Embed Size (px)
Citation preview
1TEORIJA SISTEMA
Uvod 1.1. Istorijski pregled
^ovje~anstvo je kroz istoriju poku{avalo da upravqa svijetom u kome `ivi. Od najranijih dana ~ovjek je spoznao da wegova snaga nije velika u odnosu na svijet oko wega. Mogao je da pre`ivi samo uz mudrost i lukavstvo. Wegova najve}a prednost u odnosu na sva ostala `iva bi}a na Zemqi bila je superiorna inteligencija.
^ovjek kamenog doba je razvio alate i oru`ja od kremena, kamena i kostiju. Tako|e je otkrio da mo`e nau~iti `ivotiwe da slu{aju wegove naredbe. Tako su nastave najranije forme sistema upravqawa. Veoma davno su zaprege uvedeni da preuzmu razli~ite poslove, ukqu~uju}i transport. Pro{lo je dugo vremena prije nego je ~ovjek nau~io da `ivotiwe zamjeni ma{inama.
Najva`niji globalni zahtjevi za opstanak i napredak ~ovje~anstva su usmjereni na:
obezbje|ivawe ~istog vazduha, vode i hrane odlagawe svih vrsta otpadaka na erfikasan na~in i da se
{to je mogu}e vi{e sprije~i zaga|ivawe okoline adekvatno obrazovawe i uvo|ewe tehnolo{kih inovacija,
koje kroz razli~ite forme sistema upravqawadoprinose mawem utro{ku energije.
Fundamentalno je za svaki sistem upravqawa da postoji mogu}nost da se mjeri wegov izlaz i preduzmu upravqa~ka djelovawa ako vrijednost izlaza odstupa od wene `eqene vrijednosti. Ovo name}e nu`nost upotrebe mjernih elemenata. ^ovjek ima mnogo «ugra|enih» senzora koje je na samom po~etku koristio za upravqawe vlastitih aktivnosti (pokreta), aktivnosti drugih i mnogo kasnije upravqa radom ma{ina. Naprimjer, pri upravqawu vozilom, najva`niji senzor je ~ulo vida, ali tako|e ~ulo sluha i mirisa mogu doprinijeti postupcima (aktivnostima) voza~a. Prvi veliki korak u uvo|ewu ma{ina, koji je najavio industrijsku revoluciju, bio je razvoj parne ma{ine. Problem sa kojim su se suo~ili rukovaoci ma{ina toga vremena bio je kako upravqati brzinom obrtawa ma{ine bez сталних intervencija ~ovjeka. Najuspje{niji postupak, me|u mnogobrojnim drugim poku{ajima, bilo je kori{}ewe kupastog klatna, ~iji je ugao nagiwawa bio funkcija (ali ne linearna) od ugaone brzine osovine. Ovaj princip je iskoristio Xems Vat (James Watt) 1769 godine u
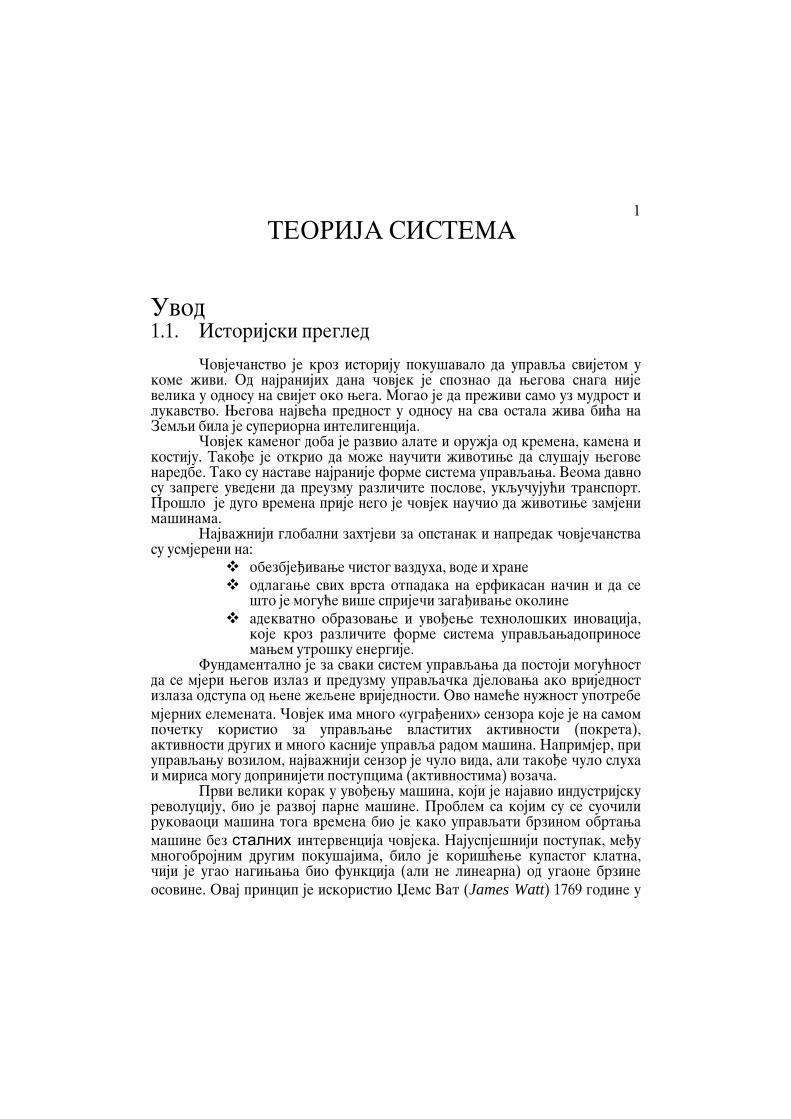
2konstruisawu centrifugalnog regulatora brzine. Ovo se smatra prvim
sistemom za automatsko upravqawe ma{inom. Princip rada Vatovog regulaotora je skiciran na Sl. 1.1. Promjena
brzine okretawa osovine ima za posqedicu promjenu ugla nagiba rotiraju}ik kugli. Ovo daqe prouzrokuje linearno kretawe rukavca koji,
preko ventila, pode{ava protok pare u ma{inu. Vat je bio prakti~ar i nije posvetio mnogo vremena teorijskoj analizi. Ipak, uo~io je da pod odre|enim uslovima ma{ina po~iwe da se pona{a neprihvatqivo, jer brzina osovine osciluje oko wene `eqene vrijednosti. Eliminacija oscilacija, ili kako je mnogo {ire poznato, nestabilnosti, je vrlo va`an aspekt kod projektovawa svih sistema upravqawa. Maksvel (Maxwell) je, u radu objavqenom 1868, pomo}u diferencijalnih jedna~ina opisao pona{awe centrifugalnog regulatora, linearizovao ovaj model u okolini ravnote`nog stawa i pokazao da stabilnost sistema zavisi od toga da li korijeni karakteristi~ne jedna~ine imaju negativne realne dijelove. Problemom odre|ivawa kriterija stabilnosti linearnih sistema bavili su se Hurvic (Hurwitz) (1875) i Rausa (Routh) (1905). Ruski matemeti~ar Qapunov (Лъапунов) (1893), je problem stabilnosti pro{irio na razmatrawe stabilnosti nelinearnih sistema. Osnovni matemati~ki okvir za teorijsku analizu razvili su Laplas (Laplace) (1749-1827) i Furije (Fourier) (1758-1830).
Сл. 1.1
x
ω
Парна машина
Optere-}ewe на осовини
Довод паре
Центрифугалнирегулатор
Вентил
3 Rad u Belovim (Bell) laboratorijama (tridesetih godina dvadesetog vijeka) na poja~ava~ima sa povratnom spregom, zasnovan je na konceptu frekvencijskog odziva i sveden na matemati~ki problem funkcija kompleksnih promjenqivih. Problem je razmatrao Nikvist (Nyquist) (1932) u radu «Regeneration Theory», u kome se obja{wava kako se mo`e odrediti stabilnost sistema kori{tewem metoda u frekvencijskoj oblasti. Analizu su pro{irivali Bode (Bode) (1945) i Nikols (Nichols) kroz narednih 15 godina i postavili temeqe postupaka za projektovawe sistema upravqawa, koji se i danas vrlo {iroko koriste. Drugi va`an pristup projektovawu sistema upravqawa razvio je Ivens (Evans) (1948). Na osnovu radova Maksvela i Rausa, u metodi geometrijskog mjesta korijena (root locus method) Ivens je definisao pravila i tehnike koje omogu}avaju da se promjena korijena karakteristi~ne jedna~ine u zavisnosti od nekog parametra predstave grafi~ki.
1.2 Osnove sistema upravqawa 1.2.1 Ilustracije sistema kroz primjere
Prije definisawa strukture sistema upravqawa neophodno je definisati {ta se podrazumijeva pod pojmom sistem. Sistem ima razli~ita zna~ewa za razli~ite qude i mo`e podrazumijevati iskqu~ivo fizi~ke sisteme kao {to je mehanizovani sto ra~unarski upravqanih (Computer Numerically Controlled – CNC) alatnih ma{ina ili alternativno, postupci neophodni za kupovinu sirovine zajedno sa upravqawem wihovim inventarisawem u sistemu za planirawe potra`we materijala. Me|utim, svi sistemi imaju neka zajedni~ka svojstva. Naprimjer, potrebna je specifikacija ulaza i izlaza za svaki sistem. U slu~aju mehanizovanog stola CNC alatne ma{ine, ulaz mo`e biti snaga motora za pokretawe, a izlazi mogu biti pozicija, brzina i ubrzawe stola. Za sistem planirawa nabavke materijala ulazi treba da ukqu~uju narud`be za prodaju i predikciju prodaje (ugra|ene u glavni plan proizvodwe), evidenciju materijala, dijelova, komponenata i poluproizvoda, popis inventara i informacije koje se odnose na potrebne kapacitete u skladu sa planom. Sistemi planirawa nabavke materijala generi{u razli~ite izlazne izvje{taje koji se koriste u planirawu i upravqawu radom fabrike. Oni ukqu~uju izdavawe naruxbi, status inventara, naruxbe sa prekora~ewem roka i predvi|awe zaliha. Neophodno je precizno definisati ograni~ewa sistema, zajedno sa ulazima i izlazima tako da se
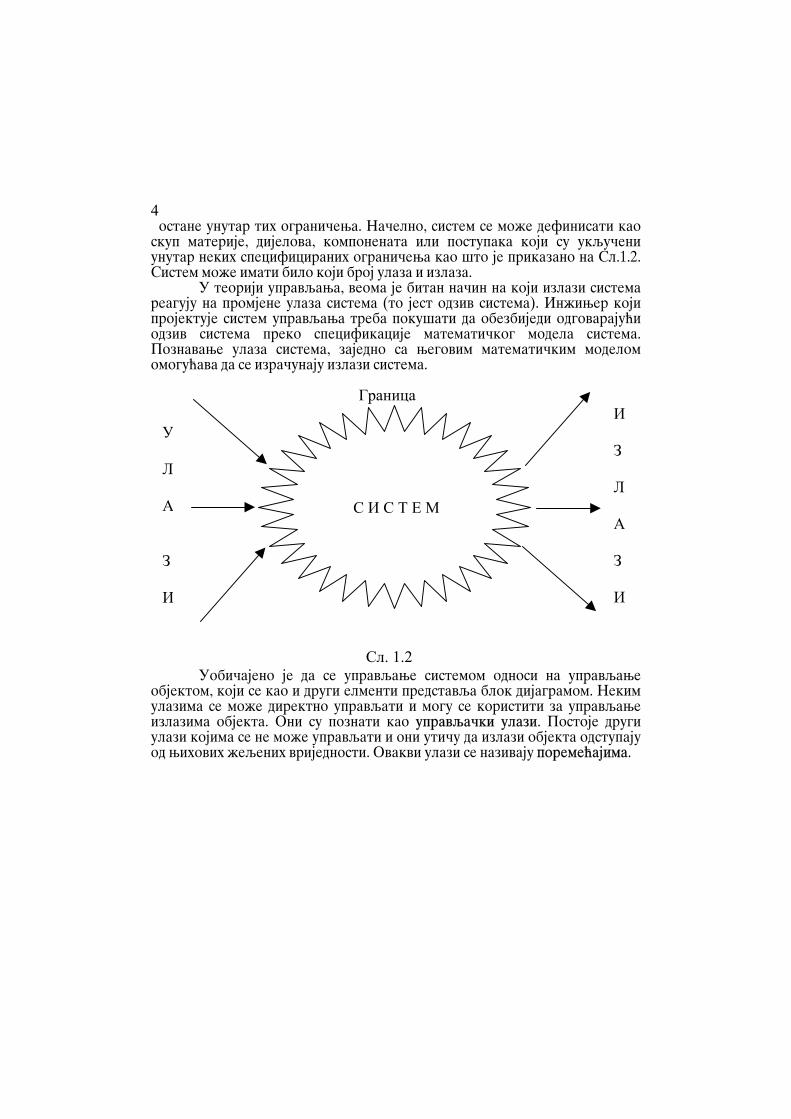
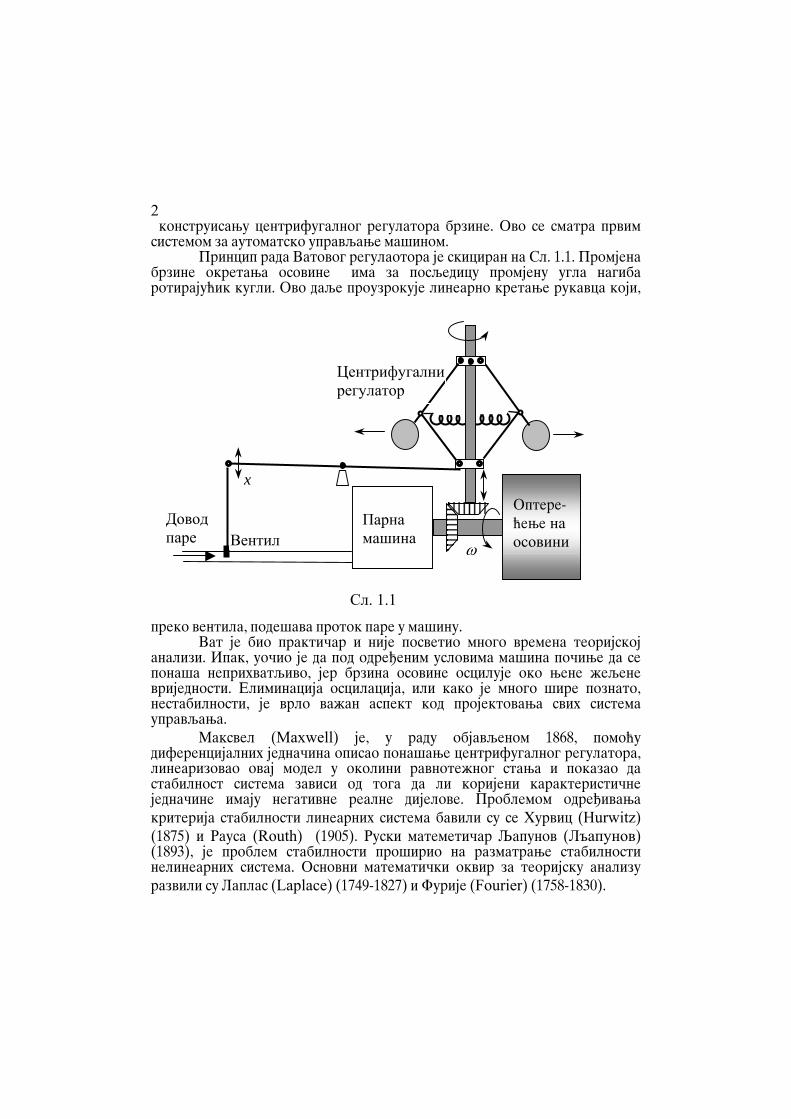
4ostane unutar tih ograni~ewa. Na~elno, sistem se mo`e definisati kao
skup materije, dijelova, komponenata ili postupaka koji su ukqu~eni unutar nekih specificiranih ograni~ewa kao {to je prikazano na Sl.1.2. Sistem mo`e imati bilo koji broj ulaza i izlaza. U teoriji upravqawa, veoma je bitan na~in na koji izlazi sistema reaguju na promjene ulaza sistema (to jest odziv sistema). In`iwer koji projektuje sistem upravqawa treba poku{ati da obezbijedi odgovaraju}i odziv sistema preko specifikacije matemati~kog modela sistema. Poznavawe ulaza sistema, zajedno sa wegovim matemati~kim modelom omogu}ava da se izra~unaju izlazi sistema.
Uobi~ajeno je da se upravqawe sistemom odnosi na upravqawe objektom, koji se kao i drugi elmenti predstavqa blok dijagramom. Nekim ulazima se mo`e direktno upravqati i mogu se koristiti za upravqawe izlazima objekta. Oni su poznati kao upravqa~ki ulazi. Postoje drugi ulazi kojima se ne mo`e upravqati i oni uti~u da izlazi objekta odstupaju od wihovih `eqenih vrijednosti. Ovakvi ulazi se nazivaju poreme}ajima.
У Л А З И
И З Л А З И
С И С Т Е М
Сл. 1.2
Граница
5
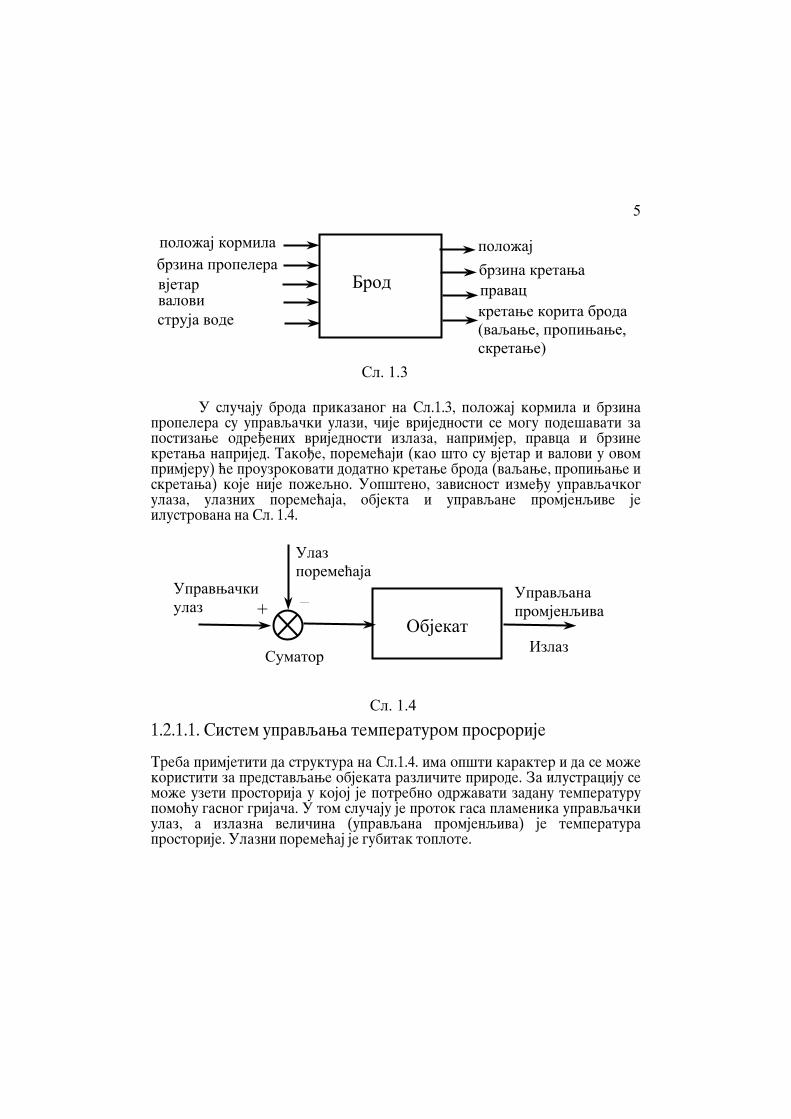
U slu~aju broda prikazanog na Sl.1.3, polo`aj kormila i brzina propelera su upravqa~ki ulazi, ~ije vrijednosti se mogu pode{avati za postizawe odre|enih vrijednosti izlaza, naprimjer, pravca i brzine kretawa naprijed. Tako|e, poreme}aji (kao {to su vjetar i valovi u ovom primjeru) }e prouzrokovati dodatno kretawe broda (vaqawe, propiwawe i skretawa) koje nije po`eqno. Uop{teno, zavisnost izme|u upravqa~kog ulaza, ulaznih poreme}aja, objekta i upravqane promjenqive je ilustrovana na Sl. 1.4.
1.2.1.1. Sistem upravqawa temperaturom prosrorije Treba primjetiti da struktura na Sl.1.4. ima op{ti karakter i da se mo`e koristiti za predstavqawe objekata razli~ite prirode. Za ilustraciju se mo`e uzeti prostorija u kojoj je potrebno odr`avati zadanu temperaturu pomo}u gasnog grija~a. U tom slu~aju je protok gasa plamenika upravqa~ki ulaz, a izlazna veli~ina (upravqana promjenqiva) je temperatura prostorije. Ulazni poreme}aj je gubitak toplote.
Објекат
Управњачки улаз
Улаз поремећаја
Суматор
Управљана промјенљива
Излаз
+ _
Сл. 1.4
Брод
положај кормила брзина пропелера вјетар валови
кретање корита бродa (ваљање, пропињање, скретање)
струја воде
положај брзина кретања правац
Сл. 1.3
6
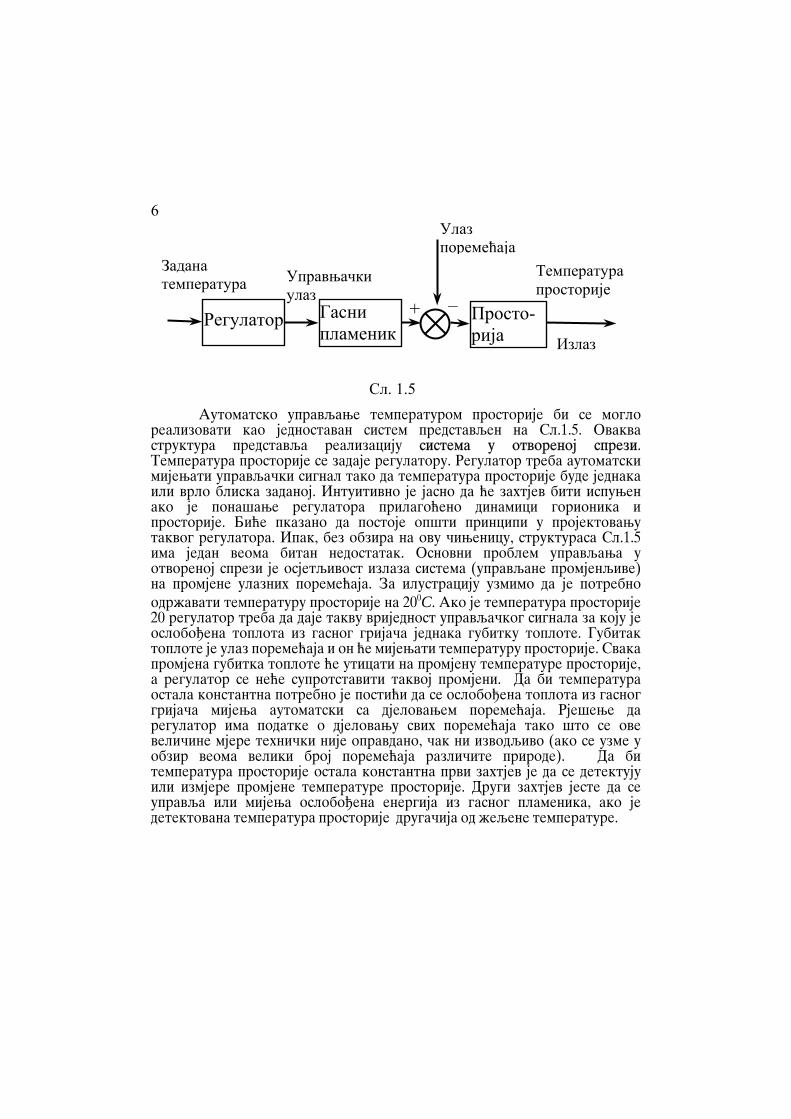
Automatsko upravqawe temperaturom prostorije bi se moglo realizovati kao jednostavan sistem predstavqen na Sl.1.5. Ovakva struktura predstavqa realizaciju sistema u otvorenoj sprezi. Temperatura prostorije se zadaje regulatoru. Regulator treba automatski mijewati upravqa~ki signal tako da temperatura prostorije bude jednaka ili vrlo bliska zadanoj. Intuitivno je jasno da }e zahtjev biti ispuwen ako je pona{awe regulatora prilago}eno dinamici gorionika i prostorije. Bi}e pkazano da postoje op{ti principi u projektovawu takvog regulatora. Ipak, bez obzira na ovu ~iwenicu, strukturasa Sl.1.5 ima jedan veoma bitan nedostatak. Osnovni problem upravqawa u otvorenoj sprezi je osjetqivost izlaza sistema (upravqane promjenqive) na promjene ulaznih poreme}aja. Za ilustraciju uzmimo da je potrebno odr`avati temperaturu prostorije na 200C. Ako je temperatura prostorije 20 regulator treba da daje takvu vrijednost upravqa~kog signala za koju je oslobo|ena toplota iz gasnog grija~a jednaka gubitku toplote. Gubitak toplote je ulaz poreme}aja i on }e mijewati temperaturu prostorije. Svaka promjena gubitka toplote }e uticati na promjenu temperature prostorije, a regulator se ne}e suprotstaviti takvoj promjeni. Da bi temperatura ostala konstantna potrebno je posti}i da se oslobo|ena toplota iz gasnog grija~a mijewa automatski sa djelovawem poreme}aja. Rje{ewe da regulator ima podatke o djelovawu svih poreme}aja tako {to se ove veli~ine mjere tehni~ki nije opravdano, ~ak ni izvodqivo (ako se uzme u obzir veoma veliki broj poreme}aja razli~ite prirode). Da bi temperatura prostorije ostala konstantna prvi zahtjev je da se detektuju ili izmjere promjene temperature prostorije. Drugi zahtjev jeste da se upravqa ili mijewa oslobo|ena energija iz gasnog plamenika, ako je detektovana temperatura prostorije druga~ija od `eqene temperature.
Просто- рија
Управњачки улаз
Улаз поремећаја
Температура просторије
Излаз
+ _
Сл. 1.5
Гасни пламеник
Регулатор
Задана температура
7
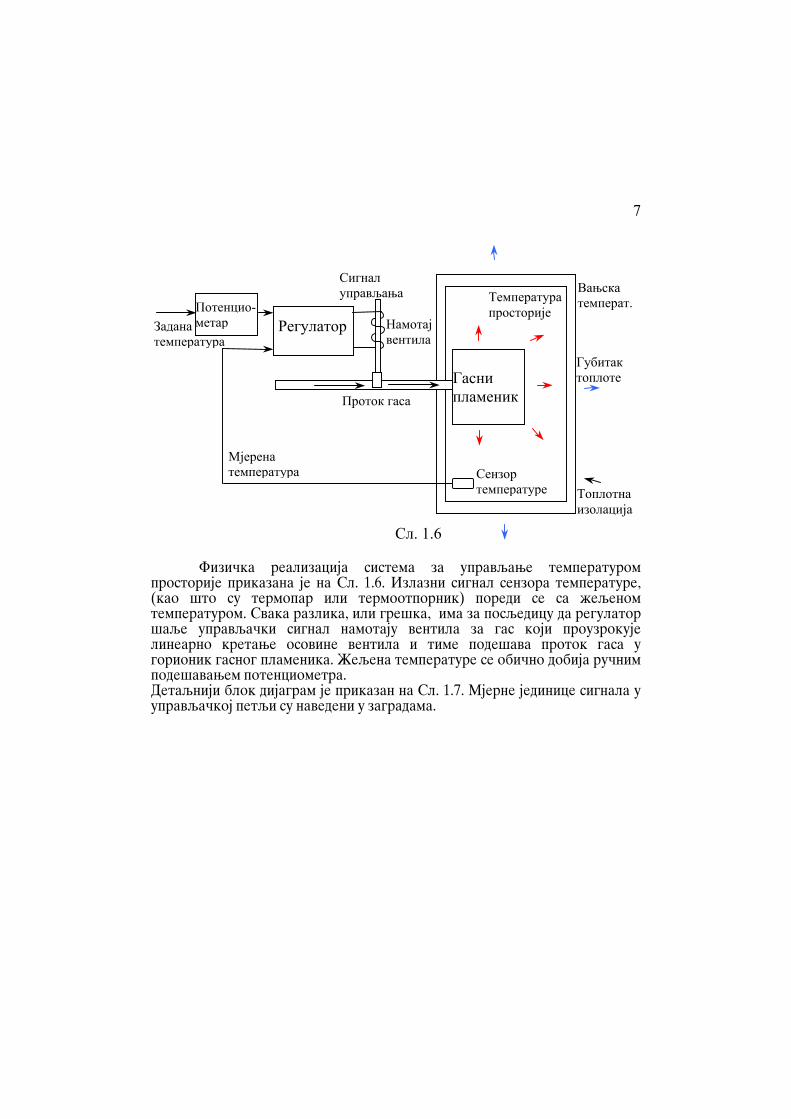
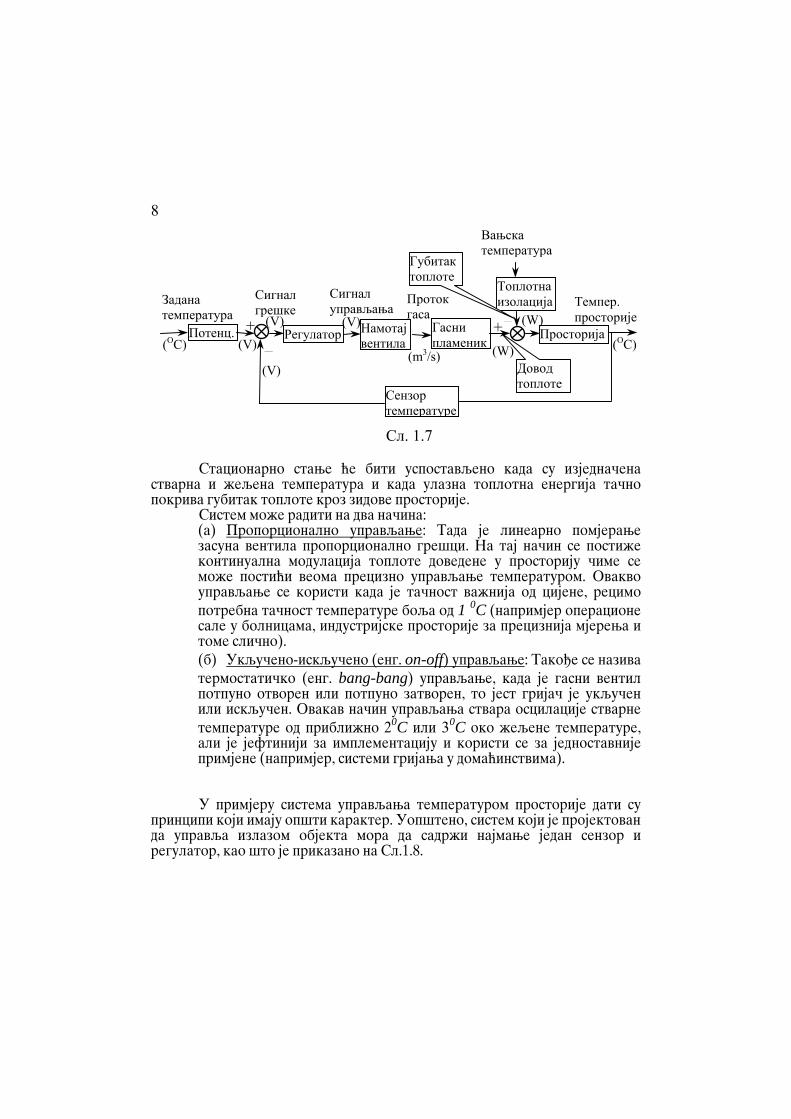
Fizi~ka realizacija sistema za upravqawe temperaturom prostorije prikazana je na Sl. 1.6. Izlazni signal senzora temperature, (kao {to su termopar ili termootpornik) poredi se sa `eqenom temperaturom. Svaka razlika, ili gre{ka, ima za posqedicu da regulator {aqe upravqa~ki signal namotaju ventila za gas koji prouzrokuje linearno kretawe osovine ventila i time pode{ava protok gasa u gorionik gasnog plamenika. @eqena temperature se obi~no dobija ru~nim pode{avawem potenciometra. Detaqniji blok dijagram je prikazan na Sl. 1.7. Mjerne jedinice signala u upravqa~koj petqi su navedeni u zagradama.
Регулатор Потенцио- метар
Гасни пламеник
Сензор температуре
Губитак топлоте
Вањска температ. Температура
просторије Задана температура
Мјерена температура
Сигнал управљања
Намотај вентила
Проток гаса
Топлотна изолација
Сл. 1.6
8
Stacionarno stawe }e biti uspostavqeno kada su izjedna~ena
stvarna i `eqena temperatura i kada ulazna toplotna energija ta~no pokriva gubitak toplote kroz zidove prostorije.
Sistem mo`e raditi na dva na~ina: (a) Proporcionalno upravqawe: Tada je linearno pomjerawe zasuna ventila proporcionalno gre{ci. Na taj na~in se posti`e kontinualna modulacija toplote dovedene u prostoriju ~ime se mo`e posti}i veoma precizno upravqawe temperaturom. Ovakvo upravqawe se koristi kada je ta~nost va`nija od cijene, recimo potrebna ta~nost temperature boqa od 1 0C (naprimjer operacione sale u bolnicama, industrijske prostorije za preciznija mjerewa i tome sli~no). (b) Ukqu~eno-iskqu~eno (eng. on-off) upravqawe: Tako|e se naziva termostati~ko (eng. bang-bang) upravqawe, kada je gasni ventil potpuno otvoren ili potpuno zatvoren, to jest grija~ je ukqu~en ili iskqu~en. Ovakav na~in upravqawa stvara oscilacije stvarne temperature od pribli`no 20C ili 30C oko `eqene temperature, ali je jeftiniji za implementaciju i koristi se za jednostavnije primjene (naprimjer, sistemi grijawa u doma}instvima).
U primjeru sistema upravqawa temperaturom prostorije dati su principi koji imaju op{ti karakter. Uop{teno, sistem koji je projektovan da upravqa izlazom objekta mora da sadr`i najmawe jedan senzor i regulator, kao {to je prikazano na Sl.1.8.
Регулатор Потенц. Гасни пламеник
Сензор температуре
Вањска температура
Темпер. просторије
Задана температура
Сигнал управљања
Намотај вентила
Проток гаса
Топлотнаизолација
Сл. 1.7
Просторија + _
+_
Сигнал грешке
Губитак топлоте
Довод топлоте
(V)
(V)
(V)
(V)
(W)
(W)
(OC) (OC) (m3/s)
9
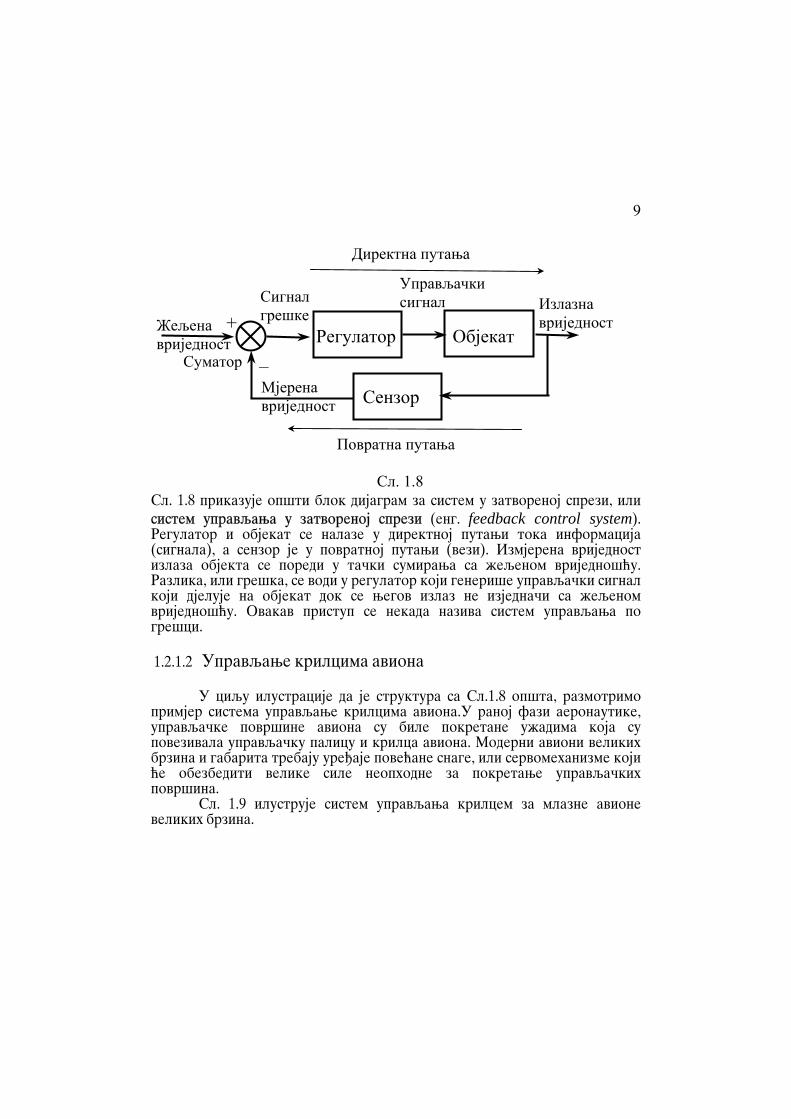
Sl. 1.8 prikazuje op{ti blok dijagram za sistem u zatvorenoj sprezi, ili sistem upravqawa u zatvorenoj sprezi (eng. feedback control system). Regulator i objekat se nalaze u direktnoj putawi toka informacija (signala), a senzor je u povratnoj putawi (vezi). Izmjerena vrijednost izlaza objekta se poredi u ta~ki sumirawa sa `eqenom vrijedno{}u. Razlika, ili gre{ka, se vodi u regulator koji generi{e upravqa~ki signal koji djeluje na objekat dok se wegov izlaz ne izjedna~i sa `eqenom vrijedno{}u. Ovakav pristup se nekada naziva sistem upravqawa po gre{ci. 1.2.1.2 Upravqawe krilcima aviona
U ciqu ilustracije da je struktura sa Sl.1.8 op{ta, razmotrimo primjer sistema upravqawe krilcima aviona.U ranoj fazi aeronautike, upravqa~ke povr{ine aviona su bile pokretane u`adima koja su povezivala upravqa~ku palicu i krilca aviona. Moderni avioni velikih brzina i gabarita trebaju ure|aje pove}ane snage, ili servomehanizme koji }e obezbediti velike sile neophodne za pokretawe upravqa~kih povr{ina.
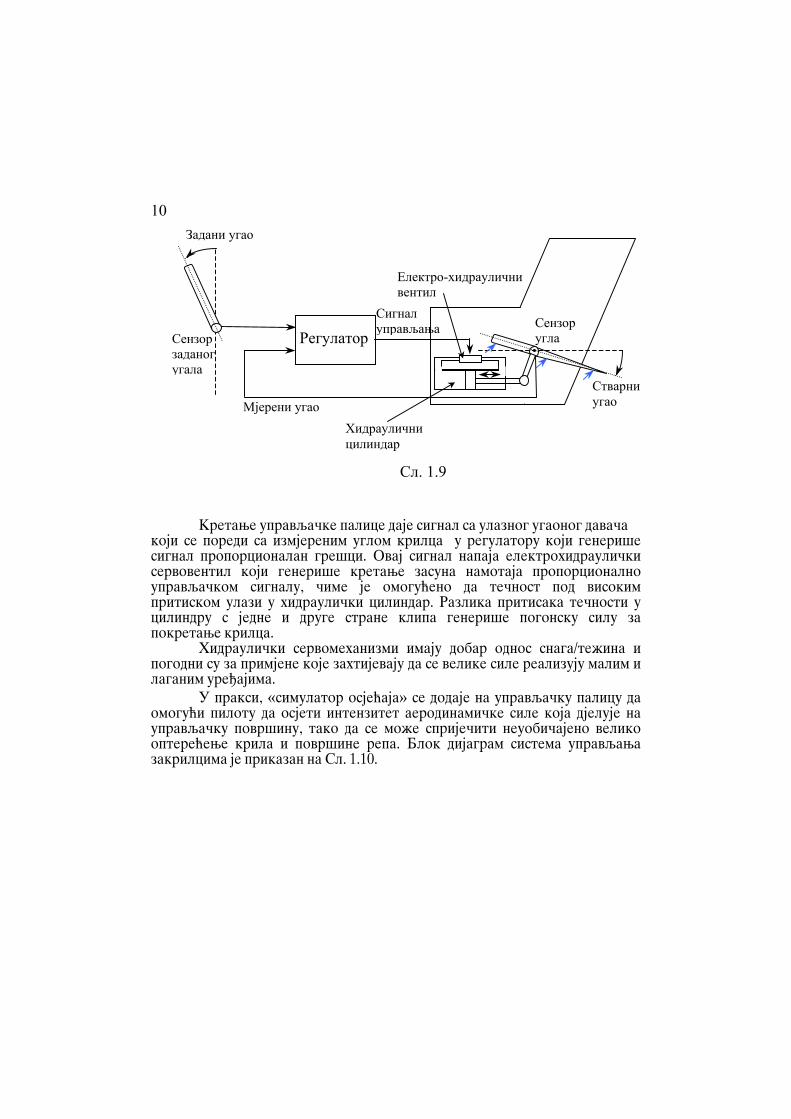
Sl. 1.9 ilustruje sistem upravqawa krilcem za mlazne avione velikih brzina.
Регулатор Жељена вриједност
Сигнал грешке
Суматор
Излазна вриједност
Управљачки сигнал
+
_
Сл. 1.8
Објекат
Сензор
Директна путања
Повратна путања
Мјерена вриједност
10
Kretawe upravqa~ke palice daje signal sa ulaznog ugaonog dava~a
koji se poredi sa izmjerenim uglom krilca u regulatoru koji generi{e signal proporcionalan gre{ci. Ovaj signal napaja elektrohidrauli~ki servoventil koji generi{e kretawe zasuna namotaja proporcionalno upravqa~kom signalu, ~ime je omogu}eno da te~nost pod visokim pritiskom ulazi u hidrauli~ki cilindar. Razlika pritisaka te~nosti u cilindru s jedne i druge strane klipa generi{e pogonsku silu za pokretawe krilca. Hidrauli~ki servomehanizmi imaju dobar odnos snaga/te`ina i pogodni su za primjene koje zahtijevaju da se velike sile realizuju malim i laganim ure|ajima. U praksi, «simulator osje}aja» se dodaje na upravqa~ku palicu da omogu}i pilotu da osjeti intenzitet aerodinami~ke sile koja djeluje na upravqa~ku povr{inu, tako da se mo`e sprije~iti neuobi~ajeno veliko optere}ewe krila i povr{ine repa. Blok dijagram sistema upravqawa zakrilcima je prikazan na Sl. 1.10.
Регулатор
Стварни угао
Губитак топлоте
Задани угао
Мјерени угао
Сл. 1.9
Сигнал управљања
Сензор заданог угала
Сензор угла
Електро-хидраулични вентил
Хидраулични цилиндар
11
1.2.1.3 Ra~unarski upravqana (eng. Computer Numerically Controlled – CNC) alatna ma{ina
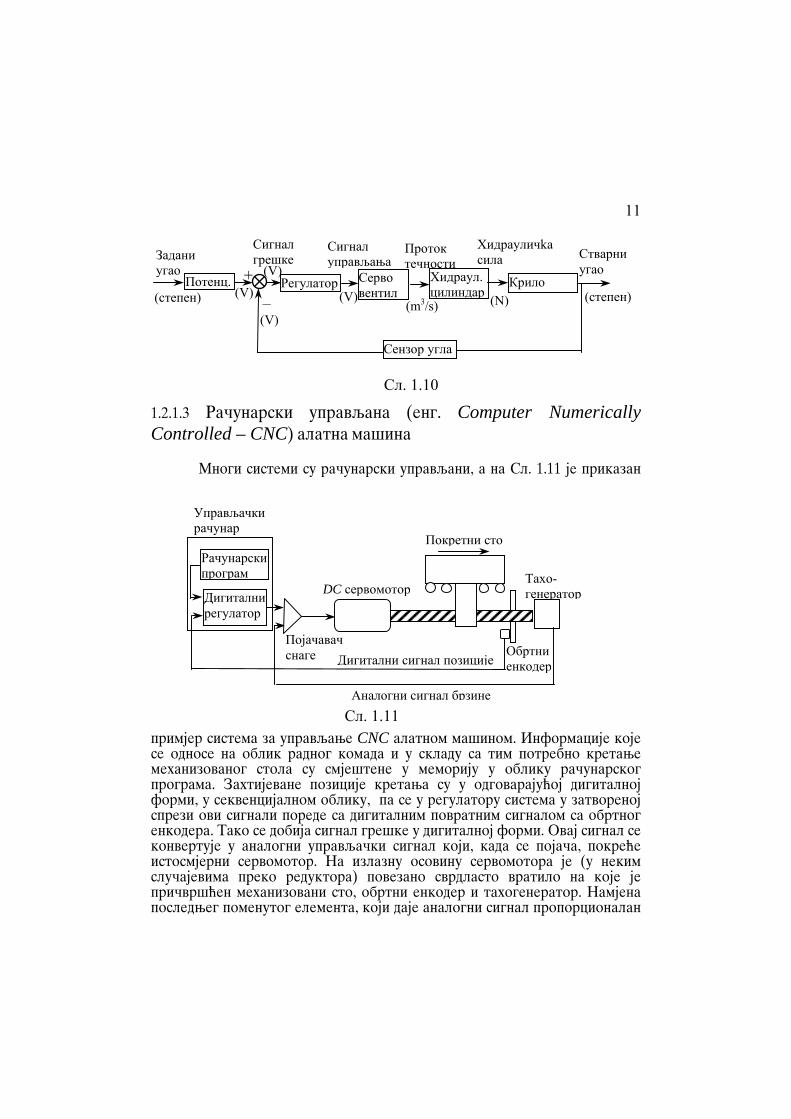
Mnogi sistemi su ra~unarski upravqani, a na Sl. 1.11 je prikazan
primjer sistema za upravqawe CNC alatnom ma{inom. Informacije koje se odnose na oblik radnog komada i u skladu sa tim potrebno kretawe mehanizovanog stola su smje{tene u memoriju u obliku ra~unarskog programa. Zahtijevane pozicije kretawa su u odgovaraju}oj digitalnoj formi, u sekvencijalnom obliku, pa se u regulatoru sistema u zatvorenoj sprezi ovi signali porede sa digitalnim povratnim signalom sa obrtnog enkodera. Tako se dobija signal gre{ke u digitalnoj formi. Ovaj signal se konvertuje u analogni upravqa~ki signal koji, kada se poja~a, pokre}e istosmjerni servomotor. Na izlaznu osovinu servomotora je (u nekim slu~ajevima preko reduktora) povezano svrdlasto vratilo na koje je pri~vr{}en mehanizovani sto, obrtni enkoder i tahogenerator. Namjena posledweg pomenutog elementa, koji daje analogni signal proporcionalan
Дигитални регулатор
Рачунарски програм
Обртни енкодер
Тахо- генератор
Покретни сто
Управљачки рачунар
Дигитални сигнал позиције
DC сервомотор
Појачавач снаге
Сл. 1.11 Аналогни сигнал брзине
Регулатор Потенц. Хидраул.цилиндар
Сензор угла
Стварни угао
Задани угао
Сигнал управљања
Серво вентил
Проток течности
Сл. 1.10
Крило + _
Сигнал грешке
(V)
(V)
(V)
(V) (N)(степен) (m3/s)(степен)
Хидрауличkа сила
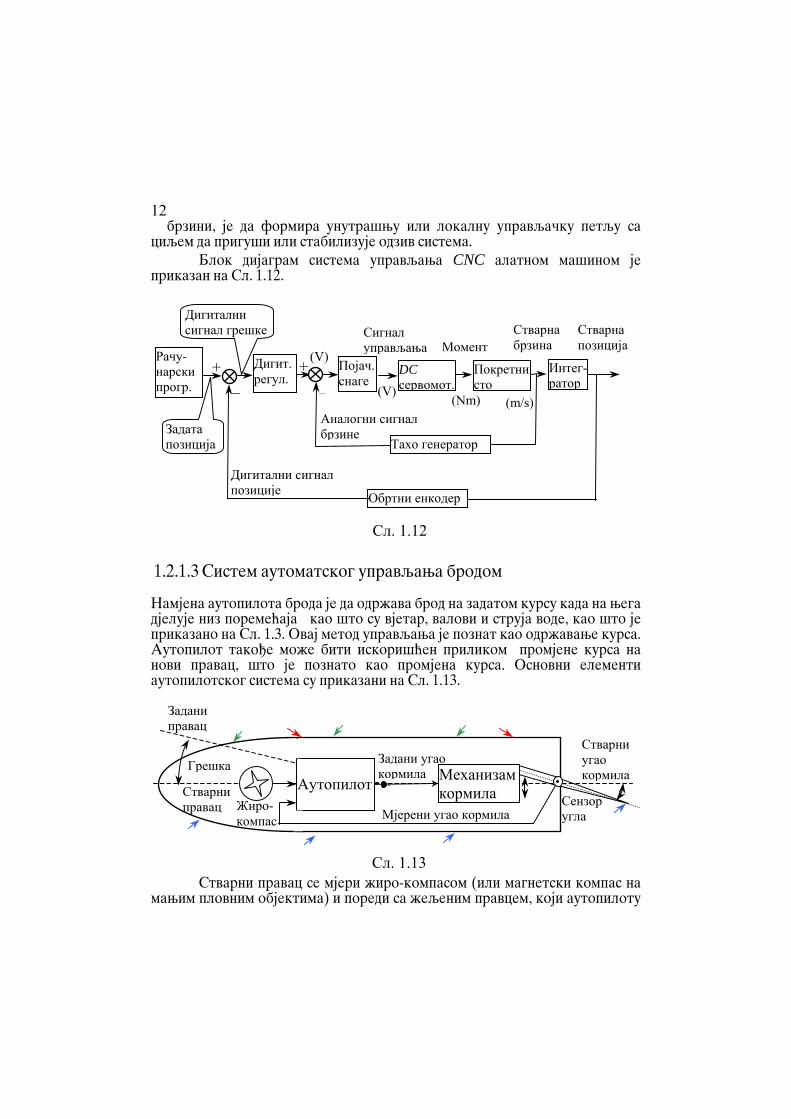
12brzini, je da formira unutra{wu ili lokalnu upravqa~ku petqu sa
ciqem da prigu{i ili stabilizuje odziv sistema. Blok dijagram sistema upravqawa CNC alatnom ma{inom je prikazan na Sl. 1.12.
1.2.1.3 Sistem automatskog upravqawa brodom Namjena autopilota broda je da odr`ava brod na zadatom kursu kada na wega djeluje niz poreme}aja kao {to su vjetar, valovi i struja vode, kao {to je prikazano na Sl. 1.3. Ovaj metod upravqawa je poznat kao odr`avawe kursa. Autopilot tako|e mo`e biti iskori{}en prilikom promjene kursa na novi pravac, {to je poznato kao promjena kursa. Osnovni elementi autopilotskog sistema su prikazani na Sl. 1.13.
Stvarni pravac se mjeri `iro-kompasom (ili magnetski kompas na mawim plovnim objektima) i poredi sa `eqenim pravcem, koji autopilotu
Дигит. регул.
Рачу-нарски прогр.
DC сервомот.
Тахо генератор
Стварна брзина
Сигнал управљања
Појач. снаге
Сл. 1.12
Покретни сто
+ _
(V)
(V)(Nm) (m/s)
МоментИнтег-ратор
Дигитални сигнал позиције
_ +
Стварна позиција
Обртни енкодер
Аналогни сигнал брзине
Дигитални сигнал грешке
Задата позиција
Стварни угао кормила
Задани правац
Мјерени угао кормила
Сл. 1.13
Жиро- компас
Сензор угла
Грешка Аутопилот Механизам
кормила
Задани угаокормила
Стварниправац
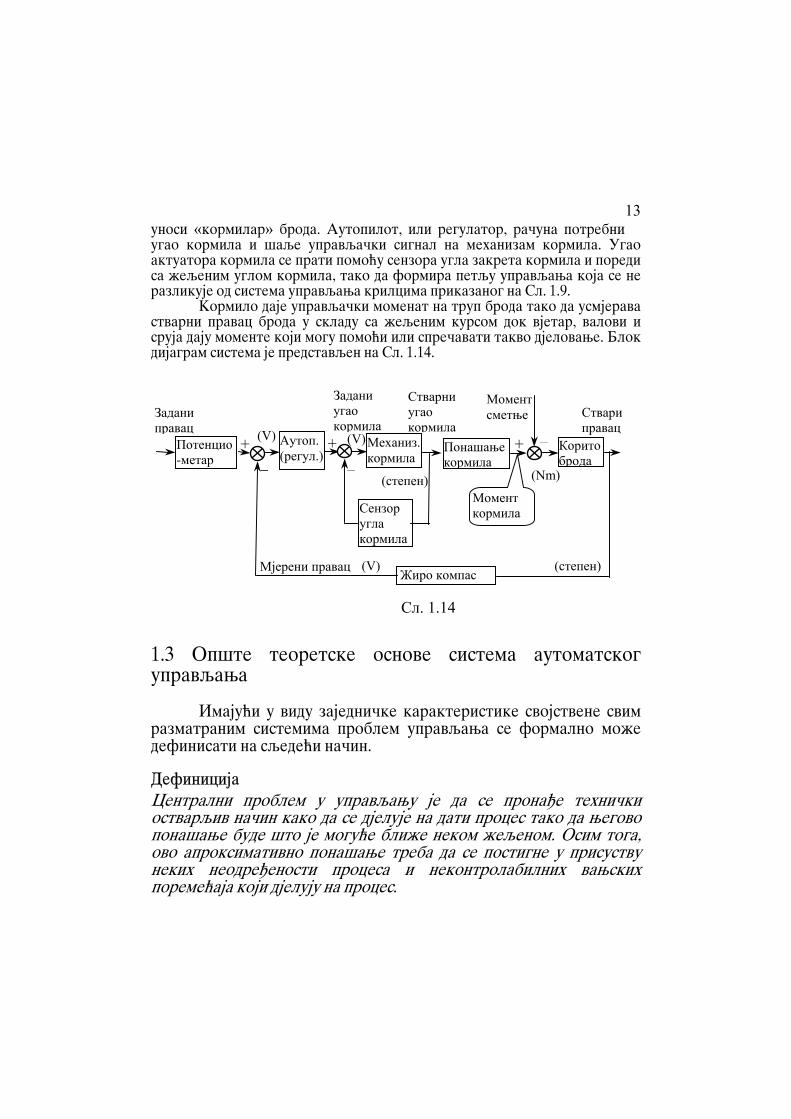
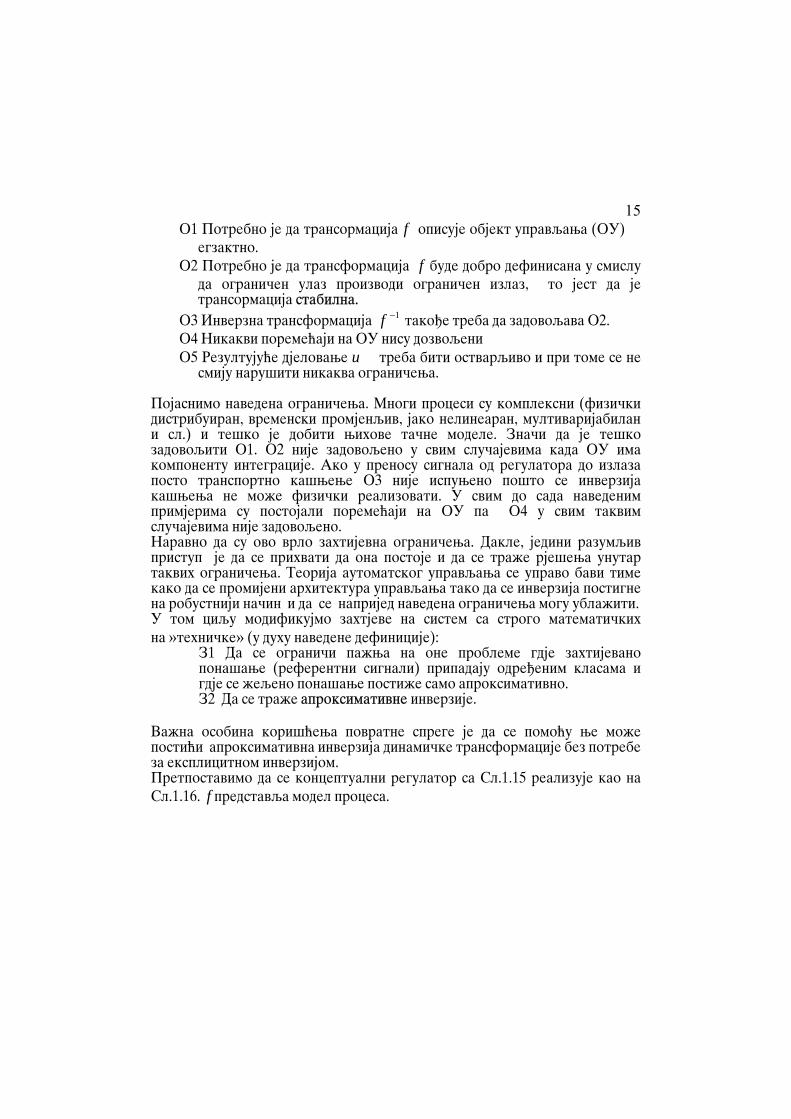
13unosi «kormilar» broda. Autopilot, ili regulator, ra~una potrebni ugao kormila i {aqe upravqa~ki signal na mehanizam kormila. Ugao aktuatora kormila se prati pomo}u senzora ugla zakreta kormila i poredi sa `eqenim uglom kormila, tako da formira petqu upravqawa koja se ne razlikuje od sistema upravqawa krilcima prikazanog na Sl. 1.9. Kormilo daje upravqa~ki momenat na trup broda tako da usmjerava stvarni pravac broda u skladu sa `eqenim kursom dok vjetar, valovi i sruja daju momente koji mogu pomo}i ili spre~avati takvo djelovawe. Blok dijagram sistema je predstavqen na Sl. 1.14.
1.3 Op{te teoretske osnove sistema automatskog upravqawa Imaju}i u vidu zajedni~ke karakteristike svojstvene svim razmatranim sistemima problem upravqawa se formalno mo`e definisati na sqede}i na~in.
Definicija Centralni problem u upravqawu je da se prona|e tehni~ki ostvarqiv na~in kako da se djeluje na dati proces tako da wegovo pona{awe bude {to je mogu}e bli`e nekom `eqenom. Osim toga, ovo aproksimativno pona{awe treba da se postigne u prisustvu nekih neodre|enosti procesa i nekontrolabilnih vawskih poreme}aja koji djeluju na proces.
Аутоп. (регул.)
Потенцио-метар
Сензор угла кормила
Стварни угао кормила
Механиз. кормила
Сл. 1.14
Понашање кормила
+ _
(V)
(степен) (Nm)
Корито брода
Мјерени правац
_ +
Ствари правац
Жиро компас
Задани правац
(V)
Задани угао кормила
Момент сметње
_ +
(степен)
Момент кормила
(V)

14Poku{ajmo rje{ewe u smislu gorwe definicije dobiti pomo}u
inverzije. Da bi opisali rje{ewe problema upravqawa preko inverzije pretpostavi}emo sqede}e:
• Da znamo `eqeno pona{awe izlaza.
• Da znamo kakav efekat na izlazu izaziva neko djelovawe na ulazu sistema.
Izrazimo pretpostavke odgovaraju}im signalima i relacijama izme|u tih signala. Neka je zahtijevano pona{awe specificirano pomo}u skalarnog referentnog signala r(t) koji se odnosi na poseban izlaz procesa y(t). Recimo da tako|e imamo na raspolagawu jednu manipulativnu promjenqivu
u(t). Ozna~i}emo sa y funkciju vremena tj. { }Rttyy ∈= :)( . Tako|e }emo
sa uf ozna~iti nelinearno preslikavawe od u na y. Neka je relacija izme|u ulaza i izlaza poznata i data sa
ufy =
gdje f ozna~ava ulazno-izlaznu transformaciju objekta upravqawa. Ovom relacijom je ustvari dat model OU. Problem upravqava je da se prona|e na~in kako da se generi{e u da bi se postiglo da je y=r. Tada jednostavno treba odrediti inverziju relacije izme|u ulaza i izlaza sistema kako bi znali koje ulazno djelovawe izaziva `eqeno pona{awe na izlazu. U duhu inverzije, direktno rje{ewe se dobija iz uslova
ufry ==
iz kojeg se dobija zakon upravqawa kao rje{ewe za u(t), to jest
rfu 1−= Ova ideja je ilustrovana na Sl. 1. 15, gdje se tako|e pretpostavqa mjerewe efekta poreme}aja na izlazu.
Rje{ewe je jednostavno, ali ono pretpostavqa stroga ograni~ewa kao {to su
Konceptualni regulator Objekat upravqawa
Sl.1. 15
15O1 Potrebno je da transormacija f opisuje objekt upravqawa (OU)
egzaktno. O2 Potrebno je da transformacija f bude dobro definisana u smislu
da ograni~en ulaz proizvodi ograni~en izlaz, to jest da je transormacija stabilna.
O3 Inverzna transformacija 1−f tako|e treba da zadovoqava O2. O4 Nikakvi poreme}aji na OU nisu dozvoqeni O5 Rezultuju}e djelovawe u treba biti ostvarqivo i pri tome se ne
smiju naru{iti nikakva ograni~ewa. Pojasnimo navedena ograni~ewa. Mnogi procesi su kompleksni (fizi~ki distribuiran, vremenski promjenqiv, jako nelinearan, multivarijabilan i sl.) i te{ko je dobiti wihove ta~ne modele. Zna~i da je te{ko zadovoqiti O1. O2 nije zadovoqeno u svim slu~ajevima kada OU ima komponentu integracije. Ako u prenosu signala od regulatora do izlaza posto transportno ka{wewe O3 nije ispuweno po{to se inverzija ka{wewa ne mo`e fizi~ki realizovati. U svim do sada navedenim primjerima su postojali poreme}aji na OU pa O4 u svim takvim slu~ajevima nije zadovoqeno. Naravno da su ovo vrlo zahtijevna ograni~ewa. Dakle, jedini razumqiv pristup je da se prihvati da ona postoje i da se tra`e rje{ewa unutar takvih ograni~ewa. Teorija automatskog upravqawa se upravo bavi time kako da se promijeni arhitektura upravqawa tako da se inverzija postigne na robustniji na~in i da se naprijed navedena ograni~ewa mogu ubla`iti. U tom ciqu modifikujmo zahtjeve na sistem sa strogo matemati~kih na »tehni~ke» (u duhu navedene definicije):
Z1 Da se ograni~i pa`wa na one probleme gdje zahtijevano pona{awe (referentni signali) pripadaju odre|enim klasama i gdje se `eqeno pona{awe posti`e samo aproksimativno. Z2 Da se tra`e aproksimativne inverzije.
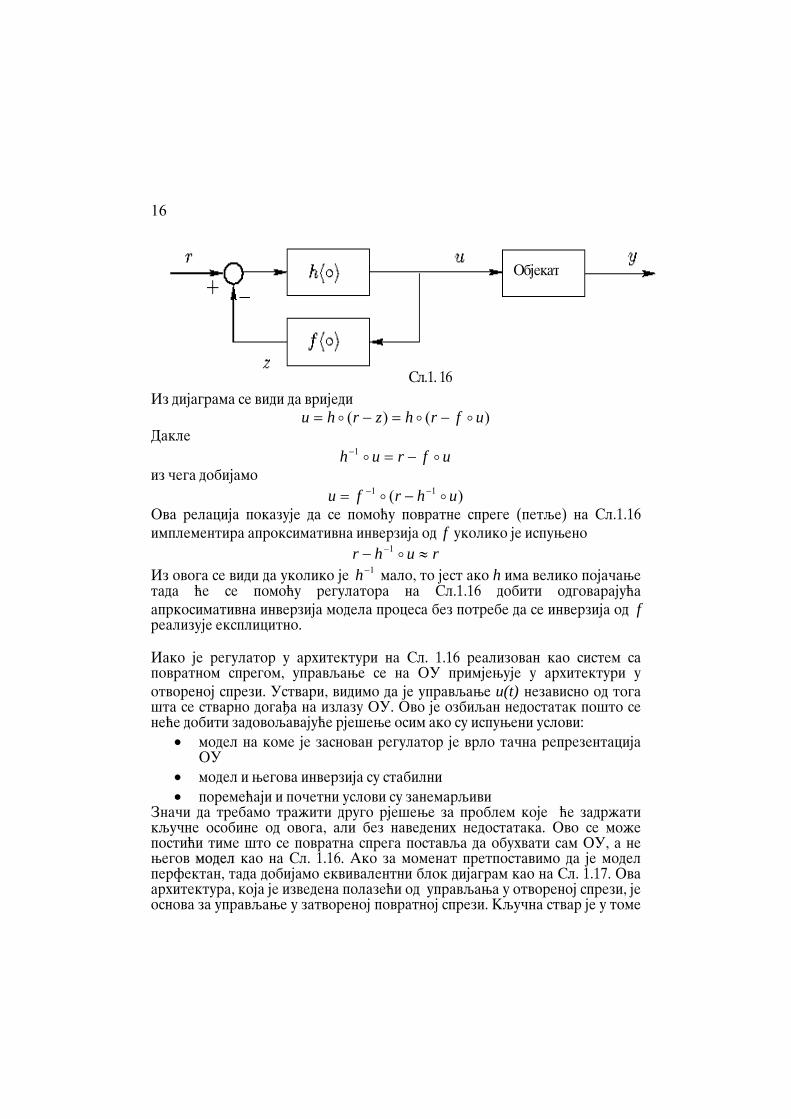
Va`na osobina kori{}ewa povratne sprege je da se pomo}u we mo`e posti}i aproksimativna inverzija dinami~ke transformacije bez potrebe za eksplicitnom inverzijom. Pretpostavimo da se konceptualni regulator sa Sl.1.15 realizuje kao na Sl.1.16. f predstavqa model procesa.
16
Iz dijagrama se vidi da vrijedi )()( ufrhzrhu −=−=
Dakle
ufruh −=−1 iz ~ega dobijamo
)( 11 uhrfu −− −= Ova relacija pokazuje da se pomo}u povratne sprege (petqe) na Sl.1.16 implementira aproksimativna inverzija od f ukoliko je ispuweno
ruhr ≈− −1 Iz ovoga se vidi da ukoliko je 1−h malo, to jest ako h ima veliko poja~awe tada }e se pomo}u regulatora na Sl.1.16 dobiti odgovaraju}a aprkosimativna inverzija modela procesa bez potrebe da se inverzija od f realizuje eksplicitno. Iako je regulator u arhitekturi na Sl. 1.16 realizovan kao sistem sa povratnom spregom, upravqawe se na OU primjewuje u arhitekturi u otvorenoj sprezi. Ustvari, vidimo da je upravqawe u(t) nezavisno od toga {ta se stvarno doga|a na izlazu OU. Ovo je ozbiqan nedostatak po{to se ne}e dobiti zadovoqavaju}e rje{ewe osim ako su ispuweni uslovi:
• model na kome je zasnovan regulator je vrlo ta~na reprezentacija OU
• model i wegova inverzija su stabilni
• poreme}aji i po~etni uslovi su zanemarqivi Zna~i da trebamo tra`iti drugo rje{ewe za problem koje }e zadr`ati kqu~ne osobine od ovoga, ali bez navedenih nedostataka. Ovo se mo`e posti}i time {to se povratna sprega postavqa da obuhvati sam OU, a ne wegov model kao na Sl. 1.16. Ako za momenat pretpostavimo da je model perfektan, tada dobijamo ekvivalentni blok dijagram kao na Sl. 1.17. Ova arhitektura, koja je izvedena polaze}i od upravqawa u otvorenoj sprezi, je osnova za upravqawe u zatvorenoj povratnoj sprezi. Kqu~na stvar je u tome
Objekat
Sl.1. 16
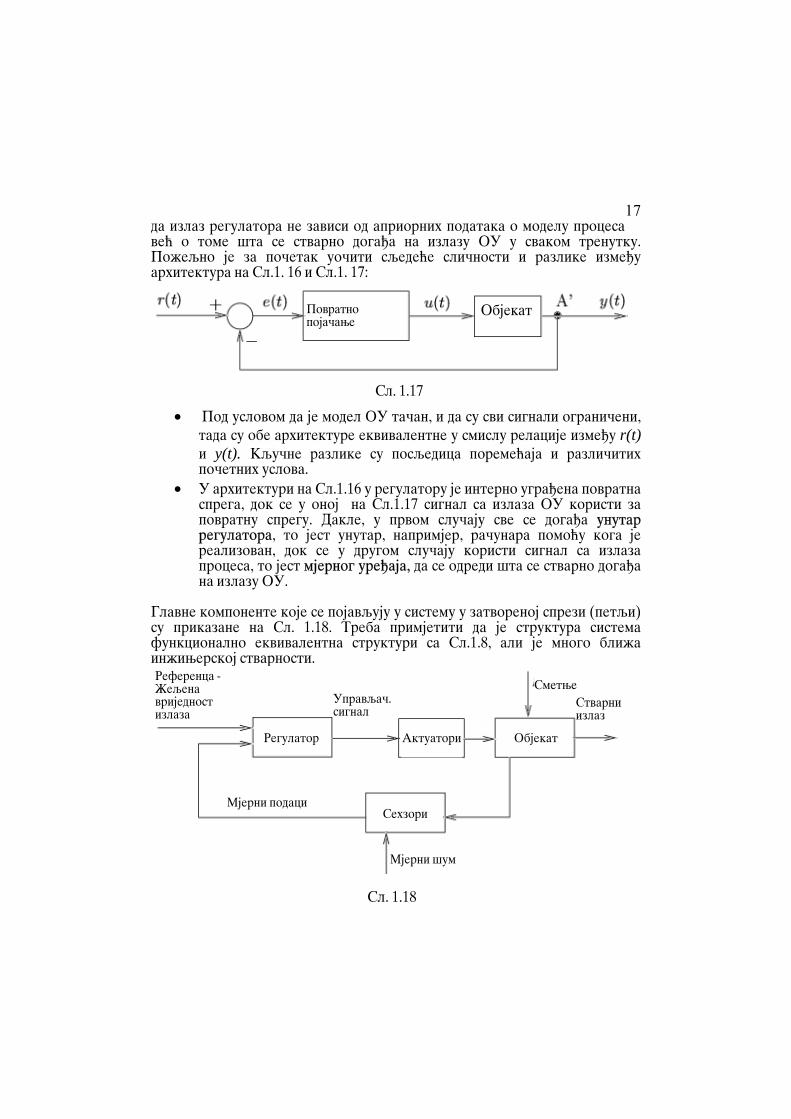
17da izlaz regulatora ne zavisi od apriornih podataka o modelu procesa ve} o tome {ta se stvarno doga|a na izlazu OU u svakom trenutku. Po`eqno je za po~etak uo~iti sqede}e sli~nosti i razlike izme|u arhitektura na Sl.1. 16 i Sl.1. 17:
Povratno poja~awe
Objekat
Sl. 1.17
• Pod uslovom da je model OU ta~an, i da su svi signali ograni~eni, tada su obe arhitekture ekvivalentne u smislu relacije izme|u r(t) i y(t). Kqu~ne razlike su posqedica poreme}aja i razli~itih po~etnih uslova.
• U arhitekturi na Sl.1.16 u regulatoru je interno ugra|ena povratna sprega, dok se u onoj na Sl.1.17 signal sa izlaza OU koristi za povratnu spregu. Dakle, u prvom slu~aju sve se doga|a unutar regulatora, to jest unutar, naprimjer, ra~unara pomo}u koga je realizovan, dok se u drugom slu~aju koristi signal sa izlaza procesa, to jest mjernog ure|aja, da se odredi {ta se stvarno doga|a na izlazu OU.
Glavne komponente koje se pojavquju u sistemu u zatvorenoj sprezi (petqi) su prikazane na Sl. 1.18. Treba primjetiti da je struktura sistema funkcionalno ekvivalentna strukturi sa Sl.1.8, ali je mnogo bli`a in`iwerskoj stvarnosti. Referenca - @eqena vrijednost izlaza
Regulator
Upravqa~. signal
Aktuatori Objekat
Sehzori
Mjerni podaci
Mjerni {um
Smetwe
Stvarni izlaz
Sl. 1.18
181.4 Kompromisi kod izbora poja~awa sistema
upravqawa u zatvorenoj sprezi
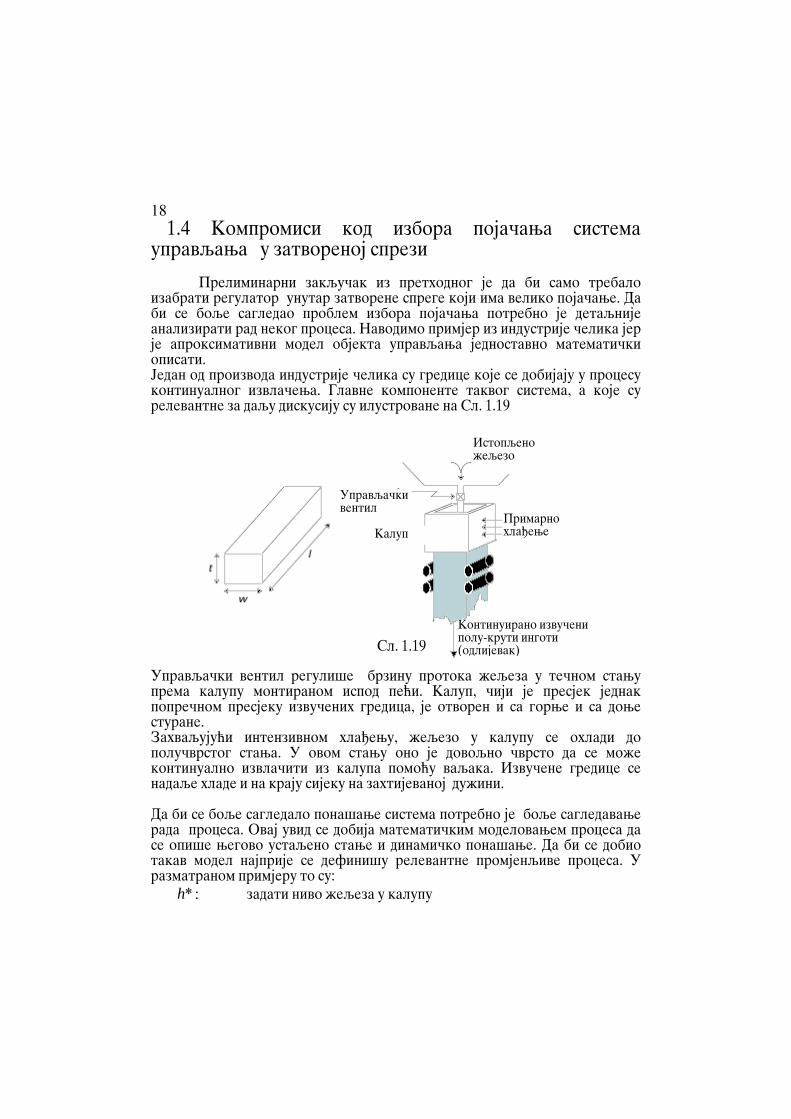
Preliminarni zakqu~ak iz prethodnog je da bi samo trebalo izabrati regulator unutar zatvorene sprege koji ima veliko poja~awe. Da bi se boqe sagledao problem izbora poja~awa potrebno je detaqnije analizirati rad nekog procesa. Navodimo primjer iz industrije ~elika jer je aproksimativni model objekta upravqawa jednostavno matemati~ki opisati. Jedan od proizvoda industrije ~elika su gredice koje se dobijaju u procesu kontinualnog izvla~ewa. Glavne komponente takvog sistema, a koje su relevantne za daqu diskusiju su ilustrovane na Sl. 1.19
Upravqa~ki ventil
Primarno hla|ewe Kalup
Istopqeno `eqezo
Kontinuirano izvu~eni polu-kruti ingoti (odlijevak)Sl. 1.19
Upravqa~ki ventil reguli{e brzinu protoka `eqeza u te~nom stawu prema kalupu montiranom ispod pe}i. Kalup, ~iji je presjek jednak popre~nom presjeku izvu~enih gredica, je otvoren i sa gorwe i sa dowe styrane. Zahvaquju}i intenzivnom hla|ewu, `eqezo u kalupu se ohladi do polu~vrstog stawa. U ovom stawu ono je dovoqno ~vrsto da se mo`e kontinualno izvla~iti iz kalupa pomo}u vaqaka. Izvu~ene gredice se nadaqe hlade i na kraju sijeku na zahtijevanoj du`ini. Da bi se boqe sagledalo pona{awe sistema potrebno je boqe sagledavawe rada procesa. Ovaj uvid se dobija matemati~kim modelovawem procesa da se opi{e wegovo ustaqeno stawe i dinami~ko pona{awe. Da bi se dobio takav model najprije se defini{u relevantne promjenqive procesa. U razmatranom primjeru to su:
:*h zadati nivo `eqeza u kalupu
19:)(th stvarni nivo `eqeza u kalupu
:)(tv pozicija ventila
:)(tσ brzina izvla~ewa
:)(tqul ulazni protok materije u kalup
:)(tqiz izlazni protok materije iz kalupa
Na osnovu zakona o odr`awu materije imamo
∫∞−
− −=t
izul dqqAth τττ ))()(()( 1
gdje je A popre~ni presjek kalupa. Daqe }emo tako|e pretpostaviti da su mjerewa pozicije v(t) i brzine izvla~ewa )(tσ tako kalibrisana da vrijedi
)()()()(tqttqtv
iz
ul
==
σ
Dakle, uz jedini~ni presjek A=1, model procesa postaje
ττστ dvtht
∫∞−
−= ))()(()(
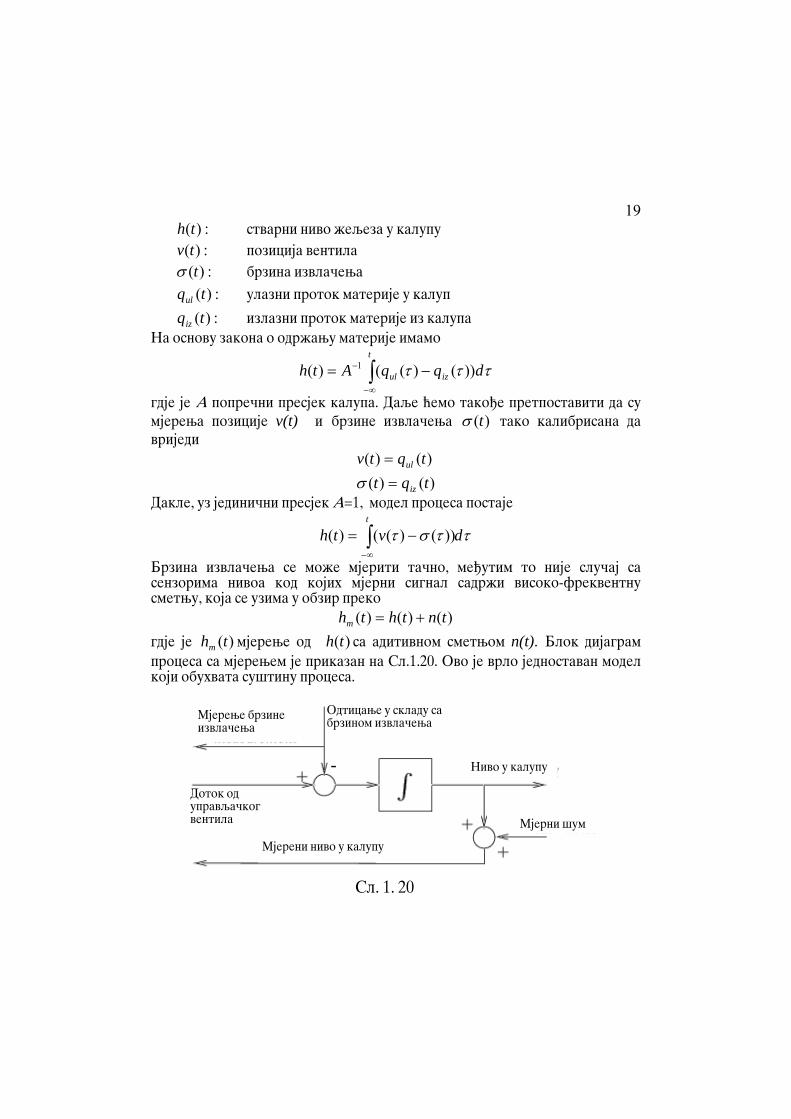
Brzina izvla~ewa se mo`e mjeriti ta~no, me|utim to nije slu~aj sa senzorima nivoa kod kojih mjerni signal sadr`i visoko-frekventnu smetwu, koja se uzima u obzir preko
)()()( tnththm +=
gdje je )(thm mjerewe od )(th sa aditivnom smetwom n(t). Blok dijagram
procesa sa mjerewem je prikazan na Sl.1.20. Ovo je vrlo jednostavan model koji obuhvata su{tinu procesa.
Mjerewe brzine izvla~ewa
Odticawe u skladu sa brzinom izvla~ewa
Dotok od upravqa~kog ventila
Nivo u kalupu
Mjerni {um
Mjereni nivo u kalupu
Sl. 1. 20
-
20
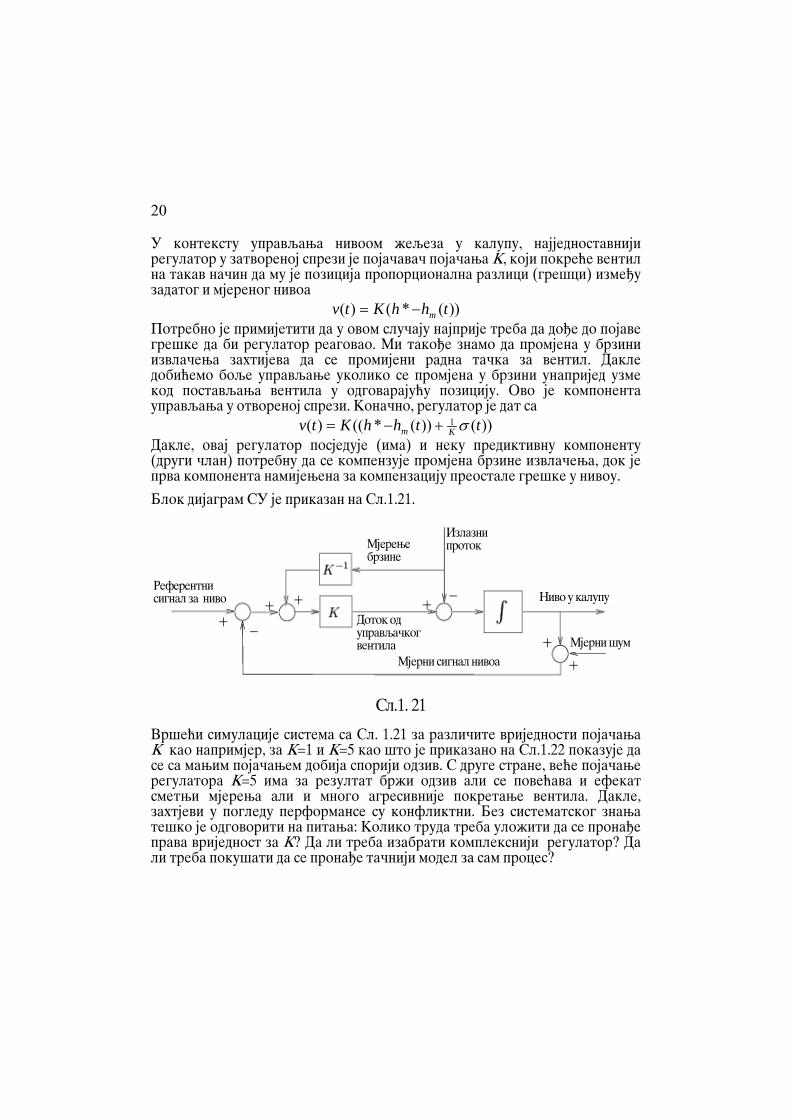
U kontekstu upravqawa nivoom `eqeza u kalupu, najjednostavniji regulator u zatvorenoj sprezi je poja~ava~ poja~awa K, koji pokre}e ventil na takav na~in da mu je pozicija proporcionalna razlici (gre{ci) izme|u zadatog i mjerenog nivoa
))(*()( thhKtv m−=
Potrebno je primijetiti da u ovom slu~aju najprije treba da do|e do pojave gre{ke da bi regulator reagovao. Mi tako|e znamo da promjena u brzini izvla~ewa zahtijeva da se promijeni radna ta~ka za ventil. Dakle dobi}emo boqe upravqawe ukoliko se promjena u brzini unaprijed uzme kod postavqawa ventila u odgovaraju}u poziciju. Ovo je komponenta upravqawa u otvorenoj sprezi. Kona~no, regulator je dat sa
))())(*(()( 1 tthhKtv Km σ+−=
Dakle, ovaj regulator posjeduje (ima) i neku prediktivnu komponentu (drugi ~lan) potrebnu da se kompenzuje promjena brzine izvla~ewa, dok je prva komponenta namijewena za kompenzaciju preostale gre{ke u nivou.
Blok dijagram SU je prikazan na Sl.1.21.
Mjerewe brzine
Izlazni protok
Referentni signal za nivo
Dotok od upravqa~kog ventila
Nivo u kalupu
Mjerni {um
Mjerni signal nivoa
Sl.1. 21
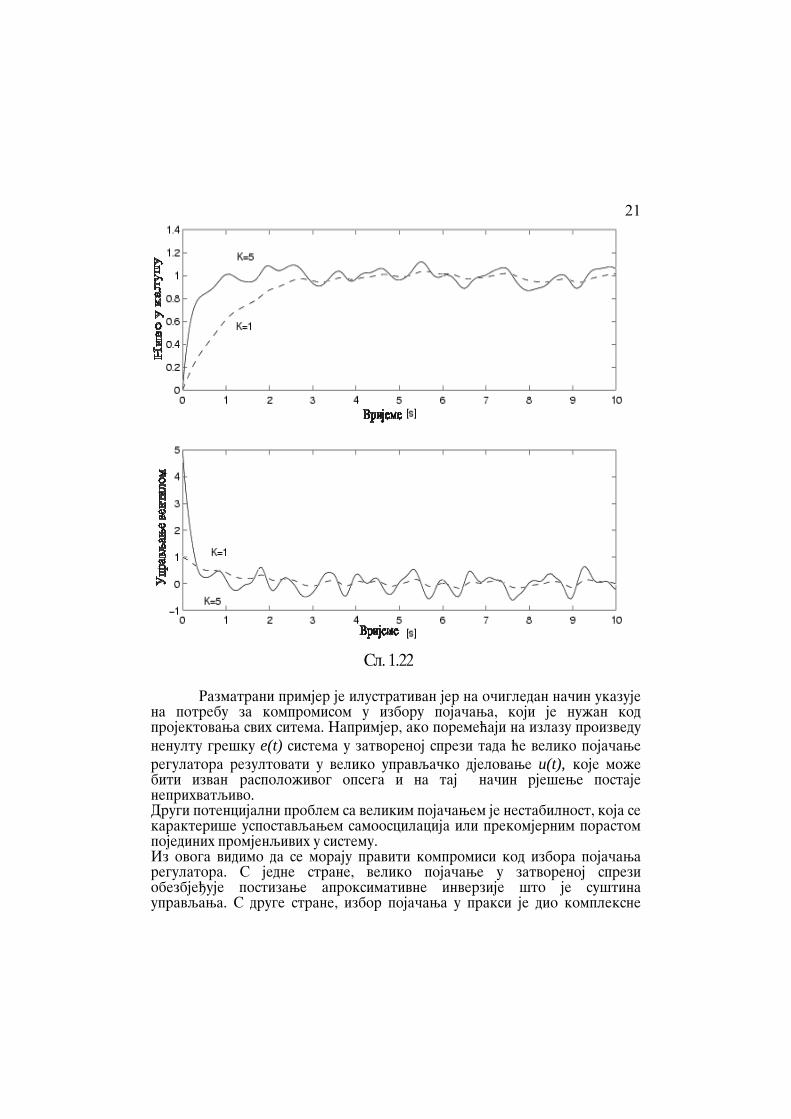
Vr{e}i simulacije sistema sa Sl. 1.21 za razli~ite vrijednosti poja~awa K kao naprimjer, za K=1 i K=5 kao {to je prikazano na Sl.1.22 pokazuje da se sa mawim poja~awem dobija sporiji odziv. S druge strane, ve}e poja~awe regulatora K=5 ima za rezultat br`i odziv ali se pove}ava i efekat smetwi mjerewa ali i mnogo agresivnije pokretawe ventila. Dakle, zahtjevi u pogledu performanse su konfliktni. Bez sistematskog znawa te{ko je odgovoriti na pitawa: Koliko truda treba ulo`iti da se prona|e prava vrijednost za K? Da li treba izabrati kompleksniji regulator? Da li treba poku{ati da se prona|e ta~niji model za sam proces?
21
Sl. 1.22
Razmatrani primjer je ilustrativan jer na o~igledan na~in ukazuje na potrebu za kompromisom u izboru poja~awa, koji je nu`an kod projektovawa svih sitema. Naprimjer, ako poreme}aji na izlazu proizvedu nenultu gre{ku e(t) sistema u zatvorenoj sprezi tada }e veliko poja~awe regulatora rezultovati u veliko upravqa~ko djelovawe u(t), koje mo`e biti izvan raspolo`ivog opsega i na taj na~in rje{ewe postaje neprihvatqivo. Drugi potencijalni problem sa velikim poja~awem je nestabilnost, koja se karakteri{e uspostavqawem samooscilacija ili prekomjernim porastom pojedinih promjenqivih u sistemu. Iz ovoga vidimo da se moraju praviti kompromisi kod izbora poja~awa regulatora. S jedne strane, veliko poja~awe u zatvorenoj sprezi obezbje|uje postizawe aproksimativne inverzije {to je su{tina upravqawa. S druge strane, izbor poja~awa u praksi je dio kompleksne
22mre`e kompromisa kod projektovawa. Razumijevawe i balansirawe kod
ovih kompromisa je su{tina u projektovawu sistema AU. 1.5. Sa`etak Da bi se projektovao i implementirao sistem upravqawa potrebni su sqede}i osnovni elementi: Poznavawe `eqene vrijednosti: Neophodno je poznavati {ta je
potrebno upravqati, sa kojom ta~no{}u i u kom opsegu vrijednosti. Ovo mora biti izra`eno u obliku specifikacije performansi. U fizi~kim sistemima ova informacija mora biti konvertovana u pogodnu formu tako da se mo`e daqe obra|ivati u regulatoru (analogni ili digitalni signal). Poznavawe izlaza ili stvarne vrijednosti: Ova vrijednost mora biti
mjerena senzorom u povratnoj vezi, i tako|e mora biti u takvoj formi koju prihvata regulator. Dodatno, senzor mora imati potrebnu rezoluciju i dinami~ki odziv tako da izmjerena vrijednost ima ta~nost zahtijevanu u specifikaciji performansi. Poznavawe upravqa~kog ure|aja: Regulator mora biti takav da
prihvati mjerewa `eqene i stvarne vrijednosti i da generi{e upravqa~ki signal u odgovaraju}em obliku za pokretawe izvr{nog elementa (aktuatora). Regulatori mogu biti razli~ite prirode, ukqu~uju}i mehani~ke poluge, pneumatske elemente, analogna ili digitalna elektri~na kola ili mikrokontrolere. Poznavawe aktuatora (izvr{nog elementa): Ovaj elemenat poja~ava
upravqa~ki signal i obezbe|uje da se sa potrebnom snagom djeluje na promjenu toka signala, energije ili materije u objekat upravqawa kako bi se postigla promjena izlaza objekta prema `eqenoj vrijednosti. U slu~aju sistema za upravqewe temperaturom prostorije, aktuator je gasni elektro-ventil i gorionik, «djelovawe» predstavqa oslobo|ena toplota (W). Za sistem autopilota broda aktuator je kormilo, «djelovawe» je zakretni moment (Nm). Poznavawe objekta: Ve}ina upravqa~kih strategija zahtijeva neka
znawa stati~kih i dinami~kih karakteristika objekta. Ona se mogu dobiti na osnovu mjerewa ili na osnovu kori{tewa osnovnih fizikalnih i drugih zakona, ili kombinacijom oba ova postupka.
1.5.1 Projektovawe sistema upravqawa Sa svim navedenim znawima i informacijama za projektanta sistema upravqawa ostaje samo da projektuje sistem. Prvi problem sa kojim se susre}e je da znawa o sistemu nisu potpuno ta~na i kompletna. Posebno, dinami~ke karakteristike sistema mogu se mijewati s vremenom
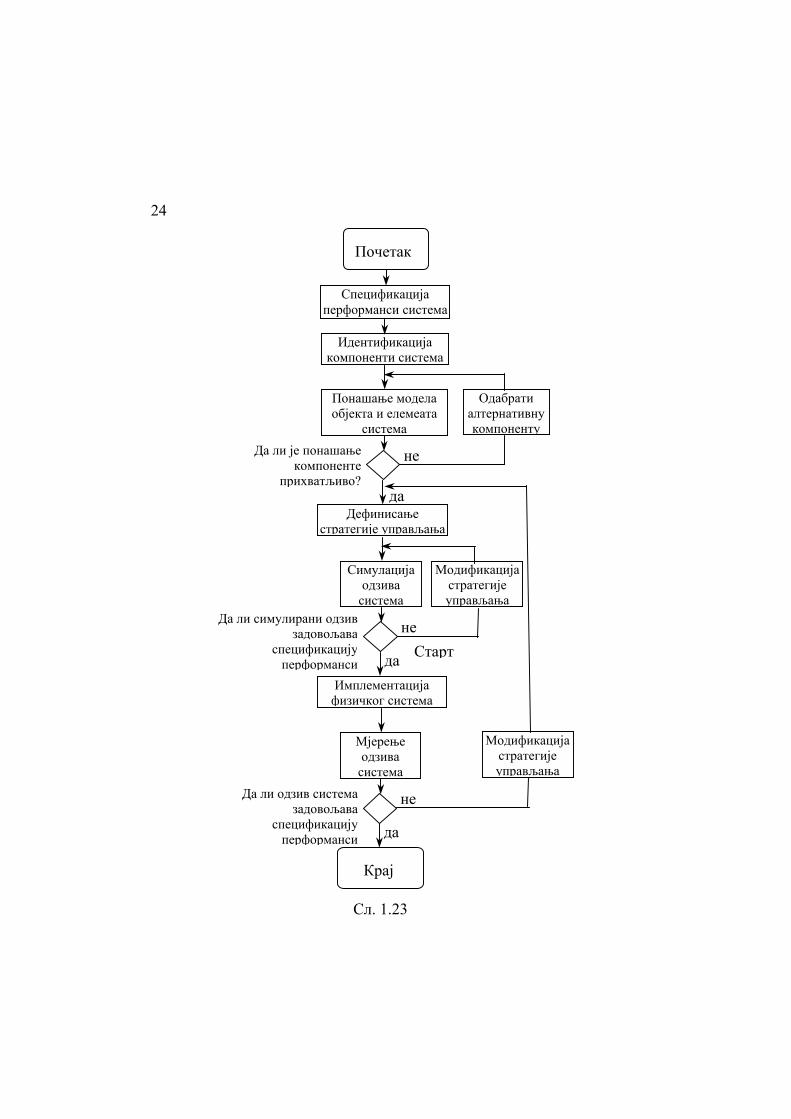
23(vremenski promjenqivi) tako da fiksna strategija upravqawa ne}e biti zadovoqavaju}a. Naprimjer, zbog potro{we goriva masa aviona nakon dugog leta mo`e biti skoro polovina vrijednosti koju je imao u trenutku polijetawa. Mjerewa upravqanih promjenqivik sadr`e elektri~ne smetwe i efekte poreme}aja. Neki senzori }e dati ta~ne i pouzdane podatke, a drugi, zbog pote{ko}a u mjerewu izlazne veli~ine mogu dati vi{e slu~ajnu i skoro neupotrebqivu informaciju. Ipak, postoji standardna metodologija koja se mo`e koristiti u projektovawu ve}ine sistema upravqawa. Ovi standardni koraci su prikazani na Sl. 1.23. Projektovawe sistema upravqawa je kombinacija tehnike i iskustva. Kwiga obja{wava neke poku{ane i testirane tehnike i metode koje stoje na raspolagawu projektantu sistema upravqawa. Iskustvo, me|utim, dolazi samo s vremenom.
24
Почетак
Сл. 1.23
Спецификација перформанси система
Идентификација компоненти система
Понашање модела објекта и елемеата
система
Одабрати алтернативну компоненту
не
да
Да ли је понашањекомпоненте
прихватљиво?
Дефинисање стратегије управљања
Симулацијаодзива система
Модификација стратегије управљања
не
да
Да ли симулирани одзивзадовољава
спецификацијуперформанси
Имплементација физичког система
Мјерење одзива система
Модификација стратегије управљања
не
да
Да ли одзив системазадовољава
спецификацијуперформанси
Старт
Крај