Embed Size (px)
Citation preview

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
SEMINARIO DE TITULACIÓN:
“AUTOMATIZACIÓN INDUSTRIAL Y SUS TECNOLOGIAS¨
LLENADORA DE GARRAFONES”
TESINA
PARA OBTENER EL TÍTULO DE:
INGENIERO MECANICO CRUZ GALICIA LEOBARDO
INGENIERO EN ELECTRONICA
RODRIGUEZ RETANA LUIS ENRIQUE
MÉXICO D.F. A 14 DE JUNIO DE 2008

IPN
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD CULHUACAN
TESINA QUE PARA OBTENER EL TITULO DE: INGENIERO MECÁNICO POR LA OPCION DE TITULACIÓN: AUTOMATIZACIÓN INDUSTRIAL Y SUS TECNOLOGÍAS DEBERÁ DESARROLLAR: LEOBARDO CRUZ GALICIA
LUIS ENRIQUE RODRÍGUEZ RETENA
“LLENADORA DE GARRAFONES”
I. MARCO TEÓRICO
II. DESCRIPCIÓN DEL PROBLEMA
III. DESARROLLO DEL PROYECTO
IV. PROGRAMAS DE PLC
México D.F. a 14 de junio de 2008 ING. EZEQUIEL A. SANTILLÁN LECHUGA ING. FERNANDO MORALES GARCÍA Director del Seminario l Asesor
ING. MAGDALENO VÁZQUEZ RODRÍGUEZ
Jefe de carrera de Ingeniería Mecánica

Introducción 1 Justificación 2
Capitulo I Marco Teórico 1.1 Historia de la automatización 3 1.2 Conceptos básicos 4 1.2.1 Fluido 41.2.2 Propiedades particulares de los líquidos 41.2.3 Propiedades de los gases 4 1.2.4 Densidad absoluto 51.2.5 Peso especifico 51.2.6 Presión 51.2.7 Principio de pascal 51.2.8 Prensa hidráulica 51.2.9 Presión atmosférica 6 1.2.10 Experimento de torricelli 61.2.11 Barómetro 71.2.12 Manómetro 71.2.13 Flujo estacionario y turbulento 81.2.14 Tubo de pitot 81.2.15 Caudal 8 1.2.16 Potencia 81.2.17 Potencia hidráulica 9 1.2.18 Cupla 9 1.2.19 Cavitación 91.2.20 Sistema hidráulico 9 1.2.21 Bomba 9 1.2.22 Bomba de desplazamiento positivo 9 1.2.23 Bombas con desplazamiento no positivo 10 1.2.24 Actuadores hidráulicos 101.2.25 Depósitos 101.2.26 Válvulas 101.2.26.1 Válvulas antirretorno 101.2.26.2 Válvula de alivio 101.2.26.3 Válvula reguladora de caudal 111.2.26.4 Válvula de distribución 111.2.27 Conductor 111.2.28 Compresores 11 1.3 Elementos de una instalación automatizada 11 1.3.1 Maquinas 111.3.2 Accionadores 111.3.3 Preaccionadores 111.3.4 Captadores 121.3.5 Elementos de dialogo humano-maquina 121.3.6 Elementos de mando 121.3.7 Sensores y actuadores 121.3.7.1 Sensores análogos 12 1.3.7.2 Sensor todo o nada 121.3.7.3 Sensores numéricos (encoders) 121.3.7.4 Sensores de proximidad inductivos 121.3.7.5 Sensores de proximidad capacitivos 131.3.7.6 Sensores ultrasónicos 131.3.7.7 Sensores fotoelectrónicos 131.3.8 Electroválvulas 13

Capitulo II Descripción del problema 2.1 Descripción del problema 142.2 Selección del garrafón a llenar 142.3 Lavado externo e interno del envase 142.4 Lavado externo e interno del envase con químicos 152.5 Primer enjuague 162.6 Segundo enjuague 172.7 Colocación del envase limpio hacia la parte de llenado 172.8 Llenado del envase en forma manual 182.9 Tapado del envase 192.10 Colocación del sello termoencojible 192.11 Paso del envase por el túnel de calor 192.12 Codificado 19Tabla III Caracteristicas de las bombas, motores y resistencia 20Tabla IV Valvulas y accesorios 21Diagrama de procesos 22
Capitulo III Desarrollo del proyecto Propuesta del proyecto 23Tabla I Elementos de control a utilizar 27Tabla I Elementos neumaticos a utilizar 28Lavado 29Enjuagues 29Colocacion del envase 30Llenado 313.1 Memoria de calculo 32Diagrama neumatico 39Analisis Economico 42
ANEXO PROGRAMA DE PLC Conclusiones 48Bibliografia 49

CAPITULO
I
MARCO TEORICO

INTRODUCCIÓN
Por medio del presente trabajo se pretende describir en forma breve las modificaciones que se realización en una maquina llenadora de garrafones de 19lts. Haciendo uso de elementos y técnicas de automatización ya que la demanda de dicho producto no es cubierta con la producción actual, en la primera parte se mencionan fundamentos básicos necesarios para entender la situación y funcionamiento
Algunas modificaciones se hicieron basándose en el conocimiento y experiencia de los operarios, ya que algunos de ellos nos indican que otras empresas donde laboran se trabajan en forma diferente.
Se pretende solucionar dichas problemática haciendo más eficiente el proceso, considerando la seguridad del operario, así como los costos económicos.

JUSTIFICACIÓN:
En base a las necesidades que se pudieron observar, en una planta envasadora de agua purificada, de envases de 19 lts. Se pretende realizar un estudio de los procesos de envasado debido a la demanda, ya que la producción actual no cubre cantidades en tiempo requerido, por lo cual se hará uso de elementos de automatización para incrementar la producción en un tiempo muy corto y que los gastos involucrados en dicho cambio sean rentables, beneficiando tanto a la empresa como al cliente.

1.1 Historia de la automatización La ingeniería de automatización industrial ha efectuado un enorme progreso en las últimas décadas. Elementos de hardware cada día potentes, la incorporación de nuevas funcionalidades, y el desarrollo de las redes de comunicación industriales, permiten realizar en tiempos mínimos excelentes sistemas de Automatización industrial. En la antigüedad el ser humano se percato de que existían tareas que podía realizar incluso por medio de sistemas mecánicos, hidráulicos más o menos complejos. Comenzó a crear artefactos y maquinas encargadas de realizar tareas diarias y comunes que le facilitaban la actividad cotidiana. Los primeros autómatas se registraron en la antigua Etiopia. En el año 1500 A.C Amenhotep construye una estatua de memon, el rey de la Etiopia, que emitía sonidos cuando la iluminaban los rayos del sol al amanecer. La cultura árabe heredo y difundió los conocimientos griegos, utilizándolos o solo para realizar mecanismos destinados a la diversión, si ñoqui les dieron una aplicación práctica, introduciéndolos en la vida cotidiana de la realeza. Ejemplos de estos son diversos sistemas dispensadores de agua para beber o lavarse. Los árabes fueron unos maestros en la construcción de autómatas y en la precisión de cálculos, y como ejemplo de ello, se puede mencionar que inventaron el reloj mecánico, así como grande aportaciones a la astrología. A diferencia de los autómatas androides los automatismos dedicados a controlar maquinas industriales incorporan el concepto de reglamentación. El ingeniero disipador tenía una doble labor, realizar el proceso de diseño mecánico y también desarrollar el automatismo, que en mucho casos era parte integrante de la maquina. A partir de aquí el desarrollo de los automatismos es impresionante, en muchos casos se incorporan elementos mecánicos como los programadores cíclicos en los cuales se definía la secuencia de operación. La realización física de los automatismos dependido continuamente del desarrollo de las tecnologías implementándose en primer lugar mediante ingenios puramente mecánicos y posteriormente mediante tecnologías cableada como la neumática. En las dos últimas décadas se han abandonado las tecnologías cableadas siendo sustituidas posteriormente por las autómatas programables. La mayoría de los procesos automatizados están controlados por autómatas programables y en menor medida por ordenadores de control y reguladores industriales La combinación de la ingeniería de los autómatas programables con los accionadores industriales, así como el desarrollo de captadores y accionadores cada día más especializados, permite que se automatice un mayor número de procesos, liberando al ser humanó tanto de tareas de gran compleción intelectual como de realizar esfuerzos sustituidos por accionadores electromecánicos neumáticos, etc.

No es posible automatizar todos los procesos, las razones o causas pueden ser varias aunque las más comunes son: - No existe captadores fiables del proceso que se desea automatizar - Es más barato que lo realice un ser humano 1.2 Conceptos básicos 1.2.1 Fluido Es una sustancia que puede fluir, este concepto comprenderá tanto líquidos como gases. 1.2.2 Propiedades particulares de los líquidos Tensión superficial.- consiste en que la superficie de estos se comporta como una membrana elástica tensa. Adherencia .- Interacción producida entre moléculas de la misma clase que las que las mantiene unidas. Capilaridad.- Fenómeno que ocurre en las regiones donde un liquido esta en
contacto con un solidó y se debe a la acción combinada de la cohesión y la adherencia. Este fenómeno se presenta cuando los líquidos se encuentran alojados en tubos de pequeño diámetro por los cuales asciende el líquido llamado capilares.
Viscosidad.- Propiedad de oponerse al desplazamiento de las capas de un líquido sobre otra. Incompresibilidad.- Propiedad de los líquidos de oponerse a reducir su volumen 1.2.3 Propiedades de los gases Expansibilidad.- Propiedad de los gases de ocupar todo el volumen de los recipientes que los contiene. Compresibilidad.- Propiedad de los gases para reducir su volumen por efecto de la presión a la que se le somete. Difusibilidad.- Propiedad de los gases que consiste en que al poner en contacto dos o mas gases en forma directa o a través de una membrana las mismas características en todo sus puntos.

1.2.4 Densidad absoluta Se entiende por densidad absoluta, densidad marica o simplemente densidad a la cantidad de masa en una sustancia por unidad de volumen. 1.2.5 Peso especifico Se define como el peso por unidad de volumen de una sustancia. 1.2.6 Presión Supongamos que una superficie de área A y que sobre cada elemento de la superficie actúa una fuerza F perpendicular a la misma. La resultante de todas estas fuerzas F perpendicular a la superficie, y cuya magnitud F representa una fuerza total ejercida sobre el área Hay que tener presente que la presión existe únicamente cuando sobre una superficie actúa un sistema de fuerza distribuida por todos los puntos de la misma. 1.2.7 Principio de pascal Considerando ahora un liquido contenido en un recipiente abierto. Tomemos ahora un punto en la superficie del líquido donde la presión es P1 y un punto dos en un nivel inferior siendo la presión en este punto P2 la diferencia de presiones entre los puntos será: P2-P1 = pg(h2-h1) Por lo tanto la presión en el punto dos será:
P2 = P1pgh Es decir que para obtener la presión total en cualquier punto colocado en el interior del liquido es necesario añadir a la presión hidrostática (pgh) cualquier presión que se ejerza en la superficie del liquido P1 y esta presión es la misma en todos los puntos situados a una misma profundidad independiente de la superficie del recipiente. Generalizando podemos decir que si por medio se aumenta la presión P1 la presión P2 a una determinada profundidad, aumenta exactamente en la misma cantidad P1. Este hecho fue anunciado por el científico Blas Pascal (1623-1662) y se conoce con el nombre de principio de Pascal el cual se enuncia: La presión aplicada a un fluido retransmite íntegramente a cada punto del fluido 1.2.8 Prensa hidráulica Una de las principales aplicaciones del principio de Pascal lo constituye el principio de funcionamiento de la prensa hidráulica. Consiste en dos cilindros comunicados entre sí, en el interior de los cuales se ajusta sin fricción dos émbolos de sección transversal A1 y A2. En el embolo menor sección A2 se aplica una fuerza pequeña F2 la caudal produce

una presión P = F2/A2 sobre un liquido como aceite. Esta presión se transmite íntegramente a trabes del fluido de modo que al actuar sobre el embolo mayor sección A1, se produce una fuerza resultante hacia arriba F1, puesto que la presión es la misma en ambos cilindros tenemos que: P = F2/A2= F1/A1 por lo tanto F1 = (a1/A2)F2 Dado que A1 es mayor que A2 y la fuerza aumenta proporcionalmente a la relación de las áreas, se deduce que la prensa hidráulica es un dispositivo que sirve para aumentar la fuerza o para disminuirla en caso de aplicar la fuerza F1 exteriormente al embolo A1.
Figura 1.1.- Principio de prensa hidráulica
1.2.9 Presión atmosférica La superficie terrestre está envuelta por una capa gaseosa llamada atmósfera que tiene una altura aproximada de 40 Km. La atmósfera es una mezcla de gases que se denomina aire: Nitrógeno (78%), Oxigeno (20%), Argón (1%), Anhídrido carbónico (0.03%), Hidrogeno (0.01%) y algunos otros gases como el helio. Etc. Esta masa gaseosa al descansar sobre la superficie terrestre, ejerce en cada punto de los cuerpos que se encuentran sobre la misma, una presión llamada presión atmosférica. Generalmente no nos damos cuenta de la existencia de la presión atmosférica porque estamos constantemente bajo su acción, pero si ascendemos a un lugar de gran altura donde la presión es menor, experimentamos sensaciones molesta (dolor de oído, etc.) producto de la variación de la presión. 1.2.10 Experimento de Torricelli Varias experimentaciones fueron realizadas a fin de demostrar la existencia de la presión atmosférica, sin embargo el más transcendental fue el realizado en 1644 por Torriceli (1608-1647), al construir lo que fue conocido como barómetro de mercurio. Este experimentó consistió en tomar un tubo de vidrio cerrado en un extremo y de aproximadamente un metro de longitud, el cual lleno de mercurio y cerrando con su dedo el extremo abierto, invirtió el tubo y lo introdujo en una cubeta conteniendo mercurio y que al nivel del mar esta era de 760 mm. Además pudo comprobar que la altura h es independiente del diámetro del tubo de su inclinación y de su forma.

Figura 1.2.- Experimento de Torricelli
La aplicación, suponiendo la existencia de la presión atmosférica es simple: en un líquido la presión en todos los puntos de una superficie horizontal es igual sobre el mismo. Luego todos los puntos sobre la superficie a debe de tener la misma presión, que es la presión atmosférica Pa, así todos los puntos que estén en la base del toldo deben encontrarse bajo la acción de una presión hidrostática (pgh) igual a Pa = pgh, donde P es la densidad del liquido. 1.2.11 Barómetro Son instrumentos destinados a medir la presión atmosférica, siendo el más usual el de mercurio. 1.2.12 Manómetro Son instrumentos destinados a medir la presión de los gases y de los líquidos, siendo el más sencillo el manómetro de aire libre. El manómetro consiste en un tubo de vidrio en forma de u en cuyo interior se encuentra un liquido generalmente agua o mercurio. El tubo se conecta por uno de sus extremos al recipiente el cual se desea medir la presión P2. Supongamos que la presión P2 es mayor a la atmosférica Pa, luego el gas contenido en el recipiente empujara el liquido hasta la presión total P2 equilibre a la suma de la presión hidrostática y la presión atmosférica P2 = Pa pgh. Basta por lo tanto medir la presión atmosférica con un barómetro y medir la altura h para poder calcular la presión total en el interior del recipiente. Si la presión P2 es menor que la atmósfera ocurrirá lo contrario y el menisco A se encontrara elevado que D y la presión total será P2 = Pa - pgh.
Figura 1.3.- funcionamiento de barómetro

1.2.13 Flujo estacionario y turbulento En la figura siguiente vamos a representar una tubería de sección variable a trabes del cual circula un fluido, por ejemplo agua. Si se observa una película en diferentes puntos de su trayectoria, se le ve desplazarse con diferentes velocidades en A, B y C. La trayectoria de la película se le llama línea de flujo o corriente, si todas las partículas que pasan por A lo hacen a la misma velocidad y eso mismo se cumple en los puntos B y C, se dice que el movimiento del flujo es del tipo estacionario. Por el contrario si las partículas del fluido pasan a velocidades diferentes en A, B y C, el flujo se mueve con régimen turbulento esto ocurre cuando sus velocidades son muy grandes o pasan un obstáculo. Las causas del tipo de flujo se deben a diámetros de tubería (menores y mayores).
VA
A
BC
VCVB
Figura 1.4.- Flujo estacionario y turbulento
1.2.14 Tubo de Pitot El tubo de Pitot se utiliza para medir la velocidad de flujo de gas. Considérese el gas digamos aire, pasando por las aberturas “a”. Estas aberturas son paralelas a la dirección del flujo y se atrás suficiente distancia para que la velocidad y la presión fuera de las aberturas tenga el mismo valor que los valores de la corriente libre. Entonces la presión en la rama de la izquierda del manómetro, que está conectado con esas aberturas, es igual a la presión estática en la corriente de gas Pa. La abertura en la rama derecha del manómetro es perpendicular a la corriente. La velocidad se reduce en cero en “b” la presión total de ariete Pb 1.2.15 Caudal Es la relación entre volumen de liquido desplazado y el tiempo empleado en hacerlo. Dicho de otra manera es la intensidad con que un líquido fluye, su unidad de medida es el metro cúbico/seg. Pero debido a que resulta una unidad muy grande para el empleo en una tecnología hidráulica de maquinaria se emplea lts/seg. 1.2.16 Potencia Es la relación entre el trabajo realizado por una fuerza y el tiempo empleado. Su unidad de medida es el Watts, o sea el trabajo realizado por la fuerza de un Newton en un metro durante un segundó

1.2.17 Potencia hidráulica En hidráulica la fuerza la aplicamos por medio de una fuerza y originamos una presión por la superficie por el espacio que equivale al trabajo hidráulico dividido por el tiempo. 1.2.18 Cupla Para rotar un cuerpo alrededor de un eje, es necesario aplicar un par de fuerzas igual y en sentido contrario aplicadas en los extremos de una palanca que pasa por el eje. La magnitud de la cupla se incrementa al aumentar el largo de los brazos de palanca y con la intensidad de las fuerzas y su valor esta dado por el producto de ambas. 1.2.19 Cavitación Los fluidos hidráulicos no son perfectos, contienen componentes principales y pequeñas porciones de gas y de otros líquidos disueltos en el. Por este motivo ocurren fenómenos en los circuitos hidráulicos que son muy perjudiciales si no se les controla con el especial cuidado, estos fenómenos se les conocen bajo el nombre de capitación e implican la formación de cavidades o discontinuidades en seno del fluido Al contrario de una partícula de gas pasa, en determinadas condiciones de presión, al estado liquido provocando una especie de implosión. Por esta razón son zonas de capitación los lugares donde la presión se eleva bruscamente o desciende por debajo de la presión atmosférica. Las zonas de aspiración de las bombas, especialmente cuando hay obstrucciones y las zonas de fondo de dientes de bombas y motores a engranes son los lugares donde preferentemente ocurren estos fenómenos. Los cambios bruscos de sentido de circulación del fluido y los cambios de sección suelen originar carga dinámica que se suma a las presiones actuantes y son también causa de cavitación. La violencia de la cavitación es tal que provoca desprendimientos metálicos en los conductos y partes del circuito. 1.2.20 Sistema hidráulico Es una asociación de varios elementos que sirven para efectuar transmisiones de energía utilizando como transmisor un fluido, sus elementos son generalmente bomba, motor o cilindro, depósitos, válvulas y conductores. 1.2.21 Bomba Es el mecanismo que convierte la energía mecánica en energía hidráulica. El movimiento mecánico que la acciona la transforma en ella en movimiento del fluido hidráulico. 1.2.22 Bomba de desplazamiento positivo En las que el volumen desplazado por revolución se mantiene prácticamente constante a cualquier presión de trabajo y velocidad de giro. Hay bombas en que el volumen desplazado es fijo y otras en que este puede regularse a voluntad, por lo cual las bombas oleohidraulicas con desplazamiento positivo pueden dividirse en

dos grandes grupos. 1.2.23 Bombas con desplazamiento no positivo En las que el volumen desplazamiento por revolución no es constante si no que varía en función de la presión de trabajo, velocidad de giro, temperatura, etc. Son de este tipo las bombas centrifugas, los embragues y convertidores hidráulicos, etc. 1.2.24 Actuadores hidráulicos Son aquellos conjunto hidráulicos que reconvierten la energía hidráulica que reciben en energía mecánica, formados por un cilindro y un pistón, con sus elementos de cierre, unidos a un vástago que emerge de un extremo del cilindro a trabes de un sistema de cierre que lo hace hermético. Se les emplea donde hay que aplicar fuerzas o efectuar movimientos, su velocidad de accionamiento depende del caudal que se les suministra y la presión en el sistema de la fuerza que el cilindro entrega. 1.2.25 Depósitos El depósito encargado de suministrar el fluido hidráulico al sistema es un recipiente que contiene: 1.-Una comunicación con la atmósfera para que exista una presión de alimentación 2.- Un tubo de alimentación por donde sale el fluido hacia la bomba 3.- Un tubo de retorno donde regresa el fluido que regresa del sistema 4.- Tapón de drenaje y eventualmente limpiarlo 5.- Filtro para evitar que partículas extrañas contaminen el fluido 6.- Deflectores para evitar la formación de burbujas y favorecer la decantación de impurezas que arrastre el aceite desde el cilindro 7.- Un visor para observar el nivel del aceite Hay casos donde se pueden cerrar herméticamente 1.2.26 Válvulas Las válvulas que forman parte de los diferentes sistemas hidráulicos se pueden clasificar, de acuerdo con las funciones que cumple en: 1.2.26.1 Válvulas antirretorno Solo permiten el sentido de fluyo en un solo sentido 1.2.26.2 Válvula de alivio Su funcionamiento consiste cuando la presión actúa sobre la válvula vence la acción del resorte esta se abre permitiendo la descarga del flujo hasta la presión sea menor que la calibración de la válvula y el resorte venza su acción cerrando la descarga automáticamente.

1.2.26.3 Válvula reguladora de caudal Es un paso parcialmente abierto que por restricción permite pasar solo un caudal determinado manteniéndolo prácticamente contante en cualquier condición de trabajo 1.2.26.4 Válvula de distribución Es una bomba que mediante un comando permite el paso del caudal de aceite en una dirección o en otra. 1.2.27 Conductor El pasaje de flujo hidráulico, entre las diferentes partes del sistema, se hace mediante tubería rígida o flexible en las partes móviles. 1.2.28 Compresores El aire comprimido a una cierta presión por encima de la atmosfera, tiene muchos usos prácticos, como la operación de pequeños motores de aire y herramientas neumáticas, accionamientos de montacargas especiales, limpieza por chorro de aire, inflado de neumáticos de autos, rociado de pintura, elevación de líquidos por medio neumáticos y muchas otras aplicaciones industriales especializadas. Los compresores son de dos tipos generales: El de movimiento alternativo (de cilindro y embolo) El de movimiento rotativo (ya sea de acción directa o bien centrifuga) Los de segundo tipo son los que predominan en la práctica 1.3 Elementos de una instalación automatizada 1.3.1 Maquinas Donde se realizan traslados, procesos, transformaciones de los productos 1.3.2 Accionadores Son motores de c.c., c.a., cilindros neumáticos. Dentro de los accionadores existen los eléctricos (Válvulas eléctricas, motores de velocidad variable y fija, resistencias de calentamiento, cabezas de soldadura, de corte por láser) neumáticos (utilizan como fuete de elegía el aire comprimido como los cilindros neumáticos), hidráulicos (solo se utilizan cuando los esfuerzos con precisión) exciten varios más dependientes de donde tomen su fuente de energía. 1.3.3 Preaccionadores Para comandar los accionadores, como variadores de velocidad, electro válvulas dentro de este grupo tenemos tanto eléctricos (contadores, arrancadores y variadores de velocidad) como neumáticos (estos reciben una señal neumática o una señal eléctrica como mando).

1.3.4 Captadores Son electos que informan al órgano de mando del estado del sistema o de eventos que suceden en el. Detectan posición, precisión, temperatura, caudal, velocidad, etc. 1.3.5 Elementos de dialogo humano-maquina Permiten el dialogo operador y unidad de control como pulsadores, teclados, visualizadores 1.3.6 Elementos de mando Son los elementos de cálculo y control que comanda el proceso 1.3.7 Sensores y actuadores Para efectuar el control de las maquinas que los controladores conozcan la posición de las partes móviles de las maquinas de los objetos fabricados por ellas o de las variables como son: temperatura, presión, etc., Para suministrar esta información al controlador será necesario disponer de sensores en las maquinas. La gama de sensores (captadores o detectores) es muy amplia con el objeto de responder a los múltiples problemas de detección en las maquinas de fabricación. Se pueden encontrar finales de carrera, detectores de proximidad inductivos y capacitivos, ultrasónicos, ópticos. Una primera clasificación de los sensores se puede establecer según el tipo de señal suministrada a la salida 1.3.7.1 Sensores análogos Suministran una señal proporciona la una variable analógica, como pueden ser posición, temperatura, velocidad, presión, etc. 1.3.7.2 Sensor todo o nada Suministran una señal que solamente tiene dos estados, asociado a cierre o apertura de un contacto eléctrico, o bien a la conducción o corte de un interruptor estático como transistor, adoptan diferentes formas (finales de carrera, detectores de proximidad (inductivos y capacitivos), fotocélulas, etc. 1.3.7.3 Sensores numéricos (encoders) Se utilizan en la medida de posiciones, de caudales, etc. 1.3.7.4 Sensores de proximidad inductivos Se utilizan para detectar piezas o elementos metálicos en distancias que van desde 0 a 30 mm. Su principio de funcionamiento consiste en la posibilidad de influenciar desde su exterior un oscilador HF completado con un circuito resonante LC. Un núcleo de ferrita con un bobinado oscilante, lo que produce una disminución en la amplitud de las oscilaciones. Un circuito detecta una variación de amplitud y determina una conmutación de la señal dada por el sensor (ver figura 1.5), algunas de sus ventajas son:

- Conmutación sin realizar esfuerzos mecánicos - No existe desgaste - insensibles a influencia externas - Larga duración y gran precisan en el punto de conmutación - Frecuencias de conmutación elevadas
Figura 1.5.- Sensor de proximidad inductivo
1.3.7.5 Sensores de proximidad capacitivos Permiten la detección sin contacto de materiales conductores y no conductores, madera, vidrio, cartón, plástico, cerámica, fluidos se utilizan en control de nivel en depósitos, tolvas o silos. 1.3.7.6 Sensores ultrasónicos Emiten y reciben mediante transductores señales de sonido a altas frecuencias 1.3.7.7 Sensores fotoelectrónicos Incorporan un emisor y un receptor reaccionan ante las variaciones de luz que es emitida por el emisor. 1.3.8 Electroválvulas Reciben excitación eléctrica proveniente de las salidas del autómata, y mediante la conexión de bobinas se encargan de distribuir el aire a la salida deseada. Las válvulas regulan la puesta en marcha, paro sentido, presión o caudal del flujo transportado por la bomba o almacenado en el depósito. Las valvulasbiestables llevan dos bobinas, para colocar las válvulas en cada una de las posiciones que tiene, mientras que las monoestables, solamente tienen una sola bobina puesta que el estado de reposo se consigue que todas las válvulas monoestables tengan.

CAPITULO
II
DESCRIPCION
DEL
PROBLEMA

2.1 Descripción del problema
A continuación se hará una descripción breve sobre cada uno de las operaciones que llevan a cabo para el llenado de garrafón con capacidad de 20lts. Para agua purificada con la finalidad de entender la situación actual de la planta en cuanto a su forma de llevar a cabo dichas tareas entre las cuales podemos mencionar
1.- Selección del garrafón a llenar (inspección visual)
2.- Lavado externo e interno del envase en forma manual
3.- Lavado interno y externo del envase con químicos
4.- Primer enjuague
5.- Segundo enjuague
6.- Colocación del envase limpio a la parte de llenado en forma manual
7.- Llenado del envase en forma manual
8.- Tapado del envase
9.- Colocación del sello termoencojible
10.- Paso del envase por túnel termoencojible
11.- Codificación
12.- distribución del producto al consumidor
2.2 Selección del garrafón a llenar
En este proceso se realiza una inspección, para determinar que envase está en condiciones para el siguiente proceso, los criterios más usuales para la evaluación son:
Aspectos físicos del envase como pueden ser aquellas que no afecten su funcionalidad (asa floja y/o rota, perforaciones, ralladuras, quemaduras etc.) otro factor que se considera es el aroma que desprende de su interior el envase, debido a que en ocasiones es utilizado para contener sustancias diferentes al agua purificada.
2.3 Lavado externo e interno del envase
A cada uno de los envases se les realza, un lavado interno en forma semiautomática con un cepillo accionado eléctricamente, con la finalidad de quitar impurezas que pudieran estar adheridas a la pared del lado interno.
En este punto se les aplica una solución jabonosa que elimina grasa. En cuanto a el lavado externo se refiere podemos decir, que solo se realiza un tallado por su exterior con ayuda de una solución igual a la utilizada en su limpieza interna.

2.4 Lavado externo e interno del envase con químicos
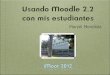
En este proceso el operador coloca envase (garrafones) de 3 en 3 a una banda transportadora, la cual conduce el envase en forma invertida a través de un túnel a una velocidad lenta, en la cual una bomba conectada a una red de tuberías que apuntan hacia el interior y otras hacia el exterior del garrafón rocían por aspersión una solución de sosa a 80°C, con la finalidad de seguir continuar con una limpieza del envase en forma más profunda .En la figura 2.1 se describe en forma esquemática el lavado externo e interno .
Figura 2.1.- Proceso del lavado externo e interno del envase
VISTA SUPERIOR V.S.
VISTA LATERAL V.L.
Bomba
B1
Tina con sosa
Tina con sosa
Bomba
B1

2.5 Primer enjuague Después de que los envases han sido tratados por un lavado con sosa disuelta (250gr. en 200lts.) en agua caliente (80ºC) se pasan a un primer enjuague sobre la misma banda transportadora, solo que ahora se pasan a un sistema de aspersión que limpia interna y externamente el envase con agua, para quitar las impurezas que podrían quedar después del lavado con sosa. En la figura 2.2, se representa el primer enjuague.
Figura 2.2.- Proceso de primer enjuague del envase
Agua
Vista Superior
Vista Lateral
Bomba B2
Bomba B2

2.6 Segundo enjuague
En el segundo enjuague se realiza el mismo procedimiento que en el primer enjuague, solo que en esta parte se utiliza agua purificada a traves de la bomba B3.
2.7 Colocación del envase limpio hacia la parte de llenado
Al finalizar los procesos de lavado y enjuagues se colocan los envases en una banda que los conduce a la parte de llenado manual.
Figura 2.3.- Colocación de envase limpio para su llenado
En esta parte como se puede apreciar en el dibujo, la colocación del envase que viene de la línea de lavado y enjuague, es en forma manual, ya que se tiene que
Línea de llenado Tope
Línea de lavado y enjuagues
Operador encargado de colocar los envases en la línea de llenado.

pasar hacia la línea de llenado, que está formada por un transportador independiente y cuyo avance es regulado por el operador, dependiendo de los procesos siguientes.
2.8 Llenado del envase en forma manual
En esta parte el operador tiene que accionar cada una de las válvulas que conectan la tina de llenado con las boquillas que llenan directamente los 4 garrafones; el nivel de la tina es controlado por medio de niveles que accionan la bomba según el consumo que se tenga.
Figura 2.4.- Proceso de llenado de garrafones
Una vez que los envases han llegado al tope que se acciona manualmente, el operador debe parar la banda transportadora para que los envases queden posicionados. Una vez realizado lo anterior se procede a detener el transportador y abrir las válvulas de llenado hasta alcanzar el nivel optimo de llenado; antes de volver a poner en marcha el transportador se quita el tope y dejar pasar solo los envases llenos para el siguiente proceso.
Nivel Max.
Nivel min.
tope
agua
Bomba 3 En esta parte hay un operador que se encarga de abrir unas válvulas para el llenado, una vez que han llegado al tope

2.9 Tapado del envase
El tapado del envase se realiza en forma manual, ya que en ocasiones se trata de envases que utilizan tapa rosca y en otras la tapa debe colocarse a presión por lo que el operador de este proceso se auxilia de un mazo de goma.
Figura 2.5.- Proceso de tapado de garrafones
2.10 Colocación del sello termoencojible
Se realiza manualmente.
2.11 Paso del envase por el túnel de calor
En esta parte debe vigilarse que la etiqueta quede adherida correctamente al envase sin deformaciones.
2.12 Codificado
Se realiza un codificado para llevar un control de la fecha de elaboración y la de caducidad del producto.

TABLA III CARACTERÍSTICAS DE LAS BOMBAS , MOTORES Y RESISTENCIA
B1 y B2 BOMBA DE LAVADO Y PRIMER ENJUAGUE Marca: Barnes Barmesa Motor trifásico abierto diseño NEMA B CP 2000KW Voltaje 220YY/440Y Amps 5,7/2,85 RPM 3440 Eric. Nom. 76%
B3 BOMBA DE ENJUAGUE FINAL Marca : Franklin Electric 1 H.P. RPM 3450 Voltaje 220/440 60 Hz.
M 3 MOTOR DEL TRANSPORTADOR DE LAVADO Y ENJUAGUES Marca: Motors US Modelo F029B 1 H.P. Voltaje 208-230 Amps. 4.2 RPM. 1750
M 4 MOTOR DEL TRANSPORTADOR DE LLENADO Marca : BALDOR Modelo:C43546 HP 1.0 Voltaje 220 Amps. 3.4 RPM. 1765 60 Hz.
R RESISTENCIA PARA CALENTAR LA TINA CON SOSA A 220V DE 9500WATT

TABLA IV VÁLVULA Y ACCESORIOS
ELEMENTO
MODELO
MARCA
CAPACIDAD
NÚM. PIEZAS
FILTRO AF
AF4000‐0AC
SMC
1.0 MPa
1 Pza.
REGULADOR AR
AR4000‐0AG
SMC 0.05‐0.85 MPa
1 Pza.
LUBRICADOR AL
AL4000‐04
SMC
1.0 MPa
1 Pza.
ACCESORIO PARA ENSAMBLADO DE LA UNIDAD DE MANTENIMIENTO AC
AC4000‐04
SMC
1 Pza.
VÁLVULA V1
SY7220‐N9
SMC
5 Pza.
VÁLVULA V2
VF5120‐5D‐02
SMC
1 Pza.
VÁLVULA V3
SOLENOIDE VP342
SMC
2 Pza.
MANIFOLD KM
KM11‐08‐12‐10
SMC
1 Pza.
TUBERÍA FLEXIBLE
Ø12 SMC TS1209BU‐20 Ø8 SMC TU0805BU‐20
1 Pza. 1 Pza.

Cilindro 2.0
Cilindro 1.0
Cilindro 5.0 Sensor S5
Bomba B1
Diagrama de procesos
Tina de Agua purificada
Ball vibrador 6.0
Lavado y enjuague
Colocación del envase hacia la banda de llenado y tapado
llenado
tapado
Sensor S1
Sensor S2
Sensor S3
Sensor S4
Sensor S7

CAPITULO
III
DESARROLLO
DEL
PROYECTO

Una vez que se ha planteado la situación actual, en que se encuentran los procesos procedimos a plantear las posibles soluciones en los siguientes procesos:
Primer, segundo y tercer enjuague Se pretende controlar el avance por medio de la colocacion de un sensor que detecte cada placa portagarrafones, ademas de colocar espreas en las tuberias correspondientes
Tambien se necesitara un mecanismo que ayude a colocar los envases de la primera banda transportadora hacia la de llenado, auxiliado de un cilindro neumatico y sensores que detecten la presencia del envase para poder sincronizar los movimientos del actuador.
En el proceso de llenado sera necesario utilizar un mecanismo que nos permita accionar simultaneamente las valvulas de paso que se utilizan para el llenado de los envases, auxiliandonos de un cilindro neumatico que sea controlado su avance por medio de sensores para obtener un llenado mas rapido y preciso.
Cabe mencionar que para el proceso de llenado sera necesario apoyarnos de accesorios que nos permitan sujetar y detener los envases, para de esta forma posicionar adecuadamente los envases y sean llenados, los cuales mencionaremos en detalle mas adelante.
Por ultimo se pretende inplementar un cilindro que facilite el tapado de los envases ya que el tipo de tapa no es roscada y solo requiere presion para ser colocada adecuadamente
En cada uno de los procesos a automatizar se consideraron diferentes factores que permitieran disminuir el costo de inversion asi como facilitar el proceso sin disminuir la calidad del producto.

Para los procesos de lavado y enjuagues, que se realizan en la banda transportadora se propone, que el avance sea regulado, no solo por el variador de velocidad sino también por un sensor que nos ayude a controlar el frenado de cada avance; lo anterior se necesitaría para poder situar a los envases de tal forma que queden centrados con las espreas que se colocarían en la tubería inferior, con lo cual se pretende tener una mayor presión de los “chorros” y por lo tanto mejor penetración de las sustancias utilizadas (sosa, agua normal y agua purificada) hacia el interior del envase
Figura 3.1.- Proceso de enjuague de garrafones
En la parte de cambio de banda transportadora se podría, construir un mecanismo neumático, capaz de voltear los envases y colocarlos en posición para el siguiente
VISTA SUPERIOR
El sensor será ubicado en la posición que indica la figura, ya que es un lugar donde es fácil de ajustar, probar si está trabajando bien y además en este lugar queda hasta cierto grado protegido de la humedad o en su defecto, puede protegerse con facilidad
Otro de los puntos que se pretende modificar es la colocación de las espreas, como se puede apreciar en la figura designada como vista lateral.
VISTA LATERAL

proceso, aunque esto implicaría algunos ajustes en la altura de dichas bandas transportadoras. En la figura (3.2) se pretende plantear esta idea:
Figura 3.2.- Traslado de garrafones para su llenado
En la figura se puede apreciar los movimientos que tiene que realizar el envase, para poder quedar en posición y ser llevado al siguiente proceso, una vez que ha quedado en posición sobre la segunda banda transportadora.
El traslado del envase solo es posible con la ayuda de un cilindro neumático que jala una canastilla hasta un tope.
En la parte correspondiente al llenado, también será necesario diseñar un sistema que nos permita abrir y cerrar todas las válvulas de llenado, con ayuda de un cilindro neumático
1º
2º
3º Cilindro 2.0
tope

Figura 3.3.- Proceso de llenado de garrafones
El sistema también contara con dos micros, (M1 y M2) que nos permitan coordinar el momento en que el cilindro del tope pueda activarse y ayudar a posicionaren primer lugar junto con el centrador a los envases.
Línea de llenado
Cilindro 3.0
M 2 M 1
Cilindro 4.0
centrador
Tina de llenado
Cilindro llenador 1.0
Tina de llenado
Accesorio llenador
Accesorio centrador
Accesorio tope Microinterruptores

TABLA I: ELEMENTOS DE CONTROL A UTILIZAR (SENSORES)
Butler Hamar S1 SENSA LA PLACA PORTAGARRAFONES E85-SMS D200-HD 200mm. Difuse / DK 10-30 VDC 100 mA SERIE A20102A
CARLO GAVAZZI S2 SENSA QUE LA CANASTILLA TENGA ENVASE PA18C5R30PK TIPO: REFLEXIVO
CARLO GAVAZZI S3 SENSA QUE LA BANDA TENGA ENVASE, PA18C5R30PK TIPO REFLEXIVO
CUTLER HAMMER M1 SENSAN LOS ENVASES A LA ENTRADA E50 6P DEL LLENADO.(MICRO) E50SA6P SERIE B1
CUTLER HAMER M2 SENSA LOS ENVASES A LA SALIDA DEL E50 6P LLENADO (MICRO) E50SA6P SERIE B1
BANNER S7 SENSA LA PRESENCIA DE TAPA, PARA S185N6L QUE SE ACTIVE EL TASON TIPO : REFLEXIVO
CARLO GAVAZZI S4 SENSA LA PRESENCIA DE TAPAS EN LA PC 50CND10RP CARRILLERA 24-240 VAC 50/60 Hz TIPO : REFLEXIVO 12-240 VDC Max. 3 A.
US US LISTED S5 SENSA LA PRESENCIA DE ENVASE PARA Clase 2 45 UB ACTIVAR UN CILINDRO QUE PRESIONA LA FQ 05D2 TAPA 12-230VAC/DC 2.5 VA : 3A 30VAC -1A 220VAC INFRA ITALIA
SMC D-453 S SENSA LA POSICION DEL CILINDRO Magnetico D-A57 RETRAÍDO Y/O EXTENDIDO.

TABLA II : ELEMENTOS NEUMÁTICOS A UTILIZAR ( ACTUADORES ) 1.0 Cilindro neumático (para accionar el mecanismo que llena los envases) Carrera mínima de 47 plg (1200 mm) Acción doble Pieza existente en el mercado Rango de operación de la presión de 0.05MPa a 0.8MPa Carrera de 500., Ø de 45 mm, acción doble 2.0 Cilindro neumático (para poder mover la canastilla) con tirantes acción doble Carrera mínima de requerida 3.6 plg (91.44mm) Fuerza requerida al contraerse (entrada) 289.44N. Accesorios articulaciones para montaje tipo clevis macho y hembra para la parte posterior y rodamiento clevis para la parte frontal Pieza existente en el mercado C95S-C40-125-NII (SMC) Carrera de 125 mm., Ø de 40 mm., fuerza mínima a 0.3 MPa es 317 N. Rango de operación de la presión de 0.05MPa a 1.0MPa 3.0 Cilindro neumático (para mover el tope) Carrera mínima de 4plg. (101.6mm.) Fuerza requerida para detener los envases 1.12 N. Acción doble Pieza existente en el mercado MGQM25-100-XC18 (SMC) Carrera de 100mm., Ø de 25 mm, acción doble Rango de operación de la presión de 0.05MPa a 0.8MPa 4.0 Cilindro neumático (para mover el dispositivo centrador) Carrera mínima de 4.25 plg Pieza existente en el mercado MGQM32-100-FQ 5/8 (SMC) Carrera de 100 mm., Ø de 32 mm., acción doble Rango de operación de la presión de 0.05MPa a 0.8MPa 5.0 Cilindro neumático (para poder tapar los envases) Carrera mínima de 6 plg Acción doble Pieza existente en el mercado BAMBA 6X2 Carrera de 6plg., Ø de 2 plg., acción doble Rango de operación de la presión de 0.05MPa a 0.8MPa

LAVADO
S1 (sensor)
B1 (Bomba de lavado)
Tina con sosa (400gr de sosa en 200 lts de agua a 80 C
Se coloca un sensor S1 en el inicio de la banda para poder regular el avance de la banda, y asi poder posicionar los envases justo por debajo de las espreas y tener un mejor lavado del envase
espreas
espreas
Tina con agua sin ningun tratamiento Tina con agua purificada
B2 (Bomba de el primer enjuague)
B3 (bomba de el segundo enjuague
ENJUAGUES
En los enjuagues tambien se colocaron espreas con la finalidad de aprovechar el avance uqe se controla, para de esta manera hacer mas eficiente dichos procesos, ya que la descarga del agua sera realizada en puntos especificos

S3 sensor que indica que la banda de llenado esta desocupada en su
S2 (sensor que indica que la canastilla esta desocupada
S 2
2.0 cilindro que levanta la canastilla para colocar envases a la 2ª banda
S3
Elementos reflexivos de los sensores S2 y S3
COLOCACION DE LOS ENVASES DE LA PRIMERA BANDA (LAVADO Y ENJUAGUES) A LA SEGUNDA BANDA (LLENADO)
En la siguiente figura se puede apreciar la colocacion de los sensores que ayudan a cordinar el translado de los envases de una banda a otra,asi como la posición del cilindro que levanta la canastilla

Cilindro 1.0
M1 M2
Cilindro 3.0
Cilindro 4.0
Sensor S 5
Sensor S4
Cilindro 5.0
Sensor S7
LLENADO
TAPADO
M1 y M2 microinterruptores

3.1 Memoria de cálculo
Para poder colocar los envases de la banda transportadora de lavado y enjuague hacia la de llenado es necesario construir una base que pueda girar los garrafones, que desde ahora llamaremos canastilla. FIGURA
40 plg 1.5 plg
32.5
l
10 plg
6 ½ plg
2½ plg
1.5 plg
16 plg
2 plg
7 plg
5 plg
1 plg
10 plg
3.43plg
5 plg 1 plg
Material : AISI 304 (C 0.08 Cr 18.0 Ni 10 )
Perfil: PTR de 1½ plg x 1½ plg x 139 plg calibre 14 ( para el bastidor)
PTR de 2 ½plg x 1½plg x 34 plg calibre 14 (para el bastidor)
Lamina : 83 plg x 10 plg calibre 18
Perfil para soportar los envases
bastidor
34 plg
12 plg

Calculo de las fuerzas en la canastilla.
F1=(m)(g) pero m=(v)(d)
v=(base)(altura)
base=(85.58plg)(10)= 855.8plg²
altura=calibre 18=0.04960plg
v=(855.8) plg²(0.0496)plg
v= 42.447plg³
d=densidad = 7.8gr/cm³=127.819gr/plg³ =0.127kg/plg³
m= (42.447plg³)( 0.127kg/plg³)
m= 5.39kg.
F1 =(5.39kg)(9.81m/seg²)=52.875N (1 pieza)
F2 =(m)(g)=(v)(d)(g)=(base)(altura)(d)(g) pero base=(lado)²-(lado-calibre)²
F2 = [(lado)²-(lado-calibre)²][altura][d][g] aquí el calibre es 14(0.0787plg
F2 =[(1.5plg)²-(1.5plg-0.0787plg)²][40plg][0.127kg/plg³][9.81m/seg²]
F2= 11.462N=F4 ( 1 pieza c/u)
F3 =(m)(g)=(v)(d)(g)=(base)(altura)(d)(g) pero base=(lado)²-(lado-calibre)²
F3 = [(lado)²-(lado-calibre)²][altura][d][g] aquí el calibre es 14(0.0787plg
F3 =[0.23plg²][7plg][0.127kg/plg³][9.81m/seg²]
F3= 2.005 N (2 piezas)

F1
F7
F6 F6 F5
F3
F4 F3
F2 F1+F3+F3
F6+F6
F5
F7
F2
F4
Ubicación de las fuerzas en cada parte de la canastilla
F2F5
F6
F7
Fe
F4
F1
F3
Fe

Análisis de fuerzas que actúan sobre la canastilla para la selección del cilindro neumático:
F2
F3
F4
F5
Fe
F1
Transportador
F5
F1
F2
F4
F3
Fe
F6
F7Ø
Guía F
Fx
Fy
Ø=50°
FC
y
x
Fx=(senØ)(F)
Fe=peso del envase (0.36Kg)
Considerando el número de piezas tenemos que:
(Faya)(2) , (Fey)(3) y (F6y)(2)
Considerando,las componentes de las fuerzas en el eje x y sacando momentos con respecto al punto donde se aplica la fuerza F7 ya que es el punto fijo del sistema y considerando como brazo de palanca la distancia que hay de F7 a F5(punto de apoyo del vastago del cilindro) obtenemos a FC=Fuerza Del cilindro =289.44N
F5
F7
7.25 plg
7.25 plg
Ø
Resolviendo el triangulo, podemos obtener la distancia que recorre el punto F5 y que es la carrera del cilindro (L)
L= 3 591 plg
L
Momento (M)
M=Fuerza x distancia

Para poder llenar los envases es necesario, utilizar un pistón que nos cubra las siguientes características, según las medidas del mecanismo siguiente:
En el proceso de llenado también es necesaria una fuerza capaz de abrir y cerrar el mecanismo, para lo cual se diseño un mecanismo de polea para tal situación, el cual se describe a continuación:
Es conveniente mencionar que por razones de espacio se trato de no profundizar demasiado en detalles de algunos mecanismos, como las dimensiones y pesos del dispositivo centrador debido a que los datos más relevantes que nos conciernen son los de la fuerza que requieren nuestros cilindros y la carrera y/o longitud que debe desplazarse el vástago correspondiente.
Para poder detener los envases en la banda de llenado es necesario, utilizar un pistón del tipo tope que nos cubra las siguientes características, que son las que se requieren para el proceso de llenado, según las medidas del mecanismo siguiente
m
LLas pruebas realizadas nos indicaron que la fuerza mínima necesaria para mover la palanca de la posición de cerrado a abierto fue de 1.45Kg (m) que fue la masa colocada en un extremo y que al multiplicarse por el numero de válvulas (4) a abrir nos daría el valor de la fuerza requerida en el pistón es decir F=(m)(g)(4)=56.898N
L
Cilindro llenador Posición para válvula cerrada
Posición para válvula cerrada
L=carrera

En el proceso de tapado del envase se tuvieron que realizar diferentes pruebas para poder determinar la fuerza necesaria, que se requiere para poder colocar las tapas a presión de los envases, siendo la más práctica la que a continuación se describe
La carrera que se necesita que salga el tope es de 4 plg. Los envases se desplazan a una velocidad máxima de ⅓ m/seg y el tope debe entrar y salir aun cuando la banda este en funcionamiento, para poder detener adecuadamente los envases.
L1=4 plg
V= ⅓m/s
Como cada envase pesa 0.360 Kgr, la fuerza total ejercida sobre el tope será:
(F)(t)=[(m)(g)][Vf-Vi]
F=([{0.36Kg}{4}{9.81m/s}][⅓m/s])/(4.204s)
Vi= 0 F=1.12 N.
Vf=⅓m/s
m=(0.360Kg)(4 envases)
g =9.81m/s²
t= tiempo que tarda en llegar el 5° envase a la posición de llenado =Vf/d
d=1.4m
t=4.204 s
d
Cilindro 3.0
L2=2plg
Tope del accesorio
centrador

.
En base a los resultados obtenidos se procedió a buscar un cilindro neumático que satisficiera los resultados obtenidos=14.715N y carrera L=5 plg.
Tubo guía
L=5plg.
A
A=área que tiene la tapa del garrafón=3.14(r²), r=2plg
A=12.56plg²=8103.209mm²
A=0.813m²
La fuerza aplicada en la tapa es el peso mínimo requerido para que esta quedara bien colocada
Dejando caer un peso a una distancia L de 5 plg a través de un tubo usado como guía
Fuerza aplicada
Ø=8 plg
Accesorio taponador
FIGURA A

DIAGRAMA NEUMÁTICO
1.1
1.0
Y1 Y2
2.1
2.0
Y3 Y4
3.1
3.0
Y5 Y6
4.1
4.0
Y7 Y8
5.1
5.0
Y9 Y10
1.0 pistón de llenado
1.1 válvula direccional
Y1 bobina
Y2 bobina
2.0 pistón de canastilla
2.1 válvula direccional
Y3 bobina
Y4 bobina
3.0 pistón de tope
3.1 válvula direccional
Y5 bobina
Y6 bobina
4.0 pistón de centrado
4.1 válvula direccional
Y7 bobina2
Y8 bobina
5.0 pistón de tapado
5.1 válvula direccional
Y9 bobina
Y10 bobina

Diagrama a bloque de conexión de PLC
B1 sosa B2 1° enjuague B3 2° enjuague
Motor para la Banda M3
Motor para la banda de llenado M4

Figura Diagrama a bloques de control de potencia de bombas

ANÁLISIS ECONÓMICO
La inversión mínima necesaria para poder realizar los cambios en los procesos ,
Se realizo en base a los siguientes costos:
Elemento
# de Piezas
Características
Precio x # de Pzas.
S1
1
Ver tabla I
$460
S2
1
Ver tabla I
$950
S3
1
Ver tabla I
$950
S4
1
Ver tabla I
$800
S5
1
Ver tabla I
$480
S7
1
Ver tabla I
$1080
S
10
Ver tabla I
$280
1
1
Ver tabla II
$4250
2
1
Ver tabla II
$3100
3
1
Ver tabla II
$2800
4
1
Ver tabla II
$2700
5
1
Ver tabla II
$2500
6
1
Ver tabla II
$3200
AC
2
Ver tabla IV
$600

AF
1
Ver tabla IV
$2100
AR
1
Ver tabla IV
$2300
AL
1
Ver tabla IV
$2050
V1
5
Ver tabla IV
$1750
V2
1
Ver tabla IV
$1600
V3
2
Ver tabla IV
$1600
KM
1
Ver tabla IV
$1060
T12
1
Ver tabla IV
$2750
T08
1
Ver tabla IV
$2230
AN
14
Ver tabla IV
$2600
AS
14
Ver tabla IV
$3400
KQ
14
Ver tabla IV
$2500
TV
1
Ver tabla IV
$5200
Canastilla
1
Ver figura B
$3200
Accesorio Llenador
1
Ver figura C
$2700
Accesorio Centrador
1
Ver figura C
$2600
Accesorio Tope
1
Ver figura C
$1200

Accesorio Taponador
1
Ver figura A
$1200
Instalación
1
$13500
PLC
1
$45000
Programación PLC
1
$8000
Instalación PLC
1
$6000
Tablero (gabinete inoxidable)
$3100
Material eléctrico (botones y cables)
$12600
Total
$154,390
El costo total de las modificaciones para la automatización en los procesos es de 154,390 $ que es la inversión que se tiene que recuperar en base al ahorro de los siguientes puntos :

RECURSOS HUMANOS
Personal inicial empleado: empleados salario
semanal
Operador que lava y coloca los envases 1 1300 $
Operador que pasa los envases de una banda a otra 1 1300 $
Operador que llena los envases en forma manual 1 1300 $
Operador que coloca los sellos termoencojibles 1 1300 $
Supervisor 1 1700 $
TOTAL 5 6900 $
Personal final empleado
Operador que lava y coloca los envases 1 1300 $
Operador que coloca los sellos termoencojibles 1 1300 $
Supervisor 1 1700 $
--------------------------------------------------------------------------------------------------------------
TOTAL 3 4300 $
CALIDAD
Mayor higiene en el producto

RECURSOS MATERIALES
Ahorro de energía eléctrica, agua y tiempo de fabricación y entrega
El tiempo empleado en la producción se reduce hasta en un 50%, para una producción promedio a la semana se tiene que es de aproximadamente 10,000 piezas, laborando dos turnos, (80 hrs.) por lo que podemos decir que el costo del personal laborando sobre cada pieza es de:
(6900 $ ) (2 turnos) = 13800 $ semanal
esto dividido entre 10000 piezas semanales tenemos que :
13800$/10000piezas=1.38$/pieza
considerando el tiempo de fabricación es decir : 10000piezas/80hrs=125piezas/hr
.En cada turno laboran 1 supervisor y cuatro operadores.
Con las modificaciones hechas en los procesos se tiene ahora que emplear 1 supervisor y dos operadores, los cuales producen 50% más. Es decir 20000 piezas semanales, trabajando un turno (40hrs), por lo que el costo del personal sobre cada pieza es de :
4300$/20000piezas=0.215$/pieza
con respecto al anterior que era de 13.8$/pieza se tiene un ahorro de :
ahorro=1.38$/pieza-0.215$/pieza=1.165$/pieza
Como la in versión fue de 154,390 $ podemos decir que esta cantidad dividida entre el ahorro nos dará el número de piezas a producir para recupera la inversión:
154,390 $ /1.165$/pieza =132523.6 piezas

si con las modificaciones hechas se pueden producir hasta 20000 piezas ,con un solo turno a la semana pero como por el momento solo la demanda es de 10000 el tiempo para recuperar la inversión es de :
132523.6piezas/10000piezasxsemana= 13.252 semanas = tiempo de amortización

ANEXO
PROGRAMA
PLC

CONCLUSIONES AL f inalizar el presente trabajo, se pudo tener una mayor percepción de los factores que intervienen en la realización del proyecto, desde las diversas alternativas para solucionar la problemática presente en una planta purificadora de agua. Ya que la producción actual no era suficiente para satisfacer la demanda. Las modificaciones sugeridas fueron hechas tomando encuenta elementos de automatización que fueran lo mas efectivos y adecuados de tal forma que al poder llevarlos a la practica fueran rentables, con un tiempo de amortización corto. La propuesta que aquí se presenta considero factores que puedan facilitar el trabajo de los operarios sin disminuir la calidad del producto, reduciendo el tiempo de producción asi como satisfacer las necesidades del cliente en cuanto a tiempo de entrega, calidad del producto y menor costo posible.

BIBLIOGRAFIA TITULO : PRINCIPIOS DE HIDRAULICA AUTOR : FEDERICO S. HITMAN EDITORIAL : LIMUSA
TITULO : NEUMATICA AUTOR : S. GREGORIO VAZQUEZ EDITORIAL : MAC GRAW HILL
TITULO : HIDRAULICA DE POTENCIA AUTOR : OLGUIN LOPEZ L. EDITORIAL : TRILLAS
TITULO : PROGRAMACION DE PLC AUTOR : FREDERIC H. HISLSON EDITORIAL : PRENTICE HALL
TITULO : MANUAL DE PRORAMACION MITSUBISHI
TITULO : APUNTES DE SEMINARIO DE TECNICAS DE AUTOMATIZACION