-
224 TORIA OA ElASTICIDADE
Lembrando que E e as derivadas au/ax .... awlaz sao quantidades
pequenas cujos quadrados e produtos podem seT desprezados . e
usando a [2 + m! + n ! = I, a Eq. (d) se lorna
t: = II au + m! au + nl iJw + lm (au + au) + In (au ,... ott')
ax iJy c1Z iJy ax iJz \ ax
+ mn + aw) (116) a. ay
Portanto, 0 aJongamento de urn elemento , pode ser calculado,
desde que as expressOes
-
226 TEORIA DA ELASTICIDADE
Se os eixos coordenadosx. y. z coincidirem com os eixos
principais de de-fonna~o. a Equa~ao (119) se escreve .
Neste case, 0 alongamento de urn elemento linear qualquer de
co-senos diretores I, m, n se toma, pela Eq, (117),
(120)
e a deformac;ao angular correspondente a duas dire~Oes
perpendiculares r e " se toma, pela Eq. (118),
(121)
Pode desta forma ser visto que a deforma~o em urn ponto fica
completamente determinada se forem conhecidas as dire~6es dos eixos
principais de deforma~ao e os vaJores dos aJongamentos unitarios
principais. A determina~o dos eixos principais de defonna~o e dos
alongamentos principais pode ser feita da ma-neira indicada no Art
. 77. Pode tambem ser demonstrado que a soma E ... + E. + E.r
pennanece constante quando se efetua uma rota~ao do sistema de
eixos coor-denados. Esta soma tern , como sabemos, urn significado
fisico simples: repre-senla a expansao volumetrica unitaria causada
pela defonna~o. em urn ponto.
83 Rota~o
Em geral . durante a deforma~o de urn corpa, urn elemento
qualquer sofre va-ria~ao de forma. transla~o e rota~o. Em virtude
da deforma~o angular, as arestas nao apresentam a mesma rota~ao e
se toma necessario considerar de que forma a rota~o do elemento
pode ser especificada. Urn elemento de faces para-lelas aos eixos
x, y, z Pexte ser )evado it forma, posic;ao e orientac;ao finais,
mediante as tres eta pas seguintes. partindo do elemento no corpo
indeformado: I. Sao aplicadas ao elemento as deforma~6es E ....
Ell' E.r. Y"'II' YIIZ> Y ... " e, em se-
guida, 0 elemento e orientado de tal modo que as dire~6es das
deforma~6es principais nao apresentern rota~Oes .
2. 0 elemento e transladado, ate que seu centro\ocupe a
posic;a,o final. 3. 0 elemento e girado. ate que assuma sua
orientar;ao final.
A rOlac;a,o indicada na terceira elapa e, evidentemente. a
rota~a das dirc-C6es principais de deformac;ao. e,
consequentemente. independe da escalha dos eixos x, y, z. Deve ser
passlvel calcula-Ia quando os deslocamentos u, v, Ii' forem
conhecidos. Por outro lado, ela c1aramente independe das
cornponentes de deformar;ao.
Uma vez que a translac;ao do elemento nao apresenta aqui
interesse, pode-mas considerar 0 deslocamento de urn ponto 0 1 tal
como no Art. 81 e na Fig. 128. em relacao ao centro 0 do elemento.
Este deslocamento relativo e fome-cido pelas Eqs. (b) do Art . 81
como sendo
au au iJu Ul - U = - lix + - ay + - az
ax iJy az au av av
VI - V = - ox + - liy + - 4z ax iJy iJz (}w iJw dto
WI - to = - ax + - liy + - 6z ax iJy tlz
(a)
ANALISE DE TENSOES E DEFORMACOES EM TR~S DlMENSOES 227
lntroduzindo a notayao (e) do Art . 81 para as componentes de
deforma~ao. e tambem a notac;aol
= w~ - - - - ~ '" (122) 1 (av au) 2 ax ay podemos escrever as
Eqs. (a) na forma
Ul - u = E., Ox + ~'Yrl' oy + "~1'lU OZ - w, oy + WII OZ
v,-v-K~b+~b+K~b-~b+~b
w,-w~K~b+K~b+~b-~b +~b
(b)
que exprimem 0 deslocamento relativo em duas partes, uma
dependendo apenas das componentes de deformayao, e a cutra
dependendo somente das quantidades Wz W II w,.
Podemos agora mostrar que Wn WII' W z sao, de fato, as
componentes da rotacrao 3. Consideremos a superficie dada peJa Eq.
(I 19) . 0 quadrado do raio em urna dire~o qualquer e inversamente
proporcional ao alongamento unilario de urn elemento linear nessa
dire~ao. A Eq. (119) e da forma
F(x,y,z) = const. (e)
Se considerannos urn ponto vizinho x + dx, y + dy, Z + dz
situado sobre a superjicie, temos a rela~o
aF aF aF -dx + -dy + -dz ~ 0 ~x ay az
(d)
A varia~ao de posi~ao dx. dy, dz se efetua numa dire~o cujos
co-senos diretores sao proporcionais a dx. d.\', dz. As tres
quantidades aFlax, iJF/iJy, iJF/al. tambCm especificam urna
dire~aa. ja que podemos considerar co-senos direlorc~
propor-cionais a elas. 0 membra da esquerda da Eq. (d) e. entao,
proporcional ao co-sena do angulo entre estas duas dire~Oe s. Como
ele se anula , as duas dlre~Ocs sao perpendiculares e. urna vez que
dx. dy. dz representam urna dire~o contida no plano tangente a
superficie no ponto x, y. Z, a dire~ao representada par iJF/iJx,
iJF/iJ)" iJF/a;. e normal a superficie dada pela Eq (c).
Considerando agora que , neste caso. F(x,y. :::, ) e a flln~ao
do membra da di-reita da Eq. (119), tcmos
aF iJx "'" 2tJ[x + 'Y"I/Y + )' ... Z aF iJy = 'YrvX + 2EIIY +
1'1/'Z (e) aF iJz = '1%.% + 'YlI.y + 2t.z
Ipclo exame da Fig. 6, vcriftca.-se que iWlax c - iJulay, que
apareccm oa exp"cssio de w . sao as ~s, em scntKlo horirio, dos
elementos lineares O'A'. O'B'. a partir de suas pos~Oes Iniciai s
OA, DB. ~anto, w. c a media dcstas rotacs. C WJ[ C w~ tern
significado anlilogo nos pianos ),Z C Xl.. respecllvamentc.
-
r
.-,...
228 TEORIA DA ELASTICIDADE
Sendo a superficie definida pela Eq. (119) tra~ada com centro no
ponto 0 (Fig. 128). podemos idenlificar /Ix. ~y. &. nas Eqs.
(b). comx. y. l. nas Eqs. re).
Consideremos agora 0 caso particular em que CtJ.l" W", W z sao
nulos. Entao, os membros da direita das Eqs. (e) e das Eqs. (b) sao
identicos. exceto pela presen~a de .um rator 2. Em consequencia, 0
deslocamento correspondente as Eqs. (b) e normal it superficie
definida pela Eq. (119). Islo significa que, se con-siderannos 0
ponto 0 1 (Fig. 128) como pertencente a superficie, 0 sell
desloca-mento se faz perpendicularmente it mesma. Portanto, se 00 1
for urn dos eixos principais de defonna~o. ou seja, urn dos eixos
principais da supemcie, 0 des-locamento de 0 1 se efelua na
dire!rao de 00" a qual, conseqiientemente, nao sofre rotar;ao. 0
deslocamento em questao correspondern. entao, a primeira etapa
acima descrita .
A fim de completar a deslocamenta, devemas restituir as Eqs. (b)
os termos wz , W II , w". Entretanto, estes termas correspondem a
uma pequena rata~a de corpo rigida , de componentes w z , W II , W"
segundo os eixosx, y, z. Cansequente-mente, estas quantidades,
fornecidas por (122), exprimem a rota~o da terceira etapa, ista e,
a rota~o dos eixos principais de deforma~ao. no ponto O. Etas sao
denominadas simplesmente componentes de rota,iio .
PROBLE~AS
1. Qual e a equacao, do tipo ftx.y,z) = 0, da superficie com
centro ern 0, que se toma urna esferax'5 + y'l + Z'I = r op6s a
defonnacao hornogenea do Art. 80? Que tipo de superficie e ela?
2. Mostre que, se a rotacio for nula ern lodos os pontos do corp
(deformacao inutacio-nal), 0 vetor deslocamento e 0 gradiente de
urna funcio escalar.
Indique urn ou rnais exemplos desla defonnayao irrotacional,
dentre os problemas analisados no texto .
Teoremas Gerais
84 Equa~Oes diferenciais de equilibria
No desenvolvimento do Art. 74, consideramos a tensao em urn
ponto de urn corpo elastico. Vamos considerar agora a varia~ao da
tensao quando rnudamos a posi~o do ponto. Com este objetivo, as
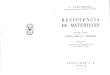
condi~6es de equilibrio de urn pequeno paralelepipedo relangulo de
arestas &X, liy. liz (Fig. 129) devem ser estudadas. As
componentes de ten sao atuando nas faces deste pequeno elemento e
seus senti-dos positivos sao indicados na figura . Tomaremos, aqui,
em considera~ao as pequenas varia'rOes das componenles de tensao
devidas aos pequenos incremen-tos &X, liy. liz. das
coordenadas. Entao, designando os pontos medios das faces do
elemento por I. 2. 3. 4, 5 e 6, como na Fig. 129, distinguimos
entre 0 valor de fIz no ponto I, e seu valor no ponto 2,
designando-os por (fIr)L e (fIr)z, respectiva-mente . E claro que 0
simbolo fIr designa 0 valor desta componente de tensao no )X)nto x,
y. z.. No calculo dasjor,as que atuam no elemento, consideremos as
faces muito pequenas, e a for~a como obtida peJa multiplica~o da
ten sao no centr6ide da face peJa area da me sma.
Deve ser nOlado que a for'ra de volume atuando no elemento -
desprezada como um infinitesimo de ordem superior na discussao do
equillbrio do tetraedro
(uz ls
I' 610 I (~7:ls l";yzJs I (j ) 7r,."),, /-Y T3U l ~ #Ih-"'i
(O'Y)3 - 0(' I I X 6, 4 , I 3 t ' ) (r:~),)1 ~)'),) ;!!!JC.!J
____
/ /
/ / - -61' Y
Fig. 129
-
230 TEORIA DA ElASTICIDADE
(Fig. 126) - precisa agora seT leva~ considera~~, porgue e da
mesm~ ordem de ~ndeza que os termos devidos as varia~Oes das
componentes de teo sao, que agora sao considerados. Designando por
X, Y. Z as componentes desta for~a por unidade de volume do
eJemento. en lao a equa~o de equilibrio obtida pela soma de todas
as fOf!r3S que atuam neste elemento na dire~o x e
[(")' - ( ).[ Iy Iz + [(Tq). - (T.,).I Ix !, [(T .. ). - (T ..
).1 Ix;y +Xlxlylz=O
As duas outras equa~Oes de equilibria 520 obtidas do mesmo modo.
Depois de se dividir por &X, 6y, liz e estabelecer 0 limite
pela contra9ao do clemen to ate 0 ponto x, y, z, encontra-se
oas + dTs" + OTs. + X = 0 ox oy az
oa" + Ur~1I + OT". + Y = 0 ay dX az
(123)
aa. + drs.. + aT". + z = 0 ilz dX ay
As Eqs, (I23) devem ser satisfeitas em todos os pontos ao {ongo
do volume do sOlido, As tensOes variam neste volume e, quando
chegamos ao contomo, elas devem ser tais que estejam em equilibrio
com as fon;as extemas na superfi-cie do solido, Estas condi~Oes de
equilfbrio na superficie podem ser obtidas a partir das Eqs. (108).
Considerando urn tetraedro OBCD (Fig. 126) tal que a face BCD
coincida com a superficie eo solido, e designando por X , y, t as
compo-nentes das for~as de superficie por unidade de area neste
ponto, as Eqs. (108) se tomam
x = a.t + T"lIm + Tun Y = allm + TII,n + T~lIl Z = a,n + Tul +
TII.m
(124)
nas quais I, m, II sao os co-senos direlores da normal exterior
a superficie do corpo no ponto em cons idcrar.;ao.
Se 0 problema consiste em delcrminar 0 cstado de tens..;'o em
urn solido submetido a a~o de forr.;as dadas, e necessario resolver
as Eqs. ( 123)~lu r.;:ao deve ser tal que sati sfar.;a as
condie;Oes de contorno (124). Estas equae;6es, contendo seis
componentes de tensao. U.r, . . . , Til: nao sao suficientes para a
delerminar.;ao destas componentes. 0 problema e estaticamente
indeterminado, e. a tim de obtermos a solu~ao, devemos proceder
como no caso dos problemas bidimensionais, i.e., as deforma~6e s
elasticas do corpo precisam tambem ser consideradas.
85 Condi~Oes de compatibilidade
Deve ser notado que as seis componentes de deformac;ao em cada
ponto sao completamente determinadas pelas tres fun~6es u, v, w,
representando as com-
TEOREMAS GERAIS 231
ponentes do deslocamento. Logo, as componentes de defonnac;ao
nao podem seT tomadas arbitrariamente como fun~Oes de x, y, ~, mas
estaa sujeitas as rela~6es obtidas a partir das Eqs . (2) ,'
Entao.
das quais
(a)
Mais duas rela~6es do mesmo tipo podem ser obtidas por permuta~o
dclica das letras x, y, z.
A partir das re la~6es difere,neiais
encontramos que
iJ'YlI~ = ~ + a'w iJx dX az ax ay
ayrv _ iJiu + iJ2u Tz - ay ilz ax ilz
(b)
OUlras duas rel a~6es do tipo (b) podem ser obtidas pela
pennuta~o das letras x, v, z. Chegamos entao as se is 'seguintes
rela~Oe s diferenciais entre as componen-'tes de dcforma~ao , as
quais devem ser sat isfeitas em virtude das Eqs. (2):
a!i'~: ay dz ( 125)
Estas equar.;6es diferenciais l sao denominadas condiroes de
compalibilidade. Usando a lei de Hooke [Eqs. (3)], as condi~Oes
(l25) podem ser transforma
das em relae;Oes entre as corpponentes de ten sao. Seja, por
exemplo. a condie;ao
'A demonst~ao dt: que estas St:is t:qua~cX:S sao suficientt:s
para assegurar a existencia de urn desloca mento correspondente a
um conjunto dado de fun~0e5 ( .. , . ,'Y ..... ,pede ser encontrada
em A. E. H. Love, Mat'u'maticaf Th~ory 0/ Elasticity. 4.- ed., p.
49, Cambridge University, New York, 1927, e em 1. S. Sokolnikoff,
Mathmuuicol Th~ory 0/ Elasticity, p. 2S, 19.s6, As pr6prias equa~s
roram dadas pelf B. de Saint-Venant em sua edi~ do livre de C. L.
M. H. Navier, Risumi d~s uroftJ sur I'Applicatiofl d~ la
Micafliqu~. ap. 3, Cari1ian-Goeury, Paris, 1864.
-
,..
232 TfORIA OA EUSTICIOAOE
(c)
A partir das Eqs. (3) e (4), usando a nota~o (7),
encontramos
1 .. = E [(I + ')" - .e]
1 ' . = E [(I + ,) . - .e]
2(1 + ,)T,. 1'1/0 = E
Substituindo estas express6es em (e), obtemos
(I + ,) (a'., + a',,) _ ,{a'6 + 3-'6) = 2(1 + ,) a". .. az! ely!
azl iJyt iJy at (d)
o membra do lade direito desta equa~o pode ser transformado
usando-se as equar;6es de equilibria (123). Destas,obtemos
ih". _ . _ iJrZI _ Z -ay= az ax ~ = _ au" _ dTZJI _ Y at. ay
ax
Derivando a primeira destas equa~Oes em re la~o a Z, a segunda
em rela~ao a y, e somando os resultados das deriv~6es.
encontramos
2 a;"111 = _ alul _ alu, _ ~ (a-ru. + O-rZll) _ az _ aY ay al.
al.I ayl ax al. ay al. ay
ou, usando a prime ira das Eqs. (123),
Substituindo esta na Eq . (d) e usando, para simplificar a
escrila, 0 simbolo
encontramos
(I + ,) (V's _ V'" _ a's) _ , (V's _ a's) ax! ax' = (I + ,) (ax
_ aY _ az) te)
ax ay al. Duas equar;Oes amilogas podem ser.obtidas a partir das
duas outras condilrOes de compatibilidade do tipo (c).
TfOREMAS GERAIS 233
Adicionando as tres equa!;Oes do tipo (e) encontramos
(f)
Substituindo esta expressao para vze na Eq. (e),
V'. + _ 1_ a's = _ _ '_ (ax + aY + az) _ 2 ax '" 1 + .. ax! 1 -
II ax ely az ax tg)
Podernos obt~r tres equa~6es deste tipo, co rrespondentes as
tres primeiras das Eqs. (125). Do mesmo modo, as restantes tres
condi~6es (125) JXJdem ser trans-farmadas em equar;6es do seguinte
tipo:
V'" . + _ 1_ a's = _ (az + ay) 1/ l+voyoz elyaz
(h)
Se nao existem foq;as de massa, ou se estas sao constantes, as
Eqs. (g) e (II) se {amam
a's (I + ,)V'" + ax' = 0 a's (I + ,)v". .. + ay az = 0
a's (1 + ,)V'" + ay' = 0 a's (I + .)V"." + ax az = 0 (126)
a's (I + , )V' + az' = 0 a's (I + ,)V"'~ + ax ay = 0
Vemos que, em adi~o as equa~Oes de equillbrio (123) e as
condir;oes de contomo (124), as componentes de tensao em urn corp
isOtropo precisam sat is-fazer as seis condir;6es de
compatibilidade (g) e (h) ou as seis condir;Oes (126). Este sistema
de equar;oes e geralmente suficiente para determinar as
cemponen-tes de tensao, sem ambigiiidade (ver Art. 96).
As condir;Oes de compatibilidade contem somente derivadas
segundas das componentes de ten sao. Logo, se as for~s extemas sao
tais que as equar;6es de equilibrio (123) juntamente com as
condir;Oes de contomo (124) podem ser satis-feitas temando as
componentes de ten sao como constantes ou como funr;6es lineares
das coordenadas. as equar;6es de compatibilidade sao identicamente
sa-ti sfeitas , sendo este sistema de tensOes a solu~o correta do
problema . Varios exemplos de tais problemas serao considerados no
Cap. 9.
86 Determina~o dos deslocameotos
Quando as componentes de tensao sao encontradas a partir das
equar;6es ante-riores , as componentes de deformar;ao podem ser
calculadas usando-se a lei de Hooke [Eqs. (3) e (6)]. Entao . as
Eqs. (2) sao usadas para a determinar;ao dos deslocamentos u, v, w.
Derivando as Eqs. (2) em relar;.ao ax, y, Z podemos obler 18
equar;6es contendo 18 derivadas segundas de u, v. w. a partir das
quais todas estas derivadas podem ser determinadas. Para u, por
exemplo, obtemos
-
234 TEO RIA OA ELAST1CIOAOE
As derivadas segundas para as outras duas componentes de
deslocamento. v e w, podem ser obtidas por permu~o dciica, nas Eqs.
(a). das tetras x, y, ,.
Agora, u, v, w podem ser obtidos por inte~ao dupla destas
derivadas segundas. A introdu~o de constantes arbitnirias de
integra~io resultari. em adi-dooar aos valores de u, v, w fun~6es
lineares em x, y, l . porquanto e evidente que tais fun~6es podem
ser somadas au. v, w sem afetar as equa~Oes tais como (a). Para
termos as componentes de deforma~o (2) inalteradas par tal
acres-cimo, as fun90es lineares adicionais devem ter a forma
u,_a+bY-CZ] v'=d-bx+ez.
Wi =J+cx. -ey
(b)
Isla signlfica que as deslocamentos nao sao inteiramente
determinados pelas tens6es e defonnat;6es. Aos deslocamentos
encontrados a partir das equa~6e s diferenci.is (123), (124) e
(126) um deslocamento de corpo rigido pode ser super-posto. As
constantes a, de/ nas Eqs. (b) representam urn movirnento de
trans-lat;io do solido, e as constantes h, c e e sao as tres
rota!;Oes de corpo rigido em torno dos eixos coordenados. Quando
existem suficientes vlnculos para impedir o movimento de corpo
rigido, as seis conslantes nas Eqs.IbLpodem facilmente ser obtidas
de forma que satisfat;am as condit;Oes de restrit;ao. Varios
exemplos dos referidos calculos serno mostrados posteriormente .
---
87 Equa~Oes de equilibrio em termos de deslocamentos
Urn metodo de solut;3,o de problemas elasticos consiste em
eliminar as compo-nentes de tensao das Eqs. (123) e (124), usando a
lei de Hooke. e exprimir as componentes de defonnar;ao em termos
dos deslocamentos , usando as Eqs. (2). Desta mane ira, chegamos a
tres equac;6es de equilibrio con tendo somente as Ires func;Oes
desconhecidas u, v, w. Substituindo na primeira das Eqs. (123), de
(II),
e de (6),
encontramos
au u, ~ Xe + 2G -ax
(au av) T ... , = G"Yr, = G ay + ax T .... = G"Yr. = G - + -(aw
au') ax az
(a)
(b)
TEOREMAS GERAIS 235
As duas outms equ3!Y-oes podem ser transformadas da mesma
maneira . Entao, usando 0 simbolo '\71 (ver p. 232). as equa~6es de
equilibrio (123) se tomam
ae (X + G) ax + G V'u + X - 0
ae (X + G) - + G V'v + Y - 0 ay
(X + G) ~ + G V'w + Z - 0
e, Quando nao ha for~as de volume,
(X + G) ae + G V'u - 0 ax (X + G) ae + G v'v ~ 0
ay
(X + G) ~ + G v'w - 0 a,
(127)
(128)
Derivando estas equac;6es, a primeira em relacao a x, a segunda
em relar;a,o a y, e a terceira em relac;ao a z. . e somando 0
resultado das derivat;6es, encontramos
(X+2G)V'e-0
i.e., a expansao volumetrica unitaria e satisfaz a equao
diferencial
(129)
A mesma conclus3.o e valida tambem quando as fon;.as de massa
sao constantes ao longo do vo lume do s6lido.
Pela substituic;ao das equac;.oes tais como (a) e (b) nas
condic;Oes de con-torno (124), encontramos
x - Xel + G' - I + - m + - n + G - I + - m + - n -, (au au, au)
(au av aw) ax ay Oz. ax ax ax
(130)
As Eqs. (l27)juntamente com as condic;6es de contomo (130)
dcfinem com-pletamente as tres fun!;Oes u, v, w. A partir destas,
as componentes de deforma-~o sao obtidas usando-se as Eqs. (2), e
as componentes de tensao usando as Eqs. (9) e (6). Aplicac;6es
destas equat;6es serno mostradas no Cap. 14 .
88 Solu""o geral para os deslocamentos
E facilmente verificado, por substitui~o. que as equac;Oes
diferenciais de equili-
-
236 TEORIA DA ELASnClDADE
brio (128), em lennos dos deslocamentos, sao satisfeitas
pori
a u = 4>, - a ax (4). + x4>, + y4>. + z4>,)
a v = 4>. - a oy (4). + x4>, + y4>. + z4>,)
a 10 = 4>, - a a. (4). + x4>, + y4>. + z4>,)
oode 4a = 1/(1 -v) e as quatro fun~6es CPo. 4>2. 4>3 sao
harmonicas, i. e.,
V'lq,o = 0
Pode ser mostrado que esta solu~o e geral. rnesmo quando ~o e
ornitida. Z Esta fonna de sotu~o foi adaptada a coordenadas
curvilineas JX)r Neuber e
apJicada por ele a resolu~o de problemas de solidos de
revolu~a03 gerados por hiperboles (entalhe hiperbOlico em urn
cilindro) e elipses (cavidade em forma de urn elipsoide de
revolu~o) transrnitindo tra~o . flexao. tor~o. ou fo~a cortante
transversal ao eixo combinadas com flexao .
89 Principio de superposif;iio
A solu~o de urn problema de urn dado solido elastico, com fo~s
de superficie e de ' volume dadas. exige-nos a detennina~o de
componentes de tensao, ou deslocamentos, que satisfa~arn as
equa~6es diferenciais e as condi~6es de con-torno. Se escolhennos
trabalhar com as componentes de tensao. temos que satis fazer: (I)
as equacr6es de equilibrio (123); (2) as equa~6es de
compatibilidade (125); (3) as condicr6es de contomo (124). Sejam
U;e'''' Tn'" as componentes assim detenninadas, e devidas as fo~as
de superficie X. Y, teas forcras de massa X, Y, Z.
Sejam U z', ... T ;ell' as componentes de tensao no mesmo corpo
elastico devidas as for~s de superficie X', }". Z: e as forcras de
massa X', Y', Z' . Entao, as componentes de tensao U,z + uz' ...
T,zll + Tr/ ... representariio as tens6es devidas as forcras de
superficie X + X' ... e as fo~as de massa X + X' ... . Isto e
valido porque todas as equacr6es diferenciais e condicr6es de
contorno sao iineares. Entao. adicionando a primeira das Eqs. (123)
a equacrao correspondente
du/ + a-rzv' + a-ru' + X ' = 0 ax ay az
'Esta sol~o roi dada indc:pendcnlcmcntc por p~ F. PapkovilCh,
CampI. R~nd., vol. 19!i, pp. !ill c 754, 1932 e por H. Neube.r, z.
Ang~. Millh. M~ch., vol. 14, p. 203, 1934. Outral sol~s SCl1lis
foram dadas por B. Galerkln, CampI. R~nd., vol. 190. p. 1047, 1930,
e por Boussinesq e Kelvin _ veja Todhunter e Pearson, . History of
Elasticity", vol . 2. pl. 2. p. 268. Veja tambem R. D. Mindlin
Bull. Am . Milth. Soc .. 1936. p. 373. IPaB discuslio do DUmero de
rU~0e5 neces:s&riu 1 complcteza, veja P. M. Nashdi e C. S. Hsu,
1. Millh. M~ch., vol.. 10, pp. 23),246, 1961 , e as referincias
citadas oeste arti&o. IH . Neuber, X~rbsptlnlUtn,li~hr~. 2.-
ed., Sprinaer-Verlaa; OHG, Serlim, 1958. Elte livro conh~m tambem
aoIu~ de problemas bidimeosionais . Vu Cap. 6.
TEOREMAS GERAIS 237
encontmmos
:x ( .. + .:) + OOy (T., + T~ ') + :. (T + T.:) + X + X' = 0 e
de forma similar, da primeira das Eqs. (124) e de sua
correspondente. temos por adi~ao
51: + 51:' = ( + .:)1 + (T~ + T~')m + (T~ + T.:)n
As condi~6es de compatibilidade podem seT Gombinadas de forma
semelhante. 0 conjunto completo de equa~6es mostra que CTz + u/,
... "XII + Tz ./ '" satisfa-zem a todas as equa~Oes e tondi~Oes que
detenninam as tensOes devidas as foryas X + X', ... x + X', ....
Este e urn exemplo do principia de superposi-~o, que pode seT
estendido a outros tipos de condi~Oes de contoma, como
deslocamentos prescritos .
Na dedu~o das equa~Oes de equilibrio (123) e das condiyOes de
contomo (124), nao fizemos nenhuma distin~o entre a posi~o e fonna
do elemento antes do carregamento, e sua posi~ao e fonna depois do
mesmo. Como consequencia, essas equa~6es, e as conclusoes delas
deduzidas. sao validas someote se os pe~ quenos deslocamentos
produzidos na defonna~o nao afetarem substancialrnente a a~o das
for~s extemas. Existem casos, contudo. nos quais a deforma~o
precisa ser levada em considera~o. Nestes. a justificativa do
principio de su~ perposi~o, dada acima, nao e valida. A viga sob
compressao axial e carrega mento lateral simultaneos fornece urn
exemplo deste tipo. e muitos outros apare cern na considera~o da
estabilidade elastica de estruturas de paredes fmas.
90 Energia de derorma~ao
Quando uma barra unifonne e carregada em tra~o simples, as
forc;as em suas extremidades realizam uma certa quantidade de
trabalho quando a barra e dis tend ida. Ent30, se 0 elemento
mostrado na Fig. 130 e submetido somente a ten sOes normais u z ,
temos uma forcra uzdy dz que realiza trabalho em uma eXlen sao Ez
dx. A relac;ao entre estas duas quantidades durante 0 carregamento
e representada por uma linha reta como OA na Fig. BOb, e 0 trabalho
realizado durante a deformac;ao e fomecido pela area 72 (u,z dy dz)
(Ez dx) do triangulo OAB. Designando por dV este trabalho,.
temos
dV = ~ dxdydz (a)
E evidente que a mesma quantidade de trabalho e realizada em
todos os elemen lOS, se os seus volumes forem os mesmos. Indagamos
agora em que se trans forma este trabalho - em que tipo de energia
ele e convertido?
d dx Vi ~ d~x
o B t:xt:ix (a) (6)
fig. 130
-
238 TEO RIA DA ELASTICIDAOE
No caso de urn gas. a compressao adiabatica produz urn aumento
de tempe-ratura. Quando urna barra de 3'rO comum e adiabaticamente
comprimida, existe urn analogo, porem muito pequeno, aumento de
temperatura. A temperatura ori-ginal pode entao seT restaurada
retirando-se calof. Esla varia~o de temperatura a1tera a deforma~o,
mas somente em urna pequena fra~o da deformac;ao adia-batica. Se
iSIO nao ocorresse, existiria significativa diferenc;a entre 0
mOdulo de elasticidade "adiahatico e 0 isotermico. As diferenc;as
reais para os metais co-muns sao insignificantes. 1 Por exemplo, 0
mOdulo de Young adiabatico para 0 ferro excede 0 modulo isotermico
de somente 0,26 por eeolo. Aqui. serao des-prezadas estas
diferenc;as.2 0 trabalho realizado em urn elemento, e nele
arma-zenado, sera denominado energia de deforma~o . E suposto que 0
elemento permanece elastico e que nenhuma energia cinetica e
desenvolvida.
As mesmas considera~6es se aplicam quando 0 elemento tern todas
as seis componentes de tensao, U z , 0"1." U Z "ZII' '(liZ' "zz
nele atuando (Fig. 3). A conser-va~o de energia requer que 0
trabalho nao dependa da ordem na qual as for~as sao aplicadas, mas
somente de suas grandezas finais. De outra forma. poderia-mos
carregar segundo uma ordem e descarregar segundo oulra,
correspondendo a uma maior quantidade de trabalho. Entao. uma
quantidade liquida de trabalho seria obtida do elemento em urn
cicio completo.
D calculo do trabalho executado e mais simples se todas as fo~as
ou ten-s6es aumentam simultaneamente na me sma ra:z.ao. Entao. a
rela~o entre cada for~ e 0 deslocamento correspondente e ainda
linear, como na Figura I3
-
240 TEORIA DA ELAsnCIDADE
na qual
e= E.,+t,.+f~ E.
(1 + ,)(1
Esta forma mostra imediatamente que Vo e sempre positivo. E
facil mostrar que a derivada de VOl como dada por (132), em rela~ao
a
uma componente de deforma~ao quaJquer. forneee a correspondente
compo-Dente de tensao. Logo, tamando a derivada em relaca,o a Er e
usando a Eq . (11) , encontramos
avo ~
)..e + 2GEa = U" (g)
Para 0 caso de estado plano de tensao, no qual (J, = T z , = Til
l = 0, temos, a partir de (131 ).
(133)
ou, em termos das componentes de deforma~o ,
(1 34)
A energia de deforma~ao total V de urn corpo elastico deformado
e obtida a partir da energia de deforma~o por unidade de volume,
Vo, por integi-a~o . Es-crevendo dT para 0 elemento de volume,
temos
(135)
Esta equa~ao representa 0 trabalho total executado em OpoSi9aO
as for~as inte r-nas durante 0 carregamento. Se imaginannos 0 corpo
como constituido de urn numero muito grande de particulas
interconcctadas por molas, V represcntaria 0 trabalho executado em
distender ou comprimir as rnolas. Para 0 trabalho rcali-zado sobre
as particulas pel as for~as intemas, devemos trocar 0 sinal.
A quantidade de energia de deformacao armarenada por unidade de
volu me do male-rial e as vezes utilizada como base para a
determinacao do estado limite de ten sao no qua l OCOITe a ruptu ra
desle materiaL I Com 0 objetivo de conduzir esta tcoria em concord
fmcia com 0 fato de que materiais is6tropos podem suportar uma
enorme pressao hidrostatica scm escoamento, foi proposto dividir a
energia de deformar;:a,o em duas partes - uma devida a varia~o de
volume e outra dcvida a distorcao - e considerar somenle a segunda
parte na determina~o da re sistencia .!
Sabemos que a varia~o de volume e proporcional a soma das IreS
componentes nor-mais de tensao (Eq. (8; logo , se esta soma e I)ula
, a deforma~o e unicamente de distor-
IVirias teorias de resistincia sao discutidas em S. Timoshenko,
" Resistincia dos Materiais", vol. 2, AD Livro TCcnico S. A., 1969.
'M. T . Huber, Cvuopismo Techni1.M, Lw6v, 1904. Veja tambCm R. von
Mises, Gottingen Nachrich-Un, Marh .-Phys. Klasse, 1913, p. 582, e
F. Schleicher, Z. Anre"". Math. Mech ., vol. 5, p. 199, 1925.
Para
-
242 lEORIA OA ELASTICIDADE
(0 diametro, p:>r exemplo) da parte solicitada, as
componentes de deformar;ao sao da ordem de pIE. e os deslocamentos
re lativos na parte solicitada sao da ordem de pa lE. 0 traballlO
executado e da ordem de pa'Z(pa/E) ou p 1a 31E.
Por outro lado, as componentes de tensao da ordem de p implicam
em energia de deformacao da ordem de plfE IXlr unidade de volume. 0
trabalho executado e consequen-t~mente relativo somente a urn
volume da ordem de 0 ' , em concordancia com 0 estabele-cido no
principia de Saint-Ve.nant.
Considerou-se. ate aqui, que 0 corpo obedece a lei de Hooke e e
de forma madc;a . A primeira restricao pode ser dispensada,
considerando-se E, na assert iva acima . denotando meramente a
ordem de grandeza das inclina~s das curvas tensao-deformacao do
mate-ria1. Se 0 corp
-
--,
-
246 "!fORIA DA ELASnCIDADE
menlO de segunda ordem, positivo, desde que Vo em (134) seja
positivo para quaisquer valores de Ez, Ell' "I;r;I/'
Na energia potencial total representada pelos termos entre
colcbetes em (137'), sob as condi~Oes I e 2 formuladas acima. nao
existe incremento de se-gunda ordem proveniente de for~as de massa
e de cQnlomo. Seu incremento de primeira ordem se anula. vista que
os deslocamentos reais Bu, Sv, 8w na pertur-ba~o podem seT tornados
como deslocamentos virtuais. Sendo 0 incremento de segunda ordem
necessariamente positivo, temos estabi/idade no sentido ja
defi-nido. Sera vista que esta conclusao depende do uso da lei de
Hooke,l como tambem das condic;oes 1 e 2. Para relac;Oes
tensao-deformac;ao nao lineares, a s incrementos de ordem superior
conduziriam a lennos alem dos de segunda or-dem o
Considera90es gerais da energia potencial total do sistema Coram
aplicadas por A. A. Griffith no desenvolvirnento de sua teoria de
ruptura de rnateriais frageis .1 E sabido que os materiais
rnostrarn sernpre urna resistencia rnuito abaixo daquela que
poderia ser esperada a partir das for9as rnoleculares. Para urn
certo vidro. Griffith encontrou urna resistencia te6rica a tra-;ao
da ordern de 1,10 x 101 N/rn2 enquanto que os ensaios de tra9ao com
barms deste mate-rial deram somente O,.()18 x 101 N/m1 Ele mostrou
que esta discrepancia entre a teoria e os experimentos pode ser
explicada imaginando-se que, em tais mate-riais, como 0 vidro por
exemplo, existem fissuras e defeitos microscopicos que produzem
elevadas concentra~Oes de tensao e consequentemente propaga~o das
fissuras. Com fmalidade de calculo, Griffith tomou urna fissura na
forma de urn orificio eifptico rnuito estreito, cujo eixo maior era
perpendicular a dire-;ao da forc;a. de tra9ao. Consideremos urna
chapa fixada ao longo dos lados ab e cd, e submetida a urna
distribui-;ao unifonne de forc;a.s de tra9iio S. agindo ao longo
dos rnesrnos lados (Fig. 131). Se urn orificlo eJiptico
microsc6pico AB, de com-prirnento I , e feito na chapa (ab e cd
permanecendo fixos), a energia de deforma--;ao inicial , devida a
tensao S de tra9iio. sera reduzida. Esta redu9ao pode ser
~rl~ c d
Fig. 131
INa leona da estabilidad.e. 0 material pode obcdeccr a lei de
Hooke e mcsmo assim uma coluna ou cha~ sob ~ga de compressio que
exccda 0 valor critico de Euler MO lera ~Slabifidad, no presenle
scnt.ido. N.ao obslante, os problemas de estabiJidadc sao exclufdos
da leoria da elasticidadc /in..-ar, devido 1 hlp6tese de pcqucnas
defonna~Ocs. Por Citemplo, as condi~s de contomo do problema da
FIB. 37. para os bordos Yerticais, sio tomadas como fJ"z - Tn =- 0
em x _ ~ I. As cond~Ocs de con-lomo exatas seriam as de bordos
d..-[ormados liyfCS de carregamcnto normal e langcncial . 2J"rorlS.
Roy. Soc. (London), Sir. A . vol. 221 . pp. 163198, 1921; e Pro
-
r
248 TEORIA DA ELASTICIDADE
determinar as componentes de teosao. Podemos encontrar muitas
distribui~6es de tensOes diferentes satisfazendo as equ3\rOes de
eQuilibrio e as cond ilrOes de contomo, dando origem it questiio: 0
que distingue a verdadeira di stribuicy3.o de tens6es de todas as
demais distribuic;:Oes estaticamente possiveis?
Consideremos U;,;. etc, as verdadeiras componentes de tensao
corresponden-les a posicao de equilibrio , e wz etc, peQuenas
variac;:Oes destas componentes, lais que as novas componentes de
tensao u z + &r J'" etc, satisfac;:am as mesmas equ3C;:Oes de
equilibrio (123). Entao, subtraindo estas equ390es aplicadas as
componentes ,reais de teo sao. das mesmas aplicadas as novas
componentes. en-contramos que as varia90es nas componentes de
tensao sati sfazem a tres equa ~s do tipo
(a)
Correspondendo a esta varia~ao de componentes de tensao, haveni
urna certa varia~o nas for~s de superticie. Sejatn &t, 8f, e
lii as pequenas rnodifica'!;Oes destas for~as; logo, a partir das
condi~Oes de contomo (124) , encontramos tres equa~6es do tipo
(b)
Consideremos, agora, a varia
-
250 TORlA OA ELASTICIOAOE
Ik. Ocr. + t'li &T. + t. 00. + l'zv OTJ'lI + 'YV' &rll +
'Yo:< OT.,..) dT ~ f(u oX + v of + w oZ) dS (k)
o membro da eSQuerda desta equ~ao e 6V. como em (d). Entao a
vari~ao de energia de deforma~ao na forma (131) , correspondendo as
varia~Oes das compo-nentes de lensao Que preservam 0 equilibrio, e
dada por
ov ~ f(uoX +vof +woZ)dS (139)
As tensOes reais sao aquelas que sati sfazem a esta equac;ao.
Tais varia~6es sao matematicas e nao fisicas. Varia'!;Oes fisicas
de tensOes, provocadas por varia~6es de carregamento de ccnlorne,
sao sujcitas a Qutras reslri~Oes alem das de equillbrio expressas
por (a). Entrelanto , matematicamente. a integral em (136), com Vo
expresso em fun~ao de scis va riavcis - as se is componenles. de
tensao em (131 ) - sofre urna varia
-
252 TEO RIA OA ELASnCIDADE
Pode ser notado que para urn conlorna simplesmente conexo, tal
como (emos no presente caso, a distribui~o de tensOeS depende das
constaDtes elAsticas do material (ver pagina 133) e os c:ilculos
podem assim ser simplificados tamanda 0 coeficiente de Poisson"
nulo. En~o. considerando a fum;ao de tensao 4>. e substituindo
em (b)
". Tk' -- a:z;iJy , - 0 encontramos
1 If [( . ). ( . ). ( ". ).] V- 2E - + - +2 -- dzdy iJyl clz l
iJziJy (0) A expressao correta para a fun~ao de tensao e a que
satisfaz as condi/iOes (a) e lorna minima a energia de deforma~ao
(e).
Se aplicarmos cciIculo variacional para determinar 0 minima de
(e), encontraremos a Eq. (30) para a CunCio de tensao cPo Em vez
disso, adotemos 0 seguinte procedimento' que conduz a uma soluCao
aproximada do problema. Tomemos a fu~o de lensao na forma de uma
sene,
(d)
tal que as condi~Oes de contomo (a) sejam satisfeitas, e a ..
a!t aJ, . .. sejam constantes a serem detenninadas posterjonnente.
Substituindo esta sene na expressao (e), encontramos V como uma
fun~o de segundo grau em a" at, a" ... . Os vaJores destas
constantes podem enta~ ser calculados a partir das cond~6es.
aV _ 0
aV _ 0
' .. que seriio equac6es lineares em ah at, as ....
aV _ 0
(,)
Por uma escolha adequada das fu~6es 4>" 4>" podemos
geralmente obter uma solucao aproximada satisfat6ria utilizando
apenas poucos termos da sene (d). No nosso caso, as condic6es de
contomo (a) sao satisfeitas usando-se
que fomece
'., a' .po =---= 0 ax a" ( y.)
.,~ - af/I - 8 1 - bi
As demrus func6es 4>" 4>2 ... devem ser escolhidas trus
que as tens6es correspondentes a elas se anulem no contomo. Para
assegurat" este fato. tomemos a expressao (x~ - a' )' (y' _ b~)t
como um fator em todas estas funC6es ; a derivada segunda desta
expressao em relaCao a x se anula nos bordos y = :!: b, e a denvada
segunda em relacao a y se anula nos extremos x "":!: a; a derivada
segunda at/iJxay se anula em todos os qualro bordos da chapa.
Pode-se entao es~rever a funcao de lensao como
(f)
Somenle potencias pares de x e y sao tomadas na serie, porque a
distribuiCao de tens6es e simelrica ~m relacao aos eixos x e y.
Limitando nossa escolha apenas ao primeiro {ermo a,
'Metodo de Ritz. au de Rayleigh. Rilz. Veja W. Ritz. 1. R~jn~
.Ang~w. Math . vol. I3S. pp. 1-61, 1908; au W. Ritz, G~sammdu
W~rA:~ , Gauthier-Villan. Paris, pp. 192-250, 1911.
TEOREMAS GERAIS 253
entre parenteses. temos
Entao, a primeira das Eqs. (e) se loma
Para uma chapa quadrada (0 = b), encontramos
e as componentes de tensao se escrevem
" ( 3%') ( y.), -O,li02S 1 - Qi" 1 -;;. - 0 GS058 - 1 - - 1 -
-ry ( %.) ( ) , at 0.1 0.1
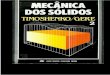
A distribuiCao de CTz na seCao transversal x = 0 e representada
pela curva IP (Fig. 133). Para uma maior aproximacao, tomaremos
agora tres termos na serie (/). Entao. as
Eqs. (e) para 0 cruculo das constantes al> at. as. se
escre!em
(64 256 ~ ~ ~) (~ ~ ~) (~ ~ ~ ~~) S
0'1 l' + 49 at + 7 a~ + O',a 77 + 49 0.1 + (I"~a 49 0.1 + 77 a'
= alb'
(64 64 b ~) ,(192 256 b' 192 b~) (64. bl 64 b')
0' 1 fi +"7 ' + ata 143 + TI (it + 7 ' + 0,0. 77 (it + n Qf
s
= (l 'b' (g)
(64 64 b') . (64 64 b')
0'1 "7 + 11 0' + o,a- ;; + n ' (192 h' 256 b' 192 b~) + a~a """7
Qi + 77 ~ + 143 a'
o 0 02 04 06 08 , 0
0,2 b 1/ J I
0,4b
0,6 b
0,8 b V W I
b I J[m
y Fig. 133
'A curva I representa a distribui~io panb61ica de tensQeS nas
extremidades da chapa.
-
254 TEORIA OA ELASTICIDAOE
Para a chapa quadrada, estas equa~Oes fomecem
S a! - al :::: 0.011744'
A distribui~ao de U z oa se~ao transversal x :::: 0 e dada
por
(0-"),, . 0 - S (1 - ~) - 0,1616S (I - 3~) + 0,0235 (1 - 12 ~ +
15~) Na Fig. 133 esta distribuic;ao de tensOeS e moslrada pela
curva lIP .
A medida que 0 comprimento da chapa e aumentado , esta
distribuic;ao de tensOes ao longo da sec;ao transversal x "" 0 se
toma cada vez mais uniforme. Se lomarmos, por exemplo. a = 2b,
encontraremos, a partir das Eqs. (8),
S 0.1 = 0,07983 alb'
S 0., -= 0,1250 a'b l
Logo, os correspondentes vaJores de U z ao longo da ~ao
transversa] x labela abaixo:
o serna as da
0,2 0,4 0,6 0,8 1,0
0"" - O,690S 0,6848 O,669S 0,6538 0.6498 0.6758
Esta distribuiya.o de tens6es e representada oa Fig. 133 pela
linha interrompida. Vemos que oeste caso 0 afastamenlo em relac;ao
a tensao media - %8 - e muito pequeno.
Para 0 tratamento de outras distribuiC;Oes simetricas de forc;as
ao longo das extremida-des x = ::ta, temos somente que trocar a
forma da func;ao
-
256 TEO RIA OA ELASTICIOAOE
Para tamar 0 problema tao simples quanta possivel. e suposto que
temos uma viga continua infmita com apoios equidistantes. Todos as
'laos sao igualmentc carregados com carps simetricas, em rela~o ao
seu meio . Urn dos apoios, como mostrado ria Fig. 135, e tornado
como origem das coordenadas, com 0 eixo x coincidente com 0 eixo da
viga. Devido a simetria. somente urn 'lao e uma metade do flange,
como, jX)r exemplo. as que correspondem ao sentido positivo de y,
precisam ser considerados. Admitese que a lar-gura do flange e
infmila, e que sua c'spessura h e muito pequena em compara~o com a
altura da viga. A fledo do flange como uma placa fina pade ser
desprezada, supondo-se que, durante a flexao da viga, for~as sao
transmitidas ao flange em seu plano medio, de tal forma que a sua
dislribui~ao de tens6es seja a de urn problema bidimensional; A
corres-pondente fun~o de tensao M t .... sao calculados a partir
das condi~6es de carregamento. Sendo N a for~ de compressao no
flange (Fig. 13Sc). 0 mo-menta fletor M pode ser dividido em duas
partes: M' - absorvida pela alma - eM" , igual a Nt', devida as
for~as longitudinais N na alma e no flange , Pelo equilibria
estatico, as lensOeS normais em qualquer se~ao transversal de viga
completa fomecem 0 conjugado M: logo,
11/' - 2he /0'" (f~d!l "" At onde - VIe I: O"zdy = /'.1" e a
parte do momento fletor absorvida pelo flange . A energia de
dcforma~ao da alma :.e escreve sob a forma
(21 Nldx (21 M'ldx (h) V I "' }o 2AE + 10 -m--
A partir da primeira das Eqs. (g) encontramos
/. . /. _ .'. I~O N _ -2h (f~d!l - -2h .dy - 2h. o oay y ... A
cxpres~o (d) para a fun~ao de lensao fomece
Logo .
N '" 2h \' TlR" n .. x L T4 .. COST ._1
( ) L n.. n .. z - .. - ! A .. cos T .y .-. _ I
r" \' nr n .. x !If' = M + 2hc)o a~ dy = .f!1 - Ne - At - 2he L
T A" cos T
ou, usando a notacao
podemos escrever
N G \'. nrz L .\"COST ._1
2h n;-- A .. = X ..
~ nrX ~ /tf' - M-e L X.COST - M.+ L
" ~ I "-1
._1
n
-
258 TEORIA OA ELASnCIOAOE
Substiluindo em (h), e notanda que
{21 1Iu 10 cos r [ dx '" l ('1.1 11,..% m,...:t
10 cos -1- 00. - 1- dz - 0 obtemos
v, - 2AIE ~ X I + ~ + _1_ \' ~ ~ EJ 2E/ ~ ~ l __ I
Adicionando eSla ullima exp",ssao a ene.-gia de deConna,.o Ie)
do flange, e ulilizando as nola~6es
enCOniramos a seguinle eXpressao para a ene rgia IOlal de
defonna~o
v ~ ':E I "IY,' + (I + ' )X.Y. + (I + .)X.'J + 2~E i x.' +
ftf~'1 11"') " _ I
. + 2:1 I w. - 'X.l' (I) ...
As quanlidades M" X. Y. sao detenninadas a pani, da condi,.o de
minimo da en,,-gia de defonna,.o (Q. Pode-se observ., que M , apa""
somente no lenno M ,'/IEI , e a partIr da condi~ao de minimo em
(I). segue que Mo = O.
Da condicao
av aY~ ... 0
se oblem que
2Y .. + (I + ,,)X~ "" 0
Y --~X ' 2' SubSlituindo esta expressao e Mo energia de
deforma~iio: o na Eq. (/), chegamos a segu inte express.io para
a
V =: ~ 3 + 2" _ ~1 2hb' -4
(m)
A partir da condicao de que X~ deve IOrnar V urn minimo , lemos
que av ax .. - 0
da qual enCOntrdmos
x. M.. 1 e 1 + (l/A~I) + (nrl/h/e l)f(3 + 2" (n)
Co~sid"emos um caso panicul." no qual 0 diagrnma de mOmenlO
fletor tem a forma cosenoldal, M = M I cos (Trxll). EnLio, da Eq.
(11),
TEOREMAS GERAIS 259
x, AI, 1 e I + (I/AeJ) + (:rJ / he'l)/(3 + 2,. ... ')/4J
e. considerando-se a Eq. (kJ. 0 momenlo devido a fo~ N do flange
se escrcve
(p)
A distribui~ao da lensao CT r ao loogo da largura do flange
po(fe agora Scr calculada a partir de Id), lomando_se os
coeficienles A. e D .. excelo A, e D" iguais a zero, e
colocando-se, segundo as nota~6cs adoladas,
I + B, ... --2- A,-
ESla diSl,ibui,iio de "r e mOSlColda pelas curvas na Fig. 1350.
Observa-se que a tensao "r diminui COm 0 aUmenlO da dislanc ia em
rela~o a alma.
Determinemos agora a largura 2A do flange (Fig. 13.5a), de uma
viga T, lal que uma dislribui~ao uniforme de lensOes sobre a secao
transversal do flan8e, moslrada pcla area hachurnda , forne~a 0
momento M " calculado acima pela Equacao (P). Esta sera, enlao, a
lar8urn efeliva do flange .
Chamando, como antenormente. M' e M" as por~6es do momento
flelor absorvidas pela alma e pclo flange. respcctivamente, CTt a
tensao no centr6ide C da alma, e CT~ a lensilo no plano medio do
flange, encontramos, a part ir da leoria elementar de flexio,
que
M', ~. -~' -I
(q) e. pc/as equa~6es da estat ica.
2>.hcr. + ~.A ... 0 -2>..hcr.e _ M"
As express6es para as duas referidas parcelas de momento flelor
, pelas Eqs. (q) e (r). sao
M' =< -1 (u. - a.) - - ; (1 + ~h) u. M" "" -2>..heu.
A relaeao entre M " e 0 momento fletor total e
M " 2Aht!#. AI ' + .1/" :: 2hh~a,""t" (I/~)/l + (2M/A)ja,
(.)
Para fazer eSla re/acao igua/ a ratio M"IM Obtida da soluCao
exata (p). precisamos tomar
A partir disto, obtemos a se8uinle expressao para a largura
efeliva 2>..:
2>.. _ 41 ,..(3 + 2" "I)
Cons idcrando. por exemp/o. v =: 0.3, encontrnmos
2>.. ... 0.181(21)
i.e., para 0 diagrama de momenlos fleto"s considerado, a
la.-gura efetiva do flange e apm-ximadamente 18% do vao.
-
,..
260 TEO RIA DA ELASTICIDADE
Flg. 136
No caso de urna viga continua com fo~s concentradas iguais nos
pontos medias dos vaos, 0 diagrama de momentos fletares sera 0
mostrado na Fig. 136. Representando esle diagrama por uma sene de
Fourier e usando 0 metoda geral acima desenvolvido. eneon-tramas
que a largura efetiva nos apoios e
i.e., urn pouco menos que no caso do diagrama de momentos de
forma co-senoidal. , Urn problema de mesma natureza geraJ que 0
discutido no Art. 94 ocorre em estrutu-
ras de paredes floas enrijecldas. Consideremos urna viga-caixao
(Fig. 137) (armada a partir de dais perfis V, ABFE e DCHG, Iigados
por duas chapas ABeD e EFGH. por meio de rebites ou solda ao longo
de seus bordos. Se a viga e engastada em sua eXlremidade es-querda.
e solicitada como urna viga em balan-;o pelas fo~s P aplicadas aos
perfis oa Qulra extremidadc, a leona clemcnt3r de Hexao fomeceni
uma tensio de tmca,o na chapa ABCD unifonne ao longo de qualquer
selrao paraJeJa aBC. Na verdade. entretanto. a chapa ad quire suas
tensOes trativas a partir de tens6es cisalhantes em seus bordos,
transmitidas pelos perlis U, como indicado na Fig. 137, e a
distribuicao de tensiles de traeao ao longo da largura nao sera
uniforme, mas, como mostrado na figura , maior nos bordos que no
meio . Este afastamenlo da distribuieao uniforme suposta pela
leoria elemenlar e conhecido como arTaste pOT tensiio eisa/hante,
uma vez que ele envolve uma defonnalrao por cisa-Ihamenlo nas
chapas. Este problema foi analisado por meio da energia de
deformaeao e OUlros melodos. com 0 auxilio de hip6teses
simplificadoras. 1
Fig. 137
PROBLEMAS
1. Por qual razao devcmos esperar que 0 mOdulo de Young
isotennico de qualquer metal comum seja m~nOT que 0 mOdulo
adiabatico?
2. Encontre uma expressao em tennos de (T ... , U " , T ... ~
para a energia de defonna~ao V por
IE. Rcissner. Quan. Appi. Math .. vol. 4, p. 268. 1946; J .
HadjiArgyris, Brit . AeTon. Res. Council Repts. Mem. 2{l38. 1944; J
. HadjiArgyris e H. L. Cox. Brit. A('ron. Res. Council Reprs. Mem.
1969. 1944. Referincias para investigaes mais reccntes sao dadas
nc:ste artigo. V~ tambem 0 0. 1. p. 255.
TEOREMAS GERAIS 261
unidade de espessura em urn cilindro ou prisma em estado plano
de derorma~ao (E.::: 0) .
3. Escre va a integral para a energia de deforma~ao V em termos
de coordenadas polares e componenles de ten sao para 0 caso de
estado plano de tensOes Lef. Eq. (b), Art. 93J.
M
A distribuiCao de tcnsOes fomecida pelas Eqs. (79) resolve 0
problema. indicado oa Fig . 138, de urn anel solicitado no bordo
interno por uma dislribuiCao uniforme de forr;as cisalhantts,
formando urn conjugado M, e equil ibrada por outro conj ugado
apli-cado no bordo ex-lema. Calcule a energia de deformacao oeste
anel. e igualando a energia calculada ao trabalho executado durante
0 carregamento. deduza a rotaeao do bordo exlemo, quando 0 anel
esta fixado no bordo interno (eL Prob. 3, pag. 141),
Q b
Fig. 138
4. Calcule a energia de dcformalraO por unidade de comprimento
de urn cilindro a < r < b subme tido a uma pressao intema PI'
As extremidades do cilindro est.ao livres T: = 0).
S. Interprete a equa~o
e fomelra a just ificali va da exislencia dos fatores 1/2 no
membro da direita. 6. Mostre a par1ir da Eq (131) que. se lemos urn
caso de estado plano de tensao e urn
corresponden le casu de estado plano de defonnayao (Ez = 0). nos
quai s as tensOe s (T r. (Til' Trll sao as mesmas. a energia de
defonnacao c maior (por unidade de espessura) para 0 est ado plano
de tcn~o.
7. N .. Fig. 139. (a) representa uma lamina sob compress:l0. na
qual 0 estado de ten
-
-
262 Tl'ORIA DA ELASnCIDADE
10. "A Equa~ao (142) e valida Quando cW, ax, ar resull am de
quaisqucr pcquenas modifica~6es nas componentes de lensao que 5ali
sfacam as condi!yOes de equilibria fa) no Art. 93, quer estas mod
ifica~6es violem as condies de compatibilidade (An. 16) ou nao. No
ult imo caso, as varia~s nas tens6es sao aquelas que realmente
ocorrem quando as for~as de contomo sao modificadas de oX, ai'''.
Esta afirmativa e correta?
11. A Equa~o (g) na p. 240 se refe re a urn material que obedece
a lei de Hooke. Suponha que 0 material nao obed~a a esta lei. mas
tenha a energia de deformacao Vo expressa por uma funiY3.o das
componentes de deformacao, de forma mais elaborada que em (132).
Mostre que as relaes tensao-deformacao (nao lineares) sao ainda
dadas por relaes do t ipo
(considere urn incremento de uma com"Pone nte de deforma95o,
permanecendo todas as demais inalteradas).
96 Unicidade da solu~ao
Consideremos agora se nossas equa~6es padem ter mais de uma
solU9ao para detenninadas for~s de superfic ie e de massa.
Suponhamos que U / . . , 7" ~/ representem uma solU9aO paras as
cargas X .. ,X .... e a/' . 7";c/ ' .... seja uma segunda soluCao
para as mesmas cargasX ... ,X . ... Entao, para a primeira soluC:io
temos as equ390es
OUz' + 07"z/ + OTz.' + X = 0 ax ay az
e tambem as condiem L. N. G. Filon. Brit ...... ssoc. Ad.ollc.
Sci. Rep! .. 1921. p. 305. e V. VolterTa, Sur I'equilibre des corps
elastiques multiplement con nexes. Ann. Ecole Norm., Paris., ser.
3, vol. 24. pp. 401-.517, 1907. Qutras rcferincias a tensOeS
inieiais sao dadas no trabalho de P. Nemenyi. Z. A.ngew. Math .
Mech .. vol. II, p . .59, 1931.
-
264 TIORIA DA ELAsnCIDADE
~o ou compressao ax ial inicial - sem 0 conhecimento do valo r
desta teo sao inicial.
97 Teorema da reciprocidade
Consideremos agora urn dado corpo elast ica sujeito a urn
conjunto de delenn i nadas fort;as de superficie X'. Y', 2: e fo~as
de massa X'. Y', Z' e suponhamos que sejam con hecidos os
deslocamentos. defonna90es e tensOes. designados respectivamente
por u' E/. Yn/, (J'z', 'TJ:JI'. etc. lndependentemente,
considere-mos urn segundo conjunlo de foq;.as X", etc, X", etc, e
indiquernos os resulta-dos para este segundo estado de carregamento
como lI", E/'. 'Y .ell", U r", T n/' . etc.
Ternos entao duas sol u~6es d ist intas para os dois casos de
carregamento, mas devido ao fatD de se tratar do mesmo corpo
elastico, existe uma relacao ent re estes do is casos. Vamos
estabelecer aqui urn aspecto desta re la~ao - 0 teorema da
reciprocidade. I
A partir das duas solu~Oes podemos fonnar, puramente por
opera~6es rna tematicas, a quant idade 'T" definida par
'T" = f(X'u" + f'v" + Z'w") dS + f(X'u" + Y'v" + Z'w") dT
(a)
Nesta ultima equa~o. permutando os sinais que indicam os casos
de carrega mento, temos a forma
"T' = J(X",,' + . . . + .. oj dS + J(X"u' + ... +. oj dT (b)
o teorema estabelece que
'T" = "T' (c)
Para provalo, necessitamos novamente do teorema da divergencia
(138). Consi. deremos em (a) 0 termo
f X'u" dS (d)
que e 0 mesmo que
f(luz' + mT.:r/ + nTn')u" dS (e) Podemos fazer em (138)
u = u"v/ lV = U"TU' (f)
p~ra tomar 0 membro da di reita desta Equa~o ( 138) iguaJ Ii
integral de superfi. cle(e).
'E. Belli. II tlUOI'O Ciml'flto. sir. 2. vols. 7 e 8. 1872.
Exislem leoremas do mesmo tipo em oUlros assu~tos. - ver Rayleigh.
Proc. London Moth. Soc .. vol. 4, 1873. e sua obra Thl'ory of
Sound. Dover Pubhcauons, New Yorit; e H. Lamb. H ighl'r
Ml'chQflics. Cambridge University Press Inc. New York. 1920. '
,
TIOREMAS GERAIS 265
Entao. procedendo de Conna analoga a if) e (g) do Art 93, e
usando as Ires equa~Oes de equ ilibria do tipo
d(J/ + iJTr/ + i1T%,' + X' = 0 ax ay dz (g)
obtemos. em lugar de (J..) do Art. 93,
HE/'v,.' + ... + .. + 'Yz.,/'Tz./ + ... + ... ) dT = J(X'u" +
V'v" + Z'w") dS + J(X'u" + Y'v" + Z'w") dT (h)
mostrando que (a) pade ser convert ida em
'Til = f(f/'V/ + .. +.. + 'YrIJ"TrIJ' +. . + ... ) dT (t)
Podemos expressar (i) inteiramente em lermos das componentes de
tensao, ou unicamente em termos das cosnponentes de defonna~o .
Escolhendo estas lilti mas, e conveniente utilizar a lei de Hooke
na forma de (11) e (6). Logo, para 0 integrando em (i),
enconlramos
f 2"V/ + ... + ... + 'Y2OI"Tzw' + .' + ... = >..t't" +
2G(f2'f/' + f,/f,/' + E:to")
+ G(-y.:-y~" + -y.:-y,," + -y .. 'y./') (j) onde
o resultado (j) e evidentemente inalterado se os sinais que
indicam os casos de carregamento sao permlltados. Mas esta troca em
(i) e sufic iente para expressar itT' em lugar de 'T". Logo 0
teorema (e) esta demonstrado .
o membro da direita de (0) e frequentemente denominado como 0
trabalho das fo r9
-
266 TEORIA OA ELASTICIOAOE
8) = J.(Qh/AE), oode A e a area da se~o transversal da barra.
Logo, 0 teorema da reciprocidade fomeee a eQua~ao
lal Q=J hl 8 (b)
--l _
Fig . 140
Q!
eo alongamento desta barra. produzida pelas for~as P da Figura
14fu, se es-creve
e e independenle da forma da se~ao transversal. Como segundo
exemp!o, ca lcu lemos a redu~ao !1 no volume de urn corpo
elastica produzida por duas for~as P, iguais e oposlas, como
indicado na Fig. 141a. Tomemos para 0 segundo estado, 0 mesmo corpo
elastica submetido a a~o da pressao p uniformemente distribuida.
Neste ultimo caso, tcremos em cada ponto do corpo urna compressao
uniforme em todas as dire~Oes de valor (I - 2v)PIE [ver Eq. (8)], e
a distancia I entre os pontcs de aplicacao A e B diminuira da
quantidade (I - 21J)pI/E. 0 (corema da reciproc idade apJicado aos
dois est ados I da Fig. 141 fornecera entao
P ( I - 2,)pl E ~ tl.p
e a redu~ao no volume do corpo e conseqiientemente
fa}
Fig. 141 (bl
PI(I - 2.) E
'Para oUlras aplica~0e5 desle lipo veja Love, op. cit ., pp.
174-176.
TEOREMAS GERAIS 267
98 CarMer aproximado das solUl;Oes do estado plano de tensao
Foi ressaJtado , na pagina 29. que 0 conjunlo de equa\;Oes
eSlabeJecido como sufic iente para 0 estado plano de tensiio, sob
as hip6teses U z = Tr~ "" Tn = 0 e U r , U II ' Tn indepen-dentes
de z, nao garantem 0 alendimento a tOOas as condi~Oes de
compatibiJidade. Estas hip6teses implicam em que Er , E", Z' Yrll
sejam independentes de z. e que 'Y ..... 'Yilt scjam nulas. A
primcira das condi~Oes de compatibil idade (125) foi incluida na
teoria do estado plano de tensao como a Eq. (21), E facilmente
veriticado que as outras cinco condi~Oes sao satisfeitas somente se
Ez for uma fu~o linear dex e y, 0 que e uma exc~ao e nao a regra
nas so lu~Oes de estado plano de tensao obtidas nos Caps . 3 a 6.
Evidentemente estas solu~Oes nao podem ser exatas, mas vercmo ..
agora que elas sao boas aproxima~Oes para 0 caso de chapas finas
.
Busquemos so l u~6es cxata .. p
-
268 TEORIA DA ELAsnCIDADE
oode 8 0 e uma fun~o de x e y satisf~ndo a Eq. (d). Usandose (a)
e a primeira das Equa~Oes (b). a primeira de (126) se lorna
(f)
Entrelanto,
onde a Eq, (e) foi utilizada na ult ima etapa. Considerando (d),
podemos tambem substituir a!f301ax2 em if) por - a!f301iJyl, Logo,
(f) se lorna
ou a' (a'. ) all' azl+l+.e, =0 (,) Esta equa~ao pode ser
utilizada em lugar da prime ira das Equa~6es (126) . De forma
simi-lar, a segunda e a ultima podem ser substituidas por
a' (a'. ) a.:z;1 az' + 1 + " e. - 0 a' (a'. ) azay al:'+l+.e~
=0
Estas, juntamente com (g), mostram que tOOas as tres derivadas
segundas em relalriio a x e y da funcao (de x, y e z) entre
parinteses, se anu lam. Entao , esta funcao deve ser linear em x e
y. e podemos escrever
at" " ' all + 1 + ,ea .., (I: + bx + ell (h)
onde a, bee sao fun~6es arbitrarias de l. lntegrando esta equa~o
duas vezes em re la~ao a l , encontramos
1 4> .. - 2 ~ Oalt + A + Bx + Cy + 4>.% + 4>0
onde A, B. C sao fun~Oes de l obtidas por integra~ao repetida de
tI. b. c. e ch 4>0 sao fun~Oes de x e y, ainda arbitrarias.
Se calcularmos (Tr, (T" Trw a partir de (i) por meio das formu
las (h). os termos
A+8z+Cy
nao afetam os resullados. Podemos entao adotar A. B, e C iglJais
a zero, 0 que corres-ponde a tomar 1I, bee como nulas em (h).
Se nos restringirmos a problemas nos quais a dislribuicao de
tcnslXS e simetrica em rela~ao ao plano medio da c hapa. z = O. 0
tcrmo I},.:, dcve tambern se anu lar. como tam-bem k na Eq.
(a).
Logo, a Eq , (i) se reduz a
4> = 4>0 - ~ - "- Go" 21 +" (j)
Nao obstante.
es restantes de (126) sao satisfeitas pela consideracao da Eq.
(a) e da nulidade de uz ...... 'T ....
Podemos agora obler uma dislribuir;.ao de tens6es escolhendo uma
fun~ao CPo de x e y Que satjsfa~a a Eq. (/), encontrando e. a
partir da Eq. (k) e cp a partir de lj). As tensOes sao enlia
encontradas pelas fonnulas (bJ; cada uma delas sera constituida de
duas partes: a primeira, obtida a partir de ,po na Eq. OJ. e a
segunda, do terma -(1/2)v6oZ1/(1 + II), Tendo em vista a Eq. (/),
esla primeira parte corresponde exatamente as componentesdO estade
plano de tensao determinadas nos Caps. 3 a 6. A segunda parte.
senda proporcional a 41, pede ser feita laO pequcna quanto se
queira, comparando-se com a primeira, limitando-nos a chapas
suficientemente finas. Logo, concluimos que as solu~Oes dos Caps. 3
a 6, que nao satisfazem a tooas as condi~Oes de compatibilidade ,
sao, apesar disto. boas aproxima~Oes para chapas delgadas.
As solu~Oes "exatas", representadas por fun~6es de tensao da
formalj). exigirao que as tens6es no contomo do corpo, como em seu
interior, tenham uma varia~ao parabOlica ao longo da espessura.
Entretanto, qualquer modificalriio desta distribuicao, tal que nao
altere a intensidade da fon;a por unidade de comprimento da curva
do contorno, somenle alterara as tens6es na vizinhanca imediata
deste, considerando-se 0 principio de 5aint-Venant (pagina 38). A
solucao do lipo considerado acima representara sempre as tens6es
reais, e as componentes cr., T.:w Tw~ serno de fato despreziveis,
excelO proximo aos bor-dos, '
PROBLEMAS
1. Mostre que
*~ _ k(.:z;1 + yl) 'Y .. - k'xy:
onde k, k' sao constantes pequenas, mio e urn possivel estado de
deforma~ao, 2. Urn solido e aquecido de modo nao uniforme a
temperatura T. funcao de x, y e l.
Supondo-se que cada elemento tern uma expansao h!rmica
irrestrita, as componentes de deforma~o serao
onde Q e 0 coeficiente de expansao tcrmica constante. Prove que
islo somente pode ocorrer quando T e uma fun~ao linear de x.)' e l.
(As
lensOes e consequentes deforma~Oes que aparecem quando T nao e
linear sao disc:ulidas no Cap. 13,)
3. Urn disco ou cilindro da forma mostrada na Figura 141a e
comprimido por for~as P em C eD, ao longo de CD. causando
alongamento de AB. E. entao, comprimido por for~as P no longo de AB
(Fig. 141a) provocando alongamento de CD. Mostre que estes
alon-gamcntos s.io iguais.
4. Na solu~o gera! do Artigo 88, que escolha de funcoes
-
,..
-,
Problemas Elementares de Elasticidade Tridimensional
99 I Tensao uniforme
Ao se examinar as equa~6es de equilibrio (123) e as condi~ees de
contomo (124), ficou estabelecido que a solu~ao verdadeira de urn
problema deve satisfazer nao somente as Eqs. (123) e (124) como
tambem as condi~6es de compatibilidade (ver Art . 85). Estas
ultimas condi~6es apresentam, se as for~as de massa sao ausentes ou
constantes. apenas derivadas segundas das componentes de tensao.
Portanto. se colocamos as componentes de ten sao como constantes ou
como fun~6es lineares das coordenadas, as Eqs. (123) e as condi~6es
(124) podem ser atendidas, as condi~6es de compatibilidade sao
idcnticame nlc satisfci tas, c estas tensOts representam, entao, a
solu~ao correta do problema.
Como urn exemplo bastante simples, podemos considerar uma barra
prisma-tica sujeita a tra~ao na dire~ao axial (Fig. 9.142).
Desprezando-se as fo~as de massa. as equa~6es de equilibrio sao
satisfeitas por
0"" = const (a)
E evidente que as condic;6es de conlomo (124) para a superficie
lateral da barra, sendo esla livre da ac;iio de for~as extemas, sao
sat isfeitas, pois, com exc~ao de CT .... todas as componentes de
(enSaO sao nulas. As condir;6es de conlomo para as sec;6es das
extremidades se reduzem a
(b)
ou seja. se as tensOts de trac;ao nas faces exlremas da balTa
forem uniforme-mente di sUibuidas, teremos igualmente uma
distribuiC;ao uniforme de tens6es normais sobre qualquer set;ao
intermedima. Neste caso, a solut;ao (a) atende as Eqs. (123) e
(124) e constitui a solu~ao exata do problema porque as condic;6es
de compatibilidade (126) tambem sao identicamente satisfeitas.
PROBLEMAS ELEMENTARES OE ELASTlClOAOE TRIOIMENSIONAL 271
Fig. 9.142
A solu~ao (a) deixa de seT correta se as tens6es de trar;ao
aplicadas nas extremidades naD sao uniformemente disLribuidas, pais
assim nao satisfaz as condi
-
-
272 TEORIA DA ELASTICIOADE
provocada pelo peso da por~ao da barn situada abaixo da se~ao
considerada. Facilmente se comprova que, para a superficie lateral
sabre a qual nao
3tuam fo~as externas. as condi~oes de conloma (124) sao
verificadas,' As coo-di~Oes nas extremidades da p~a fomecem tens6es
nulas para a s~o inferior e, para a superior, tensOes de tr~ao
uniformemente distribuidas de valor U;r = ~l. oode J e 0
comprimento da barra.
As equa~Oes de compatibilidade (126) tambem sao satisfeitas pela
solu~ao (b); portanto, ela representa a solucao correta do problema
para urna distribui~ao uniforme de for~as no topa da barra. Estes
resultados coincidem com a solw;ao usualmente dada nos livros
elementares de resistencia dos materiais.
Consideremos agora as deslocamentos (ver Art. 86), Aplicando a
Lei de Hooke, atraves das 'Eqs, (3) e (6), se chega a
aw u. pgz ~' =az=E=E
(e)
au iJv pgz Eo: = E~ = ax = iJy = -/IE (d)
au av au aw au iJw ~~~~~~b+b~h+b~~+b~O (e)
Os deslocamentos u, v e w podem agora seT caJculados por
integra~ao das Eqs. (e), (d) e (e), A integr"l'ao da Eq. (e)
romece
PIIc' w=2E+ wo (f)
onde Wo e uma fun9ao de x e y a ser determinada adiante.
Substituindo if) na segunda e terceira das Eqs. (e), temos
das quais
oWa + au = 0 ax iJz
aw, u =- z - +u, ax
awo+~=o oy OZ
aw, v = -z- + L'o ay (g)
e Uo e Vo sao fun~6es so mente de x e y. Das expressOes (g).
substituidas nas Eqs. (d) , resulta
_ z a'wo + auo = piJZ ax' ax -"if (il)
Lembrando que Uo e Vo nao dependem da variavel z. as Eqs. (h)
sao satisfeitas somente se
auo = avo = 0 ax ay (k)
Substituindo as expressOes '(p) de u e v na primeira das Eqs.
(e), encontramos
PROBLEMAS ELEMEHTARES DE ELASTICIDADE TRIDIMENSIONAL 213
-2% (PWa + dUo + dVo = 0 iJx ay iJy ax
e. desde que 110 e !Jo naQ dependem de z. devemos leT
(I)
A partir das Eqs. (k) e (I), as expressOes gerais das fun~6es
110, ~. Wo podem seT formuladas. E f;leil mostrar que todas estas
equ~6es sao satisfeitas para os seguintes valores:
U o = oy + OL VO = - ox + "1'1
'PII U', ~ 2E (x' + y') + ax + py + ~
onde a, f3. "Y. a, 81> ')'1 sao constantes arbitnirias.
Agora, com as Eqs. (f) e (g), compomos as expressOes gerais dos
deslocamentos
IIpgXZ U ~ - ---r- - ac + Iy + I,
IIpgyz V = - ---g- - fJz - ox + 'Yl (m)
pgZ2 "'PI} w ~ 2E + 2E (x' + y') + ax + py + ~
As seis constantes arbitnirias devem ser deterrninadas
considerando-se as condi-~Oes de sustenta~ao da barra, as quais
devem ser estabelecidas de modo a impe-dir qualquer movimento de
corpo rigido da mesma. A fim de evitar um movi-mento de transla
-
-
274 TEORIA OA ELAsnCIDAOE
e as express6es finais dos deslocamentos sao
v-
. pgz! lip(} pgl'-w - 2E + 2E (x' + y') - 2E
Pode-se verificar que as pontos do eixo z tern somente
deslocamentos verticais dados por
w = - pg (P - Z2) 2E
Como consequencia da cont~ao lateral, as demais pontos da barra
expenmen-tarao, aIem de deslocamentos verticais . outros
horizontais , de tal modo que Ii-nhas paraJeIas ao eixo z antes da
deforma~ao se tarnam inclinadas em rela~ao a esse eixo depois da
mesma, e a barra adquire a forma final mostrada na Fig. 9.143 pelas
linhas tracejadas . S~oes transversais planas e perpendiculares ao
eixo, depois da deforma~ao. se apresentam curvas como a superficie
de urn pa-rabol6ide. Os pontos da s~ao l. = c, por exemplo. depois
da deform~ao estarao sabre a superficie
Esta superficie e perpendicular a todas as fibras longitudinais
da barra, sendo estas incLinadas em rela~ao ao eixo z por efeilo da
deforma~ao e, portanlO, as distorcoes 'YZII e 'YZIl serao
nuJas.
101 I Tor~iio de eixos cilindricos de s~iio circular
constante
Da leoria elementar da (oreao de p~as ciHndricas de s~ilo
circular. tem-se que a tensilo cisalhante T , em qualquer ponto da
se~ao (Fig. 9.144), e perpendicular ao raio r e proporcional a
distancia r e ao angulo de torr;ao 6 por unidade de comprimento do
ci lindro:
T - G8r (a)
oode G e 0 mOdulo de cisalhamento. Decompondo estas tensoes nas
dir~6es paraleJas aos eixos x e y. obtemos
TV' = GBr~ = G8x r
y ' -G8r- - -G6y
r
(b)
PROBLEMAS ElEMENTARES DE ELAsnCIOAOE TRIDIMENSIONAL 275
Fig. 9. 144
A teoria elementar tambem admi te que
Podemos demonstrar que , sob certas condi~Oes, esta solur;ao
elementar e exata. Para tanto, desde que as componentes de tensao
sao todas au fu~Oes lineares das coordenadas ou zero, as equar;6es
de compatibilidade (126) sao sa-tisfeitas, sendo apenas necess3.rio
considerar as equa~6es de equilibrio (123) e as condir;6es de
contorno (124). Levando as express6es acima das componentes de
tensilo nas Eqs. (123), encontramos que estas equar;6es sao
satisfeitas quando nao atuam foreas de massa. A superficie lateral
do ci lindro e isenta da ar;ao de forr;as; assim , as condir;6es de
contorno (124) , lembrando-se que em uma super-flcie ci lindrica
cos (Nz) = n = 0, se reduzem a
o - T .. cos (Nx) + T._ cos (Ny)
Para 0 caso de cilindro circular temos tambem
cos (Nx) - ~ r
cos (Ny) = Y. T
( ('I
(dJ
Substituindo estas e as expressoes (b) das componentes de tensao
na Eq. (e), fica claro que esta equar;ao e atendida. E tamoom
evidente que. para se~oes que nao sejam circulares, nas quais as
Eqs. (d) nao sao validas, as componentes (b) nao satisfazem as
condi~Oes de conlorno (e), e portanto a solu~ao (a) nao pode ser
aplicada. Estes problemas moos complicados de toreao sedio
examinados posteriormente (ver Cap. 10).
Considerando agora as condir;6es de conlomo nas extremidades do
eixo ci-ifndrico, vemos que as forr;as cisalhantes de superfici e
devem ser distribuldas exatamente como as tensoes TZIl e TlI~ 0 sao
em qualquer se~ao intermediaria. Somente neste caso, a di
stribuir;ao de tens6es definida peias Eqs. (b) constitui-rao uma
soJur;ao exata do problema. Entretanto, sua aplica~ao pratica pode
se estender a oulros casos porque, levando em conta 0 principio de
SOOnt- Venant.
-
276 TEO RIA OA ELASnCIOAOE
conclui-se que a uma suficiente distancia dos extremos de uma
barra compnda sujeita a tor~ao . as tens6es dependem somente da
intensidade do momento de to~ao M f e sao praticamente
independentes da maneira pela qual as foI).ClS sao distribufdas nas
extremidades.
Os deslocamentos, oeste casa, podem ser obtidos de maneira
semelhante ao item anterior. Admitindo a mesma condiC3.o de
vincula'rao no ponto A, encoo-tramas
u = -8yz v = 8xz w~O
Este resultado significa que a hip6tese das s~Oes permanecerem
planas e as raios continuarem retos , usualmente feita nas dedu~6es
elernentares da teona da tor~ao, e correta.
102 Flexao pura de barras prismaticas
Considerernos uma barra pnsmatica fletida pela a~o de dois
conjugados M, iguais e de sen tid os opostos, que atuam em urn de
seus pianos principais (Fig. 9.J45). Tomando como origem das
coordenadas 0 centr6ide da s~ao transversal e 0 plano xz
coincidente com 0 plano principal da flexao, a leoria elementar da
flexao nos da para as componentes de tensao os valores
Ex (f~ = "If (a)
oode Reo raio de curvatura da barra defonnada pela flexao.
Substituindo as express6es (a) das componentes de tensao nas
equa~6es de equilibrio (123), estas equac;6es serao satisfeitas
sempre que nao existirem for~as de massa. As condi~6es de contorno
(124), para as superficies laterais da barra que se encon-tram
livres de esforc;os, sao igualmenle obedecidas. As mesmas
condic;6es de contorno (124), considerando-se agora as s~6es das
extremidades , requerem que as forc;as de superucie sejam dispostas
da mesma forma que as tens6es CTz . Somente sob esta condic;ao as
tensoes (a) representam a soluc;ao exata do pro-blema. 0 momento
fletor M e dado pela equa~ao
! ! Ex'dA EI, M ~ x dA ~ - R- ~ R na qual/II e 0 momento de
inercia da se~ao da viga com relac;ao ao eixo neutro
0p:icid -IS: x
(a)
Fig. 9.145
y [;-J~a -~
1-2h-" I x
(hi
PROBLEMAS ELEMENTARES DE ELASnCIDADE TRIDIMENSIONAL 277
paraJeJo ao eixo y. Desta equacao resulta
que e uma conhecida formula da leoria elementar da flexao .
Consideremos agora as deslocamentos para 0 caso da tlexao purn. A
Lei de
Hooke e as Eqs. (2), levadas na 501U93.0 (a), nos fornecem
aw x t'=iJz=R
au x au x t'=iJx=-v R tV=ay=-vR,
~ + ~v = au + aw = ~ + aw = 0 ay ax az ax az ay
(b)
(c)
(d)
Levando-se em conta as condi~6es de fixa~ao da barra, os
deslocamentos podem ser obtidos, atraves destas equa~6es
diferenciais. pelo mesmo metoda usado no Art. 100.
Da Eq. (b), (cmos dlretamente
w = ~ + Wa R
na qual W Q e uma fun
-
278 TEORIA OA ElASn CIOAOE
Agora, colocando (e) e (g) na primeira das Eqs. (
-
a
280 TEORIA OA ElASnCtOAOE
y
-IH---?lR--'--H-z
fa) (6)
Fla. 9.146
vidro e a superucie curva da viga. Esta espessura variavel pade
sec med.ida por processos 6pticos. Urn feixe de luz monocromatico,
tal como a radi~o amarela do s6dio t dirigido perpendicularmente a
placa de vidro se refletici parciaimente pela placa e parcialmente
pela superficie da viga. Produzir-se-a uma interferencia . entre os
dois raios refletidos t em pontos onde a espessura da camada de ar
de-termina uma diferen~a entre os caminhos 6pticos dos raios igual
a urn numero impar de semicomprimentos da onda luminosa. A
fotografia mostrada na Fig. 9.146b, representando as curvas de
nivel hiperb6licas. foi obtida por este pro-cesso.
103 I Flexao pur. de placas
Os resultados obtidos no item anterior podem ser aplieados ao se
analisar a flexao de piacas possuindo espessura uniforme. Se as
tensOes U'z = El.lR forem distribuidas sobre os bordos paralelos ao
eixo y (Fig. 9.147), a superficie da placa se transformara ' em uma
superftcie antici:istica, cuja curvatura em pianos ' paralelos a xz
e I/R e na dir~o perpendicular e - viR. Se h for a espessura da
placa. M 1 0 momento Oetor por unidade de comprimento sobre os
bordos parale-
z
Fl 9.147
I Admitc-se que as Oechas .10 pcquenas quando comparadas com a
espessura cia placa.
PROBLEMAS ElEMEHTARES OE ElASnCtDADE TRIDIMENSIONAL
los ao eixo y, e
'" I" = 12
281
o momento de inercia por unidade de comprimento, a relacao entre
Ml e R, de acoedo com 0 que roi deduzido anteriormente, sera
1 M, 12M, R = EI, = Eh' (a)
Quando temos momentos fletores atuando em duas d.ire~6es
perpendicula-res (Fig. 9.148), as curvaturas da superficie
defletida podem sec obtidas por su-perposicao. Sejam 1/R. e l/R, as
curvaturas da supemcie em pianos paralelos aos pianos coordenados
zx e zy. respectivamente; e sejam M I eM, os momentos netares por
unidade de comprimento sabre os hordos paraJelos aos eixos y ex.
respectivamente. Entia, aplicando-se a Eq. (a) e 0 principio de
superposicao, resulta
1 12 R, = Eh' (lIf, - ,M,)
1 1 R, = Eh' (M, - ,M,) (b)
Os momentos sao considerados positivos se produzem uma supemcie
fletida da placa convexa para baixo. Resolvendo 0 sistema de Eqs.
(b) para M t eM". temos
M, = Eh' (1 +, 1 \) 12(1 - ,') R, fl,
Eh' (1 + 1) M,= - '-R 12(1 - ,') R, , Para pequenas flechas
podemos usar as aproxima!;Oes
y
z
Flg. 9.148
a'w Rl = - ax'
x
(c)
document2010-09-10-184919document2010-09-10-185002document2010-09-10-185132document2010-09-10-185217document2010-09-10-185253document2010-09-10-185427document2010-09-10-185504document2010-09-10-185558document2010-09-10-185636