Embed Size (px)
Citation preview
UNIVERSITA' DEGLI STUDI DI BOLOGNA
FACOLTA' DI INGEGNERIA Dottorato di Ricerca in
“ Ingegneria delle Macchine e dei Sistemi Energetici “
Sviluppo di modelli termodinamici per il controllo di motori a combustione interna
equipaggiati con dispositivi innovativi complessi
Tesi di Dottorato di Alessandro Rosetti
Relatore Chiar.mo Prof. Ing. Giorgio Minelli
Coordinatore del Dottorato
Chiar.mo Prof. Ing. Davide Moro
XVIII CICLO
Anno Accademico 2004-2005

2

Ai miei genitori, Pier Angelo e Franca
Ai miei fratelli Annalisa e Angelo
Ai miei nonni, Vincenzo e Maria
Al ricordo di Quinto e Anna

Ringraziamenti
Un sentito ringraziamento al Prof. Giorgio Minelli, al Prof. Davide Moro,
al Prof. PieroMario Azioni, all’Ing. Fabrizio Ponti, all’Ing. Nicolò Cavina
e all’Ing. Enrico Corti per aver lasciato in me un grande esempio, e ancor
più un prezioso ricordo che mi accompagnerà nella futura professione. Un
particolare ringraziamento al Prof. Davide Moro per l’aiuto e la
professionalità dimostrata.
Un saluto e un ringraziamento a tutti gli “amici” del dipartimento D.I.E.M.
per gli anni passati insieme.

INDICE
I
INDICE
INTRODUZIONE
CAPITOLO 1 –Il motore a combustione interna ............. Pag. 1
1.1 IL MOTORE A COMBUSTIONE INTERNA .........................................Pag. 1 1.2 LA CENTRALINA ELETTRONICA............................................................. Pag. 2
1.3 ESIGENZE DI DIAGNOSI IN UN M.C.I. ................................................... Pag. 3
1.4 INQUINAMENTO E SISTEMI O.B.D. ........................................................ Pag. 4
1.4.1 GLI INQUINANTI..................................................................................Pag. 4
1.4.2 EFFETTI SULL’UOMO E SULL’AMBIENTE ......................................Pag. 5
1.4.3 TECNICHE PER L’ABBATTIMENTO DEGLI INQUINANTI ..............Pag. 5
1.4.4 LA NORMATIVA OBD II NEGLI STATI UNITI....................................Pag. 9
CAPITOLO 2 –I modelli matematici e la loro
identificazione................................................ Pag. 15
2.1 GENERALITA’ .......................................................................................... Pag. 15 2.2 LA RAPPRESENTAZIONE DEI SISTEMI MEDIANTE MODELLI
MATEMATICI ........................................................................................... Pag. 16 2.3 IL PROBLEMA DELL’IDENTIFICAZIONE ............................................ Pag. 17 2.4 IDENTIFICAZIONE A SCATOLA NERA ................................................. Pag. 18 2.5 IDENTIFICAZIONE PER INDAGINE DIRETTA..................................... Pag. 19
2.6 METODOLOGIE GENERALI DI IDENTIFICAZIONE ........................... Pag. 20
2.7 DETERMINAZIONE DEI PARAMETRI INCOGNITI DI UN MODELLOPag. 21

INDICE
II
CAPITOLO 3 –Il modello termodinamico......................... Pag. 25
3.1 GENERALITA’ .......................................................................................... Pag. 25
3.2 IL PRIMO PRINCIPIO DELLA TERMODINAMICA............................... Pag. 26
3.3 DOMINIO ANGOLARE ............................................................................ Pag. 30
3.4 CINEMATICA E DINAMICA DEL MANOVELLISMO ............................ Pag. 31
3.5 IL CALORE ASSORBITO:
IL MODELLO DI WIEBE PER LA COMBUSTIONE .............................. Pag. 33
3.6 IL CALORE CEDUTO .............................................................................. Pag. 35
3.7 IL FLUSSO DI CALORE NEI COLLETTORI........................................... Pag. 37
3.8 IL MODELLO DELLE PORTATE E IL MOTO DEL FLUIDO................ Pag. 38
3.9 LA GEOMETRIA DELLE VALVOLE........................................................ Pag. 43
3.10 IL MODELLO DEL CORPO FARFALLATO.......................................... Pag. 48
3.11 IL CALCOLO DELLA PRESSIONE........................................................ Pag. 54
CAPITOLO 4 –Applicazione del modello ad un
motore “VW VR6 3.2 GDI” ........................Pag. 55
4.1 CARATTERISTICHE DEL MOTORE UTILIZZATO ................................ Pag. 55
4.2 I SEGNALI RILEVATI E I SENSORI IMPIEGATI.................................... Pag. 57
4.3 DESCRIZIONE DEI SEGNALI OTTENUTI ............................................. Pag. 61
4.4 I SENSORI ................................................................................................. Pag. 65
4.4.1 IL PICK UP MAGNETICO................................................................. Pag. 65
4.4.2 IL SENSORE AD ESTENSIMETRI .......................................................Pag.66
4.4.3 IL DEBIMETRO.................................................................................. Pag. 67
4.5 LA MISURA DELLA PRESSIONE NEL CILINDRO ................................ Pag. 71
4.5.1 IL TRASDUTTORE DI PRESSIONE PIEZOELETTRICO ................. Pag. 71
4.5.2 L’AMPLIFICATORE DI CARICA ........................................................Pag.73
4.5.3 CORREZIONE DELLA DERIVA E RECUPERO
DELLA COMPONENTE MEDIA ....................................................... Pag. 76
4.5.4 CORREZIONE DEGLI ERRORI DOVUTI AGLI SHOCK TERMICI ..Pag.79

INDICE
III
CAPITOLO 5 –Il modello in SIMULINK ..............................Pag. 83
5.1 PERCHE’ .................................................................................................. Pag. 83
5.2 REALIZZAZIONE DEL MODELLO ......................................................... Pag. 84
5.3 INTEGRAZIONE IN SIMULINK............................................................... Pag. 85
5.4 COLLEGAMENTO TRA I BLOCCHI: IL BUS ......................................... Pag. 86
5.5 IL MODELLO............................................................................................ Pag. 87
5.6 AMBIENTE................................................................................................ Pag. 89
5.7 CILINDRO................................................................................................. Pag. 90
5.8 IL COLLETTORE DI ASPIRAZIONE ..................................................... Pag. 112
5.9 IL COLLETTORE DI SCARICO ............................................................. Pag. 116
5.10 I VOLUMI RUNNER E RACCORDI DI SCARICO .............................. Pag. 117
CAPITOLO 6 –Ottimizzazione delle simulazioni
e risultati .................................................................Pag. 119
6.1 INTRODUZIONE .................................................................................... Pag. 119
6.2 ANDAMENTO DELLA PRESSIONE ALL’INTERNO DEL CILINDRO Pag. 120
6.3 OTTIMIZZAZIONE DEI PARAMETRI DI SIMULAZIONE ................... Pag. 120
6.4 RISULTATI DELLE SIMULAZIONI ....................................................... Pag. 137
6.5 VALUTAZIONE DELL’EGR INTERNO ................................................. Pag. 143
6.5.1 LA STIMA DELL’EGR INTERNO TRAMITE IL MODELLO ETH.. Pag. 143
6.5.2 LA STIMA DELL’EGR INTERNO TRAMITE
IL MODELLO DI HEYWOOD.......................................................... Pag. 146
6.6 SIMULAZIONI IN CONDIZIONI NON STAZIONARIE......................... Pag. 150

INDICE
IV
SECONDA PARTE
CAPITOLO 7 –Applicazione del modello ad un motore
FIAT fire 1200cc. ............................................. Pag. 161
7.1 CARATTERISTICHE DEL MOTORE UTLIZZATO ............................... Pag. 161
7.2 FINALITA’ DEL MODELLO IN AMBIENTE SIMULINK E
SUDDIVISIONE IN VOLUMI................................................................. Pag. 163
7.3 ASPIRAZIONE ........................................................................................ Pag. 164
7.4 SCARICO................................................................................................. Pag. 168
7.5 LE CONDIZIONI INIZIALI..................................................................... Pag. 176
7.6 LA COMBUSTIONE................................................................................ Pag. 178
CAPITOLO 8 –La sonda lambda e
la sua modellizzazione .................................Pag. 183
8.1 ANALISI DEI FUMI ................................................................................ Pag. 183
8.2 DESCRIZIONE DELLA SONDA LAMBDA............................................ Pag. 188
8.3 SONDA ON-OFF..................................................................................... Pag. 189
8.4 SONDA LINEARE ................................................................................... Pag. 191
8.5 LA SONDA NEL MODELLO .................................................................. Pag. 194
8.5.1 ANALISI CHIMICA E SONDA ......................................................... Pag. 195
8.5.2 ANALISI DELLA COMBUSTIONE ALL’INTERNO DI UN CILINDRO
NEL MODELLO IMPLEMENTATO IN SIMULINK ........................ Pag. 197

INDICE
V
8.5.3 UNA PRIMA IPOTESI SUL FUNZIONAMENTO DELLA SONDA . Pag. 198
8.5.4 LA COMBUSTIONE IN UN PLURICILINDRICO ........................... Pag. 202
8.5.5 COMBUSTIONE COMPLETA ......................................................... Pag. 205
8.5.6 UNA POSSIBILE INTERPRETAZIONE DEL SEGNALE
DELLA SONDA................................................................................. Pag. 208
8.5.7 LA SONDA REALE ........................................................................... Pag. 212
8.6 LA DINAMICA DELLA SONDA ............................................................. Pag. 217
8.7 CONCLUSIONI SUL COMPORTAMENTO DELLA SONDA................ Pag. 224
CAPITOLO 9 –Il modello dei mix di scarico e la sua
inversione ................................................................Pag. 227
9.1 MISCELA DEI GAS DI COMBUSTIONE IN UN SITEMA CHIUSO..... Pag. 227
9.2 CALCOLO DELL’INDICE LAMBDA PER UN SISTEMA APERTO ..... Pag. 233
9.3 APPLICAZIONE DEL MODELLO DEL MIX ........................................ Pag. 235
9.3.1 DAI RACCORDI DI SCARICO ALLA SONDA POSTA ALLA
CONFLUENZA ................................................................................. Pag. 236
9.3.2 DAL SEGNALE DELLA SONDA POSTA ALLA CONFLUENZA AL
VALORE DELL’INDICE LAMBDA NEI QUATTRO RACCORDI
DI SCARICO ..................................................................................... Pag. 240
9.3.3 DESCRIZIONE DELL’ALGORITMO DI INVERSIONE.................. Pag. 241
CAPITOLO 10 –La ricostruzione dell’indice lambda ed i
suoi limiti ..............................................................Pag. 247
10.1 INTRODUZIONE .................................................................................. Pag. 247
10.2 ALGORITMO DEL MIX DEI GAS DI SCARICO:I RISULTATI DELLE
SIMULAZIONI ..................................................................................... Pag. 248
INDICE
VI
10.3 ALGORITMO DEL MIX DEI GAS DI SCARICO:I RISULTATI DELLE
SIMULAZIONI ..................................................................................... Pag. 250
10.3.1 EFFETTI DELLA DINAMICA DELLA SONDA SULL’ALGORITMOPag.259
10.3.2 EFFETTO DEI DISTURBI SULL’ALGORITMO ............................ Pag. 263
10.4 CONFRONTO DEL MODELLO DEI MIX DEI GAS DI SCARICO
CON ALTRI MODELLI PRESENTI IN LETTERATURA ..................... Pag. 264
10.5 EFFETTO DI UN ERRORE NEL CALCOLO DELLE PORTATE
SULLA RICOSTRUZIONE DEL RAPPORTO A/F ............................... Pag. 267

Introduzione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” I
INTRODUZIONE
La progettazione dei motori endotermici a combustione interna ha da sempre suscitato
interesse e curiosità per la complessità dei fenomeni fisico-ingegneristici che racchiude in sé. Negli ultimi anni l’attività di sviluppo e analisi si è notevolmente complicata, dovendo affrontare, fra le altre cose, problemi connessi alle emissioni acustiche e inquinanti. Queste peculiarità hanno portato ad abbandonare il vecchio approccio di progettazione, sostanzialmente semi-empirico, per rivalutare in parte quello analitico computazionale. Benché i test sperimentali siano essenziali e decisivi per poter definire compiutamente le capacità di un qualsiasi sistema e in particolare di un motore, il loro costo molto spesso ne limita la realizzazione. Tale costo può essere notevolmente ridotto nel caso sia possibile disporre di modelli matematici, basati sui fenomeni fisici che accadono all’interno del motore stesso e simulabili con l’ausilio di un calcolatore. Lo scopo è quello di ottenere, tramite modelli, informazioni sull’andamento qualitativo delle grandezze fondamentali. Le conoscenze acquisite risultano poi molto utili al momento delle prove al banco. Ecco allora la necessità di creare un modello che dia indicazioni sia sul comportamento del motore, che per il supporto delle prove sperimentali. Obiettivo della presente tesi è proprio lo sviluppo di un modello termodinamico di un motore a combustione interna, versatile ed adattabile ad ogni tipo di motore, sia per quanto riguarda la modalità di combustione (diesel o benzina), sia per quanto riguarda la geometria e le dimensioni caratteristiche (compreso il numero dei cilindri). Il modello simula le principali fenomenologie connesse al funzionamento di un motore endotermico alternativo, fornendo un supporto alle prove sperimentali. Le applicazioni legate a questa attività sono molteplici, prima fra tutte l’approfondimento del comportamento del motore completo, al fine di diagnosticarne il funzionamento. Il software utilizzato per creare il modello è SIMULINK, il noto toolbox di Matlab®, dedicato alla modellazione, alla simulazione e all’analisi dei sistemi dinamici. La modularità offerta dal programma SIMULINK è risultata particolarmente efficace, in quanto è stato possibile creare una libreria di blocchi da cui prendere gli elementi necessari per la simulazione di motori diversi da quello su cui è basato il modello.

Introduzione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” II
La presente tesi si sviluppa in tre parti:
• la prima sezione è dedicata alla costruzione di un modello termofluidodinamico (implementato in ambiente SIMULINK) di un motore endotermico alternativo;
• la seconda parte si occupa dell’applicazione del modello a un motore a sei cilindri a V VW VR6 3.2 GDI;
• la terza sezione è centrata sull’applicazione del modello a un motore FIAT FIRE 1.2 per lo studio e l’approfondimento del mix dei gas di scarico.
Le tematiche trattate richiedono sia analisi teoriche sia indagini sperimentali: queste ultime sono state svolte attraverso prove al banco eseguite sullo specifico motore oggetto dello studio, quindi in parte nelle sale prove della Magneti Marelli e in parte nella sala prova del dipartimento D.I.E.M. Sezione Macchine. Nel primo capitolo viene fatta un’introduzione sui motori a combustione interna. Nel secondo capitolo si analizzano le tecniche per la rappresentazione dei sistemi mediante modelli matematici, i tipi di identificazione e quale può essere il processo di identificazione dei parametri incogniti in un modello. Nel terzo capitolo vengono discusse le equazioni che si trovano alla base del modello implementato in SIMULINK, analizzando equazioni, ipotesi e semplificazioni che caratterizzano il modello e i risultati ottenibili durante le simulazioni. Il quarto capitolo inizia la seconda parte della tesi e tratta l’applicazione ad un motore VW VR6 3.2 GDi del modello sviluppato nel capitolo 3, descrivendo in particolare il motore, i segnali acquisiti e le problematiche connesse con l’acquisizione della pressione nel cilindro. Nel capitolo 5 e 6 si analizzano l’implementazione in SIMULINK e il confronto fra i risultati delle simulazioni e i dati sperimentali. Il capitolo 7 inizia la terza parte della tesi e la descrizione del motore FIAT FIRE 1.2 e come viene impostata la sua modellazione in SIMULINK. Nel capitolo 8 si descrive la modellazione della sonda lambda e la sua dinamica. Il capitolo 9 e 10 trattano il modello dei mix di scarico e la sua inversione, con la ricostruzione dell’indice lambda ed i suoi limiti.

Il motore a combustione interna
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 1
Capitolo 1
IL MOTORE A COMBUSIOTNE
INTERNA
1.1 Il motore a combustione interna I motori a combustione interna sono macchine termiche motrici a funzionamento ciclico preposte alla conversione, in lavoro meccanico, dell’energia termica che si sviluppa, bruciando combustibile. Nei motori ad accensione comandata (motori a ciclo Otto) la miscela di aria e vapori di benzina viene accesa da una scintilla fatta scoccare tra gli elettrodi di una candela, e la combustione che ne deriva può essere considerata, idealmente, a volume costante. Per quanto riguarda i motori ad accensione per compressione (motori a ciclo Diesel) l’accensione della miscela avviene spontaneamente quando si raggiungono determinate condizioni di pressione e temperatura; si realizza così una combustione, idealmente, a pressione costante. Nei motori ad accensione comandata, la potenza erogata viene controllata variando la massa di miscela aria-benzina aspirata dai cilindri; per problemi legati alla detonazione e alle emissioni inquinanti è importante mantenere il rapporto aria combustibile costante e prossimo al valore stechiometrico. Tale regolazione si effettua agendo, attraverso il pedale dell’acceleratore, sulla posizione angolare del corpo farfallato in modo da parzializzare l’ingresso di aria nei cilindri; nei motori ad iniezione elettronica, la quantità di benzina ottimale viene calcolata dalla centralina utilizzando le informazioni provenienti da vari sensori e introdotta, attraverso gli iniettori, nel condotto di aspirazione (single point) o nelle vicinanze delle valvole di aspirazione (multi point). Per un funzionamento ottimale occorre pertanto tenere sotto controllo i seguenti parametri:
• quantità di carburante da iniettare (quindi la durata dell’iniezione)
• istante di iniezione
• anticipo di accensione
• la quantità di aria supplementare nelle condizioni di funzionamento al minimo In particolari condizioni si può considerare ulteriormente la quantità di aria supplementare nelle condizioni di funzionamento al minimo.

Capitolo 1
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 2
Il controllo di queste variabili viene realizzato dalla centralina sulla base di opportune strategie, volte a:
• minimizzare le emissioni inquinanti e il consumo di carburante
• assicurare una buona guidabilità, mantenere il minimo motore costante anche a seguito di improvvise richieste di potenza da parte di attuatori ausiliari (per esempio condizionatore e servosterzo.), ecc.
1.2 La centralina elettronica E’ un vero e proprio microcalcolatore che, in base a una serie di istruzioni in esso memorizzate (la cosiddetta mappatura) e alle informazioni ricevute dai vari sensori, è in grado di controllare le diverse funzioni del motore e della vettura. Inizialmente le centraline elettroniche sono state utilizzate soprattutto per determinare l’anticipo d’accensione e la quantità di benzina iniettata (iniezione). Con lo sviluppo delle moderne tecnologie e con le sempre maggiori richieste di strategie di gestione del motore mirate alla riduzione degli inquinanti e all’ottimizzazione delle prestazioni, si è arrivati ad una gestione completa del motore. Oggigiorno una sola centralina è utilizzata per accensione e iniezione: regola i tempi di iniezione, gli anticipi di accensione, l’avviamento a freddo e l’arricchimento in accelerazione, il regime di minimo, il cut off , il limite di fuorigiri, la rotazione del corpo farfallato (DBW), il controllo della trazione (TCS), la diagnostica, ecc.
Figura 1.1 – Esempio di schema dell’impianto di iniezione/accensione.

Il motore a combustione interna
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 3
Figura 1.2 - Esempio di centralina.
Normalmente in vettura oltre al tipo precedente, esistono altre centraline adibite alla gestione delle funzioni ausiliari quali il sistema antibloccaggio dei freni (ABS), degli airbag, delle sospensioni attive, del climatizzatore e di tutto ciò che necessita di un controllo di tipo elettronico. Il funzionamento si basa, in genere, su mappature: la quantità di combustibile da iniettare è determinata in funzione della velocità di rotazione del motore e della pressione nel collettore misurate da sensori. Naturalmente le mappe sono sperimentali. Sono create acquisendo dati in sala prove, validate da collaudi al banco e in vettura. Questa metodologia di gestire il comportamento del motore e della vettura attraverso strategie basate su mappe presenta problematiche legate a un numero fitto di punti di calibrazione (si arriva anche a 12.000), a tal punto che a volte che è impensabile farlo al banco e, soprattutto, senza accettare delle approssimazioni. Nasce quindi in parallelo la determinazione delle mappe con l’ausilio della statistica. Si determinano i valori delle grandezze fisiche da mappare in determinati punti di funzionamento del motore, estrapolando statisticamente i valori nei restanti. Il futuro, già iniziato, vedrà la gestione delle funzioni, da parte delle centraline, non tramite mappe, bensì con modelli realizzati conoscendo i fenomeni fisici che li caratterizzano.
1.3 Esigenze di diagnosi in un M.C.I. L’adozione da parte della Comunità Europea di limiti sempre più restrittivi sulle emissioni inquinanti ha obbligato le case costruttrici di autoveicoli a utilizzare oltre ai soliti strumenti essenziali per contenere gli inquinanti, come il catalizzatore trivalente, anche

Capitolo 1
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 4
particolari strategie di controllo e diagnosi di malfunzionamenti. Tali strategie devono essere implementate in centralina attraverso algoritmi che, ciclicamente, controllino i vari componenti legati alla produzione di emissioni inquinanti cercando di rilevare la presenza di anomalie di funzionamento o di guasti. Le funzioni più importanti di un sistema di diagnosi e identificazione di malfunzionamenti possono essere così riassunte:
• Detonazione: in molti veicoli si utilizza un’accelerometro, montato sulla testata, che invia un segnale in centralina relativo alle vibrazioni del motore; in presenza di detonazione il segnale presenta ampiezza e frequenza tali da permettere l’identificazione della combustione anomala.
• Catalizzatore: per monitorarne il corretto funzionamento si utilizzano due sonde lambda
)(λ , una a monte e una a valle del catalizzatore stesso; dal confronto dei segnali è
possibile trarre informazioni sul suo funzionamento.
• Misfire: è necessario poter diagnosticare le eventuali mancate combustioni con estrema affidabilità in tutte le condizioni di funzionamento.
1.4 Inquinamento e sistemi OBD
1.4.1 Gli inquinanti Negli ultimi anni si è diffusa a livello mondiale l’attenzione verso le problematiche relative alla salvaguardia dell’ambiente e al contenimento delle emissioni inquinanti. Tutto ciò non poteva far altro che coinvolgere il mondo automobilistico; le varie case costruttrici sono obbligate, per legge, a garantire che le emissioni dei veicoli, immessi sul mercato, siano contenute entro i limiti previsti. La più completa e avanzata legislazione in materia di contenimento delle emissioni spetta allo Stato della California; l’organismo preposto allo scopo è il C.A.R.B. (California Air Resource Board), il quale ha stabilito che, dall’anno 2000, siano montate su tutte le vetture apparecchiature in grado di diagnosticare “on board” eventuali guasti o malfunzionamenti dei componenti che rientrino, direttamente o indirettamente, nel controllo del livello di inquinanti. Tali normative, che vanno sotto il nome di OBD II (On Board Diagnostic II), sono state poi recepite dall’E.P.A. (Enviromental Protection Agency) che le ha estese a tutte gli Stati Uniti. Successivamente la Comunità Europea ha assimilato queste direttive, quindi anche le case produttrici Europee hanno dovuto adeguare i loro prodotti per poterne ottenere l’omologazione. Da ciò si capisce come la diagnostica divenga di importanza strategica anche per il mercato europeo. Iniziamo a trattare questa complessa problematica partendo dalla formazione degli inquinanti all’interno del motore. La combustione di una miscela aria-carburante non avviene mai in modo perfetto. Per tale ciò si creano dei prodotti della combustione definiti “inquinanti”, quali il monossido di carbonio (CO), gli ossidi di azoto (NOx) e gli idrocarburi incombusti (HC). A questi si possono aggiungere i

Il motore a combustione interna
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 5
residui carboniosi, il benzene, l’ammoniaca e gli ossidi di zolfo (SOx). Con la messa al bando della “benzina rossa” addittivata di piombo tetraetile, il problema degli ossidi di piombo è stato eliminato. Il monossido di carbonio si forma quando la reazione di combustione avviene in carenza di ossigeno; questa situazione si può creare o per cattiva dispersione del combustibile nel comburente oppure quando si usano “miscele grasse”. Le tipiche situazioni in cui si produce molto CO sono: all’avviamento (in cui le basse temperature impediscono la completa evaporazione del combustibile e non si hanno quindi delle combustioni complete) e a basso numero di giri (la scarsa turbolenza dell’aria non permette un elevato grado di miscelazione combustibile-comburente). Gli idrocarburi incombusti sono sempre presenti nei gas di scarico in tutte le condizioni di funzionamento del motore. La loro concentrazione assume valori particolarmente elevati quando il motore funziona in condizioni di miscela grassa. Anche nelle normali condizioni di funzionamento si nota la presenza di HC, dovuta ad una non perfetta combustione dello strato aderente alle pareti dei cilindri. Su questo tipo di emissioni influiscono anche: l’incrocio di apertura delle valvole di aspirazione e scarico, l’incrostazione delle candele, la dosatura della miscela e la presenza di mancate combustioni (misfiring). L’azoto è l’elemento presente in percentuale maggiore nell’aria; essendo un gas inerte, non partecipa alla combustione e quindi lo si ritrova tale e quale allo scarico. Però, in particolari condizioni, l’azoto può ossidarsi secondo due reazioni che portano alla formazione di NO e NO2. Sperimentalmente si è visto che questi ossidi si formano in condizioni di pressione e, soprattutto, temperatura elevata; il fenomeno è accentuato in condizioni di miscela magra.
1.4.2 Effetti sull’uomo e sull’ambiente
Analizziamo ora gli effetti degli inquinanti sull’organismo umano e sull’ambiente.
Monossido di carbonio La tossicità dell’ossido di carbonio è causato principalmente dal fatto che esso si combina in maniera irreversibile con l’emoglobina del sangue; al momento della combinazione prende il sopravvento sull’ossigeno. Pertanto il CO si può accumulare nel sangue pur non essendo presente nell’ambiente in elevate concentrazioni. A seguito della combinazione si forma la Carbossiemoglobina (COHb), che impedisce l’ossigenazione dei tessuti provocando, anche con quantitativi ridotti, seri problemi alla salute e addirittura la morte.
Idrocarburi incombusti In particolari condizioni atmosferiche gli idrocarburi incombusti danno luogo a reazioni chimiche che producono perossidi e aldeidi di odore sgradevole, irritanti e nocivi per la salute umana e vegetale. Tra gli HC si trovano spesso particelle di benzoprene; queste vengono inalate

Capitolo 1
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 6
direttamente nei polmoni e costituiscono, insieme al fumo da sigaretta, una delle cause principali del diffondersi dei tumori polmonari.
Ossidi di azoto Sono tra i maggiori responsabili dell’inquinamento dell’aria. Questi composti rimangono sospesi nell’atmosfera per 3-4 giorni dopo di che, legandosi al vapor d’acqua, precipitano al suolo sotto forma di nitrati. Alcuni esperimenti, effettuati sugli animali, hanno rivelato una tossicità a livello polmonare con possibilità di edemi mortali; si sono rilevati anche effetti sul sistema nervoso centrale col manifestarsi di convulsioni e paralisi. Nonostante non vengano quasi mai raggiunte concentrazioni pericolose si considerano gli NOx responsabili dell’aumento delle infezioni respiratorie e dell’aggravamento dei fenomeni asmatici che si verificano nei centri con alto grado di inquinamento.
1.4.3 Tecniche per l’abbattimento degli inquinanti L’obiettivo del controllo e della riduzione degli inquinanti nei gas di scarico è stato affrontato su due linee: la prima, relativa a interventi sulla struttura del motore per ottimizzare la combustione e ridurre le emissioni, la seconda, relativa al trattamento dei fumi di scarico al fine di convertire le sostanze inquinanti in altre non nocive o, almeno, meno nocive.
Figura 1.3 – Concentrazioni di inquinanti al variare
del rapporto aria/combustibile.
Le modifiche che possono essere apportate al motore e alle variabili di combustione non sono, attualmente, sufficienti ad abbassare il livello di emissioni fino al limite stabilito dalla legge.

Il motore a combustione interna
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 7
Inoltre le possibili contromisure atte ad abbassare un particolare tipo di inquinante, spesso provocano un aumento delle emissioni delle altre famiglie (vedi fig. 1.3); ne consegue che le sostanze nocive considerate non possono essere eliminate tutte contemporaneamente. Quello che si cerca di fare è ottimizzare la combustione, al fine di ridurre al minimo le emissioni, senza però penalizzare troppo le prestazioni e i comportamenti dell’intera vettura. Nell’intervenire sul motore è necessario controllare tutte quelle variabili operative che influenzano le emissioni inquinanti. Senza entrare troppo nello specifico possiamo dire che gli elementi intorno a cui si è concentrato lo studio sono: il rapporto di miscela, l’istante di accensione, la contropressione allo scarico, la riduzione degli attriti, la geometria della camera di combustione, il rapporto di compressione e la fasatura. Quando il problema delle emissioni inquinanti venne alla ribalta e furono emanate le prime leggi (California 1959), era ancora possibile agire solo sui parametri sopra elencati per far sì che i valori rientrassero nei limiti; in seguito la normativa è divenuta sempre più restrittiva e questa tipologia di intervento, da sola, è risultata insufficiente. Fu così che vennero introdotti dei sistemi che non intervenivano più sulla causa della formazione degli inquinanti ma operavano una riduzione delle emissioni a valle del motore; nacquero così il convertitore catalitico e il sistema di ricircolo dei gas di scarico (EGR). In seguito si è posta l’attenzione sulle emissioni globali del veicolo interessando, così, le perdite per evaporazione del carburante dal serbatoio e la fuga di gas dal carter; si è così imposto che il veicolo “inquinasse”, entro i limiti concessi, considerando tutte le sue emissioni e non più solo quelle che fuoriuscivano attraverso lo scarico del motore. Attualmente il problema delle evaporazioni viene risolto utilizzando un circuito anti-evaporativo dotato di un filtro a carbone attivo (canister); tale sistema raccoglie i vapori e li "intrappola" all'interno di un filtro per poi rilasciarli e bruciarli in camera di combustione durante il funzionamento del motore.
Catalizzatore Sviluppato negli Stati Uniti all’inizio degli anni ’70 e poi diffuso in tutto il mondo, il catalizzatore è il principale strumento per l’abbattimento delle tre le famiglie di inquinanti. Senza entrare troppo nei dettagli possiamo considerare il convertitore catalitico come un dispositivo atto a realizzare delle reazioni chimiche che permettono di trasformare gli inquinanti in un fluido “pulito”; tale risultato viene ottenuto attraverso l’ossidazione del CO e degli HC e la riduzione degli NOx. Queste trasformazioni sono rese possibili dalla presenza di elementi catalizzatori; in particolare si usa il rodio per la riduzione e il platino o il palladio per l’ossidazione. Occorre precisare che il catalizzatore raggiunge la massima efficienza quando la combustione avviene con miscela prossima al rapporto stechiometrico, se ciò non accade si avrà un abbattimento non sufficiente di almeno una famiglia di inquinanti. Infatti un eccesso di ossigeno inibisce l’effetto del rodio e quindi non permette la riduzione degli NOx mentre una sua carenza blocca la reazione di ossidazione. Pertanto risulta fondamentale controllare la composizione dei fumi di scarico (utilizzo della sonda λ) e agire sulla quantità di combustibile da iniettare.

Capitolo 1
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 8
E.G.R. Il ricircolo dei gas di scarico (Exhaust Gas Recirculation) è un metodo per ridurre le emissioni degli ossidi di azoto, basato sugli effetti della diluizione della carica di aria “fresca” aspirata dal motore. Questo metodo riduce la produzione degli NOx mentre lascia pressoché inalterati i valori degli HC e CO. Il gas esausto, rimesso in circolo a monte della camera di combustione, ha lo scopo di ridurre la temperatura di combustione, visto che la maggiore formazione degli ossidi di azoto è legata proprio all’aumento di questo parametro. Esistono due tipi di ricircolo: esterno, in cui i gas combusti vengono convogliati verso il condotto di aspirazione, e interno, in cui il ricircolo avviene durante la fase di incrocio delle valvole. L’EGR interno è sempre presente in quanto una frazione dei gas combusti rimane intrappolata nella camera di combustione e quindi va a miscelarsi con la carica fresca aspirata. Inoltre è possibile creare un ulteriore EGR interno regolando opportunamente la fasatura del motore; così facendo si ha, in prossimità della fine della fase di scarico, la contemporanea apertura delle valvole di scarico e di aspirazione permettendo così ad una frazione dei gas di scarico di “fondersi” con la carica fresca proveniente dall’esterno. Purtroppo l’incrocio non può essere aumentato a piacere pena uno scadimento delle prestazioni del motore; i problemi che più comunemente insorgono sono: instabilità della combustione, possibilità di misfire e aumento della produzione degli HC. Poiché il solo ricircolo interno non è sufficiente a ridurre la produzione degli NOx per poter così rientrare nelle soglie fissate dalla legge è necessario affidarsi anche a quello esterno. L’EGR esterno ricircola dal collettore di aspirazione a quello di scarico, attraverso un condotto, una parte significativa dei gas di scarico che vanno poi a miscelarsi all’aria aspirata dall’esterno. In base alla quantità di gas ricircolata è possibile ridurre le emissioni di ossidi di azoto di oltre il 60% anche se in questi casi tendono ad aumentare sia la produzione di idrocarburi incombusti che il consumo di carburante; se invece si mantengono percentuali intorno al 10-15% non si hanno incrementi rilevanti di consumi. Il massimo valore dell’EGR è limitato dall’incremento delle emissioni di HC, dall’aumento del consumo e dalla “ruvidità” del motore. Durante il funzionamento del motore si hanno delle situazioni in cui il sistema non entra in azione: al minimo, in cui il basso carico non permette la formazione degli NOx e in fase di pieno carico, in cui la miscela grassa impegna tutto l’ossigeno per far avvenire la combustione. In passato il ricircolo dei gas esausti era principalmente controllato da sistemi meccanici che regolavano la quantità in ricircolo in funzione della posizione della valvola a farfalla, della pressione nel collettore di aspirazione e della contropressione allo scarico. Ovviamente una regolazione di questo genere è imprecisa, ragion per cui ora il controllo viene svolto in maniera elettronica.
Sistema antievaporativo con Canister Questo sistema, come detto in precedenza, serve per evitare che i vapori di carburante si disperdano nell’atmosfera; questi vapori si generano sia a veicolo fermo ad esempio (riscaldamento

Il motore a combustione interna
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 9
del carburante ad opera del calore solare che investe la vettura) sia in movimento (riscaldamento del combustibile nel circuito di alimentazione degli iniettori).
Il serbatoio del carburante, a seguito dell’evaporazione, va in pressione e quindi, per preservarne l’integrità, è necessaria una valvola di sfogo; i vapori che fuoriescono non possono essere usati direttamente in camera di combustione in quanto non solo creerebbero rapporti di miscela di entità sconosciuta ma, se venissero inviati a motore fermo, non accadrebbe nulla. Risulta quindi necessario convogliare detti vapori verso un filtro supplementare: il canister; questi è costituito da un filtro a carboni attivi e il vapore di benzina rimane intrappolato all'interno dei micropori della matrice grafitica. Durante il funzionamento del motore, la centralina provvede al lavaggio del canister mettendolo in comunicazione con il collettore di aspirazione; la depressione creata permette il miscelamento dell’aria con il carburante. In questa situazione il controllo dell’iniezione diventa critico in quanto non è nota la portata di combustibile proveniente dal canister; per questo motivo si deve programmare la centralina in modo tale da evitare lo svuotamento nelle fasi di minima richiesta di combustibile (si ha la massima incidenza percentuale dei vapori sulla quantità iniettata). Il programma di centralina inibisce il lavaggio durante tutte quelle fasi in cui sia la velocità angolare che la pressione di collettore sono inferiori ad un certo valore limite.
1.4.4 La normativa OBD II negli Stati Uniti La storia dei sistemi di diagnostica "on board", gli OBD, ha inizio nel 1988 quando lo Stato della California impose ai costruttori l'implementazione in centralina di programmi in grado di monitorare il corretto funzionamento della sonda lambda e del catalizzatore e di avvertire in caso di loro malfunzionamenti. Negli anni successivi il decreto venne esteso a tutti gli Stati Uniti e, successivamente, arrivò in Europa. Nel 1997 è entrata in vigore la normativa OBD II la quale allarga il campo di azione del precedente sistema di diagnostica includendo tutti quei componenti che, non lavorando correttamente, possono provocare un aumento delle emissioni inquinanti. La normativa definisce un componente o un sistema "malfunzionante" quando le emissioni del veicolo superano un determinato limite; quando ciò accade si accende una spia nel cruscotto detta MIL (Malfunction Indicator Light), e si attiva un programma che blocca il normale funzionamento della vettura e obbliga il conducente a un immediato controllo. E' previsto, inoltre, che la centralina sia in grado di dare informazioni dettagliate sui guasti presenti in modo da agevolare il compito dei tecnici riparatori; a tal proposito è stato assunto un unico standard per i singoli codici di guasto nelle diverse vetture. Una volta riparato il guasto dovranno ovviamente sparire dalla memoria della centralina tutti i codici attivati dall'avaria. Per poter realizzare questo nuovo sistema di diagnostica non sono, in generale, necessari altri sensori oltre quelli solitamente già presenti; basta modificare i programmi della centralina ed, eventualmente, aumentarne la capacità di calcolo.

Capitolo 1
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 10
Per poter rendere affidabile il programma di diagnosi è necessario prevedere degli algoritmi che controllino le azioni del sistema stesso; infatti c'è sempre la possibilità che si possano verificare due tipologie di errore: la mancata rilevazione di un guasto, che può portare alla rottura del componente, oppure la rilevazione di un guasto inesistente, che invece blocca la vettura senza che ciò sia necessario. Il programma di supervisione prevede che la MIL si accenda solo se uno stesso malfunzionamento si presenta per due cicli consecutivi dove, per ciclo, si intende la fase che va dall'accensione del motore fino al suo spegnimento. La normativa prevede due tipi di prove di controllo: la FTP (Federal Test Procedure) e la I/M (Inspection and Maintenance). La prova FTP ha lo scopo di verificare che la vettura non superi i limiti antinquinamento previsti dalla legge mentre la prova I/M (Inspection and Maintenance) viene effettuata dopo aver percorso 100000 miglia (160934 km) al fine di valutare lo "stato di salute"sia del sistema di abbattimento delle emissioni che del sistema di diagnostica. Vediamo ora quali sono i componenti che devono essere monitorati secondo la normativa OBD II, analizzando in dettaglio sia i criteri per la determinazione del malfunzionamento sia la tempistica di avviso del conducente:
Catalizzatore I costruttori devono prevedere un sistema di controllo sulla marmitta catalitica al fine di valutarne la capacità di conversione; allo stato attuale della normativa sono esentati da questo controllo i motori diesel. Criteri per la determinazione di malfunzionamento: il catalizzatore è considerato malfunzionante quando si verifica una delle seguenti situazioni: l'emissione di HC supera la soglia stabilita per il tipo di veicolo considerato oppure l'efficienza di conversione, valutata su un ciclo FTP, scende sotto il 50%. Per quanto riguarda il primo criterio bisogna distinguere tra i vari tipi di veicoli infatti esistono vetture LEV (Low Emission Vehicles), TLEV (Transictional LEV) e ULEV (Ultra LEV); per i TLEV la soglia è fissata su 2 volte il limite FTP HC più le emissioni di un test effettuato con un catalizzatore che ha percorso 4000 miglia mentre per i LEV e i ULEV la soglia è, rispettivamente, 2.5 e 3 volte il limite FTP HC più l'emissione di cui sopra. Ai costruttori è richiesto, inoltre, di introdurre questo sistema su una percentuale crescente di vetture a seconda dell'anno di produzione: 20% per i modelli del '98, del 40% per quelli del '99, 60% per quelli del 2000, 80% per quelli del 2001 e infine il 100% dal 2002 in poi. Per i modelli del '94 e '95 i costruttori devono monitorare la parte frontale del catalizzatore ed, eventualmente, la parte restante; qualunque sia il metodo scelto si deve rilevare un malfunzionamento quando l'efficienza scende sotto il 60%. L'efficienza viene determinata in un test in stazionario confrontando il livello di HC contenuto nelle emissioni a valle del catalizzatore con quelle rilevate all'interno del catalizzatore. Accensione della MIL e attivazione dei codici di guasto: generalmente il sistema si deve attivare non più tardi della fine ciclo successivo, alla prima rilevazione di guasto, se questo continua a permanere. Per i catalizzatori in cui si controlla l'efficienza di conversione, il sistema deve effettuare due controlli consecutivi prima di evidenziare il problema; se l'efficienza rimane sotto il limite per tre controlli successivi il sistema deve entrare in azione.

Il motore a combustione interna
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 11
Sistema di riscaldamento del catalizzatore Il catalizzatore, per poter funzionare in modo adeguato, deve trovarsi ad una temperatura di almeno 250°C. Questo controllo deve essere effettuato insieme al controllo del catalizzatore. Criteri per la determinazione di malfunzionamento: il sistema è malfunzionante quando non riesce a raggiungere la temperatura di regime entro un certo tempo prefissato. Il tempo viene determinato imponendo che le emissioni allo scarico, a regime termico, non superino di 1.5 volte quelle fissate dal ciclo FTP. Accensione della MIL e attivazione dei codici di guasto: generalmente il sistema si deve attivare non più tardi della fine ciclo successivo, alla prima rilevazione di guasto, se questo continua a permanere.
Misfire Come noto con il termine “misfire” si intende una mancata accensione all’interno del cilindro. E’ necessario diagnosticare i misfire per ridurre i problemi di emissioni inquinanti correlati e evitare perdite di prestazioni. Sarà necessario allora in centralina un sistema di diagnosi di mancate accensioni. Il sistema deve rilevare il cilindro specifico in cui si è verificato l’eventuale misfire; in caso di mancata accensione multipla il sistema deve essere in grado di rilevare in quali cilindri sta accadendo. Criteri per la determinazione di malfunzionamento: la rilevazione del guasto deve essere effettuata valutando la percentuale di misfire, rispetto al numero totale di accensioni, in due situazioni diverse: a) su una finestra di 200 cicli, per evitare un eccessivo riscaldamento del catalizzatore che potrebbe danneggiarlo irreversibilmente. b) su una di 1000 cicli per evitare che le emissioni superino di 1.5 volte il limite del ciclo FTP. Il campo di funzionamento, in cui effettuare il controllo, è quello relativo all’area di funzionamento del motore in termini di giri e farfalla, dove viene prodotta coppia positiva. Quando il sistema rileva un livello di misfire superiore alla soglia, la centralina deve memorizzare la velocità angolare e la coppia in cui accade il fenomeno; questo serve per poter confrontare tra di loro i vari punti di funzionamento in cui si verificano misfire e permettere l'attivazione dei codici di guasto (due punti sono considerati simili dalla procedura se le velocità non differiscono più di 375 rpm e le coppie del 20%). A partire dai modelli prodotti dal 1997 i costruttori sono obbligati a impiegare il sistema di monitoraggio dei misfire; partendo da tale data l'introduzione è così distribuita: su almeno il 50% dei veicoli prodotti nel '97, sul 75% nel 2000, sul 90% nel 2001 e, infine, sul 100% dal 2002 in poi. Accensione della MIL e attivazione dei codici di guasto: in questo caso è necessario considerare separatamente i casi a) e b), visti al punto precedente. Caso a): ogni qualvolta il livello di misfire supera il limite stabilito si deve attivare un codice temporaneo e la MIL deve lampeggiare; durante l'esecuzione del programma di guasto la MIL

Capitolo 1
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 12
deve continuare a lampeggiare a ogni misfire. Se, nel successivo ciclo con le medesime caratteristiche, la situazione si ripresenta, si deve attivare il codice di guasto definitivo e la MIL deve rimanere accesa finché non cessano i misfire (cioè finchè non si interviene per eliminare il problema). In tutti quei veicoli provvisti di blocco del carburante e di un controllo "di default" dell'iniezione, necessari per impedire l'alimentazione durante i misfire, la MIL non si deve accendere. Si accenderà solo se, dopo questa prima precauzione, il fenomeno rimane. Caso b): in questo caso il codice temporaneo si deve attivare solo dopo che il livello di misfire viene superato per la quarta volta all'interno dello stesso ciclo. Il codice definitivo si attiva solo quando si rileva, nel ciclo simile successivo, il superamento del limite per altre quattro volte. Qualora il superamento venga rilevato nei 1000 cicli immediatamente successivi all'accensione del motore, il codice temporaneo si deve attivare immediatamente.
Mancate combustioni per motori diesel A partire dai modelli prodotti nel 1998 il sistema di diagnostica dei motori diesel deve essere in grado di rilevare le mancate combustioni in uno o più cilindri. Inoltre, senza aggiungere alcun componente, il sistema deve essere in grado di indicare in quale, o in quali cilindri non si stanno rilevando combustioni. Criteri per la determinazione di malfunzionamento: un cilindro è considerato malfunzionante quando non si rileva alcuna combustione. Accensione della MIL e attivazione dei codici di guasto: rilevato un misfire, il sistema si deve attivare non più tardi della fine del ciclo successivo se il fenomeno permane.
Sistema antievaporativo La normativa chiede che sia verificata sia l'integrità del sistema di raccolta dei vapori di combustibile che il suo corretto funzionamento. Criteri per la determinazione di malfunzionamento: il sistema non funziona correttamente quando o non si rileva alcun flusso oppure si ha una fuga di vapori di intensità maggiore, o uguale, alla perdita causata da un foro di diametro pari a 0.04 pollici (1.106 mm). A partire dal 2000 i costruttori devono utilizzare questo sistema di diagnostica su almeno il 20% delle vetture prodotte; la percentuale passa al 40% nel 2001, al 70% nel 2002 e, infine, al 100% dal 2003 in poi. Accensione della MIL e attivazione dei codici di guasto: rilevato un malfunzionamento, il sistema si deve attivare non più tardi della fine del ciclo successivo, se il fenomeno permane.
Sistema di aria secondaria I veicoli equipaggiati con qualsiasi sistema di trasporto di aria secondario devono monitorare sia il sistema di trasporto stesso che la valvola di comando. Criteri per la determinazione di malfunzionamento: il sistema non funziona quando il flusso rilevato è inferiore al valore minimo, fissato dal costruttore, per il quale si ha un livello di emissioni inquinanti che superi di 1.5 volte quello del ciclo FTP standard

Il motore a combustione interna
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 13
Accensione della MIL e attivazione dei codici di guasto: rilevato un malfunzionamento, il sistema si deve attivare non più tardi della fine del ciclo successivo, se il fenomeno permane.
Sistema per l'aria condizionata Il sistema deve controllare che non ci siano perdite di fluido refrigerante in quanto questo va a intaccare la fascia di ozono. Tutti i veicoli prodotti dal 1996 in poi che utilizzano fluidi privi di CFC (CloroFluoroCarburi) sono esentati da questo controllo. Criteri per la determinazione di malfunzionamento: i singoli costruttori devono mettere a punto delle strategie che l'Executive Officer deve approvare. Accensione della MIL e attivazione dei codici di guasto: rilevato un malfunzionamento, il sistema si deve attivare non più tardi della fine del ciclo successivo, se il fenomeno permane.
Sensore per la rilevazione dell’ossigeno (sonda λ) Premesso che le vetture montano due sensori di questo tipo: uno primario, di tipo isterico, per il controllo del catalizzatore e uno secondario, di tipo lineare, per la diagnosi e/o il fuel trim (dispositivo correzione invecchiamento). Per quanto riguarda il sensore primario, il sistema deve controllare il voltaggio del segnale in uscita, la velocità di risposta e ogni altro parametro che può avere effetti importanti sul livello di emissioni inquinanti. Per il sensore secondario il voltaggio e/o la velocità di risposta. Con velocità di risposta si intende il tempo necessario, al sensore, per evidenziare l’avvenuto cambiamento del rapporto di miscela nella combustione (da magro a grasso e viceversa). Criteri per la determinazione di malfunzionamento: il sensore non funziona correttamente quando il voltaggio, il tempo di risposta o uno degli altri parametri controllati supera un valore di soglia fissato dal costruttore. Tale valore viene fissato in modo che non venga superato un livello di emissioni inquinanti pari ad 1.5 volte quello del ciclo FTP. Per quanto riguarda il sensore primario, esso va monitorato dalla fine della fase di avviamento fino al closed-loop (attivazione della strategia di controllo in catena chiusa). Per quello secondario, qualunque sia il suo uso, sarà il costruttore a stabilire delle strategie di controllo. Accensione della MIL e attivazione dei codici di guasto: rilevato un malfunzionamento, il sistema si deve attivare non più tardi della fine del ciclo successivo, se il fenomeno permane.
EGR La centralina deve monitorare l’entità del flusso dei gas di ricircolo e verificare che questa sia compresa entro due valori limite. Criteri per la determinazione di malfunzionamento: si ha un funzionamento non corretto quando accade una di queste situazioni: alcuni componenti si guastano e il sistema non lavora più secondo le specifiche del costruttore oppure l’entità del flusso esce dai limiti fissati cosicché le emissioni eccedano 1.5 volte quelle del ciclo FTP. Accensione della MIL e attivazione dei codici di guasto: rilevato un malfunzionamento, il sistema si deve attivare non più tardi della fine del ciclo successivo, se il fenomeno permane.

Capitolo 1
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 14
PCV (Positive Crankcase Ventilation) Il PCV è il sistema di circolazione forzata dei gas contenuti nel carter. Si ha la presenza di tali gas in quanto, durante il normale funzionamento del motore, si hanno dei trafilamenti di miscela aria-carburante attraverso la superficie di contatto tra le fasce elastiche dei pistoni e i cilindri (fenomeno del “blow-by”). Il compito del sistema è prelevare i gas dal carter e riportarli nel condotto di aspirazione in modo da poterli riutilizzare; il moto avviene a seguito della depressione che si crea all’apertura della valvola che mette in comunicazione carter e collettore di aspirazione. La normativa prevede l’introduzione obbligatoria di questo sistema dal 2002; come spesso accade, l’introduzione avviene per gradi: sul 30% dei modelli prodotti nel 2002, sul 60% nel 2003 e, infine, sul 100% dal 2004 in poi. Criteri per la determinazione di malfunzionamento: il PCV non funziona correttamente quando non si rileva un flusso tra il carter e la valvola o tra la valvola stessa e il collettore di aspirazione. Accensione della MIL e attivazione dei codici di guasto: rilevato un malfunzionamento, il sistema si deve attivare non più tardi della fine del ciclo successivo, se il fenomeno permane.
Termostato In tutte le vetture in circolazione è montato un termostato che controlla la temperatura del fluido refrigerante; nella fase di avviamento è fondamentale che tale fluido non circoli in modo da far crescere velocemente la temperatura verso il valore di regime (a cui corrispondono le emissioni minime). Una volta raggiunta la temperatura voluta, il fluido viene fatto circolare nella quantità necessaria per mantenere tale valore. E’ ovvia quindi l’importanza del monitorare il termostato. Dal 2002 tutti i modelli prodotti devono essere provvisti di questo controllo. Criteri per la determinazione di malfunzionamento: il termostato non funziona correttamente se la temperatura del fluido refrigerante non raggiunge la temperatura fissata dal costruttore per attivare le altre diagnostiche. Questo controllo può essere inibito se la temperatura ambiente non raggiunge un valore minimo
imposto dal costruttore.
Accensione della MIL e attivazione dei codici di guasto: rilevato un malfunzionamento, il sistema si deve attivare non più tardi della fine del ciclo successivo, se il fenomeno permane.
I modelli matematici e la loro identificazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 15
Capitolo 2
I MODELLI MATEMATICI E LA
LORO IDENTIFICAZIONE
2.1 Generalità Per ottenere il modello di un qualunque sistema fisico o concettuale è possibile darne una descrizione mediante un linguaggio: con questo termine ci si riferisce a un sistema di simboli (fonetici, grafici, gestuali, ecc.) che rappresentano dei concetti elementari per mezzo dei quali, seguendo opportune regole (codificate nelle grammatiche), si possono costruire frasi di lunghezza qualunque, così da definire concetti più complessi ed elaborati. Anche la matematica è un linguaggio, in quanto anch’essa ammette un sistema di concetti di base (esprimibili graficamente con simboli fonetici e ideogrammatici) ed una serie di regole che costituiscono la grammatica (i postulati di fondazione, le regole della logica formale, nonché le regole di grammatica del linguaggio corrente). Sono fonetici i simboli come quelli del seno (sin), del coseno (cos), del limite (lim), ecc., e sono ideogrammatici i simboli come quello di integrale ( ∫ ), di radice ( √ ), delle quattro operazioni (+, -, :, x), ecc., cioè tutti quei simboli la cui rappresentazione grafica è indipendente dall'espressione fonetica. Sulla base della grammatica si possono costruire frasi di qualunque lunghezza (definizioni, enunciati di teoremi e loro dimostrazioni, ecc.), mediante le quali è possibile passare, anche in questo caso, a concetti più complessi ed elaborati. La differenza fondamentale tra le frasi del linguaggio corrente e quelle del linguaggio matematico è, dunque, che, per costruire queste ultime, si richiede il rispetto, oltre che delle normali regole di grammatica proprie del linguaggio corrente, anche delle regole della logica formale (in particolare del principio di non contraddizione) e dei postulati di fondazione; conseguentemente, se si assume che la nozione di vero sia equivalente a quella di conseguenza logico-formale dei postulati, risulta garantita la correttezza non solo formale, ma anche sostanziale delle frasi del linguaggio matematico. Perciò, si usa dire che la matematica non costituisce soltanto un linguaggio comodo, ma, in realtà, rappresenta un linguaggio più un ragionamento. D’altra parte i simboli si possono considerare delle entità astratte in quanto, pur avendo una loro consistenza fisica, non sono altro che dei supporti ai quali corrispondono, in modo del tutto convenzionale, i concetti che costituiscono il loro significato. Ne consegue che la descrizione di sistemi o fenomeni di qualunque tipo fatta tramite un linguaggio, essendo realizzata mediante un

Capitolo 2
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 16
sistema di simboli, può considerarsi una rappresentazione astratta delle entità e degli avvenimenti stessi. Perciò, dare la descrizione di un sistema per mezzo di un qualunque linguaggio non significa altro che fornire una rappresentazione astratta di questo sistema o, come si suole dire, un suo modello astratto; ecco allora che descrivere un sistema fisico mediante il linguaggio matematico significa fornire un modello astratto di tipo matematico del sistema stesso o, più brevemente, un suo modello matematico. Da quanto si è detto si può dunque concludere che non ha senso cercare il modello “vero” dei fenomeni fisici (cioè la legge che li governa), perché ciò presupporrebbe che la creazione del mondo fosse stata fatta utilizzando gli stessi strumenti matematici di cui si serve ora l’uomo nelle sue indagini; al contrario, la matematica (e quindi anche la geometria) è un sistema di rappresentazione costruito dall’uomo in modo del tutto arbitrario.
2.2 La rappresentazione dei sistemi mediante modelli matematici Con la parola sistema (fisico o concettuale) si intende un insieme isolato di parti diverse, tra loro interagenti. Naturalmente le modalità con le quali queste parti possono interagire tra di loro possono essere le più diverse cosi, per poter determinare il modello di un sistema, non basta indicarne le parti interagenti, ma bisogna anche precisare a quali tipi di interazioni si vuole fare riferimento. Se, per esempio, ciò che si vuole studiare è la caduta di un grave, può sembrare scontato che l’interesse sia rivolto all’andamento della sua velocità o della sua accelerazione, cioè al risultato complessivo dovuto all’interazione tra il corpo e la terra (ovvero all’attrazione gravitazionale) e all’interazione tra l’aria e il corpo (ovvero all'attrito). Per descrivere un sistema bisogna, dunque, definire quali sono gli aspetti che interessano del suo comportamento complessivo, ovvero quali interazioni tra le sue parti si vogliono rappresentare. Conseguentemente, si può dire che non esiste il modello di un motore elettrico, ma esistono tanti modelli che descrivono i diversi aspetti (elettrico, elettromeccanico, termico, meccanico, ecc.) del comportamento del sistema motore elettrico. Naturalmente, il fatto che spesso si parli di modello di un motore elettrico è perché si ritiene sottinteso a quale aspetto (o a quali particolari aspetti) del comportamento del motore elettrico ci si intende riferire. Per tener conto di questi fatti si usa dire che a uno stesso sistema fisico si possono associare diversi “sistemi astratti e orientati”, ciascuno dei quali descrive in maniera univoca il particolare aspetto del sistema che interessa. Si è già visto nel paragrafo precedente a che cosa si riferisce l’aggettivo “astratto”. Quanto all’aggettivo “orientato” esso implica la definizione degli ingressi e delle uscite del sistema, cioè l’individuazione delle grandezze (le uscite) che caratterizzano il particolare aspetto (del sistema) a cui si è interessati e l'individuazione delle grandezze (gli ingressi) delle quali si vuole valutare l'influenza sullo stesso aspetto del sistema. In altre parole gli ingressi si possono considerare la causa e l'uscita l'effetto.

I modelli matematici e la loro identificazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 17
La definizione di un sistema astratto e orientato è il primo passo per determinare il modello matematico del particolare aspetto che si vuole rappresentare nell’ambito di un dato sistema fisico. D’altra parte il modo concettualmente più semplice di associare un sistema astratto e orientato a un dato sistema fisico consiste nel prenderne in esame l’insieme delle possibili coppie ingresso-uscita, analizzando cioè gli andamenti nel tempo di tutte le grandezze scelte come uscite in funzione dei corrispondenti andamenti assegnati alle grandezze di ingresso. In altre parole un sistema astratto e orientato può essere descritto fissando un istante di tempo t0 e considerando (per tutti i valori t>t0) un possibile andamento nel tempo dell’ingresso e il corrispondente andamento dell’uscita; si individuano così una o più coppie di funzioni del tempo, definite per t>t0, ciascuna delle quali prende il nome di coppia ingresso-uscita: raccogliendo i risultati di tutti i possibili esperimenti di questo tipo si ottiene l'insieme di coppie ingresso-uscita che definisce il sistema astratto e orientato. Questo modo di definire un sistema astratto e orientato viene spesso indicato come “approccio ingresso-uscita” e, come è facile capire, prescinde sia dalla natura delle grandezze in gioco, sia dai particolari meccanismi causa-effetto che stabiliscono le corrispondenze tra le grandezze stesse. Il sistema, cioè, viene sostanzialmente interpretato come una “scatola nera”. Naturalmente, ci si può domandare come sia possibile individuare tutte le coppie ingresso-uscita (potenzialmente anche infinite) che definiscono uno dei possibili sistemi astratti e orientati da associare a un dato sistema fisico. Il procedimento usato a tale scopo è detto “identificazione” e dà come risultato un modello matematico del sistema stesso; come si vedrà nel prossimo paragrafo, per ottenere tale modello è utile conoscere o fare delle ipotesi sul sistema in esame.
2.3 Il problema dell’identificazione Come si è già accennato nel paragrafo precedente, identificare un sistema vuol dire individuare tutte le coppie ingresso-uscita che definiscono uno dei sistemi astratti e orientati che si possono associare al sistema stesso. Il processo di identificazione viene completato non già memorizzando tutte le possibili coppie ingresso-uscita che definiscono il sistema astratto e orientato che interessa, ma individuando opportune procedure in grado di generare tali coppie; in genere sono appunto tali procedure che caratterizzano i diversi metodi di identificazione. I metodi di identificazione di un sistema si dividono in metodi di identificazione a scatola nera e metodi di identificazione per indagine diretta.

Capitolo 2
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 18
2.4 Identificazione a scatola nera Nei metodi di identificazione a scatola nera si suppone che le procedure per mezzo delle quali si possono ricavare le coppie ingresso-uscita che definiscono il sistema astratto ed orientato che interessa, siano fornite da relazioni matematiche parametrizzate ipotizzate a priori (per esempio un sistema di equazioni differenziali di un certo ordine); queste relazioni parametrizzate costituiscono il modello matematico del sistema e sono di tipo ingresso-uscita (IU) se in esse compaiono soltanto le variabili di ingresso e di uscita, mentre sono di tipo ingresso-stato-uscita (ISU) se, accanto a queste variabili, vengono introdotte delle variabili ausiliarie dette variabili di stato (o, semplicemente, stati). In entrambi i casi le ipotesi fatte per la costruzione del modello sono di tipo esclusivamente matematico e non tengono conto in alcun modo della struttura fisica del sistema, cioè degli effettivi meccanismi causa-effetto che legano ingressi ed uscite. In pratica, si fanno delle ipotesi sostanzialmente di tentativo (eventualmente sfruttando analogie con altri sistemi simili) cercando di ottenere la massima precisione di rappresentazione del sistema con la minima complicazione (principio di economicità). La scelta della classe alla quale si può supporre appartenga il sistema dato (e conseguentemente il modello) è senz’altro l’aspetto più delicato di tutto il procedimento di identificazione a scatola nera. Infatti, anche nel caso assai semplice di sistemi lineari, se l’ordine del modello differisce anche solo di qualche unità da quello del sistema, si possono ottenere errori intollerabili. Per la verità, non si dovrebbe parlare di ordine del sistema (cioè del sistema fisico) ma solo di ordine del modello che meglio lo rappresenta. Pertanto l'espressione “ordine del sistema” va intesa nel senso convenzionale che ora si cercherà di spiegare. Si pensi a quanto accade in un normale problema di interpolazione, cioè quando, minimizzando un opportuno funzionale costo, si cerca di approssimare con un polinomio (cioè con un particolare modello matematico) una data curva di tipo non polinomiale o, addirittura, nemmeno rappresentabile analiticamente. Come è ben noto, variando il grado del polinomio, l'approssimazione che si consegue presenta un andamento monotono (ovviamente diverso per ogni tipo di curva) del tipo di quello rappresentato in figura 2.1, in cui in ordinata è riportato l’errore commesso e in ascissa il grado del polinomio (cioè l'ordine del modello).
Figura 2.1 – Andamento dell’errore di approssimazione
in funzione del grado del polinomio interpolante.

I modelli matematici e la loro identificazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 19
Naturalmente se la curva da approssimare è di tipo polinomiale, per un opportuno valore del grado del polinomio, l’errore si annulla e tale rimane per valori superiori del grado stesso; diversamente, quando la curva non è rappresentabile per mezzo di un polinomio (o addirittura non è rappresentabile analiticamente) l’errore non si annulla mai, ed assume valori tendenti a zero per valori del grado del polinomio interpolante tendenti all'infinito. Tuttavia, se la curva da approssimare, pur non essendo di tipo polinomiale, si discosta abbastanza poco da una curva di questo tipo, è facile prevedere che esista un valore del grado del polinomio interpolante al di sopra del quale la diminuzione dell'errore sia abbastanza modesta, cosicché la curva di figura presenti in corrispondenza di questo valore una netta variazione di pendenza. Qualcosa di analogo accade quando si cerca di rappresentare un sistema con modelli di diverso ordine. In particolare, l’ordine che si ha in corrispondenza della variazione di pendenza di cui si è detto sopra è ciò che si può chiamare, convenzionalmente, ordine del sistema; naturalmente il fatto che il modello vero non esista, cioè il sistema, per ipotesi, non sia rappresentabile analiticamente in modo esatto, fa sì che l’errore sia sempre diverso da zero, quale che sia il tipo di modello scelto. Una delle maggiori difficoltà nell’esecuzione dei diversi tentativi per la scelta della classe del modello è quella di capire se la differenza tra il comportamento del modello e quello del sistema sia da imputare ad un errore nelle ipotesi che si sono fatte, oppure ad un errore riguardante l’ordine del sistema e, conseguentemente, quali sono le ipotesi da variare nel tentativo successivo. Concludendo si può dire che, quali che siano i tipi di modelli usati, la caratteristica fondamentale del metodo di identificazione a scatola nera è che esso prescinde totalmente da qualunque conoscenza o ipotesi sull’effettivo comportamento interno del sistema da identificare; in altre parole si può dire che questo approccio più che un modello di funzionamento fornisce una descrizione matematica della serie dei dati ingresso-uscita che si sono raccolti. Perciò nel caso di modelli ISU, le variabili di stato sono semplicemente delle variabili di collegamento tra ingresso e uscita (come, peraltro, è insito nel concetto stesso di variabile di stato) e non assumono, in generale, alcun significato fisico.
2.5 Identificazione per indagine diretta Nel metodo di identificazione per indagine diretta (detto anche “a scatola grigia”) si suppone che le relazioni parametrizzate dalle quali si possono ricavare le coppie ingresso-uscita che definiscono il sistema astratto ed orientato di interesse siano ottenibili tenendo conto dei legami fisici esistenti tra le diverse parti del sistema. Tali relazioni costituiscono il modello matematico parametrico del sistema. Questo metodo si usa soprattutto quando sono già noti i modelli dei componenti del sistema e dei fenomeni di interazione che hanno luogo tra questi ultimi; in tal modo il modello del sistema complessivo si ottiene assai semplicemente a partire dai modelli dei componenti e delle interazioni di cui si è detto (modelli a loro volta ricavati

Capitolo 2
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 20
utilizzando questo stesso metodo o il metodo a scatola nera). Naturalmente questo metodo di identificazione si può applicare soltanto se i modelli dei componenti utilizzati per ricavare il modello complessivo sono anch’essi di tipo parametrico. In altre parole si può dire che, con questo metodo, resta definita la classe di appartenenza del modello del sistema da rappresentare senza che si debba ricorrere a procedimenti per tentativi. Questo fatto sembra sottintendere che la classe del modello che così si ottiene sia da considerarsi proprio quella “vera”. In realtà, con questo metodo di identificazione non si devono fare tentativi soltanto perché essi sono già stati fatti quando si sono ricavati i modelli dei componenti e, conseguentemente, non si pone il problema di migliorare l'approssimazione del modello complessivo, approssimazione che, ovviamente, non potrà mai essere migliore di quella raggiunta per i singoli componenti. Ciò non toglie, tuttavia, che una qualche maggiore informazione sulla struttura fisica del sistema questo tipo di modello la fornisca effettivamente, e ciò per l’ovvia ragione che più si scompone un sistema in sottosistemi elementari, più si riduce la parte intrinsecamente non nota, cioè la parte di cui non si riesce ad avere il modello di funzionamento, ma soltanto la descrizione matematica fornita dalle sequenze ingresso-uscita. A ciò si aggiunga che i modelli dei componenti e delle loro interazioni sono, in genere, il risultato di approfonditi studi fisici e tecnologici (sono cioè l’oggetto stesso degli studi di fisica e di ingegneria) e, quindi, raggiungono spesso livelli di approssimazione che difficilmente possono essere ottenuti in procedimenti di identificazione che prendano in esame l’intero sistema di cui si vuole creare il modello. Si noti ancora che, anche se i modelli con i quali sono rappresentati i singoli componenti sono del tipo IU, il modello complessivo risulta del tipo ISU avendo come variabili di stato le variabili di ingresso e di uscita dei singoli componenti; in tal modo queste ultime variabili assumono un significato fisico diretto e lo stesso accade per i parametri che intervengono nelle equazioni che costituiscono il modello.
2.6 Metodologie generali di identificazione Si è spiegato cosa significa realizzare un modello a scatola grigia di un sistema fisico, si è detto della necessità di identificarne gli eventuali parametri incogniti, accennando anche ad una metodologia per condurre l’identificazione. Si vuole ora analizzare più in dettaglio l’approccio matematico al problema, soffermandosi in particolare sugli strumenti di calcolo che è necessario impiegare e su quali sono stati utilizzati lavorando in ambiente MATLAB. In generale si cerca di condurre il processo di identificazione con riferimento ai singoli sottomodelli separatamente, in modo da semplificare al massimo il calcolo e da escludere ulteriori incertezze derivanti dalla presenza contemporanea di più relazioni funzionali oggetto di identificazione. Una volta scelto il sottomodello su cui lavorare, per eseguirne l’identificazione è necessario conoscere tutti gli ingressi e le uscite che lo riguardano, in modo da poter invertire le relazioni

I modelli matematici e la loro identificazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 21
funzionali che legano le variabili di input e di output esplicitando i parametri incogniti la cui determinazione è appunto lo scopo del processo di identificazione. Affinché sia possibile ricavare tutti i parametri incogniti, è ovviamente necessario invertire un numero di relazioni funzionali (in cui questi figurino) pari al numero dei parametri stessi: tutte le grandezze fisiche (ingressi o uscite) che fanno parte di queste equazioni devono essere note, meglio se da misure sperimentali (per ridurre al minimo le incertezze connesse con una loro determinazione approssimativa), o qualora ciò non fosse possibile, da altre relazioni o sottomodelli precedentemente identificati. Dovendosi muovere nello spazio dei parametri alla ricerca del minimo di una opportuna funzione costo, che in questo lavoro è stata individuata nello “scarto quadratico medio percentuale” (indicato da ora in poi con SQMP), si è fatto uso delle funzioni fminsearch e fmincon di MATLAB, assieme al comando optimset che consente di variare, rispetto ai valori di default impostati dal programma, i parametri in base ai quali viene effettuata la ricerca del minimo, quali le tolleranze, il numero di iterazioni da eseguirsi, ed altri. Il comando fminsearch necessita di un vettore di condizioni iniziali di dimensione pari al numero di parametri incogniti; la scelta di tali valori è di fondamentale importanza per il risultato dell’identificazione, perché da essa dipende l’esito della ricerca del minimo nello spazio dei parametri: infatti variando il set di condizioni iniziali è facile ottenere risultati anche notevolmente diversi, perché è possibile individuare minimi relativi diversi. Il comando fmincon è sostanzialmente simile a fminsearch, ma si condizionano le variabili all’interno di un intervallo di ammissibilità.
2.7 Determinazione dei parametri incogniti di un modello Solitamente nel costruire un modello fisico, come si vedrà anche in questa tesi, pur inquadrando il fenomeno con una serie di leggi fisiche, si possono incontrare alcuni parametri il cui valore non è desumibile a priori. In questi casi l’approccio più vantaggioso è quello di sfruttare la conoscenza dei fenomeni fisici per determinare la struttura del modello, ed identificare i parametri incogniti sulla base degli andamenti misurati degli ingressi e delle uscite; in questi casi si parla di “modelli a scatola grigia”. Quest’ultimo sarà anche l’approccio seguito in questo lavoro per creare i modelli dei vari sistemi presi in considerazione. Il processo di identificazione dei parametri incogniti del modello richiede una scelta preliminare della struttura dello stesso, il che corrisponde a fissare a priori le funzioni f1,…, fn che legano i parametri del modello agli ingressi. Questo richiede una analisi accurata dei dati acquisiti al fine di evidenziare particolari legami funzionali tra le variabili, ed un’analisi dei fenomeni fisici alla base del sistema in esame. L’analisi delle prove sperimentali e dei fenomeni fisici, al fine di evidenziarne i legami funzionali, non sono due processi in successione logica, ma vanno considerati come due aspetti da sviluppare in parallelo. Infatti, dall’analisi dei dati, si possono evidenziare degli elementi che non erano stati presi in considerazione, oppure si può osservare quale dei fenomeni in esame è

Capitolo 2
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 22
trascurabile rispetto ad altri, mentre una conoscenza del problema fisico aiuta ad interpretare meglio i dati disponibili. Una volta definita la struttura del modello, si affronta la vera e propria identificazione dei parametri incogniti tramite la ricerca del minimo di una “funzione costo”. Conoscendo, sulla base di prove sperimentali, le risposte del sistema reale ad ingressi noti, è possibile determinare sulla base dei criteri prescelti, il valore dei parametri incogniti del modello stesso. Come già anticipato, la ricerca di questi parametri è riconducibile alla ricerca del minimo di una funzione delle uscite del sistema reale (misurate) e della simulazione. Tale funzione costo è così dipendente dai parametri incogniti e la sua struttura è correlata a quella del modello e del criterio prescelti. La valutazione della bontà del modello è basata sulle sue capacità nel prevedere i dati reali. L’indice alla base di questa valutazione deve essere, oltre che un indice della correttezza delle ipotesi formulate, il principale dei termini di confronto tra le diverse soluzioni presentate per uno stesso problema. Il parametro utilizzato a tale scopo in questa tesi è lo “scarto quadratico medio percentuale” (SQMP), definito come segue: dati n punti sperimentali, detto Yi il valore misurato dell’uscita i-esima, e Y′i il valore simulato dal modello della stessa uscita, si ha:
( )100
1
1
1
1
2'
∑
∑
=
=
−= n
ii
n
iii
Yn
YYn
SQMP (2.1)
In altre parole lo SQMP è il rapporto tra lo scarto quadratico medio e il valore medio del modulo della misura. Un’analisi di questi parametri e la validazione, per mezzo di un set di prove sperimentali (meglio se diverso da quello su cui si è basata l’identificazione), dei risultati forniti dalla simulazione del modello, permettono di valutare l’efficacia del modello stesso, e quindi di decidere se accettare la struttura scelta o riconsiderare l’espressione dei legami funzionali. L’identificazione stessa diventa allora un aiuto nella scelta della struttura del modello, indicando, iterazione dopo iterazione, se la strada intrapresa è da ritenersi corretta o meno. Nel suo complesso la procedura di realizzazione di un modello non è lineare nel suo percorso logico, ma richiede solitamente diverse iterazioni, come mostrato nello schema di figura 2.2, per giungere alla fine del processo ad un risultato attendibile.

I modelli matematici e la loro identificazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 23
Sì
Sì
No
No
No
Si
Inizio
Acquisizione dei dati
Analisi dei dati
Definizione dei legami funzionali
Dati sufficienti?
Identificazione dei parametri incogniti sulla base della minimizzazione della funzione costo
Analisi della deviazione dei parametri
Accetto il modello?
Dati di altre prove
Validazione dei risultati
Accetto il modello?
Fine
Analisi fisica del problema
Figura 2.2 - Percorso che sta alla base della modellistica

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 25
Capitolo 3
IL MODELLO
TERMODINAMICO
3.1 Generalità Il fondamento fisico di base per l’analisi delle trasformazioni all’interno di un motore a
combustione interna è dato dal primo principio della termodinamica, per questo il modello utilizzato per le simulazioni è detto termodinamico. Il modello non prende in considerazione le variazioni spaziali, o puntuali, delle grandezze in esame, ma ipotizza che ogni variazione infinitesima di una grandezza avvenga istantaneamente in modo uniforme e uguale in tutti i punti interessati, si tratta quindi di una modellizzazione zero-dimensionale. Analizzando il funzionamento di un motore, si può osservare che il cilindro si comporta come un sistema aperto, che può scambiare materia con l’esterno, nella fase di aspirazione e in quella di scarico; è invece un sistema chiuso durante le fasi di compressione, combustione ed espansione. Inoltre, scambia calore e lavoro con l’esterno in ogni istante. Per descrivere il suo comportamento, si può utilizzare il primo principio della termodinamica nella sua formulazione più generale, cioè per sistemi aperti. Per la realizzazione del modello si considera il gas all’interno del cilindro eterogeneo e ideale, ipotizzando la miscela fresca costituita da aria, eventualmente inquinata dai gas di ricircolo presenti nel collettore d’aspirazione, e da benzina. All’interno del cilindro la miscela fresca viene a combinarsi con i gas esausti del ciclo precedente; mentre l’assunzione che sia ideale rappresenta sempre una approssimazione ma che ci permette di utilizzare la legge dei gas perfetti: TRmVp ⋅⋅=⋅
Nel caso ideale R è la costante specifica dell’aria:
( )
KkgJ
kmolkgKkmolJ
mRR o
⋅=
⋅⋅
== 287/29
/3,8314
dove Ro è la costante universale dei gas perfetti ed m è la massa molare dell’aria.

Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 26
Nel modello i calori specifici sono stati inseriti variabili in funzione della temperatura, calcolati tramite l’utilizzo delle tabelle Janaf. Quindi R che compare nella formula è considerato variabile con la temperatura.
3.2 Il primo principio della termodinamica Esiste un problema di fondo nello sfruttamento del primo principio della termodinamica
per la descrizione dei sistemi reali. In effetti si riferirebbe a sistemi aperti ed in condizioni di equilibrio stazionario. Ciò che accade all’interno di un cilindro di un motore è ben lontano dall’equilibrio; inoltre, in alcuni casi, vi è scambio di materia con l’esterno. Abbiamo la necessità di disporre di una formulazione più generale in condizioni non stazionarie a cui associare, nel rispetto del principio di conservazione della massa, il bilancio di massa. E’ possibile superare questa difficoltà considerando contemporaneamente sia un sistema chiuso che si sposta nello spazio sia una regione fissa che, al trascorrere del tempo, viene attraversata dal suddetto sistema chiuso; questa regione costituisce il sistema aperto. Il suo confine è delimitato dal cilindro e dalle due sezioni di passaggio di materia.
Figura 3.1 - Schematizzazione del sistema aperto.
Il sistema chiuso può essere definito in maniera tale da comprendere, nell’istante iniziale, tutta la massa contenuta nel sistema aperto più una porzione di massa dM1 collocata a monte della sezione di ingresso corrispondente alla sezione d’aspirazione. Nell’intervallo dτ tutta e sola la massa dM1 passa attraverso la sezione di passaggio 1 (sezione d’ingresso, ossia di aspirazione) e contemporaneamente la sezione di passaggio 2 (sezione di uscita, ossia di scarico) viene attraversata dalla massa dM2 che esce dal sistema. Non essendo in condizioni stazionarie si ha che M(τo)≠ M(τo+dτ), ma per soddisfare il bilancio di massa vale
0 1 0 2( ) ( )
totM M dM M d dMτ τ τ= + = + + (3.1)
τo Istante iniziale
τo+dτ Istante successivo
dM2 dM1

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 27
Per quanto riguarda il bilancio energetico, durante l’intervallo dτ è possibile modificare il contenuto energetico del sistema chiuso solo per mezzo di scambi di energia sotto forma di calore e di lavoro attraverso il suo contorno, si può quindi scrivere l’equazione di conservazione dell’energia, corrispondente al primo principio della termodinamica:
TdE dQ dL= − (3.2)
dove dE è l’energia interna, dQ è la quantità di calore scambiata con l’esterno e sarà composta dal calore assorbito e da quello ceduto; dLT è il lavoro totale anch’esso composto da diversi contributi. Un tipo di contributo è dato dal lavoro scambiato a causa di una variazione di volume e quindi espresso nella formulazione pdV ; a questo si potrebbe sommare un eventuale lavoro dovuto a organi mobili rotanti (dLrot), ma per il cilindro è una modalità che non interessa e quindi considerata nulla. Infine, un’ulteriore contributo è senz’altro il lavoro per introdurre ed estrarre la massa dal volume.
Si può calcolare il lavoro intro
dL compiuto a monte e, analogamente, estraz
dL a valle del sistema
chiuso, speso per introdurre nel sistema aperto la massa dM1 e per estrarne la massa dM2. Sia p1 la pressione che si suppone uniforme sulla sezione di ingresso di area S1:
11111111111roint dMvp)xS(dvpdxSpdL ⋅⋅=⋅⋅⋅⋅=⋅⋅= ρ
dove dx1 è il tratto infinitesimo di condotto, a monte della sezione d’ingresso, occupato dalla massa dM1, mentre v1 è il volume specifico. Analogamente, a valle della sezione d’uscita:
estraz 2 2 2 2 2 2
dL p S dx p v dM= ⋅ ⋅ = ⋅ ⋅
dove dx2 è il tratto infinitesimo di condotto, a valle della sezione di uscita, occupato dalla massa dM2, mentre v2 è il volume specifico. Indicando con dL il lavoro che il sistema chiuso scambia con l’esterno per la variazione di volume, si può allora dire che:
222111estrazrointT dMvpdMvppdVdLdLdLdL +−=+−= (3.3)
dx1
p1
S1
dx2
S2
p2
dM1
dM2

Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 28
Per esprimere la variazione di energia dE per il sistema aperto, è necessario analizzare le condizioni in corrispondenza dei due stati τo e τo+dτ considerando che dE sarà espresso dalla
differenza ( ) ( )0 0E d Eτ τ τ+ − ; inizialmente si va a considerare il contributo energetico del
sistema chiuso all’istante τo, dato dalla somma delle energie della massa dM1 (energia interna u1,
cinetica 2
1c1e
2
c= e potenziale 1 1pe gz= ) e a quella racchiusa entro il volume V del sistema
aperto (con e si indica genericamente il valore locale dell’energia, comprendendo in esso tutte le forme che può assumere: interna, cinetica e potenziale):
( )1 1 1 10
0
c pv
E e dV u e e dMττ
ρ⎡ ⎤
= ⋅ + + + ⋅⎢ ⎥⎣ ⎦∫ (3.4)
Al termine del successivo istante (τo+dτ), l’energia che caratterizza il sistema chiuso vale:
( )2 2 2 20
0
c pV
dd
E e dV u e e dMτ τ
τ τ
ρ+
+
⎡ ⎤= ⋅ + + + ⋅⎢ ⎥
⎣ ⎦∫ (3.5)
Il primo principio prende quindi la seguente forma:
( ) ( )2 2 2 2 1 1 1 1
0 0
2 2 2 1 1 1
c p c pV Vd
u e e dm u e e dm e dV e dV
dQ dL p v dm p v dmτ τ τ
ρ ρ+
⎡ ⎤ ⎡ ⎤+ + ⋅ − + + ⋅ + ⋅ − ⋅ =⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
= − − +
∫ ∫
Ricordando la definizione di entalpia:
vpuh ⋅+= (3.7)
e considerando che, in generale, per lo sviluppo di Taylor:
( ) ( ) ( ) ( )0
0 0 0x
ff x f x x x O x xx
∂= + − + −
∂ (3.8)
e quindi
( ) ( ) ( )0
0 0x
ff x f x x xx
∂− = −
∂ (3.9)
i due integrali si possono compattare:
0 0 0V V Vd
e dV e dV e dV dttτ τ τ τ
ρ ρ ρ+
⎡ ⎤ ⎡ ⎤ ⎡ ⎤∂⋅ − ⋅ = ⋅ ⋅⎢ ⎥ ⎢ ⎥ ⎢ ⎥∂⎣ ⎦ ⎣ ⎦ ⎣ ⎦
∫ ∫ ∫ (3.10)
e l’equazione 3.6 diventa:
(3.6)
dm1
dm2

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 29
( ) ( )2 2 2 2 1 1 1 1
0
c p c pV
h e e dm h e e dm e dV dt dQ dLt τ
ρ⎡ ⎤∂
+ + ⋅ − + + ⋅ + ⋅ ⋅ = −⎢ ⎥∂ ⎣ ⎦∫ (3.11)
Si può a questo punto dividere per dt e quindi passare alle portate:
( ) ( )0
2 2 2 2 1 1 1 1c p c pV
dQ dLh e e m h e e m e dVt dt dt
τ
ρ⎡ ⎤∂
+ + ⋅ − + + ⋅ + ⋅ = −⎢ ⎥∂ ⎢ ⎥⎣ ⎦
∫& & (3.12)
L’energia della massa contenuta nel cilindro è supposta costituita solo dall’energia interna e = u, si trascura dunque il contributo dell’energia potenziale, ipotizzando nulla la differenza di quota, e dell’energia cinetica. Quest’ultima ipotesi equivale a imporre che i gas all’interno del cilindro siano fermi, ipotesi non corrispondente alla realtà ma semplificativa. Inoltre si considera trascurabile anche ogni variazione dell’energia potenziale e cinetica per le portate in ingresso e in uscita, quindi si può scrivere più semplicemente:
1 1 2 2V
dQ dLu dV m h m ht dt dt
ρ⎡ ⎤∂
⋅ = − + ⋅ − ⋅⎢ ⎥∂ ⎢ ⎥⎣ ⎦
∫ & & (3.13)
Soffermiamoci sul termine a primo membro che riguarda la variazione di energia della massa all’interno del sistema aperto. Si può ipotizzare che l’energia specifica u sia indipendente dal volume, ma distribuita uniformemente, per cui:
( )V
u M M uu dV u Mt t t t
ρ⎡ ⎤ ∂ ⋅∂ ∂ ∂
⋅ = = ⋅ + ⋅⎢ ⎥∂ ∂ ∂ ∂⎢ ⎥⎣ ⎦
∫ (3.14)
Inoltre, siccome con u si identifica l’energia interna, si può scrivere
Vu c T= ⋅ (3.15)
In definitiva si può scrivere l’espressione del principio di conservazione dell’energia come segue:
CILV CIL V asp asp sca sca
Ass Ced
dM dT dQ dLc T M c m h m hdt dt dt dt
dQ dQ pdVdt dt dt
+ − ⋅ + ⋅ = − =
= − −
& &
(3.16)
e quindi, esplicitando dTdt
, si può ricavare una equazione differenziale di primo ordine
capace di descrivere il comportamento termico del fluido contenuto nel cilindro:
vCIL
CILvscapscaasppasp
cMdt
dMTcTcmTcmdtdL
dtdQ
dtdT
⋅
−⋅⋅−⋅⋅+−=
&& (3.17)

Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 30
considerando che :
dtdQ
dtdQ
dtdQ CEDASS −= e
dtpdV
dtdL
= .
3.3 Dominio angolare
Questa formulazione del primo principio della termodinamica è stata ottenuta considerando un dominio temporale con un intervallo di variazione infinitesimo dt. In un modello teorico del motore (quello reale avrebbe un passo finito ∆t e non infinitesimo), dt sarebbe il passo di simulazione in corrispondenza del quale vengono campionati i valori delle grandezze fisiche variabili nel tempo, ma il funzionamento del motore avviene con velocità che variano anche notevolmente. Poiché molte grandezze dipendono dalla posizione angolare dell’albero di manovella (ϑ ), mantenendo un passo temporale costante, al variare della velocità
varierebbe anche il passo angolare ( /dt dϑ ω= ). Per questo motivo si ritiene più corretto adottare un dominio angolare, così da poter considerare un passo dϑ costante e non essere più dipendenti dalla velocità di rotazione del motore per quanto riguarda il campionamento. L’equazione del primo principio della termodinamica deve essere quindi modificata per adattarsi al dominio angolare. Considerando le portate, esse sono variazioni di massa nel tempo, quindi è necessario mantenerle tali collegando dt con dϑ :
1 2 1 2dM dM dM dMdt dtd d dt d dt dϑ ϑ ϑ ϑ
= − = − = −& &1 2
dM 1 1m md ω ωϑ
(3.18)
Inoltre, siccome il modello ha un passo finito e non infinitesimo, si dovrà adottare un
ϑ∆ e di conseguenza G∆ di una grandezza generica sarà dato dal prodotto della variazione nell’intervallo infinitesimo per l’ampiezza dell’intervallo finito:
dG dGGd dt
ϑϑϑ ω
∆∆ = ⋅∆ = ⋅ (3.19)
Quindi ogni variazione infinitesima nell’intervallo dϑ deve essere moltiplicata per ϑ∆ , e l’equazione (3.18) diventa
1 2 1 2M m m m mϑ ϑω ω∆ ∆
∆ = − = ∆ − ∆& & (3.20)

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 31
Gli altri termini dell’equazione del primo principio diventano:
; ; ; CILCIL
dMdT dL dQT L Q Md d d d
ϑ ϑ ϑ ϑϑ ϑ ϑ ϑ
∆ = ∆ ∆ = ∆ ∆ = ∆ ∆ = ∆
Se per uno di questi termini fosse necessario esprimere la dipendenza dal tempo, come le portate, verranno espresse in funzione del tempo e divise per ω. L’equazione del principio della termodinamica assume quindi la forma seguente:
1 2
V
p asp p sca V CIL
CIL
Q L m c T m c T c T MT
M c
∆ − ∆ + ∆ ⋅ ⋅ − ∆ ⋅ ⋅ − ⋅ ∆∆ = (3.21)
I calcoli fatti per i cilindri si basano su questa formula; a essa come si vede sono associate diverse quantità e grandezze da determinarsi: il volume nell’espressione del lavoro è ricavato tramite l’espressione della dinamica del manovellismo, il calore assorbito prevede l’utilizzo del modello della combustione che prende il nome di Wiebe, mentre per quello ceduto si basa sulle equazioni dei flussi di calore attraverso le pareti; infine, le portate sono calcolate tramite il modello fluido dinamico del flusso tra due ambienti a pressione differente e “gestite” dal bilancio di massa. Per quanto riguarda la pressione, essa è calcolata tramite l’equazione dei gas perfetti. A riguardo di ciò si spiegherà meglio dopo aver acquisito tutte le nozioni del presente capitolo.
3.4 Cinematica e dinamica del manovellismo Il sistema biella-manovella permette di trasformare il moto alternato dello stantuffo nel moto rotatorio dell’albero motore. Si consideri un manovellismo di spinta centrato e si faccia riferimento alla figura seguente:
Figura 3.2 - Schema del sistema
biella-manovella-pistone.

Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 32
Indichiamo con SB lo spostamento assiale del punto B (piede di biella) a partire dalla posizione di punto morto superiore B’ (nella quale il punto A si trova in A’, allineato con B e O, e interno al segmento BO).
Indichiamo con ϑ l’angolo di manovella, ovvero l’angolo che l’asse della manovella AO forma con il raggio OA’ procedendo in senso orario. Con γ indichiamo l’angolo che l’asse BA della biella forma con l’asse del moto di B. Indichiamo. Infine, con r la lunghezza della manovella e con l la lunghezza della biella. Proiettando la spezzata BAO sulla direzione B’O si ha
SB=l+r-l cos γ - r cos ϑ (3.22) Proiettando la stessa spezzata sulla direzione normale alla precedente si ottiene:
l sen γ=r sen ϑ (3.23)
ossia, posto λ=r/l si ha:
2 2 2cos 1-sen γ 1 senγ λ ϑ= = − (3.24)
di conseguenza si ha:
2 2BS 1 cosl r l sen rλ ϑ ϑ= + − − − (3.25)
Derivando quest’ultima rispetto al tempo si ottiene la velocità di spostamento dello stantuffo:
2 2
2
2 1
B BB
dS dS d senV r sendt d dt sen
ϑ λ ϑω ϑϑ λ ϑ
⎛ ⎞⋅⎜ ⎟= = ⋅ = ⋅ +⎜ ⎟−⎝ ⎠
(3.26)
essendo:
30d n raddt sϑ πω ⋅ ⎡ ⎤= = ⎢ ⎥⎣ ⎦
(3.27)
la velocità angolare ed n il numero di giri al minuto del motore. In alcuni casi è possibile anche considerare l’espressione dello spostamento SB in modo semplificato. Infatti il numero λ è quasi sempre piccolo rispetto ad 1 e quindi si può trascurare quando è elevato alla seconda. L’espressione di SB diviene pertanto :
( )2 211 cos 1 1 1 cosBS r sen rϑ λ ϑ ϑλ
⎡ ⎤⎛ ⎞= ⋅ − + − − ≈ ⋅ −⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦ (3.28)

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 33
Mentre quella della velocità VB , trascurando ϑ22 senλ ⋅ :
22BV r sen senλω ϑ ϑ⎡ ⎤≅ ⋅ +⎢ ⎥⎣ ⎦
(3.29)
Derivando la (3.29) rispetto al tempo si ha l’accelerazione di B :
( )2 cos cos 2 22Ba r r sen senλω ϑ λ ϑ ω ϑ ϑ⎡ ⎤≅ + + ⋅ +⎢ ⎥⎣ ⎦
& (3.30)
che per ω = costante si riduce all’espressione di uso corrente :
( )2 cos cos 2Ba r ω ϑ λ ϑ≅ ⋅ + (3.31)
La dinamica del manovellismo, in effetti, è utile per ogni applicazione riguardante il cilindro, poiché indispensabile per descrivere correttamente lo spostamento e quindi la velocità e l’accelerazione, ma anche il volume messo a disposizione del fluido, che nell’equazione del
primo principio della termodinamica è espresso nel termine pdVLd
ϑϑ
∆ = ∆ . Poiché il passo
della simulazione è finito, il dVd
ϑϑ
∆ diverrà ∆V e sarà dato dalla differenza del volume tra due
passi successivi ( ( ) ( )V V Vϑ ϑ ϑ∆ = − − ∆ ) senza bisogno di moltiplicare per ϑ∆ e il suo
valore istantaneo dato dal prodotto tra lo spostamento, variabile con ϑ , e l’area del pistone costante:
( )cos cosBV S l r l rγ ϑ= Ω⋅ = Ω⋅ + − − (3.32)
3.5 Il calore assorbito: il modello di Wiebe per la combustione Il termine QAss è diverso da zero solamente durante la fase di combustione. In pratica si suppone che, al fluido contenuto nel cilindro, sia somministrata dall’esterno una certa quantità di calore che, nella realtà, è fornita dalla combustione della miscela stessa. Viene adottato il modello di rilascio del calore di Wiebe. In base a questa teoria, la frazione di miscela bruciata XB è calcolata in funzione dell’angolo di manovella istantaneo ϑ e degli angoli di inizio e fine combustione, indicati con ϑ i e ϑ f , che vengono impostati dall’esterno:
( ) 1 exp
m
iB
f i
X aϑ ϑ
ϑϑ ϑ
⎡ ⎤⎛ ⎞−⎢ ⎥⎜ ⎟= − − ⋅⎢ ⎥⎜ − ⎟⎝ ⎠⎢ ⎥⎣ ⎦
(3.33)
Nella formula compaiono due costanti a ed m; esse dipendono dalla forma geometrica della
camera e dall’efficienza della combustione; infatti, a viene definita “parametro di efficienza” e

Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 34
misura la completezza del processo, mentre m è detto “fattore di camera” ed influenza la velocità di combustione. Nelle Figura 3.3 e 3.4, di seguito riportate, vengono graficati gli andamenti della funzione di Wiebe al variare di “a”, mantenendo “m” costante e uguale a 2.5 , e al variare di “m”, mantenendo “a” costante ed uguale a 5, per una combustione di durata pari a 90° con θi = 330° e
θf = 420°; questa simulazione è relativa al caso in cui il ciclo motore parte dall’aspirazione e si conclude con lo scarico e il punto morto superiore attorno al quale avviene la combustione si trova a 360°.
0 100 200 300 400 500 600 700 8000
0.2
0.4
0.6
0.8
1
posizione angolare della manovella, °
valo
re d
ella
funz
ione
di W
iebe
330 340 350 360 370 380 390 400 410 4200
0.2
0.4
0.6
0.8
1ZOOM SULL'INTERVALLO DI COMBUSTIONE
posizione angolare della manovella, °
valo
re d
ella
funz
ione
di W
iebe
(confronto ad m = cost = 2.5)
a = 5
a = 1
Figura 3.3 - andamenti della funzione di Wiebe per m=cost ed a variabile.
0 100 200 300 400 500 600 700 8000
0.2
0.4
0.6
0.8
1
posizione angolare della manovella, °
valo
re d
ella
funz
ione
di W
iebe
330 340 350 360 370 380 390 400 410 4200
0.2
0.4
0.6
0.8
1ZOOM SULL'INTERVALLO DI COMBUSTIONE
posizione angolare della manovella, °
valo
re d
ella
funz
ione
di W
iebe
(confronto ad a= cost = 5)
m = 1
m = 5
Figura 3.4 - andamenti della funzione di Wiebe per a=cost ed m variabile.
m = 2.5
a = 5

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 35
Per quanto riguarda “m” si nota che un basso valore comporta un elevato rilascio di calore nella prima fase della combustione, mentre vale il viceversa se il valore di “m” è elevato. Nel modello realizzato i valori di a ed m dipendono dal tipo di motore considerato e dal punto di funzionamento (rpm, apertura farfalla, ecc.), vengono calcolati in base alla minimizzazione dello scarto quadratico medio percentuale fra il valore di pressione sperimentale e quello simulato. Dalla frazione istantanea di miscela bruciata si può ricavare la relativa quantità di calore rilasciata:
Ass BB i
dQ dXm k
d dϑ ϑ
ϑ ϑ∆ = ⋅ ⋅ ∆ (3.34)
nella quale mB indica la massa di combustibile iniettata, mentre ki è il potere calorifico inferiore. Essendo però il passo finito si possono fare le stesse considerazioni fatte per il volume e ottenere l’equazione del calore introdotto valido per ogni passo ϑ∆ :
( ) ( )ass B i B BQ m k X Xϑ ϑ ϑ⎡ ⎤∆ = ⋅ − − ∆⎣ ⎦ (3.35)
La massa di combustibile iniettata mB è calcolata tramite la relazione chimica che ne
individua la quantità stechiometrica in base alla quantità di ossigeno presente all’interno del cilindro. Questo modello di combustione si adatta bene ai motori a ciclo otto, mentre nei motori a ciclo diesel occorre distinguere tra le fasi di combustione premiscelata e diffusiva: un modello semplice si può ottenere con la combinazione di diverse funzioni di Wiebe.
3.6 Il calore ceduto Il calore ceduto rappresenta la quantità di calore dissipata verso l’esterno del sistema dal fluido che scambia calore in ogni momento con le pareti fredde (perché raffreddate) del cilindro. Come modello teorico per la valutazione di questo fenomeno, sono stati analizzati due modelli: il modello di Annand e il modello di Woschni. Entrambi sono risultati validi per la trattazione e la valutazione della quantità di calore ceduto, con risultati molto simili fra loro. In questo modello si è utilizzato il modello di Annand, sia per la maggiore semplicità di impostazione dei parametri che lo caratterizzano sia perché con esso è possibile tenere conto del contributo principale, dovuto alla convezione forzata, e di quello secondario dovuto all'irraggiamento. Questo permette anche di avere una stima più immediata in caso si voglia valutare il ciclo trascinato del motore o un ciclo in presenza di misfire, annullando, in prima approssimazione, il calore ceduto dovuto all’irraggiamento.
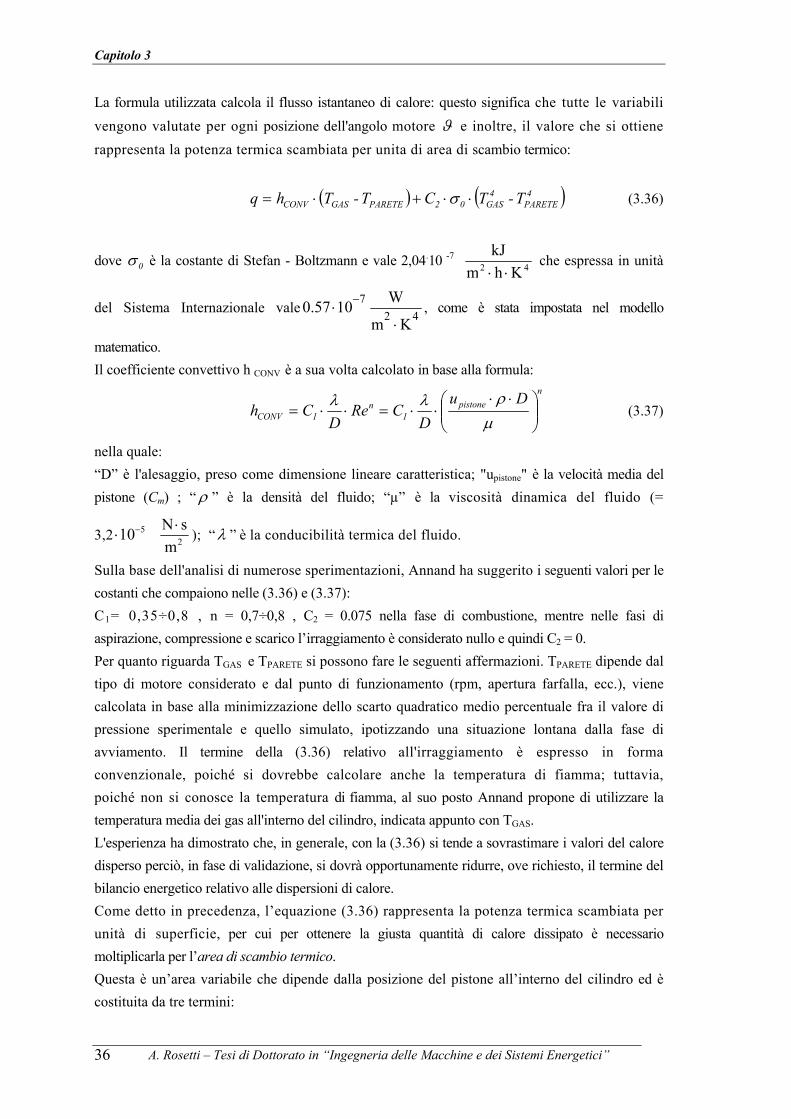
Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 36
La formula utilizzata calcola il flusso istantaneo di calore: questo significa che tutte le variabili vengono valutate per ogni posizione dell'angolo motore ϑ e inoltre, il valore che si ottiene rappresenta la potenza termica scambiata per unita di area di scambio termico:
( ) ( )4PARETE
4GAS02PARETEGASCONV T-T CT-Thq ⋅⋅+⋅= σ (3.36)
dove 0σ è la costante di Stefan - Boltzmann e vale 2,04.10 -7 42 KhmkJ
⋅⋅ che espressa in unità
del Sistema Internazionale vale 72 4W0.57 10
m K
−⋅⋅
, come è stata impostata nel modello
matematico. Il coefficiente convettivo h CONV è a sua volta calcolato in base alla formula:
npistone
1n
1CONV
D uD
CReD
Ch ⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅⋅⋅⋅=⋅⋅=
µρλλ
(3.37)
nella quale: “D” è l'alesaggio, preso come dimensione lineare caratteristica; "upistone" è la velocità media del pistone (Cm) ; “ ρ ” è la densità del fluido; “µ” è la viscosità dinamica del fluido (=
3,2 5 2
N s10 m
− ⋅⋅ ); “ λ ” è la conducibilità termica del fluido.
Sulla base dell'analisi di numerose sperimentazioni, Annand ha suggerito i seguenti valori per le costanti che compaiono nelle (3.36) e (3.37): C1= 0,35÷0,8 , n = 0,7÷0,8 , C2 = 0.075 nella fase di combustione, mentre nelle fasi di aspirazione, compressione e scarico l’irraggiamento è considerato nullo e quindi C2 = 0. Per quanto riguarda TGAS e TPARETE si possono fare le seguenti affermazioni. TPARETE dipende dal tipo di motore considerato e dal punto di funzionamento (rpm, apertura farfalla, ecc.), viene calcolata in base alla minimizzazione dello scarto quadratico medio percentuale fra il valore di pressione sperimentale e quello simulato, ipotizzando una situazione lontana dalla fase di avviamento. Il termine della (3.36) relativo all'irraggiamento è espresso in forma convenzionale, poiché si dovrebbe calcolare anche la temperatura di fiamma; tuttavia, poiché non si conosce la temperatura di fiamma, al suo posto Annand propone di utilizzare la temperatura media dei gas all'interno del cilindro, indicata appunto con TGAS. L'esperienza ha dimostrato che, in generale, con la (3.36) si tende a sovrastimare i valori del calore disperso perciò, in fase di validazione, si dovrà opportunamente ridurre, ove richiesto, il termine del bilancio energetico relativo alle dispersioni di calore. Come detto in precedenza, l’equazione (3.36) rappresenta la potenza termica scambiata per unità di superficie, per cui per ottenere la giusta quantità di calore dissipato è necessario moltiplicarla per l’area di scambio termico. Questa è un’area variabile che dipende dalla posizione del pistone all’interno del cilindro ed è costituita da tre termini:

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 37
2
PISTONE
CILINDRO PISTONE
2 2
CAMERA 2
A4
_A
4A _ _4 4
4
D
Volume Vol cameraA D
D D DVol camera Vol cameraD D
π
π
π π ππ
=
−=
= + = +
L’area totale sarà la somma di questi tre termini:
TOT PISTONE CILINDRO CAMERA A A +A ( )+Aϑ= (3.38)
notando che la variabilità del suo valore è data dalla variazione dell’ACILINDRO grazie al termine “Volume” al suo interno, che rappresenta il volume della cilindrata lasciato libero dal pistone nella sua corsa tra i due punti morti. Per quanto riguarda gli altri dati, essi sono facilmente individuabili: per D si intende l’alesaggio del pistone e per Vol_camera il volume della camera di combustione. Si può concludere che il calore ceduto nei cilindri può essere inserito nell’equazione del primo principio della termodinamica con la seguente forma:
( )TOTcedQ q Aϑ ϑω∆
∆ = ⋅ (3.39)
Essendo una potenza esso dipende dal tempo quindi viene trattato come le portate:
moltiplicato per ϑ∆ e diviso per ω.
3.7 Il flusso di calore nei collettori
Anche in questo caso si sono adottate le stesse considerazioni usate per il cilindro, ma con variazioni specifiche per ogni collettore.
COLLETTORE DI ASPIRAZIONE
Il collettore di aspirazione è considerato un volume cilindrico nel quale entra aria fresca, attraverso il corpo farfallato, che arriva poi ai cilindri e dai quali, in certe condizioni, riceve parte dei gas caldi a causa del back flow. Le temperature del fluido al suo interno, quindi, non raggiungono mai valori elevati. I valori di temperatura di parete dipendono dal tipo di motore considerato e dal punto di funzionamento (rpm, apertura farfalla, ecc.), possono essere in prima approssimazione posti uguali al valore della temperatura media sperimentale dei gas nel collettore di aspirazione, ipotizzando, anche in questo caso, una situazione lontana dalla fase di
⋅π D

Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 38
avviamento.; l’equazione dello scambio termico può essere ridotta al solo termine riguardante la convezione:
( )CONV GAS PARETE_collq h T -T= ⋅ (3.40)
L’area di scambio termico, essendo considerata una superficie cilindrica, è ricavata dal valore del volume del collettore, conoscendo il diametro e di conseguenza la lunghezza equivalente.
__ _ _2
_
;
4
coll aspcoll asp coll asp coll asp
coll asp
volumelung D
Dπ
π= = ⋅ ⋅
⋅lateralelung area
COLLETTORE DI SCARICO
Anche se probabilmente trascurabili, nel collettore di scarico sono stati considerati anche gli scambi per irraggiamento, in quanto in esso vengono scaricati i gas combusti che inizialmente sono ad una temperatura di circa 1300 K. Per i valori della temperatura di parete valgono le stesse considerazioni fatte per il collettore di aspirazione (supporre il valore della temperatura di parete in prima approssimazione uguale al valore sperimentale dei gas rilevato allo scarico, maggiorato di una certa quantità dipendente dal punto motore). Si vedranno meglio in seguito i valori assunti per i motori considerati Le considerazioni fatte per i cilindri valgono anche in questo caso:
lat collcedQ q Aϑω∆
∆ = ⋅ (3.41)
3.8 Il modello delle portate e il moto del fluido Il modello della portata sfrutta le leggi fisiche relative al moto di un fluido tra due
ambienti a pressione diversa, separati da una sezione di gola che determina la modalità di passaggio del fluido. Il moto di un fluido in un motore non sovralimentato può essere schematizzato in tre sottomodelli: dall’ambiente, attraverso la valvola a farfalla, entra nel collettore di aspirazione, poi attraverso le valvole di aspirazione e scarico, entra ed esce dal cilindro. È’ necessario quindi analizzare innanzitutto le equazioni che regolano il flusso da un ambiente all’altro, in quanto comuni per ogni caso; poi si prendono in considerazione le geometrie specifiche per ogni sezione, ricavando così le informazioni necessarie per individuare l’area di passaggio. Per determinare il moto del fluido è necessario calcolare la portata in massa che attraversa uno strozzamento in date condizioni. Si ritengono comunque valide le ipotesi di flusso ideale:

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 39
o il gas segue la legge dei gas perfetti TRmVp ⋅⋅=⋅ ;
o tutte le grandezze hanno il medesimo valore in ogni punto della generica sezione perpendicolare al flusso (moto unidirezionale) e questo sia costante nel tempo (moto stazionario);
o non vi è alcun scambio di calore tra il flusso e le pareti del condotto (flusso adiabatico);
Si introducono ora le grandezze totali o di ristagno, identificandole con il pedice 0 e definite come segue:
“entalpia totale”: 2
2
0uTch p +=
“temperatura totale”: 2
00 2p p
h uT Tc c
= = +⋅
supponendo la trasformazione isoentropica costpk =
ρ, con
v
p
cc
k = ottengo:
“pressione totale”: 1
00
−
⎥⎦⎤
⎢⎣⎡⋅=
kk
TTpp
“densità totale”: k
pp
1
00 ⎥
⎦
⎤⎢⎣
⎡⋅= ρρ
Le stesse grandezze sono definibili anche in funzione del numero di Mach, che, essendo c la velocità del suono nel fluido, può essere espresso così:
u uMc kRT
= = (3.42)
Ponendo
( ) ⎥⎦
⎤⎢⎣
⎡⋅−+=
211
2MkX (3.43)
si può ricavare che :
XTT ⋅=0 (3.44)
111
00
−−−
⋅=⎥⎦⎤
⎢⎣⎡ ⋅
⋅=⎥⎦⎤
⎢⎣⎡⋅= k
kkk
kk
XpT
XTpTTpp (3.45)
11
1
00
−⋅=⎥⎦
⎤⎢⎣
⎡⋅= k
kX
pp ρρρ (3.46)
Dall’equazione energetica del moto dei fluidi in forma meccanica si può arrivare all’equazione della velocità di passaggio:

Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 40
0dRdLρ
dpgdzvdv =++++ (3.47)
in base alle ipotesi fatte, si considerano nulli gli scambi di lavoro con le pareti e si può trascurare il termine gdz relativo alla variazione di quota. Risultando nullo il lavoro scambiato, la (3.47) diventa:
0dpvdv =+ρ
(3.48)
Integrando ora la (3.47) tra una generica sezione dell’ambiente a monte e la sezione di massimo restringimento della vena (che verrà indicata con il pedice g ) si ottiene:
0dP2v-
2v g
0
20
2g =+ ∫ ρ
(3.49)
Tenendo conto del tipo di trasformazione considerata e le condizioni di velocità a monte nulle (v0=0), si può risolvere l’integrale e giungere all’espressione:
k-1kg0
g0 0
PP2kv 1k-1 Pρ
⎡ ⎤⎛ ⎞⎢ ⎥
= − ⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
(3.50)
Inoltre, non essendoci alcuno scambio né di lavoro, né di calore con le pareti del condotto, l’equazione di conservazione dell’energia si riduce alla costanza dell’entalpia totale tra le sezioni (1 sez. monte e 2 sez. di valle):
0102 hh = (3.51)
Combinando tale equazione con quella dei gas perfetti e con quella di trasformazione adiabatica, si può calcolare la portata ideale in massa, in funzione della sola sezione minima (sezione 2), e delle grandezze totali di monte (sezione1), tutte note:
2 2 2im A uρ= ⋅ ⋅& (3.52)
La velocità 2u del caso in esame, in virtù delle ipotesi fatte in precedenza, assume la forma :
1
01 22
01 01
2 11
kkp pku
k pρ
−⎡ ⎤⎛ ⎞⎢ ⎥
= ⋅ ⋅ − ⎜ ⎟⎢ ⎥⎜ ⎟− ⎢ ⎥⎝ ⎠⎣ ⎦
(3.53)
Adesso si può riportare il calcolo della portata massica ideale:
11
012 22 2 2 1 2
1 01 01
2 11
kkk
ipp pkm A u A
p k pρ ρ
ρ
−⎡ ⎤⎛ ⎞⎛ ⎞ ⎢ ⎥
= ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅ − =⎜ ⎟⎜ ⎟ ⎢ ⎥⎜ ⎟ ⎜ ⎟− ⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
&

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 41
11 1
101 012 221
01 01 011
2 11
kk kk k
k
k
pp pkX Ap k p
X
ρρ
−
−
−
⎡ ⎤⎛ ⎞⎛ ⎞ ⎛ ⎞⎢ ⎥⎜ ⎟= ⋅ ⋅ ⋅ ⋅ − =⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟ ⎜ ⎟⎜ ⎟ − ⎢ ⎥⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎣ ⎦
2 2 1
01 2 22 01
01 01 01
21
kk k kp p pkA
k p pρ
ρ
−+⎡ ⎤
⎛ ⎞ ⎛ ⎞⎢ ⎥= ⋅ ⋅ ⋅ ⋅ − =⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟ ⎜ ⎟− ⎢ ⎥⎝ ⎠ ⎝ ⎠
⎣ ⎦
2 2 1
01 2 22 01
01 01 01
21
kk k kp p pkA
k p pρ
ρ
−+⎡ ⎤
⎛ ⎞ ⎛ ⎞⎢ ⎥= ⋅ ⋅ ⋅ ⋅ − =⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟ ⎜ ⎟− ⎢ ⎥⎝ ⎠ ⎝ ⎠
⎣ ⎦
2 1
01 2 22 01
01 01 01
2 11
kk kp p pkA
k p pρ
ρ
−⎡ ⎤⎛ ⎞⎛ ⎞ ⎛ ⎞⎢ ⎥⎜ ⎟
= ⋅ ⋅ ⋅ ⋅ −⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟− ⎢ ⎥⎜ ⎟⎝ ⎠ ⎝ ⎠⎢ ⎥⎝ ⎠⎣ ⎦
(3.54)
Indicando con:
2 1
2 2 2
01 01 01
2 11
kk k
fp p pkp k p p
−⎡ ⎤⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎢ ⎥⎜ ⎟
Φ = ⋅ −⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟− ⎢ ⎥⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎢ ⎥⎝ ⎠⎣ ⎦
(3.55)
la “Velocità Adimensionale”, si ottiene:
01 22 01
01 01i
p pm A
pρ
ρ
⎛ ⎞= ⋅ ⋅ ⋅Φ ⎜ ⎟⎜ ⎟
⎝ ⎠& ⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅⋅=
1
2012 p
pRTA Φ (3.56)
che è l’espressione della portata massica in condizioni di moto subsonico, valida cioè fino a quando il rapporto tra la pressione di valle e quella di monte è maggiore del valore critico:
12
1
21
kkp
p k−⎛ ⎞ ⎛ ⎞≥⎜ ⎟ ⎜ ⎟⎜ ⎟ +⎝ ⎠⎝ ⎠
ricavabile dalla (3.43) insieme alla (3.45) per M = 1.
Nel caso in cui il rapporto sia inferiore a tale valore, si instaurano le condizioni di moto sonico, e la portata non può crescere al di sopra del valore imposto dal blocco sonico. Per qualsiasi valore della pressione la funzione di flusso diventa:

Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 42
2 11 12
01
2 11 1
2 2 211 1 1
2 2 1 21 1 1 1
k k kk k k k
f
kk k
p kp k k k
k k kk k k k
−⋅ ⋅
− −
+− −
⎡ ⎤⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎢ ⎥⎜ ⎟Φ = ⋅ − =⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟ − + +⎝ ⎠ ⎝ ⎠⎜ ⎟⎝ ⎠ ⎢ ⎥⎝ ⎠⎣ ⎦
−⎛ ⎞ ⎛ ⎞ ⎛ ⎞= ⋅ ⋅ =⎜ ⎟ ⎜ ⎟ ⎜ ⎟− + + +⎝ ⎠ ⎝ ⎠ ⎝ ⎠
(3.57)
Analogamente per la portata che assume il valore:
( ) ( )
( )
1 12 1 2 101
2 01 2 01 0101
12 1
2 01 01
2 21 1
21
k kk k
i
kk
pm A k A kRT
k k
A ck
ρ ρρ
ρ
+ +− −
+−
⎡ ⎤ ⎡ ⎤= ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ =⎢ ⎥ ⎢ ⎥+ +⎣ ⎦ ⎣ ⎦
⎡ ⎤= ⋅ ⋅ ⋅ ⎢ ⎥+⎣ ⎦
&
(3.58)
Nel caso di flusso reale non sono verificate le ipotesi fatte per fluidi ideali; per tenere conto delle differenze di comportamento si introduce un coefficiente di efflusso, definito come rapporto tra
la portata in massa reale rm& , e quella ideale im& :
r
i
mC
m=&
& (3.59)
Quanto esposto fino ad ora risulta valido nell’ipotesi che il flusso sia direzionato dall’ambiente a monte all’ambiente a valle; se invece il flusso ha direzione contraria (“back flow”), la velocità è posta con segno negativo e le condizioni a monte (P, T, ρ) diventano quelle precedentemente a valle e viceversa.
3.9 La geometria delle valvole
La geometria delle valvole e della loro sede, come mostrato in Figura 3.6, è caratterizzata da un’alzata, L, al di sopra di una sede inclinata di un angolo φ, la quale ha un diametro interno e uno esterno denominati rispettivamente Di e De. Il flusso di gas in entrata o in uscita dalle valvole passa attraverso la luce che si viene a formare tra la valvola e la sua sede grazie all’alzata della valvola stessa. L’area di passaggio non è espressa semplicemente dall’area laterale di un cilindro di diametro Di e altezza L, ma corrisponde all’area superficiale di un tronco di cono, definito dall’angolo dell’inclinazione della sede di valvola, φ, dalla lunghezza della distanza inclinata x e dal raggio di base r variabili al variare dell’alzata della valvola, L. La superficie laterale, Atc, è:
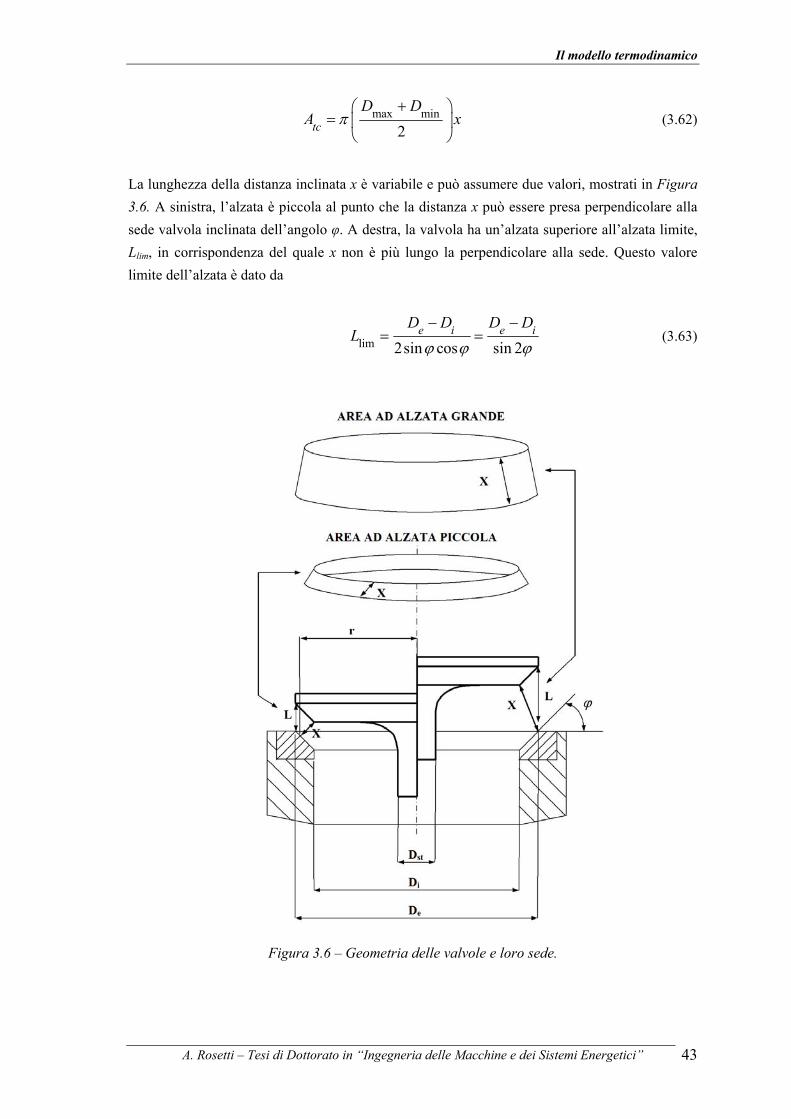
Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 43
max min2tc
D DA xπ
+⎛ ⎞= ⎜ ⎟
⎝ ⎠ (3.62)
La lunghezza della distanza inclinata x è variabile e può assumere due valori, mostrati in Figura 3.6. A sinistra, l’alzata è piccola al punto che la distanza x può essere presa perpendicolare alla sede valvola inclinata dell’angolo φ. A destra, la valvola ha un’alzata superiore all’alzata limite, Llim, in corrispondenza del quale x non è più lungo la perpendicolare alla sede. Questo valore limite dell’alzata è dato da
lim 2sin cos sin 2e i e iD D D D
Lϕ ϕ ϕ− −
= = (3.63)
Figura 3.6 – Geometria delle valvole e loro sede.
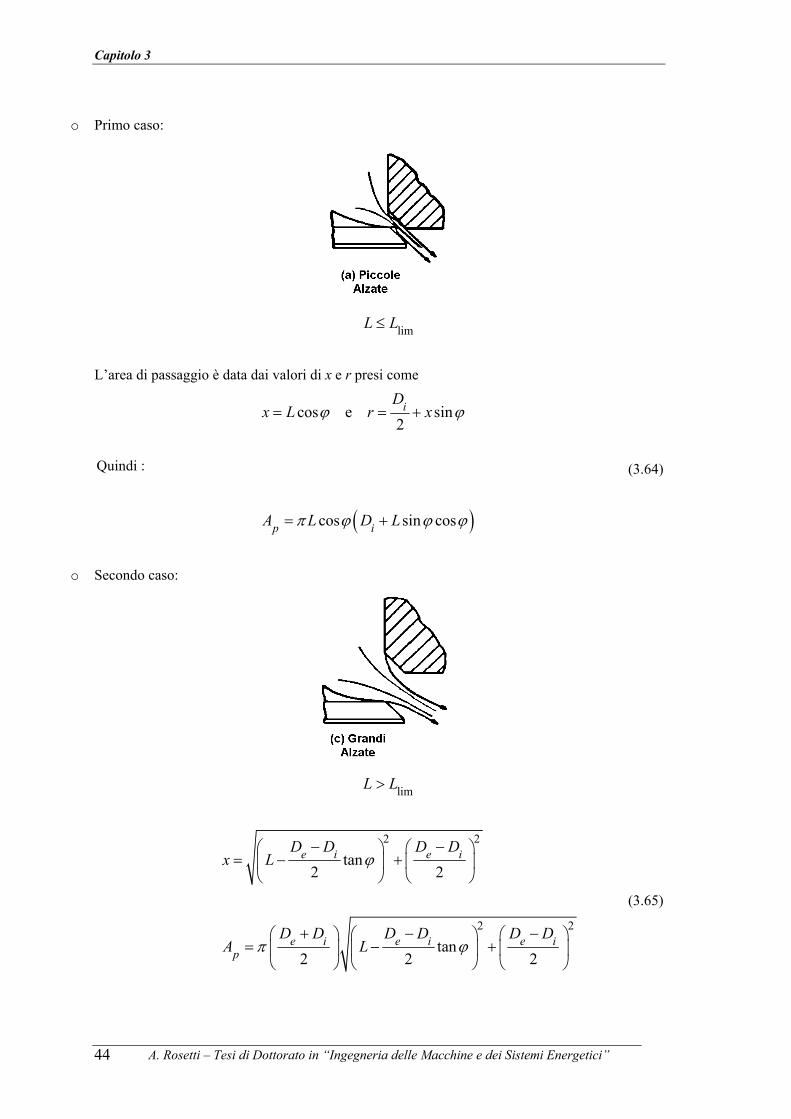
Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 44
o Primo caso:
limL L≤
L’area di passaggio è data dai valori di x e r presi come
( )
cos e sin2
quindi
cos sin cos
i
p i
Dx L r x
A L D L
ϕ ϕ
π ϕ ϕ ϕ
= = +
= +
(3.64)
o Secondo caso:
limL L>
2 2
2 2
tan2 2
tan2 2 2
e i e i
e i e i e ip
D D D Dx L
D D D D D DA L
ϕ
π ϕ
− −⎛ ⎞ ⎛ ⎞= − +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
+ − −⎛ ⎞ ⎛ ⎞ ⎛ ⎞= − +⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠
(3.65)
Quindi :

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 45
Se l’angolo φ è di 45° allora tan φ è unitario e l’equazione (3.65) viene in parte semplificata. Oltre ai due casi precedenti è opportuno e giusto considerarne anche un terzo: poiché l’area di passaggio dipende dall’alzata, si potrebbe pensare di progettare un’alzata molto elevata da permettere il passaggio di più flusso possibile; questo è possibile fino a un limite definito dalla differenza dell’area di imbocco di diametro Di e l’area dello stelo di diametro Dst; quest’area è denominata Amax. In questo caso l’area di passaggio, anche se grazie a un valore elevato dell’alzata L sarebbe maggiore dell’Area massima, si mantiene costante e uguale proprio al valore dell’area massima. Dunque valgono le relazioni:
( )2 2max 4p i stA A D Dπ
= = ⋅ − (3.66)
Come detto, nel modello del motore per la simulazione dell’apertura e chiusura delle valvole è necessario introdurre anche il coefficiente di efflusso. Di seguito in Figura 3.7 vengono riportate le leggi di alzate valvole di un motore dotato di VVT (Variable Valve Timing), di cui si valuterà la simulazione completa nei capitoli seguenti. In figura 3.8 viene presentato il coefficiente di efflusso determinato sperimentalmente in funzione dell’alzata valvole.
Figura 3.7 – Leggi di alzata valvole di un motore dotato di VVT (Variable Valve Timing).

Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 46
Figura 3.8 – Coefficiente di efflusso valvola in funzione dell’alzata
per un motore dotato di VVT (Variable Valve Timing).
Nel caso in cui non si conosca il coefficiente di efflusso da prove sperimentali, è possibile valutare la portata secondo la seguente metodologia: nel passaggio attraverso le valvole il fluido subisce delle perdite di carico dovuto alla deviazione delle linee di flusso e agli attriti sulle superfici. Tali perdite sono tanto più grandi quanto più la luce di passaggio è piccola, quindi saranno massime nei tratti iniziale dell’alzata. Per il calcolo di dette perdite ci si può avvalere di un coefficiente correttivo delle portate:
0
hfD
ζ⎛ ⎞
= ⎜ ⎟⎝ ⎠
(3.67)
dove h è l’alzata istantanea delle valvole D0 è il diametro del condotto a monte della valvola; ( si può porre in prima approssimazione
D0 = Di , diametro interno della battuta della valvola). Il coefficiente ζ è correttivo della portata massica, quindi viene inserito secondo la relazione :
1in inm A vel A velµ ρ ρ
ζ= ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅& (3.68)
Tuttavia, essendo un coefficiente semi-empirico, viene fornita solo una tabella in funzione del
rapporto 0
hD
, per valori di tale rapporto compresi tra 0,10 e 0.40 e il rispettivo grafico, come si
può vedere dalla figura 3.9.

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 47
0
hD
1
3 5
7
9
11
13
Figura 3.9 - Andamento delle perdite (ζ) attraverso le valvole
al variare del rapporto tra l’alzata (h) e il diametro del condotto (D0).
h/D 0.10 0.15 0.20 0.25 0.30 0.35 0.40
ζ 10.6 6.27 4.35 3.10 2.27 1.82 1.14
Tabella 3.1 - Variazione del coefficiente ζ al variare del rapporto tra l’alzata (h) e il diametro del condotto (D0).
3.10 Il modello del corpo farfallato
Il corpo farfallato rappresenta un orifizio a luce variabile e pertanto è possibile determinare, analogamente a quanto visto per le valvole, la portata in massa che lo attraversa in funzione delle pressioni a monte e a valle di esso. Considerando come sezione ristretta la sezione 2 e come sezione di monte la sezione 1 alla quale corrispondono le condizioni ambiente, si riporta di seguito l’ equazione 3.56:
01 22 01
01 01i
p pm A
pρ
ρ
⎛ ⎞= ⋅ ⋅ ⋅Φ ⎜ ⎟⎜ ⎟
⎝ ⎠& (3.69)
che è l’espressione generale della portata massica. Per la trattazione della sezione ristretta 2, viene assunta la seguente formulazione:
2 1 cos( )4 cos( )cond c
passc
DA
π α αα
⋅ − += (3.70)
in cui α è l’angolo di apertura della farfalla a partire dalla battuta (αc) posta ad esempio a 15° dopo la verticale e Dcond è il diametro del condotto di aspirazione, come è illustrato in Figura 3.10.
0.10 0.14 0.18 0.22 0.26 0.30 0.34 0.38 0.42
ζ

Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 48
Quando però la valvola è totalmente aperta e quindi longitudinale al moto, il condotto non può considerarsi completamente libero, ma viene tenuto conto anche dell’ingombro dello stelo (di spessore s) che sostiene la valvola a farfalla. In particolare si seguono le seguenti condizioni:
2 c
c
2
cos( + )4 cos
:4
cond cond
condpass tot cond tot
se s D D
Dallora diventa A A s D con A
α απ
α
π
⋅ ≥ ⋅ ⋅⋅
⋅= − ⋅ =
Figura 3.10 - Schema del condotto (dove è alloggiata la valvola a farfalla)
che collega l’ambiente esterno al collettore d’aspirazione. Le relazioni sin qui considerate sono valide per un fluido che parte da uno stato di quiete fino ad arrivare alla sezione di massimo restringimento del tubo di flusso a valle della strozzatura (legata attraverso il coefficiente di restringimento Cd all’area geometrica dell’orifizio). Queste relazioni possono essere modificate nel caso in cui si abbiano a disposizione dati sperimentali relativi alla portata d’aria in funzione dell’ apertura della valvola a farfalla del motore che si sta considerando e di cui si vuole realizzare il modello. E’ possibile infatti integrare l’equazione generalizzata del moto tra la sezione di quiete (sezione 0 in Figura 3.11) ed una nuova sezione di riferimento (sezione 1 in Figura 3.11), più a valle di quella di massimo restringimento, ed aggiungendo un ulteriore termine che tenga conto delle perdite legate all’espansione del fluido dalla sezione di massimo restringimento alla sezione 1 considerata.
αc 15°
αc+ α
s α
FARFALLA CHIUSA
FARFALLA APERTA

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 49
Figura 3.11 – Passaggio dell’aria attraverso la farfalla, sezione iniziale di quiete (0), di
massimo restringimento della vena dopo l’ostruzione (g), e la sezione di valle (1).
Di seguito riportiamo il risultato finale dell’integrazione:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛−
=
+k
kk
eff pp
pp
kkpAm
1
0
1
2
0
1001 1
2ρ& (3.71)
tale relazione è valida in condizioni subsoniche, cioè se 1
0
1
12 −
⎟⎠⎞
⎜⎝⎛
+>
kk
kpp
; nel caso contrario, in
cui risulta 1
0
1
12 −
⎟⎠⎞
⎜⎝⎛
+≤
kk
kpp
, si è in condizioni di moto sonico e la portata dipende soltanto
dall’apertura dell’orifizio e dalle condizioni a monte, secondo l’espressione:
11
001 12 −
+
⎟⎠⎞
⎜⎝⎛
+=
kk
eff kkpAm ρ& (3.72)
Si può allora calcolare la portata d’aria che fluisce attraverso la farfalla usando quella che
verrà indicata come “relazione dell’efflusso isoentropico di un fluido comprimibile attraverso un orifizio a sezione variabile”:
⎟⎟⎠
⎞⎜⎜⎝
⎛=
0
11
0
01 p
pAC
RTp
m d β& (3.73)
dove col pedice 0 si sono indicate le grandezze relative ad una sezione con flusso indisturbato a monte dell’ostruzione che determina la massima restrizione della vena, mentre col pedice 1 ci si è riferiti ad una generica sezione a valle della suddetta ostruzione; Cd rappresenta il “coefficiente di efflusso”, definito in generale come:
teorica
realed m
mC
&
&= (3.74)

Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 50
ed è stato introdotto nell’equazione dell’efflusso per tenere conto del fatto che il gas in oggetto non è ideale, e la trasformazione che subisce nell’attraversare il condotto in questione non è isoentropica a causa delle inevitabili perdite; tale coefficiente assume valori minori di 1 ed è funzione di:
- forma e dimensioni del condotto - numero di Reynolds - numero di Mach - proprietà fisiche reali del gas
Infine il fattore indicato con β rappresenta una funzione del rapporto tra le pressioni a valle e a monte dell’ostruzione attraverso la quale si verifica l’efflusso, ed assume valori diversi a seconda che il regime di moto sia subsonico in tutti i punti del condotto, oppure raggiunga le condizioni soniche nella sezione di massimo restringimento della vena: in tal caso la portata risulta, come detto, costante rispetto ad ulteriori diminuzioni del valore del suddetto rapporto di pressioni, e si parla di “flusso in blocco sonico”; le espressioni assunte da questa funzione, nei due casi ora citati, sono le seguenti:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛−
=⎟⎟⎠
⎞⎜⎜⎝
⎛+k
kk
pp
pp
kk
pp
1
0
1
2
0
1
0
1
12β se:
1
0
1
12 −
⎟⎠⎞
⎜⎝⎛
+>
kk
kpp
(3.75)
( )121
0
1
12 −
+
⎟⎠⎞
⎜⎝⎛
+=⎟⎟
⎠
⎞⎜⎜⎝
⎛ kk
kk
pp
β se: 1
0
1
12 −
⎟⎠⎞
⎜⎝⎛
+≤
kk
kpp
(3.76)
Nel caso in esame, il condotto del corpo farfallato, le sezioni prima indicate con i pedici 0 e 1 corrispondono rispettivamente alla sezione di imbocco del condotto stesso, in cui si assume di avere le condizioni di pressione e temperatura ambiente, e a quella generica del collettore d’aspirazione; pertanto la relazione che fornisce la portata attraverso la farfalla diventa:
⎟⎟⎠
⎞⎜⎜⎝
⎛=
atm
manththd
atm
atmfarfaria p
pACRTpm β__& (3.77)
in cui il fattore β è dato dalle (3.75) o (3.76), mentre il prodotto tra l’area geometrica Ath della sezione del condotto di aspirazione in cui lavora la farfalla (dove il pedice “th” si riferisce appunto alla farfalla, dall’inglese “throttle”) ed il relativo coefficiente di efflusso (Cd_th) altro non è che la quantità precedentemente indicata come “area efficace di farfalla” (Aeff). Tale parametro sarà oggetto dell’identificazione con un ulteriore modello, in modo da concentrare al suo interno tutte le incertezze relative al corretto impiego della relazione che fornisce la portata attraverso la farfalla, prima fra tutte l’aver assunto, invece della vera sezione di massimo restringimento della vena, come prevede la (3.77), un generico punto interno al collettore: tale scelta è dettata dalla necessità di conoscere lo stato fisico del fluido anche in questa sezione.

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 51
E’ importante rilevare che l’identificazione dovrà essere differenziata a seconda del tipo di motore, e basandosi su dati sperimentali. Sarà altrimenti necessario introdurre dei coefficienti di efflusso come precedentemente indicato per le valvole nel paragrafo precedente. Utilizzando la relazione che governa l’efflusso attraverso la valvola:
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛=
amb
man
amb
ambefffarfaria p
pRTp
nAm βα ,_& (3.78)
si ottiene l’espressione che segue per l’area efficace:
( )⎟⎟⎠
⎞⎜⎜⎝
⎛=
amb
man
amb
amb
farfariaeff
pp
RTp
mnA
βα _,
& (3.79)
Con questa espressione è possibile calcolare il valore reale dell’area efficace di farfalla,
utilizzando al posto di farfariam _& la misura di portata dai dati sperimentali; si effettua ora una
trattazione empirica per l’identificazione dell’area efficace, basata sulla minimizzazione di una funzione parametrica. L’area efficace dipende da α (angolo di apertura della farfalla) e dalla differenza di pressione fra collettore e ambiente, che a sua volta è funzione di α e del numero di giri del motore. Si riporta a titolo di esempio l’analisi fatta per un motore a 6 cilindri a V, di cui si daranno tutte le caratteristiche nel capitolo seguente. Dopo un’attenta analisi delle influenze di questi parametri sull’andamento dell’area efficace è stata scelta questa funzione:
( )( ) ( )DP
CC
CCCefficaceArea2
542
321 sincos1_ αα
ααα ⋅++⋅+⋅−−⋅= (3.80)
La ricerca dei coefficienti è stata condotta seguendo le modalità illustrate nel capitolo 2, ed
ha portato ai seguenti valori:
C1= 0.019097; C2= -0.00043605; C3= -0.0073051; C4= 2.7341e-007;C5= -0.45872;
Nelle figure 3.12 e 3.13 sono illustrati graficamente gli andamenti della portata d’aria attraverso la farfalla in diversi punti motore.

Capitolo 3
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 52
Figura 3.12 – Portate d’aria attraverso la farfalla 1.
Figura 3.13 – Portate d’aria attraverso la farfalla 2.
Analogamente a quanto detto per le valvole, nel caso in cui non si abbiamo a priori a
disposizione dati sperimentali per la valutazione della portata, anche per la farfalla è possibile

Il modello termodinamico
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 53
Dc u
Df
δ
impostare un coefficiente ζf che tiene conto delle perdite di carico che subisce il fluido nel passaggio dall’ambiente al collettore di aspirazione.
( )( )
( )
2
2 22
1 2 1120 50 1.561Re Re 11
501Re Re
rapp
frapprapp
qu
D sen
D senD sen
A
δζ
δδ
ζ
⎛ ⎞+ + ⎛ ⎞⎜ ⎟= + − =⎜ ⎟⎜ ⎟⎝ ⎠ − ⋅− ⋅ ⎝ ⎠
⎛ ⎞= + −⎜ ⎟⎝ ⎠
(3.81)
dove
( )( )
( )22
1 2 1120 ; Re ;
1
rapp c crapp
frapp
D sen u D DA D
DD sen
δ
νδ
+ + ⋅= = =
− ⋅
Considerando che
2
2
1.5625 : 11
50Re 50 :1 0Re
qurapp
perD sen
e per
δ ζδ
⎛ ⎞⎜ ⎟> ° = −⎜ ⎟− ⋅⎝ ⎠
≤ − =
Figura 3.5 - Condotto di aspirazione e valvola a farfalla.
3.11 Il calcolo della pressione
Il calcolo della pressione è semplicemente affidato all’equazione dei gas perfetti, quindi data dal valore istantaneo del volume, della temperatura, della massa di fluido all’interno del volume considerato (collettori o cilindro) e da R non più costante ma variabile con la temperatura e in più dipendente dallo stato fisico della miscela di gas.
MRTpV
= (3.82)
La pressione che compare nell’equazione del primo principio della termodinamica per sistemi aperti non è altro che il valore istantaneo del passo precedente, p(ϑ ϑ− ∆ ).

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 55
Capitolo 4
APPLICAZIONE DEL
MODELLO AD UN MOTORE
“VW VR6 3.2 GDI”
4.1 Caratteristiche del motore utilizzato Il motore utilizzato per la campagna di prove sperimentali (effettuata dalla Magneti Marelli) è un motore sperimentale VW 3.2 VR6 GDI, che è possibile veder rappresentato anche nella figura 4.6. In tabella 4.1 sono riassunte le caratteristiche tecniche principali.
CILINDRATA 3188 cm3 NUMERO CILINDRI 6 NUMERO VALVOLE 24
SISTEMA DI INIEZIONE MULTI-POINT SEQUENZIALE FASATO
RAPPORTO DI COMPRESSIONE 12 CORSA 95.9 mm
ALESAGGIO 84.0 mm BIELLA 164.0 mm
DIAMETRO PIATTELLO ASPIRAZIONE 34.8 mm
DIAMETRO STELO ASPIRAZIONE 3.2 mm DIAMETRO PIATTELLO SCARICO 31.6 mm
DIAMETRO INTERNO CORPO FARFALLATO 74.0 mm
SEQUENZA DI ACCENSIONE 1-5-3-6-2-4 FASATURA VALVOLA DI
ASPIRAZIONE I.V.O.=-8°; I.V.C.=100°; VVT=-50°
FASATURA VALVOLA DI SCARICO E.V.O.=-80°; E.V.C.=22°;VVT=40° ALZATA MASSIMA VALVOLE 10 mm
VOLUME PLENUM 2500 cm3 VOLUME COMPLESSIVO DEI RUNNER
DI ASPIRAZIONE 4300 cm3
Tabella 4.1 - dati tecnici motore VW VR6 3.2 GDI.

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 56
L’iniezione è di tipo diretto, con il carburante che viene introdotto, quindi, per mezzo di iniettori, direttamente in camera di combustione; mentre la fasatura delle valvole di aspirazione e scarico è di tipo variabile (VVT) con controllo continuo in entrambi i casi.
0 90 180 270 360 450 540 630 7200
2
4
6
8
10
12
14
Angolo di manovella [gradi]
Pres
sion
e [b
ar]
Chiusura scarico
Chiusura aspirazione
Apertura scarico
Apertura aspirazione
Figura 4.1: Andamento di pressione interna ad un cilindro, relativo ad un ciclo motore e corrispondente diagramma di distribuzione. In rosso è evidenziatala la fasatura “base” della valvola di scarico con i relativi istanti di apertura e chiusura, mentre in arancione la situazione corrispondente al massimo ritardo ammesso dal VVT. Analogamente in blu è identificata la fasatura “base” della valvola di aspirazione ed i relativi punti di apertura e chiusura, mentre in azzurro la situazione corrispondente al massimo anticipo.

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 57
La fasatura di ogni valvola viene identificata tramite un angolo, che individua di quanto si sia anticipata l’apertura della valvola di scarico, oppure di quanto si sia ritardata la chiusura della valvola di aspirazione, rispetto alle posizioni, per così dire, base. Il motore in questione presenta, poi, un sistema di ricircolo esterno dei gas di scarico (EGR esterno) gestito tramite una valvola. Guardando il seppur semplice schema del motore in figura 4.6 è possibile notare una particolarità costruttiva: esso può essere suddiviso in due bancate, di cui una costituita dai cilindri 1, 3 e 5 (bancata 1) e l’altra da 2, 4 e 6 (bancata 2); le due bancate hanno tra loro caratteristiche abbastanza differenti, a partire dalla lunghezza dei condotti di scarico, più lunghi per la bancata 2, e di aspirazione, più lunghi, invece, per la 1. Queste differenze si tradurranno, a parità di condizioni di funzionamento, anche in comportamenti, per alcuni aspetti, diversi.
4.2 I segnali rilevati e i sensori impiegati Le prove sperimentali sono state effettuate con il motore montato al banco e collegato ad un freno a correnti parassite, necessario per assorbire il carico generato dal motore stesso: la coppia resistente, esercitata dal freno sull’albero motore, sostituisce, infatti, in questa configurazione, le forze resistenti che il veicolo incontra nella marcia su strada (come, ad esempio, resistenza aerodinamica, attrito tra pneumatici e asfalto, eventuali richieste di energia da parte di alcuni dispositivi ausiliari). Durante ogni prova sono stati registrati una serie di dati, memorizzati, poi, in due differenti files:
un file Excel, in cui sono confluiti tutti i dati forniti dalla centralina e tutte le misurazioni (provenienti dai diversi sensori successivamente posizionati) che si possono ritenere costanti nell’ambito di un ciclo motore o per i quali, comunque, è interessante la conoscenza del solo valore medio in un ciclo; si è ottenuta in tal modo un’unica tabella, per la quale, ad ogni riga, sono memorizzati i dati relativi ad una prova;
un file di tipo testo (di estensione “txt”), in cui sono stati salvati quei dati di cui è interessante conoscere l’andamento durante il ciclo, come la pressione all’interno del cilindro o la pressione nel collettore di aspirazione.
Nella pagina successiva sono riportati due esempi dei file appena descritti. I dati di pressione, presenti nel file di testo, hanno la particolarità di essere il risultato di una media dei valori misurati in più cicli consecutivi: è noto, infatti, che, a parità di condizioni, l’andamento della pressione varia di ciclo in ciclo per una molteplicità di fattori e si è voluto, così, limitare eventuali errori dovuti alla scelta di un ciclo singolo. Dai due file a disposizione è stato, creato un unico file di Matlab (estensione “mat”), in modo da poter leggere ed utilizzare più facilmente i dati con il detto programma.

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 58
Figura 4.2 - Esempio di parte di un file di tipo testo.
SPEED MAPNOM VVTasp VVTexh EGR ENGSPEED MAP TORQUE POWER
rpm mbar deg deg % rpm mbar Nm kW
1000 350 0 0 0 1008 319 19,8 2,09
1000 350 10 0 0 1007 302 18,5 1,96
1000 350 20 0 0 1007 292 17,6 1,85
1000 350 30 0 0 1007 296 17,9 1,89
1000 350 40 0 0 1007 318 19,1 2,01
1000 350 0 10 0 1007 323 20,2 2,13
1000 350 10 10 0 1007 306 18,7 1,98
1000 350 20 10 0 1007 302 18,2 1,92
1000 350 30 10 0 1007 317 19,1 2,02
1000 350 40 10 0 1007 354 19,5 2,06
1000 350 0 20 0 1007 336 21,1 2,23
1000 350 10 20 0 1007 324 20,4 2,15
1000 350 20 20 0 1007 329 19,8 2,09
1000 350 30 20 0 1007 359 19,8 2,09
1000 350 0 30 0 1008 360 22,7 2,39
1000 350 10 30 0 1007 357 22,2 2,34
1000 350 20 30 0 1007 375 20 2,11
Figura 4.3 - Esempio di parte di un file Excel.
Crank Angle
PCYLM1 PCYLM2 PCYLM3
deg bar bar bar -360 0,6020833 0,5798611 0,5673611
-359 0,6013889 0,5777778 0,5680556
-358 0,5958333 0,5798611 0,5666667
-357 0,5881944 0,5770833 0,5645833
-356 0,5826389 0,5736111 0,5625
-355 0,5777778 0,5722222 0,5597222
-354 0,5743056 0,5659722 0,5569444
-353 0,5694444 0,5583333 0,5520833
-352 0,5625 0,5513889 0,5465278
-351 0,55625 0,5409722 0,5402778
-350 0,5444444 0,5277778 0,5319444

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 59
Sono state effettuate prove in condizione stazionarie riconducibili a tre gruppi fondamentali: • Senza EGR esterno, per le quali si sono registrati i dati relativi a prove effettuate a diversi
regimi di rotazione (1000, 2000, 3000 e 4000 rpm) e, per ognuno di essi, a diversi carichi, quindi, a differenti posizioni della farfalla e valori della pressione nel collettore di aspirazione. Si sono ottenuti set di dati relativi alle condizioni: 1000 rpm e 350, 600, 900 mbar di pressione nel collettore; 2000 rpm e 300, 600, 900 mbar; 3000 rpm e 300, 600, 900 mbar; 4000 rpm e 300, 600, 800 mbar. Per ognuna di esse, poi, si è provveduto a far variare l’anticipo di apertura della valvola di scarico ed il ritardo di chiusura di quella di aspirazione, in modo indipendente l’una dall’altra, di 10° in 10°, da 0° fino a 40°, variando in tal modo l’ampiezza dell’angolo di incrocio ed il posizionamento angolare del centro dello stesso rispetto al PMS. Si è fatto ciò, al fine di valutare gli effetti delle diverse fasature delle valvole di aspirazione e scarico sull’EGR interno. Occorre notare come, per alcuni punti motore, non si siano potute effettuare le prove per tutte le possibili configurazioni del sistema VVT, a causa del fatto che i valori corrispondenti di EGR erano talmente alti da compromettere la stabilità della combustione e, quindi, il funzionamento del motore. Le prove senza EGR esterno sono composte da un insieme di 291 punti motore, caratterizzati da differenti valori di velocità di rotazione, pressione nel collettore di aspirazione, e fasatura delle valvole di aspirazione e scarico.
0 10 20 30 400
10
20
30
40
VVTasp [gradi]
VV
T exh [g
radi
]
0 1000 2000 3000 4000 50000
300
600
900
1000
Velocità di rotazione [rpm]
Pres
sione
[bar
]
Figura 4.4 e 4.5 - Grafici che indicano i valori di pressione e velocità di rotazione dell’albero
motore e di ritardo di chiusura della valvola di scarico (VVTexh) e anticipo di apertura della valvola di aspirazione (VVTasp) per cui sono state effettuate le prove senza EGR esterno.
• Con EGR esterno, in cui, per le stesse combinazioni di velocità di rotazione e pressione nel
collettore di aspirazione e per fasature delle valvole di aspirazione e scarico fissate a 0° e 0° oppure a 20° e 20°, si è fatta via via aumentare la percentuale di EGR esterno (modificando l’apertura dell’apposita valvola) da 0% a 25% con step di 5%. In alcuni casi non è stato possibile raggiungere il valore massimo del 25%, a causa di problemi di stabilità del motore in cui, in presenza di un eccesso di gas combusti (risultanti dalla somma di EGR interno ed esterno), la fiamma ha difficoltà a propagarsi. Questo gruppo è costituito da un insieme di 121 prove.

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 60
Per quanto riguarda, in particolare, i dati di pressione variabili nell’ambito del ciclo motore, si distinguono due metodi di acquisizione: acquisizione su base tempo ed acquisizione su base angolo. Nel primo caso, si rileva il valore del segnale considerato ad intervalli di tempo consecutivi dt, pari al reciproco della frequenza di campionamento. Nel secondo caso, invece, si utilizza come intervallo di campionamento una frazione dell’angolo spazzato dalla manovella del motore, durante il funzionamento; come frazione dell’angolo di manovella si è utilizzato 1°, il cui corrispondente intervallo temporale è variabile, in quanto, in generale, la velocità angolare cambia. I motivi per cui si fa uso di un campionamento su base angolo sono essenzialmente due:
si ottiene lo stesso numero di campioni per ciclo, indipendentemente dalla velocità angolare (campionando in base tempo tale numero sarebbe invece tanto più alto quanto più bassa é la velocità di rotazione del motore);
la centralina lavora su base angolare. Per queste ragioni, i dati utilizzati sono stati campionati su base angolo.

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 61
4.3 Descrizione dei segnali ottenuti
Figura 4.6: Rappresentazione schematica del motore VW 3.2 con indicati anche i vari tipi di
sensori ed il loro posizionamento.
L’acquisizione dei dati sul motore VolksWagen 3.2 VR6 GDI è stata realizzata attraverso l’insieme di sensori posizionati come schematicamente indicato in figura 4.6. I dati ottenuti sono poi stati memorizzati, come detto, in due file, riassunti, infine, in uno unico di Matlab; con tale programma è stato, poi, possibile trattare i dati sotto forma di vettori o matrici. Si analizzeranno, ora, le varie grandezze di cui si è fatto uso e le eventuali problematiche ad esse connesse. Occorre tener conto del fatto che numerosi dati, tra quelli utilizzati, presentano due versioni, delle quali una proveniente dai sensori posizionati a banco e l’altra ottenuta dalla
Analisi di gas o fumi
Temperatura
Sonda UEGO
Sensore NOx
Pressione
Dato centralina (ECU)
Altro
6 5
43
21
Condotto di ricircolo per EGR esterno
Linea 2 Linea 1
Bancata 1
Bancata 2

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 62
centralina del motore, tramite i dispositivi di cui essa normalmente si serve. Queste seconde grandezze sono generalmente identificate dal prefisso ECU. Nel caso di dati doppi, generalmente, per i calcoli, si è preferito evitare di utilizzare le grandezze provenienti dalla centralina, in quanto ritenute meno precise. I dati seguenti sono prelevati dal file di testo, corrispondente alla prova a cui sono associati, e sono trasformati, in Matlab, in vettori di celle (cell array). Ciascun elemento del cell array è un vettore di 720 elementi, ognuno corrispondente al valore della grandezza in questione, per ogni grado di un ciclo motore, costituito da due giri dell’albero motore e, quindi, da 720°.
• pmanm è il segnale medio di pressione nel collettore di aspirazione; è ottenuto dal sensore ad estensimetri, descritto più avanti in questo capitolo, attraverso una media dei valori misurati da più cicli consecutivi. Il suo andamento è ondulatorio, a causa della dinamica del collettore: siccome da esso attingono più cilindri, ad ogni corsa di un pistone, in fase di aspirazione, corrisponde un’oscillazione nel segnale. Si avrà, quindi, un numero di oscillazioni per ciclo coincidente con il numero di cilindri collegati al collettore e, quindi, in questo caso, 6. Guardando il grafico di figura 4.7 è possibile notare come sia presente un picco di pressione particolarmente basso: esso è dovuto al fatto che il sensore di pressione è posto in corrispondenza dell’imboccatura del condotto di aspirazione di un cilindro, identificato dal numero che accompagna il nome del dato. La corsa di aspirazione di questo cilindro è, quindi, avvertita, dal sensore ad esso vicino, in modo molto più importante rispetto agli altri cilindri, che producono oscillazioni di entità alquanto inferiore.
0 90 180 270 360 450 540 630 7200.26
0.27
0.28
0.29
0.3
0.31
0.32
0.33
Angolo di manovella [gradi]
Pres
sion
e ne
l col
lett
ore
[bar
]
Figura 4.7 - Esempio di un andamento della pressione
nel collettoredi aspirazione ”pmanm”.

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 63
0 90 180 270 360 450 540 630 7200
2
4
6
8
10
12
14
Angolo di manovella [gradi]
Pres
sion
e ne
l cili
ndro
[bar
]
Figura 4.8 - Esempio di un andamento della pressione interna al cilindro ”pcylm”.
• pcylm è il segnale di pressione interna al cilindro, ottenuto da un sensore piezoelettrico
affacciato in camera di combustione ed amplificato tramite un amplificatore di carica, descritti nei paragrafi successivi. Anche questo segnale è ricavato, come già detto, tramite una media dei valori misurati in più cicli successivi. Il segnale pcylm è generalmente accompagnato da un numero, che identifica il cilindro a cui corrisponde l’andamento di pressione.
I dati presentati di seguito sono, invece, contenuti nel file di Excel ed in Matlab compongono vettori aventi il nome della grandezza considerata ed una lunghezza pari al numero di prove del set, questi dati sono, infatti, costanti lungo il ciclo motore.
• MAP è, sostanzialmente, il valor medio del segnale pmanm ed è il valore della pressione nel collettore di aspirazione utilizzato nei calcoli.
• MAPNOM è il valore nominale che il valor medio della pressione nel collettore di aspirazione dovrebbe assumere per quella prova: in realtà i valori misurati si discostano leggermente da esso.
• ENGSPEED è la velocità di rotazione dell’albero motore, ricavata attraverso il pick-up magnetico, posto in corrispondenza del volano, e descritto nel paragrafo successivo.
• SPEED, similmente a MAPNOM, è la velocità di rotazione nominalmente assunta dal motore per quella prova e si discosta molto poco dal valore effettivamente misurato.
• VVTasp è il valore nominale del ritardo angolare, rispetto alla posizione base, con cui si chiude la valvola di aspirazione.
• ECU_IVO è, invece, il dato corrispondente a VVTasp, ma fornito dalla centralina che normalmente equipaggia il motore.
• VVTexh è il valore nominale dell’anticipo angolare, rispetto alla posizione base, con cui si apre la valvola di scarico.

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 64
• ECU_EVO è, invece, il dato corrispondente a VVTexh, ma fornito dalla centralina che normalmente equipaggia il motore.
• LAMBDA_b1 è il segnale della sonda lambda posizionata nella bancata 1, mentre il corrispondente LAMBDA_b2 è quello relativo alla bancata 2.
• LAMLS_b1 è il segnale della sonda lambda lineare posizionata nella bancata 1. Con il numero 2 verrà identificato, invece, il dato relativo alla bancata 2.
• LAMLS_L1 è il segnale della sonda lambda lineare posizionata sul condotto di scarico della linea 1, indicato in figura 4.6. Esiste anche il segnale analogo, ma valido per la linea 2.
• EGR rappresenta la percentuale di EGR esterno nominalmente ricircolata all’aspirazione.
• EGR_RATE è, invece, la percentuale di EGR effettivamente ricircolata. • FC è il consumo orario di combustibile, ottenuto dalla apposita bilancia. • AIRMstk_cyl1 è la quantità d’aria che entra per ogni ciclo nel cilindro 1 (e valida in
generale per tutti i cilindri della bancata 1) ed è calcolata a partire da un debimetro, che sarà descritto nel seguito. Con 2 si indica la quantità d’aria determinata per il cilindro 2.
• AIRMstk è la quantità d’aria che entra mediamente in un cilindro ed è un valore medio tra AIRMstk_cyl1 e AIRMstk_cyl2.
• FUELMstk_cyl1 è la massa di combustibile iniettata per ciclo nel cilindro 1 (e valida per i tre cilindri della bancata 1) ed è determinata tramite la conoscenza della massa d’aria presente nel cilindro e del segnale della sonda lambda. Potrebbe essere calcolata anche attraverso il consumo orario.
• FUELMstk, come per AIRMstk, è un valore medio di benzina iniettata per cilindro ed è ottenuto da FUELMstk_cyl1 e FUELMstk_cyl2.
• ECU_TJcyl1 è il tempo di iniezione associato all’iniettore del cilindro 1: da esso, tramite la caratteristica dell’iniettore, è possibile risalire alla benzina iniettata.
• ECU_QACVOLT è il segnale, in tensione, proveniente dal debimetro che misura la portata d’aria in ingresso nei cilindri.
• ECU_SAcyl1 è il segnale che fornisce l’anticipo angolare rispetto al PMS in cui scocca la scintilla agli elettrodi della candela del cilindro 1; è valido, in generale, per tutti i cilindri della bancata 1 e ne esiste uno analogo per l’altra bancata.
• T_CYL_1 è la temperatura dei gas, misurata con una termocoppia posizionata subito a valle del cilindro 1; è stata posizionata una termocoppia per ognuno dei sei cilindri.
• T_EGR è la temperatura dei gas combusti ricircolati all’aspirazione, misurata da una termocoppia posta nel corrispondente condotto.
• ECU_AIRT è la temperatura dell’aria presente nel collettore di aspirazione e fornita dalla centralina.
• T_MANT è sempre la temperatura dell’aria presente nel collettore, ma misurata da una termocoppia indipendente dalla centralina.
• T_ASP_3 è la temperatura fornita da una termocoppia, posizionata sul condotto di aspirazione del cilindro corrispondente al numero indicato, in questo caso 3.

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 65
4.4 I sensori In questo paragrafo verranno analizzati alcuni dei sensori utilizzati nella rilevazione dei dati precedentemente presentati, eccezion fatta per la catena di misura necessaria alla determinazione della pressione interna al cilindro, che sarà valutata, data la sua importanza, in un paragrafo a parte.
4.4.1 Il pick up magnetico Il pick-up magnetico è il dispositivo che consente la misura della velocità angolare dell’albero motore; è un elemento, costituito da un magnete attorno al quale è avvolta una bobina, che deve essere posizionato in modo da trovarsi affacciato ai denti, ricavati sulla corona esterna del volano, come riportato in figura 4.9. A seconda del fatto che in corrispondenza del sensore si trovi un vano od un dente della dentatura del volano, si ha una diversa riluttanza del campo magnetico al traferro. Una volta posto in rotazione il volano, quindi, il passaggio dei denti e dei vani di fronte al sensore provoca una variazione del flusso del campo magnetico concatenato con il circuito della bobina e, quindi, una forza elettromotrice indotta nella bobina stessa. Tale f.e.m. è descritta da una sinusoide, avente ampiezza e frequenza legate alla frequenza con cui i denti del volano transitano in corrispondenza del magnete e, quindi, alla velocità angolare.
Figura 4.9 - Pick-up magnetico per la misura della velocità angolare. Un sensore del tutto analogo è posizionato di fronte alla puleggia, attraverso la quale la cinghia di distribuzione muove l’albero a camme. Sulla puleggia è, a sua volta, montato un grano

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 66
metallico, che si affaccia al sensore durante la rotazione. Quando il grano si avvicina al magnete, la f.e.m. indotta nella bobina, proporzionale alla variazione nel tempo del flusso concatenato, cala fino ad un minimo, per poi risalire a zero quando il grano e il pick-up sono perfettamente allineati; quando, poi, il grano si allontana, si verifica l’esatto contrario, cioè la f.e.m. aumenta fino ad un massimo, per poi tornare a zero. Visto che, mentre l’albero motore compie due giri, l’albero di distribuzione (e quindi la puleggia) ne descrive uno, è ovvio che la brusca transizione della f.e.m. dal minimo al massimo si verifica una volta per ogni ciclo. Esistono, però, altre oscillazioni di minore entità, dovute al passaggio, davanti al pick-up, dei bulloni che collegano la puleggia all’albero a camme.
4.4.2 Il sensore ad estensimetri Per la misura della pressione nel collettore di aspirazione si fa uso di un sensore ad estensimetri, del tipo schematizzato in figura 4.10.
Figura 4.10: In alto a sinistra, il disegno del diaframma di un trasduttore di pressione ad estensimetri; a destra, invece, una delle rosette estensimetriche utilizzate per la misura delle deformazioni. In basso, invece, un sensore completo.

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 67
Il diaframma è costituito da una membrana metallica corrugata (assai più rigida di una membrana piana), che si deforma per effetto della differenza tra la pressione da misurare e la pressione di riferimento (solitamente quella atmosferica). Su di essa sono incollati quattro estensimetri, collegati ai rami di un ponte di Wheatstone. In uscita dal circuito si ha una tensione proporzionale all’inflessione del diaframma e, quindi, alla differenza di pressione che l’ha generata. Nota la pressione di riferimento, è possibile impostare lo strumento in modo che l’uscita sia proporzionale alla pressione da rilevare. Il materiale e lo spessore della membrana vanno scelti in funzione della natura del fluido di cui si vuole rilevare la pressione e del campo di pressioni in cui il trasduttore dovrà operare. La massa assai ridotta e la costante elastica relativamente alta conferiscono al diaframma un’elevata frequenza naturale, ragion per cui questi sensori sono adatti per la misura di pressioni sia statiche che dinamiche. È comunque ovvio che la risposta dello strumento é attendibile fintanto che si rimane in campo elastico, cioè per piccole deformazioni. Non si possono, pertanto, misurare pressioni troppo lontane da quella di riferimento.
4.4.3 Il debimentro I debimetri, o anemometri a filo caldo, sono comunemente costruiti secondo due forme base: il tipo a corrente costante e quello a temperatura costante. Entrambi utilizzano lo stesso principio fisico, ma in due modi differenti. Nel tipo a corrente costante, un sottilissimo filo viene esposto al flusso di cui si vuole determinare la velocità: esso raggiungerà la temperatura di equilibrio quando il calore (Ri2), prodotto dal passaggio della corrente elettrica, sarà esattamente bilanciato dal calore perso per convezione alla sua superficie. Il circuito viene costruito in modo che il calore Ri2 sia essenzialmente costante, cosicché la temperatura del filo si modificherà fino al raggiungimento della condizione di equilibrio. Dal momento che il coefficiente di scambio termico per convezione è funzione della velocità del flusso, la temperatura di equilibrio del filo può essere considerata una misura della velocità stessa. Si può, poi, risalire alla temperatura valutando la resistenza elettrica del filo: le due grandezze sono, infatti, correlate in modo molto stretto. Nel tipo a temperatura costante, invece, la corrente che percorre il filo viene continuamente aggiustata per mantenere costante la temperatura: la corrente necessaria per fare ciò diventa una misura della velocità del fluido. In condizioni di equilibrio è possibile scrivere un’equazione di bilancio energetico per il filo caldo:
)(2fww TTAhiR −⋅⋅=⋅ (4.1)
con: i corrente nel filo, Rw Resistenza del filo, Tw temperatura del filo, Tf temperatura del fluido, h coefficiente di scambio termico per convezione, A superficie di scambio.

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 68
Ora, h, per una data densità del fluido, è funzione della velocità del flusso rispetto al filo; per un range limitato di velocità, questa funzione (a volte chiamata legge di King) ha la forma generale:
VCCh ⋅+= 10 (4.2)
Per misure di velocità medie, un bilanciamento manuale del sistema del tipo a temperatura costante è la soluzione ottimale per costi ed affidabilità. Al fine di ottenere risultati accurati, ogni sensore a filo caldo deve essere, però, tarato nel fluido per cui verrà utilizzato, tramite un’esposizione ad un flusso di velocità nota. Dopo di che, per la misura, si esporrà lo strumento al flusso di velocità incognita e si agirà sulla resistenza variabile del ponte di Wheatstone, a cui il filo caldo è collegato, fino a riportare il ponte all’equilibrio. A quel punto, dalla lettura del valore della corrente i, si ottiene la velocità cercata:
( ) ( )VCC
RVCCTTA
iw
fw ⋅−=⋅+⋅−⋅
= 32102 (4.3)
Come si nota, la (4.3) è una relazione di tipo non lineare, e tale sarà anche quella che lega la velocità e la tensione come si può ad esempio vedere in figura 4.12. Occorre sottolineare anche come eventuali metodi correttivi, per tenere conto delle variazioni nella temperatura e nella pressione del fluido, sono abbastanza semplici. La principale applicazione degli anemometri a filo caldo è la misura di velocità variabili, come anche nel caso in esame di un flusso entrante in un motore a combustione interna. A questo scopo sono utilizzati sia sistemi a temperatura costante che a corrente costante, con una netta preferenza, però, per i primi. Per seguire le rapide fluttuazioni della velocità, in tal caso, si fa uso di un ponte a bilanciamento automatico, con l’ausilio di sistemi di controllo in retroazione. La preferenza per il tipo a temperatura costante è dovuta ad una serie di ragioni. La prima, e forse più importante, è legata alla fragilità del dispositivo. Nel sistema a corrente costante, infatti, per una data velocità del flusso, la corrente deve essere fissata ad un valore sufficientemente alto da garantire di riscaldare il filo considerevolmente oltre la temperatura del fluido. Se, però, il flusso improvvisamente rallenta, il filo si brucia, poiché gli scambi termici per convezione non possono compensare il calore generato, prima del raggiungimento del punto di fusione. Il tipo a temperatura costante non soffre di questo problema, poiché il sistema in retroazione aggiusta automaticamente la corrente, per mantenere la temperatura desiderata. Un altro vantaggio lo si ha, poi, nella compensazioni dinamiche, necessarie per adeguare la prontezza del sistema alle variazioni nella velocità: il sistema a temperatura costante è in grado di fornire compensazioni più semplici e precise, per un range più ampio di velocità. Problemi pratici nelle applicazioni dell’anemometro a filo caldo sono riconducibili alla ridotta robustezza dei sottilissimi fili e nelle variazioni di taratura causate dall’accumulo di impurità. A meno che il fluido non sia pulitissimo, si osservano, in pochi minuti, cambiamenti significativi nella taratura. Le particelle di impurità più grandi, poi, possono provocare la rottura del filo.

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 69
Un’evoluzione dell’anemometro a filo caldo, costruita per estenderne il campo di utilizzo, è il trasduttore a film caldo (rappresentato in figura 4.11): l’elemento resistente è, in questo caso, una sottile pellicola di platino, depositata su di una base vetrosa. Il film sostituisce il filo, mentre il circuito è sostanzialmente simile a quello utilizzato nella tipologia a temperatura costante. Gli anemometri così costruiti sono meccanicamente molto resistenti e, se internamente raffreddati a liquido, possono essere utilizzati anche con temperature molto alte.
Figura 4.11 - Due esempi di anemometri a film caldo, di cui, quello a sinistra, raffreddato a liquido e, quindi, resistente alle alte temperature. Grazie ai notevoli progressi ottenuti nella resistenza meccanica di questo dispositivo, in alcuni casi viene montato di serie anche su alcune vetture, opportunamente protetto da due filtri, uno a monte ed uno a valle, per ridurre le rotture del filo, o del film, dovute ad eventuali impurità. Con l’ausilio del debimetro è, infatti, possibile stimare la portata d’aria entrante nel motore e, quindi, risalire alla massa aspirata dal singolo cilindro, che è una grandezza sempre più importante per il controllo del motore ed il contenimento delle emissioni inquinanti. Occorre sottolineare come fino ad ora si sia parlato solamente di misure di velocità fornite dall’anemometro: la misura di portata può, infatti, essere dedotta attraverso la conoscenza della sezione di passaggio offerta dal dispositivo. Con opportuni procedimenti di taratura, è possibile ottenere direttamente in uscita un segnale funzione della portata. Per quanto riguarda i dati forniti da Magneti Marelli, essi sono stati inizialmente ottenuti attraverso una taratura del debimetro, eseguita in base al consumo orario di combustibile, determinato dalla corrispondente bilancia. Ciò è possibile, infatti, grazie alle seguenti equazioni:
⎥⎦⎤
⎢⎣⎡⋅⎥⎦
⎤⎢⎣⎡⋅⎥⎦
⎤⎢⎣⎡⋅⎥⎦
⎤⎢⎣⎡=⎥⎦
⎤⎢⎣⎡
ciclocilindri
hcicliN
cilindrokgm
hkgFC comb 6min60
min2 (4.4)
Essendo FC il consumo orario di combustibile, mcomb la massa di combustibile iniettata per cilindro al ciclo ed N la velocità di rotazione dell’albero motore. Dalla precedente, quindi, si ricava mcomb:
NFCmcomb ⋅⋅⋅
=660
2 (4.5)

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 70
e, quindi, la portata d’aria oraria necessaria per tarare l’anemometro diventa:
⎥⎦⎤
⎢⎣⎡⋅⎥⎦
⎤⎢⎣⎡⋅⎥⎦
⎤⎢⎣⎡⋅⋅⎟
⎠⎞
⎜⎝⎛⋅⎥⎦
⎤⎢⎣⎡=
ciclocilindri
hcicliN
FA
cilindrokgmQ p
scombair 6min60
min2λ (4.6)
Essendo:
sF
A⎟⎠⎞
⎜⎝⎛ il rapporto aria combustibile in condizioni stechiometriche;
pλ il segnale della sonda lambda proporzionale.
500 1000 1500 2000 2500 3000 3500-50
0
50
100
150
200
250
300
350
400
Port
ata
d'ar
ia [k
g/h]
Tensione [Volt] Figura 4.12 - Caratteristica del debimetro; in blu la caratteristica iniziale, ottenuta tramite il consumo orario, ed in rosso quella corretta, basata sulla caratteristica dell’iniettore. Successivamente alla conclusione della campagna prove, si è, però, ravvisata una scarsa affidabilità del dato del consumo orario di combustibile e si è quindi ritarato l’anemometro sfruttando, per la determinazione del quantitativo di benzina utilizzato, il tempo di iniezione del singolo iniettore e la caratteristica dello stesso. Noti questi due parametri è possibile, infatti, risalire alla massa di benzina iniettata. Fondamentalmente si è quindi riutilizzata la (4.6), ma risalendo ad mcomb tramite il tempo di iniezione e al rapporto A/F della sonda lambda lineare e non grazie al consumo orario di combustibile. Con questo stratagemma non si è, dunque, resa necessaria la ripetizione della campagna di acquisizione. Siccome, infatti, si disponeva, per ogni prova, dell’output in volt del debimetro, da questo e dall’andamento della nuova caratteristica corretta, si è potuto facilmente risalire alla corrispondente portata d’aria esatta. E’ possibile vedere un confronto tra le due caratteristiche, la corretta in rosso e l’originale in blu, nella figura 4.12.

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 71
4.5 La misura della pressione nel cilindro La misura di pressione, nel cilindro di un motore alternativo a combustione interna, risulta molto delicata ed esiste una vasta letteratura a riguardo, che illustra quali possibili problematiche possano sorgere e gli effetti di queste sulla precisione del dato misurato. Al momento attuale la catena di misura ritenuta più affidabile ed idonea è quella esaminata qui di seguito e costituita da un sensore piezoelettrico e da un amplificatore di carica.
4.5.1 Il trasduttore di pressione piezoelettrico Per la misura della pressione all’interno del cilindro si utilizza un trasduttore piezoelettrico: esso è costituito da una membrana elastica a contatto, da una parte, con il fluido di cui si vuole rilevare la pressione e, dall’altra, con una piastrina di materiale piezoelettrico, alla quale trasmette una forza, data dalla pressione incognita moltiplicata per l’area efficace (nota).
F
F
+ + + + + + +- - - - - - -
Figura 4.13 - Una piastrina piezoelettrica sottoposta a una forza F
si deforma liberando cariche elettriche. La piastrina, così, si comprime, liberando sulle sue superfici una quantità di cariche elettriche direttamente proporzionale alla deformazione subita xi e, quindi, alla pressione p da misurare:
pkxkQ piq ⋅−=⋅−= (4.7)
dove il segno meno sta ad indicare il segno delle cariche liberate rispetto al verso della p.
+ + + + + + +- - - - - - - eo
Figura 4.14 - Trasduzione delle cariche liberate in tensione, ai capi di un condensatore sulle due lamine metalliche.

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 72
La carica Q, raccolta dalle due lamine metalliche poste a contatto con le due facce della piastrina, si trasforma in una tensione eo ai capi del condensatore, formato dalle due suddette lamine, che ne costituiscono le armature. Detta Ca la capacità del condensatore così costruito, è possibile scrivere:
a
p
ao C
pkCQe
⋅−== (4.8)
Dal punto di vista del funzionamento elettrico, il trasduttore, schematicamente raffigurato in figura 4.14, può essere rappresentato con un circuito composto da un generatore di corrente e da un parallelo tra una resistenza (Ra) ed una capacità (Ca):
RaCa
i a e 0
Figura 4.15 - Modello elettrico del trasduttore di pressione. Generalmente la capacità Ca è dell’ordine di 103 pF (1 pF = 10-12 F), mentre la resistenza Ra è dell’ordine di 1011 Ω. La corrente elettrica generata dalla variazione della pressione p nel tempo è:
( ) ( )dt
tdpkdt
tdQi pa −== (4.9)
Lo strumento così ottenuto è dotato delle caratteristiche tipiche dei sensori piezoelettrici, come elevata frequenza naturale, ampio campo di linearità ed isteresi trascurabile. Uno degli aspetti negativi che lo riguardano è, però, la sensibilità agli shock termici, dovuti alle elevate temperature che si raggiungono, soprattutto agli alti carichi, in camera di combustione, alla quale deve essere necessariamente connesso. Per effetto di tali shock termici, l’elemento sensibile subisce delle deformazioni, che ne modificano la caratteristica di risposta; al decrescere della temperatura della membrana, le deformazioni sono recuperate, ed il trasduttore torna a rispondere secondo le modalità note: il risultato è, però, una notevole alterazione del dato misurato per un certo numero di cicli (quelli ai carichi più alti e quelli ad essi seguenti). Fra i vari sensori offerti dalle case produttrici, quelli raffreddati ad acqua presentano indubbiamente una minore influenza al fenomeno dello shock termico. Il montaggio di tali sensori nella testa del cilindro, tuttavia, non sempre è facile, sia per motivi di ingombro e per la

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 73
conseguente difficoltà nel determinare un adeguato piazzamento all’interno della camera, sia per la necessità di eseguire lavorazioni particolari.
Figura 4.16 - Candela speciale per il collegamento con un trasduttore di pressione.
D’altra parte, la possibilità per i sensori non raffreddati, grazie al loro minore ingombro, di essere alloggiati all’interno di una candela, permette un facile, rapido ed economico montaggio, pur presentando lo svantaggio di più elevate distorsioni della misura, dovute agli shock termici. Lo sforzo dei costruttori di sensoristica a questo riguardo, è rivolto alla ricerca di dimensionamenti insensibili alle deformazioni indotte dalla temperatura e di quarzi piezoelettrici con un’elevata stabilità alle variazioni di questa.
4.5.2 L’amplificatore di carica Date le energie molto ridotte in gioco nel funzionamento della piastrina piezoelettrica, la tensione eo(t), in uscita da essa, deve essere amplificata per essere utilizzabile nella misura della pressione p: a tal scopo viene utilizzato un amplificatore di carica, collegato al trasduttore piezoelettrico, mediante un cavo coassiale. L’amplificatore di carica è, sostanzialmente, un amplificatore operazionale, controreazionato con una capacità Cf ed una resistenza Rf. Nel caso di un amplificatore operazionale ideale, è possibile supporre che la tensione e- al morsetto invertente abbia lo stesso valore di quella al morsetto non invertente, e+. Essendo, poi, quest’ultimo collegato a terra, si avrà e+=e-=0.

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 74
C f
+
-
e 0Rc
Cc
e -
e+
R f
RaCa
i a
Figura 4.17 - Schema del circuito che si ottiene collegando il trasduttore di pressione ad un amplificatore di carica.
C f
+
-
e 0Rt
Ct
e -
e+
R f
i a
i f
Figura 4.18 - Semplificazione del circuito di figura 4.17. Il circuito di figura 4.17 può essere ridotto a quello di figura 4.18, attraverso l’utilizzo delle formule che forniscono la resistenza e la capacità equivalenti ad un sistema di resistenze o capacità in serie oppure, come in questo caso, in parallelo:
ca
cat RR
RRR
+⋅
= e cat CCC += (4.10)
Considerando il comportamento dell’amplificatore come ideale, si ha, quindi, che le correnti passanti attraverso la resistenza Rt e la capacità Ct sono nulle, dal momento che le tensioni ai loro capi sono uguali. Di conseguenza, la corrente ia prodotta dal trasduttore piezoelettrico si presenta inalterata al morsetto invertente dell’amplificatore di carica dove giunge anche la corrente if di retroazione dello strumento; per il principio di Kirchoff deve essere:

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 75
)()()()( titititiff RCfa +==− (4.11)
A questo punto, per determinare l’equazione che descrive il funzionamento dell’amplificatore di carica nel dominio dei tempi, è possibile scrivere che:
pkdt
tdpkti ppa &⋅−=⋅−=)()( (4.12)
00
0 )()(1)( eCtidiC
te fC
t
Cf
ff&⋅=⇒⋅= ∫ ττ (4.13)
fCf iRe ⋅=0 (4.14)
da cui risulta:
ffp R
teteCtpk )()()( 00 +⋅=⋅ && (4.15)
L’amplificatore, schematicamente appena descritto, è, come detto inizialmente, un elemento imprescindibile della catena di misura, ma è anche la causa di alcuni importanti inconvenienti: esso non si limita, infatti, solo a fornire in uscita una tensione amplificata e proporzionale alla carica che la piastrina piezoelettrica libera, ma provoca anche un filtraggio passa alto. In definitiva, il valore medio, insieme alle armoniche a più bassa frequenza del segnale di pressione, sono tagliate dall’amplificatore. Ogni volta, poi, che si ha una variazione nelle condizioni di funzionamento e, quindi, nel valore medio della pressione, il filtraggio operato dall’amplificatore produce anche una ‘deriva’ dei valori misurati. Si cercherà ora di chiarire questo concetto con un esempio. Si supponga di avere un funzionamento in transitorio del motore, costituito da una parte iniziale stazionaria, seguita da una brusca accelerata. Per effetto del filtraggio, eseguito dall’amplificatore di carica ai danni delle componenti a bassa frequenza, il segnale misurato prima dell’accelerata è a media nulla. L’incremento della pressione in camera di combustione, dovuto all’accelerata, è causa però della nascita di un valore medio diverso da zero e pari alla differenza fra i valori medi reali, esistenti prima e dopo l’accelerazione. Tale componente media del dato misurato, tuttavia, per effetto del taglio delle componenti a bassa frequenza, viene via via attenuato e la pressione ritorna più o meno rapidamente a media nulla, evidenziando una ‘deriva’ verso il basso. Il filtraggio passa alto non ha però solo effetti negativi: esso impedisce, infatti, la saturazione dell’amplificatore, che può verificarsi qualora nella catena di misura siano presenti anche minime componenti medie di tensione dovute, per esempio, ad effetti secondari sugli amplificatori operazionali, di cui è costituito l’amplificatore di carica. Occorre poi sottolineare

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 76
come gli elementi dei circuiti dell’amplificatore di carica possano essere sorgenti di rumore elettronico, dovuto ad imperfezioni nella composizione, a variazioni di temperatura, etc... Questo rumore si manifesta come una tensione ai capi dell’amplificatore e comincia ad assumere una certa importanza al di sotto dei 100 Hz, diventando la sorgente predominante di disturbo alle frequenze più basse: il filtraggio passa alto, anche in questo caso, è fondamentale, in quanto minimizza questi effetti del rumore.
4.5.3 Correzione della deriva e recupero della componente media Per correggere le distorsioni che si presentano nel segnale e che sono dovute all’effetto di filtro dell’amplificatore, si prende in considerazione il modello della catena di misura descritto nel paragrafo precedente, ed in particolare l’ultima equazione ottenuta, che si riporta per comodità:
ffp R
)t(e)t(eC)t(pk 0
0 += && (4.15)
Dalla (4.15) si ottiene:
fpp
f
Rkte
dttde
kC
dttdp
⋅+⋅=
)()()( 00 (4.16)
e quindi, integrando:
cdeRk
tekC
tpt
fpp
f +⋅⋅
+= ∫ ττ0
00 )(1)()( (4.17)
La (4.17) permette, attraverso un opportuno trattamento del segnale, di ricostruire la pressione che si è avuta nel cilindro dal dato misurato in Volt.
Il calcolo del primo termine, ( )tekC
p
f0 , permette di riportare il segnale acquisito in Volt in unità
meccaniche equivalenti; il calcolo del termine integrale e la determinazione della costante di integrazione permettono, invece, di eliminare gli effetti di distorsione e di taglio della componente media. Per determinare il valore della costante di integrazione si possono adottare numerosi metodi differenti, dei quali si riportano i tre più importanti:
1. Con questo primo metodo si determina il valore della costante c da aggiungere all’andamento a media nulla di cui si dispone, imponendo che il valore della pressione,

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 77
in corrispondenza del punto morto inferiore, nella fase di aspirazione, sia uguale alla pressione interna al collettore di aspirazione.
La precisione del metodo dipende dalla distanza tra il sensore di pressione nel collettore ed il cilindro in esame: i risultati migliori si ottengono, ovviamente, se il sensore si trova immediatamente a monte della valvola di aspirazione del cilindro; in questo modo, infatti, la differenza rispetto alla pressione interna al cilindro, dovuta alle perdite di carico, sarà minima. La precisione risulta, invece, fortemente compromessa nel caso in cui la dinamica del collettore di aspirazione sfrutti le onde di pressione in modo molto spinto, per ottenere un più efficiente riempimento del cilindro. Un altro problema di questo procedimento è l’elevata sensibilità al rumore, legata al fatto che esso si basa sul valore misurato della pressione in un istante angolare ben preciso (il PMI di aspirazione); il risultato ottenuto è, quindi, condizionato dall’entità del rumore del segnale in quel punto. Una soluzione potrebbe essere la determinazione della pressione al PMI, attraverso una media delle pressioni rilevate nei punti circostanti.
2. Il secondo metodo prevede, invece, di imporre che il valor medio della pressione misurata durante la corsa di scarico sia uguale alla pressione rilevata allo scarico. Questo procedimento presenta problematiche simili a quelle del metodo precedente, con un peggioramento dell’effetto delle onde acustiche di risonanza, che, allo scarico, sono solitamente più pronunciate.
3. Data la curva di pressione in un ciclo motore, la porzione costituita dalla fase di compressione può essere descritta da una trasformazione politropica a coefficiente costante:
=⋅ nVp cost (4.18)
Per i diesel si pone n=1.27, mentre per i motori a benzina si considera generalmente n=1.32. L’andamento reale della pressione p è dato dalla somma tra la curva a media nulla ( p ), di cui si
dispone, e il valor medio c tagliato dall’amplificatore di carica:
cpp += (4.19)
In base alle (4.18) e (4.19) la differenza ( 1212 ˆˆ ppppp −=−=∆ ) tra due valori di pressione
campionati durante la fase di compressione è data da:
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅+=
⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅=∆ 1ˆ1
2
11
2
11
nn
VVcp
VVpp (4.20)
Dal momento che i volumi nei punti in cui si decide di rilevare la pressione possono essere facilmente calcolati a partire dai dati geometrici del motore, è immediato ricavare il valore di c tramite:

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 78
1
2
1
12
1
p
VV
ppcn
−
⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛
−= (4.21)
Occorre, naturalmente, scegliere i punti 1 e 2 in modo oculato: è necessario, infatti, che le valvole di aspirazione e scarico siano chiuse e che la combustione non sia ancora iniziata. Anche questo metodo risente del rumore presente nel segnale, ma è possibile ridurne l’influenza tramite una media dei risultati che si ottengono applicando la (4.21) a più coppie di punti. In figura 4.19 è visibile, a titolo di esempio, un andamento di pressione riportato a media nulla.
0 90 180 270 360 450 540 630 720-2
0
2
4
6
8
10
12
Angolo di manovella [gradi]
Pres
sion
e [b
ar]
Figura 4.19 - Esempio di andamento di pressione a media nulla.
0 90 180 270 360 450 540 630 7200
2
4
6
8
10
12
14
Angolo di manovella [gradi]
Pres
sion
e [b
ar]
Figura 4.20 - Andamenti di pressione ricavati dal precedente,ma con valori
delle costanti di integrazione calcolati facendo uso di punti differenti.

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 79
Nelle figure 4.20 e 4.21 sono mostrati, invece, due andamenti di pressione derivati da quello a media nulla di figura 4.19, ma facendo uso di costanti calcolate basandosi su una diversa scelta dei punti 1 e 2 e di un esponente della politropica pari ad 1.32 invece dell’1.35 proposto da Magneti Marelli. La costante è stata ottenuta, inoltre, tramite la media di cinque valori calcolati grazie a coppie di punti tra loro distanti 35° e collocati in modo che ogni coppia fosse spostata rispetto alla precedente di 1°. In particolare, quella in rosso è la curva originariamente fornita da Magneti Marelli, mentre quella in blu è quella modificata successivamente.
0 90 180 270 360 450 540 630 7200
0.2
0.4
0.6
0.8
1
Angolo di manovella [gradi]
Pres
sion
e [b
ar]
Figura 4.21 - Zoom della figura precedente che evidenzia le differenze
tra le due curve nelle fasi di aspirazione e scarico.
4.5.4 Correzione degli errori dovuti agli shock termici Come già accennato precedentemente, un’altra importante distorsione presente nel segnale di pressione dovuto alla catena di misura, è quella dovuta al riscaldamento dell’elemento sensibile del sensore piezoelettrico, causato dalle forti escursioni di temperatura che avvengono all’interno del cilindro. Come è ovvio, l’effetto di tale shock termico è più consistente ai carichi elevati, perché, in quelle condizioni, si hanno combustioni con liberazione di un maggiore quantitativo di energia e, quindi, temperature più elevate, ed alle velocità più sostenute, in quanto, fra una combustione e l’altra, c’è meno tempo a disposizione per il raffreddamento. Occorre dire, però, che i cicli anomali possono generalmente essere identificati, in quanto presentano valori di pressione misurata più bassi nelle fasi di scarico ed aspirazione rispetto ad un ciclo regolare. In un funzionamento stazionario, infatti, queste fasi dovrebbero essere governate fondamentalmente dalla pressione nel collettore e dalla contropressione allo scarico e, pertanto, dovrebbero ripetersi all’incirca con lo stesso andamento in tutti i cicli; ciò, tuttavia, non

Capitolo 4
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 80
accade per effetto delle combustioni che occasionalmente portano la temperatura interna al cilindro ad un valore tale da provocare il cosiddetto shock termico.
0 180 360 540 720 900 1080 1260 1440 Angolo di manovella [gradi]
Pres
sion
e [b
ar]
0
10
20
30
40Ciclo ”normale” Ciclo “anomalo”
Figura 4.22 - Confronto tra ciclo ‘normale’ e ciclo ‘anomalo’.
Confrontando, poi, gli andamenti di pressione su due cicli, uno “anomalo” ed uno “normale”, è possibile notare anche come il ciclo cosiddetto “anomalo” presenti un valore del picco di pressione più alto: in esso ha, infatti, avuto luogo una combustione con maggiore liberazione di energia. Oltre il picco, quindi, nella fase di espansione, la pressione registrata inizia a decrescere più rapidamente di quanto avvenga in realtà, a causa del maggior rammollimento della piastrina piezoelettrica, determinato dalle più elevate temperature raggiunte: al termine dell’espansione e per tutto lo scarico, la pressione misurata nel ciclo “anomalo” risulta, quindi, inferiore a quella del ciclo “normale”. Sulla base di queste considerazioni è possibile stimare l’andamento dell’errore introdotto dallo shock termico; considerando, infatti, la differenza fra le pressioni acquisite nel ciclo “anomalo” ed in quello “normale”, si ha che, se non fosse presente lo shock termico, essa dovrebbe essere nulla sia nella fase di aspirazione che in quella di scarico; durante tali parti del ciclo, quindi, la differenza delle pressioni è ben rappresentativa dell’errore introdotto. Lo stesso ragionamento può essere esteso alla parte finale dell’espansione; la dispersione ciclica, infatti, è causa di differenze nella pressione di picco, ma lascia sostanzialmente inalterato, nel caso di un funzionamento in stazionario, il tratto finale dell’espansione. Per quanto riguarda, invece, la combustione e la prima parte dell’espansione, la differenza tra cicli regolari ed anomali è imputabile anche alla maggior o minor quantità di energia liberata dalla combustione e non solo ad effetti di shock. In questo caso, quindi, è più difficile stimare l’errore, anche se, un andamento qualitativo di esso può essere ricavato; si può osservare, infatti, che l’errore indotto dallo shock termico deve essere nullo all’inizio della combustione, e crescere (in modulo, ma con segno negativo) fino ad andare a coincidere, in fase di espansione, all’errore caratteristico di questa porzione del ciclo, che è stato precedentemente valutato.

Applicazione del modello ad un motore VW VR6 3.2 GDi
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 81
Quindi, ipotizzando, tra l’inizio della combustione e la fase finale dell’espansione, un andamento di tipo lineare per l’errore, è possibile attuare una correzione ragionevole anche in questa zona. Le valutazioni appena esposte per la correzione dell’errore dovute allo shock termico devono poi essere ripetute per le diverse condizioni di funzionamento, al fine di applicare, per ognuna di esse, gli aggiustamenti più adeguati. A tal fine può essere utile tenere presente che:
• l’entità della distorsione dovuta allo shock termico non è uguale in tutti i cicli o in tutte le condizioni di funzionamento. Si può osservare, tuttavia, che distorsioni più intense determinano errori più ampi nella misura della pressione durante la fase di scarico. Una stima dell’errore causato dallo shock termico può essere, quindi, ottenuta confrontando la lettura della pressione nel cilindro durante la corsa di svuotamento e la corrispondente pressione misurata allo scarico (o una sua stima nel caso non sia disponibile la misura).
• la posizione angolare in cui la distorsione comincia a manifestarsi dipende dall’angolo in cui inizia la combustione e, quindi, dall’anticipo di accensione.
Nelle prove a carico più elevato, infine, è logico aspettarsi, per la maggior energia sviluppata dalla combustione e per la dispersione ciclica, un’incidenza percentualmente maggiore di cicli anomali sul totale dei cicli. Ciò può dar luogo ad una sovrapposizione continua di perturbazioni di diversa entità ed, in tal caso, la procedura di correzione deve tenere conto di questo fenomeno.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 83
Capitolo 5
IL MODELLO IN SIMULINK
5.1 Perché simulink SIMULINK ha una semplice impostazione grafica, utilizza simboli grafici per le relazioni logiche e funzionali. I codici fatti con esso assumono l’aspetto di un vero e proprio foglio di lavoro, quasi un layout in cui le relazioni e le funzioni si percepiscono visivamente. Si riesce così a creare un’interfaccia grafica fatta di schemi a blocchi, di facile assemblaggio tramite semplici operazioni di click-and-drag col mouse. Per questo si è scelto SIMULINK per creare un modello basato sui principi fisici descritti nel capitolo 3, in modo da avere, in ogni istante, la conoscenza delle condizioni all’interno di tutti gli ambienti costituenti la struttura schematica del motore, vale a dire i cilindri, i collettori di aspirazione e di scarico, i runner e i condotti di scarico. Questo studio ha comportato grossi vantaggi, tra cui modificare molto semplicemente le condizioni in cui opera il nostro motore e riuscire a realizzare simulazioni anche in transitorio. La costruzione del modello è avvenuta per passi successivi, per verificare qualitativamente il modello realizzato. Come detto tale modello è di tipo termodinamico zerodimensionale, cioè i vari elementi costituenti sono pensati privi di una loro dimensione caratteristica prevalente, rispetto alla quale possano variare le coordinate termodinamiche in funzione di quelle spaziali (il che avverrebbe in un modello almeno monodimensionale): con questa ipotesi si suppongono quindi condizioni omogenee all’interno di ciascun elemento, e variazioni discrete ai confini tra le diverse parti. Un limite che si può individuare è la mancanza della dinamica delle onde di pressione nei condotti, di cui si è tenuto in considerazione con opportuni coefficienti di efflusso e rendimenti volumetrici, poiché comunque si sta realizzando un modello a scatola grigia.

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 84
5.2 Realizzazione del modello
Per la realizzazione di un modello di un motore a combustione interna a quattro tempi, è necessario avere : o Le grandezze geometriche del motore e dei cilindri, in modo che ad ogni angolo del
motore sia possibile conoscere il volume del cilindro e le aree di passaggio attraverso le valvole, per ogni valore di velocità di rotazione.
o Una suddivisione del motore in sottovolumi teorici, all’interno dei quali si hanno condizioni uniformi in termini di pressione, temperatura e composizione della miscela.
o Un modello del flusso dei gas all’interno del motore, anche in presenza di discontinuità che il flusso incontra dall’aspirazione allo scarico: se necessario utilizzare coefficienti di efflusso, per moto diretto o inverso.
o Un modello del comportamento termodinamico e del bilancio di massa del fluido operatore in ogni volume in condizioni non stazionerie.
Vista la complessità del sistema da modellizzare, si è pensato di procedere per gradi mettendo a punto inizialmente il comportamento di un motore monocilindrico per poi, in seguito, adattare tale modello al motore a sei cilindri. La scelta di questa metodologia ha permesso di gestire in maniera più rapida e semplice l’ottimizzazione dei parametri e la risoluzione di taluni problemi che inevitabilmente si sono presentati durante lo sviluppo, consentendo inoltre una migliore comprensione dei fenomeni fisici che avvengono nei singoli ambienti all’interno del motore: collettore di aspirazione, di scarico e cilindri. Il modello relativo al monocilindrico ha quindi permesso, in primo luogo, di ridurre i tempi di calcolo nella fase di messa a punto e, in secondo luogo, di eliminare eventuali effetti di interazione tra i vari cilindri che avrebbero reso più difficile capire se si stesse procedendo nella giusta direzione. Il passaggio al sei cilindri ha richiesto particolare attenzione soprattutto per il corretto sfasamento delle grandezze relative ad ogni cilindro come, ad esempio, gli angoli di apertura e chiusura delle valvole, gli angoli di inizio e fine combustione, la posizione iniziale del pistone, e tutto quanto concerne il settaggio delle concentrazioni in massa iniziali delle specie chimiche presenti all’interno dei volumi di dimensioni variabili. Le costanti, le condizioni iniziali delle varie grandezze, le dimensioni e la geometria del motore vengono letti da simulink dal workspace di Matlab prima e durante la simulazione. Il modello è stato realizzato nel dominio angolare prendendo come intervallo di riferimento un ciclo motore pari a 720° (4π) di rotazione dell’albero a gomiti; il ciclo motore viene ripetuto più volte fino al raggiungimento della condizione di regime, ossia fino alla completa stabilizzazione dei valori di tutte le grandezze fisiche nei diversi ambienti. Il modello infatti parte dalla condizione in cui tutti i volumi sono alle condizioni ambientali di riferimento, poi dal moto del

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 85
cilindro si creano depressioni e sovrappressioni. Sono proprio queste differenze di pressione a provocare i flussi del fluido operatore, come avviene fisicamente nel motore. Come zero angolare si è assunto l’inizio della corsa di combustione del pistone nel cilindro UNO, ossia l’istante in cui tale pistone si trova al P.M.I. di inizio aspirazione. Questa scelta è stata dettata dalla necessità di avere l’intervallo di combustione di ogni cilindro all’interno dei 720° del ciclo motore dopo i quali il clock della simulazione torna ad azzerarsi. Questo concetto verrà spiegato meglio nell’illustrazione dei blocchi. Il passo della simulazione è angolare e posto inizialmente pari a 1° di angolo di manovella. In caso di necessità può essere aumentato o diminuito a piacere.
5.3 Integrazione in SIMULINK Prima di illustrare i blocchi del modello si può introdurre la caratteristica principale della modellizzazione in Simulink: ad ogni passo la simulazione calcola il valore istantaneo della grandezza generica, ottenibile tramite l’applicazione delle equazioni che governano il comportamento termofluidodinamico del motore. Nel capitolo 3 sono state illustrate e specificate tali equazioni e si è visto che tutto si basa sul primo principio della termodinamica per sistemi aperti in condizioni non stazionarie. Facendo riferimento all’equazione ricavata su base angolare (3.21), riproposta qui di seguito come (5.1),
1 2
V
p asp p sca V CIL
CIL
Q L m c T m c T c T MT
M c
∆ −∆ + ∆ ⋅ ⋅ − ∆ ⋅ ⋅ − ⋅∆∆ = (5.1)
si è detto che ogni termine che indica una variazione ∆, è composto dalla variazione infinitesima
d dϑ moltiplicata per il passo ϑ∆ ; le grandezze che variano nel tempo, sono espresse come
funzione del tempo ( d dt ), e quindi sono anche divise per ω1.
In Simulink la moltiplicazione per il passo di simulazione è effettuata tramite l’integrazione
inserendo il blocchetto 1s
.Ciò equivale a integrare in θ, ed essendo il passo finito, moltiplicare
per ϑ∆ . Questo comporta variazioni all’equazione del primo principio:
o I termini come presente inV L∆ ∆ e presente inassQ Q∆ ∆ , che non hanno bisogno
della moltiplicazione per ϑ∆ , devono essere divisi per il passo ϑ∆ .
o I termini come presente incedQ Q∆ ∆ e i im∆ relativi alle portate, sono solo divisi
per ω senza essere moltiplicati per ϑ∆ . Queste variazioni saranno visibili durante l’illustrazione delle parti più significative dei blocchi del modello.
1 dG dGGd dt
ϑϑϑ ω
∆∆ = ⋅∆ = ⋅

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 86
5.4 Collegamento tra i blocchi: il BUS Aspetto fondamentale per la realizzazione del modello è l’utilizzo dello strumento di Simulink denominato BUS. Esso permette di raccogliere in un'unica linea i segnali di più grandezze per poterle così trasportare da un blocco all’altro senza incorrere in intrecci delle parti e sottoparti costituenti il modello stesso. Grazie alla possibilità di raccogliere un segnale uscente da un dato blocco tramite lo strumento Goto e utilizzarlo in un altro blocco a parte, non collegato ad esso con linee di segnale, ma tramite il From, si è riusciti a creare un blocco BUS nel quale vengono racchiuse tutte le grandezze principali utili in più parti del modello. Poi con il Bus selector per ogni sottomodello si estraggono solo i segnali necessari alla realizzazione dell’equazione richiesta.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 87
5.5 Il modello
La Figura 5.1 mostra il modello principale, nel quale sono contenuti tutti i sottomodelli, rappresentati dai blocchi dell’ambiente, del collettore di aspirazione, dei runner, dei sei cilindri, dei condotti di scarico e del collettore di scarico. Questi sono a loro volta composti dai sottomodelli rappresentanti le equazioni fisiche che descrivono il comportamento termofluidodinamico di ogni componente del motore.
Figura 5.1: Rappresentazione schematica del motore VW VR6 3.2 in SIMULINK.

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 88
E’ possibile confrontate la figura 5.1 con la figura 5.2 che riporta la rappresentazione schematica del motore utilizzata da Magneti Marelli, per comprendere la schematizzazione in sottovolumi. In figura 5.1 alcuni collegamenti rappresentano i Bus di cui si è parlato al paragrafo precedente, mentre altre rappresentano un segnale singolo, ad esempio si nota quello della coppia motore. Durante la simulazione i collegamenti via bus diventano di spessore maggione. Procedendo per gradi, si cerca ora di illustrare le singole parti del modello, cominciando dall’ambiente, per passare poi ai cilindri e ai vari sottovolumi.
Figura 5.2: Rappresentazione schematica del motore VW 3.2 con indicati anche
i vari tipi di sensori ed il loro posizionamento.
Analisi di gas o fumi
Temperatura
Sonda UEGO
Sensore NOx
Pressione
Dato centralina (ECU)
Altro
6 5
4 3
21
Condotto di ricircolo per EGR
esterno
Linea 2 Linea 1
Bancata 1
Bancata 2

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 89
5.6 Ambiente
L’Ambiente è l’esempio tipico di Bus Creator, il raccoglitore dei segnali in un unico blocco dal quale parte la multilinea del segnale di Bus.
1BUS AMBIENTE
cv
cp
0.
0.
ro_0
0.
0.77
0.23
k
p_0
T_0
X_fuel_ambiente
X_H2O_ambiente
X_CO2_ambiente
X_N2_ambiente
X_O2_ambiente
ro_ambiente
p_ambiente
T_ambiente
cp_ambiente
cv_ambiente
k_ambiente
Figura 5.3: Blocco ambiente.
In questo blocco sono semplicemente raccolte tutte le costanti fisiche proprie
dell’ambiente settate nel file di lancio da Matlab.
I valori di pressione e temperatura ambiente, p_0 e T_0 sono caricati dai valori dati dalle
prove sperimentali, in modo da rendere completamente coerente la sperimentazione con
la simulazione. La densità viene ricavata in base alla composizione dell’aria. Per l’aria si
è scelta una composizione di 23% di ossigeno e 77% di azoto. I valori di calore specifico
a volume e a pressione costante vengono ricavati dai precedenti dati e da tabelle, come si
vedrà nel paragrafo dedicato al calore specifico.

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 90
5.7 Cilindro
Il modello del cilindro è uguale per ogni cilindro, vengono differenziate solo i nomi delle variabili e le grandezze legate all’ordine di accensione. Il modello è impostato sull’uso delle Tag Visibility (l’insieme di blocchetti nella parte alta del modello in figura 5.5) che, usate insieme ai blocchi From e Goto, permettono di specificare la visibilità di una etichetta: From riceve i segnali da Goto secondo l’etichetta (tag) specificata. Un segnale, quindi, viene prima inserito in un Goto e, dopo essere etichettato con un Tag, può essere richiamato da un From in ogni parte del modello e di tutti i sotto modelli relativi; è questo il vantaggio ricercato: ogni cilindro ha le sue tag e non interferiscono con quelle degli altri cilindri, questo permette di passare da un motore ad un altro con un numero di cilindri maggiore, semplicemente facendo una copia del blocco cilindro Solo al momento di mettere tutti i quattro cilindri in un unico modello (come nei collettori), sarà necessario dare un nome diverso ai segnali di ogni cilindro. Anche in caso di variabili da salvare nel Workspace di Matlab è ovviamente necessario chiamarle con nomi diversi. Illustrando i modelli si cercherà di spiegare anche questi aspetti. In origine le condizioni di aspirazione e scarico erano quelle ambiente e il modello monocilindrico era a contatto con l’ambiente; poi, con l’introduzione dei collettori, sono diventati questi i blocchi che definiscono le condizioni operative a valle e a monte del cilindro. CILINDRO UNO è costituito da 15 modelli principali (Figura 5.4), molti dei quali richiamano le equazioni fisiche che descrivono il comportamento del cilindro.
Figura 5.4: Elenco dei modelli del motore VR6 e dei sottomodelli del blocco cilindro UNO.
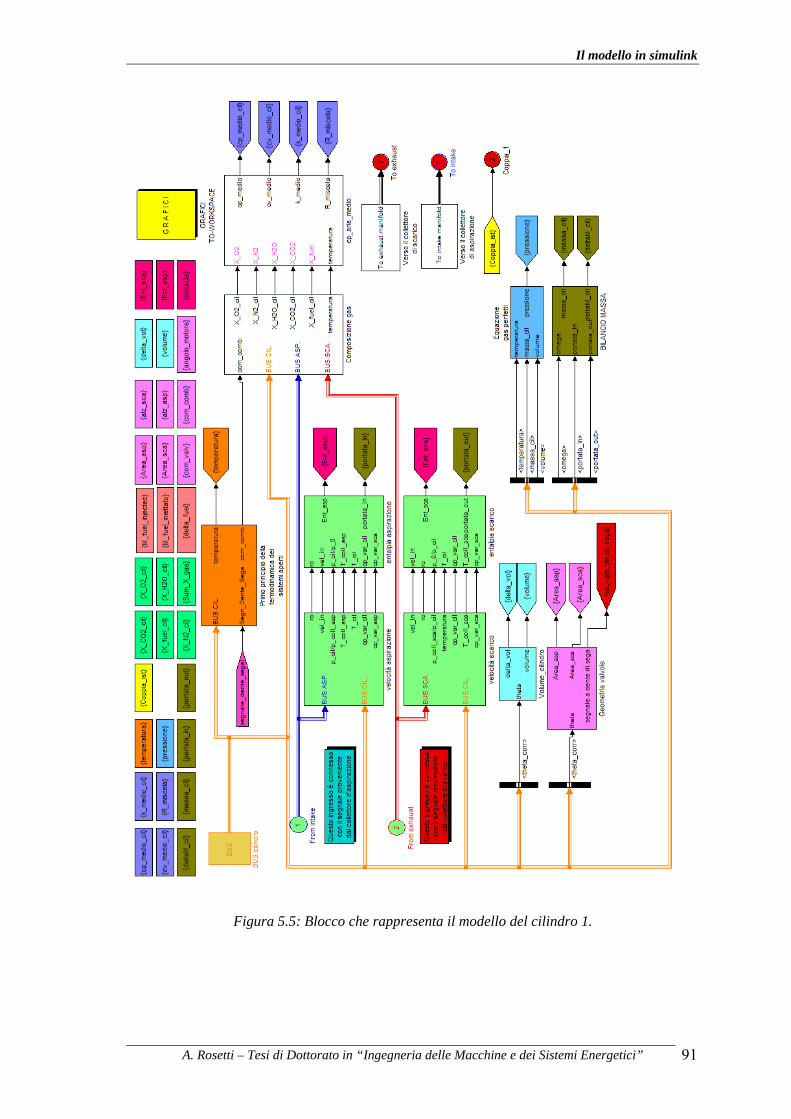
Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 91
Figura 5.5: Blocco che rappresenta il modello del cilindro 1.

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 92
Verranno ora presentati i sottomodelli descrivendone le caratteristiche. o BUS CILINDRO Il blocco BUS cilindro raggruppa tutti i segnali che devono essere trasmessi nel modello. In esso è inserito anche il segnale di clock, che corrisponde alla variazione dell’angolo ϑ di manovella, e la costante omega, la velocità di rotazione in radianti al secondo, settata nel file di lancio.
Figura 5.6: Bus cilindro.
Il segnale di clock rappresenta il valore assoluto dell’angolo di manovella. All’interno del blocco cilindro è anche presente un blocchetto che azzera i segnali di ogni ciclo motore (720 ° C.A. o 4π) ottenendo così un segnale a dente di sega.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 93
o PRIMO PRINCIPIO DELLA TERMODINAMICA PER SISTEMI APERTI IN
CONDIZIONI NON STAZIONARIE.
Figura 5.7 : Primo principio della termodinamica per sistemi aperti.
La figura 5.7 rappresenta il modello in SIMULINK del primo principio della termodinamica; si nota che le portate sono qui denominate Ent_asp ed Ent_sca poiché sono già state moltiplicate per il termine entalpico cp
. T. Si può notare la possibilità di utilizzo per lo scambio termico sia del blocco relativo al modello di Annand, sia quello relativo al modello di Woschni, tramite uno switch manuale. Questo blocco fornisce anche l’esempio di utilizzo del Bus Selector e conferma la versatilità nella gestione dei segnali.

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 94
Figura 5.8 : Il BUS selector.
La prima finestra (“Signals in the bus” in figura 5.8) raccoglie i segnali presenti nel Bus cilindro; da questo elenco si può scegliere il segnale che si vuol far uscire e metterlo nella finestra accanto, che rappresenta i segnali in uscita (“Selected signals”); il vantaggio sta nel fatto che si può selezionare un segnale a piacere e farlo uscire nella posizione preferita, così da poter collegare ordinatamente le equazioni del blocco successivo. o VOLUME CILINDRO.
thetadelta_vol
volume
Volume_cilindro
delta_vol
volume<theta_corr>
Figura 5.9 : Blocco del volume del cilindro.
In figura viene riportato il blocchetto in simulink che calcola il volume spazzato dal cilindro.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 95
questa costante mi serve per rendere coerentela geometria del cilindro con la fasatura dellevalvole
2volume
1delta_vol
f(u)
theta->gamma f(u)
Volume spazzatoz1
Unit Delay
[0]
IC
angolo_motore
pi
0
Fase
1theta
gamma
Figura 5.10: Volume cilindro.
Dal bus di figura 5.9 viene estratto solo l’angolo theta fornito dal clock; la costante fase con valore 0 è relativa al cilindro UNO, negli altri cilindri saranno presenti fasature differenti.
Questo blocco ricava il volume istantaneo ( )V ϑ spazzato dal cilindro e la sua variazione
( ) ( )V V Vϑ ϑ ϑ∆ = − −∆ , alla quale è impostata una condizione iniziale nulla.
Figura 5.11: Confronto fra volume del cilindro sperimentale e da simulaizone.
In figura 5.11 viene riportato il confronto fra il volume del cilindro rilevato sperimentalmente e quello calcolato dalla simulazione. E’ molto importante avere una variazione di volume precisa e
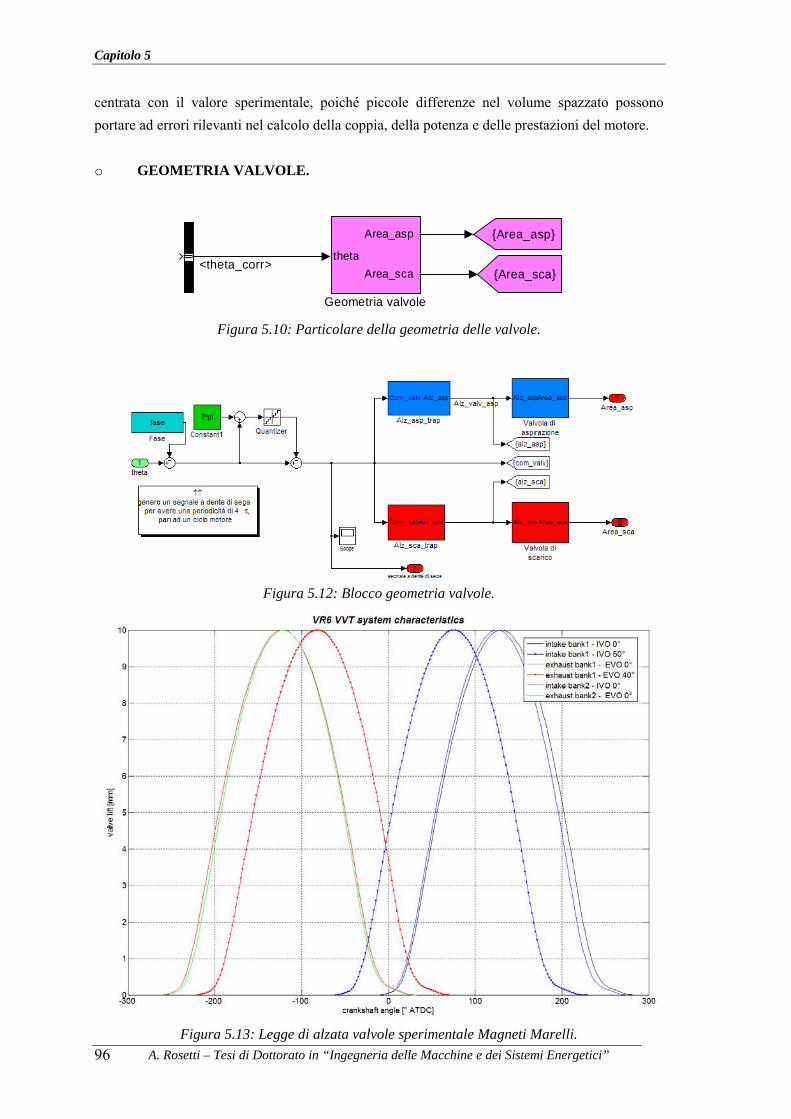
Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 96
centrata con il valore sperimentale, poiché piccole differenze nel volume spazzato possono portare ad errori rilevanti nel calcolo della coppia, della potenza e delle prestazioni del motore. o GEOMETRIA VALVOLE.
Area_sca
Area_asp
theta
Area_asp
Area_sca
Geometria valvole
<theta_corr>
Figura 5.10: Particolare della geometria delle valvole.
Figura 5.12: Blocco geometria valvole.
Figura 5.13: Legge di alzata valvole sperimentale Magneti Marelli.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 97
Figura 5.14: Coefficiente di efflusso in funzione dell’alzata delle valvole.
Figura 5.15: Valore di alzata valvole per cui risulta un coefficiente di efflusso nullo
(ingrandimento di figura 5.13 e da dati figura 5.14).

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 98
Figura 5.16: Legge di alzata valvole da simulazione in funzione
dell’angolo di manovella(VVT 0-0).
Figura 5.17: Legge di alzata valvole da simulazione per VVT 0 - 0. Visualizzazione per
confronto con dati sperimentali

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 99
Per la modellazione di grandezze cicliche nel funzionamento del motore, si è sfruttata la periodicità di 4 π, pari alla durata di un ciclo stesso, creando così un modello dell’alzata delle valvole, con la quale è possibile calcolare l’area di passaggio del flusso di gas che entra ed esce dal cilindro. La legge di alzata deriva da dati sperimentali, e quindi realizzata tramite una mappa in SIMULINK. In mancanza di dati che definiscono la legge di alzata è possibile simularla con una funzione di tipo trapezoidale ad angoli smussati, con una rampa di salita e discesa. La figura 5.13 riporta le leggi di alzata valvola sperimentali. Si nota la possibilità di variare la fasatura tramite il sistema VVT di cui il motore VR6 è predisposto. Oltre alla legge di alzata è necessario conoscere il coefficiente di efflusso, se ne riporta l’andamento in figura 5.14. Si riesce così ad avere un modello completo dell’alzata valvole, di cui si riportano le figure 5.16 e 5.17. Nella prima la legge di alzata in un ciclo e nella seconda in layout analogo a quello sperimentale. Si notano inoltre in figura 5.16 i punti in cui la valvola comincia l’alzata (contrassegnati con un pallino) e l’istante in cui invece effettivamente comincia ad aprire (contrassegnato da un asterisco). o BILANCIO DI MASSA.
deltaM_cil
massa_cilomega
portata_in
portata_out
massa_cil
deltaM_cil
BILANCIO MASSA
<omega>
<portata_in>
<portata_out>
Figura 5.18: Particolare del bilancio di massa in SIMULINK..
Per il bilancio di massa si è fatto riferimento all’equazione 5.2, riportata di seguito. A questa equazione si è aggiunta la quantità di combustibile iniettata prima della combustione, poiché stiamo considerando un motore GDi.
Figura 5.19: Equazione del bilancio di massa in SIMULINK..

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 100
1 1 ;in out cil cilcil
dm dm dM dMM
dt dt d dϑ
ω ω ϑ ϑ− = ∆ = ∆ (5.2)
Le due uscite di questo blocco sono la variazione istantanea di massa e la massa istantanea all’interno del cilindro, entrambe utili per l’equazione del primo principio della termodinamica. Il loro andamento è illustrato nelle figure seguenti che rappresentano il secondo ciclo da 4π (12.56) a 8π (25.13), poiché nel primo ciclo la combustione è inibita per permettere alla simulazione di aggiornare i valori gradualmente. Si è utilizzato un passo angolare di 0.5 C.A.
Figura 5.20: Andamento della massa all’interno del cilindro in un ciclo motore (rpm=1000,
MAP=300[mbar], VVTASP=0, VVTSCA=0).
Figura 5.21: variazione della massa all’interno del cilindro in un ciclo motore. Si nota l’istante
di iniezione durante la fase di compressione, trattandosi di un motore GDi.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 101
o COMPOSIZIONE GAS. Questo blocco è un modello che fornisce la composizione dei gas in percentuale all’interno del cilindro. Essa varia in funzione delle aperture delle valvole e al procedere della combustione. La formula chimica utilizzata per simulare il processo di combustione è la seguente :
( )2 2 2 2 22m nnC H O kN mCO H O kNλ λ+ + = + + (5.3)
Dove λ è fornito dall’equilibrio della relazione e vale 4nm + , mentre k rappresenta il rapporto in
massa tra ossigeno e azoto presenti nell’aria fresca, 77/23 nel nostro caso. I valori di m e n definiscono il tipo di combustibile; in questo caso è stata considerata la benzina con la semplice
composizione 8 18C H .
Conoscendo il valore istantaneo della massa di combustibile, si possono ricavare la quantità istantanea di ossigeno usata e la quantità istantanea di anidride carbonica e di vapore acqueo prodotta; i bilanci che forniscono queste quantità sono i seguenti, considerando che l’azoto non viene fatto partecipare alla combustione:
2
31,99884
1,008 12,011O fuel
nmdM dM
n m
⎛ ⎞+⎜ ⎟⎝ ⎠= ⋅
⋅ + ⋅ (5.4)
2
44,00981,008 12,011CO fuel
mdM dMn m
⋅= ⋅
⋅ + ⋅ (5.5)
( )2
1,008 2 15,999421,008 12,011H O fuel
n
dM dMn m
⋅ ⋅ += ⋅
⋅ + ⋅ (5.6)
Successivamente, integrando si ottiene la variazione finita e, dividendo per la variazione finita della massa totale all’interno del cilindro, si ottiene la percentuale delle composizioni presenti. Inoltre ad ogni ciclo parte dei gas rimangono all’interno del cilindro e quindi le quantità vengono continuamente aggiornate. Di seguito sono riportati i blocchi in SIMULINK relativi a questo modello.

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 102
Figura 5.22: Modello di calcolo delle specie chimiche nel motore.
2
M_O2_cil
1
X_O2_cil
-K-
O2_out
O2_in
1s
Integrator
1
Segnale
<X_O2_sca>
<X_O2_asp>
<dM_fuel>
<massa_cil>
M_O2_cildM_O2_cilX_O2_cil
<dM_aria_in>
<dM_aria_out>
Figura 5.23: Bilancio di ossigeno nel motore.
Si può impostare una percentuale di vaporepresente nell'aria in ingresso scegliendo un
opportuno valore del guadagno per dM_aria_in
2
M_H2O_cil
1
X_H2O_cil1s
Integrator
H2O_out
H2O_in
-K-
Bilancio H2O
1
Segnale
<X_H2O_sca>
<X_H2O_asp>
X_H2O_cil<dM_fuel>dM_H2O_comb
<massa_cil>
M_H2O_cil
dM_H2O_cil
<dM_aria_in>
<dM_aria_out>
Figura 5.24: Bilancio di H2O nel motore.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 103
2
M_CO2_cil
1
X_CO2_cil
-K-
1s
Integrator
CO2_out
CO2_in
1
Segnale
dM_CO2_comb
<X_CO2_sca>
<X_CO2_asp>
X_CO2_cil<dM_fuel>
<massa_cil>
M_CO2_cildM_CO2_cil
<dM_aria_in>
<dM_aria_out>
Figura 5.25: Bilancio di CO2 nel motore.
Nei blocchi _in e _out è considerato anche il caso in cui la massa totale in ingresso o in uscita sia positiva o negativa. Ad esempio, si consideri il blocchetto H2O_in in Figura 5.24: se dM_aria_in è positivo entra aria nel cilindro con la composizione presente nell’aspirazione, X_H2O_asp; se, invece, la massa è negativa l’aria esce dal cilindro con le condizioni presenti all’interno del cilindro stesso, X_H2O_cil. L ’azoto cambierà la sua percentuale in massa all’interno del cilindro anche se non partecipa alla combustione, ma per la sola uscita o entrata del fluido operatore nel cilindro.
2
M_N2_cil
1
X_N2_cil
Product
N2_out
N2_in
1s
Integrator1
Segnale
<X_N2_sca>
<X_N2_asp>X_N2_cil
<massa_cil>
M_N2_cil
<dM_aria_in>
<dM_aria_out>
Figura 5.26: Bilancio di N2 nel motore.
Rimane da considerare il bilancio del combustibile. Per calcolare la quantità di combustibile stechiometricamente necessaria per la combustione, si è utilizzata l’equazione (5.7):
2
1,008 12,011
31,99884
fuel On mdM dM
nm
⋅ + ⋅= ⋅
⎛ ⎞+ ⋅⎜ ⎟⎝ ⎠
(5.7)
ricordando che n = 8 e m = 18.

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 104
Da questa equazione si ricava la quantità di combustibile iniettata, da prendere in considerazione per il calcolo, nella funzione di Wiebe, della quantità di combustibile bruciato che, nel bilancio, sarà posto con segno negativo. Inoltre, come detto nel capitolo terzo, nella funzione di Wiebe devono essere impostati dei parametri, uno dei quali definisce la quantità di incombusti presenti in camera; quindi è da prevedere un ricircolo del fuel incombusto e un aggiornamento continuo delle condizioni iniziali, come per gli altri gas. Si è posto che la quantità di combustibile necessaria venga iniettata tutta in un solo istante, 10° prima dell'inizio della combustione. Maggiori dettagli sull’ottimizzazione della funzione di Wiebe verranno dati nel capitolo 6.
Segnale che va a sommare al combustibile iniettato il combustibile non bruciato durante
la combustione del ciclo precedente⇓⇓
2M_fuel_cil
1X_fuel_cil1
s
Integratore
comb rimasto
massa_cil
com_comb
M_fuel_iniettato
Iniezione M_fuel_iniettato
Fuel_out
Fuel_in
2com_comb
1
Segnale
<X_fuel_sca>
<X_fuel_asp>
<dM_fuel>
<massa_cil>
X_H2O_cil
<dM_aria_in>
<dM_aria_out>
Figura 5.27: Bilancio di fuel nel motore.
Figura 5.28: Percentuali specie chimiche nel cilindro in un ciclo.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 105
Infine, per controllare che i calcoli fissero esatti, si sommano tutte le percentuali in massa dei diversi componenti del gas presente nel volume e si grafica il tutto in un unico diagramma (Figura 5.28): se la somma rimane costantemente pari a 100, il funzionamento è corretto. o ENTALPIA.
BUS SCA.
BUS CIL.
vel_inro
p_coll_sca/p_ciltemperatura
cp_var_cilT_coll_scacp_var_sca
velocità scarico
BUS ASP.
BUS CIL.
rovel_in
p_cil/p_coll_aspT_coll_asp
T_cilcp_var_cil
cp_var_asp
velocità aspirazione
vel_inrop_0/p_cilT_cilcp_var_cilT_coll_scacp_var_sca
Ent_sca
portata_out
entalpia scarico
rovel_inp_cil/p_0T_coll_aspT_cilcp_var_cilcp_var_sca
Ent_asp
portata_in
entalpia aspirazione
Ent_sca
portata_out
portata_in
Ent_asp
Figura 5.29: Particolare del calcolo dell’entalpia (del fluido operatore nella fase di scarico).
Si illustra ora il semplice blocco dell’entalpia. In questo blocco viene calcolata la portata attraverso il prodotto tra densità ro2, velocità vel_in (provenienti dal blocco della velocità) e Area di passaggio Area_sca (nel caso dell’aspirazione sarà Area_asp), richiamata tramite un blocco From.
2portata_out
1Ent_sca
Switch
Area_sca
7cp_var_sca
6T_coll_sca
5cp_var_cil
4T_cil
3p_0/p_cil
2ro 1
vel_in
Figura 5.30: Entalpia di scarico.
2 La densità ro è pari a quella del cilindro se il rapporto delle pressioni è tale da provocare una velocità
positiva, mentre è pari a quella del collettore di scarico nel caso contrario.

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 106
In base al rapporto delle pressioni, si ha un flusso diretto o inverso attraverso le valvole. Si può allora moltiplicare l’entalpia corrispondente alle condizioni provenienti dal cilindro se il rapporto delle pressioni favorisce un flusso diretto e alle condizioni del collettore di scarico se il flusso è inverso. Ent_asp ed Ent_sca sono i termini che prendono parte all’equazione del primo principio della termodinamica , come visto in precedenza. o CALORE SPECIFICO A PRESSIONE COSTANTE E A VOLUME COSTANTE
Cp e Cv. Questo blocco calcola il valore del cp e di conseguenza di cv , k e R, al variare della temperatura, in riferimento alle tabelle Janaf. Si basano quindi su look-up-table: in ingresso c’è la variabile indipendente (temperatura) e in uscita la variabile dipendente ( cp o cv).
Figura 5.31: cp_aria_medio.
Inoltre, grazie alla composizione percentuale del gas all’interno del cilindro, è possibile calcolare la media pesata dei valori dei coefficienti cp, cv , k e R. Quindi, in ogni istante, si hanno valori diversi dipendenti non solo dalla temperatura, ma anche dalla composizione della miscela, che si modifica notevolmente ogni volta che avviene la combustione.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 107
o VELOCITA’. Per il calcolo in SIMULINK delle velocità del fluido operatore, i blocchi relativi a scarico e aspirazione sono molto simili, cambiano solo le condizioni a valle e a monte; per il resto il procedimento è identico. Per illustrare i blocchi del modello è possibile ad esempio riferirsi solo alla velocità di scarico mostrata in Figura 5.32.
Figura 5.32: Calcolo della velocità di scarico in SIMULINK.
Le condizioni a monte provengono dal BUS CILINDRO, mentre le condizioni a valle sono definite dal BUS di SCARICO. Da questi valori si ricava il rapporto di pressione in funzione del quale è espressa la velocità. In base al segno di tale rapporto è possibile avere flusso diretto o
7
cp_v
ar_s
ca6
T_co
ll_sc
a
5
cp_v
ar_c
il
4
tempe
ratur
a
3
p_co
ll_sc
a/p_c
il
2 ro 1
vel_i
n
if
In1ve
l_flus
so
fluss
o inv
erso
else
vel_f
lusso
fluss
o dire
tto
u1if(u
1 > 1) els
e
If
1/u
2
BUS
CIL.
1
BUS
SCA.
<temp
eratu
ra>
p_ou
t/pre
ssion
e
<p_o
ut/pr
essio
ne>
ro_in
<ro_
coll_
sca>
<p_o
ut/pr
essio
ne>
<ro_
in>
<p_o
ut/pr
essio
ne>
<pre
ssion
e>
<pre
ssion
e>
<k_v
ar_c
il>
<pre
ssion
e>
<ro_
coll_
sca>
<p_c
oll_s
ca>
<temp
eratu
ra>
<cp_
var_
cil>
<T_c
oll_s
ca>
<cp_
var_
sca>
pres
sione
/p_ou
t
<p_c
oll_s
ca>
<k_v
ar_s
ca>
<R_m
iscela
>

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 108
flusso inverso, identici dal punto di vista dei passaggi, ma opposti per quanto riguarda le condizioni a valle e monte e per il segno: al flusso inverso è assegnato il segno negativo.
↑↑cadim*√p0/ρ0
1vel_flusso
k_varrapp_crit_var
rapporto critico var
if
p_out/pressione
k_var_cilvel_flusso_adim
flusso subsonico
else rapp_cr_var
k_var_cilvel_flusso_adim
flusso sonico
Switch
>
sqrt
u1
u2
if(u1 > u2)
else
If
else
Action Port
1
<p_out/pressione>
<p_out/pressione>
<p_out/pressione>
<pressione>
<ro_in>
<k_var_cil>
<k_var_cil>
Figura 5.33: flusso diretto.
Come espresso nel capitolo terzo, la velocità può essere sonica o subsonica in base al valore del rapporto di pressione. In caso di rapporto di pressione minore del rapporto critico, si ha la velocità costante al valore sonico definito da k. Essendo k dipendente da cp e cv (k = cp/cv ) variabili in funzione della temperatura, è anch’esso considerato variabile, creando così un rapporto critico variabile al variare della temperatura.
1rapp_cri t_var
uv
11
2
1k_var
Figura 5.34: Blocco per il calcolo del rapporto critico variabile.
↑↑√(2*k/(k-1)*[(p1/p0)2/k-(p1/p0)(1+k)/k])
1vel_flusso_adim
2/u
(1+u)/u
2*u/(u-1)
uv
sqrt
uv
else
Action Port
2k_var_cil
1rapp_cr_var
Figura 5.35: flusso sonico.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 109
1vel_flusso_adim
else p_out/pressione
k_v ar_cil
v el_par
velocitàparabol ica
if
p_out/pressione
k_v ar_cil
v el_lam
velocitàlaminare
Switchu1
if (u1 > rapp_lam)
else
If
i f
Action Port
2k_var_ci l
1p_out/pressione
Figura 5.36: flusso subsonico.
Il flusso subsonico a sua volta si scompone in velocità parabolica e velocità laminare; quest’ultima si ha quando il rapporto delle pressioni supera il valore di 0.90, come spiegato nel terzo capitolo.
↑↑√(2*k/(k-1)*[(p1/p0)2/k-(p1/p0)(1+k)/k])
1vel_lam
2/u
(1+u)/u
2*u/(u-1)
u-1
uv
sqrt
uv
-C-
Constant
if
Action Port
2k_var_cil
1p_out/pressione
Figura 5.37: velocità laminare.
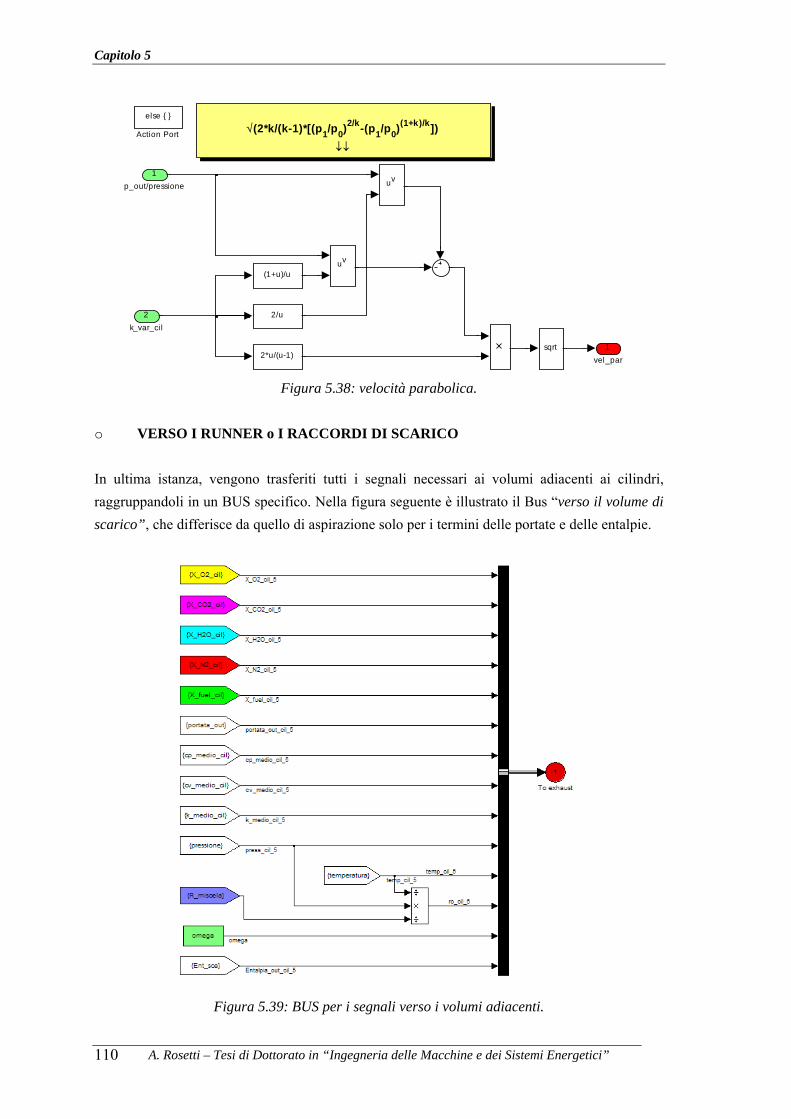
Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 110
√(2*k/(k-1)*[(p1/p0)2/k-(p1/p0)(1+k)/k])↓↓
1vel_par
2/u
(1+u)/u
2*u/(u-1)
uv
sqrt
uv
else
Action Port
2k_var_ci l
1p_out/pressione
Figura 5.38: velocità parabolica.
o VERSO I RUNNER o I RACCORDI DI SCARICO In ultima istanza, vengono trasferiti tutti i segnali necessari ai volumi adiacenti ai cilindri, raggruppandoli in un BUS specifico. Nella figura seguente è illustrato il Bus “verso il volume di scarico”, che differisce da quello di aspirazione solo per i termini delle portate e delle entalpie.
Figura 5.39: BUS per i segnali verso i volumi adiacenti.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 111
o GRAFICI TO WORKSPACE
Figura 5.40: Insieme di grandezze trasferite al “Workspace” di Matlab
per la fase di post-processing. Nel blocco di Figura 5.40 sono raccolti i grafici delle grandezze fondamentali e i salvataggi dei dati nell’ambiente di lavoro di Matlab (Workspace); i dati relativi al cilindro UNO sono privi di indicazione numerica, mentre per gli altri cilindri è specificato il numero di appartenenza (Es: vol_cil vol_cil_2 vol_cil_3 vol_cil_4). Il blocco “GRAFICI TO WORKSPACE” chiude un po’ l’analisi dei modelli in SIMULINK e di come le equazioni del capitolo 3 siano state implementate al fine della simulazione del cilindro. Per brevità non si riportano gli schemi di altre equazioni, quali equazione dei gas perfetti o equazione di Wiebe, vista la facile comprensione dall’analisi effettuata nel capitolo 3.

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 112
5.8 Il collettore di aspirazione
Figura 5.41: Blocco che rappresenta il modello del collettore di aspirazione.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 113
Come si può vedere dalla Figura 5.41, il collettore di aspirazione non differisce più di tanto dal cilindro; le equazioni che ne regolano il comportamento sono le stesse e spesso semplificate. Si mostrerà quindi solo ciò che rappresenta una novità e una peculiarità del collettore di aspirazione. o DAI CILINDRI o dai VOLUMI ad essi ADIACENTI Caratteristica del collettore di aspirazione è il bus dei segnali provenienti dai cilindri o dai volumi adiacenti (Figura 5.42). In questo caso i cilindri sono quattro, ma, come si può notare, i blocchi sono identici tranne per il numero corrispondente al cilindro3.
Figura 5.42: Bus dei segnali provenienti dai cilindri o dai volumi ad essi adiacenti.
3 Quindi è facile aggiungere a piacimento altri blocchi che rappresentano altri cilindri nel modello;
caratteristica importante perché uno degli obiettivi di partenza.

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 114
o VELOCITA’ DI ASPIRAZIONE ED ENTALPIA IN INGRESSO Analogamente a quanto visto per il caso del modello del cilindro, le velocità dipendono dalle condizioni a monte e a valle nei volumi adiacenti al collettore. Per chiarire questo concetto si riporta uno schema di come si potrebbe pensare suddiviso il motore in sottovolumi nella figura seguente.
Figura 5.43: Schematizzazione del motore in sottovolumi.
In base a questa schematizzazione si può notare che le condizione nel collettore di aspirazione dipendono dalla posizione della farfalla e dalla portata attraverso la farfalla, e non più, come nel cilindro, attraverso le valvole. La trattazione delle equazioni però rimane la stessa, come descritto nel capitolo 3, introducendo un parametro definito AREA EFFICACE di farfalla che va a sostituire quello che per le valvole di aspirazione e di scarico era il coefficiente di efflusso. o ENTALPIA IN USCITA. L’entalpia in uscita dal collettore di aspirazione differisce da quella del cilindro poiché è rappresentata dalla somma delle entalpie richieste dai singoli cilindri,essendo il volume collettore adiacente a tutti e sei i cilindri. Si possono avere flussi entranti o uscenti in funzione del rapporto di pressione.
Figura 5.44: Entalpia in uscita dal collettore di aspirazione.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 115
o BILANCIO DI MASSA
Figura 5.45: Bilancio di massa nel collettore di aspirazione.
Nel bilancio di massa del collettore di aspirazione si hanno in uscita le portate richieste dai cilindri e in ingresso, oltre alla portata che attraversa la valvola a farfalla, anche una portata di EGR esterno, proveniente dal collettore di scarico. Questo condotto può essere aperto o chiuso a seconda che si stiano considerando prove in presenza di EGR esterno o prove in assenza di EGR esterno, come si vedrà meglio nel capitolo 6. o CALORE DISSIPATO Le equazioni adottate per il calcolo del calore dissipato attraverso le pareti del collettore sono del tutto analoghe a quelle dei cilindri, con la differenza che per il collettore di aspirazione non sono considerate le perdite per irraggiamento. Quindi in riferimento al capitolo 3, equazione 3.36, si dovrà considerare il solo contributo dovuto alla convezione. E’ questa l’unica differenza riguardo al calore ceduto rispetto al cilindro.

Capitolo 5
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 116
o PRIMO PRINCIPIO DELLA TERMODINAMICA Per calcolarsi la temperatura all’interno del collettore si è fatto uso naturalmente del primo principio della termodinamica per sistemi aperti che si presenta simile a quello dei cilindri tranne per il fatto che qui non esiste la combustione. Come si può vedere dalla figura di seguito riportata, la mancanza di combustione porta all’assenza del modello di Wiebe e, viste le basse temperature, la presenza di scambio per sola convezione e non per irraggiamento.
Figura 5.46: Primo principio della termodinamica applicato al collettore di aspirazione.
5.9 Il collettore di scarico Il collettore di scarico è sostanzialmente analogo al collettore di aspirazione, vi sono poche differenze che ora verranno analizzate. Innanzitutto, è evidente la semplificazione che per il collettore di scarico non c’è nessuna sezione di gola tra esso e l’ambiente, per cui la velocità di scarico è calcolata semplicemente come flusso tra due ambienti a pressione diversa e la sezione di passaggio è costante e pari all’area del condotto di scarico. L’entalpia in ingresso al collettore corrisponde all’entalpia in uscita dai cilindri, o dai volumi ad essi adiacenti. L’entalpia in uscita dal collettore di scarico è data dalla somma dell’entalpia del flusso in uscita verso l’ambiente esterno, e dall’entalpia in uscita dall’ EGR esterno, unica novità rispetto agli altri blocchi.

Il modello in simulink
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 117
5.10 I VOLUMI RUNNER E RACCORDI DI SCARICO I volumi identificati con i nomi RUNNER e RACCORDI DI SCARICO seguono le equazioni descritte nel capitolo 3. E’ importante notare che per la fase di ottimizzazione delle grandezze termodinamiche all’interno del cilindro, al fine di semplificare e velocizzare la simulazione, è possibile considerare un modello “semplificato”, costituito dai 5 sottovolumi principali, come schematizzato in figura 5.43. Il modello completo risulta allora quello riportato nella seguente figura 5.47.
Figura 5.47: Modello utilizzato per l’ottimizzazione dei parametri di simulazione.

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 119
Capitolo 6
OTTIMIZZAZIONE DELLE
SIMULAZIONI E RISULTATI
6.1 Introduzione La grandezza di maggiore interesse, dal punto di vista termodinamico, in un motore a combustione interna è la pressione all’interno del cilindro, ed essendo il modello realizzato termodinamico, si farà proprio riferimento alla pressione all’interno dei cilindri per l’identificazione del modello. Inoltre, come visto nel capitolo 4, la campagna prove sperimentali della Magneti Marelli fornisce un numero notevole ed interessante di grandezze caratteristiche del motore. E’ allora possibile effettuare confronti anche sulle pressioni e sulle temperature nel collettore di aspirazione e nel condotto di scarico. Si possono successivamente trarre indicazioni su altre grandezze di difficile misurazione, quali, ad esempio, l’EGR interno. E’ necessario spiegare in questa introduzione che si è cercato di realizzare un sistema che, dati in ingresso diversi dati sperimentali in punti motore ritenuti rappresentativi (determinati ad esempio da analisi DOE), riuscisse a simulare gli andamenti delle grandezze negli stessi punti motore per le varie prove, e analizzare quindi anche altri punti motore, senza bisogno di successive prove sperimentali. Sicuramente le prove sperimentali sono alla base della progettazione e dello sviluppo di un motore, avere però uno strumento in grado di dare andamenti al variare delle condizioni operative, può senza dubbio ridurre i tempi necessari per lo sviluppo. Nel presente capitolo verranno analizzati i parametri necessari al modello per la simulazione. Tali parametri possono essere facilmente messi a punto dal punto di vista fisico per una singola prova. In generale per la messa a punto del modello, anche per altri motori, ci si può basare su un “pacchetto” di dati sperimentali, sui quali determinare i parametri incogniti. Si è cercato di produrre un modello del motore, e come tale, inevitabilmente può avere dei limiti e delle approssimazioni.

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 120
6.2 Andamento della pressione all’interno del cilindro La figura 6.1 riporta l’andamento della pressione all’interno del cilindro rilevata sperimentalmente dal banco prova Magneti Marelli ( corretta secondo le tecniche descritte nel capitolo 4 ) a confronto con i risultati della simulazione del modello. Suddividendo il ciclo di pressione nelle 4 fasi di un motore a quattro tempi, si possono ricavare informazioni utili al settaggio dei paramentri caratteristici del modello.
Figura 6.1: Andamento della pressione all’interno del cilindro – RPM=1000, MAP=300,
IVO=0, EVO=0, funzionamento in omogeneo, EGR EST=0.
6.3 Ottimizzazione dei parametri di simulazione I principali parametri da definire nel modello sono i seguenti:
1. TEMPERATURA DI PARETE NEL CILINDRO Necessaria per la determinazione del calore scambiato fra il fluido operatore all’interno del cilindro e le pareti del cilindro stesso secondo il modello di Annand. 2. TEMPERATURA DI PARETE DEL COLLETTORE DI ASPIRZIONE Necessaria per la determinazione del calore scambiato tra il fluido nel collettore di aspirazione e le sue pareti secondo il modello di Annand.

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 121
3. TEMPERATURA DI PARETE DEL COLLETTORE DI SCARICO Necessaria per la determinazione del calore scambiato tra il fluido e la parete nel collettore di scarico. 4. TEMPARATURA DI PARETE NEI RUNNER E NEI RACCORDI DI SCARICO 5. COSTANTI C1 e C2 per MODELLO DI ANNAND Constanti per la determinazione del calore ceduto (vedi equazioni 3.36 e 3.37) 6. PARAMENTRI DI WIEBE RELATIVI ALLA COMBUSTIONE Necessario per la determinazione del calore generato dalla combustione, in particolare sono necessari l’angolo di inizio combustione θi, angolo di fine combustione θf, a ed m. Essendo la campagna prove sperimentali costituita da un notevole numero di prove, come visto nel capitolo 4, non è possibile pensare di ottimizzare i parametri con un settaggio manuale, ma è necessario ottenere delle metodologie per una determinazione delle incognite in modo rapido e consistente. Visto l’elevato numero di grandezze indipendenti da definire, si è scelto di fissare a priori alcune grandezze e determinare poi in automatico altre grandezze, tramite la funzione “fminsearch” o “fmincon” di Matlab. Si sono allora definite le seguenti grandezze: TEMPERATURA DI PARETE NEL CILINDRO = si è posta uguale a 470 gradi, supponendo quindi di essere già in condizioni di regime termico del motore. Tale valore è stato scelto in base a valori suggeriti dalla bibliografia per i modelli di scambio in uso. Si è ritenuto corretto mantenere una temperatura delle pareti costanti in quanto in tutta la campagna di prove sperimentali si è cercato di mantenere la temperatura dell’acqua di raffreddamento a valori costanti e compresa fra 80 e 90 °C. Analizzando inoltre l’andamento della temperatura dell’olio di lubrificazione del motore (riportato in figura 6.2 e 6.3) al variare delle prove, si può vedere che ha un andamento abbastanza piatto, ed anche questo conferma che durante le prove sperimentali si è mantenuto pressoché costante lo scambio termico del motore, tramite scambiatori di calore disposti in sala prova. Infine, essendo presenti anche i parametri C1 e C2 per il settaggio del calore ceduto per convezione e irraggiamento rispettivamente, è possibile tenere in conto di eventuali correzioni alle condizioni di scambio tramite questi due coefficienti, correggendo eventuali approssimazioni introdotte considerando la temperatura di parete costante. In figura 6.2 e 6.3 si riporta l’andamento delle temperature dell’olio rilevata sperimentalmente al variare del numero della prova, in caso di assenza di EGR esterno (valvola di EGR chiusa), e con EGR esterno. In figura 6.4 e 6.5 sono invece riportati gli andamenti delle temperature entranti e uscenti del fluido refrigerante, e nelle figure successive anche l’andamento rilevato dalla centralina. Gli andamenti riportati in queste figure confermano l’ipotesi di avere condizioni del motore già a regime termico.
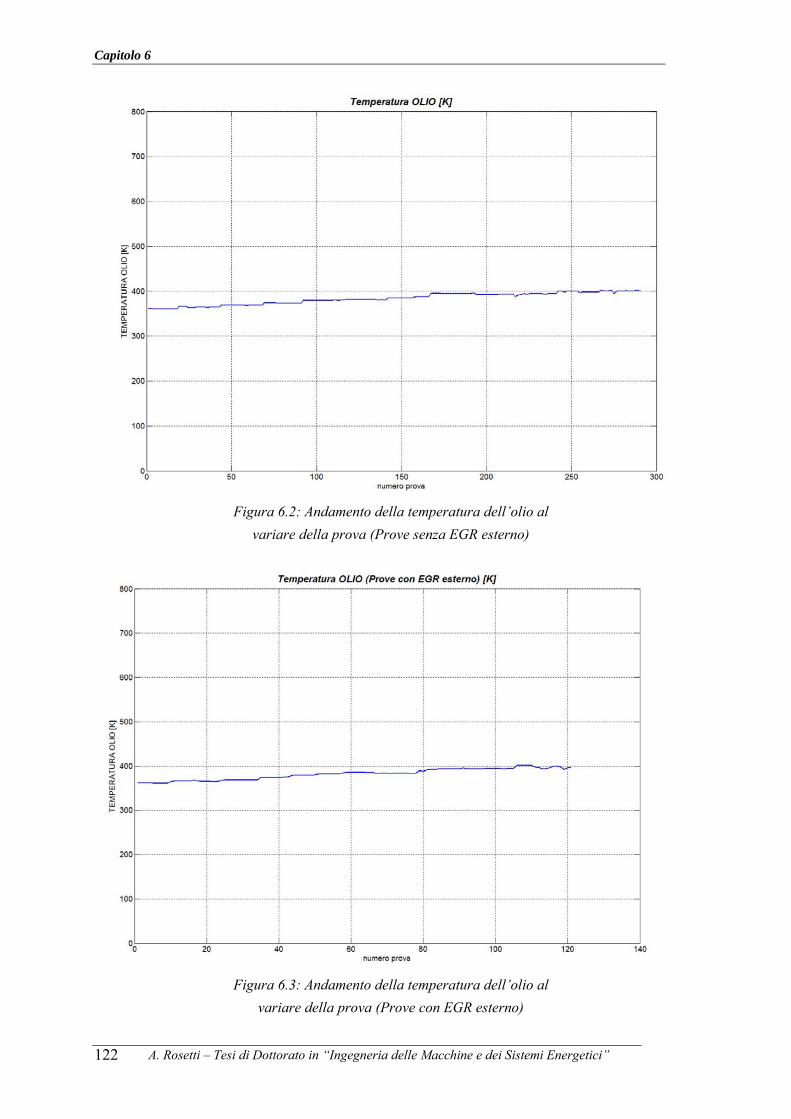
Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 122
Figura 6.2: Andamento della temperatura dell’olio al
variare della prova (Prove senza EGR esterno)
Figura 6.3: Andamento della temperatura dell’olio al
variare della prova (Prove con EGR esterno)

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 123
Figura 6.4: Andamento della temperatura dell’acqua in ingresso e in uscita dal motore per
prove senza EGR esterno.
Figura 6.5: Andamento della temperatura dell’acqua in ingresso e in uscita dal motore per
prove con EGR esterno.

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 124
Figura 6.6: Confronto fra temperatura letta in centralina e temperatura dell’acqua in
ingresso e in uscita dal motore per prove senza EGR esterno.
Figura 6.7: Confronto fra temperatura letta in centralina e temperatura dell’acqua in
ingresso e in uscita dal motore per prove con EGR esterno.

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 125
TEMPERATURA DI PARETE DEL COLLETTORE DI ASPIRZIONE = Si è posta la temperatura di parete del collettore di aspirazione uguale alla temperatura dell’aria rilevata sperimentalmente all’interno del collettore di aspirazione, supponendo quindi nuovamente il motore già a regime termico. Le figure 6.8 e 6.9 riportano l’andamento della temperatura nel PLENUM per le prove senza EGR esterno e CON EGR esterno
Figura 6.8: Andamento della temperatura del collettore di aspirazione (senza EGR esterno)
Figura 6.9: Andamento della temperatura del collettore di aspirazione (con EGR esterno)

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 126
TEMPERATURA DI PARETE DEL COLLETTORE DI SCARICO = dopo diverse prove, si è rilevato che la temperatura della parete del collettore di scarico poteva essere espressa da una legge del tipo: L’andamento della temperatura di parete nel collettore di scarico è riportato in figura 6.34. TEMPARATURA DI PARETE NEI RUNNER E NEI RACCORDI DI SCARICO = Si è posta la temperatura di parete dei volumi nel lato aspirazione (Runner o altro) uguale a quella del collettore di aspirazione e la temperatura di parete dei volumi lato scarico (Raccordi di scarico o altro) uguale a quella del collettore di scarico. COSTANTI C1 e C2 per MODELLO DI ANNAND = Tali costanti sono state determinate tramite le finzioni “fminsearch” e “fmincon” di Matlab, basate su tecniche di minimizzazione analoghe a quelle descritte nel capitolo 2.. PARAMETRI DI WIEBE RELATIVI ALLA COMBUSTIONE = I parametri relativi alla combustione sono quattro: l’angolo di inizio combustione θi, angolo di fine combustione θf, a ed
m. Si è pensato di determinare i parametri che fisicamente si riuscivano a ricavare quali il θi e il
θf, e di determinare a e m mediante la minimizzazione di funzioni obiettivo di cui si approfondirà in seguito.
1 DETERMINAZIONE DELL’ANGOLO θi L’angolo di inizio della combustione potrebbe essere in prima approssimazione posto uguale al valore dell’anticipo al variare della prova. In realtà la teroria del processo di combustione evidenzia un ritardo fisico fra l’istante di accensione e l’inizio effettivo della combustione, dovuto ad una prima parte di incubazione del processo, della durata di frazioni di secondo, seguito da una fase di propagazione laminare della fiamma, e infine da un processo turbolento con diffusione molto rapida. E’ quindi possibile distinguere tre parti:
Accensione ed incubazione della fiamma; fase in cui si accende un “volumetto” di miscela per effetto della scintilla che scocca tra gli elettrodi della candela. In questa fase la combustione è assimilabile a quella di tipo laminare ed è comunque preceduta da un tempo chiamato ritardo di accensione.
Combustione principale: caratterizzata da una rapida propagazione delle reazioni. Il pistone ora è vicino al PMS e perciò il volume della camera di combustione è con buona approssimazione costante.
Completamento della combustione: la fiamma raggiunge i punti più lontani della camera, arrestandosi.
)1000
1000RPM(*)300
MAP900(*51015.273TT SPERIMscap−−
+++=

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 127
Figura 6.10: Diagrammi di pressione di un ciclo con combustione (Fired cycle) e senza
combustione (Unfired cycle)
In figura 6.10 si può notare che fino al punto B di inizio combustione turbolenta, le curve di ciclo senza combustione e con combustione sono praticamente coincidenti. Dopo aver bruciato una percentuale variabile tra l’1% e il 5% della carica presente nel cilindro, la curva dell’andamento della pressione durante la fase di combustione si discosta, salendo per il rilascio di energia prodotta dalle reazioni chimiche di combustione sale per il calore prodotto dalle reazioni chimiche. Per la realizzazione del modello è necessario determinare in automatico il ritardo di accensione, cioè il tratto A-B a partire dai dati sperimentali e in particolare dalla curva di pressione. Per la determinazione dell’angolo effettivo di inizio combustione sono state utilizzate 2 tecniche:
tecnica del coefficiente della politropica
tecnica della derivata del rilascio di calore
Si descrivono ora i due metodi METODO DEL COEFFICIENTE DELLA POLITROPICA Si basa sull’osservazione che dopo l’istante di chiusura della valvola di aspirazione il pistone comprime la miscela secondo una legge politropica del tipo:
PVK = cost (6.1)

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 128
E’ possibile allora determinare il valore di K che caratterizza la trasformazione. Il K si mantiene pressoché costante col procedere della compressione, fino a quando, all’innescarsi del processo di combustione, comincia ad aumentare di valore fino a perdere significato fisico. Considerando due punti1 e 2, uno all’inizio e uno alla fine della fase di compressione, quando il cilindro è isolato e quindi con entrambe le valvole di aspirazione escarico chiuse, applicando i logaritmi a primo e secondo membro dell’equazione 6.1 è possibile determinare il valore di K come:
)VVlog()PPlog(K
21
12
−−
= (6.2)
Rappresentando allora il diagramma di indicatore in scala logaritmica, è possibile vedere che il significato fisico di k è il coefficiente angolare della linea retta di compressione.
Figura 6.11: Diagramma di indicatore in scala logaritmica, il tratto di compressione è a
pendenza costante, definita dal valore di K.
E’ allora possibile individuare l’istante in cui la curva di pressione si discosta dall’andamento rettilineo per determinare l’istante di inizio effettivo della combustione, come si può vedere dalla figura 6.12. Conoscendo poi l’istante di accensione mappato in centralina, si determina il ritardo di accensione A-B- rappresentato in figura 6.10 in modo automatico. Si è quindi descritta a la prima metodologia per determinare l’angolo θi.
METODO DEL COEFFICIENTE DELLA POLITROPICA

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 129
Figura 6.12: Diagramma di indicatore in scala logaritmica, il tratto di compressione è a pendenza costante, definita dal valore di K. Il primo pallino verde definisce l’istante di
innesco effettivo della combustione, mentre il secondo l’istante di fine combustione. METODO DELLA DERIVATA DEL RILASCIO DI CALORE L’andamento del rilascio di calore in prossimità degli istanti di accensione della miscela ha un comportamento caratteristico visualizzato in figura 6.13 e tipico dei motori GDi. Dalla figura si può infatti vedere che nella zona di inizio combustione si ha una prima fase di raffreddamento del fluido, in parte dovuto all’iniezione di combustibile, seguito da un andamento crescente che sta ad indicare l’innesco della combustione. Si può allora univocamente determinare l’istante di inizio della combustione individuando l’istante in cui la derivata del rilascio di calore assume valore uguale a zero.
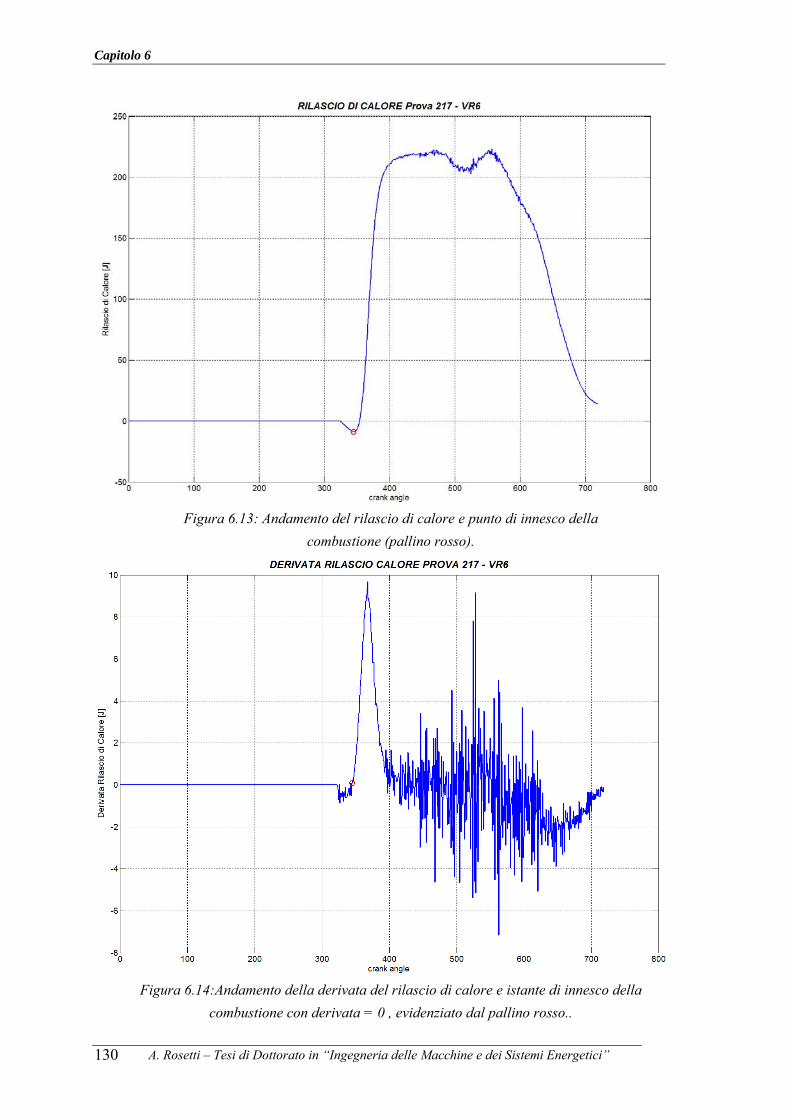
Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 130
Figura 6.13: Andamento del rilascio di calore e punto di innesco della
combustione (pallino rosso).
Figura 6.14:Andamento della derivata del rilascio di calore e istante di innesco della
combustione con derivata = 0 , evidenziato dal pallino rosso..

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 131
2 DETERMINAZIONE DELL’ANGOLO θf L’angolo di fine combustione non è di facile determinazione a causa dell’interazione della fiamma con le pareti della camera di combustione. La determinazione dell’angolo di fine combustione è necessaria per inserire un valore consistente nel modello di combustione. Per la determinazione dell’angolo effettivo di fine combustione sono state utilizzate 2 tecniche:
tecnica del coefficiente della politropica
tecnica del Massimo valore del prodotto PVn
Si descrivono ora i due metodi. METODO DEL COEFFICIENTE DELLA POLITROPICA Come nel caso dell’angolo di inizio combustione, si basa sull’osservazione che nella fase prima dell’istante di apertura della valvola di scarico, quando non vi è più scambio di calore con le pareti, si può pensare che il fluido operatore, costituito dai prodotti di combustione e dalla piccola percentuale di incombusti, subisca una trasformazione politropica secondo la legge :
PVK = cost (6.3) Anche in questo caso è possibile determinare il valore di K che caratterizza la trasformazione. Il K si mantiene pressoché costante col procedere della fase di espansione. Applicando i logaritmi a primo e secondo membro dell’equazione 6.3 è possibile ottenere il valore di K come dall’equazione 6.2. Dalle figure 6.11 e 6.12 è possibile notare come anche nella fase di espansione sia presente una trasformazione politropica. Si può allora determinare l’istante di fine combustione analogamente all’istante di inizio combustione come visualizzato dal secondo pallino verde in figura 6.12. METODO DEL MASSIMO VALORE DEL PRODOTTO PVn E’ necessario osservare che in bibliografia si trovano diversi valori suggeriti per il valore dell’esponente n, fra i quali i più consistenti sono risultati n=1,15 e n=1,20. In questo lavoro si è ritenuto il più corretto il valore di n=1,20. Entrambi i valori comunque danno buoni risultati. La figura 6.15 riporta l’andamento del metodo PVn per valori di n=1,15 e 1,20.

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 132
Figura 6.15:Andamento del prodotto PVn e identificazione del massimo.
La figure seguenti riportano i valori determinati di angoli di inizio e fine combustione al variare del numero della prova determinati con il metodo del rilascio di calore, del PVn e con i metodi del coefficiente della politropica, a confronto con gli angoli di anticipo e con gli angoli caratteristici della combustione MFB=10%, MFB=50% e MFB=100%.
Figura 6.16: Angoli di combustione determinati col metodo del rilascio di calore e PVn a
confronto con gli angoli di anticipo da centralina .

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 133
Figura 6.17: Angoli di combustione determinati col metodo del rilascio di calore e PVn a confronto con gli angoli di MFB=10%,50% e 90% e i valori di anticipo da centralina .
Figura 6.18: Angoli di combustione determinati col metodo del coefficiente della politropica
a confronto con i valori di anticipo da centralina .

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 134
Figura 6.19: Angoli di combustione determinati col metodo del coefficiente della politropica
a confronto con gli angoli di MFB=10%,50% e 90% e i valori di anticipo da centralina .
Figura 6.20: Confronto fra i metodi di deternimazione degli angoli di combustione con i
valori di MFB=10%, 50% e 90% e i valori di anticipo di centralina.

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 135
Per finire l’analisi della combustione è interessante riportare gli andamenti al variare della prova del prodotto della massa di combustibile iniettata ( Mc ) e del potere calorifico inferiore ( Ki ), a confronto con il valore massimo determinato del rilascio di calore del fluido operatore. Analizzandone la differenza riportata in figura 6.22 e il rapporto in figura 6.23, è possibile avere un’indicazione della potenza termica scambiata con le pareti; si può notare che ha un andamento pressoché costante in rapporto al variare della prova.
Figura 6.21: Andamento del prodotto Mc*Ki in nero e del massimo valore del rilascio di
calore in rosso.

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 136
Figura 6.22: Differenza del prodotto Mc*Ki e del massimo del rilascio di calore al variare
della prova.
Figura 6.23: Rapporto del prodotto Mc*Ki e del massimo del rilascio di calore al variare
della prova.

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 137
6.4 Risultati delle simulazioni E’ possibile ora riportare gli andamenti della pressione in camera per differenti punti motore. Per semplicità e per completezza si scelgono tre punti motore, a bassi giri a farfalla parzialmente chiusa, a giri intermedi e farfalla mediamente chiusa, e ad lati giri e farfalla aperta.
Figura 6.24: Andamento della pressione all’interno del cilindro – RPM=2000, MAP=300,
IVO=0, EVO=0, funzionamento in omogeneo, EGR EST=0.
Figura 6.25: Andamento della pressione all’interno del cilindro – RPM=3000, MAP=600,
IVO=0, EVO=0, funzionamento in omogeneo, EGR EST=0.

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 138
Figura 6.26: Andamento della pressione all’interno del cilindro – RPM=4000, MAP=800,
IVO=0, EVO=0, funzionamento in omogeneo, EGR EST=0.
A titolo d’esempio si riportano i grafici della pressione in camera di combustione anche in scala logaritmica, l’andamento del rilascio di calore e della curva della frazione di massa bruciata al variare del c.a.
Figura 6.27: Andamento della pressione all’interno del cilindro – RPM=2000, MAP=300,
IVO=0, EVO=0, funzionamento in omogeneo, EGR EST=0.

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 139
Figura 6.28: Andamento del rilascio di calore al variare del c.a, – RPM=2000, MAP=300,
IVO=0, EVO=0, funzionamento in omogeneo, EGR EST=0.
Figura 6.28: Andamento della frazione di massa bruciata in funzione del c.a. – RPM=2000,
MAP=300, IVO=0, EVO=0, funzionamento in omogeneo, EGR EST=0.

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 140
Le figure seguenti riportano il confronto fra i dati sperimentali e i risultati della simulazione dell’aria aspirata per ciclo e dei valori di pressione nel collettore di aspirazione, per prove in assenza di EGR esterno e in presenza di EGR esterno.
Figura 6.29: Andamento dell’aria aspirata per ciclo al variare della prova, EGR EST=0.
Figura 6.30: Andamento della pressione nel collettore di aspirazione al variare della prova,
EGR EST=0.

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 141
Figura 6.31: Andamento dell’aria aspirata per ciclo al variare della prova,
prove con EGR esterno.
Figura 6.32: Andamento della pressione nel collettore di aspirazione al variare della prova,
prove con EGR esterno.

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 142
Le due figure seguenti riportano gli andamenti della temperatura nel collettore di aspirazione e nel collettore di scarico, al variare della prova.
Figura 6.33: Andamento della temperatura nel collettore di aspirazione al variare della
prova,prove senza EGR esterno.
Figura 6.34: Andamento della temperatura nel collettore di scarico al variare della prova,prove
senza EGR esterno.

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 143
6.5 Valutazione dell’EGR Interno.
Con il termine EGR interno si identifica quella parte di gas combusti che, al termine della fase di scarico del singolo ciclo motore, rimane intrappolata all’interno del cilindro. Esso è anche chiamato, in modo forse più chiaro, in inglese, residual gas fraction, cioè frazione di gas residui. L’EGR interno è sempre presente, qualsiasi motore si voglia considerare: la fase di scarico, infatti, deputata all’espulsione dei gas combusti, non è mai perfetta e lo svuotamento dal cilindro risulta sempre incompleto. Per la valutazione dell’EGR interno si sono considerati principalmente 2 modelli matematici, il primo proposto da Michael Mladek e Chistopher H. Onder dello Swiss Federal Institute of Technology di Zurigo (in seguito chiamato con l’abbreviativo tedesco ETH), il secondo, realizzato da Fox – Heywood è detto “modello di Heywood”. Si approfondiscono ora questi due modelli.
6.5.1 La stima dell’EGR interno tramite il modello dell’ETH.
Il modello fisico-matematico analizzato è incentrato su di un singolo cilindro e si propone di stimare la massa totale di carica in esso presente e la percentuale di EGR interno, durante il normale funzionamento in regime stazionario ed in condizioni stechiometriche. Il modello è stato realizzato per valutare l’EGR in tempo reale, quindi considera presente nel motore un sensore di pressione di cui la centralina conosca i valori al variare dell’angolo di manovella. Il calcolo si basa su un algoritmo che tramite un processo iterativo ricava la frazione di EGR interno. Per il calcolo sono necessari alcuni dati sperimentali, quali l’andamento della pressione in camera di combustione in funzione dell’angolo motore, la pressione e la temperatura nel collettore di aspirazione. L’algoritmo in questione è costituito essenzialmente da due cicli:
• un ciclo “for”, che consente la ripetizione di tutti i calcoli previsti, per le prove che si vogliono analizzare, che differiscono tra loro per i valori di pressione nel collettore di aspirazione (e, quindi anche andamenti di pressione interna al cilindro), regime di rotazione e fasatura delle valvole di aspirazione e scarico;
• un ciclo “while”, innestato nel precedente, e necessario in quanto il sistema di equazioni, di cui si dispone, non risulta risolvibile per sostituzione e deve essere risolto, quindi, iterativamente. Ad ogni iterazione si calcoleranno tre grandezze caratteristiche (il valore dell’EGR interno, la temperatura e la costante R dei gas perfetti al 50% della massa bruciata) da utilizzarsi come input per l’iterazione successiva. Il procedimento avrà termine allorquando il valore di partenza dell’EGR, alla generica ripetizione del calcolo, sarà uguale a quello restituito alla fine della stessa. Ovviamente, per la prima iterazione, si farà uso di valori di partenza ragionevoli per le tre grandezze.
I dati di cui si fa uso all’interno dell’algoritmo, oltre a quelli geometrici del motore, sono: - Andamento della pressione nel cilindro (come detto, si suppone la centralina riesca a far
uso di questa informazione); - Pressione dell’aria nel collettore di aspirazione; - Temperatura dell’aria in ingresso al collettore di aspirazione; - Anticipo di accensione della candela; - Velocità di rotazione dell’albero motore; - Istante di chiusura della valvola di aspirazione;

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 144
- Segnale della sonda lambda. Si analizza, ora, un po’ più nel dettaglio, il funzionamento dell’algoritmo di calcolo, con l’aiuto del diagramma di flusso di figura 6.35 in seguito riportata.
Figura 6.35: Diagramma di flusso del processo di stima dell’EGR interno.
A partire, dunque, dai dati sperimentali da analizzare, si esegue l’algoritmo un numero di volte pari a quello delle prove da esaminare: in particolare esiste un contatore, all’interno del
CICLO “WHILE”
Dati prove
Numero della prova
Andamento della massa
bruciata
Stima dello stato
all’IVC
R50, T50 ed Xrg di primo tentativo
R50, T50 ed Xrg iterazione precedente
Legge dei gas perfetti al 50% di massa bruciata
Prova = prova finale ?
CICLO “FOR”
NO
NO
SI
Numero prova
successiva Legge dei gas perfetti all’IVC
Bilancio energetico all’IVC
Bilancio energetico tra IVC e 50% di massa
TIVC
Mtot
T50
Xrg
Xrg = Xrg di inizio iterazione ?
SI Risultati: Mtot Xrg ed Mair
x50, V50, p50 e Lavoro
tra IVC ed x50

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 145
ciclo “for”, nel diagramma chiamato numero della prova, che viene aggiornato ad ogni ciclo e che consente di sapere se si è arrivati o meno all’ultima prova. Il blocco “Andamento della massa bruciata” utilizza come input la pressione interna al cilindro, l’anticipo di accensione della candela e l’andamento del volume del cilindro rispetto all’angolo di manovella e serve per determinare l’istante angolare in cui risulta bruciato il 50% della carica fresca (detto x50); ciò è possibile una volta ottenuto il classico andamento ad “S” della massa bruciata. Noto x50 , si ottengono i corrispondenti valori di pressione e volume del cilindro, allo stesso istante. Le operazioni fino ad ora descritte vengono effettuate una sola volta per prova e si trovano, infatti, al di fuori del ciclo “while”. Non così accade, invece, per le parti seguenti. Nella sezione centrale del programma di calcolo, si determinano la massa totale presente nel cilindro, la temperatura all’istante di chiusura della valvola di aspirazione, la temperatura e la costante dei gas perfetti al 50% della massa bruciata e la frazione di EGR interno (Xrg); ciò è possibile grazie all’utilizzo delle equazioni dei gas perfetti e di altre equazioni di bilancio. Indispensabili, in questa fase, sono anche le relazioni che permettono di ricavare le costanti dei gas perfetti e i calori specifici a volume costante di miscele di gas, a partire dai valori caratteristici dei singoli componenti. Questi calcoli, interni al ciclo “while”, vengono ripetuti più volte, fino a quando non si verifica la coincidenza tra il valore dell’Xrg introdotto all’inizio della generica iterazione e quello restituito alla fine della stessa: ciò sta a significare, infatti, che tutte le equazioni utilizzate sono soddisfatte e, quindi, le grandezze determinate sono quelle corrette. Occorre dire che si è introdotta un’ulteriore condizione (nel diagramma non indicata) per l’uscita dal ciclo “while”, che viene interrotto, per la generica prova, alla sua centesima iterazione: è stato fatto per evitare che processi che convergono troppo lentamente o che, addirittura, non convergono, portino l’algoritmo al loop. Una volta ripetuto il procedimento ora descritto per tutte le prove del set considerato, il programma visualizza, infine, i risultati ottenuti. L’equazione che permette di calcolare la frazione di EGR interno è la seguente:
( )( ) ( )fcIVCvfcIVCrgcrg
fcIVCvfcrg TTcTTc
TTcX
−+−
−= (6.3)
Dove, TIVC rappresenta la temperatura del fluido di chiusura della valvola di aspirazione, Tfc la temperatura della carica fresca , e Trg la temperatura dei gas residui.

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 146
Figura 6.36 –Calcolo dell’EGR % con il metodo dell’ ETH per diversi punti motore.
6.5.2 La stima dell’EGR interno tramite il modello di HEYWOOD.
Questo modello è basato su di un ciclo ideale tipo quello Otto ( Beau de Rochas). Sebbene se ne differenzi dal momento che presenta un’area di pompaggio particolare essendo costituita tutta da trasformazioni ideali a pressione costante e a volume costante. Le trasformazioni che caratterizzano questo ciclo sono:
1→2 adiabatica: viene compiuto lavoro sul fluido (fase di compressione); 2→3 isocora: viene fornito calore all’interno dello stesso fluido lavorante (fase di combustione); 3→4 adiabatica: viene compiuto lavoro dal fluido sull’esterno (fase di espansione); 4→5 isocora: si verifica un calo improvviso di pressione (blow down) che, nella realtà, è accompagnato da un’improvvisa fuoriuscita di gas combusti; 5→6 isobara: viene compiuto ancora lavoro sul fluido, necessario per poter evacuare gas; 6→7 isocora: con questa trasformazione viene simulato il calo di pressione che si verifica quando si apre la valvola di aspirazione; 7→1 isobara: è la corsa che serve ad introdurre nel cilindro la carica fresca a pressione costante.

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 147
Gli autori, Heywood e Fox hanno mostrato che la frazione in massa di gas residui sia dovuta alla somma di due termini: il termine dovuto al back-flow e quello dato dalla massa di gas intrappolati nel cilindro in corrispondenza dell’ IVO; si ha:
xr = (xr)backflow + (xr)IVO (6.4) in cui:
( )
( )
∫
∆∆
−
∝==•EVC
IVO c
db
ieb
ecc
backflowrbackflowr m
NOFVpp
dtmmm
mx
ϑϑρ
ρ1,
(6.5)
Dove mc rappresenta la massa intrappolata all’interno del cilindro, me la portata nella fase di incrocio, il pedice “b” indica i gas combusti, “i” le grandezze in aspirazione ed “e” allo scarico. N rappresenta il numero di giri. All’interno di questa formula ci sono alcune grandezze che è bene evidenziare; ad esempio il termine OF può essere espresso come:
( )d
eeii
VADAD
OF+
= (6.6)
in cui:
ϑdLAEVIV
IVOii ∫
=
= e ϑdLAEVC
EVIVee ∫
=
=
e quindi permette di quantificare l’entità dell’incrocio delle valvole a cui è direttamente collegata la quantità di gas che dallo scarico tende a passare all’aspirazione; infatti Ai e Ae sono le aree di cortina massime calcolate con l’ipotesi di Heywood quindi assumendo che sia l’area di dimensione minore a determinare l‘entità del flusso di b-f; questo è il motivo per cui le alzate vengono entrambe integrate, dall’apertura effettiva fino al punto in cui IV=EV per ottenere l’Ai e dal punto in cui IV=EV fino alla chiusura effettiva per ottenere l’Ae. Il termine OF/∆θ che compare nella (6.5) invece deriva dal definire un’area di passaggio media che rimane sempre aperta durante tutto l’overlap; si ha:
AFA= ϑπ
ϑϑϑπ
∆=
⎭⎬⎫
⎩⎨⎧
+∆ ∫∫
=
= OFVdLDdLD d
EVC
EVIVee
EVIV
IVOii
in cui AFA sta per ‘Avarage Flow Area’ . La formula finale utilizzata per calcolare realmente l’xRG differisce da quelle riportate dal momento che le costanti di proporzionalità presenti, compresa la C, sono state sostituite con altre che hanno permesso di correlare i dati ottenuti sperimentalmente a quelli calcolati; la formula finale, del modello validato è quindi:
( )Φ
74.0
i
e
c87.0
e
i
ie
r PP
r1632.0
PP
PPN
OF
266.1x ⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎟⎟⎠
⎞⎜⎜⎝
⎛
−⎟⎠⎞
⎜⎝⎛
= (6.7)

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 148
Di seguito si riportano i valori di EGR % calcolati con il modello di Heywood, per la bancata 1 e per la bancata 2. Le prove vanno da 1000rpm a 4000 con pressioni nel collettore da 350 a 900mba.
Figura 6.37 –Calcolo dell’EGR % della BANCATA 1 con il metodo di Heywood per diversi
punti motore.
Figura 6.38 –Calcolo dell’EGR % della BANCATA 2 con il metodo di Heywood per diversi
punti motore.
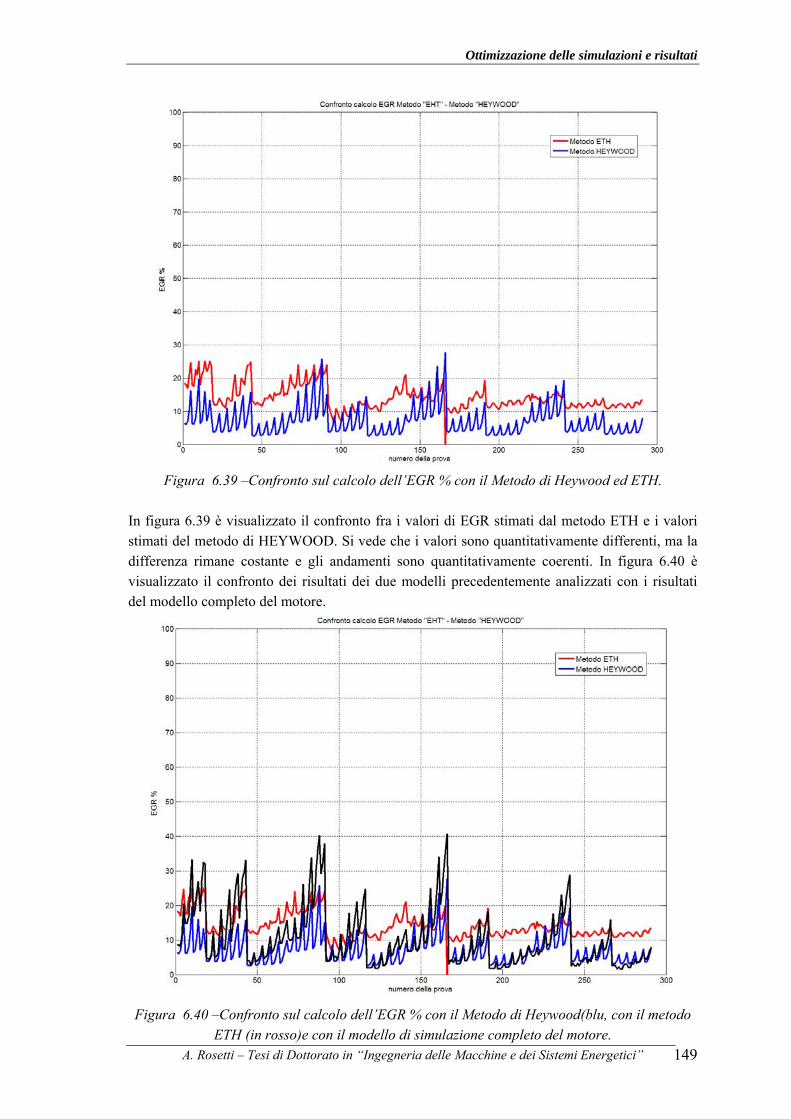
Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 149
Figura 6.39 –Confronto sul calcolo dell’EGR % con il Metodo di Heywood ed ETH.
In figura 6.39 è visualizzato il confronto fra i valori di EGR stimati dal metodo ETH e i valori stimati del metodo di HEYWOOD. Si vede che i valori sono quantitativamente differenti, ma la differenza rimane costante e gli andamenti sono quantitativamente coerenti. In figura 6.40 è visualizzato il confronto dei risultati dei due modelli precedentemente analizzati con i risultati del modello completo del motore.
Figura 6.40 –Confronto sul calcolo dell’EGR % con il Metodo di Heywood(blu, con il metodo
ETH (in rosso)e con il modello di simulazione completo del motore.

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 150
6.6 Simulazioni in condizioni non stazionerie. Il modello che finora abbiamo utilizzato per ottimizzare le prove è un modello che possiamo definire statico, nel senso che opera la simulazione in base al punto prova nel quale viene settato. Ogni punto prova, definito da un numero, possiede dei valori univoci di numero dei giri, di pressione nel collettore di aspirazione e di VVT allo scarico e all’aspirazione. In realtà sappiamo che un motore durante il suo esercizio lavora dinamicamente, ovvero le sue condizioni di funzionamento possono variare nel tempo. Al banco prova spesso viene testato in punti prova fissi e nei quali regnano determinati valori di numero di giri e di apertura farfalla e in base alle esigenze sperimentali. A questo proposito è stata nostra intenzione estendere il modello finora utilizzato per simulare prove non stazionarie. Sostanzialmente, variando nel tempo giri e apertura farfalla, otterremo delle curve che variano nel tempo fornendo risultati differenti a seconda degli ingressi. Nel nostro caso il modello si trova a lavorare nel dominio angolare, pertanto i nostri dati verranno forniti in funzione dell’angolo di manovella o di suoi derivati quali i cicli di simulazione. E’ immediato poi passare al dominio temporale conoscendo la velocità. Sostanzialmente, variando nel tempo giri e apertura farfalla, otterremo delle curve che variano nel tempo fornendo risultati differenti a seconda degli ingressi.
Sono state create, per ogni parametro di simulazione che necessitava della realizzazione di una mappa, delle matrici multidimensionali (multidimensional arrays) nelle quali nella prima dimensione (le righe) vengono identificati il numero dei giri, nella seconda dimensione (le colonne) i valori della MAP, nella terza dimensione il valore di VVT all’aspirazione e nella quarta dimensione il valore di VVT allo scarico. In questo modo il modello riesce ad avere in ingresso le condizioni operative in termini di giri e posizione farfalla, e si ricava in automatico i parametri necessari per la simulazione, tramite mappe ottimizzate in prove statiche di riferimento. In figura 6.41 e 6.42 vengono riportati degli esempi di creazione delle mappe per prove in condizioni non stazionarie.
Figura 6.41 –Mappe per il parametro “a ”di Wiebe della combustione.

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 151
Figura 6.42 –Mappe multidimensionali per la simulazione di prove in dinamico.
Finora si è parlato di modelli dinamici, ovvero di modelli in grado di simulare le curve caratteristiche di un motore mutando nel tempo il punto di funzionamento.
Tuttavia il nostro modello non ha implementato l’equazione di dinamica dell’albero motore:
ω&⋅=− JCC rm (6.8)
dove Cm è la coppia motrice, Cr è la coppia resistente, J è il momento di inerzia e ω& è l’accelerazione angolare.
Di fatto si è indirettamente considerata la variazione della coppia resistente tramite la maggiore apertura o chiusura della valvola a farfalla, ovvero lavorando a maggiore o minore carico. Infatti ci si è basati su prove sperimentali effettuate al banco e quindi era già presente una macchina operatrice (freno) per la trasformazione da energia in forma meccanica a energia in altra forma.
In questi termini il nostro modello potrebbe essere definito più propriamente “quasi dinamico” .
Ad ogni modo in questa sede, preso atto che comunque si tiene conto della coppia resistente durante le simulazioni tramite la farfalla, possiamo parlare di prove compiute in dinamico.

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 152
Un primo esempio di prove in dinamico è illustrato nella tabella seguente: Cicli Giri [rpm] Apertura farfalla [deg]
0 1000 2.06
15 1000 2.06
16 1000 2.06
25 3000 13.5
35 3000 13.5
36 3000 13.5
45 4000 24.38
55 4000 24.38
56 4000 24.38
65 4000 24.38
75 4000 24.38
76 4000 24.38
85 1000 2.06
Le due figure seguenti riportano l’andamento dell’angolo di apertura farfalla e dei giri e successivamente i risultati delle simulazioni.
Figura 6.43 –Andamento dell’angolo di apertura della farfalla..

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 153
Figura 6.44 –Andamento dei giri per le prove in dinamico..
Figura 6.45 –Andamento della pressione nel collettore di aspirazione.

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 154
Figura 6.46 –Andamento della pressione all’interno del cilindro.
Figura 6.47 –Ingrandimento della pressione all’interno del cilindro.
Le figure 6.45 e 6.46 riportano glia andamenti della pressione nel collettore e della pressione all’interno del cilindro, con il suo ingrandimento in figura 6.47. Non vi è un confronto diretto

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 155
con le prove sperimentali ma è possibile fare confronti con le stesse condizioni in stazionario, riportati nelle figure 6.48, 6.49 e 6.50.
Figura 6.48 –Confronto del ciclo in dinamico con le condizioni stazionarie per RPM =1000
Figura 6.49 –Confronto del ciclo in dinamico con le condizioni stazionarie per RPM =3000

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 156
Figura 6.50 –Confronto del ciclo in dinamico con le condizioni stazionarie per RPM =4000
Si è infine fatta una simulazione in dinamico in condizioni differenti dal quelle sperimentali, estrapolando i risultati. Le seguenti figure riportano gli andamenti.
Figura 6.51 –Prove in dinamico, andamento dei giri.

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 157
Figura 6.52 –Prove in dinamico, andamento della farfalla.
Figura 6.53 –Prove in dinamico, andamento della pressione all’interno dei cilindri.

Capitolo 6
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 158
Figura 6.54 –Prove in dinamico, ingrandimento della pressione nei cilindri.
Figura 6.55 –Prove in dinamico, andamento della pressione nel collettore.

Ottimizzazione delle simulazioni e risultati
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 159
Figura 6.56 –Prove in dinamico, ingrandimento della pressione nel collettore.

Applicazione ad un motore FIAT “fire” 1200 cc.
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 161
Capitolo 7
APPLICAZIONE DEL
MODELLO AD UN MOTORE
“FIAT fire 1200 cc”.
Introduzione Il modello termodinamico descritto nel capitolo 4 ben si presta all’analisi delle
percentuali delle speci chimiche all’interno dei sottovolumi realizzati. Si è pensato allora di
applicarlo allo studio dei gas di scarico di un motore, in particolare con l’obiettivo di risalire al
rapporto lambda presente all’interno dei singoli cilindri, a partire dal segnale di una sonda
lambda posta alla confluenza dei condotti di scarico. Obiettivo di questa sezione pertanto è
l’analisi di alcune problematiche relative al controllo del titolo cilindro per cilindro, in
particolare lo studio è concentrato sulla indagine del comportamento della sonda lambda lineare
e sulla descrizione del mix dei gas di scarico.
7.1 Caratteristiche del motore utilizzato Il motore utilizzato per la campagna di prove sperimentali, a cui si fa riferimento per lo studio delle problematiche del controllo del titolo cilindro per cilindro, è un motore di produzione Fiat, della serie “fire” ,con le caratteristiche costruttive riportate in tabella 7.1 Il sistema di iniezione del carburante è di tipo “speed-density multi-point” (cioè un iniettore per ogni cilindro) con sonda lambda e catalizzatore trivalente allo scarico. Nelle prove effettuate si è deciso di mantenere il controllo in retroazione mediante sonda lambda dato che, essendo questo dispositivo obbligatorio per legge, ai fini del nostro lavoro va considerato come parte integrante del motore. Le prove sono state effettuate con il motore montato al banco prova dell’Università di Bologna secondo il lay-out di figura 7.1.

Capitolo 7
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 162
Ciclo Otto a 4 tempi
Numero cilindri 4 in linea
Numero valvole 8 (2 per cilindro)
Alesaggio 70.8 mm
Corsa 78.86 mm
Cilindrata 1242 cm3
Rapporto di compressione 9.8 : 1
Massa equivalente di un manovellismo 0.395 kg
Sequenza di accensione dei cilindri 1 3 4 2
Potenza massima CEE 54 kW a 6000 giri/min
Coppia massima CEE 106 Nm a 4000 giri/min Tabella 7.1
Figura 7.1 - Lay-out del banco prova motori.
Il motore è stato collegato ad un freno a correnti parassite, impiegato per simulare gli assorbimenti di potenza che si hanno durante un normale funzionamento in vettura come ad esempio attrito dei pneumatici, resistenza aerodinamica, salite, climatizzatore, etc.
Freno
Motore

Applicazione ad un motore FIAT “fire” 1200 cc.
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 163
7.2 Finalità del modello in ambiente Simulink e suddivisione in volumi
Figura 7.2 - Il modello implementato in
Simulink.
Il modello sviluppato è finalizzato allo studio delle problematiche del controllo del titolo cilindro per cilindro, pertanto è necessario utilizzare una schematizzazione che sia in grado di riprodurre in modo accurato la composizione dei gas di scarico nei vari tratti: si capisce che la descrizione degli elementi relativi al condotto di scarico dovrà essere particolarmente precisa. Se la composizione chimica dei gas è un parametro molto importante in relazione all’analisi del titolo della miscela che ha preso parte alla combustione, l’andamento delle pressioni riveste una importanza secondaria, quindi non è necessario introdurre la dinamica delle onde che si propagano lungo i condotti. Per descrivere il modello implementato si possono suddividere i volumi in due categorie: volumi a monte dei cilindri (aspirazione) e volumi a valle dei cilindri (scarico). Ciascuna capacità (volume) è caratterizzata da parametri termodinamici come ad esempio la temperatura di parete e la conducibilità, solo per citarne alcuni, e da parametri che descrivono la geometria dei tratti schematizzati: nel capitolo vengono presi in esame questi ultimi. I parametri geometrici più importanti in relazione alle problematiche del controllo del titolo cilindro per cilindro sono:
− la dimensione del volume di ogni capacità;
− il diametro della sezione di ingresso.
Il primo (dimensione del volume) è legato alla possibilità di accumulo di massa, il secondo (diametro della sezione di ingresso) influenza il livello di pressione che si instaura in una

Capitolo 7
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 164
capacità: una volta fissata la portata, la componente cinetica dipende dalla dimensione della sezione e questa componente come visto viene completamente dissipata. In un modello parametrico a scatola grigia, il valore di alcune grandezze può essere misurato direttamente, come ad esempio la dimensione del volume ed il diametro dei condotti, tuttavia non è detto che i valori così ricavati permettano di ottenere una descrizione accurata. In altri termini anche se è possibile attribuire un significato fisico ai parametri, la scelta del valore numerico da assegnare deve essere validata sulla base di risultati sperimentali. Per avere risposte qualitativamente corrette, si possono assegnare ai parametri i valori ottenuti analizzando la geometria reale dei tratti descritti: in questo modo si è sicuri di rispettare almeno i rapporti tra le grandezze. Ad esempio, i raccordi di scarico non sono tutti uguali ed in particolare è diverso il loro volume: assegnando al parametro “volume” il valore rilevato dall’analisi della geometria reale, si è sicuri di rispettare il rapporto tra le dimensioni dei volumi dei quattro raccordi, rapporto che sicuramente influenza l’andamento qualitativo dei risultati. Nelle prossime pagine verrà descritto in modo sintetico il criterio con cui si sono suddivisi i condotti di aspirazione e scarico e le modalità attraverso le quali si sono assegnati i valori numerici ai due parametri “volume” e “diametro della sezione di ingresso”.
7.3 Aspirazione
L’aspirazione è stata suddivisa in sei volumi: “ingresso”, “collettore” e quattro “raccordi” che sono tra loro in parallelo.
Figura 7.3 - I volumi posti alla aspirazione.

Applicazione ad un motore FIAT “fire” 1200 cc.
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 165
La capacità “ingresso” rappresenta il volume del filtro di aspirazione, pertanto è in
comunicazione a monte con l’ambiente (capacità a volume infinito), a valle con il collettore di
aspirazione: la dimensione di questo volume (“ingresso”) è stata stimata pari a circa 3,5 litri.
Figura 7.4 - il filtro di aspirazione.
Figura 7.5 - la valvola a farfalla
La valvola a farfalla rappresenta la sezione di passaggio tra il filtro ed il collettore che nel
modello è stato suddiviso in due parti: “collettore di aspirazione” e “raccordi di aspirazione”.
Il volume del collettore è stato fissato a 3,05 litri, quello dei raccordi a 1,0 litri ed è uguale per
tutti e quattro.
Le sezioni di ingresso sono schematizzate come sezioni circolari di diametro:
25 mm per i “raccordi di aspirazione”;
50 mm per il volume “ingresso”;
il “collettore di aspirazione” è in comunicazione con l’ambiente a monte attraverso la farfalla
che è un collegamento a sezione variabile.

Capitolo 7
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 166
Figura 7.6 - collettore di aspirazione e raccordi di aspirazione.
Le dimensioni elencate in questo paragrafo sono state ricavate avvalendosi di fotografie
analoghe a quelle riportate nelle immagini Figura.4, Figura7.5, Figura7.6.
A questo punto occorre una precisazione relativa al rapporto esistente tra la dimensione del
volume, il diametro della sezione di ingresso e il passo di integrazione (queste considerazioni
sono valide anche nel caso dei volumi a valle dei cilindri).
Una geometria caratterizzata da una sezione di ingresso “grande” che collega due capacità di
volume “piccolo” impone l’utilizzo di un passo di integrazione relativamente “stretto”. Infatti,
anche se la differenza di pressione tra le due capacità è bassa, a causa delle dimensioni della
sezione, la portata può essere grande e riempire eccessivamente il volume a valle (o vuotare
quello a monte) se il passo di integrazione è troppo ampio: come già spiegato si instaurano delle
oscillazioni. Emerge un legame stretto tra i tre parametri volume, sezione di ingresso, passo di
integrazione: una volta fissato il volume, per poter usare passi di integrazione più grandi, occorre
ridurre i diametri di ingresso. Ad esempio, nel caso dei raccordi di aspirazione, un diametro di 25
mm ed un volume di 100000 mm3 richiedono l’utilizzo di un passo di integrazione pari π/360,
riducendo il diametro (15 mm per esempio) il passo può essere aumentato.
A chiarimento di ciò si può analizzare la differenza tra gli andamenti ottenuti in due simulazioni
in cui, a parità di passo di integrazione e volume, la sezione di ingresso viene fatta variare: sono
evidenti le oscillazioni quando il diametro è settato sul valore maggiore (le oscillazioni si
propagano anche nei volumi a valle).

Applicazione ad un motore FIAT “fire” 1200 cc.
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 167
Figura 7.7 - oscillazioni causate da passi di integrazione troppo grandi
L’immagine si riferisce ad un raccordo di scarico (non di aspirazione), quindi le condizioni al
contorno sulle pressioni sono fissate a valle, dunque si spiega il fatto che all’aumentare del
diametro la pressione diminuisce, infatti calano anche le perdite di carico (perdita della intera
componente cinetica). Il picco di pressione evidenziato da un cerchietto rosso dipende dalla
geometria dello scarico in cui, come vedremo, si trova un tratto nel quale due raccordi di scarico
si immettono in uno stesso condotto.
In Figura7.8 si vede che non ci sono più oscillazioni se si riduce il passo di integrazione da π/180
a π/360 (curva arancione). Inoltre si nota che tale diminuzione rende meno accentuati i picchi di
pressione. Infatti la massa contenuta all’interno di una capacità viene calcolata integrando le
portate (bilancio di massa), cioè moltiplicando le portate per il passo di integrazione; pertanto se
ci sono forti aumenti o diminuzioni di portata, più piccolo è il passo più precisa è l’integrazione.
Figura 7.8 - diminuendo il passo di simulazione scompaiono le oscillazioni

Capitolo 7
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 168
Diametro della sezione di
ingresso
Volume
ingresso
50 mm 3,50 litri
collettore di aspirazione
farfalla 3,05 litri
raccordo 1
25 mm 0,10 litri
raccordo 2
25 mm 0,10 litri
raccordo 3
25 mm 0,10 litri
raccordo 4
25 mm 0,10 litri
Tabella 7.2
A conclusione del paragrafo vengono riassunti in Tabella i dati geometrici.
7.4 Scarico
I condotti di scarico sono stati suddivisi in un maggior numero di volumi rispetto alla aspirazione, infatti interessa descrivere in modo preciso la geometria dei tratti compresi tra i cilindri e la sonda lambda lineare posta alla confluenza, geometria che gioca un ruolo di primo piano sull’andamento del segnale della sonda alla confluenza.
Nella figura si vede in modo chiaro la geometria “complessiva” dello scarico, manca invece il dettaglio dei raccordi e del posizionamento della sonda a cui sarà dedicata maggiore attenzione nelle prossime pagine. I volumi inseriti nel modello sono: “raccordi di scarico” (quattro volumi in parallelo);

Applicazione ad un motore FIAT “fire” 1200 cc.
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 169
“due in uno” (due volumi in parallelo); “collegamento alla sonda lambda” (due volumi in parallelo); “sonda lambda”; “uno” (due volumi in parallelo); “collettore di scarico”; “terminale”;
in totale si trovano tredici volumi, il maggior numero dei quali è concentrato nella zona circostante la sonda
Figura 7.9 - i volumi posti allo scarico
.La geometria dei raccordi di scarico è la seguente:
Figura7.10 - raccordi di scarico
1 2 3 4

Capitolo 7
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 170
Figura 7.11 - raccordi di scarico
Figura 7.12
Ciascun raccordo corrisponde ad un volume nel modello: dato che la lunghezza dei raccordi è diversa, la dimensione dei volumi è differente. Inoltre si vede che i raccordi provenienti dai cilindri 1 e 4 confluiscono in un condotto separato da quello in cui si immettono i raccordi 2 e 3: questa geometria “due in uno” è stata modellata con un volume con due ingressi ed una sola uscita (volume “due in uno”).
1 2 3 4

Applicazione ad un motore FIAT “fire” 1200 cc.
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 171
Figura7.13 - condotti “due in uno”
La sonda lambda è inserita in parallelo ai due condotti che raccolgono i gas provenienti dai cilindri 1 e 4 e dai cilindri 2 e 3, la sua posizione è evidenziata nella Figura7.13. Nel modello il volume “sonda lambda” è posto in parallelo ad altri due volumi chiamati “collegamento alla sonda lambda”; i volumi “collegamento” presentano un ingresso e due uscite, una diretta verso il tratto di condotto di scarico che segue (chiamato “uno”), l’altra verso la sonda. Il volume “sonda lambda” ha la particolarità di essere posto in parallelo alle due capacità “collegamento”, quindi non ha propriamente un ingresso ed una uscita: nel modello in Simulink, all’interno del volume “sonda lambda” non si trova il blocco che calcola le due portate che la “attraversano”, questo calcolo viene eseguito nei due volumi “collegamento” (pertanto all’interno della sonda si trovano solo il bilancio energetico e il bilancio di massa).

Capitolo 7
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 172
Figura 7.14
Figura 7.15
A valle di ciascuno dei volumi “collegamento alla sonda lambda” è inserita la capacità “uno” che ha un solo ingresso ed una sola uscita, questa è seguita dal volume “collettore di scarico” in cui i due flussi provenienti dai cilindri 1-4 e 2-3 si miscelano, quindi il collettore ha due ingressi ed una uscita. Tutto il volume a valle è rappresentato dalla capacità “terminale” attraverso la quale i gas di scarico giungono all’ambiente. Grazie alle informazioni ricavate dai disegni riportati e completandole attraverso il rilevamento di alcune quote dal vero, è stato possibile ricostruire la geometria del volume interno al condotto di scarico (cioè il volume occupato dal gas) fino al collettore, utilizzando un CAD tridimensionale.

Applicazione ad un motore FIAT “fire” 1200 cc.
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 173
Figura 7.161 - modello dei volumi interni dei condotti di scarico realizzato con un CAD 3D
Il modello tridimensionale può essere suddiviso in volumi di dimensione nota, nella Figura7.17 è rappresentato questo frazionamento.
Figura 7.17 - suddivisione dei condotti di scarico in volumi

Capitolo 7
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 174
Figura 7.18 - i volumi rappresentati in figura 7.17 inseriti nel modello in Simulink
Il percorso che devono coprire i gas di scarico per arrivare a lambire la sonda è diverso a seconda del cilindro dal quale provengono, in particolare è più lungo per il fluido che esce dai cilindri 1 e 4: l’informazione relativa alla lunghezza dei condotti non è richiesta tra i dati geometrici dei volumi implementati in Simulink (il modello è zerodimensionale), tuttavia, indirettamente, influisce sulle dimensioni del volume, cioè sulla capacità di accumulare massa. Una seconda osservazione è che la dimensione delle sezioni di passaggio influenza il livello di pressione in un volume (a causa della perdita della componente cinetica per il fluido che entra nel volume): dato che la sonda è posta in parallelo, se il livello di pressione nelle capacità “collegamento1” e “collegamento2” è mediamente diverso (ad esempio a causa di sezioni di passaggio di diametro diverso tra questi volumi e “due in uno”), il flusso nel volume sonda lambda può essere unidirezionale, in questo caso la sonda analizzerebbe i gas provenienti da due soli cilindri. I dati geometrici fissati nel modello sono raccolti nella seguente tabella. Diametro
Dimensione del volume
Raccordo1
28 mm 0,13 litri
Raccordo2
28 mm 0,10 litri
Raccordo3
28 mm 0,11 litri
Raccordo4 28 mm 0,12 litri

Applicazione ad un motore FIAT “fire” 1200 cc.
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 175
Due in uno 1
34 mm 0,20 litri
Due in uno 2
34 mm 0,11 litri
Collegamento1 alla sonda lambda
34 mm 0,10 litri
Collegamento2 alla sonda lambda
34 mm 0,10 litri
Uno1
34 mm 0,25 litri
Uno2
34 mm 0,25 litri
Collettore
44 mm 1,00 litri
Terminale
50 mm 4,00 litri
Sonda
5 mm 0,10 litri
Tabella 7.3 Nella tabella la dimensione dei volumi “due in uno1” e “due in uno2” è diversa mentre in Figura7.17, così come in realtà, è circa uguale: si è scelto di “distribuire” una parte del volume di “due in uno2” ai raccordi 2 e 3 per ridurre il rischio di oscillazioni durante il calcolo. Comunque complessivamente la dimensione del volume tra lo scarico del cilindro 2 o del cilindro 3 e la sonda posta alla confluenza non è alterata da questa “ridistribuzione”. I volumi “collegamento alla sonda lambda” dovrebbero avere dimensioni ridotte per garantire una descrizione “puntuale” della composizione del fluido che entra a contatto con la sonda lambda, tuttavia ciò non è possibile, infatti la sezione di ingresso (di 34 mm di diametro) è ampia quindi si potrebbero manifestare delle oscillazioni durante la simulazione. Se i raccordi di scarico sono lunghi, si possono suddividere in due o più volumi, inoltre la sonda lambda inserita nel raccordo può essere modellata come una capacità (rappresenta il volume del cappuccio protettivo della sonda) in comunicazione con il tratto più vicino al cilindro, tratto che deve avere dimensioni ridotte compatibilmente con il passo di integrazione scelto (un esempio è riportato in Figura 7.19).

Capitolo 7
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 176
Figura 7.19 – Esempio di sonda lambda nel modello.
La geometria dello scarico presentata in questo paragrafo prevede raccordi di dimensione ridotta rappresentabili utilizzando un unico volume, inoltre, per semplicità, il blocco che calcola l’indice lambda in corrispondenza al raccordo è stato inserito all’interno del raccordo stesso e non in una capacità esterna .
7.5 Le condizioni iniziali Le condizioni iniziali, cioè i valori assunti dalle variabili termofluidodinamiche e geometriche all’istante zero della simulazione, possono essere impostate attraverso un file di lancio oppure possono essere fissate a partire dai dati ricavati durante simulazioni precedenti. In pratica, al lancio di una nuova simulazione, i valori assunti dalle variabili durante l’ultimo passo della simulazione precedente vengono settati come condizioni iniziali per la nuova simulazione. Uno dei vantaggi di questo modo di imporre le condizioni iniziali è che il motore può partire da una situazione di regime, risparmiando così il tempo di calcolo necessario per portarlo a regime. Inoltre la possibilità di imporre come condizioni iniziali le “condizioni finali” della simulazione precedente è utile quando si esegue una “mappatura” del motore. In questo caso il campo di funzionamento del motore viene diviso in funzione di due variabili (velocità di rotazione e carico oppure apertura della farfalla) ottenendo una tabella. Per ridurre i tempi richiesti per portare a regime il motore quando si fissa un nuovo punto di funzionamento, la tabella viene percorsa a “zig zag” in modo che le condizioni termodinamiche del motore in due punti successivi siano il più vicino possibile. Come detto, in ciascun volume del modello si trova un sistema di equazioni differenziali del primo ordine disaccoppiate da integrare: ognuna di queste equazioni richiede vengano fissate condizioni iniziali.

Applicazione ad un motore FIAT “fire” 1200 cc.
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 177
Figura 7.20 - il blocco che fissa le condizioni iniziali per il ciclo successivo.
Le equazioni differenziali sono: • sei equazioni relative al “bilancio di massa”, delle quali cinque legate ai bilanci delle
singole specie chimiche ed una al bilancio globale; • una equazione per descrivere la conservazione della energia (“bilancio energetico”); quindi in tutto sette condizioni al contorno. Nel caso dei volumi “cilindro” a queste sette condizioni se ne aggiungono altre cinque: • la prima per definire il valore della derivata della funzione di Wiebe all’istante zero
(altrimenti questa derivata sarebbe nulla all’istante zero); • la seconda per fissare la variazione del volume all’istante iniziale zero (altrimenti questa
variazione sarebbe nulla all’istante iniziale); • la terza per stabilire il valore iniziale dell’angolo di manovella, valore a cui è legato il
volume iniziale del cilindro; • la quarta per definire la quantità di combustibile iniettata (infatti può capitare che la
simulazione abbia l’istante iniziale compreso nell’intervallo tra la iniezione e la fine della combustione, quindi l’iniezione del combustibile che deve bruciare è avvenuta prima dell’inizio della simulazione: di questo è tenuta traccia nella condizione iniziale imposta);
• la quinta per fissare la massa stechiometrica di combustibile all’istante iniziale. Nella Figura7.20 è rappresentato il blocco che “cattura” l’ultimo valore (cioè il valore corrispondente all’ultimo passo di simulazione) assunto dalle variabili che influenzano le dodici condizioni iniziali; nel modello questo blocco è chiamato “condizioni iniziali” e se ne trova uno in ciascun volume.

Capitolo 7
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 178
Figura 7.21 – Esempio di condizioni i
La Figura 7.21 mostra, ad esempio, come vengono imposte le condizioni iniziali relative al bilancio dell’ossigeno nel cilindro 1 settando il valore iniziale dell’integrale.
7.6 La combustione
Il controllo del titolo cilindro per cilindro permette di compensare eventuali squilibri tra i valori dell’indice lambda dei cilindri, infatti nel motore è possibile avere alcuni cilindri che bruciano una miscela grassa e altri una miscela magra, mentre complessivamente il rapporto tra aria e combustibile è stechiometrico. Nel modello in Simulink occorre poter squilibrare i quattro cilindri per simulare una condizione di funzionamento analoga a quella appena descritta. Per ciascuno dei quattro cilindri, i sottosistemi che “regolano” la combustione sono due: • in uno viene valutata la quantità di combustibile da iniettare; • nell’altro è implementata la funzione di Wiebe, cioè è calcolata la quantità di
combustibile bruciata. Il calcolo del tempo di iniezione (e quindi della quantità di combustibile inviata nel cilindro ad ogni ciclo) in un motore “reale” è affidato alla centralina che rappresenta l’unità “pensante” di un sistema di controllo che può essere in catena aperta o in catena chiusa. Nel modello non è ancora stato implementato un sistema che simula il comportamento del controllo operato dalla centralina, pertanto la quantità di carburante da iniettare viene valutata direttamente conoscendo il contenuto di ossigeno all’interno del cilindro.
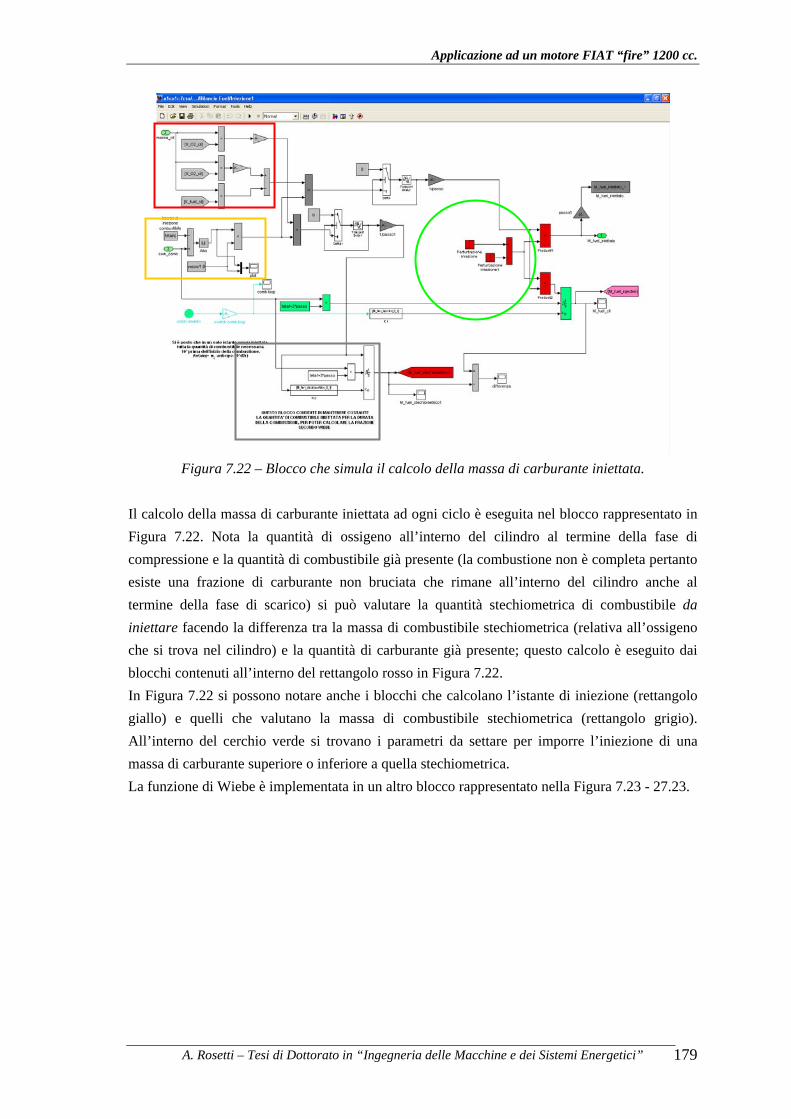
Applicazione ad un motore FIAT “fire” 1200 cc.
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 179
Figura 7.22 – Blocco che simula il calcolo della massa di carburante iniettata.
Il calcolo della massa di carburante iniettata ad ogni ciclo è eseguita nel blocco rappresentato in Figura 7.22. Nota la quantità di ossigeno all’interno del cilindro al termine della fase di compressione e la quantità di combustibile già presente (la combustione non è completa pertanto esiste una frazione di carburante non bruciata che rimane all’interno del cilindro anche al termine della fase di scarico) si può valutare la quantità stechiometrica di combustibile da iniettare facendo la differenza tra la massa di combustibile stechiometrica (relativa all’ossigeno che si trova nel cilindro) e la quantità di carburante già presente; questo calcolo è eseguito dai blocchi contenuti all’interno del rettangolo rosso in Figura 7.22. In Figura 7.22 si possono notare anche i blocchi che calcolano l’istante di iniezione (rettangolo giallo) e quelli che valutano la massa di combustibile stechiometrica (rettangolo grigio). All’interno del cerchio verde si trovano i parametri da settare per imporre l’iniezione di una massa di carburante superiore o inferiore a quella stechiometrica. La funzione di Wiebe è implementata in un altro blocco rappresentato nella Figura 7.23 - 27.23.

Capitolo 7
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 180
Figura 7.23 - 2
La massa di combustibile presente nel cilindro viene confrontata con quella stechiometrica (rettangolo rosso): se la quantità di carburante presente è minore o uguale alla massa stechiometrica viene bruciata tutta (in realtà la combustione non è completa quindi una piccola frazione non viene ossidata); viceversa viene bruciata solo la quantità stechiometrica, pertanto la massa di combustibile eccedente si trova sottoforma di incombusti tra i prodotti della reazione. Il cerchietto blu racchiude un “ingresso” che può essere utilizzato per simulare una mancata accensione. Infatti la funzione di Wiebe è la seguente:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛
−−
⋅−−=ζ
ϑϑϑϑ
ξϕif
iexp1
dove: • ϑ indica l’angolo di manovella e i pedici i ed f inizio e fine combustione;
• ϕ la frazione (in massa) di combustibile bruciata;
• ζ regola la velocità della combustione;
• ξ la completezza;
pertanto se ξ = 0 non viene bruciato il combustibile (ϕ = 0).
A conclusione del paragrafo è interessante mettere in evidenza una discrepanza tra la schematizzazione adottata nel modello e ciò che accade realmente. I rapporti A/F possono variare da cilindro a cilindro sia perché vengono iniettate quantità di combustibile differenti (a causa delle tolleranze di lavorazione degli iniettori ad esempio), sia perché le masse di aria aspirate possono essere diverse (ciò è dovuto alla dinamica del fluido che

Applicazione ad un motore FIAT “fire” 1200 cc.
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 181
si sposta lungo i condotti ed alle diverse geometrie dei tratti che collegano i cilindri con il collettore di aspirazione). Invece nel modello implementato lo squilibrio del rapporto A/F tra i cilindri si ottiene solamente modificando la quantità di combustibile iniettato: questa è una approssimazione. Nell’ottica dello studio del controllo cilindro per cilindro il modello del motore a combustione interna viene utilizzato come un “generatore di segnali” ed in particolare interessa generare allo scarico portate di gas relative a combustioni qualitativamente differenti. Pertanto l’approssimazione appena evidenziata non rappresenta un limite per lo studio affrontato.

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 183
Capitolo 8
LA SONDA LAMBDA E LA SUA
MODELLIZZAZIONE
8.1 Analisi dei fumi La massa di aria stechiometrica, cioè strettamente necessaria per la combustione completa della unità di massa di combustibile, si valuta a partire dalle seguenti reazioni stechiometriche:
22
222
22
22SOOS
OHOHCOOC
→+→+
→+
In realtà nei combustibili attualmente in uso non si trova zolfo in quantità rilevanti, quindi si considerano solo le prime due reazioni. L’analisi dei fumi fornisce la percentuale in volume dei componenti dei fumi secchi, cioè dei fumi raffreddati fino alla temperatura ambiente, quindi quasi tutto il vapore condensa e la sua pressione parziale diventa trascurabile. Note dall’analisi dei fumi le percentuali di ossigeno ed anidride carbonica e data la composizione elementare del combustibile, si può risalire alla percentuale di ossido di carbonio e all’eccesso d’aria. Infatti, oltre all’azoto che non partecipa alla reazione e quindi si può non considerare per il momento, tra i prodotti si hanno CO2, CO, O2 ed H2O cioè quattro componenti le cui quantità (espresse ad esempio in frazioni in volume o in frazioni in massa) non sono indipendenti: esistono tre vincoli stechiometrici legati ai bilanci delle kilomoli di idrogeno, ossigeno e carbonio che devono essere presenti nei prodotti nelle stesse quantità esistenti tra i reagenti. Pertanto delle quattro frazioni in volume (o in massa) solo una è indipendente, cioè nota la composizione elementare del combustibile e la quantità di aria che reagisce con l’unità di massa di combustibile, basta conoscere la concentrazione di un solo componente dei fumi per risalire alla loro composizione completa. Invece, se non si conosce la quantità di O2 presente tra i reagenti, le incognite del problema salgono a due (infatti “cade” uno dei tre vincoli), quindi basta conoscere due frazioni in massa per risalire alla composizione completa dei fumi e all’eccesso d’aria. Bisogna notare che la

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 184
massa dei fumi (e perciò anche quella dei reagenti che è uguale) si ritiene nota, inoltre l’azoto non è una variabile indipendente, essendo legato all’ossigeno che prende parte alla reazione (la percentuale di azoto nell’aria è nota). I diagrammi di Ostwald consentono di tradurre in forma grafica queste considerazioni: vengono presi in esame tali diagrammi e le relazioni che ne stanno alla base. Si può sviluppare l’analisi in tre passaggi. 1) Combustione completa e senza eccesso d’aria dell’unità di massa di combustibile. Le reazioni da analizzare sono:
OHOHCOOC
222
22
22 →+→+
Nel combustibile di partenza (la massa di combustibile è unitaria quindi le grandezze riportate di seguito sono relative all’unità di massa di combustibile) si trova: − c kg di carbonio per ogni kg di combustibile; − h’ kg di H2 in un kg di combustibile (h’=h-o/8 dove o sono i kg di O2 presenti nel
combustibile, cioè h’ è l’idrogeno libero nel combustibile). Quindi (Vst = volume d’aria stechiometrico):
⎟⎠⎞
⎜⎝⎛ +⋅=
4'
1221,04,22 hcVst
(8.1) Infatti: − O2 occupa circa il 21% in volume nell’aria (N2 occupa il restante 79%); − 22,4 m2 è il volume occupato da una kmole di gas perfetto nelle condizioni: T =0°C, p
=1atm. Notazione: • m = 0,21; • C = 22,4 c; H’ = 22,4 h’. Quindi:
mO
V
HCV
st
O
2
4'
122
=
+=

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 185
dove 2OV rappresenta il volume di ossigeno che reagisce con l’unità di massa di combustibile in
condizioni stechiometriche, stV è il volume di aria stechiometrico.
Ora si può calcolare il volume dei fumi secchi:
⎟⎠⎞
⎜⎝⎛ +⋅
−+=
4'
121
120HC
mmCV
(8.2)
Il primo addendo rappresenta le kmoli di CO2, il secondo di N2 (il vapore è condensato), quindi la concentrazione di CO2 nei fumi vale:
CHm
mHC
mmC
C
k'3)1(1
4'
121
12
120
⋅⋅−+=
⎟⎠⎞
⎜⎝⎛ +⋅
−+
=
(8.3)
2) Combustione imperfetta (cioè si forma CO al posto di CO2) e senza eccesso d’aria
dell’unità di massa di combustibile. Le reazioni da studiare ora sono:
OHOHCOOC
222
2
2222
→+→+
In modo analogo a quanto fatto nel caso precedente (indico con l’apice le grandezze relative a questo caso):
mV
V
HCV
Ost
O
2
2
'
4'
24′
=
+=′
(8.4)
⎟⎠⎞
⎜⎝⎛ +⋅
−+=
4'
241
12'0
HCm
mCV (8.5)
)21'3()1(1
4'
241
12
12'0−⋅⋅−+
=⎟⎠⎞
⎜⎝⎛ +⋅
−+
=
CHm
mHC
mmC
C
k
(8.6)
3) Combustione in cui si producono sia CO che CO2 e con eccesso d’aria (sempre in
relazione ad una massa unitaria di combustibile).

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 186
Nei fumi secchi trovo ossigeno, ossido di carbonio, anidride carbonica e azoto. Si può scrivere:
VVVV
VpVmVVkVkV
VkVkV
a
aO
CO
CO
=++
⋅=⋅=
⋅=⋅=
⋅=⋅=
00
00
00
'
'''
2
2
(8.7)
quindi:
1''
00
=++mp
kk
kk
(8.8)
Nelle relazioni appena scritte 0V e 0'V sono i volumi teorici dei gas di scarico nella
combustione senza eccesso d’aria; aV il volume di aria presente in più il cui ossigeno non
partecipa alle reazioni; V il volume dei fumi secchi; 2COV , COV ,
2OV i volumi reali e k , 'k , p
le rispettive concentrazioni reali. Quindi, ad esempio, noti k e p si può risalire a k’ e all’eccesso d’aria definito:
teoricaaria
eccessoaria
teoricaaria
teoricaariaaria
VV
VVV
e_
_
_
_ =−
= (8.9)
Infatti:
mC
VV coaeccessoaria ⋅
−=24_
dove Cco è la componente di C relativa alla sola CO; in altre parole il parametro C può essere
diviso in due addendi (2COCO CCC += ) ,uno relativo alla massa di carbonio che reagisce
formando CO2, l’altro legato alla massa di carbonio che si combina per formare CO (ad esempio
nel caso 1 in cui la combustione è completa e non si forma CO, 2COCC = , invece nel caso 2 in
cui non si forma CO2 , COCC = ). aV è noto grazie a p (infatti questo parametro permette di
calcolare 2OV mentre m è conosciuto a priori essendo una caratteristica dell’aria), infine Cco = 12
Vco = 12 k’ V . L’equazione (8.8) e la sua rappresentazione grafica nel piano p k con parametro k’ prendono il nome di relazione e diagramma di Ostwald. Le linee a k’ costante sono rette parallele che intersecano l’asse delle ascisse e delle ordinate rispettivamente nei punti:

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 187
( )
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅=
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅=
00
0
''1;0;0
0;''10;
kkkk
kkmp
Nel diagramma sono riportate anche le linee ad eccesso d’aria costante. Ricordando che:
( )( ) asVHC
mmk
kC
CHCm
mkCkHC
mmC
C
k
=⎟⎠⎞
⎜⎝⎛ +⋅=
−⋅
−⋅⇒
⇒=⎟⎠⎞
⎜⎝⎛ +⋅
−⋅+⋅⇒
⎟⎠⎞
⎜⎝⎛ +⋅
−+
=
4'
121
1
112
124'
121
124
'12
112
12
0
0
000
ponendo:
( )'122
kkVCCC COCO +⋅⋅=+=
si ricava:
( )
( ) ( )
( )
( ) ( )0
0
0
0
1'
12'
1'
12'
kkkV
kmmVk
mVp
kkkV
kmmVkV
ea
−⋅+⋅
⋅−⋅⎟⎠⎞
⎜⎝⎛ ⋅
−⋅
=−⋅+⋅
⋅−⋅⎟⎠⎞
⎜⎝⎛ ⋅
−=
(8.10)
Mettendo a sistema questa equazione con quella di Ostwald si ottiene l’andamento delle curve ad eccesso d’aria costante.
Dato che i coefficienti 0k e 0'k dipendono dalla composizione elementare del combustibile,
occorre tracciare un diagramma di Ostwald per ogni combustibile. Ricordo le ipotesi fatte sulla combustione: 1) combustione con possibile eccesso d’aria; 2) combustione che può portare alla formazione sia di CO che di CO2; 3) assenza di incombusti tra i prodotti.

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 188
Figura 8.1 – Diagramma di Ostwald
Dalle considerazioni svolte emerge che: a) nei casi in cui sono applicabili le ipotesi elencate, bastano due informazioni sulla
frazione in massa di due componenti dei fumi per risalire all’analisi completa dei gas di scarico e all’eccesso d’aria;
b) è possibile sintetizzare in forma grafica il procedimento operativo.
8.2 Descrizione della sonda lambda La combustione può avvenire in condizioni stechiometriche, magre o grasse. Indicando con λ il rapporto:
ricostechiomet
effettivo
FA
FA
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
=λ
dove con A ed F si intendono le masse di aria e combustibile, si ha: • λ <1 combustione grassa
• λ =1 combustione stechiometrica
• λ >1 combustione magra Il sensore che permette di valutare questo rapporto a partire dalla concentrazione di alcune specie chimiche presenti nei gas di scarico è la sonda lambda. Esistono due tipologie di sonda lambda. o Sonda on –off che emette un segnale elettrico di circa 1V nel caso di miscela grassa,
circa un decimo di volt per la miscela magra. In pratica l’informazione che si può ricavare è solo di tipo qualitativo.
o Sonda lineare caratterizzata da un segnale proporzionale al valore di lambda, quindi l’informazione è di tipo sia qualitativo che quantitativo: questo consente un controllo più preciso.

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 189
Il funzionamento di base è comune per i due sensori. Grazie a questi trasduttori si può controllare il valore di lambda in catena chiusa e mantenere questo parametro all’interno di un intervallo sufficientemente stretto.
Figura 8.2 - La sonda lambda permette il controllo in catena chiusa del rapporto A/F
8.3 Sonda on-off La parte terminale della sonda lambda è coperta da un cappuccio che presenta fessure longitudinali (non è rappresentato nella figura riportata di seguito) attraverso le quali i gas di combustione arrivano al sensore che è costituito da un cono di ossido di zirconio (ZrO2) che ha
la proprietà di essere un elettrolita solido. Le superfici interne ed esterne del cono sono coperte da un sottile strato di platino poroso (tale cioè da permettere l’assorbimento e lo sviluppo di ossigeno): questi due strati costituiscono gli elettrodi sui quali viene generata una tensione elettrica. L’elettrodo esterno è circondato da uno strato poroso protettivo (allumina Al2O3) per impedire il danneggiamento ad opera dei gas di combustione (cioè il contatto tra elettrodo esterno e gas di combustione è mediato da uno strato poroso protettivo); l’elettrodo interno è a contatto con l’aria. Il sensore, in pratica, è una pila di concentrazione, cioè una pila che non sfrutta una reazione di ossidoriduzione, ma un processo di espansione (o di
diluizione). L’ossido di zirconio ha la proprietà di permettere il passaggio degli ioni O2- attraverso i siti vacanti
Figura 8.3 - Rappresentazione schematica della sonda

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 190
presenti nel proprio reticolo cristallino. Il processo elettrochimico in ciascuno dei due elettrodi (che da un lato sono a contatto con l’ossigeno) è il seguente:
−− →+ 2)()(2 24 sg OeO
in questo caso il platino funge anche da catalizzatore per la reazione appena scritta.
Figura 8.4 - Elemento sensibile di una sonda On-Off
Il corrispondente potenziale di riduzione è dato dalla legge di Nerst:
)ln(4 2
222
2/
0/ OOOOO
pFTREE ⋅
+= −−
in cui F è la costante di Faraday e vale F=96486.7 [C/mol]. L’elettrodo a contatto con l’aria avverte una pressione parziale dell’ossigeno praticamente costante e superiore rispetto a quella dell’elettrodo a contatto con i gas di scarico, allora tra i due elettrodi si instaura una differenza di potenziale:
)ln(4 )(
)(/
2
22
2ScaricoO
AriaOOO p
pFTRE ⋅
=− (8.11)
Figura 8.5 - Schema di funzionamento.

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 191
Figura 8.6 - Caratteristica di una sonda On-Off Pertanto il segnale prodotto è legato alla pressione parziale dell’ossigeno nei gas di combustione e quindi alla frazione in massa di ossigeno allo scarico. La cella opera a temperature dai 500 °C fino a 1000 °C in modo che la migrazione degli ioni O2- attraverso l’elettrolita sia sufficientemente rapida (ottimo a 600 °C): questo spiega la presenza del riscaldatore nella sonda (Sonda HEGO: Heated Exhaust Gas Oxygen sensor). Nei primi secondi di avviamento del motore le temperature sono inferiori rispetto ai valori appena indicati, quindi le informazioni della sonda vengono ignorate ed il controllo è in catena aperta. Nel controllo in catena chiusa, che utilizza la sonda on-off come trasduttore, il valore di λ oscilla sempre attorno al valore stechiometrico: per il corretto funzionamento del catalizzatore queste oscillazioni non devono essere troppo ampie.
8.4 Sonda lineare Come già sottolineato, la sonda di tipo on-off può valutare solo se la miscela è magra o grassa, ma non stimare quanto è lontana dalle condizioni stechiometriche. La sonda lineare (UEGO Universal Exhaust Gas Oxigen Sensor), invece, è caratterizzata da un segnale proporzionale a lambda, almeno in un intorno del valore stechiometrico. La sonda lineare ha in comune con quella isterica gli elettrodi di platino, l’elettrolita solido (ossido di zirconio) e il riscaldatore elettrico ceramico.

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 192
Nell’elemento sensibile si trova una cavità dalle pareti porose (Detection chamber) in cui diffondono i gas di combustione; questa cavità separa due celle elettrolitiche. Una delle due celle si comporta in modo analogo ad una sonda on-off (Vs cell), l’altra, invece, pompa o rimuove ossigeno dai gas di combustione (Ip cell).
Figura 8.7 - Schema di funzionamento della sonda lineare
Il funzionamento della sonda lineare si può descrivere in questo modo. La sonda HEGO indica se la miscela è grassa o magra (quindi l’informazione è di tipo qualitativo), il segnale generato da questo sensore (è un segnale in tensione che vale circa 0,45 V nel caso stechiometrico come visto) è comparato con il riferimento 0,45 V; l’amplificatore operazionale fornisce in uscita una tensione positiva o negativa (Vs
+ oppure Vs-) a seconda della differenza tra il riferimento e il
segnale della cella HEGO. Questa differenza di potenziale si instaura tra gli elettrodi di platino della cella Ip. Ora, osservando nella figura i collegamenti dei due elettrodi della cella HEGO e dei due elettrodi della cella Ip, si può notare che gli elettrodi a contatto con i gas di combustione sono messi a terra. Se ad esempio i gas sono relativi ad una combustione magra, l’elettrodo non a terra della cella HEGO ha una tensione circa nulla, quindi l’amplificatore operazionale dà in uscita una tensione positiva (Vs
+), pertanto l’elettrodo della cella Ip a contatto con l’aria perde cariche negative che si accumulano su quello interno (a contatto con i gas di scarico): il flusso di ioni O2- all’interno dell’elettrolita , attratti dalle cariche negative, sarà diretto verso l’aria. Così si instaura un vero e proprio flusso di ossigeno dai gas di combustione verso l’aria. Questo flusso cessa quando il contenuto di ossigeno nei gas di combustione, stimato dalla cella HEGO, è pari a quello stechiometrico, cioè quando il comparatore dà come risultato zero. Tornando al flusso di ioni O2- nella cella Ip, si può notare che ciascuno ione “pompato” sottrae una carica positiva dall’elettrodo a contatto con l’aria (in realtà cede una carica negativa 2e-): allora, per mantenere la differenza di potenziale (Vs
+), si instaura una corrente sul circuito esterno. Integrando questa corrente (oppure la tensione ai capi della resistenza rappresentata nella figura) si ottiene un segnale proporzionale al contenuto di ossigeno nei gas di combustione in eccesso o

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 193
in difetto rispetto alla condizione stechiometrica. In altre parole la somma delle cariche che circolano nel circuito esterno (integrale della corrente), è pari alla somma delle cariche che attraversa l’ossido di zirconio della cella Ip e quindi proporzionale alle moli di ossigeno pompate. Inoltre l’intensità della corrente o la differenza di potenziale ai capi della resistenza saranno tanto maggiori in valore assoluto quanto più i gas di scarico sono grassi o magri. Infatti, se ad esempio la combustione è magra, la quantità di ossigeno a contatto con l’elettrodo interno della Detection chamber aumenta, pertanto cresce il numero di molecole di O2 che prendono parte alla
reazione −− →+ 2)()(2 24 sg OeO , allora cresce il numero di cariche elettriche che attraversano
l’elettrolita solido nell’unità di tempo, dunque aumentano le cariche elettriche che attraversano il circuito esterno nell’unita di tempo cioè cresce l’intensità della corrente. Nella figura si può notare che gli elettrodi della cella Ip sono più ampi di quelli della cella HEGO, il loro compito infatti è diverso: i primi pompano ossigeno, i secondi devono semplicemente valutare il contenuto di ossigeno dei gas di scarico. Tutto questo è sintetizzato nella figura in cui è indicato anche il flusso delle cariche negative.
Figura 8.8 – Sonda lambda lineare, flusso delle carche negative.
In modo opposto, in caso di miscela grassa, viene pompato ossigeno nei gas accumulati nella camera: cambia la direzione della corrente nel circuito esterno. In realtà il segnale è influenzato anche dalla presenza di CO e di incombusti nella detection chamber: il loro contributo è molto importante e sarà trattato nei prossimi paragrafi.

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 194
Figura 8.9 – Sonda lambda lineare.1
Per ridurre l’ingombro della sonda, si sostituisce un contatto con l’aria utilizzando una corrente continua pari a 10 mA, cioè l’accumulo di cariche positive sull’elettrodo che dovrebbe essere a contatto con l’aria non è più generato dalla ionizzazione dell’ossigeno atmosferico, ma da una corrente continua.
8.5 La sonda nel modello La sonda lambda lineare è un sistema che ha come ingresso alcune caratteristiche chimiche dei gas di combustione ed in uscita fornisce un segnale legato all’indice λ della miscela bruciata. Per modellare un sistema di questo tipo è necessario definire in modo meno generico gli ingressi, cioè sostituire nella frase la locuzione “alcune caratteristiche chimiche” con l’elenco delle caratteristiche che hanno una influenza sulla uscita. Comunque il modello può già essere considerato orientato dal momento che si è specificato che avrà una o più grandezze di natura chimica come ingresso. Sicuramente la frazione in massa di ossigeno nei gas di combustione influenza il segnale della sonda, si tratta di stabilire se le frazioni di altri componenti lasciano una traccia sui valori in uscita dal sensore; poi, in un secondo momento, si può modellare la loro influenza. I paragrafi che seguono hanno questo obiettivo. Un secondo aspetto da trattare è quello relativo alla dinamica della sonda: verrà dedicato un paragrafo all’analisi della influenza della dinamica del sensore sul segnale in uscita. L’analisi parte considerando un caso semplificato di combustione che non prevede la formazione di CO: questo è il tipo di combustione che si trova nel modello del motore e il risultato che ci si attende da questo studio è capire se è possibile generare un segnale analogo a quello della sonda in questo caso semplificato. Si passa poi al caso generale.

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 195
8.5.1 Analisi chimica e sonda
La reazione di combustione (combustibile mn HC ) può essere rappresentata in questo modo:
mnmn HeCdOOcHbCOaCOOHC ++++→⋅+ 2222αββ
I parametri a, b, c, d ed e non sono indipendenti perché esistono tre relazioni che li legano ed esprimono il fatto che il numero di moli di ciascuna specie che compare tra i reagenti, deve essere uguale a quello che si trova tra i prodotti (cioè esistono tre vincoli stechiometrici):
⎪⎪⎩
⎪⎪⎨
⎧
⋅=⋅+⋅
⋅=+++
⋅=⋅++
memc
dcba
nenba
β
αβ
β
222
Pertanto, per risalire al valore di α (che rappresenta le moli di aria che reagiscono con una mole di combustibile) non è necessario conoscere tutti e cinque i coefficienti stechiometrici dei prodotti.
Precisato questo si può scrivere la relazione che consente di ricavare α nota la composizione dei gas di scarico, sfruttando tutte e cinque le frazioni in massa, invece nei prossimi paragrafi si analizzerà come ricavare λ utilizzando solo due frazioni :
mnX
nXX
XXXX
mnHCCOCO
OHOCOCO
+⋅+⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛+
+++=
121
2844
1821
322821
442
222
α (8.12)
dove con X è indicata la frazione in massa. In pratica attraverso la formula scritta sopra si calcola il numero di moli di ossigeno tra i prodotti (che è uguale a quello tra i reagenti αβ ⋅ ) e lo si divide per il numero di moli di Cn tra i
prodotti ( β ), cioè si calcola α che è un parametro indicativo dell’aspetto qualitativo della
combustine mentre β rappresenta l’aspetto quantitativo.
Come visto, oltre a λ si può definire il parametro eccesso d’aria:
⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ +−
=−=−
=
4
41mn
mn
AA
AAA
ericastechiomet
effettiva
ricastechiomet
ricastechiometeffettivaα
ricostechiomet
effettiva
AA
=λ

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 196
quindi le due variabili sono legate tra loro:
1+= eλ (8.13) La sonda lineare ha un comportamento che non può essere descritto semplicemente attraverso le espressioni appena elencate infatti, ad esempio, immaginando di avere la mancata accensione di una miscela stechiometrica, il segnale della sonda è “miscela magra”, anche se in realtà la miscela è stechiometrica: questo fa immaginare che l’ossigeno lasci una traccia più profonda sul segnale rispetto alle altre specie chimiche. Qualitativamente l’uscita della sonda nel caso “mancata accensione” è uguale a quella del caso “mancata iniezione”, quantitativamente il secondo è più spostato verso il magro rispetto al primo. Nel caso di mancata accensione a livello della sonda è presente anche combustibile, quindi la frazione in massa di ossigeno è più bassa: questo può spiegare parzialmente il risultato sperimentale. La sonda può essere suddivisa idealmente in due “blocchi” che lavorano in serie: un blocco descrive il comportamento chimico della sonda attraverso relazioni analoghe a quelle presentate in questo paragrafo, l’altro blocco rappresenta la dinamica del sensore, dinamica che è legata alla diffusione degli ioni all’interno dell’elettrolita solido e dei gas di scarico dentro al cappuccio protettivo. Il comportamento della sonda durante una mancata accensione si può spiegare in due modi diversi ritenendo responsabile l’uno o l’altro blocco. 1. Se solo l’ossigeno lasciasse una traccia sul segnale della sonda, visto che durante una
mancata accensione il tenore di O2 allo scarico cresce come quando il motore brucia miscele magre, il comportamento descritto sopra sarebbe giustificato. In realtà anche altre specie hanno influenza sul segnale della sonda (ciò verrà dimostrato nei prossimi paragrafi), quindi l’ipotesi appena fatta cade, tuttavia rimane valida l’idea di base: non tutte le specie chimiche lasciano traccia sulla uscita della sonda e da questo dipende il comportamento del sensore durante un miss fire.
2. La mancata accensione della miscela comporta la presenza allo scarico di incombusti in quantità elevate, se diffondessero all’interno dell’elettrolita solido più lentamente rispetto all’ossigeno, la sonda segnalerebbe in un primo momento “miscela magra” poi, quando anche gli incombusti iniziano a lasciare una traccia, il segnale della sonda si riporterebbe sul valore “corretto” di lambda.
Nelle prossime pagine verranno analizzate queste due ipotesi iniziando dalla prima che verrà approfondita a partire dal prossimo paragrafo.

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 197
8.5.2 Analisi della combustione all’interno di un cilindro nel modello
implementato in Simulink Nel modello del motore la combustione è descritta in modo “semplificato” come un processo in cui non si forma CO; allora, in generale, la reazione si può rappresentare in questo modo:
mnmn HeCdOObHaCOOHC +++→+ 2222α
in cui si considera una kilomole di combustibile ( mn HC ) che reagisce con α kilomoli di
ossigeno. Occorre precisare che la possibilità di riferirsi a una quantità unitaria di combustibile è dovuta al fatto che l’indice lambda è rappresentativo degli aspetti qualitativi, cioè è indipendente dalla quantità di combustibile in sé, ma è legato al rapporto tra questa e la quantità di aria.
Al variare di α si passa dal caso “combustione grassa” a “combustione magra”: 4mn +=α
rappresenta il valore di “transizione” e corrisponde alla condizione “combustione stechiometrica”. In realtà, la combustione all’interno del cilindro non è uniforme, allora il passaggio da combustione magra a grassa non è così netto, cioè nel modello si introduce una seconda approssimazione trascurando la turbolenza e la non omogeneità della carica in camera di combustione. Ritornando alla schematizzazione adottata, nel caso di combustione completa, tra i prodotti della combustione grassa non si trova l’ossigeno:
mnmn HCmn
mnOHmn
mCOmn
nOHC+⋅
⋅−+⋅+
+⋅⋅⋅
++⋅⋅⋅
→+4
4442
44
222αααα
4mn +<α
invece se la combustione non è completa, tra i prodotti compare anche O2:
( ) ( )
( )2
222
4141
1421
44
ObHCmn
b
OHbmn
mCObmn
nOHC
mn
mn
αα
ααα
⋅+⎟⎠⎞
⎜⎝⎛
+⋅−⋅⋅
−+
+−⋅⎟⎠⎞
⎜⎝⎛
+⋅⋅⋅
+−⋅⎟⎠⎞
⎜⎝⎛
+⋅⋅⋅
→+
dove 10 ≤≤ b . In questa espressione b è il parametro che tiene conto della non completezza (b=0 se la combustione è completa, b=1 se la reazione non avviene cioè in caso di mancata accensione) e, dato che in caso grasso il limite alla combustione è rappresentato dall’ossigeno, la mancata reazione di una parte della miscela “libera” alcune moli di O2 che così si trovano tra i prodotti:

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 198
allora è giusto che la quantità di ossigeno nei gas di combustione sia direttamente proporzionale a b . Per una combustione magra (o stechiometrica) completa vale:
2222 42OmnOHmnCOOHC mn ⎟
⎠⎞
⎜⎝⎛ −−++→+ αα
4mn +≥α
le formule cambiano rimovendo l’ipotesi di completezza:
( ) ( ) ( ) mnmn HbCObmnOHbmCObnOHC +⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +−+−⋅+−⋅→+ 2222 1
41
21 αα
10 ≤≤ b . La combustione non completa di una miscela magra comporta l’esistenza di incombusti tra i gas di scarico in quantità proporzionale alla non completezza.
Si può notare che c’è continuità, al variare di α tra le relazioni che descrivono la combustione
magra e grassa, cioè coincidono per 4mn +=α .
8.5.3 Una prima ipotesi sul funzionamento della sonda Alla luce delle relazioni che descrivono la combustione per un cilindro, si può ipotizzare che gli ingressi della sonda lambda si riducano alla sola frazione in massa di ossigeno e si possono analizzare le informazioni ricavabili da questo unico parametro. Si ricorda che i gas di combustione sono formati da: 1) anidride carbonica (CO2); 2) vapore d’acqua (H2O); 3) incombusti (CnHm); 4) ossigeno (O2); 5) azoto (N2); e che le frazioni in massa di questi cinque componenti sono legate tra loro da quattro relazioni: • tre vincoli stechiometrici; • un vincolo dovuto al fatto che l’aria è composta in massa circa per il 23% da O2 e il
restante 77% da N2, quindi, dalla quantità di ossigeno tra i reagenti, si risale all’azoto presente tra i reagenti ed i prodotti (N2 non partecipa alla combustione).
Questo vuole dire che, noto l’eccesso d’aria (ci si riferisce ad una kilomole di combustibile
quindi basta conoscere α), è sufficiente conoscere una frazione in massa per avere la composizione completa dei gas di scarico; in altre parole basta una sola informazione sui

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 199
prodotti per stabilirne la composizione in modo univoco, è sufficiente cioè definire il grado di completezza della reazione. Invece, se non si hanno informazioni sulla quantità di ossigeno presente tra i reagenti, occorrono due grandezze per risalire alla composizione dei gas di combustione e all’eccesso d’aria (ad esempio due frazioni in massa). Se il segnale della sonda fosse influenzato solo dalla frazione in massa dell’ossigeno, si avrebbe a disposizione una sola informazione, quindi per risalire all’eccesso d’aria occorrerebbe fissare a priori un secondo parametro: il grado di completezza della reazione. In altre parole, se la sonda rileva solo
l’ossigeno nei gas di scarico, si può risalire a λ “tarandola” su un certo valore di completezza della reazione (parametro indicato con la lettera b). La frazione in massa di ossigeno vale:
rmnbX O ⋅⋅++⋅
⋅⋅=
αα
321232
2 miscela grassa;
( )
rmn
bmnX O ⋅⋅++⋅
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +−
=α
α
3212
3214
2 miscela magra o stechiometrica
r è il parametro che tiene conto della composizione dell’aria ( la frazione in massa dell’ossigeno
nell’aria è il 23% circa): 23.01
=r .
Si può ricavare α in funzione di XO2 e di b semplicemente invertendo queste due equazioni; operativamente si seleziona l’una o l’altra in funzione di XO2, fissando come valore di separazione quello corrispondente ad una combustione avvenuta in condizioni stechiometriche. È interessante notare che b è dato dalla funzione di Wiebe:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛
−−
⋅−−=ζ
ϑϑϑϑ
ξϕif
iexp1
dove: • ϑ indica l’angolo di manovella e i pedici i ed f inizio e fine combustione;
• ϕ la frazione (in massa) di combustibile bruciata;
• ζ regola la velocità della combustione;
• ξ la completezza;
pertanto b è fissato da ξ : se ξ = 7 (come nel modello ), b = exp(-7) = 0,00091189.
Si può studiare la funzione che lega XO2 ad α e a b: su un piano si traccia una famiglia di curve
parametrizzate in α .
Seguendo le frecce rosse si vede come è possibile ricavare α a partire da XO2 una volta fissato b;
in particolare, a parità di XO2, se b1<b2 allora α1>α2, quindi lo stesso valore di XO2 , rilevato
da due ipotetiche sonde che sfruttano l’algoritmo appena descritto e tarate in modo diverso, dà come risultato un eccesso d’aria diverso.

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 200
La linea corrispondente ad α stechiometrico è la retta più inclinata passante per l’origine (verde
in figura). Si vede che se non avviene la combustione ed α tende all’infinito XO2 tende a 0,23 (cerchio verde).
Figura 8.9 – Andamento della percentuale di ossigeno in funzione
della completezza della reazione Questo algoritmo, in base alle osservazioni appena fatte, segnala “miscela magra” di fronte ad una mancata accensione, cioè, qualitativamente, si comporta in modo analogo ad una sonda lambda reale. È interessante studiare l’errore che commetterebbe l’algoritmo a causa di una “taratura” errata su b . Se ad esempio il valore reale di b (freccia arancione Figura 8.9) è superiore a quello di taratura (freccia rossa), il segnale è spostato in modo sistematico verso il “magro” (valore
stimato=α1>α2=valore reale . L’andamento dell’errore è riportato nella Figura 8.10.

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 201
Figura 8.10 – Andamento dell’eccesso di aria in funzione di α.
Un algoritmo di questo tipo è molto sensibile alla taratura specialmente nel campo delle miscele grasse (eccesso d’aria negativo). Lo stesso andamento (ottenuto per via teorica) si può ricavare applicando l’algoritmo non tarato al modello di un motore monocilindrico (Figura 8.11). In questa figura i punti gialli sono quelli ricavati con l’algoritmo tarato (si possono anche ottenere a partire dal rapporto tra la massa di ossigeno e la massa di combustibile nel cilindro un istante prima dell’inizio della combustione), invece i punti rossi sono quelli indicati dall’algoritmo non tarato. Nel caso di un motore pluricilindrico è necessario rivedere le equazioni alla base dell’algoritmo: questo verrà chiarito nel prossimo paragrafo. L’aspetto interessante che emerge da queste considerazioni è che, per simulare almeno da un punto di vista qualitativo il comportamento della sonda, occorre costruire una funzione che dipenda oltre che dall’eccesso d’aria, dalla completezza della reazione.
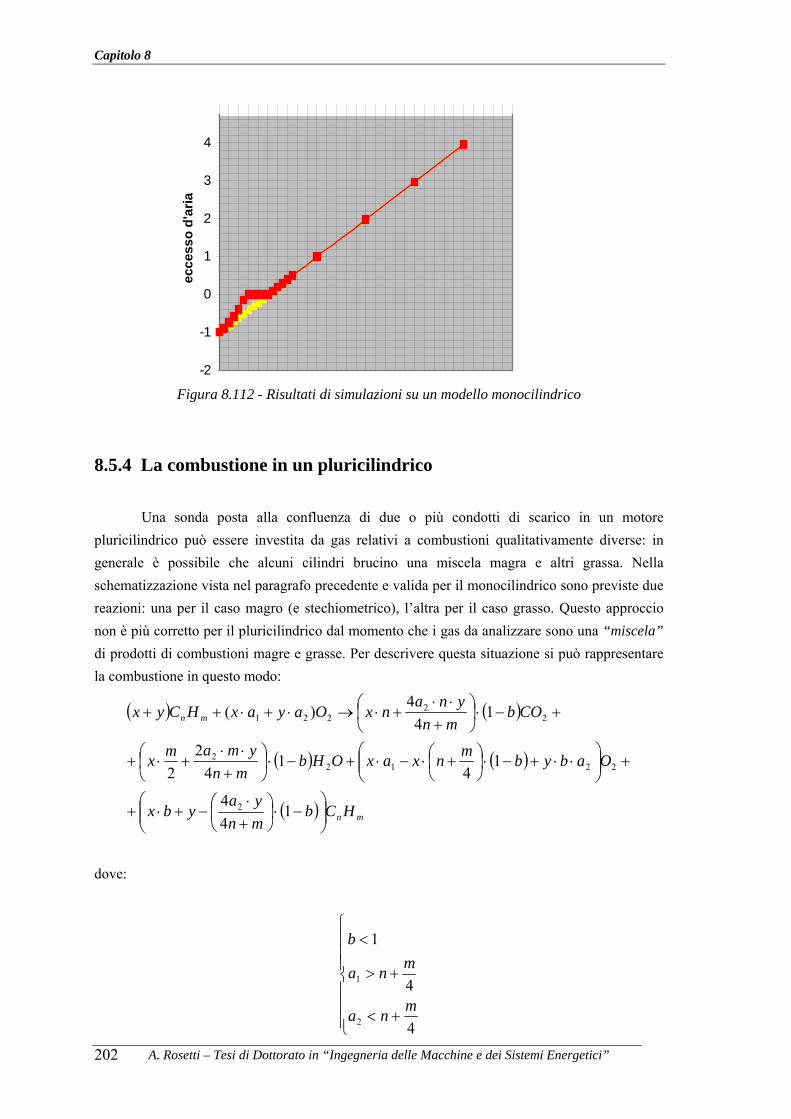
Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 202
-2
-1
0
1
2
3
4
ecce
sso
d'ar
ia
Figura 8.112 - Risultati di simulazioni su un modello monocilindrico
8.5.4 La combustione in un pluricilindrico Una sonda posta alla confluenza di due o più condotti di scarico in un motore pluricilindrico può essere investita da gas relativi a combustioni qualitativamente diverse: in generale è possibile che alcuni cilindri brucino una miscela magra e altri grassa. Nella schematizzazione vista nel paragrafo precedente e valida per il monocilindrico sono previste due reazioni: una per il caso magro (e stechiometrico), l’altra per il caso grasso. Questo approccio non è più corretto per il pluricilindrico dal momento che i gas da analizzare sono una “miscela” di prodotti di combustioni magre e grasse. Per descrivere questa situazione si può rappresentare la combustione in questo modo:
( ) ( )
( ) ( )
( ) mn
mn
HCbmnyaybx
OabybmnxaxOHbmn
ymamx
CObmn
ynanxOayaxHCyx
⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛
+⋅
−+⋅+
+⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅+−⋅⎟
⎠⎞
⎜⎝⎛ +⋅−⋅+−⋅⎟
⎠⎞
⎜⎝⎛
+⋅⋅
+⋅+
+−⋅⎟⎠⎞
⎜⎝⎛
+⋅⋅
+⋅→⋅+⋅++
144
14
14
22
14
4)(
2
22122
22
221
dove:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+<
+>
<
4
4
1
2
1
mna
mna
b

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 203
e x + y =1 cioè la reazione coinvolge una kilomole di combustibile.
In altri termini x kilomoli di CnHm danno luogo ad una combustione magra con 1ax ⋅ kilomoli di
O2, le rimanenti y = 1-x kilomoli di CnHm ad una grassa con 2ay ⋅ kilomoli di O2 e i relativi
prodotti si miscelano. Quando tutti i cilindri lavorano in campo magro y=0 ed x=1 quindi si torna alla espressione vista nel paragrafo 8.4.2, in altri termini quella appena riportata è una formula che ammette come casi particolari le relazioni elencate al paragrafo 8.4.2 ed in più permette di descrivere la composizione della combinazione dei gas di scarico provenienti da cilindri che bruciano miscele qualitativamente differenti. La frazione in massa di ossigeno vale:
( )
32)(12
3214
21
21
2 ⋅⋅+⋅++⋅
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅+−⋅⎟
⎠⎞
⎜⎝⎛ +⋅−⋅
=ayaxmn
abybmnxaxX O (8.14)
dunque è funzione di a1 e a2 separatamente, di x e di b: non si riesce a ricavare )( 21 ayax ⋅+⋅
semplicemente fissando b . Per chiarire meglio questo aspetto, si può considerare la composizione dei gas di scarico (alla confluenza) quando in un motore quattro cilindri un cilindro brucia una miscela magra (cilindro 1), un cilindro una miscela grassa (cilindro 2) ed i rimanenti due cilindri una miscela stechiometrica. Il cilindro 1 immette allo scarico più ossigeno rispetto alla condizione stechiometrica, il cilindro 2 più incombusti, quindi, globalmente, le frazioni in massa di ossigeno ed incombusti crescono. Ad esempio, se complessivamente la quantità di combustibile iniettato è stechiometrica (cioè il combustibile che manca nel cilindro 1 è quello presente in eccesso nel cilindro 2) l’andamento delle frazioni in massa è quello riportato nella Figura8.12 (i cilindri 1 e 2 sono “starati” a partire dal secondo ciclo).

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 204
Figura 8.12 - Frazione in massa di ossigeno
Da questa figura emerge chiaramente la dipendenza della frazione in massa di ossigeno dal parametro x (preso singolarmente): se la frazione in massa di ossigeno dipendesse da
)( 21 ayax ⋅+⋅ sarebbe costante nel tempo, dato che i cilindri 1 e 2 si compensano.
Per ricavare )( 21 ayax ⋅+⋅ occorre conoscere due frazioni in massa tra loro indipendenti; in
questo modo si risale alla composizione completa dei gas di scarico e all’eccesso d’aria. Ad esempio, se oltre ad XO2 si considera XCO2:
( )
32)(12
4414
4
21
2
2 ⋅⋅+⋅++⋅
⋅−⋅⎟⎠⎞
⎜⎝⎛
+⋅⋅
+⋅=
ayaxmn
bmn
ynanx
X CO (8.15)
è facile dimostrare che:
32)(12)(
411
4432 21
2122
⋅⋅+⋅++⋅⋅+⋅
=⎟⎠⎞
⎜⎝⎛ ⋅+⋅+=
ayaxmnayax
nmXX
f COO (8.16)
cioè f è funzione solo di )( 21 ayax ⋅+⋅ e si costruisce semplicemente conoscendo il tipo di
combustibile (n ed m) e le frazioni in massa di ossigeno e anidride carbonica. Dato che f non dipende da b, un algoritmo che sfrutta la relazione appena scritta non si comporta come una sonda lambda reale di fronte ad una mancata accensione. Riassumendo: 1) la sonda lambda reale sicuramente non rileva la sola frazione in massa di ossigeno,
altrimenti non sarebbe in grado di risalire all’eccesso d’aria (come si è visto la frazione in

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 205
massa di ossigeno non dipende solo dall’eccesso d’aria, ma anche, ad esempio, dalla proporzione tra prodotti di una combustione magra e prodotti di una combustione grassa che si “miscelano”); questo vuole dire che anche altre specie chimiche oltre all’ossigeno lasciano una traccia sul segnale;
2) semplificando la reazione di combustione trascurando la presenza di CO, non si riesce a costruire un segnale simile a quello effettivo della sonda senza introdurre l’effetto della dinamica della sonda lambda (cioè basandosi solo su considerazioni di carattere chimico).
Tornando alla prima formula scritta in questo paragrafo, si vede che a sinistra della freccia compaiono tre incognite (x, a1, a2), inoltre, delle quattro frazioni in massa dei prodotti, solo due sono indipendenti, infatti esistono i vincoli stechiometrici sulle moli di idrogeno e carbonio, quindi, nota la composizione dei gas di scarico (cioè le quattro frazioni in massa), non si riesce a
risalire ad x, a1, a2: in pratica ci sono 1∞ combinazioni di (x, a1, a2) che danno come risultato le stesse frazioni. Alla luce di questi risultati nel modello si è scelto di calcolare l’eccesso d’aria attraverso la semplice espressione:
mnX
nX
XXX
mnHCCO
OHOCO
+⋅+⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛
++=
121
44
1821
32442
222
α
(8.17)
1
4
41 +=⇒⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ +−
=−=−
= emn
mn
AA
AAA
ericastechiomet
effettiva
ricastechiomet
ricastechiometeffettiva λα
(8.18)
Come già evidenziato, queste formule non descrivono in ogni condizione il funzionamento di
una sonda lineare, comunque permettono di calcolare in modo preciso il valore di λ in ogni situazione (cosa che la sonda “reale” non è in grado di fare). Rimane da analizzare quello che accade rimovendo l’ipotesi semplificativa di non considerare la CO tra i prodotti di combustione: a questo studio sarà dedicato il prossimo paragrafo.
8.5.5 Combustione completa Dall’analisi della combustione “semplificata” svolta nei paragrafi precedenti sono emersi due risultati: 1) il segnale della sonda lambda è influenzato da più ingressi, quindi non solo dal
contenuto di ossigeno, ma anche dalle frazioni in massa di altri componenti; 2) non si riesce a costruire un segnale simile a quello della sonda semplificando la
combustione: questo fa immaginare che l’ossido di carbonio lasci una traccia sull’uscita della sonda lambda.

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 206
A questo punto è necessario rimuovere l’ipotesi semplificativa e considerare anche la possibilità di una combustione imperfetta cioè che porti alla formazione anche di ossido di carbonio.
Figura 8.133 - Frazioni in massa di ossigeno, anidride carbonica ed
ossido di carbonio al variare del parametro alfa In modo schematico, tra i prodotti della combustione di una kilomole di CnHm, al variare delle kilomoli di ossigeno che partecipano alla reazione, oltre al vapor d’acqua, agli incombusti e all’azoto si trovano (Figura 8.133): • O2 e CO2 nel caso magro; • CO2 e CO nel caso grasso se l’ossigeno tra i reagenti supera un valore “soglia”; • CO se l’ossigeno tra i reagenti è sotto a questo valore. Nell’ipotesi “combustione completa”, la reazione che avviene in un cilindro è la seguente. Combustione magra e stechiometrica:
4
42 2222
mn
OmnOHmCOnOHC mn
+≥
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⎟
⎠⎞
⎜⎝⎛ +−+⋅+⋅→+
α
αα
Combustione grassa:

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 207
442
2422
22 222
mnmn
OHmCOmnCOmnOHC mn
+≤≤+
+⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ +⋅+−+⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ +−→+
α
ααα
Combustione “molto” grassa:
42
242
22
24
22
mn
HCmn
mnOHmn
mCOmn
nOHC mnmn
+≤
+−+
++⋅
++⋅
→+
α
αααα
Esistono due tipi di combustione che hanno prodotti diversi: una richiede più ossigeno in
condizioni stechiometriche (4mn +=α ) e tra i prodotti ha CO2, l’altra porta alla formazione di
CO al posto di CO2 e ha bisogno di meno ossigeno (42mn
+=α in condizioni stechiometriche).
Quando l’ossigeno non è sufficiente per una combustione “perfetta” incomincia a formarsi CO . Rimovendo l’ipotesi “combustione completa” le reazioni diventano le seguenti. Combustione magra e stechiometrica:
( ) ( ) ( )
4
14
12
1 2222
mn
HbCObmnOHbmCObnOHC mnmn
+≥
+⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +−+−⋅+−⋅→+
α
αα
Combustione grassa:
( )
( ) ( )
442
12
14
222
12
22
22
22
mnmn
dOHbCOHbmCObmnd
CObmndOHC
mn
mn
+≤≤+
++−⋅+⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +⋅++−+
+⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +−−→+
α
α
αα
Combustione “molto” grassa:
( ) ( )
( )
42
2142
212
214
2
22
mn
bOHCmn
bmn
OHmn
bmCOmn
bnOHC
mn
mn
+≤
⋅++
−⋅−++
++
−⋅⋅+
+−⋅⋅
→+
α
αα
ααα

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 208
In queste espressioni compaiono due parametri (b e d) per descrivere la non completezza delle reazioni. Sono necessarie due variabili e non una come nel caso analizzato nei paragrafi precedenti, perché esistono due possibili combustioni, una che ha come prodotto CO2 e l’altra CO: dato che richiedono quantità diverse di ossigeno, l’O2 tra i prodotti varia a seconda del grado di completezza di ciascuna. Ad esempio, nell’ipotesi che il grado di completezza sia identico, bd ⋅= α , quindi la seconda espressione diventa (le altre rimangono identiche):
( ) ( )
( )
442
12
14
2212
2
22
22
mnmn
bOHbCOHbm
CObmnCObmnOHC
mn
mn
+≤≤+
⋅++−⋅+
+−⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ +⋅+−+−⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ +−→+
α
α
ααα
In tutte le formule elencate in questo paragrafo 10 ≤≤ b .
8.5.6 Una possibile interpretazione del segnale della sonda Come visto nei paragrafi in cui si è analizzata la combustione “semplificata”, dato che la sonda in genere è posta alla confluenza di condotti provenienti da cilindri diversi, il fluido che la interessa deve essere considerato una miscela di gas relativi a combustioni qualitativamente differenti, dal momento che alcuni cilindri possono lavorare in modo magro ed altri in modo grasso. La sonda lineare dà buoni risultati in termini di precisione in un intorno del valore stechiometrico, allora lo studio si può centrare sui casi miscele magre, miscele stechiometriche e miscele grasse, tralasciando il caso “miscele molto grasse”, cioè la miscela di gas allo scarico è data da prodotti di combustioni magra, stechiometrica e grassa miscelati tra loro. Le reazioni da combinare sono le seguenti. Combustione magra e stechiometrica:
( ) ( ) ( )
4
14
12
1 2222
mn
HbCObmnOHbmCObnOHC mnmn
+≥
+⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +−+−⋅+−⋅→+
α
αα
Combustione grassa:

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 209
( ) ( )
( )
442
12
14
2212
2
22
22
mnmn
bOHbCOHbm
CObmnCObmnOHC
mn
mn
+≤≤+
⋅++−⋅+
+−⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ +⋅+−+−⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ +−→+
α
α
ααα
Combinando (“miscelando”) le formule appena scritte (sommo la prima moltiplicata per x alla seconda moltiplicata per y):
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) mn
mn
HCyxbObaybmnax
OHbyxmCObmnay
CObmnaynxOayaxHCyx
+⋅+⎥⎦
⎤⎢⎣
⎡⋅⋅+⎟⎟
⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +−⋅+
+−⋅+⋅+−⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ ++−⋅+
+−⋅⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ +−⋅+⋅→⋅+⋅++
221
22
22221
14
12
12
22
12
2
(8.19) dove 1=+ yx cioè reagisce una sola kilomole di combustibile o, in altre parole, ci si riferisce
alla unità di combustibile. In pratica 1ax ⋅ kilomoli di ossigeno reagiscono con x di CnHm in
una combustione magra, quindi 41mna +≥ ; le restanti 2ay ⋅ kilomoli di O2 si combinano con
y kilomoli di CnHm in una combustione grassa, quindi 442 2mnamn
+≤≤+ . Della
completezza della reazione si tiene conto attraverso b che è un parametro minore di 1. Rappresentata in modo generico, la reazione è questa:
mnmn HeCdOOcHbCOaCOOHC ++++→+ 2222α
e come già visto a, b, c, d ed e sono legati tra loro da tre relazioni:
⎪⎪⎩
⎪⎪⎨
⎧
=⋅+⋅
=+++
=⋅++
memc
dcba
nenba
222
α
quindi se α non è noto, partendo dalle frazioni in massa di tre componenti dei prodotti, si risale
alla composizione completa dei prodotti e ad α. Infatti, se conoscessi α noti due dei cinque parametri (a, b, c, d, e), attraverso le tre equazioni scritte sopra ricaverei gli altri tre, invece, dal
momento che α è incognito (è proprio il valore che ci interessa trovare) “cade” una delle tre

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 210
relazioni (la seconda), allora occorre conoscere tre parametri indipendenti e utilizzando la
seconda equazione si trova anche α. Una seconda osservazione importante è che le kilomoli di combustibile tra i prodotti sono funzione solo del grado di completezza della reazione, parametro che può essere fissato a priori in modo relativamente preciso come già visto. Quindi ora bastano due frazioni in massa per
risalire a 21 ayax ⋅+⋅=α dal momento che la quantità di incombusti è stata fissata. Dato che
sicuramente O2 interviene nel segnale e, in base a quanto visto nei paragrafi precedenti, lo stesso discorso vale per CO, è immediata la scelta dei due parametri. Ora si può definire un parametro indicato con f (notazione):
COO XXf ⋅−⋅= 472
(8.20)
che è funzione solo delle frazioni in massa di ossigeno e ossido di carbonio, frazioni che si possono ricavare dalla formula che descrive la miscela di gas che lambiscono la sonda:
( )
( )
( )
( )
23.01
3212
2812
22
3212
3214
21
2
21
21
2
=
⋅⋅+⋅⋅++
⋅−⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ ++−⋅
=
⋅⋅+⋅⋅++
⋅⎥⎦
⎤⎢⎣
⎡⋅⋅+⎟⎟
⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +−⋅
=
r
rayaxmn
bmnayX
rayaxmn
baybmnaxX
CO
O
Quindi:
( )
rmn
bmnf
⋅⋅++
⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +−⋅
=α
α
3212
14
224 (8.21)
allora è funzione solo di α e di b (oltre che di n ed m che sono noti una volta fissato il tipo di combustibile ed r che dipende dalla composizione dell’aria ed è un dato). Fissato b, invertendo la
relazione scritta, si ottiene α. Pertanto si è dimostrato che bastano tre frazioni in massa per risalire alla quantità di aria che ha partecipato alla reazione. Si ottiene:
( ) ( )
rf
bmnmnf
⋅⋅−
−⋅⎟⎠⎞
⎜⎝⎛ +⋅++⋅
=32224
14
22412α (8.22)

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 211
Sfruttando un algoritmo che si basa su questa formula per ricavare il segnale della sonda, si ottiene, per una mancata accensione, un comportamento simile a quello di una sonda reale: il segnale è “miscela magra” anche se si è iniettata una quantità stechiometrica di combustibile (che però non ha bruciato).
È interessante riportare in un grafico f in funzione di b (in ascissa) e di α (famiglia di curve
parametrizzate in α).
Figura 8.14 - f in funzione di b e di alfa.
Seguendo le frecce rosse si vede come da f, fissato b, si ottiene α Si può notare anche, che fissato b, cioè “tarato” l’algoritmo, se la combustione ha un grado di completezza diverso da quello ipotizzato, il segnale non è più preciso; ad esempio se la combustione è meno completa
(freccia marrone) rispetto a quanto ipotizzato a priori, il valore reale di αche si ricava seguendo la freccia marrone, è più basso rispetto a quello segnalato dall’algoritmo (che in questo caso è tarato male): in pratica il valore letto è spostato in modo sistematico verso il magro rispetto a quello reale. Nelle figura riportata di seguito è sintetizzato quanto appena detto.

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 212
Figura 8.15 – Eccesso d’aria in funzione di alfa.
Si vede che l’algoritmo tarato è preciso, quello non tarato commette un errore in modo sistematico (in questo caso la curva blu è relativa ad una taratura fatta con un valore di b inferiore a quello reale).
8.5.7 La sonda reale I risultati ottenuti nel paragrafo precedente si possono riassumere in questo modo: 1) il segnale della sonda è influenzato dalle frazioni di ossigeno, ossido di carbonio e
incombusti allo scarico; 2) note le frazioni in massa di questi tre componenti si riesce a risalire all’eccesso d’aria; 3) dato che la quantità di incombusti allo scarico è legata solo alla completezza della
combustione (nel caso “miscele molto grasse” questo non è vero, ma in questo campo la sonda non dovrebbe lavorare), si può anche fissare a priori il tenore di incombusti;
4) a partire dal parametro COO XXf ⋅−⋅= 472
si riesce a risalire alla massa di ossigeno
che ha reagito con l’unità di massa di combustibile, cioè a λ.
In particolare il parametro COO XXf ⋅−⋅= 472
ha le seguenti caratteristiche:
a) è la combinazione lineare di frazioni in massa;

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 213
b) l’effetto su f di 2OX e COX è diverso, infatti se l’ossigeno incrementa f, un aumento di
ossido di carbonio lo riduce. Tutto questo fa immaginare che sugli elettrodi di platino della sonda lambda, oltre alla reazione
−− →+ 2)()(2 24 sg OeO , possa avere luogo anche la reazione −+ +→ eCOCO 22 . In questo
modo l’effetto dell’ossigeno viene compensato da quello della reazione della CO, in altri termini se O2 rimuove cariche negative dall’elettrodo, CO incrementa le cariche negative accumulate. Questo è coerente con la forma di f che è la combinazione lineare di frazioni in massa e con il segno negativo che moltiplica la frazione in massa di ossido di carbonio. Infatti ricordo che, nel paragrafo che descrive il comportamento della sonda lineare da un punto di vista fisico, si era osservato che la tensione ai capi dei due morsetti rappresentati nella figura (tensione = e0) è proporzionale al contenuto di ossigeno nei gas di combustione. Ora si può aggiungere che è proporzionale anche al contenuto di CO, e che la costante di proporzionalità per CO ha segno opposto rispetto a quella relativa all’ossigeno. In questo modo si può attribuire un senso fisico al parametro f : f è proporzionale alla tensione e0. Occorre precisare che non è detto che i coefficienti che moltiplicano le frazioni in massa in realtà siano proprio 7 e –4: questi sono i valori che in teoria permettono di ottenere l’indice lambda in modo preciso. In realtà potrebbero essere diversi: questo limita il campo di validità della sonda
lineare in un intorno del valore di λ in cui viene tarata.
Figura 8.16
In secondo luogo oltre alle frazioni di O2 e CO possono intervenire anche le frazioni di incombusti. Pertanto la forma più generale che può assumere f è la seguente:
mn HCFCOFOFf 3221 −−= (8.23)

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 214
anche se i tre parametri non dovrebbero discostarsi troppo da quelli “ideali” (F1 = 7; F2 = 4; F3 = 0); i segni rimangono gli stessi. L’effetto di un cambiamento dei parametri si può apprezzare nella Figura 8.18.17 in cui F1 = 6, F2 = 2 ed F3 = 0. In questo caso i parametri si discostano molto da quelli “ideali”, comunque si vede che in un intorno del valore stechiometrico (freccia verde) l’eccesso d’aria calcolato a partire da f è molto vicino a quello reale. Anche ora è importante tarare l’algoritmo, che peraltro è stato modificato attraverso coefficienti correttivi per compensare i cambiamenti dei tre parametri.
Figura 8.17
Riassumendo, se F1 = 7; F2 = 4; F3 = 0 la funzione f dipende solo da α e da b; al limite se
mn
mnF
+⋅
⎟⎠⎞
⎜⎝⎛ +⋅
=12
4224
3 allora f dipende solo da α. Se però il valore di F1 ed F2 si discosta da
quelli indicati, f è funzione di a1 , a2 , x , y e b separatamente: questo vuole dire che in generale
non si riesce a risalire ad 21 ayax ⋅+⋅=α attraverso la sola f se non in un intorno del “punto”
di taratura. Nella realtà per tarare la sonda la si “immerge” in un gas di combustione di cui si conosce il valore di lambda e si legge il valore in tensione segnalato dal sensore: ripetendo questo procedimento per gas qualitativamente diversi si costruisce una “mappa” in cui ad ogni valore del segnale in tensione è legato in modo biunivoco un valore di lambda.
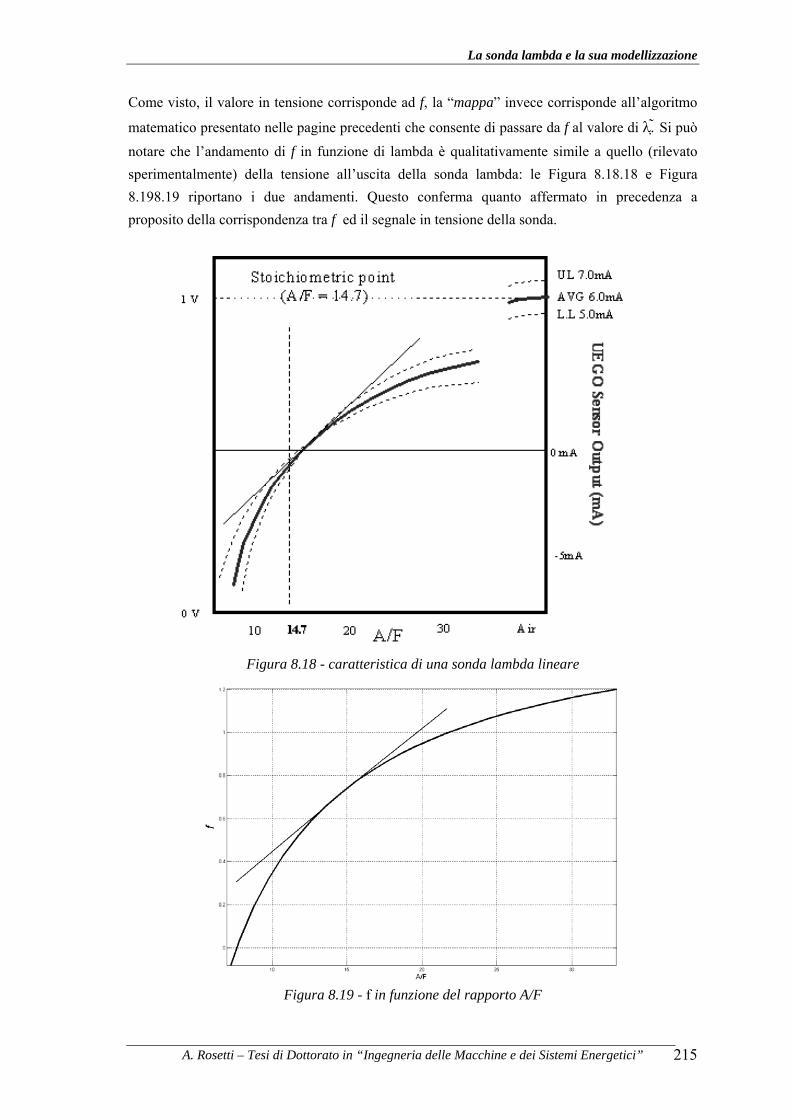
La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 215
Come visto, il valore in tensione corrisponde ad f, la “mappa” invece corrisponde all’algoritmo
matematico presentato nelle pagine precedenti che consente di passare da f al valore di λ. Si può notare che l’andamento di f in funzione di lambda è qualitativamente simile a quello (rilevato sperimentalmente) della tensione all’uscita della sonda lambda: le Figura 8.18.18 e Figura 8.198.19 riportano i due andamenti. Questo conferma quanto affermato in precedenza a proposito della corrispondenza tra f ed il segnale in tensione della sonda.
Figura 8.18 - caratteristica di una sonda lambda lineare
Figura 8.19 - f in funzione del rapporto A/F

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 216
Elaborando il segnale in tensione è possibile associare al valore di lambda un valore di e0 (tensione) secondo una caratteristica lineare a ridosso del valore stechiometrico come si vede nelle figure . Una delle ipotesi alla base dell’analisi svolta è relativa al grado di completezza della combustione: si è posto il grado di completezza della combustione ideale (cioè con la formazione della sola CO2) uguale a quello della combustione “imperfetta” (cioè la combustione in cui tra i prodotti si trova CO).
Per quanto riguarda le considerazioni sul parametro COO XXf ⋅−⋅= 472
, si può dimostrare
che sono valide a prescindere da questa ipotesi. Infatti in generale la combustione in caso grasso può essere descritta in questo modo:
( ) ( )
( )
442
12
14
22212
22
22
22
mnmn
dOHbCOHbm
CObmndCObmndOHC
mn
mn
+≤≤+
++−⋅+
+⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +⋅++−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +−−→+
α
ααα
Componendo questa reazione con quella relativa al caso magro (e stechiometrico) si ottiene:
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) mn
mn
HCyxbOdybmnax
OHbyxmCObmnday
CObmndaybnxOayaxHCyx
+⋅+⎥⎦
⎤⎢⎣
⎡⋅+⎟⎟
⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +−⋅+
+−⋅+⋅+⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +++−⋅+
+⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ ++−⋅+−⋅⋅→⋅+⋅++
21
22
22221
14
12
12
222
12
221
A questo punto si possono calcolare le frazioni in massa di ossigeno e ossido di carbonio:
( )
( )
( )
( )
23.01
3212
2812
222
3212
3214
21
2
21
1
2
=
⋅⋅+⋅⋅++
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +++−⋅
=
⋅⋅+⋅⋅++
⋅⎥⎦
⎤⎢⎣
⎡⋅+⎟⎟
⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +−⋅
=
r
rayaxmn
bmndayX
rayaxmn
dybmnaxX
CO
O
(8.24)
ora si valuta COO XXf ⋅−⋅= 472
( ) ( )
rmn
bmnayaxf
⋅⋅++
⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛ +−⋅+⋅⋅
=α3212
14
224 21

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 217
quindi valgono tutte le considerazioni su f svolte nei paragrafi precedenti.
8.6 La dinamica della sonda lambda Nelle prossime pagine verranno analizzati gli effetti della dinamica della sonda lambda sul segnale del sensore. La dinamica della sonda può essere descritta in modo schematico suddividendola in due “contributi”: 1) la dinamica legata alla diffusione degli ioni all’interno dell’elettrolita solido (ossido di
zirconio); 2) la dinamica dei gas di scarico che entrano ed escono dal cappuccio protettivo della
sonda, cioè la dinamica connessa all’effetto “capacitivo” del cappuccio protettivo. In letteratura la dinamica della sonda viene “modellata” attraverso un filtro del primo ordine (passa basso) con guadagno unitario e costante di tempo τs. Nel dominio temporale, indicando con x(t) l’ingresso ed y(t) l’uscita, la dinamica del filtro è la seguente:
( ) ( ) ( )txtytys
=+τ1
& (8.25)
e può essere rappresentata con il seguente schema a blocchi:
Figura 8.20 – Schematizzazione della dinamica del filtro.4
Nel dominio angolare l’espressione diventa:
( )( ) ( ) ( )
( )( ) ( ) ( )ϑω
ϑωτϑ
ϑ
ϑϑτ
ωϑϑ
xydyd
xydyd
s
s
11
1
=⋅
+⇒
⇒=+⋅
(8.26)
quindi la rappresentazione del filtro è questa:

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 218
Figura 8.21 – Rappresentazione del filtro.5
Nel modello la sonda alla confluenza è rappresentata da un volume di piccole dimensioni che simula la dinamica del cappuccio protettivo, perciò non occorre un filtro alla uscita del segnale della sonda per riprodurre l’effetto capacitivo del cappuccio. Viceversa, per descrivere il fenomeno della diffusione degli ioni, si può porre un filtro sull’uscita della sonda oppure in ingresso su ciascuna frazione in massa prima del calcolo di lambda (questa seconda modalità verrà discussa con maggior dettaglio). Nei paragrafi precedenti si è visto che in base al modello di combustione implementato sono sufficienti due frazioni in massa per risalire a lambda, ad esempio si possono scegliere la frazione di ossigeno e quella di incombusti.
( ) ( )
( ) ( )
( ) mn
mn
HCbmnya
ybx
OabybmnxaxOHbmn
ymamx
CObmn
ynanxOayaxHCyx
⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎠⎞
⎜⎝⎛
+⋅
−+⋅+
+⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅+−⋅⎟
⎠⎞
⎜⎝⎛ +⋅−⋅+−⋅⎟
⎠⎞
⎜⎝⎛
+⋅⋅
+⋅+
+−⋅⎟⎠⎞
⎜⎝⎛
+⋅⋅
+⋅→⋅+⋅++
144
14
14
22
14
4)(
2
22122
22
221
Definisco la variabile f funzione solo di XO2 ed Xfuel:
mn
mnXXf
fuelO
+
⎟⎠⎞
⎜⎝⎛ +⋅
+=12
432
2 (8.27)
sostituendo XO2 ed Xfuel ed indicando con z la quantità yx
ayax+
⋅+⋅ )( 21 si vede che:
( )
f
mnfmnz
zmn
mnzf
23.0321
412
23.03212
4
−
++⋅+=⇒
⋅++
⎟⎠⎞
⎜⎝⎛ +−
=
allora è facile calcolare lambda dato che
4mn
z
+=λ .

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 219
Ora si può inserire un filtro passa basso prima di ciascuno dei due ingressi XO2 ed Xfuel , inoltre si possono imporre costanti di tempo diverse per simulare la diversa dinamica di diffusione di ossigeno ed incombusti.
Figura 8.22 - Blocco che simula la sonda in Simulink.
Occorre precisare che all’uscita del filtro è necessario moltiplicare il segnale per sτ
1, infatti, se
ad esempio x(t) = costante, terminato il transitorio ( ) 0=ty& , quindi ( ) ( ) ( )txtytys
=+τ1
&
diventa ( ) ( )txtys
=τ1
allora ( ) ( )txty s ⋅= τ , dunque moltiplicando y(t) per sτ
1 si ritrova
( ) ( ) costante1==⋅
s
s
s
txtyττ
τ(questa operazione è eseguita dai blocchi cerchiati di rosso in
Figura 8.228.22). Per caratterizzare la dinamica inserita (diffusione degli ioni) sono riportati nelle due figure seguenti i risultati di due simulazioni in cui a partire da un certo istante tutti i cilindri bruciano una miscela magra o grassa: in Figura 8.23 – Indice lambda con una iniezione 0.8volte il valore stechiometrico.68.23 è iniettata una massa di combustibile pari a 0,8 volte quella stechiometrica, mentre in Figura 8.24 la massa di combustibile è 1,2 volte quella stechiometrica. Il motore parte da condizioni di regime con i quattro cilindri che bruciano una miscela stechiometrica durante il primo ciclo, il passo di simulazione è π/360, cioè ogni 0,5 gradi di rotazione dell’albero motore vengono calcolate tutte le variabili. Altre informazioni utili per la comprensione dei risultati sono le seguenti: • l’ordine di accensione dei quattro cilindri è 1 3 4 2; • le valvole di aspirazione e scarico si aprono e chiudono senza ritardi o anticipi;
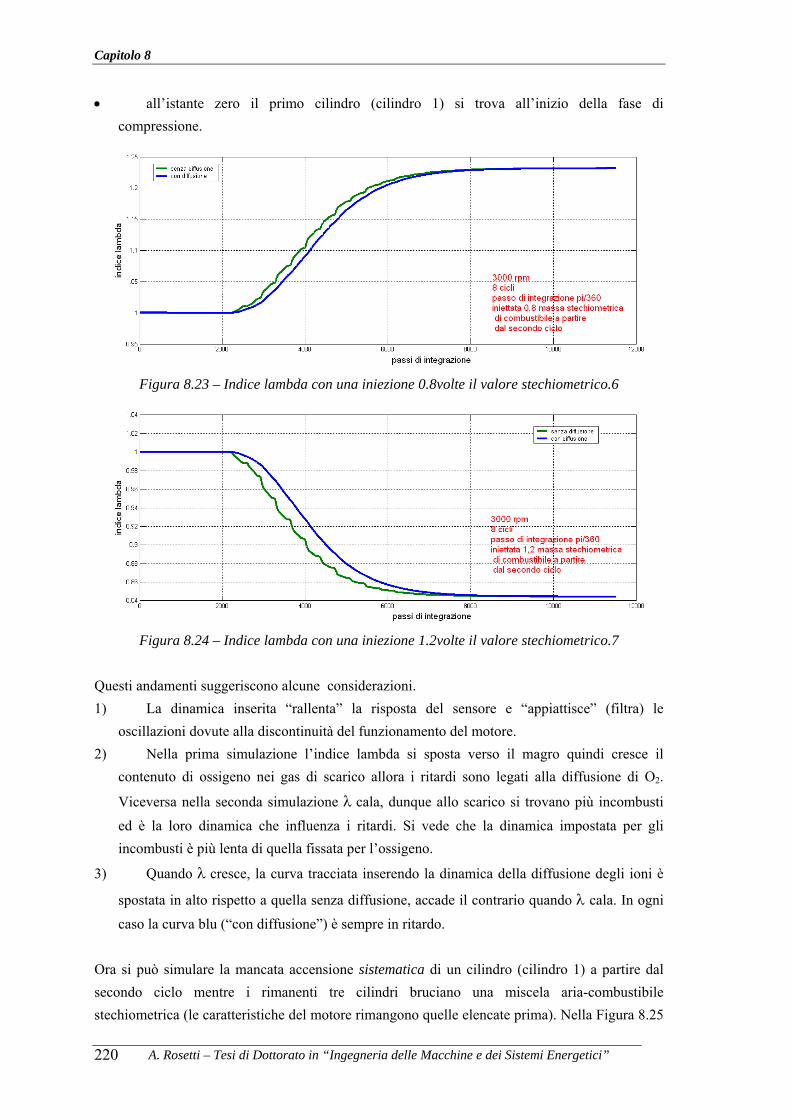
Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 220
• all’istante zero il primo cilindro (cilindro 1) si trova all’inizio della fase di compressione.
Figura 8.23 – Indice lambda con una iniezione 0.8volte il valore stechiometrico.6
Figura 8.24 – Indice lambda con una iniezione 1.2volte il valore stechiometrico.7
Questi andamenti suggeriscono alcune considerazioni. 1) La dinamica inserita “rallenta” la risposta del sensore e “appiattisce” (filtra) le
oscillazioni dovute alla discontinuità del funzionamento del motore. 2) Nella prima simulazione l’indice lambda si sposta verso il magro quindi cresce il
contenuto di ossigeno nei gas di scarico allora i ritardi sono legati alla diffusione di O2.
Viceversa nella seconda simulazione λ cala, dunque allo scarico si trovano più incombusti ed è la loro dinamica che influenza i ritardi. Si vede che la dinamica impostata per gli incombusti è più lenta di quella fissata per l’ossigeno.
3) Quando λ cresce, la curva tracciata inserendo la dinamica della diffusione degli ioni è
spostata in alto rispetto a quella senza diffusione, accade il contrario quando λ cala. In ogni caso la curva blu (“con diffusione”) è sempre in ritardo.
Ora si può simulare la mancata accensione sistematica di un cilindro (cilindro 1) a partire dal secondo ciclo mentre i rimanenti tre cilindri bruciano una miscela aria-combustibile stechiometrica (le caratteristiche del motore rimangono quelle elencate prima). Nella Figura 8.25

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 221
si vede il segnale della sonda posta alla confluenza, invece la Figura .26 verrà commentata in seguito.
Figura 8.25 – Indice lamnbda: esempio di mancata accensione nel cilindro 1.
Figura 8.26 – Andamento del rapporto tra la frazione in massa
di ossigeno reale e quella completa stechiometrica. Si notano ad ogni ciclo (1440 passi di integrazione) due picchi in magro e due in grasso. L’esistenza di picchi in magro ed in grasso può essere chiarita considerando gli andamenti in Figura .26 e Figura .27. In ordinata si trova: per la curva azzurra il rapporto tra la frazione in massa di ossigeno all’interno del cappuccio protettivo della sonda e la frazione di ossigeno che si avrebbe se la combustione fosse stechiometrica e completa, per la curva blu un parametro analogo ma riferito agli incombusti (questa grandezza è chiamata “rapporto” nelle due figure).

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 222
Figura 8.27 - Ingrandimento del rapporto tra la frazione in massa di ossigeno reale
e quella completa stechiometrica in funzione del tempo Quando ad attraversare la sonda sono i gas di scarico provenienti dal cilindro 1 le frazione in massa di ossigeno ed incombusti crescono, ma a causa della differente dinamica di diffusione la sonda si accorge prima dell’aumento dell’ossigeno (seguire la freccia rossa in figura) segnalando “miscela magra”, questa è la ragione del picco in magro. Quando i gas provenienti dal cilindro 1 si allontanano dalla sonda le frazioni in massa di ossigeno ed incombusti calano, ma visto che la dinamica degli incombusti è più lenta la sonda avverte la loro diminuzione più tardi (seguire la freccia marrone in figura), quindi segnala “miscela grassa” (picco in grasso). In Figura .26 si nota che nel caso A il parametro “rapporto” per l’ossigeno è superiore rispetto a quello valutato per gli incombusti quindi il segnale della sonda è “miscela magra”; accade il contrario nel caso B. La presenza di due picchi in magro e due in grasso durante un ciclo si spiega ricordando che i gas di scarico dei cilindri 1 e 4 si miscelano prima di arrivare alla sonda, lo stesso per i gas di scarico dei cilindri 2 e 3, poi, ricordando che l’ordine di accensione è 1 3 4 2, si spiega anche l’alternarsi di tali picchi. È interessante notare che se la mancata accensione è sistematica e su tutti i quattro i cilindri, terminato il transitorio dovuto alla diffusione degli ioni nell’ossido di zirconio, il segnale della
sonda torna ad essere λ = 1 se il carburante è iniettato in quantità stechiometrica. Questo risultato è riportato in Figura 87 in cui si nota che il valore segnalato dal sensore si sposta in campo magro durante il transitorio per poi fissarsi sul valore ideale a transitorio concluso (mancata accensione a partire dal secondo ciclo). Eseguendo un test analogo al banco prova si può verificare la correttezza delle ipotesi alla base delle considerazioni svolte in questo paragrafo.

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 223
Figura 87 – Esempio di mancata accensione a partire dal secondo ciclo.
Questa simulazione suggerisce anche una seconda prova da eseguire al banco: inserendo una sonda lineare su uno dei quattro raccordi di scarico (“immediatamente” a valle di un cilindro) e imponendo una mancata accensione sistematica solo sul cilindro che scarica nel raccordo in questione, si dovrebbe ottenere un andamento del tipo riportato in figura 8.28.
Figura 9.28
Le oscillazioni di λ che si verificano a regime sono da attribuire al cilindro che scarica sullo stesso tratto “due in uno” dove scarica il cilindro in cui avviene il miss fire: nel modello si hanno flussi inversi da “due in uno” al “raccordo” durante questa fase. Nella figura che riporta l’andamento della sonda nel raccordo si vede un picco più accentuato rispetto a quello segnalato dalla sonda alla confluenza: questo fatto è legato alla dinamica dei volumi e al mix dei gas.
Figura 10.29 – Segnale della sonda alla confluenza per mancate accensioni su tutti i cilindri

Capitolo 8
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 224
Nella Figura 10.29 si trova il segnale della sonda alla “confluenza” quando la mancata accensione su tutti e quattro i cilindri dura solo per un numero finito di cicli (7 cicli in figura). Si nota il picco in magro all’inizio della perturbazione (mancata accensione) ed il picco in grasso quando la combustione torna ad essere regolare. Nella Figura 11.30 è riportato un confronto tra il segnale della sonda alla confluenza durante una mancata accensione in un solo cilindro e per un solo ciclo ed una mancata iniezione sempre nello stesso cilindro per un ciclo.
Figura 11.30 -
Il valore massimo durante la mancata iniezione è superiore rispetto a quello che si registra a causa della mancata accensione, in quest’ultimo caso si trova anche un minimo. A conclusione del paragrafo occorre ricordare che nel modello in Simulink la combustione non prevede la formazione di CO, quindi in caso grasso la dinamica della sonda è legata alla dinamica di diffusione degli incombusti mentre in realtà dovrebbe essere influenzata dalla dinamica di diffusione dell’ossido di carbonio, almeno per valori di lambda compresi tra
nm
nm
41
421
+
+ ed 1 (se lambda è inferiore a
nm
nm
41
421
+
+ iniziano a formarsi anche incombusti, quindi
entra in gioco anche la loro dinamica). Viceversa nel caso reale, così come nel modello, la dinamica della sonda durante una mancata accensione è legata sia alla diffusione di ossigeno sia alla diffusione degli incombusti.
8.7 Conclusioni sul comportamento della sonda lambda Da un punto di vista chimico si è visto che la sonda è sensibile non solo al tenore di ossigeno nei gas di scarico, ma sicuramente anche alla concentrazione di altre specie, come ad esempio l’ossido di carbonio.

La sonda lambda e la sua modellizzazione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 225
Il comportamento della sonda durante una mancata accensione si può spiegare in due modi. Negli ultimi paragrafi si è dimostrato che una differente dinamica (costanti di tempo diverse) nella diffusione degli ioni delle diverse specie all’interno dell’elettrolita solido (ossido di zirconio) può essere alla base di questo comportamento. Sperimentalmente tale ipotesi potrebbe essere verificata osservando il segnale di una sonda “immersa” in un ambiente in cui si trovano molecole di aria e combustibile dosate in modo stechiometrico: appena inserito il sensore dovrebbe segnalare “miscela magra”, terminato il transitorio il segnale si dovrebbe assestare sul valore stechiometrico. Una seconda ipotesi per spiegare il comportamento della sonda è basata su considerazioni di carattere chimico: il sensore viene tarato, quindi il valore dell’indice lambda segnalato dalla sonda è attendibile quando le condizioni di funzionamento del motore sono sufficientemente vicine a quelle di taratura. Un parametro importante è il grado di completezza della reazione: la sonda è tarata considerando una reazione praticamente completa, durante una mancata accensione la reazione invece non avviene. Se gli incombusti non lasciassero traccia sul segnale del sensore oppure lasciassero una traccia insufficiente, tarare la sonda vorrebbe dire anche “fissare” il grado di completezza della reazione. Nei primi paragrafi del capitolo si è visto come ricavare lambda a partire dalle frazioni in massa di un numero limitato di componenti e si è dimostrato che fissando attraverso la taratura il grado di completezza della reazione si riesce a ricavare lambda. Poi, si è dimostrato che durante una mancata accensione, a causa della taratura, il segnale in uscita dal sensore è proprio “miscela magra”. Sperimentalmente, in base a questa seconda ipotesi, immergendo la sonda in un ambiente in cui si trovano aria e combustibile dosati in modo stechiometrico anche a regime il valore segnalato dovrebbe corrispondere a “miscela magra”: quindi questo esperimento permette di chiarire quale delle due ipotesi è più attendibile. Indipendentemente dalla attendibilità, la seconda ipotesi ha permesso di approfondire l’analisi del comportamento chimico della sonda. Da questo studio è emerso che: 1) il segnale in tensione alla uscita del sensore potrebbe essere proporzionale alla
combinazione lineare delle frazioni in massa di ossigeno, ossido di carbonio ed incombusti (eventualmente anche di altre specie come gli ossidi d’azoto o l’idrogeno);
2) questa combinazione lineare (indicata con f ) è legata in modo biunivoco all’indice
lambda, pertanto è possibile associare ad ogni valore di f un unico valore di λ.

Il modello dei mix di scarico e la sua inversione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 227
Capitolo 9
IL MODELLO DEI MIX DI
SCARICO E LA SUA
INVERSIONE
9.1 Miscela dei gas di combustione in un sistema chiuso Si consideri il caso di un sistema chiuso suddiviso in due parti da un setto che non può essere attraversato dai gas. In ciascuna camera inizialmente si trovano i prodotti di una combustione e, per ipotesi, l’eccesso d’aria delle due combustioni è diverso, cioè i gas contenuti nelle due camere sono relativi a reazioni avvenute con eccessi d’aria diversi. Ricordo che in generale una combustione può essere espressa in questa forma (il significato dei
due parametri a ed α emergerà con maggiore chiarezza nel seguito della discussione):
mnmn HCbObOHbCObCObaOHC 524232212 ++++→⋅+ αα
si ricorda che il numero di moli di ciascuna specie chimica è uguale tra i reagenti ed i prodotti, quindi anche la massa di reagenti e prodotti è la stessa. Pertanto, dato che il calcolo dell’indice lambda (o dell’eccesso d’aria) si può ricondurre al conteggio degli atomi di ossigeno e carbonio, è indifferente valutare lambda analizzando i reagenti o i prodotti, quindi ci si può concentrare sui reagenti:
K→⋅+ 2aOHC mn αα

Capitolo 9
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 228
Ora, immaginando di eliminare il setto, i due gas contenuti nelle due camere si miscelano: quello che interessa è valutare l’indice lambda (o l’eccesso d’aria) per la miscela. Fisicamente ciò che si combina sono i prodotti di due combustioni distinte, idealmente li possiamo immaginare come i risultati di una combustione fittizia di cui appunto
cerchiamo di calcolare λ. In altre parole, per il calcolo dell’eccesso d’aria della miscela, occorre “contare” da un lato il
numero di atomi di ossigeno presenti sotto forma di ossigeno molecolare
(O2), oppure aggregati con il carbonio (CO2, CO) o con l’idrogeno (H2O); dall’altro il numero di atomi di carbonio che nella miscela si trovano aggregati con l’ossigeno (CO2, CO) oppure con l’idrogeno (CnHm). Il risultato non cambia se il conteggio viene eseguito sulla miscela “ideale” dei reagenti. Per maggior chiarezza, quanto appena detto si può esprimere anche attraverso formule chimiche in cui il pedice 1 individua i gas contenuti nella camera 1 ed i relativi reagenti da cui hanno tratto origine; con il pedice 2, di conseguenza, i gas presenti nella seconda camera:
mnmn HCbObOHbCObCObOaHC 15214213122112111 ++++→⋅+ αα
mnmn HCbObOHbCObCObOaHC 25224223222212222 ++++→⋅+ αα
eliminando il setto si ottiene la seguente miscela:
( )( )mn
mn
HCbObOHbCObCObHCbObOHbCObCOb
2522422322221
1521421312211
+++++
+++++
lo stesso numero di atomi di idrogeno, carbonio e ossigeno si ha nella miscela fittizia dei reagenti:
( ) ( )22222111 OaHCOaHC mnmn ⋅++⋅+ αααα
quindi a questa ci si può riferire per calcolare λ.
In relazione alla espressione generica K→⋅+ 2aOHC mn αα si può calcolare:
Figura 1: sistema chiuso diviso da un setto
Figura 2: eliminato il setto i gas 1 e 2 si
miscelano

Il modello dei mix di scarico e la sua inversione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 229
( )
( )
ka
mn
mn
mn
a
fuelmassaariamassa
fuelmassaariamassa
RICASTECHIOMET
REALE =
+⋅⋅
⋅⎟⎠⎞
⎜⎝⎛ +
+⋅⋅
⋅⋅
=
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛
=
12123.0
324
1223.0
32
__
__
α
α
λ (9.1)
dove 4mnk += .
Una caratteristica molto interessante di questa espressione è che λ dipende esclusivamente da a e
non da α, quindi si può dire che a rappresenta l’aspetto qualitativo della combustione (cioè
combustione magra, grassa o stechiometrica), invece α descrive l’aspetto quantitativo, infatti può essere definito come il rapporto tra il numero di moli di ossigeno che effettivamente partecipano alla reazione e il numero di moli che reagirebbero con una sola mole di combustibile
per dare luogo ad una reazione qualitativamente identica a quella reale (cioè con lo stesso λ). Un risultato analogo si sarebbe ottenuto ragionando in termini di eccesso d’aria. Tornando alla miscela di gas e ragionando sui reagenti si può scrivere:
( ) ( )( ) ( ) 2221121
22222111
OaaHCOaHCOaHC
mn
mnmn
⋅+⋅++==⋅++⋅+
αααααααα
quindi:
( ) ( ) K→⋅+⋅++ 2221121 OaaHC mn αααα
L’indice λ vale:
( )( )
( )( )
( )21
2211
21
22
11
21
2211
ααλαλα
αα
αααααα
λ+
⋅+⋅=
+
⎟⎠⎞
⎜⎝⎛ ⋅+⋅
=+
⋅+⋅
=ka
ka
k
aa
(9.2)
pertanto l’indice lambda della miscela è una media pesata dei λ dei due gas che si combinano e
il peso è rappresentato dal parametro α.
È interessante sottolineare che la formula appena scritta indica che il “peso” è il parametro α e
non la massa complessiva del gas, cioè λ della miscela non è una media pesata che sfrutta la massa dei due gas che si combinano come peso. Al medesimo risultato si può arrivare seguendo anche un’altra via. Ritornando alla espressione dell’indice lambda:
RICASTECHIOMET
REALE
fuelmassaariamassa
fuelmassaariamassa
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛
=
__
__
λ
si può notare che, fissata la quantità di aria uguale per la combustione reale e quella stechiometrica (si arriverebbe allo stesso risultato anche fissando uguali le due masse di combustibile), vale:

Capitolo 9
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 230
( )( )REALE
RICASTECHIOMET
fuelmassafuelmassa
__
=λ
pertanto :
( ) ( ) RICASTECHIOMETREALE fuelmassafuelmassa __ =⋅λ
quindi per la miscela:
( ) ( ) ( ) ⇒⋅+⋅=21
___ 21 REALEREALERICASTECHIOMET fuelmassafuelmassafuelmassa λλ( ) ( )( ) ( )
21
21
____ 21
REALEREALE
REALEREALEMISCELA fuelmassafuelmassa
fuelmassafuelmassa+
⋅+⋅=⇒
λλλ (9.3)
Si vede anche da questa espressione che il “peso” non è costituito dalla massa globale del gas, ma solo dalla massa di combustibile che ha preso parte alla reazione: il senso fisico della media
pesata sugli α è proprio questo. In altre parole, dal momento che nella definizione dell’indice lambda compaiono le masse di combustibile o di aria e non la massa globale della miscela (massa di combustibile + massa di aria), l’indice lambda per la miscela di due gas non può essere una media pesata sulla massa globale dei due gas. Per completezza si può esaminare anche il caso in cui si fissa la quantità di combustibile nella definizione dell’indice lambda, quindi:
( )( )
( ) ( ) RICASTECHIOMETREALE
RICASTECHIOMET
REALE
fuelmassafuelmassa
ariamassaariamassa
__1_
_
=⋅⇒
⇒=
λ
λ
per la miscela si ricava:
( ) ( ) ( ) ⇒⋅+⋅=21
_1_1_21
REALEREALERICASTECHIOMET ariamassaariamassaariamassaλλ
( ) ( )
( ) ( )21
21
__
_1_11 21
REALEREALE
REALEREALE
MISCELA ariamassaariamassa
ariamassaariamassa
+
⋅+⋅=⇒
λλλ
(9.4)
Fatta questa precisazione, ora, noti i valori di lambda per i due gas che si miscelano, occorre
calcolare α1 e α2 per ottenere il valore di λ per la miscela (nelle formule riportate di seguito non compaiono i pedici poichè sono valide per entrambi i gas). In generale è nota la massa globale di ciascuno dei due fluidi (M) che può essere espressa in questo modo (ricordando che la massa di reagenti e prodotti è uguale):
αλα ⋅⎟⎠⎞
⎜⎝⎛ +⋅+⋅⋅=⋅⎟
⎠⎞
⎜⎝⎛ +⋅+⋅= mnkmnaM 12
23.03212
23.032
(9.5)
allora si può ricavare:

Il modello dei mix di scarico e la sua inversione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 231
⎟⎠⎞
⎜⎝⎛ +⋅+⋅⋅
=mnk
M
1223.0
32λα (9.6)
quindi si è dimostrato che dati M e λ si ottiene α. Fisicamente, siccome M dipende sia da a che
da α cioè sia dagli aspetti qualitativi sia da quelli quantitativi, attraverso l’espressione scritta sopra si “depura” la massa globale del gas dagli aspetti qualitativi. Riassumendo, due elementi interessanti che emergono dalle considerazioni svolte in questo paragrafo, sono: 1) l’indice lambda di una miscela di prodotti di combustioni diverse si ottiene facendo la
media pesata dei valori di λ di ciascuno dei due gas che si combinano utilizzando come peso
il parametro α, oppure, in modo analogo, la massa di combustibile (o di ossigeno) che ha preso parte a ciascuna delle due reazioni e non la massa dei due gas che si miscelano;
2) noti la massa complessiva e l’indice lambda, si ottiene il parametro α quindi si è in
grado di calcolare il valore di λ per una miscela di gas provenienti da combustioni diverse. Si possono mettere in pratica le relazioni elencate precedentemente analizzando un esempio semplice. Si considerino due reazioni che coinvolgono la stessa quantità di ossigeno e quantità diverse di combustibile: alla prima prende parte una massa di combustibile che è 0,8 volte quella stechiometrica (combustione magra), alla seconda una massa pari ad 1,2 volte quella stechiometrica (combustione grassa); quindi, globalmente, valutando le due reazioni e la quantità di ossigeno che vi prende parte, la massa di combustibile totale (0,8+1,2 = 2 volte la massa stechiometrica) è in rapporto stechiometrico con la massa di ossigeno complessivamente presente nelle due combustioni. Ad esempio, se la quantità di ossigeno (uguale nelle due reazioni) è quella che darebbe luogo ad una combustione stechiometrica di una kilomole di combustibile, le due reazioni sono le seguenti:
2222 42,0
28,08,0
48,0 OmnOHmnCOOmnHC mn ⎟
⎠⎞
⎜⎝⎛ ++⋅+⋅→⎟
⎠⎞
⎜⎝⎛ ++
mnmn HCOHmnCOOmnHC 2,024
2,1 222 ++→⎟⎠⎞
⎜⎝⎛ ++
Quindi nella miscela si trovano:
( ) mn
mn
HCOmnOHmmCOnn
HCOHmnCOOmnOHmnCO
2,04
2,022
8,08,0
2,024
2,02
8,08,0
222
22222
+⎟⎠⎞
⎜⎝⎛ ++⎟
⎠⎞
⎜⎝⎛ +⋅++⋅=
=⎟⎠⎞
⎜⎝⎛ +++⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ ++⋅+⋅
cioè : − nnnn ⋅=⋅++⋅ 22,08,0 kilomoli di carbonio (aggregate nelle molecole di
anidride carbonica o di combustibile)

Capitolo 9
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 232
− ⎟⎠⎞
⎜⎝⎛ +⋅=⋅+⋅++⋅++⋅
42
42,02,0
448,08,0 mnmnmmnn kilomoli di ossigeno
(O2 in forma molecolare oppure aggregato in molecole di acqua e anidride carbonica) Allora, in base a questo calcolo, la miscela è stechiometrica anche se singolarmente non lo sono le due reazioni di partenza; allo stesso risultato e in modo più veloce si sarebbe arrivati conteggiando il carbonio e l’ossigeno tra i reagenti così come visto al paragrafo precedente. Calcolando l’indice lambda per le due miscele, si ottiene:
( )
( )
8,01
1223,0
324
128,023,0
324
1 =
+⋅
⋅⎟⎠⎞
⎜⎝⎛ +
+⋅⋅
⋅⎟⎠⎞
⎜⎝⎛ +
=
mn
mn
mn
mn
λ ( )
( )
2,11
1223,0
324
122,123,0
324
2 =
+⋅
⋅⎟⎠⎞
⎜⎝⎛ +
+⋅⋅
⋅⎟⎠⎞
⎜⎝⎛ +
=
mn
mn
mn
mn
λ
Ora valuto la massa dei due gas:
( ) ⎥⎦
⎤⎢⎣
⎡⋅⎟
⎠⎞
⎜⎝⎛ +++⋅=
23,032
4128,01
mnmnM
( ) ⎥⎦
⎤⎢⎣
⎡⋅⎟
⎠⎞
⎜⎝⎛ +++⋅=
23,032
4122,12
mnmnM
Calcolando l’indice lambda per la miscela come media pesata sulle masse M1 e M2 si ottiene:
=+
⋅+⋅=
21
2211
MMMM λλ
λ
( ) ( )
( ) ( )=
⎥⎦
⎤⎢⎣
⎡⋅⎟
⎠⎞
⎜⎝⎛ +++⋅+⎥
⎦
⎤⎢⎣
⎡⋅⎟
⎠⎞
⎜⎝⎛ +++⋅
⋅⎥⎦
⎤⎢⎣
⎡⋅⎟
⎠⎞
⎜⎝⎛ +++⋅+⋅⎥
⎦
⎤⎢⎣
⎡⋅⎟
⎠⎞
⎜⎝⎛ +++⋅
=
23,032
4122,1
23,032
4128,0
2,11
23,032
4122,1
8,01
23,032
4128,0
mnmnmnmn
mnmnmnmn
( )11
223,0
324
12
23,032
4121
≠+⋅⎥
⎦
⎤⎢⎣
⎡⋅⎟
⎠⎞
⎜⎝⎛ +++
⋅⎟⎠⎞
⎜⎝⎛ +⋅
=mnmn
mn
Nel caso dell’ottano (C8H18) n =8, m =18; quindi il valore che si ricava applicando la formula appena scritta è:
( )039,11
223,0
324
18818812
23,032
4188
121
=+⋅⎥
⎦
⎤⎢⎣
⎡⋅⎟
⎠⎞
⎜⎝⎛ +++⋅
⋅⎟⎠⎞
⎜⎝⎛ +⋅
=λ

Il modello dei mix di scarico e la sua inversione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 233
l’errore è del 4% circa.
Viceversa, il risultato che si trova eseguendo una media pesata utilizzando α al posto di M, è
λ =1, infatti:
( )
( )8,0
23,032
48,0112
23,032
4128,0
1 =
⎥⎦
⎤⎢⎣
⎡⋅⎟
⎠⎞
⎜⎝⎛ +⋅++
⎥⎦
⎤⎢⎣
⎡⋅⎟
⎠⎞
⎜⎝⎛ +++⋅
=mnmn
mnmnα
( )
( )2,1
23,032
42,1112
23,032
4122,1
2 =
⎥⎦
⎤⎢⎣
⎡⋅⎟
⎠⎞
⎜⎝⎛ +⋅++
⎥⎦
⎤⎢⎣
⎡⋅⎟
⎠⎞
⎜⎝⎛ +++⋅
=mnmn
mnmnα
quindi:
122
2,18,02,1
12,18,0
18,0
21
2211 ==+
⋅+⋅=
+⋅+⋅
=αα
λαλαλ
Allo stesso risultato si sarebbe arrivati considerando come pesi le masse di combustibile. Si vede che non è corretto fare una media pesata sulle masse globali dei gas.
9.2 Calcolo dell’indice lambda per un sistema aperto Per il momento l’unico caso analizzato è quello di un sistema chiuso inizialmente suddiviso in due camere separate contenenti i prodotti di due combustioni diverse che ad un certo istante vengono miscelati (il setto che separa le due camere può essere rimosso). Occorre estendere i risultati ottenuti per il sistema chiuso ad un sistema aperto, cioè in questo paragrafo viene definita una relazione che permette di ricavare l’indice lambda all’interno di un volume in cui entra una portata nota di un fluido prodotto da una combustione di cui si conosce l’eccesso d’aria e dal quale esce una portata conosciuta. Le ipotesi alla base di questo studio sono: 1) completa miscelazione della portata entrante con la massa già presente nel sistema (si
possono avere anche più portate distinte in ingresso), quindi il valore di λ all’interno del volume è unico;
2) si immagina di conoscere l’indice lambda di tutte le masse di gas in ingresso ed anche il
valore di λ del fluido già presente nel sistema prima che avvenga la miscelazione; 3) è nota la portata in uscita; 4) dal momento che le relazioni andranno implementate in un modello definito in un
dominio discreto suddiviso in passi di dimensione finita, anche le relazioni che verranno

Capitolo 9
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 234
ricavate saranno definite in un dominio di questo tipo, cioè si ragiona in termini di ∆τ e non
dτ (la lettera τ indica la variabile temporale).
Il valore dell’indice lambda all’interno del sistema aperto all’istante τ+∆τ è dato dalla media
pesata del valore di λ della massa che entra durante l’intervallo ∆τ e del valore di λ della massa già presente all’interno del volume e che si miscela con quella in ingresso, cioè della
massa contenuta nel sistema aperto all’istante τ meno la massa che esce nell’intervallo ∆τ (la massa che esce ha lo stesso indice lambda di quella che rimane nel sistema) Questo risultato si può esprimere in termini analitici così:
( ) ( ) ( ))()()()(
τατατλτατλτα
ττλSISTEMAINGRESSO
SISTEMASISTEMAINGRESSOINGRESSOSISTEMA +
⋅+⋅=∆+ (9.7)
in questo caso si è considerata una sola portata in ingresso per semplicità, ma per due o più flussi distinti entranti, le cose non cambiano.
Figura 3.3 - Mix dei gas di scarico in un sistema aperto.
Rimangono da esplicitare i valori di α:
( )
( ) mnmn
m
INGRESSO
INGRESSOINGRESSO
+⋅+⋅⋅⎟⎠⎞
⎜⎝⎛ +
∆⋅=
1223,0
324
)(τλ
τττα
& (9.8)
( ) ( )
( ) mnmn
mM
SISTEMA
USCITASISTEMASISTEMA
+⋅+⋅⋅⎟⎠⎞
⎜⎝⎛ +
∆⋅−=
1223,0
324
)(τλ
ττττα
& (9.9)
dove con M viene indicata una massa e con m& una portata.

Il modello dei mix di scarico e la sua inversione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 235
La relazione:
( ) ( ) ( ))()()()(
τατατλτατλτα
ττλSISTEMAINGRESSO
SISTEMASISTEMAINGRESSOINGRESSOSISTEMA +
⋅+⋅=∆+
può anche essere invertita cioè utilizzata per risalire all’indice lambda del flusso in ingresso una
volta che si conosce il valore assunto da λ nel volume a valle, in altre parole, noto λSISTEMA
all’istante τ e all’istante successivo τ+∆τ , si ricava λINGRESSO(τ) . Occorre sottolineare che
anche α dipende da λ, quindi è necessario esplicitare questa dipendenza prima di invertire l’equazione. L’inversione, poi, è possibile solo se l’ingresso è unico oppure se solo per uno degli ingressi non è noto il valore dell’indice lambda, altrimenti l’equazione avrebbe due o più incognite.
9.3 Applicazione del modello del mix Nei paragrafi precedenti si è visto come calcolare il valore dell’indice lambda in un sistema
aperto e si è evidenziata la dipendenza di tale indice dal valore di λ nei gas che entrano nel
sistema, cioè dal valore di λ negli ambienti a monte del sistema, mentre si è visto che l’indice
lambda è indipendente dal valore che λ assume nei volumi a valle. Quindi, seguendo la direzione
del flusso, in un certo istante si può valutare λ nel sistema a valle una volta che si conosce il valore dell’indice per il sistema a monte. Nel caso del modello del motore, questa considerazione mostra che è possibile risalire al valore dell’indice lambda segnalato dalla sonda lineare alla “confluenza” (in realtà è posta in parallelo a
due tratti dello scarico e non alla confluenza), a partire dal valore di λ alla uscita dei quattro cilindri. Operativamente si dispongono quattro sonde lineari direttamente allo scarico di ciascun
cilindro (a rigore il valore segnalato da ciascuno di questi trasduttori non è esattamente λ all’interno del cilindro corrispondente, ma, se la sonda non è troppo lontana dal cilindro, la differenza non dovrebbe essere grande), quindi, nel modello, interessa dapprima analizzare come costruire il segnale della sonda alla “confluenza” conoscendo questi quattro valori. L’algoritmo che si occupa di ciò sarà descritto nel prossimo paragrafo.
Il problema di ricavare il valore di λ in ciascun cilindro a partire dal segnale alla confluenza invece è più articolato, dato che da un unico segnale occorre “estrarne” quattro, inoltre, come vedremo in modo approfondito nelle pagine che seguono, non è sempre possibile ripercorrere a ritroso l’algoritmo di cui si è parlato prima, cioè non si riescono a ricostruire sempre in modo esatto i quattro valori (nelle prossime pagine viene descritto anche questo secondo algoritmo
che “osserva” i valori di λ nei raccordi di scarico).

Capitolo 9
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 236
9.3.1 Dai raccordi di scarico alla sonda posta alla confluenza In questo paragrafo viene analizzato l’algoritmo che permette di ricavare il segnale della sonda lambda lineare posta alla confluenza a partire dal valore dell’indice lambda letto dalle quattro sonde lineari poste nei raccordi di scarico. L’algoritmo è definito nel dominio angolare visto che deve essere implementato nel modello e si basa sulle equazioni elencate nei paragrafi precedenti adattate alla geometria che deve essere descritta e ridefinite nel dominio angolare, dato che le formule già ricavate sono espresse nel dominio temporale. Riguardo quest’ultimo aspetto, ricordo che:
ωϑ
ττϑ
ϑϑ
ωττ
ϑϑωϑ
ϑτϑϑ
ϑττ
dd
dfdd
dfd
dfd
dffdd
ddf
dd
ddf
⋅=⋅⇒
⇒⋅=⇒⋅=⋅=
)()(
1)()()()()(
da questa espressione segue che la massa entrante o uscente da un sistema aperto in un intervallo di tempo τ∆ espressa come τ∆⋅=∆ mm & nel dominio temporale, diventa
ωωϑ passommm ⋅=
∆⋅=∆ && nel dominio angolare, dove “passo” rappresenta il passo di
integrazione e m∆ è la massa che esce o entra dal sistema durante un intervallo angolare pari al passo . Precisato questo si può rappresentare in forma generale l’equazione che permette di ricavare l’indice lambda nei sistemi a valle noto il valore assunto dall’indice nei volumi situati a monte:
( )( ) ( )( ) ( ) ( )
( ) )()(1
1
1
ii
iiiii
SISTEMA
n
jjINGRESSO
SISTEMASISTEMA
n
jjINGRESSOjINGRESSO
SISTEMA
αα
λαλαλ
+
⋅+⋅=+
∑
∑
=
= (9.10)
dove:
( )
( ) mnimn
passoimi
jINGRESSO
jINGRESSO
jINGRESSO
+⋅+⋅⋅⎟⎠⎞
⎜⎝⎛ +
⋅=
1223,0
324
)(λ
ωα&
se ( ) 0≥im jINGRESSO&
0)( =ijINGRESSOα se ( ) 0<im jINGRESSO&

Il modello dei mix di scarico e la sua inversione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 237
( ) ( )
( ) mnimn
passoimiMi
SISTEMA
q
jjUSCITASISTEMA
SISTEMA
+⋅+⋅⋅⎟⎠⎞
⎜⎝⎛ +
⋅−=
∑=
1223,0
324
)( 1
λ
ωα
&
in queste espressioni n rappresenta il numero di ingressi e q il numero di uscite (esistono volumi con più ingressi come “due in uno” e volumi con più uscite come “collegamento alla sonda”).
Figura 4.4 - Volume generico.
Queste equazioni stabiliscono che il valore di λ di un sistema al passo i+1-esimo si ricava dalla
media pesata dei valori di λ nei volumi a monte e del sistema stesso relativi al passo i-esimo. In realtà quella appena riportata non è la forma più generale in cui possono essere espressi i
parametri α infatti, alla base di queste relazioni, ci sono alcune ipotesi che ne limitano l’applicabilità. 1) Le sezioni che mettono in comunicazione il sistema aperto con l’esterno sono già state
suddivise in sezioni di ingresso e sezioni di uscita, cioè, per sfruttare queste espressioni, occorre definire preliminarmente la direzione del flusso principale (come indicato dalle frecce nella figura 9.4). Nel caso del modello il flusso principale allo scarico è quello diretto dal motore all’ambiente.
2) Come visto è possibile l’inversione del flusso, cioè la massa in ingresso può assumere segno negativo e diventare una massa uscente: in questo caso dovrebbe entrare nel
“bilancio” di αUSCITA e incrementare il termine legato alla portata che esce. Nelle formule appena scritte invece non compare questo contributo: l’ipotesi alla base di tale approssimazione è che i flussi inversi siano di portata limitata rispetto a quelli diretti in uscita e quindi trascurabili; nel caso del modello ciò è soddisfatto.
3) Le portate in uscita vengono considerate sempre positive infatti questi flussi non si invertono mai nei volumi a valle dei raccordi di scarico del modello che sono appunto i “sistemi” ai quali vengono applicate le formule.

Capitolo 9
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 238
Figura 55: sistema aperto (volume) in comunicazione con altri volumi
Riassumendo, le espressioni elencate sopra non sono le più generali dato che sono basate su una serie di ipotesi che ne restringono il campo di applicabilità, ma si è preferito scrivere queste perché sono quelle implementate. Per completezza ora si possono generalizzare rimovendo le tre ipotesi viste sopra. Si può fissare convenzionalmente il segno delle portate: positive quelle che entrano nel sistema aperto ad esempio. Le espressioni diventano:
( )( ) ( )( ) ( ) ( )
( ) )()(1
1
1
ii
iiiii
SISTEMA
n
jj
SISTEMASISTEMA
n
jjj
SISTEMA
αα
λαλαλ
+
⋅+⋅=+
∑
∑
=
′
= (9.11)
( )
( ) mnimn
passoimi
j
j
j
+⋅+⋅⋅⎟⎠⎞
⎜⎝⎛ +
⋅=
1223,0
324
)(λ
ωα&
se ( ) 0≥im j&
0)( =ijα altrimenti;

Il modello dei mix di scarico e la sua inversione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 239
( ) ( )( )
( ) mnimn
passoimiMi
SISTEMA
im jSISTEMA
SISTEMAj
+⋅+⋅⋅⎟⎠⎞
⎜⎝⎛ +
⋅+=
∑ <
1223,0
324
)(0
λ
ωα&
&
Nel condotto di scarico si trova una geometria che ancora non è stata analizzata: è il volume della sonda lambda alla “confluenza” posto in parallelo ad altri due. In questo caso non ha senso definire a priori una direzione principale per il flusso che attraversa il “volumetto” della sonda (come si vede dalle frecce nella figura 9.6), pertanto, nel caso del sistema “sonda alla confluenza”, bisogna ricorrere alle espressioni generalizzate appena descritte, mentre bastano alcune modifiche alle espressioni iniziali per i due volumi in parallelo con la sonda.
Figura 6.6 - Capacità in parallelo con altre due capacità Nell’algoritmo si trova una semplificazione nel caso della sonda alla confluenza: in teoria i flussi che collegano le capacità indicate con i numeri 1 e 2 alla sonda (in figura), possono essere diretti entrambi dentro il volume della sonda oppure entrambi all’esterno di questo sistema o ancora uno entrante e l’altro uscente, cioè esistono quattro casi. A livello pratico solo due hanno un peso rilevante, infatti, eccetto “brevi” periodi, i due flussi sono uno entrante ed uno uscente dalla sonda, quindi sono stati presi in considerazione solo questi due casi nell’algoritmo senza diminuire in pratica la precisione dei risultati.

Capitolo 9
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 240
Operativamente, noti i quattro valori dell’indice lambda nei quattro volumi “raccordo di
scarico”, è immediato il calcolo di λ nei volumi “due in uno” attraverso le equazioni descritte in
questo paragrafo: dai valori relativi ai raccordi 1 e 4 si valuta λ in “due in uno1”; dai valori
relativi ai raccordi 2 e 3 si trova l’indice lambda in “due in uno2”. I valori di λ così trovati
servono come dato di ingresso per risalire a λ nei volumi “collegamento1”, “sonda” e “collegamento2”. Quest’ultimo calcolo non può essere suddiviso in passaggi intermedi a causa del collegamento in parallelo descritto prima da cui nasce una interconnessione tra le ultime tre capacità menzionate.
Riassumendo, conoscendo i valori di λ solo nei quattro raccordi di scarico e tutte le portate che collegano i vari volumi compresi tra i raccordi e la sonda alla confluenza, si può ricavare l’indice lambda in corrispondenza del volume “sonda lambda” alla confluenza.
9.3.2 Dal segnale della sonda posta alla confluenza al valore dell’indice
lambda nei quattro raccordi di scarico L’andamento dell’indice lambda rilevato dalla sonda posta alla confluenza può essere descritto in modo “esatto” in funzione del valore di lambda nei quattro cilindri, cioè esiste una relazione che lega i quattro valori al segnale alla confluenza ed è stata descritta nelle pagine precedenti. Il passaggio inverso, dal segnale alla confluenza ai quattro allo scarico, in generale non è sempre possibile dato che da un unico valore occorrerebbe ricavarne quattro. In altre parole ci si trova di
fronte ad una equazione in quattro incognite quindi sono possibili 3∞ soluzioni: tra queste si trova la soluzione “vera”. Nel caso di un motore quattro cilindri con i quattro cilindri “fasati” in modo diverso, si ha uno scarico ogni 180° dell’albero motore. Intuitivamente si può immaginare che l’indice lambda alla confluenza sia influenzato dallo scarico di un solo cilindro almeno in un certo intervallo, cioè
che esista una frazione di tempo in cui tre dei quattro coefficienti che moltiplicano i valori di λ
nella equazione che restituisce λ alla confluenza si annullino: così, almeno per questo intervallo, si ha una equazione con una sola incognita. In altri termini, il vettore degli indici lambda relativi
ai quattro cilindri (λ1(τ) ; λ2(τ) ; λ3(τ) ; λ4(τ) ) non può essere ricostruito, tuttavia ciascuna
delle quattro componenti può essere calcolata all’interno di un certo intervallo temporale in cui le restanti tre componenti non hanno influenza su lambda alla confluenza e quindi non sono “osservabili”. In modo schematico, un condotto di scarico può essere suddiviso in capacità che si possono classificare in due categorie: capacità con una sola entrata e capacità con due o più ingressi. Nel
primo caso, noto il valore di λ nella capacità, si riesce ad “osservare” l’indice lambda a monte; nel secondo ciò è possibile se nella capacità una sola portata entrante è positiva, allora si può
risalire a λ nel sistema a monte da cui proviene tale portata. Ad esempio, nel modello del

Il modello dei mix di scarico e la sua inversione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 241
motore, il volume “due in uno 1” ha due ingressi provenienti dai raccordi 1 e 4; se la portata proveniente dal raccordo 1 è positiva mentre quella relativa al raccordo 4 è negativa l’indice lambda nel volume del raccordo 1 è osservabile, altrimenti no . Un secondo aspetto da sottolineare è che “l’osservabilità” di un sistema a monte (intesa come intervallo di tempo in cui si riesce a valutare l’indice lambda) è sempre inferiore rispetto a quella del sistema a valle (volumi disposti in serie).
Figura 7.7 - Capacità poste in serie.
Ciò verrà ripreso e trattato in termini “analitici” nel prossimo paragrafo, comunque, per chiarire in modo qualitativo questa considerazione, si può osservare la figura 9.7 in cui si vedono tre capacità in serie ed è fissata la direzione del flusso che le collega. Le frecce rosse indicano il “percorso” che porta alla ricostruzione dell’indice lambda per la capacità 1: è chiaro che se la
capacità 3 è “osservabile” in un intervallo di tempo ∆τ3 la capacità 1 lo sarà in un intervallo
∆τ1 "contenuto" in ∆τ3 dal momento che condizione necessaria ma non sufficiente per l’osservabilità in 1 e 2 è l’osservabilità in 3. Inoltrese la portata in ingresso nella capacità 3
indicata con la freccia azzurra fosse positiva durante tutto l’intervallo ∆τ3 e il valore dell’indice
lambda relativo a tale portata fosse sconosciuto, il valore di λ nei volumi a valle (1 e 2) non
sarebbe ricostruibile (cioè ∆τ1=0).
9.3.3 Descrizione dell’algoritmo di inversione I concetti espressi sono stati implementati secondo il criterio che verrà discusso in questo paragrafo da cui emergeranno le linee guida per interpretare l’algoritmo che permette di ricavare
i valori di λ nei quattro raccordi di scarico, noto l’indice lambda alla confluenza. Il primo passaggio da analizzare è proprio quello relativo alla “inversione” delle equazioni. Si ricord che:

Capitolo 9
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 242
( )( ) ( )( ) ( ) ( )
( ) )()(1
1
1
ii
iiiii
SISTEMA
n
jjINGRESSO
SISTEMASISTEMA
n
jjINGRESSOjINGRESSO
SISTEMA
αα
λαλαλ
+
⋅+⋅=+
∑
∑
=
=
( )
( ) mnimn
passoimi
jINGRESSO
jINGRESSO
jINGRESSO
+⋅+⋅⋅⎟⎠⎞
⎜⎝⎛ +
⋅=
1223,0
324
)(λ
ωα&
se ( ) 0≥im jINGRESSO&
0)( =ijINGRESSOα altrimenti;
( ) ( )
( ) mnimn
passoimiMi
SISTEMA
q
jjUSCITASISTEMA
SISTEMA
+⋅+⋅⋅⎟⎠⎞
⎜⎝⎛ +
⋅−=
∑=
1223,0
324
)( 1
λ
ωα
&
Dato che l’equazione può essere invertita quando la portata in un solo ingresso è positiva, l’espressione diventa:
( ) ( ) ( ) ( ) ( ))()(
11
11
iiiiii
iαα
λαλαλ
+⋅+⋅
=+ (9.12)
in cui il pedice 1 indica la sezione di ingresso attraversata da una portata positiva e le grandezze senza pedice si riferiscono al volume (sistema).
)(1 iα si può esprimere in questo modo adottando una notazione diversa comoda per i calcoli
che seguono:
( )( ) 211
11 )(
ccii
i+⋅
=λ
γα (9.13)
dove:
mnc
mnc
+⋅=
⋅⎟⎠⎞
⎜⎝⎛ +=
1223,0
324
2
1
( ) ( )ω
γ passoimi ⋅= 11 &
Di seguito si trovano i passaggi per ricavare l’equazione “inversa”:
( ) ( )( ) ( ) ( )
( ) ( ) ( ) ( )iiicci
iii
ccii
i λαλλ
γαλ
λγ
λ ⋅+⋅+⋅
=⋅+++⋅
⋅+ 1211
1
211
1 )(11

Il modello dei mix di scarico e la sua inversione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 243
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( )21111
1121 )(1)(11cciiiii
ciiiciiii+⋅⋅⋅+⋅=
=⋅⋅⋅++⋅⋅++⋅+λλαλγ
λαλαλγλ
raccogliendo i fattori comuni:
( ) ( ) ( ) ( ) ( )( )( ) ( ) ( ) ( ) ( ) ( )( )iiciiiiiciii λλαλγλλαγλ −+⋅⋅++⋅=+−⋅⋅+⋅ 111 21111
quindi:
( ) ( ) ( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( )1
11
11
211 +−⋅⋅+
−+⋅⋅++⋅=
iiciiiiciii
iλλαγ
λλαλγλ
ponendo ( ) ( ) ( ) ( )( )1+−⋅= iiiidifferenza λλα (notazione)
l’ espressione formalmente diventa più semplice:
( ) ( ) ( ) ( )( ) ( )idifferenzaci
idifferenzaciii⋅+
⋅++⋅=
11
211
1γ
λγλ (9.14)
Questa è l’equazione implementata nell’algoritmo nel caso di volumi posti in serie come ad esempio il volume “raccordo 1” e il volume “due in uno 1”, viene anche utilizzata per il passaggio dal volume “sonda” ai volumi “collegamento 1” e “collegamento 2”. Invece per risalire all’indice lambda nei volumi “due in uno” bisogna modificare le formule. L’equazione “diretta” è la seguente:
( ) ( ) ( ) ( ) ( ) ( ) ( ))()()(
1iii
iiiiiiicsd
ccssddc ααα
λαλαλαλ++
⋅+⋅+⋅=+ (9.15)
dove il pedice c indica il volume “collegamento” (che in questo caso è il sistema di cui si calcola l’indice lambda con la formula diretta), il pedice s il volume “sonda” ed il pedice d la capacità “due in uno”. Ponendo:
( ) ( ) ( ) ( ) ( )
( ) )()(
)()(
iii
iiiiii
i
cs
cs
ccss
ααα
ααλαλα
λ
+=
+⋅+⋅
= (notazione)
l’espressione di λc(i+1) si semplifica:

Capitolo 9
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 244
( ) ( ) ( ) ( ) ( ))()(
1ii
iiiii
d
ddc
αα
λαλαλ
+
⋅+⋅=+
questa può essere invertita:
( ) ( ) ( ) ( ) ( )iiiiiiii dddc λαλααλαλ ⋅+⋅=⋅++⋅+ )()(1)(1
dove (notazione):
( )( ) 21
)(cci
ii
d
dd +⋅
=λ
γα
mnc
mnc
+⋅=
⋅⎟⎠⎞
⎜⎝⎛ +=
1223,0
324
2
1
( ) ( )ω
γ passoimi dd ⋅= &
quindi:
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) 21
21
)(
)(1)(1)(1
ciiciiiii
ciiciiiii
ddd
cdcdc
⋅⋅+⋅⋅⋅+⋅=
=⋅⋅++⋅⋅⋅++⋅+
λαλλαλγ
αλλαλγλ
( ) ( ) ( )( ) ( ) ( ) ( )( )( ))()(1)(1)(1 12 iciiiiciiiii dcdcdc γαλλλαλλγλ +⋅⋅+−⋅=⋅⋅−++⋅+
ponendo ( ) ( ) ( )( ) )(1 iiiidifferenza c αλλ ⋅−+= (notazione) si ottiene una espressione
formalmente analoga a quella ricavata per gli altri volumi:
( ) ( ) ( ) ( )( ) ( )idifferenzaci
idifferenzaciii
d
cdd ⋅+
⋅++⋅=
1
21γ
λγλ (9.16)
Quelle elencate in questo paragrafo sono le formule implementate, ora, per completare la descrizione dell’algoritmo, rimangono da considerare due aspetti: 1) analizzare l’osservabilità per stabilire se ad un certo passo di integrazione in un certo
volume sono applicabili o meno le formule; 2) definire un criterio per assegnare un valore all’indice lambda in un volume, quando
questo parametro non è osservabile.
In relazione alla prima problematica ricordo che λ è ricostruibile in un volume se: a) nel sistema a valle vi è una sola portata entrante positiva e questa proviene dal volume;

Il modello dei mix di scarico e la sua inversione
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 245
b) nel sistema a valle il valore di λ è noto con “esattezza”, cioè il sistema a valle è osservabile.
Leggendo le equazioni scritte sopra si trova il valore dell’indice lambda nel volume a valle relativo sia al passo i sia al passo i+1, pertanto il sistema a valle deve essere osservabile sia al passo i-esimo sia al passo i+1-esimo. Questo conferma quanto detto nel paragrafo precedente: l’osservabilità del sistema a monte non può essere superiore a quella del sistema a valle. Operativamente nell’algoritmo, per tenere traccia della osservabilità dei sistemi, per ogni volume si è costruita una funzione che assume valore unitario se l’indice lambda nella capacità è ricostruibile, altrimenti vale zero. Riassumendo, per stabilire se ad un certo passo si riesce a
ricavare λ in un volume, occorre che nel sistema a valle di questo siano soddisfatte contemporaneamente le due verifiche a e b elencate sopra. L’ultimo aspetto da studiare è relativo alla “ricostruzione” dell’indice lambda durante gli intervalli in cui questo non è osservabile: ipotizzando che il sistema si trovi in condizioni di
funzionamento a regime si può porre λ(i) = λ(i-1), in questo modo l’andamento di λ non si discosta troppo dal valore “esatto” anche quando le equazioni non sono applicabili. Pertanto gli andamenti ricostruiti secondo il criterio descritto presentano alcuni tratti orizzontali simili a gradini in corrispondenza alle zone non osservabili. Occorre sottolineare che questi valori “estrapolati”, non essendo precisi, non si possono sfruttare per risalire all’indice lambda a monte, come già messo in luce in questo paragrafo.
Dato che inizialmente non si conosce il valore di λ in tutti i volumi (si conosce solo quello letto dalla sonda) e, in base alle considerazioni svolte, non lo si riesce nemmeno a calcolare, occorre fissare dei valori di partenza che comunque non hanno alcun effetto sulla “convergenza” dell’algoritmo.

La ricostruzione dell’indice lambda ed i suoi limiti
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 247
Capitolo 10
LA RICOSTRUZIONE
DELL’INDICE LAMBDA ED I
SUOI LIMITI
10.1 Introduzione La ricostruzione dell’indice lambda nei quattro raccordi di scarico, conoscendo solo il segnale della sonda lambda posta alla confluenza, rappresenta una delle problematiche alla base del controllo del titolo cilindro per cilindro, per questo il problema viene affrontato in modo graduale. Il primo passo consiste nell’analisi teorica del problema; ciò permette di chiarire se è possibile la ricostruzione del rapporto A/F nei cilindri nel caso “ideale” in cui i sensori non sono affetti da disturbi e si trascura la dinamica propria della sonda (diffusione degli ioni dei gas all’interno dell’elettrolita solido). È importante sottolineare che uno studio di questo tipo è reso possibile dall’utilizzo di un modello termofluidodinamico che simula il comportamento di un motore a combustione interna. Infatti sfruttando il modello per generare i dati sui quali costruire l’algoritmo si può astrarre dai disturbi e dalla dinamica propria del sensore, ciò sarebbe impossibile se lo studio si basasse esclusivamente su dati ricavati al banco prova. Dopo aver dimostrato che è possibile ricostruire i quattro rapporti A/F nel caso ideale, occorre analizzare il caso reale introducendo nel modello i disturbi sul segnale della sonda e la dinamica del sensore. Anche in questo caso è interessante impiegare il modello termofluidodinamico del motore a combustione interna, infatti si possono inserire separatamente i disturbi e la dinamica e quindi analizzarne separatamente gli effetti. Nel capitolo, dopo una breve analisi dell’algoritmo del mix dei gas di scarico, viene considerato l’algoritmo inverso, affrontando inizialmente lo studio teorico. Negli ultimi paragrafi invece è preso in esame l’effetto della dinamica della sonda lambda e dei disturbi.

Capitolo 10
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 248
10.2 Algoritmo del mix dei gas di scarico: i risultati delle simulazioni Nel capitolo precedente si è descritto un algoritmo che permette di ricavare il valore dell’indice lambda segnalato dal sensore posto alla confluenza a partire dai valori indicati dalle sonde inserite nei quattro raccordi di scarico. Ora si può applicare tale algoritmo e verificare la precisione dei risultati. Prima di passare alle simulazioni è necessario chiarire il criterio con cui applicare le formule. Nelle relazioni compaiono le seguenti grandezze:
− indice lambda nei quattro raccordi di scarico; − portate tra i volumi; − masse dei gas contenuti nelle capacità;
queste variabili rappresentano i dati di ingresso dell’algoritmo, invece il valore di lambda nei volumi a valle dei raccordi viene calcolato dall’algoritmo. Dato che l’algoritmo viene utilizzato in parallelo al modello termofluidodinamico implementato in Simulink, i tre dati in ingresso sono ricavati direttamente dalle simulazioni effettuate sul modello ed inseriti nell’algoritmo che
così calcola l’indice lambda nei volumi a valle dei raccordi. Tali valori di λ si possono confrontare con quelli valutati all’interno di ciascun volume: se l’algoritmo è preciso i valori di
λ devono coincidere.
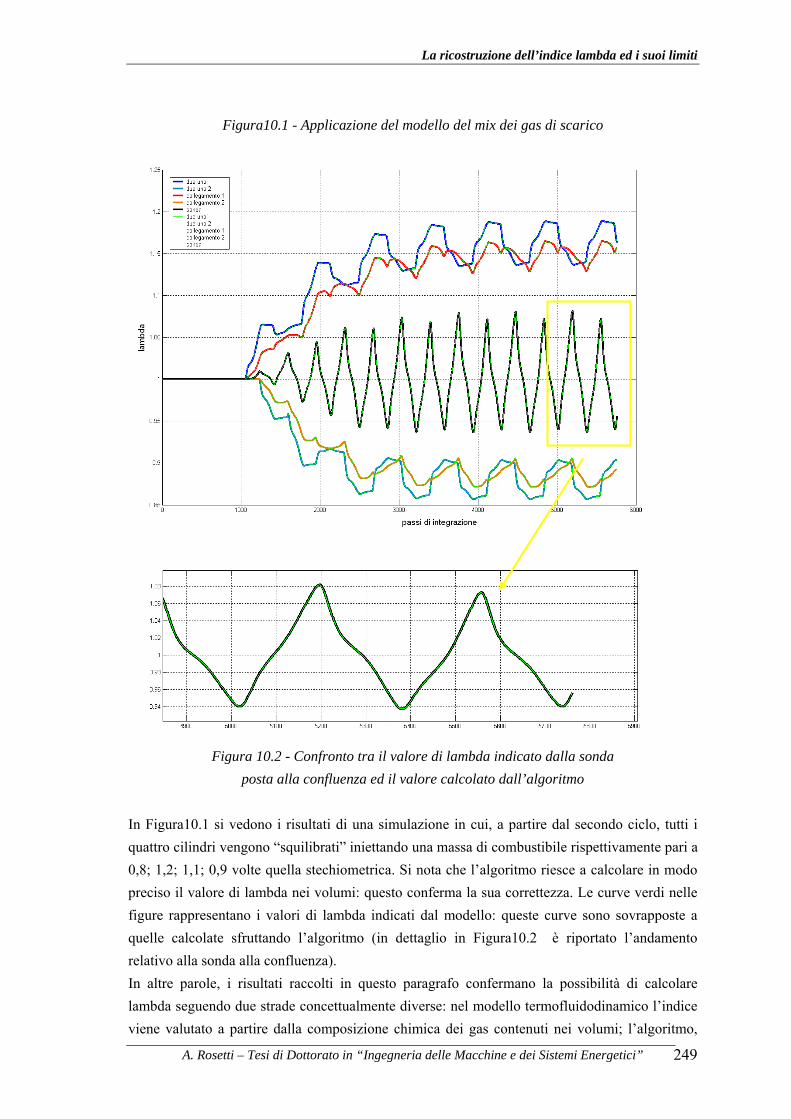
La ricostruzione dell’indice lambda ed i suoi limiti
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 249
Figura10.1 - Applicazione del modello del mix dei gas di scarico
Figura 10.2 - Confronto tra il valore di lambda indicato dalla sonda
posta alla confluenza ed il valore calcolato dall’algoritmo In Figura10.1 si vedono i risultati di una simulazione in cui, a partire dal secondo ciclo, tutti i quattro cilindri vengono “squilibrati” iniettando una massa di combustibile rispettivamente pari a 0,8; 1,2; 1,1; 0,9 volte quella stechiometrica. Si nota che l’algoritmo riesce a calcolare in modo preciso il valore di lambda nei volumi: questo conferma la sua correttezza. Le curve verdi nelle figure rappresentano i valori di lambda indicati dal modello: queste curve sono sovrapposte a quelle calcolate sfruttando l’algoritmo (in dettaglio in Figura10.2 è riportato l’andamento relativo alla sonda alla confluenza). In altre parole, i risultati raccolti in questo paragrafo confermano la possibilità di calcolare lambda seguendo due strade concettualmente diverse: nel modello termofluidodinamico l’indice viene valutato a partire dalla composizione chimica dei gas contenuti nei volumi; l’algoritmo,

Capitolo 10
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 250
invece, calcola lambda semplicemente a partire dal valore assunto dall’indice nei quattro raccordi di scarico. Entrambi i criteri presuppongono la conoscenza delle portate che attraversano i volumi e delle masse contenute nelle capacità.
10.3 Algoritmo del mix dei gas di scarico: i risultati delle simulazioni
Nel capitolo precedente si è descritto l’algoritmo che permette di risalire al valore di λ nei quattro raccordi di scarico a partire dal segnale della sonda posta alla confluenza, in questo paragrafo vengono analizzati e commentati alcuni risultati di simulazioni. Come visto, uno degli aspetti “critici” dell’algoritmo è il fatto che si basa sulla inversione di equazioni che in generale coinvolgono più di una variabile: questo limita la applicabilità del
criterio. Inoltre, per ricavare λ nel volume a monte al passo i-esimo, occorre conoscere λ nel volume a valle al passo i-esimo ed al passo i+1-esimo; anche questo limita la applicabilità dell’algoritmo. Per tradurre in termini analitici le due limitazioni appena elencate, per ciascun volume è stata definita una funzione chiamata “osservabilità” che assume due valori:
− osservabilità =1 se è possibile risalire a λ nel volume in modo “esatto” (cioè l’algoritmo è applicabile);
− osservabilità =0 se non è possibile ricavare λ a causa di una delle limitazioni ricordate.
Figura10.3 - Rappresentazione schematica dei condotti di scarico
Per chiarire questi concetti si può esaminare la Figura10.3 in cui sono rappresentati in modo schematico i volumi a partire dai raccordi fino alla sonda alla confluenza. Ad esempio, affinché si possa ricostruire al passo i-3-esimo il valore dell’indice lambda nel raccordo 1:
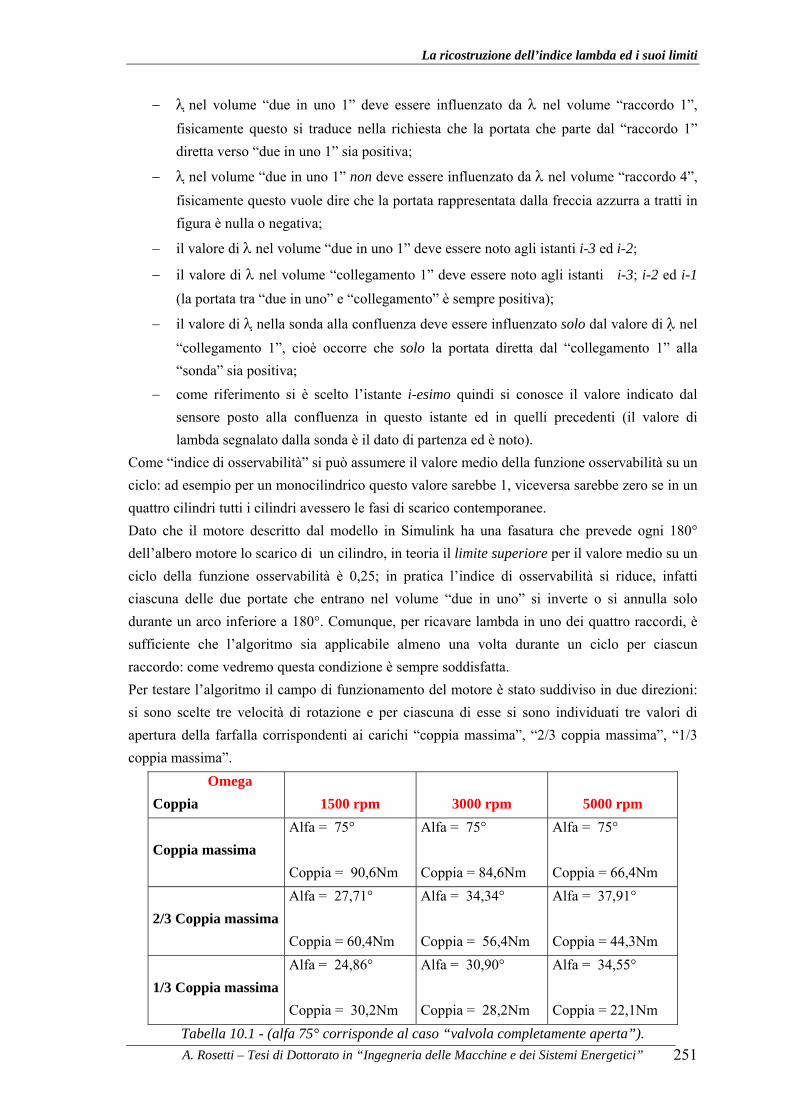
La ricostruzione dell’indice lambda ed i suoi limiti
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 251
− λ nel volume “due in uno 1” deve essere influenzato da λ nel volume “raccordo 1”, fisicamente questo si traduce nella richiesta che la portata che parte dal “raccordo 1” diretta verso “due in uno 1” sia positiva;
− λ nel volume “due in uno 1” non deve essere influenzato da λ nel volume “raccordo 4”, fisicamente questo vuole dire che la portata rappresentata dalla freccia azzurra a tratti in figura è nulla o negativa;
− il valore di λ nel volume “due in uno 1” deve essere noto agli istanti i-3 ed i-2;
− il valore di λ nel volume “collegamento 1” deve essere noto agli istanti i-3; i-2 ed i-1 (la portata tra “due in uno” e “collegamento” è sempre positiva);
− il valore di λ nella sonda alla confluenza deve essere influenzato solo dal valore di λ nel “collegamento 1”, cioè occorre che solo la portata diretta dal “collegamento 1” alla “sonda” sia positiva;
− come riferimento si è scelto l’istante i-esimo quindi si conosce il valore indicato dal sensore posto alla confluenza in questo istante ed in quelli precedenti (il valore di lambda segnalato dalla sonda è il dato di partenza ed è noto).
Come “indice di osservabilità” si può assumere il valore medio della funzione osservabilità su un ciclo: ad esempio per un monocilindrico questo valore sarebbe 1, viceversa sarebbe zero se in un quattro cilindri tutti i cilindri avessero le fasi di scarico contemporanee. Dato che il motore descritto dal modello in Simulink ha una fasatura che prevede ogni 180° dell’albero motore lo scarico di un cilindro, in teoria il limite superiore per il valore medio su un ciclo della funzione osservabilità è 0,25; in pratica l’indice di osservabilità si riduce, infatti ciascuna delle due portate che entrano nel volume “due in uno” si inverte o si annulla solo durante un arco inferiore a 180°. Comunque, per ricavare lambda in uno dei quattro raccordi, è sufficiente che l’algoritmo sia applicabile almeno una volta durante un ciclo per ciascun raccordo: come vedremo questa condizione è sempre soddisfatta. Per testare l’algoritmo il campo di funzionamento del motore è stato suddiviso in due direzioni: si sono scelte tre velocità di rotazione e per ciascuna di esse si sono individuati tre valori di apertura della farfalla corrispondenti ai carichi “coppia massima”, “2/3 coppia massima”, “1/3 coppia massima”.
Omega Coppia
1500 rpm
3000 rpm
5000 rpm
Coppia massima
Alfa = 75° Coppia = 90,6Nm
Alfa = 75° Coppia = 84,6Nm
Alfa = 75° Coppia = 66,4Nm
2/3 Coppia massima
Alfa = 27,71° Coppia = 60,4Nm
Alfa = 34,34° Coppia = 56,4Nm
Alfa = 37,91° Coppia = 44,3Nm
1/3 Coppia massima
Alfa = 24,86° Coppia = 30,2Nm
Alfa = 30,90° Coppia = 28,2Nm
Alfa = 34,55° Coppia = 22,1Nm
Tabella 10.1 - (alfa 75° corrisponde al caso “valvola completamente aperta”).
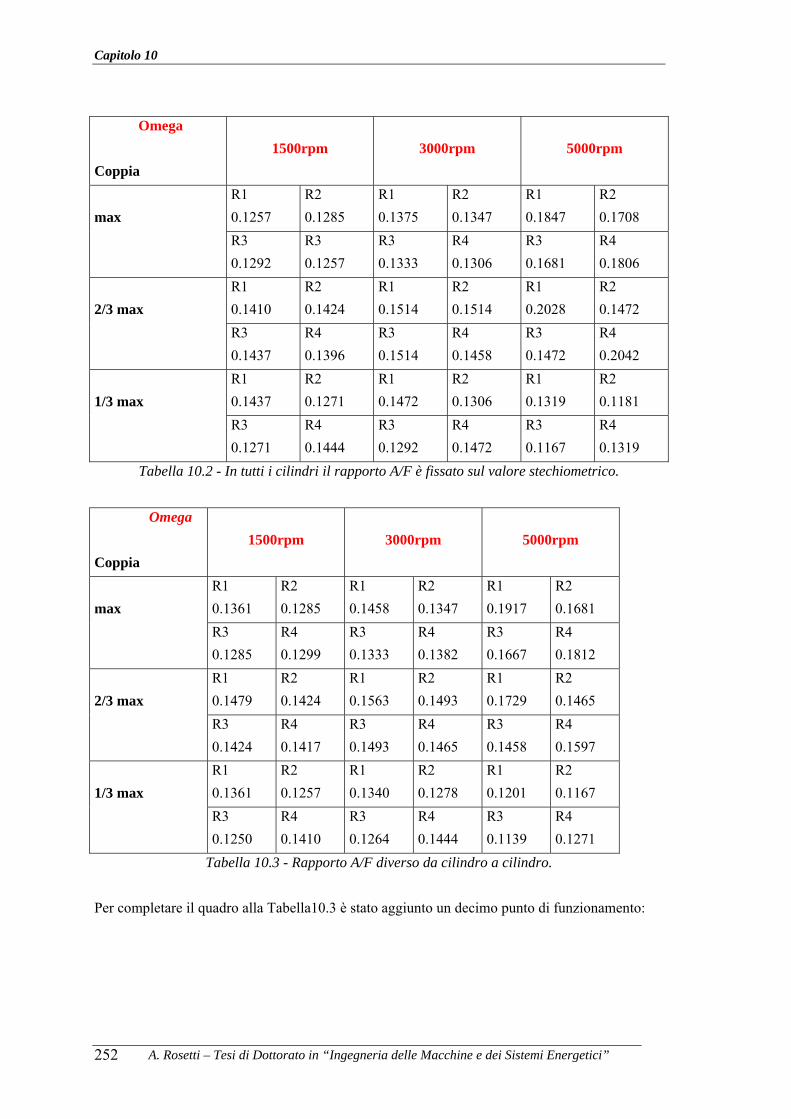
Capitolo 10
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 252
Omega Coppia
1500rpm
3000rpm
5000rpm
R1 0.1257
R2 0.1285
R1 0.1375
R2 0.1347
R1 0.1847
R2 0.1708
max
R3 0.1292
R3 0.1257
R3 0.1333
R4 0.1306
R3 0.1681
R4 0.1806
R1 0.1410
R2 0.1424
R1 0.1514
R2 0.1514
R1 0.2028
R2 0.1472
2/3 max
R3 0.1437
R4 0.1396
R3 0.1514
R4 0.1458
R3 0.1472
R4 0.2042
R1 0.1437
R2 0.1271
R1 0.1472
R2 0.1306
R1 0.1319
R2 0.1181
1/3 max
R3 0.1271
R4 0.1444
R3 0.1292
R4 0.1472
R3 0.1167
R4 0.1319
Tabella 10.2 - In tutti i cilindri il rapporto A/F è fissato sul valore stechiometrico.
Omega
Coppia
1500rpm
3000rpm
5000rpm
R1 0.1361
R2 0.1285
R1 0.1458
R2 0.1347
R1 0.1917
R2 0.1681
max
R3 0.1285
R4 0.1299
R3 0.1333
R4 0.1382
R3 0.1667
R4 0.1812
R1 0.1479
R2 0.1424
R1 0.1563
R2 0.1493
R1 0.1729
R2 0.1465
2/3 max
R3 0.1424
R4 0.1417
R3 0.1493
R4 0.1465
R3 0.1458
R4 0.1597
R1 0.1361
R2 0.1257
R1 0.1340
R2 0.1278
R1 0.1201
R2 0.1167
1/3 max
R3 0.1250
R4 0.1410
R3 0.1264
R4 0.1444
R3 0.1139
R4 0.1271
Tabella 10.3 - Rapporto A/F diverso da cilindro a cilindro. Per completare il quadro alla Tabella10.3 è stato aggiunto un decimo punto di funzionamento:

La ricostruzione dell’indice lambda ed i suoi limiti
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 253
In ciascuno dei nove punti indicati nelle tabelle (Tabella10.2, Tabella10.3) il comportamento del motore è stato simulato in due diverse condizioni:
1) la Tabella10.2 si riferisce al caso in cui i quattro cilindri bruciano una miscela stechiometrica;
2) la Tabella10.3 contiene i dati ricavati iniettando nei cilindri masse di benzina diverse pari rispettivamente a 0,8; 1,2; 1,1; 0,9 volte quella stechiometrica.
Nelle due tabelle si trovano i valori medi su un ciclo della funzione “osservabilità” in ciascuno dei quattro raccordi di scarico. Tali valori evidenziano che l’algoritmo permette di risalire al rapporto A/F nei raccordi in tutti i nove punti, inoltre l’indice di osservabilità è relativamente grande a testimonianza del fatto che si riesce a ricostruire il valore di lambda durante più passi di integrazione. Anche se è difficile dare una interpretazione “completa” dei dati elencati nelle tabelle, è possibile comunque individuare alcune tendenze che possono essere giustificate. In particolare è interessante inserire in una tabella i valori medi della osservabilità dei quattro raccordi e lo scarto quadratico medio per ciascuno dei 10 punti di funzionamento (Tabella 1.6, Tabella 20.7).
Tabella 1.6 omega coppia
1500rpm
1/6 max
M = 0.0927 s2
= 3.12 .10-5
Omega Coppia
7000rpm
R1 0.0972
R2 0.0903
1/6 coppia max R3
0.0847 R4 0.0986
Omega Coppia
7000rpm
1/6 coppia max
Alfa = 33° Coppia = 8,5Nm
Tabella 10.4
Tabella 10.5

Capitolo 10
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 254
Omega Coppia
1500
3000
5000
max
M = 0.1308
s2 = 9,87 .10-6
M = 0.1380 s2
= 2,35 .10-5
M = 0.1769 s2
= 1,05 .10-4 2/3 max
M = 0.1436 s2
= 6,25 .10-6
M = 0.1504 s2
= 1,31 .10-5
M = 0.1562 s2
= 1,23 .10-4 1/3 max
M = 0.1320 s2
= 4,66 .10-5
M = 0.1332 s2
= 5.04.10-5
M = 0.1194 s2
= 2.43.10-5 Tabella 20.7 - Valori medi della osservabilità su quattro raccordi e scarti quadratici medi
Nelle immagini riportate (Figura10.4 e Figura10.5) si nota, che fissata la coppia al valore massimo, l’osservabilità cresce all’aumentare della velocità di rotazione del motore, questa tendenza si attenua al diminuire del carico. Come prima cosa occorre sottolineare che il “nodo” critico per la osservabilità nei quattro raccordi è rappresentato dalle portate dirette dal volume “raccordo di scarico” al volume “due in uno”. Pertanto è interessante riportare gli andamenti delle portate che partono dai raccordi 1 e 4 ad esempio (si troverebbero risultati qualitativamente analoghi esaminando gli andamenti relativi ai raccordi 2 e 3) e cercare di risalire alle cause della tendenza appena descritta basandosi sulla analisi di tali andamenti.

La ricostruzione dell’indice lambda ed i suoi limiti
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 255
coppiamax 2/3
coppiamax
1/3coppiamax
1/6coppiamax
1500 rpm
3000 rpm
5000 rpm
7000 rpm
0,0927
0,1769
0,1562
0,11940,138 0,1504
0,13320,13080,1436
0,132
00,020,040,060,08
0,1
0,12
0,14
0,16
0,18In
dice
di o
sser
vabi
lità
med
io
Indice di osservabilità medio
1500 rpm3000 rpm5000 rpm7000 rpm
Figura10.4 - Valore medio dell’indice di osservabilità
coppiamax 2/3
coppiamax
1/3coppiamax
1/6coppiamax
1500 rpm
3000 rpm5000 rpm
7000 rpm
3,12E-05
1,05E-04 1,23E-04
2,43E-052,35E-05
1,31E-05
5,04E-05
9,87E-066,25E-06
4,66E-05
0,00E+00
2,00E-05
4,00E-05
6,00E-05
8,00E-05
1,00E-04
1,20E-04
1,40E-04
Scar
to q
uadr
atic
o m
edio
Scarto quadratico medio
1500 rpm3000 rpm5000 rpm7000 rpm
Figura10.5 - Scarto quadratico medio

Capitolo 10
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 256
Figura 1.6 - Portata diretta dai raccordi 1 e 4 al volume “due in uno1”
Figura 2.7 - Indice di osservabilità relativo alla Figura 1.6
In Figura 1.6 si nota chiaramente che il periodo del blowdown è uno degli elementi che rende l’osservabilità a 5000 rpm superiore rispetto a quella relativa a 1500 rpm. Infatti la durata di questa fase è fissata su scala temporale e non angolare, pertanto è più ampia a 5000 rpm. Infatti all’aumentare della velocità di rotazione uno stesso arco temporale occupa una maggiore “fascia” angolare. In generale si nota che una volta instaurata la portata inversa in un raccordo, a 5000rpm il fluido non fa tempo praticamente ad invertire nuovamente la direzione del moto (cerchietto giallo in Figura 1.6) quindi cresce anche la fascia di osservabilità in corrispondenza della fase che segue il blowdown. Una seconda tendenza che si può estrapolare dalla Tabella 20.7 è la brusca diminuzione dell’indice di osservabilità al diminuire del carico; tale effetto si accentua all’aumentare della velocità di rotazione. Anche in questo caso si può interpretare tale comportamento esaminando gli andamenti delle portate dirette verso il volume “due in uno”.

La ricostruzione dell’indice lambda ed i suoi limiti
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 257
Figura 3.8 - Portata diretta dai raccordi 1 e 4 al volume “due in uno1”
Figura 4.9 - Indice di osservabilità relativo alla Figura 3.8
Dalle figure si nota chiaramente che al diminuire del carico la fase di blowdown si riduce di intensità fino praticamente a scomparire ed al posto del blowdown si trova un flusso inverso a causa delle depressioni che si verificano all’interno del cilindro quando ai bassi carichi inizia la fase di scarico (cerchio nero). Nella Figura 4.9 la fascia di osservabilità relativa al periodo del blowdown scompare ai carichi bassi. Il modello in Simulink può essere suddiviso in tre blocchi: i cilindri ed i condotti di aspirazione e scarico. Nei cilindri il moto del fluido è regolato dalle valvole, dal pistone e dal susseguirsi delle combustioni che impongono andamenti ciclici alle variabili termofluidodinamiche (non si considerano la turbolenza e la propagazione delle onde di pressione); viceversa nei condotti non esistono organi di intercettazione ed il moto del fluido è regolato dalle portate imposte dai cilindri. Pertanto i cilindri rappresentano “il motore” del sistema, i condotti invece sono “sistemi” sollecitati dai cilindri, cioè dal susseguirsi delle fasi del motore. In realtà i condotti non hanno una vera e propria inerzia, ma le fasi del motore impongono continui “riempimenti” e “svuotamenti” dei volumi. Dato che i tempi di svuotamento o riempimento dipendono anche dalle dimensioni dei volumi, ciascuno dei volumi posti in serie per descrivere i condotti di

Capitolo 10
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 258
scarico ha tempi propri. Inoltre, a seconda del carico e della velocità di rotazione, un cilindro scarica più o meno massa ad ogni ciclo ed in ogni volume variano la temperatura e la pressione, dunque cambia anche la densità del fluido contenuto o, in altre parole, la capacità di accumulare massa all’interno del volume. Tutto questo influisce sulla osservabilità poiché tale parametro è strettamente legato all’andamento delle portate che attraversano le capacità. Questo può giustificare il fatto che non esistono tendenze particolari nei dati elencati nella tabella in relazione alle differenze di osservabilità tra i quattro raccordi. Infatti a priori non è possibile fare previsioni visto che l’andamento delle portate dipende dalla interazione di una “forzante” che è il motore (le variabili sono il carico e la velocità di rotazione) con il sistema “raccordi di scarico” costituito da volumi in serie ed in parallelo (la variabile è la dimensione del volume). La Figura 5.10 presenta i risultati della simulazione corrispondente alla casella nella prima riga seconda colonna di tabella 2 (3000rpm, pieno carico, cilindri “squilibrati”): in verde sono tracciati i valori di lambda segnalati dal modello in Simulink, le altre curve si riferiscono ai valori di lambda calcolati dall’algoritmo.
Figura 5.10: ricostruzione del rapporto A/F nei volumi a monte della sonda lambda
posta alla confluenza Si nota che è possibile ricostruire gli andamenti anche se non in tutti i punti (infatti l’indice di osservabilità è sicuramente minore di uno): nei punti in cui un volume non è osservabile l’indice

La ricostruzione dell’indice lambda ed i suoi limiti
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 259
lambda viene fissato sull’ultimo valore calcolato in modo esatto, quindi nelle zone “non osservabili” gli andamenti sono caratterizzati da tratti orizzontali. Nella figura Figura 6.11 è evidenziato il confronto tra l’indice lambda nel “raccordo 1” ricostruito e quello effettivo: quando lambda nel “raccordo 1” è osservabile, l’algoritmo fornisce risultati accurati.
Figura 6.11 - Ricostruzione dell’indice lambda nel volume “raccordo 1” e calcolo della
funzione “osservabilità” (per il volume “raccordo 1”) A conclusione di questo paragrafo bisogna precisare che l’algoritmo che permette di ricostruire l’indice lambda nei quattro raccordi di scarico non è propriamente un osservatore degli stati, infatti, come verrà chiarito nelle prossime pagine, il modello di mix dei gas di scarico alla base dell’algoritmo non è lineare. Dunque si parla di “osservatore” in modo improprio, in realtà l’algoritmo “si limita” ad invertire delle equazioni in più variabili.
10.3.1 Effetti della dinamica della sonda sull’algoritmo Come visto nel capitolo precedente, da un punto di vista fisico la dinamica della sonda lambda è legata a due fenomeni diversi:
− diffusione dei gas di scarico all’interno del cappuccio protettivo della sonda; − diffusione degli ioni delle varie specie chimiche nell’elettrolita solido.
Nel modello in Simulink la prima dinamica è già descritta, infatti si è inserito il blocco che calcola l’indice lambda all’interno di una capacità che simula appunto il cappuccio protettivo; la

Capitolo 10
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 260
seconda dinamica può essere modellata attraverso un filtro del primo ordine posto ad esempio sulla uscita del segnale della sonda.
Figura 7.12 - Segnale della sonda posta alla confluenza per simulazioni a 3000rpm e 5000rpm; il rapporto A/F nei cilindri è analogo a quello relativo alla Tabella10.3. Anche la prima dinamica è simile a quella di un filtro passa basso come si può notare confrontando due andamenti ricavati sfruttando il modello “ideale” della sonda alla confluenza (cioè il modello in cui non è ancora introdotta la dinamica legata alla diffusione) . Nella prima simulazione la velocità di rotazione è stata fissata a 3000 rpm, nella seconda a 5000 rpm. Si vede che all’ aumentare del numero di giri al minuto l’ampiezza del segnale cala: ciò è imputabile all’effetto capacitivo dei volumi (compreso il volume del cappuccio protettivo della sonda) che si trovano tra la sonda posta alla confluenza e le valvole di scarico. Pertanto l’algoritmo “osservatore” implicitamente tiene già conto della prima dinamica, viceversa deve essere modificato per trattare i segnali all’uscita del filtro passa basso che simula la seconda dinamica. Una soluzione può essere quella di filtrare il segnale direttamente in Simulink a valle del blocco che riproduce la dinamica di diffusione: così le modifiche al codice dell’algoritmo sono limitate. È questa la strada seguita e verrà descritta in modo approfondito. La dinamica di un filtro passa basso nel dominio angolare è la seguente:
( )( ) ( ) ( )ϑϑτϑ
ϑω xydyd
s
=+⋅1
dove y rappresenta il segnale in uscita dal filtro ed x quello in ingresso. Pertanto si può ricavare il segnale in ingesso (x) a partire da quello di uscita (y) semplicemente implementando questa equazione in Simulink. Per il momento non si tiene conto di eventuali disturbi sul segnale in uscita dalla sonda, in realtà questi giocano un ruolo molto importante e limitano la precisione dei risultati. Inoltre occorre fare attenzione a come vengono calcolate derivate ed integrali in Simulink. Integrando e successivamente derivando un segnale generico x, ci si aspetta che l’uscita y(i) coincida con l’ingresso x(i), invece si trova y(i ) = x(i-1), cioè al generico passo di integrazione l’uscita è in ritardo di un passo sull’ingresso.

La ricostruzione dell’indice lambda ed i suoi limiti
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 261
Figura 8.13
Questo dipende dalle modalità di calcolo di integrale e derivata. Integrale (indicando con e l’ingresso ed u l’uscita, con il pedice I l’integrale):
;)1()1()( passoieiuiu III ⋅−+−=
derivata (indicando con e l’ingresso ed u l’uscita, con il pedice d la derivata):
.)1()(
)(passo
ieieiu dd
d−−
=
Quindi integrando e poi derivando un segnale si ottiene:
)1()1()1()1()1()(
)( −=−−⋅−+−
=−−
= ixpasso
iupassoixiupasso
iuiuiy IIII .
Alla luce delle considerazioni appena fatte si può invertire il filtro passa basso direttamente nel modello in Simulink (Figura 9.14). In figura (Figura 9.14) sono evidenziati due blocchi posti in serie: il primo rappresenta il filtro che simula la dinamica di diffusione degli ioni, il secondo blocco permette di invertire il primo filtro. Come visto, l’uscita del sistema costituito dai due blocchi posti in serie coincide con l’ingresso ritardato di un passo di integrazione: l’algoritmo “osservatore” deve semplicemente “recuperare” questo ritardo sostituendo il segnale della sonda al passo i-esimo con il segnale della sonda al passo i+1-esimo.
Figura 9.14 - Il blocco che simula la dinamica di diffusione
ed il filtro che elimina l’effetto della dinamica

Capitolo 10
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 262
Se la dinamica legata alla diffusione delle diverse specie chimiche è differente, è più appropriata la schematizzazione che prevede un filtro passa basso su ciascuno dei segnali in ingresso alla sonda, cioè sulle frazioni in massa delle diverse specie. In questo caso il problema della “inversione del filtro” è più complesso.
Il calcolo di λ può essere suddiviso nel seguente modo: Pertanto prima di invertire la dinamica dei filtri passa basso occorre invertire l’ultimo passaggio, cioè è necessario invertire una equazione non lineare con più di una incognita. Se posto in questi termini il problema non ammette soluzione. In realtà il segnale in tensione della sonda non corrisponde esattamente all’indice lambda, ma ad una grandezza legata in modo biunivoco a tale indice. In base alle ipotesi presentate nel capitolo 8, il segnale in tensione dovrebbe essere la combinazione lineare delle frazioni in massa di alcuni componenti dei gas di scarico, come ad esempio l’ossigeno, l’ossido di carbonio e gli incombusti. In questo caso si potrebbe costruire un osservatore per calcolare separatamente le frazioni in massa quando si conosce il segnale della sonda, quindi invertire la dinamica di diffusione. Pertanto se dai risultati sperimentali emergessero costanti di tempo differenti in relazione alla dinamica con la quale la sonda rileva le concentrazioni delle diverse specie chimiche, sarebbe necessario approfondire lo studio del segnale della sonda per stabilire se è possibile ricostruire il rapporto A/F nei quattro cilindri. Riassumendo, la dinamica della diffusione degli ioni all’interno dell’elettrolita solido può rappresentare un limite alla applicabilità dell’algoritmo di ricostruzione se le diverse specie chimiche hanno dinamiche differenti, viceversa se si può applicare il primo modello descritto in questo paragrafo, tale dinamica non costituisce un limite come dimostrato.
Frazioni in massa dei
componenti dei gas di scarico
Dinamica diffusione: filtro del
primo ordine
Indice lambda: funzione non lineare delle
frazioni in massa
Frazioni in massa dei
componenti dei gas di scarico
Dinamica diffusione: filtro del
primo ordine
Segnale della sonda: combinazione
lineare delle frazioni in massa

La ricostruzione dell’indice lambda ed i suoi limiti
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 263
10.3.2 Effetto dei disturbi sull’algoritmo Il segnale in uscita della sonda alla confluenza è affetto da disturbi che, come vedremo, limitano la applicabilità dell’algoritmo. Per simulare questi rumori si può sommare al segnale della sonda un segnale “casuale” che simula i disturbi, quindi si può applicare l’algoritmo. Eseguendo prove di questo tipo l’algoritmo ha dimostrato di essere estremamente sensibile: i disturbi lo rendono praticamente inutilizzabile. Tale comportamento (scarsa “robustezza” ai disturbi) è la conseguenza di due aspetti caratteristici dell’algoritmo:
1) il mix dei gas di scarico è descritto attraverso relazioni non lineari; 2) l’algoritmo prevede l’utilizzo di tali relazioni in “cascata”, cioè il risultato di una
relazione rappresenta l’ingresso della successiva, pertanto gli errori si propagano ed “amplificano” .
Queste due caratteristiche verranno approfondite nel prossimo paragrafo. In altri termini, per poter risalire all’indice lambda segnalato dalle sonde poste nei quattro raccordi di scarico, l’algoritmo deve essere sensibile anche a “piccole” variazioni del valore di lambda alla confluenza, dunque è sensibile anche alle variazioni di lambda causate dal rumore. In pratica un disturbo viene interpretato come una variazione di lambda in un cilindro e tale “contributo” può rendere completamente errata la ricostruzione dell’andamento del rapporto tra massa d’aria e di combustibile nel cilindro. Per rendere più “robusto” l’algoritmo (cioè meno sensibile ai disturbi) è necessario semplificare la “forma” delle relazioni che ne sono alla base ad esempio linearizzandole oppure evitando l’utilizzo di più equazioni in cascata: tali cambiamenti però devono essere compatibili con la schematizzazione adottata per descrivere il sistema dei raccordi di scarico. Come sarà chiarito nel prossimo paragrafo il modello implementato in Simulink può essere descritto in modo accurato solo attraverso equazioni non lineari applicate in cascata, in altri termini la complessità del modello implementato in Simulink ed in particolare della schematizzazione dei condotti di scarico è una delle cause principali della complessità dell’algoritmo.
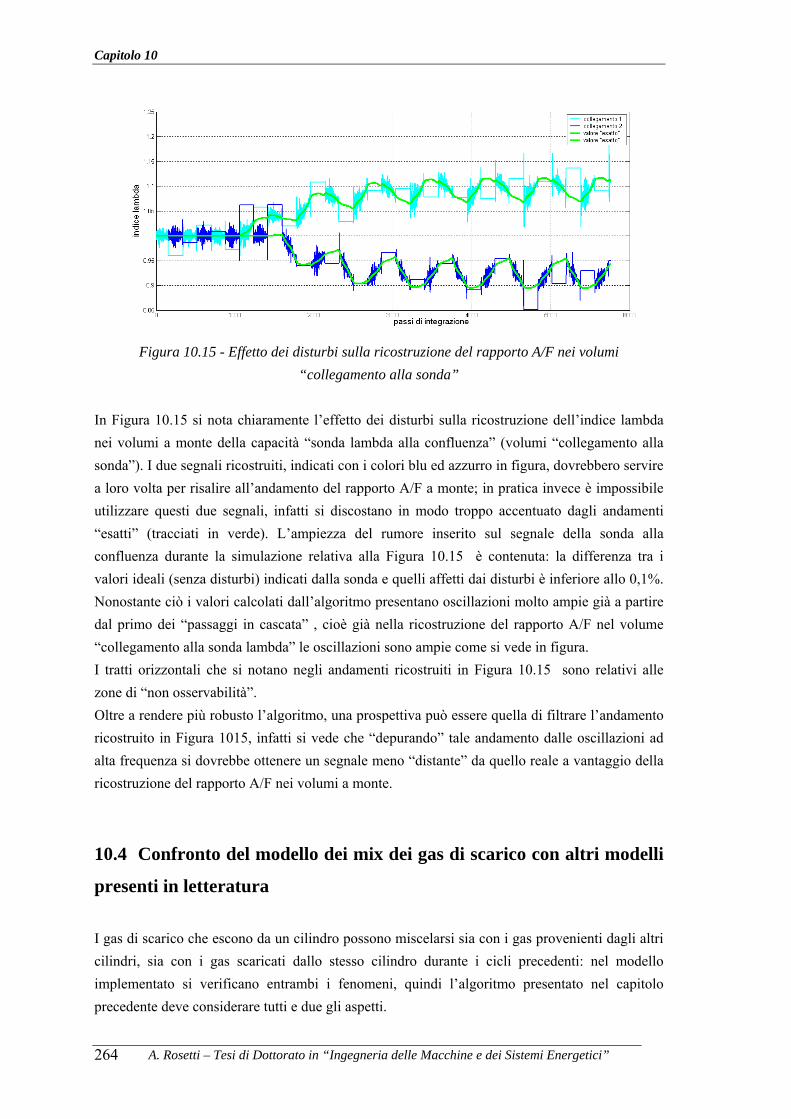
Capitolo 10
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 264
Figura 10.15 - Effetto dei disturbi sulla ricostruzione del rapporto A/F nei volumi
“collegamento alla sonda” In Figura 10.15 si nota chiaramente l’effetto dei disturbi sulla ricostruzione dell’indice lambda nei volumi a monte della capacità “sonda lambda alla confluenza” (volumi “collegamento alla sonda”). I due segnali ricostruiti, indicati con i colori blu ed azzurro in figura, dovrebbero servire a loro volta per risalire all’andamento del rapporto A/F a monte; in pratica invece è impossibile utilizzare questi due segnali, infatti si discostano in modo troppo accentuato dagli andamenti “esatti” (tracciati in verde). L’ampiezza del rumore inserito sul segnale della sonda alla confluenza durante la simulazione relativa alla Figura 10.15 è contenuta: la differenza tra i valori ideali (senza disturbi) indicati dalla sonda e quelli affetti dai disturbi è inferiore allo 0,1%. Nonostante ciò i valori calcolati dall’algoritmo presentano oscillazioni molto ampie già a partire dal primo dei “passaggi in cascata” , cioè già nella ricostruzione del rapporto A/F nel volume “collegamento alla sonda lambda” le oscillazioni sono ampie come si vede in figura. I tratti orizzontali che si notano negli andamenti ricostruiti in Figura 10.15 sono relativi alle zone di “non osservabilità”. Oltre a rendere più robusto l’algoritmo, una prospettiva può essere quella di filtrare l’andamento ricostruito in Figura 1015, infatti si vede che “depurando” tale andamento dalle oscillazioni ad alta frequenza si dovrebbe ottenere un segnale meno “distante” da quello reale a vantaggio della ricostruzione del rapporto A/F nei volumi a monte.
10.4 Confronto del modello dei mix dei gas di scarico con altri modelli
presenti in letteratura I gas di scarico che escono da un cilindro possono miscelarsi sia con i gas provenienti dagli altri cilindri, sia con i gas scaricati dallo stesso cilindro durante i cicli precedenti: nel modello implementato si verificano entrambi i fenomeni, quindi l’algoritmo presentato nel capitolo precedente deve considerare tutti e due gli aspetti.

La ricostruzione dell’indice lambda ed i suoi limiti
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 265
Da un punto di vista fisico la presenza contemporanea di queste due tipologie di mix nel modello si spiega ricordando che in ciascun volume la portata che entra al passo i-esimo si miscela con la massa contenuta nella capacità, quindi nella portata che esce al passo i+1 si trovano alcune delle particelle entrate al passo i. Questo vuole dire che se anche la dimensione della capacità è inferiore al volume dei gas scaricati durante un ciclo, nella capacità al termine della fase di scarico si trovano comunque gas relativi a cicli precedenti. Inoltre esistono volumi con due ingressi (“due in uno” ad esempio), quindi i prodotti di scarico di un cilindro si miscelano anche con i gas provenienti da altri cilindri. Come visto, il modello del mix dei gas combusti implementato nell’algoritmo non è lineare, infatti si basa su equazioni di questo tipo applicate a ciascun volume:
( )( )21
2211
ααλαλα
λ+
⋅+⋅=MISCELA (nel caso di miscela di due gas ad esempio)
dove
⎟⎟⎠
⎞⎜⎜⎝
⎛+⋅+⋅⋅⎟
⎠⎞
⎜⎝⎛ +
=mnmn
M
1223.0
324 1
11
λα
M rappresenta la massa dei gas che si miscelano oppure la portata in massa, il combustibile è
CnHm; dunque l’indice lambda compare anche all’interno dei coefficienti α. Per applicare la teoria degli osservatori degli stati occorre utilizzare modelli di mix lineari come ad esempio il seguente:
4321
44332211
MMMMMMMM cilcilcilcil
MISCELA +++⋅+⋅+⋅+⋅
=λλλλ
λ (10.1)
dove al posto dei coefficienti α si trovano le masse (oppure le portate in massa) M. Oltre ad essere lineare, il secondo modello ha anche la caratteristica di non prevedere il mix dei gas che escono da un cilindro con quelli scaricati dallo stesso cilindro durante i cicli precedenti. Da un punto di vista fisico questo vuole dire che il volume in cui è posizionata la sonda, ad ogni ciclo viene completamente “lavato” dai gas di scarico, cioè non rimane traccia dei prodotti delle combustioni precedenti. In letteratura è proposto il seguente modello lineare per descrivere il mix di gas provenienti dallo stesso cilindro, ma prodotti durante cicli diversi:
( )g
krgkrINCIDENT V
VVV φφφ
⋅−+= −1 se rg VV ≥ (10.2)
( ) ( )g
krgkgrINCIDENT V
VVVV 12 2 −− ⋅−⋅+⋅−=
φφφ se grg VVV ⋅≤≤ 2 (10.3)

Capitolo 10
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 266
in cui INCIDENTφ è l’inverso dell’indice lambda valutato in corrispondenza della sonda posta alla
confluenza, Vg indica il volume del gas scaricato dal cilindro, Vr il volume del raccordo. Infatti
se rg VV ≥ i gas scaricati al ciclo k spingono verso la sonda tutti gas contenuti nel raccordo che
occupano un volume Vr, questi sono relativi al ciclo k-1, poi il restante volume di gas che
lambiscono la sonda ( )rg VV − corrisponde ai prodotti della combustione avvenuta durante il
ciclo k-esimo. Invece se grg VVV ⋅≤≤ 2 il raccordo contiene sia prodotti di scarico relativi alla
combustione k-1-esima, sia relativi al ciclo k-2-esimo, quindi se durante il k-1-esimo scarico
viene espulso un volume Vg, nel raccordo il volume ( )gr VV − è occupato dai prodotti della
reazione avvenuta durante il ciclo k-2. Pertanto se nella fase di scarico viene spazzato verso la
sonda un volume Vg di gas, la componente ( )gr VV − è costituita da gas relativi alla
combustione k-2, la restante componente ( ) ( )rggrg VVVVV −⋅=−− 2 è occupata da gas
corrispondenti alla reazione avvenuta durante il ciclo k-1. Occorre fare una precisazione relativa alla geometria del condotto di scarico modellato. Se lo scarico fosse del tipo “quattro in uno” a regime, per ciascuno dei quattro raccordi di scarico sarebbe indifferente parlare di indice lambda relativo al passo k-esimo o al passo k-1-esimo dato che i due valori sarebbero identici in assenza di flussi inversi. Pertanto non sarebbe necessario descrivere il mix dei gas che entrano nel volume “raccordo” con quelli già presenti, poiché il mix dei gas non influenzerebbe il valore di lambda del fluido contenuto nel raccordo: tale valore sarebbe costante nel tempo. Viceversa, per una geometria del tipo “due in uno”, a valle del tratto in cui i due raccordi si congiungono, il valore di lambda varia nel tempo anche a regime, seppur in modo periodico, quindi è necessario descrivere il mix dei gas che entrano nel volume “due in uno” con quelli già presenti. Riassumendo, nel modello implementato in Simulink, l’utilizzo di capacità per simulare il comportamento dei vari tratti del condotto di scarico introduce implicitamente entrambe le tipologie di mix descritte: mix dei prodotti di scarico di cilindri diversi e mix di gas relativi a combustioni avvenute durante cicli differenti. Questo giustifica in parte la complessità del modello di mix introdotto nell’algoritmo. Un secondo aspetto che complica l’algoritmo è la presenza di più volumi posti in serie: per ciascuno di essi occorre applicare le formule presentate nel capitolo precedente. Se tali relazioni, ad esempio, venissero semplificate attraverso una linearizzazione, l’errore legato alla approssimazione fatta sulle equazioni relative ad un volume a valle si propagherebbe
e si amplificherebbe spostandosi verso i volumi a monte, cioè il calcolo di λ nel volume a monte
risentirebbe in modo accentuato dell’errore sul calcolo di λ nel volume a valle. In conclusione, per rendere più semplice e quindi anche più robusto l’algoritmo occorre in primo luogo ridurre la complessità del modello implementato in Simulink eliminando ad esempio alcuni volumi, cioè riducendo il numero di “blocchi” in cui i gas di scarico si miscelano con i prodotti delle combustioni precedenti.

La ricostruzione dell’indice lambda ed i suoi limiti
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 267
10.5 Effetto di un errore nel calcolo delle portate sulla ricostruzione
del rapporto A/F L’algoritmo che ricostruisce il rapporto A/F nei raccordi di scarico prevede due tipologie di dati in ingresso:
1) l’indice lambda segnalato dalla sonda posta alla confluenza; 2) l’andamento delle portate che attraversano i volumi compresi tra lo scarico e la sonda
posta alla confluenza. Sicuramente il rapporto A/F in ciascuno dei quattro cilindri influenza anche le portate che attraversano i volumi. Nelle simulazioni presentate fino a questo punto le portate introdotte nell’algoritmo sono quelle calcolate dal modello termofluidodinamico, quindi effettivamente variano in funzione del rapporto A/F nei singoli cilindri. In realtà, per un algoritmo che controlla l’iniezione in un motore a combustione interna, i dati relativi alle portate sono mappati in funzione della velocità di rotazione e del carico. Pertanto occorre verificare la “sensibilità” dell’algoritmo ad eventuali errori nel calcolo delle portate. In particolare i dati mappati in centralina presumibilmente sono ottenuti durante prove in cui in tutti i cilindri il rapporto A/F è fissato sul valore stechiometrico: è interessante studiare l’errore che commette l’algoritmo in questo caso. Di seguito vengono elencati i risultati di due simulazioni in cui, anche se i cilindri 1 e 3 sono squilibrati, le portate inserite nell’algoritmo si riferiscono ad un funzionamento ideale in cui tutti i cilindri bruciano miscele stechiometriche. Dato che già nel calcolo dell’indice lambda nei volumi “collegamento alla sonda lambda” l’algoritmo commette inevitabilmente un errore, si capisce che i dati ricavati per i volumi a monte delle capacità “collegamento alla sonda lambda” sono inattendibili, comunque è interessante studiare l’errore commesso nel primo passaggio (dalla sonda posta alla confluenza ai volumi “collegamento” 1 e 2).
Figura 110.16

Capitolo 10
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 268
Figura 120.17
Figura 130.18
In Figura 110.16 i cilindri 1 e 3 bruciano miscele in cui si è iniettata una massa di combustibile rispettivamente pari a 0,8 ed 1,2 volte quella stechiometrica; in Figura 120.17 gli squilibri sono ridotti a 0,995 e 1,005. L’algoritmo riesce a ricostruire in modo sufficientemente accurato l’andamento dell’indice lambda nei due volumi a monte della sonda, inoltre la qualità dei risultati aumenta al diminuire dello squilibrio del rapporto A/F tra i cilindri. In particolare in Figura 120.17 si notano errori estremamente contenuti, in questo caso si riesce anche a ricostruire l’andamento dell’indice lambda nei volumi “due in uno” come mostrato nella Figura 130.18: si vede che all’interno degli intervalli in cui il rapporto A/F è osservabile i risultati sono accettabili.

Conclusioni
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 1
CONCLUSIONI
E
SVULIPPI FUTURI
Obiettivo centrale del lavoro presentato nella tesi è la realizzazione di un modello termodinamico per la simulazione di un motore a combustione interna. Per quel che riguarda la prima parte del lavoro, si sono ottenuti buoni risultati, e sicuramente utili per l’analisi sia di prove in condizioni differenti dalle prove sperimentali, sia di prove in transitorio. Nel capitolo 5 e capitolo 6 vengono riportati rispettivamente il modello termodinamico in Matlab-Simulink e l’analisi dei risultati. Gli aspetti più interessanti del modello sono sia la possibilità di una messa a punto in automatico mediante la minimizzazione di funzioni obiettivo ,basate sull’analisi del diagramma di pressione, sia la possibilità di simulazioni in condizioni non stazionarie, in tempi molto rapidi. E’ forse questo l’aspetto più interessante, perché non è semplice simulare prove in transitorio. L’analisi effettuata dell’EGR interno può essere ulteriormente approfondita mediante prove sperimentali mirate alla misura di questa grandezza, anche se di non facile determinazione. Ulteriori sviluppi possono portare all’introduzione della dinamica delle onde di pressione e l’integrazione di un numero maggiore di specie chimiche. Nella seconda parte del lavoro il problema è stato affrontato da un punto di vista teorico costruendo un modello fisico che descrive il mix dei gas di scarico. Grazie a questo modello è stato implementato un algoritmo che calcola il valore di lambda segnalato dalla sonda posta alla confluenza conoscendo solo i rapporti A/F indicati dalle sonde poste allo scarico dei singoli cilindri. Tuttavia le equazioni alla base del modello del mix sono non lineari, pertanto non possono essere utilizzate per costruire un osservatore degli stati, ma semplicemente possono essere invertite: in questo modo è stato realizzato l’algoritmo “inverso” che ricostruisce i rapporti A/F nei raccordi di scarico basandosi solo sul segnale della sonda posta alla confluenza. L’applicazione di tale algoritmo ha messo in luce la possibilità teorica di ricostruire in modo “esatto” i rapporti A/F allo scarico dei cilindri in tutto il campo di funzionamento del motore (tabelle 7.2 e 7.3). I disturbi sul segnale della sonda lambda posta alla confluenza rappresentano uno degli aspetti critici del problema della ricostruzione del rapporto A/F nei raccordi di scarico. Simulando l’effetto di tali disturbi sono emerse due caratteristiche estremamente importanti dell’algoritmo

Conclusioni
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” 2
di ricostruzione: la sensibilità alle variazioni del segnale della sonda posta alla confluenza e la conseguente scarsa ” robustezza” dell’algoritmo ai disturbi. Le prove hanno mostrato che è praticamente impossibile il calcolo del rapporto A/F in presenza di disturbi. In realtà questo risultato non esclude in modo definitivo la possibilità di ricostruire il valore di lambda a livello dei raccordi di scarico. Come indicato nel capitolo 7, “snellendo” il modello termofluidodinamico del motore a combustione interna, si riesce a semplificare anche l’algoritmo (ciò può rappresentare uno sviluppo futuro); inoltre, in questo caso, si potrebbe anche linearizzare il modello del mix: ciò renderebbe più “robusto” l’algoritmo (cioè meno sensibile ai disturbi). In conclusione, trascurando i disturbi ed ipotizzando che la sonda lambda sia in grado di rilevare in tempi praticamente identici le variazioni di tutte le specie chimiche presenti nei prodotti di combustione, si è visto che è possibile ricostruire il rapporto A/F nei raccordi di scarico quando si conosce il valore di lambda segnalato dalla sonda posta alla confluenza. Tuttavia i disturbi e la dinamica della sonda lambda rappresentano limiti forti alla applicabilità dell’algoritmo. Una delle possibili direzioni da seguire per sviluppare i risultati trovati, è quella di semplificare la descrizione dei condotti di scarico. Ciò permette di ridurre la complessità dell’algoritmo di ricostruzione, complessità che è un delle cause della sensibilità ai disturbi.

Bibliografia
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” I
Bibliografia
• J. B. Heywood: “Internal combustion engine foundamentals”. McGraw Hill
international editions, 1988.
• E. O. Doebelin: “Measurement systems: application and design”. McGraw Hill international editions, 1990.
• G. Minelli: “Misure meccaniche”. Ed. Patron, Bologna, 1974.
• G. Minelli: “Motori endotermici alternativi”. Pitagora editrice, Bologna, 1984. • A. Cocchi: “Elementi di termofisica generale ed applicata”. Progetto Leonardo,
ed. Esculapio Bologna, 1990.
• A. Cavallo, R. Setola, F. Vasca: “La nuova guida a Matlab, simulink e control toolbox”. Liguori editore, 2002.
• M. W. Chase, American chemical society: “Janaf Thermochemical tables, vol. 1
e 2”. 1986.
• M. Ranieri: “Stima dell’EGR interno per il controllo di un motore a combustione interna”. Tesi di laurea, Università di Bologna, 2002.
• F. Ponti: “Metodologia di stima della pressioni interne ai cilindri e delle coppie
indicate e di carico di un motore ad accensione comandata per autotrazione”. Tesi di dottorato in ingegneria delle macchine, Università di Bologna, 1999.
• F. Castellani: “IL CONTROLLO DEL TITOLO CILINDRO PER CILINDRO.
ANALISI DELLE PROBLEMATICHE E SVILUPPO DI UN MODELLO TERMO-FLUIDODINAMICO DI SIMULAZIONE”. Tesi di Laurea.
• N. Bariselli: “VALIDAZIONE DI UN MODELLO MATEMATICO PER LA STIMA
DELL’EGR INTERNO IN UN MOTORE A COMBUSTIONE INTERNA AD ACCENSIONE COMANDATA”. Tesi di Laurea.

Bibliografia
A. Rosetti – Tesi di Dottorato in “Ingegneria delle Macchine e dei Sistemi Energetici” II
• M. Mladeck and C. Onder: “A model for estimation of inducted air mass and the
residual gas fraction using cylinder pressure measurement”. SAE paper 2000-01-0958, 2000.
• G. Woschni: “A universally applicable equation for the istantaneous heat transfer
coefficient in internal combustione engines”. SAE paper 670931, 1967. • G. Woschni and K. Huber: “The influence of soot deposites on combustion
chamber walls on heat losses in diesel engines”. SAE paper 910297, 1997.
• S. B. Han, Y. J. Chung, Y .J Kwon and S. Lee: “Empirical formula for istantaneous heat transfer coefficient in spark ignition engine”. SAE paper 972995, 1997.
• G. H. Abd Alla: “Computer simulation of four stroke spark ignition engine”.
Energy conversion & management, 2001.
• J. Hernandez Grau, J. Martinez Garcia, J. Perez Garcia, A. Viedma Robles, R. Royo Pastor: “Modelling methodology of a spark-ignition engine and experimental validation part I: single-zone combustion model”. SAE paper 2002-01-2193, 2002.
• J. Hernandez Grau, J. Martinez Garcia, J. Perez Garcia, A. Viedma Robles, R.
Royo Pastor: “Modelling methodology of a spark-ignition engine and experimental validation part II: gas exchange process”. SAE paper 2002-01-2193, 2002.
• F. Grasso: “Evaluation of Annand’s formula for heat transfer calculations in
internal combustion engines”. La termotecnica, Gennaio 1983.
• Y. Enomoto, S. Furuhama and K. Minatami: “Heat lossto combustion chamber wall of four-stroke gasoline engine”. Bulletin of JSME, vol. 28, no. 238, Aprile 1985.
• M. E. Penati, G. Bertoni: “Automazione e sistemi di controllo” – Vol. I, II.
Esculapio, Bologna.
• S. Ishizawa: “Analysis of HC in residual gas and combustion efficiency of spark-ignition engine”. SAE paper 972939, 1997.





























