Embed Size (px)
Citation preview

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 1 — #1 ii
ii
ii
Topicos de Mecanica Classica
@ por Artur Lopes
Instituto de Matematica - UFRGS

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 2 — #2 ii
ii
ii
2
Indice
1. Acao Associada a Bilhares Convexos 4
2. O Teorema Ergodico e a Hipotese de Boltzmannn 21
3. A Teoria de Aubry 58
4. Formas Diferenciais em Variedades 89
5. Formalismo Simpletico 130
6. Linhas de Vortex 147
7. E.D.P: Metodo das Caracterısticas 153
8. E.D.P: Metodo da Solucao Completa 169
9. O Princıpio de Huygens em Mecanica Hamiltoniana 184
10. A Equacao da Onda 207
11. O Metodo da Fase Estacionaria - em conjuntocom M. Sebastiani 215
12. Aplicacao de Primeiro Retorno 235
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 3 — #3 ii
ii
ii
3
Prefacio
O presente livro e uma sequencia natural do material apresentadono texto [Lo] do mesmo autor.
As primeiras tres secoes do texto introduzem conceitos de TeoriaErgodica e sua relacao com a Mecanica Classica. Nestas secoes apre-sentamos exemplos de sistemas em que aparece o fenomeno KAM.
Como veremos a fundamentacao matematica da Mecanica Es-tatıstica ”a la Gibbs”necessita de fato de resultados de Teoria Ergodicacomo o Teorema de Birkhoff. Referimos o leitor para [Rue] e [PP]para maiores detalhes sobre este assunto.
As secoes de 5 a 6 abordam o Formalismo Simpletico. Parase analisar sistemas mecanicos de maneira intrınseca em variedadesdiferenciaveis se necessita deste formalismo. Estes resultados podemser generalizados (ver [AM]) para dimensao infinita e permitem aanalise da equcao de Korteg-de Vries, etc...
A equacao de Hamilton-Jacobi e sua relacao com o Princıpio deHuyghens e o tema das secoes 7 a 10. Nesta parte do livro e abordadoa relacao entre frentes de onda e raios de luz que foi a motivacao prin-cipal para a introducao do ponto de vista hamiltoniano na MecanicaClassica.
Na secao 11 (em conjunto com M. Sebastiani) apresentamos algu-mas propriedades de integrais oscilantes que permitem o melhor en-tendimento da otica oscilatoria (que foi abordado na secao 10) e queestao tambem relacionadas com o limite semi-classico da MecanicaQuantica.
O apendice secao 12 apresenta algumas definicoes e exemplos deaplicacoes de primeiro retorno induzidas em secoes, pontos periodicoshiperbolicos, elıpticos, etc... conceitos estes que aparecem anterior-mente no texto.
Referimos o leitor ao texto [DL] para resultados gerais sobre E-quacoes Diferenciais Ordinarias que serao aqui utilizados.
Ressaltamos que livro [FMP] apresenta uma grande quantidadede material de Mecanica Classica de uma maneira muito elegante ecom muitos detalhes nas demonstracoes.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 4 — #4 ii
ii
ii
Capıtulo 1
A Acao Associada aBilhares Convexos
Vamos considerar a seguir bilhares determinados por uma curva con-vexa e sua relacao com fluxos Hamiltonianos. Este exemplo possibili-tara introduzir de maneira natural alguns conceitos basicos do pontode vista estatıstico (nao determinıstico) de se entender a mecanica.
Na proxima secao apresentaremos ao leitor os rudimentos da Teo-ria Ergodica. Nos reportaremos a alguns exemplos tratados na pre-sente secao para ilustrar algumas propriedades descritas la.
Considere o movimento livre de uma partıcula de massa 1 no planosujeito a acao do Hamiltoniano
1
2(p21 + p22).
Como sabemos a trajetoria da partıcula se dara segundo umalinha reta e pelo Teorema da Conservacao da Energia Total (queneste caso, e tambem a Energia Cinetica) a velocidade ao longo datrajetoria tera modulo
√p21 + p22 = c = constante.
Vamos descrever alguns resultados basicos na Teoria dos Bilhares(ver [CM] e [CRZ]).
Suponha a existencia de um recipiente circundando a partıcula detal modo que vai impedir que a partıcula va embora para o infinito.
4

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 5 — #5 ii
ii
ii
5
Mais precisamente, suponha que exista uma curva infinitamentediferenciavel C de Jordan (sem auto-intercecao), que e parametrizadapor g : [0, c] → C ⊂ R2 no sentido anti-horario, g diferenciavel eg(0) = g(c). Considere a condicao inicial (q0, p0) ∈ R4 da partıculade tal modo que q0 esteja contida no interior da regiao D delimitadapela curva C e que a velocidade inicial p0 seja tal que ∥p0∥ = 1 (logopor conservacao de energia este modulo se mantera constante igual a1 para sempre).
Vamos supor que a regiao D e estritamente convexa (sem seg-mentos retos), isto e, que dados dois pontos quaisquer q1, q2 ∈ D, osegmento de reta unindo q1 a q2 esta estritamente contido no interiorda regiao delimitada por D.
A evolucao temporal da partıcula
(q(s), p(s)) = (q1(s), q2(s), p1(s), p2(s))
a partir da condicao inicial (q0, p0) = (q10 , q20 , p
10, p
20) ∈ R4 sera tal que
cada vez que a trajetoria q(s) ∈ R2, s ∈ R colide com a curva C,ela reflete de tal modo que o angulo de incidencia com a tangente acurva C seja igual ao angulo de reflexao (ver Figura 1.1).
Desta maneira, se a trajetoria for tal que q0 esta inicialmentena parte D interior a curva C, ela jamais saira de D. Vamos su-por tambem que as reflexoes sao elasticas, ou seja, nao ha perda deenergia. Sendo assim, este movimento estara restrito a superfıcietridimensional em R4 determinada por p21 + p22 = 1.
Este modelo e uma boa aproximacao para o que acontece com aspartıculas de um gas contido em um recipiente fechado. O problemaem que estamos interessados nesta secao e analisar o que acontececom a evolucao temporal (q(s), p(s)) de “uma”partıcula que no tempoinicial s = 0 esta exatamente em q0 ∈ D (ou em C) e com vetorvelocidade p0. Problemas de acustica tambem podem ser modeladospor bilhares.
Considere g : [0, c] → C (c e o comprimento da curva) umaparametrizacao da curva C pelo comprimento de arco, isto e ∥g′(t)∥ =1. Vamos supor sem perda de generalidade que a curva C tenha com-primento igual a 1 (caso contrario faca uma mudanca de variaveis),ou seja que c = 1.
Como entre cada batida o movimento e trivial (e descrito poruma linha reta) podemos simplificar o problema tridimensional (na

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 6 — #6 ii
ii
ii
6CAPITULO 1. A ACAO ASSOCIADAA BILHARES CONVEXOS
superfıcie p21 + p22 = 1) para um problema bidimensional em queq0 ∈ C da seguinte maneira: a posicao inicial (q0, p0) ∈ R4 tal que(p10)
2+(p20)2 = 1 e q0 = (q10 , q
20) ∈ C, pode ser descrita por (t, φ) onde
t ∈ [0, 1] e tal que g(t) = q0, e φ ∈(−π
2 ,π2
)e o angulo de p0 com
a normal a C em q0 apontando para dentro de C (ver Figura 1.2).Por convencao assumimos que φ = −π/2 corresponde a tangente tda curva (orientada no sentido anti-horario).
O vetor p0 sempre aponta para dentro da curva C, logo seu angulocom a normal (apontando para dentro da curva) varia de −π/2 a π/2como foi dito acima.
Por uma questao de conveniencia em vez de φ, vamos usar avariavel θ = sinφ ∈ (−1, 1).
Segundo a convencao g′(t) corresponde a θ = −1.Para descrever com mais exatidao a analogia que existe entre o
modelo do bilhar e propriedades de sistemas hamiltonianos vamosusar a seguinte notacao, vamos associar t = q e θ = p. Sendo assim,denotaremos indistintamente t = q = g(t) e tambem θ = p.
Dada a condicao inicial (t0, θ0), considere a trajetoria (q(s), p(s))(solucao do fluxo Hamiltoniano comecando em (q0, p0) = (t0, θ0))q(s) ∈ D e apos a primeira colisao e respectivo rebote obteremos(q1, p1), q1 ∈ C. Denotaremos por (t1, θ1) os novos valores obtidosnas coordenadas (t, θ) de tal jeito que g(t1) = q1 e exatamente oponto de C onde a trajetoria q(s) determinada por (q(s), p(s)) vaicolidir com C pela primeira vez (ver Figura 1.2). O angulo θ1 eobtido como o valor do seno do angulo (do vetor refletido) com anormal (ver Figura 1.2).
O fato de assumir que a curva C e estritamente convexa implicaque T (t0, θo) = (t1, θ1) esta bem definida e e continua. Devemosassumir que a curva e parametrizada por uma funcao de Classe C2
para que resulte um difeomorfismo a aplicacao de primeiro retorno.Fica assim, determinado um difeomorfismo
T : [0, 1)× (−1, 1) → [0, 1)× (−1, 1),
onde T (t0, θ0) = (t1, θ1).A diferenciabilidade do difeomorfismo e C1.Vamos denotar por
E = [0, 1)× (−1, 1)

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 7 — #7 ii
ii
ii
7
a regiao bidimensional em que T vai estar definida. E representauma secao transversal (ver secao 12 para consideracoes gerais sobreo assunto) na superfıcie tridimensional p21 + p22 = 1.
Reduzimos assim um problema com tempo contınuo em dimensao3 para um problema de dimensao 2 com tempo discreto, ou seja adinamica temporal para o fluxo ϕt, t ∈ R transforma-se na dinamicatemporal para Tn, n ∈ N, onde T : E → E e um difeomorfismo. Estesegundo problema, em princıpio, e mais simples e vai apresentar asprincipais caracterısticas do primeiro.
Para entender o que acontece com com a evolucao temporal ϕs(q, p),s ∈ R, da partıcula com posicao inicial (q, p) = (t, θ), q ∈ C, bastasaber o que acontece com as sucessivas batidas determinadas por Tem C, ou seja pela orbita de (q, p) = (t, θ) dada por
(t, θ) , T (t, θ) , T (T (t, θ)) , ..., Tn(t, θ) , ...,
pois entre cada batida a trajetoria e uma linha reta. A linha quebradacorrespondendo aos varios rebotes desta evolucao temporal t ∈ Rpode ser facilmente reconstruıda a partir da informacao da orbita de(t0, θ0).
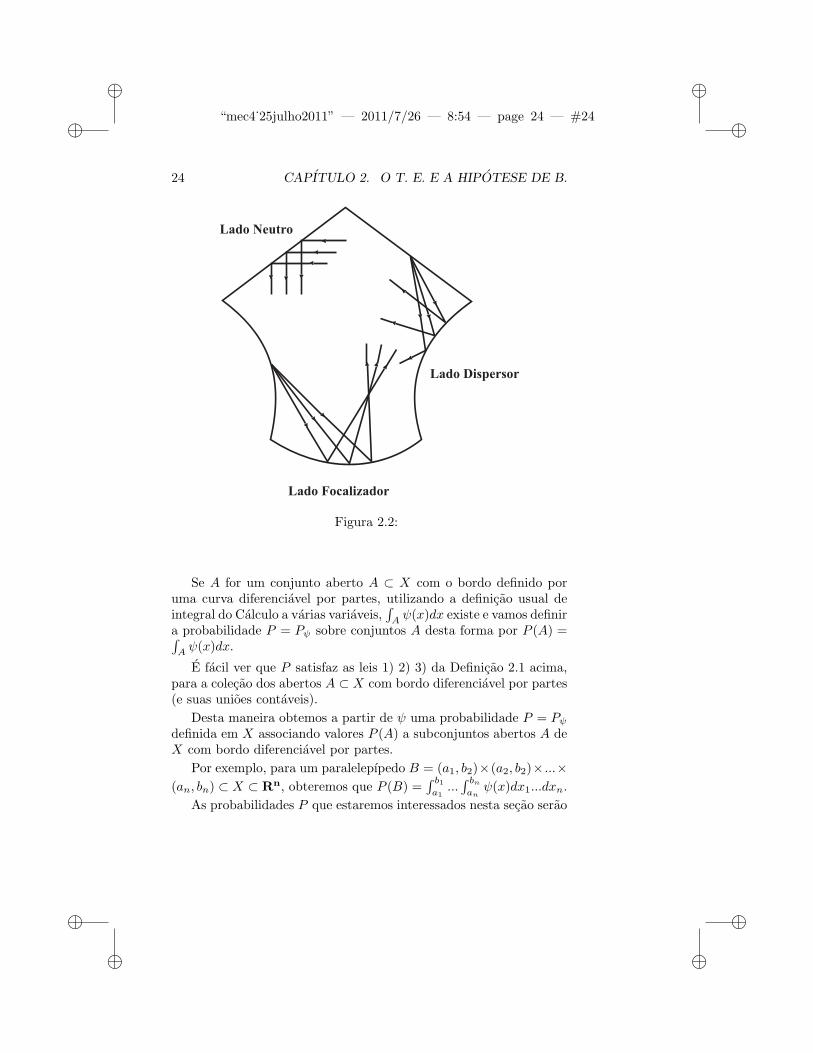
Note que se a fronteira do bilhar for constituıdo por uniao decurvas diferenciaveis como na Figura 1.4 e 2.1, existirao singulari-dades devido aos vertices e isto cria uma pequena dificuldade (quepode ser eliminada conforme veremos na proxima secao) na definicaode T . Alguns destes bilhares (como o da Figura 2.1) chamados dis-persores ou de Sinai (ver [Mar] para definicao), apresentam caos epodem ser rigorosamente analisados adaptando tecnicas de sistemashiperbolicos da Teoria dos Sistemas Dinamicos e Teoria Ergodica (verRo[1]). Os bilhares analisados aqui sao focalizadores (em oposicao aosdispersores) e tambem podem exibir como veremos em alguns casoscomportamento caotico mas para sua analise rigorosa as tecnicas em-pregadas sao de natureza distinta (e na verdade mais difıcil) do queas utilizadas no caso dispersor.
Bilhares sao os exemplos naturais mais simples em que se observacaos (ver Figura 2.2).
Para o leitor familiarizado com a teoria geometrica das equacoesdiferenciais ordinarias (ver [LL] e [So]) esclarecemos que o procedi-mento acima (tomar a iteracao do difeomorfismo T em vez do fluxo

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 8 — #8 ii
ii
ii
8CAPITULO 1. A ACAO ASSOCIADAA BILHARES CONVEXOS
Figura 1.1:
ϕt) e similar a tomar uma secao de Poincare (global) para umaequacao diferencial. Neste sentido, a aplicacao T pode ser enten-dida da seguinte maneira. O movimento do bilhar se da na regiaoinvariante tridimensional p21 + p22 = 1. A regiao E (secao transversalde acordo com a secao 12) vai ser constituıda pelos pontos da forma(q, p) onde q esta na curva C (bordo de D) e p e um vetor de norma1 em q e apontando para dentro da curva C.
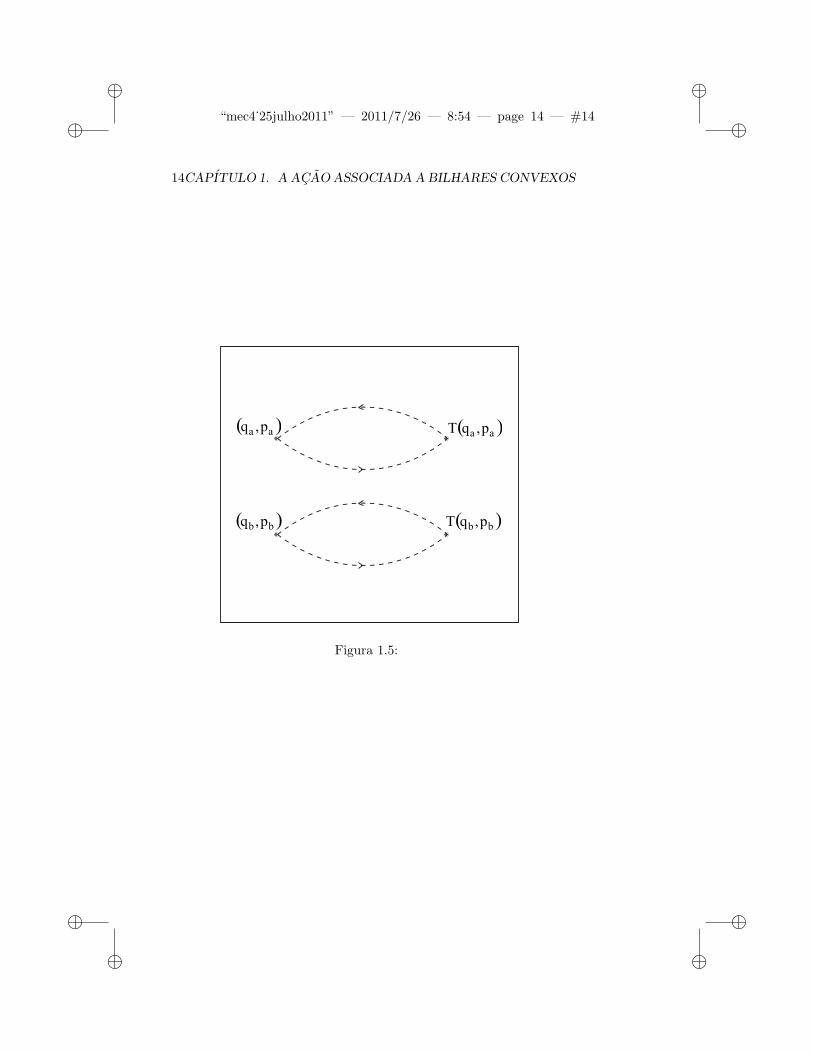
Dada uma condicao inicial em E, a aplicacao T vai determinar oprimeiro retorno (seguido de uma simetria do angulo de incidenciacom a normal a curva) da trajetoria (que se desloca na regiao tridi-mensional) a secao transversal E (ver Figura 1.5).
Observacao 1.1. Note que em geral se comecarmos com uma con-dicao inicial (q0, p0), e denotando por (pn, qn) = Tn(q0, p0), se se-guirmos os iterados (qn, pn), tentando prever exatamente onde elevai estar no tempo (digamos) 1000, (isto e, qual o valor exato de(q1000, p1000)) enfrentaremos serias dificuldades. Um pequeno errona aproximacao do valor exato de (q1, p1) se propaga para (q2, p2)e assim por diante, fazendo com que a previsao do valor exato de(q1000, p1000) seja bastante difıcil. O ponto de vista acima descritopode ser entendido como o ponto de vista determinıstico. Para o tipode problema que estamos considerando (bilhares em regioes convexas)sera melhor analisar a questao do ponto de vista da analise estatısticadas trajetorias. Para isto sera necessario mostrar que T preservaarea, o que vai ser feito a seguir.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 9 — #9 ii
ii
ii
9
Notacao: Como estamos identificando t com q = g(t) (para sim-plificar a notacao), denote
S(q0, q1) = ∥q0 − q1∥ = S(q,Q)
(ou alternativamente
S(t0, t1) = ∥g(t0)− g(t1)∥,
onde g(t0) = q = q0, g(t1) = q1 = Q) o comprimento do segmentoligando q0 a q1. Como D e estritamente convexo, este segmento estainteiramente contido em D.
Proposicao 1.1. Seja (q1, p1) = T (q0, p0). Para q0 fixado,∂S(q0,q1)
∂q1=
−p1.
Demonstracao: Como sabemos d<z(t) , z(t)>dt = 2 < z′(t) , z(t) >,entao usando a notacao descrita acima onde q0 = g(t0) e q1 = g(t1)
∂S(q0, q1)
∂q1=d√< g(t1)− g(t0) , g(t1)− g(t)) >
dt1=
1
∥g(t1)− g(t0)∥< g′(t1) , g(t1)− g(t0) > .
Como ∥g′(t1)∥ = 1 por hipotese, usando a expressao
< u, v >= ∥u∥∥v∥ cos (angulo formado por u e v),
obtemos que ∂S(q0,q1)∂q1
e o cosseno do angulo entre (g(t1) − g(t)) e
g′(t1), ou seja e igual ao cosseno do angulo de incidencia da partıculaem g(t1) com a tangente g′(t1) neste ponto. Como p1 = θ1 = sinϕ1e o seno do angulo com a normal apos o rebote, concluımos quedS(q0,q1)
dq1= −p1.
A troca de sinal e devido ao angulo refletido. Analogamente pode se mostrar que para q1 fixado ∂S(q0,q1)
∂q0= p0.
Sendo assim S define uma transformacao que preserva area. Seguirado que foi descrito acima que:

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 10 — #10 ii
ii
ii
10CAPITULO 1. A ACAO ASSOCIADAA BILHARES CONVEXOS
Figura 1.2:
Proposicao 1.2. Fixe dois pontos q1 e q3 em C e considere A(q) =A(t) a funcao de t = q ∈ [0, 1) (estamos usando a notacao, de iden-tificar g(t) = q ∈ C) tomando valores reais, tal que para todo valorq ∈ C,
A(q) = S(q1, q) + S(q, q3) = ∥q1 − q∥+ ∥q − q3∥.
Entao, e equivalente dizer que A(q) = S(q1, q) + S(q, q3) tem umponto crıtico em q2 e dizer que a trajetoria do bilhar em D, sai deq1, colide a seguir com C em q2 ∈ C e finalmente bate em q3 ∈ C.
Demonstracao: Pela ultima proposicao, ∂S(q1,q2)∂q2
= −p2. De
maneira analoga se pode mostrar que ∂S(q2,q3)∂q2
= p2.Sendo assim, a partir do que vimos na ultima proposicao, a condi-
cao da igualdade do angulo de incidencia e o angulo de reflexao entreos segmentos q1, q2 e q2, q3 no ponto q2 e equivalente a dizer que q2satisfaz a
∂S(q1, q)
∂q+∂S(q, q3)
∂q= 0.
Esta ultima condicao, por sua vez, e equivalente a A(q) ter q2como ponto crıtico.
A conclusao e que (q1, p1) = T (q0, p0) satisfaz as equacoes
∂S(q0, q1)
∂q= p0
e∂S(q0, q1)
∂q1= −p1.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 11 — #11 ii
ii
ii
11
Figura 1.3:
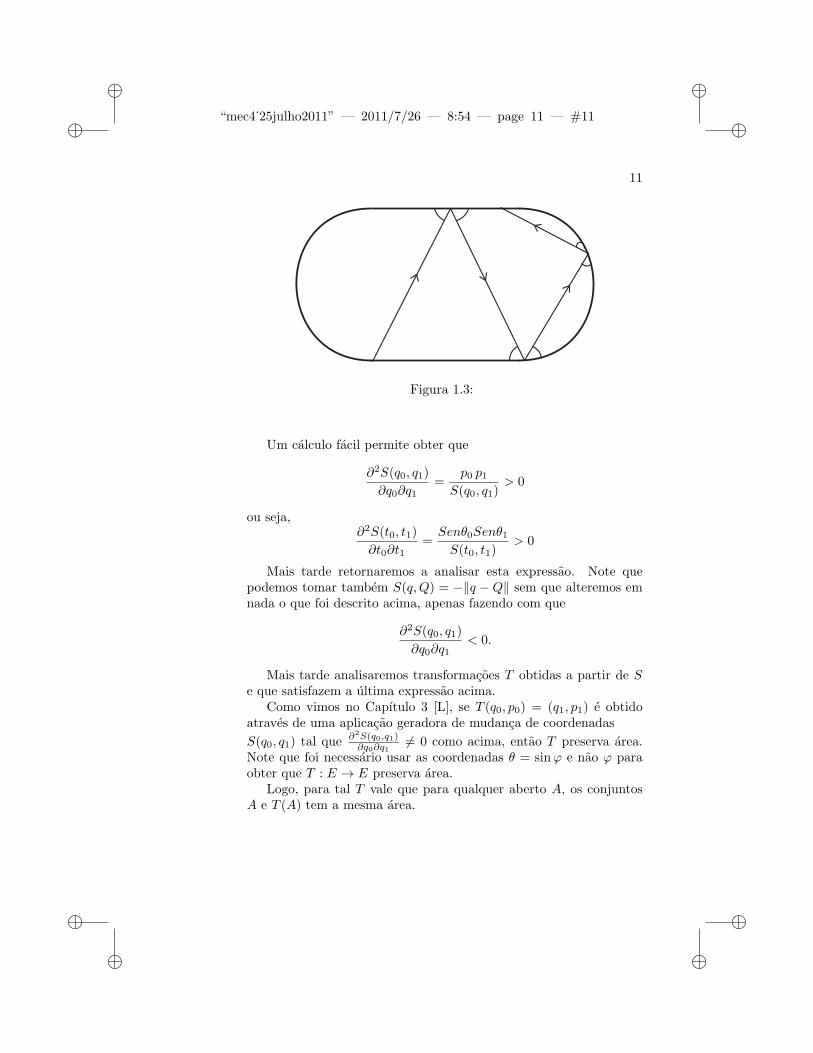
Um calculo facil permite obter que
∂2S(q0, q1)
∂q0∂q1=
p0 p1S(q0, q1)
> 0
ou seja,∂2S(t0, t1)
∂t0∂t1=Senθ0Senθ1S(t0, t1)
> 0
Mais tarde retornaremos a analisar esta expressao. Note quepodemos tomar tambem S(q,Q) = −∥q −Q∥ sem que alteremos emnada o que foi descrito acima, apenas fazendo com que
∂2S(q0, q1)
∂q0∂q1< 0.
Mais tarde analisaremos transformacoes T obtidas a partir de Se que satisfazem a ultima expressao acima.
Como vimos no Capıtulo 3 [L], se T (q0, p0) = (q1, p1) e obtidoatraves de uma aplicacao geradora de mudanca de coordenadas
S(q0, q1) tal que ∂2S(q0,q1)∂q0∂q1
= 0 como acima, entao T preserva area.Note que foi necessario usar as coordenadas θ = sinφ e nao φ paraobter que T : E → E preserva area.
Logo, para tal T vale que para qualquer aberto A, os conjuntosA e T (A) tem a mesma area.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 12 — #12 ii
ii
ii
12CAPITULO 1. A ACAO ASSOCIADAA BILHARES CONVEXOS
Figura 1.4:
Definicao 1.1. A aplicacao ∥q1−q∥ = S(q, q1) : [0, 1]× (−1, 1) → Re denominada Acao associada ao bilhar definido pela curva C.
Uma conclusao que podemos obter do fato acima demonstradoe que todos os pontos do bilhar sao nao errantes (ver Definicao 5,Capıtulo 3 [L]). Isto segue de imediato do fato que T preserva area edo Teorema de Poincare (Teorema 5, Capıtulo 3).
O Exemplo 13, Capıtulo 1 [L], constituıdo por duas partıculascolidindo num intervalo, pode ser transformado num problema sobretrajetorias no bilhar triangular. A demonstracao que a aplicacao nobordo do bilhar preserva area tambem pode ser aplicada a tal bil-har. Concluimos portanto que no caso do sistema de duas partıculascolidindo num intervalo, todos os pontos sao nao errantes.
O fato do difeomorfismo T do bilhar convexo preservar area, per-mitira tambem usar tecnicas probabilısticas na analise das trajetoriasdo sistema mecanico em consideracao. Estes resultados serao apre-sentados na proxima secao.
O resultado acima, sobre conservacao de area e verdadeiro parauma grande classe de interessantes e diferentes tipos de bilhares. Aevolucao das trajetorias do bilhar vai depender no entanto de maneiraessencial da forma da curva C. Vamos mostrar isto atraves de algunsexemplos.
Definicao 1.2. Dizemos que V : E → R e uma integral primeira de

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 13 — #13 ii
ii
ii
13
T se V (q, p) e contınua e constante ao longo das orbitas Tn(q0, p0) =(qn, pn).
A existencia de tal V : [0, 1)× (−1, 1) → R implica na existenciade uma integral primeira V para ϕt em p21 + p22 = 1. Isto ocorreporque, o sistema a tempo contınuo ϕt na superfıcie tridimensionalp21+p
22 = 1, e obtido a partir de T apenas acrescentando retas ligando
x a T (x). Cada curva invariante em [0, 1) × (−1, 1) determina por-tanto uma superfıcie bidimensional invariante para ϕt na superfıcietridimensional em p21 + p22 = 1.
Exemplo 1.1. O cırculo. Considere C um cırculo de raio 1. Em vezda parametrizacao do cırculo por (cos 2πt, sen 2πt ), 0 ≤ t ≤ 1 vamosusar as coordenadas 0 ≤ s < 2π para a posicao q e −π/2 ≤ φ < π/2para o angulo com a normal. No caso do cırculo e facil ver queS(q,Q) = S(s0, s1) = 2 sen ((s1 − s0)/2).
Por propriedades elementares de geometria o angulo φ nao variaao longo de uma orbita e T e dado por T (s0, φ0) = (s1, φ1) =(s0 + 2φ0, φ0) E facil ver que se a condicao inicial for (s0, φ0) =(q0, p0) ∈ [0, 2π) × (−π/2, π/2), entao para todo n, Tn(q0, p0) =(qn, pn) e tal que pn = p. Sendo assim se plotarmos varias trajetorias(q, p), T (q, p), T 2, ..., Tn(q, p), onde (q, p) sao diferentes condicoesiniciais, obteremos uma decomposicao do espaco de fase (q, p) ∈[0, 2π)× (−π/2, π/2), da forma apresentada na Figura 1.7.
Logo, a funcao V (q, p) = p (ou seja V (s, φ) = φ) e constante aolongo de cada orbita. Portanto, tal V e uma integral primeira dobilhar.
Como T (s0, φ0) = (s0 + 2φ0), ϕ0) considere apenas a acao de Tna primeira ordenada g(s0) = s0 + 2φ0 (mod 1). Se 2φ0 for daforma racional vezes 2π e facil ver que todo ponto s0 sera periodico.Caso 2φ0 for da forma irracional vezes 2π entao, conforme a proximasecao, ocorre que para qualquer s0 fixado a orbita gj(s0), j > 0 seradensa em [0, 1). Neste ultimo caso, naturalmente, nao existem orbitasperiodicas.
Sendo assim, concluımos que a dinamica da evolucao temporal deTn(s0, φ0) fica completamente entendida e de acordo com a Figura1.5. Se quisermos podemos mudar novamente coordenadas e conside-rar alternativamente o problema nas coordenadas Tn(t0, θ0) obtendo
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 14 — #14 ii
ii
ii
14CAPITULO 1. A ACAO ASSOCIADAA BILHARES CONVEXOS
Figura 1.5:

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 15 — #15 ii
ii
ii
15
Figura 1.6:
os resultados analogos. Optamos pelas coordenadas (s, φ) apenasporque as formulas de T e S neste caso ficam mais simples.
Exemplo 1.2. A elipse. Tomando varias condicoes iniciais (q, p) ∈[0, 1)× (−1, 1) diferentes e tomando as correspondentes orbitas
(q, p), T (q, p), ..., Tn(q, p), ...
obteremos uma decomposicao do espaco de fase (q, p) ∈ [0, 1)×(−1, 1)da forma apresentada na Figura 1.7.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 16 — #16 ii
ii
ii
16CAPITULO 1. A ACAO ASSOCIADAA BILHARES CONVEXOS
A funcao
V (q, p) =q2 − ϵ2 cos2 ν
1− ϵ2 cos2 ν
(onde ϵ e a excentricidade da elipse e ν e o angulo de p com o eixo dosx), por sua vez, e constante ao longo das orbitas do bilhar na elipse.
Um exame das curvas de nıvel de tal G nos determina a Figuraque 1.7 descreve orbitas associadas a diversas condicoes iniciais. Damesma maneira como no cırculo algumas curvas de nıvel serao taisque as orbitas de condicoes iniciais sobre elas serao densas nela e emalgumas outras curvas tal nao ocorre.
E possıvel mostrar tambem que em algumas curvas de nıvel o tjde (tj , θj) = T (t0, θ0), j > 0 explora densamente on intervalo [0, 1] eem outras nao; a Figura 1.7 e 1.8 ilustra tal fato.
A existencia de tal V : [0, 1) × (−1, 1) → R por sua vez implicana existencia de uma integral primeira V para ϕt em p21 + p22 = 1.Portanto, da mesma maneira como no caso do cırculo, obtemos nestecaso uma integral primeira para o sistema a tempo contınuo associ-ado.
Exemplo 1.3. O ovo (ver Figura 1.8). Tomando varias condicoesiniciais (q, p) diferentes e tomando as correspondentes orbitas
(q, p), T (q, p), ..., Tn(q, p)
obteremos uma decomposicao do espaco de fase da forma apresen-tada na Figura 1.8. Note que mesmo que a elipse e o ovo tenhamformas semelhantes, o espaco de fase do bilhar com fronteira dadapelo ovo apresentado na Figura 1.8 e bastante diferente dos dois ex-emplo anteriores. Este sistema, aparentemente pelo que mostra aFigura 1.8 nao existe funcao contınua V (definida em todo E e naoconstante) que seja constante em cada orbita Tn(x), n ∈ N paracada x = (q, p) ∈ E.
O Exemplo 1.3 (ver Figura 1.8) mostra uma combinacao de com-portamentos distintos (dependendo da orbita ou seja da condicao ini-cial escolhida); existe uma evidencia numerica que existem algumascurvas invariantes por T e tambem regioes bidimensionais invariantespor T (que nao sao uniao de curvas invariantes conforme Figura 1.8).

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 17 — #17 ii
ii
ii
17
Neste caso aparece o que se convenciona chamar de ilhas KAM eque sera analisado mais tarde no texto.
Nas curvas invariantes que aparecem na figura podem haver orbitasperiodicas, trajetorias com orbita densa, etc...
Exemplo 1.4. O estadio circular e o bilhar tal que a curva C tema forma apresentada na Figura 1.4. E constituıdo por duas retasparalelas com comprimento l > 0 e por duas metades de um cırculo.
Tomando apenas “uma certa”condicao inicial (q0, p0) e plotandoa orbita de (q, p) ate ordem n=999, isto e, plotando o conjunto
(q, p), T (q, p), ..., T 999(q, p)
obtemos Figura 1.7 (figura da direita). A orbita T j(q0, p0), j ∈1, 2, ..., n parece se distribuir de maneira uniforme sobre E, istoe o numero de j ∈ 1, 2, ..., n − 1 em um aberto qualquer fixado Adividido por 1000 parece ser proporcional a area de A.
Note que podem existir orbitas no estadio circular que nao temo comportamento acima descrito: por exemplo orbitas periodicas deperıodo dois como aparece na Figura 1.6.
Na verdade para a ”maioria”das condicoes iniciais (q0, p0) as or-bitas no estadio circular T j(q0, p0) terao uma distribuicao uniformecomo no caso da Figura 1.7 (figura da direita). Explicar o sentidoda palavra ”maioria”sera um dos objetivos da proxima secao. Esteexemplo sera um dos assim chamados sistemas ergodicos.
Observacao 1.2. Note que o comportamento da trajetoria Tn(q, p)neste ultimo Exemplo 1.4 e totalmente distinto dos dois primeirosExemplos 1.1 e 1.2, onde cada trajetoria esta confinada a uma curva(um conjunto unidimensional) por causa da integral primeira V .
O comportamento descrito pelo Exemplo 1.4 mostra uma situacaoque e tambem diferente do Exemplo 1.3. No presente caso a tra-jetoria Tn(x), x ∈ [0, 1)× (−1, 1) de um ponto escolhido ao acaso noExemplo 1.4 parece tentar explorar toda a regiao bidimensional E.Mais precisamente, a orbita Tn(x) tenta ocupar densamente todoo espaco E = [0, 1)×(−1, 1) e neste caso, nao parece existirem curvasinvariantes para tal T em E.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 18 — #18 ii
ii
ii
18CAPITULO 1. A ACAO ASSOCIADAA BILHARES CONVEXOS
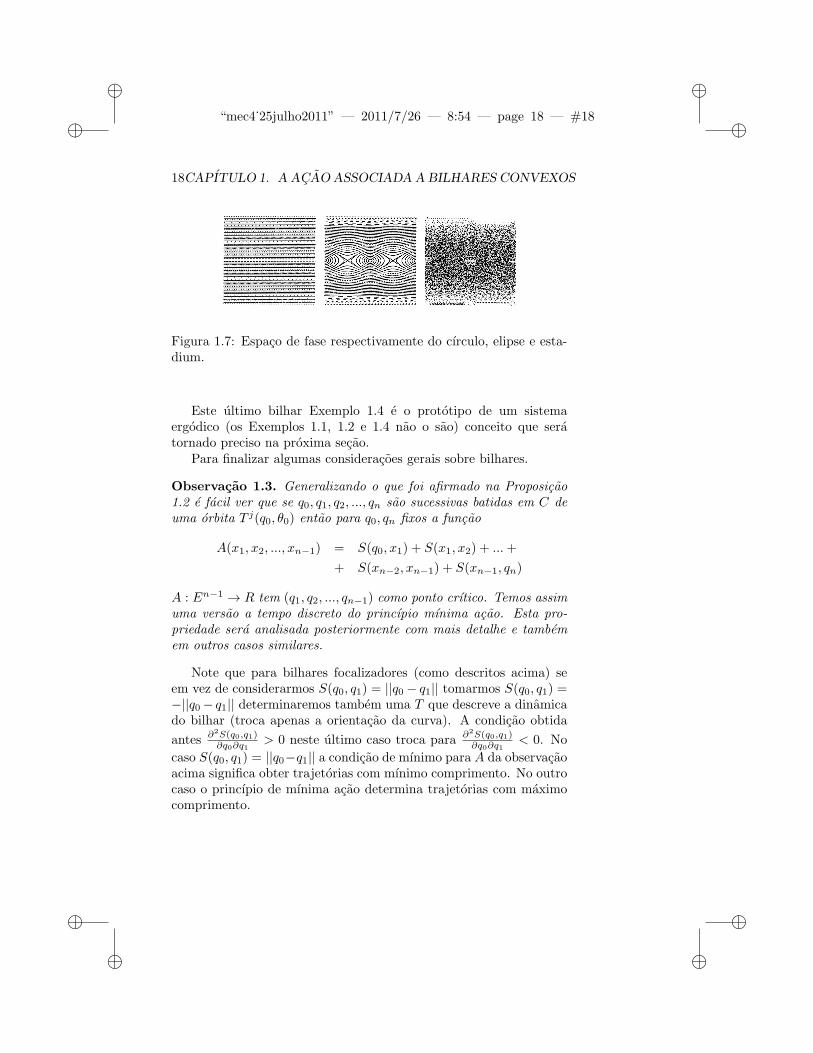
Figura 1.7: Espaco de fase respectivamente do cırculo, elipse e esta-dium.
Este ultimo bilhar Exemplo 1.4 e o prototipo de um sistemaergodico (os Exemplos 1.1, 1.2 e 1.4 nao o sao) conceito que seratornado preciso na proxima secao.
Para finalizar algumas consideracoes gerais sobre bilhares.
Observacao 1.3. Generalizando o que foi afirmado na Proposicao1.2 e facil ver que se q0, q1, q2, ..., qn sao sucessivas batidas em C deuma orbita T j(q0, θ0) entao para q0, qn fixos a funcao
A(x1, x2, ..., xn−1) = S(q0, x1) + S(x1, x2) + ...+
+ S(xn−2, xn−1) + S(xn−1, qn)
A : En−1 → R tem (q1, q2, ..., qn−1) como ponto crıtico. Temos assimuma versao a tempo discreto do princıpio mınima acao. Esta pro-priedade sera analisada posteriormente com mais detalhe e tambemem outros casos similares.
Note que para bilhares focalizadores (como descritos acima) seem vez de considerarmos S(q0, q1) = ||q0 − q1|| tomarmos S(q0, q1) =−||q0− q1|| determinaremos tambem uma T que descreve a dinamicado bilhar (troca apenas a orientacao da curva). A condicao obtida
antes ∂2S(q0,q1)∂q0∂q1
> 0 neste ultimo caso troca para ∂2S(q0,q1)∂q0∂q1
< 0. No
caso S(q0, q1) = ||q0−q1|| a condicao de mınimo para A da observacaoacima significa obter trajetorias com mınimo comprimento. No outrocaso o princıpio de mınima acao determina trajetorias com maximocomprimento.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 19 — #19 ii
ii
ii
19
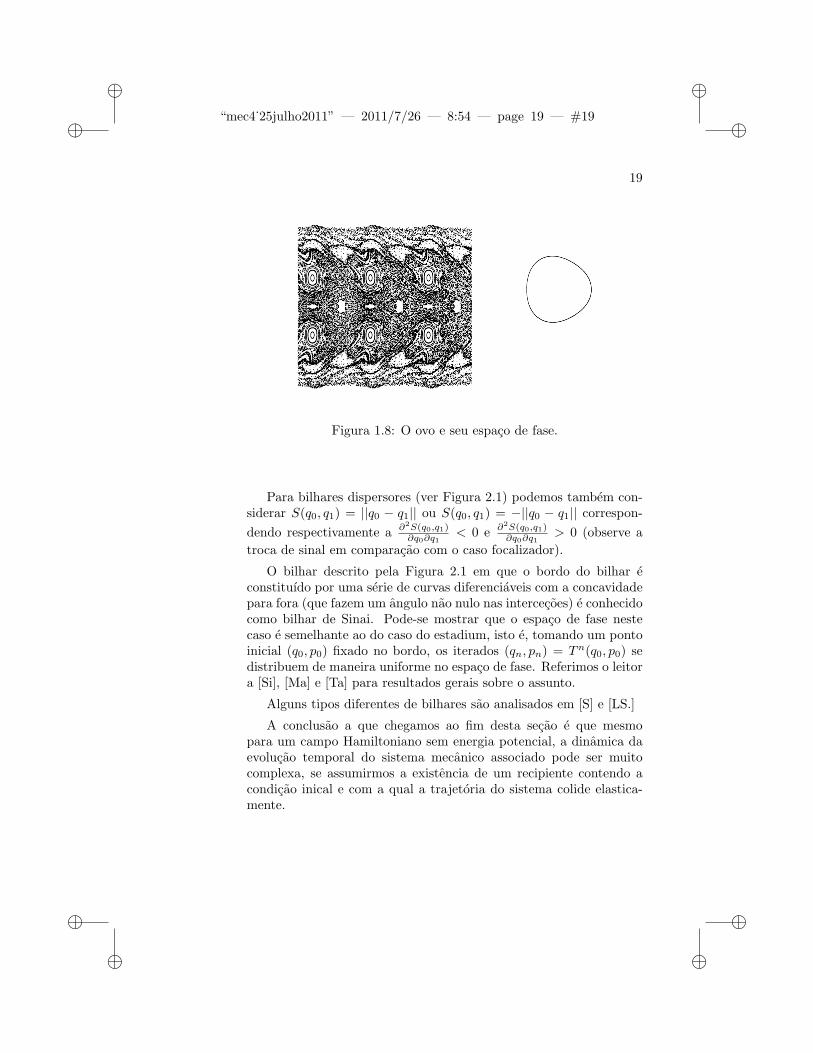
Figura 1.8: O ovo e seu espaco de fase.
Para bilhares dispersores (ver Figura 2.1) podemos tambem con-siderar S(q0, q1) = ||q0 − q1|| ou S(q0, q1) = −||q0 − q1|| correspon-dendo respectivamente a ∂2S(q0,q1)
∂q0∂q1< 0 e ∂2S(q0,q1)
∂q0∂q1> 0 (observe a
troca de sinal em comparacao com o caso focalizador).
O bilhar descrito pela Figura 2.1 em que o bordo do bilhar econstituıdo por uma serie de curvas diferenciaveis com a concavidadepara fora (que fazem um angulo nao nulo nas intercecoes) e conhecidocomo bilhar de Sinai. Pode-se mostrar que o espaco de fase nestecaso e semelhante ao do caso do estadium, isto e, tomando um pontoinicial (q0, p0) fixado no bordo, os iterados (qn, pn) = Tn(q0, p0) sedistribuem de maneira uniforme no espaco de fase. Referimos o leitora [Si], [Ma] e [Ta] para resultados gerais sobre o assunto.
Alguns tipos diferentes de bilhares sao analisados em [S] e [LS.]
A conclusao a que chegamos ao fim desta secao e que mesmopara um campo Hamiltoniano sem energia potencial, a dinamica daevolucao temporal do sistema mecanico associado pode ser muitocomplexa, se assumirmos a existencia de um recipiente contendo acondicao inical e com a qual a trajetoria do sistema colide elastica-mente.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 20 — #20 ii
ii
ii
20CAPITULO 1. A ACAO ASSOCIADAA BILHARES CONVEXOS
Exercıcio
1. Mostre que V (q, p) = p do Exemplo 1.1, e constante ao longodas trajetorias do bilhar no cırculo.
2. Mostre que V (q, p) = q2−ϵ2 cos2 ν1−ϵ2 cos2 ν do Exemplo 1.2, e constante
ao longo das trajetorias do bilhar na elipse.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 21 — #21 ii
ii
ii
Capıtulo 2
O Teorema Ergodico e aHipotese de Boltzmann
Nesta secao vamos apresentar de maneira suscinta o Teorema Ergodicoe algumas de suas consequencias. Primeiramente vamos apresentar oTeorema Ergodico com tempo discreto e mais para o fim desta secaoo Teorema Ergodico com tempo contınuo.
Informamos ao leitor que o objetivo da presente secao e apenasapresentar ideias e descrever resultados interessantes. Referimos paraos excelentes textos [M] e [KH] para a fundamentacao matematicarigorosa do que segue abaixo. O autor do presente livro escreveutambem notas [L2] onde estes topicos sao apresentados com todorigor matematico.
Ao fim da presente secao, o Exemplo 2.15 e um dos mais im-portantes deste texto. Neste exemplo, mostraremos que sob certascondicoes, vale a hipotese de Boltzmann (ver consideracoes a seguir)em torno de um ponto de equilıbrio de um sistema integravel.
Como vimos anteriormente quando analisamos o bilhar na Secao1, o entendimento do comportamento das orbitas do fluxo Hamilto-niano
H(q1, q2, p1, p2) = p21 + p22
restrito a um recipiente delimitado por uma curva C (na qual ex-
21

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 22 — #22 ii
ii
ii
22 CAPITULO 2. O T. E. E A HIPOTESE DE B.
iste um rebote quando a orbita colide com a curva) pode ser obtidopela iteracao de uma aplicacao T induzida em uma secao transversalbidimensional E (pelo primeiro retorno). Vamos apresentar um re-sultado matematico que vai possibilitar entender melhor a evolucaotemporal de tal sistema mecanico. Lembre que o difeomorfismo Tinduzido pelo bilhar em C preserva area, pois e obtido atraves deuma aplicacao geradora S (ver Proposicao 1.2 e Lema 11.1, Capıtulo3 [L]).
Definicao 2.1. Uma probabilidade P definida em um conjunto abertoX do Rn e uma lei que associa a cada subconjunto A ⊂ X um valorP (A) ∈ [0, 1].
Uma probabilidade deve satisfazer tambem as seguintes proprie-dades:
1) P (∅) = 0 (∅ e o conjunto vazio)2) P (X) = 1.
3) P
(∪∞i=1Ai
)=∑∞i=1 P (Ai) se os conjuntos Ai forem todos
disjuntos.
Na Secao 10 do Capıtulo 3 (ver Exemplo 51 em [L]), introduzimosum caso particular de probabilidade. Outras serao consideradas aseguir.
Observacao 2.1. Nao dissemos nada a respeito da classe de subcon-juntos A de X onde esta definido tal probabilidade P .
P precisa ser definida numa sigma-algebra (ou seja, uma colecaode conjuntos F tal que
a) X ∈ F ,b) se A ∈ F entao X −A ∈ Fe c) para toda colecao enumeravel An ∈ F vale que ∪nAn ∈ F).
Para nao entrar em detalhes tecnicos, vamos apenas esclarecerque muitas vezes que nem todos os subconjuntos A terao um valor deprobabilidade P (A). Felizmente, os conjuntos A que tem importanciano desenvolvimento que segue terao sempre um valor bem definidode probabilidade. O leitor interessado na formalizacao matematicade tais conceitos, que envolvem Teoria da Medida, sigma-algebras,

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 23 — #23 ii
ii
ii
23
Figura 2.1:
etc..., podem encontrar uma otima exposicao do assunto em [Fe] e[Rud].
A classe de subconjuntos A que vamos necessitar utilizar aqui(e que terao um valor bem definido de probabilidade) incluem entreoutros os abertos com bordo diferenciavel por partes.
Nosso ponto de vista aqui sera apenas dar uma ideia dos conceitosprincipais sem entrar em detalhes matematicos mais sofisticados.
Vamos descrever brevemente agora que tipo de probabilidades Pvamos considerar a seguir.
Considere X ⊂ Rn, subconjunto aberto limitado com o bordoconstituido por uma curva diferenciavel por partes, e uma funcaocontinua nao negativa ψ definida em X, tal que∫
X
ψ(x)dx =
∫X
ψ(x)dx1dx2...dxn = 1.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 24 — #24 ii
ii
ii
24 CAPITULO 2. O T. E. E A HIPOTESE DE B.
Figura 2.2:
Se A for um conjunto aberto A ⊂ X com o bordo definido poruma curva diferenciavel por partes, utilizando a definicao usual deintegral do Calculo a varias variaveis,
∫Aψ(x)dx existe e vamos definir
a probabilidade P = Pψ sobre conjuntos A desta forma por P (A) =∫Aψ(x)dx.
E facil ver que P satisfaz as leis 1) 2) 3) da Definicao 2.1 acima,para a colecao dos abertos A ⊂ X com bordo diferenciavel por partes(e suas unioes contaveis).
Desta maneira obtemos a partir de ψ uma probabilidade P = Pψdefinida em X associando valores P (A) a subconjuntos abertos A deX com bordo diferenciavel por partes.
Por exemplo, para um paralelepıpedo B = (a1, b2)×(a2, b2)× ...×(an, bn) ⊂ X ⊂ Rn, obteremos que P (B) =
∫ b1a1...∫ bnanψ(x)dx1...dxn.
As probabilidades P que estaremos interessados nesta secao serao
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 25 — #25 ii
ii
ii
25
Figura 2.3:
sempre do tipo acima descrito P = Pψ. ψ sera denominada densidadeda probabilidade P = Pψ. Se ψ e constante diremos que Pψ e a“probabilidade uniforme”em X. Neste caso,
P (A) =area de A
area de X.
Fixada uma probabilidade P , a classe de conjuntos A ⊂ X so-bre os quais necessitamos definir o que seria a probabilidade P (A),no entanto, deve ser maior do que a classe dos abertos com bordodiferenciavel por partes. Sera necessario por exemplo, no TeoremaErgodico, falar sobre certos conjuntos A que nao sao abertos, mastem relevancia no entendimento da evolucao temporal do sistema.Estes conjuntos serao denominados de conjuntos de probabilidadetotal.
Muitos dos resultados que apresentaremos a seguir valem paraprobabilidades mais gerais P (nao so do tipo Pψ), mas para naoentrarmos em problemas tecnicos desnecessarios, vamos considerarapenas probabilidades deste tipo.
Definicao 2.2. Dada uma probabilidade P em X, dizemos que umconjunto A ⊂ X ⊂ Rn tem probabilidade zero para P se para qualquerϵ existe uma sequencia de paralelepıpedos Bi , i ∈ N contidos emX ⊂ Rn tal que A ⊂ ∪∞
i=1Bi e∑∞i=1 P (Bi) < ϵ.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 26 — #26 ii
ii
ii
26 CAPITULO 2. O T. E. E A HIPOTESE DE B.
Para conjuntos A deste tipo, sera verdade que P (A) = 0 (ver [Fe]e [Rud]).
O criterio de mostrar que um certo conjunto tem probabilidadezero, mostrando que satisfaz a Definicao 2.2 e extremamente util.
Exemplo 2.1. Considere a probabilidade uniforme em [0, 1], queatribui probabilidade b − a para todo intervalo [a, b] ⊂ [0, 1]. Paraesta probabilidade o conjunto dos racionais em [0, 1], isto e Q∩ [0, 1](ou qualquer conjunto enumeravel) tem probabilidade zero. Isto seguedo fato que, dado ϵ, os conjuntos da forma Bϵi = Bi, i ∈ N
Bi =
x ∈ [0, 1] | |x− qi| <
(1
2
)iϵ
2
cobrem Q, onde qi ∈ Q∩[0, 1], i ∈ N e uma enumeracao dos racionaisem [0, 1]. Note que o comprimento total coberto pela uniao dos Bi, i ∈N, e menor que ϵ qualquer dado.
Dada a probabilidade P = Pψ em X, a integral de uma funcao φ :X → R com respeito a P , e por definicao
∫Xφ(x)ψ(x)dx, expressao
que e denotada por∫φ(x)dP (x).
Dado um conjunto A vale sempre que∫IA(x)dP (x) = P (A)
Se P e a probabilidade uniforme em X, entao∫φ(x)dP (x) =∫
Xφ(x)dx
area de X.
Exemplo 2.2. Conjuntos de probabilidade zero aparecem natural-mente na Teoria das Series de Fourier. Suponha que duas funcoes fe g sao iguais em todos os pontos do intervalo [0,1], menos num con-junto A de probabilidade uniforme 0 (no qual podem eventualmente
ser distintos), sendo assim,∫ 1
0f(x)dx =
∫ 1
0g(x)dx. Este fato segue
facilmente da definicao de integral (ver [Li1] e [Fe]). Concluımosentao que duas funcoes que diferem apenas num conjunto de medidazero tem a mesma integral com respeito a dx.
Como as funcoes f(x)ei2πxn e g(x)ei2πnx tambem sao iguais emtodos os pontos do intervalo (0, 1), menos num conjunto A de prob-abilidade 0, entao∫ 1
0
f(x)ei2πxndx =
∫ 1
0
g(x)ei2πnxdx.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 27 — #27 ii
ii
ii
27
Logo as duas funcoes f e g como acima possuem a mesma seriede Fourier, porque possuem os mesmos coeficientes de Fourier:
1
2π
∫ 1
0
f(x)ei2πxndx =1
2π
∫ 1
0
g(x)ei2πxn , ∀n ∈ Z.
A recıproca tambem e verdadeira: duas funcoes que tem todos oscoeficientes de Fourier iguais sao iguais a menos de um conjunto deprobabilidade dx nula.
Logo, a Serie de Fourier, nao distingue uma f e g que sao iguaisa menos de um conjunto de probabilidade uniforme zero.
Exemplo 2.3. Seja X = [0, 1] × [0, 1]. Se P (A) = area de A,para cada A ⊂ [0, 1] × [0, 1] (esta probabilidade como vimos antese chamada de uniforme), entao um conjunto tem probabilidade zeropara P , se puder ser coberto por unioes de retangulos tal que a somadas areas destes retangulos pode ser tomada arbitrariamente pequena.
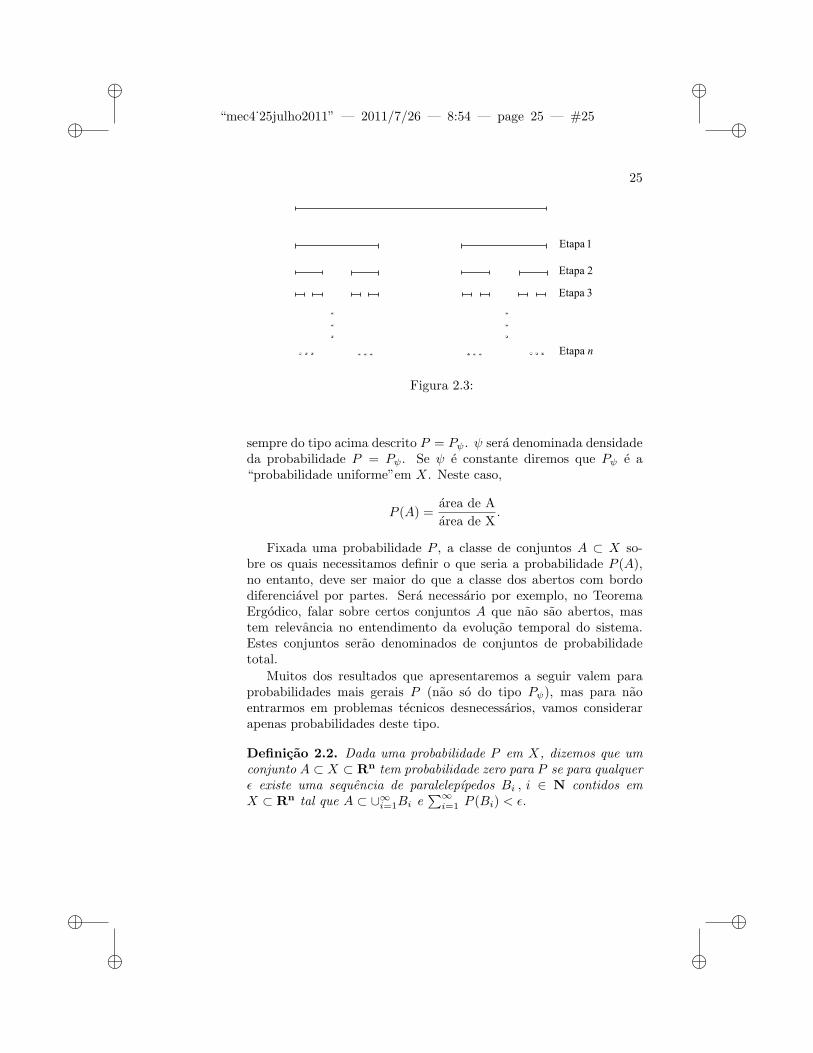
Exemplo 2.4. Considere em X = [0, 1] o conjunto A obtido daseguinte maneira. Primeiro retire o terco central do intervalo [0,1],a seguir retire dos dois intervalos que sobraram os tercos do meio.Obteremos assim 4 intervalos. Retire novamente de cada um dos4 intervalos os tercos medios e prossiga assim indefinidamente. Naetapa n teremos ao todo 2n intervalos disjuntos. O conjunto que sobradeste procedimento de retirar infinitamente tercos dos intervalos quevao sobrando, e mostrado de maneira aproximada na Figura 2.3. Esteconjunto e denominado conjunto de Cantor. Considere a probabili-dade P tal que P ([a, b]) = b− a para qualquer intervalo [a, b] ⊂ [0, 1].O conjunto de Cantor tem probabilidade 0 para tal P . Para provaristo, basta cobrir o conjunto de Cantor por uniao de intervalos talque a soma dos intervalos e arbitrariamente pequena.
Note que os 2n intervalos que restam do procedimento na etapan, contem C e tem soma total dos comprimentos igual a 2n 1
3
n. Como
23
nconverge a zero, entao o conjunto de Cantor tem probabilidade
zero em [0,1] para a probabilidade uniforme.O conjunto de Cantor nao e um conjunto aberto. Como o conjunto
de Cantor tem probabilidade zero e portanto um conjunto “ralo”(ouseja, muito pequeno) no intervalo [0, 1]. Este conjunto e o exemplomais elementar de fractal (ver definicao em [Fa]).
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 28 — #28 ii
ii
ii
28 CAPITULO 2. O T. E. E A HIPOTESE DE B.
Note que foi fundamental usar o criterio da Definicao 2.2 paradizer que o conjunto de Cantor tem probabilidade zero.
Os conjuntos de probabilidade zero sao considerados desprezıveisna analise probabilıstica. Ou seja, se uma propriedade e valida paratodos os pontos de E, menos para um conjunto de probabilidade zero,entao do ponto de vista probabilıstico tal propriedade e verdadeira.Se escolhessemos um ponto ao acaso no intervalo [0,1] de acordo coma Probabilidade P do ultimo exemplo, este ponto nao estaria no con-junto de Cantor, pois este conjunto tem probabilidade 0.
Definicao 2.3. Para uma certa probabilidade P definida em X, dize-mos que um conjunto B tem probabilidade total para P se X−B temprobabilidade zero para P .
Exemplo 2.5. O conjunto dos irracionais no intervalo [0,1], istoe o conjunto [0, 1] −Q, tem probabilidade total para a probabilidadeuniforme, pois Q ∩ [0, 1] tem probabilidade zero.
Diz-se que uma propriedade e valida em P -quase toda parte, seela e valida num conjunto de probabilidade total para P . Quando sediz que um ponto x e escolhido ao acaso segundo um probabilidadeP , x e na verdade ao acaso dentro de um conjunto de probabilidadetotal B. Este ponto de vista (ou seja se preocupar apenas com o quee verdadeiro P -quase toda parte) e a essencia da Teoria da Probabi-lidade.
Definicao 2.4. Um ponto x escolhido num conjunto de probabili-dade total e denominado de um ponto “generico no sentido proba-bilıstico”(para a probabilidade P ).
Nosso objetivo a seguir e analisar do ponto de vista estatıstico (ouprobabilıstico) a evolucao temporal da orbita Tn(x) de um difeomor-fismo T : X → X. Iremos considerar uma probabilidade P sobre Xe tentaremos fazer afirmacoes que tenham sentido do ponto de vistaprobabilıstico. Isto e, o que se pode dizer para as orbitas Tn(x) sex for escolhido num conjunto de probabilidade total para P? Emoutras palavras, desejamos obter propriedades das orbitas Tn(x) depontos x escolhidos ao acaso de acordo com a probabilidade P (ouseja pontos x genericos).

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 29 — #29 ii
ii
ii
29
As probabilidades P que sao uteis para o entendimento da evolucaotemporal das orbitas T : X → X, devem ter algum tipo de relacaocom T .
Esta relacao sera descrita pela proxima definicao.
Definicao 2.5. Dizemos que P probabilidade sobre X e invariantepara um difeomorfismo T se P (T (A)) = P (A) para qualquer conjuntoA ⊂ X.
Exemplo 2.6. Na ultima secao mostramos que o difeomorfismo Tassociado ao bilhar convexo preserva area em E = [0, 1) × (−1, 1)(Proposicao 1.2, Capıtulo 1). Logo, se P e definido por
P (A) =area de A
2,
entao P e invariante para tal T . Neste caso a densidade ψ(t, θ) = 12 ,
define Pψ = P .
Note que no caso da Figura 2.1 (bilhar dispersor) tınhamos difi-culdade em definir T : E → E porque algumas trajetorias T (t0, θ0)poderiam bater numa quina. Como estamos utilizando um ponto devista probabilıstico ficaremos satisfeitos se T estiver bem definido emum subconjunto K ⊂ E de P -probabilidade total. Em muitos casostal propriedade e verdadeira e a analise dinamica que faz sentido serana verdade de T : K → K (ver [Ma]).
No caso do bilhar dispersor (ou outro qualquer com quinas) con-sidere L = (q0, p0)| tal que T (q0, p0) bate numa quina ou p1 = 1ou −1 (ou seja a reta a partir de q com angulo p intersecta umaquina ou fica tangente a um lado). E facil ver que nos casos mais co-muns o conjunto L e uma curva diferenciavel por partes e tem medidabidimensional em E nula.
Considere agora K = E −∪n∈ZTnL. E facil ver que em K todos
os iterados de Tn estao bem definidos e perdemos do conjunto E umconjunto de medida 0 (pois P (E) = P (K) = 1). Nada foi perdido doponto de vista probabilıstico com esta restricao.
Exemplo: Seja T (x) = x + λ (mod 1), T : [0, 1] → [0, 1], ondeλ e uma constante, entao a probabilidade uniforme (ou seja dx) einvariante para T . Isto segue trivialmente do fato que a inclinacao

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 30 — #30 ii
ii
ii
30 CAPITULO 2. O T. E. E A HIPOTESE DE B.
do grafico de T e 1, logo para cada intervalo A a imagem T (A) tem omesmo comprimento total (pode ser a uniao de dois intervalos) queA.
Considere agora uma funcao φ : E → R, que na maioria das vezesvai representar algum observavel do sistema (por exemplo, o valor daposicao t (neste caso φ(t, θ) = t) na curva C do bilhar consideradona secao anterior).
Ao longo da evolucao temporal do sistema comecando em x (ouseja, a orbita x, T (x), T 2(x), ..., Tn(x), ... comecando no ponto x ∈E) estaremos interessados em calcular o valor medio de φ, denotadopor
φm(x) =1
m(φ(x) + φ(T (x)) + ...+ φ(Tm−1(x)))
ao longo da orbita de x do tempo 0 ate o tempo m− 1.Fazendo o numero de iteracoes m tender a infinito, obteremos a
media assintotica media do observavel φ ao longo da evolucao tem-poral iniciada em x:
φ(x) = limm→∞
1
m(φ(x) + φ(T (x)) + ...+ φ(Tm−1(x))).
Estaremos assim obtendo uma informacao de natureza assintoticadesta evolucao temporal. Um dos topicos de maior interesse daMecanica Estatıstica e saber o que acontece em termos probabilısticos(em x) com as medias temporais φ(x) e sua dependencia em x.
O fısico L. Boltzmann estava interessado em entender o sistemade partıculas (da ordem de 1023 partıculas) de um gas delimitado porum recipiente fechado. Um sistema com tantas partıculas e difıcil deser analisado do ponto de vista determinıstico. O sistema com ape-nas “uma”partıcula colidindo elasticamente com a fronteira de umaregiao bidimensional que apresentamos na secao anterior ja apresentadificuldades de analise determinıstica como vimos anteriormente (verObservacao 1.1, Capıtulo 1 em [L]). Prever a evolucao temporal deuma partıcula apos decorrido em tempo t muito grande e muito difıcil(devido a acumulacao de erros nas aproximacoes), imagine analisarum numero enorme de partıculas (1023) como acontece em um gasem um compartimento fechado. Sendo assim, faz mais sentido, per-guntar sobre a probabilidade de encontrar uma partıcula numa regiao

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 31 — #31 ii
ii
ii
31
Figura 2.4:
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 32 — #32 ii
ii
ii
32 CAPITULO 2. O T. E. E A HIPOTESE DE B.
D do recipiente. Este e o ponto de vista probabilıstico da Mecanicae que e o objeto da Mecanica Estatıstica. Estaremos interessados emfazer afirmacoes para pontos x “genericos no sentido probabilıstico”.
Para fixar ideias vamos considerar a evolucao temporal
T (x), T 2(x), ..., Tn(x)
quando x = (q, p) descreve a posicao de “uma”partıcula de um gasque esta em q com velocidade p. Considere agora φ um observavel dosistema (θ, ou temperatura, etc...), isto e, φ e uma funcao do espacode fase x = (q, p) ∈ E tomando valores em R. O que se pode dizerdo valor medio φ(x)?
A Hipotese Ergodica de Boltzmann: A Hipotese Ergodica deBoltzmann, que foi enunciada por L. Boltzmann no meio do seculoXIX, afirmava que fixado um nıvel de energia H0, este valor φ(x) naodeveria depender de x neste nıvel de energia H0 (no caso de um gasnum recipiente fechado).
Bem, a referida hipotese em termos tao amplos nao resultou serverdadeira. Primeiro, vamos tentar entender em termos Matematicosmais precisos o que L. Boltzmann estava querendo afirmar com a suaHipotese Ergodica. Mais tarde, tentaremos esclarecer o que nao foiconfirmado de tal hipotese.
Em termos matematicos mais precisos, o que L. Boltzmann estavaafirmando, na verdade, e que deve existir uma probabilidade naturalP definida no nıvel de energia X = (q, p), H(q, p) = H0, tal quedado uma funcao φ sobre X, deveria existir uma constante c tal quepara P -quase todo ponto x no conjunto X (o nıvel de energia H0), ovalor φ(x) e igual a c. P seria uma probabilidade natural invarianteassociada ao sistema de partıculas de um gas. Ou seja, que existiriaum conjunto B contido no nıvel de energia H0 tal que P (B) = 0 epara qualquer x ∈ X − B, deveria ser verdade que φ(x) = c. Emoutras palavras, que φ e constante para pontos genericos no sentidoprobabilıstico.
O Teorema de Birkhoff que sera apresentado a seguir vai se referira questao mencionada acima.
A evolucao temporal das condicoes iniciais x que sao fisicamenteobservadas no sistema constituido pelo gas sao as trajetorias que
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 33 — #33 ii
ii
ii
33
comecam em x, onde x e escolhido num conjunto de probabilidadetotal em relacao a uma probabilidade natural P . Esta propriedade e ofundamento do ponto de vista probabilıstico da Mecancia Estatıstica.A probabilidade P e chamada algumas vezes de estado de Gibbs(terminologia usada em homenagem ao matematico W. Gibbs) dosistema mecanico (ver [Ru], [E], [BS] e [KH] para referencias). Parasimplificar estamos supondo que o gas vai ser descrito por uma unicapartıcula para evitar ter que analisar problemas relativos a colisoesentre partıculas do gas.
Nao vamos definir aqui o que e um estado de Gibbs, mas queremosapenas mencionar que no caso do bilhar numa curva convexa ele e aprobabilidade uniforme em E = [0, 1) × (−1, 1) (conforme Exemplo2.6).
Definicao 2.6. Seja P uma probabilidade invariante para um difeo-morfismo T : X → X. Dizemos que P e ergodica se toda vez queT (A) = A, A ⊂ X, entao P (A) = 0 ou P (A) = 1.
Em outras palavras, uma probabilidade P e ergodica quando naoexistem conjuntos invariantes pela acao de T que nao sejam triviais(dizemos que um conjunto A ⊂ X e trivial se P (A) = 0 ou P (A) = 1).
Observacao 2.2. Note que e sempre verdade (ver Definicao 1.2) queP (∅) = 0 (∅ e o conjunto vazio) e P (X) = 1 (onde X e o conjuntoonde P esta definido), e ainda que T (∅) = ∅ e T (X) = X, poristo a necessidade de enunciar a definicao de probabilidade ergodicacomo foi feito acima (e nao apenas dizendo que nao existem conjuntosinvariantes). Os conjuntos X e ∅ sao triviais.
Exemplo : A transformacao T (x) = x + λ (mod 1), onde λ e umaconstante irracional, T definida no intervalo [0, 1) (ou no cırculo S1)e ergodica para dx.
Seja A tal que T−1(A) = A, entao IA(x) = IT−1(A)(x) = IA(T (x))para todo x ∈ [0, 1).
Expresse IA(x) como Serie de Fourier
IA(x) =
∞∑n=−∞
ane2πinx.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 34 — #34 ii
ii
ii
34 CAPITULO 2. O T. E. E A HIPOTESE DE B.
Figura 2.5:
Como IA(x) = IA(T (x)) temos que
IA(x) =∞∑
n=−∞ane
2πinx =∞∑
n=−∞ane
2πin(x+λ) = IA(T (x)).
Portanto
∞∑n=−∞
ane2πinx =
∞∑n=−∞
ane2πinλe2πinx.
Como os coeficientes de Fourier sao unicos ane2πinλ = an para
todo n ∈ Z. Como λ e irracional entao nλ nao e inteiro para todon (a menos que n = 0). A conclusao e que an = 0 para todo n = 0.Portanto IA is constante (a menos de um conjunto de medida zero),mas como so assume os valores 0 ou 1, ela e, a menos de um conjuntode medida zero a funcao constante 0 ou a funcao constante 1. Logoµ(A) =
∫IA(x)dx =
∫0dx = 0 ou µ(A) =
∫IA(x)dx =
∫1dx = 1
(porque funcoes que diferem apenas em um conjunto de medida zerotem a mesma integral).
Se λ e racional T (x) = x+ λ (mod 1) nao e ergodica.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 35 — #35 ii
ii
ii
35
Observacao 2.3. Um gas em um recipiente fechado, ao longo dasua evolucao temporal, tendera a ocupar densamente todo o espacodisponıvel, nao deixando espaco para existirem regioes invariantes.Esta observacao traduz em termos fısicos aproximados o que o con-ceito de ergodicidade expressa em termos matematicos.
O fato da transformacao bilhar preservar area e do fluxo Hamil-toniano preservar volume os qualificam para os metodos de TeoriaErgodica [A3].
Seja um difeomorfismo T : E → E, P = Pφ probabilidade in-variante sobre E para T e φ : E → R funcao tomando valores reais(observavel). O proximo resultado e valido em geral e nao precisare-mos assumir que T e a transformacao induzida pelo primeiro retornoa uma secao transversal de um fluxo Hamiltoniano no bilhar convexo.
Um dos resultados Matematicos mais relevantes para a MecanicaEstatıstica e o Teorema Ergodico de G. Birkhoff (1935) que afirma oseguinte:
Teorema 2.1. (Teorema de Birkhoff) Seja φ : E → R contınua,P = Pψ probabilidade ergodica para T : E → E e suponha que∫φ(y)dP (y) < ∞, entao, existe c ∈ R tal que para todo ponto x,
generico no sentido probabilıstico em relacao a probabilidade P , valeque
c = φ(x) = limm→∞
1
m(φ(x) + ...+ φ(Tm−1(x))).
O valor c pode ser obtido como
c =
∫φ(y)dP (y),
ou seja, a integral de φ em relacao a P .
Para a prova e para consideracoes mais gerais sobre o TeoriaErgodica, referimos o leitor para [PY], [M1], [CFS] e [KH]. Esta Teo-ria permite um melhor entendimento de questoes fundamentais daMecanica Estatistica [PP] e [Ru]. O ponto de vista do formalismoDLR da Mecanica Estatistica e descrito em [G].
Em resumo o teorema de Birkhoff diz que existe um conjunto Atal que P (A) = 1 tal que para todo x ∈ A vale que a media temporal

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 36 — #36 ii
ii
ii
36 CAPITULO 2. O T. E. E A HIPOTESE DE B.
assintotica
φ(x) = limm→∞
1
m
n−1∑j=0
φ(T j(x))
e igual a integral espacial∫φ(y)dP (y) =
∫E
φ(y)ψ(y)dy.
Observacao: Mostramos em exemplo anterior que T (x) = x + λ(mod 1) e ergodica para a probabilidade uniforme (a P tal P ([a, b]) =b − a). E facil ver por inducao que Tn(x) = x + nλ (mod 1). Seja[a, b] intervalo qualquer e considere φ(x) = I[a,b](x).
Podemos aplicar o teorema ergodico tambem neste caso e concluirque existe K ⊂ [0, 1] tal que P (K) = 1 e para todo x ∈ K
ˆI[a,b](x) = limm→∞
1
m
n−1∑j=0
I[a,b](Tj(x)) =
∫I[a,b](y)dP (y) = b− a > 0.
Note que T j(x) ∈ [a, b], se e so se, I[a,b](Tj(x)) = 1. Portanto,
para x ∈ K a orbita Tn(x)|n ∈ Z visita o conjunto [a, b].Logo as orbitas Tn(x)|n ∈ Z, para x quase todo ponto (em
relacao a P ), vao determinar conjuntos densos em [0, 1] (ver exercıcio?).
Exemplo 2.7. Considere o estadio circular (l > 2) do Exemplo 1.4e que foi descrito na secao anterior.
Um resultado nao trivial obtido recentemente por [Bu] afirma quea probabilidade natural P (a area) associada ao bilhar no estadio eergodica, isto e, a aplicacao induzida no bordo pelo primeiro retornoT : [0, 1) × (−1, 1) → [0, 1) × (−1, 1) e ergodica para a probabilidadeuniforme.
Considere a, b valores em [0,1) e φ : E → R a funcao indicadorde A = (a, b)× (−1, 1).
Para A um subconjunto de X, IA(z), a funcao indicador de A, ea funcao tal que IA(z) = 1 se z ∈ A e IA(z) = 0 se z nao esta estaem A.
E facil ver que∫IA(x)ψ(x)dx =
∫Aψ(x) = P (A).

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 37 — #37 ii
ii
ii
37
No caso em consideracao neste exemplo de bilhares em E = [0, 1)×(−1, 1) ψ(x) e constante igual a 1/2.
A funcao φ = IA nao e contınua (tem descontinuidades numacurva diferenciavel por partes), mas o Teorema Ergodico tambem evalido para tal tipo de funcao φ (ver [M1] e [CFS]).
E facil ver que para x fixo e m ∈ N e φ = IA
1
m(φ(x) + φ(T (x)) + ...+ φ(Tm−1(x))
e igual a
#j ∈ 0, 1, ...,m− 1 tal que T j(x) ∈ (a, b)× (−1, 1)m
.
Sendo assim o limite
φ(x) = limn→∞
1
m(φ(x) + φ(T (x)) + ...+ φ(Tm−1(x)) ),
neste caso expressa o valor medio de vezes que a trajetoria comecandoem x bate na regiao do bordo do bilhar compreendida entre g(a) e g(b),(onde g e a parametrizacao do bordo do bilhar). Neste caso φ(x) vaidescrever o que chamamos de tempo de ocupacao assintotico da regiaoA.
O conceito de tempo de ocupacao ja foi apresentado antes naDefinicao 25, Capıtulo 3 [L], mas vamos repeti-lo a seguir.
Definicao 37*: Considere T : E → E difeomorfismo, A ⊂ E ex = (q, p) ∈ E. Dizemos que x tem um tempo de ocupacao assintoticode A igual a oA(x) se existe o limite
limn→∞
# vezes que T j(q, p) ∈ A, j ∈ 1, 2, ..., nn
= oA(x).
O valor c = φ(x) = IA(x) = oA(x) e constante para todo x (forade um conjunto de probabilidade 0) pelo Teorema de Birkhoff, e e
igual a∫φdP =
∫IAdP2 = P (A) = area de A = (b − a). Portanto,
gracas ao Teorema Ergodico podemos calcular no Exemplo 2.7 o valor

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 38 — #38 ii
ii
ii
38 CAPITULO 2. O T. E. E A HIPOTESE DE B.
exato do tempo de ocupacao assintotica oA(x) do conjunto A para xquase toda parte; este valor e b− a.
Sendo assim, podemos fazer a seguinte previsao: no bilhar noestadio com l = 2 (que e ergodico), se formos observar a partıculadepois de 1000 rebotes, dentre estes 1000 rebotes, aproximadamenteum numero (b − a)1000 deles foram no arco de curva compreendidoentre g(a) e g(b).
Vamos relembrar agora a Definicao no Capıtulo 1 de ponto perio-dico.
Dizemos que uma orbita Tn(q, p), n ∈ N e periodica se existem ∈ N tal Tm(q, p) = (q, p). Neste caso
Tn(q, p) , n ∈ N = (q, p), T (q, p), ..., Tm−1(q, p).
O valor m e denominado perıodo de (q, p).
Observacao 2.4. Note que o resultado sobre o tempo de ocupacaooA(x) = φ(x) no estadio l > 0 nao pode ser verdade para todasas condicoes iniciais x = (q, p). Na Figura 1.5, mostramos duas tra-jetorias a e b na parte interna do estadio, que correspondem a orbitasperiodicas para T de perıodo dois, respectivamente (qa, pa), T (qa, pa)e (qb, pb), T (qb, pb). Na Figura 1.6 mostramos tambem no espaco defase (q, p) ∈ [0, 1)×(−1, 1) as duas orbitas acima mencionadas. Estasorbitas naturalmente vao determinar tempos de ocupacao diferentespara o conjunto A que aparece na Figura 3.25. O tempo de ocupacaoassintotico de A para a orbita a e zero e para a orbita b e um.
Note que o comportamento desta duas trajetorias e totalmentedistinto do comportamento da trajetoria descrita pela Figura 1.7 ap-resentada na ultima secao. Para “qualquer ponto inicial x escolhidoao acaso”de acordo com a probabilidade uniforme, a orbita Tn(x)gera a Figura 1.7.
Nao existe contradicao entre a Figura 1.7 e 1.6, pois no ulimocaso a posicao da condicao inicial (q0, p0) e muito particular, e estafora do conjunto de probabilidade total para o qual vale o Teoremade Birkhoff. A explicacao para este fato e que estas duas condicoesiniciais (qa, pa) e (qb.pb) nao serao condicoes “genericas”no sentidoestabelecido pela Definicao 2.4 e pelo Teorema Ergodico. No entanto,se escolhermos ao acaso (de acordo com P uniforme) a condicaoinicial (q0, p0), entao (q0, p0) sera generica e portanto vai satisfazer

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 39 — #39 ii
ii
ii
39
a propriedade que o tempo ocupacao oA para um certo conjunto Afixado, existe e independe da condicao inicial. Isto e o que afirma oTeorema Ergodico para φ = IA!
E importante destacar que na analise matematica e probabilısticados bilhares, as orbitas periodicas (principalmente as de perıodo muitoalto) desempenham um papel importantıssimo no entendimento dadinamica das trajetorias.
Exemplo 2.8. No caso do sistema de duas partıculas
x = (x1, x2, v1, v2)
que foi considerado no Exemplo 13 da Secao 4, Capıtulo 1 [L], existeum conjunto A denso (ver Definicao 13, Capıtulo 1 [L]) em R2 talque quando as massas m1 e m2 sao tais que (m1,m2) ∈ B, entao epossıvel mostrar (ver [KMS]) que a probabilidade natural P associadaao bilhar triangular e ergodica.
Logo, no caso em que (m1,m2) ∈ A, as medias φ(x) para qualquerfuncao contınua φ definida sobre o bilhar triangular sao as mesmas,independentes da condicao inicial x (contanto que x seja escolhidoao acaso de acordo com a probabilidade P ).
Podemos portanto, analogamente ao procedimento do exemplo an-terior, obter o valor exato oB, onde B corresponde ao evento: aposicao x1 e x2 ao colidirem estao no intervalo (0.2, 0.5). Do Teo-rema Ergodico segue que oB = P (B) e oB independe de x (para xnum conjunto de probabilidade total). O valor oB pode entao sercalculado facilmente a partir de P .
Quando√m2√m1
∈ Q, o sistema acima considerado nao e ergodico.
Acreditamos que com estes dois ultimos exemplos tenha ficadotransparente a importancia do Teorema Ergodico de Birkhoff para aanalise de propriedades estatısticas das orbitas dos fluxos Hamiltoni-anos.
Note que se P e ergodica e e sempre positiva em abertos entao parax P-quase toda parte a orbita x, T (x), .., Tn(x), ... e um conjuntodenso; de fato, dado um aberto A como P (A) > 0 entao
0 < P (A) =
∫IA(x)dP (x) = oA(x) =
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 40 — #40 ii
ii
ii
40 CAPITULO 2. O T. E. E A HIPOTESE DE B.
limn→∞
1
m(IA(x) + IA(T (x)) + ...+ IA(T
m−1(x)) ).
Neste caso algum IA(Tj(x)) e igual a 1.
Para um sistema ergodico, o Teorema de Birkhoff descreve amaneira matematica exata como deve ser entendida a hipotese deBoltzmann.
A teoria de Kolmogorov-Arnold Moser (KAM) (ver [KH] e Secao13, Capıtulo 3 [L]) desenvolvido no meio deste seculo mostrou quepara uma grande quantidade de Hamiltonianos a propriedade da er-godicidade nao e valida. Vamos a seguir, atraves de um exemplo, daruma breve ideia porque nao e verdade a Hipotese de Boltzmann emsua formulacao mais geral.
Consideraremos agora o bilhar no ovo (Exemplo 1.4, Capıtulo 1)e T a aplicacao induzida no bordo do bilhar conforme mostra Figura1.8.
Observacao 2.5. No caso do bilhar no ovo, existe uma evidencianumerica de haver um uniao finita de curvas fechadas invariantesγi, i ∈ 1, .., n para T (ver Figura 1.8), mostra claramente que tal Tnao e ergodica. Isto porque
( [0, 1)× (−1, 1) )− ∪iγi
possui um conjunto invariante de probabilidade uniforme positiva (porexemplo a uniao das partes internas das γi).
Isto pode ser observado numericamente em um computador, con-siderando orbitas comecando em condicoes iniciais que estao respec-tivamente no interior e no exterior da curva.
Concluımos entao que existe uma evidencia numerica de que talsistema nao e ergodico.
Este fato contraria entao a Hipotese Ergodica de Boltzmann poisT representa a evolucao temporal de uma partıcula de uma gas numrecipiente fechado.
O leitor poderia argumentar que ja para o bilhar no cırculo (Exem-plo 1.2) o difeomorfismo T nao e ergodico para a probabilidade uni-forme em [0, 1)× (−1, 1) (uma linha horizontal l = (θ0, t) invariantepor T determina em [0, 1) × (−1, 1) duas componentes invariantespor T de medida uniforme nao nulas). Para ser mais preciso, caberessaltar que a Hipotese Ergodica de Boltzmann e em geral relaxada e

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 41 — #41 ii
ii
ii
41
enunciada para um conjunto denso de possıveis bordos de bilhares. Oexemplo acima e persistente, isto e, para curvas diferenciaveis con-vexas γ, que estao C1 proximas da curva do ovo, o espaco de faseda aplicacao T induzida pelo bilhar em γ continua a determinar cur-vas invariantes. Sendo assim, existem ao menos duas regioes bidi-mensionais invariantes de probabilidade positiva e portanto pode-sedizer que existem bilhares que nao podem ser aproximados por bil-hares tais que o correspondente T seja ergodico para a probabilidadeuniforme em [0, 1) × (−1, 1). Portanto, o exemplo do bilhar no ovonos parece indicar indicar numericamente que a Hipotese Ergodicade Boltzmann nao e verdadeira em geral. No exemplo do estadio cir-cular da secao anterior, por usa vez, a hipotese e confirmada pois osistema e ergodico.
Na verdade nao estamos mostrando matematicamente que a Hi-potese Ergodica de Boltzmann nao e verdadeira, estamos apenas sug-erindo atraves de exemplos e figuras obtidas no computador que ex-iste uma forte evidencia numerica de que esta hipotese nao e ver-dadeira. Na Teoria KAM se obtem resultados matematicos precisosque mostram exemplos onde a hipotese nao e verdadeira (ver [KH]).
Na Secao 3 vamos mostrar para aplicacao “standard”a existenciade curvas invariantes, e assim dar uma demontracao matematica deque realmente a hipotese ergodica em alguns casos particulares nao everdadeira.
Em alguns outros casos particulares importantes, no entanto, ahipotese de Boltzmann resultou ser verdadeira como por exemplo emvariedades de curvatura constante negativa (ver [KH] e [A2]).
Vamos agora analisar o Teorema Ergodico para tempo continuo.
Definicao 2.7. Considere para todo t (−∞ < t < ∞), uma trans-formacao St do espaco X em si mesmo, St : X → X, que satisfaca aseguinte condicao: para quaisquer t1, t2, St1 St2 = St1+t2 . Chamare-mos tal famılia de um sistema dinamico a tempo contınuo.
Exemplo 2.9. Dada uma equacao diferencial x′ = G(x), x ∈ Rn, ofluxo ϕt associado a tal equacao (conforme Definicao 21, Capıtulo 1[L]) e um exemplo de um sistema dinamico a tempo contınuo St = ϕt.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 42 — #42 ii
ii
ii
42 CAPITULO 2. O T. E. E A HIPOTESE DE B.
Exemplo 2.10. Considere α numero real e defina St : R → R porSt(x) = x+ tα, para todo real t. St e um sistema dinamico a tempocontınuo.
Exemplo 2.11. Considere α numero real e defina St : [0, 1) → [0, 1)por St(x) = x + tα (mod 1) para todo real t. Este sistema dinamicosera muito importante em nossas futuras consideracoes.
Definicao 2.8. A probabilidade µ e dita invariante em relacao aosistema dinamico St se, para todo conjunto B ⊂ X e para qualquert real, µ(StB) = µ(B).
Uma maneira equivalente de dizer que uma medida µ e invariantepara St: Para toda funcao contınua ϕ e para todo t real vale que∫ϕ(x)dµ(x) =
∫ϕ(St(x))dµ(x).
O Teorema de Liouville (Teorema 4, Capıtulo 3 [L]) mostra quese ϕt e o fluxo associado a um Hamiltoniano H, entao para todo t, epara todo aberto A vale que area ϕt(A) = area de A.
Logo, neste caso, o sistema dinamico St = ϕt deixa invariante aprobabilidade uniforme.
O Exemplo 33 do Capıtulo 3 [L] mostra um exemplo de proba-bilidade invariante sobre uma curva γ obtida atraves do tempo deocupacao assintotico.
Exemplo 2.12. E facil ver que o sistema dinamico St do Exem-plo 2.11 deixa invariante a probabilidade µ definida sobre [0,1) porµ( [a, b] ) = b − a. Esta probabilidade, como vimos antes se chamaprobabilidade uniforme em [0,1).
Dada uma orbita periodica γ(s), s ∈ [0, b], tal que γ(0) = γ(b)defina a medida µ tal que para toda funcao contınua ϕ temos∫
ϕ(x)dµ(x) =
∫ b
0
ϕ(γ(s))ds.
A medida µ assim definida e invariante; de fato, para t fixo∫ϕ(St(x))dµ(x) =
∫ b
0
ϕ(St(γ(s)))ds =
∫ b
0
ϕ(St(Ss(γ(0)))ds =
∫ b
0
ϕ(St+s(γ(0)))ds.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 43 — #43 ii
ii
ii
43
Fazendo a mudanca de variavel s→ s+ t, obtemos∫ϕ(St(x))dµ(x) =
∫ b
0
ϕ(Ss(γ(0))ds =
∫ b
0
ϕ(γ(s))ds =
∫ϕ(x)dµ(x).
Definicao 2.9. O fluxo St e dito ergodico para µ se para todo con-junto A ⊂ X tal que St(A) = A,∀t ∈ R, entao µ(A) = 0 ou µ(A) = 1.
Vamos agora considerar St = ϕt o fluxo associado a um campo devetores Hamiltoniano H em (q, p) ∈ R2n restrito a uma superfıcie deHamiltoniano H constante.
Suponha que a superfıcie S de energia constante H0 seja com-pacta. Neste caso, como veremos na Secao 5, existe sempre umaprobabilidade invariante P para o fluxo Hamiltoniano ϕt restrito a su-perfıcie H(q, p) = H0 de Hamiltoniano constante. Esta probabilidadeP e a probabilidade P = PH0 = P k
∥∇H∥com densidade ψ = k
∥∇H∥sobre H(q, p) = H0 (ver Secao 5) onde k e apenas uma constantepara normalizar a probabilidade P .
Tal probabilidade P definida sobre S e positiva em abertos deS, ou seja, dado x ∈ S e ϵ > 0, entao P (B(x, ϵ) ∩ S) > 0, ondeB(x, ϵ) = y ∈ R2n | |x− y| < ϵ.
Vamos tentar colocar a afirmacao de Boltzmann de uma maneiramatematicamente mais precisa do que a que foi feita pelo mesmo noseculo XIX.
A Hipotese Ergodica de Boltzmann: A Hipotese Ergodica deBoltzmann para Hamiltonianos e analoga a anteriormente descrita(no caso em que o tempo e discreto n ∈ N).
A Hipotese Ergodica para Hamiltonianos afirma que para todovalor de energiaH0, PH0
e ergodico para o fluxo ϕt restrito aH(q, p) =H0.
E importante nao confundir a acao de fluxo ϕt sobre o espaco(q, p) ∈ R2n com a acao (restrita) do fluxo ϕt sobre uma superfıciede Energia constante H0.
A questao da validade ou nao da Hipotese Ergodica de Boltzmanninfluenciou sobremaneira a Fısica e a Matematica do seculo XX.
Contra-exemplo 68: Lembre que o fluxo Hamiltoniano ϕt preservavolume em R2n ou seja preserva a probabilidade uniforme em cada

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 44 — #44 ii
ii
ii
44 CAPITULO 2. O T. E. E A HIPOTESE DE B.
subconjunto aberto limitado invariante X ⊂ R2n. A probabilidadeP em X = R2n neste caso nao e ergodica para ϕt. Isto porque umsistema com uma integral primeira nao pode ser ergodico (lembre queH e integral primeira) como veremos a seguir.
Se tomarmos o aberto limitado A ⊂ X (com probabilidade posi-tiva para P portanto) dos pontos x ∈ R2n tal que E1 < H(x) < E2,entao o fluxo Hamiltoniano ϕt deixa A invariante pelo Teorema deConservacao do Hamiltoniano e no entanto 1 > P (A) > 0. Logo, em-bora o fluxo Hamiltoniano deixe invariante a probabilidade P , nao everdade que P e ergodico para ϕt.
Outra questao de natureza distinta e: sera que ϕt e ergodicoquando restrito a uma superfıcie S de energia constante H0?
Teorema 2.2. (Teorema de Birkhoff) Seja um Sistema Dinamico Stdefinido em X, preservando a probabilidade ergodica P = Pψ. Entaopara toda funcao contınua f tal que
∫Xf(x)dP (x) =
∫Xf(x)ψ(x)dx <
∞, existe uma constante c e existe um conjunto B de probabilidadetotal tal que para todo ponto x ∈ B
c = limt→∞
1
t
∫ t
0
f(Sτx)dτ = limt→∞
1
t
∫ t
0
f(S−τx)dτ.
O valor c naturalmente depende de f e pode ser obtido como
c =
∫X
f(y)dP (y) =
∫X
f(y)ψ(y)dy.
Vamos recordar mais uma vez a definicao de tempo de ocupacaoassintotico (ver Secao 10, Capıtulo 3 [L]), desta vez no caso de tempocontınuo t ∈ R.
Definicao 37**: Dado um conjunto A ⊂ X e uma condicao inicialx ∈ X,
limt→∞
1
t
∫ t
0
IA(Sτx)dτ = oA(x)
e chamado de tempo de ocupacao assintotico de A comecando em x.
Uma consequencia importante do teorema anterior e que, no casode P ser ergodico para St, entao para todo x em um conjunto B deprobabilidade total para P , a orbita de x pelo sistema dinamico St(x)
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 45 — #45 ii
ii
ii
45
determina um tempo de ocupacao assintotico de um conjunto abertoqualquer A ⊂ X tal que o(A)(x) = P (A).
Isto e verdade, porque pelo Teorema 2.2, dado um subconjunto Ae considerando f = IA acima obtemos
limt→∞
1
t
∫ t
0
IA(Sτx)dτ =
∫X
IA(z)dP (z) =
=
∫A
dP (z) = P (A) = c = constante
para x em um conjunto B de probabilidade total para µ.Logo, se um sistema e ergodico, existe B tal que P (B) = 1 e para
x ∈ B o tempo de ocupacao assintotico de um conjunto aberto A naodepende do valor x.
A analogia do Teorema Ergodico com tempo contınuo t ∈ R parao Teorema Ergodico com tempo discreto n ∈ N visto anteriormentee transparente.
Examinaremos, agora, um tipo importante de sistema dinamicocom tempo contınuo: o grupo de translacoes a um parametro no toro.
Seja X =Torn = S1 × S1 × ... × S1 (n fatores) o toro de di-mensao n. Um ponto desse espaco pode ser representado pelo sis-tema de numeros complexos z = (z1, z2, ..., zn), |zk| = 1, 1 ≤ k ≤n. Note que e possıvel escrever zk = e2πixk (xk ∈ R); entao, omesmo ponto z pode ser identificado com o sistema de numeros reaisx = (x1, x2, ..., xn) ∈ [0, 1)n, definidos mod 1 (neste caso, podemosassumir que 0 ≤ xk < 1). A primeira notacao e conhecida comomultiplicativa, e a segunda, como aditiva.
Sendo assim iremos identificar o toro com o conjunto [0, 1)n ondeidentificamos faces opostas do paralelepıpedo. Definiremos o sistemadinamico das translacoes no toro Torn pela expressao
Stz = (z1e2πiλ1t, z2e
2πiλ2t, ..., zne2πiλnt)
ou, equivalentemente, com
Stx = (x1 + λ1t( mod 1), x2 + λ2t( mod 1), ..., xn + λnt( mod 1)),
onde λ1, λ2, ..., λn sao numeros reais fixos. Cada St e dita umatranslacao no toro, e por isso St e chamado um grupo de translacoesa um parametro em Torn, definido pelo vetor λ = (λ1, λ2, ..., λn).
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 46 — #46 ii
ii
ii
46 CAPITULO 2. O T. E. E A HIPOTESE DE B.
Note que a probabilidade uniforme no toro dµ =∏nk=1 dxk e
invariante em relacao a St. Isto porque, como St(A) e apenas umtransladado de A, ∀A, entao St(A) e A tem a mesma area. Logo Stpreserva o volume dx1...dxn. Note que µ(Torn) = 1. Sendo assim sedefinirmos µ(A) =
∫Adx1...dxn, a probabilidade uniforme µ resulta
ser invariante para o sistema dinamico St em [0, 1)n.O conjunto dos vetores a(t) = (e2πiλ1t, e2πiλ2t, ..., e2πiλnt), −∞ <
t < ∞, define a trajetoria do zero atraves da evolucao temporal dosistema dinamico St.
O Sistema Dinamico St acima definido e muitas vezes chamadocondicionalmente periodico, sendo λk (1 ≤ k ≤ n) suas frequencias.
Exemplo 2.13. O exemplo mais simples de tais sistemas St foiapresentado nos Exemplos 2.11 e 2.12: para α fixo, St(x) = x +αt(mod1), α = 0. Neste caso a probabilidade invariante P e a prob-abilidade uniforme em [0, 1). Uma pergunta natural e quando que Pe ergodica para tal St.
Vamos mostrar agora que tal P e sempre ergodica para tal St.
Observacao 2.6. Pode-se mostrar (ver [M1]) que um fluxo Ste ergodico para µ, se e so se, vale que para toda funcao f tal que∫Xfdµ < ∞ e f(St(x)) = f(x) para todo x, entao e porque f(x) =
const. =∫Xf dµ para um conjunto de pontos x em um conjunto B
de probabilidade total para µ.
Vamos usar o resultado mencionado na observacao acima paramostrar que St e ergodico para a probabilidade uniforme.
Considere fixado um ponto x ∈ [0, 1). Observe que variando t,St(x) percorre todos os valores possıveis y do intervalo [0, 1). Logo,para uma dada funcao f , f(St(x)) = f(x) significa que para todoy ∈ [0, 1), f(y) = f(x). Logo f e constante. Sendo assim pela ultimaobservacao St e ergodico.
Vamos apresentar agora uma outra prova da ergodicidade da Stacima definida, e que vai motivar a demonstracao do proximo teo-rema. Considere um funcao f que seja invariante para St, ou seja,f(St(x)) = f(x) para qualquer x ∈ [0, 1). Escreva f em serie deFourier
f(x) =∑s∈Z
cse2πisx.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 47 — #47 ii
ii
ii
47
Como f e invariante
f(St(x)) =∑s∈Z
cse2πis(x+αt) =
∑s∈Z
cse2πisαte2πisx =
=∑s∈Z
cse2πisx = f(x).
Logo, concluımos pela unicidade da Serie de Fourier de uma funcao,que ∀s ∈ Z,∀t ∈ R, cse
2πisαt = cs, ou seja que se cs = 0, para todot vale que e2πiαst = 1. Portanto α s = 0, e como α = 0, isto e im-possıvel a menos que s = 0. Portanto, cs = 0 para s = 0. Logo f econstante em quase toda parte com relacao a probabilidade uniformeP pois sua serie de Fourier e constante igual a c.
Logo, pela ultima observacao St(x) = x+ αt e sempre ergodico.
Sera que St(x1, x2, .., xn) = (x1 + λ1t(mod1), ..., xn + λnt(mod1))tambem e ergodico para a probabilidade uniforme? A resposta e: nem sempre! Sera necessario assumir alguma hipotese sobre osλ1, .., λn. Estas condicoes serao estabelecidas pelo proximo teorema.
Teorema 2.3. Para que um fluxo condicionalmente periodico St sejaergodico e necessario e suficiente que os numeros λ1, λ2, ..., λn sejamracionalmente independentes, isto e, que igualdades da forma s1λ1 +s2λ2 + ...+ snλn = 0, onde s1, s2, ..., sn ∈ Z sejam possıveis apenasquando s1 = s2 = ... = sn = 0.
Demonstracao:Vamos utilizar o criterio estabelecido pela ultima observacao para
demonstrar o resultado desejado.Primeiro, provaremos a suficiencia. Suponhamos que os numeros
λ1, λ2, ..., λn
sejam racionalmente independentes.Vamos mostrar que qualquer f tal que f(St(x)) = f(x), e tal que
f e constante fora de um conjunto de probabilidade uniforme nula.A funcao f em Torn tomando valores reais, pode ser expandida
em uma serie de Fourier que convirja na media quadratica, ou seja,
f(x) =∑s
cs e2πi(s1x1+s2x2+...+snxn),

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 48 — #48 ii
ii
ii
48 CAPITULO 2. O T. E. E A HIPOTESE DE B.
onde s = (s1, s2, ..., sn) ∈ Zn, e a soma e tomada sobre a famılias des ∈ Zn.
Da invariancia de f obtemos
f(Stx) =∑s
cs e2πi[s1(x1+λ1t)+s2(x2+λ2t)+...+sn(xn+λnt)]
=∑s
cs e2πi(s1λ1+s2λ2+...+snλn)t . e2πi(s1x1+s2x2+...+snxn) = f(x)
=∑s
cse2πi(s1x1+s2x2+...+snxn),
a menos de um conjunto de probabilidade uniforme zero (lembre quea serie de Fourier de uma funcao f e definida a menos de um conjuntode probabilidade uniforme 0.
Em virtude da unicidade do coeficiente de Fourier,
cs = cse2πi(s1λ1+...+snλn)t,
isto e, para todo s ou cs = 0 ou e2πi(s1λ1+...+snλn)t = 1. A segundaigualdade so e valida quando (s1λ1 + ... + snλn)t = p, onde p ∈ Z.Como t e arbitrario, isto acontece apenas se s1λ1 + ... + snλn = 0,ou seja, se s1 = ... = sn = 0, pois estamos supondo que λ1, ..., λneram racionalmente independentes. Logo, para todo s = (0, 0, ..., 0),temos que cs = 0. Note que o argumento nao pode ser aplicado a c0.Portanto, todos os coeficientes de Fourier cs tais que s = 0 sao nulos.Logo, temos que f(x) = c0 = constante a menos de um conjunto deprobabilidade zero. Portanto, pela Observacao 2.6, concluımos queP e ergodica.
Agora, provaremos a necessidade. Suponhamos que haja um vetornao-nulo s = (s1, ..., sn) com coordenadas inteiras tais que s1λ1+ ...+snλn = 0. Entao, a funcao f tal que
f(x) = e2πi(s1x1+...+snxn)
nao e constante (mod 0), mas e invariante em relacao a St pois
f(Stx) = e2πi[s1(x1+λ1t)+...+sn(xn+λnt)]
= e2πi(s1λ1+...+snλn)t.e2πi(s1x1+...+snxn) = f(x).
Portanto, St nao e ergodico, o que e uma contradicao. Assim,completamos a prova do teorema.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 49 — #49 ii
ii
ii
49
Exemplo 2.14. Segue do teorema acima que o sistema dinamico
St(x1, x2) = (x1 + t (mod1), x2 + αt (mod1))
e ergodico, se, e somente se, α e irracional.
Considere agora o Hamiltoniano H(q, p) = p21 + p22 + ...+ p2n.Para p0 = (λ1, λ2, ..., λn) fixado considere o subconjunto D do
R2n constituıdo pelos pontos da forma
(q, p0) = (q1, q2, ..., qn, p1, ..., pn) = (q1, q2, ..., qn, λ1, ..., λn),
onde (q1, q2, ..., qn) ∈ [0, 1]n.Podemos considerar que este sistema Hamiltoniano oriundo de tal
H(q, p) esta definido em q ∈ Rn (mod 1), descrevendo assim um fluxoHamiltoniano no toro [0, 1)n.
E facil ver que D e invariante para o fluxo Hamiltoniano ϕt geradoporH. Por exemplo, D pode ser obtido atraves de superfıcies de nıvelde integrais primeiras do tipo Vi(q, p) = pi = λi. E tambem facil vera projecao π1 (ϕt ) (onde π1(q, p) = q) do fluxo ϕt e na verdade igualao St(q) = π1 ϕt(q, p0) acima descrito.
Como a velocidade p(t) das solucoes (q(t), p(t)) do HamiltonianoH e constante igual a p0 = (λ1, ..., λn) entao podemos pensar queSt e apenas uma mudanca de coordenadas π1 do fluxo Hamiltoni-ano (restrito a D) determinado por tal H. Sendo assim entender aevolucao temporal do sistema dinamico St das translacoes no toro ena verdade entender a evolucao de um sistema mecanico periodicosem energia potencial.
Observacao 2.7. Com relacao ao Teorema acima ha um esclareci-mento importante a fazer: em todos os nossos argumentos, a condicaode ergodicidade do fluxo no toro, foi equivalente a independenciaracional dos numeros λ1, ..., λn; ora, nem sempre a condicao de in-dependencia racional dos numeros λ1, ..., λn e verdadeira (por exem-plo, se todos os λi forem racionais). Felizmente, o conjunto dos(λ1, ..., λn) que nao sao racionalmente independentes, tem probabil-idade zero em relacao a probabilidade de dλ1...dλn em [0, 1)n (verExercıcio 5).
Sendo assim, escolhendo um conjunto de valores (λ1, ..., λn) aoacaso em Rn de acordo com a probabilidade uniforme em dλ1...dλn

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 50 — #50 ii
ii
ii
50 CAPITULO 2. O T. E. E A HIPOTESE DE B.
obteremos um sistema que tem otimas propriedades estatısticas. Por-tanto, do ponto de vista probabilıstico podemos afirmar que o sistemaobservado na natureza (escolhendo os λ1, ..., λn com probabilidade to-tal em Rn) possui propriedades estatısticas otimas para as trajetoriascomecando em x num conjunto de probabilidade total.
Dizemos que um sistema tem propriedades estatısticas otimas separa um conjunto de probabilidade total de condicoes iniciais, as tra-jetorias visitam uma dada regiao A com a mesma frequencia assin-totica.
Note que a afirmacao do sistema ter otimas propriedades estatıs-ticas nao pode ser feita para “todos”os possıveis sistemas λ1, ..., λncondicionalmente periodicos.
Exemplo 2.15. Considere um ponto de equilıbrio de um sistemaHamiltoniano natural unidimensional H(q, p) = 1
2p2 + V (q) onde
V (q) tem mınimo local em 0. Suponha que d2V (q)dq2 |q=0 > 0. O sis-
tema Hamiltoniano em torno do ponto (0, 0) e integravel e as curvasde nıvel para o Hamiltoniano sao curvas fechadas envolvendo o ponto(0, 0).
Conforme vimos na Secao 7, Capıtulo 3 expressao (3.5) [L], ofluxo Hamiltoniano pode ser localmente escrito em coordenadas acao- angulo (θ, I) atraves da equacao
θ = w(I) , I = 0.
As solucoes deste sistema, como vimos antes sao da forma(θ(t), I(t)) = (θ0 + w(I0) t, I0), onde (θ0, I0) e a condicao inicial.
Logo, em variaveis acao-angulo, o fluxo Hamiltoniano ϕt restritoa curva de nıvel I = I0 = constante, e da forma ϕt(θ0, I0) = (θ0 +w(I0)t, I0).
A partir de ϕt, considerando apenas a variavel θ, obtemos no nıvelde energia correspondente a I0 o sistema dinamico
St(θ) = θ + w(I0) t (mod 1).
Este sistema dinamico foi analisado anteriormente e e sempreergodico.
Retornando as variaveis (q, p) o resultado analogo sera tambemverdadeiro.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 51 — #51 ii
ii
ii
51
Desta maneira, pelo que vimos acima, o fluxo Hamiltoniano ϕtrestrito a uma curva de Energia constante, proxima ao ponto deequilıbrio e ergodico. Sendo assim, a Hipotese Ergodica de Boltz-mann e verdadeira neste caso.
Sera que a mesma propriedade e valida para o caso analogo n-dimensional?
Considere agora o sistema n-dimensional H(q, p) = |p|22 + V (q)
com q e p em Rn e suponha que V (q) tenha mınimo local em q =0 ∈ Rn. Suponha ainda que V (q) = 1
2a21q
21 + .. + 1
2a2nq
2n. Esta
hipotese nao e muito restritiva, na verdade, pode-se mostrar que emum sentido generico, todo campo Hamiltoniano da forma H(q, p) =|p|2 + V (q) que tem mınimo local q0 para V , pode ser representadolocalmente atraves de mudancas de coordenadas deste forma (ver [A-M] e [Milnor]).
A equacao de Hamilton, neste caso, e separavel em n equacoes
q′′
i − aiqi = 0, i ∈ 1, 2, ..., n.
Nao e difıcil ver que cada plano (qi, pi) e invariante pelo fluxoHamiltoniano ϕt, que cada trajetoria (qi(t), pi(t)) e periodica no plano(qi, pi) e que sao validos em cada um destes planos (qi, pi) os resul-tados que obtivemos na Secao 7, Capıtulo 3 [L], obtendo variaveisacao-angulo (θi, Ii) e frequencias wi = w(Ii) = ai, i ∈ 1, 2, ..., n.O fluxo Hamiltoniano ϕt em coordenadas acao-angulo e dado por(θi(t), Ii(t)) = (θi0 + ai t (mod1), I
i0).
E facil ver que o conjunto dos (θ1, I1, θ2, I2, ..., θn, In) tal que
I1 = I10 , I2 = I20 , ..., I
n = In0
define uma superfıcie S invariante para o fluxo Hamiltoniano.Logo fixada a condicao inicial (θ10, I
10 , θ
20, I
20 , ..., θ
n0 , I
n0 ), de maneira
analoga ao caso unidimensional tratado acima, nas coordenadas(θ1, .., θn) o fluxo Hamiltoniano ϕt restrito a S se escreve como
St(θ10, ..., θ
n0 ) = (θ1(t), θ2(t), ..., θn(t)) =
= (θ10 + ait(mod1), ..., θn0 + ant(mod1))
e define em S uma translacao St condicionalmente periodica no sen-tido anteriormente considerado.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 52 — #52 ii
ii
ii
52 CAPITULO 2. O T. E. E A HIPOTESE DE B.
Pergunta: O fluxo Hamiltoniano e ergodico quando restrito a talsuperfıcie S?
Como veremos, a resposta e afirmativa se os ai sao racionalmenteindependentes.
Note que o resultado a seguir nao e para a superfıcie de Ener-gia constante E, mas para a superfıcie S acima definida (e que estaestritamente contida num nıvel de Energia E).
A partir do Teorema 2.3 e da Observacao 2.7, concluımos que nocaso do sistema mecanico com potencial V (q) = 1
2a21q
21 + ...+ 1
2a2nq
2n,
o fluxo ϕt = St e ergodico em S se os a1, ..., an sao escolhidos aoacaso de acordo com a probabilidade uniforme. Em funcao do quefoi dito acima no caso de um sistema mecanico real, assumir que osai satisfazem tal propriedade e uma hipotese bastante razoavel.
O resultado obtido para (θ1, I1, ..., θn, In) pode ser tranferido viamudancas de coordenadas para o sistema Hamiltoniano inicial nasvariaveis (q, p). Sendo assim, podemos afirmar neste caso, que lo-calmente em torno do ponto de equilıbrio (0, 0) no plano (q, p), aHipotese de Boltzmann vale para a superfıcie com variavel AcaoIi0, i ∈ 1, 2, .., n constante, se o potencial V (q) = 1
2a21q
21 + ... 12a
2nq
2n
e tal que os ai, i ∈ 1, .., n sao escolhidos ao acaso de acordo coma probabilidade uniforme em Rn. Sendo assim, localmente e nestesentido um pouco mais fraco (restricao sobre uma escolha ao acasodos ai), a Hipotese de Boltzmann e verdadeira.
Chamamos a atencao para um fato: a ergodicidade do fluxo Stnao implica a ergodicidade do difeomorfismo T = St para um valor tfixo.
Agora nos concentraremos no estudo de uma das muitas aplicacoesdos sistemas dinamicos no toro: o problema de Lagrange, que surgiude algumas questoes de Mecanica Celeste e que tem estimulado odesenvolvimento da teoria das funcoes quase periodicas.
Considere um sistema constituıdo por n pendulos com hastes detamanhos distintos acoplados um ao outro e com o extremo inicialfixo (ver Figura 2.4). Sejam n numeros complexos a1, a2, ..., an (nvetores no plano). Examinaremos a curva no plano complexo dadapela equacao
z(t) = a1e2πiλ1t + a2e
2πiλ2t + ...+ ane2πiλnt.
O significado geometrico da funcao z e o seguinte: suponhamos

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 53 — #53 ii
ii
ii
53
que haja um vetor a1 no plano, que o vetor a2 esteja ligado a extrem-idade de a1 e que cada um dos outros esteja ligado a extremidade doanterior. Se a1 girar em torno de sua origem fixa (o ponto (0,0)) comvelocidade angular constante λ1, a2 girar ao mesmo tempo em tornode sua origem (a extremidade de a1) com velocidade angular λ2 eassim por diante, a curva dada por z e a trajetoria da extremidadedo vetor an. A Figura 2.5 ilustra o caso em que n = 3.
Suponhamos que z(t) nao se anule para nenhum t. Entao podemosrepresentar z(t) na forma
z(t) = r(t)e2πiϕ(t),
onde ϕ e uma funcao contınua de t (veja a Figura 2.5).Lagrange formulou a seguinte pergunta: ”Existe
ω = limt→∞
1
tϕ(t),
e, se existir, como podemos determina-lo?” Em outras palavras, comque velocidade angular media a extremidade do vetor an gira emtorno da origem do vetor a1?
A resposta, no caso em que
|a2|+ |a3|+ ...+ |an| < |a1| , (2.1)
e simples de ser obtida, pois ϕ(t) = λ1t+ α(t), onde α e uma funcaolimitada, ou seja, |α(t)| ≤ αmax. Claramente, temos que ω = λ1.
Isto se deve ao fato que a rotacao limite de z(t) e determinadaapenas por a1, pois as outras hastes sao muito curtas em relacao aa1.
Se a desigualdade (2.1) nao for valida, o problema torna-se ra-zoavelmente difıcil, sendo que o proprio Lagrange o resolveu somentecom dois vetores.
Consideraremos, agora o caso generico com n hastes, onde ex-ibiremos a relacao entre esse problema e a teoria ergodica.
Tomando os logaritmos de ambos os lados da equacao de z(t),obtemos
ϕ(t) = Re
(1
2πilog z(t)
),
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 54 — #54 ii
ii
ii
54 CAPITULO 2. O T. E. E A HIPOTESE DE B.
(onde Re(z) representa a parte real de z, isto e, Re(a + bi) = a) eentao
dϕ
dt(t) = Re
(1
2πi
z′(t)
z(t)
)= Re
n∑k=1
λkake2πiλkt
n∑k=1
ake2πiλkt
=
= Re
n∑k=1
λk|ak|e2πi(xk+λkt)
n∑k=1
|ak|e2πi(xk+λkt)
,
onde x = (x1, x2, ..., xn) determina a posicao inicial dos vetores a1,a2, ..., an, ou seja,
ak = |ak|e2πixk , 1 ≤ k ≤ n
(note que, utilizando a igualdade anterior, podemos escrever
z(t) = |a1|e2πi(x1+λ1t) + |a2|e2πi(x2+λ2t) + ...+ |an|e2πi(xn+λnt)).
Consideremos o toro Torn = [0, 1)n e o fluxo condicionalmenteperiodico determinado pelo vetor λ = (λ1, λ2, ..., λn). A medida uni-forme µ no toro (visto como subconjunto do Rn) e invariante para ofluxo como ja vimos antes. Suponhamos inicialmente que os numerosλ1, ..., λn sejam racionalmente independentes, de forma que o fluxocorrespondente seja ergodico.
Usando a notacao aditiva, definamos a seguinte funcao em Torn:
f(x) = f(x1, ..., xn) = Re
n∑k=1
λk |ak| e2πixk
n∑k=1
|ak| e2πixk
. (2.2)
Entao, e valida a igualdade
dϕ
dt(t) = f(Stx),
e, por isso,
ϕ(t2)− ϕ(t1) =
∫ t2
t1
f(Sτx)dτ.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 55 — #55 ii
ii
ii
55
O limite que desejamos encontrar pode ser, portanto, reescritocomo
limt→∞
ϕ(t)
t= limt→∞
1
t
∫ t
0
f(Sτx)dτ.
Se a funcao f fosse limitada e contınua, este limite existiria paratodo x ∈Torn e seria, de acordo com o teorema ergodico, igual a∫
Tornfdµ.
Contudo, o denominador em (2.2) pode se anular. A condicao
n∑k=1
|ak|e2πixk = 0 (2.3)
e, na verdade, um sistema de duas equacoes em relacao a x1, ..., xn(tanto a parte real como a imaginaria da soma devem ser iguais azero). Isso implica que os pontos onde a equacao (2.3) vale constituemuma subvariedade diferenciavel de codimensao 2 em Torn = [0, 1)n.Portanto, o conjunto de todas as trajetorias que a interceptam e umasubvariedade de dimensao n − 1, e sua probabilidade uniforme em[0, 1)ne zero. Entao, para uma trajetoria escolhida aleatoriamente,a equacao (2.3) nao vale com probabilidade 1. Usando essas consid-eracoes, suponhamos que o teorema ergodico seja aplicavel e substi-tuamos a integral ao longo da trajetoria pela integral sobre o toro.
Temos que
∫Torn
fdµ = Re
∫Torn
n∑k=1
λk |ak| e2πixk
n∑k=1
|ak| e2πixk
dx1dx2...dxn =n∑k=1
λk |ak|Wk,
onde
Wk = Re
∫Torn
e2πixk
n∑j=1
|aj | e2πixj
dx1...dxn.
E importante interpretarmos esse resultado. Para tal fim, deve-mos reescrever a integral sobre o toro na forma de integrais iteradas,
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 56 — #56 ii
ii
ii
56 CAPITULO 2. O T. E. E A HIPOTESE DE B.
efetuando a integracao em relacao a xk. Entao,
Wk = Re
∫Torn−1
[∫ 1
0
e2πixk
B + |ak| e2πixkdxk
]dx1...dxk−1dxk+1...dxn,
onde B e o somatorio de todos os termos tais que j = k.
Quando xk varia de 0 a 1, o ponto Z = B + |ak| e2πixk descreveum cırculo C no plano complexo na Figura 2.5. Portanto,∫ 1
0
e2πixk
B + |ak| e2πixkdxk =
1
2πi |ak|
∫ 1
0
Z ′(xk)
Z(xk)dxk =
1
2πi |ak|
∫C
1
ZdZ.
A ultima expressao e igual a 1|ak|, se o disco delimitado por Ccontem a origem; caso contrario, e igual a zero.
O cırculo delimita um disco contendo a origem se |B| < |ak|.Logo,
Wk =1
|ak|P(
(x1, ..., xk−1, xk+1, ..., xn) ∈ Torn−1| |B| < |ak|),
onde P e a probabilidade de Lebesgue em Torn−1.
A independencia racional de λ1, ..., λn implica a de
λ1, ..., λk−1, λk+1, ..., λn.
Portanto, o fluxo em Torn−1 tambem e ergodico. Como, nessecaso, o tempo relativo que uma trajetoria escolhida aleatoriamentepermanece em um dado conjunto mensuravel e igual a probabilidadedeste, o resultado obtido pode ser interpretado da seguinte maneira:|ak|Wk e a parte desse tempo em que a rotacao do vetor ak contribuipara a funcao ϕ.
O problema de Lagrange ilustra um fato que e bastante natural emMecanica Classica: existe um conjunto desprezıvel de situacoes ruins,mas para condicoes iniciais fora deste conjunto de probabilidade zero,um resultado bastante forte e preciso do ponto de vista estatısticopode ser enunciado para o sistema mecanico em consideracao.
Exercıcios:

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 57 — #57 ii
ii
ii
57
1. Mostre que se A = γ for uma curva diferenciavel em [0, 1] ×[0, 1], entao A tem probabilidade zero para probabilidade uniformeem [0, 1]× [0, 1].
2. Considere P a probabilidade uniforme em [0, 1]. Mostre quese F e um difeomorfismo de classe C1 de [0, 1] em si mesmo e A temprobabilidade zero, entao F (A) tem probabilidade zero.
3. Seja T (x) = 2x (mod 1), T [0, 1] → [0, 1]. Mostre que T einvariante e e ergodica para a probabilidade uniforme P . Sugestao:considere um conjunto A e escreva IA em serie de Fourier. A seguir,suponha que T−1(A) = A, e conclua que IT−1(A)(x) = IA T (x) =IA(x). O resultado e obtido igualando os correspondentes coeficientesde Fourier de IA e IA T .
4. Mostre que se λ e irracional, entao T (x) = x + λ (mod 1),T [0, 1] → [0, 1], e tal que existe um conjunto K ⊂ [0, 1] tal que paratodo x ∈ K a orbita de x e densa em [0, 1].
5. Mostre que uma superfıcie de dimensao d < n em Rn temprobabilidade uniforme 0 em Rn
6. Mostre que o conjunto dos pontos (x1, x2, ..xn) racionalmenteindependentes tem medida total em Rn.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 58 — #58 ii
ii
ii
Capıtulo 3
A Teoria de Aubry paraQuase-Cristais eExemplos do TipoKAM
Vamos descrever a seguir uma versao discretizada da Acao de umSistema Hamiltoniano que e semelhante em um certo sentido ao pro-cedimento que utilizamos na secao 11 na qual analisamos bilharesdeterminados por curvas convexas. Neste modelo o fenomeno denom-inado KAM (de Arnold, Kolmogorov e Moser) ira aparecer e iremosfazer uma analise matematica do problema em primeira aproximacao.
Ressaltamos que alguns dos resultados apresentados nesta secaonao estao de todo formalizados de maneira matematicamente rig-orosa. Nosso objetivo e apresentar algumas das ideias e conceitosprincipais como motivacao para o estudo da Teoria de Aubry-Mather[CRZ], [Au1], [Au2], [CI], [Fat], [M2], [MH], [MF], [dL], [B] e [LC].
A equacao de Hamilton para o Hamiltoniano natural H(q, p) =12p
2 − V (q), q, p ∈ R e
q = p
58

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 59 — #59 ii
ii
ii
59
p =∂V
∂q.
Trocamos o sinal do potencial V acima apenas para obter ao fi-nal de nossas consideracoes um sistema a tempo discreto dentro danotacao de Aubry [Au1] e [Au2].
Uma versao em diferencas finitas de tal equacao e
qi+1 = qi + pi+1∆t
pi+1 = pi +∆t∂V
∂qi|qi .
Tomando ∆t = 1, obtemos
G(qi, pi) = (qi+1, pi+1) = (qi + pi+1, pi∂V
∂qi|qi).
O leitor pode facilmente checar que tal transformacao do planono plano preserva area, bastando para isso mostrar que a matrizJacobian tem determinante 1.
Aplicacoes do tipo acima representam uma versao discretizadadas equacoes de Hamilton e preservam area como veremos em breve(ver Lema 3.1).
Na verdade existe um modelo com real significado fısico que podeser representado por tal aplicacao. Este modelo (ver [B], [MF], [Au1],[Au2] e [Me] para mais detalhes) sera brevemente descrito abaixo.
A teoria que vamos considerar agora aparece na analise de algunsmodelos fısicos para ions mergulhados em plasma. Consideraremostambem alguns exemplos da Teoria KAM que aparecem no modelo.
Nao iremos fazer uma analise completa da equacao das curvasque aparecem nos fenomenos da Teoria KAM (Kolmogorov-Arnold-Moser), mas iremos apenas dar uma visao esquematica de como anal-isar a equacao associada as curvas KAM em primeira aproximacao.O problema com esta simplificacao permitira ao leitor ter uma ideiaporque aparecem pequenos denominadores e propriedades da Teoriados Numeros (ver [Le] e [Kh] para referencia) e das Series de Fourier(ver [Fi] e [Ju] para referencia) na Teoria. Com esta simplificacaoestaremos evitando certos detalhes tecnicos complicados (mas im-portantes [A2], [H] e [Ba]), e cuja dificuldade esta acima do nıvel quedesejamos manter no presente texto.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 60 — #60 ii
ii
ii
60 CAPITULO 3. A TEORIA DE AUBRY
Considere na reta real o Potencial V (u) periodico de perıodo 1e assuma tambem que V (0) = 0, V ′(0) = 0 e V ′′(u) > 0,∀u ∈(−1/2, 1/2] (ou alternativamente em (0, 1]). Vamos considerar (Figura3.1) como um caso particular importante o exemplo em que
V (u) =1
2(1− cos 2πu).
O modelo que vamos analisar e descrito por varios atomos cujaposicao ui ∈ R e descrita por arranjos uii∈Z, onde i ∈ Z. Estesatomos formam uma cadeia e estao acoplados de forma que cadaatomo na posicao ui sofre influencia apenas dos atomos vizinhos nasposicoes ui−1 e ui+1.
Nosso objetivo e analisar os arranjos uii∈Z que tem significadofısico real. A seguir vamos descrever como sao tais arranjos.
O termo de energia cinetica na reta real sera dado por
W (u) =1
2u2,
que vai ser na verdade uma funcao da distancia entre ui+1 e ui. Maisprecisamente, a energia cinetica sera dada por
W (ui+1 − ui) =1
2(ui+1 − ui)
2.
Fazendo um analogia com a Mecanica Classica, o valor ui+1−ui
1faz o papel da velocidade (ou momento) no modelo, e assim por suavez 1
2 (ui+1 − ui)2 desempenha o papel da Energia Cinetica.
A ideia neste modelo e substituir equacoes diferenciais da MecanicaClassica por equacoes de diferencas. Deste modo, de maneira analoga,e natural introduzir um parametro externo λ que vai estabelecer aaltura do poco do potencial λV .
De maneira analoga ao caso classico (nao discretizado), o La-grangiano natural S agindo sobre cada partıcula, e Energia Cineticamenos Energia Potencial, ou seja a acao individualizada ligando ui aui+1 vai ser dada por
S(ui+1, ui) = λV (ui) +W (ui+1 − ui) (3.1).

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 61 — #61 ii
ii
ii
61
Definicao 3.1. Considere um arranjo uii∈Z. Para n < m fixados,a Acao Total do arranjo uii∈Z de n a m e dada por
ϕ(ui) =m−1∑i=n
λV (ui) +W (ui+1 − ui) =m−1∑i=n
S(ui+1, ui).
A Acao Total de n a m e a soma das Acoes individuais (3.1) ecorresponde na Mecanica Classica a
∫Sdq.
Definicao 3.2. Um arranjo uii∈Z vai ser minimal para a AcaoTotal, se para todo n e m fixos n < m, e para todo arranjo vi talque vn = un e vm = um vale que
ϕ(ui) =m−1∑i=n
λV (ui) +W (ui+1 − ui) ≤ ϕ(vi) =
=m−1∑i=n
λV (vi) +W (vi+1 − vi).
A condicao de um arranjo ser minimal, acima definida, e clara-mente inspirada pelo Princıpio de Mınima Acao (ver Secao 9, Capıtulo3 [L]).
Definicao 3.3. Um arranjo uii∈Z e crıtico para a Acao Total separa todo n e m, n < m fixados vale que
∂ϕ
∂ui= 0, ∀ i ∈ n+ 1,m− 1.
Isto e, um arranjo e crıtico se mantendo os extremos un e um fixose variando as posicoes intermediarias ui, a expressao acima e crıticapara tais variacoes ui. Note a semelhanca da ultima expressao coma Proposicao 1.2 da Secao 1 sobre bilhares convexos.
Todo arranjo minimal e claramente crıtico, embora a recıprocanao seja sempre verdadeira. Na teoria que vamos brevemente descr-ever a seguir, do ponto de vista fısico e tambem do ponto de vistamatematico, os resultados interessantes concernem os arranjos mini-mais e nao apenas os arranjos crıticos.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 62 — #62 ii
ii
ii
62 CAPITULO 3. A TEORIA DE AUBRY
Os arranjos que sao fisicamente observados no problema acimadescrito sao na verdade os arranjos minimais.
Primeiramente vamos determinar um metodo para encontrar ar-ranjos crıticos.
Note que para um arranjo uii∈Z, cada valor ui, n < i < maparece na acao total ϕ de n a m em apenas dois termos
S(ui+1, ui) + S(ui, ui−1) =
λV (ui) +W (ui+1 − ui) + λV (ui−1) +W (ui − ui−1).
Para calcular a expressao do arranjo crıtico, derivamos a ultimaexpressao em relacao a ui e considerando V , W como acima, obtere-mos
0 = λV ′(ui)− (ui+1 − ui) + (ui − ui−1).
Logo, obtemos a equacao
0 = λV ′(ui) + 2ui − (ui+1 + ui−1),
a qual toda solucao crıtica uii∈Z deve satisfazer.Sendo assim, obtemos de maneira equivalente
−λ2V ′(ui) = ui −
ui+1 + ui−1
2. (3.2)
Por exemplo, como V (0) = 0 e W (0) = 0, concluımos que oarranjo ui = 0,∀i ∈ Z, e crıtico para acao total.
Uma interpretacao pictorica da expressao (3.1) e que a forca(menos a derivada do potencial)
−λ2V ′(ui)
e equilibrada pelo deslocamento de ui da posicao de equilıbrio (pontomedio ui+1+ui−1
2 ) da corda elastica ligando ui−1 a ui+1 (Lei de Hooke)conforme mostra Figura 3.28.
Deste ponto de vista, o arranjo uii∈Z parece descrever umelastico fixo na posicao un e um, em que pela Lei de Hooke, o afasta-mento do elastico na posicao ui da posicao intermediaria ui−1+ui+1
2 ,e equilibrada pela forca criada pelo potencial agindo em cada retax = i.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 63 — #63 ii
ii
ii
63
O modelo acima descreve exatamente quase-cristais, que sao ob-jeto de estudo recente em Fısica da Materia e da Teoria do Plasma[Au].
Voltemos agora a analisar que propriedades podemos obter sobreos arranjos crıticos definidos acima.
A expressao (3.2) para um arranjo crıtico uii∈Z pode ser ex-pressa numa relacao de tres termos como
ui+1 = λV ′(ui) + 2ui − ui−1.
No modelo em que V (u) = 12 (1−cos 2πu), um arranjo crıtico (ver
Definicao 3.3) pode ser calculado conforme (3.2) por uma relacao detres termos
ui+1 = λπ sin 2πui + 2ui − ui−1.
Logo o arranjo uii∈Z pode ser calculado a partir de u0 e u1inicial pela relacao de tres termos acima descrita.
Passando a uma relacao de pares (ui+1, ui) obtemos(ui+1
ui
)= T
(uiui−1
)=
(2ui + λπ sin 2πui − ui−1
ui
)a partir de coordenadas iniciais (u1, u0) ∈ R2.
As solucoes crıticas uii∈Z sao obtidas portanto atraves das or-bitas de T .
E natural interpretar o momento pi como uma nova variavel,
pi = ui − ui−1,
em funcao da analogia do problema descrito acima com a versaodiscretizada da Mecanica Classica no espaco de fase (p, q) = (p, u).
Vamos a seguir expressar a aplicacao T mencionada anteriormenteem coordenadas (p, u).
Antes disso, note tambem que se uii∈Z e arranjo crıtico, ui +1i∈Z tambem e arranjo crıtico. Este fato nos sugere considerar osui (mod 1) para simplificar o problema.
Algumas vezes vamos considerar os ui tomados (mod 1) e outrasvezes nao. No primeiro caso (ui, pi) esta em [0, 1)×[0, 1) e no segundocaso (ui, pi) esta em R2.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 64 — #64 ii
ii
ii
64 CAPITULO 3. A TEORIA DE AUBRY
Para nao confundir o leitor vamos reservar a letra q para u (mod1).
Seja qi o valor ui (modulo 1), como pi+1 = ui+1−ui (mod 1) (quee o mesmo que qi+1 − qi (mod 1)), obtemos a transformacao acimadefinida T agindo sobre ( pi, qi) ∈ [0, 1)× [0, 1) como
T
(piqi
)=
(pi+1
qi+1
)=
(pi + λπ sin 2πqi (mod 1)pi+1 + qi (mod 1)
)que e conhecida como a aplicacao padrao, ou standard.
Logo a iteracao de uma orbita Tn(p0, q0) = (pn, qn), n ∈ Z apartir de uma condicao inicial (p0, q0), vai definir na segunda variavelui o arranjo uii∈Z (a menos de um inteiro) a solucao crıtica doproblema acima descrito. Uma infinidade de solucoes qii∈Z saopossıveis, basta tomar diferentes condicoes iniciais (p0, q0). Faremosa seguir (Definicao 3.4, Capıtulo 3) uma restricao que vai determinarum arranjo uii∈Z de maneira unica.
Observo que tomar qi (mod 1) e bastante natural (ou seja suporque o espaco de configuracao e compacto), mas tomar pi (mod 1),em princıpio nao. No caso do modelo de quase-cristais, no entanto,e natural esta segunda hipotese. Estas duas hipoteses de qualquerjeito permitem considerar a iteracao de T num espaco compacto (ouseja fechado e limitado).
Duas trajetorias minimais nao podem se cruzar duas vezes comona Figura 3.2. Esta propriedade e conhecida como a condicao Twist(ver [CRZ] para mais detalhes).
Considerando potenciais V mais gerais (V (u) ou V (q) sempreperiodico de perıodo 1) obterıamos de maneira analoga uma T definidaem [0, 1]× [0, 1] → [0, 1]× [0, 1] por
T
(piqi
)=
(pi+1
qi+1
)=
(pi + λV
′(qi)
pi+1 + qi
).
Nao estamos colocando o termo (mod 1) na expressao acima, masela esta implıcita no modelo em consideracao.
A aplicacao padrao preserva area. Mostraremos na verdade nocaso mais geral (nao somente para V (q) = 1
2 (1 − cos 2πq)), quea aplicacao T , obtida acima a partir de um potencial V qualquer,preserva area. As Figuras desta secao que descrevem iteracoes de T

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 65 — #65 ii
ii
ii
65
para o caso de V (u) = 12 (1 − cos 2πu) ocorrem tambem em outras
situacoes quando se considera um V geral.Vamos usar, a partir de agora, indistintamente as letras q ou u e
o contexto vai indicar qual da duas estamos considerando.Note a semelhanca da aplicacao acima definida com a que apresen-
tamos no comeco desta secao e associada a discretizacao da equacaode Hamilton.
Lema 3.1. A aplicacao T dada por
T
(piui
)=
(pi+1
ui+1
)=
(pi + λV
′(ui)
pi+1 + ui
)(3.3)
preserva area.
Demonstracao:Vamos considerar S(Q, q) = S(un+1, un) abaixo.Desejamos mostrar que
∂S
∂un(un+1, un) = −pn
e∂S
∂un+1(un, un+1) = pn+1
A segunda equacao acima descreve trivialmente o que acontececom a variavel pn pela iteracao de T (p, u), pois
S(un+1, un) = λV (un) +1
2(un+1 − un)
2
e pn+1 = (un+1 − un).A equacao das trajetorias crıticas
0 =∂ϕ
∂un=
∂S
∂un(un+1, un) +
∂S
∂un(un, un−1).
Ora, como vimos
∂S
∂un(un, un−1) = un − un−1 = pn.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 66 — #66 ii
ii
ii
66 CAPITULO 3. A TEORIA DE AUBRY
Portanto, da equacao da trajetoria crıtica
∂S
∂un(un+1, un) = − ∂S
∂un(un, un−1) = −pn (3.4)
Logo fica definida atraves de S uma funcao geradora de mudancasde coordenadas
(pn, un) = (p, q) → (pn+1, un+1) = −(P,Q)
atraves de
S(Q, q) = S(un+1, un) = λV (un)+1
2(un+1−un)2 = λV (q)+
1
2(Q−q)2. (3.5)
Note que −(P (q, p), Q(q, p)) preservar area e equivalente a
(P (q, p), Q(q, p))
preservar area.A funcao (pn, qn) → (pn+1, qn+1) assim definida e a T anteri-
ormente considerada. Fica assim determinado (ver Proposicao 17,Capıtulo 3 [L]) que a transformacao T preserva area e e da forma
T
(pnun
)=
(pn+1
un+1
).
onde∂S
∂un(un+1, un) = − ∂S
∂un(un, un−1) = −pn
e∂S
∂un+1(un+1, un) = pn+1.
Existem infinitos possıveis arranjos uii∈Z. Necessitamos impor
condicoes de fronteira do seguinte tipo:
limn−n′→∞
un − un′
n− n′= l
para assim determinar uma solucao crıtica unica a partir de l.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 67 — #67 ii
ii
ii
67
Definicao 3.4. Dada uma configuracao crıtica uii∈Z, o valor ldado por
limn−n′→∞
un − un′
n− n′= l
e chamado distancia media atomica (ou numero de rotacao).
Na definicao acima devemos considerar u1 e nao qi.Em princıpio nao ha garantia de que exista tal limite para uma
configuracao qualquer. l tambem e chamado de numero de rotacaoda configuracao uii∈Z.
Estamos considerando na expressao acima que os un, un′ nao saotomados (mod 1). Sendo assim l representa uma inclinacao media doconjunto de pontos (i, ui), i ∈ Z, vista com subconjunto de pontos doR2.
Observe que quanto mais proximo de zero for l, o deslocamentopara a direita de n produzira muitos pontos muito proximos ui (mod1). Neste caso a distancia media entre elementos ui devera ser muitomenor do que para inclinacoes grandes de l. Fica assim justificado onome de distancia media atomica.
Outra interpretracao de l e a seguinte: como un−un′ =∑ni=n′+1 pi,
podemos pensar que l e o momento medio da trajetoria. Isto porque
un − un′
n− n′=
∑ni=n′+1 pi
n− n′.
Propriedade Importante: E possıvel mostrar (ver [Ba]) que fixadol, sob certas condicoes, obtem-se um unico arranjo minimal uii∈Z
(no sentido da Definicao 3.2) com tal valor de distancia media atomical (momento medio).
Fazendo analogia com a Mecanica Classica, fixados posicao e mo-mento medio, desejamos encontrar de maneira unica uma solucaouii∈bfZ (que sera mınima) com aquela posicao inicial e com aquelemomento medio.
No caso λ = 0, entao ui = il+α (linear em i) e solucao, e portanto,ao menos neste caso trivial, sabemos que existe a inclinacao mediaassociada a tal ui.
No caso λ = 0, se l e irracional, a solucao ui = il + α (modulo 1)sera densa em [0,1] (ver [A2]).

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 68 — #68 ii
ii
ii
68 CAPITULO 3. A TEORIA DE AUBRY
A questao relevante no modelo acima descrito e analisar no casogeral λ = 0, o arranjo minimal associado a cada valor l. Isto epara cada condicao de fronteira l, deseja-se encontrar propriedadesda solucao minimal com inclinacao media l.
Nesta direcao, o seguinte Teorema (ver [Ba]), que nao sera demon-strado, e de fundamental importancia.
Teorema 3.1. Dada uma configuracao uii∈Z mınima, existem le α tal que para qualquer i, os valores ui e il + α (nao estamosconsiderando mod 1) estao no mesmo intervalo [mi,mi +1] onde mi
e um numero inteiro.
Segue portanto deste teorema que toda solucao minimal tem umvalor de distancia media atomica l.
Definicao 3.5. O valor α acima apresentado e denominado a faseda configuracao crıtica ui.
O proximo teorema vai apresentar um resultado bastante pre-ciso sobre as solucoes minimais uii∈Z. Antes necessitamos algumasdefinicoes e resultados da Teoria dos Numeros (ver [A2], [Kh] e [Le]para referencias gerais sobre os topicos que serao considerados aqui).
Definicao 3.6. Um numero l > 0 e do tipo Diofantino se existeγ > 0, r > 2 tal que ∀ p, q ∈ N∣∣∣∣l − p
q
∣∣∣∣ > γ1
qr. (3.6)
Um numero deste tipo e mal aproximado por racionais , ou seja,ele e “muito irracional”.
Lembre (ver Definicao 2.2, Capıtulo 2) que um subconjunto D dareta tem medida zero se para qualquer ϵ pequeno existe uma cober-tura de D por intervalos [ai, bi], i ∈ N tal que
∑∞i=1(b1 − ai) < ϵ.
Ou seja D e desprezıvel em termos de comprimento, embora possaser um conjunto ate mesmo denso em R (por exemplo o conjunto dosracionais tem medida zero).
Lembre tambem (ver Definicao 2.3, Capıtulo 2) que dizemos queum subconjunto A tem medida total na reta, se o seu complementare desprezıvel, ou seja que o seu complementar tem medida zero.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 69 — #69 ii
ii
ii
69
Figura 3.1:
Observacao 3.1. Se r > 2 e γ > 0 estao fixados, e possıvel mostrar(veja [A2]) que o conjunto de numeros que satisfazem (3.6) na defi-nicao acima, tem medida total em R. Sendo assim, se escolhermosum numero ao acaso de acordo com a probabilidade uniforme emR, este numero sera Diofantino. Nem todos os numeros reais saoDiofantinos.
Todo numero irracional pode ser aproximado por fracoes contınuas,isto e, x pode ser expresso da seguinte forma
x = n0 +1
n1 +1
n2+1
n3+...
, (3.7)
onde os ni sao numeros naturais.O procedimento e o seguinte: dado x, subtraia sua parte inteira,
obtendo x− n0 ∈ (0, 1). Portanto, 1x−n0
> 1. Seja n1 a parte inteira
de 1x−n0
, logo x1 = 1x−n0
− n1 ∈ (0, 1].
Portanto x = n0 +1
n1+x1.
Aplique agora o mesmo procedimento a x1, isto e, considere n2 aparte inteira de 1
x1e x2 = 1
x1− n2 ∈ (0, 1] obtendo assim
x = n0 +1
n1 +1
n2+x2
.
Repetindo o mesmo procedimento para x2 e indutivamente assimpor diante obtemos a expansao de x em fracoes contınuas (3.7). Osnumeros x tal que tal procedimento termina em algum instante n(isto e, xn = 0 ou xn = 1) sao os numeros x racionais.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 70 — #70 ii
ii
ii
70 CAPITULO 3. A TEORIA DE AUBRY
1 1.5 2 2.5
0
0.5
1
1.5
2
1.4 1.6 1.8 2 2.2 2.4 2.6
0.4
0.6
0.8
1
1.2
1.4
1.6
1.7 1.8 1.9 2 2.1 2.2 2.3
0.7
0.8
0.9
1
1.1
1.2
1.3
1 1.5 2 2.5 3
0
0.5
1
1.5
2

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 71 — #71 ii
ii
ii
71
1 1.5 2 2.5 3
0
0.5
1
1.5
2
1.2 1.3 1.4 1.5 1.6
0
0.25
0.5
0.75
1
1.25
1.5
1.75
1.6 1.8 2 2.2 2.4
0.6
0.8
1
1.2
1.4
1 1.5 2 2.5 3
p
0
0.5
1
1.5
2
theta
Seja x irracional e k ∈ N, vamos denotar por
pkqk
= n0 +1
n1 +1
n2+1
n3+...+ 1nk
o aproximante de ordem k de x, onde pk, qk ∈ N.
O seguinte resultado e demonstrado em [A2].
Teorema 3.2. Para qualquer numero real irracional x, aproximado
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 72 — #72 ii
ii
ii
72 CAPITULO 3. A TEORIA DE AUBRY
for fracao contınua da forma
x = n0 +1
n1 +1
n2+1
n3+...
ni ∈ N, i ∈ N, e valido que∣∣∣∣x− pkqk
∣∣∣∣ < 1
q2k.
Ou seja r > 2 na definicao de numero Diofantino e uma pro-priedade nem sempre satisfeita para x qualquer, mas tomando γ = 1e r = 2 e sempre possıvel aproximar qualquer numero real x porracionais pk
qkcomo acima no ultimo Teorema. No que segue, sera
essencial assumir que l e do tipo Diofantino satisfazendo (3.6) comr > 2.
A expansao em fracoes contınuas surgiu inicialmente em Mate-matica como um procedimento eficaz para aproximar um numeroirracional x por numeros racionais. A aproximcao de x de ordem ke obtida quebrando a expansao em fracoes contınuas no termo nk,obtendo assim um numero racional pkqk .
Em geral a aproximacao por fracoes contınuas e melhor que asoutras maneiras conhecidas (o erro decai como 1
q2kcomo se pode ob-
servar pela ultima desigualdade).Posteriormente, a expansao em fracoes contınuas se mostrou util
e fundamental para analisar uma serie de questoes de Aritmetica etambem em questoes de Mecanica Classica e Geometria Diferencial.
Note que quanto maiores forem os ni, maiores serao os correspon-dentes qk, permitindo assim melhores aproximacoes por racionais donumero irracional considerado.
Exemplo 3.1. O numero π e aproximado em fracoes continuas deordem 3 por
p3q3
=333
106
A aproximacao e de 6 casas decimais.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 73 — #73 ii
ii
ii
73
Exemplo 3.2. O numero real β dado pela razao aurea satisfaz
β = 1 +1
1 + 11+ 1
1+...
=
√5 + 1
2
e portanto e super mal aproximado por racionais (os qk crescem deva-gar porque os ni = 1 sao os menores possıveis). Logo podemos dizerque a razao aurea e o mais irracional dos numeros reais.
Para mostrar que este numero β tem a expansao em fracoes con-tınuas acima basta observar que β satisfaz a equacao
1 +1
β= β.
Vamos agora apresentar o resultado mais importante desta secaoe que e apresentado de maneira resumida em [Au].
Teorema 3.3. Suponha que l, a distancia media entre atomos, sejairracional para uma certa configuracao minimal uii∈Z, ou seja,uii∈Z satisfaz
(ui − ui+1) + (ui − ui−1) = −λV ′(ui) (mod1). (3.8)
e ainda e mınima no sentido da Definicao 51, Capıtulo 3.Entao existe f monotona crescente tal que
ui = f(il + α) (mod1).
a) Se f e descontınua, o conjunto das descontinuidades e denso.b) Se o numero l e Diofantino, entao existe λcrıtico(l) tal que
para λ < λcrıtico(l) a funcao f e contınua.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 74 — #74 ii
ii
ii
74 CAPITULO 3. A TEORIA DE AUBRY
1.6 1.625 1.65 1.675 1.7 1.725
0
0.5
1
1.5
2
1.7 1.8 1.9 2 2.1 2.2 2.3
0
0.25
0.5
0.75
1
1.25
1.5
1.75
1.94 1.96 1.98 2 2.02 2.04 2.06
0.85
0.9
0.95
1
1.05
1.1
1.15
2.275 2.3 2.325 2.35 2.375 2.4
0
0.5
1
1.5
2
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 75 — #75 ii
ii
ii
75
1.06 1.08 1.1 1.12 1.14
0
0.5
1
1.5
2
0.96 0.98 1 1.02 1.04
0
0.5
1
1.5
2
0.86 0.88 0.9 0.92 0.94
0
0.5
1
1.5
2
1 1.25 1.5 1.75 2 2.25
p
0
0.5
1
1.5
2
theta
A diferenciabilidade de f vai depender da diferenciabildade de Ve tambem do valor λ. Dependendo de λ, em alguns casos f e continuamas nao e diferenciavel, em alguns casos f e apenas diferenciavel declasse Ck e em alguns casos f e analıtica.
E usual e mais pratico, em vez de dizer que existe f como acima,dizer que existe g tal que
ui = f(il + α) = (il + α) + g(il + α). (3.9)
A existencia de f e claramente equivalente a existencia de g. Va-mos a seguir mostrar que existe tal g.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 76 — #76 ii
ii
ii
76 CAPITULO 3. A TEORIA DE AUBRY
Figura 3.2:
Observacao 3.2. No caso de haver uma funcao continua f , associ-ado a um certo valor l irracional, as iteracoes da aplicacao padrao Ta partir de um ponto inicial (p0, u0) (ou seja u0, u1) vao determinarum arranjo ui denso (mod 1) em [0, 1], com inclinacao media l etal que a correspondente orbita associada Tn(p0, u0) = (pn, un) deter-mina atraves do conjunto dos seus pontos de acumulacao em R2 umacurva de Jordan fechada no espaco de fase (p, u). Estas curvas saochamadas de curvas KAM. O exemplo de uma curva KAM aparecenas Figuras 3.3 e 12.12.
Vamos explicar ao leitor como determinar a curva KAM em [0, 1]×[0, 1] no caso acima descrito. Ora (pn, un) = (un − un−1, un), logo(pn, un) = (f(nl + α)− f(nl + α− l), f(nl + α)).
Logo, (pn, un) (mod 1) esta sobre a curva
(f(u)− f(u− l) (mod1) , f(u) (mod1)).
Se l e irracional, il + α determina um conjunto denso (mod 1)de pontos no intervalo (0, 1) e portanto, como afirmamos, o conjuntodos pontos de acumulacao de (un, pn) (mod 1) determina a curva
(f(u)− f(u− l) (mod1) , f(u) (mod1)) , u ∈ (0, 1).
Nem sempre a um valor irracional l vai corresponder uma curvaKAM.
Quando f nao e continua (caso a) do Teorema 3.3, Capıtulo 3),fica entao determinado pelo fecho da orbita Tn(p0, u0) um conjunto“ralo”tipo Cantor (tambem chamado de conjunto de Aubry-Mather)conforme mostra Figura 2.3.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 77 — #77 ii
ii
ii
77
Demonstracao do item b) do Teorema 3.3: Nao vamos daruma demonstracao completa do item b) do Teorema 3.3, mas apenasanalisar o problema em primeira aproximacao. Vamos considerar λpequeno (λ < λcrıtico) e l Diofantino. Neste caso existira f continuae nosso objetivo a seguir e dar uma ideia aproximada porque talpropriedade e verdadeira (referimos o leitor a [He], [LC], [Ba] e [MF]para uma demonstracao completa).
Vamos ver como aparece de maneira natural a condicao do numerol ser Diofantino no problema em consideracao. Substituindo ui =il + α + g(il + α) na equacao (ui − ui+1) + (ui − ui−1) = −λV ′(ui)obtemos
−λV ′(ui) = il + α+ g(il + α)− ((i+ 1)l + α)
−g((i+1)l+α)+ il+α+ g(il+α)− ((i− 1)l+α)− g((i− 1)l+α) =
2g(il + α)− g(il + α+ l)− g(il + α− l).
Desejamos saber se existe uma g analıtica (ou continua ao menos)satisfazendo a expressao acima
−λV′(ui) = 2g(il+α)−g(il+α+ l)−g(il+α− l) (3.10)
Nosso procedimento sera tentar descobrir que tipo de equacaodeve satisfazer tal g na variavel u.
l e irracional, logo os numeros da forma il+α ∈ Z determinam umconjunto denso em [0, 1) (mod 1) conforme foi visto na secao anterior.
Observacao 3.3. No caso geral (λ > λcrıtico) , nem sempre paraum arranjo uii∈Z crıtico e verdade que os ui sao densos no inter-valo [0,1] (embora o conjunto dos il + α seja denso em [0,1] se l eirracional).
Isto se deve do fato que |un+1 − un| ≤ l + 2 (ver Teorema 3.1) eda equacao (3.2)
λV ′(ui) = (ui+1 + ui−1)− 2ui ≤ 2(l + 2),
logo
V ′(ui) ≤2(l + 2)
λ.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 78 — #78 ii
ii
ii
78 CAPITULO 3. A TEORIA DE AUBRY
Portanto, se λ for grande, V ′(ui) vai poder assumir apenas valorespequenos. Seja z tal que V ′(z) = 0, entao somente uma pequenavizinhanca A = u|V ′(u) < 4l
λ de z podera ser visitada pela orbitauii∈Z.
Sendo assim, neste caso, o conjunto dos ui nao sera denso em[0, 1). Em muitos destes casos o fecho do conjunto dos ui (mod 1)e um conjunto tipo Cantor de medida zero. Neste caso o raciocınioque faremos a seguir, usando series de Fourier nao se aplica.
No que segue e essencial assumir que os ui (mod 1) sejam densosem [0,1), e isto ocorre quando λ < λcrıtico.
A equacao (3.10) para g em primeira aproximacao e dada por
λV′(u) = 2g(u)− g(u+ l)− g(u− l) (3.11).
A primeira aproximacao resulta de supor que g(il + α) e pe-queno e portanto que ui seja aproximadamente igual a il + α (poisui − (il + α) = g(il + α)). Como os ui sao densos, podemos substi-tuir na equacao (3.10) os ui e os il+ α por u ∈ [0, 1) e obter assim aequacao para g dada por (3.11). Esta aproximacao e verdadeiramentemuito grosseira, mas o esquema da demonstracao matematica comecaresolvendo a equacao em primeira aproximacao e depois resolvendouma sequencia de melhores aproximacoes da equacao (3.10) (ver [H]).Nao demonstraremos esta parte mais sofisticada do teorema aqui enos contentaremos apenas em entender a questao da primeira aprox-imacao. Desta maneira nao entraremos em questoes de dificuldadetecnica bastante grande.
Com as hipotese acima em mente, vamos proseguir na analise daequacao (3.9) para g em primeria aproximacao, ou seja da equacao(3.11) para g.
Expandindo V ′ em Serie de Fourier, obtemos
V ′(u) =∞∑
m=−∞Vme
i2πmu.
Vamos tentar obter g em Serie de Fourier
g(u) =
∞∑m=−∞
gmei2πmu.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 79 — #79 ii
ii
ii
79
Substituindo esta expressao na equacao (3.11), obtemos
g(u) = −λ2
∞∑m=−∞
Vm(1− cos 2πml)
ei2πmu. (3.12)
Observe a existencia de pequenos denominadores na equacao aci-ma. Isto porque o termo no denominador do quociente de cada termoda serie acima vai ficar proximo de zero, pois cos 2πml vai estar, paracertos valores de m, muito proximo de 1 (isto segue do fato que oconjunto ml, n ∈ Z e denso (mod 1) em [0,1]). Sendo assim nao hagarantia de que para todos valores de u a serie formal (3.12) definidaacima convirja. Note no entanto que Vm tambem vai a zero e podemhaver compensacoes do denominador e numerador de cada termo daserie (3.12).
Se uma serie converge absolutamente, ela converge. Sendo assim,uma condicao suficiente para convergencia da serie (3.12) acima e∣∣∣∣ Vm
1− cos(2πml)
∣∣∣∣ < K
m1+B(3.13)
K, B > 0, ou seja,∣∣∣∣ Vm1− cos 2πml
∣∣∣∣1/2 < K
m1+B
2
. (3.14)
Ou seja, neste caso, o denominador de cada termo da serie podeser pequeno, mas Vm e menor ainda.
Observacao 3.4. Note que a condicao suficiente acima descrita, ex-ige apenas que na ultima expressao 1+B
2 > 12 . A seguir vamos mostrar
que tal propriedade e verdadeira para certos numeros l do tipo Dio-fantino.
Quando 2πml esta proximo de 2π(mod 1), entao pela Formula deTaylor
(1− cos 2πml) ∼ 1
24π2(lm− n)2
onde n e o inteiro mais proximo de lm (estamos tomando a formulade Taylor em torno de 2πn).
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 80 — #80 ii
ii
ii
80 CAPITULO 3. A TEORIA DE AUBRY
Logo ∣∣∣∣ Vm1− cos(2πml)
∣∣∣∣ < Vm
K(4π)2(lm− n)2.
Se assumirmos que V′(x) e analıtica complexa na faixa em que a
parte imaginaria de x e menor que ρ, entao existe k, ρ tal que
|Vm| < k exp−2π|m|ρ (3.15)
Este resultado (3.15) pode ser facilmente obtido da formula in-tegral de Cauchy de Variavel Complexa (ver [N]), e considerandoum contorno retangular no plano complexo passando pelos pontos−π, π, π+ρi,−π+ρi. Integrando neste contorno e usando o fato queas integrais em dois lados do retangulo cancelam, segue o resultado.
Se V′(z) nao e analıtica, mas apenas ν vezes diferenciavel, entao
|Vm| < k1mν+1
(3.16)
para uma certa constante k1 (ver [Fi] secao 2.8).Logo se V
′e ν vezes diferenciavel,∣∣∣∣ Vm1− cos 2πml
∣∣∣∣ 12 ≤ k2m(ν+1)/2(lm− n)
,
onde k2 e uma constante.Se l e numero Diofantino, de (3.6)∣∣∣∣l − n
m
∣∣∣∣ > γ1
mr, r > 2.
O valor de r sera especificado em breve.Logo
|lm− n| > γ1
mr−1
ou seja
γ1
|lm− n|< mr−1.
Concluindo∣∣∣∣ Vm1− cos 2πml
∣∣∣∣ 12 < K3mr−1
m(ν+1)/2= K3
1
mν+12 −r+1
,

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 81 — #81 ii
ii
ii
81
para uma certa constante K3.Tomando ν suficientemente grande
ν + 1
2− r + 1 (3.17)
fica maior que 12 e assim, segundo a Observacao 3.4, segue que (3.14)
e verdadeira e assim a serie de Fourier da g que desejamos obterconverge.
Desta maneira, mostramos que sob certas condicoes existe solucaog contınua (em primeira aproximacao) da equacao (3.9) da curvaKAM (ver Observacao 3.2).
Vamos fazer uma analise mais delicada da questao acima consid-erada.
Estamos interessados em propriedades que sao validas para todol em um conjunto de medida total. Sendo assim, podemos assumirr = 2 + ε com ε pequeno (ver Observacao 3.1 antes do teorema)e concluir que para um conjunto de medida total de valores l (osnumeros Diofantinos), para valores λ menores que λcrıtico, existeuma curva KAM.
Neste caso, se V′for apenas tres vezes diferenciavel ja obtemos
de (3.17) (ver Observacao 3.4) que
3 + 1
2− r + 1 = 2− 2− ε+ 1 >
1
2
pois
ε <1
2
Sendo assim se V′for tres vezes diferenciavel, a condicao (3.13) e
valida para tal g e a Serie de Fourier (3.12) de g converge, embora gnao seja necessariamente diferenciavel (apenas contınua).
A conclusao final e que se V′for tres vezes diferenciavel, entao g
(ou seja f) satisfazendo (3.8) e (3.9) existe e contınua e e expressaatraves da Serie de Fourier (3.9) acima descrita.
Se V ′ for mais de tres vezes diferenciavel entao as curvas obtidasserao diferenciaveis. Quanto maior a classe de diferenciabilidade deV ′, maior sera a classe de diferenciabilidade da g que define a curvaKAM.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 82 — #82 ii
ii
ii
82 CAPITULO 3. A TEORIA DE AUBRY
E realmente um fato muito interessante o fato que propriedadestopologicas (a existencia de curvas KAM ou a existencia de conjuntosde Cantor invariantes, conforme aparece no conjunto das 16 figuras)dependem de propriedades de diferenciabilidade de V ′ e tambem depropriedades numericas de l.
Considere um valor l de distancia media atomica fixado.Se V ′ for analıtica, entao pode-se mostrar que para pequenos val-
ores de λ, a funcao g e analıtica.Pode-se mostrar que para valores de λ um pouco maiores, a curva
invariante e diferenciavel, mas nao analıtica (mesmo que V ′ sejaanalıtica).
Para valores de λ moderadamente grandes, a aplicacao padraodefinida acima, vai apresentar exemplos em que a g acima consideradae realmente continua mas nao diferenciavel e este fato vai assegurara existencia de curvas KAM nao diferenciaveis.
Em todos os casos considerados acima, existe curva KAM.No conjunto das oito figuras, logo apos a Figura 1.14, para varios
valores de λ, plotamos varias orbitas no espaco de fase de variasaplicacoes padrao T = Tλ associados ao potencial λV (u) = λ 1
2 (1 −cos 2πu).
No conjunto das oito figuras antes da Figura 1.5 mostramos oespaco de fase de varias orbitas para T quando λ = 0. Note a semel-hanca deste caso com o bilhar no cırculo do Exemplo 1.1, Capıtulo3.
As figuras do meio das oito correspondem a valores nao muitograndes nem muito pequenos de λ.
A ultima figura do primeiro conjunto mostra o espaco de fase deT para o valor λ que fica localizado um pouco antes da destruicao daultima curva KAM. Esta curva tem numero de rotacao l = β a razaoaurea.
Um fato relevante a ser destacado e que a medida que aumen-tamos λ mais e mais as g associadas a l Diofantinos vao deixandode ser contınuas. Este fenomeno e conhecido como a destruicao dascurvas invariantes em teoria KAM. A medida que estas curvas vaosendo destruidas, aparecem conjuntos ’ralos”tipo Cantor e tambemregioes bidimensionais invariantes (ver Figura 3.32). As regioes bidi-mensionais ocupam uma parte cada vez maior de [0, 1]× [0, 1] ate quefinalmente para valores muito grandes de λ elas parecem ocupar todo

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 83 — #83 ii
ii
ii
83
Figura 3.3:

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 84 — #84 ii
ii
ii
84 CAPITULO 3. A TEORIA DE AUBRY
o [0, 1]× [0, 1] (ver ultima figura do conjunto dos primeiros oito).As dezesseis figuras foram obtidas da seguinte maneira, tomando
um ponto (p0, u0) inicial ao acaso, iteramos 10,000 vezes a condicaoinicial e plotamos esta trajetoria de
(p0, u0), T (p0, u0), ..., T 10000(p0, u0).
Observacao 3.5. Note que muitas das evidencias numericas queaparecem nas figuras obtidas em computador nao correspondem sem-pre a conclusoes verdadeiras. Por exemplo, para λ grande, a ultimafigura do conjunto das oito primeiras, mostra que aparentemente osistema e ergodico quando restrito a uma regiao bidimensional (es-cura) de area positiva. Poderia ocorrer que certas orbitas ficam encer-radas em regioes bidimensionais invariantes muito proximas da pro-pria orbita. O que se assemelha a uma orbita que parece ocupar den-samente o espaco de fase, na verdade seria apenas um ponto elıptico(ver definicao na ultima secao do texto, Definicao 12.4) de perıodomuito grande. Este fato nao poderia ser percebido pela resolucao docomputador que gerou tais figuras. Tal situacao que parece insolita,de fato corre com alguns parametros da aplicacao “padrao”(ver [Du]).
As figuras obtidas de simulacoes no computador podem ser degrande valia no entendimento da riqueza de fenomenos que aparecemnum sistema mecanico. Note que a Figura 1.8 parece descrever a ex-istencia de pontos elıpticos. Elas por si so, no entanto, nao assegurama veracidade matematica do fenomeno que parecem descrever.
Conclusao: Considere um potencial V analıtico. Para um valorpequeno de λ, nao existem mais curvas invariantes para T com lracional. Elas sao destruidas e dao lugar a orbitas periodicas. Naoexistem tambem curvas com l irracional nao Diofantino. Subsistemvarias curvas KAM com l Diofantino, mas a medida que aumentamosλ, mais e mais destas curvas vao sendo destruidas, dando razao aoaparecimento de conjuntos fractais (muito pequenos, quase imper-ceptiveis) e a regioes bidimensionais invariantes. Quando uma curvaKAM e destruida, aparece em geral uma sequencia alternada de pon-tos periodicos elıpticos e hiperbolicos (ver ultima figura do segundoconjunto). Aparecem assim pontos hipebolicos que geram assim umconjunto tipo ferradura (ver [R02] [Ka ][PM]). A secao 6.3 em [DL]

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 85 — #85 ii
ii
ii
85
descreve este fenomeno. Entremeado neste conjunto, aparecem “il-has elıpticas”. Estas “ilhas elıpticas”em torno dos pontos elipticos,por sua vez, possuem curvas invariantes e cada um desta curvas temnumero de rotacao (ou distancia media atomica) l em torno de cadaponto elıptico. Estas curvas, por sua vez, se tem numero de rotacaol (em torno do ponto elıptico) racional ou nao Diofantino, logo saodestruidas ao aumentar o parametro λ . Restam as curvas (em tornodeste ponto elıptico) com l Diofantino, as quais vao sendo destruidasa medida que o parametro λ aumenta criando novas sequencias depontos hiperbolicos e elıpticos e assim por diante. Para valores deλ muito grande, aparentemente, so existe uma regiao bidimensionalinvariante, ou seja a probabilidade uniforme P e ergodico para T .Dizemos aparentemente, por causa da Observacao 3.5 acima.
Existe uma conjectura que diz que para valores λ grandes, o con-junto de tais λ que determinam T = Tλ nao ergodica, e muito pequenoem termos da medida uniforme em λ ∈ R (ver [Du] para maiores con-sideracoes a respeito do assunto). Este resultado implicaria entao quepara λ grande, a maioria das transformacoes T seria ergodica para aProbabilidade uniforme.
A evolucao do espaco de fase com o parametro λ descrita acimae o que se chama de fenomeno KAM.
A destruicao das curvas invariantes acima descritas, correspondema destruicao de toros invariantes em torno de pontos elıpticos deaplicacoes de Poincare de primeiro retorno, conforme foi descrito nofim da Secao 7, Capıtulo 1 [L].
Aplicacoes do tipo padrao formam uma classe mais geral de apli-cacoes denominadas de tipo “twist”ou tambem chamadas “aplicacoesque giram para a direita”.
Esta classe de aplicacoes e objeto de intenso estudo nos ultimosanos (ver [MF] e [M2]).
Definicao 3.7. Seja T : [0, 1]× [0, 1] → [0, 1]× [0, 1], obtida a partirde uma funcao geradora S(x,X), dizemos que T (x, y) e do tipo quegira para a direita, se T = (T1, T2), e existe C > 0 tal que
C <∂T1∂y
< C−1. (3.18)
Tal T preserva area (ou seja, preserva dxdy.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 86 — #86 ii
ii
ii
86 CAPITULO 3. A TEORIA DE AUBRY
Para aplicacoes do tipo acima podemos considerar o problemaanalogo: determinar as qi onde T (q0, p0) = (qi, p1) tais que se q0,q1, q2, ..., qn sao sucessivas iteradas na variavel q de uma orbitaT j(q0, p0) entao para q0, qn fixos a funcao
A(x1, x2, ..., xn−1) =
= S(q0, x1) + S(x1, x2) + ...+ S(xn−2, xn−1) + S(xn−1, qn),
A : En−1 → R tem (q1, q2, ..., qn−1) como ponto crıtico (ou mınimo),etc....
E facil ver que a aplicacao T definida por (3.3) gira para a direitapois ∂T1
∂u = λV′′(u) > 0 e e obtida atraves de uma funcao geradora
S(q,Q).
Exemplo 3.3. (Bilhares convexos) Considere como na secao ante-rior a acao S(ui, ui+1) = |ui−ui+1|, ou seja a distancia entre o pontoui e ui+1 no bordo do bilhar, e a acao total de n a m como a soma∑mi=n S(ui, ui+1). As trajetorias do bilhar determinam configuracoes
crıticas para a acao total. A aplicacao T que determinamos para obilhar convexo e portanto analoga a T que estamos considerando napresente secao.
O difeomorfismo T do bilhar convexo e a aplicacao induzida peloprimeiro retorno ao bordo do bilhar convexo. A aplicacao T preservaarea como vimos na Proposicao 17, Capıtulo 3 [L]. E facil mostrar quetal T satisfaz (3.18) (ver [LC] e [CRZ] para prova). Logo, utilizando aS acima, a transformacao T induzida pelas batidas do bilhar no bordode um bilhar convexo define uma aplicacao que gira para a direita.
Seja T : [0, 1] × [0, 1] → [0, 1] × [0, 1], obtida a partir de umafuncao geradora S(x,X), dizemos que T (x, y) e do tipo que gira paraa esquerda, se T = (T1, T2), e existe C > 0 tal que
−C−1 <∂T1∂y
< −C.
No caso do bilhar do Sinai (ver definicao na secao 1) se conside-rarmos a acao S(q,Q) = |q − Q| obteremos uma funcao T que girapara esquerda.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 87 — #87 ii
ii
ii
87
Esclarecemos ao leitor que a teoria em que ”minimizamos
S(q0, x1) + S(x1, x2) + ...+ S(xn−2, xn−1) + S(xn−1, qn)
para aplicacoes que giram para a direita”e a mesma teoria em que”maximizamos
S(q0, x1) + S(x1, x2) + ...+ S(xn−2, xn−1) + S(xn−1, qn)
para aplicacoes que giram para a esquerda”(ver [LC]).Note no entanto que a teoria em que ”minimizamos
S(q0, x1) + S(x1, x2) + ...+ S(xn−2, xn−1) + S(xn−1, qn)
para aplicacoes que giram para a esquerda”e diferente a teoria emque ”minimizamos
S(q0, x1) + S(x1, x2) + ...+ S(xn−2, xn−1) + S(xn−1, qn)
para aplicacoes que giram para a direita”. No primeiro caso estaremoslocalizando conjuntos ”proximos”de pontos de sela e no segundo con-juntos ”proximos”de pontos elıpticos. Na ultima figura do primeiroconjunto de oito vemos uma alternancia de pontos elıpticos e pontoshiperbolicos em cada anel. Fixado uma aplicacao T que gira para adireita ”minimizar”ou ”maximizar”S vai determinar que tipo de con-junto estamos tentando encontrar. As curvas KAM aparecem apenasno problema em que minimizamos S.
Sendo assim no caso do bilhar do Sinai (ver definicao na secao1) e mais interessante considerar a acao S(q,Q) = −|q −Q| obtendoassim uma funcao T que gira para direita.
Dada uma orbita periodica de um sistema Hamiltoniano, se aaplicacao de primeiro retorno T tem um ponto fixo elıptico, em geralesta T e localmente uma aplicacao que gira para a direita. Referimoso leitor para [M2] para uma prova deste fato.
A teoria acima possui uma extensao para lagrangianos periodicose mais recentemente foi extendida para lagrangianos Autonomos. Oleitor pode encontrar um texto cobrindo tais assuntos em [CI] e [Fat].
Existe tambem uma teoria analoga para transformacoes expan-sivas e sistemas tipo Anosov (ver [CLT]) em que se considera entreoutras coisas o expoente de Lyapunov.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 88 — #88 ii
ii
ii
88 CAPITULO 3. A TEORIA DE AUBRY
Sendo assim, esperamos ter convencido ao leitor da importanciado entendimento dinamico das aplicacoes que giram para a dire-ita. Este entendimento possibilitaria a melhor compreensao de variosproblemas importantes da Mecanica Classica. Muito trabalho aindasera requerido para chegar ao entendimento matematico completo dadinamica de tais aplicacoes.
Exercıcios:
1. Mostre que a transformacao T associada ao bilhar, consideradana Secao 11, e do tipo que gira para a esquerda.
2. Mostre que os numeros Diofantinos tem probabilidade total nareta.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 89 — #89 ii
ii
ii
Capıtulo 4
Formas Diferenciais emVariedades
Nesta secao vamos apresentar de maneira resumida as principais pro-priedades das formas diferenciais em variedades diferenciaveis, queserao necessarias para o entendimento da proxima secao que analisa-ra o formalismo simpletico. Referimos o leitor a [MC1] para o leitorque desejar uma exposicao mais completa do assunto abordado nestasecao.
O objetivo de considerar formas diferenciais como faremos a seguir,sera apresentar no futuro (ver proxima secao) uma versao da MecanicaClssica que seja intrınseca, isto e, que seja definida sem apelo a co-ordenadas locais. Lembre que, por exemplo, para definir o campoHamiltoniano usamos a estrutura do R2n (necessitamos de variaveisq e p separadas) de maneira essencial. Muitas vezes em problemasfısicos concretos, nao e natural supor que o sistema em consideracaoseja um subconjunto do R2n. Isto vai nos conduzir ao conceito devariedade diferenciavel. Para definir o campo Hamiltoniano neces-sitaremos tambem do conceito de formas diferenciais.
Dado p ∈ Rn, chamaremos de espaco tangente a Rn em p, edenotaremos Rn
p = (TRn)p, o conjunto de todos os vetores tangentesv do Rn, cuja origem esta localizada no ponto p.
89

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 90 — #90 ii
ii
ii
90 CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Mais precisamente, v ∈ Rnp determina a classe de todas as curvas
γ(t) ∈ Rn tal que γ(0) = p e γ′(0) = v.Rnp e um espaco vetorial, e seu dual sera (Rn
p )∗, isto e, o conjunto
de todos as transformacoes lineares f : Rnp → R.
Definicao 4.1. Uma k-forma w em Rnp e por definicao uma funcao
do tipow : Rn
p ×Rnp × · · · ×Rn
p︸ ︷︷ ︸k vezes
→ R
tal que w e linear em cada coordenada.A forma w e dita alternada se ∀ i < j,
w(v1, v2, ..., vi, ..., vj , ..., vk) = −w(v1, v2, ..., vj , ..., vi, ..., vk).
Denotaremos para cada p ∈ Rn por Ωk(Rnp ), o conjunto das
funcoes k-lineares alternadas em Rnp tomando valores reais.
Note que se houver repeticao de um elemento v na k-upla, entao
w(v1, v2, ..., v, ..., v, .., vk) = −w(v1, v2, ..., v, ..., v, ..., vk)
e portanto w(v1, v2, ..., v, ..., v, ..., vk) = 0.
Exemplo 4.1. Em R3 a 3-forma w tal que w(v1, v2, v3) e o de-terminante da matriz que tem como colunas (v1, v2, v3) e alternada.Por exemplo, esta 3-forma satisfaz w(v1, v2, v3) = −w(v2, v1, v3) =w(v2, v3, v1).
Exercıcio: Mostre que se v1 e combinacao linear de v2, v3, ..., vn,isto e, v1 =
∑ki=2 αivi, entao w(v1, v2, ..., vn) = 0. Em particular
para uma 2-forma w(v, v) = 0.
Este ultimo conjunto Ωk(Rnp ) com a operacao de soma de funcoes,
e multiplicacao por escalar definidas de maneira usual, ((f + g)(x) =f(x) + g(x) e (cf)(x) = cf(x), ∀x ∈ Rn
p ), e um espaco vetorial.
Exemplo 4.2. Seja dx2 : R3 → R a projecao na segunda coorde-nada,
dx2(y1, y2, y3) = y2.
Entao, dx2 ∈ R3∗p , para qualquer p ∈ R3.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 91 — #91 ii
ii
ii
91
As transformacoes lineares dxi : Rn → R, tal que
dxi(y1, y2, ..., yn) = yi
sao transformacoes (ou funcionais) lineares, que formam uma basepara Ω1(Rn
p ).
Observacao 4.1. Ω1(Rnp ) = (Rn
p )∗.
Note que dxi satisfaz dxi(ej) = δi,j , i, j = 1, 2, ..., n, onde δi,j = 0se i = j e δi,j = 1 se i = j.
Definicao 4.2. Uma 1-forma ou forma exterior de grau 1 em umaberto A do Rn, e uma aplicacao ω definida em A ⊂ Rn tomandovalores em Ω1(Rn
p ), que associa a cada ponto p ∈ A ⊂ Rn, umafuncao linear ω(p) : Rn
p → R.Como dx1, dx2, ..., dxn e base do espaco das transformacoes lin-
eares, ω(p) podera ser escrito como:
ω(p) = a1(p)dx1 + a2(p)dx2 + ...+ an(p)dxn.
Se cada ai : A ⊂ Rn → R for diferenciavel ∀ p ∈ A ⊂ Rn, diremosque ω e uma 1-forma diferenciavel ou forma exterior diferenciavel degrau 1.
Por abuso de notacao, falaremos de uma forma diferencial em Rn
quando nos referirmos a uma 1-forma diferencial sobre um abertoA ⊂ Rn.
Definicao 4.3. Se φ1, φ2, ..., φk, sao 1-formas lineares, podemosobter um elemento
φ1 ∧ φ2 ∧ · · · ∧ φk
de Ωk(Rnp ), definindo:
(φ1 ∧ φ2 ∧ · · · ∧ φk)(v1, v2, . . . , vk) = det([φi(vj)]).
Segue das propriedades do determinante, que (φ1 ∧φ2 ∧ · · · ∧φk)e k-linear, alternada. E facil ver que (φ1 ∧ · · · ∧ φk) ∈ Ωk(Rn
p ).Em particular (dx1)∧ · · · ∧ (dxk) ∈ Ω(Rn
p ). Denotaremos (dx1)∧· · · ∧ (dxk) por (dx1 ∧ · · · ∧ dxk).

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 92 — #92 ii
ii
ii
92 CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Proposicao 4.1. O conjunto (dxi1 ∧ dxi2 ∧ · · · ∧ dxik), i1 < i2 <· · · < ik, onde ij ∈ 1, 2, . . . , n, forma uma base para Ωk(Rn
p ).
Demonstracao: Primeiramente veremos que os elementos desteconjunto sao linearmente independentes. Suponha que∑
i1<···<ik
ai1···ikdxi1 ∧ · · · ∧ dxik = 0.
Considere fixado j1 < ... < jk, ji ∈ 1, 2, . . . , n, tal que o cor-respondente aj1···jk nao seja nulo. Entao para qualquer k-upla deındices i1 < ... < ik, dxi1 ∧ · · · ∧ dxik aplicado a (ej1 , . . . , ejk) resultaser
(dxi1 ∧ · · · ∧ dxik)(ej1 , . . . , ejk) =
= det
∣∣∣∣∣∣∣dxi1(ej1) dxi1(ej2) · · · dxi1(ejk)...
......
...dxik(ej1) dxik(ej2) · · · dxik(ejk)
∣∣∣∣∣∣∣ .Lembramos que
dxi(ej) =
0, se i = j1, se i = j
Logo (dxj1 ∧· · ·∧dxjk)(ej1 , . . . , ejk) = 1 e portanto aj1,...jk(dxj1 ∧· · · ∧ dxjk)(ej1 , . . . , ejk) = aj1,...,jk .
Mantendo-se fixo (ej1 , . . . , ejk) e fazendo-se todas as escolhas pos-sıveis (diferentes desta) para i1 < i2 < · · · < ik, il ∈ 1, 2, . . . , n,obteremos:
−aj1j2···jk =
∗∑i1<···<ik
ai1···ik(dxi1 ∧ · · · ∧ dxik)(ej1 , . . . , ejk),
onde o∑∗
significa que evitamos (i1, ..., ik) = (j1, . . . jk) no somatorioacima.
Note agora que se (i1, i2, · · · , ik) e diferente de (j1, ..., jk) entao
(dxi1 ∧ · · · ∧ dxik)(ej1 , . . . , ejk) = 0.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 93 — #93 ii
ii
ii
93
Logo,∑i1<···<ik
ai1···ik(dxi1 ∧ · · · ∧ dxik)(ej1 , . . . , ejk) = 0 ⇒ aj1···jk = 0.
Obtivemos portanto uma contradicao.Logo o conjunto (dxi1 ∧ dxi2 ∧ · · · ∧ dxik)p, i1 < i2 < · · · < ik,
onde ij ∈ 1, 2, . . . , n, e linearmente independente em Ωk(Rnp ).
Mostraremos agora que se f ∈ Ωk(Rnp ), entao f e uma combinacao
linear da forma:
f =∑
i1<···<ik
ai1···ikdxi1 ∧ · · · ∧ dxik .
Para vermos isto, basta definirmos ai1···ik = f(ei1 , . . . , eik) (lem-bramos que f e k-linear alternada).
Definicao 4.4. Uma k-forma (ou forma exterior de grau k) em umaberto A, A ⊂ Rn (k ≥ 1) e uma aplicacao ω que a cada p ∈ A ⊂ Rn
associa ω(p) ∈ Ωk(Rnp ).
Como vimos na ultima proposicao, ω pode ser escrito como:
ω(p) =∑
i1<···<ik
ai1···ik(p)(dxi1 ∧ · · · ∧ dxik),
ij ∈ 1, 2, . . . , n onde ai1···ik : A ⊂ Rn → R.Se estas funcoes ai1···ik forem diferenciaveis, ω e chamada uma
k-forma diferenciavel.
Por abuso de linguagem, as k-formas sobre abertos A do Rn seraochamadas de k-formas diferenciais em Rn.
Observacao 4.2. A k-upla (i1, . . . , ik), i1 < · · · < ik sera indicadapor I, e a notacao a ser usada a partir de agora sera:
ω =∑I
aIdxI ,
dxI = dxi1 ∧ · · · ∧ dxik .Convenciona-se que uma 0-forma diferenciavel em Rn e uma
funcao diferenciavel f : A ⊂ Rn → R.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 94 — #94 ii
ii
ii
94 CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Se ω e φ sao duas k-formas,
ω =∑I
aIdxI , φ =∑I
bIdxI ,
podemos definir a soma:
ω + φ =∑I
(aI + bI)dxI
e a multiplicacao de ω por escalar c ∈ R
cω =∑I
c aIdxI .
Estas propriedades determinam que o conjunto das k-formas di-ferenciais em A aberto do Rn e um espaco vetorial.
Definicao 4.5. Se ω e uma k-forma e φ uma s-forma, podemosdefinir uma operacao chamada produto exterior ω ∧ φ, obtendo umak + s-forma.
Seω =
∑I
aIdxI , I = (i1, . . . , ik) k-forma
φ =∑J
bJdxJ , J = (j1, . . . , js) s-forma.
Por definicao,
ω ∧ φ =∑I,J
aIbJdxI ∧ dxJ ,
onde dxI ∧ dxJ = dxi1 ∧ ... ∧ dxik ∧ dxj1 ∧ ... ∧ dxjs .
Note que esta definicao e compatıvel com a Definicao 4.3.Por exemplo, (2dx1+5dx3)∧(5dx2+4dx3) = 10dx1∧dx2+8dx1∧
dx3 − 25dx2 ∧ dx3.
Proposicao 4.2. Se ω e uma k-forma, φ uma s-forma e θ umar-forma, teremos:
(a) (ω ∧ φ) ∧ θ = ω ∧ (φ ∧ θ)(b) (ω ∧ φ) = (−1)ksφ ∧ ω(c) ω ∧ (φ+ θ) = ω ∧ φ+ ω ∧ θ quando r = s.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 95 — #95 ii
ii
ii
95
Demonstracao: (a) e (c) sao consequencias das definicoes acima.Para o item (b), sejam ω =
∑I aIdxI e φ =
∑J bJdxJ , onde I =
(i1, . . . , ik) e J = (j1, . . . , js)
ω ∧ φ =∑I,J
aIbJdxi1 ∧ · · · ∧ dxik ∧ dxj1 ∧ · · · ∧ dxjs =
=∑I,J
aIbJ(−1)dxi1 ∧ · · · ∧ dxik−1∧ dxj1 ∧ dxik ∧ dxj2 ∧ · · · ∧ dxjs =
=∑I,J
(−1)kaIbJdxj1 ∧ dxi1 ∧ dxi2 ∧ · · · ∧ dxik ∧ dxj2 ∧ · · · ∧ dxjs ,
fazendo a mesma inversao para dxj2 , dxjn , . . . , dxjs , ao final teremosrealizado este raciocınio s-vezes, teremos s-vezes (−1)k a frente deaIbJ , ou seja, (−1)ks, portanto φ ∧ ω = (−1)ksω ∧ φ.
Note que uma n-forma diferenciavel w em um aberto A do Rn esempre da forma w(x) = c(x) dx1 ∧ dx2 ∧ ...∧ dxn, onde c : A→ R euma funcao diferenciavel.
Fixado x, para determinar c(x), basta tomar w(x)(e1, e2, ..., en) =c(x), onde ei, i ∈ 1, 2, .., n e a base canonica do Rn.
Definicao 4.6. Seja f : A ⊂ Rn → Rm uma funcao diferenciavel,entao a derivada dfp : R
np → Rm
f(p) induz para cada ponto p ∈ A uma
transformacao linear f∗p : Ωk(Rmf(p)) → Ωk(Rn
p ) do seguinte modo:
dado w ∈ Ωk(Rmf(p)), f
∗(w) = w1 ∈ Ωk(Rnp ) e tal que
w1(v1, . . . , vk) = f∗p (ω)(v1, . . . , vk) = ω(dfp(v1), dfp(v2), . . . , dfp(vk)),
onde v1, v2, . . . , vk ∈ Rnp .
Fazendo p variar em Rn, obtemos uma aplicacao f∗ que leva k-formas diferenciais do Rm em k-formas diferenciais do Rn.
Convenciona-se que f∗(g) = g f se g e uma 0-forma do Rm.Enunciaremos a seguir algumas propriedades de f∗.
Proposicao 4.3. Se f : A ⊂ Rn → Rm e diferenciavel entao:(a) f∗(ω1 + ω2) = f∗(ω1) + f∗(ω2), onde ω1 e ω2 sao k-formas.(b) f∗(ω1 ∧ ω2) = f∗(ω1) ∧ f∗(ω2) onde ω1 e ω2 sao 1-formas.(c) f∗(gω) = f∗(g)f∗(ω) onde g e uma 0-forma do Rm e ω uma
k-forma do Rm.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 96 — #96 ii
ii
ii
96 CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Demonstracao:
(a) f∗(ω1 + ω2)(p)(v1, v2, . . . , vk) =
= (ω1 + ω2)(f(p))(dfp(v1), . . . , dfp(vk)) =
= ω1(f(p))(dfp(v1, . . . , dfp(vk)) + ω2(f(p))(dfp(v1), . . . , dfp(vk)) =
= f∗(ω1)(p)(v1, . . . , vk) + f∗(ω2)(p)(v1, . . . , vk).
(b) f∗(ω1 ∧ ω2)(p)(v1, v2) = (ω1 ∧ ω2)f(p)(dfp(v1), dfp(v2)) =
= det
∣∣∣∣ ω1 f(p)(dfp(v1)) ω1 f(p)(dfp(v2))ω2 f(p)(dfp(v2)) ω2 f(p)(dfp(v2))
∣∣∣∣ == det
∣∣∣∣ f∗(ω1)(p)(v1) f∗(ω1)(p)(v2)f∗(ω2)(p)(v1) f∗(ω2)(p)(v2)
∣∣∣∣ == (f∗(ω1)(p) ∧ f∗(ω2)(p))(v1, v2).
(c)f∗(gω)(p)(v1, . . . , vk) = (gω)(f(p))(dfp(v1), . . . , dfp(vk)) =
= (g f)(p)f∗(ω)(p)(v1, . . . , vk) = f∗(g)(p)f∗(ω)(p)(v1, v2, . . . , vk).
Estamos prontos agora para mostrar que a operacao f∗ e equiva-lente a substituicao de variaveis.
Seja f : A ⊂ Rn → Rm uma funcao diferenciavel que associa(x1, . . . , xn) a (y1, y2, . . . , ym) da seguinte maneira:
y1 = f1(x1, . . . , xn)y2 = f2(x1, . . . , xn)...ym = fm(x1, . . . , xn).
Seja ω =∑I aIdyI uma k-forma do Rm, usando a ultima pro-
posicao, temos que: f∗(ω) = f∗(∑I aIdyI) =
∑I f
∗(aI)f∗(dyi1) ∧
f∗(dyi2)∧· · ·∧f∗(dyik). Ora f∗(dyi)(v) = dyi(df(v)) = d(yif)(v) =dfi(v) e f∗(aI) = aI f = aI(f), pois aI e uma o-forma (usamosdefinicao de f∗ para 0-formas). Assim,
f∗(ω) =∑I
aI(f1(x1, . . . , xn), . . . , fm(x1, . . . , xn))dfi1∧dfi2∧· · ·∧dfik

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 97 — #97 ii
ii
ii
97
onde fi e dfi sao funcoes de xj ,
dfi =n∑j=1
∂fi∂xj
dxj ,
portanto aplicar f∗ a ω equivale a substituir em ω as variaveis yi esuas diferenciais pelas funcoes xk e df(xk).
Vimos na proposicao anterior que a adicao comuta com a substi-tuicao de variaveis (f∗(ω1 + ω2) = f∗(ω1) + f∗(ω2)) veremos agoraque o produto exterior de duas formas diferenciais quaisquer tambemcomutam com a substituicao de variaveis.
Na Secao 6, Capıtulo 3 [L], quando consideramos mudancas devariavel
F (x, y) = (X(x, y), Y (x, y)),
a expressao de uma forma W na variavel (X,Y ) era calculada navariavel (x, y). O Teorema 16 e a Proposicao 17, Capıtulo 3 [L],sao casos particulares da propriedade geral apresentada pela ultimaexpressao. Por exemplo, expressar a forma diferencial W = dX ∧ dYna variavel (X,Y ) atraves de outra forma diferenciavel w na variavel(x, y) corresponde a tomar w = F ∗(W ), isto e, w = F ∗(dX ∧ dY ) =(∂X∂x dx+ ∂X
∂y dy) ∧ (∂Y∂x dx+ ∂Y∂y dy).
Exercıcio: No caso geral, dados abertos A,B doRn,o difeomorfismof : A → B, e W (y) = c(y) dy1 ∧ ... ∧ dyn uma n-forma diferencialem B, entao a n-forma diferencial w = f∗(W ) em A e dada porw(x) = c(f(x)) (det Df(x)) dy1∧ ...∧dyn = z(x) dy1∧ ...∧dyn. Istosegue do fato que w(e1, e2, .., en) = z(x).
Proposicao 4.4. Seja f : A ⊂ Rn → Rm uma aplicacao diferencia-vel que a cada (x1, . . . , xn) ∈ A ⊂ Rn, associa
(y1, . . . , ym) = (f1(x1, . . . , xn), . . . , fm(x1, . . . , xn))
∈ Rm entao:(a) f∗(ω∧φ) = f∗(ω)∧f∗(φ), onde ω e φ sao formas diferenciais
em Rm.(b) (f g)∗(ω) = g∗(f∗(ω)), onde g : Rp → Rn e uma aplicacao
diferenciavel.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 98 — #98 ii
ii
ii
98 CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Demonstracao: Sejam ω =∑I aIdyI , φ =
∑I bJdyJ .
Sabemos que: ω ∧ φ =∑I,J aIbJdyI ∧ dyJ .
(a) f∗(ω ∧ φ) =∑I,J aI(f1, . . . , fm)bJ(f1, . . . , fm)dfI ∧ dfJ =
f∗(ω) ∧ f∗(φ)
(b) (f g)∗(ω) =∑I aI((f g)1, . . . , (f g)m)d(f g)I =
=∑I aI(f1(g1, . . . , gn), . . . , fm(g1, . . . , gn))dfI(dg1, dg2, . . . , dgn)
= g∗(f∗(ω)) Dada uma 0-forma diferenciavel, ou seja, uma funcao diferenciavel,
podemos obter uma 1-forma, efetuando a operacao de derivacao so-bre f . Vamos definir agora uma operacao sobre uma k-forma, a qualchamaremos de diferencial exterior, que associa esta k-forma a uma(k + 1)-forma.
Definicao 4.7. Se ω =∑I aIdxI e uma k-forma diferencial, a
diferencial exterior de ω sera a (k + 1)-forma diferencial definidada seguinte maneira:
dω =∑I
daI ∧ dxI .
Proposicao 4.5. (a) d(ω1+ω2) = dω1+dω2, ω1 e ω2 sao k-formas.(b) d(ω1 ∧ω2) = dω1 ∧ω2 +(−1)kω1 ∧ dω2, ω1 uma k-forma e ω2
e uma s-forma.(c) d(dω) = d2ω = 0.(d) d(f∗(ω)) = f∗(dω), onde ω e uma k-forma em Rm e f : A ⊂
Rn → Rm e uma aplicacao diferenciavel.
Observacao 4.3. O item (d) nos diz que esta operacao de tomarderivada independe das coordenadas que usamos para representar ω.
Demonstracao:(a) Sejam ω1 =
∑I aIdxI e ω2 =
∑I bIdxI duas k-formas e
ω1 + ω2 =∑I(aI + bI)dxI .
d(ω1+ω2) =∑I d(aI+bI)∧dxI =
∑I daI∧dxI+
∑I dbI∧dxI =
dω1 + dω2
(b) ω1 =∑I aIdxI uma k-forma e ω2 =
∑J bJdxJ uma s-forma,
ω1 ∧ ω2 =∑I,J aIbJdxI ∧ dxJ
d(ω1∧ω2) =∑I,J d(aIbJ)∧dxI ∧dxJ =
∑I,J daIbJ ∧dxI ∧dxJ+∑
I,J aJdbJ ∧ dxI ∧ dxJ =

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 99 — #99 ii
ii
ii
99
= dω1 ∧ ω2 + (−1)k∑I,J aIdbJ(−1)k ∧ dxI ∧ dxJ = dω1 ∧ ω2 +
(−1)kω1 ∧ dω2.
(c) Demonstraremos este item usando inducao em k.Primeiramente provaremos a validade da assercao, para 0-formas.Seja f : A ⊂ Rn → R.
d(df) = d
(n∑i=1
∂f
∂xidxi
)=
n∑i=1
d
(∂f
∂xi
)∧ dxi =
=
n∑i=1
(n∑j=1
∂2f
∂xi∂xjdxj ∧ dxi
)=
=∑i<j
∂2f
∂xi∂xjdxj ∧ dxi +
∑i>j
∂2f
∂xi∂xjdxj ∧ dxi = 0,
pois os coeficientes sao iguais e dxj ∧ dxi = −dxi ∧ dxj , portantod(df) = 0.
Suponhamos agora, por hipotese de inducao, que tenhamosd(dω) = 0, para uma k-forma ω, mostraremos que o mesmo vale parauma (k + 1)-forma.
Toda a (k+1)-forma pode ser escrita como soma de (k+1)-formasdo tipo ω ∧ dxi. Pelo que provado no item (a), a soma comuta com adiferenciacao externa, portanto, temos que provar o item (c) apenaspara as (k + 1)-formas do tipo ω ∧ dxi.
d(d(ω ∧ dxi)) = d(dω ∧ dxi + (−1)kω ∧ d(dxi)), ora xi : Rm → Re uma 0-forma, logo d(dxi)) = 0, sendo assim
d(d(ω∧dxi)) = d(dω∧dxi) = d(dω)∧dxi+(−1)kdω∧d(dxi) = 0,pois d d(ω) = 0 por hipotese de inducao, e d(dxi)) = 0 tambem.
(d) Da mesma forma que fizemos no item (c), a demonstracaosera feita por inducao em k.
Provaremos o resultado inicialmente para uma 0-forma g : Rm →R.
f∗(dg) = f∗
(m∑i=1
∂g
∂yidyi
)=
m∑i=1
∂g
∂yi
n∑j=1
∂fi∂xj
dxj =∑j
∂(g f)∂xj
dxj =

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 100 — #100 ii
ii
ii
100CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
= d(g f) = d(f∗g).
Suponhamos agora que d(f∗ω) = f∗(dω), para ω uma k-formaprovaremos que este resultado e valido para uma k + 1-forma.
Toda a k + 1-forma e escrita como uma soma finita de formasdo tipo ω ∧ dxi, mas tanto f∗, como “d”, comutam com a soma(proposicoes anteriores), assim, temos apenas que provar este resul-tado para k + 1-formas do tipo ω ∧ dxi.
f∗(d(ω∧dxi)) = f∗(dω∧dxi+(−1)kω∧d(dxi)) = f∗(dω∧dxi) =f∗(dω) ∧ f∗(dxi), mas por hipotese de inducao f∗(dω) = d(f∗(ω)).
Portanto,
f∗(d(ω ∧ dxi)) = d(f∗(ω)) ∧ f∗(dxi) =
= d[f∗(ω) ∧ f∗(dxi)] = d(f∗(ω ∧ dxi)).
Definicao 4.8. A integral de uma k-forma diferenciavel w em Rn,sobre uma superfıcie k-dimensional S ⊂ Rn, parametrizada por umaunica g(x1, ..., xk), g : U ⊂ Rk → Rn, U simplesmente conexo, (talsuperfıcie e dita simples conforme Definicao 12, Capıtulo 1) e pordefinicao∫
S
w =
∫U
wg(x)
(∂g
∂x1,∂g
∂x2, ...,
∂g
∂xk
)dx1dx2...dxk
Esta definicao engloba todas as definicoes de integral de formadiferencial (integral de linha, de superfıcies, sobre abertos etc.) apre-sentadas na Secao 6, Capıtulo 3.
Observacao 4.4. Note que conforme o exercıcio proposto anterior-mente para uma n-forma diferencial
a(x) dx1 ∧ dx2 ∧ ... ∧ dxn
em Rn, e f : A ⊂ Rn → Rn vale que
f∗x(a(x) dx1 ∧ ... ∧ dxn) = a(f(x)) (det Jac f)(x)dx1 ∧ ... ∧ dxn.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 101 — #101 ii
ii
ii
101
Deste modo se g1 : U1 → S e g2 : U2 → S forem duas cartascoordenadas para S, aplicando este resultado para f = g1 (g2)
−1,segue da formula de mudanca de variaveis que∫
U1
wg1(x)
(∂g1∂x1
,∂g1∂x2
, ...,∂g1∂xk
)dx1dx2...dxk =
∫U2
wg2(x)
(∂g2∂x1
,∂g2∂x2
, ...,∂g2∂xk
)dx1dx2...dxk
.
Logo,∫Sw independe da escolha da carta coordenada e e assim
um conceito intrınseco.
Esta propriedade e similar a que foi considerada na Secao 10,Capıtulo 3 [L], sobre integrais de superfıcies.
Exercıcio: Mostre que dado f : A ⊂ Rn → A ⊂ Rn e w k-formadiferencial, entao f∗(w) = w, se e somente se, para toda superfıcieS ⊂ A de dimensao k ∫
S
w =
∫S
f∗(w).
Para a integral de uma forma diferencial sobre a superfıcie simplesS estar bem definida, devemos fixar uma orientacao sobre S (verCapıtulo 3 [L]).
Para integrar superfıcies k dimensionais nao simples, que sao obti-das atraves de varias cartas g, utilizaremos particoes da unidade queserao apresentadas em breve (ver Definicao 4.25).
Este procedimento sera uma alternativa ao procedimento de co-lar superfıcies k dimensionais simples que foi desenvolvido na secaoCapıtulo 3 [L]. Este procedimento podera tambem ser utilizado paraintegrar formas diferenciais em variedades.
Note que uma n-forma em Rn e sempre da forma a(x)dx1∧dx2∧... ∧ dxn.
Definicao 4.9. Uma n-forma diferencial em Rn com a(x) ≥ 0 echamada uma forma volume sobre Rn.
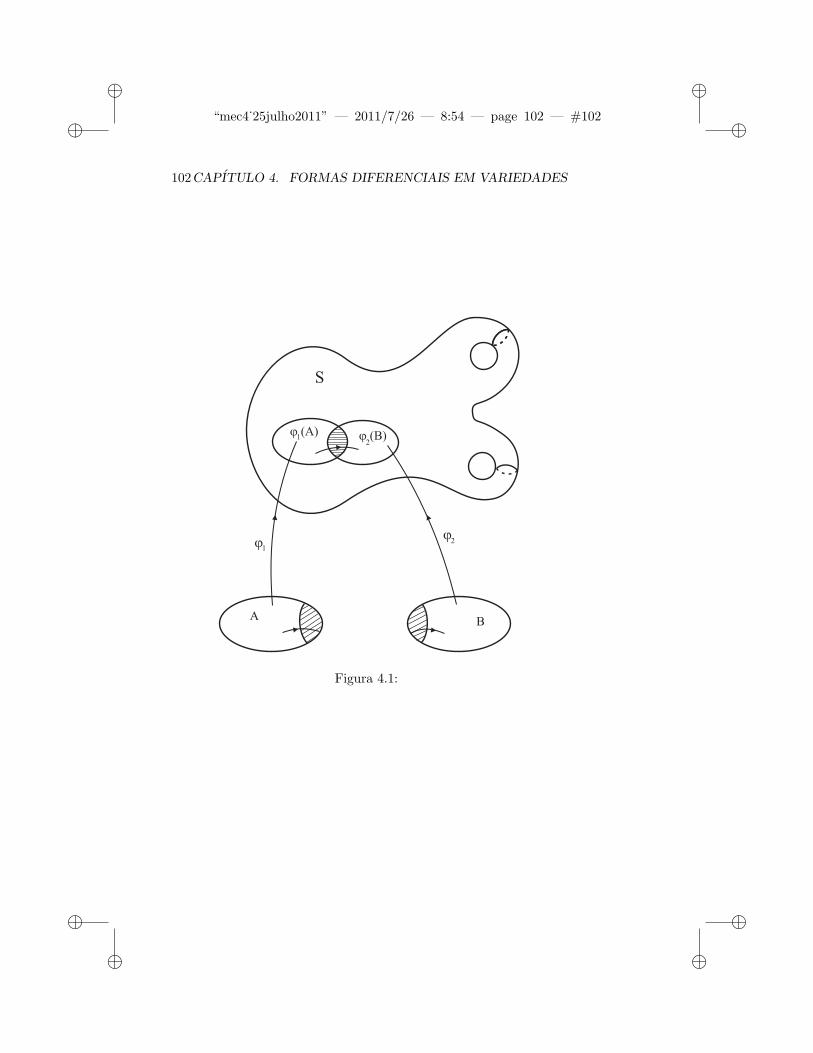
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 102 — #102 ii
ii
ii
102CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Figura 4.1:
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 103 — #103 ii
ii
ii
103
Note que segue da definicao acima que para uma forma volumew = a(x)dx1 ∧ dx2 ∧ ... ∧ dxn em Rn, e para um aberto A ⊂ Rn∫
A
w =
∫A
a(x)dx1dx2...dxn.
Vamos agora introduzir o conceito de variedade diferenciavel.Seja M um conjunto. Um sistema de coordenadas locais ou carta
local em M e uma aplicacao bijetiva fα : Uα → fα(Uα) de um sub-conjunto Uα ⊂M sobre um aberto fα(Uα) ⊂ Rn.
Dizemos que n e a dimensao de fα : Uα → fα(Uα).Para cada p ∈ Uα tem-se fα(p) = (x1(p), ..., xn(p)). Os numeros
xi = xi(p), i = 1, ..., n sao chamados as coordenadas do ponto p ∈Mno sistema fα.
Definicao 4.10. Um atlas de dimensao n sobre um conjunto M euma colecao U de sistemas de coordenadas locais fα : Uα → Rn emM , cujos domınios Uα cobrem M . Os domınios Uα dos sistemas decoordenadas fα ∈ U sao chamados as vizinhancas coordenadas de U .
Definicao 4.11. Um conjunto M no qual existe um atlas de di-mensao n chama-se uma variedade de dimensao n. Em outras pala-vras, M e uma variedade de dimensao n se, e somente se, cada pontox de M existe fα : Uα → Rn carta local com x ∈ Uα.
Usaremos a seguinte notacao: gα : Vα → Uα ⊂ M e a inversa defα : Uα → Vα ⊂ Rn. Logo Vα e um aberto em Rn.
Sendo assim, um variedadeM de dimensao n pode ser alternativa-mente definida por um atlas U cartas gα : Vα →M , tal que ∪αgα(Vα)cobre todo M e onde para todo α, Vα e aberto de Rn.
Exemplo 4.3. Toda superfıcie M ⊂ Rm de dimensao n e uma va-riedade de dimensao n.
Dados os sistemas de coordenadas locais fα : Uα → Rm e fβ :Uβ → Rn no conjunto M , tais que Uα ∩ Uβ = ∅, cada ponto p ∈Uα ∩ Uβ tem coordenadas xi = xi(p) no sistema fα e coordenadasyi = yi(p) relativamente ao sistema fβ .
A correspondencia
(x1(p), ..., xn(p)) ↔ (y1(p), ..., yn(p))
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 104 — #104 ii
ii
ii
104CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
estabelece uma bijecao φαβ = fβ f−1α : fα(Uα ∩Uβ) → fβ(Uβ ∩Uα)
que e chamada mudanca de coordenadas.As mudancas de coordenadas sao ditas C∞ se elas sao de Classe
Ck para todo k ∈ N. Todas as variedades, mudancas de coordenadas,funcoes etc., que consideraremos no texto serao assumidas ser declasse C∞.
Definicao 4.12. Um atlas U de dimensao n sobre um conjunto Mdiz-se diferenciavel, de classe C∞ (k ≥ 1), se todas as mudancas decoordenadas φαβ = fβ f−1
α , fα, fβ ∈ U sao aplicacoes de classeC∞.
Como φαβ = (φβα)−1, e φβα e diferenciavel segue-se que os φαβ
sao, de fato, difeomorfismos de classe C∞ (ver Figura 4.1). Em par-ticular, se escrevemos φαβ : (x1, ..., xn) 7→ (y1, ..., yn), entao o deter-minante jacobiano
det
(∂yi
∂xj
)e nao nulo em todo ponto de fα(Uα ∩ Uβ).Definicao 4.13. Uma variedade diferenciavel, de dimensao n e classeC∞ e um par ordenado (M,U) onde M e um conjunto e U e um atlasde dimensao n e classe C∞ sobre M .
Na maioria das vezes vamos omitir o U quando nos referimos auma variedade M .
O espaco Rn e naturalmente uma variedade diferenciavel com umatlas U com uma unica carta fα : Uα = Rn → Rn, onde fα(x) = x.
Definicao 4.14. Uma variedade orientavel M e uma variedade di-ferenciavel que admite um atlas cobrindo toda a variedade e de taljeito que as mudancas de carta coordenadas φαβ sempre satisfazema propriedade que que
det
(∂yi
∂xj
)> 0.
O conjunto de cartas que satisfazem tal propriedade e chamadode uma orientacao para a variedade. Quando falamos de uma varie-dadeM orientavel, estamos implicitamente dizendo que fixamos umaorientacao em M , ou seja que fixamos um atlas como acima.
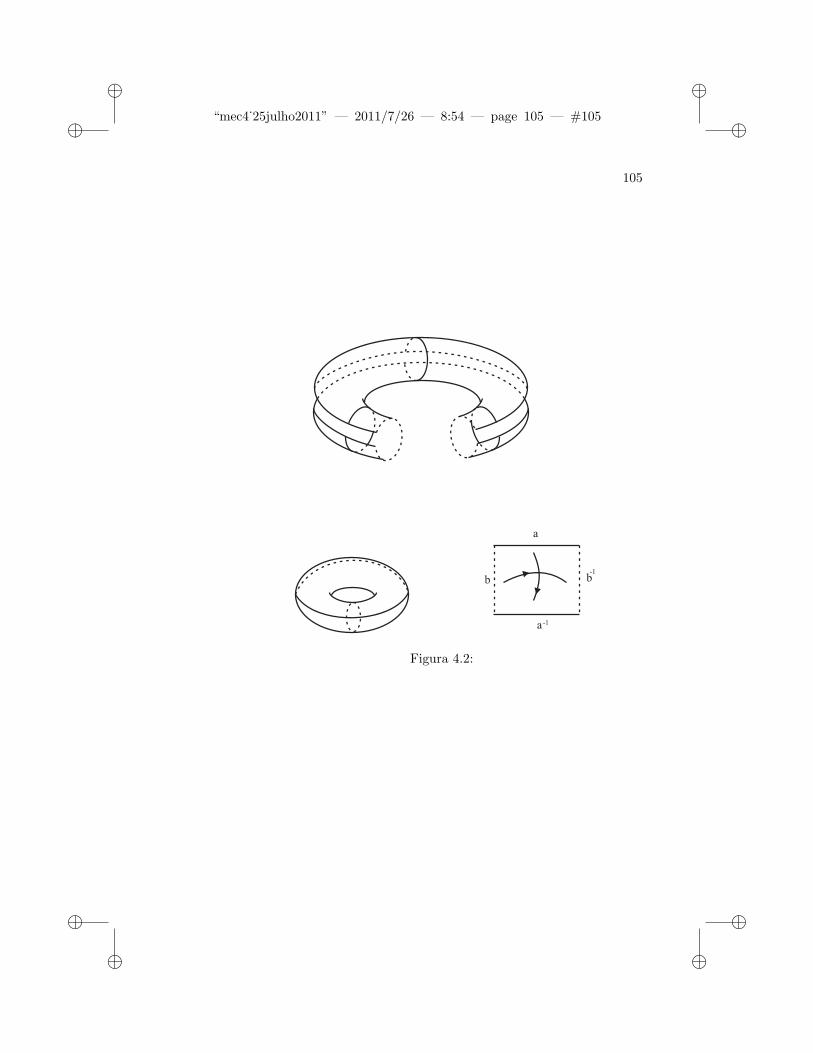
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 105 — #105 ii
ii
ii
105
Figura 4.2:

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 106 — #106 ii
ii
ii
106CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Exercıcio: O espaco Rn com o atlas U , constituıdo pelas cartasf1(x) = x e f2(x) = 2x e uma variedade orientavel.
Exemplo 4.4. O Plano Projetivo P 2 e uma variedade diferenciavelde dimensao dois como veremos a seguir. O plano projetivo P 2 e oconjunto das retas r de R3 que passam pela origem (0,0,0) de R3.Uma tal reta e determinada por um ponto (x, y, z) = (0, 0, 0) de R3 eos pontos (λx, λy, λz), λ = 0, determinam a mesma reta. Portanto,P 2 e o espaco quociente de R3−(0, 0, 0) pela relacao de equivalenciaque identifica (x, y, z) com (λx, λy, λz), λ = 0; os pontos de P 2, quesao retas r passando pela origem, serao indicados por r = [x, y, z] =(x1, y1, z1)| tal que existe λ = 0, tal que (x, y, z) = λ(x1, y1, z1).
Qualquer elemento (x1, y1, z1) ∈ [x, y, z] pode ser tomado comorepresentante da classe, isto e, [x, y, z] = [x1, y1, z1].
Definimos em P 2 subconjuntos U1, U2, U3 por:
U1 = [x, y, z];x = 0,
U2 = [x, y, z]; y = 0,
U3 = [x, y, z]; z = 0
e aplicacoes gi : R2 → Ui, i = 1, 2, 3, por:
g1(u, v) = [1, u, v],
g2(u, v) = [u, 1, v],
g3(u, v) = [u, v, 1]
onde (u, v) ∈ R2.Em termos geometricos, U2 e o conjunto das retas de R3 que
passam pela origem e nao pertencem ao plano xOz.Afirmamos que as funcoes
fα1 = g−11 , fα2 = g−1
2 , fα3 = g−13 ,
determinam um atlas C∞ sobre P 2. Com efeito, cada aplicacao gi,i = 1, 2, 3, e evidentemente biunıvoca e∪
i
gi(R2) = P 2.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 107 — #107 ii
ii
ii
107
A ultima igualdade segue do fato que dado qualquer reta r, toman-do um ponto (x, y, z) sobre ela e supondo (sem perda de generalidade)que x = 0, entao g1(y/x, z/x) = r
Resta mostrar que fαi(Ui ∩ Uj) e aberto em R2 e que f−1αj
fαi
e aı diferenciavel. Demonstraremos este fato para i = 1, j = 2; osoutros casos sao inteiramente analogos.
Os pontos de fα1(U1 ∩U2) sao da forma (u, v), com u = 0, v = 0.Portanto fα1(U1 ∩ U2) e aberto em R2 e
fα2 f−1α1
(u, v) = fα2 [1, u, v] = g−12
[1
u, 1,
v
u
]=
(1
u,v
u
)e evidentemente diferenciavel, como querıamos.
Logo, P 2 admite um atlas C∞.Pode-se mostrar que o plano projetivo nao e uma variedade orien-
tavel (ver por exemplo [Li3]).Passaremos agora a estender as variedades diferenciaveis as nocoes
de Calculo diferencial que sao validas em abertos do Rn.Superfıcies diferenciaveis de dimensao 2 podem ser obtidas via um
processo de colagem a partir de abertos do R2 (ver Figuras 4.2 e 4.3).
Definicao 4.15. Seja S uma variedade diferenciavel de dimensao n.Uma funcao φ : S → R e diferenciavel em p ∈ S se para algumaparametrizacao gα : Vα → S, Vα ⊂ IRn com p ∈ gα(Vα), tem-se queφ gα : Vα → R e diferenciavel no ponto g−1
α (p).Diremos que φ e diferenciavel em S se e diferenciavel para todo
p ∈ S. A funcao φgα e chamada a expressao de φ na parametrizacaogα.
E claro que esta definicao independe da parametrizacao, pois segβ : Vβ → S e outra parametrizacao, com p ∈ gα(Vα)∩ gβ(Vβ), entao
φ gβ = (φ gα) (g−1α gβ),
e assim φ gβ e diferenciavel, se e somente se, φ gα e diferenciavel(pois e composta de aplicacoes diferenciaveis).
Um caso particular importante da definicao acima e dado a seguir.
Definicao 4.16. Seja S uma variedade de dimensao n. Uma curvaλ : I = (−ϵ, ϵ) ⊂ R → S e diferenciavel em t ∈ I se, para alguma
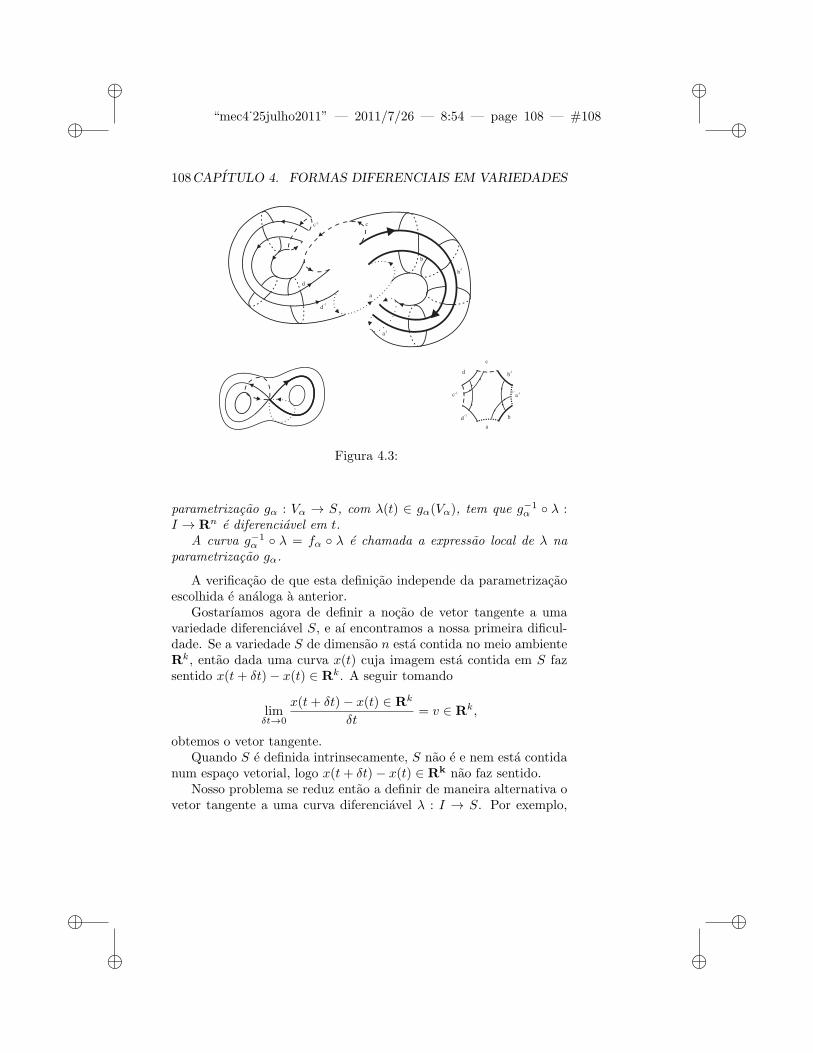
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 108 — #108 ii
ii
ii
108CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Figura 4.3:
parametrizacao gα : Vα → S, com λ(t) ∈ gα(Vα), tem que g−1α λ :
I → Rn e diferenciavel em t.A curva g−1
α λ = fα λ e chamada a expressao local de λ naparametrizacao gα.
A verificacao de que esta definicao independe da parametrizacaoescolhida e analoga a anterior.
Gostarıamos agora de definir a nocao de vetor tangente a umavariedade diferenciavel S, e aı encontramos a nossa primeira dificul-dade. Se a variedade S de dimensao n esta contida no meio ambienteRk, entao dada uma curva x(t) cuja imagem esta contida em S fazsentido x(t+ δt)− x(t) ∈ Rk. A seguir tomando
limδt→0
x(t+ δt)− x(t) ∈ Rk
δt= v ∈ Rk,
obtemos o vetor tangente.Quando S e definida intrinsecamente, S nao e e nem esta contida
num espaco vetorial, logo x(t+ δt)− x(t) ∈ Rk nao faz sentido.Nosso problema se reduz entao a definir de maneira alternativa o
vetor tangente a uma curva diferenciavel λ : I → S. Por exemplo,

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 109 — #109 ii
ii
ii
109
quando S ⊂ R3 e superfıcie de dimensao 2, o vetor tangente de λe simplesmente o vetor velocidade λ′(t) de λ, como vetor de R3.Como nao temos a estrutura ambiente de R3, precisamos destacaruma propriedade caracterıstica do vetor tangente que nao dependado espaco ambiente.
Para isto, seja v um vetor de R2, com origem em p ∈ R2 e compo-nentes (α, β). Escolha-se uma curva diferenciavel λ : I = (−ϵ, ϵ) →R2 com λ(0) = p e λ′(0) = v = (α, β).
Se λ(t) = (u1(t), u2(t)), podemos escrever que
α = u′1(0),
β = u′2(0).
Observe-se agora que dada uma funcao φ, diferenciavel em umavizinhanca de p, podemos restringir φ a λ(t) e tomar a “derivadadirecional”de φ em relacao a v, isto e
d(φ λ)dt
∣∣∣∣t=0
=
(∂φ
∂u1
du1dt
+∂φ
∂u2
du2dt
)t=0
=
=
α
(∂
∂u1
)t=0
+ β
(∂
∂u2
)t=0
φ.
Desta maneira, a “derivada direcional segundo v”e um operadorL sobre funcoes diferenciaveis que so depende de v. Esta sera a pro-priedade que tomaremos no caso geral para definir o vetor tangentea uma curva.
O vetor v esta associado de maneira unica ao α e β que definemo operador L = Lλ sobre funcoes φ tomando valores reais
Lλ(φ) = L(φ) =
α
(∂
∂u1
)t=0
+ β
(∂
∂u2
)t=0
φ.
Em outra palavras, optamos por determinar o vetor v por suaacao sobre funcoes diferenciaveis em vez de tomar o objeto geometricov ∈ Rk.
Note que o operador acima depende de α e β e nao da expressaoescolhida para λ (lembre que varias possıveis curvas λ tem a mesmatangente v = (α, β)).

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 110 — #110 ii
ii
ii
110CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Um vetor tangente sera considerado a seguir como um destes o-peradores L : Dp → R obtidos a partir de um λ, agindo sobre Dp, oconjunto das funcoes φ diferenciaveis em p.
Definicao 4.17. Seja λ : I → S uma curva diferenciavel em umavariedade diferenciavel S de dimensao n com λ(0) = p, e seja Dpo conjunto das funcoes φ : S → R, diferenciaveis em p. O vetortangente a curva λ no ponto p e a funcao real L = Lλ : Dp → R talque para cada φ ∈ Dp,
L(φ) =d
dt(φ λ)
∣∣∣∣t=0
.
Um vetor tangente em p ∈ S e o vetor tangente de uma curva dife-renciavel λ : I → S, com λ(0) = p.
Muitas curvas distintas λ poderao determinar o mesmo operadorL = Lλ.
Denotaremos por TpS o conjunto de tais vetores tangentes, ouseja de tais operadores L. Algumas vezes, por abuso de linguagem,vamos denotar o vetor tangente L = Lλ por λ′(0), onde λ e um dosλ tais que Lλ = L. Pode-se mostrar (ver consideracoes a seguir) queo espaco TpS de tais L = Lλ para diferentes λ, e um espaco vetorialde dimensao n.
Note que varios λ podem determinar um mesmo L = Lλ. No casode superfıcies de dimensao 2 em R3, os λ que geram o mesmo L saoaqueles que determinam o mesmo vetor λ′(0) = v ∈ R3. Isto seguedo fato que os α e β acima ficam neste caso determinados de maneiraunica a partir de v.
Algumas vezes, tais L da Definicao 4.17 serao tambem denotadospor v ∈ TpS.
Fixada uma parametrizacao gα(u1, u2, ..., un), e um ponto p ∈ S
usaremos a notacao
(∂∂ui
)0
∈ Dp para denotar o operador L definido
pela curva
x(t) = gα(u1, u2, ..., ui1 , ui + t, ui+1, ..., un),
onde gα(u1, u2, ..., un) = p. Note que x(0) = p.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 111 — #111 ii
ii
ii
111
Para mostrar que a nocao acima L = Lλ possui as propriedadesusuais dos vetores tangentes, considere uma parametrizacao gα :Vα → S, com
gα(0, 0, ..., 0) = p.
Seja φ uma funcao diferenciavel em uma vizinhanca de p e supon-hamos que φ gα se escreva como φ(u1, u2, ..., un). Entao e claroque
λ′(0)(φ) =dφ(u1(t), u2(t), ..., un(t))
dt
∣∣∣∣t=0
=
=
α1
(∂
∂u1
)0
+ ...+ αn
(∂
∂un
)0
(φ)
onde αi = u′i(0). Decorre daı que
λ′(0) = α1
(∂
∂u1
)0
+ ...+ αn
(∂
∂un
)0
onde (∂
∂ui
)0
, i ∈ 1, ..., n
sao os vetores tangentes em p respectivamente as curvas
ui → λ(0, ..., ui, ..., 0).
Seja T o espaco vetorial gerado por(∂
∂ui
)0
, i ∈ 1, 2, ..., n
onde as operacoes sao definidas como operacoes sobre funcoes.Em resumo, como nao podemos falar do vetor tangente da maneira
usual para superfıcies, estamos substituindo o vetor tangente pela suaacao sobre funcoes φ diferenciaveis.
Lema 4.1. O conjunto Tp(S) dos vetores tangentes v = Lλ a S emp ∈ S coincide com T . O vetor (α1, ..., αn) ∈ Rn definido comoacima, e chamado de expressao local do vetor v segundo a carta gα.A aplicacao que leva (α1, ..., αn) em v e um isomorfismo de espacosvetoriais.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 112 — #112 ii
ii
ii
112CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Demonstracao: Pelo que acabamos de ver Tp(S) ⊂ T . Reciproca-mente, se v ∈ T , entao existem α1, ..., αn ∈ R tal que
v = α1
(∂
∂u1
)0
+ ...+ αn
(∂
∂un
)0
.
Seja λ : I → S uma curva, cuja expressao nas coordenadas(u1, u2, ..., un) da parametrizacao gα e u1(t) = αit,... un = αnt.Entao
Lλ = λ′(0) = α1
(∂
∂u1
)0
+ ...+ αn
(∂
∂un
)0
,
isto e, v ∈ Tp(S).Decorre daı que a soma de elementos L de Tp(S), definida como
soma de funcoes, e ainda um elemento de Tp(S) e o mesmo se passa
com o produto por um numero real. E imediato verificar que, comestas operacoes, Tp(S) e um espaco vetorial. Alem disso,(
∂
∂u1
)0
, ...,
(∂
∂un
)0
sao vetores linearmente independentes que geram Tp(S). PortantoTp(S) tem dimensao n e e chamado o plano tangente de S em p.
A base (∂
∂u1
)0
, ...,
(∂
∂un
)0
de Tp(S) e chamada a base associada a parametrizacao f no ponto p.
Voltemos a extensao das nocoes de Calculo as variedades difer-enciaveis.
Definicao 4.18. Dada uma variedade S, o fibrado tangente a S e oconjunto ∪p∈STp(S) = TS.
Note que o fibrado tangente tem uma estrutura de variedadediferenciavel de dimensao 2n. De fato, dado uma parametrizacaogα,β(u1, ..., un), a funcao Gα,β(u1, ..., un, u1, ..., un) que associa a cada(u1, ..., un) e a cada vetor
(u1, ..., un)
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 113 — #113 ii
ii
ii
113
o operador L definido por por
L = u1
(∂
∂u1
)0
+ ...+ un
(∂
∂un
)0
,
determina cartas coordenadas de R2n em TS. Estas cartas, e facilver, determinam em TS uma estrutura de variedade diferenciavel.
Um campo de vetores G numa variedadeM de dimensao n e umaescolha de um vetor v(p) = G(p) ∈ TpM para todo p ∈M . O campode vetores e diferenciavel se para alguma (todas) carta coordenadafα = g1α tal que p ∈ Uα, a expressao local de G(p) em Rn (ver Lema4.1), atraves da carta coordenada fα, em coordenadas locais em Rn
define um campo de vetores diferenciavel em Rn.Uma curva λ(t) em M e uma solucao da equacao diferencial as-
sociada ao campo de vetores G, com condicao inicial p0 no tempo t0,se λ′(t) = G(λ(t)) e λ(t0) = p0. Passando para cartas locais fα, a ex-istencia e unicidade de solucoes de campos de vetores diferenciaveis Gem variedades segue de imediato do Teorema 10.8 [DL] de existenciae unicidade. A solucao λ(t) em M e obtida atraves da carta coorde-nada fα e da solucao da equacao diferencial de primeira ordem emfα(Uα) ⊂ Rn. Para valores grandes de t (muito maiores que t0) asolucao pode sair fora de uma carta coordenada. A solucao λ(t), nestecaso, e obtida pela expressao em cada carta local e “colada”pedacoa pedaco em M .
Definicao 4.19. Seja uma aplicacao h : S1 → S2 e p ∈ S1. Diz-se que h e diferenciavel em p, se existem sistemas de coordenadasg1 : V1 → S1 e g2 : V2 → S2 com p ∈ g1(V1) e h(p) ∈ g2(V2),tais que g−1
2 h g1 e diferenciavel em g−11 (p). A aplicacao h diz-se
diferenciavel em S1 se for diferenciavel em p para todo p ∈ S1.
De uma maneira analoga ao que consideramos nas definicoes an-teriores, verifica-se que a definicao acima nao depende dos sistemasde coordenadas escolhidas.
Definicao 4.20. Um difeomorfismo h : S1 → S2 e uma aplicacaobijetiva de S1 sobre S2, tal que h e sua inversa h−1 : S2 → S1 saodiferenciaveis.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 114 — #114 ii
ii
ii
114CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Definicao 4.21. A derivada de uma aplicacao diferenciavel h : S1 →S2 em p ∈ S1 e a aplicacao dhp : TpS1 → Th(p)S2 que a cada operador
v = L ∈ TpS1 (agindo em Dp) associa o operador v = L = dhp(v) ∈Th(p)S2 (agindo em Dh(p)), da seguinte maneira: se L = Lλ = λ′(0), para alguma curva λ : I → S1 com λ(0) = p, entao dhp(v) =
(h λ)′(0) = L = Lhλ. E facil ver que dhp independe da curvaλ e que e uma aplicacao linear. Vamos denotar a derivada de hpor dh : TS1 → TS2, repetindo o processo acima em cada pontop ∈ S1, onde TS1 (respectivamente TS2) denota o fibrado tangente aS1 (respectivamente S2).
Observacao 4.5. Com a nocao de diferencial, podemos obter aseguinte interpretacao da base de Tp(S), associada a uma parame-trizacao gα : Vα → S. Suponhamos que gα(q) = p, q = (0, 0, ..., 0),e sejam e1, ..., en os vetores da base canonica de Rn (e que estaoassociados aos operadores
∂
∂ui,
i ∈ 1, 2, ..., n). Entao
dgαq (ei) =d
duigα(0, ..., ui, ..., 0)
∣∣∣∣ui=0
= (∂
∂ui)p,
formam um base de TpS, se variamos i ∈ 1, 2, ..., n.Mais precisamente, para i ∈ 1, 2, ..., n fixo e para cada φ ∈ Dp
∂
∂ui p(φ) =
d
duiφ gα(0, ..., ui, ..., 0)
∣∣∣∣ui=0
e um elemento da base de TpS.Convem estendermos a definicao de variedade, dada anterior-
mente, de modo a incluir as variedades com “bordo”. A definicaoacima apresentada de variedade diferenciavel nao inclui, por exem-plo, o conjunto M (o cilindro com bordo) dado por
M = (x, y, z) ∈ R3; 1 = x2 + y2, 1 ≥ z0 ≥ 0,
pois a intersecao V ∩M de qualquer vizinhanca V em R3 de um pontop = (x, y, z0) do “bordo”de M com M nao e sequer homeomorfa aum aberto de R2.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 115 — #115 ii
ii
ii
115
Observamos, entretanto, que V ∩M e homeomorfa a um abertodo semi-plano (u, v) ∈ R2; v ≤ 0, enquanto que os pontos de Mque nao estao no bordo se comportam como pontos de uma variedadede dimensao 2. Isso nos sugere uma nova definicao de variedade queinclui a situacao mencionada.
Um aberto do Rn e sempre uma variedade de dimensao N .Chamaremos de semi-espaco superior Hn ⊂ Rn ao conjunto dada
por
Hn = (x1, ..., xn) ∈ Rn;x1 ≥ 0.
Um aberto V de Hn e a intersecao de um aberto U de Rn comHn, isto e, V = U ∩Hn.
Diremos que uma funcao f : V → R, definida de um aberto V deHn e diferenciavel se existir uma funcao f : U → R de um aberto Ude Rn contendo V , tal que a restricao de f a V seja igual a f . Se fe diferenciavel em V a diferencial dfp e definida por dfp = dfp.
Se o aberto V nao contem pontos da forma (0, x2, ..., xn) entao,V e um aberto de Rn e a definicao coincide com a usual. Se p eda forma (0, x2, ..., xn), dfp esta definida para todos os vetores de Rn
com origem p, e nao apenas para os que “apontam”para o semi-espacosuperior Hn. Tomando curvas diferenciaveis em V passando por p, efacil mostrar que a definicao de dfp nao depende da extensao f de f .
A definicao de aplicacao diferenciavel f : V → Rn, V aberto emHn e estabelecida de maneira analoga.
Daremos agora uma definicao de variedade com bordo, de modoa incluir a definicao (Definicao 4.13) anterior de variedade como casoparticular.
Definicao 4.22. Uma variedade diferenciavel (de dimensao n) combordo regular e um conjunto M e um atlas de aplicacoes gα : Vα ⊂Hn →M de Vα ⊂ Hn tomando valores em M tais que:
1) ∪α
gα(Vα) =M
2) para todo par α, β, com gα(Vα)∩gβ(Vβ) =W = ∅, os conjuntosg−1α (W ), g−1
β (W ) sao abertos em Hn e as aplicacoes g−1β gα, g−1
α gβ,aı definidas, sao diferenciaveis em Hn (no sentido acima descrito).
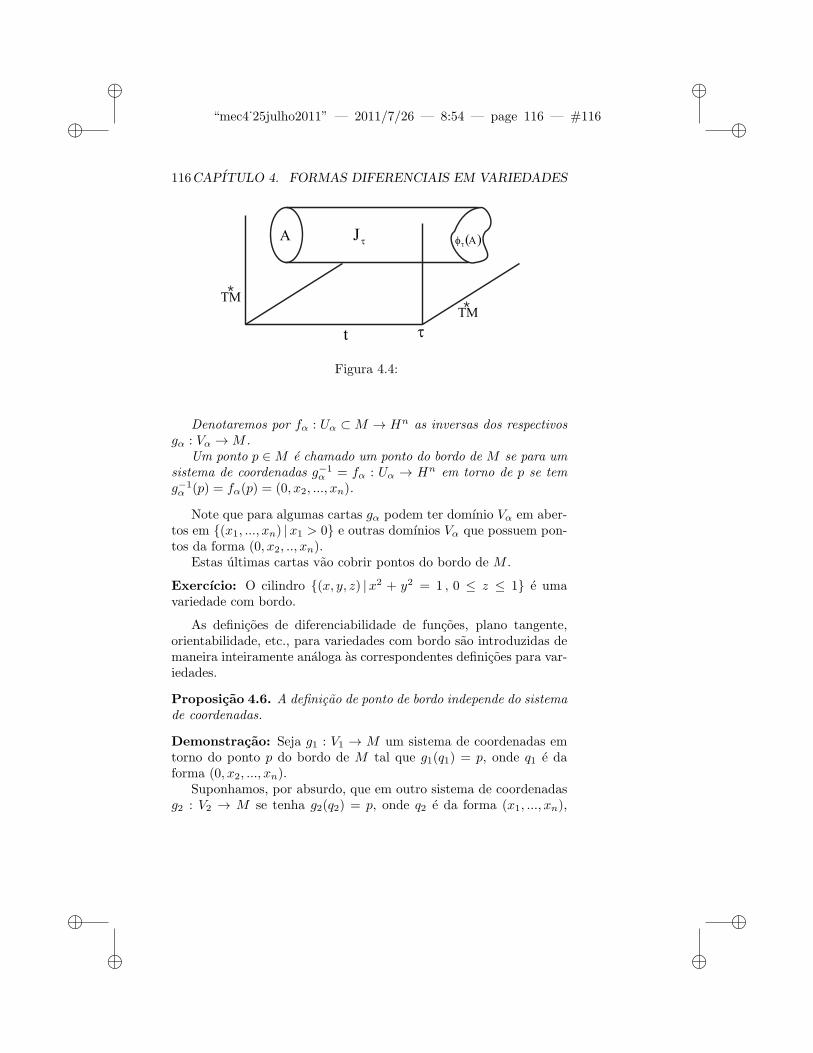
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 116 — #116 ii
ii
ii
116CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Figura 4.4:
Denotaremos por fα : Uα ⊂M → Hn as inversas dos respectivosgα : Vα →M .
Um ponto p ∈M e chamado um ponto do bordo de M se para umsistema de coordenadas g−1
α = fα : Uα → Hn em torno de p se temg−1α (p) = fα(p) = (0, x2, ..., xn).
Note que para algumas cartas gα podem ter domınio Vα em aber-tos em (x1, ..., xn) |x1 > 0 e outras domınios Vα que possuem pon-tos da forma (0, x2, .., xn).
Estas ultimas cartas vao cobrir pontos do bordo de M .
Exercıcio: O cilindro (x, y, z) |x2 + y2 = 1 , 0 ≤ z ≤ 1 e umavariedade com bordo.
As definicoes de diferenciabilidade de funcoes, plano tangente,orientabilidade, etc., para variedades com bordo sao introduzidas demaneira inteiramente analoga as correspondentes definicoes para var-iedades.
Proposicao 4.6. A definicao de ponto de bordo independe do sistemade coordenadas.
Demonstracao: Seja g1 : V1 → M um sistema de coordenadas emtorno do ponto p do bordo de M tal que g1(q1) = p, onde q1 e daforma (0, x2, ..., xn).
Suponhamos, por absurdo, que em outro sistema de coordenadasg2 : V2 → M se tenha g2(q2) = p, onde q2 e da forma (x1, ..., xn),

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 117 — #117 ii
ii
ii
117
x1 = 0.Seja W = g1(V1) ∩ g2(V2); aplicacao
g−11 g2 : g−1
2 (W ) → g−11 (W )
e um difeomorfismo. Como q2 e da forma (x1, ..., xn) com x1 = 0,existe uma vizinhanca U de q2, V ⊂ g−1
2 (W ) que nao intercepta oeixo x1.
Restringindo g−11 g2 a U , teremos uma aplicacao diferenciavel
g−11 g2 : U → Hn
com jacobiano nao nulo em q2 ∈ U . Pelo teorema da funcao inversa(ver [Li1]), g−1
1 g2 leva uma vizinhanca V ⊂ U de q2 em Rn difeo-morficamente sobre uma vizinhanca g−1
1 g2(V ) ⊂ g−11 g2(U) de q1
em Rn; mas entao, g−11 g2(V ) conteria pontos de forma (x1, ..., xn)
com x1 > 0, o que contradiz o fato de g−11 g2(V ) ⊂ g−1
1 (S). Portantoa hipotese de que q2 e da forma (x1, ..., xn) com x1 = 0 leva a umacontradicao.
O conjunto dos pontos de bordo deM que e, portanto, bem deter-minado, e chamado o bordo de M e indicado por ∂M . Se ∂M = ∅, aDefinicao 4.19 coincide com a Definicao 4.13 de variedade diferencial.
Proposicao 4.7. O bordo ∂M de uma variedade diferenciavel dedimensao n com bordo e uma variedade diferenciavel de dimensaon− 1.
Demonstracao: Seja p ∈ M um ponto do bordo de M e gα :Vα →M um sistema de coordenadas em torno de p, i.e., Vα ⊂ Hn eaberto, gα e biunıvoca e gα(q) = p, onde q = (0, x2, ..., xn) ∈ U .
Seja Zα = Vα ∩ (x1, x2, ..., xn−1, xn) ∈ Rn;x1 = 0. Identifi-cando
(x1, x2, ..., xn) ∈ Rn;x1 = 0
com Rn−1, Zα e um conjunto aberto de Rn−1.Se denotarmos por gα a restricao de gα a Zα, entao pela Proposicao
4.6, gα(Zα) ⊂ ∂M . E facil ver que a famılia (Zα, gα) e uma estru-tura diferenciavel em ∂M . A definicao de orientacao e apresentadana Definicao 4.14.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 118 — #118 ii
ii
ii
118CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Proposicao 4.8. Seja M uma variedade com bordo ∂M . Se M eorientavel, uma orientacao de M induz uma orientacao em ∂M .
Demonstracao: Fixemos uma orientacao em M , isto e, escolhamosuma famılia gα : Vα → M de sistemas de coordenadas tal quegα(Vα) cobre M , e se gα(Vα) ∩ gβ(Uβ) = ∅ entao a mudanca decoordenadas tem jacobiano positivo. Consideremos a famılia dos Vαtal que gα(Vα) ∩ ∂M = ∅. Como vimos na proposicao anterior, afamılia (Zα, gα) e uma estrutura diferenciavel em ∂M .
Basta entao mostrar que se gα e gβ sao dois sistemas de coorde-nadas tais que gα(Zα) ∩ gβ(Zβ) = ∅, a mudanca de coordenadas
uα2 = uα2 (uβ2 , ..., u
βn)
...
uαn = uαn(uβ2 , ..., u
βn)
satisfaz a condicao∂(uα2 , ..., u
αn)
∂(uβ2 , ..., uβn)
> 0.
Para isso, observamos que a mudanca de coordenadas de gα : Vα →M a gβ : Vβ →M satisfaz as condicoes
0 = uα2 (0, uβ2 , ..., u
βn)
uα2 = uα2 (uβ2 , ..., u
βn)
...
uαn = uαn(0, uβ2 , ..., u
βn),
e portanto∂(uα1 ...u
αn)
∂(uβ1 ...uβn)
(0, uβ2 , ..., uβn) =
∂uα1
∂uβ1(0, uβ2 , ..., u
β2 )∂(uα2 , ..., u
αn)
∂(uβ2 , ..., uβn)
(0, uβ2 , ..., uβn) > 0.
Alem disso,∂uα1
∂uβ1(0, uβ2 , ..., u
βn) > 0,
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 119 — #119 ii
ii
ii
119
pois uα1 = 0 em (0, uβ2 , ..., uβn) e torna-se negativo com uβ1 . Portanto
∂(uα2 , ..., uαn)
∂(uβ2 , ..., uβn)
> 0.
Toda variedade diferenciavel e uma variedade diferenciavel com
bordo.
Definicao 4.23. Dada uma variedade diferenciavel com V de di-mensao n, uma k-forma w em V e uma aplicacao k-linear alternadaem cada fibra TzM, z ∈ V . Em outras palavras, wz(v1, v2, ..., vk) paracada z ∈ V fixo, e linear em cada vi, i ∈ 1, 2, ..., n e e tambemalternada.
Por exemplo as 1-formas sao aplicacoes 1-lineares, e assim, paracada z sao transformacoes lineares em cada TzM tomando valoresreais.
Definicao 4.24. Uma k-forma diferenciavel w em uma variedadediferenciavel V e uma k-forma em V tal que para cada carta decoordenadas locais gα : Vα ⊂ V → Rn, nas coordenadas locais(x1, x2, ..., xn), a forma w e expressa como∑
I
aI(x1, x2, ..., xn)dxI
e os aI(x1, x2, ..., xn) sao diferenciaveis em (x1, x2, ..., xn).Denotamos Ωk(V ) o conjunto das k-formas diferenciaveis em V .
As definicoes introduzidas anteriormente para formas diferenciaisem Rn se estendem de maneira analoga para formas diferenciais emvariedades V .
Por exemplo, a derivada dw de w ∈ Ωk(V ) e uma (k + 1)-formadiferenciavel dw ∈ Ωk+1(V ) tal que em coordenadas locais e igual aderivada de w (em coordenadas locais). Em geral qualquer conceitoque seja local, como derivada, etc. definido em Rn vai se extenderpara uma variedade diferenciavel V de maneira semelhante a maneiraacima utilizada.
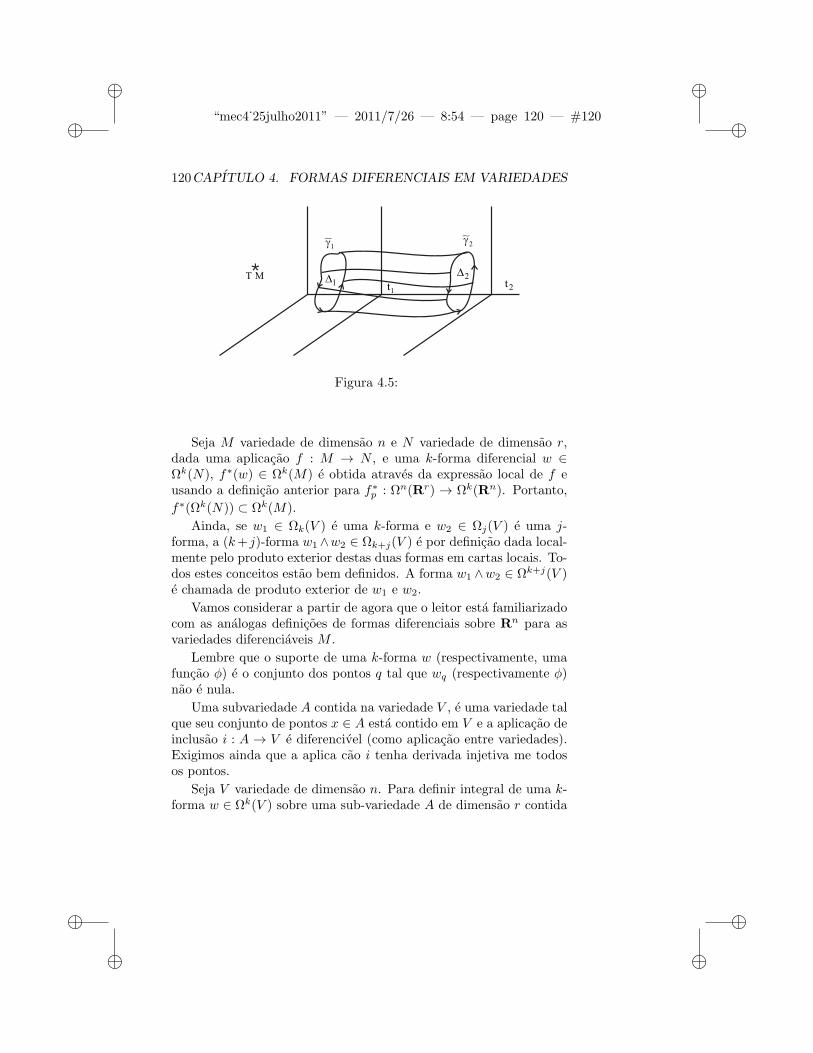
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 120 — #120 ii
ii
ii
120CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Figura 4.5:
Seja M variedade de dimensao n e N variedade de dimensao r,dada uma aplicacao f : M → N , e uma k-forma diferencial w ∈Ωk(N), f∗(w) ∈ Ωk(M) e obtida atraves da expressao local de f eusando a definicao anterior para f∗p : Ωn(Rr) → Ωk(Rn). Portanto,
f∗(Ωk(N)) ⊂ Ωk(M).
Ainda, se w1 ∈ Ωk(V ) e uma k-forma e w2 ∈ Ωj(V ) e uma j-forma, a (k+ j)-forma w1∧w2 ∈ Ωk+j(V ) e por definicao dada local-mente pelo produto exterior destas duas formas em cartas locais. To-dos estes conceitos estao bem definidos. A forma w1 ∧w2 ∈ Ωk+j(V )e chamada de produto exterior de w1 e w2.
Vamos considerar a partir de agora que o leitor esta familiarizadocom as analogas definicoes de formas diferenciais sobre Rn para asvariedades diferenciaveis M .
Lembre que o suporte de uma k-forma w (respectivamente, umafuncao ϕ) e o conjunto dos pontos q tal que wq (respectivamente ϕ)nao e nula.
Uma subvariedade A contida na variedade V , e uma variedade talque seu conjunto de pontos x ∈ A esta contido em V e a aplicacao deinclusao i : A → V e diferencivel (como aplicacao entre variedades).Exigimos ainda que a aplica cao i tenha derivada injetiva me todosos pontos.
Seja V variedade de dimensao n. Para definir integral de uma k-forma w ∈ Ωk(V ) sobre uma sub-variedade A de dimensao r contida
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 121 — #121 ii
ii
ii
121
na variedade V (ver Definicao 4.33), necessitaremos de algum cuidadoespecial (integrar nao e um conceito local como derivar). Em primeirolugar, se a forma w que desejamos integrar tem suporte no domınio Uαde uma carta coordenada fα : Uα ⊂ V → Rn, entao a sub-variedadeA, em cordenadas locais x ∈ Rn, vai resultar numa superfıcie dedimensao k em Rn.
A integral de w em A e neste caso a integral da forma w em A(superfıcie n-dimensional) nas coordenadas locais (x1, x2, ..., xn) emRn (ver Definicao 4.8). Nao e difıcil ver que tal conceito esta bemdefinido.
O problema e como definir integral no caso em que o suporteda forma w nao cabe inteiramente dentro do domınio de uma cartacoordenada.
Definicao 4.25. Seja M variedade diferenciavel, um conjunto coor-denadas locais fαi : Uαi ⊂ M → Rn, i ∈ N. Considere um conjuntode funcoes diferenciaveis 0 ≤ ϕi, i ∈ N definidas em M tomandovalores em R tal que
∑∞i=1 ϕi(x) = 1 e tal que o suporte de cada
ϕi(q) esta contido em Uαi . Vamos supor ainda que em cada cartaUαi apenas um numero finito das ϕj sao nao nulas. Tal conjunto defuncoes ϕi, i ∈ N e chamada de uma particao da unidade para M .
Pode-se mostrar (ver por exemplo [MC1]) que dada uma variedadediferenciavel M sempre existe uma particao da unidade para M .
A partir de uma particao da unidade podemos definir a integralde uma k-forma w como veremos em breve.
Referimos o leitor a [Li4] para referencias sobre produto internoe formas quadraticas.
Definicao 4.26. Uma estrutura Riemanniana em uma variedadediferenciavelM de dimensao n e uma escolha de uma forma quadraticaW (v), v ∈ TMq, q ∈ M definida positiva em cada plano tangenteTMq. Vamos tambem exigir que tal forma quadratica W quando ex-pressa em coordenadas locais gα : Vα ⊂ M → Rm seja tal que oscoeficientes aij(x1, ..., xn) de
n∑i,j=1
ai,j(x1, ..., xn)vivj
sejam diferenciaveis em (x1, ..., xn) ∈ gα(Vα).
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 122 — #122 ii
ii
ii
122CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Acima, vi, i ∈ 1, 2, ..., n denota as componentes do vetor tan-gente v nas coordenadas x = (x1, ..., xn).
M munida de tal estrutura e denominada variedade Riemanniana.
Uma forma quadraticaW esta sempre associada de maneira unicaa um produto interno < , >=< u, v >, u, v em TMq tal que valeW (v) =< v, v >, ∀v ∈ TMq. Reciprocamente, podemos definir <u, v >, u, v ∈ TMq a partir de W por < u, v >= 1
2 (W (u + v) −W (u)−W (v)).
Denotaremos a variedade diferenciavel M com tal estrutura Rie-manniana por (M, < , > ).
Note que cada carta local gα determina uma metrica Riemanniana
n∑i,j=1
ai,j(x1, ..., xn)vivj
em um aberto no Rn no sentido anteriormente considerado (verDefinicao 1, Secao 2 e Definicao 20, Secao 7 do Capıtulo 2.)
Proposicao 4.9. Toda variedade diferenciavel admite uma metricaRiemanniana.
Demonstracao: Sejam fi : Ui → Rn coordenadas locais e ϕi :M →R funcoes diferenciaveis que determinam uma particao da unidade.
Se v e vetor tangente a M no ponto p e se p ∈ Ui, denotaremosvi1 , ..., vin as coordenadas de v segundo fi.
Seja Wi(v) = v2i1 + ... + v2in se v ∈ Ui e Wi(v) = 0 se v nao estaem Ui.
Entao W =∑ϕWi e uma metrica Riemanniana em M . Para
provar isto, basta lembrar que a soma anterior e localmente finita.O comprimento de uma curva γ(t), t ∈ [a, b] contida em M e
obtida considerando varias cartas fi : Ui → Rn, i ∈ 1, ..., s de talmodo que o traco da curva γ esteja contido em ∪si Ui , pois γ[a, b] ecompacto (ver Definicao 4.32, Capıtulo 3). A seguir, dividimos [a, b]em intervalos [a, a1], [a1, a2], [a2, a3], ..., [as−1, b] que definem umaparticao de [a, b] de tal modo que γ[ai, ai+1] ⊂ Ui. Podemos calcularo comprimento de γ[ai, ai+1] passando a uma carta local fi : Ui → Rn
(use a Definicao 18, Secao 7, Capıtulo 2 para o comprimento de uma

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 123 — #123 ii
ii
ii
123
curva γ|[ai,ai+1] segundo uma metrica Riemanniana num aberto doRn). O comprimento de γ, denotado por ∥γ∥, e por definicao asoma dos comprimentos das curvas γ[ai, ai+1]. Pode-se mostrar queeste procedimento esta bem definido, isto e, nao depende das cartasescolhidas.
Vamos apresentar as seguir algumas definicoes e propriedades deespacos metricos. Referimos o leitor a [Li2] para uma exposicao com-pleta sobre o topico.
Definicao 4.27. Um espaco metrico M e um conjunto munido comuma funcao d(x, y), x, y ∈ M , d : M ×M → R, chamada distancia(ou metrica) tal que
a) d(x, y) ≥ 0 e ainda vale que d(x, y) = 0, se e so se, x = y;
b) d(x, y) ≤ d(x, z) + d(z, y), ∀x, y, z ∈M ;
c) d(x, y) = d(y, x).
Vamos denotar tal espaco por (M,d).
Exemplo 4.5. Quando considerarmosM o espaco Rn, entao d(x, y)= ∥x− y∥ (onde ∥ ∥ e a norma Euclidiana) define uma metrica, istoe, as propriedades a), b), c) acima sao satisfeitas para tal d. Paraabertos do Rn, se nada for dito, estaremos considerando a metricad(x, y) = ∥x− y∥.
Definicao 4.28. Um aberto A no espaco metrico (M,d) e um con-junto A ⊂M tal que ∀x ∈ A, existe ϵ > 0 tal que
y ∈M | d(x, y) < ϵ ⊂ A.
Definicao 4.29. Um conjunto F contido em (M,d) e dito fechadose o conjunto M − F e aberto.
Definicao 4.30. Uma aplicacao contınua F : M1 → M2, entre doisespacos metricos (M1, d1) e (M2, d2), e uma aplicacao F tal que, paratodo ponto x ∈ M1, vale que para todo ϵ > 0, existe δ > 0 tal que sed(x, y) < δ entao d(f(x), f(y)) < ϵ.
Definicao 4.31. Um homeomorfismo h entre os espacos metricos(M1, d1) e (M2, d2) e uma aplicacao bijetiva tal que h e h−1 saocontınuas.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 124 — #124 ii
ii
ii
124CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Uma cobertura de um espaco metricoM e uma colecao de abertosAi contidos em M (onde i varia num conjunto qualquer de ındices)tal que M ⊂ ∪iAi.
Definicao 4.32. Um espaco metrico M e dito compacto se todacobertura por abertos admite uma subcobertura finita.
Exemplo 4.6. Para uma superfıcies S de dimensao k em Rn, sem-pre podemos considerar a metrica induzida pelo Rn, ou seja d(x, y) =∥x− y∥, x, y ∈ S define uma metrica em Rn. E possıvel mostrar quetoda superfıcie S que e fechada no espaco Rn e que seja tambem limi-tada (isto e, existe K ∈ R tal que ∀x, y ∈ S, d(x, y) ≤ K) e compactacom relacao a tal metrica. Logo, neste caso, e possıvel selecionara partir de um atlas qualquer de S, um novo atlas com apenas umnumero finito de cartas coordenadas. Isto porque, o domınio Uα decada carta coordenada de um atlas e um aberto de S e S e compacta.
Dada uma variedade diferenciavel M com uma estrutura Rieman-niana, vamos mostrar que sempre e possıvel obter uma metrica (nosentido da Definicao 4.24) a partir da metrica Riemanniana.
Exemplo 4.7. Considere (M,< , >) variedade Riemanniana. E-xiste uma distancia natural d = d< ,> em M associada a estruturaRiemanniana < , >, definida para (x, y) ∈M por
d(x, y) = inf∥γ∥ | γ[a, b] →M,
γ e curva em M ligando γ(a) = x a γ(b) = y.
E possıvel mostrar que tal d define realmente uma metrica em M(ver [MC1] [Li3]).
Vamos supor a partir deste momento pelo resto do texto que avariedade M que vamos considerar esteja equipada com uma metricaRiemanniana < , > e com a distancia d = d< ,> associada a estruturaRiemanniana < , > do Exemplo 4.7.
Sempre se pode equipar uma variedade M com uma estruturaRiemanniana como vimos na Proposicao 4.9 acima.
Quando falarmos de um aberto em M variedade Riemanniana,estaremos nos referindo a Definicao 4.28 e usando a distancia d acimadescrita.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 125 — #125 ii
ii
ii
125
E facil mostrar que toda variedade diferenciavel compactaM (comuma metrica Riemanniana) admite um atlas com um numero finitode cartas coordenadas. Isto segue do fato que os domınios das cartascoordenadas locais Uαi sao abertos de M .
Dada uma estrutura Riemanniana numa variedade V , sempre queconsiderarmos A subvariedade de V (ver Definicao 4.33, Capıtulo 3),estaremos considerando em A a estrutura Riemanniana obtida pelarestricao da estrutura Riemanniana de V a A.
Definicao 4.33. Quando dizemos que A e uma subvariedade davariedade V (que possui uma metrica Riemanniana < , >), estamosquerendo dizer que o subconjunto de pontos de A esta contido emV , que a funcao inclusao i : (A, d1) → (V, d2) tal que i(x) = x eum homeomorfismo de A sobre i(A) ⊂ V (com respeito a metrica d1associada a estrutura Riemanniana induzida em A e d2 a metrica as-sociada a estrutura Riemanniana em V ) e ainda que para todo p ∈ Aa derivada dip : TpA→ TpV e injetiva.
Suponha que A seja subvariedade da variedade V . Quando dize-mos que A e compacta, isto significa que estamos considerando em Aa distancia d< ,> = d< ,>A
obtida pela metrica Riemanniana < , >A,restricao da metrica Riemanniana de V a A. Sendo assim e possıvelmostrar que A esta contida numa uniao finita de domınios Uαi de car-tas de V . Na proxima definicao estaremos utilizando as consideracoesfeitas acima.
Exemplo 4.8. Um exemplo de espaco metrico e o conjunto F dasfuncoes contınuas F = f | f : (a, b) → Rn, f contınua , com adistancia d tal que d(f, g) = supremo ∥f(x) − g(x)∥x∈(a,b), ondef, g ∈ F .
Exemplo 4.9. Um exemplo de espaco metrico e o conjunto F∗ dasfuncoes C1, F∗ = f | f : (a, b) → Rn, f e de classe C1, coma distancia d tal que d(f, g) = supremo ∥f(x) − g(x)∥ , ∥f ′(x) −g′(x)∥x∈(a,b), onde f , g ∈ F∗.
A distancia do Exemplo 4.9 foi anteriormente considerada naSecao 2, Capıtulo 2.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 126 — #126 ii
ii
ii
126CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Figura 4.6:
Definicao 4.34. Dizemos que um conjunto B contido em um espacometrico M e denso em (M,d), se para todo x ∈ M e ϵ > 0, existey ∈ B tal que d(x, y) ≤ ϵ.
A definicao acima generaliza a Definicao 13, Capıtulo 1 e e aDefinicao 6, Capıtulo 3.
Muitas das propriedades interessantes de um sistema mecanico,embora nao acontecam para todos os possıveis sistemas, sao no en-tanto verdadeiras para sistemas que estao num subconjunto densoB de tais sistemas (ver por exemplo no fim da Secao 7, Capıtulo 1,Exemplo 13, Capıtulo 1, consideracoes apos Definicao 13, Capıtulo 1e consideracoes antes do Teorema 5, Capıtulo 3).
Apos as consideracoes anteriores, estamos agora prontos paradefinir a integral de uma forma diferencial numa variedade difer-enciavel.
Definicao 4.35. Dada uma k-forma diferenciavel w ∈ Ωk(V ) navariedade Riemanniana diferenciavel V de dimensao r e uma particaoda unidade ϕi, i ∈ N para V , a integral da k-forma w em uma sub-variedade diferenciavel compacta A, A ⊂ V de dimensao k (k ≤ r) e

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 127 — #127 ii
ii
ii
127
dada por ∫A
w =∞∑i=1
∫A
ϕi(q)wq.
Cada uma das integrais da soma da expressao da direita esta bemdefinida pois a k-forma ϕi w tem suporte em finitas Ui, domınio dacarta coordenada xi.
Pode-se mostrar que tal conceito esta bem definido e a integralnao depende da particao da unidade ϕi, i ∈ N escolhida (ver [MC1]).
Exercıcio: Mostre que dado f : V → V , V variedade diferenciavel, ew k-forma diferencial sobre V , entao f∗(w) = w, se e somente se, paratoda subvariedade S ⊂ V de dimensao k, vale que
∫Sw =
∫Sf∗(w).
O resultado principal desta secao e o Teorema de Stokes, que valeem grande generalidade e que sera apresentado a seguir.
Teorema 4.1. (Teorema de Stokes) Considere V variedade Rieman-niana diferenciavel de dimensao r. Dada uma n-forma diferenciavelw ∈ Ωn(V ), n ≤ r − 1 e uma variedade compacta C de dimensaon+ 1 com bordo ∂(C) de dimensao n, C subvariedade de V , entao∫
C
dw =
∫∂C
w.
Para sermos mais precisos deverıamos escrever a expressao acimacomo: ∫
C
dw =
∫∂C
i∗w,
onde i e a inclusao de ∂(C) em V (ver Definicao 4.33).No caso em que o bordo de C tenha varias componentes conexas,
no Teorema acima, devemos considerar em cada uma delas uma ori-entacao. Este procedimento de expressar ∂(C) como soma de com-ponentes orientadas, por exemplo, ∂(C) = G1 + G2 + G3, em queas orientacoes das variedades Gi de dimensao n dependem duma ori-entacao da superfıcie C, foi descrito acima na Proposicao 4.8 (vertambem Secao 5, Capıtulo 3).
O teorema de Stokes vai dizer no caso do exemplo mencionadoacima que ∫
C
dw =
∫G1
w +
∫G2
w +
∫G3
w.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 128 — #128 ii
ii
ii
128CAPITULO 4. FORMAS DIFERENCIAIS EM VARIEDADES
Referimos o leitor a [MC1] para uma demonstracao do teoremaacima.
Vamos considerar agora um exemplo de variedade diferenciavel(que vai ser importante para o que segue) obtida a partir de outravariedade diferenciavel M . Vamos definir agora o fibrado cotangentea variedade M .
Definicao 4.36. Para cada q ∈ M fixado, TMq e o espaco vetorialtangente a M em q. Considere T ∗Mq o conjunto das transformacoeslineares de TMq em R. O conjunto T ∗M e por definicao o con-junto ∪qT ∗Mq. Este conjunto sera denominado fibrado cotangente avariedade M .
Vamos assumir que M possua uma estrutura Riemanniana < , >.Vamos agora equipar T ∗M com um atlas diferenciavel a partir de umatlas diferenciavel de M .
Dado q ∈ M considere < , >q=< , >. E facil ver que para cadaq fixo e l ∈ T ∗Mq, existe um unico η = ηl ∈ TMq tal que para todoz ∈ TMq, l(z) =< η, z >.
Fica assim definida uma aplicacao que leva l em ηl e que estabeleceum isomorfismo de T ∗Mq em TMq.
Como estamos supondo que M possui uma estrutura Riemanni-ana < , >, se fα : Uα ⊂ M → Rn e carta coordenada local, entaoXα : ∪x∈VαT
∗Mx → R2n dado por Xα(q, l) = (fα(q), dfαq (ηl)) definecarta coordenada local.
E possıvel mostrar (ver [Li3]) que variando as possıveis cartaslocais fα, as correspondentes cartas Xα assim obtidas definem umaatlas diferenciavel para T ∗M .
Chama-se de fibra tangente sobre q o conjunto dos v ∈ TMq.Considere M variedade de dimensao n. Fixada uma carta fα :
Uα → Rn deM , tal que fα(x) = q, x ∈ Uα ⊂M, q = (q1, q2, ..., qn) ∈Rn, e i ∈ 1, 2, ..., n considere a aplicacao projecao πi, tal queπi(q, p) = qi.
Fica assim definida a transformacao linear dqi : TMq → R difer-encial de tal πi. Estas transfromacoes dqi formam uma base do con-junto das transformacoes lineares de TMq em R. Sendo assim, dadauma transformacao linear p : TMq → R e usual denotar tal p emcoordenadas locais q = fα(x) como p = p1dq1 + ...+ pndqn.
Chama-se de fibra cotangente sobre q o conjunto dos p ∈ T ∗Mq.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 129 — #129 ii
ii
ii
129
Um vetor v tangente a T ∗M em (q, p) e portanto um elemento emT (T ∗M ) que pode ser identificado com todas as curvas (q(t), p(t))tal que (q(0), p(0)) = (q, p) e ainda que (q′(0), p′(0)) determinam omesmo v ∈ T (T ∗M ) (ver Definicao 4.17).
Exercıcios:
1. Mostre que a esfera x2 + y2 + y2 = 1 em R3 admite um atlasC∞ que a torna uma variedade orientavel.
2. Mostre que o conjunto dos planos passando pela origem em R3
possui uma estrutura de variedade diferenciavel.
3. Calcule dF para a transformacao F : S → S, onde S e a esferade centro (0,0,0) e raio 1 em R3 e F (x, y, z) = (−x,−y, z).
4. Calcule a integral da 2-forma diferencial w = x1dx1 ∧ dx2 +x2dx2 ∧ dx3 + x3dx3 ∧ dx4 em Ω(R4) sobre a superfıcie de dimensao2 dada por x21 + x22 + x23 + x24 = 1 e x1 = 0.1.
5. Calcule a integral de dp1 ∧ dq1+ dp2 ∧ dq2 sobre a superfıcie dedimensao dois q21+q
22+p
21+p
22 = 1 e q1 = 0.1 em (q1, q2, p1, p2) ∈ R4.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 130 — #130 ii
ii
ii
Capıtulo 5
Formalismo Simpletico
Nosso objetivo nesta secao e apresentar a equacao de Hamilton demaneira intrınseca, ou seja de uma maneira que seja independentede coordenadas locais. Usaremos para isto o formalismo das formasdiferenciais. Vamos considerar nesta secao sistemas autonomos. Ossistemas nao autonomos serao analisados na proxima secao.
Na Mecanica Hamiltoniana as variaveis posicao e momento saoindependentes (na Mecanica Lagrangeana a posicao e a velocidadenao sao independentes). Este ponto de vista e desejavel na MecanicaQuantica [ABC].
Em primeiro lugar vamos considerar o espaco dual deRn. Lembreque este espaco, denotado por Rn∗, e por definicao o espaco dastransformacoes lineares l : Rn → R (ver Definicao 4.36).
Para cada ponto q do Rn considere Rnq o espaco tangente a Rn
em q e Rn∗q o espaco cotangente em q.
Uma base de Rn∗q e dada por dq1, dq2, ..., dqn.
O conjunto dos elementos (q, l) onde q ∈ Rn e l ∈ Rn∗q e chamado
de fibrado cotangente e e denotado por T ∗Rn = ∪qRn∗q .
Note que Rn∗ = T ∗Rn e uma variedade de dimensao 2n.Nesta secao vamos introduzir o estudo de sistemas Hamiltonianos
em variedades no caso em que o Hamiltoniano nao dependa do tempot.
Na proxima secao vamos considerar o caso nao autonomo.
130

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 131 — #131 ii
ii
ii
131
Em primeiro lugar cumpre destacar que a expressao
q =∂H
∂pp = −∂H
∂q, (5.1)
(q, p) ∈ R2n, usa explicitamente a estrutura do R2n, em que dividi-mos algumas coordenadas como p e outras como q. Caso tenhamos aintencao de definir um Hamiltoniano e as equacoes de Hamilton (emsistemas mecanicos em que o espco de configuracao e uma variedadediferenciavel M) de uma maneira analoga a (5.1), e necessario ex-pressar tais equacoes de uma maneira independente da estrutura doR2n.
Para este fim sera natural introduzir formas diferenciais para ex-pressar as equacoes de (5.1).
Considere
J =
(0 E−E 0
)onde E e a matriz identidade em Rn. Sendo assim J e uma matriz2n× 2n.
Note que J2 = −I (a matriz identidade). J vai ser a expressaomatricial local do que vamos chamar abaixo de forma simpletica.
No caso em que n = 1 obtemos
J =
(0 1−1 0
)Considere agora a 2-forma diferencial
w(z, v) = ⟨Jz, v⟩ =
= zn+1v1 + zn+2v2 + ...+ z2nvn − z1vn+1 − z2vn+2 − ...− znv2n,
z, v ∈ R2n onde ⟨, ⟩ e o produto interno Euclidiano. Note que we alternada. Tal forma diferencial sera denominada mais tarde desimpletica.
Para cada valor de i ∈ 1, 2, ..., n, considere a 2-forma dpi ∧dqi nas variaveis (q, p) = (q1, q2, ..., qn, p1, p2, ..., pn) ∈ R2n. Noteque para η = (η1, ..., ηn, ηn+1, ..., η2n), θ = (θ1, ..., θn, θn+1, ..., θ2n) aexpressao de dpi ∧ dqi quando aplicado a estes vetores e dada por
dpi ∧ dqi(η, θ) = θiηn+i − ηiθn+i.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 132 — #132 ii
ii
ii
132 CAPITULO 5. FORMALISMO SIMPLETICO
Logo w pode ser escrita como w(η, θ) =∑ni=1 dpi ∧ dqi(η, θ) =
dp ∧ dq(η, θ).Observe agora que dado H(v, w) : R2n → R
J
∂H∂q1...∂H∂qn∂H∂p1...∂H∂pn
=
∂H∂p1...∂H∂pn
− ∂H∂q1
...− ∂H∂qn
.
Sendo assim as Equacoes de Hamilton em R2n podem ser escritasde maneira compacta como
(q, p) = J(∇H) = (∂H
∂p1, ...,
∂H
∂pn,−∂H
∂q1, ...,
∂H
∂qn).
J(∇H) define assim o campo de vetores Hamiltoniano.Como sabemos,
dH =∂H
∂q1dq1 + ...+
∂H
∂qndqn +
∂H
∂p1dp1 + ...+
∂H
∂pndpn
e uma 1-forma diferencial em ∈ R2n. Seja um vetor η ∈ R2n,
η = (η1, ..., η2n).
Note que
dH(η) =n∑i=1
∂H
∂qiηi +
n∑i=1
∂H
∂piηn+i =
⟨(ηn+1, ..., η2n,−η1, ...,−ηn),
(∂H
∂p1, ...,
∂H
∂pn,−∂H
∂q1, ...,−∂H
∂qn
)⟩=
⟨Jη, J(∇H)⟩ = w(η, J(∇H)).
Em outras palavras ε = J(∇H) = (∂H∂p ,−∂H∂q ) e o unico vetor em
R2n tal que para todo η, vale que w(η, ε) = dH(η).
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 133 — #133 ii
ii
ii
133
Observacao 5.1. Podemos portanto afirmar que ε =
(∂H∂p ,−
∂H∂q
)e
o unico vetor tal que para todo η ∈ R2n
w(η, ε) = (dp1 ∧ dq1 + ...+ dpn ∧ dqn) (η, ε) = dH(η).
A expressao acima e a que realmente pode ser tratada de maneiraintrınseca para fins de definicao do campo de vetores Hamiltonianocomo veremos a seguir.
Vamos definir o Campo Hamiltoniano de maneira intrınseca emuma variedade n-dimensional.
Dada uma superfıcie de configuracao M , o campo Hamiltonianopara ser definido de maneira intrınseca, devera ser definido sobre V ,onde V e o fibrado cotangente T ∗M = V .
Definicao 5.1. Sobre uma variedade V de dimensao 2n, diz-se queuma 2-forma w em V e nao degenerada se para todo x ∈ V , vale que∀ ε ∈ TxV = 0 existe um η ∈ TxV tal que wx(η, ε) = 0.
Definicao 5.2. Uma forma w e chamada de forma simpletica sobreuma variedade V se w satisfaz dw = 0 e e tambem nao degenerada.Uma variedade V com uma 2-forma simpletica w e chamada de umavariedade simpletica e sera denotada por (V,w).
Exemplo 5.1. A 2-forma∑ni=1 dpi ∧ dqi define uma estrutura sim-
pletica sobre R2n.
Lembre que um campo de vetores G em uma superfıcie V dedimensao r e uma escolha de um vetor tangente G(x) ∈ TVx paracada x ∈ V .
Como vimos anteriormente, nesta secao,
(q, p) = J(∇H) =
(∂H
∂p,−∂H
∂q
)= G(q, p),
define o campo de vetores Hamiltoniano.
Vamos a seguir definir campos de vetores Hamiltonianos sobrevariedades simpleticas.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 134 — #134 ii
ii
ii
134 CAPITULO 5. FORMALISMO SIMPLETICO
Definicao 5.3. Considere uma variedade simpletica (V,w). Paracada vetor ε ∈ TVx tangente a variedade simpletica (V,w) no pontox, associamos a 1-forma wε tal que
∀ η ∈ TVx, wε(η) = w(η, ε).
Denote por A : TV → T ∗V a aplicacao tal que A(ε) = wε, ondeε ∈ TVx e wε ∈ T ∗Vx foi definida acima.
Observe que A e isomorfismo linear entre dois espacos vetoriaisde mesma dimensao. Isto porque, A e injetiva de TVx no espaco das1-formas em TV ∗
x , isto e, A(ε) = 0 implica que ε = 0 (isto seguefacilmente de ∀ ε = 0 existe um η tal que wx(η, ε) = 0, ε, η ∈ TVx).
Considere agora In a inversa de A
In : TV ∗ → TV.
Definicao 5.4. Dado H : V → R qualquer, onde (V,w) e uma var-iedade simpletica, o campo Hamiltoniano em M determinado por He por definicao In(dH). Isto e, para x ∈ V fixo In(dH) = ε ∈ TVx,onde wε(η) = w(η, ε) = dH(η), ∀η ∈ TVx. Fica definido assim umcampo de vetores ε(x) = G(x) para todo x ∈ V , que sera denominadocampo de vetores Hamiltoniano associado a H.
A definicao acima e absolutamente natural apos as consideracoesque fizemos anteriormente nesta secao (ver Observacao 5.1). Con-siderando H(q, p) definido sobre (q, p) ∈ T ∗Rn e w = dp ∧ dq re-cuperamos a expressao do campo Hamiltoniano quando estamos nascoordenadas locais de R2n.
Observe que para diferentes estruturas simpleticas w sobre a mes-ma variedade V , podemos ter diferentes campos Hamiltonianos.
Note que dH (e uma transformacao linear agindo em TMx) e w(e uma transformacao bilinear agindo em TMx) sao definidos intrin-secamente, logo o vetor ε foi definido de maneira intrınseca.
Vamos agora usar coordenadas locais x = (q, p) em V = T ∗M(ver Definicao 4.36), p = p1dq1 + ...+ pndqn transformacao linear deTMq em R (M variedade de configuracao) e denotar x = (x1, ..., x2n)por
x = (q1, ..., qn, p1, ..., pn)
e vetores tangentes por
(q′1, ..., q′n, p
′1, ..., p
′n) ∈ T (T ∗M )x.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 135 — #135 ii
ii
ii
135
Proposicao 5.1. Seja M variedade de dimensao n. O fibrado cotan-gente T ∗M , tem uma estrutura simpletica natural w. Essa estruturasimpletica w, em coordenadas locais e dada por dp1∧dq1+dp2∧dq2+...+ dpn ∧ dqn.
Demonstracao: Considere p : TMq → R uma transformacao lineare (q, p) ∈ T ∗M .
Vamos primeiramente definir uma 1-forma v em T ∗M . A 2-formaw = dv, derivada de tal forma v sera a forma simpletica que bus-camos.
Seja ε ∈ T (T ∗M)(q,p) um vetor tangente do fibrado cotangenteno ponto (q, p) onde p ∈ T ∗Mq.
Um vetor tangente ε em T (T ∗M)(q,p) e representado por umacurva (q(t), p(t)) ∈ T ∗M, t ∈ (−ϵ, ϵ), tal que (q′1, ..., q
′n, p
′1, ..., p
′n) =
(q′(0), p′(0)) = ε e (q(0), p(0)) = (q, p).Considere agora a projecao π : T ∗M → M tal que π(q, p) = q.
Para ε um vetor em T (T ∗M), temos que dπ(ε) ∈ TM (pois dπ :T (T ∗M) → TM e a derivada da projecao π).
Definimos a 1-forma v em T ∗M por
v(ε) = p(dπ(ε)) , ∀ε ∈ T (T ∗M)(q,p).
Afirmamos que esta 1-forma v em coordenadas locais se escrevecomo pdq =
∑ni=1 pidqi.
Vamos mostrar agora a afirmacao mencionada acima. Considerecoordenadas locais (q, p) para T ∗M .
Por definicaoπ : T ∗M →M
(q, p) → q = (q1, q2, ..., qn)
Logo dπ : T (T ∗M) → TM e apenas (dq1, dq2, ..., dqn). Logodπ(ε) = (q′1, ..., q
′n).
A transformacao linear p definida em TMq tem coordenadas locais
p1, p2, ..., pn,
isto e p e a transformacao p1dq1 + p2dq2 + ...+ pndqn.Finalmente, v(ε) = p(dπ(ε)) = piq
′1 + ...+ p2q
′2 =
∑ni=1 pidqi(ε).
Fica portanto demonstrada a afirmacao que v = pdq.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 136 — #136 ii
ii
ii
136 CAPITULO 5. FORMALISMO SIMPLETICO
Considere agora w = dv.E claro que dw = ddv = 0 (ver Proposicao 4.5, Capıtulo 2).Note que em coordenadas locais w =
∑ni=1 dpi ∧ dqi = dp ∧ dq.
E facil ver tambem que w e nao degenerada, pois se ε = (ε1, ..., ε2n) =0, entao existe εi = 0 (suponhamos que i esteja entre os primeiros n dovetor ε para simplificar a notacao que segue). Portanto w(η, ε) = 0,onde η = (η1, ..., η2n) e escolhido de tal modo que ηj = 0, paraj = n + i e ηn+i = 1 (este fato segue da forma local de w(z, v) =<Jz, v >=
∑ni=1 dpi ∧ dqi).
Se o termo nao nulo εi esta entre os ultimos n elementos do vetorε, um raciocınio analogo pode ser aplicado.
Concluımos assim que w como definida acima e uma forma sim-pletica.
Um resultado mais geral que o anterior, mas que nao sera demon-strado no texto e o teorema de Darboux (ver [A1] para prova).
Teorema 5.1. (Teorema de Darboux) Dada uma variedade simpleticaV de dimensao 2n e uma forma simpletica w, para todo ponto x ∈ V ,e possıvel encontrar um sistema de coordenadas fα em torno de xtal que fα : Uα → R2n, fα(x) = (q1, q2, ..., qn, p1, p2, ..., pn), tal quenestas coordenadas w e da forma
∑ni=1 dpi ∧ dqi = dp ∧ dq.
Vamos mostrar agora um resultado muito importante.Seja (M,w) uma estrutura simpletica e H : TM∗ → R Hamilto-
niano. Assuma que In(dH) define o campo de vetores HamiltonianoG(x) e seja ϕt : T
∗M → T ∗M o correspondente fluxo de difeomorfis-mos associado ao campo, isto e,
d
dt
∣∣∣∣t=0
ϕtx = In(dH)(x) = G(x).
Esse fluxo se chama o fluxo Hamiltoniano associado ao Hamilto-niano H.
Uma variedade diferenciavel A de dimensao dois com bordo esimplesmente conexa se ela e difeomorfa a um aberto simplesmenteconexo do R2.
Teorema 5.2. O fluxo Hamiltoniano ϕt sobre TM∗ preserva a es-
trutura simpletica natural w = dp ∧ dq, isto e, (ϕt)∗w = w.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 137 — #137 ii
ii
ii
137
Demonstracao: Temos que mostrar (ver exercıcio apos Definicao4.35) que qualquer subvariedade (que sem perda de generalidadepodemos assumir ser simplesmente conexa) A de dimensao 2, A ⊂T ∗M com bordo diferenciavel por partes e tal que∫
A
w =
∫ϕt(A)
w.
Considere a superfıcie de dimensao 3 , A × (0, τ) ⊂ T ∗M ×R esua imagem pelo fluxo ϕt,
Jτ = ∪t∈(0,τ) ∪x∈A (ϕt(x), t) ⊂ T ∗M ×R,
entao, ver Figura 4.4,
∂Jτ = −(∪t∈(0,τ) ∪x∈∂A (ϕt(x), t) + ϕτA−A.
Denotaremos ∪t∈(0,τ) ∪x∈∂A (ϕt(x), t) = Bτ , que e a superfıcie dedimensao 2 (que depende de τ).
Note que w e uma forma diferencial em TM∗ e assim podemospensar que e uma forma diferencial sobre TM∗ × R que nao de-pende da segunda variavel. Quando formos usar a seguir o teoremade Stokes, lembre que a contribuicao da integral em ∪t∈(0,τ) ∪x∈δA(ϕt(x), t), nao vai depender do t na parte (., t) acima. Sendo as-sim, para simplificar a notacao, algumas vezes vamos omitir a partecorrespondente a t nas integrais abaixo.
Primeiro, vamos mostrar que
d
dτ
∫Bτ
w =
∫ϕτ (∂A)
dH =
∫(ϕτ (δA),τ)
dH,
isto e, vamos mostrar equivalentemente que∫Bτ
w =
∫ τ
0
(∫ϕt(∂A)
dH
)dt.
Seja f(s), 0 < s ≤ 1 parametrizacao de ∂A.Entao φ(s, t) = (ϕt(f(s)), t) = ϕt(f(s)), 0 < s ≤ 1, 0 < t < τ ,
define uma parametrizacao da superfıcie Bτ de dimensao 2.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 138 — #138 ii
ii
ii
138 CAPITULO 5. FORMALISMO SIMPLETICO
Por definicao de integral de uma 2-forma diferencial∫Bτ
w =
∫ τ
0
∫ 1
0
w(η, ε)dsdt
onde
ε =∂φ
∂te
η =∂φ
δs,
pois φ(s, t) = ϕt(f(s)) parametriza Bτ .Note que ε e o vetor que define o campo Hamiltoniano.Por definicao de campo Hamiltoniano
dH(η) = dH(∂φ
∂s) = w(η, ε)
(ver Definicao 5.4).Logo∫ τ
0
(∫ϕt(∂A)
dH
)dt =
∫ τ
0
(∫ 1
0
dH
(∂φ(s, t)
∂s
)ds
)dt =
∫Bτ
w.
Assim concluımos que
d
dτ
∫Bτ
w =
∫ϕτ (∂A)
dH.
Ora pelo Teorema de Stokes,∫ϕt(∂A)
dH =
∫∂(ϕt(∂A))
H = 0
pois ∂(ϕt(∂(A))) = ∅.Logo ∫
Bτ
w
e constante.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 139 — #139 ii
ii
ii
139
Quando τ → 0,∫Bτw converge a
∫∂Aw = 0 (afinal estamos in-
tegrando uma 2-forma em uma superfıcie com regiao bidimensionalconvergindo a uma curva quando τ vai a zero).
Logo ∫Bτ
w = 0 (5.2)
para todo τ .Como w e simpletica satisfaz dw = 0 entao:
0 =
∫Jτ
dw. (5.3)
Pelo teorema de Stokes∫Jτ
dw =
∫∂Jτ
w =
∫ϕτ (A)
w −∫A
w −∫Bτ
w. (5.4)
Juntando as expressoes (5.3) e (5.4) obtemos
0 =
∫Jτ
dw =
∫∂Jτ
w =
∫ϕτ (A)
w −∫A
w −∫Bτ
w.
Como o termo∫Bτw e zero por (5.2) concluımos que∫
ϕτ (A)
w =
∫A
w,
ou seja, ϕt preserva a forma simpletica w.
Definicao 5.5. Dizemos que uma k-forma diferencial w e um in-variante integral absoluto para g : T ∗M → T ∗M se∫
g(C)
w =
∫C
w
para toda variedade C de dimensao k contida em T ∗M .Equivalentemente, w e invariante integral absoluto para g : T ∗M →
T ∗M se g∗(w) = w.
A proposicao anterior mostrou que g∗(w) = w quando g = ϕt eo fluxo Hamiltoniano para t fixo obtido a partir de H e w a formasimpletica natural (Proposicao 5.1).

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 140 — #140 ii
ii
ii
140 CAPITULO 5. FORMALISMO SIMPLETICO
Exemplo 5.2. Se g preserva area em R2 entao w = dq ∧ dp e uminvariante integral absoluto de g.
Proposicao 5.2. Se w1 e w2 sao invariantes integrais de g, entaow1 ∧ w2 tambem e invariante integral de g.
Demonstracao: Segue imediatamente do fato que
g∗(w1 ∧ w2) = (g∗w1) ∧ (g∗w2) = w1 ∧ w2
(ver Proposicao 4.3 c)). A 2n-forma diferencial (w)n define um elemento de volume em
T ∗M (ver Definicao 4.9). Note que em coordenadas locais
wn = (dp ∧ dq)n = dp1 ∧ dp2 ∧ ... ∧ dpn ∧ dq1 ∧ dq2 ∧ ... ∧ dqn.
Proposicao 5.3. O fluxo Hamiltoniano ϕt preserva o elemento devolume (w)n.
Demonstracao: Segue imediatamente do fato que g∗(wn) = (g∗w)n
= (w)n, quando g = ϕt, t fixo, e do Teorema 5.2.
Definicao 5.6. Uma transformacao g, g : T ∗M → T ∗M que preservaw, isto e, g∗w = w, e dita canonica.
Note que se g e canonica, g tambem preserva o elemento de volume(w)n, pois g∗(wn) = (g∗w)n = (w)n.
Definicao 5.7. Uma k-forma w e dita invariante relativo para g :T ∗M → T ∗M se ∫
∂C
w =
∫g(∂C)
w
para toda subvariedade C de dimensao k com bordo contida em T ∗M .
Proposicao 5.4. Se w e invariante relativo para g : T ∗M → T ∗Mentao dw e invariante absoluto para g.
Demonstracao: Seja w invariante relativo e C subvariedade de di-mensao k + 1 com bordo ∂(C) contida em T ∗M . Note que o bordode ∂(C) e vazio.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 141 — #141 ii
ii
ii
141
Logo pelo Teorema de Stokes∫C
dw =
∫∂C
w =
∫g(∂C)
w =
∫∂(g (C))
w =
∫g(C)
dw.
Logo, concluımos que dw e invariante absoluto. Vamos agora demonstrar a versao simpletica do teorema de con-
servacao do Hamiltoniano. Observe como a demonstracao fica abre-viada atraves do uso do formalismo simpletico.
Teorema 5.3. (Lei de Conservacao de Energia) A funcao H e con-stante ao longo das trajetorias do fluxo Hamiltoniano.
Demonstracao: A derivada direcional de H na direcao θ e dH(θ).Por definicao In(dH) e o Campo Hamiltoniano. Seja entao η =In(dH).
Entao dH(η) = w(η, In(dH)) = w(η, η) = 0 (pois como w ealternada w(η, η) = −w(η, η)).
Logo, H e constante ao longo do fluxo Hamiltoniano. Dado um Hamiltoniano H(q, p), q ∈M , variedadem-dimensional,
vamos mostrar agora que existe uma densidade natural 1∥∇H(x)∥ que
define uma medida invariante para o fluxo Hamiltoniano restrito auma superfıcie (2m− 1) dimensional de Energia total constante.
Considere uma superfıcie S de dimensao m − 1 em Rm. Dadom-vetores v1, v2, ..., vm em Rm, o volume determinado por estes ve-tores e expresso por dx1 ∧ ...∧ dxm(v1, v2, ..., vm) (ver Definicao 4.3).O procedimento natural de induzir em S uma maneira de medir vo-lume m − 1 dimensional em cada plano TSx e o seguinte: dadosu1, u2, ..., um−1 ∈ TSx, definimos o volume w(u1, ..., um−1) determi-nado por u1, .., um−1 como
w(u1, ..., um−1) = dx1 ∧ ... ∧ dxm(η, u1, u2, ..., um−1),
onde η e o vetor normal unitario (aqui estamos usando a metricaRiemanniana) em S.
Geometricamente falando, estamos considerando um paralelepı-pedo m dimensional com altura η e dizendo que o volume m − 1dimensional da base e o volume m-dimensional do paralelepıpedoη, u1, .., um−1 (isto porque η tem altura 1).
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 142 — #142 ii
ii
ii
142 CAPITULO 5. FORMALISMO SIMPLETICO
As consideracoes geometricas feitas acima devem esclarecer o leitorpara o procedimento que sera utilizado na proxima proposicao.
Vamos denotar por wn a forma volume usual em R2n = dq1∧ ...∧dqn ∧ dp1 ∧ ... ∧ dpn.
Proposicao 5.5. SejaM = Rn variedade Riemanniana de dimensaon com a metrica Riemanniana definida por <, >. Considere umHamiltoniano H(q, p) e w forma simpletica natural (ver Proposicao56, Capıtulo 3) sobre R2n = V = T ∗M = T ∗(Rn). Entao a formaw ((2n − 1)-forma diferencial) sobre uma superfıcie compacta E =(q, p) |H(q, p) = c (2n−1 dimensional) de Hamiltoniano constante(assuma que ∥∇H(x)∥ nao se anule em E) dada por
wx(v2, v3, ..., v2n) =1
∥∇H(x)∥wnx (ηx, v2, ..., v2n)
e invariante para ϕt restrito a esta superfıcie E.
Demonstracao: Para c ∈ R fixo considere a variedade de dimensao2n− 1
Ec = E = x ∈ T ∗M |H(x) = c.
Como sabemos pelo Teorema de Conservacao do Hamiltoniano,E e invariante por ϕt.
A forma wn e forma volume sobre T ∗M . Se M for o R2n entaown = dp1 ∧ ... ∧ dpn ∧ dq1 ∧ ... ∧ dqn. A forma volume natural sobrea superfıcie E de dimensao 2n− 1 e a forma w tal que ∀ x ∈ E
wx(v2, ..., v2n) = wnx (ηx, v2, ..., v2n)
onde ηx e o vetor normal a E (estamos assumindo uma orientacaoem E) com norma 1 (estamos assumindo que existe uma metricaRiemanniana, ou seja, que ⟨ηx, ηx⟩ = ∥ηx∥2 = 1).
Considere sobre E a 2n− 1 forma diferencial
wx =1
∥∇H(x)∥wx,
isto e,
wx(v2, v3, ..., v2n) =1
∥∇H(x)∥wnx (ηx, v2, ..., v2n).

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 143 — #143 ii
ii
ii
143
Vamos mostrar que w = ϕ∗t (w) para qualquer t ∈ R. Logo ϕt vaideixar invariante uma forma volume sobre E.
Antes, mostramos na Secao 2, Capıtulo 3 que H ϕt = H, ∀t ∈ R.Logo
dH dϕt(x) = dH.
Portanto, ∀η ∈ T ∗Mx,
⟨∇Hϕt(x), dϕt(x)(η)⟩ = (dH dϕt(x))(η) = dH(η) = ⟨∇Hx, η⟩.
Aplicando a ultima expressao a η = ∇Hx, obtemos ⟨∇Hx,∇Hx⟩ =∥∇Hx∥2 = ⟨∇Hϕt(x), dϕt(x)(∇Hx) ⟩.
Como ∇H e normal a variedade E, temos que
ηx =∇Hx
∥∇Hx∥e
ηϕt(x) =∇Hϕt(x)
∥∇Hϕt(x)∥.
Logo a ultima igualdade pode ser reescrita como
∥∇H(x)∥∥∇Hϕt(x)∥
=
⟨∇Hϕt(x)
∥∇Hϕt(x)∥, dϕt(x)(ηx)
⟩= ⟨ηϕt(x), dϕt(x)(ηx)⟩.
Logo a projecao de dϕt(x)(ηx) sobre ηϕt(x) e
∥∇H(x)∥∥∇Hϕt(x)∥
.
Sendo assim
dϕt(x)(ηx) =∥∇Hx∥
∥∇Hϕt(x)∥ηϕt(x) + z1
onde z1 ∈ TEϕt(x).Note que se v2, v3, ..., v2n e uma base de TEϕt(x), entao existem
αi, i ∈ 2, ..., 2n tal que
z1 =2n∑i=2
αivi.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 144 — #144 ii
ii
ii
144 CAPITULO 5. FORMALISMO SIMPLETICO
Logo
wnϕt(x)(z1, v2, v3, ..., v2n) = wnϕt(x)
(2n∑i=2
αivi, v2, ..., v2n
)=
2n∑i=2
αiwnϕt(x)
(vi, v2, v3, ..., vi, ..., v2n) = 0.
E facil ver a partir da ultima expressao que para qualquerv2, v3, ..., vn ∈ TEϕt(x), w
nϕt(x)
(z1, v2, ..., v2n) = 0.Portanto, para qualquer v2, v3, ..., vn ∈ TEϕt(x)
wnϕt(x)(dϕt(x)(ηx), v2, ..., v2n) = wnϕt(x)
(∥∇Hx∥
∥∇Hϕt(x)∥ηϕt(x), v2, ..., v2n
). (5.5)
Vamos agora mostrar que ϕ∗t w = w.Ora, ϕ∗t (x)(w)(v2, ..., v2n) = wϕt(x)(dϕt(x)(v2), ..., dϕt(x)(v2n))
=1
∥∇Hϕt(x)∥wnϕt(x)
(ηϕt(x), dϕt(x)(v2), ..., dϕt(x)(v2n))
=1
∥∇Hx∥wnϕt(x)
(∥∇Hx∥
∥∇Hϕt(x)∥ηϕt(x), dϕt(x)(v2), ..., dϕt(x)(v2n)
)
=1
∥∇Hx∥wnϕt(x)
(dϕt(x)(ηx), dϕt(x)(v2), ..., dϕt(x)(v2n))
=1
∥∇Hx∥wnx (ηx, v2, ..., v2n).
A ultima igualdade segue de ϕ∗t (x)(wn) = wn (Proposicao 5.3,
Capıtulo 3) e a penultima de (5.5).Concluımos portanto que w define uma densidade invariante para
ϕt restrito a superfıcie de Hamiltoniano constante Ec. Este fato seguede que
wx(v2, v3, ..., v2n) =1
∥∇H(x)∥wnx (ηx, v2, ..., v2n)
e invariante para ϕt, t ∈ R.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 145 — #145 ii
ii
ii
145
Para obter uma probabilidade a partir de w devemos multiplicarw pela constante k = 1∫
Ew.
Deixamos a cargo do leitor estender o resultado acima para var-iedades simpleticas.
Para concluir esta secao, vamos agora descrever o procedimentonatural para se obter um Hamiltoniano a partir de uma LagrangianoL(q, q), definido sobre uma variedade de configuracao M , q ∈ M ,q ∈ TMq.
Para um Lagrangiano L, e para (q, q) fixo, vamos considerar queo momento p ∈ Rn∗
q e dado por p = dLdq (q, q), isto p e a transformacao
linear derivada de L em relacao a q no ponto (q, q).Sendo assim, fixada a base dq1, dq2, ..., dqn, a 1-forma diferencial
(famılia de transformacoes lineares dependendo de q) p = ∂L∂q nesta
base e dada por
p =∂L
∂q1dq1 + ...+
∂L
∂qndqn.
Desta maneira dLdq quando expressa na base dq1, dq2, ..., dqn, de-
termina o que anteriormente chamavamos de momento p.Sendo assim, para cada q fixo fica associado a q ∈ Rn de maneira
bem definida um elemento p ∈ Rn∗q (contanto que a condicao da
Observacao 4, Capıtulo 3), que vai ser o momento.Uma questao importante e a seguinte: como obterH(q, p), (q, p) ∈
T ∗M , a partir de L(q, q), (q, q) ∈ TM .Para (q, q) fixo considere p = ∂L
∂q ∈ T ∗Mq.Para q fixo obtemos assim uma associacao de q com p, definindo
uma aplicacao Bq : TVq → T ∗Vq tal que Bq(q) = p. Esta aplicacao e
bijetiva se por exemplo ∂2L∂q > 0, conforme a Observacao 4, Capıtulo
3.Vamos supor no que segue que tal Bq seja bijetivo para todo
q ∈ V .Considere um Lagrangiano L(q, q). Para (q, p) fixados, definimos
H(q, p) como
H(q, p) = p(B−1q (p))− L(q,B−1
q (p)) = p(q)− L(q, q),
onde Bq(q) = p.Acima, p(B−1
q (p)) significa aplicar a transformacao linear p novetor tangente q = B−1
q (p).
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 146 — #146 ii
ii
ii
146 CAPITULO 5. FORMALISMO SIMPLETICO
Note que o Lagrangiano e naturalmente definido no fibrado tan-gente TM de uma variedade M de configuracao, enquanto que oHamiltoniano e naturalmente definido no fibrado cotangente T ∗Mda variedade de configuracao.
Conclusao: Dada uma funcaoH(q, p) definida no fibrado cotangentea uma variedade M e possıvel definir um campo de vetores sobre ofibrado cotangente denominado campo Hamiltoniano. Isto porque, ofibrado cotangente tem uma estrutura simpletica natural.
Quando desejamos fazer alguma conta, podemos considerar umcerto sistema de coordenadas locais e assim obter resultados sobre osistema.
E mais natural proceder de maneira intrınseca como foi feitoacima, pois nao existe razao para um certo sistema de coordenadasser privilegiado em relacao aos outros.
As trajetorias deste campo de vetores podem ser definidas tambemcomo os extremais da acao
∫γpdq onde os extremos do caminho γ
estao fixos em γ(t1) = a, γ(t2) = b.Este campo nao e determinado por um unico possıvel Hamilto-
niano H, pois podemos somar a esta funcao uma forma w tal quedw = 0, e claramente a Definicao 96 nao vai alterar o campo Hamil-toniano que vamos obter.
Dada uma funcao sobre o fibrado tangente a uma variedade M ,podemos obter um sistema Lagrangiano sobre o fibrado tangente. Amaneira de relacionar os dois sistemas foi descrita acima.
Exercıcios:1. Para o Hamiltoniano do pendulo sem atrito, calcule para cada
nıvel de energia constante a densidade ψ do Teorema 63.Assuma que o nıvel de energia nao passe pelo ponto (0,0) ou (π, 0).
2. Mostre que o toro S1 × S1 admite um estrutura simpletica.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 147 — #147 ii
ii
ii
Capıtulo 6
Linhas de Vortex emMecanica Hamiltoniana
Nesta secao vamos considerar apenas campos Hamiltonianos nao au-tonomos H(q, p, t). Vamos desenvolver o formalismo que permitedefinir neste caso as equacoes de Hamilton de maneira intrınseca.
O ponto de vista sera intrınseco e o leitor pode perceber que asas demostracoes utilizando tal ponto de vista serao simples e naoenvolvem demasiado calculo.
Proposicao 6.1. Dado uma 2-forma w em R2n+1, existe ξ = 0 talque w(ξ, η) = 0, ∀ η ∈ R2n+1.
Demonstracao: Uma forma diferencial e por definicao alternada,portanto e dado por w(ξ, η) = ⟨Aξ, η⟩ onde A e matriz alternada.Ora o determinante de tal matriz (2n + 1) × (2n + 1) e zero poisA∗ = −A e detA = detA∗ = det(−A) = (−1)2n+1 detA = −detA.
Logo existe um auto-vetor ξ = 0 com auto-valor 0 e, portanto,w(ξ, η) = ⟨Aξ, η⟩ = ⟨0, η⟩ = 0.
Definicao 6.1. Uma 2-forma e dita nao singular se
dimξ ∈ R2n+1|w(ξ, η) = 0,∀ η ∈ R2n+1 = 1.
147

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 148 — #148 ii
ii
ii
148 CAPITULO 6. LINHAS DE VORTEX
Definicao 6.2. Dada uma 2-forma w nao singular, em cada ponto doR2n+1, o subespaco de dimensao 1 definido por algum ξ da Proposicao6.1 e chamada direcao de vortex.
Definicao 6.3. Seja w 2-forma diferencial nao singular. Uma curvadiferenciavel em R2n+1 cuja tangente em cada ponto esta na direcaode vortex naquele ponto da 2-forma w e chamada uma linha de vortexda 2-forma w.
Os teoremas de existencia e unicidade de equacoes diferenciaisordinarias asseguram localmente a existencia das linhas de vortex,bastando para isso assumir condicoes de suavidade (C∞) da 2-formaw nao singular. Observe que enquanto a solucao de uma equacao dife-rencial depende do tempo de maneira bem definida, a linha de vortexe uma curva, para a qual poderıamos ter varias parametrizacoes peloparametro t.
As linhas de vortex determinam o que se chama um campo delinhas e nao um campo de vetores (ver [MC3]).
Proposicao 6.2. Considere em R2n+1 o Hamiltoniano H(p, q, t), a1-forma w1 = pdq −Hdt e a 2-forma w2 = dw1. Entao as solucoesdo sistema Hamiltoniano
q =dH
dpp = −dH
dq
sao linhas de vortex de w2.
Demonstracao: Suponha que w2 seja nao singular. Sendo assimbasta mostrar que ξ = (Hp,−Hq, 1) em (q, p, t) e direcao de vortex da2-forma w2 no ponto (q, p, t). Primeiro mostraremos este ultimo fato,e deixaremos ao leitor o trabalho de mostrar que w2 e nao singular.
Ora, denote η por (q1, p1, t1)
w2(ξ, η) = dw1(ξ, η) =
(dp∧dq− dH
dp(dp∧dt)− dH
dq(dq∧dt)
)(ξ, η) =
= [(−Hqq1 −Hpp1)−Hp(Hqt1 − p1)−Hq(−Hpt1 − q1) = 0.
Logo ξ = (Hp,−Hq, 1) e a direcao de vortex e as solucoes dep = Hp e q = −Hq sao curvas de vortex. Exercıcio: Mostre que a forma w2 definida acima e nao singular.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 149 — #149 ii
ii
ii
149
Exemplo 6.1. Vamos calcular em um exemplo a forma w2 = dw1
quando w1 = pdq −Hdt. Seja
H(p, q) =p2
2+ω20
2q2
o Hamiltoniano do oscilador harmonico. Logo
w1 = pdq −Hdt = pdq −(p2
2+ω20
2q2)dt
e w2 = dw1 = dp ∧ dq − pdp ∧ dt− qw20dq ∧ dt.
Ora,
q =dH
dp= p
p = −dHdq
= −ω20q.
Neste caso, temos realmente para η = (q1, p1, t1) eξ = (Hp,−Hq, 1) = (p, w2
0q, 1) que
w2(ξ, n) = [dp ∧ dq − pdq ∧ dt− qω20dq ∧ dt] (ξ, n) =
(−ω20qq1 − pp1)− p(−ω2
0qt1 − p1)− qω0(pt1 − q1) = 0.
Este exemplo serve apenas como ilustracao do resultado mais geralanteriormente demonstrado.
A conclusao importante do resultado que obtivemos acima e quee possıvel expressar as curvas solucoes do Hamiltoniano atraves deformas diferenciais, sem usar a estrutura global do R2n+1. Isto per-mitira introduzir as equacoes de Hamilton (caso nao autonomo) emuma variedade diferenciavel M . Deixamos a cargo do leitor fazer talextensao.
Considere em R2n+1 duas curvas fechadas γ1 e γ2 tal que γ2 eobtida aplicando o fluxo Hamiltoniano a curva γ1 (ver Figura 4.5).
Definicao 6.4. Duas curvas fechadas na situacao acima serao de-nominadas de “relacionadas pelo fluxo Hamiltoniano”.
Definicao 6.5. A forma w1 = pdq−Hdt sera chamada de invariantede Poincare-Cartan.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 150 — #150 ii
ii
ii
150 CAPITULO 6. LINHAS DE VORTEX
Teorema 6.1. Sejam γ1 e γ2 duas curvas fechadas relacionadas pelofluxo Hamiltoniano, entao
∮γ1pdq −Hdt =
∮γ2pdq −Hdt.
Demonstracao: Seja w1 = pdq −Hdt a forma de Poincare-Cartan,entao pelo Teorema de Stokes,∫
σ
dw1 =
∫γ1
w1 −∫γ2
w1
onde σ e o tubo bidimensional que tem como bordo as duas curvasγ1 e γ2 orientadas na direcao positiva.
As curvas γ1 e γ2 da Figura 4.5 correspondem respectivamente aγ1 e −γ2.
A integral de ∫σ
dw1 = 0,
pois o vetor (−Hp, Hq, 1), tangente a superfıcie com bordo σ, se anulapara a forma dw1. Isto se deve a uma Proposicao que foi anterior-mente demonstrada.
Considere agora uma curva γ1 contida em um plano t1 = cons-tante.
Sendo assim, considerando o campo (−Hp,Hq, 1) e a sua evolucaocom t, e facil ver que a curva γ2 que se obtem aplicando o fluxoϕt a curva γ1, e tal que γ2 tambem esta contida em um plano t =constante, digamos t = t1. Neste caso, a proposicao acima diz apenasque ∫
γ1
pdq =
∫γ2
pdq.
Isto porque ∫γ1
Hdt =
∫γ2
Hdt = 0,
uma vez que nao existe componente na direcao t para os vetorestangentes a γ1 ou γ2.
Observe que todas as consideracoes que fizemos acima sao validasem variedades diferenciaveis. Em outras palavras, nao usamos emnenhum momento propriedades do espaco R2n+1.
Proposicao 6.3. O fluxo (−Hq,Hq, 1) preserva volume em R2n+1.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 151 — #151 ii
ii
ii
151
Demonstracao: Seja γ1 curva fechada simples contida em t1 =constante e γ2 outra curva obtida pela evolucao do fluxo no tempot2.
Entao pelo teorema de Stokes em R2n ≡ R2n × t1, temos∫γ1
pdq =
∫ ∫∆1
dp ∧ dq
onde ∆1 e a regiao de R2n ≡ R2n × t1 tal que δ∆1 = γ1 (ver Figura4.5). Da mesma forma se ϕt(∆1) = ∆2 entao δ∆2 = γ2 em R2n =R2n × t2, e ainda pelo teorema de Stokes∫
γ1
pdq =
∫ ∫∆2
dp ∧ dq.
Como vimos antes ∫γ1
pdq =
∫γ2
pdq,
logo segue-se que ∫ ∫∆1
dp ∧ dq =∫ ∫
∆2
dp ∧ dq.
Como o resultado vale para qualquer ∆1 (note que ϕt(∆1) = ∆2
e ϕt(γ1) = γ2) concluımos que ϕt preserva dp ∧ dq. Como
(dp ∧ dq)n = dp1 ∧ ... ∧ dpn ∧ dq1 ∧ ... ∧ dqn,
concluımos que o fluxo Hamiltoniano ϕt em R2n preserva volume.Observe que o resultado acima foi provado para Hamiltonianos
H(q, p, t) que dependem do tempo. Ja havıamos mostrado antes esteresultado, o teorema de Liouville, mas a demonstracao acima podeser aplicada tambem a ao fibrado cotangente T ∗M de uma variedadediferenciavel M .
Deixamos a cargo do leitor extender os resultados acima obtidosno Rn para variedades diferenciaveis M de dimensao n.
Conclusao: A partir de um Hamiltoniano H(q, p, t), definido sobreo produto cartesiano do fibrado tangente a uma variedade M por R,
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 152 — #152 ii
ii
ii
152 CAPITULO 6. LINHAS DE VORTEX
foi possıvel definir um campo de vetores Hamiltoniano sobre o fibradocotangente a M .
Este campo de vetores pode tambem ser caracterizado como osextremais de
∫γpdq−Hdt, em que os extremos (e os tempos) γ(t1) = a
e γ(t2) = b estao fixos.Este campo nao e determinado por um unico possıvel Hamiltoni-
ano H, pois podemos somar a esta funcao uma forma w = dG, e osvalores da acao irao se alterar por uma valor fixo G(b)−G(a). Logo,irao determinar os mesmos extremais.
Exercıcios:
1. Considere o Hamiltoniano H(q, p, t) = p2 + q2 + t. Calcule aslinhas de vortex em R3 para tal Hamiltoniano.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 153 — #153 ii
ii
ii
Capıtulo 7
Equacoes DiferenciaisParciais: Metodo dasCaracterısticas
Para analisar com mais profundidade a equacao diferencial de Hamil-ton-Jacobi necessitaremos primeiro analisar alguns aspectos da teoriageral das equacoes diferenciais de primeira ordem. Referimos o leitorpara [Jo], [I] e [Ju] para uma exposicao mais completa sobre o assunto.
Nosso objetivo nas proximas secoes, sera explicar a relacao dasfrentes de ondas com raios de luz. Esta relacao e um dos pontoscentrais na formulacao da Mecanica Hamiltoniana.
Primeiramente, necessitaremos analisar alguns topicos da teoriadas equacoes diferenciais parciais.
Vamos comecar analisando um exemplo bem simples que vai an-tecipar as principais propriedades dos exemplos mais complexos deequacoes diferenciais que serao analisados a seguir.
Considere a equacao diferencial parcial de 1a ordem
x∂u
∂x+ y
∂u
∂y= 0. (7.1)
Desejamos encontrar quem e a funcao u(x, y) que satisfaz tal
153

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 154 — #154 ii
ii
ii
154 CAPITULO 7. METODO DAS CARACTERISTICAS
equacao. Em geral existem infinitas solucoes, pois se u e solucaoentao βu+α tambem e solucao (β, α ∈ R sao constantes quaisquer).
Observe que se u e solucao de (7.1), entao u(x, y) = B determinauma curva cuja tangente (x′, y′) em (x, y) e colinear com (x, y). Istoporque
∇u =
(∂u
∂x,∂u
∂y
)e normal a curva de nıvel e por hipotese de u ser solucao de (7.1),
⟨(x, y),∇u⟩ = 0.
Vamos tentar determinar a expressao analıtica de tais curvas
u(x, y) = constante = B.
Suponha que possamos obter a mencionada curva atraves da ex-pressao u(x, y(x)) = B onde y(x) e obtido a partir de x pelo Teoremada Funcao Implıcita. Temos, portanto, que (1, y′(x)) e tangente a estacurva, logo a partir do que afirmamos acima devemos ter que
y′(x)
1=y(x)
x.
Logoy′(x)
y(x)=
1
x,
e portanto,d
dx(log y(x)) =
d
dxlog x.
Sendo assim, log(y(x)) = log x + c, c ∈ R, e finalmente y(x) = axpara algum a ∈ R. Logo u e constante em semi retas passandopela origem, e portanto as curvas de nıveis de u sao tais semi-retas.Observe que em (x, y) = (0, 0) nao podemos fazer as consideracoesacima.
Note que se estabelecermos como condicao de fronteira os valoresde u em uma curva diferenciavel Γ que e cortada por cada uma dassemi-retas y = ax em apenas um ponto da curva Γ, pelo que de-duzimos anteriormente, os valores da “possıvel”(ainda nao sabemos

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 155 — #155 ii
ii
ii
155
se existe) solucao u ficam necessariamente determinados. O valoru(x, y) tem que ter o valor de u, oriundo da condicao de fronteira,na intercecao da reta y = ax com a curva Γ. Isto e, se este ponto deintercecao for (x0, y0), entao escolheremos o valor u(x, y) para todoponto (x, y) desta semi-reta y = ax, como u(x, y) = u(x0, y0). Com auniao deste feixe de retas cobre um aberto do plano, entao podemosdefinir u em um subconjunto aberto do plano.
Vamos mostrar que a u assim definida na verdade e realmentesolucao de (7.1).
Fixado (x, y), pela maneira como estamos definindo u, a reta y =ax e curva de nıvel de u, logo ∇u e perpendicular a esta reta. Como(x, y) esta nesta reta, segue que < ∇u, (x, y) >= 0. Logo a u definidaacima realmente satisfaz a equacao diferencial (7.1).
Em geral o problema que pode ocorrer e que a curva Γ (ondee fixada a condicao de fronteira) intercepte uma destas semi-retasy = ax em mais de um ponto. Neste caso poderıamos ter o problemade nao poder obter u de maneira bem definida. Se nao ocorrer estasituacao, no entanto, entao o problema esta bem posto e a solucaoexiste e esta bem definida (e unica) da maneira como foi escolhidoacima.
Em outras palavras, a condicoes natural inicial (ou de fronteira)do problema de Cauchy deve ser fixar o valor de u em uma curva Γque intercepta cada semi-reta passando pela origem em apenas umponto.
Agora vamos analisar a equacao linear geral de primeira ordem.Considere a equacao diferencial parcial de 1a ordem em R2
a(x, y)∂u
∂x+ b(x, y)
∂u
∂y= 0. (7.2)
Gostarıamos de encontrar a solucao desta equacao de uma maneirasemelhante a utilizada no exemplo anterior.
Da maneira analoga como no exemplo anterior, primeiro resolver-emos o sistema de equacoes diferenciais ordinarias de 1a ordem
dx
dt= a(x, y)
dy
dt= b(x, y). (7.3)

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 156 — #156 ii
ii
ii
156 CAPITULO 7. METODO DAS CARACTERISTICAS
Observe agora o que acontece com a restricao de u (solucao de(7.2)) as solucoes de (7.3):
d
dtu(x(t), y(t)) =
∂u
∂xx′ +
∂u
∂yy′ =
∂u
∂xa(x, y) +
∂u
∂yb(x, y) = 0.
Logo u e constante ao longo das solucoes de (7.3).
Sendo assim, se (x(t), y(t)) e uma solucao de (7.3), entao
< ∇u(x(t), y(t)), (x(t), y(t)) >= 0.
Logo, cada curva (x(t), y(t)) deve satisfazer a propriedade que(x(t), y(t)) esta na reta tangente a curva u(x, y) = c.
Se tomarmos agora uma curva Γ cortando em um e so um pontocada curva solucao de (7.3), e fixando os valores de u em Γ de-terminaremos a solucao u(x, y) (pois u e constante em solucoes de(7.3)). Do mesmo modo como no exemplo anterior, basta dar o valoru(x, y) = u(x0, y0) para cada (x, y) sobre uma curva γ solucao de(7.3) tal que Γ ∩ γ = (x0, y0). Uma curva com tais propriedadesdefine a condicao natural de fronteira do problema.
Definicao 7.1. As curvas solucoes de (7.3) sao chamadas curvascaracterısticas de (7.2).
Exemplo 7.1. Considere a equacao
y∂u
∂x− x
∂u
∂x= 0, (7.4)
com a condicao de fronteira (ou inicial) u(s, 0) = s2, 0 ≤ s.Uma outra maneira de especificar a condicao de fronteira acima
e estabelecer que esta fixa uma curva em R3 dada por
(x(s), y(s), u(s)) = (s, 0, s2),
no espaco das variaveis (x, y, u). Esta maneira, na verdade, e a queusaremos na sequencia desta secao.
Neste caso a equacao diferencial ordinaria que define as carac-terısticas e
x = y
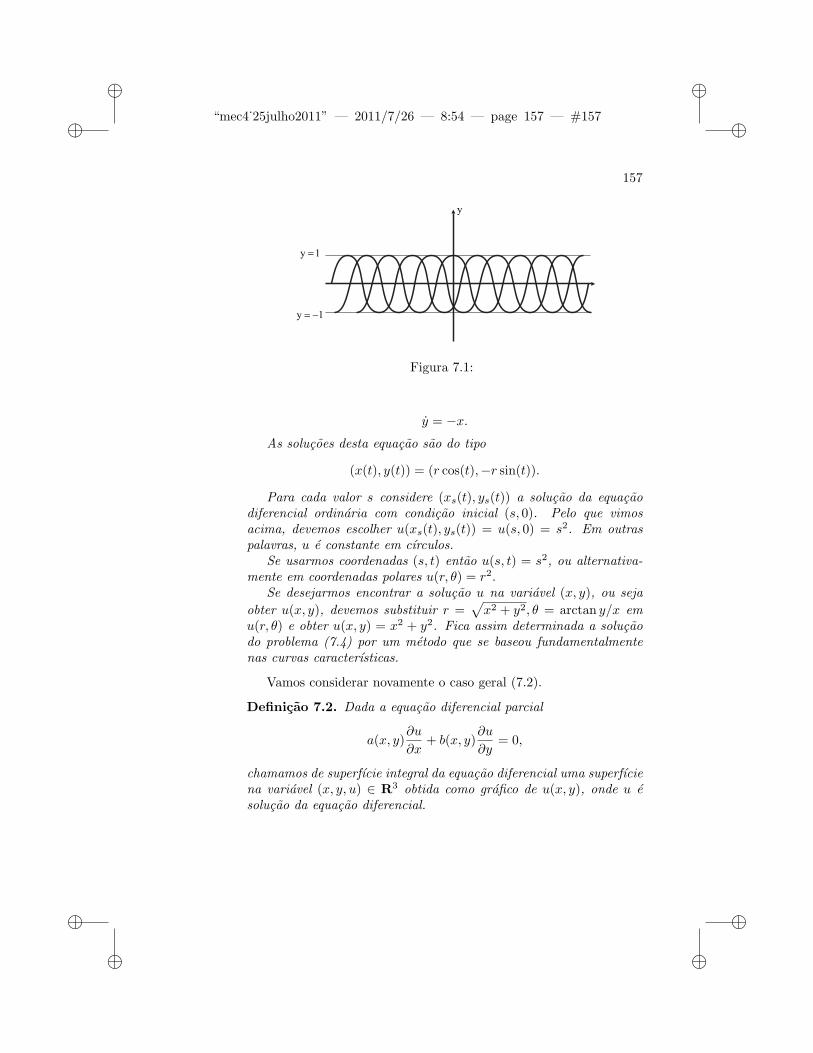
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 157 — #157 ii
ii
ii
157
Figura 7.1:
y = −x.As solucoes desta equacao sao do tipo
(x(t), y(t)) = (r cos(t),−r sin(t)).
Para cada valor s considere (xs(t), ys(t)) a solucao da equacaodiferencial ordinaria com condicao inicial (s, 0). Pelo que vimosacima, devemos escolher u(xs(t), ys(t)) = u(s, 0) = s2. Em outraspalavras, u e constante em cırculos.
Se usarmos coordenadas (s, t) entao u(s, t) = s2, ou alternativa-mente em coordenadas polares u(r, θ) = r2.
Se desejarmos encontrar a solucao u na variavel (x, y), ou seja
obter u(x, y), devemos substituir r =√x2 + y2, θ = arctan y/x em
u(r, θ) e obter u(x, y) = x2 + y2. Fica assim determinada a solucaodo problema (7.4) por um metodo que se baseou fundamentalmentenas curvas caracterısticas.
Vamos considerar novamente o caso geral (7.2).
Definicao 7.2. Dada a equacao diferencial parcial
a(x, y)∂u
∂x+ b(x, y)
∂u
∂y= 0,
chamamos de superfıcie integral da equacao diferencial uma superfıciena variavel (x, y, u) ∈ R3 obtida como grafico de u(x, y), onde u esolucao da equacao diferencial.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 158 — #158 ii
ii
ii
158 CAPITULO 7. METODO DAS CARACTERISTICAS
Observacao 7.1. Uma condicao necessaria e suficiente para queuma superfıcie S ⊂ R3 seja uma superfıcie integral de (7.2) e quepara cada (x, y, u) ∈ R3, o vetor (a(x, y), b(x, y), 0) esteja no planotangente a superfıcie S em (x, y, u). Isto porque como o vetor nor-mal η = (∂u∂x ,
∂u∂y ,−1) e ortogonal a superfıcie em (x, y, u) (isto e, η e
perpendicular ao plano tangente), entao
< η, (a, b, 0) >=∂u
∂xa+
∂u
∂yb+ 0 = 0.
Portanto, segue que (a, b, 0) estar no plano tangente a S em(x, y, u) e uma condicao necessaria e suficiente para S ser superfıcieintegral.
Esta relacao e valida para a equacao linear (7.2). Vamos definirem breve superfıcie integral para uma EDP qualquer e neste caso aanalogoa relacao sera mais complexa.
Dada a equacao diferencial (7.2), uma maneira geometrica deobter o conjunto de pontos S que define uma superfıcie integral paraesta equacao e satisfazendo uma condicao de fronteira inicialmentefixada e a seguinte: para cada condicao inicial (x(s), y(s), u(s)), con-sidere (xs(t), ys(t)) curvas caracterısticas (solucao de (7.3)) com con-dicao inicial no tempo t = 0 igual a (x(s), y(s)). Considere em R3 asuperfıcie S obtida pela uniao das curvas
(xs(t), ys(t), u(s)),
onde s, t variam sem restricao (ver Figura 4.6).
Pictoricamente, para obter S, estamos varrendo a condicao inicial
(x(s), y(s), u(s))
com curvas caracterısticas, ou seja solucoes de (7.3).Vamos mostrar agora que realmente tal superfıcie S assim obtida
e uma superfıcie integral de (7.2) com a condicao de fronteira dada.E obvio que S satisfaz a condicao de fronteira.Suponha agora que (x, y) possa ser obtido como (xs(t), ys(t)) para
algums valor de s, t. Para cada s fixo, o vetor
(dxs(t)
dt,dys(t)
dt,du(s)
dt) = (x′s(t), y
′s(t), 0) = (a(x, y), b(x, y), 0)

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 159 — #159 ii
ii
ii
159
esta no plano tangente a S em (x, y, u). Sendo assim pela Observacao45, S determina superfıcie integral satisfazendo a condicao de fron-teira.
Note que foi necessario supor que (xs(t), ys(t)) cobre um abertodo R2 para poder concluir a afirmacao acima. Na verdade (s, t)deveria ser considerado como novas coordenadas adaptadas a solucaodo problema. Voltando as antigas coordenadas (x, y) por mudancade variavel podemos obter
u(s(x, y), t(x, y)) = u(x, y)
como funcao de (x, y).O procedimento acima e a essencia do metodo das caracterısticas.
Encontramos a solucao u de uma EDP resolvendo uma EDO. E maisconveniente pensar no conjunto geometrico S ⊂ R3 de pontos dografico da solucao u em vez de diretamente com u(x, y) pois as-sim podemos ter a liberdade de considerar coordenadas (s, t) maisapropriadas (em funcao das caracterısticas) e finalmente encontrar asolucao final u em coordenadas (x, y) apenas atraves de um procedi-mento de mudancas de coordenadas.
Vamos agora considerar o caso geral de uma equacao diferencialparcial de primeira ordem.
Considere uma funcao diferenciavel de Classe C2, F : R5 → R,
F (x, y, z, p, q).
No contexto que vamos considerar a seguir z vai expressar a funcaoz(x, y) (sera portanto uma variavel dependente) solucao da EDP quesera definida a partir de F e
p =∂z
∂x, q =
∂z
∂y
(serao tambem dependentes).A equacao diferencial parcial geral de primeira ordem pode ser
expressa atraves da condicao
0 = F (x, y, z(x, y),∂z
∂x,∂z
∂y) = F (x, y, z, p, q), (3.55)
para uma certa F fixada.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 160 — #160 ii
ii
ii
160 CAPITULO 7. METODO DAS CARACTERISTICAS
Figura 7.2:
Dada uma curva (x(s), y(s), z(s), p(s), q(s)), a < s < b (que faz opapel de condicao de fronteira) desejamos encontrar a solucao z(x, y)da EDP geral de primeira ordem de tal jeito que a solucao z(x, y)satisfaca a condicao de fronteira z(x(s), y(s)) = z(s). Os valores(q(s), p(s)) devem satisfazer certas condicoes como veremos a seguir.
Definicao 7.3. Uma superfıcie integral da equacao diferencial parcialF = 0 e uma superfıcie S em R3 tal que e grafico de uma funcaoz(x, y) que satisfaz
F (x, y, z(x, y), zx(x, y), zy(x, y)) = 0.
Encontrar superfıcies integrais equivale a resolver (3.55).Nesta secao, vamos desenvolver metodos geometricos que se apli-
cam a situacoes bem gerais e que sao semelhantes aos anteriormenteusados. Atraves da condicao de fronteira, vamos escolher condicoesiniciais e a seguir vamos varre-las com feixes de caracterısticas (queserao adequadamente definidas) e assim finalmente iremos identificaruma superfıcie integral S. Encontrar a solucao final em uma certa

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 161 — #161 ii
ii
ii
161
Figura 7.3:
variavel (por exemplo (x, y)) e apenas uma questao de mudanca decoordenadas.
Procedendo de maneira semelhante a que fizemos antes, as carac-terısticas serao obtidas como curvas solucoes de equacoes diferenciaisordinarias de tal jeito que F (x, y, z, p, q) e constante igual a zero aolongo destas curvas solucoes (x(t), y(t), z(t), p(t), q(t)). Nosso obje-tivo inicial e encontrar a equacao diferencial ordinaria em R5 que vaidefinir solucoes com estas propriedades.
Afirmamos que se desejarmos que (x(t), y(t), z(t), p(t), q(t)) satis-faca a propriedade acima descrita F (x(t), y(t), z(t), p(t), q(t)) = 0,entao esta curva deve satisfazer:
dx
dt= Fp (7.5)

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 162 — #162 ii
ii
ii
162 CAPITULO 7. METODO DAS CARACTERISTICAS
dy
dt= Fq (7.6)
dz
dt= pFp + qFq. (7.7)
Mais duas equacoes serao adicionadas mais tarde para dpdt e dq
dt .
Primeiro queremos justificar a necessidade de assumir que as tresequacoes acima sejam satisfeitas.
Para (x0, y0, z0) fixados, resolvemos em p a equacao
F (x0, y0, z0, p, q(p)) = 0.
A equacao do plano tangente a superfıcie integral S passando por
(x0, y0, z0)
determina que
(z − z0) = p(x− x0) + q(y − y0) =∂z
∂x(x0, y0) +
∂z
∂y(x0, y0).
Sendo assim, teremos (z − z0) = p(x− x0) + q(p)(y − y0).
Derivando a ultima expressao em p obtemos
0 = (x− x0) + (y − y0)dq
dp. (7.8)
Derivando em p a equacao F (x0, y0, z0, p, q(p)) = 0 obtemos
Fp + Fqdq
dp= 0. (7.9)
Eliminandodq
dp
das duas ultimas equacoes ((7.8) e (7.9)), obtemos
x− x0Fp
=y − y0Fq
.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 163 — #163 ii
ii
ii
163
Assumindo agora que a curva (x(t), y(t), z(t)) esta na superfıcieintegral e que (x(0), y(0), z(0)) = (x0, y0, z0) entao
FpFq
=x(t)− x0y(t)− y0
=x(t)−x0
ty(t)−y0
t
.
Fazendo o limite em t tender a zero, obtemos
x′(t)
Fp=y′(t)
Fq.
Isto justifica tomar x′(t) = Fp e y′(t) = Fq.Vamos agora justificar z′ = pFp + qFq.Ora
dz
dt=∂z
∂x
dx
dt+∂z
∂y
dy
dt= px′ + qy′.
Como assumimos que x′ = Fp e y′ = Fq, concluımos que z′ =Fpp+ Fqq.
Concluımos portanto que (7.5), (7.6) e (7.7) sao condicoes naturaispara as caracterısticas.
Seja a equacao diferencial ordinaria em R5 dada por
dx
dt= Fp (7.10)
dy
dt= Fq (7.11)
dz
dt= pFp + qFq (7.12)
dp
dt= −Fx − pFz (7.13)
dq
dt= −Fy − qFz (7.14)
Estas equacoes sao denominadas equacoes das caracterısticas.
Definicao 7.4. As solucoes do sistema de equacoes diferenciais or-dinarias acima sao denominadas de caracterısticas.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 164 — #164 ii
ii
ii
164 CAPITULO 7. METODO DAS CARACTERISTICAS
Nosso objetivo e mostrar que F e constante ao longo das carac-terısticas.
Antes porem, devemos justificar a escolha das equacoes das ca-racterısticas.
Ora (7.10), (7.11) e (7.12) sao nada mais que (7.5), (7.6) e (7.7).Devemos portanto justificar apenas (7.13) e (7.14).
Suponha que (x(t), y(t), z(t), p(t), q(t)) pertence ao conjunto depontos de uma superfıcie integral. Ora p(x(t), y(t)) e q(x(t), y(t))satisfazem
dp
dt= px
dx
dt+ py
dy
dt= pxFp + pyFq (7.15)
edq
dt= qx
dx
dt+ qy
dy
dt= qxFp + qyFq. (7.16)
Derivando F (x, y, z, p, q) = 0 em relacao a x obtemos
0 =
︷ ︸︸ ︷Fx + Fz
∂z
∂x+Fp
∂p
∂x+ Fq
∂q
∂x
= Fx + Fzp︸ ︷︷ ︸+Fppx + Fqqx. (7.17)
Derivando F (x, y, z, p, q) = 0 em relacao a y obtemos
0 =
︷ ︸︸ ︷Fy + Fz
∂z
∂y+Fp
∂p
∂y+ Fq
∂q
∂y
= Fy + Fzq︸ ︷︷ ︸+Fppy + Fqqy (7.18)
Como∂2z
∂y∂x= py = qx =
∂2z
∂x∂y
entao juntando (7.15) e (7.17) e juntando (7.16) e (7.18) derivamos(7.13) e (7.14), ou seja,
dp
dt= −Fx − Fzp
dq
dt= −Fy − Fzq.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 165 — #165 ii
ii
ii
165
Fica assim justificado (7.13) e (7.14) e portanto as equacoes dascaracterısticas. Vamos entao considerar a equacao diferencial or-dinaria nao linear em R5 dada por (7.10), (7.11), (7.12), (7.13) e(7.14). Denotaremos tal equacao por r′ = G(r) onde r ∈ R5 eG : R5 → R5.
Vamos voltar agora a considerar o problema de Cauchy que esta-vamos interessados em resolver, ou seja F (x, y, z, p, q) = 0 com umacerta condicao de fronteira dada por (x(s), y(s), z(s), p(s), q(s)). De-sejamos encontrar pelo metodo das carcterısticas z(x, y) satisfazendoas condicoes iniciais
(x(s), y(s), z(s), p(s), q(s)).
Observacao 7.2. Note que estas 5 quantidades nao podem ser es-colhidas independentemente pois devem obedecer as relacoes
dz
ds=∂z
∂x
dx
ds+∂z
∂y
dy
ds= p
dx
ds+ q
dy
ds
eF (x(s), y(s), z(s), p(s), q(s)) = 0.
Sendo assim a condicao inicial sera dada apenas por(x(s), y(s), z(s)). Os valores (p(s), q(s)) devem ser escolhidos satis-fazendo as equacoes acima.
Por exemplo, se escolhemos z(s) constante sobre (x(s), y(s)), entaoas duas equacoes acima sao F (x(s), y(s), z(s), p(s), q(s)) = 0 ep(s)x′(s) + q(s)y′(s) = 0.
Como dissemos antes, a maneira correta de entender a condicaoinicial na verdade e a seguinte, dada uma curva γ no plano, parame-trizada por (x(s), y(s)) escolhemos os valores de z (ou u) em γ. Istoequivale a escolher de fato a condicao (x(s), y(s), z(s)).
Vamos agora encontrar a solucao pelo metodo das caracterısticas.Para cada valor s fixado considere a curva em R5
(xs(t), ys(t), zs(t), ps(t), qs(t)) =
solucao de r′ = G(r) com condicao inicial
r(0) = (x(s), y(s), z(s), p(s), q(s)).
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 166 — #166 ii
ii
ii
166 CAPITULO 7. METODO DAS CARACTERISTICAS
Figura 7.4:

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 167 — #167 ii
ii
ii
167
Denotaremos por
x = x(s, t) = xs(t)
y = y(s, t) = ys(t)
z = z(s, t) = zs(t)
p = p(s, t) = ps(t)
q = q(s, t) = qs(t)
os valores obtidos com o procedimento acima.Vamos considerar agora a superfıcie S ⊂ R3 obtida varrendo a
condicao de fronteira (x(s), y(s), z(s)) por curvas (xs(t), ys(t), zs(t))obtidas a partir das curvas caracterısticas. Vamos mostrar que a Sassim definida e uma superfıcie integral.
Para mostrar que S define uma superfıcie integral, vamos agoraderivar
F (xs(t), ys(t), zs(t), ps(t), qs(t))
em relacao a t.Usando as equacoes das caracterısticas
dF
dt= Fx
dx
dt+ Fy
dy
dt+ Fz
dz
dt+ Fp
dp
dt+ Fq
dq
dt=
= FxFp+FyFq +Fz(pFp+ qFq)−Fp(Fx+ pFz)−Fq(Fy + qFz) = 0.
Logo F e constante e nao depende de t. Como assumimos que
(x(s), y(s), z(s))
esta na superfıcie integral e (p(s), q(s)) foram escolhidos de tal jeitoque F (x(s), y(s), z(s), p(s), q(s)) = 0, concluımos que
F (xs(t), ys(t), zs(t), ps(t), qs(t)) = 0
para qualquer s, t. Logo S e superfıcie integral satisfazendo a condicaode fronteira. S pode ser definida como a superfıcie bidimensionaldefinida por (xs(t), ys(t), zs(t)) (ver [Jo]).
Suponha que (x(s, t), y(s, t)) cobre um aberto do plano (x, y), in-jetivamente em (s, t). Uma condicao suficiente para tal propriedade

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 168 — #168 ii
ii
ii
168 CAPITULO 7. METODO DAS CARACTERISTICAS
ocorrer localmente e (x′(s), y′(s)) nao ser colinear com (Fp, Fq) =(x′(t), y′(t)) sobre a curva de condicoes iniciais. Se conseguirmos in-verter a relacao entre as variaveis (x(s, t), y(s, t)), obtendo(s(x, y), t(x, y)), poderemos expressar a solucao z(x, y) como
z(x, y) = z(s(x, y), t(x, y)),
onde z(s, t) = zs(t) foi obtida acima (ver [Jo]).
O conceito de superfıcie integral permite pensar de maneira geo-metrica, sem se preocupar com as variaveis (x, y), e assim descrevera solucao em coordenadas mais naturais que sao (s, t). Finalmente,podem obter z(x, y) atraves do desenvolvimento acima.
A equacao de Hamilton-Jacobi e uma equacao diferencial parcialde primeira ordem, e o metodo das caracterısticas e um procedimentonatural para calcular solucoes desta equacao.
Exercıcios:
1. Calcule a equacao das caracterısticas para a equacao diferencialparcial de Hamilton-Jacobi
0 = 1−H(x, y,∂z
∂x,∂z
∂y) = F (x, y, z, zx, zt).
2. Encontre as caracterısticas da equacao diferencial parcial x2zx+y2zy = 0, z(x, y) ∈ R, (x, y) ∈ R2. A seguir determine uma curva decondicoes iniciais tal que esteja bem definida a solucao do problemade Cauchy.
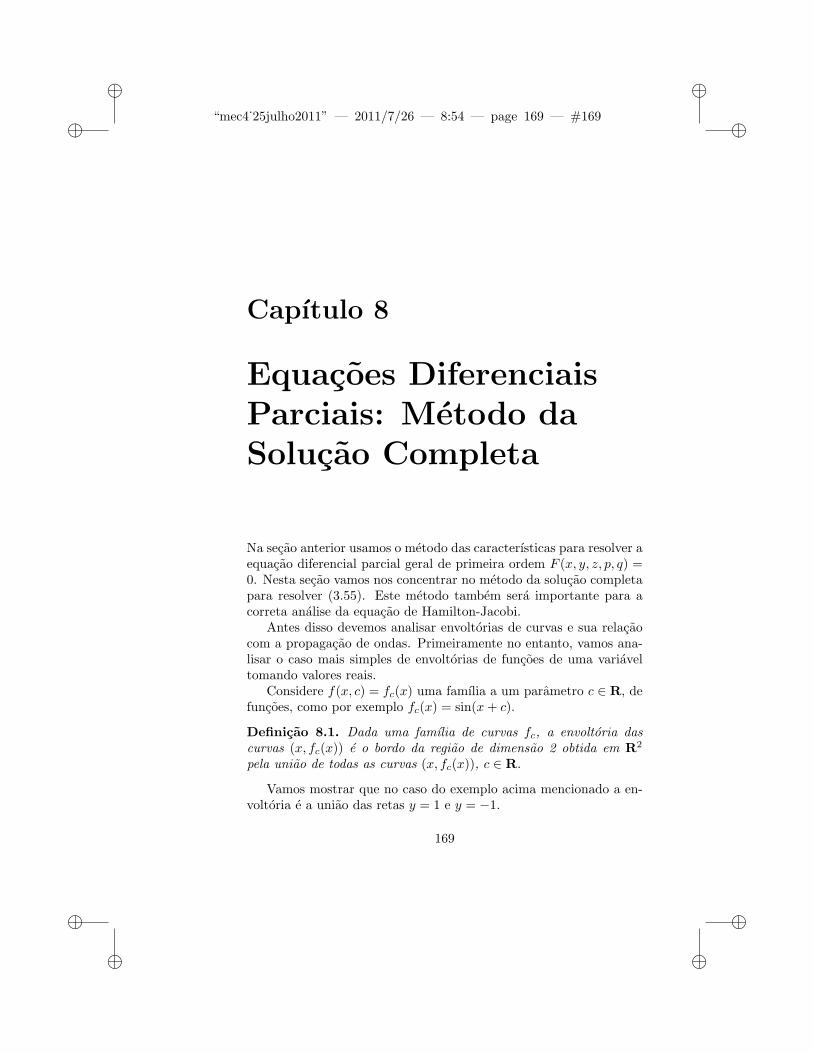
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 169 — #169 ii
ii
ii
Capıtulo 8
Equacoes DiferenciaisParciais: Metodo daSolucao Completa
Na secao anterior usamos o metodo das caracterısticas para resolver aequacao diferencial parcial geral de primeira ordem F (x, y, z, p, q) =0. Nesta secao vamos nos concentrar no metodo da solucao completapara resolver (3.55). Este metodo tambem sera importante para acorreta analise da equacao de Hamilton-Jacobi.
Antes disso devemos analisar envoltorias de curvas e sua relacaocom a propagacao de ondas. Primeiramente no entanto, vamos ana-lisar o caso mais simples de envoltorias de funcoes de uma variaveltomando valores reais.
Considere f(x, c) = fc(x) uma famılia a um parametro c ∈ R, defuncoes, como por exemplo fc(x) = sin(x+ c).
Definicao 8.1. Dada uma famılia de curvas fc, a envoltoria dascurvas (x, fc(x)) e o bordo da regiao de dimensao 2 obtida em R2
pela uniao de todas as curvas (x, fc(x)), c ∈ R.
Vamos mostrar que no caso do exemplo acima mencionado a en-voltoria e a uniao das retas y = 1 e y = −1.
169

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 170 — #170 ii
ii
ii
170 CAPITULO 8. METODO DA SOLUCAO COMPLETA
Para cada x0 ∈ R fixado, os dois pontos da envoltoria que estaosituados na reta vertical passando por x0 podem ser determinados daseguinte maneira: considere para cada possıvel valor de c os possıveisvalores f(x0, c). Estes valores f(x0, c) vao determinar um intervalo depossıveis valores. Os valores extremos deste intervalo devem corres-ponder ao supremo e ao ınfimo de g(c) = f(x0, c), onde g e encaradocomo uma funcao da variavel c. Logo tomando os dois valores c =cx0 tal que g′(c) = 0 (ou seja ∂f
∂c = 0) temos que f(x, cx0) esta naenvoltoria da famılia fc.
Exemplo 8.1. Para fc(x) = sin(x+ c), obtemos do desenvolvimentoacima a equacao
0 =∂f
∂c(x, c) = cos(x+ c),
logo
(x+ c) =π
2ou − π
2,
portanto, teremos fc(x) = sin(x+ c) = 1 ou fc(x) = sin(x+ c) = −1.Logo a envoltoria da famılia fc e a uniao das retas y = −1 e y = 1
(ver Figura 7.1).
Exemplo 8.2. (Transformada de Legendre) Seja f : R → R e afamılia de retas em R2
g(x, p) = gp(x) = xp− f(p).
p faz o papel do parametro da famılia de funcoes gp.Para cada p ∈ R fixado xp − f(p) e a equacao de uma reta na
variavel x. A envoltoria u desta famılia de retas e encontrada daseguinte maneira: encontre p0 tal que
∂g
∂p(x, p0) = 0,
a seguir tomeu(x) = xp0 − f(p0).
Dado x, estas equacoes equivalem a escolher p tal que x = f ′(p)e u(x) = xp− f(p), ou seja, u e a Transformada de Legendre de f .
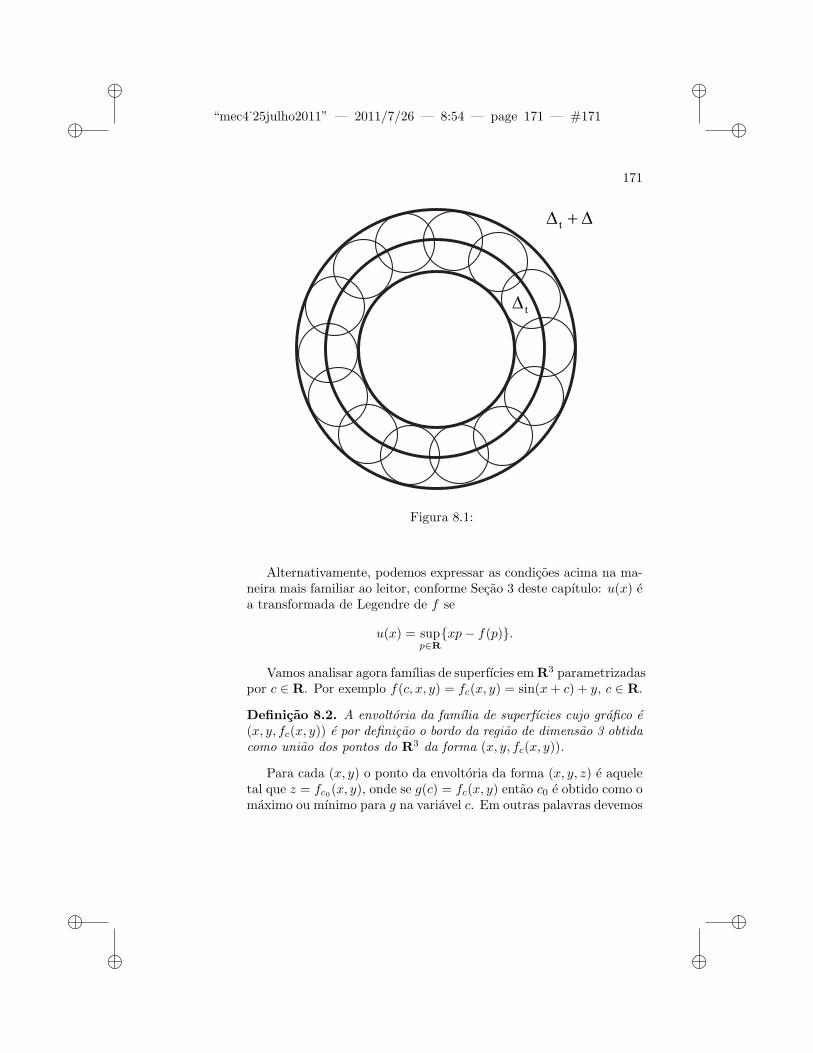
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 171 — #171 ii
ii
ii
171
Figura 8.1:
Alternativamente, podemos expressar as condicoes acima na ma-neira mais familiar ao leitor, conforme Secao 3 deste capıtulo: u(x) ea transformada de Legendre de f se
u(x) = supp∈R
xp− f(p).
Vamos analisar agora famılias de superfıcies emR3 parametrizadaspor c ∈ R. Por exemplo f(c, x, y) = fc(x, y) = sin(x+ c) + y, c ∈ R.
Definicao 8.2. A envoltoria da famılia de superfıcies cujo grafico e(x, y, fc(x, y)) e por definicao o bordo da regiao de dimensao 3 obtidacomo uniao dos pontos do R3 da forma (x, y, fc(x, y)).
Para cada (x, y) o ponto da envoltoria da forma (x, y, z) e aqueletal que z = fc0(x, y), onde se g(c) = fc(x, y) entao c0 e obtido como omaximo ou mınimo para g na variavel c. Em outras palavras devemos

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 172 — #172 ii
ii
ii
172 CAPITULO 8. METODO DA SOLUCAO COMPLETA
encontrar c0 = c0(x, y) tal que g′(c0) = 0, ou seja c0 tal que
∂f
∂c(c, x, y) = 0,
e a seguir considerar (x, y, z) onde z = fc0(x, y).A funcao u(x, y) = fc0(x,y)(x, y) define entao atraves do seu grafico
(x, y, u(x, y)) a envoltoria da famılia. fc
Exemplo 8.3. Seja fc(x, y) = sin(x + c) + y, entao c = c(x,y) devesatisfazer
∂f
∂c(c, x, y) = cos(x+ c) = 0.
Ou seja,
x+ c =π
2ou x+ c = −π
2,
logo
z = sin
(π
2
)+ y = 1 + y ou z = sin
(−π2
)+ y = −1 + y.
A envoltoria da famılia e, portanto, a uniao de dois planos (x, y, 1+y) e (x, y,−1 + y).
Agora vamos voltar a considerar o problema de resolver equacoesdiferenciais parciais.
A equacao diferencial parcial geral de 1a ordem para a funcaode duas variaveis z(x, y) e suas derivadas zx = p e zy = q pode serescrita como
F (x, y, z, p, q) = 0, (8.1)
onde F : R5 → R tem derivadas parciais de segunda ordem contınuas.Considere a condicao de fronteira dada por uma curva (x(t), y(t), z(t)).
Um exemplo de tal tipo de equacoes diferenciais e F (x, y, z, p, q) =(z − px − qy)2 + (1 + p2 + q2) = 0. Este exemplo sera analisado embreve.
Nosso objetivo inicial sera obter novas solucoes de F = 0 a partirde famılias de solucoes de F = 0.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 173 — #173 ii
ii
ii
173
O fato de z(x, y) ser solucao de (8.1) nos da uma relacao no ponto(x0, y0, z0) entre
p =∂z
∂x(x0, y0, z0) e q =
∂z
∂y(x0, y0, z0).
Vamos considerar agora uma famılia fc(x, y) = z = f(x, y, c) desolucoes de (8.1), ou seja, para cada c fixado, z(x, y) = fc(x, y) esolucao de F = 0.
Vamos mostrar que a envoltoria desta famılia de solucoes nos de-termina uma outra solucao de F = 0.
A funcao g(x, y) cujo grafico e a envoltoria da famılia pode serobtida da seguinte maneira: para (x, y) fixados, encontre c0 tal que
∂f
∂c(x, y, c0) = 0, (8.2)
e entao obteremos z = g(x, y) = f(x, y, c0).Note que c0 = c0(x, y) na verdade depende de (x, y).A envoltoria g sera f(x, y, c(x, y)) e satisfara entao a equacao
∂g
∂x=∂f
∂x+∂f
∂c
∂c
∂x=∂f
∂x
e∂g
∂y=∂f
∂y+∂f
∂c
∂c
∂y=∂f
∂y.
Como fc(x, y) e solucao de (8.1) entao para fc(x, y) = fc(x,y)(x, y)= g(x, y) a relacao F (x, y, fc(x, y), p, q) = 0 e valida e portanto
F (x, y, g(x, y), p, q) = 0
pois
p =∂f
∂x=∂g
∂xe q =
∂f
∂y=∂g
∂y.
Portanto g tambem satisfaz a equacao diferencial parcial (8.1).Note que nas consideracoes acima, nada foi dito sobre condicoes defronteira.
Obter mais uma solucao g a partir de uma famılia fc nao parececontribuir muito para a solucao geral do problema (8.1). No entanto,

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 174 — #174 ii
ii
ii
174 CAPITULO 8. METODO DA SOLUCAO COMPLETA
se considerarmos famılias a dois parametros de solucoes z(x, y) =fa,b(x, y) = f(x, y, a, b), estaremos obtendo atraves de envoltoriasuma informacao nao trivial como veremos a seguir. O ponto fun-damental e que desejamos encontrar solucoes da EDP, F = 0, massujeita a uma certa curva de valores de fronteira (x(s), y(s), z(s))dada. Uma famılia a um parametro de solucoes nao permite isto, esera necessario considerar famılias a dois parametros.
Escolha uma famılia a um parametro (a(s), b(s)) no espaco deparametros (a, b). Esta famılia sera determinada em breve no texto.
Considere a famılia a um parametro s ∈ R, z = f(x, y, a(s), b(s))e sua envoltoria (ver expressao (8.2)) z = f(x, y, a(s), b(s)) (onde ssatisfaz 0 = ∂f
∂s = ∂f∂aa
′ + ∂f∂b b
′) que e tambem uma solucao de F = 0como vimos antes .
Vamos mostrar agora que dada uma curva de condicoes iniciaisem R3
(x(s), y(s), z(s)),
podemos tentar obter uma superfıcie integral que contenha tal curvaa partir de uma escolha conveniente de (a(s), b(s)).
Seja entao (x(s), y(s), z(s)) uma curva, a qual desejamos encon-trar uma superfıcie integral que a contenha.
Considere as duas equacoes
z(s)− f(x(s), y(s), a, b) = 0 (8.3)
z′ − ∂f
∂xx′(s)− ∂f
∂yy′(s) = 0 (8.4)
obtendo assim uma relacao de a e b em funcao de s (para s fixadotemos duas equacoes a duas incognitas). Obtemos assim a(s) e b(s)de tal jeito que satisfazem (8.3) e (8.4).
Com essa escolha de a(s) e b(s) vamos determinar uma famıliaa um parametro que vai determinar atraves da sua envoltoria umasupefıcie integral passando por (x(s), y(s), z(s)).
Considere a famılia a um parametro
z = fs(x, y) = f(x, y, a(s), b(s)) (8.5)
e como vimos acima a sua correspondente equacao da envoltoria

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 175 — #175 ii
ii
ii
175
z = f(x, y, a(s0), b(s0)) (8.6)
onde s0 = s0(x, y) satisfaz
0 =∂f
∂s=∂f
∂aa′(s) +
∂f
∂bb′(s). (8.7)
Seja g(x, y) a envoltoria da famılia (8.5), isto e:
g(x, y) = f(x, y, a(s0(x, y)), b(s0(x, y))),
onde s = s0(x, y) e obtido para (x, y) fixo satisfazendo (8.7).Note que conforme ja vimos antes, e sempre verdade que tal en-
voltoria g(x, y) determina uma superfıcie integral que e solucao daEquacao Diferencial Parcial. A questao que nos interessa e se acurva inicialmente dada pertence a superfıcie integral S que obtive-mos. Afirmamos que (x(s), y(s), z(s)) esta na superfıcie integral daenvoltoria g(x, y), ou seja satisfaz (8.6) e (8.7). Isto e verdade pois(8.6)
z(s) = f(x(s), y(s), a(s), b(s))
vem de (8.3) e da maneira como s foi escolhido.Devemos mostrar agora que (8.7) e (8.4) sao equivalentes.Ora de (8.3) z(s) = f(x(s), y(s), a(s), b(s)), logo derivando em
relacao a s
z′(s) =∂f
∂xx′(s) +
∂f
∂yy′(s) +
∂f
∂aa′(s) +
∂f
∂bb′(s)
A expressao (8.4) nos diz que
z′ =∂f
∂xx′(s) +
∂f
∂yy′(s)
portanto∂f
∂aa′(s) +
∂f
∂bb′(s) = 0.
Isto mostra que (8.7) e equivalente a (8.4).Logo se a(s) b(s) satisfazem (8.3) e (8.4), entao obtemos atraves de
g(x, y) acima, envoltoria da familia fs, a solucao da EDP satisfazendoa condicao de fronteira dada.
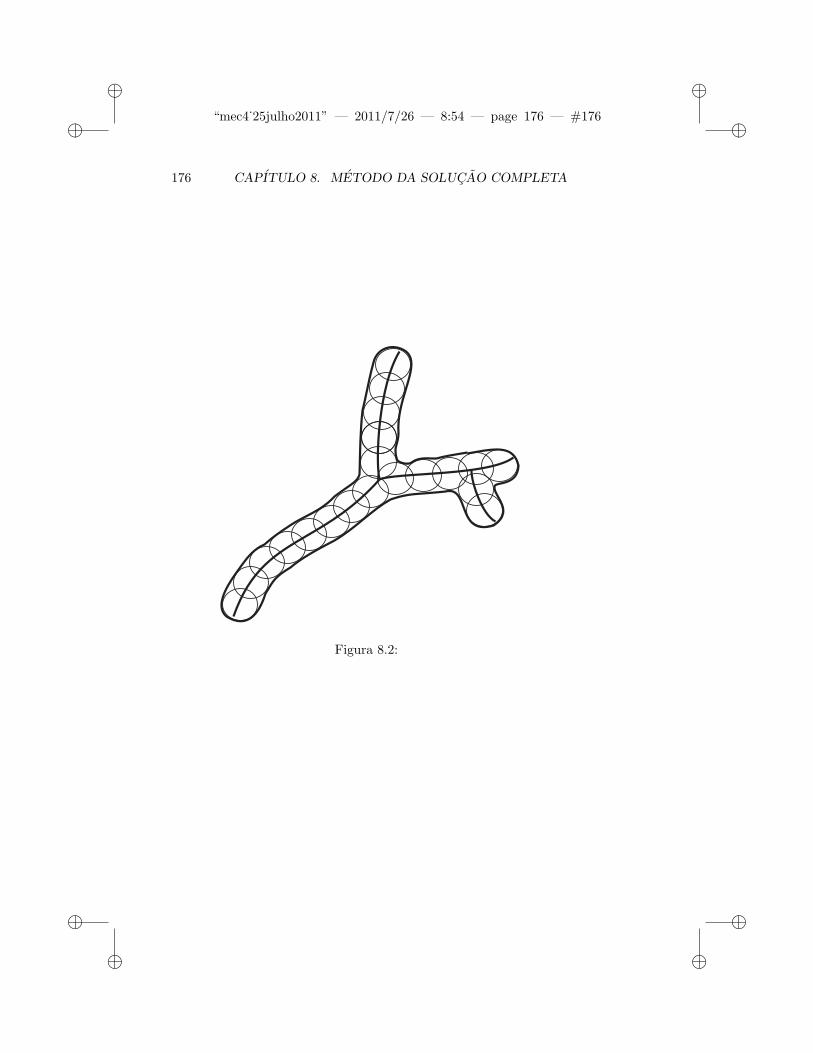
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 176 — #176 ii
ii
ii
176 CAPITULO 8. METODO DA SOLUCAO COMPLETA
Figura 8.2:

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 177 — #177 ii
ii
ii
177
Portanto dado uma curva (x(s), y(s), z(s)) em R3, atraves dometodo exposto acima, podemos obter uma superfıcie integral quea contenha.
Definicao 8.3. Uma famılia fa,b(x, y) a dois parametros (a, b) desolucoes de (8.1) e chamada uma solucao completa de (8.1).
O metodo descrito acima, que permite atraves de uma famılia adois parametros (uma solucao completa conforme a definicao acima)encontrar uma superfıcie integral a partir de condicoes de fronteira echamado de metodo da solucao completa.
Exemplo 8.4. Vamos resolver agora, atraves do metodo da solucaocompleta a EDP(
u− ∂u
∂xx− ∂u
∂yy
)2
−
(1 +
(∂u
∂x
)2
−(∂u
∂y
)2)
= 0.
Isto e F (x, y, z, p, q) = (z − px − qy)2 − (1 + p2 + q2) = 0. Seja afamılia a dois parametros a e b (com a2 + b2 < 1)
z =−a√
1− (a2 + b2)x+
−b√1− (a2 + b2)
y+1√
1− (a2 + b2)= fa,b(x, y)
de solucoes (uma solucao completa).Dada a curva z = 1, x = 1/2 cos θ, y = 1/2 sin θ, 0 ≤ θ ≤ 2π
entao (8.3) significa:
z =−ax− by + 1√1− (a2 + b2)
,
ou seja,√1− (a2 + b2) +
a
2cos θ +
b
2sin θ − 1 = 0. (8.8)
Ja (8.4) significa
0− (a)√1− (a2 + b2)
(− sin θ)
2+
−b2
cos θ√1− (a2 + b2)
= 0,

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 178 — #178 ii
ii
ii
178 CAPITULO 8. METODO DA SOLUCAO COMPLETA
ou seja,a sin θ − b cos θ = 0. (8.9)
De (8.8) e (8.9) se obtem a(θ) = 4/5 cos θ, b(θ) = 4/5 sin θ.Logo a solucao que buscamos z(x, y) (envoltoria da famılia a um
parametro θ)
z = −4
3x cos θ − 4
3y sin θ +
5
3
que fornece como solucao o cone
z = −4
3
√x2 + y2 +
5
3.
A equacao de Hamilton-Jacobi e de primeira ordem, e o metodo dasolucao completa sera utilizado em breve para analisar tal equacao.
Anteriormente estavamos considerando envoltorias de funcoes. A-gora iremos considerar envoltorias de curvas, obtendo resultados quetambem serao muito importantes em Mecanica Hamiltoniana.
Vamos agora considerar famılias de curvas. Estas curvas seraodadas implicitamente.
Definicao 8.4. A envoltoria de uma famılia de curvas dadas implici-tamente sera a curva que define o bordo da uniao de todas as curvasda famılia.
Considere a famılia a um parametro de curvas implicitamentedadas por f(x, y, α) = 0, α ∈ R. Para cada α, 0 = fα(x, y) =f(x, y, α) define implicitamente na variavel (x, y) uma curva da famılia.Como encontrar a curva C (ou curvas) que determinam a envoltoriada famılia fα?
Teorema 8.1. Se a famılia a parametro α de curvas determinadapor
fα(x, y) = f(x, y, α) = 0
tem uma curva envoltoria, entao esta curva pode ser encontrada im-plicitamente atraves da equacao que se obtem substituindo α = αx,y,solucao de
∂f(x, y, α)
∂α= 0. (8.10)
em f(x, y, α) = 0.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 179 — #179 ii
ii
ii
179
Fica assim determinado implicitamente a envoltoria por
0 = g(x, y) = F (x, y, αx,y)
.
Demostracao: Supondo por exemplo
∂f
∂y(x, y, α) = 0
entao para (x, y, α) perto de (x, y, α) tem-se
f(x, y, α) = 0 ⇔ y = g(x, α)
com g diferenciavel. Pelo resultado anterior (8.2), a envoltoria dafamılia de curvas gα(x) e dada por
∂g
∂α(x, α) = 0.
Como f(x, g(x, α), α) = 0 para todo (x, α) proximo de (x, α), obtem-se, diferenciando com relacao a α,
0 =∂f
∂y(x, g(x, α), α)
∂g
∂α(x, α) +
∂f
∂α(x, g(x, α), α)
e em particular, em (x, α):
0 =∂f
∂y(x, g(x, α), α)
∂g
∂α(x, α)︸ ︷︷ ︸=0
+∂f
∂α(x, g(x, α)︸ ︷︷ ︸
=y
, α) =∂f
∂α(x, y, α),
i.e., a envoltoria das curvas e dado equivalentemente por
∂f
∂α(x, y, α) = 0.
O caso∂f
∂x(x, y, α) = 0
e analogo.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 180 — #180 ii
ii
ii
180 CAPITULO 8. METODO DA SOLUCAO COMPLETA
Exemplo 8.5. Vamos encontrar a envoltoria da famılia de cırculos
f(x, y, α) = x2 + y2 − 2αx− 2αy + α2 = 0
usando o ultimo Teorema.Esta famılia representa cırculos de raio ∥α∥ centrados nos pontos
da reta diagonal (α, α), ou seja, a famılia (x− α)2 + (y − α)2 = α2.Ora
∂f
∂α= −(2x+ 2y − 2α) = 0,
logo α = (x+y). Substituindo α = αx,y por (x+y) em f(x, y, α) = 0,obtemos 0 = f(x, y, α) = (x−α)2+(y−α)2−α2 = y2+x2−(x+y)2 =−2xy.
Obtemos portanto a equacao da envoltoria como xy = 0, ou sejaa equacao retas que definem os eixos de x e dos y. Geometricamentee bem facil se observar que realmente os eixos do x e y sao a solucaodo problema (ver Figura 7.2).
Vamos agora aplicar o resultado acima em uma situacao que seraextremamente importante na teoria de propagacao de ondas.
Exemplo 8.6. Seja uma funcao ϕ : R2 → R tal que para cada T ,ϕ(x, y) = T determina uma curva de nıvel diferenciavel ΣT .
Suponhamos que ϕ tem a seguinte propriedade: para T , ∆ > 0 acurva ΣT+∆ e obtida como a envoltoria por cırculos de raio ∆ sobrea curva ΣT (ver Figuras 7.3 e 7.4).
Vamos mostrar que a funcao ϕ deve satisfazer a equacao
1 =
(∂ϕ
∂x
)2
+
(∂ϕ
∂y
)2
. (8.11)
Esta equacao e conhecida como equacao eikonal da otica geome-trica.
Seja (x1(α), x2(α)) uma parametrizacao de ΣT . Entao a famılia
f(x, y, α) = (x1(α)− x)2 + (x2(α)− y)2 −∆2 = 0
vai definir implicitamente a equacao de cırculos (na variavel (x, y))de raio ∆, centrados nos pontos da curva ΣT .

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 181 — #181 ii
ii
ii
181
As Figuras 8.1 e 8.2 dao uma ideia dos distintos envoltorios obti-dos a partir de um objeto unidimensional generico.
Como vimos antes a envoltoria da famılia e obtido como a curvana variavel (x, y) que satisfaz as equacoes ∂f
∂α = 0 e f(x, y, α) = 0.Sendo assim obtemos as equacoes:
0 =∂f
∂α= 2(x1(α)− x)x′1(α) + 2(x2(α)− y)x′2(α),
e (x1(α)− x)2 + (x2(α)− y)2 = ∆2.Resolvendo o sistema acima vamos encontrar (x(α), y(α)) para-
metrizacao de ΣT+∆ dependendo do ponto (x1(α), x2(α)) sobre acurva ΣT . O ponto (x(α), y(α)) esta na envoltoria e dista ∆ de(x1(α), x2(α)).
Da equacao [(x1(α)−x(α))x′1(α)+ (x2(α)− y(α))x′2(α)] = 0 con-cluımos que para todo ∆(x1(α) − x(α), x2(α) − y(α)) e perpendicu-lar ao vetor tangente (x′1(α), x
′2(α)). Em outras palavras, (x1(α) −
x(α), x2(α)− y(α)) e normal a ΣT para todo ∆.Como sabemos v∆ = −((x1(α) − x(α)), x2(α) − y(α)) para todo
∆ (pequeno) e colinear com ∇ϕ (que e perpendicular a superfıcie denıvel) e v∆ tem sempre norma ∆.
Portanto,∇ϕ∥∇ϕ∥
=v∆∥v∆∥
.
Como ⟨∇ϕ, ∇ϕ
∥∇ϕ∥
⟩= ∥∇ϕ∥,
entao ⟨∇ϕ, v∆
∆
⟩= ∥∇ϕ∥.
Ora
⟨∇ϕ, u⟩ = ⟨∇ϕ, (u1, u2)⟩ = lim∆→0
ϕ(x+ u1∆, y + u2∆)− ϕ(x, y)
∆,
logo
∥∇ϕ∥ =
⟨∇ϕ, v∆
∆
⟩=

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 182 — #182 ii
ii
ii
182 CAPITULO 8. METODO DA SOLUCAO COMPLETA
Figura 8.3:
lim∆→0
1
∆
[ϕ
(x1(α) + ∆
(x(α)− x1(α)
∆
),
x2(α) + ∆
((y(α)− x2(α))
∆
)− ϕ(x1(α), x2(α))
]
lim∆→0
1
∆[ϕ(x(α), y(α))− ϕ(x1(α), x2(α))] = lim
∆→0
∆+ T − T
∆= 1.
Sendo assim, ∥∇ϕ∥ = 1, ou seja,(∂ϕ
∂x
)2
+
(∂ϕ
∂y
)2
= 1.
Concluımos, portanto, que uma funcao ϕ satisfazendo a proprie-dade das envoltorias por cırculos de mesmo raio para as superfıciesde nıvel ΣT , deve satisfazer a equacao diferencial parcial acima.
Esta equacao foi denominada anteriormente de Equacao de Ha-milton-Jacobi autonoma para o Hamiltoniano H(q, p) = p21+p
22. Esta
equacao nao e linear. Para resolve-la vamos aplicar os metodos paracalcular as solucoes de equacoes diferenciais parciais de 1a ordem naolineares a partir de condicoes de fronteira que consideramos antes.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 183 — #183 ii
ii
ii
183
Exercıcios:
1. Calcule pelo metodo da solucao completa a solucao da equacaodiferencial parcial
(∂S
∂x)2 +
1
4(∂S
∂y)2 = 1,
com a condicao inicial (x(s), y(s), S(s)) = (s, 0, 1).
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 184 — #184 ii
ii
ii
Capıtulo 9
O Princıpio de Huygensem MecanicaHamiltoniana
Vamos analisar a seguir a evolucao de uma frente de onda em umplano (o caso mais geral em Rn e semelhante). Para fixar ideias,vamos supor que desejamos analisar a seguinte questao: largamosuma pequena pedra ou um galho de arvore na superfıcie de um lagoem repouso. A superfıcie do lago sera entao percorrida por umafrente de onda que se propaga a partir da excitacao inicial causadapela pedra ou galho (ver respectivamente Figuras 8.1 e 8.2).
Vamos denotar por Σt a posicao espacial em R2 da frente de ondano tempo t.
Observe nas Figuras 8.1 e 8.2 que a frente de onda Σt+∆ e (a parteexterna da) envoltoria por cırculos de raio ∆ centrados na frente deonda Σt. Essa propriedade e observada na natureza e em essenciaexpressa o seguinte fato. A frente de onda Σt+∆ poderia ser obtidalancando ao mesmo tempo t varias pedrinhas sobre a posicao dafrente de onda Σt. Esperando decorrer o tempo ∆ cada pedrinhaindividualmente cria um cırculo (de raio ∆) de frente de onda. Aenvoltoria destes cırculos determina a frente de onda Σt+∆.
184

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 185 — #185 ii
ii
ii
185
Essa propriedade e o que se denomina (em termos simplificados)o princıpio de Huygens.
O mesmo princıpio e tambem valido para a propagacao da luz apartir de um ponto p0 onde acendemos a luz no tempo inicial t0. Aluz tem velocidade finita e a separacao entre a regiao iluminada numtempo T e a regiao ainda nao iluminada e a frente de onda.
Em certos cristais a luz nao se propaga em linha reta e as frentesde onda nao sao necessariamente cırculos. Podem haver direcoes emque a luz tem mais facilidade de se propagar. Este fato se deve muitasvezes a estrutura molecular do cristal e e conhecido como anisotropia,ou nao-homogeneidade do meio.
Para descrever matematicamente a evolucao da frente de onda,vamos supor que existe uma funcao S(x, t), S : Rn×R → R que vaidescrever de maneira implıcita a posicao da frente de onda, isto e,dado t1 ∈ R, t1 > 0, S(x, t1) = 0, vai definir a hipersuperfıcie Σt1 emRn, que define a frente de onda no tempo t1. Vamos supor sempreque (
∂S
∂x1
)2
+
(∂S
∂x2
2)
+ ...+
(∂S
∂xn
)2
= 0.
Referimos o leitor para [BF] e [Jo] para uma explanacao maiscompleta dos topicos a serem apresentados a seguir.
Exemplo 9.1. Considere S(x, t) =√x21 + ...+ x2n − t, entao para
t > 0 a frente de onda Σt sera a esfera com raio t, ou seja, o conjuntodos (x1, ..., xn) tal que
√x21 + ...+ x2n − t = 0.
No caso n = 2, a funcao S descreve a evolucao da frente deonda de uma pequena pedra lancada no tempo t = 0 na superfıciede um lago (na posicao (0, 0)). E facil ver geometricamente que apropriedade da envoltoria das curvas de nıvel por cırculos e verdadepara tal S. Estamos neste caso supondo que a propagacao da onda eisotropica e homogenea (vamos definir estes conceitos mais precisa-mente em breve).
Note que tal S satisfaz a equacao diferencial(∂S
∂x1
)2
+
(∂S
∂x2
)2
= −∂S∂t
= 1,
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 186 — #186 ii
ii
ii
186 CAPITULO 9. O PRINCIPIO DE HUYGENS
ou equivalentemente√(∂S
∂x1
)2
+
(∂S
∂x2
)2
= −∂S∂t
= 1.
Note que esta equacao corresponde a equacao de Hamilton-Jacobipara o Hamiltoniano H(q, p) =
√p21 + p22. Este fato sera analisado
com mais detalhe em breve.
Exemplo 9.2. Considere para x ∈ R2, S(x, t) =√x21 + 4x22 − t,
entao as frentes de onda sao elipses√x21 + 4x22 − t = 0. Nesse caso
estaremos descrevendo a evolucao da frente de onda de um disturbioinicial no tempo 0 feito no ponto (0,0). A propagacao nao e ho-mogenea pois a onda se propaga mais rapidamente na direcao x1.
S satisfaz neste caso a equacao diferencial(∂S
∂x1
)2
+1
4
(∂S
∂x2
)2
= −∂S∂t,
ou equivalentemente√(∂S
∂x1
)2
+1
4
(∂S
∂x2
)2
= −∂S∂t.
Note que esta equacao corresponde a equacao de Hamilton-Jacobi as-
sociada ao Hamiltoniano H(q, p) =√p21 +
14p
22.
Este exemplo sera analisado mais uma vez em breve.
Neste texto estaremos analisando, prioritariamente, propagacaohomogenea e isotropica. Sendo assim, a frente de onda Σt+∆ e obtidacomo a envoltoria de cırculos de mesmo raio com centro em Σt. Nooutro caso terıamos que fazer envoltorios com elipses e a excentri-cidade de tais elipses depende da posicao no caso de um meio nao-homogeneo e anisotropico.
Considere uma S(x, t) : Rn+1 → R, que define implicitamente aposicao das frentes de onda conforme definimos anteriormente. Parasimplificar nossas consideracoes vamos supor ainda mais que existaS(x) : Rn → R tal que S(x, t) = S(x) − t (esta expressao e analoga

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 187 — #187 ii
ii
ii
187
a expressao S(q, t) = S(q) − wt que usamos anteriormente quandoestavamos analisando solucoes da equacao de Hamilton-Jacobi naSecao 8, Capıtulo 3 [L]).
Que tipo de restricoes tal funcao S deve satisfazer?Suponha, 0 = S(x, t) = S(x)− t, para t fixo, vai descrever a curva
que estabelece a frente de onda no tempo t. Pelo princıpio de Huygensa curva de nıvel no tempo t+∆ e obtida como a envoltoria de cırculos(o meio e homogeneo e isotropico) de raio ∆ e centrados sobre a curvade nıvel no tempo t. Esta situacao, no caso do plano, e exatamenteaquela que analisamos na secao anterior e sabemos portanto que nestecaso S deve satisfazer a equacao da eikonal(
∂S
∂x1
)2
+
(∂S
∂x2
)2
= 1.
E possıvel tambem mostrar no caso geral do Rn, que a funcao Sdeve satisfazer(
∂S
∂x1
)2
+
(∂S
∂x2
)2
+ ...+
(∂S
∂xn
)2
= 1.
Esta equacao e tambem denominada equacao da eikonal e e umcaso particular de equacao de Hamilton-Jacobi autonoma (ver (3.13)Secao 8, Capıtulo 3 [L]). A relacao desta equacao com a equacao deHamilton sera o objetivo das nossas proximas consideracoes.
A relacao entre raios de luz e frentes de onda vai nos possibili-tar entender a razao da introducao do ponto de vista de “frentes deonda” de Hamilton de entender a Mecanica Classica. Vamos a seguirexplicar melhor esta relacao.
Na verdade este ponto de vista e, nada mais nada menos, que oprincıpio de Huygens para a Mecanica Hamiltoniana.
Voltando ao caso geral, considere S(x, t) que vai descrever paracada tempo t, a frente de onda no tempo t atraves da curva obtidaimplicitamente pela equacao S(x, t) = 0.
Suponha que x(t) vai descrever uma curva em Rn tal que ∀ t ∈ R,x(t) ∈ Σt. Em outras palavras, x(t) vai estar sempre na frente deonda. Sendo assim, S(x(t), t) = 0, ∀ t ∈ R, t > 0 e, portanto,
∂S
∂x1x′1 +
∂S
∂x2x′2 + ...+
∂S
∂xnx′n +
∂S
∂t= 0
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 188 — #188 ii
ii
ii
188 CAPITULO 9. O PRINCIPIO DE HUYGENS
ou seja
⟨∇S, x′⟩ = −∂S∂t.
Observacao 9.1. Considere S(x, t) que descreve atraves de S(x, t) =0 a evolucao temporal de uma frente de onda causada por uma fontepontual luminosa localizada em um ponto x0. Para t fixo, a en-voltoria dos caminhos z(s), s ∈ [0, t] (todos com velocidade constante∥z′(s)∥ = 1, s ∈ (0, t)) com ponto inicial x0 = z(0) e ponto final z(t)determina a frente de onda. Um caminho x(s) entre tantos possıveisz(s), que esta localizado de tal jeito que x(t) esta na frente de ondaS(x, t) = 0 vai representar o raio de luz fisicamente observavel. Estecaminho x(s) e o que realmente se chama de raio de luz.
Ora, ∇S e perpendicular a Σt, logo a componente do vetor x′(t)na direcao ∇S
∥∇S∥ (normal a frente de onda) e
−∂S∂t
∥∇S∥.
Em geral, nem sempre ∇S, o gradiente da funcao frente de ondaS, e x′(t), o vetor tangente ao raio de luz x(t), sao colineares, mas seo meio e homogeneo e isotropico, isto acontecera como veremos embreve.
Definicao 9.1. A velocidade de propagacao da frente de onda e pordefinicao o vetor velocidade de propagacao normal a superfıcie Σt,ou seja
−∂S∂t
∥∇S∥2∇S.
Definicao 9.2. O modulo do vetor velocidade de frente de onda edado por
−∂S∂t
∥∇S∥> 0.
O modulo do vetor frente de onda e a grandeza mais importanteque vai descrever a evolucao temporal da frente de onda. A lei quedetermina tal evolucao sera descrita a seguir.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 189 — #189 ii
ii
ii
189
Assuma agora que S(x, t) = ϕ(x)−t, isto significa que a velocidadede propagacao da onda e
−∂S∂t
∥∇S∥=
1
∥∇S∥=
1
∥∇ϕ∥.
Como ja vimos antes no caso do plano, se o princıpio de Huygense verdadeiro para ϕ entao ∥∇ϕ∥ = 1.
Sendo assim, assumir que S(x, t) e da forma ϕ(x) − t e assumirque a velocidade de propagacao da frente de onda e igual a 1. Sedesejassemos analisar uma situacao em que a velocidade da frentede onda e w entao deverıamos tentar encontrar S do tipo S(x, t) =ϕ(x)− wt.
Neste caso, e facil ver que a equacao que descreve tal S e√∥∇S∥ = w.
Fica portanto justificado porque e bastante comum quando bus-camos encontrar solucoes da equacao de Hamilton-Jacobi tentar en-contrar solucoes da forma S(q, t) = S(q)− wt.
Vamos analisar agora a propagacao de ondas de um ponto de vistabastante geral. Vamos descrever a lei fısica que S(x, t) deve satisfazer.
O modulo do vetor velocidade da propagacao da onda deve sa-tisfazer uma lei que e chamada de propriedade constitutiva do meiocontınuo. Essa lei, que como veremos a seguir e bastante natural,envolve uma funcao H0(x, p), onde x ∈ Rn, (mas definida apenaspara valores unitarios, ou seja p ∈ Rn, ∥p∥ = 1) que vai descreverpropriedades microscopicas do meio. A lei determina que o modulodo vetor velocidade de propagacao da onda
−∂S∂t
∥∇S∥
satisfaca
−∂S∂t
∥∇S∥= H0
(x,
∇S∥∇S∥
). (9.1)
A equacao diferencial parcial acima estabelece uma dependenciade ∂S
∂t em x e no vetor unitario ∇S∥∇S∥ . Esta dependencia e estabele-
cida por H0 e expressa uma lei agindo a nıvel local (microscopico)

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 190 — #190 ii
ii
ii
190 CAPITULO 9. O PRINCIPIO DE HUYGENS
no sistema em consideracao. H0 vai descrever a falta de homogenei-dade e anisotropia (ou nao) que existe no meio. Esta lei local (9.1)vai determinar propriedades globais (macroscopicas) do sistema (porexemplo a forma das frentes de onda a partir de uma perturbacaoinicial em um certo ponto do meio) como veremos a seguir.
Atraves de consideracoes de natureza fısica e geometrica e naturalagora estabelecer que H seja homogenea na segunda variavel, ou seja,que
H(x, λp) = λH0(x, p). (9.2)
Por exemplo, se estivermos analisando uma metrica Riemamnni-ana < , > como Hamiltoniano, e mais natural neste caso, considererarH =
√< , > em vez de H =< , >. Desta maneira a integral
∫γHdt
de uma curva γ depende apenas do tracøda curva (dos pontos dacurva) e nao da parametrizacao utilizada.
∀λ ∈ R, ou seja que para um vetor nao unitario, H tem umadependencia linear no comprimento do vetor p. Sendo assim a partirde (9.1), a equacao constitutiva do meio para S(x, t) que descreve aevolucao de uma frente de onda torna-se
∂S
∂t+ ∥∇S∥H0(x,
∇S∥∇S∥
) =∂S
∂t+H(x,∇S) = 0. (9.3)
Esta equacao foi denominada anteriormente (Definicao 26, Secao8, Capıtulo 3 [L]) de equacao de Hamilton-Jacobi.
O Hamiltoniano H desempenha portanto na Mecanica Hamilto-niana o papel da lei constitutiva do meio na propagacao de frentesde onda.
Se S(x, t) for da forma S(x, t) = ϕ(x)− t, entao a equacao acimatorna-se
0 =∂S
∂t+H(x,∇S) = −1 +H(x,∇ϕ),
ou seja H(x,∇ϕ) = 1.
Esta equacao foi denominada em (3.13) na Secao 8, Capıtulo 3[L], de equacao de Hamilton-Jacobi autonoma.
Como dissemos antes, no caso isotropico e homogeneo, devemosconsiderar a metrica Euclidiana H(x, p) =
√p21 + p22 e entao teremos

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 191 — #191 ii
ii
ii
191
a equacao
−∂S∂t
= H(x,∇S) =
√(∂S
∂x1
)2
+
(∂S
∂x2
)2
.
Se S(x, t) = ϕ(x)− t, entao a equacao acima significa
1 =
(∂ϕ
∂x1
)2
+
(∂ϕ
∂x2
)2
.
A conclusao portanto e que a equacao constitutiva
0 =∂S
∂t+H(x,∇S)
e apenas uma descricao geral do princıpio de Huygens e determinauma equacao do tipo Hamilton-Jacobi.
SeH no caso bidimensional e dado porH(x, p) =√p21 + p22, entao
esta ultima equacao e a equacao da eikonal.Sendo assim a equacao de Hamilton-Jacobi, neste caso particu-
lar, expressa a lei constitutiva do meio e esta equacao determina apropagacao de frentes de onda num meio homogeneo e anisotropico.
Podemos extrapolar o raciocınio acima e pensar que o Hamilto-niano H(x, p) determina uma lei constitutiva no espaco da variavelx (de configuracao), e que a equacao de Hamilton-Jacobi descrevefrentes de onda de solucoes do sistema mecanico.
A dependencia deH0(x, p) em p caracteriza a anisotropia do meio.
Definicao 9.3. No caso em que H0(x, p) nao depende de p, o meioe dito isotropico.
Definicao 9.4. Se H0(x, p), por sua vez nao depende de x, dizemosque o meio e homogeneo.
Exemplo 9.3. Seja o Hamiltoniano H(q, p) = a(q)p21 + 2c(q)p1p2 +b(q)p22 (ou H(q, p) =
√a(q)p21 + 2c(q)p1p2 + b(q)p22), q = (x1, x2), p =
(p1, p2), e suponha que exista solucao da forma S(q, t) = S(q)−t paraa EDP de Hamilton-Jacobi associada, entao
0 = −1 +H(q, p) =∂S
∂t+H(q, p) =
∂S
∂t+√H(q, p)
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 192 — #192 ii
ii
ii
192 CAPITULO 9. O PRINCIPIO DE HUYGENS
vai descrever em geral a evolucao de frentes de onda no plano em ummeio anisotropico e nao homogeneo.
Note que no caso de propagacao de ondas num meio contınuo, porcausa de (9.2), o H(q, p) deve ser
H(q, p) =√a(x)p21 + 2c(x)p1p2 + b(x)p22
, mas como vimos na equacao acima, tanto faz tomar a raiz quadradaou nao, para fins de calcular a equacao de Hamilton-Jacobi.
Voltaremos a analisar este exemplo em breve.
Acreditamos que neste momento tenha ficado transparente a rela-cao do princıpio de Huygens com a Mecanica Hamiltoniana, em par-ticular com a equacao de Hamilton-Jacobi. A propagacao de frentesde onda e a inspiracao principal para este ponto de vista da MecanicaClassica.
Uma boa justificativa porque os raios de luz podem ser inter-pretados como geodesicas aparece na Observacao 9.1 e subsequenteconclusao no fim da proxima secao.
A questao relevante do ponto de vista Fısico e a seguinte: con-sidere um sistema Hamiltoniano definido por H(q, p) e
(q(t), p(t)) = (x1(t), x2(t), p1(t), p2(t))
solucao do problema mecanico. Desejamos analisar a partir de umafrente de onda de condicoes iniciais de posicao e velocidade (q, p) =(q(s), p(s)) = (x1(s), x2(s), p1(s), p2(s)), s ∈ (a, b), a evolucao destafrente de onda com o tempo t segundo o sistema mecanico. Isto e,desejamos descobrir a funcao
(q(s, t), p(s, t)) = (x1(s, t), x2(s, t), p1(s, t), p2(s, t)) =
= (xs1(t), xs2(t), p
s1(t), p
s2(t))
que determina a posicao da condicao inicial
(q(s), p(s)) = (x1(s, 0), x2(s, 0), p1(s, 0), p2(s, 0))
apos decorrido tempo t.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 193 — #193 ii
ii
ii
193
Em outras palavras gostarıamos de determinar a evolucao tem-poral de um feixe (uma frente de onda) de condicoes iniciais. Comoveremos a seguir, a Mecanica Hamiltoniana permite tal tratamento.
Vamos agora analisar a evolucao de frentes de onda de condicoesiniciais no espaco de fase da Mecanica Hamiltoniana.
Considere um Hamiltoniano H, por exemplo
H(q, p) = U(q) +1
2
2∑i=1
p2i = U(x1, x2) +1
2
2∑i=1
p2i (9.4)
sendo assim, a equacao
0 =∂S
∂t+H
(q,∂S
∂q
)=∂S
∂t+H(q,∇S)
de Hamilton-Jacobi, obtida anteriormente na Mecanica Hamiltonianae analoga a equacao que descreve a evolucao de uma onda em um meiocontınuo.
Note que para um sistema mecanico em geral da forma (9.4), aexpressao (9.2) nao e verdadeira.
Supondo por separacao de variaveis que S e da forma S(q, t) =ϕ(q)−t, entao a equacao diferencial parcial F = 0 associada a equacaode Hamilton-Jacobi e
0 = F (x1, x2, ϕ, p1, p2) = U(x1, x2) +1
2(p21 + p22)− 1 =
U(x1, x2) +1
2((∂ϕ
∂x1)2 +
(∂ϕ
∂x2)2)− 1 = H(x1, x2, p1, p2)− 1,
onde
p1 =∂ϕ
∂x1, p2 =
∂ϕ
∂x2.
Vamos voltar a considerar um Hamiltoniano qualquer a partirdeste momento.
A equacao diferencial parcial nao linear de Hamilton-Jacobi
H(q, p)− 1 = H(q,∇ϕ)− 1 = 0,

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 194 — #194 ii
ii
ii
194 CAPITULO 9. O PRINCIPIO DE HUYGENS
pode ser resolvida atraves do metodo das caracterısticas como foidesenvolvido na Secao 7. As equacoes das caracterısticas para a Fdefinida acima neste caso sao
x′1 =∂F
∂p1=∂H
∂p1
x′2 =∂F
∂p2=∂H
∂p2
ϕ′ = p1∂F
∂p1+ p2
∂F
∂p2
p′1 = − ∂F
∂x1= − ∂H
∂x1
p′2 = − ∂F
∂x2= − ∂H
∂x2(9.5)
As primeiras duas e as ultimas duas equacoes acima definem assolucoes do campo de vetores Hamiltoniano no plano (x1, x2, p1, p2).
Logo as caracterısticas de equacao de Hamilton-Jacobi projetadasno espaco (x1, x2, p1, p2) sao as solucoes das equacoes de Hamilton.
O Teorema de Hamilton-Jacobi (Teoremas 22 e 23), que apre-sentamos na Secao 9 [L], afirma que se pode passar diretamente dasolucao completa para as caracterısticas da EDP de Hamilton-Jacobi.
A terceira equacao de (9.5) afirma que as caracterısticas (solucoesda equacao de Hamilton) (x1(t), x2(t), p1(t), p2(t)) sao tais que afuncao
ϕ(x1(t), x2(t))
satisfazdϕ
dt=
2∑i=1
piHpi =2∑i=1
piFpi .
Note que o resultado sobre caracterısticas acima e valido paraum Hamiltoniano qualquer H(q, p) e nao apenas para Hamiltonianosnaturais do tipo H(q, p) = 1
2
∑ni=1 p
2i + V (q).
O metodo que vamos descrever a seguir vai determinar a evolucaode uma frente de onda (q(s, t), p(s, t)) a partir de (q(s), p(s)). Destamaneira poderemos determinar a evolucao temporal de feixes de con-dicoes iniciais do problema mecanico (ver Propriedade Importante

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 195 — #195 ii
ii
ii
195
a seguir). Esta questao e fundamental em Mecanica Estatıstica eMecanica Quantica (ver [OA]). A propriedade importante descrita aseguir, nao e para um sistema mecanico qualquer, mas apenas paraum sistema associado a uma metrica Riemanniana. Lembre que emuitas vezes possıvel transformar por mudanca de parametro tempo-ral um problema mecanico em um problema geometrico (ver Teorema20 e Corolario 21, Capıtulo 2 [L]).
Propriedade Importante: Seja o Hamiltoniano
H(q, p) = a(q)p21 + 2c(q)p1p2 + b(q)p22
q = (x1, x2), p = (p1, p2), e seja S(q, t) = ϕ(q)−t solucao da respectivaequacao de Hamilton-Jacobi
0 =∂S
∂t+H
(q,∂S
∂q
),
ou seja ϕ satisfaz
1 = H
(q,∂ϕ
∂q
),
e a condicao inicial (ou de fronteira) (q(s), ϕ(s)) = (q(s), 1).Entao S(x1, x2, t0) = S(x, t0) = 0 vai determinar para cada t0
fixo, a posicao de q(s, t1) = (x1(s, t1), x2(s, t1)), t1 = t1(t0), dascurvas
(xs1(t), xs2(t)),
projecao no plano (x1, x2) das curvas (xs1(t), x
s2(t), p
s1(t), p
s2(t)), solucao
do campo Hamiltoniano comecando no tempo t = 0 em
(x1(s), x2(s), p1(s), p2(s)),
s ∈ (a, b). Note que p(s) = (p1(s), p2(s)) deve satisfazer a Observacao7.2 da Secao 7.
A Propriedade Importante segue do seguinte fato:
S(x, t) = S(x1, x2, t) = S((x1(s, t), x2(s, t), t)
depende apenas de t (linearmente em t de fato) e as caracterısticassao as solucoes do problema mecanico como vimos acima.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 196 — #196 ii
ii
ii
196 CAPITULO 9. O PRINCIPIO DE HUYGENS
Seja ϕ(x1, x2) solucao da equacao de Hamilton-Jacobi
0 = H(x1, x2, p1, p2)− 1 = H(q,∇ϕ(p))− 1 = F (x1, x2, ϕ, p1, p2),
que sera analisada a seguir pelo metodo das caracterısticas.A funcao ϕ(x1(s, t), x2(s, t)) satisfaz
d (ϕ(x1(s, t), x2(s, t))
dt=
∂ϕ
∂x1x1s
′(t) +∂ϕ
∂x2x2s
′(t) =
p1Hp1 + p2Hp2 = p1(2a(q)p1 + 2c(q)p2) + p2(2c(q)p1 + 2b(q)p2) =
2H(q(s, t), p(s, t)).
E facil ver pela Observacao 46 que para o Hamiltoniano
H(q, p) = a(q)p21 + 2c(q)p1p2 + b(q)p22,
a condicaoF (x1(s), x2(s), ϕ(s), p1(s), p2(s)) =
= H(x1(s), x2(s), p1(s), p2(s))− 1 = 0
significa que H(q(s, 0), p(s, 0)) = 1 para todo s.Pelo Teorema de conservacao do Hamiltoniano (Teorema 2, Ca-
pıtulo 3 [L]) H(q(s, t), p(s, t)) e constante igual a 1. Logo, para todos
d (ϕ(x1(s, t), x2(s, t))
dt= 2.
Concluımos portanto que
dS(x, t)
dt=d(ϕ(x)− t)
dt= 2− 1 = 1.
Se assumirmos ϕ(x1(s, 0), x2(s, 0)) = ϕ(x1(s), x2(s)) = 1, ∀s ∈(a, b) entao S(x1(s, t), x2(s, t), t) = 1 + t.
Fica assim justificada a afirmacao da Propriedade Importanteacima enunciada. Em breve apresentaremos exemplos em que uti-lizaremos a propriedade acima descrita (Exemplos 9.5, 9.6 e 9.7).
Considere agora o caso particular em que H(x, p) = p21 + p22, Ssolucao da equacao da eikonal(
∂S
∂x1
)2
+
(∂S
∂x2
)2
= 1

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 197 — #197 ii
ii
ii
197
com a condicao inicial da frente de onda na posicao
q(s) = (x1(s), x2(s)) ∈ R2
dada. Entao, pela Propriedade Importante ϕ(x) − t = S(x, t) = 0,vai descrever implicitamente a posicao espacial da frente de onda notempo t1.
Vamos considerar no tempo t = 0, condicoes iniciais (x1(s), x2(s))e perguntar a posicao desta frente de onda apos decorrido tempo t.Vamos utilizar o resultado mencionado pela Propriedade Importantevisto anteriormente.
Vamos tentar resolver este problema atraves dos dois metodosdesenvolvidos antes: o metodo da integral completa e o metodo dascaracterısticas.
Primeiro vamos aplicar o metodo das caracterısticas.Usando a notacao da Secao 7, a Equacao diferencial parcial de 1a
ordem nao linear (∂ϕ
∂x1
)2
+
(∂ϕ
∂x2
)2
= 1
pode ser expressa como 0 = F (x1, x2, ϕ, p1, p2) = 1 − (p21 + p22) =1− (ϕ2x + ϕ2y) onde p1 = ϕx e p2 = ϕy.
Vamos analisar neste caso a expressao das equacoes das carac-terısticas da EDP, F (x1, x2, ϕ, p1, p2) = 0 . Neste caso, a equacaoe
p21 + p22 − 1 = 0,
ou seja, neste caso F (p1, p2) = p21 + p22 − 1.Usando a expressao das equacoes das caracterısticas obtemos
dx1dt
= 2p1
dx2dt
= 2p2
dϕ
dt= 2p21 + 2p22
dp1dt
= 0

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 198 — #198 ii
ii
ii
198 CAPITULO 9. O PRINCIPIO DE HUYGENS
dp2dt
= 0. (9.6)
Observacao 9.2. Note que no caso acima, o vetor gradiente dafrente de onda ∇ϕ = p e colinear com x′.
Observacao 9.3. Das equacoes das caracterısticas acima, as carac-terısticas (x1(t), x2(t), ϕ(t), p1(t), p2(t)) devem portanto satisfazer
d2x1dt2
=d
dt
(dx1dt
)=
d
dt(2pi) = 0
ed2x2dt2
=d
dt
(dx2dt
)=
d
dt(2p2) = 0.
Note que os valores p1(t) e p2(t) sao constantes.Da equacao acima segue que x1(t) e x2(t) sao lineares em t, ou
seja, x1(t) = 2p1t+ c1 e x2(t) = 2p2t+ c2.A conclusao e que a projecao das caracterısticas no plano x =
(x1, x2) sao linhas retas.Finalmente, ϕ′(t) = 2p21 + 2p22 = 2(p21 + p22) = 2× 1 = 2, pois por
hipotese p21 + p22 = 1.Logo ϕ(t) = 2t+ c3.Sendo assim, concluımos finalmente que as caracterısticas sao re-
tas em R5.
Vamos agora usar os resultados obtidos anteriormente para cal-cular solucoes da EDP via o metodo das caracterısticas.
Exemplo 9.4. Vamos calcular a solucao da equacao diferencial par-cial (
∂ϕ
∂x1
)2
+
(∂ϕ
∂x2
)2
= 1,
sujeita as condicoes
(x1(s), x2(s), ϕ(s), p1(s), p2(s)) = (cos s, sin s, 1, cos s, sin s).
Observe que p1(s) e p2(s) sao compatıveis com (x1(s), x2(s), ϕ(s))como e necessario assumir no problema em consideracao (Secao 7).

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 199 — #199 ii
ii
ii
199
As caracterısticas ja foram calculadas acima, e portanto as carac-terısticas (xs1(t), x
s2(t), ϕ
s(t), ps1(t), ps2(t)) obtidas a partir das condicoes
iniciais
(cos s, sin s, 1, cos s, sin s),
sao
xs1(t) = 2p1(s)t+ cos s = 2 cos(s)t+ cos(s)
xs2(t) = 2p2(s)t+ sin s = 2 sin(s)t+ sin(s)
ϕs(t) = 2t+ 1
ps1(t) = cos s
ps2(t) = sin s.
Observacao 9.4. Note que a partir de p(s) = (p1(s), p2(s)) fixado, ovetor ps(t) = (ps1(t), p
s2(t)) nao se altera, ou seja neste caso particular,
o momento se conserva.Antes de expressar a funcao ϕ nas coordenadas (x1, x2), devemos
relacionar as coordenadas (s, t) e as coordenadas (x1, x2).Ora, (x1(s, t), x2(s, t)) = (cos s(2t+1), sin s(2t+1)), logo x21+x
22 =
cos2 s(2t+ 1)2 + sin2 s(2t+ 1)2 = (2t+ 1)2.Portanto,
t =1
2
(√x21 + x22 − 1
)e como x1 = cos s(2t+ 1) entao
s = arccosx1
2t+ 1= arccos
x1√x21 + x22
.
Em conclusao
(s(x1, x2), t(x1, x2)) =
(arccos
x1√x21 + x22
,1
2
(√x21 + x22 − 1
)).
Como ϕ(s, t) = 2t + 1, concluımos que a solucao ϕ(x1, x2) satis-fazendo as condicoes iniciais pre-fixadas e ϕ(x1, x2) =
√x21 + x22.
Sugerimos ao leitor calcular ϕ2x1+ ϕ2x2
para testar e certificar-seque realmente a ϕ acima descrita satisfaz ϕ2x1
+ ϕ2x2= 1.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 200 — #200 ii
ii
ii
200 CAPITULO 9. O PRINCIPIO DE HUYGENS
A evolucao de (q(s, t), p(s, t)) a partir da frente de onda no tempot = 0, dada por (q(s), p(s)) = (cos(s), sin(s), cos(s), sin(s)) pode serseguida para tempos t subsequentes atraves de ϕ, isto e, ϕ(q1, q2) = tdetermina a posicao no tempo t da frente de onda acima considerada.
A conclusao neste caso, e que as frentes de ondas sao cırculos como mesmo centro.
Exemplo 9.5. Vamos agora tentar encontrar a solucao da equacaodiferencial parcial ϕ2x+ϕ
2y = 1 atraves do metodo da solucao completa.
Devemos tentar primeiramente encontrar uma famılia fa,b(x1, x2) adois parametros (a, b) ∈ R2 de solucoes de ϕ2x + ϕ2y = 1.
Vamos tentar encontrar a solucao pelo metodo de separacao devariaveis. Suponhamos que ϕ possa ser escrita da forma ϕ(x1, x2) =f(x1) + g(x2).
Substituindo ϕ na equacao ϕ2x1+ ϕ2x2
= 1, obtemos f ′(x1)2 +
g′(x2)2 = 1.
Como f ′(x1)2 = 1−g′(x2)2, entao f ′(x1) nao depende de x1. Logo
f ′(x1) e constante. Da mesma forma g′(x2) tambem e constante.Como f ′(x1)
2 + g′(x2)2 = 1, podemos escrever f ′(x1) = cos a e
g′(x2) = sin a.Portanto, f(x1) = x1 cos a+ c1 e g(x2) = x2 sin a+ c2.Finalmente concluımos que
f(x1, x2, a, b) = f (a,b)(x1, x2) = x1 cos a+ x2 sin a+ b
e uma famılia completa de solucoes da equacao diferencial parcialϕ2x1
+ ϕ2x2= 1.
Exemplo 9.6. Vamos agora encontrar a solucao de ϕ2x1+ ϕ2x2
= 1com as condicoes iniciais (x1(s), x2(s), ϕ(s)) = (cos s, sin s, 1), 0 ≤t ≤ 2π.
Como vimos antes no paragrafo sobre envoltorias, primeiro deve-mos encontrar (a(s), b(s)) solucao de
1 = z(s) = x1(s) cos a(s) + x2(s) sin a(s) + b(s)
= cos s cos a(s) + sin s sin a(s) + b(s) (9.7)
e
0 = z′(s) =∂f
∂x1x′1(s) +
∂f
∂x2x′(s) =

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 201 — #201 ii
ii
ii
201
(− cos a(s) sin s+ sin a(s) cos s). (9.8)
E facil derivar que a(s) = s, b = 0 sao as solucoes do sistema(9.7) e (9.8).
Devemos portanto considerar a famılia a um parametro s, dadapor
f t(x1, x2) = x1 cos a(s) + x2 sin a(s) + 0 = x1 cos s+ x2 sin s.
A envoltoria desta famılia nos permitira obter a solucao z(x1, x2).Fixe (x1, x2) ∈ R2, vamos encontrar quem e s(x1,x2) que satisfaz
0 =∂f
∂s= −x1 sin s+ x2 cos s
e f(x1, x2) = x1 cos s+ x2 sin s.Seja θ e r > 0 tal que x1 = r cos θ e x2 = r sin θ.Logo
0 = −x1 sin+x2 cos s = −r cos θ sin s+ r sin θ cos s = −r sin(s− θ)
, implica que
s(x1,x2) = arctanx2x1.
Portanto, u(x1, x2) = x1 cos s(x1,x2) + x2 sin s(x1,x2) =
= x1x1r
+ x2x2r
=x21 + x22√x21 + x22
=√x21 + x22.
Sendo assim obtivemos a solucao da equacao da eikonal com acondicao inicial (q(s), p(s), 1) utilizando o metodo da solucao com-pleta.
A partir da solucao da equacao de Hamilton-Jacobi u, sabemospela Propriedade Importante que podemos determinar a evolucao dasfrentes de onda de solucoes do sistema mecanico (q(s, t), p(s, t)) apartir de condicoes iniciais (q(s), p(s)).
Exemplo 9.7. Seja a matriz
M =
(a c
c b
),

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 202 — #202 ii
ii
ii
202 CAPITULO 9. O PRINCIPIO DE HUYGENS
positiva definida e que define uma metrica Riemanniana
L =< Mv, v >= av21 + 2cv1v2 + bv22 .
Neste caso, (ver (3.1) na Secao 2, Capıtulo 3 [L])
H(x, p) =1
4⟨M−1p, p⟩
e o Hamiltoniano associado ao Lagrangiano L dado pela metrica Rie-manniana (com coeficientes a, b, c constantes). Note que 1
4M−1
tambem e positiva definida.Sendo assim, se S(q, t) e da forma S(q)− t, a equacao
0 =∂S
∂t+H(x,∇S) = ∂S
∂t+
1
4⟨M−1∇S,∇S⟩ =
−1 +
⟨1
4M−1∇S,∇S
⟩= −1 +
√1
4⟨M−1∇S,∇S⟩
vai descrever a evolucao de frentes de onda em um meio homogeneomas nao isotropico.
Note que H tambem define uma forma quadratica positiva definida,pois se M e positiva definida, M−1 tambem e.
Das equacoes das caracterısticas obtemos que p(t), q(t) sao cons-tantes pois a equacao diferencial definida por F nao depende de z, x1, x2.Sendo assim o vetor normal as superfıcies de nıvel sao constantes.
Se assumirmos por exemplo que
1
4M−1 =
(1 00 1/4
),
ou seja que
M =
(1/4 00 1
),
entao a equacao de Hamilton-Jacobi associada e
0 = −1 + (∂S
∂x1)2 +
1
4(∂S
∂x2)2.
Uma solucao de tal equacao ja foi considerada no exemplo S(x, t) =√x21 + 4x22 − t.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 203 — #203 ii
ii
ii
203
Neste caso um disturbio inicial no ponto (0,0) vai gerar frentes deonda com forma de elipses. Um propriedade macroscopica, a formada frente de onda, e entao determinada por uma propriedade mi-croscopica.
S descreve a evolucao em um meio homogeneo anisotropico.
Exemplo 9.8. Uma metrica Riemanniana pode ter os coeficientes
a(x1, x2), b(x1, x2), c(x1, x2)
dependendo da variavel (x1, x2). Considerando L o Lagrangiano as-sociado a metrica Riemanniana
L = a(x1, x2)p21 + 2c(x1, x2)p1p2 + b(x1, x2)p
22,
e seu correspondente Hamiltoniano H (ver (3.1) Secao 2, Capıtulo3).
Entao a equacao constitutiva natural ao problema e dado por
−∂S∂t
= H(x,∇S)
ondeH(x, p) = H(x1, x2, p1, p2) =
1
4
b(x1, x2)p21 − 2c(x1, x2)p1p2 + a(x1, x2)p
22
ac− b2.
Para simplificar a notacao, podemos reescrever a expressao acimaconsiderando
a =1
4
b
ab− c2, c =
1
4
−cab− c2
, b =1
4
a
ab− c2.
Obtemos assim o Hamiltoniano
H(x, p) = a(x1, x2)p21+2c(x1, x2)p1p2+b(x1, x2)p
22. (9.9)
Supondo S(x, t) = t − ϕ(x) temos entao a equacao de Hamilton-Jacobi para tal H (ou para
√H, tanto faz)
1 = a(x1, x2)p21 + 2c(x1, x2)p1p2 + b(x1, x2)p
22,

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 204 — #204 ii
ii
ii
204 CAPITULO 9. O PRINCIPIO DE HUYGENS
onde p1 = ϕx1 , p2 = ϕx2 .Sendo assim a equacao constitutiva do meio (ou seja a equacao
de Hamilton-Jacobi) determina a equacao diferencial parcial 0 =F (x1, x2, ϕ, p1, p2) = a(x1, x2)p
21 + 2c(x1, x2)p1p2 + b(x1, x2)p
22 − 1,
onde p1 = ϕx1 e p2 = ϕx2 .Note que F nao depende de ϕ, mas depende neste caso de x1
e x2. Sendo assim, as equacoes das caracterısticas nao determi-narao mais (como no Exemplo 9.4) que p(t) e constante. Isto sedeve a dependencia de H(x, p) em x e em p. A falta de homogenei-dade e isotropia do meio e descrita pela metrica Riemanniana L (oumais precisamente pela metrica Riemanniana H). Note que nestecaso nao estamos considerando nenhum termo correspondente a e-nergia potencial. O Hamiltoniano neste caso e dado pelo modulo aoquadradado do vetor velocidade considerando a norma descrita pelametrica Riemanniana. Lembre que para fins de calculo do traco dascurvas solucoes do sistema (ver Secao 7), tanto faz tomar a raizquadrada ou nao na expressao do Hamiltoniano acima.
Afirmamos que as geodesicas desta metrica Riemanniana nas co-ordenadas (q, p) desempenharao o papel das caracterısticas, pois aequacao das caracterısticas para
0 = F (x1, x2, z, p1, p2) = a(x1, x2)p21+2c(x1, x2)p1p2+b(x1, x2)p
22−1
sao
x′1(t) =∂F
∂p1= 2ap1 + 2cp2
x′2(t) =∂F
∂p2= 2cp1 + 2bp2
p′1(t) = − ∂F
∂x1
p′2(t) = − ∂F
∂x2.
e determinam as equacoes das equacoes geodesicas. Esta afirmacaofoi demonstrada anteriormente para um Hamiltoniano qualquer, istoe, mostramos que as caracterısticas sao as trajetorias do sistemaHamiltoniano (que no caso em consideracao so possui energia cinetica).

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 205 — #205 ii
ii
ii
205
As geodesicas sao portanto as caracterısticas da equacao diferen-cial parcial
0 = F (x1, x2, z, p1, p2) = a(x1, x2)p21+2c(x1, x2)p1p2+b(x1, x2)p
22−1.
A velocidade da luz e finita e apos uma normalizacao podemossupor que esta velocidade e igual a 1, sendo assim, fixado um pontoinicial q0 onde no tempo 0 se acende a luz, a frente de onda
∑T e o
conjunto dos pontos de plano (x1, x2) que distam T de q0.As envoltorias por raios de luz (ou por geodesicas) determinam as
frentes de ondas num cristal conforme Observacao anterior.A conclusao final e que as geodesicas fazem o papel dos raios de
luz e das caracterısticas. Esta conclusao traduz fielmente a relacaoentre a Mecanica Hamiltoniana e a propagacao de frentes de onda.
Note que no caso da metrica Riemanniana da esfera, a frente deonda
∑T emitida a partir de um polo q0, apos um certo tempo T0
ira colapsar no outro polo (ver Figura 3.10 b)).Este fenomeno, que nem sempre ocorre, e denominado de criacao
de causticas. Em termos matematicos dizemos que o aparecimentodas causticas esta associado a existencia de pontos conjugados. Refe-rimos o leitor a [MC3] para maiores consideracoes sobre este topico.
Exercıcio: No caso da metrica hiperbolica
1
2(x1
2
x22+x2
2
x22),
o momento p1 = ∂L∂x1
= x1
x22= x1. Calcule a equacao de Hamilton-
Jacobi associada.
Observacao 9.5. Em geral, para um H como acima (9.9), oriundode uma metrica Riemanniana
(x′1, x′2) = (2ap1 + 2cp2, 2cp1 + 2bp2). (9.10)
Logo em geral x′ e p′ nao sao colineares.
No caso da metrica Euclidiana, no entanto, x e p sao colineares(ver Observacao 48).
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 206 — #206 ii
ii
ii
206 CAPITULO 9. O PRINCIPIO DE HUYGENS
Observacao 9.6. As equacoes das caracterısticas afirmam, no casode uma metrica Riemanniana geral, as geodesicas sao as caracterıs-ticas (projetadas em (x1, ..., xn)). Uma frente de onda
∑t causada
por uma perturbacao pontual em q0 e constituıdo pelo conjunto dospontos que distam t de q0.
Note que p e perpendicular a frente de onda, pois ∇S = p, mas ovetor q nao necessariamente (se o meio nao for homogeneo e aniso-tropico) conforme mostra a expressao (9.10) na Observacao 9.5 (verFigura 8.3).
Em conclusao, podemos afirmar que as consideracoes feitas ante-riormentes sobre raios da luz e geodesicas como geradores de frentesde onda, foi a inspiracao para o ponto de vista de Hamilton de ten-tar analisar a Mecanica Classica atraves de um ponto de vista deperturbacao por frentes ondas de um meio contınuo.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 207 — #207 ii
ii
ii
Capıtulo 10
A Equacao da Onda
O que chamamos de raio de luz nas secoes anteriores, correspondiaa geodesicas de uma metrica Riemanniana. Na verdade, uma carac-terıstica importante do raio de luz fısico real e o seu carater ondu-latorio, o qual nao foi considerado na nossa analise anterior [Lu].
A luz e um fenomeno eletromagnetico, que obedece as equacoesde Maxwell (ver [Go]). A partir desta equacao, pode se mostrar quea luz obedece a equacao da onda em R3.
Abstraindo o carater ondulatorio da luz, conseguimos nas secoesanteriores entender o relacionamento da Acao com as frentes de ondae as geodesicas.
Vamos descrever agora brevemente a luz (por abuso de linguagemvamos chamar de raio de luz) como uma onda e relacionar o que foidescrito anteriormente com este novo ponto de vista (ver Observacao10.2 ao fim desta secao).
Referimos o leitor para [Go] para referencias gerais sobre o as-sunto.
Para isto necessitaremos considerar a equacao da onda em R3
∂2ϕ
∂x21+∂2ϕ
∂x22+∂2ϕ
∂x23− η2
c2∂2ϕ
∂t2= 0 (10.1)
onde η e uma constante.
207
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 208 — #208 ii
ii
ii
208 CAPITULO 10. A EQUACAO DA ONDA
A solucao ϕ(x1, x2, x3, t) vai descrever a evolucao da onda em ummeio com ındice de refracao η. O valor c e a velocidade da luz que euma constante universal.
Vamos primeiro tentar entender o que representa enfim um raiode luz no tempo t0 e relacionar tal conceito com a equacao acima. Oraio de luz (individualizado) no tempo t0 vai ser representado por
ϕ(x1, x2, x3) = ϕ(x1, x2, x3, t0) =
= ϕ0ei (<x , r >−w t0) = ϕ0e
i ( ⟨ ( x1,x2,x3 ) , ( r1,r2,r3 ) ⟩−w t0 ), (10.2)
onde ϕ0 e uma constante, r = (r1, r2, r3) e um vetor constante e wa constante que vai determinar a frequencia da oscilacao temporal.Existe uma relacao entre w e r que sera descrita em breve.
Vamos agora tentar explicar ao leitor porque e natural considerartal ϕ para descrever um raio de luz (individualizado).
ϕ0 determina a amplitude do raio de luz.O raio de luz “individualizado”descrito acima e tal∑
c
= (x1, x2, x3) |ϕ(x1, x2, x3, t0) = c
t0, c ∈ R, determina planos perpendiculares a direcao (r1, r2, r3).Um raio de luz no tempo t0 e portanto descrito por uma serie de
planos, por isso e tambem denominado de uma onda plana.Note que para um t0 fixo o raio de luz contem uma informacao
em todo o espaco de posicoes R3 (sao os varios planos de nıvel).O leitor pode observar que qualquer funcao g(α), onde
α = ⟨(x1, x2, x3), (r1, r2, r3)⟩ =< x, r >
tambem determinaria planos como superfıcies de nıvel.Para descrever o raio de luz, assumimos tambem uma periodi-
cidade espacial (o raio de luz tem um carater ondulatorio) de ϕ.Isto explica o termo ei <x,r> na expressao acima para ϕ. Em vezde usar senos e cossenos estamos usando a notacao complexa paraei ⟨ (x1,x2,x3),(r1,r2,r3) ⟩ que e mais compacta. A periodicidade espacialde ϕ vai depender do modulo
2π
∥r∥.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 209 — #209 ii
ii
ii
209
Vamos denominar este valor do perıodo de fase otica.Sendo assim, para t0 fixo, o valor de ϕ se repete espacialmente na
direcao r com perıodo 2π∥r∥ .
Esta periodicidade espacial vai acontecer tambem de maneira tem-poral para x fixo quando variarmos t0. Isto e expresso pelo termoei wt0 na expressao ϕ = ϕ0e
i(⟨x,r⟩−wt) = ϕ0ei⟨x,r⟩e−iwt. Logo para x
fixo, de tempos em tempos (com frequencia w) repetem-se os valoresde ϕ.
Fica assim descrito de maneira geral como devemos entender oraio de luz individualizado ϕ(x, t) = ϕ0e
i(⟨x,r⟩−wt). Para cada w er fixos, associamos um raio de luz ϕ = ϕr,w. Tal ϕ = ϕ(x, t) =ϕ0e
i(⟨x,r⟩−wt) e uma funcao que depende de (x, t).Considere w fixo e uma funcao f(x) = ft0(x) que vai descrever
um feixe da raios de luz no tempo t0.A variavel real α = ⟨x, r⟩ como vimos antes vai determinar uma
periodicidade em ei⟨x,r⟩ = eiα e sendo assim podemos encara-locomo um gerador de funcoes f(x) na variavel x via Transformadade Fourier. Ou seja f(x) vai ser uma combinacao de ϕr para dife-rentes r (ou seja um feixe de raios individualizados de luz ϕr dadopela expressao (10.2)). Mais precisamente, dado f(x), considere a
transformada de Fourier f(r) tal que f(x) =∫f(r)(ei<r,x>)dr.
Logo
f(x, t) = f(x) e−i w t = (
∫f(r)(ei<x,r>)dr)e−iwt =∫
f(r)ei(<x,r>−wt)dr (10.3)
vai representar um feixe de raios de luz (note que w e constante eindepende de r).
f e determinada pela distribuicao (ver [Ju] para definicao) f .O que chamamos de luz e na verdade uma combinacao dos raios
de luz individuais (10.2) dados por ϕ0ei(α−wt) = ϕ0e
i(⟨x,r⟩−wt) viatransformada de Fourier como acima.
Se f e o Delta de Dirac no ponto r0 com massa ϕ0, entao
f(x)e−iwt = ϕ0ei<x,r0>e−iwt = ϕ0e
i(<x,r0>−wt).
Recuperamos assim o raio de luz individualizado (10.2).
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 210 — #210 ii
ii
ii
210 CAPITULO 10. A EQUACAO DA ONDA
O raio individualizado ϕ0ei(α−wt) e na verdade uma abstracao
do ponto de vista Fısico. A luz, quando observada, em geral e um“pacote”com varios raios de luz individualizados (10.2), como apareceem (10.3).
Para a correta definicao do raio de luz, falta ainda mais umarestricao. Vai existir uma relacao entre ∥r∥ e w que vai advir daequacao da onda anteriormente apresentada.
Vamos agora relacionar o raio de luz com a equacao da onda. Oraio de luz fisicamente observado e tambem solucao da equacao daonda (ver [Go]).
Substituindo o raio de luz “individualizado”ϕ(x, t) = ϕ0ei(⟨r,x⟩−w t)
na equacao da onda
∆ϕ− η2
c2∂2ϕ
∂t2= 0,
η constante, obtemos que ϕ e solucao da equacao acima no caso emque
∥r∥ =η w
c. (10.4)
Sendo assim, existe uma relacao entre a periodicidade espacial ∥r∥e a periodicidade temporal w, determinada pela equacao diferencialparcial acima.
A igualdade (10.4) acima e chamada de relacao de dispersao. Fi-nalmente, com esta relacao entre w e r, o raio de luz fica precisamentebem definido.
Como sabemos, a equacao da onda acima descrita (10.1) e linear.Sendo assim, uma combinacao linear f(x)e−w i t de tais funcoes raiode luz individualizados ϕ = ϕr (via Transformada de Fourier) tambemvai ser solucao da equacao linear da onda
∂2ϕ
∂x21+∂2ϕ
∂x22+∂2ϕ
∂x23− η2
c2d2ϕ
dt2= 0,
η constante.Fica portanto esclarecido em que sentido ϕ = f(x)e−i w t (um feixe
de raios de luz) e solucao da equacao da onda com η fixo.Vamos agora investigar o caso em que η(x) nao e constante, e e
fracamente variavel (ver Observacao 10.1 a seguir) com a posicao x.A otica geometrica e o ramo da ciencia interesssado em analisar
o caso em que η e fracamente variavel com a posicao. Uma relacao

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 211 — #211 ii
ii
ii
211
muito interessante e importante com a equacao de Hamilton-Jacobivai aparecer.
Considere η(x) uma funcao no R3 e a equacao
dϕ2
dx21+dϕ2
dx22+dϕ2
dx23− η2(x)
c2d2ϕ
dt2= 0 (10.5)
A analise que vamos fazer neste caso corresponde aos raios de luzem um meio nao homogeneo.
Uma solucao ϕ para a equacao com η variavel, nao vai mais nestecaso ser uma onda plana. A solucao que se busca e da forma
ϕ = eA(x)+i(S(x) k0−w t). (10.6)
w e uma constante, eA(x) vai representar a amplitude, o termoei S(x) k0 representa as frentes de onda espaciais (antes quando S erada forma
S(x) =< x, r >
estas frentes de onda eram planas) e k0 e uma constante. O termoe−i w t representa a periodicidade temporal. A(x) e S(x) tomam va-lores reais.
Fica assim descrito de maneira esquematica a informacao que nostraz a expressao do raio de luz ϕ num meio em que η varia composicao.
O problema em consideracao supoe que no infinito η e constante,ou seja, que a regiao em que η(x) depende de x esta localizada apenasem um aberto limitado.
Logo, para pontos x muito distantes, vale que a onda ϕ(x, t) secomporta como uma onda plana. Logo, para tais pontos x, a solucao(10.6) deve ser da forma (10.3). Sendo assim, vale tambem a relacaode dispersao (10.4) mencionada anteriormente.
Neste caso e usando a notacao acima, esta relacao significa
k20 =w2
c2. (10.7).
Vamos tentar agora relacionar a teoria descrita acima com a Teo-ria de Hamilton-Jacobi. Em particular desejamos tentar entendermelhor o papel desempenhado por S.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 212 — #212 ii
ii
ii
212 CAPITULO 10. A EQUACAO DA ONDA
Ora ∇ϕ = ϕ∇(A + ik0S) e ∆ϕ = ϕ[∆(A + ik0S) + ∥∇(A +ik0S) ∥2].
Esta ultima expressao e igual a
∆ϕ = ϕ[ ∆A+ ik0∆S + ∥∇A∥2 − k20 ∥∇S∥2 + 2ik0 ⟨∇A,∇S⟩ ].
A equacao da onda (usando (10.6)) torna-se entao
ik0 [ 2⟨∇A,∇S⟩+∆S ]ϕ+ [∆A+ ∥∇A|∥2 − k20 ∥∇S∥2 + η2k20 ]ϕ = 0.
Como A, S sao reais, a equacao da onda representa
∆A+ ∥∇A∥2 + k20 ( η2 − ∥∇S ∥2 ) = 0
e∆S + 2 ⟨∇A,∇S⟩ = 0.
Logo, se S e A satisfazem tais equacoes, ϕ descreve um raio deluz.
Observacao 10.1. Vamos assumir agora que k20 e muito grande emtermos relativos com a parte ∆A + ∥∇A∥2. Esta hipotese traduzem termos matematicos precisos a afirmacao que “η(x) e fracamentevariavel com a posicao x”feita anteriormente.
Portanto, com esta hipotese,
∆A+ ∥∇A∥2
k20+ (η2 − ∥∇S∥2) = 0
significa aproximadamente que η2 − ∥∇S∥2 = 0, ou seja, que S sat-isfaz a Equacao de Hamilton-Jacobi(
∂S
∂x1
)2
+
(∂S
∂x2
)2
+
(∂S
∂x3
)2
= η2(x). (10.8)
Esta equacao e a Equacao de Hamilton-Jacobi (9.3) para o Hamil-toniano
H(q, p) = p21 + p22 + p23 − η2(x) + 1. (10.9)
Sendo assim, como vimos antes a funcao S solucao da equacao(10.8) acima, deve corresponder a Acao de um sistema mecanico.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 213 — #213 ii
ii
ii
213
O termo η corresponde a falta de homogeneidade do meio no casodos raios de luz num cristal.
Por exemplo, se η e constante igual a 1, a partir de (10.8) determi-namos que S deve satisfazer a equacao de Hamilton-Jacobi autonomaassociada ao Hamiltoniano p21+p
22+p
23, ou seja a equacao da eikonal.
Note que uma vez que se obtem S, a funcao A satisfazendo
∆S + 2 ⟨∇A,∇S⟩ = 0,
pode ser facilmente obtida por integracao. Desta maneira, com ashipoteses acima, obtemos a solucao
ϕ = eA(x)+i(S(x) k0−w t).
Observacao 10.2. O Lagrangiano associado a tal Hamiltoniano (10.9)e
L(q, p) = 4(p21 + p22 + p23) + η2(x)− 1.
Pelo Teorema de Mauperitus (Teorema 20, Secao 7, Capıtulo 2)o problema mecanico associado a tal Lagrangiano, e equivalente aconsiderar um Lagrangiano da forma
L(x1, x2, x3, p1, p2, p3) =< M(x)(p1, p2, p3), (p1, p2, p3) >,
onde M(x) e uma matriz positiva definida que depende da posicao x.Ou seja, as equacoes da equacao de Hamilton do sistema (10.9) saogeodesicas (a menos de reparametrizacao do tempo) de uma metricaRiemanniana L (ver Secao 6, Capıtulo 2 [L]).
Conclusao: Concluımos que o S que aparece na expressao do feixeda raios de luz ϕ deve ser aproximadamente igual a solucao da equacaode Hamilton-Jacobi para um problema de Mecanica Classica (se k0for tomado bem grande). Portanto, S corresponde aproximadamentea acao de um sistema mecanico. No limite, tomando k0 = ∞, entaoS e realmente a acao de um sistema mecanico definido pelo Hamil-toniano (10.9), como descrito acima. As superfıcies com S constantevao representar superfıcies de fase constante. A Teoria de Hamilton-Jacobi nos diz entao que a Mecanica Classica corresponde a OticaGeometrica (fazendo um limite em que k20 vai a ∞). Este tipo deresultado e essencial na Teoria semi-classica da Mecanica Quantica.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 214 — #214 ii
ii
ii
214 CAPITULO 10. A EQUACAO DA ONDA
Finalmente, a partir do que foi dito acima, podemos justificar asconsideracoes das secoes anteriores onde afirmamos que o raio de luzdeve ser visto como uma geodesica, na verdade corresponde a suporque o raio de luz (10.3) que consideramos nesta secao esta situadoem um meio em que k20 e muito grande (mais precisamente k0 = ∞).
Essa relacao compatibiliza dois pontos de vista que no passadoforam antagonicos: o ponto de vista de Newton que a luz e um raiocorpuscular e o ponto de vista de Hamilton que a luz e na verdadeuma frente de onda.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 215 — #215 ii
ii
ii
Capıtulo 11
O Metodo da FaseEstacionaria e suasAplicacoes em Otica
por Artur Lopes e Marcos Sebastiani
11.1 Introducao
Vamos considerar aqui funcoes C∞ definidas em semi-reta reaise tomando valores complexos F (τ) : (d,+∞) → C onde d e umaconstante real.
Definicao 11.1. H(τ) e de decrescimento rapido se para todo Nvale que H(τ)τN → 0 quando τ → ∞ e o mesmo e valido para as
derivadas de ordem k de H, ou seja para todo N vale que dkH(τ)dτk τN →
0, quando τ → ∞.
Definicao 11.2. F (τ) e G(τ) tem mesmo comportamento assintoticose F (τ) − G(τ) e de decrescimento rapido e utiliza-se a notacao
215
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 216 — #216 ii
ii
ii
216 CAPITULO 11. O METODO DA FASE ESTACIONARIA
F (τ) ∼ G(τ)
Duas funcoes F e G que tem o mesmo comportamento assintoticosao quase que indistinguıveis para valores de τ grandes.
O τ tem o significado de frequencia em Otica e no Eletromag-netismo. Estamos interessados entao apenas em situacoes em que afrequencia τ vai a infinito, ou seja, quando ela e muito grande. Nestecontexto, se H(τ) tem decrescimento rapido, podemos dizer que paraτ grande podemos substituir ela pela funcao nula (H(τ) ∼ 0).
Nosso objetivo principal e analisar o assintotico de expressoes daforma
F (τ) =
∫ ∞
−∞f(x)eiτϕ(x)dx
quando τ vai para infinito [1], [5], [6], [7] e [8].
Para se ter uma breve ideia da complexidade do problema con-sidere ϕ(x) = x: note que neste caso quando τ esta fixo, mas emuito grande, o termo eiτx oscila muito com x, ou seja, uma pequenavariacao de x faz variar bastante eiτx; a ideia heurıstica basica aquie que essas oscilacoes irao produzir cancelamentos e um comportantobem definido aparece disto tudo quando τ vai a infinito.
Em Otica o f(x) representa a amplitude, τ a frequencia e o ϕ(x)a fase de uma onda que e descrita pela expressao acima [3], [4] e[8]. O limite quando τ vai a infinito conduz a assim chamada OticaGeometrica [2] Section 9-8 .
Vamos assumir em todo o texto que f e de classe C∞.
Uma outra importante aplicacao do calculo do assintotico de taisintegrais e no estudo do limite semi-classico da Mecanica Quantica:neste caso τ = 1/h e h vai a zero [3], [5] e [2].
Como decorrencia natural do que vamos analisar no texto vamosapresentar brevemente a fundamentacao matematica da teoria dasseries nao convergentes. H. Poincare foi o primeiro matematico aintroduzir tais series.
11.2 Fase Estacionaria
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 217 — #217 ii
ii
ii
217
Proposicao 11.1. Seja f ∈ C∞0 (IR), ou seja uma funcao C∞ com
suporte compacto, entao
F (τ) =
∫ ∞
−∞f(x)eiτxdx
e de decrescimento rapido.
Demonstracao: De fato, segue de propriedades de Series de Fourier(apenas integracao por partes) que
F (τ) =
∫ ∞
−∞f(x)eiτxdx =
−1
iτ
∫ ∞
−∞
df(x)
dxeiτxdx
e repetindo a integracao por parte n vezes, obtemos
F (τ) =−1n
(iτ)n
∫ ∞
−∞
dnf(x)
dnxeiτxdx.
Entao |τnF (τ)| ≤ (b− a)Maxa≤x≤bdnf(x)dnx , onde o intervalo (a, b)
contem o suporte de f e a, b sao constantes reais.Logo F (τ)τn e limitada para todo n, portantoF (τ)τn−1 tende a zero para todo n quando τ vai a infinito. Re-
sultado analogo vale para as derivadas k-esimas. Logo, tal F (τ) temdecrescimento rapido.
Utilizando o ponto de vista de equivalencia ∼, podemos dizer, doponto de vista da Definicao 11.2 que podemos substituir F (τ) por 0para τ grande, ou seja
F (τ) =
∫ ∞
−∞f(x)eiτxdx ∼ 0.
Vamos agora analisar em geral outros tipos de funcoes F (τ), comopor exemplo
F (τ) =
∫ ∞
−∞f(x)eiτϕ(x)dx
onde ϕ(x) e uma funcao qualquer que supomos doravante analıtica.No exemplo anterior ϕ(x) = x.E possıvel mostrar mais geralmente que:
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 218 — #218 ii
ii
ii
218 CAPITULO 11. O METODO DA FASE ESTACIONARIA
Proposicao 11.2. Se ϕ′(x) nao tem zeros no suporte de f entao
vale que
F (τ) =
∫ ∞
−∞f(x)eiτϕ(x)dx ∼ 0.
Demostracao: Para cada τ tal que ϕ′(τ) = 0, podemos escolher um
intervalo aberto Uτ = (τ−ϵ, τ+ϵ) disjunto do suporte de f . Por outrolado, para cada τ tal que ϕ
′(τ) = 0 podemos escolher um intervalo
aberto Uτ = (τ − ϵ, τ + ϵ) tal que ϕ′(x) = 0,∀x ∈ Uτ . Tomando
uma particao da unidade subordinada ao recobrimento assim obtido,basta provar que ∫ a
b
f(x)eiτϕ(x)dx ∼ 0,
quando (a, b) contem o suporte de f e ϕ′(x) = 0 em [a, b]. O resultado
segue da proposicao 1 pela mudanca de coordenadas ϕ(x) = y. Se ϕ
′(a) = 0, ϕ
′′(a) = 0 dizemos que a e ponto estacionario or-
dinario (e crıtico nao degenerado para ϕ). Se ϕ′(a) = 0, ϕ
′′(a) = 0
dizemos que a e ponto de caustica.Um caso importante foi estudado por Fresnel, que corresponde a
ϕ(x) = x2. Neste caso x = 0 e ponto estacionario ordinario para ϕ.Lembre que∫ ∞
−∞eix
2τdx =1√τ
∫ ∞
−∞eiy
2
dy =
√π√τeiπ/4
Desejamos calcular
F (τ) =
∫ ∞
−∞f(x)eiτx
2
dx
Ora
F (τ)− f(0)
√π√τeiπ/4 =
∫ ∞
−∞f(x)eiτx
2
dx− f(0)
∫ ∞
−∞eiτx
2
dx =
= limR→∞
∫ R
−R(f(x)− f(0))eiτx
2
dx.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 219 — #219 ii
ii
ii
219
Seja g(x) tal que f(x)−f(0) = xg(x), onde g ∈ C∞(R) e g′= c
x2
para x fora do suporte de f .Ora ∫ R
−R(f(x)− f(0))eiτx
2
dx =
∫ R
−Rxg(x)eiτx
2
dx =
eiτx2
g(x)
2iτ|x=Rx=−R − 1
2iτ
∫ R
−Rg
′(x)eiτx
2
dx.
Se R e grande, g(R) = − f(0)R e g(−R) = f(0)
R .Decorre daı que
limR→∞
∫ R
−R(f(x)− f(0))eiτx
2
dx = − 1
2iτ
∫ ∞
−∞g
′(x)eiτx
2
dx.
Sendo assim,
F (τ) = eiπ/4f(0)√πτ−1/2 +
i
2τ
∫ ∞
−∞g
′(x)eiτx
2
dx.
Note que por hipotese de g, para cada τ fixo
i
2τ
∫ ∞
−∞g
′(x)eiτx
2
dx
e uma constante finita; esta integral vai a zero quando τ vai a infinito.Como τ−1 vai a zero mais rapido que τ−1/2 quando τ vai a in-
finito, o termo f(0)√πτ−1/2 domina o termo i
2τ
∫∞−∞ g
′(x)eiτx
2
dx naconvergencia a zero de F (τ) quando τ vai a infinito.
Fazendo o mesmo procedimento m vezes obtemos:
Proposicao 11.3. Para todom vale que se F (τ) =∫∞−∞ f(x)eiτx
2
dx,entao
F (τ) =
m∑k=0
eiπ/4√π(i/2)k
f2k(0)
(2k)!!τ−k−1/2+
+(i/(2τ))m+1
∫ ∞
−∞h(x)eiτx
2
dx,
onde h(x) e uma funcao em C∞ tal que h(x)x2 e limitada e onde(2k)!! = 2 4 6...(2(k − 1)) (2k).

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 220 — #220 ii
ii
ii
220 CAPITULO 11. O METODO DA FASE ESTACIONARIA
A funcao h acima e obtida recursivamente seguindo o procedi-mento do caso m = 1. O termo dominante na convergencia a zero daexpressao acima e de ordem τ−1/2. Podemos afirmar que em primeiraaproximacao o termo dominante de F (τ) e eiπ/4f(0)
√πτ−1/2.
Gostarıamos de fazer m tender a infinto para se ter entao umaexpressao completa de F (τ) em serie, mas este procedimento podeincorrer em problemas de convergencia da serie; esta e a razao paraintroduzir a seguir o conceito de uma serie convergir assintoticamentea uma funcao F (τ).
Definicao 11.3. Dizemos que∑∞
0 gk(τ) converge assintoticamentea F (τ) ∈ C se fixados quaisquer r, s, existe M tal que para m fixo,m ≥M
(drF (τ)
drτ−
m∑k=0
drgk(τ)
drτ)τ s
e limitada quando τ → ∞.
Usaremos a notacao F (τ) ∼∑∞
0 gk(τ) que estende a notacaoanterior.
Note que a serie acima nao converge na maioria dos casos pelo
teorema de E. Borel [8]; os termos f2k(0)(2k)!! podem ser qualquer coisa!!!
A expressao acima, no entanto, faz completo sentido matematico,se interpretada de acordo com a ultima definicao.
Observamos que por definicao F (τ)′ ∼
∑∞0 g
′
k(τ)
Usando a notacao acima, podemos concluir das consideracoes an-teriores que
F (τ) ∼∞∑k=0
eiπ/4√π(i/2)k
f2k(0)
(2k)!!τ−k−1/2 (11.1)
Quando na definicao acima falamos em derivada r-esima de Festamos pensando na expressao formal da derivada, ou seja, por e-xemplo para r = 1 usamos que
F ′(τ) =
∫ ∞
−∞ix2f(x)eiτx
2
dx
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 221 — #221 ii
ii
ii
221
quando
F (τ) =
∫ ∞
−∞f(x)eiτx
2
dx.
Mais geralmente, por inducao
F (j)(τ) =
∫ ∞
−∞(ix2)jf(x)eiτx
2
dx.
Note que dependendo de f o termo√π(i/2)k f
2k(0)(2k)!! pode ser qual-
quer coisa. De qualquer modo atraves de (1), no caso ϕ(x) = x2, fo-mos capazes de caracterizar o comportamento assintotico de F paraτ grande.
Vamos apresentar a seguir, a tıtulo de ilustracao, um exemploque embora nao seja exatamente o caso considerado acima da a ideiaexata das questoes que desejamos analisar aqui.
O caso que vamos apresentar a baixo tem a vantagem de utilizarapenas resultados elementares de Calculo Diferencial e Integral.
Considere a funcao F (τ) tomando valores reais como funcao davariavel τ (vamos estar interessados apenas em valores grandes de τ):
F (τ) =
∫ ∞
0
e−τx
1 + xdx.
Note que F (τ) vai a zero quando τ vai a infinito.Note que a principal diferenca do caso acima para o caso anteri-
ormente considerado da fase estacionaria (consideramos agora o casoparticular que corresponde na notacao anterior a f(x) = 1/(1 + x) eϕ(x) = x), e que consideramos e−τx e nao e−iτx; no entanto as ideiasbasicas que funcionam num caso funcionam no outro.
Vamos mostrar que tal funcao F para valores grandes de τ podeser aproximada por uma serie de potencias que tem uma expressaobem simples:
∞∑n=0
(−1)nn!
τn+1.
Observe que tal serie nao e convergente!!! A utilidade de consi-derar tal serie deriva do seguinte fato: F (2) e mal aproximado por∑∞n=0
(−1)nn!2n+1 , mas F (10) (neste caso τ = 10 pode ser considerado
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 222 — #222 ii
ii
ii
222 CAPITULO 11. O METODO DA FASE ESTACIONARIA
grande) e aproximado com erro percentual de menos de 0, 0006 por∑3n=0
(−1)nn!10n+1 , ou seja os primeiros tres termos de
∑∞n=0
(−1)nn!10n+1 sao
tais que |∑3n=0
(−1)nn!10n+1 − F (10)| ≤ F (10)0, 0006.
Desejamos enfatizar que estamos dizendo acima que F (τ) e aprox-
imado por∑∞n=0
(−1)nn!τn+1 apenas para valores grandes de τ !!!
A seguinte definicao para F tomando valores reais e analoga aanteriormente considerada para F tomando valores complexos.
Definicao 11.4. Dizemos que∑∞
0 gk(τ) converge assintoticamentea F (τ) ∈ R, quando τ vai a infinito, se fixados quaisquer r, s, existeM tal que para m fixo, m ≥M
|drF (τ)
drτ−
m∑k=0
drgk(τ)
drτ|τs
e limitada quando τ → ∞.Neste caso dizemos que
F (τ) ∼∞∑n=0
gn(τ).
Existe uma diferenca fundamental entre series convergentes∑∞n=0 anτ
n = G(τ) e series assintoticas, quando τ vai a infinito,∑∞n=0 anτ
n ∼ F (τ).
No primeiro caso, dado ϵ e τ , existe N tal que |∑Nn=0 anτ
n −G(τ)| < ϵ, enquanto no segundo caso, dado ϵ e N existe K > 0 tal
que |∑Nn=0 anτ
n−F (τ)| < ϵτ−N para τ > K. Note que o K dependede ϵ e N ; estamos considerando na aproximacao um erro percentualque leva em conta a grandeza do valor de τ utilizado.
Sendo assim, o que ocorre de fato no caso nas series assintoticas,e que para τ fixo a proximacao e boa para N pequeno, mas fica ruimpara N de ordem maior que τ .
No nosso caso gn(τ) =(−1)nn!τn+1 e afirmamos que
F (τ) ∼∞∑n=0
(−1)nn!
τn+1,
Vamos elaborar um pouco sobre o sentido do ∼; mais exatamentevamos considerar a questao apenas para r = 0.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 223 — #223 ii
ii
ii
223
Ora,
1− (−1)NxN
1 + x= 1− x+ x2 − · · ·+ (−1)N−1xN−1,
portanto, para todo x
1
1 + x=N−1∑0
(−1)nxn +(−1)NxN
1 + x.
Usando a expansao acima na forma integral de F obtemos
F (τ) =N−1∑n=0
(−1)nn!
τn+1+ (−1)N
∫ ∞
0
e−τxxN
1 + xdx.
Note que a parte esquerda do somatorio acima coincide com os
primeiros N termos de∑∞n=0
(−1)nn!τn+1 , sendo assim o erro na aproxi-
macao de F por∑∞n=0
(−1)nn!τn+1 e
EN (τ) = (−1)N∫ ∞
0
e−τxxN
1 + xdx,
logo
|EN (τ)| =∫ ∞
0
e−τxxN
1 + xdx <
∫ ∞
0
e−τxxN
1dx =
N !
τN+1,
Visto de outro modo
|F (τ)−N−1∑n=0
(−1)nn!
τn+1|τN+1 ≤ N !
e N ! e uma constante.Sendo assim, na Definicao 11.4, dado s = N +1 devemos escolher
M = N . Note que para s = N + 1 fixado, a constante N ! e muitogrande (se N e grande) mas fixa.
Acreditamos que com o exemplo acima ficou claro o sentido daafirmacao
F (τ) ∼∞∑n=0
(−1)nn!
τn+1,

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 224 — #224 ii
ii
ii
224 CAPITULO 11. O METODO DA FASE ESTACIONARIA
11.3 Fase nao degenerada
Voltamos agora a considerar o caso em que F toma valores com-plexos.
Vamos considerar agora o caso em que ϕ(x) possui varios pon-tos crıticos isolados p1, p2, .... Sejam Vi respectivamente vizinhancasdisjuntas dos pontos pi.
Considere Um colecao de abertos tal que ∪m,iUm ∪ Vi = R, talque pi nao esta em nenhum Um e ainda que a cobertura de R sejalocalmente finita.
Seja θm, ϵi uma particao da unidade subordinada a particao. Es-tamos usando a notacao que θm tem suporte em Um e ϵi tem suporteem Vi.
Sendo assim
F (τ) =∑m
∫ ∞
−∞θm(x)f(x)eiτϕ(x)dx+
∑m
∫ ∞
−∞ϵm(x)f(x)eiτϕ(x)dx.
Observamos que ambas as somas sao finitas e que basta pelaProposicao 11.2 examinar
∑m
∫ ∞
−∞ϵm(x)f(x)eiτϕ(x)dx.
ou seja, basta examinar individualmente
H(τ) =
∫ ∞
−∞f(x)eiτϕ(x)dx
quando o suporte de f esta em um intervalo (−δ, δ) e 0 e ponto crıticoisolado de ϕ (podemos transladar o problema e colocar o ponto crıticono ponto 0).
No caso em que 0 e nao degenerado ϕ′(0) = 0, ϕ′′(0) = 0), existeuma mudanca de coordenadas local x = x(y) tal que ϕ(x(y)) = y2.Neste caso recaımos na Proposicao 11.3, pois
H(τ) =
∫ ∞
−∞f(x)eiτϕ(x)dx =

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 225 — #225 ii
ii
ii
225
∫ ∞
−∞f(x(y))eiτy
2
x′(y)dy =
∫ ∞
−∞g(y)eiτy
2
dy. (11.2)
Vamos considerar com mais detalhe agora o caso em que todosos pontos crıticos de ϕ sao nao-degenerados. Neste caso, temos queescolher com mais cuidado os intervalos abertos Um, Vj .
E claro que ϕ(x)− ϕ(pj) = (x− pj))2ψj(x), onde ψj e analıtica e
ψj(pj) =12ϕ
′′(pj). Seja µj = sgnϕ′′(pj). Definimos a nova variavel
y = (x− pj)√µjψj(x)
na vizinhanca de pj . Temos
dy
dx(pj) > 0.
Tomamos Vj = (pj − δj , pj + δj) tal que seja valida a mudanca devariavel neste intervalo. Depois escolhemos os Um tais que
Um ∩(pj −
δj2, pj +
δj2
)seja vazio para todos m e j. Nestas condicoes:
∫ +∞
−∞ϵj(x)f(x)e
iτϕ(x)dx =
∫ pj+δj
pj−δjϵj(x)f(x)e
iτϕ(x)dx =
= eiτϕ(pj)∫ pj+δj
pj−δjϵj(x)f(x)e
iτ(ϕ(x)−ϕ(pj))dx =
= eiτϕ(pj)∫ y(pj+δj)
y(pj−δj)ϵj(x(y))f(x(y))e
iµjτy2 dx
dydy =
= eiτϕ(pj)∫ +∞
−∞
⌊ϵj(x(y))f(x(y))
dx
dy
⌋eiµjτy
2
dy,

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 226 — #226 ii
ii
ii
226 CAPITULO 11. O METODO DA FASE ESTACIONARIA
onde ϵj(x(y)) = 1 na vizinhanca de 0. Seja:
cjk =
d2k[f(x(y))dxdy
]dy2k
(0).
Observamos que os cjk podem ser efetivamente calculados porqueas derivadas de x(y) calculam-se derivando sucessivamente a identi-dade y = (x− pj)
√µjψj(x) respeito de y.
1o¯ caso) ϕ′′(pj) > 0. Neste caso, µj = 1. Pelo visto antes,∫ +∞
−∞ϵj(x(y))f(x(y))
dx
dyeiτy
2
dy ∼√πei
π4
+∞∑k=0
(i
2
)kcjk
(2k)!!τ−k−
12 .
2o¯ caso) ϕ′′(pj) < 0. Neste caso, µj = −1. Observemos que:∫ +∞
−∞g(y)e−iτy
2
dy =
∫ +∞
−∞g(y)eiτy2dy
para toda g ∈ C∞0 (IR). Entao,∫ +∞
−∞ϵj(x(y))f(x(y))
dx
dye−iτy
2
dy ∼√πe−i
π4
+∞∑k=0
(− i
2
)kcjk
(2k)!!τ−k−
12 .
Finalmente, ∫ +∞
−∞f(x)eiτϕ(x)dx ∼
∼√π
+∞∑k=0
(i
2
)k[ei
π4
∑ϕ′′(pj)>0
eiτϕ(pj)cjk+(−1)ke−iπ4
∑ϕ′′(pj)<0
eiτϕ(pj)cjk
]τ−k−
12
(2k)!!.
Por definicao
cj0 = f(pj)dx
dy(0) = f(pj)
[dy
dx(pj)
]−1
=f(pj)√µjψj(pj)
=
√2f(pj)√|ϕ′′(pj)|
.
Logo, da anterior resulta:∫ +∞
−∞f(x)eiτϕ(x)dx =
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 227 — #227 ii
ii
ii
227
=
[√2π∑
ϕ′′(pj)>0
f(pj)ei(τϕ(pj)+
π4 )√
|ϕ′′(pj)|+√2π∑
ϕ′′(pj)<0
f(pj)ei(τϕ(pj)−
π4 )√
|ϕ′′(pj)|
]τ−
12+0(τ−1)
para τ → +∞.Fica entao determinado o termo dominante de F (τ) como o termo
a esquerda da ultima linha (vai a zero como τ−12 ).
11.4 Aplicacao as integrais de Airy generalizadas
Seja
F (τ) =
∫ +∞
−∞eiτϕ(x)dx
onde ϕ(x) e um polinomio, a coeficientes reais, do qual todos os pon-tos crıticos sao nao degenerados e cujo grau e n ≥ 2.
Lema 11.1. A integral precedente converge para todo τ ∈ IR, τ > 0e define uma funcao C∞ de τ em (0,+∞).
Seja I um intervalo que contem no seu interior todas as raızes deϕ(x), ϕ′(x) e ϕ′′(x). Seja f ∈ C∞
0 (IR) tal que f(x) = 1 se x ∈ I. Sejag(x) = 1− f(x).
Entao∫ +∞
−∞eiτϕ(x)dx =
∫ +∞
−∞f(x)eiτϕ(x)dx+
∫ +∞
−∞g(x)eiτϕ(x)dx.
Como f tem suporte compacto o Lema 11.1 segue imediatamentedo lema seguinte, que provaremos depois.
Lema 11.2. ∫ +∞
−∞g(x)eiτϕ(x)dx,
τ > 0, converge e define uma funcao C∞ de τ que tem decrescimentorapido para τ → +∞.
O Lema 11.2 nos diz tambem, que para ter o desenvolvimentoassintotico de F (τ) basta ter o de∫ +∞
−∞f(x)eiτϕ(x)dx.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 228 — #228 ii
ii
ii
228 CAPITULO 11. O METODO DA FASE ESTACIONARIA
Mas este ultimo se calcula como antes, observando ainda que f = 1na vizinhanca de cada ponto crıtico de ϕ.
Vamos aplicar o anterior a funcao de Airy
Ai(t) =1
2π
∫ +∞
−∞cos
(1
3ω3 + tω
)dω
e estudar seu comportamento para t→ ±∞.Consideremos primeiro para t→ −∞.Entao consideramos, para t→ +∞, a funcao:
G(t) = Ai(−t) = 1
2π
∫ +∞
−∞cos
(1
3ω3 − tω
)dω.
Mudando de variavel: t = τ23 obtemos
F (τ) = G(τ23 ) =
1
2π
∫ +∞
−∞cos
(1
3ω3 − τ
23ω
)dω.
Mudemos agora a variavel de integracao: ω = τ13 (1 + x):
F (τ) =τ
13
2π
∫ +∞
−∞cos
[1
3τ(1 + x)3 − τ(1 + x)
]dx
=τ
13
2π
∫ +∞
−∞cos
(1
3x3 + x2 − 2
3
)τdx.
Logo,
F (τ) =τ
13
2πRe
∫ +∞
−∞eiτ
(13x
3+x2− 23
)dx
e estamos no caso anterior com:
ϕ(x) =1
3x3 + x2 − 2
3.
Os pontos crıticos sao p1 = −2 e p2 = 0. Temos que:
ϕ(p1) =2
3, ϕ′′(p1) = −2, ϕ(p2) = −2
3, ϕ′′(p2) = 2.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 229 — #229 ii
ii
ii
229
Obtemos:
F (τ) =τ
13
2πRe
[(√2πei
(− 2
3 τ+π4
)√2
+√2πei
(23 τ−
π4
)√2
)τ−
12 + 0(τ−1)
]
= π− 12 τ−
16 cos
(2
3τ − π
4
)+ 0(τ−
23 )
Logo,
G(t) = π− 12 t−
14 cos
(2
3t32 − π
4
)+ 0(t−1)
resultado que melhora o de Olver pagina 103 mas que resulta tambemde Olver pagina 392.
O mesmo metodo aplicado a Ai(t) para t → +∞ mostra queAi(t) ∼ 0 para t→ +∞.
Prova do Lema 11.2. Vamos notar C∞k (IR) os espaco das funcoes
C∞f : IR→ IC tais que, para todo j = 0, 1, · · · , vale
djf
dxj= 0(|x|−k)
para x→ ±∞.Por exemplo, se f ∈ C∞(IR) e se existe K > 0 tal que
f(x) =p(x)
q(x)
se |x| ≥ |K|, onde p, q sao polinomios e (grau q-grau p) ≥ k, entaof ∈ C∞
k (IR).Alem disso, se f ∈ C∞
k ((IR) e p(x) e um polinomio de grau m ≤ kentao p(x)f(x) ∈ C∞
k−m((IR).
Afirmacao: Para cada k = 1, 2, 3, · · · existe h ∈ C∞k (IR) tal que∫ +∞
−∞g(x)eiτϕ(x)dx = µ(τ)
∫ +∞
−∞h(x)eiτϕ(x)dx
(τ > 0) onde µ(τ) = cte.τ−r com r ≥ k.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 230 — #230 ii
ii
ii
230 CAPITULO 11. O METODO DA FASE ESTACIONARIA
Com efeito,∫ +∞
−∞g(x)eiτϕ(x)dx =
1
iτ
∫ +∞
−∞
g(x)
ϕ′(x)eiτϕ(x)iτϕ′(x)dx
(g(x)
ϕ′(x)∈ C∞(IR)
porque g e nula sobre um aberto que contem os zeros de ϕ′
). Logo,
∫ +∞
−∞g(x)eiτϕ(x)dx =
1
iτ
[g(x)
ϕ′(x)eiτϕ(x)
]+∞
−∞+i
τ
∫ +∞
−∞g1(x)e
iτϕ(x)dx
onde
g1(x) =p(x)
q(x)
para |x| bastante grande, com p, q polinomios e grau q-grau p = n(lembremos que (g(x) = 1 para |x| bastante grande). Logo, comog(x) = 1 para |x| bastante grande e grau ϕ′ ≥ 1,∫ +∞
−∞g(x)eiτϕ(x)dx =
i
τ
∫ +∞
−∞g1(x)e
iτϕ(x)dx
onde g1(x) ∈ C∞n (IR). Iterando este procedimento, decorre a afirmacao.
Da afirmacao com k = 2, ja resulta que∫ +∞
−∞g(x)eiτϕ(x)dx
e convergente e define G : (0;+∞) → IC.Seja dado m(= 0, 1, 2, ...). Tomamos k > mn+2. Pela afirmacao:
G(τ) = µ(τ)
∫ +∞
−∞h(x)eiτϕ(x)dx
onde a integral converge absolutamente, junto com todas as suasderivadas respeito de τ ate a ordem m. Como µ(τ) = constante τ−r
com r ≥ k, decorre daı que G(τ) e derivavel ate a ordem m e
djG
djτ= 0(τ−k)
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 231 — #231 ii
ii
ii
231
para 0 ≤ j ≤ m. Como m e arbitrario, G ∈ C∞(0,+∞) e G ∼ 0.
11.5 Fase com Pontos de Caustica
O anterior da conta do caso em que os pontos crıticos sao naodegenerados.
Supondo, por outro lado, que o ponto crıtico seja degenerado(caustica), existe uma mudanca de coordenadas local tal que ϕ(x(y)) =ym,m ≥ 3.
Vamos portanto analisar o caso ϕ(x) = xm, m ≥ 3 (o caso ϕ(x) =−xm e obtido a partir deste por conjugacao).
Vamos assumir inicialmente, para simplificar, que f possa ser es-crito como f(x) = xkg(x), onde g e constante igual a 1 numa vizi-nhanca de 0.
Como ϕ(x) = xm,m ≥ 3, temos entao para cada k fixo que que
Fk(τ) =
∫ ∞
−∞xkg(x)eiτx
m
dx =
∫ ∞
−∞f(x)eiτx
m
dx
satisfaz
F ′k(τ) =
∫ ∞
−∞ixmf(x)eiτx
m
dx = 1/(mτ)
∫ ∞
−∞(xf(x)) (ixm−1mτeiτx
m
)dx.
Integrando por partes,
F ′k(τ) = −1/(mτ)
∫ ∞
−∞(xf(x))′ eiτx
m
dx =
−1/(mτ)
∫ ∞
−∞f(x)eiτx
m
dx− 1/(mτ)
∫ ∞
−∞xf ′(x) eiτx
m
dx =
−1/(mτ)Fk(τ)− 1/(mτ)
∫ ∞
−∞xf ′(x) eiτx
m
dx.
Ou seja,
mτF ′k(τ) + Fk(τ) = −
∫ ∞
−∞xf ′(x) eiτx
m
dx.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 232 — #232 ii
ii
ii
232 CAPITULO 11. O METODO DA FASE ESTACIONARIA
Ora,
xf ′(x) = kxkg(x) + xk+1g′(x) = kf(x) + xk+1g′(x).
Como 0 nao esta no suporte de g′(x), a Proposicao 11.2 nos dizfinalmente que mτF ′
k(τ) + (k + 1)Fk(τ) e de decrescimento rapido.Como Fk esta ımplicito na ultima equacao, nao sabemos ainda
determinar o assintotico de Fk(τ) =∫∞−∞ xkg(x)eiτx
m
dx, onde g econstante igual a 1 numa vizinhanca de 0, mas sabemos que satisfazmτF ′
k(τ)+(k+1)Fk(τ) ∼ 0. Vamos a seguir determinar o assintoticode Fk(τ), mas antes precisamos uma definicao que vai contemplar apossibilidade de termos o conceito de uma serie nao convergente sersolucao de uma equacao diferencial (no sentido assintotico).
Definicao 11.5. Sejam p0(τ), p1(τ), .., pn(τ) polinomios. Dizemosque a funcao C∞, y(τ), e solucao da equacao diferencial assintoticalinear
pn(τ)dny(τ)
dτn+ ...+ p1(τ)
dy(τ)
dτ+ p0(τ)y(τ) ∼ 0,
sen∑j=0
pj(τ)djy(τ)
dτ j
e de decrescimento rapido.
A partir da definicao acima note que as consideracoes feitas ante-riormente mostram que Fk(τ) e solucao de
mτdy(τ)
dτ+ (k + 1)y(τ) ∼ 0,
ou equivalentemente
mτdy(τ)
dτ+ (k + 1)y(τ) = b(τ)
onde b(τ) e de decrescimento rapido.Uma solucao particular da equacao acima e
y(τ) =−1
mτ−(k+1)/m
∫ ∞
τ
x(k+1−m)/mb(x)dx
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 233 — #233 ii
ii
ii
233
que e de decrescimento rapido.A solucao geral e cτ−(k+1)/m + y(τ).Decorre daı que existe constante ck tal que Fk(τ) e assintotica-
mente equivalente a
ckτ−(k+1)/m. (11.3)
Concluımos portanto a analise do assintotico de
Fk(τ) =
∫ ∞
−∞xkg(x)eiτx
m
dx
no caso em que g e constante igual a 1 numa vizinhanca de 0. O valordas constantes ck devem ser determinados em cada caso.
Vamos agora analisar o caso um pouco mais geral de f(x) =xkg(x) (sem hipoteses sobre g) com g qualquer em C∞
0 , mas paraisto precisamos antes da seguinte:
Proposicao 11.4. Dado g ∈ C∞0 e N ≥ 0 existe K ≥ 0 tal que
τNdj
dτ j
∫ ∞
−∞xkg(x)eiτx
m
dx = τNdj
dτ j
∫ ∞
−∞f(x)eiτx
m
dx
e limitada para τ → ∞ e para todo j se k ≥ K.
Demonstracao : Se k ≥ m, integrando por partes temos∫ ∞
−∞xkg(x)eiτx
m
dx = 1/(miτ)
∫ ∞
−∞xk−m+1g(x)iτmxm−1eiτx
m
dx =
−1/(miτ)
∫ ∞
−∞(xk−m+1g(x))′eiτx
m
dx
e (xk−m+1g(x))′ = xk−mh(x) onde h(x) esta em C∞0 , o que permite
iterar o calculo. O resultado segue de derivar a expressao varias vezes.
O caso em que ϕ(x) e analıtica (nao so da forma xm) e obtidoa partir da proposicao 4 e atraves de mudanca de variavel como em(2) acima. Isto da conta do caso F (τ) =
∫∞−∞ xkg(x)eiτϕ(x)dx com
g ∈ C∞0 .
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 234 — #234 ii
ii
ii
234 CAPITULO 11. O METODO DA FASE ESTACIONARIA
Vamos agora, finalmente, analisar o caso mais geral de um f(x)qualquer e ϕ(x) analıtica, isto e, o caso F (τ) =
∫∞−∞ f(x)eiτϕ(x)dx
com f ∈ C∞0 .
Escreva
f(x) = a0 + a1x+ a2x2 + ...+ ak−1x
k−1 + xkg(x)
onde g ∈ C∞0 .
Podemos substituir na analise f(x) por f(x)h(x) onde h(x) temsuporte em uma pequena vizinhanca de 0 (usando uma particao daunidade) ou seja, basta analisar o assintotico de
F (τ) =
∫ ∞
−∞h(x)(a0+a1x+a2x
2+...+ak−1xk−1+xkg(x))eiτϕ(x)dx =
∫ ∞
−∞(h(x)a0+h(x)a1x+h(x)a2x
2+...+h(x)ak−1xk−1+xkh(x)g(x))eiτϕ(x)dx.
Para o assintotico dos primeiros termos usamos (3) e para o termo∫ ∞
−∞xkh(x)g(x)eiτϕ(x)dx
usamos a Proposicao 11.4.Resulta portanto que para F (τ) =
∫∞−∞ f(x)eiτϕ(x)dx com f ∈
C∞0 . existe desenvolvimento assintotico da forma
F (τ) =∞∑k=0
ckτ−(k+1)/m.
O primeiro valor ck nao nulo do desenvolvimento acima, carac-teriza o termo principal de decaimento de F (τ) quanto τ → ∞, ouseja ckτ
−(k+1)/m e o termo principal do ponto de vista assintotico.O valor de tal k e denominado de expoente inicial ou invariante deMalgrange. Referimos o leitor para [8] onde sao apresentadas consid-eracoes gerais sobre tal invariante.
O texto acima ilustra de maneira breve a fundamentacao matema-tica da teoria das series de potencias nao convergentes e sua relacaocom as integrais oscilantes e otica.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 235 — #235 ii
ii
ii
Capıtulo 12
Apendice - Aplicacao dePrimeiro Retorno paraEquacoes DiferenciaisOrdinarias
Considere uma equacao diferencial ordinaria x′ = f(x) definida parax num aberto A em que f e de classe C1. Vamos supor que as solucoesx(t) estao sempre definidas para todo t real. Por definicao, para t fixo,ϕt(x) = y quando a solucao x(t) de x′(t) = f(x(t)), x(0) = x e talque x(t) = y.
Podemos considerar entao o fluxo ϕt : A → A, para todo t real.ϕt e um difeomorfismo de A em A.
Recomendamos o leitor a [DL] e [So] para resultados gerais sobreequacoes diferenciais ordinarias e sistemas Hamiltonianos.
Uma solucao x(t) de x′ = f(x) e dita periodica se existe t > 0 talque x(t) = x(0), ou seja ϕt(x) = x. Fica assim determinada a orbitaperiodica γ = ϕs(x)|s ∈ [0, t).
Uma secao local de x, e um conjunto V obtido pela intersecao deum hiperplano de dimensao n − 1 V ⊂ Rn (um espaco afim n − 1
235
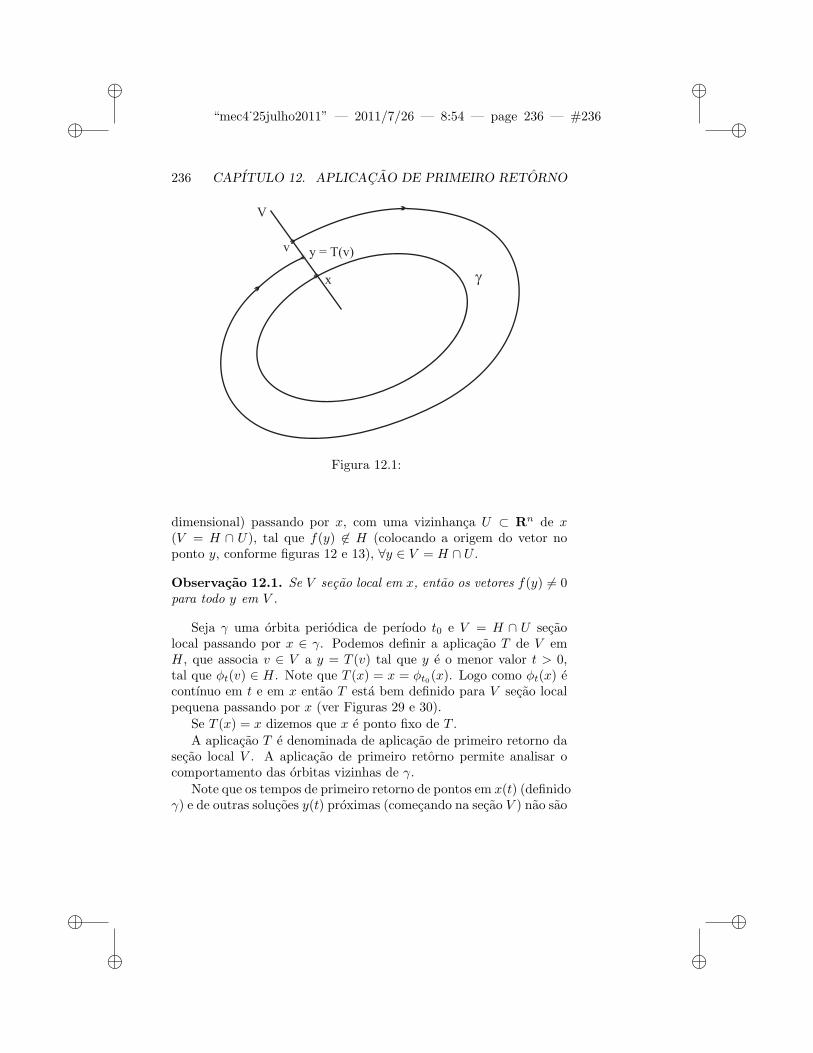
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 236 — #236 ii
ii
ii
236 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
Figura 12.1:
dimensional) passando por x, com uma vizinhanca U ⊂ Rn de x(V = H ∩ U), tal que f(y) ∈ H (colocando a origem do vetor noponto y, conforme figuras 12 e 13), ∀y ∈ V = H ∩ U .
Observacao 12.1. Se V secao local em x, entao os vetores f(y) = 0para todo y em V .
Seja γ uma orbita periodica de perıodo t0 e V = H ∩ U secaolocal passando por x ∈ γ. Podemos definir a aplicacao T de V emH, que associa v ∈ V a y = T (v) tal que y e o menor valor t > 0,tal que ϕt(v) ∈ H. Note que T (x) = x = ϕt0(x). Logo como ϕt(x) econtınuo em t e em x entao T esta bem definido para V secao localpequena passando por x (ver Figuras 29 e 30).
Se T (x) = x dizemos que x e ponto fixo de T .
A aplicacao T e denominada de aplicacao de primeiro retorno dasecao local V . A aplicacao de primeiro retorno permite analisar ocomportamento das orbitas vizinhas de γ.
Note que os tempos de primeiro retorno de pontos em x(t) (definidoγ) e de outras solucoes y(t) proximas (comecando na secao V ) nao sao
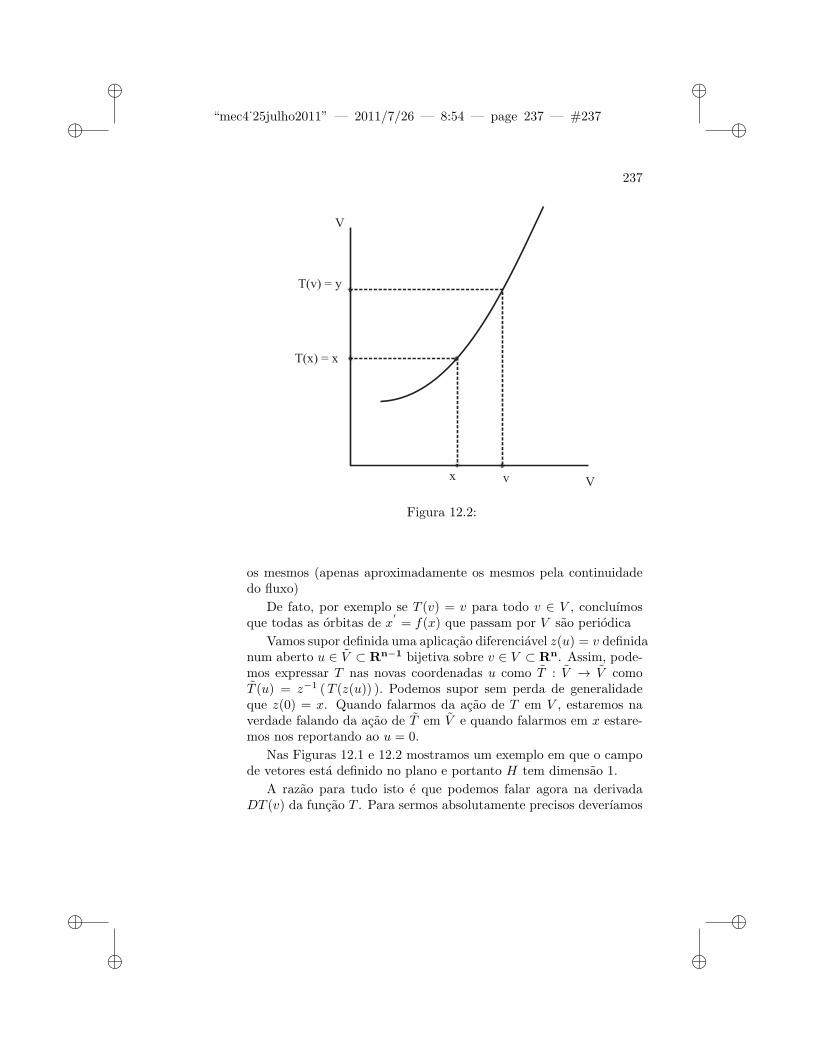
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 237 — #237 ii
ii
ii
237
Figura 12.2:
os mesmos (apenas aproximadamente os mesmos pela continuidadedo fluxo)
De fato, por exemplo se T (v) = v para todo v ∈ V , concluımosque todas as orbitas de x
′= f(x) que passam por V sao periodica
Vamos supor definida uma aplicacao diferenciavel z(u) = v definidanum aberto u ∈ V ⊂ Rn−1 bijetiva sobre v ∈ V ⊂ Rn. Assim, pode-mos expressar T nas novas coordenadas u como T : V → V comoT (u) = z−1 (T (z(u)) ). Podemos supor sem perda de generalidadeque z(0) = x. Quando falarmos da acao de T em V , estaremos naverdade falando da acao de T em V e quando falarmos em x estare-mos nos reportando ao u = 0.
Nas Figuras 12.1 e 12.2 mostramos um exemplo em que o campode vetores esta definido no plano e portanto H tem dimensao 1.
A razao para tudo isto e que podemos falar agora na derivadaDT (v) da funcao T . Para sermos absolutamente precisos deverıamos
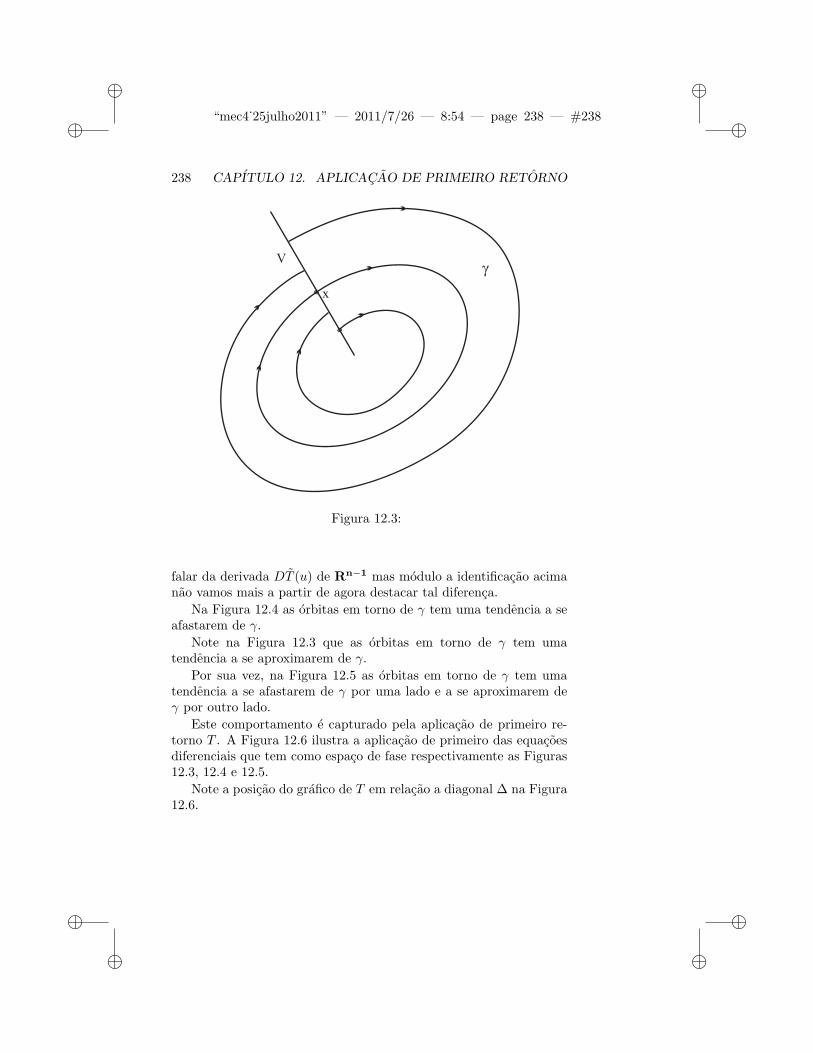
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 238 — #238 ii
ii
ii
238 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
Figura 12.3:
falar da derivada DT (u) de Rn−1 mas modulo a identificacao acimanao vamos mais a partir de agora destacar tal diferenca.
Na Figura 12.4 as orbitas em torno de γ tem uma tendencia a seafastarem de γ.
Note na Figura 12.3 que as orbitas em torno de γ tem umatendencia a se aproximarem de γ.
Por sua vez, na Figura 12.5 as orbitas em torno de γ tem umatendencia a se afastarem de γ por uma lado e a se aproximarem deγ por outro lado.
Este comportamento e capturado pela aplicacao de primeiro re-torno T . A Figura 12.6 ilustra a aplicacao de primeiro das equacoesdiferenciais que tem como espaco de fase respectivamente as Figuras12.3, 12.4 e 12.5.
Note a posicao do grafico de T em relacao a diagonal ∆ na Figura12.6.
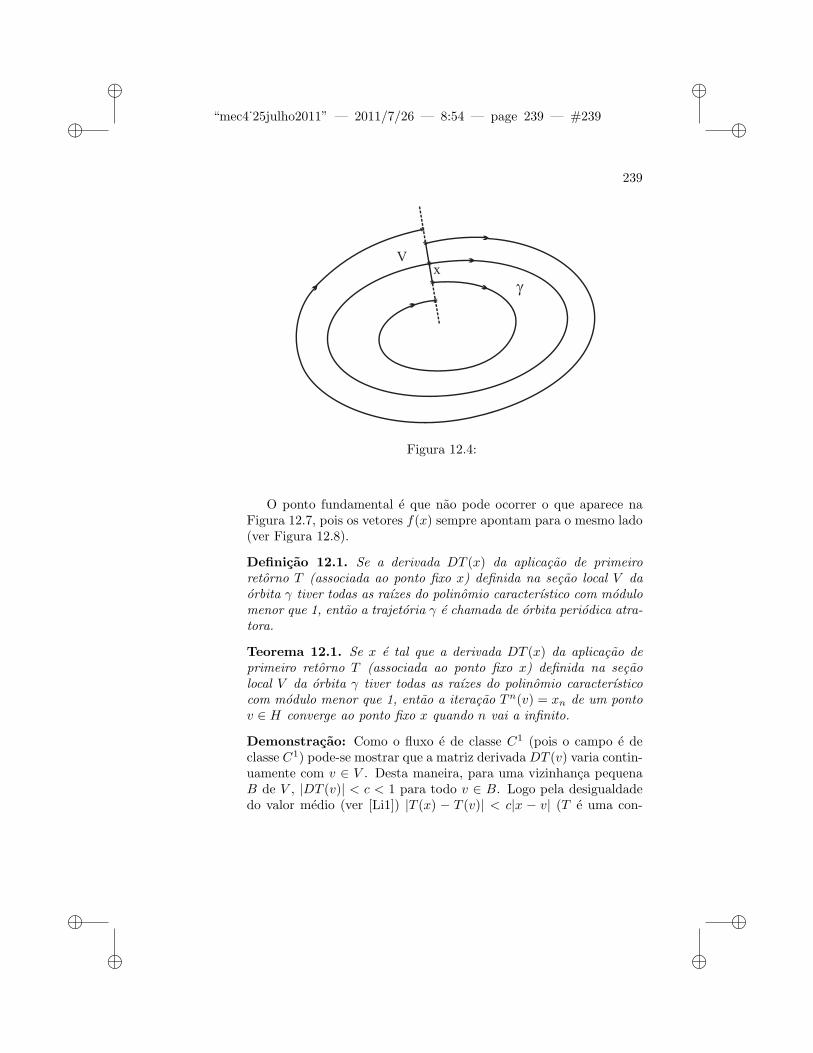
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 239 — #239 ii
ii
ii
239
Figura 12.4:
O ponto fundamental e que nao pode ocorrer o que aparece naFigura 12.7, pois os vetores f(x) sempre apontam para o mesmo lado(ver Figura 12.8).
Definicao 12.1. Se a derivada DT (x) da aplicacao de primeiroretorno T (associada ao ponto fixo x) definida na secao local V daorbita γ tiver todas as raızes do polinomio caracterıstico com modulomenor que 1, entao a trajetoria γ e chamada de orbita periodica atra-tora.
Teorema 12.1. Se x e tal que a derivada DT (x) da aplicacao deprimeiro retorno T (associada ao ponto fixo x) definida na secaolocal V da orbita γ tiver todas as raızes do polinomio caracterısticocom modulo menor que 1, entao a iteracao Tn(v) = xn de um pontov ∈ H converge ao ponto fixo x quando n vai a infinito.
Demonstracao: Como o fluxo e de classe C1 (pois o campo e declasse C1) pode-se mostrar que a matriz derivada DT (v) varia contin-uamente com v ∈ V . Desta maneira, para uma vizinhanca pequenaB de V , |DT (v)| < c < 1 para todo v ∈ B. Logo pela desigualdadedo valor medio (ver [Li1]) |T (x) − T (v)| < c|x − v| (T e uma con-
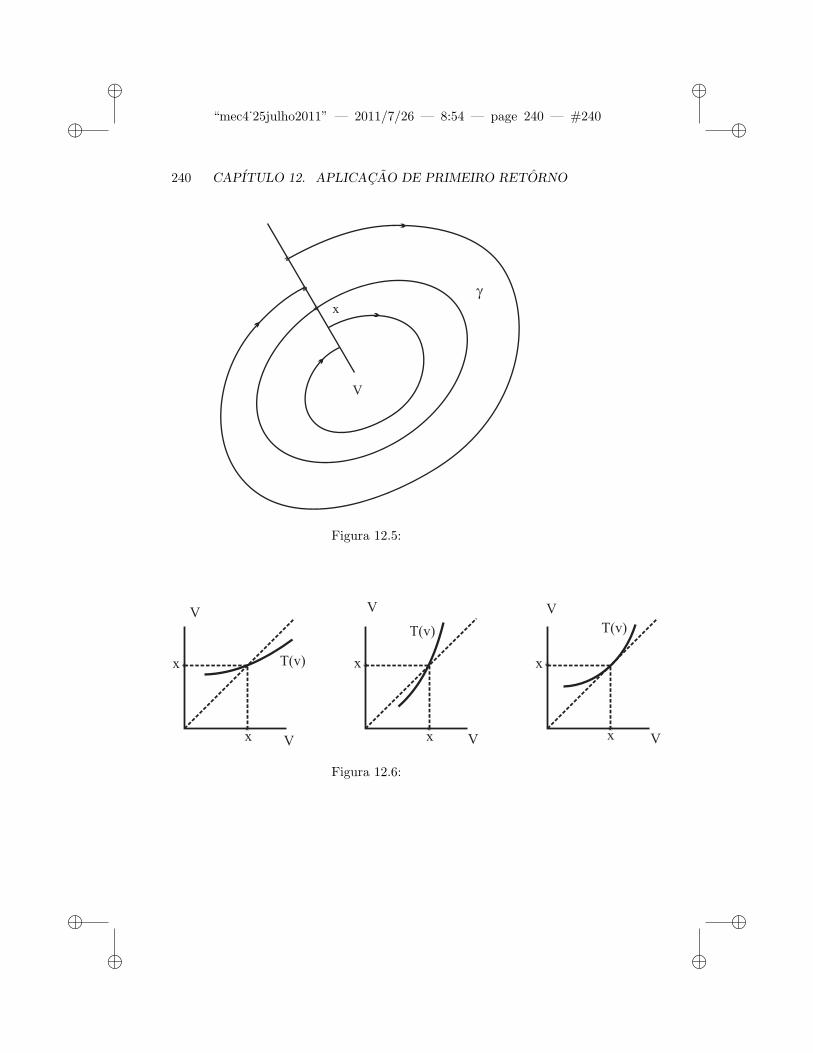
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 240 — #240 ii
ii
ii
240 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
Figura 12.5:
Figura 12.6:
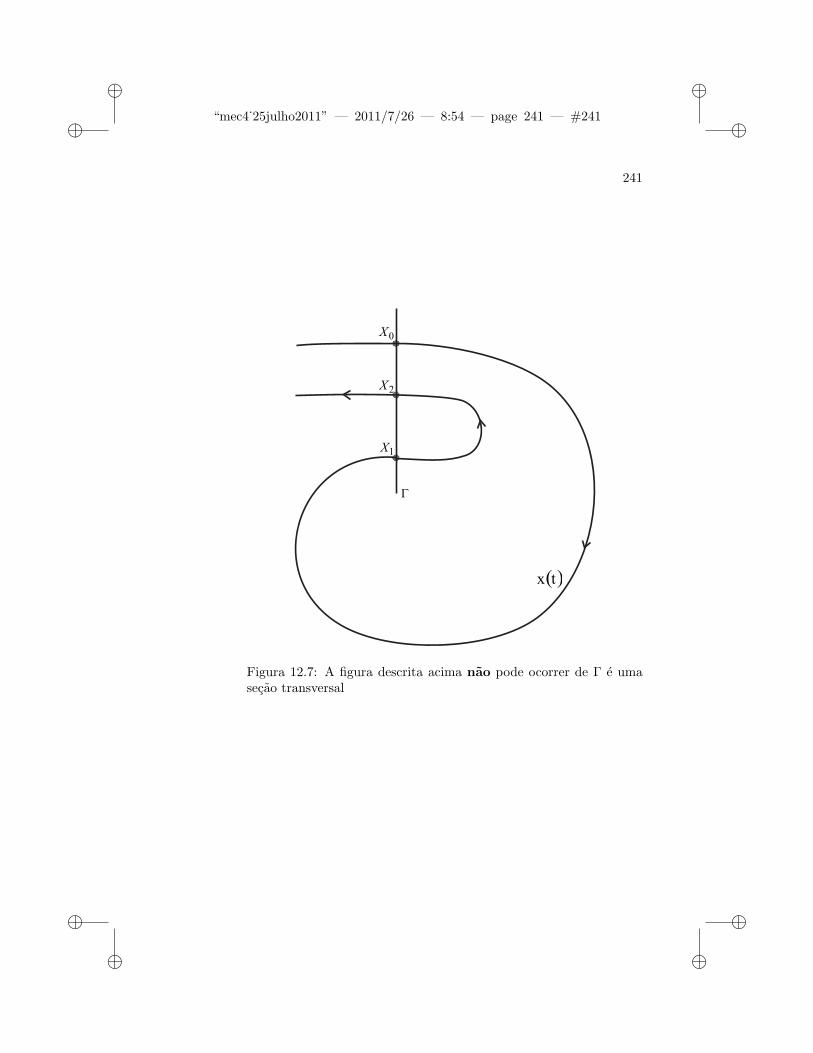
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 241 — #241 ii
ii
ii
241
Figura 12.7: A figura descrita acima nao pode ocorrer de Γ e umasecao transversal
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 242 — #242 ii
ii
ii
242 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
tracao quando definida numa pequena vizinhanca M de x conformedefinicao que aparece no Capıtulo 3). Sendo assim, como Tn(x) = x,por inducao |x − Tn(v)| < cn|x − v| e concluımos que Tn(v) → xquando n→ ∞.
No caso f bidimensional e portanto T unidimensional a condicaoacima significa apenas que |T ′
(x)| < 1. Neste caso, as orbitas dassolucoes da equacao diferencial que cortam V se aproximam de γconforme o teorema acima.
O papel dos autovalores da matriz DT da aplicacao de primeiroretorno T (associada a uma orbita periodica) serem em modulo menorque 1 desempenha um papel analogo ao dos autovalores da derivadaDF do campo de vetores F no caso de pontos de equilıbrio.
Se todos autovalores de DT tem modulo menor que 1 entao pode-mos dizer que γ se comporta assim como uma especie de ”poco”(emanalogia com pontos de equilıbrio tipo poco) atraindo as trajetorias(com tempo crescente) com condicoes iniciais em um aberto proximode si. Tal γ e um exemplo do que se chama um atrator periodico emequacoes diferenciais.
Definicao 12.2. Se a derivada DT (x) de T em x (ponto fixo deT ) tiver todas raızes do polinomio caracterıstico maiores que 1, atrajetoria γ e chamada de orbita periodica repulsora.
No caso unidimensional a condicao acima significa apenas que|T ′
(x)| > 1.Nesse caso, as orbitas das solucoes da equacao diferencial que
cortam V se afastam de γ. Podemos dizer que γ se comporta comouma especie de ”fonte”(em analogia com pontos de equilıbrio tipofonte) repelindo (com o tempo crescente) as trajetorias com condicoesiniciais proximas de si. Tal γ e um exemplo do que se chama umrepulsor em equacoes diferenciais.
O papel da secao local e basicamente discretizar o tempo. Adinamica de ϕt(x) em torno de γ pode ser analisada pela dinamicade Tn(v) na secao local.
Note por exemplo que apenas partir do grafico T do ultimo casoda 12.5 podemos deduzir que neste caso as trajetorias das solucoesperto de γ se aproximam por um lado e se afastam pelo outro. Tudoisto segue apenas da analise da secao local e da aplicacao de primeiro

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 243 — #243 ii
ii
ii
243
retorno. Note que neste caso T ′(x) = 1.Se o fluxo preserva area entao nao pode ocorrer nem 12.4 nem
12.3.Outra maneira de discretizar o tempo e considerar ϕ1(y) = F (y).
F como vimos e um difeomorfismo e podemos obter varias pro-priedades de ϕt(x) atraves dos iterados F
n(x) = ϕn1 (x) = ϕn(x).Este ponto de vista de analisar a dinamica de uma equacao dife-
rencial atraves de uma secao local T ou de um difeomorfismo F , temproduzido uma serie de resultados importantes na Teoria dos SistemaDinamicos. O tempo torna-se uma variavel discreta e nao contınua.
A hipotese de os autovalores da aplicacao de primeiro retorno Tem x terem todos modulo menor que 1 desempenha no caso de orbitasperiodicas uma papel analogo a hipotese de todos os autovalores deDf(x0) terem parte real negativa quando x0 e de equilıbrio.
Antes de prosseguirmos desejamos enfatizar que numa secao trans-versal Γ local os vetores f(v) (com v ∈ Γ) apontam todos semprepara um mesmo lado. Sendo assim as trajetorias solucoes x(t) daequacao diferencial x′ = f(x) que batem na secao Γ entram semprepelo mesmo lado e saem pelo outro. Mais exatamente, ”nao”podeocorrer algo do tipo descrito pela Figura 35.
A Figura 12.13 descreve o que deve ocorrer em duas batidas sub-sequentes numa secao transversal T da trajetoria x(t) solucao daequacao diferencial.
Podemos considerar a partir de um Hamiltoniano H(p, q) definidoem R2n tomando valores reais a equacao de Hamilton (Definicao 3,Capıtulo 3 [L]). Obtemos assim uma EDO em R2n. Os conceitosdescritos acima podem ser aplicados neste caso.
Vamos agora descrever brevemente como pode ser rico o compor-tamento dinamico das trajetorias do fluxo de uma equacao diferencialautonoma em torno de uma orbita periodica. Referimos o leitor para[DL], [PM] e [R] para demonstracao dos resultados que vamos consi-derar a seguir. Nosso objetivo nesta secao e tao somente ilustrar comfiguras alguns dos comportamentos que caracterizam tais sistemasem R3.
Considere uma secao transversal P passando por z0 = z(t0) per-tencente a uma trajetoria periodica z(t) ∈ Rn de uma equacao di-ferencial de primeira ordem x′ = G(x) (neste caso o vetor tangentez
′(t0) nao esta em P ). Na Figura 12.9 mostramos a aplicacao T in-

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 244 — #244 ii
ii
ii
244 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
Figura 12.8:
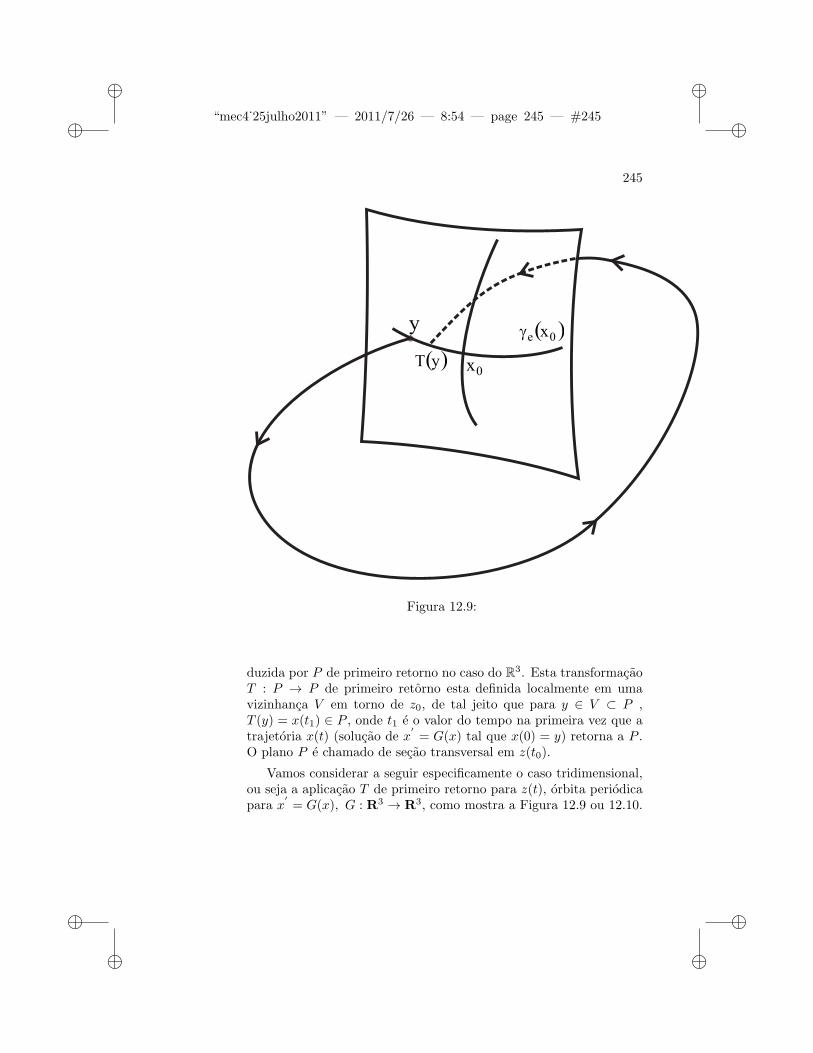
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 245 — #245 ii
ii
ii
245
Figura 12.9:
duzida por P de primeiro retorno no caso do R3. Esta transformacaoT : P → P de primeiro retorno esta definida localmente em umavizinhanca V em torno de z0, de tal jeito que para y ∈ V ⊂ P ,T (y) = x(t1) ∈ P , onde t1 e o valor do tempo na primeira vez que atrajetoria x(t) (solucao de x
′= G(x) tal que x(0) = y) retorna a P .
O plano P e chamado de secao transversal em z(t0).
Vamos considerar a seguir especificamente o caso tridimensional,ou seja a aplicacao T de primeiro retorno para z(t), orbita periodicapara x
′= G(x), G : R3 → R3, como mostra a Figura 12.9 ou 12.10.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 246 — #246 ii
ii
ii
246 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
O comportamento das trajetorias em torno da orbita periodicapode ser analisado atraves da aplicacao T definida em uma vizinhancade z0 = z(t0) em P , onde neste caso P e um plano bidimensional.Note que T e um difeomorfismo local em torno de z0 = z(t0) ∈ P .Note tambem que z0 e ponto fixo para T , isto e, T (z0) = z0.
Definicao 12.3. Dizemos que a orbita periodica z(t) ∈ R3 e hiper-bolica, se DT (z0) tem todos autovalores reais (no caso sao dois) commodulo diferente de 1. O ponto z0 sera dito ponto fixo hiperbolicopara a aplicacao T de primeiro retorno.
Definicao 12.4. Dizemos que a orbita periodica z(t) ∈ R3 e elıptica,se DT (z0) tem os autovalores (no caso sao dois) com modulo iguala 1. O ponto z0 sera dito ponto fixo elıptico para a aplicacao T deprimeiro retorno.
Os dois casos acima descrevem situacoes excludentes e que cobremtodas as possibilidades (note que se os dois autovalores sao igual a 1,dizemos que o ponto e elıptico)
Definicao 12.5. O conjunto estavel de z0, ponto fixo hiperbolico paraT de primeiro retorno a P , e o conjunto dos pontos y ∈ P tal que
limn→∞
Tn(y) = z0.
Este conjunto e denotado por γe(z0).
Definicao 12.6. O conjunto instavel de z0, ponto fixo hiperbolicopara T de primeiro retorno a P , e o conjunto dos pontos y ∈ P talque
limn→−∞
Tn(y) = z0.
Este conjunto e denotado por γi(z0).
Na Figura 12.9 mostramos a posicao dos dois conjuntos em tornodo ponto hiperbolico z0. E possıvel mostrar para z0 hiperbolico quequando a matriz DT (z0) possui um autovalor real maior que 1 outroreal menor que 1 (ver [PM], [Ro2]) entao os conjuntos γi(z0) e γe(z0)sao realmente curvas passando por z0 e a dinamica em torno desteponto e descrita pela Figura 12.9. Mais exatamente, as condicoes
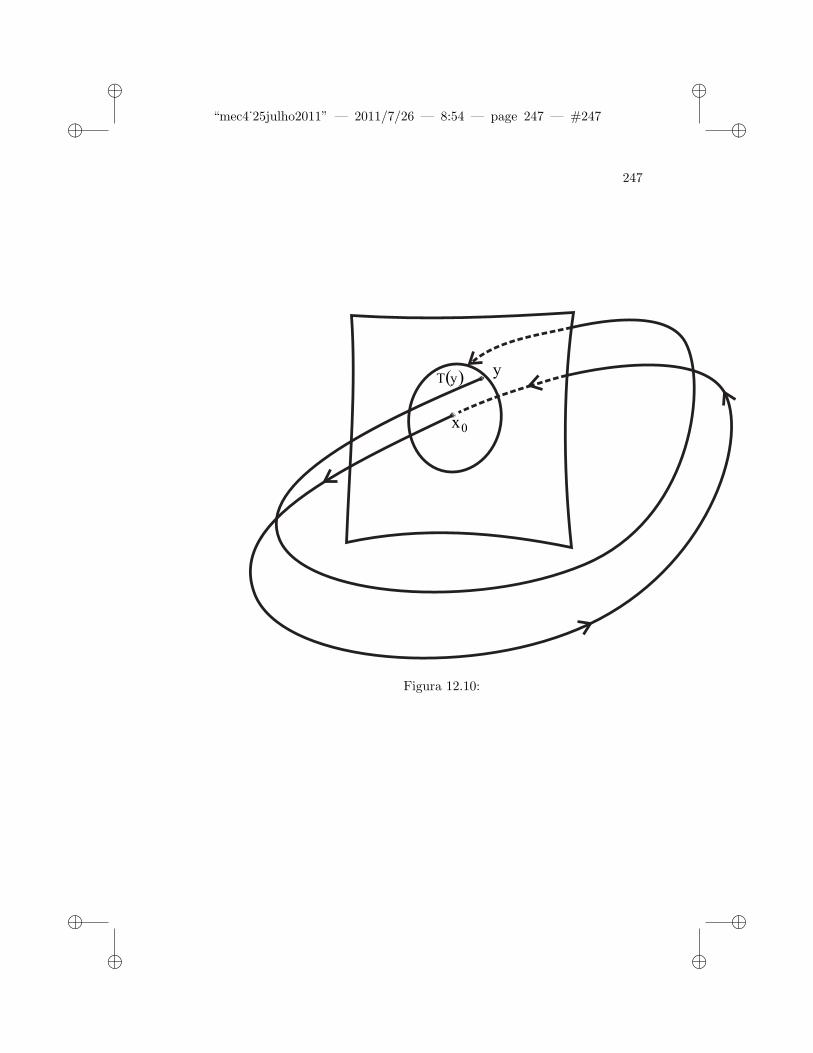
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 247 — #247 ii
ii
ii
247
Figura 12.10:
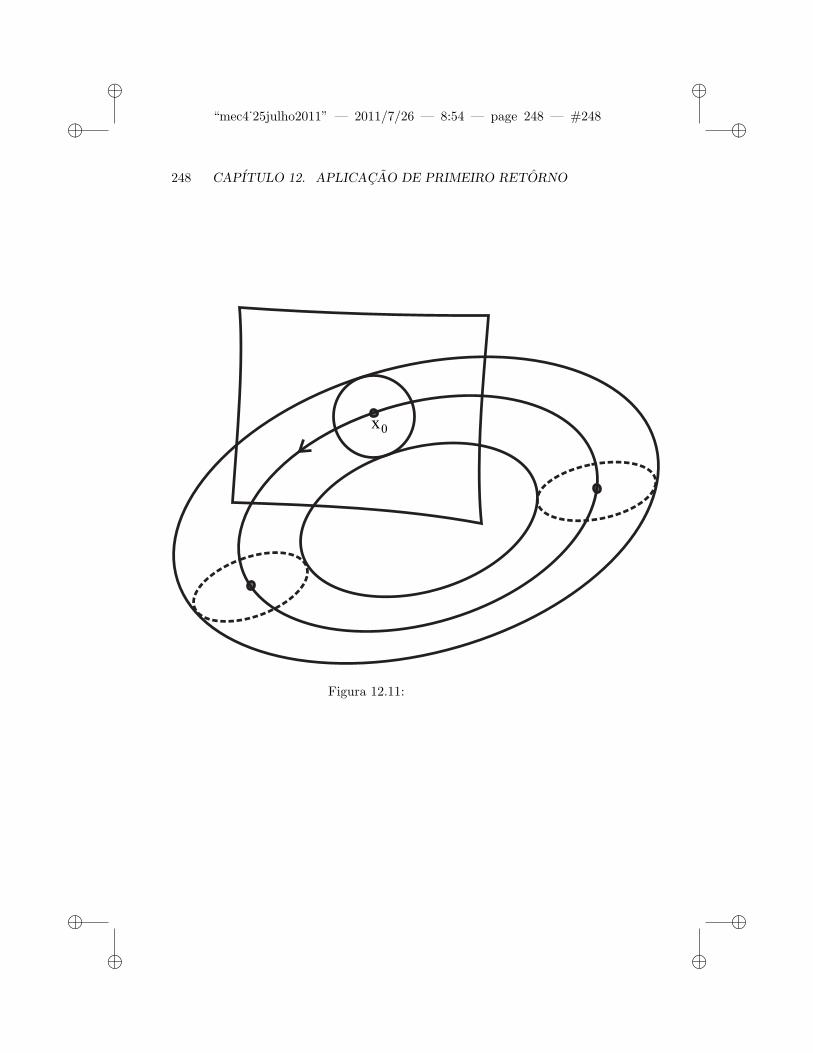
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 248 — #248 ii
ii
ii
248 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
Figura 12.11:
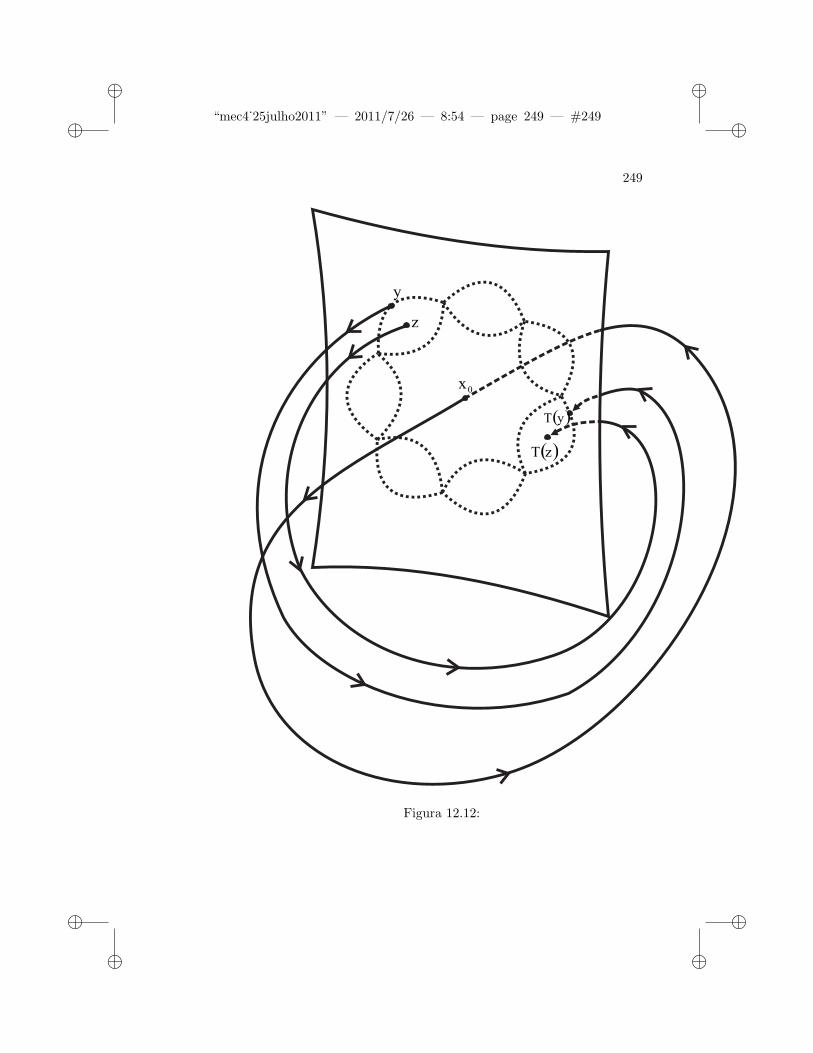
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 249 — #249 ii
ii
ii
249
Figura 12.12:

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 250 — #250 ii
ii
ii
250 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
iniciais y ∈ γe(z0) convergem a z0 atraves da evolucao temporalTn, n > 0 e as condicoes iniciais y ∈ γi(z0) convergem a z0 paraa evolucao temporal com tempo negativo Tn(y), n < 0.
Se z0 e tal que a matriz DT (z0) possui os dois autovalores commodulo menor que 1 (ver [PM], [Ro2]), entao a dinamica em tornodeste ponto z0 e descrita por um atrator (ver [DL]). Mais exatamente,as iteracoes Tn(z) para z condicao inicial convergem a z0.
Este fenomeno nao ocorre num sistema Hamiltoniano autonomopois o fluxo preserva volume 2n dimensional (Capıtulo 3 [L]).
E tambem possıvel mostrar para z0 hiperbolico que quando a ma-triz DT (z0) possui os dois autovalores modulo maior que 1 (ver [PM],[Ro2]), entao a dinamica em torno deste ponto z0 e descrita por umrepulsor (ver [DL]). Mais exatamente, as iteracoes T−n(z), n > 0 de zcondicao inicial convergem a z0. As iteracoes positivas Tn(z0), n > 0,saem de qualquer vizinhanca de z0 para n suficientemente grande.
Pontos y fora de γe(z0) e fora de γi(z0) possuem a propriedadeque Tn(y), para algum n positivo e para algum n negativo, vao sairfora da vizinhanca V em trono de z0 onde T pode ser definida.
Observacao 12.2. E possıvel mostrar que a Figura 12.9 ilustra tam-bem localmente o espaco de fase das iteracoes de K(x) = dT (z0)(x)(onde dT (z0) = DT (z0) e a matriz derivada de T ) em torno doponto fixo K(0) = 0 no caso hiperbolico. Mais precisamente, Kn(y)para diferentes y (condicoes iniciais em uma vizinhanca de 0 ∈ R2)tambem tem uma evolucao temporal semelhante a Figura 12.9, quee a figura da evolucao temporal em torno de z0 ∈ P do sistema naolinearizado T (x) : P → P .
Em resumo, localmente em torno de um ponto hiperbolico z0, adinamica de T e de seu linerizado dT sao semelhantes (ver [PM] e[Ro2] para demonstracao).
Na Figura 12.14 mostramos uma orbita periodica em R3 emque aparece o fenomeno da ferradura. Isto segue do fato da var-iedade estavel e variadade instavel de um ponto x0 se interceptarem.Mostramos na Figura 12.15 como se comporta a transformacao dePoincare T na secao transversal. Neste caso e possıvel mostrar queocorrem infinitas orbitas periodicas para o campo de vetores. Maisprecisamente se mostra que existem infinitos pontos periodicos paraT de perıodos arbitrariamente grandes (ver [Ro2]).
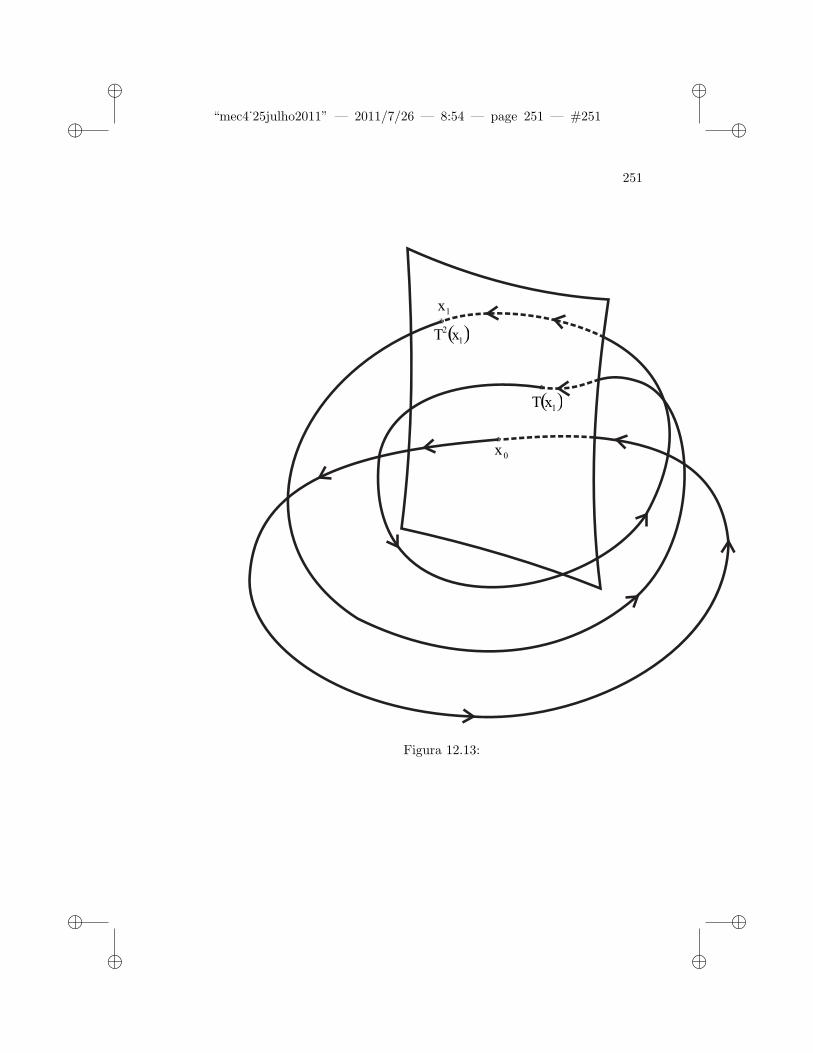
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 251 — #251 ii
ii
ii
251
Figura 12.13:
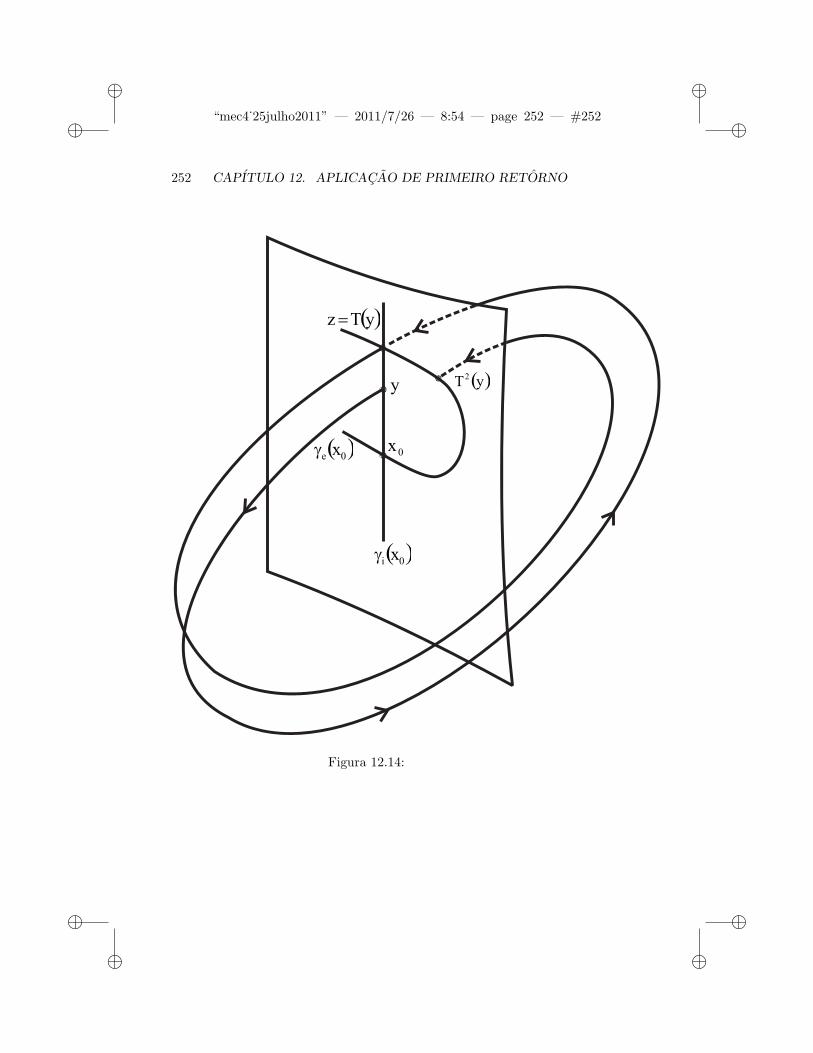
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 252 — #252 ii
ii
ii
252 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
Figura 12.14:
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 253 — #253 ii
ii
ii
253
Este fenomeno descoberto por H. Poincare no problema dos trescorpos teve grande impacto na Mecanica Classica e na modernaTeoria dos Sistemas Dinamicos. Ele ilustra a grande complexidadedinamica que ocorre nesta situacao (ver[Ro2] para mais detalhes).
Nas Figuras 12.10, 12.11 e 12.12 mostramos um exemplo do quepode acontecer em alguns casos para a evolucao temporal de pon-tos elıpticos. Cada ponto inicial y tem a tendencia de rodar emtorno de z0 ao longo de sua evolucao temporal Tn(y), n > 0. Nestecaso, o comportamento de T e aproximadamente o comportamentoda evolucao temporal de Kn(x), n > 0, onde K e a derivada de T emz0, K = dT (z0) da transformacao de primeiro retorno T da orbitaelıptica z(t).
Observacao 12.3. E importante destacar que, diferentemente docaso hiperbolico (ver Observacao 12.1 e Figura 8.3), nem sempre aevolucao temporal em torno de um ponto fixo elıptico vai seguir aevolucao temporal Kn(x) da derivada K = dT (z0), sugerida pelaFigura 12.12. Fenomenos extremamente complexos podem suceder nocaso de uma orbita elıptica e estes exemplos sao descritos na assimchamada teoria KAM (ver [HK]).
A Figura 12.9 descreve o que acontece com as trajetorias do fluxoϕt do campo de vetores x
′= G(x) em torno de uma orbita periodica
hiperbolica z(t).A Figura 12.12, mostra o que aconteceria se a orbita periodica
elıptica fosse tal que a T de primeiro retorno tivesse em torno de z0um comportamento descrito pela Figura 3.3. Neste caso haveria umcontınuo de toros envolvendo z(t), cada toro sendo invariante pelofluxo (fenomeno KAM). O fenomeno de destruicao de toros invari-antes por perturbacoes e de fundamental importancia em SistemasDinamicos [HK].
Definicao 12.7. Seja um difeomorfismo T : A→ A, entao um pontox tal que exista n > 0 satisfazendo Tn(x) = x e dito ponto periodico.O menor de tais possıveis valores n > 0 e chamado de perıodo de x.
Um ponto fixo e um caso particular de ponto periodico.Na Figura 12.13 mostramos a trajetoria periodica x(t) (ver Defini-
cao 22) de um campo de vetores G e mostramos tambem como pode

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 254 — #254 ii
ii
ii
254 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
Figura 12.15:
aparecer de maneira natural um ponto periodico x (ver Definicao12.7) proximo ao ponto fixo para a aplicacao de primeiro retorno T(no caso um ponto de perıodo 2) associada a uma orbita periodicaz(t) do campo de vetores G.
Se x e periodico para T , entao
T j(x), j ∈ N = x, T (x), T 2(x), ..., Tn−1(x).
Note que se x e periodico para T com perıodo n, entao
x, T (x), T 2(x), .., Tn−1(x)
tambem sao pontos periodicos para T e tem perıodo n.O conjunto x, T (x), T 2(x), .., Tn1(x) e chamado de orbita do
ponto periodico x por T
Definicao 12.8. Um ponto periodico x do difeomorfismo F comperıodo n e dito hiperbolico, se x e ponto fixo hiperbolico para T = Fn.
E facil ver que se x e periodico hiperbolico, cada ponto pertencentea sua orbita tambem e hiperbolico.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 255 — #255 ii
ii
ii
255
Definicao 12.9. O conjunto estavel (respectivamente instavel) γe(x)(respectivamente γi(x)) de um ponto periodico hiperbolico x e a uniaodos conjuntos estaveis (respectivamente instaveis) de sua orbita.
Definicao 12.10. Um ponto periodico x do difeomorfismo F comperıodo n e dito elıptico, se x e ponto fixo elıptico para T = Fn.
Um fluxo que preserva area no plano tem propriedades especiais.Fixada uma secao transversal H a aplicacao de primeiro retorno deveser a identidade; nao pode ocorrer o que e descrito pela Figura 12.3e 12.4. Isto porque a area da regiao A seria maior do que a area daregiao B e o fluxo ϕt (para t o tempo de primeiro retorno da trajetoriax(t)) levaria A em ϕt(A) = B (aproximadamente). Note que os tem-pos de retorno de pontos em x(t) e de outras solucoes y(t) proximas(comecando na secao) nao sao os mesmos (apenas aproximadamenteos mesmos pela continuidade do fluxo).
Definicao 12.11. Uma secao H transversal ao fluxo (definido poruma equacao diferencial x′ = f(x)) e dita global quando para qualquerponto x no espaco A onde esta definida a equacao diferencial valeque existe t > 0 e s < 0 tal que ϕt(x) ∈ H e ϕs(x) ∈ H, onde ϕ e ofluxo. Neste caso a ”toda”a dinamica do fluxo da equacao diferencialx′ = f(x) pode ser capturada pela aplicacao de primeiro retorno Tdefinida em H.
Nosso objetivo acima foi apenas descrever de maneira sumariao que acontece em torno das orbitas periodicas z(t) de um sistemamecanico. Como vimos, este comportamento depende fundamental-mente da aplicacao de primeiro retorno T induzida em uma secaotransversal P passando por z0.
O estudo da iteracao de difeomorfismos e extremamente impor-tante na Teoria dos Sistemas Dinamicos e sua analise permite o en-tendimento da aplicacao T de primeiro retorno a uma secao transver-sal. Esta Teoria permite tambem analisar a dinamica de F = ϕt0 , t0fixo, onde ϕt e o fluxo associado a um campo de vetores.
A partir do que foi discutido acima, o leitor pode assim percebera extrema complexidade que pode suceder na evolucao temporal dascondicoes iniciais y em torno de uma orbita periodica de uma equacaodiferencial, em especial dos sistemas Hamiltonianos.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 256 — #256 ii
ii
ii
256 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
Nao foi possıvel apresentar provas dos resultados acima descritos,pois isto implicaria em ter que escrever nesta secao um livro com-pleto de Sistemas Dinamicos. Nosso objetivo foi apenas apresentaralgumas ideias centrais que aparecem na pesquisa atual envolvendo oentendimento da dinamica global de Sistemas Mecanicos. Referimoso leitor para [DL], [So], [PM], [R], [M], [CL], [S] e [HS] para referenciassobre varios aspectos da Teoria dos Sistemas Dinamicos.
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 257 — #257 ii
ii
ii
257
Bibliografia
[AM] R. Abraham and J. Mardsen, Foundations of Mechanics,Benjamin, 1980.
[ABC] B. Amaral, A. Baraviera and M. Terra Cunha, MecanicaQuantica para Matematicos em formacao, Coloq. Bras. Mat. 2011,IMPA, Rio de Janeiro
[Ap] A. Appel, Traite de Mecanique Rationnelle, Ed. Gauthier-Villars, 1953.
[A1] V. I. Arnold, Mathematical Methods of Classical Mechanics,Springer Verlag, 1978.
[A2] V. I. Arnold, Geometric Methods in the Theory of OrdinaryDifferential Equations, Spri. Verla, 1983.
[A3] V. I. Arnold and A. Avez, Ergodic Problems of ClassicalMechanics, Benjamin, 1968.
[Au1] S. Aubry, Analiticity breaking and Anderson localizationin incommensurate lattices, Annals of the Israel Phys. Soc., Vol 3(1980).
[AU2] S. Aubry and P. Y. Le Daeron, The discrete Frenkel-Kon-torova model and its extensions, PhysicaD, Vol 8 (1983), pp 381-422
[B] V. Bangert, Mather sets for Twist maps and Geodesics onTori, Dynamics Reported , 1-56, John Wiley, 1988.
[BG] I. Q. Barros e M. V. P. Garcia, Mecanica Analıtica Classica,Ed Edgar Blucher, 1995.
[BF] R. Bassanezi e W. Ferreira, Equacoes Diferenciais com Apli-cacoes, Edit Harbra, 1988.
[BS] C. Beck and F. Schlogl, Thermodynamics of Chaotic Sys-tems: an Introduction, Cambridge Press, 1993.
[BU] L. Bunimovich, On ergodic properties of nowhere dispersingbilliards, Comm in Math Phys, 65 pp 295-312, 1979.
[MC1] M. do Carmo, Formas Diferenciais e aplicacoes, 12 ColoqBras Mat., 1979.
[MC2] M. do Carmo, Geometria Riemanniana, Projeto Euclides,IMPA, 1988.
[MC3] M. do Carmo, Differential Geometry of Curves and Sur-faces, Prentice Hall, 1976.
[CRZ] M. Carneiro, C. Ragazzo e S. Zanata, Introducao a Dinamica
ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 258 — #258 ii
ii
ii
258 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
de Aplicacoes do tipo Twist, Coloquio Brasileiro de Matematica,IMPA, RJ, 2005.
[CI] G. Contreras e R. Iturriaga, Global Minimizers of AutonomousLagrangians, 22 Coloquio Brasileiro de Matematica, IMPA, (1999)
[CLT] G. Contreras, A. Lopes and P. Thieullen, Lyapunov Mini-mizing Measures; Erg Theo and Dyn Systems, n 21, (2001)
[CM] N. Chernov and R. Markarian, Chaotic Billiards, AMS,2006.
[CFS] I. Cornfeld, S. Fomin and Ya Sinai, Ergodic Theory, SpringerVerlag, 1982.
[dL] R. de la Llave, A. Tutorial in KAM theory, Proc. Symp.Pure Applied Math. 69, Amer. Math. Soc., Providence, RI, 2001
[De] R. Devaney, An introduction to Chaotic Dynamical Systems,Benjamin, 1986.
[DL] C. Doering and A. O. Lopes, Equacoes Diferenciais Or-dinarias, Matematica Universitaria, IMPA, 2005
[Du] P. Duarte, Ann Inst Henry Poincare, Ann. Non-Lin, Vol 11n4, 1994 pp 359-409.
[E] R. S. Ellis, Entropy, Large Deviations and Statistical Mechan-ics, Sprin. Verlag, 1985.
[FMP] A. Fasano, S Marmi and B. Pelloni, Analytical Mechanics:An Introduction, Oxford Press
[Fa] J. Falconer, Fractal Geometry, John Wiley, 1990.
[Fat] A. Fathi, Weak KAM Theorem in Lagrangian Dynmaics,preprint, 2011.
[Fe] P. Fernandez, Medida e Integracao, Proj Euclides, 1976.
[Fi] D. Figueiredo, Analise de Fourier Series e Equacoes Diferen-ciais Parciais, Projeto Euclides, IMPA, 1987.
[GF] I. M. Gelfand and S. V. Fomin, Calculus of Variations, Pren-tice Hall, 1963.
[GP] Guillemin Pollack, Diferential Topology
[Go] H. Goldstein, Classical Mechanics, Addison-Wesley, 1972.
[GH] J. Guckenheimer and P. Holmes, Non-linear oscilations, Dy-namical Systems and Bifurcations of Vector Fields, Springer Verlag,1983.
[Gu] J. Gutzwiller, Chaos in Classical and Quantum Mechanics,Springer Verlag, 1990.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 259 — #259 ii
ii
ii
259
[H] M. Hermann, Sur le courbes invariantes par les diffeomorphismde l’anneau, Asterisque, Soc math Franc, 1983.
[LC] P. Le Calvez, Etude Topologique des applications deviant laVertical, Ensaios Matematicos, SBM.
[H] D. T. Harr, Elements of Hamiltonian Mechanics, PergamonPress, 1982.
[HS] M. Hirsh and S. Smale, Differential Equations, Linear Alge-bra and Dynamical Systems, Acad. Press, 1974.
[I] V. Iorio, EDP, Um curso de graduacao, Colecao MatematicaUniversitaria, IMPA, Rio, 1989.
[Ja] B. James, Probabilidade: um curso intermediario, ProjetoEuclides, IMPA, 1982.
[Jo] F. John, Partial Differential Equations, Springer Verlag, 1975.[PM] J. Palis and W. Melo, Introducao aos Sistemas Dinamicos,
Proj Euclides, IMPA, 1982.[G] H.-O. Georgii, Gibbs Measures and Phase Transitions. de
Gruyter, Berlin, (1988).[Ju] R. Iorio Junior, Equacoes diferenciais parciais: uma introdu-
cao, Projeto Euclides, IMPA, 1988.[KH] A. Katok and B. Hassenblat, Introduction to the Modern
Theory of Dynamical Systems, Cambridge U. P., 1995.[KMS] S. Kerckhoff, A. Mazur and J. Smillie, Ergodicity of billiard
flows and quadratic differentials, Ann of Math, Vol 124, N2, 293-311,1986.
[Kh] A. Khintchine, Continued Fractions, Univ of Cicago Press,1964.
[LL] L. Landau and E. Lifshitz, Mechanics, Pergamon Press, 1960.[Le] Y. Lequain, Aproximacao de um numero real por numeros
racionais, Coloq Bras Mat 1993, IMPA.[Lo] A. O. Lopes, Introducao a Mecanica Classica, EDUSP, 2006[LS] A. O. Lopes and M. Sebastiani, Poncelet pairs and the Twist
map associated to the Poncelet billiard, Real Analyses Exchange, vol.35, ISSUE2, 335-374, 2010.
[LiLi] A. Lichtenberg and M. Liberman, Regular nd StochasticMotion, Springer Verlag, 1983.
[Li1] E. L. Lima, Curso de Analise, vol II, Projeto Euclides, IMPA,1989.
[Li2] E. L. Lima, Espacos Metricos, Proj Euclides, IMPA, 1977.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 260 — #260 ii
ii
ii
260 CAPITULO 12. APLICACAO DE PRIMEIRO RETORNO
[Li3] E. L. Lima, Variedades Diferenciaveis, IMPA, RJ.
[Li4] E. L. Lima, Algebra Linear, Col. Mat. Universitaria, IMPA,Rio (1995).
[Lu] R. Luneburg, Mathematical Theory of Optics, Univ. of Cal-ifornia Press, (1964)
[M1] R. Mane, Teoria Ergodica, Projeto Euclides, IMPA, 1982.
[M2] R. Mane, Global Variational Methods in Conservative Dy-namics, 18 Coloq Bras Mat, 1991.
[MR] J.Mardsen and T. Ratiu, Introduction to Mechanics andSimetry Springer Verlag, 1994
[MT] J. Marion and S. Thorton, Classical Dynamics, HartcourtBrace Dubl, 1988.
[Ma] R. Markarian, Introduction to the Ergodic Theory of PlaneBilliards, Dynamical Systems, Congress in Santiago do Chile (1990),Ed by R.Bamon, R. Labarca, J. Palis and J. Lewowicz, LongmanEdit (1993), 327-439.
[MF] J. Mather and G. Forni, Action Minimizing orbits in Hamil-tonian Systems, Lecture Notes in Math, Springer Verlag (1994).
[Me] J. D. Meiss, Sympletic maps, variational principles, andtransport, Reviews of Modern Physics, Vol 64, N3, July 1992
[MH] K. Meyer and G. Hal, Introduction to Hamiltonian Dynam-ics Systems and the n-body problem, Springer Verlag, 1992.
[Mi] J. Milnor, Morse Theory, Princ Univ Press.
[Mo] J. Moser, Stable and Random Motions in Dynamical Sys-tems, Princeton Univ. Press, 1973
[O] E. Ott, Chaos in Dynamical Systems, Camb Univ Press, 1993.
[IR] I. Percival and D. Richards, Introduction to Dynamics, Cam-bridge Univ Press, 1982.
[PY] M. Pollicott and M. Yuri, Dynamical systems and ErgodicTheory, Academic Press, 1998
[N] A. L. Neto, Funcoes de uma variavel Complexa, Projeto Eu-clides, IMPA, 1993.
[OA] A. Ozorio de Almeida, Sistemas Hamiltonianos: Caos eQuantizacao, Edit UNICAMP.
[PP] W. Parry and M. Pollicott, Zeta functions and the periodicorbit structure of hyperbolic dynamics, Asterisque 187-188 (1990)
[R] S. N. Rasband, Dynamics, John Wiley, 1983.

ii
“mec4˙25julho2011” — 2011/7/26 — 8:54 — page 261 — #261 ii
ii
ii
261
[Ro1] C. Robinson, A global approximation theorem for Hamilto-nian Systems, Proc. in Symp in Pure Math, XIV, Global Analysis,edit S. Chern and S. Smale, AMS, 1970.
[Ro2] C. Robinson, Dynamical Systems, CRC Press, 1995.[Rud] W. Rudin, Real and Complex Analysis, Mc Graw Hill, 1974.[Rue] D. Ruelle, Thermodynamic Formalism, Adisson Wesley,
1978.[SW] R. Saks e H. Wu, General Relativity for Mathematicians,
Springer-Verlgag, 1977.[S] M. Sebastiani, O Teorema de Poncelet, Publicacoes Matema-
ticas, IMPA, 2011.[Si] Ya. Sinai, Dynamical System with elastic reflections, Russian
Math Surveys, 25, pp 137-189, 1970.[So] J. A Sottomayor, Licoes de Equacoes Diferenciais Ordinarias,
Projeto Euclides, IMPA, RJ.[Ta] S. Tabachinov, Billiards, Soc Math Franc, (1990)[T] M. Tabor, Chaos and integrability in nonlinear dynamics,
John Wiley and Sons, 1989.[W] E. T. Whittaker, A Treatise in the Analitical Dynamics of
Particles and Rigid Bodies, Dover, 1944.















![Lyapunov exponents for Quantum Channels: an entropy ...mat.ufrgs.br/~alopes/Lyapunov-exp-quantum-26-jun.pdf · For a xed and a general Lit was presented in [12] a natural concept](https://img.pdfslide.tips/doc/110x75/5f646c0164fb447c6567564f/lyapunov-exponents-for-quantum-channels-an-entropy-matufrgsbralopeslyapunov-exp-quantum-26-junpdf.jpg)








![舒康雞 HOLSEM · 2020. 4. 3. · : BA]2020/30797 : 2020/03/17 I I I I I I I I I I I I I I I I I I I I Il I Il I I I I I I I I I I I I I I I I I Il I Il I I I I Ill I I I I I I](https://img.pdfslide.tips/doc/110x75/60e1a613faf52e69a51b7862/ee-holsem-2020-4-3-ba202030797-20200317-i-i-i-i-i-i-i-i-i-i.jpg)



