Embed Size (px)
Citation preview
TESISSANTI ANGGRAINI
2208202006
Meriam adalah salah satu sistem senjata yang sangat berperan penting di kapal perang.
Sistem kendali meriam ada dua macam, yaitu pertama menggunakan radar kendali senjata dan kedua menggunakan kolonka.
Sistem pengendalian senjata otomatis memiliki beberapa level, diantaranya deteksi target, tracking, dan identifikasi.
Dalam proses tracking target terdapat beberapa gangguan diantaranya perubahan kecepatan kapal, gerak kapal sendiri seperti efek gelombang laut (pitch dan roll).
Perubahan parameter momen inersia merupakan ketidaklinieran gerakan meriam
Pada modifikasi sistem kendali meriam ini dilakukan penelitian dan percobaan menggunakan Sliding Mode Control untuk mengatur posisi laras meriam (training dan elevasi) pada platform yang bergerak.

• Bagaimana mendesain dan sekaligus membuat sebuah plant yaitu model meriam yang dapat melakukan gerakan training dan elevasi.
• Merancang kontroler SMC agar respon keluaran sistem ( gerakan training dan elevasi ) tetap pada posisinya / setpoint , meskipun terdapat gangguan akibat platform yang bergerak ( pitch dan roll ).
• Bagaimana mengimplementasikan kontroler SMC pada plant sebenarnya, kemudian diamati bagaiman performasinya.
• Pembahasan materi sebatas pengendalian gerakan motor meriam saja :
a. Gerakan elevasi mulai sudut -10° s/d 75°.
b. Gerakan training mulai sudut ± 120° dengan sudut 0° berada ditengah-tengah.
• Tidak membahas proses akurasi penembakan (perhitungan kecepatan kapal sendiri maupun target dan TOF)
• Tidak menggunakan simulasi radar.• Masukan sistem dari keyboard dengan memasukkan
data sudut training dan sudut elevasi .• Gangguan pitch dan roll diperoleh dari gerakan
platform bergerak yang dikenakan pada meriam.

• Tidak memperhitungkan gerak relatif platform meriam dan pergerakan sasaran.
• Platform yang bergerak terletak pada media diam, sehingga tidak memperhitungkan arah dan kecepatan kapal.
• Sensor ADXL 330 dipasang pada meriam, sehingga data yang dibaca sensor merupakan pengukuran terhadap global ( bumi ).
• Model matematik plant diperoleh melalui proses identifikasi.
• Diasumsikan sistem controllable.
Implementasi kontroler SMC digunakan untuk mengendalikan gerakan training dan elevasi pada meriam sehingga pergerakan meriam dapat mencapai setpoint / posisi sudut yang diharapkan, walaupun terdapat gangguan akibat platform yang bergerak (gerakan pitch dan roll).
Metode Sliding Mode Control digunakan untuk mengatur posisi motor DC karena sifat robustness terhadap model yang tidak pasti dan gangguan luar, serta kemampuannya dalam kontrol sistem nonlinier dan sistem MIMO. Pada metode ini digunakan control gain untuk menghindari munculnya fenomena chattering. ( M. Fallahi, dkk, 2009)
Perancangan model dinamik dan control dari ROV dalam 4 derajat kebebasan ( 4 DOF ). Sistem kontrol SMNNS ( Sliding Mode Neural Network System ) untuk underwater ROV ( Remotely Operated Vehicle ) menghasilkan kontrol posisi yang tepat. Walaupun dinamika ROV tidak diketahui secara eksplisit dan tanpa linierisasi untuk merancang kontroler, serta tanpa proses pembelajaran untuk kontroler. Langsung digunakan secara on-line berdasarkan stabilitas Lyapunov. (Ahmad Bagheri, dkk, 2009 )
Pemodelan dinamis pada quadrotor orde tinggi non holonomic, mengembangkan suatu metode kontrol yang mempengaruhi dinamika terbang. Pendekatan Backstepping digunakan untuk sintesa tracking eror dan fungsi Lyapunov. Sliding Mode Controller digunakan untuk menjamin stabilitas Lyapunov, menangani non-linieritas sistem, dan mendapat lintasan yang dikehendaki. ( H. Bouadi, dkk, 2007 )
Sliding Mode Control digunakan untuk control gerakan Stewart Platform. Model dinamik model ini dalam 6 derajat kebebasan (6 DOF). Model dinamik plant diturunkan untuk membuat Sliding Mode Control sehingga tracking error menuju ke nol asimtotik. Analisa stabilitas berdasar pada teori Lyapunov agar hasil perancangan kontroler stabil. (Chin-I Huang, dkk )
Pada dasarnya penelitian yang berkaitan dengan meriam terbatas dilakukan. Oleh karena itu kajian pustaka yang kami ulas di atas hanya sebatas mengambil metode kontroler yang akan diterapkan pada meriam. Dengan harapan bahwa Sliding Mode Control dapat diterapkan pada meriam dengan parameter-parameter berubah-ubah (momen inersia) yang merupakan ketidaklinieran gerakan meriam dan pengaruh gangguan luar (pitch dan roll), sehingga tujuan penelitian dapat tercapai.
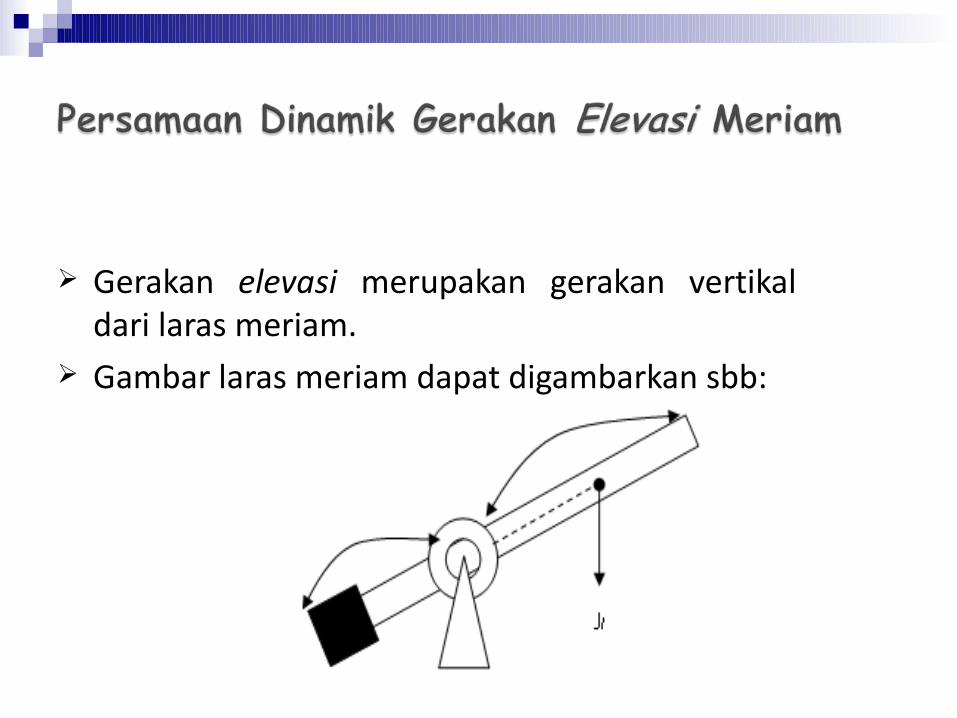
Gerakan elevasi merupakan gerakan vertikal dari laras meriam.
Gambar laras meriam dapat digambarkan sbb:
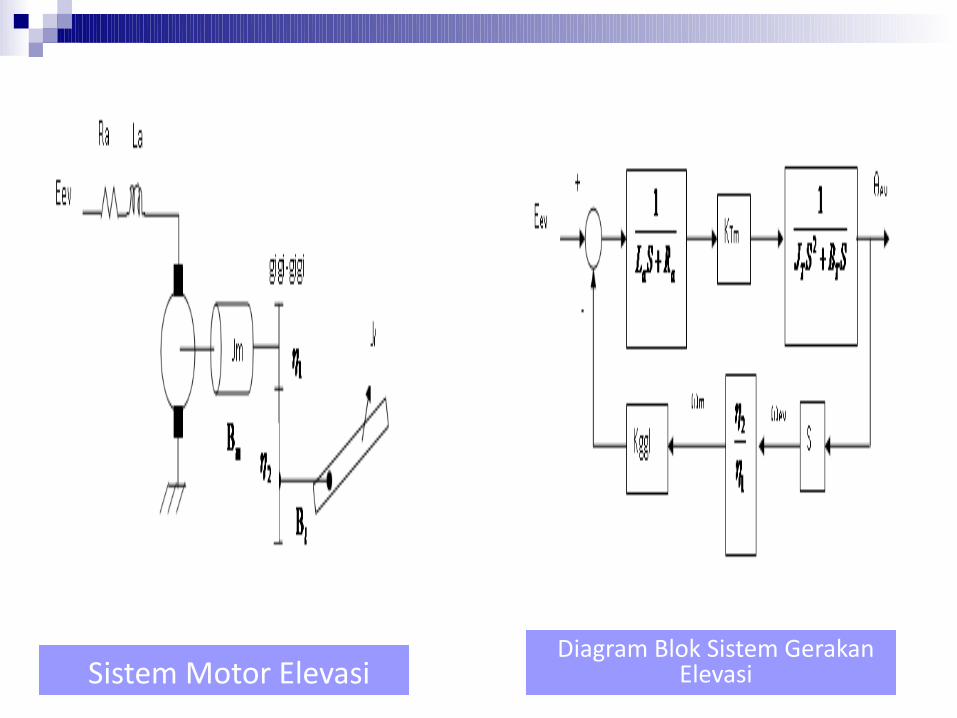
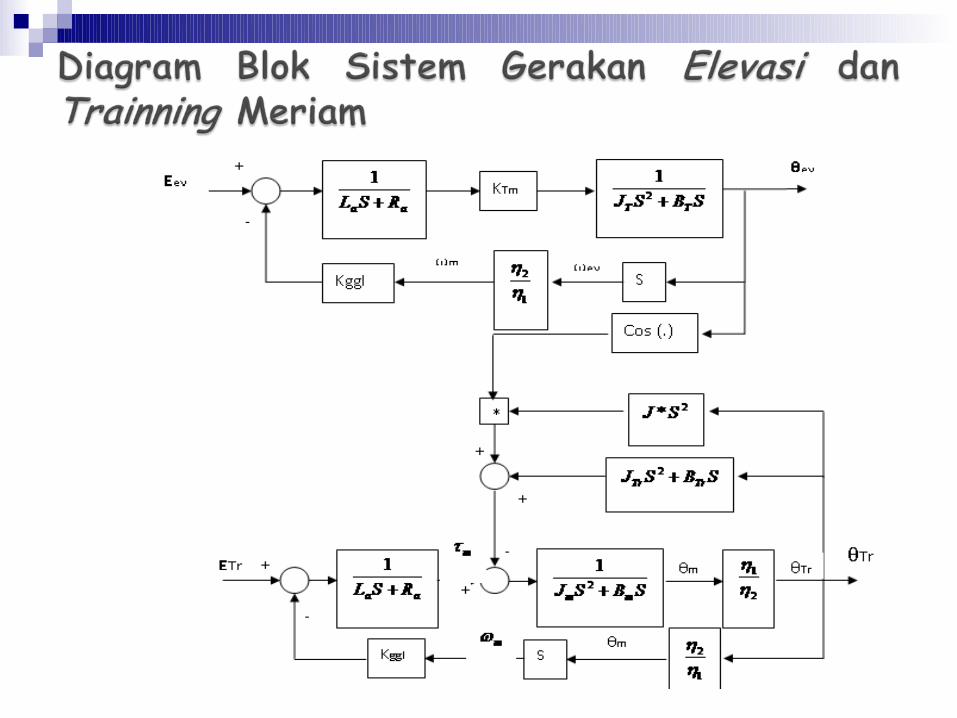
Sistem Motor ElevasiDiagram Blok Sistem Gerakan
Elevasi
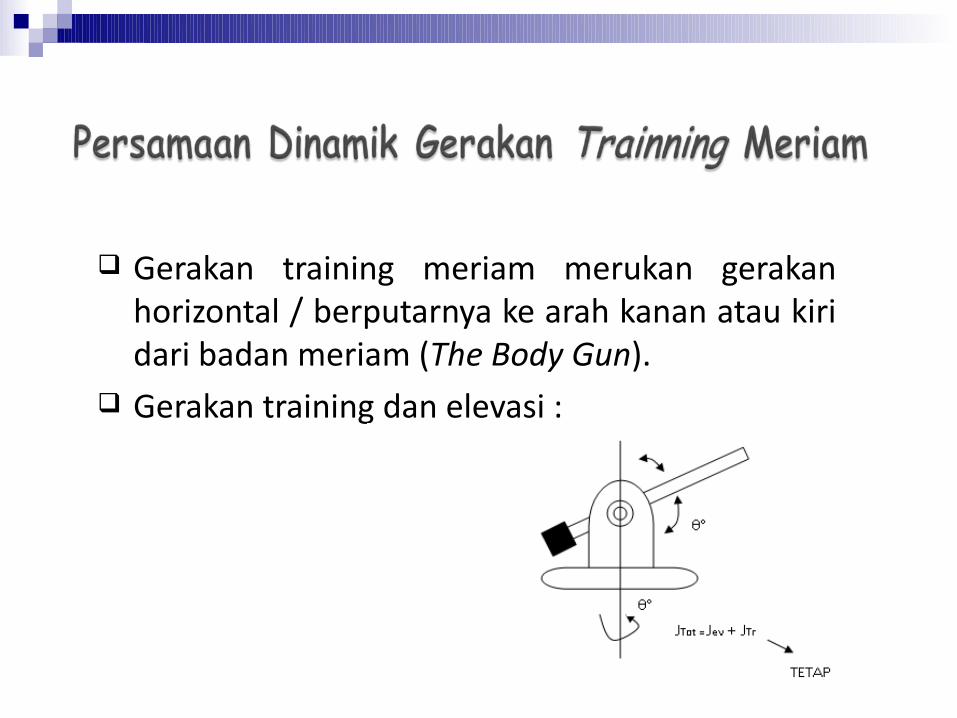
Gerakan training meriam merukan gerakan horizontal / berputarnya ke arah kanan atau kiri dari badan meriam (The Body Gun).
Gerakan training dan elevasi :
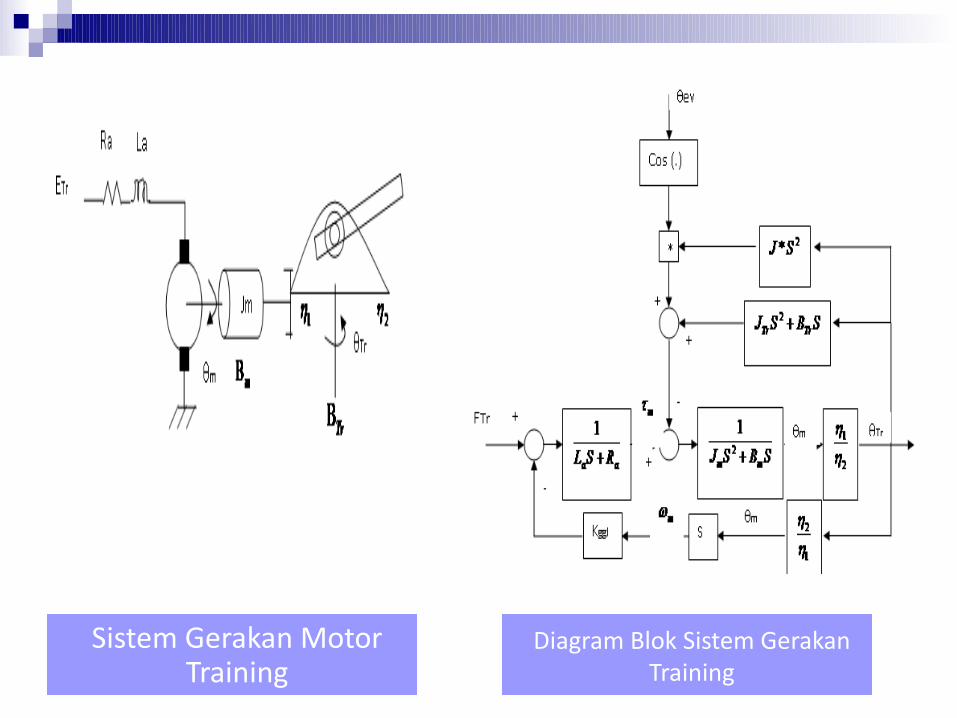
Sistem Gerakan Motor Training
Diagram Blok Sistem Gerakan Training
Sliding Mode Controller (SMC) merupakan sebuah kendali umpan balik pensaklaran berkecepatan tinggi (high speed switching feedback control ) yang efektif dan kokoh dalam mengendalikan sistem linear maupun non-linear.
Pada prinsipnya, SMC menggunakan sebuah hukum kendali pensaklaran berkecepatan tinggi untuk membawa trajektori status dari sistem linier / non-linier ke dalam sebuah permukaan tertentu dalam sliding surface, kemudian trajektori status tersebut dipelihara agar tetap meluncur pada permukaan tersebut.
Proses pemeliharaan trajektori status pada permukaan luncur mengakibatkan terjadinya osilasi pada permukaan luncur, yang disebut dengan chattering.
Fenomena chattering pada permukaan luncur akan berdampak pada stabilitas sistem kendali.
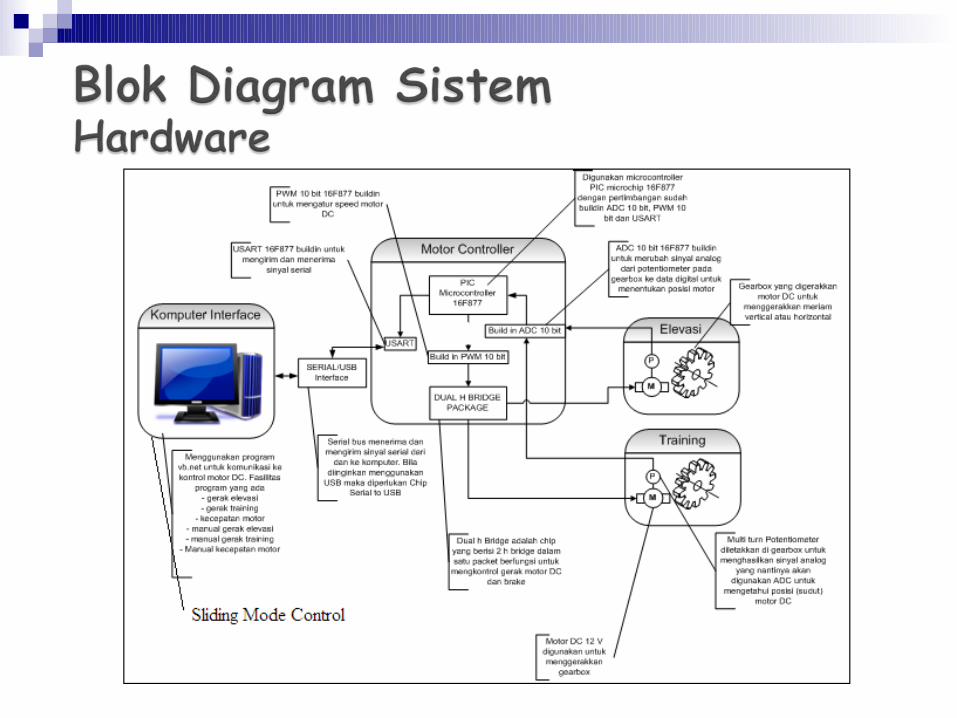
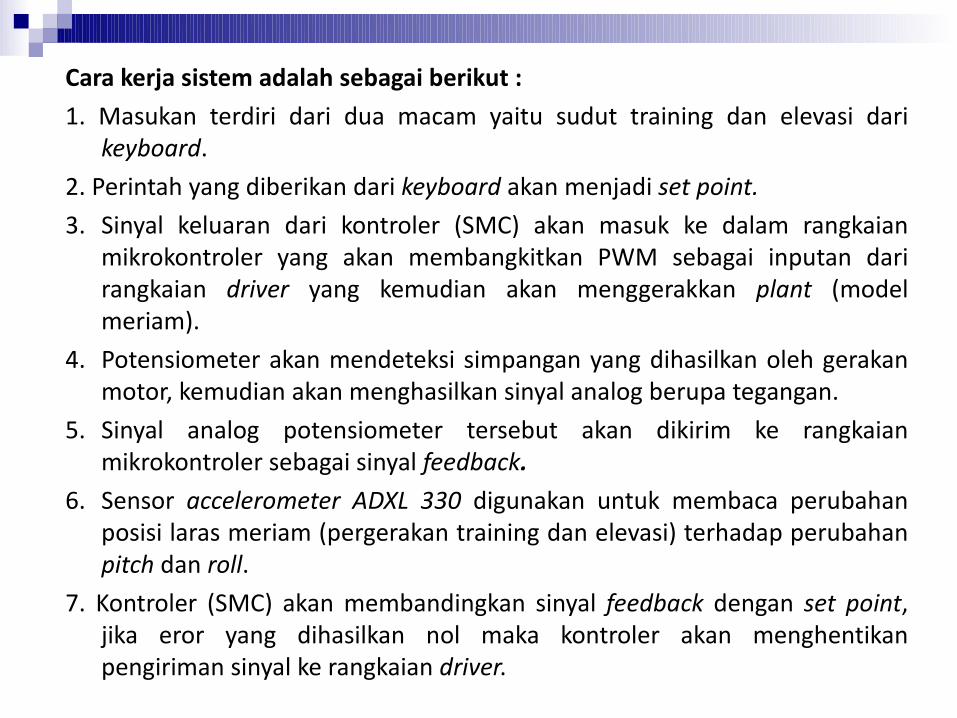
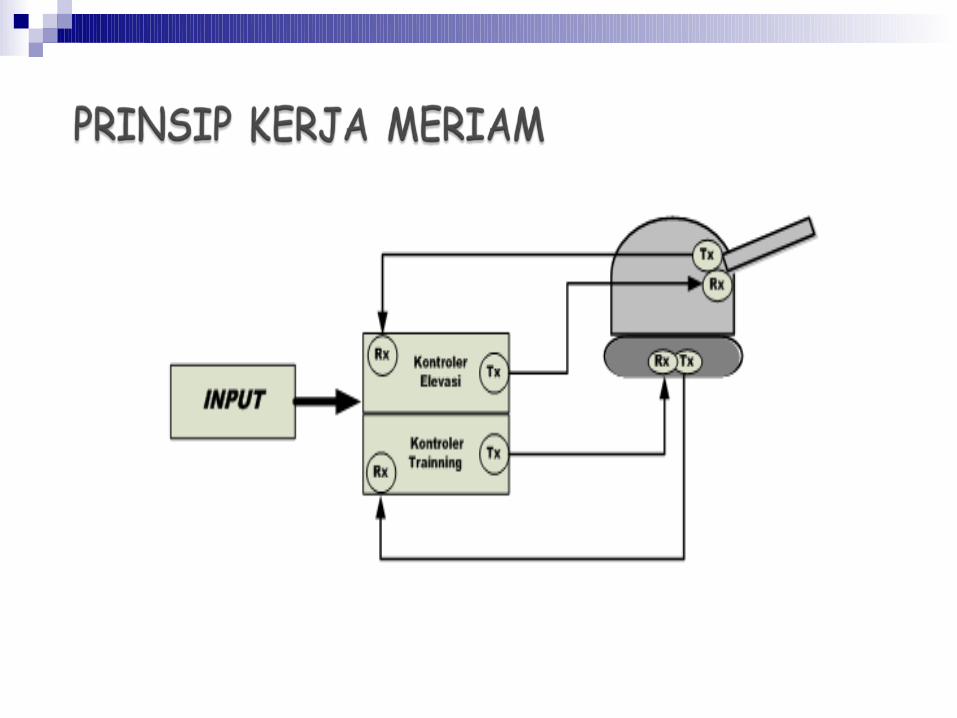
Cara kerja sistem adalah sebagai berikut :
1. Masukan terdiri dari dua macam yaitu sudut training dan elevasi dari keyboard.
2. Perintah yang diberikan dari keyboard akan menjadi set point.
3. Sinyal keluaran dari kontroler (SMC) akan masuk ke dalam rangkaian mikrokontroler yang akan membangkitkan PWM sebagai inputan dari rangkaian driver yang kemudian akan menggerakkan plant (model meriam).
4. Potensiometer akan mendeteksi simpangan yang dihasilkan oleh gerakan motor, kemudian akan menghasilkan sinyal analog berupa tegangan.
5. Sinyal analog potensiometer tersebut akan dikirim ke rangkaian mikrokontroler sebagai sinyal feedback.
6. Sensor accelerometer ADXL 330 digunakan untuk membaca perubahan posisi laras meriam (pergerakan training dan elevasi) terhadap perubahan pitch dan roll.
7. Kontroler (SMC) akan membandingkan sinyal feedback dengan set point, jika eror yang dihasilkan nol maka kontroler akan menghentikan pengiriman sinyal ke rangkaian driver.
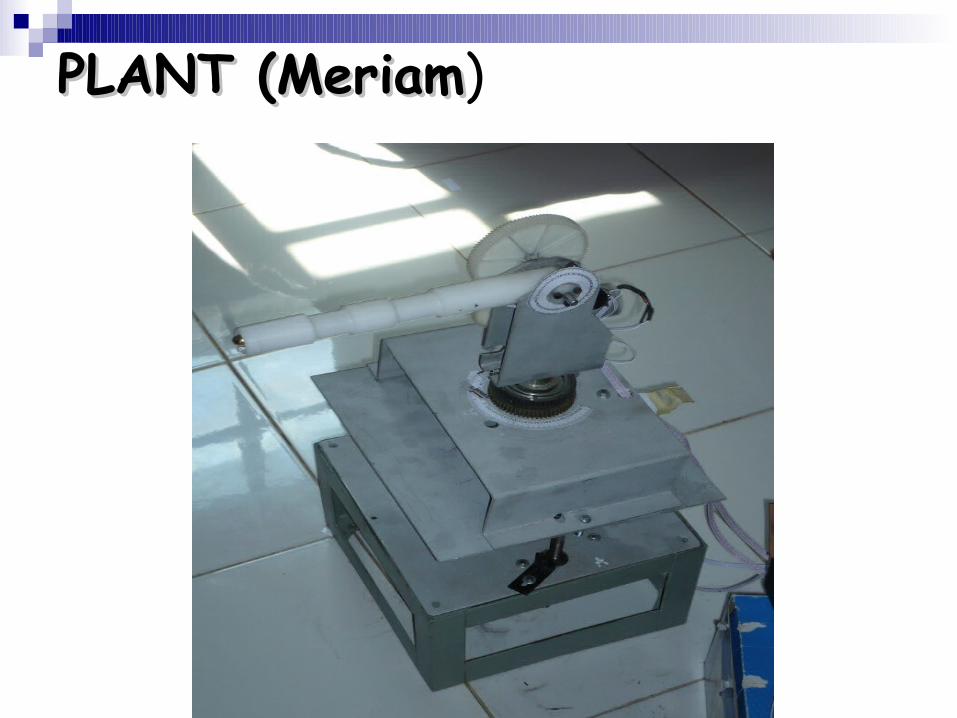
PLANT (MeriamPLANT (Meriam)

GANGGUANGANGGUAN
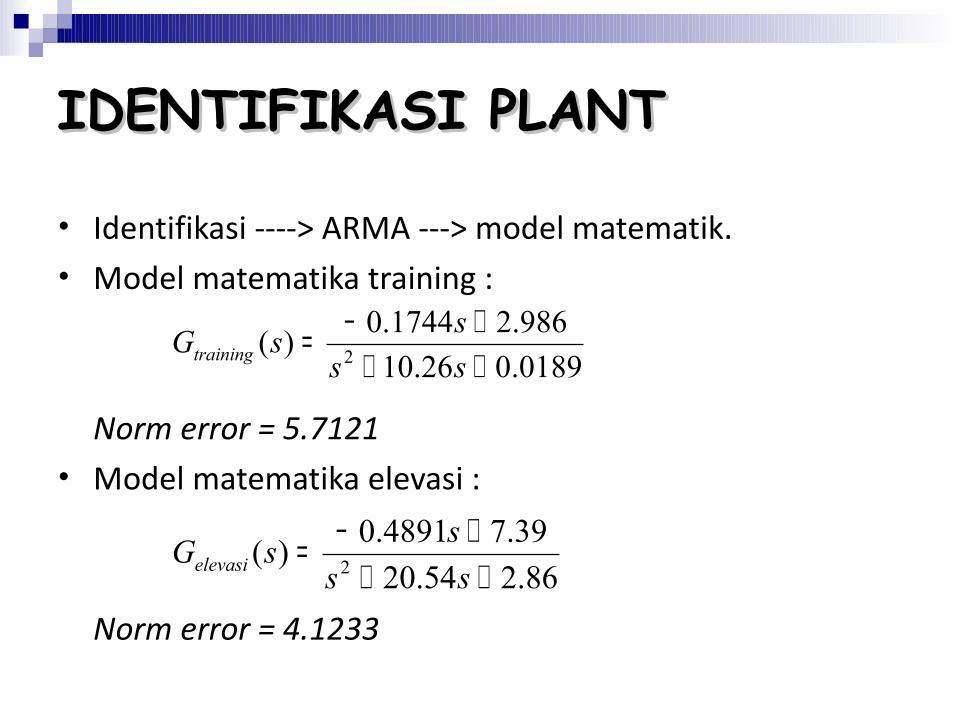
IDENTIFIKASI PLANTIDENTIFIKASI PLANT
• Identifikasi ----> ARMA ---> model matematik.• Model matematika training :
Norm error = 5.7121• Model matematika elevasi :
Norm error = 4.1233
0189.026.10986.21744.0)( 2 ++
+−=ssssGtraining
86.254.2039.74891.0)( 2 ++
+−=ssssGelevasi

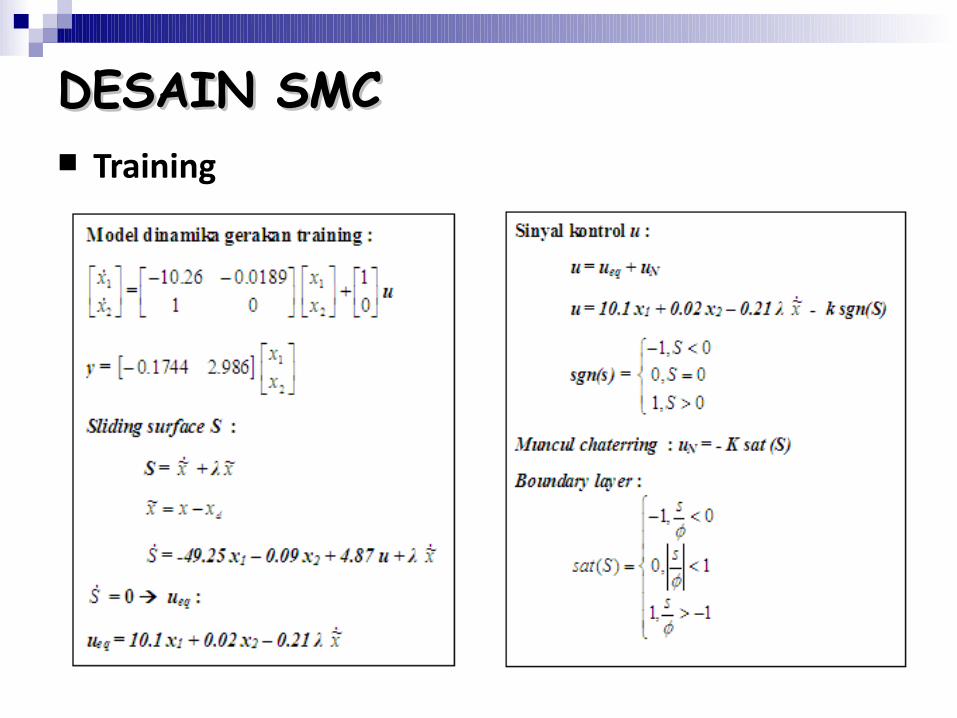
DESAIN SMCDESAIN SMC Training
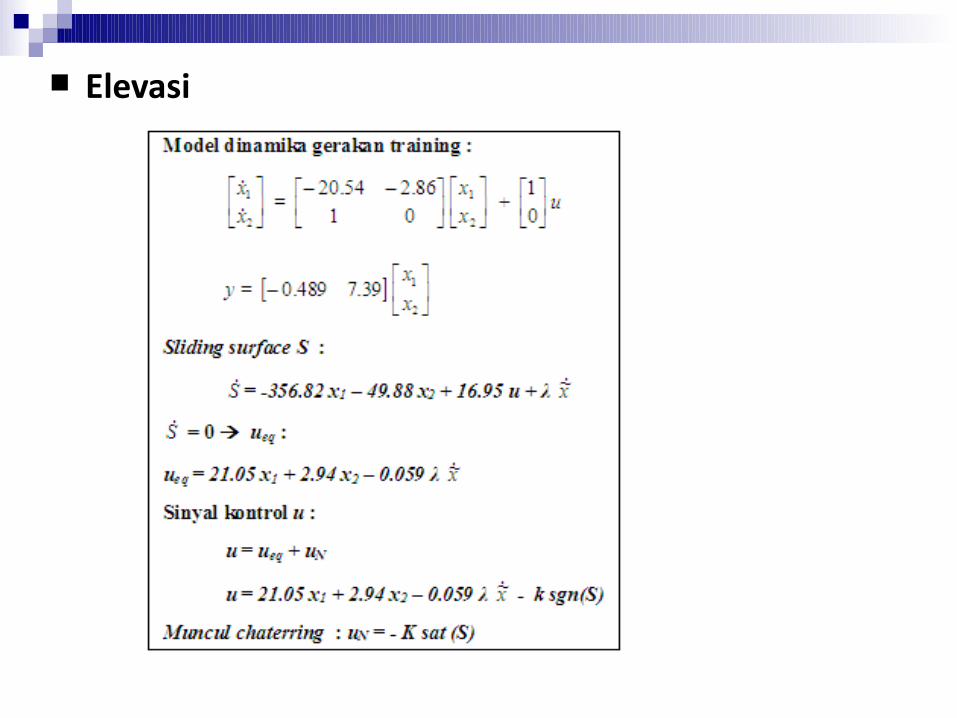
Elevasi
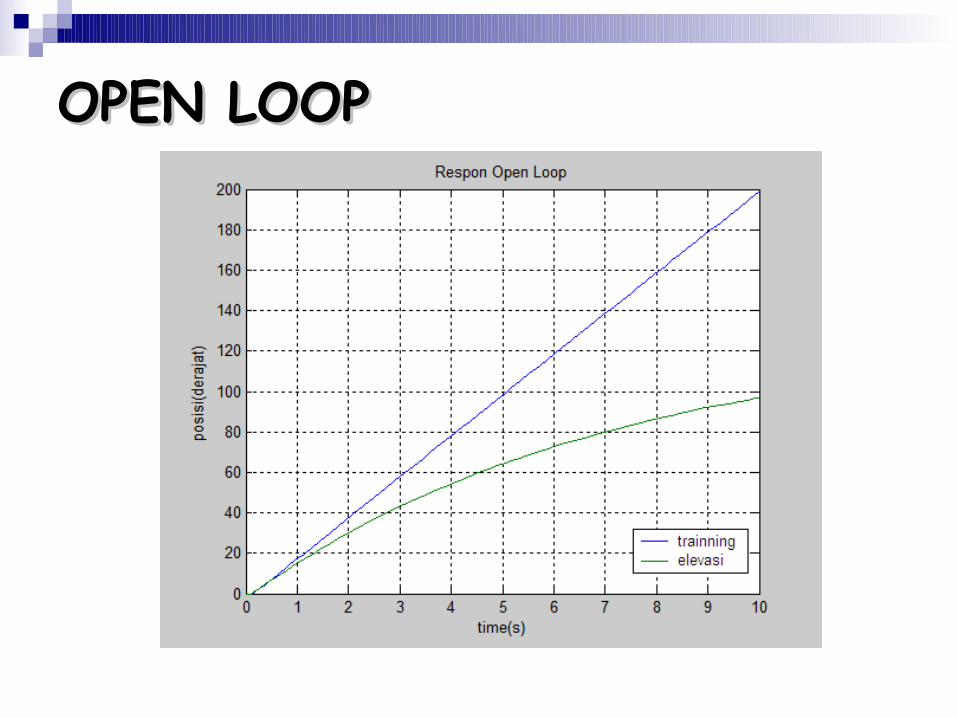
OPEN LOOPOPEN LOOP
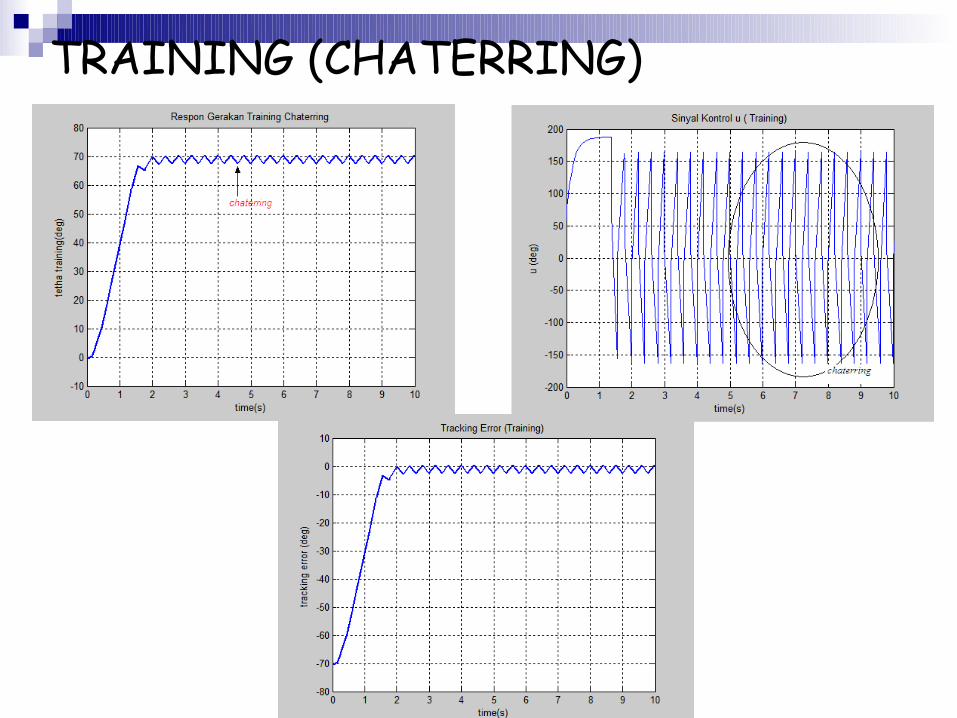
TRAINING (CHATERRING)
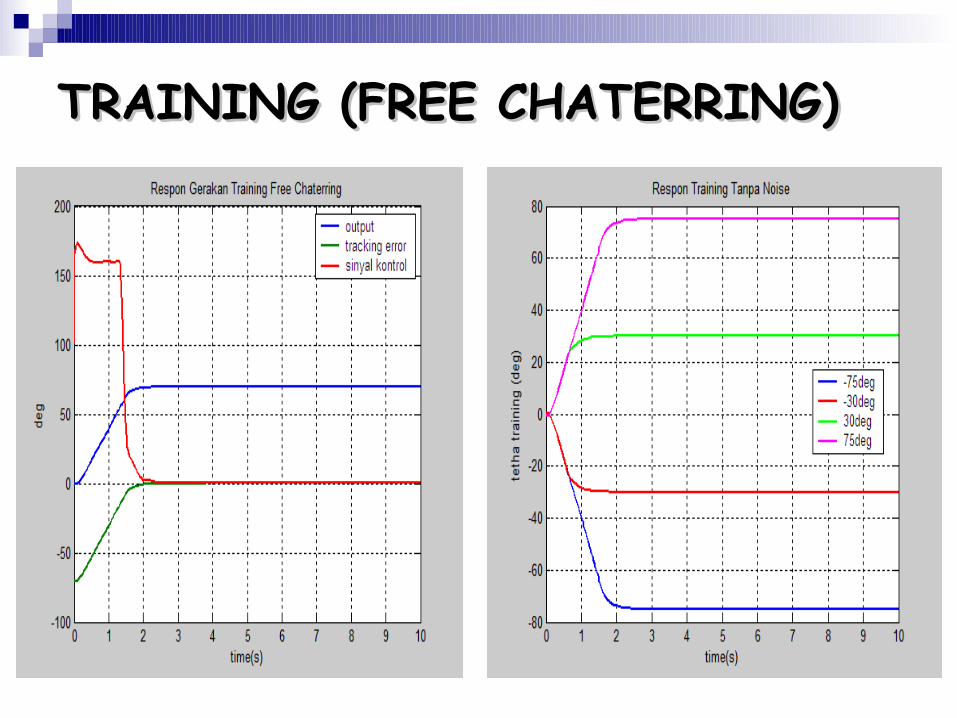
TRAINING (FREE CHATERRING)TRAINING (FREE CHATERRING)
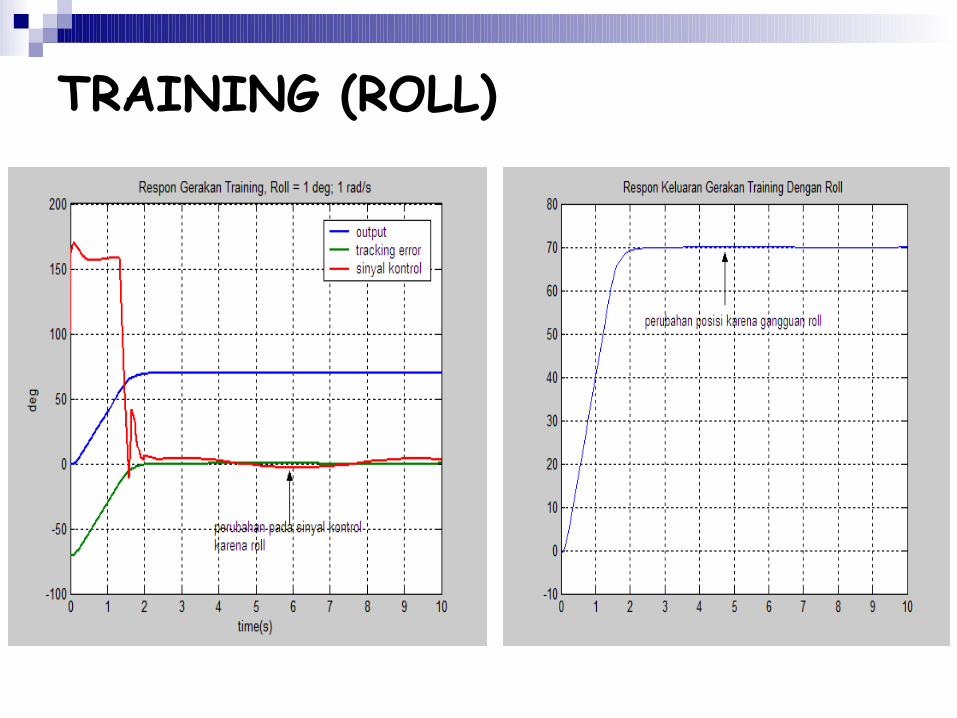
TRAINING (ROLL)
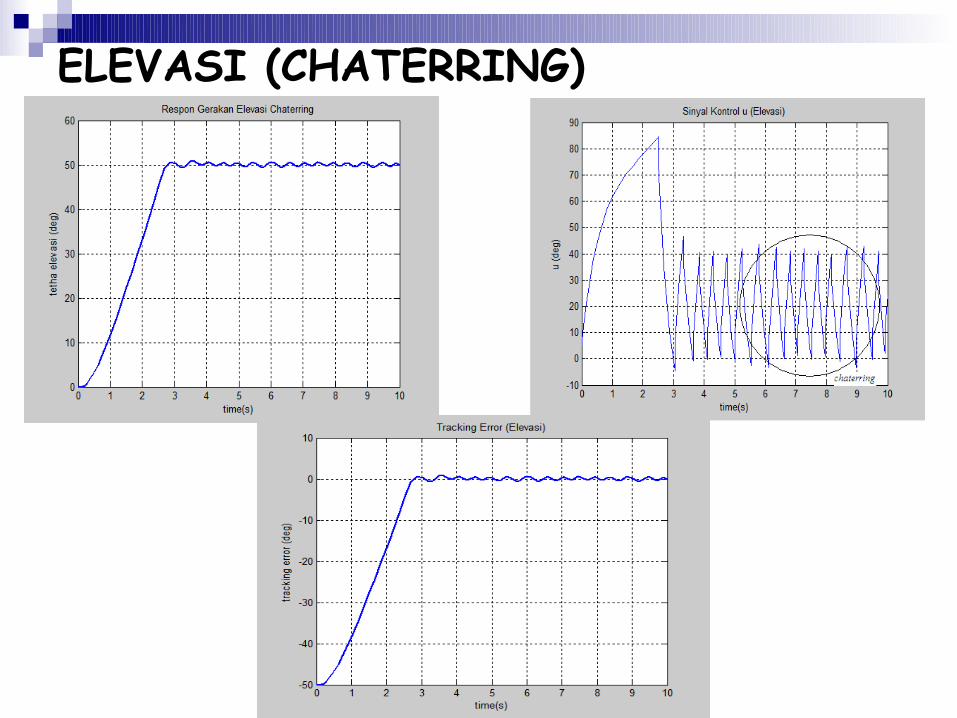
ELEVASI (CHATERRING)

ELEVASI (FREE CHATERRING)
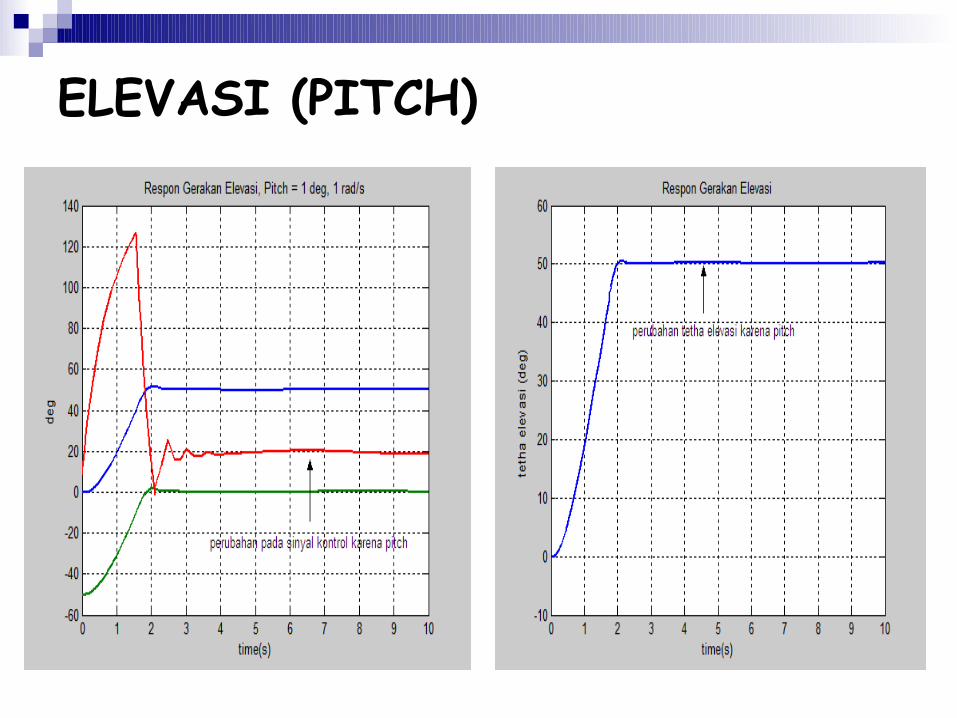
ELEVASI (PITCH)
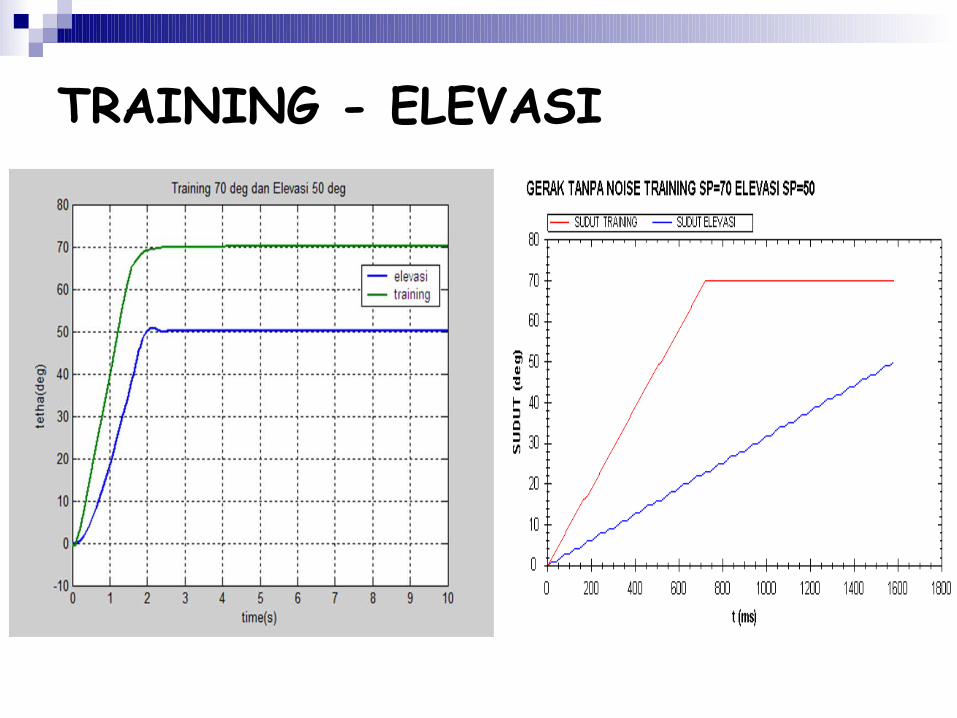
TRAINING - ELEVASI
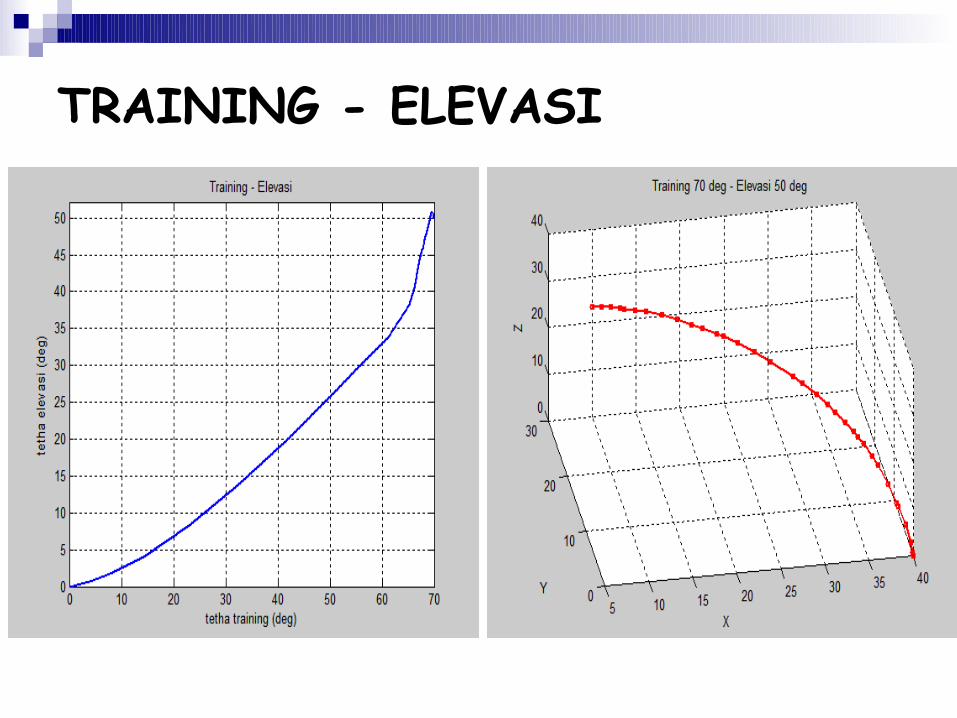
TRAINING - ELEVASI
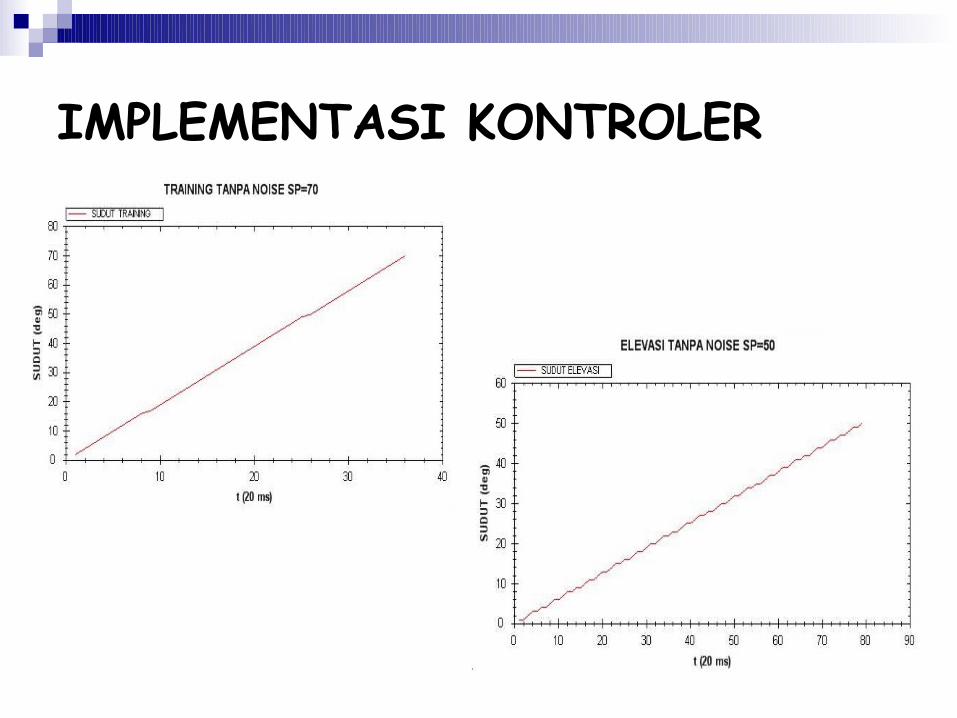
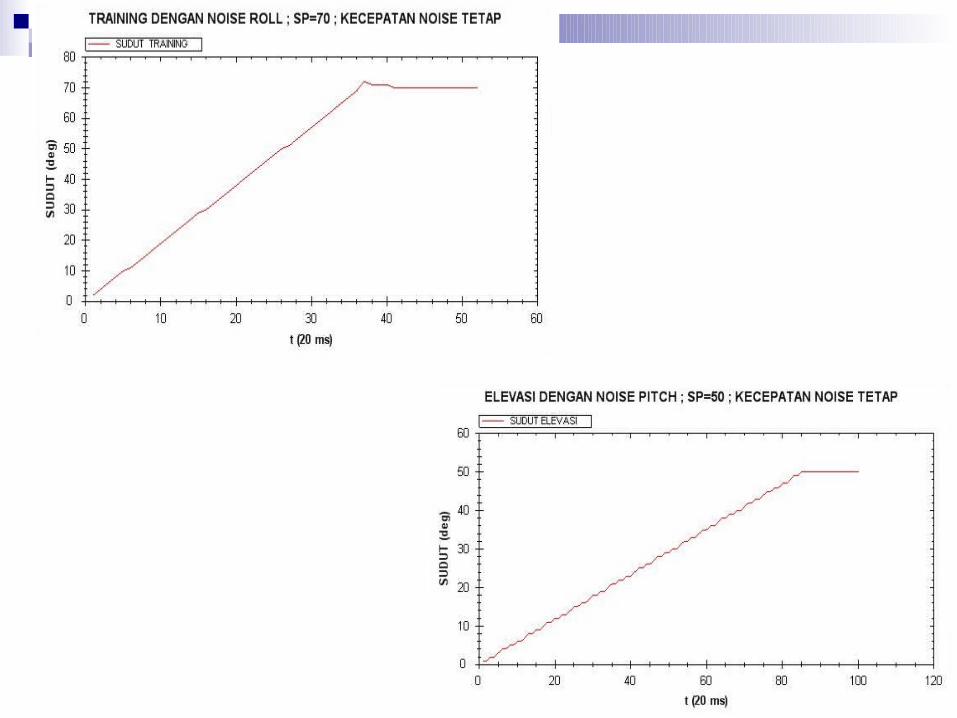
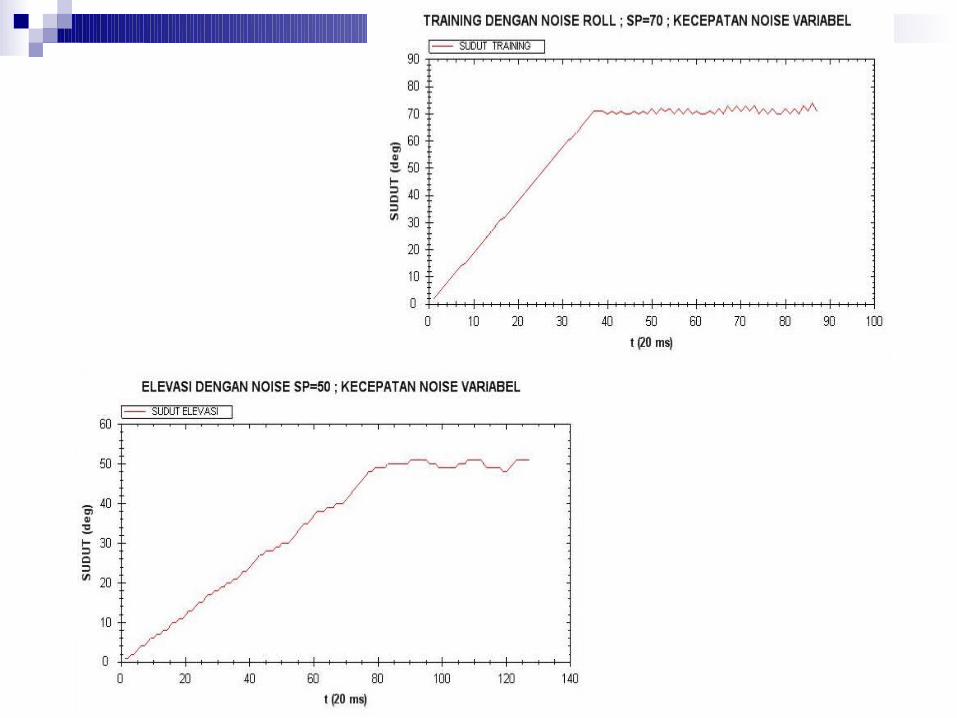
IMPLEMENTASI KONTROLER
KESIMPULAN
• Model matematika yang diperoleh dari proses identifikasi dapat mewakili karakteristik plant, sehingga dapat diimplementasikan dengan baik.
• Hasil desain kontroler Sliding Mode Control dapat memperbaiki posisi laras meriam sesuai dengan setpoint, pada saat gangguan pitch atau roll dikenakan pada meriam.
• Switching control (uN) dengan fungsi boundary layer dapat menghilangkan chaterring sehingga sistem menjadi stabil.
• Gangguan pitch atau roll tidak mempengaruhi sistem dalam sliding mode.
• Pengujian implememtasi menunjukkan hasil yang baik, sehingga performasi sistem dapat dipertahankan saat terjadi perubahan sudut pada laras meriam akibat pitch atau roll.
SARAN
Penyelesaian persoalan matematik dalam penelitian ini menggunakan pendekatan SISO untuk masing – masing loop (gerakan training dan elevasi), sehingga masing – masing loop diselesaikan terpisah. Penelitian berikutnya dapat menggunakan pendekatan MIMO.
Penambahan kontroler SMC untuk koordinasi. Untuk implementasi selanjutnya ditambahkan sensor ADXL
330 yang diletakkan pada badan kapal, sehingga dapat dibandingkan data dari meriam dan kapal sebagai data
koreksi.
M. Fallahi, S. Azadi ( 2009 ), “ Robust Control of DC Motor Using Fuzzy Sliding Mode Control With PID compensator “, Proceedings of the International MultiConference of Engineers and Computer Scientist Vol II.
Ahmad Bagheri, Jalal Javadi Moghaddam ( 2009 ), “ Simulation and Tracking Control Based Neural Netwwork Startegy and Sliding Mode Control for Underwater Remotely Operated Vehicle”, International Journal Neurocomputing 72 : 1934 – 1950.
H. Bouadi, M. Bouchoucha, dan M. Tadjine ( 2007 ), “ Sliding Mode Control based on Backstepping Approach for an UAV Type-Quadrotor “,World Academy of Science, Engineering and Technology 26.
Chin-I Huang, Chih-Fu Chang, Ming-Yi Yu dan Li-Chen Fu, “ Sliding-Mode Tracking Control of the Stewart Platform ”.
Feijun Song and Samuel M. Smith, “AUTONOMOUS UNDERWATER VEHICLE CONTROL USING FUZZY LOGIC” .
Andry Bayu, “IMPLEMENTASI FUZZY LOGIC CONTROLLER BERBASIS PC (PERSONAL COMPUTER) PADA PENGENDALIAN MODEL MERIAM 57 MM KRI KELAS PARCHIM” , Teknik Elektro STTAL, 2006.
Wilfrid Perruquetti, Jean Pierre Barbot, “SLIDING MODE CONTROL IN ENGINEERING”, Marcel Dekker Inc., New York, 2002.
R.SaravanaKumar, K.Vinoth Kumar, dan Dr. K.K.Ray ( 2009 ),” Sliding Mode Control of Induction Motor using Simulation Approach”, International Journal of Computer Science and Network Security, VOL.9 No.10.
Claudio Vecchio, “Sliding Mode Control: theoretical developments and applications to uncertain mechanical systems”, UNIVERSITÀ DEGLI STUDI DI PAVIA DIPARTIMENTO DI INFORMATICA E SISTEMISTICA.