-
8/18/2019 Teoria_Tema_4.pdf
1/32
Capítulo 4
Derivadas parciales.
Diferenciabilidad.
Definición 4.0.1 Sea z =
f (x1, x2, x3, · · · , xi, · · · xn) una función
de Rn → R , se define derivada parcial
de z respecto a xi, en el punto
(x1, x2, x3, · · · , xn) como:∂z
∂xi= lim
∆xi→0
f (x1, x2, x3, · · · , xi + ∆xi, · · · , xn)−
f (x1, x2, x3, · · · , xi, · · · , xn)∆xi
= lim∆xi→0
∆z
∆xi
Definición 4.0.2 Sea z =
f (x, y) una función de R2 → R
, se define derivada parcial
de z respecto a x, en el punto
(x, y) como:
∂z
∂x = lim
∆x→0
f (x + ∆x, y) − f (x, y)∆x
= lim∆x→0
∆z
∆x
Esta derivada parcial, expresa la razón de cambio de la función
z = f (x, y) con
respecto a la variable x.
El cálculo de esta derivada parcial ∂z
∂x, se lleva a cabo derivando la función en la
que se considera la variable y como una
constante.
Análogamente se define la derivada parcial de
z respecto a y , en el punto (x, y)
:
∂z
∂y = lim
∆y→0
f (x, y + ∆y)− f (x, y)∆y
= lim∆y→0
∆z
∆y
Esta derivada parcial, expresa la razón de cambio de la función
z = f (x, y) con
respecto a la variable y.
El cálculo de esta derivada parcial ∂z
∂y, se lleva a cabo derivando la función en la
que se considera la variable x como una constante.
9
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
2/32
10 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
Expresiones equivalentes para las derivadas parciales son:
∂z
∂x ≈ ∂f (x, y)
∂x ≈ f ′x ≈ z ′x
∂z
∂y ≈ ∂f (x, y)
∂y ≈ f ′y ≈ z ′y
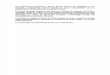
4.0.1 Interpretación geométrica de la derivada parcial en
una función de dos variables.
Sea z = f (x, y) una función de
dos variables; la intersección del plano y = y0
con la
superficie z = f (x, y),
determina en dicho plano la curva
z = f (x, y0).
Y
X
Z
O
•
•
P'(x0,y0,z0)
y = y0
P(x0 , y0)
α
z = f(x,y0)
fig.1-t19
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
3/32
11
La derivada parcial ∂f
∂x
en (x0, y0) representa en el plano y
= y0, la pediente de
la tangente a la curva z = f (x, y0)
en el punto P ′(x0, y0, z 0). Es decir,
∂f ∂x
(x0,y0)
indica la pendiente de la superficie z =
f (x, y) en P ′(x0, y0, z 0),
en la dirección y
sentido del semieje OX .
Análogamente la ∂f
∂y en (x0, y0) representaría en un plano x
= x0, la pediente de
la tangente a la curva z = f (x0, y)
en el punto P ′(x0, y0, z 0). Es decir,
∂f
∂y
(x0,y0)
indica la pendiente de la superficie z =
f (x, y0) en P ′(x0, y0, z 0),
en la dirección y
sentido del semieje OY .
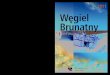
Ejemplo 4.0.3 Calcular las derivadas parciales de la
función f (x, y) = 4−x2−2y2en el punto (1, 1)
e interpretar el resultado.
––
∂f
∂x = −2x ⇒
∂f
∂x
(1,1)
= −2
∂f
∂y = −4y ⇒
∂f
∂x(1,1) = −4
La intersección del paraboloide z = 4 − x2 −
2y2 con el plano y = 1, determinala curva
z = 2− x2 (parábola) en dicho plano.
El valor
∂f
∂x
(1,1)
= −2, es la pendiente de la recta tangente a la
parábola
z = 2− x2 en el punto (1, 1, 1).
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
4/32
12 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
X
Y
Z
rectatangente •
P'(1,1,1)P'(1,1,1)
tg α =(1,1)
•
y = 1
O
α
y = 1•
• P (1,1)
P' (1,1,1
∂
∂
x
f
y = 1
z = 2 - x2
z =4 - x2 - 2y2
fig2-t19
4.1 Continuidad y existencia de derivadas parcia-
les.
En una función de dos variables, no existe ningún tipo de
implicación entre el hecho
de que existan las derivadas parciales en un punto y la función
sea continua en dicho
punto.
Ejemplo 4.1.1 Estudiar existencia de derivadas parciales y
continuidad de la fun-
ción
f (x, y) = xy2
x2 + y4 si (x, y) = (0, 0)0 si
(x, y) = (0, 0)
en el punto (0, 0).
––
Veamos si existen las derivadas parciales:
∂z
∂x
(0,0)
y
∂z
∂y
(0,0)
∂f ∂x(0,0) = limh→0f (0 + h, 0)
−f (0, 0)
h =lim
h→0
0h2 − 0h
= 0
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
5/32
4.1. CONTINUIDAD Y EXISTENCIA DE DERIVADAS PARCIALES.
13
∂f ∂y (0,0) = limk→0f (0, 0 + k)− f (0,
0)
k
=limk→0
0k4 − 0k
= 0
Luego existen las derivadas parciales en el punto (0,
0).
Sin embargo comprobamos que la función no es continua en
(0, 0).
Pues vemos que el límite cambia según las trayectorias
y = mx e y2 = x :
lim(x,y)→(0,0)
xy2
x2 + y4 =y=mx
limx→0
xx2m2
x2 + x4m4 = 0
lim(x,y)→(0,0)
xy2
x2 + y4 =y2=x
limy→0
y4
y4 + y4 = 1
2
Por tanto la función de partida tiene derivadas parciales
en (0, 0) y no es continua
en (0, 0).
Ejemplo 4.1.2 Estudiar continuidad y existencia de
derivadas parciales de la fun-
ción
f (x, y) =
x sen
1
x2 + y2 si (x, y) = (0, 0)
0 si (x, y) = (0, 0)
en el punto (0, 0).
––
Vemos si es cierto que lim(x,y)→(0,0)
f (x, y) = f (0, 0) = 0.
Efectivamente el límite es cero, pues bién aplicando el criterio
de la funciónmayorante o por la propia definición de límite se
tiene que:
∀ε > 0∃δ (ε)/∀(x, y) con 0
<
x2 + y2 < δ se verifica que |f (x,
y)− 0| < ε
pues
|f (x, y)| =x sen
1
x2 + y2
≤ |x| <
x2 + y2 < ε , con tal que
δ = ε
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
6/32
14 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
Sin embargo no existen las dos derivadas parciales, pues:
∂f
∂x
(0,0)
= limh→0
f (0 + h, 0)− f (0, 0)h
=limh→0
h sen 1
h2 + 02
h =lim
h→0sen
1
h2 ⇒ ∄
∂f
∂y
(0,0)
= limk→0
f (0, 0 + k)− f (0, 0)k
=limk→0
0 · sen 102 + k2
k = 0
Luego la función es continua en (0, 0) y no existen
las dos derivadas parciales.
4.2 Derivadas parciales sucesivas.
Sea f (x, y) una función de dos variables,
y ∂z
∂x su derivada parcial con respecto a
x. Si esta nueva función es derivable con respecto a x, se
puede obtener la derivada
parcial segunda:∂ 2z
∂x2 =
∂
∂x
∂z
∂x
Si esta última admite derivada, se puede obtener la derivada
parcial tercera:
∂ 3z
∂x3 =
∂
∂x
∂ 2z
∂x2
y así sucesivamente se obtienen las derivadas de orden n
:
∂ nz
∂xn =
∂
∂x
∂ n−1z
∂xn−1
Las derivadas parciales cruzadas serán:
∂ 2z
∂x∂y =
∂
∂x
∂z
∂y
∂ 2z
∂y∂x =
∂
∂y
∂z
∂x
Estas dos derivadas parciales pueden ser iguales o distintas,
las condiciones su-
ficientes para la igualdad, nos las da el siguiente teorema:
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
7/32
4.2. DERIVADAS PARCIALES SUCESIVAS. 15
4.2.1 Teorema de Schwarz
Sea f : A ⊂ R2 → R , definida
en el abierto A. Si las derivadas parciales
cruzadas ∂ 2z
∂x∂y y
∂ 2z
∂y∂x existen y son continuas en A,
entonces:
∂ 2z
∂x∂y =
∂ 2z
∂y∂x ∀(x, y) ∈ A
Este teorema da condiciones suficientes, que no necesarias como
vemos en el
ejemplo siguiente .
Ejemplo 4.2.1 Comprobar que la función:
z ≡ f (x, y) =
x4
x2 + y2 si (x, y) = (0, 0)
0 si (x, y) = (0, 0)
verifica
∂ 2z
∂x∂y(0,0) = ∂ 2z
∂y∂x(0,0)y sin embargo
∂ 2z
∂x∂y y
∂ 2z
∂y∂x no son continuas en (0, 0).
––
Calculamos las derivadas parciales primeras:
f 1(x, y) =∂z
∂x
(x,y)
=
∂z
∂x(x,y)=(0,0)=
4x3 (x2 + y2)− 2xx4(x2 + y2)2
= 2x5 + 4x3y2
(x2 + y2)2
∂z
∂x
(x,y)=(0,0)
=limh→0
f (0 + h, 0)− f (0, 0)h
=limh→0
h4
h2+0 − 0
h = 0
f 2(x, y) =
∂z
∂y
(x,y)
=
∂z
∂y
(x,y)=(0,0)
≡
∂f
∂y
(x,y)=(0,0)
= ∂
∂x
x4
x2 + y2
= −2yx4(x2 + y2)2
∂z
∂y
(x,y)=(0,0)
=limk→0
f (0, 0 + k)− f (0, 0)k
=limk→0
00+k2
− 0k
= 0
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
8/32
16 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
Calculamos a continuación las parciales segundas cruzadas:
∂ 2z
∂y∂x
(x,y)=(0,0)
= 8x3y (x2 + y2)
2 − 2 (x2 + y2) 2y (2x5 + 4x3y2)(x2 + y2)4
= −8x3y3(x2 + y2)3
∂ 2z
∂y∂x
(x,y)=(0,0)
=limk→0
f 1(0, 0 + k)− f 1(0, 0)k
=limh→0
0(0+k2)2
− 0k
=limh→0
0k4
k = 0
∂ 2z
∂x∂y
(x,y)=(0,0)
= −8yx3 (x2 + y2)2 + 2 (x2 + y2) 2x2yx4
(x2 + y2)4 =
−8y3x3(x2 + y2)3
∂ 2z ∂x∂y
(x,y)=(0,0)
=limh→0
f 2(0 + h, 0)− f 2(0, 0)h
=limh→0
0h4
h = 0
Tenemos por tanto que: ∂ 2z
∂y∂x
(x,y)=(0,0)
=
∂ 2z
∂x∂y
(x,y)=(0,0)
= 0
Sin embargo las funciones ∂ 2z ∂y∂x y
∂ 2z
∂x∂y, no son continuas en (0, 0), pues:
lim(x,y)→(0,0)
∂ 2z
∂y∂x
=
∂ 2z
∂y∂x
(0,0)
= 0
lim(x,y)→(0,0)
∂ 2z
∂x∂y
=
∂ 2z
∂x∂y
(0,0)
= 0
ya que:
lim(x,y)→(0,0)
∂ 2z
∂y∂x
= lim
(x,y)→(0,0)
−8x3y3(x2 + y2)3
=y=mx
limx→0
−8x6m3(x2 + x2m2)3
= −8m3(1 + m2)3
que depende de m, por lo que ∄
lim(x,y)→(0,0)
∂ 2z
∂y∂x
⇒
∂ 2z
∂y∂x
no continua en
(0, 0).
Análogamente:
lim(x,y)→(0,0) ∂ 2z
∂x∂y = lim(x,y)→(0,0) −8y3x3
(x2 + y2)3 =y=mx limx→0 −8x6m3
(x2 + x2m2)3 = −8m3
(1 + m2)3
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
9/32
4.3. TEOREMA DE LOS INCREMENTOS FINITOS. FUNCIONES DE DOS
VARIABLES.17
que depende de m, por lo que ∄
lim(x,y)→(0,0)
∂ 2z
∂x∂y ⇒ ∂ 2z
∂x∂y no continua en(0, 0).Muchas de las funciones que
aparecen en la práctica, cumplen las hipótesis del
teorema de Schwarz, cuando esto ocurre, sólamente habrá 3
derivadas parciales
distintas de orden 2 :∂ 2z
∂x2, ∂ 2z
∂y2,
∂ 2z
∂x∂y ≡ ∂
2z
∂y∂x
Si estas funciones (derivadas parciales 2as) cumplen las
condiciones del Th. de
Schwarz, sólamente habrá 4 derivadas parciales
distintas de orden 3:
∂ 3z
∂x3, ∂ 3z
∂y3,
∂ 3z
∂y2∂x ≡ ∂
3z
∂y∂x∂y ≡ ∂
3z
∂x∂y∂y,
∂ 3z
∂x2∂y ≡ ∂
3z
∂x∂y∂x ≡ ∂
3z
∂y∂x∂x
En general, siempre que se cumplan las condiciones del teorema
de Schwarz
para las funciones: derivadas parciales de orden (n− 1),
sólamente habrá (n + 1)derivadas parciales distintas de
orden n, de las 2n existentes.
4.3 Teorema de los incrementos finitos. Funcio-
nes de dos variables.
Sea f (x, y) una función continua en un
entorno cerrado de P (x, y), existiendo
las derivadas parciales: f ′x y
f ′y , finitas en el correspondiente entorno abierto
de
P (x, y), entonces:
∆z ≡ f (x + ∆x, y + ∆y)− f (x, y)
= ∆x f ′x(x0, y) + ∆y f ′y(x + ∆x, y0)
siendo x0 = x + θ1∆x ;
0 < θ1 < 1
y0 = y + θ2∆y ; 0 < θ2
< 1
Demostración
Sea P (x, y) un punto del plano
XY y pasemos al punto Q(x + ∆x, y
+ ∆y) ;
veremos como este incremento de la función, se puede expresar en
función de las
derivadas parciales.
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
10/32
18 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
P(x,y)
C(x+∆x,y) Q(x+∆x,y+∆y)
•
•
•
•
∆∆∆∆ z
f(P)
f(Q)
.
z = f(x,y)
x0
y0
X
Y
Z
θ
O
fig.3-t19
Consideramos el punto intermedio C , vértice del
triángulo rectángulo P CQ, que
nos permite escribir:
∆z = f (Q)− f (P )
= f (x + ∆x, y + ∆y)− f (x, y)
= f (Q)− f (C ) + f (C )−
f (P ) =
= [f (x + ∆x, y + ∆y)− f (x + ∆x, y)] +
[f (x + ∆x, y)− f (x, y)] = (1)
= ∆y f ′
y(x + ∆x, y0) + ∆x f ′
x(x0, y)
Por tanto podemos expresar el incremento de la función como:
∆z ≡ f (x + ∆x, y + ∆y)− f (x, y)
= ∆x f ′x(x0, y) + ∆y f ′y(x + ∆x, y0)
donde (x0, y)y (x + ∆x, y0) , son
puntos intermedios de los segmentos P C y
CQ
respectivamente.
1 Aplicamos en cada paréntesis, el teorema de los incrementos
finitos para funciones de una
variable.
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
11/32
4.4. DERIVADA DIRECCIONAL. 19
4.4 Derivada direccional.
Expresa la razón de cambio de la función
z = f (x, y) con respecto a cambios
que
pueden ser simultáneos de x e y.
Así como ∂z
∂x y
∂z
∂y permiten determinar la pendiente de la superficie según
la di-
rección y sentido de los semiejes
OX y OY , respectivamente, la
derivada direccional
permite determinar la pendiente en cualquier dirección que esta
exista.
X
Y
Z
•P'(1,1,1)
O
u
P(x0,y0)
P'(x0,y
0,z
0)
tg α= f (x0,y0)D
u( )α
•
•
ur
P' (x0 , y0 , z0 )
fig.4-t19
Definición 4.4.1 Sea f :
A ⊆ R2 → R y sea (x0, y0)
un punto interior de A y
−→u = (a, b) un vector unitario, esto es −→u
=
√ a2 + b2 = 1
Se define derivada direccional de f en
la dirección del vector −→u , en el punto
P (x0, y0) como:
(D−→u f )(x0,y0) =limλ→0
f (x0 + λa, y0 + λb)− f (x0,
y0)λ
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
12/32
20 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
Cuando −→u = (1, 0) la derivada es en la dirección y
sentido del semieje OX , estoes:
(D−→u f )(x0,y0) ≡
∂f
∂x
(x0,y0)
Cuando −→u = (0, 1) la derivada es en la dirección y
sentido del semieje OY , estoes:
(D−→u f )(x0,y0) ≡
∂f
∂y
(x0,y0)
Este vector −→u , se puede escribir: −→u =
(cos θ, sen θ) , para algún θ ∈ [0, 2π] ,por
lo que:
(D−→u f )(x0,y0) ≡ f ′θ(x0, y0)
=limλ→0f (x0 + λ cos θ , y0 + λ
sen θ)− f (x0, y0)
λ
Ejemplo 4.4.2 Dada la función
f (x, y) = x3cos (x− y)
x2 + y2 si (x, y) = (0, 0)
0 si (x, y) = (0, 0)
determinar la derivada direccional en el punto (0,0), en
cualquier dirección θ.
––
Utilizando la definición, tenemos que:
f ′θ(0, 0) = limλ→0
f (0 + λ cos θ, 0 + λ
sen θ)− f (0, 0)λ
=limλ→0
f (λ cos θ, λ sen θ)
λ
= limλ→0
λ3 cos3θ cos(λ cos θ−λ s en
θ)λ2
λ =lim
λ→0cos3θ cos (λ cos θ − λ sen θ)
= cos3θ
Las derivadas parciales serán:
∂f
∂x
(0,0)
= (cos3θ)θ=0 = 1∂f
∂y
(0,0)
= (cos3θ)θ=π2
= 0
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
13/32
4.4. DERIVADA DIRECCIONAL. 21
4.4.1 Otras expresiones de la derivada direccional.
Teorema 4.4.3 Si la función z =
f (x, y) es continua en un entorno cerrado
de
P (x, y) , existen y son continuas las derivadas
parciales f ′x , f ′y en el
entorno abier-
to, entonces ∃ la derivada
direccional f ′θ(x, y) en cualquier
dirección θ y se puede expresar de la
forma:
f ′θ(x, y) = f ′x(x, y)
cos θ + f
′y(x, y) sen θ
Demostración
Puesto que la derivada direccional expresa la razón de cambio de
z respecto a
cambios que pueden ser simultáneos de x e y, se
puede decir que
f ′θ(x, y) = lim∆s→0
∆z
∆s
P(x,y)
C(x+∆x,y) Q(x+∆x,y+∆y)
•
∆∆∆∆ z
f(P)
f(Q)
.
z = f(x,y)
X
Y
Z
∆ x ∆ s
∆ y
.
cosθ
senθ∆x
∆y
θ
θ
•
•
yxs 22 ∆+∆=∆
∆ y
=
=
∆ x∆ s
∆ s
O
θ•
fig.5-t19
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
14/32
22 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
Por cumplirse las hipótesis del Th. de los incrementos finitos
para funciones de
dos variables, se tiene que:
f ′θ(x, y) = lim∆s→0
∆z
∆s = lim
∆s→0
∆x f ′x(x0, y) + ∆y f ′y(x + ∆x, y0)
∆s =
= lim∆s→0
∆s cos θ f ′x(x0, y) + ∆s sen θ
f ′y(x + ∆x, y0)
∆s = (2)
= f ′x(x, y) cos θ +
f ′y(x, y) sen θ
Por tanto, cuando se cumplen las condiciones señaladas en el
teorema, la derivada
direccional se puede expresar como el producto escalar:
f ′θ(x, y) =−→∇f (x, y) · −→u
donde el vector −→∇f (x, y) es el llamado vector
gradiente:
−→∇f (x, y) = f ′x(x,
y) i + f ′y(x, y) jy el
vector u es el vector unitario ( cos
θ i+ sen θ j )
en la dirección θ.
≫ Si las condiciones que se exigen, no se cumplen, esta
expresión puede no ser
la correcta para obtener la derivada direccional.
Ejemplo 4.4.4 Aplicar a la función :
f (x, y) =
x3cos (x− y)x2 + y2
si (x, y) = (0, 0)0 si (x, y)
= (0, 0)
la expresión del producto escalar, para tratar de obtener la
derivada direccional
en la dirección θ y comentar el resultado.
––
El producto escalar es:
f ′θ(0, 0) =−→∇f (0, 0) · −→u =
f ′x(0, 0) cos θ + f ′y(0, 0)
sen θ = cos θ
La derivada direccional, obtenida mediante su propia definición
daba cos3 θ, estas
expresiones son distintas, por tanto debemos pensar que no
se cumplen las condi-
ciones del teorema. (Fácilmente se demuestra, como las derivadas
parciales no son
continuas en (0, 0)).
2 Por la tendencia ∆s→ 0 y la continuidad de las
funciones f ′xy f ′y
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
15/32
4.4. DERIVADA DIRECCIONAL. 23
Ejemplo 4.4.5 Dada la función f (x, y) =
x2 − 5xy + 3y2. Hallar la
derivada direccional de f en el punto
P (3,−1) en la dirección θ =
π
4 .
––
La función cumple las condiciones necesarias para poder
garantizar la existencia
de derivada direccional en cualquier dirección bajo la
expresión:
f ′θ(x, y) =−→∇f (x, y) · −→u =
f ′x(x, y) cos θ + f ′y(x, y)
sen θ
donde:
−→∇f (x, y) = (2x− 5y,−5x + 6y) ⇒−→∇f (x, y)
(3,−1)= (11,−21) ≡ 11 i− 21 j
u = cos π
4 i + sen
π
4 j =
1√ 2
i + 1√
2 j
por tanto:
f ′θ(x, y) =−→∇f (x, y) · −→u =
11 i − 21 j
·
1√ 2
i + 1√
2 j
=
11√ 2− 21√
2= − 10√
2
4.4.2 Dirección de máxima variación de la función.
Teniendo presente la forma en la que está expresada la derivada
direccional, distin-
guimos dos casos:
a) Si la derivada direccional se puede expresar mediante el
producto escalar:
f ′θ(x, y) =−→∇f (x, y) · −→u
se tiene que
f ′θ(x, y) =−→∇f (x, y) · |u| · cos γ
donde γ es el ángulo formado
por −→∇f y u.
El valor de la derivada direccional, por tanto, será máximo
cuando cos γ = 1,
esto es en la dirección y sentido del vector gradiente, y este
valor es:
f ′θ(x, y) = −→∇f (x, y)
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
16/32
24 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
La derivada direccional tomará el mínimo valor cuando cos
γ = −1, esto es en ladirección y sentido opuesto al
vector gradiente, y este valor es:
f ′θ(x, y) = −−→∇f (x, y)
por tanto la máxima variación de la función se obtiene en la
dirección de la recta
que soporta al vector gradiente.
b) Si la derivada direccional viene expresada a través de
la propia definición
f ′θ(x, y) =limλ→0
f (x + λ cos θ, y + λ
sen θ)− f (x, y)λ
el valor máximo y mínimo se obtiene buscando los extremos de
esta función “derivada
direccional”, respecto a la variable θ.
Ejemplo 4.4.6 En la función :
f (x, y) =
x3cos (x
−y)
x2 + y2 si (x, y) = (0, 0)0
si (x, y) = (0, 0)
determinar la dirección y sentido en los que la derivada
direccional, en el punto
(0, 0), toma el máximo y mínimo valor.
––
Se trata de obtener los extremos de la función
f ′θ (0, 0) = g(θ) = cos3 θ
g′(θ) = −3 cos2θ sen θ = 0 ⇒
θ = 0
θ = ±π2
g′′(θ) = −3 −2 cos θ
sen2θ + cos3θ = 6 cos θ
sen2θ − 3 cos3θ
Para el valor θ = 0, se tiene que g
′′(θ=0) = −3Por lo que la derivada direccional es máxima en
dirección y sentido del semieje
positivo OX , esta derivada es lógicamente, la
derivada parcial ∂f
∂x en el punto (0, 0).
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
17/32
4.4. DERIVADA DIRECCIONAL. 25
Para los valores θ = ±π2
, se tiene:
g′′(θ=±π2) = 0
g′′′(θ) = 6−sen3θ + 2 sen θ cos2θ +
9 cos2θ sen θ
= −6 sen3θ + 12 sen θ
cos2θ + 9 cos2θ sen θ = 21
sen θ cos2θ − 6 sen3θg′′′(θ=π
2) = −6
g′′′(θ=−π2) = 6
Por tanto la primera derivada que no se anula es de orden impar,
con lo que no
existirán más extremos.
Ejemplo 4.4.7 Calcular el valor de la derivada direccional
de f (x, y) = x3y2 en
P (−1, 2), en la dirección del vector a =
4 i− 3 j.¿En qué dirección y sentido tomará el
máximo valor?. ¿Cuál es ese valor?.
––
Se cumplen las condiciones para poder obtener la derivada
direccional mediantela expresión:
f ′θ(x, y) =−→∇f (x, y) · −→u
calculamos:
−→∇f (x, y) = 3x2y2, 2x3y⇒ −→∇f (x, y)(−1,2)
= 12 i − 4 j
u = 4√
25
,
−
3√ 25 ≡
4
5 i
−
3
5 j
por tanto:
f ′θ(−1, 2) =
12 i − 4 j·
4
5 i − 3
5 j
= 12
el máximo valor se obtiene en la dirección y sentido del vector
gradiente
−→∇f = 12 i − 4 j
Este valor será −→∇f = √ 160
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
18/32
26 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
4.4.3 Dirección en la que la derivada direccional es nula.
Si la derivada direccional se puede expresar mediante el vector
gradiente:
f ′θ(x, y) =−→∇f (x, y) · −→u =
−→∇f (x, y) · |u| · cos γ
Esta derivada se hace nula cuando γ = ±π2
, es decir en la dirección perpendicular
al vector gradiente.
Si la derivada direccional viene expresada a través de la propia
definición:
f ′θ(x, y) =limλ→0
f (x + λ cos θ, y + λ
sen θ)− f (x, y)λ
Deberá estudiarse el valor ó valores de θ que anulan
esta función.
Ejemplo 4.4.8 En la función
f (x, y) =
x3cos (x− y)x2 + y2
si (x, y) = (0, 0)
0 si (x, y) = (0, 0)
determinar la dirección o direcciones en las que la derivada
direccional es nula.
––
Según la expresión obtenida anteriormente para la derivada
direccional:
f ′θ(0, 0) = cos3θ = g(θ)
se tiene que esta será nula para θ = ±π2
, esto es, la derivada direccional se hace cero
sobre la dirección que soporta al eje OY .
Perpendicular al vector gradiente (1, 0).
4.5 Vector gradiente y curvas de nivel.
El vector gradiente es en cada punto, normal a las curvas de
nivel (siempre que −→∇f (x, y) = 0).Demostración
Puesto que z = f (x, y) es
constante en cada curva de nivel, la razón de cambio
de z cuando varían x e y , es
cero, por lo que la derivada direccional en la dirección
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
19/32
4.6. DIFERENCIABILIDAD. 27
del vector de posición, es cero, es decir3 −→
∇f
·u = 0
⇒ −→
∇f cos γ = 0 ⇒
γ =
±
π
2
y
por tanto −→∇f ⊥ u
f ∇r
ur
fig.6-t19
Ejemplo 4.5.1 Dada la curva de nivel
z = y − sen x = 0, construir
los vectores normales a dicha curva, en los
puntos (−π, 0) , (0, 0) y π
2, 1
.
––
Los vectores normales vienen determinados por el vector:
−→∇f (x, y) = −→∇ (y − sen x) = − cos x i +
jque para los puntos dados toma los valores:
−→∇ (−π, 0) = i + j−→∇ (0, 0) =
- i + j
−→∇π
2, 1
= 0 i + j =
j
Diferencial de una función de dos variables.
4.6 Diferenciabilidad.
Sea z = f (x, y) una función
definida y acotada en un subconjunto A ⊆ R2 y
seanP (x, y) y Q (x + ∆x, y + ∆y)
dos puntos de un abierto de A.
Definición 4.6.1 Diremos, que z =
f (x, y) es diferenciable en (x, y)
si ∆z puede
expresarse:
3f ′θ(x, y) admite la expresión producto escalar, al
ser las parciales continuas.
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
20/32
28 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
∆z = ∆xf ′x(x, y) + ∆yf ′y(x, y)
+ ε1∆x + ε2∆y
donde ε1(∆x) y ε2(∆x, ∆y)
son infinitésimos.
De otra forma:
∆z = ∆xf ′x(x, y) + ∆yf ′y(x, y)
+ ε
∆2x + ∆2y
donde ε(∆x, ∆y) es un infinitésimo, esto
es:
lim(∆x,∆y)→(0,0)
∆z −
∆x f ′x(x, y)−
∆y f ′y(x, y) ∆2x + ∆2y = 0
4.7 Diferencial de una función.
Se define diferencial de la función z =
f (x, y),como la parte principal de
∆z y se
expresa:
dz = ∆x f ′x(x, y) + ∆y f ′y(x, y)
Se comprueba que ∆x
≡dx y que ∆y
≡dy; pues para z = f (x, y)
= x, se tiene
que dz = ∆z
dz = dx⇒ ∆x ≡ dx
Análogamente:
Cuando z = f (x, y) = y ,
se tiene que
dz = ∆y
dz = dy⇒ ∆y ≡ dy
Luego la diferencial de z la podemos
escribir:
dz = ∂z
∂xdx +
∂z
∂ydy
Teniendo en cuenta esta expresión, en una función diferenciable
en (x, y) se tiene
que
∆z =
dz + ε1∆x + ε2∆y
por cuanto ∆z ≈
dz.(∆z y dz sólo se diferencian en un
infinitésimo)Esta aproximación entre ∆z y
dz nos permite calcular el valor de la función
en
el punto (x + ∆x, y + ∆y) a través del
valor de la diferencial en el punto (x, y):
f (x + ∆x, y + ∆y) ≈
dz + f (x, y)
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
21/32
4.7. DIFERENCIAL DE UNA FUNCIÓN. 29
Ejemplo 4.7.1 Dada la función
f (x, y) =
x + y + (x
2 + y2)cos 1
(x2 + y2) si (x, y) = (0, 0)
0 si (x, y) = (0, 0)
Se pide:
a) Estudiar su diferenciabilidad en el punto (0, 0).
b) Estimar mediante la diferencial, el valor de la función en el
punto (0.1, 0.2).
––
a) Para ver si es diferenciable en (0, 0) veamos si
∆z se puede escribir:
∆z = ∆xf ′x(0, 0) + ∆yf ′y(0, 0)
+ ε
∆2x + ∆2y , con lim
(∆x,∆y)→(0,0)ε = 0
Para lo cual calculamos previamente el valor de las parciales en
el punto (0, 0):
f ′x(0, 0) = limh→0
f (0 + h, 0)− f (0, 0)h
=limh→0
h + h2 cos 1
h2
h = 1
f ′y(0, 0) = limk→0
f (0, 0 + k)− f (0, 0)k
=limk→0
k + k2 cos 1
k2
k = 1
Veamos si
∆z = ∆x + ∆y + ε
∆2x + ∆2y , con lim(∆x,∆y)→(0,0)
ε = 0
ε = ∆z −∆x−∆y ∆2x + ∆2y
= [f (0 + ∆x, 0 + ∆y)− f (0, 0)]
−∆x−∆y ∆2x + ∆2y
=
=∆x + ∆y + (∆2x + ∆2y)cos 1
(∆2x+∆2y) −∆x−∆y
∆2x + ∆2y=
=
∆2x + ∆2y cos 1
(∆2x + ∆2y)
Comprobamos que
lim(∆x,∆y)→(0,0) ε = lim(∆x,∆y)→(0,0) ∆2x + ∆2y
cos 1(∆2x + ∆2y) = 0
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
22/32
30 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
pues basta aplicar el criterio de la función mayorante. Luego la
función es diferen-
ciable en (0, 0).b) Se trata de calcular f (0.1,
0.2), esto es f (x + ∆x, y + ∆y) a
través del valor
de dz en el punto (x, y) mediante la
aproximación:
[f (x + ∆x, y + ∆y)− f (x, y)] ≡
∆z ≈ dz
de donde
f (x + ∆x, y + ∆y) ≈ f (x, y)
+ dz = f (x, y) + f ′x(0,
0)∆x + f ′y(0, 0)∆y
sabiendo que:
El punto es el (0, 0), donde f (0, 0) = 0
x + ∆x = 0.1 ⇒ ∆x = 0.1y + ∆y = 0.2 ⇒
∆x = 0.2
se tiene:
f (0.1, 0.2) ≈ f (0, 0) + 1× 0.1 + 1 × 0.2 = 0 + 0.1 +
0.2 = 0.3
Ejemplo 4.7.2 Estudiar la diferenciabilidad de la
función f (x, y) = x2y + 3y
para
cualquier (x, y) ∈ R2.
––
Veamos si se puede escribir:
∆z = ∆xf ′x(x, y) + ∆yf ′y(x, y)
+ ε1∆x + ε2∆y
donde ε1(∆x) y ε2(∆x, ∆y) son
infinitésimos.Calculamos las derivadas parciales:
f ′x(x, y) = 2xy
f ′y(x, y) = x2 + 3
Calculamos ∆z :
∆z = f (x + ∆x, y + ∆y)−
f (x, y) =
(x + ∆x)2 (y + ∆y) + 3 (y + ∆y)
−
x2y + 3y
=
= x2y + x2∆y + y∆2x +
∆2x∆y + 2xy∆x + 2x∆x∆y + 3y + 3∆y − x2y +
3y
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
23/32
4.8. DIFERENCIABILIDAD Y CONTINUIDAD. 31
que podemos expresar:
∆z = ∆x( 2xy f ′x(x,y)
) + ∆y(3 + x2 f ′y(x,y)
) + (y∆x ε1
)∆x + (∆2x + 2x∆x ε2
)∆y
Por tanto la función es diferenciable en cualquier punto
(x, y) de R2.
Tambien se puede demostrar su diferenciabilidad en cada punto
(x, y) mediante
la segunda expresión, es decir viendo que:
∆z = ∆x f ′x(x, y) + ∆y f ′y(x, y)
+ ε ∆
2x + ∆2y , con lim(∆x,∆y)→(0,0)
ε = 0
En nuestro caso resulta
ε = y∆2x + ∆2x∆y + 2x∆x∆y
∆2x + ∆2y
y se comprueba que lim(∆x,∆y)→(0,0)
ε = 0, (aplicar criterio de la función mayorante,
con F (r) = yr + r2 + 2xr para
cada (x, y) ∈ R2).
4.8 Diferenciabilidad y continuidad.
Si z = f (x, y) es
diferenciable en el punto (x, y) entonces es continua
en dicho
punto.
La recíproca no es cierta.
Demostración
Efectivamente, si f es diferenciable en
(x, y) se prueba que es continua , esto es
que:
lim(∆x,∆y)→(0,0)
f (x + ∆x, y + ∆y)− f (x, y) = 0
Pues por la diferenciabilidad de f se tiene
que:
∆z = ∆x f ′x(x, y) + ∆y f ′y(x, y)
+ ε1∆x + ε2∆y
y al ser f ′x(x, y) y f ′y(x, y)
funciones acotadas, tomando límites resulta que
lim(∆x,∆y)→(0,0) ∆z = 0.
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
24/32
32 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
Por tanto≫ Una condición necesaria, que no suficiente,
para la diferenciabilidad, es la
continuidad. La no continuidad implica entonces, no
diferenciabilidad.
≫ Una condición suficiente, que no necesaria, para la
diferenciabilidad de unafunción en un punto, es que existan las
derivadas parciales f ′x y f
′y y sean continuas
en dicho punto.
4.9 Diferenciabilidad y existencia de derivada di-
reccional.
Si z=f(x,y) es diferenciable en un punto P(x,y), entonces admite
en ese punto deriva-
da direccional en cualquier dirección θ, que se puede
obtener mediante la expresión:
f ′θ(x, y) =−→∇f (x, y) · u = f ′x(x,
y) cos θ + f ′y(x, y)sen θ
La recíproca no es cierta, esto es, una función puede admitir
derivada direccional en cualquier dirección en un punto
P (x, y) y no ser diferenciable en este punto.
Demostración
En efecto si f (x, y) es diferenciable en
P (x, y) se tiene que:
∆z = ∆x f ′x(x, y) + ∆y f ′y(x, y)
+ ε1∆x + ε2∆y
donde ∆x e ∆y son los catetos del
triángulo:
∆x
∆y
∆s
.θ
fig.1-t20
por lo que
∆s = ∆2x + ∆2y;sen x = ∆y∆s ;cos
x = ∆x∆s
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
25/32
4.9. DIFERENCIABILIDAD Y EXISTENCIA DE DERIVADA
DIRECCIONAL.33
y el ∆z se podrá escribir:
∆z = ∆s cos θ f ′x(x, y) + ∆s sen θ f ′y(x,
y) + ε1∆s cos θ + ε2∆s sen θ
Utilizando la definición de derivada direccional como
f ′θ(x, y) = lim∆s→0
∆z
∆s
se tiene que:
f ′θ(x, y) = lim∆s→0
∆z
∆s = lim
∆s→0
∆s
cos θ f ′x(x, y) + sen θ f ′y(x, y)
+ ε1 cos θ + ε2 sen θ
∆s
=
= f ′
x(x, y)cos θ + f ′
y(x, y)sen θ = −→∇f (x, y) · uquedando demostrado lo
que queriamos probar.
Ejemplo 4.9.1 Probar que la función:
f (x, y) =
x3 cos(x− y)x2 + y2
si (x, y) = (0, 0)0 si (x, y)
= (0, 0)
admite derivada direccional en el punto (0, 0) en
cualquier dirección y no es diferen-ciable en este punto.
––
En un ejemplo anterior vimos como esta función admite derivada
direccional en
cualquier dirección, en el punto (0,0), y vale :
f ′θ(0, 0) = cos3 θ.
Veamos que sin embargo, no es diferenciable en el punto
(0, 0).
Pues planteando
∆z = ∆xf ′
x(0, 0) + ∆yf ′
y(0, 0) + ε ∆2x + ∆2y =
∆x + ε ∆2x + ∆2ydespejando ε :
ε = ∆z −∆x
∆2x + ∆2y=
∆3x cos(∆x−∆y)∆2x+∆2y
−∆x ∆2x + ∆2y
= ∆3x cos(∆x−∆y)−∆x (∆2x + ∆2y)
(∆2x + ∆2y)3
2
y calculando
lim(∆x,∆y)→(0,0)
ε = lim(∆x,∆y)→(0,0)
∆3x cos(∆x−∆y)−∆x (∆2x + ∆2y)(∆2x + ∆2y)
3
2
=∆y=m∆x
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
26/32
34 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
= lim∆x→(0,0)
∆3x cos(∆x−m∆x)−∆x
(∆2x + m2∆2x)(∆2x + m2∆2x)
3
2
= −m2
(1 + m2)3
2
se observa que depende de m, por lo que no existe límite y
por tanto la función
no es diferenciable en el punto (0, 0).
≫ La no diferenciabilidad se ve de inmediato, comprobando
como la derivadadireccional obtenida por el producto escalar es
−→∇f (x, y) ·u = cos θ = cos3 θ obtenidasegún la
definición de derivada direccional.
4.10 Interpretación geométrica de la diferencial.Plano
tangente.
Dada la superficie z = f (x, y), y un
punto de ella P (x0, y0, z 0), la ecuación del
plano
tangente a la superficie en ese punto viene dada por la
ecuación:
z − z 0 = f ′x(x0, y0)(x− x0
∆x
) + f ′y(x0, y0)(y − y0 ∆y
) (1)
P(x0,y0)•X
Y
Z
O
P' ( x0 , y0 , z0 )
•u
z = f ( x , y )F (x0 , y0 , z0 )
∆
fig.2-t20
por lo que dicha ecuación la puedo escribir:
z − z 0 = dz
por cuanto la condición necesaria y suficiente para que la
superficie z = f (x, y)
admita plano tangente en un punto es que esta sea diferenciable
en dicho punto.
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
27/32
4.10. INTERPRETACIÓN GEOMÉTRICA DE LA DIFERENCIAL. PLANO
TANGENTE.35
Tenemos en cuenta que si
u = (x− x0) i + (y − y0) j +
(z − z 0) k
es un vector del plano tangente, la ecuación del plano (1) se
obtiene igualando a
cero el producto escalar de los vectores v
y u,donde:
v = f ′x(x0,
y0) i + f ′y(x0, y0) j −
k ≡
−→∇F (x0, y0, z 0)u = (x− x0) i + (y
− y0) j + (z − z 0) k
cuando F (x,y,z ) = f (x, y)−
z, es la ecuación en forma implícita de la superficie
z = f (x, y).
Por tanto la ecuación del plano tangente se obtiene al igualar a
cero el producto
escalar
v. u ≡ −→∇F (x0, y0, z 0) · u =
(F ′x)(P ) (x− x0) +
F ′y(P )
(y − y0) + (F ′z)(P ) (z − z 0) =
0
lo que muestra que el vector gradiente−→∇F en el
punto P (x0, y0, z 0) es perpendicular
al plano tangente, puesto que lo es a cada vector
u del plano que pase por el punto.
Ejemplo 4.10.1 Hallar la ecuación del plano tangente a la
superficie dada implíci-
tamente por
F (x,y,z ) = xyz + L(xyz )−
z = 0en el punto P (1, 1, 1). Obtener también
la ecuación de la recta normal al plano en
dicho punto.
––
Ec. del plano tangente:
−→∇F (x0, y0, z 0) · u = 0
Obtenemos los vectores:
−→∇F =
yz + yz
xyz
i +
xz +
xz
xyz
j +
xy +
xy
xyz − 1
k
−→∇F (1, 1, 1) = 2i + 2 j + ku =
(x− 1) i + (y − 1) j + (z −
1) k
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
28/32
36 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
y sustituyendo:
−→∇F (x0, y0, z 0) · u = (2i +
2 j + k)
(x− 1) i + (y − 1) j + (z −
1) k
= 0
resulta:ecuación del plano tangente : 2x +
2y + z − 5 = 0
ecuación de la recta normal : x− 1
2 =
y − 12
= z − 1
4.11 Fórmula de Taylor para funciones de dos va-
riables.
Sea una función z = f (x, y)
que verifica:
a) Todas sus derivadas parciales hasta el
orden n son continuas en un entorno
cerrado de P (x0, y0).
b) Existen las derivadas parciales de orden n +
1 en el correspondiente entorno
abierto de P (x0, y0).
Entonces el valor de la función en cualquier punto Q(x0
+ h, y0 + k) de un
entorno cerrado de P (x0, y0) se puede
aproximar por el que toma un polinomio
p(h, k) ( llamado de Taylor) en el punto
P (x0, y0), más un resto; de modo que se
puede escribir:
f (Q) = p(P ) + Rn (fórmula de
Taylor)
donde Rn es el término complementario o
resto.
Demostración
Consideramos la recta que pasa por P y Q
:
X
Y
•
•
O
•
Q( x0+h , y
0+k )
( x, y ) = (x0+ht , y
0+kt )
P( x0 , y
0 )
fig.1-t21
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
29/32
4.11. FÓRMULA DE TAYLOR PARA FUNCIONES DE DOS VARIABLES.
37
A partir de las ecuaciones paramétricas de esta recta, se tiene
que cada punto
del segmento P Q queda expresado por: x =
x0 + ht
y = y0 + ktcon 0 ≤ t ≤ 1
El valor de la función en el punto P (x, y)
será f (x0 + ht, y0 + kt),
función que
depende exclusivamente de t, por cuanto se puede
escribir.
F (t) = f (x, y)
= f (x0 + ht, y0 + kt)
Esta función de una variable, admite desarrollo de MacLaurin,
que será:
F (t) = F (0) + F ′(0)t +
1
2!F ′′(0)t2 + · · ·+ 1
n!F (n(0)tn +
1
(n + 1)!F (n+1(θt)tn+1
Calculamos F (0) y las sucesivas derivadas de
F (t) en t = 0, teniendo en
cuenta
que el arbol de dependencia tanto para F (t)
como sus sucesivas derivadas es:
Fx
y
t
fig.2-t21
F (0) = f (x0, y0)
F ′(t) = dF
dt =
∂F
∂x
dx
dt +
∂F
∂y
dy
dt =
∂f
∂xh +
∂f
∂yk ⇒ F ′(0) =
∂f
∂xh +
∂f
∂yk
(x0,y0)
F ′′(t) = ∂
∂xF ′(t)
dx
dt+
∂
∂yF ′(t)
dy
dt =
∂
∂x
∂f
∂xh +
∂f
∂yk
dx
dt +
∂
∂y
∂f
∂xh +
∂ f
∂yk
dy
dt =
=∂ 2f
∂x2h + ∂
2f ∂x∂y
k
h + ∂ 2f
∂y∂xh + ∂
2f ∂y2
k
k
que podemos escribir:
F ′′(t) =
∂f
∂xh +
∂f
∂yk
(2⇒ F ′′(0) =
∂f
∂xh +
∂ f
∂yk
(2(x0,y0)
Análogamente se calculan las derivadas de orden superior,
resultando:
F (n(t) = ∂f ∂x h + ∂ f
∂yk
(n
⇒F (n(0) = ∂f ∂x h +
∂f
∂yk
(n
(x0,y0)
Matemáticas 2º Finanzas. M. Díaz Gabela
-
8/18/2019 Teoria_Tema_4.pdf
30/32
38 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
El término complementario es:
F (n+1(θt) =
∂f
∂xh +
∂f
∂yk
(n+1(x0+hθt,y0+kθt)
Por lo que el desarrollo de McLaurin para F (t),
bajo el supuesto de cumplirse
Th. Schwarz,
será:
F (t) = f (x, y)
= f (x0 + ht, y0 + kt)
= f (x0, y0) + ∂f
∂x
h + ∂f
∂y
k(x0,y0) t++
1
2!
∂f
∂xh +
∂f
∂yk
(2(x0,y0)
t2 + · · · + 1n!
∂f
∂xh +
∂ f
∂yk
(n(x0,y0)
tn+
+ 1
(n + 1)!
∂f
∂xh +
∂f
∂x∂yk
(n+1(x0+hθt,y0+kθt)
tn+1
El valor de f (Q) ≡ f (x0 + h, y0 + k),
se obtiene del desarrollo de McLaurin parat = 1:
F (1) = f (Q) = f (x0+h, y0+k)
= f (x0, y0)+
∂f
∂xh +
∂ f
∂yk
(x0,y0)
+ 1
2!
∂f
∂xh +
∂ f
∂yk
(2(x0,y0)
+
+ · · · + 1n!
∂f
∂xh +
∂ f
∂yk
(n(x0,y0)
+
∂f
∂xh +
∂f
∂yk
(n+1(x0+hθ,y0+kθ)
; 0 < θ
-
8/18/2019 Teoria_Tema_4.pdf
31/32
4.11. FÓRMULA DE TAYLOR PARA FUNCIONES DE DOS VARIABLES.
39
La fórmula de Taylor se generaliza para el caso de k
variables:
f (x1+h1, · · · , xk+hk) = f (x1, x2, · · · ,
xk)+n
m=1
1
m!
∂ f
∂x1h1 + · · · + ∂f
∂xkhk
(n(x1,x2,···,xk)
+
+ 1
(n + 1)!
∂f
∂x1h1 + · · ·+ ∂f
∂xkhk
(n+1(x1+h1θ,x2+h2θ,···,xk+hkθ)
; 0 < θ
-
8/18/2019 Teoria_Tema_4.pdf
32/32
40 CAPÍTULO 4. DERIVADAS PARCIALES.
DIFERENCIABILIDAD.
∂ 3f
∂x3
= 6y2
⇒ ∂ 3f
∂x3(1,1) = 6 ;
∂ 3f
∂y3
= 12
⇒ ∂ 3f
∂y3(1,1) = 12
∂ 2f
∂x∂y =
∂ 2f
∂y∂x = 6x2y ⇒
∂ 2f
∂x∂y
(1,1)
=
∂ 2f
∂y∂x
(1,1)
= 6
∂ 3f
∂x2∂y =
∂ 3f
∂x∂y∂x =
∂ 3f
∂y∂x2 = 12xy
∂ 3f
∂x2∂y
(1,1)
=
∂ 3f
∂x∂y∂x
(1,1)
=
∂ 3f
∂y∂x2
(1,1)
= 12
∂ 3f
∂x∂y2 =
∂ 3f
∂y∂x∂y =
∂ 3f
∂y2∂x = 6x2
∂ 3f ∂x∂y2
(1,1)
= ∂ 3f
∂y∂x∂y
(1,1)
= ∂ 3f
∂y2∂x
(1,1)
= 6
Sustituyendo estos valores, se obtiene el desarrollo:
f (x, y) = 7 + (11h + 8k) + 1
2
14h2 + 14k2 + 12hk
+
1
6
6h3 + 12k3 + 36h2k + 18hk2
f (x, y) = 7 + 11h + 8k + 7h2 + 7k2 +
6hk + h3 + 2k3 + 6h2k + 3hk2
Expresado en potencias de (x− 1) e (y − 1)
, el desarrollo será :
f (x, y) = 7 + 11(x− 1) + 8(y − 1) + 7(x− 1)2 + 7(y − 1)2 +
6(x− 1)(y − 1) ++(x− 1)3 + 2(y − 1)3 + 6(x− 1)2(y − 1) + 3(x− 1)(y
− 1)2
Matemáticas 2º Finanzas. M. Díaz Gabela