Embed Size (px)
Citation preview
![Page 1: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/1.jpg)
COPPE/UFRJCOPPE/UFRJ
ESTUDO DO COMPORTAMENTO DINÂMICO APLICÁVEL À VEÍCULOS DE
LOCALIZAÇÃO, INVESTIGAÇÃO E RESGATE SUBMARINO
Alexandre Vianna Santana
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Mecânica, COPPE, da Universidade Federal do
Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Mestre em
Engenharia Mecânica.
Orientador: Max Suell Dutra
Rio de Janeiro
Agosto de 2010
![Page 2: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/2.jpg)
ESTUDO DO COMPORTAMENTO DINÂMICO APLICÁVEL À VEÍCULOS DE
LOCALIZAÇÃO, INVESTIGAÇÃO E RESGATE SUBMARINO
Alexandre Vianna Santana
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO
LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA
(COPPE) DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE
DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE
EM CIÊNCIAS EM ENGENHARIA MECÂNICA.
Examinada por:
________________________________________________
Prof. Max Suell Dutra, Dr -Ing.
________________________________________________
Prof. Jules Ghislain Slama, D. Sc.
________________________________________________
Prof. Felipe Maia Galvão França, Ph.D
________________________________________________
Dr. Alexandre Alves Santiago, D. Sc.
RIO DE JANEIRO, RJ - BRASIL
AGOSTO DE 2010
![Page 3: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/3.jpg)
iii
Santana, Alexandre Vianna
Estudo do Comportamento Dinâmico Aplicável à
Veículos de Localização, Investigação e Resgate
Submarino/ Alexandre Vianna Santana. – Rio de Janeiro:
UFRJ/COPPE, 2010.
XV, 140 p.: il.; 29,7 cm.
Orientador: Max Suell Dutra
Dissertação (mestrado) – UFRJ/ COPPE/ Programa de
Engenharia Mecânica, 2010.
Referencias Bibliográficas: p. 138-140.
1. Robótica submarina. 2. Cinemática. 3. Dinâmica. I.
Dutra, Max Suell II. Universidade Federal do Rio de
Janeiro, COPPE, Programa de Engenharia Mecânica. III.
Titulo.
![Page 4: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/4.jpg)
iv
AGRADECIMENTOS
Primeiramente, não só agradeço como dedico esse trabalho aos meus pais, minha
esposa e minha filha. Eles constituem parte integrante das vitórias da minha vida e são
fontes de estímulo e amor, fundamentais para a conclusão dos projetos de vida.
Também agradeço à minha irmã pelo amor e compreensão.
Ao professor, orientador e amigo Max Suell Dutra, pela inestimável orientação
que em muito transcendeu os limites da pesquisa estudada.
Aos amigos que fiz no Laboratório de Robótica da COPPE ao longo de quase 3
anos de freqüência, em especial Ivanovich, Ricardo, Camilla, Omar, Magda e Fausto
Hirata , que tantas vezes expuseram a mim suas visões valiosas e apoio constante.
Ao Prof. Alexandre Santiago pela colaboração desde a concepção até a revisão e
fechamento deste trabalho.
Aos Chefes da Marinha do Brasil, em especial CA Alan, CA Deiana, CMG
Nigri e CF Neves pela oportunidade e ETM Maffei e ETM Sislei, por sempre estarem
solícitos a me ajudar, seja com uma palavra de apoio e de amizade ou com revisões,
correções e opiniões sempre pertinentes.
Agradeço também ao suporte oferecido pela Marinha do Brasil para a realização
deste trabalho.
Finalmente, agradeço a Deus, por ter me agraciado com mais esta realização.
![Page 5: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/5.jpg)
v
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
ESTUDO DO COMPORTAMENTO DINÂMICO APLICÁVEL À VEÍCULOS DE
LOCALIZAÇÃO, INVESTIGAÇÃO E RESGATE SUBMARINO
Alexandre Vianna Santana
Agosto/2010
Orientador: Max Suell Dutra.
Programa: Engenharia Mecânica
Em geral, sistemas baseados em veículos remotamente operados têm crescido de
importância em várias atividades de inspeção e intervenção submarina, dentre elas,
destaca-se a localização e o resgate de submarinos sinistrados em locais que o uso de
mergulhadores é inviável.
Esta dissertação propõe um modelo genérico para a cinemática e dinâmica de
um veículo genérico utilizado em operações com submarinos sinistrados e investiga
mecanismos para controlar a atitude do mesmo. A abordagem adotada é inspirada na
modelagem dinâmica de Veículos Operados Remotamente (ROVs) e Veículos
Subaquáticos Autônomos (AUVs), incluindo o efeito das correntes marinhas. Além
disso, apresenta o desenvolvimento conceitual de um controlador robusto de posição.
Este tipo de controle é importante, uma vez que em muitas situações deseja-se levar o
veículo para determinada posição para a realização de alguma tarefa. Após um
desenvolvimento teórico, um exemplo é apresentado, tendo-se como referência veículos
submarino cujos parâmetros do modelo são conhecidos. Apesar da complexidade e da
não-linearidade da dinâmica do veículo, os resultados das simulações atestam que o
sistema de controle desenvolvido apresenta um desempenho aceitável em condições
normais de operação.
![Page 6: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/6.jpg)
vi
.
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
STUDY OF DYNAMIC BEHAVIOUR APPLICABLE TO SEARCH AND RESCUE
UNDERWATER VEHICLES
Alexandre Vianna Santana
August /2010
Advisor: Max Suell Dutra
Department: Mechanical Engineering
In general, systems based on remotely operated vehicles have grown in
importance in various activities of underwater inspection and intervention, among them
stands out the search and rescue submarine operations. Mainly, in places that the use of
divers is not feasible.
This dissertation proposes a generic model for the kinematics and dynamics of a
generic vehicle used in operations with submarine disaster victims and investigates
mechanisms to control the attitude of it. The approach is inspired by the dynamic
modeling of Remotely Operated Vehicles (ROVs) and Autonomous Underwater
Vehicles (AUVs), including the effect of ocean currents. Moreover, it presents the
conceptual development of a robust controller position. This type of control is
important, since in many situations one wishes to take the vehicle for a particular
position to perform some task. After a theoretical development, an example is
presented, taking as reference undersea vehicles whose model parameters are known.
Despite the complexity and non-linearity of vehicle dynamics, the results of simulations
show that the control system has developed an acceptable performance in normal
operation.
![Page 7: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/7.jpg)
vii
SUMÁRIO
ÍNDICE DE FIGURAS .......................................................................................XI
ÍNDICE DE TABELAS ................................................................................... XIV
ABREVIATURAS............................................................................................ XV
1 INTRODUÇÃO............................................................................................ 1
1.1 Motivação ................................................................................................... 1
1.2 Estado da Técnica...................................................................................... 3
1.3 Objetivos desta Dissertação ...................................................................... 9
1.4 Revisão Bibliográfica............................................................................... 10
1.5 Modelos Matemáticos de Veículos Marinhos........................................ 11
1.6 Dinâmica de Cabos Umbilicais............................................................... 17
1.7 Modelo das Solicitações Ambientais ...................................................... 19
1.7.1 Espectro de Pierson-Moskowitz ................................................................. 20
1.7.2 Espectro de JONSWAP............................................................................... 21
1.8 Esforços Hidrodinâmicos........................................................................ 22
1.8.1 Massa Adicionada ...................................................................................... 23
1.8.2 Arrasto ou dissipação hidrodinâmica ........................................................ 24
1.9 Estratégias de Controle Aplicáveis ........................................................ 25
1.10 Organização da Dissertação ................................................................... 25
1.11 Resumo das principais hipóteses simplificadoras................................. 27
2 MODELAGEM DE VEÍCULOS SUBMARINOS........................................ 28
![Page 8: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/8.jpg)
viii
2.1 Modelo Cinemático.................................................................................. 29
2.1.1 Sistemas de Coordenadas ........................................................................... 29
2.1.2 Sistema de Coordenadas – Fundamentos Teóricos.................................... 30
2.1.3 Ângulos de Euler ........................................................................................ 33
2.1.4 Conversão das Velocidades de Translação do Sistema Móvel Para o
Sistema Inercial ......................................................................................... 34
2.1.5 Conversão das Velocidades de Rotação Para o Sistema Inercial ............. 36
2.2 Modelo Dinâmico..................................................................................... 37
2.2.1 Influências sobre o comportamento dinâmico do veículo. ......................... 37
2.2.2 Forças restaurativas................................................................................... 38
2.2.3 Esforços Inerciais ....................................................................................... 40
2.2.4 Esforços hidrodinâmicos ............................................................................ 41
2.3 Dinâmica................................................................................................... 44
2.3.1 Corpo rígido e os sistemas de referência ................................................... 46
3 FORMULAÇÃO MATEMÁTICA ............................................................... 48
3.1 Introdução ................................................................................................ 48
3.2 Metodologias Usuais em Análise de Cabos ........................................... 49
3.2.1 Análise dinâmica de cabos ......................................................................... 52
3.3 Objetivo .................................................................................................... 55
3.4 Implementação Computacional ............................................................. 55
3.4.1 Metodologia adotada - 1ª abordagem ....................................................... 56
3.4.2 Metodologia adotada - 2ª abordagem ....................................................... 61
4 MODELAGEM COMPUTACIONAL DO VEÍCULO SUBMARINO
GENÉRICO ...................................................................................................... 69
4.1 Introdução ................................................................................................ 69
4.2 Modelagem matemática de sistemas dinâmicos.................................... 70
4.2.1 Características dos sistemas ...................................................................... 70
![Page 9: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/9.jpg)
ix
4.2.2 Função de transferência ............................................................................. 72
4.2.3 Diagrama de Blocos ................................................................................... 73
4.2.4 Modelagem no espaço de Estados.............................................................. 74
4.2.5 Linearização de modelos matemáticos não-lineares ................................. 76
4.2.6 Aspectos da codificação computacional..................................................... 77
4.3 Contextualizando a modelagem do Veículo de Resgate ....................... 78
4.3.1 Simulação do sistema dinâmico do veículo usando Simulink® ................ 78
4.3.2 Aspectos cinemáticos – posições e velocidades ......................................... 81
4.4 Codificação das Funções da Cinemática ............................................... 86
4.5 Codificação da Notação para Veículos Marinhos de 6 GDL. .............. 87
4.6 Codificações de Funções.......................................................................... 89
4.7 Sistema de Coordenadas para a Corrente Marinha............................. 89
4.8 Dinâmica do Corpo Rígido ..................................................................... 90
5 SIMULAÇÕES COMPUTACIONAIS ........................................................ 94
5.1 Considerações sobre a estrutura do veículo de resgate........................ 94
5.2 Aspectos sobre massa, massa adicional e inércia do veículo. .............. 95
5.3 Forças de Coriolis .................................................................................... 97
5.4 Forças de Amortecimento ....................................................................... 97
5.5 Forças Restauradoras ........................................................................... 109
5.6 Modelo completo.................................................................................... 109
5.7 Simulações e resultados em malha aberta. .......................................... 110
6 CONSIDERAÇÕES SOBRE TEORIAS DE CONTROLE APLICÁVEIS. 116
6.1 Introdução .............................................................................................. 116
![Page 10: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/10.jpg)
x
6.2 Necessidade de modelagem................................................................... 116
6.3 Controle não-linear ............................................................................... 117
6.4 Representação de sistemas dinâmicos lineares ................................... 117
6.5 Formulação do espaço de estados ........................................................ 117
6.6 Controlador PID.................................................................................... 118
6.7 Sintonia Heurística ................................................................................ 121
6.8 Controle Ótimo ...................................................................................... 121
6.9 Controle Fuzzy....................................................................................... 124
6.10 Comentários Adicionais ........................................................................ 125
6.11 Modelo Linear para aplicação do controle de atitude do veículo ..... 126
6.12 Controlador Linear de Atitude ............................................................ 129
7 CONCLUSÕES....................................................................................... 135
7.1 Resultados Alcançados.......................................................................... 135
7.2 Aspectos relevantes observados e considerados.................................. 135
8 SUGESTÕES PARA TRABALHOS FUTUROS ..................................... 137
9 LISTA DE REFERÊNCIAS ..................................................................... 138
![Page 11: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/11.jpg)
xi
ÍNDICE DE FIGURAS
Figura 1.1 Estado da Técnica - Técnicas de resgate......................................................... 2
Figura 1.2 Estado da Técnica - DSRV-2 AVALON. ....................................................... 4
Figura 1.3 Estado da Técnica - Veículo de Operação Remota Super Scorpio. ................ 5
Figura 1.4 Estado da Técnica - Conceito de sino de resgate utilizado no Brasil –
McCann Bell................................................................................................... 7
Figura 1.5 Estado da Técnica - Veículo de resgate - REMORA..................................... 8
Figura 1.6 Estado da Técnica - Conceito do Módulo de salvamento PRMS da US e
Royal Navy..................................................................................................... 8
Figura 1.7 Situação em estudo (fonte: SANTANA, DUTRA E SANTIAGO,2009)..... 11
Figura 1.8 Sistemas de referência – sítio www.oceanica.ufrj.br .................................... 12
Figura 1.9 Rotações entre sistemas de referência........................................................... 13
Figura 1.10 Diagrama de equilíbrio de elemento do cabo.............................................. 17
Figura 1.11 Discretização do cabo em elementos cilíndricos ........................................ 19
Figura 1.12 Espectro de Pierson-Moskowitz.................................................................. 21
Figura 1.13 Comparação dos espectros PM X JONSWAP............................................ 21
Figura 2.1 Sistemas de coordenadas referenciais ........................................................... 31
Figura 2.2 Sistemas de Coordenadas Móvel e Inercial .................................................. 33
Figura 2.3 Movimentos de Balanço, Caturro e Guinada (roll, pitch e yaw) .................. 35
Figura 2.4 Efeitos do empuxo e do peso em um corpo submerso. ................................. 38
Figura 2.5 Instabilidade do corpo submerso até o alinhamento dos centros de gravidade
e de carena. ................................................................................................... 39
Figura 2.6 Cilindro sob ação das forças de inércia e arrasto .......................................... 42
Figura 3.1 Diagrama de equilíbrio de elemento do cabo............................................... 49
Figura 3.2 Sistemas de Coordenadas Móvel e Inercial .................................................. 51
Figura 3.3 Diagrama de Forças ...................................................................................... 59
Figura 3.4 Tela inicial da simulação do perfil do cabo umbilical ................................. 60
Figura 3.5 Resultado da simulação do perfil do cabo umbilical ................................... 60
Figura 3.6 Método de massas concentradas .................................................................. 61
Figura 3.7 Modelagem dos elementos discretos do cabo umbilical segundo o modelo
massa-mola-amortecedor.............................................................................. 62
Figura 3.8 Definição dos ângulos iα e iβ com a orientação do cabo no espaço......... 66
![Page 12: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/12.jpg)
xii
Figura 3.9 Esforços no cabo umbilical segundo dados apresentados na tabela anterior 67
Figura 3.10 Perfil do cabo umbilical segundo dados apresentados na tabela anterior para
300s de simulação......................................................................................... 68
Figura 4.1 Linearização por partes ................................................................................. 70
Figura 4.2 Definição da propriedade da homogeneidade de sistemas lineares. ............ 71
Figura 4.3 Definição da propriedade da aditividade de sistemas lineares...................... 71
Figura 4.4 Exemplo de diagrama de blocos. ................................................................. 73
Figura 4.5 Exemplo de diagrama de blocos de sistema em malha fechada.................... 74
Figura 4.6 Espaço de estados n-dimensional.................................................................. 75
Figura 4.7 Diagrama de bloco do veículo de resgate em estudo .................................... 79
Figura 4.8 Diagrama de bloco do veículo de resgate em estudo .................................... 80
Figura 5.1 Projeto conceitual testado ............................................................................. 94
Figura 5.2 Projeto conceitual dos lemes direcionais ...................................................... 95
Figura 5.3 Ponto considerado para a aplicação das forças sobre o leme...................... 100
Figura 5.4 Forças aplicadas no ponto ........................................................................... 100
Figura 5.5 Codificação do modelo – função Vxdot...................................................... 110
Figura 5.6 Template da simulação do comportamento do veículo sem nenhum esforço
de cabo ou corrente atuando sobre o veículo de resgate com propulsão de
10N . ........................................................................................................... 113
Figura 5.7 Gráfico da evolução da posição do ponto P do modelo .............................. 113
Figura 5.8 Template da simulação com esforços de cabo e corrente atuando sobre o
veículo de resgate . ..................................................................................... 114
Figura 5.9 Gráfico da simulação referente a posição do ponto P do modelo com o
template da figura 5.8 ................................................................................. 114
Figura 5.10 Simulação comparativa da posição do ponto P do modelo com e sem
esforços de cabo e de corrente marinha atuante. ........................................ 115
Figura 6.1 Diagrama de blocos da formulação no espaço de estados. ........................ 118
Figura 6.2 Exemplo de controle PID. .......................................................................... 119
Figura 6.3 Exemplo de controle P ............................................................................... 120
Figura 6.4 Exemplo de controle I ................................................................................. 120
Figura 6.5 Exemplo de controle D................................................................................ 120
Figura 6.6 – Modelo linearizado................................................................................... 126
Figura 6.7 Movimentação do veículo em roll.............................................................. 128
Figura 6.8 Movimentação do veículo em Pitch........................................................... 128
![Page 13: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/13.jpg)
xiii
Figura 6.9 Modelo de sensores .................................................................................... 131
Figura 6.10 Modelo de Atuadores ............................................................................... 131
Figura 6.11 Modelo do sistema em malha fechada usando um Regulador Quadrático
Linear ( LQR) ............................................................................................. 132
Figura 6.12 Resultado da simulação proposta do veículo sujeito a ruídos e perturbações
ambientais................................................................................................... 133
Figura 6.13 Resultado da simulação proposta do veículo sujeito a ruídos e perturbações
ambientais e a tensão no cabo umbilical calculada no capítulo 3 ............. 133
Figura 6.14 Resultado da simulação proposta do veículo sujeito a ruídos e perturbações
ambientais com propulsão reduzida (10 N)............................................... 134
![Page 14: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/14.jpg)
xiv
ÍNDICE DE TABELAS
Tabela 2.1 Notação [SNAME/1950] de movimentos, forças e momentos relativos...... 30
Tabela 3.1 Tabela de entradas para a simulação de esforços e posicionamento do cabo
com a 1º metodologia ................................................................................... 59
Tabela 3.2 resultados para a simulação – 2º abordagem ................................................ 67
Tabela 5.1 – Dados utilizados....................................................................................... 111
Tabela 5.2 Resumo das variáveis utilizadas na simulação 6 ....................................... 112
Tabela 6.1 Exemplos de controle retroalimentado ...................................................... 116
Tabela 6.2 Método de Ziegler-Nichols....................................................................... 121
![Page 15: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/15.jpg)
xv
ABREVIATURAS
ROV Remotely Operated Vehicle
ROTV Remotely Operated Towed Vehicle
UUV Unmanned Underwater Vehicle
AUV Autonomous Underwater Vehicle
DOF Degree of Freedom
PID Proporcional, Integral e Derivativo
SISO Single-input-single-output
MIMO Multiple-input-multiple-output
LQR Linear Quadratic Regulator
LQG Linear Quadratic Gaussian
LTR Loop Transfer Recovery
![Page 16: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/16.jpg)
1
1 INTRODUÇÃO
1.1 Motivação
Até pouco tempo, os navios somente navegavam sobre a superfície das
águas, mas o advento do submarino permitiu que o fundo do mar também se tornasse
um universo a ser explorado. Esta invenção permitiu lutar, com algumas vantagens, em
batalhas militares, além de permitir a execução de explorações submarinas civis com os
mais variados objetivos.
A sobrevivência durante meses, ou até mesmo anos, abaixo da superfície do mar
é considerada uma das maiores vitórias da ciência marítima e naval.
Porém, quando um submarino sofre um acidente e vai de encontro ao leito
marinho em conseqüência de uma colisão ou devido a uma explosão a bordo, uma
operação de localização e resgate do submarino acidentado ou sinistrado é iniciada.
Missões de localização, em uso atualmente podem ser, as chamadas “localização
em alcatéia”, com o uso de diversos veículos comunicando-se entre si, ou missões que
utilizam veículos singelos, com sensores (sonares, câmeras) que permitam a localização
do sinistro.
Em geral, a operação de resgate consiste em enviar algum veículo de resgate
tripulado, ou operado remotamente para a retirada da tripulação ou prender algum tipo
de dispositivo para içar o submarino do fundo do mar.
Outross veículos são utilizados, ainda, para fins acadêmicos e científicos, uma
vez que podem ser instrumentos de estudos ecológicos de habitats do mar profundo e
obter fotografias e filmagens, de alta qualidade, de locais anteriormente inacessíveis.
A indústria de petróleo e gás é a maior usuária de veículos submarinos. Estes
ajudam na perfuração, instalação e construção de estruturas submersas. Eles são
primordiais em reservas que estão situadas a profundidades de 2000m ou mais, logo
inacessíveis para mergulhadores.
Na lista de veículos importantes em operações submarinas, incluem mini-
submarinos chamados veículos de resgate de submersão profunda (DSRV), sinos de
mergulho (SRC) rebocados por uma embarcação de apoio ou veículos submarinos
teleoperados ou independentes.
![Page 17: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/17.jpg)
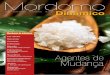
2
O resgate é efetuado após a localização do submarino e pode ser feito utilizando
uma dentre as diversas técnicas de resgate existentes. Cada técnica apresentada na
Figura 1.1 tem vantagens e desvantagens que, dependendo das condições ambientais
reinantes e das circunstâncias do acidente, devem ser levadas em conta.
Figura 1.1 Estado da Técnica - Técnicas de resgate.
Quando o acidente ocorre, por exemplo, em área com condições ambientais
adversas (ondas, ventos e correntes), em cotas onde não é possível o emprego de
mergulhadores ou quando o submarino sinistrado está em uma posição ou ângulo que
dificulta o acoplamento do veículo de resgate, estudos prévios contribuiriam para o
sucesso desta missão de resgate.
Estes estudos poderiam incluir, por exemplo, a previsão de comportamento do
aparato de resgate disponível e a sua aplicabilidade a uma determinada missão de
resgate.
![Page 18: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/18.jpg)
3
A previsão do comportamento de veículos submarinos rebocados, teleoperados
ou independentes submetidos às solicitações ambientais externas é seguramente uma
área de pesquisa das mais importantes hoje em dia. Especialmente, se a antecipação de
determinada situação adversa e a conseqüente correção da atitude do veículo for
possível de ser obtida.
O resgate de tripulantes de submarinos sinistrados utilizando-se destes veículos é
abordado na literatura técnica em diversos níveis de abrangência, porém nota-se que
este problema não está totalmente resolvido ou esgotado.
Dezenas de novas e antigas técnicas de resgate continuam sendo simuladas,
testadas e executadas mundo afora, por isto, entende-se que a revisitação teórica deste
problema no contexto nacional mostra-se extremamente pertinente.
O projeto conceitual de sistemas de resgate e salvamento de submarinos, capazes
de suportar determinadas condições operacionais de maneira eficiente ainda tem se
constituído em um desafio estimulante aos engenheiros e aos departamentos técnicos
das marinhas de todo o mundo.
Condições ambientais adversas, solicitações da embarcação de apoio e o
posicionamento do submarino sinistrado após o acidente, mesmo com todo avanço no
campo da exploração marinha, continuam sendo obstáculos ao sucesso deste tipo de
missão.
1.2 Estado da Técnica
Quando o submarino americano Squalus afundou a uma profundidade de 75
metros nas águas costeiras da Nova Inglaterra (EUA), não existiam métodos
estabelecidos de resgate ou equipamentos especializados. A solução para a época (1939)
foi a utilização de um batiscafo. O batiscafo é uma pesada plataforma recoberta por um
revestimento em forma de sino. O aparelho é estabilizado de forma a não adernar, e cria
um bolsão de ar em seu interior.
Porém, após o naufrágio de dois submarinos nucleares dos EUA,
respectivamente em 1963 e 1968, a marinha americana decidiu reforçar seu esforço de
resgate submarino. Em 1964, o programa naval de engenharia oceânica criou o Projeto
de Sistemas de Submersão Profunda (DSSP), para desenvolver veículos de resgate
![Page 19: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/19.jpg)
4
profundo (DSRV) capazes de mergulhar e de se fixar aos cascos de submarinos
naufragados, permitindo que os marinheiros escapassem em segurança.
Os primeiros DSRV estavam prontos para testes em 1970. Depois da conclusão
de exercícios bem-sucedidos de resgate, os DSRV foram entregues à marinha e
entraram em serviço em 1971, portando os nomes Mystic e Avalon.
Figura 1.2 Estado da Técnica - DSRV-2 AVALON.
O Mystic e o Avalon (Figura 1.2) têm quase 15 metros de comprimento e pesam
aproximadamente 50 toneladas. A capacidade máxima de mergulho é de 1,5 mil metros,
e eles são equipados com um radar Doppler e três tipos de sonar, bem como uma
câmera fotográfica de 35 milímetros para enviar informações à superfície. Os DSRV
requerem tripulação de quatro marinheiros e cada um deles pode transportar, no
máximo, 24 passageiros [fonte: http:ciência.hsw.uol.com.br].
Os Veículos de operação remota são parte crucial dos esforços de resgate
profundo. Usualmente são acopladas a outro submarino ou navio. Conhecidos pela sua
sigla em inglês ROVs (Remote Operated Vehicles), estes veículos compreendem uma
estrutura submersível, cuja massa é equilibrada por flutuadores fixos ao veículo. Em
caso de anomalia no controle, estes flutuadores permitem uma flutuabilidade positiva do
conjunto possibilitando assim o resgate do sistema, ou então uma flutuabilidade
![Page 20: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/20.jpg)
5
negativa, quando a emersão do equipamento pode causar acidente com alguma
embarcação. Normalmente estes veículos são compostos dos seguintes componentes:
Figura 1.3 Estado da Técnica - Veículo de Operação Remota Super Scorpio.
• Propulsores para o seu deslocamento submerso;
• Equipamentos de foto e vídeo;
• Equipamentos eletrônicos e hidráulicos;
• Braço manipulador com sete graus de liberdade; e
• Braço manipulador com cinco graus de liberdade.
Os veículos podem ser elétricos ou eletro-hidráulicos. Os elétricos são menores e
mais leves e possuem todos os seus componentes acionados eletricamente através de um
cabo umbilical, que fornece os sinais de controle e a energia da superfície. Já os eletro-
hidráulicos têm seus equipamentos mecânicos acionados por uma unidade hidráulica
localizada no próprio veículo, que por sua vez recebe força elétrica igualmente da
superfície. Um exemplo de ROV especializado em operações de apoio ao resgate é
apresentado na Figura 1.3.
![Page 21: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/21.jpg)
6
As Câmaras de Resgate Submarino (SRCs) ou sinos de resgate são casulos de
metal que podem ser fixadas ou presas a um submarino sinistrado. As câmaras se
mantêm pressurizadas e permitem a extração segura da tripulação. Assim que os
homens estiverem a bordo, a SRC sobe à superfície em ritmo seguro. Existe uma
unidade semelhante chamada Sistema Transportável de Câmera de Compressão
(TCRS), usado para evacuar e normalizar a compressão de tripulantes de veículos de
mergulho profundo. Uma escotilha de transferência forma uma conexão firme entre o
submarino e a TRCS, e isso permite que pessoal médico entre no submarino em
ambiente de pressurização equilibrada. Como a SRC, a TRCS é puxada à superfície por
um cabo e a tripulação passa por compressão gradativa.
No Brasil, o Aparato de resgate disponível adotado pela Marinha do Brasil é do
tipo, Submarine Rescue Chamber (SRC) / McCann Bell, ou sino de resgate de
especificação norte-americana.
O sino de resgate McCann Bell, Figura 1.4, sofre severas limitações quando
exposto às correntes muito fortes, quando necessita acoplar em um submarino
pressurizado ou quando o submarino sinistrado está posicionado em ângulos extremos.
Ainda hoje, a Marinha Americana, possui 2 (dois) sinos que podem ser
rapidamente transportados para um navio de suporte ou socorro a serem utilizados no
local do acidente. Os sinos (SRC) são capazes de atuar em resgates em profundidades
até 260 metros em um ângulo máximo de 30º e podem ser acoplados ao submarino
sinistrado através de um cabo-guia que é fixado em um conector especial no escotilhão
de escape do submarino de resgate.
O sino de resgate consiste em uma câmara de aço em forma de sino, tanques de
lastro, engrenagem ou polia de içamento e é dividido em compartimento superior e
inferior por uma antepara com um escotilhão estanque à água em seu centro. O sino
McCann bell pesa 9797 Kg (seco) e mantém 453Kg de reserva de flutuabilidade
(especificação 9594-AE-GTP-010/DISABLE SUB – Naval Sea Systems Command).
O compartimento superior é mantido à pressão atmosférica. O compartimento
inferior é aberto para o mar e a água é drenada na operação de acoplamento. Os tanques
![Page 22: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/22.jpg)
7
de lastro são normalmente secos, mas, podem ser usados para alterar o ângulo de
acoplamento para no máximo 30º.
Mergulhadores ou um veículo (Remotely Operated Vehicle - ROV) deverão
fixar o cabo-guia no escotilhão de resgate do submarino sinistrado. O sino (SRC)
utilizará o cabo-guia para direcioná-lo até o submarino. Logo após, o SRC acopla-se ao
submarino. Um selo é formado pela diferença de pressão gerada após a remoção de
água do compartimeno inferior. Quando a pressão é equalizada entre o submarino e o
SRC, o escotilhão pode ser aberto e os náufragos transferidos para o SRC.
Figura 1.4 Estado da Técnica - Conceito de sino de resgate utilizado no Brasil – McCann Bell
O veículo de resgate submarino australiano REMORA, Figura 1.5, é um ROV
(veículo de operação remota) de 16,5 toneladas construído sobre um sino de resgate.
Possui compartimento para 7 (sete) pessoas, podendo ser um tripulante e seis náufragos.
É capaz de operar na cota de 500m, com correntes marinhas de cerca de 3 nós e
com o dispositivo de acoplamento do submarino sinistrado a cerca de 60º da vertical
![Page 23: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/23.jpg)
8
O veículo é energizado e controlado através de um umbilical de 914m que provê
energia para as unidade hidráulicas.
Figura 1.5 Estado da Técnica - Veículo de resgate - REMORA
O REMORA e sua câmara (sino associado) ainda representam o estado da
técnica na tecnologia de resgate de submarinos, como também é o único sistema
considerado “portátil” de resgate capaz de resgatar e transferir sobre pressão, extremos
ângulos e profundidades significativas.
Figura 1.6 Estado da Técnica - Conceito do Módulo de salvamento PRMS da US e Royal Navy
A US Navy mantêm, atualmente, o PRMS (Pressurised, Rescue Module System
- Figura 1.6) substituto dos atuais submarinos tripulados destinados a esta função na
US-Navy e Royal Navy. Denominou-se este programa de HADES, ou simplesmente
Submarino não Tripulado de Resgate.
![Page 24: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/24.jpg)
9
Diferentemente dos sinos de resgate cuja escotilha fixa dificulta o contato, este
semi-esférico basculante auxilia o acoplamento, a diferentes ângulos, permitindo o
ajuste deste em quaisquer condições e ângulos de inclinação.
1.3 Objetivos desta Dissertação
Unmanned Underwater Vehicles (UUV) ou veículos remotos não-tripuladados
são intensamente pesquisados mundialmente para diversas aplicações. Os benefícios
operacionais e operativos de veículos submarinos baseados em tecnologia UUV podem
ser extremamente valiosos ainda que os desafios de uma integração sejam significativos.
O termo UUV normalmente inclui: Remotely Operated Vehicles (ROVs) –
veículos remotamente operados, Autonomous Underwater Vehicles (AUVs) – veículos
submarinos autônomos e Remotely Operated Towed Vehicles (ROTVs) – veículos
rebocados remotamente operados.
Sabe-se que Veículos autônomos submarinos, ou AUVs (Autonomous
Underwater Vehicles), tem aplicação limitada atualmente, mas são objeto de intensa
pesquisa em laboratórios ao redor do mundo. Futuramente, estes veículos realizarão
rotineiramente missões de inspeção de equipamentos, tubulações e cabos, mapeamento
de regiões submarinas, atendendo às demandas militares, da indústria petrolífera e de
telecomunicações.
Devido ao fato de não estarem fisicamente ligados ao navio de apoio, a operação
eficiente dos AUVs, diferentemente dos ROV e RTOV, encontra problemas adicionais
referentes a armazenamento de energia e transmissão de dados. Em função da rápida
atenuação de ondas eletromagnéticas na água, a comunicação acústica se torna a única
alternativa viável. No entanto, ela ainda impõe sérias limitações. Esta forma de
comunicação é principalmente limitada pela velocidade de propagação do som na água,
por volta de 1500m/s, e pelo aumento da atenuação com a frequência do som. Assim, a
comunicação acústica sempre sofre um atraso, devido à velocidade de propagação, e sua
banda decresce em função do alcance.
Outro desafio para o projeto de AUVs está em sua navegação e controle. Estes
necessitam de informações confiáveis sobre a localização e atitude do veículo, o que é
obtido através de complexos sistemas de fusão sensorial. O controle de alto-nível,
![Page 25: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/25.jpg)
10
permitindo a programação de combinações de tarefas como navegação, seguimento de
fundo ou retorno à base, ainda constitui objeto de intensa pesquisa.
Para as operações envolvendo submarinos sinistrados o Brasil dispõe de uma
embarcação de apoio com posicionamento dinâmico, veículos remotamente operados
(ROV) e um aparato para resgate por sino de mergulho (SRC). Estes fatos são
considerados para o estudo em tela e o base das proposições para novos equipamentos e
expansão dos limites operacionais do conceito projeto atualmente em uso no pais.
Assim, esta dissertação almeja os seguintes objetivos:
• Apresentar o Estado da Técnica dos veículos ou aparatos mecânicos
utilizados para operações de localização, investigação, salvamento e
resgate de submarinos sinistrados.
• Desenvolver um modelo matemático para avaliar e simular o
comportamento dinâmico de um veículo genérico, além de observar
como algumas perturbações (cabos umbilicais e corrente marinha)
influenciam o comportamento dinâmico de todo o aparato, constituído
pelo Navio de apoio, o cabo umbilical e o veículo propriamente dito.
• Apresentar um modelo computacional em ambiente
MATLAB/SIMULINK que permita a manipulação deste problema tanto
para sistemas de apoio à decisão como para sistemas de controle do
posicionamento e atitude do veículo para futuras utilizações em
problemas de resgate de submarinos sinistrados.
1.4 Revisão Bibliográfica
Esta seção apresenta uma breve revisão das fontes bibliográficas pesquisadas
organizadas por temas.
A dissertação abordará um sistema dinâmico composto pelo Navio ou
embarcação de apoio, cabo umbilical e veículo de resgate submarino sujeito às
condições ambientais reinantes, conforme ilustrado na Figura 1.7.
Neste contexto, a utilização de cabos umbilicais mesmo para veículos de
localização encontra sustentação. Porém, o uso de cabo umbilical conectado a
embarcação de apoio na superfície, implica na sujeição deste sistema dinâmico à ação
de ondas, correntes e ventos. Estes efeitos ambientais, adicionados do posicionamento
![Page 26: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/26.jpg)
11
dinâmico da embarcação, representam distúrbios ao posicionamento do veículo
submarino genérico (localização ou resgate) tendo seus efeitos acoplados até a
determinação do esforço resultante na outra extremidade do cabo, conectada ao veículo.
Este cenário, em que o cabo umbilical se encontra totalmente estendido e tensionado,
exemplificam uma das principais fontes de distúrbios ao posicionamento do veículo
submarino genérico, que serão exploradas neste trabalho.
Desta forma, no sentido de prover subsídios para projetos que certamente serão
necessários nesta área da engenharia nos próximos anos; tópicos sobre modelagem
dinâmica de navios, umbilicais, e veículos submarinos; solicitações ambientais
reinantes, esforços hidrodinâmicos, técnicas para o controle de posição do veículo e
acoplamento do veículo com o submarino sinistrado, serão tratados e alguns simulados.
Figura 1.7 Situação em estudo (fonte: SANTANA, DUTRA E SANTIAGO,2009)
1.5 Modelos Matemáticos de Veículos Marinhos
FOSSEN (1994) discutiu um modelo clássico baseado na analogia com a
robótica, no qual a dinâmica do casco é tradicionalmente determinada a partir dos
princípios das leis de Newton de movimento aplicadas a um corpo rígido que se move
em um fluido. O modelo dinâmico é composto de dois sistemas de coordenadas (Figura
1.8): um deles fixa a um ponto do casco (xB, yB, zB), e outro fixo a terra (xE, yE, zE), e seis
graus de liberdade: três translacionais e três rotacionais: translacionais (avanço ou
![Page 27: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/27.jpg)
12
surge, deriva ou sway, afundamento ou heave) e rotacionais (jogo ou roll, caturro ou
picth, guinada ou yaw).
Na modelagem de veículos submarinos também é conveniente trabalhar com
estes dois sistemas de referência. Com isso, a dinâmica é modelada no referencial do
corpo. Durante as simulações, em cada passo de integração das equações diferenciais,
efetuam-se transformações para o referencial inercial. D’SOUZA E GARG (1984)
apontam, como uma vantagem desse procedimento, o fato dos momentos de inércia do
veículo permanecerem constantes em relação ao referencial do corpo para qualquer
orientação do veículo. Além disso, a redução de ordem necessária para a solução
numérica das equações diferenciais representativas da dinâmica do veículo já é feita
automaticamente durante a modelagem. Assim, a dinâmica do veículo com seis graus de
liberdade não é modelada por seis equações diferenciais de segunda ordem, mas por
doze equações diferenciais de primeira ordem.
Figura 1.8 Sistemas de referência – sítio www.oceanica.ufrj.br
As relações cinemáticas são obtidas através de três transformações lineares
sucessivas, que representam as rotações necessárias para coincidir as direções dos eixos
do sistema de referência fixo com as do sistema móvel. Como as matrizes finais são
obtidas por operações que envolvem o produto das matrizes de rotação (que é uma
![Page 28: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/28.jpg)
13
operação não necessariamente comutativa), a ordem escolhida para as rotações
influencia o resultado final.
Figura 1.9 Rotações entre sistemas de referência
Trabalhando-se com ângulos de Euler, a transformação é obtida a partir de uma
seqüência de rotações em torno de cada um dos eixos coordenados (Figura 1.9). Com
isso, gera-se uma matriz de transformação cujos elementos são funções trigonométricas
dos ângulos de orientação do corpo rígido. Multiplicando a matriz de transformação
pelo vetor expresso num referencial, obtém-se a representação desse vetor em outro
referencial.
FOSSEN (1994) orienta que na obtenção das equações de movimento de Navios
e veículos submarinos, o trabalho é simplificado observando as seguintes premissas:
a) O veículo é rígido; e
b) O sistema de coordenadas fixado na terra é inercial.
Assim, equação geral de corpos rígidos com 6 (seis graus de liberdade) de
acordo com a notação SNAME (1950) pode ser estabelecida.
A dinâmica do navio pode ser escrita, de forma simplificada, como (1.1):
( ) ( ) ( ) RBM C D gυ υ υ υ υ η τ+ + + =� (1.1)
![Page 29: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/29.jpg)
14
Onde:
υ é o vetor velocidade do Navio ou veículo;
υ� é o vetor aceleração do Navio ou veículo;
η representa a posição e a atitude do Navio ou veículo;
τ representa o somatório dos esforços externos;
M quantifica a inércia do Navio ou veículo no ar adicionada das inércias da
massa adicionada ;
( )C υ υ corresponde aos esforços relacionados com a aceleração centrípeta e de
Coriólis;
( )D υ υ corresponde aos esforços de dissipação hidrodinâmica; e
( )g η corresponde aos esforços gravitacionais e de empuxo.
[ , , , , , ]
[ , , , , , ]
T
TRB
u v w p q r
X Y Z K M N
υ
τ
=
=
(1.2)
São os vetores velocidade angular e linear do sistema de coordenadas fixos no
corpo e o vetor generalizado das forças e momentos externos respectivamente.
As componentes dos vetores velocidade linear dos sistemas de referência móvel
1υ e inercial 1η� relacionam-se através do operador de transformação não linear J1
definido como:
1 1 2 1( )Jη η υ=� (1.3)
![Page 30: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/30.jpg)
15
Analogamente, as componentes dos vetores velocidade angular dos sistemas de
referência móvel e inercial relacionam-se através do operador de transformação não
linear 2J definido como:
2 2 2 2( )Jη η υ=�
(1.4)
A matriz de inércia M é formada pela massa (m), momentos de inércia (Ix, Iy,
Iz), produtos de inércia (Ixy , Iyz , Ixz ) e coordenadas do centro de gravidade no
referencial do corpo ( XG , YG ,ZG ).
Note que nos esforços em (1.1) os operadores ( )C υ υ e são funções da
velocidade do veículo e caracterizam esforços não-lineares. Adicionalmente, estes
sistemas estão sujeitos à variação paramétrica com as condições de operação, ou seja, é
possível que ocorram variações dos coeficientes de arrasto hidrodinâmico em função da
velocidade ou de massa adicionada em função da aceleração e da inércia com a variação
da posição, velocidade e aceleração.
As dinâmicas das velocidades nos diferentes graus de liberdade são acopladas,
ou seja, a velocidade em uma direção ou grau de liberdade contribui para a dinâmica ou
movimento do veículo em um grau de liberdade diferente.
A correnteza marítima e a dinâmica do cabo umbilical são dinâmicas externas ao
veículo. Estas dinâmicas não modeladas e externas ao sistema correspondem aos
distúrbios em um sistema de controle. Outras dinâmicas não modeladas do sistema
correspondem às perturbações no sistema de controle. Estas perturbações, ao contrário
da variação paramétrica, correspondem a fenômenos não considerados no modelo e, por
isso, são também chamados de incerteza não-estruturada.
As principais referências para o tipo de veículo em estudo neste trabalho são os
modelos matemáticos que descrevem o comportamento dinâmico de ROVs, ROTVs e
AUVs.
A temática do controle de posição de veículos marinhos ganhou força pelo
invento de Elmer Sperry (1911) chamado de agulha giroscópica, que permitiu o
( )D υ υ
![Page 31: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/31.jpg)
16
primeiro controle em malha fechada que compensava os estados de mar usando controle
retroalimentado e ajuste automáticos de ganho.
Em 1922, Nicholas Minorsky apresentou uma análise detalhada do controle de
posição retroalimentado onde ele formulou o controle a três termos, hoje mundialmente
conhecido como controle PID.
NOMOTO & HATTORI (1986) abordaram as características hidrodinâmicas de
um veículo (ROV – DOLPHIN 3K) específico e analisaram a manobrabilidade do
veículo através de simulações em computador. ISHIDERA ET AL. (1986) avaliaram o
veículo MURS 300 Mark II, e elaboraram para 6 (seis) graus de liberdade o modelo
matemático do mesmo. onde, com o auxílio de um tanque de provas, os esforços
hidrodinâmicos foram determinados ( em função das velocidades de translação e
rotação do veículo).
DOMINGUEZ (1989) comparou diversas modelagens, existentes até então.
Onde realizou comparações dos equacionamentos propostos por NOMOTO &
HATTORI (1986) e ISHIDERA, TSUSAKA, ITO, OISHI, CHIBA & MAKI (1986).
Além disto, desenvolveu um programa de simulaçãoo de veículos remotamente
operados onde avaliou técnicas de controle do tipo Proporcional e Derivativo (PD -
Proportional and Derivative) e Proporcional + Proporcional e Integral (P-PI -
Proportional + Proportional and Integral) para o guinada e a profundidade.
SOARES (2002) apresentou uma comparação entre os sistemas constitutivos de
veículos submarinos não tripulados, ROVs e AUVs (Autonomous Underwater Vehicles
- Veículos Submarinos Autônomos), e propôs um projeto de plataforma de testes de
baixo custo para o desenvolvimento desse tipo de veículo submarino.
SOUZA (2003) discutiu um modelo do veículo nos seis graus de liberdade onde,
o sistema atuador, foi dimensionado para que o sistema seja totalmente controlável e
modelado com a consideração dos efeitos eletro-mecânico do motor elétrico e
hidrodinâmicos, Adicionalmente, desenvolveu um algoritmo para o mapeamento dos
esforços de controle no sistema propulsor. O cabo umbilical foi considerado no modelo
com o objetivo de reproduzir os distúrbios presentes quando operado sob condições
reais. Seu estudo mostrou que apesar da incerteza com relação à dinâmica do veículo
![Page 32: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/32.jpg)
17
submarino, sujeita a distúrbios de naturezas diversas, um controlador linear que
considera os graus de liberdade independentes pode ser capaz de garantir estabilidade de
maneira robusta e até desempenho robusto. No entanto, pode ser alcançado com a
limitação das condições de operação a baixas velocidades.
ANTONELLI, CACCAVALE, CHIAVERINI & FUSCO (2003) utilizaram
Quaternions para representar a orientação do ROV de maneira que este pudesse
rotacionar em todos os eixos sem atingir nenhuma singularidade. Esta abordagem é
desnecessária neste trabalho uma vez, considera-se, para todos os efeitos, que a
distância entre os centros de gravidade e flutuação é suficiente para que o veículo de
resgate não opere próximo às singularidades.
1.6 Dinâmica de Cabos Umbilicais
Verificou-se na literatura que os métodos de modelagem geralmente empregados
para a modelagem dinâmica de cabos pertencem a três categorias principais: Métodos
de elementos finitos, métodos diferenciais e o de massas concentradas (lumped masses).
YOUNG (1971) apresenta a dinâmica do sistema navio/cabo/veículo rebocado.
Acrescenta que este sistema não está apenas sujeito às solicitações devidas às ondas,
ventos e correntes marinhas, mas, também à excitação vibratória devida ao fluxo ao
redor do cabo de reboque e do veículo rebocado. YOUNG (1971) discute o diagrama de
equilíbrio de um cabo de reboque exposto a um fluxo de velocidade constante.
Figura 1.10 Diagrama de equilíbrio de elemento do cabo
Ele faz sua abordagem pelo método diferencial, onde as equações
diferenciais originadas levam em consideração à coordenada S que representa o
![Page 33: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/33.jpg)
18
comprimento de arco do formato curvado do cabo. No centro deste comprimento de
arco, a linha tangente faz um ângulo φ com horizontal de acordo com a Figura 1.10.
Neste momento assume-se que o cabo é inextensível. A tensão e a pressão
hidrostática irão alongar o cabo, mas o efeito pode ser desprezado em função do
comprimento.
O diagrama de corpo livre apresenta as seguintes componentes:
• Wn: Peso na água do cabo por unidade de comprimento.
• Rn(s): força externa normal, por unidade de comprimento.
• Rt(s): força externa tangencial, por unidade de comprimento.
• T(s):Tensão local.
• φ (s): ângulo de inclinação local
O balanço das forças no sistema de coordenadas tangencial e normal gera duas
equações acopladas (1.5) e (1.6) para T e φ :
T
d
dS
φ= Rn + Wn cosφ
(1.5)
cost n
dTR w
dSφ= − +
(1.6)
NOMOTO E HATTORI (1986), KOTERAYAMA, YAMAGUCHI E
NAKAMURA (2000) E DRISCOLL, LUECK E NAHON ( 2000) utilizam o modelo
de massas concentradas ou lumped mass para modelar o cabo umbilical , no qual a
estrutura do cabo é aproximado por um modelo discreto composto de pequenos
elementos cilíndricos extensíveis. Neste procedimento as massas são consideradas
localizadas nos nós, que correspondem à interface entre os vários cilindros, como
ilustrado na Figura 1.11.
Os esforços do elemento superior são determinados e seus efeitos
“propagados” de elemento em elemento até a determinação do esforço resultante no
elemento da “ponta”.
![Page 34: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/34.jpg)
19
Figura 1.11 Discretização do cabo em elementos cilíndricos
BEHBAHANI-NEJAD e PERKINS (1996) afirmam que os principais esforços
externos que atuam sobre o cabo são o arrasto hidrodinâmico e as forças restaurativas.
As forças de arrasto hidrodinâmico são o resultado da composição das
componentes tangencial e normal.
A tensão e o amortecimento axiais constituem os principais esforços que
independem do ambiente de operação e são considerados como internos. Os efeitos dos
esforços flexionais são comparativamente menos importantes em relação aos efeitos dos
esforços acima, podendo-se considerá-los ausentes.
1.7 Modelo das Solicitações Ambientais
A melhor compreensão das solicitações à que o aparato está exposto se fará
definindo as formulações usadas na análise e processamento dos dados de ondas (para o
Navio-mãe) que não será modelada neste trabalho, de correntes marinhas (para o
veículo) e dos esforços hidrodinâmicos envolvidos.
O mar não se comporta de forma contínua ou facilmente descrita. Para se avaliar
este fenômeno utiliza-se um espectro de onda equivalente à área onde a embarcação
operará. O espectro pode ser comparado a um histograma que oferece previsão das
maiores ocorrências de ondas significativas durante um período considerável de
medições. Em algumas regiões do planeta, alguns espectros são reavaliados
sistematicamente de forma a apresentar quais são as condições do estado de mar. Isto é
![Page 35: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/35.jpg)
20
uma importante ferramenta para se avaliar se o Navio ou embarcação terá uma resposta
satisfatória aquele carregamento de ondas. Este espectro de onda se remete a uma
análise probabilística que nos permite estimar o comportamento no mar
Em geral, a forma do espectro de ondas varia consideravelmente de acordo com
a velocidade do vento, período de tempo que o vento sopra (duração), comprimento da
pista, sabendo que pista é a região do espelho d’água onde a velocidade e a direção do
vento podem ser consideradas constantes.
Com a intenção de se obter um espectro de ondas esperado para as diversas
condições de mar, diversos autores vêm propondo formulações baseando-se em analises
teóricas juntamente com ajustes empíricos (JONSWAP, Bretschneider, Pierson-
Moskowitz, DNV e outros).
1.7.1 Espectro de Pierson-Moskowitz
Para mares totalmente desenvolvidos no oceano, Pierson e Moskowitz (1964)
propuseram uma formulação para o espectro de potência (espectro PM), que é função
apenas da velocidade do vento (independente da pista).
(1.7)
Onde α e β são constantes (8,1 × 10-3 e 0,74, respectivamente), w é a
frequência e Vv representa a velocidade do vento para uma altura determinada,
geralmente é tomada para uma altura de aproximadamente 19,5m sobre a superfície.
![Page 36: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/36.jpg)
21
Figura 1.12 Espectro de Pierson-Moskowitz
1.7.2 Espectro de JONSWAP A formulação de JONSWAP (Figura 1.13) baseia-se em uma extensiva coleta de
dados de ondas do programa Joint North Sea Wave Project, realizado por
HASSELMAN ET AL (1968). O espectro representa mares com limitação de pista, e os
dados de entrada são a velocidade do vento e o comprimento da pista.
Figura 1.13 Comparação dos espectros PM X JONSWAP
![Page 37: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/37.jpg)
22
Já para um veículo submarino, o efeito ambiental relevante é a corrente
marítima. A corrente é formada a partir de três princípios distintos. O primeiro deles é o
vento, que gera correnteza na camada mais próxima da superfície. Em seguida, a troca
de calor por convecção entre as camadas, lâminas d’água, do ambiente marinho e na
superfície entre os fluidos ar-água, assim como nas alterações de salinidade (mudanças
de concentração e conseqüentemente, do peso específico). Por fim, o efeito da maré
provocado pela lua também influi no aparecimento da corrente marítima.
Segundo LEWIS, LIPSCOMBE E THOMASSON, (1984) e KALSKE E
HAPPONEN, (1991), a caracterização da correnteza marítima é realizada segundo a
especificação da sua velocidade, em geral definida por coordenadas dadas no sistema
inercial. Nestes casos, deve-se obter suas coordenadas no sistema referencial móvel
quando for necessária a sua incorporação na dinâmica do veículo.
Assim, a transformação de velocidade de corrente marítima do referencial fixo
para o móvel pode ser escrita como (1.8):
11 1 2 1( )c cJν η η−= �
(1.8)
E a velocidade relativa do Veículo de resgate ( rν ) no fluido pode ser escrita
como:
r cν ν ν= −
(1.9)
Fossen (1994) demonstra que para levar em consideração a corrente marinha,
basta trabalhar, na equação(1.1), com a velocidade do veículo em relação à água νr ,
dada por (1.9).
1.8 Esforços Hidrodinâmicos
CLAYTON E BISHOP (1982) afirmaram que o conjunto dos esforços
hidrodinâmicos ao qual um dispositivo totalmente submerso está sujeito quando este
sofre deslocamento pelo fluido são:
![Page 38: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/38.jpg)
23
• Esforços devido à massa adicionada;
• Arrasto ou dissipação hidrodinâmica (Amortecimento hidrodinâmico); e
• Esforços de sustentação.
Segundo NEWMAN (1977), no início da aceleração de um dispositivo
submerso, os esforços devidos a massa adicionada correspondem ao efeito
hidrodinâmico mais importante. Neste intervalo os fenômenos viscosos podem ser
desprezados, pois o gradiente de velocidade relativa entre o corpo submerso e o fluido é
pequeno. À medida que o corpo eleva sua velocidade os esforços devem-se cada vez
mais aos efeitos de viscosidade, com o aparecimento de vórtices na superfície posterior
do corpo, isto é à jusante do corpo. Na condição de velocidade constante existe a
eliminação de vórtices (vortex shedding) de maneira oscilatória, o que corresponde ao
mecanismo responsável pelo arrasto em regime.
1.8.1 Massa Adicionada
Os esforços devido à massa adicionada estão relacionados com a movimentação
forçada de partículas do fluido que envolve o corpo do veículo quando tem aceleração.
YUH (1990) apresenta as forças Aτ correspondentes a massa adicional de
acordo com a seguinte expressão (1.10):
A A
dM
dtτ ν= −
(1.10)
Onde MA corresponde à matriz de inércia devido à massa adicionada.
FOSSEN (1994) utiliza as equações de Kirchhoff, que relacionam a energia
cinética do fluido com as forças e momentos atuantes no veículo, para chegar a
expressões que descrevem os esforços de massa adicionada. A expressão do esforço
![Page 39: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/39.jpg)
24
devido à massa adicionada Aτ , em função das matrizes de inércia MA e de Coriolis CA,
pode ser escrita da seguinte forma (1.9):
( )A A AM Cν ν ν τ+ = −� (1.11)
1.8.2 Arrasto ou dissipação hidrodinâmica
CLAYTON E BISHOP (1982) correlacionaram o esforço hidrodinâmico devido
ao arrasto com dois fenômenos, denominados fricção de superfície e arrasto devido à
pressão. Simplificadamente, o arrasto de fricção de superfície deve-se às tensões
tangenciais entre o fluido e a rugosidade da superfície do corpo o que resulta em um
regime turbulento para números de Reynolds menores. Este componente do arrasto é
dominante na dissipação hidrodinâmica em baixas velocidades. O outro fenômeno deve-
se à diferença de pressões normais à superfície do corpo e portanto dependem
diretamente da forma do corpo.
Por isso, o arrasto devido à pressão também é conhecido como arrasto de forma.
O aparecimento da força de arrasto surge, então, com a diferença de pressões à
montante e à jusante com o movimento do veículo em relação ao fluido.
Segundo FOSSEN (1994), O esforço de dissipação hidrodinâmica ( )D υ υ pode
tem como principal componente o esforço de arrasto FD (equação 1.12), sendo que este
pode ser quantificado de acordo com a seguinte expressão:
0.5D dF C Sρ ν ν= − (1.12)
Nesta expressão, ρ é a massa específica do fluido e Cd é uma matriz de
coeficientes de arrasto hidrodinâmico e S é a área molhada.
![Page 40: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/40.jpg)
25
1.9 Estratégias de Controle Aplicáveis
As técnicas de controle aplicadas ao posicionamento de veículos submarinos são
das mais variadas possíveis. A seleção de uma é função do sistema e das condições de
operação. Dentre as estratégias de controle empregadas em veículos submarinos pode-se
destacar:
• Controle linear PID,
Muito embora, possua validade apenas local (como os demais métodos lineares),
em torno de um ponto de operação, técnicas adicionais como o gain scheduling podem
ser empregados para elevar o domínio da aplicação.
• Técnicas adaptativas,
As mudanças das condições de operação do veículo e, conseqüentemente, dos
seus parâmetros justificam a utilização deste modelo. Porém, o algoritmo de estimação
pode, sofrer influência do ruído introduzido no processo de estimação de estados pelos
sensores (FOSSEN, 1994).
• Controle ótimo
A aplicação do controle ótimo em veículos submarinos pode ser encontrada em
(KAJIWARA, KOTERAYAMA, NAKAMURA, TERADA E MORITA, 1993;
NAKAMURA, KAJIWARA AND KOTERAYAMA, 2000).
O controle robusto é indicado quando o sistema está sujeito a distúrbios de
naturezas diversas, à variação paramétrica e a ruídos nas medições dos estados de
posição e velocidade. Como técnicas robustas aplicáveis ao controle de veículos
submarinos tem-se : H∞, LQR, LQG/LTR (observada em (JUUL ET AL., 1994), ) e
sliding mode.
1.10 Organização da Dissertação
Com o presente trabalho pretende-se apresentar contribuições para projetos
futuros que possam ser utilizados nos trabalhos na área de localização, resgate e
salvamento de submarinos que operem em cotas superiores à atual e em condições
ambientais adversas.
Com este propósito, foi admitido que o problema dinâmico a ser investigado
envolve a dinâmica do sistema Navio, veículo e do cabo, sobretudo para controlar a
atitude do veículo na aproximação do veículo sinistrado.
![Page 41: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/41.jpg)
26
No Capítulo 1 foi apresentada a motivação e uma revisão do estado da técnica,
dando ênfase à veículos autônomos e de localização e resgate, e os objetivos desta
dissertação. Em seguida, foi realizada uma breve revisão bibliográfica que visou
apresentar o que é abordado sobre o assunto pela comunidade técnico-científica.
O Capítulo 2 é dedicado ao detalhamento dos modelos matemáticos que
descrevem o comportamento de um veículo submarino.
O Capítulo 3 é dedicado a uma discussão introdutória sobre dinâmica de cabos,
aos modelos matemáticos adotados comumente, para tratar este problema e simulações
computacionais para definir os esforços oriundos do cabo umbilical atuantes no
veículo.
No Capítulo 4 são apresentadas as convenções e os modelos computacionais
elaborados em ambiente MATLAB/SIMULINK para o tratamento do modelo de
veículo submarino genérico.
No Capítulo 5 são apresentadas as especificidades e atribuídos valores
numéricos para um veículo específico e as simulações elaboradas
No Capítulo 6 são apresentados alguns sistemas de controle aplicáveis ao
problema e apresentado um controlador linear de atitude com simulações.
No Capítulo 7 são apresentados os resultados alcançados e as conclusões desta
dissertação.
Finalmente, no Capítulo 8 são apresentadas as sugestões para trabalhos futuros.
![Page 42: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/42.jpg)
27
1.11 Resumo das principais hipóteses simplificadoras
No Capítulo 3 que é sobre dinâmica de cabos, as principais hipóteses
simplificadoras são a fixação da ponta superior do cabo com relação ao referencial
inercial, a desconsideração dos esforços torcionais, flexionais, oriundos ou induzidos
por vórtices (VIV).
No Capítulo 4 são as expressões da dinâmica de corpo rígido para o veículo
submarino e as expressões matriciais apresentadas abaixo que seguem com as seguintes
hipóteses:
• A massa está distribuída uniformemente;
• A massa é constante e a posição do centro de massa é considerada
invariante;
• A origem do sistema de coordenadas móvel não coincide com o centro de
• gravidade do veículo, para o caso mais geral.
No Capítulo 5, são introduzidas simplificações para a aplicação da força de
arrasto, que é aplicada em apenas um ponto de cada leme.
![Page 43: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/43.jpg)
28
2 MODELAGEM DE VEÍCULOS SUBMARINOS
O modelo matemático descreve em termos matemáticos o comportamento
dinâmico do veículo submarino. A mecânica Newtoniana é geralmente utilizada para a
referida modelagem, onde a principal dificuldade consiste na determinação de diversos
coeficientes que permitirão conhecer os esforços que atuam sobre os corpos. A
modelagem matemática é complexa e pode ser dividida em vários modelos tais como: o
modelo cinemático; o modelo dinâmico; modelos dos sistemas de controle (atuadores,
propulsores e sensores); e modelos de perturbações que atuam sobre o veículo. O
modelo matemático de um veículo submarino é importante visto que a maioria dos
métodos para previsão de comportamento precisa do conhecimento deste. Por outro
lado, existem alguns métodos de controle, como a lógica Fuzzy, que não dependem do
modelo matemático.
Os modelos matemáticos são usualmente desenvolvidos na fase de projeto do
veículo. Posteriormente, após resultados dos testes em protótipos, o modelo matemático
é ajustado. Quando este é construído, diferentes testes e provas são aplicados para
comprovar todas as especificações do projeto e melhorar o modelo matemático da
dinâmica do veículo.
De forma a permitir futuros desenvolvimentos de sistemas de controle e de
previsão de comportamento, os seguintes modelos matemáticos são necessários:
• Modelo da cinemática do veículo;
• Modelo da dinâmica do veículo;
• Modelo de geração do vetor de controle; e
• Modelo de perturbações.
![Page 44: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/44.jpg)
29
2.1 Modelo Cinemático
As equações de movimentação destes veículos demandam estudos em campos
fundamentais da mecânica: estática e dinâmica. A Estática manipula as forças que
produzem o equilíbrio nos corpos em estudo, tais como empuxo e gravidade, enquanto a
dinâmica tem como objetivo a análise de esforços no contexto da movimentação
produzida no corpo.
O estudo da dinâmica pode ser dividido em duas partes: cinemática a qual se refere só a
os aspectos geométricos de movimentação, sem considerar massa ou forças; e a cinética,
que analisa as forças que causam os movimentos.
Para desenvolver sistemas de controle e orientação de um veículo submarino, é
necessário descrever matematicamente todas as movimentações deste. O
comportamento dinâmico destes veículos é determinada usando os princípios das leis de
Newton de movimentação aplicadas a um corpo rígido num fluido.
2.1.1 Sistemas de Coordenadas
A definição adequada das referências é essencial para especificar o comportamento
dinâmico de um veículo no espaço.
A determinação da posição e orientação de um corpo rígido no espaço submarino prevê
a utilização de seis coordenadas independentes ou graus de liberdade (6GDL): três
translacionais e três rotacionais convencionados como: Avanço, Deriva, Arfagem,
Balanço, Caturro e Guinada.
A tabela abaixo organiza a notação das forças e momentos, posicionamento e
velocidades nos seis graus de liberdade nos dois sistemas de referência (fixo e móvel).
![Page 45: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/45.jpg)
30
Tabela 2.1 Notação [SNAME/1950] de movimentos, forças e momentos relativos
Ref. Inercial ou
Global
Ref. Móvel ou do
Corpo GDL Nome Forças e
Momentos Pos./atit. Velocidade Pos./atit. Velocidade
1 Avanço
(surge) X x x� mx u
2 Deriva
(sway) Y y y� my v
3 Arfagem
(heave) Z z z� mz w
4 Balanço
(roll) K φ φ� mφ p
5 Caturro
(pitch) M θ θ� mθ q
6 Guinada
(yaw) N ψ ψ� mψ r
As primeiras três coordenadas e suas derivadas temporais correspondem à
posição e movimentação de translação ao longo dos eixos x, y, e z; enquanto que as
últimas três coordenadas e suas derivadas temporais são usadas para descrever a
orientação e o movimento rotacional (Figura 1.8).
2.1.2 Sistema de Coordenadas – Fundamentos Teóricos As velocidades e acelerações de um veículo são, em geral, descritas em diferentes
referenciais.
Para o caso de veículos cujos movimentos estudados são aqueles em relação ao planeta
Terra, podem-se classificar os sistemas de coordenadas em :
a. Referenciais vinculados à Terra;
b. Referenciais vinculados ao corpo do veículo.
![Page 46: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/46.jpg)
31
Figura 2.1 Sistemas de coordenadas referenciais
ECI – (Earth Centered Inertial frame)
Este sistema tem origem no centro do planeta. Eixo z coincide com o eixo de rotação da
terra. Move-se com a terra em seu movimento de translação, mas mantém sua
orientação fixa em relação às estrelas.
NED – (North, East and Down Frame)
Este sistema tem origem no ponto de interseção entre a linha que liga o centro do
planeta ao C.G. do veículo e a superfície terrestre (ou do oceano). Para problemas
relacionados a veículos marítimos pode-se considerar o mesmo como um Referencial
inercial
BODY FRAME – (Sistema de Coordenadas fixo no corpo): fixo no corpo do
veículo. Os três eixos são (Figura 2.1):
• Longitudinal: direção de avanço do veículo.
• Lateral: direção lateral-direita do veículo.
• Descendente: direção inferior do veículo.
Em geral, o centro do sistema de referência móvel está localizado no ponto médio do
eixo longitudinal. Este ponto é tipicamente o centro de gravidade do veículo. O centro
de gravidade de um corpo rígido é o ponto no qual é assumido que as forças e
momentos são aplicados.
![Page 47: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/47.jpg)
32
O sistema de referência é definido de tal forma que seus eixos coincidam com os eixos
principais de inércia. Desta forma, tira-se vantagem da simetria do veículo conduzindo a
modelos mais simples.
Um veículo movimenta-se se alguma força externa ou torque está atuando sobre seu
casco. Estas forças e torques são provenientes de atuadores ou forças motrizes (as
hélices, os propulsores, o leme, etc.) ou podem ser resultado de forças ambientais como
ondas, ventos, correntes marítimas, etc. As forças e momentos desejados são
controlados e formam o vetor de controle, enquanto isso, as outras são denominadas
perturbações externas (ambientais).
A movimentação das coordenadas de referência fixa no corpo (móvel) é descrita em
relação às coordenadas de referência fixas na terra (inercial). Para veículos submarinos
é, usualmente, assumido que as acelerações num ponto na superfície da terra podem ser
ignoradas. Como resultado desta aproximação o eixo de referencia fixo na terra pode ser
considerado inercial. Isto sugere que a posição e orientação do veículo devem ser
descritas relativas ao sistema de referência inercial enquanto as velocidades angular e
linear devem ser expressas no sistema de referência móvel. Baseado na notação
SNAME, a movimentação geral de um veículo submarino em 6GDL, pode ser descrita
pelos seguintes vetores:
[ ] [ ] [ ][ ] [ ] [ ][ ] [ ] [ ]TTTT
TTTT
TTTT
NMKZYX
rqpwvu
zyx
,,,,,
,,,,,
,,,,,
2121
2121
2121
==→=
==→=
==→=
τττττ
υυυυυ
ψθφηηηηη
(2.1)
Onde η denota a posição e orientação em relação ao sistema de referência inercial; υ
denota o vetor de velocidade linear e angular em relação ao sistema de referência
móvel; e τ é usado para descrever as forças e momentos atuando no veículo no sistema
de referência móvel.
![Page 48: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/48.jpg)
33
Figura 2.2 Sistemas de Coordenadas Móvel e Inercial
2.1.3 Ângulos de Euler
O modelo cinemático é uma descrição do movimento e da geometria do veículo, o
modelo é baseado em rotações progressivas ao redor dos diferentes eixos. Esta
progressão é usada para construir a matriz de rotação, que permite a conversão de
vetores entre os sistemas de referência. Esta matriz de rotação J pode ser obtida
mediante diferentes métodos, cada um com vantagens e desvantagens. O método
comumente empregado para construir esta matriz utiliza três rotações consecutivas sob
uma progressão dos eixos, este método é chamado de Ângulos de Euler, “Euler Angles”.
A ordem em que as rotações acontecem, determina a localização final do corpo no
espaço tridimensional. Os ângulos de Euler proporcionam uma descrição física da
atitude do veículo para pequenos ângulos.
Estas definições dos ângulos de Euler são consistentes com as definições da arquitetura
naval . Esta é uma importante propriedade dado que doze diferentes e únicos sistemas
de coordenadas (de ângulos de Euler) são possíveis, enquanto que unicamente uma
![Page 49: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/49.jpg)
34
convenção dos ângulos de Euler é correspondente com as convenções da arquitetura
naval.
A referência inercial requer que as definições de orientação dos ângulos de Euler de
balanço, caturro e guinada, sejam efetuadas em ordem.
A consistência dos resultados usando ambos os métodos pode ser demonstrada
examinando a ordem matemática das matrizes de rotação resultantes, as quais são
idênticas em cada caso. Naturalmente, quando a ordem das rotações é inversa, a
conversão está ocorrendo da referência móvel à coordenada de referência inercial.
Normalmente, os ângulos de Euler devem restringir a orientação vertical do veículo de
forma a evitar singularidades matemáticas. Adicionalmente, na maioria dos veículos
deve prevenir-se a inversão horizontal e o apontamento vertical para evitar danos
internos no veículo e condições de instabilidade de difícil controle. Estas restrições
adicionam limitações no ângulo de balanço para condições normais de operação.
As restrições aplicadas aos ângulos de Euler são as seguintes:
πφπ ≤<−
22
πθ
π<<−
πψ 20 <≤
(2.2)
2.1.4 Conversão das Velocidades de Translação do Sistema Móvel Para o Sistema Inercial
A velocidade de trajetória de um corpo em relação ao sistema de coordenadas inercial é
dada pela transformação de velocidade. Sendo:
![Page 50: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/50.jpg)
35
( )
( ) ( ) ( ) ( )
( )
( )
( )
1 1 2 1
1 2
0
0
0 0 1
0
0 1 0
0
1 0 0
0
0
T T Tz y x
z
y
x
J
J J J J
c s
J s c
c s
J
s c
J c s
s c
η η υ
η ψ θ φ
ψ ψ
ψ ψ ψ
θ θ
θ
θ θ
φ φ φ
φ φ
=
=
= −
− =
= −
�
Tem-se ,
1 2( )
c c s c c s s s s c s c
J s c c c s s s c s s s c
s c s c c
ψ θ ψ φ ψ θ φ ψ φ ψ θ φ
η ψ θ ψ φ ψ θ φ ψ φ ψ θ φ
θ θ φ θ φ
− + + = + − + −
(2.3)
Onde a ( )1 2J η é a matriz de transformação (2.3) (sistema móvel ao sistema inercial), a
qual é comumente descrita por três rotações, obtidas mediante as funções dos ângulos
de Euler: balanço ( )φ , caturro ( )θ e guinada ( )ψ .
Sabendo que :
cos
tan
c
t
sen s
θ θ
θ θ
θ θ
=
=
=
1Z0Z
0Y
1Yφ
φ
1v
vq
1w
w
r
p
2X
2Z
1X
1Z
θ
θ
2u1u
2w1w
θ�φ�
ψ�θ�
ψ
ψ
2v
3v 3Y
2Y
2u
3u
2X3X
Figura 2.3 Movimentos de Balanço, Caturro e Guinada (roll, pitch e yaw)
![Page 51: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/51.jpg)
36
A transformação inversa da velocidade pode ser determinada de uma forma similar:
( )1
1 1 2 1Jυ η η−= � (2.4)
Dado que a matriz de rotação 1J e a matriz inversa ( )11 2J η− cumprem com a condição
de ortogonalidade:
( ) ( )1
1 2 1 2TJ Jη η− = (2.5)
Resumindo, ( )2 1J η representa as rotações sofridas pelo veículo nos eixos x, y e z e é
descrita como:
( ) ( ) ( ) ( )1 2
T T Tz y xJ J J Jη ψ θ φ= (2.6)
2.1.5 Conversão das Velocidades de Rotação Para o Sistema Inercial
As velocidades angulares expressas de acordo com o sistema de coordenadas inercial
podem ser interpretadas como as derivadas dos ângulos de orientação do veículo: ψ , θ
e φ . Então, as velocidades de rotação em relação ao sistema de coordenadas fixos no
veículo são dadas por:
12 2 2 2
0 0
0 ( ) ( ) ( ) 0 ( )
0 0x x yJ J J J
φ
ν φ θ φ θ η η
ψ
−
= + + =
�
� �
�
(2.7)
(2.8)
![Page 52: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/52.jpg)
37
2 2
1
( ) 0
0
s t c t
J c s
s c
c c
φ θ φ θ
η φ φ
φ φ
θ θ
= −
Note que:
12 2 2 2( ) ( )TJ Jη η− ≠ (2.9)
É interessante observar que, para φ = 0◦ e θ = 0◦, a relação entre as velocidades de
rotação nos dois sistemas de coordenadas é dada por uma identidade. Além disso, a
matriz de transformação de coordenadas mostrada acima é singular para θ = ±90◦.
Nestas condições, seria necessária a utilização de Quatérnions para representar a
orientação do veículo no sistema inercial de maneira a evitar tal singularidade
(ANTONELLI ET AL. 2003). Entretanto, para este tipo de veículo em particular, os
centros de gravidade e de flutuação estão suficientemente afastados, evitando a
singularidade e suas complicações conforme observado em CUNHA (1995). Pode-se
escrever as transformações de coordenadas para os seis graus de liberdade do sistema,
como:
3 31 2
3 32 2
( )
( ) 0( )
0 ( )
J
JJ
J
η η υ
ηη
η
×
×
=
=
�
(2.10)
2.2 Modelo Dinâmico
2.2.1 Influências sobre o comportamento dinâmico do veículo. A dinâmica submarina introduz um grande número de esforços que afetam o
comportamento dinâmico do veículo. Entre os esforços a serem considerados no
processo incluem-se as forças restaurativas, inerciais e as forças hidrodinâmicas.
![Page 53: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/53.jpg)
38
2.2.2 Forças restaurativas • Empuxo e gravidade.
De acordo com a relação entre as forças de gravidade e de empuxo, a flutuabilidade do
veículo pode ser definida como:
• negativa,
• positiva,
• neutra.
Para um veículo remotamente operado - ROV, por exemplo, o sistema é dimensionado
para que a flutuabilidade seja ligeiramente positiva, ou seja, |W| < |B|, de modo que o
veículo suba à superfície naturalmente, visando facilitar o seu resgate,em caso de falha
do equipamento.
Para o caso dos veículos autônomos (AUVs), prefere-se a a flutuabilidade neutra, por
apresentar força vertical resultante nula, e o menor esforço de deslocamento otimiza a
reserva de energia.
Figura 2.4 Efeitos do empuxo e do peso em um corpo submerso.
• Estabilidade.
Conforme observado na Figura 2.4, a força de gravidade é descrita por um vetor
paralelo ao eixo vertical do sistema estacionário (z) que atua sobre o centro de
gravidade do veículo (G) e a força de empuxo é um vetor, paralelo ao mesmo eixo, que
![Page 54: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/54.jpg)
39
atua sobre o centro de flutuação (B). Como estes dois pontos geralmente não coincidem,
o efeito de restauração irá introduzir forças e momentos, respectivamente, ao longo e
em torno dos três eixos referenciados ao veiculo no sentido de alinhar tais centros ao
eixo z .
Quanto maior for a distância metacêntrica entre esses dois pontos, maior será a atuação
do momento restaurador (RM) buscando estabilizar o sistema na condição de
alinhamento dos mesmos com o eixo z.
Figura 2.5 Instabilidade do corpo submerso até o alinhamento dos centros de gravidade e de carena.
Como pode se ver na Figura 2.5, a configuração instável produz um momento, RM ,
este esforço é diretamente proporcional a distância entre o centro de gravidade G e o
centro de carena (B) Este momento pode ser descrito como:
( )WBdRM +=
2
1
(2.11)
Onde d é a distância perpendicular entre as forças atuantes B e W em que são
aplicadas em G e B respectivamente.
Pelo fato dessas forças (B e W) estarem descritas no sistema inercial (fixo), devem ser
primeiramente transformadas para o sistema de referência do veículo (móvel) para
serem adicionadas ao modelo dinâmico. Isto é feito com a pré-multiplicação de tais
forças pela inversa da matriz de transformação de coordenadas conforme descrito
abaixo
![Page 55: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/55.jpg)
40
11 2
0
( ) ( ) 0G J
W
τ η η−
=
(2.12)
11 2
0
( ) ( ) 0B J
B
τ η η−
= −
(2.13)
W mg= (2.14)
B gρ= ∇ (2.15)
A simbologia ∇ na expressão (2.15) representa o volume de fluido deslocado pelo veículo e g, na expressão (2.14), a aceleração da gravidade. A expressão para forças e momentos restaurativos é representada por:
( ) ( )( )
( ) ( )G B
G G B B
Gr r
τ η τ ηη
τ η τ η
+ = − × + ×
(2.16)
2.2.3 Esforços Inerciais
Segundo FOSSEN (1994), os efeitos devidos à dinâmica de corpo rígido e os efeitos
devidos à dinâmica de corpo submerso são reescritos separadamente. A matriz CCR, ao
contrário da matriz de Inércia, pode ser parametrizada de várias maneiras, veja
(FOSSEN, 1994). Então, as forças centrípetas e de Coriolis do corpo rígido são dadas
por :
![Page 56: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/56.jpg)
41
3 3 10( )
1 2x
CR T
CC
C Cυ
= −
(2.17)
2.2.4 Esforços hidrodinâmicos
Lembrando que o conjunto dos esforços hidrodinâmicos ao qual um dispositivo
totalmente submerso está sujeito quando este sofre deslocamento pelo fluido são:
• Esforços devido à massa adicionada;
• Arrasto ou dissipação hidrodinâmica; e
• Esforços de sustentação.
Os esforços devido à massa adicionada estão relacionados com a movimentação
forçada de partículas do fluido que envolve o corpo do veículo quando tem aceleração.
Sendo representado pela expressão abaixo:
A A
dM
dtτ ν= −
(2.18)
Onde MA corresponde à matriz de inércia devido à massa adicionada.
A determinação das forças de arrasto e dissipação hidrodinâmicas em uma estrutura
submersa é uma das principais tarefas em um projeto desse tipo. Essa também é uma
das tarefas mais difíceis devido à complexidade envolvida na interação fluido-estrutura.
Além disso, há a dificuldade de se descrever analiticamente a natureza aleatória das
ondas e determinar o carregamento provocado por elas na estrutura. No entanto, nos
dias de hoje, algumas teorias estão disponíveis. Estas teorias envolvem o entendimento
dos fenômenos de interação, testes em laboratório e no próprio mar, e são
razoavelmente precisas nos cálculos de carregamento de onda nas mais diversas
aplicações submersas.
![Page 57: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/57.jpg)
42
Com base nas dimensões da estrutura, podem ser utilizadas diferentes formulações para
se determinar a força aplicada pelo fluido em movimento. Basicamente há duas
formas de se calcular esta força:
a) Equação de Morison
b) Teoria de Difração
A Equação de Morison assume que a força sobre a estrutura é composta por duas
parcelas de força, uma devido ao arraste e outra devida à inércia, agindo
simultaneamente. Os coeficientes de arrasto e inércia necessários para se determinar a
força são obtidos experimentalmente.
Quando as dimensões da estrutura possam alterar o campo de corrente, assim como o
campo de onda nas proximidades, a difração pela superfície da estrutura deve ser levada
em conta no cálculo da força. Essa formulação é conhecida como Teoria de Difração.
A Equação de Morison foi desenvolvida por Morison, O´Brien, Johnson, e Shaaf (1950)
para descrever a força horizontal de onda que age sobre um cilindro vertical que se
estende desde o fundo até a superfície livre, conforme pode ilustrado abaixo.
Figura 2.6 Cilindro sob ação das forças de inércia e arrasto
![Page 58: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/58.jpg)
43
O princípio da força de inércia está na quantidade de movimento que uma partícula de
água carrega consigo. Quando a partícula passa pelo cilindro ela é acelerada e em
seguida desacelerada, o que requer uma força para alterar este movimento. A
força incremental em um pequeno segmento de cilindro induzido pela aceleração da
partícula de água
21 4M
udf C D s
t
πρ
∂= ∂
∂
(2.19)
Onde df1 é a força de inércia sobre um segmento ds do cilindro vertical, D é o
diâmetro do cilindro, u
t
∂
∂ é a aceleração da partícula de água em relação a linha
de centro do cilindro representado na Figura e CM é o coeficiente de inércia. Pela
Equação (2.19) nota-se que a força de inércia é proporcional a aceleração local da
partícula de água. Essa força é linear se, para a determinação da aceleração, for
usada a Teoria Linear de Onda. Por outro lado, o termo de inércia será não linear
se a aceleração horizontal considerar os termos convectivos.
A causa principal da força de arrasto em um cilindro é a diferença de pressão
criada pela passagem do fluxo ao redor deste cilindro, essa diferença de pressão
promove o fenômeno de separação da camada limite. Em um fluxo oscilatório, é
utilizado o valor absoluto da velocidade da partícula de água na Equação de Morison
para garantir que a força de arrasto esteja na mesma direção da velocidade, dessa forma,
a força pode ser escrita como:
1
2D Ddf C D u udsρ= (2.20)
onde dfD é a força de arrasto no segmento de cilindro, u é a velocidade instantânea da
partícula de água e CD é o coeficiente de arrasto. Combinando as componentes de
inércia e arrasto, a Equação de Morison para um cilindro fixo na presença de ondas é
escrita como:
![Page 59: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/59.jpg)
44
2 1
4 2M D
uf C D s C D u uds
t
πρ ρ
∂= ∂ +
∂
(2.21)
onde f é a força por unidade de comprimento de um cilindro vertical, deve-se notar
que a Equação de Morison não prevê forças oscilatórias devido ao
desprendimento de vórtices na direção transversal, isso é, perpendicular à direção de
propagação das ondas. Várias tentativas tem sido feitas para melhorar a Equação
de Morison ou para desenvolver uma nova formulação. SARPKAYA E
ISAACSON (1981) descreveram métodos para melhorar a Equação de Morison,
comparando os resultados obtidos analiticamente com resultados medidos
experimentalmente e introduzindo novos termos na equação original que não serão
abordados neste trabalho.
2.3 Dinâmica
A avaliação do comportamento dinâmico consiste em estabelecer relações entre causa e
efeito para o movimento de um corpo material. Um corpo material pode ser interpretado
como ponto material ou como corpo rígido, dependendo das dimensões e da sua
distribuição de massa. A dinâmica de um ponto material de massa m descrevendo um
movimento no espaço é regida pela seguinte expressão:
1 1mη τ=��
(2.22)
Considerando que a aceleração 1η�� é resultado direto da atuação da resultante dos
esforços externos 1τ .
Porém, o veículo de resgate submarino deve ser tratado como corpo rígido. A
representação da dinâmica para um corpo rígido possui termos adicionais em relação à
dinâmica do ponto material que estão relacionados com o movimento de rotação do
corpo em torno dos seus eixos. Estes termos adicionais correspondem à força centrípeta
e à força de Coriolis.
![Page 60: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/60.jpg)
45
Ressalta-se a conveniência de escrever as equações da dinâmica do movimento do corpo
rígido parametrizados no sistema de coordenadas móvel, visto que ação dos agentes
externos e a inércia do veículo são constantes em relação a este referencial.
Sendo assim, as expressões da dinâmica de um corpo rígido, para translação e rotação
podem ser escritas como abaixo (Fossen, 1994):
[ ]1 2 1 2 2 2 1( )G Gm r rν ν ν ν ν ν τ+ × + × + × × =� �
(2.23)
( )0 2 1 2 1 2( )G
dI mr
dtν ν ν ν τ+ × + × =�
(2.24)
Nas expressões acima o operador × representa o produto vetorial, o vetor Gr
corresponde à distância do centro de massa do veículo com relação ao sistema de
coordenadas móvel e a matriz 0I contém os momentos e produtos de inércia do veículo
com relação ao centro do sistema de coordenadas móvel.
Reescrevendo as expressões acima na forma matricial tem-se:
( )CR CRM Cν ν ν τ+ =�
(2.25)
A matriz CRM refere-se à matriz de Inércia, contendo a massa m e os momentos e
produtos de inércia do tensor 0I , já a matriz CRC é denominada matriz de centrípeta e
de Coriolis, contendo os termos das forças centrípetas e de Coriolis.
![Page 61: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/61.jpg)
46
2.3.1 Corpo rígido e os sistemas de referência
Segundo Fossen, a matriz de inércia do corpo rígido ( CRM ) é definida por:
11 21
21 22
T
CR
M MM
M M
=
(2.26)
Sendo,
11
0 0
0 0
0 0
m
M m
m
=
, 21
0
0
0
G G
G G
G G
mz my
M mz mx
my mx
− = − −
e 22
x xy xz
yx y yz
zx zy z
I I I
M I I I
I I I
− −
= − − − −
logo,
0 0 0
0 0 0
0 0 0
0
0
0
G G
G G
G G
CRG G x xy xz
G G yx y yz
G G zx zy z
m mz my
m mz mx
m my mxM
mz my I I I
mz mx I I I
my mx I I I
− − −
= − − −
− − − − − −
(2.27)
Ressalta-se que no caso de submersão do corpo rígido, incorporam-se massas adicionais
a seu comportamento. A partir deste ponto, a matriz de inércia do corpo é expressa por:
CR AM M M+�
(2.28)
onde:
M . . . Matriz de inércias resultante do veículo submerso;
![Page 62: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/62.jpg)
47
AM . . .Matriz de massas adicionais. Representa o armazenamento de energia cinética
no fluido deslocado pelo veículo. (Filho 1996).
Assim, a matriz completa de massas adicionais é dada por:
u v w p q r
u v w p q r
u v w p q r
Au v w p q r
u v w p q r
u v w p q r
X X X X X X
Y Y Y Y Y Y
Z Z Z Z Z ZM
K K K K K K
M M M M M M
N N N N N N
= −
� � � � � �
� � � � � �
� � � � � �
� � � � � �
� � � � � �
� � � � � �
(2.29)
Onde, de acordo com Fossen (1994), cada elemento corresponde à massa adicional em
um eixo para deslocamentos no próprio eixo ou em outro adjacente.
Porém, por questões de simetria do veículo, a matriz pode ser reescrita de várias
maneiras, tal com a exemplificada abaixo utilizada para veículos com simetria no plano
xz e no plano yz (simetria bombordo/boreste e proa/popa), tal como o veículo de resgate
em estudo:
11 51
22 42
33
42 44
51 55
66
0 0 0 0
0 0 0 0
0 0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0 0
m m
m m
mM
m m
m m
m
=
(2.30)
Para Fossen (1994), os efeitos devidos à dinâmica de corpo rígido e os efeitos devidos à
dinâmica de corpo submerso são reescritos separadamente. Então, a matriz dos termos
das forças centrípetas e de Coriolis do corpo rígido são:
3 3 10( )
1 2x
CR T
CC
C Cυ
= −
(2.31)
![Page 63: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/63.jpg)
48
3 FORMULAÇÃO MATEMÁTICA
3.1 Introdução
Neste capítulo serão apresentadas algumas abordagens matemáticas para a
modelagem do cabo, objetivando mensurar a influência desta força no veículo de
resgate.
Mais detalhes sobre estas formulações podem ser encontrados na literatura de
análise dinâmica e elementos finitos.
O cabo submarino “umbilical” é um sistema caracterizado por uma dinâmica
“Não-Linear” complexa, o problema completo pode ser submetido a condições de “snap
loading”, vibrações induzidas por vórtices e vários outros problemas operacionais
relacionados ao problema no cabo submerso no oceano.
Modelos confiáveis são capazes de prever a resposta do cabo submerso e
calcular com acurácia os deslocamentos e esforços aplicados no cabo para diversas
condições de operação possíveis. Dois modelos são típicos para prever a resposta
dinâmica do cabos: contínuos e discretos.
Modelos contínuos são poderosas ferramentas que podem ser usados para
calcular várias características hidrodinâmicas de sistemas rebocados por cabos mas com
certas limitações. Estes modelos, em geral, não são utilizados para condições
transientes, porque a força de arrasto “quadrática” real precisa ser linearizada em torno
das posições de equilíbrio.
Este tipo de modelo não é adequado para modelagens onde os cabos não estejam
permanentemente tensionados, tecnicamente chamados de “cables in slack conditions”
porque o mesmo pode não determinar adequadamente a configuração do cabo.
Finalmente, é extremamente complicado resolver as equações de movimento do cabo
quando os esforços hidrodinâmicos e as propriedades do cabo tais como massa,
elasticidade, rigidez à flexão se modificam ao longo do comprimento do cabo.
Modelos discretos não estão sujeitos às limitações impostas aos modelos
contínuos e são válidos para uma razoável gama de condições de operação. Eles podem
resolver equações de governo não-lineares sem aplicar nenhuma técnica de linearização.
Eles estão aptos a prever a resposta dinâmica quando o cabo está na transição entre as
![Page 64: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/64.jpg)
49
condições tensionada e não-tensionada (frouxa) – mesmo quando ocorre mudança na
dinâmica fundamental e o sistema se comporta de forma não-linear.
As equações de movimento discretas são tipicamente obtidas a partir dos
modelos contínuos utilizando o método de parâmetros concentrados, o método de
diferenças finitas ou métodos de elementos finitos.
Particularmente, métodos de elementos finitos tendem a demandar maior esforço
computacional que os métodos anteriores, porém garante grande flexibilidade
geométrica e tratamento simplificado para condições de contorno.
3.2 Metodologias Usuais em Análise de Cabos
YOUNG (1971) apresentou a dinâmica do sistema navio/cabo/veículo
rebocado. Acrescenta que este sistema não está apenas sujeito às solicitações devidas às
ondas, ventos e correntes marinhas, mas, também à excitação vibratória devida ao fluxo
ao redor do cabo de reboque e do veículo rebocado.
YOUNG (1971) discutiu o diagrama de equilíbrio de um cabo de reboque
exposto a um fluxo de velocidade constante.
Figura 3.1 Diagrama de equilíbrio de elemento do cabo
Ele faz sua abordagem pelo método diferencial, onde as equações
diferenciais originadas levam em consideração à coordenada S, que representa o
comprimento de arco do formato curvado do cabo. No centro deste comprimento de
arco, a linha tangente faz um ângulo φ com horizontal de acordo com a figura 3.1
![Page 65: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/65.jpg)
50
Neste momento assume-se que o cabo é inextensível. A tensão e a pressão
hidrostática irão alongar o cabo, mas o efeito pode ser desprezado em função do
comprimento.
O diagrama de corpo livre apresenta as seguintes componentes:
• Wn: Peso na água do cabo por unidade de comprimento.
• Rn(s): força externa normal, por unidade de comprimento.
• Rt(s): força externa tangencial, por unidade de comprimento.
• T(s):Tensão local.
• φ (s): ângulo de inclinação local
• S, comprimento de arco do formato curvado do cabo
O balanço das forças no sistema de coordenadas tangencial e normal gera duas
equações acopladas (3.1) e (3.2) para T e φ :
cosn n
dT R w
dS
φφ= +
(3.1)
cost n
dTR w
dSφ= − +
(3.2)
NOMOTO E HATTORI (1986), KOTERAYAMA, YAMAGUCHI E
NAKAMURA (2000) E DRISCOLL, LUECK E NAHON ( 2000) utilizam o modelo
de massas concentradas ou lumped mass para modelar o cabo umbilical , no qual a
estrutura do cabo é aproximado por um modelo discreto composto de pequenos
elementos cilíndricos extensíveis. Neste procedimento as massas são consideradas
localizadas nos nós, que correspondem à interface entre os vários cilindros, como
ilustrado na figura 3.2.
![Page 66: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/66.jpg)
51
Figura 3.2 Sistemas de Coordenadas Móvel e Inercial
BEHBAHANI-NEJAD AND PERKINS (1996) afirmam que os principais
esforços externos que atuam sobre o cabo são o arrasto hidrodinâmico e as forças
restaurativas. As forças de arrasto hidrodinâmico são resultado da composição das
componentes tangencial e normal.
A tensão e o amortecimento axiais constituem os principais esforços que
independem do ambiente de operação e são considerados como internos. Os efeitos dos
esforços flexionais são comparativamente menos importantes em relação aos efeitos dos
esforços acima, podendo-se considerá-los ausentes.
As massas são localizadas nas interfaces (nós) entre os vários cilindros, como
ilustrado na figura 3.2.
Os esforços do elemento superior são determinados e seus efeitos transmitidos
até a determinação do esforço resultante no elemento final do cabo, conectado ao
veículo submarino, e então transformado para o sistema de coordenadas de referência
móvel, obtendo-se, assim, o esforço do cabo umbilical .
Normalmente, o local onde o cabo umbilical liga-se ao veículo submarino é
próximo ao centro do sistema de coordenadas móvel. Desta maneira são evitados
momentos que surgiriam devido ao braço do ponto de conexão cabo-veículo e o centro
do sistema de coordenadas móvel.
![Page 67: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/67.jpg)
52
Uma outra metodologia de resolução seria o emprego de análises usuais para
estruturas treliçadas conforme citado na bibliografia especializada (Labegalini et al.,
2005), ou seja, o emprego análise estática, ou seja, as ações dinâmicas (variáveis no
tempo) são consideradas através de “ações estáticas equivalentes”.
No entanto, sabe-se que para obter valores mais precisos dos esforços e dos
deslocamentos que surgem nestas estruturas, quando submetidas às ações dinâmicas,
uma análise que forneça tais resultados ao longo do tempo (análise dinâmica) é de
considerável importância.
Um método de integração temporal direta (explícito) das equações do
movimento, que apresenta uma formulação que pode ser empregada para obter a
resposta ao longo do tempo nos elementos dos cabos, permitindo inclusive tratar não-
linearidades físicas e geométricas, além da vantagem de não requerer a montagem da
matriz de rigidez global, já que a integração é realizada em nível de elemento (Menezes
et al.). Este tipo de análise aplica-se a estruturas, que podem ser discretizadas como
elementos de barra.
3.2.1 Análise dinâmica de cabos
Para a análise de cabos e outros tipos de estruturas expostas a solicitações dinâmicas é
comum o uso de Métodos explícitos de integração direta das equações de movimento .
De forma a contextualizar o problema, supõe-se que a equação governante de equilíbrio
de resposta dinâmica de um sistema de elementos finitos seja representada por:
( ) ( ) ( ) ( )MU t CU t KU t R t+ + =�� �
(3.3)
![Page 68: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/68.jpg)
53
Onde M, C, e K são matrizes de massa, amortecimento e rigidez respectivamente, R é o
vetor de carregamento ( )U t�� , ( )U t� e, ( )U t e representam, nessa ordem, a aceleração,
velocidade e deslocamento do sistema no instante de tempo t.
Para solucionar numericamente este problema dinâmico, ou seja, dependente do tempo
é importante verificar o método de integração ideal. A integração numérica direta se
baseia em dois pontos principais. Primeiro, invés de tentar satisfazer a equação (3.3) em
qualquer instante t, a idéia é satisfazer a equação (3.3) apenas em intervalos de tempo
discreto t∆ . A segunda premissa na qual a integração direta se baseia é que a cada
intervalo de tempo t∆ existe uma variação de deslocamento, velocidade e aceleração do
sistema.
Diversos métodos de integração poderiam ser citados, cada um com suas vantagens e
desvantagens quanto a custo e eficiência computacional, precisão, convergência,
estabilidade entre outros, mas serão apresentados o método de diferenças finitas e o
método de Newmark.
O método de Diferença Central, também conhecido com método de diferenças finitas,
é um método de resolução de equações diferenciais que se baseia na aproximação de
derivadas por diferenças finitas. A fórmula de aproximação obtém-se da série de Taylor
da função derivada. O operador de diferenças finitas para derivada pode ser obtido a
partir da série de Taylor para a função:
portanto a derivada pode ser escrita como uma diferença mais um termo de erro :
Ignorando-se o termo de erro tem-se o operador de diferenças finitas para a primeira
derivada (forward) de f definido como:
Para a equação de equilíbrio (3.3) temos:
![Page 69: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/69.jpg)
54
2
1( ) ( ( ) 2 ( ) ( )U t U t t U t U t t
t= − ∆ − + + ∆
∆��
(3.4)
1( ) ( ( ) ( ))
2U t U t t U t t
t= − − ∆ + + ∆
∆�
(3.5)
Substituindo (3.5) e (3.4) em (3.3) tem-se:
2 2 2
1 1 2 1 1( ) ( ) ( ) ( )
2 2M C U t t R t K U t M C U t t
t t t t t
+ + ∆ = − − − − − ∆ ∆ ∆ ∆ ∆ ∆
(3.6)
De onde pode-se extrair )( ttU ∆+ . É importante ressaltar que a solução )( ttU ∆+ é
baseada nas condições de equilíbrio no instante t , isto é, )( ttU ∆+ é calculado pela
equação (3.3). Por isso é chamada de integração é explicita. A estabilidade de um
método explícito por diferenças finitas depende do passo de integração t∆ ser menor
que um passo crítico que está relacionado com a maior freqüência natural do sistema.
O método de Newmark é basicamente uma extensão do método de aceleração linear,
no qual é adotada uma variação linear da aceleração entre t e tt ∆+ . As seguintes
premissas são utilizadas:
( ) ( ) [(1 ) ( ) ( )]U t t U t U t U t t tδ δ+ ∆ = + + + + ∆ ∆� � �� ��
(3.7)
2( ) ( ) ( ) [(0.5 ) ( ) ( )]U t t U t U t t U t U t t tα α+ ∆ = + ∆ + − + + ∆ ∆�� � ��
(3.8)
onde α e δ são parâmetros que podem ser determinados para obter precisão e
estabilidade da integração. Originalmente Newmark propôs o uma solução
![Page 70: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/70.jpg)
55
incondicionalmente estável quando 4/1=α e 2/1=δ em (3.7) e (3.8) , também
chamada de regra do trapézio.
Em conjunto com as equações (3.7) e (3.8), para solução de deslocamento, velocidade e
aceleração no instante tt ∆+ , a equação de equilíbrio (3.3) no instante tt ∆+ pode ser
reescrita como:
( ) ( ) ( ) ( )MU t t CU t t KU t t R t t+ ∆ + + ∆ + + ∆ = + ∆�� �
(3.9)
Solucionando por (3.8) )( ttU ∆+�� em termo de )( ttU ∆+ e substituindo em (3.7),
obtém-se as equações de )( ttU ∆+�� e )( ttU ∆+� em termos de )( ttU ∆+ . Essas duas
relações de )( ttU ∆+�� e )( ttU ∆+� substituídas em (3.9) retornam a solução de
)( ttU ∆+ . Com o resultado as equações (3.7) e (3.8) podem ser solucionada para esse
instante de tempo. Diferente do Método de Diferença Central, a regra do trapézio trata-
se de um método implícito sempre estável independente do passo escolhido.
3.3 Objetivo
O principal objetivo deste capítulo consiste em desenvolver uma rotina computacional
para permitir:
- uma análise preliminar do comportamento dinâmico do cabo submetida a ação da
correntes marítimas,
- a visualização dos resultados, isto é, os esforços nos elementos selecionados dos cabos
e os deslocamentos ao longo do tempo da análise.
3.4 Implementação Computacional
De modo a alcançar os objetivos citados acima foi elaborada uma rotina que
através de processos iterativos, encontra o novo posicionamento dos nós dos elementos
cilíndricos discretizados do cabo.
![Page 71: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/71.jpg)
56
Como primeira aproximação e solução, temos o cabo posicionado verticalmente
em relação à coluna d’água com um determinado peso rebocado (veículo de resgate) e
submetido à ação de um determinado perfil de velocidade de corrente marítima e a uma
determinada velocidade do Navio-rebocador, até que a primeira estimativa de inclinação
do elemento será feita e novas posições dos nós dos elementos discretizados serão
calculadas considerando a força de arrasto local, a inclinação dos elementos e as áreas
expostas ao perfil de corrente.
De forma a minimizar o custo computacional a inércia foi desprezada reduzindo
a equação de morison a apenas um termo, vibrações induzidas por vórtices (VIV) e
efeitos de torção e flexão também foram ignorados.
3.4.1 Metodologia adotada - 1ª abordagem
Após a avaliação das técnicas citadas acima para abordar o problema, foi adotada uma
implementação computacional com o objetivo de encontrar o posicionamento dos nós
do cabo através de um processo iterativo e as forças no último nó para utilização futura
no modelo do veículo.
Como primeira solução, adotou-se o cabo posicionado verticalmente em relação à
coluna de água, até que a primeira estimativa de inclinação do mesmo é feita e novas
posições são calculadas considerando a força de arrasto local, os elementos inclinados e
a área exposta. a partir deste ponto o cabo encontra-se sob tensão e poderá alongar-se.
A solução final assume que cada elemento possui um equilíbrio de forças estáticas do
vetor (x,y e z) e tempo suficiente para alcançar a posição de equilíbrio.
As forças atuando na direção vertical são empuxo, tensão superior ao nó, tensão inferior
ao nó e arrasto de possíveis correntes verticais.
De modo a simplificar o cálculo, o modelo do cabo não considera esforços de
sustentação, variações inerciais, vibrações ou “snap loading”. As soluções, mesmo para
simulações dependentes do tempo, são todas analisadas como localmente “estáticas”.
![Page 72: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/72.jpg)
57
O modelo considera somente cilindros e esferas. Superfícies mais complexas são
“aproximadas” para um correto ajuste do coeficiente de arrasto e área da superfície
exposta ao fluxo.. Esferas caracterizam dispositivos isotrópicos, enquanto cilindros são
anisotrópicos em relação as direções verticais e horizontais. A força de arrasto é
determinada de acordo com a forma do elemento, a área exposta ao fluxo e ao
coeficiente hidrodinâmico de arrasto. Para cada elemento apresentam-se três equações e
seis incógnitas, sendo a tensão superior e inferior ao nó e duas coordenadas esféricas de
cada elemento em relação ao eixo vertical Z e ao plano X-Y.
O elemento do topo do cabo não tem tensão superior ao nó. Então, possui três
incógnitas e três equações.
A tração e os ângulos entre forças de tração de dois elementos são iguais e atuam em
direções opostas. Logo, as forças de tração acima do elemento são iguais as que estão
abaixo.
O método de solução visa estimar as forças de tração e ângulos do elemento superior e
só então, estimar as forças e ângulos dos elementos inferiores. O resultado é um
conjunto de ângulos ( , )z zψ θ e o comprimento dos elementos que determinam a exata
posição de cada elemento (x,y,z).
No instante que a solução converge, um gráfico tridimensional é gerado e a posição
final dos elementos, tensão no cabo e comprimentos e ângulos finais são apresentados.
Mais especificamente, a solução é obtida da seguinte forma: a velocidade da corrente
marinha e as seções do cabo (pode-se adicionar a variação da densidade da água do
mar) são interpoladas para aproximadamente 1 metro de resolução usando interpolação
linear. A força de arrasto em cada direção é calculada de acordo com uma simplificação
da equação de Morrison apresentada no capítulo 2.
1
2j v d i jQ C AUUρ=
(3.10)
Onde:
![Page 73: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/73.jpg)
58
jQ é a força de arrasto em [N] atuante no elemento “i” na água de densidade wρ na
direção j. jU é a componente da velocidade do elemento localizada na profundidade na
qual o coeficiente hidrodinâmico de arrasto de arrasto DC é apropriado a forma do
elemento, com a superfície jA perpendicular a j .
U é vetor resultante da velocidade,
2 2 2U U V W= + +
(3.11)
na profundidade do elemento. A força de arrasto em todas as três direções é estimada
[j=1(x), 2(y), 3(z)], incluindo a componente vertical, que de acordo com a literatura
(Dewey,1999) é desprezível.
Uma vez que cada força de arrasto atuante em cada elemento tenha sido calculada, a
tensão e os ângulos necessários para o elemento no espaço podem ser estimados. As três
[x,y,z] equações componentes a serem resolvidas para cada elemento são:
1 cosi i i i iX X L senθ ψ+= +
1i i i i iY Y L sen senθ ψ+= +
1 cosi i i iZ Z L ψ+= +
(3.12)
Quando finalizado o cálculo, a posição de cada elemento é apresentada, enquanto as
tensões e ângulos desde o topo até o final do cabo são listados.
A inclinação de cada elemento é considerada quando estima-se a força e arrasto e a área
da superfície exposta ao fluxo(2).
Particularmente observa-se que para elementos cilíndricos inclinados, várias
modificações nestes esforços são observadas. Primeiro, a área exposta ao fluxo nas
direções horizontal e vertical muda. Além disto, O arrasto é dividido em componentes
tangencial e normal para cada direção de corrente atuante no elemento cilíndrico.
![Page 74: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/74.jpg)
59
Figura 3.3 Diagrama de Forças
Tabela 3.1 Tabela de entradas para a simulação de esforços e posicionamento do cabo com a 1º metodologia
MASSA DO VEÍCULO
(KG)
VELOCIDADE DA
CORRENTE(M/S)
MATERIALDO CABO DO
UMBILICAL
NÚMERO DE ELEMENTOS
DO CABO
DENSIDADE DA ÁGUA DO MAR
1400 [0,1,0] KEVLAR 4 1024 COEFICIENTE DE ARRASTO
DO CORPO REBOCADO
POSIÇÃO INICIAL DO
CORPO REBOCADO
VELOCIDADE DO NAVIO
1,2 [0,0,0] [0,0,0]
![Page 75: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/75.jpg)
60
Figura 3.4 Tela inicial da simulação do perfil do cabo umbilical
Figura 3.5 Resultado da simulação do perfil do cabo umbilical
![Page 76: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/76.jpg)
61
3.4.2 Metodologia adotada - 2ª abordagem
Figura 3.6 Método de massas concentradas
• Esforços de natureza externa ao cabo Os esforços de natureza externa que atuam sobre o cabo são o arrasto hidrodinâmico FF e as forças restaurativas FG. As forças de arrasto hidrodinâmico são a composição das componentes tangencial Ft e normal Fn, como mostrado na Figura (3.5). A tensão T e o amortecimento P axiais são considerados internos. Os efeitos dos esforços flexionais e torsionais são desconsiderados (TRIANTAFYLLOU, 1984; BEHBAHANI-NEJAD AND PERKINS, 1996). A dinâmica de cada elemento discreto do cabo obedece a seguinte equação:
1 1[ ] ( ) ( )i Ai cabo cabo i i cabo i i cabo iM M T P T P Fη − −+ = + − + +��
(3.13)
onde icaboη�� é a aceleração do i-ésimo nó e iM , 3 3x
AiM ∈� são as matrizes de massa e
de massa adicionada do i-ésimo elemento cilíndrico, Na expressão acima tem-se, ainda, tem-se que Ncabo é o número de nós utilizados e 1.. 1caboi N= − .
• Esforços de natureza interna ao cabo A Figura 3.7 apresenta cada elemento discreto como um sistema massa mola amortecedor, onde as ações de amortecimento e a ação da tensão normal são modeladas. A tensão normal
icaboT atuando sobre o i-ésimo nó, é expressa como:
![Page 77: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/77.jpg)
62
0
0
[1 ]icabo i
EAT R L
l= −
(3.14)
Figura 3.7 Modelagem dos elementos discretos do cabo umbilical segundo o modelo massa-mola-
amortecedor.
Na expressão acima, E é o módulo de Young do cabo, Acaboi é a seção transversal do cabo com diâmetro di e l0i é o comprimento natural de cada elemento do cabo. A grandeza Ri é dada por:
1
1
( )
( )i i
i i
i cabo cabo
i cabo S S
R
P C
η η
η η+
−
= −
= −
(3.15)
Onde
icaboη é a posição do i-ésimo nó.
Os internos do cabo produzem um efeito de amortecimento do movimento relativo de dois pontos pertencentes ao cabo. Este amortecimento é modelado como proporcional a diferença de velocidades de dois nós consecutivos (BUCKHAM, NAHON e SETO, 1999) e é linear.
1( )
i ii cabo S SP C η η −= −
(3.16)
iSη refere-se à velocidade do i-ésimo na direção s. Assim, é possível observar que a
dissipação possui componente não nula apenas na direção tangente aos dois nós. Para
![Page 78: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/78.jpg)
63
transformar as componentes desta força de amortecimento interno para o sistema de coordenadas inercial, procede-se primeiramente com a projeção das velocidades dos nós na direção tangente do cabo:
icabo
i
Rprojeção
Rη= �
(3.17)
Onde Ri, mencionado acima, possui direção tangente ao cabo pois é dado pela diferença da posição de dois nós consecutivos. Em seguida, multiplica-se o número escalar projeção pelo versor tangente, obtendo, desta maneira a componente de velocidade na direção tangente ao cabo de cada nó, ou seja:
1i i
i ii cabo cabo cabo
i i
R RP C
R Rη η
−
= −
� �
(3.18)
A resultante externa F é resultado da força restaurativa FG e do esforço de arrasto hidrodinâmico FF , sendo:
1
1( )
2i i i iF F GF F F F−= + +
(3.19)
A força hidrodinâmica FF possui componentes normal e tangencial conforme a expressão:
1( )
2i i i i i i iF n t i n n n t t n iF F F d C U U C U U Rρ= + = +
(3.20)
A constante ρ é a massa especifica da água, Cn e Ct são os coeficientes de arrasto
normal e tangencial, geralmente adotados constantes. Os termos restantes, inU e
itU ,
equivalem às componentes normal e tangencial da velocidade de escoamento do fluido para cada elemento do cabo e expressas como:
![Page 79: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/79.jpg)
64
2
[( ) ]i
i
c cabo i it
i
R RU
R
η η−=� �
(3.21)
i i in c cabo tU Uη η= − −� �
(3.22)
onde cη� corresponde à velocidade de correnteza, já abordada na seção anterior.Os
esforços de sustentação são aqui desconsiderados. Um exemplo em que estes esforços são levados em consideração pode ser encontrado em (Yamaguchi et al.,2001). O método de discretização lumped mass possui limitações numéricas quanto à convergência dos esforços internos aos nós. Verificou-se que o método numérico exige uma redução do comprimento dos elementos cilíndricos quando o cabo possui uma curvatura muito acentuada (Mullarkey, McNamara and O’Sullivan, 1999), caso contrário o modelo deixa de reproduzir a realidade. Além disso, o tempo de convergência é sensível à configuração ou condição inicial do cabo, sendo, à princípio, tanto maior quanto mais distante for a condição inicial do cabo da configuração em regime. Os esforços em regime obtidos segundo o modelo lumped mass foram comparados com os resultados teóricos (esperados) dos esforços necessários para manter o cabo umbilical em uma configuração de equilíbrio. Estes resultados teóricos foram determinados através de expressões analíticas para o caso bidimensional (ver (Pode, 1951)), ou seja, na condição do cabo umbilical estar contido no plano vertical do sistema inercial. Matrizes de Inércia do Cabo Umbilical As matrizes de massa e de massa adicionada para cada elemento cilíndrico discretizado conforme discussão acima são abordadas, respectivamente, por (Nakamura et al., 2000; Yokobiki et al., 2000):
0 0
0 0
0 0cabo
m
M m
m
=
(3.23)
onde m é a massa de cada elemento discretizado e :
![Page 80: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/80.jpg)
65
11 12 13
21 22 23
31 32 33
Acabo
m m m
M m m m
m m m
=
(3.24)
Onde,
2 2 2 211
2 2 2 212 21
2 2 2 222
23 32
cos cos (1 cos cos )
cos cos (1 cos cos )
cos (1 cos )
( ) cos
t n
t n
t n
t n
m A A
m m A A
m sen A sen A
m m A A sen sen
α β α β
α β α β
α β α β
α β β
= + −
= = + −
= + −
= = − − −
2 233 cost nm sen A Aβ β= +
(3.25)
Nas expressões acima At e An são os coeficientes de massa adicionada nas direções tangencial e normal ao fluxo do fluido, respectivamente. O ângulo α corresponde ao ângulo de inclinação do cabo no plano xz e , ao ângulo de inclinação β do cabo no plano xy, como mostra a Figura 3.6. O ânguloα é determinado tomando-se uma média aritmética dos ângulos iα e 1iα − de dois elementos consecutivos, através da relação:
1
1( )
2 i iα α α −= +
(3.26)
O ângulo β é determinado de forma análoga, ou seja:
1
1( )
2 i iβ β β −= +
(3.27)
![Page 81: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/81.jpg)
66
Figura 3.8 Definição dos ângulos iα e iβ com a orientação do cabo no espaço.
Note que na Figura 3.8, o cabo umbilical é parametrizado no sistema de coordenadas
inercial.
No trabalho de MULLARKEY, MCNAMARA AND O’SULLIVAN, (1999) foi concluído que o método numérico de discretização (lumped mass) exige uma redução do comprimento dos elementos cilíndricos, esta necessidade é clara quando o cabo apresenta uma curvatura muito elevada, caso contrário o modelo deixa de reproduzir a realidade. Além disso, o tempo de convergência é afetado pela configuração ou condição inicial do cabo, é maior quando a condição inicial do cabo é considerada distante da configuração em regime. Santana, Dutra e Santiago (2009), demonstraram através desta abordagem e com estes dados iniciais:
[ ]
[ ]
[ ]
[ ]
1
2
1
50;50;30
0;0;1.3
0.5 / ;0.5 / ;0.3 / ;0;0;0.013 /
0.5; 0.4; 0.1 /
final
final
c
m
rad
m s m s m s rad s
m s
η
η
η
η
=
=
=
= − − −
�
�
![Page 82: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/82.jpg)
67
Que os esforços obtidos segundo o modelo lumped mass podem ser comparados com os resultados teóricos dos esforços necessários para manter o cabo umbilical em uma configuração de equilíbrio. Estes resultados teóricos foram determinados através de expressões analíticas para o caso bidimensional apresentados no trabalho de Pode, (1951), ou seja, na condição do cabo umbilical estar contido no plano vertical do sistema inercial. Os resultados são apresentados na Figura 3.9 e na Tabela 3.2. E os mesmos serão adotados como entradas no modelo completo adotado no próximo capítulo.
Tabela 3.2 resultados para a simulação – 2º abordagem
Nome das variáveis Resultados obtidos da simulação
Profundidade de operação (m) 187,40 Posição horizontal da operação -100
Esforço vertical (N) 460 Esforço horizontal (N) 120
Comprimento do cabo (m) 220
Figura 3.9 Esforços no cabo umbilical segundo dados apresentados na tabela anterior
![Page 83: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/83.jpg)
68
Figura 3.10 Perfil do cabo umbilical segundo dados apresentados na tabela anterior para 300s de
simulação
![Page 84: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/84.jpg)
69
4 MODELAGEM COMPUTACIONAL DO VEÍCULO
SUBMARINO GENÉRICO
4.1 Introdução
Neste capítulo, será apresentado o desenvolvimento de um modelo matemático
de um veículo submarino genérico e sua respectiva codificação computacional,
inspirada em modelagens citadas nas referências. Objetiva-se aliar o arcabouço teórico
da modelagem de veículos submarinos com a implementação do seu modelo
computacional.
A aproximação utilizada pode adaptar-se a outros modelos de veículo
submarino, facilitando decisões de projeto posteriores. O código pode ser utilizado para
as especificações de diferentes veículos e eventualmente pode ser compilado em
sistemas de tomada de decisão ou de controle.
No caso de modelos voltados para a tarefa de controle, sabe-se que o controle de
veículos submarinos pode visar tanto a estabilização do movimento diante das
perturbações como a realização de manobras.
Esta estabilização ou manobra sofre influência da forma geométrica do veículo.
Sendo que em geral, veículos de resgate apresentam-se nas formas “OPENFRAME” –
muito comum em ROV e veículos de investigação e localização têm algum perfil
hidrodinâmico – AUV ou ROTV do tipo Torpedo.
ASADA, H. e SLOTINE, J.J. E. (1986) apresenta a utilização de um controlador
de modo deslizante para um ROV efetuar manobras em torno de grandes objetos em
velocidade muito lenta.
Apesar da formulação do problema ser genérica, para apresentar os efeitos das
simulações realizadas nesta dissertação é apresentado um veículo de forma geométrica
com fins de localização, semelhante à de um AUV ou ROTV do tipo torpedo ou a de
DSRV mencionado no capítulo 1.
![Page 85: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/85.jpg)
70
4.2 Modelagem matemática de sistemas dinâmicos
A necessidade de controlar ou predizer comportamentos de sistemas dinâmicos
envolve:
• Modelagem de sistemas dinâmicos
• Análise de características dinâmicas
Um modelo matemático é o conjunto de equações que representa a dinâmica do sistema
no grau de aproximação adequado. Sendo que suas representações típicas são:
• Equações diferenciais
• Representação no espaço de estados
• Funções de transferência
4.2.1 Características dos sistemas Um aspecto importante a ser considerado na modelagem é a caracterização do sistema
como linear ou não-linear, um sistema não-linear é aquele que não atende aos princípios
de prpoporcionalidade e de superposição de efeitos. Com isso, sistemas não-lineares
criam novas freqüências em regime permanente, ou seja, o sinal de saída pode
apresentar freqüências que não estão presentes no sinal de entrada. Já no sistema linear,
a resposta do sistema frente a uma dada entrada não é afetada pela presença simultânea
de outras entradas.
A aproximação linear por partes de sistemas não-lineares permite a aplicação de
técnicas de análise e projeto desenvolvidas para sistemas lineares: linearização em
torno de pontos de operação supondo-se pequenas perturbações.
Figura 4.1 Linearização por partes
![Page 86: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/86.jpg)
71
Formalmente, um sistema é chamado linear se possui duas propriedades matemáticas:
homogeneidade e aditividade.
Se for possível demonstrar que um sistema possui ambas as propriedades, então estará
provado que o sistema é linear.
Outra característica relevante é a invariância no tempo, que pode ser resumida pela
manutenção das características do sistema ao longo do tempo.
Um sistema é dito homogêneo se uma mudança na amplitude da entrada resulta em
uma mudança idêntica na saída. Isto é, se X[n] resulta em Y[n] , então K*X[n]
resulta em K*Y[n] para qualquer sinal , X[n], e qualquer constante k , como mostra a
figura 4.2.
Figura 4.2 Definição da propriedade da homogeneidade de sistemas lineares.
Um sistema é denominado aditivo se a soma de sinais aplicados à entrada do mesmo
resultam em saídas compostas apenas pelas somas das respostas individuais .
A figura 4.3 ilustra esta definição.
Figura 4.3 Definição da propriedade da aditividade de sistemas lineares.
![Page 87: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/87.jpg)
72
4.2.2 Função de transferência A função de transferência pode ser definida para sistemas lineares, invariantes no
tempo, descritos por equações diferenciais, como a razão entre a Transformada de
Laplace da saída pela Transformada de Laplace da entrada assumindo-se todas as
condições iniciais nulas.
De forma a exemplificar, considere um sistema descrito por :
( ) ( 1) (1) ( ) ( 1) (1)0 1 1 0 1 1... ...n n m m
n n m ma y a y a y a y b x b x b x b x− −
− −+ + + + = + + + +
(4.1)
Onde x é a entrada e y é a saída. Então:
1 10 1 1
1 10 1 1
...( )( )
( ) ...
m mm m
n nn n
b s b s b s bY sG s
X s a s a s a s a
−
−
−
−
+ + + += =
+ + + +
(4.2)
será a função de transferência do sistema.
A função de transferência de um sistema pode ser experimentalmente obtida
aplicando-se uma entrada conhecida e estudando-se a saída obtida.
Se
( )( )
( )
( ) ( ). ( )
Y sG s
X s
Y s G s X s
=
=
(4.3)
Então
0
( ) ( ) ( )t
y t x g t dτ τ τ= −∫
(4.4)
que é a definição de integral de convolução, com g(t)=0 e x(t)=0 e t <0.
Uma vez que,
( ) ( ) ( ) 1x t t X sδ= ↔ =
![Page 88: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/88.jpg)
73
então
( ) ( )Y s G s=
(4.5)
ou seja, a função de Transferência do sistema é igual à Função de Transferência da saída
para uma entrada impulso unitário. Desta forma
( ) ( )y t g t=
(4.6)
Onde ( )g t é chamada a resposta ao impulso do sistema, que é a resposta do
sistema a uma entrada impulso unitário quando todas as condições iniciais são nulas.
Se ( )G s é a função de transferência do sistema, é possível então caracterizar
completamente um sistema linear, invariante no tempo, excitando-o com uma entrada
impulso unitário e medindo-se sua resposta.
4.2.3 Diagrama de Blocos Trata-se de uma representação gráfica das funções de cada componente de um sistema
dinâmico e dos fluxos de sinais entre eles.
As vantagens são: a facilidade de observação do comportamento global do sistema e a
contribuição de cada componente com o todo.
Figura 4.4 Exemplo de diagrama de blocos.
Ao ser observado um sistema em malha fechada com sensor na saída:
![Page 89: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/89.jpg)
74
Figura 4.5 Exemplo de diagrama de blocos de sistema em malha fechada.
Pelo diagrama de blocos, tem-se que:
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
Y s G s E s
E s R s B s
B s H s Y s
=
= −
=
Logo:
( )( ) ( )
1 ( ) ( )
G sY s R s
G s H s=
+
(4.7)
Ou seja, a saída do sistema depende da função de transferência de malha fechada e da
entrada.
4.2.4 Teoria de controle convencional versus Teoria de controle moderno
A teoria do controle convencional é somente aplicável a sistemas com entradas e saídas
únicas, lineares e invariantes no tempo, predominantemente aplicada no domínio da
frequência.
Já a teoria moderna não possui as limitações anteriores e é essencialmente abordada no
domínio do tempo.
4.2.4 Modelagem no espaço de Estados O estado de um sistema é o menor conjunto de valores de variáveis, em t=t0 (variáveis
de estado) que em conjunto dos valores de entrada determinam o comportamento do
sistema em qualquer instante 0t ≥
A modelagem no espaço de estados envolve três tipos de variáveis:
• Variáveis de entrada
• Variáveis de saída
![Page 90: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/90.jpg)
75
• Variáveis de estado
Aplicável a sistemas lineares ou não-lineares, SISO (Single Input, Single Output)
ou MIMO (Multiple Input, Multiple Output), invariantes ou variantes no tempo
Abordagem normalmente no domínio do tempo
As variáveis de estado podem ser mensuráveis, observáveis ou calculadas, e
podem ser arranjadas em um vetor de estados.
O Espaço de Estados é o espaço n-dimensional cujos eixos coordenados são os estados
1 2, ,..., nx x x , e onde os vetores de estados são pontos.
Figura 4.6 Espaço de estados n-dimensional.
Equações no espaço de estados envolvem não apenas as entradas e saídas, mas também
os estados.
O sistema dinâmico deve envolver elementos que “memorizem” o valor das entradas
tais como os integradores. As saídas destes podem ser consideradas variáveis de estado
que definem o estado interno do sistema.
Neste caso, o número de variáveis de estado que descrevem completamente a
dinâmica do sistema é igual ao número de integradores do sistema.
![Page 91: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/91.jpg)
76
Seja:
( ) ( , , )
( ) ( , , )
x t f x u t
y t g x u t
=
=
�
(4.8)
Sendo (4.8) a representação das equações de estado e de saída do sistema dinâmico.
Se este for linearizado e considerado invariante no tempo, pode-se considerar:
( ) ( ) ( )
( ) ( ) ( )
x t Ax t Bu t
y t Cx t Du t
= +
= +
�
(4.9)
Onde A é a matriz de estado, B é a matriz de entrada, C é a matriz de saída e D é a
matriz de transmissão direta.
4.2.5 Linearização de modelos matemáticos não-lineares A linearização permite aplicar para sistemas não-lineares as técnicas de análise e
projeto desenvolvidas para sistemas lineares.
Pode-se realizar uma Expansão em Série de Taylor e truncar a série no primeiro termo.
A expansão em torno de um ponto de operação implica que o modelo
linearizado é válido apenas na vizinhança deste ponto.
A aproximação será razoável se os termos desprezados forem suficientemente
pequenos.
A dinâmica modelagem cinemática e de veículos submarinos apresentada acima,
assim como para a maioria dos sistemas físicos, possui limitações com relação à
representatividade da dinâmica da planta real, sendo válida para a região de baixas
freqüências de velocidade. Até mesmo a definição do intervalo de freqüências em que
o modelo é válido constitui uma tarefa complexa pois à medida que o sistema físico
é excitado a operar com freqüências mais altas aumenta a dificuldade da avaliação
do acompanhamento do sinal de entrada. Isto se deve por causa dos problemas
relacionados com o tempo de resposta da instrumentação necessária ou mesmo quando
uma relação sinal-ruído adequada não é possível.
![Page 92: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/92.jpg)
77
Como mencionado anteriormente, o veículo submarino constitui numa planta
caracterizada por uma dinâmica não linear, onde a dinâmica dos seis graus de liberdade
estão acoplados e sujeitos à variação paramétrica, dos coeficientes das matrizes MA
e CA e FD, com a velocidade e a aceleração do veículo. Adicionalmente à variação
paramétrica, um veículo submarino pode sofrer variação da sua geometria e/ou de
massa. Neste caso, ocorre uma variação dos parâmetros das matrizes do modelo de
corpo rígido MCR e CCR.
Visto o modelo geral de um veículo submarino ser caracterizado por uma dinâmica
não linear e multivariável, conforme exposto acima, em muitos casos recorre-se à
modelos simplificados para aplicação de controle, especialmente quando da utilização
destes sobre uma ampla faixa de operação, isto é, velocidades. Quando do emprego
de técnicas lineares de controle, PID por exemplo, utilizam-se modelos lineares do
veículo para o projeto. O processo de linearização utilizando série de Taylor,
considerando até termos de baixa ordem, necessita levar em conta vários pontos em
torno dos quais esta é realizada, pois devido à natureza não linear do movimento de um
veículo submarino, somente um conjunto de modelos lineares (um para cada região
de operação) é representativo do caso real.
4.2.6 Aspectos da codificação computacional O Matlab® é um software comercial, criado pela empresa MathWorks, caracterizado
por ser um ambiente de computação numérica e uma linguagem de programação. Este
software permite fácil manipulação de matrizes, plotagem de funções e dados,
implementação de algoritmos, criação de interfaces com o usuário e comunicação com
programas desenvolvidos em outras linguagens. Além disso, possui uma ferramenta
chamada Simulink®. O Simulink® é uma ferramenta para modelagem,que se utiliza da
técnica de diagrama de blocos para a simulação e análise de sistemas dinâmicos,
adicionado a uma série de toolboxes que facilitam o desenvolvimento de experimentos.
Este software será o utilizado para a codificação computacional do modelo de veículo
de veículo de resgate em estudo.
![Page 93: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/93.jpg)
78
4.3 Contextualizando a modelagem do Veículo de Resgate
A modelagem de veículos submarinos baseia-se no movimento de um corpo rígido no
espaço, sem restrições. Os esforços oriundos da interação com o fluido, sejam eles
propulsores, estabilizadores ou perturbadores são freqüentemente controláveis .
Conforme abordado anteriormente, as equações de movimento para a modelagem de
veículos são desenvolvidas usando um sistema de coordenadas fixo no corpo e um
sistema de referencia global ou fixo na terra. O sistema de coordenadas fixo no corpo
tem seis componentes de velocidade, que representam o vetor velocidade:
( ) ( ) ( ) ( ) ( ) ( ) ( )[ ]Ttrtqtptwtvtutx ,,,,,' =
(4.10)
Enquanto que os seis componentes de posição no sistema de referência global são:
( ) ( ) ( ) ( ) ( ) ( ) ( )[ ]TttttZtYtXtz ψθφ ,,,,,=
(4.11)
Os ângulos ( )tφ , ( )tθ , ( )tψ , (azimut, elevação e spin), são relativos às transformações
de Euler relacionadas aos movimentos de yaw, pitch e roll. As entradas de controle, as
superfícies de controle (se existentes), forças dos propulsores e o ajuste da estabilidade,
em geral, são consideradas como o vetor de entradas, ( )tu :
4.3.1 Simulação do sistema dinâmico do veículo usando Simulink® Relembrando o mencionado em (4.8), para sistemas dinâmicos de tempo contínuo tem-
se:
( ) ( , , )
( ) ( , , )
x t f x u t
y t g x u t
=
=
�
Onde t é o tempo, x é o vetor de estados, u é o vetor de entradas (input), y é o vetor de
saídas.
A atribuição de valores para as condições iniciais do vetor de estados, e para o vetor de
entradas dependentes do tempo permite conhecer a evolução da saída (output) e dos
vetores de estado pela resolução das equações.
![Page 94: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/94.jpg)
79
O Simulink® manipula os sistemas dinâmicos através de um mecanismo chamado “S-
function mechanism”, especificamente, cada objeto do programa (blocos, composição
de blocos, esquemas) representa um sistema dinâmico; logo, cada objeto (incluindo
todo o esquema de simulação) é internamente representado pela “S-function”.
Tipicamente, a construção em blocos pode ser realizadas com blocos pré-compilados ou
diretamente escritas na linguagens Matlab, C, C++, Ada ou Fortran.
Neste trabalho, a dinâmica do veículo será codificada em Matlab, e será estruturada em
um bloco do Simulink “MatlabFunction”. Este bloco receberá os valores de entrada e
os processará através da Matlab function. A função retornará um vetor singular que
será a saída do bloco.
Esta sistemática apresenta a limitação de aceitar apenas uma entrada e uma saída, para
contornar este revés, foi incluída a variável “veh” ao programa.
A variável “veh” contém toda a informação relativa à estrutura do veículo,e esta pode
ser adicionada ao bloco “Matlab Function” através do mecanismo de compartilhamento
do Matlab (workspace).
Isto significa que, antes de começar a simulação, a variável global “veh” deve ser
definida e carregada (usando a função veh) com a estrutura do veículo.
Segue abaixo o diagrama de blocos referente ao comportamento dinâmico do veículo de
resgate quando submetido aos diversos esforços citados sem implementação de
controle.
Figura 4.7 Diagrama de bloco do veículo de resgate em estudo
![Page 95: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/95.jpg)
80
Abaixo é apresentado o mesmo diagrama de blocos codificado no software simulink®
para representar o comportamento dinâmico do veículo de resgate genérico em estudo.
Figura 4.8 Diagrama de bloco do veículo de resgate em estudo
A figura 4.8 apresenta o diagrama de blocos do Simulink® que representa o veículo de
resgate em estudo sem controle implementado. Onde:
• As entradas representam respectivamente:
- O sistema de estados inicial do veículo (posição e velocidade generalizada)
- o vetor dos ângulos dos lemes direcionais (se existentes);
- Os esforços em relação ao sistema de coordenadas fixas no corpo
(propulsores);
- Os esforços em relação ao sistema de coordenadas inerciais (cabo umbilical); e
- Velocidade e aceleração das correntes marinhas com relação ao sistema de
coordenadas inerciais.
• A MATLAB Function descrita na figura 4.8 como Vxdot é a codificação
equivalente da equação de governo a ser resolvida.
• As saídas representam a evolução temporal do sistema de estados do veículo
(posições e velocidades) .
![Page 96: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/96.jpg)
81
4.3.2 Aspectos cinemáticos – posições e velocidades
4.3.2.1 Convenções para os Sistemas de Coordenadas
De forma a estabelecer a notação básica ou convenção tratada nesta dissertação,
será adotado, por exemplo “ eυ ” para referenciar um vetor 3D “υ ” descrito no
referencial fixo.
4.3.2.2 Sistemas de Coordenadas Fixos na Terra e no Corpo – Definição das
posições generalizadas.
No capítulo 2 foi apresentada a conveniência de se definir dois sistemas de
coordenadas como exemplificado na figura 2.2.
O sistema móvel é fixado no corpo do veículo e é chamado sistema fixo no corpo.
A origem do sistema de referência fixo no corpo é freqüentemente escolhida para ser o
plano principal de simetria do corpo, e os eixos do corpo são escolhidos para coincidir
com os eixos principais de inércia e serão definidos como:
• X: eixo longitudinal;
• Y: eixo transversal;
• Z: eixo Normal.
O movimento do sistema de referência móvel é descrito relativo ao sistema de
referência inercial.
Para veículos submarinos, um eixo fixado na terra é assumido como inercial,
tendo em vista as baixas velocidades envolvidas.
A orientação do sistema de coordenadas em relação ao outro pode ser expressa
pela matriz de rotação ebR tal que eυ = e
bR * bυ . Se forem denotados como ia, ja e ka; os
vetores unitários dos eixos x, y e z de um sistema de coordenadas de “A”, então:
![Page 97: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/97.jpg)
82
b
b e
b
e T
ee e e e T b Tb b b b
e T
ì
R i j k j R
k
= = =
(4.12)
Onde é possível provar que para cada mudança de operação do sistema “b”(fixo
no corpo) em relação ao sistema “E”(fixo na terra) pode ser produzido ser produzido
através de uma simples rotação de “b” em relação a “e”.
Definindo a matriz Sυ como o produto vetorial entre υ e w , tem-se:
3 2
3 1
2 1
0
( ) 0
0
S
υ υ
υ υ υ
υ υ
− = − −
(4.13)
Tem-se que:
( ) cos( ) ((1 cos )) ( ) ( )e S TbR e I sen Sα υ α α υυ α υ= = + − +
(4.14)
Onde I é uma matriz-identidade 3x3, α é o ângulo de “b” em relação a “e”.
A convenção indica que a matriz de rotação é descrita por uma ordem predefinida,
tornando X3Y3Z3 o sistema de coordenadas obtido pela translação do sistema de
coordenadas fixo na terra XeYeZe paralelo a ele mesmo até que sua origem coincida
com a origem fixa no corpo. Então, o sistema de coordenadas X3Y3Z3 é rotacionado de
um ângulo yaw (ψ ) sobre Z3 , gerando um sistema X2Y2Z2. Este último é rotacionado
de um ângulo pitch (θ ) sobre Y2,obtendo-se então o sistema X1Y1Z1, sendo que este é
rotacionado de um ângulo roll (ϕ ) sobre X1 produzindo o sistema de coordenadas fixo
ao corpo.
A matriz de rotação ebR pode ser resumida como o produto de três matrizes de
rotação.
![Page 98: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/98.jpg)
83
1 0 0
0 1 0
0 0 1* *S S S
ebR e e e
ψ θ ϕ
=
(4.15)
4.3.2.3 Codificações de Funções
Ao traduzir, para o código em uso, a matriz ( )S υ definida em (2), tem-se:
function z=vp(x,y)
% z=vp(x,y); z = produto vetorial de x e y
% vp(x) e a matriz do produto vetorial : vp(x)*y=vp(x,y).
z=[ 0 -x(3) x(2);
x(3) 0 -x(1);
-x(2) x(1) 0 ];
if nargin>1, z=z*y; end
Como a maioria das simulações será desenvolvida no sistema fixo ao corpo, a
matriz beR será utilizada com mais freqüência do que a sua transposta e
bR . A função
descrita abaixo foi elaborada de forma a produzir uma rotação, dados como entrada um
vetor de orientação contendo os ângulos de roll, pitch e yaw.
function R_eb=rpy2R_eb(rpy) % R_eb=rpy2R_eb(rpy), calcula a matriz de rotação do sistema “e” em relação ao sistema “b”, % tendo como input um vetor contendo os ângulos roll, pitch and yaw. sf = sin(rpy(1)); cf = cos(rpy(1)); st = sin(rpy(2)); ct = cos(rpy(2)); sp = sin(rpy(3)); cp = cos(rpy(3)); R_eb = [ +ct*cp +ct*sp -st +sf*st*cp-cf*sp +sf*st*sp+cf*cp +sf*ct +cf*st*cp+sf*sp +cf*st*sp-sf*cp +cf*ct ];
![Page 99: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/99.jpg)
84
4.3.2.4 Sistemas de Coordenadas Auxiliares
O sistema definido como “sistema-W” é um sistema de coordenadas fixo no
corpo (localizado em um dado ponto do veículo submerso) em um dado ponto do
veículo de resgate (ou qualquer outro) com seu eixo “x” orientado de acordo com a
velocidade do corpo em relação ao fluido neste ponto específico, e o seu eixo Z
localizado no plano XZ em relação ao “Sistema - b”.
O “sistema-W” pode ser obtido a partir do “Sistema-B” através de duas rotações.
Primeiramente girando sobre o eixo Y de um ângulo α , no sentido horário do “sistema-
B”, depois girando sobre o eixo Z segundo um ângulo β :
0 0
1 0
0 1
cos( ) cos( ) cos( ) ( ) ( )
* ( ) cos( ) 0
( )cos( ) ( ) ( ) cos( )
s s
bw
sen sen
R e e sen
sen sen sen
β α β α β α
β β
α β α β α
−
− = = −
(4.16)
A velocidade do corpo em relação ao fluido pode, então ser expressa no
“sistema-W” pelo vetor [ 0 0]TV
4.3.2.5 Definição das velocidades generalizadas.
a) Velocidade linear
Sabe-se que o vetor ebO é variável no tempo, então a velocidade linear de “b”
em relação a “e”, expressa no sistema de referência fixo na terra “Sistema-E”, é a
derivada temporal do vetor ebO :
/
e eb e bV O= �
(4.17)
![Page 100: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/100.jpg)
85
Normalmente, a velocidade linear é expressa no sistema de referência fixo no corpo
(sistema-B), logo:
/ /* *b b e b e
b e e b e e bV R V R O= = �
(4.18)
b) Velocidade angular
Se a orientação de “b” com relação a “e’ varia no tempo, então a matriz de rotação é
variável no tempo. A velocidade angular de “b” com relação a “e” expressa no
“Sistema-E”, é o vetor /e
b eW representado por :
/( )e e e
b b e bR S W R=
(4.19)
A velocidade angular não poderá ser integrada diretamente para a obtenção das
coordenadas angulares devido ao fato desta integral não possuir interpretação física
imediata. Entretanto, a velocidade angular pode ser relacionada com as derivadas dos
ângulos de roll, pitch e yaw , de fato se for observada a definição destes ângulos, nota-
se que /e
b eW é a soma de três componentes, conforme expresso abaixo:
/ 3 2 1 1 2 3( ) ( , ) ( , ) ( )e e e e e e e
b eW K J I I J K
φ
ψ ψ θ θ ψ φ θ ψ ψ θ
ψ
= + + =
�
� � ��
�
(4.20)
Mas para obter /b
b eW deve-se multiplicar à esquerda por beR , logo:
![Page 101: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/101.jpg)
86
/ / 1 2 3
/
/
* ( , ) ( )
1 0
0 cos cos
0 cos cos
1 tan cos tan
0 cos
0 / cos cos / cos
b b b b e e eb e e b e e
bb e
bb e
W R W R I J K
sen
W sen
sen
sen
sen W
sen
φ
θ ψ ψ θ
ψ
θ φ
φ θ φ θ
φ θ φ ψ
φ φ θ φ θ
θ φ φ
ψ φ θ φ θ
= =
− = −
= −
�
�
�
�
�
�
�
�
�
2
πθ = ±
(4.21)
Assim, para obter as derivadas dos ângulos de roll, pitch e yaw a partir de /b
b eW
e os ângulos de roll, pitch e yaw, a relação é expressa por :
/
1 tan cos tan
0 cos
0 / cos cos / cos
bb e
sen
sen W
sen
φ φ θ φ θ
θ φ φ
ψ φ θ φ θ
= −
�
�
�
(4.22)
Note-se que esta matriz não tem solução para 2
πθ = ±
4.4 Codificação das Funções da Cinemática
Para esta etapa, será convencionada a notação abaixo a ser utilizada na
codificação das funções cinemáticas:
• Para vetores, a letra minúscula após o sublinhado (underscore) representa o
sistema de coordenadas no qual o vetor está expresso, por exemplo “P_”
significa o vetor P expresso no sistema de coordenadas fixo na terra “e”,
definido como eP .
• Para matrizes de rotação, as duas letras minúsculas após o sublinhado
representam os sistemas de coordenadas relacionados pela matriz. Por
exemplo,R_be significa a matriz ebR .
![Page 102: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/102.jpg)
87
• Para velocidade, três letras minúsculas após o sublinhado terão o seguinte
significado: V_abc será o equivalente a velocidade de um sistema de
coordenadas “a”em relação a um sistema “b” expresso no sistema de
coordenadas “c”.
4.5 Codificação da Notação para Veículos Marinhos de 6 GDL.
Segundo FOSSEN(1994) e CAMPA, INNOCENTI E NASUTI(1998), os
vetores abaixo são usados para descrever o movimento de um veículo submerso em 6
GDL.
1
2
1
2
1
2
1 /
2 /
( )
( )
eb
bb e
bb e
x
O y
z
v
v
u
v v v
w
p
v w q
r
J
J
ηη
η
η
φ
η θ
ψ
υ
η
η η υ
=
= =
=
=
= =
= =
=�
(4.23)
η é o vetor de coordenadas generalizadas do “Sistema-B” em relação ao “Sistema-E”,
especificamente, x,y,z são as posições de Ob ao longo dos eixos e φ ,θ e ψ são os
![Page 103: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/103.jpg)
88
ângulos de roll, pitch e yaw do “Sistema-B” em relação ao “Sistema-E” como descrito
em (2).
1
2
v
vυ
=
; 1 /b
b e
u
v v v
w
= =
;
2 /b
b e
p
v w q
r
= =
(4.24)
υ é o vetor de velocidades generalizadas do “Sistema-B” em relação ao “Sistema-E”,
com coordenadas fixadas no corpo (Sistema-B), mais detalhadamente υ é a velocidade
angular no “Sistema-B” com relação ao “Sistema-E” com coordenadas no “Sistema-B”,
como descrito no tópico anterior.
Então, υ representará a velocidade do sistema de coordenadas do corpo
“Sistema-B” em relação ao “Sistema-E”.
O vetor υ é relacionado com a derivada de η pela matriz ( )J η :
( )Jη η υ=� ;
1 2 3
3 2 2
( ) 0( )
0 ( )
JJ
J
ηη
η
=
(4.25)
Onde 30 é uma matriz de zeros 3x3, 1 2( )J η é ebR (a transposta de b
eR ) e 2 2( )J η é a
matriz em (12).
11 2
2
; ;
X K
Y M
Z N
ττ τ τ
τ
= = =
(4.26)
τ é o vetor de forças e momentos atuando sobre o veículo.
![Page 104: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/104.jpg)
89
4.6 Codificações de Funções
Ao traduzir, para o código em uso, a matriz jacobiana definida em (79), tem-se:
Matlab function rpy2J function J=rpy2J(rpy) % J=rpy2J(rpy); codifica a matriz jacobiana generalizada que % transforma as derivadas de ni em derivada de eta , dados como entrada os % ângulos roll pitch and yaw. sf = sin(rpy(1)); cf = cos(rpy(1)); tt = tan(rpy(2));
ct = cos(rpy(2));
J = [ rpy2R_eb(rpy)' zeros(3,3)
zeros(3,3) [1 sf*tt cf*tt; 0 cf -sf; 0 sf/ct cf/ct] ];
4.7 Sistema de Coordenadas para a Corrente Marinha
Este sistema, chamado deste ponto em diante de “sistema-C”, é utilizado para
expressar a velocidade da corrente ao redor do veículo de resgate, este possui a
orientação do “sistema-E” e uma velocidade linear que corresponde a velocidade de
corrente em relação ao “sistema-E”
11 / / 2 / /
2
0
; * ; * 0
0
cc b b e b b e
c c e e c e c c e e c ec
c
u
c V R V v c W R W
w
ϑϑ ϑ ϑ
ϑ
= = = = = = =
1
2
cc
c
ϑϑ
ϑ
=
(4.27)
Logo,
11 / / / /
0b b b ec
c c e b e c e c eV W V Vϑ
ν ϑ
= = = = − × +
�� ��
(4.28)
![Page 105: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/105.jpg)
90
Adicionalmente, a velocidade relativa é definida como a velocidade do corpo em
relação à corrente:
/ / /
/ / /
b b bb e c e b c
r b b bb e c e b c
V V VV V Vc
W W W
−= − =
−
(4.29)
4.8 Dinâmica do Corpo Rígido
Conforme comentado no capítulo 2 a equação de movimento de um veículo em um
espaço tridimensional pode ser expressa como:
( )CR CRM Cν ν ν τ+ =�
(4.30)
Onde pode-se ampliar a matriz de inércia para :
3 ( )
( )
b
CR b bb
mI mS GM
mS G IO
−=
(4.31)
Onde I3 é uma matriz identidade 3X3, m é a massa do veículo, bG é a posição do centro
de massa em relação ao sistema de referência fixo ao corpo (Sistema-B) e bbIO é o
tensor de inércia em relação à bO expresso no Sistema- B.
Se ρ é a densidade do corpo no ponto P, e V é o volume, então as propriedades m, bG
e bbIO podem ser reescritas da seguinte forma :
( )b
volm P dpρ= ∫
(4.32)
![Page 106: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/106.jpg)
91
1( )b b b
vol
G P P dpm
ρ= ∫
(4.33)
2 ( ) ( )b b bb
vol
IO S P P dpρ= − ∫
(4.34)
A matriz CRC , diferentemente da matriz de inércia, pode apresentar diversas
parametrizações, uma das mais comuns na literatura (FOSSEN, 1994) é a representada
abaixo:
( )
11 12
11 12 21 22
0 ( )
( ) ( )
CR CR
CR
CR CR CR CR
S M MC
S M M S M Mν
− = − −
(4.35)
O vetor de forças e momentos é a soma de diversos esforços:
rest amort adic FK extτ τ τ τ τ τ= + + + +
(4.36)
Com relação às forças de restauração (devido às forças peso e empuxo), restauτ é uma
função de posição e orientação do veículo, e pode ser representada por ( )g η− :
g( ) ( ) ( )
( ) g( )
bbm
rest g b b bb bm
Volm gg
S B VolS G m g
ρτ η τ η τ η
ρ
= − = + = −
(4.37)
![Page 107: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/107.jpg)
92
Onde b g é a aceleração gravitacional expressa no sistema fixo no corpo (sistema-B),
mρ é a densidade da água do mar, b B é o centro de flutuação, que é definido como b G ,
mas com a densidade da água do mar no lugar da densidade do corpo. ( )Pρ .
amortτ representa o conjunto de esforços relacionados aos diferentes tipos de
amortecimento, o potencial que é relativo às ondas produzidas pelo veículo, o relativo a
resistência adicionada pela fricção do casco, e o devido à formação de vórtices.
Este vetor é dependente da velocidade relativa do veículo R Cυ υ υ= − (onde Cυ é a
velocidade do fluido) e da posição da deflexão dos lemes direcionais (quando
existentes), e é expresso como:
( , )amort R RDτ υ δ υ= −
(4.38)
adτ representa o conjunto de forças e momentos devido a massa adicionada, ou seja,
devido a inércia do fluido circundante ao veículo, que dependem da aceleração do
corpo em relação ao fluido e são freqüentemente expressos como:
( )adic A r A r rM Cτ υ υ υ= − −�
(4.39)
Onde AM e AC equivalem a CRM e CRC conforme descrito no capítulo 2.
FKτ representa as forças de Froude-Kriloff , que derivam da matriz de inércia de fluido
deslocado, ou seja:
![Page 108: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/108.jpg)
93
FK FK cMτ υ= �
(4.40)
FKM é definida usando a densidade do fluido ρf(P) ao invés da densidade do veículo.
ρ(P)
extτ representa todas as forças externas genéricas, como por exemplo, a força
desenvolvida pelos propulsores ou a força de um cabo de reboque ou umbilical.
corτ , geralmente, é definida como:
( ) ( )cor CR A r rC Cτ υ υ υ υ= − −
(4.41)
Repetindo as premissas usadas por Fossen(1994), onde FKM = CRM , ou seja, o
corpo tem flutuabilidade neutra e distribuição homogênea de massa, obtêm-se:
[ ]CR A restau ext corM M ν τ τ τ+ = + +�
(4.42)
Para a facilitar a implementação computacional, a equação (4.42) pode ser
reescrita no formato abaixo:
[ ]CR A cor amort ext restM M υ τ τ τ τ+ = + + +�
(4.43)
Finalmente, pode-se escrever a versão das equações da cinemática e dinâmica que serão
manipuladas pelo software através da função (matlab function) vxdot, que são:
1
( )
[ ] ( ( , ) ( , ) ( ))c CR A cor c amort c ext rest
J
M M
η η υ
υ υ τ υ υ υ τ υ υ δ τ τ η−
=
= + + − + − + +
�
� �
(4.44)
![Page 109: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/109.jpg)
94
5 SIMULAÇÕES COMPUTACIONAIS
5.1 Considerações sobre a estrutura do veículo de resgate
Para as simulações, será avaliada uma estrutura cilíndrica com lemes direcionais,
conforme desenho abaixo:
Figura 5.1 Projeto conceitual testado
Cada leme terá um dispositivo capaz de girar no sentido anti-horário de seu eixo y, e
este ângulo de rotação é representado pela letra δ.
O eixo X da parte fixa de cada leme é considerado como coincidente com eixo X do
corpo quando δ=0, o eixo z é obtido diretamente ( k = S(i)j ).
serão utilizados 8 lemes direcionais posicionados em dois conjuntos.
![Page 110: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/110.jpg)
95
Figura 5.2 Projeto conceitual dos lemes direcionais
5.2 Aspectos sobre massa, massa adicional e inércia do veículo.
a) Massa e massa adicional
De forma a contextualizar a simulação seguem algumas premissas para o veículo
simulado neste trabalho.
O centro de gravidade bG será localizado a uma distância d/2 abaixo do centro de
carena, para permitir a estabilidade do movimento de roll.
Os momentos de inércia da estrutura foram processados usando as fórmulas gerais do
cilindro, meia-esfera e placas retangulares (lemes direcionais).
Finalmente, a matriz de corpo rígido é obtida.
Os termos de massa adicional seguem descritos abaixo:
3
11
22
( / )2x f
y yc yla ylp
dA ma l d
A ma ma ma ma
ρ π= =
= = + +
(5.1)
Sendo que c corresponde ao corpo do cilindro, la aos lemes direcionais
anteriores(próximos à proa) e lp aos lemes direcionais posteriores.
Mais especificamente, ylama e ylpma podem ser representados como:
![Page 111: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/111.jpg)
96
2
1( / )4yla f
dma k l dρ π=
(5.2)
2
2 ( / )4ylp f
c bma lk b cρ π=
(5.3)
Sendo que, d e l são o diâmetro do cilindro e o comprimento do cilindro
respectivamente e b e c representam o comprimento e a largura dos lemes direcionais.
Lembrando-se que é comum a utilização da simetria como ferramenta, o veículo testado
é simétrico em relação ao eixo X do sistema de coordenadas fixo no corpo (sistema B),
logo tem-se que 33 22A A= , e, fixando-se o centro de massa adicionada neste mesmo eixo
( 0ay = , 0az = ).
Dito isto, o centro de massa adicionada ao longo do eixo x pode ser calculado da forma
explicitada abaixo:
yc c yla la ylp lpa
yc yla ylp
ma x ma x ma xx
ma ma ma
+ +=
+ +
(5.4)
Para a montagem da matriz de momentos de inércia adicionais, devem ser utilizadas as
mesmas expressões clássicas utilizadas para massas de corpos rígidos, substituindo a
massa do veículo pelas adicionais.Em resumo, as matrizes de massas adicionais são
descritas como:
11 22 33 11 22 33
11 22 33
( , , ) ( ) ( , , )
( , , ) ( )b
bA
A b bA O
diag A A A S G diag A A AM
diag A A A S G A
−=
(5.5)
![Page 112: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/112.jpg)
97
11 12
11 12 21 22
0 ([ ])( )
([ ]) ([ ])
A A r
A rA A r A A r
S M MC
S M M S M M
υυ
υ υ
− =
− −
(5.6)
5.3 Forças de Coriolis
Conforme observado na equação (4.44), pode-se implementar computacionalmente o
termo correspondente aos esforços de coriolis da seguinte forma.
O vetor de esforços de Coriolis depende da velocidade e dos vetores de velocidade
relativa e de parâmetros fixos como massa, centro de massa, tensor de inércia de massas
adicionadas.
Function tau_cor
function tc=tau_cor(veh,v,vr)
% tc=tau_cor(veh,v,vr) calcula as forces de coriolis oriundas
% das variáveis do veículo e das velocidades generalizadas v e vr
Crb=[ zeros(3,3), -vp(veh.Mrb(1:3,:)*v);
-vp(veh.Mrb(1:3,:)*v), -vp(veh.Mrb(4:6,:)*v)];
Ca= [ zeros(3,3), -vp(veh.Ma(1:3,:)*vr);
-vp(veh.Ma(1:3,:)*vr), -vp(veh.Ma(4:6,:)*vr)];
tc=Crb*v+Ca*vr;
5.4 Forças de Amortecimento
Ainda de acordo com a equação (4.44), pode-se implementar computacionalmente o
termo correspondente aos esforços de amortecimento usando a teoria abordada no
capítulo 2, onde a força hidrodinâmica atuante sobre a superfície submersa é usualmente
expressa na coordenadas auxiliares, da seguinte forma:
![Page 113: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/113.jpg)
98
1
2
d
w b T bx f c c c
l
C
F S C V V
C
ρ
= −
(5.7)
onde fρ é a densidade do fluido, e S a superfície submersa.
Os coeficientes hidrodinâmicos ( dC , CC , LC ) ,bem como o ponto de aplicação da força
dependem da forma geométrica da superfície, da velocidade da corrente do Número de
Reynolds
Nesta dissertação, devido a simetria do veículo proposto, a ausência de dados
experimentais, e o fato de se visar simular diferentes configurações, com lemes
direcionais variando de posição e número é utilizada uma aproximação
diferenciada.Cada esforço (força ou momento) de cada leme e de todo o corpo cilíndrico
do veículo são considerados separadamente e os coeficientes hidrodinâmicos
( dC , CC , LC )) são funções da orientação e posição da superfície que são obtidas nas
referências relacionadas com a hidrodinâmica.
Todos estes esforços calculados em separado são adicionados a posteriori, ignorando-se
as interações entre todas estas superfícies avaliadas.
a) Forças nos lemes direcionais
Dado um ponto do leme nº 1 em relação ao sistema fixo no corpo 1bP , sua velocidade
em relação à corrente, expressa no sistema de coordenadas 1 pode ser expressa:
1 1 11/ 1/ / / 1( )b b b b
c b c b b c b cV R V R V Pω= = + ×
(5.8)
Neste trabalho, a componente da velocidade da corrente marinha ao longo do eixo 1Y
dos lemes direcionais é ignorada, logo 11/cV repousa inteiramente sobre o plano 1 1X Z− .
Dada esta simplificação pode-se fazer:
![Page 114: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/114.jpg)
99
1 11 1/ 1/tan 2( (3), (1))c ca V Vα =
(5.9)
Este é o ângulo de ataque entre o sistema de referência auxiliar W e o leme fixado no
sistema de referência fixado neste leme 1, (atan2 é definida para corrigir erros no
cálculo do arco tangente em ângulos fora do primeiro quadrante e é uma função interna
do Matlab).
A matriz de rotação é representada por:
1
0
( 1 ) 1 101
1 1
cos( ) 0 ( )
0 1 0
( ) 0 cos( )
S
W
sen
R e
sen
α α α
α α
−
− = =
(5.10)
Para pequenos valores 1α α= , os coeficientes hidrodinâmicos dC e LC são obtidos a
partir das relações abaixo:
2
min
L L
d d
C C
C C KC
αα=
= +
(5.11)
![Page 115: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/115.jpg)
100
Figura 5.3 Ponto considerado para a aplicação das forças sobre o leme.
Figura 5.4 Forças aplicadas no ponto
Quando α apresentar valores superiores a 45 graus, a força sobre os lemes direcionais
resultante será assumida como sendo constante e normal à superfície do mesmo
conforme a figura 5.4 acima, ou seja:
cosL T
D T
C C
C C sen
α
α
=
=
(5.12)
De posse destes coeficientes LC e DC , a força exercida sobre cada leme pode ser
expressa, conforme a expressão 5.13. Porém, como cada uma destas forças está descrita
no sistema de coordenadas fixos no leme se faz necessário descrevê-las nas
coordenadas fixas no corpo (sistema-B), através das seguintes relações :
![Page 116: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/116.jpg)
101
11 1 1
b b wwF R R F=
22 2 2
b b wwF R R F=
88 8 8
b b wwF R R F=
(5.13)
Obviamente o mesmo raciocínio é feito com relação aos momentos em relação à origem
do sistema de coordenadas fixo no corpo:
1/ 1 1b b b
bM P F= ×
2/ 2 2b b b
bM P F= ×
.
.
8/ 8 8
b b bbM P F= ×
(5.14)
Onde 1bP , 2
bP ,..., 8bP são as posições do ponto de aplicação da força nos lemes
direcionais descritos no sistema referencial fixo no corpo.
a.1) Codificações das Funções
Nesta codificação foram omitidos os valores numéricos a serem inseridos por ocasião da
simulação.
![Page 117: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/117.jpg)
102
function [Cl,Cd,xcp]=a2clcdxc(alfa)
% [Cl,Cd,xcp]=a2clcdxc(alfa) processa os coeficientes hidrodinâmicos
% Cl e Cd para o corpo, e a distância entre a proa e o ponto de aplicação da força xcp
% Costantes consideradas
CD0 =;
CD90 =;
ALFA1 =;
ALFA2 =;
C1 =; % coeficientes de interpolação
C2 =;
C3 =;
C4 =;
C5 =;
C6 =;
K1 =;
K2 =;
% correção de sinal
mod_alfa=abs(alfa-sign(alfa)*(abs(alfa)>pi/2)*pi);
Cd = CD0 + (CD90 - CD0) * sin(mod_alfa)^3;
xcp = K1*mod_alfa + K2*mod_alfa^0.5;
if mod_alfa < ALFA1 Cl = C1*mod_alfa +C2*mod_alfa^2;
elseif mod_alfa < ALFA2 Cl = C3*mod_alfa +C4;
else Cl = C5*mod_alfa +C6;
end
% correção de sinal
Cl = Cl*sign(sin(2*alfa));
xcp = xcp*sign(cos(alfa)) + (abs(alfa)>pi/2);
Foi necessária a introdução de correções de sinais para que a consistência da resposta
fosse mantida em toda faixa de trabalho.
b) Forças no corpo do veículo
![Page 118: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/118.jpg)
103
Para as forças hidrodinâmicas atuantes no corpo do veículo, a velocidade do centro de
flutuação (B) do mesmo será considerada como a velocidade do corpo, assim uma vez
fornecido o centro de flutuação é possível calcular a velocidade de todo o corpo em
relação a corrente marinha descrita no sistema referencial fixo no corpo.
/ / /
b b b bB c b c B cV V W B= + ×
(5.15)
Sabendo que o corpo do veículo é simétrico em relação aos planos X-Y e X-Z, é
razoável a introdução de outro sistema de referência fixo no corpo, o sistema f, centrado
em B, de tal forma que o sistema de coordenadas auxiliar W é obtido pela simples
rotação do sistema f ao redor do seu eixo y de um ângulo positivo de ataque α .
Resumindo, o sistema de coordenadas f é estruturado de forma /f
B cV deve estar
totalmente contido no plano Xf-Zf.
O eixo Xf é escolhido para ser coincidente com o eixo Xb, o que implica que if = ib .
if e ib são os vetores unitários relacionados aos eixos X correspondentes.
O eixo Zf foi escolhido de modo que sua parte positiva contenha a componente de /b
B cV
que não está sobre o eixo Xb,isto significa que o vetor kf deve ser escolhido da
seguinte forma:
22 22 3
3
01
fK VV V V
=
+
(5.16)
Onde: [ ]/ 1 2 3
TbB cV V V V=
Logo, a matriz de rotação de f com relação ao sistema – B é descrita da seguinte forma :
![Page 119: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/119.jpg)
104
b b b bf f f fR i j k = (5.17)
A velocidade do centro de flutuação descrito em f é igual:
/ /f b b
B c f B cV R V= (5.18)
Sabendo que /f
B cV está inserida no plano Xf-Zf, tem-se que:
[/ /tan 2( (3), (1)) 0, )f ff B c B ca V Vα π= ∈ (5.19)
que é o ângulo de ataque entre o sistema de referência auxiliar W e o sistema- f. Esta
matriz de rotação é expressa por:
cos( ) 0 ( )
0 1 0
( ) 0 cos( )
f f
fw
f f
sen
R
sen
α α
α α
−
=
(5.20)
O coeficiente hidrodinâmico de arrasto Cd é ,então, processado com a seguinte fórmula
sendo ( fα α= ):
30 90 0( ) ( )d d d dC C C C senα α= + − (5.21)
Com relação ao coeficiente hidrodinâmico de sustentação,tem-se que:
![Page 120: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/120.jpg)
105
2 1
3 4
5 6
( ) ( ( ) )( )
( ) ( )
( ) ( )
l
l
l
C C C
C C C
C C C
α α α
α α
α α
= +
= +
= +
para 1
2
α α
α α
≤
≥
3 4( ) ( )lC C Cα α= + para [ ]1 2,α α α∈
5 6
1 6
( ) ( )
..lC C C
C C
α α= + (5.22)
para 2α α≥
Onde os valores de 1 6..C C e de 1 6..α α são obtidos em CAMPA, G., INNOCENTI, M. e
NASUTI, F. (1998).
Saliente-se que se 2 3 0V V= = e α =0, não há coeficiente de sustentação, então os
sistemas de referência f, w e b se igualam sendo f w b= = .
Com relação ao ponto de aplicação da força, é admitido que:
( )*
0
0
p
bB
xc l
P
α =
(5.23)
Onde l é o comprimento do veículo e pxc é representado por:
1 2( )Xcp K Kα α= + (5.24)
As constantes 1K e 2K são escolhidas de acordo com CAMPA, G., INNOCENTI, M. e
NASUTI, F. (1998) e os resultados são apresentados no próximo capítulo.
Uma vez obtidos os coeficientes hidrodinâmicos dC e lC e o ponto de aplicação da
força, a força agindo sobre o casco do veículo pode ser expressa como afirmado em
![Page 121: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/121.jpg)
106
(5.25), onde a superfície de referência escolhida será 2
4
dπ. Porém como esta força está
expressa no sistema de referência F, é necessário a utilização dos operadores de rotação
já mencionados para obter a mesma expressa no referencial do corpo (5.25):
b b f wB f w BF R R F= (5.25)
Esta força proporciona o seguinte momento em relação à origem do sistema fixo no
corpo do veículo:
/b b b
B b B BM P F= × (5.26)
b.1) Codificação dos coeficientes hidrodinâmicos
function [Cl,Cd,xcp]=a2clcdxc(alfa)
% [Cl,Cd,xcp]=a2clcdxc(alfa) processa os coeficientes hidrodinâmicos
% Cl e Cd para o casco, e a distância entre a proa e o ponto de aplicação da força xcp
% Costants
CD0 =;
CD90 =;
ALFA1 =;
ALFA2 =;
C1 =; % coeficientes de interpolação
C2 = ;
C3 =;
C4 =;
C5 =;
C6 =;
K1 =;
K2 =;
% correção de sinal
mod_alfa=abs(alfa-sign(alfa)*(abs(alfa)>pi/2)*pi);
Cd = CD0 + (CD90 - CD0) * sin(mod_alfa)^3;
xcp = K1*mod_alfa + K2*mod_alfa^0.5;
![Page 122: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/122.jpg)
107
if mod_alfa < ALFA1 Cl = C1*mod_alfa +C2*mod_alfa^2;
elseif mod_alfa < ALFA2 Cl = C3*mod_alfa +C4;
else Cl = C5*mod_alfa +C6;
end
% correção de sinal
Cl = Cl*sign(sin(2*alfa));
xcp = xcp*sign(cos(alfa)) + (abs(alfa)>pi/2);
b.2) Codificação dos esforços de amortecimento
function td=tau_damp(veh,vr,de)
% td=tau_damp(veh,vr,de); Calcula as forças de amortecimento a partir das variáveis do
veículo, velocidades generalizadas e ângulos de inclinação dos lemes direcionais%
%Alexandre Vianna
% --------------------------------------------------------------
% forças no casco
% superfície de referência do casco
sf=pi/4*veh.d^2;
% velocidade relativa de B_b em relação a c descrito em b
v_Bcb=vr(1:3)+vp(vr(4:6),veh.B_b);
% matriz de rotação do casco do veículo
i_fb=[1; 0; 0];
if norm([0; v_Bcb(2); v_Bcb(3)])<1e-12, k_fb=[0; 0; 1];
else k_fb=[0; v_Bcb(2); v_Bcb(3)]/norm([0; v_Bcb(2); v_Bcb(3)]);end
R_fb=[i_fb, vp(k_fb,i_fb), k_fb];
% velocidade relativa de B_b com relação à c descrito em f
v_Bcf=R_fb'*v_Bcb;
% angulo de ataque
af=atan2(v_Bcf(3),v_Bcf(1));
% matriz de rotação do sistema de coordenadas auxiliar
R_wf=[cos(af) 0 -sin(af); 0 1 0; sin(af) 0 cos(af)];
% cl cd xcp processamento
[cl,cd,xcp]=a2clcdxc(af);
% forças de amortecimento em B com relação a w
F_Bw=-0.5*veh.rho*sf*v_Bcf'*v_Bcf*[cd; 0; cl];
![Page 123: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/123.jpg)
108
% forces em B com relação a b
F_Bb=R_fb*R_wf*F_Bw;
% ponto de aplicação da força
Pf_b=[-xcp*veh.l; 0; 0];
% moments on B with pole in b wrt b
M_Bbb=vp(Pf_b,F_Bb);
tf=[F_Bb;M_Bbb];
% forças no Leme direcional 1
% Matriz de rotação do leme 1
R_1b=[cos(de(1)) 0 sin(de(1)); 0 1 0; -sin(de(1)) 0 cos(de(1))];
% Velocidade relativa do ponto intermediário do leme 1 com relação a c descrito em b
v_1cb=vr(1:3)+vp(vr(4:6),veh.P1_b);
% velocidade relativa do ponto médio do leme 1 com relação a c descrito em 1
v_1c1=R_1b'*v_1cb;
% ângulo de ataque
a1=atan2(v_1c1(3),v_1c1(1));
% matriz de rotação do sistema de coordenadas auxiliares do leme 1
R_w1=[cos(a1) 0 -sin(a1); 0 1 0; sin(a1) 0 cos(a1)];
% cl e cd processamento
[cl,cd]=a2clcd(a1);
% forças de amortecimento em 1 com relação a w
F_1w=-0.5*veh.rho*veh.sw*(v_1c1(1)^2+v_1c1(3)^2)*[cd; 0; cl];
% forças de amortecimento em 1 com relação a b
F_1b=R_1b*R_w1*F_1w;
% momentos atuantes em 1 descritos em b
M_1bb=vp(veh.P1_b,F_1b);
t1=[F_1b;M_1bb];
% --------------------------------------------------------------
% --------------------------------------------------------------
% Esforços resultantes forças e momentos descritos em b
td=tf+t1+t2+t3+t4+t5+t6+t7+t8;
![Page 124: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/124.jpg)
109
5.5 Forças Restauradoras
O vetor das forças restauradoras possui forças e momentos devido ao peso e ao empuxo.
Considerando que o centro de massa está localizado abaixo do centro de
flutuação,conforme abordado no capítulo 2, um torque restaurador aparece no momento
que os ângulos de roll e pitch são diferentes de zero.
Como conseqüência, os movimentos dos planos X-Z e X-Y são diferentes.
a.1) Codificação das Forças Restauradoras
function tr=tau_rest(veh,p)
% tr=tau_rest(veh,p); calcula forces de restauração a partir
% das variaveis do veículo e posições generalizadas p
% Força e momento hidrostático
FB_e=-veh.vol*veh.rho*veh.g_e;
FB_b=rpy2R_eb(p(4:6))*FB_e;
MB_b=vp(veh.B_b,FB_b);
tb=[FB_b;MB_b];
% Força e momento gravitacional
FG_e=veh.m*veh.g_e;
FG_b=rpy2R_eb(p(4:6))*FG_e;
MG_b=vp(veh.G_b,FG_b);
tg=[FG_b;MG_b];
tr=tb+tg;
5.6 Modelo completo
Após a abordagem detalhada de todos os componentes da equação de governo, é
possível reescrever o modelo não-linear descrito pela equação (5.30):
1
( )
[ ] ( ( , ) ( , ) ( )c CR A cor c amor c rest ext
J
M M
η η ν
ν ν τ υ υ υ τ υ υ δ τ η τ−
=
= + + − + − + +
�
� � (5.27)
![Page 125: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/125.jpg)
110
Estas equações descrevem até 12 estados do sistema que podem ser simulados nos
ambientes Matlab® e Simulink®.
Figura 5.5 Codificação do modelo – função Vxdot.
As equações apresentadas acima são codificadas de modo a receber como entrada um
vetor de 38 dimensões contendo:
1) Os 12 estados iniciais (posição e velocidade).
2) Vetor de ângulos dos lemes direcionais, contendo 8 elementos.
3) Forças e momentos externos descritos nas coordenadas do corpo, (neste exemplo :
Propulsores), 6 elementos.
4) Forças e momentos externos descritos em coordenadas fixas na terra, (Nesta
dissertação um cabo umbilical, porém poderia ser qualquer força de contato com
objetos externos), 6 elementos.
5) aceleração e velocidade da corrente marinha descrita em coordenadas fixas na terra.
Esta função,então, processa estas entradas e a informação das variáveis relacionada ao
veículo (armazenadas na função veh) para processar as derivadas dos sistemas de
estado conforme descrito nas equações (5.29). Estas derivadas podem então ser
integradas através de um processo numérico para apresentar a evolução temporal do
sistema de estados.
5.7 Simulações e resultados em malha aberta.
Neste capítulo, será apresentada a série de resultados e avaliações referentes ao
comportamento cinemático e dinâmico do veículo em malha aberta.
![Page 126: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/126.jpg)
111
5.6.1 Dados relacionados ao tipo de veículo utilizado na simulação
Tabela 5.1 – Dados utilizados Código da variável Descrição Valor unidade
g_e Gravidade descrita
em coordenadas
fixas na terra(e)
[0; 0; 9.81] m/s2
Rho densidade da água
do mar
1033 Kg/m3
M Massa 1444.0 Kg
Matriz de corpo rígido (Kg Kg*m; Kg*m Kg*m^2)
1444 0 0 0 252,7 0
0 1444 0 252,7 0 2527
0 0 1444 0 2527 0
0 252,7 0 142,8 0 0
252,7 0 2527 0 2796 0
0 2527 0 0 0 2778
CRM
− −
= −
−
(5.28)
Matriz de massas adicionadas (Kg Kg*m; Kg*m Kg*m^2)
57,6 0 0 0 0 0
0 1460 0 0 0 102
0 0 1460 0 102 0
0 0 0 83, 4 0 0
0 0 102 0 3401 0
0 102 0 0 0 3401
aM
−
=
−
(5.29)
![Page 127: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/127.jpg)
112
Tabela 5.2 Resumo das variáveis utilizadas na simulação 3
![Page 128: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/128.jpg)
113
Figura 5.6 Template da simulação do comportamento do veículo sem nenhum esforço de cabo ou corrente
atuando sobre o veículo de resgate com propulsão de 10N .
Figura 5.7 Gráfico da evolução da posição do ponto P do modelo
![Page 129: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/129.jpg)
114
Figura 5.8 Template da simulação com esforços de cabo e corrente atuando sobre o veículo de resgate .
Figura 5.9 Gráfico da simulação referente a posição do ponto P do modelo com o template da figura 5.8
![Page 130: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/130.jpg)
115
Figura 5.10 Simulação comparativa da posição do ponto P do modelo com e sem esforços de cabo e de
corrente marinha atuante.
![Page 131: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/131.jpg)
116
6 CONSIDERAÇÕES SOBRE TEORIAS DE CONTROLE
APLICÁVEIS.
6.1 Introdução
No projeto de controladores em geral é abordada a criação de sistemas dinâmicos que
operam de forma adequada a determinado propósito. Muitos sistemas avaliados são
físicos; como máquinas do leme de Navios, atuadores hidráulicos diversos, e processos
químicos. Controladores também podem ser aplicados em sistemas não-físicos; como na
economia. O conceito fundamental é que um conjunto de variáveis de entrada atua
através de uma planta e cria um conjunto de saídas. Controles com retroalimentação
utilizam sensores para monitorar as saídas e corrigir as entradas:
Tabela 6.1 Exemplos de controle retroalimentado Planta Entradas Saídas Sensores
Navios Ângulo do leme aproamento giroscópio
Reator Nuclear resfriamento, fluxo de
nêutrons
Nível de
energia
termômetro,
manômetro
6.2 Necessidade de modelagem
Um controle efetivo é beneficiado quando é elaborado a partir de um modelo
matemático preciso. Porém, muitos controladores industriais podem ser sintonizados
satisfatoriamente sem o conhecimento da planta tais como: o método de Ziegler e
Nichols, o relé de aström (ASTRÖM, K. J. AND HÄGGLUND, T. (1988)) e o controle
fuzzy. Em nenhum caso, porém os modelos representam a totalidade de um sistema
real; apenas os componentes essenciais na forma de equações diferenciais ou integrais-
diferenciais.
Assim, quando não é possível a modelagem do comportamento de sistemas dinâmicos
baseando-se na física, é possível a geração de um modelo gerado a partir de dados
experimentais. Este processo chamado de “identificação de sistemas” apresenta reveses
![Page 132: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/132.jpg)
117
relacionados a ruídos oriundos do sensor ou perturbações que podem gerar
comportamentos imprevisíveis.
6.3 Controle não-linear
Devido à elevada dificuldade relacionada ao projeto de controles não-lineares,
geralmente este são tratados sob os auspícios da teoria linear. Existe um conjunto de
ferramentas disponíveis para este fim. Maiores detalhes da teoria de controle não-linear
são expostos em ASADA, H. e SLOTINE, J.-J. E. (1986) .
6.4 Representação de sistemas dinâmicos lineares
Exceto para a maioria das heurísticas que se utilizam da sintonia de sistemas dinâmicos
simplificados e das que utilizam inteligência computacional (lógica difusa, redes
neuronais ou similares), o projeto de um sistema de controle depende de uma
modelagem adequada do sistema dinâmico, maiores detalhes em CHIANG, R. Y. AND
SAFONOV, M. G. (2001).
6.5 Formulação do espaço de estados
Ao escrever um sistema linear no espaço de estados tem-se:
x Ax Bu Gw
y Cx Du v
= + +
= + +
�
(6.1)
Onde, x é um vetor de estados, com tantos elementos quanto os estipulados pelas
equações diferenciais de governo
A é a matriz que mapea x até a sua derivada; A captura a dinâmica natural do sistema
sem a presença das entradas externas.
B é uma matriz de ganho de entrada para a entrada de controle u.
G é uma matriz de ganho para w perturbação desconhecida; w unidades no estado assim
como o controle u.
![Page 133: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/133.jpg)
118
y é o vetor de observação, majoritariamente composto por uma combinação linear de
estados Cx (onde C é uma matriz).
Du é um mapa direto da entrada para a saída (normalmente zero para sistemas físicos).
V é um sensor de ruído desconhecido que corrompe a medição.
Figura 6.1 Diagrama de blocos da formulação no espaço de estados.
6.6 Controlador PID
O controle PID mantem uma variável de processo (PV) em um valor de
referência (SP) desejado, a partir da manipulação da variável de controle (CV).
A definição básica do método aborda três parâmetros que devem ser definidos de
acordo com o processo que se está sintonizando (método de adequação das constantes
ao processo). Estes parâmetros são chamados Kp (constante proporcional), Ki
(constante integral) e Kd (constante derivativa).
Onde, uma das expressões simplificadas mais utilizadas é a mostrada a seguir:
0
1 ( )[( ) ( ) * ]
t d PVSaída Kc E E dt Td bias
Ti dt= + + +∫
(6.2)
Sendo que o erro é igual a: E = SP – PV ou E = PV - SP
![Page 134: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/134.jpg)
119
Figura 6.2 Exemplo de controle PID.
Na figura acima podemos notar um diagrama esquemático, baseado nos seguintes
parâmetros:
� Setpoint (SP): Valor de referência introduzido. � Variável de Processo (PV): Valor da variável observado por um sensor. � Variável de Controle (CV): Valor controlado pelo controle PID. � Erro (E): é a diferença entre o SP e a PV ou vice-versa. � Bias: Perturbações. Kp, Ki e Kd devem ser sintonizados de acordo com o processo.
6.6.1 Controle Proporcional
Uma das ações de controle é a proporcional que faz com que tenhamos uma
aproximação rápida da Variável de Processo (em relação ao setpoint), sem sobretudo
atingi-la. Uma das desvantagens deste controle quando aplicado é que ele gera um offset
(erro estacionário) que pode ser visto com mais detalhes no gráfico a seguir.
![Page 135: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/135.jpg)
120
Figura 6.3 Exemplo de controle P
6.6.2 Controle Integral
A ação integral permite alcançar o set point, porém causa o overshoot (sobresinal).
Assim pode-se perder o controle ou causar danos dependendo da intensidade do mesmo.
Figura 6.4 Exemplo de controle I
6.6.3 Controle Derivativo
Há um último controle a ser feito que é o derivativo, este é extremamente
necessário quando queremos controlar malhas lentas. Como sempre temos aqui também
um inconveniente que são as oscilações ocorridas logo depois da variável de processo
atingir o setpoint.
Figura 6.5 Exemplo de controle D
![Page 136: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/136.jpg)
121
6.7 Sintonia Heurística
Para muitos sistemas práticos, o ajuste de um controlador PID pode ser executado sem
qualquer modelo matemático do sistema. Uma abordagem útil é devido a Ziegler e
Nichols (B'elanger, 1995), através do método da resposta ao degrau, ou método do
domínio do tempo, que requer o conhecimento de duas grandezas que caracterizam a
resposta ao salto de um processo:
( )1
TsKeG s
sτ
−
+�
(6.3)
Sendo T o tempo de retardo, τ a constante de tempo. O método de Ziegler-
Nichols é aplicável a sistemas cuja função de transferência não possui pólos na origem
ou pólos complexos conjugados dominantes. A resposta ao degrau deste tipo de
sistemas é do tipo sobreamortecido ou seja a forma de um S distorcido. Se a resposta
não tem a forma de uma curva em S este método não é aplicável. d é o máximo valor
da variação de saída e Td é o instante de tempo que este valor é observado.
Tabela 6.2 Método de Ziegler-Nichols
6.8 Controle Ótimo
No caso da teoria do controle ótimo, o controle é obtido através da escolha de uma
função de custo e um índice de desempenho para minimização. A formulação do
controle ótimo também permite uma consideração mais natural das restrições sobre
![Page 137: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/137.jpg)
122
as variáveis de estado como também considerações para redução do tempo necessário
para o controle trazer a resposta a um nível desejado como visto em DA CRUZ,
J.J(1996).
A formulação do controle ótimo também permite uma consideração mais
natural das restrições sobre as variáveis de estado como também consideração
para redução de muito tempo, ou tempo final, requerido para o controle trazer a
resposta a um nível desejado.
De forma a exemplificar, considere-se um sistema controle e o modelo estrutural dado
pelas equações :
2 f
f f
Mq A q Kq f f
f B u
+ + = +
=
�� � (6.4)
Assim, o objetivo do controle ótimo é calcular o controle u(t) que minimiza o índice de
desempenho especificado, denominado pôr ( , , , )J J q q t u= � , dadas as condições iniciais
0( )q t , 0( )q t� e sujeito as restrições que:
2( ) fM q A q kq B u+ + =�� �
(6.5)
é satisfeito com as condições iniciais apropriadas.
Esta última expressão é chamada de uma restrição diferencial e é usualmente escrita na
forma de espaço de estado. A função custo é geralmente dada em termos de uma
integral. O processo do projeto do controle ótimo consiste da escolha de uma
função J. A função J deve ser expressa de forma a refletir o desempenho desejado.
A melhor opção para u, ou seja o “u ótimo”, denotado u *, deve ter a seguinte
propriedade:
J(u*) < J(u)
Um exemplo de escolha para a função de custo J pode ser o problema de tempo mínimo:
0
ft
f o
t
J t t dt= − = ∫
(6.6)
Sendo, ot igual o tempo inicial, ft o tempo final.
![Page 138: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/138.jpg)
123
Outro exemplo de problema do controle ótimo é chamado de problema do
regulador linear.
O controle ótimo quadrático tem como base o 2º método de Lyapunov, onde um
índice de desempenho quadrático é minimizado. Em conseqüência, a principal
vantagem deste tipo de controle é que, em sendo o sistema controlável, ele será
estável e ótimo.
6.8.1 Controlabilidade e Observabilidade
A obtenção de um sistema de controle linear ótimo está vinculada às propriedades de
controlabilidade e de observabilidade do sistema. Sendo que, estas propriedades
estabelecem condições para uma equivalência completa entre as representações sob
a forma de variáveis de estado e de função de transferência.
Um sistema é dito completamente estado-controlável se, qualquer que seja to,
todo estado inicial x(to) pode ser transferido para qualquer estado final x(tf) num
tempo finito, tf > to, por intermédio de um vetor excitação u(t) não sujeito a
restrições, isto é, que não apresente limitações quanto aos valores de u(t). Esta
definição indica que u(t) é capaz de influenciar cada uma das variáveis de estado na
expressão.
Um conceito similar ao de controlabilidade é a idéia que toda variável de estado
do sistema tem algum efeito sobre a saída do sistema (resposta). Isto é chamado
observabilidade.
Um sistema é dito completamente observável se todo estado inicial x(to) pode ser
determinado exatamente a partir de medidas da resposta y(t), durante um intervalo
de tempo finito to ≤ t ≤ tf. Esta definição indica que todas as variáveis de x(t)
influenciam a resposta y(t).
6.8.2 Regulador linear
A teoria do controle ótimo lida com a operação de um sistema dinâmico com um custo
mínimo. A situação onde a dinâmica do sistema é descrita por um conjunto de equações
diferenciais lineares e o custo é descrito por uma função quadrática, é denominada
problema QL. Um dos principais resultados na teoria é que a solução é provida pelo
regulador quadrático linear (RQL), um controlador de retroalimentação criado pelo
matemático Rudolf Kalman em 1960, cujas equações são descritas abaixo.
![Page 139: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/139.jpg)
124
O regulador linear tem aplicação particular em controle de posição de aeronaves e
veículos aéreos e espaciais. Em particular, o objetivo é o retorno da resposta do valor
de estado inicial x(t) de posições de equilíbrio do sistema.
O índice de desempenho para o problema do regulador linear é definido por:
0
1( )
2
ft
T T
t
J x Qx u Ru dt= +∫
(6.7)
Onde Q e R são matrizes de peso simétricas positivas definidas. Onde a matriz peso Q, é
denominada de matriz custo de estado, e a matriz peso R, é chamada de matriz custo de
controle. A determinação da lei de controle ótimo possui um significado prático de
que o sistema resultante estabelece um compromisso entre a minimização do erro
integral e a minimização da energia de controle. A função objetivo previne-se contra
as grandes oscilações das variáveis de estado, ao mesmo tempo em que busca limitar as
grandes e repetidas oscilações do acionamento dos atuadores, controlando desta forma
as instabilidades geradas pelas perturbações internas ou externas presentes no sistema.
A dificuldade no controle de modelos de veículos remotamente operados é que o
sistema inclui não-linearidades na sua dinâmica. As propriedades dinâmicas do
sistema não são invariantes no tempo, tendo variações durante o ciclo de vida do
veículo. Além disso, o propósito de um sistema de compensação é satisfazer as
exigências de desempenho em diferentes situações. Exemplos de sistemas de
compensação podem ser diversificados como por exemplo os vários métodos para
resolver o problema da suspensão ativa. A maior parte destas contribuições de
pesquisa é baseada em modelos lineares invariantes no tempo (BUCKNER&
SCHUETZE, 2000). Um possível modo de controle é pela utilização do método
de linearização "feedback" para obtenção de um controlador não-linear
(RAFIKOV & BALTHAZAR, 2004).
6.9 Controle Fuzzy
Os Sistemas de controle baseados em lógica fuzzy desenvolvidos por Lotfi Zadeh na
década de 60, são utilizadas com sucesso em varias áreas, inclusive na área de
veículos remotamente operados (JAIN & JAIN, 1997). No entanto, na medida em que a
complexidade dos processos aumenta, fica difícil estabelecer uma configuração ideal
para um sistema de controle fuzzy, sendo necessárias muitas vezes ferramentas de
![Page 140: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/140.jpg)
125
auxílio ao controle fuzzy, entre elas pode-se citar o algoritmo genético e as redes
neurais (RUAN, 1997).
Geralmente, na forma mais usual, utiliza-se o modelo clássico de Mamdani, onde a
escolha das funções de pertinência dos conjuntos Fuzzy, tem forma simétrica e são
igualmente espaçadas com o objetivo de suavizar eventuais descontinuidades e
minimizar problemas de ruídos. Pode-se alterar o numero de funções de pertinência, o
de modo a concatenar precisão com demanda computacional.
6.10 Comentários Adicionais
Em certos casos, no entanto, o controle linear PID não é adequado para aplicações em
controle de veículos submarinos. Devido à natureza não linear do movimento
deveículos submarinos um controlador linear não permite um desempenho satisfatório
para condições de operação muito diferentes das quais foi projetado. Nestes casos é
necessário o projeto de vários controladores, um para cada região de operação, ou
intervalo de velocidade. Considerando uma combinação de movimentos e magnitudes
de velocidade, utilizando os seis cada grau de liberdade, fica evidente o aumento de
complexidade de projeto, exigindo considerável quantidade de tempo para projeto e
simulações. Mesmo considerando um veículo submarino atuando em apenas um grau de
liberdade, muitas vezes a utilização de um controlador PID não é adequada pois a
operação do UUV pode não se limitar a uma pequena extensão ou intervalo de
velocidades. Adicionalmente, uma estimativa próxima dos parâmetros da dinâmica do
veículo seria indispensável para a determinação dos ganhos do controlador.
Um procedimento freqüentemente utilizado no controle de veículos submarinos, e de
sistemas multivariáveis em geral, é considerar que o sistema possui uma dinâmica
desacoplada. Feita esta hipótese, decompõe-se a equação matricial da dinâmica do
sistema, conforme exposto neste trabalho em seis equações diferenciais desacopladas
(Cunha, Lizarralde, Costa, Hsu, Smith Jr., Wollmann Jr. and Sant’Anna, 1994) (Fossen,
1994; Caccia and Veruggio, 2000) (Caccia, Bruzzone and Veruggio, 2001)
![Page 141: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/141.jpg)
126
6.11 Modelo Linear para aplicação do controle de atitude do
veículo
Neste tópico, abordar-se-á a criação do modelo não-linear linearizado a um certo ponto
de operação usando a rotina de linearização residente no Matlab “linmod”, onde os
valores das entradas, estados e saídas mais relevantes são selecionados e finalmente a
auto-estrutura e valores singulares resultantes do modelo linear podem ser analisados.
6.11.1 Linearização
Primeiramente, é necessário a criação de um bloco no simulink, a partir de agora
chamado de modo controlado ou “xtrlmod”:
Figura 6.6 – Modelo linearizado
A função “Vxdot” deste sistema é exatamente que descreve a dinâmica do veículo em
estudo (com 26 entradas, 12 estados, e 12 saídas), e é, portanto, a que é tratada pela
rotina de linearização "linmod".
>> u0=[zeros(8,1);350;zeros(17,1)];
>> x0=[zeros(6,1);2;zeros(5,1)];
A aposição de condições iniciais x0 e u0 , exemplificadas acima, estabelece-se o ponto
de operação do sistema quanto ao espaço x-u, sendo x o eixo longitudinal fixo no corpo
e u os vetores de atuação.
Neste ponto, tem-se, os ângulos dos lemes zerados, a força de impulsão igual a 350 N,
não há corrente, não há força externa e o veículo segue positivamente em relação ao
eixo x fixado no corpo com velocidade igual a 2 m/s.
>> [A,B,C,D]=linmod('xtrlmod',x0,u0);
![Page 142: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/142.jpg)
127
O uso do comando nativo “linmod” para o sistema no modo controlado “xtrlmod” no
ponto de operação x0-u0 apresentado, resulta nas matrizes A B C D do modelo
linearizado.
Finalmente para teste de um controle exclusivo de atitude, pode-se selecionar as
variáveis de interesse:
>> [a,b,c,d]=ssselect(A,B,C,D,1:8,4:6,[4:12]);
Neste caso, demontra-se que selecionamos apenas os ângulos do lemes como entradas e
os ângulos de roll, pitch e yaw como saídas, ignorando as posições x, y e z referenciadas
na terra, resultandoem um vetor de estado de 9 dimensões como se segue.
[ ], , , , , , , ,T
u v w p q rϕ θ ψ
Somente oito das vinte entradas (posição dos lemes) e [ ], ,ϕ θ ψ serão observadas como
saídas.
A matriz A tem autovalor nulo correspondente a ψ , enquanto ϕ e θ não apresentam
este efeito integrador. Esta diferença de comportamento pode ser atribuída ao fato do
torque restaurador que é gerado pela combinação dos esforços gravitacionais e de
empuxo (o centro de gravidade é localizado abaixo do ponto de aplicação da força de
empuxo). Assim, existem 3 (três) modos fortemente relacionados com θ ,ψ , ,v w e
fracamente com q e r. Estes são relacionados com a geometria do veículo, a qual tende
a movimentar o veículo para cima e para baixo quando o mesmo movimenta-se para a
frente, não há uma simetria exata entre a dinâmica das superfícies de controle e a
dinâmica de mergulho, em função da combinação das forças de empuxo e peso.
![Page 143: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/143.jpg)
128
Figura 6.7 Movimentação do veículo em roll
Figura 6.8 Movimentação do veículo em Pitch
![Page 144: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/144.jpg)
129
6.12 Controlador Linear de Atitude
Neste tópico final, um controlador linear de atitude será apresentado para o modelo linearizado obtido nos tópicos anteriores. Este mesmo controlador será testado no modelo não-linear. a) LQR Reconhecido por bom desempenho e robustez. O Regulador Linear Quadrático foi o escolhido neste trabalho para testar o comportamento em malha fechada do sistema não-linear em estudo. Considerando no espaço de trabalho (“workspace”), as matrizes a,b,c e d. do modelo considerado nos capítulos anteriores, para a aplicação deste controle retroalimentado requer apenas o seguinte par de linhas de comandos: >> Q=diag([20 20 20 ones(1,6)]); >> R=eye(size(b,2));
Os comandos acima selecionam as matrizes de ponderação Q e R, este fato designa um peso maior nos estados que controlam a atitude do veículo. Onde, neste trabalho, foi designado o valor de ponderação igual a “20” que será comparado com o valor “1”correspondente aos outros estados e entradas, refletindo assim os comamdos pré-ajustados de controle de atitude “TRACKING” do veículo. >> K=lqr(a,b,Q,R);
Adicionalmente, a linha de comandos acima processa a matriz de ganho K. Considerações sobre a determinação dos estados iniciais do veículo submarino. b) Considerações sobre a determinação dos estados iniciais do veículo submarino Existem unidades de medição inercial (IMU) que usam fusão sensorial para apresentar referências para prover estabilização e controle de atitude de câmeras, veículos e sistemas autônomos. Dispositivos para determinação da atitude são caracterizados pelos três ângulos de orientação do veículo em relação a um sistema de coordenadas tridimensional conhecido, encontram aplicação em diversas áreas, desde realidade virtual até as engenharias aeroespacial (Kuipers, 1998) e submarina. Nos casos de maior complexidade, em que o objeto de interesse não está fixo a uma plataforma, sensores de diversas naturezas são empregados, desde câmeras a conjuntos de sonares. Dentre as abordagens para estimação da atitude mais utilizadas. Tem-se a baseada na medição das velocidades de rotação do veículo, proporcionada por girômetros. A partir da integração numérica de tais medidas e do conhecimento da atitude inicial em relação ao sistema de referência, é possível obter uma estimativa da atitude, como descrito em Titterton and Weston (1997). A outra abordagem é baseada na medição de vetores locais dos campos gravitacional e magnético. A partir do conhecimento dos valores desses vetores no sistema de referência, também é possível determinar uma estimativa da atitude, conforme exposto em Rogers (2003).
![Page 145: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/145.jpg)
130
i) Girômetros
Os girômetros são sensores que medem a velocidade de rotação de um corpo em relação
a um sistema de coordenadas inercial, ou Sistema. Neste sentido, caso o sensor opere
em um sistema de coordenadas rotativo, como a Terra, tal rotação será medida pelo
sensor. Entretanto, devido ao tempo de operação do sistema e à reduzida magnitude da
rotação da Terra, ωe ≈ 15 o/hora, quando comparada aos ruídos apresentados pelos
girômetros deste trabalho, tal efeito ´e desconsiderado. Assim, considera-se que ωb nb =
ωbib.
ii) Acelerômetros e magnetômetros
Acelerômetros são sensores com os quais pode ser obtida estimativa da aceleração a
partir da medição da força incidente em um corpo de prova localizado no interior do
dispositivo, fb
Assim, um acelerômetro de três eixos mede não apenas a aceleração inercial
representada em componentes do Sistema B empreendida pelo veículo, ab, mas também
a aceleração gravitacional local, gb.
Já um magnetômetro, por sua vez, é um sensor capaz de medir a intensidade do campo
magnético incidente no dispositivo, mb
Tais sensores são utilizados, de maneira conjunta (fusão), para uma estimativa completa
da atitude em relação a um sistema de coordenadas conhecido. Utiliza-se os dados de
dois sensores porque, a partir da medição de apenas um vetor cujos componentes são
conhecidos em um sistema de coordenadas de interesse, pode - se determinar apenas de
forma incompleta a atitude relativa a tal referência. Por exemplo, caso seja conhecido
gb , é possível determinar a inclinação do sistema em relação ao plano perpendicular à
aceleração da gravidade. Não será possível determinar, entretanto, a orientação em torno
do eixo paralelo à gravidade.
Entretanto, caso dois vetores não paralelos estejam disponíveis, é possível determinar
por completo a atitude do veículo.
![Page 146: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/146.jpg)
131
6.10.1 Simulação do sistema em malha fechada De forma a retroalimentar os atuadores do veículo, os sensores são simulados de forma
a quantizar o sinal, subtrair as condições iniciais e somente disponibilizar as medições
selecionadas.
Figura 6.9 Modelo de sensores
Como neste trabalho o objetivo é estabelecer uma simulação com maior realismo para
propiciar ao projetista ou ao tomador de decisões, a melhor estimativa de
comportamento dinâmico do veículo de resgate.
Os atuadores serão simulados com atrasos, limitadores de posição e limitador de taxa
de variação de posição.
Figura 6.10 Modelo de Atuadores
![Page 147: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/147.jpg)
132
Figura 6.11 Modelo do sistema em malha fechada usando um Regulador Quadrático Linear ( LQR)
Um filtro discreto de segunda ordem (IIR) será utilizado para remover o ruído simulado. O sistema foi elaborado de forma a buscar posicionamento submetido a perturbações ambientais através de três rampas independentes, onde é possível a taxa de velocidade de atuação em rad/s e a amplitude máxima de variação em rad. Nas simulações apresentadas abaixo variar-se-á, primeiramente, o canal yaw e depois os canais pitch e roll Nas simulações específicas, apresentadas abaixo e baseadas no modelo acima, são apresentadas 3 rampas independentes com taxa de variação de 0.1 rad/s e amplitude máxima de 0.3 rad, onde, as variações nos canais yaw, pitch e roll são solicitadas a 5, 10 e 15 s respectivamente. O comando no espaço de saída corresponde ao espaço de estados simplesmente alterado pela utilização de comandos que tornaram nulos os outros 6(seis) estados. A diferença entre os comandos de posicionamento da trajetória no espaço de estados e a medição filtrada é então multiplicada pela Matriz de ganho LQR amplificando a retroalimentação para as entradas dos atuadores. A matriz “feedforward” é simplesmente a pseudo-inversa da função de transferência: (D-C*A-1*B)+ funcionando como um “set-point”.
A seguir são apresentados os resultados da simulação em malha fechada:
![Page 148: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/148.jpg)
133
Figura 6.12 Resultado da simulação proposta do veículo sujeito a ruídos e perturbações ambientais
Figura 6.13 Resultado da simulação proposta do veículo sujeito a ruídos e perturbações ambientais e a tensão no cabo umbilical calculada no capítulo 3
![Page 149: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/149.jpg)
134
Figura 6.14 Resultado da simulação proposta do veículo sujeito a ruídos e perturbações ambientais com propulsão reduzida (10 N)
Os resultados obtidos demonstram que o sistema de posicionamento de atitude (tracking control), utilizando o Regulador Linear Quadrático, tem potencial para estabilizar o sistema não linear proposto e obter um seguimento de trajetória mesmo na presença de ruídos , perturbações ambientais (correntes) e esforços externos de cabos umbilicais. Apenas no exemplo, da Figura 6.14 devido a baixa velocidade e e consequentemente baixa sustentação, o controle de atitude não obteve bom desempenho.
![Page 150: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/150.jpg)
135
7 CONCLUSÕES
7.1 Resultados Alcançados
Foi apresentado um modelo matemático e um simulador que objetiva facilitar decisões de projetos conceituais de veículos aplicáveis às operações de localização, investigação e resgate de submarino com o incremento de controle para rejeição de perturbações ambientais e esforços externos e tomadas de decisão para planejamento de operações envolvendo veículos submarinos não tripulados (UUV) . Este simulador baseou-se em um modelo orientado por estudos dos sistemas de coordenadas, cinemática, dinâmica e hidrodinâmica elementar envolvendo a modelagem em seis graus de liberdade (6 DOF vehicles problems) O conceito explorado foi a análise das forças atuantes no veículo e conseqüente introdução das equações que regem o movimento. Objetivou-se demonstrar a relação entre o modelo matemático e o código computacional ao longo do trabalho para facilitar sua evolução em trabalhos subseqüentes. Ressalta-se que foi priorizada, a estruturação de um modelo teórico genérico, que pode ser aprimorado, de acordo com as especificidades do UUV que será simulado, por isto maiores detalhes quanto a sensores necessários ao modelo não foram explorados neste trabalho. Finalmente, foram avaliados alguns exemplos onde o simulador demonstrou seu potencial em tratar o problema de controle de atitude de veículos de localização tanto na monitoração em malha aberta quanto na possibilidade de implementar controles, neste caso em particular o LQR. Verificou-se que o controlador de atitude linear, utilizando o LQR, demonstrou sucesso no controle de atitude do modelo não linear apresentado.
7.2 Aspectos relevantes observados e considerados
Verificou-se que para a comparação de resultados do sistema controlado com diferentes estratégias era necessário explorar o compromisso “estabilidade- desempenho”. Tendo em vista esta perspectiva, depara-se com um necessário processo para sintonizar os controladores. Porém, conforme discutiu-se no capítulo 6, várias técnicas e metodologias não apresentam um arcabouço analítico e em diversas aplicações são usadas experimentações e simulações, para a obtenção ou convergências de valores finais para os coeficientes e ganhos. (Cunha et al., 1994; Slotine and Li, 1991). Salienta-se que os resultados apresentados na 2ª metodologia do estudo de cabo umbilical, e metodologia adotada neste trabalho consideraram a ponta superior do cabo
![Page 151: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/151.jpg)
136
fixa com relação ao referencial inercial. Entretando, o Navio de apoio apresenta uma movimentação induzida fundamentalmente pelas ondas, onde poderia ser tratada pela teoria descrita no capítulo 1 e assim, estudar o comportamento do sistema de controle frente ao distúrbio introduzido pela oscilação da embarcação na superfície. Dos resultados obtidos na dissertação, observa-se que foi possível um acompanhamento, ou rastreamento, do sinal de referência de modo satisfatório. Observa-se que é possível a obtenção de desempenho robusto com a estratégia adotada incluindo na condição de baixa velocidade. Faz-se importante salientar que o desempenho robusto aqui mencionado diz respeito ao acompanhamento do sinal de referência, à rejeição de perturbações (e distúrbios) e à insensibilidade da variação paramétrica do veículo submarino. O sistema de controle possui um integrador natural entre velocidade e posição. Sabe-se que a adição de integradores no sistema de controle contribui para aumentar as margens de fase (Levine, ed., 1996), o que auxilia na atenuação de distúrbios e incertezas do modelo do veículo. As simulações do veículo considerou principalmente a utilização dos elementos da diagonal principal, devido à dificuldade de sensibilidade do acoplamento físico da dinâmica do UUV. O projeto de controle da estratégia LQR envolve um compromisso entre modelagem, e conseqüentemente a determinação das incertezas e/ou dinâmicas não modeladas, e o desempenho robusto tal que o erro de acompanhamento seja menor que a precisão necessária, isto foi observado com as simulações apresentadas. Tanto no problema de controle de atitude como, possivelmente no de posicionamento, deve-se evitar que as superfícies de controle ou o sistema propulsor saturem a atitude desejada ou a posição do veículo que pode sofrer oscilações até encontrar um ponto de equilíbrio, em que os distúrbios do cabo umbilical serão compensados pelo sistema propulsor. No pior caso, entretanto, o sistema pode não encontrar um ponto de equilíbrio mas apresentar oscilações permanentes (instabilidade), com deslocamento máximo limitado à extensão do cabo umbilical. Verificou-se que cabos umbilicais mais pesados atenuam os efeitos da correnteza marítima sobre o veículo submarino e reduzem a carga do sistema propulsor. Cabos com muita massa contribuem para o atraso de fase do sistema veículo controlado-cabo umbilical. cabos com seção transversal relativamente maiores contribuem para maior arrasto do sistema, sendo mais sensível à correnteza marítima e, conseqüentemente, exigindo mais do atuador (sistema propulsor/ superfície de controle). Revelando a importância do levantamento de um modelo analítico com o qual o controlador é projetado.
![Page 152: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/152.jpg)
137
8 SUGESTÕES PARA TRABALHOS FUTUROS
A seguir são apresentadas algumas sugestões para trabalhos futuros que complementariam o trabalho executado nesta dissertação ou que podem vir a incrementar o desempenho destes simuladores para tomada de decisão.
• Avaliar e simular os esforços externos ao veículo provocados pelo cabo umbilical sobre a ótica das outras metodologias.
• Implementar o movimento oscilatório do Navio nas simulações de esforços do cabo umbilical.
• Avaliar e simular a utilização de um maior número de propulsores para atuar nos demais graus de liberdade do veículo de modo a avaliar a
• Explorar a influência dos propulsores nos esforços externos ao veículo utilizando tecnologia CFD .
• Avaliar o índice de robustez de diversas metodologias de controle linear e não linear e apresentar as vantagens e desvantagens da aplicação.
• Desenvolver protótipo para validar e incrementar o simulador preliminar apresentado visando sua melhoria contínua
![Page 153: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/153.jpg)
138
9 LISTA DE REFERÊNCIAS
ASADA, H. e SLOTINE, J.-J. E. (1986). Robot Analysis and Control, John Wiley
ASTRÖM, K. J. AND HÄGGLUND, T. (1988). Automatic Tuning of PID Controllers,
BEHBAHANI-NEJAD, M. AND PERKINS, N. C. (1996). Freely PropagatingWaves in
Elastic Cables, Journal of Sound and Vibration 196(2): 189–202.
BUCKHAM, B., NAHON, M. AND SETO, M. (1999). Three-Dimensional Dynamics
Simulation of a Towed Underwater Vehicle, Proceedings of the 18th Conference
Cable, IEEE Journal of Oceanic Engineering 15(2): 72–83.
CAMPA, G., INNOCENTI, M. AND NASUTI, F. (1998). Robust Control of
Underwater Vehicles: Sliding Mode vs. ¹ - Synthesis, Proceedings of the
OCEANS’98
CHIANG, R. Y. AND SAFONOV, M. G. (2001). Robust Control Toolbox User’s
Guide, The MathWorks Inc.
CLAYTON, B. R. AND BISHOP, R. E. (1982). Mechanics of Marine Vehicles, Gulf
Control of Unmanned Underwater Vehicles in Six Degrees of Freedom: A Quaternion
Feedback Approach, Tese (Doutorado), Department of Engineering Cybernetics,
The Norwegian Institute of Technology, University of Trondheim N-7034,
Trondheim, Norway.
CUNHA, J. P. V. S., COSTA, R. R. AND HSU, L. (1995). Design of a High
Performance Variable Structure Position Control of ROV’s, IEEE Journal of
Oceanic Engineering 20(1): 42–55.
CUNHA, J. P. V. S., LIZARRALDE, C. F., COSTA, R. R., HSU, L., SMITH JR., R.,
WOLLMANN JR., D. AND SANT’ANNA, A. C. C. M. (1994). Sistema de
Posicionamento Dinâmico para um Veículo Submarino de Operação Remota, X
Congresso Brasileiro de Automática 1994 pp. 1309–1314.
DA CRUZ, J. J. (1996). Controle Robusto Multivariável: O Método LQG/LTR,
DENIELLOU, L., GALLOU, Y., GOURMELEN, P. AND DEUBE, N. (1998). Force
Control of Underwater Thrusters with Application to AUV Motion Control,
Proceedings of the OCEANS’98 IEEE Conference pp. 1054–1058.
Dril M. “Electronics and sensor desing of an autonomous underwater vehicle”.
University of applied sciences Koblenz. The university of western Australia. 2006
![Page 154: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/154.jpg)
139
DRISCOLL, F. R., LUECK, R. G. AND NAHON, M. (2000). Development and
Validation of a Lumped-Mass Dynamics Model of a Deep-Sea ROV System,
Applied Ocean Research 22: 169–182.Edinburgh, UK 2: 74–84.
FALTISEN, O. M. (1990). Sea Loads On Ships And Offhore Structures, Cambridge
University Press. Fjellstad, O.-E. (1994).
Fossen, T. “Guidance and control of ocean vehicles”. University of Thondheim.
Norway. Ed. 1. Jhon Wiley & Sons. 1994.
FOSSEN, T. I. AND FJELLSTAD, O.-E. (1995). Robust adaptive control of
underwater vehicles: A comparative study, Proceedings of the 3rd IFAC
Workshop
FOSSEN, T. I. AND SAGATUN, S. I. (1991a). Adaptive Control of Nonlinear
Systems: A Case Study of Underwater Robotic Systems, Journal of Robotic
Systems
FOSSEN, T. I. AND SAGATUN, S. I. (1991b). Adaptive Control of Nonlinear
Underwater Robotic Systems, Proceedings of the 1st IEEE Conference on
Robotics
FOSSEN, T. I. e BALCHEN, J. G. (1991). The NEROV Autonomous Underwa-
FOSSEN, T. I. e BLANKE, M. (2000). Nonlinear Output Feedback Control of
Underwater Vehicle Propellers Using Feedback Form Estimated Axial Flow
Velocity, IEEE Journal of Oceanic Engineering 25(2): 241–255.
FOSSEN, T. I. ROSS A.”Nonlinear Modelling, Identification and control or UUVs”
Norweigan University of Science and technology. Norway. 2006
FU, K.S., GONZALEZ, R.C. AND LEE, C.S.G., Robotics: Control, Sensing, Vision
and Intelligence, McGraw-Hill, New York, 1987.
GONZALES L. A.”Design, Modeling and control of an autonomous underwater
vehicle”. The university of western Australia. 2004Handbook Series, CRC Press
& IEEE Press.
HILLER, M. KECSKEMÉTHY A. WOERNLE C. “Computer-Aided kinematics and
dynamics of multybody systems. With applications in vehicle dynamics”
Universitat -GH- DUISBURG, fachgebiet Mechanik. 1990.IEEE Conference pp.
1640–1644.
ISHIDERA, H., TSUSAKA, Y., ITO, Y., OISHI, T., CHIBA, S. AND MAKI, T.
(1986). Simulation and Experiment Of Automatic Controlled ROV, Proceedings
of 5th International Offshore, Mechanical and Artic Engineering Symposium
![Page 155: TESE MESTRADO ALEXANDRE [3] versaocapaduraobjdig.ufrj.br/60/teses/coppe_m/AlexandreViannaSantana.pdf · estudo do comportamento dinÂmico aplicÁvel À veÍculos de localizaÇÃo,](https://reader039.pdfslide.tips/reader039/viewer/2022022110/5c0d0bb609d3f213228d0333/html5/page/155.jpg)
140
J. N. NEWMAN, Marine Hydrodynamics, (chap 2.9, Appendix A, table 2.3), 1977, MIT press,Cambridge MA.
JUUL, D. L., MCDERMOTT, M., NELSON, E. L., BARNETT, D. M. AND
WILLIAMS, G. N.(1994). submersible control using the linear quadratic gaussian
with looptransfer recovery method, proceedings of the 1994 IEEE symposium
KAJIWARA, H., KOTERAYAMA, W., NAKAMURA, M., TERADA, H. AND
MORITA, T. (1993). control system design of an rov operated both as towed and
self-propulsive vehicle, proceedings of the 3rd international offshore and polar
engineering conference, singapure pp. 451 – 454.
KALSKE, S. AND HAPPONEN, K. (1991). motion simulation of subsea vehicles,
proceedings of the 1st international offshore and polar engineering conference,
KHALIL, H. K. (1996). NONLINEAR SYSTEMS, 2 EDN, PRENTICE HALL.
KWAKERNAAK, H. (1985). Uncertainty models and the design of robust control
systems.in: uncertainty and control, j. Ackermann ed., vol. 70 of lecture
LEE NICKELL C. “Modular modification of a buoyant auv for low speed operation”.
Virginia polytechnic institute and state university. Estados unidos. 2005
LEWIS, EDWARD V., EDITOR, “Principles Of Naval Architecture”, Volume Ii,
Second Revision. SOCIETY OF NAVAL ARCHITECTS AND MARINE
ENGINEERS (SNAME), New Jersey, 1988
SNAME: the society of naval architects and marine engineers. Nomenclature for
treating the motion of a submerged body through a fluid, technical and research
bulletin no. 1. 1950.
YOUNG. H CHEY (1971), Cable Towed Dynamics , Ge General Eletric, New York,
Ny.
YUH, J.(1990) Design and Control of autonomous underwater robots: a survey.
international j. of autonomous robots, 2000