Embed Size (px)
Citation preview

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca Automática
2º Curso del Grado en
Ingeniería en Tecnología Industrial
Tema 5.
Análisis de la Respuesta Frecuencial
de Sistemas LTI

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Contenido
TEMA 5.- Análisis de respuesta en frecuencia
5.1. Análisis de sistemas en tiempo continuo en el dominio de la
frecuencia.
5.2. Representación mediante diagramas de Bode.
5.3. Trazado de diagramas de Bode.
5.4. Sistemas de fase no mínima.
5.5. Especificaciones del comportamiento en el dominio de la
frecuencia.
5.6. Análisis de estabilidad. Márgenes de ganancia y de fase.
5.7. Relación de la respuesta en frecuencia con la respuesta
temporal.
5.8. Determinación experimental de la función de transferencia a
partir de la respuesta en frecuencia.
5.9. Compensación en el dominio de la frecuencia.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis en frecuencia de sistemas LTI
Respuesta en frecuencia:
Se entiende por respuesta en frecuencia la respuesta en estado
estacionario de un sistema estable ante una entrada senoidal.
La respuesta en estado estacionario de un sistema LTI ante una
entrada senoidal no depende de las condiciones iniciales, por lo
que se van a suponer condiciones iniciales nulas.
Una de las ventajas que ofrece el estudio de la respuesta en
frecuencia de un sistema es que mediante pruebas sencillas se
puede determinar de forma experimental su función de
transferencia utilizando generadores de onda y equipos de
medición de uso frecuente en los laboratorios.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Función de transferencia senoidal:
La transformada de Laplace de la función seno es:
y la salida será:
Calculando la transformada inversa de Laplace y aplicando el
límite cuando el tiempo tiende a infinito se obtiene la salida en
estado estacionario:
La salida es una señal senoidal de la misma frecuencia que la
señal de entrada pero multiplicada por una ganancia |G(jω)| y
desplazada en la fase por un ángulo G(jω).
Análisis en frecuencia de sistemas LTI

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis en frecuencia de sistemas LTI
Función de transferencia senoidal (cont.):
La respuesta en frecuencia de un sistema con función de
transferencia G(s) se obtiene sustituyendo s=jω, obteniendo la
función G(jω) denominada función de transferencia senoidal:
donde se cumple que Y(jω) = G(jω) X(jω).
Gráficamente:

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Función de transferencia senoidal (cont.):
El módulo de la función de transferencia senoidal se obtiene del
cociente entre las amplitudes de las señales de salida y entrada.
El ángulo de la función de transferencia senoidal, denominado
ángulo de fase, es la diferencia entre los ángulos de las señales
de salida y entrada.
Si el ángulo de fase es positivo, se denomina adelanto de fase,
mientras que si es negativo se denomina atraso retardo de fase.
Análisis en frecuencia de sistemas LTI

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
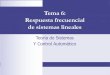
Función de transferencia senoidal (cont.):
Ejemplo:
• Entrada: x(t) = sin(4πt)
• Salida 1: y1(t) = 1.5 sin(4πt + π /4) Adelanto de fase.
• Salida 2: y2(t) = 1.5 sin(4πt - π /4) Retardo de fase.
Análisis en frecuencia de sistemas LTI
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1.5
-1
-0.5
0
0.5
1
1.5Adelanto y atraso de fase
t (segundos)
x (
entr
ada)
y1 (
salid
a a
dela
nto
)
y2 (
salid
a a
traso)
x
y1
y2

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Contenido
TEMA 5.- Análisis de respuesta en frecuencia
5.1. Análisis de sistemas en tiempo continuo en el dominio de la
frecuencia.
5.2. Representación mediante diagramas de Bode.
5.3. Trazado de diagramas de Bode.
5.4. Sistemas de fase no mínima.
5.5. Especificaciones del comportamiento en el dominio de la
frecuencia.
5.6. Análisis de estabilidad. Márgenes de ganancia y de fase.
5.7. Relación de la respuesta en frecuencia con la respuesta
temporal.
5.8. Determinación experimental de la función de transferencia a
partir de la respuesta en frecuencia.
5.9. Compensación en el dominio de la frecuencia.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Representación mediante diagramas de Bode
-80
-60
-40
-20
0
20
Mag
nitud
(dB)
10-2
10-1
100
101
102
-180
-135
-90
-45
0
Fase
(deg
)
Diagrama de Bode
Frequencia (rad/sec)
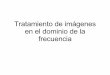
Diagramas de Bode:
Un diagrama de Bode representa la función de transferencia
senoidal G(jω) mediante dos gráficas distintas, utilizando un eje
de abscisas común en escala logarítmica para la frecuencia ω
(rad/seg) y una escala lineal para los ejes de ordenadas:
• Expresada en dB (20log|G(jω)|) para la gráfica de magnitud.
• Expresada en grados para la gráfica de ángulo de fase.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Representación mediante diagramas de Bode
Diagramas de Bode (cont.):
La utilización de una escala logarítmica para ω permite
representar en un solo diagrama las características de alta y
baja frecuencia de G(jω).
La frecuencia ω se expresa en décadas, donde una década es
la banda de frecuencia desde ω1 a 10ω1 siendo ω1 cualquier
valor de frecuencia.
10-2
10-1
100
101
-40
-30
-20
-10
0
10
20
números en escala logarítmica
Deci
belio
s
La figura muestra el |G(jω)|=|jω|.
En escala logarítmica (3
décadas) la gráfica resultante
es una línea recta de 20
dB/década que pasa por el
punto (1 rad/s, 0dB).

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Contenido
TEMA 5.- Análisis de respuesta en frecuencia
5.1. Análisis de sistemas en tiempo continuo en el dominio de la
frecuencia.
5.2. Representación mediante diagramas de Bode.
5.3. Trazado de diagramas de Bode.
5.4. Sistemas de fase no mínima.
5.5. Especificaciones del comportamiento en el dominio de la
frecuencia.
5.6. Análisis de estabilidad. Márgenes de ganancia y de fase.
5.7. Relación de la respuesta en frecuencia con la respuesta
temporal.
5.8. Determinación experimental de la función de transferencia a
partir de la respuesta en frecuencia.
5.9. Compensación en el dominio de la frecuencia.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Factores básicos:
La función de transferencia de un sistema puede representarse
como un producto de factores básicos (en forma normalizada):
1. Ganancia K.
2. Integradores y derivadores con orden de multiplicidad n.
3. Polos y ceros .
4. Polos y ceros ( ).
Para dibujar el diagrama de Bode de cada uno de estos términos,
se calcula la correspondiente función de transferencia senoidal
G(jω) para varias frecuencias y se representan los puntos
gráficamente. El trazado se simplifica utilizando aproximaciones
asintóticas para cada uno de los factores.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ganancia K:
La curva de magnitud logarítmica para una ganancia constante K
es una recta horizontal cuya magnitud es de 20 log K decibelios.
• si K > 1 recta con valor positivo en dBs.
• si 0 < K < 1 recta con valor negativo en dBs.
El ángulo de fase de la ganancia K es cero grados.
El recíproco de un número difiere de su valor sólo en el signo:
El efecto de variar la ganancia K en la función de transferencia
es que sube o baja la curva de magnitud logarítmica de la
función de transferencia en la cantidad constante
correspondiente, pero no afecta a la curva de fase.
Trazado de diagramas de Bode

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Integradores :
Los valores de la magnitud expresada en dB y del ángulo
expresado en grados son:
Como w se expresa en escala logarítmica, la representación de
la magnitud en dB es una línea recta que pasa por el punto
(1 rad/s, 0 dB) y pendiente de -20 dB/década.
Trazado de diagramas de Bode

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Integradores (cont.):

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Derivadores G( jω) = jω:
Los valores de la magnitud expresada en decibelios y del ángulo
expresado en grados son:
La pendiente de la curva de magnitud es de +20 dB/década y el
signo del ángulo de fase cambia de signo (pasa a ser positivo).
Trazado de diagramas de Bode

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Derivadores G( jω) = jω (cont.):
Trazado de diagramas de Bode

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Integradores y derivadores de orden superior a 1:
Los valores de la magnitud expresada en decibelios y del ángulo
expresado en grados serían:
Trazado de diagramas de Bode
Tanto las pendientes como los ángulos de fase se multiplican por n.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Integradores y derivadores de orden superior a 1 (cont.):
Trazado de diagramas de Bode

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Polo real:
La función de transferencia de un sistema de primer orden con
constante de tiempo T es
El diagrama de Bode de la magnitud se obtiene de la expresión
que se aproxima a:

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Polo real (cont.):
La representación de la curva de ganancia es una recta de
pendiente -20 dB/década. Para la frecuencia w=1/T, las
asíntotas de alta y baja frecuencia toman ambas 0 dB,
denominándose frecuencia de cruce, con un error máximo de
¿¿cuál es el polo ?? ¿¿cuál es el polo ??
En su forma normalizada (f.n.)
OJO: En escala logarítmica

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Polo real (cont.):
Para representar el ángulo de fase, se utiliza la expresión:

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Polo real (cont.):
Diagrama de Bode en magnitud y fase de un sistema con un
polo real.
cruce

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Cero real:
La asíntota de baja frecuencia del cero, recíproco del polo real,
es de 0 dB y la pendiente de la asíntota de alta frecuencia de
+20 dB/década. El ángulo de fase varía de 0º a +90º con el
punto de inflexión en +45º.
Una ventaja de los diagramas de Bode es que para
factores recíprocos, las curvas de magnitud y ángulo
de fase sólo requieren un cambio de signo.
polo cero?

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Cero real (cont.):
Diagrama de Bode en magnitud y fase de un sistema con un
cero real.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Polos complejos conjugados:
En el caso de polos complejos conjugados la función de
transferencia senoidal cuando G(s) expresada en función de ωn y
de ξ es:
El módulo de G(jω) expresado en decibelios viene dada por
que se aproxima a
Ambas asíntotas se cruzan en la frecuencia natural ωn que es la
frecuencia de cruce.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Polos complejos conjugados (cont.):
Mientras que la representación asintótica es independiente de ξ,
la representación exacta de la curva de magnitud depende del
valor de este parámetro, produciéndose un máximo más
acentuado (pico de resonancia) a medida que el valor de ξ es
más pequeño.
La frecuencia a la que se produce el máximo de la curva de
magnitud se denomina frecuencia de resonancia.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Polos complejos conjugados (cont.):
Diagrama de Bode en magnitud de sistema con polos complejos
conjugados.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Polos complejos conjugados (cont.):
El ángulo de fase de los factores complejos conjugados también
depende de ξ según
Sustituyendo para diferentes valores de w se obtiene
En ingeniería se utiliza la
variante de atan que calcula el
ángulo en 4 cuadrantes (atan2)

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Polos complejos conjugados (cont.):
Diagrama de Bode en magnitud y fase de sistema con polos
complejos conjugados.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Ceros complejos conjugados:
El diagrama de Bode de magnitud tiene la asíntota de alta
frecuencia de pendiente +40 dB/década y el ángulo de fase varía
de 0º a +180º con el punto de inflexión en +90º.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode.
Procedimiento general:
1. Reescribir la función de transferencia senoidal G(jω) como
producto de los factores básicos.
a. Considerando la forma general de una función de transferencia:
b. se escribe como un producto de factores básicos:
donde la ganancia es:

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode.
Procedimiento general:
1. Reescribir la función de transferencia senoidal G(jω) como
producto de los factores básicos.
2. Obtener los trazados individuales de cada factor básico, y
representarlos.
3. Sumar todos los trazados: los de magnitud o módulo entre
sí (en dB) y los de ángulo o fase entre sí (grados).
Ganancia de G(jω) en dB
Ángulo de G(jω) en grados

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode.
Procedimiento general:
1. Reescribir la función de transferencia senoidal G(jω) como
producto de los factores básicos.
2. Obtener los trazados individuales de cada factor básico, y
representarlos.
3. Sumar todos los trazados: los de magnitud o módulo entre
sí (en dB) y los de ángulo o fase entre sí (grados).
4. Si se desea registrar una aproximación rápida, se puede
hacer el trazado asintótico.
La curva exacta, se encuentra
cerca de la curva asintótica.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Ejemplo:
Para evitar errores al trazar la curva de magnitud logarítmica, es
conveniente reescribir la función de transferencia en forma
normalizada:
Esta función se compone de los factores siguientes:
1 2 3 4 5
ωn y ξ ?

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Trazado de diagramas de Bode
Ejemplo:
Las frecuencias de corte del tercer, cuarto y quinto términos son
w = 3, w = 2 y wn = , respectivamente.2
Observe que el último
término tiene el factor
de amortiguamiento
relativo de 0.3536.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Contenido
TEMA 5.- Análisis de respuesta en frecuencia
5.1. Análisis de sistemas en tiempo continuo en el dominio de la
frecuencia.
5.2. Representación mediante diagramas de Bode.
5.3. Trazado de diagramas de Bode.
5.4. Sistemas de fase no mínima.
5.5. Especificaciones del comportamiento en el dominio de la
frecuencia.
5.6. Análisis de estabilidad. Márgenes de ganancia y de fase.
5.7. Relación de la respuesta en frecuencia con la respuesta
temporal.
5.8. Determinación experimental de la función de transferencia a
partir de la respuesta en frecuencia.
5.9. Compensación en el dominio de la frecuencia.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Sistemas de fase mínima y de fase no mínima:
Un sistema de fase no mínima se caracteriza por tener para
altas frecuencias una fase más negativa de lo que era de
esperar por el grado del polinomio del numerador y
denominador de la función de transferencia.
Ejemplos de sistemas de fase no mínima son sistemas con
algún cero positivo y sistemas con retardo de transporte.
Sistemas de fase no mínima

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Sistemas de fase mínima y de fase no mínima (cont.):
Ejemplo:
Sistemas de fase no mínima
G1 es de fase mínima G2 es de fase no mínima

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Sistemas de fase mínima y de fase no mínima (cont.):
Ejemplo:
Sistemas de fase no mínima
Las curvas de magnitud de
ambos sistemas coinciden,
sin embargo, las curvas de
fase son bien distintas

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Sistemas de fase mínima y de fase no mínima (cont.):
Ejemplo:
Sistemas de fase no mínima
Los sistemas de fase no
mínima son lentos en su
respuesta. En la mayor parte
de los sistemas de control, se
debe tener cuidado en evitar
un atraso de fase excesivo.
Al diseñar un sistema, si una velocidad de respuesta rápida es de
vital importancia, no deben usarse componentes de fase no mínima.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Sistemas de fase no mínima
Cómo detectar si un sistema es de fase mínima:
Sabiendo que p y q son los grados de los polinomios del
denominador y numerador, respectivamente, de la función de
transferencia, podemos afirmar que:
1. En cualquier sistema, sea o no de fase mínima, la pendiente de
la curva de magnitud para valores altos de frecuencia verifica la
relación
-20(p-q) dB/década
2. Sólo si el sistema es de fase mínima la curva de ángulos de fase
para valores altos de frecuencia verifica la relación
-90 (p-q) grados
Para detectar si el sistema es de fase NO mínima se examina la
pendiente de la asíntota de la curva del ángulo de fase para
valores altos de frecuencia y se comprueba si verifica, o no, la
expresión del punto 2.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Retardo de transporte:El retardo existente entre la medición y la acción de control da
lugar a un tiempo muerto denominado retardo de transporte.
Ejemplo:Sistema térmico en el que circula aire caliente para conservar
constante la temperatura de una cámara. En este sistema, el
sensor de temperatura se sitúa corriente abajo a una distancia de
L metros del horno. La velocidad del aire es de v m/s por lo que
transcurrirá T = L / v segundos antes de que el termómetro
detecte cualquier cambio en la temperatura del horno.
Sistemas de fase no mínima

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Sistemas de fase no mínima
Sistemas con retardo:
Los sistemas con retardo de transporte tienen un
comportamiento de fase no mínima y presentan un atraso
excesivo de fase sin atenuación para valores altos de frecuencia.
La entrada x(t) y la salida y(t) de un elemento de retardo de
transporte se relacionan mediante:
donde T es el tiempo de retardo.
La función de transferencia se obtiene calculando la
transformada de Laplace:
Los retardos de transporte
están presentes normalmente
en sistemas térmicos,
hidráulicos y neumáticos.
No afecta a la curva de ganancia

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Sistemas de fase no mínima
Sistemas con retardo (cont.):
El módulo y argumento de la función de transferencia senoidal será:

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Sistemas de fase no mínima
Sistemas con retardo (cont.):
Comparación entre sistemas con y sin retardo de primer orden:
por qué
fase G3 más
negativa ?

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Contenido
TEMA 5.- Análisis de respuesta en frecuencia
5.1. Análisis de sistemas en tiempo continuo en el dominio de la
frecuencia.
5.2. Representación mediante diagramas de Bode.
5.3. Trazado de diagramas de Bode.
5.4. Sistemas de fase no mínima.
5.5. Especificaciones del comportamiento en el dominio de la
frecuencia.
5.6. Análisis de estabilidad. Márgenes de ganancia y de fase.
5.7. Relación de la respuesta en frecuencia con la respuesta
temporal.
5.8. Determinación experimental de la función de transferencia a
partir de la respuesta en frecuencia.
5.9. Compensación en el dominio de la frecuencia.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Especificaciones del comportamiento en frecuencia
Especificaciones:
Las especificaciones estudiadas en el dominio del tiempo, tales
como la sobreoscilación o el tiempo de subida, no se pueden
utilizar directamente en el dominio de la frecuencia.
Partiendo del diagrama de Bode de la función de transferencia
las especificaciones que se utilizan frecuentemente en la
práctica son:
• Pico de resonancia y frecuencia de resonancia.
• Ancho de banda, frecuencia de corte y razón de corte.
• Margen de fase y de ganancia.Especificaciones
de bucle abierto,
pero ojo, están
relacionadas con
la estabilidad del
sistema en bucle
cerrado.
Especificaciones
de bucle cerrado

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
10-1
100
101
102
-70
-60
-50
-40
-30
-20
-10
0
10
-3 dB
Mr(dB)
wbwr
BW
Especificaciones:
Especificaciones del comportamiento en frecuencia
Pico de resonancia
Frecuencia de resonancia
Ancho de banda
Razón de corte
Frecuencia de corte

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Especificaciones del comportamiento en frecuencia
• Pico de resonancia (Mr):
Es el valor máximo de la curva de magnitud del diagrama de
Bode. Indica la estabilidad relativa de un sistema estable en
bucle cerrado.
Un valor grande de Mr se corresponde en general con una
constante de amortiguamiento pequeña. En la práctica, el valor
deseado se encuentra entre 1.1 y 1.5.
• Frecuencia de resonancia (wr):
Es la frecuencia en la que se produce el pico de resonancia Mr
• Frecuencia de corte (wb):
Es la frecuencia en la cual la magnitud de respuesta en
frecuencia en lazo cerrado está 3 dB debajo de su valor de baja
frecuencia.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Especificaciones del comportamiento en frecuencia
• Ancho de banda (BW)
El rango de la frecuencia en el cual la magnitud en
lazo cerrado no desciende a -3 dB se denomina ancho de
banda del sistema.
La especificación del ancho de banda se relaciona con:
1. La capacidad de reproducir la señal de entrada.
2. Las características de filtrado necesarias para el ruido de alta
frecuencia.
Un ancho de banda grande corresponde a un tiempo de subida
pequeño, es decir, a una respuesta rápida. En términos
generales, puede decirse que el ancho de banda es
proporcional a la velocidad de respuesta.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Especificaciones del comportamiento en frecuencia
• Razón de corte:
La razón de corte es la pendiente de la curva de magnitud
logarítmica cercana a la frecuencia de corte.
La razón de corte indica la capacidad de un sistema para
distinguir la señal del ruido.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Especificaciones del comportamiento en frecuencia
Ejemplo:

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Contenido
TEMA 5.- Análisis de respuesta en frecuencia
5.1. Análisis de sistemas en tiempo continuo en el dominio de la
frecuencia.
5.2. Representación mediante diagramas de Bode.
5.3. Trazado de diagramas de Bode.
5.4. Sistemas de fase no mínima.
5.5. Especificaciones del comportamiento en el dominio de la
frecuencia.
5.6. Análisis de estabilidad. Márgenes de ganancia y de fase.
5.7. Relación de la respuesta en frecuencia con la respuesta
temporal.
5.8. Determinación experimental de la función de transferencia a
partir de la respuesta en frecuencia.
5.9. Compensación en el dominio de la frecuencia.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis de estabilidad en frecuencia
Introducción:
Al diseñar un sistema de control se requiere que el sistema sea
estable. Además es necesario que tenga una estabilidad relativa
adecuada por lo que es necesario conocer su grado de
estabilidad.
En el análisis de estabilidad que se va a realizar, se va a trabajar
con la función de transferencia en bucle abierto G(s)H(s) y con
sistemas de fase mínima.
La función de transferencia en bucle abierto coincide con G(s)
sólo si se considera realimentación unitaria H(s)=1.
La mayor o menor estabilidad de un sistema en bucle cerrado se
suele expresar en términos de margen de fase y de ganancia,
cuyas definiciones son las siguientes cuando se trata de
sistemas de fase mínima.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis de estabilidad en frecuencia
Margen de ganancia (Mg o Kg):
El margen de ganancia es el recíproco de la magnitud |G(jω)| de
la función de transferencia en lazo abierto en la frecuencia de
cruce de fase.
o bien en decibelios:
donde w1 es la frecuencia de cruce de fase.
La frecuencia de cruce de fase es la frecuencia en la cual el
ángulo de fase de la función de transferencia en lazo abierto es
igual a –180º.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis de estabilidad en frecuencia
Margen de fase (Mf o g ):
El margen de fase es la cantidad de atraso de fase adicional en
la frecuencia de cruce de ganancia requerida para llevar el
sistema al borde de la inestabilidad:
g = 180º + f
donde f es el ángulo de fase de la función de transferencia en
lazo abierto en la frecuencia de cruce de ganancia.
La frecuencia de cruce de ganancia es la frecuencia en la cual
la magnitud de la función de transferencia en lazo abierto es
unitaria, |G(jω)|=1 (i.e. 0 dBs).

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis de estabilidad en frecuencia
Margen de fase y de ganancia:
En el diagrama de Bode de la función de transferencia en bucle
abierto del sistema, los márgenes de ganancia y de fase se
determinan como indica la figura.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis de estabilidad en frecuencia
Condición de estabilidad:
Un sistema de fase mínima es estable si los márgenes de fase y
de ganancia deben ser ambos positivos. Basta con que uno de
estos márgenes sea negativo para que el sistema sea inestable.
Los márgenes adecuados de fase y de ganancia aseguran
contra las variaciones de los componentes del sistema y se
especifican para valores de frecuencia definidos.
Para obtener un comportamiento satisfactorio, el margen de
fase debe estar entre 30º y 60º, y el margen de ganancia debe
ser mayor que 6 dB.Con estos valores, un sistema de fase
mínima tiene una estabilidad garantizada,
incluso si la ganancia en lazo abierto y
las constantes de tiempo de los
componentes varían en cierto grado.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis de estabilidad en frecuencia
Condición de estabilidad:
Ejemplo 1:
Sistema estable

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis de estabilidad en frecuencia
Condición de estabilidad:
Ejemplo 2:
Sistema inestable

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis de estabilidad en frecuencia
Condición de estabilidad:
Ejercicio 1:
Para un sistema de realimentado, la función de transferencia de la
planta es:
y el factor de realimentación es:
Se pide:
1. Estudiar la estabilidad del sistema calculando márgenes de
ganancia y fase.
2. Obtener el ancho de banda del sistema en bucle cerrado.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis de estabilidad en frecuencia
Condición de estabilidad:
Ejercicio 1:
Para obtener los márgenes de ganancia y de fase, se trabaja con el
Bode de la función de transferencia en bucle abierto.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis de estabilidad en frecuencia
Condición de estabilidad:
Ejercicio 1:
Para obtener el ancho de banda, trabajamos con el Bode de la
función de transferencia en bucle cerrado.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis de estabilidad en frecuencia
Condición de estabilidad:
Ejercicio 2:
En la figura se muestra un sistema realimentado donde aparece un
parámetro que es la ganancia K.
También se incluye el diagrama de Bode del sistema para tres
valores diferentes, K=0.1, K=2 y K = 10 (ver siguiente trasparencia).
Se pide:
1. Calcular los márgenes de ganancia y de fase para los tres valores
de K y
2. Determinar la estabilidad del sistema en los tres casos.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Análisis de estabilidad en frecuencia
Condición de estabilidad:
Ejercicio 2:
Se puede observar
cómo la curva de fase
es la misma mientras
que la de magnitud
sube o baja en el
diagrama dependiendo
de K.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Condición de estabilidad:
Ejercicio 2:
Para K = 0.1 el
sistema es estable,
pues tanto el margen
de ganancia como el
de fase son positivos.
Análisis de estabilidad en frecuencia

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Condición de estabilidad:
Ejercicio 2:
Para K = 2 el sistema
está en el límite de la
estabilidad, por tanto
el margen de
ganancia y el de fase
son nulos.
Análisis de estabilidad en frecuencia

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Condición de estabilidad:
Ejercicio 2:
Análisis de estabilidad en frecuencia
Para K = 10 el
sistema es inestable,
pues tanto el
margen de ganancia
como el de fase son
negativos.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Condición de estabilidad:
Ejercicio 2:
Análisis de estabilidad en frecuencia
Para K = 2 el
sistema está
en el límite de
la estabilidad.
Para K = 0.1
el sistema es
estable.
Para K = 10 el
sistema es
inestable.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Contenido
TEMA 5.- Análisis de respuesta en frecuencia
5.1. Análisis de sistemas en tiempo continuo en el dominio de la
frecuencia.
5.2. Representación mediante diagramas de Bode.
5.3. Trazado de diagramas de Bode.
5.4. Sistemas de fase no mínima.
5.5. Especificaciones del comportamiento en el dominio de la
frecuencia.
5.6. Análisis de estabilidad. Márgenes de ganancia y de fase.
5.7. Relación de la respuesta en frecuencia con la respuesta
temporal.
5.8. Determinación experimental de la función de transferencia a
partir de la respuesta en frecuencia.
5.9. Compensación en el dominio de la frecuencia.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Relación de la respuesta frecuencial y temporal
Estudio del transitorio de la respuesta temporal:
Se va a estudiar la relación de respuesta en frecuencia con la
temporal para el caso de un sistema prototipo de segundo orden.
La correspondiente función de transferencia senoidal es:
Si el orden es superior a
dos, pero tiene dos polos
complejos conjugados
dominantes las relaciones
también son válidas.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Relación de la respuesta frecuencial y temporal
Estudio del transitorio de la respuesta temporal
Operando en la expresión del módulo se obtiene el máximo, que
se producirá en la frecuencia de resonancia, y el valor del
máximo obtenido será el pico de resonancia. Los valores
calculados son:
Estas ecuaciones son validas para valores de la relación de
amortiguamiento 0 < x < 0.707
Observando las ecuaciones se puede deducir que:
a) El pico de resonancia Mr depende sólo del coeficiente x.
b) Si x 0 el pico de resonancia Mr ∞.
c) Cuando aumenta x el pico de resonancia Mr disminuye.
(cont.):
¿?

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Relación de la respuesta frecuencial y temporal
Estudio del transitorio de la respuesta temporal
Operando, también se puede obtener la expresión analítica del
ancho de banda para un sistema de segundo orden que es:
y realizando una aproximación lineal de la misma, se obtiene
Observando las ecuaciones se puede deducir que:
a) De la que se puede deducir que el ancho de banda BW es
directamente proporcional a la frecuencia natural wn.
b) Para un valor de la frecuencia natural fijo, el ancho de banda
disminuye a medida que la relación de amortiguamiento xaumenta.
(cont.):

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Relación de la respuesta frecuencial y temporal
Estudio del transitorio de la respuesta temporal
Aumentar la relación de amortiguamiento implica que tanto el
ancho de banda como el valor del pico de resonancia se hacen
más pequeños.
(cont.):

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Relación de la respuesta frecuencial y temporal
Estudio del estacionario de la respuesta temporal:
Considerando un sistema de control con realimentación unitaria,
las constantes estáticas de error de posición, velocidad y
aceleración describen el comportamiento de baja frecuencia de
los sistemas de tipo 0, tipo 1 y tipo 2, respectivamente.
Para un sistema definido, sólo es finita y significativa una de las
constantes de error estático.
El tipo de sistema determina la pendiente de la curva de
magnitud logarítmica en frecuencias bajas.
La existencia y la magnitud del error en
estado estacionario se determina a partir de
la observación en baja frecuencia de la
curva de magnitud logarítmica

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Relación de la respuesta frecuencial y temporal
Estudio del estacionario de la respuesta temporal
Para el caso de un sistema de tipo 0, la gráfica de la magnitud
G(jw) logarítmica en baja frecuencia es igual a Kp.
(cont.):

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Relación de la respuesta frecuencial y temporal
Estudio del estacionario de la respuesta temporal
Para el caso de un sistema tipo 1, la intersección del segmento
inicial -20 dB/década (o su extensión) con la línea w = 1 tiene la
magnitud de 20 log Kv.
por tanto
También se puede comprobar que
donde w1 = 1 es la frecuencia a la que |G(jw)|=1.
(cont.):

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Relación de la respuesta frecuencial y temporal
Estudio del estacionario de la respuesta temporal
Para el caso de un sistema tipo 1.
(cont.):

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Relación de la respuesta frecuencial y temporal
Estudio del estacionario de la respuesta temporal
Para el caso de un sistema de tipo 2, dado que a bajas
frecuencias,
se deduce que
Además
donde wa = 1 es la frecuencia a la que |G(jw)|=1.
(cont.):

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Relación de la respuesta frecuencial y temporal
Estudio del estacionario de la respuesta temporal
Para el caso de un sistema de tipo 2
(cont.):

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Contenido
TEMA 5.- Análisis de respuesta en frecuencia
5.1. Análisis de sistemas en tiempo continuo en el dominio de la
frecuencia.
5.2. Representación mediante diagramas de Bode.
5.3. Trazado de diagramas de Bode.
5.4. Sistemas de fase no mínima.
5.5. Especificaciones del comportamiento en el dominio de la
frecuencia.
5.6. Análisis de estabilidad. Márgenes de ganancia y de fase.
5.7. Relación de la respuesta en frecuencia con la respuesta
temporal.
5.8. Determinación experimental de la función de transferencia a
partir de la respuesta en frecuencia.
5.9. Compensación en el dominio de la frecuencia.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Identificación de sistemas:
Si es posible medir la razón de amplitudes E/S del sistema y el
cambio de fase para un número suficiente de frecuencias dentro
del rango de frecuencias de interés, se puede graficar por
puntos el diagrama Bode.
Posteriormente se puede determinar la función de transferencia
mediante aproximaciones asintóticas.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Identificación de sistemas (cont.):
Para el ajuste experimental es necesario el uso de generadores
de señales senoidales.
Los rangos de frecuencia necesarios para la prueba son,
aproximadamente, 0.001 - 10 Hz para sistemas con constantes
de tiempo grandes y 0.1 - 1000 Hz para sistemas con
constantes de tiempo pequeñas. Las frecuencias han de convertirse a
rad/s antes de calcular las constantes
de tiempo de cada polo o cero.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Consideraciones a tener en cuenta:
1. Por lo general es más fácil obtener mediciones precisas de
la amplitud que de la fase.
2. Los sistemas físicos tienen varios tipos de no linealidades.
Por tanto, es necesario considerar con cuidado la amplitud
de las señales senoidales de entrada:
– Si la amplitud de la señal de entrada es demasiado grande, el
sistema se saturará.
– En cambio, una señal pequeña provocará errores debidos a la
zona muerta.
Es necesario comprobar que la forma de la onda de la salida
sea senoidal y de que el sistema opere en su región lineal
durante el periodo de prueba.
La respuesta en
frecuencia producirá
resultados imprecisos

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Pasos para identificar una función de transferencia
1. Determinar la pendiente para bajas frecuencias en la curva de
magnitud (número de polos en el origen).
2. Determinar la pendiente para altas frecuencias en la curva de
magnitud (diferencia del orden del polinomio del denominador y el
numerador (p-q)).
3. Determinar los ángulos en la curva de fases para bajas y altas
frecuencias (detecta si se trata de un sistema de fase mínima o no).
4. Determinar la ganancia de baja frecuencia (Kp, Kv ó Ka).
5. Detectar el número de frecuencias de cruce, su posición y dibujar las
asíntotas. Para los términos de segundo orden estimar la relación de
amortiguamiento.
6. Utilizar el diagrama de fases para en caso de tratarse de un retardo
de transporte y estimar la constante de tiempo del mismo.
7. Calcular la respuesta en frecuencia de la función de transferencia
estimada y compararla con las curvas experimentales iniciales.
8. Iterar y repetir el proceso para afinar la posición de los polos y ceros.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 1:
A partir del diagrama de Bode de la figura, determinar
experimentalmente la función de transferencia del sistema:
Determinación experimental de la función de transferencia

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 1 (cont.):
Estimación de la pendiente inicial.
Determinación experimental de la función de transferencia
Pendiente inicial = -20 dB/década.
Un polo en el origen Tipo 1.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 1 (cont.):
Cálculo de la ganancia estática de un sistema de tipo 1.
Determinación experimental de la función de transferencia
15 dB = 20 log(Kv) Kv=5.62
w =1

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 1 (cont.):
Aproximación asintótica de la curva de ganancia.
Determinación experimental de la función de transferencia
wc = 4 wc = 25 wc = 70

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 1 (cont.):
Estimación de las caídas de dB/década para cada asíntota.
Determinación experimental de la función de transferencia
-20 dB / década

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 1 (cont.):
Estimación de las caídas de dB/década para cada asíntota.
Determinación experimental de la función de transferencia
-40 dB / década polo real
wc = 4

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 1 (cont.):
Estimación de las caídas de dB/década para cada asíntota.
Determinación experimental de la función de transferencia
-60 dB / década polo real
wc = 25

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 1 (cont.):
Estimación de la pendiente final.
Determinación experimental de la función de transferencia
Pendiente final = -40 dB / década
cero real (p-q) = 2
wc = 70

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 1 (cont.):
¿Es el sistema de fase mínima o no?
Determinación experimental de la función de transferencia
wc = 4 wc = 25 wc = 70
-90º (p-q) = -180º
2
Fase mínima
SI

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Ejemplo 1 (cont.):
Como resultado de la identificación del Ejemplo 1 se obtiene la
siguiente función de transferencia senoidal:
y la forma final haciendo el cambio jw=s sería:

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 1 (cont.):
¿Es el sistema estable en bucle cerrado?
Determinación experimental de la función de transferencia
Mg = 19 dB
Mf = 40ºwcp = 13
wcg = 4
SI

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Ejemplo 2:
A partir del diagrama de Bode de la figura, determinar
experimentalmente la función de transferencia del sistema:

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Ejemplo 2 (cont.):
Estimación de la pendiente inicial.
Pendiente inicial = 0 dB/década Tipo 0.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Ejemplo 2 (cont.):
Cálculo de la ganancia estática de un sistema de tipo 0.
20 dB = 20 log(Kp) Kp=10

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Ejemplo 2 (cont.):
Aproximación asintótica de la curva de ganancia.
15 dB
wc = 0.2 wc = 1 wc = 5

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Ejemplo 2 (cont.):
Estimación de las caídas de dB/década para cada asíntota.
-20 dB/décadaPolo real
wc = 0.2

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Ejemplo 2 (cont.):
Aproximación asintótica de la curva de ganancia.
0 dB/década Cero real
wc = 1

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Ejemplo 2 (cont.):
Aproximación asintótica de la curva de ganancia.
Pendiente final = -40 dB/década
Polo complejo conjugado (p-q) = 2
wc = 5

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Determinación experimental de la función de transferencia
Ejemplo 2 (cont.):
¿Es el sistema de fase mínima o no?
15 dB
wc = 0.2 wc = 1 wc = 5
-90º (p-q) = -180º
2
Fase mínima
SI

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 2 (cont.):
El valor del pico de la curva de magnitud en wn = 5.0 es
aproximadamente igual a 15 dB, por lo que mirando las curvas
de la figura se puede aproximar una relación de
amortiguamiento igual a ξ = 0.1.
Determinación experimental de la función de transferencia

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 2 (cont.):
Como resultado de la identificación del Ejemplo 2, se obtiene la
siguiente función de transferencia senoidal:
y la forma final haciendo el cambio jw = s sería:
Determinación experimental de la función de transferencia.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejemplo 2 (cont.):
¿Es el sistema estable en bucle cerrado ?
Determinación experimental de la función de transferencia
Mg = ∞
Mf = 4º wcp = ?
wcg = 8.5
SI

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Contenido
TEMA 5.- Análisis de respuesta en frecuencia
5.1. Análisis de sistemas en tiempo continuo en el dominio de la
frecuencia.
5.2. Representación mediante diagramas de Bode.
5.3. Trazado de diagramas de Bode.
5.4. Sistemas de fase no mínima.
5.5. Especificaciones del comportamiento en el dominio de la
frecuencia.
5.6. Análisis de estabilidad. Márgenes de ganancia y de fase.
5.7. Relación de la respuesta en frecuencia con la respuesta
temporal.
5.8. Determinación experimental de la función de transferencia a
partir de la respuesta en frecuencia.
5.9. Compensación en el dominio de la frecuencia.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Compensación en el dominio de la frecuencia
Introducción:
El cumplimiento de las especificaciones de funcionamiento de un
sistema conlleva habitualmente el diseño de sistemas de
compensación o control.
La técnica de compensación permite la modificación de la dinámica
del sistema en bucle cerrado con objeto de cumplir dichas
especificaciones, las cuales vienen dadas por requerimientos de
precisión, estabilidad relativa y velocidad de respuesta.
Las especificaciones pueden venir dadas en el dominio del tiempo
(tr, SO, ts,…) o en el dominio de la frecuencia (Mp, Mg, Mr, BW,…).

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Compensación en el dominio de la frecuencia
Compensación:
En general, la función de transferencia del compensador vendrá
dado por una ganancia, ceros y polos cuyas localizaciones
permitan el cumplimiento simultáneo de las especificaciones de
respuesta, que para el caso continuo será

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Compensación (cont.):1. En general, se realizará en primer lugar el ajuste de la ganancia
proporcional, lo cual no siempre basta para cumplir el conjunto de
especificaciones.
Un aumento de ganancia produce mejora en la precisión, aumento
en la velocidad de respuesta, pero perjudica la estabilidad relativa
(incluso puede hacer inestable al sistema).
2. Una vez modificada la ganancia se añaden polos y ceros hasta el
cumplimiento de la especificaciones. Particularizando el
procedimiento de compensación en el dominio de la frecuencia, en
tiempo continuo se pueden distinguir 3 tipos:
• Compensador de Adelanto
• Compensador de Atraso
• Compensador Mixto
(Atraso-Adelanto)
Compensación en el dominio de la frecuencia
1 , 1
1)( <
Ts
TsKsG cc
1 , 1
1)(
Ts
TsKsG cc
1 ,
)1(1
)1()1()(
21
21
sTsT
sTsTKsG cc

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Compensación en el dominio de la frecuencia
Compensación proporcional:
La compensación proporcional conlleva el uso de Gc(s) = Kc, lo
cual dada la configuración en serie del sistema de control
supone el añadir un término ganancia en 20log(Kc) dB en la
curva de magnitud de la planta Gp(s) y ninguna modificación en
la curva de fase o ángulo.
En general, se produce un mejora en la constantes de error
estático Kp, Kv o Ka (siempre y cuando no sean de valor infinito),
mientras que aumentará la frecuencia de cruce de ganancia y
con ello la velocidad de respuesta, mientras que se reducirán en
general el margen de fase y de ganancia, reduciéndose con ello
la estabilidad relativa.

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Compensación en el dominio de la frecuencia
Ejercicio:
En la figura se muestra un sistema realimentado donde aparece
un parámetro que es la ganancia K. Se pide:
a) Determinar la K crítica (Kc) del sistema y
b) Hallar el rango de K válido que permite obtener un Mp > 75º y
un Mg > 25 dB.
???

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejercicio (cont.):
Para determinar la Kc se trazará el diagrama de Bode de bucle
abierto del sistema realimentado.
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
Phase (
deg)
-150
-100
-50
0
50
100
Magnitu
de (
dB
)Bode Diagram
Gm = 6.02 dB (at 1 rad/sec) , Pm = 21.4 deg (at 0.682 rad/sec)
Frequency (rad/sec)
Compensación en el dominio de la frecuencia
6.02 dB = 20log(Kc) Kc = 2
K < 2 (sistema estable)

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Ejercicio (cont.):
Se comprobará si el sistema está en el límite de la estabilidad
para K = Kc observando la respuesta ante entrada escalón
unitario del sistema realimentado para este valor de K.
Compensación en el dominio de la frecuencia
0 0.5 1 1.5 2 2.5 3 3.5 4
x 105
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Step Response
Time (seconds)
Am
plit
ude
Límite de la
estabilidad

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
Phase (
deg)
-150
-100
-50
0
50
100
Magnitu
de (
dB
)Bode Diagram
Gm = 6.02 dB (at 1 rad/sec) , Pm = 21.4 deg (at 0.682 rad/sec)
Frequency (rad/sec)
Compensación en el dominio de la frecuencia
Ejercicio (cont.):
Se determina la K para Mg > 25 dB.
(6.02-25) dB = 20log(Klim) K < 0.11= Klim
Klim = 0.11 < 2 = Kc
Mg=6.02 dB

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Compensación en el dominio de la frecuencia
Ejercicio (cont.):
Se comprueba si para 0 < K < 0.11 el Mg > 25 dB determinando
el valor del Mg para el sistema realimentado con K = Klim = 0.11.
-150
-100
-50
0
50
Magnitu
de (
dB
)
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
Phase (
deg)
Bode Diagram
Gm = 25.2 dB (at 1 rad/sec) , Pm = 77.6 deg (at 0.109 rad/sec)
Frequency (rad/sec)
25 dB

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Compensación en el dominio de la frecuencia
Ejercicio (cont.):
Por último, se comprueba si para 0 < K < 0.11 el Mf > 75º
determinando el valor del Mf para el sistema realimentado con
K = Klim = 0.11.
SI K < 0.11
-150
-100
-50
0
50
Magnitu
de (
dB
)
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
Phase (
deg)
Bode Diagram
Gm = 25.2 dB (at 1 rad/sec) , Pm = 77.6 deg (at 0.109 rad/sec)
Frequency (rad/sec)
77 º

Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca
Dep
art
am
en
to d
e I
ng
en
ierí
a
de S
iste
mas y
Au
tom
áti
ca Automática
2º Curso del Grado en
Ingeniería en Tecnología Industrial
FIN