Embed Size (px)
Citation preview

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Teoria de Estabilidade de Lyapunov
Leonardo A. B. Torres
Marco de 2019
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
1 Teoria de Estabilidade de Lyapunov
2 Princıpio de Invariancia de LaSalle
3 Lema de Barbalat
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Pontos de Equilıbrio
Um ponto de equilıbrio x eq e um estado no qual o campo vetorial e nulo,isto e, nao ha tendencia de mudanca do estado, ou seja,
x = 0⇒ f(x eq,t) = 0.
Portanto, se emt = t0, x(t0) = x eq,
entao o estado do sistema permanece o mesmo, isto e:
x(t) = x eq, ∀t ≥ t0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Pontos de Equilıbrio
Sem perda de generalidade, nos desenvolvimentos a seguir podemosconsiderar x eq = 0.
Para ver isso, suponha que x eq 6= 0. Neste caso podemos usar umatranslacao de coordenadas z = x− x eq e escrever:
x = f(x,t),
z = x = f(z + x eq,t) ≡ f(z,t);
tal que z eq = 0 e um ponto de equilıbrio do novo sistema
z = f(z,t).
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Analise de Estabilidade de Pontos de Equilıbrio –Importancia em Problemas de Controle I
Considere o seguinte sistema dinamico em Malha Fechada (u ≡ u(x,t))em que se deseja a obtencao de um novo Ponto de Equilıbrio estavel:
x = f(x,u,t),
x = f(x,u(x,t),t) = f(x,t).
O novo P.E., sem perda de generalidade, pode ser considerado comosendo x eq = 0, isto e, f(0,t) = 0.Note que, neste contexto:
Observacao Importante
Estudar a estabilidade de Pontos de Equilıbrio de sistemas dinamicosquaisquer e equivalente a se estudar a Estabilidade do SistemaControlado em Malha Fechada!
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Analise de Estabilidade de Pontos de Equilıbrio –Importancia em Problemas de Controle II
Em muitos trabalhos o vetor x e de fato o vetor erro ou diferenca e(t)entre o comportamento do sistema e o comportamento desejado, tal que
e = f(e,t),
e se busca provar que o Ponto de Equilıbrio e eq = 0 e pelo menos:
Estavel, no sentido de Lyapunov;
ou, preferencialmente, Globalmente Assintoticamente Estavel – GAS(Globally Asymptotically Stable), no sentido de Lyapunov.
Estes conceitos serao melhor explorados nos proximos slides.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Estabilidade segundo Lyapunov
Em Teoria de Controle Nao Linear e comum investigar-se inicialmente aestabilidade do sistema em torno de seus pontos de equilıbrio.
Ha muitas diferentes definicoes de estabilidade, mas no presente casoestamos interessados nas definicoes segundo Lyapunov.
Alexander Mikhailovich Lyapunov (1857–1917).
Matematico Russo que publicou, em 1892, aprincipal Teoria de Estabilidade usada emControle de Sistemas Dinamicos Nao Lineares.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Estabilidade
P.E. Estavel: dado ε > 0 qualquer, ∃ δ(ε,t0) > 0, tal que‖x(t0)‖ < δ ⇒ ‖x(t)‖ < ε, ∀t ≥ t0.
x1
x2
x2
x1
t
ε
δ
ε
δ
Note que necessariamente δ ≤ ε.
Em resumo: comecando perto o suficiente de um ponto de equilıbrioestavel, os estados do sistema permanecem, para sempre, taoproximos ao ponto de equilıbrio quanto quisermos.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Estabilidade
P.E. Estavel: dado ε > 0 qualquer, ∃ δ(ε,t0) > 0, tal que‖x(t0)‖ < δ ⇒ ‖x(t)‖ < ε, ∀t ≥ t0.
x1
x2
x2
x1
t
ε
δ
ε
δ
Note que necessariamente δ ≤ ε.
Em resumo: comecando perto o suficiente de um ponto de equilıbrioestavel, os estados do sistema permanecem, para sempre, taoproximos ao ponto de equilıbrio quanto quisermos.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Estabilidade AssintoticaP.E. Assintoticamente Estavel:
1 E um P.E. estavel;2 ∃ r(t0) > 0, tal que ‖x(t0)‖ < r ⇒ ‖x(t)‖ → 0, t→∞.
x1
x2
x2
x1
t
rr
Note que nao basta que o estado convirja para o P.E. A condicao 1impoe que a trajetoria se mantenha no interior de uma bola de raiolimitado ε escolhido arbitrariamente, e portanto tao pequeno quantose queira.
Em resumo: comecando perto o suficiente de um ponto de equilıbrioassintoticamente estavel, os estados do sistema ficarao proximos aele, e convergirao para ele a medida que o tempo passa.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Estabilidade AssintoticaP.E. Assintoticamente Estavel:
1 E um P.E. estavel;2 ∃ r(t0) > 0, tal que ‖x(t0)‖ < r ⇒ ‖x(t)‖ → 0, t→∞.
x1
x2
x2
x1
t
rr
Note que nao basta que o estado convirja para o P.E. A condicao 1impoe que a trajetoria se mantenha no interior de uma bola de raiolimitado ε escolhido arbitrariamente, e portanto tao pequeno quantose queira.
Em resumo: comecando perto o suficiente de um ponto de equilıbrioassintoticamente estavel, os estados do sistema ficarao proximos aele, e convergirao para ele a medida que o tempo passa.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Instabilidade
P.E. Instavel: e o ponto de equilıbrio que nao e estavel.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Instabilidade: segundo Lyapunov
Por exemplo, suponha o caso de um sistema cujo estado sempre visitauma regiao de raio R antes de convergir para o P.E. Neste caso o P.E.nao sera estavel no sentido de Lyapunov, contrariando nossasexpectativas.
x1
x2
x2
x1
t
R
ε
δ
ε
δ
Isso mostra que a definicao de estabilidade segundo Lyapunov nao cobretodos os casos de interesse.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Estabilidade Exponencial
Estabilidade Exponencial: estabilidade assintotica em que se podegarantir uma taxa exponencial λ de aproximacao do ponto deequilıbrio.
Existe δ(t0), e constantes α > 0 e λ > 0, tais que
‖x(t0)‖ < δ(t0)⇒ ‖x(t)‖ ≤ α‖x(t0)‖e−λ(t−t0)
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Estabilidade Uniforme
Estabilidade uniforme: caracteriza-se pela independencia em relacaoao instante inicial t0 considerado. Exemplos:
1 P.E. Uniformemente Estavel: e o P.E. estavel em que o raio δ ≡ δ(ε)nao depende do instante inicial t0 considerado.
2 P.E. Uniformemente Assintoticamente Estavel: e o P.E.assintoticamente estavel em que o raio δ ≡ δ(ε) nao depende doinstante inicial t0 considerado.
3 P.E. Uniformemente Exponencialmente Estavel: e o P.E.exponencialmente estavel em que o raio δ nao depende do instanteinicial t0 considerado.
A nocao de Estabilidade Uniforme e particularmente importante naanalise de estabilidade de sistemas nao autonomos. Para os sistemasautonomos, em que nao ha dependencia explıcita com o tempo, aspropriedades de Estabilidade sao automaticamente uniformes em relacaoao instante inicial t0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Estabilidade Assintotica Global – GAS
Estabilidade Assintotica Global: valida nao apenas para condicoesiniciais proximas ao equilıbrio, mas para todo x ∈ Rn. Isto e:
1 Sistema Estavel, e2 Verifica-se que
‖x(t)‖ → 0, t→∞, ∀x(t0) ∈ Rn.
GAS – Global Asymptotic Stability
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Direto de Lyapunov I
Seja V (x) uma funcao continuamente diferenciavel e definida positiva,chamada de Funcao de Lyapunov Candidata.
Ser uma funcao definida positiva significa que:
V (0) = 0; e V (x) > 0,∀x 6= 0.
E ser continuamente diferenciavel significa que V (x) e contınua, e quesuas derivadas parciais ∂V/∂x1, ∂V/∂x2, · · · , ∂V/∂xn existem e saocontınuas.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Direto de Lyapunov II
Theorem (Metodo Direto de Lyapunov para Sistemas Autonomos)
Seja x = 0 um ponto de equilıbrio – P.E. de x = f(x), em quef : D → Rn, e D ⊆ Rn um domınio contendo x = 0. Seja V : D → Ruma funcao continuamente diferenciavel tal que
V (0) = 0; V (x) > 0, ∀x ∈ D − 0;V ≤ 0, ∀x ∈ D.
Entao o P.E. e estavel. Alem disso, se
V < 0, ∀x ∈ D − 0,
entao o P.E. e assintoticamente estavel.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Direto de Lyapunov III
O seguinte quadro apresenta de forma simplificada o metodo direto deLyapunov, notando que V ≡ V (x) = ∂V
∂xdxdt = ∂V
∂x f(x):
Se dVdt ≤ 0,∀x 6= 0, ⇒ o P.E. e Estavel;
Se dVdt < 0,∀x 6= 0, ⇒ o P.E. e Assintoticamente Estavel.
Se uma das condicoes acima se verificar, diz-se que V (x) e uma Funcaode Lyapunov.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Direto de Lyapunov IV
Se uma das condicoes anteriores for verificada apenas em umconjunto aberto Ω do Espaco de Estados X, tal que Ω contem oP.E., isto e,
V (0) = 0, V (x) > 0, ∀x ∈ Ω ⊂ X,x eq = 0 ∈ Ω,
V (x) ≤ 0, ou V (x) < 0, ∀x ∈ Ω,
entao o resultado e Local.
Se, alem disso, Ω ≡ Rn e a Funcao de Lyapunov eradialmente ilimitada, isto e,
‖x‖ → ∞⇒ V (x) = +∞,
entao o resultado e Global.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Direto – Interpretacoes
Interpretacao Fısica:
1 Se considerarmos V (x(t)) uma funcao usada para se medir a Energiado sistema, no sentido de que ela e sempre positiva, e apresenta seumınimo apenas quando o sistema esta em equilıbrio (x = x eq),
2 e se essa Energia sempre decresce ao longo do tempo, isto e,dVdt < 0,
3 entao podemos concluir que o sistema ira entrar em equilıbrio:
x(t)→ x eq,
que corresponde a condicao de mınima energia.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Direto – InterpretacoesInterpretacao Fısica:A energia decai ao longo do tempo, levando o sistema para o ponto deequilıbrio.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Direto – Interpretacoes
Interpretacao Geometrica:
dV
dt=∂V
∂x
dx
dt=∂V
∂xf(x) = 〈∇V (x), f(x)〉;
sendo ∇V = ∂V/∂x o gradiente da Funcao de Lyapunov, e 〈·,·〉 ooperador produto escalar de dois vetores. Ou seja, parax = [x1 x2 . . . xn]> e f(x) = [f1(x) f2(x) . . . fn(x)]> vetores coluna,tem-se:
〈∇V (x), f(x)〉 =
[∂V
∂x1
∂V
∂x2. . .
∂V
∂xn
]·
f1(x);f2(x);
...fn(x)
.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Direto – Interpretacoes
Interpretacao Geometrica:
Neste caso, supondo superfıcies de nıvel definidas por V (x) = c, sendoc > 0 uma constante real positiva, e lembrando que o gradiente ∇V (x) eperpendicular a superfıcie de nıvel em questao no ponto x, ve-se que osvetores “velocidade” f(x) correspondentes devem apontar para dentro dasuperfıcie, uma vez que:
dV
dt= 〈∇V (x), f(x)〉 = ‖∇V (x)‖‖f(x)‖ cos(θ);
〈∇V (x), f(x)〉 ≤ 0 ⇒ π
2≤ θ ≤ 3π
2;
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Direto – Interpretacoes
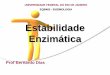
Interpretacao Geometrica:
−1.5 −1 −0.5 0 0.5 1 1.5
−1
−0.5
0
0.5
1
x1
x2
Em preto os vetores gradiente ∇V (x) perpendiculares as superfıcies denıvel, e em vermelho os vetores “velocidade” f(x).
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Direto – Interpretacoes
Vide animacao: animated-Lyapunov.gif
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Direto – Observacoes
Importantes observacoes sobre o Metodo Direto de Lyapunov:
1 Se a Funcao de Lyapunov Candidata mostra-se nao ser uma Funcaode Lyapunov, isto e,
dV
dt= 〈∇V (x), f(x)〉 > 0
para algum x ∈ Ω ⊆ Rn, nada podemos concluir sobre a estabilidadedo Ponto de Equilıbrio.
2 Nao ha um procedimento formal geral por meio do qual se possaobter sempre uma Funcao de Lyapunov para o problema.
3 As Funcoes de Lyapunov nao sao unicas. Por exemplo, se V (x) euma Funcao de Lyapunov, entao W (x) = ρ[V (x)]α, com ρ > 0 eα > 0, tambem e uma F. de Lyapunov para o sistema.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplos de Aplicacao
Mostre que o sistema massa-mola nao linear e estavel no sentido deLyapunov:
mx = −bx− k0x− k1x3,
usando m = 1; b = 1; k0 = 1 e k1 = 1.
1 Tentativa 1: V (x,x) = 12x2 + 1
2(x)2;
2 Tentativa 2: V (x,x) =1
2m(x)2︸ ︷︷ ︸Ecinetica
+
∫ x
0
(k0x+ k1x3)dx︸ ︷︷ ︸
Epotencial elastica
;
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplos de Aplicacao
Projete uma lei de controle para estabilizar o P.E. x = x = 0,quando u = 0, do sistema:
x+ (x)3 − x2 = u.
1 Tentativa 1: V (x) = 12x21 + 1
2x22;
2 Tentativa 2: V (x) = 32x21 + 1
2x22 + x1x2, isto e,
V (x1,x2) =1
2[x1 x2]>
[3 11 1
] [x1x2
]= x>Px,
em que P = P> =
[32
12
12
12
]e uma matriz simetrica definida
positiva, ou seja,
x>Px > 0, ∀x 6= 0.
Resp.: u = −x2 + (x)3 − x− 2x.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplos de Aplicacao
Projete uma lei de controle para estabilizar o P.E. x = x = 0,quando u = 0, do sistema:
x+ (x)3 − x2 = u.
1 Tentativa 1: V (x) = 12x21 + 1
2x22;
2 Tentativa 2: V (x) = 32x21 + 1
2x22 + x1x2, isto e,
V (x1,x2) =1
2[x1 x2]>
[3 11 1
] [x1x2
]= x>Px,
em que P = P> =
[32
12
12
12
]e uma matriz simetrica definida
positiva, ou seja,
x>Px > 0, ∀x 6= 0.
Resp.: u = −x2 + (x)3 − x− 2x.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Direto de Lyapunov – Sistemas LinearesInvariantes no Tempo (SLIT)
Para sistemas dinamicos que sao Lineares e Invariantes no Tempo, epossıvel obter resultados mais fortes:
Teorema de Lyapunov para SLITs
Um SLIT autonomox = Ax,
e assintoticamente/exponencialmente estavel se, e somente se, dada umamatriz Q = Q> definida positiva, a seguinte equacao de Lyapunov
A>P + PA = −Q, (1)
tem como solucao uma matriz P = P> tambem definida positiva.
Atencao: a matriz simetrica definida positiva Q e dada, e a matriz P ecalculada para satisfazer (1).
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Aplicacao do Metodo Direto para SLITs I
Utilizacao do Teorema de Lyapunov para SLITs: Para um sistema
x = Ax,
tomando como funcao de Lyapunov candidata V (x) = x>Px, com umamatriz P definida positiva que satisfaz a equacao (1), temos que
dV
dt= x>Px+ x>Px,
= x>A>Px+ x>PAx,
= x>[A>P + PA
]x,
= −x>Qx < 0, ∀x 6= 0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Aplicacao do Metodo Direto para SLITs II
Como V (x) = x>Px e radialmente ilimitada, o sistema e GlobalmenteAssintoticamente Estavel – GAS. Alem disso, uma vez que
x>Px ≤ λmax (P )x>x,x>Qx ≥ λmin (Q)x>x,
⇒ x>Qx ≥ λmin (Q)
λmax (P )
[x>Px
],
podemos escrever, para V (x) = x>Px, que
dV
dt= −x>Qx,
V ≤ −βV,⇒ V (t) ≤ e−β(t−t0)V (t0),
com β = λmin(Q)λmax(P ) . E fica clara a estabilidade exponencial global do P.E.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Aplicacao para SLITs: Maxima Taxa de Convergencia I
A melhor estimativa da taxa de convergencia exponencial β pode serobtida escolhendo-se:
Q = I.
Para ver isso [2], considere os casos em que
A>P0 + P0A = −I,A>P1 + P1A = −Q1,
(2)
com Q1 definida positiva e tal que λmin(Q1) = 1, o que e semprepossıvel fazer escolhendo-se Q1 = 1
λmin(Q)Q, para Q > 0. Alem disso,
neste caso P1 = 1λmin(Q)P , com P a solucao unica de A>P +PA = −Q.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Aplicacao para SLITs: Maxima Taxa de Convergencia II
A partir das equacoes (2), subtraindo a primeira da segunda vemos que
A>(P1 − P0) + (P1 − P0)A = −(Q1 − I),
e, neste caso, como −(Q1 − I) = (I −Q1) ≤ 0, pois
x>Ix− x>Q1x ≤ x>x− λmin(Q1)x>x = 0,
entao a solucao da equacao de Lyapunov acima, (P1 − P0) ≥ 0, eλmax(P1) ≥ λmax(P0), e portanto,
β0 =λmin (I)
λmax (P0)=
1
λmax (P0)≥ β1 =
λmin (Q1)
λmax (P1)=
1
λmax (P1).
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Indireto de Lyapunov: Linearizacao Jacobiana I
Em torno do P.E., isto e, para ‖x− x eq‖ ≈ 0, e considerando quef(·) : Rn 7→ Rn e uma funcao analıtica, as equacoes diferenciais podemser aproximadas localmente pelo truncamento da Serie de Taylor, tal que:
x = f(x),
= f(x eq)︸ ︷︷ ︸Por definicao igual a zero
+∂f
∂x
∣∣∣∣x=xeq
(x− x eq) + O(‖x− x eq‖2)︸ ︷︷ ︸Termos de ordem superior
,
≈ ∂f
∂x
∣∣∣∣x=0
x,
≈ Ax,
uma vez que f(x eq) = f(0) = 0, sendo A = ∂f∂x (0) a matriz Jacobiana
do sistema avaliada em x = x eq = 0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Indireto de Lyapunov: Linearizacao Jacobiana IIExemplo.
Pendulo simples:
x1 = x2,x2 = −g/l sin(x1)− bx2.
Um possıvel ponto de equilıbrio e x eq = [0 0]>. Em torno desseponto de equilıbrio, i.e. para x1 ≈ 0 e x2 ≈ 0, definindoδx1 = x1 − x eq
1 e δx2 = x2 − x eq2 , temos que
x1 ≈ x
eq2 + [0]δx1 + [1]δx2,
x2 ≈[−g/l sin
(x
eq1
)− bx eq
2
]+
[−g/l cos
(x
eq1
)]δx1 + [−b]δx2.
E a matriz Jacobiana correspondente sera:
A =
[∂f1
∂x1
∂f1
∂x2∂f2
∂x1
∂f2
∂x2
]x=x eq
=
[0 1
−g/l cos(x eq1 ) −b
],
A =
[0 1−g/l −b
].
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Metodo Indireto de Lyapunov: Linearizacao Jacobiana III
A partir do conhecimento de A tem-se que:
Se algum autovalor de A tiver parte real positiva ⇒ P.E. instavel.
Se todos os autovalores de A tiverem parte real negativa ⇒ P.E.localmente assintoticamente estavel.
Obs.:
1 Note que o resultado de estabilidade e apenas local.
2 Se houver algum autovalor com parte real nula, e mesmo que todosos outros tenham parte real negativa, nada podemos afirmar.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Conjuntos Positivamente Invariantes
Um conjunto de pontos Ω no Espaco de Estados e dito ser positivamenteinvariante sse
∀x(t0) ∈ Ω⇒ x(t) ∈ Ω,∀t ≥ t0.
Ou seja, se comecar em Ω, la permanecera indefinidamente a medida queo tempo cresce.Alguns exemplos: um conjunto formado por um unico Ponto de Equilıbrio; a bacia de atracao de um Ponto de Equilıbrio assintoticamente
estavel; um ciclo limite; uma trajetoria do sistema; o Espaco de Estados.
A partir desse conceito, podemos desenvolver uma “relaxacao”interessante para o Teorema de Estabilidade Lyapunov para sistemasautonomos, no caso em que dV
dt ≤ 0 (ao inves de dVdt < 0), conhecido
como Teorema de LaSalle.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
O Teorema de Krasovskii-LaSalle
Teorema de Krasovskii-LaSalle
Seja V : Rn → R uma funcao continuamente diferenciavel, tal queV ≤ 0 em torno do ponto x = x eq = 0.
Seja Ω um conjunto compacto (fechado e limitado) positivamenteinvariante que contem o P.E. x eq = 0.
Seja ΩZ ⊆ Ω formado pelo conjunto de pontos em que V (x) se anula,isto e, ΩZ = x ∈ Ω; V (x) = 0.
Seja ΩI ⊆ ΩZ o maior conjunto positivamente invariante contido em ΩZ ,isto e, ΩI e a uniao de todos os conjuntos invariantes contidos em ΩZ .
Entao, para todas as condicoes iniciais em Ω, a trajetoria do sistema seaproximara assintoticamente de ΩI a medida que t→∞.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
O Teorema de Krasovskii-LaSalle
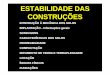
Ω
x eq
Seja Ω um conjunto compacto (fechado e limitado) positiva-
mente invariante que contem o P.E. xeq = 0.
ΩZ
Seja ΩZ ⊆ Ω formado pelo conjunto de pontos em que V (x)
se anula.
ΩI
Seja ΩI ⊆ ΩZ o maior conjunto positivamente invariante
contido em ΩZ .
Para todas as condicoes iniciais em Ω, a trajetoria do sistema
se aproximara assintoticamente de ΩI .
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
O Teorema de Krasovskii-LaSalle
Ω
x eq
Seja Ω um conjunto compacto (fechado e limitado) positiva-
mente invariante que contem o P.E. xeq = 0.
ΩZ
Seja ΩZ ⊆ Ω formado pelo conjunto de pontos em que V (x)
se anula.
ΩI
Seja ΩI ⊆ ΩZ o maior conjunto positivamente invariante
contido em ΩZ .
Para todas as condicoes iniciais em Ω, a trajetoria do sistema
se aproximara assintoticamente de ΩI .
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
O Teorema de Krasovskii-LaSalle
Ω
x eq
Seja Ω um conjunto compacto (fechado e limitado) positiva-
mente invariante que contem o P.E. xeq = 0.
ΩZ
Seja ΩZ ⊆ Ω formado pelo conjunto de pontos em que V (x)
se anula.
ΩI
Seja ΩI ⊆ ΩZ o maior conjunto positivamente invariante
contido em ΩZ .
Para todas as condicoes iniciais em Ω, a trajetoria do sistema
se aproximara assintoticamente de ΩI .
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
O Teorema de Krasovskii-LaSalle
Ω
x eq
Seja Ω um conjunto compacto (fechado e limitado) positiva-
mente invariante que contem o P.E. xeq = 0.
ΩZ
Seja ΩZ ⊆ Ω formado pelo conjunto de pontos em que V (x)
se anula.
ΩI
Seja ΩI ⊆ ΩZ o maior conjunto positivamente invariante
contido em ΩZ .
Para todas as condicoes iniciais em Ω, a trajetoria do sistema
se aproximara assintoticamente de ΩI .
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
O Teorema de Krasovskii-LaSalle – Observacoes
Observacoes:
x eq ∈ ΩZ , e x eq ∈ ΩI .
Nao se exige que V (x) seja definida positiva!
Se V (x) e definida positiva; isto e, V (x) > 0,∀x 6= 0; e usando ahipotese V ≤ 0, entao pode-se usar o conjuntoΩ = x ∈ Rn;V (x) ≤ c, para alguma constante real positiva c,como conjunto compacto positivamente invariante.
Corolario do Teorema de Krasovskii-LaSalle
Para V (x) definida positiva, tal que V ≤ 0, se o maior conjuntoinvariante contido em ΩZ for ΩI = x eq, isto e, um singleton (um unicoelemento), entao o P.E. e assintoticamente estavel.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo: Massa-mola nao linear I
No slide 26 vimos que para o sistema
x1 = x2,
x2 = − bmx2 − k0
m x1 − k1
m x31,
usando a Funcao de Lyapunov Candidata
V (x1,x2) =1
2mx2
2︸ ︷︷ ︸Ecinetica
+
∫ x1
0
(k0x+ k1x3)dx︸ ︷︷ ︸
Epotencial elastica
obtivemosV (x1,x2) = −bx2
2 ⇒ V ≤ 0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo: Massa-mola nao linear II
1 Como V (x) = 12mx
22 + k0
2 x21 + k1
4 x41 e definida positiva, podemos
definir um conjunto positivamente invariante
Ω = x ∈ R2;V (x) < c,
para alguma constante arbitraria c > 0, poisV ≤ 0⇒ V (t) ≤ V (t0),∀t ≥ t0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo: Massa-mola nao linear III
2 Contido em Ω temos
ΩZ = x ∈ Ω; V (x) = 0 ≡ x ∈ Ω;x2 = 0.
3 Por outro lado, contido em ΩZ , o maior conjunto invariante e
ΩI = x ∈ ΩZ ;x2(t) = 0,∀t ≥ t0 ≡ x ∈ ΩZ ;x1 = 0, x2 = 0.
Para ver isso, considere um ponto em ΩZ tal que(x1(t0);x2(t0)) = (α; 0), com α 6= 0. De acordo com a dinamica dosistema, isso conduziria a x1(t0) = 0, e x2(t0) 6= 0 – o que levaria oestado x2(t) a abandonar o conjunto ΩZ para t > t0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo: Massa-mola nao linear IV
4 Aplicando o Teorema de Krasovskii-Lasalle, concluımos, portanto,que o sistema ira para o conjunto ΩI formado pelo unico ponto(x1;x2) = (0; 0) que e o P.E.
Com isso, ao inves de provarmos que o P.E. e globalmente estavel,provamos algo mais forte: que ele e globalmente assintoticamenteestavel – GAS.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo em Robotica1 Cancelamento dinamico ou Torque Computado:
Considere a dinamica de um robo descrita por:
M(q)q + C(q,q)q + g(q) + b(q,q)︸ ︷︷ ︸N(q,q)
= u,
e o problema de rastreamento de uma trajetoria desejada qd(t), talque
e(t) = q(t)− qd,
sendo que a lei de controle utilizada e dada por
u = M(q)~a+ C(q,q)q +N(q,q),
~a = qd −KD(q − qd)−KP(q − qd).
Seja
V (e,e) =1
2e>KPe+
1
2e>e.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Continuidade Uniforme e o Lema de Barbalat I
E possıvel desenvolver ainda outras extensoes para o Metodo Diretode Lyapunov.
A partir do conceito de Continuidade Uniforme de funcoescandidatas de Lyapunov, podemos obter uma “alternativa” para oTeorema de Estabilidade de Lyapunov para sistemas nao-autonomos,conhecida como Lema de Barbalat. Para essa classe de sistemas naoe possıvel usar diretamente o Princıpio de Invariancia de LaSalle.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Continuidade Uniforme e o Lema de Barbalat II
Para uma funcao continuamente diferenciavel V (t):
limt→∞
V (t) = L ; limt→∞
V (t) = 0,
em que |L| <∞. Por exemplo, V (t) = e−t sin(e2t), que temderivada ilimitada V (t) = −e−t sin(e2t) + 2et cos(e2t).
limt→∞
V (t) = 0 ; limt→∞
V (t) = L,
em que |L| <∞ e uma constante. Por exemplo, V (t) = sin(log(t)),que nao converge apesar de sua derivada tender a zero quandot→∞: V (t) = cos(log(t)) 1
t .
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Continuidade Uniforme e o Lema de Barbalat III
Por outro lado, para funcoes diferenciaveis V (t) que apresentem apropriedade especial de terem suas derivadas uniformemente contınuas,a primeira implicacao no slide anterior e verdadeira, isto e:
limt→∞
V (t) = L ⇒ limt→∞
V (t) = 0,
se V (t) e uniformemente contınua.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Continuidade Uniforme e o Lema de Barbalat IV
Nos desenvolvimentos a seguir e importante notar que, para funcoescontinuamente diferenciaveis V (t) que tenham um limite inferior, que:
(V (t) ≥ Vmin > −∞) e (V (t) ≤ 0,∀t ≥ 0) ⇒ limt→∞
V (t) = L,
em que |L| <∞ e uma constante.
Isto e, o fato de ter um limite inferior e de sua derivada sersemi-definida (ou definida) negativa implica que a funcao convergepara um valor constante, quando t→∞. Mas e perfeitamentepossıvel que L 6= Vmin.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Funcoes Contınuas
Definition (Funcoes Contınuas)
Uma funcao f(t), f : R→ R e contınua se, dado t0 ∈ R qualquer, eε > 0 qualquer (tao pequeno quanto se queira), podemos sempreencontrar um δ(t0,ε) > 0 (pequeno o suficiente), tal que
|t− t0| < δ(t0, ε)⇒ |f(t)− f(t0)| < ε.
Compare esta definicao com a seguinte.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Funcoes Uniformemente Contınuas I
Definition (Funcoes Uniformemente Contınuas)
Uma funcao f(t), f : R→ R e uniformemente contınua se, dado t0 ∈ Rqualquer, e ε > 0 qualquer (tao pequeno quanto se queira), podemossempre encontrar um δ(ε) > 0 que nao depende de t0 (mas que podedepender de ε), tal que
|t− t0| < δ ⇒ |f(t)− f(t0)| < ε.
Ou seja,
Continuidade uniforme ⇒ Continuidade.Continuidade uniforme : Continuidade.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Funcoes Uniformemente Contınuas
Vide animacao:Continuity-and-uniform-continuity-2.gif
Clique aqui para ver no site da Wikipedia.org o verbete UniformContinuity .
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Funcoes Uniformemente Contınuas: cond. suficientes I
Ha uma maneira mais facil de se verificar se uma dada funcaodiferenciavel f(t) e uniformemente contınua, usando a seguinte condicaosuficiente: ∣∣∣∣dfdt
∣∣∣∣ < m <∞⇒ Continuidade Uniforme.
Isto e, se a derivada da funcao e limitada, entao a funcao euniformemente contınua.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Funcoes Uniformemente Contınuas: cond. suficientes II
Definition (Funcao Lipschitz Contınua)
Uma funcao f(t) : X → R, com X ⊆ R, e Lipschitz Contınua em X, seexiste uma constante 0 ≤ K <∞ (constante de Lipschitz), tal que
|f(t1)− f(t2)| ≤ K|t1 − t2|, ∀t1,t2 ∈ X.
Ex.: a funcao saturacao, que e contınua, linear por partes, e limitada,mas nao diferenciavel.
Para o caso de funcoes nao diferenciaveis podemos usar a seguintecondicao suficiente muito similar a condicao mostrada no slide anterior:
Continuidade Lipschitz ⇒ Continuidade Uniforme.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Lema de Barbalat
Lema de Barbalat – Versao (1)
Seja uma funcao V (t),V : R+ → R,
tal que o limitelimt→∞
V (t) = L,
existe e e finito (|L| <∞).
Se a derivada temporal V (t) e uniformemente contınua, entao:
limt→∞
V (t) = 0.
Note que nao se exige que a funcao V (t) seja definida positiva.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Lema de Barbalat
Lema de Barbalat – Versao (2)
Seja uma funcao φ(t),φ : R+ → R,
uniformemente contınua em [0,∞), e tal que o limite abaixo existe e efinito:
limt→∞
∫ t
0
φ(τ)dτ = L, |L| <∞.
Neste caso:limt→∞
φ(t) = 0.
Obs.: Nessa versao, φ(t) faz o papel de V (t) na versao anterior.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Lema de Barbalat
Lema de Barbalat – Versao (3)
Seja uma funcao V (t),V : R+ → R,
tal que as seguintes propriedades sao verificadas:
−∞ < m ≤ V (t), V ≤ 0; ∀t ≥ 0, (3)
isto e, V (t) e limitada inferiormente, e sua derivada V (t) e semi-definidanegativa. Se alem disso V (t) e uniformemente contınua, entao:
limt→∞
V (t) = 0.
Obs.: Nessa versao, as condicoes (3) garantem a existencia do limite:limt→∞ V (t) = L, |L| <∞.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Um Corolario do Lema de Barbalat
Corolario
Seja uma funcao diferenciavel Ψ(s),
Ψ : R→ R,
tal que∣∣dΨds
∣∣ < m1 <∞, ∀s, e Ψ(s) = 0⇔ s = 0; sendo que s ≡ s(t),isto e, s : R+ → R, e s(t) e tambem uma funcao diferenciavel tal que∣∣dsdt
∣∣ < m2 <∞, ∀t ≥ 0. Se
limt→∞
∫ t
0
Ψ(s(τ))dτ = L, |L| <∞,
entao:limt→∞
s(t) = 0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao I
Suponha um sistema estavel de 1a ordem:
x = −apx+ u, (4)
para o qual se deseja projetar um sistema de controle que conduza a umcomportamento dinamico desejado, dado pelo seguinte modelo:
xm = −amxm + r(t), am > 0, (5)
em que r(t) e um sinal de referencia limitado. Uma maneira de seconseguir isso e usando a lei de controle:
u = r(t) + (ap − am)x.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao IIMas suponha que nao se conhece a priori o valor do parametro ap.Neste caso, uma possıvel lei de controle seria uma aproximacao da leiideal:
u = r(t) + (ap − am)x, (6)
em que ap e uma aproximacao para ap. O erro na estimacao desteparametro pode ser escrito como
ap = ap − ap. (7)
Usando (6) em (4), considerando (5), e definindo e = x− xm, podemosescrever que:
e = −apx+ r(t) + (ap − am)x− −amxm + r(t) ,e = −ame+ apx. (8)
Para garantir que o erro convirja para zero, podemos projetar uma lei deadaptacao adequada para o parametro ap.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao III
Uma forma de se fazer isso e considerar a seguinte funcao definidapositiva, e inferiormente limitada:
V (e,ap) =1
2e2 +
1
2a2
p, V (e,ap) ≥ 0. (9)
De (8), a derivada temporal dessa funcao e dada por:
V = ede
dt+ ap
dap
dt,
= e [−ame+ apx] + apdap
dt,
= −ame2 + apex+ ap
dap
dt, (10)
Na equacao acima usou-se o fato dedap
dt = ddt [ap − ap], com ap uma
constante desconhecida.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao IV
A partir de (10), ve-se que se escolhermos
dap
dt= −ex, (11)
entao
V = −ame2
sera uma funcao semi-definida negativa. Isso garante que V (e,ap) e umafuncao nao-crescente, que por ser inferiormente limitada tem um limitequando t→∞.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao V
Alem disso, V e uniformemente contınua pois
V = −2amee,
= −2ame [−ame+ apx] ,
= 2a2me
2 − 2ameap (e+ xm)︸ ︷︷ ︸x
e uma funcao limitada, uma vez que:
1 V (e,ap) = 12e
2 + 12 a
2p e sempre menor ou igual ao seu valor inicial, e
isso necessariamente implica em e e ap serem variaveis limitadas;
2 am e por hipotese uma constante positiva;
3 xm e uma variavel limitada, pois por hipotese assumiu-se que r(t) euma funcao limitada, e a partir de (5) ve-se que xm(t) e a saıda deum sistema BIBO (Bounded-Input Bounded-Output) estavel.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao VI
Pelo Lema de Barbalat, conclui-se que
limt→∞
V = 0 ⇒ limt→∞
e(t) = 0.
Note que o sistema original e nao-autonomo, por isso nao e possıvel usaro Teorema de LaSalle, pois o conjunto ΩI nao pode ser definido.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao em Robotica I
Pode-se mostrar que as equacoes dinamicas de um robo podem serrepresentadas como
M(q)q + C(q, q)q + g(q) + b(q, q)︸ ︷︷ ︸N(q,q)
= u,
Y (q, q, q)θ = u,
em que Y (q, q, q) ∈ Rl×l e a matriz de regressores associada a equacaocanonica do Robo, e θ ∈ Rl. No caso em que os parametros sao incertos,podemos escrever que
Y (q, q, q)θ ′ ≈ u,
em que θ ′ ∈ Rl e uma estimativa dos parametros de massa do robo.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao em Robotica II
Nos slides seguintes usaremos a propriedade de linearidade nosparametros θ das equacoes dinamicas de um robo para a seguinteexpressao correlata [2]:
M(q)qr + C(q, q)qr + g(q) + b(q, q)︸ ︷︷ ︸N(q,q)
= Y (q, q, qr, qr)θ, (12)
em que Y (q, q, qr, qr) ∈ Rl×l e a mesma matriz de regressores anterior,mas na qual algumas variaveis foram substituıdas pelos vetores qr e qr.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao em Robotica III
Definindo o erro de estimacao como:
θ = θ ′ − θ ⇒ ˙θ = θ ′,
onde a ultima expressao decorre da hipotese de que θ seja constante,considere a seguinte Funcao de Lyapunov candidata:
V (s, q, θ) = 12s>M(q)s+ 1
2 θ>Γ−1θ,
em que Γ = Γ> > 0, es = e− Λe, (13)
com e = q − qd, e Λ uma matriz Hurwitz. Note que
s = q − qr, para qr = qd + Λe.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao em Robotica IV
Neste caso, a derivada da Funcao de Lyapunov candidata sera
V = s>Ms+1
2s>Ms+ θ>Γ−1 ˙
θ,
= s>M (q − qr) +1
2s>Ms+ θ>Γ−1 ˙
θ,
= s> (u−N(q, q)− C(q, q)q −Mqr) +1
2s>Ms+ θ>Γ−1θ ′,
= s> (u−N(q, q)− C(q, q) [s+ qr]−Mqr) +1
2s>Ms+ θ>Γ−1θ ′,
Lembrando que M − 2C e uma matriz anti-simetrica, tem-se que
s>(
12M − C
)s = 0, e portanto:
V = s> (u−N(q, q)− C(q, q)qr −M(q)qr) + θ>Γ−1θ ′.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao em Robotica V
Usando a propriedade de linearidade (12), podemos escrever que:
V = s> (u− Y (q, q, qr, qr)θ) + θ>Γ−1θ ′.
Fazendo
u = Y (q, q, qr, qr)θ′ −KDs,
tem-se queV = s>Y (θ ′ − θ) + θ>Γ−1θ ′ − s>KDs.
Escolhendo a lei de adaptacao dos parametros estimados como
θ ′ = −ΓY >s,
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao em Robotica VI
obtem-se, subtituindo-se na expressao para a derivada da Funcao deLyapunov candidata (lembrando que Γ = Γ>):
V = −s>KDs ⇒ V ≤ 0.
A partir desse resultado, considerando que a Funcao de Lyapunovproposta e inferiormente limitada, podemos concluir que:
1 As variaveis s, q e θ sao limitadas.
2 Como θ = θ ′ − θ e limitada e os parametros desconhecidos θ saoconstantes, os parametros estimados via adaptacao θ ′ sao tambemlimitados.
3 Note tambem que, a partir de (13), se s e limitada, a variavel epode ser vista como a “saıda” de um SLIT que e exponencialmenteestavel (Λ e Hurwitz), e consequentemente e tambem um sistemaBIBO estavel. Portanto, e e limitada, bem como e.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao em Robotica VII
4 A partir desse resultado, e supondo que qd(t) e limitada, comderivadas limitadas qd(t) e qd(t), conclui-se que q e q sao limitados,alem de qr(t) e qr(t) serem tambem limitadas.
5 Consequentemente, a partir da expressao para u, conclui-se que estetambem e um vetor de sinais limitados.
6 Finalmente, com u, q e q limitados, a partir da Equacao Canonicado Robo concluımos que q e limitada.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Teoria de Estabilidade de Lyapunov Princıpio de Invariancia de LaSalle Lema de Barbalat
Exemplo de Aplicacao em Robotica VIII
Da analise anterior, e usando a expressao para s, ve-se que a derivadasegunda da Funcao de Lyapunov
V = −2s>KDs
e limitada. Portanto, V (t) e uniformemente contınua e, aplicando o lemade Barbalat:
limt→∞
V (t) = 0 ⇒ s→ 0.
Consequentemente,limt→∞
e(t) = 0,
pois, como dito anteriormente, a variavel e pode ser vista como a “saıda”de um SLIT estavel definido por (13).
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Apendice
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Matrizes Definidas e Semi-definidas I
1 Matriz Definida Positiva: Uma matriz P ∈ Rn×n e definidapositiva se, e somente se, a funcao escalar V (x) = x>Px e definidapositiva, isto e
x>Px > 0,∀x 6= 0.
2 Matriz Semidefinida Positiva: Uma matriz P ∈ Rn×n esemidefinida positiva se, e somente se, a funcao escalar
x>Px ≥ 0,∀x 6= 0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Matrizes Definidas e Semi-definidas II
3 Matriz Definida Negativa: Uma matriz Q ∈ Rn×n e definidanegativa se, e somente se, a funcao escalar
x>Qx < 0,∀x 6= 0.
4 Matriz Semidefinida Negativa: Uma matriz Q ∈ Rn×n esemidefinida negativa se, e somente se, a funcao escalar
x>Qx ≤ 0,∀x 6= 0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Matrizes Definidas e Semi-definidas III
Observacoes importantes sobre funcoes quadraticas do tipo
φ(x) = x>Px.
1 Nao ha perda de generalidade ao se considerar apenas matrizessimetricas P = P> na expressao de φ(x). Para ver isso, note quequalquer matriz P pode ser decomposta como
P =1
2
(P + P>
)︸ ︷︷ ︸
S: Parte Simetrica
+1
2
(P − P>
)︸ ︷︷ ︸
A: Parte Anti-simetrica
,
= S +A. S = S>, A = −A>.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Matrizes Definidas e Semi-definidas IV
Mas a parte anti-simetrica nao contribui para φ(x), pois, lembrandoque x>Ax e uma funcao escalar, temos que
x>Ax =[x>Ax
]>= x>A>x,
= −x>Ax ⇒ x>Ax = 0,∀x ∈ Rn.
Consequentemente,
φ(x) = x>Px,
= x> (S +A)x = x>Sx+:0
x>Ax ,
= x>Sx,
e somente a componente simetrica S = 12
(P + P>
)contribui para
se determinar o valor de φ(x) = x>Px.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Matrizes Definidas e Semi-definidas V
2 E possıvel mostrar que toda matriz P = P> simetrica definidapositiva pode ser escrita como o produto (Teorema daDecomposicao Espectral):
P = U>ΛU,
em que Λ = diagλ1,λ2, . . . ,λn, sendo λi ∈ R+, parai = 1,2, . . . ,n, autovalores de P , que sao numeros reais positivos; eU ∈ Rn×n uma matriz real ortogonal, isto e,
U>U = In, UU> = In,
sendo In ∈ Rn×n a matriz identidade. Isto significa que as colunasde U podem ser vistas como vetores de norma unitaria que saoortogonais entre si, isto e, U = [u1 u2 · · · un], com u>i uj = 0, sei 6= j, e u>i ui = 1.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Matrizes Definidas e Semi-definidas VI
3 A partir do item anterior, e sem perda de generalidade considerandoP = P>, podemos escrever que
φ(x) = x>Px = x>(U>ΛU
)x =
(x>U>
)Λ (Ux) ,
= zΛz,
= λ1z21 + λ2z
22 + . . .+ λnz
2n,
em que z = Ux e uma transformacao de coordenadas que preserva anorma dos vetores: ‖x‖2 = ‖z‖2 = x>U>Ux. Considerandoλ1 ≤ λ2 ≤ . . . ≤ λn, temos que
φ(x) = x>Px,
= λ1z21 + λ2z
22 + . . .+ λnz
2n ≤ λnz2
1 + λnz22 + . . .+ λnz
2n,
≤ λnz>z,
≤ λnx>x. ⇒ x>Px ≤ λnx>x.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Matrizes Definidas e Semi-definidas VII
De forma semelhante, tambem se consegue mostrar quex>Px ≥ λ1x
>x, e portanto,
λ1x>x ≤ x>Px ≤ λnx>x,
em que λ1 = λmin (P ) e o menor autovalor de P , e λn = λmax (P )e o maior autovalor de P :
λmin(P )‖x‖2 ≤ x>Px ≤ λmax(P )‖x‖2.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Teorema de Lyapunov para Sistemas Autonomos I
Theorem (Metodo Direto de Lyapunov para Sistemas Autonomos)
Seja x = 0 um ponto de equilıbrio – P.E. de x = f(x), em quef : D → Rn, e D ⊆ Rn um domınio contendo x = 0. Seja V : D → Ruma funcao continuamente diferenciavel tal que
V (0) = 0; V (x) > 0, ∀x ∈ D − 0;V ≤ 0, ∀x ∈ D.
Entao o P.E. e estavel. Alem disso, se
V < 0, ∀x ∈ D − 0,
entao o P.E. e assintoticamente estavel.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Teorema de Lyapunov para Sistemas Autonomos II
Prova da Parte sobre Estabilidade:Dado ε > 0, escolha 0 < r ≤ ε tal que a bola fechada
Br = x ∈ Rn; ‖x‖ ≤ r
esteja contida em D, onde as hipoteses do teorema sao verdadeiras.Seja α = min‖x‖=r V (x). Entao existe α, e α > 0, pois trata-se domınimo de uma funcao contınua em um domınio compacto (Teo.dos Extremos ou Teo. de Weierstrass). Escolha 0 < β < α, e definao conjunto
Ωβ =x ∈ Br; V (x) ≤ β
.
Note que Ωβ esta no interior de Br, isto e, nenhum ponto x ∈ Ωβpode ser um ponto na fronteira de Br. Se isso ocorresse, entao‖x‖ = r e simultaneamente V (x) ≤ β < α, violando o fato deα = min‖x‖=r V (x).
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Teorema de Lyapunov para Sistemas Autonomos III
Alem disso, Ωβ e um conjunto positivamente invariante; i.e. sex(t0) ∈ Ωβ , entao x(t) ∈ Ωβ , ∀t ≥ t0; pois
V ≤ 0 ⇒ V (t) ≤ V (t0) ≤ β, ∀t ≥ t0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Teorema de Lyapunov para Sistemas Autonomos IV
Agora so e preciso encontrar uma bola de raio δ, contida na bola deraio r < ε, de possıveis condicoes iniciais a partir das quais astrajetorias nao podem abandonar a bola de raio ε. Para tanto,podemos usar a continuidade de V (x) em torno de x = 0, e o fatode a mesma ser definida positiva, para afirmar que existe δ > 0 talque
‖x− 0‖ < δ ⇒ |V (x)− 0| < β
m‖x‖ < δ ⇒ V (x) < β,
e, neste caso,
Bδ ⊂ Ωβ ⊂ Br ⊂ Bε.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Teorema de Lyapunov para Sistemas Autonomos V
Alem disso, considerando o fato de Ωβ ser positivamente invariante,tem-se que
x(t0) ∈ Bδ ⇒ x(t0) ∈ Ωβ ;
x(t0) ∈ Ωβ ⇒ x(t) ∈ Ωβ ,∀t ≥ t0;
x(t) ∈ Ωβ ,∀t ≥ t0 ⇒ x(t) ∈ Bε,∀t ≥ t0.
Portanto, prova-se a estabilidade do P.E.:
‖x(t0)‖ < δ ⇒ ‖x(t)‖ < ε, ∀t ≥ t0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Teorema de Lyapunov para Sistemas Autonomos VI
Prova da Parte sobre Estabilidade Assintotica:Neste caso, e preciso mostrar que
limt→∞
‖x(t)‖ = 0,
quando V < 0, ∀x ∈ D − 0.
Isso e equivalente a dizer que, dado a > 0 tao pequeno quanto sequeira, pode-se encontrar um intervalo de tempo finito Ta ≥ 0, talque
‖x(t)‖ < a, ∀t ≥ t0 + Ta. (14)
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Teorema de Lyapunov para Sistemas Autonomos VII
Entretanto, usando os mesmos argumentos anteriores, sabe-se quesempre havera um βa > 0, para 0 < b < a, com
βa < min‖x‖=b
V (x),
tal que Ωβa ⊂ Bb ⊂ Ba, sendo que
Ωβa = x ∈ Bb;V (x) ≤ βa
e um conjunto positivamente invariante. Deste modo, pode-seconcluir (14), se for possıvel mostrar que, dado a > 0 tao pequenoquanto se queira, obtem-se um βa > 0 como mostrado acima, e umintervalo de tempo finito Ta ≥ 0, tal que
V (x(t)) ≤ βa ⇒ ‖x(t)‖ < a, ∀t ≥ t0 + Ta. (15)
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Teorema de Lyapunov para Sistemas Autonomos VIII
O Tempo Ta que satisfaz (15) pode ser computado considerando osseguintes casos
x(t0) ∈ Ωβa ⇒ Ta = 0.
x(t0) /∈ Ωβa ⇒ V (x(t0)) = V0 > βa. Neste caso, considere oconjunto fechado e limitado (portanto, compacto)
R0 = x ∈ Br;βa ≤ V (x) ≤ V0,
e considere que, usando novamente o Teorema dos Extremos, existe
γ = maxx∈R0
V (x),
que e um valor negativo por hipotese, i.e. γ < 0, pois V (x) < 0,∀x ∈ D − 0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Teorema de Lyapunov para Sistemas Autonomos IX
Mas com isso conclui-se que, para x(t0) ∈ R0,
V (x(t)) = V (x(t0)) +
∫ t
t0
V (x(τ)) dτ,
V (x(t)) ≤ V0 +
∫ t
t0
γ dτ,
V (x(t)) ≤ V0 + γ(t− t0)
e, portanto, lembrando que γ < 0 e V0 > βa, tem-se que
t ≥ t0 +V0 − βa−γ
⇒ V (x(t)) ≤ βa.
Isto significa que se pode escolher Ta = V0−βa−γ <∞ para se
satisfazer (15).
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
GAS: Necessidade de V (x) ser Radialmente Ilimitada I
Como visto anteriormente, a Estabilidade Assintotica Globaldepende de se ter uma Funcao de Lyapunov radialmente ilimitada,isto e, V (x)→∞, quando ‖x‖ → ∞ segundo qualquer caminho,isto e, dado c > 0 qualquer, tao grande quanto se queira, sempreexiste r > 0 tal que V (x) > c,∀‖x‖ ≥ r.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
GAS: Necessidade de V (x) ser Radialmente Ilimitada II
Note que isto pode ser expresso logicamente de duas maneirasequivalentes:
∀c > 0,∃r, 0 < r <∞ : ‖x‖ > r ⇒ V (x) > c,
∀c > 0,∃r, 0 < r <∞ : V (x) ≤ c⇒ ‖x‖ ≤ r,
sendo que a ultima expressao e equivalente a dizer que o conjunto
Ωc = x ∈ Rn;V (x) ≤ c ,
para qualquer c > 0, e limitado, pois esta contido em uma bola deraio finito. Como pontos x da fronteira; i.e. tais que V (x) = c;pertencem a Ωc, esse conjunto e fechado. Portanto, Ωc e compacto(fechado e limitado).
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
GAS: Necessidade de V (x) ser Radialmente Ilimitada III
A partir da constatacao de que os conjuntos Ωc sao compactos,pode-se mostrar que as trajetorias irao atravessar a fronteira dequalquer conjunto deste tipo, enquanto caminham em direcao aoponto de equilıbrio, uma vez que V (t) e estritamente decrescente(V (t) < 0). Isto e, a trajetoria do sistema ira atravessarΩc1 ⊃ Ωc2 ⊃ Ωc3 ⊃ · · · , em que c1 > c2 > c3 > · · · .
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
GAS: Necessidade de V (x) ser Radialmente Ilimitada IV
O exemplo a seguir mostra que, se essa condicao for eliminada, hacasos em que V (x) e definida positiva, continuamente diferenciavel,com V (x) < 0,∀x 6= 0, e ainda assim GAS nao se verifica.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
GAS: Necessidade de V (x) ser Radialmente Ilimitada V
Considere o sistema [1, Exercıcio 4.8, pag. 182]:x1 =
−6x1
φ2+ 2x2,
x2 =−2(x1 + x2)
φ2,
em que φ ≡ φ(x1) = 1 + x21. Note que φ > 0,∀(x1,x2) ∈ R2. Seja a
Funcao Candidata de Lyapunov, definida positiva e continuamentediferenciavel, dada por
V (x) =x2
1
φ+ x2
2 =x2
1
1 + x21
+ x22.
Veja que V (x) nao e radialmente ilimitada, pois para x2 = c, em que c eum valor constante arbitrario, limx1→∞ V (x) = 1 + c2 <∞.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
GAS: Necessidade de V (x) ser Radialmente Ilimitada VI
1 Fato 1: V (x) < 0,∀x 6= 0; e V (x) e contınua.
dV
dt=∂V
∂x1x1 +
∂V
∂x2x2,
V =
[2x1
φ+−2x3
1
φ2
] [−6x1
φ2+ 2x2
]+ x2
[−4(x1 + x2)
φ2
],
φ4V = −12x21φ+ 4x1x2φ
3 + 12x41 − 4x3
1x2φ2 − 4(x1 + x2)φ2,
φ4V = −12x21(1 + x2
1) + 12x41 + 4x1x2φ
2(φ− x2
1
)− 4x1x2φ
2 − 4x22φ
2,
φ4V = −12x21 + 4x1x2φ
2
:0
(φ− x21 − 1) − 4x2
2φ2,
V = −12x2
1
φ4− 4
x22
φ2< 0, ∀x 6= 0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
GAS: Necessidade de V (x) ser Radialmente Ilimitada VII
2 Fato 2: o sistema nao e GAS, pois existe pelo menos uma fonteiraque nao pode ser atravessada pelas trajetorias do sistema.Considere condicoes iniciais que satisfazem
x1(0) >√
2, x2(0) >2
x1(0)−√
2.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
GAS: Necessidade de V (x) ser Radialmente Ilimitada VIII
Vetores tangentes a fronteira x2 = 2x1−√
2, com x1 >
√2, sao dados
por
~vt =
[1dx2
dx1
]=
[1−2
(x1−√
2)2
],
de modo que vetores ortogonais a fronteira, e que apontam para oprimeiro quadrante do plano, podem ser obtidos como
~vp =
[2
(x1−√
2)2
1
],
pois ~v>t ~vp = 0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
GAS: Necessidade de V (x) ser Radialmente Ilimitada IXO produto escalar destes vetores ortogonais a fronteira, definidossobre ela, com o campo vetorial do sistema dinamico sobre afronteira e dado por:
~v>p x =
[2
(x1 −√
2)2
(−6x1
φ2+ 2x2
)+−2(x1 + x2)
φ2
]x2= 2
x1−√
2
,
=−12x1
(x1 −√
2)2φ2+
8
(x1 −√
2)3+−2x1
φ2+
−4
(x1 −√
2)φ2,
de modo que, para E0 = α(x1)(~v>p x
), com
α(x1) =[(x1 −
√2)3φ2
]> 0, ∀x1 >
√2,
tem-se que:
E0 = 8φ2 − 12x1(x1 −√
2)− 2x1(x1 −√
2)3 − 4(x1 −√
2)2.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
GAS: Necessidade de V (x) ser Radialmente Ilimitada XObservando que se esta considerando x1 >
√2, ao substituirmos
(x1 −√
2) po x1 na expressao E0 acima pode-se concluir que
E0 > E1 = 8φ2 − 12x21 − 2x4
1 − 4x21,
E1 = 8(1 + 2x21 + x4
1)− 16x21 − 2x4
1,
E1 = 8 + 12x21 + 6x4
1 > 0, ∀x1 ∈ R.
Portanto, para todo ponto sobre a fronteira x2 = 2x1−√
2, com
x1 >√
2,
~v>p x =1
α(x1)E0 >
1
α(x1)E1 > 0,
e isto significa que o campo vetorial do sistema tem sempre umacomponente na direcao que aponta para fora da fronteira, pois oproduto escalar e positivo.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
GAS: Necessidade de V (x) ser Radialmente Ilimitada XIDesta maneira, a fronteira x2 = 2
x1−√
2e de fato uma barreira para as
trajetorias do sistema, conforme ilustrado abaixo:
Condicoes iniciais
a direita da barreira
conduzem a
trajetorias com
x1 →∞ e x2 → c,
de modo que V (x)
sempre descresce,
mas nao vai para
zero, enquanto que,
ao mesmo tempo,
V (x)→ 0. Nao se
tem, portanto, um
sistema GAS.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
T. de Lyapunov para SLITs: Prova da Necessidade I
Vamos provar que, dado um SLIT autonomo assintoticamente estavel
x = Ax, (16)
com x ∈ Rn, associada a uma matriz simetrica definida positivaarbitraria Q = Q> > 0, existe uma matriz simetrica definida positivaP = P> > 0 que satisfaz a equacao de Lyapunov:
A>P + PA = −Q. (17)
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
T. de Lyapunov para SLITs: Prova da Necessidade II
Considere a seguinte possıvel solucao para a matriz P :
P = limT→∞
∫ T
0
etA>QeAtdt. (18)
Como o sistema (16) e estavel, o limite acima existe, pois eAt → 0.Alem disso, a matrix P assim definida e simetrica, pois e obtidaintegrando-se elementos de uma matriz simetrica dada por(
etA>QeAt
)>= etA
>Q>eAt = etA
>QeAt.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
T. de Lyapunov para SLITs: Prova da Necessidade III
A matriz P e tambem definida positiva, pois
x>0 Px0 = x>0
(∫ ∞0
etA>QeAtdt
)x0,
=
∫ ∞0
(x>0 e
tA>)Q(eAtx0
)dt,
=
∫ ∞0
x>(t)Qx(t)dt,
≥ λmin(Q)
∫ ∞0
‖x(t)‖2dt > 0, ∀x0 6= 0,
∴ x>0 Px0 > 0, ∀x0 6= 0,
em que x(t) = eAtx0 e a trajetoria do sistema partindo de x(0) = x0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
T. de Lyapunov para SLITs: Prova da Necessidade IV
Vamos mostrar que a matriz P em (18) e uma solucao para a equacao(17):
A>P + PA = A>(∫ ∞
0
etA>QeAtdt
)+
(∫ ∞0
etA>QeAtdt
)A,
=
∫ ∞0
(A>etA
>)QeAt + etA
>Q(eAtA
)dt,
=
∫ ∞0
(d
dt
(etA
>)QeAt + etA
>Qd
dt
(eAt))
dt,
=
∫ ∞0
d
dt
(etA
>QeAt
)dt,
=[etA
>QeAt
]∞0
= 0−Q = −Q.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
T. de Lyapunov para SLITs: Prova da Necessidade V
Finalmente, vamos mostrar que a matriz P em (18) e, de fato, a unicasolucao. Para isso, considere a existencia de duas solucoes P1 e P2 para aequacao (17), para uma matriz dada Q = Q> > 0:
A>P1 + P1A = −Q,A>P2 + P2A = −Q,
⇒ A>(P1 − P2) + (P1 − P2)A = 0.
Logo, a funcao quadratica W (x) = x>(t)(P1 − P2)x(t) e tal que:
dW
dt= x>(t)
[A>(P1 − P2) + (P1 − P2)A
]x(t) = 0
⇔W (x(t)) = constante,∀t ≥ 0.
Como x(t) 6= constante, isso so e possıvel sse W (x) ≡ 0⇔ P1 = P2.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Definicoes Equivalentes para Estabilidade Uniforme I
Lemma
Para um sistema dinamico x = f(t,x), com x(t0) = x0, em que x = 0 eum ponto de equilıbrio – P.E. uniformemente estavel, sao equivalentes asafirmacoes:
(A) Dado ε > 0, existe δ ≡ δ(ε), independente do instante inicial t0,tal que
‖x(t0)‖ < δ ⇒ ‖x(t)‖ < ε, ∀t ≥ t0.
(B) Existe c > 0 e uma funcao α(·) ∈ K, tal que
‖x(t0)‖ < c⇒ ‖x(t)‖ < α(‖x(t0)‖), ∀t ≥ t0.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Definicoes Equivalentes para Estabilidade Uniforme II
Prova: A⇒ B
Prova: B⇒ AUma vez que ‖x(t)‖ ≤ α(‖x(t0))‖, ∀‖x(t0)‖ < c, e ∀t ≥ t0, entao,dado ε > 0 qualquer, escolha
δ = minc, α−1(ε),
de modo que
‖x(t0)‖ ≤ δ ⇒ α(‖x(t0)‖) ≤ α(δ) ≤ ε.
E, assim, ∀t ≥ t0,
‖x(t)‖ ≤ α(‖x(t0)‖)⇒ ‖x(t)‖ ≤ ε.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov

Apendice
Referencias Bibliograficas I
Hassan K. Khalil.Nonlinear Systems.Prentice Hall, third edition, 2002.
Jean-Jacques Slotine and Weiping Li.Applied Nonlinear Control.Prentice Hall, 1990.
M. Vidyasagar.Nonlinear Systems Analysis.Prentice-Hall International, Inc., second edition, 1993.
Leonardo A. B. Torres
FCNL – Estabilidade Lyapunov