Embed Size (px)
Citation preview

1
TRƯỜNG ĐẠI HỌC HÀNG HẢI VIỆT NAM
KHOA ĐIỆN-ĐIỆN TỬ
THUYẾT MINH
ĐỀ TÀI NCKH CẤP TRƯỜNG
ĐỀ TÀI
NGHIÊN CỨU KHẢO SÁT ĐỘNG CƠ ĐỒNG BỘ KÍCH
THÍCH NAM CHÂM VĨNH CỬU VÀ CẤU TRÚC ĐIỀU KHIỂN
SỬ DỤNG PHẦN MỀM MATLAB
Chủ nhiệm đề tài: TS. PHẠM TÂM THÀNH
Hải Phòng, tháng 5/2016
2
MỤC LỤC Trang MỞ ĐẦU .................................................................................................................................... 3
1. Tính cấp thiết của vấn đề nghiên cứu ............................................................................. 3
2. Tổng quan về tình hình nghiên cứu ................................................................................ 3
3. Mục tiêu, đối tượng, phạm vi nghiên cứu ....................................................................... 3
4. Phương pháp nghiên cứu, kết cấu của công trình nghiên cứu ..................................... 3
5. Kết quả đạt được của đề tài ............................................................................................. 3
Chương 1. Khảo sát mô hình động học của động cơ đồng bộ ............................................. 4
1.1. Khái quát về động cơ đồng bộ kích thích vĩnh cửu (ĐB-KTVC) .............................. 4
1.2. Mô hình động học của PMSM ...................................................................................... 4
1.2.1. Nguồn tương đương ................................................................................................ 4
1.2.2. Momen điện từ ........................................................................................................ 5
1.2.3. Từ thông móc vòng ................................................................................................. 5
1.2.4. Mạch tương đương ................................................................................................. 6
1.2.5. Mô phỏng động học ................................................................................................ 8
1.2.6. Phương trình tín hiệu nhỏ của PMSM ............................................................... 10
1.2.7. Đánh giá đặc tính điều khiển của PMSM ........................................................... 12 Chương 2. Cấu trúc và chiến lược điều khiển động cơ đồng bộ kích thích vĩnh cửu ...... 13
2.1. Cấu trúc hệ truyền động điều khiển động cơ đồng bộ kích thích nam châm vĩnh
cửu ........................................................................................................................................ 13
2.1.1. Hệ truyền động điều khiển mô-men .................................................................... 13
2.1.2. Mô phỏng và kết quả của hệ truyền động điều khiển mômen .......................... 16
2.1.3. Hệ truyền động điều chỉnh tốc độ ....................................................................... 17
2.1.4. Mô phỏng hệ truyền động điều chỉnh tốc độ ...................................................... 20 2.2. Một số chiến lược điều khiển ...................................................................................... 21
2.2.1. Điều khiển giữ góc mômen bằng hằng số 090 .............................................. 21
2.2.2. Điều khiển hệ số công suất ................................................................................... 23
2.2.3. Điều khiển từ thông là hằng................................................................................. 24
2.2.4. Điều khiển góc giữa từ thông tổng và dòng phức ............................................. 25
2.2.5. Điều khiển tối ưu mômen/dòng điện ................................................................... 27
2.2.6. Điều khiển hệ số tổn hao công suất là hằng ........................................................ 27
2.2.7. Điều khiển hiệu suất tối đa .................................................................................. 31 Chương 3. Mô phỏng cấu trúc điều khiển động cơ đồng bộ sử dụng phần mềm Matlab 32
3.1. Cấu trúc hệ truyền động động cơ đồng bộ kích thích nam châm vĩnh cửu ........... 32
3.2. Cấu trúc mô phỏng ...................................................................................................... 32
3.2.1. Thông số động cơ .................................................................................................. 32
3.2.2. Mô hình Simulink của động cơ đồng bộ kích thích nam châm vĩnh cửu ........ 33
3.2.3. Mô phỏng cấu trúc điều khiển ............................................................................. 34 KẾT LUẬN ............................................................................................................................. 40
TÀI LIỆU THAM KHẢO ...................................................................................................... 41
PHỤ LỤC ................................................................................................................................ 42
3
MỞ ĐẦU
1. Tính cấp thiết của vấn đề nghiên cứu
Để có thể phục vụ tốt hơn trong công tác giảng dạy, nghiên cứu về máy điện,
truyền động điện, tổng hợp hệ điện cơ… cần tiến hành khảo sát, mô phỏng động học
của máy điện, mô phỏng các cấu trúc điều khiển máy điện nói chung hay động cơ
đồng bộ kích thích nam châm…giúp sinh viên, học viên có thể tiếp cận dễ dàng khi
học tập các học phần đó
2. Tổng quan về tình hình nghiên cứu Ở Việt Nam cũng như ở nước ngoài đề tài nghiên cứu về máy điện nói chung và
động cơ điện đồng bộ xoay chiều ba pha nói riêng đã được nhiều nhà khoa học quan
tâm. Máy điện rất đa dạng, lý thuyết về máy điện rất phức tạp, việc phân tích các quá
trình quá độ, trạng thái làm việc của máy điện là điều không dễ dàng thực hiện được.
Cấu trúc điều khiển máy điện xoay chiều ba pha và cấu trúc điều khiển động cơ
đồng bộ xoay chiều ba pha được các nhà khoa học trong nước và quốc tế đặc biệt quan
tâm.
3. Mục tiêu, đối tượng, phạm vi nghiên cứu
a. Mục tiêu nghiên cứu
Xây dựng tài liệu nghiên cứu động cơ điện đồng bộ kích thích nam châm vĩnh
cửu sử dụng công cụ Matlab và Simulink, phục vụ học tập trực quan cho sinh viên
chuyên ngành. Đó cũng là mục đích nghiên cứu của đề tài. Đề tài có sản phẩm đó là
tập hợp tài liệu và các chương trình viết trên Matlab phục vụ nghiên cứu đối tượng
động cơ điện đồng bộ kích thích nam châm vĩnh cửu và cấu trúc điều khiển.
b. Đối tượng, phạm vi nghiên cứu
Nghiên cứu động cơ đồng bộ kích thích vĩnh cửu, nghiên cứu về mô hình toán
của động cơ đồng bộ kích thích vĩnh cửu, các cấu trúc điều khiển và khảo sát mô
phỏng sử dụng phần mềm Matlab
4. Phương pháp nghiên cứu, kết cấu của công trình nghiên cứu
Trong quá trình nghiên cứu tác giả kết hợp các phương pháp: Lý thuyết và mô phỏng
máy tính.
Kết cấu của công trình nghiên cứu gồm 3 chương và phụ lục
- Chương 1: Khảo sát mô hình động học động cơ đồng bộ kích thích vĩnh cửu
- Chương 2: Cấu trúc và chiến lược điều khiển động cơ đồng bộ kích thích vĩnh cửu
- Chương 3: Mô phỏng cấu trúc điều khiển động cơ đồng bộ sử dụng phần mềm
Matlab
5. Kết quả đạt được của đề tài
Đề tài là tài liệu nghiên cứu về đối tượng động cơ điện đồng bộ kích thích nam
châm vĩnh cửu gồm: mô hình toán và các cấu trúc điều khiển, mô hình động cơ và cấu
trúc điều khiển được mô phỏng kiểm chứng bởi phần mềm Matlab&Simulink.
Kết quả nghiên cứu sẽ làm phong phú thêm nội dung bài giảng các môn học
chuyên ngành: Kỹ thuật điện, máy điện… và phục vụ công tác đào tạo nhân lực của
Nhà trường.. Như vậy đề tài “Nghiên cứu khảo sát động cơ đồng bộ kích thích nam
châm vĩnh cửu và cấu trúc điều khiển sử dụng phần mềm Matlab” được đưa ra vừa có
ý nghĩa khoa học, vừa có giá trị thực tiễn và đào tạo.
4
Chương 1. Khảo sát mô hình động học của động cơ đồng bộ
1.1. Khái quát về động cơ đồng bộ kích thích vĩnh cửu (ĐB-KTVC)
Động cơ đồng bộ kích thích vĩnh cửu có cấu tạo gồm các cuộn dây 3 pha phân bố
đối xứng và rotor gắn nam châm vĩnh cửu để tạo từ trường khe hở. Việc loại bỏ được
mạch điện kích từ ở phía rotor đem lại một số ưu điểm cho động cơ ĐB-KTVC như
giảm tổn hao đồng, mật độ công suất cao hơn, giảm mô-men quán tính của động cơ,
cấu tạo rotor bền vững về mặt cơ khí hơn..Hiện nay, giá thành của loại động cơ ĐB-
KTVC vẫn cao hơn so với loại động cơ không đồng bộ rotor lồng sóc (KĐB-RLS) ở
cùng dải công suất, nhưng động cơ ĐB-KTVC thường có hiệu suất cao hơn, nên trong
thời gian lâu dài thì giá thành sử dụng của động cơ ĐB-KTVC vẫn nhỏ hơn so với
động cơ KĐB-RLS. Động cơ ĐB-KTVC đang được sử dụng rất rộng rãi và ngày càng
nhiều hơn trong công nghiệp, đặc biệt ở dải công suất thấp và trung bình (công suất tới
vài trăm hp-horse power)
1.2. Mô hình động học của PMSM
1.2.1. Nguồn tương đương
Các đầu vào công suất cho máy ba pha có được bằng năng lượng đầu vào cho các
máy hai pha có ý nghĩa giải thích trong phép đo, phân tích và mô phỏng. Công suất
đầu vào tức thời của 3 pha là: t
i abc abc as as bs bs cs csp v i v i v i v i (1.1)
pi : công suất đầu vào tức thời t
abcv : vector điện áp pha abc tức thời
, ,as bs csv v v : điện áp đầu vào pha a, b, c
iabc : vector điện áp pha abc
, ,as bs csi i i : dòng điện stator tức thời 3 pha
Các dòng pha abc và điện áp được chuyển thành tương đương:
1
0
r
abc abc qdi T i
(1.2)
1
0
r
abc abc qdv T v
(1.3)
Từ (1.1), (1.2), (1.3) ta có công suất đầu vào:
1 1
0 0
ttr r
i qd abc abc qdp v T T i
(1.4)
Khai triển phía bên phải của phương trình (1.4), công suất đầu vào trong các
biến dq0 là:
0 0
32
2
r r r r
i qs qs ds dsp v i v i v i (1.5)
Đối với máy 3 pha không có thứ tự dòng điện, công suất đầu vào có thể được
thu gọn:
0 0
32
2
r r r r
i qs qs ds dsp v i v i v i (1.6)

5
1.2.2. Momen điện từ
Mô-men điện từ là các biến đầu ra quan trọng nhất để xác định các động lực cơ
khí của máy chẳng hạn như vị trí rotor và tốc độ. Nó có nguồn gốc từ phương trình ma
trận máy bằng cách nhìn vào công suất đầu vào và các thành phần khác của nó như tổn
thất điện trở, công suất cơ học, và mức độ thay đổi của năng lượng từ trường tích lũy
trong cuộn dây stator. Mức độ thay đổi của năng lượng từ trường được lưu trữ chỉ có
thể bằng không trong trạng thái ổn định. Do đó, trong một trạng thái ổn định có tổn
thất điện trở và công suất đầu ra chênh lệch với công suất đầu vào. Mức độ thay đổi
của năng lượng từ trường tích lũy trong cuộn dây stator không cần phải bằng không.
Và nguồn gốc của các momen xoắn điện từ được thực hiện như sau.
Các phương trình động học của PMSM có thể được viết như sau:
[ ] [ ] [ ] rV R i L pi G iw= + + (1.7)
Công suất đầu vào tức thời là:
[ ] [ ] [ ]t t t t
i rp i V i R i i L pi i G iw= = + + (1.8)
Với:
[R] : ma trận các thành phần điện trở
[L] : ma trận các hệ số của hàm điều hành p
[G] : ma trận các hệ số của tốc độ rotor (ωr)
it[R]i : điện trở tổn thất ở rotor và stator
it[L]pi : biểu thị mức độ thay đổi trường lưu trữ
it[G]ωri : các thành phần còn lại bao gồm cả khe hở không khí
Mối liên hệ giữa khe hở không khí và momen xoắn:
[ ] [ ].2
t t
m e a r m
PT P i G i i G iw w w= = = (1.9)
Trong đó P là số cực. Bỏ qua tốc độ trên cả hai vế phương trình ta có momen
điện từ:
[ ]2
t
e
PT i G i= (1.10)
Thay thế [G] trong phương trình (1.10) ta có momen xoắn điện từ thu được
dưới dạng:
( )3
( . )2 2
r r
e af d q ds qs
PT L L i i N mlé ù= + -ê úë û
(1.11)
1.2.3. Từ thông móc vòng
Các phương trình động lực của PMSM trong hệ tọa độ rotor có thể được thể hiện
bằng cách sử dụng các mối liên kết thông như các biến. Ngay cả khi điện áp và dòng là
không liên tục thì các từ thông móc vòng vẫn liên tục. Điều này tạo thuận lợi phân biệt
các biến số có sự ổn định. Các từ thông móc vòng stator và rotor trong hệ tọa độ rotor
được định nghĩa là:
r r
qs s qsL il = (1.12)
6
r r
ds s ds afL il l= + (1.13)
Từ những phương trình này, dòng điện stator trong hệ tọa độ rotor có thể được
biểu diễn với các từ thông móc vòng và cuộn cảm. Điện áp theo hệ dq stator về các từ
thông móc vòng trong hệ tọa độ rotor như sau:
r r r rs
qs qs qs r ds
q
Rv p
Ll l w l= + + (1.14)
( )r r r rs
ds ds af ds r ds
d
Rv p
Ll l l w l= + + - (1.15)
Những phương trình này có thể được biểu diễn dưới dạng các mạch tương đương
và cũng có thể ở dạng một sơ đồ khối. Momen điện từ như là một hàm của các từ
thông móc vòng thu được bằng cách thay thế dòng điện stator về các từ thông móc
vòng và được tính toán như:
( )3 1 3
12 2 2 2
r r r r r r
e af ds qs ds ds qs qs
q
P PT p i i
Ll r l l l lé ù é ù= + - = +ë û ë û (1.16)
Với : q
d
L
Lr = (1.17)
Phần thứ hai của biểu thức thể hiện rõ hơn momen là kết quả của sự tương tác
giữa từ thông móc vòng và dòng điện trục d-q ở các cuộn dây và ngược lại. Các dấu
trừ liên quan đến các từ thông móc vòng trục q và trục d dòng điện là bởi vì nó tạo ra
một momen cản ngược lại với các thành phần momen khác.
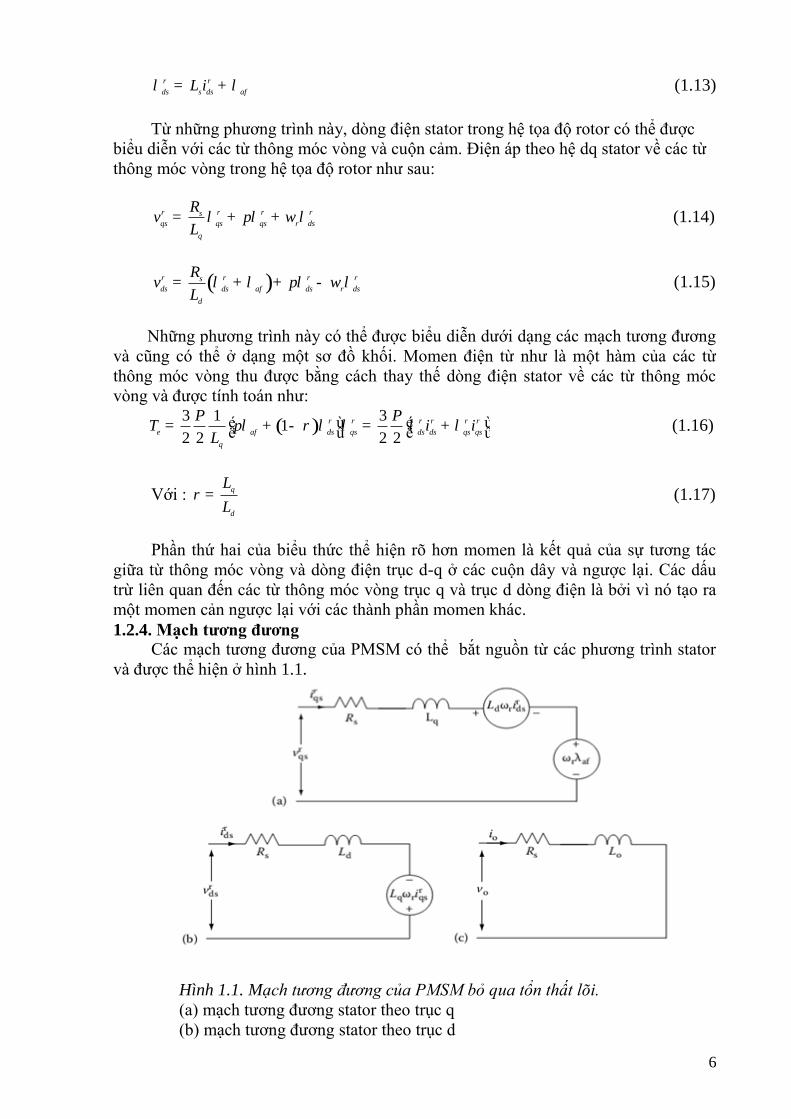
1.2.4. Mạch tương đương
Các mạch tương đương của PMSM có thể bắt nguồn từ các phương trình stator
và được thể hiện ở hình 1.1.
Hình 1.1. Mạch tương đương của PMSM bỏ qua tổn thất lõi.
(a) mạch tương đương stator theo trục q
(b) mạch tương đương stator theo trục d
7
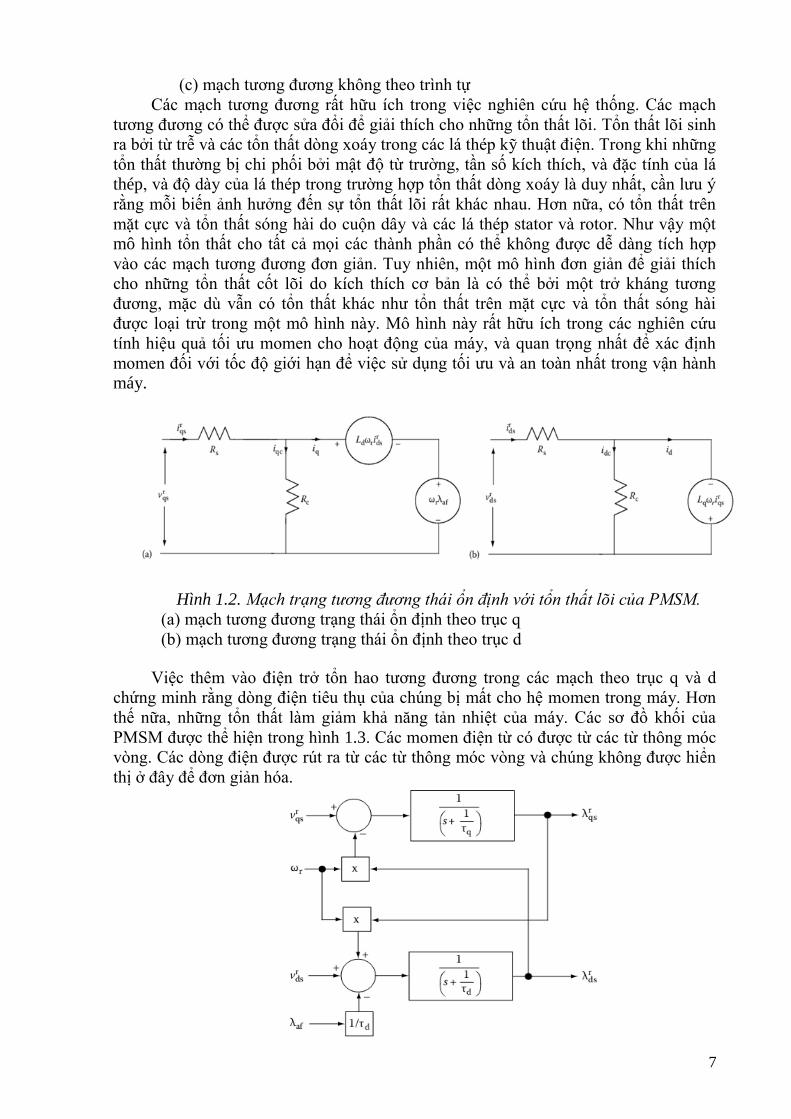
(c) mạch tương đương không theo trình tự
Các mạch tương đương rất hữu ích trong việc nghiên cứu hệ thống. Các mạch
tương đương có thể được sửa đổi để giải thích cho những tổn thất lõi. Tổn thất lõi sinh
ra bởi từ trễ và các tổn thất dòng xoáy trong các lá thép kỹ thuật điện. Trong khi những
tổn thất thường bị chi phối bởi mật độ từ trường, tần số kích thích, và đặc tính của lá
thép, và độ dày của lá thép trong trường hợp tổn thất dòng xoáy là duy nhất, cần lưu ý
rằng mỗi biến ảnh hưởng đến sự tổn thất lõi rất khác nhau. Hơn nữa, có tổn thất trên
mặt cực và tổn thất sóng hài do cuộn dây và các lá thép stator và rotor. Như vậy một
mô hình tổn thất cho tất cả mọi các thành phần có thể không được dễ dàng tích hợp
vào các mạch tương đương đơn giản. Tuy nhiên, một mô hình đơn giản để giải thích
cho những tổn thất cốt lõi do kích thích cơ bản là có thể bởi một trở kháng tương
đương, mặc dù vẫn có tổn thất khác như tổn thất trên mặt cực và tổn thất sóng hài
được loại trừ trong một mô hình này. Mô hình này rất hữu ích trong các nghiên cứu
tính hiệu quả tối ưu momen cho hoạt động của máy, và quan trọng nhất để xác định
momen đối với tốc độ giới hạn để việc sử dụng tối ưu và an toàn nhất trong vận hành
máy.
Hình 1.2. Mạch trạng tương đương thái ổn định với tổn thất lõi của PMSM.
(a) mạch tương đương trạng thái ổn định theo trục q
(b) mạch tương đương trạng thái ổn định theo trục d
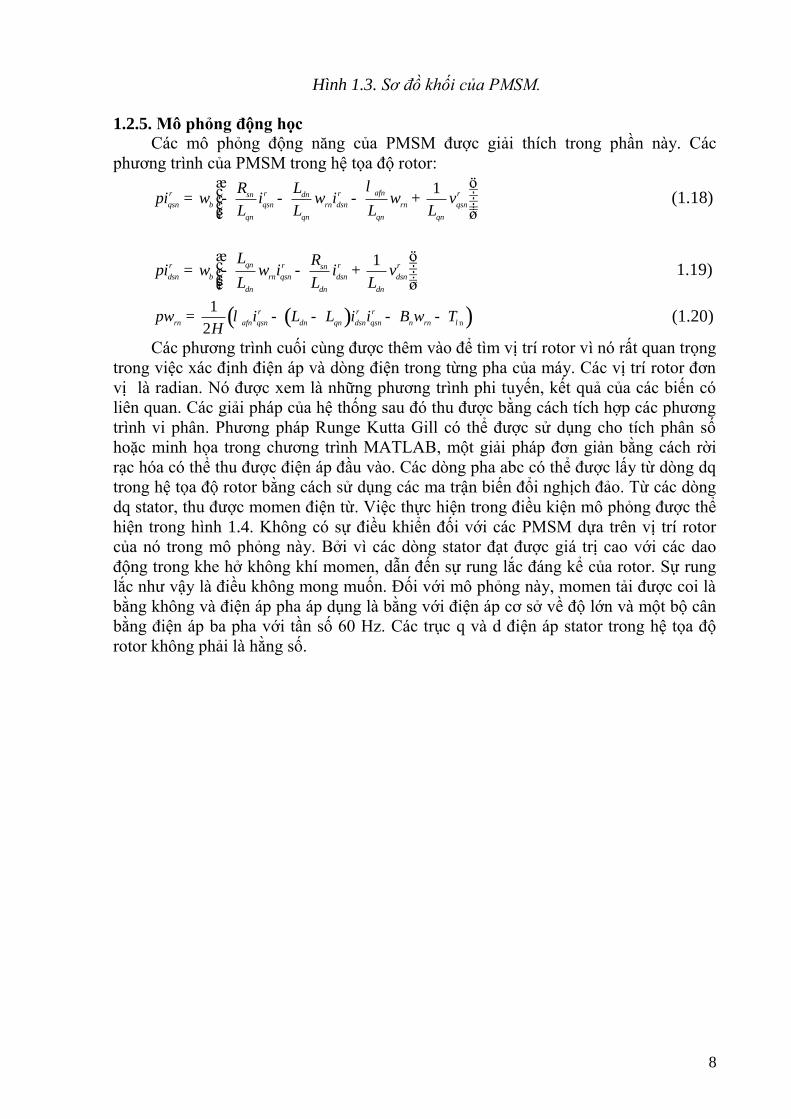
Việc thêm vào điện trở tổn hao tương đương trong các mạch theo trục q và d
chứng minh rằng dòng điện tiêu thụ của chúng bị mất cho hệ momen trong máy. Hơn
thế nữa, những tổn thất làm giảm khả năng tản nhiệt của máy. Các sơ đồ khối của
PMSM được thể hiện trong hình 1.3. Các momen điện từ có được từ các từ thông móc
vòng. Các dòng điện được rút ra từ các từ thông móc vòng và chúng không được hiển
thị ở đây để đơn giản hóa.
8
Hình 1.3. Sơ đồ khối của PMSM.
1.2.5. Mô phỏng động học
Các mô phỏng động năng của PMSM được giải thích trong phần này. Các
phương trình của PMSM trong hệ tọa độ rotor:
1afnr r r rsn dn
qsn b qsn rn dsn rn qsn
qn qn qn qn
R Lpi i i v
L L L L
lw w wæ ö
÷ç ÷ç= - - - + ÷ç ÷÷çè ø (1.18)
1qnr r r rsn
dsn b rn qsn dsn dsn
dn dn dn
L Rpi i i v
L L Lw wæ ö
÷ç ÷= - - +ç ÷ç ÷çè ø 1.19)
( )( )n
1
2
r r r
rn afn qsn dn qn dsn qsn n rn lp i L L i i B T
Hw l w= - - - - (1.20)
Các phương trình cuối cùng được thêm vào để tìm vị trí rotor vì nó rất quan trọng
trong việc xác định điện áp và dòng điện trong từng pha của máy. Các vị trí rotor đơn
vị là radian. Nó được xem là những phương trình phi tuyến, kết quả của các biến có
liên quan. Các giải pháp của hệ thống sau đó thu được bằng cách tích hợp các phương
trình vi phân. Phương pháp Runge Kutta Gill có thể được sử dụng cho tích phân số
hoặc minh họa trong chương trình MATLAB, một giải pháp đơn giản bằng cách rời
rạc hóa có thể thu được điện áp đầu vào. Các dòng pha abc có thể được lấy từ dòng dq
trong hệ tọa độ rotor bằng cách sử dụng các ma trận biến đổi nghịch đảo. Từ các dòng
dq stator, thu được momen điện từ. Việc thực hiện trong điều kiện mô phỏng được thể
hiện trong hình 1.4. Không có sự điều khiển đối với các PMSM dựa trên vị trí rotor
của nó trong mô phỏng này. Bởi vì các dòng stator đạt được giá trị cao với các dao
động trong khe hở không khí momen, dẫn đến sự rung lắc đáng kể của rotor. Sự rung
lắc như vậy là điều không mong muốn. Đối với mô phỏng này, momen tải được coi là
bằng không và điện áp pha áp dụng là bằng với điện áp cơ sở về độ lớn và một bộ cân
bằng điện áp ba pha với tần số 60 Hz. Các trục q và d điện áp stator trong hệ tọa độ
rotor không phải là hằng số.

9
Start
Đọc thông số của
động cơ
Khởi tạo thời gian và
đọc các điện áp và
thời gian cuối
Tính các điện áp dq0
trong hệ tọa độ rotor
Giải các phương trình
vi phân của động cơ
sử dụng phương pháp
tích phân số Runge-
Kutta
Tính mô-men, từ
thông và dòng abc
Lưu giữ giá trị của các
biến
Đã đạt thời gian cuối?Time time t
Sai
Đúng
In/hiển thị thời gian
đáp ứng
End
Hình 1.4. Lưu đồ mô phỏng động lực của PMSM

10
Hình 1.5. Kết quả mô phỏng động lực
Để vận hành PMSM tốt hơn, hãy xem xét điều khiển vòng kín đơn giản mà vị trí
rotor được sử dụng để thiết lập một pha điện áp như một hình sin của vị trí rotor và
góc α cố định. Các điện áp pha b và c có nguồn gốc tương tự. Góc α được gọi là góc
pha điện áp stator. Độ lớn của điện áp pha được đưa ra như là một chức năng của tốc
độ rotor cộng với một điện áp bù đắp như:
( )1m b r
V K Vw= + (1.21)
Với:
bK : Hằng số EMF
rw : Tốc độ quay rotor
Điện áp bù vượt quá điện áp rơi trên trở để làm cho nó có khả năng tạo ra một
dòng điện tại thời điểm bắt đầu từ điểm dừng. Đối với biến tần điều khiển tốc độ động
cơ cảm ứng có thể nhận ra rằng điện áp bù phục vụ cùng một mục đích trong việc điều
khiển U/f. Giả sử điện áp cơ sở là Vb, điện áp pha bình thường được viết là:
( ) ( )sin .m
asn t
b
VV t p u
Vw a= + (1.22)
Điện áp tăng lên tương ứng với tốc độ. Góc giữa các từ thông móc vòng rotor và
điện áp được duy trì ở 90 °, nghĩa là α = 90 °. Các momen khe hở không khí giảm khi
dòng điện giảm trong biên độ do sức điện động gây ra và tăng khi tốc độ tăng. Điện áp
và tần số của điện áp và pha có thể được lập trình từ các tín hiệu điều khiển.
1.2.6. Phương trình tín hiệu nhỏ của PMSM
Các phương trình điện của PMSM và các hệ thống con điện cơ được đưa ra trong
phương trình (1.18) qua (1.21) kết hợp để cung cấp cho các phương trình động học của
hệ thống tải của động cơ. Những phương trình động học phi tuyến là sản phẩm của hai
biến dòng điện hoặc một biến dòng điện và tốc độ rotor. Đối với thiết kế bộ điều khiển
với kỹ thuật thiết kế hệ thống điều khiển tuyến tính, các phương trình phi tuyến động

11
lực không thể được sử dụng trực tiếp. Chúng phải được tuyến tính xung quanh một
điểm làm việc sử dụng kỹ thuật nhiễu loạn. Đối với đầu vào tín hiệu nhỏ hoặc rối loạn,
các phương trình tuyến tính là hợp lệ. Các phương trình tuyến tính thu được như sau.
Các biến trong các đơn vị SI là sau khi nhiễu loạn:
( ) ( )0 0
r r r r
qs s q qs r d ds d ds af rv R L p i L i L Id d w d l dw= + + + + (1.23)
( )0 0
r r r r
ds r q qs s d ds q qs rv L i R L p i L Id w d d dw= - + + - (1.24)
( )2
r r l
PJp B T Tdw dw d d+ = - 1.25)
r rpdq dw= (1.26)
( )( )( )0 0
3
2 2
r r r r r
e af qs d q ds qs qs ds
PT i L L I i I id l d d d= + - + (1.27)
Kết hợp phương trình thông qua (1.23) và (1.27) đưa về mô hình không gian
trạng thái ta có:
pX AX BU= + (1.28)
Với: t
r r
qs ds r rX i id d dw dqé ù= ë û (1.29)
tr r
qs ds lU v v Td d dé ù= ë û (1.30)
0 0
0 0
1 0 1 0
0
0
0
0 0 1 0
rs dr af d ds
q q
q q rsr qs
d d d
r r
af d q ds d q ds
R LL I
L L
L LRI
A L L L
Bk L L I k L L I
J
(1.31)
10 0
10 0
0 02
0 00
q
d
L
BL
P
J
(1.32)
2
1
3 1
2 2
Pk
J
æ ö÷ç= ÷ç ÷çè ø
(1.33)
Đầu ra có thể là hàm của các biến trạng thái:
y CX DU= + (1.34)
Trong đó C và D tại là vector kích thước thích hợp. Những hệ thống và đầu ra được mô
tả bởi phương trình (1.28) và (1.34). Với mục đích nhỏ gọn trong việc xây dựng,
momen tải đã được coi như một đầu vào.
12
1.2.7. Đánh giá đặc tính điều khiển của PMSM Biến đổi Laplace phương trình (1.28) và (1.34) với các giả thiết điều kiện ban
đầu bằng không:
( ) ( ) ( )1sX s AX s Bu s= + (1.35)
( ) ( ) ( )y s CX s Du s= + (1.36)
Với s là biến Laplace. Áp dụng phương trình (1.31) và (1.32), đầu ra như sau:
( ) ( ) ( )1
1y s C sI A B D u s
-é ù= - +ê úë û (1.37)
Với I là ma trận đơn vị. Ma trận đầu vào được viết:
( ) ( )1 i iBu s bu s= (1.38)
Với bi là vector cột thứ i của ma trận B và i tương ứng với số phần tử trong
vector đầu vào, tương tự:
( ) ( )i iDu s d u s= (1.39)
và kết quả là các phương trình:
( ) ( ) ( )i isX s AX s bu s= + (1.40)
( ) ( ) ( )i iy s CX s d u s= + (1.41)
Việc đánh giá các hàm truyền được thực hiện đơn giản nếu dạng biến chính tắc
hay pha của phương trình trạng thái được đưa ra trong phương trình (1.28) được tìm
thấy. Giả định rằng nó được thực hiện bằng việc chuyển đổi sau đây:
p pX T X= (1.42)
Các phương trình trạng thái và đầu ra được chuyển thành:
p p p p ipX A X B u= + (1.43)
p p i iy C X d u= + (1.44)
Với: 1
p p pA T AT-= (1.45)
1
p p iB T b-= (1.46)
p pC CT= (1.47)
Các ma trận và vector có dạng:
1 2 3
0 1 0
0 0 1p
A
m m m
é ùê úê ú=ê úê ú- - -ë û
(1.48)
[ ]0 0 1t
pB = (1.49)
[ ]1 2 3pC n n n= (1.50)
Và hàm chuyển đổi được viết:
( )
( )
2
1 2 3
2
1 2 3
i
y s n n s n sd
u s m m s m s
+ += +
+ + (1.51)
Vấn đề nằm ở chỗ tìm các ma trận biến đổi, Tp. Một thuật toán để xây dựng Tp
được đưa ra dưới đây:

13
1 2 3
3
; 1,23- 3- 3- 1
T t t tp
t bi
t At m b kik k k
(1.52)
Với t1, t2, t3 là các vector cột. Các phương trình cuối cùng cần các hệ số của
phương trình đặc trưng và được tính toán trước đó bằng cách sử dụng thuật toán
Leverrier. Các thuật toán Leverrier được đưa ra sau đây:
3 3 3
2 3 2 5 4
1 2
1
2
1
5
( );
( );
( )
A m I
A m I
m trace A H
m trace AH H H
m trace AH
(1.53)
Với các vết một ma trận là tổng các phần tử đường chéo của nó. Tần số đáp ứng
được đánh giá từ phương trình (1.37) bằng cách thay thế, s = j ω. Mức độ và đồ thị pha
có thể được vẽ trên phạm vi tần số mong muốn cho việc đánh giá các đặc tính điều
khiển.
Chương 2. Cấu trúc và chiến lược điều khiển động cơ đồng bộ kích thích vĩnh
cửu
2.1. Cấu trúc hệ truyền động điều khiển động cơ đồng bộ kích thích nam châm
vĩnh cửu
2.1.1. Hệ truyền động điều khiển mô-men
Coi hệ truyền động động cơ đồng bộ kích thích vĩnh cửu với đầu vào bên ngoài
là mômen và từ thông tổng yêu cầu (giá trị đặt). Chúng có thể là các đầu vào độc lập
trong trường hợp mômen điều khiển truyền động động cơ trong ứng dụng điều khiển
chuyển động hoặc có thể là trong hệ truyền động điều chỉnh tốc độ phụ thuộc vào các
biến nội bộ. Cung cấp mômen đặt *
Mm , giá trị đặt dòng stator *
si và góc mômen đặt *
14
được tính toán từ các phương trình đã biết của mômen, từ thông tổng, các biến đặt
được đưa ra thay cho biến thực và chúng là:
2
* * * * *3 1sin sin 2 .
2 2 2
p
M p s sd sq s
zm i L L i N m
(2.1)
2
* * * * *cos sinm p sd s sq sL i L i Wb (2.2)
Cung cấp đầu vào bên ngoài là mômen và từ thông đặt, biên độ dòng stator và
góc từ thông đặt có thể được tính toán từ phương trình (2.1), (2.2) với giả thiết rằng
tham số của động cơ là hằng. Có sự phức tạp và khó khăn khi giải các phương trình
này là đặc biệt là đối với PMSM cực lồi. Cần yêu cầu một số phép tính lặp với tính
toán off-line và bảng trong quá trình thực hiện. PMSM với điện cảm dọc trục và ngang
trục bằng nhau, khi đó giá trị đặt mômen và từ thông được giảm
* * *3sin . )
2 2
p
M p s
zm i N m (2.3)
2 2 2
* * * * * 2 * * *cos sin 2 cosm p sd s sq s p sd s p sd sL i L i L i L i Wb (2.4)
Giải pháp cho giá trị đặt mômen được phân tích theo các bước sau:
▪Bước 1: Thành phần dòng stator sinh từ thông * *cossi được tính từ (2.4) bằng cách
thay * *sinsi từ (2.3)
2*
2* 2
* *
3
2 2cos
M
m sd p
p
p
s
sd
mL
z
iL
(2.5)
▪Bước 2: Dòng đặt stator được tính từ (2.4) bằng cách thay thế * *cossi từ (2.5)
* 2 * *
*2 cosm p p s
s
sd
ii
L
(2.6)
Giá trị đặt góc mômen có thể được tính từ (2.5) và (2.6). Từ giá trị đặt dòng và
giá trị đặt góc mômen, thành phần dòng sản sinh từ thông và mômen có thể được tính
từ để thay thế thực bằng biến đặt: *
*
*
sin
cos
T
s
f
ii
i
(2.7)
Sử dụng chuyển hệ tọa độ từ hệ tọa độ rotor sang hệ tọa độ dòng ba pha, dòng
pha đặt được tính:
*
*
*
* * *
*
*
*
sincos sin
2 2 2cos sin sin
3 3 3
2 2 2cos sin sin
3 3 3
ss ssu
T
sv s s s s
f
sw
s s s
ii
i ii
i
(2.8)
Dòng pha đặt có thể tính trực tiếp từ dòng stator chiếu lên các trục u,v,w như
hình 2.1. Khi đó thực hiện điều khiển vector trong hệ truyền động điều khiển mômen
động cơ đồng bộ kích thích vĩnh cửu. Sơ đồ cấu trúc cơ bản như hình 2.2. Cấu trúc
15
điều khiển không thay đổi đối với máy điện đồng bộ cực lồi ngoại trừ các công thức
dẫn xuất từ (2.1) và (2.2) điều này tương tự như cách cài đặt giá trị đặt của biên độ
dòng stator và góc mômen. Các quá trình tính toán có thể được thực hiện on-line hoặc
lưu giữ trong các bảng tính off-line để giảm bớt thời gian tính toán. Khi các thông số
thay đổi, các bảng khác nhau cho sự biến đổi được lưu giữ và được gọi ra trong quá
trình vận hành
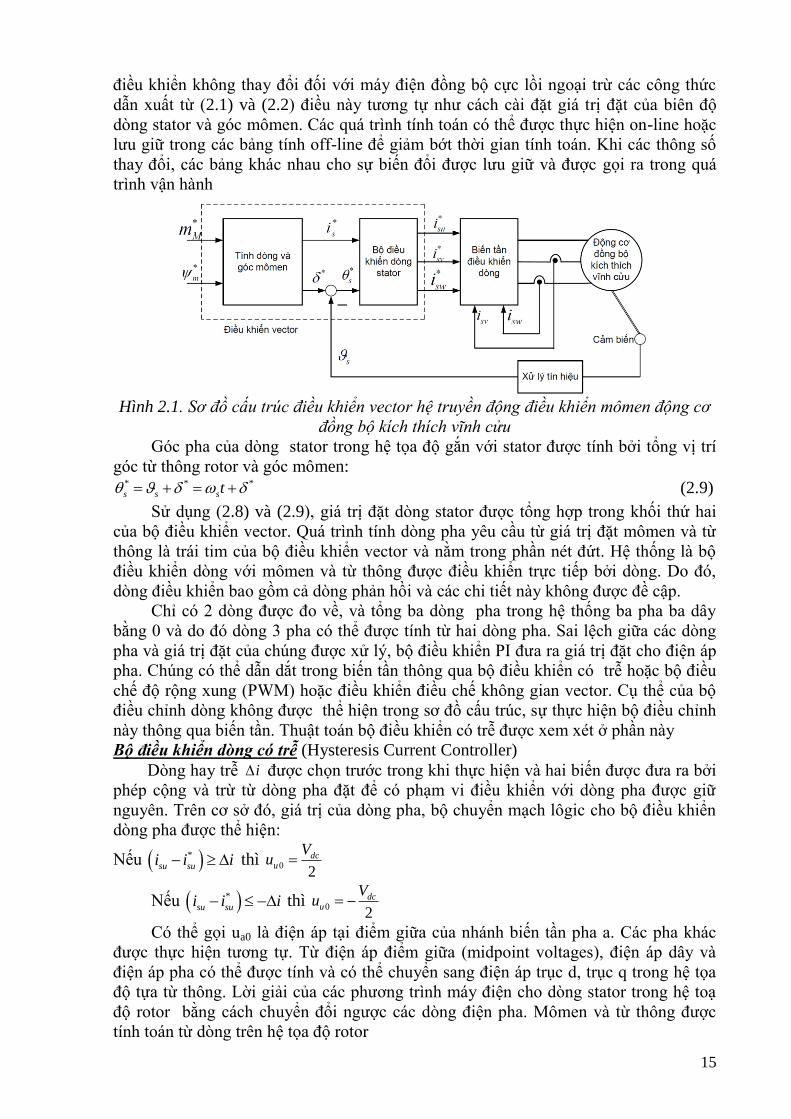
Hình 2.1. Sơ đồ cấu trúc điều khiển vector hệ truyền động điều khiển mômen động cơ
đồng bộ kích thích vĩnh cửu
Góc pha của dòng stator trong hệ tọa độ gắn với stator được tính bởi tổng vị trí
góc từ thông rotor và góc mômen: * * *
s s st (2.9)
Sử dụng (2.8) và (2.9), giá trị đặt dòng stator được tổng hợp trong khối thứ hai
của bộ điều khiển vector. Quá trình tính dòng pha yêu cầu từ giá trị đặt mômen và từ
thông là trái tim của bộ điều khiển vector và nằm trong phần nét đứt. Hệ thống là bộ
điều khiển dòng với mômen và từ thông được điều khiển trực tiếp bởi dòng. Do đó,
dòng điều khiển bao gồm cả dòng phản hồi và các chi tiết này không được đề cập.
Chỉ có 2 dòng được đo về, và tổng ba dòng pha trong hệ thống ba pha ba dây
bằng 0 và do đó dòng 3 pha có thể được tính từ hai dòng pha. Sai lệch giữa các dòng
pha và giá trị đặt của chúng được xử lý, bộ điều khiển PI đưa ra giá trị đặt cho điện áp
pha. Chúng có thể dẫn dắt trong biến tần thông qua bộ điều khiển có trễ hoặc bộ điều
chế độ rộng xung (PWM) hoặc điều khiển điều chế không gian vector. Cụ thể của bộ
điều chỉnh dòng không được thể hiện trong sơ đồ cấu trúc, sự thực hiện bộ điều chỉnh
này thông qua biến tần. Thuật toán bộ điều khiển có trễ được xem xét ở phần này
Bộ điều khiển dòng có trễ (Hysteresis Current Controller)
Dòng hay trễ i được chọn trước trong khi thực hiện và hai biến được đưa ra bởi
phép cộng và trừ từ dòng pha đặt để có phạm vi điều khiển với dòng pha được giữ
nguyên. Trên cơ sở đó, giá trị của dòng pha, bộ chuyển mạch lôgic cho bộ điều khiển
dòng pha được thể hiện:
Nếu *
su sui i i thì 02
dcu
Vu
Nếu *
su sui i i thì 02
dcu
Vu
Có thể gọi ua0 là điện áp tại điểm giữa của nhánh biến tần pha a. Các pha khác
được thực hiện tương tự. Từ điện áp điểm giữa (midpoint voltages), điện áp dây và
điện áp pha có thể được tính và có thể chuyển sang điện áp trục d, trục q trong hệ tọa
độ tựa từ thông. Lời giải của các phương trình máy điện cho dòng stator trong hệ toạ
độ rotor bằng cách chuyển đổi ngược các dòng điện pha. Mômen và từ thông được
tính toán từ dòng trên hệ tọa độ rotor

16
2.1.2. Mô phỏng và kết quả của hệ truyền động điều khiển mômen
Tốc độ của máy điện được giữ không đổi, mômen đặt là đầu vào của hệ truyền
động. Điều này dễ dàng để kiểm tra trong phòng thí nghiệm nhưng không biết điều
chỉnh mômen được thực tiễn như thế nào. Thường thì tốc độ điều khiển theo một cách
thức nhất định hoặc trong thực tiễn, chẳng hạn con người sử dụng mạch vòng tốc độ
trong hệ truyền động của phương tiện giao thông sử dụng điều chỉnh mômen. Một hệ
truyền động đơn giản với góc mômen 900 với kết quả dòng đầu vào dòng stator sinh
ra mômen điện từ và không có thành phần dòng tạo từ thông với kết quả đó không có
suy giảm từ thông dọc theo trục từ. Điều đó không có nghĩa là không có sự biến đổi
của từ thông, bởi vì từ thông stator trục q phụ thuộc vào thành phần dòng stator trục q
liên kết với từ thông rotor vĩnh cửu. Với sự gia tăng của biên độ dòng stator, từ thông
tăng lên được thấy rõ. Để tăng tốc độ tính toán, phương pháp số để giải phương trình
vi phân cho máy điện được sử dụng là phương pháp Euler và cho thấy nhiều ưu điểm
hơn sử dụng phương pháp Runger-Kutta bậc 4
Kết quả mô phỏng cho hệ truyền động điều chỉnh mômen khi giữ tốc độ 0.5pu
(đơn vị tương đối), được thể hiện như hình 2.2 với bộ điều khiển dòng có trễ trong
mạch vòng dòng. Sai lệch dòng được đặt là 0.1pu, giá trị lớn nhưng thuận tiện để theo
dõi sự đập mạch của mômen. Bởi vì độ gợn cao của dòng trục q, độ nhấp nhô của
mômen cũng tương đối lớn. Bộ điều khiển dòng dẫn dắt dòng theo các giá trị đặt với
thời gian trễ nhỏ, một lợi thế riêng của bộ điều khiển dòng có trễ. Có thể thấy rằng từ
thông tổng hay từ thông khe hở không khí tăng trưởng cùng với dòng stator. Góc
mômen được điều khiển là giá trị trung bình để được giá trị mong muốn nhưng sai
lệch của nó so với giá trị đặt phụ thuộc chủ yếu vào sai lệch dòng so với giá trị đặt
được xác định bởi chất lượng của bộ điều khiển dòng trong biến tần và tham số của
máy điện
Thành phần dòng stator tạo từ thông cũng như vậy, giữ bằng 0 tương tự như góc
mômen. Các biến trên đồ thị đều ở đơn vị tương đối trừ góc mômen, đây là góc điện
và thời gian.
Sau khi viết chương trình mô phỏng trên phần mềm Matlab ta có kết quả mô
phỏng dưới đây, ứng với thông số của động cơ:
▪Số đôi cực zp=6
▪Điện trở stator: Rs=1,4 ( )
▪Điện cảm trục d: Lsd=0.0056 (H)
▪Điện cảm trục q: Lsq=0.009(H)
▪Từ thông cực 0.1546( )p Wb
▪Hệ số ma sát: B=0.01
▪Mômen quán tính J=0.006 (kg/m2)
▪Điện áp một chiều Vdc=285V
▪Tốc độ góc định mức 314.3( / )s rad s

17
mM
*,m
M
0
0.5
1
ws
0
100
delta*,
delta
0 0.005 0.010
0.5
1
isq*,
isq
-1
0
1
isd*,
isd
-1
0
1
isu*,
isv*,
isw
*
-1
0
1
isu,isv,isw
0 0.005 0.010
1
2
Phim
Hình 2.2. Điều khiển mômen với bộ điều khiển dòng có trễ
Truyền động điều chỉnh mômen trên cơ sở điều chế PWM sine được thể hiện như
hình 2.2 với điều kiện vận hành tương tự như bộ điều khiển dòng có trễ. Thực hiện bộ
điều khiển dòng PWM được thể hiện trong hệ điều chỉnh tốc độ động cơ. Tần số sóng
mang PWM là 20kHz. Dòng điện nhấp nhô và mômen dao động là rất nhỏ với tần số
đóng cắt cao khi so sánh với bộ điều khiển có trễ với sai lệch lớn. Nhưng khi tính
trung bình, các biến của hệ truyền động, chẳng hạn, mômen và từ thông khe hở được
nhận dạng trong cả hai cấu trúc. Sự khác nhau về chất lượng là biên độ của dòng nhấp
nhô và mômen đập mạch
2.1.3. Hệ truyền động điều chỉnh tốc độ
Hệ truyền động điều chỉnh tốc độ được xây dựng bằng cách dùng hệ truyền động
điều chỉnh mômen như cấu trúc hình 2.1 làm cốt lõi và thêm vào mạch vòng điều
khiển tốc độ để điều chỉnh tốc độ rotor của hệ truyền động và được thể hiện như hình
2.3. Sai lệch tốc độ giữa tốc độ thực và tốc độ đặt * được xử lý thông qua bộ điều
khiển PI (bộ điều khiển tốc độ) để vô hiệu hóa trạng thái sai lệch tốc độ.
Đầu ra của bộ điều chỉnh tốc độ thiết lập giá trị đặt cho mômen *
Mm bởi vì sai lệch
tốc độ có thể bằng không và cực tiểu hóa chỉ bằng cách tăng hoặc giảm mômen điện từ
của máy điện, phụ thuộc vào sai lệch tốc độ là dương hay âm. Để đáp ứng nhanh tốc
độ, một bộ điều chỉnh tỷ lệ-tích phân-đạo hàm PID được sử dụng.
Từ thông đặt được đưa ra phụ thuộc vào tốc độ rotor. Biên độ của sức điện động
cảm ứng không vượt quá điện áp một chiều cấp cho nghịch lưu, tỷ số giữa sức điện
động cảm ứng và tần số stator được giữ là hằng, kết quả là từ thông không đổi và tần
số lớn nhất (tần số cơ bản), với sự giới hạn này, tốc độ ở đây là tốc độ cơ bản. Ngay
khi tần số vượt quá giá trị cơ bản, tốc độ được điều khiển vượt quá tốc độ cơ bản và hệ
quả là sức điện động cảm ứng ban đầu vượt quá biên độ của điện áp một chiều cung
cấp.

18
Hình 2.3. Hệ truyền động điều chỉnh tốc độ động cơ đồng bộ kích thích vĩnh cửu
Điều này dẫn đến điều khiển dòng stator rất khó và dẫn đến điều khiển mômen
cũng khó khăn. Điều khiển hệ truyền động trở nên chậm trong vùng này. Để duy trì
dòng điều khiển cần duy trì điều khiển qua độ lớn sức điện động cảm ứng, từ thông có
thể được tính toán để giảm tỷ lệ nghịch với tốc độ, sức điện động cảm ứng được giới
hạn ở một mức mà có thể đáp ứng tốc độ cơ bản thậm chí tốc độ được đẩy vượt quá
giá trị đó. Chế độ vận hành này được hiểu là vùng suy giảm từ thông, chế độ vận hành
này gọi là điều khiển suy giảm từ thông. Nhưng mômen không thể hy vọng giữ ở giá
trị cơ bản đáp ứng tốc độ cơ bản cung cấp công suất tổng và nó không bao giờ có thể
được vượt quá trong máy điện trong trạng thái ổn định, khi đó tổn hao lớn, bảo vệ
nhiệt tác động, dẫn đến máy điện bị lỗi. Dòng stator yêu cầu vượt quá giá trị cơ bản
của máy điện. Tất cả các vấn đề này xảy ra khi mômen giảm, khi tốc độ vượt quá tốc
độ cơ bản, bằng cách lập trình để giảm dưới giá trị cơ bản, do đó, công suất khe hở
không khí sinh ra cân bằng với công suất cơ bản. Điều khiển phức tạp được thực hiện
đơn giản theo hai bước sau đây:
▪Lập trình tính toán từ thông
Một bộ điều khiển cung cấp 1 p.u để tăng đến tốc độ cơ bản và quá tốc độ, điều
này sẽ cho đầu ra tỷ lệ nghịch với tốc độ định mức, được tạo ra khi sử dụng chức năng
tạo hàm để mô tả mômen hằng và chế độ vận hành trong vùng suy giảm từ thông của
hệ truyền động. Đầu ra được định nghĩa bởi thành phần ( )bnf và tỷ lệ với từ thông
đặt. Hệ số tỷ lệ Kf được đưa ra ở đây nhằm mục đích đó.
Hàm chức năng ( )bnf sẽ đặt giá trị đặt cho từ thông tổng đòi hỏi hằng số Kf.
Đầu ra của hàm chức năng cũng là đơn vị tương đối p.u, giá trị của Kf là duy nhất
▪ Lập trình tính toán mômen trong vùng suy giảm từ thông
Điều này kéo theo quá trình tính toán của bộ điều khiển tốc độ tạo ra giá trị mômen đặt *m như một hàm của tốcđộ. Từ thông được tính toán tỷ lệ với tốc độ
19
-2
0
2
mM
*,m
M
0
1
2
is*,
is-1
0
1
ws*,
ws
0 0.02 0.04-2
0
2
iT*,
isq
-1
0
1
if*,
isd
-1
0
1
-1
0
1
isu,isv,isw
0 0.02 0.040
1
2
Phi m
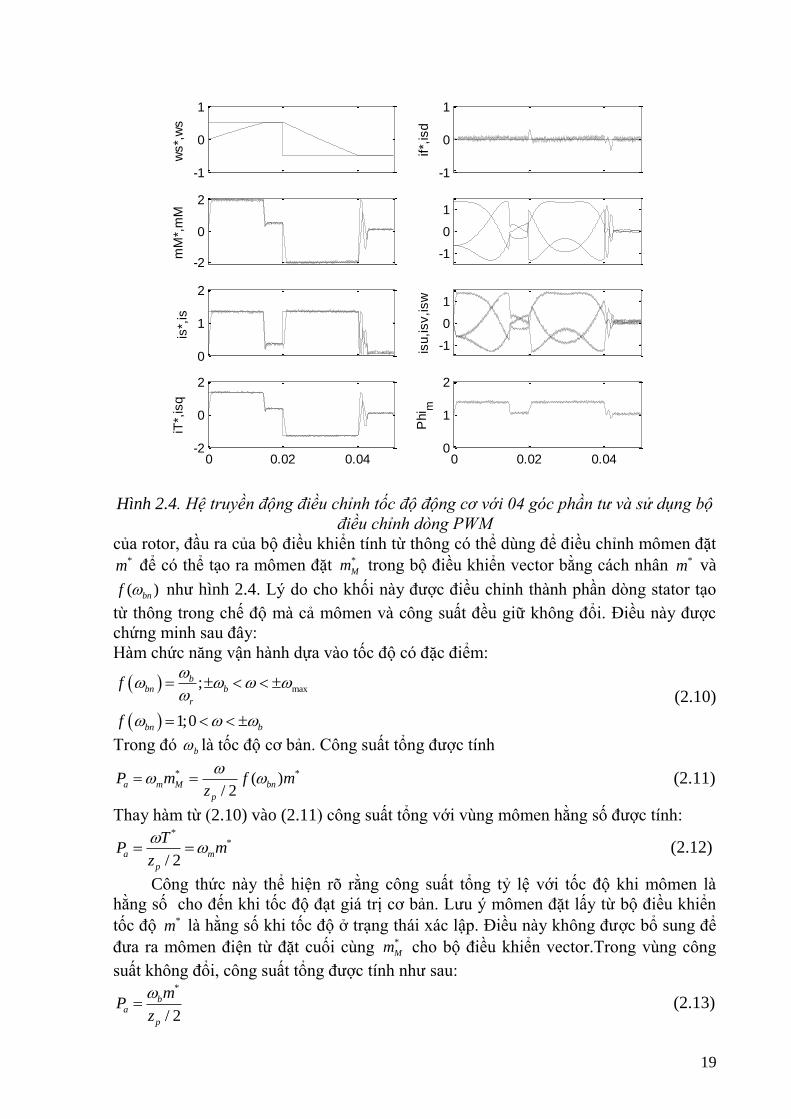
Hình 2.4. Hệ truyền động điều chỉnh tốc độ động cơ với 04 góc phần tư và sử dụng bộ
điều chỉnh dòng PWM
của rotor, đầu ra của bộ điều khiển tính từ thông có thể dùng để điều chỉnh mômen đặt *m để có thể tạo ra mômen đặt *
Mm trong bộ điều khiển vector bằng cách nhân *m và
( )bnf như hình 2.4. Lý do cho khối này được điều chỉnh thành phần dòng stator tạo
từ thông trong chế độ mà cả mômen và công suất đều giữ không đổi. Điều này được
chứng minh sau đây:
Hàm chức năng vận hành dựa vào tốc độ có đặc điểm:
max;
1;0
bbn b
r
bn b
f
f
(2.10)
Trong đó b là tốc độ cơ bản. Công suất tổng được tính
* *( )/ 2
a m M bn
p
P m f mz
(2.11)
Thay hàm từ (2.10) vào (2.11) công suất tổng với vùng mômen hằng số được tính: *
*
/ 2a m
p
TP m
z
(2.12)
Công thức này thể hiện rõ rằng công suất tổng tỷ lệ với tốc độ khi mômen là
hằng số cho đến khi tốc độ đạt giá trị cơ bản. Lưu ý mômen đặt lấy từ bộ điều khiển
tốc độ *m là hằng số khi tốc độ ở trạng thái xác lập. Điều này không được bổ sung để
đưa ra mômen điện từ đặt cuối cùng *
Mm cho bộ điều khiển vector.Trong vùng công
suất không đổi, công suất tổng được tính như sau: *
/ 2
ba
p
mP
z
(2.13)
20
Tốc độ cơ bản b và *m là hằng và do đó công suất đầu ra trong chế độ suy giảm
từ thông được giữ là hằng tại công suất cơ bản. Chế độ vận hành giữ mômen không
đổi và công suất không đổi được thực hiện với khối tạo hàm, như (2.12) và (2.13). Lưu
ý rằng trừ bớt tổn hao trên trục động cơ từ công suất tổng được công suất đầu ra trên
trục động cơ
Hệ truyền động điều chỉnh tốc độ động cơ là phần cơ bản của hệ truyền động
điều chỉnh vị trí. Mạch vòng phản hồi vị trí rotor biến đổi tốc độ hệ truyền động sang
vị trí . Khi đó hệ truyền động điều chỉnh vị trí có thể được xây dựng, chẳng hạn với
động cơ servo. Ở đây ta quan tâm có thể mô phỏng hệ truyền động với các hiểu biết về
hệ thống
2.1.4. Mô phỏng hệ truyền động điều chỉnh tốc độ
Mô phỏng được thực hiện bằng phần mềm Matlab, kết hợp giá trị đặt của thành
phần dòng tạo mômen đặt. Với từ thông, giá trị đặt không giữ lâu như từ thông tổng,
một cách dễ dàng để thực hiện là giữ giá trị đặt trục d của hệ tọa độ gắn với rotor. Điều
này có nghĩa từ thông rotor là tổng của từ thông cực từ và từ thông dọc trục tạo bởi
thành phần dòng stator. Mặc dù có sự thay đổi, đặc tính động của hệ truyền động vẫn
được đảm bảo như kết quả mô phỏng. Lưu ý rằng từ thông đặt không được thực hiện
theo cách này trong thực tiễn
Mạch vòng tốc độ của hệ truyền động điều chỉnh mômen là mạch vòng kín và
làm việc ở bốn góc phần tư, khi mô phỏng với mômen tải 0.3pu. Kết quả được thể hiện
như hình 2.4. Bộ điều khiển tốc độ PI được sử dụng trong hệ truyền động này. Bộ điều
khiển dòng PWM được thiết lập trong mô phỏng này. Máy điện đứng yên tại thời điểm
ban đầu và với tốc độ dương, mômen đặt được điều khiển là giá trị dương lớn nhất và
được duy trì cho đến khi tốc độ rotor đạt giá trị yêu cầu. Khi tốc độ rotor bằng với tốc
độ yêu cầu, mômen đặt sẽ giảm để phù hợp với mômen tải và mômen ma sát.
Mômen đặt là âm khi tốc độ đặt thay đổi từ 0.5pu đến -0.5pu. Tốc độ rotor giảm dần
tới 0. Giữ mômen âm, rotor đảo chiều quay và bám theo tốc độ đặt -0.5pu. Khi gần
giá trị -0.5pu, mômen điện từ giảm nhẹ thấp hơn giá trị mômen tải +0.3pu, bởi vì
mômen ma sát là âm và do đó tổng của mômen ma sát và mômen tải được mômen
tổng. Quan trọng là chất lượng của mạch vòng dòng là minh chứng cần thiết của sự
đảo dòng pha trong khi đổi chiều quay. Sự phản ứng chậm của mạch vòng dòng sẽ tác
động tiêu cực đến đáp ứng tốc độ .
Chế độ vận hành suy giảm từ thông: Khi lớn hơn 0.5pu, từ thông suy giảm được
khởi tạo sử dụng thuật toán đã biết ở phần trước. Dòng đặt trục d được giảm khi suy
giảm từ thông, kết quả là giảm từ thông tổng. Chất lượng của hệ truyền động dưới điều
kiện này được nhận dạng để đạt hiệu quả trong cả 4 góc phần tư. Lưu ý rằng trong
miền suy giảm từ thông, mômen yêu cầu giảm để giữ công suất tổng không đổi. Mã
chương trình Matlab có thể được thêm vào mạch vòng mô phỏng sau khi tính toán
mômen đặt:
if w<wb, fw=1;
end
if w>wb/2, fw=(wb/2)/w;
end
mM_refnew=mM_ref*fw;
if_ref=(fw-1)*Phi_p/Lsd;
it_ref=mM_refnew*(2/3)*(2/zp)/((Lsd-Lsq)*if_ref+Phi_p);
21
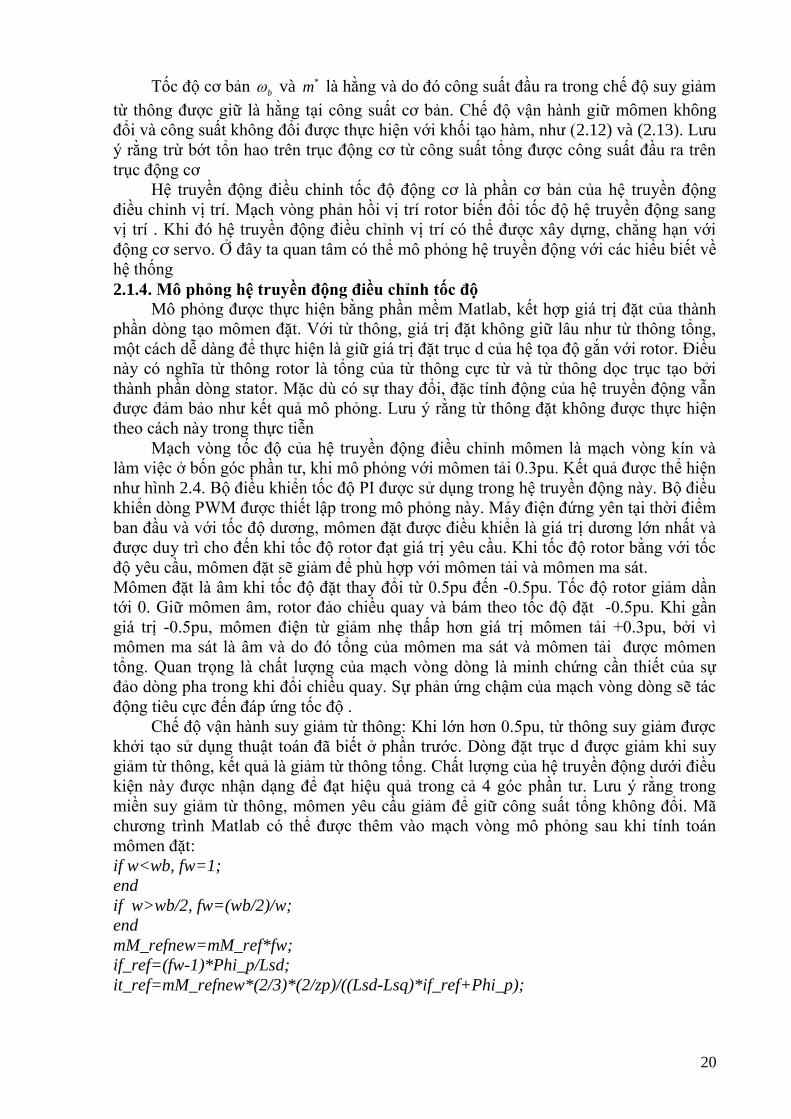
Hình 2.5. Cấu trúc điều khiển tốc độ đơn giản của hệ truyền động động cơ đồng bộ
kích thích vĩnh cửu
Bộ điều chỉnh tốc độ động cơ đồng bộ được thể hiện như hình 2.5. Không có ảnh
hưởng giữa 2 trục. Kết quả là mômen phản kháng không tồn tại trong hệ truyền động,
dẫn đến biểu diễn đơn giản của mômen. Dòng đặt sinh mômen được tính bằng cách
chia mômen đặt cho tích giữa từ thông rotor và hằng số K1.
Mômen được điều chỉnh cho vùng suy giảm từ thông bằng cách nhân hàm tốc độ
đầu ra với đầu ra của bộ điều khiển tốc độ. Từ thông suy giảm là đơn giản khi tính
toán trước dòng tạo từ thông và lập trình được lưu giữ trong ROM. Chú ý rằng chỉ từ
thông dọc trục được điều khiển chứ không phải từ thông tổng là kết quả tương hỗ giữa
mạch từ stator và mạch từ rotor.
2.2. Một số chiến lược điều khiển
Điều khiển vector được chứng minh và đạt được tách kênh giữa từ thông và
mômen trong máy điện đồng bộ kích thích vĩnh cửu. Tách kênh rất cần thiết cho một
hệ truyền động chất lượng cao, yêu cầu phương pháp điều khiển đơn giản điều khiển
từ thông, điều khiển tối ưu mômen, điều khiển tối đa hiệu suất và điều khiển mômen,
tốc độ cực đại. Chất lượng cũng thể hiện là có thể điều khiển dòng pha stator và trong
một số trường hợp phải đảm bảo tách kênh mômen và từ thông. Chất lượng truyền
động điện là yêu cầu quan trọng trong các ứng dụng trong công nghiệp. Chẳng hạn,
điều khiển từ thông tổng cung cấp tín hiệu điều khiển trơn trên toàn bộ vùng tốc độ
mômen với sự chuyển đổi liền mạch sang vùng suy giảm từ thông trên tốc độ cơ bả.
Điều khiển tối ưu hiệu suất là quan trọng nhất trong các ứng dụng khi yêu cầu tiết
kiệm năng lượng và giá thành điện năng với các ứng dụng quạt, bơm, xe điện. Tiêu chí
đặc biệt này càng trở lên cấp thiết trong công nghiệp và gia dụng.
Các chiến lược điều khiển được xem xét một cách chi tiết trong các hệ truyền
động động cơ đồng bộ:
1. Điều khiển góc mômen là hằng hoặc dòng trục d bằng 0
2. Điều khiển hệ số công suất
3. Điều khiển từ thông tổng là hằng
4. Điều khiển góc của từ thông tổng và vector phức dòng
5. Điều khiển tối ưu mômen
6. Điều khiển giảm tổn hao trên cơ sở điều khiển trong phạm vi tốc độ-mômen lớn
nhất
7. Điều khiển tối thiểu tổn hao hoặc tối đa hiệu suất
Các chiến lược điều khiển này được phân tích từng bước
2.2.1. Điều khiển giữ góc mômen bằng hằng số 090
Góc mômen δ được giữ không đổi bằng 900 và từ thông hay dòng dọc trục bằng
0, chỉ có mômen hay thành phần dòng ngang trục. Chế độ vận hành này nhỏ hơn tốc
22
độ cơ bản đáp ứng từ thông tổng dọc trục và chiến lược điều khiển này là phổ biến
trong một số hệ truyền động điện. Phương trình đưa ra trong chế độ vận hành này là:
3 3
.2 2 2 2
p p
M p sq p s
z zm i I N m (2.14)
Trong đó Is là biên độ của vector dòng stator. Mômen/ dòng stator là hằng theo công
thức: 3
. /2 2
pMp
s
zmN m A
I (2.15)
Và mômen điện từ được chuẩn hóa theo công thức:
3
2 2 ( . .)3
2 2
p
p sM
Mn snpb
p b
zI
mm I p u
zmI
(2.16)
Thể hiện rằng mômen bằng với dòng stator trong đơn vị tương đối điều này làm
cho việc thực thi điều khiển một cách đơn giản nhất trong hệ truyền động điện động cơ
đồng bộ. Chú ý rằng Isn là biên độ dòng phức stator được chuẩn hóa. Phương trình đó
xác định trạng thái ổn định của hệ truyền động động cơ PMSM với chiến lược điều
khiển được đưa ra sau đây. Điện áp stator dọc trục và ngang trục trong hệ tọa độ gắn
với rotor:
( )sq s sq s p s s pu R L p I R I V (2.17)
sd sq su L I (V) (2.18)
Biên độ của điện áp stator 2 2 ( )s sd sqU u u V (2.19)
Và Us được chuẩn hóa bởi công thức:
2( . )s s
sn n sn sn sqn sn n
b b p
U UU R I L I p u
U
(2.20)
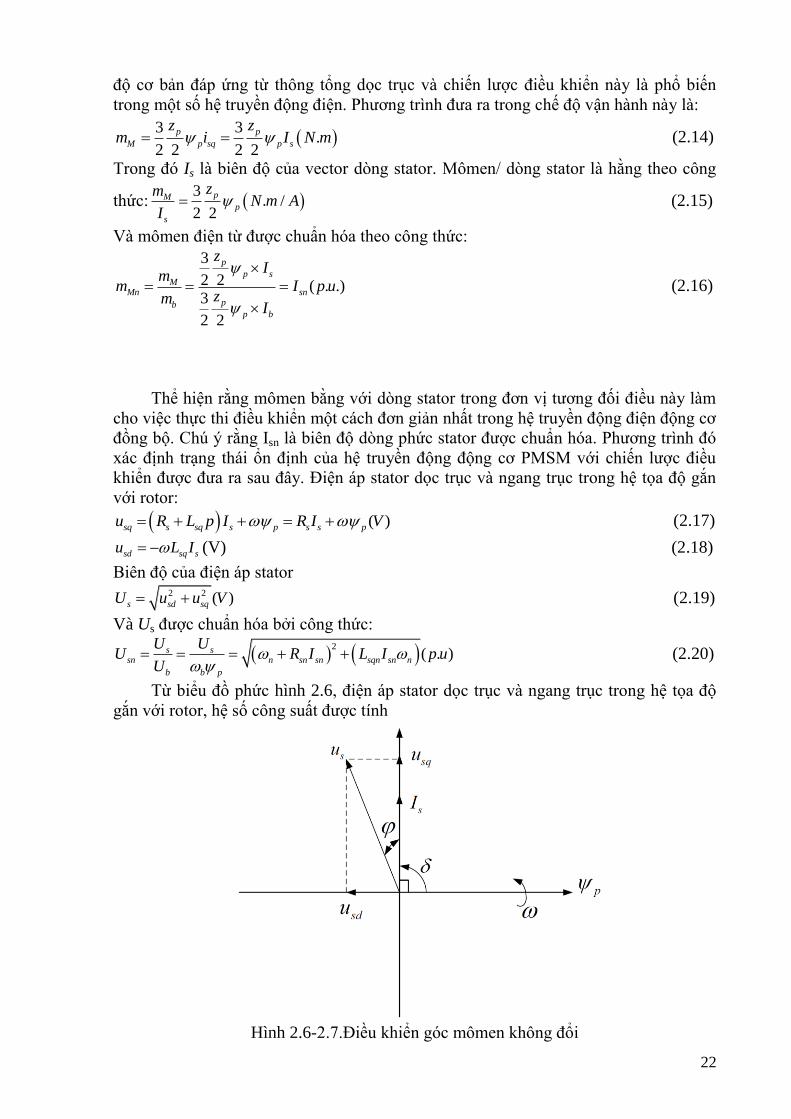
Từ biểu đồ phức hình 2.6, điện áp stator dọc trục và ngang trục trong hệ tọa độ
gắn với rotor, hệ số công suất được tính
Hình 2.6-2.7.Điều khiển góc mômen không đổi

23
2 2
2
1cos
1
1
sqsd
s sq sd sqn sn
sn sn
sn
uu
U u u L I
R I
(2.21)
Công thức này thể hiện hệ số công suất giảm khi tốc độ rotor tăng. Tốc độ lớn
nhất của rotor, với chiến lược điều khiển này với dòng stator xác định và bỏ qua điện
áp rơi trên điện trở, được tính từ biên độ điện áp:
2 2
(max)(max)
1
snn
sqn sn
U
L I
(2.22)
Với Usn(max) được tính từ điện áp Udc
2 0.45(max) dc
sn
b
UU
U
(2.23)
Giả thiết rằng sử dụng nghịch lưu 6 van công suất, bỏ qua điện áp rơi trên thiết bị
và cable. Thực tế coi biến tần PWM, trong trường hợp đó, điện áp được giảm bởi hệ số
Kdr thường trong dải từ 0.85 đến 0.95 và điện áp được tính: 0.636
(max) dr dcsn
b
K UU
U (2.24)
Suy giảm từ thông tổng không thể dùng cho chiến lược điều khiển này, thể hiện
từ công thức chuẩn hóa từ thông: 2 21mn sqn snL I (2.25)
Sự biến thiên của từ thông tổng có thể thay đổi từ 1p.u cho điểm làm việc lớn
hơn. Nhưng không có cách nào để giảm nó xuống dưới 1p.u khi góc mômen được giữ
900, để dòng tạo từ thông bằng 0. Bởi vì thực tế, chiến lược điều khiển này là giới hạn
cho các ứng dụng truyền động servo yêu cầu không vận hành ở vùng suy giảm từ
thông. Mômen khe hở không khí càng cao, dòng stator ngang trục càng lớn, dẫn đến từ
thông tổng tăng và yêu cầu điện áp stator lớn hơn
2.2.2. Điều khiển hệ số công suất
Điều khiển hệ số công suất có nghĩa là với công suất định mức VA của biến tần
được tận dụng một cách triệt để công suất đầu vào động cơ đồng bộ. Điều khiển u/f
được điều khiển bằng cách điều khiển góc mômen như là một hàm của các tham số
động cơ. Phương trình trong chế độ này được cho dưới đây:
Dòng điện dọc trục và ngang trục:
sinsq sI I (2.26)
cossd sI I (2.27)
và mômen được chuẩn hóa theo công thức:
sin 2 sin .2
sdn sqn
Mn sn sn
L Lm I I p u
(2.28)
Điện áp stator theo trục d và trục q như sau:
1 cos .sin ( . )snsn
sqn n sdn sn
R Iu L I p u
(2.29)
24
cos sin ( . )snsdn n sn sqn
n
Ru I L p u
(2.30)
Từ đó điện áp stator có biên độ được tính: 2 2 ( . )sn sqn sdnU u u p u (2.31)
Và góc giữa điện áp trục d và điện áp tổng được tính:
tansqn
sdn
u
u (2.32)
Góc hệ số công suất bằng 0 trong quá trình điều khiển này:
0 (2.33)
Mối quan hệ với góc mômen:
tansqn
sdn
u
u (2.34)
Thay phương trình (2.28) và (2.30) vào phương trình (2.34) được kết quả:
1 cos sinsin
coscossin
sn snsdn sn
n
sn snsqn sn
n
R IL I
R IL I
(2.35)
Với 2 2sin cos cossn sqn sdnI L L (2.36)
Từ đó góc mômen được tính:
2
11 1 4
cos rad2
sqn sn sdn sqn
sn sdn sqn
L I L L
I L L
(2.37)
Lưu ý rằng sdn sqnL L là âm đối với động cơ đồng bộ và góc mômen lớn hơn 900. Nếu
góc mômen nhỏ hơn 900, thì mômen tổng tăng và dẫn đến bão hoà từ thông trong máy
điện, điều này không được chấp nhận nếu xét theo quan điểm tổn hao. Do vậy, chỉ dấu
dương trong công thức (2.37) sẽ thoả mãn yêu cầu góc 090 . Công thức này đưa ra
luật điều khiển hệ số công suất và sự thi hành yêu cầu biên độ dòng pha động cơ và
thông số của động cơ Lsq và Lsd. Chú ý rằng góc mômen cưỡng bức độc lập với tốc độ
rotor
2.2.3. Điều khiển từ thông là hằng
Trong chiến lược điều khiển này, từ thông tổng của stator dọc trục và ngang trục
được giữ không đổi và thường bằng với giá trị của từ thông rotor p . Ưu điểm chính
là với giá trị giới hạn của từ thông tương hỗ, điện áp stator yêu cầu thấp hơn. Thêm
vào đó, sự thay đổi của từ thông tương hỗ đơn giản và không phức tạp ở vùng suy
giảm từ thông vận hành ở tốc độ lớn hơn tốc độ cơ bản. Điều khiển từ thông hỗ cảm là
một trong những kỹ thuật hiệu quả với dải tốc độ đầu vào, điều này được giới hạn cho
chế độ vận hành dưới tốc độ cơ bản. Từ thông hỗ cảm được biểu diễn theo công thức
sau:
2 2
m p sd sd sq sqL I L I (2.38)
Với m p (2.39)
Và dòng phức stator và góc mômen được tính:

25
2 2 2
2 cos
cos sin
p
s
sd
IL
(2.40)
Tỷ số lồi được tính: sq
sd
L
L (2.41)
Hai trường hợp rõ ràng có thể nhận thấy phụ thuộc vào tỷ số . Với bề mặt cực từ
gần như đồng nhất và với máy điện đồng bộ cực chìm, hệ số này có giá trị cao
khoảng bằng 3. Giá trị càng cao được thấy ở trong các thiết bị đặc biệt. Hai trường hợp
đó được phân tích một cách riêng dưới đây.
▪ Trường hợp 1: 1 , điều này gắn với giá trị của góc mômen , từ công thức (2.38)
và (2.39) ta có:
1cos (rad)2
sd s
p
L I
(2.42)
Chú ý rằng điện áp cơ sở được xác định là:
( )b b pU V (2.43)
Và tổng trở cơ bản: bb b b
b
UZ L
I (2.44)
Sử dụng các chuẩn hóa này cho dòng động cơ cho bởi phương trình (2.40), góc
mômen được xác định:
1 1. /cos cos (rad)
2 2
sd b s b sn sdn
p
L I I I I L
(2.45)
▪ Trường hợp 2: 1
Trong trường hợp này góc mômen
2
1
22 2
1 1 1cos (rad)
(1 )1 1sdn snsdn snL IL I
(2.46)
Hai giá trị tối thiểu của được chọn sao cho dòng tạo từ thông là nhỏ. Cũng lưu ý
rằng, có thể lớn hơn 900.
2.2.4. Điều khiển góc giữa từ thông tổng và dòng phức
Mômen tổng có thể tính theo:
3sin
2 2
p
M m s ms
zm i (2.47)
Với ms là góc giữa dòng và từ thông hỗ cảm. Mối quan hệ giữa dòng và từ thông hỗ
cảm dọc trục và ngang trục được thể hiện như hình 2.7. Chiến lược điều khiển có thể
được tổng hợp để giữ góc giữa dòng và từ thông ms là 900. Trong trường hợp đó, điều
khiển của máy điện đưa về điều khiển tương tự như máy điện một chiều kích từ độc
lập, mômen là tích của từ thông và dòng phần ứng. Trong máy điện một chiều kích từ
độc lập, từ thông có thể được giữ không đổi bởi vì dòng kích từ được điều khiển độc
lập.
Nhưng trong động cơ đồng bộ, từ thông tổng, kết quả của từ thông rotor và từ thông
stator, không thể giữ là hằng đối với tất cả các dòng khi góc giữa từ thông và dòng
được giữ 900. Do đó, hằng số mômen thay đổi như là hàm của dòng phần ứng khi so
sánh với máy điện một chiều kích thích độc lập, khi hằng số mômen được giữ không
đổi bằng dòng kích từ
26
Sức điện động cảm ứng vượt trước từ thông góc 900. Dòng điều khiển vượt trước từ
thông bởi một góc giống như góc giữa sức điện động cảm ứng và dòng pha. Nếu bỏ
qua điện trở stator chú ý rằng điện áp đầu cực stator bằng với sức điện động cảm ứng
và góc pha giữa chúng bằng 0, kết quả như trường hợp điều khiển hệ số công suất
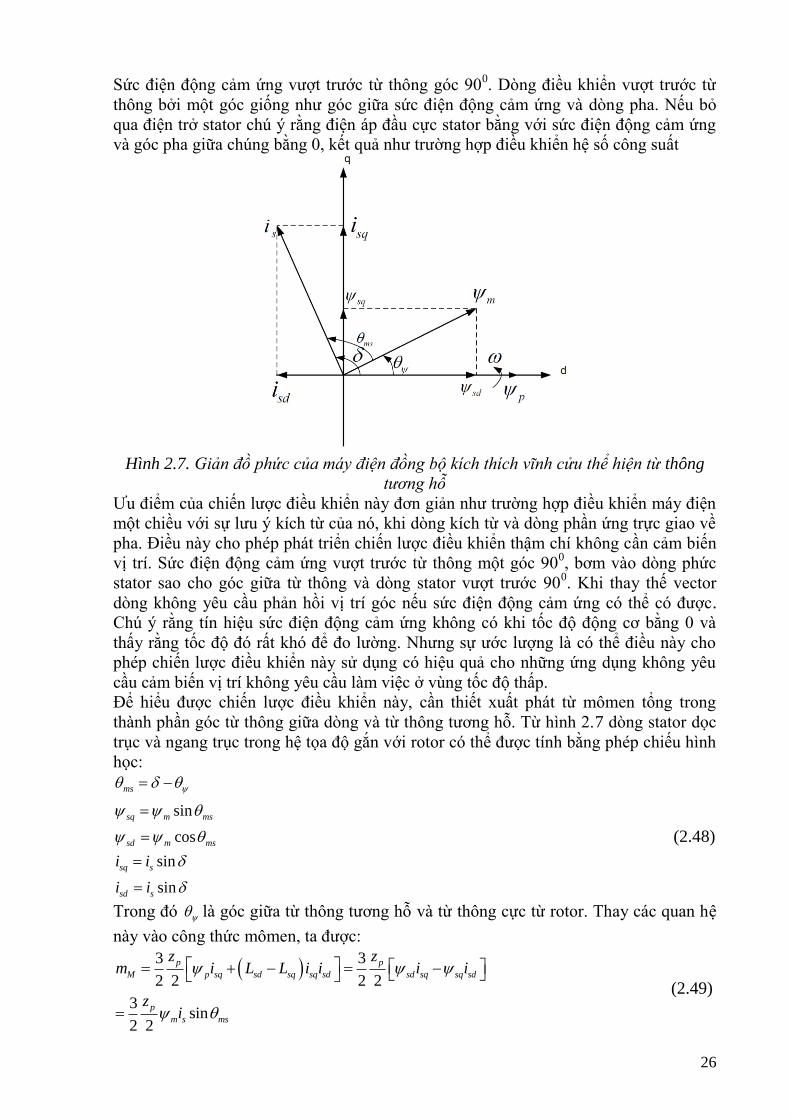
Hình 2.7. Giản đồ phức của máy điện đồng bộ kích thích vĩnh cửu thể hiện từ thông
tương hỗ
Ưu điểm của chiến lược điều khiển này đơn giản như trường hợp điều khiển máy điện
một chiều với sự lưu ý kích từ của nó, khi dòng kích từ và dòng phần ứng trực giao về
pha. Điều này cho phép phát triển chiến lược điều khiển thậm chí không cần cảm biến
vị trí. Sức điện động cảm ứng vượt trước từ thông một góc 900, bơm vào dòng phức
stator sao cho góc giữa từ thông và dòng stator vượt trước 900. Khi thay thế vector
dòng không yêu cầu phản hồi vị trí góc nếu sức điện động cảm ứng có thể có được.
Chú ý rằng tín hiệu sức điện động cảm ứng không có khi tốc độ động cơ bằng 0 và
thấy rằng tốc độ đó rất khó để đo lường. Nhưng sự ước lượng là có thể điều này cho
phép chiến lược điều khiển này sử dụng có hiệu quả cho những ứng dụng không yêu
cầu cảm biến vị trí không yêu cầu làm việc ở vùng tốc độ thấp.
Để hiểu được chiến lược điều khiển này, cần thiết xuất phát từ mômen tổng trong
thành phần góc từ thông giữa dòng và từ thông tương hỗ. Từ hình 2.7 dòng stator dọc
trục và ngang trục trong hệ tọa độ gắn với rotor có thể được tính bằng phép chiếu hình
học:
sin
cos
sin
sin
ms
sq m ms
sd m ms
sq s
sd s
i i
i i
(2.48)
Trong đó là góc giữa từ thông tương hỗ và từ thông cực từ rotor. Thay các quan hệ
này vào công thức mômen, ta được:
3 3
2 2 2 2
3sin
2 2
p p
M p sq sd sq sq sd sd sq sq sd
p
m s ms
z zm i L L i i i i
zi
(2.49)
27
Góc từ thông và góc mômen có quan hệ với góc dòng từ thông:
2ms
(2.50)
Từ đó ta có:
sin cos (2.51)
Góc mômen và góc từ thông có thể được thay thế trong thành phần dọc trục và ngang
trục từ công thức (2.61) khi đó dòng trục d được chuẩn hoá có chuỗi sau: 4 3 2 0sdn sdn sdnai bi ci d (2.52)
Trong đó 2 2 2 2 2 4; 2 ; 1 2 ;sqn sdn sdn sqn sn sqn sna L L b L c L i d L i (2.53)
Giải phương trình trên, tìm được nghiệm, dòng stator được chuẩn hóa trên trục d, từ đó
dòng stator trên trục q được tìm từ dòng phức stator. Khi đó, tất cả các biến khác như
mômen, từ thông, góc mômen, biên độ điện áp stator để có tốc độ yêu cầu và công suất
VA được tính toán.
2.2.5. Điều khiển tối ưu mômen/dòng điện
Chiến lược điều khiển này đạt mômen điện từ lớn nhất với dòng stator xuất phát từ tối
ưu máy điện, chiến lược điều khiển này điều khiển cưỡng ép góc mômen. Góc mômen,
với biên độ dòng stator, trong chiến lược điều khiển này được xác định. Mômen điện
từ được tính:
23 1sin sin 2 .
2 2 2
p
M p s sd sq s
zm i L L i N m
(2.54)
1
sin sin 2 p.u2
Mn sn sdn sqn snm i L L i
(2.55)
Với mômen cơ bản được tính:
3
.2 2
b p b
pm I N m (2.56)
Tỷ số mômen trên dòng stator được tính:
1
sin sin 22
Mnsdn sqn sn
sn
mL L i
i
(2.57)
Giá trị lớn nhất của nó có được bằng cách đạo hàm với và cho nó bằng 0 và khi đó
góc mômen cho bởi:
2
1
1 1
1 1 1cos rad
4 4 2sn sna i a i
(2.58)
1 1sdn sqn sdna L L L (2.59)
phải lớn hơn 900 để giảm từ thông khe hở không khí.
2.2.6. Điều khiển hệ số tổn hao công suất là hằng
Mômen/tốc độ lớn nhất trong chiến lược điều khiển này nhỏ hơn vùng tốc độ cơ
bản được thực hiện bằng cách giới hạn biên độ dòng stator là giá trị định mức. Ở vùng
tốc độ lớn hơn tốc độ cơ bản, công suất trên trục thường giới hạn ở giá trị định mức.
Dòng giới hạn hạn chế tổn hao đồng nhưng không hạn chế tổn hao lõi thép. Giới hạn
công suất trên trục động cơ không trực tiếp hạn chế tổn hao công suất. Giới hạn dòng
và công suất ở giá trị định mức, bỏ qua ảnh hưởng của nhiệt độ tới máy điện, tổng tổn
hao là một giá trị có thể chấp nhận được. Dòng và công suất định mức đảm bảo công
suất tổn hao có thể chấp nhận được chỉ ở tốc độ định mức. Do đó, sự giới hạn đơn giản
này chỉ phù hợp với các ứng dụng điều khiển chuyển động. Hệ truyền động điều khiển

28
tốc độ đơn giản ngày càng được thay thế bởi hệ truyền động điều chỉnh tốc độ để gia
tăng hiệu quả và chế độ vận hành linh hoạt. Do yêu cầu tối ưu giá thành sản xuất, các
máy điện được thiết kế để tận dụng các điều kiện môi trường làm việc khác nhau,
phương pháp điều khiển cần được duy trì là ổn định về nhiệt của máy điện khi mômen
tối đa và tốc độ vượt dải tốc độ giới hạn. Chế độ vận hành với tổn hao công suất không
đổi cung cấp mômen tối đa.
Một tiêu chuẩn để vận hành tối đa trong các ứng dụng mở rọng dải tốc độ là cơ
sở tiền đề cho phạm vi vận hành của bất kỳ máy điện nào được xác định bởi công suất
tổn hao cho phép cho máy điện đó. So sánh giữa phạm vi giới hạn tổn hao công suất
và dòng, công suất giới hạn cho thấy tổn hao là phương pháp quan trọng trong trường
hợp mômen cho phép tại dải tốc độ nhỏ hơn tốc độ cơ bản. Do đó, đáp ứng động học
được đề cao khi tốc độ nhỏ hơn tốc độ cơ bản. Cũng cần giải thích rằng phương pháp
cổ điển là giới hạn công suất hay dòng có thể dẫn đến tổn hao công suất quá mức trong
vùng suy giảm từ thông.
Thực hiện chiến lược điều khiển này trên cơ sở mạch vòng phản hồi công suất
tổn hao. Đầu vào của hệ thống là tổn hao công suất lớn nhất yêu cầu của máy điện.
Mạch vòng phản hồi giới hạn mômen yêu cầu, công suất tổn hao không được vượt quá
giá trị đặt lớn nhất tại mọi điểm làm việc.Hệ thống này được ứng dụng trong tất cả các
hệ truyền động với toàn dải làm việc và độc lâp với chiến lược điều khiển động học
của mômen. Chiến lược điều khiển này có thể được tích hợp trong hệ truyền động điện
chất lượng cao với sự cải tiến nhỏ về thuật toán điều khiển. Yêu cầu về tải có thể được
tích hợp trong hệ thống điều khiển để giữ tổng hiệu suất tổn hao bằng cách thay đổi
công suất tổn hao đặt trong mạch vòng điều khiển như là một hàm của tải. Cần chú ý
rằng, với thuật toán điều khiển này sẽ thực hiện các ứng dụng thời gian thực. Công
suất tổn hao tối đa cho phép của máy điện phải được chọn dựa trên sự gia tăng nhiệt
độ biết đặt trước của máy điện. Do đó, cho phép tổn hao công suất là hằng và có thể
xác định phụ thuộc vào môi trường vận hành, nhiệt độ xung quanh và kỹ thuật làm mát
cho máy điện. Các giả thiết dưới đây được đưa ra một cách rõ ràng:
1. Tất cả các tham số của hệ truyền động được giả thiết là hằng
2. Độ dơ, ma sát và tổn hao nghịch lưu được bỏ qua mặc dù chúng có thể tham gia
và ảnh hưởng
3. Bộ điều khiển vector băng thông rộng được sử dụng trong hệ truyền động, dẫn
đến sai lệch dòng stator là không đáng kể
4. Dòng định mức được xác định là dòng mà tạo ra mômen định mức sử dụng
dòng dọc trục bằng 0
5. Giá trị cơ sở sử dụng để chuẩn hóa chọn là các giá trị định mức
▪Mô hình máy điện với tổn hao: Mô hình dq cho máy điện PMSM trong hệ tọa độ gắn
với rotor ở trạng thái xác lập với tổn hao đơn giản được đưa ra theo công thức (2.7)
như hình 2.8
Với ,sd sqI I là dòng stator dọc trục và ngang trục, ,sd sqU U là điện áp stator dọc trục và
ngang trục, Iq và Id là dòng sinh mômen theo trục q và trục d. Iqc và Idc là dòng tổn hao
trục q và trục d. Rs và Rc là điện trở stator và điện trở tổn hao lõi thép, Lsd và Lsq là điện
cảm trục d và trục q.
Đầu vào dòng và áp stator được tính từ mô hình tương đương có tổn hao:
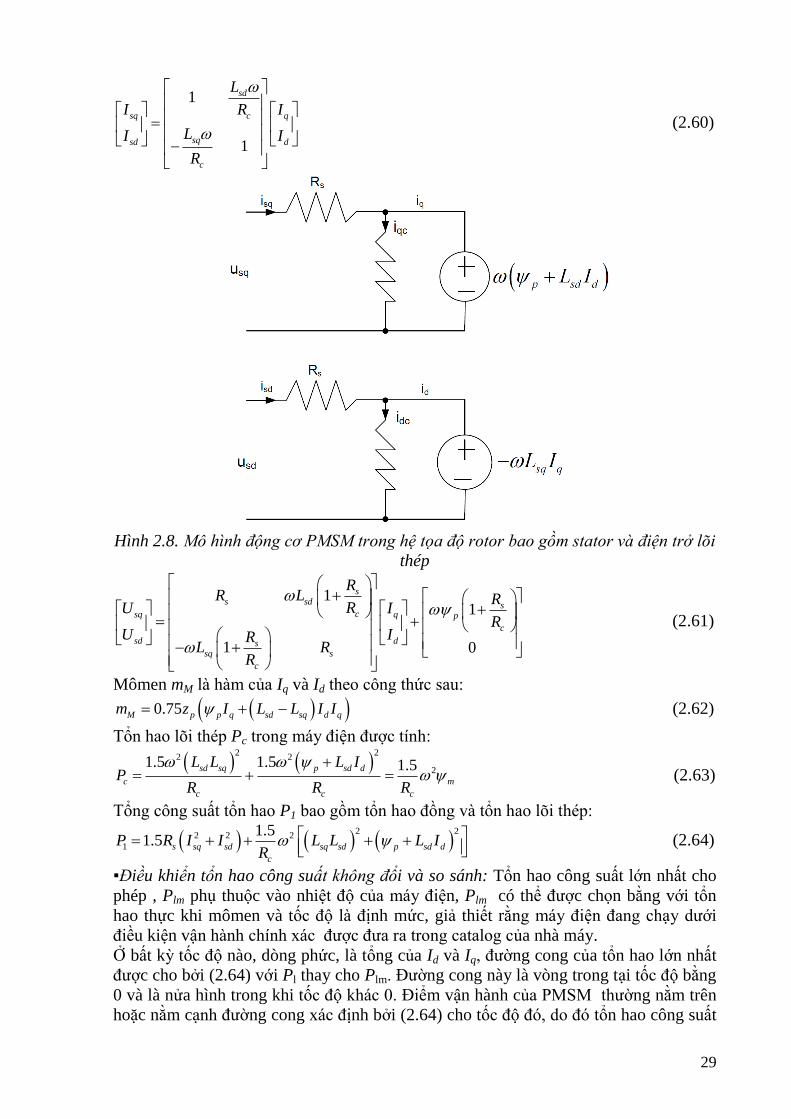
29
1
1
sd
sq c q
sqsd d
c
L
I R I
LI I
R
(2.60)
Hình 2.8. Mô hình động cơ PMSM trong hệ tọa độ rotor bao gồm stator và điện trở lõi
thép
11
1 0
ss sd s
csq q p
c
sd dssq s
c
RR L R
RU IR
U IRL R
R
(2.61)
Mômen mM là hàm của Iq và Id theo công thức sau:
0.75M p p q sd sq d qm z I L L I I (2.62)
Tổn hao lõi thép Pc trong máy điện được tính:
2 2
2 2
21.5 1.5 1.5sd sq p sd d
c m
c c c
L L L IP
R R R
(2.63)
Tổng công suất tổn hao P1 bao gồm tổn hao đồng và tổn hao lõi thép:
2 2
2 2 2
1
1.51.5 s sq sd sq sd p sd d
c
P R I I L L L IR
(2.64)
▪Điều khiển tổn hao công suất không đổi và so sánh: Tổn hao công suất lớn nhất cho
phép , Plm phụ thuộc vào nhiệt độ của máy điện, Plm có thể được chọn bằng với tổn
hao thực khi mômen và tốc độ là định mức, giả thiết rằng máy điện đang chạy dưới
điều kiện vận hành chính xác được đưa ra trong catalog của nhà máy.
Ở bất kỳ tốc độ nào, dòng phức, là tổng của Id và Iq, đường cong của tổn hao lớn nhất
được cho bởi (2.64) với Pl thay cho Plm. Đường cong này là vòng trong tại tốc độ bằng
0 và là nửa hình trong khi tốc độ khác 0. Điểm vận hành của PMSM thường nằm trên
hoặc nằm cạnh đường cong xác định bởi (2.64) cho tốc độ đó, do đó tổn hao công suất
30
thực không vượt quá Plm. Tại bất kỳ tốc độ nào, điểm vận hành trên quỹ đạo tổn hao
công suất không đổi, sẽ cho mômen lớn nhất , xác định phạm vi vận hành ở tốc độ đó.
Tại điểm làm việc , mômen tối đa được sinh ra để có tổn hao công suất Plm. Trong
miền suy giảm từ thông, cả điện áp và công suất tổn hao bị giới hạn mômen lớn nhất
tại tốc độ làm việc nào đó. Mối liên hệ các dòng phức tại điểm làm việc trong vùng
suy giảm từ thông, giả thiết rằng điện áp rơi trên điện trở pha được bỏ qua
0.5
2 2
sm sq sd p sd d mU L L L I
(2.65)
Với Usm là sức phản điện động lớn nhất hoặc là thành phần cơ bản của điện áp lớn
nhất. Ứng dụng sau đó co điều khiển điện áp 6 bước. Điểm làm việc này đáp ứng
mômen tối đa cho phép tại tốc độ đã cho trong vùng suy giảm từ thông
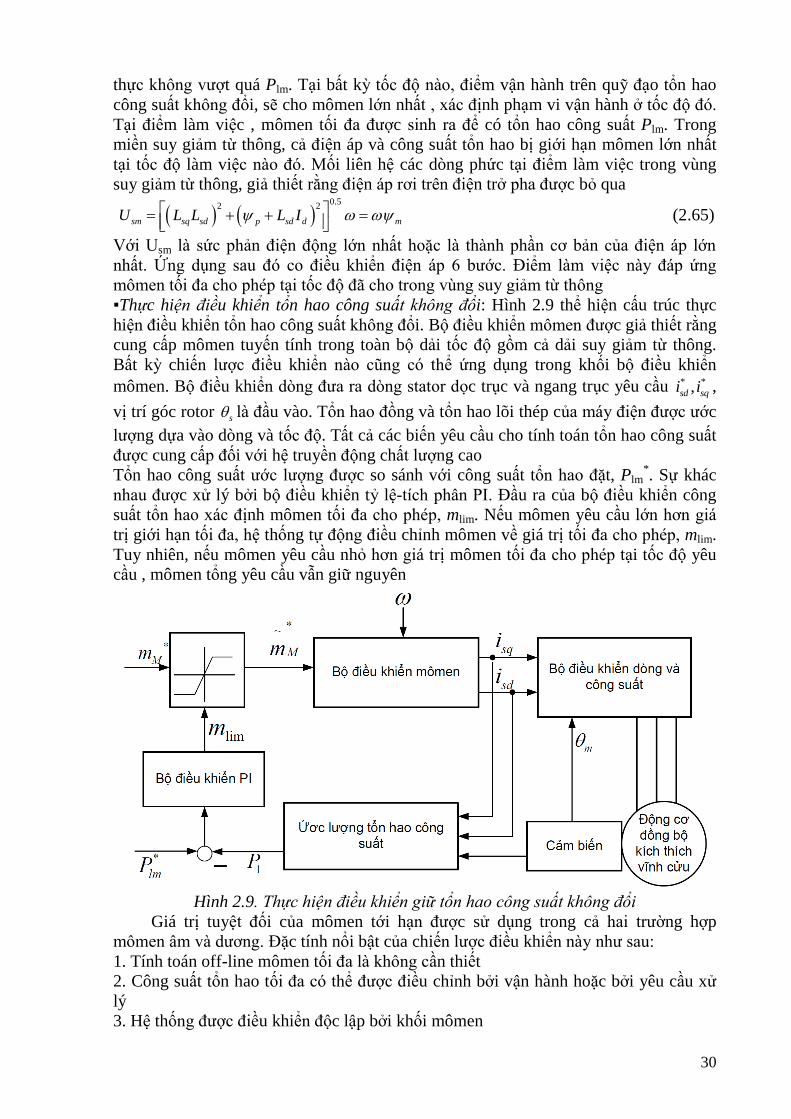
▪Thực hiện điều khiển tổn hao công suất không đổi: Hình 2.9 thể hiện cấu trúc thực
hiện điều khiển tổn hao công suất không đổi. Bộ điều khiển mômen được giả thiết rằng
cung cấp mômen tuyến tính trong toàn bộ dải tốc độ gồm cả dải suy giảm từ thông.
Bất kỳ chiến lược điều khiển nào cũng có thể ứng dụng trong khối bộ điều khiển
mômen. Bộ điều khiển dòng đưa ra dòng stator dọc trục và ngang trục yêu cầu * *,sd sqi i ,
vị trí góc rotor s là đầu vào. Tổn hao đồng và tổn hao lõi thép của máy điện được ước
lượng dựa vào dòng và tốc độ. Tất cả các biến yêu cầu cho tính toán tổn hao công suất
được cung cấp đối với hệ truyền động chất lượng cao
Tổn hao công suất ước lượng được so sánh với công suất tổn hao đặt, Plm*. Sự khác
nhau được xử lý bởi bộ điều khiển tỷ lệ-tích phân PI. Đầu ra của bộ điều khiển công
suất tổn hao xác định mômen tối đa cho phép, mlim. Nếu mômen yêu cầu lớn hơn giá
trị giới hạn tối đa, hệ thống tự động điều chỉnh mômen về giá trị tối đa cho phép, mlim.
Tuy nhiên, nếu mômen yêu cầu nhỏ hơn giá trị mômen tối đa cho phép tại tốc độ yêu
cầu , mômen tổng yêu cầu vẫn giữ nguyên
Hình 2.9. Thực hiện điều khiển giữ tổn hao công suất không đổi
Giá trị tuyệt đối của mômen tới hạn được sử dụng trong cả hai trường hợp
mômen âm và dương. Đặc tính nổi bật của chiến lược điều khiển này như sau:
1. Tính toán off-line mômen tối đa là không cần thiết
2. Công suất tổn hao tối đa có thể được điều chỉnh bởi vận hành hoặc bởi yêu cầu xử
lý
3. Hệ thống được điều khiển độc lập bởi khối mômen

31
4.Tất cả các thông số yêu cầu để thực hiện chiến lược điều khiển này đều sẵn sàng
trong các bộ điều khiển hiệu năng cao
5. Dễ dàng thực hiện điều khiển thời gian thực
Phương pháp điều khiển tác động đến nghịch lưu phụ thuộc vào dòng cho phép cao
hơn ở tốc độ thấp hơn tốc độ cơ bản và ảnh hưởng của độ nhạy tham số
2.2.7. Điều khiển hiệu suất tối đa
Chiến lược điều khiển, tổng tổn hao điện là nhỏ nhất ở tất cả các điểm làm việc,
đây là điều quan trọng trong một số ứng dụng khi hiệu suất vận hành là lớn nhất được
yêu cầu. Các ứng dụng có thể thấy trong phần lớn trong quạt tản nhiệt và trong máy
điều hoà không khí và các ứng dụng trong gia đình chẳng hạn máy rửa, máy sấy, tủ
lạnh và các thiết bị cầm tay sử dụng acquy, công cụ làm vườn, máy hút bụi. Các ứng
dụng hiệu năng cao, yêu cầu tối đa hiệu suất có thể bền đối với nhiệt độ cao, tuổi thọ
cao với cách điện của máy, đây là yêu cầu thực tế của các hệ truyền động
Tỷ số mômen/dòng lớn nhất chỉ tối thiểu tổn hao trên điện trở stator không cần tối ưu
tổn hao sắt từ và do đó cần kết hợp tổn hao về điện. Điều này được giải thích trong
phần điều khiển hệ số tổn hao công suất. Chiến lược điều khiển hiệu suất tối đa đạt
được từ mômen tối đa với tốc độ vận hành toàn dải với tổn hao công suất điện là cố
định. Nếu công suất đầu vào là nhỏ nhất ở mọi điểm làm việc khi đó cần điều khiển
tổn hao công suất là nhỏ nhất và đạt được hiệu suất lớn nhất.
Đó là lý do tại sao giảm tổn hao khi tăng dòng stator và góc mômen vì đó là tổn
hao lõi thép giảm khi từ thông tương hỗ giảm dù tổn hao trên điện trở stator tăng
chậm. Với sự tăng góc mômen, dòng stator dọc trục tăng và dẫn đến từ thông dọc trục
giảm. Thậm chí nếu dòng ngang trục vẫn giữ nguyên hoặc tăng, giữ nguyên hoặc tăng
tương ứng từ thông ngang trục, từ thông hỗ cảm dọc trục giảm phụ thuộc vào dòng
stator dọc trục. Điều này tích tụ ảnh hưởng đến giảm từ thông hỗ cảm. Khi tổn hao lõi
thép tỷ lệ với từ thông, sự giảm của nó dẫn đến giảm toàn bộ tổn hao công suất điện.
Trong máy điện cực lồi, dòng stator ngang trục không tăng mà giữ không đổi như
mômen trước và sau khi góc mômen thay đổi. Một trong những ưu điểm của chiến
lược điều khiển này là được ứng dụng trong máy điện với máy điện cực lồi, máy điện
cực lồi thậm chí đối với máy điện cực lồi có tỷ số bằng 1
Mặc dù phương pháp điều khiển đơn giản nhưng không dễ để thực hiện các thuật toán
đơn giản online. Tối thiểu tổn hao cho tất cả các điểm làm việc được tính off-line và
có thể đưa vào các bảng để sử dụng tối ưu trong khi thực hiện. Phương pháp này
dường như được thực hiện phổ biến. Tương tự như kỹ thuật điều khiển mờ được ứng
dụng cho động cơ không đồng bộ nhằm tối thiểu tổn hao. Cấu trúc điều khiển tối đa
hiệu suất được thể hiện trong hình sau:
Hình 2.10. Cấu trúc hệ truyền động điều khiển tối thiểu tổn hao
32
Chương 3. Mô phỏng cấu trúc điều khiển động cơ đồng bộ sử dụng phần mềm
Matlab
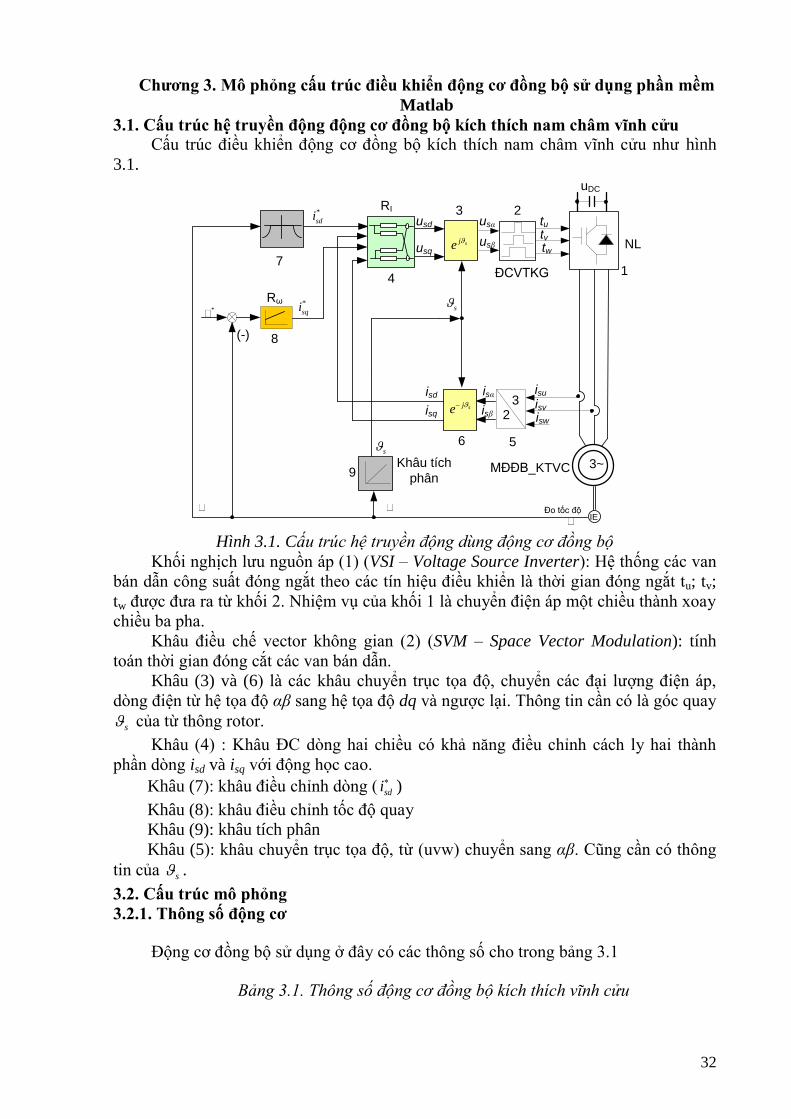
3.1. Cấu trúc hệ truyền động động cơ đồng bộ kích thích nam châm vĩnh cửu
Cấu trúc điều khiển động cơ đồng bộ kích thích nam châm vĩnh cửu như hình
3.1.
sje
3~
IE
MĐĐB_KTVC
32
tutvtw
usαusd
usq
isα isu
ĐCVTKG
NL
isq
isd
uDC
sje
usβ
isv
isw
s
Đo tốc độ
isβ
Rω
*
sdi
*
sqi
(-)
s
Khâu tích
phân
*
RI
1
23
6
4
5
8
7
9
Hình 3.1. Cấu trúc hệ truyền động dùng động cơ đồng bộ
Khối nghịch lưu nguồn áp (1) (VSI – Voltage Source Inverter): Hệ thống các van
bán dẫn công suất đóng ngắt theo các tín hiệu điều khiển là thời gian đóng ngắt tu; tv;
tw được đưa ra từ khối 2. Nhiệm vụ của khối 1 là chuyển điện áp một chiều thành xoay
chiều ba pha.
Khâu điều chế vector không gian (2) (SVM – Space Vector Modulation): tính
toán thời gian đóng cắt các van bán dẫn.
Khâu (3) và (6) là các khâu chuyển trục tọa độ, chuyển các đại lượng điện áp,
dòng điện từ hệ tọa độ αβ sang hệ tọa độ dq và ngược lại. Thông tin cần có là góc quay
s của từ thông rotor.
Khâu (4) : Khâu ĐC dòng hai chiều có khả năng điều chỉnh cách ly hai thành
phần dòng isd và isq với động học cao.
Khâu (7): khâu điều chỉnh dòng (
sdi )
Khâu (8): khâu điều chỉnh tốc độ quay
Khâu (9): khâu tích phân
Khâu (5): khâu chuyển trục tọa độ, từ (uvw) chuyển sang αβ. Cũng cần có thông
tin của s .
3.2. Cấu trúc mô phỏng
3.2.1. Thông số động cơ
Động cơ đồng bộ sử dụng ở đây có các thông số cho trong bảng 3.1
Bảng 3.1. Thông số động cơ đồng bộ kích thích vĩnh cửu
33
Thông số Giá trị
Công suất định mức Pđm 3HP
Điện áp định mức Udm 380V
Dòng stator định mức 10.5A
Mômen định mức 11N.m
Số đôi cực pp 4
Tốc độ 1800 vg/ph
Từ thông cực 0.175Wb
Điện trở stato Rs 0.2
Mômen quán tính J 0.01kgm2
Điện cảm phía stator Lsd 8.5mH
Điện cảm tản phía stator Lsq 8.5mH
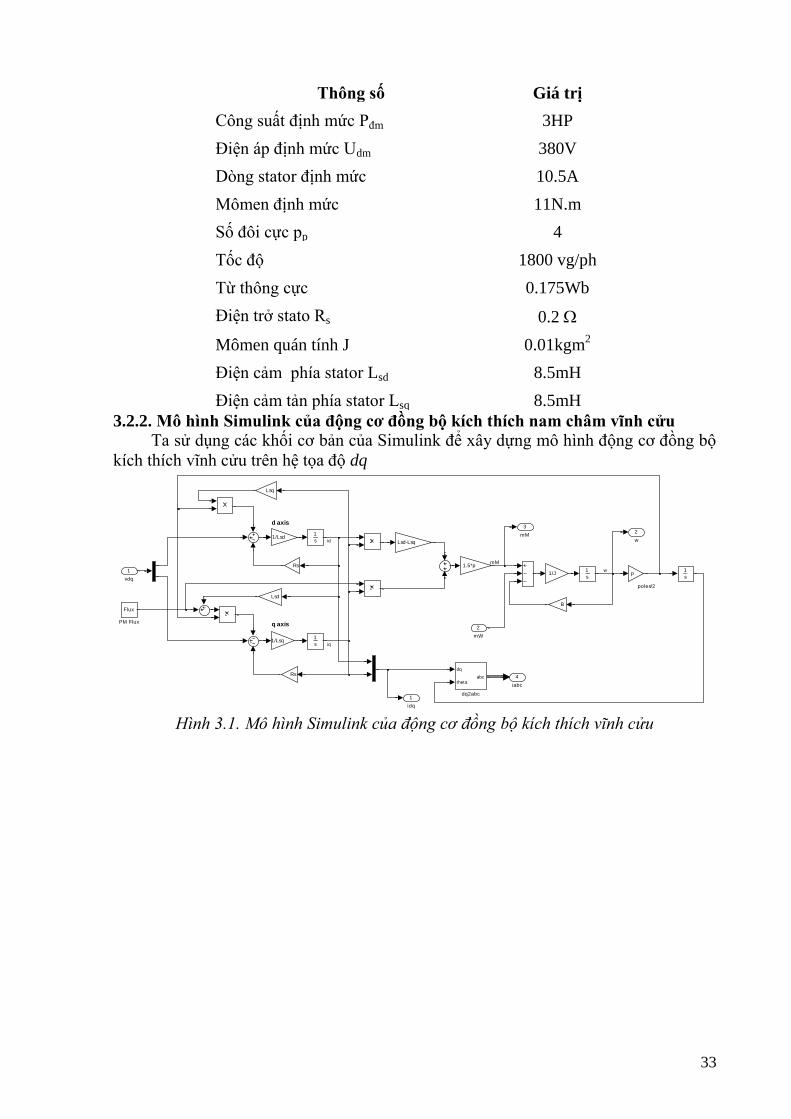
3.2.2. Mô hình Simulink của động cơ đồng bộ kích thích nam châm vĩnh cửu
Ta sử dụng các khối cơ bản của Simulink để xây dựng mô hình động cơ đồng bộ
kích thích vĩnh cửu trên hệ tọa độ dq
q axis
d axis
mM
poles/2
4
iabc
3
mM2
w
1
idq
p
dq
thetaabc
dq2abc
Flux
PM Flux
Lsd
Lsq
1
s
1
s
1
s
1
s
1.5*p
Rs
Rs
B
Lsd-Lsq
1/Lsq
1/Lsd
1/J
2
mW
1
vdq
id
iq
w
Hình 3.1. Mô hình Simulink của động cơ đồng bộ kích thích vĩnh cửu
34
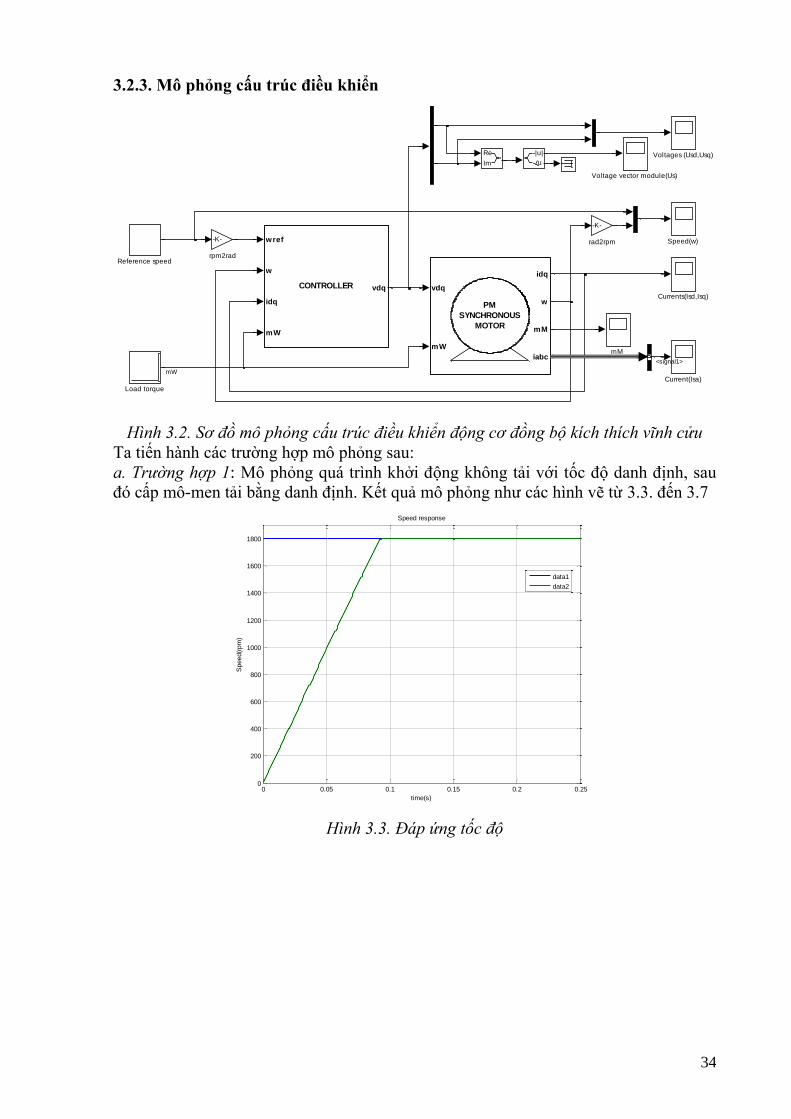
3.2.3. Mô phỏng cấu trúc điều khiển
vdq
mW
idq
w
mM
iabc
PM
SYNCHRONOUS
MOTOR
-K-
rpm2rad
-K-
rad2rpm
mM
Voltages (Usd,Usq)
Voltage vector module(Us)
Speed(w)
Reference speed
Re
Im
Load torque
Currents(Isd,Isq)
Current(Isa)
|u|
u
wref
w
idq
mW
vdqCONTROLLER
mW
<signal1>
Hình 3.2. Sơ đồ mô phỏng cấu trúc điều khiển động cơ đồng bộ kích thích vĩnh cửu
Ta tiến hành các trường hợp mô phỏng sau:
a. Trường hợp 1: Mô phỏng quá trình khởi động không tải với tốc độ danh định, sau
đó cấp mô-men tải bằng danh định. Kết quả mô phỏng như các hình vẽ từ 3.3. đến 3.7
0 0.05 0.1 0.15 0.2 0.250
200
400
600
800
1000
1200
1400
1600
1800
time(s)
Speed(r
pm
)
Speed response
data1
data2
Hình 3.3. Đáp ứng tốc độ

35
0 0.05 0.1 0.15 0.2 0.25-5
0
5
10
15
20
25
time(s)
Curr
ents
(A)
Current response Isd,Isq
Isd
Isq
Isd
Isq
Hình 3.4. Dòng isd, isq
0 0.05 0.1 0.15 0.2 0.25-20
-15
-10
-5
0
5
10
15
20
time(s)
Curr
ent(
A)
Isu
Hình 3.5. Dòng pha, Isu
36
0 0.05 0.1 0.15 0.2 0.250
5
10
15
20
25
time(s)
Torq
ue(N
m)
Electromagnetic Torque
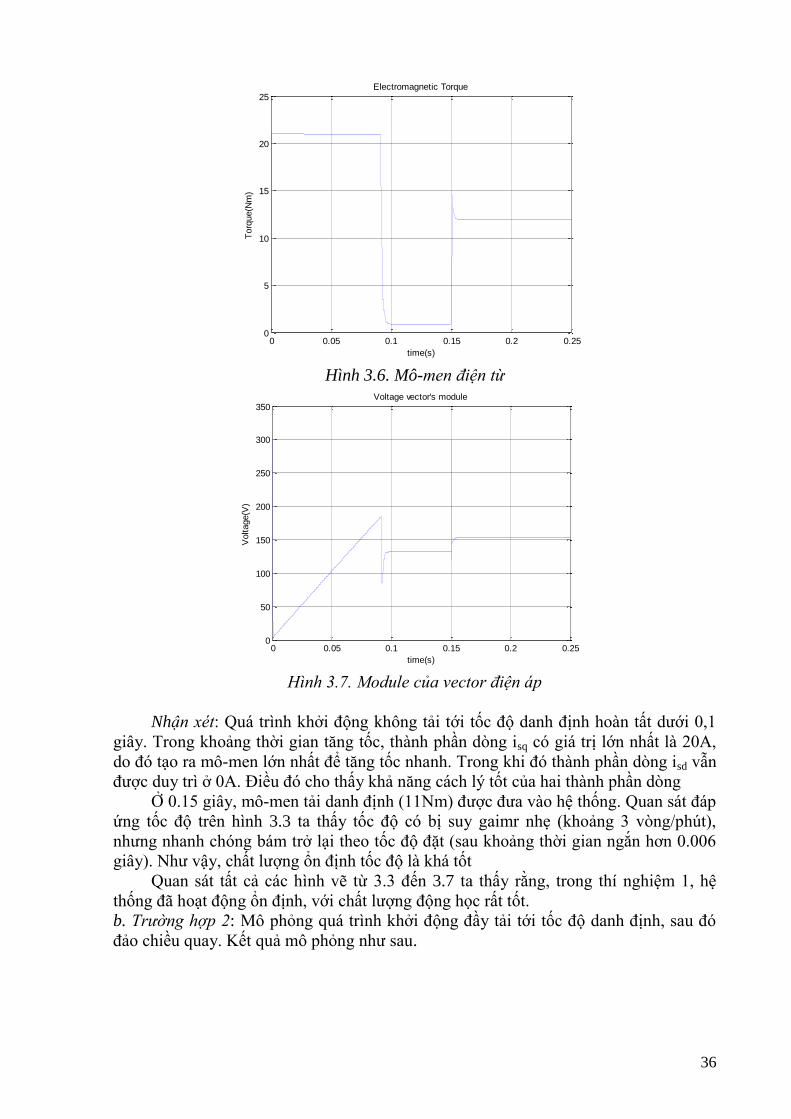
Hình 3.6. Mô-men điện từ
0 0.05 0.1 0.15 0.2 0.250
50
100
150
200
250
300
350
time(s)
Voltage(V
)
Voltage vector's module
Hình 3.7. Module của vector điện áp
Nhận xét: Quá trình khởi động không tải tới tốc độ danh định hoàn tất dưới 0,1
giây. Trong khoảng thời gian tăng tốc, thành phần dòng isq có giá trị lớn nhất là 20A,
do đó tạo ra mô-men lớn nhất để tăng tốc nhanh. Trong khi đó thành phần dòng isd vẫn
được duy trì ở 0A. Điều đó cho thấy khả năng cách lý tốt của hai thành phần dòng
Ở 0.15 giây, mô-men tải danh định (11Nm) được đưa vào hệ thống. Quan sát đáp
ứng tốc độ trên hình 3.3 ta thấy tốc độ có bị suy gaimr nhẹ (khoảng 3 vòng/phút),
nhưng nhanh chóng bám trở lại theo tốc độ đặt (sau khoảng thời gian ngắn hơn 0.006
giây). Như vậy, chất lượng ổn định tốc độ là khá tốt
Quan sát tất cả các hình vẽ từ 3.3 đến 3.7 ta thấy rằng, trong thí nghiệm 1, hệ
thống đã hoạt động ổn định, với chất lượng động học rất tốt.
b. Trường hợp 2: Mô phỏng quá trình khởi động đầy tải tới tốc độ danh định, sau đó
đảo chiều quay. Kết quả mô phỏng như sau.
37
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-2000
-1500
-1000
-500
0
500
1000
1500
2000
time(s)
Speed(r
pm
)
Speed response
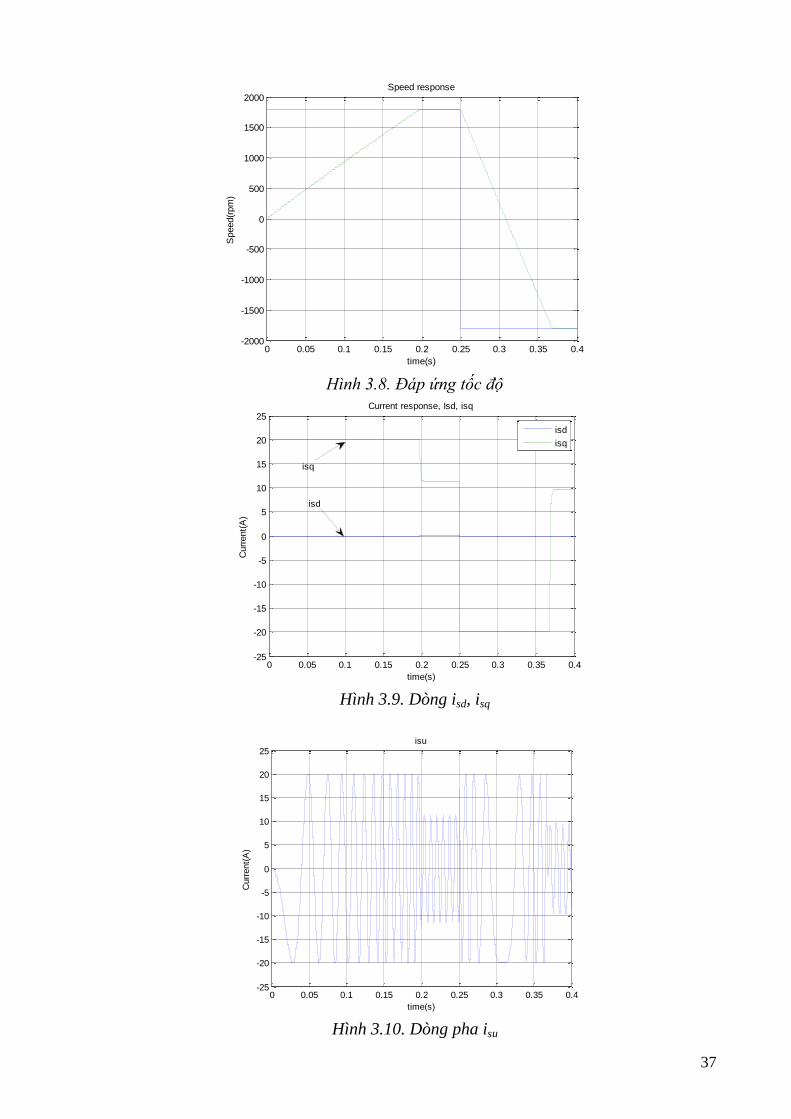
Hình 3.8. Đáp ứng tốc độ
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-25
-20
-15
-10
-5
0
5
10
15
20
25
time(s)
Curr
ent(
A)
Current response, Isd, isq
isd
isq
isd
isq
Hình 3.9. Dòng isd, isq
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-25
-20
-15
-10
-5
0
5
10
15
20
25
time(s)
Curr
ent(
A)
isu
Hình 3.10. Dòng pha isu
38
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-25
-20
-15
-10
-5
0
5
10
15
20
25
time(s)
Torq
ue(N
m)
Electromagnetic torque
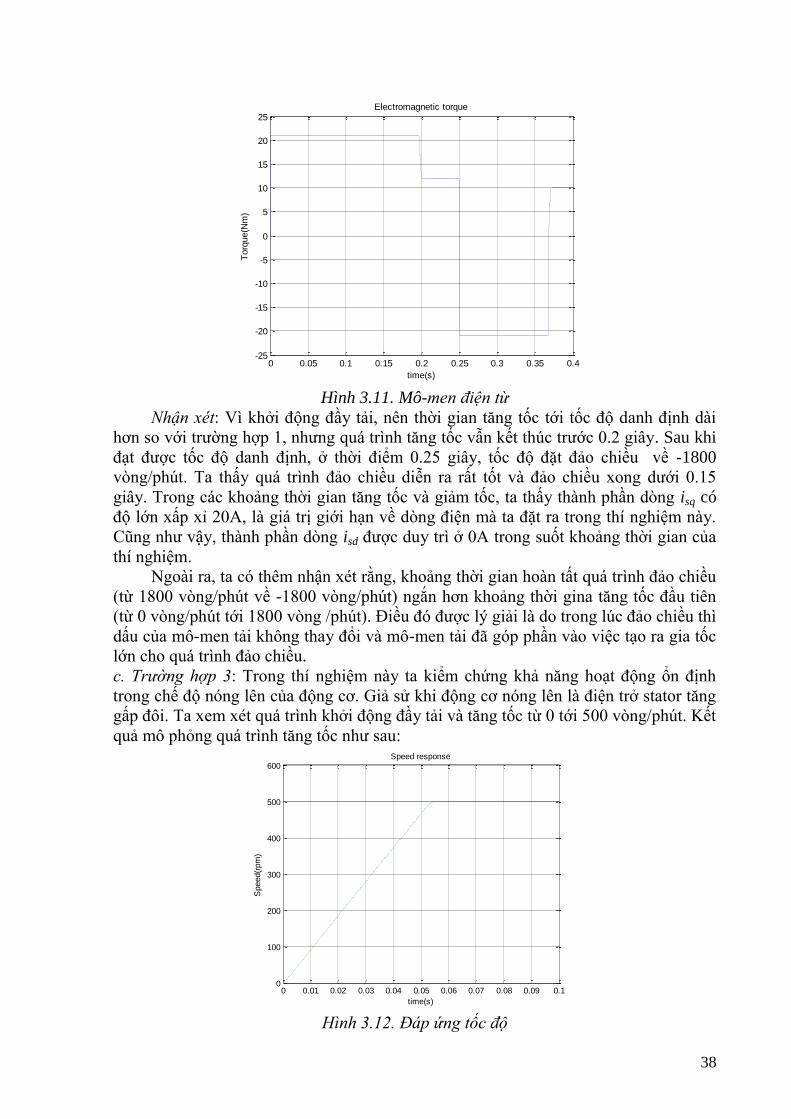
Hình 3.11. Mô-men điện từ
Nhận xét: Vì khởi động đầy tải, nên thời gian tăng tốc tới tốc độ danh định dài
hơn so với trường hợp 1, nhưng quá trình tăng tốc vẫn kết thúc trước 0.2 giây. Sau khi
đạt được tốc độ danh định, ở thời điểm 0.25 giây, tốc độ đặt đảo chiều về -1800
vòng/phút. Ta thấy quá trình đảo chiều diễn ra rất tốt và đảo chiều xong dưới 0.15
giây. Trong các khoảng thời gian tăng tốc và giảm tốc, ta thấy thành phần dòng isq có
độ lớn xấp xỉ 20A, là giá trị giới hạn về dòng điện mà ta đặt ra trong thí nghiệm này.
Cũng như vậy, thành phần dòng isd được duy trì ở 0A trong suốt khoảng thời gian của
thí nghiệm.
Ngoài ra, ta có thêm nhận xét rằng, khoảng thời gian hoàn tất quá trình đảo chiều
(từ 1800 vòng/phút về -1800 vòng/phút) ngắn hơn khoảng thời gina tăng tốc đầu tiên
(từ 0 vòng/phút tới 1800 vòng /phút). Điều đó được lý giải là do trong lúc đảo chiều thì
dấu của mô-men tải không thay đổi và mô-men tải đã góp phần vào việc tạo ra gia tốc
lớn cho quá trình đảo chiều.
c. Trường hợp 3: Trong thí nghiệm này ta kiểm chứng khả năng hoạt động ổn định
trong chế độ nóng lên của động cơ. Giả sử khi động cơ nóng lên là điện trở stator tăng
gấp đôi. Ta xem xét quá trình khởi động đầy tải và tăng tốc từ 0 tới 500 vòng/phút. Kết
quả mô phỏng quá trình tăng tốc như sau:
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
100
200
300
400
500
600
time(s)
Speed(r
pm
)
Speed response
Hình 3.12. Đáp ứng tốc độ

39
Nhận xét: Mặc dù điện trở stator Rs tăng gấp đôi nhưng đáp ứng tốc độ vẫn rất
tốt. Điều đó cho thấy luật điều khiển ít nhạy cảm với sự thay đổi của tham số điện trở
stator Rs. Đây là một đặc điểm tốt, vì điện trở Rs vừa khó thu thập được giá trị chính
xác, vừa thường xuyên thay đổi trong quá trình hoạt động của động cơ
d. Trường hợp 4: Trong thí nghiệm này ta muốn kiểm chứng hoạt động của luật điều
khiển khi thông tin về mô-men tải không chính xác. Ta xem xét quá trình tăng tốc từ 0
tới 500 vòng/phút, với mô-men tải thực tế là 10Nm, còn giá trị mô-men tải được khai
báo với bộ điều khiển là 5Nm. Kết quả mô phỏng quá trình tăng tốc như sau:
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
100
200
300
400
500
600
time(s)
Speed(r
pm
)
Speed response
Hình 3.13. Đáp ứng tốc độ
Nhận xét: Quan sát kết quả mô phỏng trên hình 3.13 ta rút ra nhận xét: khi thông
tin về mô-men tải không chính xác thì tồn tại sai lệch tĩnh khá lớn.

40
KẾT LUẬN
Đề tài đã giải quyết được các vấn đề sau:
- Phân tích mô hình toán (phương trình toán) của động cơ đồng bộ kích thích vĩnh cửu
trên miền liên tục.
- Phân tích cấu trúc điều khiển và chiến lược điều khiển
- Mô phỏng hệ truyền động động cơ đồng bộ kích thích vĩnh cửu và các kết quả mô
phỏng thu được từ Matlab&Simulink.
Hướng phát triển:
Tổng hợp phần cơ sở lý thuyết, hoàn thiện chương trình phần mềm trên Matlab
để có thể cung cấp cho sinh viên dưới dạng tài liệu tham khảo, sách , phục vụ công tác
giảng dạy.

41
TÀI LIỆU THAM KHẢO
[1] Nguyễn Bính (2000), Điện tử công suất, NXB Khoa học và kỹ thuật, Hà Nội.
[2] Phạm Văn Bình (2011), Máy điện tổng quát, Nhà xuất bản giáo dục Việt Nam.
[3] Trần Khánh Hà, (1997), Máy điện I, Nhà xuất bản Khoa học và Kỹ thuật.
[4] Thân Ngọc Hoàn, Nguyễn Tiến Ban (2007), Điều khiển tự động các hệ thống
truyền động điện, Nhà xuất bản Khoa học và Kỹ thuật
[5] Thân Ngọc Hoàn, Máy điện, Nhà xuất bản xây dựng
[6] Bùi Quốc Khánh, Phạm Quốc Hải, Nguyễn Văn Liễn, Dương Văn Nghi (2004),
Điều chỉnh tự động truyền động điện, Nhà xuất bản Khoa học và Kỹ thuật.
[7] Bùi Quốc Khánh, Nguyễn Văn Liễn, Nguyễn Thị Hiền (2006), Cơ sở truyền động
điện, Nhà xuất bản Khoa học & Kỹ thuật.
[8] Nguyễn Văn Liễn, Nguyễn Mạnh Tiến, Đoàn Quang Vinh (2005), Điều khiển
động cơ xoay chiều ba pha cấp từ biến tần bán dẫn, NXB Khoa học và kỹ thuật,
Hà Nội.
[9] Nguyễn Thương Ngô (2005), Lý thuyết điều khiển tự động thông thường và hiện
đại, NXB Khoa học và kỹ thuật, Hà Nội.
[10] Nguyễn Doãn Phước (2006), Lý thuyết điều khiển nâng cao, Nhà xuất bản Khoa
học & Kỹ thuật.
[11] Nguyễn Phùng Quang (1998), Điều khiển tự động truyền động điện xoay chiều ba
pha, NXB Giáo dục, Hà Nội.
[12] Nguyễn Phùng Quang, Andreas Dittrich (2004), Truyền động điện thông minh,
NXB Khoa học và kỹ thuật, Hà Nội.
[13] Nguyễn Phùng Quang (2004), MATLAB và Simulink dành cho kỹ sư điều khiển tự
động, Nhà xuất bản Khoa học và Kỹ thuật.
[14] Phạm Tâm Thành, Nguyễn Phùng Quang (2011), “Khảo sát đặc điểm ổn định của
mô hình trạng thái gián đoạn của động cơ đồng bộ kích thích vĩnh cửu”. CD tuyển
tập hội nghị điều khiển và tự động hóa toàn quốc lần thứ nhất, VCCA-2011,
tr.318-323, Hà Nội
[15] Phạm Tâm Thành, Nguyễn Phùng Quang (2013) Mô hình trạng thái gián đoạn
bilinear của máy điện xoay chiều ba pha theo phương pháp Taylor. Chuyên san
Kỹ thuật Điều khiển&Tự động hóa, số 7/2013, tr.2-7
[16] Pham Tam Thanh, N.P. Quang (2013), “Quasi-continous Implementation of
Structural Nonlinear Controller Based pn Direct-decoupling for Permanent
Magnet Synchronous Motor”. IEEE International Conference on Control,
Automation and Information Sciences (ICCAIS2013), Nha Trang,
Vietnam,pp.254-259
[17] Pham Tam Thanh, Nguyen D.That (2014) “Nonlinear Flatness-Based Controller
for Permanent Magnet-Excited Synchronous Motor”. The 31st International
Symposium on Automation and Robotics in Construction and Mining (ISARC
2014), Sydney, Australia, pp.120-125.
[18] Stephen J. Chapman: Electric Machinery Fundamentals. 4th Edition. Mc Graw
Hill, 2005.

42
PHỤ LỤC MỘT SỐ CHƯƠNG TRÌNH MÔ PHỎNG
*****************************************************
%Điều khiển tốc độ một góc phần tư của hệ truyền động điều khiển dòng điện theo PWM%
clear
P=6;
Rs=1.4;
Ld=0.0056;
Lq=0.009;
lamaf=.1546;
B=0.01;
J=0.0012;
vdc=285;
wr_ref=314.3;
fc=20000;
Kpi=10;
Kp=2;
Ki=1;
fc=20000;
Kpi=10;
Kp=2;
Ki=1;
Tb=5.5631;
Ib=12;
wb=628.6;
Vb=97.138;
Lb=0.0129;
ias=0;ibs=0;ics=0;t1=0;
vax1=0;vbx1=0;vcx1=0;
y=0;
theta_r=0;
wr=0;
t=0;
dt=1e-6;
tfinal=.05;
if_ref=-1e-16;
iqs=0;ids=0;
vqs=0;vds=0;
Tl=0.3*Tb;
n=1;
x=1;
signe=1;
ramp=-1;
ias=0;ibs=0;ics=0;
t1=0;
vax1=0;vbx1=0;vcx1=0;
zia=0;zib=0;zic=0;
while (t<tfinal),
if t>0.02,
wr_ref=-314.3;
end
wr_err=wr_ref-wr;
y=y+wr_err*dt;
Te_ref=Kp*wr_err+Ki*y;

43
if Te_ref>2*Tb,
Te_ref=2*Tb;
end
if Te_ref<-2*Tb,
Te_ref=-2*Tb;
end
it_ref=Te_ref*(2/3)*(2/P)/( (Ld-Lq)*if_ref+lamaf);
is_ref=sqrt(it_ref^2+if_ref^2);
if it_ref>=0,
delta_ref=pi/2;
elseif it_ref<0,
delta_ref=-pi/2;
end
ias_ref=is_ref*sin(theta_r+delta_ref);
ibs_ref=is_ref*sin(theta_r+delta_ref-2*pi/3);
ics_ref=is_ref*sin(theta_r+delta_ref+2*pi/3);
vax=Kpi*(ias_ref-ias);
if vax>1,
vax=1;
elseif vax<-1,
vax=-1;
end
vbx=Kpi*(ibs_ref-ibs);
if vbx>1,
vbx=1;
elseif vbx<-1,
vbx=-1;
end
vcx=Kpi*(ics_ref-ics);
if vcx>1,
vcx=1;
elseif vcx<-1,
vcx=-1;
end
if t1>1/fc,
vax1=vax;
vbx1=vbx;
vcx1=vcx;
t1=0;
end
if vax1>=ramp,
vao=vdc/2;
elseif vax1<ramp,
vao=-vdc/2;
end
if vbx1>=ramp,
vbo=vdc/2;
elseif vbx1<ramp,
vbo=-vdc/2;
end
if vcx1>=ramp,
vco=vdc/2;
elseif vcx1<ramp,
vco=-vdc/2;
end
vab=vao-vbo;
vbc=vbo-vco;
44
vca=vco-vao;
vas=(vab-vca)/3;
vbs=(vbc-vab)/3;
vcs=(vca-vbc)/3;
vqs=(2/3)*(cos(theta_r)*vas+cos(theta_r-2*pi/3)*vbs+cos(theta_r+2*pi/3)*vcs);
vds=(2/3)*(sin(theta_r)*vas+sin(theta_r-2*pi/3)*vbs+sin(theta_r+2*pi/3)*vcs);
d_iqs=(vqs-Rs*iqs-wr*Ld*iqs-wr*lamaf)*dt/Lq;
iqs=iqs+d_iqs;
d_ids=(vds+wr*Lq*iqs-Rs*ids)*dt/Ld;
ids=ids+d_ids;
is=sqrt(iqs^2+ids^2);
delta=atan(iqs/ids);
Te=(3/2)*(P/2)*iqs*((Ld-Lq)*ids+lamaf);
d_wr=((P/2)*(Te-Tl)-B*wr)*dt/J;
wr=wr+d_wr;
d_theta_r=wr*dt;
theta_r=theta_r+d_theta_r;
ias=iqs*cos(theta_r)+ids*sin(theta_r);
ibs=iqs*cos(theta_r-2*pi/3)+ids*sin(theta_r-2*pi/3);
ics=-(ias+ibs);
ramp=signe*(2/(1/(2*fc)))*dt+ramp;
if ramp>1,
signe=-1;
end
if ramp<-1,
signe=1;
end
t=t+dt;
t1=t1+dt;
if x>16,
t
tn(n)=t;
Terefn(n)=Te_ref/Tb;
it_refn(n)=it_ref/Ib;
if_refn(n)=if_ref/Ib;
is_refn(n)=is_ref/Ib;
ias_refn(n)=ias_ref/Ib;
ibs_refn(n)=ibs_ref/Ib;
ics_refn(n)=ics_ref/Ib;
iasn(n)=ias/Ib;
ibsn(n)=ibs/Ib;
icsn(n)=ics/Ib;
vasn(n)=vas/Vb;
vbsn(n)=vbs/Vb;
vcsn(n)=vcs/Vb;
iqsn(n)=iqs/Ib;
idsn(n)=ids/Ib;
isn(n)=is/Ib;
Ten(n)=Te/Tb;
wrn(n)=wr/wb;
wrrefn(n)=wr_ref/wb;
lammn(n)=sqrt((1+Ld*ids/(Ib*Lb))^2+(Lq*iqs/(Ib*Lb))^2);
n=n+1;
x=1;
end
x=x+1;
end

45
figure(1);orient tall;
subplot(4,2,3)
plot(tn,Terefn,'k--',tn,Ten,'k');axis([0 .05 -2.1 2.1]);
set(gca,'xticklabel',[]);
subplot(4,2,5)
plot(tn,is_refn,'k--',tn,isn,'k');axis([0 .05 0 2]);
set(gca,'xticklabel',[]);
subplot(4,2,1)
plot(tn,wrrefn,'k--',tn,wrn,'k');axis([0 .05 -1 1]);
set(gca,'xticklabel',[]);
subplot(4,2,7)
plot(tn,it_refn,'k--',tn,iqsn,'k');axis([0 .05 -2 2]);
subplot(4,2,2)
plot(tn,if_refn,'k--',tn,idsn,'k');axis([0 .05 -1 1]);
set(gca,'xticklabel',[]);
subplot(4,2,4)
plot(tn,ias_refn,'k',tn,ibs_refn,'k:',tn,ics_refn,'k--');
axis([0 .05 -1.5 1.5]);set(gca,'xticklabel',[]);
subplot(4,2,6)
plot(tn,iasn,'k',tn,ibsn,'k:',tn,icsn,'k--')
axis([0 .05 -1.5 1.5]);set(gca,'xticklabel',[]);
subplot(4,2,8)
plot(tn,lammn,'k')
axis([0 .05 0 2]);
*****************************************************
%Hệ truyền động có điều khiển dòng trễ%
clear
P=6;
Rs=1.4;
Ld=0.0056;
Lq=0.009;
lamaf=.1546;
B=0.01;
J=0.006;
vdc=285;
wr_ref=314.3;
Tb=5.5631;
Ib=12;
wb=628.6;
Vb=97.138;
Lb=0.0129;
deli=0.1*Ib;
theta_r=0;
wr=wr_ref;
t=0;
dt=1e-6;
tfinal=.01;
if_ref=-1e-16;
iqs=0;ids=0;
vqs=0;vds=0;
n=1;
x=1;
signe=1;
ramp=-1;
ias=0;ibs=0;ics=0;t1=0;
46
vax1=0;vbx1=0;vcx1=0;
zia=0;zib=0;zic=0;
while (t<tfinal),
Te_ref=Tb;
it_ref=Te_ref*(2/3)*(2/P)/( (Ld-Lq)*if_ref+lamaf);
is_ref=sqrt(it_ref^2+if_ref^2);
delta_ref=atan(it_ref/if_ref);
if delta_ref<0,
delta_ref=delta_ref+pi;
end
ias_ref=is_ref*sin(theta_r+delta_ref);
ibs_ref=is_ref*sin(theta_r+delta_ref-2*pi/3);
ics_ref=is_ref*sin(theta_r+delta_ref+2*pi/3);
if (ias_ref-ias)>=deli,vao=vdc/2;
end
if (ias_ref-ias)<-deli,vao=-vdc/2;
end
if (ibs_ref-ibs)>=deli,vbo=vdc/2;
end
if (ibs_ref-ibs)<-deli,vbo=-vdc/2;
end
if (ics_ref-ics)>=deli,vco=vdc/2;
end
if (ics_ref-ics)<-deli,vco=-vdc/2;
end
vab=vao-vbo;
vbc=vbo-vco;
vca=vco-vao;
vas=(vab-vca)/3;
vbs=(vbc-vab)/3;
vcs=(vca-vbc)/3;
vqs=(2/3)*(cos(theta_r)*vas+cos(theta_r-2*pi/3)*vbs+cos(theta_r+2*pi/3)*vcs)
vds=(2/3)*(sin(theta_r)*vas+sin(theta_r-2*pi/3)*vbs+sin(theta_r+2*pi/3)*vcs)
d_iqs=(vqs-Rs*iqs-wr*Ld*ids-wr*lamaf)*dt/Lq;
iqs=iqs+d_iqs;
d_ids=(vds+wr*Lq*iqs-Rs*ids)*dt/Ld;
ids=ids+d_ids;
is=sqrt(iqs^2+ids^2);
delta=atan(iqs/ids);
if delta<0,delta=delta+pi;
end
Te=(3/2)*(P/2)*iqs*((Ld-Lq)*ids+lamaf);
wr=314.3;
d_theta_r=wr*dt;
theta_r=theta_r+d_theta_r;
ias=iqs*cos(theta_r)+ids*sin(theta_r);
ibs=iqs*cos(theta_r-2*pi/3)+ids*sin(theta_r-2*pi/3);
ics=-(ias+ibs);
t=t+dt;
if x>16,
t
tn(n)=t;
Terefn(n)=Te_ref/Tb;
it_refn(n)=it_ref/Ib;
is_refn(n)=is_ref/Ib;
ias_refn(n)=ias_ref/Ib;
ibs_refn(n)=ibs_ref/Ib;
47
ics_refn(n)=ics_ref/Ib;
iasn(n)=ias/Ib;
ibsn(n)=ibs/Ib;
icsn(n)=ics/Ib;
iqsn(n)=iqs/Ib;
idsn(n)=ids/Ib;
isn(n)=is/Ib;
ifrefn(n)=if_ref/Ib;
delta_refn(n)=delta_ref;
deltan(n)=delta;
Ten(n)=Te/Tb;
wrn(n)=wr/wb;
lammn(n)=sqrt((1+Ld*ids/(Ib*Lb) )^2+(Lq*iqs/(Ib*Lb))^2);
n=n+1;
x=1;
end
x=x+1;
end
figure(1);orient tall;
subplot(4,2,1)
plot(tn,Terefn,'k--',tn,Ten,'k')
axis([0 .01 0 2]);
set(gca,'xticklabel',[]);
subplot(4,2,3)
plot(tn,wrn,'k');
axis([0 .01 0 1]);
set(gca,'xticklabel',[]);
subplot(4,2,5)
plot(tn,delta_refn*180/pi,'k--',tn,deltan*180/pi,'k');
axis([0 .01 0 180]);
set(gca,'xticklabel',[]);
subplot(4,2,7)
plot(tn,it_refn,'k--',tn,iqsn,'k');axis([0 .01 0 1]);
subplot(4,2,2)
plot(tn,ifrefn,'k--',tn,idsn,'k');axis([0 .01 -1 1]);set(gca,'xticklabel',[])
subplot(4,2,4)
plot(tn,ias_refn,'k',tn,ibs_refn,'k--',tn,ics_refn,'k:');
axis([0 .01 -1 1]);set(gca,'xticklabel',[])
subplot(4,2,6)
plot(tn,iasn,'k',tn,ibsn,'k--',tn,icsn,'k:')
axis([0 .01 -1 1]);set(gca,'xticklabel',[])
subplot(4,2,8)
plot(tn,lammn,'k')
axis([0 .01 0 2]);
*****************************************************
% Mô phỏng động lực %
clear
m=0
lq=0.0125
ld=0.0057
ro=lq/ld
Rc=416
lamaf=0.123
Rs=1.2
Pb=890

48
Tb=2.43
Ib=4.65
P=4
ws=(2*pi*1800/60)*P/2
B=0.0005
J=0.0002
tln=0
Vb=Pb/(3*Ib)
zb=Vb/Ib
lamb=lamaf
lb=lamb/Ib
wb=Vb/lamb
rsn=Rs/zb
lqn=lq/lb
ldn=ld/lb
Bn=B*wb^2/(Pb*(P/2)^2)
H=J*wb^2/(2*Pb*(P/2)^2)
lamafn=lamaf/lamb
x1=0
x2=0
x3=0
x4=0
tp=2*pi/3
n=1
dt=0.0001
for t=0:0.0001:0.1
wst=ws*t
vabc= [sin(wst); sin(wst-tp); sin(wst+tp)]
T=2/3*[cos(x4) cos(x4-tp) cos(x4+tp);
sin(x4) sin(x4-tp) sin(x4+tp);
0.5 0.5 0.5 ];
vqdo=T*vabc
x1=x1+dt*wb*(-rsn/lqn*x1-x3*ldn/lqn*x2+1/lqn*(vqdo(1)-x3*lamafn) )
x2=x2+dt*wb*(x3*lqn/ldn*x1-rsn/ldn*x2+vqdo(2)/ldn)
Ten=(lamafn-(ldn-lqn)*x2)*x1
x3=x3+dt*(Ten-Bn*x3-tln)/(2*H)
x4=x4+dt*x3*wb
iqd=[x1;x2]
T1=[cos(x4) sin(x4);
cos(x4-tp) sin(x4-tp);
cos(x4+tp) sin(x4+tp)]
iabc=T1*iqd
vas(n)=vabc(1)
vqs(n)=vqdo(1)
vds(n)=vqdo(2)
ias(n)=iabc(1)
ibs(n)=iabc(2)
Te(n)=Ten
speed(n)=x3
time(n)=t
n=n+1
end
subplot(5,1,1)
plot(time,vas,'k')
axis([0 0.1 -1.2 1.2])
set(gca,'xticklabel',[])
subplot(5,1,2)

49
plot(time,vqs,'k',time,vds,'k')
axis([0 0.1 -1.2 1.2]);set(gca,'xticklabel',[])
subplot(5,1,2)
plot(time,vqs,'k',time,vds,'k')
axis([0 0.1 -1.2 1.2]);set(gca,'xticklabel',[])
subplot(5,1,3)
plot(time,ias,'k',time,ibs,'k')
axis([0 0.1 -6 6]);set(gca,'xticklabel',[])
subplot(5,1,4)
plot(time,Te,'k')
axis([0 0.1 -5 5]);set(gca,'xticklabel',[])
subplot(5,1,5)
axis([0 0.1 0 1.2]);plot(time,speed,'k')
*****************************************************





























