metri.
Curenţii
Curenţii se presupun a fi fluxuri de fluid nerotaţionale cu o viteză liniară dată, dar fără
viteză unghiulară. Calculată într-un system inertial, viteza va fi [42]:
3R
w
v
u
v
c
c
c
n
c
Dacă se presupune că variaţia curentului ca viteză este lentă, atunci [42]:
0dt
vd n
c
Dacă sistemul de referinţă se ia pe corpul scufundat atunci [42]:
)3(SOR
vRv
n
b
n
c
Tn
b
b
c
Viteza relativă liniară a unui corp scufundat într-un curent şi acceleraţia să sunt date
de [42]:
dt
vd
dt
Rd
dt
vd
dt
vd
vRvv
n
c
Tn
bbb
r
n
c
Tn
b
bb
r
Conductele sunt considerate ca fiind structuri cu volum mic. Excitaţiile induse de
valuri asupra unor asemenea structuri mici se pot determina cu ecuaţia lui Morison folosind
CM=2 şi CD=1.
În schimb, nava lansatoare este supusă simultan la acţiunea valurilor, vântului şi
curenţilor. În ecuaţia de mişcare a navei acţiunile vântului şi a valurilor sunt însumate pe
baza principiului superpoziţiei [42]:
wavewindv
Stinger-ul fiind extins mult în afara bordului liber, mărimea acestuia va afecta
dinamica navei lansatoare, iar dat fiind că el pătrunde destul de adânc în apă, va fi afectat de
condiţiile de mediu marin descrise mai sus. Aşadar, includerea în modelul de calcul a
platformei este absolut necesară pentru obţinerea de rezultate corecte.
(3.33)
(3.34)
(3.35)
(3.36)
(3.37)
(3.38)

Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
30
3.5 Ecuaţia lănţişorului natural
Ecuaţia lănţisorului este punctul de start în orice încercare de calculare a tensiunilor si
deformaţiilor în zonele cu săgeată ale conductei lansate.
Folosirea ecuaţiei lănţisorului la lansarea conductelor submarine are câteva avantaje:
Este exterm de simplă;
Soluţiile au forme simple;
Rezultatele sunt aproape de realitate;
Este un punct bun de plecare pentru analize mai sofisticate.
Pe de altă parte, există câteva dezavantaje certe:
Soluţiile îşi pierd precizia aproape de capetele conductei;
Momentul de încovoiere este discontinuu în zona de aterizare a conductei;
Nu poate contabiliza încărcările dinamice.
Modul de deducere a ecuaţiei naturale a lănţisorului se face asemănător cu modelul
folosit la determinarea aspectului grinzilor. Din Sub-Capitolul 3.4.3 putem continua să
scriem [42]:
cosswds
dT
Pentru care soluţiile în ipoteza unui fund de mare plat, sunt date de [42]:
sw
Harctgs
s
)(
Unde H=H0.
Dacă se trece la sistemul cartezian de coordonate x-y avem [42]:
cos
cos
ds
dx
ds
dy
Care poate fi rezolvată astfel [42]:
1cosh)(
H
xw
w
Hxy s
Unde x este distanţa de la punctul de aterizare şi y este înălţimea conductei măsurată
de la fundul mării.
Curbura de-a lungul conductei este [42]:
coscoshcos2
2
H
xw
H
w
dx
zd
ds
d ss
(3.39)
(3.40)
(3.41)
(3.42)
(3.43)
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
31
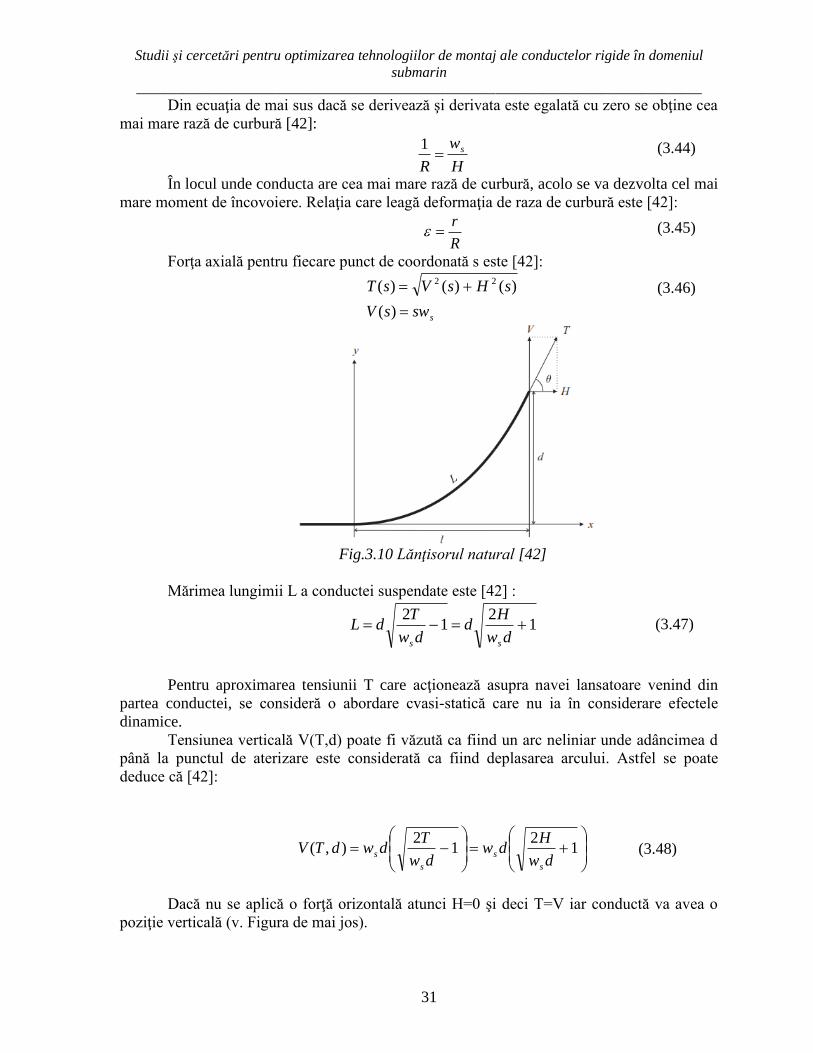
Din ecuaţia de mai sus dacă se derivează şi derivata este egalată cu zero se obţine cea
mai mare rază de curbură [42]:
H
w
R
s1
În locul unde conducta are cea mai mare rază de curbură, acolo se va dezvolta cel mai
mare moment de încovoiere. Relaţia care leagă deformaţia de raza de curbură este [42]:
R
r
Forţa axială pentru fiecare punct de coordonată s este [42]:
sswsV
sHsVsT
)(
)()()( 22
Fig.3.10 Lănţisorul natural [42]
Mărimea lungimii L a conductei suspendate este [42] :
12
12
dw
Hd
dw
TdL
ss
Pentru aproximarea tensiunii T care acţionează asupra navei lansatoare venind din
partea conductei, se consideră o abordare cvasi-statică care nu ia în considerare efectele
dinamice.
Tensiunea verticală V(T,d) poate fi văzută ca fiind un arc neliniar unde adâncimea d
până la punctul de aterizare este considerată ca fiind deplasarea arcului. Astfel se poate
deduce că [42]:
1
21
2),(
dw
Hdw
dw
TdwdTV
s
s
s
s
Dacă nu se aplică o forţă orizontală atunci H=0 şi deci T=V iar conductă va avea o
poziţie verticală (v. Figura de mai jos).
(3.44)
(3.45)
(3.46)
(3.47)
(3.48)
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
32
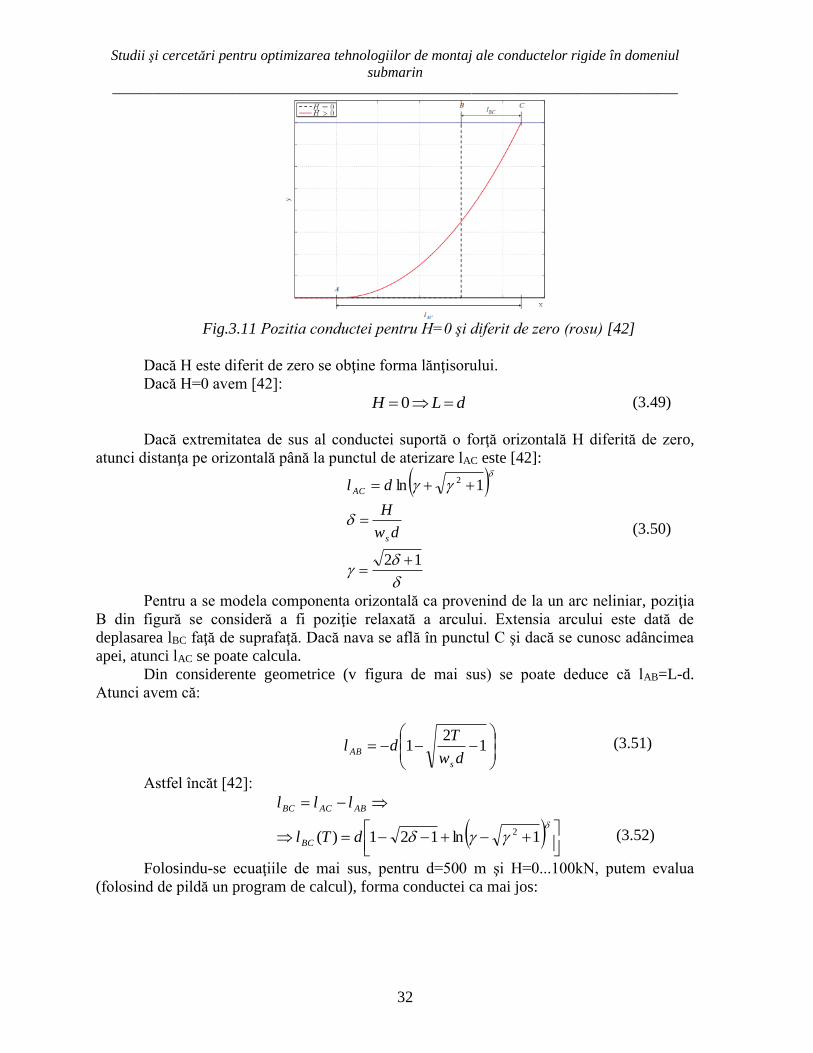
Fig.3.11 Pozitia conductei pentru H=0 şi diferit de zero (rosu) [42]
Dacă H este diferit de zero se obţine forma lănţisorului.
Dacă H=0 avem [42]:
dLH 0
Dacă extremitatea de sus al conductei suportă o forţă orizontală H diferită de zero,
atunci distanţa pe orizontală până la punctul de aterizare lAC este [42]:
12
1ln 2
dw
H
dl
s
AC
Pentru a se modela componenta orizontală ca provenind de la un arc neliniar, poziţia
B din figură se consideră a fi poziţie relaxată a arcului. Extensia arcului este dată de
deplasarea lBC faţă de suprafaţă. Dacă nava se află în punctul C şi dacă se cunosc adâncimea
apei, atunci lAC se poate calcula.
Din considerente geometrice (v figura de mai sus) se poate deduce că lAB=L-d.
Atunci avem că:
1
21
dw
Tdl
s
AB
Astfel încăt [42]:
1ln121)( 2dTl
lll
BC
ABACBC
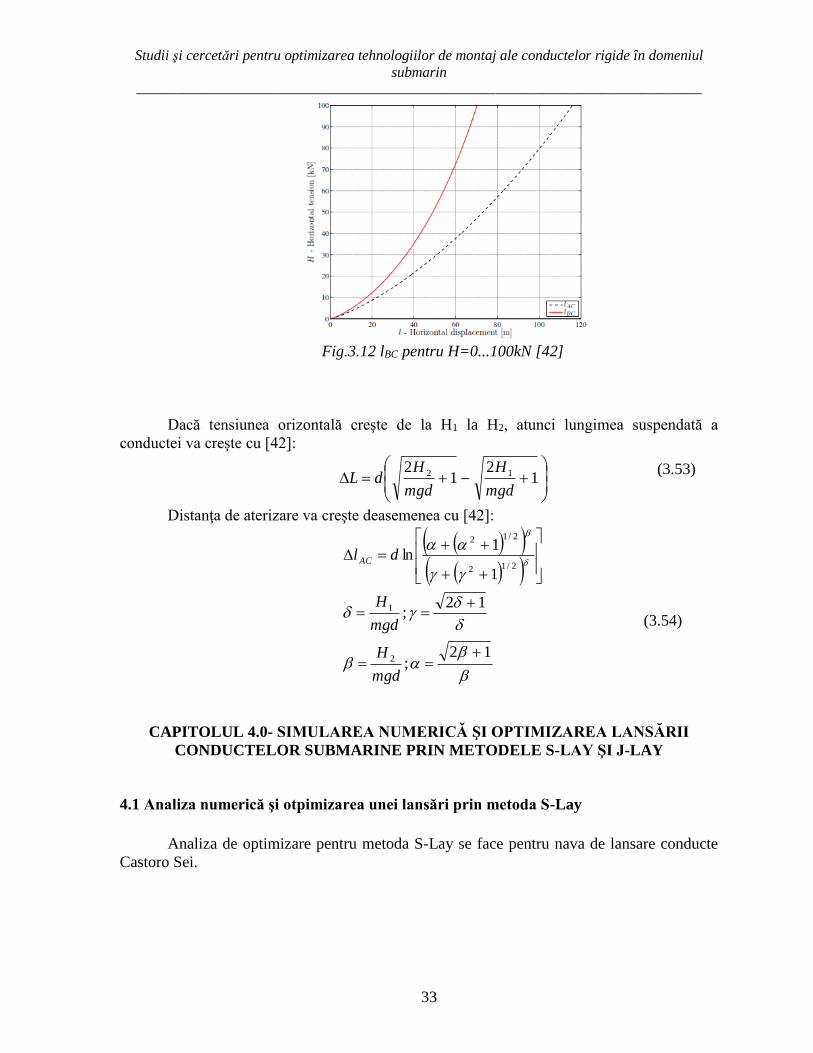
Folosindu-se ecuaţiile de mai sus, pentru d=500 m şi H=0...100kN, putem evalua
(folosind de pildă un program de calcul), forma conductei ca mai jos:
(3.49)
(3.50)
(3.51)
(3.52)
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
33
Fig.3.12 lBC pentru H=0...100kN [42]
Dacă tensiunea orizontală creşte de la H1 la H2, atunci lungimea suspendată a
conductei va creşte cu [42]:
1
21
2 12
mgd
H
mgd
HdL
Distanţa de aterizare va creşte deasemenea cu [42]:
12;
12;
1
1ln
2
1
2/12
2/12
mgd
H
mgd
H
dl AC
CAPITOLUL 4.0- SIMULAREA NUMERICǍ ŞI OPTIMIZAREA LANSĂRII
CONDUCTELOR SUBMARINE PRIN METODELE S-LAY ŞI J-LAY
4.1 Analiza numerică şi otpimizarea unei lansări prin metoda S-Lay
Analiza de optimizare pentru metoda S-Lay se face pentru nava de lansare conducte
Castoro Sei.
(3.53)
(3.54)
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
34
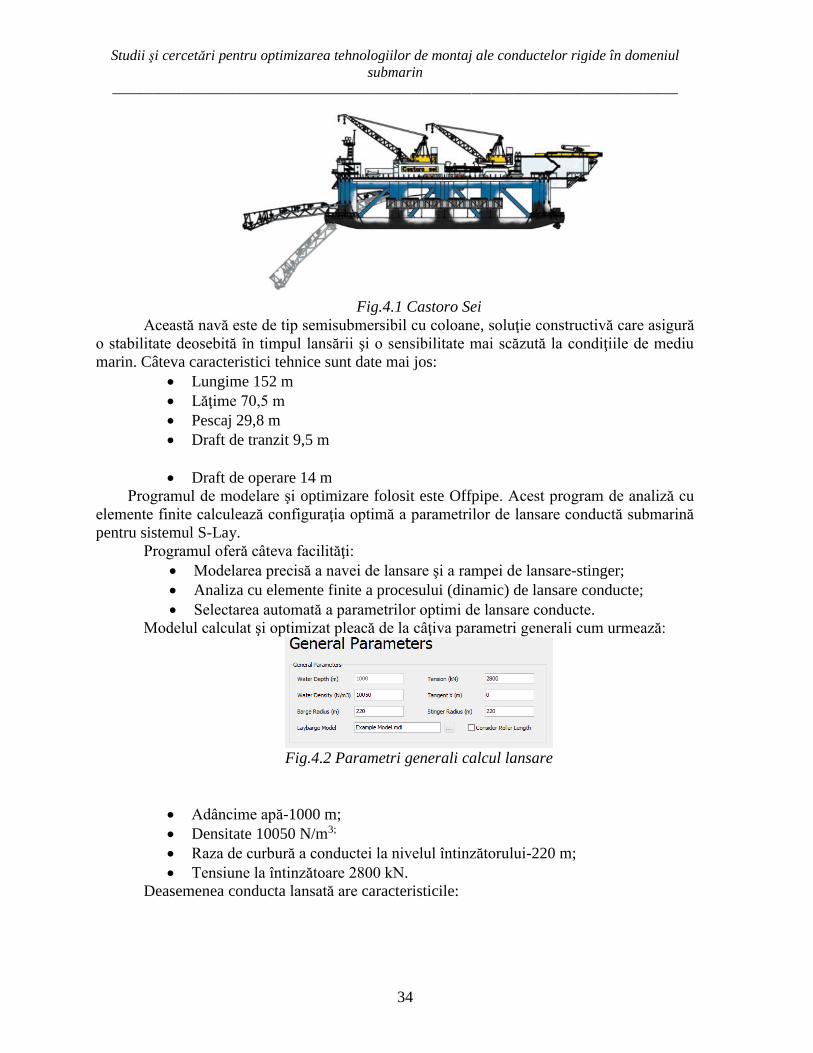
Fig.4.1 Castoro Sei
Această navă este de tip semisubmersibil cu coloane, soluţie constructivă care asigură
o stabilitate deosebită în timpul lansării şi o sensibilitate mai scăzută la condiţiile de mediu
marin. Câteva caracteristici tehnice sunt date mai jos:
Lungime 152 m
Lăţime 70,5 m
Pescaj 29,8 m
Draft de tranzit 9,5 m
Draft de operare 14 m
Programul de modelare şi optimizare folosit este Offpipe. Acest program de analiză cu
elemente finite calculează configuraţia optimă a parametrilor de lansare conductă submarină
pentru sistemul S-Lay.
Programul oferă câteva facilităţi:
Modelarea precisă a navei de lansare şi a rampei de lansare-stinger;
Analiza cu elemente finite a procesului (dinamic) de lansare conducte;
Selectarea automată a parametrilor optimi de lansare conducte.
Modelul calculat şi optimizat pleacă de la câţiva parametri generali cum urmează:
Fig.4.2 Parametri generali calcul lansare
Adâncime apă-1000 m;
Densitate 10050 N/m3;
Raza de curbură a conductei la nivelul întinzătorului-220 m;
Tensiune la întinzătoare 2800 kN.
Deasemenea conducta lansată are caracteristicile:

Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
35
Fig.4.3 Parametri conductă
Limita de curgere a materialului-448 Mpa;
Deformaţie maximă-0,25%;
Modulul lui Young-207000Mpa;
Densitate oţel-76970 N/m3;
Diametru exterior-220 mm;
Grosime perete-18,3 mm;
Grosime strat coating-2,35 mm;
Densitate coating-9000 N/m3
După introducerea acestor date generale, se introduc date cu privire la parametrii de
optimizat, şi anume ţintele de optimizare.
Fig.4.4 Ţintele parametrilor de optimizat
Tintele alese: pentru raza de curbură optimă să fie cuprinsă între 200 şi 300 m, iar
tensiunea din conductă să fie între 2000 şi 3000 kN.
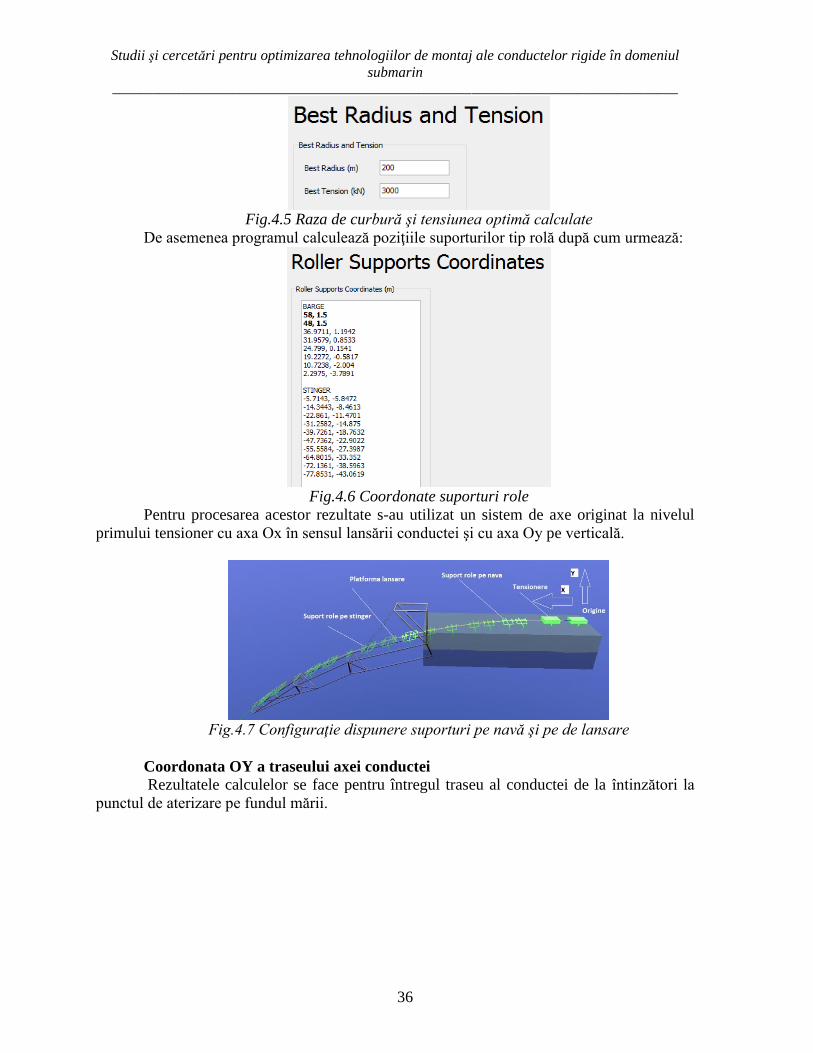
După efectuarea calculelor rezultatele arată că cea mai bună rază este de 200 m la
care tensiunea dezvoltată de întinzătoare este de 3000 kN.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
36
Fig.4.5 Raza de curbură şi tensiunea optimă calculate
De asemenea programul calculează poziţiile suporturilor tip rolă după cum urmează:
Fig.4.6 Coordonate suporturi role
Pentru procesarea acestor rezultate s-au utilizat un sistem de axe originat la nivelul
primului tensioner cu axa Ox în sensul lansării conductei şi cu axa Oy pe verticală.
Fig.4.7 Configuraţie dispunere suporturi pe navă şi pe de lansare
Coordonata OY a traseului axei conductei
Rezultatele calculelor se face pentru întregul traseu al conductei de la întinzători la
punctul de aterizare pe fundul mării.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
37
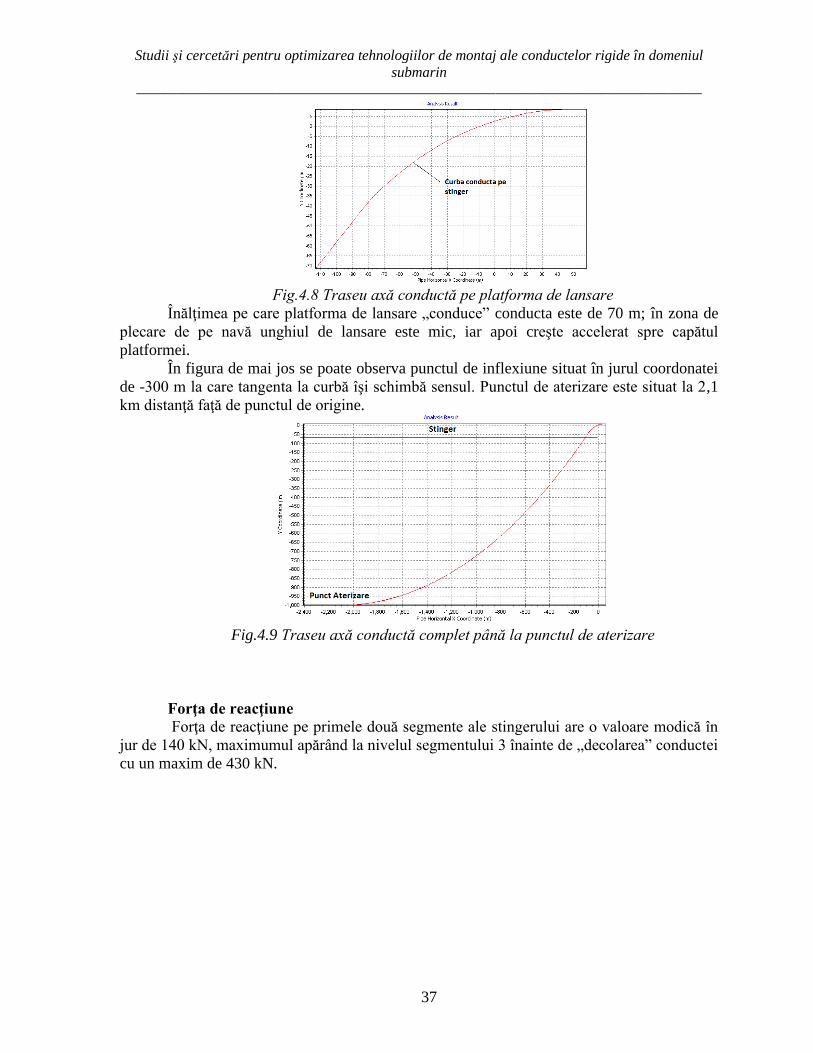
Fig.4.8 Traseu axă conductă pe platforma de lansare
Înălţimea pe care platforma de lansare „conduce” conducta este de 70 m; în zona de
plecare de pe navă unghiul de lansare este mic, iar apoi creşte accelerat spre capătul
platformei.
În figura de mai jos se poate observa punctul de inflexiune situat în jurul coordonatei
de -300 m la care tangenta la curbă îşi schimbă sensul. Punctul de aterizare este situat la 2,1
km distanţă faţă de punctul de origine.
Fig.4.9 Traseu axă conductă complet până la punctul de aterizare
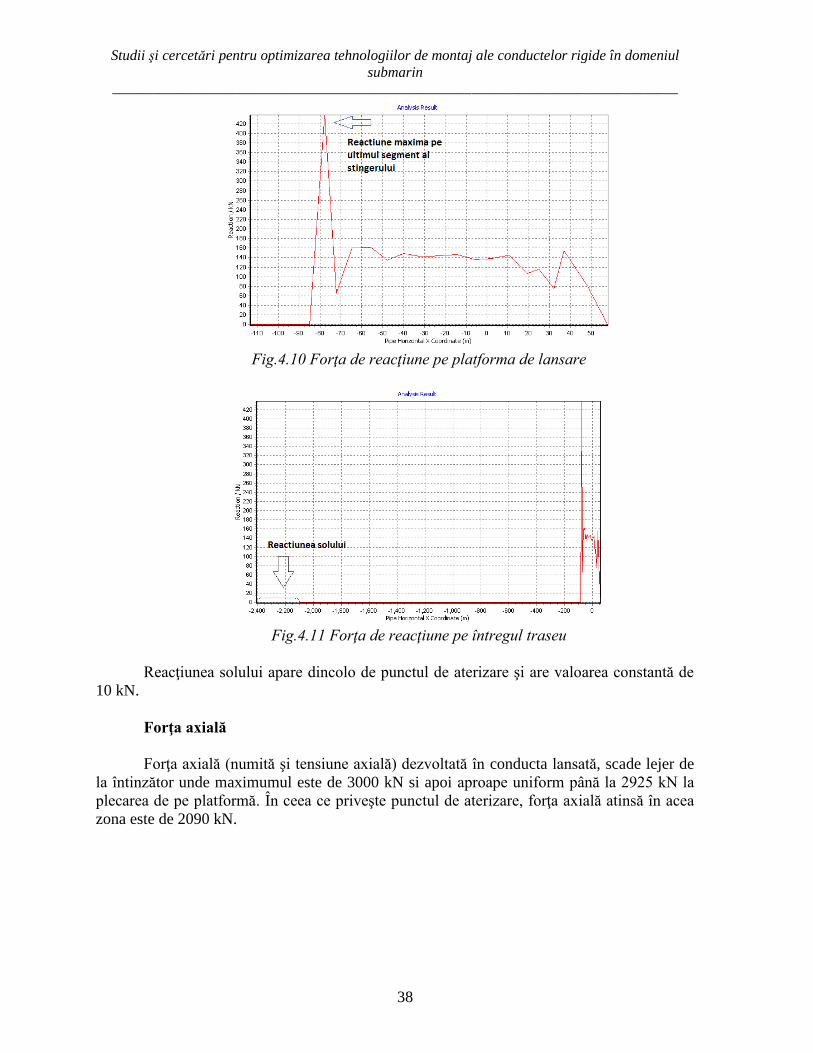
Forţa de reacţiune
Forţa de reacţiune pe primele două segmente ale stingerului are o valoare modică în
jur de 140 kN, maximumul apărând la nivelul segmentului 3 înainte de „decolarea” conductei
cu un maxim de 430 kN.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
38
Fig.4.10 Forţa de reacţiune pe platforma de lansare
Fig.4.11 Forţa de reacţiune pe întregul traseu
Reacţiunea solului apare dincolo de punctul de aterizare şi are valoarea constantă de
10 kN.
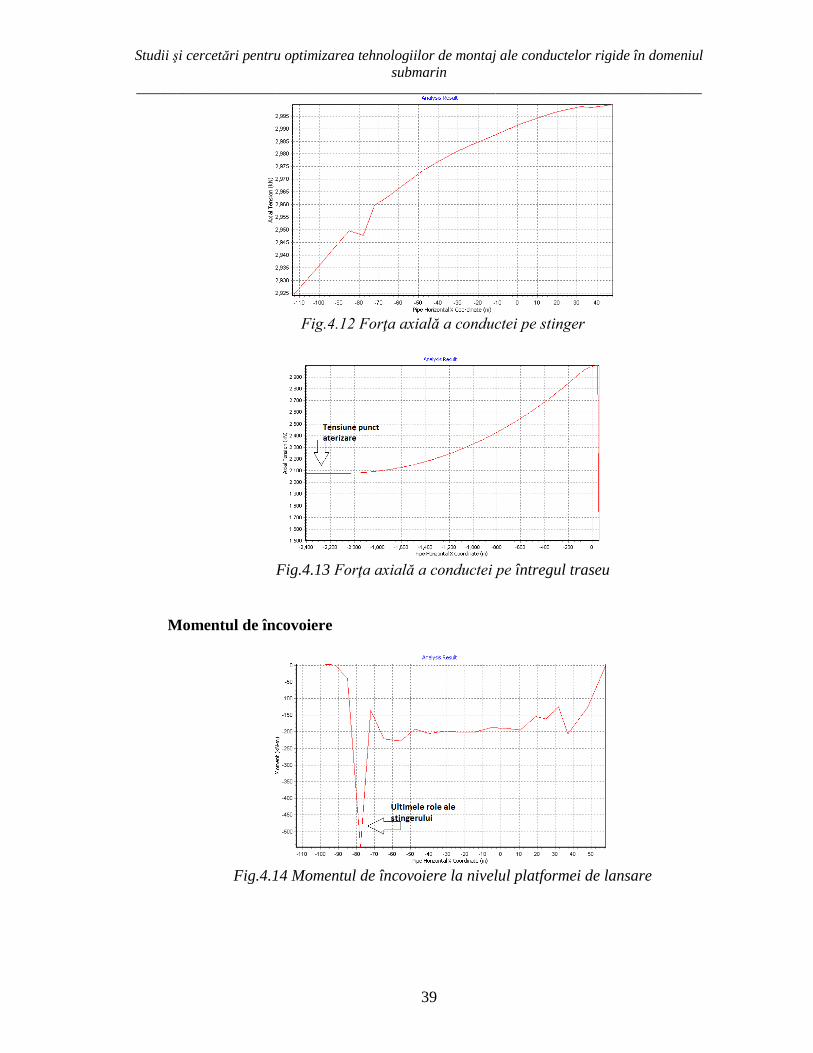
Forţa axială
Forţa axială (numită şi tensiune axială) dezvoltată în conducta lansată, scade lejer de
la întinzător unde maximumul este de 3000 kN si apoi aproape uniform până la 2925 kN la
plecarea de pe platformă. În ceea ce priveşte punctul de aterizare, forţa axială atinsă în acea
zona este de 2090 kN.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
39
Fig.4.12 Forţa axială a conductei pe stinger
Fig.4.13 Forţa axială a conductei pe întregul traseu
Momentul de încovoiere
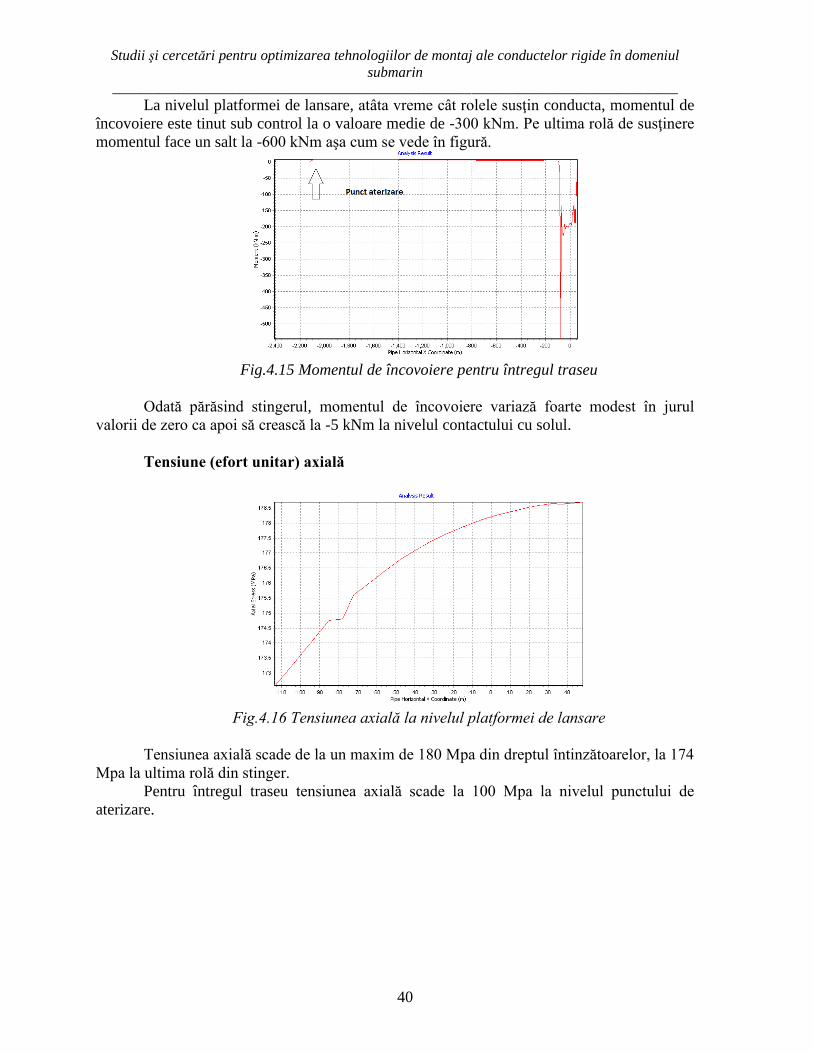
Fig.4.14 Momentul de încovoiere la nivelul platformei de lansare
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
40
La nivelul platformei de lansare, atâta vreme cât rolele susţin conducta, momentul de
încovoiere este tinut sub control la o valoare medie de -300 kNm. Pe ultima rolă de susţinere
momentul face un salt la -600 kNm aşa cum se vede în figură.
Fig.4.15 Momentul de încovoiere pentru întregul traseu
Odată părăsind stingerul, momentul de încovoiere variază foarte modest în jurul
valorii de zero ca apoi să crească la -5 kNm la nivelul contactului cu solul.
Tensiune (efort unitar) axială
Fig.4.16 Tensiunea axială la nivelul platformei de lansare
Tensiunea axială scade de la un maxim de 180 Mpa din dreptul întinzătoarelor, la 174
Mpa la ultima rolă din stinger.
Pentru întregul traseu tensiunea axială scade la 100 Mpa la nivelul punctului de
aterizare.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
41
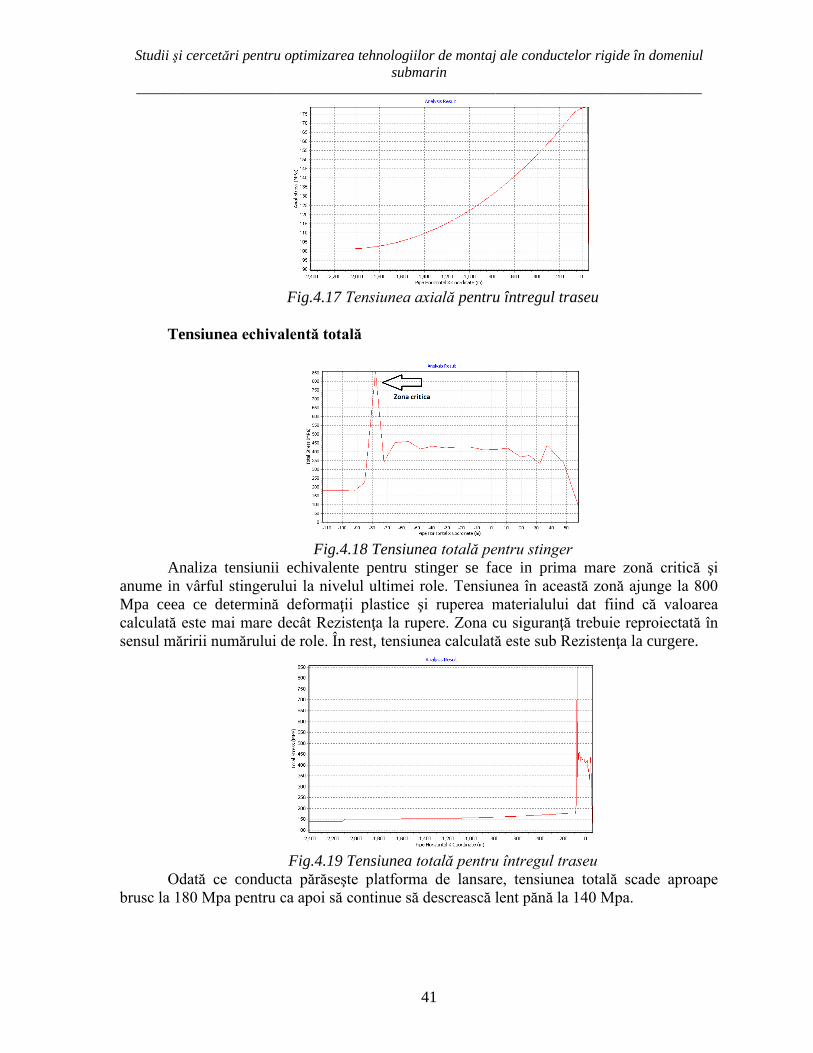
Fig.4.17 Tensiunea axială pentru întregul traseu
Tensiunea echivalentă totală
Fig.4.18 Tensiunea totală pentru stinger
Analiza tensiunii echivalente pentru stinger se face in prima mare zonă critică şi
anume in vârful stingerului la nivelul ultimei role. Tensiunea în această zonă ajunge la 800
Mpa ceea ce determină deformaţii plastice şi ruperea materialului dat fiind că valoarea
calculată este mai mare decât Rezistenţa la rupere. Zona cu siguranţă trebuie reproiectată în
sensul măririi numărului de role. În rest, tensiunea calculată este sub Rezistenţa la curgere.
Fig.4.19 Tensiunea totală pentru întregul traseu
Odată ce conducta părăseşte platforma de lansare, tensiunea totală scade aproape
brusc la 180 Mpa pentru ca apoi să continue să descrească lent pănă la 140 Mpa.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
42
Deformaţia maximă
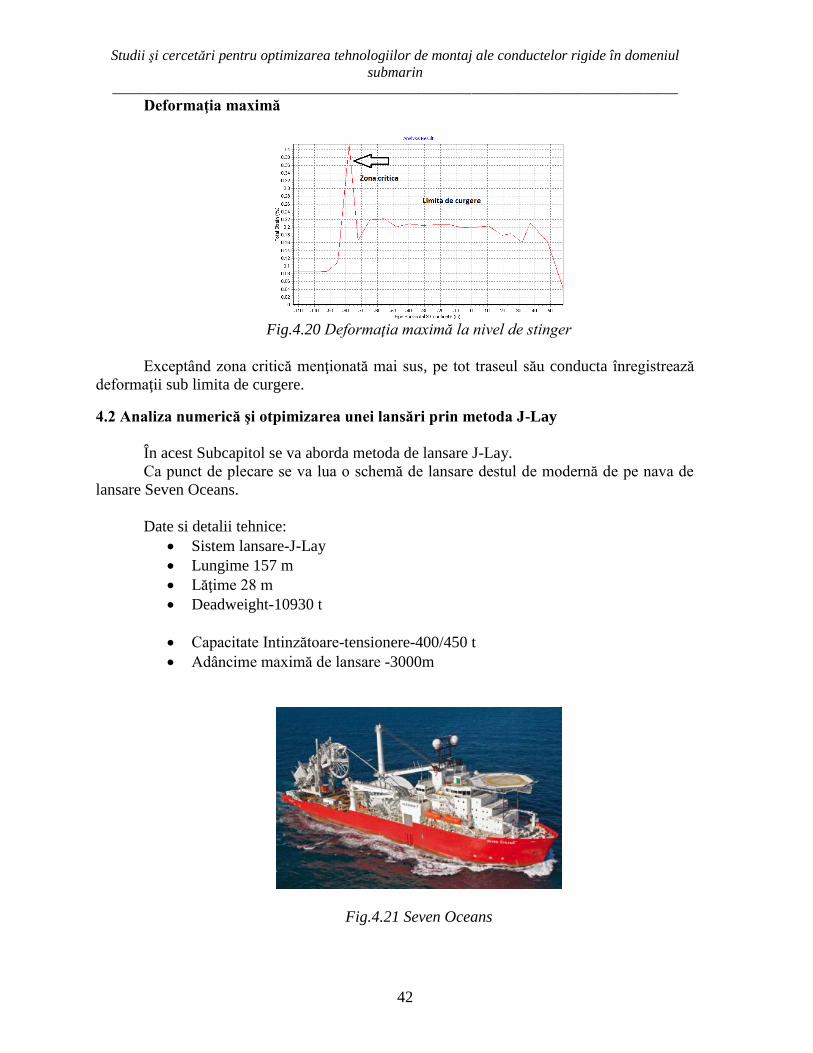
Fig.4.20 Deformaţia maximă la nivel de stinger
Exceptând zona critică menţionată mai sus, pe tot traseul său conducta înregistrează
deformaţii sub limita de curgere.
4.2 Analiza numerică şi otpimizarea unei lansări prin metoda J-Lay
În acest Subcapitol se va aborda metoda de lansare J-Lay.
Ca punct de plecare se va lua o schemă de lansare destul de modernă de pe nava de
lansare Seven Oceans.
Date si detalii tehnice:
Sistem lansare-J-Lay
Lungime 157 m
Lăţime 28 m
Deadweight-10930 t
Capacitate Intinzătoare-tensionere-400/450 t
Adâncime maximă de lansare -3000m
Fig.4.21 Seven Oceans
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
43
De această dată, optimizarea va privi traseul conductei de la plecarea de pe linia de
montaj şi tensionere, până la punctul de contact cu suprafaţa apei. Programele folosite vor fi
SolidWorks 2015 pentru generarea geometriei şi ANSYS 15 pentru analiza cu modulele
Explicit Dynamics şi Response Surface Optimisation.
4.2.1 Calculul matematic al forţelor care apar pe traseul conductei la lansare
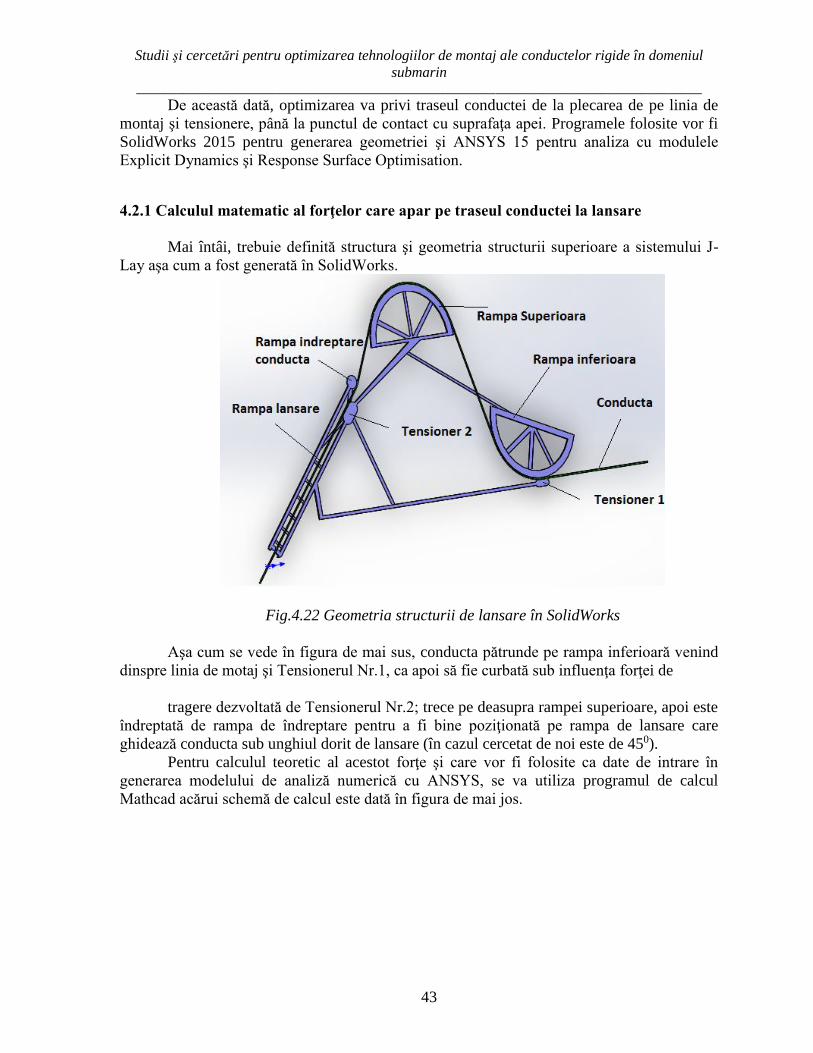
Mai întâi, trebuie definită structura şi geometria structurii superioare a sistemului J-
Lay aşa cum a fost generată în SolidWorks.
Fig.4.22 Geometria structurii de lansare în SolidWorks
Aşa cum se vede în figura de mai sus, conducta pătrunde pe rampa inferioară venind
dinspre linia de motaj şi Tensionerul Nr.1, ca apoi să fie curbată sub influenţa forţei de
tragere dezvoltată de Tensionerul Nr.2; trece pe deasupra rampei superioare, apoi este
îndreptată de rampa de îndreptare pentru a fi bine poziţionată pe rampa de lansare care
ghidează conducta sub unghiul dorit de lansare (în cazul cercetat de noi este de 450).
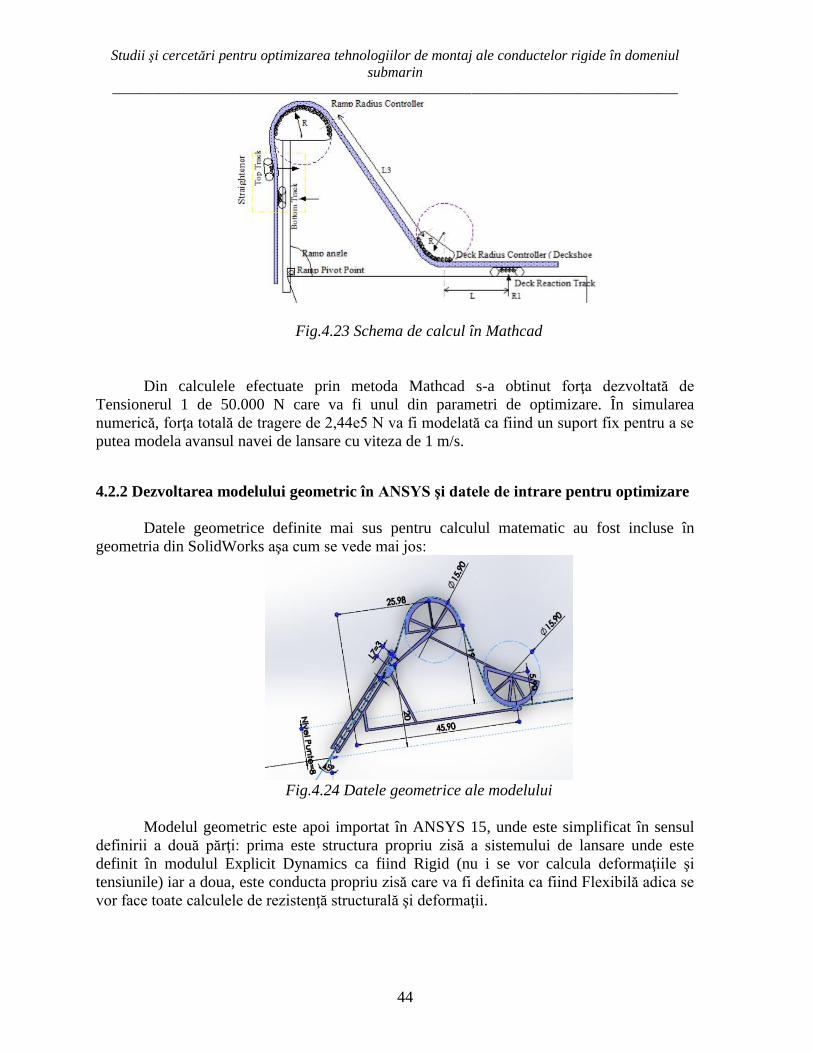
Pentru calculul teoretic al acestot forţe şi care vor fi folosite ca date de intrare în
generarea modelului de analiză numerică cu ANSYS, se va utiliza programul de calcul
Mathcad acărui schemă de calcul este dată în figura de mai jos.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
44
Fig.4.23 Schema de calcul în Mathcad
Din calculele efectuate prin metoda Mathcad s-a obtinut forţa dezvoltată de
Tensionerul 1 de 50.000 N care va fi unul din parametri de optimizare. În simularea
numerică, forţa totală de tragere de 2,44e5 N va fi modelată ca fiind un suport fix pentru a se
putea modela avansul navei de lansare cu viteza de 1 m/s.
4.2.2 Dezvoltarea modelului geometric în ANSYS şi datele de intrare pentru optimizare
Datele geometrice definite mai sus pentru calculul matematic au fost incluse în
geometria din SolidWorks aşa cum se vede mai jos:
Fig.4.24 Datele geometrice ale modelului
Modelul geometric este apoi importat în ANSYS 15, unde este simplificat în sensul
definirii a două părţi: prima este structura propriu zisă a sistemului de lansare unde este
definit în modulul Explicit Dynamics ca fiind Rigid (nu i se vor calcula deformaţiile şi
tensiunile) iar a doua, este conducta propriu zisă care va fi definita ca fiind Flexibilă adica se
vor face toate calculele de rezistenţă structurală şi deformaţii.

Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
45
Fig.4.25 Definirea geometriei în ANSYS împreună cu parametrii de optimizare
Cu acest prilej sunt definiţi şi parametri geometrici de optimizare:
Fig.4.26 Parametrii geometrici de optimizare
Parametri folosiţi pentru optimizare vor fi:
Diametrul rampei superioare sub numele DiamRolaSup;
Diametrul rampei inferioare-DiamRolaInf;
Coordonata pe ava Oy a centrului rampei superioare-YrolaSup;
Coordonata pe ava Ox a centrului rampei superioare-XrolaSup;
Forţa de tracţiune dezvoltată de Tensionerul 1 -Force X Component.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
46
Practic, se va urmări optimizarea diametrelor rampelor, a dispunerii rampei
superioare şi a forţei dezvoltate de Tensionerul 1, astfel încât tensiunile dezvoltate în
conductă pe traseul de lansare să fie cele mai mici.
4.2.3 Calculul tensiunilor cu elemente finite în conductă la lansare
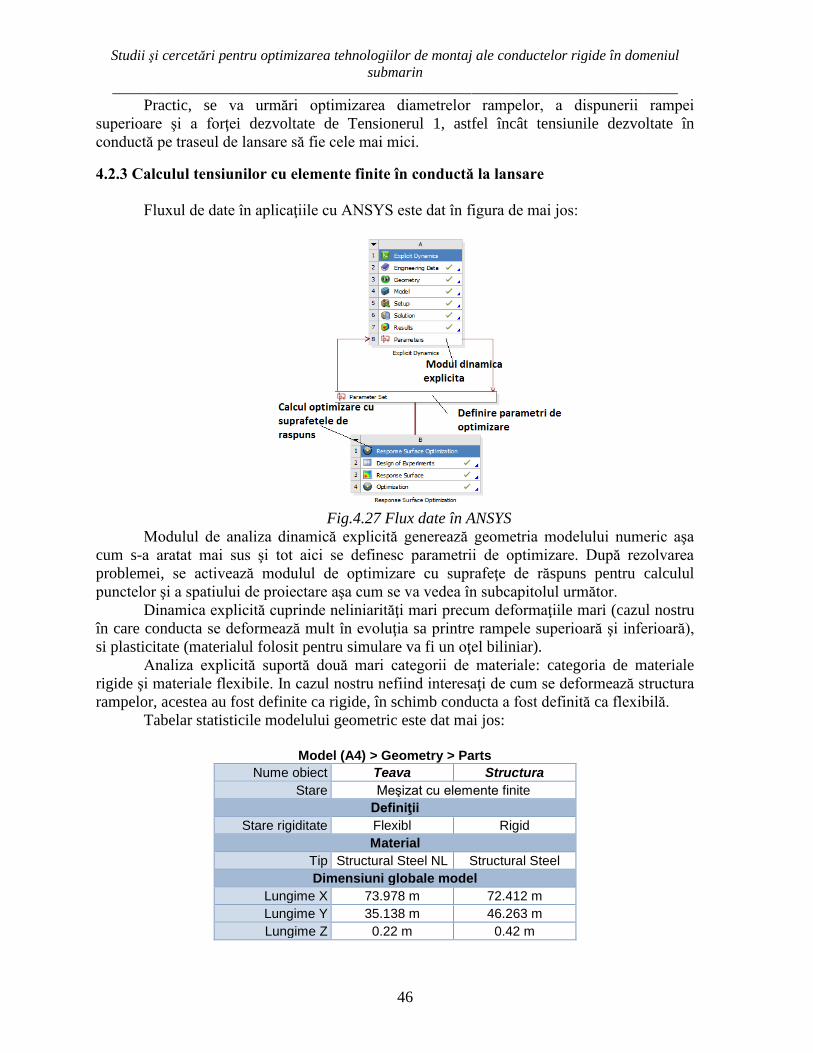
Fluxul de date în aplicaţiile cu ANSYS este dat în figura de mai jos:
Fig.4.27 Flux date în ANSYS
Modulul de analiza dinamică explicită generează geometria modelului numeric aşa
cum s-a aratat mai sus şi tot aici se definesc parametrii de optimizare. După rezolvarea
problemei, se activează modulul de optimizare cu suprafeţe de răspuns pentru calculul
punctelor şi a spatiului de proiectare aşa cum se va vedea în subcapitolul următor.
Dinamica explicită cuprinde neliniarităţi mari precum deformaţiile mari (cazul nostru
în care conducta se deformează mult în evoluţia sa printre rampele superioară şi inferioară),
si plasticitate (materialul folosit pentru simulare va fi un oţel biliniar).
Analiza explicită suportă două mari categorii de materiale: categoria de materiale
rigide şi materiale flexibile. In cazul nostru nefiind interesaţi de cum se deformează structura
rampelor, acestea au fost definite ca rigide, în schimb conducta a fost definită ca flexibilă.
Tabelar statisticile modelului geometric este dat mai jos:
Model (A4) > Geometry > Parts
Nume obiect Teava Structura
Stare Meşizat cu elemente finite
Definiţii
Stare rigiditate Flexibl Rigid
Material
Tip Structural Steel NL Structural Steel
Dimensiuni globale model
Lungime X 73.978 m 72.412 m
Lungime Y 35.138 m 46.263 m
Lungime Z 0.22 m 0.42 m
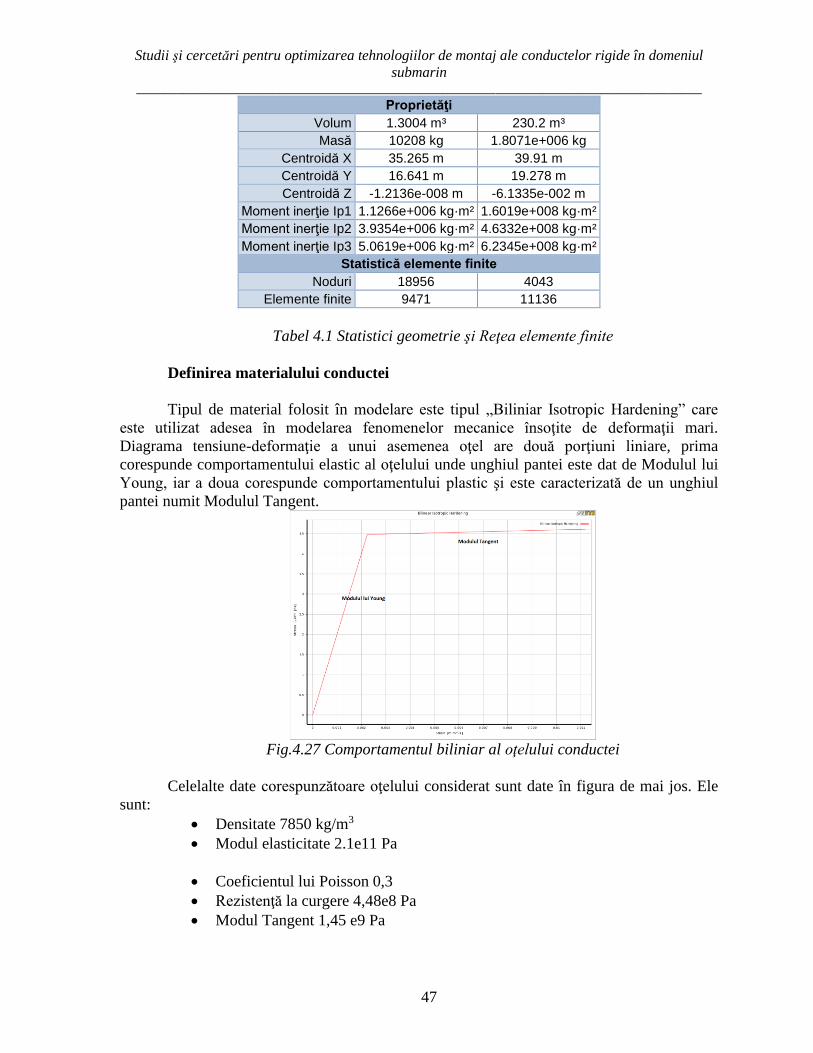
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
47
Proprietăţi
Volum 1.3004 m³ 230.2 m³
Masă 10208 kg 1.8071e+006 kg
Centroidă X 35.265 m 39.91 m
Centroidă Y 16.641 m 19.278 m
Centroidă Z -1.2136e-008 m -6.1335e-002 m
Moment inerţie Ip1 1.1266e+006 kg·m² 1.6019e+008 kg·m²
Moment inerţie Ip2 3.9354e+006 kg·m² 4.6332e+008 kg·m²
Moment inerţie Ip3 5.0619e+006 kg·m² 6.2345e+008 kg·m²
Statistică elemente finite
Noduri 18956 4043
Elemente finite 9471 11136
Tabel 4.1 Statistici geometrie şi Reţea elemente finite
Definirea materialului conductei
Tipul de material folosit în modelare este tipul „Biliniar Isotropic Hardening” care
este utilizat adesea în modelarea fenomenelor mecanice însoţite de deformaţii mari.
Diagrama tensiune-deformaţie a unui asemenea oţel are două porţiuni liniare, prima
corespunde comportamentului elastic al oţelului unde unghiul pantei este dat de Modulul lui
Young, iar a doua corespunde comportamentului plastic şi este caracterizată de un unghiul
pantei numit Modulul Tangent.
Fig.4.27 Comportamentul biliniar al oţelului conductei
Celelalte date corespunzătoare oţelului considerat sunt date în figura de mai jos. Ele
sunt:
Densitate 7850 kg/m3
Modul elasticitate 2.1e11 Pa
Coeficientul lui Poisson 0,3
Rezistenţă la curgere 4,48e8 Pa
Modul Tangent 1,45 e9 Pa
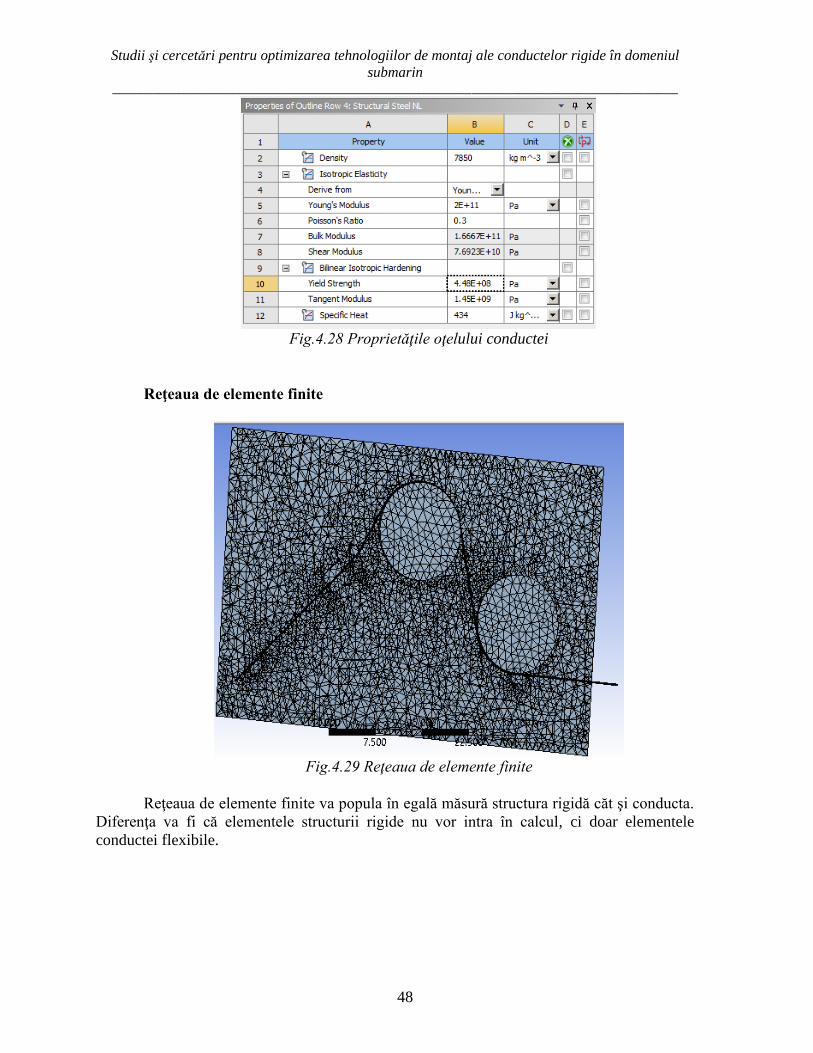
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
48
Fig.4.28 Proprietăţile oţelului conductei
Reţeaua de elemente finite
Fig.4.29 Reţeaua de elemente finite
Reţeaua de elemente finite va popula în egală măsură structura rigidă căt şi conducta.
Diferenţa va fi că elementele structurii rigide nu vor intra în calcul, ci doar elementele
conductei flexibile.
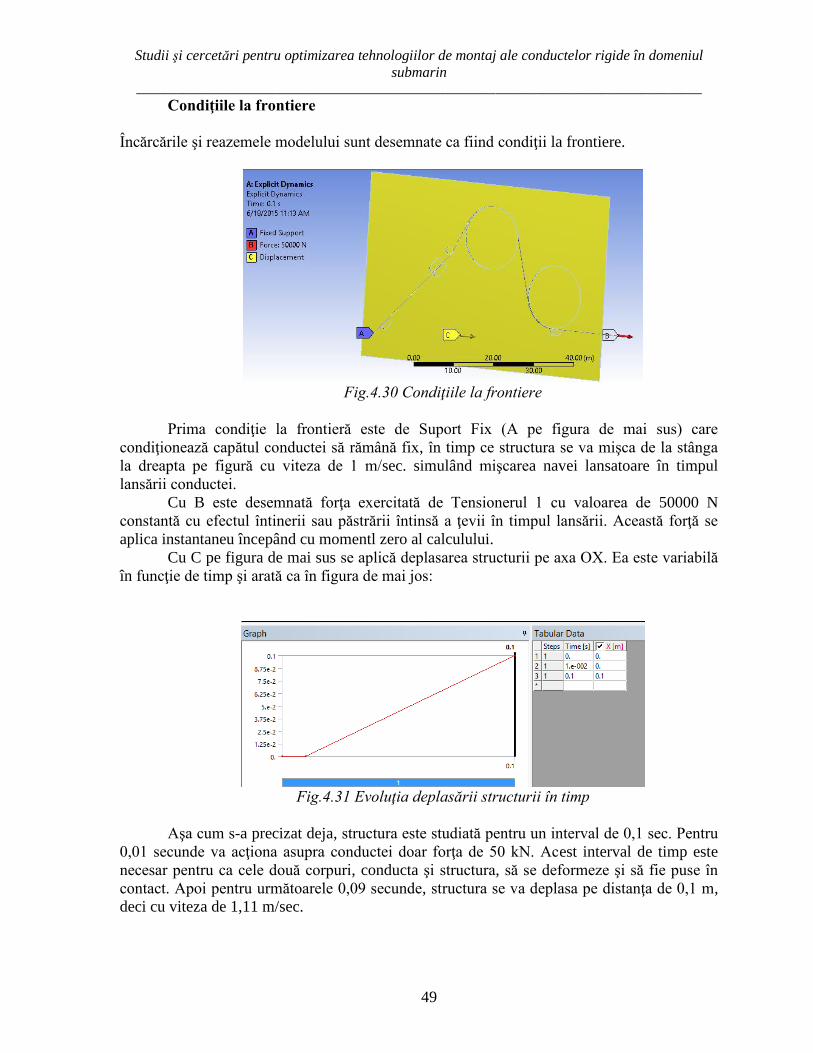
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
49
Condiţiile la frontiere
Încărcările şi reazemele modelului sunt desemnate ca fiind condiţii la frontiere.
Fig.4.30 Condiţiile la frontiere
Prima condiţie la frontieră este de Suport Fix (A pe figura de mai sus) care
condiţionează capătul conductei să rămână fix, în timp ce structura se va mişca de la stânga
la dreapta pe figură cu viteza de 1 m/sec. simulând mişcarea navei lansatoare în timpul
lansării conductei.
Cu B este desemnată forţa exercitată de Tensionerul 1 cu valoarea de 50000 N
constantă cu efectul întinerii sau păstrării întinsă a ţevii în timpul lansării. Această forţă se
aplica instantaneu începând cu momentl zero al calculului.
Cu C pe figura de mai sus se aplică deplasarea structurii pe axa OX. Ea este variabilă
în funcţie de timp şi arată ca în figura de mai jos:
Fig.4.31 Evoluţia deplasării structurii în timp
Aşa cum s-a precizat deja, structura este studiată pentru un interval de 0,1 sec. Pentru
0,01 secunde va acţiona asupra conductei doar forţa de 50 kN. Acest interval de timp este
necesar pentru ca cele două corpuri, conducta şi structura, să se deformeze şi să fie puse în
contact. Apoi pentru următoarele 0,09 secunde, structura se va deplasa pe distanţa de 0,1 m,
deci cu viteza de 1,11 m/sec.
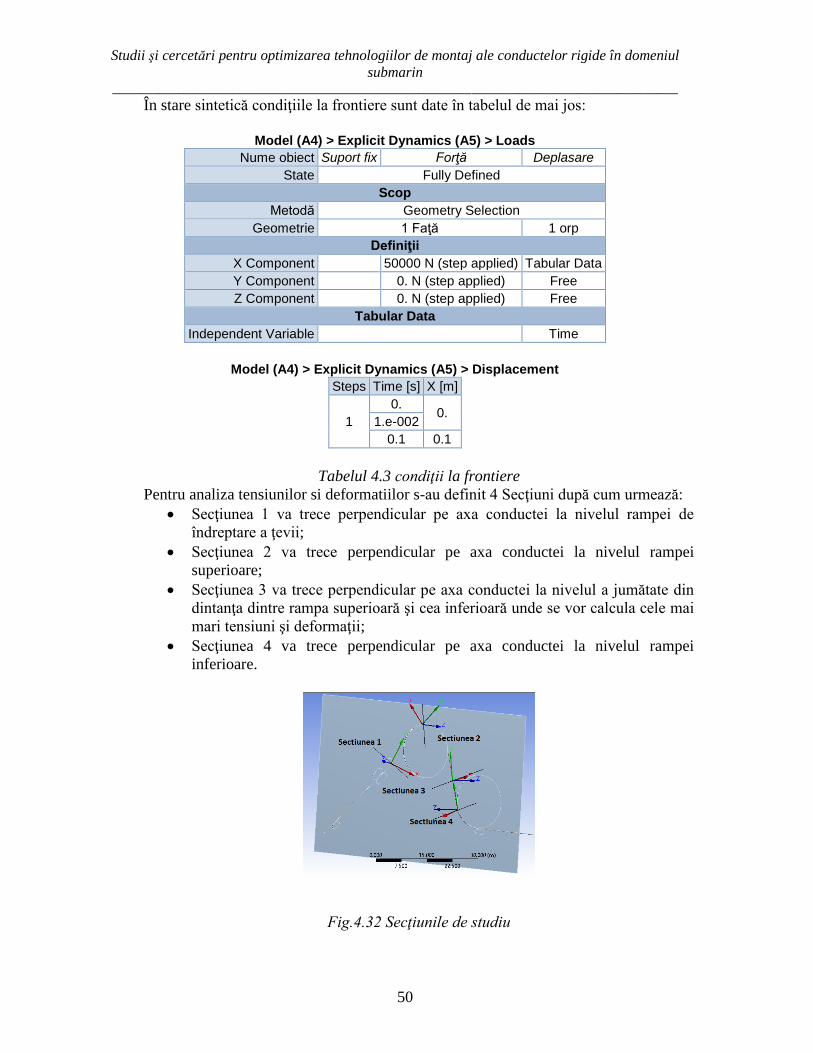
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
50
În stare sintetică condiţiile la frontiere sunt date în tabelul de mai jos:
Model (A4) > Explicit Dynamics (A5) > Loads
Nume obiect Suport fix Forţă Deplasare
State Fully Defined
Scop
Metodă Geometry Selection
Geometrie 1 Faţă 1 orp
Definiţii
X Component 50000 N (step applied) Tabular Data
Y Component 0. N (step applied) Free
Z Component 0. N (step applied) Free
Tabular Data
Independent Variable Time
Model (A4) > Explicit Dynamics (A5) > Displacement
Steps Time [s] X [m]
1
0. 0.
1.e-002
0.1 0.1
Tabelul 4.3 condiţii la frontiere
Pentru analiza tensiunilor si deformatiilor s-au definit 4 Secţiuni după cum urmează:
Secţiunea 1 va trece perpendicular pe axa conductei la nivelul rampei de
îndreptare a ţevii;
Secţiunea 2 va trece perpendicular pe axa conductei la nivelul rampei
superioare;
Secţiunea 3 va trece perpendicular pe axa conductei la nivelul a jumătate din
dintanţa dintre rampa superioară şi cea inferioară unde se vor calcula cele mai
mari tensiuni şi deformaţii;
Secţiunea 4 va trece perpendicular pe axa conductei la nivelul rampei
inferioare.
Fig.4.32 Secţiunile de studiu
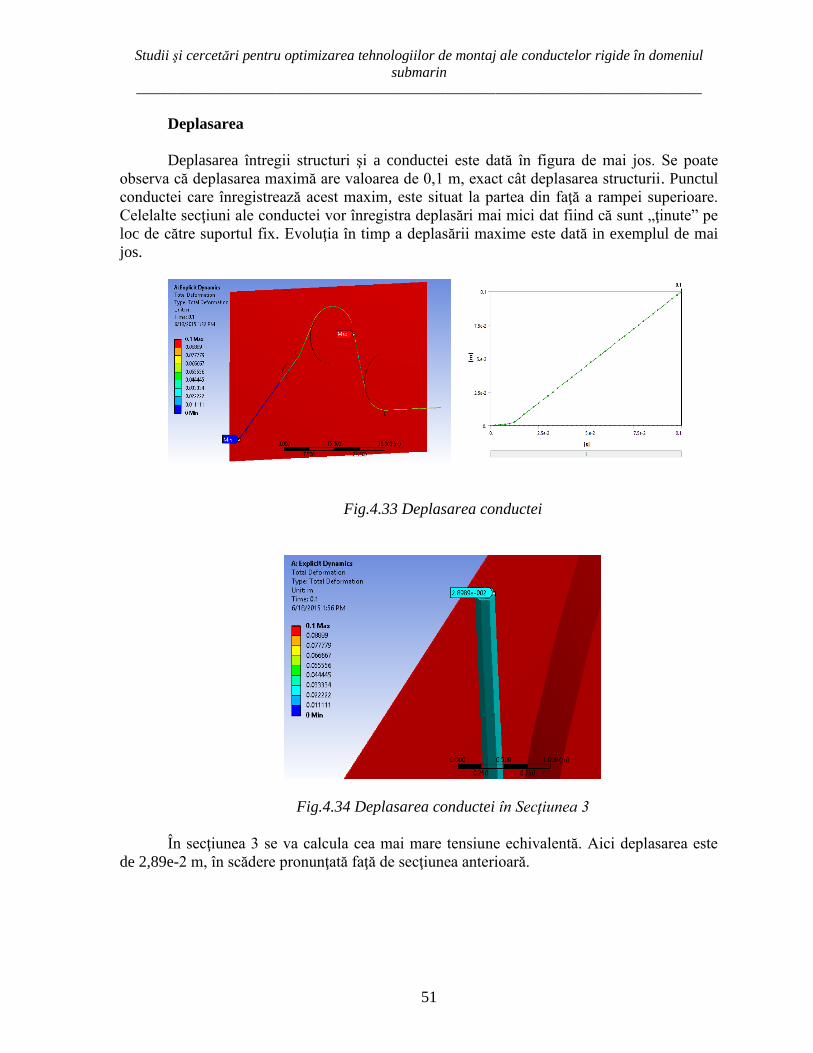
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
51
Deplasarea
Deplasarea întregii structuri şi a conductei este dată în figura de mai jos. Se poate
observa că deplasarea maximă are valoarea de 0,1 m, exact cât deplasarea structurii. Punctul
conductei care înregistrează acest maxim, este situat la partea din faţă a rampei superioare.
Celelalte secţiuni ale conductei vor înregistra deplasări mai mici dat fiind că sunt „ţinute” pe
loc de către suportul fix. Evoluţia în timp a deplasării maxime este dată in exemplul de mai
jos.
Fig.4.33 Deplasarea conductei
Fig.4.34 Deplasarea conductei în Secţiunea 3
În secţiunea 3 se va calcula cea mai mare tensiune echivalentă. Aici deplasarea este
de 2,89e-2 m, în scădere pronunţată faţă de secţiunea anterioară.
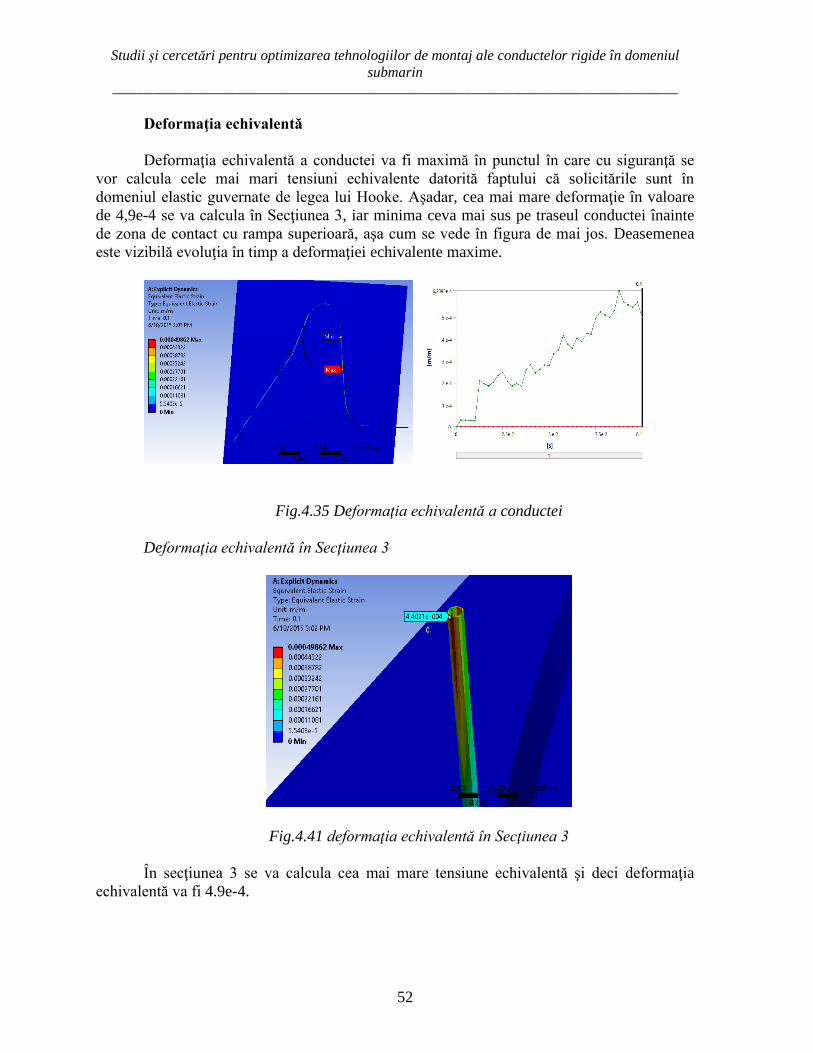
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
52
Deformaţia echivalentă
Deformaţia echivalentă a conductei va fi maximă în punctul în care cu siguranţă se
vor calcula cele mai mari tensiuni echivalente datorită faptului că solicitările sunt în
domeniul elastic guvernate de legea lui Hooke. Aşadar, cea mai mare deformaţie în valoare
de 4,9e-4 se va calcula în Secţiunea 3, iar minima ceva mai sus pe traseul conductei înainte
de zona de contact cu rampa superioară, aşa cum se vede în figura de mai jos. Deasemenea
este vizibilă evoluţia în timp a deformaţiei echivalente maxime.
Fig.4.35 Deformaţia echivalentă a conductei
Deformaţia echivalentă în Secţiunea 3
Fig.4.41 deformaţia echivalentă în Secţiunea 3
În secţiunea 3 se va calcula cea mai mare tensiune echivalentă şi deci deformaţia
echivalentă va fi 4.9e-4.
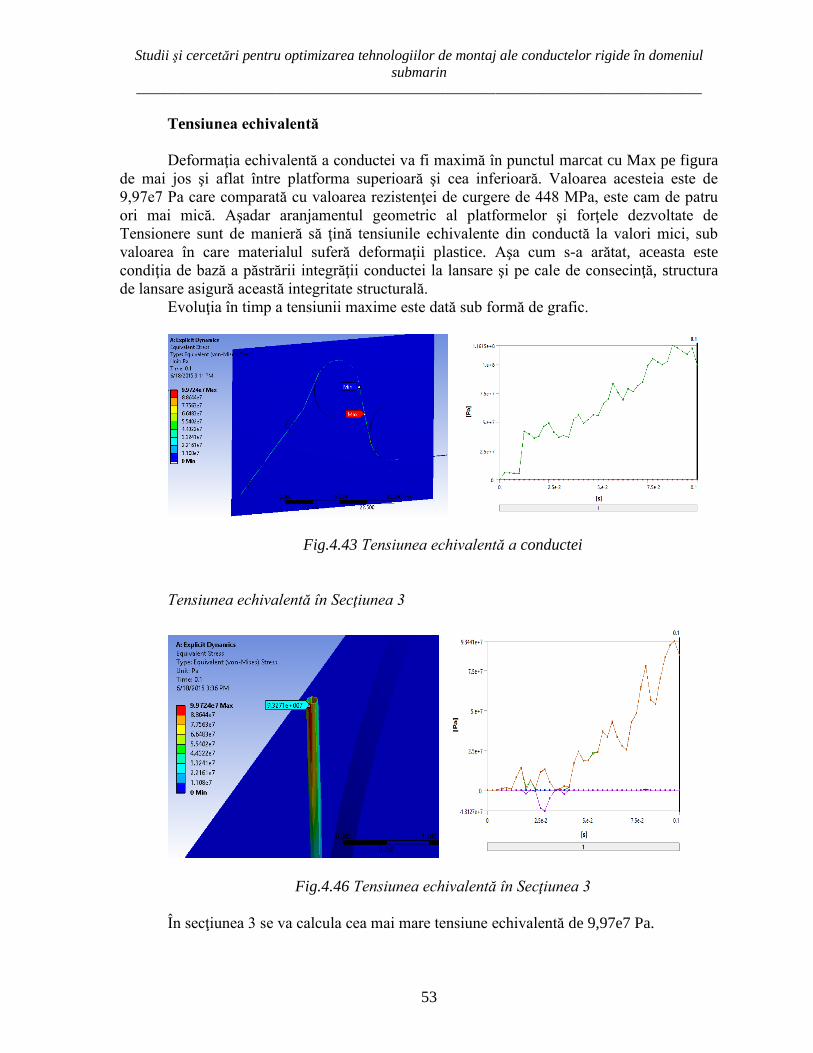
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
53
Tensiunea echivalentă
Deformaţia echivalentă a conductei va fi maximă în punctul marcat cu Max pe figura
de mai jos şi aflat între platforma superioară şi cea inferioară. Valoarea acesteia este de
9,97e7 Pa care comparată cu valoarea rezistenţei de curgere de 448 MPa, este cam de patru
ori mai mică. Aşadar aranjamentul geometric al platformelor şi forţele dezvoltate de
Tensionere sunt de manieră să ţină tensiunile echivalente din conductă la valori mici, sub
valoarea în care materialul suferă deformaţii plastice. Aşa cum s-a arătat, aceasta este
condiţia de bază a păstrării integrăţii conductei la lansare şi pe cale de consecinţă, structura
de lansare asigură această integritate structurală.
Evoluţia în timp a tensiunii maxime este dată sub formă de grafic.
Fig.4.43 Tensiunea echivalentă a conductei
Tensiunea echivalentă în Secţiunea 3
Fig.4.46 Tensiunea echivalentă în Secţiunea 3
În secţiunea 3 se va calcula cea mai mare tensiune echivalentă de 9,97e7 Pa.
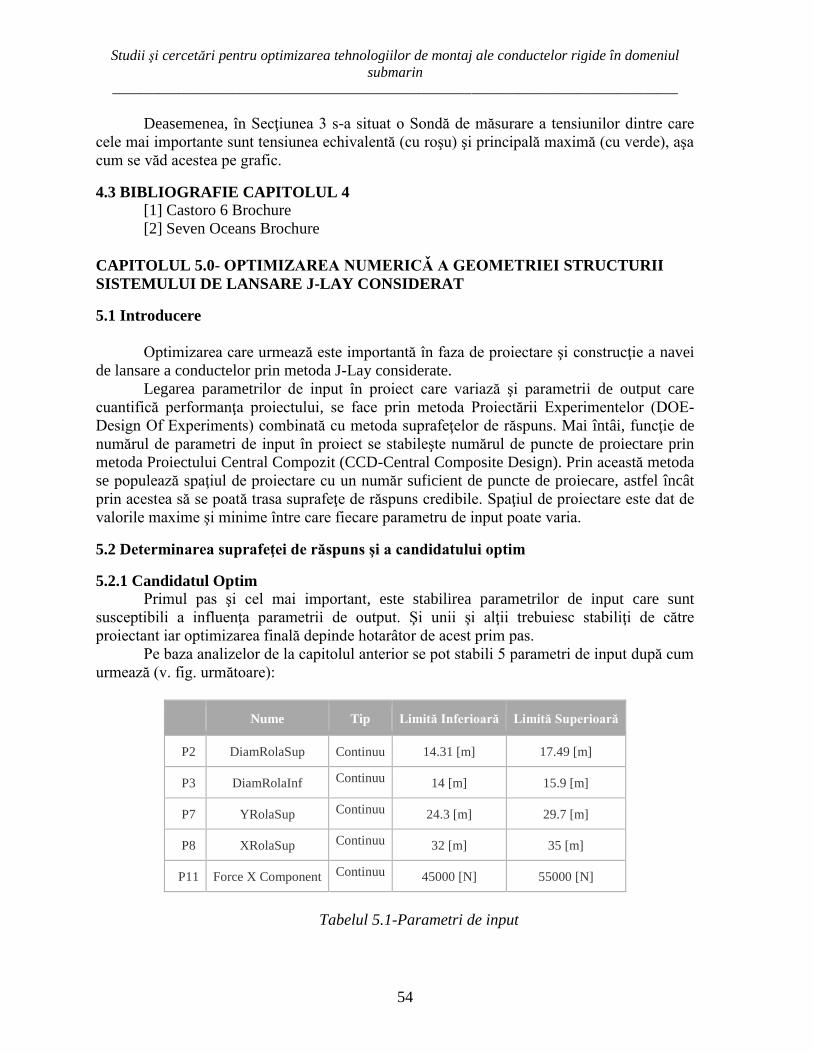
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
54
Deasemenea, în Secţiunea 3 s-a situat o Sondă de măsurare a tensiunilor dintre care
cele mai importante sunt tensiunea echivalentă (cu roşu) şi principală maximă (cu verde), aşa
cum se văd acestea pe grafic.
4.3 BIBLIOGRAFIE CAPITOLUL 4
[1] Castoro 6 Brochure
[2] Seven Oceans Brochure
CAPITOLUL 5.0- OPTIMIZAREA NUMERICǍ A GEOMETRIEI STRUCTURII
SISTEMULUI DE LANSARE J-LAY CONSIDERAT
5.1 Introducere
Optimizarea care urmează este importantă în faza de proiectare şi construcţie a navei
de lansare a conductelor prin metoda J-Lay considerate.
Legarea parametrilor de input în proiect care variază şi parametrii de output care
cuantifică performanţa proiectului, se face prin metoda Proiectării Experimentelor (DOE-
Design Of Experiments) combinată cu metoda suprafeţelor de răspuns. Mai întâi, funcţie de
numărul de parametri de input în proiect se stabileşte numărul de puncte de proiectare prin
metoda Proiectului Central Compozit (CCD-Central Composite Design). Prin această metoda
se populează spaţiul de proiectare cu un număr suficient de puncte de proiecare, astfel încât
prin acestea să se poată trasa suprafeţe de răspuns credibile. Spaţiul de proiectare este dat de
valorile maxime şi minime între care fiecare parametru de input poate varia.
5.2 Determinarea suprafeţei de răspuns şi a candidatului optim
5.2.1 Candidatul Optim
Primul pas şi cel mai important, este stabilirea parametrilor de input care sunt
susceptibili a influenţa parametrii de output. Şi unii şi alţii trebuiesc stabiliţi de către
proiectant iar optimizarea finală depinde hotarâtor de acest prim pas.
Pe baza analizelor de la capitolul anterior se pot stabili 5 parametri de input după cum
urmează (v. fig. următoare):
Nume Tip Limită Inferioară Limită Superioară
P2 DiamRolaSup Continuu 14.31 [m] 17.49 [m]
P3 DiamRolaInf Continuu 14 [m] 15.9 [m]
P7 YRolaSup Continuu 24.3 [m] 29.7 [m]
P8 XRolaSup Continuu 32 [m] 35 [m]
P11 Force X Component Continuu 45000 [N] 55000 [N]
Tabelul 5.1-Parametri de input
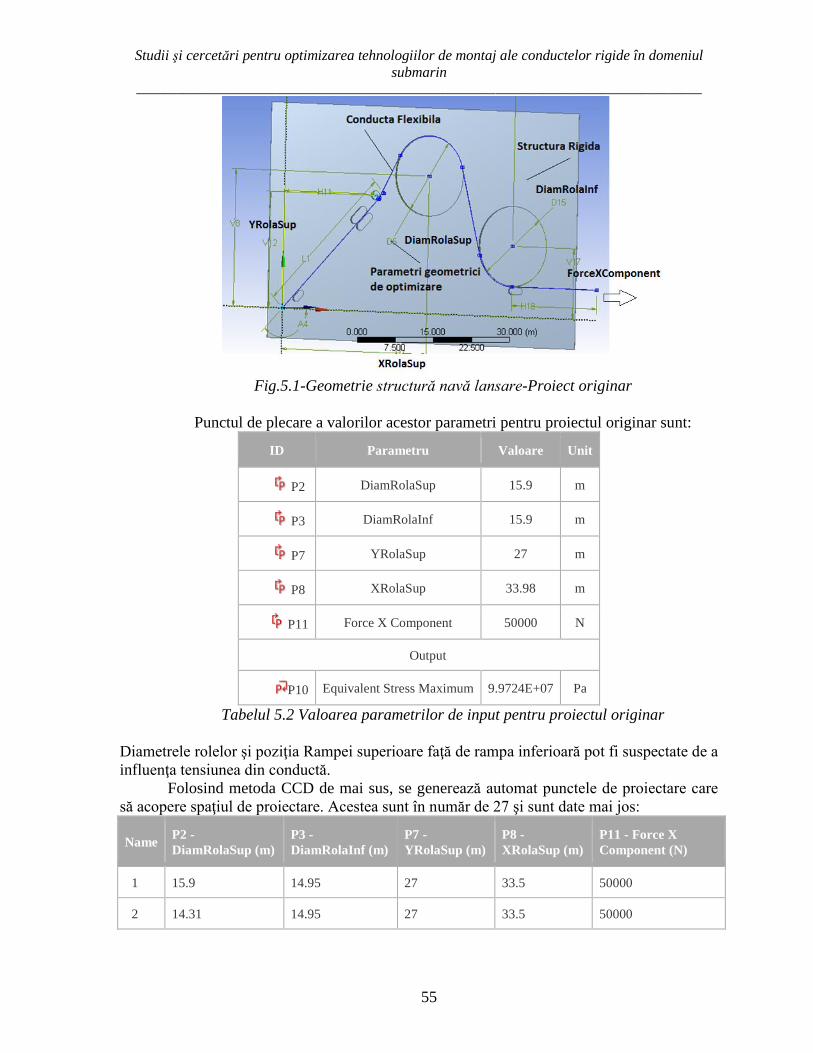
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
55
Fig.5.1-Geometrie structură navă lansare-Proiect originar
Punctul de plecare a valorilor acestor parametri pentru proiectul originar sunt:
ID Parametru Valoare Unit
P2 DiamRolaSup 15.9 m
P3 DiamRolaInf 15.9 m
P7 YRolaSup 27 m
P8 XRolaSup 33.98 m
P11 Force X Component 50000 N
Output
P10 Equivalent Stress Maximum 9.9724E+07 Pa
Tabelul 5.2 Valoarea parametrilor de input pentru proiectul originar
Diametrele rolelor şi poziţia Rampei superioare faţă de rampa inferioară pot fi suspectate de a
influenţa tensiunea din conductă.
Folosind metoda CCD de mai sus, se generează automat punctele de proiectare care
să acopere spaţiul de proiectare. Acestea sunt în număr de 27 şi sunt date mai jos:
Name P2 -
DiamRolaSup (m)
P3 -
DiamRolaInf (m)
P7 -
YRolaSup (m)
P8 -
XRolaSup (m)
P11 - Force X
Component (N)
1 15.9 14.95 27 33.5 50000
2 14.31 14.95 27 33.5 50000
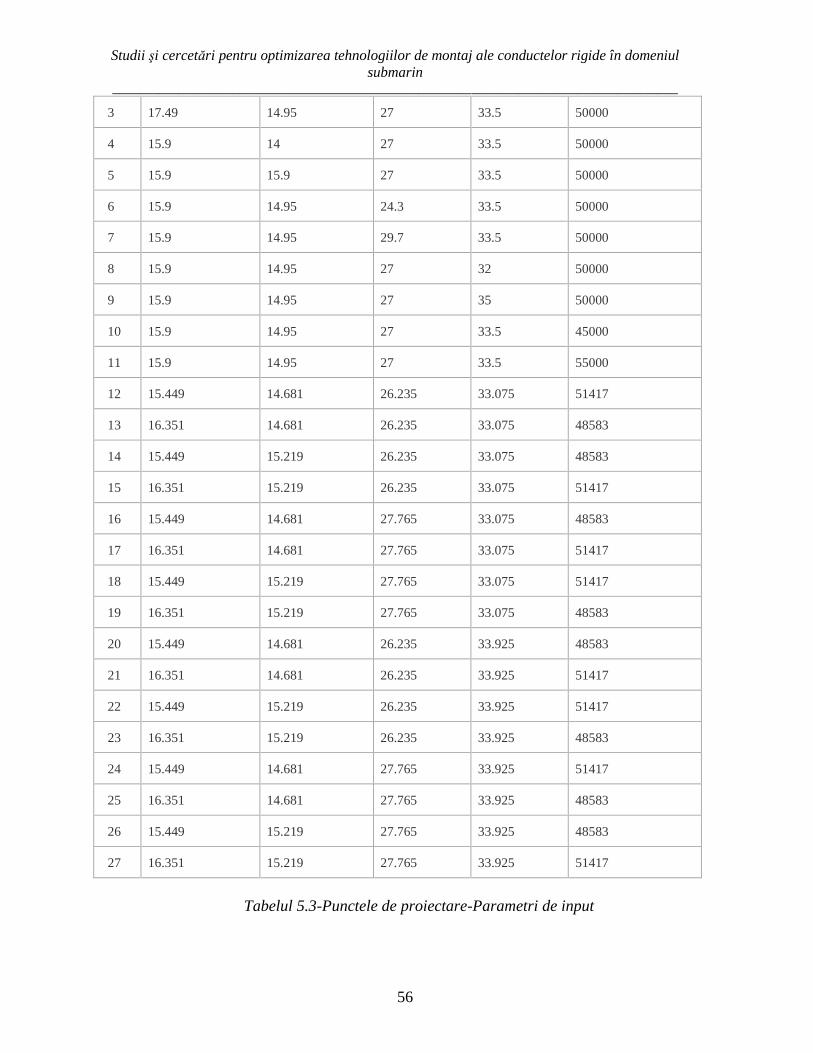
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
56
3 17.49 14.95 27 33.5 50000
4 15.9 14 27 33.5 50000
5 15.9 15.9 27 33.5 50000
6 15.9 14.95 24.3 33.5 50000
7 15.9 14.95 29.7 33.5 50000
8 15.9 14.95 27 32 50000
9 15.9 14.95 27 35 50000
10 15.9 14.95 27 33.5 45000
11 15.9 14.95 27 33.5 55000
12 15.449 14.681 26.235 33.075 51417
13 16.351 14.681 26.235 33.075 48583
14 15.449 15.219 26.235 33.075 48583
15 16.351 15.219 26.235 33.075 51417
16 15.449 14.681 27.765 33.075 48583
17 16.351 14.681 27.765 33.075 51417
18 15.449 15.219 27.765 33.075 51417
19 16.351 15.219 27.765 33.075 48583
20 15.449 14.681 26.235 33.925 48583
21 16.351 14.681 26.235 33.925 51417
22 15.449 15.219 26.235 33.925 51417
23 16.351 15.219 26.235 33.925 48583
24 15.449 14.681 27.765 33.925 51417
25 16.351 14.681 27.765 33.925 48583
26 15.449 15.219 27.765 33.925 48583
27 16.351 15.219 27.765 33.925 51417
Tabelul 5.3-Punctele de proiectare-Parametri de input
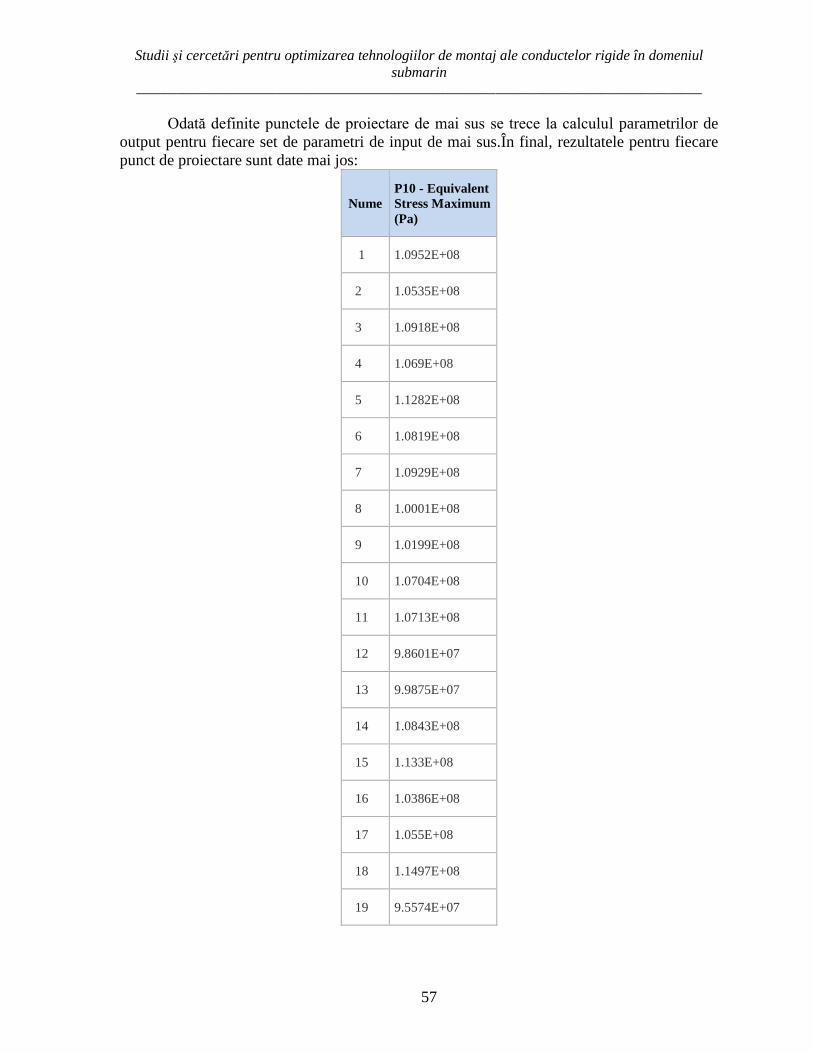
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
57
Odată definite punctele de proiectare de mai sus se trece la calculul parametrilor de
output pentru fiecare set de parametri de input de mai sus.În final, rezultatele pentru fiecare
punct de proiectare sunt date mai jos:
Nume
P10 - Equivalent
Stress Maximum
(Pa)
1 1.0952E+08
2 1.0535E+08
3 1.0918E+08
4 1.069E+08
5 1.1282E+08
6 1.0819E+08
7 1.0929E+08
8 1.0001E+08
9 1.0199E+08
10 1.0704E+08
11 1.0713E+08
12 9.8601E+07
13 9.9875E+07
14 1.0843E+08
15 1.133E+08
16 1.0386E+08
17 1.055E+08
18 1.1497E+08
19 9.5574E+07
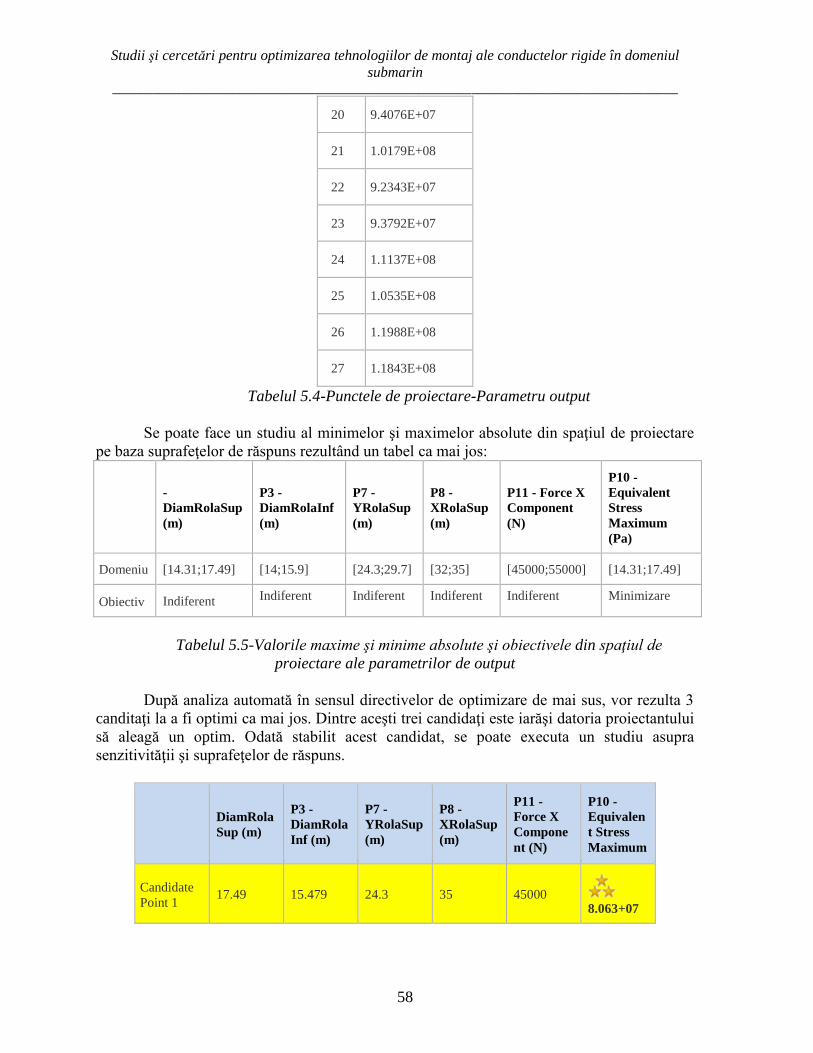
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
58
20 9.4076E+07
21 1.0179E+08
22 9.2343E+07
23 9.3792E+07
24 1.1137E+08
25 1.0535E+08
26 1.1988E+08
27 1.1843E+08
Tabelul 5.4-Punctele de proiectare-Parametru output
Se poate face un studiu al minimelor şi maximelor absolute din spaţiul de proiectare
pe baza suprafeţelor de răspuns rezultând un tabel ca mai jos:
-
DiamRolaSup
(m)
P3 -
DiamRolaInf
(m)
P7 -
YRolaSup
(m)
P8 -
XRolaSup
(m)
P11 - Force X
Component
(N)
P10 -
Equivalent
Stress
Maximum
(Pa)
Domeniu [14.31;17.49] [14;15.9] [24.3;29.7] [32;35] [45000;55000] [14.31;17.49]
Obiectiv Indiferent Indiferent Indiferent Indiferent Indiferent Minimizare
Tabelul 5.5-Valorile maxime şi minime absolute şi obiectivele din spaţiul de
proiectare ale parametrilor de output
După analiza automată în sensul directivelor de optimizare de mai sus, vor rezulta 3
canditaţi la a fi optimi ca mai jos. Dintre aceşti trei candidaţi este iarăşi datoria proiectantului
să aleagă un optim. Odată stabilit acest candidat, se poate executa un studiu asupra
senzitivităţii şi suprafeţelor de răspuns.
DiamRola
Sup (m)
P3 -
DiamRola
Inf (m)
P7 -
YRolaSup
(m)
P8 -
XRolaSup
(m)
P11 -
Force X
Compone
nt (N)
P10 -
Equivalen
t Stress
Maximum
Candidate
Point 1 17.49 15.479 24.3 35 45000
8.063+07
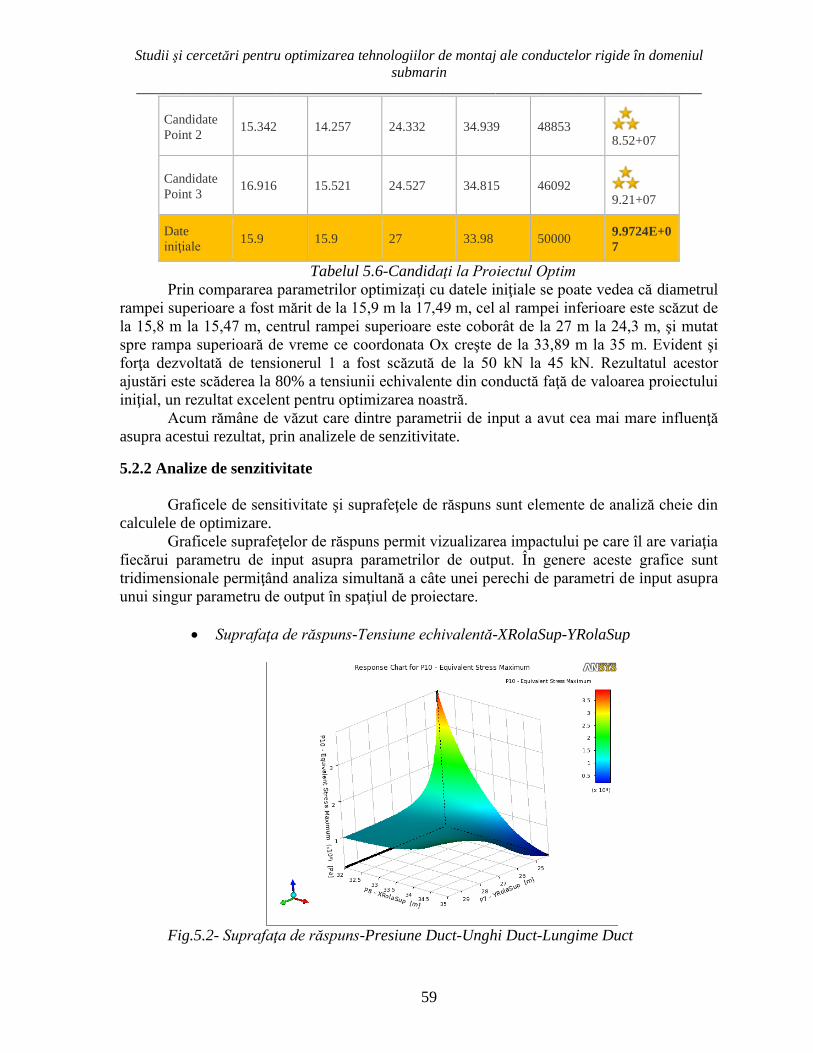
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
59
Candidate
Point 2 15.342 14.257 24.332 34.939 48853
8.52+07
Candidate
Point 3 16.916 15.521 24.527 34.815 46092
9.21+07
Date
iniţiale 15.9 15.9 27 33.98 50000
9.9724E+0
7
Tabelul 5.6-Candidaţi la Proiectul Optim
Prin compararea parametrilor optimizaţi cu datele iniţiale se poate vedea că diametrul
rampei superioare a fost mărit de la 15,9 m la 17,49 m, cel al rampei inferioare este scăzut de
la 15,8 m la 15,47 m, centrul rampei superioare este coborât de la 27 m la 24,3 m, şi mutat
spre rampa superioară de vreme ce coordonata Ox creşte de la 33,89 m la 35 m. Evident şi
forţa dezvoltată de tensionerul 1 a fost scăzută de la 50 kN la 45 kN. Rezultatul acestor
ajustări este scăderea la 80% a tensiunii echivalente din conductă faţă de valoarea proiectului
iniţial, un rezultat excelent pentru optimizarea noastră.
Acum rămâne de văzut care dintre parametrii de input a avut cea mai mare influenţă
asupra acestui rezultat, prin analizele de senzitivitate.
5.2.2 Analize de senzitivitate
Graficele de sensitivitate şi suprafeţele de răspuns sunt elemente de analiză cheie din
calculele de optimizare.
Graficele suprafeţelor de răspuns permit vizualizarea impactului pe care îl are variaţia
fiecărui parametru de input asupra parametrilor de output. În genere aceste grafice sunt
tridimensionale permiţând analiza simultană a câte unei perechi de parametri de input asupra
unui singur parametru de output în spaţiul de proiectare.
Suprafaţa de răspuns-Tensiune echivalentă-XRolaSup-YRolaSup
Fig.5.2- Suprafaţa de răspuns-Presiune Duct-Unghi Duct-Lungime Duct
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
60
Din graficul de mai sus se poate deduce că creşterea poziţiei orizontale a rampei
superioare are un efect constant exponenţial asupra mărimii tensiunii din conductă în sensul
micşorării pe când pozitia pe verticală dacă este scazută până la 27 m are efect marcat în
sensul scăderii după care până la 35 m efectul este aproape nul.
Suprafaţa de răspuns-Tensiune echivalentă-XRolaSup-YRolaSup
Din graficul de mai jos se poate deduce că Diametrele rolelor nu au mare efect asupra
tensiunii echivalente, cel puţin în domeniul de variaţie considerat (V.Tabelul 5.1).
Fig.5.3- Suprafaţa de răspuns-Presiune Duct-Diametre role
Suprafaţa de răspuns-Tensiune echivalentă-Forţa tensionerului 1
Fig.5.4- Suprafaţa de răspuns-Tensiune-Forţă Tensioner 1
De această dată, forţa dezvoltată de Tensionerul 1 influenţează destul de marcat
tensiunea maximă apărută în conductă în cursul lansării.
Toate concluziile de mai sus se pot pune pe un singur grafic, cel al sensitivităţii.
Dintr-o singură privire se pot deduce care parametri de input au o influenţă mai mare sau mai
mică asupra parametrilor de output.
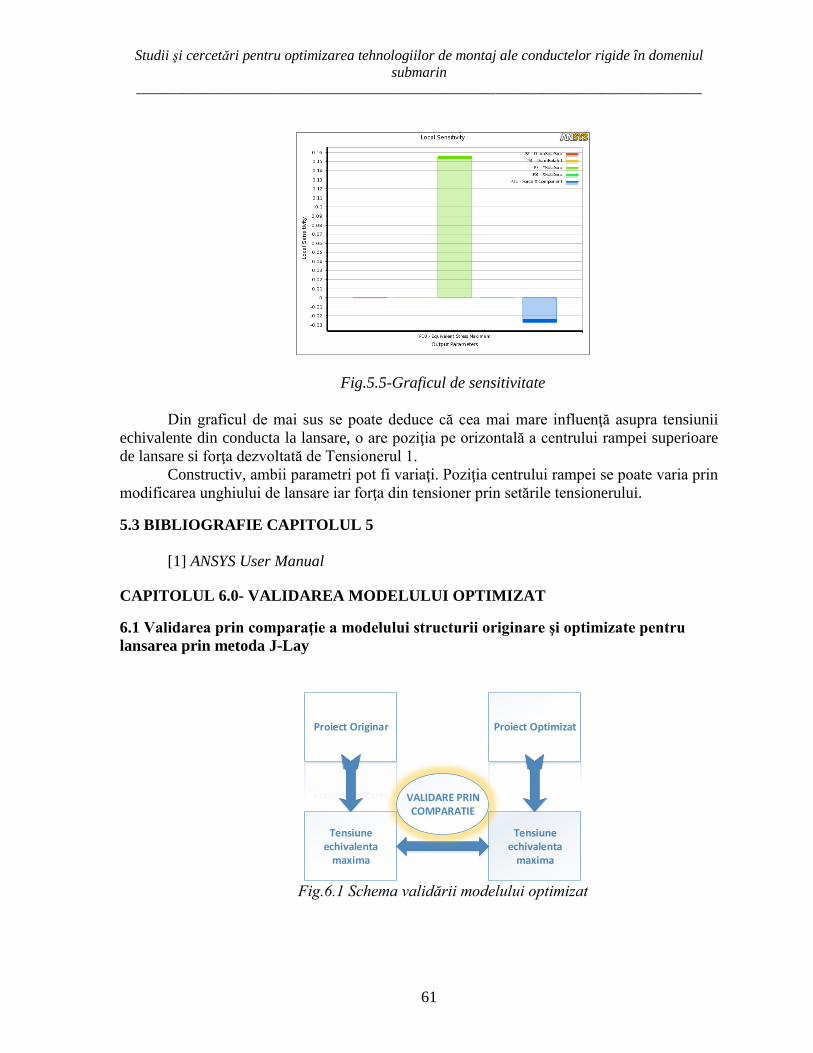
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
61
Fig.5.5-Graficul de sensitivitate
Din graficul de mai sus se poate deduce că cea mai mare influenţă asupra tensiunii
echivalente din conducta la lansare, o are poziţia pe orizontală a centrului rampei superioare
de lansare si forţa dezvoltată de Tensionerul 1.
Constructiv, ambii parametri pot fi variaţi. Poziţia centrului rampei se poate varia prin
modificarea unghiului de lansare iar forţa din tensioner prin setările tensionerului.
5.3 BIBLIOGRAFIE CAPITOLUL 5
[1] ANSYS User Manual
CAPITOLUL 6.0- VALIDAREA MODELULUI OPTIMIZAT
6.1 Validarea prin comparaţie a modelului structurii originare şi optimizate pentru
lansarea prin metoda J-Lay
Proiect Originar Proiect Optimizat
Tensiune echivalenta
maxima
Tensiune echivalenta
maxima
VALIDARE PRIN COMPARATIE
Fig.6.1 Schema validării modelului optimizat
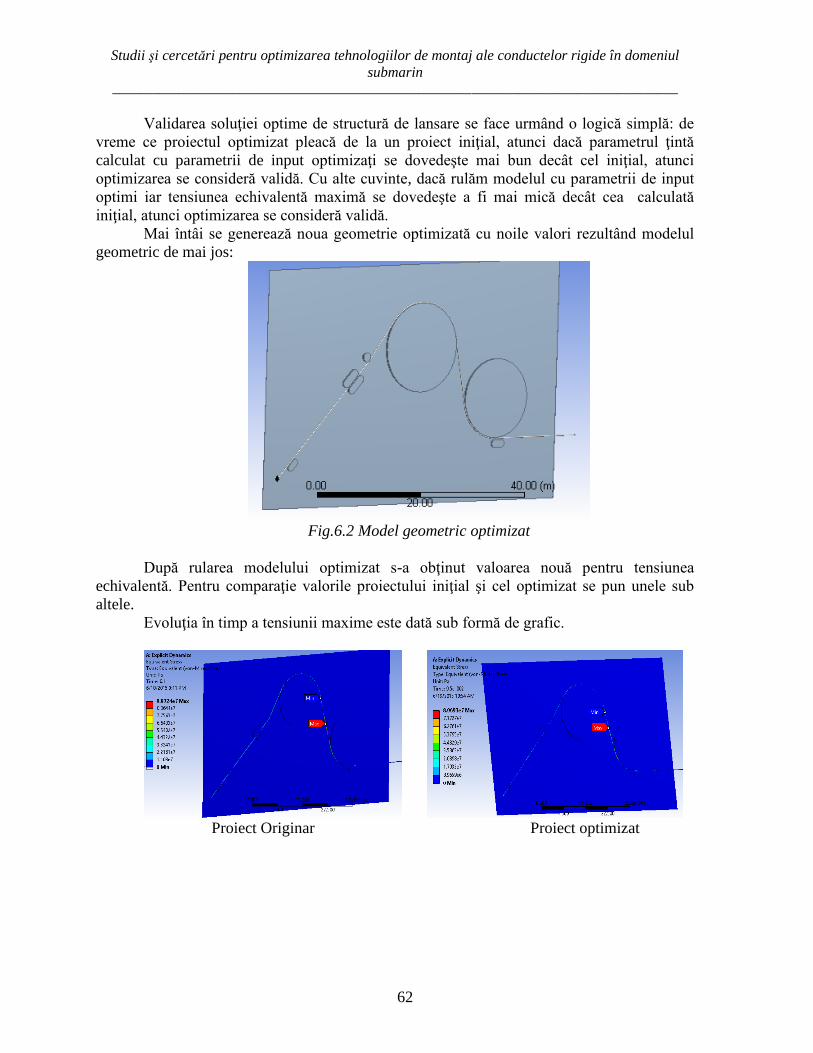
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
62
Validarea soluţiei optime de structură de lansare se face urmând o logică simplă: de
vreme ce proiectul optimizat pleacă de la un proiect iniţial, atunci dacă parametrul ţintă
calculat cu parametrii de input optimizaţi se dovedeşte mai bun decât cel iniţial, atunci
optimizarea se consideră validă. Cu alte cuvinte, dacă rulăm modelul cu parametrii de input
optimi iar tensiunea echivalentă maximă se dovedeşte a fi mai mică decât cea calculată
iniţial, atunci optimizarea se consideră validă.
Mai întâi se generează noua geometrie optimizată cu noile valori rezultând modelul
geometric de mai jos:
Fig.6.2 Model geometric optimizat
După rularea modelului optimizat s-a obţinut valoarea nouă pentru tensiunea
echivalentă. Pentru comparaţie valorile proiectului iniţial şi cel optimizat se pun unele sub
altele.
Evoluţia în timp a tensiunii maxime este dată sub formă de grafic.
Proiect Originar Proiect optimizat
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
63
Proiect Originar Proiect Optimizat
Fig.6.3 Comparaţie dintre modelul originar şi optimizat
Se poate observa prin studiul figurii de mai sus că tensiunea maximă se va obţine în
exact aceeaşi regiune a conductei lansate, doar că mărimea tensiunii echivalente s-a diminuat
de la 9,97e7 Pa la 8,06e7 Pa. Deasemenea studiind graficele, tensiunea maximă absolută care
s-a calculat la lansarea cu structura originară a fost de 1,16e8 Pa pe când la proiectul
optimizat această valoare a fost de numai 9e7 Pa.
6.2 Validarea calitativă a modelării
Validarea calitativă comportă comparaţia cu alte lucrări sau articole publicate în
domeniu. Deşi gradul de relevanţă al acestui tip de comparaţie se referă doar la metodologia
modelării, concluziile care se pot trage sunt importante în ceea ce priveşte unghiul de atac
sub care s-a rezolvat problema lansării conductelor submarine în lucrarea de faţă.
Lucrările publicate în domeniul abordat nu sunt foarte multe dar oricum s-au selectat
3 articole după cum urmează.
6.2.1 Lucrarea „A computational system for subsea pipelaying simulation”, autori
Danilo Machado Lawinscky da Silva ş.a- International journal of modeling and
simulation for the petroleum industry, vol. 3, no.1, june 2009
Autorii prezintă în acest articol un software specific de firmă folosit de Petrobras
Brazilia, numit SITUA-PetroPipe.Acest program de analiză cu elemente finite permite
calculul simultan şi cuplat al răspunsului chilei navei de lansare şi influenţele reciproce dintre
conducta lansată şi nava lansatoare. Aceste influenţe reciproce sunt calculate destul de
similar cu programul folosit de noi OffPipe în simularea metodei S-Lay.
Ca şi rezultate finale după rularea programului se obţin tensiunile echivalente de-a
lungul conductei atât în formulare statică cât şi dinamică:
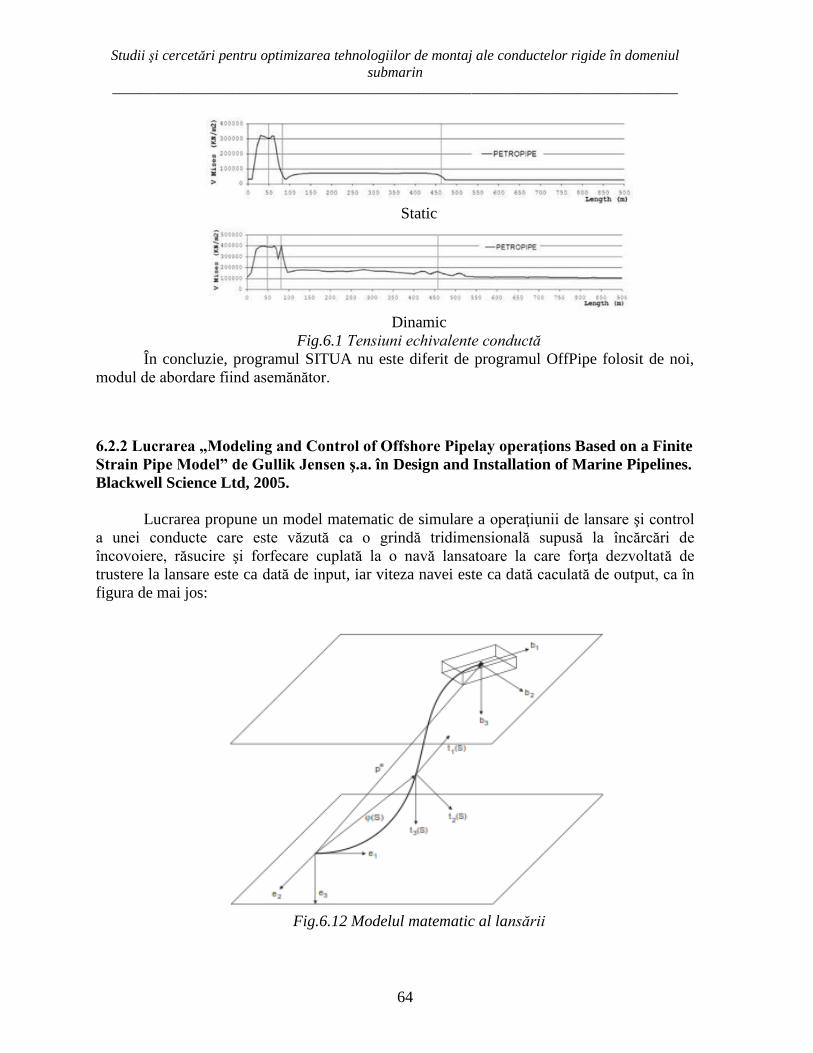
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
64
Static
Dinamic
Fig.6.1 Tensiuni echivalente conductă
În concluzie, programul SITUA nu este diferit de programul OffPipe folosit de noi,
modul de abordare fiind asemănător.
6.2.2 Lucrarea „Modeling and Control of Offshore Pipelay operaţions Based on a Finite
Strain Pipe Model” de Gullik Jensen ş.a. în Design and Installation of Marine Pipelines.
Blackwell Science Ltd, 2005.
Lucrarea propune un model matematic de simulare a operaţiunii de lansare şi control
a unei conducte care este văzută ca o grindă tridimensională supusă la încărcări de
încovoiere, răsucire şi forfecare cuplată la o navă lansatoare la care forţa dezvoltată de
trustere la lansare este ca dată de input, iar viteza navei este ca dată caculată de output, ca în
figura de mai jos:
Fig.6.12 Modelul matematic al lansării
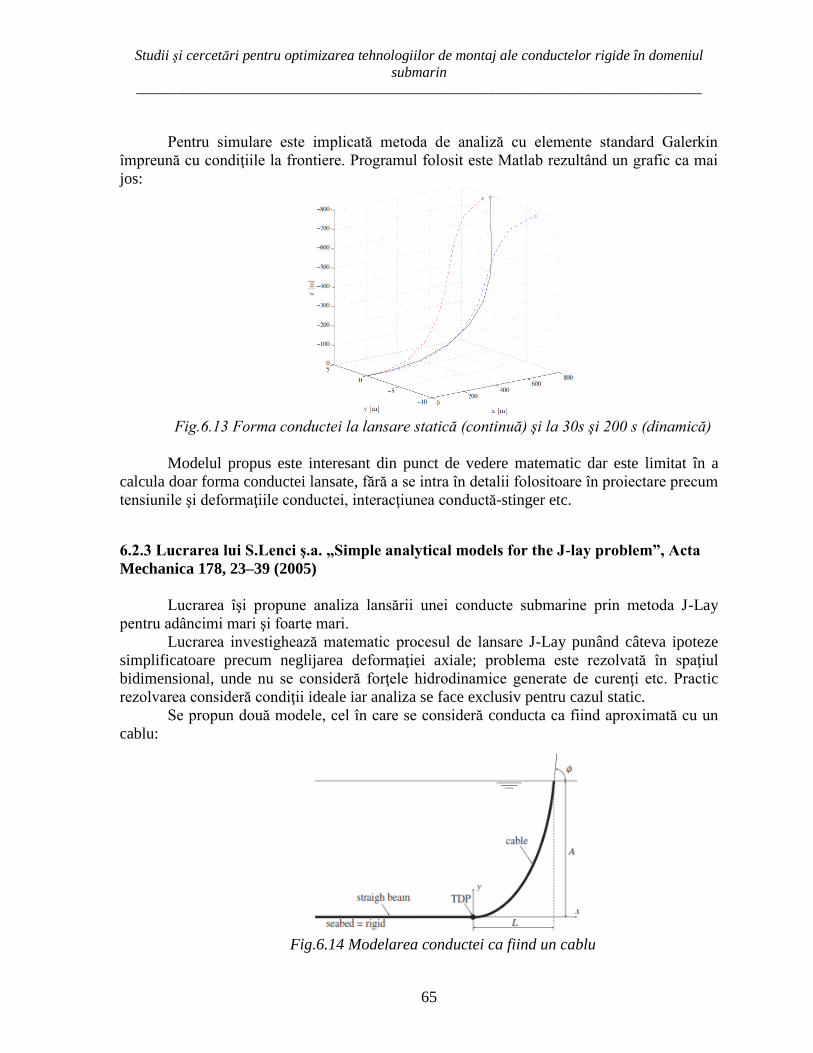
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
65
Pentru simulare este implicată metoda de analiză cu elemente standard Galerkin
împreună cu condiţiile la frontiere. Programul folosit este Matlab rezultând un grafic ca mai
jos:
Fig.6.13 Forma conductei la lansare statică (continuă) şi la 30s şi 200 s (dinamică)
Modelul propus este interesant din punct de vedere matematic dar este limitat în a
calcula doar forma conductei lansate, fără a se intra în detalii folositoare în proiectare precum
tensiunile şi deformaţiile conductei, interacţiunea conductă-stinger etc.
6.2.3 Lucrarea lui S.Lenci ş.a. „Simple analytical models for the J-lay problem”, Acta
Mechanica 178, 23–39 (2005)
Lucrarea îşi propune analiza lansării unei conducte submarine prin metoda J-Lay
pentru adâncimi mari şi foarte mari.
Lucrarea investighează matematic procesul de lansare J-Lay punând câteva ipoteze
simplificatoare precum neglijarea deformaţiei axiale; problema este rezolvată în spaţiul
bidimensional, unde nu se consideră forţele hidrodinamice generate de curenţi etc. Practic
rezolvarea consideră condiţii ideale iar analiza se face exclusiv pentru cazul static.
Se propun două modele, cel în care se consideră conducta ca fiind aproximată cu un
cablu:
Fig.6.14 Modelarea conductei ca fiind un cablu
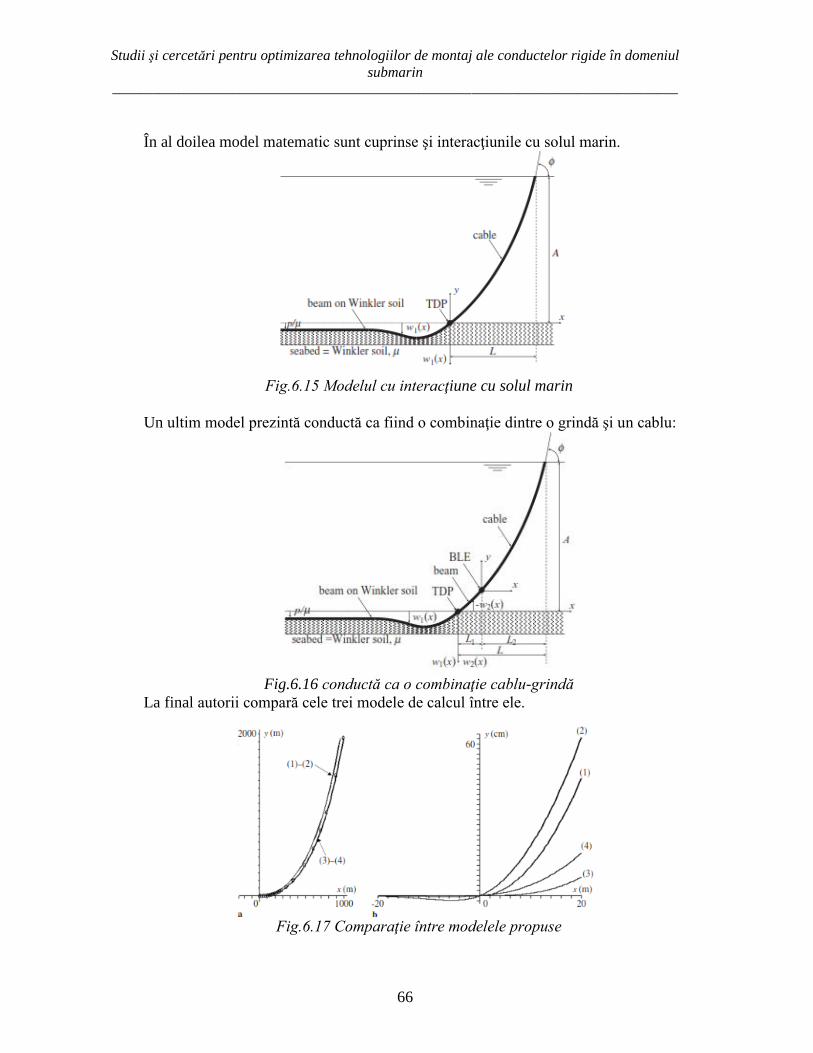
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
66
În al doilea model matematic sunt cuprinse şi interacţiunile cu solul marin.
Fig.6.15 Modelul cu interacţiune cu solul marin
Un ultim model prezintă conductă ca fiind o combinaţie dintre o grindă şi un cablu:
Fig.6.16 conductă ca o combinaţie cablu-grindă
La final autorii compară cele trei modele de calcul între ele.
Fig.6.17 Comparaţie între modelele propuse
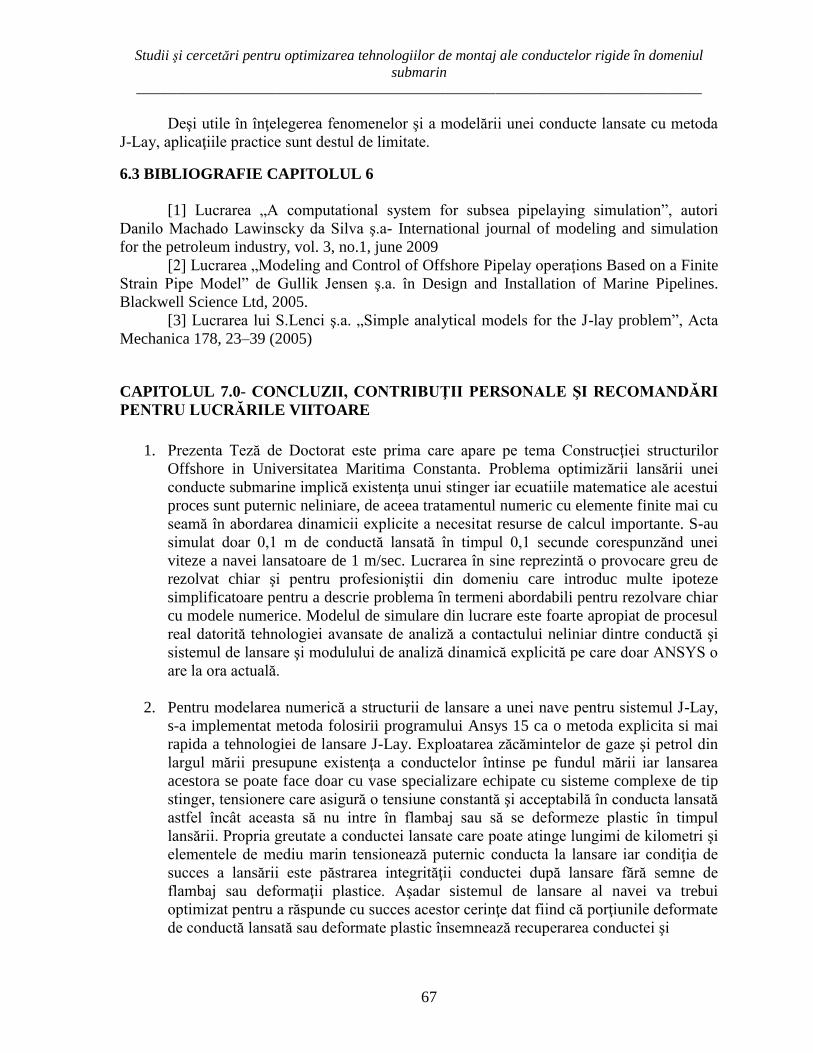
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
67
Deşi utile în înţelegerea fenomenelor şi a modelării unei conducte lansate cu metoda
J-Lay, aplicaţiile practice sunt destul de limitate.
6.3 BIBLIOGRAFIE CAPITOLUL 6
[1] Lucrarea „A computational system for subsea pipelaying simulation”, autori
Danilo Machado Lawinscky da Silva ş.a- International journal of modeling and simulation
for the petroleum industry, vol. 3, no.1, june 2009
[2] Lucrarea „Modeling and Control of Offshore Pipelay operaţions Based on a Finite
Strain Pipe Model” de Gullik Jensen ş.a. în Design and Installation of Marine Pipelines.
Blackwell Science Ltd, 2005.
[3] Lucrarea lui S.Lenci ş.a. „Simple analytical models for the J-lay problem”, Acta
Mechanica 178, 23–39 (2005)
CAPITOLUL 7.0- CONCLUZII, CONTRIBUŢII PERSONALE ŞI RECOMANDĂRI
PENTRU LUCRĂRILE VIITOARE
1. Prezenta Teză de Doctorat este prima care apare pe tema Construcţiei structurilor
Offshore in Universitatea Maritima Constanta. Problema optimizării lansării unei
conducte submarine implică existenţa unui stinger iar ecuatiile matematice ale acestui
proces sunt puternic neliniare, de aceea tratamentul numeric cu elemente finite mai cu
seamă în abordarea dinamicii explicite a necesitat resurse de calcul importante. S-au
simulat doar 0,1 m de conductă lansată în timpul 0,1 secunde corespunzănd unei
viteze a navei lansatoare de 1 m/sec. Lucrarea în sine reprezintă o provocare greu de
rezolvat chiar şi pentru profesioniştii din domeniu care introduc multe ipoteze
simplificatoare pentru a descrie problema în termeni abordabili pentru rezolvare chiar
cu modele numerice. Modelul de simulare din lucrare este foarte apropiat de procesul
real datorită tehnologiei avansate de analiză a contactului neliniar dintre conductă şi
sistemul de lansare şi modulului de analiză dinamică explicită pe care doar ANSYS o
are la ora actuală.
2. Pentru modelarea numerică a structurii de lansare a unei nave pentru sistemul J-Lay,
s-a implementat metoda folosirii programului Ansys 15 ca o metoda explicita si mai
rapida a tehnologiei de lansare J-Lay. Exploatarea zăcămintelor de gaze şi petrol din
largul mării presupune existenţa a conductelor întinse pe fundul mării iar lansarea
acestora se poate face doar cu vase specializare echipate cu sisteme complexe de tip
stinger, tensionere care asigură o tensiune constantă şi acceptabilă în conducta lansată
astfel încât aceasta să nu intre în flambaj sau să se deformeze plastic în timpul
lansării. Propria greutate a conductei lansate care poate atinge lungimi de kilometri şi
elementele de mediu marin tensionează puternic conducta la lansare iar condiţia de
succes a lansării este păstrarea integrităţii conductei după lansare fără semne de
flambaj sau deformaţii plastice. Aşadar sistemul de lansare al navei va trebui
optimizat pentru a răspunde cu succes acestor cerinţe dat fiind că porţiunile deformate
de conductă lansată sau deformate plastic însemnează recuperarea conductei şi
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
68
înlocuirea secţiunilor deformate, proces ce este foarte scump afectând profitabilitatea
proiectului. Reducerea tensiunilor din conductă şi optimizarea subsecventă a
sistemului de lansare reprezintă un obiectiv central al procesului de proiectare iar
abordarea numerică descrisă în lucrarea prezentată arată cum se poate face această
optimizare folosind tehnici de modelare numerică avansate.
3. S-a reusit optimizarea geometriei a structurii de lansare a unei nave pentru sistemul J-
Lay folosind tehnica de tip ANSYS Design Explorer avand ca rezultat reducerea
Tensiunii echivalente cu 20%. În dictionarul matematic optimizarea numită şi
programarea matematică presupune prin definiţie găsirea celei mai bune variante
dintr-un set dat de posibilităţi. Cel mai simplu model de optimizare de pildă este
maximizarea/minimizarea unei funcţii matematice prin alegera variabilelor de input
intr-o secvenţă sistematică şî calcularea valorii funcţiei pentru fiecare dintre
variabilele alese. În cazul lucrării de faţă problema este mult mai complicată
necesitând module speciale de proiectare asistată astfel încât date fiind o plajă de
variaţie pentru variabilele de input (geometrice la nivel de sistem de lansare), să se
poată alege cea mai bună configuraţie a sistemului de lansare cu obiectivul scăderii
tensiunii din conductă date fiind implicaţiile descrise la punctul anterior. Acest lucru
s-a reuşit cu prisosinţă, valoarea de 20% fiind semnificativă pentru oricare inginer
specializat în lansarea de conducte submarine.
4. Contributii personale:
- Participarea activa in dezvoltarea unei noi directii de studii de Master in limba
engleza la Universitatea Maritima Constanta pe directia ingineriei gazelor si
produselor petroliere in industria offshore ( Advanced Engineering in Gas and Oil
Offshore Industry);
- Publicarea primelor carti de specialitate din Romania in domeniu numite
„Offshore Construction Technology” şi „Computer Aided Design of Offshore
Structures” la editura Nautica împreună cu Inginer Doctor Sef de Lucrari Ioan
Călimănescu şi Profesorul Universitar Doctor Nicolae Buzbuchi.
- Publicarea sub egida Editurii Nautica Constanta 2015 in Sectiunea II ,,Mechanical
Engineering and Environment’’a doua articole de specialitate in industria offshore
cu titlurile: ,,Numeric simulation for J-Lay Subsea Pipeline Launching System’’ si
,,Numeric Optimization for J-Lay Subsea Pipeline Launching System’’ impreuna
cu Profesor Universitar Doctor Nicolae Buzbuchi;
- Publicarea in aceeasi Sectiune II a Editurii Nautica a altor doua articole de
specialitate si anume: ,,Damage Analsys of a Gear box shaft under upset working
condtion using Ansys n code si ,, Stress fatigue life optimisation of an airplane
landing gear lever arm’’ using Ansys n code, impreuna cu Inginer Doctorand
Velcea Dorel Dumitru si Sef de Lucrari Inginer Doctor Ioan Calimanescu.
Teza de Doctorat a venit firesc în continuarea şi dezvoltarea acestui domeniu „exotic”
pentru ţara noastră, dar care ca urmare a descoperirii de noi zăcăminte în Marea Neagră, nu
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
69
va mai putea fi atât de discret. Piaţa petrolului şi preţul cotaţiilor internaţionale în utimul an a
scăzut dramatic ceea ce a determinat companiile producătoare să amâne multe programe de
investiţii cu consecinţe asupra contractorilor din domeniul serviciilor petroliere inclusiv
offshore. Într-un singur an 250.000 de salariaţi din industria constructoare au fost concediaţi,
455 de companii constructoare mici şi mijlocii au falimentat, ceea ce are dimensiunea unui
cataclism mult mai grav decât criza din 2008. Dar de pildă pe data de 03.05.2016 preţul
petrolului Brent era de 48,1 $/baril crescând semnificativ de la minimumul istoric de
28$/baril înregistrat în Ianuarie 2016 arătând un trend clar crescător. Deja semnalele sunt
pozitive în industrie şi peste puţin constructorii se vor întoarce la lucru inclusiv la noi în
Marea Neagră, cercetările în domeniul construcţiei petroliere offshor vor căpăta iarăşi avânt.
Lucrarea de faţă este o deschizătoare de drumuri şi pionierat în domeniu la noi în ţară, si va
putea fi privită ca o bornă de început la un drum lung şi anevoios.
7.1 RECOMANDĂRI PENTRU LUCRĂRILE VIITOARE
Recomandările pentru lucrările viitoare derivă direct din cartea publicată de autor
legată de proiectarea asisatată de computer a structurilor Offshore. Acestea pot fi:
Dimensionarea şi optimizarea diametrului conductelor submarine;
Proiectarea la încărcări termice ale conductelor submarine;
Coroziunea conductelor submarine;
Stabilitatea conductelor submarine;
Expansiunea conductelor submarine;
Rezemarea conductelor submarine.
BIBLIOGRAFIE
BIBLIOGRAFIE CAPITOLUL 2
[1] Palmer, A.C., and B. Ormerod, (1997) ,,Global Warming: the Ocean
Solution.’’Science and Public Affairs. Autumn,49-51;
[2] Grace, R.A. (1978) Marine Pipe Systems. Englewood Cliffs, NJ Prentice-Hall;
[3] Yergin, D (1991) The Prize: The Epic Quest for Oil, Money and Power. New York:
Simon & Schuster.
[4] Searle, A. (1995) PLUTO (Pipe-Line Under the Ocean); the Definitive Story.
Shanklin, England
[5] Craig,B.D. (1991)Practical Oilfield Metallurgy;
[6] API Specifications 5L ,,Line Pipe’’;
[7] Publication No.166 ,,Specification of Line for Offshore Pipelines’’;
[8] Palmer, A.C. (1998) ,,Innovation in Pipeline Engineering’’;
[9] Takeuchi, F.Yamamoto, A.and Okaguchi, S (2002),,Prospect of High Grade Steel
Pipes for Gas Pipelines’’ 185-203;
[10] Higgins, R.A. (1993) Engineering Metallurgy.London;
[11] Courteny,T.H.(1990) Mechanical Behavior of Materials. New York: McGraw Hill;
[12] ISO 3183: ,,Petroleum and Natural Gas Industries: Steel Pipe for Pipelines part 3.’’
International Organization for Standardization.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
70
[13] API 1104: ,,Welding of Pipelines and Related Facilities’’. American Petroleum
Institute.
[14] BS 4515: ,,Welding of Steel Pipelines on Land and Offshore.’’British Standards
Institution.
[15] Boekholt. R (1990),,Mechanised Welding Methods in Pipelene
Construction.’’Proceeding of the Pipeline Tehnology Conference, Oostende, Belgium,
October.
[16] Parlane, A,J,A and L.R Still (1988) ‘’Pipelines for Subsea Oil and gas
Transmision.’’
[17] Jones, R.L.(1998) ,,Welding of Carbon Steel Pipelines’’.Proceedings of the TWI
Conference.
[18] BS 499: ,,Glossary for Welding, Brazing and Thermal Cutting’’. British Standards
Institution.
[19] R. Pargeter, T.G.G ooch.(1994) ,,Welding for Sour Service’’. Proceeding of the
Update on Sour Service: material, Maintenance and Inspection in the Oil &Gas Industries,
IBC, London, October.
[20] J.F.Lancaster (1993) Metallurgy of Welding. London: Chapman & Hall.
[21] NACE MR-0175: Sulfide Stress Cracking Resistant Metallic materials for Oilfield
Equipment’’ national Association of Corrosion Engineers.
[22] BS 2600: ,,Radiographic Examination of Fusion wWelded Butt Joints in Steel-
Methods for Steel 2 mm up to and Including 50 mm Thick’’.British Standards Institution.
[23] BS 4069: ,,Magnetic Flaw Detection Inks and Powders’’. British Standards
Institution.: ,,Method for Magnetic Particle Flaw detection’'
[24] BS 6072 : ,, Method for magnetic particle Flaw Detection”.British Standards
Institution.
[25] Komar, PD (1974) Beach Processes and Sedimentation;
[26] Sarpkaya, T,M.Isaacson (1981) Mechanics of Wave Forces on Offshore Structures.
New York;
[27] Littlejohns, P.S.G. (1974) Current- induced Forces on Submarine Pipelines,
Wallingfort, England: Hydraulic Research Station;
[28] St.Denis (1969),,On Wind-Generated Waves’’. Topics in Ocean Engineeing;
[29] Wilkinson R.H, A.C Palmer, J.W.Ells, N.Sanderson (1988) Stability of Pipelines in
Trenches : Proceedings of the Offshore Oil and Gas Pipeline Technology Seminar;
[30] Brink-Kjaer, O.J. Knudsen, G.s.Roodenhuis, M. Rugbjerg (1984) Extreme Wave
Conditions in the Central North Sea;
[31] Verley.R.L.P, K.Reed (1987) Hydrodynamic Forces on Seabed Pipelines-
Proceedings of the 19th Annual Offshore Tehnology Conference.Houston;
[32] Lambrakos. K.F. (19885) Marine Pipelines Soil Friction Coefficients from In-Situ
Testings – Ocean Engineering 12. 131-150;
[33] Lyons.C.G.(1973) Soil Resistance to Lateral Sliding of Marine Pipelines-
Proceedings of the 5th Annual Offshore Tehnology Conference. Houston 2.479-484;
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
71
[34] Wagner. D.A.,J.D.Murff, H. Brennoden, O. Sveggen (1987) Pipe-Soil Interaction
Model –Proceedings of the 19th Annual Offshore Tehnology Conference.Paper OTC 5504-
presented at the 19th Annual Offshore Tehnology Conference 3. 181-190;
[35] Palmer.A.C, J.Steenfeld, J.O.Steensen-Bach, V.Jacobsen (1988) Lateral Resistance
of Marine Pipelines on Sand ( OTC5853)-Proceedings of the 20th Annual Offshore
Tehnology Conference 4, 399-408;
[36] A.G.A (1991) Submarine Pipelines On-Bottom Stability; vol 1- Analysis and
Design Guidelines-Final Report on Projects PR-178-516 and PR 178-717.American Gas
Association;
[37] Palmer.A.C, (1996) A Flow in the Conventional Approach to Stability Design of
Pipelines- Proceedings of the Pipeline Tehnology Conference.Amsterdam;
[38] Sleath, J.F.A (1998) Depth of Errosion under Storm Condition-Proceedings of the
26th Conference on Coastal Engineering, ASCE New York, 2968-2979;
[39] The.T.C., A.C Palmer, M.D. Bolton, J.S Damgaard (2004) Experimental Study of
Marine Pipelines on Unstable and Liquefied Seabed. Coastal Engineering.
[40] Sarpkaya, T and Rajabi, F (1980) Hydrodinamic drag on bottom-mounted smooth
and rough cylinders in periodic flow. In proceedings of the Eleventh Annual Offshore
Tehnology Conference, Huston, Texas, May 1980 pg 219-226
[41] Sriskandarajah, T and Mahendran, IK (1987) Parametric consideration of design and
installation of deepwater pipelines, Offshore Oil and Gas Pipeline Tehnology, European
Seminar, pg 35;
[42] Verley, R, lambrakos, KF and Reed (1987)
[43] Ioan Călimănescu, Iulian Radu, Nicolae Buzbuchi (2015)-Offshore
Construction Technology, ed. Nautica
[44] Ioan Călimănescu, Iulian Radu, Nicolae Buzbuchi (2015)-CAD of Offshore
Structures, ed. Nautica.
BIBLIOGRAFIE CAPITOLUL 3
[1] ANSYS Theory-User Manual
[2] API, 1998. API RP 1111. API, Design, Construction, operaţion, and Maintenance
of Offshore Hydrocarbon Pipelines.
[3] Aranha, J., Pinto, M., da Silva, R., 2001. On the dynamic compression of risers:
An analytic expression for the critical load. Applied Ocean Research 23 (2), 83{91.
[4] Astroom, K. J., 1996. Automatic control: A perspective. Colloquium on
Automatic Control, Vol. 215 of Lecture Notes in Control and Information Sciences. Springer
Berlin / Heidelberg, pp. 1{26.
[5] Austin, D., Carriker, B., McGuire, T., Pratt, J., Priest, T., Pulsipher, A. G., Jul.
2004. History of the o_shore oil and gas industry in Southern Louisiana. Interim report.
Volume 1: Papers on the evolving o_shore industry. Tech. rep., Mexico.
[6] Bai, Y., Bai, Q., 2005. Subsea Pipelines and Risers. Elsevier.
[7] Balas, M. J., 1978. Active control of exible systems. Journal of Optimization
Theory and Applications 25 (3), 415{436.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
72
[9] Betsch, P., Steinmann, P., 2002. Frame-indifeerent beam _nite elements based
upon the geometrically exact beam theory. International Journal for Numerical Methods in
Engineering 54 (12), 1775{1788.
[10] Blanke, M., Kinnaert, M., Lunze, J., Staroswiecki, M., 2006. Diagnosis and
Fault{Tolerant Control, 2nd Edition. Springer.
[11] Braestrup, M. W., Andersen, J. B., Andersen, L. W., Bryndum, M. B.,
Christensen, C. J., Rishfy, N., 2005. Design and Installation of Marine Pipelines. Blackwell
Science Ltd.
[12] Bray, D., 2003. Dynamic Positioning, 2nd Edition. Vol. 9 of Oil_eld
Seamanship. Oil field Publications Limited.
[13] Breivik, M., Fossen, T. I., 2008. Guidance laws for planar motion control. In:
Proceedings of the 47th IEEE Conference on Decision and Control, Cancun, Mexico.
[14] Brewer, W. V., Dixon, D. A., 1969. Inuence of lay barge motion on a deep water
pipeline laid under tension. In: Proceedings of the Annual O_shore Technology Conference.
OTC 1072.
[15] Bryndum, M. B., Colquhoun, R. S., Verway, A., 1982. Dynamic lay stresses for
pipelines. In: Proceedings of the Annual O_shore Technology Conference. OTC 4267.
[16] BS, 1993. BS 8010. BSI, Code of Practice for Pipeline - Part 3. Pipeline Subsea:
Design, Construction and Installation.
[17] Callegari, M., Canella, F., Titti, F. M., Bruschi, R., Torselletti, E., Vitali, L.,
2000. Concurrent design of an active automated system for the control of stinger/pipe
reaction forces of a marine pipelaying system. In: Proceedings of the Int. Workshop on
Harbour, Maritime & Multimodal Logistics Modelling and Simulation, Porto_no,
Italy.Cavicchi, M., Ardavanis, K., 2003. J{lay installations lessons learned. In: Proceed-ings
of the Annual Offshore Technology Conference. OTC 15333.
[18] Chatjigeorgiou, I. K., Feb. 2008. Solution of the boundary layer problems for
calculating the natural modes of riser-type slender structures. Journal of OFFshore
Mechanics and Arctic Engineering 130 (1), 011003.
[19] Chickasaw, 2009. Global Industries Brochure (www.globalind.com).
[20] Choi, H., Jo, H., 1999. Characteristics of ultra{deepwater pipelay analysis. In:
Proceedings of the Annual OFFshore Technology Conference. OTC 10710.
[21] Collier, G. P., Rosier, P., 1995. Environmental impact of submarine pipeline
installation. Journal of OFFshore Technology 3 (2), 9{14.
[22] Cox, H. D., Hammett, D. S., Ronald, D. J., Shatto Jr., H. L., Jul. 1967. Tension
pipe laying method. U.S. Patent 3331212
[23] Det Norske Veritas, 2000. OFFshore Standard DNV{OS{F101 Submarine
Pipeline Systems. DNV.
[24] Dixon, D., Rutledge, D., February 1968. Sti_ened catenary calculations in
pipeline laying problem. ASME Journal of Engineering for Industry 90 (1), 153{160.
[25] Egeland, O., Gravdahl, J. T., 2002. Modeling and Simulation for Automatic
Control, 1st Edition. Marine Cybernetics.
[26] Faldini, R., 1999. S7000: A new horizon. In: Proceedings of the Annual
OFFshore Technology Conference. OTC 10712.
[27] Faltinsen, O. M., 1990. Sea Loads on Ships and OFFshore Structures. Cambridge
University Press.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
73
[28] Fathi, D., 2004. ShipX Vessel Responses (VERES). MARINTEK Trondheim,
www.marintek.sintef.no.
[29] Faiy, H., 1990. Dynamic Positioning Systems: Principles, Design and
Applications. Editions Technip.
[30] Fossen, T. I., 1994. Guidance and Control of Ocean Vehicles. John Wiley &
Sons Ltd.
[31] Fossen, T. I., 2002. Marine Control Systems: Guidance, Navigation, and Control
of Ships, Rigs and Underwater Vehicles, 1st Edition. Marine Cybernetics, Trondheim
Norway.
[32] Fossen, T. I., Perez, T., 2004. Marine systems simulator (MSS). URL
www.marinecontrol.org
[33] Fossen, T. I., Smogeli, _. N., 2004. Nonlinear time{domain strip theory
formulation for low{speed manoeuvering and station{keeping. Modeling, Identification and
Control 25 (4), 201{221.
[34] Fylling, I., Larsen, C. M., S_dahl, N., Passano, E., Bech, A., Engseth, A. G., Lie,
H., Ormberg, H., 2008. RIFLEX User's Manual 3.6, MARINTEK, Trondheim, Norway.
[35] Guo, B., Song, S., Chacko, J., Ghalambor, A., 2005. OFFshore Pipelines. Gulf
Professional Publishing.
[36] Heerema, E., 2005. Recent achievements and present trends in deepwater pipelay
systems. In: Proceedings of the Annual OFFshore Technology Conference. OTC 17627.
[37] Heerema, E. P., 1995. DP pipelay vessel 'Solitaire': Plunging into the deep. In:
Proceedings of the International Conference on OFFshore Mechanics and Arctic Engineering
{ OMAE. Vol. 5. ASME, Copenhagen, Denmark, pp. 525-537.
[38] Heerema, E. P., 1998. Major deepwater pipelay vessel starts work in North Sea.
Oil and Gas Journal 96 (18), 78-82.
[39] Khalil, H., 2002. Nonlinear Systems, 3rd Edition. Prentice Hall.
[40] Knight, R., Palathingal, O., 2007. Pipelay market constrained by vessel shortages
In: OTC07 Show Daily 05.02.07. pp. 20-21.
[41] Knott, T., Jul. 2005. Solitaire shines even brighter. OFFshore Engineer, 22-30.
Kongsberg, 2006. Kongsberg K-Pos DP Dynamic Positioning System. Kongsberg Maritime
AS, report no. 301093/B.
[42] Kyriakides, S., Corona, E., 2007. Mechanics of OFFshore Pipelines, Volume 1:
Buckling and Collapse, 1st Edition. Elsevier.
[43] Langner, C. G., 1969. The articulated stinger: A new tool for laying Offshore
pipelines. In: Proceedings of the Annual OFFshore Technology Conference. OTC 1073.
[44] Larsen, C. M., 1976. Static and dynamic analysis of Offshore pipelines during
installation. Ph.D. thesis, Norges tekniske h_gskole. Institutt for skipskonstruksjoner. Le_er,
W. L., Pattarozzi, R., Sterling, G., 2003. Deepwater Petroleum Exploration & Production: A
Nontechnical Guide. PennWell Books.
[45] Martinez, C. E., Goncalves, R., 2003. Laying modeling of submarine pipelines
using contact elements into a corotational formulation. Journal of OFFshore Mechanics and
Arctic Engineering 125 (2), 145-152.
[46] McRobie, F., Lasenby, J., 1999. Simo-Vu Quoc rods using Cli_ord algebra.
International Journal for Numerical Methods in Engineering 45 (4), 377-398.
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
74
[47] Miesner, T. O., Le_er, W. L., 2006. Oil & Gas Pipelines in Nontechnical
Language. PennWell Books.
[48] Molin, B., 2002. Hydrodynamique des Structures OFFshores. Editions
TECHNIP.
[49] Morison, J. R., O'Brien, M. P., Johnson, J. W., Schaaf, S. A., 1950. The force
exerted by surface waves on piles. Petroleum Transactions AIME 189, 149-189.
[50] Merk, K. J., Collberg, L., Bj_rnsen, T., 1998. Limit state design in DNV'96 rules
for submarine pipeline systems: Background and project experience. In: Proceedings of the
Annual OFFshore Technology Conference. OTC 8671.
[51] Ogilvie, T. F., 1964. Recent progress toward the understanding and prediction of
ship motions. In: Proceedings of the Fifth Symposium on Naval Hydrodynamics, Bergen,
Norway. Vol. ACR-112. ONR, pp. 3-79.
[52] Palmer, A. C., 1994. Deepwater pipelines: Improving state of the art. In:
Proceedings of the Annual OFFshore Technology Conference. OTC 7541.
[53] Palmer, A. C., Hutchinson, G., Ells, J. W., 1974. Configuration of subnmarine
pipelines during laying operaţions. Journal of Engineeing for IndustryTransactions of the
ASME 96 (4), 1112-1118.
[54] Palmer, A. C., King, R. A., 2008. Subsea Pipeline Engineering, 2nd Edition.
PennWell Books.
[55] Reissner, E., 1982. Some remarks on the problem of column buckling.
IngenieurArchiv 52, 115-119.
[56] Rienstra, S. W., 1987. Analytical approximations for Offshore pipelaying
problems. In: Proceedings of ICIAM 87, Paris-La Vilette, France.
[57] Romero, I., Armero, F., 2002. An objective _nite element approximation of the
kinematics of geometrically exact rods and its use in the formulation of an energymomentum
conserving scheme in dynamics. International Journal for Numerical Methods in Engineering
54 (12), 1683-1716.
[58] Soafstrtom, N., 2009. Modeling and simulation of rigid body and rod dynamics
via geometric methods. Ph.D. thesis, Norwegian University of Science and Technology.
[59] Sciavicco, L., Siciliano, B., 2001. Modelling and Control of Robot Manipulators,
2nd Edition. Springer.
[60] Searle, A., 2004. PLUTO Pipe-Line Under The Ocean, 2nd Edition. Shaklin
Chine.
[61] Seven Oceans, 2009. Subsea7 Brochure (www.subsea7.com).
[62] Seyed, F. B., Patel, M. H., 1992. Mathematics of exible risers including pressure
and interal ow e_ects. Marine Structures 5 (2-3), 121-150.
[63] Simo, J. C., May 1985. A _nite strain beam formulation. The three-dimensional
dynamic problem. Part I. Computer Methods in Applied Mechanics and Engineering 49 (1),
55-70.
[64] Simo, J. C., Tarnow, N., Doblare, M., 1995. Non-linear dynamics of
threedimensional rods: Exact energy and momentum conserving algorithms. International
Journal for Numerical Methods in Engineering 38, 1431-1473.
[65] Sumer, B. M., Freds_e, J., 2006. Hydrodynamics Around Cyclindrical
Structures. World Scienti_c Publishing Company, revised edition, (Advanced Series on
Ocean Engineering).
Studii şi cercetări pentru optimizarea tehnologiilor de montaj ale conductelor rigide în domeniul
submarin _____________________________________________________________________________________
75
[66] Timmermans, W., 2000. The past and future of Offshore pipelines. OFFshore
Pipeline Technology EP 1108.
[67] Torselletti, E., Bruschi, R., Vitali, L., Marchesani, F., 1999. Lay challenges in
deep waters: Technologies and criteria. In: Proceedings of the 2nd Int. Deepwater Pipeline
Technology Conf., New Orleans, Louisiana, USA.
[68] Triantafyllou, M. S., 1990. Cable mechanics with marine appl., lecture notes.
Dept. of Ocaen Eng., M.I.T., Cambridge, MA.
[69] van den Boom, H. J. J., 1985. Dynamic behaviour of mooring lines. In:
Proceedings of the 4th Int. Conference on Behaviour of OFFshore Structures.
[70] Wade, B. G., Dwyer, M., 1976. On the application of Morison's equation to
Offshore platforms. In: Proceedings of the Annual OFFshore Technology Conference. OTC
2723.
[71] WAMIT, 2004. WAMIT User Manual. www.wamit.com.
[72] Wilhoit, J. C., Merwin, J. E., Feb 1967. Pipe stress induced in laying Offshore
pipeline. Journal of Engineering for Industry.
[73] Wilkins, J. R., 1994. From S-lay to J-lay. In: Proceedings of the 13th Int.
Conference on OFFshore Mechanics and Arctic Engineering, New York, NY, USA.
[74] Worldsen, A. S., 2007. Modelling and control of tensegrity structure. Ph.D.
thesis, Norwegian University of Science and Technology.
BIBLIOGRAFIE CAPITOLUL 4
[1] Castoro 6 Brochure
[2] Seven Oceans Brochure
BIBLIOGRAFIE CAPITOLUL 5
[1] ANSYS User Manual





























