Embed Size (px)
Citation preview
12/10/16
1
AULA 9 – ATUADORES ELÉTRICOS
Prof. Fabricia Neres
Tipos de Acionamento
Os acionadores são dispositivos responsáveis pelo movimento nos atuadores. Podem ser classificados em: • Acionamento Elétrico; • Acionamento Pneumático; • Acionamento Hidráulico.
Acionamento Elétrico • Oferecem menor velocidade e força (quando comparados aos hidráulicos); • Permitem maior precisão, maior repetibilidade e mais “limpos” na utilização;
• Exemplos de acionamentos elétricos: motores passo a passo (controle em malha fechada ou aberta) e servomotores DC (controle em malha fechada e mais usados).
Acionamento Pneumático
• Utilizado em robôs de pequeno porte e que possuam poucos graus de liberdade
• Baixo custo (mais econômico que os demais)
Acionamento Hidráulico
• Permite grandes valores de velocidade e de força; • A grande desvantagem é o seu elevado custo; • Preferíveis em ambientes nos quais os drives elétricos
poderão causar incêndios.
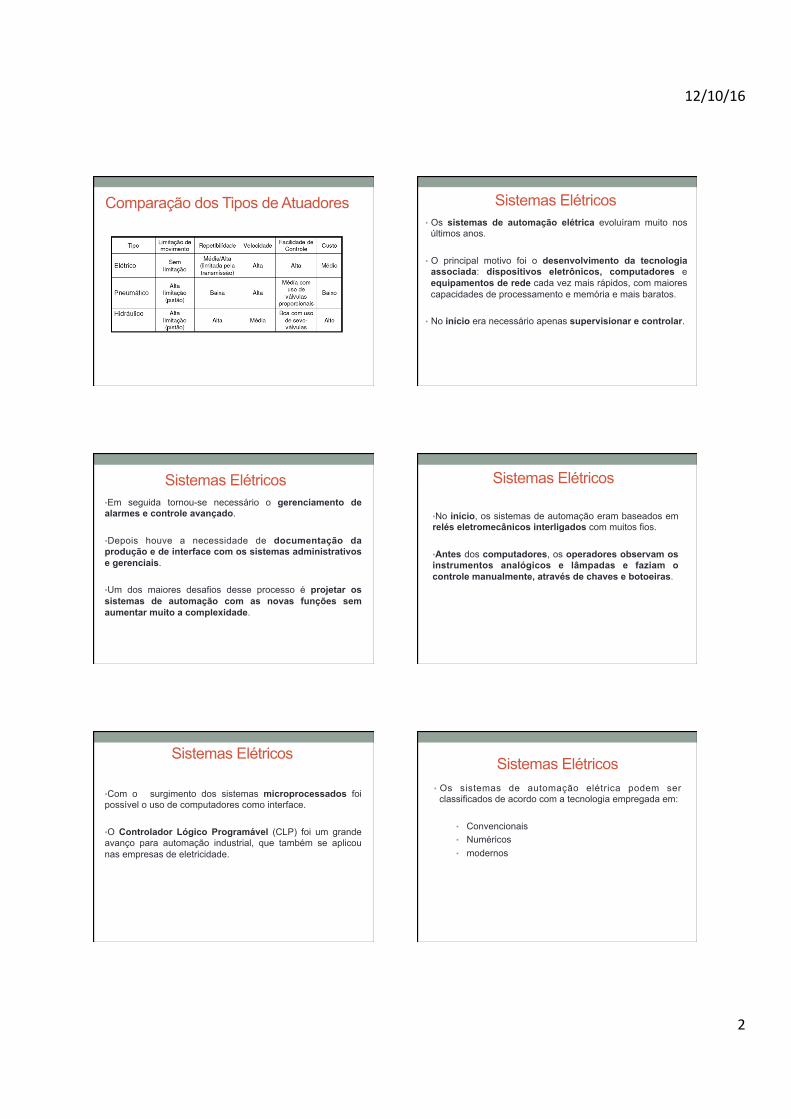
Comparação dos Tipos de Atuadores
12/10/16
2
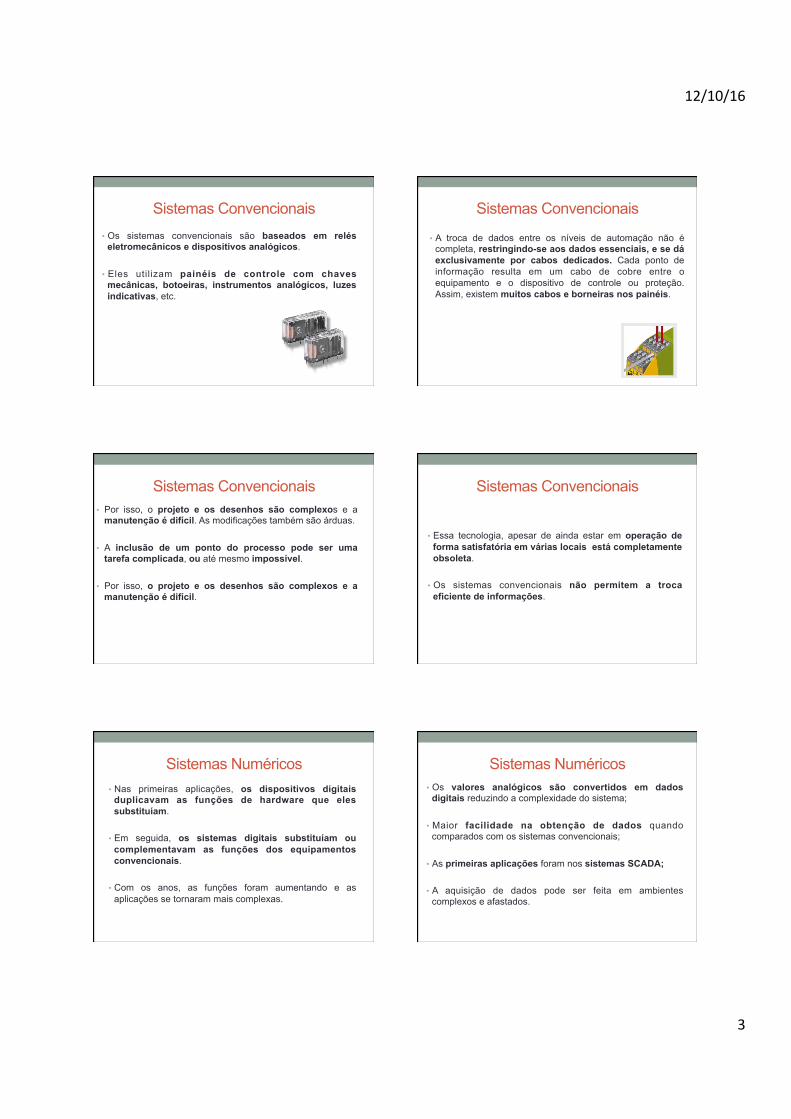
Comparação dos Tipos de Atuadores Sistemas Elétricos • Os sistemas de automação elétrica evoluíram muito nos
últimos anos. • O principal motivo foi o desenvolvimento da tecnologia
associada: dispositivos eletrônicos, computadores e equipamentos de rede cada vez mais rápidos, com maiores capacidades de processamento e memória e mais baratos.
• No início era necessário apenas supervisionar e controlar.
Sistemas Elétricos • Em seguida tornou-se necessário o gerenciamento de alarmes e controle avançado.
• Depois houve a necessidade de documentação da produção e de interface com os sistemas administrativos e gerenciais. • Um dos maiores desafios desse processo é projetar os sistemas de automação com as novas funções sem aumentar muito a complexidade.
Sistemas Elétricos
• No início, os sistemas de automação eram baseados em relés eletromecânicos interligados com muitos fios. • Antes dos computadores, os operadores observam os instrumentos analógicos e lâmpadas e faziam o controle manualmente, através de chaves e botoeiras.
Sistemas Elétricos
• Com o surgimento dos sistemas microprocessados foi possível o uso de computadores como interface.
• O Controlador Lógico Programável (CLP) foi um grande avanço para automação industrial, que também se aplicou nas empresas de eletricidade.
Sistemas Elétricos • Os sistemas de automação elétrica podem ser
classificados de acordo com a tecnologia empregada em:
• Convencionais • Numéricos • modernos
12/10/16
3
Sistemas Convencionais • Os sistemas convencionais são baseados em relés
eletromecânicos e dispositivos analógicos. • Eles utilizam painéis de controle com chaves
mecânicas, botoeiras, instrumentos analógicos, luzes indicativas, etc.
Sistemas Convencionais
• A troca de dados entre os níveis de automação não é completa, restringindo-se aos dados essenciais, e se dá exclusivamente por cabos dedicados. Cada ponto de informação resulta em um cabo de cobre entre o equipamento e o dispositivo de controle ou proteção. Assim, existem muitos cabos e borneiras nos painéis.
Sistemas Convencionais • Por isso, o projeto e os desenhos são complexos e a
manutenção é difícil. As modificações também são árduas. • A inclusão de um ponto do processo pode ser uma
tarefa complicada, ou até mesmo impossível. • Por isso, o projeto e os desenhos são complexos e a
manutenção é difícil.
Sistemas Convencionais
• Essa tecnologia, apesar de ainda estar em operação de forma satisfatória em várias locais está completamente obsoleta.
• Os sistemas convencionais não permitem a troca
eficiente de informações.
Sistemas Numéricos • Nas primeiras aplicações, os dispositivos digitais
duplicavam as funções de hardware que eles substituíam.
• Em seguida, os sistemas digitais substituíam ou
complementavam as funções dos equipamentos convencionais.
• Com os anos, as funções foram aumentando e as
aplicações se tornaram mais complexas.
Sistemas Numéricos • Os valores analógicos são convertidos em dados
digitais reduzindo a complexidade do sistema; • Maior facilidade na obtenção de dados quando
comparados com os sistemas convencionais;
• As primeiras aplicações foram nos sistemas SCADA; • A aquisição de dados pode ser feita em ambientes
complexos e afastados.
12/10/16
4
Sistemas Numéricos • Os dados são concentrados em um único lugar,
facilitando o seu uso para a operação e minimizando os erros humanos;
• As informações podem ser disponibilizadas de forma
“amigável” através de tabelas e diagramas; • O uso de IHM baseada em telas proporciona uma
interface comum. Assim, a idade dos equipamentos não impede o seu uso seguro.
Sistemas Modernos • Os sistemas atuais classificados com modernos, têm as
características dos sistemas numéricos utilizando; • Hardware comum ao invés de equipamentos dedicados
por função; • Além disso, eles substituem o cabeamento de cobre
convencional do nível de processo por uma rede de comunicação de dados.
Sistemas Modernos
• Assim, os sistemas de automação elétrica são totalmente digitais;
• Permitem nova abordagem da automação; • Outro aspecto que caracteriza a tecnologia é que ela é
fortemente baseada em padrões e normas globais convergentes.
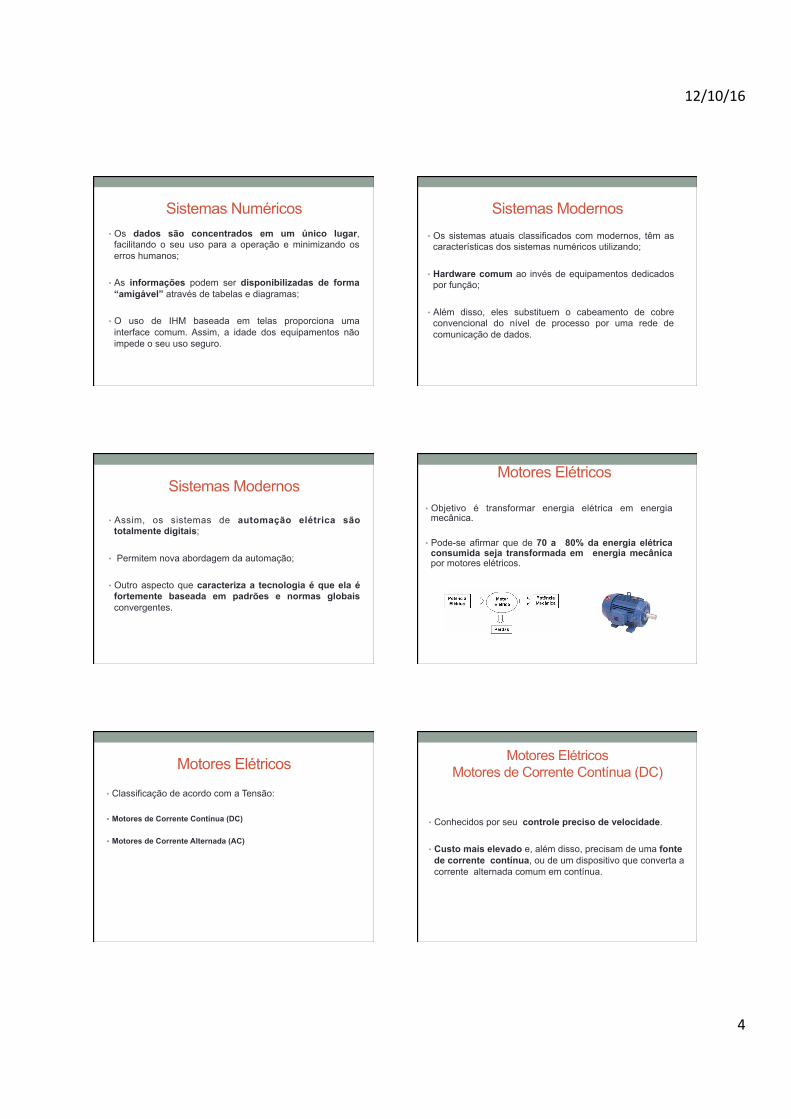
Motores Elétricos
• Objetivo é transformar energia elétrica em energia mecânica.
• Pode-se afirmar que de 70 a 80% da energia elétrica
consumida seja transformada em energia mecânica por motores elétricos.
Motores Elétricos
• Classificação de acordo com a Tensão: § Motores de Corrente Contínua (DC) § Motores de Corrente Alternada (AC)
Motores Elétricos Motores de Corrente Contínua (DC)
• Conhecidos por seu controle preciso de velocidade.
• Custo mais elevado e, além disso, precisam de uma fonte de corrente contínua, ou de um dispositivo que converta a corrente alternada comum em contínua.
12/10/16
5
Motores Elétricos A escolha dependem da utilização a que o motor vai ser sujeito e das possibilidades do investidor. Destaca-se:
• Fonte de alimentação: DC ou AC, monofásico ou polifásico, tensão, freqüência, etc.
• Condições ambientais: agressividade, altitude, temperatura. • Exigências da carga e condições de serviço: potência
solicitada, rotação, esforços mecânicos, ciclos de operação. • Consumo e Manutenção: • Controlabilidade: Posição, torque, Velocidade, Corrente de
partida (depende das exigências da carga).
Motores Elétricos
Os motores de corrente alternada do tipo de indução são classificados em: • SÍNCRONO: Funciona com velocidade fixa; • ASSÍNCRONO: Funciona normalmente com uma velocidade constante, que varia ligeiramente com a carga mecânica aplicada ao eixo.
Motores de Passo
• Dispositivos eletro-mecânicos que convertem pulsos elétricos em movimentos mecânicos que geram variações angulares discretas.
• O rotor ou eixo de um motor de passo é rotacionado em
pequenos incrementos angulares, denominados “passos”, quando os pulsos elétricos são aplicados aos seus terminais.
Motores de Passo • A velocidade do motor está ligada freqüência dos
pulsos recebidos e o tamanho do ângulo de cada passo.
• Utilizados em aplicações onde se deseja movimentos
precisos sendo possível controlar ângulo de rotação, velocidade sincronismo e posição.
• Muito usados em robôs e dispositivos eletrônicos.
Servo - Motores
• Compostos por motores DC e um redutor de velocidade, junto com um sensor de posição e um sistema de controle re-alimentado.
• Podem ser considerados como sendo motores
comandados em posição (angular ou linear). • São pequenos, com ampla variação de torques.
Servo - motores • O mecanismo de posicionamento ajusta a posição
angular por meio de um sinal codificado que lhe é enviado.
• Enquanto esse código estiver na entrada, o servo irá
manter a sua posição angular. • Em geral o sinal e do tipo PWM (Pulse Width Modulation)
12/10/16
6
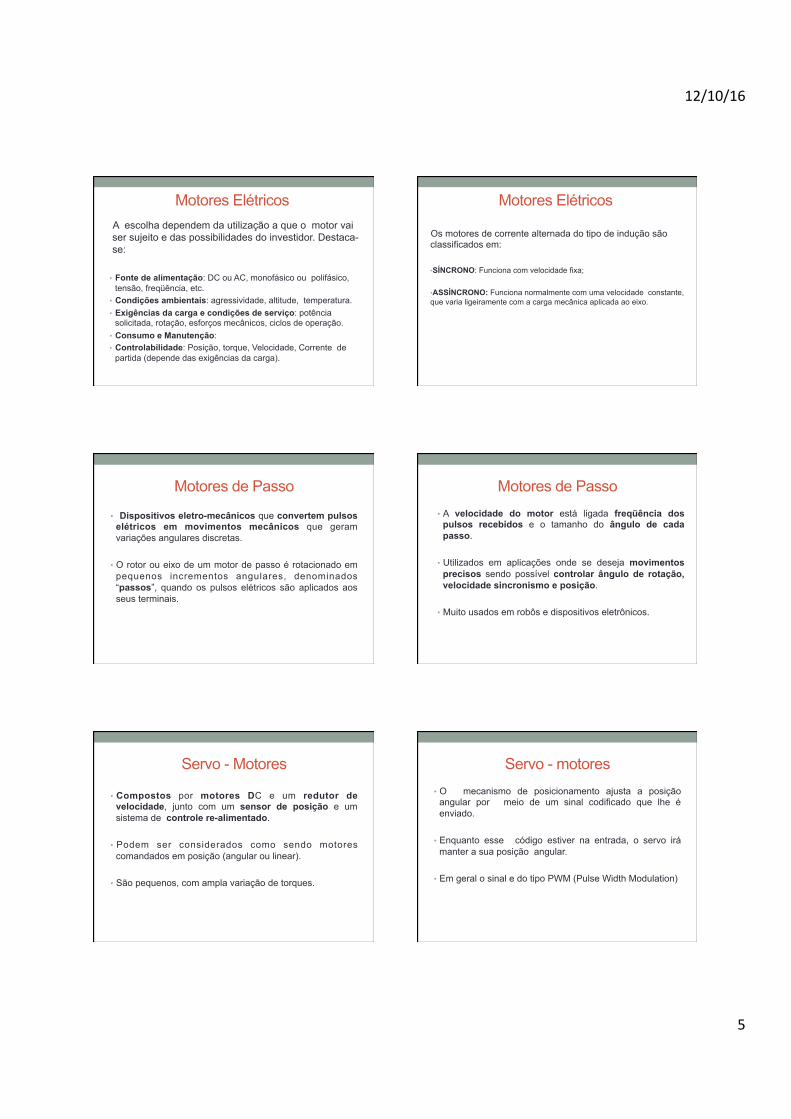
Motores Elétricos Motores de Corrente Alternada (AC)
• São os mais utilizados, porque a distribuição de energia
elétrica é feita normalmente em corrente alternada; • Muito usado por causa de sua simplicidade, construção
robusta, baixo custo de fabricação e boas características de funcionamento;
• Estima-se que 90% dos motores fabricados são motores de
indução de gaiola.
Motores de Indução
• Podem ser trifásicos ou monofásicos; • Transforma em energia mecânica aproximadamente 85%
da energia elétrica que recebe;
Motores de Indução • Vantagens: u Baixo custo de aquisição; u Baixo custo de manutenção; u Torque de partida não nulo; u Robustez;
u Potência: de 0,25 HP até 30.000 HP;. • Desvantagens: u Controle de velocidade difícil; u Corrente de partida elevada; u Fator de potência baixa e sempre indutivo.
Motores de Indução
Tipos de ligação: • Estrela : tensão nominal 220
• Triangulo: tensão nominal 380
Especificação do Motor
12/10/16
7
Motores de Indução – Acionamento Atualmente
• Motor: converte energia elétrica em energia mecânica;
• Dispositivo Eletrônico: comanda e/ou controla a potência elétrica entregue ao motor;
• Transmissão Mecânica: adapta a velocidade e inércia
entre o motor e máquina (carga);
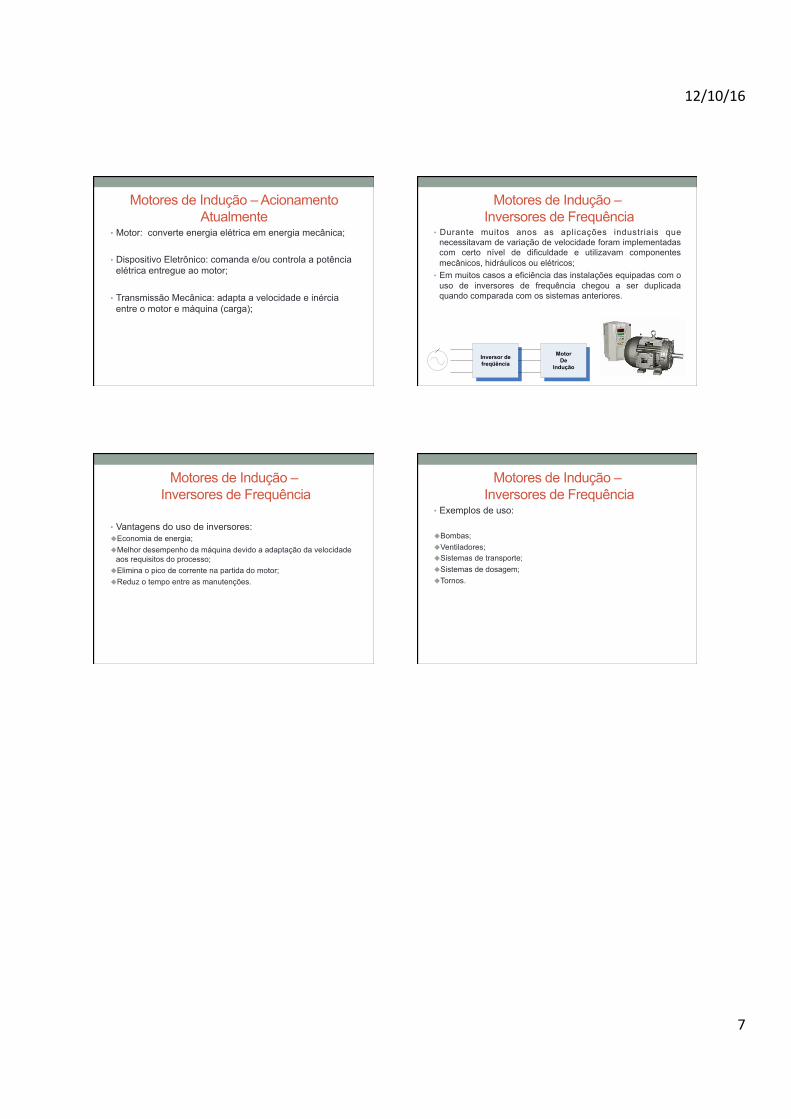
Motores de Indução – Inversores de Frequência
• Durante muitos anos as aplicações industriais que necessitavam de variação de velocidade foram implementadas com certo nível de dificuldade e utilizavam componentes mecânicos, hidráulicos ou elétricos;
• Em muitos casos a eficiência das instalações equipadas com o uso de inversores de frequência chegou a ser duplicada quando comparada com os sistemas anteriores.
MotorDe
Indução
Inversor de freqüência
Motores de Indução – Inversores de Frequência
• Vantagens do uso de inversores: u Economia de energia; u Melhor desempenho da máquina devido a adaptação da velocidade
aos requisitos do processo; u Elimina o pico de corrente na partida do motor; u Reduz o tempo entre as manutenções.
Motores de Indução – Inversores de Frequência
• Exemplos de uso: u Bombas; u Ventiladores; u Sistemas de transporte; u Sistemas de dosagem; u Tornos.





























