Embed Size (px)
Citation preview

TEMA 1. VECTORES Y MATRICES
1.4. APLICACIONES

1. VECTORES Y MATRICES
1.4. APLICACIONES
1.4.1. Cálculo del rango de una matriz.
1.4.2. Cálculo de la inversa de una matriz.
1.4.3. Resolución de ecuaciones matriciales.
1.4.4. Discusión y resolución de sistemas lineales

1. VECTORES Y MATRICES
MENOR DE ORDEN r DE UNA MATRIZ Dada una matriz A de orden nm , si se eligen r-filas y r-columnas de A
),( nrmr , y consideramos los elementos que pertenecen CONJUNTAMENTE a dichas filas y columnas obtenemos una submatriz cuadrada de orden r. Al determinante de dicha submatriz se le denomina menor de orden r de la matriz A.
EJEMPLO: 1) Dada la matriz
124
321
212
A
obtener todos sus menores de orden 1, de
orden 2 y de orden 3.
2) Dada la matriz
19
03
12
A obtener todos sus menores de orden 1 y de
orden 2.
1.4. APLICACIONES
1.4.1. CÁLCULO DEL RANGO DE UNA MATRIZ
1. VECTORES Y MATRICES
RANGO DE UNA MATRIZ Se define el rango de una matriz A , como el máximo número de vectores fila o vectores columna que son linealmente independientes.
CARACTERIZACIÓN DEL RANGO DE UNA MATRIZ
Utilizando la propiedad 9 de los determinantes podemos garantizar que si una matriz cuadrada tiene determinante no nulo, entonces sus vectores fila o sus vectores columna son linealmente independientes.
El rango de una matriz A es el orden del mayor menor no nulo que contiene dicha matriz. Se denota por )(Arg .
1.4. APLICACIONES
1.4.1. CÁLCULO DEL RANGO DE UNA MATRIZ
EJEMPLO.
Calcula el rango de las siguientes matrices:
02
31A
215
211
012
B
1. VECTORES Y MATRICES
MÉTODOS PARA OBTENCIÓN DEL RANGO Método de menor a mayor rango Consideremos el método general a partir del siguiente ejemplo:
Calcular el rango de la matriz
3353
1010
1111
1353
B .
PASO 1: Menores de orden 1. Como existe un menor no nulo de orden 1 entonces 1)( Arg .
1.4. APLICACIONES
1.4.1. CÁLCULO DEL RANGO DE UNA MATRIZ

1. VECTORES Y MATRICES
PASO 2: Menores de orden 2. Buscamos un menor no nulo de orden 2 no nulo que
contenga los elementos del menor anterior. El menor 025311
53 . Por tanto,
2)( Arg Si todos los menores de orden 2 hubieran sido nulos el rango de la matriz habría sido 1.
1.4. APLICACIONES
1.4.1. CÁLCULO DEL RANGO DE UNA MATRIZ

1. VECTORES Y MATRICES
Por tanto, 3)( Arg . Si todos los menores de orden 3 obtenidos por este procedimiento hubieran sido nulos entonces el rango de la matriz hubiese sido 2.
1.4. APLICACIONES
1.4.1. CÁLCULO DEL RANGO DE UNA MATRIZ
PASO 3: Menores de orden 3. Buscamos algún menor de orden 3 no nulo que contenga los elementos del menor no nulo anterior. Considerando las tres primeras filas de la matriz B , teniendo en cuenta que los menores que buscamos deben contener las columnas 1ª y 2ª, obtenemos dos menores
Considerando las filas 1ª, 2ª (que contienen el menor anterior) y la fila 4ª, se obtienen otros dos menores de orden 3
1. VECTORES Y MATRICES
PASO 4: Menores de orden 4. Buscamos algún menor de orden 4 no nulo que contenga el menor no nulo de orden 3 anterior. En este caso, como la matriz es de orden 4, el único menor de orden 4 es el determinante de la matriz B : Por tanto, el rango de la matriz B es 3.
1.4. APLICACIONES
1.4.1. CÁLCULO DEL RANGO DE UNA MATRIZ
0
383
121
363
3383
1000
1121
1363
3353
1010
1111
1353
ª3
422
filaladeadjuntospor
ndodesarrollaCCC
EJEMPLO:
Calcula el rango de la matriz:
10111
42780
00102
21543
B

1. VECTORES Y MATRICES
1.4. APLICACIONES
1.4.1. CÁLCULO DEL RANGO DE UNA MATRIZ
Es útil para calcular el rango en función de parámetros.
EJEMPLO: Calcular el rango de la matriz
451
30
52
a
a
B
2) Método cálculo del rango: de rango mayor posible a menor
Para matrices constante no es útil.
EJEMPLO: Calcular el rango de la matriz
3353
1010
1111
1353
B
EJEMPLOS: Calcular el rango de las matrices:
113212
11210
17001
A y
321
523
002
a
a
a
B

1. VECTORES Y MATRICES
1) Calcula el rango de las matrices:
a)
10
32
21
A b)
7382
1120
2011
B c)
1012
3465
4321
C
2 Calcula el valor del parámetro “ x ” para que el rango de la matriz A sea 2:
11
1
11
x
xx
x
A
1.4. APLICACIONES
1.4.1. CÁLCULO DEL RANGO DE UNA MATRIZ : EJERCICIOS
EJERCICIOS: “Problemas y cuestiones
de álgebra lineal”, P. Ortega.
Págs 181-187
Ejercicios 17,18,19,20,21
1. VECTORES Y MATRICES
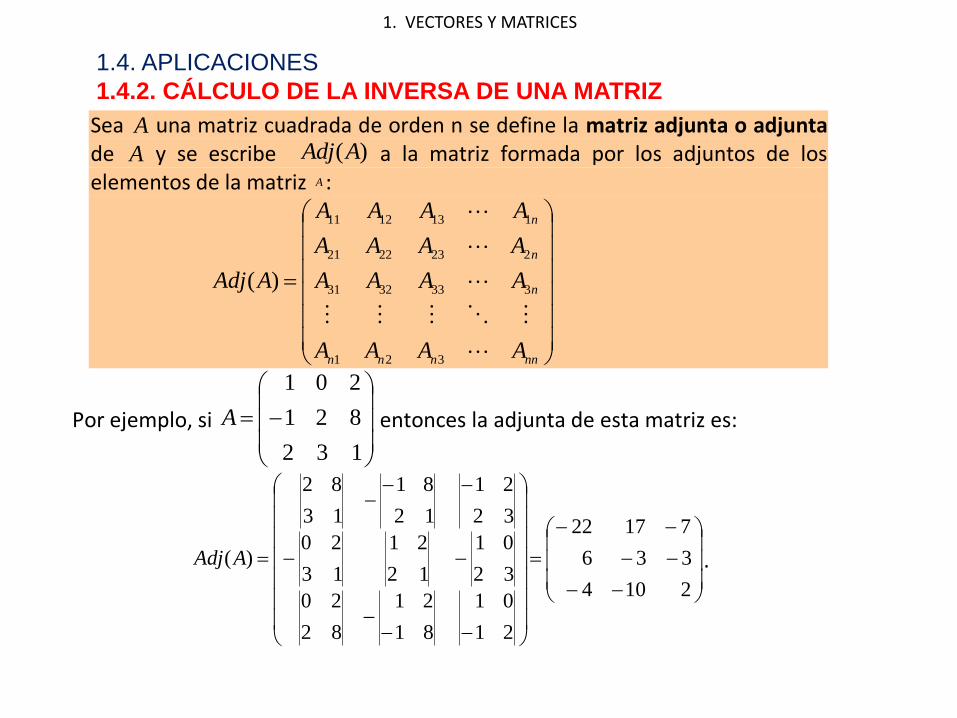
Sea A una matriz cuadrada de orden n se define la matriz adjunta o adjunta de A y se escribe )(AAdj a la matriz formada por los adjuntos de los elementos de la matriz A :
nnnnn
n
n
n
AAAA
AAAA
AAAA
AAAA
AAdj
321
3333231
2232221
1131211
)(
Por ejemplo, si
132
821
201
A entonces la adjunta de esta matriz es:
2104
336
71722
21
01
81
21
82
20
32
01
12
21
13
20
32
21
12
81
13
82
)(AAdj .
1.4. APLICACIONES
1.4.2. CÁLCULO DE LA INVERSA DE UNA MATRIZ
1. VECTORES Y MATRICES
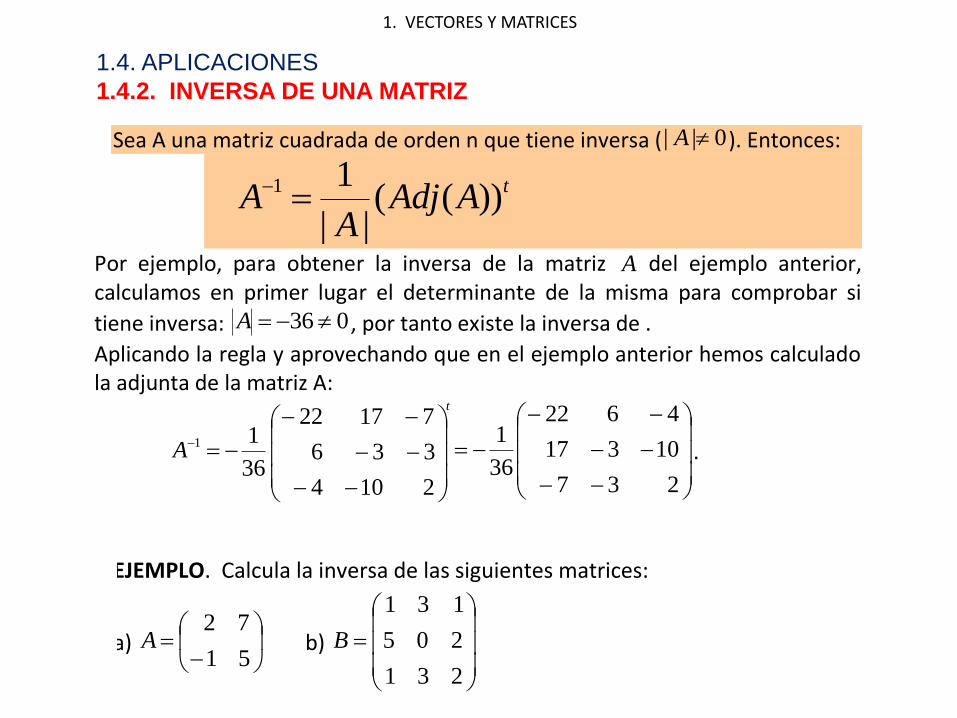
Sea A una matriz cuadrada de orden n que tiene inversa ( 0|| A ). Entonces:
tAAdjA
A ))((||
11
Por ejemplo, para obtener la inversa de la matriz A del ejemplo anterior, calculamos en primer lugar el determinante de la misma para comprobar si
tiene inversa: 036 A , por tanto existe la inversa de .
Aplicando la regla y aprovechando que en el ejemplo anterior hemos calculado la adjunta de la matriz A:
36
11 A
t
2104
336
71722
237
10317
4622
36
1.
1.4. APLICACIONES
1.4.2. INVERSA DE UNA MATRIZ
EJEMPLO. Calcula la inversa de las siguientes matrices:
a)
51
72A b)
231
205
131
B

1. VECTORES Y MATRICES
1) Sea la matriz:
a
A
43
110
211
a) Determina para qué valores de a la matriz tiene inversa. b) Calcula si es posible la inversa de A para 0a
2) Calcula en cada caso la matriz inversa:
a)
131
212
021
A b)
013
425
412
B c)
211
432
111
C
1.4. APLICACIONES
1.4.2. INVERSA DE UNA MATRIZ: EJERCICIOS.
EJERCICIOS: “Problemas y cuestiones
de álgebra lineal”, P. Ortega.
Págs. : 189, 192
Ejercicios 22, 23
1. VECTORES Y MATRICES
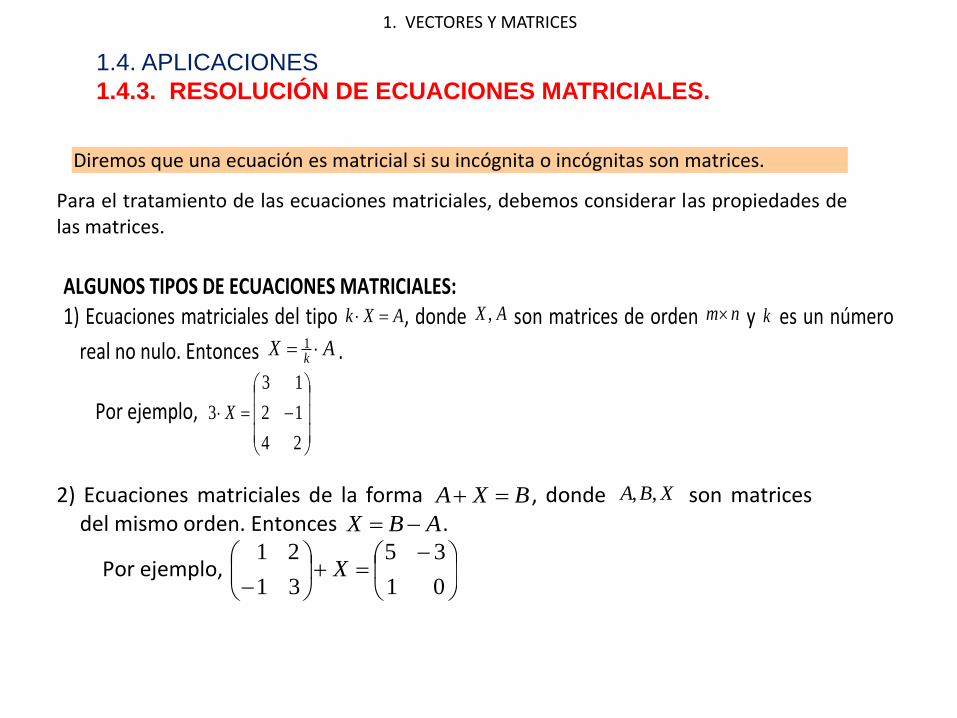
Diremos que una ecuación es matricial si su incógnita o incógnitas son matrices.
Para el tratamiento de las ecuaciones matriciales, debemos considerar las propiedades de las matrices.
1.4. APLICACIONES
1.4.3. RESOLUCIÓN DE ECUACIONES MATRICIALES.
ALGUNOS TIPOS DE ECUACIONES MATRICIALES: 1) Ecuaciones matriciales del tipo AXk , donde AX , son matrices de orden nm y k es un número
real no nulo. Entonces AXk 1 .
Por ejemplo,
24
12
13
3 X
2) Ecuaciones matriciales de la forma BXA , donde XBA ,, son matrices del mismo orden. Entonces ABX .
Por ejemplo,
01
35
31
21X
1. VECTORES Y MATRICES
1.4. APLICACIONES
1.4.3. RESOLUCIÓN DE ECUACIONES MATRICIALES.
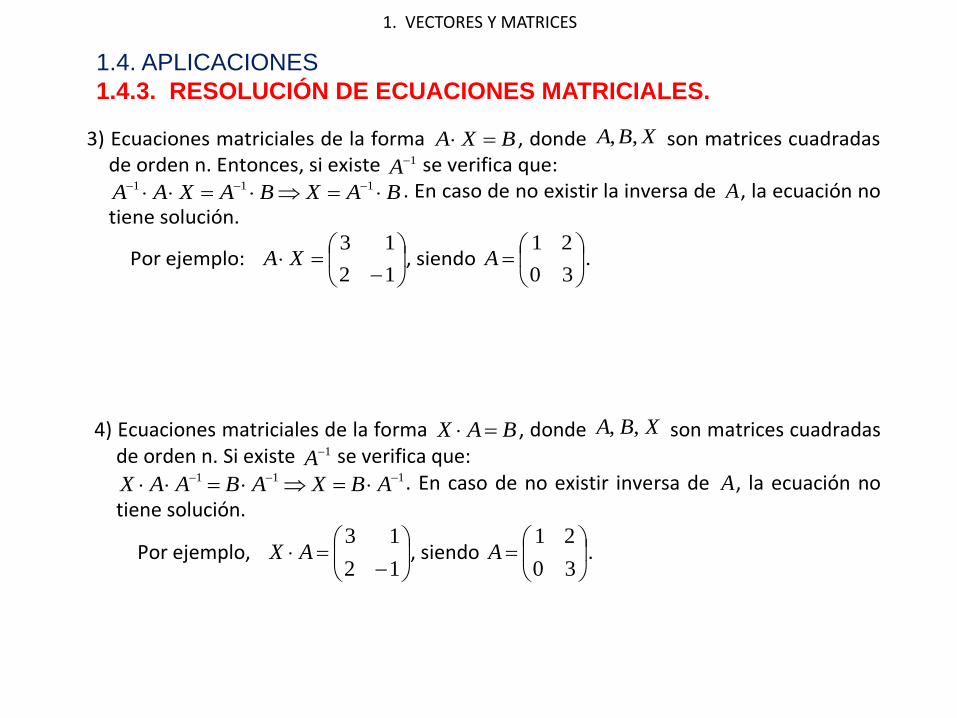
3) Ecuaciones matriciales de la forma BXA , donde XBA ,, son matrices cuadradas de orden n. Entonces, si existe 1A se verifica que:
BAXBAXAA 111 . En caso de no existir la inversa de A, la ecuación no tiene solución.
Por ejemplo:
12
13XA , siendo
30
21A .
4) Ecuaciones matriciales de la forma BAX , donde XBA ,, son matrices cuadradas
de orden n. Si existe 1A se verifica que: 111 ABXABAAX . En caso de no existir inversa de A, la ecuación no
tiene solución.
Por ejemplo,
12
13AX , siendo
30
21A .

1. VECTORES Y MATRICES
A continuación mostramos algunos esquemas de ecuaciones matriciales y el método de resolución:
1) CBXA BCXA si existe 1A )(1 BCAX .
2) CBAX BCAX si existe 1A 1)( ABCX .
3) DCXBXA DCXBA )( CDXBA )(
si existe 1)( BA )()( 1 CDBAX .
4) CBAX )( si existe 1B 11 BCAXBCAX
5) CBXA . Si existen 11, BA 11 BCAX .
6) BXAX BXIABIXAX )(
si existe 1)( IA 1( )X A I B
1.4. APLICACIONES
1.4.3. RESOLUCIÓN DE ECUACIONES MATRICIALES.
1. VECTORES Y MATRICES
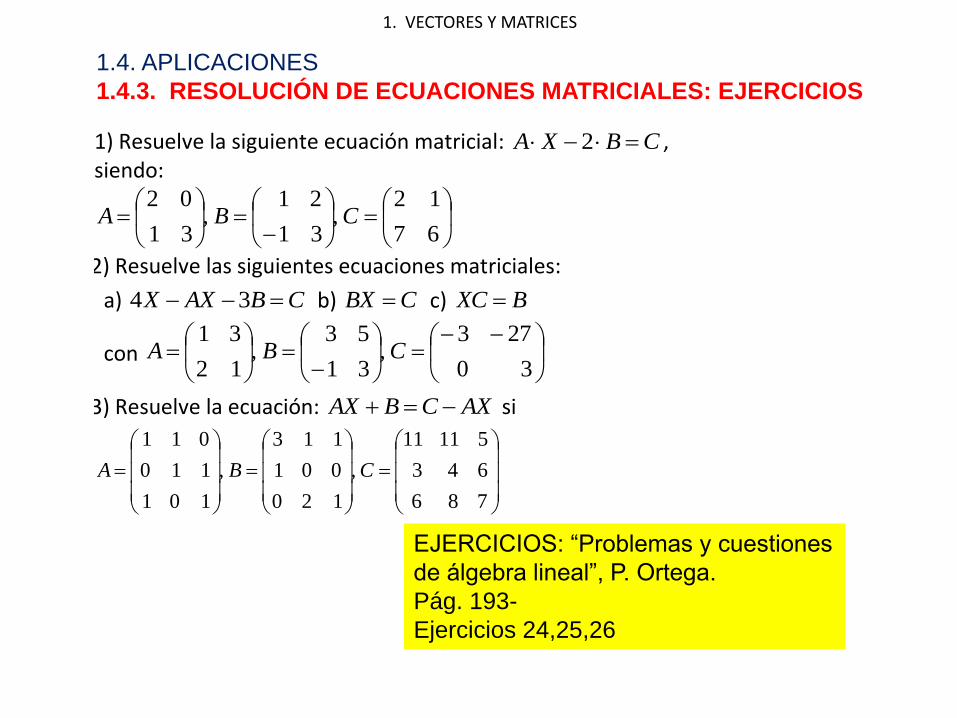
1) Resuelve la siguiente ecuación matricial: CBXA 2 , siendo:
67
12,
31
21,
31
02CBA
2) Resuelve las siguientes ecuaciones matriciales:
a) CBAXX 34 b) CBX c) BXC
con
30
273,
31
53,
12
31CBA
3) Resuelve la ecuación: AXCBAX si
786
643
51111
,
120
001
113
,
101
110
011
CBA
1.4. APLICACIONES
1.4.3. RESOLUCIÓN DE ECUACIONES MATRICIALES: EJERCICIOS
EJERCICIOS: “Problemas y cuestiones
de álgebra lineal”, P. Ortega.
Pág. 193-
Ejercicios 24,25,26
1. VECTORES Y MATRICES
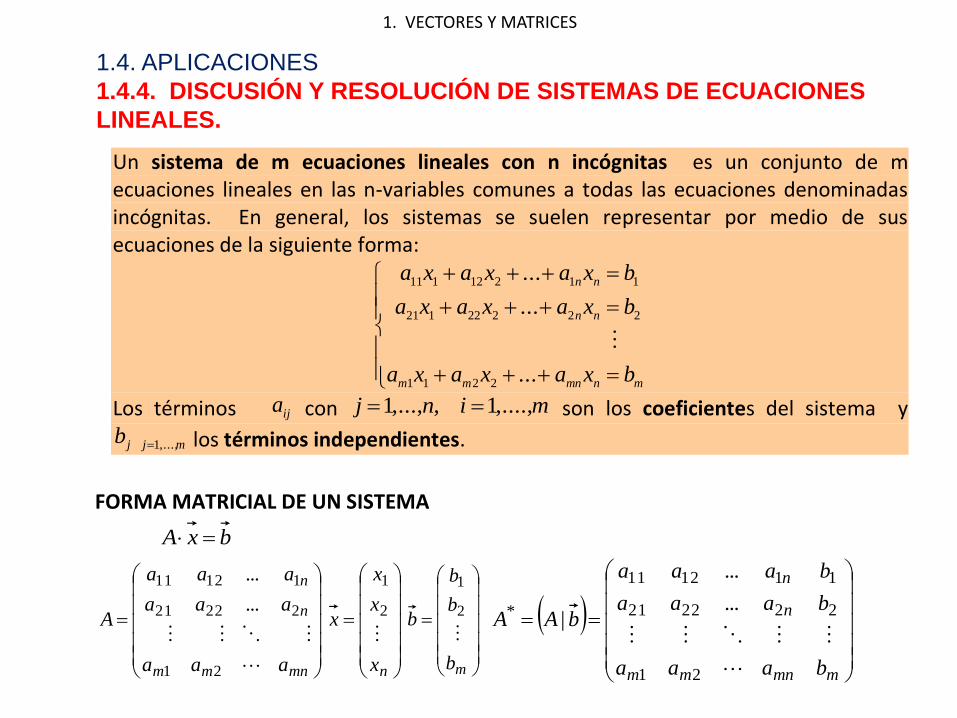
Un sistema de m ecuaciones lineales con n incógnitas es un conjunto de m ecuaciones lineales en las n-variables comunes a todas las ecuaciones denominadas incógnitas. En general, los sistemas se suelen representar por medio de sus ecuaciones de la siguiente forma:
mnmnmm
nn
nn
bxaxaxa
bxaxaxa
bxaxaxa
...
...
...
2211
22222121
11212111
Los términos ija con minj ,....,1,,...,1 son los coeficientes del sistema y
mjjb ,...,1 los términos independientes.
FORMA MATRICIAL DE UN SISTEMA
bxA
mnmm
n
n
aaa
aaa
aaa
A
21
22221
11211
...
...
nx
x
x
x2
1
mb
b
b
b2
1
mmnmm
n
n
baaa
baaa
baaa
bAA
21
222221
111211
* ...
...
|
1.4. APLICACIONES
1.4.4. DISCUSIÓN Y RESOLUCIÓN DE SISTEMAS DE ECUACIONES
LINEALES.
1. VECTORES Y MATRICES
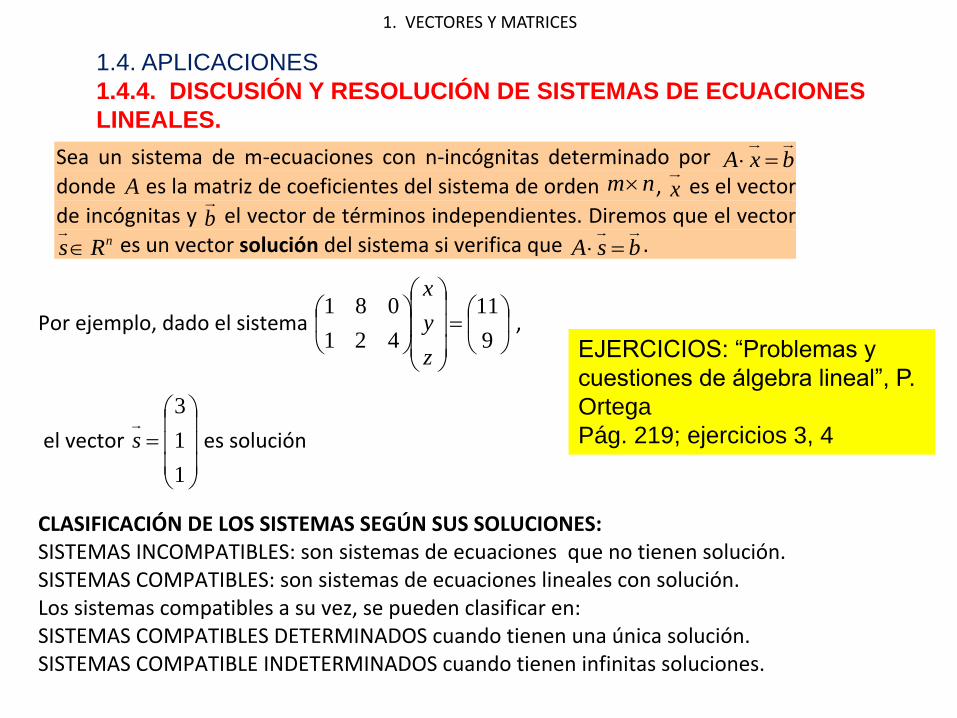
Sea un sistema de m-ecuaciones con n-incógnitas determinado por bxA
donde A es la matriz de coeficientes del sistema de orden nm , x es el vector
de incógnitas y b el vector de términos independientes. Diremos que el vector nRs es un vector solución del sistema si verifica que bsA .
Por ejemplo, dado el sistema
9
11
421
081
z
y
x
,
el vector
1
1
3
s es solución
CLASIFICACIÓN DE LOS SISTEMAS SEGÚN SUS SOLUCIONES: SISTEMAS INCOMPATIBLES: son sistemas de ecuaciones que no tienen solución. SISTEMAS COMPATIBLES: son sistemas de ecuaciones lineales con solución. Los sistemas compatibles a su vez, se pueden clasificar en: SISTEMAS COMPATIBLES DETERMINADOS cuando tienen una única solución. SISTEMAS COMPATIBLE INDETERMINADOS cuando tienen infinitas soluciones.
1.4. APLICACIONES
1.4.4. DISCUSIÓN Y RESOLUCIÓN DE SISTEMAS DE ECUACIONES
LINEALES.
EJERCICIOS: “Problemas y
cuestiones de álgebra lineal”, P.
Ortega
Pág. 219; ejercicios 3, 4
1. VECTORES Y MATRICES
DISCUSIÓN DE SISTEMAS:
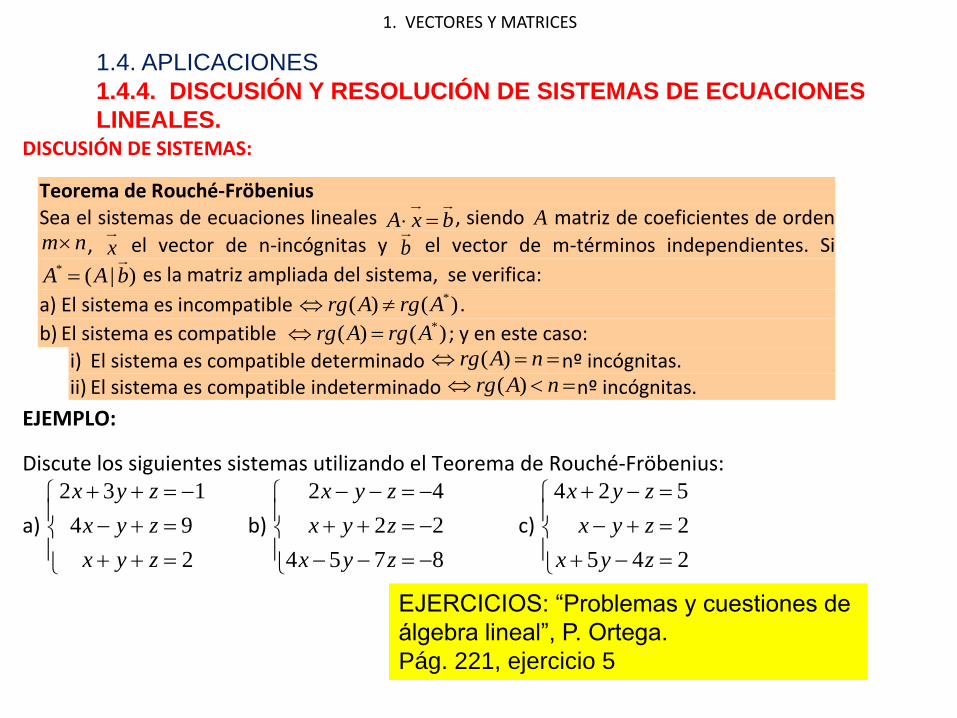
Teorema de Rouché-Fröbenius Sea el sistemas de ecuaciones lineales bxA , siendo A matriz de coeficientes de orden
nm , x el vector de n-incógnitas y b el vector de m-términos independientes. Si
)|(* bAA es la matriz ampliada del sistema, se verifica:
a) El sistema es incompatible )()( *ArgArg .
b) El sistema es compatible )()( *ArgArg ; y en este caso:
i) El sistema es compatible determinado nArg )( nº incógnitas. ii) El sistema es compatible indeterminado nArg )( nº incógnitas.
1.4. APLICACIONES
1.4.4. DISCUSIÓN Y RESOLUCIÓN DE SISTEMAS DE ECUACIONES
LINEALES.
EJEMPLO:
Discute los siguientes sistemas utilizando el Teorema de Rouché-Fröbenius:
a)
2
94
132
zyx
zyx
zyx
b)
8754
22
42
zyx
zyx
zyx
c)
245
2
524
zyx
zyx
zyx
EJERCICIOS: “Problemas y cuestiones de
álgebra lineal”, P. Ortega.
Pág. 221, ejercicio 5
1. VECTORES Y MATRICES
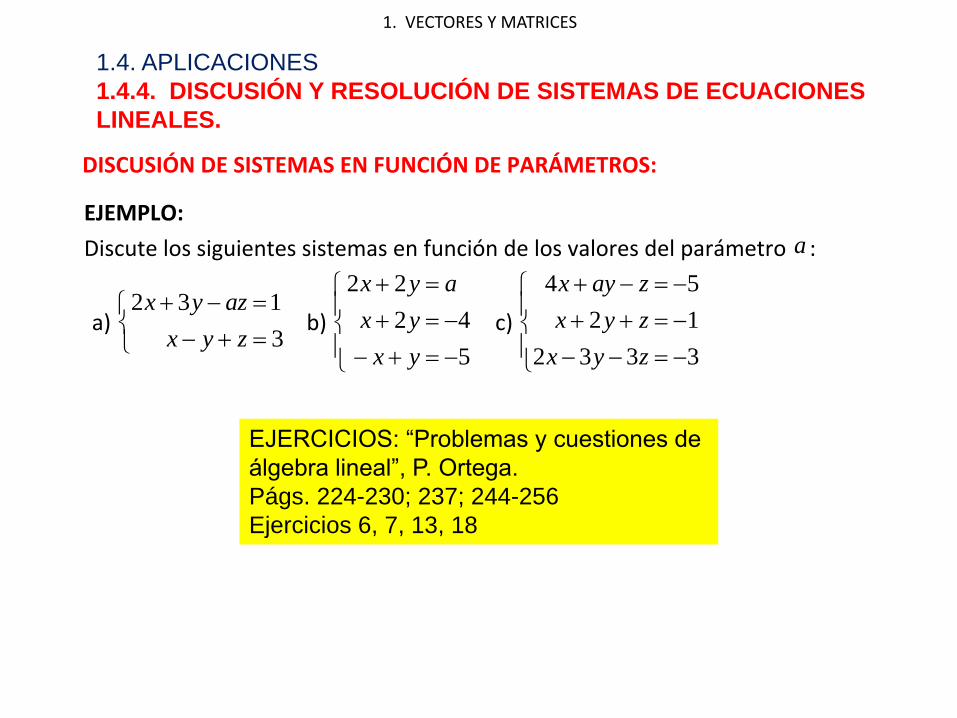
DISCUSIÓN DE SISTEMAS EN FUNCIÓN DE PARÁMETROS:
EJEMPLO:
Discute los siguientes sistemas en función de los valores del parámetro a :
a)
3
132
zyx
azyx b)
5
42
22
yx
yx
ayx
c)
3332
12
54
zyx
zyx
zayx
1.4. APLICACIONES
1.4.4. DISCUSIÓN Y RESOLUCIÓN DE SISTEMAS DE ECUACIONES
LINEALES.
EJERCICIOS: “Problemas y cuestiones de
álgebra lineal”, P. Ortega.
Págs. 224-230; 237; 244-256
Ejercicios 6, 7, 13, 18
1. VECTORES Y MATRICES
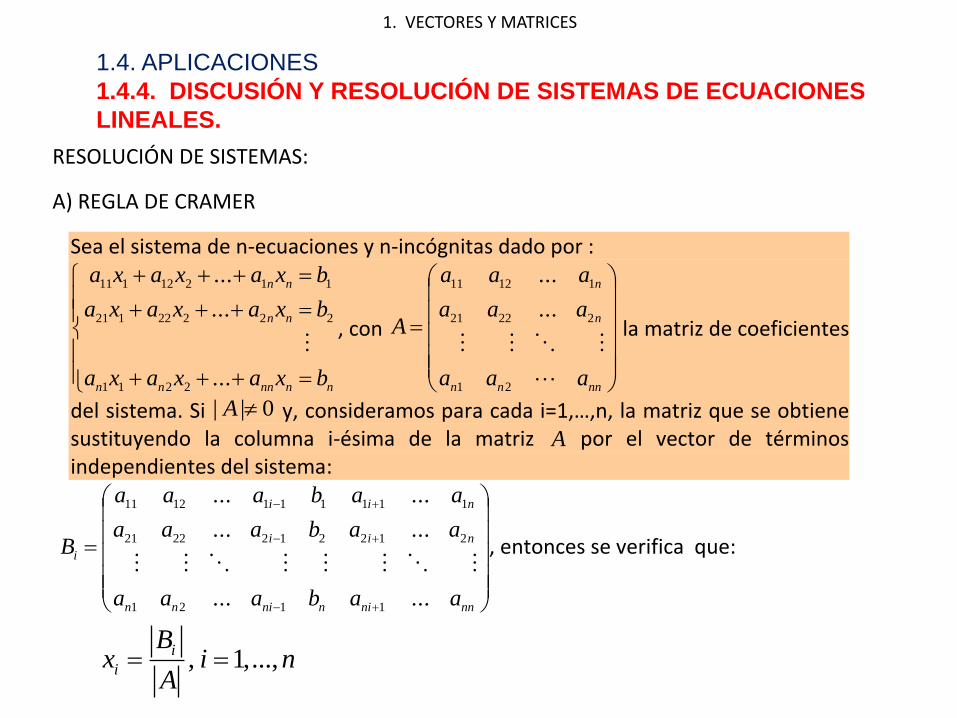
RESOLUCIÓN DE SISTEMAS:
A) REGLA DE CRAMER
Sea el sistema de n-ecuaciones y n-incógnitas dado por :
nnnnnn
nn
nn
bxaxaxa
bxaxaxa
bxaxaxa
...
...
...
2211
22222121
11212111
, con
nnnn
n
n
aaa
aaa
aaa
A
21
22221
11211
...
...
la matriz de coeficientes
del sistema. Si 0|| A y, consideramos para cada i=1,…,n, la matriz que se obtiene sustituyendo la columna i-ésima de la matriz A por el vector de términos independientes del sistema:
nnninninn
nii
nii
i
aabaaa
aabaaa
aabaaa
B
......
......
......
1121
2122122221
1111111211
, entonces se verifica que:
, 1,...,
i
i
Bx i n
A
1.4. APLICACIONES
1.4.4. DISCUSIÓN Y RESOLUCIÓN DE SISTEMAS DE ECUACIONES
LINEALES.
1. VECTORES Y MATRICES
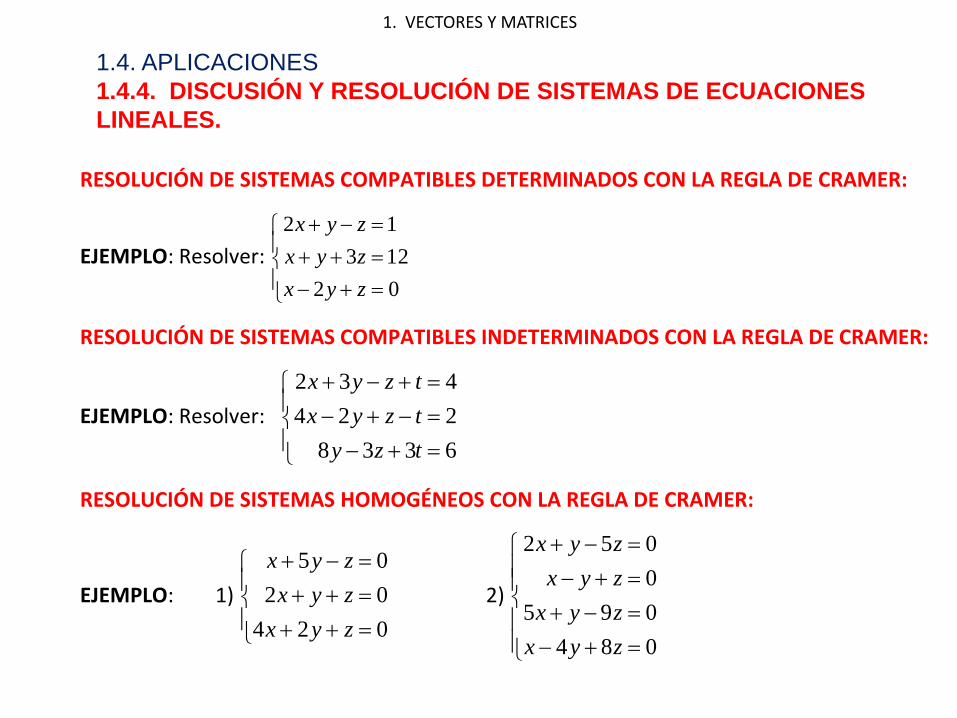
RESOLUCIÓN DE SISTEMAS COMPATIBLES DETERMINADOS CON LA REGLA DE CRAMER:
EJEMPLO: Resolver:
02
123
12
zyx
zyx
zyx
RESOLUCIÓN DE SISTEMAS COMPATIBLES INDETERMINADOS CON LA REGLA DE CRAMER:
EJEMPLO: Resolver:
6338
224
432
tzy
tzyx
tzyx
RESOLUCIÓN DE SISTEMAS HOMOGÉNEOS CON LA REGLA DE CRAMER:
EJEMPLO: 1)
024
02
05
zyx
zyx
zyx
2)
084
095
0
052
zyx
zyx
zyx
zyx
1.4. APLICACIONES
1.4.4. DISCUSIÓN Y RESOLUCIÓN DE SISTEMAS DE ECUACIONES
LINEALES.
1. VECTORES Y MATRICES
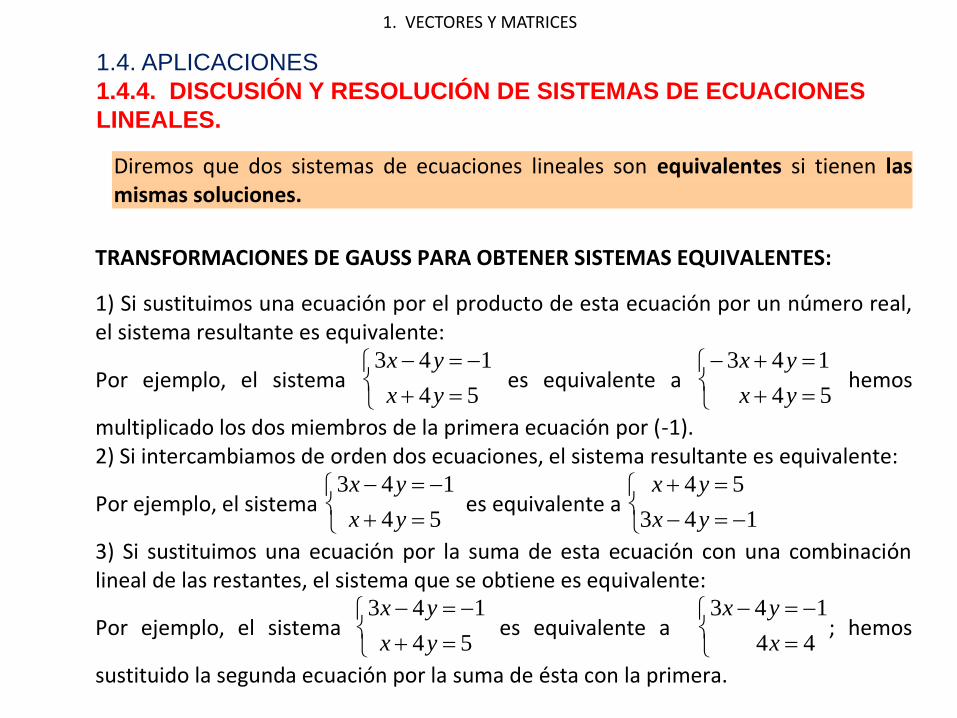
Diremos que dos sistemas de ecuaciones lineales son equivalentes si tienen las mismas soluciones.
TRANSFORMACIONES DE GAUSS PARA OBTENER SISTEMAS EQUIVALENTES:
1) Si sustituimos una ecuación por el producto de esta ecuación por un número real, el sistema resultante es equivalente:
Por ejemplo, el sistema
54
143
yx
yx es equivalente a
54
143
yx
yx hemos
multiplicado los dos miembros de la primera ecuación por (-1). 2) Si intercambiamos de orden dos ecuaciones, el sistema resultante es equivalente:
Por ejemplo, el sistema
54
143
yx
yx es equivalente a
143
54
yx
yx
3) Si sustituimos una ecuación por la suma de esta ecuación con una combinación lineal de las restantes, el sistema que se obtiene es equivalente:
Por ejemplo, el sistema
54
143
yx
yx es equivalente a
44
143
x
yx; hemos
sustituido la segunda ecuación por la suma de ésta con la primera.
1.4. APLICACIONES
1.4.4. DISCUSIÓN Y RESOLUCIÓN DE SISTEMAS DE ECUACIONES
LINEALES.
1. VECTORES Y MATRICES
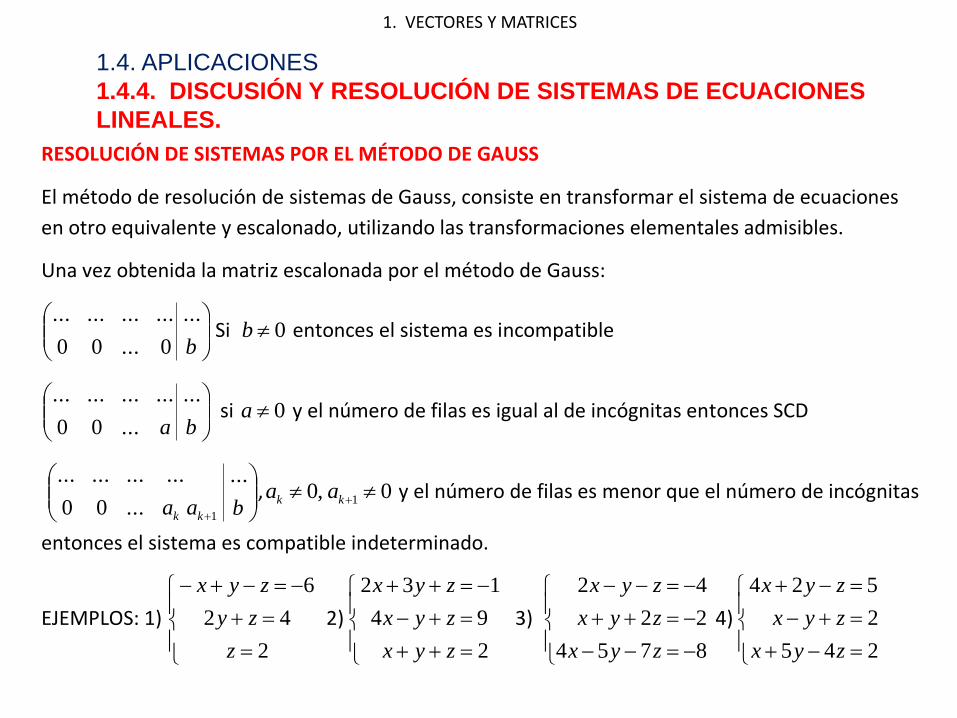
RESOLUCIÓN DE SISTEMAS POR EL MÉTODO DE GAUSS
El método de resolución de sistemas de Gauss, consiste en transformar el sistema de ecuaciones
en otro equivalente y escalonado, utilizando las transformaciones elementales admisibles.
Una vez obtenida la matriz escalonada por el método de Gauss:
b
...
0...00
............ Si 0b entonces el sistema es incompatible
ba
...
...00
............ si 0a y el número de filas es igual al de incógnitas entonces SCD
baa kk
...
...00
............
1
, 0,0 1 kk aa y el número de filas es menor que el número de incógnitas
entonces el sistema es compatible indeterminado.
EJEMPLOS: 1)
2
42
6
z
zy
zyx
2)
2
94
132
zyx
zyx
zyx
3)
8754
22
42
zyx
zyx
zyx
4)
245
2
524
zyx
zyx
zyx
1.4. APLICACIONES
1.4.4. DISCUSIÓN Y RESOLUCIÓN DE SISTEMAS DE ECUACIONES
LINEALES.

1. VECTORES Y MATRICES
1) Discute y resuelve los siguientes sistemas de tres ecuaciones con tres incógnitas aplicando el método de Gauss:
a)
02
3
33
yx
yx
zyx
b)
42
13
323
zy
zy
zyx
c)
0652
13324
12
zyx
zyx
zyx
d)
1335
52
33
zyx
zyx
zyx
2) Resuelve los siguientes sistemas de ecuaciones aplicando la regla de Cramer:
a)
53
42
zyx
zyx b)
33
72
1
zyx
zyx
zyx
c)
04
63
23
zx
zyx
zyx
d)
022
1
22
yx
zx
zyx
3) Discute los siguientes sistemas según los valores del parámetro m y resuélvelos cuando sean compatibles determinados:
a)
423
2224
1
mzyx
mzyx
zyx
b)
11410
332
2
zymx
zyx
zyx
4) Discute y resuelve según los valores del parámetro m, los siguientes sistemas homogéneos:
a)
034
0510
02
zyx
zyx
mzymx
b)
03
02
0
mzyx
zyx
zyx
1.4. APLICACIONES
1.4.4. DISCUSIÓN Y RESOLUCIÓN DE SISTEMAS DE ECUACIONES
LINEALES. EJERCICIOS.
EJERCICIOS: “Problemas y cuestiones
de álgebra lineal”, P. Ortega
p. 239- , ejercicios 15, 18 y 19
p. 262- ; ejercicios 22,22 y 23