Embed Size (px)
Citation preview

CAPÍTULO 6
FUNCIONES Y RESPUESTAS DE REDES
6.1 INTRODUCCIÓN
En este capítulo se presenta el concepto de las funciones de redes. Básicamente, una función de red se define como la razón entre la transformada de Laplace del voltaje o de la corriente y la transformada de Laplace del voltaje o la corriente en un mismo punto de una red o entre puntos diferentes de la misma. En este capítulo se analizan diferentes métodos de representar las funciones de redes y las relaciones que existen entre sus partes. Las funciones de redes se dividen básicamente en dos grupos: (1) funciones de punto impulsor, y (2) funciones de transferencia.
6.2 FUNCIONES DE PUNTO IMPULSOR
La función de punto impulsor es la relación entre el voltaje o la corriente en un punto con la corriente o el voltaje en el mismo punto. Para obtener las funciones de punto impulsor se supone que la red está en reposo (condiciones iniciales iguales a cero) y que no hay fuentes independientes internas. Las funciones de punto impulsor pueden ser impedancias o admitancias. La impedancia de punto impulsor se define como
)()()(
sIsVsZ
x
xd = (6.1)
donde se usa el subíndice x para indicar que las variables se miden en el mismo punto x. La admitancia de punto impulsor es la inversa de la impedancia de punto impulsor y se define como
)(
1)()(
sZsVsI
Ydx
xd == (6.2)
Comúnmente se habla de immitancia de punto impulsor para referirse a la función de punto impulsor, bien sea ésta la función de impedancia o la de admitancia.
6.3 FUNCIONES DE TRANSFERENCIA
La función de transferencia se usa para describir redes que tienen por lo menos dos puertos, esto es, una red que posee al menos dos pares de terminales externos o dos puertos y, al igual que para las funciones de punto impulsor, se calcula siempre con la red en reposo y sin fuentes independiente internas. La función de transferencia relaciona la transformada de una variable (voltaje o corriente) en un puerto con la transformada de otra variable (voltaje o corriente) en otro puerto. Las formas posibles de las funciones de transferencia son:
1. La función impedancia de transferencia, la cual relaciona la transformada de voltaje en un puerto con la transformada de corriente en otro puerto; esto es,

238
)()()(
1
221 sI
sVsZ = (6.3)
2. La función admitancia de transferencia, que es la relación entre la corriente en un puerto y el voltaje en otro puerto; esto es,
)()()(
2
112 sV
sIsY = (6.4)
3. La función voltaje de transferencia, que es la relación entre el voltaje en un puerto y el voltaje en otro puerto; esto es,
)()()(
1
221 sV
sVsG = (6.5)
4. La función corriente de transferencia, que es la relación entre la corriente en un puerto y la corriente en otro puerto; esto es
)()(
1
221 sI
sI=α (6.6)
En la notación que se usará en el texto, el primer subíndice en la función de transferencia indica el puerto correspondiente a la variable del numerador y el segundo subíndice indica el puerto correspondiente a la variable del denominador.
A continuación se dan dos ejemplos que ilustran estos conceptos.
EJEMPLO 1
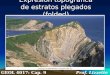
En la red de la Fig. 6.1, calcular las funciones de impedancia y admitancia de punto impulsor y las funciones de transferencia Z41(s), G41(s), Y41(s) y α41(s).
1 Ω 2 H
1 F3 Ω 3I1
I1 I3 I4
V4V2
+
V1
−
I2
Figura 6.1
Una forma rápida de calcular estas funciones es mediante el uso de un gráfico de transición de estados y de la fórmula para la ganancia de Mason, puesto que al conseguir la primera relación, con muy poco esfuerzo se pueden determinar las demás.

239
De la red de la Fig. 6.1 se obtienen las siguientes relaciones:
sIVIII
sV
sVIIIVVVI 4
413442
3312211 3 22
33 =+=−=−=−=
y el gráfico de transición de estados correspondiente se muestra en la Fig. 6.2.
1I1V 2V s11
1−
3
s21 3I 4I
s21−
4V3 1
3−
Figura 6.2
Y, por lo tanto,
2
2
222 21338
23
29
21
2331
sss
ssss++
=+++++=Δ
)(1338132)(
21
231
13382)( 12
2
122
2
1 sVsssssV
ssssssI
++++
=⎥⎦⎤
⎢⎣⎡ ++
++=
)(1338
126)(2313
23
13382)( 12
2
12
2
4 sVss
sssVssss
ssI++
+=⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ ++
++=
)(1338
126)( 124 sVss
ssV++
+=
De las relaciones anteriores se obtiene que
1321338
)()()( 2
2
1
1
++++
==ss
sssIsVsZd
1338132
)()()( 2
2
1
1
++++
==ssss
sVsIsYd
132126
)()()( 2
1
441
+++
==ss
ssIsVsZ
1338126
)()()( 2
1
441
+++
==ss
ssVsVsG

240
1338126
)()()( 2
2
1
441
+++
==ss
sssVsIsY
132126
)()()( 2
2
1
441
+++
==αss
sssIsIs
EJEMPLO 2
Para el circuito con transistor de la Fig. 6.3, se desea determinar la impedancia de punto impulsor y las funciones de transferencia ZO1, GO1 y α21.
R2
ib
+VCC
+
vo
−
ie R1
vs
Figura 6.3
Usando el modelo del transistor para pequeñas señales con los parámetros h, el circuito equivalente se ilustra en la Fig. 6.4.
hie
ib
+vo−
R2
vs
+ −
R1hoe
hrevce = −hrevohfeib
Figura 6.4

241
Del circuito en la Fig. 6.4 se obtienen las siguientes relaciones:
( )222
1Rh
vhRh
vRh
vhvviie
Ore
ie
s
ie
OreOsb
+
−−
+=
+
+−=
( ) OoebfeoeObfebeeO vhihhvihiiiRv −+=−+== 1 1
y de estas ecuaciones se obtiene el diagrama de la Fig. 6.5.
sv2
1Rhie + bi feh+1 ei 1R
Ov
2
1Rh
h
ie
re
+−−
oeh−
Figura 6.5
Aplicando la regla de la ganancia de Mason al gráfico de la Fig. 6.5 se obtiene que
( )( )
( )( )2
12112
2
11
11
111
Rh
hhRhRRhhRRhRh
hhRhR
ie
refeoeieoeie
ie
refeoe
+
−+++++=
+
−+++=Δ
( )( )( )refeoeieoeie
soeb hhRhRRhhRRh
vhRi−+++++
+=
111
12112
1
( )( )( )refeoeieoeie
sfee hhRhRRhhRRh
vhi
−+++++
+=
11
1
12112
( )( )( )refeoeieoeie
sfeO hhRhRRhhRRh
vhRv
−+++++
+=
11
1
12112
1
( ) ( )
oe
refeoeieoeie
b
sd hR
hhRhRRhhRRh
ivZ
1
12112
1
11
+
−+++++==
( )
oe
fe
b
OO hR
hR
iv
Z1
11 1
1
+
+==

242
( )
( ) ( )refeoeieoeie
fe
s
OO hhRhRRhhRRh
hR
vvG
−+++++
+==
11
1
12112
11
oe
fe
b
e
hR
h
ii
121 1
1
+
+==α
( )( )refeoeieoeie
fe
s
e
hhRhRRhhRRh
h
vi
Y−+++++
+==
11
1
1211221
6.4 POLOS Y CEROS
El lector debe haber observado en los dos ejemplos anteriores, especialmente en el Ejemplo 1, que las funciones de redes para redes lineales, invariables en el tiempo y con elementos concentrados son todas funciones racionales. En el caso de redes sin fuentes, es fácil concluir que esas funciones son racionales pues son simplemente combinaciones lineales de elementos de la forma R, sL y 1/sC o relaciones entre combinaciones lineales de esos factores. Esto se debe que a las sumas, productos, diferencias y cocientes de funciones racionales son también funciones racionales. Entonces, en general, las funciones de redes pueden representarse como cocientes de polinomios en s de la forma
01
11
011
1
)()()(
bsbsbsbasasasa
sqspsH
mm
mm
nn
nn
+++++++
==−
−
−−
L
L (6.7)
Por las mismas razones ya expuestas, es fácil concluir que todos los coeficientes de H(s) son números reales y para el caso de redes pasivas, esto es, redes que no contengan fuentes controladas en su interior, los coeficientes son también positivos.
Puesto que H(s) es una función racional, los polinomios del numerador y del denominador pueden expresarse como productos de factores lineales, esto es, podemos escribir a H(s) en la forma
( )( ) ( )( )( ) ( )
( )
( )∏
∏
=
=
−
−
=−−−−−−
== m
jj
n
ii
m
n
ps
zsK
pspspszszszsK
sqspsH
1
1
21
21
)()()(
L
L (6.8)
donde K = an/bm es una constante conocida como al factor de escala; los zi, i = 1, 2, … n son los ceros de p(s) y los pj, j = 1, 2, … m son los polos de q(s). Cuando la frecuencia compleja asume los valores zi, z = 1, 2, … , n, la función de transferencia se hace igual a cero y por ello, a esos valores de s se les conoce como los ceros de H(s). Cuando la frecuencia compleja s toma los valores pj, j = 1, 2, … , m, la función de transferencia se hace infinita. A estos valores de s se les denomina los polos de H(s). La función de la red H(s) queda completamente determinada al especificar sus polos y ceros y el factor de escala. Con frecuencia, los polos y ceros son también llamados frecuencias críticas de la función de la red. También se debe señalar que como los coeficientes de los polinomios son reales, cuando aparecen polos o ceros complejos ellos deben aparecer como pares conjugados.

243
Cuando r polos o ceros de la Ec. (6.8) tienen el mismo valor, se dice que el polo tiene multiplicidad r. En el caso que r = 1, se dice que el polo o cero es simple o distinto.
En cualquier función, el número de polos debe ser igual al número de ceros (incluyendo los polos y ceros en el infinito). Si n > m, existirán n ceros finitos, m polos finitos y n − m polos en el infinito. Si
mn < , existirán n ceros finitos, m polos finitos y m − n ceros en el infinito. En el plano complejo, los polos y ceros se grafican indicando los polos con el símbolo × y los ceros con el símbolo Ο . En los gráficos sólo se indican los polos y ceros finitos.
EJEMPLO 3
Grafique los polos y ceros de la función
sssssssH
20291072364)( 234
2
+++++
=
Factorizando se tiene que
)5)(4)(1()6)(3(4)(+++
++=
sssssssH
La función tiene ceros en s = −3, s = −6 y en s = ∞, y polos en 0=s , 1−=s y .5−=s La representación se muestra en la Fig. 6.6.
5− 3− 1− 0
1
3
××××
3−
7− 1−
Figura 6.6
EJEMPLO 4
Grafíquese los polos y los ceros de la función
131744050305)( 23
23
++++++
=sssssssH
Factorizando esta función se obtiene

244
)32)(32)(1()1)(1)(4(5)(
jsjssjsjsssH
++−++−++++
=
por lo que existen ceros en
jsjss +−=−−=−= 1 ,1 ,4
y polos en
32 ,32 ,1 jsjss +−=−−=−=
El gráfico correspondiente de polos y ceros se muestra en la Fig. 6.7.
1
3 ×
×
×
7− 5− 3− 1− 1−
3−
0
Figura 6.7
EJEMPLO 5
Determinar los polos y ceros de la función impedancia de punto impulsor de la red en la Fig. 6.8.
+
_
Ω2
1V1I
Ω4 F41
Figura 6.8
De la figura se obtiene la impedancia de punto impulsor:
1)3(2
44
442
)()()(
1
1
++
=+
×+==
ss
s
ssIsVsZd
la cual tiene un cero en s = −3 y un polo en s = −1. El gráfico correspondiente se muestra en la Fig. 6.9.

245
3−
1−
0
1
×1−
Figura 6.9
EJEMPLO 6
Determinar y graficar los polos y ceros de la función impedancia de punto impulsor de la red en la Fig. 6.10.
+
_
Ω 1
F 1
Ω 2
1 V
1 I h 2
Figura 6.10
Del circuito se obtiene que la función impedancia de punto impulsor es
)5.05.0)(5.05.0()236.0333.0)(236.0333.0(3
122146
122
1221)( 2
2
jsjsjsjs
ssss
ss
ss
sZd−+++
−+++=
++++
=++
⎟⎠⎞
⎜⎝⎛ +
+=
Los ceros de la función están en: 236.0333.0 ,236.0333.0 jsjs −−=+−= y los polos están en: 5.05.0 ,5.005 jsjs −−=+−= . El gráfico de polos y ceros se muestra en la Fig. 6.11.
0
×
-1 -0.8 -0.6 -0.4 -0.2
0.2
0.4
0.6
-0.2
-0.4
-0.6×
Figura 6.11

246
6.5 DETERMINACIÓN DE LA RESPUESTA TRANSITORIA DE UNA FUNCIÓN DE RED
Ya se ha visto que una función de la red relaciona la respuesta Y(s) en un punto de la red con la excitación U(s) en el mismo punto o en otro punto diferente de la red. Esto es,
01
11
011
1
)()()(
bsbsbsbasasasa
sUsYsH
mm
mm
nn
nn
++++++++
==−
L
L (6.9)
o también
( ) ( ) )( )( 011
1011
1 sYbsbsbsbsUasasasa mm
mm
nn
nn ++++=++++ −
−−
− LL (6.10)
La respuesta transitoria de la red es simplemente la solución de la ecuación diferencial homogénea
0)( 011
1
1 =⎟⎟⎠
⎞⎜⎜⎝
⎛++++
−
−
− tybdtdb
dtdb
dtdb
m
m
mm
m
m L (6.11)
la cual corresponde a la ecuación diferencial que describe la red con la excitación igual a cero.
Suponiendo una solución de la forma ,)( stBety = se tiene que
0 011
1
1 =⎟⎟⎠
⎞⎜⎜⎝
⎛++++
−
−
−st
m
m
mm
m
m Bebdtdb
dtdb
dtdb L (6.12)
Ejecutando las operaciones de derivación indicadas en la Ec. (6.12), se obtiene
( ) 0 011
1 =++++ −−
stmm
mm Bebsbsbsb L (6.13)
Puesto que est nunca es cero y si B fuese cero la solución sería la trivial, entonces está claro que el polinomio entre paréntesis tiene que ser cero para que exista una solución; se obtiene así la ecuación característica
0 011
1 =++++ −− bsbsbsb m
mm
m L (6.14)
la cual es un polinomio de grado m y por lo tanto puede factorizarse en la forma
( )( ) ( ) 0 21 =−−− mm pspspsb L (6.15)
donde los valores p1, p2, … , pm pueden ser reales o complejos y sencillos o repetidos. La respuesta natural o transitoria tiene entonces la forma
tpm
tptp meBeBeBty +++= )( 2121 L (6.16)
y en la cual mBBB , , , 21 K se obtienen a partir de las condiciones iniciales de la red. En el caso de factores repetidos, para obtener la solución se sigue el mismo procedimiento que se explicó en el Capítulo 2.
Obsérvese entonces de las Ecs. (6.14), (6.15) y (6.16) que en la respuesta natural, los polos de la función de la red son, en este caso, los exponentes de las funciones exponenciales que dan la respuesta natural.

247
Ahora se generalizarán estos resultados. Considérese el caso de fuentes únicas conectadas a redes que no contienen fuentes independientes. La respuesta deseada, la cual podría ser alguna corriente o algún voltaje, puede siempre expresarse mediante una función de punto impulsor o una de transferencia. Si la excitación es una corriente y la respuesta buscada es un voltaje en el mismo punto, entonces la función de punto impulsor es de la forma
011
1
011
1
)()()()(
bsbsbsbasasasa
sIsVsZsH
mm
mm
nn
nn
s
sd
++++++++
===−
−
−−
L
L
donde Is(s) es la corriente de la fuente. En este caso, la respuesta transitoria para el voltaje se determina haciendo la excitación igual a cero, y ella es
tpm
tptp meBeBeBtv +++= )( 2121 L
donde los factores mppp , , , 21 K son los polos de la función de punto impulsor H(s).
Si la excitación es un voltaje y la respuesta deseada es una corriente en el mismo punto, entonces la función de punto impulsor es de la forma
011
1
011
1
)()()()(
asasasabsbsbsb
sVsIsYsH
nn
nn
mm
mm
s
sd
++++++++
===−
−
−−
L
L
donde Vs(s) es el voltaje de la fuente. Igual que con el caso anterior, la respuesta transitoria para la corriente se determina haciendo el voltaje de excitación igual a cero, y ella es
tzn
tztz neAeAeAti +++= )( 2121 L
donde los factores nzzz , , , 21 K son los ceros de la función de punto impulsor H(s).
En ambos casos obsérvese que las frecuencias críticas de la función de punto impulsor intervienen en la determinación de la respuesta transitoria. Aunque los casos ilustrados corresponden a funciones de punto impulsor, la intervención de las frecuencias críticas en la determinación de la respuesta transitoria también ocurre en el caso de las funciones de transferencia generales. El uso de los polos o los ceros como soluciones de la ecuación característica correspondiente a la respuesta transitoria depende, por supuesto, de la respuesta deseada.
La respuesta transitoria de voltaje o corriente cuando la excitación es un voltaje se determina haciendo este voltaje igual a cero. Esta situación corresponde a una fuente de voltaje igual a cero, o lo que es lo mismo, a una situación de cortocircuito en los terminales de entrada. Por esta razón, los polos de la función de transferencia pueden ser interpretados como las frecuencias naturales de cortocircuito de la red. Si la excitación es una corriente, entonces la respuesta natural de voltaje o corriente se determina haciendo cero la corriente de excitación, lo cual corresponde a una situación de circuito abierto en los terminales de entrada. Igual que antes, los polos de la función de transferencia pueden ser interpretados como las frecuencias naturales de circuito abierto de la red. Obsérvese que en el caso de funciones de punto impulsor, las frecuencias naturales son los polos si la excitación es un voltaje y son los ceros si la excitación es una corriente.
Antes de resolver algunos ejemplos, se debe señalar que toda red pasiva es estable bajo cualquier circunstancia y, por ello, su respuesta transitoria tiende a cero conforme el tiempo aumenta. Esto implica

248
que para las funciones de punto impulsor los polos y ceros tienen que estar obligatoriamente en la parte izquierda del plano complejo, aun cuando se permiten polos y ceros en el eje imaginario en el caso de redes sin pérdidas, pero ellos deben ser sencillos. Para una función de transferencia general, la respuesta también debe decaer a cero con el tiempo. Esto conduce a la conclusión que los polos de una función de transferencia deben estar en la parte negativa del plano complejo. Sin embargo, sus ceros pueden estar en cualquier parte del plano. Lo dicho para la función de punto impulsor con respecto a polos en el eje imaginario también se cumple para las funciones de transferencia.
EJEMPLO 7
Determinar la respuesta transitoria para la corriente i(t) en la red de la Fig. 6.12.
+
_
Ω2
)(ti)(tv Ω4 F41
Figura 6.12
Del circuito se obtiene
1)3(2
44
442
)()()(
++
=+
×+==
ss
s
ssIsVsZd
Por lo tanto,
)()1()()3(2 sVssIs +=+
y la ecuación característica correspondiente a la condición V(s) = 0 es
03 =+s
por lo que la frecuencia crítica es s = −3 y la respuesta transitoria para la corriente es
tAeti 3)( −=
EJEMPLO 8

249
En la red de la Fig. 6.13, calcule el voltaje transitorio entre los terminales a y b después de t = 0.
a
b
A1 Ω5 h2
0=t
Ω10
Figura 6.13
La impedancia de punto impulsor vista desde los terminales a – b es
5.225
)()()(
+×
==s
ssIsVsZ ab
d
Por lo tanto, la ecuación característica es
05.2 =+s
y la respuesta transitoria del voltaje entre los terminales a y b es
tab Betv 5.2)( −=
EJEMPLO 9
En la red de la Fig. 6.14, calcular la respuesta transitoria de v(t) si la excitación es e(t).
+
_)(tv
+
_
R
C)(te
Figura 6.14
Del circuito se obtiene

250
RCs
RC
sCR
sCsEsV
sH1
1
1
1
)()(
)(+
=+
==
El polo está localizado en RCs 1−= , por lo que la respuesta transitoria de voltaje es
RCtAetv −=)(
EJEMPLO 10
En la red de la Fig. 6.15, calcular la respuesta transitoria de v(t) si la excitación es e(t).
10 Ω
2 H
5 Ω
1 F
e(t)
i1 i2
+ v(t) −
Figura 6.15
Del circuito se obtiene
15)(
15
)()( 210)()( 21
+=
+=
+=
sssE
s
sEsIs
sEsI
Por lo tanto,
( ))15)(102()(1010
15)(
102)(2)(1)(2)(
2
21++
−=
+−
+=−=
sssEs
ssE
sssEsI
sssIsV
y entonces
( ))2.0)(5(
)1)(1()15)(102(
1010)()()(
2
++−+
=++
−==
ssss
sss
sEsVsH
De la función de transferencia se obtiene que los polos están situados en s = −5 y s = −0.2 y los ceros están en .1y 1 =−= ss La respuesta transitoria de voltaje es entonces

251
tt eAeAtv 2.02
51)( −− +=
Observe que en este caso la función de transferencia tiene un cero en el lado derecho del plano complejo, como ya se explicó anteriormente.
6.6 SOLUCIÓN PERMANENTE DE LAS RESPUESTAS DE UNA FUNCIÓN DE RED
La función de transferencia, expresada en términos de la excitación y la respuesta a esa excitación es de la forma
)()()(
sEsRsH = (6.17)
donde E(s) y R(s) son las transformadas de Laplace de la excitación y de la respuesta. De esta ecuación se obtiene la relación
)()()( sEsHsR = (6.18)
Es muy sencillo demostrar que cuando un sistema lineal e invariable en el tiempo es excitado por una función exponencial de la forma tjAe ω , la respuesta es simplemente de la misma forma modificada por el factor de amplitud H(s) evaluado en s = jω; esto es,
ω=ω=ω js
tj sHAejR )()( (6.19)
Por supuesto, para regresar la función al dominio del tiempo, se debe tomar en cuenta la forma como está expresada la excitación en el dominio del tiempo.
A continuación se dan tres ejemplos de este procedimiento.
EJEMPLO 11
Encontrar la respuesta en régimen permanente de la siguiente función de transferencia si la excitación es e(t) = 1:
1273514
)()(
)(2
2
++
++==
ssss
sEsR
sH
En este ejemplo, la amplitud es A = 1 y la frecuencia es ω = 0; por lo tanto,
917.21235)0(1)0( 0 ===×== jsHejsR tj
y la respuesta en régimen permanente es
917.2917.2)( 0 == tjetr

252
EJEMPLO 12
Repítase el ejemplo anterior si la excitación es tte sen)( = .
En este caso, la función de excitación es de la forma Im{ejωt}; por lo tanto A = 1 y jω = j1, y
°−=°−∠=++
=++
++==×== 09.10
2
282.209.1082.2
7111434
12)(735)(14)1(1)1( je
jj
jjjjjsHjsR
y en el dominio del tiempo, la respuesta es
r(t) = 2.82 { } ( )°−=°− 09.10sen82.2Im )09.10( te tj
EJEMPLO 18
En la red de la Fig. 6.16 calcular:
a) La función de transferencia ).()()( sEsVsH =
b) El voltaje de régimen permanente v(t) si la función de excitación es e(t) = 2.0 V.
c) El voltaje de régimen permanente v(t) si la función de excitación es .2cos10)( tte =
100 Ω 1 H
1 kΩ0.01 F+
v(t)−
e(t)
Figura 6.16
(a) De la figura se obtiene
1101.100100
)110(1000100)110(1000
)(2 ++
=+++
+=
sssss
sH
(b) Para una frecuencia ω = 0:

253
110100)0( =H por lo que V 818.1
1101002)0( =×=V y Vtv 818.1)( =
(c) Para una frecuencia ω = 2:
°−∠=+
=++
= 1.62441.02.200106
100110)2(1.100)2(
100)2(2 jjj
jH
°−∠=°−∠×= 1.6241.41.62441.010V
)1.622cos(41.4)( °−= ttv
6.7 SOLUCIÓN DE LA RESPUESTA FORZADA A PARTIR DEL GRÁFICO DE POLOS Y CEROS
La respuesta forzada de un sistema en el dominio del tiempo puede determinarse también a partir del gráfico de los polos y ceros en el plano s de la función de la red correspondiente y del gráfico de los polos y ceros de la transformada en el mismo plano de las fuentes aplicadas. Este método es gráfico en contraste con el método aplicado en la Sección 6.6 que es analítico.
Considere una función de red típica en forma factorizada,
( )( ) ( )( )( ) ( )m
n
pspspszszszsKsH
−−−−−−
= )(
21
21
L
L (6.20)
en donde K es un número real, pero los polos, ceros y la frecuencia de la fuente son, en general, cantidades complejas. Estas cantidades se pueden representar mediante puntos o mediante vectores en el plano complejo como se indica en la Fig. 6.17. El valor de s correspondiente a la frecuencia compleja se representa por un círculo sombreado.
×1p
2p
1z
2z
3z ×
s
×1p
2p
1z
2z
3z ×
s
Figura 6.17

254
El vector que une a s con z1 representa el factor s − z1 en el numerador de H(s). La magnitud y el ángulo de este factor son iguales a la longitud y al ángulo (medido con respecto al eje real positivo) del vector correspondiente en el plano s. El vector que une a s con p1 representa el factor s − p1 en el denominador de H(s) y su magnitud y ángulo se miden en la forma indicada para el cero. En forma similar se representan los demás factores de H(s) mediante vectores dibujados desde los polos y ceros hasta el punto s, tal y como se indica en la Fig. 6.18. La magnitud de la función de la red se determina multiplicando las magnitudes de los vectores en el numerador y dividiendo por las magnitudes de los vectores en el denominador; el ángulo de la función se calcula sumando los ángulos de los vectores en el numerador y restando los ángulos de los vectores en el denominador.
×1p
2p
1z
2z
3z×
s1ps −
2ps −
1zs −2zs −
3zs −
Figura 6.18
EJEMPLO 13
Se desea determinar la respuesta forzada para la función de transferencia
( )22)2(5)(
2 +++
=sss
ssH
si la función de excitación es .3sen2)( ttu =
Factorizando el denominador de H(s) se obtiene
)1)(1()2(5)(
jsjssssH
++−++
=
cuyos polos y ceros y los vectores correspondientes a la frecuencia compleja de la excitación s = j3 se muestran en la Fig. 6.19.
Midiendo la magnitud y el ángulo de cada uno de los vectores que unen al cero y los polos con la frecuencia de excitación, se obtiene
°∠=°∠=°∠=°∠= 4.632.2 761.4 903 3.566.3 4321 HHHH

255
El valor correspondiente de la función de transferencia es
°−∠=××
×= 1.16364.0
432
1
HHHHKH
y la respuesta forzada en el dominio de la frecuencia es
°−∠=°−∠×= 1.16328.11.16364.02Y
y la respuesta correspondiente en el dominio del tiempo es
( )°−= 1.1633sen28.1)( tty
×
1H2H
3H4H×
×-1-2-3
j3
-j
Figura 6.19
El método gráfico posee sus ventajas y, por supuesto, sus limitaciones. Es muy útil cuando sólo se desean soluciones aproximadas; también permite la visualización de la importancia relativa de cada uno de los factores que conforman la función de transferencia. En el ejemplo anterior se observa claramente que si el punto s (frecuencia de la excitación) está muy cerca de un cero, la magnitud de H(s) es relativamente pequeña, y que si está cerca de un polo, la magnitud es relativamente grande. Se habla entonces en estos casos del cero o del polo dominante. El método también es particularmente útil para observar cómo varía la respuesta en una red cuando alguno de sus parámetros varía. Por último se debe indicar que cuando la frecuencia de la excitación coincide con un polo la función de la red se hace infinita, cuando coincide con un cero, la función de la red se hace cero.
6.8 CURVAS DE LA RESPUESTA DE FRECUENCIA CON EXCITACIÓN SINUSOIDAL
La respuesta en régimen permanente o estable a excitaciones sinusoidales se determina reemplazando en la función de la red la frecuencia compleja s por jω. En la práctica, las señales de excitación a menudo

256
consisten de un gran número de componentes sinusoidales de frecuencias diferentes. En algunos casos, la respuesta y la excitación deben tener la misma forma (redes lineales); por lo tanto, la relaciones entre las amplitudes y los ángulos de fase de la respuesta y la excitación de las diferentes componentes deben ser las mismas; se concluye de esto que la magnitud de la función de la red, |H(jω)|, debe ser constante y que su argumento, )( ω∠ jH , debe ser proporcional a la frecuencia ω en la banda de interés. En otros casos, la red debe discriminar entre señales de diferentes frecuencias, por lo que es importante examinar la variación de la función de la red cuando varía la frecuencia de la excitación. Esta información normalmente se analiza utilizando dos curvas de respuesta: (a) la curva de la variación de la magnitud o módulo de la función de la red, |H(jω)|, versus la frecuencia ω, y (b) la curva de la variación del argumento o ángulos de fase de la función de la red, )( ω∠ jH , versus la frecuencia ω.
Las dos curvas de las respuestas de frecuencia pueden ser construidas calculando la magnitud y el ángulo de H(jω) para un número suficiente de valores de la frecuencia ω y luego dibujando las curvas correspondientes a los valores calculados.
En los ejemplos que se dan a continuación, la excitación es sinusoidal.
EJEMPLO 14
En la red de la Fig. 6.20, dibujar las curvas de las respuestas de frecuencia de la función de transferencia
)()()( 0
ωω
=ωjE
EjHi
1 Ω
0.5F
+
v(t)
−
e(t)
Figura 6.20
De la figura se obtiene
22
212
)()()( 0
+=
+==
sss
sEsEsH
i
La función de transferencia tiene un polo en s = −2 y como la excitación es sinusoidal, la frecuencia está situada en s = jω, como se muestra en la Fig. 6.21. En función de la frecuencia, la expresión para la función de transferencia es

257
ω+=ω
jjH
22)(
-1-2×
ωj
2+s
0
Figura 6.21
Variando ahora ω desde cero hasta infinito, se obtienen los valores para )( ωjH indicados en la Tabla 1.-6
Tabla 6 - 1
ω )( ωjH ω )( ωjH
0 1.0∠0° 12 0.164∠−80.5°
2 0.707∠−45° 14 0.141∠−81.9°
4 0.447∠−63.4° 16 0.124∠−82.9°
6 0.316∠−71.6° 18 0.110∠−83.7°
8 0.243∠−76.0° 20 0.100∠−84.3°
10 0.196∠−78.7° ∞ 0∠−90°
00,10,20,30,40,50,60,70,80,9
1
0 2 4 6 8 10 12 14 16 18 20
)( ωjH
ω
-100
-80
-60
-40
-20
00 2 4 6 8 10 12 14 16 18 20
)( ωjH∠ ω

258
Figura 6.22 EJEMPLO 15
Para la red de la Fig. 6.23, determínese las curvas de respuesta de frecuencia de la función
)()()(
ωω
=ωjIjEjH
De la figura se obtiene
sjsjs
sss
ss
sIsEsZsH d
)34)(34(258258)()()()(
2 −+++=
++=++==
8 Ω 1 H
0.04 FEI
Figura 6.23
Los ceros de la función están situados en s = −4 − j3 y en s = −4 + j3 y el polo está en s = 0. El gráfico de polos y ceros se ilustra en la Fig. 6.24.
-5 -4 -3 -2 -1 0
3
2
1
-1
-2
-3
×
Figura 6.24
Variando ω desde cero hasta infinito, se obtienen los valores mostrados en la Tabla 6 - 2.

259
Tabla 6 - 2
ω )( ωjH ω )( ωjH
0 ∞∠−90° 9 10.1∠37.9°
1 25.5∠−71.6° 10 11.0∠43.2°
2 13.2∠−52.7° 11 11.8∠47.5°
3 9.6∠−33.7° 12 12.7∠51.1°
4 8.3∠−15.7° 14 14.6∠56.8°
5 8.0∠0° 16 16.5∠61.0°
6 8.2∠12.9° 18 18.5∠64.3°
7 8.7∠23.2° 20 20.4∠66.9°
8 9.4∠31.2° ∞ ∞∠90°
Las dos curvas de la respuesta de frecuencia se muestran en la Fig. 6.25.
05
1015202530
0 2 4 6 8 10 12 16 20ω -100
-60
-20
20
60
100
0 2 4 6 8 10 12 16 20ω
)( ωjH )( ω∠ jH
Figura 6.25
Al conocer la posición de los polos y los ceros de la función bajo estudio, se pueden trazar en forma aproximada las curvas de respuesta de frecuencia, teniendo siempre en cuenta que cuando la frecuencia de la excitación se acerca a un polo, la función de la red tiende a infinito y que cuando se acerca a un cero, la función tiende a cero. También se debe recordar que los polos contribuyen ángulos negativos y los ceros ángulos positivos.

260
EJEMPLO 16
Una función de red tiene la configuración de polos y ceros dada en la Fig. 6.26. Se desea dibujar en forma aproximada las curvas de respuesta de frecuencia.
-2 -1 0
1
-1
×
Figura 6.26
Conforme la frecuencia de excitación se acerca a cero, donde está ubicado un polo, el módulo del denominador de la función tiende a cero y el del denominador tiende a 2; por lo tanto, el módulo de la función tiende a infinito. Al mismo tiempo, el argumento del denominador es 90° y el argumento del numerador tiende a cero, por lo que el argumento de la función tiende a −90°. Al aumentar la frecuencia, aumentan tanto el módulo del numerador como el del denominador, pero el módulo de la función disminuye (el denominador está aumentando). Al mismo tiempo, el argumento del denominador permanece en 90° y el argumento del numerador tiende también a 90°. Cuando la frecuencia se hace infinita, los módulos del numerador y del denominador se hacen iguales, lo mismo que los argumentos. Por lo tanto, el módulo de la función tiende a 1 y su argumento tiende a 0°. Las curvas se dibujan en la Fig. 6.27.
1
0
0
ω
ω
)j(H ω)j(H ω∠
°− 90
Figura 6.27
EJEMPLO 17
En la Fig. 6.28 se muestra la configuración de polos y ceros para una función de red. Se quiere dibujar en forma aproximada las curvas de respuesta de frecuencia.

261
-5 -4 -3 -2 -1 0
3
2
1
-1
-2
-3
× 4
-4×
Figura 6.28
Cuando la frecuencia es igual a cero, el módulo del numerador es cero, lo que hace que el módulo de la función sea cero; el argumento del numerador es de 90° y el del denominador es igual a 0°, por lo que el argumento de la función para esta frecuencia es igual a 0°. Al aumentar la frecuencia, aumenta el módulo del numerador, disminuye el módulo del polo con parte imaginaria positiva y aumenta el módulo con parte imaginaria negativa. Todo esto hace que el módulo de la función aumente. Al mismo tiempo, el argumento del numerador permanece constante en 90°, el del polo con parte imaginaria positiva se hace menos negativo tendiendo a 90°. Todo esto hace que el módulo de la función aumente y que el argumento disminuya. Para una frecuencia en la que la suma de los argumentos de los dos polos sea 90° (esto es, 123.441 22 =+=ω rad/s), el argumento de la función es cero y conforme la frecuencia sigue aumentando, el argumento se hace negativo y tiende a 90°. A la misma frecuencia mencionada, el módulo de la función tiene un máximo. Para frecuencias mayores, el módulo de la función disminuye y tiende a cero. Las curvas se dibujan en la Fig. 6.29.
0
0,05
0,1
0,15
0,2
0,25
0,3
0 1 2 3 4 5 6 7 8 9 10ω
-90
0
90
0 1 2 3 4 5 6 7 8 9 10ω
)( ωjH )( ω∠ jH
Figura 6.29

262
6.9 GRÁFICOS POLARES
En la sección anterior se dibujaron las curvas de respuesta de frecuencia en dos gráficos, separando las curvas correspondientes al módulo y al argumento de la función de la red. El gráfico polar representa en una sola curva en el plano complejo, la magnitud y el argumento de la función. En general, la forma polar de la función de la red es
)()()( ω+ω=ω jXRjH (6.21)
donde )(ωR y )( ωjX representan las partes real e imaginaria de la función de la red, respectivamente.
Para dibujar estas gráficas, se toma la frecuencia ω como parámetro variable y en el plano complejo se considera a )( ωjH como un fasor que se desplaza conforme ω varía, y se gráfica determinando los valores
⎥⎦
⎤⎢⎣
⎡
ωω
=ω∠ω+ω=ω −
)()(tan)(y )()()( 122
RXjHXRjH
En algunas aplicaciones, este método se prefiere a los anteriores porque facilita la aplicación de criterios de estabilidad y además permite, mediante una curva aproximada, tener una idea bastante clara del comportamiento de la función.
El trazado aproximado de estas curvas se consigue usando solamente valores de ω en cero y en infinito y observando el comportamiento de la función para valores intermedios de la frecuencia. A continuación, se ilustra el método mediante algunos ejemplos.
EJEMPLO 18
Determínese el gráfico de la función de transferencia
)()(
)(ωω
=ωjEjV
jH
para la red de la Fig. 6.30.

263
+
_
+
_
Ω1
E VF21
Figura 6.30
De la figura, se obtiene que
22
)()()(
+==
ssEsVsH
de donde
22 42
44
22)(
ω+
ω−
ω+=
ω+=ω j
jjH
A partir de esta última ecuación se obtiene
⎟⎠⎞
⎜⎝⎛ ω
−=ω∠ω+
=ω −
2tan)( ,
4
2)( 12
jHjH
De estas dos últimas relaciones, se obtiene que para ω = 0, ,00.1)( °∠=ωH y para ω = ∞, .900)( °−∠=ωjH Obsérvese también que para valores intermedios de ω, el argumento de la función permanece negativo entre 0° y −90°. El gráfico correspondiente se muestra en la Fig. 6.31.
0 0.5 1∞=ω
ω
ω = 0
Figura 6.31
EJEMPLO 19
Dibújese el gráfico polar para la siguiente función de red:

264
)51)(21(10)(
ω+ω+=ω
jjjH
De la función se obtiene que para 0=ω , ;010)( °∠=ωjH para .1800)( , °∠=ω∞=ω jH Obsérvese también que el ángulo de )( ωjH se mantiene siempre negativo para ω creciente. El gráfico correspondiente se indica en la Fig. 6.32.
ω
∞=ω ω = 0100
Figura 6.32 EJEMPLO 20
Dibujar el gráfico polar para la siguiente función de red:
)101)(51)(21(5)(
ω+ω+ω+=ω
jjjjH
De la expresión anterior se obtiene: para ;05)( ,0 °∠=ω=ω jH para .2700)( , °−∠=ω∞=ω jH Observe también que el argumento de H(jω) siempre se mantiene negativo para ω creciente. El gráfico correspondiente se muestra en la Fig. 6.33.
ω
∞ = ω ω = 0 5
Figura 6.33
EJEMPLO 21
Se desea dibujar el gráfico polar de la siguiente función de red:

265
)1()1()1()(
321 TjTjTjjKjH
ω+ω+ω+ω=ω
A partir de la expresión para )( ωjH se obtiene: para 0=ω , ;90)( °−∞∠=ωjH para ,∞=ω .3600)( °−∠=ωjH Observe también que para ω creciente, el argumento de )( ωjH se mantiene negativo entre −90° y −360°. El gráfico se muestra en la Fig. 6.34.
∞=ω
ω
Figura 6.34
6.10 DIAGRAMAS DE BODE
En esta sección estudiaremos otro método para obtener un gráfico aproximado de las variaciones de la amplitud y el argumento de la función de la red en función de la frecuencia ω. Las curvas de respuesta aproximada se conocen como diagramas de Bode y conforman un gráfico particularmente importante y útil en el análisis y diseño de circuitos de control y en la visualización de la respuesta de frecuencia de sistemas lineales. Los diagramas utilizan una escala logarítmica de frecuencia para la abscisa, y para la magnitud también usan unidades logarítmicas denominadas decibelios (dB), y consisten de dos gráficos: uno correspondiente al módulo de la función expresado en decibelios versus la frecuencia, y otro correspondiente al argumento de la función en grados versus la frecuencia.
6.10.1 OCTAVAS, DÉCADAS Y DECIBELIOS
Una octava es una banda de frecuencias entre, digamos, f1 y f2 donde f2/f1 = 2. Por ejemplo, el número de octavas en la banda de frecuencias de f1 a f3 es
( ) ( )1313 log322.3
2loglog ffff
= (6.22)
Una década es una banda de frecuencias entre f1 y f2, donde f2/f1 = 10. El número de décadas en la banda de frecuencias de f1 a f3 es

266
( ) ( )1313 log
10loglog ffff
= (6.23)
En las Ecs. (6.22) y (6.23), la función “log” se refiere al logaritmo de base 10.
EJEMPLO 22
Se desea calcular el número de octavas y décadas en la banda de frecuencias que va desde 20 Hz hasta 20000 Hz.
De las relaciones dadas en las Ecs. (6.22) y (6.23), se obtiene
( ) octavas 966.92log
2020000log octavas de No. ==
( ) décadas 310log
2020000log décadas de No. ==
Obsérvese que si el número de octavas se multiplica por 2log también se obtiene el número de décadas para la misma banda de frecuencias.
La magnitud en decibelios (dB) de una función de red )( ωjH se define como
)(log20dB ω= jHH (6.24)
Es importante conocer algunos de los valores importantes de las cantidades en decibelios. El valor en decibelios de la cantidad 2 es dB. 630103.0202log20 ≈×= A continuación se dan los valores en decibelios de algunas cantidades:
dB 46 0.200)( dB 0 0.1)(
dB 40 0.100)( dB 6 5.0)(
dB 20 0.10)( dB 20 1.0)(
dB 6 0.2)( dB 40 01.0)(
dBdB
dBdB
dBdB
dBdB
==ω==ω
==ω==ω
==ω==ω
==ω==ω
HjHHjH
HjHHjH
HjHHjH
HjHHjH
De los valores dados, obsérvese que un incremento en ωjH ( por un factor de 10 corresponde a un incremento en HdB de 20 dB. También, cuando se duplica una cantidad, el valor del aumento es de 6 dB. Usando los valores, podemos determinar otros valores. Por ejemplo, el valor en dB de 5 es
. 142log2010log20210log205log20 dB=−==
6.10.2 FACTORES QUE INTERVIENEN EN LOS DIAGRAMAS DE BODE
Cuando tenemos la función de la red en función de la variable compleja s, para obtener los diagramas de Bode la reemplazamos por jω y los factores que aparecen en la función son de la siguiente forma:

267
1. La constante K.
2. El factor .)( nj ±ω
3. El factor de primer orden .)1( nTj ±ω+
4. El factor de segundo orden 2)( 21 TjTj ω+ως+
La Constante K
Puesto que la constante K no varía con la frecuencia, sus gráficos de Bode son: el correspondiente a dB log20 K es una línea recta de valor constante; si K es positiva, el ángulo es 0°, y si es negativa es
180°.
EJEMPLO 22
Se desea determinar los diagramas de Bode de la función .30)( =ωjH
°=ω∠≈== 0( 30db 54.2930log20dB jHH
Los diagramas se muestran en la Fig. 6.35.
0 10 20 30 40
1 10 100 1000 Frecuencia (rad/s
-4
-2
0
2
4
1 10 100 1000
Frecuencia (rad/s)
H db Áng H
Figura 6.35
Ejemplo 23
Dibujar los diagramas de Bode de la función .150)( −=ωjH

268
Para esta función se tiene que
°=ω∠== 180)( 52.43150log20 jHH dB
Los diagramas correspondientes se muestran en la Fig. 6.36.
0 10 20 30 40 50
1 10 100 1000 Frecuencia (rad/s
0 50
100 150
200
1 10 100 1000 Frecuencia (rad/s)
H Áng Hdb
Figura 6.36
El Factor jω
El factor jω puede aparecer en la función de la red H(jω) en el numerador o en el denominador; esto es, si la función tiene ceros o polos en el origen. Si el factor está en el numerador, vale decir,
ω=ω jjH )(
entonces, la magnitud en decibelios es
ω=ω= log20 log20dB jH
De esta expresión se obtiene que cada vez que se aumenta la frecuencia por un factor de 2, la magnitud se incrementa en 6 decibelios, y si la frecuencia se aumenta por un factor de 10, la magnitud se incrementa en 20 decibelios; esto es, se tiene una recta con una pendiente de 6 dB/octava o, equivalentemente, de 20 dB/década y para ω = 1 rad/s, HdB = 0 db. La gráfica para HdB se muestra en la Fig. 6.37(a). El ángulo de la función es constante e igual a 90°; esta gráfica se muestra en la Fig. 6.37 (b).

269
-20
0
20
40
0,1 1 10 100
Frecuencia (rad/s )
0
50
100
0,1 1 10 100 Frecuencia (rad/s)
HdB Áng H
(a) (b)
Figura 6.37
Si el factor jω está en el denominador, entonces
ω−=ω
= log201log20dB jH
Ésta es una situación semejante a la anterior, pero ahora la pendiente de la recta es negativa e igual a −6 dB/octava o −20 dB/década, y el ángulo de fase es igual a −90°. Las curvas correspondientes se muestran en la Fig. 6.38.
-40
-20
0
20
40
0.1 1 10 100
Frecuencia (rad/s )
Decibelios
-100
-50
0 0.1 1 10 100
Frecuencia (rad/s)
Ángulo (grados)
Figura 6.38
Si el factor jω está elevado a la potencia ±m, o sea mj ±ω)( , entonces el gráfico de magnitud tiene una pendiente de ±6m dB/octava o ±20m dB/década, pasando por el punto de 0 dB para ω = 1; el ángulo es constante e igual a ±m90°, tal como se indica en la Fig. 6.39 para diferentes valores de m.

270
-200
-100
0
100
200
0,1 1 10 100 1000
m=1m=2
m=3
m=-1m=-2
m=-3
Hdb
-300
-200
-100
0
100
200
300
0,1 1 10 100 1000
Frecuencia (rad/s)
Ángulo (grados)
m=3m=2
m=1
m=-1m=-2
m=-3-200
AngH
Figura 6.39
Factor 1 + jωT
El factor Tjω+1 aparece en la función de red si la red tiene un cero o un polo en el eje real. Si el factor aparece en el numerador, lo cual significa que la función tiene un cero en el eje real, la magnitud en decibelios es
( )2222dB 1log101log201log20 TTTjH ω+=ω+=ω+=
Para valores pequeños de ω tales que ,1<<ωT se tiene que
01log20dB =≈H
Para valores grandes de ω tales que ,1>>ωT se tiene que
TH ω≈ log20dB
La curva aproximada consiste entonces de dos asíntotas, las cuales se cruzan en T1=ω y esta curva se muestra en la Fig. 6.40. Observe que la asíntota para 1>>ωT tiene una pendiente de 6 dB/octava o de 20 dB/década.

271
-20
0
20
40
0.1/T 1/T 10/T 100/T
Frecuencia
H db
Figura 6.40
Si el factor Tjω+1 aparece en el denominador, la magnitud en decibelios es
22db 1log20
11log20 T
TjH ω+−=
ω+=
Esta relación es similar a la obtenida en el caso cuando el factor Tjω+1 está en el numerador, excepto que ahora la asíntota para 1>>ωT tiene una pendiente de −6 dB/octava o de −20 dB/década. En la Fig. 6.41 se muestra la curva correspondiente para este caso.
-40
-20
0
20
Frecuencia (rad/s )
0.1/T 1/T 10/T 100/T
H db
Figura 6.41
En la tabla siguiente se dan los valores exactos y aproximados cuando se linealizan las curvas para diferentes frecuencias:
ωT Valor exacto Valor Aproximado Error
(decibelios) (decibelios)
0.1 0.043 0 0.043

272
0.2 0.170 0 0.170
0.5 0.969 0 0.969
1.0 3.010 0 3.010
2.0 6.990 6 0.990
4.0 12.304 12 0.304
10.0 20.043 20 0.043
20.0 26.032 26 0.031
Obsérvese que cuando se usan las aproximaciones asintóticas, el mayor error se comete para ,1=ωT el punto de quiebre de la curva aproximada. Por lo general, un primer análisis se hace con las asíntotas y luego, si se necesitan resultados más precisos, se hacen ciertas correcciones. Las correcciones más comunes son las de 3 dB en el punto de quiebre ( T1=ω ), y la de un decibel a una octava por debajo ( )T5.0=ω y a una octava por encima ( )T2=ω de la frecuencia de quiebre.
La aproximación de la curva correspondiente al ángulo de fase de la función de red versus la frecuencia para el cero Tjω+1 es un poco más difícil. El ángulo de la función es
TTjjH ω=ω+∠=ω∠ −1tan)1()(
Esta expresión también se representa mediante asíntotas, aunque se requieren tres segmentos de línea. Para ,0)( ,1 °≈ω∠<<ω jHT de hecho, es igual a 0 para ω = 0, y se usa ésta recta como asíntota para
:1.0<ωT
1.0 para ,0)( <ω°=ω∠ TjH
Para altas frecuencias, ,1>>ωT tenemos que ,90)( °≈ω∠ jH y se usa esta línea como asíntota para :10>ωT
10 para 90)( >ω°=ω∠ TjH
Puesto que el ángulo de la función en T1=ω es 45°, se construye la otra asíntota que va desde 0° en T1.0=ω , hasta 90° en .10 T=ω La pendiente de esta recta en escala logarítmica es
década45100log
901.0log10log
090°==
−−
=m
y la ecuación de la recta que pasa por 45° cuando ,1=ωT es
°+ω=ω∠ 45log45)( TjH
La curva asintótica se muestra en la Fig. 6.42.

273
0
45
90
135
Frecuencia (rad/s) 0.1/T 1/T 10/T
ang H(j ) ω
Figura 6.42
En la tabla siguiente se muestran los valores exactos y aproximados cuando la curva del ángulo se linealiza para diferentes frecuencias:
ωT Valor Exacto (grados)
Valor Aproximado (grados)
Error
0.05 2.86 0 2.86
0.1 5.71 0 5.71
0.2 11.31 13.55 2.24
0.5 26.57 31.45 4.88
1.0 45.0 45.0 0
2.0 63.43 58.55 4.89
5.0 78.69 76.45 2.24
10.0 84.29 90.0 5.71
20.0 87.14 90.0 2.86
Obsérvese que el error se distribuye uniformemente para frecuencias por encima o por debajo de T1=ω y disminuye para frecuencias muy altas o muy bajas.
Se acostumbra hacer un primer análisis basado en el gráfico formado por las asíntotas y luego hacer correcciones de 5.71° en los puntos de quiebre ( ).10y 101 TT =ω=ω
Si la función Tjω+1 está en el denominador, la asíntota hasta T101=ω permanece igual al caso anterior con un valor de 0°, la asíntota desde T101=ω hasta T10=ω tiene una pendiente de −45°, y para T10>ω , la asíntota tiene un valor de −90°.

274
A continuación se presentan algunos ejemplos de cómo obtener los diagramas de Bode.
EJEMPLO 24
Se desea determinar los diagramas de Bode de la función de red
ω+=ω 101)( jjH
Aquí )( ωjH está constituida por un solo factor y T = 10. Los gráficos correspondientes se muestran en la Fig. 6. 43.
-20
0
20
40
Frecuencia (rad/s )
0.01 0.1 1 10
Hdb
0
45
90
135
Frecuencia (rad/s)0.001 0.01 0.1 1 10
angH(j )ω
Figura 6.43
EJEMPLO 25
Determinar los diagramas de Bode de la función
ω+=ω
211)(j
jH
Igual que en el caso anterior )( ωjH está constituida por un solo factor, un polo en el denominador, y .2=T Los diagramas de Bode correspondientes se muestran en la Fig. 6.44.

275
-40
-30
-20
-10
00.05 0.5 5 50
Frecuencia (rad/s)0.05 0.5 5 50
Hdb
-90
-70
-50
-30
-10
0.005 0.05 0.5 5 50Frecuencia (rad/s)
0.05 0.5 5 500.005
AngH(j )ω
Figura 6.44
EJEMPLO 26
Construir los diagramas de Bode de la función
ω+ω+
=ωj
jjH1
)1001(5)(
El método más utilizado para representar la función en términos de sus diagramas de Bode consiste en representar cada factor por separado y luego sumar los diagramas individuales para obtener la representación final. Para la función de red dada, tenemos que
ω+−ω++= jjH 1log201001log205log20dB
Así que el diagrama consiste de tres factores:
a) El factor correspondiente a la constante 5: 145log20 = dB. b) El factor correspondiente al cero .1001log20 :1001 ω+ω+ jj
c) El factor correspondiente al polo .1log20 :1 ω+−ω+ jj
El diagrama correspondiente se muestra en la Fig. 6.44. En la figura se indican las curvas individuales y las curvas resultantes se indican en líneas sólidas (negritas).
-60
-40
-20
0
20
40
60
0,01 0,1 1 10 100
Frecuencia (Rad/s)
Hdb
a
b
c
Resultante
-100
-50
0
50
100
0,001 0,01 0,1 1 10 100Frecuencia (Rad/s)
a
b
c
Resultante
Ang H(j )ω

276
Figura 6.44
EJEMPLO 27
Construir los diagramas de Bode de la función
)101()1.01(4)(
ω+ωω+
=ωjj
jjH
El diagrama consiste de cuatro factores:
a) El factor 4: 124log20 = dB. b) El factor .1.01 ω+ j c) El factor .ωj d) El factor .101 ω+ j
La contribución de cada uno de estos factores se muestra en la Fig. 6.45, y las curvas totales para la magnitud y el ángulo de )( ωjH se muestran en líneas sólidas (negritas).
-80
-40
0
40
80
0,001 0.01 0.1 1 10 100 Frecuencia (Rad/s)
H db
a b c
d
Resultante
-200
-150 -100 -50
0 50
100
0,001 0.01 0.1 1 10 100 1000 Frecuencia (Rad/s)
Ang H(j ) ω
b d
c
Resultante
Figura 6.45
El Factor 2)(21 TjTj ω+ςω+
El factor 2)(21 TjTj ω+ςω+ aparece en la función de red si ella tiene ceros o polos complejos conjugados. La cantidad ζ se conoce como el factor de amortiguamiento. Si el factor
2)(21 TjTj ω+ςω+ aparece en el numerador, lo cual significa que la función tiene ceros en el plano complejo, la respuesta de magnitud en decibelios es
2
2dB
)(21log20
)(21 log20
TTj
TjTjH
ω−ςω+=
ω+ςω+=

277
Para valores pequeños de ω tales que ,1<<ωT db. 01log20dB =≈H Ésta es la asíntota de baja frecuencia. Si ,1>>ωT solamente el término elevado al cuadrado es de importancia y
TTH ω=ω−≈ log40)(log20 2dB
Ésta es la asíntota de alta frecuencia y tiene una pendiente de +40 dB/década o 12 dB/octava. Las dos asíntotas se cruzan en .1 T=ω
Para valores de ω tales que ,1=ωT se tiene que
ς=ςω= 2log202log20dB TjH
por lo que en ese punto, la magnitud en decibelios depende del factor de amortiguamiento ζ y, por lo tanto, se debe introducir un factor de corrección en las cercanías de la frecuencia de quiebre. En la tabla siguiente se indican ciertos valores de las magnitudes para varios valores del factor de amortiguamiento:
ζ 0.1 0.2 0.3 0.5 0.71 1.0
dB −14 −8 −4.4 0 3 6
En la Fig. 6.46 ilustra la representación asintótica. Normalmente, esta aproximación asintótica es suficiente para un primer análisis; para curvas más precisas se utilizan las correcciones dadas en la tabla anterior.
-10
40
90
Frecuencia (Rad/s)0.1/T 1/T 10/T 100/T
Hdb
Figura 6.46
Si el factor 2)(21 TjTj ω+ςω+ aparece en el denominador de la función, lo cual significa que existen polos en el plano complejo, la magnitud en decibelios es

278
2
2dB
)(21log20
)(21 log20
TTj
TjTjH
ω−ςω+−=
ω+ςω+−=
Esto es, la asíntota de bajas frecuencias permanece igual, la de altas frecuencias tiene ahora una pendiente de −40 dB/década y para valores de ω tales que ,1=ωT se tiene que ς−= 2log20dBH y los valores de magnitud dados en la tabla anterior cambiarán de signo para los mismos valores del factor de amortiguamiento.
Si ,0=ς lo que corresponde a factores en el eje imaginario, entonces 0)1( =TjH y ∞= mdBH . Para esta situación no se acostumbra dibujar los diagramas de Bode.
El ángulo de fase de la función es
221
12tan)(
TTjH
ω−ςω
=ω∠ −
Este factor varía desde 0° para una frecuencia igual a cero hasta +180° o −180°, si el factor está en el numerador o en el denominador, para una frecuencia infinita, y tiene un valor de ±90°, según el caso, en el punto de quiebre cuando .1 T=ω El diagrama de Bode correspondiente al ángulo se aproxima por una recta con un valor de 0° hasta ;101 T=ω una segunda recta con valor de ±180° que comienza en
;10 T=ω y una línea recta con pendiente ±90°/década que pasa por 90° cuando .1 T=ω El diagrama se muestra en la Fig. 6.47; la curva indicada con una “a” corresponde al factor en el numerador y con una “b” al factor en el denominador.
-200
-100
0
100
200
Frecuencia (rad/s)
Ang H(j )ω
a
b
0.01/T 0.1/T 1/T 10/T 100/T
Figura 6.47
EJEMPLO 28
Construir el diagrama de Bode para la función

279
( )[ ]22 10101)(
)1(10)(
ω+ω+ω
ω+=ω
jjj
jjH
La función está conformada por cuatro factores:
a. La constante 10. b. El factor ω+ j1 en el numerador; éste corresponde a un cero.
c. El factor ,)( 2ωj correspondiente a un polo doble en el eje imaginario.
d. El factor ,)10(101 2ω+ω+ jj correspondiente a dos polos complejos conjugados.
Estos factores se analizarán y graficarán (mediante líneas punteadas) por separado.
1. El factor constante 10:
°=∠== 010 dB 2010log20dB1H
2. El factor :1 ω+ j
ω+= jH 1log20dB2
La gráfica para HdB2 tiene una pendiente de 20 dB/década a partir de 1=ω y es igual a cero para frecuencias menores que 1=ω . El ángulo es igual a 90° a partir de ,10=ω igual a cero para frecuencias inferiores a ,1.0=ω y tiene una pendiente de 45°/década entre .10y 1.0 =ω=ω Además, tiene un valor de 45° para 1=ω .
3. El factor 2)10(101 ω+ω+ jj se grafica utilizando el método ya descrito. Este factor está en el denominador; por lo tanto, tiene una pendiente de –40 dB/década a partir de 10=ω y es igual a cero para frecuencias inferiores a 10=ω . El ángulo es igual a −180° a partir de 100=ω e igual a cero por debajo de .1=ω Además, tiene una pendiente de −90°/década entre ,100y 1 =ω=ω con un valor de −90° en .10=ω
4. El factor (jω)2 en el denominador de la función representa una línea recta de pendiente igual a dB/década 40− y que cruza el eje en ω = 1. El ángulo es constante e igual a −180°.
El diagrama de Bode para la magnitud y la fase se muestran en la Fig. 6.48. Los factores de la función se indican con los números correspondientes y se grafican mediante líneas más claras. La curva resultante se indica mediante una línea más gruesa.
-150
-75
0
75
150
Frecuencia (rad/s)
Hdb
0.1 1 10 100 1000
Resultante1
2
34
-300
-225
-150
-75
0
75
0.01 0.1 1 10 100 1000
Frecuencia (rad/s)
)( ωjangH
12
3
4 Resultante

280
Figura 6.48
PROBLEMAS
1. En los problemas siguientes determine la impedancia y la admitancia de punto impulsor y las funciones Z21(s) y Y21(s) de las redes dadas.
Ω1Ω2
Ω22F 5F
1h
+
_1V
1I 2I2V
+
_
Ω1
Ω2
2F
+
_1V
1I2I 2V
+
_
2F
5Ω
2. Determine y grafique los ceros y los polos de las siguientes funciones:
(a) )10)(20(
)5(10)(++
+=
sssssH
(b) ( )100)10(2)( 2 ++
+=
sssssH
+_
_
+
v2v
1
VCC
50KΩ
500 Ω
10KΩ
5KΩ90KΩ
i 2
i1
2K ΩΩ= 500hie4
re 10h −=
100hfe =
mhos 20hoe μ=

281
(c) ( )2010)10(8)( 2
2
+++
=sss
ssH
(d) 5056266
4812)( 234 +++++
=ssss
ssH
3. En la red de la figura, determine y grafique los ceros y polos de la función de punto impulsor.
Ω1
Ω2
1F
1h
+
_
1V
1I
3Ω
4. Determine y grafique los polos y los ceros de las funciones de redes del Problema 1.
5. En las redes siguientes determine las corrientes transitorias i(t) sin evaluar las condiciones iniciales.
Ω1
Ω2
2h+
_
Ωv
iΩ1
Ω2
+
_
2h
v
i
1F1
6. En las redes siguientes calcular el voltaje transitorio en las terminales a y b sin evaluar las condiciones iniciales.

282
Ω1
Ω2
2h+
_
Ωv
iΩ1
Ω2
+
_
2h
v
i
1F1
a
b
a
b
7. En las redes siguientes calcular la respuesta transitoria v(t) si se aplica un voltaje e(t).
2h
+
_
Ωe
i
Ω1
Ω2
+
_v
i
1F
5R
C
+
_
e
+
_
v
8. Calcular la respuesta transitoria y permanente de la siguiente función de transferencia
( )100)10(2
)()()( 2 ++
+==
ssss
sUsYsH
si la excitación es (a) u(t) = 2; (b) .2cos5)( ttu =
9. En la red siguiente, calcular:
(a) La función de punto impulsor .)()()( sEsIsYd = (b) La corriente de régimen permanente si la excitación es .sen5)( tte = (c) La corriente de régimen permanente si la excitación es .2)( =te

283
2h
Ω
Ω2
+_
i
1F
5e
1F
10Ω
10. En las redes siguientes, construir las curvas de respuesta de frecuencia de la función de red
)()()(
ωω
=ωjEjIjH
1h+_i
0.04F1Ω +_i
e 8Ωie oe
_
+
1F
11. Una función de red tiene la configuración polos – ceros que se indica. Dibuje en forma aproximada las curvas de respuesta de frecuencia.
×
×
×
-1 -1
2
1
-1
-2
En los problemas que siguen, dibuje los diagramas de Bode para las funciones de transferencia dadas.
12. ( )( )20155
)55(160244)(22
2
++−−+
=sss
ssssH 13. ( )642444001004)(
22
2
++−+−
=ssssssH
14. ( )90201010015)(
22
2
++−+
=sss
sssH 15. ( ) )10(18102)102)(124(5)(
22 +++−+
=ssss
sssH
16. ( )16204)402)(404()102(50)(
2
2
++−++
=ssss
sssH 17. ( )( )53240010240684)(
22
2
++++++
=sssss
sssH

284
18. ( )( )( )88244
)10)(5(45)(223
2
+++++−+++
=sssss
sssssH 19. ( )( )80122
)2020(403010)(22
2
−−−++
=sss
ssssH
20. ( )( )20010050
)8(6011)(2
2
+++−+
=sss
ssssH 21. ( )( )96123
)4(180455)(22
2
−−−+++
=sss
ssssH
22. ( )( )ss
ssssH )5(93100)(2 −++
−= 23. ( )( )8018
)5(93100)(2
2
++−++
−=sss
ssssH
24. ( )816102)4(1064)(
23
2
+++−++
=sssssssH 25. ( )
( )12198)2(3614)(
23
2
++++++
=ssssssssH
26. ( )( )823
)10(42)(23
2
++++++
=ssss
ssssH



![RODRÍGUEZ RODRÍGUEZ, Manuel · RODRÍGUEZ RODRÍGUEZ, Manuel Hora de comer [Recurso electrónico] : sistema de comida sana para ocho semanas / autores, Manuel Rodríguez Rodríguez,](https://img.pdfslide.tips/doc/110x75/5e211d6fac4d0616083aaf34/rodrguez-rodrguez-rodrguez-rodrguez-manuel-hora-de-comer-recurso-electrnico.jpg)