Embed Size (px)
Citation preview

UNIVERSIDADE TÉCNICA DE LISBOA INSTITUTO SUPERIOR TÉCNICO
COMPENSAÇÃO DE ENERGIA REACTIVA
COM CONVERSOR MULTINÍVEL TRIFÁSICO
Luís José Lamy Rocha da Encarnação (Licenciado)
Dissertação para a obtenção do grau de Mestre em Engenharia Electrotécnica e de Computadores
Orientador: Doutor José Fernando Alves da Silva Co-Orientador: Doutor Vasco Emanuel Anjos Soares
Júri: Presidente: Doutor José Fernando Alves da Silva Vogais: Doutor Adriano da Silva Carvalho Doutora Sónia Maria Nunes dos Santos Paulo Ferreira Pinto Doutor Vasco Emanuel Anjos Soares
Outubro de 2007

DEDICATÓRIA
À minha Avó,
Isabel Lamy (in memoriam)

I
RESUMO
Este trabalho pretende dar um contributo para o desenvolvimento de novos sistemas de
compensação de potência reactiva, de uma forma contínua e automática, em sistemas
trifásicos sem neutro. Os sistemas de compensação de potência reactiva mais usuais são
constituídos por associações de baterias de condensadores colocadas em paralelo com as
cargas. Estes bancos de condensadores apresentam apenas alguns valores de capacidade, não
têm possibilidade de compensar potências reactivas em cargas capacitivas e a entrada em
funcionamento de um escalão de condensadores provoca uma distorção transitória na onda de
tensão, afectando desta forma a qualidade de energia.
Propõe-se a criação de um sistema de compensação de energia reactiva usando conversores
multinível trifásicos controlados por processador digital de sinal. É efectuada a modelação, o
controlo e a simulação do sistema em estudo. Os resultados experimentais obtidos validam o
estudo efectuado bem como mostram insensibilidade a variações de carga.
Neste trabalho, salienta-se a aplicação da teoria da potência instantânea p-q, assim como a
técnica de controlo por modo de deslizamento (sliding mode control). Neste tipo de controlo
incorpora-se a técnica para equilibrar as tensões contínuas dos condensadores da alimentação
do conversor multinível, sem recurso a meios exteriores.
Palavras Chave: Compensação de energia reactiva, controlo por modo de deslizamento,
conversão multinível, modelação, electrónica de potência, teoria da potência instantânea p-q.

II
ABSTRACT
This thesis addresses reactive power compensation using multilevel converters in three-phase,
three-wire systems. These power electronic compensators provide automatic and continuous
compensation, while the usual capacitive reactive compensation schemes (shunt capacitor
batteries) can only provide some compensation steps, are not able to compensate reactive
capacitive power and introduce switching-on transients or harmonic distortion in the voltage
waveform, degrading power quality.
The proposed reactive power compensation method uses three-phase multilevel power
converters controlled by a digital signal processor. The modeling, the control and the
simulation of the compensation system are presented, together with experimental results,
validating the proposed compensation system controllers, and showing robustness concerning
load variation.
The instantaneous active-reactive p-q power concepts are used, and complemented by sliding
mode control of the compensating currents. Sliding mode control is also used to equalize the
dc capacitor divider voltages, which fed the multilevel converter.
Keywords: Reactive power compensation, sliding mode control, multilevel converters,
modeling, simulation, instantaneous active-reactive power.

III
AGRADECIMENTOS
Gostaria de começar por apresentar os meus sinceros agradecimentos ao orientador e amigo,
Professor Fernando Silva pela orientação, motivação, paciência e pela disponibilidade sempre
presentes.
Queria também agradecer ao co-orientador Professor Vasco Soares, pela contribuição dada
neste trabalho, principalmente na implementação prática.
Pretendo também agradecer ao Departamento de Engenharia Electrotécnica e Automação
(DEEA) do Instituto Superior de Engenharia de Lisboa (ISEL) pelo apoio dado na
implementação deste trabalho.
Ao Centro de Automática da Universidade Técnica de Lisboa – CAUTL, pelo apoio na
inscrição de uma conferência científica.
À Secção de Controlo e à Secção de Electrometria, pela disponibilização de todo o tipo de
meios e espaços para a realização experimental deste trabalho.
Ao Eng.º José Ribeiro, pelo apoio contínuo que teve neste trabalho desde os tempos em que
iniciámos o estudo do tema da tese numa cadeira de Mestrado.
Ao Rodrigo, pela preciosa ajuda que teve na implementação do protótipo e no
acompanhamento dos ensaios no laboratório.
A todos os outros colegas do ISEL que aqui não foram referidos, mas que de uma forma ou de
outra me apoiaram.
Aos amigos do Algarve que, de vez em quando, me telefonavam a dar apoio.
Um agradecimento especial à família (Pai, Mãe, Irmã) que, apesar de estarem longe, sempre
me incentivaram nesta minha caminhada.
Por fim, um agradecimento especial à minha esposa Erika pela paciência que teve, e um
pedido de desculpas pelo tempo que não estivemos juntos.

IV
SIMBOLOGIA
C - Capacidade equivalente.
C(s) - Representação da função de transferência do controlador linear.
C1; C2 - Capacidades dos condensadores no lado contínuo do conversor
multinível.
C1min ; C2min - Valores mínimos obtidos no dimensionamento para as capacidades dos
condensadores C1 e C2.
CAproximado - Valor obtido no dimensionamento da capacidade equivalente, usando
expressões aproximadas.
CExacto - Valor obtido no dimensionamento da capacidade equivalente, usando
expressões exactas.
Cαβ - Matriz de Concordia.
Cdq - Matriz de Park.
f - Frequência da rede de energia eléctrica.
fcom - Frequência de comutação.
FP - Factor de potência.
Gm - Margem de ganho.
I - Matriz identidade.
i - Corrente definida no esquema do conversor (Figura 2.3).
i1; i2; i3 - Valor instantâneo das correntes num sistema trifásico.
iC1; iC2 - Correntes nos condensadores 1 e 2, no lado contínuo do conversor
multinível.

V
id; iq - Correntes do conversor multinível em coordenadas dq.
id ref ; iq ref - Valores de referência das correntes do conversor, em coordenadas dq
(controlador linear).
ik - Correntes de saída do conversor multinível (variáveis de estado).
Ik ; I’k - Correntes definidas no esquema do conversor (Figura 2.3).
in - Corrente no ponto médio dos dois condensadores (Figura 3.11).
io - Corrente definida no esquema do conversor (Figura 2.3). Corrente média
do lado contínuo do conversor (controlador linear).
IRMS - Valor eficaz da corrente.
IRMS1 - Componente fundamental da corrente a 50Hz.
iα; iβ - Correntes do conversor multinível em coordenadas αβ.
iα ref ; iβ ref - Correntes de referência do conversor multinível em coordenadas αβ.
kP; kI - Ganhos do controlador proporcional e integral.
L - Coeficiente de auto-indução das bobinas que fazem a interligação do
conversor multinível e a rede de energia eléctrica.
LC - Coeficiente de auto-indução das bobinas utilizadas na carga.
p - Potência activa trifásica instantânea.
P - Potência activa média.
Pm - Margem de fase.
Q - Potência reactiva média.
q - Potência reactiva trifásica instantânea.

VI
R - Resistência das indutâncias colocadas entre o conversor multinível e a
rede de energia eléctrica.
RC - Resistência da carga RL.
Req - Resistência equivalente do conversor no modelo equivalente em
coordenadas dq.
S - Potência aparente.
s - Variável complexa usada no domínio da frequência (Laplace).
Sk; Skj - Variável que identifica os semicondutores no conversor multinível
(Figura 2.3).
Smd (e,s) - Superfície de deslizamento.
T - Período da onda da corrente de saída do conversor multinível.
t - Variável temporal.
Td - Atraso da corrente id.
Uα; Uβ - Tensão simples (Us1, Us2 e Us3) em coordenadas αβ.
u1; u2; u3 - Valor instantâneo das tensões simples num sistema trifásico (Teoria de
Akagi).
U12; U23; U31 - Tensão composta disponível no conversor multinível (Figura 2.3).
UC1; UC2 - Tensões nos condensadores 1 e 2 (variáveis de estado).
Udc - Tensão do lado contínuo do conversor multinível trifásico de 3 níveis do
tipo NPC.
Udc ref - Tensão de referência do lado contínuo do conversor multinível.
UL - Tensão na indutância L do conversor.

VII
Umk - Tensão disponível no braço k (3 níveis) de acordo com o valor da variável
de comutação γk (Figura 2.3).
UR - Tensão na resistência R do conversor.
usk - Tensão simples da rede de energia eléctrica em coordenadas de sistema
(123) (Figura 2.3).
USk - Tensão simples disponível no conversor multinível (Figura 2.3).
uSα; uSβ - Tensões simples da rede representadas em coordenadas αβ.
uαβ - Vector de entrada em coordenadas αβ.
u123 - Vector de entrada em coordenadas 123.
udq - Vector de entrada em coordenadas dq.
u(t); i(t) - Valores instantâneos da tensão e da corrente.
URMS - Valor eficaz da tensão.
W; F - Matrizes auxiliares usadas no cálculo do modelo do conversor em espaço
de estados em coordenadas dq.
WA; WB - Energia das cargas A e B, usadas nos dimensionamento das capacidades
C1 e C2.
Y(s); X(s) - Variáveis de entrada e de saída do sistema, no domínio de s.
Xαβ - Vector de estado em coordenadas αβ.
X123 - Vector de estado em coordenadas 123.
Xdq - Vector de estado em coordenadas dq.
123
RL
- Matriz da dinâmica (não linear e variante no tempo). Matriz de Estado em
coordenadas 123.

VIII
( )md i ,S e ,t•
α β - Derivada da superfície de deslizamento.
αβ
1L
- Matriz de entrada em coordenadas αβ.
123
1L
- Matriz de entrada em coordenadas 123.
dq
1L
- Matriz de entrada em coordenadas dq.
αβ
RL
- Matriz de estado em coordenadas αβ.
dq
RL
- Matriz de estado em coordenadas dq.
; ; S U I - Vectores da potência, da tensão e da corrente (plano αβ).
ϕ - Ângulo de desfasagem entre a onda de tensão e a onda de corrente.
ϕP - Valor inicial do ângulo de Park.
ϕU ; ϕI - Ângulo de desfasagem na onda de tensão e na onda de corrente.
θ - Ângulo de transformação de Park.
ξ - Coeficiente de amortecimento do sistema.
Ξ - Matriz constituída por variáveis de comutação (funções não lineares).
ε - Metade do valor do tremor da onda da corrente de saída do conversor.
λα; λβ - Variáveis de comutação usadas na selecção de vectores (2 tabelas).
Γ1α; Γ2α; Γ1β;
Γ2β
- Variáveis auxiliares obtidas por aplicação da transformação de Concordia
às variáveis de comutação Γ1k, Γ2k.

IX
Γ1d ; Γ2d ; Γ1q ;
Γ2q
- Variáveis auxiliares obtidas por aplicação da transformação de Park às
variáveis Γ1α, Γ2α, Γ1β, Γ2β.
Γ1k; Γ2k - Variáveis de comutação. Funções não lineares.
ℑ1; ℑ2 - Variáveis utilizadas no cálculo da corrente in (equilíbrio dos
condensadores).
γd ; γq - Variáveis utilizadas no dimensionamento do controlador linear.
ΔW - Variação de energia entre duas cargas (dimensionamento das
capacidades).
Δi - Tremor da corrente (dimensionamento de L).
γk - Variáveis de comutação ternárias que definem o estado dos
semicondutores.
Λk - Variáveis de comutação. Funções não lineares.
ωn - Frequência própria ou natural do sistema (não amortecida).
ΔQ - Variação da energia reactiva entre duas cargas indutivas
(dimensionamento de C).
Δt - Metade do período da onda da corrente de saída do conversor (onda
triangular).
Δu - Queda de tensão entre a tensão imposta pelo conversor e a rede
(dimensionamento de L).
Δumin - Queda de tensão mínima que a indutância L pode estar sujeita
(dimensionamento de L).

X
ABREVIATURAS
1, 2, 3 - Coordenadas no sistema de eixos trifásico.
ADC - Conversor analógico digital (Analog-to-Digital Converter).
Bit - Dígito binário (0 ou 1).
CPU - Unidade central de processamento (Central Processing Unit).
dq0 - Coordenadas de Park.
DC - Tensão/ Corrente contínua (Direct Current).
DPF - Factor desfasamento 1ª harmónica (Displacement Power Factor).
DSP - Processador digital de sinal (Digital Signal Processor).
FACTS - Sistemas de transmissão flexíveis em AC (Flexible AC Transmission
Systems).
FT - Função de transferência.
FTCA - Função de transferência de cadeia aberta.
FTCF - Função de transferência de cadeia fechada.
IGBT - Transístor bipolar de porta isolada (Insulated Gate Bipolar Transistor).
NPC - Conversor de díodos de ligação ao neutro (Neutral Point Clamped).
PI - Controlador proporcional integral.
SPD; SPE - Semi-plano direito complexo e semi-plano esquerdo complexo.
SSSC - Controlador série (Static Synchronous Series Compensator).
STATCOM - Controlador paralelo (Static Synchronous Compensator).

XI
SVC - Compensador estático (Static VAR Compensator).
THD - Distorção harmónica total (Total Harmonic Distortion).
UPFC - Controlador combinados Série-Paralelo (Unified Power Flow Controller).
αβ0 - Coordenadas de Concordia.

ÍNDICE
Capítulo 1 – Introdução.............................................................................................................. 1
1.1 – Enquadramento e motivação ......................................................................................... 1
1.2 – Objectivos...................................................................................................................... 8
1.3 – Estrutura da dissertação................................................................................................. 9
Capítulo 2 – Conversores multinível: modelação e dimensionamento .................................... 10
2.1 – Introdução.................................................................................................................... 10
2.2 – Princípio de funcionamento do conversor multinível ................................................. 12
2.3 – Modelos dinâmicos do conversor trifásico NPC de 3 níveis ...................................... 15
2.3.1 – Modelo do conversor no sistema de coordenadas 123 (eixos a 120º).................. 15
2.3.2 – Modelo dinâmico do conversor num referencial ortonormado (coordenadas
αβ) ........................................................................................................................ 18
2.3.3 – Modelo dinâmico do conversor num referencial síncrono (coordenadas dq) ...... 20
2.4 – Dimensionamento dos parâmetros do conversor ........................................................ 21
2.4.1 – Tensão no lado contínuo do conversor................................................................. 21
2.4.2 – Bobina de interligação do conversor à rede de energia........................................ 22
2.4.3 – Condensadores do lado contínuo do conversor.................................................... 27
2.4.4 – Tensão e corrente nos semicondutores usados..................................................... 32
Capítulo 3 – Controlo do conversor multinível........................................................................ 33
3.1 – Introdução.................................................................................................................... 33
3.2 – Cálculo das Referências das Correntes de Compensação ........................................... 34
XII

XIII
3.2.1 – Componente em quadratura da corrente de referência......................................... 35
3.2.2 – Componente directa da corrente de referência..................................................... 40
3.3 – Controlo não linear das correntes do conversor (modo de deslizamento) .................. 42
3.3.1 – Lei de controlo. .................................................................................................... 42
3.3.2 – Relação entre os vectores de tensão e a dinâmica das correntes de linha do
conversor............................................................................................................... 44
3.3.3 – Lei de comutação ................................................................................................. 46
3.3.4 – Selecção dos vectores........................................................................................... 46
3.3.5 – Estabilidade .......................................................................................................... 52
3.4 – Equilíbrio da tensão nos condensadores...................................................................... 53
3.5 – Controlo linear da tensão contínua Udc ....................................................................... 59
3.5.1 – Dimensionamento do controlador ........................................................................ 59
3.5.2 – Estabilidade do controlador da tensão contínua................................................... 66
Capítulo 4 – Simulação, Implementação e Resultados Experimentais .................................... 70
4.1 – Simulação .................................................................................................................... 70
4.2 – Implementação Laboratorial ....................................................................................... 74
4.3 – Resultados de Simulação e Resultados Experimentais ............................................... 76
Capítulo 5 – Conclusões e trabalho futuro ............................................................................... 80
5.1 – Conclusões .................................................................................................................. 80
5.2 – Propostas de trabalhos futuros..................................................................................... 81
Bibliografia............................................................................................................................... 83
Anexos...................................................................................................................................... 86

XIV
Anexo 1 – Modelos do Conversor em coordenadas αβ e em dq ......................................... 87
Modelo do conversor em espaço de estados em coordenadas αβ .................................... 87
Modelo do conversor em espaço de estados em coordenadas dq .................................... 91
Anexo 2 – Constituição do Protótipo ................................................................................... 95
Circuito de potência do Conversor Multinível – (Placa 1)............................................... 95
Circuito de inibição e geração de tempos mortos – (Placa 2) ......................................... 97
Circuito de comando e amostragem das tensões e correntes – (Placa 3) ....................... 100
Circuitos de disparo dos IGBT’s – (Placa 4).................................................................. 103
Fotografias gerais do sistema de compensação de reactiva implementado ................... 104
Anexo 3 – Determinação do ângulo de Park, θ.................................................................. 106
Anexo 4 – Esquemas do Matlab/Simulink usados na Simulação ...................................... 108
Bloco Rede Trifásica...................................................................................................... 108
Bloco Conversor Multinível........................................................................................... 109
Bloco Comutação e Controlo Não Linear ...................................................................... 111
Bloco Controlo Linear.................................................................................................... 113
Bloco Correntes de Compensação.................................................................................. 114
Anexo 5 – Esquemas do Matlab/Simulink usados no DSP................................................ 115

1
Capítulo 1 – Introdução
1.1– Enquadramento e motivação
Nas últimas décadas tem-se verificado um aumento contínuo do consumo de energia eléctrica.
Acompanhando este crescimento, em geral, cada vez mais as cargas ligadas à rede eléctrica
necessitam de uma certa potência reactiva, o que obriga a aumentar ainda mais o valor eficaz
da corrente nas linhas. A criação de novas unidades de produção, novas linhas de transmissão,
ou mesmo a sobrecarga moderada dos sistemas existentes, são estratégias pouco desejáveis
devido aos elevados custos subjacentes e às questões ambientais. Em relação à potência
reactiva tem-se observado uma crescente preocupação da Entidade Reguladora do Sector
Energético (ERSE) e do cliente na sua gestão adequada.
Actualmente, a utilização crescente de sistemas de alimentação electrónica comutada leva à
injecção de harmónicas de corrente na rede eléctrica, estando em discussão
[IEEE, Std 1459-2000] as definições de potência reactiva, potência aparente e factor de
potência nestes casos em que as cargas se comportam de forma não linear.
Do ponto de vista da entidade fornecedora, o trânsito da potência reactiva está normalmente
associado ao controlo da tensão da rede, mas uma má gestão de energia reactiva apresenta
muitos inconvenientes [EDP], o que implica uma má exploração das instalações:
• Aumento das perdas na rede eléctrica – As perdas por efeito de Joule são
proporcionais ao quadrado do valor eficaz da corrente (IRMS) e não apenas ao valor
eficaz da componente fundamental da corrente (I1RMS);
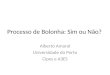
Na Figura 1.1 pode-se observar um exemplo do aumento das perdas com a diminuição do
factor de potência [Grady, 1993].

2
0
1
2
3
4
5
0,5 0,6 0,7 0,8 0,9 1Factor de Potência
Perd
as -
Valo
r no
min
al 1
PU
Figura 1.1 – Variação das perdas com o factor de potência (valor nominal das perdas é 1 PU).
• Cabos de maior secção – Para debitar uma dada potência activa, a secção dos cabos
aumenta à medida que o factor de potência diminui, como mostra a Tabela 1.1.
Verifica-se que, para um factor de potência de 0,5, a secção de cabos tem de ser quatro vezes
maior que a necessária para um factor de potência unitário. Um valor típico de factor de
potência nas instalações é 0,7. Neste caso, a secção necessita ser o dobro da secção necessária
para um factor de potência unitário.
• Penalizações Tarifárias – Para satisfazer as necessidades crescentes de potência
reactiva, são necessários investimentos ao nível da produção e da distribuição. Estes
investimentos vão-se repercutir em condições mais gravosas para os consumidores.
Esta energia (consumida e fornecida) é paga mensalmente apenas nas horas em vazio e
sempre que o factor de potência médio for inferior a 0,928 (tgϕ>0,4), ou seja, sempre
que existir um desfasamento superior a 21,8º entre a tensão simples e a corrente na
fase respectiva. A unidade de medida é o varh e o seu custo unitário no tarifário varia
com o tipo de contrato. Consultando o tarifário para 2007 [ERSE], verifica-se que a
energia reactiva tem tarifário previsto para as instalações de Baixa Tensão Especial
(BTE), Média Tensão (MT), Alta Tensão (AT) e Muito Alta Tensão (MAT), ou seja,
fica fora deste tarifário a Baixa Tensão Normal (BTN). A Baixa Tensão Especial
inclui os pequenos negócios como restauração, hotelaria, lavandaria, panificação,
(potências contratadas superiores a 41,4kVA). Como exemplo, em 2007 a tarifa de
venda a clientes finais em BTE para a energia reactiva fornecida e recebida é
respectivamente 0,0191 e 0,0146 €/kvarh.

3
Tabela 1.1 – Variação da secção relativa dos condutores com o valor do factor de potência.
Secção Relativa Factor de
Potência
1,0 1,0
1,23 0,9
1,56 0,8
2,04 0,7
2,78 0,6
4,0 0,5
6,25 0,4
11,1 0,3
• Redução da vida útil dos equipamentos – Correntes de elevado valor eficaz provocam
aquecimento excessivo nos dispositivos de comando e de protecção das redes
eléctricas, encurtando a sua duração e comprometendo a segurança das instalações.
• Sub-utilização da capacidade instalada – Uma instalação com baixo factor de potência,
estando sub-utilizada, condiciona futuras ampliações. A entrada em funcionamento de
novos equipamentos pode implicar investimentos elevados que poderiam ser evitáveis
se o valor do factor de potência fosse alto (≈1). Como exemplo, a Tabela 1.2 mostra
que, para uma mesma potência activa, pode ser necessário utilizar dois
transformadores, se o factor de potência baixar de 1 para 0,5.

4
Tabela 1.2 – Variação da potência dos transformadores em função do factor de potência.
Potência útil Absorvida
(kW) Factor de Potência
Potencia dos
Transformadores (kVA)
0,5 1600
0,8 1000 800
1,0 800
Para manter o factor de potência num valor elevado (0,96 a 0,99), é necessário instalar
sistemas de compensação do factor de potência:
Compensação global – Sistema de compensação colocado à saída do transformador de
alimentação geral;
Compensação individual – Sistema de compensação afecto exclusivamente a um
equipamento;
Compensação por sector – Sistema de compensação colocado num quadro parcial;
Compensação mista – Combinação das hipóteses anteriores;
Compensação com regulação automática – Variação da capacidade por escalões.
Do ponto de vista técnico, a melhor solução é a compensação individual, porque evita o
trânsito de energia reactiva pelos cabos de alimentação, reduzindo as perdas por efeito de
Joule e aumentando a capacidade de transporte. Esta solução, se recorrer a filtros activos de
potência [Soares, 1997], permite também compensar as harmónicas de corrente injectadas
pelos conversores electrónicos de potência (variadores de velocidade, pontes rectificadoras,
etc), cada vez mais utilizados nas cargas ligadas à rede eléctrica, embora esta solução possa
ser dispendiosa.
Neste trabalho, assume-se que a compensação de harmónicas de corrente é feita localmente,
pelo que se considera apenas a potência reactiva, ligada à desfasagem entre as harmónicas
fundamentais da tensão e da corrente, não sendo considerado o caso de cargas não lineares.

5
Na maioria das instalações, recorre-se à compensação global complementada com
compensação por sectores e/ou compensação mista.
Os sistemas de compensação mais usuais consistem em associações (ou baterias ou bancos)
de condensadores, colocadas em paralelo com as cargas (Figura 1.2) [Santana, 1991]. Nestes
bancos de condensadores de compensação por escalões, a potência reactiva fornecida é
proporcional ao quadrado da tensão da rede e não pode variar de forma contínua (só existem
alguns escalões). Para além disso, não pode variar nos dois quadrantes e a entrada em
funcionamento de um escalão provoca uma distorção transitória na onda de tensão, afectando
desta forma a qualidade de energia.
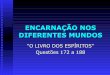
Figura 1.2 – Esquema de ligação de bancos de condenadores à rede para compensar energia reactiva
na carga. Esquema adaptado de [Santana, 1991].
As baterias de condensadores são construídas e ligadas por escalões de acordo com o valor da
potência reactiva a compensar. Em geral, sendo reduzido o número de escalões, para
compensar a potência reactiva de uma forma contínua utiliza-se o compensador estático
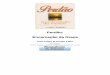
representado na Figura 1.3.
Figura 1.3 – Esquema de ligação de um compensador estático para regular a energia reactiva de uma
forma contínua. Esquema adaptado de [Santana, 1991].

6
Existem actualmente novas tecnologias para gerir de forma mais eficiente as instalações de
energia eléctrica, como por exemplo, controlar os fluxos de potência activa e reactiva, em
determinados pontos da rede. Estes novos sistemas controlam os fluxos de potência, são
conhecidos por Sistemas Flexíveis de Transmissão em Corrente Alternada “Flexible AC
Transmission Systems” - FACTS, e começaram a ser implementados a partir da década de 60
por diversas entidades. Em 1988, Hingorani publicou 2 artigos intitulados “Power Electronics
in Electric Utilities: Role of Power Electronics in Future Power Systems” [Hingorani, 1988a]
e “ High Power Electronics and Flexible AC Transmission System” [Hingorani, 1988b], e o
nome FACTS passou a ser conhecido. Em 1995 foi introduzido o conceito “Custom Power”,
que consiste em melhorar a qualidade da energia eléctrica (harmónicas e desequilíbrios e
variações de tensão). Com o aparecimento destas novas tecnologias, é possível uma melhor
utilização das instalações existentes, uma maior flexibilidade e uma melhoria do desempenho
das redes de energia eléctrica. Estes dois conceitos (FACTS e Custom Power) tratam da
aplicação da electrónica potência em sistemas de energia e têm como objectivos:
• Controlar rápida e eficientemente o fluxo de potência em determinados trajectos
específicos;
• Aumentar a capacidade de transmissão de energia na rede (FACTS);
• Melhorar a qualidade de Energia Eléctrica (Custom Power).
Os controladores FACTS podem ser classificados em 4 categorias:
• Controlador série (SSSC – “Static Synchronous Series Compensator”);
• Controlador paralelo (STATCOM – “Static Synchronous Shunt Compensator”);
• Controlador combinado Série-Série;
• Controlador combinado Série-Paralelo (UPFC – “Unified Power Flow Controller”).
A utilização de conversores electrónicos comutados na compensação de potência reactiva vai
permitir fornecer um valor de potência reactiva quase independente do valor da tensão da
rede, fazer variar de forma contínua o valor da potência reactiva e evitar a perturbação da
tensão da rede eléctrica.

7
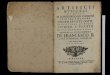
Na Figura 1.4, sem o compensador, a corrente sinusoidal iT estaria desfasada de um certo
ângulo em relação à tensão sinusoidal da rede, devido ao desfasamento da corrente iL. Para
que o sistema de compensação cumpra o objectivo de fazer com que a corrente iT fique em
fase com a tensão, o conversor deve estabelecer uma corrente, iC, tal que subtraída de iL,
origine uma corrente iT, sinusoidal em fase com a tensão da rede. O sistema de compensação
deve ter a flexibilidade e a capacidade de se adaptar a variações das características da carga,
visto que na generalidade das aplicações um compensador é usado numa instalação incluindo
várias cargas que funcionam independentemente.
Figura 1.4 – Esquema de ligação do compensador de energia reactiva.

8
1.2– Objectivos
Pretende-se construir um conversor comutado para compensação contínua da potência
reactiva em redes de distribuição de MT.
Para concretização deste objecto é necessário:
a) Seleccionar, projectar e construir um conversor comutado que tenha potencialidades para
aplicação em redes MT;
b) Modelar o conversor comutado e o sistema de compensação da potência reactiva;
c) Projectar os sistemas de comando do conversor e de controlo da potência reactiva;
d) Simular numericamente o sistema a construir;
e) Implantar num microprocessador digital de sinal (DSP) os algoritmos de comando e
controlo obtidos;
f) Validar experimentalmente em laboratório, usando um modelo de potência reduzida, os
resultados obtidos teoricamente e por simulação.

9
1.3– Estrutura da dissertação
Esta dissertação está organizada em cinco capítulos, complementados por anexos.
No primeiro capítulo apresenta-se o enquadramento e os objectivos deste trabalho, bem como
a descrição da estrutura do mesmo.
O conversor multinível trifásico é apresentado no capítulo 2. Descreve-se o seu princípio de
funcionamento e obtêm-se os modelos matemáticos do conversor no espaço de estados em
coordenadas 123, em αβ (referencial estático) e em dq (referencial síncrono). Nesse capítulo,
são dimensionados os parâmetros do conversor, em particular o valor da tensão contínua
necessária, os valores das indutâncias, dos condensadores e dos semicondutores.
O capítulo 3 é dedicado ao estudo do controlo do sistema de compensação. Neste capítulo,
apresenta-se o cálculo das correntes de compensação que vão permitir a determinação das
referências de corrente a fornecer a um sistema de controlo não linear. As correntes de saída
do conversor serão injectadas na rede de energia eléctrica, de modo que a componente da
potência reactiva na linha seja minimizada. Confirma-se a estabilidade do sistema no controlo
não linear das correntes do conversor. Descreve-se a estratégia para equilibrar as tensões nos
condensadores. Este capítulo termina com o dimensionamento do controlador linear da tensão
contínua do conversor, e o respectivo estudo de estabilidade.
No capítulo 4, descreve-se o processo de simulação, apresentando-se os respectivos
resultados, assim como os resultados experimentais. É descrita a implementação laboratorial
do sistema de compensação de energia reactiva.
No capítulo 5, apresentam-se as conclusões deste trabalho e perspectivam-se evoluções
futuras que poderão dar sequência ao trabalho apresentado nesta dissertação.
A bibliografia é apresentada de seguida. Os anexos apresentados no fim deste documento
contêm deduções dos modelos do conversor (coordenadas αβ e dq), constituição do protótipo
implementado (fotografias, esquemas eléctricos e placas de circuito impresso), cálculo do
ângulo da Transformação de Park, diagramas do Simulink usados na simulação e no programa
implementado no DSP.

10
Capítulo 2 – Conversores multinível: modelação e dimensionamento
2.1 – Introdução
Neste capítulo é apresentado o conversor multinível, conversor com potencialidades para
funcionar com tensões de vários kV, o seu princípio de funcionamento e são obtidos os
modelos matemáticos em coordenadas 123, num referencial estático ortonormado αβ e dq
(referencial síncrono). É também efectuado o dimensionamento dos elementos do conversor.
Na Figura 2.1 apresenta-se o esquema do conversor multinível e a sua interligação à rede
trifásica. O conversor trifásico NPC – neutral point clamped – ou conversor de díodos de
ligação ao neutro, de 3 níveis, é composto por 3 grupos de díodos de ligação ao neutro e 3
braços, cada um com 4 associações em anti-paralelo de um díodo com um Transistor Bipolar
de Porta Isolada, (Insulated Gate Bipolar Transistor – IGBT). Os semicondutores comandam
o fluxo de energia trocada entre um sistema trifásico alternado e um sistema de tensões
contínuas no lado DC, que contém um divisor capacitivo de 2 condensadores C1 e C2,
formando 3 níveis de tensão Udc, Udc/2 e 0. O conversor é designado por conversor de 3
níveis, porque cada braço pode disponibilizar três valores de tensão de acordo com as
combinações possíveis dos estados dos dispositivos de comutação (n=3).
Figura 2.1 – Esquema do conversor trifásico NPC de 3 níveis, e da sua ligação à rede eléctrica trifásica
considerada ideal, usando bobinas L com resistência interna R.

11
Uma das vantagens dos conversores multinível, face à topologia clássica de conversão de dois
níveis, é a capacidade de trabalhar com tensões elevadas, da ordem de vários kV, visto que
cada dispositivo de comutação é sujeito apenas a uma tensão máxima igual à diferença entre
dois níveis adjacentes das tensões no lado contínuo. Para um conversor de 3 níveis Udc,
Udc/2, 0, a tensão máxima é de Udc/2. Para um conversor de n níveis, a tensão máxima é de
Udc/(n-1). Outra das vantagens deste tipo de conversores é a capacidade de processamento de
potências elevadas, da ordem do MW.
Em comparação com a conversão de 2 níveis, a conversão multinível permite reduzir a
distorção harmónica total (THD – Total Harmonic Distortion) devido às tensões com n
degraus ou níveis que pode disponibilizar. Quanto maior o valor n, menor será a THD, e
portanto menores serão os requisitos de filtragem passiva.
O comando das correntes – ou tensões – do lado alternado (AC), pode ser feito usando
modulação de largura de impulso com modulante sinusoidal – SPWM (sinusoidal pulse width
modulation) [Santana, 1991], ou usando modulação por vectores espaciais – SVM (space
vector modulation) [Liu, 1991]. O controlo das tensões ou das correntes também pode ser
feito utilizando a técnica de controlo por modo de deslizamento [Gao, 1993], adequada para
sistemas de estrutura variável como os conversores comutados.
A regulação adequada da tensão do lado contínuo Udc, que deve ser quase constante, bem
como o equilíbrio das tensões UC1 e UC2, são factores essenciais para que o conversor
funcione correctamente e possa, quando necessário, transferir energia dos condensadores para
a rede trifásica e vice-versa, de forma reversível. Devido ao facto das associações dos
semicondutores de potência do conversor multinível, anti-paralelo de um IGBT com um
díodo e díodos de ligação ao neutro, serem reversíveis em corrente, o conversor pode
funcionar como um sistema bidireccional, ou seja, como inversor (fornecendo energia do
condensador para a rede) ou como rectificador (recebendo energia da rede para carregar o
condensador). Os semicondutores de potência funcionam em comutação com frequências da
ordem de alguns kHz ou perto de 1kHz para tensões de vários kV.
São diversas as aplicações actuais dos conversores multinível: em tracção eléctrica, como
interface entre sistemas de aproveitamento de energias renováveis, em redes de transporte ou
distribuição de energia eléctrica, em sistemas de redução de cavas de tensão, em sistemas de
correcção de factor de potência, entre outras.

12
Neste trabalho, o conversor multinível é utilizado como compensador de energia reactiva,
sendo modelado, simulado e o seu funcionamento verificado experimentalmente.
A representação do conversor NPC trifásico de 3 níveis faz-se usando modelos no espaço de
estados comutados. Este tipo de modelo consiste num conjunto de equações diferenciais, com
parâmetros variantes no tempo, que representam a dinâmica temporal do sistema nos diversos
estados do conversor. São elaborados os modelos nos sistemas de coordenadas trifásicas 123,
sistema bifásico equivalente αβ e referencial síncrono dq.
2.2– Princípio de funcionamento do conversor multinível
Neste sub-capítulo apresenta-se o funcionamento do conversor multinível de 3 níveis. A sua
análise inicia-se no estudo de um braço do conversor (Figura 2.2).
Figura 2.2 – Braço de comutação de 3 níveis.
Supõe-se que existem controladores (descritos no capítulo 3) que garantem uma tensão Udc
quase constante – ou, com maior rigor, dentro de um intervalo suficientemente pequeno de
valores em torno desse valor constante – e que essa tensão Udc está igualmente repartida pelos
dois condensadores C1 e C2 – também neste caso com uma pequena margem de tolerância.
Supõe-se ainda que os semicondutores de potência se comportam como interruptores ideais
(comutações instantâneas, tensão de condução nula no estado de saturação e corrente nula no
estado de corte).
O interruptor Sk, considerado ideal (k corresponde ao número do interruptor, na prática
constituído pelo IGBT e díodo em anti-paralelo), pode assumir um de dois estados de

13
comutação, designados 1 ou 0, condução ou corte respectivamente, e representado pela
variável binária Sk:
1 se o interruptor está em condução0, se o interruptor está ao cortek
,S
⎧= ⎨
⎩.
Das 16 combinações de estados que os 4 interruptores poderiam assumir em conjunto com os
díodos D31 e D32, apenas 3 respeitam as restrições topológicas da teoria dos circuitos, das
quais resultam 3 níveis de tensão Um (Tabela 2.1).
Tabela 2.1 – Combinações possíveis no funcionamento de um braço de comutação.
S1 S2 S3 S4 Um
1 1 0 0 1 2dc
CUU =
0 1 1 0 0
0 0 1 1 2 2dc
CUU = −
Supondo os condensadores C1 e C2 carregados, com tensões equilibradas de valor Udc/2, pode
definir-se a variável de comutação γ, que assume os valores 1, 0 e -1, de acordo com as
combinações Sk anteriores, e permite relacionar a tensão Um com a tensão Udc [Silva, 2001]:
2dc
mUU = γ , (2.1)
em que;
1 2 3 4
2 3 1 4
3 4 1 2
1 se 1 00 se 1 0 1 se 1 0
S S S SS S S S
- S S S S
= = ∧ = =⎧⎪γ = = = ∧ = =⎨⎪ = = ∧ = =⎩
. (2.2)
Na Tabela 2.2 representam-se as 3 combinações possíveis de um braço do conversor, o valor
de γ e o estado dos interruptores Skj.

14
Cada uma das tensões Um1, Um2 e Um3 pode assumir os valores de Udc/2, 0 e – Udc/2,
resultando no total 33=27 combinações diferentes de acordo com os estados possíveis dos
interruptores Skj.
Tabela 2.2 – Combinações possíveis de funcionamento de um braço do conversor.
11 1 0 0
2
k
k
dcmk
s
UU
⎧⎪γ =⎪
=⎨⎪⎪ =⎩
00 1 1 00
k
k
mk
s U
γ =⎧⎪ =⎨⎪ =⎩
1
0 0 1 1
2
k
k
dcmk
s
UU
⎧⎪γ = −⎪
=⎨⎪⎪ = −⎩
As tensões Umk expressas em função das variáveis de comutação γk, são dadas por:
1 1
2 2
33
2m dc
m
m
U UUU
γ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥γ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥γ⎣ ⎦⎣ ⎦
(2.3)
As tensões compostas escrevem-se:
1 212
23 2 3
31 3 1
m m
m m
m m
U UUU U UU U U
−⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦
(2.4)
Estas tensões compostas apresentam um número de níveis dado por (2n-1), que corresponde a
cinco níveis na tensão composta Udc; Udc/2; 0; -Udc/2; -Udc.

15
2.3– Modelos dinâmicos do conversor trifásico NPC de 3 níveis
2.3.1 – Modelo do conversor no sistema de coordenadas 123 (eixos a 120º)
A modelação dinâmica do conversor é feita a partir do circuito da Figura 2.3, considerando
semicondutores de potência ideais, para determinar relações entre as variáveis de comutação
γk, e as variáveis de estado UC1 e UC2 do lado contínuo e i1, i2, i3 do lado alternado, bem como
entre variáveis intermédias, USk e Ik.
Na Figura 2.3, definem-se os sentidos das variáveis mais importantes com vista à obtenção
dos modelos dinâmicos e levanta-se a restrição anteriormente adoptada UC1=UC2=Udc/2, isto
é, considera-se apenas UC1+UC2=Udc.
Figura 2.3 – Esquema do Conversor NPC.
Considerando a relação entre as variáveis de comutação γk e as tensões Umk, e as correntes Ik:
1
2
10 0
1
1 10 1 0 1
C k
mk k
C k
k k k kk k
k k
U =U =
U = -
-i = i = -I I '
-
→ γ⎧⎪= → γ⎨⎪− → γ⎩
→ γ → γ⎧ ⎧= =⎨ ⎨→ γ ≠ → γ ≠⎩ ⎩
(2.5)
Definindo as variáveis Γ1k e Γ2k:

16
( ) ( )1 2
1 12 2
k k k kk k
- e
γ γ + γ γΓ = Γ = (2.6)
Podem expressar-se as tensões Umk e as correntes Ik, I’k em função destas novas variáveis:
1 1 2 2
1
2
mk k C k C
k k k
k k k
U U U
I i
I ' i
= Γ + Γ
= −Γ
= −Γ
(2.7)
No lado AC, aplicando as leis de Kirchoff à fase k:
dd
kSk k sk
iU Ri L ut
= + + (2.8)
Obtém-se o modelo de estado comutado:
dd
k Sk skk
i R U uit L L L
= − + − (2.9)
Do lado DC, aplicando a lei dos nós, temos para o nó A (Figura 2.3):
1
11
31
11
dd
dd
C o
Co
Ck o
k
i i i UC i i
tUC I i
t =
= + ⇔
= + ⇔
= + ⇔∑
(2.10)
3
11 1
1
dd
Ck k o
k
UC i it =
= − Γ +∑ (2.11)
ou seja:
1 1 11 2 12 3 13
1
dd
C oU i i i it C
− Γ − Γ − Γ += (2.12)
Procedendo da mesma forma para o nó B (Figura 2.3):
2 1 21 2 22 3 23
2
dd
C oU i i i it C
− Γ − Γ − Γ += (2.13)

17
Considerando um sistema trifásico equilibrado em que 1 2 3 0S S SU U U+ + = e a relação
1 1 2 2mk C k C kU U U= Γ + Γ em (2.7), obtém-se o seguinte sistema de equações:
( ) ( )
( ) ( )
( ) ( )
1 11 12 13 2 21 22 231
21 12 11 13 2 22 21 23
3
1 13 11 12 2 23 21 22
2 23
2 23
2 23
C CS
SC C
S
C C
U - - U - -UU
U - - U - -U
U - - U - -
Γ Γ Γ + Γ Γ Γ⎡ ⎤=⎡ ⎤ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ Γ Γ Γ + Γ Γ Γ⎢ ⎥⎢ ⎥⎣ ⎦ ⎢ ⎥⎢ ⎥
Γ Γ Γ + Γ Γ Γ⎢ ⎥⎢ ⎥⎣ ⎦
(2.14)
Para as tensões compostas tem-se:
12 1 2 1 2
23 2 3 2 3
31 3 1 3 1
m m S S
m m S S
m m S S
U U -U U -UU U -U U -UU U -U U -U
=⎡ ⎤ ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(2.15)
Introduzindo a matriz Ξ definida por:
11 12
21 22
31 32
= Ξ Ξ⎡ ⎤⎢ ⎥Ξ Ξ⎢ ⎥⎢ ⎥Ξ Ξ⎣ ⎦
Ξ (2.16)
Em que
11 12 11 12 13 21 22 23
21 22 12 11 13 22 21 23
31 32 13 11 12 23 21 22
2 212 232 2
- - - -- - - -- - - -
Ξ Ξ Γ Γ Γ Γ Γ Γ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥Ξ Ξ Γ Γ Γ Γ Γ Γ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥Ξ Ξ Γ Γ Γ Γ Γ Γ⎣ ⎦ ⎣ ⎦
(2.17)
Resulta
1 111 12
2 21 22
31 32 23
S C
S
CS
U UU
UU
Ξ Ξ⎡ ⎤ ⎡ ⎤⎡ ⎤=⎢ ⎥ ⎢ ⎥⎢ ⎥Ξ Ξ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥Ξ Ξ⎣ ⎦ ⎣ ⎦⎣ ⎦
. (2.18)
Nas tensões simples USk existem 9 níveis ou patamares de tensão.
Substituindo (2.18) em (2.9) e juntando (2.12) e (2.13), obtém-se o modelo do conversor, no
espaço de estados, em coordenadas 123:

11 121 1
2 221 22
3 3
1 131 32
2 2
11 12 13
11 1 1
21 22 23
22 2 2
1 0 0 00 0dd 10 0 00 0
10 0 00 0
10 0 00 0
10 0 00 0
C C
C C
Ri iLL L Li it R
i i LL L LU URU U LL L L
CC C C
CC C C
⎡Ξ Ξ⎡ ⎤⎡ ⎤ ⎡ ⎤ −−= ⎢ ⎥⎢ ⎥ ⎢ ⎥ +⎢ ⎥⎢ ⎥ ⎢ ⎥Ξ Ξ⎢ ⎥ −−⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥Ξ Ξ −⎢ ⎥−⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎢ ⎥⎢ ⎥Γ Γ Γ− − −⎢ ⎥
⎢ ⎥⎢ ⎥Γ Γ Γ− − −⎢ ⎥
⎣⎣ ⎦
1
2
3
0
S
S
S
uuui
⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
⎦
(2.19)
Este modelo em coordenadas 123 é variante no tempo e não linear.
2.3.2 – Modelo dinâmico do conversor num referencial ortonormado (coordenadas
αβ)
Nesta secção elabora-se o modelo do conversor no sistema de coordenadas αβ, ou seja,
procede-se à transformação do modelo no referencial 1, 2, 3 em que as tensões e correntes
constituem um sistema trifásico equilibrado, para um outro modelo em que essas grandezas
são representadas num sistema bifásico equivalente. Esta transformação é chamada
transformação de Concordia.
A transformação de Concordia consiste na aplicação das relações (2.20) ou (2.21), que
estabelecem as relações entre grandezas de um sistema trifásico em coordenadas 123, X123, e
do sistema bifásico equivalente em coordenadas αβ, Xαβ:
123 αβ αβ=X C X (2.20)
(2.21) T123X C Xαβ αβ=
Em que Cαβ, normalmente designada por matriz de transformação ou matriz de Concordia, é
dada por (2.22):
18

19
12 1 023
1 3 12 2 21 3 12 2 2
-
- -
αβ
⎡ ⎤⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
C
(2.22)
A matriz Cαβ é ortogonal, ou seja:
-1 T1 12 12 233 30
2 21 1 12 2 2
C C - -
-
αβ αβ
⎡ ⎤== ⎢ ⎥
⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(2.23)
O desenvolvimento da dedução do modelo do Conversor no Espaço de Estados, em
coordenadas αβ, está apresentado detalhadamente no Anexo I.
O modelo do conversor no espaço de estados, em coordenadas αβ resultante da transformação
de Concordia é dado por (2.24).
1 2
1 2
1 1 0
2 211
11 1
22
22 2
1d 0 0 0d
10 0 0
10 00 0
10 00 0
S
S
C C
C C
Ri i uLL L Lt i i uR
U U iLL L LU U
CC C
CC C
α ααα α
ββ ββ β
βα
βα
Γ Γ ⎡ ⎤⎡ ⎤ − ⎡ ⎤⎡ ⎤ −= ⎡ ⎤ + ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥Γ Γ ⎢ ⎥⎢ ⎥ −− ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥Γ⎣ ⎦ ⎣ ⎦Γ ⎢ ⎥⎢ ⎥− −⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ΓΓ ⎢ ⎥⎢ ⎥− − ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦
(2.24)
Onde Γ1α, Γ1β, Γ2α, e Γ2β são obtidos aplicando a transformação de Concordia aos vectores
coluna Γ1k e Γ2k, ou seja:

20
( )
( )
( )
( )
1 11 12 13
2 21 22 23
1 12 13
2 22 23
1 3 23 21 3 23 21212
- -
- -
-
-
α
α
β
β
⎧Γ = Γ Γ Γ⎪
⎪⎪
Γ = Γ Γ Γ⎪⎪⎨⎪Γ = Γ Γ⎪⎪⎪Γ = Γ Γ⎪⎩
(2.25)
Este modelo poderá ser utilizado com vantagem para sintetizar controladores não lineares no
referencial αβ.
2.3.3 – Modelo dinâmico do conversor num referencial síncrono (coordenadas dq)
Procurando obter um modelo invariante no tempo e, se possível, linear é necessário aplicar a
transformação de Park, ao modelo do conversor multinível em coordenadas αβ.
A transformação de Park é obtida através das relações (2.26) e (2.27), relações entre
transformações de grandezas num referencial αβ e um referencial dq síncrono rodando à
velocidade ω, em que a matriz de transformação Cdq é dada por (2.28):
dq dqαβ =X C X (2.26)
1X C Xdq dq−
αβ= (2.27)
cos ω -sen ω=sen ω cos ω
dq t tt t
⎡ ⎤⎢ ⎥⎣ ⎦
C, (2.28)
A matriz Cdq é ortogonal, pelo que 1 T=C Cdq dq− , vindo:
1 cos ω sen ω=
-sen ω cos ωdq t t
t t
− ⎡ ⎤⎢ ⎥⎣ ⎦
C, (2.29)
Considerando θ=ω Pt + ϕ (ângulo de Park), em que Pϕ é o valor inicial deste ângulo,
escreve-se:

21
cos θ -sen θ=sen θ cos θ
dq ⎡ ⎤⎢ ⎥⎣ ⎦
C (2.30)
Aplicando a transformação de Park ao modelo em coordenadas αβ, (2.24), o modelo do
conversor multinível, em coordenadas dq, é dado por (2.31). Os cálculos detalhados
encontram-se no Anexo I.
1 2
1 21 1 0
2 211
11 1
22
22 2
1d 0 0d
10 0
10 00 0
10 00 0
d dd d Sd
q q Sqq q
C C
C Cqd
qd
Ri i u--LL L Lt i i u
R -- -U U iLL L LU U
- - CC C
- - CC C
Γ Γ ⎡ ⎤⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤ω += ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥Γ Γ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ω ⎢ ⎥ ⎣ ⎦⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦ΓΓ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ΓΓ ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦⎢ ⎥⎣ ⎦
(2.31)
Em que as variáveis de comutação Γ1d, Γ1q, Γ2d, e Γ2q são dados por (fazendo 0Pϕ = ):
1 1α 1β
2 2α 2β
1 1α 1β
2 2α 2β
Γ =Γ cos ω + Γ sen ωΓ =Γ cos ω + Γ sen ωΓ =-Γ sen ω + Γ cos ωΓ =-Γ sen ω + Γ cos ω
d
d
q
q
t tt tt tt t
⎧⎪⎪⎨⎪⎪⎩
. (2.32)
Este modelo, embora ainda não linear, pode ser considerado constante no tempo, desprezando
as pequenas variações nas grandezas devidas ao funcionamento comutado.
2.4 – Dimensionamento dos parâmetros do conversor
2.4.1 – Tensão no lado contínuo do conversor
Vai dimensionar-se um protótipo laboratorial de um conversor multinível para investigação.
Atendendo a restrições orçamentais e à segurança de equipamentos e de pessoas, vão
utilizar-se tensões relativamente baixas da ordem das duas a três centenas de volts. Esta
abordagem permite economizar nos materiais, minimizar acidentes e avarias nos
semicondutores, sendo, no entanto, suficientemente ilustrativa das potencialidades do sistema,
desde que a frequência de comutação seja da ordem de grandeza da que seria possível utilizar
num conversor operando com tensões de 1-2kV. A estas tensões, a frequência de operação

22
dos conversores multinível com semicondutores actuais pode atingir cerca de 2kHz no
laboratório. No protótipo utilizar-se-á frequência variável em torno de 2kHz e com valor
máximo de cerca de 5kHz, o que permite economizar componentes reactivos e permite testar
a velocidade de execução dos algoritmos de concretização dos controladores em
microprocessador.
Utilizou-se um valor nominal de tensão contínua Udc=300V no cálculo do coeficiente de
auto-indução da bobina de interligação do conversor às tensões alternadas (obtidas de um
transformador ligado à rede eléctrica) no cálculo dos condensadores do lado contínuo do
conversor e no dimensionamento dos semicondutores.
2.4.2– Bobina de interligação do conversor à rede de energia
Os controladores de corrente, definidos no capítulo 3, asseguram que as correntes no lado
alternado do conversor seguem as respectivas referências. Tratando-se de um conversor
comutado existirá, no entanto, um certo (±ε) erro ou tremor (ripple). A Figura 2.4 ilustra a
evolução destas correntes durante meio período.
0.02 0.025 0.030
10
20
30
40
t(s)
i referência
i conversor
i(A)
Figura 2.4 – Corrente numa fase do lado alternado do conversor (i conversor), e respectiva corrente de
referência (i referência).
O dimensionamento do coeficiente de auto-indução L é feito aplicando as leis de Kirchoff ao
circuito equivalente do lado AC do conversor multinível trifásico NPC de três níveis (Figura
2.5).

23
Figura 2.5 – Esquema equivalente por fase do lado alternado do conversor multinível NPC de três
níveis: circuito indutivo (R, L) com fonte de tensão alternada us1.
Como 1 1s L R sU U U u= + + , pode escrever-se:
11 1 1
dds siU L Ri ut
= + + (2.33)
Desprezando a queda de tensão resistiva, Ri1, cujo valor é muito pequeno (Ri1≈0), comparado
com os restantes termos de (2.33), (Figura 2.6) tem-se:
11 1 1
dds L s siU U u L ut
= + = + (2.34)
Figura 2.6 – Esquema equivalente por fase do lado alternado do conversor multinível, desprezando a
queda de tensão resistiva Ri1.
Ou seja:
11 1
dd s siL U u ut
= − = Δ (2.35)
A taxa de variação da corrente, di/dt depende do coeficiente de auto-indução, L, e da
diferença de tensão entre Us1 e us1 (tensões impostas, respectivamente, pelo conversor e pela
rede).

24
Para efeitos de dimensionamento, pode considerar-se que a máxima taxa de variação ocorre
para um factor de ciclo de 50% (T/2), sendo a componente de alta-frequência da corrente do
conversor uma onda aproximadamente triangular cuja amplitude é ε.
T
irefª
irefª+ε
irefª -ε
imax
Δi=2ε
Δt=T/2imin
2ε
Figura 2.7 – Linearização da corrente de referência.
Sendo então a evolução da corrente praticamente linear, a sua taxa de variação é:
1 1ddi it t
Δ=
Δ (2.36)
De (2.35) vem:
1 1
1
( )s sU u tLi
− Δ=
Δ (2.37)
Atendendo a que Δi1=2ε (Figura 2.7), e que Δt=T/2 em que T é o período associado à
frequência de comutação fcom 12 com
tf
⎛ ⎞Δ =⎜ ⎟
⎝ ⎠, tem-se:
1 1
1
( )2
s s
com
U uLf i
−=
Δ ⇔ 1 1( )
4s s
com
U uLf −
=ε
(2.38)
O dimensionamento do coeficiente de auto-indução é realizado usando (2.39), que tira partido
do conversor multinível, ou seja, considera a tensão Us1- us1 mínima que é possível aplicar
pelo conversor na bobina ((Us1- us1)min=Δumin). Este valor mínimo pode ocorrer quando o
tremor da corrente é máximo, ou seja, para us1=0 (Figura 2.8), sendo Δumin = Us1min

25
1
12s min
mincom
ULf i
=Δ
(2.39)
Do estudo do modelo dinâmico do conversor, de (2.18), e supondo UC1=UC2=Udc/2, vem:
1 1
2 2
3 3
2 1 13 3 3 21 2 13 3 31 1 23 3 3
S dc
S
S
U U- -UU - -
- -
⎡ ⎤⎡ ⎤ γ⎡ ⎤+= ⎢ ⎥⎢ ⎥ ⎢ ⎥γ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ + ⎢ ⎥γ⎣ ⎦ ⎣ ⎦⎢ ⎥⎢ ⎥⎢ ⎥+⎣ ⎦
. (2.40)
0 0.02 0.04 0.06
0
t(s)
us1
u(V)
Δu min.
123s máx. dcU U=
1230 23s máx.u =
6dc
min.UuΔ =
123s máx. dcU U− = −
1230 23s máx.u− = −
Figura 2.8 – Gráfico ilustrando as tensões de saída do conversor Us1, e a tensão simples us1.
De (2.40), obtém-se a relação entre Us1 e Udc, que é dada por 1 1 2 32 1 13 3 3 2
dcs
UU ⎛ ⎞= γ − γ − γ⎜ ⎟⎝ ⎠
em
que γ pode variar no conjunto -1, 0, 1. O menor degrau entre níveis adjacentes desta tensão
obtém-se, por exemplo, para γ1=1, γ2=1 e γ3=0, e vale Us1min= Udc/6. Assim:
112
dcmin
com
ULf i
=Δ
(2.41)

26
Considerando Udc=300V, fcom= 4kHz, Δi1=1A (±0,5A), obtém-se Lmin =6,25mH.
Na prática foi usado 6,92mH (2×3,46mH) como valor do coeficiente de auto-indução das
bobinas de interligação do conversor à rede de energia.
Na Figura 2.9, apresenta-se um resultado experimental, onde se pode mostrar a acção do
sistema de compensação, ou seja, colocar a corrente na linha em fase com a tensão simples.
Este resultado serve para mostrar que a expressão usada neste dimensionamento fornece um
valor adequado para o coeficiente de auto-indução da bobina L.
Figura 2.9 – Dimensionamento de L (tensão em fase com a corrente); CH1 – Tensão simples na fase 1
(40V/div); CH2 – Corrente na linha 1 IT1 (2A/div); (2ms/div).
Os principais parâmetros utilizados na realização do ensaio e relacionados com o
dimensionamento do coeficiente de auto-indução foram a tensão no lado contínuo, Udc, 120V
e o tremor da corrente Δi, igual a 0,3A (±0,15A).
Da curva da corrente (Figura 2.9), retira-se a frequência de comutação de cerca 5000Hz.
Apesar da frequência de comutação ser variável ao longo de um período da rede, considera-se
para feitos de cálculos que a onda triangular da corrente apresenta um comportamento
periódico na zona do zero da tensão.
Substituindo estes valores na equação (2.41), resulta o valor do coeficiente de auto-indução de
6,67mH.
CH2
CH1

27
2.4.3– Condensadores do lado contínuo do conversor
O processo utilizado neste trabalho para dimensionar os condensadores do lado contínuo do
conversor (C1 e C2), considera a situação de funcionamento mais desvantajosa. As
capacidades são dimensionadas com base na variação da energia armazenada em duas
situações extremas (Situação A e Situação B), indicadoras das possibilidades do
compensador, como se mostra na Figura 2.10.
Considerando inicialmente uma capacidade equivalente no lado contínuo do conversor, Ceq,
carregada à tensão Udc, aplicando uma certa variação na carga indutiva na saída do conversor
(ligação de uma dada carga no instante t1), obtém-se um decrescimento na tensão Udc (Figura
2.10).
Figura 2.10 – Gráfico explicativo da variação da tensão quando há variação de carga reactiva.
A energia na capacidade equivalente na situação A é 212A eq AW C U= e a energia WB na
situação B é 212B eq BW C U=
Sabe-se também que A BW -W W= Δ , obtendo-se as seguintes relações:

28
2 21 12 2A B eq A eq BW W -W C U C UΔ = = − (2.42)
Sendo ( )2 2 222B A B A A AU =U - u U = U - u U U u uΔ ⇒ Δ = − Δ + Δ
De que resulta ( )( ) ( )2 2 2 21 12 22 2eq A A A eq AW C U U U u u C U u uΔ = − − Δ + Δ = Δ − Δ
Ou seja, ( )21 22 eq AW C U u uΔ = Δ − Δ , pelo que:
2
22eq
A
WCU u u
Δ=
Δ − Δ (2.43)
Sabendo que UA=Udc, obtém-se o valor de Ceq:
2
22eq
dc
WCU u u
Δ=
Δ − Δ (2.44)
Se o termo Δu2 for desprezável face a 2UdcΔu, então uma solução aproximada para o cálculo
de Ceq é:
eqdc
WCU u
Δ=
Δ (2.45)
De modo a relacionar a capacidade equivalente Ceq, com as capacidades dos condensadores
C1 e C2 (Figura 2.3), consideram-se as seguintes relações:
1 2
1 2dc C C
C C C
U U U
= =⎧⎪⎨⎪ = +⎩
. (2.46)
Para obter a relação existente entre C1, C2 e Ceq, pode utilizar-se (2.44), considerando apenas
um condensador, C1, ou seja, aplicando (2.44) ao cálculo de C1, ou C2, para o que deve
considerar-se metade da energia (ΔW1=ΔW/2), metade da tensão (UC1=Udc/2) e metade da
variação da tensão (Δu1=Δu/2):

29
11 2 22
1 1 1
22
2 4C
dc
W WC C Cu uU u u U
Δ Δ= = = =
Δ ΔΔ − Δ − (2.47)
Desenvolvendo a expressão (2.47) conclui-se que:
1 2 2
4 22 eq
dc
WC C C CU u u
Δ= = = =
Δ − Δ (2.48)
De modo a dimensionar o valor das capacidades C1 e C2, utilizando estas relações, efectuou-
-se um estudo, que consiste em aplicar cargas de natureza indutiva de modo a provocar
variações de energia nos condensadores. Como se viu, com base nesta variação de energia
dimensiona-se a capacidade mínima. Na Tabela 2.3 encontram-se as características das cinco
cargas utilizadas na simulação (Matlab-Simulink).
Tabela 2.3 – Cargas utilizadas no estudo para dimensionar os condensadores C1 e C2.
Nome
da
Carga
R
(Ω)
L
(H)
XL
(Ω)
Z
(Ω)
φ
(º)
ST
(VA)
Ilinha
(A)
P
(W)
Q
(VAr)
3A 7,5 0,001 0,314 7,51 2,40 2349,05 10,21 2346,99 98,31
3B 7 0,005 1,571 7,17 12,65 2457,92 10,69 2398,28 538,17
3C 5,82 0,001 3,142 6,61 28,36 2666,15 11,59 2346,17 1266,44
3D 3,8 0,012 3,770 5,35 44,77 3294,24 14,32 2338,62 2320,10
3E 0,95 0,008 2,51 2,69 69,29 6562,88 28,53 2320,48 6138,95
Na Figura 2.11, são apresentados os gráficos da tensão Udc quando o sistema é sujeito a
variações na carga (durante 5s) e uma ampliação (Zoom) da tensão Udc no instante 3s, que
mostra a passagem da carga 3B para carga 3E (12,65º→69,29º).

30
Figura 2.11 – Variações na tensão Udc provocadas por variações de cargas.
Na Tabela 2.4, pode-se comparar o valor das capacidades utilizadas na simulação
(C1=C2=3mF), com os cálculos exactos e aproximados resultantes das várias mudanças de
carga em cada segundo.
Tabela 2.4 – Tabela de verificação do cálculo das capacidades C1 e C2 para várias variações de carga.
Variações de
Carga
Δu
(V)
ΔQ
(VAr)
Δt
(s)
ΔW
(J)
Ceq
Cálculo Exacto
Ceq, Cálculo
Aproximado
Em 1s Carga 3A
passa para carga 3D
(2,4º→44,7º)
-1,5 Qi=98,3
Qf=2320,10,0003 -0,667
Ceq=1,48 mF
C1=C2=2,96 mF
Ceq=1,48 mF
C1=C2=2,96 mF
Em 2s Carga 3D
passa para carga 3B
(44,7º→12,65º)
1,2 Qi=2320,1
Qf=538,2 0,0003 0,535
Ceq=1,49 mF
C1=C2=2,98 mF
Ceq=1,49 mF
C1=C2=2,97 mF
Em 3s Carga 3B
passa para carga 3E
(12,65º→69,29º)
-8 Qi=538,2
Qf=6139,00,00065 -3,641
Ceq=1,50 mF
C1=C2=3,00 mF
Ceq=1,52 mF
C1=C2=3,03 mF
Em 4s Carga 3E
passa para carga 3C
(69,29º→28,36º)
7,5 Qi=6139,0
Qf=1266,40,0007 3,411
Ceq=1,54 mF
C1=C2=3,08 mF
Ceq=1,52 mF
C1=C2=3,04 mF

31
Este exemplo de cálculo mostra que, neste caso, a capacidade depende essencialmente da
variação de Energia ΔW e da queda de tensão de Udc, Δu.
Fazendo um estudo para verificar a relação entre ΔW e Δu, com base nos valores retirados da
tabela acima, obtém-se o gráfico da Figura 2.12, válido para as capacidades C1=C2=3mF.
0
0,5
1
1,5
2
2,5
3
3,5
4
0 1 2 3 4 5 6 7 8 9Δu (V)
ΔW
(J)
Figura 2.12 – Variação de Energia (ΔW) com a queda de tensão (Δu), para C1=C2=3mF.
Repare-se que a tensão Udc não pode ser mais baixa do que o valor de pico das tensões
alternadas (neste caso 40% mais baixo do que Udc), ou seja, tem de verificar-se Us1>us1máx,
caso contrário o conversor não tem possibilidade de comandar as correntes (Figura 2.8).
As capacidades dos condensadores devem então ser suficientemente elevadas, para manterem
a tensão Udc, admitindo uma pequena perturbação Δu, nas situações mais desvantajosas para
as quais o sistema de compensação esteja dimensionado.
Então, as capacidades são dimensionadas para que o sistema admita no máximo:
• Queda de tensão de 10 % ⇒ Δu=30V ⇒ ΔW 13,8J (valor obtido da Figura 2.12),
2 2
2 2 13 8 1 61mF2 2 300 30 30
13 8 1 53mF
300 30
Exactodc
Aproximadodc
W ,C ,U u - u -
W ,C ,U u
Δ ×⎧ = = =⎪ Δ Δ × ×⎪⎪⎨⎪ Δ⎪ = = =
Δ ×⎪⎩
⇒C1 min=C2 min≈3,2mF;

32
• Queda de tensão de 5 % ⇒ Δu=15V ⇒ ΔW 6,9J (valor obtido da Figura 2.12),
2 2
2 2 6 9 1 57mF2 2 300 15 15
6 9 1 53mF
300 15
Exactodc
Aproximadodc
W ,C ,U u - u -
W ,C ,U u
Δ ×⎧ = = =⎪ Δ Δ × ×⎪⎪⎨⎪ Δ⎪ = = =
Δ ×⎪⎩
⇒C1 min=C2 min≈3mF;
Por razões de disponibilidade comercial, o valor das capacidades adquiridas para serem
usadas no protótipo foi de C1=C2=4,7mF.
2.4.4– Tensão e corrente nos semicondutores usados
Neste protótipo podem ser usados módulos de IGBT com díodo em anti-paralelo capazes de
suportar 1200V e 50A de corrente média, valores estes bastante comuns e relativamente
económicos. Estes módulos permitirão trabalhar com grande margem de segurança
considerando as tensões planeadas para experimentação.
A máxima corrente eficaz no lado alternado do conversor é normalmente limitada pelas
perdas máximas admissíveis em cada módulo, que também depende da frequência de
comutação. Neste caso, dado que a topologia do conversor multinível inclui 12 IGBT e 18
díodos, pode admitir-se que, sendo as correntes de pico dos módulos de 50A normalmente
limitadas a 100A, o máximo valor eficaz da corrente não poderá em caso algum ultrapassar
70A. Este valor é largamente superior à corrente necessária para os ensaios experimentais
(inferior à dezena de ampere) e ao valor limite admitido nos sensores de corrente utilizados
(25A).

33
Capítulo 3 – Controlo do conversor multinível
3.1 – Introdução
Neste capítulo descreve-se o sistema de controlo do sistema de compensação de potência
reactiva. O controlo baseia-se na injecção de correntes de compensação, correntes essas que
devem seguir referências de corrente com duas componentes, uma em quadratura (iq ref) e
outra directa (id ref). Para se obter id ref e iq ref, são calculadas primeiro as correntes de
compensação em coordenadas αβ, depois aplica-se a transformação de Park para obter a
componente em quadratura, iq ref. A componente directa id ref, relacionada com a potência
activa, é obtida indirectamente, por um controlador linear cuja missão é manter constante a
tensão contínua do conversor, compensando as perdas do conversor.
A componente da corrente em quadratura, iq ref, é obtida a partir das correntes de compensação
(iCα e iCβ) calculadas pelo método da potência instantânea pq, proposto por Akagi (1983).
O controlo não linear das correntes injectadas pelo compensador é realizado em coordenadas
αβ. É necessário aplicar a transformação inversa de Park, às referências de corrente iq ref e
id ref, de modo a obter-se as referências de corrente em coordenadas αβ.
O controlo não linear das correntes de saída do conversor é conseguido usando a técnica de
modo por modo deslizamento (Sliding mode control) [Gao, 1993], [Utkin, 1993]. O controlo
das correntes de saída do conversor realiza-se partindo do pressuposto que a tensão Udc é
constante – à parte de pequenas variações em torno do valor constante – e que essa tensão Udc
está aproximadamente repartida pelos dois condensadores C1 e C2. Assim, para além do
controlo das correntes de saída do conversor, é necessário controlar as grandezas Udc, UC1 e
UC2.
É explicada a estratégia usada para efectuar o equilíbrio das tensões nos condensadores, UC1 e
UC2. No fim do capítulo, efectua-se o controlo linear da tensão contínua Udc, e apresenta-se
um estudo da estabilidade referente ao controlo linear. Para o dimensionamento do
controlador efectua-se a linearização do conversor.

34
3.2– Cálculo das Referências das Correntes de Compensação
O objectivo de um compensador de energia reactiva é de anular, ou diminuir para valores
aceitáveis, o trânsito de energia reactiva numa linha eléctrica. Ou seja, pretende-se que o
factor de potência (FP), a montante da ligação do compensador, seja, tanto quanto possível,
próximo da unidade (factor de potência quase unitário), isto é, as componentes fundamentais
das correntes i1T, i2T, e i3T da Figura 3.1 devem estar em fase com as tensões U1, U2, e U3.
Figura 3.1 – Esquema eléctrico do sistema em análise.
Neste trabalho considera-se a potência aparente S numericamente igual à máxima potência
activa que é possível transmitir a uma carga ideal resistiva pura, mantendo constante a tensão
na carga e as perdas na linha, e define-se factor de potência FP como o quociente entre a
potência activa P, efectivamente fornecida a uma dada carga real, e a potência aparente, S,
dada pelo produto dos valores eficazes da tensão (URMS) e da corrente (IRMS). Considera-se,
ainda, que a potência reactiva Q está ligada à desfasagem entre as harmónicas fundamentais
da tensão e da corrente [Santana, 1991].

35
Em sistemas sinusoidais de uma única frequência (sem distorção), o FP também pode ser
expresso pelo valor de cosϕ, em que ϕ corresponde à desfasagem entre a onda de tensão e a
onda de corrente, U I Iϕ = ϕ − ϕ = −ϕ , uma vez que se considera ϕU=0
0
1 ( ) ( )cos
T
PRMS RMS
u t i t dtTPF
S U I= = = ϕ
∫ (3.1)
Em geral, para cargas não lineares, o factor de potência é normalmente inferior à unidade,
1 1 1 1 cos cos
RMS RMS RMSP
RMS RMS RMS
P U I IFS U I I
ϕ ϕ= = = , (3.2)
em que IRMS1 corresponde à componente fundamental da corrente a 50Hz e cosϕ1 corresponde
a desfasagem entre a tensão e a harmónica fundamental da corrente, ou seja, os contributos
para a potência activa P são os valores eficazes da 1ª harmónica da tensão e da corrente e do
cosϕ1.
3.2.1– Componente em quadratura da corrente de referência
A componente em quadratura da corrente é calculada pela teoria p-q, [Akagi, 1983],
[Watanabe 1998]. Esta teoria também é conhecida por teoria da potência activa e reactiva
instantâneas. Este método implementa a transformação de Concordia no sistema de
coordenadas 123. Esta transformação algébrica origina um referencial estacionário onde as
coordenadas αβ são ortogonais umas com as outras.
Para chegar às expressões das potências (activa e reactiva), é necessário definir o sistema de
tensões simples, o sistema de correntes nas três fases, e depois aplicar a transformação de
Concordia em cada um destes sistemas. Considerando as tensões simples (tensão fase-neutro)
definidas por:
( )( )
1
2
3
2 sin
2 sin 2 3
2 sin 2 3
u U t
u U t /
u U t /
⎧ = ω⎪⎪ = ω − π⎨⎪
= ω + π⎪⎩
(3.3)
As correntes nas três fases são definidas por:

( )( )( )
1
2
3
2 sin
2 sin 2 3
2 sin 2 3
⎧ = ω − ϕ⎪⎪ = ω − π −⎨⎪
= ω + π −⎪⎩
I
I
I
i I t
i I t /
i I t /
ϕ
ϕ
(3.4)
Em notação matricial, as tensões e as correntes num referencial de coordenadas αβ
escrevem-se:
1 1
2 2
3 3
1 122 1 0 1 02 233
1 3 1 1 3 12 2 2 22 21 3 1 1 3 12 2 2 22 2
u iu iu iu iu i
u i
α α
β β
ο ο
⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ = ⎢ ⎥=⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦− −⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦− − − −⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
⎥⎥
(3.5)
A potência trifásica instantânea p, em coordenadas 123 e em coordenadas αβ, é dada por:
1 1 2 2 3 3p u i u i u i u i u i u iα α β β ο= + + = + + ο (3.6)
Num sistema equilibrado, em que a componente homopolar é nula, a potência activa em
coordenadas αβ é dada por:
p u i u iα α β β= + (3.7)
As potências p e q, também podem ser obtidas através da potência complexa S, ou seja,
considerando o diagrama da Figura 3.2, onde estão representados os vectores da corrente e da
tensão em coordenadas αβ, em que:
j
j
u u
i i
α β
α β
⎧ = +⎪⎨⎪ = +⎩
U
I
(3.8)
36

37
U
I
Figura 3.2 – Representação vectorial dos vectores de tensão e corrente no plano αβ.
O vector potência aparente S é usualmente definido por:
( ) ( ) j j u i u i u i u i p q
∗
α α β β β α α β= = + + − = +S U I (3.9)
Em notação matricial p e q são:
iu up
u u iqαα β
β α β
= ⎡ ⎤⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥ −⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(3.10)
A potência reactiva q, em coordenadas αβ e em coordenadas 123, é dada por:
( ) ( ) ( )1 2 3 2 3 1 3 1 23
3q u i u i i v v i v v i v vβ α α β ⎡ ⎤= − = − + − + −⎣ ⎦ (3.11)
As correntes de compensação são obtidas de modo a garantir que a potência reactiva na linha
seja nula (qT=0). A definição dos sentidos das potências e das correntes, na linha, na carga e
no conversor, é apresentada no diagrama da Figura 3.3.
Figura 3.3 – Definição dos sentidos das potências e das correntes em todo o sistema.

38
As correntes de compensação podem ser calculadas em coordenadas αβ ou em coordenadas
dq. Neste trabalho, são apresentadas duas formas de calcular as referências de corrente, em
função da potência activa e em função da potência reactiva.
a) Correntes de compensação em função da Potência Activa, em coordenadas αβ
A estratégia para calcular as correntes de compensação neste processo, consiste em não alterar
o valor da potência activa em trânsito na linha, fazendo pT=pL (Figura 3.3). Como se pretende
ter a potência reactiva na linha igual a zero (qT=0) faz-se qC=qL. As componentes das
correntes de compensação em função da potência activa são obtidas com base nestas
considerações no sistema de equações das potências trifásicas instantâneas p e q.
Aplicando a lei dos nós no ponto de interligação do conversor na rede, tem-se T L Ci i i= − .
Colocando o sistema de equações de potências da linha (pT e qT) em função das correntes do
conversor e da carga, obtém-se:
T L CT
T L LT
i i iu u u upu u u ui i iq
α α αα β α β
β α β αβ β β
= = −⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ − − −⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦
(3.12)
Manipulando o sistema de equações das correntes em função da potência activa e reactiva
total, temos:
1
L C T
L L T
i i u u pu ui i q
−α α α β
β αβ β
=−⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥−− ⎣ ⎦⎣ ⎦⎣ ⎦
(3.13)
Substituindo no sistema anterior as condições referidas anteriormente pT=pL e qT=0:
1
0L C L
L L
i i u u pu ui i
−α α α β
β αβ β
=−⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥−− ⎣ ⎦⎣ ⎦⎣ ⎦
(3.14)
Desenvolvendo a equação anterior, obtém-se:
2 2
10
L C L
L L
i i u u pu ui i u u
α α α β
β αβ β α β
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥ ⎢ ⎥−− + ⎣ ⎦⎣ ⎦⎣ ⎦
(3.15)

39
Daqui resulta que:
2 2
2 2
C L L
C L L
u i i pu u
u i i p
u u
αα α
α β
ββ β
α β
⎧= −⎪ +⎪⎪
⎨⎪⎪ = −
+⎪⎩
(3.16)
Pode-se observar que as referências de corrente são calculadas em função da potência activa
da carga (é necessário efectuar a amostragem das tensões da rede e das correntes na carga, de
modo que as correntes de compensação sejam calculadas).
b) Correntes de compensação em função da Potência Reactiva, em coordenadas αβ
Neste segundo processo, basta estudar o conversor e a carga porque a estratégia consiste em
saber qual o valor da potência reactiva na carga e gerar uma corrente de compensação de
modo que qC=qL (se esta condição se verificar, então qT=0). Por outras palavras, este segundo
processo consiste em saber qual o valor da componente da corrente (em coordenadas αβ) que
deve ser injectada na rede, de modo que não interfira na potência activa da carga (pC=0), e
que tenha um valor igual à potência reactiva da carga (qC=qL).
Considerando na carga, o sistema de equações anteriormente definido:
LL
LL
iu upu u iq
αα β
β α β
= ⎡ ⎤⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥ −⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(3.17)
Colocando o sistema de equações das correntes em função das potências na carga, temos:
1
L L
L L
i u u pu ui q
−α α β
β αβ
=⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥− ⎣ ⎦⎣ ⎦⎣ ⎦
(3.18)
Substituindo na equação (3.18), as equações da carga pelas correntes do conversor e impondo
as condições pretendidas, ou seja, que as correntes do conversor não interfiram na potência
activa da carga (pC=0), e que anulem a potência reactiva da mesma (qC=qL), obtém-se a
equação (3.19):

40
1 0C
C L
i u uu ui q
−α α β
β αβ
=⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥− ⎣ ⎦⎣ ⎦⎣ ⎦
(3.19)
Daqui resulta que:
2 2
2 2
C L
C L
ui q
u u
ui qu u
βα
α β
αβ
α β
⎧=⎪ +⎪⎪
⎨⎪ −⎪ =
+⎪⎩
(3.20)
As expressões (3.16) e (3.20) são equivalentes podendo ser usada qualquer uma delas para o
cálculo da corrente de compensação da componente em quadratura iq ref, ou seja, depois de
calculadas as correntes de compensação do conversor em coordenadas αβ, é necessário
aplicar a transformação de Park a estas correntes (iCα e iCβ) e usar a componente em
quadratura iq ref. A obtenção da componente directa da corrente de referência, id ref é discutida
no próximo ponto (3.2.2).
Neste trabalho utiliza-se as expressões (3.16) no cálculo das correntes de compensação,
(expressões implementadas no programa de controlo em microprocessador digital de sinal -
DSP). Estes cálculos necessitam da amostragem das tensões da rede e das correntes na carga
(no Anexo 2 descreve-se a constituição do protótipo, onde está incluído o esquema eléctrico
do circuito de amostragem das tensões e das correntes).
3.2.2– Componente directa da corrente de referência
Para além da componente em quadratura da corrente do conversor, que anula a potência
reactiva da rede, deve existir uma componente directa extra para compensar a descarga dos
condensadores, provocada pelas perdas por correntes de fuga nos próprios condensadores,
perdas nas bobinas de interligação e por perdas de condução e comutação nos dispositivos
electrónicos de comutação.
Esta corrente é obtida indirectamente controlando o erro entre a referência de tensão
contínua (tensão desejada para os condensadores) e a tensão Udc dos condensadores (Figura
3.4).

41
Udc_ref
Udc Refª
Erro Udc id
PI
1Udc
Ref ª erro id
Figura 3.4 – Controlador linear para obtenção da componente id da corrente de referência.
As correntes de compensação, referências de corrente, transformações de Concordia e de
Park, podem ser observadas nos esquemas do Simulink apresentados nos anexos. Como
exemplo apresenta-se um desses esquemas na Figura 3.5.
Figura 3.5 – Diagrama de blocos que ilustra a obtenção das referências de corrente, iα ref e iβ ref.
Observando a Figura 3.5, verifica-se que as variáveis de saída deste bloco são eiα e eiβ, ou
seja, estas duas variáveis correspondem às variáveis de entrada do controlo não linear das
correntes. Estas correntes são controladas através da aplicação de vectores de tensão no plano
αβ, o que justifica a aplicação da transformação inversa de Park nas referências de corrente,
id ref e iq ref, mencionadas no diagrama de blocos da Figura 3.5.

42
3.3– Controlo não linear das correntes do conversor (modo de deslizamento)
As correntes de saída do conversor são obtidas através de um controlador não linear
(modulador multinível). Este controlo não linear baseia-se no método de controlo por modo
de deslizamento (Sliding Mode Control), e tem como objectivos determinar a superfície de
deslizamento (Smd) e a obtenção da lei de comutação [Silva, 2001].
Esta técnica de comando pode ser considerada uma variante da Modulação por Vectores
Espaciais – SVM [Hyo, 1991]. As correntes do conversor são comandadas com base nos
vectores de tensão, no plano αβ, que o conversor pode disponibilizar. Durante um certo
intervalo de tempo, é aplicado o vector de tensão cujas componentes α e β satisfaçam as
condições de convergência das correntes para as respectivas referências.
Este tipo de controladores podem seguir superfícies de deslizamento, cujos parâmetros são
independentes das condições de funcionamento e parâmetros do sistema a controlar, pelo que
o desempenho do controlador é robusto relativamente à variação desses parâmetros e
condições. A estabilidade pode ser garantida por uma lei de comutação adequada [Utkin,
1993]. A técnica do modo de deslizamento é adequada para sistemas de estrutura variável no
tempo, como os conversores de electrónica de potência. Esta metodologia permite, ainda, sob
certas condições (impondo restrições na dinâmica do controlo), reduzir a ordem do sistema.
O controlo das correntes é efectuado em coordenadas αβ. A lei de comutação determina o
valor de duas variáveis de comutação que posteriormente são usadas na selecção do vector a
aplicar.
3.3.1– Lei de controlo.
A técnica de controlo por modo de deslizamento indica que uma superfície de deslizamento
Smd (e,t), função do vector dos erros e do tempo t, adequada para garantir robustez (sobre
certas condições dinâmicas) é [Gao, 1993]:
( ) 0mmd o xoo i
S e,t k e=
= =∑ (3.21)
Onde ko é um ganho determinante do comportamento dinâmico do sistema em modo de
deslizamento.

43
Considerando como objectivo o controlo das correntes de linha do conversor iα e iβ, que
devem seguir as respectivas referências:
ref
ref
i i
i i
α α
β β
=⎧⎪⎨⎪ =⎩
(3.22)
Sendo o erro definido por:
i ref
i ref
e i i
e i i
α α α
β β β
= −⎧⎪⎨⎪ = −⎩
(3.23)
As superfícies de deslizamento do controlador das correntes são:
( )
( )
( ) ( )
( ) ( )
md i i ref md i i i
md i i i md i i ref
S e ,t k i iS e ,t k e
S e ,t k e S e ,t k i i
α α α αα α α
β β β β β β β
⎧ = −⎧ =⎪⎪
⇒⎨ ⎨⎪ ⎪= = −⎩ ⎩
(3.24)
O sistema diz-se em modo de deslizamento se cumprir a condição ( ) 0md i ,S e ,tα β = e, para que
o sistema não abandone o modo de deslizamento, deve também verificar-se a condição
( ) 0md i ,S e ,t•
α β = . Visto que a verificação simultânea destas condições implicaria uma
frequência de comutação infinita entre estruturas do sistema, na prática estabelece-se uma
margem de erro dentro da qual se considera que o sistema está quase em modo de
deslizamento:
Figura 3.6 – Ilustração da evolução temporal de um sinal controlado por modo de deslizamento.
t (s)
I (A)

44
Assim, quando ( )md i ,S e ,tα β > +ε deve verificar-se a condição ( ) 0md i ,S e ,t•
α β < e, quando
( )md i ,S e ,tα β < −ε , deve verificar-se ( ) 0md i ,S e ,t•
α β > , para que o sistema retome o modo de
deslizamento. Quando estas condições não se verificam, deve actuar-se sobre os vectores da
tensão de saída u(t) do conversor de acordo com a lei de comutação enunciada em seguida.
( ) ( ) ( )
( ) ( ) ( )
0 0
0 0
• •
md mdmd i i i
• •
md mdmd i i i
S e ,t S e ,t aumenta-se o nível de u(t) até que S e ,t
S e ,t S e ,t diminui-se o nível de u(t) até que S e ,t
⎧ > +ε ∧ > → <⎪⎪⎨⎪
< −ε ∧ < → >⎪⎩
(3.25)
3.3.2– Relação entre os vectores de tensão e a dinâmica das correntes de linha do
conversor
Partindo do modelo dinâmico do conversor, em coordenadas αβ, equação (2.24), e
considerando que existe um processo de equilíbrio das tensões UC1 e UC2 de modo a garantir
que 1 2 2dc
C CUU U≈ ≈ , a dinâmica das correntes de linha do conversor pode ser representada
pelo seguinte modelo:
1 1d 0 0 0d
1 10 0 0
S S
S S
R ii u U-L L Lt ii u U
RL L L
αα α α
ββ β β
⎡ ⎤ ⎡ ⎤ ⎡ ⎤+⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤= −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(3.26)
Em que os vectores USα,β têm os valores:
1
2
3
1 12 12 23 23 30
2 2
S dc
S
U UU
α
β
⎡ ⎤ Λ⎡ ⎤⎡ ⎤ − −= ⎢ ⎥ ⎢ ⎥⎢ ⎥ Λ⎢ ⎥⎣ ⎦ ⎢ ⎥⎢ ⎥ ⎢ ⎥Λ⎣ ⎦−⎢ ⎥⎣ ⎦
(3.27)
E as variáveis Λk têm os valores:

45
( )
( )
( )
1 1 2 3
2 1 2 3
3 1 2 3
1 231 231 23
⎧Λ = γ − γ − γ⎪⎪⎪
Λ = −γ + γ − γ⎨⎪⎪
Λ = −γ − γ + γ⎪⎩
(3.28)
A superfície de comutação estabelece que
( ) ( )
( ) ( )
md i i ref
md i i ref
S e ,t k i i
S e ,t k i i
α α α α
β β β β
⎧ = −⎪⎨⎪ = −⎩
(3.29)
Cujas derivadas são:
( ) ( )
( ) ( )
dd
dd
md i i ref
md i i ref
S e ,t k i it
S e ,t k i it
•
α α α α
•
β β β β
⎧ = −⎪⎪⎨⎪⎪ = −⎩
(3.30)
Substituindo iα e iβ pelos valores da expressão (3.26), obtém-se
( )
( )
d 1 1d
d 1 1d
md i i ref s s
md i i ref s s
RS e ,t k i i u Ut L L L
RS e ,t k i i u Ut L L L
•
α α α α α α
•
β β β β β β
⎧ ⎛ ⎞= + + −⎜ ⎟⎪ ⎝ ⎠⎪⎪⎨⎪ ⎛ ⎞⎪ = + + −⎜ ⎟⎪ ⎝ ⎠⎩
(3.31)
Donde se podem obter os valores de US que garantem a estabilidade em modo de
deslizamento.
( )
( )
d0 d
d0d
S smd i
md i S s
U L i Ri uS e ,t t
S e ,t U L i Ri ut
•
•
⎧⎧ < + +⎪>⎪ ⎪⎪ ⇒ ⎨⎨⎪⎪
< ⎪⎪ > + +⎩ ⎩
(3.32)
Estas desigualdades permitem definir o valor mínimo da tensão Udc necessária para impor um
certo valor US, como se mostrará adiante.

46
3.3.3 – Lei de comutação
Da lei de comutação (3.25) e de (3.32), tira-se que
( ) ( )( )
( )
dd
0dd
md i s ref s
mdmd i , i ,
md i s ref s
S e ,t U L i Ri ut
S e ,t S e ,t
S e ,t U L i Ri ut
α α α α α
•
α β α β
β β β β β
⎧ > +ε ∧ < + +⎪⎪
> +ε ∧ > ⇒ ⎨⎪⎪ > +ε ∧ < + +⎩
(3.33)
( ) ( )( )
( )
dd
0dd
md i s ref s
mdmd i , i ,
md i s ref s
S e ,t U L i Ri ut
S e ,t S e ,t
S e ,t U L i Ri ut
α α α α α
•
α β α β
β β β β β
⎧ < −ε ∧ > + +⎪⎪
< −ε ∧ < ⇒ ⎨⎪⎪ < −ε ∧ > + +⎩
(3.34)
Quando se verifica uma das condições de (3.33), deve aumentar-se o nível da respectiva
componente da tensão US. Por outro lado, quando se verifica uma das condições de (3.34),
deve diminuir-se o nível da respectiva tensão de saída do conversor, US.
3.3.4 – Selecção dos vectores
Existem 27 combinações possíveis das tensões Umk correspondentes a cada um dos 3 níveis de
tensão que cada uma das 3 tensões Umk podem assumir. Na Tabela 3.1, figuram essas 27
combinações de tensões, simples e compostas, o valor das variáveis de comutação que lhes
dão origem, e o valor das tensões em coordenadas αβ, em valores p.u. (1 p.u. = Udc).
As tensões Uα e Uβ (tensões simples do conversor em coordenadas αβ) representadas na
Tabela 3.1, foram obtidas pela aplicação da transformação de Concordia às tensões USk da
equação (2.40):
1
2
3
1 12 12 2 233 30
2 2
dcUUU
α
β
⎡ ⎤ γ⎡ ⎤⎡ ⎤ − −= ⎢ ⎥ ⎢ ⎥⎢ ⎥ γ⎢ ⎥⎣ ⎦ ⎢ ⎥⎢ ⎥ ⎢ ⎥γ⎣ ⎦−⎢ ⎥⎣ ⎦
(3.35)

47
Tabela 3.1 – Valores em p.u. dos vectores de tensão de saída do conversor.
Na Figura 3.7, estão representados no plano αβ, cada um destes vectores de tensão
disponíveis no conversor.
Vector γ1 γ2 γ3 Um1 Um2 Um3 U12 U23 U31 Uα /Udc Uβ /Udc
1 1 1 1 Udc/2 Udc/2 Udc/2 0 0 0 0,0000 0,0000
2 1 1 0 Udc/2 Udc/2 0 0 Udc/2 -Udc/2 0,2041 0,3536
3 1 1 -1 Udc/2 Udc/2 - Udc/2 0 Udc -Udc 0,4082 0,7071
4 1 0 -1 Udc/2 0 -Udc/2 Udc/2 Udc/2 -Udc 0,6124 0,3536
5 1 0 0 Udc/2 0 0 Udc/2 0 -Udc/2 0,4082 0,0000
6 1 0 1 Udc/2 0 Udc/2 Udc/2 -Udc/2 0 0,2041 -0,3536
7 1 -1 1 Udc/2 -Udc/2 Udc/2 Udc -Udc 0 0,4082 -0,7071
8 1 -1 0 Udc/2 -Udc/2 0 Udc -Udc/2 -Udc/2 0,6124 -0,3536
9 1 -1 -1 Udc/2 -Udc/2 -Udc/2 Udc 0 -Udc 0,8165 0,0000
10 0 -1 -1 0 -Udc/2 -Udc/2 Udc/2 0 -Udc/2 0,4082 0,0000
11 0 -1 0 0 -Udc/2 0 Udc/2 -Udc/2 0 0,2041 -0,3536
12 0 -1 1 0 -Udc/2 Udc/2 Udc/2 -Udc Udc/2 0,0000 -0,7071
13 0 0 1 0 0 Udc/2 0 -Udc/2 Udc/2 -0,2041 -0,3536
14 0 0 0 0 0 0 0 0 0 0,0000 0,0000
15 0 0 -1 0 0 -Udc/2 0 Udc/2 -Udc/2 0,2041 0,3536
16 0 1 -1 0 Udc/2 -Udc/2 -Udc/2 Udc -Udc/2 0,0000 0,7071
17 0 1 0 0 Udc/2 0 -Udc/2 Udc/2 0 -0,2041 0,3536
18 0 1 1 0 Udc/2 Udc/2 -Udc/2 0 Udc/2 -0,4082 0,0000
19 -1 1 1 -Udc/2 Udc/2 Udc/2 -Udc 0 Udc -0,8165 0,0000
20 -1 1 0 -Udc/2 Udc/2 0 -Udc Udc/2 Udc/2 -0,6124 0,3536
21 -1 1 -1 -Udc/2 Udc/2 -Udc/2 -Udc Udc 0 -0,4082 0,7071
22 -1 0 -1 -Udc/2 0 -Udc/2 -Udc/2 Udc/2 0 -0,2041 0,3536
23 -1 0 0 -Udc/2 0 0 -Udc/2 0 Udc/2 -0,4082 0,0000
24 -1 0 1 -Udc/2 0 Udc/2 -Udc/2 -Udc/2 Udc -0,6124 -0,3536
25 -1 -1 1 -Udc/2 -Udc/2 Udc/2 0 -Udc Udc -0,4082 -0,7071
26 -1 -1 0 -Udc/2 -Udc/2 0 0 -Udc/2 Udc/2 -0,2041 -0,3536
27 -1 -1 -1 -Udc/2 -Udc/2 -Udc/2 0 0 0 0,0000 0,0000

48
Figura 3.7 – Representação em p.u. no plano αβ dos vectores de tensão do conversor.
Conforme se pode observar na Figura 3.7, os 27 vectores que o conversor disponibiliza têm 5
níveis de tensão na componente β e 9 na componente α. No entanto, como só existem 19
vectores distintos, das duas leis de comutação, podem definir-se duas variáveis inteiras, λα e
λβ, cada uma delas com 5 valores distintos para poder seleccionar qualquer dos 19 vectores.
O processo de selecção do vector tem como objectivo, minimizar o erro das correntes (os
vectores correspondentes a afixos duplos devem poder ser usados para equilibrar a tensão nos
condensadores). O processo de selecção consiste em calcular os erros, eα e eβ, através da lei de
comutação, que origina as duas variáveis (λα e λβ) de cinco níveis (-2; -1; 0; 1; 2), Figura 3.8:

49
Figura 3.8 – Escolha dos vectores em função dos níveis de tensão.
Alguns vectores com idêntico afixo, como o 17 e o 22, ou o 2 e 15, produzem idênticas
componentes da tensão na saída do conversor (vectores redundantes). Em termos de tensão de
saída, do ponto de vista da carga é indiferente escolher qualquer um dos vectores que
aparecem duplicados no plano αβ. Mas o efeito de cada um dos vectores redundantes na
tensão dos condensadores não é o mesmo. Assim, quando na saída se pretender aplicar um
dos vectores redundantes, é escolhido aquele que fizer tender a tensão nos condensadores para
o equilíbrio. A selecção dos vectores redundantes será discutida no ponto 3.4 (equilíbrio dos
condensadores), deste trabalho.
A tabela seguinte apresenta o vector a ser escolhido de acordo com o nível das variáveis de
comutação (λα e λβ). No centro da tabela podem observar-se os vectores redundantes.

50
Tabela 3.2 – Selecção de vectores de acordo com λα e λβ.
λβ λα -2 -1 0 1 2
-2 25 25 12 7 7
-1 24 13; 26 6; 11; 13; 26 6; 11 8
0 19 18; 23 1; 14; 27 5; 10 9
1 20 17; 22 2; 15; 17; 22 2; 15 4
2 21 21 16 3 3
A lei de comutação (3.25), expressa em função das variáveis λ, para cada instante de tempo h
assume a seguinte forma:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
1
1
1 <2
1 <2
mdmd i ih h h
mdmd i ih h h
S e ,t S e ,t
S e ,t S e ,t
•
α α α α α+
•
β β β β β+
⎧ λ = λ + ⇐ > ε ∧ > ε ∧ λ⎪⎪⎨⎪
λ = λ + ⇐ > ε ∧ > ε ∧ λ⎪⎩
(3.36)
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
1
1
1 > 2
1 > 2
mdmd i ih h h
mdmd i ih h h
S e ,t S e ,t
S e ,t S e ,t
•
α α α α α+
•
β β β β β+
⎧ λ = λ − ⇐ < −ε ∧ < −ε ∧ λ −⎪⎪⎨⎪
λ = λ − ⇐ < −ε ∧ < −ε ∧ λ −⎪⎩
(3.37)
A obtenção das variáveis de comutação λα, λβ no DSP (implementação da lei de comutação)
consiste em calcular λα e λβ em função dos erros e das variações do erro, uma vez que, em
rigor, só é necessário conhecer o sinal da derivada. A implementação deste processo pode ser
visualizada nos Anexos (esquemas de Simulink).
De seguida, apresenta-se um resultado laboratorial que mostra que o conversor é capaz de
impor correntes que seguem as referências de corrente de um sistema trifásico sem neutro.
Os testes realizados para verificar o controlo do conversor, para uma determinada corrente de
referência, foram efectuados com uma carga praticamente resistiva e uma corrente de
referência sinusoidal com amplitude de 3A, 50Hz (passo de cálculo h=25μs).

51
Figura 3.9 – Resultados experimentais do controlo de corrente do conversor (Udc=120V)
CH1 – Corrente na fase 1; CH2 – Corrente na fase 2. Escala vertical 2A/div; (5ms/div).
Nestes ensaios, para seleccionar um vector, bastou aplicar a lei de comutação aos sinais de
erro (eα e eβ) e usar a Tabela 3.2 adaptada, ou seja, um vector por nível (nos vectores
redundantes definiu-se um dos vectores, por exemplo para λα=1 e λβ=1, definiu-se o vector
2). Conclui-se que esta implementação da lei de comutação, apresenta um comportamento
uniforme para as três fases.
Para comparação, os resultados de simulação estão apresentados na Figura 3.10.
Figura 3.10 – Resultados de simulação do controlo de corrente do conversor (Udc=120V)
1) – Corrente na fase 1; 2) – Corrente na fase 2.

52
3.3.5– Estabilidade
No estudo da estabilidade utilizou-se as expressões da teoria do modo de deslizamento, [Gao,
1993], [Utkin, 1993]. Este critério origina um polinómio que, posteriormente, pode ser
estudado segundo o critério de estabilidade de Routh-Hurwitz.
A técnica de controlo por modo de deslizamento indica que uma superfície de deslizamento
Smd (e,t) garante robustez e baixa a ordem do sistema (sobre certas condições dinâmicas), se
cumprir a condição
( ) 0mmd o xoo i
S e,t k e=
= =∑ (3.38)
De modo a assegurar que o sistema em estudo é estável, o polinómio Smd (e,t) tem que
obedecer às regras de estabilidade do critério de Routh-Hurwitz.
Para que o sistema seja estável, basta garantir que este esteja em modo de deslizamento. Para
isso é necessário cumprir as seguintes condições, já referidas em pontos anteriores:
( ) ( )
( ) ( )
0 0
0 0
•
mdmd i i
•
mdmd i i
Se S e ,t S e ,t
Se S e ,t S e ,t
⎧ > ⇒ <⎪⎪⎨⎪
< ⇒ >⎪⎩
(3.39)
Ou seja, para que um sistema se mantenha em modo de deslizamento é necessário aplicar um
vector que obedeça às restrições anteriormente apresentadas de modo a garantir que:
( ) ( ) 0mdmd i iS e ,t S e ,t •
< (3.40)
A condição de chegada em modo de deslizamento está relacionada com o critério de
estabilidade de Routh-Hurwitz. Se ( ) 0md iS e ,t > e o objectivo é ter ( ) 0md iS e ,t = , então é
necessário aplicar um vector de tensão, de modo que d
0dt
mxe< . Do mesmo modo, se
( ) 0md iS e ,t < , então será necessário aplicar um vector de tensão de modo que d
0dt
mxe> .
Para se obter derivadas positivas ou negativas (depende do sinal de ( )md iS e ,t ), é necessário
que o vector aplicado cumpra as condições (3.32) a seguir apresentadas,

53
( )
( )
d0 d
d0d
S smd S eq mini
S eq maxmd i S s
U L i Ri u U US e ,t t
U US e ,t U L i Ri ut
•
•
⎧⎧ < + + <⎪> ⎧⎪ ⎪ ⎪⎪ ⇒ ⇒⎨ ⎨⎨⎪ ⎪⎪ >⎩< ⎪⎪ > + +⎩ ⎩
Isto implica que bastará seleccionar uma tensão de alimentação Us>Ueq máx para garantir a
estabilidade do sistema em modo de deslizamento.
3.4– Equilíbrio da tensão nos condensadores
Uma das vantagens deste conversor multinível consiste no facto de não ser necessário criar
um sistema auxiliar (em hardware), para equilibrar as tensões nos condensadores C1 e C2. Esta
vantagem é conseguida devido ao grau de liberdade adicional que o conversor disponibiliza
na redundância dos vectores. Utilizar este grau de liberdade extra, consiste em aproveitar os
vectores de tensão redundantes, que o conversor disponibiliza no plano αβ, que se encontram
no centro da Tabela 3.2 para equilibrar as tensões nos dois condensadores.
Dois vectores redundantes (ex. vector 2 e 15), apesar de apresentarem o mesmo valor de
tensão na saída do conversor (U12=0; U23=Udc/2; U31=-Udc/2), provocam efeitos diferentes
sobre os condensadores C1 e C2. Por exemplo, se o conversor estiver a funcionar em modo
inversor e for aplicado o vector 2 (γ1=1, γ2=1 e γ3=0), verifica-se que o condensador C1
descarrega e o condensador C2 carrega. Na mesma situação de funcionamento do conversor,
se for aplicado o vector 15 (γ1=0, γ2=0 e γ3=-1), o condensador C1 carrega e o condensador C2
descarrega. O comportamento dos condensadores, caso o sistema esteja a funcionar em modo
rectificador, é o oposto do modo inversor.
Com uma correcta selecção de vectores é possível o conversor impor correntes seguindo as
referências de corrente, e ao mesmo tempo, equilibrar as tensões dos dois condensadores.
Para isso, pode desdobrar-se a Tabela 3.2 em duas tabelas de comutação (Tabela 3.3 e Tabela
3.4). Podemos observar os vectores redundantes nos centros das tabelas. Estas tabelas de
comutação são seleccionadas de acordo com o sinal do vector (UC1-UC2)In.

54
Se (UC1-UC2)In<0 aplica-se os vectores Tabela 3.3, se (UC1-UC2)In>0 aplica-se a Tabela 3.4.
Tabela 3.3 – Selecção de vectores de acordo com λαβ, e (UC1-UC2)In<0.
λβ λα -2 -1 0 1 2
-2 25 25 12 7 7
-1 24 13 6; 13 6 8
0 19 18 1; 14; 27 5 9
1 20 17 2; 17 2 4
2 21 21 16 3 3
Tabela 3.4 – Selecção de vectores de acordo com λαβ, e (UC1-UC2)In>0.
λβ λα -2 -1 0 1 2
-2 25 25 12 7 7
-1 24 26 11; 26 11 8
0 19 23 1; 14; 27 10 9
1 20 22 15; 22 15 4
2 21 21 16 3 3
Para decidir qual o vector a aplicar, é necessário calcular a diferença de tensão entre UC1 e
UC2 e o sentido da corrente no neutro in, em função de i1, i2 e i3 (correntes do conversor).
Considerando o esquema da Figura 3.11 e aplicando a lei dos nós no ponto de interligação dos
dois condensadores (neutro), temos que a corrente do neutro (in) está relacionada com as
correntes dos condensadores (iC1 e iC2) da seguinte forma:
1 2n C Ci i i= − (3.41)

55
Figura 3.11 – Esquema eléctrico do lado continuo do conversor. Definição do sentido de in.
Da modelação do conversor (capítulo 2), sabe-se que
3 3
11 1 1 11 2 12 3 131 1
1 1 1 1 1
3 3
22 2 1 21 2 22 3 231 1
2 2 2 2 2
dd
dd
K o K K oC C o ok k
K o K K oC C o ok k
I i i iU i i i i i i i
t C C C C C
I i i iU i i i i i i i
t C C C C C
= =
= =
⎧+ − Γ +⎪ + − Γ − Γ − Γ +⎪ = = = = =
⎪⎪⎨⎪⎪ + − Γ +
+ − Γ − Γ − Γ +⎪ = = = = =⎪⎩
∑ ∑
∑ ∑
(3.42)
Fazendo a 1ª derivada de UC1-UC2=eC12, e considerando que C1=C2=C, e recordando que
( ) ( )1 2
1 1 e
2 2k k k k
k k
-γ γ + γ γΓ = Γ = , temos:
( ) ( )3 3
12
1 1
1 1dd 2 2
k k k kCn K K
k k
-ei C - i it = =
⎛ ⎞ ⎛ ⎞γ γ + γ γ= = +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠∑ ∑ (3.43)
Efectuando o desenvolvimento desta expressão em função de i1 e de i2, vem que;
( ) ( )2 2 2 2
1 3 1 2 3 2 1 1 2 2n
i i i i iC C
γ − γ + γ − γ ℑ + ℑ= = (3.44)
De modo a evitar frequências de comutação elevadas, criou-se uma histerese (h1), no cálculo
da diferença de tensões UC1 e UC2.

56
Condições de escolha das tabelas de comutação:
Se (UC1-UC2) in< -h1, deve-se aplicar a Tabela 3.3.
Se (UC1-UC2) in>h1, deve-se aplicar a Tabela 3.4.
A implementação destas condições em software pode ser consultada nos esquemas de
Simulink disponíveis nos Anexos IV e V. De um modo resumido, o procedimento consiste em
calcular a corrente no neutro do conversor (in) com base nas correntes do conversor,
adquiridas pelo DSP, através dos conversores analógicos digitais, e depois multiplicar pela
diferença de tensões UC1 e UC2 (grandezas também adquiridas pelo DSP). Com base no sinal
deste produto escolhe-se a tabela correspondente.
Na Figura 3.12 e Figura 3.13, são apresentados resultados experimentais que mostram o
equilíbrio das tensões dos condensadores UC1 e UC2. O valor da amplitude do tremor
triangular da tensão nos condensadores vale h1, histerese usada no procedimento de decisão
do vector redundante a aplicar.
Figura 3.12 – Resultados experimentais – Equilíbrio das tensões dos condensadores C1 e C2
(Udc=80V); CH1 – UC1; CH2 – UC2. Escala vertical 6V/div (0,2V/div ×30); (500ms/div).
CH1 CH2

57
Na Figura 3.13, apresenta-se um resultado experimental, que serviu para analisar o
comportamento dinâmico das tensões UC1 e UC2, no caso de haver uma perturbação ou
variação da tensão Udc.
Figura 3.13 – Resultados experimentais – Equilíbrio das tensões dos condensadores C1 e C2 quando se
varia a tensão Udc (passagem de 100 para 120V); CH1 – UC1; CH2 – UC2. Escala vertical 15V/div
(0,5V/div ×30); (500ms/div).
Para comparação, os resultados de simulação estão apresentados na Figura 3.14 e Figura 3.15,
e foram obtidos no Simulink com os seguintes parâmetros:
• Tensão Udc=80V (Figura 3.14), 100V e 120V (Figura 3.15).
• Capacidade dos condensadores, C1=C2=4,7mF e coeficiente de auto-indução das
indutâncias de interligação do conversor à rede, L=6,92mH.
• Valor da histerese usada no bloco de decisão h1=±2V.
• Parâmetros da carga RL, RC=11Ω e LC=25mH.
CH1 CH2

58
Figura 3.14 – Resultados de simulação – Equilíbrio das tensões dos condensadores C1 e C2 (Udc=80V);
1) – Tensão no condensador 1, UC1; 2) – Tensão no condensador 2, UC2.
Figura 3.15 – Resultados simulação – Comportamento das tensões dos condensadores C1 e C2 quando
se aplica uma perturbação na tensão Udc (passagem de 100 para 120V); 1) – Tensão no condensador 1,
UC1; 2) – Tensão no condensador 2, UC2.
1 2
1 2

59
3.5– Controlo linear da tensão contínua Udc
É necessário efectuar o controlo da tensão Udc para a manter dentro de valores aceitáveis e
compensar as perdas no conversor. Este controlador não tem necessidade de apresentar uma
dinâmica rápida, podendo ser concretizado por um controlador linear PI (proporcional
integral).
Considerando o controlador de correntes por modo de deslizamento representado por um
ganho e um atraso, é possível obter modelos lineares para a dinâmica da tensão Udc, de modo
a estabelecer um controlador que garanta erro estático nulo. O dimensionamento do
controlador é efectuado a partir do modelo dinâmico do conversor em coordenadas dq.
3.5.1– Dimensionamento do controlador
Partindo do modelo do conversor multinível em coordenadas dq, equação (2.31), e
considerando apenas as equações que dizem respeito às variáveis de estado UC1 e UC2, fica:
11 1
1 1 1
22 2
2 2 2
d 1d
d 1d
qC dd q o
qC dd q o
U - i - i it C C C
U - i - i it C C C
Γ⎧ Γ= +⎪
⎪⎪⎨⎪ ΓΓ⎪ = +⎪⎩
(3.45)
Considerando que as capacidades são iguais 1 2C C C= = e que as tensões nos condensadores
C1 e C2 estão equilibradas 1 2 2dc
C CUU U= = , somam-se as duas equações de (3.45):
( ) 1 21 2 1 2d 2 d
q qC C d d od q
U U ii - i -t C C C
Γ + Γ+ ⎛ ⎞Γ + Γ⎛ ⎞= + +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.46)
Substituindo na equação de (3.46), as novas variáveis, 1 2d d dΓ = Γ = −γ , 1 2q q qΓ = Γ = −γ e
2eqCC = , obtêm-se:
2 d 2 2
dq qdc d o d o
d q d qeq eq eq
i iU i i i it C C C C C C
= γ + γ + = γ + γ + (3.47)

60
De acordo com a equação (3.47), obteve-se o esquema equivalente do conversor em
coordenadas dq.
2eqCC =
Figura 3.16 – Esquema equivalente do conversor em coordenadas dq.
Considerando a transformação de Park aplicada em (3.10), obtém-se q=uqid – udiq. De modo a
garantir um factor de potência unitário (q=0) e sabendo que o método de cálculo, do ângulo
de transformação de Park (Anexo 3), coloca os eixos de modo que a tensão uq=0, e
considerando factor de potência quase unitário (iq=0), resulta a seguinte equação:
dd
dc d od
eq eq
U i i= +t C C
γ . (3.48)
O novo modelo equivalente é obtido considerando a capacidade Ceq ideal e io a corrente na
resistência em paralelo com cada um dos condensadores para garantir a descarga destes,
quando o sistema é desligado (Figura 3.17).
2eqCC =
Figura 3.17 – Esquema equivalente simplificado do conversor em coordenadas dq.
Considerando que a corrente é dco
e q
UiR
= − e aplicando transformada de Laplace na expressão
(3.48), e desenvolvendo tem-se:

61
( )( ) 1
d eqdc
d ref eq eq
RU s I s R C s
γ=
+ (3.49)
Que se traduz no diagrama de blocos da Figura 3.18:
dγ1
e q
e q eq
RR C s +
Figura 3.18 – Diagrama de blocos que relaciona Udc com Id ref.
Considerando agora um atraso Td da corrente id em relação a id ref, (Figura 3.19)
1d ref-sTd
d d ref dd
ii i e i
sT= ⇒ ≈
+. (3.50)
Figura 3.19 – Comportamento da corrente Id variando dentro de uma histerese ±ε.
Este sistema de 1ª ordem resulta dos dois primeiros termos do desenvolvimento da função
exponencial em Série de Taylor.
Em cadeia aberta, o diagrama de blocos resultante está representado na Figura 3.20.
1e q
e q eq
RR C s +1
d
dsTγ
+
Figura 3.20 – Diagrama de blocos que relaciona Udc com Id ref, com atraso de Id.
Como se pretende controlar a tensão Udc, o diagrama de blocos em cadeia fechada (Figura
3.21), inclui um compensador C(s) a determinar e permite obter a referência da corrente id no
sistema de compensação de reactiva.

62
1e q
e q eq
RR C s +1
d
dsTγ
+
Figura 3.21 – Diagrama de blocos em cadeia fechada do sistema de controlo da tensão Udc.
Considerando um controlador proporcional, C(s)=kP, tem-se
2
( )( ) 1
P d
eq ddc
dc ref eq eq d P d eq
d eq eq eq d eq
k C TU s
U s R C T s k Rs s
T R C C T R
γ
=⎛ ⎞ ⎛ ⎞+ + γ
+ +⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
. (3.51)
Com o controlador proporcional, verifica-se que o sistema apresenta um erro estacionário
constante para entradas do tipo escalão de posição (o sistema não é exacto).
Se fosse utilizado somente um controlador integral, ( ) IkC ss
= , o erro estático anulava-se,
mas a resposta do sistema seria muito lenta, porque o pólo dominante ficaria próximo da
origem.
Sendo assim, utiliza-se um controlador PI, ( ) IP
kC s ks
= + que também pode ser escrito
1( )
PI
I
kk sk
C ss
⎛ ⎞+⎜ ⎟
⎝ ⎠= .
Com o zero do controlador, cancela-se o pólo dominante do sistema, localizado em 1
e q eqR C− ,
e resulta um sistema de 2ª ordem.
Considerando a função de transferência standard de um sistema de 2ª ordem,
2
2 2
( )( ) 2
n
n n
Y sX s s s
ω=
+ ξω + ω (3.52)
Comparando (3.52) com a equação da função de transferência em cadeia fechada:

63
2
( )( )
I d eq
dc d
I d eqdc ref
d d
k RU s T
k RsU s sT T
γ
= γ+ +
(3.53)
Retiram-se as seguintes relações:
2
12
Peq eq
I
nd
I d eqn
d
kR Ck
Tk R
T
⎧=⎪
⎪⎪⎪ ξω =⎨⎪⎪ γ
ω =⎪⎪⎩
⇒2
12
nd
n dI
d eq
P I eq eq
T
TkR
k k R C
⎧ω =⎪ ξ⎪⎪ ω
=⎨ γ⎪⎪ =⎪⎩
(3.54)
O procedimento utilizado para dimensionar os parâmetros do controlador consiste em saber o
valor pretendido do coeficiente de amortecimento ξ. Com este valor, calcula-se a frequência
natural do sistema não amortecido, 12n
dTω =
ξ, a seguir determina-se o valor do ganho
integral 2
n dI
d eq
TkR
ω=
γ e, por fim, o ganho proporcional, P I eq eqk =k R C .
Valores utilizados no dimensionamento dos parâmetros do controlador PI
• Capacidade Equivalente (Ceq)
Como C=C1=C2=4,7 mF ⇒ 2 35 mF2eqCC ,= =
• Resistência Equivalente (Req)
Verifica-se a relação 2
dc dco
e q
U UiR R
= − = − . Então Req=2R. Como R= 2,2kΩ, então Req=4,4 kΩ
• Atraso da Corrente id, (Td)
O valor deste atraso depende da frequência de comutação dos semicondutores. Esta
frequência depende da tolerância definida nos erros alfa e beta e do valor do coeficiente de

64
auto-indução L utilizado. A frequência de comutação varia ao longo do período da rede. Para
efeitos de cálculo, considera-se um valor de 5 kHz (valor do período é 0,2ms).
Considerando o atraso como a média estatística dos atrasos, ou seja, metade do período da
frequência de comutação (5kHz), obtém-se, Td=0,1ms.
• O cálculo de γd pode ser feito, aplicando a lei dos nós no circuito equivalente (Figura
3.17)
d d o ci i iγ + = (3.55)
Em termos de valores médios IC=0 logo 0d dI Iγ = −
Igualando a potência do circuito equivalente lado DC e do lado AC (PDC=PAC), obtém-se a
relação de γd em função de Vd e Udc:
0
0
(- )132,8 0,44300
(- )
dc d dd
ddc
d d
U I V IVU
I I
=⎧⎪ γ = = =⎨⎪γ =⎩
Em resumo, 2 35 mF ; 4 4 kΩ ; 0 1 ms ; 0 44eq eq d dC , R , T , ,= = = γ = .
Dimensionando o controlador para uma resposta rápida (critério mínimo de ITAE) –
coeficiente de amortecimento ξ=0,707 – o sistema responde provocando desequilíbrios nas
correntes de saída do conversor, ou seja, para este valor de ξ o controlador é demasiado
agressivo. Para respostas muito lentas – coeficiente de amortecimento ξ > 20 – o controlador
não tem capacidade para responder e os condensadores descarregam (a tensão Udc tende para
zero).
Com um coeficiente de amortecimento, ξ=9, o sistema responde de uma forma aceitável.
Para o valor de ξ=9 obteve-se uma frequência natural do sistema, -1556 rad.snω = , que
implica um ganho integral de 0 02Ik ,= , do qual resulta o ganho proporcional de 0 16Pk ,= .
Os parâmetros do controlador utilizados na simulação e na implementação laboratorial foram:
kI=0,02 e kP=0,16.

65
Os resultados obtidos para a regulação de tensão contínua Udc estão representados na Figura
3.22.
A resposta temporal da tensão Udc (CH2) atinge o regime estacionário ao fim de 9 ciclos da
rede, isto é, 180ms. O valor do erro estático da tensão Udc, em percentagem, é inferior a 2%.
Este valor de erro é, em parte, devido a erros de medição dos sensores de tensão.
Figura 3.22 – Resultados experimentais para um escalão de tensão de 40V (passagem de 60 para 100V
na tensão Udc). CH1 – Corrente na Linha fase 1 (2A/div); CH2 – Tensão Udc (20V/div); (20ms/div).
Parâmetros do controlador kP=0,16 e kI=0,02.
O método utilizado para obter os resultados experimentais da Figura 3.22 consistiu, numa
primeira fase, em carregar os condensadores pela fonte AC (através dos díodos do conversor),
depois ligou-se o controlador (via software) impondo os vários valores de referência na tensão
Udc (100, 150, 200V).
CH2
CH1

66
Figura 3.23 – Resultados simulação para um escalão de tensão de 40V (passagem de 60 para 100V na
tensão Udc). 1) IL1 – Corrente na Linha fase 1 (2A/div); 2) Udc – Tensão Udc (20V/div). Parâmetros do
controlador kP=0,16 e kI=0,02.
Os vários ensaios efectuados mostraram que o dimensionamento do controlador linear
apresenta valores de erros estáticos de posição praticamente nulos e que o tempo de reposta da
tensão Udc é considerado aceitável, ou seja, ao fim de 9 ciclos da rede (180ms), a resposta
atinge o valor de referência desejável e mantém-se nesse valor.
3.5.2– Estabilidade do controlador da tensão contínua
O estudo da estabilidade deste controlador é efectuado com base no critério de estabilidade de
Bode (Margem de ganho e margem de fase) e pelo lugar geométrico do lugar das raízes (Root
Locus). O sistema em análise é de 3ª ordem e é constituído por 3 pólos (raízes do
denominador) e um zero (raízes no numerador) na função de transferência de cadeia fechada
(FTCF).
Efectuando um estudo para verificar a influência da variação do zero do sistema no semi-
plano esquerdo, (Situação A - zero do sistema coincidente com o pólo dominante; Situação B
- zero do sistema à direita do pólo dominante; Situação C - zero do sistema à esquerda do
pólo dominante), conclui-se que a movimentação do zero do controlador no eixo real
negativo, não interfere na estabilidade do sistema. No entanto, o coeficiente de amortecimento
varia (Situação A - ξ=9, Situação B - ξ=5,07 e Situação C - ξ=1,6), podendo o controlador
linear impor demasiado esforço de controlo. Em seguida, apresenta-se o estudo da
ref.2
ref.1
1
2

67
estabilidade para a Situação A, porque foi com esta condição que o controlador linear foi
dimensionado.
Recordando o diagrama de blocos da Figura 3.21 e substituindo a função do controlador
por ( ) IP
kC s =k +s
, obtém-se o diagrama de blocos da Figura 3.24:
1e q
e q eq
RR C s +1
d
dsTγ
+I
pkks
+
Figura 3.24 – Diagrama de blocos em cadeia fechada, regulação da tensão Udc. Controlador PI.
As funções, FTCF e a FTCA (função do sistema em cadeia aberta) são:
3 2
( ) ( )
( ) 1
d P I
eq ddc
dc ref eq eq d P d eq I d
d eq eq eq d eq eq d
k s kC TU sFTCF
U s R C T k R ks s sT R C C T R C T
γ +
= =⎛ ⎞ ⎛ ⎞+ + γ γ+ + +⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(3.56)
( )
( )( )
1 1d eq P I
d eq eq
R k s kFTCA
s sT R C sγ +
=+ +
(3.57)
Pela expressão (3.57), verifica-se que o sistema é do tipo 1 e tem um zero localizado em
-kI/kP.
Efectuando o cancelamento do pólo dominante com o zero do controlador, resulta
Peq eq
I
k R Ck
= . A seguinte FTCA é usada na análise da estabilidade,
( )
1
d eq I
d
R kFTCA
s sTγ
=+
(3.58)

68
• Resumo dos Parâmetros usados na análise de estabilidade (Situação A)
0 440 0164 4 kΩ 2 35 mF
0 1 ms =0,16
dI
eq eq
d P
,k ,R , C ,T , k
γ == ⎧⎧⎪⎪ = =⎨⎨⎪⎪ = ⎩⎩
⇒( )
38 720 0001 1
,FTCAs , s
=+
Em seguida, apresenta-se a localização dos pólos e dos zeros da FTCF (Figura 3.25 e Figura
3.26), o diagrama da localização do lugar das raízes (Figura 3.27) e os diagramas de Bode
(amplitude e de fase), na Figura 3.28.
Figura 3.25 – Representação sem escala da localização dos 3 pólos e do zero da FTCF.
O pólo 1 está relacionado com o atraso da corrente id em relação a idref , o pólo 2 corresponde
ao pólo do controlador PI . O pólo 3 é o dominante do sistema, 1
e q eqR C⎛ ⎞
−⎜ ⎟⎜ ⎟⎝ ⎠
e coincidente com
o zero do controlador PI, I
P
kk
⎛ ⎞−⎜ ⎟
⎝ ⎠.
a) Zoom da localização do pólo 1 b) Zoom da localização dos pólos 2,3 e do zero
Figura 3.26 – Localização dos 3 pólos e do zero da FTCF, utilizando função pzmap do Matlab.

69
Figura 3.27 – Diagrama do lugar das raízes da FTCA.
Pela evolução do gráfico (k>0) da Figura 3.27, conclui-se que o sistema é estável para
qualquer valor de k, considerando válida a aproximação (3.50).
Figura 3.28 – Diagrama de Bode para a situação A.
Pelos indicadores da margem de Ganho (Gm=∞) e da margem de fase (Pm=89,8) conclui-se
também que o sistema é estável. Para o sistema apresentar grande margem de estabilidade, a
margem de fase Pm, deveria estar compreendida entre 30 e 60º e a margem de ganho Gm>6db.

70
Capítulo 4 – Simulação, Implementação e Resultados Experimentais
4.1 – Simulação
A simulação de todo o sistema foi feita usando a ferramenta Simulink do programa Matlab.
Para facilitar a manipulação do elevado número de variáveis que este sistema apresenta e para
modificar, de uma forma mais simples, os parâmetros dos vários blocos do sistema (conversor
NPC 3 níveis, rede, carga, controlador), foi elaborado um programa no Matlab com uma
janela de diálogo que se apresenta na Figura 4.1. Este programa permite configurar todo o
sistema de uma forma fácil, memoriza valores de ensaios e permite gerar gráficos
previamente configurados.
Figura 4.1 – Janela de diálogo que permite introduzir os parâmetros do conversor.

71
A lista das variáveis, necessárias para configurar os parâmetros de simulação na janela de
diálogo (programa de simulação em Matlab), é apresentada na Tabela 4.1.
Tabela 4.1 – Lista de variáveis usadas na janela de diálogo no programa de simulação.
VARIÁVEL SIGNIFICADO
Alfa Fase da tensão da rede no instante t=0.
C1; C2 Capacidade dos Condensadores C1 e C2.
ErroAlfa,
ErroBeta
Componentes α e β dos valores que delimitam o intervalo, em torno
do valor de referência, dentro do qual a grandeza controlada está em
modo de deslizamento.
f Frequência da rede.
kI alfa ; kI beta Constante de multiplicação do cálculo das superfícies de deslizamento
conforme definido na lei de controlo.
kP; kI Parâmetros do controlador linear.
RC; LC Resistência e indutância da carga.
R; L Resistência e coeficiente de auto-indução, por fase, ligadas em série
com o conversor.
Rfuga Resistência em paralelo com os condensadores C1 e C2.
Udc Tensão contínua Udc
Us Tensão RMS simples da rede.
A simulação do sistema foi realizada com base no diagrama da Figura 4.2. Neste diagrama,
podemos observar os blocos principais, conversor multinível, rede, carga e blocos de controlo.

72
α βλ ;λ
Figura 4.2 – Diagrama de Comando implementado na Simulação e na Implementação Prática.
Explicação do diagrama:
A partir dos valores instantâneos da corrente da carga (iL1, iL2, iL3) e dos valores das tensões
compostas (u12 e u23), são calculadas as correntes de compensação. O controlo da tensão Udc é
realizado com um controlador linear, PI que estabelece a referência da corrente id. As
referências de corrente em coordenadas dq são transformadas para o referencial αβ e
comparadas com as correntes de saída do conversor (depois da transformação de Concordia).
O sinal de erro destas correntes vai entrar em processos de decisão de modo a seleccionar o
vector adequado. Este vector depois é convertido para 12 saídas digitais de modo a controlar a
abertura ou o fecho dos interruptores do conversor.

73
O sistema modelado no Simulink foi dividido em blocos de forma a tornar fácil a sua análise,
a ter-se acesso a várias grandezas intermédias e facilitar a realização de testes a cada bloco
desenhado.
O método de cálculo usado nas simulações foi Runge-Kutta e o passo de cálculo foi de 10 μs
(passo fixo).
A Figura 4.3 apresenta a estrutura geral do sistema (raiz do programa) onde estão os blocos
principais.
Figura 4.3 – Estrutura geral do sistema simulado.
Os subsistemas mais importantes dos esquemas de Simulink desta estrutura encontram-se no
Anexo 4 deste trabalho.

74
4.2 – Implementação Laboratorial
Com vista a obter resultados experimentais dos vários temas abordados neste trabalho, foi
construído um protótipo de baixa tensão e baixa potência (5kW, 300V). A Figura 4.4
apresenta o esquema de potência do sistema desenvolvido. Basicamente, este protótipo é
composto por um conversor multinível trifásico de três níveis do tipo NPC, que é controlado
por um microprocessador 1104 da DSPACE. Este sistema também inclui uma carga
equilibrada indutiva, uma rede trifásica equilibrada sem neutro. Para interligar estes blocos foi
necessário projectar várias placas de circuito impresso (comando, potência, condicionamento
de sinal, aquisição de sinais, circuitos de disparo, etc).
O diagrama de comando da Figura 4.2 mostra, de forma pormenorizada, as variáveis
necessárias para implementar este trabalho, bem como os blocos de cálculo usados no DSP
(exemplo: o microprocessador gera os sinais de comando para os semicondutores que passam
por uma placa de condicionamento de sinal e por uma placa de circuitos de disparos).
É utilizada uma carga indutiva RL, que devido à sua construção, é possível seleccionar várias
combinações de valores de RC e de LC (exemplo: Bateria resistências 3×10Ω ou 3×20Ω ou
3×30Ω ou 3×6,7Ω, 3 indutâncias de 50mH com tomada a 25mH).
O conversor multinível é constituído por semicondutores de potência, transístores IGBT de
1200V, 50A, díodos anti-paralelo integrados (MG50Q2YS50) e por díodos de ligação ao
neutro (IRKD56/16A). Os condensadores (C1 e C2) são do tipo electrolítico (Alumínio) e têm
uma capacidade de 4,7mF, tendo as indutâncias de interligação com a rede 3×6,92mH
(Siemens).
Das características mais importantes do DSPACE 1004 (http://www.dspace.de), destacam-se
um CPU a 250MHz, painel de controlo com 8 conversores analógicos digitais (são efectuadas
aquisições, de 4 tensões com 1 ADC de 16 bits com multiplexer de 4 canais, e de 4 correntes
com 4 ADC de 12 bits) e 20 saídas digitais I/O (usam-se 12 saídas digitais para os 12 sinais
de comando para os IGBTs). Todos os cálculos, blocos de controlo, tabelas de vectores,
blocos de decisão, são implementados neste microprocessador.

75
Figura 4.4 – Diagrama de Potência do Sistema de Compensação de Energia Reactiva.
Constituição do diagrama
Numa placa de circuito impresso (Placa de Leitura), é realizada a aquisição de 8 grandezas
eléctricas (2 tensões dos condensadores uC1 e uC2, 2 tensões compostas u12 e u23, 2 correntes
na carga iL1 e iL2, 2 correntes do conversor iC1 e iC2). Depois, esta informação é enviada para o
DSP através de 8 cabos com ficha BNC.
No DSP são realizados os cálculos, transformações, escolhas de vectores. Como saída, o
microprocessador gera doze saídas digitais (uma para cada IGBT) num cabo multifilar como
uma ficha DB37. Estes sinais passam por uma placa de condicionamento de sinal (Placa de
comando) e depois terminam em 6 mini placas com os circuitos de disparos dos IGBTs (cada
placa contém 2 circuitos de disparos). As placas com os circuitos de disparos ficam próximas
das portas dos módulos dos IGBTs que, por sua vez, estão incorporados na placa de potência
do conversor multinível (Conversor multinível NPC 3 níveis).
Toda a constituição do protótipo (placas, circuitos eléctricos, fotos) encontra-se descrita no
Anexo 2 deste trabalho.

76
4.3 – Resultados de Simulação e Resultados Experimentais
Os resultados de simulação e experimentais aqui apresentados referem-se essencialmente à
corrente e à tensão simples numa determinada fase, antes e depois da compensação. Mostra-se
também o valor da tensão no barramento contínuo, Udc, e a tensão VCE (tensão entre o colector
e o emissor) num determinado semicondutor (metade da tensão Udc, quando o semicondutor
não conduz).
Ao longo do trabalho foram mostrados já outros resultados experimentais tais como, controlo
de correntes de referência, equilíbrio das tensões nos condensadores, e controlo da tensão
contínua Udc.
O ensaio 1 foi realizado com os seguintes parâmetros: Udc=120V; kP=0,6; histerese h1=±1V;
Passo de cálculo 40μs; Carga (RC=11Ω, LC=25mH, ϕ=35º).
Os objectivos deste ensaio foram, comprovar a compensação de reactiva para uma carga com
um desfasamento de 35º (Figura 4.5), verificar o comportamento da tensão contínua Udc, e
medir a tensão entre o colector e o emissor num determinado interruptor (Figura 4.7).
a) Antes da compensação b) Depois da compensação
Figura 4.5 – Exemplo de compensação de energia reactiva para uma carga RL (ϕ=35º). CH1 –
Corrente na linha 3, IT3 (2A/div); CH2 – Tensão simples na fase 3, Us3 (50V/div); (5ms/div).
Os resultados de simulação referentes ao ensaio 1, Figura 4.6, foram realizados com os
mesmos parâmetros da parte experimental.
CH2 CH2
CH1
CH1

77
a) Antes da compensação b) Depois da compensação
Figura 4.6 – Simulação do ensaio 2. 1) – Corrente na linha 3, IT3 (2A/div); 2) – Tensão simples na
fase 3, Us3 (50V/div).
Os resultados experimentais (Figura 4.5) e de simulação (Figura 4.6) mostram que a corrente
está em fase com a tensão (depois da compensação) e que o valor eficaz da corrente diminui.
Na Figura 4.7 pode-se observar o valor da tensão contínua Udc, ou tensão do barramento, e
confirmar que o valor da tensão que está aplicada a um determinado interruptor (S21) é metade
da tensão Udc.
a) Antes da compensação b) Depois da compensação
Figura 4.7 – a) Tensão contínua Udc (Bus) no ensaio 1. CH2 – Tensão Udc (20V/div); (5ms/div).
b) Tensão VCE do semicondutor S21, CH2 – Tensão Udc (20V/div); (50μs/div).
2
1
2
1

78
No ensaio 2, testou-se a compensação de reactiva com uma carga bastante mais indutiva
(55º). Esta experiência foi realizada com os seguintes valores: Udc=120V; histerese h1=±1V;
kP=0,6; Passo de Cálculo 40μs; Carga (RC=11Ω, LC=50mH, ϕ=55º).
a) Antes da compensação b) Depois da compensação
Figura 4.8 – Exemplo de compensação de energia reactiva para uma carga RL (ϕ=55º). CH1 –
Corrente na linha 3, IT3 (2A/div); CH2 – Tensão simples na fase 3, Us3 (50V/div); (5ms/div).
Os resultados experimentais da Figura 4.8 mostram que o sistema é capaz de colocar a
corrente em fase com a tensão (depois da compensação). No entanto, verifica-se que o
compensador tem mais dificuldades para compensar cargas com desfasamentos elevados e
que a corrente apresenta uma maior distorção em relação ao ensaio anterior (Figura 4.5).
O ensaio 3 consistiu em estudar o comportamento da corrente na linha, quando se passa a
tensão no barramento contínuo, Udc=80V para a tensão de Udc =150V. Neste ensaio, foi
utilizada uma carga com um desfasamento de 36,8º.
Os parâmetros do ensaio 3 foram: Udc=80V e 150V; histerese h1=±1V; kP=0,15; Passo de
Cálculo 37μs; Carga (RC=21Ω, LC=50mH, ϕ=36,8º).
CH2 CH2
CH1
CH1

79
a) Sistema compensado com Udc=80V b) Sistema compensado com Udc=150V
Figura 4.9 – Exemplo de compensação de energia reactiva para uma carga RL (ϕ=36,8º). CH1 –
Corrente na linha 1, IT1 (2A/div); CH2 – Tensão simples na fase 1, Us1 (50V/div); (5ms/div).
Nesta experiência, verifica-se que, aumentando a tensão Udc de 80V para 150V, o sistema de
compensação continua a colocar a corrente em fase com a tensão, aumentando o tremor com o
aumento da tensão contínua. Para voltar a colocar o tremor nos valores anteriores, seria
necessário aumentar o valor do coeficiente de auto-indução da bobina de saída do conversor.
Na segunda parte do ensaio da Figura 4.9b, aumentou-se a tensão simples para o dobro, o que
provocou obviamente um aumento das correntes nas linhas.
CH2 CH1
CH1

80
Capítulo 5 – Conclusões e trabalho futuro
5.1– Conclusões
A principal motivação deste trabalho foi mostrar a viabilidade funcional de um sistema de
compensação de energia reactiva, com potencialidades para ser usado na Média Tensão.
Nestes níveis de tensão, existem problemas para realizar a compensação de reactiva de uma
forma contínua a automática. Por ser necessário desenvolver um sistema que pudesse ser
utilizado com tensões elevadas (kV), utilizou-se um conversor Multinível trifásico de três
níveis, controlado por um processador digital de sinal (DSP).
Realizou-se a modelação e dimensionamento dos elementos do conversor. Desenvolveram-se
sistemas para comandar o conversor e para controlar a energia reactiva. Foi verificada a
eficácia do modo de controlo por deslizamento para controlar as correntes de compensação.
Desenvolveu-se a estratégia para equilibrar a tensão nos condensadores num conversor
multinível de três níveis, sem recurso a meios exteriores e foi feita a simulação do sistema em
estudo.
Foi construído um protótipo laboratorial em escala reduzida (construção compacta com os
vários módulos dos subsistemas interligados em andares), e fizeram-se ensaios experimentais
que serviram para comprovar o estudo efectuado. É possível referir que:
• As técnicas de controlo utilizadas no controlo de corrente são praticamente insensíveis
a variações de carga (robustez) e apresentam desempenhos dinâmicos correctos. Para
cargas com grandes desfasamentos (>50º), o sistema continua a efectuar a
compensação (factor de potência quase unitário), isto é, coloca a corrente em fase com
a tensão, embora a corrente apresente uma distorção superior à que é observada para
cargas com desfasamentos menores.
• O sistema de controlo da tensão contínua e de equilíbrio das tensões nos
condensadores revelou um comportamento de acordo com o especificado
teoricamente.

81
• Os resultados experimentais permitiram validar os resultados de simulação, bem como
os modelos teóricos utilizados na simulação e no controlo.
• O método de determinação das correntes de compensação, teoria da potência
instantânea p-q, revelou-se capaz de satisfazer o objectivo da compensação contínua
de potência reactiva.
• A técnica de controlo desenvolvida permite a sua execução no DSP mais lento da
DSPACE, com taxas de amostragem adequadas às frequências de comutação do
conversor.
• Os conversores multinível controlados por DSP apresentam a possibilidade de fazer a
compensação de potência reactiva em média tensão, pois permitem a compensação
mesmo com frequências de comutação relativamente baixas.
5.2– Propostas de trabalhos futuros
Apresenta-se sugestões para melhorar o trabalho já realizado ou continuar o seu
desenvolvimento:
• Obter resultados experimentais a tensões e correntes mais elevadas e frequências
ligeiramente mais baixas.
• Compensar cargas capacitivas.
• Criar novos circuitos de redução de ruído de amostragem, usando amplificadores de
isolamento óptico.
• Usar filtros LC de acoplamento entre o conversor e a rede para reduzir o ruído
injectado na rede e verificar a influência destes filtros nos algoritmos de controlo.
• Adicionar ao algoritmo existente (compensação de reactiva), a compensação de
harmónicas (filtro activo).
• Modificar o algoritmo de controlo para efectuar compensação de cavas de tensão
(utilizando o mesmo protótipo, com maior capacidade de armazenamento de energia).

82
• Reprogramar (em linguagem C) o algoritmo de controlo, de modo a baixar o passo de
cálculo (processamentos mais rápidos), permitindo o uso de DSP mais económicos ou
de algoritmos de controlo com funções adicionais.
• Utilizar um microprocessador de raiz baixando o preço do protótipo.
• Alterar o conversor de 3 braços de forma a torná-lo um conversor de 4 braços, para
efectuar a compensação de reactiva em sistemas desequilibrados, e consequente
alteração dos algoritmos de controlo.
• Estudar as potencialidades oferecidas por um conversor com maior número de níveis e
compará-lo com os resultados obtidos com o conversor de 3 níveis.

83
Bibliografia
AFONSO, J.; SEPÚLVEDA, M. J.; MARTINS, J. S. – p-q Theory Power Components Calculations. ISIE’2003 – IEEE International Symposium on Industrial Electronics, Rio de Janeiro, Brasil, 9-11 Junho de 2003, ISBN: 0-7803-7912-8.
AKAGI, H.; KANAZAWA, Y.; NABAE, A. – Generalized Theory Of The Instantaneous Reactive Power In Three-Phase Circuits. JIEE-IPEC, pp. 1375-1386, 1983
DUGAN, Roger – Electrical Power Systems Quality. McGraw-Hill, NY 1996. ISBN: 0-07-018031-8 .
ENCARNAÇÃO, L.; SILVA, J. Fernando; SOARES, V. – Reactive Power Compensation Using Sliding-Mode Controlled Three-Phase Multilevel Converters. 12th International Conference on Harmonics and Quality of Power – ICHQP 2006 Cascais, Portugal.
GAO W.; HUNG, J. – Variable Structure Control: A Survey. IEEE Transactions on Industrial Electronics, vol. 40, no. 1, pp. 2-22, February 1993.
GRADY, W. Mack; GILLESKIE, Robert J. – Harmonics And How They Relate To Power Factor. In Proceedings of the EPRI, Power Quality Issues and Opportunities Conference - PQA’93, San Diego C. A., November 1993.
HINGORANI, N.G. – High Power Electronics And Flexible AC Transmission System. IEEE, Power Engineering Review, Vol. 8, Issue7, pp. 3-4, ISSN: 0272-1724, July 1988b.
HINGORANI, N.G. – Power Electronics In Electric Utilities: Role Of Power Electronics In Future Power Systems. In Proceedings of the IEEE, Vol. 76, Issue4, pp. 481-482, ISSN: 0018-9219, April 1988a.
LIU, H. L; CHOI, N. S.; CHO, G.H. – DSP Based Space Vector PWM For Three-Level Inverter With DC-Link Voltage Balancing. Industrial Electronics, Control an Instrumentation – IECON 1991 Kobe, Japan. vol. 1, pág. 197-203, ISSN 0-87942-688-8.
OGATA, K. – Engenharia de Controlo Moderno. Prentice-Hall 2003. ISBN: 8587918230.
PAIVA, J. P. Sucena – Redes de Energia Eléctrica. IST Press, 2005. ISBN: 9728469349.

84
SANKARAN, C. - Power Quality. CRC Press, 2002. ISBN: 0-8493-1040-7.
SANTANA, J. J. Esteves; LABRIQUE, F. – Electrónica de Potência. Fundação Calouste Gulbenkian, Lisboa 1991. ISBN: 972-31-0534-9.
SILVA, J. Fernando – Control Methods For Power Converters, capítulo 19, pp 431-486, do Power Electronics Handbook, Editor M.H. Rashid, Academic Press, 895pp, ISBN: 0-12-581650-2, USA, 2001.
SILVA, J. Fernando – Electrónica Industrial. Fundação Calouste Gulbenkian, Lisboa 1998. ISBN: 972-31-0801-1.
SILVA, J. Fernando – Sliding Mode Control Design Of Drive And Regulation Electronics For Power Converters. Special Issue on Power Electronics of Journal on Circuits, Systems and Computers, vol. 5, no. 3, pp. 355-371, September 1995.
SILVA, J. Fernando – Sliding Mode Control Of Multilevel Power Converters. Special Session, Sliding Mode Control in Power Electronics, Proc. EPE/IEEE-PEMC’2000 Conference, ISBN 80-88922-18-6, Kosice, Slovakia, Setembro 2000.
SILVA, J. Fernando [et tal.] – Advanced Control Methods For Power Electronic Systems. Special issue on Modelling and simulation of Electrical Machines, Converters and Systems, IMACS, vol 63, 3-5, pp 281-295, Nov 2003, ISSN 0378-4754.
SILVA, N. Moreira, – Controlo das Potências Activa e Reactiva Fornecidas à Rede Eléctrica por Conversores CC/CA fontes de Tensão. Tese de Mestrado, 2004.
SOARES, V. – Filtro Activo de Potência baseado no Método da Corrente Activa e Reactiva Instantânea id-iq. Tese de Mestrado, 1997.
SOARES, V. – Filtros Activos de Potência – Metodologias de Controlo e Implementação Digital. Tese de Doutoramento, 2005.
SOARES, V.; VERDELHO, P.; MARQUES, G. – Active Power Filter Control Circuit Based On The Instantaneous Active And Reactive Current id-iq Method. PESC’97 “28th Annual IEEE Power Electronics Specialists Conference”, vol. 2, pág. 1096-1101, 1997.
SOARES, V.; VERDELHO, P.; MARQUES, G. – An Instantaneous Active And Reactive Current Component Method For Active Filters. IEEE Transactions on Power Electronics; vol. 15, n.º 4, pp. 660-669, July, 2000.

85
UTKIN, V. – Sliding Mode Control Design Principles And Applications To Electric Drives. IEEE Transactions on Industrial Electronics, vol. 40, no. 1, pp. 23-26, February 1993.
WATANABE, E. H.; AREDES, M. – Teoria de Potência Ativa e Reativa Instantânea e Aplicações – Filtros Activos e Facts. Tutorial publicado no CBA’1998, XII Congresso Brasileiro de Automática, mini curso pp. 81-122, Uberlândia, MG, Setembro.
Documentos da Internet:
Aquisição e recepção de energia eléctrica. Consultado em 10 de Março de 2006. http://www.aeportugal.pt/inicio.asp?Pagina=/Areas/AmbienteEnergia/EnergiaElectrica Efeitos da energia reactiva nas redes eléctricas. Consultado em 4 de Dezembro de 2006. http://www.edp.pt/EDPI/Internet/PT/Group/Clients/Energy_services/Reactive_energy FEUP, “FACTS e a Estabilidade – Dinâmica e Estabilidade de Sistemas Eléctricos”. Consultado em 15 de Fevereiro de 2006. http://paginas.fe.up.pt/~fmb/DESE/Trabalhos/FACTS%20%20e%20Estabilidade.pdf IEEE Std 1459-2000, “IEEE Trial-Use Standard Definitions for the Measurement of Electric Power Quantities Under Sinusoidal, Nonsinusoidal, Balanced, Or Unbalanced Conditions”. Consultado em 10 de Janeiro de 2005. http://ieeexplore.ieee.org/iel5/7738/21240/00985671.pdf?arnumber=985671 O impacto dos problemas de qualidade da energia em instalações eléctricas (Ciclo palestra Ordem Engenheiros 2001). Consultado em 30 de Novembro de 2005. http://www.qenergia.pt/pdf/perturbacoes.pdf Silva, J. Fernando – Conversão Multinível em Electrónica de Potência. Dezembro 2001. Consultado em 25 de Agosto de 2005. http://alfa.ist.utl.pt/~elregcom/CEP_26_9_01.pdf (sujeito a password) Tarifário 2007 (ERSE). Consultado em 15 de Fevereiro de 2007. http://www.erse.pt/vpt/entrada/electricidade/tarifaseprecos/tarifasanuaisem2007 Universidade do Minho, “Implementação de um Filtro Activo de Potência para Optimização da Interface entre a Rede e outros Sistemas Eléctricos”. Consultado em 3 de Janeiro de 2006. https://repositorium.sdum.uminho.pt/bitstream/1822/835/15/TeseCapitulo2.pdf

ANEXOS
86

Anexo 1 - Modelos do Conversor em coordenadas αβ e em
dq
Neste anexo, apresentam-se em detalhe os modelos do conversor no espaço de estados em
coordenadas αβ e nas coordenadas dq.
O modelo do conversor multinível no espaço de estados em coordenadas αβ é obtido com
base na aplicação da transformação de Concordia ao modelo de espaço de estados em
coordenadas 123 (Capitulo 2.3.1).
A obtenção do modelo em coordenadas dq é feita aplicando a transformação de Park ao
modelo em coordenadas αβ.
Modelo do conversor em espaço de estados em coordenadas αβ
Nesta secção, elabora-se o modelo do conversor no sistema de coordenadas αβ, ou seja,
procede-se à transformação do modelo em que as tensões e correntes constituem um sistema
trifásico para um outro modelo em que essas grandezas são representadas num sistema
bifásico equivalente. Esta transformação é chamada transformação de Concordia.
A transformação de Concordia consiste na aplicação das relações (A1.2) ou (A1.3), em que
Cαβ é normalmente designada por matriz de transformação, e é dada por (A1.1):
12 1 023
1 3 12 2 21 3 12 2 2
-
- -
αβ
⎡ ⎤⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
C
(A1.1)
As relações entre grandezas de um sistema trifásico em coordenadas 123 e do sistema bifásico
equivalente em coordenadas αβ são as seguintes:
123 αβ αβ=X C X (A1.2)
87

(A1.3) T123 αβ αβ=X C X
ou, considerando a componente homopolar,
, (A1.4) [T T11 2 3oX X X X X X−
α β αβ⎡ ⎤ =⎣ ⎦ C ]
T1−αβ αβ=C C é uma matriz ortogonal, denominada matriz de Concordia:
1 T1 12 12 233 30
2 21 1 12 2 2
- -
-
−αβ αβ
⎡ ⎤== ⎢ ⎥
⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
C C
(A1.5)
Em coordenadas 123, o modelo do conversor pode ser representado em notação matricial
condensada por:
123 123 123123 123
ddt
= +R 1X X uL L
(A1.6)
Usando a relação (A1.3):
123 123
ddt αβ αβ αβ αβ αβ αβ= +
R 1C X C X C uL L
(A1.7)
Para resolver a equação em ordem a αβX , multiplica-se à esquerda ambos os lados da equação
(A1.7), por : TCαβ
T T T
123 123
ddtαβ αβ αβ αβ αβ αβ αβ αβ αβ= +
R 1C C X C C X C C uL L
(A1.8)
Como resultado, tem-se:
ddt αβ αβ
αβ αβ= +
R 1X XL L αβu (A1.9)
88

Em que:
T
123
T
123
αβ ααβ
β
αβ ααβ
⎧ =⎪⎪⎨⎪ =⎪⎩
R RC CL L
1 1C CL L β
(A1.10)
Após a realização destas operações matriciais, obteve-se os seguintes resultados:
αβ→
RL
O produto das três matrizes dá origem a uma matriz de ordem [5×5], em que se
suprime a linha e a coluna que diz respeito à componente homopolar visto o sistema não ter
neutro acessível (Linha 3 e Coluna 3), resultando uma matriz de ordem [4x4]:
1 2
1 2
11
1 1
22
2 2
0
0
0 0
0 0
R-L L L
R-L L L
- -C C
- -C C
α α
αβ
β β
βα
βα
Γ Γ⎡ ⎤= ⎢ ⎥⎢ ⎥
Γ Γ⎢ ⎥⎢ ⎥⎢ ⎥ΓΓ⎢ ⎥⎢ ⎥⎢ ⎥ΓΓ⎢ ⎥⎢ ⎥⎣ ⎦
RL
(A1.11)
em que ,
( )
( )
( )
( )
1 11 12
2 21 22
1 12 13
2 22 23
1 3 23 21 3 23 21212
- -
- -
-
-
α
α
β
β
⎧Γ = Γ Γ Γ⎪⎪⎪Γ = Γ Γ Γ⎪⎪⎨⎪Γ = Γ Γ⎪⎪⎪Γ = Γ Γ⎪⎩
13
23. (A1.12)
αβ
1L
→ O produto das três matrizes origina uma matriz de ordem [5x4] que, depois de
suprimida a linha e a coluna respeitante à componente homopolar, por se tratar de um sistema
equilibrado (Linha 3 e Coluna 3), resulta numa matriz de ordem [4x3]:
89

1
2
1 0 0
10 0
10 0
10 0
-L
-L
C
C
αβ
⎡ ⎤= ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
1L
(A1.13)
Colocando o modelo comutado no espaço de estados na forma x= , ou seja,
substituindo a notação matricial da equação
Ax+Bu
(A1.9) pelo seu conteúdo, obtém-se o modelo do
Conversor no Espaço de Estados, em coordenadas αβ dado por (A1.14).
1 2
1 2
1 1 0
2 211
11 1
22
22 2
1d 0 0 0d
10 0 0
10 00 0
10 00 0
S
S
C C
C C
Ri i uLL L Lt i i uR
U U iLL L LU U
CC C
CC C
α ααα α
ββ ββ β
βα
βα
Γ Γ ⎡ ⎤⎡ ⎤ − ⎡ ⎤⎡ ⎤ −= ⎡ ⎤ + ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥Γ Γ ⎢ ⎥⎢ ⎥ −− ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥Γ⎣ ⎦ ⎣ ⎦Γ ⎢ ⎥⎢ ⎥− −⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ΓΓ ⎢ ⎥⎢ ⎥− − ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦
⎥ (A1.14)
90

Modelo do conversor em espaço de estados e coordenadas dq
Na segunda parte deste anexo, obtém-se um modelo invariante no tempo. Para isso, é
necessário aplicar a transformação de Park, ao modelo do conversor multinível em
coordenadas αβ.
A transformação de Park é obtida através das relações (A1.16) ou (A1.17), em que a matriz
Cdq é dada por (A1.15):
cos ω -sen ω=sen ω cos ω
dq t tt t
⎡ ⎤⎢ ⎥⎣ ⎦
C, (A1.15)
Ou
cos θ -sen θ=
sen θ cos θCdq
⎡ ⎤⎢ ⎥⎣ ⎦
.
Considera-se o Ângulo de Park, θ=ω Pt +ϕ , em que ϕP é o valor inicial deste ângulo.
As relações entre transformações de grandezas num referencial αβ e um referencial dq são
(A1.16) dq dqαβ =X C X
1X C Xdq dq−
αβ= (A1.17)
1 T=dq dq−C C é uma matriz ortogonal, e é expressa por (fazendo ϕP=0) :
1 cos ω sen ω=
-sen ω cos ωdq t t
t t
− ⎡ ⎤⎢ ⎥⎣ ⎦
C. (A1.18)
Aplicando a transformação de Park ao modelo comutado do conversor no espaço de estados
em coordenadas αβ, obtido anteriormente pela equação (A1.9), resulta a relação (A1.19):
dd dq dq dq dq dq dqt αβ αβ
= +R 1C X C X C uL L
(A1.19)
Resolvendo o termo mais à esquerda da equação (A1.19), obtêm-se:
91

dd ddq dq dq dqt t
⎛ ⎞ ⎛+⎜ ⎟ ⎜⎝ ⎠ ⎝
C X C Xd ⎞⎟⎠
(A1.20)
De modo a ser possível o produto e soma das várias matrizes, é necessário aumentar a matriz
Cdq que passa de uma matriz de ordem [2×2] para uma matriz de ordem [4×4], como a seguir
se indica:
Desenvolvendo e substituindo o valor das várias matrizes, resulta
1 1
2 2
-ωsen ω -ωcos ω 0 0 cos ω -sen ω 0 0 dωcos ω -ωsen ω 0 0 sen ω cos ω 0 0 d
0 0 0 0 0 0 1 00 0 0 0 0 0 0 1
d d
q q
C C
C C
i it t t ti it t t t t
U UU U
⎡ ⎤ ⎡⎡ ⎤ ⎡+ ⎤⎤⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥⎥⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥⎥⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥⎥⎢ ⎥ ⎢⎢ ⎥ ⎢
⎣ ⎦ ⎣⎥⎥
⎦⎣ ⎦ ⎣ ⎦
(A1.21)
Designando por W a matriz mais à esquerda de (A1.21), e substituindo em (A1.19), resulta a
equação (A1.22):
d ddq dq dq dq dq dq dqt αβ αβ
+ = +R 1W X C X C X C uL L
. (A1.22)
Ajustando esta equação matricial de modo a ficar na forma : x=Ax+Bu
d ddq dq dq dq dq dq dq-t αβ αβ
⎛ ⎞= +⎜ ⎟⎝ ⎠
R 1C X C X W X C uL L
(A1.23)
Desenvolvendo o 2º termo de (A1.23), dq dq dq-αβ
R C X W XL
, resulta (A1.24):
1 2
1 2
1 11 1
1 2 1 1
2 22 2
2 2 2 2
- cos ωt+ωsen ω sen ω +ωcos ω
- sen ω -ωcos ω - cos ω +ωsen ω
- cos ω - sen ω sen ω - cos ω 0 0
- cos ω - sen ω sen ω - cos ω 0 0
R Rt t tL L LR Rt t t tL L L
t t t tC C C C
t t t tC C C C
α α
β β
β βα α
β βα α
Γ Γ⎡ ⎤⎢ ⎥⎢ ⎥
Γ Γ⎢ ⎥⎢ ⎥⎢ ⎥Γ ΓΓ Γ⎢⎢⎢ Γ ΓΓ Γ⎢⎢⎣ ⎦
1
2
d
q
C
C
ii
UU
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢⎣⎥⎥⎥⎥⎥
L
L ⎥⎦ (A1.24)
Atribuindo o nome de F à equação (A1.24), e substituindo na equação (A1.23), resulta:
92

dddq dq dq dqt αβ
= +1C X F C uL
(A1.25)
Multiplicando ambos os lados da equação (A1.25) pela matriz : TdqC
d +ddq dq dq dq dq dq dqt αβ
=T T T 1C C X C F C C uL
. (A1.26)
O produto das 2 matrizes do lado esquerdo da equação (A1.26), tem como resultado a matriz
identidade. Resolvendo o 2º termo de (A1.26), obtêm-se (A1.27). Nesta operação matemática,
de modo a ser possível a multiplicação de matrizes, a matriz teve de ser aumentada,
passando da ordem [2×2] para ordem [4×4].
TCdq
T 1 2
1 21
211
1 1
22
2 2
0 0
0 0
d d ddq dqdq
qq q
C
Cqd
qd
R i-L L L i
R- - UL L L
U- -
C C
- -C C
Γ Γ⎡ ⎤ ⎡ ⎤= = ω⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥Γ Γ⎢ ⎥ ⎢ ⎥ω⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦ΓΓ⎢ ⎥⎢ ⎥⎢ ⎥ΓΓ⎢ ⎥⎢ ⎥⎣ ⎦
RC F XL
, (A1.27)
onde:
. (A1.28)
1 1α 1β
2 2α 2β
1 1α 1β
2 2α 2β
Γ =Γ cos ω + Γ sen ωΓ =Γ cos ω + Γ sen ωΓ =-Γ sen ω + Γ cos ωΓ =-Γ sen ω + Γ cos ω
d
d
q
q
t tt ttt t
⎧⎪⎪⎨⎪⎪⎩
t
Desenvolvendo o 3º termo de (A1.26), resulta (A1.29). De modo a ser possível realizar estas
multiplicações de matrizes, a matriz teve de ser aumentada, passando esta a ter a ordem
[4×4]; a matriz
TdqC
αβ
1L
a ordem [4×3] e por fim a matriz a ordem [3x3]. dqC
93

T
αβ
0
1
2
1= = 0 0
10 0 10 0
10 0
Sddq dq dq dqdq
Sq
u-L u
- iL
C
C
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
1 1C C u uL L
(A1.29)
Agrupando as várias matrizes calculadas na forma matricial : x=Ax+Bu
dd dq dq dq
dq dq= +
tR 1X XL L
u (A1.30)
Substituindo as matrizes de (A1.30) pelo seu conteúdo obtêm-se (A1.31), ou seja, o modelo
do conversor em espaço de estados em coordenadas dq.
1 2
1 21 1 0
2 211
11 1
22
22 2
1d 0 0d
10 0
10 00 0
10 00 0
d dd d Sd
q q Sqq q
C C
C Cqd
qd
Ri i u--LL L Lt i i u
R -- -U U iLL L LU U
- - CC C
- - CC C
Γ Γ ⎡ ⎤⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ω += ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥Γ Γ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ω ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦ΓΓ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ΓΓ ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦⎢ ⎥⎣ ⎦
⎤
⎣ ⎦ (A1.31)
94

Anexo 2 – Constituição do Protótipo
Neste anexo é apresentado a constituição do protótipo construído, ou seja, os esquemas
eléctricos das várias placas, esquemas de circuito impresso e fotografias.
Na Figura A2.1, pode-se observar a ligação das várias placas construídas que permitem ter o
sistema de compensação de reactiva a funcionar.
Figura A2.1 – Diagrama de blocos do protótipo implementado.
Circuito de potência do Conversor Multinível – (Placa 1)
Função da Placa: Implementação do circuito de potência do conversor multinível. Por baixo
da placa onde estão colocados os módulos dos IGBT’s e dos díodos de potência, foi colocado
um dissipador. Por cima desta placa foram colocados vários pilares que suportam a placa de
comando e de leituras das grandezas eléctricas (tensões e correntes).
Este PCB também permite que sejam colocadas as 6 placas com os circuitos de comando para
os IGBT’s (circuitos de disparo).
95

Figura A2.2 – Fotografia do Circuito de Potência do Conversor Multinível.
Figura A2.3 – Circuito Potência do Conversor Multinível – camada inferior (Bottom).
Figura A2.4 – Circuito Potência do Conversor Multinível – camada Superior (Top).
Dimensões da placa: Tamanho A4 (29,5×21) cm; Quantidade: 1
96

Circuito de inibição e geração de tempos mortos – (Placa 2)
Função da Placa: Implementação de um circuito de geração de tempos mortos dos sinais de
comando (ton), e circuito de inibição manual das 12 saídas digitais.
12 SAÍDAS DIGITAIS Condicionamento
Sinal
DSP OUT
U3A74HCT14N
U2A74HCT08E
C110nF
1N4148D1
U1A74HCT04E
S1
D2LED0
5 V
Placa 3
R1120K
R4120R
R2120R
R3420R
Figura A2.5 – Esquema eléctrico do circuito de inibição e geração de tempos mortos dos sinais
digitais.
Figura A2.6 – Fotografia do circuito de inibição e geração de tempos mortos do Conversor Multinível.
97

Figura A2.7 – Circuito de inibição e geração de tempos mortos do Conversor Multinível – camada
inferior Bottom).
Figura A2.8 – Circuito de inibição e geração de tempos mortos do Conversor Multinível – camada
superior (Top).
Dimensões da placa: (14,5×13) cm; Quantidade: 1
98

1
2
Figura A2.9 – Resultado experimental do tempo morto imposto de 1μs aos sinais de comando do
IGBT’s (ton). 1) – Sinal de comando do DSP; 2) – Sinal de comando com atraso de 1μs (placa 2).
Escala vertical 1V/div; (1μs/div).
99

Circuito de comando e amostragem das tensões e correntes – (Placa 3)
Função da Placa: A placa 3, apesar de ser fisicamente uma só, em termos de funções, está
dividida em duas (Placa 3A e Placa 3B). Na placa 3A, é efectuado o condicionamento dos 12
sinais digitais do DSP (Hexabuffer). Na Placa 3B, é efectuada a interligação do conversor
com a rede e com a carga (ligação em T). É também efectuada a amostragem e filtragem das 8
entradas analógicas do DSP (4 tensões e 4 correntes).
8 EntradasAnalógicas do DSP (8ADC)
8 LEMS(4 TENSÕES E 4 CORRENTES)
12 SinaisPlaca Atraso e inibição
6 Placa dos Drivers
Placa 2
U4A74LS07
5 V
Drivers
LEMJ1
C2100nF
D3BZV85-C12
D6BZV85-C12
R5270R
R8200R
R71K5
R110k
Figura A2.10 – Esquema Eléctrico do circuito de comando e amostragem das tensões e correntes.
No esquema inferior da Figura A2.10, observa-se um conjunto de valores do filtro RC
(R7=1,5kΩ e C2=100nF). No entanto, estes valores diferem de acordo com o tipo da grandeza
eléctrica a amostrar (tensão ou corrente). Em seguida, apresenta-se um quadro resumo com
estes valores de dimensionamento.
100

Tabela A2.1 – Valores dos filtros (malha RC) usados na placa de amostragem.
Saída analógica para DSP
Nome da variável
(4 correntes e 4 tensões)
Resistência do Filtro, R7
(Ω)
Capacidade do Filtro, C2
(μF)
Frequência de corte (kHz)
1 e 4 ICONV2 e ICONV1 330 0,01 48,23
2 e 3 ICARGA1 e ICARGA2 150 0,1 10,61
5, 6, 7 e 8 U23, U12, UC2 e UC1 1500 0,1 1,06
Figura A2.11 – Fotografia do Circuito de Comando do Conversor Multinível.
101

Figura A2.12 – Circuito Comando do Conversor Multinível – camada inferior (Bottom).
Figura A2.13 – Circuito Comando do Conversor Multinível – camada Superior (Top).
Dimensões da placa: Tamanho A4 (29,5×21) cm; Quantidade: 1
102

Circuitos de disparo dos IGBT’s – (Placa 4)
Função da Placa: Circuitos de disparo dos IGBT’s (cada placa comanda 2 IGBT’s, ou seja,
um módulo). Isolamento óptico. Protecção das gates dos IGBT’s. Condicionamento do sinal
de comando.
Condicionamento Sinal CONVERSOR
(12 IGBT's)GND2 Flutuante
FONTEISOLADA
Placa 3
U5HCPL-J312
GND1
GND2 Flutuante
D5BZT03-C18
D4BZT03-C18
Q1MG50Q2YS50
R615R
Figura A2.14 – Esquema Eléctrico do circuito de comando dos IGBT’s (circuitos de disparo).
Figura A2.15 – Fotografia da Implementação do circuito de comando dos IGBT´s (circuitos de
disparo).
103

a) Circuito de disparo de 2 IGBT´s –
camada inferior (Bottom).
b) Circuito de disparo de 2 IGBT´s –
camada superior (Top).
Dimensões da placa: (4,5×5) cm ; Quantidade: 6
Fotografias gerais do sistema de compensação de reactiva implementado
Figura A2.16 – Sistema de compensação de Energia Reactiva (Conversor, DSP, Carga).
104

Figura A2.17 – Conversor Multinível mostrando as placas de comando e de amostragem.
Figura A2.18 – Carga RL do Sistema de compensação.
105

Anexo 3 – Determinação do ângulo de Park, θ.
Devido ao facto de ser necessário efectuar transformações de Park para o cálculo de correntes
de compensação (correntes de referência), é necessário calcular a posição angular da rede
eléctrica. Existem diversas formas de obter o valor do ângulo θ (exemplo: uarctg
uβ
αθ = ), e
métodos de sincronização vectoriais (exemplo: Fluxo magnético virtual). Porém, alguns
destes métodos requerem uma grande carga computacional. Outros métodos podem conduzir
a erros devido à passagem por zero no denominador, e a utilização da função arctg pode não
indicar correctamente o valor do ângulo devido à não identificação correcta do quadrante.
O método utilizado neste trabalho foi desenvolvido por Verdelho e Soares (1997), e consiste
em criar um sincronizador adaptado através da aquisição dos valores das tensões simples, que
depois são transformadas em uα e uβ através da transformação de Concordia. Depois desta
transformação, é feita uma filtragem (filtro passa-baixo) a uα e uβ, de modo a reduzir a
existência de ruído das tensões da rede (na implementação prática esta filtragem foi efectuada
antes da transformação 123 → αβ). Com o cálculo do módulo de u, que corresponde à soma
vectorial de uα com uβ, é possível obter o valor de cosθ e de sinθ do modo em que é
apresentado no diagrama abaixo.
Este processo permite efectuar a transformação de referencial estático α, β para o referencial
síncrono d,q sem efectuar o cálculo de funções trigonométricas, as quais requerem um tempo
de processamento muito mais elevado.
2 2U U Uα β= +
UUβ
UUα
Figura A3.1 – Sincronizador vectorial baseado na tensão da rede eléctrica.
106

U
Figura A3.2 – Representação vectorial da tensão nos referenciais αβ e dq.
107

Anexo 4 – Esquemas do Matlab/Simulink usados na Simulação
Neste anexo, encontram-se os esquemas dos subsistemas considerados mais importantes, com
base na raiz do esquema principal da Figura A4.1.
Figura A4.1 – Estrutura geral do sistema simulado.
Bloco Rede Trifásica
Figura A4.2 – Passagem de tensões compostas para simples.
108

Bloco Conversor Multinível
No bloco Conversor Multinível são implementadas as equações do modelo do conversor. De
forma a tornar a análise mais fácil e ter-se acesso a algumas variáveis intermédias, o modelo
foi dividido em vários subsistemas.
3Uc12
2Udc
1i 123
UC1
UC2
EK
Us
iK
SubSistema 3
T1K
T2k
correntes
UC1
UC2
SubSistema 2
Gama 1
Gama 2
Gama 3
T1K
T2K
EK
SubSistema 1
em
i123
Udci123 io
Correntes ik
2Gamas
1Us
Uc2
Uc1
Figura A4.3 – Constituição do Bloco do Conversor Multinível (3 Subsistemas).
SUBSISTEMA 1 do Bloco Conversor Multinível
Figura A4.4 – Subsistema 1 do Bloco do Conversor.
109

• BLOCO Matrizes Psi Grande (Ξ)
E11
E21
E31
E12
E22
E32
1EK
2
Gain9
1/3
Gain8
2
Gain7
1/3
Gain6
2
Gain5
1/3
Gain4
2
Gain3 1/3
Gain2
2
Gain11
1/3
Gain10
2
Gain1 1/3
Gain
em
em
em
em
em
em
2T2K
1T1K
Figura A4.5 – Bloco da Matriz Ξ , do Subsistema 1 do Bloco do Conversor.
SUBSISTEMA 2 do Bloco Conversor Multinível
Figura A4.6 – Subsistema 2 do Bloco do Conversor.
110

SUBSISTEMA 3 do Bloco Conversor Multinível
Figura A4.7 – Subsistema 3 do Bloco do Conversor.
Bloco Comutação e Controlo Não Linear
Figura A4.8 – Esquema geral do Bloco Comutação e Controlo Não Linear. 111

SUBSISTEMA do Bloco Comutação e Controlo Não Linear - LEI DE COMUTAÇÃO
2
Lbda be ta
1
Lbda a l fa
du/d t
di /d t2
du/d t
di /d t1
Satura tion1
Satura tion
Relay3
Relay2
Relay1
Relay
Product1
Product
M em ory1
M em ory
1/2
Gain1
1/2
Gain
2
e ia l fa
1
e ibeta
Figura A4.9 – Determinação dos valores de λα e λβ em função do erro e da derivada da corrente.
SUBSISTEMA do Bloco Comutação e Controlo não Linear – ESCOLHA DO VECTOR
Figura A4.10 – Escolha do vector a aplicar ao conversor.
112

• BLOCO Cálculo de In
Figura A4.11 – Cálculo da corrente In.
Bloco Controlo Linear
No Bloco Controlo é efectuado o controlo linear da tensão Udc e o controlo por modo de
deslizamento das correntes do conversor.
Figura A4.12 – Bloco Controlo.
113

SUBSISTEMA do Bloco Controlo linear – BLOCO PI
Figura A4.13 – Bloco do Controlador Proporcional – Integral.
O “Erro Udc” é positivo quando a tensão Udc é menor que a tensão Udc ref, ou seja, o erro é
positivo quando é necessário carregar os condensadores para elevar a tensão. A corrente id
está definida como positiva no sentido conversor-rede, ou seja, quando descarrega os
condensadores. Daí a necessidade de se colocar um ganho de -1 à saída do controlador.
Bloco Correntes de Compensação
Figura A4.14 – Bloco de cálculo da componente em quadratura da corrente de compensação.
114

Anexo 5 – Esquemas do Matlab/Simulink usados no DSP
Figura A5.1 – Raiz do programa.
Figura A5.2 – Bloco I (compensação).
115

Figura A5.3 – Bloco Controlo.
Figura A5.4 – Bloco derivada.
116