Embed Size (px)
Citation preview
________________________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Julio Julinho Marcondes de
Moura”
TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
HUGO COLOMBO CAIXETA
WELLYNTON COLOMBO CAIXETA
CADEIRA DE RODAS AUTOMATIZADA SOBRE ESTEIRA
COMANDADA POR VOZ
GARÇA- SP
2017
________________________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Julio Julinho Marcondes de
Moura”
TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
HUGO COLOMBO CAIXETA
WELLYNTON COLOMBO CAIXETA
CADEIRA DE RODAS AUTOMATIZADA SOBRE ESTEIRA
COMANDADA POR VOZ
Artigo Científico apresentado à Faculdade de Tecnologia
de Garça-Fatec, como requisito para conclusão do curso
de Tecnologia em Mecatrônica Industrial. Data da
Aprovação: ____/____/____
____________________________________
Prof. Dr. Edio Roberto Manfio Fatec Garça
____________________________________
____________________________________
ÍNDICE
1. INTRODUÇÃO ..................................................................................................................05
2. OBJETIVOS .......................................................................................................................06
2.1 Geral ...................................................................................................................................06
2.2 Específicos .........................................................................................................................06
3. PROCEDIMENTOS METODOLOGICOS ....................................................................07
3.1 Conceitos e características do microcontrolador (Arduino) ..........................................07
3.2 Visual Studio base de programção e Microsoft Speech ..................................................10
3.3 Características da Ponte H L298N ..................................................................................11
4 PROJETO .................................................................................................................................................14
4.1 Sensor Ultrassônico ........................................................................................................14
4.2 Controle Joystick .............................................................................................................14
4.3 Motor Elétrico ..................................................................................................................15
4.4 Características de funcionamento e mecânica .................................................................15
5. CONSIDERAÇÕES FINAIS.............................................................................................19
REFERÊNCIAS .....................................................................................................................20

CADEIRA DE RODAS AUTOMATIZADA SOBRE ESTEIRA COMANDADA POR
VOZ
Hugo Colombo Caixeta¹
Wellynton Colombo Caixeta¹
Prof. Dr. Edio Roberto Manfio1
Resumo – Analisando o dia – a – dia de pessoas que necessitam de cadeiras de rodas
convencionais pode-se observar a dificuldade de locomoção em determinados obstáculos
como calçadas sem rampas, escadas, terrenos acidentados onde não tem uma segurança para
se locomover utilizando uma cadeira de rodas convencional tornando assim um
constrangimento para estes usuários. Atualmente já é possível encontrar exemplares de
cadeiras de rodas automatizadas por controles e comandos inteligentes mais com um grande
custo tornando - se inacessíveis a muitos usuários. O objetivo deste projeto é desenvolver um
sistema de baixo custo para a automatização com comandos de voz para cadeira de rodas.
Este projeto é relevante, pois a automatização para esta aplicação permitirá torna-la mais
segura para o usuário além de possibilitar o comando de voz para pessoas com uma
deficiência maior. A metodologia utilizada é o desenvolvimento experimental de um protótipo
para verificar a eficácia do projeto.
Palavras-chave: Automatização. Cadeira de rodas automatizada. Comandos de voz.
Abstract - Aiming at the daily routine of wheelchair users we can see a difficulty in
locomotion in certain everyday obstacles such as sidewalks without ramps, escadas, terrain
where there is no safety to walk using a conventional wheelchair Thus making it a great
constraint for these users. Today we can find automated wheelchairs by intelligent controls
and controls with a great cost both in the market and its manufacturing and embedded
technology making it not so accessible to all who need it.
The automation of a chair for this project is to make them safer for the user and a greater
control over it by making use of the technology by voice control and manual controls, reduce
costs by generating a more accessible prototype but with an equally functional technology.
Keywords: Automation, wheelchair automated, voice commands
1 Alunos do curso de Tecnologia em Mecatrônica Industrial Fatec - Garça
² Docente da Fatec - Garça
1. INTRODUÇÃO
Pessoas com necessidades especiais sofrem com problemas de acessibilidade em todo
o mundo. Hoje ainda há muitos locais que dificultam a vida das pessoas que precisam das
cadeiras de roda para se locomover como escadas e calçadas sem rampas de acesso e muitos
outros exemplos similares, um levantamento feito pelo Instituto Brasileiro de Geografia e
Estatística (IBGE) mostra que no Brasil somente 4,7% das vias urbanas contam com rampas
para cadeirantes. Pensando nesses problemas foi elaborado o tema para o projeto de uma
Cadeira de Rodas que poderia ser capaz de subir e descer escadas ou também degraus e outros
obstáculos, esse tema foi escolhido pois se trata de um problema social atual e por agregar os
conhecimentos adquiridos no curso de Tecnologia em Mecatrônica Industrial para a
montagem da cadeira o projeto também está fundamentado através da leitura de fontes atuais
e importantes onde adquirimos mais conhecimento sobre robótica e automação que será usado
no projeto.
O tema escolhido para a elaboração do projeto de pesquisa encontra – se dentro do
curso de Tecnologia em Mecatrônica Industrial fazendo o uso da mecânica, automação, e
eletrônica.
Segundo Ottoni (2010, p.1), robótica é um ramo da tecnologia que engloba mecânica,
eletrônica e computação, que atualmente trata de sistemas compostos por máquinas e partes
mecânicas automáticas e controladas por circuitos integrados, tornando sistemas mecânicos
motorizados, controlados manualmente ou automaticamente por circuitos elétricos.
Para Bayer, Eckhardt, Machado, (2011, p.11), a palavra Automação, no latim Automatus,
que significa “mover–se por si’’ significa, portanto, dotar um equipamento de meios que lhe
permitam realizar seu controle automaticamente, sem a intervenção humana.
Segundo Thomazini, Daniel, (2010, p.17), sensor é o termo empregado para designar
dispositivos sensíveis a alguma forma de energia do ambiente que pode ser luminosa, térmica,
cinética, relacionando informações sobre uma grandeza que que precisa ser medida, como
temperatura, pressão, velocidade, corrente, aceleração, posição, etc.
Conforme Rosário João, Maurício, (2005, p.55), um sensor pode ser definido como um
transdutor que altera a sua característica física interna devido a um fenômeno físico externo –
presença ou não de luz, som, gás, campo elétrico campo magnético etc.
Conforme Rosário, João, Maurício, (2005, p.11), o ponto importante do conceito e da
filosofia da mecatrônica é a combinação concorrente da mecânica, da eletrônica e da
computação, com vistas a obter, no produto características como flexibilidade e inteligência e,

no projeto, sistemas mecânicos mais simples, com custos reduzidos e facilidade para
introduzir modificações.
2. OBJETIVOS
2.1 Geral
O objetivo geral do projeto foi desenvolver uma cadeira de rodas totalmente
automatizada e comandada por voz para que o cadeirante vença as limitações impostas pelo
trajeto, visando a melhora da sua qualidade de vida.
O projeto conta com a construção de uma cadeira de rodas que seja capaz de subir e
descer escadas e degraus ou terrenos acidentados utilizando uma esteira lagarta como um
sistema de rodas que realizara o movimento de subida e descida na escada ou em outros
obstáculos, será desenvolvido tambem um programa que possibilitara utlizar a cadeira atraves
de comandos por voz na linguagem em português, visando assim acessibilidade para qualquer
grau de portadores de necessidades especiais.
A missão do projeto é fazer com que o usuario portador de nescessidades especiais se
sinta seguro durante a execução dos movimentos, além disso tentar reduzir os custos do
projeto assim tornando-o um produto acessivel para a maioria dos usuarios portadores de
nescessidades especiais.
2.2 Específicos
Os objetivos específicos incluem automatizar uma cadeira de rodas utilizando
Microcontroladores programáveis, (Arduino), que ira utilizar sensores ultrassônicos para
detectar obstáculos à frente (guias, escadas,degraus e etc), também contará com a utilização
dos programas Visual Studio para elaborar o software de comandos por voz e o Microsoft
Seepch que fará o reconhecimento do comando dado pelo usuario, o sistema mecânico
contará com motores de corrente continua, que farão a locomoção da cadeira, quando estiver
realizando o movimento de subida ou decida do obstáculo, contará tambem com um sistema
de inclinação do assento atraves de um motor DC diferente dos que farão a locomoção da
cadeira, assim dando mais segurança para o usuário.
3. PROCEDIMENTOS METODOLÓGICOS
Foram realizadas pesquisas na área da robótica e mecatrônica, para possibilitar uma
solução para problemas de locomoção que muitos deficientes fisicos apresentam.
Então a partir da ideia de resolver esse problema, foi pesquisada uma solução de um
projeto de uma cadeira de rodas que possa possibilitar a pessoa vencer os obstáculos que
muitos centros urbanos aprensentam, como por exemplo, subir e descer escadas e guias de
calçadas sem a ajuda de alguem ou do proprio usuário, fazendo somente uso de um sistema
inteligente que faz com que a pessoa (cadeirante) , fique segura enquanto se realiza o processo
sem que o haja algum risco para o usuário. O protótipo funcionara a base de sensores e de um
sistema de programação do Arduino, e será desenvolvido tambem um sistema mecânico
utilizando motores de passo e uma esteira lagarta para a movimentação da cadeira,
funcionando simultaneamente com os comandos do Microcontrolador (Arduino) e sobre os
comandos de voz.
3.1 Conceitos e características do microcontrolador (Arduino)
Alimentação da placa pode ser feita atras de portas USB ou por uma fonte de alimentação
externa, conforme a figura 1.
Figura 1 – Entradas para alimentação do Arduino.
Fonte: SOUZA (2013)
A alimentação externa é feita através do conector p4 com positivo no centro, onde o
valor de tensão da fonte externa deve estar entre os limites 6 volts a 2 volts, porém se
alimentada com uma tensão abaixo de 7 volts., a tensão de funcionamento da placa, que
no Arduino Uno é 5 volts, pode ficar instável e quando alimentada com tensão acima de
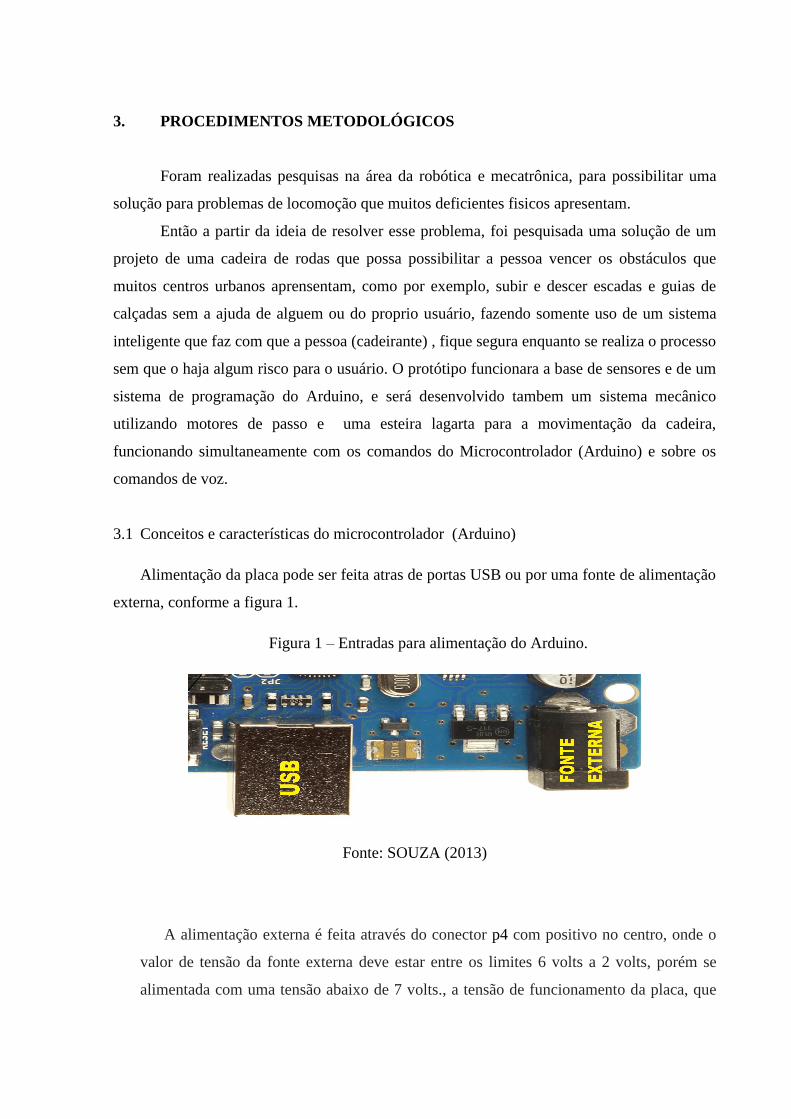
12 volts, o regulador de tensão da placa pode sobreaquecer e danificar a placa. Dessa
forma, é recomendado para tensões de fonte externa valores de 7 volts a 12 volts. A
Figura 2 exibe conectores de alimentação para conexão de shields e módulos na placa
Arduino.
Figura 2 – Conectores para alimentação.
Fonte: SOUZA (2013)
IOREF - Fornece uma tensão de referência para que shields possam selecionar o tipo de
interface apropriada, dessa forma shields que funcionam com a placas Arduino que são
alimentadas com 3,3 volts podem se adaptar para ser utilizados em 5 volts e vice-versa.
RESET - pino conectado a pino de RESET do microcontrolador. Pode ser utilizado para
um reset externo da placa Arduino.
3,3 volts. - Fornece tensão de 3,3 volts para alimentação de shield e módulos externos.
Corrente máxima de 50 mA.
5 volts - Fornece tensão de 5 volts para alimentação de shields e circuitos externos.
GND - pinos de referência, terra
VIN - pino para alimentar a placa através de shield ou bateria externa. Quando a placa é
alimentada através do conector Jack, a tensão da fonte estará nesse pino.
O componente principal da placa Arduino UNO é o microcontrolador ATMEL
ATMEGA328, um dispositivo de 8 bits da família AVR com arquitetura RISC avançada
e com encapsulamento DIP28. Ele conta com 32 KB de Flash (mas 512 Bytes são
utilizados para o bootloader), 2 KB de RAM e 1 KB de EEPROM. Pode operar a até 20
MHz, porém na placa Arduino UNO opera em 16 MHz, valor do cristal externo que está
conectado aos pinos 9 e 10 do microcontrolador.
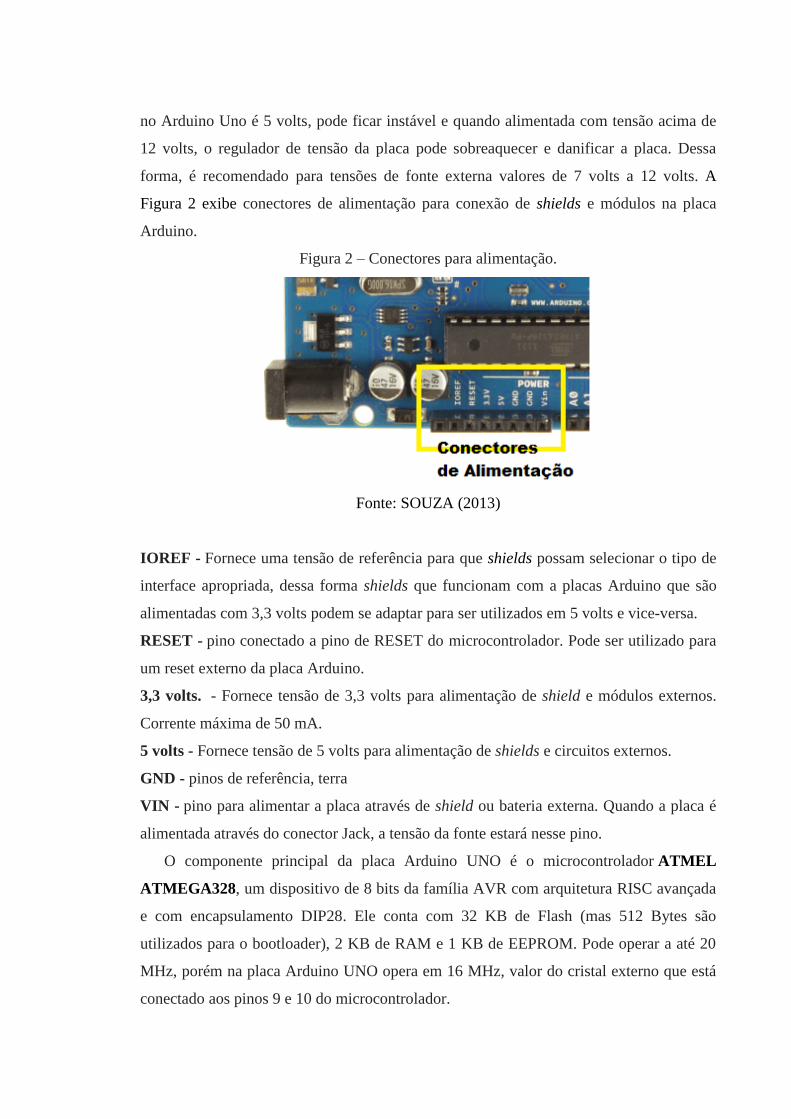
O Microcontrolador Arduino Uno Rev 3 possui 28 pinos, sendo que 23 desses podem
ser utilizados como I/O.
Figura 3 – Pinagem ATmega328 usado no Arduino UNO.
Fonte: SOUZA (2013)
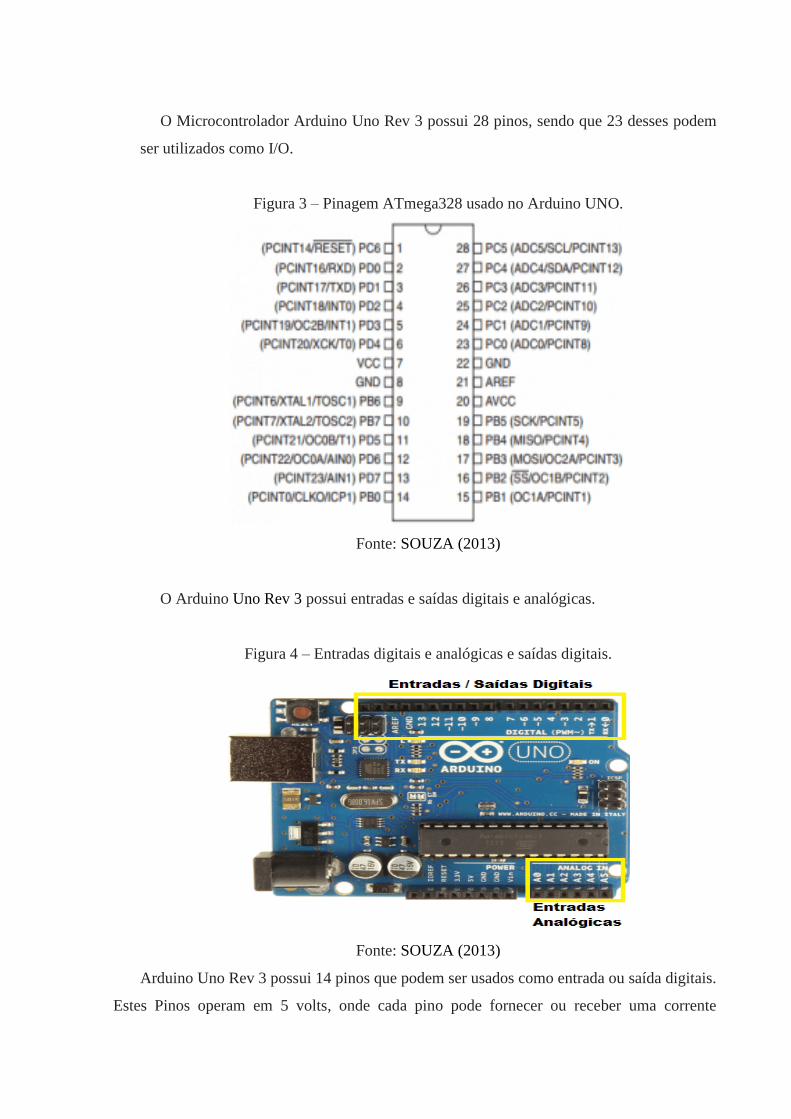
O Arduino Uno Rev 3 possui entradas e saídas digitais e analógicas.
Figura 4 – Entradas digitais e analógicas e saídas digitais.
Fonte: SOUZA (2013)
Arduino Uno Rev 3 possui 14 pinos que podem ser usados como entrada ou saída digitais.
Estes Pinos operam em 5 volts, onde cada pino pode fornecer ou receber uma corrente
máxima de 40 mili Amperes. Cada pino possui resistor de pull-up interno que pode ser
habilitado por software. Alguns desses pinos possuem funções especiais:
- PWM: 3,5,6,9,10 e 11 podem ser usados como saídas PWM de 8 bits através da
função analogWrite ();
- Comunicação serial: 0 e 1 podem ser utilizados para comunicação serial. Deve-se
observar que estes pinos são ligados ao microcontrolador responsável pela comunicação
USB com o PC;
- Interrupção externa: 2 e 3. Estes pinos podem ser configurados para gera uma
interrupção externa, através da função attachInterrupt ().
A placa Arduino Uno Rev 3 é programada através da comunicação serial, pois o
microcontrolador vem programado com o bootloader. Dessa forma não há a necessidade de
um programador para fazer a gravação (ou upload) do binário na placa. A comunicação é feita
através do protocolo STK500.
A programação do microcontrolador também pode ser feita através do conector ICSP
(in-circuit serial programming) utilizando um programador ATMEL.
3.2 Visual Studio base de programção e Microsoft Speech
Microsoft Visual Studio é um ambiente de desenvolvimento integrado (IDE)
da Microsoft para desenvolvimento de software especialmente dedicado ao .NET
Framework e às linguagens Visual Basic (VB), C, C++, C# (C Sharp) e J# (J Sharp). Também
é um produto de desenvolvimento na área web, usando a plataforma do ASP.NET,
como websites, aplicativos web, serviços web e aplicativos móveis. As linguagens com maior
frequência nessa plataforma são: VB.NET (Visual Basic.Net) e o C♯ (lê-se C Sharp).
A Speech Application Programming Interface ou SAPI é uma API desenvolvida pela
Microsoft para permitir o uso de reconhecimento de voz e síntese de voz em aplicativos
Windows. No projeto será utilizado para dar comandos os motores fazendo uso através do
Visual Studio com conexão ao Arduino.
3.3 Características da Ponte H L298N
Este Driver Ponte H será utilizada para controlar a velocidade através dos pinos PWM
do Arduino Uno Rev 3 e também o sentido de rotação dos motores elétricos. A Figura 05
exibe as principais Conexões e barramentos da Ponte H. Eis algumas das Especificações da
Ponte H L298N:
Tensão de operação é de 4 a 35 volts;
Com ela é possível controlar 2 motores DC (corrente continua) ou um motor de passo;
Corrente de operação máxima é de 2 Amperes por canal ou 4 Amperes max;
Tensão lógica é de 5 volts;
Corrente lógica 0 a 36 mili Amper;
Limites de temperatura é de -20 a 135° C;
Potência máxima 25 Watts;
Dimensões são 43 x 43 x 27mm;
Peso de 30g;
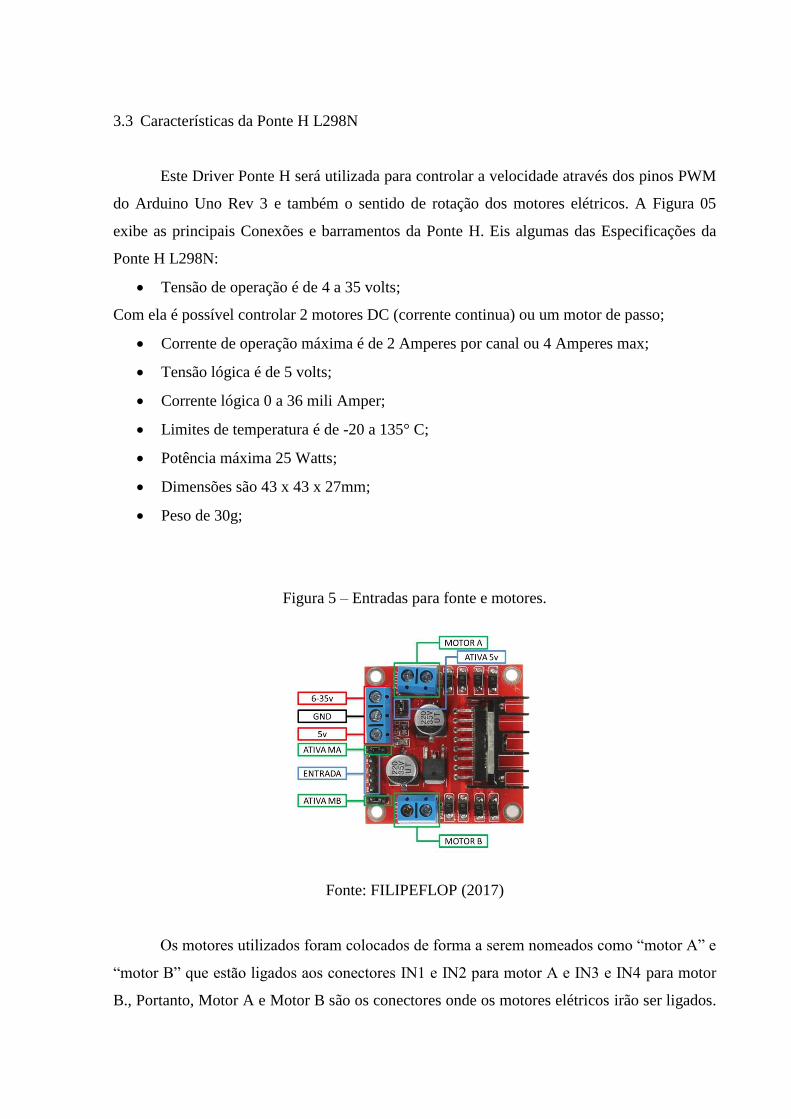
Figura 5 – Entradas para fonte e motores.
Fonte: FILIPEFLOP (2017)
Os motores utilizados foram colocados de forma a serem nomeados como “motor A” e
“motor B” que estão ligados aos conectores IN1 e IN2 para motor A e IN3 e IN4 para motor
B., Portanto, Motor A e Motor B são os conectores onde os motores elétricos irão ser ligados.
Ativa MA e Ativa MB são os pinos onde pode ser feito o controle PWM para os motores A e
B. Para utilizar esses pinos para controle de velocidade dos motores é necessário retirar os
jumpers, pois eles estão ligados em 5 volts. Ativa 5 volts e 5 volts: o Driver Ponte L298N
possui um regulador de tensão integrado. Quando a ponte H está operando entre 6 a 35 volts o
regulador disponibiliza uma saída regulada de +5 volts no pino 5 volts para um uso externo
com o jumper podendo alimentar algum outro componente eletrônico. Não se pode alimentar
o pino 5 volts com +5 volts do Arduino se estiver controlando um motor de 6-35 volts com o
jumper conectado pois poderá danificar a placa. O pino de 5 volts só poderá ser usado como
uma entrada caso estiver controlando um motor de 4 -5, 5 volts sem o jumper somente assim
será usada a saída +5 volts do Arduino. As opções 6-35 volts e GND é onde vai conectada a
fonte de alimentação externa para controlar o motor DC que opera entre 6-35 volts, o conector
GND que é o neutro. A Entrada corresponde ao barramento composto por IN1, IN2, IN3, IN4
onde estes pinos são responsáveis pela rotação do Motor A usando o IN1 e IN2, e Motor B
IN3 e IN4.
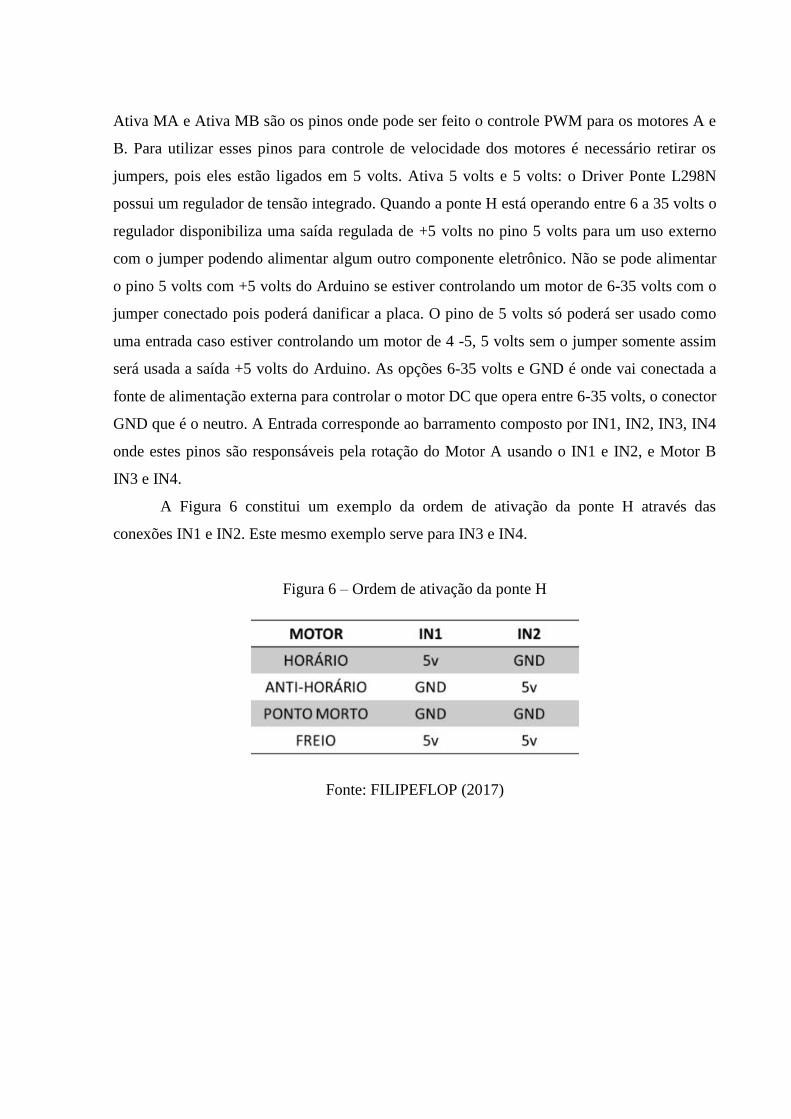
A Figura 6 constitui um exemplo da ordem de ativação da ponte H através das
conexões IN1 e IN2. Este mesmo exemplo serve para IN3 e IN4.
Figura 6 – Ordem de ativação da ponte H
Fonte: FILIPEFLOP (2017)
4. PROJETO
4.1 Sensor Ultrassônico
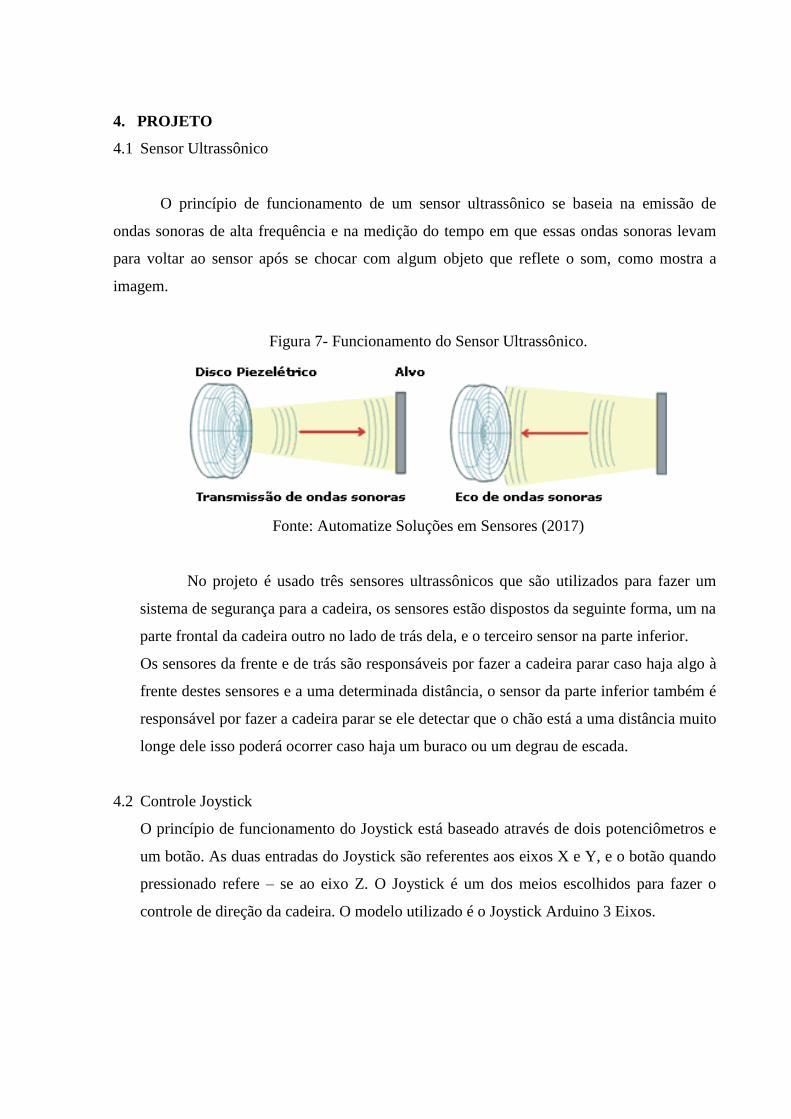
O princípio de funcionamento de um sensor ultrassônico se baseia na emissão de
ondas sonoras de alta frequência e na medição do tempo em que essas ondas sonoras levam
para voltar ao sensor após se chocar com algum objeto que reflete o som, como mostra a
imagem.
Figura 7- Funcionamento do Sensor Ultrassônico.
Fonte: Automatize Soluções em Sensores (2017)
No projeto é usado três sensores ultrassônicos que são utilizados para fazer um
sistema de segurança para a cadeira, os sensores estão dispostos da seguinte forma, um na
parte frontal da cadeira outro no lado de trás dela, e o terceiro sensor na parte inferior.
Os sensores da frente e de trás são responsáveis por fazer a cadeira parar caso haja algo à
frente destes sensores e a uma determinada distância, o sensor da parte inferior também é
responsável por fazer a cadeira parar se ele detectar que o chão está a uma distância muito
longe dele isso poderá ocorrer caso haja um buraco ou um degrau de escada.
4.2 Controle Joystick
O princípio de funcionamento do Joystick está baseado através de dois potenciômetros e
um botão. As duas entradas do Joystick são referentes aos eixos X e Y, e o botão quando
pressionado refere – se ao eixo Z. O Joystick é um dos meios escolhidos para fazer o
controle de direção da cadeira. O modelo utilizado é o Joystick Arduino 3 Eixos.

Figura 8 - Joystick
Fonte: FlipFlop (2017)
4.3 Motor Elétrico
No projeto está sendo utilizados dois motores elétricos Mabuchi, estes motores são
responsáveis por fazer o deslocamento da cadeira de rodas. Este motor foi escolhido por
possuir um alto torque quando funcionando a sua potência máxima e uma velocidade
considerada mediana essencial para a cadeira.
Figura 9 – Motor Mabuchi
Fonte: os próprios autores.
4.4 Características de funcionamento e mecânica
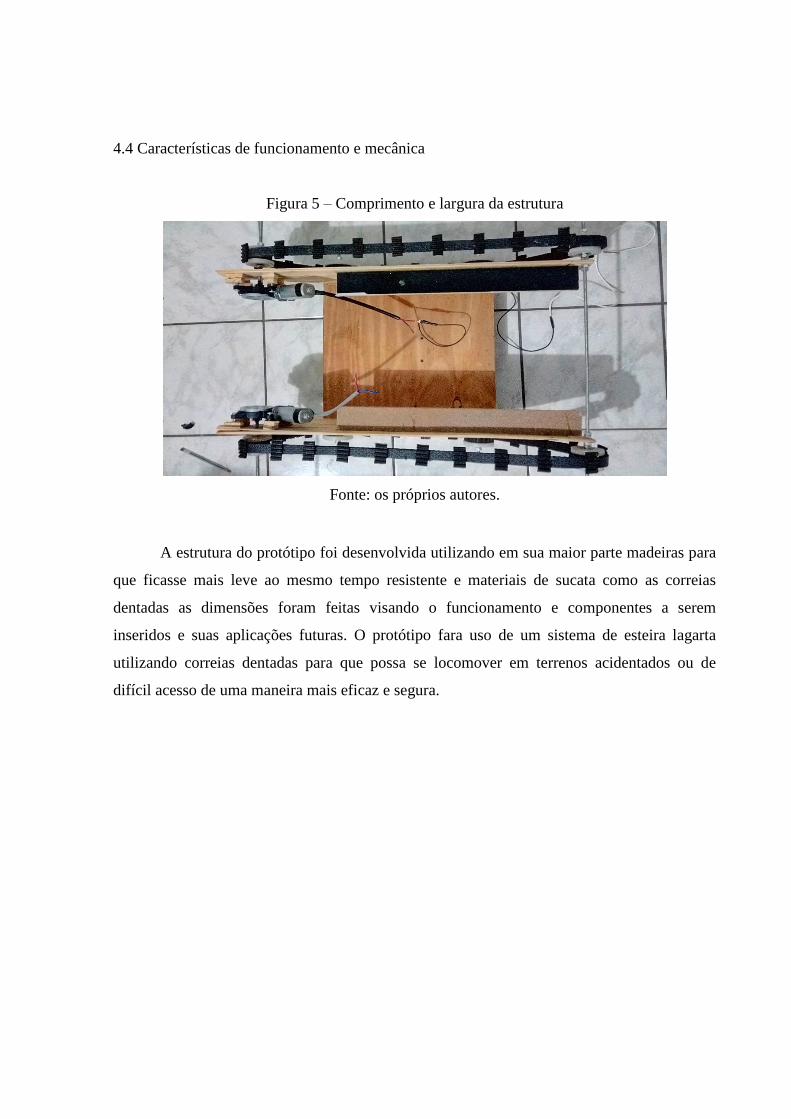
Figura 5 – Comprimento e largura da estrutura
Fonte: os próprios autores.
A estrutura do protótipo foi desenvolvida utilizando em sua maior parte madeiras para
que ficasse mais leve ao mesmo tempo resistente e materiais de sucata como as correias
dentadas as dimensões foram feitas visando o funcionamento e componentes a serem
inseridos e suas aplicações futuras. O protótipo fara uso de um sistema de esteira lagarta
utilizando correias dentadas para que possa se locomover em terrenos acidentados ou de
difícil acesso de uma maneira mais eficaz e segura.
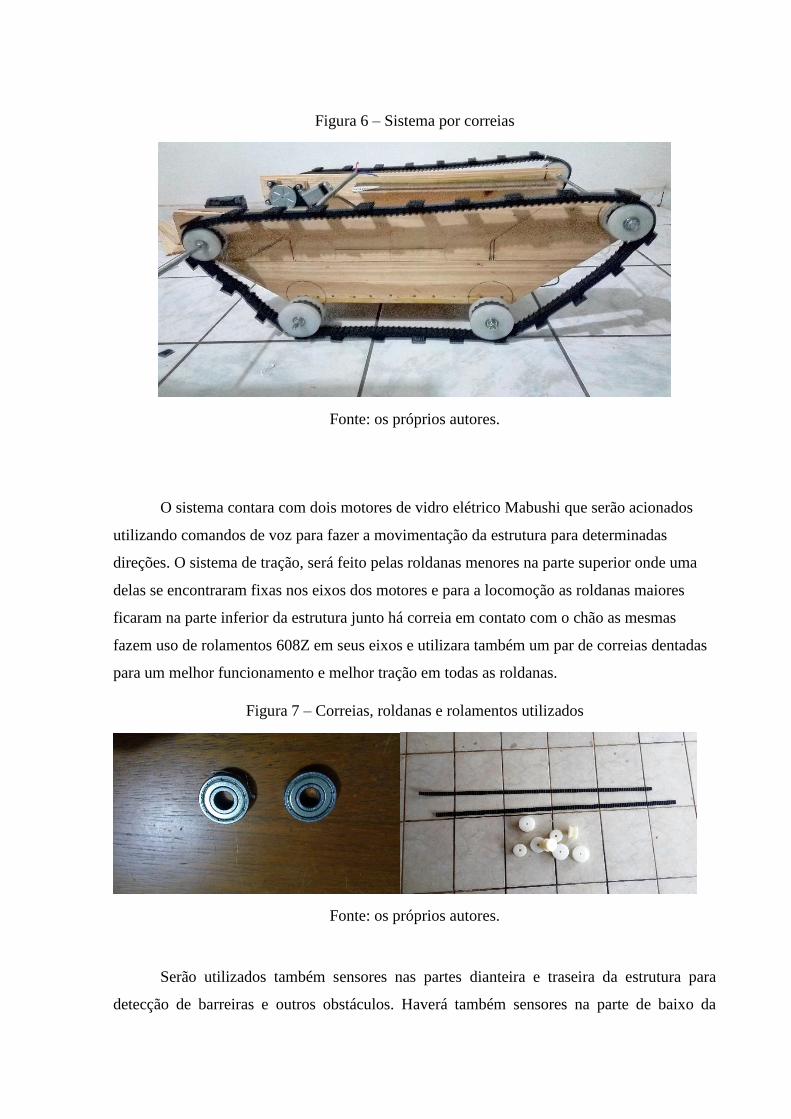
Figura 6 – Sistema por correias
Fonte: os próprios autores.
O sistema contara com dois motores de vidro elétrico Mabushi que serão acionados
utilizando comandos de voz para fazer a movimentação da estrutura para determinadas
direções. O sistema de tração, será feito pelas roldanas menores na parte superior onde uma
delas se encontraram fixas nos eixos dos motores e para a locomoção as roldanas maiores
ficaram na parte inferior da estrutura junto há correia em contato com o chão as mesmas
fazem uso de rolamentos 608Z em seus eixos e utilizara também um par de correias dentadas
para um melhor funcionamento e melhor tração em todas as roldanas.
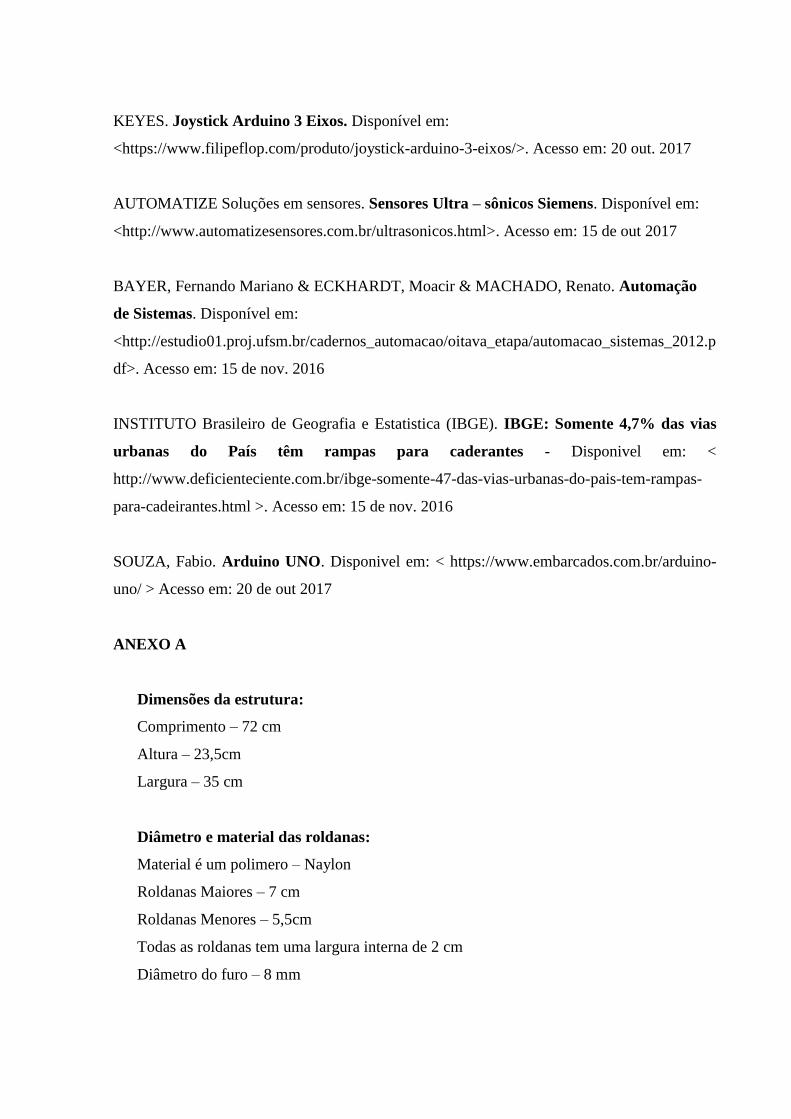
Figura 7 – Correias, roldanas e rolamentos utilizados
Fonte: os próprios autores.
Serão utilizados também sensores nas partes dianteira e traseira da estrutura para
detecção de barreiras e outros obstáculos. Haverá também sensores na parte de baixo da

estrutura para detectar buracos ou quando houver uma depressão que possa trazer perigo para
o usuário da cadeira.
A correção do grau de inclinação será feita através de um terceiro motor que simulara
a correção de inclinação que a base da cadeira se encontra trazendo assim uma segurança para
o usuário. As dimensões e informações da parte mecânica e estrutura encontrados no anexo A.
5 CONSIDERAÇÕES FINAIS
O objetivo geral do projeto foi desenvolver uma cadeira de rodas totalmente
automatizada e comandada por voz para que o cadeirante vença as limitações impostas pelo
trajeto, visando a melhora da sua qualidade de vida.
A construção de uma cadeira de rodas capaz de subir e descer escadas e degraus ou
terrenos acidentados utilizando uma esteira lagarta como um sistema de rodas foi concluido
Ela realiza o movimento de subida e descida na escada ou em outros obstáculos, e o
programa desenvolvido possibilita utlizar a cadeira atraves de comandos por voz na
linguagem em português, visando assim acessibilidade para qualquer grau de portadores de
necessidades especiais.
A missão do projeto que era fazer com que o usuario portador de nescessidades
especiais se sinta seguro durante a execução dos movimentos foi atingida. Além disso o
projeto teve custo reduzidos e tem potencial para se tornar um produto acessivel para a
maioria dos usuarios portadores de nescessidades especiais.
Os testes feitos com o prototipo tiveram os resultados esperados, o sistema em esteira
para a cadeira de rodas coseguiu vencer obstaculos como pedras ondulações e pequenos
degraus de forma eficaz e com pequenos impactos. Em nenhum momento o sistema foi
impedido em seu deslocamento por tais obstaculos mostrando-se assim na pratica a
funcionalidade do prototipo e de seu sistema desenvolvido.
REFERÊNCIAS
ROSÁRIO, João Maurício. Introdução à Mecatrônica. São Paulo: Prentice Hall, 2005.
THOMAZINI Daniel & ALBUQUERQUE Pedro Urbano Braga. Sensores Industriais
Fundamentos e Aplicações. 2010. Editora Érica Ltda/SP. Sensor. 17p .
KEYES. Joystick Arduino 3 Eixos. Disponível em:
<https://www.filipeflop.com/produto/joystick-arduino-3-eixos/>. Acesso em: 20 out. 2017
AUTOMATIZE Soluções em sensores. Sensores Ultra – sônicos Siemens. Disponível em:
<http://www.automatizesensores.com.br/ultrasonicos.html>. Acesso em: 15 de out 2017
BAYER, Fernando Mariano & ECKHARDT, Moacir & MACHADO, Renato. Automação
de Sistemas. Disponível em:
<http://estudio01.proj.ufsm.br/cadernos_automacao/oitava_etapa/automacao_sistemas_2012.p
df>. Acesso em: 15 de nov. 2016
INSTITUTO Brasileiro de Geografia e Estatistica (IBGE). IBGE: Somente 4,7% das vias
urbanas do País têm rampas para caderantes - Disponivel em: <
http://www.deficienteciente.com.br/ibge-somente-47-das-vias-urbanas-do-pais-tem-rampas-
para-cadeirantes.html >. Acesso em: 15 de nov. 2016
SOUZA, Fabio. Arduino UNO. Disponivel em: < https://www.embarcados.com.br/arduino-
uno/ > Acesso em: 20 de out 2017
ANEXO A
Dimensões da estrutura:
Comprimento – 72 cm
Altura – 23,5cm
Largura – 35 cm
Diâmetro e material das roldanas:
Material é um polimero – Naylon
Roldanas Maiores – 7 cm
Roldanas Menores – 5,5cm
Todas as roldanas tem uma largura interna de 2 cm
Diâmetro do furo – 8 mm
Rolamentos utilizados:
Rolamento 608ZZ
Medidas:
D=22 mm
d= 8 mm
E=7 mm
Correias utilizadas:
Correia dentada
Largura da correia – 2 cm
Eixos
3 eixos com rosca infinita de 8mm
Motor de vidro elétrico Mabushi:
Engrenagem de 8 Dentes
Tensão: 12 volts
Consumo: 1,3 Amperes
Força: 9,12 N.m / 93Kg.cm
Joystick de 3 eixos:
Tensão de Operação: 3,3 – 5 volts
Marca: Keyes
Modelo: KY – 023
Facil instalação: 4 Furos
Dimensões: 37 x 25 x 32 mm
Peso: 15g
Motor Impressora
Tensão: 24 volts
Tipo: Micro-Motor
Potencia de Saida: 1w

Velocidade: 4300rpm





























