Embed Size (px)
Citation preview
Universidad Nacional de Colombia- Sede Medellın
Superficies desarrollables y
geodesicas en las imagenes
medicas
Tesis presentada por Jose Fernando Ramırez Huaca
para obtener el grado de Magister en Ciencias- Matematicas
Director
Marco Paluszny Kluczynsky
Facultad de Ciencias
Escuela de Matematicas
2012
Indice general
0.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1. Preliminares 1
1.1. Conceptos basicos de geometrıa diferencial . . . . . . . . . . . . . . . . 1
1.1.1. Curvas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.2. Superficies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.3. Superficies desarrollables y geodesicas . . . . . . . . . . . . . . . 9
1.2. Conceptos basicos de CAGD . . . . . . . . . . . . . . . . . . . . . . . . 16
1.2.1. Curvas de Bezier. . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.2.2. Superficies de Bezier. . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2.3. Cubicas de Overhauser. . . . . . . . . . . . . . . . . . . . . . . . 21
1.3. Conceptos basicos de imagenes medicas . . . . . . . . . . . . . . . . . . 24
2. Construccion de superficies desarrollables por medio de curvas prede-
terminadas 27
2.1. Algoritmo de Aumann . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.1.1. Forma matricial del algoritmo de Aumann . . . . . . . . . . . . 30
2.1.2. Superficies desarrollables a trozos usando cubicas de Overhauser
y el algoritmo de Aumann . . . . . . . . . . . . . . . . . . . . . 32
2.2. Superficie desarrollable dada por el vector de Darboux . . . . . . . . . 36
3. Superficies desarrollables semidiscretas 40
3.1. Parametrizaciones conjugadas y mallas-CP . . . . . . . . . . . . . . . . 40
3.2. Superficie desarrollable semidiscreta M.A. . . . . . . . . . . . . . . . . 43
3.2.1. Interpolacion con el algoritmo de Aumann . . . . . . . . . . . . 44
3.2.2. Superficie moulding . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.2.3. Construccion de la superficie desarrollable semidiscreta MA . . . 49
3.3. Superficie desarrollable semidiscreta TDE . . . . . . . . . . . . . . . . . 53
i
ii Indice general
4. Aplicaciones a las imagenes medicas 54
4.1. Rodaja dental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2. Craneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Bibliografıa 62
Indice de figuras
1.1. Triedro de Frenet y el plano osculador . . . . . . . . . . . . . . . . . . 3
1.2. Superficie parametrizada regular, TPM , Xu, Xv ,u-curva y v-curva . . . 5
1.3. Aplicacion de Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4. Superficie desarrollable y geodesica . . . . . . . . . . . . . . . . . . . . 9
1.5. Superficie reglada desarrollable . . . . . . . . . . . . . . . . . . . . . . . 11
1.6. Superficies desarrollables sobre la curva α (en verde). Cilindro (en rojo),
cono (en azul) y tangente (en negro) . . . . . . . . . . . . . . . . . . . 12
1.7. Curva sobre dos superficies, vector normal a la curva en rojo, vector
normal las superficies en negro . . . . . . . . . . . . . . . . . . . . . . 13
1.8. Desarrollo de las superficies y la curva de la figura 1.7 . . . . . . . . . 14
1.9. Polinomios de la base B3 con u ∈ [0, 1] . . . . . . . . . . . . . . . . . . 17
1.10. Curva de Bezier de grado 3 (en azul) y polıgono de control (en rojo) . . 18
1.11. Superficie de Bezier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.12. Superficie reglada de Bezier . . . . . . . . . . . . . . . . . . . . . . . . 21
1.13. Cubica de Overhauser . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.14. Cubica con dos polıgonos de control, negro para la parametrizaciıon de
Bezier, rojo para la de Overhauser . . . . . . . . . . . . . . . . . . . . 23
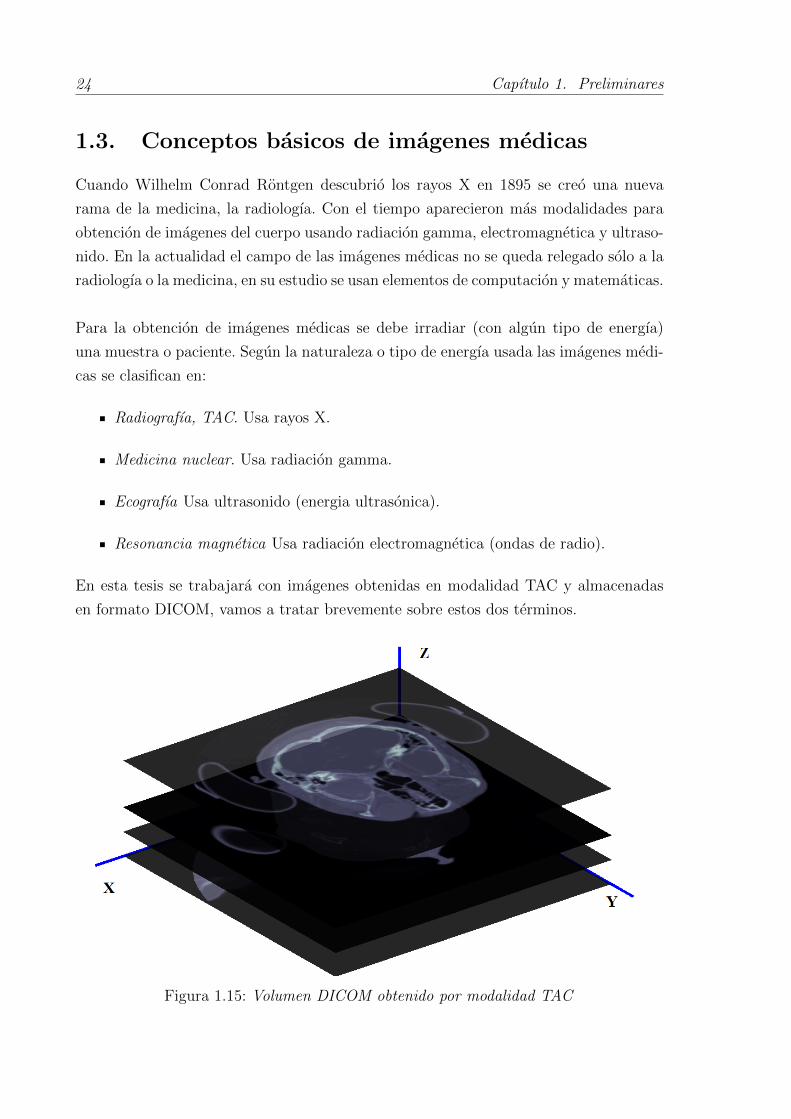
1.15. Volumen DICOM obtenido por modalidad TAC . . . . . . . . . . . . . 24
1.16. Seccion transversal de K . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.17. Codificacion de colores en una imagen medica . . . . . . . . . . . . . . 26
2.1. Superficie tangente. λ = 0,6, µ = 1,2, curva b(u) en verde . . . . . . . . 28
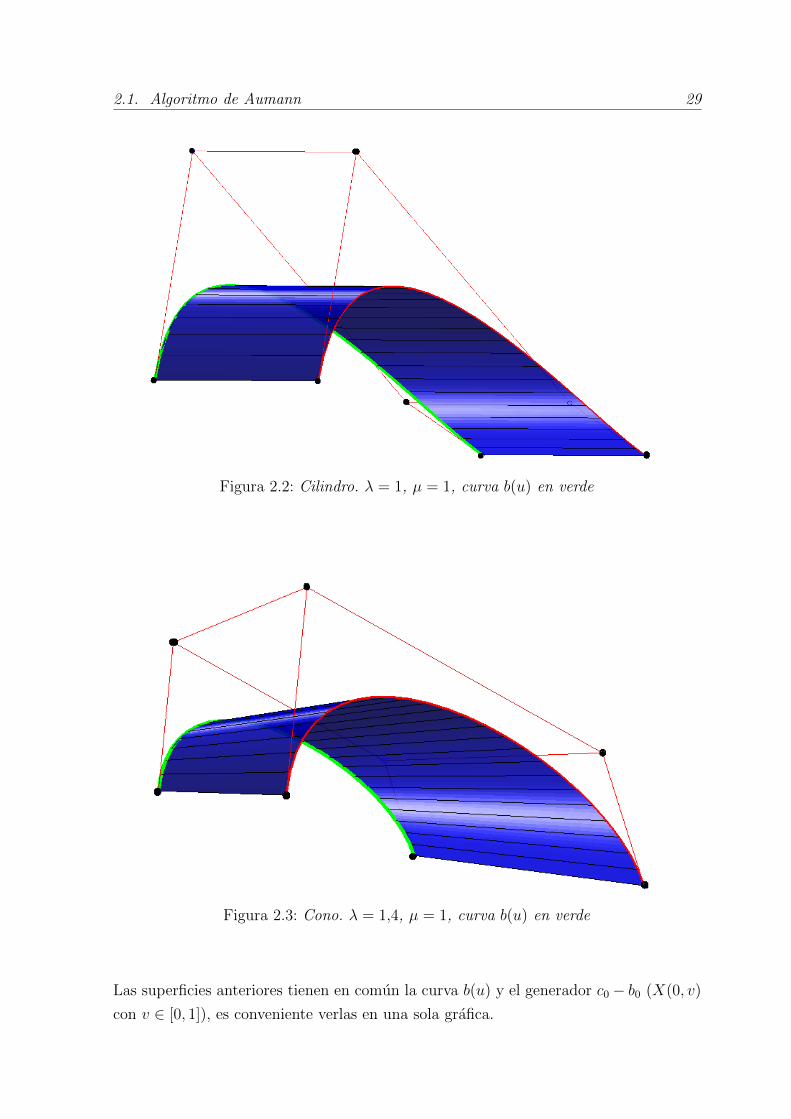
2.2. Cilindro. λ = 1, µ = 1, curva b(u) en verde . . . . . . . . . . . . . . . . 29
2.3. Cono. λ = 1,4, µ = 1, curva b(u) en verde . . . . . . . . . . . . . . . . 29
2.4. Superficies desarrollables sobre b(u). Cono (en azul), cilindro (en verde)
y superficie tangente (en rojo) . . . . . . . . . . . . . . . . . . . . . . . 30
2.5. Diagrama conmutativo . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
iii

iv Indice de figuras
2.6. Segmentos de cubicas de Overhauser interpolantes, los puntos de control
de b1(t) son A0, .., A3, los de b2(t) son A1, .., A4 . . . . . . . . . . . . . 33
2.7. Trozos X(u, v) en rojo y X∗(u, v) en azul . . . . . . . . . . . . . . . . . 35
2.8. Superficie de Darboux para la curva α(u) (en rojo) . . . . . . . . . . . 37
2.9. Desarrollo de la superficie de Darboux para α(u) . . . . . . . . . . . . . 38
2.10. Superficie de Darboux para la curva α(u) (en rojo) . . . . . . . . . . . 39
3.1. Superficie traslacional en azul, envolvente de los planos tangentes de una
curva isoparametrica en rojo . . . . . . . . . . . . . . . . . . . . . . . . 41
3.2. Modelo tangente en azul y polıgono de regresion en rojo . . . . . . . . . 42
3.3. Refinamiento de una malla-CP . . . . . . . . . . . . . . . . . . . . . . 43
3.4. Caso L0 y L1 alabeadas . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.5. Curva α(u) en azul, offsets en negro y evoluta en rojo . . . . . . . . . . 46
3.6. Superficie moulding M(u, v), en azul, q(v) en rojo, p(u) en negro, cilindro
C(v, w) en verde, y un plano de la familia Πv en rojo . . . . . . . . . . 48
3.7. Paso 1. Curva q(v) en verde, rectas ri en azul . . . . . . . . . . . . . . 49
3.8. Paso 2. Polıgonos Ci en rojo . . . . . . . . . . . . . . . . . . . . . . . . 50
3.9. Malla m del paso 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.10. Superficie MA sobre dos trapecios consecutivos M1,j, M1,j+1 . . . . . . . 52
3.11. Superficie MA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.12. Superficie T.D.E. formada por dos strips . . . . . . . . . . . . . . . . . 53
4.1. Rodaja dental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2. Imagen DICOM del Scan dental . . . . . . . . . . . . . . . . . . . . . 55
4.3. Extracion de los datos . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.4. Rodaja en 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.5. Desarrollo de la rodaja . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.6. Craneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.7. Imagen DICOM del craneo con los puntos de control . . . . . . . . . . 58
4.8. Imagen DICOM del craneo con una curva ti + αib(u) . . . . . . . . . . 59
4.9. Craneo modelado por 7 strips . . . . . . . . . . . . . . . . . . . . . . . 59
4.10. Craneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.11. Strip 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.12. Desarrollo del strip 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
0.1. Introduccion 1
0.1. Introduccion
Las superficies desarrollables son aquellas que se pueden construir a partir del doblado
curvo de un plano (o papel). Esta propiedad las hace muy atractivas para la construc-
cion y la arquitectura. En la actualidad, dentro del diseno geometrico, hay gran interes
en la investigacion de este tipo de superficies.
Las imagenes medicas son un campo interdisiplinar que se dedica al analisis de las
estructuras internas del cuerpo mediante imagenes. Inicio con el descubrimiento de los
rayos X en 1895, en la actualidad la utilizacion de las tomografıas computarizadas y
resonancias magneticas permiten el estudio y analisis en tres dimensiones del cuerpo
humano. Dentro de las imagenes medicas se investiga basicamente sobre los siguientes
tres problemas:
1. Segmentacion- Metodos automaticos que permitan dividir las diferentes estructu-
ras anatomicas dentro de las imagenes.
2. Visualizacion- Aprovechar y digerir la enorme cantidad de datos producidos por
los modernos sistemas de imagenes medicas.
3. Simulacion- Software que permite simular y planear tratatientos.
En esta tesis abordaremos el problema de la visualizacion de imagenes medicas usando
superficies desarrollables. Se usara en especial la teorıa que en el diseno geometrico, se
ha desarrollado sobre este tipo de superficies para aplicaciones a la arquitectura en [1],
[4] y [7].
En la actualidad hay software que a partir de un conjunto de imagenes medicas, que con-
forman un volumen, nos permite visualizar la textura sobre cualquier plano. Tambıen
es posible hacer la reconstruccion en 3D de cualquier esrtructura anatomica. Aquı usa-
remos las superficies desarrollables para visualizar estructuras anatomicas tridimensio-
nales de forma plana sin que haya deformacion, esto ayudara al diagnostico a partir de
imagenes medicas.
La tesis se puede dividir en tres partes. En la primera (capıtulo 1) se dan los con-
ceptos basicos de geometrıa diferencial clasica, diseno geometrico e imagenes medicas
que se usaran. En la segunda (capıtulos 2 y 3) se desarrollan los algoritmos basicos y
se construyen algunas superficies desarrollables. En la cuarta (capıtulo 4) se muestran
algunas superficies construidas anteriormente, aplicadas a las imagenes medicas.
Capıtulo 1
Preliminares
1.1. Conceptos basicos de geometrıa diferencial
Primero veremos los conceptos basicos de la geometrıa diferencial clasica de curvas y
superficies que se utilizaran en este trabajo, nos basaremos en [5] .
1.1.1. Curvas
Decimos que una funcion f : (a, b) −→ R3 es Ck (k = 0, 1, 2, ...) si f y sus primeras k
derivadas son continuas. Decimos que f es suave si f es Ck para todo entero positivo k.
Una curva parametrizada es una funcion C3 (o suave) α : I −→ R3 para algun intervalo
I = (a, b) o [a, b] en R que podrıa ser infinito, aquı usaremos principalmente I = [0, 1].
Se dice que α es regular si α′(t) 6= 0 ∀t ∈ I 1.
Longitud de arco. Si α : [a, b] −→ R3 es una curva parametrizada entonces ∀t ∈ [a, b]
definimos su longitud de arco desde a hasta t por
s(t) =
∫ t
a
∥∥∥α′(u)∥∥∥ du (1.1)
Decimos que una curva parametrizada α esta parametrizada por longitud de arco si∥∥α′(t)∥∥ = 1 para todo t, por tanto s(t) = t − a, en este caso usamos el parametro s y
escribimos α(s).
Es importante notar que “ en teorıa” toda curva parametrizada regular se puede repa-
rametrizar por longitud de arco. Si α es regular entonces es claro que la fucion longitud
de arco s(t) dada por (1.1) es creciente (pues s′(t) =
∥∥α′(t)∥∥ > 0 para todo t), luego
1En caso de un extremo se consideran las derivadas laterales
1

2 Capıtulo 1. Preliminares
tiene inversa t = t(s), y con esta podemos considerar la parametrizacion
β(s) = α(t(s)).
Notemos que aplicando la regla de la cadena tenemos
β′(s) = α
′(t(s))t
′(s) =
α′(t(s))
s′(t(s))=
α′(t(s))
‖α′(t(s))‖
es decir∥∥β ′(s)∥∥ = 1 para todo s. En la practica es dificil encontrar la funcion t(s) de
manera explıcita.
Triedro de Frenet. Sea α una curva parametrizada por longitud de arco, entonces
α′
es su vector tangente unitario que denotaremos por T (s). Como T tiene magnitud
constante entonces T′(s) es ortogonal a T (s). Suponiendo que T
′(s) 6= 0 se define el
vector normal N(s) = T′(s)/
∥∥T ′(s)∥∥ y la curvatura κ(s) =∥∥T ′(s)∥∥, luego tenemos
T′(s) = κ(s)N(s).
Si κ(s) = 0 el vector normal no esta definido. Suponiendo κ 6= 0 se define el vector
binormal B(s) = T (s) × N(s). A la base ortonormal de R3 T (s), N(s), B(s) se le
denomina triedro de Frenet para la curva regular α. (α : [a, b] −→ R3 inyectiva).
Definimos la torsion τ(s) = N′(s) ·B(s). De lo anterior se deduce facilmente lo siguiente
(ver comentario 4)
T′(s) = κ(s)N(s).
N′(s) = −κ(s)T (s) + τ(s)B(s).
B′(s) = −τ(s)N(s).
Las anteriores son conocidas como las formulas de Frenet (o Frenet-Serret) que se pueden
escribir en forma matricial como: | | |T′(s) N
′(s) B
′(s)
| | |
=
| | |T (s) N(s) B(s)
| | |
0 −κ(s) 0
κ(s) 0 −τ(s)
0 τ(s) 0
Notemos que la matriz de la derecha es antisimetrica.
Si la curva α(t) no esta parametrizada por longitud de arco (que es lo mas comun)
1.1. Conceptos basicos de geometrıa diferencial 3
entonces el triedro de Frenet es:
T (t) =α′(t)
‖α′(t)‖, B(t) =
α′(t)× α′′(t)
‖α′(t)× α′′(t)‖, N(t) = B(t)× T (t). (1.2)
La curvatura y la torsion se expresan como:
κ(t) =
∥∥α′(t)× α′′(t)∥∥‖α′(t)‖3
, τ(t) =α′(t) ·
(α′′(t)× α′′′(t)
)‖α′(t)× α′′(t)‖2
. (1.3)
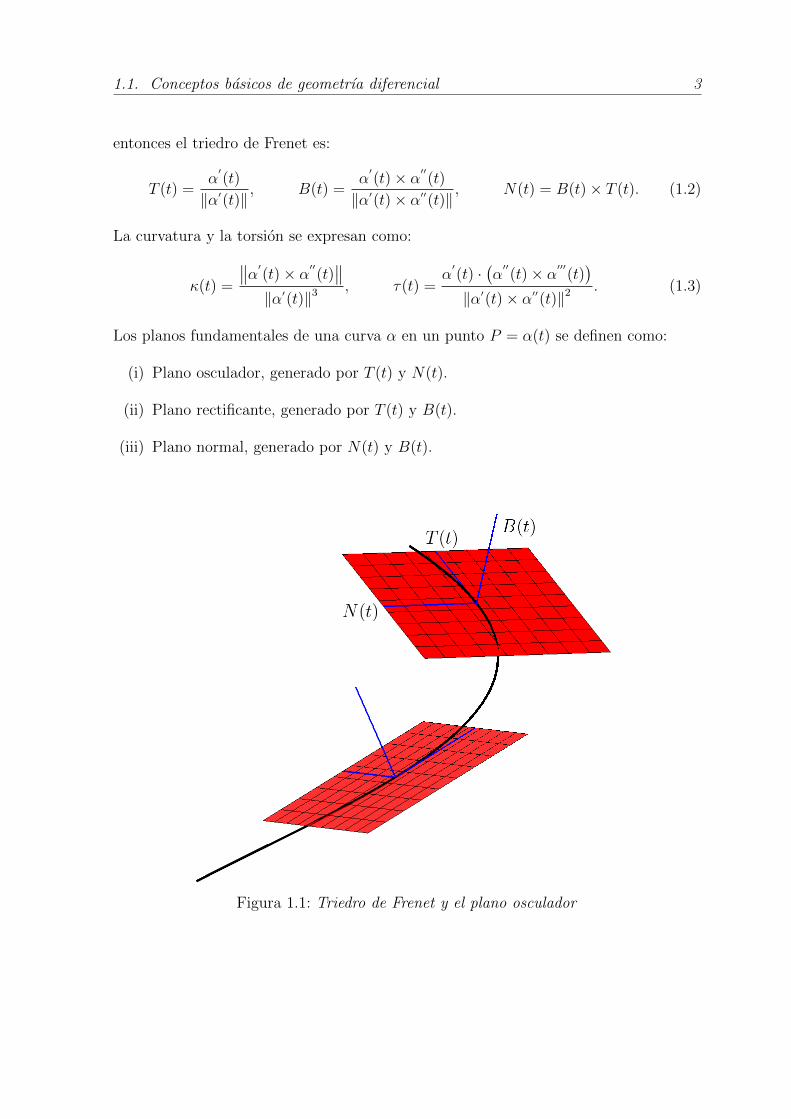
Los planos fundamentales de una curva α en un punto P = α(t) se definen como:
(i) Plano osculador, generado por T (t) y N(t).
(ii) Plano rectificante, generado por T (t) y B(t).
(iii) Plano normal, generado por N(t) y B(t).
Figura 1.1: Triedro de Frenet y el plano osculador
4 Capıtulo 1. Preliminares
Comentarios.
1. Notemos que por la definicion se tiene κ ≥ 0, pero τ puede ser positiva o negativa.
2. La curvatura κ mide la razon de cambio del vector tangente unitario T respecto
al parametro t, por tanto κ = 0 sii la curva es una recta.
3. La torsion τ mide la razon de cambio del vector binormal B respecto al parametro
t, por tanto τ = 0 sii la curva es plana, y si esto ocurre esta esta contenida en el
plano osculador.
4. Las formulas de Frenet se deducen facilmente usando el siguiente resultado.
Si f, g : (a, b) −→ R3 son diferenciables y f(t) · g(t) es constante ∀t ∈ (a, b)
entonces f′(t) · g(t) = −f(t) · g′(t) y en particular ‖f(t)‖ es constante sii f(t) ·
f′(t) = 0 ∀t ∈ (a, b)
5. Toda curva esta completamente determinada por su torsion y su curvatura. Dos
curvas C,C∗ son congruentes (difieren por un movimiento rıgido) sii para sus
correspondientes parametrizaciones por longitud de arco α, α∗ se tiene κ(s) =
κ∗(s) y τ(s) = τ ∗(s) para todo s.
1.1.2. Superficies
Superficies parametrizadas y primera forma fundamental. Sea U ⊂ R2 abierto,
una funcion f : U −→ Rm es Ck si f y sus derivadas parciales de orden k son conti-
nuas. Decimos que f es suave si es Ck para todo entero positivo k. Usaremos m = 3 y
supondremos que las funciones a tratar son Ck para k ≥ 3; usaremos la notacion (u, v)
para las coordenadas del espacio de parametros U , (x, y, z) para las coordenadas en R3
y subındices para las derivadas parciales.
Una parametrizacion regular de un subconjunto M ⊂ R3 se define como una fun-
cion inyectiva X : U −→M tal que Xu×Xv 6= 0 para algun U ⊂ R2 abierto. M es una
superficie parametrizada regular si existe una parametrizacion regular X para esta.
Sea M superficie parametrizada regular, y sea P = X(u0, v0) ∈ M . El plano tangente
de M en P denotado TPM se define como el generado por Xu(u0, v0) y Xv(u0, v0). Se
define el vector normal a la superficie como
n =Xu ×Xv
‖Xu ×Xv‖.

1.1. Conceptos basicos de geometrıa diferencial 5
Para P , si fijamos u = u0 y variamos v obtenemos una v-curva X(u0, v) y Xv(u0, v0) es
el vector tangente a esta, analogamente Xu(u0, v0) es tangente a la u-curva X(u, v0). A
las u-curvas y las v-curvas se les denomina curvas isoparametricas
Figura 1.2: Superficie parametrizada regular, TPM , Xu, Xv ,u-curva y v-curva
Para una parametrizacion regular X de una superficie M , el conjunto Xu, Xv forma
una base natural para TPM y con esta se introduce la primera forma fundamental
IP : TPM × TPM −→ R
IP (U, V ) = U · V
y se definen
E = IP (Xu, Xu) = Xu ·Xu,
F = IP (Xu, Xv) = Xu ·Xv = Xv ·Xu = IP (Xv, Xu),
G = IP (Xv, Xv) = Xv ·Xv,
que es conveniente ubicar en las entradas de una matriz simetrica (esta es la matriz de
I en terminos de la base Xu, Xv)
IP =
[E F
F G
]ya que IP (U, V ) = UT
[E F
F G
]V

6 Capıtulo 1. Preliminares
Se dice que dos superficies M y M∗ son localmente isometricas si ∀P ∈ M hay una
parametrizacion regular X : U −→M y una parametrizacion regular
X∗ : U −→ M∗ (usando el mismo abierto U ∈ R2 ) tal que IP = I∗P ∗ siempre que
P = X(u, v) y P ∗ = X∗(u, v) para algun (u, v) ∈ U . Esto significa que la funcion
f = X∗ X−1 : X(U) −→ X∗(U) (1.4)
es una correspondencia 1-1 que preserva la primera forma fundamental y por ende la
distancia y los angulos.
La primera forma fundamental describe las propiedades metricas de una superficie pa-
rametrizada M . Si α(t) = X(u(t), v(t)) con t ∈ [a, b] es una curva parametrizada en
M entonces la longitud L de α y el area A de M se calculan como:
L(α) =
∫ a
b
√Iα(t)(α
′(t), α′(t))dt (1.5)
=
∫ a
b
√E(t)(u′(t))2 + 2F (t)u′(t)v′(t) +G(t)(v′(t))2dt (1.6)
A(M) =
∫U
‖Xu ×Xv‖ dudv =
∫U
√EG− F 2dudv (1.7)
Aplicacion de Gauss y la segunda forma fundamental. Dada una superficie
parametrizada regular M , la funcion n : M −→ S2 ⊂ R3 (donde S2 es la esfera
unitaria de R3) que a cada punto de P ∈ M le asigna su vector normal unitario n(P ),
se denomina aplicacion de Gauss de M .
Figura 1.3: Aplicacion de Gauss

1.1. Conceptos basicos de geometrıa diferencial 7
Para todo V ∈ TPM la derivada direccional DV n(p) ∈ TPM y esto permite introducir
el operador de forma en P denotado por SP como la funcion lineal SP : TPM −→ TPM
definida por SP (V ) = −DV n(P ). Esta funcion es simetrica , es decir, ∀U, V ∈ TPM
SP (U) · V = U · SP (V ) (1.8)
Notemos que si ∀P ∈ M se tiene que SP = 0 entonces M es un subconjunto de un
plano. En una esfera de radio a centrada en el origen tenemos n = 1aX(u, v) luego para
todo P se tiene SP (Xu) = −nu y SP (Xv) = −nv de donde SP = − 1aID donde ID es la
funcion identidad en TPM .
Ahora podemos introducir la segunda forma fundamental
IIP : SPM × SPM −→ R
IIP (U, V ) = SP (U) · V
Para todo V ∈ TPM ( con ‖V ‖ = 1) IIP mide la curvatura de las curvas α que estan
en la interseccion de M y el plano generado por n(p) y V ya que
IIP (V, V ) = SP (V ) · V = −Dvn(P ) · V = ±κ.
Al igual que para IP buscamos una representacion matricial para IIP , para esto defini-
mos
L = IIP (Xu, Xu) = −DXun ·Xu = Xuu · n
M = IIP (Xu, Xv) = −DXun ·Xv = Xvu · n = Xuv · n = IIP (Xv, Xu)
N = IIP (Xv, Xv) = −DXvn ·Xv = Xvv · n
y escribimos
IIP =
[L M
M N
]=
[Xuu · n Xuv · nXuv · n Xvv · n
](1.9)
y como en el caso de IP
IIP (U, V ) = UT
[L M
M N
]V
Para una base general de TPM Xu, Xv la matriz que representa al operador de forma
8 Capıtulo 1. Preliminares
SP esta dada por las dos formas fundamentales ası
SP = I−1P IIP =
[E F
F G
]−1 [L M
M N
]
luego si Xu, Xv es una base ortonormal entonces IIP es la representacion matricial
de SP . Como SP es una funcion lineal simetrica entonces tiene 2 valores propios reales
denotados por k1(P ), k2(P ) y denominados curvaturas principales de M en P . Los co-
rrespondientes vectores propios son llamados direcciones principales, y son ortogonales.
Al producto de las curvaturas principales se le denomina curvatura Gaussiana
K = k1k2 = det(SP ). El promedio de de las curvaturas principales se denomina curva-
tura media H = 12(k1 + k2). Se dice que M es una superficie minimal si H = 0.
Dado P ∈ M fijo, se dice que P es un punto umbilical si k1 = k2. Si k1 = k2 = 0
el punto P se denomina punto plano. Si K = 0 pero P no es punto plano, P de denomi-
na punto parabolico. Si K > 0 P es llamado punto elıptico, y si K < 0 P se denomina
punto hiperbolico.
Comentarios.
1. El plano tangente TPM de una superficie M en un punto P se definio para una ba-
se Xu, Xv dada por una parametrizacion regular X, pero realmente la definicion
de TPM independiente de la escogencia de parametrizacion regular 1.
2. Las curvaturas principales k1, k2 cambian de signo al cambiar la orientacion del
vector normal, pero K no cambia, o sea es independiente de la eleccion del vector
normal.
3. SP (V ) mide a variacion de el vector normal a la superficie (y por tanto la variacion
de TPM ) en direccion de V , describe como se curva la superficie.
4. La curvatura Gaussiana K esta completamente determinada por IP , es decir, se
puede expresar exclusivamente en terminos de E,F,G.
5. Una superficie M esta completamente determinada por las las formas fundamen-
tales (salvo el signo de la segunda). Dos parametrizaciones regulares X,X∗ son
tal que I = I∗ y II = ±II∗ sii corresponden a superficies congruentes, es decir
que difieran por un movimento rıgido.
1Para esto se puede consultar el libro de N. Hicks donde se define el espacio tangente en terminosde operadores.
1.1. Conceptos basicos de geometrıa diferencial 9
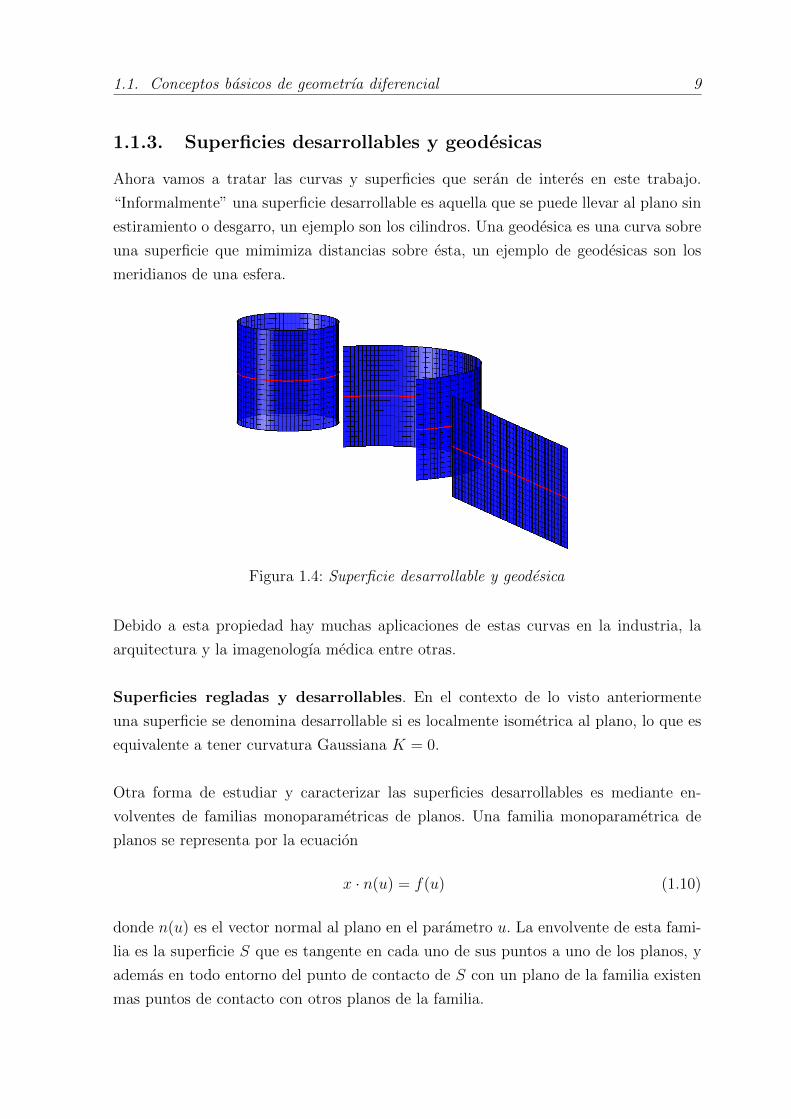
1.1.3. Superficies desarrollables y geodesicas
Ahora vamos a tratar las curvas y superficies que seran de interes en este trabajo.
“Informalmente” una superficie desarrollable es aquella que se puede llevar al plano sin
estiramiento o desgarro, un ejemplo son los cilindros. Una geodesica es una curva sobre
una superficie que mimimiza distancias sobre esta, un ejemplo de geodesicas son los
meridianos de una esfera.
Figura 1.4: Superficie desarrollable y geodesica
Debido a esta propiedad hay muchas aplicaciones de estas curvas en la industria, la
arquitectura y la imagenologıa medica entre otras.
Superficies regladas y desarrollables. En el contexto de lo visto anteriormente
una superficie se denomina desarrollable si es localmente isometrica al plano, lo que es
equivalente a tener curvatura Gaussiana K = 0.
Otra forma de estudiar y caracterizar las superficies desarrollables es mediante en-
volventes de familias monoparametricas de planos. Una familia monoparametrica de
planos se representa por la ecuacion
x · n(u) = f(u) (1.10)
donde n(u) es el vector normal al plano en el parametro u. La envolvente de esta fami-
lia es la superficie S que es tangente en cada uno de sus puntos a uno de los planos, y
ademas en todo entorno del punto de contacto de S con un plano de la familia existen
mas puntos de contacto con otros planos de la familia.

10 Capıtulo 1. Preliminares
Luego los generadores de la envolvente, es decir, las rectas (o segmentos de recta)
que conforman esta superficie, satisfacen las ecuaciones
x · n(u) = f(u)
x · n′(u) = f′(u)
A continuacion consideramos las superficies desarrollables en el contexto de las super-
ficies regladas. Una superficie es reglada si se puede parametrizar de la forma
X(u, v) = α(u) + vβ(u) (1.11)
donde α, β son curvas parametrizadas regulares, β(u) 6= 0 para todo u, u esta en un
intervalo y v ∈ R. Es claro que las v-curvas X(u0, v) = α(u0) + vβ(u0) de la superficie
dada por (1.11) son rectas que pasan por el punto α(u0) con vector director β(u0),
luego por todo punto P = X(u0, v0) de una superficie reglada pasa al menos una recta
(o segmento de recta) que esta contenida en la superficie. A la curva α se le denomina
directriz de la superficie y a las rectas (v-curvas), generatrices.
Las superficies regladas tambien se pueden parametrizar como
S(u, v) = (1− v)p(u) + vq(u) (1.12)
con u, v en intervalos. En este caso las v-curvas son segementos de recta. Notemos que
(1.12) es equivalente a (1.11) con p = α, q − p = β.
Las siguientes son condiciones necesarias y suficientes para que una superficie regla-
da parametrizada como (1.12) sea desarrollable.
D1. El vector normal n y por tanto el plano tangente TPM a la superficie es constante
sobre cada generador.
D2. El generador q(u)− p(u) y los vectores p′(u), q
′(u) son coplanares para todo u.
D3. En cada generador hay dos puntos con igual vector normal.
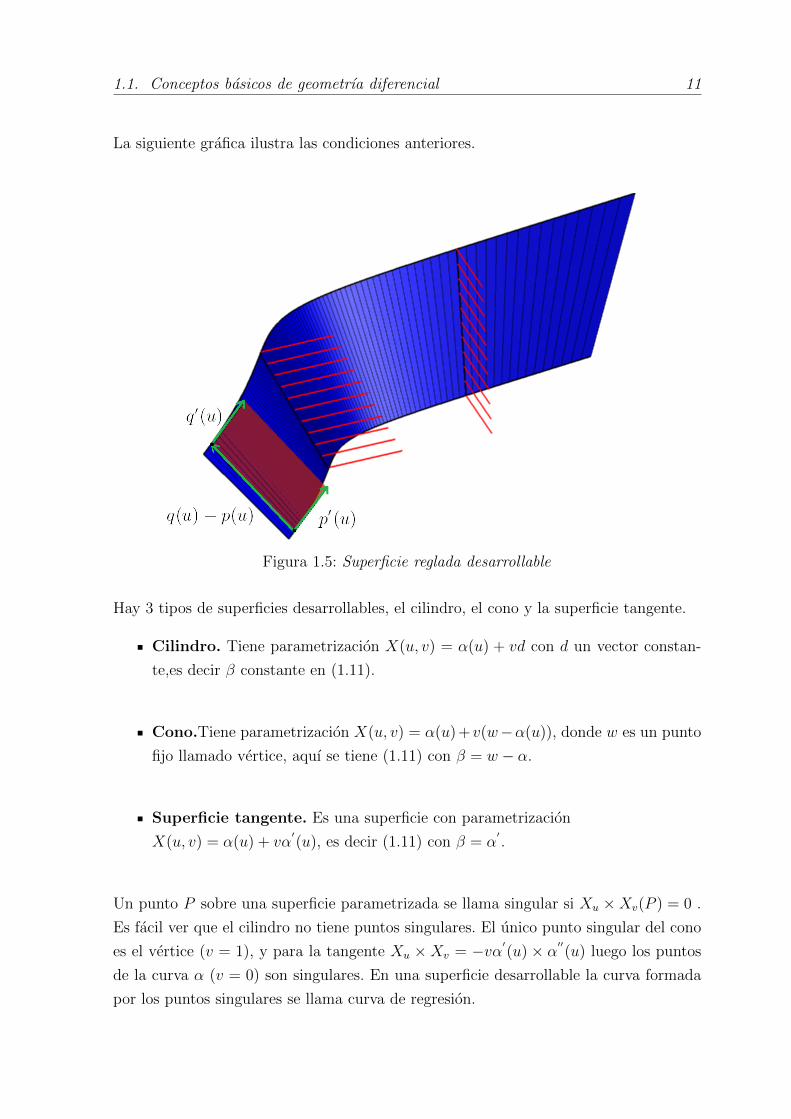
1.1. Conceptos basicos de geometrıa diferencial 11
La siguiente grafica ilustra las condiciones anteriores.
Figura 1.5: Superficie reglada desarrollable
Hay 3 tipos de superficies desarrollables, el cilindro, el cono y la superficie tangente.
Cilindro. Tiene parametrizacion X(u, v) = α(u) + vd con d un vector constan-
te,es decir β constante en (1.11).
Cono.Tiene parametrizacion X(u, v) = α(u) +v(w−α(u)), donde w es un punto
fijo llamado vertice, aquı se tiene (1.11) con β = w − α.
Superficie tangente. Es una superficie con parametrizacion
X(u, v) = α(u) + vα′(u), es decir (1.11) con β = α
′.
Un punto P sobre una superficie parametrizada se llama singular si Xu ×Xv(P ) = 0 .
Es facil ver que el cilindro no tiene puntos singulares. El unico punto singular del cono
es el vertice (v = 1), y para la tangente Xu ×Xv = −vα′(u) × α′′(u) luego los puntos
de la curva α (v = 0) son singulares. En una superficie desarrollable la curva formada
por los puntos singulares se llama curva de regresion.
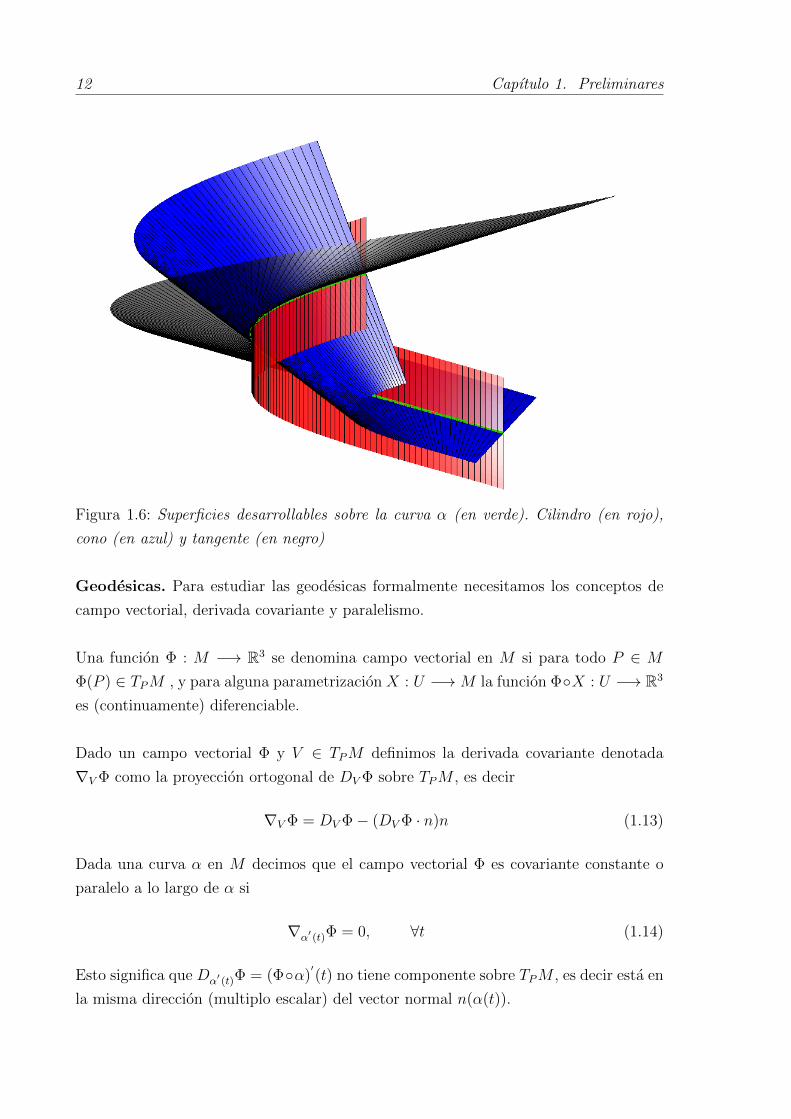
12 Capıtulo 1. Preliminares
Figura 1.6: Superficies desarrollables sobre la curva α (en verde). Cilindro (en rojo),
cono (en azul) y tangente (en negro)
Geodesicas. Para estudiar las geodesicas formalmente necesitamos los conceptos de
campo vectorial, derivada covariante y paralelismo.
Una funcion Φ : M −→ R3 se denomina campo vectorial en M si para todo P ∈ M
Φ(P ) ∈ TPM , y para alguna parametrizacion X : U −→M la funcion ΦX : U −→ R3
es (continuamente) diferenciable.
Dado un campo vectorial Φ y V ∈ TPM definimos la derivada covariante denotada
∇V Φ como la proyeccion ortogonal de DV Φ sobre TPM , es decir
∇V Φ = DV Φ− (DV Φ · n)n (1.13)
Dada una curva α en M decimos que el campo vectorial Φ es covariante constante o
paralelo a lo largo de α si
∇α′ (t)Φ = 0, ∀t (1.14)
Esto significa que Dα′ (t)Φ = (Φα)′(t) no tiene componente sobre TPM , es decir esta en
la misma direccion (multiplo escalar) del vector normal n(α(t)).
1.1. Conceptos basicos de geometrıa diferencial 13
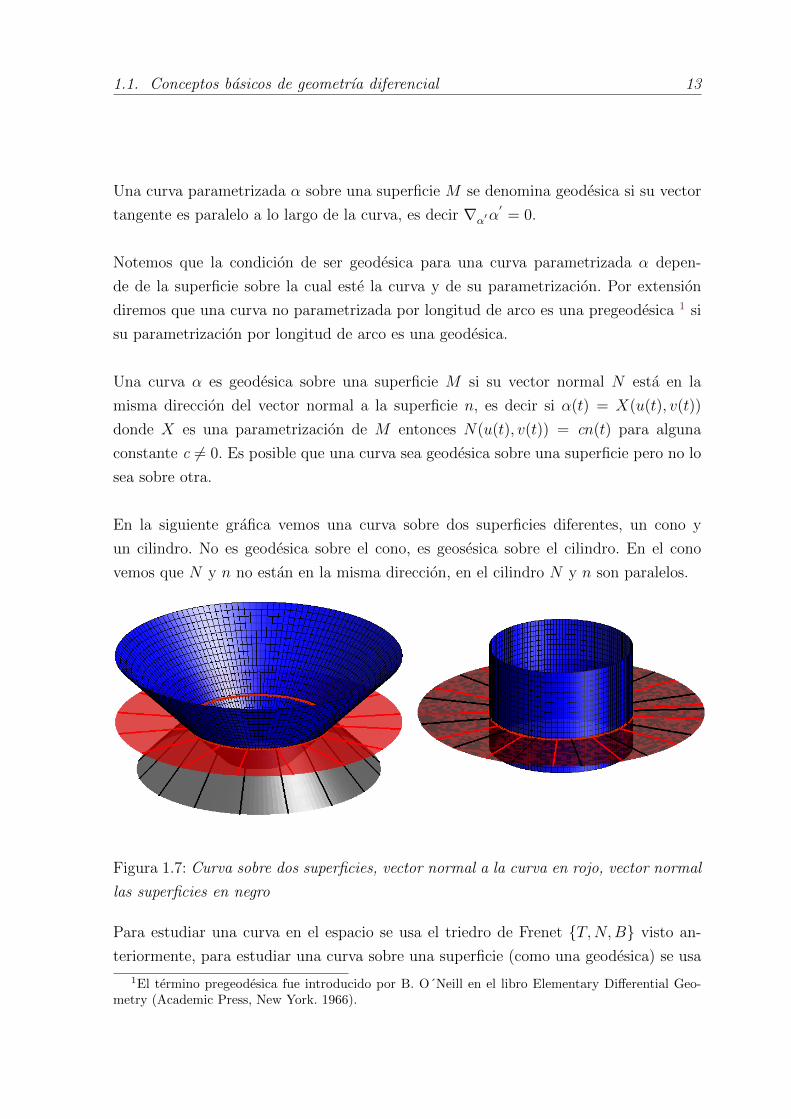
Una curva parametrizada α sobre una superficie M se denomina geodesica si su vector
tangente es paralelo a lo largo de la curva, es decir ∇α′α′= 0.
Notemos que la condicion de ser geodesica para una curva parametrizada α depen-
de de la superficie sobre la cual este la curva y de su parametrizacion. Por extension
diremos que una curva no parametrizada por longitud de arco es una pregeodesica 1 si
su parametrizacion por longitud de arco es una geodesica.
Una curva α es geodesica sobre una superficie M si su vector normal N esta en la
misma direccion del vector normal a la superficie n, es decir si α(t) = X(u(t), v(t))
donde X es una parametrizacion de M entonces N(u(t), v(t)) = cn(t) para alguna
constante c 6= 0. Es posible que una curva sea geodesica sobre una superficie pero no lo
sea sobre otra.
En la siguiente grafica vemos una curva sobre dos superficies diferentes, un cono y
un cilindro. No es geodesica sobre el cono, es geosesica sobre el cilindro. En el cono
vemos que N y n no estan en la misma direccion, en el cilindro N y n son paralelos.
Figura 1.7: Curva sobre dos superficies, vector normal a la curva en rojo, vector normal
las superficies en negro
Para estudiar una curva en el espacio se usa el triedro de Frenet T,N,B visto an-
teriormente, para estudiar una curva sobre una superficie (como una geodesica) se usa
1El termino pregeodesica fue introducido por B. O´Neill en el libro Elementary Differential Geo-metry (Academic Press, New York. 1966).
14 Capıtulo 1. Preliminares
el triedro de Darboux T, n× T, n. Al vector κN conocido como vector curvatura lo
podemos descomponer como
κN = (κN · (n× T )︸ ︷︷ ︸κg
)(n× T ) + (κN · n︸ ︷︷ ︸κn
)n
De donde es claro que κn da la componente normal del vector curvatura y κg, denomi-
nada curvatura geodesica, da la componente tangencial (sobre TPM). Luego una curva
α es geodesica sii κg = 0.
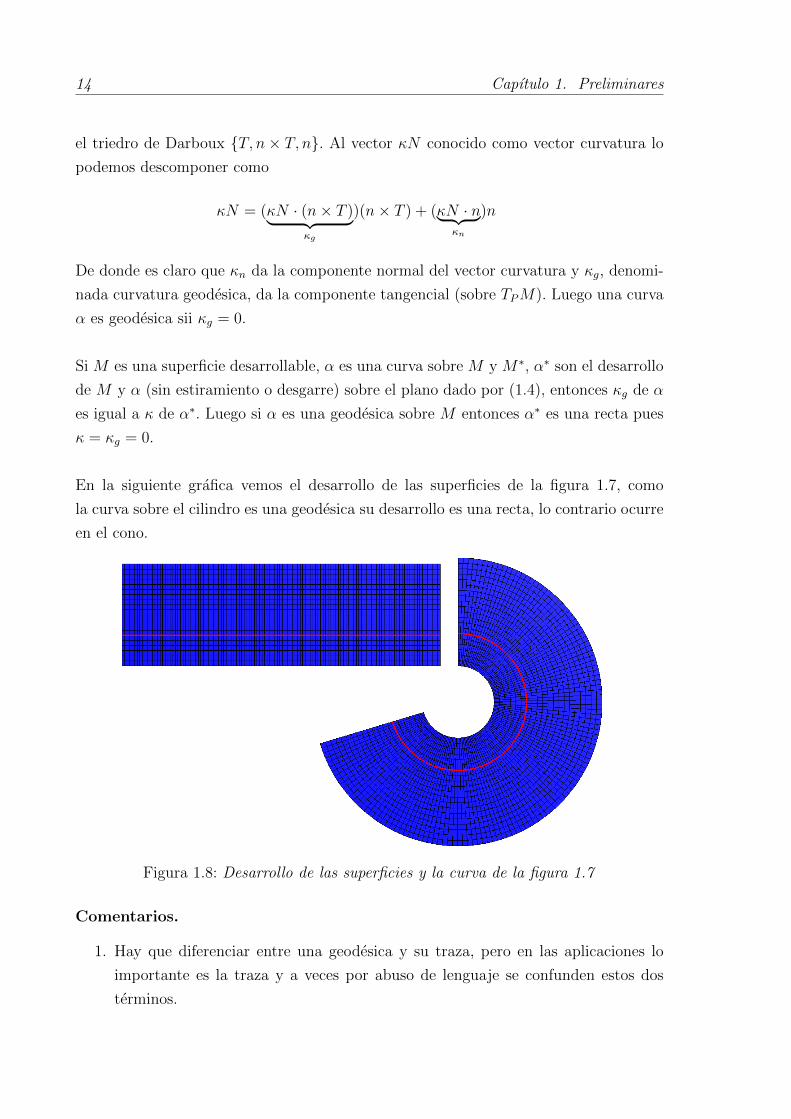
Si M es una superficie desarrollable, α es una curva sobre M y M∗, α∗ son el desarrollo
de M y α (sin estiramiento o desgarre) sobre el plano dado por (1.4), entonces κg de α
es igual a κ de α∗. Luego si α es una geodesica sobre M entonces α∗ es una recta pues
κ = κg = 0.
En la siguiente grafica vemos el desarrollo de las superficies de la figura 1.7, como
la curva sobre el cilindro es una geodesica su desarrollo es una recta, lo contrario ocurre
en el cono.
Figura 1.8: Desarrollo de las superficies y la curva de la figura 1.7
Comentarios.
1. Hay que diferenciar entre una geodesica y su traza, pero en las aplicaciones lo
importante es la traza y a veces por abuso de lenguaje se confunden estos dos
terminos.
1.1. Conceptos basicos de geometrıa diferencial 15
2. Vimos las condiciones necesarias y suficientes para que una superficie reglada
sea desarrollable y mencionamos que toda superficie desarrollable es reglada, esto
se puede probar formalmente con la curvatura Gaussiana K y las direcciones
principales.

16 Capıtulo 1. Preliminares
1.2. Conceptos basicos de CAGD
El diseno geometrico asistido por computadora o CAGD por sus siglas en ingles (Com-
puter Aided Geometric Design) se ocupa principalmente de describir curvas y superficies
de manera matematica sencilla, pero eficiente y precisa, ya que estas representan la for-
ma de un objeto que debe ser construido. El CAGD tiene su origen en los anos 50 y 60
del siglo pasado con los trabajos de Paul de Casteljau y Pierre Bezier quienes traba-
jaron para Citroen y Renault, respectivamente. Para la presentacion de los siguientes
conceptos nos basaremos en [8] y [2].
1.2.1. Curvas de Bezier.
Por el teorema de aproximacion de Weierstrass sabemos que en un intervalo cerrado
toda funcion continua se puede aproximar tanto como se quiera con un polinomio, por
tanto para describir formas dadas por curvas (trazas de funciones continuas) es suficiente
trabajar con curvas polinomicas (con parametrizacion polinomica). Las curvas de Bezier
son curvas polinomicas que se expresan en terminos de la base dada por los polinomios
de Bernstein.
La base de Bernstein para los polinomios de grado menor o igual a n
Bn = Bn0 (u), Bn
1 (u), ....., Bnn(u), esta dada por:
Bni (u) =
(n
i
)ui(1− u)n−i con
(n
i
)=
n!
i!(n− i)!(1.15)
a diferencia de la base canonica un, un−1, ..., u, 1, cada elemento de Bn tiene grado n.
Algunas propiedades de estos polinomios para u ∈ [0, 1] son:
Positividad: Bni (u) ≥ 0.
Simetrıa: Bni (u) = Bn
n−i(1− u).
Recurrencia: Bni (u) = (1− u)Bn−1
i (u) + tBn−1i−1 (u).
Raıces: Sus unicas raıces son 0 y 1.
Bni (0) = Bn
n−i(1) =
1 si i = 0
0 si i > 0
Particion de la unidad.∑n
i=0Bni (u) = 1, esto se cumple para todo u.
1.2. Conceptos basicos de CAGD 17
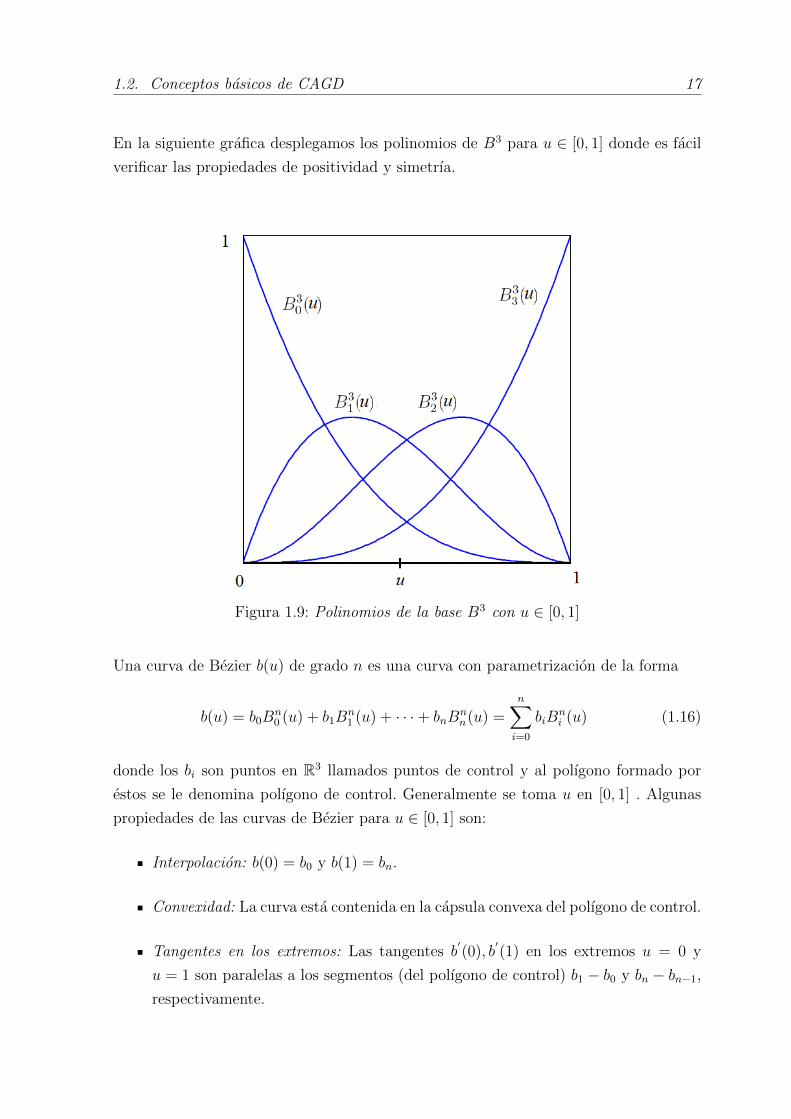
En la siguiente grafica desplegamos los polinomios de B3 para u ∈ [0, 1] donde es facil
verificar las propiedades de positividad y simetrıa.
Figura 1.9: Polinomios de la base B3 con u ∈ [0, 1]
Una curva de Bezier b(u) de grado n es una curva con parametrizacion de la forma
b(u) = b0Bn0 (u) + b1B
n1 (u) + · · ·+ bnB
nn(u) =
n∑i=0
biBni (u) (1.16)
donde los bi son puntos en R3 llamados puntos de control y al polıgono formado por
estos se le denomina polıgono de control. Generalmente se toma u en [0, 1] . Algunas
propiedades de las curvas de Bezier para u ∈ [0, 1] son:
Interpolacion: b(0) = b0 y b(1) = bn.
Convexidad: La curva esta contenida en la capsula convexa del polıgono de control.
Tangentes en los extremos: Las tangentes b′(0), b
′(1) en los extremos u = 0 y
u = 1 son paralelas a los segmentos (del polıgono de control) b1 − b0 y bn − bn−1,
respectivamente.
18 Capıtulo 1. Preliminares
Simetrıa: Si invertimos el polıgono de control de una curva, es decir, si cambiamos
b0, b1, ....bn por bn, bn−1, ....b0, la curva resultante es la misma (en el sentido
de que describe los mismos puntos de R3).
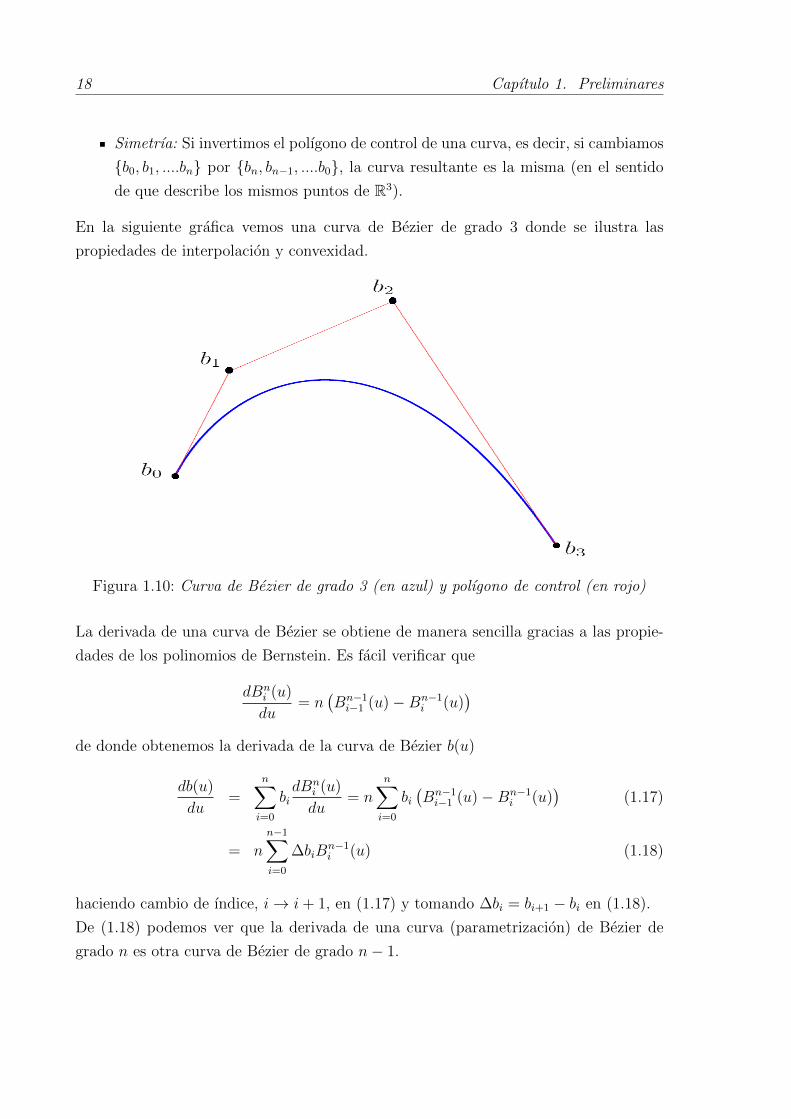
En la siguiente grafica vemos una curva de Bezier de grado 3 donde se ilustra las
propiedades de interpolacion y convexidad.
Figura 1.10: Curva de Bezier de grado 3 (en azul) y polıgono de control (en rojo)
La derivada de una curva de Bezier se obtiene de manera sencilla gracias a las propie-
dades de los polinomios de Bernstein. Es facil verificar que
dBni (u)
du= n
(Bn−1i−1 (u)−Bn−1
i (u))
de donde obtenemos la derivada de la curva de Bezier b(u)
db(u)
du=
n∑i=0
bidBn
i (u)
du= n
n∑i=0
bi(Bn−1i−1 (u)−Bn−1
i (u))
(1.17)
= nn−1∑i=0
∆biBn−1i (u) (1.18)
haciendo cambio de ındice, i→ i+ 1, en (1.17) y tomando ∆bi = bi+1 − bi en (1.18).
De (1.18) podemos ver que la derivada de una curva (parametrizacion) de Bezier de
grado n es otra curva de Bezier de grado n− 1.

1.2. Conceptos basicos de CAGD 19
1.2.2. Superficies de Bezier.
Dado un polıgono de control b0, b1, ..., bm obtenemos una curva de Bezier de grado
m. Si permitimos que cada vertice bi del polıgono se mueva sobre una curva de Bezier
bi(v) de grado n con polıgono de control bi,0, bi,1, ..., bi,n obtenemos una superficie con
parametrizacion
b(u, v) =m∑i=0
n∑j=0
bi,jBmi (u)Bn
j (v) u, v ∈ [0, 1] (1.19)
la cual se denomina superficie de Bezier de bigrado (m,n) y a los (m + 1)(n + 1)
vertices b0,0, ..., bm,n se los llama malla de control. La expresion (1.19) se puede escribir
matricialmente como
b(u, v) = (Bm0 (u) · · ·Bm
m(u))
b0,0 · · · b0,n
.... . .
...
bm,0 · · · bm,n
Bn0 (v)...
Bnn(v)
(1.20)
Las u-curvas de esta superficie son curvas de Bezier de grado m con puntos de control
bi dadas por
b(u, v0) =m∑i=0
(n∑j=0
bi,jBnj (v0)
)︸ ︷︷ ︸
bi
Bmi (u) u ∈ [0, 1]
y las v-curvas son curvas de Bezier de grado n y puntos de control bj dadas por
b(u0, v) =n∑j=0
(m∑i=0
bi,jBmi (u0)
)︸ ︷︷ ︸
bj
Bnj (v) v ∈ [0, 1]
Notemos que una superficie de Bezier de bigrado (1, n) (o (n, 1)) es una superficie regla-
da, ya que sus v-curvas son rectas. Esta superficie se puede parametrizar como (1.12)
con p(u) y q(u) curvas de Bezier de grado n.
Si b0,0, ..., b0,n, b1,0, ...b1,n es la malla de control de una superficie reglada de Bezier
que ademas es desarrollable, y denotamos por Qi al cuadrangulo formado por los pun-
tos b0,i, b1,i, b1,i+1, b0,i+1, entonces Qi es plano para todo i. El recıproco no es cierto.
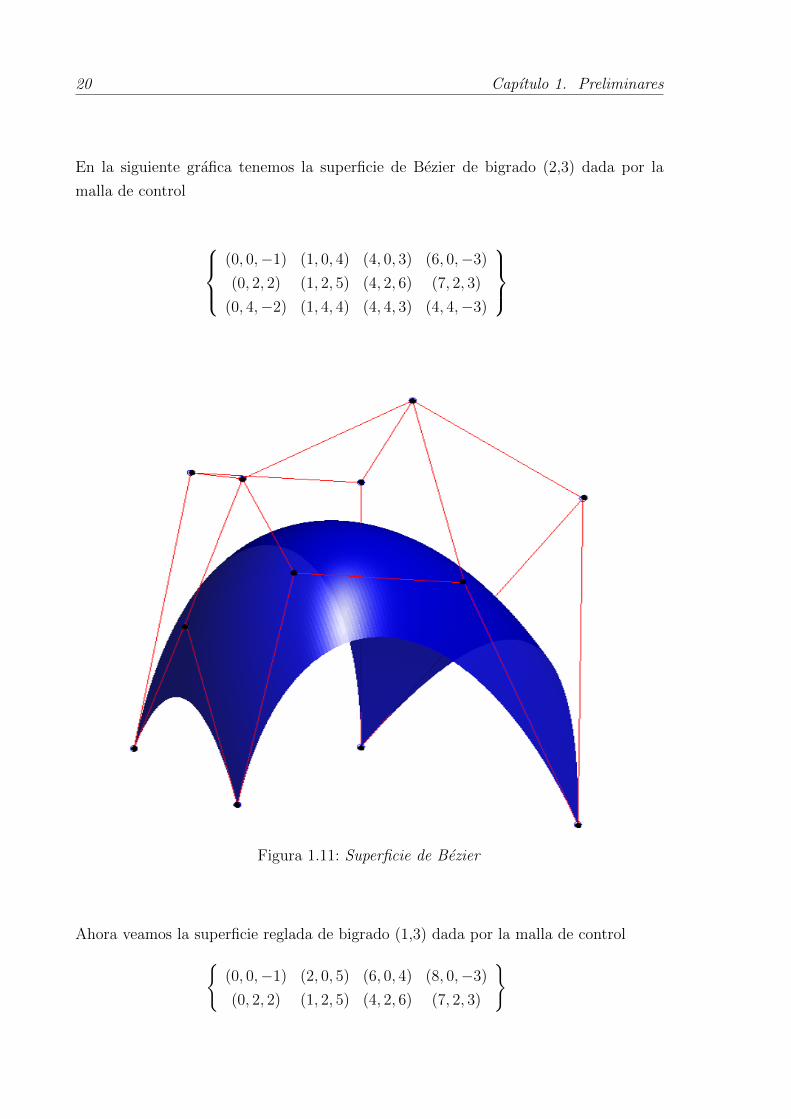
20 Capıtulo 1. Preliminares
En la siguiente grafica tenemos la superficie de Bezier de bigrado (2,3) dada por la
malla de control
(0, 0,−1) (1, 0, 4) (4, 0, 3) (6, 0,−3)
(0, 2, 2) (1, 2, 5) (4, 2, 6) (7, 2, 3)
(0, 4,−2) (1, 4, 4) (4, 4, 3) (4, 4,−3)
Figura 1.11: Superficie de Bezier
Ahora veamos la superficie reglada de bigrado (1,3) dada por la malla de control(0, 0,−1) (2, 0, 5) (6, 0, 4) (8, 0,−3)
(0, 2, 2) (1, 2, 5) (4, 2, 6) (7, 2, 3)

1.2. Conceptos basicos de CAGD 21
Figura 1.12: Superficie reglada de Bezier
1.2.3. Cubicas de Overhauser.
Son curvas con parametrizacion polinomica
p(u) =3∑i=0
piPi(u)
Donde los pi son los puntos de control y los Pi son los polinomios de Overhauser dados
por:
P0(u) =1
2
(−u3 + 2u2 − u
)P1(u) =
1
2
(3u3 − 5u2 + 2
)P2(u) =
1
2
(−3u3 + 4u2 + u
)P3(u) =
1
2
(u3 − u2
)
Es facil verificar que estos polinomios forman una base que denotaremos C. Algunas
propiedades de estas curvas para u ∈ [0, 1] son:
22 Capıtulo 1. Preliminares
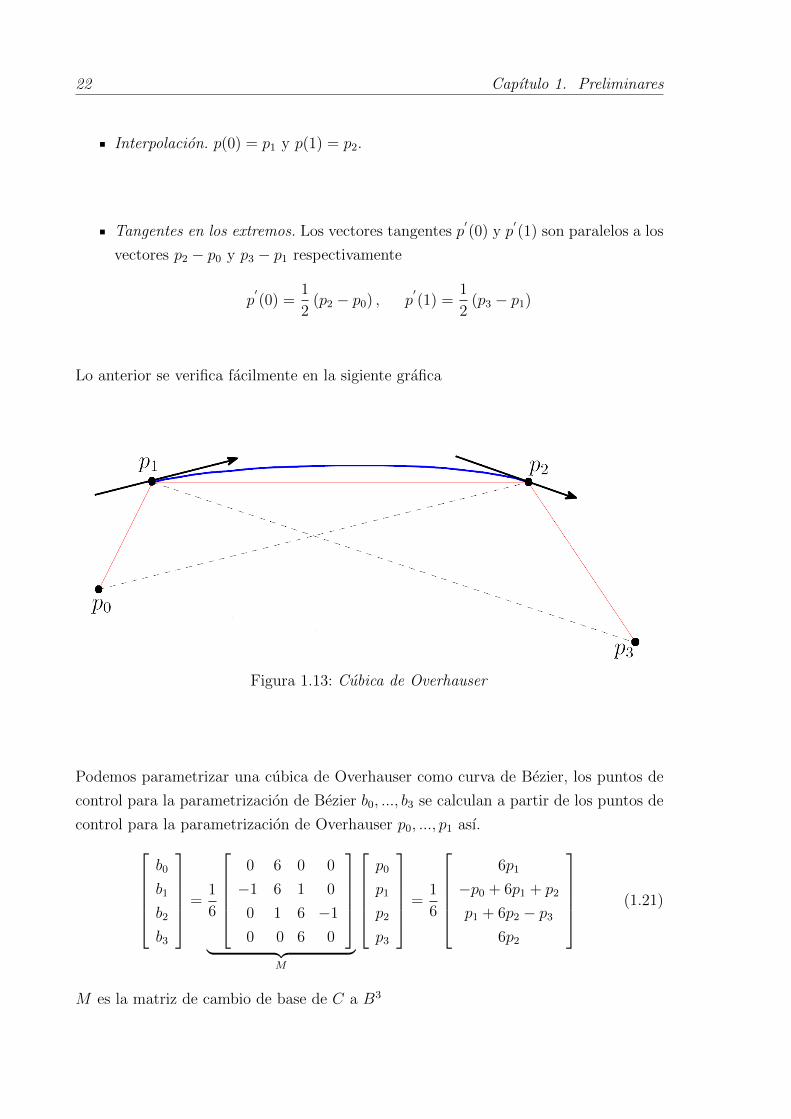
Interpolacion. p(0) = p1 y p(1) = p2.
Tangentes en los extremos. Los vectores tangentes p′(0) y p
′(1) son paralelos a los
vectores p2 − p0 y p3 − p1 respectivamente
p′(0) =
1
2(p2 − p0) , p
′(1) =
1
2(p3 − p1)
Lo anterior se verifica facilmente en la sigiente grafica
Figura 1.13: Cubica de Overhauser
Podemos parametrizar una cubica de Overhauser como curva de Bezier, los puntos de
control para la parametrizacion de Bezier b0, ..., b3 se calculan a partir de los puntos de
control para la parametrizacion de Overhauser p0, ..., p1 ası.b0
b1
b2
b3
=1
6
0 6 0 0
−1 6 1 0
0 1 6 −1
0 0 6 0
︸ ︷︷ ︸
M
p0
p1
p2
p3
=1
6
6p1
−p0 + 6p1 + p2
p1 + 6p2 − p36p2
(1.21)
M es la matriz de cambio de base de C a B3
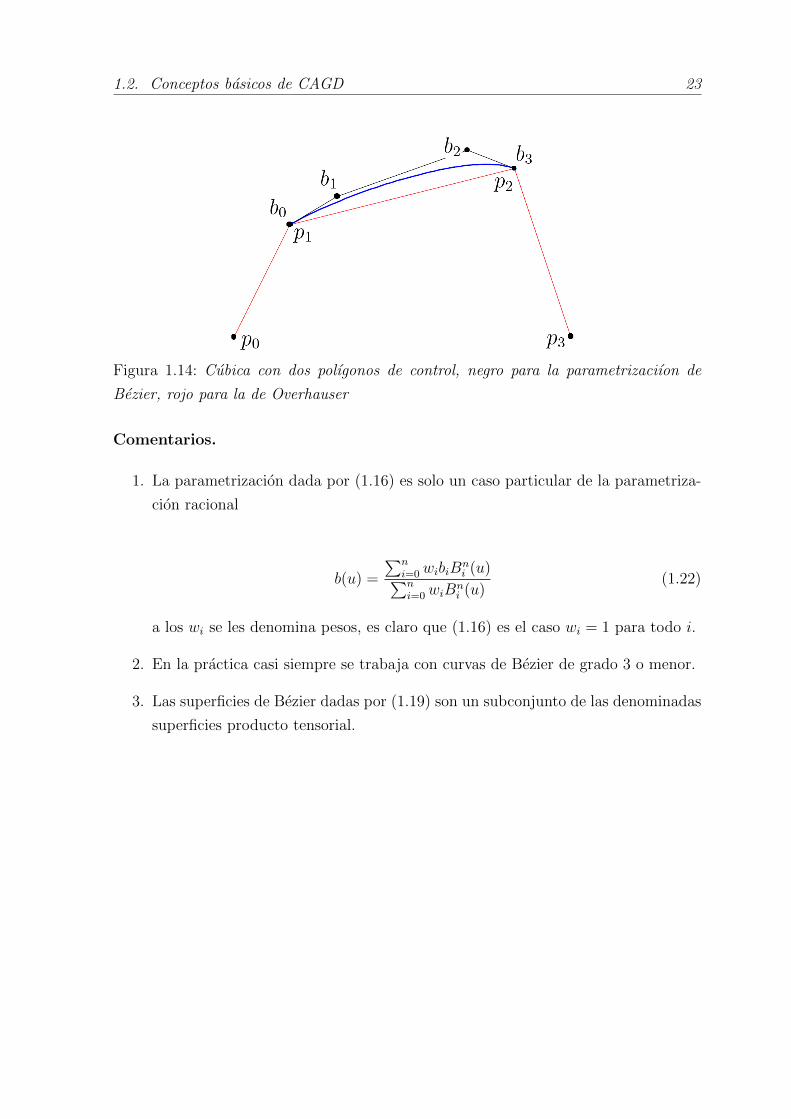
1.2. Conceptos basicos de CAGD 23
Figura 1.14: Cubica con dos polıgonos de control, negro para la parametrizaciıon de
Bezier, rojo para la de Overhauser
Comentarios.
1. La parametrizacion dada por (1.16) es solo un caso particular de la parametriza-
cion racional
b(u) =
∑ni=0wibiB
ni (u)∑n
i=0wiBni (u)
(1.22)
a los wi se les denomina pesos, es claro que (1.16) es el caso wi = 1 para todo i.
2. En la practica casi siempre se trabaja con curvas de Bezier de grado 3 o menor.
3. Las superficies de Bezier dadas por (1.19) son un subconjunto de las denominadas
superficies producto tensorial.
24 Capıtulo 1. Preliminares
1.3. Conceptos basicos de imagenes medicas
Cuando Wilhelm Conrad Rontgen descubrio los rayos X en 1895 se creo una nueva
rama de la medicina, la radiologıa. Con el tiempo aparecieron mas modalidades para
obtencion de imagenes del cuerpo usando radiacion gamma, electromagnetica y ultraso-
nido. En la actualidad el campo de las imagenes medicas no se queda relegado solo a la
radiologıa o la medicina, en su estudio se usan elementos de computacion y matematicas.
Para la obtencion de imagenes medicas se debe irradiar (con algun tipo de energıa)
una muestra o paciente. Segun la naturaleza o tipo de energıa usada las imagenes medi-
cas se clasifican en:
Radiografıa, TAC. Usa rayos X.
Medicina nuclear. Usa radiacion gamma.
Ecografıa Usa ultrasonido (energia ultrasonica).
Resonancia magnetica Usa radiacion electromagnetica (ondas de radio).
En esta tesis se trabajara con imagenes obtenidas en modalidad TAC y almacenadas
en formato DICOM, vamos a tratar brevemente sobre estos dos terminos.
Figura 1.15: Volumen DICOM obtenido por modalidad TAC
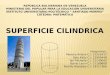
1.3. Conceptos basicos de imagenes medicas 25
Tomografıa Axial Computarizada (TAC). Permite observar el interior del cuerpo
humano a traves de cortes milimetricos transversales al eje cefalo-caudal ( que une la
cabeza con los pies), mediante el uso de rayos X.
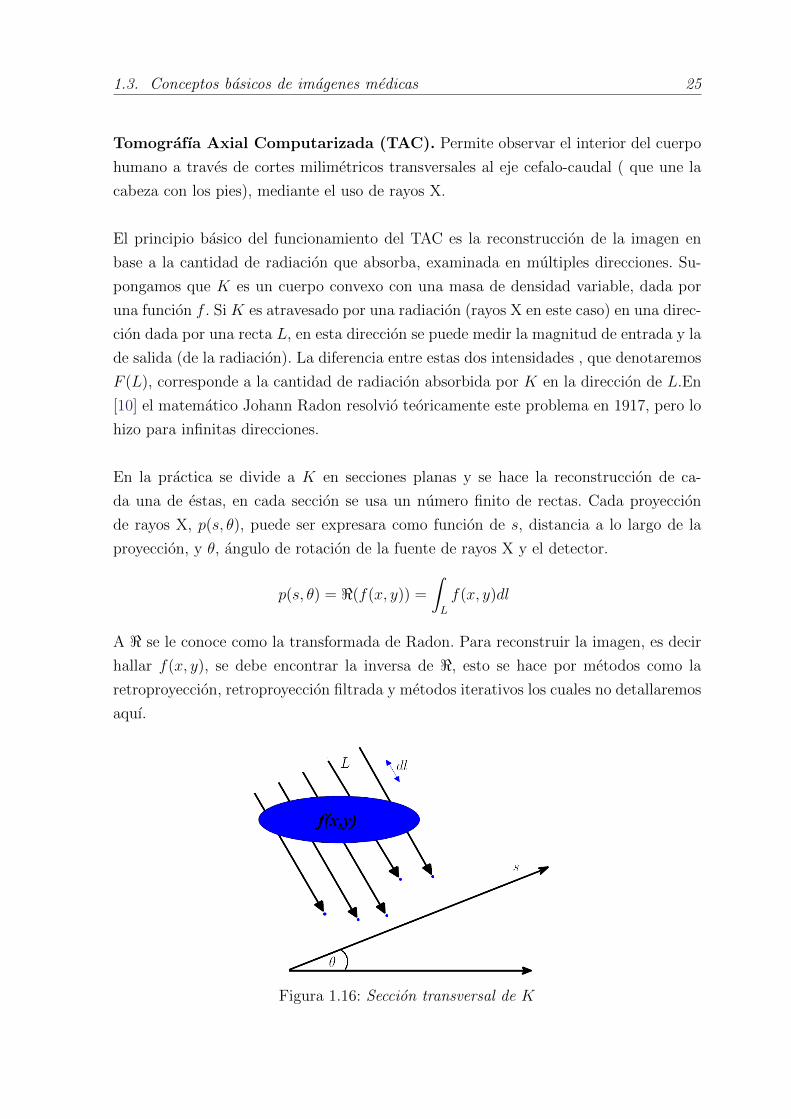
El principio basico del funcionamiento del TAC es la reconstruccion de la imagen en
base a la cantidad de radiacion que absorba, examinada en multiples direcciones. Su-
pongamos que K es un cuerpo convexo con una masa de densidad variable, dada por
una funcion f . Si K es atravesado por una radiacion (rayos X en este caso) en una direc-
cion dada por una recta L, en esta direccion se puede medir la magnitud de entrada y la
de salida (de la radiacion). La diferencia entre estas dos intensidades , que denotaremos
F (L), corresponde a la cantidad de radiacion absorbida por K en la direccion de L.En
[10] el matematico Johann Radon resolvio teoricamente este problema en 1917, pero lo
hizo para infinitas direcciones.
En la practica se divide a K en secciones planas y se hace la reconstruccion de ca-
da una de estas, en cada seccion se usa un numero finito de rectas. Cada proyeccion
de rayos X, p(s, θ), puede ser expresara como funcion de s, distancia a lo largo de la
proyeccion, y θ, angulo de rotacion de la fuente de rayos X y el detector.
p(s, θ) = <(f(x, y)) =
∫L
f(x, y)dl
A < se le conoce como la transformada de Radon. Para reconstruir la imagen, es decir
hallar f(x, y), se debe encontrar la inversa de <, esto se hace por metodos como la
retroproyeccion, retroproyeccion filtrada y metodos iterativos los cuales no detallaremos
aquı.
Figura 1.16: Seccion transversal de K
26 Capıtulo 1. Preliminares
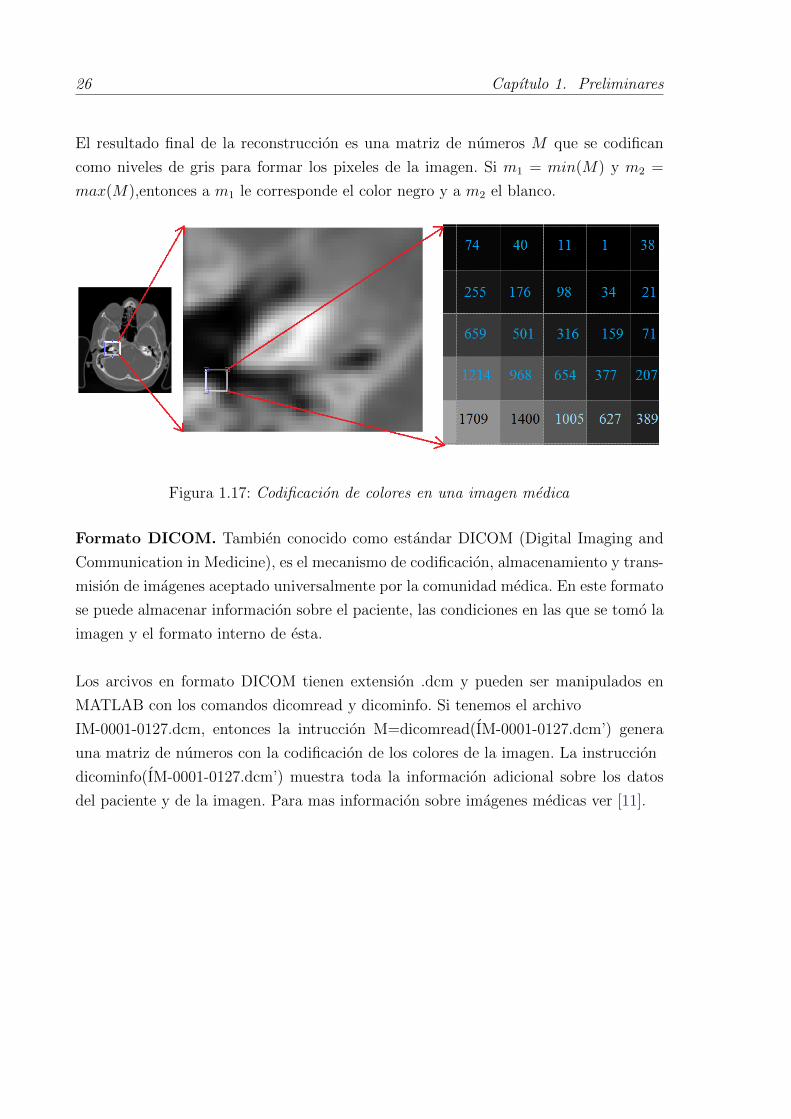
El resultado final de la reconstruccion es una matriz de numeros M que se codifican
como niveles de gris para formar los pixeles de la imagen. Si m1 = min(M) y m2 =
max(M),entonces a m1 le corresponde el color negro y a m2 el blanco.
Figura 1.17: Codificacion de colores en una imagen medica
Formato DICOM. Tambien conocido como estandar DICOM (Digital Imaging and
Communication in Medicine), es el mecanismo de codificacion, almacenamiento y trans-
mision de imagenes aceptado universalmente por la comunidad medica. En este formato
se puede almacenar informacion sobre el paciente, las condiciones en las que se tomo la
imagen y el formato interno de esta.
Los arcivos en formato DICOM tienen extension .dcm y pueden ser manipulados en
MATLAB con los comandos dicomread y dicominfo. Si tenemos el archivo
IM-0001-0127.dcm, entonces la intruccion M=dicomread(IM-0001-0127.dcm’) genera
una matriz de numeros con la codificacion de los colores de la imagen. La instruccion
dicominfo(IM-0001-0127.dcm’) muestra toda la informacion adicional sobre los datos
del paciente y de la imagen. Para mas informacion sobre imagenes medicas ver [11].
Capıtulo 2
Construccion de superficies
desarrollables por medio de curvas
predeterminadas
Sea α(u) una curva parametrizada, del capıtulo anterior sabemos que es posible cons-
truir 3 tipos de superficies desarrollables que la contienen como u-curva.
Cilindro. X(u, v) = α(u) + vd, con d vector constante.
Cono. X(u, v) = α(u) + v(t0 − α(u)), con t0 punto fijo llamado vertice.
Superficie tangente. X(u, v) = α(u) + vα′(u).
Ahora vamos a ver mas tecnicas para construir superficies desarrollables que contengan
una curva α predeterminada. Consideraremos los mecanismos de control sobre la super-
ficie construida y sobre la forma de la curva α∗ en la superficie desarrollada (aplicada
sobre el plano) X∗(u, v).
2.1. Algoritmo de Aumann
En [3] Gunter Aumann propone un metodo para construir superficies desarrollables a
partir de curvas de Bezier. Dada una curva de Bezier b(u) de grado n con u ∈ [0, 1],
y polıgono de control b0, b1, ..., bn, se construye otra curva de Bezier c(u) de grado n
con polıgono de control c0, c1, ..., cn de modo que la superficie reglada de Bezier
X(u, v) = (1− v)b(u) + vc(u) u, v ∈ [0, 1] (2.1)
27

28Capıtulo 2. Construccion de superficies desarrollables por medio de curvas
predeterminadas
sea desarrollable. El polıgono de control de c(u) se construye de la siguiente manera:
Se elige libremente c0 de modo que c0 − b0 no sea paralelo a b1 − b0.
Se eligen libremente dos constantes λ, µ 6= 0 y se construyen c1, ..., cn mediante la
recursion
ci+1 = bi + λ(bi+1 − bi) + µ(ci − bi) (2.2)
Notemos que la iteracion anterior garantiza que el punto ci+1 (o el vector ci−bi) este en
el plano que contiene a los puntos bi, bi+1, ci (generado por los vectores ci− bi, bi+1− bi).La superficie de la ecuacion (2.1) es un cilindro si y solo si λ = 1, un cono si y solo si
µ = 1 y λ 6= 1, y es una superficie tangente en otro caso. Lo anterior se demuestra en
[3], no vamos a repetir las pruebas aquı.
Las figuras 2.1, 2.2 y 2.3 muestran graficas de superficies generadas por la curva b(u)
con polıgono de control (1, 0, 0), (2,−1, 3), (3, 4, 0), (5, 2,−1), c0 = (3, 1, 0) y diferen-
tes valores de λ, µ.
Figura 2.1: Superficie tangente. λ = 0,6, µ = 1,2, curva b(u) en verde
2.1. Algoritmo de Aumann 29
Figura 2.2: Cilindro. λ = 1, µ = 1, curva b(u) en verde
Figura 2.3: Cono. λ = 1,4, µ = 1, curva b(u) en verde
Las superficies anteriores tienen en comun la curva b(u) y el generador c0− b0 (X(0, v)
con v ∈ [0, 1]), es conveniente verlas en una sola grafica.

30Capıtulo 2. Construccion de superficies desarrollables por medio de curvas
predeterminadas
Figura 2.4: Superficies desarrollables sobre b(u). Cono (en azul), cilindro (en verde) y
superficie tangente (en rojo)
2.1.1. Forma matricial del algoritmo de Aumann
La iteracion (2.2) se puede reescribir como
ci+1 = µci + ρbi + λbi+1 con ρ = (1− λ− µ) (2.3)
aplicando (2.3) es posible escribir cada ci como combinacion lineal de c0, b0, ..., bn, lo
que permite escribir el algoritmo de Aumann en forma matricial. Para n = 3 podemos
escribir este algoritmo como
c0
c1
c2
c3
=
c0
µc0
µ2c0
µ3c0
︸ ︷︷ ︸
C0
+
0 0 0 0
ρ λ 0 0
ρµ λµ+ ρ λ 0
ρµ2 µ(λµ+ ρ) λµ+ ρ λ
︸ ︷︷ ︸
A(λ,µ)
b0
b1
b2
b3
(2.4)
En (2.4) los ci y los bi se expresan como vectores columna. Si PB = b0, ..., bn es el
polıgono de control de una curva de Bezier y definimos PB = [b0, ..., bn]T , entonces
podemos reescribir (2.4) como
QB = C0 + A(λ, µ)PB (2.5)

2.1. Algoritmo de Aumann 31
donde QB = c0, ..., cn es el polıgono de control construido al aplicar a PB el algoritmo
de Aumann, y A(λ, µ) es la matriz de (2.4) (en (2.4) se tiene n = 3 pero es facil hallar
esta matriz para cualquier n). Luego el algoritmo de Aumann es una transformacion
afın de Mn×3(R) en Mn×3(R).
El algoritmo de Aumann se plantea para curvas de Bezier, pero tambien funciona para
cubicas de Overhauser si µ = 1. Si b0, ..., b3 son los puntos de control de una cubica de
Overhauser p(t), es decir
p(t) = b0P0(t) + b1P1(t) + b2P2(t) + b3P3(t)
donde P0, ..., P3 son los polinomios de la base de Overhauser, y construimos otra cubica
de Overhauser q(u) con puntos de control q0, ..., q3 usando la recursion de Aumann con
µ = 1, entonces la superficie reglada S(u, v) = (1 − v)p(u) + vq(u) es desarrollable. S
es cilindro si y solo si λ = 1, y es un cono si y solo si λ 6= 1.
Usando la forma matricial podemos dar una prueba de lo anterior. Sean B,C las bases
de Bernstein y Overhauser para los polinomios de grado 3 respectivamente, y sea M la
matriz de cambio de base de C a B. Sea p(u) una cubica de Overhauser con polıgono de
control PC = p0, ..., p3, construimos QC = q0, ..., q3 aplicando a PC el algoritmo
de Aumann con un punto inicial q0, λ libre y µ = 1, es decir QC = C0 + A(λ, 1)PC,
con C0 = [q0, q0, q0, q0]T . Sea PB = b0, ..., b3 el polıgono de control para p(u) parame-
trizada como curva de Bezier, es decir PB = MPC, y
p(t) =3∑i=0
biB3i (t) t ∈ [0, 1] (2.6)
ahora, sea QB = c0, ..., c3 el polıgono de control obtenido al aplicarle la recursion de
Auman a PB con c0 = q11 , µ = 1 y el valor λ de la anterior, es decir QB = C∗
0 +
A(λ, 1)PB, con C∗0 = [q1, q1, q1, q1]
T . La prueba se reduce a mostrar que QB = MQC,
es decir
C∗0 + A(λ, 1)PB = MQC (2.7)
C∗0 + A(λ, 1)MPC = M(C0 + APC) (2.8)
Notemos que la igualdad (2.8) equivale a decir que el siguiente diagrama conmuta,
1Se toma este punto inicial para que las cubicas inicien en el mismo punto

32Capıtulo 2. Construccion de superficies desarrollables por medio de curvas
predeterminadas
Figura 2.5: Diagrama conmutativo
es decir, se llega al mismo resultado el aplicar primero la iteracion de Aumann y despues
cambiar de parametrizacion ( o de base ), que al cambiar de parametrizacion primero
y despues aplicar la iteracion de Aumann. Para probar (2.8) la reescribimos ası
C∗0 −MC0 = (MA(λ, 1)−A(λ, 1)M)PC (2.9)
de (1.21) y (2.4) tenemos
M =
0 6 0 0
−1 6 1 0
0 1 6 −1
0 0 6 0
, A(λ, 1) =
0 0 0 0
−λ λ 0 0
−λ 0 λ 0
−λ 0 0 λ
se tiene MC0 = C0, y
[MA(λ, 1)−A(λ, 1)M ]PC = λ [p1− p0, p1− p0, p1− p0, p1− p0]T = C∗0 − C0
de donde tenemos (2.9)
2.1.2. Superficies desarrollables a trozos usando cubicas de
Overhauser y el algoritmo de Aumann
La ventaja de la parametrizacion de Overhauser sobre la de Bezier es la interpolacion.
Si queremos interpolar n puntos A1, ...., An con un spline, es decir, una familia de
curvas con tangente comun, resultante de la concatenacion de segmentos de cubicas
con tangente continua, agregamos 2 puntos auxiliares A0, An+1, y construimos n − 1
segmentos de cubicas de Overhauser b1(t), ..., bn−1(t) donde cada bi(t) tiene puntos de
2.1. Algoritmo de Aumann 33
control pi,0, ..., pi,3 dados por
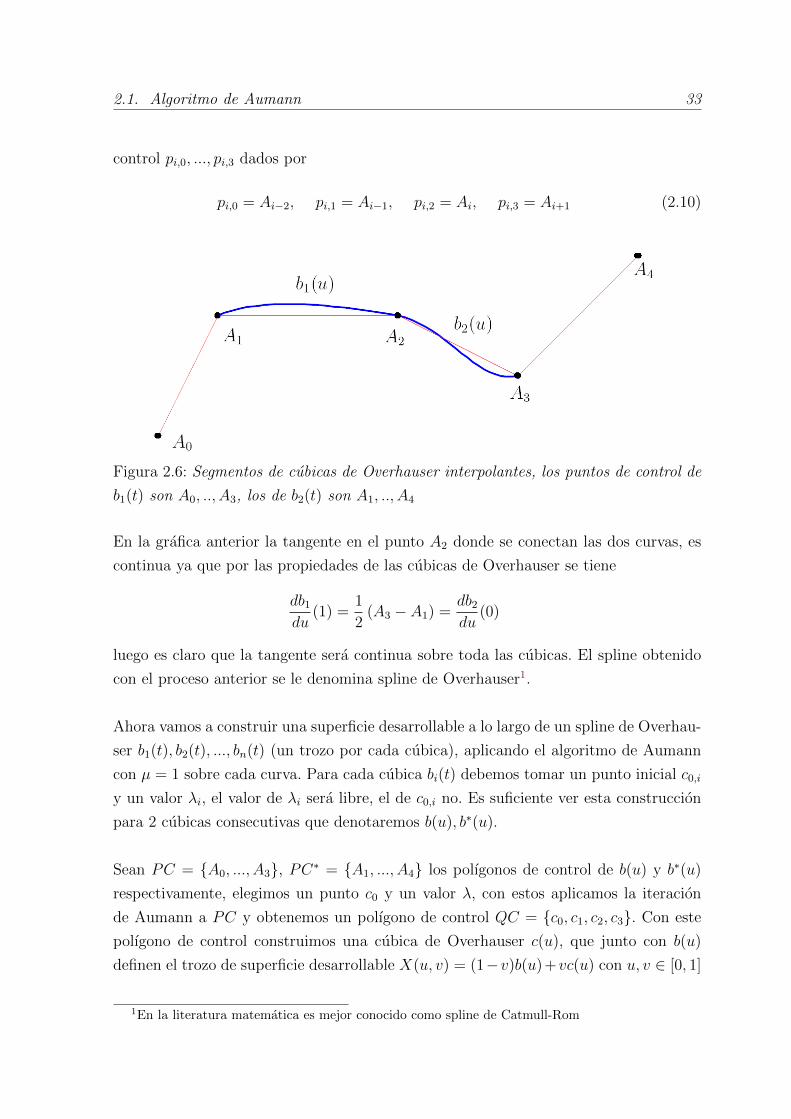
pi,0 = Ai−2, pi,1 = Ai−1, pi,2 = Ai, pi,3 = Ai+1 (2.10)
Figura 2.6: Segmentos de cubicas de Overhauser interpolantes, los puntos de control de
b1(t) son A0, .., A3, los de b2(t) son A1, .., A4
En la grafica anterior la tangente en el punto A2 donde se conectan las dos curvas, es
continua ya que por las propiedades de las cubicas de Overhauser se tiene
db1du
(1) =1
2(A3 − A1) =
db2du
(0)
luego es claro que la tangente sera continua sobre toda las cubicas. El spline obtenido
con el proceso anterior se le denomina spline de Overhauser1.
Ahora vamos a construir una superficie desarrollable a lo largo de un spline de Overhau-
ser b1(t), b2(t), ..., bn(t) (un trozo por cada cubica), aplicando el algoritmo de Aumann
con µ = 1 sobre cada curva. Para cada cubica bi(t) debemos tomar un punto inicial c0,i
y un valor λi, el valor de λi sera libre, el de c0,i no. Es suficiente ver esta construccion
para 2 cubicas consecutivas que denotaremos b(u), b∗(u).
Sean PC = A0, ..., A3, PC∗ = A1, ..., A4 los polıgonos de control de b(u) y b∗(u)
respectivamente, elegimos un punto c0 y un valor λ, con estos aplicamos la iteracion
de Aumann a PC y obtenemos un polıgono de control QC = c0, c1, c2, c3. Con este
polıgono de control construimos una cubica de Overhauser c(u), que junto con b(u)
definen el trozo de superficie desarrollable X(u, v) = (1−v)b(u)+vc(u) con u, v ∈ [0, 1]
1En la literatura matematica es mejor conocido como spline de Catmull-Rom

34Capıtulo 2. Construccion de superficies desarrollables por medio de curvas
predeterminadas
Ahora debemos usar PC∗ para construir un polıgono de control QC∗ = c∗0, c∗1, c∗2, c∗3tal que la cubica c∗(t) que se obtenga con este inicie en c2, es decir c∗(0) = c2, por tanto
se debe dar c∗1 = c2. Como QC∗ se construye aplicando la recursion de Aumann a PC∗
con un punto c∗0 y un valor λ∗,( y queremos c∗1 = c2) entonces de (2.2)
c∗1 = c2 = A1 + λ∗ (A2 − A1) + µ∗ (c∗0 − A1) .
Como µ∗ = 1, al despejar c∗0 de la ecuacion anterior tenemos
c∗0 = c2 − λ∗(A2 − A1) (2.11)
luego, tomando este c∗0 y λ∗ libre garantizamos que la recursion de Aumann aplicada a
PC∗ genere QC∗ con c∗1 = c2. Con QC∗ construimos la cubica de Overhauser c∗(u), y
con esta y b∗(u) el trozo X∗(u, v) = (1− v)b∗(u) + vc∗(u) para u, v ∈ [0, 1].
Ası tenemos dos trozos de superficie desarrollable X(u, v), X∗(u, v), que se conectan
por medio del generador comun X(1, v) = X∗(0, v) para v ∈ [0, 1]. Los extremos de este
generador son los puntos X(1, 0) = X∗(0, 0) = A2 y X(1, 1) = X∗(1, 0) = c2, es claro
que en A2 hay continuidad en la tangencia , pero ademas tenemos lo siguiente:
(a) Las tangentes de c(u) y c∗(u) son paralelas en su punto comun c2
dc
du(1) =
1
2(c3 − c1) =
λ
2(A3 − A1),
dc∗
du(0) =
1
2(c∗2 − c∗0) =
λ∗
2(A3 − A1).
(b) El punto c∗0 esta sobre la recta que pasa por c1 y tiene vector director c2− c1 y c∗2
sobre la recta que pasa por c2 con vector director c3 − c2.
Para probar (a) y (b) basta aplicar (2.2) con µ=1. Para c3 tenemos
c3 = λ (A3 − A2) + λ (A2 − A1) + c1︸ ︷︷ ︸c2
c3 − c1 = λ (A3 − A1) .
Analogamente se puede ver que c∗2 − c∗0 = λ∗ (A3 − A1), de donde se tiene (a). Ahora,
como c2 − c1 = λ(A2 − A1), es decir, c2 − c1 es paralelo a A2 − A1, entonces de (2.11)
c∗0 esta en la recta que pasa por c2 con vector director c2 − c1, analogamente se prueba
el resultado para c∗2, lo que demuestra (b).
En la siguiente grafica vemos dos trozos X(u, v), X∗(u, v), construidos usando λ=0.8,
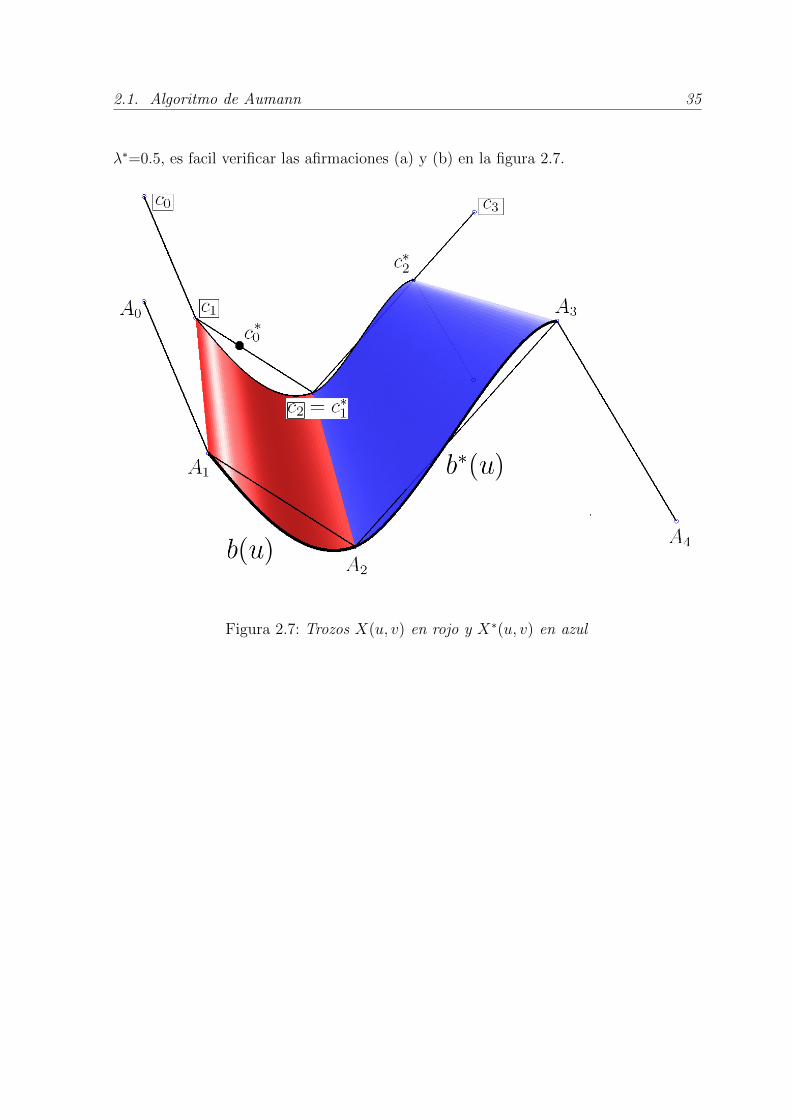
2.1. Algoritmo de Aumann 35
λ∗=0.5, es facil verificar las afirmaciones (a) y (b) en la figura 2.7.
Figura 2.7: Trozos X(u, v) en rojo y X∗(u, v) en azul

36Capıtulo 2. Construccion de superficies desarrollables por medio de curvas
predeterminadas
2.2. Superficie desarrollable dada por el vector de
Darboux
Sea α(s) una curva parametrizada por longitud de arco con α′′′ 6= 0, sea Πs el plano
rectificador ( generado por los vectores tangente T y binormal B) de esta para el valor
s del parametro. Vamos a calcular la envolvente de la familia uniparametrica de planos
dada por Πs a lo largo de α(s). Para eso debemos encontrar el vector d(s) que da la
direccion del generador, es decir el vector que permita expresar la envolvente como
X(s, t) = α(s) + td(s) donde t es el parametro para los generadores. Como el vector
normal a la curva N(s) es tambien el vector normal a la familia Πs, entonces d(s) debe
cumplir las ecuaciones
d(s) ·N(s) = 0.
d(s) ·N ′(s) = 0.
Es claro que las anteriores ecuaciones se cumplen si d(s) esta en la direccion de N(s)×N′(s), que es la misma direccion de α
′′(s)× α′′′(s), ası podemos expresar la envolvente
como
X(s, t) = α(s) + t(α′′(s)× α′′′(s)
). (2.12)
Ahora, es claro que la superficie X(s, t) es desarrollable ya que es una superficie reglada
con vector normal constante N(s0) a lo largo de cada generador X(s0, t) para s0 fijo,
ademas la curva α(s) es una geodesica sobre esta superficie, ya que su vector normal
esta en la misma direccion del vector normal a la superficie (son iguales), por tanto tiene
curvatura geodesica κg = 0. Como el vector N(s)×N ′(s) esta en el plano rectificador
entonces se puede expresar como combinacion lineal de T (s) y B(s) (vectores tangente
y binormal de α(s)), para esto usamos las formulas de Frenet ası:
N(s)×N ′(s) = N(s)× (−κ(s)T (s) + τ(s)B(s))
N(s)×N ′(s) = −κ(s)N(s)× T (s) + τ(s)N(s)×B(s)
N(s)×N ′(s) = κ(s)B(s) + τ(s)T (s) =: ω(s)
Al vector ω(s) se le denomina vector de Darboux, y usando de nuevo las formulas de

2.2. Superficie desarrollable dada por el vector de Darboux 37
Frenet se puede probar que
ω(s)× T (s) = T′(s)
ω(s)×N(s) = N′(s)
ω(s)×B(s) = B′(s)
Notemos que usando las formulas (1.2) y (1.3) podemos calcular el vector de Darboux
ω para una parametrizacion cualquiera, ası podemos expresar la superficie dada por la
parametrizacion (2.12) para una curva α que no este parametrizada por longitud de
arco como
X(u, v) = α(u) + v ( τ(u)T (u) + κ(u)B(u))
X(u, v) = (1− v)α(u) + v (α(u) + ω(u))
A la superficie X(u, v) la denominaremos superficie de Darboux para α. Es claro que
si α es una curva plana entonces su superficie de Darboux sera un cilindro con sus
generadores en la direccion del vector normal al plano que contiene la curva, ya que
ω(u) = κ(u)B(u).
La figura 2.8 ilustra la superficie de Darboux de la curva α(u) = (u3 − 2u, u2, 2u3)
para u ∈ [0, 1].
Figura 2.8: Superficie de Darboux para la curva α(u) (en rojo)
38Capıtulo 2. Construccion de superficies desarrollables por medio de curvas
predeterminadas
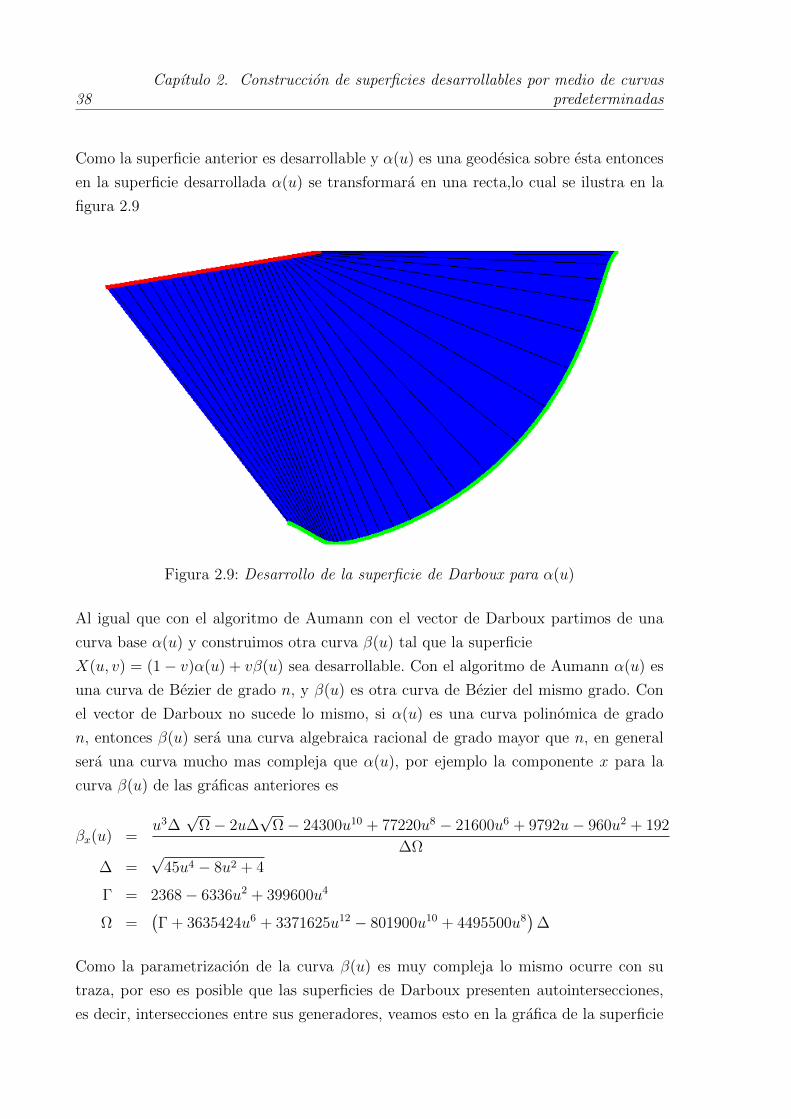
Como la superficie anterior es desarrollable y α(u) es una geodesica sobre esta entonces
en la superficie desarrollada α(u) se transformara en una recta,lo cual se ilustra en la
figura 2.9
Figura 2.9: Desarrollo de la superficie de Darboux para α(u)
Al igual que con el algoritmo de Aumann con el vector de Darboux partimos de una
curva base α(u) y construimos otra curva β(u) tal que la superficie
X(u, v) = (1− v)α(u) + vβ(u) sea desarrollable. Con el algoritmo de Aumann α(u) es
una curva de Bezier de grado n, y β(u) es otra curva de Bezier del mismo grado. Con
el vector de Darboux no sucede lo mismo, si α(u) es una curva polinomica de grado
n, entonces β(u) sera una curva algebraica racional de grado mayor que n, en general
sera una curva mucho mas compleja que α(u), por ejemplo la componente x para la
curva β(u) de las graficas anteriores es
βx(u) =u3∆
√Ω− 2u∆
√Ω− 24300u10 + 77220u8 − 21600u6 + 9792u− 960u2 + 192
∆Ω
∆ =√
45u4 − 8u2 + 4
Γ = 2368− 6336u2 + 399600u4
Ω =(Γ + 3635424u6 + 3371625u12 − 801900u10 + 4495500u8
)∆
Como la parametrizacion de la curva β(u) es muy compleja lo mismo ocurre con su
traza, por eso es posible que las superficies de Darboux presenten autointersecciones,
es decir, intersecciones entre sus generadores, veamos esto en la grafica de la superficie

2.2. Superficie desarrollable dada por el vector de Darboux 39
de Darboux para la curva α(u) = (2u3 − 4u2 + u, u3 + u, u3 − 2u− 1) para u ∈ [0, 1]
Figura 2.10: Superficie de Darboux para la curva α(u) (en rojo)
Capıtulo 3
Superficies desarrollables
semidiscretas
Vamos a denominar las superficies construidas en el capıtulo anterior como D-strips, es
decir, un D-strip es una superficie desarrollable a trozos formada por conos, cilindros o
superficies tangentes que se conectan por medio de generadores comunes. Los D-strips se
construyen sobre una familia de curvas dadas por polıgonos de control. En este capıtulo
vamos a construir superficies formadas por D-strips conectados por medio de curvas
comunes, y las vamos a denominar superficies desarrollables semidiscretas. En [4], [6]
y [1] se estudian las aplicaciones de estas superfices como solucion al problema de la
panelizacion en arquitectura, es decir, como cubrir una estructura con paneles curvos
obtenidos por medio del doblado de paneles planos. Aquı las usaremos para modelar
organos y estructuras anatomicas y visualizarlas de manera plana y sin distorsion.
3.1. Parametrizaciones conjugadas y mallas-CP
Sea P un punto en una superficie parametrizada X(u, v) (P = X(u0, u0)), se dice que
U, V ∈ TPM son direcciones conjugadas sii II(U, V ) = 0. Una parametrizacion X(u, v)
de una superficie se denomina conjugada si Xu(u0, v0) y Xv(u0, v0) son direcciones con-
jugadas para todo u0, v0, lo cual es equivalente a que Xu, Xv y Xuv sean linealmente
dependientes. A las familias dadas por u-curvas y v-curvas de una parametrizacion
conjugada se les deonomida red de curvas conjugadas. Algunos ejemplos de parametri-
zaciones conjugadas son:
1. La superficie desarrollable X(u, v) = (1− v)α(u) + vβ(u). Como el vector normal
a lo largo de cada generador (v-curva) es constante, entonces para todo u0, v0
Sp(Xv(u0, v0)) = 0, por tanto II(Xu(u0, v0), Xv(u0, v0)) = 0.
40
3.1. Parametrizaciones conjugadas y mallas-CP 41
2. La superficie traslacional X(u, v) = p(u) + q(v). Esta superficie es generada por
el movimiento de una curva perfil p(u) a lo largo de una curva directriz q(v) (o
viceversa).
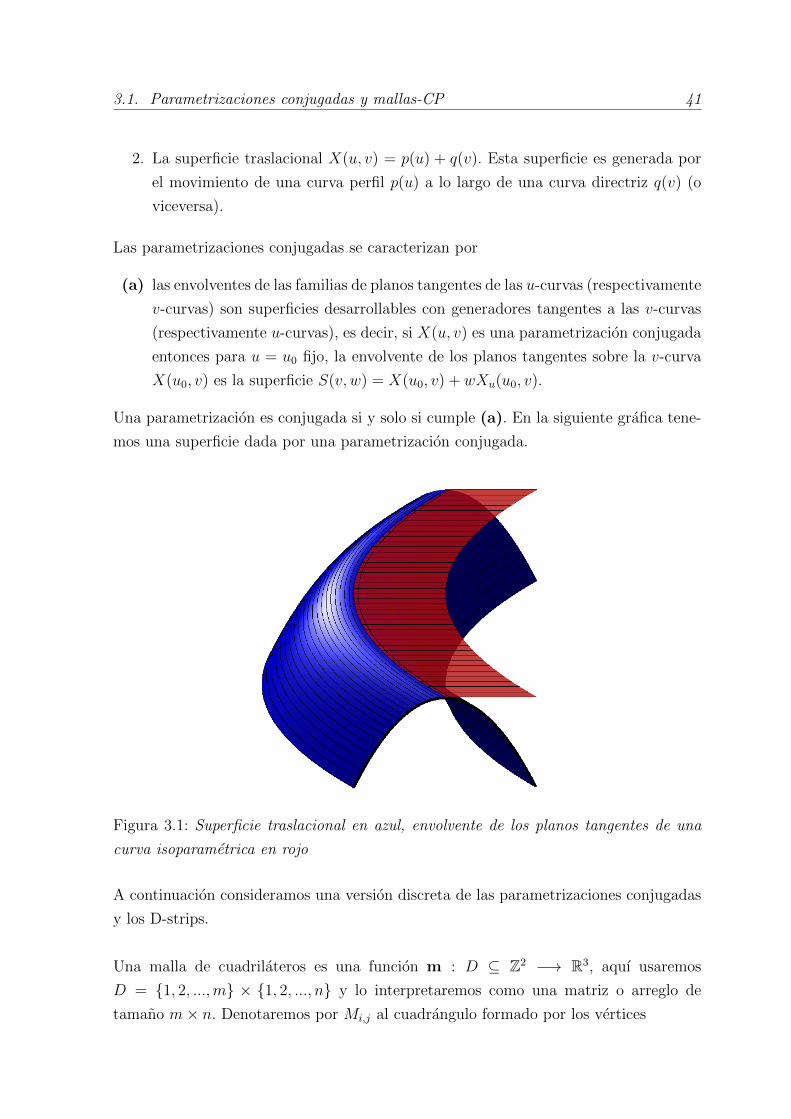
Las parametrizaciones conjugadas se caracterizan por
(a) las envolventes de las familias de planos tangentes de las u-curvas (respectivamente
v-curvas) son superficies desarrollables con generadores tangentes a las v-curvas
(respectivamente u-curvas), es decir, si X(u, v) es una parametrizacion conjugada
entonces para u = u0 fijo, la envolvente de los planos tangentes sobre la v-curva
X(u0, v) es la superficie S(v, w) = X(u0, v) + wXu(u0, v).
Una parametrizacion es conjugada si y solo si cumple (a). En la siguiente grafica tene-
mos una superficie dada por una parametrizacion conjugada.
Figura 3.1: Superficie traslacional en azul, envolvente de los planos tangentes de una
curva isoparametrica en rojo
A continuacion consideramos una version discreta de las parametrizaciones conjugadas
y los D-strips.
Una malla de cuadrilateros es una funcion m : D ⊆ Z2 −→ R3, aquı usaremos
D = 1, 2, ...,m × 1, 2, ..., n y lo interpretaremos como una matriz o arreglo de
tamano m× n. Denotaremos por Mi,j al cuadrangulo formado por los vertices
42 Capıtulo 3. Superficies desarrollables semidiscretas
m(i, j),m(i + 1, j),m(i + 1, j + i),m(i, j + 1). Si para todo (i, j) ∈ D el cuadrangulo
Mij es plano entonces diremos que m es una malla-CP (de cuadrangulos planos). Para
cada fila i de D denotaremos por Fim al poliedro formado por los Mi,j para j = 1, .., n,
y para cada columna j denotaremos por Cjm al poliedro formado por los Mi,j para
i = 1, ...m. Denotaremos por ab al segmento que une los puntos a y b.
En una malla-CP m podemos interpretar a cada Fim (y cada Cjm) como una ver-
sion discreta de un D-strip con generadores m(i, j)m(i, j + 1) para i = 1, ...,m con
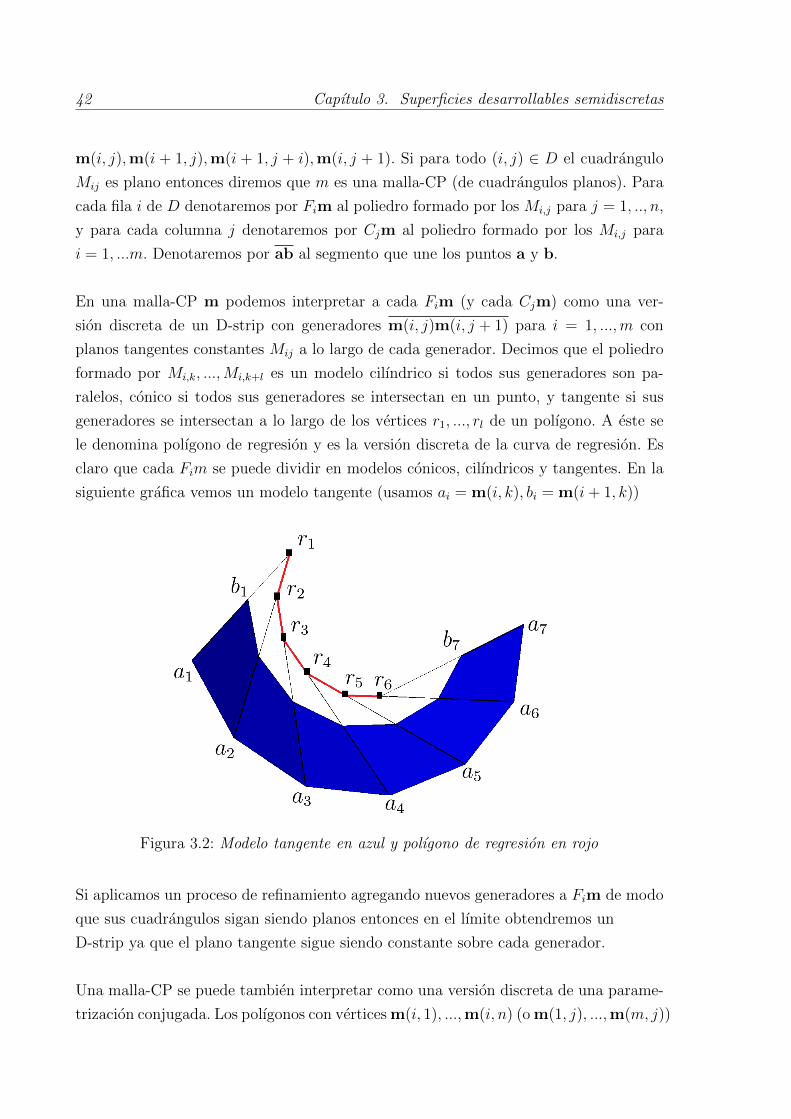
planos tangentes constantes Mij a lo largo de cada generador. Decimos que el poliedro
formado por Mi,k, ...,Mi,k+l es un modelo cilındrico si todos sus generadores son pa-
ralelos, conico si todos sus generadores se intersectan en un punto, y tangente si sus
generadores se intersectan a lo largo de los vertices r1, ..., rl de un polıgono. A este se
le denomina polıgono de regresion y es la version discreta de la curva de regresion. Es
claro que cada Fim se puede dividir en modelos conicos, cilındricos y tangentes. En la
siguiente grafica vemos un modelo tangente (usamos ai = m(i, k), bi = m(i+ 1, k))
Figura 3.2: Modelo tangente en azul y polıgono de regresion en rojo
Si aplicamos un proceso de refinamiento agregando nuevos generadores a Fim de modo
que sus cuadrangulos sigan siendo planos entonces en el lımite obtendremos un
D-strip ya que el plano tangente sigue siendo constante sobre cada generador.
Una malla-CP se puede tambien interpretar como una version discreta de una parame-
trizacion conjugada. Los polıgonos con vertices m(i, 1), ...,m(i, n) (o m(1, j), ...,m(m, j))
3.2. Superficie desarrollable semidiscreta M.A. 43
corresponden a las curvas isoparametricas ( u-curvas, v-curvas ) y los Fim (o Cim) a las
envolventes de los planos tangentes sobre estas. De lo anterior es claro que una malla-
CP cumple una version discreta de (a), por tanto al aplicar un proceso de refinamiento
a una malla-CP, es decir, agregarle vertices de modo que siga siendo una malla-CP, se
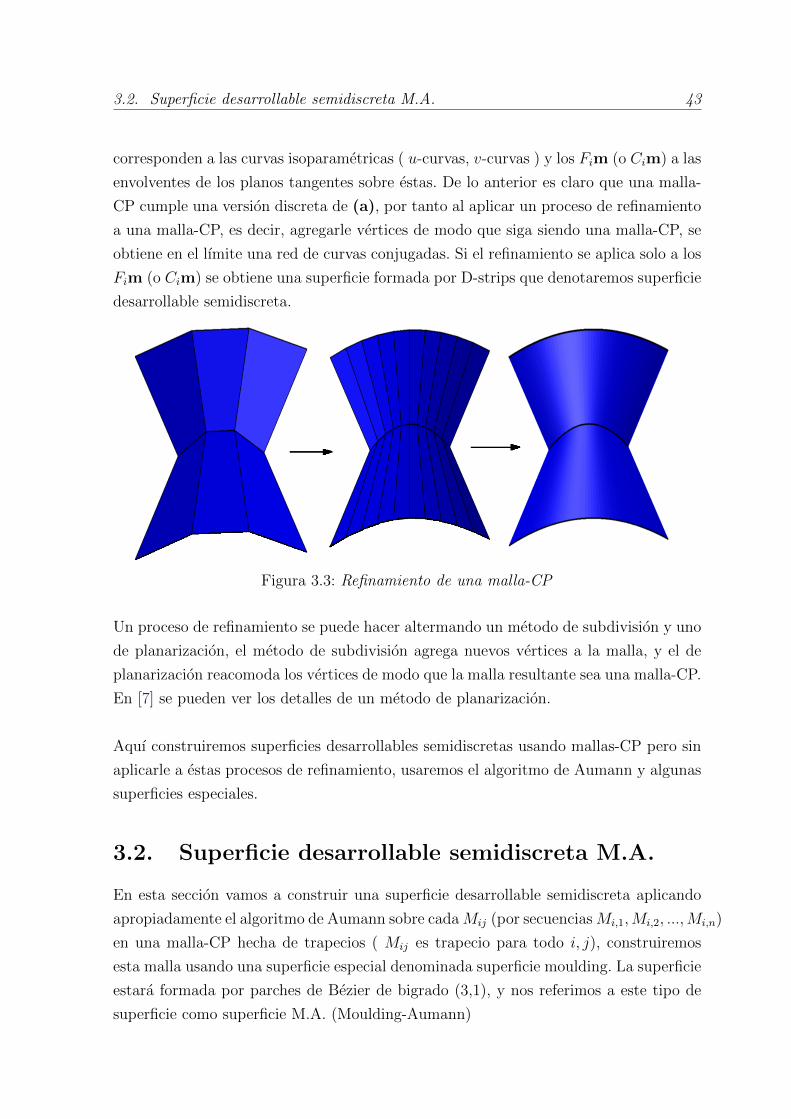
obtiene en el lımite una red de curvas conjugadas. Si el refinamiento se aplica solo a los
Fim (o Cim) se obtiene una superficie formada por D-strips que denotaremos superficie
desarrollable semidiscreta.
Figura 3.3: Refinamiento de una malla-CP
Un proceso de refinamiento se puede hacer altermando un metodo de subdivision y uno
de planarizacion, el metodo de subdivision agrega nuevos vertices a la malla, y el de
planarizacion reacomoda los vertices de modo que la malla resultante sea una malla-CP.
En [7] se pueden ver los detalles de un metodo de planarizacion.
Aquı construiremos superficies desarrollables semidiscretas usando mallas-CP pero sin
aplicarle a estas procesos de refinamiento, usaremos el algoritmo de Aumann y algunas
superficies especiales.
3.2. Superficie desarrollable semidiscreta M.A.
En esta seccion vamos a construir una superficie desarrollable semidiscreta aplicando
apropiadamente el algoritmo de Aumann sobre cadaMij (por secuenciasMi,1,Mi,2, ...,Mi,n)
en una malla-CP hecha de trapecios ( Mij es trapecio para todo i, j), construiremos
esta malla usando una superficie especial denominada superficie moulding. La superficie
estara formada por parches de Bezier de bigrado (3,1), y nos referimos a este tipo de
superficie como superficie M.A. (Moulding-Aumann)

44 Capıtulo 3. Superficies desarrollables semidiscretas
3.2.1. Interpolacion con el algoritmo de Aumann
En el capıtulo anterior usamos el algoritmo de Aumann para construir superficies desa-
rrollables a partir de una curva predeterminada, ahora lo usaremos para interpolar
segmentos, es decir, construir una superficie desarrollable que contenga unos segmentos
predeterminados como generadores.
Dados dos puntos P,Q en una recta L0, y dos puntos R, S en una recta L1, quere-
mos encontrar una superficie desarrollable X(u, v) = (1− v)b(u) + vc(u) tal que
X(0, v) = L0, X(1, v) = L1 v ∈ R. (3.1)
Mas precisamente, queremos encontrar X(u, v) con u, v ∈ [0, 1] tal que
X(0, 0) = P, X(0, 1) = Q, X(1, 0) = R, X(1, 1) = S (3.2)
Usaremos una cubica de Bezier b(u) con polıgono de control b0 = P, b1, b2, b3 = R y
aplicaremos el algoritmo de Aumann con punto inicial Q y valores apropiados de λ, µ
(que debemos buscar), para construir una cubica de Bezier c con polıgono de control
c0 = Q, c1, c2, c3. Para satisfacer (3.1) necesitamos valores de λ, µ tal que c3 ∈ L1, para
(3.2) debemos escoger estos dos valores tal que c3 = S.
Hay dos casos respecto a la posicion relativa de las rectas L0, L1: que sean coplana-
res, y que sean alabeadas (no coplanares). Vamos a considerar el primer caso tomando
µ = 1, y buscar un valor de λ tal que c3 ∈ L1.
Sea T el punto de interseccion entre L1 y la recta que pasa por Q con vector direc-
tor R− P , tomamos
λ =‖T −Q‖‖R− P‖
. (3.3)
Aplicando la iteracion de Aumann ( ecuacion (2.2)) con µ = 1 tenemos
c3 − c0 = λ(b3 − b0)
c3 −Q =‖T −Q‖‖R− P‖
(R− P ).
De la ultima ecuacion es claro que c3 = T , es decir, al aplicar la iteracion de Aumann
al polıgono de control b0 = P, b1, b2, b3 = R con µ = 1, λ como en (3.3) y punto inicial
3.2. Superficie desarrollable semidiscreta M.A. 45
Q obtenemos c3 = T .
Si queremos una superficie que cumpla (3.2) basta tomar X∗(u, v) = (1−v)b(u)+vc∗(u)
donde c∗(u) es una curva sobre X(u, v) tal que c∗(0) = Q y c∗(1) = S, es facil ver que
esta curva se puede construir como
c∗(u) = c(u) + (−i)ju ‖S − c3‖ (c(u)− b(u))
donde j = 0 si s ∈ Rc3 y j = 1 si s /∈ Rc3. El problema es que la curva c∗(u) es de
grado 4, por tanto la superficie X∗(u, v) no es un parche de Bezier de bigrado (3,1). El
problema se simplifica si tenemos PR y QS paralelos, es decir, si el polıgono P,R, S,Q
es un trapecio.
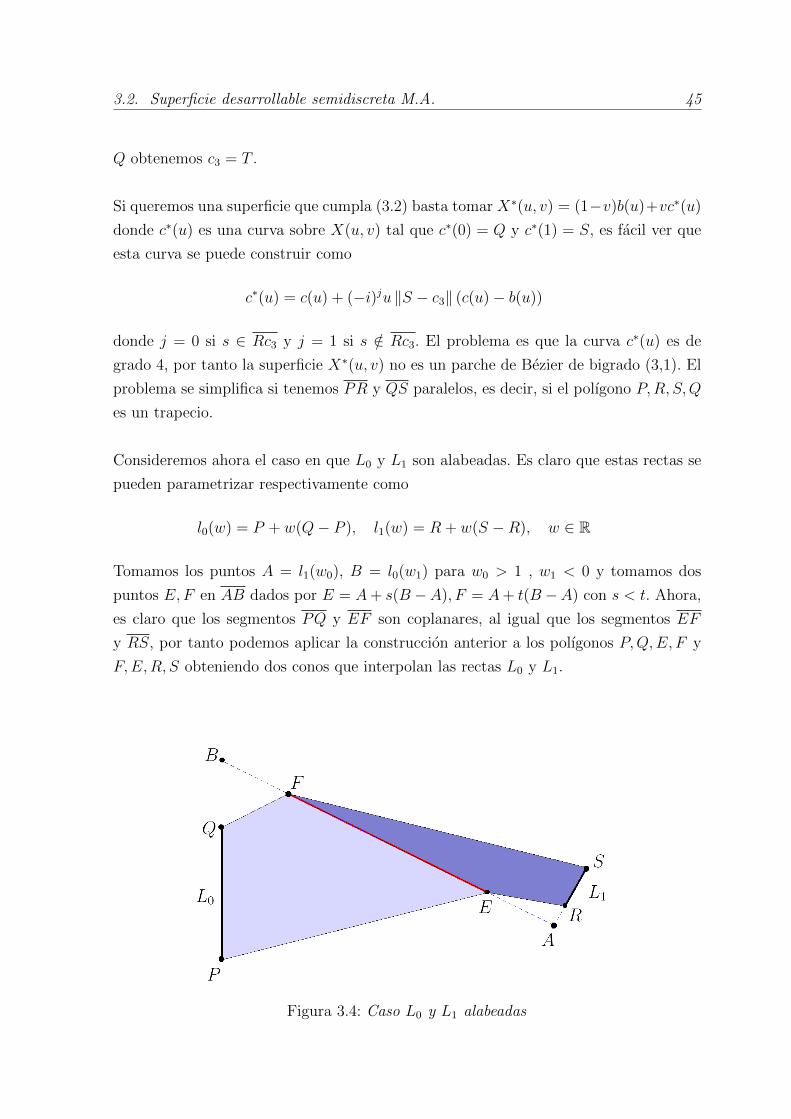
Consideremos ahora el caso en que L0 y L1 son alabeadas. Es claro que estas rectas se
pueden parametrizar respectivamente como
l0(w) = P + w(Q− P ), l1(w) = R + w(S −R), w ∈ R
Tomamos los puntos A = l1(w0), B = l0(w1) para w0 > 1 , w1 < 0 y tomamos dos
puntos E,F en AB dados por E = A+ s(B −A), F = A+ t(B −A) con s < t. Ahora,
es claro que los segmentos PQ y EF son coplanares, al igual que los segmentos EF
y RS, por tanto podemos aplicar la construccion anterior a los polıgonos P,Q,E, F y
F,E,R, S obteniendo dos conos que interpolan las rectas L0 y L1.
Figura 3.4: Caso L0 y L1 alabeadas
46 Capıtulo 3. Superficies desarrollables semidiscretas
3.2.2. Superficie moulding
Una superficie moulding es la obtenida por el movimiento de una curva plana p(u) so-
bre planos ortogonales a una curva directriz q(v). Para tratar este tipo de superficie es
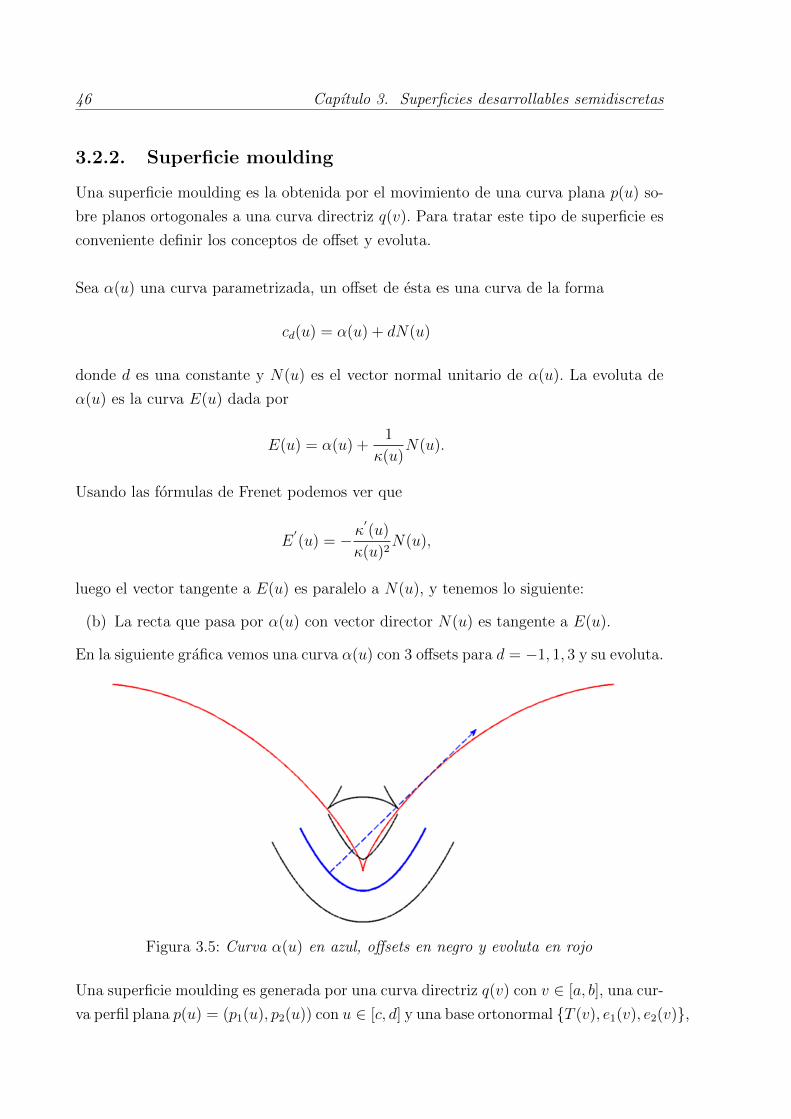
conveniente definir los conceptos de offset y evoluta.
Sea α(u) una curva parametrizada, un offset de esta es una curva de la forma
cd(u) = α(u) + dN(u)
donde d es una constante y N(u) es el vector normal unitario de α(u). La evoluta de
α(u) es la curva E(u) dada por
E(u) = α(u) +1
κ(u)N(u).
Usando las formulas de Frenet podemos ver que
E′(u) = −κ
′(u)
κ(u)2N(u),
luego el vector tangente a E(u) es paralelo a N(u), y tenemos lo siguiente:
(b) La recta que pasa por α(u) con vector director N(u) es tangente a E(u).
En la siguiente grafica vemos una curva α(u) con 3 offsets para d = −1, 1, 3 y su evoluta.
Figura 3.5: Curva α(u) en azul, offsets en negro y evoluta en rojo
Una superficie moulding es generada por una curva directriz q(v) con v ∈ [a, b], una cur-
va perfil plana p(u) = (p1(u), p2(u)) con u ∈ [c, d] y una base ortonormal T (v), e1(v), e2(v),
3.2. Superficie desarrollable semidiscreta M.A. 47
donde T (v) es el vector tangente unitario a q(v), e1(v) es un vector unitario ortogonal
a T (v) y e2(v) = e1 × T (v). Suponemos que e1(v) proviene de una funcion continua
e1 : [a, b] −→ R3.
Con los anteriores elementos se construye la superficie moulding M(u, v) como
M(u, v) = q(v) + p1(u)e1(v) + p2(u)e2(v) u ∈ [c, d], v ∈ [a, b]. (3.4)
Aquı usaremos el caso particular donde q(v) es una curva plana contenida en un plano
que denotaremos Π y e1(v) = N(v) (vector normal unitario a q(v)), por tanto e2(v) = n
donde n es el vector normal a Π, es decir, usaremos una superficie moulding M(u, v)
dada por
M(u, v) = q(v) + p1(u)N(v) + p2(u)n u ∈ [c, d], v ∈ [a, b]. (3.5)
Algunas caracterısticas de la superficie de la ecuacion (3.5) son:
(1) Las u-curvas son congruentes a la curva perfil p(u), ya que para cada v0 fijo
M(u, v0) es p(u) en el sistema de coordenadas dadas por q(v0) (como origen)
y la base ortonormal N(v0), n. Cada u-curva esta contenida en un plano con
vector normal T (v0), por tanto todas las u-curvas estan contenidas un una familia
monoparametrica de planos que denotaremos Πv (v ∈ [a, b]) y cada plano de esta
familia es ortogonal a Π. Para cada v0 fijo los vectores tangentes y normales de
M(u, v0) estan contenidos en Πv0 .
(2) Las v-curvas estan contenidas en una familia de planos paralelos a Π, ya que para
cada u0 fijo tenemos
M(u0, v) = q(v) + p1(u0)N(v)︸ ︷︷ ︸offset
+ p2(u)n︸ ︷︷ ︸traslacion
es decir, cada v-curva se puede construir como un offset de q(v) mas una traslacion
en la direccion de n. El vector M′(u0, v) = q
′(v)+p1(u0)N
′(v) , es paralelo a T (v)
ya que q′(v) y N
′(v) lo son, por tanto M(u0, v) es ortogonal a Πv para cada
v ∈ [a, b].
(3) Las u-curvas son geodesicas sobre M(u, v). Para v0 fijo de (1) y (2) tenemos
que Mu(u, v0)⊥Mv(u, v0) y si N(u) es el vector normal de M(u, v) entonces
Mv(u, v0)⊥N(u). De lo anterior tenemos N(u)⊥Mu(u, v0) y N(u)⊥Mv(u, v0) lue-

48 Capıtulo 3. Superficies desarrollables semidiscretas
go N(u) es paralelo a Mu(u, v0)×Mv(u, v0), es decir, el vector normal a la u-curva
es paralelo al vector normal a la superficie.
(4) Sea C(v, w) el cilindro dado por la extrusion de la evoluta de q(v) en la direccion
de n, es decir
C(v, w) = q(v) +1
κ(v)N(v) + wn,
entonces se deduce de (b) que para todo v0, Πv0 es tangente a C(v, w) a lo largo
del generador C(v0, w), es decir, el cilindro C(v, w) es la envolvente de la familia
de planos Πv. Ası q(v) es un segmento de cırculo entonces C(v, w) es una recta y
M(u, v) es una superficie de revolucion.
(5) Si la curva perfil p(u) es un segmento de recta entonces M(u, v) es una superficie
desarrollable, ya que el vector normal N(u) sobre cada u-curva (generador) al
estar contenido en un plano se mantiene constante.
En la siguiente grafica tenemos la superficie moulding de la ecuacion (3.5) con
q(v) = (v, 0,3v2, 0), p(u) = (0, u, u2), u, v ∈ [−1, 1].
Figura 3.6: Superficie moulding M(u, v), en azul, q(v) en rojo, p(u) en negro, cilindro
C(v, w) en verde, y un plano de la familia Πv en rojo

3.2. Superficie desarrollable semidiscreta M.A. 49
Para la superficie moulding de la ecuacion (3.4) se verifican (1), (3) y (5), ademas la
envolvente de Πv es una superficie desarrollable que contiene a la evoluta de q(v). En
[9] se puede ver mas sobre estas superficies.
3.2.3. Construccion de la superficie desarrollable semidiscreta
MA
Si tenemos una superficie moulding M(u, v) con v ∈ [a, b], u ∈ [c, d], y discretizamos
[a, b]× [c, d] por medio de las particiones PU : c = u1 < u2 < · · · < um = d,
PV : a = v1 < v2 < · · · < vn = b obtenemos de manera natural una malla
m : Z2 −→ R3
m(i, j) = M(ui, vj).
En general m no es una malla-CP.
Usaremos a M(u, v), PV y PU para construir una malla-CP m formada por trapecios,
la construccion de m se basara en la propiedad (2) , y por eso podremos interpretar a
m como una version discreta de una superficie moulding. Usaremos un algoritmo dado
por los siguientes 3 pasos.
Paso 1. Usando PV construimos la poligonal dada por los puntos q(v1), q(v2), ..., q(vn),
y para cada j construimos la recta normal a q(v) en el punto q(vj) que denotare-
mos rj.
Figura 3.7: Paso 1. Curva q(v) en verde, rectas ri en azul

50 Capıtulo 3. Superficies desarrollables semidiscretas
Paso 2. Ahora usamos PU y para cada i construimos el polıgono qi,1, qi2, ..., qi,n
que denotaremos Ci, con qi,j ∈ rj, qi,1 como la proyeccion ortogonal de M(ui, a) so-
bre Π y cada qi,kqi,k+1 paralelo a q(vk)q(vk+1). Notamos que cada Ci se puede inter-
pretar como una version discreta de un offset de la poligonal q(v1), q(v2), ..., q(vn).
Figura 3.8: Paso 2. Polıgonos Ci en rojo
Paso 3. Con cada Ci construimos Ci = Ci + din , donde di es una distancia
(que definiremos mas adelante) tal que Ci este “cerca” de M(u,v). Sobre cada
rj los puntos q1,j, q2,j, ..., qm,j forman una discretizacion de [c, d] con puntos que
denotaremos uij dados por
ui,j = c+δiδm
(d− c) con δi =i∑
k=1
‖qk,j − qk−1,j‖ si i > 1, δ0 = 0 (3.6)
De (3.6) es claro que u1,j = c, um,j = d y ui,j ∈ [c, d] para todo i. Definimos la
distancia di como
di =1
n
n∑j=1
q2(ui,j) (3.7)
Notemos que cada Ci del paso 3 esta dado por los vertices que denotaremos qi,j, dados
por qi,j = qi,j + din, y estos forman de manera natural una malla
m : Z2 −→ R3
m(i, j) = qi,j.

3.2. Superficie desarrollable semidiscreta M.A. 51
Es claro que m es una malla-CP formada por trapecios.
Figura 3.9: Malla m del paso 3
La definicion de di se podrıa hacer buscando minimizar la distancia entre la poligonal
Ci y la superficie M(u, v), pero para las aplicaciones que trabajaremos aquı es suficiente
definir di como en (3.7).
Ahora vamos a construir la superficie MA aplicando la interpolacion con el algorit-
mo de Aumann considerada en la seccion 3.2.1 sobre cada trapecio Mi,j. Esto se hace
construyendo un D-strip sobre cada Fim. Iniciamos con F1m construyendo una familia
de cubicas de Overhauser bj(u) sobre los puntos q1,1, q1,2, ..., q1,n como en (2.10) toman-
do Aj = q1,j( ver figura 2.6), notemos que cada bj(u) interpola los dos puntos de uno
de los segmentos paralelos de M1j. Para cada trapecio Mij tomamos λj como en (3.3)
y un punto inicial c0,j como en (2.11), es decir
λj =‖q2,j − q2,j+1‖‖q1,j+1 − q1,j‖
, c0,j = q2,j − λj(q1,j − c0,j−1) (3.8)
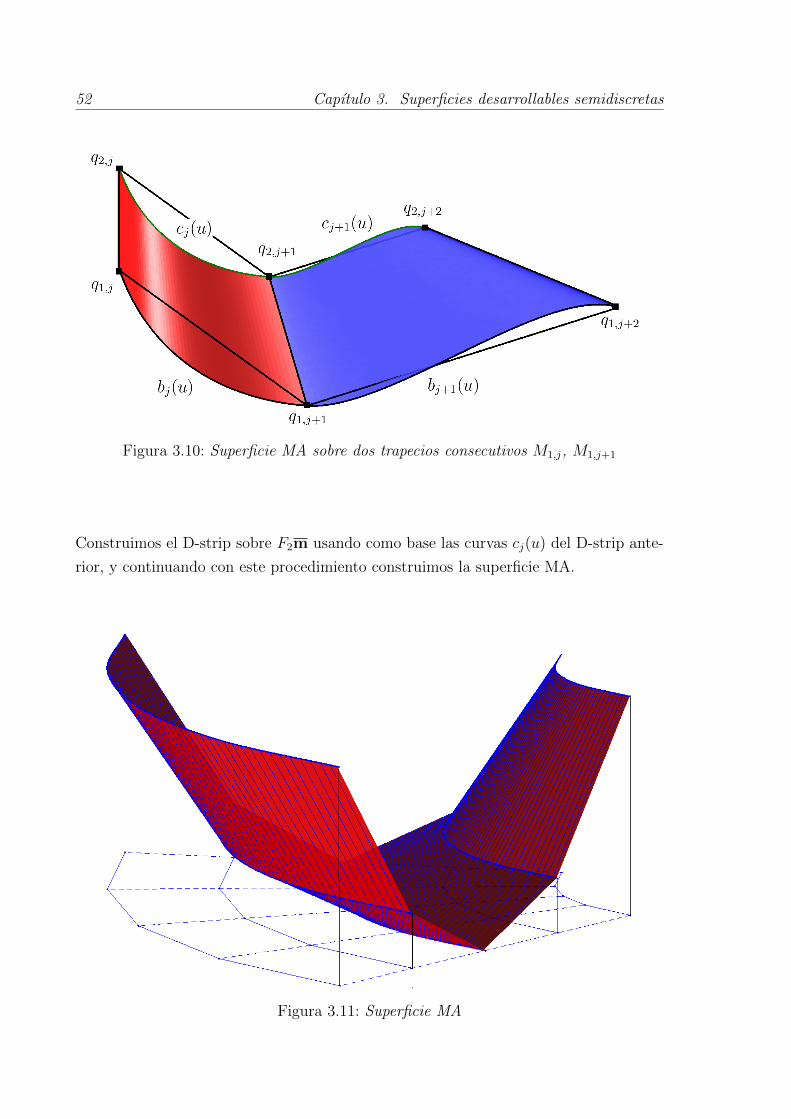
Ya tenemos la cubica bj(u) que interpola los puntos q1,j, q1,j+1 de Mij, al aplicar el algo-
ritmo de Aumann con los valores de (3.8) obtenemos una cubica cj(u) que interpola los
puntos q2,j, q2,j+1, teniendo ası una cubica para cada uno de los segmentos paralelos del
trapecio Mij. Ademas segun lo visto en la seccion 2.1.2, las curvas de la familia cj(u)
para j = 1, .., n tienen tangentes paralelas en sus puntos comunes q2,j (ver figura 2.7).
En la figura 3.10 vemos la construccion anterior sobre dos trapecios consecutivos M1,j,
M1,j+1 de F1m
52 Capıtulo 3. Superficies desarrollables semidiscretas
Figura 3.10: Superficie MA sobre dos trapecios consecutivos M1,j, M1,j+1
Construimos el D-strip sobre F2m usando como base las curvas cj(u) del D-strip ante-
rior, y continuando con este procedimiento construimos la superficie MA.
Figura 3.11: Superficie MA
3.3. Superficie desarrollable semidiscreta TDE 53
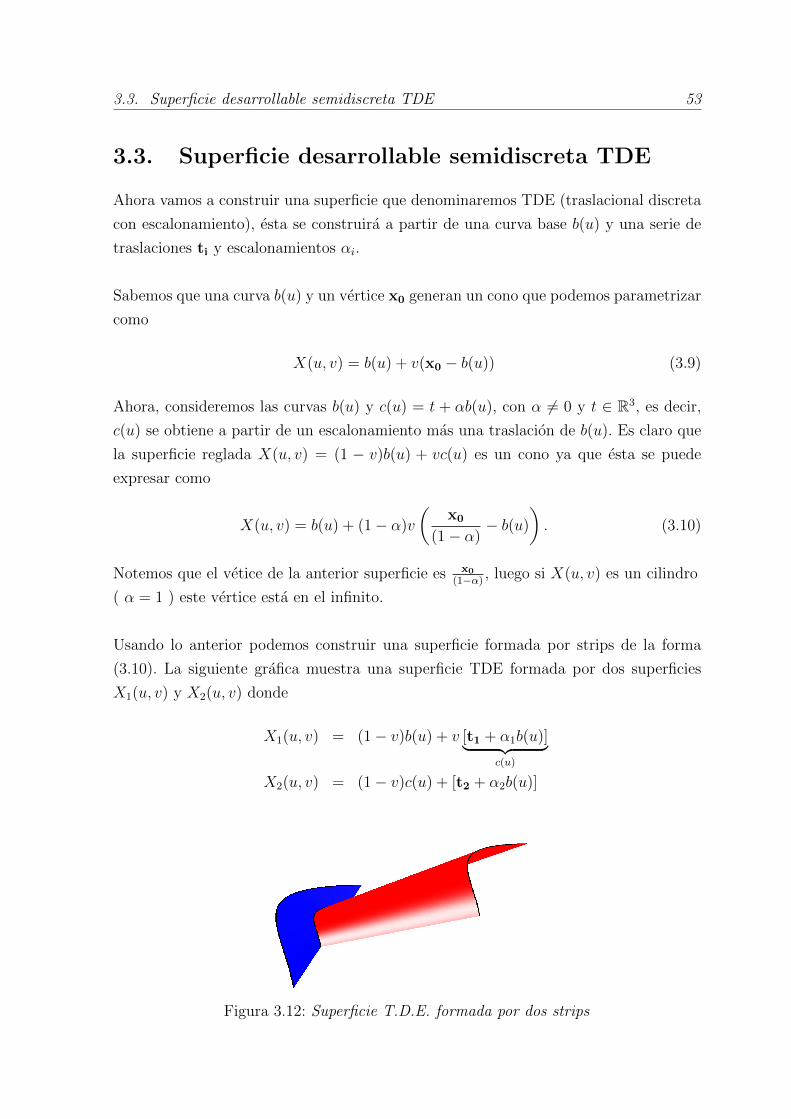
3.3. Superficie desarrollable semidiscreta TDE
Ahora vamos a construir una superficie que denominaremos TDE (traslacional discreta
con escalonamiento), esta se construira a partir de una curva base b(u) y una serie de
traslaciones ti y escalonamientos αi.
Sabemos que una curva b(u) y un vertice x0 generan un cono que podemos parametrizar
como
X(u, v) = b(u) + v(x0 − b(u)) (3.9)
Ahora, consideremos las curvas b(u) y c(u) = t + αb(u), con α 6= 0 y t ∈ R3, es decir,
c(u) se obtiene a partir de un escalonamiento mas una traslacion de b(u). Es claro que
la superficie reglada X(u, v) = (1 − v)b(u) + vc(u) es un cono ya que esta se puede
expresar como
X(u, v) = b(u) + (1− α)v
(x0
(1− α)− b(u)
). (3.10)
Notemos que el vetice de la anterior superficie es x0
(1−α) , luego si X(u, v) es un cilindro
( α = 1 ) este vertice esta en el infinito.
Usando lo anterior podemos construir una superficie formada por strips de la forma
(3.10). La siguiente grafica muestra una superficie TDE formada por dos superficies
X1(u, v) y X2(u, v) donde
X1(u, v) = (1− v)b(u) + v [t1 + α1b(u)]︸ ︷︷ ︸c(u)
X2(u, v) = (1− v)c(u) + [t2 + α2b(u)]
Figura 3.12: Superficie T.D.E. formada por dos strips
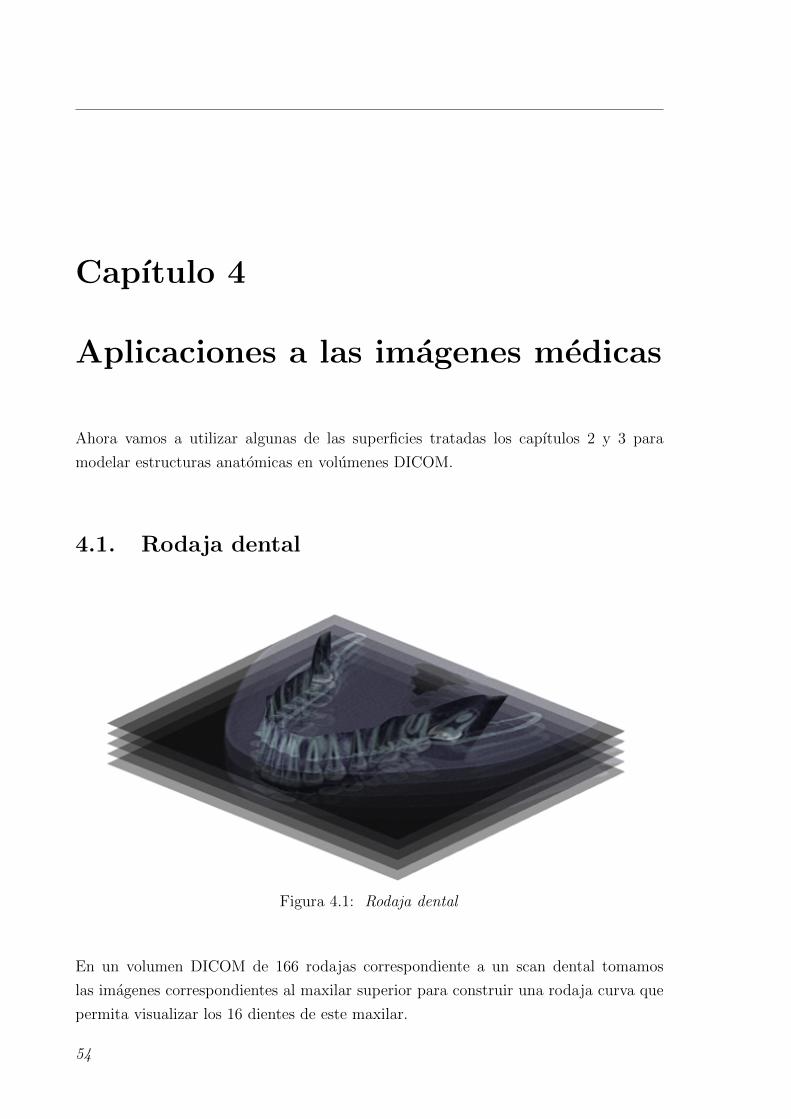
Capıtulo 4
Aplicaciones a las imagenes medicas
Ahora vamos a utilizar algunas de las superficies tratadas los capıtulos 2 y 3 para
modelar estructuras anatomicas en volumenes DICOM.
4.1. Rodaja dental
Figura 4.1: Rodaja dental
En un volumen DICOM de 166 rodajas correspondiente a un scan dental tomamos
las imagenes correspondientes al maxilar superior para construir una rodaja curva que
permita visualizar los 16 dientes de este maxilar.
54
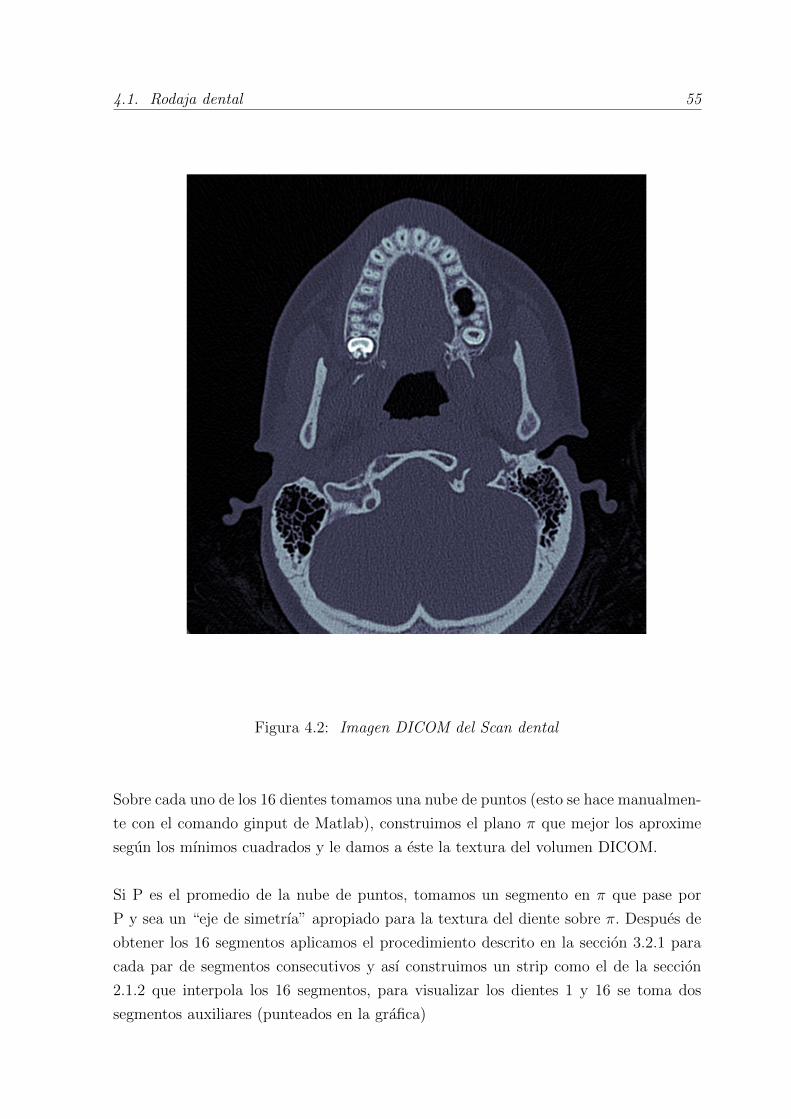
4.1. Rodaja dental 55
Figura 4.2: Imagen DICOM del Scan dental
Sobre cada uno de los 16 dientes tomamos una nube de puntos (esto se hace manualmen-
te con el comando ginput de Matlab), construimos el plano π que mejor los aproxime
segun los mınimos cuadrados y le damos a este la textura del volumen DICOM.
Si P es el promedio de la nube de puntos, tomamos un segmento en π que pase por
P y sea un “eje de simetrıa” apropiado para la textura del diente sobre π. Despues de
obtener los 16 segmentos aplicamos el procedimiento descrito en la seccion 3.2.1 para
cada par de segmentos consecutivos y ası construimos un strip como el de la seccion
2.1.2 que interpola los 16 segmentos, para visualizar los dientes 1 y 16 se toma dos
segmentos auxiliares (punteados en la grafica)
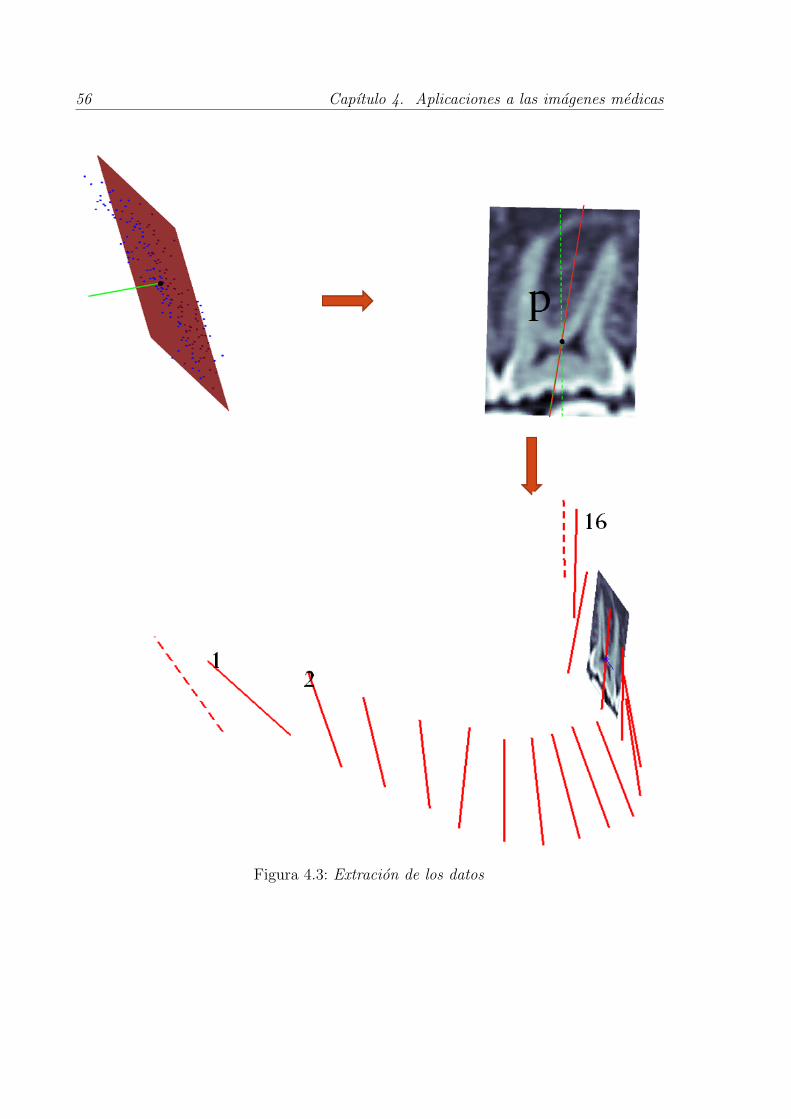
56 Capıtulo 4. Aplicaciones a las imagenes medicas
Figura 4.3: Extracion de los datos
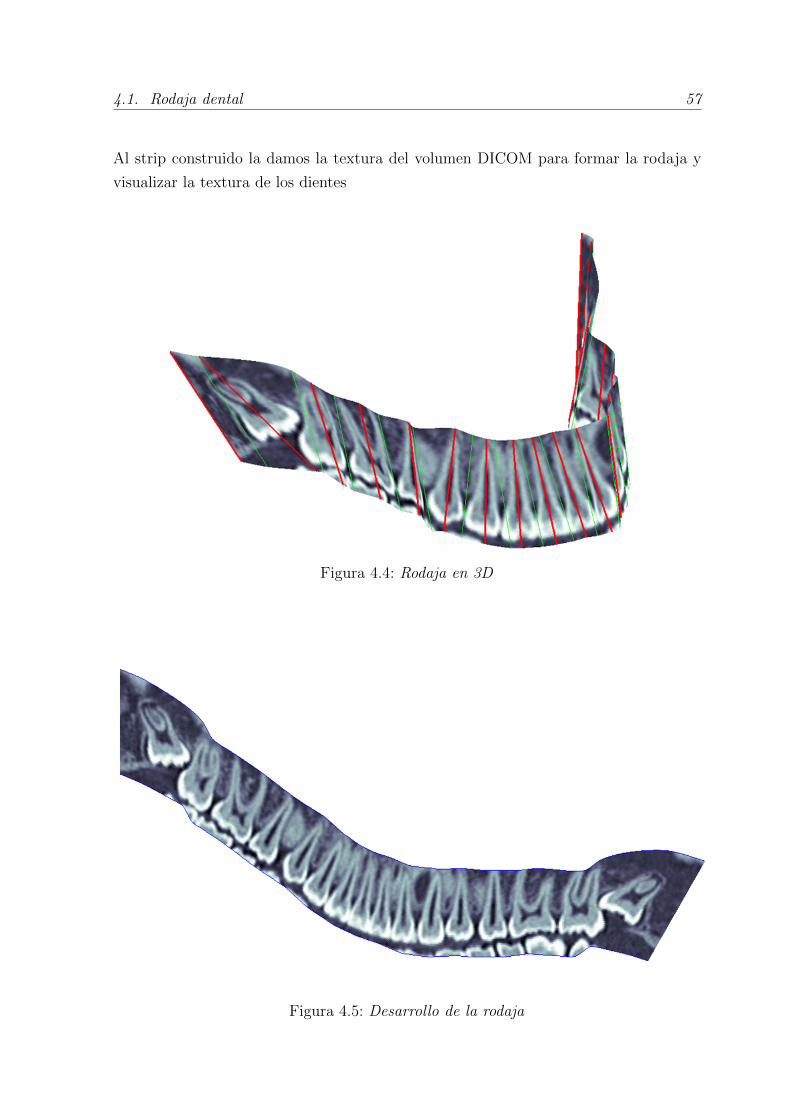
4.1. Rodaja dental 57
Al strip construido la damos la textura del volumen DICOM para formar la rodaja y
visualizar la textura de los dientes
Figura 4.4: Rodaja en 3D
Figura 4.5: Desarrollo de la rodaja
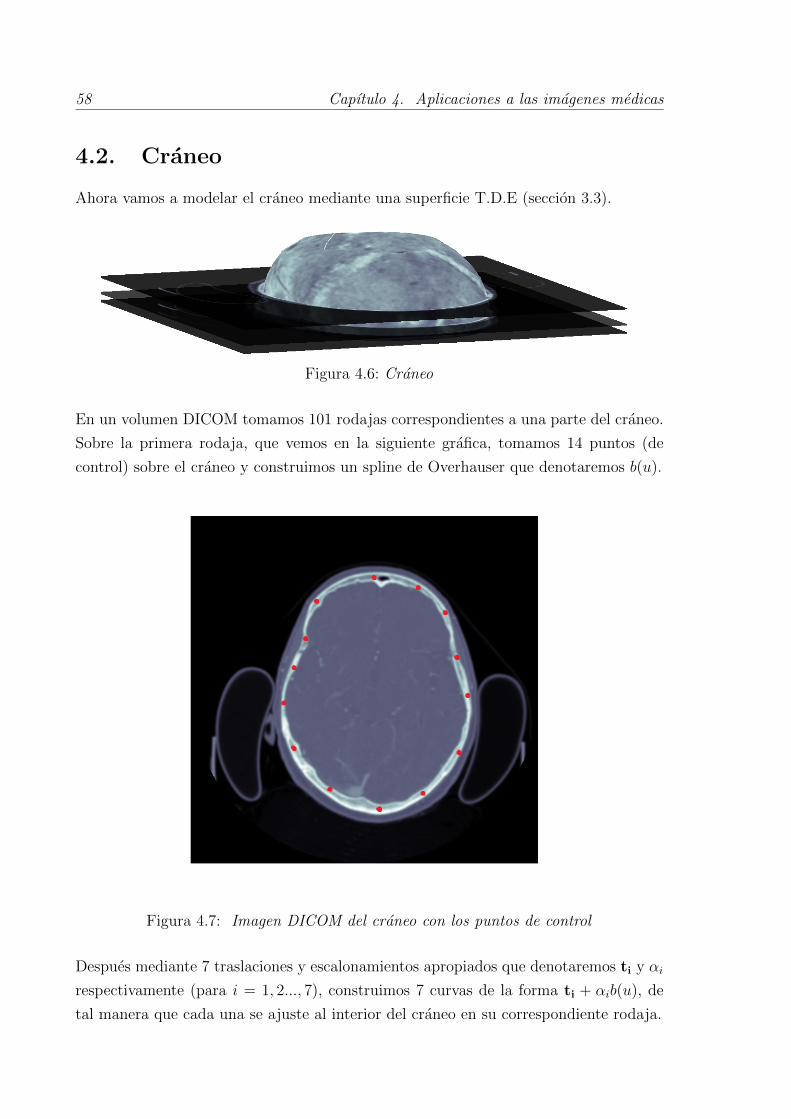
58 Capıtulo 4. Aplicaciones a las imagenes medicas
4.2. Craneo
Ahora vamos a modelar el craneo mediante una superficie T.D.E (seccion 3.3).
Figura 4.6: Craneo
En un volumen DICOM tomamos 101 rodajas correspondientes a una parte del craneo.
Sobre la primera rodaja, que vemos en la siguiente grafica, tomamos 14 puntos (de
control) sobre el craneo y construimos un spline de Overhauser que denotaremos b(u).
Figura 4.7: Imagen DICOM del craneo con los puntos de control
Despues mediante 7 traslaciones y escalonamientos apropiados que denotaremos ti y αi
respectivamente (para i = 1, 2..., 7), construimos 7 curvas de la forma ti + αib(u), de
tal manera que cada una se ajuste al interior del craneo en su correspondiente rodaja.
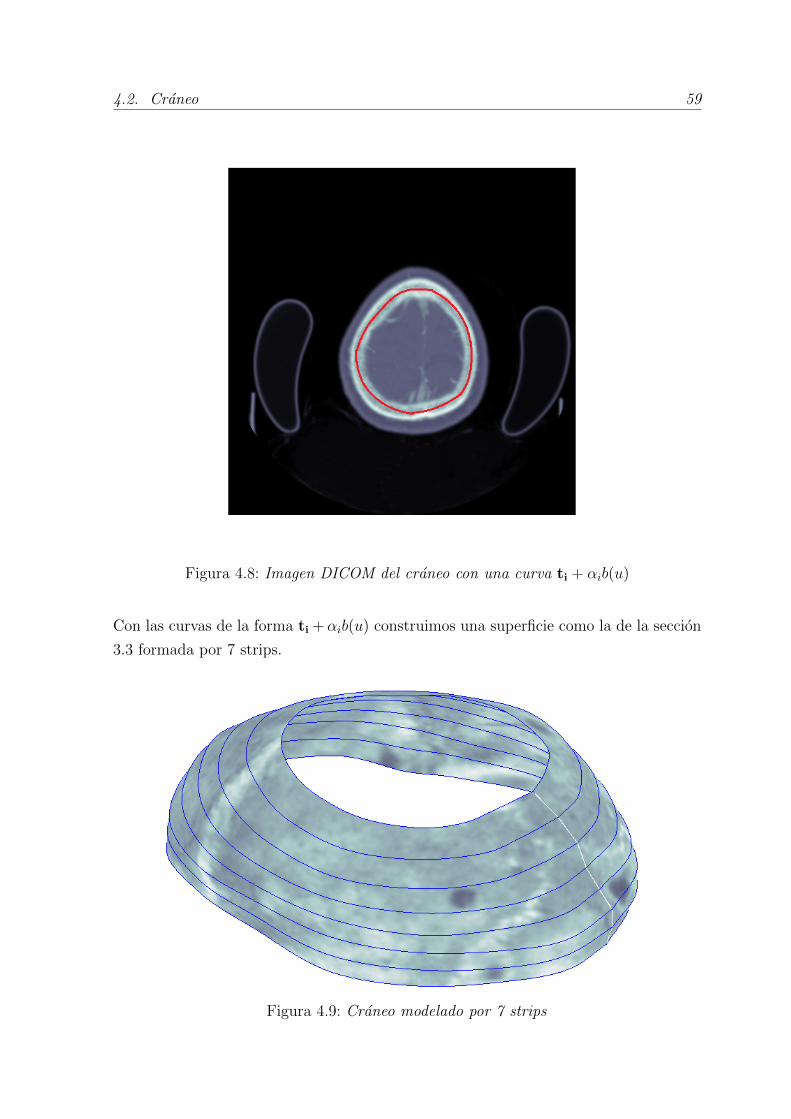
4.2. Craneo 59
Figura 4.8: Imagen DICOM del craneo con una curva ti + αib(u)
Con las curvas de la forma ti +αib(u) construimos una superficie como la de la seccion
3.3 formada por 7 strips.
Figura 4.9: Craneo modelado por 7 strips
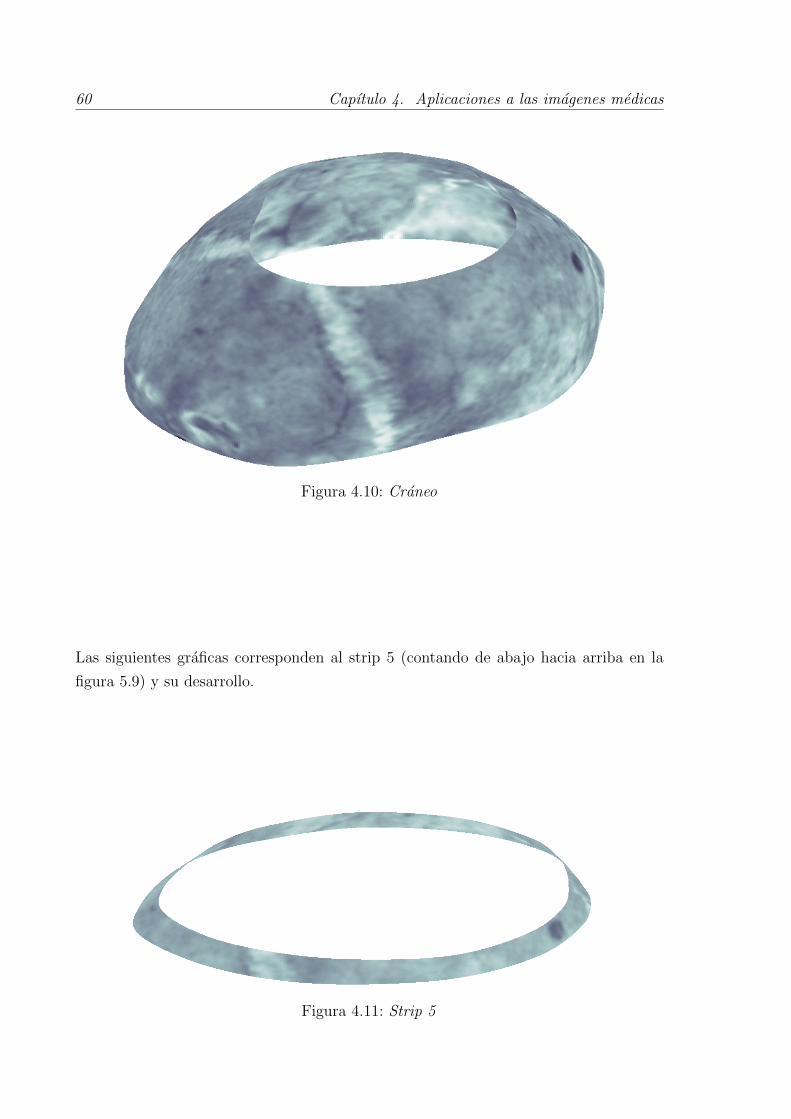
60 Capıtulo 4. Aplicaciones a las imagenes medicas
Figura 4.10: Craneo
Las siguientes graficas corresponden al strip 5 (contando de abajo hacia arriba en la
figura 5.9) y su desarrollo.
Figura 4.11: Strip 5
4.2. Craneo 61
Figura 4.12: Desarrollo del strip 5
Bibliografıa
[1] BO, Pengbo y WANG, Wenping. Geodesic-controlled developable surface for
modelling paper bending. Computer Graphics Forum, 26(34):365-374, 2007.
[2] POTTMANN, Helmut y WALLNER, Johannes. Computational Line Geo-
metry. Springer, 2001.
[3] AUMANN, Gunter. A simple algorithm for designing developable Bezier surfa-
ces. Computer Aided Geometric Design, 21:661-619, 2003.
[4] POTTMANN, Helmut, SCHIFTNER, Alexander, BO, Pengbo, SCH-
MIEDHOFER, Heinz, WANG, Wenping, BALDASSINI, Niccolo y
WALLNER, Johannes. Freeform surface from single curved panels. ACM Tran-
sactions on Graphics, 27(3):1-10, 2008.
[5] DO CARMO, Manfredo. Differential Geometry of Curves and Surfaces.
Prentice-Hall, 1976.
[6] POTTMANN, Helmut. Architectural Geometry. Bentley Institute Press (2007).
[7] POTTMANN, Helmut, WANG, Wenping, LIU, Yang, YANG, Yong-
Liang y WALLNER, Johannes. Geometric modeling with conical meshes and
developable surfaces. ACM Tansactions on Graphics, 25(3):681-689,2006.
[8] FARIN, Gerald. Curves and Surfaces for Computer Aided Geometric Design.
Academisc Press, 1996.
[9] CHEN, HouJun, DUAN, ZhenYun,LIU, Jian y WU, HongJi. Research on
basic principle of moulding-surface conjugation. Mechanism and Machine Theory.
43 (7): 791 - 811, 2008.
[10] Radon, Johann. Uber die Bestimmung von Funktionen duch ihre Integralwerte
langs gewisser Mannigfaltigkeiten. Berichte Verb Saechsische Akademie der Wis-
senschaften, Math Phys Kl. 69: 262-677, 1917.
62
Bibliografıa 63
[11] Deserno, Thomas. Biomedical Image Processing. Springer-Verlag New York,
2011:.