Embed Size (px)
Citation preview

T T
A S
t a n
d a
r d
정보통신단체표준 국문표준( )
TTAK.OT-10.0351 제정일 년 월 일: 2013 12 18
무선 랜 기반에서 로봇 이동성을 위한
실제 통신 거리 측정 방법
The Measurement Method of Actual
Communication Distance for Robots Mobility
in a Wireless LAN-Based
정보통신단체표준 국문표준( )
TTAK.OT-10.0351 제정일 년 월 일: 2013 12 18
무선 랜 기반에서 로봇 이동성을 위한
실제 통신 거리 측정 방법
The Measurement Method of Actual
Communication Distance for Robots Mobility
in a Wireless LAN-Based
본 문서에 대한 저작권은 에 있으며 와 사전 협의 없이 이 문서의 전체 또는TTA , TTA 일부를
상업적 목적으로 복제 또는 배포해서는 안 됩니다.
Copyright Telecommunications Technology Association 2013. All Rights Reserved.ⓒ

정보통신단체표준 국문표준( )
TTAK.OT-10.0351i
서 문
표준의 목적1.
본 표준은 고속 를 기반한 무선 랜 모듈을 탑재하고 있는 공공IEEE 802.11x Standard
서비스 로봇의 이동성을 위한 통신 거리 시험 측정에 있어서 효율적인 방법을 제공하는
것을 그 목적으로 하며 다양한 융합 요소를 복합하여 하나의 시스템으로 개발되어지는,
공공 서비스 로봇의 이동성 통신 성능 안정성 관점에서의 주요 시험 항목들에 대한 측정
방법을 권고하고자 한다 기본적인 무선 랜 인프라가 구성되어 있는 환경에서 운용되는.
공공 서비스 로봇의 무선통신은 일정한 수준의 통신 성능을 항상 유지할 수 있는 것은
아니다 연동 중인 무선망에서 로봇의 이동성에 따라 무선망과의 거리가 점점 멀어질 경.
우 통신 서비스는 단절이 되는 경우가 발생한다 이 통신 단절 때문에 로봇의 무선 랜 통.
신 성능이 심각하게 영향을 받게 된다 본 표준은 이러한 로봇의 이동성에 의한 통신 거.
리의 성능을 측정하는 것을 기본 목적으로 한다.
주요 내용 요약2.
본 표준은 공공 서비스 로봇의 통신 상태에 대한 이동성을 보장하고 무선 랜 통신을,
이용한 서비스 및 제어 등의 기능을 수행하기 위한 공공 서비스 로봇의 실제 통신 거리
이동 거리 측정과 성능 통신 거리 검증 단계 에 대한 평가 기준 제시 및( ) RF Coverage ( )
평가 방법을 제시하는 데 목적이 있다.
표준 적용 산업 분야 및 산업에 미치는 영향3.
본 표준은 공공 서비스 로봇의 이동성을 위해 실제 통신 거리를 정의하고 요구 사항을
제시함으로써 공공 서비스 로봇에 적용을 위해 개발되어 지는 무선 랜 통신 시스템 및,
통신의 무결성을 보장하고 검증하기 위한 도구로 활용될 수 있다 본 표준을 적용하여.
일관성 있는 공공 서비스 로봇의 이동 거리 이동성 측정 및 표준 개발을 지원함으로써( ) ,
공공 서비스 로봇의 안정성 향상 및 로봇 산업 활성화에 기여한다.
참조 표준 권고4. ( )
국외 표준 권고4.1. ( )
- IEEE Std 802.11, ‘Wireless LAN Medium Access Control (MAC) and Physical
Layer (PHY) Specifications’, 1999.
- IEEE Std 802.11g-2003, ‘Amendment 4: Further Higher-Speed Physical Layer
Extension in the 2.4 GHz Band’, 2003.

정보통신단체표준 국문표준( )
TTAK.OT-10.0351ii
- IETF RFC1042, ‘A Standard for the Transmission of IP Datagrams over IEEE
802 Networks’, 1988. 2.
국내 표준4.2.
- 전파연구소고시 제 호 방송 해상 항공 전기통신사업용 외의 기타업무용 무선2005-127 , ‘ . . .
설비의 기술기준’,
전파연구소고시 제 호 형식검정 및 형식등록 처리방법- 2005-128 , ‘ ’
고속무선 상호운용성 시험규격- TTAS.KO-06.0081, ‘ LAN(IEEE802.11g) ’, 2005.
참조 표준 권고 과의 비교5. ( )
참조 표준 권고 과의 관련성5.1. ( )
- 의 용어를 일부 준용IEEE Std 802.11g-2003
참조한 표준 권고 과 본 표준의 비교표5.2. ( )
TTAK.OT-10.0351 IEEE Std 802.11g-2003 비고
개요1. 용어사용IEEE802.11a/b/g/n 동일
표준의 구성 및 범위2. - 추가
로봇의 이동성 통신 거리 시험을4.
위한 기준 제시Path Loss- 추가
용어 정의5. 용어 사용IEEE 동일
무선 랜 기반에서 로봇 이동성을7.
위한 실제 통신 거리 측정 방법- 추가
지적 재산권 관련 사항6.
본 표준의 지적 재산권 확약서 제출 현황은 웹사이트에서 확인할 수 있다‘ ’ TTA .
본 표준을 이용하는 자는 이용함에 있어 지적 재산권이 포함되어 있을 수 있으므로,※
확인 후 이용한다.
본 표준과 관련하여 접수된 확약서 이외에도 지적 재산권이 존재할 수 있다.※

정보통신단체표준 국문표준( )
TTAK.OT-10.0351iii
시험 인증 관련 사항7.
시험 인증 대상 여부7.1.
해당 사항 없음- .
시험 표준 제정 현황7.2.
해당 사항 없음- .
표준의 이력8.
표준의 이력 정보8.1.
판수 제정 개정일․ 제정 개정 내역․제 판1 2013.12.18
제정
TTAK.OT-10.0351
주요 개정 사항8.2.
해당 사항 없음- .

정보통신단체표준 국문표준( )
TTAK.OT-10.0351iv
Preface
1. Purpose of Standard
This standard based on IEEE 802.11x Standard high-speed wireless LAN module
is equipped with a robot's mobility in the public service communications for
distance measurement in the test that provides an efficient way for that purpose,
and one by a variety of complex fusion elements which has been developed as a
system of public service in terms of the stability of the robot mobility,
communication performance of a major test for the measurement method is to
counsel. Basic wireless LAN infrastructure is configured, the public service robots
that operate in an environment of wireless communication is always a certain level
of communication performance which is not sustainable. Wireless networks are
linked to the mobility of the robot in the distance of the wireless networks and the
communication services increasingly moves away when disconnection occurs.
Because of the loss of communication, wireless communication capabilities of the
robot will be affected seriously. This standard communication distance due to the
mobility of these robots to measure the performance.
2. Summary of Contents
In this standard of public services, the communication status of the robot to
ensure mobility, wireless communications, and control functions such as using the
service for the public service of a robot to perform the actual communication
distance(Distance) measurement and RF Coverage performance(communication
distance verification phase), and the proposed method of evaluation ratings are
intended to provide.
3. Applicable Fields of Industry and its Effect
This standard of service robots for mobility, the actual communication distance is
defined by presenting the requirements, service robots have been developed for
applications where wireless communication systems and ensure the integrity of
communications and verification can be used as a tool for. Applying this standard,
the moving distance of consistent service robots(mobility) measurements and by
supporting the development of standards, services, improve the stability of the
robot and the robot industry contributes to activation.

정보통신단체표준 국문표준( )
TTAK.OT-10.0351
4. Reference Standards(Recommendations)
4.1. International Standards(Recommendations)
- IEEE Std 802.11, 1999 Edition, Wireless LAN Medium Access Control (MAC)
and Physical Layer (PHY) Specifications.
- IEEE Std 802.11g-2003, Amendment 4: Further Higher-Speed Physical Layer
Extension in the 2.4 GHz Band.
- IETF RFC1042, A Standard for the Transmission of IP Datagrams over IEEE 802
Networks, February 1988.
4.2. Domestic Standards
- RRL Notice No. 2005-127 "broadcast. Offshore. Airlines. Telecommunications
for business than other business technical standards for radio equipment", RRL
Notice No. 2005-128 "type approval and type registration process method"
- TTA Std TTAS.KO-06.0081, 2005 Edition, high-speed wireless LAN (IEEE802.11g)
interoperability test specification.
5. Relationship to Reference Standards(Recommendations)
5.1. Relationship of Reference Standards
- None
5.2. Differences between Reference Standard(Recommendation) and this Standard
TTAK.OT-10.0351 IEEE Std 802.11g-2003 Remarks
1. IntroductionTerms quoted from
IEEE802.11a/b/g/nEquivalent
2. Constitution and Scope - Added
4. Communication range of the
mobile robot for testing
proposed standards Path Loss
- Added
5. Definition of Terms Terms quoted from IEEE Equivalent
7. WiFi-enabled robots in the
actual communication distance
measurement for mobility
- Added

정보통신단체표준 국문표준( )
TTAK.OT-10.0351vi
6. Statement of Intellectual Property Rights
IPRs related to the present document may have been declared to TTA. The
information pertaining to these IPRs, if any, is available on the TTA Website.
No guarantee can be given as to the existence of other IPRs not referenced on
the TTA website.
And, please make sure to check before applying the standard.
7. Statement of Testing and Certification
7.1. Object of Testing and Certification
- None
7.2. Standards of Testing and Certification
- None
8. History of Standard
8.1. Change History
Edition Issued date Outline
The 1st edition 2013.12.18 EstablishedTTAK.OT-10.0351
8.2. Revisions
- None

정보통신단체표준 국문표준( )
TTAK.OT-10.0351vii
목 차
개요1. ·············································································································································1
표준의 구성 및 범위2. ···············································································································1
참조 표준 권고3. ( ) ························································································································2
4. 용어 정의 ···································································································································2
로봇의 이동성 통신 거리 시험을 위한 기준 제시5. Path Loss ······································3
시험 장비 구성5.1. ··············································································································3
시험 방법5.2. ························································································································3
시험 결과 기준5.3. (IEEE802.11g ) ···················································································4
기준 제시5.4. ························································································································4
6. 일반사항 ·····································································································································5
6.1. 일반 ··································································································································5
6.2. 표준 사용 상태 ··············································································································5
6.3. 시험 조건 ························································································································6
6.4. 로봇의 통신부 ················································································································7
6.5. 액세스 포인트 ················································································································7
7. 무선 랜 기반에서 로봇 이동성을 위한 실제 통신 거리 측정 방법 ·····························7
부록 참고 문헌.Ⅰ ·····················································································································12

정보통신단체표준 국문표준( )
TTAK.OT-10.0351viii
Contents
1. Introduction ·······························································································································1
2. Constitution and Scope ········································································································1
3. Reference Standards(Recommendation) ·········································································2
4. Terms and Definitions ···········································································································2
5. Communication Range of the Mobile Robot for Testing proposed Standards Path
Loss ··················································································································································3
5.1. Test Equipment Configuration ·················································································3
5.2. Test Method ··················································································································3
5.3. Test Results(IEEE802.11g criteria) ·········································································4
5.4. Redefine ··························································································································4
6. General Information ················································································································5
6.1. General ····························································································································5
6.2. Standard Conditions of Use ····················································································5
6.3. Test Conditions ············································································································6
6.4. Ministry of Robots ·······································································································7
6.5. Access Point ·················································································································7
7. WiFi-enabled Robots in the Actual Communication Distance Measurement for
Mobility ·············································································································································7
Appendix . ReferencesⅠ ·······································································································12

정보통신단체표준 국문표준( )
TTAK.OT-10.03511
무선 랜 기반에서 로봇 이동성을 위한 실제 통신 거리 측정 방법
(The Measurement Method of Actual Communication Distance
for Robots Mobility in a Wireless LAN-Based)
개요1.
로봇 산업의 발전에 따라 기계 전자 통신 소프트웨어 등 복잡한 요소들이 공공 서비, , ,
스 로봇에 탑재 되고 있으며 특히 서비스 로봇은 무선 랜 통신 방, (IEEE802.11a/b/g/n)
식을 무선 랜 네트워크 인프라 환경에서 직접적인 제어뿐만 아니라 응용서비스를 포함하
는 다양한 무선통신 관련기능과 서비스들을 활용하고 있다 하지만 무선 랜 모듈을 장착. ,
한 로봇이 망으로부터 멀리 이동함에 따라 통신 성능이 현저히 떨어질 수가 있고 로AP ,
봇이 탑재한 무선 성능과 로봇의 융합 부품의 간섭원에 의해 무선 통신 강도 및 통신 접
속 단절 현상이 발생되고 전반적인 무선 랜 통신에 영향을 미치게 된다 이에 따라 공, . ,
공 서비스 로봇의 통신 상태의 이동성을 보장하고 무선 랜 통신을 이용한 서비스 및 제,
어 등의 기능을 수행하기 위한 공공 서비스 로봇의 실제 통신 거리 이동 거리 측정과( )
성능 통신 거리 검증 단계 에 대한 평가기준 제시 및 평가 방법을 제시하RF Coverage ( )
는데 목적이 있다.
표준의 구성 및 범위2.
본 표준에서 무선 랜 규격을 장착한 공공 서비스 로봇을 대상으로 한(IEEE802.11a/b/g)
다 주행 로봇에 무선통신 기능이 적합하게 탑재되어 안정적인 무선통신 이동성 성능을.
보임으로써 신뢰성 있는 통신 거리 및 서비스 등의 수행을 보장하도록 한다.
2.1. 시험대상 의 범위(DUT)
시험 대상은 공공 서비스 로봇으로서 무선 랜 규격의 통신모듈을 장(IEEE802.11a/b/g)
착하고 있으면 된다 본 표준에서는 공공 서비스 로봇은 이동로봇 플랫폼에 무선통신기.
능을 장착하여 인간과 로봇 간 인터페이스 기능을 통하여 제어 및 서비스를 제공하는 로
봇을 말한다.
평가 항목 요약2.2.
본 표준에서는 가지의 평가 항목으로 이루어져 있다2 .
1) 서비스 로봇의 이동성을 위한 무선 랜 실제 통신 거리 측정 시험 통신 거리 이동 거- (
리 에) 따른 데이터 처리량 측정 시험
2) 서비스 로봇과 구간의 에 대한 통신 거리 검증 시험 의AP RF Coverage - AP Coverage

정보통신단체표준 국문표준( )
TTAK.OT-10.03512
에 대한 클라이언트 통신 거리 검증 시험
3. 참조 표준 권고( )
다음에 나타나는 규격은 이 규격에 인용됨으로써 이 규격의 규정 일부를 구성한다 이.
러한 인용 규격은 그 최신판을 적용한다.
고속무선 상호운용성 시험규격- TTAS.KO-06.0081, ‘ LAN(IEEE802.11g) ’, 2005.
정보통신부고시 제 호 전자파장해방지기준- 2004-23 “ ”
정보통신부고시 제 호 전자파 보호기준- KN22 2004-24 “ ”
- KN61000-4-2 ~ KN61000-4-8
- IEEE Std 802.11, ‘Wireless LAN Medium Access Control (MAC) and Physical
Layer (PHY) Specifications’, 1999.
- IEEE Std 802.11g-2003, ‘Amendment 4: Further Higher-Speed Physical Layer
Extension in the 2.4 GHz Band’, 2003.
- IEEE Std 802.1H, ‘Media Access Control (MAC) Bridging of Ethernet V2.0 in
Local Area Networks’, 1997.
용어 정의4.
이 규격에서 사용되는 용어는 및 다음의 정의에 따른다IEEE802.11, IEEE802.11a/b/g .
무선 랜4.1. (WLAN, Wireless Local Area Network)
계열 표준을 따르는 무선 근거리 네트워크를 의미한다IEEE 802.11x .
공유기4.2. (AP, Access Point)
무선 랜에서 스테이션 또는 로봇 의 통신을 중계하는 장비를 의미한다IEEE 802.11 ( ) .
통신부4.3. (communication part)
통신이 가능한 통신부 이 경우 관례에 따라 밴드 주파수 사용 모RF . ISM 2.4 GHz
듈은 포함하지만 무선 랜 모듈 장착 로봇을 의미한다.

정보통신단체표준 국문표준( )
TTAK.OT-10.03513
공공서비스 로봇4.4. (public service robot)
개인 및 가정용 로봇과 구별되는 의미로 불특정 다수를 위하여 서비스를 제공하는
서비스 로봇
전파수신감도4.5. (radio receive sensitivity)
무선통신 모듈이 로봇에 탑재되어 밴드의 국가 규격에 맞는 전파의 세기로 수ISM
신할 수 있는지의 능력을 평가하기 위한 전파 수신 감도.
상향링크 와 하향링크4.6. (uplink) (downlink)
상향링크는 모바일 스테이션 에서 로의 접속링크를 의미하고(mobile station, STA) AP
하향링크는 에서 모바일 스테이션으로의 링크를 의미한다AP .
경로 손실4.7. (Path Loss)
는 경로 손실이며 는 전자기파처럼 공간을 통해 전파되어 소스Path Loss , Path Loss
전파의 전력밀도 감소를 의미한다 일반적으로 무선통신 및 신호 전송에 통용된다. .
는 공간 손실 굴절 회절 반사 흡수 지형 윤곽선 환경 매체 안테나의Path Loss , , , , , , ,
전송기 및 수신기의 거리 등에 경로 손실이 발생된다.
로봇의 이동성 통신 거리 시험을 위한 기준 제시5. Path Loss
로봇의 이동성을 고려한 무선 랜 실제 통신 거리 시험과 통신 거리 성RF Coverage
능 시험의 실제 기준 규격을 구하기 위해 에서 환경을 구성하고 측정ETRI Open Site
하였다.
시험 장비 구성5.1.
그림 과 같이 와 데이터 전송 처리량 측정 장비 를 고정하고 무선 랜 모듈( 5-1) AP (A) ,
이 장착된 무선 랜 표준 노트북모델과 감도 측정 장비 을 기준 시험 장비로 구성RF (B)
하였다.
시험 방법5.2.
무선 랜 표준 모델 를 의 시작거리로부터 최대 까지 이동하면서 통신 거리(B) 10m 60m
를 측정한다 이동 거리 시험 기준은 로 정의하고 씩 이동할 때마다 이동 거리 대. 1m , 1m
비 통신 성능을 측정한다 측정 항목은 데이터 처리량과 전파수신 감도 및 파워를. RF Tx
정보통신단체표준 국문표준( )
TTAK.OT-10.03514
측정한다 시험 기간은 하루에 회씩 측정하였고 온습도 환경을 고려하여 일간 측정. 1 , 35
한 평균값이다 측정된 결과는 표 과 같다. < 5-1> .
시험 결과 기준5.3. (IEEE802.11g )
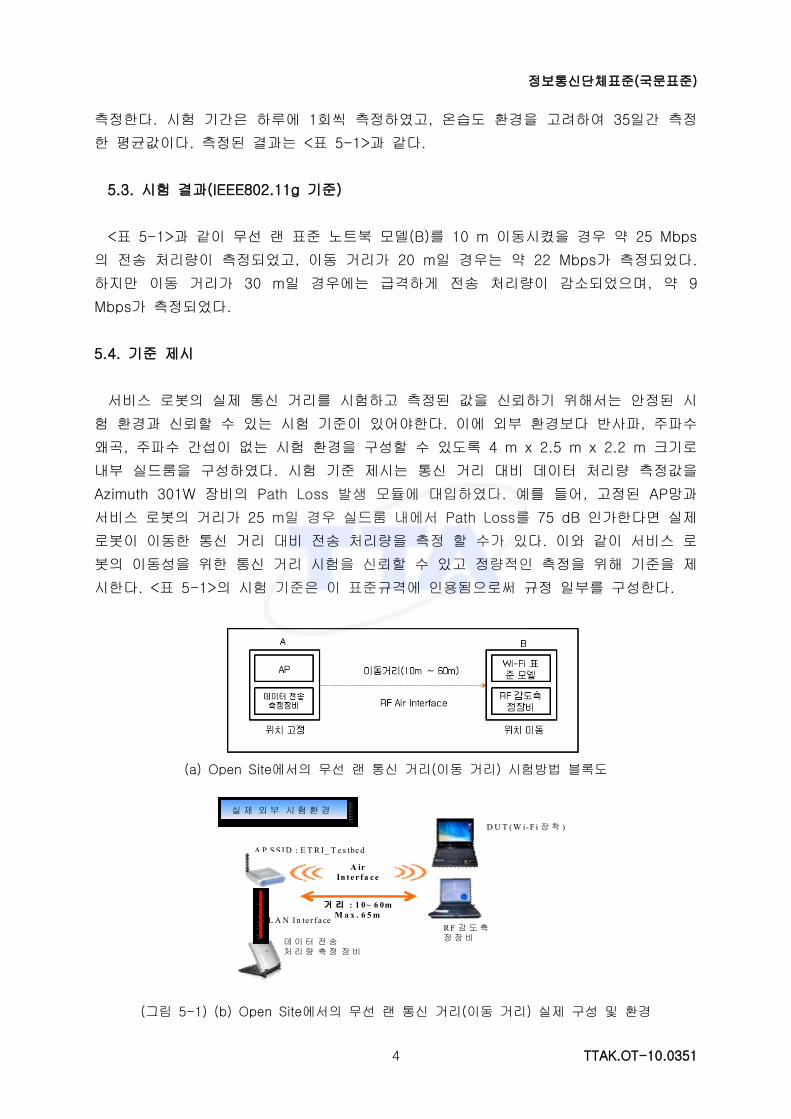
표 과 같이 무선 랜 표준 노트북 모델 를 이동시켰을 경우 약< 5-1> (B) 10 m 25 Mbps
의 전송 처리량이 측정되었고 이동 거리가 일 경우는 약 가 측정되었다, 20 m 22 Mbps .
하지만 이동 거리가 일 경우에는 급격하게 전송 처리량이 감소되었으며 약30 m , 9
가 측정되었다Mbps .
기준 제시5.4.
서비스 로봇의 실제 통신 거리를 시험하고 측정된 값을 신뢰하기 위해서는 안정된 시
험 환경과 신뢰할 수 있는 시험 기준이 있어야한다 이에 외부 환경보다 반사파 주파수. ,
왜곡 주파수 간섭이 없는 시험 환경을 구성할 수 있도록 크기로, 4 m x 2.5 m x 2.2 m
내부 실드룸을 구성하였다 시험 기준 제시는 통신 거리 대비 데이터 처리량 측정값을.
장비의 발생 모듈에 대입하였다 예를 들어 고정된 망과Azimuth 301W Path Loss . , AP
서비스 로봇의 거리가 일 경우 실드룸 내에서 를 인가한다면 실제25 m Path Loss 75 dB
로봇이 이동한 통신 거리 대비 전송 처리량을 측정 할 수가 있다 이와 같이 서비스 로.
봇의 이동성을 위한 통신 거리 시험을 신뢰할 수 있고 정량적인 측정을 위해 기준을 제
시한다 표 의 시험 기준은 이 표준규격에 인용됨으로써 규정 일부를 구성한다. < 5-1> .
에서의 무선 랜 통신 거리 이동 거리 시험방법 블록도(a) Open Site ( )
그림 에서의 무선 랜 통신 거리 이동 거리 실제 구성 및 환경( 5-1) (b) Open Site ( )
A ir
In ter fa ce
A P SS ID : E T R I_ T e s tbed
데 이 터 전 송처 리 량 측 정 장 비
DU T (W i-F i 장 착 )
RF 감 도 측정 장 비
LAN In te r f a ce
거 리 : 1 0~ 6 0m
M a x . 6 5m
실 제 외 부 시 험 환 경

정보통신단체표준 국문표준( )
TTAK.OT-10.03515
표 산출 기준표< 5-1> Path Loss
일반사항6.
일반6.1.
1) 서비스 로봇의 이동성 통신 성능은 로봇과 간의 이동 거리 즉 통신 거리의 안정AP ,
성에 의해 평가한다.
이동성 통신 성능의 안정성 여부 판단은 시험품의 사용자 매뉴얼에서 제시하는 통2)
신 규격 등의 기능을 통하여 명백히 통신이 접속되어 이 규격에서 정한 안정적 이
동 거리를 확인할 수 있을 때 이동성 통신 거리 성능을 안정적으로 판단한다.
3) 외부와의 유선 무선 통신이 가능해야 하며 이를 통해서 받은 사용자의 지시를 우선, ,
수행해야 한다 또한 로봇의 상태를 외부에 알릴 수 있는 장치를 장착하고 있어야 한.
다.
표준 사용 상태6.2.
표준 사용 상태는 다음과 같이 하고 특별히 지정되지 않는 한 통신이 접속 된 로봇은
이 상태에서 사용한다.

정보통신단체표준 국문표준( )
TTAK.OT-10.03516
표준 상태의 온도6.2.1.
표준 상태의 온도 표준 상태의 온도는 시험의 목적에 따라 또는 로 한0 , 25 35℃ ℃ ℃
다.
표준 상태의 습도6.2.2.
표준 상태의 습도는 상대 습도 또는 로 한다50 % 65 % .
표준 상태의 기압6.2.3.
표준 상태의 기압은 이상 이하로 한다86 kPa 106 kPa .
표준 상태6.2.4.
표준 상태는 표준 상태의 기압하에서 표준 상태의 온도 및 표준 상태의 습도의 각, 1
개를 조합시킨 상태로 한다.
비고: 목적에 따라 표준 상태의 온도만을 지정하여도 좋다 그 상태를 표준 온도 상태라.
한다.
참고 에서 권장하는 표준 상태는 온도 상대 습도 이다: ISO 554 23 , 50 % .℃
시험 조건6.3.
시험 환경은 평편해야 하며 시험에 필요한 충분한 통신 거리를 확보하여야 한다1) , .
와 시험시료는 를 유지해야 한다AP 1 m .
시험 환경에 사용되는 실드룸은 전파 차폐 규격에 따른다2) .
시험을 위하여 본체 또는 원격 조정기 의 버튼을 이용하여 강제로3) (remote control)
통신 접속 및 단절 명령을 내릴 수 있는 기능이 제공되어야 한다.
통신 성능의 기능을 위한 보조 수단이 사용될 경우 시험 환경에 추가하여 설치한다4) .
로봇의 이동성 통신 거리 측정에 활용될 스크립트는 의 스크립트를5) Chariot FileSndL
사용한다.
로봇을 위한 측정에 활용될 스크립트는 의 스크6) RF Coverage Chariot Throughput
립트를 사용한다.
정보통신단체표준 국문표준( )
TTAK.OT-10.03517
로봇의 통신부6.4.
요구 사항6.4.1.
로봇의 통신부에 대한 모듈과 로봇의 의 와 접속되고1) RF Main Board ground ground
의 전압차가 를 넘어서지 않아야 한다0.1 V .
로봇의 통신부는 간섭 주파수 차폐가 되어 있어야하며 다른 장비의 특성2) , EMI/EMS
에 간섭을 안 받아야 한다.
액세스 포인트6.5.
요구 사항6.5.1.
로봇에 연동되는 액세스 포인트는 전파등록인증을 받은 제품이어야 한다1) KCC .
액세스 포인트는 통신 기기 이어야 한다a) (class II appliance) .
액세스 포인트는 및 의 관련 요구 사항에 따라 설계 및 제작되어2) IEEE802.11 TTA
야 한다.
무선 랜 기반에서 로봇 이동성을 위한 실제 통신 거리 측정 방법7.
시험 목적1)
무선 랜 통신기능을 장착하고 있는 공공 서비스 로봇은 이동성으로(IEEE802.11a/b/g)
인해 접속되어 있는 로 부터 통신영역 통신 거리 이 점점 멀어질수록 전파 신호 감쇄AP ( )
에 따른 데이터 송수신의 열화 및 통신 접속 단절이 발생되고 서비스 로봇의 전반적인,
무선 랜 통신 성능에 적잖은 영향을 미치게 된다 이와 같이 무선 랜을 탑재한 로봇 제.
품의 이동성을 고려한 통신 거리 성능 측정에 그 목적을 두고 서비스 로봇의 실제 통신,
거리 및 에 대한 통신 로봇의 통신 거리 검증을 시험한다AP RF Coverage .
시험 항목2)
서비스 로봇의 이동성을 고려한 무선 랜 실제 통신 거리 측정 시험-
서비스 로봇과 구간의 에 대한 통신 거리 검증 시험- AP RF Coverage
정보통신단체표준 국문표준( )
TTAK.OT-10.03518
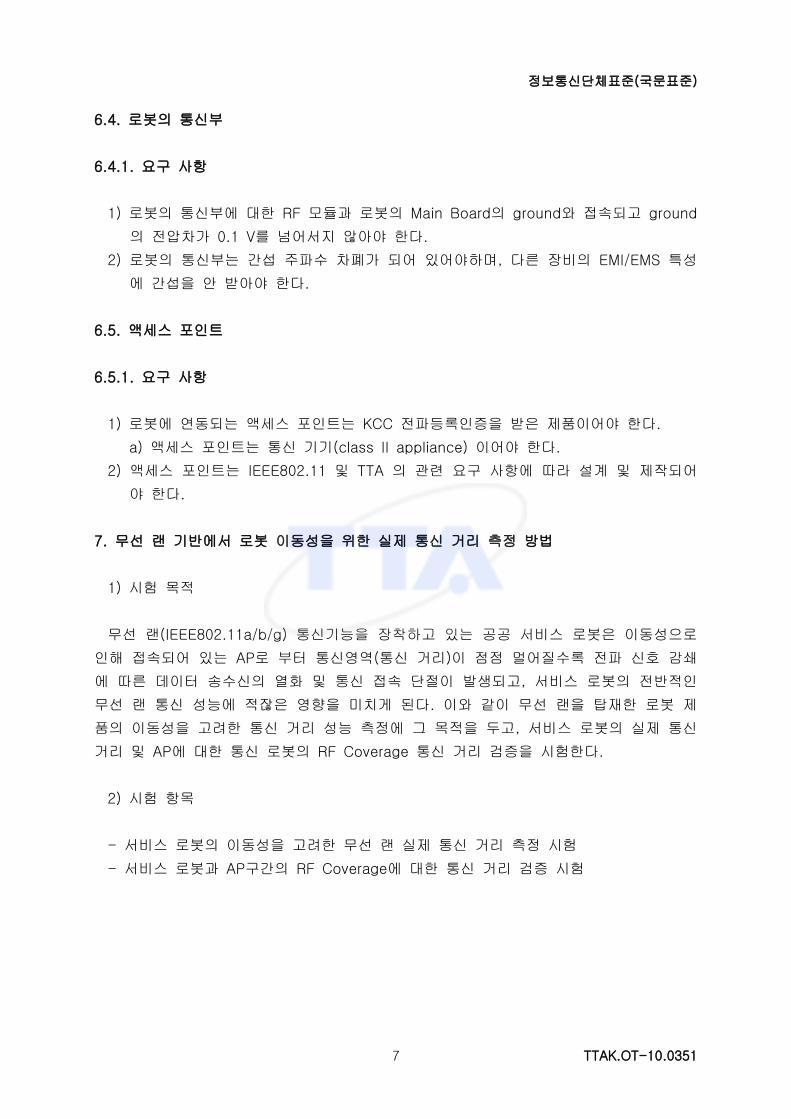
시험 환경3)
그림 서비스 로봇의 이동성을 고려한 무선 랜 실제 통신 거리 시험 환경( 7-1)
그림 서비스 로봇과 구간의 에 대한 통신 거리 검증 시험 환경( 7-2) AP RF Coverage
시험 모델4)
가 서비스 로봇의 이동성을 고려한 무선 랜 실제 통신 거리 측정 시험.
이동성 통신시험의 개념도는 그림 과 같고 서비스 로봇의 통신 거리 성능을 보( 7-3) ,
다 정확하고 효율적으로 측정 할 수 있도록 로봇 테스트베드의 대형 실드룸에 시험ETRI
환경을 구성하였다 로봇과 간의 통신 거리를 측정하기 위해서 그림 의 신호. AP ( 7-3) RF
출력 감쇄 장치에 기준에서 제시한 거리 대비 데이터 전송 처리량을 산출한 Path Loss
테이블을 적용한다 테이블은 거리의 처리량 정도를 처리할. Path Loss 25 m 15 Mbps
수 있는 를 인가한다 로봇과 의 는 모드로Path Loss 75 dB . AP Interface RF Conduction
하며 로봇의 이동성에 대한 로봇의 무선 랜 데이터의 송수신 을Interface , Throughput
측정한다 테이블은 표 과 같이 외부 환경에서 실제 측정한 데이. Path Loss < 5-1> ETRI
터를 기준하였다.

정보통신단체표준 국문표준( )
TTAK.OT-10.03519
그림 서비스 로봇의 이동성을 고려한 무선 랜 실제 통신 거리 시험 블록도( 7-3)
시험 절차(1)
그림( 7-3)① 과 같이 와 시험 로봇 간에 되었음을 을 통해 확인AP "Association" Ping
한다.
시험 로봇과 의 케이블 연결은 로 연결한다AP RF RF Conduction interface② .
그림 과 같이 와 시험 로봇 간의 통신 거리를 로 고정한다( 7-3) AP 1 m .③
시험 로봇과 간의 통신 시험 스크립트 파일은 의 로 설AP (S1) Chariot FileSndL.scr④
정한다.
는 실드 박스에 고정을 하며 로봇의 위치도 고정한다AP , .⑤
표 에서 산출한 거리의 를 신호 감< 5-1> 25 m Path Loss 75 dB Azimuth 301 W⑥
쇄 장치에 설정한다 표 참조.(< 7-1> )
은 칩 공급자로 구분하여 종류로 환경을 구성하고A1(AP) 3 (Atheros, BroadCom,⑦
구성된 개의 에 순차적으로 로봇을 연동하여 성능 시험을 한다Marvell,Intel) 3 AP .
시험 결과(2)
표 무선 랜 이동성 시험결과표< 7-1>
스크립트AP( )시험 로봇 FileSndL (Mbps) Measurement
Distance(m)DownStream Upstream
A1(S1) / Mbps / Mbps r(25)
A2(S1) / Mbps / Mbps r(25)
A3(S1) / Mbps / Mbps r(25)

정보통신단체표준 국문표준( )
TTAK.OT-10.035110
판정 기준(3)
표 과 같이 기준 규격에 따라 인가시 통신 거리 정< 5-1> Path Loss 75 dB ( 25 m①
도 시험 로봇의 무선 랜 데이터 이 가 측정되어야 한다) Throughput 15 Mbps .
나 서비스 로봇과 구간의 에 대한 통신 거리 검증 시험. AP RF Coverage
무선 랜 통신 거리 검증 시험의 개념도는 그림 와 같고 로봇RF Coverage ( 7-4) , ETRI
테스트베드의 대형 실드룸에 시험 환경이 구성되어 있다 로봇제품의 커버리지 전송. RF
시험은 로봇과 간에 데이터 송수신이 가능한 상태에서 의 통신 거리를AP RF Cell Area
측정하기 위한 시험이다 서비스 로봇의 이동성을 고려한 무선 랜 실제 통신 거리 시험.
을 검증하기 위한 차 시험이다 통신 거리는 표 과 같이 외부환경에서 측정2 . < 5-1> ETRI
한 데이터를 기준하여 로 산출하였다Path Loss .
그림 서비스 로봇과 구간의 에 대한 데이터 전송 시험 블록도( 7-4) AP RF Coverage
시험 절차(1)
그림 와( 7-4)① 같이 와 시험 로봇 간에 되었음을 을 통해 확인AP "Association" Ping
한다.
시험 로봇과 는 으로 연결한다AP Conduction intertace .②
그림 와 같이 와 시험 로봇 간의 통신 거리를 로 고정한다( 7-4) AP 1 m .③
시험 로봇과 간의 통신 시험 스크립트 파일은 로 설정 한다AP (S1) Throughput.scr .④
는 실드 박스에 고정을 하며 로봇의 위치도 고정한다AP , .⑤
⑥ 기준 제시한 테이블의 거리를 로 커버리지를 설정 한다PathLoss 25 m(75 dB) RF .
표(< 7-2> 참조)
은 칩셋으로 구분하여 종류로 환경을 구성하고A1(AP) 3 (Atheros, BroadCom,⑦
구성된 개의 에 순차적으로 로봇을 연동하여 성능 시험을 한Marvell, Intel) 3 AP
다.

정보통신단체표준 국문표준( )
TTAK.OT-10.035111
시험 결과(2)
표 무선 랜 커버리지 데이터 전송 시험 결과표< 7-2>
스크립트AP( ) 시험 로봇 Data Throughput (Mbps)Measurement
환경적( Path Loss(dB)
A1(S1) / Mbps 75
A2(S1) / Mbps 75
A3(S1) / Mbps 75
판정 기준(3)
독립된 의 영역으로부터 지점AP(Base Station) RF Cell 25 m(Path Loss : 75 dB)①
에서 로봇의 데이터 이 가 측정되어야 한다 기본시험Throughput 13 Mbps .( )
또한 추가적인 시험으로 에 대한 표 와 같이 기준의 실시간802.11g < 7-3> TTA S3(②
비디오패킷스크립트 조건에 따라 이상의 데이터 전송량이 측정되어야 한) 8 Mbps
다 비디오 영상을 실시간으로 전송하는 기능이 있는 로봇에 적용한다.( .)
표 기준표< 7-3> Throughput
Scripts SettingFileSndL(Mbps)
DownStream Upstream
A1(S1) 13 15
A2(S1) 13 15
A3(S1) 8 15
예* ) IEEE 802.11g

정보통신단체표준 국문표준( )
TTAK.OT-10.035112
부 록 Ⅰ
참고 문헌
고속무선 상호운용성 시험규격[1] TTA Std TTAS.KO-06.0081, ‘ LAN(IEEE802.11g) ’,
2005.
정보통신부고시 제 호 전자파장해방지기준 정보통신부고시 제[2] 2004-23 ‘ ’, KN22
호 전자파 보호기준2004-24 ‘ ’, KN61000-4-2 ~ KN61000-4-8
[3] IEEE Std 802.11, ‘Wireless LAN Medium Access Control (MAC) and Physical
Layer (PHY) Specifications’, 1999.

정보통신단체표준 국문표준( )
TTAK.OT-10.035113
표준 작성 공헌자
표준 번호 : TTAK.OT-10.0351
이 표준의 제정 개정 및 발간을 위해 아래와 같이 여러분들이 공헌하였습니다.․
구분 성명 위원회 및 직위연락처
등(E-mail )소속사
표준 과제 제안( )
민순호 - [email protected] 한국전자통신연구원
이동한 - [email protected] 한국전자통신연구원
김태홍 - [email protected] 한국전자통신연구원
장민 - [email protected] 유진로봇㈜
표준 초안 제출 서준호 팀 장 [email protected] 한국로봇산업협회
표준 초안
에디터서준호
지능형서비스로봇 PG간사
[email protected] 한국로봇산업협회
표준 초안 검토지수영
지능형서비스로봇 PG의장
[email protected] 한국전자통신연구원
외 지능형서비스로봇 PG위원
표준안 심의
이헌중 응용 기술위원회 의장IT [email protected] 한국정보사회진흥원
외 응용 기술위원회 위원IT
사무국 담당
박정식 - [email protected] TTA
강석규 - [email protected] TTA

정보통신단체표준 국문표준( )
무선 랜 기반에서 로봇 이동성을 위한
실제 통신 거리 측정 방법
(The Measurement Method of Actual
Communication Distance for Robots Mobility
in a Wireless LAN-Based)
발행인 한국정보통신기술협회 회장:
발행처 한국정보통신기술협회:
경기도 성남시 분당구 분당로463-824, 47
Tel : 031-724-0114, Fax : 031-724-0109
발행일 : 2013.12




![11...NOV.2010 Vol.6 11 ç * 3 | ] Ô 5 T T T T T T T T T T T #ã ç ê f ý i { . a T T T T T T T T T #å ç ' Ô 4 y ª#Ò Ð y C X T T T T T T %# ç Ó r 6 Ý M { ù Z r T T T T](https://img.pdfslide.tips/doc/110x75/5ffac48099784564a2223c88/11-nov2010-vol6-11-3-5-t-t-t-t-t-t-t-t-t-t-t-f-i.jpg)
























