Embed Size (px)
Citation preview
El tribunal constituido para la evaluación del proyecto titulado:
CIL.PID: Control de Intensidad de Luz PIDanalógico para una habitación
Realizado por el alumno: José Fidel Baltazar Domínguez yJonathan Sánchez Chávez
Y dirigido por el tutor: Dr. Miguel Castro Licona
Ha resuelto asignarle la calificación de:
SOBRESALIENTE (9 - 10 puntos)
NOTABLE (7 - 8.9 puntos)
APROBADO (5 - 6.9 puntos)
SUSPENSO
Con la nota: puntos.
El evaluador:
Cosamaloapan de Carpio, Veracruz, a 13 de diciembre del 2013.
1
ESTUDIOS DE INGENIERÍA ELECTRÓNICA
CIL.PID: Control de Intensidad de Luz PIDanalogo de una habitación
REALIZADO POR:José Fidel Baltazar Dominguez
Jonathan Sanchez Chávez
DIRIGIDO POR:Dr. Miguel Castro Licona
DEPARTAMENTO:Electronica: Taller de Investigacion II
Cosamaloapan de Carpio, Veracruz, diciembre de 2013
2

Índice de cuadros
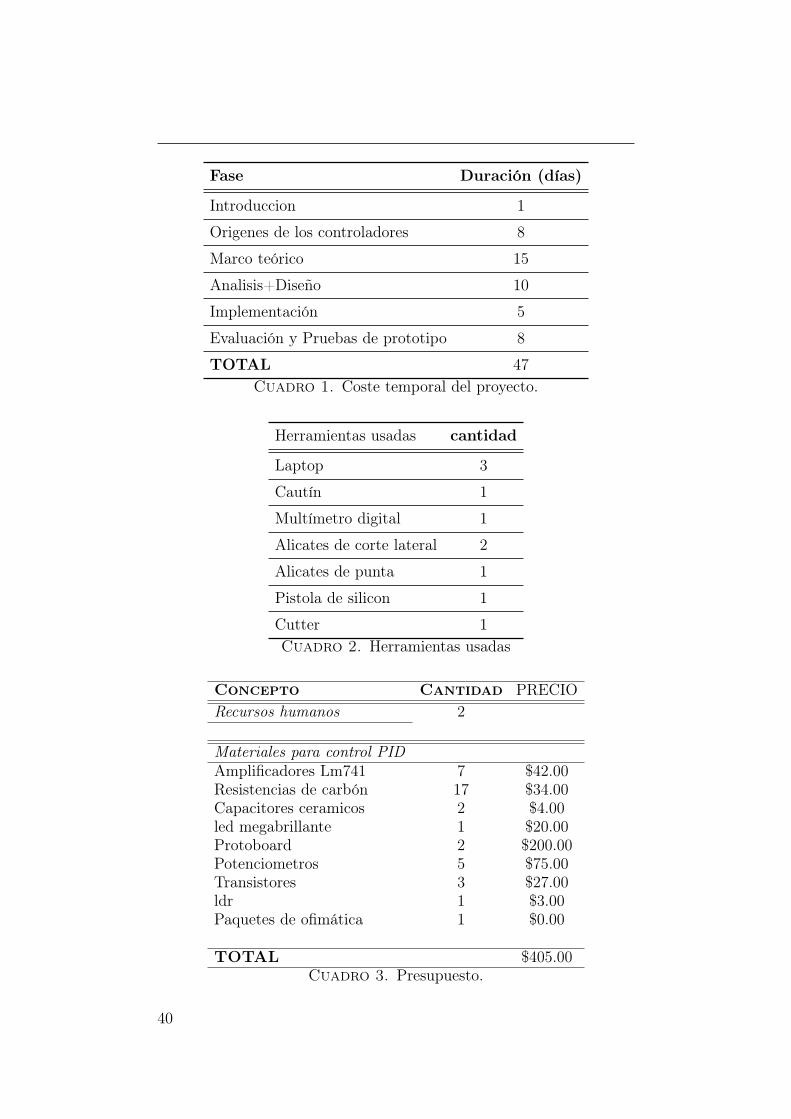
1. Coste temporal del proyecto. 402. Herramientas usadas 403. Presupuesto. 40
3

Índice de figuras
2.1.1.Un regulador doble común fabricado por Electronic TheatreControls (ETC) 15
2.1.2.Dimmer por colortran 162.1.3.Un regulador de intensidad de tipo residencial con mando
deslizante para cambiar penumbra. El dispositivo es losuficientemente pequeño como para caber en una caja de paredregular previsto un interruptor. 17
2.1.4.Primer dimmer de estado solido de la compañia Lutron 182.2.1.Dimmer autotransformador dos motores de 600 vatios
impulsadas utilizados para la iluminación de una casa 192.2.2.Un tiristor rack dimmer strand CD80 20
3.1.1.Esquema general de un sistema 233.1.2.Esquema general de un sistema de control 243.2.1.Diagrama PID 253.4.1.Implementación de la acción integral concebida como un reset
automatico. 283.4.2.Interpretación geometrica de la acción derivativa de un control
predictivo, donde la predicción se obtiene por extrapolaciónlineal. 28
4.1.1.Esquema del circuito PID 324.1.2.Esquema del circuito amplificador restador o diferenciador 344.1.3.Esquema circuital de un amplificador no inversor, generador de
la acción proporcional del controlador. 354.1.4.Esquema circuital de un integrador ideal 364.1.5.Esquema circuital de la parte derivativa del controlador 374.1.6.Diagrama de simulación del controlador PID 37
5


Índice general
Índice de cuadros 3
Índice de figuras 5
Capítulo 1. Introducción 91.1. Contexto 91.2. Motivación 91.3. Objetivos y alcance del proyecto 10
Capítulo 2. Origenes de los controladores PID 112.1. Origenes de los controles de intensidad 152.2. Tipos de Dimmer 17
Capítulo 3. Marco teórico 233.1. Sistemas de control 233.2. Sistema de control en lazo cerrado 243.3. Sistemas de control lineales y no lineales 263.4. Controlador PID 26
Capítulo 4. Analisis y diseño del controlador PID 314.1. Analisis y diseño del controlador PID 31
Capítulo 5. Recursos 395.1. Recursos 395.2. Estimación de costos 395.3. Estimación de costos de materiales 395.4. Presupuesto del controlador 39
Capítulo 6. Implementación del controlador PID 416.1. Selección de componentes para la implementación del
controlador PID 41
Capítulo 7. Conclusiones 437.1. Instalación del proyecto terminado 43
Capítulo 8. Referencias 458.1. Resultados 458.2. Referencias 45
7

Palabras ClavePID,control analogico, amplificadores operacionales,control por la-
zo cerrado,intensidad de luz
Resumen
Desde que James Watt invento el primer control realimentado mecá-nicamente, en su máquina de vapor, se dice que a partir de ahí comienzala historia de la “ingeniería de control”, aun habiendo antecedentes decontrol en la antigua china, los juguetes mecánicos griegos, las esta-tuas animadas del templo de Dédalo, y así como algunos construidosen la edad media por San Alberto Magno, estos ya eran consideradosautomatismos antecesores a la revolución industrial.
Mas particular tenemos el caso de la iluminación, que es de lo quetrata nuestra investigación, podemos contar con ella desde el año de1880, a partir desde esta fecha los hombres podemos contar con la ilumi-nación generada gracias a la energía eléctrica, misma que está sufriendouna gran transformación y hoy en día existen diversas tecnologías comola iluminación LED y los bombillos ahorradores que han ido reempla-zando los bombillos incandescentes. El control de iluminación ósea laposibilidad de regular la cantidad de luz de uno o varios espacios hasufrido una gran transformación y se ha vuelto un campo especializa-do. Un dimmer es un dispositivo para ajustar la intensidad de la luzen un ambiente, la duda de muchos es: ¿en qué casos conviene ponerdimmmers? La respuesta es fácil, siempre conviene usar dimmers. Elencendido gradual es algo que las personas que no vivieron en una ca-sa domotizada no pueden imaginar. Desde hace generaciones, estamosacostumbrados a que la luz enciende instantáneamente, no prestamosatención a eso, pero en realidad produce una sensación de crispación.Por otro lado, el encendido gradual es muy confortable ya que da tiem-po a las pupilas para que se adapten al cambio en la intensidad de laluz. Si lo pensamos un poco no existen en la naturaleza situaciones decambios bruscos de iluminación, por lo que es de esperarse que nuestrosojos no estén preparados para eso.
Por lo que el proyecto de realizar un control PID para el control dela intensidad de la luz de una habitación, hará que podamos graduarla intensidad de luz a nuestro propio gusto de manera personalizada,usando tecnologia led.
8
Capítulo 1
Introducción
1.1. Contexto
1.1.1. La importancia del proyecto. Si bien existen cientos deatenuadores para bombillos incandescentes, estos no sirven para ate-nuar las nuevas tecnologías ahorradoras. La atenuación de estas nuevastecnologías enfrenta dos retos: la baja carga de estos bombillos: 5 wattsen adelante y el tipo de transformador: electrónico. Todos los dimmerdisponibles en el mercado tienen una ficha técnica donde indica la car-ga mínima que puede manejar y el tipo de tecnología para la que fuediseñado.
La necesidad de incrementar el tiempo de vida de las lámparas detecnología led usadas en la iluminación del hogar, al igual tener la ini-ciativa de ir degradando los interruptores comunes usados en la mayorparte de hogares, oficinas, establecimientos, y de tener una intensidadde luz agradable y personalizable a cada persona, de ahí la necesidadde la elaboración de un control PID dimmer para la intensidad de laluz en el hogar, dado que llevamos muchos años usando los apagadorescomunes y corrientes, es hora de irlos desechando y actualizarnos eneste ámbito, darnos cuenta que podemos tener solamente la intensidadde luz que deseamos.
1.1.2. CIL.PID: El control de iluminación PID. El sistemade control de intensidad de la luz para una casa habitación, oficinas,edificios etc, representa una solucion alternativa a parte del problemadel ahorro energetico, cambiando todas las lamparas a lamparas leds yadecuandolas a las necesidades, es capaz de proporcionar caracteristicascomo :
Estabilidad en la intensidad de la luzUna luz agradable y personalizableMayor ahorro de energia eléctricaMayor eficacia en la luz que se usa
1.2. Motivación
Como ya se ha apuntado en la Sección 1.1, los sistemas de controlde intensidad luminica (dimmer) se recomiendan para disminuir el usode interruptores ON/OFF en los hogares, ya que desde hace muchosaños y aun en la actualidad aun abundan esos interruptores que ya
9
son obsoletos, pero aun así, seguimos instalando en casa, se pretendeaumentar el tiempo de vida de las lámparas controladas, ya que al notrabajar a toda su capacidad y al encender gradualmente tiene mayortiempo de uso.
1.3. Objetivos y alcance del proyecto
El principal objetivo del presente proyecto es el diseño e imple-mentación de un sistema basado en la tecnología de un controladorPID analogo, diseñado con amplificadores operacionales, teniendo altermino del mismo un controlador PID funcional que pueda ser usadopara el proposito antes mencionado, se espera controlar lámparas ba-sadas el tecnología Led, esta tecnología de por sí ya cuenta con muchashoras de vida con el uso general que le damos, pero esperamos aumen-tar ese tiempo de vida muchísimas horas más, así mismo como bajarel costo de la energía consumida y usar la luz de manera mas eficiente.
10
Capítulo 2
Origenes de los controladores PID
Desde tiempos inmemorables el ser humano ha tratado de mejorarsu estándar de vida y que ciertas rutinas se realicen de forma automáti-ca o por lo menos que sean llevadas a cabo sin la necesidad de vigilar sudesempeño. En esta automatización, el uso del control retroalimentadoha sido una historia fascinante. Este tipo de control al cual se le deno-mina ingeniería de control, no solamente realiza acciones en lugar delser humano, sino que también a partir de parámetros establecidos, vi-gila que se ejecuten de cierta forma y bajo ciertas condiciones. Ademásde documentos, existen objetos rudimentarios que demuestran todo loanterior, entre ellos tenemos: por ejemplo, las estatuas animadas deltemplo de Dédalo, los juguetes mecánicos de los griegos, así como losconstruidos en la Edad Media por San Alberto Magno. Aun cuandoestos ejemplos se consideran ya automatismos, se toma como origen dela ingeniería de control a la Revolución Industrial. Cabe mencionar quelos acueductos (transportar agua en lugar de acarrearla), los molinosde viento (usar la fuerza del viento para encauzar el agua o para ob-tener fuerza motriz) son mecanismos de control bastante sofisticadosy anteriores a la Revolución Industrial. Los chinos conocidos por susgrandes avances tecnológicos, diseñaron un dispositivo que se colocabaen los carros y debido a que siempre señalaban hacia el sur, el viaje-ro siempre sabía en qué dirección viajaba, sin la necesidad de sabercuál era la estrella polar o de tener conocimientos de astronomía. Estosdispositivos y muchos otros eran parte de la automatización. El añoen que James Watt inventó la máquina de vapor y su dispositivo decontrol (1769), se considera en forma general como la fecha de origende la ingeniería de control y también como el punto de arranque de laRevolución Industrial. Aunque, en ese sentido los rusos reclaman queantes de esa fecha en 1765, Polzunov inventó el primer regulador porflotación que detecta el nivel del agua y con ese parámetro controlauna válvula que regula la entrada de agua a un calentador, por lo queseñala un avance en la ingeniería de control cuatro años antes del deWatt. En 1800, Whitney desarrolló el concepto de partes intercambia-bles en manufactura, éste considera comúnmente como el principio dela producción en masa. Casi un siglo después de que Watt inventarasu máquina de vapor en 1868, J. C. Maxwell formuló un modelo mate-mático para su control. Posteriormente en 1913, Henry Ford mecanizó
11
el ensamblaje de automóviles teniendo trenes de producción estableci-dos, con lo que redujo el tiempo de producción de un automóvil, sucosto y la cantidad de personal necesario para producirlo. En 1927,H. W. Bode analizó los primeros amplificadores retroalimentados y en1932, H. Nyquist desarrollo un método para el análisis de la estabi-lidad de los sistemas. Ya para esta época la ingeniería de control nosólo se encargaba de automatizar, sino que también de estudiar ciertosconceptos y características de los sistemas. Para 1952, el desarrollo decontroladores numéricos se realizó en el MTI (Massachussets Instituteof Tecnology) para el control de los ejes de máquinas. En 1954, GeorgeDevol desarrollo el primer artefacto programado de transferencia consi-derado como el primer diseño de robot industrial. Para 1960, el primerrobot autómata ya había sido desarrollado con base en el diseño de De-vol. En ese entonces tanto la automatización, la robótica, los procesosde manufactura y la ingeniería de la producción ya eran consideradascomo disciplinas independientes a la ingeniería de control, aun cuan-do existía una cierta interconexión entre ellas. Con el desarrollo de lascomputadoras, tanto la teoría de control como el control de eventos dis-cretos era un paso obvio a seguir. El avance de la electrónica dio pasoa que los reguladores fueran electrónicos o basados en computadoras.El control retroalimentado, ampliamente usado en muchas áreas de laingeniería también se usa en los satélites enviados al espacio, tanto parael transporte como para otros fines de investigación. Para 1970, el con-trol de espacio de estados y el control óptimo fueron un paso claro parael desarrollo de la ingeniería de control. Las aplicaciones en la industriaautomotriz, la industria química, la electricidad, procesos biológicos eincluso para la economía, para la educación y las ciencias sociales erande uso común. En 1980, conceptos como el control robusto eran am-pliamente estudiados. En 1994, la mecatrónica se volvió de uso comúnen los automóviles. Actualmente, conceptos como control estocástico,control inteligente (difuso y neuronal), control por modos deslizantes ycontrol adaptivo son ampliamente usados en el campo de la ingenieríade control. Desde que James Watt inventara su primer regulador re-alimentado mecánico dando vida así al Control Automático Industrialhasta hoy, los métodos de control han variado muchísimo. Hoy día elcontrol discreto se ha impuesto en la inmensa mayoría de las aplica-ciones permitiendo implementar desde técnicas tan sencillas como elcontrol proporcional hasta técnicas avanzadas como control predictivo,adaptativo, mediante redes neuronales, en cascada, dead-bit, controlborroso. . . No obstante, en una gran parte de los casos de aplicaciónindustrial, el viejo controlador PID es más que suficiente para los requi-sitos de control deseados. Este hecho, junto con el buen conocimientoque se tiene de su comportamiento, hace que a día de hoy continúesiendo uno de los controladores más populares y empleados en la in-dustria. Hoy en día existen numerosas tipologías e implementaciones
12

de estos controladores, aunque la esencia del PID, un regulador queincluye acciones proporcional, integral y derivativa, es común a todosellos y comenzó a utilizarse en controladores ya en el siglo diecinueve.Sin embargo, la idea de un controlador de tres términos de propósitogeneral con una acción de control variable no fue introducido hastafinales de la década de 1930. Concretamente se dice que fue la TaylorInstrument Company la que introdujo el primer controlador de estetipo, primero en 1936 con una constante derivativa fijada en fábrica yluego por fin, en 1939, con una acción derivativa variable. Ya en 1922,bastante antes de su comercialización, Nicolás Minorsky había anali-zado las propiedades de los controladores tipo PID en su publicación“Estabilidad direccional de cuerpos dirigidos automáticamente”. Dichotrabajo, que constituye una de las primeras discusiones sobre Teoría deControl, describe el uso de los controladores de tres términos para elgobierno de la dirección de un buque: el “New Mexico”. Así pues, loscontroladores tipo PID nacieron para el gobierno automático de bu-ques y puede decirse que fueron descubiertos por el científico NicolásMinorsky. La idea de un gobierno completamente automatizado habíacomenzado a forjarse tras la aparición del primer timón servocontro-lado en 1864, aunque hubo pocos avances en este sentido debido a laausencia de sensores de orientación adecuados. La sensibilidad de lasagujas magnéticas no permitía utilizarlas como parte de un sistemade gobierno sin distorsionar su medida. Hubo que esperar al desarrollode los girocompases (principalmente por Anshchutz-Kämpfe y ElmerSperry a comienzos del siglo veinte) para poder hacer las primeraspruebas de automatización de buques. En la década de 1910 se cons-truyeron por fin los primeros sistemas de gobierno automático basadosen un control de tipo proporcional que dieron buenos resultados enpequeños buques. Sin embargo, el comienzo de la guerra en 1914 inte-rrumpió el desarrollo de los“giropilotos”, que no fue reanudado hasta1921 ya de la mano de Minorsky. Minorsky fue el primero en analizarla dinámica de un buque convencido de que era posible encontrar unaexpresión analítica que permitiera calcular la mejor acción del timónpara un buen gobierno en función de la inercia del buque y de las ca-racterísticas del timón. Así pues encontró que el sistema obedecía unaecuación de movimiento del estilo de:
Ae′′+ Be′ + τρ = D
Donde e es el error de dirección del buque respecto a la direccióndeseada y r es el ángulo del timón. Las constantes A y B correspondenrespectivamente al momento de inercia del buque sobre su eje vertical(pasando por el centro de gravedad) y a la resistencia al giro por efec-tos de fricción. Por su parte, t, es una constante que depende de lascaracterísticas hidrodinámicas del timón y D es el par ejercido sobre el
13

buque por distintas perturbaciones (corrientes, vientos. . . ). Minorskyconsideró principalmente dos clases de control: control sobre la posi-ción del timón y control sobre la velocidad del timón, regidos por lassiguientes expresiones:
ρ = M1e+ n1e′+ p1e
′′
ρ′ = m2e+ n2e+ p2e′′
Sobre la primera clase de control (proporcional, derivativo y deri-vativo segundo) consideró primero un caso particular en el que m1=0y p1 = 0, que correspondía al control proporcional que ya se habíautillizado en alguna ocasión y que daba lugar a un sistema de segundoorden. Minorsky comprobó que el control dependía del parámetro:
u =B
2AY observó que al aumentar el tamaño del buque, A aumentaba
mucho más rápidamente que B, lo que explicaba que el control pro-porcional, que había funcionado aceptablemente en buques pequeños,no diera buenos resultados en buques grandes. Por lo demás, para uncaso general donde m1, n1 y p1 son distintos de cero, concluyó que elcontrol sería eficiente para corregir errores producidos por perturba-ciones temporales, pero que no eliminaría una perturbación constantecomo, por ejemplo, un viento estable. Efectivamente, para aquellos quese vean abrumados por las ecuaciones o si el lugar de las raíces no osdeja ver el bosque, el término integral de los PID (que aún le falta-ba a esta primera clase de control) sirve para corregir perturbacionesconstantes, puesto que sin él la acción de control cuando se está en elrumbo deseado (set-point) sería forzosamente nula.
La segunda clase de control venia a corregir este defecto. Para suimplementación era necesario integrar las ecuaciones con lo que se ob-tenía:
ρ = m2
∫e dt+ n2e+ p2e
Que corresponde a la expresión de un control de tipo PID. En sutrabajo, Minorsky incluye también un estudio de estabilidad del sistemabasado en el criterio de Hurwitz obteniendo una serie de condiciones aimponer a los parámetros m, n y p. Finalmente estudia cómo afectan alsistema los retrasos en la transmisión del sistema, y obtiene unas nuevascondiciones para los parámetros en función de dichos retrasos asumien-do que éstos son cortos en comparación con el periodo de guiñada delbuque. Tras las primeras pruebas y ajustes, los métodos de gobiernoautomático de Minorsky instalados en el New México en 1923 dieron14
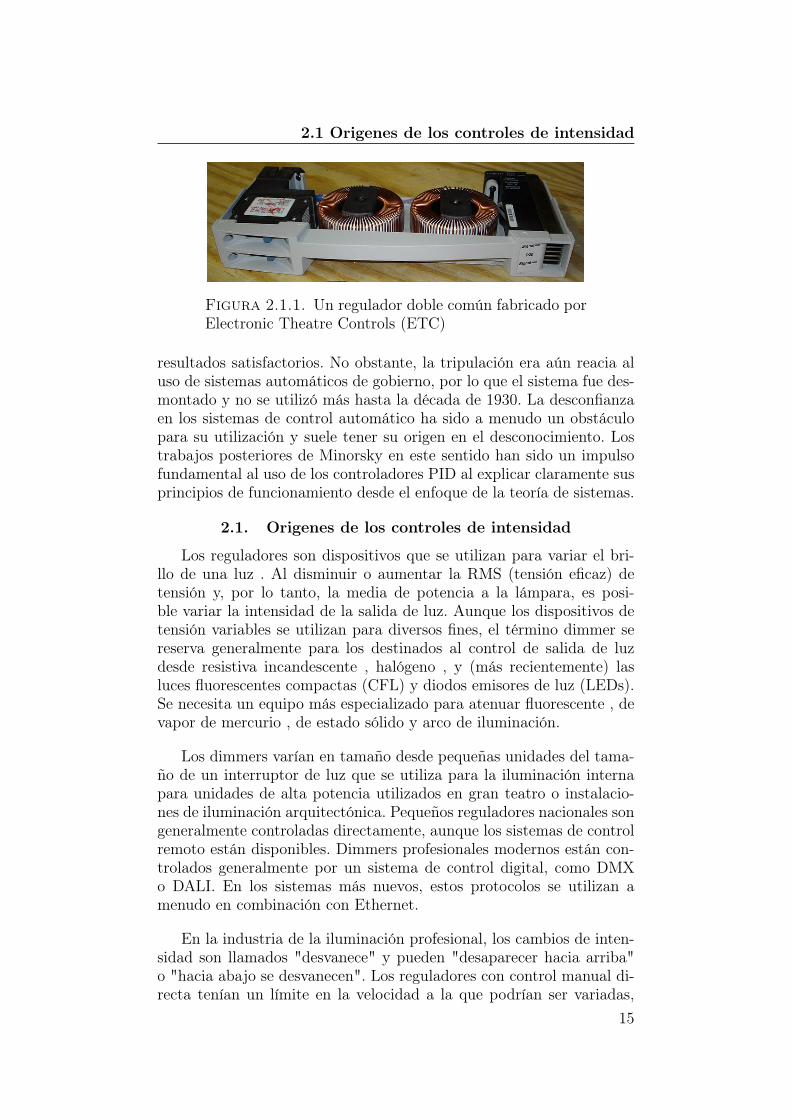
2.1 Origenes de los controles de intensidad
Figura 2.1.1. Un regulador doble común fabricado porElectronic Theatre Controls (ETC)
resultados satisfactorios. No obstante, la tripulación era aún reacia aluso de sistemas automáticos de gobierno, por lo que el sistema fue des-montado y no se utilizó más hasta la década de 1930. La desconfianzaen los sistemas de control automático ha sido a menudo un obstáculopara su utilización y suele tener su origen en el desconocimiento. Lostrabajos posteriores de Minorsky en este sentido han sido un impulsofundamental al uso de los controladores PID al explicar claramente susprincipios de funcionamiento desde el enfoque de la teoría de sistemas.
2.1. Origenes de los controles de intensidad
Los reguladores son dispositivos que se utilizan para variar el bri-llo de una luz . Al disminuir o aumentar la RMS (tensión eficaz) detensión y, por lo tanto, la media de potencia a la lámpara, es posi-ble variar la intensidad de la salida de luz. Aunque los dispositivos detensión variables se utilizan para diversos fines, el término dimmer sereserva generalmente para los destinados al control de salida de luzdesde resistiva incandescente , halógeno , y (más recientemente) lasluces fluorescentes compactas (CFL) y diodos emisores de luz (LEDs).Se necesita un equipo más especializado para atenuar fluorescente , devapor de mercurio , de estado sólido y arco de iluminación.
Los dimmers varían en tamaño desde pequeñas unidades del tama-ño de un interruptor de luz que se utiliza para la iluminación internapara unidades de alta potencia utilizados en gran teatro o instalacio-nes de iluminación arquitectónica. Pequeños reguladores nacionales songeneralmente controladas directamente, aunque los sistemas de controlremoto están disponibles. Dimmers profesionales modernos están con-trolados generalmente por un sistema de control digital, como DMXo DALI. En los sistemas más nuevos, estos protocolos se utilizan amenudo en combinación con Ethernet.
En la industria de la iluminación profesional, los cambios de inten-sidad son llamados "desvanece" y pueden "desaparecer hacia arriba"o "hacia abajo se desvanecen". Los reguladores con control manual di-recta tenían un límite en la velocidad a la que podrían ser variadas,
15
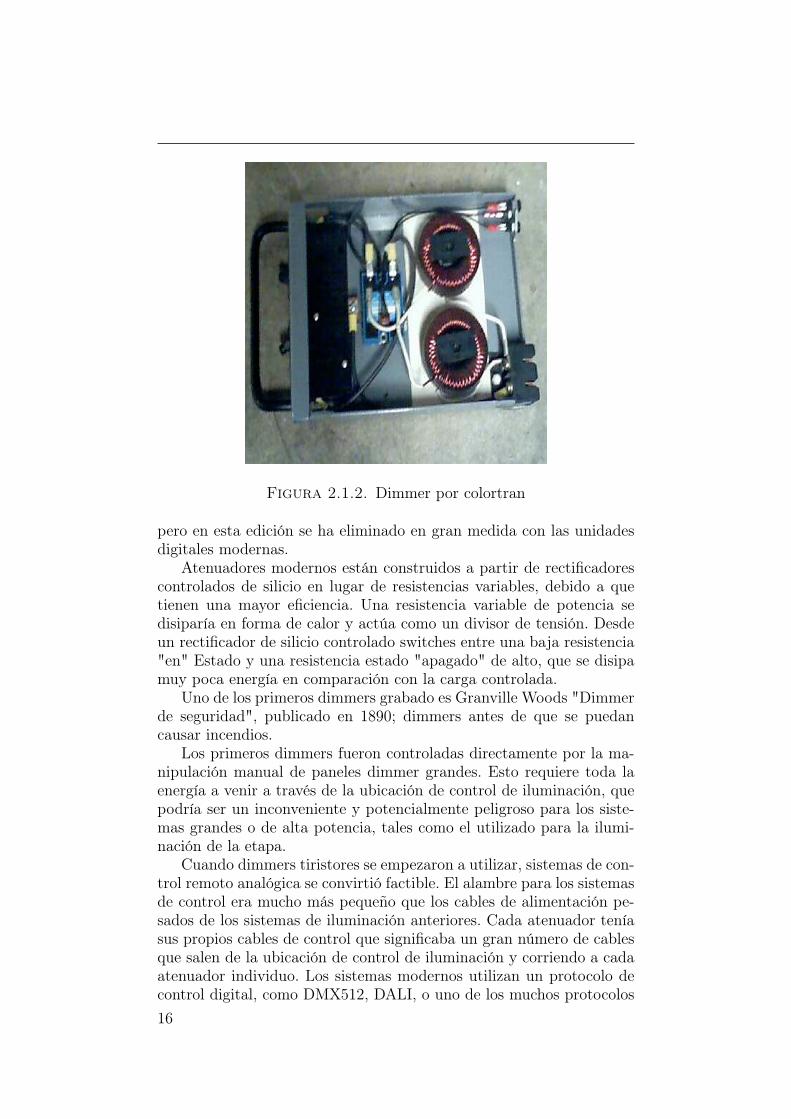
Figura 2.1.2. Dimmer por colortran
pero en esta edición se ha eliminado en gran medida con las unidadesdigitales modernas.
Atenuadores modernos están construidos a partir de rectificadorescontrolados de silicio en lugar de resistencias variables, debido a quetienen una mayor eficiencia. Una resistencia variable de potencia sedisiparía en forma de calor y actúa como un divisor de tensión. Desdeun rectificador de silicio controlado switches entre una baja resistencia"en" Estado y una resistencia estado "apagado" de alto, que se disipamuy poca energía en comparación con la carga controlada.
Uno de los primeros dimmers grabado es Granville Woods "Dimmerde seguridad", publicado en 1890; dimmers antes de que se puedancausar incendios.
Los primeros dimmers fueron controladas directamente por la ma-nipulación manual de paneles dimmer grandes. Esto requiere toda laenergía a venir a través de la ubicación de control de iluminación, quepodría ser un inconveniente y potencialmente peligroso para los siste-mas grandes o de alta potencia, tales como el utilizado para la ilumi-nación de la etapa.
Cuando dimmers tiristores se empezaron a utilizar, sistemas de con-trol remoto analógica se convirtió factible. El alambre para los sistemasde control era mucho más pequeño que los cables de alimentación pe-sados de los sistemas de iluminación anteriores. Cada atenuador teníasus propios cables de control que significaba un gran número de cablesque salen de la ubicación de control de iluminación y corriendo a cadaatenuador individuo. Los sistemas modernos utilizan un protocolo decontrol digital, como DMX512, DALI, o uno de los muchos protocolos16
2.2 Tipos de Dimmer
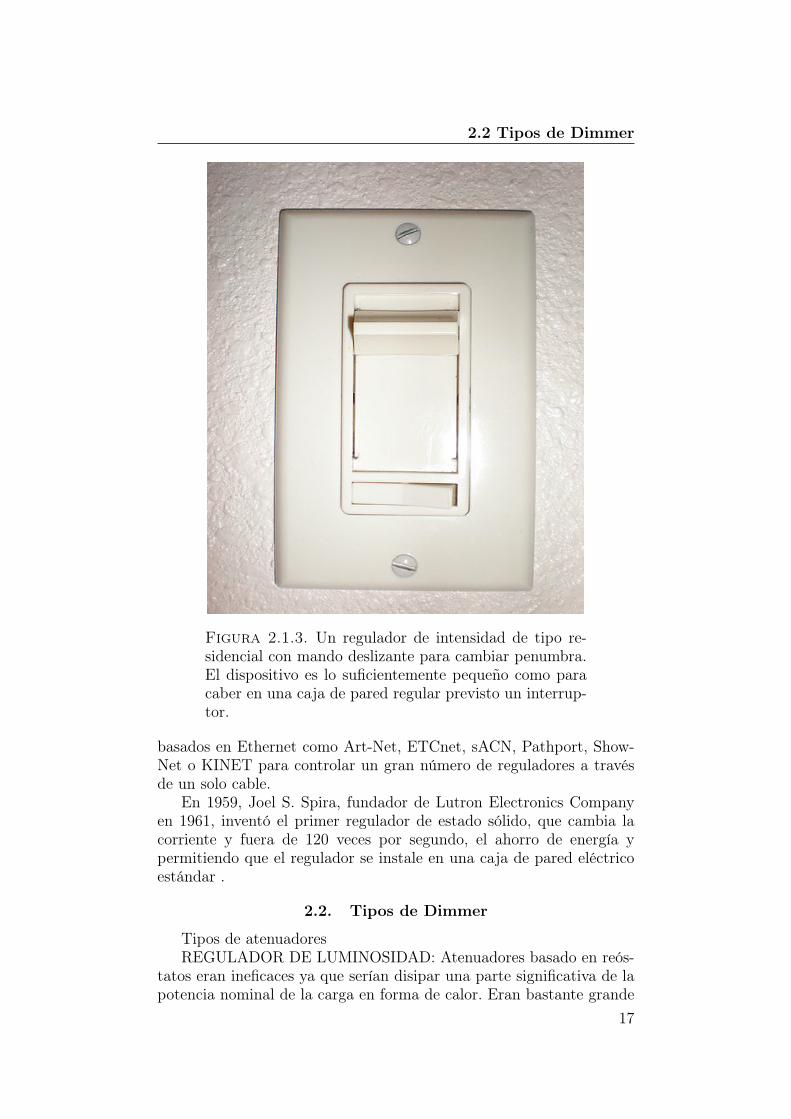
Figura 2.1.3. Un regulador de intensidad de tipo re-sidencial con mando deslizante para cambiar penumbra.El dispositivo es lo suficientemente pequeño como paracaber en una caja de pared regular previsto un interrup-tor.
basados en Ethernet como Art-Net, ETCnet, sACN, Pathport, Show-Net o KINET para controlar un gran número de reguladores a travésde un solo cable.
En 1959, Joel S. Spira, fundador de Lutron Electronics Companyen 1961, inventó el primer regulador de estado sólido, que cambia lacorriente y fuera de 120 veces por segundo, el ahorro de energía ypermitiendo que el regulador se instale en una caja de pared eléctricoestándar .
2.2. Tipos de Dimmer
Tipos de atenuadoresREGULADOR DE LUMINOSIDAD: Atenuadores basado en reós-
tatos eran ineficaces ya que serían disipar una parte significativa de lapotencia nominal de la carga en forma de calor. Eran bastante grande
17
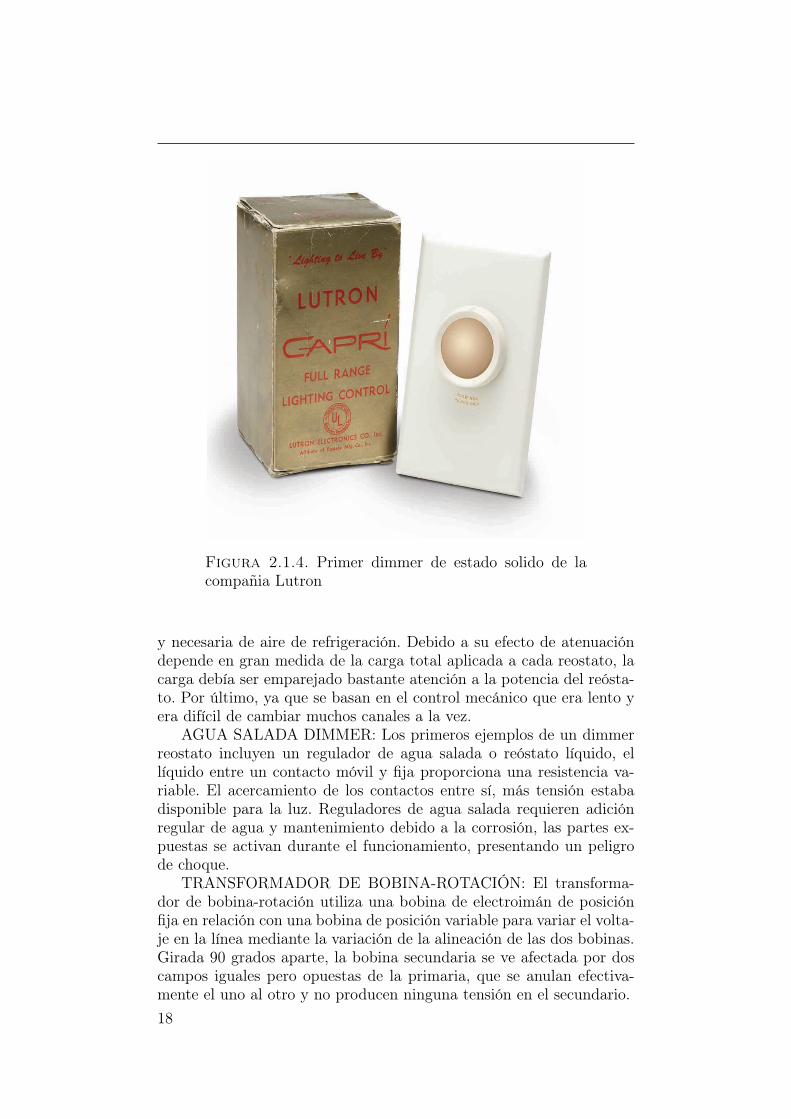
Figura 2.1.4. Primer dimmer de estado solido de lacompañia Lutron
y necesaria de aire de refrigeración. Debido a su efecto de atenuacióndepende en gran medida de la carga total aplicada a cada reostato, lacarga debía ser emparejado bastante atención a la potencia del reósta-to. Por último, ya que se basan en el control mecánico que era lento yera difícil de cambiar muchos canales a la vez.
AGUA SALADA DIMMER: Los primeros ejemplos de un dimmerreostato incluyen un regulador de agua salada o reóstato líquido, ellíquido entre un contacto móvil y fija proporciona una resistencia va-riable. El acercamiento de los contactos entre sí, más tensión estabadisponible para la luz. Reguladores de agua salada requieren adiciónregular de agua y mantenimiento debido a la corrosión, las partes ex-puestas se activan durante el funcionamiento, presentando un peligrode choque.
TRANSFORMADOR DE BOBINA-ROTACIÓN: El transforma-dor de bobina-rotación utiliza una bobina de electroimán de posiciónfija en relación con una bobina de posición variable para variar el volta-je en la línea mediante la variación de la alineación de las dos bobinas.Girada 90 grados aparte, la bobina secundaria se ve afectada por doscampos iguales pero opuestas de la primaria, que se anulan efectiva-mente el uno al otro y no producen ninguna tensión en el secundario.18

2.2 Tipos de Dimmer
Figura 2.2.1. Dimmer autotransformador dos motoresde 600 vatios impulsadas utilizados para la iluminaciónde una casa
Estas bobinas se parecían el rotor y el estator, como se usa en unmotor eléctrico estándar, excepto que el rotor se llevó a cabo utilizandolos frenos contra la rotación y fue trasladado a posiciones específicasutilizando engranajes de alto par de torsión. Debido a que el rotor nosiempre gire una revolución completa, un conmutador no se requiere ylos cables flexibles largos podría utilizarse en el rotor en su lugar.
AUTOTRANSFORMADOR DIMMER A continuación, se introdu-jeron autotransformadores variables. Mientras que aún estaban casi tangrande como atenuadores reóstato, que eran dispositivos relativamen-te eficientes. Su salida de tensión, por lo que su efecto de atenuación,era independiente de la carga aplicada, así que era mucho más fácil dediseñar la iluminación que se adjunta a cada canal autotransformador.Control remoto de los reguladores era todavía poco práctico, aunquealgunos reguladores están equipados con unidades de motor que pocoa poco y de manera constante puede reducir o aumentar el brillo de laslámparas conectadas. Variacs han caído en desuso para la iluminación,sino que se utiliza para otras aplicaciones.
TIRISTOR DIMMER Reguladores del tiristor se introdujeron pararesolver algunos de estos problemas. Reguladores del tiristor se encien-den en un tiempo ajustable tras el inicio de cada ciclo de corriente
19
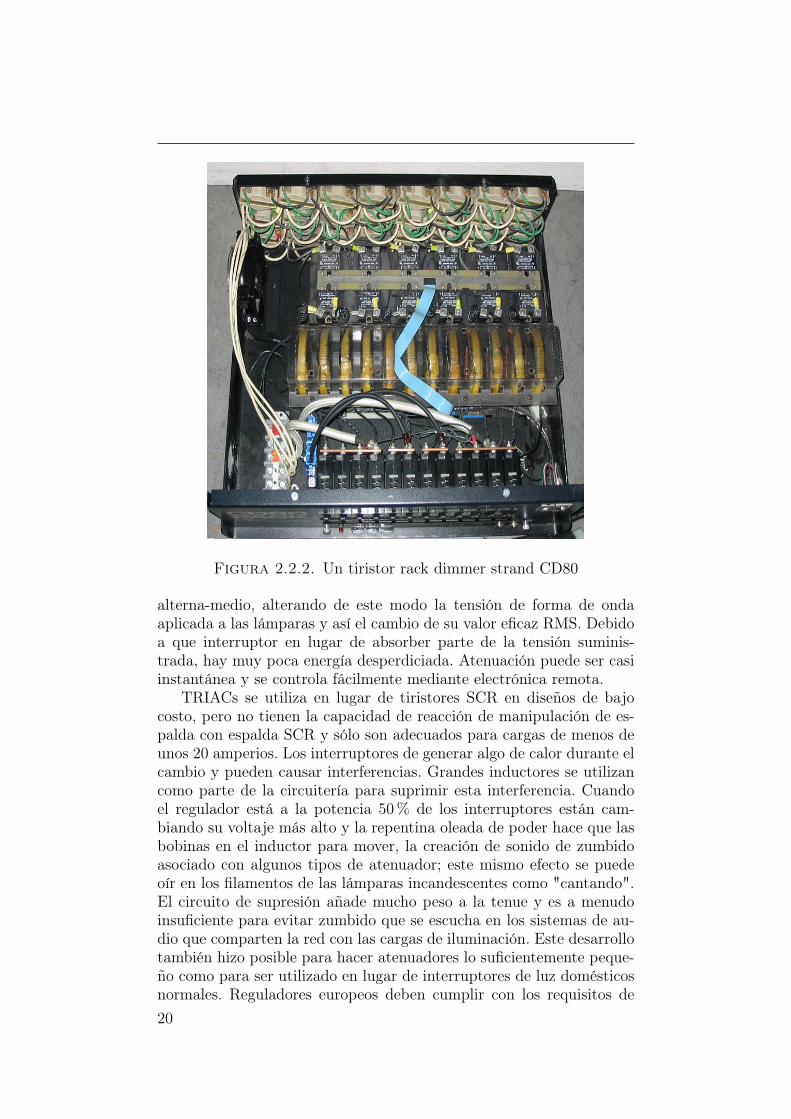
Figura 2.2.2. Un tiristor rack dimmer strand CD80
alterna-medio, alterando de este modo la tensión de forma de ondaaplicada a las lámparas y así el cambio de su valor eficaz RMS. Debidoa que interruptor en lugar de absorber parte de la tensión suminis-trada, hay muy poca energía desperdiciada. Atenuación puede ser casiinstantánea y se controla fácilmente mediante electrónica remota.
TRIACs se utiliza en lugar de tiristores SCR en diseños de bajocosto, pero no tienen la capacidad de reacción de manipulación de es-palda con espalda SCR y sólo son adecuados para cargas de menos deunos 20 amperios. Los interruptores de generar algo de calor durante elcambio y pueden causar interferencias. Grandes inductores se utilizancomo parte de la circuitería para suprimir esta interferencia. Cuandoel regulador está a la potencia 50% de los interruptores están cam-biando su voltaje más alto y la repentina oleada de poder hace que lasbobinas en el inductor para mover, la creación de sonido de zumbidoasociado con algunos tipos de atenuador; este mismo efecto se puedeoír en los filamentos de las lámparas incandescentes como "cantando".El circuito de supresión añade mucho peso a la tenue y es a menudoinsuficiente para evitar zumbido que se escucha en los sistemas de au-dio que comparten la red con las cargas de iluminación. Este desarrollotambién hizo posible para hacer atenuadores lo suficientemente peque-ño como para ser utilizado en lugar de interruptores de luz domésticosnormales. Reguladores europeos deben cumplir con los requisitos de20
2.2 Tipos de Dimmer
la legislación pertinente de EMC, lo que implica la supresión de lasemisiones descritas anteriormente a límites descritos en EN55104.
En el esquema eléctrico a la derecha, una típica atenuador de luzbasado en SCR atenúa la luz a través de control de ángulo de fase.Esta unidad está conectada en serie con la carga. Diodos forman unpuente que genera DC con mucha onda. R1 y C1 forman un circuito conuna constante de tiempo. Cuando el voltaje de cero C1 será cargada.Cuando C1 es capaz de hacer que el diodo Zener D6 conducta e inyectarcorriente en el SCR, el SCR se disparará. Cuando el SCR conduceentonces D1 C1 se descargan a través del SCR. El SCR se apagarácuando la corriente cae a cero cuando la tensión de alimentación cae alfinal del ciclo medio, listo para el circuito para empezar a trabajar enel siguiente medio ciclo.
De onda senoidal regulación promesas de resolver los problemas depeso y las interferencias que afectan a dimmers tiristores. Estas sonlas fuentes de alimentación conmutadas eficacia de alta potencia. Sebasan en una nueva generación de aislamiento transistores bipolares depuerta que todavía son relativamente caros.
2.2.1. Características. El Control de iluminación que hemosdiseñado, es compacto, sencillo de usar, es adaptable a cualquier casode aplicación que se requiera.
2.2.2. Ventajas. Bajo costo, materiales accesibles, tamaño re-ducido, y sin posibilidad de provocar corto circuito que pueda dañar laintegridad de su hogar como del suyo mismo.
2.2.3. Desventajas. Limitaciones dado que no es posible con-trolar lamparas ahorradoras, de alogeno, ya que estas requieren de vol-tajes especificos para su funcionamiento.
21

Capítulo 3
Marco teórico
3.1. Sistemas de control
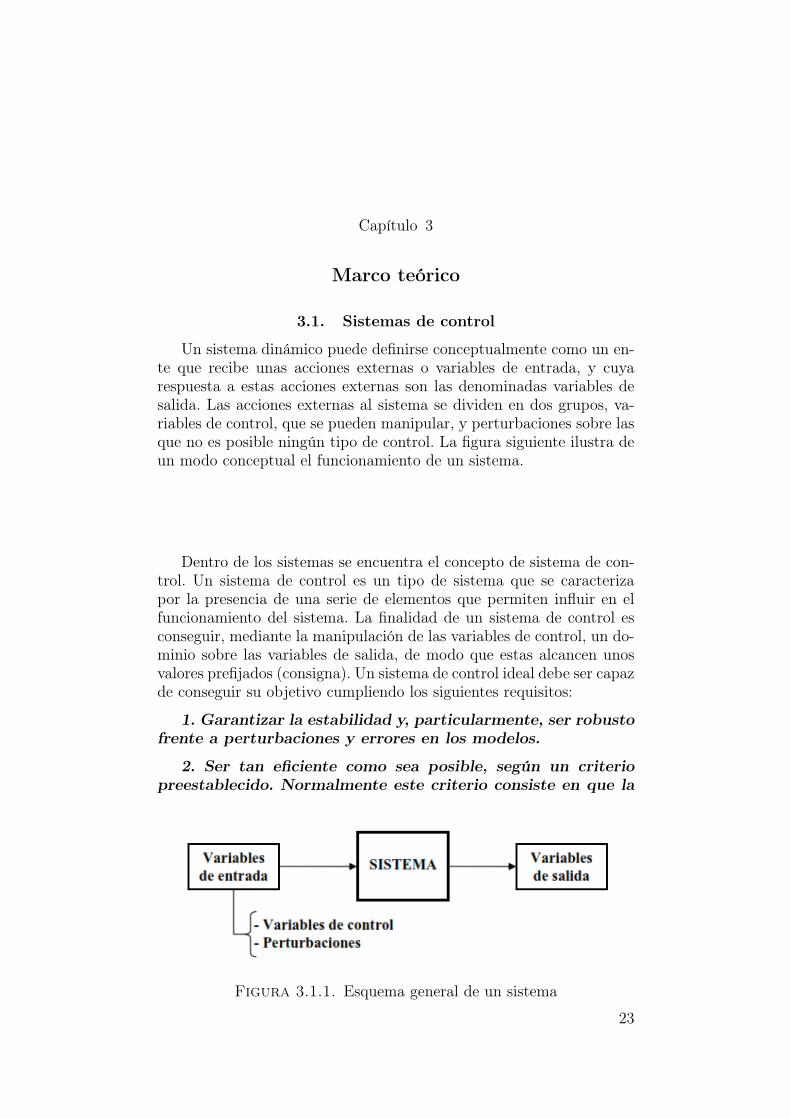
Un sistema dinámico puede definirse conceptualmente como un en-te que recibe unas acciones externas o variables de entrada, y cuyarespuesta a estas acciones externas son las denominadas variables desalida. Las acciones externas al sistema se dividen en dos grupos, va-riables de control, que se pueden manipular, y perturbaciones sobre lasque no es posible ningún tipo de control. La figura siguiente ilustra deun modo conceptual el funcionamiento de un sistema.
Dentro de los sistemas se encuentra el concepto de sistema de con-trol. Un sistema de control es un tipo de sistema que se caracterizapor la presencia de una serie de elementos que permiten influir en elfuncionamiento del sistema. La finalidad de un sistema de control esconseguir, mediante la manipulación de las variables de control, un do-minio sobre las variables de salida, de modo que estas alcancen unosvalores prefijados (consigna). Un sistema de control ideal debe ser capazde conseguir su objetivo cumpliendo los siguientes requisitos:
1. Garantizar la estabilidad y, particularmente, ser robustofrente a perturbaciones y errores en los modelos.
2. Ser tan eficiente como sea posible, según un criteriopreestablecido. Normalmente este criterio consiste en que la
Figura 3.1.1. Esquema general de un sistema
23
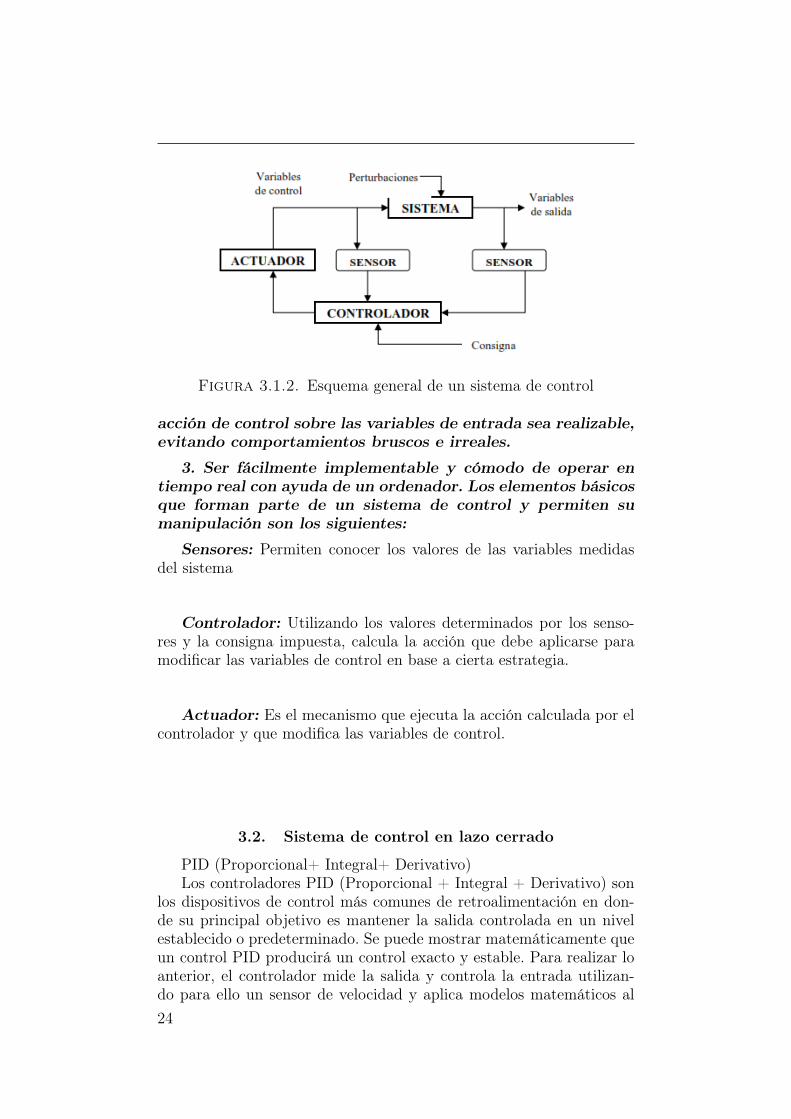
Figura 3.1.2. Esquema general de un sistema de control
acción de control sobre las variables de entrada sea realizable,evitando comportamientos bruscos e irreales.
3. Ser fácilmente implementable y cómodo de operar entiempo real con ayuda de un ordenador. Los elementos básicosque forman parte de un sistema de control y permiten sumanipulación son los siguientes:
Sensores: Permiten conocer los valores de las variables medidasdel sistema
Controlador: Utilizando los valores determinados por los senso-res y la consigna impuesta, calcula la acción que debe aplicarse paramodificar las variables de control en base a cierta estrategia.
Actuador: Es el mecanismo que ejecuta la acción calculada por elcontrolador y que modifica las variables de control.
3.2. Sistema de control en lazo cerrado
PID (Proporcional+ Integral+ Derivativo)Los controladores PID (Proporcional + Integral + Derivativo) son
los dispositivos de control más comunes de retroalimentación en don-de su principal objetivo es mantener la salida controlada en un nivelestablecido o predeterminado. Se puede mostrar matemáticamente queun control PID producirá un control exacto y estable. Para realizar loanterior, el controlador mide la salida y controla la entrada utilizan-do para ello un sensor de velocidad y aplica modelos matemáticos al24
3.2 Sistema de control en lazo cerrado
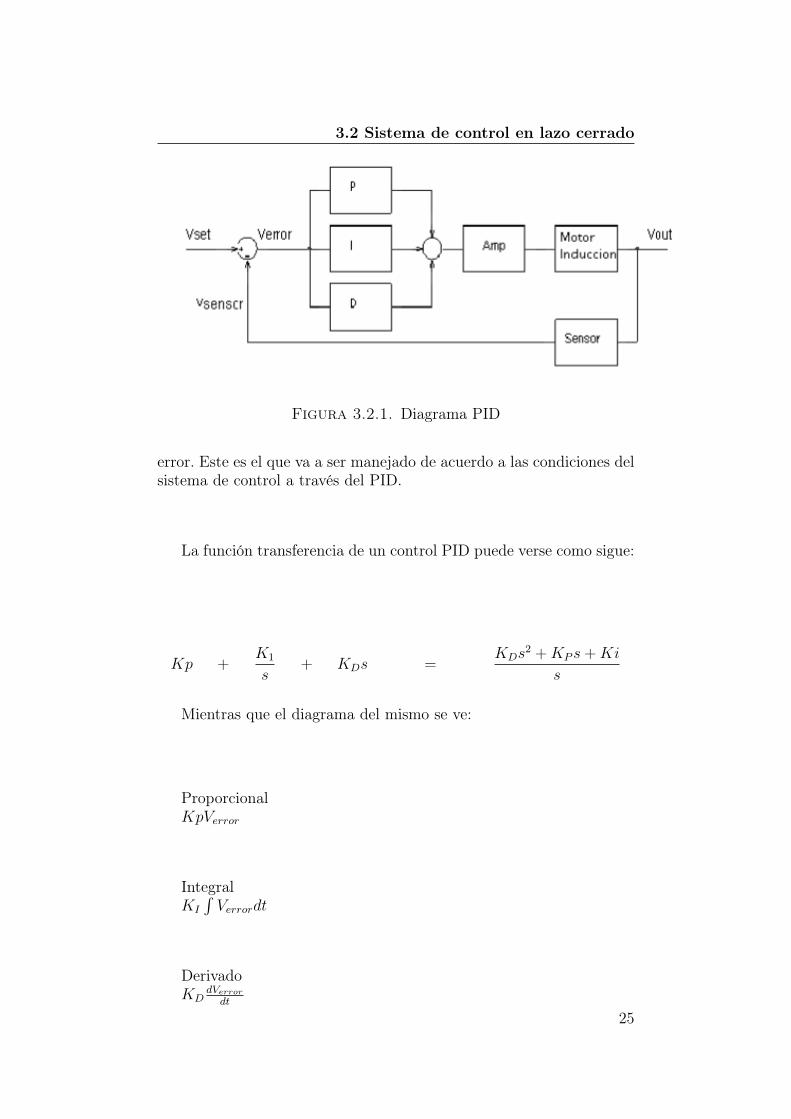
Figura 3.2.1. Diagrama PID
error. Este es el que va a ser manejado de acuerdo a las condiciones delsistema de control a través del PID.
La función transferencia de un control PID puede verse como sigue:
Kp +K1
s+ KDs =
KDs2 +KP s+Ki
s
Mientras que el diagrama del mismo se ve:
ProporcionalKpVerror
IntegralKI
∫Verrordt
DerivadoKD
dVerror
dt
25
3.3. Sistemas de control lineales y no lineales
La mayoria de los sistemas fisicos son no lineales en algun grado,por lo que pocas veces se encuentran en la práctica sistemas lineales.Los sistemas de control realimentados son modelos idealos fabricadospor el analista para simplificar el análisis y el diseño, lo que hace queun sistemas de control sea considerado lineal o no lineal en las mag-nitudes de las señales, es decir cuando estas se encuentran limitadasen intervalos, en los cuales los componentes del sistema exhiben unacaracteristica lineal, el sistema es esencialmente lineal; pero cuando di-chas magnitudes se extienden mas allá del intervalo de porción lineal,dependiendo de la severidad de la no linealidad, el sistema se considerano lineal. Frecuentemente las caracteristicas no lineales son introdu-cidas en forma intensional en un sistema de control para mejorar sudesempeño o proveeer un control mas efectivo.
Para los sistemas lineales existen una gran cantidad de tecnicasanaliticas y graficas para realizar diseños y análisis. En cambio lossistemas no lineales son dificiles de tratar en forma matemática y noexisten metodos generales disponibles para resolver una gran variedadde este tipo de sistemas (Kuo, 1996) .
3.4. Controlador PID
Uno de los factores mas importes al momento de implementar unsistema de control automatico es la selección del tipo de controladorque se requiere. Actualmente a pesar de la gran cantidad de herra-mientas sofisticadas y metodos avanzados de control, el controladorProporcional-Integral-Derivativo (PID) es el mas usado en la indus-tria moderna, controlando mas del 95% de los procesos industriales(Astrom and Hagglund, 1995).
Los controladores automáticos comparan el valor real de la salida deuna planta con la entrada de referencia ( el valor deseado), determinanel error o desviación y producen una señal de control que reducirá elerror a cero o a un valor pequeño. La manera en la cual el controladorproduce una señal de control se denomina acción de control.
Una de las representaciones para el controlador PID en función deltiempo esta dada por la ecuación:
u(t) = KP
(e(t) +
1
Ti
∫ t
0
e(γ)dγ + Tdde(t)
dt
)Donde: u(t) es la variable de control y e es el error de control. El
controlador PID es la suma de tres terminos : El término P (que esproporcional al error), el termino I (que es proporcional a la integral26

3.4 Controlador PID
del error) y el termino D ( que es proporcional a la derivada del error).Los parametros del controlador son : Ganancia proporcional Kp, tiempointegral Ki y tiempo derivativo Td (Astrom and Hangglund,1995).
3.4.1. Acción Proporcional.
En el caso de un control proporcional puro, la ley de controlanterior se reduce a :
u(t) = Kpe(t) + ub
La acción de control es simplemente proporcional al error de control.La variable ubes una señal de polarización o un reset. Cuando el errorde control e es cero, la variable de control toma el valor de u(t) =ub. El valor de ub a menudo se fija en (umax + umin) /2,pero algunasveces puede ser ajustado manualmente de forma que el error de controlen estado estacionario sea cero con una referencia dada (Astrom andHagglund, 1995).
3.4.2. Acción Integral. La función principal de la acción inte-gral es asegurar que la salida del proceso concuerde con la referenciaen estado estacionario. Con el controlador proporcional, normalmen-te existe un error en estado estacionario, Con la acción integral unpequeño error positivo siempre producirá un incremento en la señalde control y un error negativo siempre dará una señal decreciente sinimportar cuan pequeño sea el error.
El siguiente argumento muestra de forma simple que el error enestado estacionario siempre será cero con la acción integral. Asumaque el sistema está en estado estacionario con una señal de controlconstante (u0) y un error constante (e0) de la ecuación general se tieneque la señal de control está dada por:
u0 = Kp
(e0 +
e0Tit
)Como se tiene que e0 6= 0, claramente se contradice el supuesto
de que la señal de control u0es constante. Un controlador con acciónintegral siempre dará un error nulo en estado estacionario.
La acción integral tambien puede ser vista como un dispositivo queautomaticamente restablece el termino ub, de un controlador propor-cional. Esto se ilustrará en la figura siguiente. El cual muestra un con-trolador proporcional con un reset que se ajusta automáticamente. Elajuste se hace realimentando una señal, el cual es un valor filtrado dela salida del controlador a un punto de suma. El reset automatico fue elque dio origen a la acción integral del controlador de tipo PID (Astromand Hagglund, 1995).
27
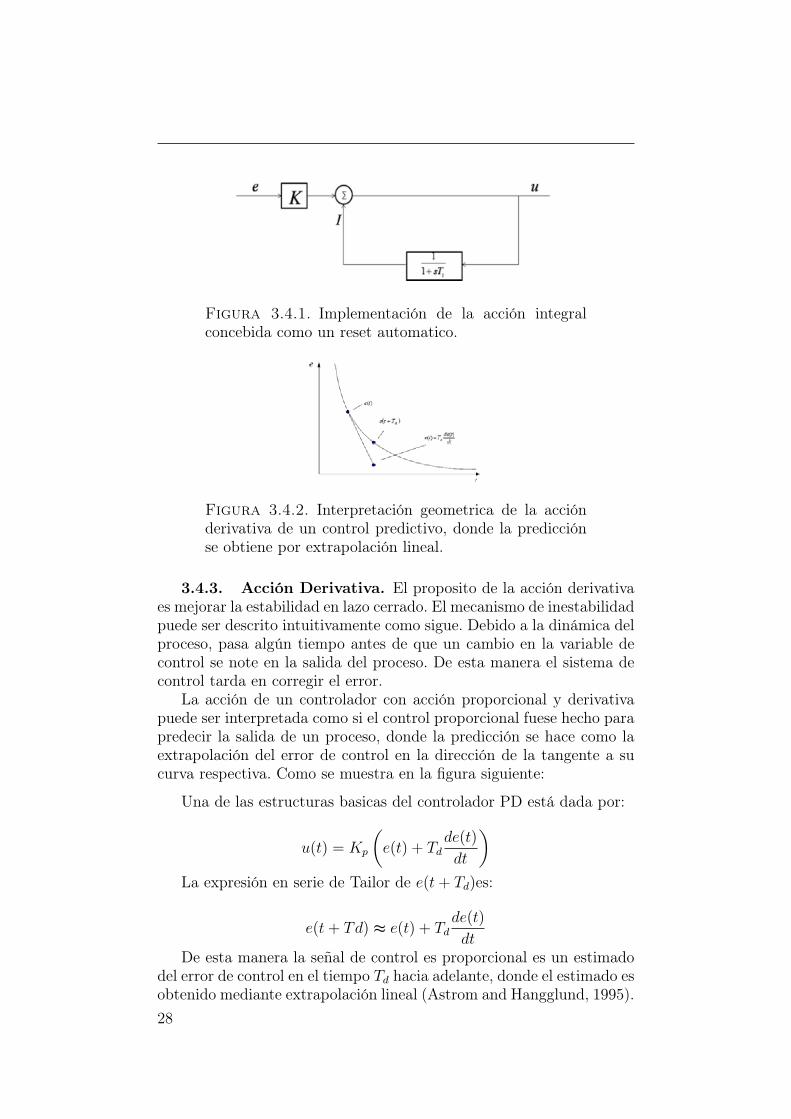
Figura 3.4.1. Implementación de la acción integralconcebida como un reset automatico.
Figura 3.4.2. Interpretación geometrica de la acciónderivativa de un control predictivo, donde la predicciónse obtiene por extrapolación lineal.
3.4.3. Acción Derivativa. El proposito de la acción derivativaes mejorar la estabilidad en lazo cerrado. El mecanismo de inestabilidadpuede ser descrito intuitivamente como sigue. Debido a la dinámica delproceso, pasa algún tiempo antes de que un cambio en la variable decontrol se note en la salida del proceso. De esta manera el sistema decontrol tarda en corregir el error.
La acción de un controlador con acción proporcional y derivativapuede ser interpretada como si el control proporcional fuese hecho parapredecir la salida de un proceso, donde la predicción se hace como laextrapolación del error de control en la dirección de la tangente a sucurva respectiva. Como se muestra en la figura siguiente:
Una de las estructuras basicas del controlador PD está dada por:
u(t) = Kp
(e(t) + Td
de(t)
dt
)La expresión en serie de Tailor de e(t+ Td)es:
e(t+ Td) ≈ e(t) + Tdde(t)
dtDe esta manera la señal de control es proporcional es un estimado
del error de control en el tiempo Td hacia adelante, donde el estimado esobtenido mediante extrapolación lineal (Astrom and Hangglund, 1995).28

3.4 Controlador PID
La función de transferencia del controlador PID correspondiente ala ecuación general esta representada por:
C(s) = Kp
(1 +
1
Tis+ Tds
)Donde:Kp : Ganancia proporcionalTi : Tiempo integralTd : Tiempo derivativoLa representación matematica de un control PID es equivalente a
la siguiente ecuación:
C(s) = Kp +Ki
s+Kds
Donde:Kp : Ganancia proporcionalKi : Ganancia integralKd :Ganancia derivativa
29


Capítulo 4
Analisis y diseño del controlador PID
4.1. Analisis y diseño del controlador PID
El diseño del circuito del controlador PID se realizó con el fin deser utilizado como controlador para diversos procesos, de manera quecumpliera con un rango amplio de especificaciones tanto en estado tran-sitorio como en estado estacionario.
4.1.1. Diseño del controlador PID. Existen diversas configu-raciones para el controlador PID, pero para este proyecto la ecuaciónque describe la configuración elegida es la siguiente:
u(t) = Kpe(t) +Ki
∫ t
0
e(γ)dγ +Kdde(t)
dty su finción de transferencia resulta:
CPID(s) =
(Kp +
Ki
s+Kds
)En los sistemas de control básicos, si la entrada de referencia es
un escalón, debido a la presencia del término derivativo en la acciónde control, la variable manipulada u(t) contendrá una función impulso(un delta). Es un controlador PID real, en lugar del término derivativoKds se emplea:
Kds
γDs+ 1
Donde γD, denominada constante de tiempo derivativa, normalmen-
te es elegida tal que 0,1 ≤ γD ≤ 0,2. Cuanto mas pequeño es γD, mejores la aproximación entre el término "derivativo filtrado" de la ecuaciónanterior y el “derivativo” Kds, es decir son iguales en el límite:
lim uPID(t) = Kpe(t) +Ki
∫ t
t0
e(γ)dγ +Kdde(t)
dt
Con la inclusión de un polo evitamos usar acciones de control gran-des en respuestas a errores de control de alta frecuencia, tales comoerrores inducidos por cambios de setpoint (referencia) o mediciones deruido. El argumento clásico por el cual se elige γD 6= 0 es, además de
31
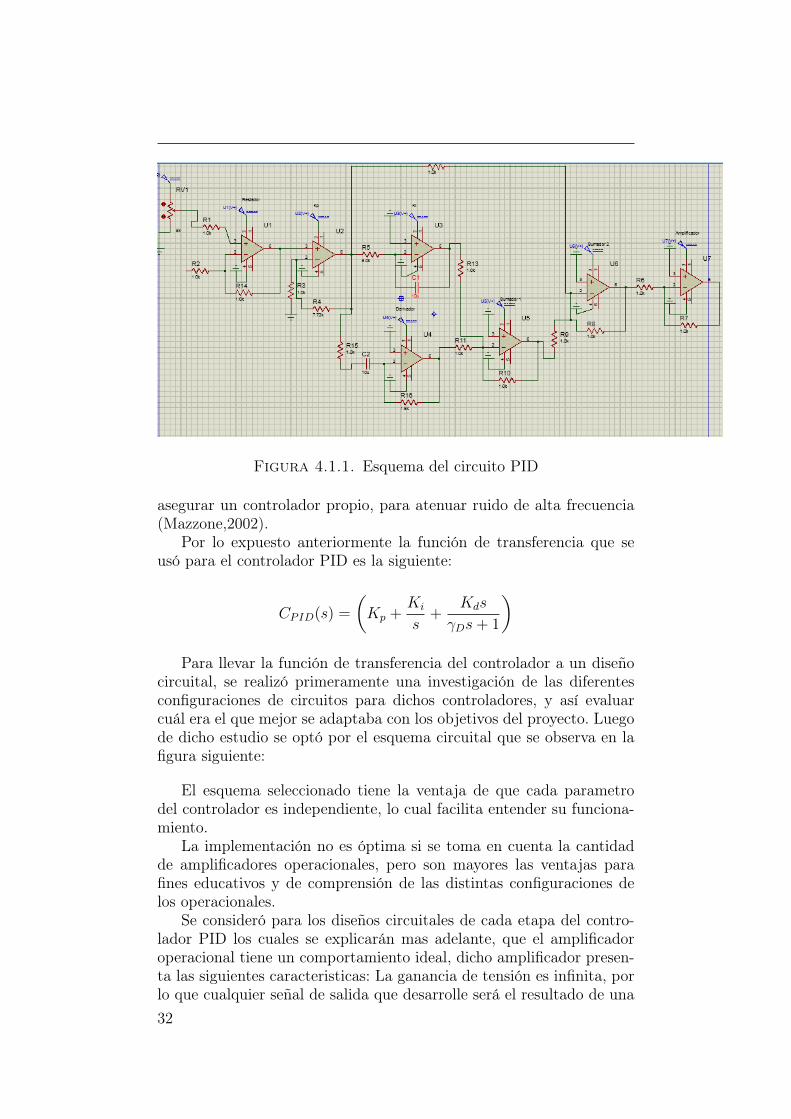
Figura 4.1.1. Esquema del circuito PID
asegurar un controlador propio, para atenuar ruido de alta frecuencia(Mazzone,2002).
Por lo expuesto anteriormente la función de transferencia que seusó para el controlador PID es la siguiente:
CPID(s) =
(Kp +
Ki
s+
Kds
γDs+ 1
)Para llevar la función de transferencia del controlador a un diseño
circuital, se realizó primeramente una investigación de las diferentesconfiguraciones de circuitos para dichos controladores, y así evaluarcuál era el que mejor se adaptaba con los objetivos del proyecto. Luegode dicho estudio se optó por el esquema circuital que se observa en lafigura siguiente:
El esquema seleccionado tiene la ventaja de que cada parametrodel controlador es independiente, lo cual facilita entender su funciona-miento.
La implementación no es óptima si se toma en cuenta la cantidadde amplificadores operacionales, pero son mayores las ventajas parafines educativos y de comprensión de las distintas configuraciones delos operacionales.
Se consideró para los diseños circuitales de cada etapa del contro-lador PID los cuales se explicarán mas adelante, que el amplificadoroperacional tiene un comportamiento ideal, dicho amplificador presen-ta las siguientes caracteristicas: La ganancia de tensión es infinita, porlo que cualquier señal de salida que desarrolle será el resultado de una32

4.1 Analisis y diseño del controlador PID
señal de entrada mucho mas pequeña, es decir la tensión de entradadiferencial es nula. También si la resistencia de entrada es infinita, noexiste flujo de corriente en ninguno de los terminales de entrada (termi-nal 2 y 3); esto es un concepto ideal del amplificador real, sin embargose acerca con mucha exactitud al comportamiento real de los circuitos.
4.1.2. Proceso del diseño del controlador PID.
4.1.3. Amplificador Restador. El diseño del controlador tieneel siguiente proceso: En el primer amplificador operacional representadopor U1 y en conjunto con las resistencias : R1 = 1kΩ, R2 = 1kΩ, R14 =1kΩ , se tiene la configuración de un amplificador diferenciador o res-tador, el cual realiza la resta entre la señal de referencia o setpoint(REF) y la señal de salida de la planta o proceso (SP), dando comoresultado el valor de error entre ambas señales. Esta configuración esla que representa el punto de retroalimentación de los diagramas decontrol en lazo cerrado.
Como vemos en el diagrama la configuración del amplificador res-tador tiene todas sus resistencias iguales, haciendo que este tenga solouna ganancia unitaria, acontinuación el analisis.
Vo = Vref − VspDonde:Vsp : La señal de salida del procesoVref : La señal de referenciaVo : La señal de entrada al controlador
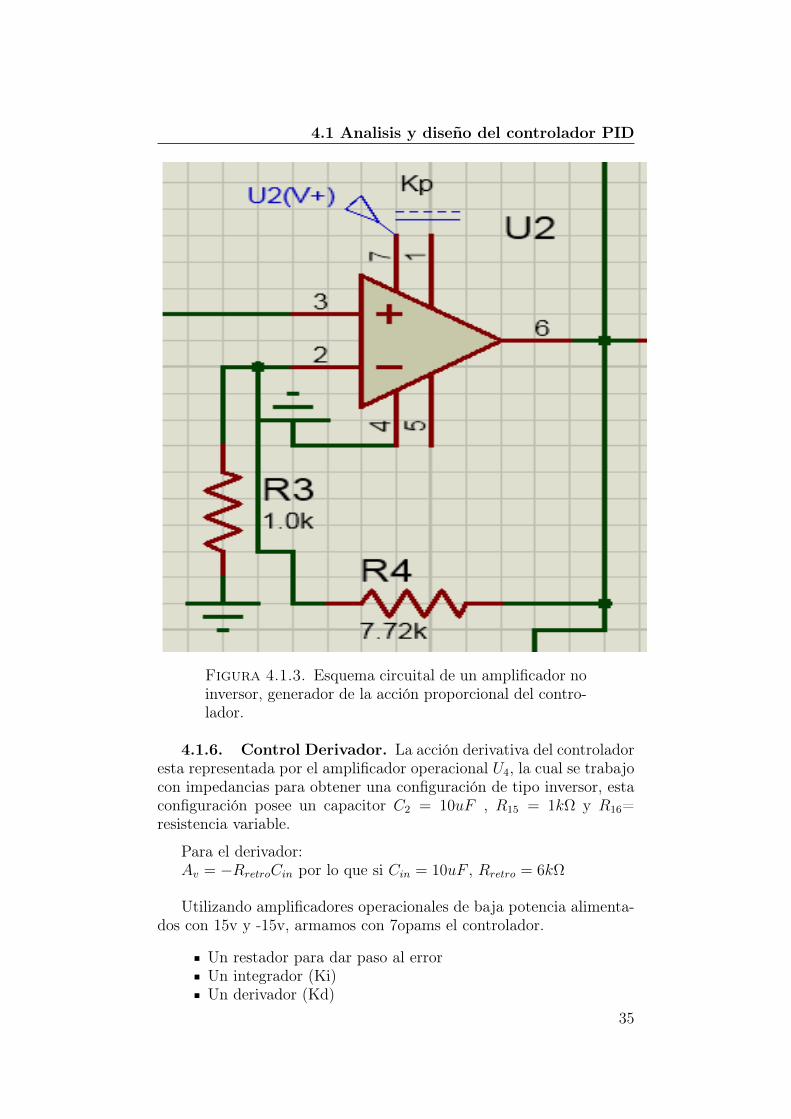
4.1.4. Control Proporcional. La acción proporcional esta re-presentada por el amplificador operacional U2 en el cual se realiza unaconfiguración de un amplificador no inversor, la cual es una de las masimportantes, por que gracias a esta, se pueden elaborar otras confi-guraciones; para este caso la ganancia esta dada por las resistencias:R3 = 1kΩ, R4 = 10kΩ (siendo R4una resistencia variable).
Para el proporcional usaremos un amplificador no inversor con unaganancia de 8.72 ajustandose a la siguiente ecuación:
Acl =VOEi
= 1 +Rf
Ri
=Rf +Ri
Ri
=7,72kΩ + 1kΩ
1kΩ= 8,72
el voltaje de salida de este amplificador estará dado por la siguienteecuación:
Vo =
(1 +
Rf
Ri
)Ei
Donde:Acl =Ganancia en lazo cerrado
33
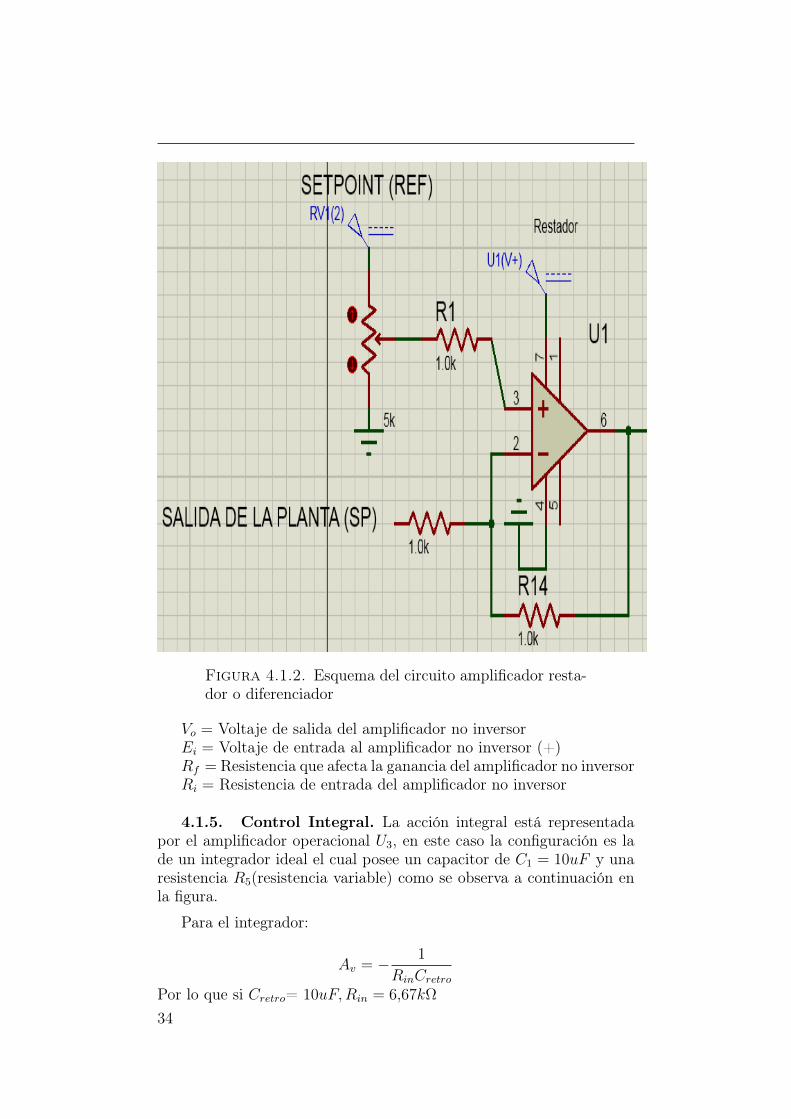
Figura 4.1.2. Esquema del circuito amplificador resta-dor o diferenciador
Vo = Voltaje de salida del amplificador no inversorEi = Voltaje de entrada al amplificador no inversor (+)Rf = Resistencia que afecta la ganancia del amplificador no inversorRi = Resistencia de entrada del amplificador no inversor
4.1.5. Control Integral. La acción integral está representadapor el amplificador operacional U3, en este caso la configuración es lade un integrador ideal el cual posee un capacitor de C1 = 10uF y unaresistencia R5(resistencia variable) como se observa a continuación enla figura.
Para el integrador:
Av = − 1
RinCretro
Por lo que si Cretro= 10uF,Rin = 6,67kΩ
34
4.1 Analisis y diseño del controlador PID
Figura 4.1.3. Esquema circuital de un amplificador noinversor, generador de la acción proporcional del contro-lador.
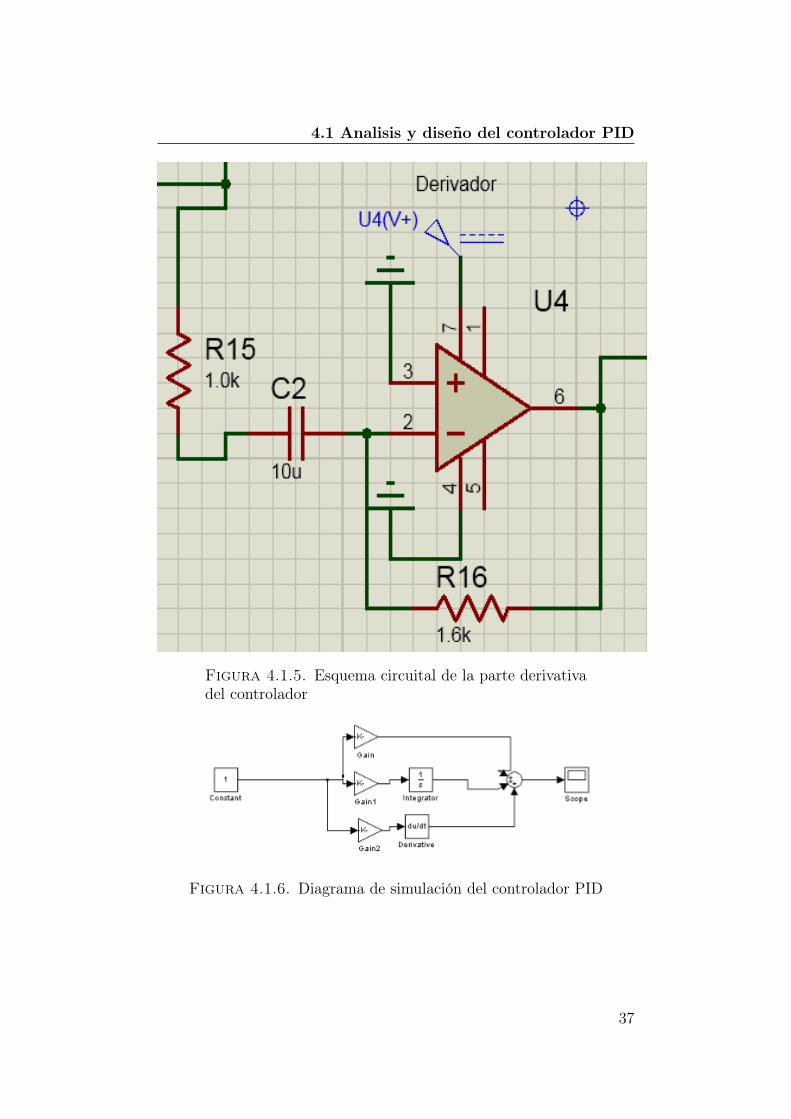
4.1.6. Control Derivador. La acción derivativa del controladoresta representada por el amplificador operacional U4, la cual se trabajocon impedancias para obtener una configuración de tipo inversor, estaconfiguración posee un capacitor C2 = 10uF , R15 = 1kΩ y R16=resistencia variable.
Para el derivador:Av = −RretroCin por lo que si Cin = 10uF , Rretro = 6kΩ
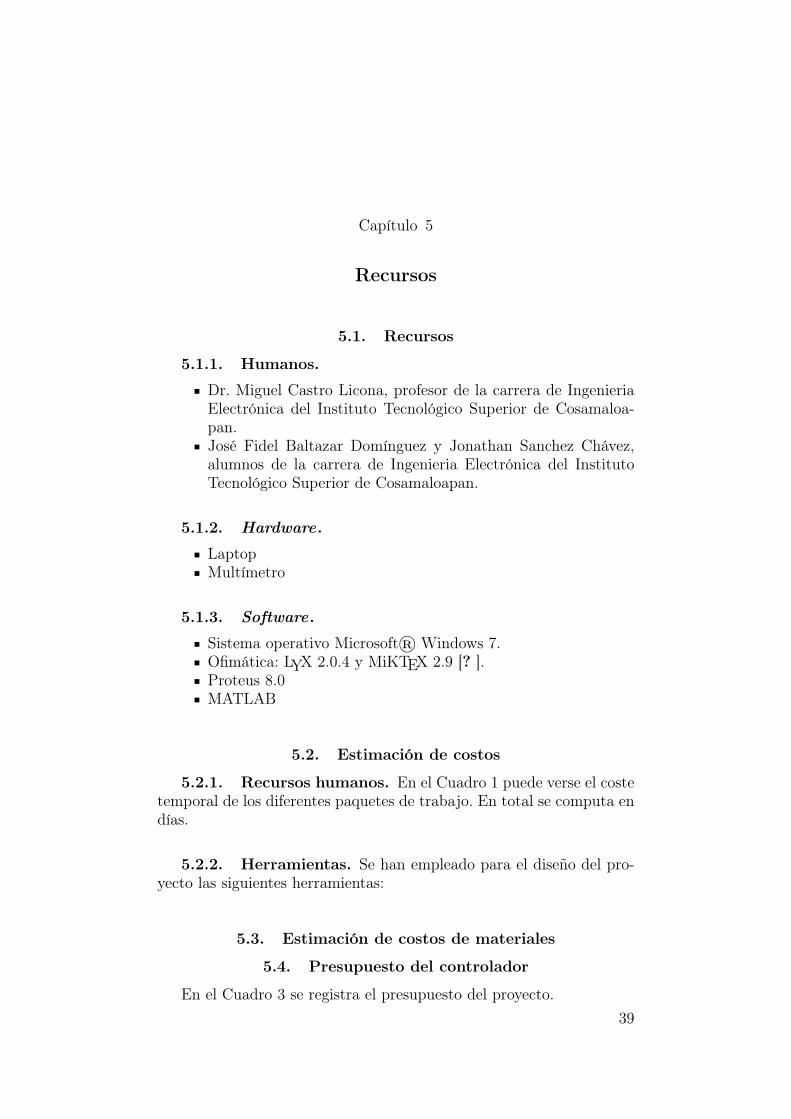
Utilizando amplificadores operacionales de baja potencia alimenta-dos con 15v y -15v, armamos con 7opams el controlador.
Un restador para dar paso al errorUn integrador (Ki)Un derivador (Kd)
35
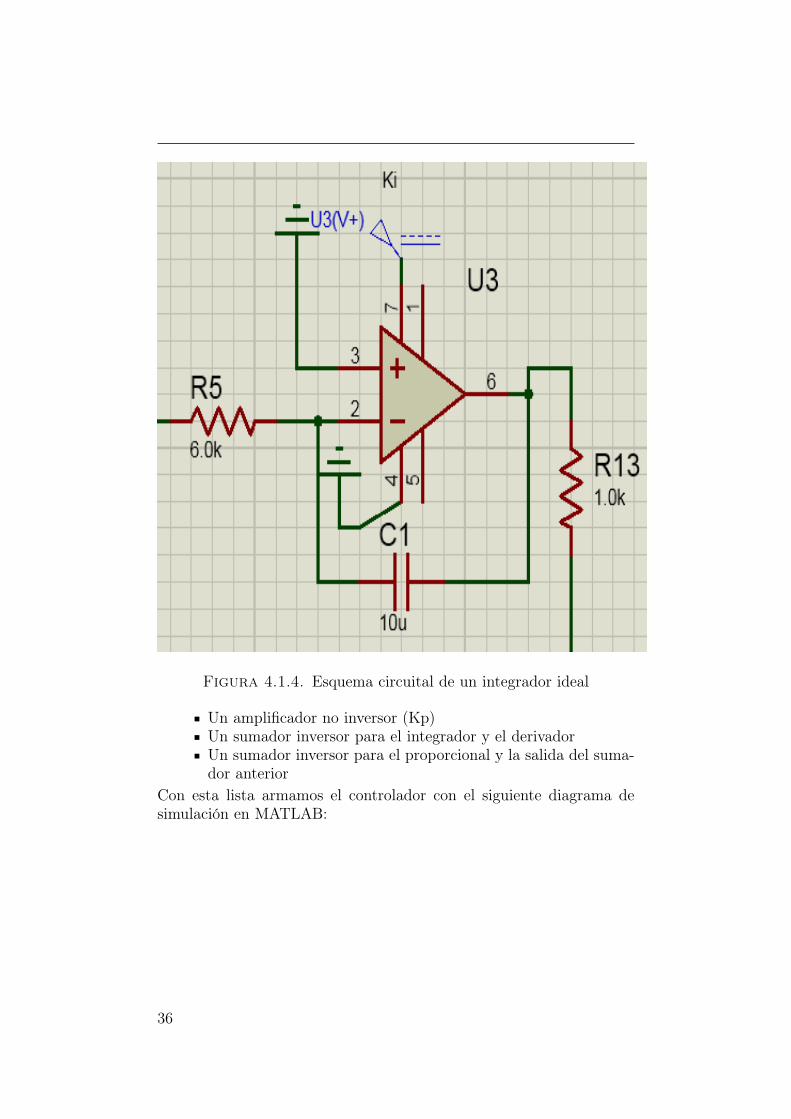
Figura 4.1.4. Esquema circuital de un integrador ideal
Un amplificador no inversor (Kp)Un sumador inversor para el integrador y el derivadorUn sumador inversor para el proporcional y la salida del suma-dor anterior
Con esta lista armamos el controlador con el siguiente diagrama desimulación en MATLAB:
36
4.1 Analisis y diseño del controlador PID
Figura 4.1.5. Esquema circuital de la parte derivativadel controlador
Figura 4.1.6. Diagrama de simulación del controlador PID
37

Capítulo 5
Recursos
5.1. Recursos
5.1.1. Humanos.
Dr. Miguel Castro Licona, profesor de la carrera de IngenieriaElectrónica del Instituto Tecnológico Superior de Cosamaloa-pan.José Fidel Baltazar Domínguez y Jonathan Sanchez Chávez,alumnos de la carrera de Ingenieria Electrónica del InstitutoTecnológico Superior de Cosamaloapan.
5.1.2. Hardware.
LaptopMultímetro
5.1.3. Software.
Sistema operativo Microsoft® Windows 7.Ofimática: LYX 2.0.4 y MiKTEX 2.9 [? ].Proteus 8.0MATLAB
5.2. Estimación de costos
5.2.1. Recursos humanos. En el Cuadro 1 puede verse el costetemporal de los diferentes paquetes de trabajo. En total se computa endías.
5.2.2. Herramientas. Se han empleado para el diseño del pro-yecto las siguientes herramientas:
5.3. Estimación de costos de materiales
5.4. Presupuesto del controlador
En el Cuadro 3 se registra el presupuesto del proyecto.39
Fase Duración (días)
Introduccion 1
Origenes de los controladores 8
Marco teórico 15
Analisis+Diseño 10
Implementación 5
Evaluación y Pruebas de prototipo 8
TOTAL 47Cuadro 1. Coste temporal del proyecto.
Herramientas usadas cantidad
Laptop 3
Cautín 1
Multímetro digital 1
Alicates de corte lateral 2
Alicates de punta 1
Pistola de silicon 1
Cutter 1Cuadro 2. Herramientas usadas
Concepto Cantidad PRECIORecursos humanos 2
Materiales para control PIDAmplificadores Lm741 7 $42.00Resistencias de carbón 17 $34.00Capacitores ceramicos 2 $4.00led megabrillante 1 $20.00Protoboard 2 $200.00Potenciometros 5 $75.00Transistores 3 $27.00ldr 1 $3.00Paquetes de ofimática 1 $0.00
TOTAL $405.00Cuadro 3. Presupuesto.
40
Capítulo 6
Implementación del controlador PID
6.1. Selección de componentes para la implementación delcontrolador PID
Luego de realizado el diseño del controlador y teniendo que satisfa-ce los objetivos planteados, y teniendo el presupuesto de materiales, seprocedió a realizar la implementación; esto se inició eligiendo compo-nentes electrónicos accesibles en el mercado y de fácil uso. En la tabla 3en el capitulo 5.4, se indican los componentes usados para la construc-ción del controlador PID analógico, posteriormente se dará una brevejustificación sobre la elección de cada uno de los componentes.
Uno de los principales componentes usados en este proyecto fue elamplificador Lm741 (Enapsulado de 8 terminales), por que es de bajocosto y es muy utilizado en diversas aplicaciones analógicas, este am-plificador es monolítico de alto rendimiento construido por el procesoepitaxial planar de fairchild (fabricante) ; y posee un alto intervalo devoltaje en modo común, otra ventaja es que es ideal como seguidor devoltaje, su alta ganancia y amplia gamma de voltajes de operación lepermiten lograr un ecepcional rendimiento como integrador, amplifi-cador sumador, y en aplicaciones de retroalimentación, no necesita decompensación en frecuencia y protege contra cortocircuitos.
Se usaron resistencias con pelicula de carbón porque tienen comocaracteristica uniformidad de dimensiones, durabilidad, propiedades deaislamiento superiores, alta inmunidad a influencias externas, bajo nivelde ruido y alta estabilidad.
Este tipo de resistencia es usado en una gran variedad de circuitoselectrónicos, además este tipo de resistor no presenta cambios aprecia-bles en su resistencia por efecto del calor producido al soldarlo en loscircuitos.
El valor elegido para las resistencias usadas en la implementacióndel controlador se seleccionó relativamente intermedio entre las resis-tencias comerciales existentes.
En la elección de los capacitores, se elegieron los capacitores cerá-micos solo por el tamaño, el inconveniente de estos dieléctricos de altacte. dieléctrica es que el valor de la misma depende mucho de la tem-peratura,(misma que en este caso no se ve afectada por eso la desiciónde usarlos) así como las pérdidas en el dieléctrico. Sin embargo, don-de el valor de la capacidad es relativamente menos importante, como
41

por ejemplo en filtros pasa RF, estos componentes son ampliamenteutilizados.
Para disminuir el ruido que proporcionan las fuentes de alimenta-ción (+15v y -15v) usadas para energizar los amplificadores operaciona-les, se usaron capacitores ceramicos de 0.1uF para filtrar dicha fuente,estos se usaron en el circuito de la fuente de alimentación los cualesfueron fijadas en una placa.
Para las correspondientes pruebas y ajustes de ganancias, set point,sensibilidad del sensor, se usaron potenciometros clasicos (recomenda-dos usar potencionetros lineales o de presición, para poder ajustar comocorresponde los parametros ajustables del controlador PID, por la co-modidad que ofrecen; tanto en sus dimensiones fisicas como por su fáciluso.
42
Capítulo 7
Conclusiones
En la primera etapa de la tesis que fue la investigación teórica, sepuede concluir que tenemos muchas fuentes de información respecto aeste tema, hay gran variedad de libros y textos, aunque aun no hay unmanual desde cero, ya que para poder implementar este proyecto, debe-mos de tener bases solidad en el área de control y electrónica analógicacon amlificadores operacionales. Lo mas difícil de este proyecto fue sen-tar las bases del marco teórico adecuado para adentrarnos en el analisisde los sistemas de control analógicos.
La segunda etapa fue el modelado, el análisis matematico y la ex-plicación de como estaba constituido las partes mas importantes delcontrolador, asi como la configuración de cada uno de los amplificado-res mas importantes que constituyen el control.
La tercera etapa fue el analisís de los recursos que ocupariamos parala elaboración del proyecto, enlistar los materiales, asi como las herra-mientas fisicas y de software y lo mas importante sacar el presupuestode los materiales a usar.
La cuarta etapa fue la la construcción de la fuente de alimentación,controlador PID, etapa sensora y etapa de potencia. Se nos dificultó alprincipio el armado del controlador, tuvimos muchos fallos al comien-zo del armado, tuvimos que desarmar y volver armarlo unas 8 vecesya que el control presentaba problemas, despues de revisarlo llegamosa ver que no hacian buen contacto todas las terminales en la poroto-board y lo cambiamos, eso nos sirvió para tener mas ideas, creatividade ingenio a la hora del armado, rehicimos el control de diferentes ma-neras y optamos por la opción de separarlo todo para poder tener unmejor analisis parte por parte y poder verificar verazmente cada etapade nuestro control, asi tambien podriamos revisar las salidas de ca-da controlador por si fallaba alguno, encontrarlo de una manera masrapida.
7.1. Instalación del proyecto terminado
7.1.1. Escenario. El medio idoneo para la instalación de un pro-totipo funcional puede ser en cualquier lado, ya sea una habitación,oficina, closet, sala, comedor, y hasta en un baño, los lugares son muydiversos y siempre son ideales.
43

7.1.2. Funcionamiento. El funcionamiento del control es senci-llo, bastará instalarse previamente, y después solo ajustar la intensidadde luz que desee a su gusto mediante el potenciometro.
7.1.3. Estimación del rendimiento. Se estima que el rendi-miento mejore notablemente, al solo usar la cantidad de luz necesariapara cada necesidad, el objetivo de esto es ir concientizando que estiempo de cambiar los clasicos apagadores por dimmers. Está claro queel costo es un poco mas alto, pero vale la pena. En lugar de tenercantidad de luz, tendremos calidad.
44

Capítulo 8
Referencias
8.1. Resultados
En este proyecto se ha diseñado e implementado a las aplicacionesen dimmers en el hogar, los resultados de la realización de este proyectono fueron muy alentadoras dado el hecho de los costos de producciónque oscilaron en $405.00 y los dimmers comerciales cuestan alrrededorde : $150.00, está claro que la realización de este proyecto fue total-mente educativa, para sentar bases solidas en las materias de control II,taller de investigación II y diseño de amplificadores operacionales. Aunasi hay opciones mas accesibles, no necesariamente controladas con am-plificadores operacionales, tambien se pueden usar microcontroladores,tarjetas arduino, PLC, etc. dando mayor alcance y mas opciones demanejar muchas mas lamparas de tecnología led.
8.2. Referencias
1. KUO, B.C.-Sistemas de Control Automático. Prentice Hall His-panoamericana, México, 1996.
2. OGATA, KATSUHIKO (1998). Ingeniería de Control Moderna.Tercera Edición. Prentice-Hall hispanoamericana, S.A.
3. Robert F. Coughlin, Frederick F. Driscoll (1999) Amplificadoresoperacionales y circuitos integrados lineales.
4. http://www.lcardaba.com/articles/cond/cond.htm#ceramico5. http://en.wikipedia.org/wiki/Dimmer#Saltwater_dimmer6. http://centrodeartigos.com/articulos-utiles/article_119515.html7. Basic Control Theory8. Astrom and Hagglund http://chem.engr.utc.edu/engr329/Relay-
feedback/11–Relay-Feedback-Experimental-Procedure-.pdf
45