Embed Size (px)
Citation preview

BASE Biotechnol. Agron. Soc. Environ.201418(3),407-421 Le Point sur :
Synthèsebibliographique:lemodèlenumériquedeterraindehauterésolution,seserreursetleurpropagationMohamarMoussaOuédraogo,AuroreDegré,CharlesDeboucheUniversitédeLiège-GemblouxAgro-BioTech.UnitéSystèmesSol–Eau.PassagedesDéportés,2.B-5030Gembloux(Belgique).E-mail:[email protected].
Reçule4mars2013,acceptéle10mars2014.
Lemodèlenumériquedeterrain(MNT)estlareprésentationnumériquedelatopographieduterrain.C’estunepiècemaitressepermettantl’extractiondenombreuxparamètrestelsquelapente,lesaxesd’écoulement,etc.Cesparamètressontrégulièrementutiliséscommeoutilsdedécisiondanslagestiondel’environnement.Dèslors,ilestessentieldegénérerdesMNTexactsd’une part et, d’autre part, de quantifier les erreurs persistantesmalgré les corrections et d’estimer leurs impacts sur lesparamètresdedécision.Cetarticleprésentel’étatdesconnaissancessurlagénérationdeMNTdehauterésolutionspatiale(maillededimensionsvalant±1m).Les technologiesd’acquisitiondesdonnéesaltimétriquesdehautedensité(plusieurspointsaum²),ainsiquelesméthodesdegénérationduMNTsontprésentéesetcomparées.LesdifférenteserreursduMNTainsiquelesméthodesutiliséespourlescorrigersontabordéesetdiscutées.Enfin,lesméthodesutiliséespourpropagerleserreursduMNTdanslesapplicationsSIG(Systèmed’InformationGéographique)sontévoquées.Mots-clés.Modèlemathématique,topographie,relevé(desdonnées),mesures,photogrammétrie.
The high resolution digital terrain model, its errors and their propagation. A review. Thedigitalelevationmodel(DEM)isanumericalrepresentationofterraintopography.DEMisaveryusefulmodel,allowingtheextractionofmanyparameterssuchasslope,drainagenetwork,etc.Theseparametersareregularlyusedfordecisionmakinginenvironmentalmanagement.Therefore,itisveryimportanttogenerateareliableDEM,toquantifytheerrorsthatremainevenaftererrorremoval,andalsotoestimatetheimpactoftheseerrorsondecisionparameters.Thisarticlepresentsthecurrentstateofknowledgeregardingthe generating of high resolutionDEMs.Fine-resolution (several points perm²) topographic data collection technologiesarepresentedandcompared.DEMerrorsandthemethodsusedtoremovethemarethenhighlightedanddiscussed.Finally,errorpropagationmethodsthatareusedtopropagateerrorsthroughGIS(GeographicInformationSystem)applicationsarepresented.Keywords.Mathematicalmodel,topography,surveying,measures,photogrammetry.
1. INTRODUCTION
Le MNT (modèle numérique de terrain) est unereprésentationnumériqueetmathématiquedel’altituded’unpointquelconquedelasurfaceterrestred’unezonegéographique,dansunsystèmeréférentielbiendéfini.Même si leMNT représenté sous formede trianglesirréguliersprésentecertainsavantages(Peuckeretal.,1978), dans la grandemajorité des cas, leMNT estreprésentécommeunensembledemaillesrégulières,caractérisées chacune par une valeur d’altitude, danslebutd’enfaciliter lamanipulationet lestockageenmémoiredel’ordinateurpendantlescalculs.LeMNTreste l’une des plus importantes sources de donnéesutilisées pour l’extraction de nombreux paramètresutiliséstelsquelapente,ladirectiond’écoulementdel’eau, l’indice topographique,etc.Cependant, il reste
unereprésentationspatialede la réalité.SelonCarter(1988), un MNT, même de meilleure exactitude,reste une approximation de la réalité du terrain. Parconséquent,ilcontienttoujoursdeserreurs.Ceserreursse propagent inévitablement dans les différentesapplications qui l’utilisent et peuvent influencerconsidérablement les résultats finaux (Huang et al.,2005; Oksanen et al., 2005). La génération d’unMNT nécessite l’acquisition de données spatialessoit sous forme de données altimétriques, soit sousforme de données photogrammétriques. Les moyensd’acquisition de ces données ont beaucoup évoluédenos joursetpermettentd’acquérirdesdonnéesdehautedensité (plusieurspointsparm²) surdeszonesde plusieurs hectares. Dès lors, il est d’une grandeimportance que nous nous intéressions de près à cesnouvellestechnologies,ainsiqu’àl’analysedeserreurs

408 Biotechnol. Agron. Soc. Environ. 201418(3),407-421 OuédraogoM.M.,DegréA.&DeboucheCh.
desMNTquiensontissuesafindelesquantifierd’unepartetd’autrepart,d’identifierlesméthodespermettantdelespropageràtraversuneapplication.
Cet article passe en revue les différentes étapesdelagénérationd’unMNTadéquatpourl’extractionde différents paramètres géomorphométriques telsque lapente, ladirectiond’écoulementde l’eau, etc.L’accent est particulièrement mis sur les nouvellesméthodesd’acquisitionsdesdonnéesaltimétriquesdehautesdensitésquipermettentdegénérerdesMNTdehauterésolutionspatiale1(maillededimensionsvalant±1m)dont laprécisionaltimétriqueestdequelquescentimètres. Le MNT n’étant pas exempt d’erreurs,nousprésentonségalementlesméthodesexistantesquitentent de les propager afin d’analyser leurs impactssur lesrésultatsdesmultiplesparamètresdedécisionquiensontextraits.
2. ACQUISITION DE DONNÉES ALTIMÉTRIQUES ET GÉNÉRATION DE MNT DE HAUTE RÉSOLUTION SPATIALE
Trois techniques d’acquisition de données spatialesnécessaires à la génération de MNT sont utiliséesen topographie. Les techniques classiques depositionnement qui sont le tachéomètre électronique,la station totale et le récepteur GNSS (Global Navigation Satellite System)enmodedifférentiel, lestechniquesutilisant la technologiede la télédétection(ilfautcomprendrelatélédétectiondanssadéfinitionla plus large, c’est-à-dire toute technique permettantl’acquisitiond’informations spatiales surunobjetouunphénomèneparl’intermédiaired’uncapteurn’ayantpasdecontactavecl’objetétudié(e.g.interférométrieradar, photogrammétrie aéroportée ou satellitaire,LiDAR [Light Detection And Ranging] aéroporté outerrestre, photogrammétrie à basse altitude utilisantles véhicules non pilotés tels que les microcoptères,les drones, les cerfs-volants, etc.) et les techniquesbasées sur les informations cartographiques (Nelsonetal.,2009).Seuleslesdeuxpremièrespeuventfournirdesdonnéesdehautedensité(plusieurspointsparm²)dontlaprécisiondescoordonnéesdansunsystèmederéférencecartographiqueestdequelquescentimètres.Les techniques classiques de positionnement sontnéanmoins très contraignantes lorsque la densitédes données nécessaires à la générationduMNTestélevéesurunegrandezoned’étude (Liet al.,2005).Une comparaison des données sources utilisées pourgénérerunMNT,faiteparNelsonetal.(2009),montreclairement que, par rapport aux autres techniques
d’acquisitionutilisantlatechnologiedelatélédétection,lesdonnéesobtenuesparphotogrammétrieetLiDARsont celles qui permettent de produire un MNTde résolution spatiale valant quelques dizaines decentimètresavecuneprécisionaltimétriquedequelquescentimètres. Li et al. (2005) vont plus loin dans lacomparaison en considérant, en plus de la précisiondesdonnées,letempsd’acquisition,lecoutetlatailledu sitedemesure.LeLiDARet laphotogrammétrieapparaissent comme les techniques permettantd’obtenir des données altimétriques de haute densité(plusieurs points par m²) pour générer desMNT dehauterésolutionspatialesurdeszonesdemoyennesetgrandessuperficies.
2.1. Le LiDAR
Le principe. Le LiDAR (Light Detection And Ranging)estunetechniqueutiliséeentélédétectionquiexploitelespropriétésdulaser(Light Amplification byStimulated Emission of Radiation)pourdéterminerlescaractéristiques d’un objet distant. Un instrument demesureutilisantleLiDARcomprendunémetteur,unrécepteurde rayon laseretunmécanismepermettantdemodifier la trajectoire du rayon laser. Par rapportà un rayon lumineux quelconque, un rayon laserprésente un niveau d’énergie, une fréquence et unelongueurd’ondebiendéfinis.Dèslors,lacomparaisondes rayons laserémiset reçuspermetd’identifier lescaractéristiquesd’unobjet.
Les techniques de mesure utilisant le LiDARpeuvent être classées en trois catégories (Heritageet al., 2009a): les systèmes LiDAR par absorptiondifférentielle utilisés pour mesurer les profils deconcentrationde gaz dans l’atmosphère, le «LiDARDoppler»quimesurelavitessed’objetsenmouvementet les systèmes LiDAR utilisés pour déterminer lepositionnementd’unobjetentroisdimensions.
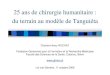
LepositionnementauLiDARconsisteàpartird’unscannerlaser,àenvoyeretrecevoirunrayonlasersurunecibledonnée,àl’instard’untachéomètreélectronique.Connaissant le temps mis par le rayon, de la ciblejusqu’àlasource,ladistance(d)estmesuréeainsiquel’angle horizontal (φ) et vertical (θ) (Figure 1). Lescoordonnées des points mesurés sont ainsi définiesdansunrepèredont l’originecoïncideaveclasourcedulaser.LescoordonnéestridimensionnellesX,YetZsontensuitecalculées(X=d.cosθ.cosφ;Y=d.cosθ.sinφ;Z=d.sinθ).Lesystèmeopèreàunesigrandevitessequ’ilpermet l’acquisitiondescoordonnéesdeplusieursdizainesvoirecentainesdemilliersdepointsparseconde.
Dans la littérature, les scanners utilisés pour lepositionnementsontclassésenfonctiondeleurprincipede mesure de distance. Les trois grandes catégoriessontlesscannerslaseràimpulsion,lesscannerslaser
1LarésolutionspatialeduMNTfaitréférenceàlatailledel’élémentgéométriqueencoreappelé«maille»,utilisépourmodéliserlatopographieduterrain.

Lemodèlenumériquedeterrain 409
àmesurededifférencedephaseetlesscannerslaseràtriangulation.Seulementlesdeuxpremièrescatégoriespeuvent être utilisées pour l’acquisition de donnéesaltimétriques,carleurportéeestdeplusieursdizainesdemètres.Leslasersàtriangulationsontsurtoututiliséspour modéliser des objets de petites tailles. Landesetal.(2011)ontcomparélesscannerslaseràimpulsionetàmesurededifférencedephase.Si lacadencedemesure des lasers à impulsion est faible par rapportà celle des scanner laser à différence de phase, ilsprésententl’avantagededisposerd’uneportéepouvantatteindre2000m,cequipeuts’avérertrèspositifpourdes mesures d’acquisition de données altimétriques,carlenombredestationsnécessairespourcouvrirunezoned’étudedonnée (enstatique)peutêtre réduitdemanièreconséquente.
Denosjours,lessystèmesLiDARontlacapacitéderecevoirunretourmultipledusignalémis(touslessystèmesn’ensontpasdotés)et,engénéral,lesystèmeenregistre le premier et le dernier retour du signal(Malletetal.,2009),cequifaitduLiDARuneméthodebienadaptéepouranalyserlastructuredesvégétationsoupourdéterminerleMNTsousuncouvertforestiercarledernierretourestceluiconsidérécommerenvoyépar le sol, cequin’estpas toujours le cas lorsque lavégétationesttrèsdense.
Les plateformes de mesures utilisées.Le LiDAR aéroporté/héliporté.Cesdernières années,le LiDAR aéroporté/héliporté (LiDARa) a étéutilisé comme méthode d’acquisition des donnéesaltimétriquespourgénérerdesMNT(Bateretal.,2009;
Li S. et al., 2011a;Hladik et al., 2012). Le systèmeest composé d’une source de lumière (laser), d’unrécepteurGNSSetd’unecentraleinertielle.IlconsisteàenvoyeràpartirdelasourceS(embarquéàbordd’unavionouunhélicoptère)lerayonlaserversunecibleC(e.g.lesoloulesur-sol)etàdéterminerladistanceS-C, connaissant le temps de parcours du laser pourrevenirversC(Wehretal.,1999).ÀpartirdesdonnéesGPS et inertielles, les coordonnées de la cible sontalors facilement déterminables. Le fait d’embarquerlesystèmedansunhélicoptèrepermetd’augmenterladensitédespointsdansdeszonesspécifiquesdusite,étantdonnéquesavitessepeutêtrenulle.Lesystèmepeut permettre ainsi l’acquisition des coordonnéesde 5000 à 10000points par seconde (Nelson et al.,2009). La précision des coordonnées acquises avecleLiDARadépendde lahauteurdevol.Engénéral,leserreurssontestiméesautourde15cmenaltimétrieet 50 à 100cm en planimétrie (Huising et al., 1998;Smith,2005).Uneprécisionaltimétrique inférieureà15cmestatteignablesilahauteurdevolestinférieureà 1200m; elle est inférieure à 25cm, par contre, silahauteurdevolestcompriseentre1200et2500m(Brinkman et al., 2000). Une comparaison complètefaiteparBaltsavias(1999)montreque,pourunegrandepartiedesapplications,leLiDARaestlatechnologielamieuxadaptéepourl’acquisitiondesdonnées.Lahautedensitédespointsainsiquelaqualitédescoordonnéesfournies par le LiDARa ont amené certains auteurs(e.g. Nelson et al., 2009) à affirmer que le LiDARaseralaméthodeidéaled’acquisitiondesdonnéesdansles prochaines années.Plusieurs pays (e.g. Belgique,Pays-Bas,Suisse,France)disposentdetellesdonnéessur leur territoire.Cela est sans doute dû à son coutd’acquisition qui reste son principal désavantage surdepetites surfaces.Deplus,depuisquelquesannées,d’autresméthodesplus adaptéespourdes superficiesdequelqueshectaressesontdéveloppées,notammentle LiDAR terrestre (LiDARt) et la photogrammétrieà basse altitude utilisant les véhicules non pilotés.Ces méthodes ne sont pas, à l’heure actuelle, desalternatives au LiDARa qui reste très adapté pourcouvrirdegrandessuperficies.Ellespermettentsurtoutl’acquisition de données altimétriques de grandedensité (plusieurs points par m²) avec une précisionde quelques centimètres sur des petites zones. Ellesprésententl’avantaged’êtrebeaucoupplusabordablesetflexiblesque leLiDARaenpermettantd’atteindredes précisions planimétriques et altimétriques dequelquescentimètres(Taharetal.,2012).
Le LiDAR terrestre.LeLiDARtpeutêtrefixe(scannerlaserstatique)oumobile (scanner laserdynamique);danscederniercas,ilestalorsaccompagnédesmêmescomposantes que le LiDARa, à savoir une centraleinertielle et un récepteur GNSS. Une comparaison
Figure 1.Mesuredescoordonnéessphériques(d,φ,θ)despoints—Spherical coordinates measurement(Landesetal.,2011).
Z
X
Y
P
d
Oθ
ϕ

410 Biotechnol. Agron. Soc. Environ. 201418(3),407-421 OuédraogoM.M.,DegréA.&DeboucheCh.
des deux systèmes faite parGoulette (2009) dans lecadred’acquisitiondedonnéessuruneportionurbainemontrequelesystèmedynamique(plateformemontéesur un véhicule dont la vitesse d’avancement est de9km.h-1) est plus rapide d’un facteur 10. Même siles besoins sont très forts sur lemarché, cette étudesouligne que les systèmes dynamiques ne répondentque partiellement aux besoins sur la précision desdonnéescarcelle-cidépendfortementdusystèmedelocalisationquiadumalàgarantirunebonneprécisiondes trajectoires du véhicule du fait desmulti-trajets,descorridorsurbains,desarbres,etc.
Guarnieri et al. (2009) ont utilisé un scanner àimpulsion (Leica HDS 3000) pour l’acquisition desdonnéesaltimétriques(10pointsparm²)dansunezonemarécageuse de 3500m² occupée par des arbustesdontlahauteurvariaitde0,3à1m.Malgrélaprésencedevégétation,leursrésultatsmontrentquelacréationd’un MNT de 1mx1m de résolution spatiale estpossible, avec un RMSE (Root Mean Square Error)de 3cm (en condition de végétation peu dense) etune erreur moyenne de 2cm. Tout récemment, desdonnées LiDARt issues d’un scanner à impulsion(Leica ScanStation) d’une densité de plus ou moins10points parm² ont été utilisées parCoveney et al.(2010) comme données de validation d’un MNTde 10mx10m généré à partir de photographiesaériennes.AprèsavoirgénéréunMNTde1mx1mderésolutionspatialeaveclesdonnéesLiDARt,leursrésultatsmontrentque95%deserreursaltimétriquessontinférieuresà±27cm.QuantàPerroyetal.(2010),en comparant le MNT généré à partir de donnéesLiDARt (acquis en utilisant unLiDARt à impulsionquiestleRieglLMS-Z420i)avecdeslevésréalisésàlastationtotale,ilsmontrentqueleLiDARtsurestimeles altitudes avec une erreur moyenne de -18cm etun écart-type de 47cm. En fonction des conditions,laqualitédesdonnéesaltimétriquesobtenuesàpartirdu LiDARt peut donc considérablement varier. Celaestprincipalementdûauxmultiplessourcesd’erreursauxquellesl’utilisateurdoitprêterattentionlorsdelaréalisation.CinqerreursontétéidentifiéesparCoveneyetal.(2011).Ils’agitdeserreursdepositionnementdespointsdecontrôle(<3cm),deserreursseproduisantlors de la fusion des nuages de points (<4cm), deserreursdegéoréférencement(<5cm),deserreurssurles positions du scanner et des cibles (~5cm) et deserreurscauséesparlaprésencedevégétation(~38cm).L’erreurlaplusimportantesembledoncêtrecauséeparlaprésencedevégétationsurlazoned’étude.Deplus,cette erreur est d’autant plus importante que l’angled’incidence(angleentrel’horizontaletladirectiondulaser) du laser est faible (Kersten et al., 2008).Celaétantprincipalementdûàladirectionrasantedulaserlorsquel’angled’incidenceestréduit.Uneautresourced’erreur mise en évidence par Kersten et al. (2008)
ainsiqueHerbin(2012)estlanon-verticalitédel’axedu scanner pendant toute la durée de l’opération demesure. En fonction des caractéristiques de la zoned’étude, le matériel sera plus ou moins stable. Onimaginebienquelastabilitéseradifférentesurunsollabouréouunsolcompacté.Lahautedensité(centainesde points par m²) des données productibles avec leLiDARtenfaitunoutildechoixpourlamodélisationde la microtopographie du sol. Plusieurs études ontainsi généré des MNT de quelques millimètres derésolutionspatialeàpartirdedonnéesLiDARt(Eiteletal.,2011;Smithetal.,2011;Barneveldetal.,2013).
Génération de MNT à partir de données LiDAR. Selon Li et al. (2005), avant de générer un MNTà partir d’un nuage de points obtenus sur un site,l’utilisateurdoitchoisirlescritèresquiluipermettrontd’obtenir leMNT adéquat. En fonction de l’objectifvisé,l’utilisateurchoisirauncritèrebasésurlanaturedel’élémentgéométriqueutiliséetuncritèrebasésurletypededonnéessources.Danslepremiercas,quatrechoix sont possibles: la représentation basée sur unélémentgéométriquedetype«point»,lamodélisationbasée sur un élément surfacique triangulaire, lamodélisationbaséesurunélémentsurfaciquedetyperectangulaireetlamodélisationutilisantsimultanémentdes éléments surfaciques de type triangulaire etrectangulaire.Dans le secondcas, lagénérationpeututiliser directement (par exemple, construction demailles triangulaires directement à partir des pointsmesurés)ouindirectement(utilisationd’uneméthoded’interpolation pour créer des mailles régulières àpartirdespointsmesurés)lespointsoriginaux.
Lamodélisationbaséesurunélémentgéométriquede type point consiste à faire correspondre à chaquepointmesurésurlesited’intérêt,unélémentsurfaciquedont l’élévation correspond à l’altitude du point. LeMNTobtenusereprésentealorscommeunesuccessiondesurfacesplanesrégulièresounon.Ladifficultéd’unetelleapproche se situeauniveaude ladéfinitiondeslimitesdesélémentssurfaciques.LareprésentationestrenduefacileavecdessurfacesrégulièresmodéliséesenutilisantlediagrammedeVoronoipourcaractériserlazoned’influencedechaquepoint.
Lamodélisation basée sur un élément surfaciquetriangulaire consiste à représenter le MNT par unensemble de triangles continus dont les sommetscorrespondent aux points mesurés sur le site. Étantdonnéqueletriangleconstitueunélémentsurfaciqueélémentaire,cetteapprochepeutêtreenvisagéequellequesoitl’organisationspatialedespoints.Lestrianglespeuvent être réguliers ou irréguliers. L’utilisation detriangles irréguliers est l’approche la plus répanduecar les trianglespeuventêtregénérerdirectementpartriangulationàpartirdunuagedepointsobtenusurlesite(Akima,1978).

Lemodèlenumériquedeterrain 411
Lamodélisation basée sur un élément surfaciquerectangulaire consiste à représenter le MNT par unensemble demailles rectangulaires. Pour des raisonsdesimplicité,lamaillecarréeestutiliséeenpratique.L’altitudeducentredechaquemaillepeutêtrecalculéedirectementparinterpolationàpartirdespointsmesurésou indirectement à partir de triangles obtenus partriangulation(Lietal.,2005).L’utilisationd’unemaillerectangulaireprésentel’avantagederendreplusfacilela génération duMNT et l’extraction de paramètresgéomorphométriques(Hengletal.,2009).Cependant,l’utilisation d’une maille carrée pour modéliser unterrain complexe avec des ruptures de pente donneun résultat insatisfaisant comparéaux résultatsd’uneméthode utilisant un élément surfacique triangulaire.Dès lors, ce dernier est plutôt utilisé pourmodéliserefficacement (meilleure représentation visuelle) lesursol(arbres,bâtiments,etc.)(Hengletal.,2009).
Après une campagne de mesures, la densité desdonnéesLiDARestrarementconstantesurl’entièretédu site. Plusieurs raisons en sont la cause. Toutd’abord, les conditions demesures peuvent entrainerune variabilité de la densité des points et certainesrégions (quelquesmètres carrés) peuvent n’avoir pasétébalayéesparlerayonlaser.Deplus,laprésencedebâtiments, de végétation sur le site, etc. agit commeunobstaclequiempêche le rayon laserd’atteindre lesol(Heritageetal.,2009).Danslecasoùuniquementl’altitudedespointsausolimporte(MNT),l’utilisationd’algorithmes et des traitements manuels permettentla suppression des données. Dans ce dernier cas, lasuperpositiondesdonnéesàdesorthophotographiesestnécessaire.Quellequesoitlacause,lacréationduMNTnécessite de combler l’information altimétrique danscesrégionsenutilisantuneméthoded’interpolation.
En SIG (Système d’Information Géographique),l’interpolation consiste à prédire la valeur d’unevariableenunpointdonnéensebasantsurlesvaleursobservéesde cettevariable surunnombredéterminéde points localisés dans la zone d’intérêt (Burroughetal.,1998;Emeryetal.,2000).Ceprincipepeutêtreappliquédanslacréationd’unMNTlorsqu’ils’agitdedéterminerl’informationaltimétriquemanquante.Danscecas,lavariabled’intérêtestl’altitudeetleMNTestgénéré en estimant l’altitude des points localisés surune grille régulière à partir d’un ensemble de pointsdontlescoordonnéessontconnues.SelonWebsteretal.(2007),laplupartdesméthodesd’interpolationutilisentl’équation1pourprédirelavaleurdelavariable:
Z* uo( ) = λii=1
n
∑ Z ui( ) Éq.1
avecZ*l’estimateuraupointuodelavariabled’intérêt,Z est la variable aléatoire dont la valeur est connue
au point ui,li est le poids assigné au point observéi etn représente le nombre total de points observés.Il existe de nombreuses méthodes d’interpolation etchacunesedistingueparl’applicationd’uneconditionqui ladéfinit,e.g. des conditionsgéostatistiques, desconditions locales, des conditions de lissage et detension, etc. (Mitas et al., 1999). Le plus souvent,uneméthoded’interpolationseraqualifiéedeglobaleou locale,d’exacteou inexacteetdedéterministeoustochastique.Uneméthodeestditeglobalesielleutilisetouteslesvaleursobservéesdelavariablesurlazoned’intérêtpourprédirelavaleurestimée,tandisqu’elleest considérée comme locale si elle n’utilise que lesvaleursobservéeslocaliséesdanslevoisinagedupointoùlavariableestestimée.Laméthodeestexactesilesvaleursobservéesdelavariablesontégalementcellesestiméesparlaméthode,tandisqu’elleseraconsidéréecomme inexactedans lecascontraire.Contrairementauxméthodesdéterministes,lesméthodesstochastiquesconsidèrent la valeur estimée de la variable commeuneréalisationparmid’autres(Burroughetal.,1998;Mitas et al., 1999). Elles incluent donc la notion deprobabilité. Une autre classification plus généraleadoptéeparLiJ.etal.(2011)considèretroiscatégoriesqui sont: lesméthodes géostatistiques, lesméthodesnongéostatistiquesetlesméthodescombinantlesdeuxtechniques.Ilssubdivisentlesméthodesgéostatistiquesenméthodesunivariéesetmultivariées.Lesméthodesmultivariéesutilisentdes informationsexogènes(e.g.des coordonnées géographiques) en plus des valeursobservéesdelavariablealtimétriquepourréaliseruneestimation. Une description détaillée, ainsi qu’unecomparaisondesdifférentesméthodesdéterministesetgéostatistiquessontdonnéesdansLietal.(2008).
L’utilisation des méthodes d’interpolation pourcréerunMNTafaitl’objetdebeaucoupderecherchescarcetteconditionalongtempsétéunenécessitépourlagénérationdeMNTàpartirdedonnéespeudenses(<1pointparm²).Cependant,depuisl’apparitiondesméthodes d’acquisition des données à haute densité(e.g. leLiDARt), d’autresméthodes ont été utiliséespour générer un MNT à partir de nuages de pointstrès denses (Guarnieri et al., 2009; Coveney et al.,2010). La méthode utilisée consiste à définir unefenêtre f, carrée, de côté fixe R (qui correspondra àla résolution spatiale duMNT créé) et à lamouvoirsurunegrillede taillemx nmailles etdepasR.Àchaquepositionijdef(correspondantàlamailleij),ilestalorspossibledesélectionner lespointsdunuagelocaliséssurlafenêtre.Ensuite,lavaleuraltimétriquede lamaille est déterminée commeune fonction desvaleurs altimétriques des points sélectionnés. Lafonctionutiliséedépendradesobjectifsdel’utilisateur.Guarnieri et al. (2009) ainsi que Coveney et al.(2010)etCoveneyetal.(2011)ontutilisélafonctionminimumcarleurobjectifétaitdedéterminerlavaleur

412 Biotechnol. Agron. Soc. Environ. 201418(3),407-421 OuédraogoM.M.,DegréA.&DeboucheCh.
altimétrique minimale sur un terrain occupé par descultures. Leur approche assure ainsi une probabilitéplusélevéequelepointsélectionné,soitsurlesoletnonsurlescultures.PouridentifierlatailleoptimaledeR,Guarnierietal.(2009)ontutilisédespointsdecontrôlelevésauGPS.Ilsmontrentqu’unevaleurdeRégaleà1mestoptimalecarleserreurscalculéescommeétantla différence entre la valeur altimétriqueminimale etlavaleuraltimétriqueobtenueauGPSsontminimales.D’autres fonctions peuvent également être utiliséestelles que lamoyenne, lemaximum, le quantile, etc.Certaines de ces fonctions sont disponibles dans laplupartdeslogicielsdeSIG.
2.2. La photogrammétrie
Le principe. La photogrammétrie est une techniquequi permet d’extraire un MNT à partir de couplesd’images stéréoscopiques (obtenus, par exemple,à partir des satellites, d’avions, d’hélicoptères oude véhicules non pilotés, VNP) d’une zone d’étude(Hirano et al., 2003). Le principe est basé sur lareconstructionen troisdimensionsd’unobjet àpartirde la superposition de deux images planes dumêmeobjet,perçusousdesanglesdifférentsà l’instarde lavisionhumaine(Aberetal.,2010).L’extractionsefaitdemanière automatique en utilisant des algorithmes,cequinécessitedesimagesnumérisées.Cesdernièressontobtenuessoitdirectementenutilisantunappareilphotographique numérique ou via une numérisationd’imagesanalogiques.Danscederniercas,l’utilisationde scanners est essentielle. Cependant, pour obtenirdes MNT de bonne exactitude, il est nécessaire deréaliserunebonnecalibrationdel’appareilnumériqueoud’utiliserdesscannersdehauteperformanceafindeminimiserladistorsiondesimages(Laneetal.,2000).SelonFabrisetal.(2005),l’extractiond’unMNTparphotogrammétrie peut être résumée en trois étapes:l’orientationinterne,l’orientationexterneetl’extractiondespoints.L’orientationinterneconsisteàdéterminerle référentiel lié à l’image produite par l’appareilphotographique. Par conséquent, certains paramètresimportantssontcalculés.Ils’agitdeladistancefocale,des paramètres permettant demodéliser la distorsiondelalentilleetdelapositiondupointprincipal(Aberetal.,2010).Lepointprincipalestl’intersectionentrel’axeoptiqueetlepland’impressiondel’image.
L’orientation externe consiste à déterminer lescoordonnées(e.g.X,Y,Zdansunsystèmederéférencelocal),ainsiquelesanglesderotationw,f,kdel’appareilphotographiqueparrapportrespectivementauxaxesdusystèmederéférencelocalaumomentdelaprisedevue.CesparamètrespeuventêtredéterminésenutilisantunGPSetunecentrale inertielleembarqués.Cependant,un tel système peut être lourd pour les VNP dontl’utilisationcommeméthoded’acquisitiondecouples
stéréoscopiquesestdeplusenplusrépandue(Aberetal.,2010).Enplus,l’exactitudeduGPSembarquéàborddesVNPestsouventinsatisfaisante(Küngetal.,2011).C’estprincipalementpourcesraisonsquelaméthodelaplusutiliséepourréaliserl’orientationexterneconsisteàutiliserdespointsdecontrôlelevésdanslesystèmede référence local (Aber et al., 2010). Les points decontrôle doivent être matérialisés sur le sol avantl’opérationd’acquisitiondesimagescarilsdoiventêtrevisiblessurcelles-ci.L’exactitudedespointsdecontrôleestcrucialepourobtenirunMNTdebonneexactitude.Pourdesimagesdequelquescentimètresderésolution(tailledespixels),ilestessentield’utiliserdespointsdecontrôletrèsprécis,levésparexempleenutilisantunestationtotale(Aberetal.,2010).Enthéorie,unnombreminimumde troispointsdecontrôle sontnécessairespourdéterminerlesparamètresdel’orientationexterned’une image. Cependant, en pratique, l’orientationexterne est réalisée simultanément pour l’ensembledes couples d’images stéréoscopiques. Cet ensembled’imagesestqualifiédeblocd’imagesetnenécessiteen théorie que quelques points de contrôle pour êtreorienté.Laméthode laplusutiliséepour l’orientationexterne est l’ajustement de faisceaux2 (Aber et al., 2010). Lefaisceaudésignelesegmentdedroitereliantun point d’attache (points identifiables sur deux ouplusieursimages)ouunpointdecontrôlesurlesoletsonimage.L’ajustementdefaisceauxconsisteàréaliserune orientation des images les unes par rapport auxautresgrâceauxpointsd’attacheetensuiteàdéterminerles paramètres de l’orientation externe (coordonnéesX, Y, Zetorientationsw,f,kdechaqueimage)etlescoordonnéesdespointsd’attacheetdecontrôle,detellesorteàminimiserlasommedesécartsdesfaisceauxparrapportauxpointsd’attacheetauxpointsdecontrôle.Ilexistedifférentesméthodesd’identificationdespointsd’attaches. Une énumération détaillée se trouve dansFabrisetal.(2005).
Les plateformes de mesures utilisées.La photogrammétrie aéroportée/héliportée. Elleconsiste à équiper un avion ou un hélicoptère d’unappareil photographiquedigital et à réaliser plusieurscouplesd’imagesstéréographiquesdelazoned’intérêt.LesystèmeembarqueégalementunecentraleinertielleetunrécepteurGNSSquipermettentdedéterminerlescoordonnéesainsiquel’orientationdesphotographies.L’obtention d’un MNT de haute résolution spatialeavec des précisions planimétrique et altimétriquecentimétriquesestcependantconditionnéeparl’échelledesphotographies(1/30000à1/2000)etlaprisedevue«selonl’axevertical»desphotographies(Henryetal.,2002).
2Enanglais:«bundle-bloc ».

Lemodèlenumériquedeterrain 413
Pendant des décennies, la photogrammétrieaéroportée a été utilisée dans de nombreuses étudespour acquérir des données altimétriques. Mais, cesdernièresannées, certainesétudes l’ontdécommandécommemoyend’acquisitiondesdonnéesaltimétriquesde haute densité du fait de la faible qualité desphotographies par rapport à d’autres sources dedonnées(Goochetal.,1999;Henryetal.,2002;Fabrisetal.,2005).Cependant,lesrécentesétudesdeHöhle(2009) et deDehvari et al. (2012)montrent qu’avecles nouveaux appareils photographiques digitaux etlesnouveauxalgorithmesdetraitement,laqualitédesMNTgénérésàpartirdesphotographiesaériennessetrouvebeaucoupaméliorée.
La photogrammétrie à basse altitude utilisant des véhicules non pilotés (VNP3). La photogrammétrieaérienneàbassealtitudeutilisantdesVNPconsisteàéquiper un véhicule d’un appareil photographique, àl’instar de la photogrammétrie classique et à réaliserdes photographies aériennes à très basse altitude(généralement inférieure à 1km). Le système peutêtre semi-autonome ou complètement autonome(Eisenbeiss, 2009). Cependant, de nos jours, lesfabricants ont réussi àmettre en place des systèmesà fonctionnements complètement automatisés carla manipulation du véhicule est loin d’être simple(Verhoeven,2009).PlusieurstypesdeVNPsontutiliséspourréaliserlesphotographiesàbassealtitude.Onpeutciterdemanièrenonexhaustivelesparapentesmotorisés(Jütte,2008),lesdirigeables(Gonzalez-Aguileraetal.,2009),lescerfs-volants(Aberetal.,2002),lesballons(Fotinopoulos, 2004), les VNP à voilure rotative(Zhang,2008 ;Niethammer et al., 2010), lesVNPàvoilure fixe (Haala et al., 2011 ;Küng et al., 2011).Actuellement, les modèles les plus commercialiséssont surtout lesVNP à voilure tournante et lesVNPà voilure fixe. Certaines compagnies ont développédes systèmes complètement autonomes permettant àunutilisateurnonexpérimentédepouvoirlesutiliser.Lamajoritédecesproduitssontàtrèsfaiblecoutparrapport à la photogrammétrie classique (Eisenbeiss,2009). Les photographies aériennes peuvent alorsêtre utilisées pour créer des orthophotographies, desmodèles numériques de surfaces (MNS), des MNT.Cependant, l’undesproblèmesmajeursdesVNPestl’absenceàleurbordd’unsystèmedecommunicationqui permettrait à l’autorité locale du trafic aériende détecter leur présence (Eisenbeiss, 2009). Parconséquent, les vols de VNP sont contrôlés et leurutilisation nécessite souvent des certificats de vols.
Plusieurs études menées ces dernières années ontmontré que des MNT/MNS de haute résolutionspatiale (dimensions de la maille ≤1m) et deprécision altimétrique de quelques centimètres sontproductibles à partir des images aériennes à bassealtitude(Schieferetal.,2007).Eisenbeissetal.(2006)ontutiliséunLiDARt(RieglLMS-Z420i)etunVNPà voilure rotative pour produire respectivement desMNSde5cmet10cmderésolutionspatialedusitearchéologique classéPinchangoAlto.Leurs résultatsmontrent que les données LiDARt sont limitanteslorsquelatopographiedulieuprésentedes«trous»carceux-cinesontpas«perçus»parlelaser.QuantauxdonnéesVNP, ce sont plutôt les structures verticalesquisontmalreprésentées.Cependant,lacomparaisondesdeuxmodèlesmontreunedifférencealtimétriquemoyenne inférieureà1cmetunécart-typede6cm.Un si grand écart-type est expliqué par les auteurscommeétantdûauchangementbrusquedepentesdanscertainespartiesdusite.Malheureusement,cetteétudenedonnepasdesrésultatsrelatifsàunecomparaisonparrapportàdesdonnéesderéférencetellesquedesdonnéesGPS enmodeRTK (Real Time Kinematic).CettecomparaisonestfaiteparValletetal.(2011)avecdesdonnéesLiDARaetdesdonnéesobtenuesàpartirdephotographiesréaliséesavecleSwinglet.Enplus,ilsontexpérimentélesrésultatsdedeuxMNSsgénérésàpartirdedeuxlogicielscommerciauxdetraitementsdedonnéesphotogrammétriques:Pix4D(http://www.pix4d.com)etSocetSetNGATE(http://www.socetgxp.com). Leurs résultats montrent des différencesmoyennes par rapport aux données altimétriquesGPS de 0,7cm (LiDARa), 4,7cm (Pix4D) et 11cm(SocetSet NGATE) et des écarts-types respectifs de4cm,9,5cmet26,7cm.LesdonnéesLiDARaontunemeilleure exactitude. Nous pouvons remarquer qu’ilexiste une différence significative entre les résultatsobtenus à partir des deux logiciels commerciaux.La différence altimétriquemoyenne obtenue à partirde NGATE est deux fois supérieure à celle obtenueà partir de Pix4D.L’écart-type obtenu avecNGATEest trois fois supérieur à celui obtenu avec Pix4D.La méthode de traitement des données a donc unimpact non négligeable sur l’exactitude du MNT.Küng et al. (2011) ont également utilisé le Swingletpourl’acquisitiondephotographiesaériennesàbassealtitude. Ils montrent que l’exactitude des donnéesaltimétriquesestdépendantede la tailledespixelsetqu’ellevarieentre2cmet20cm;elleestsupérieurelorsque la texture des images n’est pas appropriéeet lorsque la zone présente des discontinuités. Ilssoulignent qu’une telle exactitude n’est atteintequ’à condition d’utiliser des données GPS RTKpositionnées indépendamment sur la zone d’étudecomme information de géoréférencement et pas lesdonnéesfourniesparleGPSembarquésurVNP.
3ParVNP,ilfautcomprendreunvéhiculepilotédemanièresemi-automatiqueouautomatique,fonctionnantsansunpiloteassisàl’intérieurdecelui-ci.

414 Biotechnol. Agron. Soc. Environ. 201418(3),407-421 OuédraogoM.M.,DegréA.&DeboucheCh.
Génération de MNT en photogrammétrie. Aprèsl’acquisition des photographies aériennes, l’étapesuivante consiste à déterminer l’altitude de chaquepixel. Pour un pixel donné sur une image, il s’agitde déterminer le pixel homologue sur l’image aveclaquelleuncouplestéréoscopiqueestdéfinissable.Lesalgorithmes demise en correspondance peuvent êtreclassés en deux principaux groupes: les algorithmesde type «area-based » et les algorithmes de type«feature-based» (Fabris et al., 2005; Aber et al.,2010; Gruen, 2012). Les algorithmes qualifiés de«area-based» utilisent une fenêtre centrée surchaque pixel et réalisent la mise en correspondanceparcomparaisondel’information(e.g.niveaudegris)disponibleauniveaudespixelsde la fenêtre (Gruen,2012). Les algorithmes de type «feature-based»réalisent la mise en correspondance en deux étapes.Unepremièreétapepermetdedéterminer les formescaractéristiques présentes dans la première image.Ces formes sont principalement dues à la variationd’intensité dans l’image. Ensuite, une deuxièmeétape consiste à réaliser la comparaison des formescaractéristiques avec celles de la deuxième image.Cette approche considère que les caractéristiques del’image sont moins variables d’une image à l’autre(Gruen, 2012). Cependant, certaines informationspeuvent être perdues après la première étape; toutel’information n’est donc pas exploitée, ce qui est undésavantage.LaqualitéduMNTextraitàpartird’unmodèle stéréoscopique dépend principalement de lanature de la surface modélisée, des caractéristiquespropres aux images utilisées, telles que le contrasteet le niveau de bruit, et des paramètres propres auxalgorithmes(Aberetal.,2010;Gruen,2012).
Les algorithmes de type «area based» sont lesplus utilisés en photogrammétrie (Gruen, 2012). Ilsconsidèrent l’hypothèse que la distance séparantchaque pixel localisé dans la fenêtre et l’appareilphotographiqueestconstante,cequin’estpasvérifiésur des terrains inclinés ou avec des variabilitéstopographiques importantes. Certains auteurs ontproposé différentes améliorations (e.g. Zabih et al.,1994; Hirschmüller et al., 2002; Scharstein et al.,2002)toutengardantl’approche«fenêtre».D’autresauteurs, tels que Hirschmuller (2008), considèrentqu’ilfautabandonnerl’approche«fenêtre»etutiliserunecomparaisonpixelparpixel.L’algorithme«semi-global matching» proposé par Hirschmuller (2008)tient compte également de l’écart radiométrique(dû par exemple à l’effet de vignette, au tempsd’exposition,etc.)pouvantexisterentredeux imagesstéréoscopiques.Sesperformancesontétéévaluéesdemanièresatisfaisante(précisionaltimétriquede15cmet une résolution spatiale de 5cm) parGehrke et al.(2010)quiontcomparéunMNTgénéréenutilisantle«semi-global matching» et unMNTgénéré à partir
de données LiDAR. Le désavantage de l’algorithme«semi-global matching»estsontempsdecalculélevélorsque le nombre de photographies aériennes estimportant(e.g. enphotogrammétrieutilisantunVNP).Cette contrainte devient inexistante lorsque le calculest implémenté sur un GPU (Graphical Processing Unit).
3. LES ERREURS DU MNT
Lessourcesd’erreursduMNTsontvariéesetincluentprincipalement l’exactitude des points de contrôle,la densité et la distribution des données sources, lasituationgéographiquedelazoned’étude,lesméthodesutiliséespourgénérerleMNTetlamicrotopographiedelazoned’étude(Li,1991;Heritageetal.,2009b).Pike(2002)identifietroistypesd’erreurs(différenceentrelavaleuraltimétriqued’unemailleet lavaleur réelleobservable sur le terrain) dans lesMNT: les erreurssystématiques, les erreurs aléatoires et les fautes.Les erreurs systématiques résulteraient du processusde génération duMNT et peuvent être éliminées ouréduites si leurs sources sont identifiées. Les fautesrésulteraientdeserreurscommises lorsde lacollectedes données. Elles sont identifiables et éliminéesnormalement pendant les phases de traitement desdonnéesavantleurutilisation.LeserreursaléatoiresduMNTsontcependantinévitables.SelonAguilaretal.(2010), en condition de zones dégagées, l’erreur surunMNTpeut se calculervia la variancedonnéeparl’équation2:
σ total2 =σ SDE
2 +σ gridding2 +σ filtering
2 Éq.2
σ total2 exprime l’erreur verticale dans leMNT, σ SDE
2 exprime l’erreur aléatoire due à l’acquisition desdonnées,σ gridding
2 exprimel’erreurdueàl’interpolationet σ filtering
2 exprime l’erreur due au processus detraitement des données. Cependant, sur une zonedégagée,ilsconsidèrentqueσ filtering
2 peutêtrenégligée,enraisondel’absenced’objetsendogènes.σ gridding
2 peutégalementêtrenégligéesiladensitédespointsacquisestsuffisammentélevée,cequiestlecassil’onutiliseleLiDARouunVNP.Danscecas,lavariancetotaleestcalculéeenutilisantunnombresuffisantdepointsde contrôle levés sur le terrain avec une précisionmeilleurequecelledesdonnéesutiliséespourgénérerleMNT.
Cependant, le RMSE4 (équation3) reste leparamètreutilisépourquantifierleserreursd’unMNT.
4RootMeanSquareError

Lemodèlenumériquedeterrain 415
RMSE = 1
nΔhi
2
1
n
∑
Éq.3
avec Dh, la différence d’altitude entre un point decontrôledontl’altitudeestmesuréeavecunrécepteurGNSS et la maille correspondante sur le MNT. Enplusdecedernier, ilest intéressantparfoisd’estimerégalementl’erreurmoyenneetl’écart-typedeserreurs.LesMNTproduitsàpartirdesdonnéesaltimétriquescontiennent toujours des erreurs aberrantes,même sielles ont fait l’objet de traitement. Une manière desupprimer les erreurs aberrantes est d’appliquer unfiltresurlesdonnées.L’undesfiltreslesplusutilisésse base sur le calcul initial du RMSE (Höhle et al.,2006). Alors, toutes les erreurs supérieures à troisfois leRMSE sont considérées comme aberrantes etsont remplacées par une valeur estimée à partir desaltitudes des mailles voisines. Une autre approchepouréliminerleserreursaberrantes,définieparDanielet al. (2001),considèreà laplaceduRMSE, l’écart-typedesdonnéesaltimétriquesinitiales.Cettedernièreméthode sera surtout utilisée lorsqu’il n’existe pasde points de contrôle ou lorsque leur acquisition estrenduedifficileparl’inaccessibilitédelazoned’étude.C’estprincipalementlecaslorsquelazoned’étudeseretrouveenzoneforestière.Leserreurssontd’autantplusimportantesquelazoned’étudesesitueenmilieunon-ouvert, comme dans des forêts ou des zonesendogènes. Leur normalité n’est donc pas toujoursacceptée.
Pour identifier les erreurs aberrantes, Felicisimo(1994)proposedecomparerlavaleuraltimétriquedelamailleaveccelleestiméeàpartirdesesvoisines.Ildéfinitainsipourlamailleiunevaleurδi = zi
MNT − zi oùziMNT estl’altitudedelamailleiaprèscréationduMNT
et zi est l’altitude de lamaille i, estimée à partir del’altitudedesesvoisines.Enconsidérantdcommeunevariablealéatoire,ilestpossiblededéterminerδ etsδquisontrespectivementlamoyenneetl’écart-type.Enfaisant l’hypothèsequed aunedistributionnormale,Felicisimo(1994)réaliseuntestquipermetd’accepterou de rejeter l’appartenance de di à la distributionnormale N δ , sδ( ) .
Le test proposé est un test de Student puisqu’ilest appliqué individuellement à chaque valeur di(Dagnelie,2006).
L’hypothèse nulle est H0 :δ i= δ (hypothèsealternativeH1 :δ i= δ ).Lavaleur:
ti =δi −δ
sδestcalculéeetcomparéeàlavaleurcritiquetα,∞.SelonFelicisimo (1994), lavaleurdea doit êtrechoisie la
plus faible possible pour détecter uniquement lesvaleurs élevées de di. Cependant, une valeur élevéen’indique pas nécessairement une erreur, mais celapeut être considéré comme une alarme. zi peut êtreestimé tout simplement comme la moyenne desaltitudes des mailles voisines (Felicisimo, 1994) ouen utilisant un estimateur plus complexe comme lekrigeage,cequipermetdetenircomptedelavariabilitéspatialedu terrain (Hengl et al., 2004).Lavaleurdezi est influencée par le nombre de mailles voisinesconsidérées.Engénéral,desfenêtresde3x 3ou5x 5centréessurlamailleisontutilisées(Hengletal.,2004),cequiimpliqueunnombredemaillesvoisinesvalantrespectivement8ou24.Cependant,pluslenombredemaillesvoisinesaugmente,plusletempsdecalculestélevé,spécifiquementdanslecasdukrigeage.Lorsquel’hypothèsenulleestrejetée( zi
MNT considéréecommeune erreur), zi
MNT est remplacée par zi (Felicisimo,1994).
4. PROPAGATION DES ERREURS DU MNT
Le MNT a plusieurs sources d’erreurs (Li, 1991;Heritageetal.,2009b).Huangetal.(2005)ainsiqueOksanen et al. (2005) ont montré que ces erreurspeuvent se propager et influencer considérablementles résultats finaux d’une application. Pour analyserl’impact des erreurs duMNT sur les résultats d’uneapplication(e.g.extractiondesaxesderuissellement,calculsdepentes,etc.),ilestimpératifdelespropagerà travers les différentes opérations de l’application.Deuxprincipales approches existentpour analyser lapropagationdeserreursdansuneapplication,ils’agitde laméthode du développement en série deTayloret de la méthode de Monte Carlo (Burrough et al.,1998). Cependant, laméthode deMonte Carlo restelaplusutiliséeàce jourenraisondesasimplicitéetdesarigueur(Burroughetal.,1998;Wechsler,2007).De plus, lorsque l’application est le résultat d’unesuccessiond’opérationscomplexesn’utilisantpas lesopérateurs«+,-,×,÷»,laméthodedudéveloppementen série de Taylor devient presque impossible àprogrammer(Hengletal.,2010).
La méthode de Monte Carlo considère le MNTcomme une réalisation parmi d’autres (Wechsler,2007).Parunprocessusstochastique,ellesimuleunevaleurd’altitudeprobablepourchaquemailleduMNT.Lorsque le processus est répété plusieurs fois pourtoutes les mailles, on observe alors des réalisationsprobablesduMNT(Burroughetal.,1998).
D’une part, une valeur d’altitude attribuée à unemaille duMNT peut être représentée par la sommed’une constante et d’une variable aléatoire d’erreursaltimétriques dont la fonction de distribution estdéterminable(Temmeetal.,2009).Cetteapprocheest

416 Biotechnol. Agron. Soc. Environ. 201418(3),407-421 OuédraogoM.M.,DegréA.&DeboucheCh.
qualifiéed’empiriquecar laconnaissancedeserreursaltimétriquesnécessitel’utilisationdeplusieurspointsde contrôle d’une grande précision, positionnés parexempleenutilisantunrécepteurGNSStopographique(Wechsler,2007).D’autrepart,enl’absencedepointsdecontrôle(l’acquisitiondespointsdecontrôlepeutêtrecouteux, voire impossible dans certaines conditions),comme c’est souvent le cas, on utilise l’approcheheuristique qui consiste à faire une hypothèse surla distribution des erreurs altimétriques (Oksanenet al., 2005;Wechsler, 2007).La distribution la plusutilisée est la distribution gaussienne de moyennenulleetd’écart-typevalantl’écartquadratiquemoyen(EQM)duMNT,carc’estleparamètreleplussouventdisponiblepourestimerlaqualitéd’unMNT.
La méthode de Monte Carlo tient compte del’autocorrélation des erreurs altimétriques. Elle peutêtresimuléeparaumoinsquatredifférentestechniquesquisont:– lerecuitsimulé(Fisher,1991);– le modèle spatial autorégressif (Goodchild et al., 1992b);– lemodèlemoyennesmobilesspatial(Oksanenetal., 2005);– la simulation séquentielle gaussienne (Goovaerts, 1997).
La méthode de simulation, qui reste de loin la plusutilisée,estlaméthodeséquentiellegaussiennedeparsasimplicité(Temmeetal.,2009).
La méthode séquentielle gaussienne est uneméthodegéostatistiquequiconsidèrequeladistributiondeserreursduMNTestnormale(Aertsetal.,2003).Elle consiste à visiter chaque maille du MNT et àsimuler, pour chacune, une valeur de la variablealéatoirecaractérisantleserreursduMNTenutilisantune distribution de probabilité conditionnelle. Pourlapremièremaille, il s’agitdegénérerunevaleurdel’erreuraltimétriqueàpartirdeladistributionnormaleN (μ
e, σε
2 ). Pour la seconde maille, le krigeagesimple est utilisé pour générer l’erreur altimétrique,connaissant la valeur de l’erreur altimétrique de lapremière. Le processus est ainsi répété jusqu’à ceque toutes lesmaillessoientvisitées.L’utilisationdukrigeagesimplenécessitedeconnaitrel’autocorrélationdes erreurs altimétriques. Dans le cas de l’approcheempirique, l’autocorrélation, i.e. le variogramme oule corrélogramme, est estimée directement à partirdes écarts altimétriques entre les points de contrôleet le MNT (Temme et al., 2009). Dans l’approcheheuristique, le manque d’information sur les erreursaltimétriquesnécessitede fairedeshypothèsessur lemodèle d’autocorrélation (e.g. exponentiel, gaussien,sphérique,etc.).
L’un des désavantages de la méthode de MonteCarlo,signaléparBurroughetal.(1998),estletemps
decalculscar laméthodequalifiéede«forcebrute»nécessiteuntempsimportantpuisqueleprocessusestrépétéplusieursfois.Denosjours,avecledéveloppe-mentdelatechnologieinformatique,lapuissancedesCPU(Central Processing Unit)abeaucoupaugmentéd’une part et, d’autre part, des techniques de calculstelles que le calcul distribué sur grille ou le GPU(Graphical Power Unit) sont disponibles et ont étéexpérimentésparplusieursauteurs(Niewinski,2004;Ukkonenet al., 2008;Wallis et al., 2009).Plusieursétudes ont utilisé la méthode de Monte Carlo pouranalyserl’impactdeserreursduMNTsurdifférentesapplications (Goodchild et al., 1992a; Heuvelink,1998;Oksanen et al., 2005;Lindsay, 2006;Delbarietal.,2009;Hengletal.,2010;Achouretal.,2012).Même si des techniques permettent de limiter letempsdecalculs,l’utilisationdelaméthodedeMonteCarlosebasesurlechoixd’unnombreminimalNderéalisationsduMNT.Ndoitêtresuffisammentgrandpour permettre d’atteindre des résultats stables desparamètres calculés sans augmenter inutilement letempsdecalcul.PlusNestgrand,pluslesrésultatssontprécis.Cependant,cetteprécisionestproportionnelleàla racine carrée deN, i.e. pour doubler la précision,ilfautquadruplerN(Temmeetal.,2009).LenombrederéalisationsNnécessairespourobtenirdesrésultatsstablesdiffèreselonletyped’applications(Heuvelink,1998; Lindsay et al., 2005; Oksanen et al., 2005;Hengletal.,2010).Toutefois,Heuvelink(1998)ainsiqueBurroughetal.(1998)signalentqueNdoitêtreaumoinségalà100.Denosjours,noussommesàunpointoùlaméthodededéveloppementdeMonteCarloseraintégréecommeoutilstandarddansleslogicielsdeSIG(Système d’Information Géographique) (Wechsler,2007).Brownetal.(2007)ontrécemmentmisenplaceunelibrairieappeléeDUE(Data Uncertainty Engine)pour analyser la propagation des erreurs dans uneapplication.Aussi, une équipe à l’université d’AstonenAngleterre a-t-ellemis enplaceun langage infor-matique spécifique pour développer des programmespermettant d’évaluer l’impact des erreurs affectantlesdonnéessurlesrésultatsd’uneapplication(Hengletal.,2010).
5. DISCUSSION ET CONCLUSION
Àtraverslabibliographiedéveloppéeci-dessus,nouspouvonsaffirmerquelacréationduMNTn’estpasunetâcheanodine.L’utilisateurdoitimpérativementgarderà l’espritquetoutMNTcréécontientdeserreursquivontsepropagerinévitablementdanslesapplicationsqui l’utilisent et peuvent biaiser considérablementles paramètres de décision qui en sont extraits. LestechnologiestellesqueleLiDARetlaphotogrammétriesontdes solutionspermettantd’acquérirdesdonnées

Lemodèlenumériquedeterrain 417
altimétriques avec une précision de quelquescentimètresdanslebutdegénérerdesMNTdehauterésolution spatiale. Selon l’étude menée par Petzoldetal.(1999),comparéàlaphotogrammétrieaéroportée/héliportée,leLiDARaestbénéfiquecarilnécessite20à30%debudgetenmoinspourunemêmesuperficie.De nos jours, grâce aux avancées technologiques,l’apparitiondesappareilsphotographiquesdigitauxacontribuéàrendreplusaccessiblelaphotogrammétrieaéroporté/héliportéparrapportauLiDARa.Uneétudemenée par Frastia (2005) situe le prix des camérasdigitales entre 100 et quelques dizaines de milliersd’euros, tandis que le cout d’un système LiDARa(récepteur GNSS et centrale inertielle inclus) varieentre 500000 et 1300000USD (Gordon, 2011). Untel investissement reste difficilement supportablepourdes institutionspubliquesoudes institutionsderecherches.LessystèmesLiDARasontgénéralementacquis par des compagnies privées qui fournissentdes services tarifés. Il est difficile de donner deschiffres car le prix dépend de la concurrence, de ladensité des points, du post-traitement des donnéeset de l’éloignement du site demesure par rapport àl’aérodromededécollage.Engénéral,lesfournisseursdéfinissent une superficie minimale pour laquellele service demandé par le client peut être accordé.Danslesautrescas,leLiDARtetlaphotogrammétrieutilisant lesVNP restentdesalternativesaccessibles,utilisablessurdeszonesdequelqueshectares(Heritageetal.,2009a).Heritageetal.(2009a)estimentlecoutd’unsystèmeLiDARt(hardwareetsoftwarecompris)àplusde100000EUR.Cetinvestissementestdeloininférieur à celui duLiDARa,mais restemalgré toutélevé.Enplus,ilfautconsidérerlecoutd’acquisitiondesbatteries(500-700EUR)pourdesmesuresd’uneduréesupérieureà4h.Certainesfirmesproposentdespossibilités de location journalière. Les prix varientlégèrement d’unefirme à l’autre,mais s’estiment enmoyenneautourde1000EUR.Cettelocationn’inclutpaslapériodedeformationnécessaireafindemaitriserla manipulation du matériel, ainsi que d’éventuelstraitementsdedonnées.Engénéral,uneformationde2à3joursestessentielle.LeprixdesVNPpeutvarierde1000EURàplusieursmillionsd’eurosenfonctionde la complexité du système (Eisenbeiss, 2009).Cependant,l’utilisationdelaphotogrammétrieutilisantlesVNPcommeméthodealternativeauLiDARtn’adesensquepourdesVNP low cost.Dans la littérature,peud’informationexistesurlesprixproposésparlesfabricants. Des informations informelles auprès dequelquesfabricantsproposantdesVNPàvoilurefixesituentlesprixentre10000et50000EUR,cequiestplusabordable.
Lesrésultatsobtenusdanslesdifférentesétudesquenousavonsprésentéesmontrentqu’il estpossibledegénérerdesMNTdehauterésolutionspatiale(quelques
cm).L’utilisationduLiDARtrestenéanmoinsdélicatelorsque la zone levée n’est pas nue (e.g. présenced’arbres,d’arbustes,decultures,etc.).Cettecontraintepeut être éliminée si le scanner utilisé est à échomultiple.Celapermetd’extrairel’informationrelativeaudernierretouretdoncd’obtenirlescoordonnéesdespointsauniveaudusol.Engénéral,ilfautplusd’unestation pour couvrir une zone d’étude. L’obtentiond’un seul nuage de point requiert que les nuages depointsobtenusàpartirdesdifférentes stations soientfusionnés.Cetteopérationestessentielle si l’onveutéviterd’introduiredeserreursdecogénérationdanslesdonnées(Coveneyetal.,2011).Pourcela,unminimumde cinq cibles (de coordonnées connues) doit êtrecommunàchaquepairedenuagesdepoints.Heritageet al. (2009a) considèrent qu’il faut utiliser plus quecinq cibles au cas où certains sont inutilisables. Deplus, lespointsdecontrôlepeuventêtreutiliséspourcontrôlerlaqualitéduprocessusdecogénération.
Par rapport au LiDARt, les perspectivesqu’engendrent les VNP sont plus intéressantescar ceux-ci sont plus maniables (système de volsautomatisés), plus rapides et moins couteux (Rose,2012).Saprincipalecontrainteàl’heureactuellerestelanécessitéd’acquériruneautorisationdevol.D’autrepart, l’exactitude deMNT générés à partir d’imagesstéréoscopiquesenutilisantdesalgorithmesdifférentspeutvarier.SelonHugenholtzetal.(2013),celapeuts’expliquer,d’unepart,parladifficultéqu’ontcertainslogiciels pour corriger efficacement les distorsionscrééesparl’instabilitéduVNPdurantlevolet,d’autrepart, par la difficulté de calibrer correctement lesappareilsphotographiques.
DessolutionscouplantlesavantagesdesVNPetdela technologieLiDARtont été testéesdansplusieursétudes et semblent prometteuses (Eisenbeiss, 2009;Wallace et al., 2012). Le principal challenge danscette approcheestdeconcevoirdes capteursLiDARminiaturisésquinesoientpastroplourdsàembarquerpourlesVNP.
Parmilesméthodespermettantd’analyserl’impactdeserreursduMNTsurlesrésultatsd’uneapplication,la méthode de Monte Carlo nous semble la plusadaptée. Cependant, elle n’est pas implémentée àl’heureactuelledansleslogicielsdeSIGetn’estdoncpas accessible par n’importe quel utilisateur. Ellereste plutôt appliquée dans le cadre de la rechercheet son utilisation demande des connaissances enprogrammation pour automatiser la répétabilitédu processus de calculs. Comme l’a soulignéWechsler(2007),lesrecherchesencourspermettrontcertainementdansunfuturproched’utiliserlaméthodede Monte Carlo comme outil standard des logicielsde SIG et de pouvoir se prononcer sur la précisionde tout paramètre de décision extrait d’unMNT. Laméthode deMonteCarlo nous semble bien indiquée

418 Biotechnol. Agron. Soc. Environ. 201418(3),407-421 OuédraogoM.M.,DegréA.&DeboucheCh.
pouranalyser,parexemple,l’impactdeserreursd’unMNT généré sur des surfaces agricoles en utilisantles nouvelles technologies d’acquisition des donnéestellesquelesVNPetleLiDARt.
Liste des abréviations
GNSS:Global Navigation Satellite SystemLiDAR:Light Detection And RangingMNS:ModèleNumériquedeSurfaceMNT:ModèleNumériquedeTerrainRMSE:Root Mean Square ErrorVNP:VéhiculeNonPiloté
Bibliographie
AberJ.S.,AberS.W. & PavriF., 2002. Unmanned small-format aerial photography from kites for acquiringlarge-scale, high-resolution, multiview-angle imagery.Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci.,34(1),1-6.
AberJ.S.,MarzolffI.&RiesJ.B.,2010.Small-format aerial photography. Principles, techniques and geoscience applications. Chapter 3 - photogrammetry.Amsterdam,TheNetherlands:Elsevier.
AchourH.,RebaiN.,VanDenDriesscheJ.&BouazizS.,2012.Modellinguncertaintyofstreamnetworksderivedfrom elevation data using two free softwares: R andsaga.J. Geog. Inf. Syst.,4(2),153-160.
AertsJ.C.J.H.,GoodchildM.F.&HeuvelinkG.B.M.,2003.Accountingforspatialuncertaintyinoptimizationwithspatialdecisionsupportsystems.Trans. GIS,7(2),211-230.
AguilarF.J. et al., 2010.Modellingvertical error in lidar-deriveddigitalelevationmodels.ISPRS J. Photogramm. Remote Sens.,65(1),103-110.
AkimaH., 1978.Amethod of bivariate interpolation andsmooth surface fitting for irregularly distributed datapoints.ACM Trans. Math. Software,4(2),148-159.
BaltsaviasE.P., 1999. Airborne laser scanning: existingsystems and firms and other resources. ISPRS J. Photogramm. Remote Sens.,54(2-3),164-198.
BarneveldR.J., SeegerM. & Maalen-JohansenI., 2013.Assessmentof terrestrial laserscanningtechnologyforobtaining high-resolution DEMs of soils. Earth Surf. Processes Landforms,38(1),90-94.
BaterC.W.&CoopsN.C.,2009.Evaluatingerrorassociatedwithlidar-derivedDEMinterpolation.Comput. Geosci.,35(2),289-300.
BrinkmanR.F. & O’NeillC., 2000. Lidar andphotogrammetricmapping.Mil. Engineer,92(605),56-57.
BrownJ.D.&HeuvelinkG.B.M.,2007.Thedatauncertaintyengine(due):asoftwaretoolforassessingandsimulatinguncertain environmental variables. Comput. Geosci.,33(2),172-190.
BurroughP.A. & McDonnellR.A., 1998. Principles of geographical information systems. Oxford UniversityPress.
CarterJ.R., 1988. Digital representations of topographicsurfaces. Photogramm. Eng. Remote Sens., 54, 1577-1580.
CoveneyS., FotheringhamA.S., CharltonM. &McCarthyT.,2010.Dual-scalevalidationofamedium-resolutioncoastalDEMwith terrestrial lidarDSMandGPS.Comput. Geosci.,36(4),489-499.
CoveneyS. & FotheringhamA.S., 2011. Terrestrial laserscanerror in thepresenceofdensegroundvegetation.Photogramm. Rec.,26(135),307-324.
DagnelieP., 2006. Statistique théorique et appliquée : inférence statistique à une et à deux dimensions.Bruxelles:DeBoeck.
DanielC. & TennantK., 2001. Chapter 12: DEM qualityassessment. In: Maune D., ed. Digital elevation model technologies and applications. The DEM users manual. Bethesda, MD, USA: American Society forPhotogrammetryandRemoteSensing,395-440.
DehvariA. & HeckR.J., 2012. Removing non-groundpointsfromautomatedphoto-basedDEMandevaluationof its accuracywith lidarDEM.Comput. Geosci.,43,108-117.
DelbariM., AfrasiabP. & LoiskandlW., 2009. Usingsequential gaussian simulation to assess thefield-scalespatialuncertaintyofsoilwatercontent.Catena,79(2),163-169.
EisenbeissH., 2009. UAV photogrammetry. PhD thesis:ETHZurich(Switzerland).
EisenbeissH. & ZhangL., 2006. Comparison of DSMSgeneratedfromminiUAVimageryandterrestrial laserscanner in a cultural heritage application. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci.,36(5),90-97.
EitelJ.U.H. et al., 2011. Suitability of terrestrial laserscanning for studying surface roughness effects onconcentrated flow erosion processes in rangelands.Catena,87,10.
EmeryX.&ArnaudM.,2000.Estimation et interpolation spatiale. Méthodes déterministes et méthodes géostatistiques.Paris:HermesSciencePublications.
FabrisM.&PesciA.,2005.AutomatedDEMextractionindigitalaerialphotogrammetry:precisionsandvalidationformassmovementmonitoring.Ann. Geophys.,48(6),973-988.
FelicisimoA.M., 1994. Parametric statistical method forerror detection in digital elevation models. ISPRS J. Photogramm. Remote Sens.,49(4),29-33.
FisherP., 1991. First experiment in viewshed uncertainty:the accuracy of the viewable area.Photogramm. Eng. Remote Sens.,57,1321-1327.
FotinopoulosV., 2004. Baloon photogrammetry forarchaeologicalsurveys.Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci.,34(30).

Lemodèlenumériquedeterrain 419
FrastiaM.,2005.Possibilitiesofusinginexpensivedigitalcamerasinapplicationsofclose-rangephotogrammetry.Slovak J. Civil Eng.,13(2),20-28.
GehrkeS.etal.,2010.Semi-globalmatching:analternativeto lidar for DSM generation? Int. Arch. Photogramm. Remote Sens. Calgary,38(B1).
Gonzalez-AguileraD. & Gomez-LahozJ., 2009. Forensicterrestrial photogrammetry from a single image.J. Forensic Sci.,54(6),1376-1387.
GoochM.J., ChandlerJ.H. & StojicM., 1999. Accuracyassessmentofdigitalelevationmodelsgeneratedusingthe erdas imagine orthomax digital photogrammetricsystem.Photogramm. Rec.,16(93),519-531.
GoodchildM., HainingR. & WiseS., 1992a. IntergratingGISandspatialanalysis:problemsandpossibilities.Int. J. Geog. Inf. System,6(5),407-423.
GoodchildM.F., GuoqingS.U.N. & ShirenY., 1992b.Development and test of an errormodel for categoricaldata.Int. J. Geog. Inf. Syst.,6(2),87-103.
GoovaertsP., 1997. Geostatistics for natural ressources evaluation.NewYork,USA:OxfordUniversityPress.
GordonP., 2011. Airborne topographic laser scanners.GEOInformatics,14(1),34-36.
GouletteF.,2009.Relevéslaserurbainsparsystèmesmobilesdecartographie.Rev. XYZ,119,21-25.
GruenA.,2012.Developmentandstatusofimagematchinginphotogrammetry.Photogramm. Rec.,27(137),36-57.
GuarnieriA. et al., 2009. Retrieval of small-relief marshmorphologyfromterrestriallaserscanner,optimalspatialfiltering, and laser return intensity. Geomorphology,113(1-2),12-20.
HaalaN., CramerM., WeimerF. & TrittlerM., 2011.Performance test on UAV-based photogrammetric datacollection.Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci.,38-1(C22).
HenglT., GruberS. & ShresthaD.P., 2004. Reduction oferrorsindigitalterrainparametersusedinsoil-landscapemodelling.Int. J. Appl. Earth Obs. Geoinf.,5(2),97-112.
HenglT.&EvansI.S.,2009.Mathematicalanddigitalmodelsofthelandsurface.GeomorphometryConceptsSoftware Appl.,33,31-63.
HenglT.,HeuvelinkG.B.M.&VanLoonE.E.,2010.Ontheuncertainty of stream networks derived from elevationdata:theerrorpropagationapproach.Hydrol. Earth Syst. Sci.,14,13.
HenryJ.-B., MaletJ.-P., MaquaireO. & GrussenmeyerP.,2002. The use of small-format and low-altitude aerialphotos for realization of hight-resolution DEMs inmountainous areas: application to the super-sauzeearthflow(AlpesdeHaute-Provence,France).Earth Surf. Processes Landforms,27(12),1339-1350.
HerbinT., 2012.Nivellement par balayage laser.Rev. XYZ,132,41-46.
HeritageG.L.& LargeA.R.G., eds, 2009a.Laser scanning for the environmental sciences. Chichester, UK:Wiley-Blackwell.
HeritageG.L.,MilanD.J.,LargeA.R.G.&FullerI.C.,2009b.Influence of survey strategy and interpolationmodel onDEMquality.Geomorphology,112(3-4),334-344.
HeuvelinkG.B.M.,1998.Error propagation in environmental modelling with GIS.London:Taylor&Francis.
HiranoA., WelchR. & LangH., 2003. Mapping fromaster stereo image data: DEM validation and accuracyassessment. ISPRS J. Photogramm. Remote Sens.,57(5-6),356-370.
HirschmullerH., 2008. Stereo processing by semiglobalmatching andmutual information. IEEE Trans. Pattern Anal. Mach. Intell.,30(2),328-341.
HirschmüllerH.,InnocentP.&GaribaldiJ.,2002.Real-timecorrelation-basedstereovisionwithreducedbordererrors.Int. J. Computer Vision,47(1-3),229-246.
HladikC. & AlberM., 2012. Accuracy assessment andcorrectionof a lidar-derived saltmarshdigital elevationmodel.Remote Sens. Environ.,121,224-235.
HöhleJ.,2009.DEMgenerationusingadigitallargeformatframe camera.Photogramm. Eng. Remote Sens., 75(1),87-93.
HöhleJ.&PotuckovaM.,2006.The euroSDR test “checking and improving of digital terrain models”. Utrecht,TheNetherlands:Gopher.
HuangZ.&LeesB.,2005.Representingandreducingerrorinnatural resourceclassificationusingmodel combination.Int. J. Geog. Inf. Sci.,19(5),603-621.
HugenholtzC.H.etal.,2013.Geomorphologicalmappingwithasmallunmannedaircraftsystem(sUAS):featuredetectionand accuracy assessment of a photogrammetrically-derived digital terrainmodel.Geomorphology,194, 16-24.
HuisingE.J. & Gomes PereiraL.M., 1998. Errors andaccuracyestimatesoflaserdataacquiredbyvariouslaserscanningsystemsfor topographicapplications. ISPRS J. Photogramm. Remote Sens.,53(5),245-261.
JütteK., 2008. Vergleich verschiedener low-costLuftbildaufnahmesysteme sowie Einsatz von Drohnen:Grenzen und Möglichkeiten. In: Der gepixelte Wald - Fachtagung zur forstlichen Fernerkundung. Freising,Germany: Bayerische Landesanstalt für Wald undForstwirtschaft.
KerstenT., MechelkeK., LindstaedtM. & SternbergH.,2008. Geometric accuracy investigations of the latestterrestrial laser scanning systems. In: Proceedings of Integrating Generations, FIG Working week, 14-19 June 2008, Sweden, Stockholm.
KüngO. et al., 2011. The accuracy of automaticphotogrammetrictechniquesonultra-lightUAVimagery.Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci.,38-1(C22),1-7.
LandesT. & GrussenmeyerP., 2011. Les principesfondamentauxde la lasergrammétrie terrestre: systèmesetcaractéristiques.Rev. XYZ,128,37-49.
LaneS.N., JamesT.D. & CrowellM.D., 2000. Applicationof digital photogrammetry to complex topography for

420 Biotechnol. Agron. Soc. Environ. 201418(3),407-421 OuédraogoM.M.,DegréA.&DeboucheCh.
geomorphological research. Photogramm. Rec., 16(95),793-821.
LiJ. & HeapA.D., 2008.A review of spatial interpolationmethodsforenvironmentscientists.Geosci.Aust.,23.
LiJ.&HeapAD.,2011.Areviewofcomparativestudiesofspatial interpolationmethods in environmental sciences:performance and impact factors.Ecol. Inf.,6(3-4), 228-241.
LiS.etal.,2011.LidarDEMerroranalysesandtopographicdepressionidentificationinahummockylandscapeintheprairieregionofCanada.Geomorphology,129(3-4),263-275.
LiZ.,1991.EffectsofcheckpointsonthereliabilityofDTMaccuracy estimates obtained from experimental tests.Photogramm. Eng. Remote Sens.,57(10),1333-1340.
LiZ., ZhuQ.&GoldC., 2005.Digital terrain modelling - principles and methodology. Boca Raton, FL, USA:CRCPress.
LindsayJ.B., 2006. Sensitivity of channel mappingtechniquestouncertaintyindigitalelevationdata.Int. J. Geog. Inf. Sci.,20(6),669-692.
LindsayJ.B. & CreedI.F., 2005. Removal of artefactdepressions from digital elevation models: towards aminimumimpactapproach.Hydrol. Processes,19(16),3113-3126.
MalletC. & BretarF., 2009. Full-waveform topographiclidar: state-of-the-art. ISPRS J. Photogramm. Remote Sens.,64(1),1-16.
MitasL. & MitasovaH., 1999. Spatial interpolation.In: LongleyP.A., GoodchildM.F., MaguireD.J. &RhindD.W., eds. Geographical information systems: principles, techniques, management and applications.JohnWiley&Sons,481-492.
NelsonA.,ReuterH.I.&GesslerP.,2009.DEMproductionmethods and sources. In: Geomorphometry: concepts,software,applications.Dev. Soil Sci.,33,65-85.
NiethammerU.etal.,2010.UAV-basedremotesensingoflandslides.Int. Arch. Photogramm.Remote Sens. Spatial Inf. Sci.,38(5),496-501.
NiewinskiM.,2004.DistributedMonteCarlosimulationofadynamicexpansionsystem.Vacuum,73(2),257-261.
OksanenJ. & SarjakoskiT., 2005. Error propagation ofDEM-basedsurfacederivatives.Comput. Geosci.,31(8).
PerroyR.L.,BookhagenB.,AsnerG.P.&ChadwickO.A.,2010. Comparison of gully erosion estimates usingairborne andground-based lidar onSantaCruz island,California.Geomorphology,118(3),288-300.
PetzoldB., ReissP. & StösselW., 1999. Laserscanning–surveying and mapping agencies are usinga new technique for the derivation of digital terrainmodels.ISPRS J. Photogramm. Remote Sens.,54(2-3),95-104.
PeuckerT.K., FowlerR.J., LittleJ.J. &MarkD.M., 1978.The triangulated irregular network. In:Proceedings of the Digital Terrain Models Symposium, 9-11 May 1978, St. Louis, Missouri. Bethesda, MD, USA: American
Society of Photogrammetry/American Congress onSurveyingandMapping,516-540.
PikeR.J., 2002. A bibliography of terrain modelling (geomorphometry), the quantitative representation of topography-supplement 4.0. Open-file report 02-465.Reston,VA,USA:U.S.GeologicalSurvey.
RoseH., 2012.Processusde créationdenuagesdepointsparcorrélationd’images.Rev. XYZ,131,19-23.
ScharsteinD. & SzeliskiR., 2002. A taxonomy andevaluation of dense two-frame stereo correspondencealgorithms.Int. J. Comput. Vision,47(1-3),7-42.
SchieferE. & GilbertR., 2007. Reconstructingmorphometric change in a proglacial landscape usinghistorical aerial photography and automated DEMgeneration.Geomorphology,88(1-2).
SmithM.W.,CoxN.J.&BrackenL.J.,2011.Terrestriallaserscanningsoilsurfaces:afieldmethodologytoexaminesoil surface roughness and overland flow hydraulics.Hydrol. Processes,25(6),842-860.
SmithS.E., 2005.Topographicmapping. In:GrunwaldS.,ed.Environmental soil-landscape modeling: geographic information technologies and pedometrics.Vol. 1.BocaRaton,FL,USA:CRCPress,155-182.
TaharK.N. & AhmadA., 2012. A novel method for photogrammetric mapping using UAV rotary system: integration between consumer digital camera and UAV in photogrammetric mapping. Saarbrücken, Deutschland:LAPLambertAcademicPublishing.
TemmeA.J., HeuvelinkG.B.M., SchoorlJ.M. &ClaessensL., 2009. Geostatistical simulation anderror propagation in geomorphometry. In: HenglT. &ReuterH.I., eds.Geomorphometry: concept, software, applications. Developments in soil science,33.Amsterdam,TheNetherlands:Elsevier,121-140.
UkkonenT., RousiT., OksanenJ. & SarjakoskiT., 2008.Distributed error propagation analysis for automaticdrainage basin delineation. In: Proceeding of the 8th International symposium on spatial accuracy assessment in natural resources and environmental sciences, June 25-27, Shanghai, P.R. China,126-133.
ValletJ., PanissodF., StrechaC. & TracolM., 2011.Photogrammetric performance of an ultra lightweightswinglet“UAV”.Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci.,38-1(C22),1-7.
VerhoevenG.J.J.,2009.Providinganarchaeologicalbird’s-eye view - an overall picture of ground-based meansto execute low-altitude aerial photography (laap) inarchaeology.Archeol. Prospect.,16(4),233-249.
WallaceL., LucieerA., WatsonC. & TurnerD., 2012.DevelopmentofaUAV-lidarsystemwithapplicationtoforestinventory.Remote Sens.,4(6),25.
WallisC.etal.,2009.Hydrologic terrainprocessingusingparallel computing. In: Proceedings of the 18th world IMACS Congress and MODSIM09 International Congress on Modelling and Simulation, 2009, 13-17 July, Cairns, Australia.

Lemodèlenumériquedeterrain 421
WebsterR. & OliverM.A., 2007. Geostatistics for environmental scientists. 2nd ed. Chichester, UK: JohnWiley&Sons.
WechslerS.P., 2007. Uncertainties associated with digitalelevationmodelsforhydrologicapplications:areview.Hydrol.Earth Syst. Sci.,11,1481-1500.
WehrA. & LohrU., 1999. Airborne laser scanning - anintroduction and overview. ISPRS J. Photogramm. Remote Sens.,54(2-3),68-82.
ZabihR. & WoodfillJ., 1994. Non-parametric localtransforms for computing visual correspondence.
In: EklundhJ.-O., ed. Computer vision – ECCV ‘94.Vol.801.Berlin,Heidelberg:Springer,151-158.
ZhangC.,2008.AnUAV-basedphotogrammetricmappingsystem for road condition assessment. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., 37(B5),627-632.
(95réf.)