Embed Size (px)
DESCRIPTION
Projeto WIG Craft
Citation preview
1
SUMÁRIO
1 Introdução ................................................................................................................. 4
1.1 Tema .............................................................................................................................4
1.2 Justificativa ...................................................................................................................5
1.3 Objetivo Geral ..............................................................................................................6
1.4 Objetivos Específicos ....................................................................................................6
2 Revisão Bibliográfica ............................................................................................... 7
2.1 Introdução ....................................................................................................................7
2.2 Histórico .......................................................................................................................7
2.3 Características dos WIG-C ..........................................................................................13
2.4 Hidrovia Solimões – Amazonas ...................................................................................16
2.5 Viabilidade Econômica dos WIG-C ..............................................................................19
2.6 Conceitos básicos de projeto de aeronaves ...............................................................22
2.7 Conceitos básicos de aerodinâmica ............................................................................24
2.7.1 Forças Aerodinâmicas e Momento ........................................................... 25
2.7.2 Tipos de força de arrasto .......................................................................... 26
2.7.3 Centro de Pressão e Centro Aerodinâmico ............................................... 27
2.7.4 Camada limite ........................................................................................... 28
2.7.5 Downwash ................................................................................................ 29
2.7.6 Geometria ................................................................................................. 30
2.7.7 Efeito Solo ................................................................................................ 31
2.8 Conceitos básicos de desempenho .............................................................................37
2.8.1 Alcance e Autonomia ............................................................................... 37
2.8.2 Razão e Tempo de Subida e Razão de Afundamento ............................... 40
2.8.3 Potências Disponível e Requerida ............................................................ 41
2.8.4 Desempenhos de Decolagem e Pouso ...................................................... 42
2.8.5 Manobrabilidade ....................................................................................... 44
2.9 Conceitos básicos de estabilidade e controle .............................................................44
2.9.1 Equilíbrio .................................................................................................. 44

2
2.9.2 Estabilidade longitudinal ou de atitude .................................................... 45
2.9.3 Estabilidade laterodirecional .................................................................... 45
2.9.4 Estabilidade de velocidade ....................................................................... 46
2.9.5 Estabilidade de altura de voo .................................................................... 46
3 Metodologia ............................................................................................................ 48
3.1 Introdução ..................................................................................................................48
3.2 Coleta de dados ..........................................................................................................48
3.3 Especificações e requisitos .........................................................................................49
3.3.1 Finalidade do veículo WIG....................................................................... 49
3.3.2 Missão típica ............................................................................................. 49
3.3.3 Desempenho desejado .............................................................................. 50
3.3.4 Características pretendidas ....................................................................... 50
3.3.5 Requisitos ................................................................................................. 50
3.4 Estudos preliminares ..................................................................................................50
3.4.1 Lista de prioridades .................................................................................. 51
3.4.2 Métodos comparativos .............................................................................. 51
3.4.3 Delimitação protótipo ............................................................................... 51
3.5 Antiprojeto .................................................................................................................53
3.5.1 Esboço inicial ........................................................................................... 54
3.5.2 Definição da forma em planta da asa e verificação das características de
estol 54
3.5.3 Refinamento do sizing .............................................................................. 54
3.5.4 Estudo das proporções externas ................................................................ 54
3.5.5 Estimativas prévias de estabilidade e controle ......................................... 55
3.5.6 Escolha dos perfis das asas e das empenagens ......................................... 55
3.5.7 Passeio do centro de gravidade ................................................................. 56
3.5.8 Alinhamento do motor .............................................................................. 57
3.5.9 Retrabalho da configuração externa ......................................................... 57

3
3.6 Outras estimativas relevantes ....................................................................................57
3.6.1 Estimativa da polar de arrasto no efeito solo e fora do efeito solo .......... 57
3.6.2 Cálculo do coeficiente de sustentação ...................................................... 57
3.6.3 Estimativa do arrasto induzido para asa em efeito solo ............................ 58
3.7 Análise dos resultados ................................................................................................59
4 Referências Bibliográficas ...................................................................................... 60
Anexo 2.1.................................................................................................................64
Anexo 2.2.................................................................................................................65
Anexo 2.3.................................................................................................................66

4
1 INTRODUÇÃO
1.1 Tema
Os veículos do tipo asas em efeito solo (WIG – Craft) são uma solução inovadora de
transporte, pois apresentam as vantagens referentes à elevada capacidade de carga paga
das embarcações de superfície e às altas velocidades dos aviões (TAYLOR, 2002).
São veículos que utilizam o efeito aerodinâmico devido a sua proximidade com uma
superfície plana sólida ou líquida, para aumentar a sua sustentação e diminuir o seu
arrasto, permanecendo em uma altura baixa de voo, dispendendo para tal pouca energia.
Isto lhes possibilita transportar uma maior carga paga para a mesma potência instalada
(CASTRO, 2011).
Dentre as diversas vantagens apresentadas por estes veículos, quando comparados às
embarcações de superfície, destacam-se a excelente mobilidade, a capacidade de se
deslocar sem sofrer os efeitos de condições de mar, a capacidade de manobra nos planos
horizontal e vertical, operação econômica devido ao menor consumo de combustível,
maior autonomia e a independência de infraestrutura portuária (TAYLOR, 2002).
Como desvantagens, no entanto, não podemos deixar de citar a exigência de um maior
nível de adestramento da sua tripulação, a vulnerabilidade às condições de visibilidade, a
necessidade de uma manutenção mais cuidadosa e a sua pouca difusão como meio
transporte regular (TAYLOR, 2002).
O sistema hidroviário brasileiro é composto por sete grandes hidrovias, dentre as quais
destaca-se a hidrovia do Solimões-Amazonas como principal via de transporte de
passageiros entre as diversas cidades que se localizam às margens dos rios da bacia
Amazônica (ANTAQ, 2011).
As embarcações de superfície, que constituem o único meio de transporte deste sistema e
principal meio de toda a região, desenvolvem baixas velocidades quando comparadas a
outros meios de transporte, o que implica em viagens demoradas e contribui como
obstáculo ao desenvolvimento de diversas cidades ribeirinhas (ANTAQ, 2013).

5
A região amazônica também é identificada, dentre algumas regiões do planeta, como
possuindo um potencial de mercado para os veículos WIG-C (TAYLOR, 2006).
Tendo em vista o acima exposto, esse trabalho tem por proposta desenvolver o projeto
preliminar de um veículo com asa em efeito solo para prover uma forma mais rápida,
segura e confortável de transportar passageiros em rotas específicas da hidrovia
Solimões-Amazonas, contribuindo com isto para uma melhoria do desenvolvimento da
região amazônica.
1.2 Justificativa
Devido às condições geográficas do norte do Brasil, o seu sistema hidroviário é
largamente utilizado para o transporte de carga e pessoas, contribuindo deste modo para
o abastecimento e desenvolvimento dos principais núcleos econômicos e sendo os seus
rios, em muitos casos, a única via de acesso às localidades mais distantes no interior dos
estados Amazônicos.
O principal veículo empregado neste sistema de transporte são as embarcações de
superfície que, segundo o Relatório Executivo da Agencia Nacional de Transportes
Aquaviários (ANTAQ), de 2013, se deslocam nesta região com uma velocidade média de
15 nós e possuem várias deficiências e inadequabilidades relacionadas à segurança,
conforto e condições de higiene.
Enquanto o rio Amazonas e o rio Solimões possuem excelentes condições de
navegabilidade durante todo o ano, a maioria dos demais rios e canais sofre alterações
devido ao assoreamento, o que em alguns casos pode inviabilizar a sua navegação e, por
consequência, o translado das populações localizadas as suas margens.
Um outro aspecto importante a ser observado é quanto a velocidade média das
embarcações. Tal característica de desempenho destes veículos implica em traslados
demorados, cujo tempo de viagem depende também de se estar subindo ou descendo o
rio.
Conforme o supracitado relatório da ANTAC, das trezentas e quinze (315) rotas
elencadas, sessenta e cinco (65) possuem uma distância menor que duzentos quilômetros

6
(200 km) e uma movimentação mensal maior que mil (1000) passageiros (considerando
ambos os sentidos da rota).
Uma rota com distância igual ou menor a 200 km denota, segundo estudos feitos pelo
engenheiro naval britânico Graham K Taylor, um dos requisitos de potencial de
viabilidade econômica para a implementação de veículos com asa em efeito solo em dada
região. Deste modo temos que 21% das rotas regulares registradas da hidrovia Solimões-
Amazonas atendem a este requisito.
A utilização de veículos do tipo WIG-C (Wing in Ground Effect Craft) se apresentaria
como uma alternativa de transporte para a hidrovia Solimões-Amazonas, promovendo
várias vantagens, tais como drástica redução do tempo de viagem, segurança, conforto,
boas condições sanitárias para os passageiros, navegação independente das condições
hidrográficas e contribuição para melhora do meio ambiente, tendo em vista a sua menor
emissão de carbono.
A fim de viabilizar a produção e implementação de um veículo tipo WIG-C que opere de
modo a proporcionar as vantagens acima citadas, será necessário determinar
prioritariamente as suas características de projeto e operação.
1.3 Objetivo Geral
O objetivo geral deste trabalho de graduação é desenvolver um projeto preliminar de um
veículo com asa em efeito solo (WIG-Craft) para realizar missões de transporte de pessoas
em rotas específicas da hidrovia Solimões-Amazonas.
1.4 Objetivos Específicos
Determinar as características aerodinâmicas do veículo WIG-C;
Determinar as características de estabilidade e controle do veículo WIG-C;
Determinar as características de desempenho do veículo WIG-C; e
Definir o veículo WIG-C.

7
2 REVISÃO BIBLIOGRÁFICA
2.1 Introdução
Este capítulo apresenta a revisão bibliográfica sobre o histórico dos veículos WIG-C, as
hidrovias brasileiras, a viabilidade econômica para a implementação de meios de
transporte do tipo veículos WIG, conceitos básicos de projeto aeronáutico, conceitos
básicos de aerodinâmica, conceitos básicos de desempenho de aeronaves e conceitos
básicos de estabilidade e controle.
2.2 Histórico
As pesquisas sobre as influências do efeito solo nos voos próximos a superfícies planas
iniciaram-se nos anos 20 e em 1935 o primeiro veículo com asa em efeito solo foi
construído e patenteado na Finlândia pelo engenheiro finlandês T. Kaario (CASTRO,
2011).
Figura 2.1 – Embarcação “Wing-Ram” – ano 1935- Fonte: DEFESA BR
TECNOLOGIA, 2011.
Na década de 40, o engenheiro e cientista russo Rostislav Evgenievich Alexeev (1916 –
1980) liderou os estudos sobre o uso do efeito solo em embarcações de superfície, a fim
de proporcionar-lhes a capacidade de desenvolver altíssimas velocidades (AZEVEDO,
2011).

8
Os chamados barcos voadores, que exploram o supracitado efeito aerodinâmico, possuem
várias denominações, dentre as quais temos:
Asa em Efeito Solo - AES (Wing-In-Ground effect = WIG);
Asa em Efeito Superfície - AESU (Wing-In-Surface effect = WISE);
Navio de Efeito Terra - NET (Surface-Effect-Ship = SES);
Veículo em Asa de efeito solo - NANT (Wing-In-Ground Craft = WIG-C);
Navio Alado (Wingship); Ekranoplano (Ekran - tela / plano - plano).
Alexeev organizou e se manteve a frente do Central Hydrofoil Bureau (CHDB), sendo
conhecido como o criador e desenvolvedor do conceito revolucionário de veículos com
asas em efeito solo (WIG – Craft), que posteriormente, nos anos de 1950, deram origem
aos fabulosos Ekranoplanos russos que foram empregados pioneiramente pela Marinha
da então União soviética, por ocasião da guerra fria e são considerados como um dos
mais impressionantes meios de transporte construídos pelo homem (AZEVEDO, 2011)
(CASTRO, 2011).
Figura 2.2 – Rostislav Evgenievich Alexeev - Fonte: AZEVEDO, (2011)
Figura 2.3 – SM 1- Primeiro modelo projetado por Alexeev – Fonte: DEFESA BR
TECNOLOGIA, 2011.
9
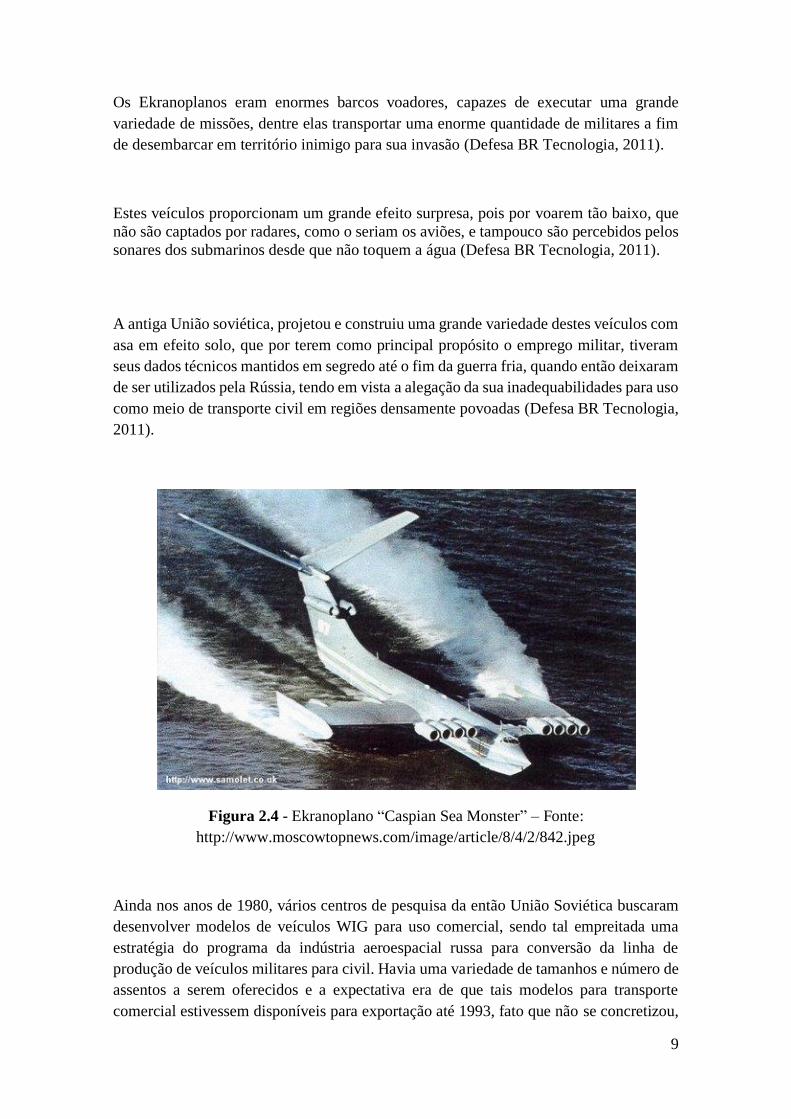
Os Ekranoplanos eram enormes barcos voadores, capazes de executar uma grande
variedade de missões, dentre elas transportar uma enorme quantidade de militares a fim
de desembarcar em território inimigo para sua invasão (Defesa BR Tecnologia, 2011).
Estes veículos proporcionam um grande efeito surpresa, pois por voarem tão baixo, que
não são captados por radares, como o seriam os aviões, e tampouco são percebidos pelos
sonares dos submarinos desde que não toquem a água (Defesa BR Tecnologia, 2011).
A antiga União soviética, projetou e construiu uma grande variedade destes veículos com
asa em efeito solo, que por terem como principal propósito o emprego militar, tiveram
seus dados técnicos mantidos em segredo até o fim da guerra fria, quando então deixaram
de ser utilizados pela Rússia, tendo em vista a alegação da sua inadequabilidades para uso
como meio de transporte civil em regiões densamente povoadas (Defesa BR Tecnologia,
2011).
Figura 2.4 - Ekranoplano “Caspian Sea Monster” – Fonte:
http://www.moscowtopnews.com/image/article/8/4/2/842.jpeg
Ainda nos anos de 1980, vários centros de pesquisa da então União Soviética buscaram
desenvolver modelos de veículos WIG para uso comercial, sendo tal empreitada uma
estratégia do programa da indústria aeroespacial russa para conversão da linha de
produção de veículos militares para civil. Havia uma variedade de tamanhos e número de
assentos a serem oferecidos e a expectativa era de que tais modelos para transporte
comercial estivessem disponíveis para exportação até 1993, fato que não se concretizou,

10
pois não houve um maior interesse dos grandes investidores (Defesa BR Tecnologia,
2011).
Figura 2.5 – Ekranoplano para uso civil projetado pela Sukoy – Fonte: DEFESA BR
TECNOLOGIA, 2011.
Figura 2.6 – Veículo WIG Volga 2 para 8 passageiros – Fonte: DEFESA BR
TECNOLOGIA, 2011.
Atualmente, os seguintes países, além da Rússia, têm se mantido na vanguarda da
pesquisa e desenvolvimento de veículos WIG-C, envidando grandes esforços para que
este meio de transporte se consolide mundialmente, respeitadas as suas limitações e
aproveitadas as suas vantagens: Alemanha, Austrália, China, Coréia do Sul, Estados
Unidos, Finlândia e Japão (TAYLOR, 2000 apud CASTRO, 2011).

11
Figura 2.7 – Protótipo desenvolvido pela Coréia do Sul - Fonte: TAYLOR, (2006)
Figura 2.8 – Aquaglide 5, desenvolvido pela Russia - Fonte: TAYLOR, (2006)
Figura 2.9 – Hydrowing 8, desenvolvido pela Alemanha - Fonte: TAYLOR, (2006)

12
Figura 2.10 – UH- 19XRW, desenvolvido pelos Estados Unidos - Fonte: TAYLOR,
(2009)
Figura 2.11 – Sea Eagle, desenvolvido pela Austrália - Fonte: TAYLOR, (2009)
Figura 2.12 – TY-1, desenvolvido pela China - Fonte: TAYLOR, (2002)

13
Figura 2.13 – Flynano, desenvolvido pela Finlândia - Fonte: TAYLOR, (2002)
2.3 Características dos WIG-C
Existem várias formas e tamanhos de veículos com asa em efeito solo, cada qual com a
sua própria configuração, a fim de se obter a melhor eficiência aero e hidrodinâmica. A
melhor aplicação do WIG-C é para pequenos e médios alcances, tipicamente com 1 hora
de duração. Dentre as principais vantagens para o seu emprego, quando comparado às
embarcações de superfície, podemos elencar (TAYLOR, 2000 apud CASTRO, 2011):
Capacidade de transportar elevadas cargas a altas velocidades;
Baixa complexidade;
Baixo custo de manutenção e operação;
Baixa potência requerida;
Baixo consumo de combustível;
Não sofre influência das condições adversas do mar;
Independe de infraestrutura sofisticada para operar;
Capacidade de manobra no plano horizontal e vertical, observando-se que no
plano vertical há uma certa restrição devido à baixa altura de voo;
Podem operar em aguas rasas, inclusive com bancos de areia;
Imune a objetos flutuantes;
Proporciona baixa fadiga para o material, tripulantes e passageiros; e
Não constitui perigo ambiental para as rotas marítimas.
Como principais desvantagens temos a necessidade de um maior grau de adestramento
da tripulação, não serem indicados para operar em regiões habitadas e de alta densidade
populacional e a vulnerabilidade às condições de visibilidade (TAYLOR, 2000 apud
CASTRO, 2011) (ZAITSEV, 2005).

14
Os WIG-C podem ser empregados em diversas missões, dentre as quais citamos
(TAYLOR, 2000 apud CASTRO, 2011):
Transporte de diversos tipos de carga;
Desembarque anfíbio;
Patrulha;
Minagem e varredura;
Reconhecimento;
Busca e salvamento;
Infiltração e exfiltração de equipes de operação especial;
Combate a incêndio;
Monitoramento ambiental; e
Combate ao narcotráfico, pirataria e contrabando.
Os WIG-C são meios de transporte que possuem baixa resistência específica, conforme o
diagrama de Gabrielli/von Karman, sendo capazes de transportar uma elevada carga a
altas velocidades, mantendo a mesma potência instalada (YANG e CZYSZ, 2011).
Há três tipos de WIG-C: tipo A, B e C. Os tipos A e B voam próximo à superfície e
diferem entre si pelo fato do tipo B ser capaz de elevar o seu voo temporariamente acima
do efeito solo, enquanto que o tipo A somente voa sob o efeito solo. Já o tipo C é capaz
de se manter voando acima do efeito solo por tempo indeterminado, ajustando o seu voo
para o efeito solo, quando necessário (TAYLOR, 2006).
Uma proposta de WIG-C ideal supõe um mínimo volume cúbico ao redor da carga paga,
mínimo peso estrutural, um projeto integrado, no qual a massa e a força estão próximas e
juntas, mínimo custo de fabricação e operação e um corpo sustentável tipo asa voadora
(TAYLOR, 2006).
Para os WIG-C que operam no mar, a velocidade está relacionada com o seu peso
estrutural. O veículo deve ser capaz de suportar o impacto do mar em uma velocidade de
cruzeiro. A medida em que a velocidade se eleva, o peso estrutural também se eleva. E
um aumento do peso estrutural implica na diminuição da carga paga. Um valor de 100
Knots para uma velocidade de cruzeiro permite um projeto de WIG-C dentro das
fronteiras do que é prático e economicamente viável, respeitando uma técnica e risco de
negócio aceitáveis (TAYLOR, 2006).

15
Quanto a manobrabilidade, os WIG-C possuem grande habilidade para operar no meio de
outros tráfegos. Um ótimo veículo deve ter um elevado efeito solo na velocidade de
cruzeiro e deve desenvolver guinadas com rolagem de pequeno raio e elevadas
velocidades (TAYLOR, 2006).
Um aspecto importante a ser observado no projeto dos WIG-C diz respeito a razão entre
a potência de decolagem e a potência de cruzeiro. Esta razão é da ordem de 5:1. Na
decolagem, é preciso uma maior potência, tendo em vista a necessidade de vencer o
arrasto hidrodinâmico nesta fase de voo. Já em cruzeiro, o motor deverá operar a maior
parte do tempo a 20% da máxima rotação contínua (MRC). Isto implica em um maior
custo de capital para um maior excesso de potência instalada, uma diminuição da carga
paga devido ao maior peso do motor instalado e uma capacidade do motor em monitorar
uma larga diferença de potência. Uma seleção cuidadosa da planta de potência se faz
bastante crítica para um projeto de WIG-C (TAYLOR, 2006).
A fim de se resolver o problema do arrasto hidrodinâmico, soluções como uso de
hidrofólios, colchões de ar gerados de forma semelhante ao mecanismo dos hover-crafts,
power-assisted-ram e colchões retráteis de ar (hover wing) são implementadas. Tais
soluções tem por objetivo reduzir a razão entre a potência de decolagem e a potência de
cruzeiro para valores em torno de 3:1. Especificamente, no caso de propulsão a jato
apresenta-se também como uma outra solução o uso de dois motores para a decolagem,
após o que, passa-se a usar somente um motor operando a 70% da MRC na fase de
cruzeiro. A solução ideal no entanto seria ter uma razão entre a potência de decolagem e
a potência de cruzeiro de 1,43:1, o que eliminaria a necessidade desta redundância de
motor (TAYLOR, 2006).
Ainda em relação a propulsão, é possível encontrar motores aeronáuticos adequados do
ciclo Diesel ou Otto para emprego em WIG-C que demandem potências até 500 HP.
Acima disto, somente é possível atender a demanda de potência com motores a jato, que
não são adequados para funcionar abaixo de 70% da MRC (TAYLOR, 2006).
O uso de motores a jato também se torna crítico sob o ponto de vista comercial, pois
representa de 50% a 70% do custo de fabricação. Um custo de capital elevado devido aos
motores aumenta o preço de venda do veículo e limita o impacto do baixo custo obtido
devido a qualquer boa prática de manufatura (TAYLOR, 2006).

16
2.4 Hidrovia Solimões – Amazonas
O Brasil possui cerca de 13000 km de vias navegáveis interiores, utilizadas para
transporte de cargas e passageiros. Este número poderá subir para 44000 km, caso haja
um investimento em infraestrutura. Todas as bacias fluviais brasileiras se comunicam
entre as cabeceiras dos seus rios, por meio de brejos ou banhados, o que se constitui em
uma vantagem adicional para o transporte fluvial, pois há uma facilidade de interligação
entre estas vias aquáticas (AMANTE, 2010).
A vias navegáveis brasileiras estão divididas em 12 regiões hidrográficas, das quais cinco
contém as sete hidrovias que constituem o sistema hidroviário nacional (ANTAQ, 2011).
Figura 2.14 – Regiões hidrográficas brasileiras - Fonte: ANTAQ, (2011)
A região hidrográfica amazônica é constituída pela bacia hidrográfica do rio Amazonas,
pelas bacias hidrográficas dos rios da Ilha de Marajó e pelas bacias hidrográficas dos rios
situados no Estado do Amapá que deságuam no Atlântico Norte (ANTAQ, 2010).
Estão contidos nesta região hidrográfica a totalidade dos territórios dos estados do Acre,
Amazonas, Rondônia, Roraima e Amapá, além de parte do Pará e Mato Grosso. Conforma
a maior rede hidrográfica do mundo, com grande número de vias navegáveis com elevada
capacidade de transporte de cargas e passageiros. Esta capacidade de transporte, em
função das características físicas das vias, é fundamental para a economia da região e para
o desenvolvimento de sua população, devido a carência de ferrovias e rodovias (ANTAQ,
2010).

17
As vias navegáveis amazônicas permitem não só o transporte de passageiros e pequenas
quantidades de cargas em embarcações de pequeno porte como também a navegação de
grandes comboios de empurrador-barcaça de navegação interior e embarcações marítimas
de cabotagem e longo curso, operando em terminais portuários flúvio-marítimos, como
Santarém, Santana e Manaus. Pertencem à Região Hidrográfica Amazônica as hidrovias
Solimões-Amazonas, do Madeira e do Tapajós (ANTAQ, 2010).
A hidrovia Solimões-Amazonas é composta pelo rio Solimões, entre a tríplice fronteira
Brasil-Peru-Colômbia e o seu encontro com o rio Negro, pelo rio Amazonas, da
confluência do negro até a sua foz, no Atlântico, e diversos afluentes de ambos, dos quais
destacam-se os rios Negro, Branco, Purús, Jari e Trombetas, conformando uma rede de
quase 7.000 km de extensão (ANTAQ, 2010).
A administração desta hidrovia é compartilhada pela Administração das Hidrovias da
Amazônia Ocidental (AHIMOC) e pela Administração das Hidrovias da Amazônia
Oriental (AHIMOR) (ANTAQ, 2011).
Devido as suas características fisiográficas e do entorno em que se insere, a hidrovia
Solimões-Amazonas constitui-se como a mais importante para o Brasil. Nela, todos os
tipos de navegação interior são praticados de forma bastante intensa, principalmente o
transporte de passageiros. A importância desta hidrovia transcende os aspectos
econômicos, representando também um pilar de desenvolvimento para os diversos
municípios do Amazonas e Pará e suas respectivas populações, haja vista a escassez de
malha rodoviária nesta região (ANTAQ, 2011).

18
Tabela 2.1 - Rios da Hidrovia Solimões - Amazonas
Hidrovia Solimões – Amazonas
Rio Extensão (Km)
Solimões 1620
Amazonas 1508
Negro 310
Branco 398
Purús 2449
Jari 110
Trombetas 110
A navegação fluvial é o mais importante meio de transporte de pessoas e mercadorias na
região amazônica, constituindo uma forma de comunicação entre as diversas
comunidades e polos de produção, comercialização e consumo situados ao longo da
imensa hidrovia Solimões-Amazonas. Existem 315 rotas regulares identificadas ao longo
desta hidrovia, das quais 21% possuem uma extensão de até 200 Km (ANEXO 2.1),
distância esta que será melhor elucidada no item 2.4 deste trabalho. Estas rotas são
servidas por uma grande heterogeneidade de embarcações de superfície, de perfis dos
seus operadores e usuários e das instalações portuárias (ANTAQ, 2013).
Figura 2.15 – Abrangência hidroviária do transporte de passageiros - Fonte: ANTAQ,
(2013)
A grande dificuldade para a movimentação de passageiros é a inexistência de um meio
de transporte regular e rápido, que atenda aos padrões de serviço adequados. Em várias
rotas, as viagens só acontecem se houver carga e passageiros que a tornem rentável
(ANTAQ, 2013). Há uma espécie de orientação de mercado ao serviço e não ao cliente.

19
A maioria das rotas é servida por embarcações de superfície ultrapassadas
tecnologicamente, estando grande parte delas com idade superior a dezenas de ano. Estas
embarcações apresentam problemas de conforto, sanitário e segurança, além de prover
um deslocamento mais lento (ANTAQ, 2013).
Um meio de transporte mais rápido para substituir grande parte das embarcações de
superfície hoje existentes, que desempenham um importante papel social para as inúmeras
localidades ribeirinhas que atendem, e que supra as demais deficiências já citadas,
contribuirá para um maior dinamismo do comércio nesta região, permitindo que uma
prosperidade econômica venha a acontecer (ANTAQ, 2013).
2.5 Viabilidade Econômica dos WIG-C
Os veículos com asa em efeito solo (WIG-C) são uma solução intermediária de transporte
que se situa entre as embarcações de superfície e os aviões. Trata-se de uma tecnologia
que implica em um novo produto, novo mercado e nova indústria (TAYLOR, 2005). Para
serem economicamente viáveis, devem possuir um Custo Total Operacional Direto por
Passageiro (TDOCPP), que é um indicador de disponibilidade de preço a ser pago por
viagem, situado entre aqueles tipos de veículos (TAYLOR, 2000 apud CASTRO, 2011).
O sucesso do projeto do WIG-C não está somente relacionado à criação de um novo tipo
de veículo, mas também à criação de uma nova indústria. Para que haja um sucesso
comercial, deve-se observar que o preço do veículo não pode exceder ao que o mercado
está disponível a pagar e o seu custo de produção não deve ser superior àquele preço.
Conhecer as expectativas do mercado possibilitará estabelecer limites para os custos de
manutenção e de operação. Estas expectativas são altamente influenciadas pela qualidade
e disponibilidade dos meios de transporte similares já disponíveis (TAYLOR, 2000 apud
CASTRO, 2011). Podemos então resumir que este sucesso é intimamente dependente da
tecnologia empregada e da viabilidade de fabricantes e operadores (TAYLOR, 2005)
O conhecimento das limitações de custo permite à gerência de projeto ter uma ideia das
diversas fronteiras do projeto, pois constitui um elemento valioso para que se melhor
defina qual o valor do capital a ser empregado no projeto e que preço deverá ter o WIG-
C, para que seja comercialmente explorável. É uma informação que proporcionará um
norteamento aos projetistas, havendo então uma mudança de paradigma em que onde se
tinha “o que construir e como vender”, passa-se a ter “o que vender e como construir”
(TAYLOR, 2000 apud CASTRO, 2011). O WIG-C a ser projetado deve ter então, como
20
um dos requisitos a serem atendidos, o seu TDOCPP situado entre uma embarcação de
superfície e um avião.
Uma análise mercadológica dos WIG-C demanda o estudo dos fatores geográficos,
políticos, demográficos, econômicos e competitivos. Há também a necessidade de se
estabelecer os seguintes cenários de mercado (TAYLOR, 2000 apud CASTRO, 2011):
Livre concorrência, no qual há uma operação livre dos meios de transporte
concorrentes, em horários comuns;
Concorrência limitada, em que há uma restrição de horários devido a vários
fatores, para um tipo de meio de transporte concorrente; e
Nicho de mercado, em que não há concorrência para restringir os gastos de capital
no projeto do WIG-C.
Um outro aspecto da análise mercadológica refere-se à capacidade industrial existente.
Sob este aspecto, pode-se ter um cenário de indústria em formação, no qual há uma grande
influência nos riscos associados às operações pioneiras do WIG-C e que se refletem a
curto prazo na vida do ativo e nas taxas de juros do financiamento necessário. Ou pode-
se ter o cenário de indústria estabelecida, no qual há uma redução a longo prazo dos
aspectos de risco e das taxas de juros (TAYLOR, 2000 apud CASTRO, 2011).
A abordagem mercadológica também requer que se observem outros aspectos ligados às
percepções dos passageiros em relação aos meios de transporte concorrentes, tais como
conforto, rapidez e conveniência. Os WIG-C estão sujeitos à desacelerações e mudanças
de altitude tempestivas, para que possam transpor algum eventual obstáculo. Este perfil
operacional implica na necessidade de restrição do movimento dos passageiros a bordo,
durante a viagem. Como consequência as viagens devem ter duração de até 1 hora e
extensão de até 200 Km. Isto faz com que os WIG-C sejam competitivos nas rotas de
curta distância com velocidade média de 250 Km/h (TAYLOR, 2000 apud CASTRO,
2011).
O conceito de WIG-C não é uma aplicação global, tendo em vistas possuir limitações
(TAYLOR, 2002), porém existe um potencial de mercado em regiões do globo terrestre
onde (YANG e CZYSZ, 2011):
O transporte aquático tem o papel de transporte local e necessita ser expandido;
Possui rios, lagos, ilhas e costas; e
Há a tendência de reduzir as horas de operação, duração ou distância das jornadas
sobre a água.

21
Por se tratar de uma tecnologia ainda não muito explorada e nova sobre o ponto de vista
das modernas implementações, os WIG-C se deparam com uma série de restrições que
refletem na sua plena viabilidade comercial, tal como os ainda elevados custos de
pesquisa e desenvolvimento (TAYLOR, 2002). Segundo a Associação de Hiperveículos,
um modelo de negócio vantajoso para fabricantes e operadores civis, que proporciona um
retorno de investimento rápido (aproximadamente em 3 anos), considera um WIG-C de
30 lugares, com um investimento total de $20.000.000,00 para cobrir os custos de projeto,
ferramental e produção inicial (TAYLOR, 2006).
O modelo de negócio para a fabricação é mais complexo que o modelo para operação.
Veículos com as seguintes características de fabricação e operação proporcionam muitas
oportunidades de mercado (TAYLOR, 2011):
Capacidade para 27 assentos;
Velocidade de cruzeiro de 100 Knots;
Capacidade para operar em estado de mar até 3 (escala Baufort);
Operar em rotas de até 100 milhas;
Possuir propulsão a jato;
Ser fabricado em alumínio ou material composto;
Ter um custo unitário para cada 10 unidades fabricadas de $ 3.444.000,00;
Ter um custo por assento para cada 10 unidades fabricadas de $ 127.500,00;
Proporcionar uma receita por passageiro, por milha de $ 0,56, com um fator de
ocupação de 80%, para manter um lucro de 20% antes dos impostos;
Operar 7 horas por dia, durante 200 dias ao ano;
Ter construção simples e barata;
Possibilitar uso contínuo; e
Ter grande durabilidade.
Caso se opte pelo uso de motores alternativos do ciclo Diesel, será possível ter um veículo
com custo de fabricação mais baixo, porém mais pesado, o que implicará na redução da
carga paga. Esta configuração implicará na redução do número de passageiros de 27 para
15, o que ainda é um número adequado para proporcionar oportunidades de mercado.
Neste caso porém, para manter uma margem de lucro de 20% antes dos impostos, a receita
por passageiros, por milha deverá aumentar de $,56 para $0,93, o que desafia o operador
a encontrar passageiros dispostos a pagar mais (TAYLOR, 2011).

22
Quando ao material usado na estrutura do WIG-C, o alumínio e os compósitos são os
mais indicados sob o ponto de vista da otimização construtiva para uma fabricação em
série, o que contribui para diminuir o custo de produção (TAYLOR, 2006).
A luz do que foi acima exposto, observamos que no Brasil temos um cenário de mercado
caracterizado pela livre concorrência e indústria em formação. Além disso, numa primeira
percepção, entende-se que para a região de operação da hidrovia Solimões-Amazonas,
será mais adequado o emprego de um WIG-C com propulsão a motor de combustão
interna do ciclo Diesel, devido haver maior apoio de logística de manutenção e material
para este tipo de propulsor, naquela região. Tal decisão implica numa passagem mais cara
a ser paga pelos usuários, que possuem na sua maioria um poder aquisitivo baixo
conforme pode ser observado no ANEXO 2.2, o que somente será possível mediante
subsídios governamentais da ordem de 0,0069% do PIB brasileiro conforme indicado no
ANEXO 2.3.
2.6 Conceitos básicos de projeto de aeronaves
O projeto de aeronaves é um processo cíclico e iterativo, no qual inicialmente o projetista
estima vários parâmetros e requisitos que, no decorrer de todo ciclo, podem sofrer
alterações diversas até que atinjam valores ótimos para o projeto.
Nos primórdios da aviação, devido às aeronaves possuírem uma baixa complexidade, as
atividades envolvidas na sua construção eram realizadas de forma aleatória, não havendo
planejamento. Tais atividades eram centradas no produto final. Esta ausência de
organização representava, no entanto, pouco prejuízo para a iniciativa de construção.
Atualmente, o cenário é bastante diferente, dada a grande complexidade das aeronaves,
faz-se necessário a aplicação de uma metodologia adequada no seu projeto (BARROS,
2001).
O desenvolvimento de aeronaves envolve basicamente sete fases: levantamento das
especificações e requisitos, estudos preliminares ou projeto conceitual, elaboração do
anteprojeto ou projeto preliminar, desenvolvimento do projeto ou projeto detalhado,
construção do protótipo, ensaios no solo e ensaios em voo. As quatro primeiras fases
constituem a elaboração do projeto propriamente dito (BARROS, 2001).
Dentre as principais metodologias de projeto, destacam-se: a de Torenbeek (1981) que é
voltada para aeronaves médias e grandes; Roskan (1985) que é bem semelhante à de

23
Torenbeek e considera que a especificação da missão deve estar disponível antes do início
do projeto; Raymer (1989) que prevê uma série de iterações no projeto conceitual, até que
se possa passar para a fase de projeto preliminar; Vandaele (1962) que considera que o
eixo diretor do projeto deve ser o projetista – chefe; e Barros (2001) que desenvolveu
uma metodologia voltada para aeronaves leves (BARROS, 2001).
Estas metodologias apresentam aspectos muitos semelhantes. Todas preveem as fases de
especificações e requisitos (Torenbeek denomina como requisitos oriundos de pesquisa
de marketing), projeto conceitual (Vandaele denomina como estudos preliminares),
projeto preliminar (Vandaele denomina como anteprojeto), projeto de detalhamento
(Vandaele denomina como projeto) e fabricação (BARROS, 2001).
Na fase de especificações e requisitos, deve-se inicialmente observar a finalidade para a
qual a aeronave se destina, definindo-se as suas missões típicas, especificando-se o
desempenho almejado e estabelecendo-se as características pretendidas, além de se
analisar e adotar também as normas técnicas pertinentes (BARROS, 2001).
Na fase de projeto conceitual, estabelece-se primeiramente uma lista de prioridades, que
é uma associação entre a finalidade básica da aeronave e as seguintes filosofias de projeto
(BARROS, 2001):
Facilidade construtiva;
Ganho de desempenho;
Facilidade de manutenção;
Segurança operacional; e
Facilidade de transporte oficina/aeroporto/oficina.
Após estabelecida a lista de prioridades, utilizando-se da técnica dos métodos
comparativos, faz-se um exame profundo do estado da arte, a fim de se obter uma
aeronave de melhor qualidade. É nesta fase que se busca perceber as tendências diversas,
para que se chegue ao melhor produto (BARROS, 2001).
Como última etapa da fase de projeto conceitual, tem-se a delimitação do protótipo ou do
projeto, onde serão feitos os estudos de: configuração externa, configuração interna,
ergonomia, estimativas de dimensões básicas, sistema de propulsão, materiais e
processos, e equipamentos e instalações (BARROS, 2001).

24
Nos estudos das dimensões básicas, podemos considerar um paradigma de projeto de
solução mínima, onde a aeronave a ser projetada deve ser a menor e a mais leve possível
para atender a missão a que se destina, ou o paradigma de solução livre, onde não há
preocupação com restrições diversas e minimização de peso e tamanho (BARROS, 2001).
Na fase de anteprojeto ou projeto preliminar, faz-se o esboço inicial da aeronave, que é
um desenho básico das três vistas, feito à mão; realizam-se estudos de diversas
considerações quanto à forma em planta; faz-se a estimativa de peso; faz-se o estudo das
proporções gerais da aeronave; faz-se a estimativa prévia de estabilidade e controle; faz-
se a escolha dos perfis; determina-se o passeio do centro de gravidade da aeronave;
realizam-se estudos de considerações quanto ao alinhamento do motor; constrói-se o
modelo da cabine em escala natural; modela-se a fuselagem em escala 1:10; e retrabam-
se os esboços da configuração externa (BARROS, 2001).
O projeto detalhado é constituído por: cálculos aerodinâmicos e de desempenho, cálculos
de estabilidade e controle, cálculos de carga, dimensionamento estrutural, elaboração dos
desenhos de fabricação (BARROS, 2001).
Todas as etapas supracitadas devem ser devidamente registradas por meio dos seguintes
documentos: relatórios de especificações e requisitos, relatórios de estudos preliminares,
relatórios de anteprojeto, relatórios de projeto, desenhos de fabricação, relatórios de
concordância e relatórios descritivos. Além destes, teremos também os relatórios de
fabricação e os relatórios de ensaios para estas respectivas fases de desenvolvimento da
aeronave (BARROS, 2001).
2.7 Conceitos básicos de aerodinâmica
Objetivando uma melhor compreensão do principal fenômeno aerodinâmico sob o qual
um veículo com asa em efeito solo está submetido durante o seu movimento por meios
próprios, faz-se necessário apresentar vários conceitos aerodinâmicos básicos e
contextualiza-los de forma mais específica dentro de um projeto de veículos com asa em
efeito solo (WIG-C).
25
2.7.1 Forças Aerodinâmicas e Momento
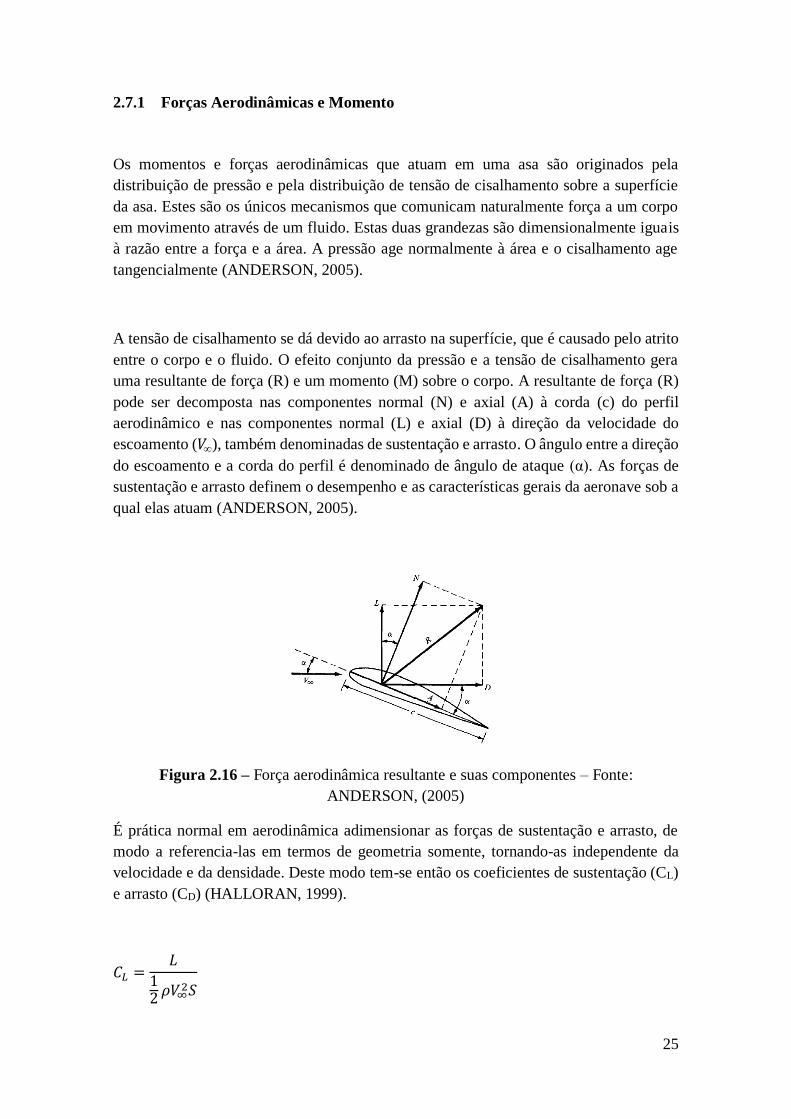
Os momentos e forças aerodinâmicas que atuam em uma asa são originados pela
distribuição de pressão e pela distribuição de tensão de cisalhamento sobre a superfície
da asa. Estes são os únicos mecanismos que comunicam naturalmente força a um corpo
em movimento através de um fluido. Estas duas grandezas são dimensionalmente iguais
à razão entre a força e a área. A pressão age normalmente à área e o cisalhamento age
tangencialmente (ANDERSON, 2005).
A tensão de cisalhamento se dá devido ao arrasto na superfície, que é causado pelo atrito
entre o corpo e o fluido. O efeito conjunto da pressão e a tensão de cisalhamento gera
uma resultante de força (R) e um momento (M) sobre o corpo. A resultante de força (R)
pode ser decomposta nas componentes normal (N) e axial (A) à corda (c) do perfil
aerodinâmico e nas componentes normal (L) e axial (D) à direção da velocidade do
escoamento (𝑉∞), também denominadas de sustentação e arrasto. O ângulo entre a direção
do escoamento e a corda do perfil é denominado de ângulo de ataque (α). As forças de
sustentação e arrasto definem o desempenho e as características gerais da aeronave sob a
qual elas atuam (ANDERSON, 2005).
Figura 2.16 – Força aerodinâmica resultante e suas componentes – Fonte:
ANDERSON, (2005)
É prática normal em aerodinâmica adimensionar as forças de sustentação e arrasto, de
modo a referencia-las em termos de geometria somente, tornando-as independente da
velocidade e da densidade. Deste modo tem-se então os coeficientes de sustentação (CL)
e arrasto (CD) (HALLORAN, 1999).
𝐶𝐿 =𝐿
12 𝜌𝑉∞
2𝑆

26
𝐶𝐷 =𝐷
12 𝜌𝑉∞
2𝑆
Onde:
𝜌 − 𝐷𝑒𝑛𝑠𝑖𝑑𝑎𝑑𝑒 𝑑𝑜 𝑎𝑟
𝑆 − Á𝑟𝑒𝑎 𝑒𝑚 𝑝𝑙𝑎𝑛𝑡𝑎 𝑑𝑎 𝑎𝑠𝑎
Em uma aeronave em condições de equilíbrio, temos que a sustentação L está balanceada
com o peso W da aeronave e o arrasto D está balanceado com a tração. Observa-se no
entanto que essas forças não são necessariamente colineares ou sequer estão na mesma
direção, o que irá gerar momentos na aeronave. Assim, para se realizar um voo reto e
nivelado, há a necessidade de um balanceamento, feito pelo profundor, que com a ação
de uma força B, possibilita o equilíbrio da aeronave (CUTLER , 2005).
Figura 2.17 – Balanceamento de forças atuantes na aeronave – Fonte: CUTLER, (2005)
2.7.2 Tipos de força de arrasto
A força de arrasto se divide em várias parcelas, que são originadas de diferentes modos
na aeronave (PULLIN, 1979):
Arrasto de perfil – também conhecido como arrasto de forma ou pressão, origina-
se devido a distribuição de pressões sobre o perfil, empenagens, fuselagem, etc;
Arrasto de atrito - também conhecido Skin Drag, ocorre em todo avião devido a
rugosidade das suas diversas superfícies;
27
Arrasto induzido – origina-se devido aos diversos vórtices que surgem nas
superfícies aerodinâmicas e depende fortemente da sustentação;
Arrasto de interferência - surge nas junções de superfícies, regiões estas onde há
elevados gradientes de pressões que originam vórtices;
Arrasto de coleta – também conhecido como Cooling Drag, ocorre devido a
variação de quantidade de movimento de ar coletado para alimentar motor,
refrigerar motor e cabine, etc;
Arrasto de onda – também conhecido como Wave Drag, ocorre em escoamentos
transônico e supersônicos devido às ondas de choque;
Arrasto de protuberâncias e frestas: origina-se devido a presença de
protuberâncias e frestas nas superfícies da aeronave; e
Arrasto parasita: no caso de um avião subsônico, é o somatório de todos os
arrastos que não dependem da sustentação.
2.7.3 Centro de Pressão e Centro Aerodinâmico
O ponto de aplicação da resultante aerodinâmica, cuja projeção no eixo vertical é a
sustentação, denomina-se centro de pressão (CP). Neste ponto, o momento aerodinâmico
(Ma) é nulo. A posição do centro de pressão, no entanto, varia com o ângulo de ataque.
Isto, para efeitos de cálculos aerodinâmicos e projeto, não é adequado, sendo então
definido um outro ponto denominado centro aerodinâmico (CA), onde o momento
aerodinâmico é constante, não variando com o ângulo de ataque e sua localização está a
aproximadamente um quarto da corda do perfil aerodinâmico. (ANDERSON, 2005).
O centro de pressão está sempre localizado à ré do centro aerodinâmico, pois caso estivesse avante
teríamos em determinada posição, uma situação paradoxal em que, ao tomarmos um centro de
pressão numa dada posição inicial avante do centro aerodinâmico, ao aumentarmos o
ângulo de ataque, esta posição se movimentaria no sentido do bordo de fuga, de forma
em que em um dado momento o centro de pressão se coincidiria com o centro
aerodinâmico, de modo que teríamos num mesmo ponto, momento aerodinâmico igual e
diferente de zero, o que é impossível (BORTOLUS, 2013).

28
2.7.4 Camada limite
O conceito de camada limite foi introduzido em 1904, por Ludwig Prandtl. Por meio deste
conceito, PRANDTL (1904) demonstrou que muitos escoamentos viscosos podem ser
analisados, dividindo-se o escoamento em duas regiões, uma próxima à fronteira sólida e
a outra abrangendo o resto do escoamento. Nesta solução proposta por Prandtl, o efeito
da viscosidade é importante somente na fina camada da região adjacente à fronteira
sólida, camada esta que é denominada camada limite e é inversamente proporcional ao
número de Reynolds (ANDERSON, 2005).
A camada limite origina-se do atrito do escoamento com a superfície e é uma região de
alta viscosidade, na qual ocorre um grande gradiente de velocidade que produz um
substancial vórtex finito dentro da camada. Devido ao efeito da viscosidade, há uma
distribuição deste vórtex ao longo da superfície da asa. Sem o atrito, não haverá
sustentação, pois não será atendida a chamada condição de KUTTA (1902), na qual um
dado aerofólio, submetido à um ângulo de ataque, deverá ter uma circulação com valor
tal, que o escoamento deixe o bordo de fuga de forma suave. O atrito também é
responsável pelo deslocamento da camada limite, o que gera uma assimetria de
distribuição de pressão, dando origem ao arrasto (ANDERSON, 2005).
Antes deste conceito, não se compreendia a significativa diferença que havia entre os
resultados obtidos experimentalmente nos ensaios hidrodinâmicos e os obtidos por meio
de uma abordagem da hidrodinâmica teórica (ANDERSON, 2005).
Para um escoamento laminar incompressível, ao longo de uma placa plana e com ângulo
de ataque igual a zero, podemos calcular a espessura da camada limite por meio da
seguinte equação (ANDERSON, 2005):
𝛿 =5𝑥
√𝑅𝑒𝑥
𝑅𝑒 =𝜌∞𝑉∞𝑥
𝜇∞
Onde:
Rex – Número de Reynolds em função da distância medida a partir do bordo de ataque.

29
2.7.5 Downwash
As asas reais possuem pontas, através das quais, devido a uma diferença de pressão entre
o intradorso (maior pressão) e extradorso (menor pressão), há um movimento do
escoamento de ar. Devido a este escoamento lateral, é gerada uma folha de vórtices que
modifica todo o campo de escoamento próximo à aeronave (ANDERSON, 2005). Este
fenômeno é responsável por conservar a quantidade de movimento da massa de ar que se
desloca através da asa e é chamado de Downwash (HALLORAN, 1999).
Figura 2.18 – Origem de vórtices de ponta de uma asa finita – Fonte: ANDERSON,
(2005)
.
Figura 2.19 – Origem do downwash – Fonte: ANDERSON, (2005)
Ao mudar o escoamento através da asa, o downwash afeta a relação angular entre a
sustentação e o arrasto. Há uma redução do ângulo de ataque efetivo (αeff) em relação ao
ângulo de ataque da asa (α) conforme pode ser observado na Figura 2.20. Ocorrem

30
também dois outros efeitos consequentes do downwash criado pela asa: o aumento do
arrasto induzido e a alteração na direção do escoamento que atinge a cauda da aeronave,
que passa a ser diferente da direção de V∞,, conforme pode ser observado na Figura 2.21
(HALLORAN, 1999).
Figura 2.20 – Ângulo de incidência efetivo - αeff – Fonte: HALLORAN, (1999)
Figura 2.21 – Escoamento e diagrama de força na empenagem horizontal – Fonte:
ANDERSON, (1989)
2.7.6 Geometria
A geometria da asa exerce uma considerável influência no seu desempenho. Diferentes
seções de asa (perfis) possuem comportamentos aerodinâmicas diferentes quando

31
submetidos a variados ângulos de ataque. Isto implica em que aeronaves com requisitos
operacionais diferentes utilizem perfis de asa diferentes (HALLORAN, 1999).
Uma das características da asa que exercem grande influência no seu desempenho é a
razão de aspecto ou alongamento, que é um parâmetro de comparação entre os
comprimentos da envergadura e da corda. Teoricamente uma asa infinita teria a maior
eficiência, porém, na prática isto não é verdade devido a sua ineficiência estrutural, que
é uma característica das grandes asas cantilever (HALLORAN, 1999).
2.7.7 Efeito Solo
O efeito solo é um fenômeno causado pela presença de uma fronteira abaixo ou próxima
a uma asa. Uma aeronave voando nas proximidades uma superfície sólida ou líquida, terá
o escoamento do ar em torno da sua asa modificado por esta superfície, de modo que a
expansão do ar se dará de forma diferente da que teria, caso o escoamento ocorresse de
forma livre. Isto resulta em um aumento da sustentação da asa e na redução do arrasto
induzido, tendo em vista que a barreira criada destrói parte dos vórtices, fazendo com que
ocorra uma redução do escoamento induzido. Quanto maior a proximidade da superfície,
maior será o efeito deste fenômeno (HALLORAN, 1999).
Considerando-se a pressão total do escoamento, a sustentação adicional é devida a
elevação da pressão estática sob a asa. A pressão total do campo de escoamento pode ser
dividida em pressão estática (pressão de superfície) e pressão dinâmica (associada à
velocidade). Como a pressão total permanece constante através do campo de escoamento,
a soma da pressão estática e da pressão dinâmica também deve permanecer constante. Ao
passar pela região entre a asa e a superfície, o escoamento sofre um decréscimo na sua
pressão dinâmica e um correspondente acréscimo na pressão estática. Como resultado
desta alteração de distribuição de pressão, haverá então um aumento na sustentação e
várias mudanças em outras características aerodinâmicas da asa (HALLORAN, 1999).
A alteração no escoamento devido à proximidade do solo também tem como efeito reduzir
o ângulo de downwash e, consequentemente, aumentar o ângulo de incidência efetivo
para um dado valor de ângulo de ataque. Isso implica na rotação do vetor resultante das
forças, o que aumenta a componente de sustentação e reduz a componente de arrasto
(HALLORAN, 1999).

32
Figura 2.22 – Asa em efeito solo – Fonte: HALLORAN, (1999)
A equação de Breguet para o alcance de aeronaves a hélice nos permite também avaliar,
de modo teórico, a eficiência das aeronaves com asa em efeito solo.
R = ηPCP .L
D . ln
Wf
Wi
Onde:
R - Alcance
ηP - Eficiência da hélice;
CP - Consumo específico de combustível;
L/D - Razão sustentação por arrasto;
Wi - Peso inicial; e
Wf - Peso final.
Verifica-se que, com o aumento da razão L/D, ocorrerá um aumento do alcance para uma
dada carga paga. A redução do arrasto também fará com que a aeronave necessite de
menos tração durante o voo de cruzeiro, resultando em uma economia de combustível
(HALLORAN, 1999).
O efeito solo ocorre a uma altura inferior a uma envergadura da asa. Na altura de 30% da
envergadura, chega-se a uma redução de até 20% no arrasto induzido, podendo este valor
atingir 50%, caso a altura de voo seja de 10% da envergadura. Para as aeronaves que
operam sob este efeito, a escolha de uma configuração do tipo asa baixa é relevante para

33
o maior aproveitamento das vantagens proporcionadas pelo fenômeno, dentre elas a
possibilidade de decolagem com menor pista (RODRIGUES, 2009).
MacCormick (1995) propôs um parâmetro que quantifica a porcentagem de redução do
arrasto induzido devido à proximidade de uma superfície. Este parâmetro é o fator de
efeito solo, que é definido como (RODRIGUES, 2009):
Ø = (16
𝐻𝑏)2
1 + (16𝐻𝑏)
2
Onde:
H – Altura da asa em relação ao solo; e
b – Envergadura da asa.
O coeficiente de arrasto induzido para uma aeronave em efeito solo é calculado conforme
a seguinte equação (RODRIGUES, 2009):
𝐶𝐷𝑖 = Ø 𝐶𝐿2
1 + 𝜋𝑒0𝐴𝑅
Onde:
CL - Coeficiente de sustentação;
e0 – Fator de Oswald; e
AR – Razão de aspecto.
O efeito solo altera o momento de arfagem gerado pela asa. Isto ocorre devido haver uma
alteração do escoamento ao redor da asas, que faz com que a localização do seu centro

34
aerodinâmico se altere. Este efeito resulta da alteração da distribuição de pressão no
intradorso. Esta distribuição passa a ser quase uniforme, conforme pode ser notado na
Figura 2.23 (HALLORAN, 1999).
Figura 2.23 – Distribuição de pressão na superfície de uma asa em efeito solo e em voo
livre – Fonte: HALLORAN, (1999)
As asas normalmente criam um momento de arfagem que tende a abaixar o nariz em voos
de cruzeiro. O efeito solo causa um aumento neste momento, resultando em uma grande
força estabilizadora para balancear este momento de arfagem. Isto implicará na
necessidade de uma empenagem horizontal maior, o que trará como consequência um
maior arrasto, reduzindo a eficiência total do veículo (HALLORAN, 1999).
O momento de arfagem também sofre modificações com a altura de voo em efeito solo.
No voo em extremo efeito solo, a posição do centro aerodinâmico pode passar de um
quarto de corda para meia corda. Isto causa consideráveis dificuldades na configuração
de projeto. Para solucionar este problema causado pelo efeito solo, alguns projetistas
usam um único perfil aerodinâmico na asa. Outros projetam asas com formatos em planta
bem diferentes dos convencionais (HALLORAN, 1999).
Várias mudanças no coeficiente de sustentação máxima também ocorrem quando uma
asa opera em efeito solo. Em extremo efeito solo, o aumento do camber reduz o
coeficiente de sustentação máximo. O ângulo de estol também fica menor, levando a um
estol mais severo, com uma abrupta perda de sustentação. A fim de solucionar este
problema, pesquisas estão sendo feitas com asas projetadas para operar especificamente
em efeito solo (HALLORAN, 1999).
Conforme visto acima, vários comportamentos aerodinâmicos observados em um voo sob
o efeito solo são função da altura voada acima da superfície. Estes comportamentos são
não lineares, o que implica em muitas complexidades relativas à elaboração do projeto de

35
um veículo com asa em efeito solo. As pesquisas neste sentido têm acontecido sob dois
paradigmas: o empírico e o de modelagem (HALLORAN, 1999).
O paradigma de modelagem considera a existência de três zonas acima da superfície. A
primeira zona é uma região em que a asa está operando entre a superfície e a altura de
20% da sua corda. Esta região proporciona um alto nível de restrição ao escoamento, na
direção vertical, fazendo com que este se torne bidimensional, com uma restrição no grau
de liberdade vertical. A segunda zona compreende uma região entre a altura de uma corda
da asa e dez comprimentos de envergadura. Nesta região o modelo é regido pela
envergadura da asa e o escoamento considerado é não viscoso. Para uma asa voando a
uma altura entre 20% da sua corda e um comprimento da corda, considera-se uma
combinação dos modelos referentes as duas zonas supracitadas. Acima de dez
comprimentos de corda, modela-se como voo livre (HALLORAN, 1999).
Sob o paradigma empírico, vários testes com asa em efeito solo também já foram
conduzidos por CARTER (1961), podendo alguns dos seus resultados ser observado nas
Figura 2.24 e Figura 2.25. Na Figura 2.23, observamos que a razão sustentação-arrasto
aumenta com a diminuição da razão altura de voo-envergadura. Nota-se também os
benefícios do efeito do uso de “end plates” e “winglets” nas asas que operam sob efeito
solo, sendo inclusive tais recursos aerodinâmicos mais eficientes em asas com baixa razão
de aspecto, tais como as utilizadas nos veículos WIG. Na Figura 2.24 observamos a
variação do momento de arfagem em função da sustentação, para uma dada altura de voo
(HALLORAN, 1999).
Figura 2.24 – Razão sustentação – arrasto em função da altura de voo acima da
superfície – Fonte: HALLORAN, (1999)

36
Figura 2.25 – Momento de arfagem em função da sustentação para uma dada altura de
voo acima da superfície – Fonte: HALLORAN, (1999)
A Tabela 2.2 mostra as fases de operação dos veículos WIG que decolam de superfícies
líquidas e os impactos do efeito solo em cada fase.
Tabela 2.2 - Fases de operação dos veículos WIG que decolam de superfícies líquidas -
Fonte: HALLORAN, (1999)
Fase Impacto
Decolagem
A aeronave opera de modo que o efeito solo e o deslocamento são
máximos. Na etapa inicial da decolagem o WIG atua como se fosse
um casco de deslocamento e a pressão estática na asa aumenta. Há
uma grande efetividade destes efeitos quando o bordo de fuga da asa
está em contato com a superfície líquida.
Voo de
cruzeiro
Nesta fase temos uma sustentação adicional provida pelo efeito solo.
Transposição
de obstáculo
ou voo fora do
efeito solo
O veículo poderá estar operando em voo livre. O controle e a
aerodinâmica se caracterizarão tal como em uma aeronave em voo
fora do efeito solo.
Pouso O veículo opera em extremo efeito solo. A velocidade é reduzida para
próximo da velocidade de estol antes do pouso.

37
2.8 Conceitos básicos de desempenho
A principal motivação para a implementação de um meio de transporte do tipo veículo
WIG encontra respaldo nas suas vantajosas características de desempenho.
Características estas que dependem fortemente da configuração aerodinâmica do veículo
WIG. Trata-se de um veículo com uma grande eficiência de transporte de elevadas cargas
pagas (maior que as embarcações de superfície) que desenvolve as altas velocidades dos
aviões (HALLORAN, 1999).
2.8.1 Alcance e Autonomia
O alcance e a autonomia são duas características de desempenho cuja análise depende da
eficiência da aeronave e do seu consumo de combustível. O alcânce é a distância máxima
a ser percorrida pela aeronave após o seu abastecimento total de combustível e a
autonomia é o tempo máximo de voo da aeronave, após também um abastecimento total,
sem que haja reabastecimento (ANDERSON, 1999).
O alcance se relaciona a uma distância no solo e para o seu cálculo usam-se as equações
de Breguet, que diferem entre si conforme tratrar-se de plantas propulsoras à
hélice/turbohélice ou a jato. Nestas equações, não são contabilizadas as distâncias de
decolagem, subida, descida e pouso.
(i) Equação de Breguet para o cálculo do alcance de aeronaves com planta propulsora
à hélice/turbohélice:
𝑅 = (𝜂𝑝
𝑐) (
𝐿
𝐷) 𝑙𝑛 (
𝑊0
𝑊1)
A condição de máximo alcance para esta configuração propulsora será atingida quando
razão (𝐿
𝐷) for máxima, o consumo específico (𝑐) for o menor possível, o rendimento
propulsivo for máximo 𝜂𝑝 e a razão (𝑊0
𝑊1) for elevada (ANDERSON, 1999).

38
(ii) Equação de Breguet para o cálculo do alcance de aeronaves com planta propulsora
à jato:
𝑅 = (2
𝑐𝑡)(√
2
𝜌∞𝑆)(
𝐶𝐿
12
𝐶𝐷)(𝑊0
12 −𝑊1
12)
A condição de máximo alcance para esta configuração de planta propulsora será atingida
quando a razão (𝐶𝐿
12
𝐶𝐷) for máxima, o consumo específico for o menor possível, a altitude
de voo for elevada e houver economia de combustível (ANDERSON, 1999). Para
obtermos uma otimização do voo, em termos de alcance, a taxa de variação do peso de
combustível em função da velocidade da aeronave deverá ser mínima (CARSON, 1980
apud ANDERSON, 1999).
Para o cálculo da autonomia, utilizamos as seguintes equações de Breguet:
(i) Equação de Breguet para o cálculo da autonomia de aeronaves com planta
propulsora à hélice/turbohélice:
𝐸 = (𝜂𝑝
𝑐𝑡) (√2𝜌∞𝑆)(
𝐶𝐿
12
𝐶𝐷)(𝑊0
12 −𝑊1
12)
A condição de máxima autonomia para esta configuração propulsora será atingida
quando razão (𝐶𝐿
12
𝐶𝐷) for máxima, a hélice utilizada tiver a maior eficiência possível, o
consumo específico (𝑐𝑡) for o menor possível, a altitude de voo for ao nível do mar e
houver economia de combustível (ANDERSON, 1999).

39
(ii) Equação de Breguet para o cálculo de autonomia de aeronaves com planta
propulsora à jato:
𝐸 = (1
𝑐𝑡) (
𝐿
𝐷) 𝑙𝑛 (
𝑊0
𝑊1)
A condição de máxima autonomia para esta configuração propulsora será atingida quando
razão (𝐿
𝐷) for máxima, o consumo específico (𝑐𝑡) for o menor possível e a razão (
𝑊0
𝑊1) for
elevada (ANDERSON, 1999).
Considerando-se o efeito do vento, num cenário de voo em que podemos ter, por exemplo,
um vento de proa ou um vento de cauda, a velocidade da aeronave em relação ao solo
(𝑉𝑔) será diferente da velocidade do escoamento (𝑉∞), o que não ocorre quando se
considera uma atmosfera estática, onde a velocidade verdadeira da aeronave, a velocidade
em relação ao solo e a velocidade do escoamento são iguais (ANDERSON, 1999).
A autonomia da aeronave não é afetada pelo vento, o que não ocorre com com o alcance,
que o é, fazendo com que as equações de Breguet sejam escritas da seguinte forma
(ANDERSON, 1999):
(i) Aeronaves com planta de propulsão à jato:
𝑅 = (𝑉𝑔
𝑐𝑡) (
𝐿
𝐷) 𝑙𝑛 (
𝑊0
𝑊1)
(ii) Aeronaves com planta de propulsão à hélice/turbohélice:
𝑅 = (𝜂𝑝
𝑐) (
𝑉𝑔
𝑉∞) (
𝐿
𝐷) 𝑙𝑛 (
𝑊0
𝑊1)

40
2.8.2 Razão e Tempo de Subida e Razão de Afundamento
A habilidade para uma aeronave transpor obstáculos num menor tempo possível depende
das suas características de subida. Num voo estável de subida, parte do peso da aeronave
é suportado pela tração. Isto faz com que a aeronave necessite de menor sustentação para
executar uma subida e, por consequência, também haverá um menor arrasto
(ANDERSON, 1999).
Ao se decompor a velocidade da aeronave nas componentes horizontal e vertical, segundo
o ângulo formado entre a trajetória reta do avião em subida e a horizontal que é também
chamado de ângulo de subida (θ), teremos que a componente vertical é a razão de subida
(RC) (ANDERSON, 1999).
A razão de subida é definida como a razão entre o excesso de potência e o peso da
aeronave, o que, após algumas manipulações matemáticas leva à seguinte equação
(ANDERSON, 1999):
𝑅𝐶 = 𝑉∞ [𝑇
𝑊−1
2𝜌∞𝑉∞
2 (𝑊
𝑆)−1
𝐶𝐷0 − (𝑊
𝑆)2𝐾𝑐𝑜𝑠2𝜃
𝜌∞𝑉∞2]
Como resultado geral da equação acima, temos que a razão de subida diminui com o
aumento da altitude, tendo em vista que o termo dominante da equação é a razão entre a
tração e o peso da aeronave (ANDERSON, 1999).
O tempo de subida é o tempo necessário à aeronave, para subir de uma altura para outra.
É calculado por meio da seguinte equação (ANDERSON, 1999):
𝑡 = ∫𝑑ℎ
𝑅𝐶
ℎ2
ℎ1
Ao ocorrer uma deficiência de potência, a aeronave entrará em voo plainado, assumindo
uma razão de afundamento dada pela seguinte equação (ANDERSON, 1999):
𝑅𝐷 = 𝑉∞ sin 𝜃 =𝐷𝑉∞
𝑊

41
Para que tenhamos uma razão mínima de afundamento, temos que ter uma mínima razão
(𝐶𝐿
32
𝐶𝐷) , e uma velocidade da aeronave dada por (ANDERSON, 1999):
𝑉∞ = (2
𝜌∞√
𝐾
3𝐶𝐷0(𝑊
𝑆))
12
2.8.3 Potências Disponível e Requerida
A potência disponível (Pd) é a potencia proporcionada pela planta de potência da
aeronave e é igual ao produto da eficiência propulsiva pela potência no eixo do motor, no
caso das plantas propulsoras à helice; pela potência efetiva, no caso de turbohélices; ou
igual ao produto da tração disponível pela velocidade do avião, no caso de turbo jatos e
turbofans (ANDERSON, 1999).
A potência requerida (Pr) é a potência necessária para que a aeronave se movimente por
meios próprios e é igual ao produto da tração requerida pela velocidade da aeronave. Para
que tenhamos uma potência requerida mínima, os seguintes requisitos deverão ser
atendidos (ANDERSON, 1999):
(i) (𝐶𝐿
32
𝐶𝐷)
𝑚𝑎𝑥
=1
4(
3
𝐾𝐶𝐷0
32
)
3
4
(ii) 𝐶𝐷0 =1
3𝐾𝐶𝐿
2
(iii) 𝑉
(𝐶𝐿
32
𝐶𝐷)
= (2
𝜌∞√
𝐾
3𝐶𝐷0
𝑊
𝑆)
1
2

42
Para uma determinada altitude de voo e uma dada velocidade, a diferença entre a potência
disponível e a potência requerida é o excesso de potência (EP), que é uma característica
de desempenho utilizada no cáculo da razão de subida (ANDERSON, 1999).
2.8.4 Desempenhos de Decolagem e Pouso
A distância de decolagem depende do peso de decolagem, da velocidade de decolagem, da relação
peso-potência, do arrastos aerodiâmico e do solo e das técnicas de pilotagem (ISCOLD, 2014).
Esta distância é composta pela soma da distância de rolagem ou corrida em solo (sg) e pela
distância coberta em solo entre o ponto em que a aeronave não sofre mais a influência do mesmo
e o ponto em que ela transporia um obstáculo de 50 pés para o caso das aeronaves militares ou 35
para as aeronaves civis (sa) (ANDERSON, 1999).
Figura 2.26 – Distância de decolagem – Fonte: ANDERSON, (1999)
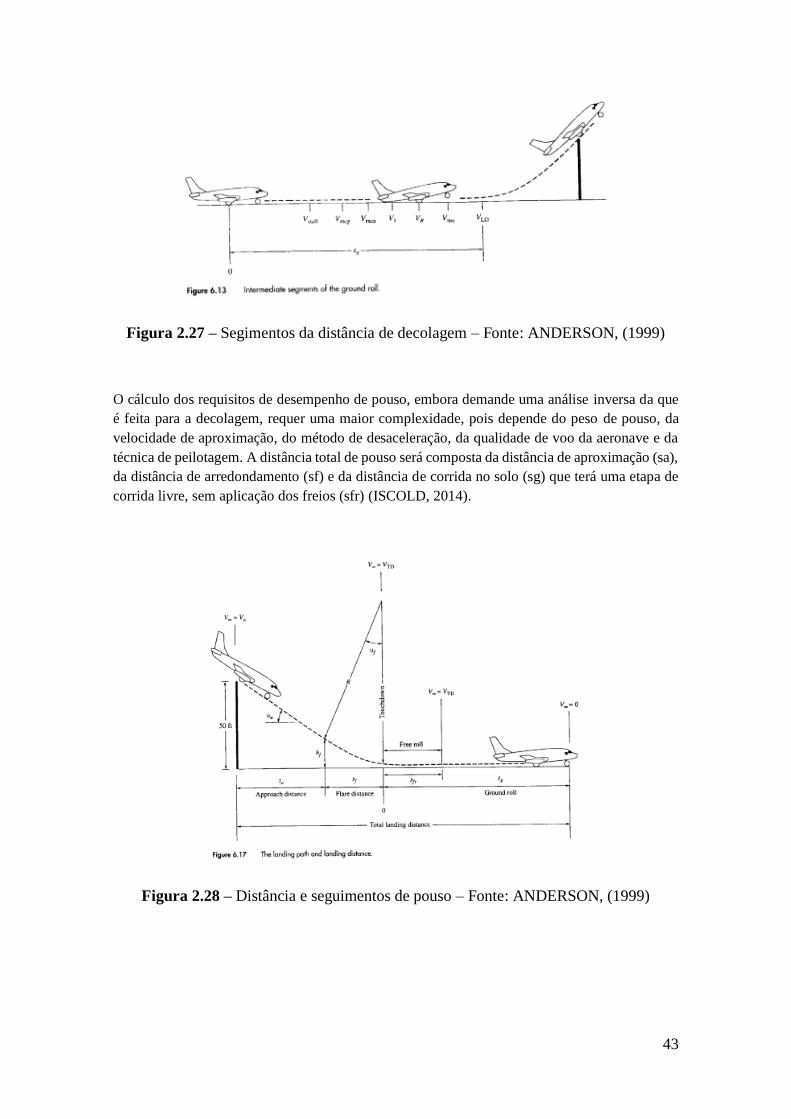
A distância de decolagem é dividida em diversos seguimentos referenciados pelas várias
velocidades envolvidas durante a corrida de decolagem. Observa-se também que, na corrida de
decolagem, o coeficiente de sustentação não é o mesmo da polar de arrasto em voo livre, tendo
em vista que o trem de pouso está abaixado e há uma redução do arrasto induzido devido ao efeito
solo (ANDERSON, 1999).
43
Figura 2.27 – Segimentos da distância de decolagem – Fonte: ANDERSON, (1999)
O cálculo dos requisitos de desempenho de pouso, embora demande uma análise inversa da que
é feita para a decolagem, requer uma maior complexidade, pois depende do peso de pouso, da
velocidade de aproximação, do método de desaceleração, da qualidade de voo da aeronave e da
técnica de peilotagem. A distância total de pouso será composta da distância de aproximação (sa),
da distância de arredondamento (sf) e da distância de corrida no solo (sg) que terá uma etapa de
corrida livre, sem aplicação dos freios (sfr) (ISCOLD, 2014).
Figura 2.28 – Distância e seguimentos de pouso – Fonte: ANDERSON, (1999)
44
2.8.5 Manobrabilidade
A manobrabilidade é uma característica de desempenho que quantifica a capacidade da aeronave
para realizar curvas. Sua especificação é feita por meio do conceito de curva coordenada. Quando
realizando uma curva, a sustentação do avião aumenta e, por consequência, o seu arrasto também.
Tudo isto implica numa maior demanda de potência. O problema da manobrabilidade resume-se
então em se determinar o fator de carga máximo que se consegue voar a uma dada velocidade e
altitude (ISCOLD, 2014).
Tratando-se dos veículos co asa em efito solo, a manobrabilidade e o controle envolvem uma
força de controle que pode ser largamente afetada pela posição do centro de gravidade do veículo,
pelo seu peso e pela sua velocidade. Isto implica em que, num projeto, os requisitos de
manobrabilidade determinam a quantidade de força necessária para o controle do veículo
(HALLORAN, 1999).
2.9 Conceitos básicos de estabilidade e controle
Uma aeronave, quando em voo fora do efeito solo, normalmente é livre para se movimentar em
qualquer direção, podendo sofrer também diversas perturbações que também implicarão em
movimento. Tais movimentos são consequência de diversas forças e momentos (BABISTER,
1961).
Quando os momentos estáticos que agem sobre a aeronave tendem a restaurar-lo para o seu estado
de equilíbrio, diz-se que esta possui estabilidade estática. A estabilidade dinâmica também
implica no retorno a um estado de equilíbrio, após cessada uma perturbação, porém dentro de
limites pré-estabelecidos. (BABISTER, 1961).
No efeito solo, devido às influências aerodinâmicas do mesmo, ocorrerá uma mudança na resposta
dinâmica dos veículos com asa em efeito solo. A estabilidade e o controle são os grandes fatores
dificultadores do projeto destes veículos, pois não existe uma relação linear entre as características
aerodinâmicas e a altura de voo (HALLORAN, 1999).
2.9.1 Equilíbrio
O equilíbrio é a situação na qual um sistema permanece por tempo indeterminado, na ausência de
perturbação. Um corpo de massa pontual está em equilíbrio quando se encontra em repouso ou
em movimento retilíneo uniforme. Nos corpos rígidos não pontuais, o equilíbrio ocorre quando
seu centro de gravidade está em repouso ou em movimento uniforme retilíneo, ou com rotação
constante em torno de um eixo que passa pelo seu centro de rotação (ULTSCH, 2014).

45
2.9.2 Estabilidade longitudinal ou de atitude
A estabilidade estática longitudinal denota a capacidade do veículo WIG para retornar à posição
de equilíbrio, após distúbios que causem movimentos de arfagem. Um comportamenro instável
resulta em um aumento da amplitude do movimento de arfagem, enquanto que um
comportamento estável resulta na volta ao ângulo de atitude em que se encontrava o veículo antes
da perturbação. Estudos mostram que o maior problema está no amortecimento das oscilações de
período longo (fugoide) (HALLORAN, 1999).
O controle da estabilidade longitudinal é uma das maiores dificuldade em um projeto de veículos
com asa em efeito solo, devido haver uma mudança nesta estabilidade à medida em que a altura
de voo varia. Uma das consequências refere-se à necessidade de elevadas forças para controle da
trimagem do veículo e o grande desafio da fase de projeto é prover uma força de controle
suficiente para a manutenção da estabilidade através do envelope vertical de altura
(HALLORAN, 1999).
A instabilidade longitudinal causa desconforto e perigo de avaria para o veículo WIG, pois as
elevadas amplitudes de arfagem podem fazer com que haja impactos com a superfície, resultando
em cargas estruturais elevadas. Métodos de controle moderno são utilizados para resolver este
problema (HALLORAN, 1999).
2.9.3 Estabilidade laterodirecional
A estabilidade laterodirecional não é uma área de pesquisa com grandes avanços quando se trata
de veículos com asa em efeito solo. A habilidade destes veículos em manter o nível de voo,
mediante as perturbações no ângulo de rolamento, torna pouco relevante a necessidade de se
conhecer mais sobre esta estabilidade, visto que são poucos os problemas a serem resolvidos
(HALLORAN, 1999).
A estabilidade lateral é garantida devido ao pequeno acréscimo de sustentação da asa baixa, a
medida em que esta se aproxima da superfície fronteiriça, fazendo com que o veículo WIG retorne
ao ponto neutro. Uma implicação deste comportamento é a redução do arrasto na asa baixa,
podendo ocasionar uma variação direcional a partir da trajetória inicial. Este problema é corrigido
com o uso de empenagem vertical (HALLORAN, 1999).
O controle direcional e a manobrabilidade do veículo WIG dependem da sua habilidade em voar
fora do efeito solo. Neste caso, seus controles demandarão uma maior complexidade,
assemelhando-se com os controles das aeronaves. Se o veículo somente voar no efeito solo, os
46
controles serão mais simples, tal como o de outros veículos com movimentos limitados a dois
graus de liberdade (ex. navios e hovercrafts) (HALLORAN, 1999).
Existem dois métodos de guinada para os veículos WIG, que dependem da sua capacidade de
voar dentro ou fora do efeito solo. O mais eficiente método é semelhante ao dos aviões que voam
na atmosfera livre, no qual são realizadas guinadas em curva, também chamadas guinada
ampliada. Esta técnica não é aplicada nos veículos que somente voam no efeito solo, pois estes
só conseguem guinar segundo um plano horizontal e para tal, usam um leme e asas escalonadas.
Esta guinada inclusive implica em um raio de giro bem maior que o de uma guinada ampliada
(HALLORAN, 1999).
2.9.4 Estabilidade de velocidade
A estabilidade de velocidade é definida como a capacidade do veículo WIG de manter a
velocidade de voo e o método de controle desta. No caso das aeronaves, o ângulo de
ataque controla a velocidade. Tratando-se dos veículos WIG, a estabilidade de velocidade
é controlada pela altura de voo e pelo ângulo de ataque (HALLORAN, 1999).
Dependendo da posição do centro de gravidade do veículo, uma variação na velocidade
pode ocasionar uma variação no ângulo de ataque ou na altura de voo. Haverá um
envelope de passeio do centro de gravidade, em que as puras variações de velocidade
resultarão somente em variações de altura de voo ou de de ângulo de ataque, ou ambas.
Dependendo do projeto, estas considerações constituirão limitações no passeio do CG do
veículo WIG (HALLORAN, 1999).
2.9.5 Estabilidade de altura de voo
A estabilidade de altura de voo é a capacidade do veículo WIG para manter ou retornar a
sua altura inicial de voo, após um distúrbio que provoque uma alteração na sua altura de
voo. Não são consideradas as variações devido à arfagem. Esta estabilidade é determinada
pelo comportamento do corpo sustentado, à medida em que este se aproxima da
superfície, pois há uma variação dos efeitos de sustentação, com a altura (HALLORAN,
1999).
Haverá estabilidade de altura de voo quando uma diminuição da altura resultar num
consequente aumento da sustentação. Sob esta circunstância, um aumento de sustentação
tem o efeito de restaurar o veículo WIG para a sua altura original. Caso as forças de
sustentação atuem, de modo a amplificar a variação de altura, teremos então uma

47
instabilidade de altura de voo, o que pode levar o veículo a uma colisão com a superfície.
Os veículos WIG devem ser, então, criteriosamente projetados para alcançar elevadas
estabilidades de altura de voo, de modo que a sustentação deve aumentar com a diminuição da
altura de voo (HALLORAN, 1999).

48
3 METODOLOGIA
3.1 Introdução
Este capítulo apresentará a metodologia a ser utilizada, bem como os procedimentos e
tarefas que serão conduzidos no desenvolvimento do projeto de um veículo com asa em
efeito solo brasileiro, abordando as fases de especificações e requsitos, estudos
preliminares ou projeto conceitual e, por fim, anteprojeto ou projeto preliminar. Ressalta-
se que não será tratada, neste trabalho, a fase de detalhamento do projeto, por não haver
tempo hábil para tal.
O projeto de um veículo WIG que opera em superfícies líquidas constitui-se numa mistura
de metodologias de projetos aeronáuticos e de arquitetura naval, pois na etapa de
decolagem há que se considerar tratar-se de um véiculo que está também submetido a
esforços hidrodinâmicos, o que implica na necessidade de maior potência nesta etapa para
vencer o arrasto hidrodinâmico e também na necessidade de uma estrutura de fuselagem
mais reforçada (HALLORAN, 1999).
Considerando-se a grande preponderância da semelhança entre o processo de
desenvolvimento de um veículo WIG e o de uma aeronave, neste trabalho abordaremos
tais veículos sob o ponto de vista aeronáutico, para efeitos de projeto, e faremos as
abordagens pertinentes sob o ponto de vista naval, quando assim for necessário,
principalmente no tocante às normas previstas pela Organização Marítima Internacional
(IMO).
Dentre as principais metodologias de projeto aeronáutico já comentadas neste trabalho,
utilizaremos as orientações propostas por Torenbeek (1981), para a determinação das
especificações e requisitos e as metodologias de Roskan (1985) e Barros (2001) para as
demais etapas do projeto.
3.2 Coleta de dados
Será necessário obter a maior quantidade de informação possível sobre os veículos WIG
já existes e complementar tais informações com dados referentes a hidroaviões, tendo em
vista as particularidades deste tipo de aeronave, em relação às resistências estruturais às
cargas devido aos impactos com a àgua.

49
3.3 Especificações e requisitos
Para a especificações iniciais serão consideradas as seguintes razões para se iniciar o
projeto do veículo WIG:
a) Necessidade de um novo meio de transporte que realize sua missão de forma mais
rápida, segura e eficiente;
b) Preenchimento de um vazio de mercado; e
c) Desafio inovador para o sistema de transporte hidroviário brasileiro.
Nesta fase, a determinação da provável demanda para o tipo de veículo WIG a ser
projetado poderá ser auxiliada por uma pesquisa de mercado junto aos potenciais clientes.
Esta pesquisa levará a uma especificação inicial que definirá principalmente o
desempenho de transporte. Também ajudará a definir os requisitos de aeronavegabilidade
e operacionais que o projeto deverá contemplar (TORENBEEK, 1981).
3.3.1 Finalidade do veículo WIG
O veículo WIG a ser projetado terá por finalidade transportar passageiros e realizará
pousos e decolagens em águas fluviais.
3.3.2 Missão típica
O veículo WIG realizará missões de transporte de passageiros ao longo de determinadas
rotas de até 200 Km, na hidrovia Solimões-Amazonas. Para esta missão, serão
especificados os tempos gastos e os respectivos consumos de combustível para as fases
de partida, taxiamento, decolagem, subida até a altitude de operação, cruzeiro, descida e
pouso. Observa-se que a máxima distância da rota a ser atendida foi definida segundo
estudos de viabilidade econômica feitos por Taylor (2000).

50
3.3.3 Desempenho desejado
As seguintes metas de desempenho a serem atingidas serão especificadas: velocidade
máxima em voo nivelado, velocidade de cruzeiro em vários regimes de potência,
velocidade de estol, razão máxima de subida, distâncias de decolagem e pouso, alcânce
máximo, autonomia máxima e altura de voo. Dentre estas metas de desempenho
elencadas, a autonomia e em seguida, as distâncias de decolagem e pouso serão
priorizadas, para fins de otimização.
3.3.4 Características pretendidas
Será feito um estudo, considerando-se diversos fatores, dentre os quais os recursos
industriais e econômicos existentes na região amazônica, a fim de se melhor especificar
as seguintes características a serem atendidas pelo veículo WIG: nível de elaboração
construtiva, custo final do veículo, exigências de manutenção, características de voo
lento, qualidades de voo, elasticidade de voo, faixa de alcance e autonomia, materiais
utilizador, nível de segurança e estilo. Após especificadas as características supracitadas,
estas serão dispostas em ordem de prioridade, observando-se que a autonomia terá a
prioridade mais elevada.
3.3.5 Requisitos
Será feita uma análise criteriosa das normas técnicas vigentes, dentre as quais destacam-
se o RBHA (Regulamento Brasileiro de Homologação de Aeronaves), o FAR (Federal
Aircraft Regulation), o BCAR (British Civil Airworthiness), e diversas outras normas da
IMO (International Maritme Organization) e ICAO (International Civil Aviation
Organization), a fim de se definir as mais adequadas a serem utilizadas no projeto no
projeto do veículo WIG.
3.4 Estudos preliminares
Nesta etapa do projeto serão utilizadas as metodologias propostas por Roskan (1985) e
Barros (2001), tentando-se extrair o que de melhor cada uma delas proporciona.

51
3.4.1 Lista de prioridades
Objetivando superar os problemas de antagonismo existentes entre os diversos
parâmetros de desempenho a serem estudados, será eleborada uma lista de prioridades
escalonadas, na qual um determinado parâmetro será priorizado em relação a outro, para
fins da sua otimização, respeitando-se a filosofia de projeto do veículo WIG escolhida.
3.4.2 Métodos comparativos
Tal como toda concepção de aeronave, a concepção de um veículo WIG também não
parte do nada, sendo necessária uma verificação criteriosa de outros veículos com
determinadas características semelhantes, já existentes, a fim de comparação.
Tabelas comparativas, gráficos e fichas contendo as diversas características dos veículos
WIG e hidroaviões selecionados segundo critérios de semelhança serão elaboradas, a fim
de se identificar algumas tendências e extrapolar outras, visando a obtenção de um projeto
de veículo WIG o mais otimizado possível.
Serão abordados também os seguintes aspectos, para fins de comparação entre os veículos
WIG existentes: suavidade de comando, proporcionalidade de comandos, docilidade,
facilidade de manutenção, custo operacional, potencial de venda e estética.
3.4.3 Delimitação protótipo
Nesta etapa serão conduzidos os seguintes estudos:
Configuração externa;
Configuração interna;
Ergonomia;
Estimativa das dimensões básicas;
Sistema de propulsão;
Materiais e processos; e
Equipamentos e instalações.

52
Alguns dos estudos supracitados, tais como configuração externa, configuração interna e
ergonomia, terão uma abordagem puramente qualitativa, originando uma lista de
possibilidades escalonadas conforme as especificações, requisitos e prioridades já
estabelecidos ao se chegar a esta etapa.
Quanto à filosofia de projeto, será seguida a filosofia de solução mínima, a fim de se
buscar uma maior simplicidade do projeto do veículo WIG, associada à obtenção de um
menor peso para o mesmo, o que contribuirá para a otimização da sua autonomia.
Nos estudos das dimensões básicas, serão feitas as seguintes estimativas:
Peso vazio que, por ser maior quando comparado aos veículos WIG e aeronaves
de mesmo porte que operam somente de terra, e não haver uma suficiente
disponibilidade de informações que permitam a obtenção direta da correlação
peso máximo de decolagem (WTO) - peso vazio (WE), far-se-á uso do método
proposto por Dias (2011) para a determinação de uma equação que expressa esta
correlação;
Área alar;
Envergadura;
Comprimento da fuselagem; e
Estimativa de potência requerida.
Para a realização das estimativas elencadas acima, será executado o seguinte algorítmo:
a) Selecionam-se da tabela comparativa os veículos WIG eu mais se assemelham,
quanto aos parâmetros, àquele que se pretende projetar;
b) Elabora-se uma tabela reduzida que contenha os seguintes parâmetros:
Razão carga útil-peso máximo de decolagem: 𝑊𝑢
𝑊𝑇𝑂
Carga alar: 𝑊𝑇𝑂
𝑆;
Alongamento: 𝑏2
𝑆;
Razão envergadura-comprimento da fuselagem: 𝑏
𝑙𝑓
Razão petência requerida-peso máximo de decolagem: 𝑃𝑟
𝑊𝑇𝑂
c) Calcula-se a média dos parâmetros elencados no item b);
d) Adotam-se valores para os parâmetros elencados no item b), à luz das médias
calculadas no item c) e das tendências observadas no mercado;

53
e) Arbitra-se um valor para carga útil (Wu), consideranto a sua definição; e
f) Calculam-se então os parâmetros estimados da seguinte forma:
Peso máximo de decolagem estimado: 𝑊𝑇𝑂 = 𝑊𝑢
(𝑊𝑢 𝑊𝑇𝑂⁄ );
Peso vazio estimado: 𝑊𝐸1 = 𝑊𝑇𝑂 −𝑊𝑢;
Área alar estimada: 𝑆 = 𝑊𝑇𝑂
(𝑊𝑇𝑂 𝑆⁄ );
Envergadura estimada: 𝑏 = √𝑆
𝐴;
Comprimento estimado da fuselagem: 𝑙𝑓 = 𝑏 (𝑙𝑓
𝑏); e
Potência requerida estimada: 𝑃𝑟 = 𝑊𝑇𝑂 (𝑃𝑢
𝑊𝑇𝑂).
Calculada a potência requerida estimada, será selecionado o motor existente no mercado
que mais se adequa a este valor de potência estimado e que também atenda aos requisitos
de desempenho pré estabelecidos.
Os materiais e processos a serem utilizados serão determinados conforme o estudo dos
recursos industriais e comerciais existentes principalmente na região amazônica, a fim de
se identificar as melhores opçãoes de cadeia produtiva nacional.
3.5 Antiprojeto
Nesta etapa do projeto também serão utilizadas as metodologias propostas por Roskan
(1985) e Barros (2001), tentando-se extrair o que de melhor cada uma delas proporciona.
Ressalta-se no entanto que este trabalho não contemplará as fases de elaboração do
modelo da cabina em escala natural, nem a modelagem da fuselagem.

54
3.5.1 Esboço inicial
Nesta fase do projeto será elaborado um desenho básico, composto de três vistas do
veículo WIG (lateral, frontal e emplanta).
3.5.2 Definição da forma em planta da asa e verificação das características de estol
Para a definição da forma em planta da asa, serão feitos além dos estudos referentes aos
aspectos de estol, estudos referentes também à resistência induzida, eficiência estrutural,
facilidade construtiva e volume disponível para alojamento de sistemas.
3.5.3 Refinamento do sizing
Nesta fase será utilizado o seguinte algorítimo:
a) Estimam-se os pesos dos componentes do veículo WIG a partir do valor do peso
máximo de decolagem (WTO) já estimado;
b) Estima–se novamente o peso vazio do veículo WIG (WE2), somando-se os pesos
dos componentes;
c) Compara-se este novo valor estimado do peso vazio (WE2) com o valor
anteriormente estimado (WE1) no item 3.4.3 f); e
d) Faz-se as correções necessárias de WE1, alterando-se a carga paga, até que se
iguale a WE2.
3.5.4 Estudo das proporções externas
A fim de se obter um projeto de veículo WIG com boas qualidade de voo, serão feitas as
comparações das proporções elencadas na Tabela 3.1, entre os veículos existentes, cujas
qualidades de voo são reconhecidas. Quaisquer desproporcionalidades identificadas
implicarão numa correção do projeto.

55
Tabela 3.1 - Proporções
Proporção Descrição 𝑙𝐻𝑐
Razão entre o braço da empenagem horizontal e a corda média geométrica da asa
𝑙𝑉𝑏
Razão entre o braço da empenagem vertical e a envergadura da asa
𝑙𝑓
𝑏
Razão entre o comprimento da fuselagem e a envergadura da asa
𝑏𝐻𝑏
Razão entre as envergaduras da empenagem horizontal e da asa
𝑐𝑟𝑙𝑓
Razão entre a corda da raiz da asa e o comprimento da fuselagem
𝑆𝑝
𝑆𝐻
Razão entre a área do profundor e a área da empenagem horizontal
𝑆𝑙𝑆𝑉
Razão entre a área do leme e a área da empenagem vertical
3.5.5 Estimativas prévias de estabilidade e controle
Esta etapa implicará na análise dos volumes de cauda vertical (V̄V) e horizontal (V̄H) dos
veículos WIG semelhantes, a partir de tabelas comparativas, a fim de possibilitar a
escolha de valores adequados destes parâmetros, para o projeto.
3.5.6 Escolha dos perfis das asas e das empenagens
Será adotada a filosofia de projeto, na qual o tipo de perfil será único para toda asa,
buscando-se diminuir o máximo possível o afilamento, contribuindo deste modo para um
melhor desempenho aerodinâmico, para se obter menores dificuldades com o estol e,
principalmente, para uma maior facilidade construtiva.
Considerando-se que a autonomia é o parâmetro de desempenho a ser priorizado, buscar-
se-á maximizar a relação 𝐶𝐿
32
𝐶𝐷 , caso se opte por uma planta propulsora tipo motor a pistão,
ou 𝐶𝐿
𝐶𝐷 , caso a planta propulsora seja do tipo motor a jato.

56
Após definida a relação a ser maximizada, será calculado o número de Reynolds para a
corda média geométrica e a velocidade de cruzeiro, usando-se a seguinte equação:
𝑅𝑒 = 19000𝑉𝑐
Se o número de Reynolds calculado não estiver adequado aos dados experimentais de
perfis disponíveis, será então adotado o valor mais próximo ao do disponível, para que se
possa elaborar uma tabela de perfis dentre os quais aquele que apresentar a melhor relação
paramétrica já definida será selecionado.
3.5.7 Passeio do centro de gravidade
A estimativa do passeio do centro de gravidade do veículo WIG será feita, decompondo-
se suas cargas, conforme se tratarem de cargas fixas ou variáveis. Para tal, será elaborada
uma vista lateral do veículo, na qual serão dispostos os diversos componentes,
identificando-se seus pesos e distâncias até um datum.
A determinação da posição do centro de gravidade do veículo (XCG) será feita da seguinte
forma:
a) Cargas fixas:
𝑋𝐶𝐺 =∑ 𝑊𝑖𝑙𝑖𝑛𝑖=1
𝑊
W =∑𝑊𝑖
𝑛
𝑖=1
b) Carga variável:
𝑋𝐶𝐺𝑗 =∑ 𝑊𝑖𝑙𝑖𝑛𝑖=1
𝑊𝑗 𝑗 = 1,2,3, … , 𝑘
W𝑗 =∑𝑊𝑖
𝑚
𝑖=1

57
c) Carga total:
𝑋𝐶𝐺𝑗 =𝑋𝐶𝐺𝑊+𝑋𝐶𝐺𝑗𝑊𝑗
𝑊+𝑊𝑗 𝑗 = 1,2,3, … , 𝑘
3.5.8 Alinhamento do motor
Será elaborada uma tabela comparativa contendo os ângulos de down-thrust e side thrust
de diversos veículos WIG e hidroaviões, a fim de possibilitar a estimativa de um valor
adequado para o projeto.
3.5.9 Retrabalho da configuração externa
Após cumpridas todas as etapas anteriores, será criteriosamente verificada a coerência
das estimativas feitas e caso se identifique alguma incoerência, todas as estimativas
pertinentes serão refeitas, até se obter um sesultado consistente.
3.6 Outras estimativas relevantes
3.6.1 Estimativa da polar de arrasto no efeito solo e fora do efeito solo
Esta estimativa envolverá dois procedimentos distintos: estimar a polar de arrasto para o
veículo WIG fora do efeito solo e no em efeito solo. Para estimar a polar de arrasto do
veículo WIG, será utilizada a metodologia proposta por Pullin (1979) que prevê o cálculo
do Cl (coeficiente de sustentação) total da aeronave e do Cd (coeficiente de arrasto) para
cada elemento. Tanto para o veículo WIG no efeito solo ou fora do efeito solo, os cálculos
realizados serão os mesmos, exceto para cálculo do Cd da asa em efeito solo que utiliza
a formulação proposta por Wieselsberger.
3.6.2 Cálculo do coeficiente de sustentação
O coeficiente de sustentação utilizado para a estimativa da polar de arrasto será calculado
considerando o equilíbrio do veículo WIG na altitude de voo, conforme a seguinte
equação:
58
Cl =W
12 . ρ . V² . S
Onde:
Cl = Coeficiente de sustentação da aeronave;
W = Peso da aeronave;
ρ = Densidade do ar;
V= Velocidade da aeronave; e
S = Área alar da aeronave.
3.6.3 Estimativa do arrasto induzido para asa em efeito solo
Os coeficientes de arrasto, tanto para o veículo WIG voando no efeito solo como fora do
efeito solo, serão calculados parcialmente, para cada elemento aerodinâmico do veículo.
Estando o veículo WIG voando fora do efeito solo, todos os elementos serão estimados
conforme proposto por Pullin (1979), enquanto que para o voo no efeito solo, somente o
arrasto da asa será estimado de forma diferente, conforme a seguinte equação proposta
por Wieselsberger (1921) e que se baseia no fato de que, quando uma asa se aproxima do
solo, há uma diminuição da ‘resistência do vento’ enquanto que a sustentação aumenta,
tendo por consequencia um aumento da razão sustentação-arrasto (L/D) (MOSTACCIO,
2006):
CDi = (1 − σ) .S. CL²
π. b²
σ = 1−0,66 . h b⁄
1,05−3,7 . h b⁄
Onde:
σ - coeficiente de influência
hb⁄ - razão altitude-envergadura;
b - envergadura;
59
CDi - coeficiente de arrasto para asa em efeito solo;
CL - coeficiente de sustentação; e
S - área alar.
3.7 Análise dos resultados
Este trabalho, que tem por objetivo desenvolver um projeto de um veículo WIG até a sua
fase preliminar, gerará diversos gráficos, tabelas, memoriais de cálculo, programas e
desenhos, que constituirão todo o projeto pretendido e representará um grande desafio a
ser enfrentado, tendo em vista a pouca disponibilidade de informações específicas
referentes a veículos com asa em efeito solo.
Diversas análises serão feitas por meio de comparações de gráfícos, tabelas e desenhos,
visando obter os melhores resultados para os parâmetros envolvidos de forma a ter como
resultado final um projeto que expresse o estado da arte em termos de coerência e
equilíbrio.

60
4 REFERÊNCIAS BIBLIOGRÁFICAS
AMANTE, Rodrigo Huaman. Análise da Viabilidade Técnica e Econômica para a
Implantação de um Sistema de Transporte Hidroviário em Porto Alegre, Porto
Alegre: 2010. Trabalho de Graduação em Engenharia Mecânica. Escola de Engenharia,
Universidade Federal do Rio Grande do Sul.
ANDERSON, John David. Fundamentals of Aerodynamics. 5a ed. s.l: McGraw-Hill,
2005.
ANDERSON, John David. Aircraft Performance and Design. 1a ed. s.l: McGraw-Hill,
1999.
AZEVEDO, Guilherme. Alexeev e o Efeito Solo. Disponível em
http://www.guilhermeazevedo.com/naveg/naveg27.pdf. Acesso em 20/06/2014.
BABISTER, A. W. Aircraft Stability And Control. Pergamon Press, Oxford, UK, 1961.
BARROS, Claudio Pinto de, Uma Metodologia para o Desenvolvimento de Projetos
de Aeronaves Leves Subsônicas, Belo Horizonte: 2001. Tese de Doutorado em
Engenharia Mecânica, Universidade Federal de Minas Gerais.
BORTOLUS, Marcos Vinícius. Notas de Aula – Aerodinâmica Básica. Universidade
Federal de Minas Gerais, 2013.
BRASIL. Presidência da Republica, Secretaria de Portos, Agência Nacional de
Transportes Aquaviários. Caracterização da Oferta e da Demanda do Transporte
Fluvial de Passageiros na Região Amazônica, Brasília: 2013.
BRASIL. Presidência da Republica, Secretaria de Portos, Agência Nacional de
Transportes Aquaviários. Transporte de Cragas nas Hidrovias Brasileiras 2010 –
Hidrovia Solimões - Amazonas, Brasília: 2011.

61
CASTRO, Luiz Fernando Theodoro. Análise da Viabilidade Econômica do Projeto de
Veículos Comerciais do Tipo Asa em Efeito Solo – WIG “Wing in Ground Effect”,
Rio de Janeiro: 2011. Monografia de Pós-Graduação “Lato Sensu”, Universidade
Cândido Mendes.
CUTLER, John, LIBER, Jeremy. Understanding Aircraft Structures. 4a ed. Blackwell
Publishing, Oxford, UK, 2005.
CZYSZ, Paul A; YANG,Wei. WIG Craft Serves Niches Transportation Needs, World
Review of International Transportation Research, Vol. 3, No. 4, 2011.
DEFESA BR Tecnologia. Os Barcos Voadores. Disponível em
http://www.defesabr.com/tecno/asa/tecno barcos voaores.htm. Acesso em 20/06/2014.
DIAS, Cesar Augusto Costa. Projeto Preliminar de Veículos não tripulados com asa
em efeito solo (U-WIG). Belo Horizonte: 2011. Trabalho de Graduação em Engenharia
Mecânica. Escola de Engenharia, Universidade Federal de Minas Gerais.
HALLORAN, M, O’MEARA, S. Wing in Ground Effect Craft Review, DSTO
Aeronautical and Maritime Research Laboratory, Australia, 1999.
ISCOLD, Paulo Henriques. Notas de Aula – Estimativa de Carga Alar e Potência.
Universidade Federal de Minas Gerais, 2014.
MASKALIK, A. I. and SINITSYN D. N. The Frist Commercial Ekranoplan
“Amphistar” and Prospects for Development of Passenger Ekranoplans.
Amsterdam, Netherland: 1998. Paper for RTO AVT Symposium on “Fluid Dynamics
Problems of Vehicles Operating near or in the Air-Sea Interface”
MOSTACCIO, Jason T. Experimental Investigation of the Aerodynamic Ground
Effect of a Tailless Lambda-Shaped UCAV with Wing Flaps. Ohio, USA, 2006.
Trabalho de Mestrado em Engenharia Aeronáutica. Departmente of the Air Force. Air
Force Institute of Technology.

62
PULLIN, D. Aerodinâmica do Avião - Desempenho. Belo Horizonte: Cid Mc Graw e
Miguel Hill, 1979.
RODRIGUES, Luiz Eduardo Miranda J. Introdução ao Projeto de Aeronaves - Aula
11 – Distribuição de Sustentação, Arrasto e Efeito Solo. São Paulo: Instituto Federal
de Educação, Ciência e Tecnologia, Taperá Aerodesign.
TAYLOR, Graham K. Market Focused Design Strategy Wing-In-Ground Vehicles;
Viable Transport System or Flight of Fancy. London, England: 1997. Paper for Wing-
In-Ground Effect Conference.
TAYLOR, Graham K. Wise or Otherwise? The Dream or Reality of Commercial
Wing in Ground Effect Vehicles. St. Petersburg, Russia: 2000. Paper for the GEM 2000
International Conference.
TAYLOR, Graham K. Commercial Dynamics: How to Make out of Wing. London,
England: 2009
TAYLOR, Graham K. Are You Missing the Boat ? The Ekranoplan in the 21ST
Century – Ites Possibilities and Limitations. Nice, France: 2002. Paper for the 18th Fast
Ferry Conference.
TAYLOR, Graham K. Turning Seaways into Freeways, the 90 Knots Zero-Wash
Ferry. Sydney, Australia: 2004. Paper for the Pacific 2004 International Maritme
Conference.
TAYLOR, Graham K. WIG – What Are You Waiting For. St. Petersburg, Russia:
2005. Paper for the International Conference on Fast Sea Transportation.
TAYLOR, Graham K. Innovation Dying of Apathy: WIG – A Case Study. London,
England: 2006. Paper for the RINA International Conference.

63
TORENBEEK, Egbert. Synthesis of Subsonic Airplane Design. Delft University Press,
1976.
ULTSCH, Ricardo Luiz. Notas de Aula – Estabilidade e Controle de Aeronaves. Universidade
Federal de Minas Gerais, 2014.
ZAITSEV, Yuri. Transporte do Futuro. Disponível em
http://port.pravda.ru/news/unknown/11-09-2005/8563-0/. Acesso em 20/06/2014.
WIESELSBERGER, C. Wing Resistance Near the Ground, NACA TM 77, 1922.

64
ANEXO 2.1
Tabela 2.3 – Rotas da hidrovia Solimões-Amazonas com distâncias menores ou iguais a
200 Km - Fonte: ANTAQ, (2013)
Km Milha
Abaetetuba - Limoeiro do Ajuru 92 49,7
Abaetetuba - Muana 65 35,1
Afua - Macapa 83 44,8
Alenquer - Curua 46 24,8
Alenquer - Santarem 93 50,2
Arapari - Belem 16 8,6
Aveiro - Itaituba 115 62,1
Aveiro - Santarem 135 72,9
Bagre - Breves 40 21,6
Baião - Tucurui 80 43,2
Barcarena - Belem 19 10,3
Belem - Breves 205 110,7
Belem - Cachoeira do Arari 50 27,0
Belem - Cafezal 22 11,9
Belem - Camara 85 45,9
Belem - Cameta 180 97,2
Belem - Curralinho 170 91,8
Belem - Loureiro do Ajuru 130 70,2
Belem -Muana 98 52,9
Belem - Oeiras do Para 185 99,9
Belem - Ponta de Pedras 62 33,5
Belem - São Sebastião da Boa Vista 135 72,9
Breves - Melgaço 50 27,0
Breves - Portel 120 64,8
Cometa - Mocajuba 38 20,5
Chaves - Macapa 132 71,3
Faro - Parintins 116 62,6
Gurupa - Santana 173 93,4
Juruti - Juruti Velho 59 31,9
Juruti - Obidos 77 41,6
Juruti - Oriximina 100 54,0
Juruti - Santarem 154 83,2
Juruti - Parintins 91 49,1
Mocajuba - Tucurui 149 80,5
Monte Alegre - Santarem 110 59,4
Obidos - Santarem 120 64,8
Oriximina - Porto Trombetas 72 38,9
Oriximina - Santarem 144 77,8
Porto Trombetas - Santarem 216 116,6
Prainha - Santarem 178 96,1
Santarem - Santana do Tapara 165 89,1
Terra Santa - Parintins 75 40,5
Anamã - Manacapuru 104 56,2
Bailique - Santana do Macapa 157 84,8
Barreirinha - Parintins 77 41,6
Caapiranga - Manacapuru 84 45,4
Carreiro da Varzea - Manaus 32 17,3
Caviana - Macapa 80 43,2
Coari - Codajas 136 73,4
Coari - Tefe 210 113,4
Itacoatiara - Manaus 211 113,9
Janauaca - Manaus 16 8,6
Manaquiri - Manaus 79 42,7
Manaus - Novo Airão 125 67,5
Manaus - Parana da Eva 75 40,5
Manaus - Rio Preto da Eva 119 64,3
Manaus - Tabocal 98 52,9
Maues - Parintins 168 90,7
Nhamunda - Parintins 185 99,9
Parintins - Uruçara 125 67,5
Tefe - Uarini 56 30,2
Laranjal do Jari - Santana 192 103,7
Manaus - Caviana 85 45,9
DistanciaLinha/trecho

65
ANEXO 2.2
Figura 2.29 – Renda familiar dos passageiros que utilizam a hidrovia Solimões-
Amazonas - Fonte: ANTAQ, (2013)

66
ANEXO 2.3
Tabela 2.4 – Estimativa de receitas e subsídios governamentais para uma propulsão a
Diesel - Fonte: ANTAQ, (2013)
Estimativa de subsidios Governamentais Estimativa de subsidios Governamentais
Diaria Mensal Anual Anual Diaria Mensal Anual Anual
[R$] [R$] [R$] [R$] [R$] [R$] [R$] [R$]
Abaetetuba - Limoeiro do Ajuru 7.077,69 212.330,63 2.547.967,56 2.066.287,56 4.261,83 127.855,00 1.534.260,04 1.052.580,04
Abaetetuba - Muana 4.928,29 147.848,56 1.774.182,69 1.299.462,69 2.967,57 89.027,09 1.068.325,06 593.605,06
Afua - Macapa 25.674,84 770.245,33 9.242.944,00 6.700.894,00 15.460,12 463.803,64 5.565.643,70 3.023.593,70
Alenquer - Curua 3.824,49 114.734,71 1.376.816,55 1.038.452,55 2.302,92 69.087,57 829.050,83 490.686,83
Alenquer - Santarem 29.648,71 889.461,39 10.673.536,62 8.378.044,62 17.852,99 535.589,65 6.427.075,82 4.131.583,82
Arapari - Belem 76.292,63 2.288.778,93 27.465.347,17 19.105.935,97 45.939,65 1.378.189,46 16.538.273,56 8.178.862,36
Aveiro - Itaituba 7.035,37 211.061,09 2.532.733,08 2.053.933,08 4.236,35 127.090,55 1.525.086,58 1.046.286,58
Aveiro - Santarem 4.502,04 135.061,16 1.620.733,90 1.255.333,90 2.710,90 81.327,15 975.925,79 610.525,79
Bagre - Breves 1.545,53 46.365,82 556.389,87 374.949,87 930,64 27.919,21 335.030,46 153.590,46
Baião - Tucurui 8.402,27 252.068,16 3.024.817,97 2.367.217,97 5.059,43 151.782,98 1.821.395,77 1.163.795,77
Barcarena - Belem 21.572,95 647.188,46 7.766.261,54 6.220.045,34 12.990,16 389.704,88 4.676.458,56 3.130.242,36
Belem - Breves 101.265,59 3.037.967,60 36.455.611,23 27.176.971,23 60.977,13 1.829.313,83 21.951.765,90 12.673.125,90
Belem - Cachoeira do Arari 8.509,60 255.288,01 3.063.456,16 1.997.856,16 5.124,06 153.721,81 1.844.661,77 779.061,77
Belem - Cafezal 3.966,85 119.005,61 1.428.067,35 1.182.518,55 2.388,64 71.659,29 859.911,52 614.362,72
Belem - Camara 121.109,82 3.633.294,65 43.602.761,38 36.893.642,98 72.926,34 2.187.790,33 26.255.426,21 19.546.307,81
Belem - Cameta 16.428,13 492.843,86 5.914.126,30 5.056.966,30 9.892,21 296.766,19 3.561.194,33 2.704.034,33
Belem - Curralinho 30.261,98 907.859,37 10.894.312,46 8.943.832,46 18.222,27 546.668,01 6.560.016,10 4.609.536,10
Belem - Loureiro do Ajuru 20.221,42 606.642,52 7.279.710,18 6.062.310,18 12.176,34 365.290,12 4.383.481,40 3.166.081,40
Belem -Muana 22.940,89 688.226,58 8.258.719,01 6.499.903,01 13.813,87 414.416,01 4.972.992,09 3.214.176,09
Belem - Oeiras do Para 21.905,13 657.153,89 7.885.846,72 6.032.446,72 13.190,19 395.705,57 4.748.466,84 2.895.066,84
Belem - Ponta de Pedras 31.962,29 958.868,68 11.506.424,12 9.731.156,12 19.246,11 577.383,29 6.928.599,47 5.153.331,47
Belem - São Sebastião da Boa Vista 44.202,77 1.326.083,23 15.912.998,81 13.350.398,81 26.616,72 798.501,73 9.582.020,79 7.019.420,79
Breves - Melgaço 2.779,04 83.371,09 1.000.453,02 739.453,02 1.673,40 50.201,94 602.423,33 341.423,33
Breves - Portel 14.857,30 445.719,07 5.348.628,86 3.992.028,86 8.946,33 268.389,98 3.220.679,74 1.864.079,74
Cometa - Mocajuba 11.600,35 348.010,46 4.176.125,51 3.411.581,51 6.985,16 209.554,69 2.514.656,22 1.750.112,22
Chaves - Macapa 5.231,79 156.953,83 1.883.445,96 1.138.965,96 3.150,33 94.509,83 1.134.118,00 389.638,00
Faro - Parintins 5.775,95 173.278,46 2.079.341,56 1.416.851,56 3.477,99 104.339,72 1.252.076,64 589.586,64
Gurupa - Santana 6.293,16 188.794,69 2.265.536,22 1.502.540,22 3.789,43 113.682,82 1.364.193,85 601.197,85
Juruti - Juruti Velho 3.019,18 90.575,50 1.086.905,96 766.505,96 1.818,00 54.540,08 654.481,01 334.081,01
Juruti - Obidos 6.381,20 191.436,11 2.297.233,33 1.648.633,33 3.842,45 115.273,36 1.383.280,29 734.680,29
Juruti - Oriximina 6.060,22 181.806,46 2.181.677,56 1.802.237,56 3.649,16 109.474,86 1.313.698,32 934.258,32
Juruti - Santarem 40.335,58 1.210.067,48 14.520.809,78 11.076.977,78 24.288,09 728.642,78 8.743.713,41 5.299.881,41
Juruti - Parintins 6.672,87 200.186,05 2.402.232,60 1.713.552,60 4.018,07 120.542,14 1.446.505,65 757.825,65
Mocajuba - Tucurui 5.225,93 156.777,89 1.881.334,66 1.551.934,66 3.146,80 94.403,89 1.132.846,68 803.446,68
Monte Alegre - Santarem 27.356,45 820.693,46 9.848.321,57 7.512.641,57 16.472,70 494.181,01 5.930.172,13 3.594.492,13
Obidos - Santarem 55.271,00 1.658.130,14 19.897.561,71 16.148.569,71 33.281,47 998.443,96 11.981.327,48 8.232.335,48
Oriximina - Porto Trombetas 11.930,92 357.927,59 4.295.131,12 2.998.231,12 7.184,21 215.526,29 2.586.315,51 1.289.415,51
Oriximina - Santarem 46.846,04 1.405.381,21 16.864.574,52 12.485.282,52 28.208,37 846.251,05 10.155.012,62 5.775.720,62
Porto Trombetas - Santarem 25.517,76 765.532,85 9.186.394,25 7.078.306,25 15.365,53 460.966,02 5.531.592,24 3.423.504,24
Prainha - Santarem 13.543,68 406.310,42 4.875.725,06 4.042.025,06 8.155,33 244.660,04 2.935.920,47 2.102.220,47
Santarem - Santana do Tapara 25.855,39 775.661,58 9.307.938,95 8.964.546,95 15.568,83 467.065,04 5.604.780,44 5.261.388,44
Terra Santa - Parintins 4.890,15 146.704,36 1.760.452,34 1.148.092,34 2.944,60 88.338,11 1.060.057,32 447.697,32
Anamã - Manacapuru 4.249,59 127.487,61 1.529.851,37 1.146.091,37 2.558,89 76.766,74 921.200,82 537.440,82
Bailique - Santana do Macapa 34.567,68 1.037.030,51 12.444.366,08 10.238.670,08 20.814,95 624.448,48 7.493.381,72 5.287.685,72
Barreirinha - Parintins 6.519,93 195.597,77 2.347.173,19 1.353.123,19 3.925,98 117.779,30 1.413.351,60 419.301,60
Caapiranga - Manacapuru 5.866,56 175.996,94 2.111.963,23 1.565.363,23 3.532,55 105.976,65 1.271.719,80 725.119,80
Carreiro da Varzea - Manaus 22.805,12 684.153,48 8.209.841,71 4.640.177,71 13.732,11 411.963,38 4.943.560,60 1.373.896,60
Caviana - Macapa 2.634,14 79.024,29 948.291,47 690.591,47 1.586,15 47.584,52 571.014,22 313.314,22
Coari - Codajas 3.696,08 110.882,39 1.330.588,72 1.075.348,72 2.225,60 66.767,89 801.214,71 545.974,71
Coari - Tefe 5.497,89 164.936,76 1.979.241,06 1.733.361,06 3.310,56 99.316,76 1.191.801,07 945.921,07
Itacoatiara - Manaus 22.622,01 678.660,18 8.143.922,20 7.103.438,20 13.621,85 408.655,59 4.903.867,13 3.863.383,13
Janauaca - Manaus 6.429,27 192.878,14 2.314.537,72 113.107,72 3.871,39 116.141,68 1.393.700,13 807.729,87-
Manaquiri - Manaus 15.201,52 456.045,59 5.472.547,04 3.966.547,04 9.153,60 274.608,10 3.295.297,14 1.789.297,14
Manaus - Novo Airão 7.862,76 235.882,67 2.830.592,09 2.229.986,09 4.734,56 142.036,88 1.704.442,55 1.103.836,55
Manaus - Parana da Eva 8.730,97 261.928,95 3.143.147,41 2.232.047,41 5.257,36 157.720,66 1.892.647,90 981.547,90
Manaus - Rio Preto da Eva 4.306,01 129.180,33 1.550.164,01 1.097.044,01 2.592,87 77.786,01 933.432,09 480.312,09
Manaus - Tabocal 6.250,80 187.523,99 2.250.287,94 1.651.247,94 3.763,92 112.917,67 1.355.012,09 755.972,09
Maues - Parintins 20.555,51 616.665,44 7.399.985,33 5.484.785,33 12.377,51 371.325,43 4.455.905,15 2.540.705,15
Nhamunda - Parintins 5.587,97 167.639,13 2.011.669,54 1.538.869,54 3.364,80 100.943,99 1.211.327,90 738.527,90
Parintins - Uruçara 5.879,10 176.372,97 2.116.475,62 1.564.325,62 3.540,10 106.203,08 1.274.436,93 722.286,93
Tefe - Uarini 2.655,30 79.659,06 955.908,72 510.588,72 1.598,89 47.966,75 575.600,95 130.280,95
Laranjal do Jari - Santana 11.503,14 345.094,20 4.141.130,35 3.015.770,35 6.926,62 207.798,66 2.493.583,87 1.368.223,87
Manaus - Caviana 60.054,78 1.801.643,40 21.619.720,85 16.090.120,85 36.162,02 1.084.860,54 13.018.326,53 7.488.726,53
1.202.199,36 36.065.980,77 432.794.994,87 333.968.124,27 723.904,99 21.717.149,71 260.607.738,85 161.780.868,25
% do PIB = 0,0069% % do PIB = 0,0033%
Linha/trecho
Estimativas de receita Estimativas de receita
Propulsão a Diesel Propulsão a Jato