-
8/2/2019 Tan Nu
1/14
An embedded system is a computer system designed for specific
control
functions within a larger system,
often with real-time computing constraints.[1][2] It is embedded
as part of a
complete device often including
hardware and mechanical parts. By contrast, a general-purpose
computer,
such as a personal computer (PC),
is designed to be flexible and to meet a wide range of end-user
needs.
Embedded systems control many devices
in common use today.[3] Embedded systems contain processing
cores that
are typically either microcontrollers or
digital signal processors (DSP).[4] The key characteristic,
however, is being
dedicated to handle a particular
Since the embedded system is dedicated to specific tasks, design
engineers
can optimize it to reduce the size and
cost of the product and increase the reliability and
performance. Someembedded systems are mass-produced, benefiting
from economies of scale.Physically, embedded systems range from
portable
devices such as digital watches and MP3 players,
to large stationary installations like traffic lights, factory
controllers, or the
systems controlling nuclear power plants.
Complexity varies from low, with a single microcontroller chip,
to very high
with multiple units, peripherals and networks
mounted inside a large chassis or enclosure.
Embedded systems are especially suited for use in
transportation, fire safety,
safety and security, medical applications and life critical
systems as these
systems can be isolated from hacking and thus be more reliable.
For fire
safety, the systems can be designed to have greater ability to
handle higher
temperatures and continue to operate. In dealing with security,
the embedded
systems can be self-sufficient and be able to deal with cut
electrical and
communication systems. [1]
In addition to commonly described embedded systems based on
small
computers, a new class of miniature wireless devices called
motes arequickly gaining popularity as the field of wireless sensor
networking rises.
Wireless sensor networking,WSN, makes use of miniaturization
made
possible by advanced IC design to couple full wireless
subsystems to
sophisticated sensors, enabling people and companies to measure
a myriad
of things in the physical world and act on this information
through IT
monitoring and control systems. These motes are completely self
contained,
http://www.embeddedsystem.com/http://en.wikipedia.org/wiki/Moteshttp://en.wikipedia.org/wiki/WSNhttp://en.wikipedia.org/wiki/WSNhttp://www.embeddedsystem.com/http://en.wikipedia.org/wiki/Moteshttp://en.wikipedia.org/wiki/WSN
-
8/2/2019 Tan Nu
2/14
and will typically run off a battery source for many years
before the batteries
need to be changed or charged.
Characteristics
Gumstix Overo COM, a tiny, OMAP-based embedded
computer-on-module
with Wifi and Bluetooth.
1. Embedded systems are designed to do some specific task,
rather than be a
general-purpose computer for multiple tasks. Some also have
real-time
performance constraints that must be met, for reasons such as
safety and
usability; others may have low or no performance requirements,
allowing the
system hardware to be simplified to reduce costs.
2. Embedded systems are not always standalone devices. Many
embedded
systems consist of small, computerized parts within a larger
device that
serves a more general purpose. For example, the Gibson Robot
Guitar
features an embedded system for tuning the strings, but the
overall purpose
of the Robot Guitar is, of course, to play music.[5] Similarly,
an embedded
system in an automobile provides a specific function as a
subsystem of the
car itself.
http://en.wikipedia.org/wiki/Gumstixhttp://en.wikipedia.org/wiki/OMAPhttp://en.wikipedia.org/wiki/Computer-on-modulehttp://en.wikipedia.org/wiki/Wifihttp://en.wikipedia.org/wiki/Bluetoothhttp://en.wikipedia.org/wiki/Real-time_computinghttp://en.wikipedia.org/wiki/Gibson_Robot_Guitarhttp://en.wikipedia.org/wiki/Embedded_system#cite_note-4http://en.wikipedia.org/wiki/Automobilehttp://en.wikipedia.org/wiki/File:Overo_with_coin.jpghttp://en.wikipedia.org/wiki/File:Overo_with_coin.jpghttp://en.wikipedia.org/wiki/Gumstixhttp://en.wikipedia.org/wiki/OMAPhttp://en.wikipedia.org/wiki/Computer-on-modulehttp://en.wikipedia.org/wiki/Wifihttp://en.wikipedia.org/wiki/Bluetoothhttp://en.wikipedia.org/wiki/Real-time_computinghttp://en.wikipedia.org/wiki/Gibson_Robot_Guitarhttp://en.wikipedia.org/wiki/Embedded_system#cite_note-4http://en.wikipedia.org/wiki/Automobile
-
8/2/2019 Tan Nu
3/14
e-con Systems eSOM270 & eSOM300 Computer on Modules
3. The program instructions written for embedded systems are
referred to as
firmware, and are stored in read-only memory orFlash memory
chips. They
run with limited computer hardware resources: little memory,
small or non-
existent keyboard or screen.
User interface
Embedded system text user interface using MicroVGA[nb 1]
Embedded systems range from no user interface at all dedicated
only to
one task to complex graphical user interfaces that resemble
modern
computer desktop operating systems. Simple embedded devices
usebuttons,
LEDs, graphic or characterLCDs (for example popularHD44780
LCD)
with a simple menu system.
More sophisticated devices which use a graphical screen with
touch sensingor screen-edge buttons provide flexibility while
minimizing space used: the
meaning of the buttons can change with the screen, and selection
involves
the natural behavior of pointing at what's desired.Handheld
systems often
have a screen with a "joystick button" for a pointing
device.
http://en.wikipedia.org/wiki/Firmwarehttp://en.wikipedia.org/wiki/Flash_memoryhttp://en.wikipedia.org/wiki/Text_user_interfacehttp://en.wikipedia.org/wiki/Embedded_system#cite_note-MicroVGA-5http://en.wikipedia.org/wiki/Desktop_operating_system#Graphical_user_interfaceshttp://en.wikipedia.org/wiki/Push-buttonhttp://en.wikipedia.org/wiki/LEDhttp://en.wikipedia.org/wiki/LCDhttp://en.wikipedia.org/wiki/Hitachi_HD44780_LCD_controllerhttp://en.wikipedia.org/wiki/Menu_(computing)http://en.wikipedia.org/wiki/Touch_screenhttp://en.wikipedia.org/wiki/Mobile_devicehttp://en.wikipedia.org/wiki/Mobile_devicehttp://en.wikipedia.org/wiki/File:MicroVGA_TUI_demoapp.jpghttp://en.wikipedia.org/wiki/File:MicroVGA_TUI_demoapp.jpghttp://en.wikipedia.org/wiki/File:ESOM270_eSOM300_Computer_on_Modules.jpghttp://en.wikipedia.org/wiki/File:ESOM270_eSOM300_Computer_on_Modules.jpghttp://en.wikipedia.org/wiki/Firmwarehttp://en.wikipedia.org/wiki/Flash_memoryhttp://en.wikipedia.org/wiki/Text_user_interfacehttp://en.wikipedia.org/wiki/Embedded_system#cite_note-MicroVGA-5http://en.wikipedia.org/wiki/Desktop_operating_system#Graphical_user_interfaceshttp://en.wikipedia.org/wiki/Push-buttonhttp://en.wikipedia.org/wiki/LEDhttp://en.wikipedia.org/wiki/LCDhttp://en.wikipedia.org/wiki/Hitachi_HD44780_LCD_controllerhttp://en.wikipedia.org/wiki/Menu_(computing)http://en.wikipedia.org/wiki/Touch_screenhttp://en.wikipedia.org/wiki/Mobile_device
-
8/2/2019 Tan Nu
4/14
Some systems provide user interface remotely with the help of a
serial (e.g.
RS-232, USB, IC, etc.) or network (e.g. Ethernet) connection.
This
approach gives several advantages: extends the capabilities of
embedded
system, avoids the cost of a display, simplifies BSP, allows us
to build rich
user interface on the PC. A good example of this is the
combination of an
embedded web serverrunning on an embedded device (such as
anIP
camera) or a network routers. The user interface is displayed in
a web
browseron a PC connected to the device, therefore needing no
bespoke
software to be installed.
Processors in embedded systems
Secondly, embedded processors can be broken into two broad
categories:
ordinary microprocessors (P) and microcontrollers (C), which
have many
more peripherals on chip, reducing cost and size. Contrasting to
the personalcomputer and server markets, a fairly large number of
basic CPU
architectures are used; there are Von Neumann as well as various
degrees of
Harvard architectures, RISC as well as non-RISC and VLIW; word
lengths
vary from 4-bit to 64-bits and beyond (mainly in DSP processors)
although
the most typical remain 8/16-bit. Most architectures come in a
large number
of different variants and shapes, many of which are also
manufactured by
several different companies.
Peripherals
Embedded Systems talk with the outside world viaperipherals,
such as:
Serial Communication Interfaces (SCI): RS-232, RS-422, RS-485
etc.
Synchronous Serial Communication Interface: I2C, SPI, SSC
and
ESSI (Enhanced Synchronous Serial Interface)
Universal Serial Bus (USB)
Multi Media Cards (SD Cards, Compact Flash etc.)
Networks: Ethernet, LonWorks, etc.
Fieldbuses: CAN-Bus, LIN-Bus, PROFIBUS, etc.
Timers: PLL(s), Capture/Compare and Time Processing Units
Discrete IO: aka General Purpose Input/Output (GPIO)
Analog to Digital/Digital to Analog (ADC/DAC)
Debugging: JTAG, ISP, ICSP, BDM Port, BITP, and DP9 ports.
http://en.wikipedia.org/wiki/RS-232http://en.wikipedia.org/wiki/USBhttp://en.wikipedia.org/wiki/I%C2%B2Chttp://en.wikipedia.org/wiki/Ethernethttp://en.wikipedia.org/wiki/Board_support_packagehttp://en.wikipedia.org/wiki/Embedded_HTTP_serverhttp://en.wikipedia.org/wiki/IP_camerahttp://en.wikipedia.org/wiki/IP_camerahttp://en.wikipedia.org/wiki/IP_camerahttp://en.wikipedia.org/wiki/Router_(computing)http://en.wikipedia.org/wiki/Web_browserhttp://en.wikipedia.org/wiki/Web_browserhttp://en.wikipedia.org/wiki/CPU_architecturehttp://en.wikipedia.org/wiki/CPU_architecturehttp://en.wikipedia.org/wiki/Von_Neumann_architecturehttp://en.wikipedia.org/wiki/Harvard_architecturehttp://en.wikipedia.org/wiki/RISChttp://en.wikipedia.org/wiki/VLIWhttp://en.wikipedia.org/wiki/Digital_signal_processorhttp://en.wikipedia.org/wiki/Peripheralhttp://en.wikipedia.org/wiki/RS-232http://en.wikipedia.org/wiki/RS-422http://en.wikipedia.org/wiki/RS-485http://en.wikipedia.org/wiki/I2Chttp://en.wikipedia.org/wiki/Serial_Peripheral_Interface_Bushttp://en.wikipedia.org/wiki/Universal_Serial_Bushttp://en.wikipedia.org/wiki/Ethernethttp://en.wikipedia.org/wiki/LonWorkshttp://en.wikipedia.org/wiki/Fieldbushttp://en.wikipedia.org/wiki/Controller_Area_Networkhttp://en.wikipedia.org/wiki/Local_Interconnect_Networkhttp://en.wikipedia.org/wiki/PROFIBUShttp://en.wikipedia.org/wiki/PLLhttp://en.wikipedia.org/w/index.php?title=Time_Processing_Unit&action=edit&redlink=1http://en.wikipedia.org/wiki/General_Purpose_Input/Outputhttp://en.wikipedia.org/wiki/Analog-to-digital_converterhttp://en.wikipedia.org/wiki/Digital-to-analog_converterhttp://en.wikipedia.org/wiki/JTAGhttp://en.wikipedia.org/wiki/In-System_Programminghttp://en.wikipedia.org/wiki/In_Circuit_Serial_Programming_(ICSP)http://en.wikipedia.org/wiki/Background_Debug_Mode_interfacehttp://en.wikipedia.org/wiki/RS-232http://en.wikipedia.org/wiki/USBhttp://en.wikipedia.org/wiki/I%C2%B2Chttp://en.wikipedia.org/wiki/Ethernethttp://en.wikipedia.org/wiki/Board_support_packagehttp://en.wikipedia.org/wiki/Embedded_HTTP_serverhttp://en.wikipedia.org/wiki/IP_camerahttp://en.wikipedia.org/wiki/IP_camerahttp://en.wikipedia.org/wiki/Router_(computing)http://en.wikipedia.org/wiki/Web_browserhttp://en.wikipedia.org/wiki/Web_browserhttp://en.wikipedia.org/wiki/CPU_architecturehttp://en.wikipedia.org/wiki/CPU_architecturehttp://en.wikipedia.org/wiki/Von_Neumann_architecturehttp://en.wikipedia.org/wiki/Harvard_architecturehttp://en.wikipedia.org/wiki/RISChttp://en.wikipedia.org/wiki/VLIWhttp://en.wikipedia.org/wiki/Digital_signal_processorhttp://en.wikipedia.org/wiki/Peripheralhttp://en.wikipedia.org/wiki/RS-232http://en.wikipedia.org/wiki/RS-422http://en.wikipedia.org/wiki/RS-485http://en.wikipedia.org/wiki/I2Chttp://en.wikipedia.org/wiki/Serial_Peripheral_Interface_Bushttp://en.wikipedia.org/wiki/Universal_Serial_Bushttp://en.wikipedia.org/wiki/Ethernethttp://en.wikipedia.org/wiki/LonWorkshttp://en.wikipedia.org/wiki/Fieldbushttp://en.wikipedia.org/wiki/Controller_Area_Networkhttp://en.wikipedia.org/wiki/Local_Interconnect_Networkhttp://en.wikipedia.org/wiki/PROFIBUShttp://en.wikipedia.org/wiki/PLLhttp://en.wikipedia.org/w/index.php?title=Time_Processing_Unit&action=edit&redlink=1http://en.wikipedia.org/wiki/General_Purpose_Input/Outputhttp://en.wikipedia.org/wiki/Analog-to-digital_converterhttp://en.wikipedia.org/wiki/Digital-to-analog_converterhttp://en.wikipedia.org/wiki/JTAGhttp://en.wikipedia.org/wiki/In-System_Programminghttp://en.wikipedia.org/wiki/In_Circuit_Serial_Programming_(ICSP)http://en.wikipedia.org/wiki/Background_Debug_Mode_interface
-
8/2/2019 Tan Nu
5/14
Tools
As with other software, embedded system designers use
compilers,
assemblers, and debuggers to develop embedded system software.
However,
they may also use some more specific tools:
In circuit debuggers or emulators (see next section).
Utilities to add a checksum orCRC to a program, so the
embedded
system can check if the program is valid.
For systems using digital signal processing, developers may use
a
math workbench such as Scilab / Scicos, MATLAB / Simulink,
EICASLAB, MathCad, Mathematica,orFlowStone DSP to simulate
the mathematics. They might also use libraries for both the host
and
target which eliminates developing DSP routines as done in
DSPnano
RTOS and Unison Operating System. A model based development tool
like VisSim lets you create and
simulate graphical data flow and UML State chart diagrams of
components like digital filters, motor controllers,
communication
protocol decoding and multi-rate tasks. Interrupt handlers can
also be
created graphically. After simulation, you can automatically
generate
C-code to the VisSimRTOS which handles the main control task
and
preemption of background tasks, as well as automatic setup
and
programming of on-chip peripherals.
Custom compilers and linkers may be used to improve
optimisation
for the particular hardware. An embedded system may have its own
special language or design
tool, or add enhancements to an existing language such as Forth
or
Basic.
Another alternative is to add a real-time operating system
or
embedded operating system, which may have DSP capabilities
like
DSPnano RTOS.
Modeling and code generating tools often based on state
machines
Software tools can come from several sources:
Software companies that specialize in the embedded market
Ported from the GNU software development tools
Sometimes, development tools for a personal computer can be used
if
the embedded processor is a close relative to a common PC
processor
http://en.wikipedia.org/wiki/Compilerhttp://en.wikipedia.org/wiki/Assemblershttp://en.wikipedia.org/wiki/Debuggerhttp://en.wikipedia.org/wiki/Cyclic_redundancy_checkhttp://en.wikipedia.org/wiki/Digital_signal_processinghttp://en.wikipedia.org/wiki/Scilabhttp://en.wikipedia.org/wiki/Scicoshttp://en.wikipedia.org/wiki/MATLABhttp://en.wikipedia.org/wiki/Simulinkhttp://en.wikipedia.org/wiki/EICASLABhttp://en.wikipedia.org/wiki/MathCadhttp://en.wikipedia.org/wiki/Mathematicahttp://en.wikipedia.org/w/index.php?title=FlowStone_DSP&action=edit&redlink=1http://en.wikipedia.org/wiki/DSPnano_RTOShttp://en.wikipedia.org/wiki/DSPnano_RTOShttp://en.wikipedia.org/wiki/Unison_Operating_Systemhttp://en.wikipedia.org/wiki/VisSimhttp://en.wikipedia.org/wiki/Interrupthttp://en.wikipedia.org/wiki/VisSimhttp://en.wikipedia.org/wiki/RTOShttp://en.wikipedia.org/wiki/Preemption_(computing)http://en.wikipedia.org/wiki/Forth_(programming_language)http://en.wikipedia.org/wiki/BASIC_Stamphttp://en.wikipedia.org/wiki/Real-time_operating_systemhttp://en.wikipedia.org/wiki/Embedded_operating_systemhttp://en.wikipedia.org/wiki/DSPnano_RTOShttp://en.wikipedia.org/wiki/UML_toolhttp://en.wikipedia.org/wiki/UML_state_machinehttp://en.wikipedia.org/wiki/GNUhttp://en.wikipedia.org/wiki/Compilerhttp://en.wikipedia.org/wiki/Assemblershttp://en.wikipedia.org/wiki/Debuggerhttp://en.wikipedia.org/wiki/Cyclic_redundancy_checkhttp://en.wikipedia.org/wiki/Digital_signal_processinghttp://en.wikipedia.org/wiki/Scilabhttp://en.wikipedia.org/wiki/Scicoshttp://en.wikipedia.org/wiki/MATLABhttp://en.wikipedia.org/wiki/Simulinkhttp://en.wikipedia.org/wiki/EICASLABhttp://en.wikipedia.org/wiki/MathCadhttp://en.wikipedia.org/wiki/Mathematicahttp://en.wikipedia.org/w/index.php?title=FlowStone_DSP&action=edit&redlink=1http://en.wikipedia.org/wiki/DSPnano_RTOShttp://en.wikipedia.org/wiki/DSPnano_RTOShttp://en.wikipedia.org/wiki/Unison_Operating_Systemhttp://en.wikipedia.org/wiki/VisSimhttp://en.wikipedia.org/wiki/Interrupthttp://en.wikipedia.org/wiki/VisSimhttp://en.wikipedia.org/wiki/RTOShttp://en.wikipedia.org/wiki/Preemption_(computing)http://en.wikipedia.org/wiki/Forth_(programming_language)http://en.wikipedia.org/wiki/BASIC_Stamphttp://en.wikipedia.org/wiki/Real-time_operating_systemhttp://en.wikipedia.org/wiki/Embedded_operating_systemhttp://en.wikipedia.org/wiki/DSPnano_RTOShttp://en.wikipedia.org/wiki/UML_toolhttp://en.wikipedia.org/wiki/UML_state_machinehttp://en.wikipedia.org/wiki/GNU
-
8/2/2019 Tan Nu
6/14
As the complexity of embedded systems grows, higher level tools
and
operating systems are migrating into machinery where it makes
sense. For
example, cellphones,personal digital assistants and other
consumer
computers often need significant software that is purchased or
provided by a
person other than the manufacturer of the electronics. In these
systems, an
open programming environment such as Linux,NetBSD, OSGi or
Embedded Java is required so that the third-party software
provider can sell
to a large market.
Debugging
Embedded debugging may be performed at different levels,
depending on
the facilities available. From simplest to most sophisticated
they can be
roughly grouped into the following areas:
Interactive resident debugging, using the simple shell provided
by the
embedded operating system (e.g. Forth and Basic)
External debugging using logging or serial port output to
trace
operation using either a monitor in flash or using a debug
server like
the Remedy Debuggerwhich even works for heterogeneous
multicore
systems.
An in-circuit debugger (ICD), a hardware device that connects to
the
microprocessor via a JTAG orNexus interface. This allows the
operation of the microprocessor to be controlled externally, but
is
typically restricted to specific debugging capabilities in the
processor. An in-circuit emulator(ICE) replaces the microprocessor
with a
simulated equivalent, providing full control over all aspects of
the
microprocessor.
A complete emulatorprovides a simulation of all aspects of
the
hardware, allowing all of it to be controlled and modified,
and
allowing debugging on a normal PC.
Unless restricted to external debugging, the programmer can
typically load
and run software through the tools, view the code running in the
processor,
and start or stop its operation. The view of the code may be as
HLLsource-
code, assembly code or mixture of both.
Because an embedded system is often composed of a wide variety
of
elements, the debugging strategy may vary. For instance,
debugging a
software- (and microprocessor-) centric embedded system is
different from
http://en.wikipedia.org/wiki/Cellphonehttp://en.wikipedia.org/wiki/Personal_digital_assistanthttp://en.wikipedia.org/wiki/Linuxhttp://en.wikipedia.org/wiki/NetBSDhttp://en.wikipedia.org/wiki/OSGihttp://en.wikipedia.org/wiki/Embedded_Javahttp://en.wikipedia.org/wiki/Debugginghttp://en.wikipedia.org/wiki/Remedy_Debuggerhttp://en.wikipedia.org/wiki/Multi-core_processorhttp://en.wikipedia.org/wiki/JTAGhttp://en.wikipedia.org/wiki/Nexus_(standard)http://en.wikipedia.org/wiki/In-circuit_emulatorhttp://en.wikipedia.org/wiki/Emulatorhttp://en.wikipedia.org/wiki/High-level_programming_languagehttp://en.wikipedia.org/wiki/Source-codehttp://en.wikipedia.org/wiki/Source-codehttp://en.wikipedia.org/wiki/Assembly_codehttp://en.wikipedia.org/wiki/Cellphonehttp://en.wikipedia.org/wiki/Personal_digital_assistanthttp://en.wikipedia.org/wiki/Linuxhttp://en.wikipedia.org/wiki/NetBSDhttp://en.wikipedia.org/wiki/OSGihttp://en.wikipedia.org/wiki/Embedded_Javahttp://en.wikipedia.org/wiki/Debugginghttp://en.wikipedia.org/wiki/Remedy_Debuggerhttp://en.wikipedia.org/wiki/Multi-core_processorhttp://en.wikipedia.org/wiki/JTAGhttp://en.wikipedia.org/wiki/Nexus_(standard)http://en.wikipedia.org/wiki/In-circuit_emulatorhttp://en.wikipedia.org/wiki/Emulatorhttp://en.wikipedia.org/wiki/High-level_programming_languagehttp://en.wikipedia.org/wiki/Source-codehttp://en.wikipedia.org/wiki/Source-codehttp://en.wikipedia.org/wiki/Assembly_code
-
8/2/2019 Tan Nu
7/14
debugging an embedded system where most of the processing is
performed
by peripherals (DSP, FPGA, co-processor). An increasing number
of
embedded systems today use more than one single processor core.
A
common problem with multi-core development is the proper
synchronization
of software execution. In such a case, the embedded system
design may wish
to check the data traffic on the busses between the processor
cores, which
requires very low-level debugging, at signal/bus level, with a
logic analyzer,
for instance.
Tracing Real-time operating systems (RTOS) often supports
tracing of
operating system events. A graphical view is presented by a host
PC tool,
based on a recording of the system behavior. The trace recording
can be
performed in software, by the RTOS, or by special tracing
hardware. RTOS
tracing allows developers to understand timing and performance
issues of
the software system and gives a good understanding of the
high-level systembehavior. A good example is RTXCview, forRTXC
Quadros by Quadros
Systems, Inc..
Reliability
Embedded systems often reside in machines that are expected to
run
continuously for years without errors, and in some cases recover
by
themselves if an error occurs. Therefore the software is usually
developed
and tested more carefully than that for personal computers, and
unreliable
mechanical moving parts such as disk drives, switches or buttons
areavoided.
Specific reliability issues may include:
1. The system cannot safely be shut down for repair, or it is
too
inaccessible to repair. Examples include space systems,
undersea
cables, navigational beacons, bore-hole systems, and
automobiles.
2. The system must be kept running for safety reasons. "Limp
modes"
are less tolerable. Often backups are selected by an
operator.
Examples include aircraft navigation, reactor control systems,
safety-
critical chemical factory controls, train signals.
3. The system will lose large amounts of money when shut
down:
Telephone switches, factory controls, bridge and elevator
controls,
funds transfer and market making, automated sales and
service.
http://en.wikipedia.org/wiki/Logic_analyzerhttp://en.wikipedia.org/wiki/RTOShttp://en.wikipedia.org/wiki/Tracing_(software)http://www.quadros.com/RTXCviewhttp://en.wikipedia.org/wiki/RTXC_Quadroshttp://www.quadros.com/http://www.quadros.com/http://en.wikipedia.org/wiki/Logic_analyzerhttp://en.wikipedia.org/wiki/RTOShttp://en.wikipedia.org/wiki/Tracing_(software)http://www.quadros.com/RTXCviewhttp://en.wikipedia.org/wiki/RTXC_Quadroshttp://www.quadros.com/http://www.quadros.com/
-
8/2/2019 Tan Nu
8/14
A variety of techniques are used, sometimes in combination, to
recover from
errorsboth software bugs such as memory leaks, and also soft
errors in the
hardware:
watchdog timerthat resets the computer unless the software
periodically notifies the watchdog
subsystems with redundant spares that can be switched over
to
software "limp modes" that provide partial function
Designing with a Trusted Computing Base (TCB)
architecture[6]
ensures a highly secure & reliable system environment
An Embedded Hypervisoris able to provide secure encapsulation
for
any subsystem component, so that a compromised software
component cannot interfere with other subsystems, or
privileged-level
system software. This encapsulation keeps faults from
propagating
from one subsystem to another, improving reliability. This may
alsoallow a subsystem to be automatically shut down and restarted
on
fault detection.
Immunity Aware Programming
Interrupt controlled system
Some embedded systems are predominantly interrupt controlled.
This means
that tasks performed by the system are triggered by different
kinds of events.
An interrupt could be generated for example by a timer in a
predefined
frequency, or by a serial port controller receiving a byte.
These kinds of systems are used if event handlers need low
latency and the
event handlers are short and simple.
Usually these kinds of systems run a simple task in a main loop
also, but this
task is not very sensitive to unexpected delays.
Sometimes the interrupt handler will add longer tasks to a queue
structure.
Later, after the interrupt handler has finished, these tasks are
executed by the
main loop. This method brings the system close to a multitasking
kernelwith discrete processes.
About the 8051
The Intel 8051 is an 8-bit microcontroller which means that most
available
operations are limited to 8 bits. There are 3 basic "sizes" of
the 8051: Short,
http://en.wikipedia.org/wiki/Soft_errorhttp://en.wikipedia.org/wiki/Watchdog_timerhttp://en.wikipedia.org/wiki/Trusted_Computing_Basehttp://en.wikipedia.org/wiki/Embedded_system#cite_note-6http://en.wikipedia.org/wiki/Embedded_Hypervisorhttp://en.wikipedia.org/wiki/Immunity_Aware_Programminghttp://en.wikipedia.org/wiki/Soft_errorhttp://en.wikipedia.org/wiki/Watchdog_timerhttp://en.wikipedia.org/wiki/Trusted_Computing_Basehttp://en.wikipedia.org/wiki/Embedded_system#cite_note-6http://en.wikipedia.org/wiki/Embedded_Hypervisorhttp://en.wikipedia.org/wiki/Immunity_Aware_Programming
-
8/2/2019 Tan Nu
9/14
Standard, and Extended. The Short and Standard chips are often
available in
DIP (dual in-line package) form, but the Extended 8051 models
often have a
different form factor, and are not "drop-in compatible". All
these things are
called 8051 because they can all be programmed using 8051
assembly
language, and they all share certain features (although the
different models
all have their own special features).
Some of the features that have made the 8051 popular are:
4 KB on chip program memory.
128 bytes on chip data memory(RAM).
4 reg banks.
128 user defined software flags.
8-bit data bus
16-bit address bus 32 general purpose registers each of 8
bits
16 bit timers (usually 2, but may have more, or less).
3 internal and 2 external interrupts.
Bit as well as byte addressable RAM area of 16 bytes.
Four 8-bit ports, (short models have two 8-bit ports).
16-bit program counter and data pointer.
1 Microsecond instruction cycle with 12 MHz Crystal.
8051 models may also have a number of special, model-specific
features,
such as UARTs, ADC, OpAmps, etc...
Typical applications
8051 chips are used in a wide variety of control systems,
telecom
applications, robotics as well as in the automotive industry. By
some
estimations, 8051 family chips make up over 50% of the embedded
chip
market.
-
8/2/2019 Tan Nu
10/14
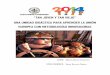
Pin diagram of the 8051 DIP
Basic Pins
PIN 9: PIN 9 is the reset pin which is used to reset the
microcontrollers
internal registers and ports upon starting up. (Pin should be
held high for 2
machine cycles.)
PINS 18 & 19: The 8051 has a built-in oscillator amplifier
hence we need to
only connect a crystal at these pins to provide clock pulses to
the circuit.
PIN 40 and 20: Pins 40 and 20 are VCC and ground respectively.
The 8051
chip needs +5V 500mA to function properly, although there are
lower
powered versions like the Atmel 2051 which is a scaled down
version of the
8051 which runs on +3V.
PINS 29, 30 & 31: As described in the features of the 8051,
this chip
contains a built-in flash memory. In order to program this we
need to supply
a voltage of +12V at pin 31. If external memory is connected
then PIN 31,
also called EA/VPP, should be connected to ground to indicate
the presenceof external memory. PIN 30 is called ALE (address latch
enable), which is
used when multiple memory chips are connected to the controller
and only
one of them needs to be selected.We will deal with this in depth
in the later
chapters. PIN 29 is called PSEN. This is "program store enable".
In order to
use the external memory it is required to provide the low
voltage (0) on both
PSEN and EA pins.
http://en.wikibooks.org/wiki/File:Pinouts8051.jpghttp://en.wikibooks.org/wiki/File:Pinouts8051.jpg
-
8/2/2019 Tan Nu
11/14
Ports
There are 4 8-bit ports: P0, P1, P2 and P3.
PORT P1 (Pins 1 to 8): The port P1 is a general purpose
input/output port
which can be used for a variety of interfacing tasks. The other
ports P0, P2and P3 have dual roles or additional functions
associated with them based
upon the context of their usage.The port 1 output buffers can
sink/source
four TTL inputs. When 1s are written to portn1 pins are pulled
high by the
internal pull-ups and can be used as inputs.
PORT P3 (Pins 10 to 17): PORT P3 acts as a normal IO port, but
Port P3
has additional functions such as, serial transmit and receive
pins, 2 external
interrupt pins, 2 external counter inputs, read and write pins
for memory
access.
PORT P2 (pins 21 to 28): PORT P2 can also be used as a general
purpose 8
bit port when no external memory is present, but if external
memory access
is required then PORT P2 will act as an address bus in
conjunction with
PORT P0 to access external memory. PORT P2 acts as A8-A15, as
can be
seen from fig 1.1
PORT P0 (pins 32 to 39) PORT P0 can be used as a general purpose
8 bit
port when no external memory is present, but if external memory
access is
required then PORT P0 acts as a multiplexed address and data bus
that canbe used to access external memory in conjunction with PORT
P2. P0 acts as
AD0-AD7, as can be seen from fig 1.1
Oscillator Circuits
The 8051 requires an external oscillator circuit. The oscillator
circuit usually
runs around 12MHz, although the 8051 (depending on which
specific
model) is capable of running at a maximum of 40MHz. Each machine
cycle
in the 8051 is 12 clock cycles, giving an effective cycle rate
at 1MHz (for a
12MHz clock) to 3.33MHz (for the maximum 40MHz clock). The
oscillatorcircuit generates the clock pulses so that all internal
operations are
synchronized.
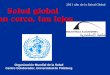
Internal Architecture
-
8/2/2019 Tan Nu
12/14
Internal schematics of the 8051.
http://en.wikibooks.org/wiki/File:Intel_8051_arch.svghttp://commons.wikimedia.org/wiki/File:Intel_8051_arch.svg
-
8/2/2019 Tan Nu
13/14
Data and Program Memory
The 8051 Microcontroller can be programmed in PL/M, 8051
Assembly, C
and a number of other high-level languages. Many compilers even
have
support for compiling C++ for an 8051.
Program memory in the 8051 is read-only, while the data memory
is
considered to be read/write accessible. When stored on EEPROM or
Flash,
the program memory can be rewritten when the microcontroller is
in the
special programmer circuit.
Program Start Address
The 8051 starts executing program instructions from address 0000
in the
program memory. The A register is located in the SFR memory
location
0xE0. The A register works in a similar fashion to the AX
register of x86
processors. The A register is called the accumulator, and by
default it
receives the result of all arithmetic operations.
Special Function Register
The Special Function Register (SFR) is the upper area of
addressable
memory, from address 0x80 to 0xFF. A, B, PSW, DPTR are called
SFR.This
area of memory cannot be used for data or program storage, but
is instead a
series of memory-mapped ports and registers. All port input and
output cantherefore be performed by memory mov operations on
specified addresses in
the SFR. Also, different status registers are mapped into the
SFR, for use in
checking the status of the 8051, and changing some operational
parameters
of the 8051.
General Purpose Registers
The 8051 has 4 selectable banks of 8 addressable 8-bit
registers, R0 to R7.
This means that there are essentially 32 available general
purpose registers,
although only 8 (one bank) can be directly accessed at a time.
To access theother banks, we need to change the current bank number
in the flag status
register.
-
8/2/2019 Tan Nu
14/14
A and B Registers
The A register is located in the SFR memory location 0xE0. The A
register
works in a similar fashion to the AX register of x86 processors.
The A
register is called the accumulator, and by default it receives
the result of all
arithmetic operations. The B register is used in a similar
manner, except that
it can receive the extended answers from the multiply and divide
operations.
When not being used for multiplication and Division, the B
register is
available as an extra general-purpose register.
MICROCONTROLLER 89S52: