Embed Size (px)
Citation preview
TEMI RISOLTI
DI MECCANICA ANALITICA
Riccardo Riganti

2
PROVA SCRITTA DI MECCANICA ANALITICACorso Ing. Aerospaziale – 14/11/2002
PROBLEMA 1
Nel sistema di figura, che e disposto in un piano verticale, la sbarretta rigida omogeneaAB ha lunghezza uguale al raggio r del disco incernierato nel suo baricentro O. La mollaEB ha costante elastica nota k, lunghezza a riposo trascurabile, e collega l’estremo Bscorrevole sull’asse x con il punto E del disco che e diametralmente opposto alla cernieraA. Le forze di attrito sono trascurabili.
A
B
mg
4mg
qO
E
x
y
Gr
AB = r
a) Assumendo come parametro di controllo il peso mg, tracciare il diagramma di stabilitadelle configurazioni di equilibrio ϑe ∈ [0, 2π] del sistema, dove ϑ e l’angolo indicato infigura.
b) Determinare la Lagrangiana L(ϑ, ϑ) del sistema.
c) Fissato per il parametro di controllo il valore mg = 32kr, scrivere l’equazione del motolinearizzata nell’intorno della sua configurazione di equilibrio stabile e calcolare il periododelle piccole oscillazioni del sistema attorno a tale configurazione.
PROBLEMA 2
Data la HamiltonianaH(q, p) = (qp)3 + 2 lnq
di un sistema con un grado di liberta, applicare alle variabili hamiltoniane q > 0 e p ∈ IRla trasformazione canonica generata da
F1(q, q′) = q′lnq.
Scrivere quindi il sistema canonico nelle nuove variabili (q′, p′); integrarlo e ricavare lasoluzione del moto {q(t), p(t)} nelle variabili originarie, associata alle condizioni iniziali:
t = 0 : q(0) = q0 > 0, p(0) = 0.

3
Soluzione
Problema 1
a) Il quadrato della elongazione della molla vale
EB2
= (3r cos ϑ)2 + (r sin ϑ)2 = r2(1 + 8 cos2 ϑ)
per cui il potenziale delle forze applicate e
U(ϑ) = −mgyG − k
2EB
2= −mgr
2sin ϑ− 4kr2 cos2 ϑ + cost.
Le configurazioni di equilibrio nell’intervallo 0 ≤ ϑ ≤ 2π devono soddisfare l’equazione:
dU
dϑ= r cos ϑ
(8kr sin ϑ− mg
2
)= 0
dalla quale si ricava:
ϑ(1)e =
π
2, ϑ(2)
e =3π
2sempre valide
ϑ(3)e = arcsin
(mg
16kr
); ϑ(4)
e = π − ϑ(3)e se mg < 16kr.
0 16kr mg
2
2
p
p
p3
qe( )2
qe( )1
qe( )3
qe( )4
La derivata seconda di U(ϑ) e
d2U
dϑ2= U”(ϑ) = −r sin ϑ(8kr sin ϑ−mg/2) + 8kr2 cos2 ϑ
e se calcolata nelle quattro configurazioni di equilibrio precedenti, vale
U”(π/2) = r(mg/2− 8kr){
> 0 se mg > 16kr< 0 se mg < 16kr
U”(
3π
2
)= −r(8kr + mg/2) < 0
U”(ϑ(3)e ) = U”(ϑ(4)
e ) = 8kr2 cos2 ϑ(3,4)e > 0.
Poiche una configurazione di equilibrio e stabile se in essa l’energia potenziale V (ϑ) =−U(ϑ) ha un minimo locale, ne segue che:

4
• ϑ(1)e = π/2 e stabile se mg < 16kr e instabile se mg > 16kr;
• ϑ(2)e = 3π/2 e sempre stabile;
• ϑ(3)e e ϑ(4)
e , quando esistono, sono instabili.
b) La velocita del baricentro G dell’asta e
~vG = −3
2r sin ϑϑ~i +
r
2cos ϑϑ~j ⇒ v2
G =r2
4(1 + 8 sin2 ϑ)ϑ2.
L’energia cinetica del sistema vale:
T (ϑ, ϑ) =1
2IdiscoO ϑ2 +
1
2mv2
G +1
2IastaG ϑ2
=1
2· 4mr2
2ϑ2 +
1
2· mr2
4(1 + 8 sin2 ϑ)ϑ2 +
1
2· mr2
12ϑ2
=mr2
2
(7
3+ 2 sin2 ϑ
)ϑ2 =
1
2a(ϑ)ϑ2
Pertanto la Lagrangiana del sistema e
L(ϑ, ϑ) = T + U =mr2
2
(7
3+ 2 sin2 ϑ
)ϑ2 − mgr
2sin ϑ− 4kr2 cos2 ϑ + cost.
c) Per mg = 32kr l’unica configurazione di equilibrio stabile e ϑ(2)e = 3π/2. Approssimia-
mo quindi T e U nell’intorno di 3π/2:
T ' 1
2a(3π/2)ϑ2 =
1
2· 13
3mr2ϑ2
U ' 1
2U”(3π/2) · (ϑ− 3π/2)2 = −1
2· 3mgr
4· (ϑ− 3π/2)2.
Con queste espressioni di T e U si ottiene l’equazione linearizzata
13
3mr2ϑ +
3mgr
4(ϑ− 3π/2) = 0
ossia
ϑ + σ2(ϑ− 3π/2) = 0 , σ2 = − U”(3π/2)
a(3π/2)=
9g
52r≡ 72k
13m,
la cui soluzione e ϑ(t) = 3π/2 + A sin(σt + ϕ). Il periodo delle piccole oscillazioni delsistema attorno a 3π/2 e pertanto
T =2π
σ=
2π
3
√52r
g≡ 2π
3
√13m
8k.
Problema 2
Si applicano le formule di trasformazione canonica :
p =∂F1
∂q=
q′
q, p′ = −∂F1
∂q′= −lnq

5
dalle quali si ricavano subito la espressioni della trasformazione diretta (q, p) → (q′, p′) edi quella inversa (q′, p′) → (q, p):
{q′ = pqp′ = − ln q
;
{p = q′ep′
q = e−p′ .
Poiche F1 non dipende esplicitamente dal tempo, questa trasformazione e completamentecanonica e la nuova Hamiltoniana H ′ si calcola come segue:
H ′(q′, p′) = H(e−p′ , q′ep′) = (q′)3 + 2 ln (e−p′) = (q′)3 − 2p′.
Il nuovo sistema canonico si scrive
dq′
dt=
∂H ′
∂p′= −2
dp′
dt= − ∂H ′
∂q′= −3(q′)2
ed ha la soluzione
q′(t) = −2t + q′0 ; p′(t) = −4t3 + 6q′0t2 − 3(q′0)
2t + p′0.
Assumendo i dati iniziali del problema, si ha
q′0 = p0q0 = 0 ; p′0 = − ln q0,
e sostituendo si ottiene:
q′(t) = −2t ; p′(t) = −4t3 − ln q0.
Se infine si ripristinano le variabili canoniche originarie, si trova la soluzione del motorichiesta:
q(t) = q0 e4t3 ; p(t) = −2t
q0
e−4t3 .
6
PROVA SCRITTA DI MECCANICA ANALITICA
Corso Ing. Meccanica – 20/01/2003
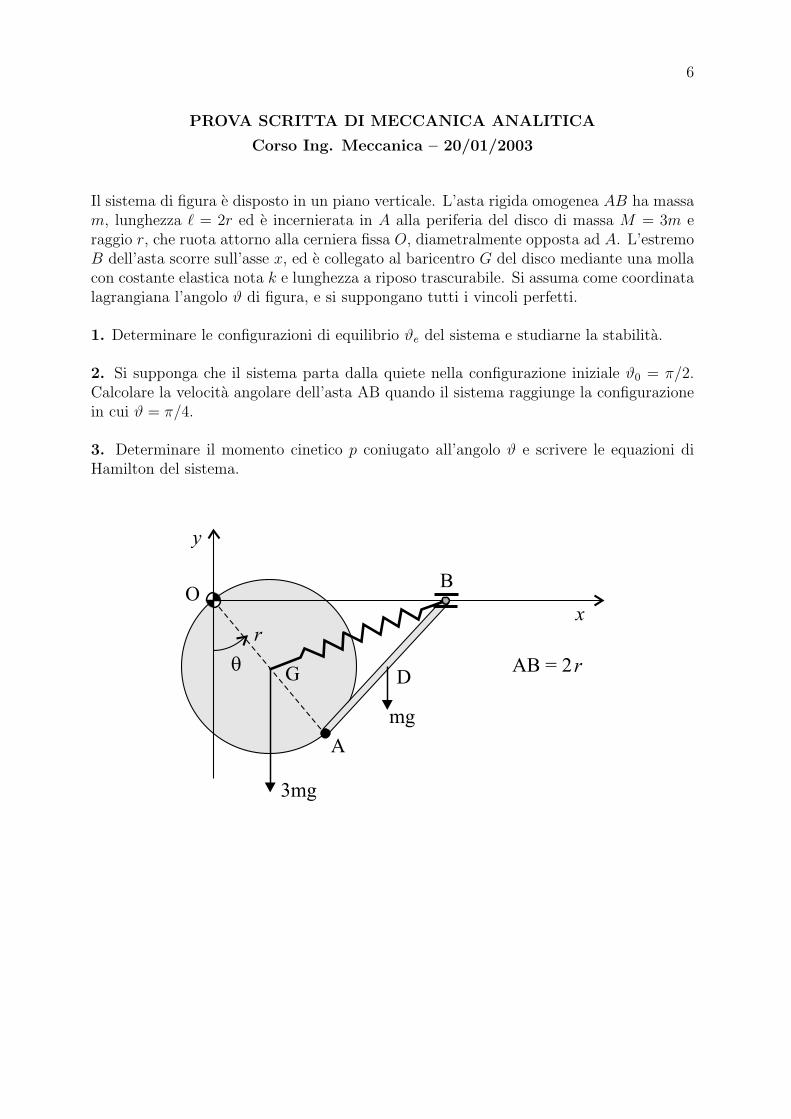
Il sistema di figura e disposto in un piano verticale. L’asta rigida omogenea AB ha massam, lunghezza ` = 2r ed e incernierata in A alla periferia del disco di massa M = 3m eraggio r, che ruota attorno alla cerniera fissa O, diametralmente opposta ad A. L’estremoB dell’asta scorre sull’asse x, ed e collegato al baricentro G del disco mediante una mollacon costante elastica nota k e lunghezza a riposo trascurabile. Si assuma come coordinatalagrangiana l’angolo ϑ di figura, e si suppongano tutti i vincoli perfetti.
1. Determinare le configurazioni di equilibrio ϑe del sistema e studiarne la stabilita.
2. Si supponga che il sistema parta dalla quiete nella configurazione iniziale ϑ0 = π/2.Calcolare la velocita angolare dell’asta AB quando il sistema raggiunge la configurazionein cui ϑ = π/4.
3. Determinare il momento cinetico p coniugato all’angolo ϑ e scrivere le equazioni diHamilton del sistema.
3mg
A
mg
D
B
qG
r
r
O
y
x
AB = 2

7
Soluzione
1) Le forze attive agenti sul sistema sono tutte conservative, ed ammettono potenziale
U = −3mgyG −mgyD − k
2BG
2.
Poiche:yG = yD = −r cos ϑ, BG
2= 9r2 sin2 ϑ + r2 cos2 ϑ,
si ricava
U(ϑ) = 4mgr cos ϑ− 1
2kr2(1 + 8 sin2 ϑ) + cost.
Le configurazioni di equilibrio sono i punti di stazionarieta di U(ϑ), e si ricavano ricercandoin [−π, π] le radici reali di
dU
dϑ= −4r sin ϑ(mg + 2kr cos ϑ) = 0.
Esse sono:
ϑ(1)e = 0 , ϑ(2)
e = π
ϑ(3)e = arccos
(−mg
2kr
), ϑ(4)
e = −ϑ(3)e , reali se mg < 2kr.
Poiche queste configurazioni sono stabili se in esse l’energia potenziale V (ϑ) = −U(ϑ) haun minimo locale, si calcola la derivata seconda:
U”(ϑ) = −4r cos ϑ(mg + 2kr cos ϑ) + 8kr2 sin2 ϑ
che nei punti di stazionarieta vale:
U”(0) = −4r(mg + 2kr) < 0 ⇒ minimo di V (ϑ)
U”(π) = 4r(mg − 2kr){
< 0 se mg < 2kr ⇒ minimo di V (ϑ)> 0 se mg > 2kr ⇒ massimo di V (ϑ)
U”(ϑ(3,4)e ) = 8kr2 sin2 ϑ(3,4)
e > 0 ⇒ massimo di V (ϑ).
Ne segue che:
• ϑ(1)e = 0 e sempre stabile;
• ϑ(2)e = π e stabile se mg < 2kr e instabile se mg > 2kr;
• ϑ(3,4)e , se esistono, sono instabili.
b) L’energia cinetica del sistema vale:
T = T disco + T asta =1
2IOϑ2 +
1
2mv2
D +1
2IDϕ2
con:
ϕ = π/2− ϑ ⇒ ϕ2 = ϑ2
~vD = 3r cos ϑϑ~ı + r sin ϑϑ~ ⇒ v2D = r2(1 + 8 cos2 ϑ)ϑ2
IO = IG + 3mr2 =9
2mr2 ; ID =
1
12m(2r)2

8
e sostituendo si ricava
T (ϑ, ϑ) =1
2mr2
(9
2+ 1 + 8 cos2 ϑ +
1
3
)ϑ2 =
1
2mr2
(35
6+ 8 cos2 ϑ
)ϑ2 ≡ 1
2a(ϑ)ϑ2.
Poiche il sistema e conservativo, si puo applicare l’integrale primo: T0 −U0 = T1 −U1, incui l’energia cinetica T e la funzione potenziale U , se calcolati nell’istante iniziale e perϑ = π/4, valgono rispettivamente
T0 = T (π/2, 0) = 0 , U0 = U(π/2) = −9
2kr2 + cost
T1 = T (π/4, ϑ1) =59
12mr2ϑ2
1 , U1 = U(π/4) = 2√
2mgr − 5
2kr2 + cost.
Sostituendo nell’integrale primo dell’energia si ottiene:
59
12mr2ϑ2
1 − 2√
2mgr +5
2kr2 =
9
2kr2 ⇒ ϑ1 = −2
√6(√
2mg + kr)
59mr.
3) Il momento cinetico coniugato a ϑ vale
p =:dL
dϑ=
d(T + V )
dϑ= a(ϑ)ϑ.
Ricavando ϑ(ϑ, p) da quest’ultima, si calcola la Hamiltoniana del sistema:
H(ϑ, p) =: pϑ(ϑ, p)−[T (ϑ, ϑ(ϑ, p)) + V (ϑ)
]
=p2
2a(ϑ)− 4mgr cos ϑ +
1
2kr2(1 + 8 sin2 ϑ) + cost
che si utilizza per ottenere le seguenti equazioni canoniche del moto:
ϑ =∂H
∂p=
p
a(ϑ)=
p
mr2(35/6 + 8 cos2 ϑ)
p = −∂H
∂ϑ= − 8p2 sin ϑ cos ϑ
mr2(35/6 + 8 cos2 ϑ)2− 4r sin ϑ(mg + 2kr cos ϑ).
9
PROVA SCRITTA DI MECCANICA ANALITICACorso Ing. Aerospaziale – 27/01/2003
PROBLEMA 1
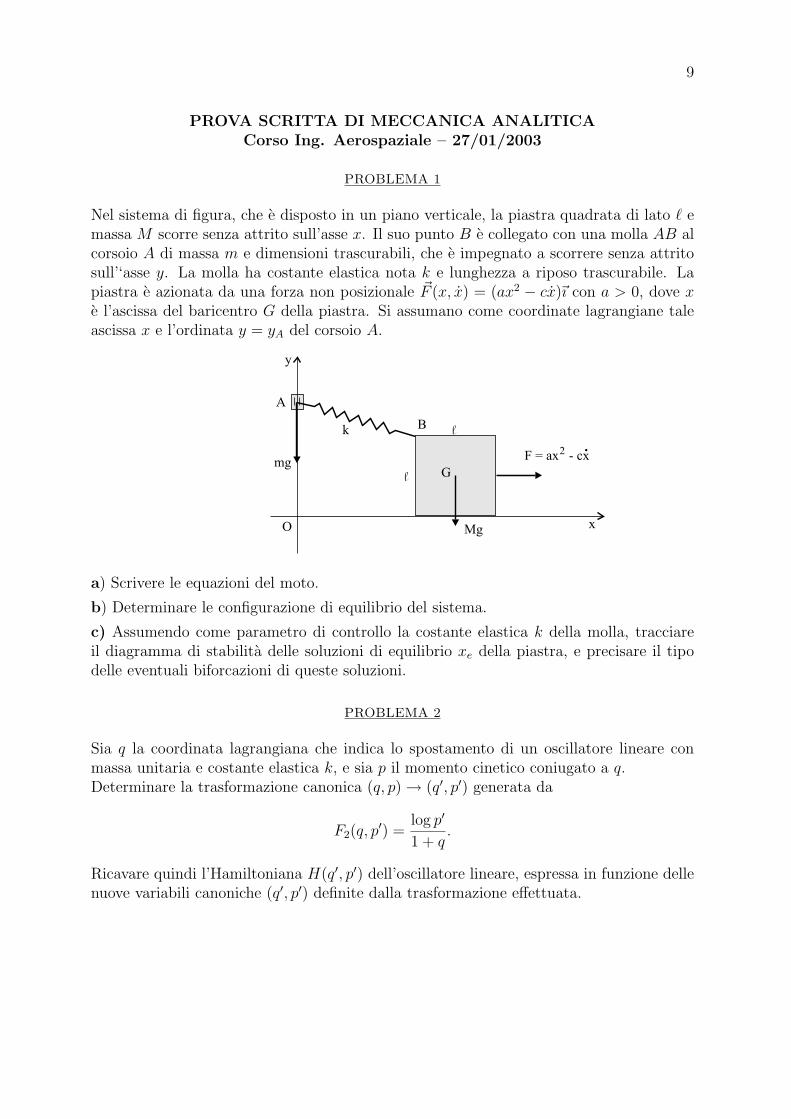
Nel sistema di figura, che e disposto in un piano verticale, la piastra quadrata di lato ` emassa M scorre senza attrito sull’asse x. Il suo punto B e collegato con una molla AB alcorsoio A di massa m e dimensioni trascurabili, che e impegnato a scorrere senza attritosull’‘asse y. La molla ha costante elastica nota k e lunghezza a riposo trascurabile. Lapiastra e azionata da una forza non posizionale ~F (x, x) = (ax2 − cx)~ı con a > 0, dove xe l’ascissa del baricentro G della piastra. Si assumano come coordinate lagrangiane taleascissa x e l’ordinata y = yA del corsoio A.
B
Mg
F = ax - cx
xO
mg
A
k
y
Gl
l
2 .
a) Scrivere le equazioni del moto.
b) Determinare le configurazione di equilibrio del sistema.
c) Assumendo come parametro di controllo la costante elastica k della molla, tracciareil diagramma di stabilita delle soluzioni di equilibrio xe della piastra, e precisare il tipodelle eventuali biforcazioni di queste soluzioni.
PROBLEMA 2
Sia q la coordinata lagrangiana che indica lo spostamento di un oscillatore lineare conmassa unitaria e costante elastica k, e sia p il momento cinetico coniugato a q.Determinare la trasformazione canonica (q, p) → (q′, p′) generata da
F2(q, p′) =
log p′
1 + q.
Ricavare quindi l’Hamiltoniana H(q′, p′) dell’oscillatore lineare, espressa in funzione dellenuove variabili canoniche (q′, p′) definite dalla trasformazione effettuata.

10
Soluzione
Problema 1
a) F e la somma di una forza conservativa F1 = ax2, con potenziale U = ax3/3 + cost, edi una forza dissipativa F2 = −cx. Le altre forze attive (le forze peso e la forza elastica)sono conservative. Il potenziale di tutte le sollecitazioni conservative e:
U(x, y) = −mgy−MgyG−k
2AB
2+
ax3
3+cost = −mgy−k
2[(x−`/2)2+(y−`)2]+
ax3
3+cost.
Le componenti generalizzate delle forze attive sono le seguenti:
Qx(x, x) =∂U
∂x− cx = ax2 − cx− k(x− `/2)
Qy(y) =∂U
∂y= −mg − k(y − `).
L’energia cinetica vale
T (x, y) =1
2Mx2 +
1
2my2,
per cui le equazioni di Lagrange che descrivono il moto del sistema sono:
mx = Qx(x, x) = ax2 − cx− k(x− `/2)
My = Qy(y) = −mg − k(y − `).
b) In condizioni di equilibrio si ha x = 0, ed e nullo il termine non conservativo presentenella componente generalizzata Qx. Ne segue che le configurazioni di equilibrio si ricavanorisolvendo il sistema:
Qx(x, 0) =∂U
∂x= ax2 − kx + k`/2 = 0
Qy(y) =∂U
∂y= −mg − k(y − `) = 0
che ha le due soluzioni:
q(1)e = {x(1)
e , ye}, x(1)e =
k
2a
1 +
√1− 2a`
k
, ye = `− mg
k
q(2)e = {x(2)
e , ye}, x(2)e =
k
2a
1−
√1− 2a`
k
,
reali se la costante elastica soddisfa la condizione: k > 2a`.
c) Per discutere la stabilita delle due configurazioni e sufficiente studiare i massimi e min-imi della funzione potenziale U(x, y). La matrice Hessiana, calcolata nelle configurazionidi equilibrio, e
H =
Uxx”(xe) Uxy”
Uyx” Uyy”
=
2axe − k 0
0 −k

11
e i suoi autovalori valgono:
λ1(xe) = 2axe − k, λ2 = −k < 0.
Sostituendo x(1,2)e sotto la condizione k > 2a`, si ottiene:
λ(x(1)e ) = k
√1− 2a`/k > 0 , λ(x(2)
e ) = −k√
1− 2a`/k < 0
per cui nella configurazione q(1)e il potenziale ha un punto di sella e q(1)
e e instabile; nellaconfigurazione q(2)
e ha un massimo e q(2)e e stabile.
Il diagramma di stabilita delle soluzioni di equilibrio xe e mostrato in figura, e presentaun punto di biforcazione (k0 = 2a`, x0 = `) del tipo nodo-sella.
k0
xe(1)
xe(2)l
2a l
Problema 2
L’oscillatore lineare con massa unitaria ha energia cinetica T (q) = q2/2 e potenzialeU(q) = −kq2/2. Il momento cinetico vale p = ∂T/∂q = q, da cui segue che l’HamiltonianaH(q, p) dell’oscillatore e
H(q, p) = T (p)− U(q) =p2
2+
k
2q2.
Applichiamo ora le formule della trasformazione canonica generata da F2:
p =∂F2
∂q= − log p′
(1 + q)2, q′ =
∂F2
∂p′=
1
p′(1 + q).
Da esse si ricavano le seguenti espressioni della trasformazione diretta (q, p) → (q′, p′) edi quella inversa (q′, p′) → (q, p):
q′(q, p) =exp[p(1 + q)2]
1 + qq(q′, p′) =
1
p′q′− 1
p′(q, p) = exp[−p(1 + q)2] p(q′, p′) = −(p′q′)2 log p′.
Poiche F2 non dipende esplicitamente dal tempo, questa trasformazione e completamentecanonica e la nuova Hamiltoniana H ′ si calcola sostituendo in H(q, p) i quadrati delleespressioni di q e p ottenute dalla trasformazione inversa:
H ′(q′, p′) = H[q(q′, p′), p(q′, p′)] =1
2(p′q′)4 log2 p′ +
k
2
(1
p′q′− 1
)2
.

12
PROVA SCRITTA DI MECCANICA ANALITICACorso Ing. Aerospaziale – 5/02/2003
Il sistema di figura e disposto in un piano orizzontale. L’asta rigida omogenea AB ha massa2m, lunghezza 2` ed e incernierata nel suo baricentro O. Il suo estremo A e collegato adue molle con lunghezza a riposo trascurabile: la prima, con elongazione AH, e fissata nelpunto H(0, `) ed ha costante elastica nota k; la seconda, con elongazione AK, e fissata nelpunto K(0,−`) ed ha costante elastica k2 = 4k. Sull’asta AB agisce una coppia antiorariacon momento costante M .L’asta BC ha massa m e lunghezza `; il suo estremo C scorre sull’asse x e l’estremo B eincernierato all’asta AB. Tutti gli attriti sono trascurabili.
A
B
C
Oq
M
H
K
k
4k
x
y
l
l l
l
l
a) Determinare le configurazioni di equilibrio ϑe del sistema (dove ϑ e l’angolo indicatoin figura) e studiarne la stabilita.
b) Si supponga che il momento della coppia valga M = 2k`2, e che il sistema parta dallaquiete nella configurazione iniziale ϑ0 = −π/2. Calcolare la velocita angolare dell’astaAB quando raggiunge la configurazione in cui ϑ1 = 0.
c) Determinare il momento cinetico p coniugato all’angolo ϑ e scrivere le equazioni diHamilton del sistema.
d) Sulle variabili (ϑ, p) si effettua una trasformazione canonica generata dalla funzione
F1 = −2π sin2 ϑ · ϑ′.
Ricavare le espressioni di ϑ ∈ [0, π/2] e p in funzione delle nuove variabili canoniche ϑ′ ep′ ∈ [0, 2π] e scrivere la nuova Hamiltoniana H ′(ϑ′, p′) del sistema.

13
Soluzione
a) I quadrati delle elongazioni delle molle valgono
AH2
= 2`2 − 2`2 cos(π/2− ϑ) = 2`2(1− sin ϑ)
AK2
= 2`2 − 2`2 cos(π/2 + ϑ) = 2`2(1 + sin ϑ)
per cui il potenziale delle forze applicate e
U(ϑ) = −k
2· 2`2(1− sin ϑ)− 4k
2· 2`2(1 + sin ϑ) + Mϑ + cost = −3k`2 sin ϑ + Mϑ + cost.
Le configurazioni di equilibrio nell’intervallo −π ≤ ϑ ≤ π devono soddisfare l’equazione:
dU
dϑ= −3k`2 cos ϑ + M = 0
dalla quale si ricava:
ϑ(1)e = arccos
(M
3k`2
); ϑ(2)
e = −ϑ(1)e se M < 3k`2.
La derivata seconda di U(ϑ), calcolata nelle configurazioni di equilibrio, e
d2U
dϑ2= 3k`2 sin ϑe
ed ha il segno di sin ϑe. Quest’ultimo e positivo per ϑ(1)e , che e compreso tra 0 e π/2,
mentre e negativo per ϑ(2)e che e compreso tra −π/2 e 0.
Quindi la derivata seconda ha un minimo per ϑ(1)e , che risulta instabile; ed ha un massimo
per ϑ(2)e che risulta stabile.
b) Poiche il sistema e conservativo, si puo applicare l’integrale primo dell’energia T −U =E tra la configurazione iniziale ϑ0 = −π/2 in cui ϑ0 = 0 e la configurazione finale ϑ1 = 0in cui ϑ1 e da determinare.
Il baricentro G dell’asta BC ha coordinate
xG = −3` cos ϑ/2, yG = −` sin ϑ/2,
e derivando rispetto al tempo si ottiene:
~vG = −3
2` sin ϑϑ~i− `
2cos ϑϑ~j ⇒ v2
G =`2
4(1 + 8 sin2 ϑ)ϑ2.
L’energia cinetica del sistema vale:
T (ϑ, ϑ) =1
2I
(AB)O ϑ2 +
1
2mv2
G +1
2I
(BC)G ϑ2
=1
2· 2m4`2
12ϑ2 +
1
2· m`2
4(1 + 8 sin2 ϑ)ϑ2 +
1
2· m`2
12ϑ2
=m`2
2(1 + 2 sin2 ϑ)ϑ2 ≡ 1
2a(ϑ)ϑ2.

14
Nelle configurazioni indicate si ha:
T0 = 0, U0 = k`2(3− π) + cost
T1 =m`2
2ϑ2
1 , U1 = cost
e l’integrale primo dell’energia fornisce:
m`2
2ϑ2
1 = −k`2(3− π) ⇒ ϑ1 =
√2k
m(π − 3).
c) Il momento cinetico vale
p =∂
∂ϑ(T + U) = a(ϑ)ϑ = m`2(1 + 2 sin2 ϑ)ϑ.
Per scrivere le equazioni canoniche del moto si ricava anzitutto l’Hamiltoniana la quale,poiche il sistema e conservativo, coincide con la sua energia E scritta in funzione dellevariabili canoniche (ϑ, p):
H(ϑ, p) = E
(ϑ, ϑ =
p
a(ϑ)
)− U(ϑ) =
p2
2m`2(1 + 2 sin2 ϑ)+ 3k`2 sin ϑ−Mϑ + cost.
Da essa si ricavano le seguenti equazioni canoniche:
ϑ =∂H
∂p=
p
m`2(1 + 2 sin2 ϑ)
p = −∂H
∂ϑ=
p2
2a(ϑ)· da
dϑ+
dU
dϑ=
2p2 sin ϑ cos ϑ
m`2(1 + 2 sin2 ϑ)2+ M − 3k`2 cos ϑ.
d) Si applicano le formule della trasformazione canonica generata da F1:
p =∂F1
∂ϑ= −4π sin ϑ cos ϑ · ϑ′ p′ = −∂F1
∂ϑ′= 2π sin2 ϑ
dalle quali, se ϑ e compreso tra 0 e π/2, si ricava anzitutto
sin ϑ =√
p′/2π, cos ϑ =√
1− p′/2π
e quindi la trasformazione inversa (q′, p′) → (q, p):
ϑ(ϑ′, p′) = arcsin√
p′/2π
p(ϑ′, p′) = −4πϑ′√
p′/2π ·√
1− p′/2π = −2ϑ′√
p′(2π − p′).
Poiche F1 non dipende esplicitamente dal tempo, questa trasformazione e completamentecanonica e la nuova Hamiltoniana H ′ si calcola come segue:
H ′(q′, p′) = H(ϑ(ϑ′, p′), p(ϑ′, p′)) =2π(ϑ′)2p′(2π − p′)
m`2(π + p′)+ 3k`2
√p′
2π−Marcsin
√p′
2π+ c.

15
PROVA SCRITTA DI MECCANICA ANALITICA
Corso Ing. Meccanica – 14/02/2003
Nel sistema di figura, che e disposto in un piano verticale, il disco omogeneo di massa me raggio r rotola senza strisciare sulla piastra rettangolare di massa M = 2m ed altezzaa = 2r, che scorre senza attrito sull’asse x. Al baricentro A del disco e incernierata lasbarretta rigida AB, di massa m e lunghezza ` = 2
√3r, il cui estremo B e impegnato a
scorrere senza attrito sull’asse x.Due molle, con uguale costante elastica k e lunghezze a riposo trascurabili, sono applicatecome in figura ai baricentri delle tre parti rigide del sistema. Sul disco agisce una coppiaoraria di momento noto ~M0 = −M0
~k.Si assumano come coordinate libere: l’ascissa x del baricentro D della piastra e lo sposta-mento relativo s = xA − xD del baricentro del disco rispetto alla piastra.
1. Determinare la configurazione di equilibrio del sistema e studiarne la stabilita.
2. Calcolare la Lagrangiana del sistema e scrivere le equazioni del moto.
3. Determinare i momenti cinetici px, ps coniugati alle variabili libere (x, s). Trovarequindi le relazioni che legano tali momenti cinetici alle quantita di moto e momenti an-golari di ciascuna parte rigida del sistema materiale.
A
G
B x
D
mg
mg
2mg
O
yM
0
C
2
r
r
rAB = 2 3 r
3

16
Soluzione
1) Se α e l’angolo tra la direzione della sbarretta AB e l’asse x, dalla geometria del sistemasi ha
α = arcsin3r
`= arcsin
√3
2=
π
3
G =
(`
2cos α + s + x
)~ı +
`
2sin α~ =
(`
4+ s + x
)~ı +
√3`
4~
GD2
=
(`
4+ s
)2
+
(√3`
4− r
)2
=
(√3
2r + s
)2
+ cost
vG = vA = s + x = x + rϕ; ϕ =s
r, ϕ =
s
r+ c
dove ϕ e l’angolo di rotazione del disco sulla piastra, scelto crescente nel verso orario.
Il potenziale delle forze attive agenti sul sistema vale:
U(x, s) = −k
2(s + x)2 − k
2
(√3
2r + s
)2
+ M0ϕ + cost
= −ks2 − k
2x2 − ksx +
(M0
r−√
3 kr
2
)s + cost.
Le configurazioni di equilibrio sono i punti di stazionarieta di U(x, s), e si ricavano ricer-cando le radici reali di
∂U
∂x= −k(s + x) = 0
∂U
∂s= −2ks− kx +
M0
r−√
3 kr
2= 0.
L’unica soluzione del sistema fornisce la configurazione di equilibrio:
xe = − se , se =M0
kr−√
3
2r.
La matrice Hessiana vale
H =
Uxx” Uxs”
Usx” Uss”
=
−k −k
−k −2k
ed ha determinante maggiore di zero: detH = 2k2 − k2 = k2 > 0.
Poiche inoltre Uxx” e Uss” sono negative, se ne deduce che l’energia potenziale V (x, s) =−U(x, s) ha un minimo per (xe, se) e la configurazione di equilibrio e stabile.
b) L’asta AB ha atti di moto traslatorio con velocita v = vG. L’energia cinetica delsistema e
T = T piastra + T disco + T asta =1
22mv2
D +1
2mv2
A +1
2IAϕ2 +
1
2mv2
G
= mx2 +1
2m(x + s)2 +
1
2
mr2
2
s2
r2+
1
2m(x + s)2
= 2mx2 +5
4ms2 + 2mxs.

17
La funzione lagrangiana L = T + U del sistema e pertanto
L(x, s, x, s) = 2mx2 +5
4ms2 + 2mxs− ks2 − k
2x2 − ksx +
(M0
r−√
3 kr
2
)s + c
e ha derivate parziali
∂L
∂x=: px = 4mx + 2ms
∂L
∂x= −k(s + x)
∂L
∂s=: ps =
5
2ms + 2mx
∂L
∂s= −2ks− kx +
M0
r−√
3 kr
2.
Da esse si ricavano le seguenti equazioni del moto:
4x + 2s +k
m(s + x) = 0
2x +5
2s +
k
m(2s + x) =
M0
mr−√
3 kr
2m.
3) I momenti cinetici px, ps sono gia stati ricavati, per derivazione della Lagrangianarispetto ad x e a s. Le quantita di moto delle tre parti rigide del sistema valgono:
Qpiastra = 2mvD = 2mx
Qdisco = mvA = m(x + s)
Qasta = mvG = mvA = m(x + s).
Dunque il momento cinetico px coincide con la quantita di moto complessiva del sistema:
Q = Qpiastra + Qdisco + Qasta = 2mx + 2ms + 2mx = px .
Poiche la piastra e l’asta traslano, l’unico momento angolare non nullo che le tre partirigide hanno rispetto ai loro baricentri e quello del disco, che ha velocita angolare istan-tanea ~ω = −ϕ~k. Questo momento angolare vale
~LA = IA ~ω =mr2
2(−ϕ)~k = −mr
2s~k.
Applicando il teorema di trasposizione dei momenti, si ricava poi che rispetto al baricentroD della piastra lo stesso disco ha un momento angolare che vale:
~LdiscoD = ~LA + (A−D) ∧ ~Qdisco = ~LA + (s~ı + 2r~ ) ∧m(x + s)~ı
= −[mr
2s + 2mr(x + s)
]~k = − r
(5
2ms + 2mx
)~k.
Si deduce pertanto che
ps = −1
rLdisco
D .

18
PROVA SCRITTA DI MECCANICA ANALITICA
Corso Ing. Aerospaziale – 17/02/2003
Il sistema da studiare e contenuto in un piano orizzontale. L’asta rigida omogenea ABha massa m e lunghezza `; il suo estremo A scorre senza attrito sull’asse x e l’estremo Be incernierato nel baricentro di un disco omogeneo di eguale massa m e raggio r < `, cherotola senza strisciare sull’asse y.All’estremo A e applicata una molla AO con costante elastica nota k e lunghezza a riposox0 = ` + r.Sull’estremo B dell’asta agisce una forza ~F = F0 sin ϑ~ con F0 > 0, dove ϑ e l’angoloindicato in figura, che si assume come coordinata lagrangiana.
A
O
B
q
y
x
qF = F sin0
Cr
l
1. Determinare le configurazioni di equilibrio ϑe ∈ [−π, π] e studiarne la stabilita.
2. Calcolare il momento cinetico p coniugato alla coordinata lagrangiana ϑ.
3. In aggiunta alle forze esterne gia considerate, si applica all’asta AB una coppia antio-raria di momento M . In tali condizioni, determinare:a) Il valore da assegnare al momento M perche il sistema si trovi in equilibrio per ϑe = π/2,e verificare che tale configurazione e di equilibrio stabile;b) le equazioni canoniche di Hamilton, linearizzate in un intorno di ϑe = π/2.

19
Soluzione
Relazioni geometrico-cinematiche:
xA = −(` cos ϑ + r), |xA − x0| = `(1− cos ϑ)
yB = ` sin ϑ , yB = ` cos ϑ ϑ = rϕ ⇒ ϕ =`
rcos ϑ ϑ
dove ϕ e l’angolo di rotazione del disco, crescente nel verso orario.
1) Il potenziale delle forze attive vale
U =∫
F · dyB(ϑ)− k
2(xA − x0)2 + cost =
= F0`∫
sin ϑ cos ϑdϑ− k
2`2(cos ϑ− 1)2 + cost
= −F0`
4cos 2ϑ− k
2`2(cos ϑ− 1)2 + cost.
Le configurazioni di equilibrio si determinano ricercando i punti di stazionarieta di U(ϑ),che sono le soluzioni di:
dU
dϑ= ` sin ϑ[F0 cos ϑ + k`(cos ϑ− 1)] = 0.
Si ricava:
ϑ(1)e = 0 , ϑ(2)
e = π
ϑ(3)e = arccos
(k`
k` + F0
), ϑ(4)
e = −ϑ(3)e , reali essendo F0 > 0.
Queste configurazioni sono stabili se in esse l’energia potenziale V (ϑ) = −U(ϑ) ha unminimo locale. Si calcola quindi la derivata seconda:
U”(ϑ) = ` cos ϑ[F0 cos ϑ + k`(cosϑ− 1)]− ` sin2 ϑ(F0 + k`)
che nei punti di stazionarieta vale:
U”(0) = `F0 > 0 ⇒ massimo di V (ϑ)
U”(π) = −`(−F0 − 2k`) > 0 ⇒ massimo di V (ϑ)
U”(ϑ(3,4)e ) = −` sin2 ϑ(F0 + k`) < 0 ⇒ minimi di V (ϑ).
Ne segue che ϑ(1)e = 0 e ϑ(2)
e = π sono instabili; ϑ(3)e e ϑ(4)
e sono stabili.
2) Indichiamo con G il baricentro dell’asta AB:
xG = −(r +
`
2cos ϑ
)yG =
`
2sin ϑ
xG =`
2sin ϑϑ yG =
`
2cos ϑϑ ⇒ v2
G =`2
4ϑ2.

20
L’energia cinetica del sistema e la seguente:
T =1
2mv2
G +1
2IGϑ2 +
1
2ICϕ2 =
1
2
m`2
4ϑ2 +
1
2
m`2
12ϑ2 +
1
2
3mr2
2· `2
r2cos ϑ2ϑ2
=1
2m`2
(1
3+
3
2cos2 ϑ
)ϑ2 ≡ 1
2a(ϑ)ϑ2.
Il momento cinetico vale pertanto:
p =:∂(T + U)
∂ϑ= a(ϑ)ϑ = m`2
(1
3+
3
2cos2 ϑ
)ϑ.
3) Con l’aggiunta della coppia di momento M , il potenziale delle forze attive e la suaderivata prima diventano:
U(ϑ) = −F0`
4cos 2ϑ− k
2`2(cos ϑ− 1)2 + Mϑ + cost
U ′(ϑ) = ` sin ϑ[F0 cos ϑ + k`(cos ϑ− 1)] + M
mentre la derivata seconda e uguale a quella calcolata al punto 1. Si pone ϑ = π/2 nellaespressione della derivata prima e si risolve l’equazione U ′(π/2) = 0 rispetto alla incognitaM . Si ricava cosı il valore del momento che assicura l’equilibrio del sistema per ϑe = π/2:
`(−k`) + M = 0 ⇒ M = k`2.
In tale configurazione si ha
U”(π/2) = −`(F0 + k`) < 0 da cui : ϑe = π/2 stabile.
L’energia cinetica e il potenziale, approssimati nell’intorno di tale configurazione stabile,valgono:
T ' 1
2
m`2
3ϑ2 =
3
2
p2
m`2
U ' 1
2U”(π/2)(ϑ− π/2)2 = −`(F0 + k`)
2(ϑ− π/2)2
e l’Hamiltoniana del sistema si approssima come
H(ϑ, p) = T − U ' 3p2
2m`2+
`(F0 + k`)
2(ϑ− π/2)2.
Se ne deducono le seguenti equazioni canoniche, linearizzate nell’intorno di ϑe = π/2:
ϑ =∂H
∂p=
3p
m`2
p = −∂H
∂ϑ= −`(F0 + k`)(ϑ− π/2).
21
PROVA SCRITTA DI MECCANICA ANALITICA
Corso Ing. Meccanica – 21/02/2003
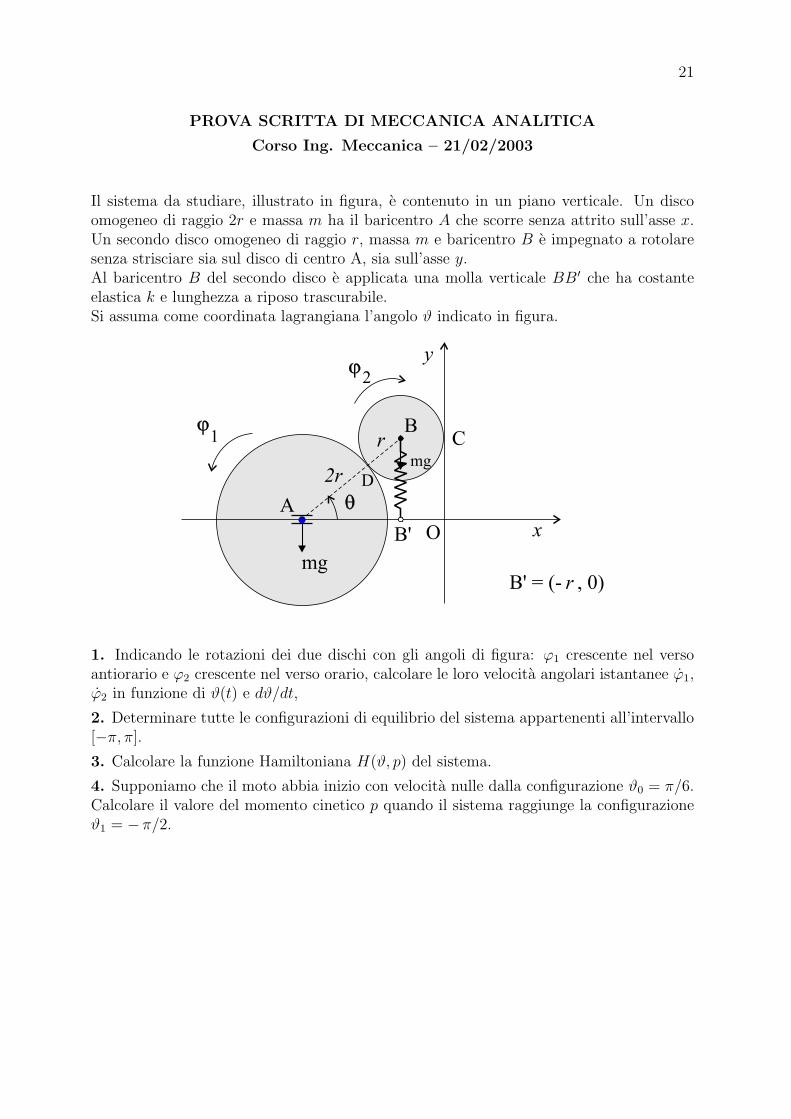
Il sistema da studiare, illustrato in figura, e contenuto in un piano verticale. Un discoomogeneo di raggio 2r e massa m ha il baricentro A che scorre senza attrito sull’asse x.Un secondo disco omogeneo di raggio r, massa m e baricentro B e impegnato a rotolaresenza strisciare sia sul disco di centro A, sia sull’asse y.Al baricentro B del secondo disco e applicata una molla verticale BB′ che ha costanteelastica k e lunghezza a riposo trascurabile.Si assuma come coordinata lagrangiana l’angolo ϑ indicato in figura.
1
2
y
B
A
mg
mg
B' O x
2r
r
rB' = (- , 0)
C
D
1. Indicando le rotazioni dei due dischi con gli angoli di figura: ϕ1 crescente nel versoantiorario e ϕ2 crescente nel verso orario, calcolare le loro velocita angolari istantanee ϕ1,ϕ2 in funzione di ϑ(t) e dϑ/dt,
2. Determinare tutte le configurazioni di equilibrio del sistema appartenenti all’intervallo[−π, π].
3. Calcolare la funzione Hamiltoniana H(ϑ, p) del sistema.
4. Supponiamo che il moto abbia inizio con velocita nulle dalla configurazione ϑ0 = π/6.Calcolare il valore del momento cinetico p quando il sistema raggiunge la configurazioneϑ1 = −π/2.

22
Soluzione
1) L’ordinata di B e la sua velocita valgono
yB = 3r sin ϑ , ~vB = yB~ = 3r cos ϑϑ~ = rϕ2~
e dall’ultima identita (che e stata ricavata tenendo conto che il disco con baricentro Brotola senza strisciare sull’asse y ) si ricava:
ϕ2 = 3 cos ϑϑ.
In D sono a contatto due punti materiali: uno solidale con il disco di centro A, che havelocita angolare ϕ1; e uno solidale con il disco di centro B che ha velocita angolare ϕ2.Se indichiamo con ~v
(A)D e ~v
(B)D le rispettive velocita, per la formula fondamentale dei moti
rigidi, applicata ai due dischi, esse valgono:
~v(A)D = ~vA + ~vD/A = xA~ı + 2rϕ1~τ
~v(B)D = ~vB + ~vD/B = 3r cos ϑϑ~ + rϕ2~τ = 3r cos ϑϑ(~ + ~τ)
dove ~τ e il versore di ~k ∧ (D − A). La condizione di rotolamento senza strisciamentoimposta al moto relativo dei due dischi implica l’uguaglianza tra queste due velocita:
xA~ı + 2rϕ1~τ = 3r cos ϑϑ(~ + ~τ)
dalla quale, uguagliando le componenti nella direzione dell’asse y, si ricava
ϕ1 =3
2(1 + cos ϑ)ϑ.
2) Il potenziale delle forze applicate vale
U(ϑ) = −mgyB − k
2(BB′)2 + cost = −3mgr sin ϑ− 9
2kr2 sin2 ϑ + cost.
Le configurazioni di equilibrio devono soddisfare l’equazione:
dU
dϑ= −3r cos ϑ (mg + 3kr sin ϑ) = 0
le cui radici nell’intervallo −π ≤ ϑ ≤ π sono:
ϑ(1,2)e = ±π
2
ϑ(3)e = arcsin
(− mg
3kr
), reale se mg < 3kr
ϑ(4)e = −π − ϑ(3)
e = −π + arcsin(
mg
3kr
), reale se mg < 3kr.
3) Il sistema e conservativo, e l’Hamiltoniana si identifica con l’energia totale del sistema,scritta in funzione delle variabili canoniche (ϑ, p). Determinata la velocita di A:
xA = −r(1 + 3 cos ϑ) vA = xA = 3r sin ϑϑ,

23
si ricava anzitutto la seguente energia cinetica:
T (ϑ, ϑ) =1
2mv2
A +1
2IAϕ2
1 +1
2mv2
B +1
2IBϕ2
2
=1
2
(9mr2 sin2 ϑϑ2 +
4r2m
2
9
4(1 + cos ϑ)2ϑ2 + 9mr2 cos2 ϑϑ2 +
mr2
29 cos2 ϑϑ2
)
=9
2mr2
(3
2+ cos ϑ + cos2 ϑ
)ϑ2 ≡ 1
2a(ϑ)ϑ2
Poiche il momento cinetico p vale
p =:∂T
∂ϑ= a(ϑ)ϑ = 9mr2
(3
2+ cos ϑ + cos2 ϑ
)ϑ ,
l’energia cinetica si esprime nella forma equivalente:
T (ϑ, p) =p2
2a(ϑ)=
p2
9mr2(3 + 2 cos ϑ + 2 cos2 ϑ).
Pertanto la Hamiltoniana del sistema e
H(ϑ, p) = T (ϑ, p) + V (ϑ) = T (ϑ, p)− U(ϑ)
=p2
9mr2(3 + 2 cos ϑ + 2 cos2 ϑ)+ 3mgr sin ϑ +
9
2kr2 sin2 ϑ + c.
4) L’Hamiltoniana ora calcolata e una costante del moto per cui, indicando con H0 e H1
il suo valore negli estremi dell’intervallo di moto considerato, si puo applicare l’integraleprimo:
H0 = H1 ⇒ T0 − U0 = T1 − U1
e calcolare l’energia nelle configurazioni ϑ0 = π/6 e ϑ1 = −π/2:
T0 = T (ϑ = π/6, p = 0) = 0 U0 = U(π/6) = − 3
2mgr − 9
8kr2
T1 = T (ϑ = −π/2, p1) =p2
1
27mr2U1 = U(−π/2) = 3mgr − 9
2kr2.
Sostituendo nell’integrale primo dell’energia si ottiene
3
2mgr +
9
8kr2 =
p21
27mr2− 3mgr +
9
2kr2
da cui
p1 = − 9mr2
√√√√3
2
(g
r− 3k
4m
).
La soluzione e negativa perche nell’intervallo di moto considerato l’angolo ϑ decresce, ede reale se 4mg > 3kr.
24
PROVA SCRITTA DI MECCANICA ANALITICA
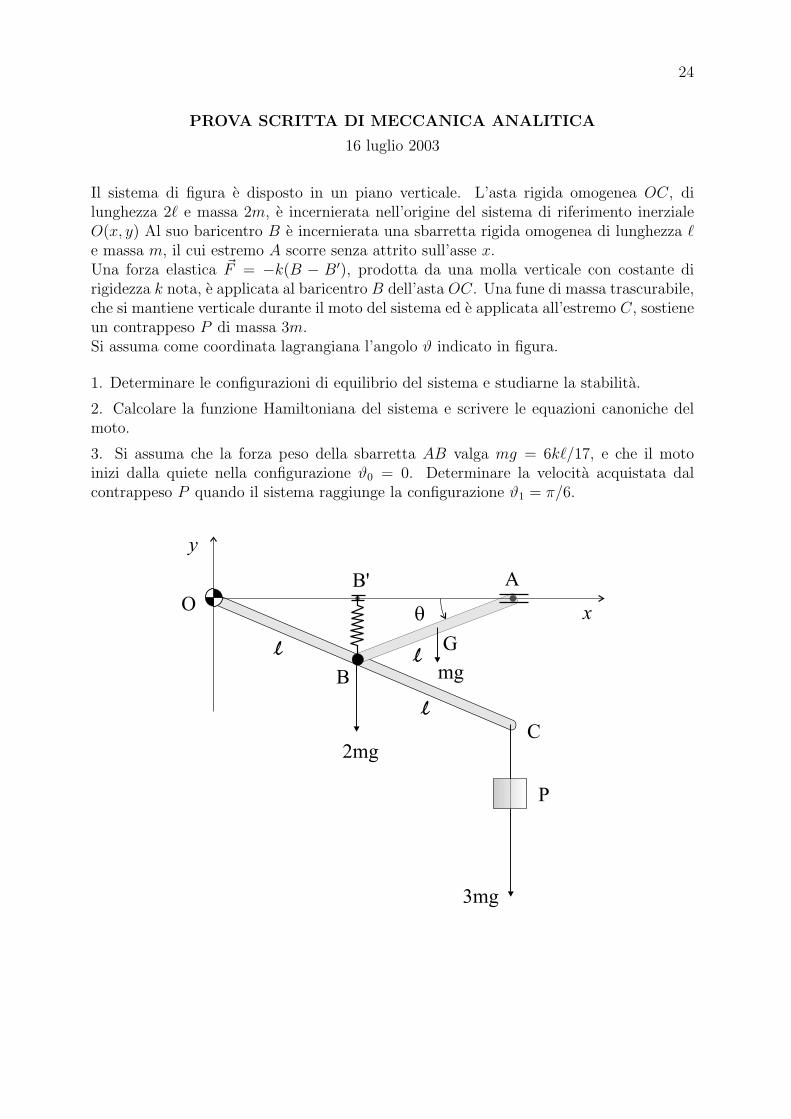
16 luglio 2003
Il sistema di figura e disposto in un piano verticale. L’asta rigida omogenea OC, dilunghezza 2` e massa 2m, e incernierata nell’origine del sistema di riferimento inerzialeO(x, y) Al suo baricentro B e incernierata una sbarretta rigida omogenea di lunghezza `e massa m, il cui estremo A scorre senza attrito sull’asse x.Una forza elastica ~F = −k(B − B′), prodotta da una molla verticale con costante dirigidezza k nota, e applicata al baricentro B dell’asta OC. Una fune di massa trascurabile,che si mantiene verticale durante il moto del sistema ed e applicata all’estremo C, sostieneun contrappeso P di massa 3m.Si assuma come coordinata lagrangiana l’angolo ϑ indicato in figura.
1. Determinare le configurazioni di equilibrio del sistema e studiarne la stabilita.
2. Calcolare la funzione Hamiltoniana del sistema e scrivere le equazioni canoniche delmoto.
3. Si assuma che la forza peso della sbarretta AB valga mg = 6k`/17, e che il motoinizi dalla quiete nella configurazione ϑ0 = 0. Determinare la velocita acquistata dalcontrappeso P quando il sistema raggiunge la configurazione ϑ1 = π/6.
O
B
B' A
C
P
2mg
mg
3mg
q x
y
Gl l
l

25
Soluzione
1) Poiche tutte le forze attive sono conservative, si puo calcolare il loro potenziale chevale:
U(ϑ) = mg`
2sin ϑ + 2mg` sin ϑ + 3mg · 2` sin ϑ− k
2`2 sin2 ϑ + cost
=17
2mg` sin ϑ− k
2`2 sin2 ϑ + cost.
Le configurazioni di equilibrio sono i punti di stazionarieta di U(ϑ), che si ottengonoannullando la derivata prima:
U ′(ϑ) = ` cos ϑ(
17
2mg − k` sin ϑ
)= 0.
Si ricavano quattro possibili soluzioni nell’intervallo 0 ≤ ϑ ≤ 2π:
ϑ(1)e =
π
2; ϑ(2)
e =3
2π sempre valide
ϑ(3)e = arcsin
(17mg
2k`
); ϑ(4)
e = π − ϑ(3)e se 17mg < 2k`.
Per discuterne la stabilita si calcoli la derivata seconda:
U”(ϑ) = −` sin ϑ(
17
2mg − k` sin ϑ
)− k`2 cos2 ϑ
che nei punti di stazionarieta assume i seguenti valori:
U”(π/2) = −`(
17
2mg − k`
) {< 0 se 17mg > 2k` ⇒ max> 0 se 17mg < 2k` ⇒ min
U”(3π/2) = `(
17
2mg + k`
)> 0 ⇒ min
U”(ϑ(3,4)e ) = −k`2 cos2 ϑe < 0 ⇒ max.
Poiche una configurazione e stabile quando l’energia potenziale V (ϑ) = −U(ϑ) vi ha unminimo, se ne conclude che:
• ϑ(1)e = π/2 e stabile se 17mg > 2k` e instabile se 17mg < 2k`
• ϑ(2)e = 3π/2 e sempre instabile
• ϑ(3,4)e , quando esistono, sono stabili.
2) Le velocita dei punti G e P valgono:
~vG = xG~ı + yG~ = − `
2(3 sin ϑ~ı + cos ϑ~ ) ϑ
~vP = ~vC = −2`(sin ϑ~ı + cos ϑ~ ) ϑ ⇒ |~vP | = 2`ϑ.

26
Indicando con IO = 8m`2/3 il momento d’inerzia dell’asta OC rispetto alla cerniera O, econ IG = m`2/12 quello baricentrico dell’asta AB, l’energia cinetica del sistema si scrive:
T (ϑ, ϑ) =1
2I0ϑ
2 +1
2· 3mv2
P +1
2mv2
G +1
2IGϑ2 =
=1
2m`2(15 + 2 sin2 ϑ) ϑ2 ≡ 1
2a(ϑ) ϑ2, posto : a(ϑ) = m`2(15 + 2 sin2 ϑ).
La sua derivata parziale rispetto a ϑ definisce il momento cinetico p coniugato a ϑ:
p =∂T
∂ϑ= a(ϑ)ϑ = m`2(15 + 2 sin2 ϑ)ϑ
che permette di scrivere la funzione Hamiltoniana. Questa e l’energia totale del sistema,espressa in funzione delle variabili canoniche (ϑ, p) e vale:
H(ϑ, p) =p2
2a(ϑ)− U(ϑ) =
p2
2m`2(15 + 2 sin2 ϑ)− `
2sin ϑ(17mg − k` sin ϑ) + c.
Le equazioni canoniche del moto sono pertanto:
ϑ =∂H
∂p=
p
a(ϑ)=
p
m`2(15 + 2 sin2 ϑ)
p = −∂H
∂ϑ=
p2
2a2(ϑ)· da
dϑ+ U ′(ϑ) =
=
[2p2 sin ϑ
m`2(15 + 2 sin2 ϑ)2+ `
(17
2mg − k` sin ϑ
)]cos ϑ.
3) Indichiamo con T0, U0, T1, U1 l’energia cinetica e la funzione potenziale nelle confi-gurazioni ϑ0 = 0 e ϑ1 = π/6. Scegliendo un valore nullo per la costante additiva delpotenziale e assumendo mg = 6k`/17, esse valgono:
T0 = U0 = 0 ; T1 =31
4m`2ϑ2
1 , U1 =17
4mg`− k`2
8=
11
8k`2.
Applichiamo quindi l’integrale primo dell’energia: T1 − U1 = T0 − U0 per ricavare:
31
4m`2ϑ2
1 =11
8k`2 ⇒ ϑ1 =
√11k
62m.
Nella configurazione ϑ1 = π/6 la velocita di P e pertanto:
~vP = −2`(sin ϑ1~ı + cos ϑ1~ )ϑ1 = −`
√11k
62m(~ı +
√3~ ).
27
PROVA SCRITTA DI MECCANICA ANALITICA
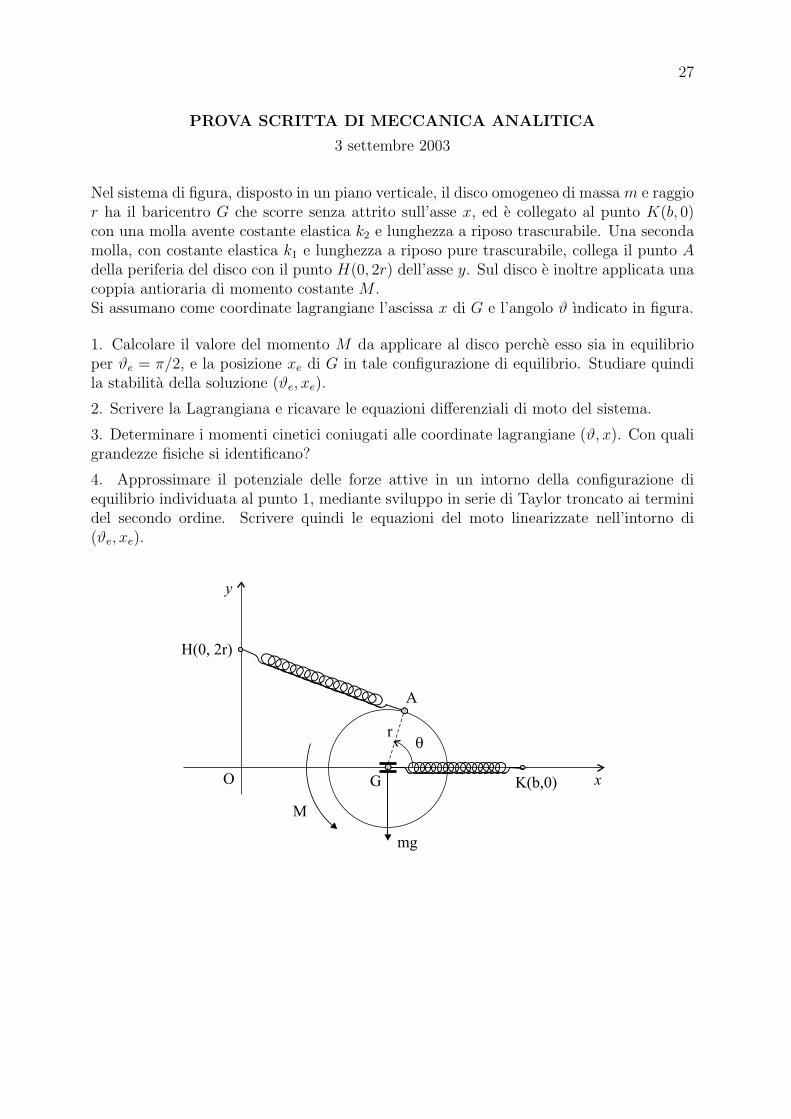
3 settembre 2003
Nel sistema di figura, disposto in un piano verticale, il disco omogeneo di massa m e raggior ha il baricentro G che scorre senza attrito sull’asse x, ed e collegato al punto K(b, 0)con una molla avente costante elastica k2 e lunghezza a riposo trascurabile. Una secondamolla, con costante elastica k1 e lunghezza a riposo pure trascurabile, collega il punto Adella periferia del disco con il punto H(0, 2r) dell’asse y. Sul disco e inoltre applicata unacoppia antioraria di momento costante M .Si assumano come coordinate lagrangiane l’ascissa x di G e l’angolo ϑ ındicato in figura.
1. Calcolare il valore del momento M da applicare al disco perche esso sia in equilibrioper ϑe = π/2, e la posizione xe di G in tale configurazione di equilibrio. Studiare quindila stabilita della soluzione (ϑe, xe).
2. Scrivere la Lagrangiana e ricavare le equazioni differenziali di moto del sistema.
3. Determinare i momenti cinetici coniugati alle coordinate lagrangiane (ϑ, x). Con qualigrandezze fisiche si identificano?
4. Approssimare il potenziale delle forze attive in un intorno della configurazione diequilibrio individuata al punto 1, mediante sviluppo in serie di Taylor troncato ai terminidel secondo ordine. Scrivere quindi le equazioni del moto linearizzate nell’intorno di(ϑe, xe).
K(b,0) x
M
mg
A
H(0, 2r)
O
y
q
G
r

28
Soluzione
1. Il potenziale delle forze applicate e la funzione
U(ϑ, x) = −mgyG − k1
2AH
2 − k2
2GK
2+ Mϑ
= −k1
2
[(x + r cos ϑ)2 + (2r − r sin ϑ)2
]− k2
2(b− x)2 + Mϑ + cost
ed ha derivate parziali
U ′ϑ = k1r(x sin ϑ + 2r cos ϑ) + M, U ′
x = −k1(x + r cos ϑ) + k2(b− x).
Posto ϑ = π/2 ed uguagliando a zero le due derivate parziali, si ottiene il sistema
rk1x + M = 0
−k1x + k2(b− x) = 0
nelle incognite M, x che fornisce la soluzione:
M = −rk1xe = − rbk1k2
k1 + k2
, xe =k2b
k1 + k2
.
Le derivate seconde del potenziale sono
U”xx = −(k1 + k2), U”ϑϑ = k1r(x cos ϑ− 2r sin ϑ), U”ϑx = k1r sin ϑ
e nella configurazione di equilibrio valgono
U”xx,e = −(k1 + k2), U”ϑϑ,e = −2k1r2, U”ϑx,e = k1r.
Poiche il determinante della matrice Hessiana e positivo:
U”xx,eU”ϑϑ,e − [U”ϑx,e]2 = k2
1r2 + 2k1k2r
2
e inoltre U”ϑϑ,e < 0, U”xx,e < 0, la funzione potenziale ha un massimo per (ϑe, xe). Se nededuce che l’energia potenziale V (ϑ) = −U(ϑ) ha un minimo e l’equilibrio e stabile.
2. L’energia cinetica del disco vale
T (ϑ, x) =1
2mv2
G +1
2IGϑ2 =
1
2m
(x2 +
r2
2ϑ2
)
per cui, ricavata la funzione Lagrangiana
L(ϑ, x, ϑ, x) = T (ϑ, x) + U(ϑ, x) =
1
2m
(x2 +
r2
2ϑ2
)− k1
2
[(x + r cos ϑ)2 + (2r − r sin ϑ)2
]− k2
2(b− x)2 + Mϑ + cost,
si ottengono le seguenti equazioni del moto:
mr2
2ϑ = M + rk1(x sin ϑ + 2r cos ϑ)
mx = −(k1 + k2)x− k1r cos ϑ + k2b.

29
3. Il momento cinetico pϑ coniugato all’angolo ϑ vale, per definizione:
pϑ =∂L
∂ϑ=
mr2
2ϑ = IGϑ
e coincide con il momento risultante delle quantita di moto del disco rispetto al suobaricentro; il momento cinetico px coniugato ad x vale
px =∂L
∂x= mx = mvG
e coincide con la quantita di moto del disco stesso.
4. L’approssimazione del secondo ordine della funzione potenziale, nell’intorno di (ϑe, xe),e la seguente:
U(ϑ, x) ' 1
2U”ϑϑ,e(ϑ− ϑe)
2 +1
2U”xx,e(x− xe)
2 + U”ϑx,e(ϑ− ϑe)(x− xe) + cost
= −k1r2(ϑ− π/2)2 − k1 + k2
2(x− xe)
2 + k1r(ϑ− π/2)(x− xe) + cost.
Sommamdo questa espressione approssimata alla energia cinetica gia calcolata (che eanch’essa del secondo ordine rispetto a una piccola perturbazione della soluzione di equili-brio), si ottiene l’espressione approssimata delle funzione Lagrangiana, valida in un intornodi (π/2, xe). Usando quindi tale espressione approssimata di L(ϑ, x, ϑ, x), si ottengonole seguenti equazioni del moto, linearizzate nell’intorno della configurazione di equilibrio(π/2, xe):
mr2
2ϑ + 2k1r
2(ϑ− π/2)− k1r(x− xe) = 0
mx− k1r(ϑ− π/2) + (k1 + k2)(x− xe) = 0.
con xe che e stato ricavato al punto 1.

30
PROVA SCRITTA DI MECCANICA ANALITICA
11 settembre 2003
Nel sistema di figura, disposto in un piano verticale, il disco omogeneo di massa m eraggio r rotola senza strisciare sull’asse x. Il suo baricentro B e impegnato a scorreresenza attrito nella scanalatura di una asta rigida OA, di lunghezza ` > r e ugual massam, incernierata nel suo estremo fisso O. L’estremo A e collegato all’asse y da una mollaorizzontale AA′ avente costante elastica nota k e lunghezza a riposo trascurabile. Sull’astaagisce una coppia di momento
~M(ϑ) =mg`
4cos ϑ~k,
dove ϑ e l’angolo indicato in figura, che si assume come coordinata lagrangiana.
1. Determinare le configurazioni di equilibrio del sistema compatibili con la condizione
arcsin(r/`) ≤ ϑ ≤ π − arcsin(r/`)
imposta dalla realta del moto.
2. Studiare la stabilita di tali configurazioni di equilibrio e tracciare il loro diagramma distabilita assumendo come parametro di controllo la forza peso mg dell’asta.
3. Scrivere la funzione Hamiltoniana del sistema e ricavare le equazioni canoniche delmoto.
4. Si assuma mg = 2k` e che l’asta inizi il moto dalla configurazione ϑ0 = π/2 con velocitaangolare ω0 > 0. Determinare la condizione che deve essere soddisfatta da ω0, se si vuoleche l’asta raggiunga la posizione di fine corsa ϑ = π − arcsin(r/`).
Omg
mgq
G
B
AA'
y
x
qM =mg
4cos
l
C

31
Soluzione
1. Il potenziale della coppia di momento M(ϑ) vale
U c(ϑ) =∫
M(ϑ)dϑ =mg`
4
∫cos ϑdϑ =
mg`
4sin ϑ + cost
e il potenziale complessivo delle forze applicate e la funzione
U(ϑ) = −mgyG −mgyB − k
2AA′2 + U c(ϑ)
= −mg`
2sin ϑ− k
2`2 cos2 ϑ +
mg`
4sin ϑ + c = −mg`
4sin ϑ− k
2`2 cos2 ϑ + c.
Per ricercare i suoi punti di stazionarieta si annulla la derivata prima:
U ′(ϑ) = ` cos ϑ(k` sin ϑ− mg
4
)= 0
da cui si ricavano le seguenti soluzioni:
ϑ(1)e =
π
2sempre valida,
ϑ(2)e = arcsin
(mg
4k`
), ϑ(3)
e = π − arcsin(
mg
4k`
), se mg ≤ 4k`.
Ma per la realta del moto deve anche essere arcsin(r/`) ≤ ϑe ≤ π − arcsin(r/`), per cuile soluzioni ϑ(2)
e e ϑ(3)e sono ammissibili se
4kr ≤ mg ≤ 4k`.
2. La derivata seconda del potenziale e
U”(ϑ) = −` sin ϑ (k` sin ϑ−mg/4) + k`2 cos2 ϑ
e se calcolata nei punti di equilibrio vale:
U”(π/2) = −`(k`−mg/4)
U”(ϑ(2,3)e ) = k`2 cos2 ϑ(2,3)
e > 0.
Quindi per ϑ(1)e = π/2 il potenziale U(ϑ) ha un massimo se mg < 4k` e un minimo se
mg > 4k`, mentre per ϑ(2,3)e ha un minimo.
Poiche l’energia potenziale V (ϑ) del sistema ha il segno opposto alla funzione U(ϑ), nesegue che la configurazione ϑ(1)
e = π/2 e stabile se mg < 4k` e instabile se mg > 4k`,mentre le configurazioni ϑ(2)
e e ϑ(3)e , se esistono, sono instabili.
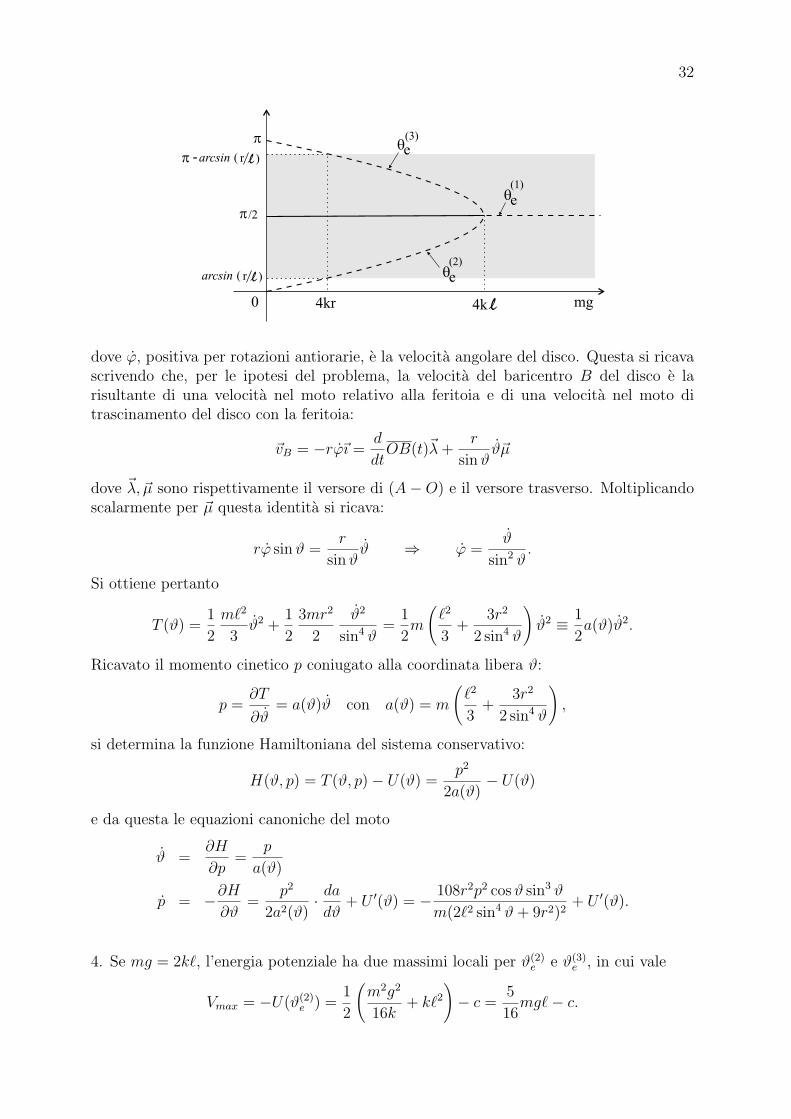
Al variare della forza peso mg, ne risulta il diagramma di stabilita mostrato nella figurache segue.
3. L’energia cinetica del disco vale
T (ϑ) =1
2IOϑ2 +
1
2ICϕ2
32
0 4kr 4k l
p/2
qe(1)
mg
arcsin lr( )
p
arcsin lr( )p -qe
(3)
qe(2)
dove ϕ, positiva per rotazioni antiorarie, e la velocita angolare del disco. Questa si ricavascrivendo che, per le ipotesi del problema, la velocita del baricentro B del disco e larisultante di una velocita nel moto relativo alla feritoia e di una velocita nel moto ditrascinamento del disco con la feritoia:
~vB = −rϕ~ı =d
dtOB(t)~λ +
r
sin ϑϑ~µ
dove ~λ, ~µ sono rispettivamente il versore di (A−O) e il versore trasverso. Moltiplicandoscalarmente per ~µ questa identita si ricava:
rϕ sin ϑ =r
sin ϑϑ ⇒ ϕ =
ϑ
sin2 ϑ.
Si ottiene pertanto
T (ϑ) =1
2
m`2
3ϑ2 +
1
2
3mr2
2
ϑ2
sin4 ϑ=
1
2m
(`2
3+
3r2
2 sin4 ϑ
)ϑ2 ≡ 1
2a(ϑ)ϑ2.
Ricavato il momento cinetico p coniugato alla coordinata libera ϑ:
p =∂T
∂ϑ= a(ϑ)ϑ con a(ϑ) = m
(`2
3+
3r2
2 sin4 ϑ
),
si determina la funzione Hamiltoniana del sistema conservativo:
H(ϑ, p) = T (ϑ, p)− U(ϑ) =p2
2a(ϑ)− U(ϑ)
e da questa le equazioni canoniche del moto
ϑ =∂H
∂p=
p
a(ϑ)
p = −∂H
∂ϑ=
p2
2a2(ϑ)· da
dϑ+ U ′(ϑ) = − 108r2p2 cos ϑ sin3 ϑ
m(2`2 sin4 ϑ + 9r2)2+ U ′(ϑ).
4. Se mg = 2k`, l’energia potenziale ha due massimi locali per ϑ(2)e e ϑ(3)
e , in cui vale
Vmax = −U(ϑ(2)e ) =
1
2
(m2g2
16k+ k`2
)− c =
5
16mg`− c.

33
Se il sistema parte dalla configurazione ϑ0 = π/2, in cui V (ϑ) ha un minimo, per raggiun-gere una delle due configurazioni estreme deve uscire dalla ”buca di potenziale” esistentenell’intervallo (ϑ(2)
e , ϑ(3)e ). Per il teorema di conservazione dell’energia, affinche cio accada
il sistema deve possedere una energia maggiore di Vmax:
T (π/2) + V (π/2) =1
2m
(`2
3+
3r2
2
)ω2
0 +mg`
4− c > Vmax =
5
16mg`− c
e da questa diseguaglianza si ricava la condizione:
ω0 >
√3g`
4(2`2 + 9r2).

34
PROVA SCRITTA DI MECCANICA ANALITICA
Corso di laurea in Ingegneria Aerospaziale, 14/11/2003
Nel sistema di figura, disposto in un piano verticale, la sbarretta rigida omogenea OA, dilunghezza ` e massa m, e incernierata nel baricentro A di un disco omogeneo di raggior e massa 2m. Il disco rotola senza strisciare su una piastra rettangolare di dimensioni(r, `+r) e massa M = 5
2m, impegnata a scorrere entro due guide parallele all’asse y. Sulla
piastra agisce una forza di richiamo ~F = −k(`/4+yB)~, dove yB e l’ordinata del baricentroB della piastra e k una costante positiva. Si assuma come coordinata lagrangiana l’angoloϑ indicato in figura e si trascurino tutti gli attriti.
1. Determinare le configurazioni di equilibrio del sistema comprese nell’intervallo 0 ≤ϑ ≤ π e studiarne la stabilita. Tracciare quindi il diagramma di stabilita assumendo comeparametro di controllo la costante k della forza di richiamo.
2. Scrivere la Lagrangiana del sistema e ricavare l’equazione di moto.
3. Linearizzare tale equazione del moto nell’intorno della configurazione di equilibriostabile che si ha quando k = 10mg/`.
4. Determinare il momento cinetico p coniugato alla coordinata ϑ, e scrivere le formuledella trasformazione canonica (ϑ, p) → (q, p) generata dalla funzione
F1(ϑ, q) = e2ϑ√
q.
Calcolare quindi i valori q0 e p0 da assegnare alle nuove variabili canoniche quando l’angoloϑ e la velocita angolare della sbarretta valgono rispettivamente: ϑ0 = π/2 rad, ϑ0 = 1/29rad·s−1.
O
y
x
q
mg
2mg
A
G
CB
mg52 yF = - k +
B4l( (
l
lOA =
AC = r = l6
r
rr+

35
Soluzione
1. Il potenziale delle forze applicate (tutte conservative) e la funzione
U(ϑ) = −mgyG − 2mgyA − 5
2mgyB − k
2
(`
4+ yB
)2
+ cost = 5mg` cos ϑ− k
2`2 cos2 ϑ + c.
Le configurazioni di equilibrio sono i suoi punti di stazionarieta, che si ricavano annullandola derivata prima:
U ′(ϑ) = ` sin ϑ(k` cos ϑ− 5mg) = 0.
Le soluzioni comprese nell’intervallo [0, π] sono:
ϑ(1)e = 0
ϑ(2)e = π
ϑ(3)e = arccos
(5mg
k`
), reale se k ≥ 5mg
`.
Per studiarne la stabilita calcoliamo la derivata seconda
U”ϑ = ` cos ϑ(k` cos ϑ− 5mg)− k`2 sin2 ϑ
che nelle tre configurazioni di equilibrio vale
U”(0) = `(k`− 5mg){
> 0 se k > 5mg/` (min di U)< 0 se k < 5mg/` (max di U)
U”(π) = −`(−k`− 5mg) > 0 (min di U)
U”(ϑ(3)e ) = −k`2 sin2 ϑ(3)
e < 0 (max di U).
Poiche l’equilibrio e stabile nei punti di minimo locale della energia potenziale V (ϑ) =−U(ϑ), si deduce che la configurazione ϑ(1)
e = 0 e stabile se k < 5mg/` e instabile sek > 5mg/`; la configurazione ϑ(2)
e = π e instabile; e la configurazione ϑ(3)e , se esiste, e
stabile (v. figura).
p
p /2
0 5mg
l
qe( )1
qe( )3
qe( )2
k
2. La velocita di A, estremo della sbarretta OA, vale: ~vA = `ϑ~τ dove ~τ = cos ϑ~ı + sin ϑ~e il versore di ~k ∧ (A − O). Se ϕ e la rotazione del disco, crescente nel verso orario, la

36
formula fondamentale dei moti rigidi applicata al disco (che rotola senza strisciare sullapiastra) fornisce:
~vA = `ϑ(cos ϑ~ı + sin ϑ~) = ~vC + rϕ~ı = ~vB + (`/6)ϕ~ı
da cui si ricavano la velocita angolare del disco e la velocita di B:
ϕ = 6 cos ϑϑ, ~vB = ` sin ϑϑ~.
L’energia cinetica e pertanto:
T (ϑ, ϑ) =1
2IOϑ2 +
1
2· 2mv2
A +1
2IAϕ2 +
1
2· 5
2mv2
B
=1
2
m`2
3ϑ2 +
1
2· 2m`2ϑ2 +
1
2· 2mr2
2· 36 cos2 ϑϑ2 +
1
2· 5
2m`2 sin2 ϑϑ2
=1
2m`2
(10
3+
3
2sin2 ϑ
)ϑ2 ≡ 1
2a(ϑ)ϑ2
e la Lagrangiana del sistema vale
L(ϑ, ϑ) = T (ϑ, ϑ) + U(ϑ) =1
2m`2
(10
3+
3
2sin2 ϑ
)ϑ2 + 5mg` cos ϑ− k
2`2 cos2 ϑ + c.
Da essa si ricava l’equazione del moto:
m`2(
10
3+
3
2sin2 ϑ
)ϑ +
3
2m`2 sin ϑ cos ϑϑ2 = ` sin ϑ(k` cos ϑ− 5mg).
3. Se k = 10mg/`, l’unica configurazione di equilibrio stabile e ϑ(3)e = arccos(1/2) = π/3.
In un suo intorno il sistema, che e conservativo e con 1 grado di liberta, compie piccoleoscillazioni descritte dall’equazione linearizzata:
ϑ + σ2(ϑ− π/3) = 0
dove
σ2 = −U”(ϑ(3)e )
a(ϑ(3)e )
= − −k`2 sin2(π/3)
m`2(
103
+ 32sin2(π/3)
) =3k`2/4
107m`2/24=
18k
107m≡ 180g
107`.
4. Il momento cinetico coniugato all’angolo ϑ, per definizione, e uguale a p = ∂L/∂ϑ =a(ϑ)ϑ con a(ϑ) determinato al punto 2, e per ϑ = ϑ0 = π/2, ϑ = ϑ0 = 1/29 vale:
p0 = m`2(
10
3+
3
2
)· 1
29=
m`2
6.
Applichiamo le formule della trasformazione canonica generata da F1:
p =∂F1
∂ϑ= 2e2ϑ
√q, p = −∂F1
∂q= − e2ϑ
2√
q
che definiscono la seguente trasformazione diretta:
q =p2
4e−4ϑ, p = −e4ϑ
p.
Calcolando i secondi membri per ϑ = ϑ0 = π/2 e p = p0 = m`2/6 si ottiene:
q0 =m2`4
144e−2π, p0 = − 6
m`2e2π.

37
PROVA SCRITTA DI MECCANICA ANALITICA
Corso di laurea in Ingegneria Meccanica, 2/2/2004
Nel sistema di figura, disposto in un piano verticale, la sbarretta rigida omogenea AB, dilunghezza ` e massa m, ha l’estremo A che scorre senza attrito sull’asse y e l’estremo Bincernierato sulla circonferenza di un disco omogeneo di raggio r e massa 4m. Al centroD del disco, che scorre senza attrito sull’asse x, e applicata una forza costante ~F = F~ı.Si assumano come coordinate lagrangiane gli angoli ϑ e ϕ di figura, entrambi definiti in[0, 2π].
1. Determinare i valori da assegnare alla coppia (F, ϑe) perche il sistema si trovi in unaconfigurazione di equilibrio qe = {ϑe, ϕe = −π/6} e studiare la stabilita delle configu-razioni trovate.
2. Scrivere le equazioni del moto del sistema, linearizzate nell’intorno della configurazionedi equilibrio stabile che e stata ricavata al punto precedente.
3. Si ponga ora r = 0, e si determini la funzione Hamiltoniana del sistema cosı modificato,costituito dalla sbarretta AB e dalla massa puntiforme 4m solidale al suo estremo B, chescorre senza attrito sull’asse x.
4. Determinare le formule della trasformazione canonica generata dalla funzione
F2(ϑ, p) = p sin ϑ
e scrivere la Hamiltoniana H(ϑ, p) del sistema definito al punto precedente, in funzionedelle nuove variabili canoniche (ϑ, p).
A
q
B
D
y
x
mg
4mg
O
F
G

38
Soluzione
1. Il potenziale delle forze applicate (tutte conservative) e la funzione
U(ϑ, ϕ) = −mgyG + FxD + cost = −mg
(r sin ϕ +
`
2cos ϑ
)+ F (` sin ϑ− r cos ϕ) + cost.
Le configurazioni di equilibrio sono i suoi punti di stazionarieta, che si ricavano annullandole derivate parziali:
∂U
∂ϑ=
mg`
2sin ϑ + F` cos ϑ = 0
∂U
∂ϕ= −mgr cos ϕ + Fr sin ϕ = 0.
Imponendo che la seconda sia soddisfatta per ϕe = −π/6 si ricava:
−√
3
2mgr − Fr
2= 0 da cui : F = −
√3mg
e sostituendo nella prima:
mg`
2sin ϑ−
√3mg` cos ϑ = 0 da cui : ϑ(1)
e = arctan(2√
3), ϑ(2)e = π +arctan(2
√3).
Si ricavano pertanto le due configurazioni di equilibrio:
q(1)e = {arctan(2
√3),−π/6}; q(2)
e = {π + arctan(2√
3),−π/6}.Per studiarne la stabilita calcoliamo le derivate seconde
U”ϑϑ =mg`
2cos ϑ− F` sin ϑ ; U”ϕϕ = mgr sin ϕ + Fr cos ϕ ; U”ϑϕ = 0
il cui segno nelle due configurazioni di equilibrio e il seguente:
U”ϑϑ(ϑ(1)e ) =
mg`
2
1√1 + tan2 ϑe
+√
3mg`tan ϑe√
1 + tan2 ϑe
=mg`
2√
1 + (2√
3)2+
6mg`√1 + (2
√3)2
=
√13
2mg` > 0;
U”ϑϑ(ϑ(2)e ) = −
√13
2mg` ≡ b11 < 0
U”ϕϕ(ϕe) = mgr sin(−π/6)−√
3mgr cos(−π/6) = −2mgr ≡ b22 < 0.
Dunque il determinante della matrice Hessiana, detH = U”ϑϑU”ϕϕ , e negativo nellaconfigurazione q(1)
e che risulta instabile; ed e positivo nella configurazione q(2)e che e stabile.
2. Per q = q(2)e il potenziale si puo approssimare nella forma
U(ϑ, ϕ) ' 1
2b11(ϑ− ϑ(2)
e )2 +1
2b22(ϕ + π/6)2 =
= −√
13
4mg`(ϑ− ϑ(2)
e )2 −mgr(ϕ + π/6)2.

39
Per calcolare l’energia cinetica, determiniamo anzitutto le componenti delle velocita deidue baricentri:
xG = (`/2) cos(ϑ− π/2) = (`/2) sin ϑ, xG = (`/2) cos ϑϑ
yG = r sin ϕ− (`/2) sin(ϑ− π/2) = r sin ϕ + (`/2) cos ϑ, yG = r cos ϕϕ− (`/2) sin ϑϑ
xD = ` sin ϑ− r cos ϕ, xD = ` cos ϑϑ + r sin ϕϕ
usando le quali si ricava:
T =1
2mv2
G +1
2IGϑ2 +
1
2·4mv2
D +1
2IDϕ2 =
1
2m
(`2
4ϑ2 + r2 cos2 ϕϕ2 − r` cos ϕ sin ϑϕϑ
)+
+m`2
24ϑ2 + 2m(`2 cos2 ϑϑ2 + r2 sin2 ϕϕ2 + 2r` cos ϑ sin ϕϕϑ) + mr2ϕ2.
L’energia cinetica ha dunque la forma
T =1
2a11(ϑ)ϑ2 + a12(ϑ, ϕ)ϑϕ +
1
2a22ϕ
2 , con :
a11(ϑ) = m`2(
1
3+ 4 cos2 ϑ
)
a12(ϑ, ϕ) =mr`
2(8 cos ϑ sin ϕ− cos ϕ sin ϑ)
a22(ϕ) = 3mr2(1 + sin2 ϕ)
e in un intorno di q(2)e = {ϑ(2)
e ,−π/6} si approssima come
T ' 1
2a11(ϑ
(2)e )ϑ2 + a12(ϑ
(2)e ,−π/6)ϑϕ +
1
2a22(−π/6)ϕ2
=25
78m`2ϑ2 +
7√
13
26mr`ϑϕ +
15
8mr2ϕ2.
Usando le espressioni approssimate di U e T , il moto del sistema in un intorno di q(2)e e
descritto dall’equazione[
a11(ϑ(2)e ) a12(ϑ
(2)e , ϕe)
a12(ϑ(2)e , ϕe) a22(ϕe)
] (ϑϕ
)=
[b11 00 b22
] (ϑ− ϑ(2)
e
ϕ + π/6
)
equivalente al seguente sistema di equazioni linearizzate:
50`
39ϑ +
7r√13
ϕ +√
13g(ϑ− ϑ(2)e ) = 0
7`√13
ϑ +15r
2ϕ + 4g(ϕ + π/6) = 0.
3. Se r = 0, la massa del disco e concentrata nel punto D ≡ B. Il sistema ha un sologrado di liberta individuato dall’angolo ϑ, e il potenziale e l’energia cinetica si riducono a
U(ϑ) = −mg`
2cos ϑ + F` sin ϑ
T (ϑ, ϑ) =m`2
2
(1
3+ 4 cos2 ϑ
)ϑ2 =
1
2a(ϑ)ϑ2.

40
Il momento cinetico coniugato a ϑ vale
p = a(ϑ)ϑ = m`2(
1
3+ 4 cos2 ϑ
)ϑ
e la funzione Hamiltoniana del sistema diventa:
H(ϑ, p) =p2
2a(ϑ)− U(ϑ) =
p2
2m`2(1/3 + 4 cos2 ϑ)+
mg`
2cos ϑ− F` sin ϑ.
4. Applichiamo le formule della trasformazione completamente canonica generata da F2:
p =∂F2
∂ϑ= p cos ϑ , ϑ =
∂F2
∂p= sin ϑ.
Da esse si ricava, tra l’altro:
cos ϑ =√
1− sin2 ϑ =√
1− ϑ2, p = p√
1− ϑ2
che, sostituite nella espressione di H(ϑ, p), forniscono la nuova Hamiltoniana
H(ϑ, p) =p2(1− ϑ2)
2m`2(13/3− 4ϑ2)+
mg`
2
√1− ϑ2 − F`ϑ.

41
PROVA SCRITTA DI MECCANICA ANALITICACorsi di laurea in Ingegneria Aerospaziale e Meccanica, 13/2/2004
Nel sistema di figura, disposto in un piano verticale, la sbarretta rigida omogenea AB,di lunghezza ` e massa m, e incernierata nell’estremo fisso A(0.2h). Su di essa scorresenza attrito il punto P , estremo di una seconda sbarretta PQ di uguale massa m euguale lunghezza `, che e impegnata a scorrere tra due rette parallele di equazioni y = 0e y = h = `/2. Sulla sbarretta AB agisce una coppia di momento M(ϑ) = M0 sin(2ϑ) conM0 > 0 costante. Si assuma come coordinata lagrangiana l’angolo ϑ indicato in figura,definito nell’intervallo −π/3 ≤ ϑ ≤ π/3.
1. Determinare le configurazioni di equilibrio del sistema soddisfacenti la condizione|ϑe| ≤ π/3. Studiarne la stabilita e tracciare il diagramma di biforcazione delle soluzioniϑe assumendo M0 come parametro di controllo.
2. Si supponga che M0 = mg`/5, e che il sistema inizi il suo moto dalla configurazioneϑ0 = −π/3 con velocita nulle. Calcolare la velocita angolare ϑ1 quando la sbarretta ABraggiunge la configurazione ϑ1 = 0.
3. Si sopprima ora la sbarretta PQ e si scrivano le equazioni di Hamilton del sistemacosı modificato, e costituito dalla sola sbarretta pesante AB sollecitata dalla coppia dimomento M(ϑ).
4. Applicare alle variabili (ϑ, p) del sistema modificato come al punto precedente, latrasformazione canonica generata dalla funzione F1(ϑ, ϑ) = ϑ sin ϑ, e scrivere l’Hamilto-niana H espressa in funzione delle nuove variabili canoniche (ϑ, p).
Domande supplementari con risposta facoltativa:
5. Calcolare la Lagrangiana del sistema originario (costituito dalle due sbarrette) escriverne l’equazione del moto.
6. Linearizzare tale equazione di moto nell’intorno della configurazione di equilibrio stabileche si ha quando M0 = mg`/5.
A
P
B
qh
h
Q
mg
mg x
y
O
qM = M sen20
G1
G2
h
AB = PQ =AO = 2 =
ll

42
Soluzione
1. Il potenziale delle forze applicate vale
U(ϑ) = −mgyG1 −mgyG2 +∫
M(ϑ)dϑ =mg`
2cos ϑ− M0
2cos 2ϑ + cost.
Le configurazioni di equilibrio sono i suoi punti di stazionarieta, che si ricavano annullandola derivata prima:
U ′(ϑ) = sin ϑ(2M0 cos ϑ−mg`/2) = 0.
Le soluzioni appartenenti all’intervallo −π/3 ≤ ϑ ≤ π/3 sono:
ϑ(1)e = 0, sempre valida;
ϑ(2)e = arccos
(mg`
4M0
), ϑ(3)
e = −ϑ(2)e , se mg`/4 ≤ M0 ≤ mg`/2.
Per studiarne la stabilita calcoliamo la derivata seconda
U”(ϑ) = cos ϑ(2M0 cos ϑ−mg`/2)− 2M0 sin2 ϑ
che nelle tre configurazioni di equilibrio vale
U”(0) = 2M0 − mg`
2
{> 0 se M0 > mg`/4 → minimo di U< 0 se M0 < mg`/4 → massimo di U
U”(ϑ(2,3)e ) = −2M0
1−
(mg`
4M0
)2 < 0 → massimi di U.
Dunque ϑ(1)e e stabile per M0 < mg`/4 e instabile per M0 > mg`/4 e ϑ(2,3)
e , se esistono,sono stabili.Il diagramma di biforcazione delle soluzioni di equilibrio nell’intervallo −π/3 ≤ ϑe ≤ π/3e mostrato in figura.
M0
02
mgl
4mgl
p 3/
p 3/
qe( )1
qe( )2
qe( )3
2. La sbarretta PQ ha atti di moto traslatorio, per cui la velocita ~vG2 = vG2~ı del suobaricentro si puo calcolare come segue:
vG2 = vP =dxP
dt=
d
dt(h tan ϑ) =
`ϑ
2 cos2 ϑ.

43
L’energia cinetica del sistema e pertanto:
T =1
2IAϑ2 +
1
2mv2
G2=
1
2· m`2
3ϑ2 +
1
2· m`2
4 cos4 ϑϑ2 =
m`2
2
(1
3+
1
4 cos4 ϑ
)ϑ2.
Si applichi l’integrale primo dell’energia nella forma T0 − U0 = T1 − U1 dove, postoM0 = mg`/5,
T0 = T (ϑ0 = −π/3, ϑ0 = 0) = 0 ; T1 = T (ϑ1 = 0, ϑ1) =7m`2
24ϑ2
1
U0 = U(−π/3) =3mg`
10; U1 = U(0) =
2mg`
5.
Sostituendo si ottiene:
−3mg`
10=
7m`2
24ϑ2
1 −2mg`
5⇒ ϑ1 =
√12g
35`.
3. In assenza della sbarretta PQ il potenziale differisce solo per un termine costanterispetto a quello gia calcolato, mentre l’energia cinetica si riduce a:
T =1
2IAϑ2 =
m`2
6ϑ2.
Espressa quest’ultima in funzione del momento cinetico
p =∂T
∂ϑ=
m`2
3ϑ,
si ricava l’Hamiltoniana:
H(ϑ, p) = T − U =3p2
2m`2− mg`
2cos ϑ +
M0
2(cos2 ϑ− sin2 ϑ) + cost
dalla quale si deducono le equazioni canoniche:
ϑ =∂H
∂p=
3p
m`2
p = −∂H
∂ϑ= sin ϑ(2M0 cos ϑ−mg`/2) ≡ U ′(ϑ).
4. Applichiamo le formule di trasformazione canonica per la funzione generatrice F1(ϑ, ϑ)= ϑ sin ϑ:
p =∂F1
∂ϑ= ϑ cos ϑ ; p = −∂F1
∂ϑ= − sin ϑ.
Da queste si ricava
sin ϑ = −p, cos2 ϑ = 1− p2, p = ϑ√
1− p2.
e sostituendo nella espressione di H(ϑ, p) si ottiene la nuova Hamiltoniana:
H =3
2m`2ϑ2(1− p2) +
M0
2(1− 2p2)− mg`
2
√1− p2 + c.

44
Risposte facoltative:
5. La funzione Lagrangiana del sistema di figura vale
L = T + U =m`2
2
(1
3+
1
4 cos4 ϑ
)ϑ2 +
mg`
2cos ϑ− M0
2cos 2ϑ + cost.
Da quest’ultima si deduce l’ equazione del moto:
m`2(
1
3+
1
4 cos4 ϑ
)ϑ +
m`2 sin ϑ
2 cos5 ϑϑ2 = sin ϑ
(2M0 cos ϑ− mg`
2
).
6. L’unica configurazione di equilibrio stabile che si ha quando M0 = mg`/5 e ϑ(1)e = 0.
In un suo intorno l’energia cinetica e il potenziale si approssimano nella forma:
T ' 1
2a(0)ϑ2 =
7m`2
24ϑ2 ; U ' 1
2U”(0)ϑ2 =
1
2
(−mg`
10
)ϑ2 = −mg`
20ϑ2
e conducono alla seguente equazione linearizzata:
ϑ + σ2ϑ = 0 con σ2 = −U”(0)
a(0)=
6g
35`.

45
PROVA SCRITTA DI MECCANICA ANALITICA
8 luglio 2004
Nel sistema in figura, che e disposto in un piano verticale, la sbarretta rigida AB dilunghezza ` e massa m e incernierata, ad un terzo della sua lunghezza, nell’origine delsistema di riferimento inerziale O(x, y). Ad essa sono applicate: una coppia di momentocostante M, e una molla con costante elastica k e lunghezza a riposo trascurabile, checollega l’estremo A ad un punto materiale P di massa mP scorrevole senza attrito sull’assex. Al punto P e applicata una forza costante ~F = F~ı.
1. Calcolare la posizione di equilibrio xe del punto P e il valore che deve avere il momentoM della coppia, perche la sbarretta si trovi in equilibrio per ϑe = π. Determinare quindila condizione che deve essere soddisfatta dalla forza F per assicurare la stabilita dellaconfigurazione di equilibrio qe = (π, xe).
2. Calcolare la Lagrangiana del sistema e scrivere le equazioni del moto.
3. Ricavati i momenti cinetici pϑ e px coniugati alle variabili lagrangiane (ϑ, x), deter-minare l’Hamiltoniana del sistema e scrivere le equazioni canoniche del moto.
4. Si supponga ora che il moto del punto P sia noto, e descritto da x(t) = R sin t + x0.Calcolare il momento cinetico p coniugato all’unica coordinata lagrangiana ϑ del sistemadinamico cosı modificato, e determinarne la funzione Hamiltoniana H(ϑ, p, t).
O
P
P
x
y
mg
q
G
m g
A
B M
F
AB =OB = /3
ll

46
Soluzione
1. Calcolati il quadrato della elongazione della molla e la quota del baricentro G:
(AP )2 = x2 +4
9`2 − 4
3`x cos ϑ ; yG = OG sin ϑ =
`
6sin ϑ,
il potenziale delle forze attive risulta:
U(ϑ, x) = −mg`
6sin ϑ− k
2
(x2 +
4
9`2 − 4
3`x cos ϑ
)+ Mϑ + Fx + cost
ed ha derivate parziali:
U ′ϑ(ϑ, x) = −mg`
6cos ϑ− 2k`
3x sin ϑ + M
U ′x(ϑ, x) = −kx +
2k`
3cos ϑ + F.
Annullandole entrambe e ponendo ϑ = ϑe = π si ricava subito:
M = −mg`
6; xe =
F
k− 2`
3.
Le derivate seconde del potenziale, calcolate nella configurazione di equilibrio qe = (−π, xe),valgono:
U”ϑϑ(qe) =mg`
6sin ϑe − 2k`
3xe cos ϑe =
2k`
3
(F
k− 2`
3
)
U”xx(qe) = −k < 0
U”ϑx(qe) = −2k`
3sin ϑe = 0
per cui U”ϑϑ(qe) e U”xx(qe) = −k coincidono con gli autovalori della matrice Hessiana.Affinche entrambi gli autovalori siano negativi (condizione affiche U(ϑ, x) abbia un mas-simo in qe), occorre che F < 2k`/3. Se e soddisfatta questa condizione, l’energia potenzialeV = −U ha un minimo, e qe e stabile.
2. Calcolata l’energia cinetica del sistema, che vale
T (ϑ, x) =1
2IOϑ2 +
1
2mP v2
P =1
2
m`2
9ϑ2 +
1
2mP x2,
si ricava la Lagrangiana:
L(ϑ, x, ϑ, x) = T + U =1
2
m`2
9ϑ2 +
1
2mP x2
−mg`
6sin ϑ− k
2
(x2 +
4
9`2 − 4
3`x cos ϑ
)+ Mϑ + Fx + cost
dalla quale si ottengono le equazioni del moto:
ϑ +3g
2`cos ϑ +
6k
`x sin ϑ =
9M
m`2
mP x + kx− 2
3k` cos ϑ = F.

47
3. I momenti cinetici valgono
pϑ =∂L
∂ϑ=
m`2
9ϑ , px =
∂L
∂x= mx
e l’energia del sistema conservativo, espressa in forma canonica, e la funzione Hamiltonia-na:
H(ϑ, x, pϑ, px) = T − U =9p2
ϑ
2m`2+
p2x
2mP
− U(ϑ, x).
Conoscendo quest’ultima, si ottengono le equazioni canoniche del moto:
ϑ =∂H
∂pϑ
= 9pϑ/m`2
x =∂H
∂px
= px/m
pϑ = −∂H
∂ϑ= U ′
ϑ = M − mg`
6cos ϑ− 2k`
3x sin ϑ
px = −∂H
∂x= U ′
x = F − kx +2k`
3cos ϑ.
4. Se il moto del punto P e assegnato, e vale x(t) = R sin t + x0, si ha a che fare conun nuovo sistema meccanico con un solo grado di liberta, individuato dalla coordinatalagrangiana ϑ, e soggetto a vincoli dipendenti dal tempo. Il potenziale generalizzato delsistema di forze applicate si scrive:
U(ϑ, t) = −mg`
6sin ϑ− k
2
(x2(t) +
4
9`2 − 4`x(t)
3cos ϑ
)+ Mϑ + Fx + cost
e l’energia cinetica vale:
T (ϑ, t) =1
18m`2ϑ2 +
1
2mP R2 cos2 t.
Se ne deduce la nuova Lagrangiana
L(ϑ, ϑ, t) =1
18m`2ϑ2 +
1
2mP R2 cos2 t + U(ϑ, t)
e il momento cinetico coniugato all’unica coordinata libera ϑ, che rimane invariato:
p =∂L
∂ϑ=
m`2
9ϑ.
Poiche il nuovo sistema dinamico non e piu conservativo, la sua Hamiltoniana non e piul’espressione canonica di T − U , perche l’energia generalizzata H(ϑ, ϑ, t) non e piu unacostante del moto. Per la sua definizione, essa vale:
H = pϑ− L(ϑ, ϑ, t) =m`2
9ϑ2 − (T + U) =
m`2
18ϑ2 − 1
2mP R2 cos2 t− U(ϑ, t)
ed esprimendola in funzione del momento cinetico se ne ricava la sua forma canonica,ovvero la Hamiltoniana:
H(ϑ, p, t) =9p2
2m`2− 1
2mP R2 cos2 t− U(ϑ, t).
48
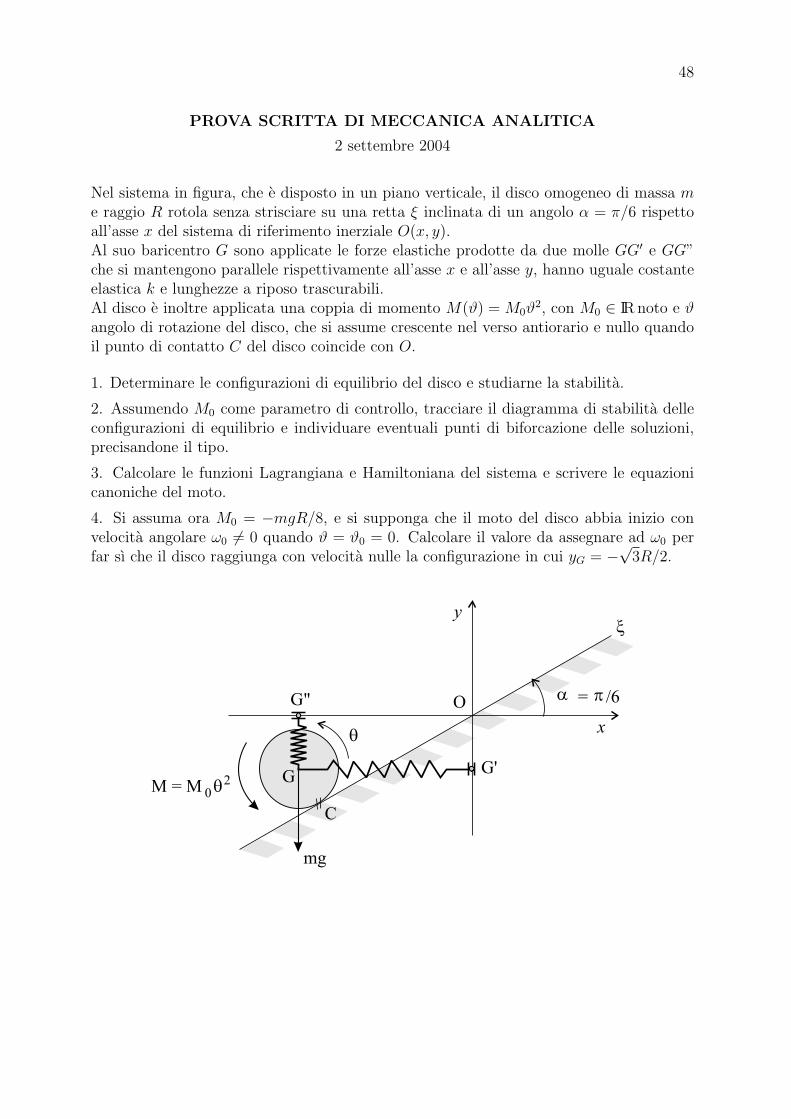
PROVA SCRITTA DI MECCANICA ANALITICA
2 settembre 2004
Nel sistema in figura, che e disposto in un piano verticale, il disco omogeneo di massa me raggio R rotola senza strisciare su una retta ξ inclinata di un angolo α = π/6 rispettoall’asse x del sistema di riferimento inerziale O(x, y).Al suo baricentro G sono applicate le forze elastiche prodotte da due molle GG′ e GG”che si mantengono parallele rispettivamente all’asse x e all’asse y, hanno uguale costanteelastica k e lunghezze a riposo trascurabili.Al disco e inoltre applicata una coppia di momento M(ϑ) = M0ϑ
2, con M0 ∈ IR noto e ϑangolo di rotazione del disco, che si assume crescente nel verso antiorario e nullo quandoil punto di contatto C del disco coincide con O.
1. Determinare le configurazioni di equilibrio del disco e studiarne la stabilita.
2. Assumendo M0 come parametro di controllo, tracciare il diagramma di stabilita delleconfigurazioni di equilibrio e individuare eventuali punti di biforcazione delle soluzioni,precisandone il tipo.
3. Calcolare le funzioni Lagrangiana e Hamiltoniana del sistema e scrivere le equazionicanoniche del moto.
4. Si assuma ora M0 = −mgR/8, e si supponga che il moto del disco abbia inizio convelocita angolare ω0 6= 0 quando ϑ = ϑ0 = 0. Calcolare il valore da assegnare ad ω0 perfar sı che il disco raggiunga con velocita nulle la configurazione in cui yG = −√3R/2.
O a = /6
x
x
G'
G"
G
C
mg
M = M 02q
q
y
p

49
Soluzione
1) Dalla geometria del sistema si ricava
xG = ξC cos α−R sin α = −R
2(√
3ϑ + 1); yG = ξC sin α + R cos α =R
2(√
3− ϑ)
~vG = xG~ı + yG~ = −Rϑ
2(√
3~ı + ~) = −Rϑ~λ ≡ ξG~λ
dove ~λ e il versore dell’asse ξ.Il potenziale delle forze applicate e pertanto
U(ϑ) = −mgyG− k
2(x2
G + y2G) +
∫M(ϑ)dϑ =
mgR
2(ϑ−
√3)− kR2
2(ϑ2 + 1) +
M0
3ϑ3 + cost
e la sua derivata prima vale
U ′(ϑ) =mgR
2− kR2ϑ + M0ϑ
2.
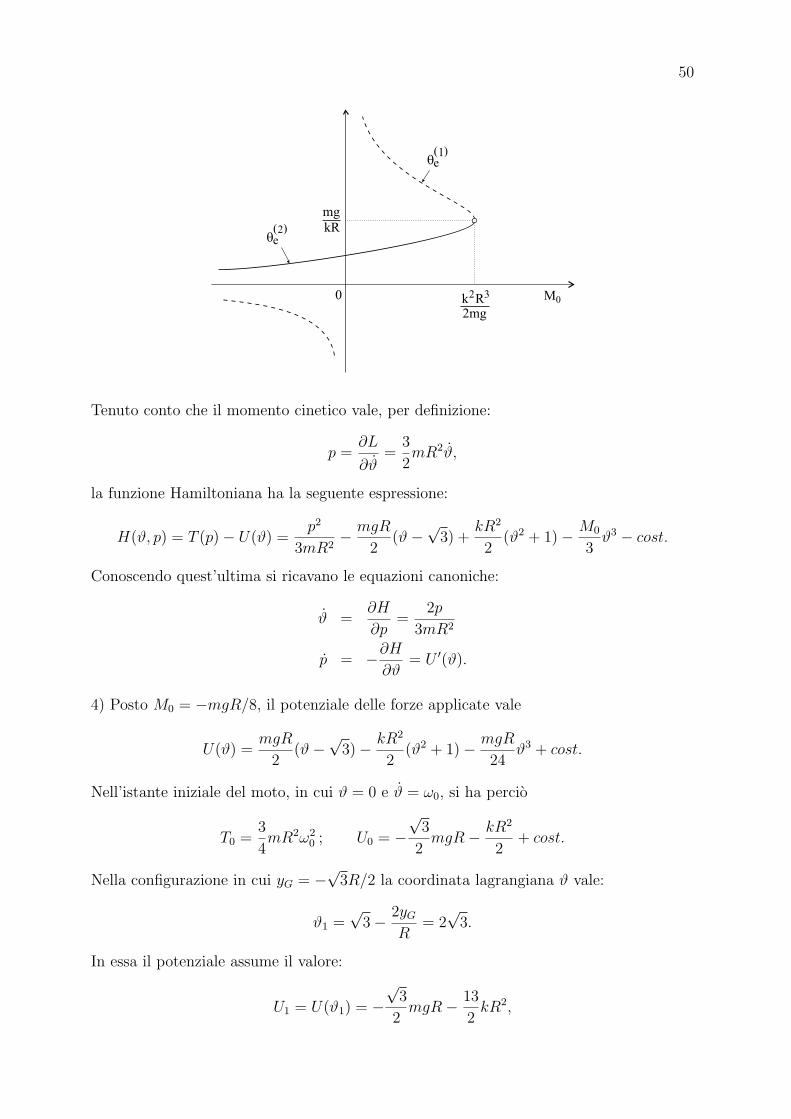
I suoi zeri forniscono i seguenti due punti di stazionarieta:
ϑ(1)e =
1
2M0
[kR2 +
√k2R4 − 2mgRM0
]; ϑ(2)
e =1
2M0
[kR2 −
√k2R4 − 2mgRM0
]
che definiscono altrettante soluzioni di equilibrio. Si noti che
limM0→0
ϑ(1)e = ±∞; lim
M0→0ϑ(2)
e =mg
2kR.
Pertanto, ϑ(2)e esiste se
M0 ≤ k2R3
2mg,
mentre ϑ(1)e esiste se e soddisfatta questa condizione e inoltre M0 6= 0. Per valutarne la
stabilita ricaviamo la derivata seconda U”(ϑ) = −kR2 + 2M0ϑ che sotto la condizioneM0 ≤ k2R3/2mg vale
U”(ϑ(1)e ) =
√k2R4 − 2mgRM0 > 0; U”(ϑ(2)
e ) = −√
k2R4 − 2mgRM0 < 0.
Dunque l’energia potenziale V (ϑ) = −U(ϑ) ha un massimo nella configurazione ϑ(1)e che,
quando esiste, e instabile, e ha un minimo per ϑ(2)e che e stabile.
2) La figura che segue mostra, nel piano (M0, ϑe), il grafico delle due soluzioni di equilibrio.Esso evidenzia un punto di biforcazione di coordinate M0 = k2R3/2mg, ϑe = mg/kR chee del tipo ”nodo-sella” o ”biforcazione tangente”.
3) L’energia cinetica del disco vale
T (ϑ, ϑ) =1
2IC ϑ2 =
3
4mR2ϑ2 ≡ 1
2aϑ2, a =
3
2mR2
e la Lagrangiana del sistema risulta
L(ϑ, ϑ) = T + U =3
4mR2ϑ2 +
mgR
2(ϑ−
√3)− kR2
2(ϑ2 + 1) +
M0
3ϑ3 + cost.
50
0 M0
qe( )1
qe( )2
k R2mg
2 3
mg
kR
Tenuto conto che il momento cinetico vale, per definizione:
p =∂L
∂ϑ=
3
2mR2ϑ,
la funzione Hamiltoniana ha la seguente espressione:
H(ϑ, p) = T (p)− U(ϑ) =p2
3mR2− mgR
2(ϑ−
√3) +
kR2
2(ϑ2 + 1)− M0
3ϑ3 − cost.
Conoscendo quest’ultima si ricavano le equazioni canoniche:
ϑ =∂H
∂p=
2p
3mR2
p = −∂H
∂ϑ= U ′(ϑ).
4) Posto M0 = −mgR/8, il potenziale delle forze applicate vale
U(ϑ) =mgR
2(ϑ−
√3)− kR2
2(ϑ2 + 1)− mgR
24ϑ3 + cost.
Nell’istante iniziale del moto, in cui ϑ = 0 e ϑ = ω0, si ha percio
T0 =3
4mR2ω2
0 ; U0 = −√
3
2mgR− kR2
2+ cost.
Nella configurazione in cui yG = −√3R/2 la coordinata lagrangiana ϑ vale:
ϑ1 =√
3− 2yG
R= 2
√3.
In essa il potenziale assume il valore:
U1 = U(ϑ1) = −√
3
2mgR− 13
2kR2,

51
e se si vuole che questa configurazione venga raggiunta con velocita nulle (ϑ = 0), appli-cando l’integrale primo dell’energia T0−U0 = T1−U1 si ricava che deve essere soddisfattal’uguaglianza:
3
4mR2ω2
0 +
√3
2mgR +
kR2
2=
√3
2mgR +
13
2kR2.
Risolvendo rispetto ad ω0 si ottiene:
ω0 =
√8k
m.

52
PROVA SCRITTA DI MECCANICA ANALITICA
13 settembre 2004
Il sistema materiale di figura e disposto in un piano verticale, ed e costituito da duesbarrette rigide OA, AB di ugual massa m e lunghezza `, incernierate in A. La sbarrettaOA e anche incernierata nell’origine O del sistema di riferimento inerziale O(x, y), el’estremo B dell’altra sbarretta e impegnato a scorrere senza attrito sull’asse y.A quest’ultimo sono applicate: una forza costante ~F = F~ con F > mg, e la forzaelastica prodotta da una molla BC avente costante elastica k nota e lunghezza a riposotrascurabile. L’estremo fisso della molla e posto sull’asse x, a una distanza da O che euguale alla lunghezza ` delle sbarrette.Si assuma come coordinata lagrangiana l’angolo ϑ indicato in figura.
1. Determinare tutte le configurazioni di equilibrio del sistema, comprese nell’intervallo−π < ϑ ≤ π.
2. Studiare la stabilita di queste configurazioni di equilibrio, e tracciare il loro diagrammadi stabilita assumendo la forza F come parametro di controllo.
3. Calcolare l’energia cinetica del sistema e scriverne l’equazione di Lagrange.
4. Ricavare il momento cinetico p coniugato alla coordinata ϑ e scrivere la funzione Ha-miltoniana del sistema. Determinare quindi la nuova Hamiltoniana H(ϑ, p) che si ottienea seguito di una trasformazione canonica definita dalla funzione generatrice
F1(ϑ, ϑ) =cos ϑ
ϑ.
O
A
B
C x
y
F > mg
mg
mg
q
l
l
G
G1
2
OA = AB = OC =

53
Soluzione
1) Il potenziale dell’insieme di forze attive agenti sul sistema, tutte conservative, e ilseguente:
U(ϑ) = −mgyG1 −mgyG2 + FyB − k
2(`2 + y2
B) = 2`(F −mg) cos ϑ− 2k`2 cos2 ϑ + cost
ed ha derivata primaU ′(ϑ) = 2` sin ϑ(mg − F + 2k` cos ϑ).
Per cercare le configurazioni di equilibrio determiniamo i punti di stazionarieta di U(ϑ),che devono soddisfare: U ′(ϑ) = 0. Si ricavano quattro soluzioni comprese nell’intervallo−π < ϑe ≤ π:
ϑ(1)e = 0; ϑ(2)
e = π sempre reali;
ϑ(3)e = arccos
(F −mg
2k`
); ϑ(4)
e = −ϑ(3)e reali se F ≤ mg + 2k`
(la condizione F ≥ mg − 2k` e verificata, se per ipotesi si assume F ≥ mg).
2) Per lo studio della stabilita di queste quattro configurazioni ricaviamo i massimi eminimi di U(ϑ) calcolando la derivata seconda
U”(ϑ) = 2` cos ϑ(mg − F + 2k` cos ϑ)− 4k`2 sin2 ϑ.
Nei punti di stazionarieta essa vale:
U”(0) = 2`(mg − F + 2k`){
< 0 se F > mg + 2k` ⇒ massimo di U> 0 se F < mg + 2k` ⇒ minimo di U
U”(π) = −2`(mg − F − 2k`) > 0 se F > mg ⇒ minimo di U
U”(ϑ(3,4)e ) = −4k`2 sin2 ϑ(3,4)
e < 0 ⇒ massimi di U.
Dunque la configurazione ϑ(1)e = 0 e stabile se F > mg + 2k` e instabile se F < mg + 2k`;
ϑ(2)e = π e sempre instabile e ϑ(3,4)
e , quando esistono, sono stabili. Il diagramma di stabilitadi queste soluzioni nel semipiano F > mg e indicato nella figura che segue.
p
p
p
p /2
- /2
-
mg Fmg + 2k l
qe
( )1
qe
( )2
qe
( )3
qe
( )4

54
3) La velocita del baricentro della sbarretta AB vale
~vG2 = − `
2(cos ϑ~ı + 3 sin ϑ~)ϑ ⇒ v2
G2=
`2
4(1 + 8 sin2 ϑ)ϑ2
e serve per calcolare l’energia cinetica nella forma:
T (ϑ, ϑ) =1
2IOϑ2 +
1
2mv2
G2+
1
2IG2ϑ
2 =m`2
2
(2
3+ 2 sin2 ϑ
)ϑ2.
Se la si usa per scrivere l’equazione di Lagrange
d
dt
(∂T
∂ϑ
)− ∂T
∂ϑ=
dU
dϑ
si ricava l’equazione del moto:
m`(
2
3+ 2 sin2 ϑ
)ϑ + 2` sin ϑ cos ϑ(mϑ2 − 2k) + 2 sin ϑ(F −mg) = 0.
4) Determinato il momento cinetico
p =∂L
∂ϑ=
∂T
∂ϑ= m`2
(2
3+ 2 sin2 ϑ
)ϑ,
l’energia cinetica, espressa in funzione delle variabili canoniche, si scrive:
T (ϑ, p) =p2
2m`2(
23
+ 2 sin2 ϑ) .
Ne segue che la Hamiltoniana, ovvero l’espressione canonica della energia totale del si-stema conservativo, vale
H(ϑ, p) = T (ϑ, p)− U(ϑ) =p2
2m`2(
23
+ 2 sin2 ϑ) + 2`(mg − F ) cos ϑ + 2k`2 cos2 ϑ + c.
Applichiamo ora alle variabili canoniche la trasformazione indicata nel testo. Si ha:
p =∂F1
∂ϑ= −sin ϑ
ϑ; p = −∂F1
∂ϑ=
cos ϑ
ϑ2
da cui anche:
p2 =1− p2ϑ4
ϑ2; sin2 ϑ = 1− p2ϑ4 ; cos ϑ = ϑ2p.
Poiche la trasformazione e completamente canonica, la nuova Hamiltoniana H(ϑ, p) siricava da H(ϑ, p) sostituendo le vecchie variabili con le espressioni ora dedotte, che sonoscritte in funzione delle variabili trasformate. Si ottiene in tal modo:
H(ϑ, p) =1− p2ϑ4
4m`2ϑ2(4/3− p2ϑ4)+ 2`pϑ2(mg − F ) + 2k`2p2ϑ4 + c.

55
Corso di laurea in Ingegneria Meccanica
PROVA SCRITTA DI MECCANICA ANALITICA
24 gennaio 2005
Problema 1. Il sistema materiale indicato in figura e disposto in un piano orizzontale.Il disco di raggio r e massa m rotola senza strisciare su una circonferenza fissa di raggio2r. Al suo baricentro A e incernierata una sbarretta rigida AB di massa 2m e lunghezza` = 3r, il cui estremo B e impegnato a scorrere senza attrito sull’asse x ed e sollecitatoda una forza costante ~F = −F~ı con F > 0. Il centro A del disco e collegato all’asse x dauna molla AA′ che si mantiene parallela all’asse y, ha costante elastica nota k e lunghezzaa riposo trascurabile.
1. Determinare le configurazioni di equilibrio del sistema comprese nell’intervallo −π <ϑ ≤ π; studiarne la stabilita e tracciare il loro diagramma di biforcazione assumendo laforza F come parametro di controllo.
2. Calcolare l’energia cinetica del sistema e scrivere l’equazione di Lagrange.
3. Linearizzare l’equazione del moto nell’intorno della configurazione di equilibrio stabileche si ha nell’ipotesi: F = 2kr.
A
B F
x
A’
C2r
r
G
qO
y
AB = 3r
Problema 2. Si ha un sistema dinamico con Hamiltoniana
H(q, p) = sin q
(p2 sin3 q +
cos q
sin2 q
)+ cost.
Applicando alle variabili (q, p) la trasformazione canonica generata dalla funzione
F2(q, p) = −p · cot q,
scrivere le equazioni canoniche nelle nuove variabili (q, p) e risolverle determinando il motodel sistema soddisfacente le condizioni iniziali: q0 = −π/2, p0 = 2.

56
Soluzione del problema 1
1) Il potenziale delle forze attive, tutte conservative, espresso in funzione della coordinatalagrangiana ϑ, vale:
U(ϑ) = −k
2(AA′)2 − FxB = −9
2kr2 sin2 ϑ− 6Fr cos ϑ + cost
ed ha derivata primaU ′(ϑ) = 3r sin ϑ(2F − 3kr cos ϑ).
Per cercare le configurazioni di equilibrio determiniamo i punti di stazionarieta di U(ϑ),che devono soddisfare: U ′(ϑ) = 0. Si ricavano quattro soluzioni comprese nell’intervallo−π < ϑe ≤ π:
ϑ(1)e = 0; ϑ(2)
e = π sempre valide
ϑ(3)e = arccos
(2F
3kr
); ϑ(4)
e = −ϑ(3)e reali se F ≤ 3
2kr.
Per studiare la loro stabilita ricaviamo i massimi e minimi di U(ϑ) calcolando la derivataseconda
U”(ϑ) = 3r cos ϑ(2F − 3kr cos ϑ) + 9kr2 sin2 ϑ.
Nei punti di stazionarieta essa vale:
U”(0) = 3r(2F − 3kr){
< 0 se F < 3kr/2 ⇒ massimo di U> 0 se F > 3kr/2 ⇒ minimo di U
U”(π) = −3r(2F + 3kr) < 0 ⇒ massimo di U
U”(ϑ(3,4)e ) = 9kr2 sin2 ϑ(3,4)
e > 0 ⇒ minimi di U.
Tenuto conto che l’energia potenziale del sistema e V (ϑ) = −U(ϑ) ed ha un minimoin ogni configurazione stabile, se ne deduce che la configurazione ϑ(1)
e = 0 e stabile seF < 3kr/2 e instabile se F > 3kr/2; ϑ(2)
e = π e sempre stabile e ϑ(3,4)e , quando esistono,
sono instabili. Il diagramma di stabilita di queste soluzioni nel piano (F, ϑe) e indicatonella figura che segue.
p
0
-
p
2
p
2
F3kr2
qe
( )
qe
( )
qe
( )qe
( )2
1
3
4
2) L’energia cinetica del sistema vale
T (ϑ, ϑ) =1
2mv2
A +1
2IAϕ2 +
1
22mv2
G +1
2IGϑ2

57
dove ϕ e la velocita angolare del disco. Indicando con ϑ∗ l’angolo compreso tra l’asse x eil vettore (A− O), che ha modulo uguale a ϑ ma e crescente nel verso orario, la velocitadel baricentro A del disco vale
~vA = rϕ~τ = ϑ∗(−~k) ∧ (A−O) = −3rϑ~τ ,
dove ~τ e il versore di ~k ∧ (A−O). Da questa si deduce anche: ϕ = −3ϑ.Inoltre, la velocita del baricentro della sbarretta vale
~vG = xG~ı + yG~ =d
dt
(9
2r cos ϑ~ı− 3
2r sin ϑ~
)= −3r
2(3 sin ϑ~ı + cos ϑ~)ϑ
da cui
v2G =
9r2
4(1 + 8 sin2 ϑ)ϑ2.
Sostituendo nella espressione dell’energia cinetica si ottiene:
T (ϑ, ϑ) =1
2mr2
(39
2+ 36 sin2 ϑ
)ϑ2 ≡ 1
2a(ϑ)ϑ2.
Se la si usa per scrivere l’equazione di Lagrange
d
dt
(∂T
∂ϑ
)− ∂T
∂ϑ≡ a(ϑ)ϑ +
1
2
da
dϑϑ2 =
dU
dϑ
si ricava l’equazione del moto:
mr2(
39
2+ 36 sin2 ϑ
)ϑ + 36mr2 sin ϑ cos ϑϑ2 − 3r sin ϑ(2F − 3kr cos ϑ) = 0.
3) Nell’ipotesi F = 2kr l’unica configurazione di equilibrio stabile e ϑ(2)e = π. In un suo
intorno il potenziale e l’energia cinetica si approssimano con
U ' 1
2U”(π)(ϑ− π)2 =
1
2(−21kr2)(ϑ− π)2; T ' 1
2a(π)ϑ2 =
39
4mr2ϑ2
e da queste espressioni si ricava l’equazione linearizzata
ϑ + σ2(ϑ− π) = 0; σ2 = −U”(π)
a(π)=
14k
13m.
Soluzione del problema 2
Le formule di trasformazione canonica per la funzione generatrice F2 = −p · cot q for-niscono:
p =∂F2
∂q=
p
sin2 q; q =
∂F2
∂p= − cot q.
Da queste si ricavano le espressioni esplicite della trasformazione diretta e della sua inversa:
{q = − cot qp = p sin2 q
{q = arctan(−1/q)p = p(1 + q2)

58
e poiche la trasformazione e completamente canonica, la nuova Hamiltoniana H(q, p) siricava applicando la trasformazione inversa alla Hamiltoniana nota H(q, p). Si ottiene intal modo:
H(q, p) = p2 − q + cost
da cui le semplici equazioni canoniche
dq
dt=
∂H
∂p= 2p
dp
dt= −∂H
∂q= 1.
La loro soluzione eq(t) = t2 + 2p0t + q0, p(t) = t + p0
con q0, p0 condizioni iniziali che, tenendo conto dei dati assegnati a q0, p0 e della trasfor-mazione diretta, valgono:
q0 = − cot q0 = 0; p0 = p0 sin2 q0 = 2 sin2(−π/2) = 2.
In conclusione si ottiene:
q(t) = t2 + 4t, p(t) = t + 2
ossia anche, in termini delle variabili canoniche originarie:
q(t) = arctan(− 1
t2 + 4t
); p(t) = (t + 2)[1 + t2(t + 4)2].

59
Corso di laurea in Ingegneria AerospazialePROVA SCRITTA DI MECCANICA ANALITICA
26 gennaio 2005
Problema 1. Il sistema materiale di figura e disposto in un piano verticale. La sbarrettarigida OA ha massa m, lunghezza ` ed e incernierata nel suo estremo fisso O. Su di essaagiscono: una coppia di momento costante M e la forza elastica prodotta da una mollaAB con rigidezza k e lunghezza a riposo trascurabile, la quale collega l’estremo libero Aal baricentro B di un disco di raggio r e massa 3m/2 che rotola senza strisciare sull’asse y.Si assumano come coordinate lagrangiane: l’angolo ϑ indicato in figura e la quota y = yB
del baricentro del disco.
1. Calcolare il momento M della coppia che assicura l’equilibrio del sistema per ϑe = π/2e la quota ye del baricentro del disco in condizioni di equilibrio. Studiare quindi la stabilitadi tale configurazione di equilibrio.
2. Calcolare l’energia cinetica e scrivere le equazione di moto del sistema.
3. Linearizzare le equazioni del moto nell’intorno della configurazione di equilibrio deter-minata al punto 1, nell’ipotesi che k` = 5mg. Determinare quindi l’integrale generale delsistema linearizzato e calcolare le frequenze proprie di vibrazione.
O
C
mg32
B
AM
mgq
x
r
y
G
Problema 2. Si ha un sistema dinamico con Hamiltoniana
H(q, p, t) = p2e−2q cos(t)− e4q
4p2.
Applicando alle variabili (q, p) la trasformazione canonica generata dalla funzione
F1(q, q) = eq√
q,
scrivere le equazioni canoniche nelle nuove variabili (q, p) e risolverle determinando il motodel sistema soddisfacente le condizioni iniziali: q0 = 0, p0 = 1/4.

60
Soluzione del problema 1
1) L’elongazione della molla AB vale
AB =√
(` cos ϑ− r)2 + (` sin ϑ− y)2 =√
`2 + r2 + y2 − 2`(r cos ϑ + y sin ϑ).
Il potenziale delle forze attive agenti sul sistema e pertanto
U(ϑ, y) = −mgyG − 3
2mgy − k
2AB
2+ Mϑ
= −mg`
2sin ϑ− 3
2mgy + k`(r cos ϑ + y sin ϑ)− k
2y2 + Mϑ + cost
ed ha derivate prime
∂U
∂ϑ= −mg
`
2cos ϑ + k`(y cos ϑ− r sin ϑ) + M
∂U
∂y= −3
2mg + k` sin ϑ− ky.
Poiche in condizioni di equilibrio il potenziale ha un punto di stazionarieta, imponiamoche queste derivate prime siano nulle per ϑ = ϑe = π/2. Si ricavano le condizioni:
−k`r + M = 0
−3
2mg + k`− kye = 0
dalle quali si ottiene
M = kr` ; ye = `− 3mg
2k.
Per studiare la stabilita della configurazione qe = (ϑe = π/2, ye) calcoliamo le derivateseconde del potenziale:
U”ϑϑ = mg`
2sin ϑ− k`(r cos ϑ + y sin ϑ); U”yy = −k ; U”yϑ = k` cos ϑ
che nel punto di stazionarieta valgono:
U”ϑϑ(qe) = mg`/2− k`ye = `(2mg − k`){
< 0 se k` > 2mg> 0 se k` < 2mg
U”yy(qe) = −k
U”yϑ(qe) = 0.
Dunque il determinante della matrice Hessiana detH(qe) = U”ϑϑU”yy−(U”yϑ)2 e positivosolo se k` > 2mg. Inoltre, se questa ipotesi e soddisfatta le derivate seconde U”ϑϑ(qe) eU”yy(qe) sono entrambe negative, il che assicura che il potenziale ha un massimo.
Tenuto conto che l’energia potenziale del sistema e V (ϑ) = −U(ϑ) ed ha un minimo inuna configurazione stabile, se ne deduce che qe e stabile per k` > 2mg e instabile sek` < 2mg.

61
2) Indicata con ϕ = y/r la velocita angolare del disco, l’energia cinetica del sistema siscrive
T (ϑ, y) =1
2IOϑ2 +
1
2· ICϕ2 =
1
6m`2ϑ2 +
9
8my2
e la sua conoscenza permette di ricavare le equazioni del moto:
1
3m`2ϑ = U ′
ϑ = −mg`
2cos ϑ + k`(y cos ϑ− r sin ϑ) + M
9
4my = U ′
y = −3
2mg + k` sin ϑ− ky.
3) Nell’ipotesi k` = 5mg, in cui risulta ye = 7`/10, la configurazione di equilibrio qe =(π/2, ye) e stabile, e in un suo intorno il potenziale si approssima con
U ' 1
2U”ϑϑ(qe)(ϑ− π/2)2 +
1
2U”yy(qe)(y − ye)
2 = −3
2mg`(ϑ− π/2)2 − k
2(y − ye)
2,
mentre non e necessario approssimare l’energia cinetica, che e omogenea quadratica nellevelocita con coefficienti costanti. La funzione Lagrangiana, approssimata nell’intorno diqe, e pertanto
L ' 1
6m`2ϑ2 +
9
8my2 − 3
2mg`(ϑ− π/2)2 − k
2(y − ye)
2.
Da questa si ricavano le equazioni linearizzate
ϑ + σ2ϑ(ϑ− π/2) = 0; σ2
ϑ =9g
`
y + σ2y(y − ye) = 0; σ2
y =4k
9m,
che sono disaccoppiate ed hanno la soluzione generale:
ϑ(t) = π/2 + A1 sin(σϑt + α1), y(t) =7
10` + A2 sin(σyt + α2)
con A1, A2, α1, α2 costanti di integrazione determinabili quando sono note le condizioniiniziali. Le frequenze proprie di vibrazione del sistema sono quindi:
νϑ =σϑ
2π=
3
2π
√g
`, νy =
σy
2π=
1
3π
√k
m≡ 1
3π
√5g
`.
Soluzione del problema 2
Le formule di trasformazione canonica per la funzione generatrice F1 = eq√
q forniscono:
p =∂F1
∂q= eq
√q; p = −∂F1
∂q= − eq
2√
q.
Da queste si ricavano le espressioni esplicite della trasformazione diretta e della sua inversa:
q = p2e−2q
p = −e2q
2p
{q = log | − 2p
√q |
p = −2p q

62
e poiche la trasformazione e completamente canonica, la nuova Hamiltoniana H(q, p) siricava applicando la trasformazione inversa alla Hamiltoniana nota
H(q, p) = p2e−2q cos t−(
e2q
2p
)2
Si ottiene in tal modo:H(q, p) = q cos t− p2
da cui le semplici equazioni canoniche
dq
dt=
∂H
∂p= −2p
dp
dt= −∂H
∂q= − cos t.
La loro soluzione e
q(t) = −2p0t + 2∫ t
0sin τdτ + q0 = −2p0t + 2(1− cos t) + q0
p(t) = p0 −∫ t
0cos τdτ = p0 − sin t
con q0, p0 condizioni iniziali che, tenendo conto dei valori assegnati a q0, p0 e della trasfor-mazione diretta, valgono:
q0 =1
16; p0 = −2.
In conclusione si ottiene:
q(t) = 4t− 2 cos t +33
16, p(t) = −(2 + sin t)
ossia anche, in termini delle variabili canoniche originarie:
q(t) = log[ 2(2 + sin t)√
4t− 2 cos t + 33/16 ]
p(t) = 2(2 + sin t)(4t− 2 cos t + 33/16).

63
Corso di laurea in Ingegneria Aerospaziale
PROVA SCRITTA DI MECCANICA ANALITICA
9 febbraio 2005
Il sistema materiale di figura e disposto in un piano orizzontale. Il disco omogeneo diraggio r e massa m rotola senza strisciare sull’asse x. In una sua scanalatura diametralee impegnato l’estremo P di una sbarretta rigida di egual massa m e lunghezza `, chescorre senza attrito in una guida orizzontale posta alla distanza h = 3r/2 dall’asse x. La
sbarretta e sottoposta a un carico ~F = F~ı con F > 0, e il disco e azionato da una coppiadi momento costante M > 0.Si assume come coordinata lagrangiana l’angolo ϑ che e mostrato in figura, crescente nelverso orario e nullo quando e nulla l’ascissa xG del baricentro del disco.
1. Determinare le configurazioni di equilibrio del sistema comprese nell’intervallo
−π/3 ≤ ϑe ≤ π/3.
2. Studiare la stabilita di tali configurazioni di equilibrio e ricavare il loro diagramma dibiforcazione assumendo come parametro di controllo il momento M della coppia applicataal disco.
3. Calcolare la funzione Hamiltoniana del sistema e scrivere le equazioni canoniche delmoto.
4. Si assuma che M = 2Fr, e che il moto abbia inizio nella configurazione in cui ϑ0 = 0.Calcolare la velocita angolare ϑ0 da imprimere al disco nell’istante iniziale del suo moto,se si vuole che esso raggiunga con velocita nulle la configurazione di fine corsa ϑ1 = π/3.
O
F M
P
G
C x
y
q
3
2r
r
A

64
Soluzione
1) Indichiamo con
s(ϑ) =h− r
cos ϑ=
r
2 cos ϑ
la distanza di P dal baricentro G del disco, e con xG = rϑ l’ascissa di G. La posizione diP nel sistema di riferimento O(x, y) e definita da
~P = (xG + s sin ϑ)~ı + (r + s cos ϑ)~ = r(ϑ +1
2tan ϑ)~ı +
3
2r~.
Poiche xA = xP − `, il potenziale della forza costante F applicata in A vale
∫FdxA =
∫FdxP = FxP + cost.
Ne segue che il potenziale complessivo delle forze agenti sul sistema e
U(ϑ) = Fr(ϑ +
1
2tan ϑ
)−Mϑ + cost = (Fr −M)ϑ +
Fr
2tan ϑ + cost
ed ha derivata prima
U ′(ϑ) = Fr −M +Fr
2 cos2 ϑ.
Le configurazioni di equilibrio sono punti di stazionarieta del potenziale, ossia le radicidell’equazione trigonometrica: U ′(ϑ) = 0. Nell’intervallo −π/3 ≤ ϑe ≤ π/3 dei valori chepuo assumere l’angolo ϑ, tali radici sono:
ϑ(1)e = arccos
√Fr
2(M − Fr), ϑ(2)
e = − arccos
√Fr
2(M − Fr)
e sono reali se soddisfano le condizioni
M > Fr ; Fr ≤ 2(M − Fr).
La seconda e quella piu restrittiva, e risolta rispetto ad M fornisce: M ≥ 32Fr. Inoltre,
affinche |ϑe| ≤ π/3 occorre anche che sia:
cos2 ϑe =Fr
2(M − Fr)≥ 1
4ossia M ≤ 3Fr,
per cui in definitiva le due configurazioni di equilibrio sono ammissibili se
3
2Fr ≤ M ≤ 3Fr.
2) Per studiare la loro stabilita calcoliamo la derivata seconda del potenziale:
U”(ϑ) = Frsin ϑ
cos3 ϑ≡ Fr tan ϑ(1 + tan2 ϑ)
la quale, avendo il segno di tan ϑ, e positiva per ϑ(1)e e negativa per ϑ(1)
e .

65
p/2
p/2-
0 Fr FrM
p/3
p/3-
32
Fr3
qe(1)
qe
(2)
Tenuto conto che l’energia potenziale del sistema: V (ϑ) = −U(ϑ) e minima in una con-figurazione stabile e massima in una instabile, se ne deduce che ϑ(1)
e , se esiste, e instabilee ϑ(2)
e e stabile.Il loro diagramma di stabilita e riportato in figura, e mostra il punto critico (M =3Fr/2, ϑe = 0) in cui avviene una biforcazione tangente, del tipo ”nodo-sella”.
3) Calcoliamo la velocita di P
vP = xP =(1 +
1
2 cos2 ϑ
)rϑ ≡ 1
2(3 + tan2 ϑ)rϑ
e osserviamo che poiche la sbarretta trasla, questa velocita e uguale a quella del suobaricentro. L’energia cinetica del sistema e pertanto
T (ϑ, ϑ) =1
2IC ϑ2 +
1
2mv2
P =1
2· 3
2mr2ϑ2 +
mr2
2
(1 +
1
2 cos2 ϑ
)2
ϑ2 =1
2a(ϑ)ϑ2
con
a(ϑ) = mr2
[3
2+
(1 +
1
2 cos2 ϑ
)2]≡ mr2
4[6 + (3 + tan2 ϑ)2].
Il momento cinetico coniugato a ϑ e
p =∂T
∂ϑ= a(ϑ)ϑ
e la Hamiltoniana del sistema (conservativo) e l’espressione canonica dell’energia:
H = T − U =p2
2a(ϑ)− U(ϑ).
Le equazioni canoniche del moto sono allora:
ϑ =∂H
∂p=
p
a(ϑ)
p = −∂H
∂ϑ=
p2
2a2(ϑ)· da
dϑ+ U ′(ϑ)
e calcolata la derivata prima:
da
dϑ= 2mr2
(1 +
1
2 cos2 ϑ
)sin ϑ
cos3 ϑ≡ mr2 sin ϑ
cos5 ϑ(1 + 2 cos2 ϑ)
≡ mr2 tan ϑ(1 + tan2 ϑ)(3 + tan2 ϑ),

66
si riscrivono nella forma finale:
ϑ =4p
mr2[6 + (3 + tan2 ϑ)2]
p =8p2 tan ϑ(1 + tan2 ϑ)(3 + tan2 ϑ)
mr2[6 + (3 + tan2 ϑ)2]2+ Fr −M +
Fr
2 cos2 ϑ.
4) Si applichi l’integrale primo dell’energia: T0−U0 = T1−U1 calcolando l’energia cineticae il potenziale nell’istante iniziale del moto e nella configurazione ϑ1 = π/3 in cui si annullala velocita angolare del disco. Nell’ipotesi M = 2Fr si ha:
T0 = T (0, ϑ0) =15
8mr2ϑ2
0 ; U0 = U(0) = cost
T1 = T (π/3, 0) = 0 ; U1 = U(π/3) =Fr
6(3√
3− 2π) + cost.
Sostituendo nell’integrale primo dell’energia si ricava
15
8mr2ϑ2
0 = −Fr
6(3√
3− 2π)
e risolvendo rispetto a ϑ0:
ϑ0 = 2
√(2π − 3
√3)F
45mr.
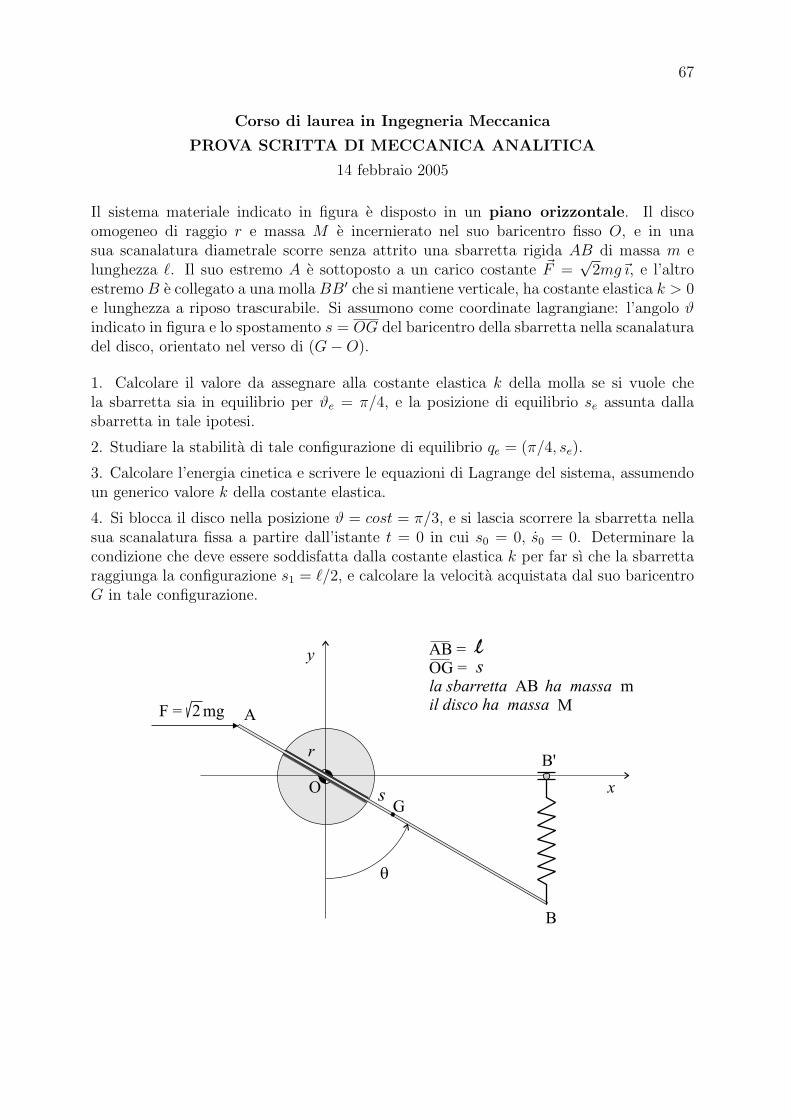
67
Corso di laurea in Ingegneria Meccanica
PROVA SCRITTA DI MECCANICA ANALITICA
14 febbraio 2005
Il sistema materiale indicato in figura e disposto in un piano orizzontale. Il discoomogeneo di raggio r e massa M e incernierato nel suo baricentro fisso O, e in unasua scanalatura diametrale scorre senza attrito una sbarretta rigida AB di massa m elunghezza `. Il suo estremo A e sottoposto a un carico costante ~F =
√2mg~ı, e l’altro
estremo B e collegato a una molla BB′ che si mantiene verticale, ha costante elastica k > 0e lunghezza a riposo trascurabile. Si assumono come coordinate lagrangiane: l’angolo ϑindicato in figura e lo spostamento s = OG del baricentro della sbarretta nella scanalaturadel disco, orientato nel verso di (G−O).
1. Calcolare il valore da assegnare alla costante elastica k della molla se si vuole chela sbarretta sia in equilibrio per ϑe = π/4, e la posizione di equilibrio se assunta dallasbarretta in tale ipotesi.
2. Studiare la stabilita di tale configurazione di equilibrio qe = (π/4, se).
3. Calcolare l’energia cinetica e scrivere le equazioni di Lagrange del sistema, assumendoun generico valore k della costante elastica.
4. Si blocca il disco nella posizione ϑ = cost = π/3, e si lascia scorrere la sbarretta nellasua scanalatura fissa a partire dall’istante t = 0 in cui s0 = 0, s0 = 0. Determinare lacondizione che deve essere soddisfatta dalla costante elastica k per far sı che la sbarrettaraggiunga la configurazione s1 = `/2, e calcolare la velocita acquistata dal suo baricentroG in tale configurazione.
A
B
B'
G
q
s
r
O x
ys
AB =OG =
l
F = mg2
la sbarretta ha massa
il disco ha massa
AB
M
m

68
Soluzione
1) Nel sistema di riferimento O(x, y) di figura la posizione degli estremi della sbarretta ela seguente:
~A = −(
`
2− s
)sin ϑ~ı +
(`
2− s
)cos ϑ~ ~B =
(`
2+ s
)sin ϑ~ı−
(`
2+ s
)cos ϑ~.
Le forze applicate sono tutte conservative, ed il loro potenziale vale
U(ϑ, s) = FxA − k
2y2
B =√
2mg
(s− `
2
)sin ϑ− k
2
(s +
`
2
)2
cos2 ϑ + cost.
Le sue derivate prime sono
∂U
∂ϑ=
√2mg
(s− `
2
)cos ϑ + k
(s +
`
2
)2
sin ϑ cos ϑ
∂U
∂s=
√2mg sin ϑ− k
(s +
`
2
)cos2 ϑ
e poiche in condizioni di equilibrio il potenziale ha un punto di stazionarieta, imponiamoche queste derivate prime siano nulle per ϑ = ϑe = π/4. Si ricava il sistema
√2mg
(`
2− se
)=
√2
2k
(se +
`
2
)2
√2mg =
√2
2k
(se +
`
2
)
nelle incognite k, se la cui soluzione e
k =4mg
`; se = 0.
2) Per studiare la stabilita della configurazione qe = (ϑe = π/4, se = 0) calcoliamo lederivate seconde del potenziale:
U”ϑϑ = −√
2mg
(s− `
2
)sin ϑ + k
(s +
`
2
)2
(cos2 ϑ− sin2 ϑ)
U”ss = −k cos2 ϑ
U”ϑs =√
2mg cos ϑ + 2k
(s +
`
2
)sin ϑ cos ϑ
che nel punto di stazionarieta valgono:
U”ϑϑ(qe) =1
2mg` ; U”ss(qe) = −k
2= −2mg
`; U”ϑs(qe) = mg +
1
2k` = 3mg.
Il determinante della matrice Hessiana, calcolato nel punto di stazionarieta, vale
detH(qe) = U”ϑϑU”ss − (U”ϑs)2 = −mgk`
4−
(mg +
1
2k`
)2
= −10m2g2 < 0

69
e poiche e negativo, il potenziale non ha ne un massimo ne un minimo in qe che risultainstabile.
3) L’atto di moto della sbarretta e la composizione del suo moto relativo alla scanalatura e
di quello di trascinamento con il disco. Pertanto, se indichiamo con ~λ il versore di (G−O)
e con ~µ il versore della direzione ~k ∧ (G − O) normale alla sbarretta, la velocita del suobaricentro e
~vG = s~λ + sϑ~µ da cui : v2G = s2 + s2ϑ2.
Si ha percio l’energia cinetica:
T (s, ϑ, s) =1
2IOϑ2 +
1
2mv2
G +1
2· IGϑ2 =
1
2
(Mr2
2+ ms2 +
m`2
12
)ϑ2 +
1
2ms2
e la sua conoscenza permette di ricavare le seguenti equazioni di Lagrange:(
Mr2
2+ ms2 +
m`2
12
)ϑ + 2mssϑ = U ′
ϑ
ms−msϑ2 = U ′s
in cui U ′ϑ, U
′s sono le derivate prime del potenziale gia calcolate nel punto 1).
4) Se si blocca il disco nella configurazione ϑ = π/3, il sistema dinamico da studiare si
riduce alla sola sbarretta rigida che trasla con velocita s~λ, scorrendo nella scanalaturafissa inclinata di π/3. La sua energia cinetica e T = 1
2ms2, e il potenziale delle forze
applicate diventa:
U(s) =
√6
2mg
(s− `
2
)− k
8
(`
2+ s
)2
+ cost = −k
8s2 +
(√6
2mg − k`
8
)s + c.
Quindi il grafico della energia potenziale V (s) = −U(s) della sbarretta e una parabolacon concavita verso l’alto, avente un minimo nella configurazione di equilibrio stabile
se = 2√
6mg/k − `/2.
Ne segue che il moto della sbarretta avviene entro questa ”buca di potenziale”, ed e unaoscillazione periodica attorno a se.
Se nell’istante iniziale del moto si ha s(0) = 0, s(0) = 0, affinche la sbarretta raggiungala configurazione s1 = `/2, occorre che sia soddisfatta la condizione
V (0) ≥ V (`/2).
Tenuto conto che
V (0) = −c, V (`/2) =k`2
32−
(√6
2mg − k`
8
)`
2− c,
si ricava la condizione
−c ≥ `
4
(3k`
8−√
6mg
)− c da cui : k ≤ 8
√6mg
3`.

70
Lo stesso risultato si ottiene quando, per calcolare la velocita s1 della sbarretta nellaconfigurazione s1 = `/2, si applica l’integrale primo dell’energia
T0 − U0 = T1 − U1
il quale si scrive
−c =1
2ms2
1 −(√
6 mg − 3k`
8
)`
4− c.
Risolvendo rispetto a s1 si ottiene:
s1 =
√√√√ `
2
(√6g − 3k`
8m
),
che e reale solo se e soddisfatta la condizione su k che e stata determinata poco sopra.La velocita di G quando s = `/2 e pertanto
~vG(s1) = s1~λ =
√2
2s1(~ı− ~) =
1
2
√√√√`
(√6g − 3k`
8m
)(~ı− ~).

71
PROVA SCRITTA DI MECCANICA ANALITICA
4 luglio 2005
Versione A
Il sistema materiale in figura si muove in un piano verticale. La trave orizzontale omogeneaAB ha massa M ed e impegnata, con vincolo di rotolamento senza strisciamento, sullaperiferia di un disco di centro E che ha raggio r, massa 4M e a sua volta rotola senzastrisciare sull’asse x del sistema di riferimento inerziale O(x, y).All’estremo A della trave e collegata rigidamente una feritoia verticale AA′ di massatrascurabile e lunghezza 2r, il cui estremo A′ scorre senza attrito sull’asse x.Nella feritoia scorre senza attrito l’estremo P di una manovella HP che ha lunghezza` < r, massa m ed e incernierata nel punto H(0, r) dell’asse y.Si assume come coordinata lagrangiana l’angolo ϑ di rotazione della manovella, indicatoin figura.
1. Determinare tutte le configurazioni di equilibrio del sistema, comprese nell’intervallo−π ≤ ϑe ≤ π.
2. Studiare la stabilita di queste configurazioni di equilibrio al variare della costanteelastica k della molla, e tracciare il loro diagramma di biforcazione.
3. Ricavare l’Hamiltoniana del sistema e scrivere le equazioni canoniche del moto.
4. Linearizzare l’equazione del moto nell’intorno di una qualsiasi tra le configurazioni diequilibrio stabile in cui si trova il sistema quando si assume k = 4mg/`, e calcolare lafrequenza delle piccole oscillazioni nell’intorno della configurazione scelta.
O
P
A
C
B
D x
y
Mgq
r
mg
4Mg
G
H
A’
E
rHP = <l

72
Soluzione della versione A
1. Indichiamo con ϕ l’angolo di rotazione del disco, crescente nel verso antiorario. Lerelazioni geometrico-cinematiche utili per svolgere i calcoli sono le seguenti.
xP = xA = ` cos ϑ; xG =`
2cos ϑ, yG = r +
`
2sin ϑ
xP = xA = 2xG = −` sin ϑϑ = xC = −2rϕ = 2xE
da cui segue anzitutto
ϕ =`
2rsin ϑϑ; xE = xG = −rϕ = − `
2sin ϑϑ
e integrando:
xE − xG = costante = d =⇒ GE2
= (xE − xG)2 + (yE − yG)2 = d2 +`2
4sin2 ϑ.
Il potenziale elastico della molla interna e pertanto:
Uel(ϑ) = −k
2GE
2= −k`2
8sin2 ϑ + cost
e il potenziale complessivo delle forze attive agenti sul sistema vale:
U(ϑ) = −mgyG − k
2GE
2+ cost = −mg`
2sin ϑ− k`2
8sin2 ϑ + cost.
Annulliamo la sua derivata prima per ottenere le configurazioni di equilibrio:
dU
dϑ= − `
2cos ϑ
(mg +
k`
2sin ϑ
)= 0 =⇒ ϑ(1)
e =π
2, ϑ(2)
e = −π
2
ϑ(3)e = arcsin
(−2mg
k`
); ϑ(4)
e = −π − ϑ(3)e .
Le prime due soluzioni sono sempre valide; la terza e la quarta esistono solo se k ≥ 2mg
`.
2. Per studiare la stabilita calcoliamo la derivata seconda:
U”(ϑ) =`
2sin ϑ
(mg +
k`
2sin ϑ
)− k`2
4cos2 ϑ
che nelle configurazioni di equilibrio vale
U”(π/2) =`
2
(k`
2+ mg
)> 0
U”(−π/2) =`
2
(k`
2−mg
)=
{< 0 se k < 2mg/`> 0 se k > 2mg/`
U”(ϑ(3,4)e ) = −k`2
4[1− sin2 ϑ(3,4)
e ] = −k`2
4+
(mg)2
k< 0 se k > 2mg/`.

73
0 2mg l 4mg l
k
p
2
p
p
2-
p-
p-
-
qe( )
qe( )
qe( )1
23
qe( )4
6
56
Poiche l’equilibrio e stabile quando l’energia potenziale V (ϑ) = −U(ϑ) ha un minimolocale, se ne deduce che: ϑ(1)
e = π/2 e sempre instabile; ϑ(2)e = −π/2 e stabile per
k < 2mg/` e instabile per k > 2mg/`; e le configurazioni ϑ(3,4)e , se esistono, sono entrambe
stabili. Ne risulta un diagramma di stabilita che presenta una biforcazione a forchetta nelpunto (2mg/`,−π/2) come e mostrato in figura.
3. Poiche la trave AB trasla, il suo baricentro ha la stessa velocita dell’estremo A. Quindil’energia cinetica del sistema vale
T (ϑ, ϑ) =1
2IOϑ2 +
1
2Mx2
A +1
2IDϕ2
=1
2· m`2
3ϑ2 +
1
2·M`2 sin2 ϑϑ2 +
1
2· 3
24Mr2 `2
4r2sin2 ϑϑ2
=1
2a(ϑ)ϑ2 con a(ϑ) = `2
(m
3+
5
2M sin2 ϑ
).
Il momento cinetico coniugato a ϑ e
p =∂T
∂ϑ= a(ϑ)ϑ
e quindi l’Hamiltoniana del sistema, che e la sua energia totale espressa in forma canonica,vale
H(ϑ, p) = T − U =p2
2a(ϑ)− U(ϑ) =
=3p2
`2(2m + 15M sin2 ϑ)+
mg`
2sin ϑ +
k`2
8sin2 ϑ− cost.
Si ricavano cosı le equazioni canoniche
ϑ =∂H
∂p=
p
a(ϑ)
p = −∂H
∂ϑ=
p2
2a2(ϑ)
da
dϑ+ U ′(ϑ)
che, effettuando le dovute sostituzioni, portano al seguente risultato:
ϑ =6p
`2(2m + 15M sin2 ϑ)

74
p =90p2M sin ϑ cos ϑ
`2(2m + 15M sin2 ϑ)2− `
2cos ϑ
(mg +
k`
2sin ϑ
).
3. Per k = 4mg/` esistono due configurazioni di equilibrio stabile: sono
ϑ(3)e = arcsin(−1/2) = −π
6; ϑ(4)
e = −π − arcsin(−1/2) = −5
6π.
Se indichiamo con ϑe una qualsiasi di queste due configurazioni, in un suo intorno l’energiacinetica e il potenziale hanno la medesima forma approssimata:
T (ϑ) ' 1
2a(ϑe)ϑ
2 =`2
2
(m
3+
5M
8
)ϑ2
U(ϑ) ' 1
2U”(ϑe)(ϑ− ϑe)
2 + cost = −3
8mg`(ϑ− ϑe)
2 + cost
da cui l’Hamiltoniana approssimata del sistema:
H(ϑ, p) ' 12p2
`2(8m + 15M)+
3
8mg`(ϑ− ϑe)
2 − cost.
Se si usa questa espressione di H si ottengono le seguenti equazioni canoniche linearizzate:
ϑ =24p
`2(8m + 15M)
p = −3
4mg`(ϑ− ϑe).
Derivando la prima equazione rispetto al tempo, si riconosce subito che esse sono equiva-lenti all’equazione differenziale del secondo ordine:
ϑ + σ2(ϑ− ϑe) = 0, σ2 = −U”(ϑe)
a(ϑe)=
18mg
`(8m + 15M)
la quale descrive il moto di un oscillatore lineare con frequenza
ν = σ/2π =3
2π
√2mg
`(8m + 15M).

75
TEMA D’ESAME DI MECCANICA ANALITICA
9 settembre 2005
Una intelaiatura triangolare, costituita dalle tre aste rigide e omogenee BD, DE e BEdi figura, ha massa totale M e si muove in un piano verticale, con i vertici B e D chescorrono senza attrito sull’asse x di un sistema di riferimento inerziale (Oxy). Sull’astaBE della intelaiatura rotola senza strisciare un disco di massa m e raggio r << `, dove` e la lunghezza delle aste BD e DE. Al baricentro A del disco sono applicate due forzeelastiche: quella prodotta da una molla verticale AA′ con costante elastica nota k che locollega all’asse x, e quella prodotta dalla molla AB con costante elastica h = 2k che locollega al vertice B della intelaiatura. Entrambe le molle hanno una lunghezza a riposotrascurabile.Si assumano come coordinate lagrangiane: l’ascissa x = xG del baricentro della intelaia-tura e la distanza s = BT dal vertice B del punto di contatto T tra il disco e l’ipotenusaBE della intelaiatura.Si supponga inoltre che il moto del sistema si svolga con le seguenti condizioni iniziali:t = 0 : x(0) = x0 6= 0, x(0) = x0 = 0; s(0) = s0 > 0, s(0) = s0 = 0.
1. Ricavare le configurazioni di equilibrio qe = {se, xe} del sistema completo.
2. Tracciare il grafico qualitativo di se in funzione della costante elastica k, e determinare:a) la condizione che deve essere soddisfatta da k per far sı che se non superi la lunghezzadell’asta BE; b) l’estremo inferiore dei valori possibili di se.
3. Scrivere le equazioni di Lagrange del sistema e determinare la soluzione s(t) del motodel disco, soddisfacente le condizioni iniziali sopra precisate.
4. Oltre all’integrale primo dell’energia, nel sistema in esame esiste un secondo integraleprimo del moto. Scrivere questo secondo integrale primo, e utilizzarlo per ricavare la leggedel moto x(t) della intelaiatura, soddisfacente le condizioni iniziali assegnate.
B DA'
A G
G
E
T
mg
Mg
p/4
p/4s
s
x
x
y
O
l
l
r
lBD = DE =
q = ( , )
sBT =
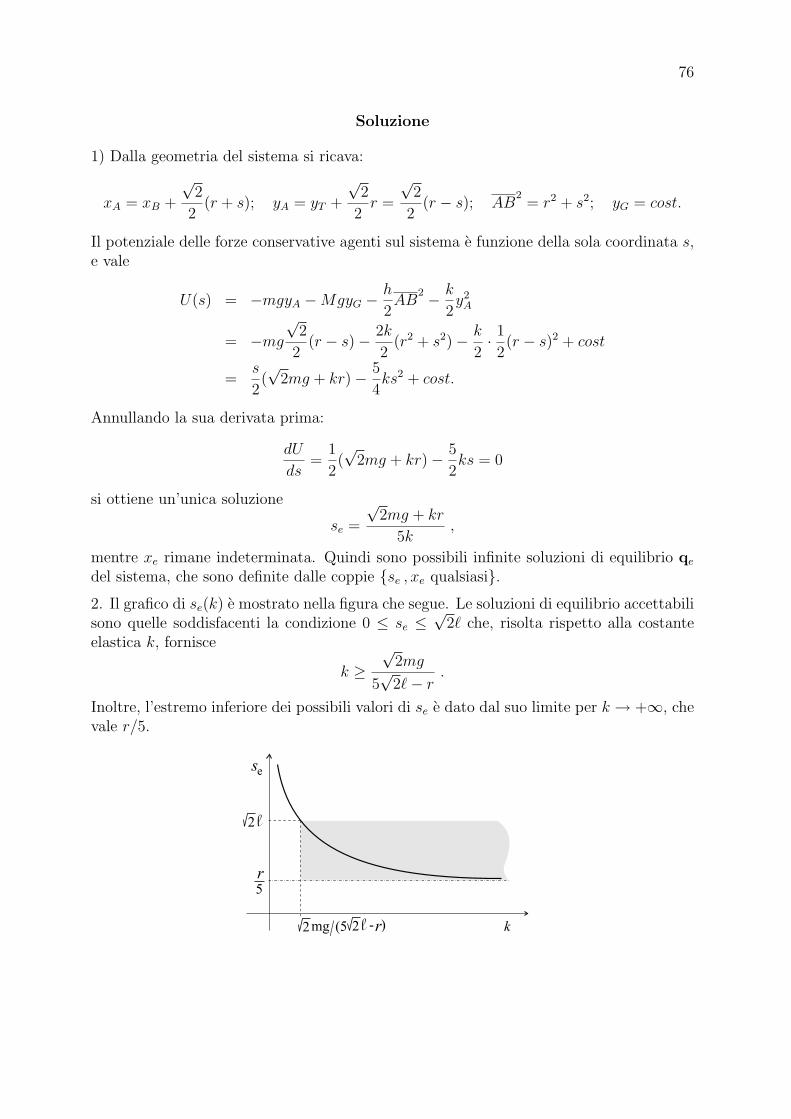
76
Soluzione
1) Dalla geometria del sistema si ricava:
xA = xB +
√2
2(r + s); yA = yT +
√2
2r =
√2
2(r − s); AB
2= r2 + s2; yG = cost.
Il potenziale delle forze conservative agenti sul sistema e funzione della sola coordinata s,e vale
U(s) = −mgyA −MgyG − h
2AB
2 − k
2y2
A
= −mg
√2
2(r − s)− 2k
2(r2 + s2)− k
2· 1
2(r − s)2 + cost
=s
2(√
2mg + kr)− 5
4ks2 + cost.
Annullando la sua derivata prima:
dU
ds=
1
2(√
2mg + kr)− 5
2ks = 0
si ottiene un’unica soluzione
se =
√2mg + kr
5k,
mentre xe rimane indeterminata. Quindi sono possibili infinite soluzioni di equilibrio qe
del sistema, che sono definite dalle coppie {se , xe qualsiasi}.2. Il grafico di se(k) e mostrato nella figura che segue. Le soluzioni di equilibrio accettabilisono quelle soddisfacenti la condizione 0 ≤ se ≤
√2` che, risolta rispetto alla costante
elastica k, fornisce
k ≥√
2mg
5√
2`− r.
Inoltre, l’estremo inferiore dei possibili valori di se e dato dal suo limite per k → +∞, chevale r/5.
k
se
r
r
5
mg/(5 - )
l2
l22

77
3. La velocita di A vale
~vA = xA~ı + yA~ =
(x +
√2
2s
)~ı−
√2
2s~ =⇒ v2
A = x2 + s2 +√
2xs
e la velocita angolare del disco e ϕ = s/r. Quindi l’energia cinetica del sistema totale e
T = T (disco) + T (aste) =1
2mv2
A +1
2IAϕ2 +
1
2Mx2 =
1
2(m + M)x2 +
3
4ms2 +
√2
2mxs.
Da essa si deducono le equazioni di Lagrange :
(m + M)x +
√2
2ms = 0
m(√
2x + 3s)−√
2mg − kr + 5ks = 0.
Sostituendo la prima nella seconda si ricava la seguente equazione differenziale nella co-ordinata s(t):
2m + 3M
m + Mms + 5k(s− se) = 0
la cui soluzione soddisfacente le condizioni iniziali s(0) = s0, s(0) = 0 e
s(t) = se + (s0 − se) cos(σt) con σ2 =5k(m + M)
m(2m + 3M).
4. La coordinata x e ignorabile perche non compare esplicitamente nella Lagrangiana delsistema:
L(s, x, s) = T + U =1
2(m + M)x2 +
3
4ms2 +
√2
2mxs +
s
2(√
2mg + kr)− 5
4ks2 + cost.
Se ne deduce che esiste l’integrale primo del momento cinetico px coniugato ad x il quale,tenuto conto delle condizioni iniziali assegnate, vale:
px =∂L
∂x= (m + M)x +
√2
2ms = cost = (m + M)x0 +
√2
2ms0 = 0.
Esso si identifica con l’integrale primo scalare della quantita di moto del sistema totale,nella direzione dell’asse x:
Qx = mxA + Mx = m
(x +
√2
2s
)+ Mx = cost = 0 ,
che esiste perche tutte le forze esterne, attive e reattive, hanno la direzione dell’asse y.Risolvendo rispetto ad x si ricava
x(t) = −√
2m
2(m + M)s(t) =
√2m
2(m + M)σ(s0 − se) sin(σt)
e integrando rispetto al tempo si ottiene
x(t) = x0 +
√2mσ(s0 − se)
2(m + M)
∫ t
0sin(σt′)dt′ = x0 +
√2m(s0 − se)
2(m + M)[1− cos(σt)].





























