Embed Size (px)
Citation preview

TOPOLOGIA II
Francisco J. LopezDepartamento de Geometrıa y Topologıa
Universidad de [email protected]
TEMA 0: Preliminares
En este tema introductorio repasaremos algunos conceptos basicos de la teorıa degrupos algebraicos, ası como algunos resultados elementales de topologıa basica.
1. Teorıa de grupos algebraicos
La definicion fundamental es la siguiente.
Definicion 1.1 Un grupo algebraico es un par (G, ·), donde G es un conjunto no vacıoy · es una aplicacion
· : G×G→ G
satisfaciendo las siguiente propiedades (escribiremos g1 · g2 en vez de ·(g1, g2) para cua-lesquiera g1, g2 ∈ G):
(g1 · g2) · g3 = g1 · (g2 · g3) para cualesquiera g1, g2, g3 ∈ G.
Existe e ∈ G tal que g · e = e · g = g para cualquiera g ∈ G. Este elemento esunico y es conocido como elemento neutro del grupo.
Para todo g ∈ G existe g−1 ∈ G tal que g · g−1 = g−1 · g = e. El elemento g−1
satisfaciendo esta propiedad es unico (dependiendo de g) y es conocido como elelemento inverso o simetrico de g en el grupo.
Si adicionalmente
g1 · g2 = g2 · g1 para cualesquiera g1, g2 ∈ G,
el grupo (G, ·) se dira abeliano o conmutativo.
Son muchos los ejemplos de grupos conocidos. Recordaremos algunos de los mas signi-ficativos.
(Cn,+), (Rn,+), (Qn,+), (Zn,+), n ∈ N.
(Zk,+), k ∈ N (enteros modulo k).
(C \ 0, ·), (R \ 0, ·), (Q \ 0, ·).
1

(Gln(C), ·), (Gln(R), ·), n ∈ N.(F(X),
), donde X 6= ∅ es un conjunto, F(X) := f : X → X : f biyectiva y
” ” es la composicion de aplicaciones.
A continuacion presentaremos una herramienta muy versatil para la construccion denuevos grupos.
1.1. Producto libre de grupos
Sea Gα : α ∈ Λ una familia disjunta de grupos, descritos con notacion multipli-cativa. Una palabra construida sobre esa familia es una expresion x1x2, . . . xn dondexi ∈ Gα para algun α ∈ Λ. Dicha palabra se llama reducida si ningun xi es el ElementoNeutro del grupo que lo contiene, y xi’s adyacentes estan en grupos Gα’s diferentes. Lapalabra vacıa se denotara por 1.
Definicion 1.2 El conjunto de las palabras reducidas construidas sobre Gα : α ∈ Λsera denotado por
•α∈ΛGα.
En general dos palabras (no necesariamente reducidas) pueden multiplicarse poryuxtaposicion, esto es
(x1x2 . . . xn) · (y1y2 . . . ym) = x1 . . . xny1 . . . ym,
Igualmente dos palabras reducidas pueden tambien multiplicarse por yuxtaposicion ydespues convertirse en reducidas, esto es, si xn e y1 estan en el mismo grupo entoncesxny1 se sustituye por xn·y1 si ese producto no es el neutro. En caso de serlo se omite xny1.Se procede ası sucesivamente cuando sean posibles mas reducciones. Esta multiplicacionen •α∈ΛGα, denotada tambien por ·, le dota de estructura de grupo. En efecto, elelemento neutro de ese grupo sera la palabra vacıa 1. El inverso de la palabra reducidax1 . . . xn es la palabra reducida x−1
n . . . , x−11 . La propiedad asociativa no es difıcil de
probar.
Definicion 1.3 Al grupo (•α∈ΛGα, ·) se le llamara el producto libre de los gruposGα : α ∈ Λ.
Es claro que si el cardinal de Λ es al menos dos y los grupos no son triviales, el productolibre no es conmutativo, ya que si x2 ∈ Gα e y2 ∈ Gβ no son el neutro y α 6= β, entonceslas palabras reducidas xy e yx son diferentes.
Definicion 1.4 El grupo libre con un generador x es el conjunto
F (x) = . . . , x−2, x−1, 1, x, x2 . . .
dotado del producto usual: xn · xm = xn+m.El grupo libre generado por un conjunto S es
F (S) = •x∈SF (x).
2

1.2. Teorıa de subgrupos
En lo que sigue (G, ·) sera un grupo arbitrario.
Definicion 1.5 Un subconjunto H ⊂ G se dira un subgrupo de G si es estable para laoperacion de G, esto es, si h1 ·h2 ∈ H y h−1
1 ∈ H para cualesquiera h1, h2 ∈ H. En esecaso se escribira H ≤ G.
Es obvio que todo subgrupo de G es a su vez un grupo con la operacion inducida, enparticular con el mismo elemento neutro de G. Ademas la interseccion de subgrupos esun subgrupo. Llamaremos
Sub(G) = H ⊂ G : H ≤ G
a la familia formada por todos los subgrupos de G. Por ejemplo, el centro de G, que sedefine como
Z(G) := h ∈ G : h · g = g · h ∀g ∈ G,
es un subgrupo de G.Dado un subconjunto A ⊂ G, el conjunto
H(A) := k∏j=1
anjj : a1, . . . , ak ∈ A, n1, . . . , nk ∈ Z, k ∈ N
es el menor subgrupo de G conteniendo a A, tambien llamado el subgrupo de G generadopor A. Es facil comprobar que H(A) coincide con la interseccion de todos los subgruposde G que contienen a A. Un conjunto A ⊂ G se dira un sistema de generadores de G siH(A) = G.
Definicion 1.6 Dado H ≤ G y g ∈ G, denotaremos por g−1 ·H ·g := g−1 ·h·g : h ∈ Hal subgrupo conjugado de H segun g. Dos subgrupos H1, H2 ≤ G se diran conjugados,y se escribira H1 ∼c H2, si existe g ∈ G tal que g−1 · H1 · g = H2. La relacion deconjugacion en Sub(G) es de equivalencia, y el correspondiente cociente se denotarapor
Sc(G) := Sub(G)/∼c
Definicion 1.7 Un subgrupo H ≤ G se dira normal si g−1 · h · g ∈ H para todo h ∈ Hy g ∈ G, esto es, si su clase de conjugacion [H] = H. En ese caso se escribe H E G.
Si H ≤ G, la relacion de equivalencia
g1Rdchag2def⇐⇒ ∃h ∈ H : g2 = h · g1
determina las clases laterales derecha H · g := h · g : h ∈ H de H en G. El cocienteasociado sera denotado
(G/H
)dcha
.Analogamente la relacion de equivalencia
g1Rizqdag2def⇐⇒ ∃h ∈ H : g2 = g1 · h
determina las clases laterales izquierda g ·H := g · h : h ∈ H de H en G. El cocienteasociado sera denotado
(G/H
)izqda
.
3

Definicion 1.8 Si H E G, entonces R := Rdcha = Rizqda, y la clase de equivalencia deg ∈ G asociada a la relacion R se denota indistintamente g ·H = H · g. La operaciondel grupo G puede ser inducida en el cociente G/H de forma natural:
(g1 ·H) · (g2 ·H) = (g1 · g2) ·H,
dotando al cociente (G/H, ·) de estructura de grupo (conocido como el grupo cocientede G sobre el subgrupo normal H).
Definicion 1.9 Si A un subconjunto de G:
N(A) := ∏k
j=1 g−1j · a
njj · gj : (aj, gj, nj) ∈ A × G × Z, j = 1, . . . , k, k ∈ N
es el menor subgrupo normal de G conteniendo a A, tambien llamado el subgru-po normal de G generado por A. Es facil comprobar que N(A) coincide con lainterseccion de todos los subgrupos normales de G que contienen a A.
Si A ≤ G, N0(A) := g ∈ G : g−1 · A · g = A es el mayor subgrupo de G quecontiene a A como subgrupo normal, tambien llamado el normalizador de A enG. Es claro que A E N0(A) ≤ G y N0(A) = G si y solo si A E G.
Proposicion 1.10 Sea G un grupo, A ⊂ G y denotemos por σ : G → G/N(A) alepimorfismo proyeccion. Sea B ⊂ G otro subconjunto. Entonces
G/N(A ∪B) ∼=(G/N(A)
)/N(σ(B)
).
Demostracion : Si σ0 : G→ G/N(A∪B) es la proyeccion, existe un unico epimorfismoΦ: G/N(A)→ G/N(A∪B) satisfaciendo Φσ = σ0 (este viene dado por Φ
(gN(A)
):=
gN(A ∪ B) para cada gN(A) ∈ G/N(A)). No es difıcil comprobar que Ker(Φ) =hN(A) : h ∈ B = σ(B), de donde el resultado se sigue por el primer teorema deisomorfia.
Dado un grupo G y dos elementos g1, g2 ∈ G, llamaremos conmutador de g1 y g2 alelemento de G dado por la expresion
[g1, g2] := g1g2g−11 g−1
2 .
Denotaremos por Gc al subgrupo normal de G generado por todos los conmutadores:
Gc = N([g1, g2] : g1, g2 ∈ G
).
Definicion 1.11 Dado un grupo G, el grupo cociente cociente
A(G) := G/Gc
es conocido como grupo abelianizado de G.Es inmediato comprobar que A(G) es un grupo abeliano.
Ejercicio 1.12 A(F (a1, . . . , ak)
) ∼= Zk.
Demostracion : El homomorfismo de grupos Φ: F (a1, . . . , ak) → Zk unıvocamentedeterminado por
Φ([aj]) := (δi,j)i=1,...,k, j = 1, . . . , k,
es un epimorfismo con nucleo F (a1, . . . , ak)c (aquı δi,j representa a la delta de Kronec-ker). El resultado se sigue del primer teorema de isomorfia.
4

1.3. Producto amalgamado de grupos
Acabaremos esta seccion con la siguiente definicion, que como veremos mas adelantejugara un papel crucial en el enunciado del Teorema de Seifert-Van Kampen (Tema 1).
Definicion 1.13 Consideremos tres grupos A, G1 y G2 y homomorfismos Φ1 : A→ G1
y Φ2 : A→ G2. Se define el producto libre amalgamado G1 •AG2 como el grupo cociente(G1 •G2)/N(R), siendo R = Φ1(a)Φ2(a)−1 : a ∈ A.
La nomenclatura usada puede confundir ya que omitimos referencia a los homomor-fismos Φi, i = 1, 2. Notese que las clases en el grupo cociente G1 •AG2 de los elementosΦ1(a) y Φ2(a) son iguales para todo a ∈ A. De una forma mas precisa, si denotamospor ij : Gj → G1 • G2, j = 1, 2, a las inclusiones naturales y π : G1 • G2 → G1 •A G2 ala proyeccion al cociente,
π i1 Φ1 = π i2 Φ2.
El producto amalgamado satisface la siguiente propiedad universal.
Proposicion 1.14 Tres homomorfismos
Ψ1 : G1 → H, Ψ2 : G2 → H y Ψ0 : A→ H
tales queΨ0 = Ψ1 Φ1 = Ψ2 Φ2
inducen un homomorfismo Ψ: G1 •A G2 → H tal que
Ψj = Ψ (π ij) y Ψ (π ij Φj) = Ψ0, j = 1, 2.
En otras palabras, el siguiente diagrama es conmutativo:
Demostracion : Consideremos el unico homomorfismo Λ: G1 • G2 → H extension delos homomorfismos Ψ1 y Ψ2. Como Ψ0 = Ψ1 Φ1 = Ψ2 Φ2, el homomorfismo Λcontiene a Φ1(a)Φ2(a)−1 : a ∈ A en su nucleo, se proyecta al cociente G1 •A G2 einduce canonicamente un unico homomorfismo Ψ: G1 •A G2 → H tal que Ψ π = Λ.Obviamente Ψ resuelve la proposicion.
5

2. Topologıa basica
A lo largo de este curso (X, τ) denotara un espacio topologico. Usualmente, y enausencia de ambiguedad, omitiremos la referencia a la topologıa τ y escribiremos sim-plemente X.
2.1. Arcos en un espacio topologico
Por definicion, un arco en un espacio topologico X es una aplicacion continua
α : [0, 1]→ X,
donde el intervalo unidad [0, 1] se entiende dotado de la topologıa euclidiana usual. Alos puntos α(0) y α(1) se les llama puntos inicial y final del arco α respectivamente (y sedira que α une o conecta los puntos α(0) y α(1)); tambien se dice que α(0), α(1) sonlos extremos del arco α. El subespacio topologico de X dado por α([0, 1]) sera referidocomo traza del arco α, y escrito Tr(α). En ocasiones, y si ello no implica ambiguedad,identificaremos un arco con su traza.
El arco mas simple que podemos construir sobre un espacio topologico es el cons-tante, que para cada p ∈ X viene definido por
εp : [0, 1]→ X, εp(t) = p para todo t ∈ [0, 1].
Tambien es posible generar nuevos arcos a partir de unos dados de forma sencilla.
Definicion 2.1 Dados arcos α, β : [0, 1]→ X con α(1) = β(0) se definen
α : [0, 1]→ X, α(t) := α(1− t).
α ? β : [0, 1]→ X, α ? β(t) =
α(2t) si t ∈ [0, 1/2]
β(2t− 1) si t ∈ [1/2, 1]
Observese que Tr(α) = Tr(α), y los puntos inicial y final de α son α(1) y α(0).Analogamente, Tr(α ? β) = Tr(α) ∪ Tr(β) y los puntos inicial y final de α ? β son α(0)y β(1).
6
Definicion 2.2 Un espacio topologico X se dice arcoconexo si para cualesquiera p,q ∈ X existe un arco α : [0, 1]→ X conectando p y q.
Un espacio topologico X se dice localmente arcoconexo si todo punto admite unabase de entornos arcoconexos (con la topologıa inducida).
Los ejemplos mas simples de espacios arcoconexos son los subconjuntos convexos (oestrellados desde un punto) de un espacio euclidiano. Trivialmente la imagen por unaaplicacion continua de un espacio arcoconexo es un espacio arcoconexo.
Es facil ver que si X = A ∪ B, con A y B subespacios arcoconexos no disjuntos,entonces X es arcoconexo. En efecto, fijado x ∈ A∩B, para cualquiera p ∈ X existe unarco αp : [0, 1]→ X con αp(0) = x y αp(1) = p. Por tanto para cualesquiera p, q ∈ X elarco αp ? αq conecta p con q, de donde X es arcoconexo.
Dado un punto p ∈ X, la arcocomponente de p en X, que denotaremos por Cp, sedefine como el mayor subespacio arcoconexo de X conteniendo a p. En otras palabras,Cp es la union de todos los subespacios arcoconexos de X que contienen a p. Como pes un subespacio arcoconexo que contiene a p, p ∈ Cp. Como la traza de un arco esarcoconexa, la identidad
Cp = q ∈ X : existe un arco en X con uniendo p y q
es evidente. Obviamente Cp, dotado con la topologıa inducida, es arcoconexo para todop ∈ X. Ademas X es la union disjunta de sus arcocomponentes.
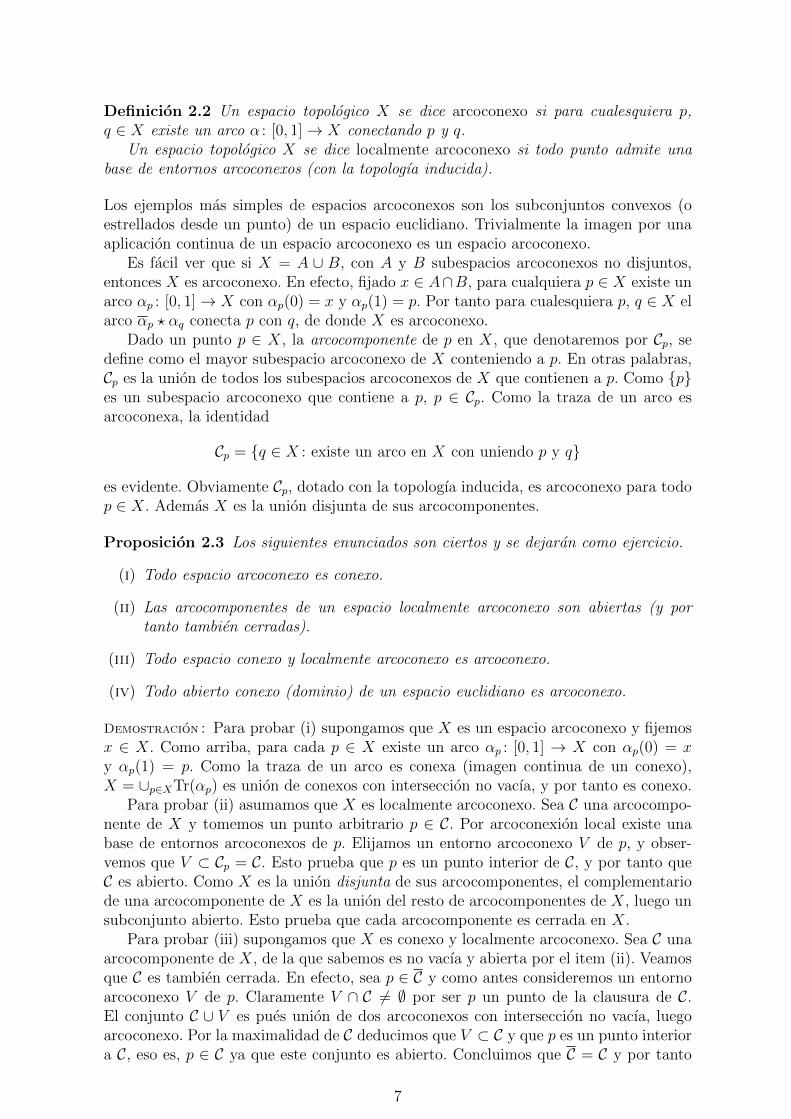
Proposicion 2.3 Los siguientes enunciados son ciertos y se dejaran como ejercicio.
(i) Todo espacio arcoconexo es conexo.
(ii) Las arcocomponentes de un espacio localmente arcoconexo son abiertas (y portanto tambien cerradas).
(iii) Todo espacio conexo y localmente arcoconexo es arcoconexo.
(iv) Todo abierto conexo (dominio) de un espacio euclidiano es arcoconexo.
Demostracion : Para probar (i) supongamos que X es un espacio arcoconexo y fijemosx ∈ X. Como arriba, para cada p ∈ X existe un arco αp : [0, 1] → X con αp(0) = xy αp(1) = p. Como la traza de un arco es conexa (imagen continua de un conexo),X = ∪p∈XTr(αp) es union de conexos con interseccion no vacıa, y por tanto es conexo.
Para probar (ii) asumamos que X es localmente arcoconexo. Sea C una arcocompo-nente de X y tomemos un punto arbitrario p ∈ C. Por arcoconexion local existe unabase de entornos arcoconexos de p. Elijamos un entorno arcoconexo V de p, y obser-vemos que V ⊂ Cp = C. Esto prueba que p es un punto interior de C, y por tanto queC es abierto. Como X es la union disjunta de sus arcocomponentes, el complementariode una arcocomponente de X es la union del resto de arcocomponentes de X, luego unsubconjunto abierto. Esto prueba que cada arcocomponente es cerrada en X.
Para probar (iii) supongamos que X es conexo y localmente arcoconexo. Sea C unaarcocomponente de X, de la que sabemos es no vacıa y abierta por el item (ii). Veamosque C es tambien cerrada. En efecto, sea p ∈ C y como antes consideremos un entornoarcoconexo V de p. Claramente V ∩ C 6= ∅ por ser p un punto de la clausura de C.El conjunto C ∪ V es pues union de dos arcoconexos con interseccion no vacıa, luegoarcoconexo. Por la maximalidad de C deducimos que V ⊂ C y que p es un punto interiora C, eso es, p ∈ C ya que este conjunto es abierto. Concluimos que C = C y por tanto
7
que C es abierto y cerrado. De la conexion de X inferimos que C = X. Ası pues X tienesolo una arcocomponente, y por lo tanto es arcoconexo.
El item (iv) es corolario del (iii). Tengase en cuenta que un abierto de un espaciolocalmente arcoconexo es localmente arcoconexo, y por tanto los abiertos euclidianosson localmente arcoconexos.
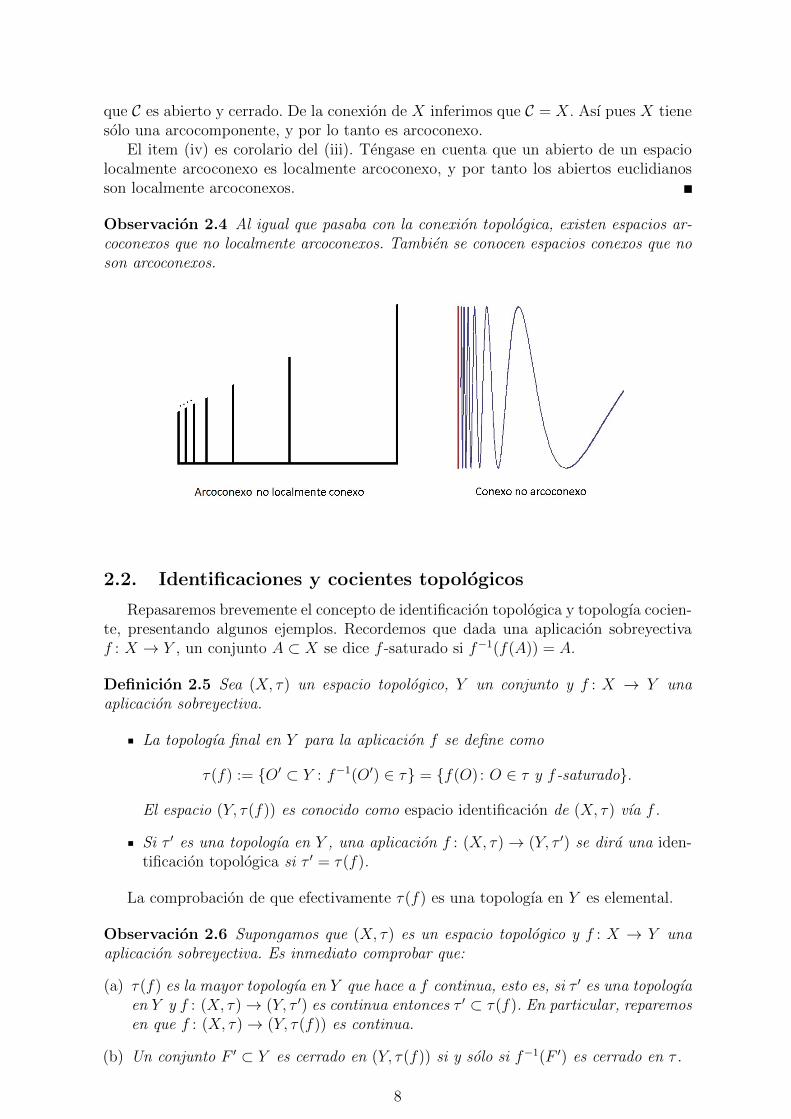
Observacion 2.4 Al igual que pasaba con la conexion topologica, existen espacios ar-coconexos que no localmente arcoconexos. Tambien se conocen espacios conexos que noson arcoconexos.
2.2. Identificaciones y cocientes topologicos
Repasaremos brevemente el concepto de identificacion topologica y topologıa cocien-te, presentando algunos ejemplos. Recordemos que dada una aplicacion sobreyectivaf : X → Y , un conjunto A ⊂ X se dice f -saturado si f−1(f(A)) = A.
Definicion 2.5 Sea (X, τ) un espacio topologico, Y un conjunto y f : X → Y unaaplicacion sobreyectiva.
La topologıa final en Y para la aplicacion f se define como
τ(f) := O′ ⊂ Y : f−1(O′) ∈ τ = f(O) : O ∈ τ y f -saturado.
El espacio (Y, τ(f)) es conocido como espacio identificacion de (X, τ) vıa f .
Si τ ′ es una topologıa en Y , una aplicacion f : (X, τ)→ (Y, τ ′) se dira una iden-tificacion topologica si τ ′ = τ(f).
La comprobacion de que efectivamente τ(f) es una topologıa en Y es elemental.
Observacion 2.6 Supongamos que (X, τ) es un espacio topologico y f : X → Y unaaplicacion sobreyectiva. Es inmediato comprobar que:
(a) τ(f) es la mayor topologıa en Y que hace a f continua, esto es, si τ ′ es una topologıaen Y y f : (X, τ)→ (Y, τ ′) es continua entonces τ ′ ⊂ τ(f). En particular, reparemosen que f : (X, τ)→ (Y, τ(f)) es continua.
(b) Un conjunto F ′ ⊂ Y es cerrado en (Y, τ(f)) si y solo si f−1(F ′) es cerrado en τ .
8

(c) F ′ ⊂ Y es cerrado en (Y, τ(f)) si y solo si existe F ⊂ X cerrado y f -saturado conf(F ) = F ′.
(d) (Y, τ(f)) es Hausdorff si y solo si para cualesquiera y1, y2 ∈ Y , y1 6= y2, existenabiertos f -saturados disjuntos O1, O2 ∈ τ tales que f−1(yj) ⊂ Oj, j = 1, 2.
(e) (Y, τ(f)) es II-Axioma de Numerabilidad si y solo si existe una familia B de abiertosf -saturados en X satisfaciendo las siguientes propiedades:
B es numerable.
Todo abierto f -saturado de X es union de abiertos de B.
(f) Si (X, τ) es conexo (arcoconexo, compacto) entonces (Y, τ(f)) es conexo (arcocone-xo, compacto).
La siguiente proposicion establece un criterio muy util para el estudio de la continuidadde aplicaciones con dominio (Y, τ(f)).
Proposicion 2.7 Sea (X, τ) un espacio topologico y f : X → Y una aplicacion sobre-yectiva. Sea (Z, τ ′) un espacio topologico y h : Y → Z una aplicacion. Entonces
h : (Y, τ(f))→ (Z, τ ′) es continua ⇐⇒ h f : (X, τ)→ (Z, τ ′) es continua.
Demostracion : La implicacion =⇒) es trivial ya que la composicion de continuas escontinua.
Para probar ⇐=) tomemos un abierto arbitrario O′ ⊂ Z. La continuidad de h fimplica que f−1(h−1(O)) ∈ τ , de donde h−1(O) ∈ τ(f). Esto prueba que h es continua.
Existe una ıntima relacion entre la topologıa final y la topologıa cociente. Explique-mos los detalles.
Sea (X, τ) un espacio topologico. Consideremos una relacion de equivalencia R enX y construyamos el espacio cociente X/R. Denotemos por π : X → X/R a la corres-pondiente proyeccion.
Definicion 2.8 La topologıa final τ(π) en X/R para π : X → X/R es conocida como latopologıa cociente inducida por la relacion R en X/R. El espacio topologico (X, τ(π))es referido como el espacio topologico cociente de (X, τ) por la relacion R.
En realidad el concepto de topologıa cociente no es sino una formulacion equivalentedel de identificacion topologica. Para comprobarlo introduzcamos alguna notacion.
Dada una aplicacion sobreyectiva f : X → Y , induciremos en X la siguiente relacionde equivalencia:
p ∼f q ⇐⇒ f(p) = f(q).
Si denotamos por [p] a la clase de equivalencia de p ∈ X por ∼f , y por πf : X → X/∼f ,πf (p) = [p], a la correspondiente proyeccion al cociente, existe una unica biyeccion
f : X/∼f → Y tal que f πf = f . Para ser mas precisos,
f : X/∼f → Y, f([p]) := f(p).
Proposicion 2.9 Sea Sea (X, τ) un espacio topologico y f : X → Y una aplicacionsobreyectiva. Entonces
f :(X/∼f , τ(πf )
)→(Y, τ(f)
)es un homeomorfismo.
9

Esta proposicion expresa el hecho de que, salvo un homeomorfismo canonico, todoespacio identificacion es un cociente topologico.
Demostracion : La biyectividad de f es trivial.Como fπf : (X, τ)→ (Y, τ(f)) coindice con la aplicacion continua f , la Proposicion
2.7 garantiza que f :(X/∼f , τ(πf )
)→(Y, τ(f)
)es continua. Recıprocamente, como
f−1 f : (X, τ)→ (X/∼f , τ(πf )) coincide con la aplicacion continua πf , la Proposicion
2.7 garantiza que f−1 :(Y, τ(f)
)→(X/∼f , τ(πf )
)es continua.
Otro resultado interesante es el siguiente:
Corolario 2.10 Sea (Xj, τj) un espacio topologico, Rj una relacion de equivalencia enXj y πj : Xj → Xj/Rj la proyeccion al cociente, j = 1, 2. Si f : (X1, τ1) → (X2, τ2) esuna continua satisfaciendo pR1q =⇒ f(p)R2f(q), entonces la unica aplicacion
f :(X1/R1, τ(π1)
)→(X2/R2, τ(π2)
)tal que f π1 = π2 f es continua.
Es interesante tener criterios manejables que simplifiquen el reconocimiento de lasidentificaciones topologicas, y por tanto, la comprension de la naturaleza de algunoscocientes topologicos. A ese fın responde la siguiente proposicion.
Proposicion 2.11 Una aplicacion f : (X, τ)→ (Y, τ ′) es una identificacion topologicasi satisface alguna de las siguientes condiciones:
(a) f es continua, sobreyectiva y abierta.
(b) f es continua sobreyectiva y cerrada.
(c) f es continua y sobreyectiva, (X, τ) es compacto e (Y, τ ′) es Hausdorff.
(d) Existe h : (Y, τ ′)→ (X, τ) continua tal que fh = IdY (f tiene una inversa continuaa la derecha).
Demostracion : Probemos (a). Supongamos que f es continua, sobreyectiva y abierta yveamos que es una identificacion topologica, esto es, que τ ′ = τ(f). Como f es continuay sobreyectiva τ ′ ⊂ τ(f), ya que la topologıa final es la mas grande topologıa en Yhaciendo continua a f . Tomemos ahora O′ ∈ τ(f). Por definicion de la topologıa finalpara f tenemos f−1(O′) ⊂ τ , y como f es abierta y sobre que O′ = f(f−1(O′)) ∈ τ ′.Esto prueba que τ(f) ⊂ τ ′ y por tanto que τ ′ = τ(f).
Item (b) es totalmente analogo al (a) por un argumento dual. Item (c) se sigue de(b) y del hecho de que toda aplicacion continua de un compacto en un Hausdorff escerrada.
Para probar (d) tomemos O′ ∈ τ(f), esto es, satisfaciendo O′ ⊂ Y y f−1(O′) ∈ τ .Usando las hipotesis y la continuidad de h inferimos que O′ = h−1(f−1(O′)) ∈ τ ′. Estoprueba que τ(f) ⊂ τ ′, y como la otra inclusion siempre es cierta que τ(f) = τ ′.
10

Estudiemos, como aplicacion practiva del Corolario 2.10 y la Proposicion 2.11, lostres modelos topologicos estandar del espacio proyectivo.
Definicion 2.12 Por definicion, el espacio proyectivo RPn, n ∈ N, es el espacio co-ciente de la esfera euclidiana (Sn, τu) por la relacion p ∼ q ⇐⇒ p = ±q:
RPn := (Sn/∼, τu/∼).
De la Observacion 2.6 se infiere que RPn es un espacio arcoconexo, compacto, Haus-dorff y II-Axioma de Numerabilidad.
Proposicion 2.13 Los siguientes espacios cocientes son homeomorfos al espacio pro-yectivo RPn, n ∈ N:
(i) El espacio cociente((Rn+1 \ 0)/∼1
), τu/∼1), n ∈ N, por la relacion p ∼1 q ⇐⇒
∃λ ∈ R \ 0 : p = λq.
(ii) El espacio cociente(Bn(0, 1)/∼2
), τu/∼2), n ∈ N, por la relacion p ∼2 q ⇐⇒
‖p− q‖ ∈ 0, 2. Aquı Bn(0, 1) = q ∈ Rn : ‖q‖ ≤ 1.
Demostracion : La aplicacion continua f : Rn+1 \ 0 → Sn, f(p) := p/‖p‖, es com-patible con las relaciones de equivalencia en Rn+1 \ 0 y Sn explicitadas en Proposi-cion 2.13-(i) y Definicion 2.2, respectivamente. Por tanto podemos utilizar el Corolario2.10 e inducir una aplicacion continua f :
((Rn+1 \ 0)/∼1
)→ RPn entre los espacios
topologicos cocientes. De igual forma la aplicacion inclusion i : Sn → Rn+1 \ 0, ob-viamente continua, induce otra aplicacion continua i : RPn →
((Rn+1 \ 0)/∼1
)entre
ambos cocientes, que claramente es la inversa de f . Por tanto Rn+1 \ 0/∼1 y RPn sonhomeomorfos, lo que prueba (i).
Comprobemos ahora (ii). Llamemos Sn+ := Sn ∩ xn+1 ≥ 0 y ∼0 la relacion deequivalencia en Sn+ dada por p ∼0 q ⇐⇒ p = ±q.
La aplicacion h : Bn(0, 1) → Sn+, h(x) := (x,+
√1− ‖x‖2), es un homeomorfismo
compatible con las relaciones de equivalencia ∼2 en Bn(0, 1) y ∼0 en Sn+, por lo que
el Corolario 2.10 induce un homeomorfismo h : Bn(0, 1)/∼2 → Sn+/∼0. Para acabar,
observese que la aplicacion j : Sn+ → RPn, j(q) := [q], es una identificacion topologica yaque es continua, sobreyectiva y va de un compacto en un Hausdorff; usese Proposicion2.11-(c). Como ∼j=∼0, el cociente Sn+/∼0 es homeomorfo a RPn, probando (ii).
Ejercicio 2.14 Las siguientes aplicaciones entre espacios euclidianos son identifica-ciones topologicas:
(i) R→ S1, t 7→ e2πıt = (cos(2πt), sen(2πt)); utilıcese Proposicion 2.11-(a).
Como consecuencia,
R/∼ ∼= S1, con t ∼ s⇐⇒ t− s ∈ Z.
(ii) [0, 1]→ S1, t 7→ e2πıt = (cos(2πt), sen(2πt)); utilıcese Proposicion 2.11-(b).
Como consecuencia,
[0, 1]/∼ ∼= S1, con t ∼ s⇐⇒ |t− s| ∈ 0, 1.
11

(iii) R2 → S1 × S1, (t1.t2) 7→ (e2πıt1 , e2πıt2); utilıcese Proposicion 2.11-(a).
Como consecuencia,
R2/∼ ∼= S1 × S1, con (t1, t2) ∼ (s1, s2)⇐⇒ tj − sj ∈ Z, j = 1, 2.
(iv) [0, 1]2 → S1 × S1, (t1.t2) 7→ (e2πıt1 , e2πıt2); utilıcese Proposicion 2.11-(b).
Como consecuencia,
[0, 1]2/∼ ∼= S1 × S1, con (t1, t2) ∼ (s1, s2)⇐⇒ |tj − sj| ∈ 0, 1, j = 1, 2.
(v) Rn+1 \ 0 → Sn, p 7→ p/‖p‖, n ∈ N; utilıcese Proposicion 2.11-(d).
Como consecuencia,
Rn+1 \ 0/∼ ∼= Sn, n ∈ N, con p ∼ q ⇐⇒ p/‖p‖ = q/‖q‖.
3. Espacios cociente de discos topologicos
En esta seccion vamos a presentar algunas construcciones sobre discos topologicosque seran de gran utilidad a lo largo del curso. Comnencemos fijando alguna notacion.
En lo que sigue X sera un espacio topologico.
Definicion 3.1 Por definicion, un subespacio topologico C ⊂ X es una curva de Jor-dan en X si es homeomorfo a S1. Analogmente, un subespacio topologico γ ⊂ X es unarco de Jordan en X si es homeomorfo a [0,1]. Un arco de Jordan abierto en X es unsubespacio topologico γ ⊂ X homeomorfo a ]0,1[.
Si γ ⊂ X es un arco de Jordan y α : [0, 1] → γ es un homeomorfismo, a los puntosα(0) y α(1), que no dependen del homeomorfismo α utilizado, se les llama extremosdel arco. Denotaremos por V (γ) := α(0), α(1) al conjunto formado por los extremosdel arco, e Int(γ) al arco de Jordan abierto γ \V (γ). Por definicion, una orientacion deγ es una ordenacion de sus extremos. Obviamente γ admite dos orientaciones, a saber(α(0), α(1)) y (α(1), α(0)).
Definicion 3.2 Dado un arco de Jordan γ en la circunferencia unidad S1 ⊂ R2 deextremos p1, p2, la orientacion (p1, p2) se dira positiva si al recorrer γ de p1 a p2 sesigue el sentido contrario a las agujas del reloj, esto es, creciente en el argumento. Enotro caso se dira negativa.
12

Definicion 3.3 Sea C una curva de Jordan en X. Sean γ1 y γ2 dos arcos de Jor-dan orientados en C, y denotemos por (p1, p2) y (q1, q2) las orientaciones de γ1 y γ2,respectivamente (con esta notacion V (γ1) = p1, p2 y V (γ2) = q1, q2).
Los arcos γ1 y γ2 se diran compatiblemente orientados si existe un homeomorfismof : C → S1 tal que las orientaciones (f(p1), f(p2)) de f(γ1) y (f(q1), f(q2)) de f(γ2)tienen el mismo caracter (esto es, ambas son positivas o negativas).
La compatibilidad o no compatibilidad de orientaciones no depende del homeomor-fismo f : C → S1 utilizado. En efecto, si h : C → S1 es otro homeomorfismo entoncesf h−1 : S1 → S1 es monotono en el argumento.
Vamos a definir el concepto de disco topologico. Algunos matices requeriran delTeorema de Invarianza del Dominio, que enunciamos sin demostracion a continuacion.
Teorema 3.4 (Invarianza del Dominio) Si O ⊂ R2 es un subespacio topologico ho-meomorfo a un abierto de R2, entonces O es un abierto de R2.
Definicion 3.5 Un disco topologico compacto es un espacio topologico homeomorfoal disco unidad cerrado D = (x, y) ∈ R2 : x2 + y2 ≤ 1 en R2. De igual forma, undisco topologico abierto es un espacio topologico homeomorfo al disco unidad abiertoD = (x, y) ∈ R2 : x2 + y2 < 1 ⊂ R2.
Si X es un disco topologico compacto y f : D → X es un homeomorfismo, el Teo-rema de Invarianza del Dominio garantiza que los subconjuntos f(S1) y f(D) de X nodependen de f ; en efecto, si h : D → X es otro homeomorfismo entonces (h−1 f)(D)y (f−1 h)(D) han de ser abiertos de R2 contenidos en D, y por tanto contenidos enD (no pueden intersecar a S1). De aquı que (h−1 f)(D) = (f−1 h)(D) = D, esto es,f(D) = h(D) y f(S1) = h(S1).
En lo que sigue denotaremos por Bd(X) := f(S1) y lo referiremos como la curva deJordan borde de X. Tambien diremos que C bordea el disco X o que X esta bordeado porC. Analogamente escribiremos Int(X) := X \ Bd(X) y lo referiremos como el interiorde X.
El siguiente resultado tecnico sera de bastante utilidad.
Corolario 3.6 Si X1 y X2 son discos topoloticos compactos y f : Bd(X1)→ Bd(X2) esun homeomorfismo, entonces existe F : X1 → X2 homeomorfismo tal que F |Bd(X1) = f .
Demostracion : Sea Fj : Xj → D un homeomorfismo cualquiera, j = 1, 2. Claramente
h := (F2|Bd(X2)) f (F−11 |S1) : S1 → S1
13

es un homeomorfismo. Construyamos
H : D → D, H(p) =
‖p‖h
(p‖p‖
)si p 6= 0
0 si p = 0,
y observemos que H un homeomorfismo en D con H|S1 = h. Para acabar basta condefinir F := F−1
2 H F1.
3.1. Discos topologicos planos
La mayorıa de los discos topologicos compactos con los que vamos a trabajar seransubespacios topologicos de R2. Introduciremos la siguiente:
Definicion 3.7 Los subconjuntos X ⊂ R2 que con la topologıa euclidiana inducida seandiscos topologicos compactos (respectivamente, abiertos) seran llamados discos planoscompactos (respectivamente, abiertos).
Observacion 3.8 Sea X ⊂ R2 un disco plano compacto. Entonces X \ Bd(X) es unacomponente conexa acotada de R2 \ Bd(X) con frontera Bd(X).
Demostracion : Por el Teorema de Invarianza del Dominio el conexo Int(X) es abiertoen R2 \ Bd(X). Como Int(X) = X es compacto (luego cerrado y acotado) en R2,deducimos que Int(X) es cerrado en R2 \ Bd(X). Esto garantiza que Int(X) es unacomponente conexa acotada de R2 \ Bd(X). Claramente Fr(Int(X))) = X \ Int(X) =Bd(X).
Surge aquı una pregunta aparentemente inocente pero de gran calado topologico:
¿Que subespacios topologicos del plano son discos planos compactos?
El Teorema de Jordan-Schoenflies clasico, cuya prueba esta fuera de las posibilidadesde este curso, da la respuesta completa a esta cuestion.
Teorema 3.9 (Jordan-Schoenflies) Si C1 y C2 son dos curvas de Jordan en R2 yf : C1 → C2 un homeomorfismo, existe F : R2 → R2 homeomorfismo tal que F |C1 = f .
Este resultado implica que cualquier curva de Jordan C en R2 es frontera de (o bordea)un disco topologico compacto en R2, y que cualquier disco topologico compacto Xde R2 surge de esta forma. En efecto, basta con aplicarlo a cualquier homeomorfismof : C → S1 y observar que X := F−1(D) es un disco plano compacto con Bd(X) = C.Tengase tambien en cuenta que el borde Bd(X) de cualquier disco plano compactoX ⊂ R2 es una curva de Jordan.
Es evidente que S1 parte R2 en dos componentes conexas con borde S1, una el discoabierto unidad y otra el exterior del disco cerrado unidad. Como corolario del Teoremade Jordan-Schoenflies el complemento de una curva de Jordan arbitraria C en el planoR2 tiene dos componentes conexas, una acotada llamada interior de C y otra no acotadallamada exterior de C, ambas con frontera la curva C. Este resultado es conocido en laliteratura como Teorema de la Curva de Jordan.
14

3.2. Pegado de discos topologicos por el borde
Sean X1 y X2 dos discos topologicos compactos disjuntos. Consideremos arcos deJordan γj ⊂ Cj := Bd(Xj), j = 1, 2, y un homeomorfismo h : γ1 → γ2. Consideremosen X := X1 ∪ X2 la topologıa suma, a saber, la que tiene por abiertos las uniones deabiertos de X1 y X2.
Vamos explicar una operacion topologica elemental, que referiremos como el pegadode los discos X1 y X2 por los arcos γ1 y γ2 vıa el homomorfismo h. La clave es generarun nuevo espacio topologico X a partir de X1, X2 y h : γ1 → γ2. Para ello definiremosla siguiente relacion de equivalencia en X:
p ∼ q ⇐⇒ p = q o p, q = r, h(r) para algun r ∈ γ1,
que materializara la identificacion deseada. Escribiremos X := X/∼ al espacio co-ciente resultante y π : X → X la correspondiente proyeccion. Es facil comprobar queπ|Xj : Xj → X es un embebimiento topologico, j = 1, 2.
Por otra parte, es claro que Cj \ Int(γj) es un arco de Jordan en Xj, luego en X,j = 1, 2. En la union de arcos de Jordan C :=
(C1 \ Int(γ1)
)∪(C2 \ Int(γ2)
)podemos
definir la relacion de equivalencia restringida p ∼0 qdef⇐⇒ p ∼ q. Escribamos C := C/∼0
y π0 : C → C a la correspondiente proyeccion topologica al cociente. Por la naturalezade ∼0, es inmediato comprobar que el espacio C es una circunferencia topologica, estoes, es homeomorfo a S1. Hagase como ejercicio.
Si i : C → X denota la inclusion, el Corolario 2.10 nos proporciona una aplicacioncontinua i : C → X satisfaciendo i π0 = π i. Por la naturaleza de las relacionesi : C → X es un embebimiento topologico.
El siguiente resultado describe la naturaleza topologica del resultado de pegar nues-tros discos. En particular, prueba que el espacio X obtenido no depende de los discostopologicos compactos considerados, de los arcos de Jordan elegidos en su borde, ni delhomeomorfismo entre ellos considerado.
Proposicion 3.10 El espacio X es un disco topologico compacto con Bd(X) = i(C).
Demostracion : Llamemos
D1 := D ∩ (x, y) ∈ R2 : y ≥ 0 y D2 := D ∩ (x, y) ∈ R2 : y ≤ 0.
La proposicion 3.22 (o el Teorema 3.9) garantiza que D1 y D2 son discos topologicoscompactos, por lo que existen homeomorfismos F1 : X1 → D1 y F2 : X2 → D2.
Llamnemos s al segmento [−1, 1] × 0. Componiendo con un conveniente homeo-morfismo G : D1 → D1, no supone perdida de generalidad asumir que F1(γ1) = s (untal G : D1 → D1 se genera tras extender vıa el Corolario 3.6 cualquier homeomorfismog : Bd(D1) → Bd(D1) que aplique F1(γ1) en s). Analogamente no supone restriccionasumir F2(γ2) = s.
15

Recuperemos el homeomorfismo h : γ1 → γ2 sobre el que se construyo la relacionde equivalencia ∼ en X que dio lugar al cociente X. Llamemos p1, p2 ⊂ X1 a losextremos de γ1, y observemos que h(p1), h(p2) ⊂ X2 son los extremos de γ2.
Veamos que el Corolario 3.6 nos permite modificar F2 para que F1(p) = F2(h(p))para todo p ∈ γ1. En efecto:
Salvo permutar ındices y cambiar F2 por S F2, donde S : D2 → D2 es la simetrıa(x, y) 7→ (−x, y), podemos asumir sin perdida de fuerza que F1(p1) = F2(h(p1)) =(−1, 0) ∈ s y F1(p2) = F2(h(p2)) = (1, 0) ∈ s.
Cambiando F2 por J F2, donde J : D2 → D2 es un homeomorfismo satisfaciendo
J |s = (F1|γ1) h−1 (F−12 |s), J |Bd(D2)\s = IdBd(D2)\s,
(construyase con ayuda del Corolario 3.6), logramos que F1(p) = F2(h(p)) paratodo p ∈ γ1.
La aplicacionF : X → D, F |X1 := F1, F |X2 = F2,
esta bien definida y es continua y sobreyectiva de un compacto en un Hausdorff, de dondees una identificacion. Como la relacion que induce ∼F coincide con ∼, la Proposicion 2.9garantiza que la unica aplicacion F : X → D tal que F π = F es un homeomorfismo.Esto prueba que X es un disco topologico cerrado.
Como Bd(X) = F−1(S1) = π(F−1(S1)) = π(C) = i(C), la proposicion se sigue.
Observacion 3.11 La Proposicion 3.10 se generaliza al caso Xj
φj∼= (x, y) ∈ R2 : y ≥0, x2 + y2 < 1 y γj := φ−1
j (] − 1, 1[), j = 1, 2. En este caso, si h : γ1 → γ2 es unhomeomorfismo y ∼ es la relacion asociada en X = X1 ∪X2 dada por
p ∼ q ⇐⇒ p = q o p, q = r, h(r) para algun r ∈ γ1,
el cociente topologico X := X/∼ es un disco topologico abierto.
Ejercicio 3.12 Es un ejercicio ilustrativo probar que dados dos discos topologicos com-pactos y disjuntos X1 y X2 y un homeomorfismo h : Bd(X1) → Bd(X2), el cocientetopologico X1 ∪X2/∼, donde ∼ denota la relacion de equivalencia en X1 ∪X2 definidapor
p ∼ q ⇐⇒ p = q o p, q = r, h(r) para algun r ∈ Bd(X1),
es homeomorfo a la esfera S2.
Dejamos tambien como ejercicio el siguiente enunciado.
Ejercicio 3.13 Sea X es un disco topologico compacto y sean γ1,j, γ2,j ⊂ Bd(X),j = 1, . . . , k, arcos de Jordan tales que γ1,j ∩ γ2,j = Pj ∈ Bd(X), j = 1, . . . , k, y(γ1,j ∪ γ2,j) ∩ (γ1,i ∪ γ2,i) = ∅, i 6= j. Sea hj : γ1,j → γ2,j un homeomorfismo tal queh(Pj) = Pj, j = 1, . . . , k. Definamos la relacion en X
p ∼ q ⇐⇒ p = q o p, q = r, hj(r) para algun r ∈ γ1,j y j ∈ 1, . . . , k.
Entonces X := X/∼ es un disco topologico compacto.
16

3.3. Discos topologicos con borde identificado
Sea X un disco topologico compacto. Escribamos por simplicidad C = Bd(X) sucircunferencia topologica borde. Sea R0 una relacion de equivalencia en C, y definamosla siguiente relacion de equivalencia en X:
pRq ⇐⇒ p = q ∨(p, q ⊂ C ∧ pR0q
).
Llamemos S al espacio topologico cociente X/R, y denotemos por σ : X → S a lacorrespondiente proyeccion al cociente.
Observemos que:
La inclusion natural i : X \C → X induce un embebimiento i0 : X \C → S dadopor i0(p) := (σ i)(p) = σ(p) ∈ S.
la inclusion j : C → X induce un embebimiento topologico j0 : C/R0 → S deter-minado por la identidad σ j = j0 σ0, donde σ0 : C → C/R0 es la proyeccion alcociente.
Por tanto, salvo componer con i0 podemos identificar el disco topologico abierto X \Ccon σ(X \C) ⊂ S, siendo la topologıa inducida por S sobre X \C la euclidiana usual.Analogamente, salvo componer con j0 podemos identificar topologicamente C/R0 conel subespacio topologico σ(C) ⊂ S. Notese que tanto S como σ(C) son arcoconexos alser cocientes de espacios arcoconexos.
Vamos a estudiar algunos cocientes de discos topologicos compactos especiales congran importancia para la teorıa, como veremos en el Tema 3. Necesitamos introduciralguna notacion.
Fijemos un conjunto infinito numerable U de sımbolos, que jugara un papel tacitoo auxiliar en lo que sigue. Construyamos el conjunto U × −1, 1 y denotemos por
π : U × 1,−1 → U
a la primera proyeccion. Por sencillez, identificaremos cada par (b, ε) ∈ U ×−1, 1 conla sılaba o caracter bε.
Definicion 3.14 Un esquema (sobre U) es una aplicacion
ω : 1, . . . , k → U × 1,−1, k ≥ 2.
El numero k ∈ N se referira como la longitud de ω, y escribiremos Long(ω) = k.
Si ω(j) = bε(j)j , j = 1, . . . , k, ω se identificara con la expresion b
ε(1)1 . . . b
ε(k)k . Al
conjunto sop(ω) := b1, . . . , bk se le llamara soporte de ω.Un esquema ω se dira binario si ]
((π ω)−1(b)
)≤ 2 para todo b ∈ U . Un esquema
binario se dira:
17

binario puro si ]((π ω)−1(b)
)∈ 0, 2 para todo b ∈ U .
binario mixto ]((π ω)−1(b)
)= 1 para algun b ∈ U .
orientable si ω es inyectiva, y no-orientable en caso contrario.
Por simplicidad, las sılabas b1 se escribiran simplemente b, para cada b ∈ U . Porejemplo, si b1, b2 y b3 ∈ U entonces b1b1b
−11 b2b2b
−13 es un esquema de longitud 6 sobre
U . El esquema b1b−11 b2b2b
−13 es binario mixto no orientable, mientras que b1b2b
−11 b−1
2 esbinario puro orientable.
Definicion 3.15 Dado un esquema ω = bε(1)1 . . . b
ε(k)k , una representacion r de ω en un
disco topologico compacto X es un par (a, h) donde
(I) a := γj : j = 1, . . . , k es una coleccion recubridora de arcos de Jordan orienta-dos y consecutivos en C := Bd(X), donde cada γj esta ligado unıvocamente a lasilaba o caracter b
εjj de ω para cada j. Para ser mas precisos:
γ1, . . . , γk son dos a dos compatiblemente orientados en C,
Int(γi) ∩ Int(γj) = ∅, i 6= j,
γj ∩ γj+1 6= ∅, j = 1 . . . , k − 1, y γk ∩ γ1 6= ∅, y
∪kj=1γj = C.
(II) h es una familia hi,j : γi → γj : (i, j) ∈ Iω de homeomorfismos, donde Iω :=(i, j) : 1 ≤ i, j ≤ k, bi = bj, satisfaciendo:
hi,j respeta las orientaciones de γi y γj si εi = εj, y las revierte si εiεj = −1.
hj,m hi,j = hi,m (en particular, hi,i = Idγi y hi,j = h−1j,i ).
Toda representacion r de ω en X induce de forma natural una relacion de equivalenciaen X. Basta considerar la relacion de equivalencia ∼0,r en C:
p ∼0,r q ⇐⇒ p, q = r, hi,j(r), r ∈ γi, (i, j) ∈ Iω.
y extenderla de forma trivial a X:
p ∼r q ⇐⇒ p = q ∨(p, q ⊂ C ∧ p ∼0,r q
).
Denotaremos por Sr y Γr, respectivamente, a los cocientes topologicos X/ ∼r y C/∼0,r
determinados por la representacion r de ω en X. Analogamente escribiremos σr : X → Sr
y σ0,r : C → Γr a las correspondientes proyecciones.La informacion topologica sobre el espacio Sr esta esencialmente concentrada en el
subespacio Γr. En este punto es aconsejable introducir la siguiente:
18

Definicion 3.16 Un espacio topologico Γ se dice un grafo conexo si existe una exahus-cion ∅ = Γ0 ⊂ Γ1 ⊂ . . . ⊂ Γn = Γ por subespacios topologicos conexos de Γ, de formaque para cada j ∈ 1, . . . , n existe un arco αj : [0, 1]→ Γ tal que
αj|[0,1] es inyectiva (arco de Jordan) o αj|[0,1[ es inyectiva y αj(0) = αj(1) (curvade Jordan).
Γj = Γj−1 ∪ αj([0, 1]).
αj|]0,1[ ∩ Γj−1 = ∅ y Γj−1 ∩ αj(0), αj(1) 6= ∅.
Si existe una circunferencia topologica (curva de Jordan) γj ⊂ ∪ji=1Γi con αj([0, 1]) ⊂γj, diremos que αj anade un ciclo a Γ, j = 1, . . . , n. Si Γj anade un ciclo para todoj = 1, . . . , n entonces Γ se dira un n-ciclo.
A los extremos de los αj se les llamara vertices de Γ, y se denotara por V (Γ) =∪nj=1αj(0), αj(1) al conjunto de todos ellos. A las componentes conexas de Γ \ V (Γ)las llamaremos lados de Γ, y denotamos E(Γ) al conjunto de todos ellos. El numeroentero
χ(Γ) := −]E(Γ) + ]V (Γ),
que coincide con 1− k donde k es el numero total de ciclos anadidos en la exahuscion∅ = Γ0 ⊂ Γ1 ⊂ . . . ⊂ Γn = Γ, se llamara caracteristica de Euler de Γ.
Observacion 3.17 Claramente Γr es un grafo conexo con vertices V (Γr) = ∪ki=1σr(V (γi)
)y lados E(Γr) = σr
(Int(γi)
): i = 1, . . . , k. Para determinar de forma correcta los car-
dinales de V (Γr) y E(Γr), y por tanto χ(Γr), hay que tener en cuenta las identificacionesinducidas por σr.
Definicion 3.18 Si ω es un esquema y r una representacion suya en un disco topologicocompacto X, el espacio topologico Sr se dira una realizacion de ω. Tambien diremosque σr : X → Sr es la identificacion asociada a la realizacion Sr.
El subespacio Γr de Sr sera referido como el grafo conexo borde de Sr.
Un mismo esquema puede admitir distintas realizaciones, pero parece natural pensarque estas son identificables topologicamente. La clave para comprenderlo esta de nuevoen el Corolario 3.6, y nos la da la siguiente proposicion.
Proposicion 3.19 Sean r1 y r2 dos representaciones del mismo esquema w en discostopologicos compactos X1 y X2, respectivamente. Entonces existe un homeomorfismoF : X1 → X2 compatible con ∼r1 y ∼r2, induciendo un homeomorfismo F : Sr1 → Sr2
tal que σr2 F = F σr1 (en particular, F (Γr1) = Γr2). El homeomorfismo F entre Sr1
y Sr2 ası obtenido se dira adaptado al esquema ω.
19

Demostracion : Pongamos ω = bε(1)1 . . . b
ε(k)k . Llamemos γl,1, . . . , γl,k a los arcos de Jor-
dan orientados en Cl := Bd(Xl) asociados a rl y denotemos por h(l)i,j : γl,i → γl.j a los
homeomorfismos asociados a rl, (i, j) ∈ Iω, l = 1, 2.Como los arcos los arcos γl,1, . . . , γl,k estan dispuestos de forma que engarzan final de
γl,j con principio de γl,j+1, e igualmente con γl,k y γl,1, l = 1, 2, existe un homeomorfismo
f : C1 → C2 tal que f(γ1,j) = γ2,j para j = 1, . . . , k.
Es mas,
la compatibilidad de las orientaciones de los arcos γl,1, . . . , γl,k, l = 1, 2,
y el hecho de que
los homeomorfismos h(1)i,j : γ1,i → γ1,j y h
(2)i,j : γ2,i → γ2,j preservan o revierten
ambos la orientabilidad para todo (i, j) ∈ Iω,
nos permite elegir f para que ademas
h(1)i,j = (f |γ2,j)−1 h(2)
i,j (f |γ1,i) ∀(i, j) ∈ Iω.
En efecto, para cada (i, j), (j, i) ∈ I2ω, i 6= j, basta fijar primero un ındice (tomare-
mos por ejemplo i), tomar cualquier homeomorfismo f |γ1,i : γ1,i → γ2,i preservando laorientacion fijada en los arcos de Jordan, y finalmente definir
f |γ2,j = h(2)i,j (f |γ1,i) (h
(1)i,j )−1 : γ1,j → γ2,j.
Por el Corolario 3.6 existe un homeomorfismo F : Int(C1)→ Int(C2) tal que F |C1 = f .Claramente
p ∼r1 q ⇐⇒ F (p) ∼r2 F (q),
por lo que F induce un homeomorfismo F : Sr1 → Sr2 tal que F σr1 = σr2 F . Estoconcluye la prueba.
Como consecuencia podemos establecer la siguiente definicion.
Definicion 3.20 Si ω = bε(1)1 . . . b
ε(k)k es un esquema, su realizacion en cualquiera disco
X auxiliar (unica salvo homeomorfismos) sera denotada por Sω. Analogamente escri-biremos por σω : X → Sω la identificacion asociada. A veces es comun identificar laexpresion formal ω con su realizacion Sω. De forma similar el grafo conexo borde Γωesta unıvocamente determinado salvo homeomorfismos adaptados a ω.
En ocasiones es aconsejable utilizar realizaciones sencillas de ω desde un punto devista geometrico. Por ejemplo, la realizacion de ω asociada a su representacion canonicar0 = (a0, h0) en D (unıvocamente determinada salvo isometrıas lineales del plano) enla que:
Todos los arcos de a0 en S1 tienen igual longitud euclidiana.
Los homeomorfismos h0 son transformaciones lineales del argumento en S1, oequivalentemente, restriccion de isometrıas lineales euclidianas.
Las propiedades topologicas basicas de las realizaciones de esquemas estan recogidas enla siguiente propocicion.
20

Proposicion 3.21 Dado un esquema ω, el espacio Sω es arcoconexo, compacto, Haus-dorff y II-Axioma de Numerabilidad.
Demostracion : Por conveniencia utilicemos la realizacion Sω ≡ Sr0 de ω comentada enla Observacion 2.6.
La arcoconexion y la compacidad de Sω se siguen de la arcoconexion y compacidadde D junto con Observacion 2.6-(f).
Dado p ∈ Sω, llamemos Up(ε) := x ∈ D : dist(x, σ−1ω (p)) < ε. Por la simetrıa de
la representacion canonica es claro que Up(ε) es un abierto σω-saturado en D. Es mas,como D esta dotado de la topologıa euclidiana, la familia σω
(Up(ε)
): p ∈ Sω, ε > 0
es una base de la topologıa cociente en Sω.Si p1 y p2 son puntos distinos en Sω, los conjuntos σ1
ω(p1) y σ−1ω (p2) son disjuntos y
por tanto existe ε > 0 sufientemente pequeno tal que Up1(ε)∩Up2(ε) = ∅. De Observacion2.6-(d) se sigue que Sω es Hausdorff.
Por ultimo, para probar que Sω es II-Axioma de Numerabilidad observese que lafamilia de abiertos σω-saturados de D
B := Up(ε) : p ∈ σω(D ∩Q2), ε ∈ Q ∪ Uσω(eıθ)(ε) : θ ∈ [0, 2π] ∩Q, ε ∈ Q
satisface Observacion 2.6-(e).
3.4. Ampliacion: El Teorema de Jordan-Schoenflies para poli-gonales
Como complemento a lo visto es las anteriores secciones probaremos una versionsuave del Teorema de la curva de Jordan para el caso particular de curvas poligonales.Comenzaremos con el siguiente resultado para curvas de Jordan convexas, que obviandoel Teorema de Jordan-Schoenflies afirma que estas siempre bordean un disco topologicoplano (ver tambien el Teorema 3.23).
Proposicion 3.22 Toda curva de Jordan convexa C en R2 bordea un disco topologicocompacto en R2.
Recordemos que una curva de Jordan C en R2 se dice convexa si para cualquiera lınearecta L en R2 el conjunto L ∩ C es
conexo (puede que vacıo) y C esta en un semiplano cerrado con borde L, o
contiene exactamente dos puntos distintos y C tiene puntos en los dos semiplanosabiertos determinados por L.
Demostracion : Hemos de demostrar que existe un disco topologico compacto X ⊂ R2
de forma que C = Bd(X). Como C contiene a lo mas una cantidad numerable desegmentos no triviales y no puede estar contenida en una recta (en ese caso serıa unintervalo compacto, ya que es conexa y compacta, y no podrıa ser homeomorfa a S1),existe una recta L en R2 cortando C en dos puntos distintos p y q. En particular,cualquiera recta R conteniendo un segmento no trivial en C (de haberlo) corta a L alo mas en un punto. Como hay una cantidad numerable de tales R’s, existe un puntox0 ∈]p, q[ tal que Lθ := x0 + sθ : s ∈ R no contiene segmentos no triviales en C paratodo θ ∈ S1. Veamos que Lθ corta a C en exactamente dos puntos distintos para todoθ ∈ S1. En efecto, si θ = ± p−q
‖p−q‖ eso es evidente ya que p, q ∈ L p−q‖p−q‖
= L q−p‖p−q‖
, y si
21
θ 6= ± p−q‖p−q‖ entonces los puntos p y q de C estan contenidos en distintos semiplanos
de R2 \ Lθ, por lo que de la conexion de C implica que Lθ ∩ C 6= ∅. La convexidadde C y el hecho de que Lθ ∩ C no contiene segmentos no triviales obliga a que Lθ ∩ Ccontenga exactamente dos puntos, uno a la izquierda de x0 y otro a la derecha de x0 enLθ, para todo θ ∈ S1. Por tanto la semirecta L+
θ := x0 + sθ : s ≥ 0 interseca a C enun unico punto qθ, para cada θ ∈ S1. Escribamos [x0, qθ] = x0 + sqθ : s ∈ [0, ‖qθ−x0‖]y definamos X := ∪θ∈S1 [x0, qθ]. Como S1 → C, θ 7→ qθ, es un homeomorfismo, laaplicacion
H : X → D, H(x0 + sqθ) = sθ,
es continua y biyectiva, y al ir de un compacto en un Hausdorff, es un homeomorfismo.Esto prueba que X es un disco topologico compacto con borde Bd(X) = H−1(S1) = C,lo que concluye la demostracion.
A continuacion probamos el Teorema de la curva de Jordan-Schoenflies para poli-gonales.
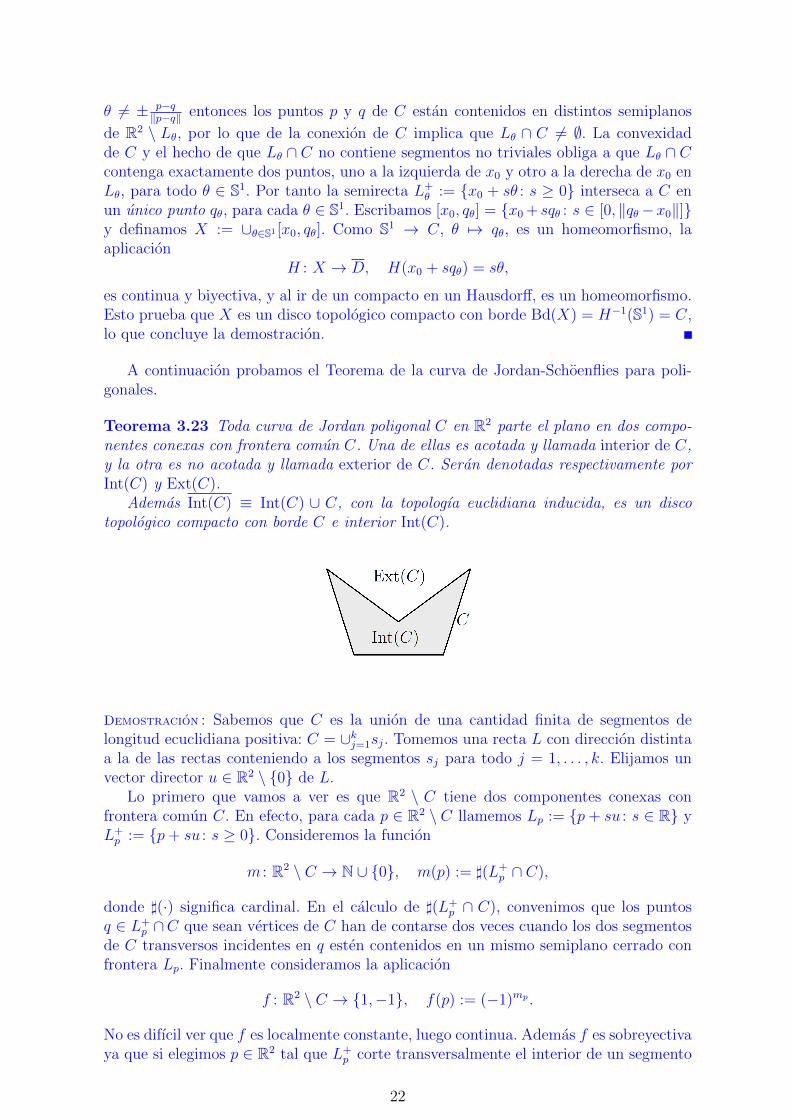
Teorema 3.23 Toda curva de Jordan poligonal C en R2 parte el plano en dos compo-nentes conexas con frontera comun C. Una de ellas es acotada y llamada interior de C,y la otra es no acotada y llamada exterior de C. Seran denotadas respectivamente porInt(C) y Ext(C).
Ademas Int(C) ≡ Int(C) ∪ C, con la topologıa euclidiana inducida, es un discotopologico compacto con borde C e interior Int(C).
Demostracion : Sabemos que C es la union de una cantidad finita de segmentos delongitud ecuclidiana positiva: C = ∪kj=1sj. Tomemos una recta L con direccion distintaa la de las rectas conteniendo a los segmentos sj para todo j = 1, . . . , k. Elijamos unvector director u ∈ R2 \ 0 de L.
Lo primero que vamos a ver es que R2 \ C tiene dos componentes conexas confrontera comun C. En efecto, para cada p ∈ R2 \ C llamemos Lp := p+ su : s ∈ R yL+p := p+ su : s ≥ 0. Consideremos la funcion
m : R2 \ C → N ∪ 0, m(p) := ](L+p ∩ C),
donde ](·) significa cardinal. En el calculo de ](L+p ∩ C), convenimos que los puntos
q ∈ L+p ∩C que sean vertices de C han de contarse dos veces cuando los dos segmentos
de C transversos incidentes en q esten contenidos en un mismo semiplano cerrado confrontera Lp. Finalmente consideramos la aplicacion
f : R2 \ C → 1,−1, f(p) := (−1)mp .
No es difıcil ver que f es localmente constante, luego continua. Ademas f es sobreyectivaya que si elegimos p ∈ R2 tal que L+
p corte transversalmente el interior de un segmento
22
sj, la funcion m|L+p \C cambia de paridad al al atravesar sj. Por tanto R2 \ C es la
union disjunta de los abiertos euclidianos Int(C) := f−1(−1) 6= ∅ (interior de C) yExt(C) := f−1(1) 6= ∅ (exterior de C). Notese que nuestro argumento tambien garantizaque C = Fr(Int(C)) = Fr(Ext(C)).
Veamos que Int(C) es conexo (analogamente se probarıa la conexion de Ext(C)).Tomemos p1, p2 ∈ Int(C) puntos arbitrarios y comprobemos que estan en la mismacomponente conexa de Int(C). Para t suficientemente pequeno, la geometrıa combina-torio elemental nos garantiza que Ct := p ∈ R2 : dist(x,C) = t es union de dos curvasde Jordan polıgonales proximas y paralelas a C, una de ellas C−t ⊂ Int(C) y la otraC+t ⊂ Ext(C). Es facil concluir de aquı que, si ε > 0 es suficientemente pequeno, el
entorno tubular N(C, ε) := ∪|t|<εCt de C es un dominio arcoconexo conteniendo a C ycon frontera C−ε ∪C+
ε . La arcoconexion de N−(C, ε) := ∪−ε<t<0C−t ⊂ Int(C) es tambien
clara ya que es homeomorfo de forma natural a ]− ε, 0[×C. Como L+pj
corta a C ya que
pj ∈ Int(C), L+pj
ha de intersecar tambien a N(C, ε), luego a N−(C, ε). Por tanto pjesta en la misma arcocomponente de Int(C) que N−(C, ε), j = 1, 2. Esto garantiza quep1y p2 estan en la misma componente conexa de Int(C) como querıamos demostrar.
Finalmente veamos que Int(C) es acotado y Ext(C) no es acotado. En efecto, si Bes una bola euclidiana conteniendo a C en su interior, el conexo R2 \ B ha de estaren alguna de las dos componentes de R2 \ C( a saber, Int(C) o Ext(C)). Pero R2 \ Bcontiene lıneas rectas paralelas al vector u, por tanto totalmente contenidas en Ext(C).Esto fuerza a que R2 \B ⊂ Ext(C), y en consecuencia a que Int(C) ⊂ B.
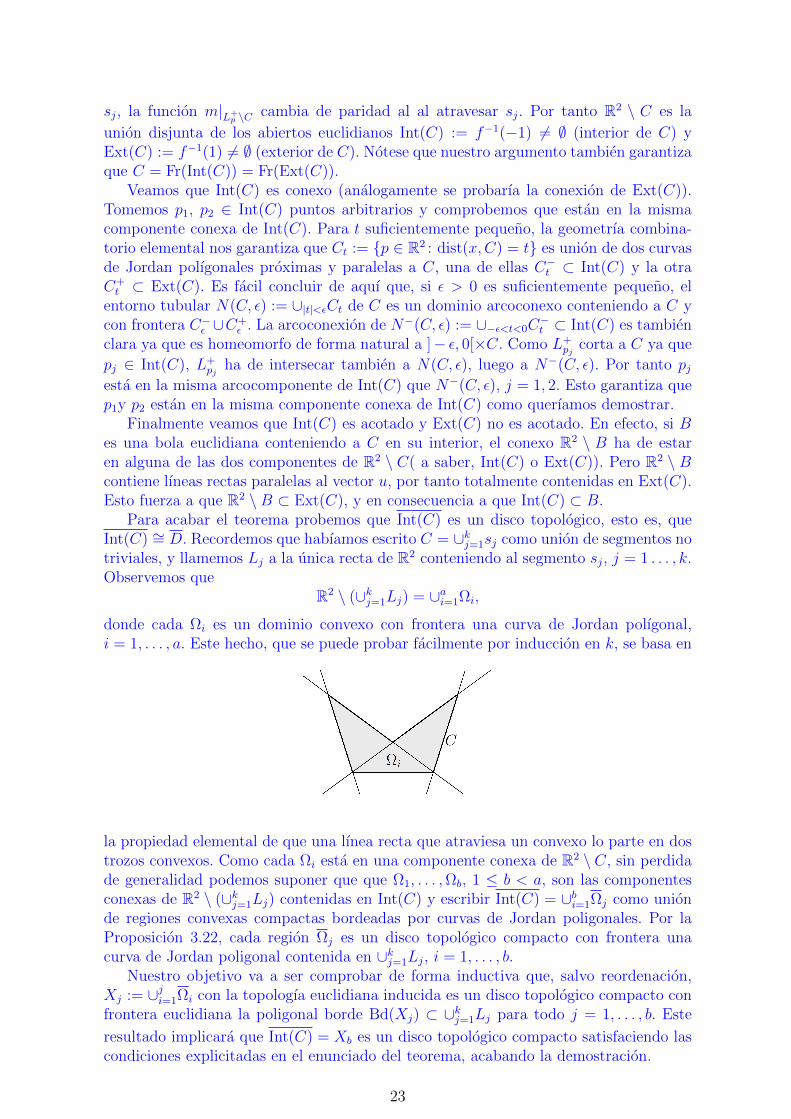
Para acabar el teorema probemos que Int(C) es un disco topologico, esto es, queInt(C) ∼= D. Recordemos que habıamos escrito C = ∪kj=1sj como union de segmentos notriviales, y llamemos Lj a la unica recta de R2 conteniendo al segmento sj, j = 1 . . . , k.Observemos que
R2 \ (∪kj=1Lj) = ∪ai=1Ωi,
donde cada Ωi es un dominio convexo con frontera una curva de Jordan polıgonal,i = 1, . . . , a. Este hecho, que se puede probar facilmente por induccion en k, se basa en
la propiedad elemental de que una lınea recta que atraviesa un convexo lo parte en dostrozos convexos. Como cada Ωi esta en una componente conexa de R2 \ C, sin perdidade generalidad podemos suponer que que Ω1, . . . ,Ωb, 1 ≤ b < a, son las componentesconexas de R2 \ (∪kj=1Lj) contenidas en Int(C) y escribir Int(C) = ∪bi=1Ωj como unionde regiones convexas compactas bordeadas por curvas de Jordan poligonales. Por laProposicion 3.22, cada region Ωj es un disco topologico compacto con frontera unacurva de Jordan poligonal contenida en ∪kj=1Lj, i = 1, . . . , b.
Nuestro objetivo va a ser comprobar de forma inductiva que, salvo reordenacion,Xj := ∪ji=1Ωi con la topologıa euclidiana inducida es un disco topologico compacto confrontera euclidiana la poligonal borde Bd(Xj) ⊂ ∪kj=1Lj para todo j = 1, . . . , b. Este
resultado implicara que Int(C) = Xb es un disco topologico compacto satisfaciendo lascondiciones explicitadas en el enunciado del teorema, acabando la demostracion.
23
En efecto, podemos suponer sin perdida de fuerza que X1 = Ω1 contiene al menosuno de los segmentos que definen C. Notemos que el disco X1 satisface las condicionesanteriores gracias a la Proposicion 3.22, por lo que la base de la induccion esta ga-rantizada. Admitamos que nuestra afirmacion es cierta para Xj, j < b. Para cerrar lainduccion, es importante obsevar que C * Bd(Xj). En efecto, en otro caso C = Bd(Xj)ya que la circunferencia topologica Bd(Xj) ∼= S1 no contiene subespacio propios ho-meomorfos a S1. Como j < b, el conexo Ωb no corta a Bd(Xj) = C, y por la primeraparte de la demostracion debe estar contenido en una de las dos componentes conexasde R2 \ Bd(Xj) = R2 \ C. Como Ωb ∩Xj = ∅ y Int(C) = Int(Bd(Xj)), deducimos queΩb ⊂ Ext(C), una contradiccion. Por tanto, existe una region en la lista Ωj+1, . . . ,Ωb,que salvo reordenacion podemos suponer es Ωj+1, que corta a C y es contigua a Xj enel sentido de que Ωj+1 ∩ Xj es un arco de Jordan. La Proposicion 3.10 garantiza queXj+1 := Xj ∪ Ωj+1 es un disco topologico compacto con borde una curva de Jordanpoligonal contenida en ∪kj=1Lj. Esto cierra la induccion y concluye la demostracion.
Observacion 3.24 El mismo argumento del teorema anterior funciona sin grandesmodificaciones cuando la curva de Jordan poligonal C se sustituye por una curva po-ligonal P propiamente embebida en R2 con una cantidad finita de segmentos (dos deellos logicamente semirectas infinitas). En este caso la conclusion es que R2 \ P tienedos componentes conexas no acotadas con frontera comun P .
24
TEMA 1: Grupo Fundamental
Francisco J. LopezDepartamento de Geometrıa y Topologıa
Universidad de [email protected]
En este tema introduciremos el primer invariante topologico de naturaleza algebraicaconocido historicamente, que motivo el nacimiento de la Topologıa Algebraica moderna.Nos referimos al grupo fundamental de un espacio topologico o grupo de Pincare.
4. Homotopıa de arcos: Grupo Fundamental
Sea X un espacio topologico.En este tema trataremos de forma recurrente con arcos en X, esto es, con aplica-
ciones contınuas α : [0, 1]→ X. La idea crucial para entender todo lo que sigue es la dedeformacion topologica de arcos, tambien conocida en la literatura como homotopıa dearcos.
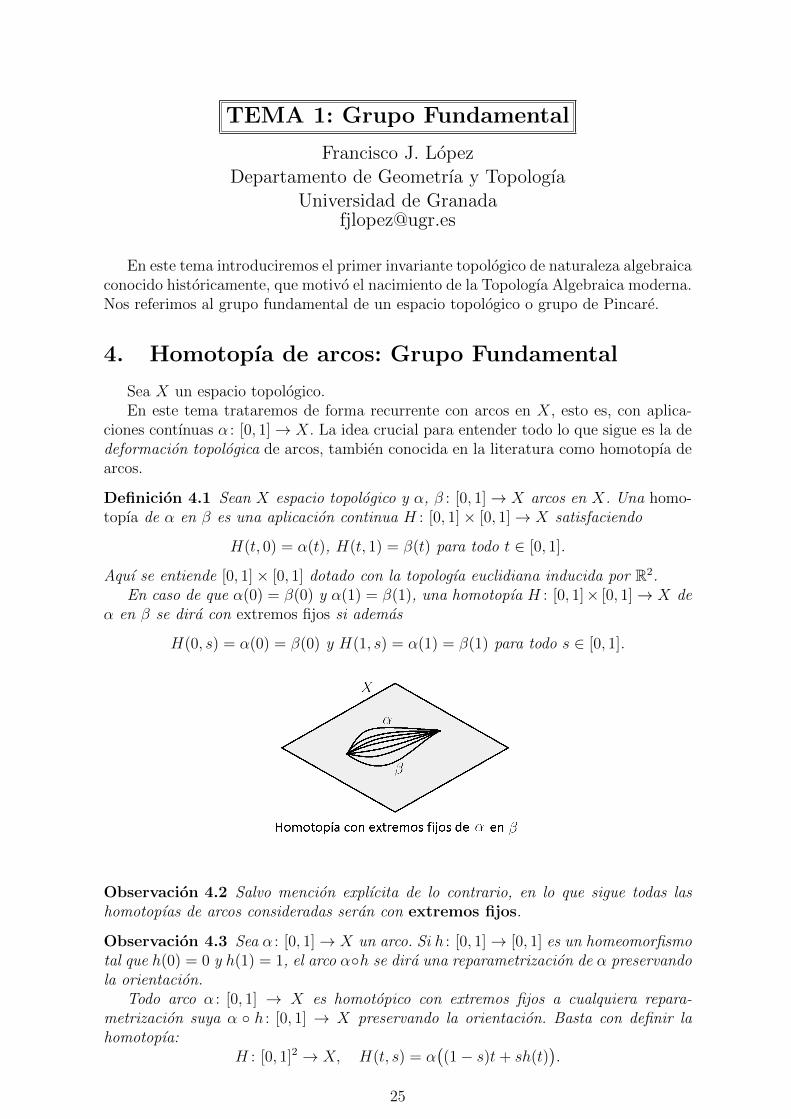
Definicion 4.1 Sean X espacio topologico y α, β : [0, 1]→ X arcos en X. Una homo-topıa de α en β es una aplicacion continua H : [0, 1]× [0, 1]→ X satisfaciendo
H(t, 0) = α(t), H(t, 1) = β(t) para todo t ∈ [0, 1].
Aquı se entiende [0, 1]× [0, 1] dotado con la topologıa euclidiana inducida por R2.En caso de que α(0) = β(0) y α(1) = β(1), una homotopıa H : [0, 1]× [0, 1]→ X de
α en β se dira con extremos fijos si ademas
H(0, s) = α(0) = β(0) y H(1, s) = α(1) = β(1) para todo s ∈ [0, 1].
Observacion 4.2 Salvo mencion explıcita de lo contrario, en lo que sigue todas lashomotopıas de arcos consideradas seran con extremos fijos.
Observacion 4.3 Sea α : [0, 1]→ X un arco. Si h : [0, 1]→ [0, 1] es un homeomorfismotal que h(0) = 0 y h(1) = 1, el arco αh se dira una reparametrizacion de α preservandola orientacion.
Todo arco α : [0, 1] → X es homotopico con extremos fijos a cualquiera repara-metrizacion suya α h : [0, 1] → X preservando la orientacion. Basta con definir lahomotopıa:
H : [0, 1]2 → X, H(t, s) = α((1− s)t+ sh(t)
).
25

La homotopıa de arcos tiene unas propiedades agradables que vamos a describir acontinuacion.
Definicion 4.4 Dados p y q puntos en un espacio topologico X, denotemos
Ωp,q(X) = α : [0, 1]→ X / α es un arco con α(0) = p y α(1) = q.
Dos arcos α, β ∈ Ωp,q(X) se diran homotopicos, y se escribira α ' β, si existe unahomotopıa H de α en β.
Proposicion 4.5 La relacion binaria ' es de equivalencia en Ωp,q(X).
Demostracion : Hemos de comprobar que es reflexiva, simetrica y transitiva.
Reflexividad: Dado α ∈ Ωp,q(X), la homotopıa
H : [0, 1]2 → X, H(t, s) := α(t)
prueba que α'α.
Simetrıa: Sean α, β ∈ Ωp,q(X). Supongamos que α'β y sea H : [0, 1]2 → X unahomotopıa de α en β. La aplicacion
H : [0, 1]2 → X, H(t, s) := H(t, 1− s)
prueba que β'α.
Transitividad: Sean α, β, γ ∈ Ωp,q(X) y supongamos que α'β y β'γ. ConsideremosH1 : [0, 1]2 → X y H2 : [0, 1]2 → X homotopıas de α en β y de β en γ, respectivamente.La aplicacion H : [0, 1]2 → X dada por
H(t, s) :=
H1(t, 2s) si s ∈ [0, 1/2]
H2(t, 2s− 1) si s ∈ [1/2, 1]
prueba que α'γ.
El caso p = q es especialmente interesante y motiva la siguiente
Definicion 4.6 (Espacio de lazos) Dados X espacio topologico y p ∈ X, escribire-mos Ωp(X) := Ωp,p(X) y llamaremos lazos con base el punto p a los arcos de Ωp(X).
Denotaremos Π1(X, p) al espacio cociente Ωp(X)/'. Si α ∈ Ωp(X) su clase enΠ1(X, p) se denotada por [α], y a los elementos de Π1(X, p) les llamaremos clases dehomotopıa de lazos en X con base el punto p.
Como conjunto de elementos, Π1(X, p) sera el grupo fundamental de X en p. Sin em-bargo, para dotar a Π1(X, p) de la estructura algebraica de grupo hace falta un esfuerzomayor que pasara por introducir una ley de composicion interna apropiada. La clavepara poder hacerlo esta en el producto de arcos introducido en la Definicion 2.1, tal ycomo se explica en las siguientes proposiciones.
Proposicion 4.7 Sean X un espacio topologico y puntos p, q, r ∈ X. Sean α, α′ ∈Ωp,q(X) y β, β′ ∈ Ωq,r(X) arcos tales que α'α′ y β'β′.
Entonces α ? β'α′ ? β′.
26

Demostracion : Sean H1 : [0, 1]2 → X y H2 : [0, 1]2 → X homotopıas de α en α′ y de βen β′, respectivamente. La aplicacion H : [0, 1]2 → X dada por
H(t, s) :=
H1(2t, s) si t ∈ [0, 1/2]
H2(2t− 1, s) si t ∈ [1/2, 1]
es una homotopıa de α ? β en α′ ? β′.
Proposicion 4.8 Sean X espacio topologico, p, q, r y s ∈ X, y α ∈ Ωp,q(X), β ∈Ωq,r(X), y γ ∈ Ωr,s(X). Las siguientes propiedades son ciertas:
(i) α ? (β ? γ)'(α ? β) ? γ.
(ii) εp ? α'α ? εq'α.
(iii) α ? α'εp.
Demostracion : La homotopıaH : [0, 1]2 → X, H(t, s) =
α( 4t
2−s) si t ∈ [0, 2−s4
]
β(4t+ s− 2) si t ∈ [2−s4, 3−s
4]
γ(4t+s−3s+1
) si t ∈ [3−s4, 1]
prueba que α ? (β ? γ)'(α ? β) ? γ, luego (I).
La homotopıa H : [0, 1]2 → X, H(t, s) =
α( 2t
s+1) si t ∈ [0, s+1
2]
q si t ∈ [ s+12, 1]
prueba que α ? εq'α. Analogamente se demuestra que εp ? α'α, de aquı (II).
27

Por ultimo, la homotopıaH : [0, 1]2 → X, H(t, s) =
α(2t) si t ∈ [0, 1−s
2]
α(1− s) = α(s) si t ∈ [1−s2, 1+s
2]
α(2t− 1) si t ∈ [1+s2, 1]
prueba que α ? α'εp, luego (III). Notese que α(2t) : t ∈ [1, 1−s2
] parametriza el sur-
barco α|[0,1−s] de α, mientras que α(2t−1) : t ∈ [1+s2, 1] parametriza el surbarco α|[s,1]
de α. Ambos subarcos tienen la misma traza aunque se recorren en sentido contrario,y degeneran en el punto p cuando s→ 1.
Como consecuencia tenemos el siguiente teorema, que es el resultado central de estetema.
Teorema 4.9 Sea X un espacio topologico y p ∈ X un punto arbitrario. La ley decomposicion interna
? : Π1(X, p)× Π1(X, p)→ Π1(X, p), [α] ? [β] := [α ? β]
esta bien definida y dota al conjunto Π1(X, p) de estructura de grupo algebraico.
Demostracion : La Proposicion 4.7 muestra que la operacion ? esta bien definida en cla-ses de equivalencia (no depende del representante elegido), mientras que la Proposicion4.8 garantiza que (Π1(X, p), ?) es un grupo.
Definicion 4.10 El grupo(Π1(X, p), ?
)es conocido como Grupo Fundamental o de
Poincare del espacio X en el punto p.
Aunque la definicion del grupo fundamental no ha requerido arcoconexion, esa propie-dad topologica resulta bastante natural para que la construccion sea canonica desde unpunto de vista global. Ese es el mensaje de fondo de la siguiente proposicion.
Proposicion 4.11 Sean p y q puntos en la misma arcocomponente de un espacio to-pologico X, y tomemos un arco f : [0, 1]→ X conectando p con q, esto es, con f(0) = py f(1) = q. Consideremos
Uf : Π1(X, p)→ Π1(X, q), Uf ([α]) = [f ? α ? f ].
Entonces Uf esta bien definido y es un isomorfismo entre los grupos fundamentales(Π1(X, p), ?) y (Π1(X, q), ?).
Ademas, si g : [0, 1]→ X es otro arco conectando p y q se tiene que
Uf = Ug ⇐⇒ g ? f ∈ Z(Π1(X, p)),
donde Z(Π1(X, p)) representa el centro del grupo Π1(X, p). En particular Uf no dependede f cuando Π1(X, p) es abeliano.
28

Demostracion : La Proposicion 4.7 garantiza que Uf esta bien definida y la Proposicion4.8 que Uf es un isomorfismo de grupos con inverso Uf .
Por otra parte, de las anteriores proposiciones tambien es claro que
Uf ([α]) = Ug([α])⇐⇒ [f ? α ? f ] = [g ? α ? g]⇐⇒ [g ? f ] ? [α] = [α] ? [g ? f ]
para todo [α] ∈ Π1[X, p), por lo que Uf = Ug ⇐⇒ g ? f ∈ Z(Π1(X, p)).
Corolario 4.12 El grupo fundamental Π1(X, p) esta unıvocamente determinado salvoisomorfismos por la arcocomponente Cp del punto p.
En particular, si X es arcoconexo entonces la clase de isomorfıa de Π1(X, p) no de-pende del punto p ∈ X. En este caso podemos relajar la notacion y escribir simplementeΠ1(X) sin enfatizar el punto base.
La importancia del grupo fundamental radica en que es un invariante topologico.Este hecho se deducira facilmente de la siguiente proposicion.
Proposicion 4.13 Sean X e Y espacios topologicos y ϕ : X → Y una aplicacion con-tinua. Consideremos α, β ∈ Ωp,q(X) y los correspondientes ϕ α, ϕ β ∈ Ωϕ(p),ϕ(q)(Y ).Se tiene que
α'β =⇒ ϕ α'ϕ β.
En particular:
La aplicacion
ϕ∗ : Π1(X, p)→ Π1(Y, f(p)), ϕ∗([α]) := [ϕ α]
esta bien definida y es un homomorfismo de grupos.
Si ψ : Y → Z es otra aplicacion continua y consideramos los homomorfismos degrupos ψ∗ : Π1(Y, ϕ(p))→ Π1
(Z, ψ(ϕ(p))
)y (ψϕ)∗ : Π1(X, p)→ Π1
(Z, ψ(ϕ(p))
),
entonces se tiene que (ψ ϕ)∗ = ψ∗ ϕ∗.
Demostracion : Para la primera parte de la proposicion tomemos H : [0, 1]2 → X unahomotopıa de α en β, y observemos que ϕ H : [0, 1]2 → Y es una homotopıa de ϕ αen ϕ β.
Por tanto ϕ∗ : Π1(X, p)→ Π1(Y, f(p)) esta bien definida. Para comprobar que ϕ∗ esun morfismo de grupos tomense [α], [β] ∈ Π1(X, p) y observese que
ϕ∗([α] ? [β]) = ϕ∗([α ? β]) = [ϕ (α ? β)] = [(ϕ α) ? (ϕ β)] = ϕ∗([α]) ? ϕ∗([β]).
El comportamiento funtorial respecto a la composicion es obvio de las definiciones.
Corolario 4.14 (Invarianza topologica del Grupo Fundamental) Si ϕ : X → Yes un homeomorfismo de espacios topologicos entonces ϕ∗ : Π1(X, p) → Π1(Y, f(p)) esun isomorfismo de grupos.
Este corolario tiene gran utilidad. Pensemos que, como consecuencia del mismo, dos es-pacios topologicos con grupos fundamentales no isomorfos no pueden ser homeomorfos.Este hecho tendra implicaciones profundas como veremos mas adelante.
29

5. Calculo del grupo fundamental: ejemplos basicos
En este tema abordaremos algoritmos complejos para el calculo del grupo funda-mental. Estudiemos ahora algunos ejemplos sencillos que son de bastante utilidad.
Ejercicio 5.1 El grupo fundamental de un subconjunto estrellado de Rn es trivial. Enparticular, todo subconjunto convexo de Rn (luego el propio Rn) tiene grupo fundamentaltrivial.
Demostracion : Consideremos A ⊂ Rn estrellado con centro x0 ∈ A, esto es, tal que[x0, x] ⊂ A para todo x ∈ A. Por supuesto A se entiende dotado de la topologıaeuclidiana inducida.
Dado un lazo α ∈ Ωx0(A), la aplicacion bien definida
H : [0, 1]2 → A, H(t, s) := (1− s)α(t) + sx0
prueba que α'εx0 , y por tanto que Π1(A, x0) = [εx0 ] ≡ 0.
La siguiente proposicion prueba que el grupo fundamental es productivo.
Proposicion 5.2 Sean X1 e X2 espacios topologicos, X1 × X2 el espacio topologicoproducto y πj : X1 ×X2 → Xj, j = 1, 2, las proyecciones.
Entonces, para cualesquiera p ∈ X1 y q ∈ X2 la aplicacion
(π1∗, π2∗) : Π1
(X1 ×X2, (p, q)
)→ Π1(X1, p)× Π1(X2, q),
es un isomorfismo de grupos.
Demostracion : Por la definicion de la topologıa producto, las proyecciones son aplica-ciones continuas. Consideremos el homomorfismo de grupos (ver Proposicion 4.13)
Λ := (π1∗, π2∗) : Π1
(X1 ×X2, (p, q))→ Π1(X1, p)× Π1(X2, q).
Sera suficiente con probar que es un isomorfismo, y para ello bastara con garantizar quetiene una inversa. Para ello consideramos la aplicacion
Θ: Π1(X1, p)× Π1(X2, q)→ Π1
(X1 ×X2), Θ([α1], [α2]) := [(α1, α2)].
No es difıcil demostrar que Θ esta bien definida. En efecto, si αj'α′j vıa una homotopıaHj : [0, 1]2 → Xj, j = 1, 2, entonces (α1, α2)'(α′1, α
′2) via la homotopıa (H1, H2) : [0, 1]2 →
X1×X2. Esto demuestra que Θ no depende del representante elegido para la definicion.El hecho de que Λ y Θ son uno inverso del otro es un ejercicio trivial.
Otra familia de espacios topologicos para la que es posible deducir informacion sobresu grupo fundamental es la de los grupos topologicos.
Definicion 5.3 Un grupo topologico es un par (G, ·) donde:
G es un espacio topologico
· : G×G→ G es una ley de composicion interna en G que le dota de estructurade grupo algebraico.
30

La aplicacion G×G→ G, (a, b) 7→ a · b−1, es continua, o equivalentemente,
· : G×G→ G, (a, b) 7→ a · b, y ( )−1 : G→ G, a 7→ a−1,
son continuas.
Teorema 5.4 Si (G, ·) es un grupo topologico y e ∈ G es su Elemento Neutro, entoncesΠ1(G, e) es abeliano.
Demostracion : Introduzcamos en Π1(G, e) una nueva ley de composicion interna, dis-tinta a ?, asociada a la estructura de grupo topologico. Para ello definimos:
· : Π1(G, e)× Π1(G, e)→ Π1(G, e), [α] · [β] = [α · β],
donde α · β : [0, 1]→ G viene dado por (α · β)(t) := α(t) · β(t) para todo t ∈ [0, 1].Como siempre, hay que garantizar que · esta bien definida en clases. Para ello con-
sideremos αj'α′j en Ωe(G) via una homotopıa Hj : [0, 1]2 → G, j = 1, 2, y observemosque H1 ·H2 : [0, 1]2 → G (definida de forma natural) es una homopia de α1 ·α2 en α′1 ·α′2.
A continuacion hagamos el siguiente calculo:
α?β(t) =
α(2t) si t ∈ [0, 1/2]
β(2t− 1) si t ∈ [1/2, 1]=
α(2t) · e si t ∈ [0, 1/2]
e · β(2t− 1) si t ∈ [1/2, 1]= (α?εe) · (εe ?β).
Analogamente,
α ? β(t) =
e · α(2t) si t ∈ [0, 1/2]
β(2t− 1) · e si t ∈ [1/2, 1]= (εe ? β) · (α ? εe).
Pero (α ? εe) · (εe ? β)'α · β y (εe ? β) · (α ? εe)'β · α, de donde α ? β'α · β'β · α, ysimetricamente β ? α'α · β'β · α. Esto prueba que [α] ? [β] = [β] ? [α] y el teorema.
6. El Grupo Fundamental de S1
Nuestro objetivo inmediato sera calcular explıcitamente el grupo fundamental de lacircunferencia S1. En lo que sigue identificaremos S1 ≡ z ∈ C : |z| = 1 ⊂ C. Como S1
es un grupo topologico con el producto de numeros complejos, a priori sabemos por elTeorema 5.4 que Π1(S1, 1) ha de ser abeliano.
Un ingrediente fundamental para nuestro estudio seran las propiedades topologicasde la aplicacion exponencial
ρ : R→ S1, ρ(t) := e2πıt =(
cos(2πt), sen(2πt)), (1)
que recordamos a continuacion:
(a) ρ : R→ S1 es continua, abierta y sobreyectiva.
(b) ρ es un homomorfismo entre los grupos (R,+) y (S1, ·): ρ(t+ s) = ρ(t) · ρ(s).
(c) ρ es periodica con periodo fundamental 1: ρ(t+ 1) = ρ(t).
(d) Si t0 ∈ ρ−1(z), z ∈ S1, entonces ρ−1(z) = t0 + Z. En particular ρ−1(1) = Z.
(e) Para todo t0 ∈ R, ρ|[t0,t0+1[ : [t0, t0 + 1[→ S1 es biyectiva.
31

(f) Para todo z ∈ S1 existe un abierto U ⊂ S1 tal que:
z ∈ U .
Si V es una arcocomponente de ρ−1(U) entonces ρ|V : V → U es un homeo-morfismo.
Todos las propiedades anteriores son bien conocidas. Quiza merezca un mınimo co-mentario la prueba del item (f). En efecto, sea z ∈ S1 y definamos U = S1 \ −z ynotese que z ∈ U . Dado t0 ∈ ρ−1(−z) es claro que ρ−1(U) = ∪m∈Z]t0 + m, t0 + m + 1[,donde los conjuntos ]t0 + m, t0 + m + 1[, m ∈ Z, son las arcocomponentes de ρ−1(U).Si V =]t0 + m, t0 + m + 1[ es una arcocomponente cualquiera de ρ−1(U), el item (e)garantiza que ρ|V : V → U es un homeomorfismo.
Necesitaremos el siguiente resultado de levantamiento.
Lema 6.1 Dada H : [0,1]2 → S1 continua con H(0, 0) = 1, existe una unica aplicacion
H : [0,1]2 → R continua tal que ρ H = H y H(0, 0) = 0.
Demostracion : La unicidad de H es evidente. En efecto, admitamos que existen dosaplicaciones H y H ′ satisfaciendo la tesis del Lema. Como ρ (H − H ′) constante e
igual a 1 ∈ S1 ⊂ C, la aplicacion continua H − H ′ : [0, 1]2 → R ha de tener su imagen
contenida en Z. Al ser [0, 1]2 conexo lo mismo ocurre con (H − H ′)([0, 1]2), de donde
concluimos que H − H ′ ha de ser constante e igual a (H − H ′)(0, 0) = 0, esto es, que
H = H ′.Probemos ahora la existencia de H.Consideremos el recubrimiento por abiertos de S1 dado por
U =U1 := S1 \ −1, U2 := S1 \ 1
.
Como C = [0, 1]2 es un espacio metrico compacto (con la distancia euclidiana in-ducida), existe el llamado numero de Lebesgue ε > 0 para el recubrimiento abiertoH−1(U) := H−1(U1), H−1(U2) de C. Esto significa que cualquier subconjunto A ⊂ Ccon diametro euclidiano < ε satisface A ⊂ H−1(Uj) para algun j ∈ 1, 2. De aquı quepodamos elegir una particion 0 = t1 < . . . < tk < tk+1 = 1 de [0, 1] tal que
H([ti, ti+1]× [th, th+1]) ⊂ Uj para algun j ∈ 1, 2, i, h = 1, . . . , k (2)
(bastara con garantizar que |tj+1 − tj| < ε√2).
Numeremos C1, . . . , CN , N = k2, la familia de cuadrados [ti, ti+1]× [th, th+1] : i, h =1, . . . , k de acuerdo al siguiente criterio:
C1 = [t1, t2]× [t1, t2].
Kj := ∪i≤jCi es conexo, j = 1, . . . , N .
Lj := Kj ∩ Cj+1 es conexo y consiste en uno o dos lados borde comunes a lasregiones poliedricas Kj y Cj+1.
La construccion de H se hara por un procedimiento inductivo. Llamemos
Hj = H|Kj : Kj → S1, j = 1, . . . , N.
32

Observemos que H1(C1) ⊂ U1 y sea V1 la arcocomponente de ρ−1(U1) ⊂ R conteniendoa 0 (ver la propiedad (f) de la proyeccion ρ : R → S1). Recordemos que ρ|V1 : V1 → U1
es un homeomorfismo que aplica 0 ∈ V1 en 1 ∈ S1. La aplicacion
H1 := (ρ|V1)−1 H1 : K1 ≡ C1 → R
es obviamente continua y satisface ρ H1 = H1 y H1(0, 0) = 0.
Supongamos construida Hj : Kj → R continua tal que ρ Hj = Hj y Hj(0, 0) = 0,1 ≤ j < N .
Procedamos a cerrar el proceso inductivo construyendo una aplicacion continuaHj+1 : Kj+1 → R satisfaciendo ρ Hj+1 = Hj+1 y Hj+1(0, 0) = 0. En efecto, primeroobservemos que Hj+1(Cj+1) = H(Cj+1) ⊂ Uj+1 para algun j+1 ∈ 1, 2; ver la ecuacion(2). Como
Hj(Lj) ⊂ Hj+1(Cj+1) ⊂ Uj+1,
Hj(Lj) es arcoconexo y
ρ(Hj(Lj)) = Hj(Lj),
por la propiedad (f) de ρ existe una arcocomponente Vj+1 de ρ−1(Uj+1) ⊂ R conteniendo
a Hj(Lj) tal que ρ|Vj+1: Vj+1 → Uj+1 un homeomorfismo. La aplicacion
Hj+1 :=
Hj sobre Kj
(ρ|Vj+1)−1 (Hj+1|Cj+1
) sobre Cj+1
esta bien definida, es continua, y satisface ρ Hj+1 = Hj+1 y Hj+1(0, 0) = 0, cerrandola induccion.
Para acabar la prueba del Lema basta con elegir H = HN .
Como consecuencia tenemos la siguiente propiedad de levantamiento de arco.
Corolario 6.2 (Propiedad del levantamiento de arco) Sea α : [0,1]→ S1 un arcocon α(0) = 1. Entonces existe un unico arco α : [0,1]→ R tal que ρ α = α y α(0) = 0.
Demostracion : La unicidad es obvia razonando como en la prueba del Lema 6.1.Procedamos a probar la existencia de α. Para ello basta con definir
H : [0, 1]2 → S1, H(t, s) := α(t),
que claramente satisface las hipotesis del Lema 6.1, y considerar la aplicacion H dadaen el. Obviamente el arco α : [0,1]→ R, α(t) := H(t, 0), resuelve el corolario.
Corolario 6.3 (Propiedad del levantamiento de homotopıas) Sean α y β arcosen S1 con α(0) = β(0) = 1 y α(1) = β(1). Supongamos que existe una homotopıa H deα en β. Entonces:
Los arcos α y β dados por el Corolario 6.2 tienen los mismos extremos.
La aplicacion H dada por el Lema 6.1 es una homotopıa (con extremos fijos) de
α en β.
33

Demostracion : Consideremos la aplicacion H dada en el Lema 6.1 y los levantamientosα y β dados en el Corolario 6.2.
Por la unicidad del Corolario 6.2, α = H(·, 0).
Como H(0, ·) : [0, 1] → R es un arco con punto inicial 0 que se proyecta en el arco
constante ε1 en S1, por la unicidad del levantamiento de arcos concluimos que H(0, ·)es el arco constante ε0 en R. De aquı que, de nuevo por el Corolario 6.2, β = H(·, 1).
Finalmente, como H(1, ·) : [0, 1]→ R es un arco que se proyecta en el arco constante
εα(1) en S1, por la unicidad del levantamiento de arcos concluimos que H(1, ·) es el arcoconstante εH(1,0) en R.
Uniendo toda esa informacion concluimos que H es una homotopıa de α en β.
Este ultimo corolario sera trascendental, en lenguaje sencillo expresa que arcos ho-motopicos en S1 se levantan a arcos homotopicos en R por la aplicacion ρ : R→ S1.
La construccion del levantamiento α a partir de α en el Corolario 6.2 es en ciertosentido implıcita. En el caso de que α sea diferencible es posible establecer una formuladirecta para este calculo.
Ejercicio 6.4 Si α ≡ (α1, α2) : [0, 1] → S1 ⊂ R2 es un arco de clase C1 con α(0) =(1, 0), entonces su levantamiento vıa ρ a R viene dado por:
α(t) =1
2π
∫ t
0
(α1(s)α′2(s)− α′1(s)α2(s)
)ds
De forma explıcita, y para cada n ∈ Z, el lazo αn : [0, 1]→ S1 ⊂ C, αn(t) := e2nπıt,se levanta con condicion inicial αn(0) = 0 al arco αn : [0, 1]→ R, αn(t) := nt.
El concepto de grado de un lazo en S1 sera el ingrediente algebraico necesario parainterpretar el grupo fundamental de la circunferencia.
Definicion 6.5 Dado un lazo α : [0, 1] → S1 con base el punto 1 ∈ S1, definimos elgrado de α como
deg(α) = α(1) ∈ Z,donde α : [0, 1]→ R representa el levantamiento de α con condicion inicial α(0) = 0.
Notese que la condicion ρ α = α implica ρ α(1) = α(1) = 1, por lo que efectivamentedeg(α) ∈ Z como se enfatiza en la definicion. El grado es interesante para la topo-logıa porque tiene un buen comportamiento respecto a la homotopıa, como muestra lasiguiente
Proposicion 6.6 Dados α, β : [0, 1]→ S1 dos lazos con base el punto 1 ∈ S1, se tieneque
α'β ⇐⇒ deg(α) = deg(β).
Demostracion : Supongamos que α'β. Por el Corolario 6.3, los correspondientes levan-tamientos α y β con condicion inicial 0 son tambien homotopicos: α'β. Esto implicaque deg(α) = α(1) = β(1) = deg(β).
Recıprocamente, supongamos que deg(α) = deg(β). Consideremos los correspon-
dientes levantamientos α y β con condicion inicial 0. Al ser deg(α) = α(1) = β(1) =deg(β), la aplicacion continua
H : [0, 1]2 → R, H(t, s) := (1− s)α(t) + sβ(t)
es una homotopıa con extremos fijos que garantiza α'β. Al ser ρ continua, α = ρ α'ρ β = β vıa la homotopıa ρ H, lo que concluye la proposicion.
34

Como consecuencia de este analisis podemos enunciar el teorema central de esta seccionque materializa el calculo del grupo fundamental de la circunferencia.
Teorema 6.7 La aplicacion
deg : (Π1(S1, 1), ?)→ (Z,+), deg([α]) := deg(α),
esta bien definida y es un isomorfismo de grupos.
Demostracion : La Proposicion 6.6 garantiza que deg : (Π1(S1, 1), ?)→ (Z,+) esta biendefinida en clases de homotopıa.
La inyectividad es consecuencia tambien de la Proposicion 6.6. En cuanto a la so-breyectividad sımplemente tengase en cuenta que deg([αn]) = n para cada n ∈ Z; verEjercicio 6.4.
Para concluir solo resta probar que deg es un homomorfismo de grupos. En efecto,tomemos [α], [β] ∈ Π1(S1, 1). Tenemos que
deg([α] ? [β]) = deg([α ? β]) = deg(α ? β) = α ? β(1).
Pero por unicidad del levantamiento es inmediato comprobar que
α ? β(t) :=
α(2t) si t ∈ [0, 1/2]
α(1) + β(2t− 1) si t ∈ [1/2, 1]
por lo que deg([α] ? [β]) = α ? β(1) = α(1) + β(1) = deg([α]) + deg([β]).Esto acaba la demostracion.
6.1. Π1(S1) = Z: consecuencias
En esta seccion recopilaremos algunas consecuencias topologicas del calculo del gru-po fundamental de S1.
Comenzaremos con esta proposicion.
Proposicion 6.8 Si D denota el disco unidad cerrado (x, y) ∈ R2 : x2 + y2 ≤ 1, noexiste ninguna aplicacion continua f : D → S1 tal que f |S1 = IdS1.
Demostracion : Razonemos por reduccion al absurdo y admitamos existe una tal f .Llamemos i : S1 → D a la aplicacion inclusion, obviamente continua, y observemos quef i : S1 → S1 es la aplicacion IdS1 .
Si denotamos i∗ : Z ≡ Π1(S1, 1) → Π1(D, 1) y f∗ : Π1(D, 1) → Π1(S,1) ≡ Z a loscorrespondientes homomorfismos entre grupos fundamentales, la Proposicion 4.13 nosgarantiza que
f∗ i∗ = (IdS1)∗ = IdZ.
Del Ejercicio 5.1 deducimos que Π1(D, 1) = [ε]1 ≡ 0. De aquı que f∗, y por tantof∗ i∗, sea el homomorfismo nulo, una contradiccion.
Como consecuencia podemos demostrar el siguiente teorema del punto fijo en dimensiondos, cuya generalizacion a dimension arbitraria es cierta aunque requiere de otro tipode herramientas para su demostracion.
Teorema 6.9 (Punto fijo de Brower) Sea f : D → D una aplicacion continua. En-tonces existe p0 ∈ D tal que f(p0) = p0.
35

Demostracion : Razonemos por reduccion al absurdo y admitamos que existe f : D → Dsin puntos fijos. La contradiccion se generara probando que entonces existe una aplica-cion continua r : D → S1 satisfaciendo r|S1 = IdS1 , lo que es contrario a la Proposicion6.8.
Tomemos p ∈ D. Como p 6= f(p), la convexidad estricta de D garantiza que lasemirecta
Lp := p+ λ(p− f(p)) : λ ≥ 0
corta S1 en un unico punto
r(p) := Lp ∩ S1,
y que ademas r(p) = p cuando p ∈ S1.
Este hecho es evidente por consideraciones geometricas, pero no obstante admiteuna demostracion formal analıtica. En efecto, es inmediato que
‖p+ λ(p− f(p))‖2 = 1⇐⇒ λ2‖f(p)− p‖2 + 2λ〈p, p− f(p)〉+ (‖p‖2 − 1) = 0.
Un analisis sencillo de esta ecuacion nos dice:
El discriminante
4(〈p, p− f(p)〉2 + ‖f(p)− p‖2(1− ‖p‖2)
)≥ 4(〈p, p− f(p)〉2 + ‖f(p)− p‖2
)≥
≥ 4(‖f(p)− p‖2 − ‖p‖2‖p− f(p)‖2
)= 4‖f(p)− p‖2(1− ‖p‖2) ≥ 0
ya que ‖p‖ ≤ 1, por lo que la ecuacion en λ tiene dos raices reales.
Como p 6= f(p) y son de norma ≤ 1, 〈p, p−f(p)〉 > 0 y existe una raiz λ−(p) < 0:
λ−(p) =1
‖p− f(p)‖2
(− 〈p, p− f(p)〉 −
√〈p, p− f(p)〉2 + ‖p− f(p)‖2(1− ‖p‖2)
)Como el t. i. es ‖p‖2 − 1 ≤ 0 y el coeficiente lıder ‖f(p) − p‖2 > 0, la otra raızλ+(p) ha de ser ≥ 0:
λ+(p) =1
‖p− f(p)‖2
(− 〈p, p− f(p)〉+
√〈p, p− f(p)〉2 + ‖p− f(p)‖2(1− ‖p‖2)
)Por tanto, r(p) esta unıvocamente determinado y viene dado por la expresion
r(p) = p+ λ+(p)(p− f(p)).
Esto demuestra que r : D → S1 es continua, y como λ+(p) = 0 cuando p ∈ S1, quer|S1 = IdS1 , lo que concluye la prueba.
36

Una de las consecuencias mas sorprendentes del hecho de que Π1(S1, 1) = Z es elTeorema Fundamental del Algebra, originalmente demostrado por Gauss.
Teorema 6.10 (Teorema Fundamental del Algebra) Sea P : C→ C una funcionpolinomica de la forma
P (z) = a0 + . . .+ an−1zn−1 + zn, (3)
donde n ≥ 1.Entonces existe z0 ∈ C tal que P (z0) = 0.
Demostracion : Razonemos por reduccion al absurdo y supongamos que P (z) 6= 0 paratodo z ∈ C.
En ese caso podemos definir
H : [0, 1]× [0, 1[→ S1, H(t, s) :=P ( s
1−se2πıt)
|P ( s1−se
2πıt)||P ( s
1−s)|P ( s
1−s).
Esta aplicacion es claramente continua en su dominio. Nuestro objetivo es probar queadmite una extension continua a [0, 1]2, esto es, que puede ser definida con continuidaden los puntos (t, 1), t ∈ [0, 1]. Esto es consecuencia de la siguiente observacion.
Consideremos una sucesion (tk, sk)k∈N ⊂ [0, 1]× [0, 1[ convergiendo a (t, 1), dondet ∈ [0, 1]. Se tiene que
lımk→∞
H(tk, sk) = lımk→∞
P ( sk1−sk
e2πıtk)
|P ( sk1−sk
e2πıtk)||P ( sk
1−sk)|
P ( sk1−sk
)= e2πınt = αn(t),
donde simplemente se ha tenido en cuenta que sk1−skk∈N → +∞, tkk∈N → t, la
expresion de P (z) en (3), y el algebra basica de lımites.Por tanto, extendiendo H a [0, 1]× 1 por la expresion
H(t, 1) = e2πınt, t ∈ [0, 1],
construimos una aplicacion continua H : [0, 1]2 → S1.Una comprobacion estandar nos dice que H(t, 0) = H(0, s) = H(1, s) = 1, por lo que
H es una homotopıa en S1 de ε1 en αn. Esto contradice que n = deg(αn) 6= 0 = deg(ε1)(ver Teorema ??), concluyendo la prueba.
7. Equivalencias homotopicas
Como bien sabemos dos espacios homeomorfos tienen el mismo grupo fundamental,salvo isomorfismos. Sin embargo existen condiciones topologicas mas debiles que elhomeomorfismo que nos permiten extraer la misma conclusion. En esta seccion lasestudiaremos con detalle.
Definicion 7.1 Sea X un espacio topologico y A ⊂ X un subespacio topologico. Unaretraccion de X en A es una aplicacion continua r : X → A satisfaciendo r|A = IdA, oequivalentemente, r i = IdA donde i : A→ X es la aplicacion inclusion. En este casose dice que A es un retracto de X.
Proposicion 7.2 Si r : X → A es una retraccion, i : A→ X es la aplicacion inclusiony a ∈ A, entonces
37

r∗ : Π1(X, a)→ Π1(A, a) es un epimorfismo y
i∗ : Π1(A, a)→ Π1(X, a) es un monomorfismo.
Demostracion : Como r i = IdA deducimos que (r i)∗ = r∗ i∗ = (IdA)∗ = IdΠ1(A,a).La proposicion se sigue trivialmente.
El ejemplo mas simple de retraccion es la aplicacion constante r : X → p paracada p ∈ X. En otras palabras, todo punto es un retracto del espacio que lo contiene.
Ejercicio 7.3 Las siguientes aplicaciones entre espacios euclidianos son retracciones:
n: Rn+1 \ 0 → Sn, n(q) = q‖q‖ .
n|B(0,1)\0 : B(0, 1) \ 0 → Sn, donde B(0, 1) = p ∈ Rn : ‖p‖ ≤ 1.
p: S1 × R→ S1 × 0 ≡ S1, p(x, y, z) := (x, y, 0).
f : R3 \ x = y = 0 → S1 × R, f(x, y, z) :=(
1‖(x,y)‖(x, y), z
).
7.1. Retractos de deformacion
Una situacion particularmente interesante es cuando un espacio puede ser deformadoen un retracto suyo de forma continua. El concepto que da sentido a esta idea se trataen la siguiente definicion.
Definicion 7.4 Dado un espacio topologico X y un subespacio suyo A ⊂ X, se diceque A es un retracto de deformacion de X si existen una retraccion r : X → A y unaaplicacion continua H : X × [0, 1]→ X satisfaciendo:
H(x, 0) = x para todo x ∈ X.
H(x, 1) = r(x) para todo x ∈ X.
Si adicionalmenteH(a, s) = a para todo (a, s) ∈ A× [0, 1],
entonces se dice que A es un retracto fuerte de deformacion de X.A las aplicaciones H y r se les llamara una deformacion y retraccion asociadas al
retracto (fuerte) de deformacion A de X, respectivamente.
Si el parametro s en la anterior definicion se interpreta como medida del tiempo trans-currido, las aplicaciones Hs := H(·, s) : s ∈ [0, 1] materializan una deformacion entrela aplicacion identidad en X (instante s = 0) y la retraccion r : X → A (instantes = 1). En otras palabras, si denotamos por Xs := Hs(X), s ∈ [0, 1], los subespaciosXs : s ∈ [0, 1] reflejan una deformacion continua del espacio total X (s = 0) en elsubespacio (retracto) A ⊂ X (s = 1).
38

Ejercicio 7.5 Las siguientes aplicaciones realizan retractos fuertes de deformacion:
El centro p0 de un conjunto estrellado A (en un espacio euclidiano Rn) es unretracto fuerte de deformacion de A:
H : A× [0, 1]→ A, H(q, s) := (1− s)q + sp0.
Sn es un retracto fuerte de deformacion de Rn+1 \ 0:
H : Rn+1 \ 0 → Rn+1 \ 0, h(q, s) := (1− s)q + sn(q),
donde n: Rn+1 \ 0 → Sn, n(q) = q‖q‖ .
Sn es un retracto fuerte de deformacion de B(0, 1) \ 0:
H : B(0, 1) \ 0 → B(0, 1) \ 0, h(q, s) := (1− s)q + s(n|B(0,1)\0)(q).
S1 es un retracto fuerte de deformacion de S1 × R:
H : S1 × R→ S1 × R, H(q, s)
= (1− s)q + sp(q),
donde p: S1 × R→ S1 × 0 ≡ S1, p(x, y, z) := (x, y, 0).
S1 × R es un retracto fuerte de deformacion de R3 \ x = y = 0:
H : R3 \ x = y = 0 → R3 \ x = y = 0, H(q, s)
= (1− s)q + sf(q),
donde f : R3 \ x = y = 0 → S1 × R, f(x, y, z) :=(
1‖(x,y)‖(x, y), z
).
Observacion 7.6 Si A es un retracto de deformacion de X, Cα : α ∈ Λ son lasarcocomponentes de A y Cα es la arcocomponente de X conteniendo a Cα para cadaα ∈ Λ, entonces:
r(Cα) = Cα para todo α ∈ Λ, y por tanto Cα 6= Cβ, α 6= β.
Cα : α ∈ Λ con las arcocomponentes de X.
Si H : X × [0, 1] → X y r : X → A son una deformacion y retraccion asociadasa A como retracto de deformacion de X, entonces H|Cα×[0,1] : Cα × [0, 1]→ Cα y
r|Cα : Cα → Cα son una deformacion y retraccion asociadas a Cα como retracto
de deformacion de Cα.
Demostracion : Tomemos r : X → A y H : X×[0, 1]→ X una retraccion y deformacionasociadas a A como retracto de deformacion de X.
Si p ∈ X, la curva H(p, s) conecta p y r(p) ∈ A, de donde se deduce que la arco-componente de p en X esta en la familia Cα : α ∈ Λ. Esto prueba que Cα : α ∈ Λson las arcocomponentes de X.
Por otra parte, sean p y q ∈ A ∩ Cα para algun α ∈ Λ, y sea c : [0, 1]→ X un arcoen X conectandolos, con traza necesariamente en Cα. Entonces r(c(t)) es un arco en Aconectando p = r(p) y q = r(q), por lo que p y q estan en la misma arcocomponente deA (a saber, Cα). Esto prueba que r(Cα) = Cα para todo α, y por tanto que Cα 6= Cβ,α 6= β.
Como Cα× [0, 1] es arcoconexo y H es continua, H(Cα× [0, 1]) esta contenido en unaarcocomponente de X. De otro lado H(Cα × 1) = r(Cα) = Cα, de donde inferimosque H(Cα× [0, 1]) esta contenido en la arcocomponente de X que contiene a Cα, a saberCα. De aquı que H|Cα×[0,1] : Cα × [0, 1]→ Cα sea una deformacion que realiza Cα como
retracto de deformacion de Cα, con retraccion asociada r|Cα : Cα → Cα.
39

A veces es util el siguiente resultado.
Proposicion 7.7 Sea F : X → Y un homeomorfismo. Si A es un retracto (fuerte) dedeformacion de Y entonces F−1(A) es un retracto (fuerte) de deformacion de X.
Demostracion : Si H : Y ×[0, 1]→ Y y r : Y → A son una deformacion y retraccion aso-ciadas a A como retracto (fuerte) de deformacion de Y , basta observar que la aplicacioncontinua
H : X × [0, 1]→ X, H(x, s) := (F−1 H)((F (x), s)
),
realiza a F−1(A) como retracto (fuerte) de deformacion de X.
Ejercicio 7.8 Denotemos por B(p, ε) a la bola euclidiana q ∈ Rn : ‖q − p‖ < ε paracada p ∈ Rn y ε > 0, y sean 0 < ε1 < ε2.
Entonces B(p, ε1) \ p es un retracto fuerte de deformacion de B(p, ε2) \ p.
Demostracion : Recordemos que B(p, ε) = q ∈ Rn : ‖q − p‖ < ε para cada p ∈ Rn yε > 0. La aplicacion
r : B(p, ε2) \ p → B(p, ε1) \ p, r(q) =
q si q ∈ B(p, ε1)
ε1q−p‖q−p‖ + p si q ∈ B(p, ε2) \B(p, ε1)
,
es una retraccion de B(p, ε2) \ p en B(p, ε1) \ p, mientras que la deformacion
H :(B(p, ε2) \ p
)× [0, 1]→ B(p, ε2) \ p, H(q, s) = (1− s)q + sr(q),
prueba que B(p, ε1) \ p es un retracto fuerte de deformacion de B(p, ε2) \ p conretraccion asociada r.
Teorema 7.9 Sea X un espacio topologico, y sea A ⊂ X un retracto fuerte de defor-macion con r : X → A una retraccion asociada. Entonces dado a ∈ A se tiene que:
r∗ : Π1(X, a)→ Π1(A, a) e i∗ : Π1(A, a)→ Π1(X, a) son isomorfismos,
uno inverso del otro.
Demostracion : Para evitar ambiguedades, si un lazo α basado en a tiene traza conteni-da en A, denotaremos por [α]A ∈ Π1(A, a) su clase de homotopıa en A, y analogamentepor [α]X ∈ Π1(X, a) su clase de homotopıa en X.
Siguiendo la demostracion de la Proposicion 7.2, es suficiente con garantizar quer∗ : Π1(X, a) → Π1(A, a) es un monomorfismo de grupos. Para ello tomemos [α]X ∈Π1(X, a) y supongamos que r∗([α]X) = [εa]A. Hemos de probar que [α]X = [εa]X .
Consideremos una deformacion H : X×[0, 1]→ X asociada a A como retracto fuertede X, con r : X → A como retraccion asociada. Es facil comprobar que la aplicacioncontinua
H : [0, 1]2 → X, H(t, s) = H(α(t), s)
es una homotopıa con extremos fijos (aquı se usa que H(a, s) = a para todo a ∈ A)entre los lazos H(·, 0) = α y H(·, 1) = r α en el espacio X, y por tanto [α]X = [r α]X .Pero por ser r∗([α]X) = [εa]A, el lazo r α (que esta contenido en A) se deformahomotopicamente en el espacio A (¡luego en en el espacio X!) en el lazo εa. Esto implicaque [r α]X = [εa]X , de donde [α]X = [εa]X como querıamos demostrar.
40

Definicion 7.10 Un espacio topologico X se dice contractil si admite como retractode deformacion a un punto p0 ⊂ X. En caso de que p0 sea retracto fuerte dedeformacion de X diremos que el espacio es fuertemente contractil.
Todo espacio contractil es arcoconexo por la Observacion 7.6. Como comentamos en elEjercicio 7.5, todo estrellado (luego todo convexo) en Rn es fueertemente contractil. Enparticular el propio Rn.
Definicion 7.11 Un espacio topologico X se dice simplemente conexo si es arcoconexoy Π1(X, p) = [εp] para algun p ∈ X (luego para todo p ∈ X).
Como consecuencia del Teorema 7.9 tenemos el siguiente:
Corolario 7.12 Todo espacio topologico fuertemente contractil es simplemente conexo.
Veremos mas adelante (ver Corolario 7.21) que este enunciado es cierto para espacioscontractiles.
Ejercicio 7.13 Como consecuencia del Ejercicio 7.5 y del Teorema 7.9:
Todo subconjunto estrellado de Rn es simplemente conexo. Esto se aplica a sub-conjuntos A ⊂ Rn convexos (estrellados desde cualquiera de sus puntos) , y portanto al propio Rn.
Si p ∈ Sn entonces Π1(Rn+1 \ 0, p) es isomorfo a Π1(Sn, p).
Si p ∈ S1 entonces Π1
(S1 × R, (p, 0)
)es isomorfo a Π1(S1, p) ∼= Z.
Si p ∈ S1 ×R entonces Π1(R3 \ x = y = 0, p) es isomorfo a Π1(S1 ×R, p) ∼= Z.
Ejercicio 7.14 El grupo fundamental de la Cinta de Mobius es isomorfo a Z.
Demostracion : Recordemos que la cinta de Mobius compacta M se define como elcociente topologico del cuadrado euclidiano [−1, 1]2 bajo la relacion de equivalencia
(x, y)R(x′, y′)⇐⇒ (x, y) = (x′, y′) ∨(x, x′ = −1, 1 ∧ y = −y′
).
Normalmente se escribe M = [0, 1]2/R. La cinta de Mobius no compacta M0 se generaa partir de la misma relacion de equivalencia pero sobre la banda vertical [−1, 1]× R:M0 := ([−1, 1] × R)/R. Por brevedad solo trataremos el caso de la compacta, aunqueel de M0 es totalmente analogo y se llega a la misma conclusion.
Si llamamos π : [−1, 1]2 → M a la proyeccion al cociente, el subespacio topologicoS := π([−1, 1]×0) ⊂M es homeomorfo a S1. La clave es observar que S es un retractofuerte de deformacion de M y usar el Teorema ??. En efecto, la retraccion viene dadapor la unica aplicacion r : M → S tal que r π = π r0, donde r0 : [0, 1]2 → [0, 1]×0,r0(x, y) = (x, 0), mientras que la deformacion H : M × [0, 1] → M viene dada por laexpresion H(π(x, y), s) := π
((1 − s)(x, y) + s(x, 0)
). Ambas aplicaciones estan bien
definidas y son continuas por la teorıa basica de identificaciones.
El siguiente Teorema tendra muchas aplicaciones practicas.
Teorema 7.15 Sea X un espacio topologico conexo y localmente arcoconexo.Supongamos que la topologia de X admite una base B satisfaciendo
41

(i) B es numerable (luego X es II-Axioma de Numerabilidad).
(ii) B es simplemente conexo para todo B ∈ B.
Entonces Π1(X, x) es numerable para todo x ∈ X.
La condicion de simple-conexion en el item (ii) se puede relajar por la de semilocalsimple conexion (ver Definicion 14.5), sin que ello afecte a la tesis del teorema.
Demostracion : Dado un par B, B′ ∈ B (puede ser B = B′), nuestras hipotesis implicanque cada arcocomponente de B∩B′ es un abierto de X, y por tanto contiene un abiertode B. Como la familia CB,B′ de arcocomponentes de B ∩B′ esta formada por conjuntosdisjuntos dos a dos y B es numerable, deducimos que CB,B′ ha de ser numerable. Portanto,
CB :=⋃
(B,B′)∈B2CB,B′
es igualmente numerable. Para cada C ⊂ CB elijamos xC ∈ C y formemos el conjuntoclaramente numerable
Ξ := xC : C ∈ CB.Para cada B ∈ B y puntos x, y ∈ B∩Ξ, fijemos un arco γBx,y : [0, 1]→ B con γBx,y(0) = xy γBx,y(1) = y. Nuevamente la familia de arcos
Γ := γBx,y : B ∈ B, x, y ∈ B ∩ Ξ
es numerable.Fijemos x0 ∈ Ξ. Nuestro objetivo va a ser demostrar que Π1(X, x0) es numera-
ble. Introduzcamos una familia numerable de lazos en X con base x0, que llamaremosespeciales. Un lazo γ : [0, 1]→ X se dira especial si γ = γ1 ? . . . ? γk con:
γj = γBjyj−1,yj ∈ Γ, donde yj−1, yj ∈ Bj ∩ Ξ para 2 ≤ j ≤ k − 1.
γ1 = γB1x0,y1
y γk = γBkyk,x0 , donde x0, y1 ∈ B1 ∩ Ξ e yk, x0 ∈ Bk ∩ Ξ.
La clave de la demostracion se centra en garantizar que para todo [α] ∈ Π1(X, x0) existeγ ∈ [α] tal que γ es especial. Esto probarıa que Π1(X, x0) esta descrito por las clasesde homotopıa de los lazos especiales, y por tanto es numerable.
Tomemos un lazo α : [0, 1] → X con base x0 arbitrario, y consideremos el recu-brimiento abierto α−1(B) : B ∈ B del compacto [0, 1]. La existencia de numerode Lebesgue para este recubrimiento y un razonamiento tıpico nos permite encon-trar 0 = t0 < t1 . . . < tk = 1 tales que α([tj−1, tj]) ⊂ Bj ∈ B, j = 1, . . . , k.Definamos αj : [0, 1] → Bj ⊂ X, αj(s) = α((1 − s)tj−1 + stj), j = 1, . . . , k, y ob-servemos que α = α1 ? . . . ? αk. Sea Cj la arcocomponente de Bj ∩ Bj+1 contenien-do a αj(1) = αj+1(0) = α(tj), y llamemos yj = xCj ∈ Ξ, 1 ≤ j ≤ k − 1. Seaσj : [0, 1]→ Cj ⊂ Bj ∩Bj+1 un arco con σj(0) = yj y σj(1) = α(tj), j = 1, . . . , k − 1.
Observese que αj'σj−1 ? γBjyj−1,yj ? σj ya que ambos lazos estan contenidos en el
simplemente conexo Bj y conectan los puntos α(tj−1) y α(tj), 2 ≤ j ≤ k − 1. Por unrazonaiento similar α1'γB1
x0,y1? σ1 y αk'σk−1 ? γ
Bkyk−1,x0
.Por tanto
α'(γB1x0,y1
? σ1) ? . . . (σj−1 ? γBjyj−1,yj
? σj) ? . . . ? (σk−1 ? γBkyk−1,x0
),
esto es,α'γB1
x0,y1? . . . γBkyk−1,x0
.
Esto prueba que α es homotopico a un lazo especial y concluye la demostracion.
42

7.2. Homotopıa de aplicaciones: tipo de homotopıa
La siguiente definicion trata sobre la idea de deformacion en el contexto mas generalposible.
Definicion 7.16 Dados dos espacios topologicos X e Y , dos aplicaciones continuas ϕ1,ϕ2 : X → Y se dicen homotopicas, y lo escribiremos ϕ1 l ϕ2, si existe una aplicacioncontinua H : X × [0, 1]→ Y satisfaciendo:
H(x, 0) = ϕ1(x) ∀x ∈ X ∧ H(x, 1) = ϕ2(x) ∀x ∈ X.
Si A ⊂ X, las aplicaciones continuas ϕ1, ϕ2 : X → Y se diran homotopicas relativasa A, y escribiremos ϕ1 lA ϕ2, si existe H : X × [0, 1] → Y como arriba satisfaciendoademas:
H(a, s) = ϕ1(a) = ϕ2(a) para todo a ∈ A.
Por ejemplo, si A ⊂ X es un retracto de deformacion vıa H con una retraccion asociadar, es inmediato que IdX l r. Si A es un retracto fuerte de deformacion de X se tieneIdX lA r.
Cuando X = [0, 1] la aplicaciones ϕj, j = 1, 2, son arcos y la relacion l se corres-ponde con la homotopıa libre (sin extremos fijos) de arcos. La relacion l0,1 no es sinola homotopıa de extremos fijos ' que sirvio para construir el grupo fundamental.
El siguiente resultado establece que cualesquiera aplicaciones homotopicas inducenlos mismos homomorfismos entre grupos fundamentales, salvo isomorfismos naturales.
Teorema 7.17 Sean X e Y espacios topologicos y sean ϕ1, ϕ2 : X → Y aplicacionescontinuas. Supongamos que ϕ1 l ϕ2 vıa H : X× [0, 1]→ Y , fijemos x0 ∈ X y llamemosγ : [0, 1]→ Y al arco uniendo ϕ1(x0) y ϕ2(x0) definido por γ(s) := H(x0, s).
Dados los homomorfismos de grupos
(ϕ1)∗ : Π1(X, x0)→ Π1(Y, ϕ1(x0)), (ϕ2)∗ : Π1(X, x0)→ Π1(Y, ϕ2(x0))
y el isomorfismo Uγ : Π1(Y, ϕ1(x0)) → Π1(Y, ϕ2(x0)) (ver Proposicion 4.11), se tieneque
Uγ (ϕ1)∗ = (ϕ2)∗.
En particular los homomorfismos (ϕ1)∗ y (ϕ2)∗ son iguales salvo isomorfismos.
Demostracion : Llamemos C = [0, 1]2 y Bd(C) = L1 ∪ L2 ∪ L3 ∪ L4, donde
L1 = 1 × [0, 1], L2 = [0, 1]× 1, L3 = 0 × [0, 1], L4 = [0, 1]× 0.
Consideremos arcos de Jordan (esto es, embebimientos) αj : [0, 1] → C, j = 1, 2, 3, 4,parametrizados para que:
αj([0, 1]) = Lj, j = 1, 2, 3, 4, y
α := α1 ? α2 ? α3 ? α4 esta bien definido.
Observese que α es un lazo en C con base (1, 0) y traza Bd(C). Ademas α es uno a unoexcepto por los puntos inicial y final que coinciden con (1, 0).
Tomemos [β] ∈ Π1(X, x0) y definamos la aplicacion continua G : C → Y, G(t, s) =H(β(t), s). Como α es un lazo con base (1, 0) en C, el arco G α es un lazo con base
43

G((1, 0)
)= ϕ1(x0) en Y . Teniendo en cuenta que H(·, j) = ϕj+1, j ∈ 0, 1, y la
Observacion 4.3, deducimos que
G α1'γ, G α2'ϕ2 β, G α3'γ, G α4'ϕ1 β,
donde todas las homotopıas son con extremos fijos. Por tanto
G α'γ ? (ϕ2 β) ? γ ? (ϕ1 β).
Al ser C simplemente conexo (de hecho es convexo), [α] = [ε(1,0)] en Π1(C, (1, 0)).De aquı deducimos que
[G α] = G∗([α]) = G∗([ε(0,1)]) = [εϕ1(x0)] ∈ Π1(Y, ϕ1(x0)),
esto es,γ ? (ϕ2 β) ? γ ? (ϕ1 β)'εϕ1(x0),
o equivalentemente, Uγ([ϕ1β]) = [ϕ2β]. En otras palabras, Uγ(ϕ1)∗ y (ϕ2)∗ coincidensobre cualquiera [β] ∈ Π1(X, x0), lo que concluye la prueba.
Corolario 7.18 Sean ϕ1, ϕ2 : X → Y aplicaciones continuas y x0 ∈ X. Supongamosque ϕ1 lx0 ϕ2 y llamemos y0 = ϕ1(x0) = ϕ2(x0).
Entonces (ϕ1)∗ = (ϕ2)∗ : Π1(X, x0)→ Π1(Y, y0).
Demostracion : Sea H : X × [0, 1] → Y una deformacion que materialice el hechoϕ1 lx0 ϕ2. El Teorema 7.17 nos dice que Uγ (ϕ1)∗ = (ϕ2)∗. Bajo nuestras hipotesisγ = εy0 , por lo que Uγ = IdΠ1(Y,y0) y el corolario se sigue.
Definicion 7.19 (Equivalencia homotopica) Sean X e Y dos espacios topologicos.Una aplicacion continua f : X → Y se dira una equivalencia homotopica si existeg : Y → X continua tal que
g f l IdX y f g l IdY .
En ese caso se diran que f y g son inversas homotopicas.Dos espacios X e Y se dicen del mismo tipo de homotopıa si existe una equivalencia
homotopica entre ellos.
44

Obviamente todo homeomorfismo es una equivalencia homotopica, pero lo recıprocono es cierto. Un espacio contractil nos proporcionara facilmente un contraejemplo. Sinembargo, la equivalencia homotopica es suficiente para garantizar isomorfismo entregrupos fundamentales.
Teorema 7.20 Sean X e Y espacios topologicos, y sea f : X → Y una equivalenciahomotopica con inversa homotopica g : Y → X. Fijemos x0 ∈ X.
Entonces f∗ : Π1(X, x0)→ Π1(Y, f(x0)) es un isomorfismo de grupos.
Demostracion : Sabemos que g f l IdX vıa una deformacion H1 : X × [0, 1]→ Y conH1(·, 0) = g f y H1(·, 1) = IdX . Llamemos γ1 : [0, 1] → X al arco γ1(·) = H1(x0, ·),consideremos el isomorfismo Uγ1 : Π1(X, g(f(x0)) → Π1(X, x0), y recordemos que porel Teorema 7.17 se tiene que
Uγ1 (g f)∗ = (IdX)∗ = IdΠ1(X,x0),
donde (g f)∗ : Π1(X, x0) → Π1(X, g(f(x0)). Inferimos que (g f)∗ = g∗ f∗ es unisomorfismo, donde
f∗ : Π1(X, x0)→ Π1(Y, f(x0)) y g∗ : Π1(Y, f(x0))→ Π1(X, g(f(x0))),
y por tanto que g∗ es un epimorfismo (y f∗ es un monomorfismo).De forma paralela, f g l IdY vıa H2 : Y × [0, 1] → Y con H2(·, 0) = f g
y H2(·, 1) = IdY . Como antes, si llamamos γ2(·) = H2(f(x0), ·) y consideramos elisomorfismo Uγ2 : Π1
(Y, f(g(f(x0))
)→ Π1(Y, f(x0)), tenemos que
Uγ2 (f g)∗ = (IdY )∗ = IdΠ1(Y,f(x0)),
donde ahora (f g)∗ : Π1(Y, f(x0))→ Π1
(X, f(g(f(x0))
).
Como arriba (f g)∗ = f∗ g∗ es un isomorfismo, donde ahora
g∗ : Π1(Y, f(x0))→ Π1(X, g(f(x0))) y f∗ : Π1
(X, g(f(x0))
)→ Π1
(Y, f(g(f(x0)))
).
Por tanto g∗ es un monomorfismo (y f∗ un epimorfismo).Como consecuencia g∗ : Π1(Y, f(x0))→ Π1(X, g(f(x0))) es un isomorfismo. Juntan-
do este hecho con la informacion anterior, f∗ : Π1(X, x0)→ Π1(Y, f(x0)) es tambien unisomorfismo. Esto concluye la prueba.
A modo de ejemplo, si A ⊂ X es un retracto de deformacion con una retraccionasociada r : X → A, e i : A → X denota la aplicacion inclusion, entonces r e i sonequivalencias homotopicas una inversa de la otra. Como consecuencia trivial es validoel siguiente resultado, ya probado anteriormente en el Teorema 7.9 para retractos fuertesde deformacion.
Corolario 7.21 Sean A ⊂ X un retracto de deformacion de X, r : X → A una retrac-cion asociada e i : A→ X la aplicacion inclusion.
Entonces para cada a ∈ A las aplicaciones
r∗ : Π1(X, a)→ Π1(A, a) e i∗ : Π1(A, a)→ Π1(X, a)
son isomorfismos de grupos.En particular, todo espacio topologico contractil es simplemente conexo.
45

8. El Grupo Fundamental de las Esferas
En esta seccion calcularemos el grupo fundamental de las esferas Sn, n ≥ 2.Para abordarlo probaremos un caso particular del Teorema de Seifert-Van Kampen,
que se estudiara mas adelante, cuya demostracion es ademas bastante inspiradora.
Proposicion 8.1 Sea X un espacio topologico, y sean U , V ⊂ X suconjuntos satisfa-ciendo:
U y V son abiertos simplemente conexos (con la topologıa inducida).
U ∩ V es arcoconexo y no vacıo.
U ∪ V = X.
Entonces X es simplemente conexo.
Demostracion : Como U y V son arcoconexos, U ∩ V 6= ∅ y X = U ∪ V , es inmediatoconcluir que X es arcoconexo. Resta demostrar que X tiene grupo fundamental trivialen algun punto (luego en todo punto por ser arcoconexo).
Fijemos x0 ∈ U ∩ V , tomemos [α] ∈ Π1(X, x0) y probemos que [α] = [εx0 ].Sea ε > 0 un numero de Lebesgue para el recubrimiento abierto α−1(U), α−1(V )
de [0, 1], y fijemos una particion
0 = t0 < t1 < . . . < tk = 1
de [0, 1] con |tj+1 − tj| < ε para todo j = 0, . . . , k − 1.Definamos αj : [0, 1]→ X, αj(t) = α((1−t)tj+t tj+1), j = 0, . . . , k−1, y observemos
que αj([0, 1]) ⊂ U o αj([0, 1]) ⊂ V .Aprovechando la arcoconexion de U , V y U∩V , es posible encontrar arcos ρj : [0, 1]→
X para j = 1, . . . , k − 1 de acuerdo al siguiente criterio:
ρj(0) = x0 y ρj(1) = α(tj).
Si αj−1([0, 1]) ∪ αj([0, 1]) = α([tj−1, tj]) ∪ α([tj, tj+1]) ⊂ U (respectivamente, V )entonces ρj([0, 1]) ⊂ U (respectivamente, V ).
Si αj−1([0, 1]) y αj([0, 1]) (o equivalentemente, α([tj−1, tj]) y α([tj, tj+1]) estancontenidos uno en U y otro en V , entonces ρj([0, 1]) ⊂ U ∩ V .
Teniendo en cuenta nuestras definiciones se observa que
(α0 ? ρ1)([0, 1]) ⊂ U o V,
(ρj ? αj ? ρj+1)([0, 1]) ⊂ U o V, j = 1, . . . , k − 2, y
(ρk−1 ? αk−1)([0, 1]) ⊂ U o V.
Com U y V son simplemente conexos, los lazos en U o en V con base x0
α0 ? ρ1, ρj ? αj ? ρj+1, j = 1, . . . , k − 2, y ρk−1 ? αk−1
se pueden deformar homotopicamente en U o en V , luego en X, al lazo constante εx0 .Por tanto,
α0 ? . . . αk−1'(α0 ? ρ1) ? (ρ1 ? α1 ? ρ2) ? . . . ? (ρk−2 ? αk−2 ? ρk−1) ? (ρk−1 ? αk−1)'εx0
y [α] = [α0 ? . . . αk−1] = [ε0], como querıamos demostrar.
46

Corolario 8.2 La esfera Sn es simplemente conexa para todo n ≥ 2.
Demostracion : Fijado p ∈ Sn, los abiertos U := Sn \ −p y V := Sn \ p sonhomeomorfos a Rn vıa las correspondientes proyecciones estereograficas, y por tantosimplemente conexos. Como U ∩ V 6= ∅ y es arcoconexo, el resultado se sigue de la laProposicion 8.1.
8.1. Algunas consecuencias
A continuacion vamos a desglosar algunas de las consecuencias topologicas masrelevantes del calculo del grupo fundamental de las esferas.
8.1.1. El Teorema de Invarianza de la Dimension
Recordemos que, usando la conexion topologica como herramienta, es facil demostrarque un abierto de R no puede ser homeomorfo a un abierto de Rn, n > 1. Vamos aextender ese resultado a su version dos dimensional.
Teorema 8.3 (Invarianza de la Dimension) Si Ω2 ⊂ R2 y Ωn ⊂ Rn, n 6= 2, sondos abiertos conexos, entonces Ω2 no es homeomorfo a Ωn.
Demostracion : Como ya hemos comentado antes, el resultado es conocido para abiertosde R y Rn, n > 1. En particular Ω2 no es homeomorfo a un abierto de R. A tıtulo infor-mativo comentaremos que el resultado es cierto para dimensiones arbitrarias, esto es,dos abiertos conexos de espacios euclidianos de distinta dimension no son homeomorfos.Sin embargo su prueba se escapa de las posibilidades de este curso.
Tomemos Ω2 ⊂ R2 y Ωn ⊂ Rn, n > 2, y demostremos que no son homeomorfos.Razonemos por reduccion al absurdo y supongamos que existen abiertos como en el
enunciado tales que Ω2∼= Ωn, n > 2.
Sea F : Ωn → Ω2 un homeomorfismo, y fijemos un punto p ∈ Ω2 y tomemos unabola euclidiana 2-dimensional B2(p, ε2) ⊂ Ω2. Como F es continua, F−1(B2(p, ε2)) es unabierto en Ωn conteniendo al punto q := F−1(p), por lo que existe una bola euclidianan-dimensional Bn(q, ε) tal que Bn(q, ε) ⊂ F−1(B2(p, ε2)). Al ser F un homeomorfismo,F (Bn(q, ε)) es un abierto de B2(p, ε2) con F (Bn(q, ε)) ⊂ B2(p, ε2). Por tanto existe unabola cerrada euclidiana 2-dimensional B2(p, ε1) ⊂ F (Bn(q, ε)), ε2 > 0.
Consideremos la siguiente secuencia de inclusiones
B2(p, ε1) \ pi1⊂ F (Bn(q, ε)) \ p
i2⊂ B2(p, ε2) \ p,
y llamemosi = i2 i1 : B2(p, ε1) \ p → B2(p, ε2) \ p.
Fijado p0 ∈ B2(p, ε1) \ p, a nivel de grupos fundamentales tenemos que
i∗ = (i2)∗ (i1)∗ : Π1
(B2(p, ε1) \ p, p0
)→ Π1
(B2(p, ε2) \ p, p0
),
donde(i1)∗ : Π1
(B2(p, ε1) \ p, p0
)→ Π1
(F (Bn(q, ε)) \ p, p0
)e
(i2)∗ : Π1
(F (Bn(q, ε)) \ p, p0
)→ Π1
(B2(p, ε2) \ p, p0
).
Es claro que B2(p, ε1)\p es homeomorfo a B2(0, 1)\0. Por tanto la Proposicion 7.7,el Ejercicio 7.5 y el Teorema 7.9 garantizan que Π1
(B2(p, ε1)\p
)es isomorfo al grupo
47

fundamental de S1, esto es, a Z. Analogamente Π1
(B2(p, ε2) \ p
)es homeomorfo a Z,
ya que B2(p, ε2)− p ∼= B2(0, ε2)− p ∼= S1×]0, ε2[.Un razonamiento similar nos dirıa que Π1
(Bn(q, ε) \ q, q0
), q0 := F−1(x0), es
isomorfo al grupo fundamental de Sn−1, luego es el grupo trivial [εq0 ] ya que n−1 ≥ 2.La misma consecuencia se extrae para Π1
(F (Bn(q, ε))\p, p0
)ya que F∗ : Π1
(Bn(q, ε))\
q, q0
)→ Π1
(F (Bn(q, ε)) \ p, p0
)es un isomorfismo.
Pero el Ejercicio 7.8 nos dice que
i∗ : Π1
(B2(p, ε1) \ p, p0
)≡ Z→ Π1
(B2(p, ε2) \ p, p0
)≡ Z
es un isomorfismo, lo que es absurdo ya que al ser i∗ = (i2)∗(i1)∗ esa aplicacion factorizapor el homomorfismo trivial. Esto completa la prueba.
8.1.2. El Teorema de Borsuk-Ulam: Consecuencias
Continuaremos con el Teorema de Borsuk-Ulam, que es valido en cualquiera dimen-sion aunque solo abordaremos su prueba para dimension dos.
Necesitamos el siguiente lema tecnico.
Lema 8.4 Sea f : S1 → S1 continua e impar (esto es, satisfaciendo f(−p) = −f(p),p ∈ S1) con f(1) = 1, y sea β el lazo en S1 basado en 1 dado por β := f α1 : [0, 1]→ S1,donde α1 = ρ|[0,1] (recordemos que ρ : R→ S1 es la aplicacion t 7→ e2πıt).
Entonces deg(β) es impar.
Demostracion : Sea γ : [0, 1] → S1 el arco en S1 dado por γ(t) = β(t/2), t ∈ [0, 1].Como f es impar inferimos que γ(1) = −γ(0) = −1. Sea γ el unico levantamiento de γa R con condicion inicial γ(0) = 0, y observemos que por ser ρ γ = γ necesariamenteγ(1) = k + 1/2, k ∈ Z. Definamos
c(t) =
γ(2t) si t ∈ [0, 1/2]
γ(1) + γ(2t− 1) si t ∈ [1/2, 1]
Claramente c : [0, 1]→ R es continua y c(0) = 0. Ademas
(ρ c)(t) =
γ(2t) si t ∈ [0, 1/2]
e2πıγ(1)γ(2t− 1) si t ∈ [1/2, 1]=
γ(2t) si t ∈ [0, 1/2]
−γ(2t− 1) si t ∈ [1/2, 1]=
=
β(t) si t ∈ [0, 1/2]
−β(t− 1/2) si t ∈ [1/2, 1]= β(t),
donde en la ultima igualdad hemos usado que β(t−1/2) = −β(t) para t ∈ [1/2, 1] comoconsecuencia de que f es impar.
Como consecuencia c : [0, 1]→ R es el levantamiento a S1 de β con condicion inicial
c(0) = 0, esto es, c = β, y por tanto deg(β) = c(1) = 2γ(1) = 2k + 1 es impar.
Lema 8.5 No existe ninguna aplicacion F : S2 → S1 continua e impar.
Demostracion : Asumamos que existe F : S2 → S1 continua satisfaciendo F (−p) =−F (p), p ∈ S2. Sin perdida de generalidad podemos suponer que F (1, 0, 0) = 1, sin masque sustituir F por la aplicacion 1
F (1,0,0)F (se usa notacion compleja), tambien continua
e impar.
48

Consideremos f : S1 → S1, f(p) := F (p, 0). Claramente f satisface las hipotesis delLema 8.4, por lo que deg(β) es impar para β = f α1.
Por otro lado, como Π1(S2, 1) = [ε1] inferimos que F∗(Π1(S2, 1)) = [ε1] ⊂Π1(S1, 1). En particular [β] = [f α1] = [F (α1, 0)] = F∗([(α1, 0)]) = [ε1], lo quecontradice que deg(β) es impar.
Teorema 8.6 (Borsuk-Ulam) Si f : S2 → R2 es continua, entonces existe x0 ∈ S2
tal que f(x0) = f(−x0).
Demostracion : Razonemos por reduccion al absurdo y supongamos que f(x) 6= f(−x)para todo x ∈ S2. Consideremos la aplicacion
F : S2 → S1, F (x) :=f(x)− f(−x)
|f(x)− f(−x)|,
bien definida y obviamente continua. Como F (x) = −F (−x), esta aplicacion es imparcontradiciendo el Lema 8.5.
Veamos algunas consecuencias sencillas del Teorema de Borsuk-Ulam.
Corolario 8.7 Si identificamos S2 con la superficie de la Tierra y f , g : S2 → R sondos magnitudes fısicas que se distribuyen de forma continua sobre dicha superfice (porejemplo, la presion y la temperatura), existen puntos antıpodas p0, −p0 ∈ S2 tales que(f, g)(p0) = (f, g)(−p0).
Corolario 8.8 Si S2 es la union de tres subconjuntos cerrados A1, A2 y A3, entoncesalguno de ellos contiene dos puntos antıpodas.
Demostracion : Definamos f : S2 → R2, f(x) = (d1(x), d2(x)), donde di : S2 → R esla funcion distancia euclidiana di(x) = dist(x,Ai), i = 1, 2. Como f es continua debeexistir xo ∈ S2 tal que f(x0) = f(−x0), esto es, δ1 := d1(x0) = d1(−x0) y δ2 := d2(x0) =d2(−x0). Si δi = 0 para algun i ∈ 1, 2 entonces x0, −x0 ∈ Ai ya que Ai es cerrado yhabrıamos acabado. En caso de que δ1δ2 > 0 deducimos que x0− x0∩ (A1 ∪A2) = ∅,y por tanto que x0, −x0 ∈ A3.
La misma idea se puede utilizar para probar que si S2 es union de dos cerrados entoncesalguno de ellos contiene dos puntos antıpodas.
Es evidente que un compacto del plano se puede dividir en dos mitades de igual areapor un argumento de barrida por rectas de separacion paralelas y continuidad. Pero nolo es tanto cuando se trata de dos compactos.
Corolario 8.9 (Teorema de las dos tortitas) Dados dos compactos A1, A2 ⊂ R2,existe una recta combinatorio de R2 que los subdivide a ambos en trozos de igual area.
Demostracion : Sin perdida de generalidad supondremos que Area(Ai) > 0 para alguni ∈ 1, 2, en otro caso el resultado es trivial.
Identifiquemos R2 con su copia topologica en R3 correspondiente al plano P :=(x1, x2, x3) ∈ R3 : x3 = 1. Para cada x ∈ S2 = p ∈ R3 : ‖p‖ = 1, denotemos porPx := y ∈ R3 : 〈y, x〉 = 0 y escribamos R3 \ Px = P+
x ∪ P+x , donde P+
x := y ∈R3 : 〈y, x〉 > 0 y P−x := y ∈ R3 : 〈y, x〉 < 0. Es claro que P+
x = P−−x para todox ∈ S2. Observemos tambien que Lx := Px ∩ P es una recta combinatorio en P ⊂ R3
salvo cuando x = (0, 0,±1), en cuyo caso Lx = ∅. Definamos la funcion ai : S2 → R,
49
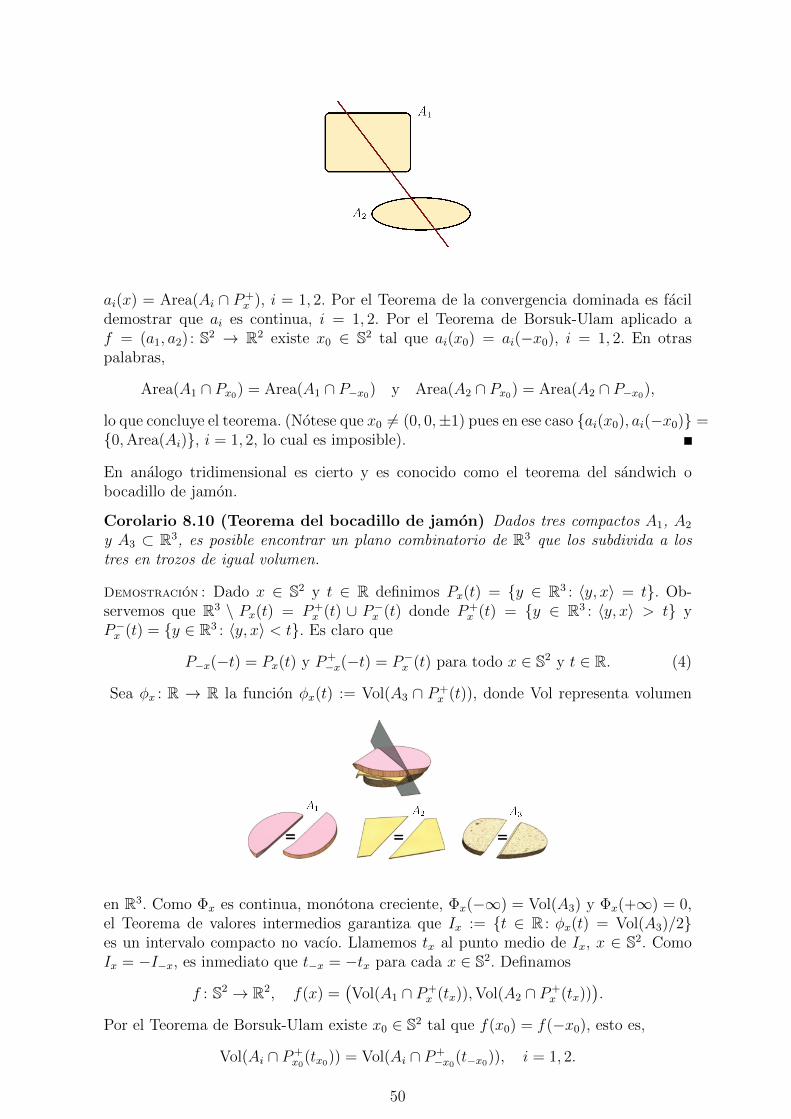
ai(x) = Area(Ai ∩ P+x ), i = 1, 2. Por el Teorema de la convergencia dominada es facil
demostrar que ai es continua, i = 1, 2. Por el Teorema de Borsuk-Ulam aplicado af = (a1, a2) : S2 → R2 existe x0 ∈ S2 tal que ai(x0) = ai(−x0), i = 1, 2. En otraspalabras,
Area(A1 ∩ Px0) = Area(A1 ∩ P−x0) y Area(A2 ∩ Px0) = Area(A2 ∩ P−x0),
lo que concluye el teorema. (Notese que x0 6= (0, 0,±1) pues en ese caso ai(x0), ai(−x0) =0,Area(Ai), i = 1, 2, lo cual es imposible).
En analogo tridimensional es cierto y es conocido como el teorema del sandwich obocadillo de jamon.
Corolario 8.10 (Teorema del bocadillo de jamon) Dados tres compactos A1, A2
y A3 ⊂ R3, es posible encontrar un plano combinatorio de R3 que los subdivida a lostres en trozos de igual volumen.
Demostracion : Dado x ∈ S2 y t ∈ R definimos Px(t) = y ∈ R3 : 〈y, x〉 = t. Ob-servemos que R3 \ Px(t) = P+
x (t) ∪ P−x (t) donde P+x (t) = y ∈ R3 : 〈y, x〉 > t y
P−x (t) = y ∈ R3 : 〈y, x〉 < t. Es claro que
P−x(−t) = Px(t) y P+−x(−t) = P−x (t) para todo x ∈ S2 y t ∈ R. (4)
Sea φx : R → R la funcion φx(t) := Vol(A3 ∩ P+x (t)), donde Vol representa volumen
en R3. Como Φx es continua, monotona creciente, Φx(−∞) = Vol(A3) y Φx(+∞) = 0,el Teorema de valores intermedios garantiza que Ix := t ∈ R : φx(t) = Vol(A3)/2es un intervalo compacto no vacıo. Llamemos tx al punto medio de Ix, x ∈ S2. ComoIx = −I−x, es inmediato que t−x = −tx para cada x ∈ S2. Definamos
f : S2 → R2, f(x) =(Vol(A1 ∩ P+
x (tx)),Vol(A2 ∩ P+x (tx))
).
Por el Teorema de Borsuk-Ulam existe x0 ∈ S2 tal que f(x0) = f(−x0), esto es,
Vol(Ai ∩ P+x0
(tx0)) = Vol(Ai ∩ P+−x0(t−x0)), i = 1, 2.
50

Como P+−x0(t−x0) = P+
−x0(−tx0) = P−x0(tx0) inferimos que
Vol(Ai ∩ P+x0
(tx0)) = Vol(Ai ∩ P−x0(tx0)), i = 1, 2,
lo que concluye la prueba.
9. El Teorema de Seifert-Van Kampen
En esta seccion probaremos la herramienta mas potente conocida para el calculoexplıcito del grupo fundamental de un espacio topologico.: el Teorema de Seifert-VanKampen. Este teorema tiene un trasfondo algebraico muy importante y requerira dellenguaje desarrollado en la seccion de grupos del Tema 0. Es muy conveniente tenerpresente la Definicion 1.13.
Teorema 9.1 (Seifert-Van Kampen) Sea X un espacio topologico y sean U, V ⊂ Xsubconjuntos tales que:
U ∩ V 6= ∅ y U ∪ V = X.
U , V y U ∩ V son abiertos arcoconexos.
Llamemos i : U∩V → U y j : U∩V → V a las aplicaciones inclusion, fijemos x0 ∈ U∩Vy consideremos i∗ : Π1(U ∩ V, x0) → Π1(U, x0) y j∗ : Π1(U ∩ V, x0) → Π1(V, x0) loscorrespondientes homomorfismos inducidos.
EntoncesΠ1(X, x0) ∼= Π1(U, x0) •Π1(U∩V,x0) Π1(V, x0),
donde el producto amalgamado es el relativo a los homomorfismos i∗ y j∗.
Demostracion : Llamemos i : U → X, j : V → X y k: U ∩ V → X a las aplicacio-nes inclusion, y consideremos i∗ : Π1(U, x0) → Π1(X, x0), j∗ : Π1(V, x0) → Π1(X, x0) yk∗ : Π1(U ∩ V, x0) → Π1(X, x0) los correspondientes homomorfismos inducidos. Llame-mos
π : : Π1(U, x0) • Π1(V, x0)→ Π1(U, x0) •Π1(U∩V,x0) Π1(V, x0)
a la proyeccion al cociente amalgamado segun i∗ y j∗, y denotemos por
π1 : Π1(U, x0)→ Π1(U, x0) •Π1(U∩V,x0) Π1(V, x0),
π2 : Π1(V, x0)→ Π1(U, x0) •Π1(U∩V,x0) Π1(V, x0) y
π0 : Π1(U ∩ V, x0)→ Π1(U, x0) •Π1(U∩V,x0) Π1(V, x0)
a los homomorfismos π1 := π|Π1(U,x0), π2 := π|Π1(V,x0) y π0 := π i∗ = π j∗.Por la propiedad universal de la Proposicion 1.14, existe un homomorfismo de grupos
Θ: Π1(U, x0) •Π1(U∩V,x0) Π1(V, x0)→ Π1(X, x0)
a traves del cual factorizan las aplicaciones i∗, j∗ y k∗. Esto quiere decir que Θπ1 = i∗,Θ π2 = j∗ y Θ πo = k∗. Analicemos con detalle y de forma explıcita la definicion deΘ. Para ello estableceremos el convenio notacional
W1,W2 = U, V .
51

Una palabra generica en Π1(U, x0)•Π1(V, x0) ≡ Π1(W1, x0)•Π1(W2, x0) viene dada porla expresion w = [α1]Wi1
. . . [αm]Wim, ij ∈ 1, 2 para todo j, donde el sibındice indica
el espacio de la clase de homotopıa. Con esta notacion,
Θ(π(w)) = [α1]X ? . . . ? [αm]X .
Como arriba, el subındice X indica ahora clase de homotopıa en Π1(X, x0).En particular,
π(i∗([α]U∩V ) · j∗([α]U∩V )−1 : [α]U∩V ∈ Π1(U ∩ V, x0)
)⊂ Ker(Θ).
La prueba del teorema consistira en demostrar que Θ es un isomorfismo. Para ver quees sobre, tomemos un lazo α : [0, 1] → X con base el punto x0 ∈ U ∩ V . Por el Lemade Lebesgue, existe n ∈ N tal que α([i/n, (i + 1)/n]) esta contenido en U o en V paratodo i = 0, . . . , n− 1. Llamemos αi : [0, 1]→ X, t 7→ α((1− t)i/n+ t(i+ 1)/n).
Si αi([0, 1]) ⊂ U y αi+1([0, 1]) ∈ V (o viceversa), el punto αi(1) = αi+1(0) estacontenido en U ∩ V y eligiremos un arco ρi en U ∩ V con punto inicial x0 y final αi(1).Cuando
(αi([0, 1]) ∪ αi+1([0, 1])
)⊂ U (o V ) se procede igual, solo que ahora el arco ρi
descansa en U (o V ). Finalmente
α ' (α0 ? ρ0) ? . . . ? (ρi−1 ? αi ? ρi+1) ? . . . ? (ρn−2 ? αn−1),
por lo que [α]X es el producto [α0 ? ρ0]X ? . . . ? [ρi−1 ? αi ? ρi+1]X ? . . . ? [ρn−2 ? αn−1]Xen Π1(X, x0). Por construccion y con el convenio anterior,
α0 ? ρ0 ⊂ Wl0 , . . . , ρi−1 ? αi ? ρi+1 ⊂ Wli , . . . , ρn−2 ? αn−1 ⊂ Wln−2 ,
para ciertos li ∈ 1, 2, i = 0, . . . , n− 2. Por tanto la palabra
w := [α0 ? ρ0]Wl0? . . . ? [ρi−1 ? αi ? ρi+1]Wli
? . . . ? [ρn−2 ? αn−1]Wln−2
de Π1(U, x0) • Π1(V, x0) satisface Θ(π(w)) = [α]X y de aquı la sobreyectividad de Θ.Resta por tanto probar que Θ es inyectivo.Supongamos que tenemos una palabra w = a1 . . . am en Π1(U, x0) • Π1(V, x0) tal
que, salvo componer con π : : Π1(U, x0) •Π1(V, x0)→ Π1(U, x0) •Π1(U∩V,x0) Π1(V, x0), seaplica por Θ en [εx0 ]. Llamemos αi : [0, 1] → Wli ∈ U, V al lazo tal que ai = [αi]Wli
para todo i. De nuestras hipotesis existe una homotopıa H : [0, 1]2 → X con extremosfijos tal que H(·, 0) = α1 ? . . . ? αm y H(·, 1) = εx0 . De nuevo el Lema de Lebesgue nosgarantiza la existencia de n ∈ N tal que todo cuadrado de lado 1/n es aplicado por Hen U o V . Sin perdida de generalidad asumiremos que
52

α1 ? . . . ? αm esta parametrizada de forma que la traza de αi se recorre sobre elintervalo [(i− 1)/m, i/m].
n es multiplo de m, y por tanto, cada subintervalo [(i− 1)/m, i/m] contiene unacantidad entera de intervalos de longitud 1/n.
Lo que hemos de demostrar es que la palabra w, pensada como un elemento de Π1(U, x0)•Π1(V, x0), puede ser alterada por relaciones de amalgamado en i∗(a) · j∗(a)−1 : a ∈Π1(U ∩ V, x0) (pasando elementos de Π1(U ∩ V, x0) en una sılaba a la siguiente) deforma que al final nos quede la palabra trivial. El procedimiento consistira, a grossomodo y salvo algun trabajo previo que hay que explicar, en probar que podemos pasarde la palabra en Π1(U, x0) • Π1(V, x0) asociada a la curva H(t, i/n) a la asociada aH(t, (i + 1)/n). Como la palabra asociada a H(t, 1) es la trivial habremos conluido laprueba.
Comencemos con los detalles. Como primera etapa, observemos que salvo modificarnuestra homotopıa sin alterar la palabra ω de una forma no permitida, podemos asumirque para todo (s, i) ∈ [0, 1]× 0, 1, . . . , n la curva horizontal H(·, s) es constante paravalores de t en un entorno de i/n. Todo ello sin alterar la propiedad de que los cuadradoscon lado de longitud 1/n tienen imagen por H dentro de U o V . En efecto, para ellobasta con reparametrizar convenientemente, y con dependencia continua en s, las curvasH(·, s). Omitimos los detalles. Un razonamiento analogo nos permite tambien suponer,adicionalmente y sin perdida de generalidad, que para todo (t, i) ∈ [0, 1]×0, 1, . . . , nla curva vertical H(t, ·) es constante para valores de s en un entorno de i/n.
Como consecuencia, H coincide con una aplicacion constante ci,j ∈ U ∪ V en unpequeno disco euclidiano Di,j centrado en (i/n, j/n) para todo (i, j) ∈ 0, 1, . . . , n2.En este punto usaremos curvas en U , V o U ∩V , con preferencia en el ultimo conjunto ydependiendo de si ci,j ∈ U , V o U ∩ V (tal y como explicamos arriba cuando probamosla sobreyectividad de Θ), para alterar H en los Di,j por una funcion radial (esto es,constante sobre las circunferencias centradas en (i/n, j/n)) de forma que H(i/n, j/n) =x0. Para ser mas precisos, si Di,j tiene radio εi,j y ρi,j : [0, εi,j]→ U , V o U ∩ V , es unacurva con punto inicial x0 y final ci,j, definiremos
H((i/n, j/n) + rθ
)= ρi,j(r), r ∈ [0, εi,j], θ ∈ S1.
En este punto ya queda claro que cada curva H(t, i/n) es producto de lazos con base x0 ycontenidos en U o V (aquellos que se corresponden con las imagenes de los subintervalos[j/n, (j+1)/n], j = 0, 1, . . . , n−1), por lo que de forma canonica se le puede asociar unapalabra en el producto libre Π1(U, x0) •Π1(V, x0). Expliquemos ahora como pasar de lapalabra asociada a H(t, i/n) en Π1(U, x0)•Π1(V, x0) a la que representa H(t, (i+1)/n).
Fijemos i ∈ 0, 1, . . . , n− 1 y llamemos βj al lazo con base x0 en U o V dado por
t 7→ H((1− t)j/n+ t(j + 1)/n, i/n
), j = 0, . . . , n− 1.
De esta forma H(·, i/n) ' β0 ? . . . , ?βn−1. Atendiendo a nuestros convenios, si Wlj
denota al abierto conteniendo a βj, j = 0, . . . , n− 1, entonces [β0]Wl0? . . . ? [βn−1]Wln−1
serıa la palabra asociada a H(·, i/n) en Π1(U, x0) • Π1(V, x0).Para i+ 1 y de forma analoga llamemos β′j al lazo con base x0 en U o V dado por
t 7→ H((1− t)j/n+ t(j + 1)/n, (i+ 1)/n
), j = 0, . . . , n− 1.
Igual que antes, [γ0]Wl0? . . . ? [γn−1]Wln−1
serıa la palabra asociada a H(·, (i+ 1)/n) en
Π1(U, x0) •Π1(V, x0). Finalmente llamemos ρj al lazo en Wlj−1∩Wlj basado en x0 dado
pors 7→ H
(j/n, (1− s)i/n+ s(i+ 1)/n
), j = 0, . . . , n,
53

donde hemos hecho el convenio Wl−1 = Wln = X (notese que ρ0 = ρn = εx0 ya que Hes homotopıa con extremos fijos).
Como cada cuadrado [j/n, (j + 1)/n] × [i/n, (i + 1)/n] es simplemente conexo, de-ducimos que (en homotopıa y como palabras en Π1(U, x0) •Π1(U∩V,x0) Π1(V, x0)) que
[β0]Wl0? . . . ? [βn−1]Wln−1
=
=([ρ0]Wl0
?[γ0]Wl0?[ρ1]−1
Wl0
)?. . .?
([ρj]Wlj
?[γj]Wlj?[ρj+1]−1
Wlj
)?. . .?
([ρn−1]Wln−1
?[γn−1]Wln−1?[ρn]−1
Wln−1
).
Tras el amalgamado de ρj en Π1(Wlj−1∩Wlj , x0) cuando Wlj−1
6= Wlj , inferimos que
[β0]Wl0?. . .? [βn−1]Wln−1
=([ρ0]Wl0
? [γ0]Wl0
)?. . .? [γj]Wlj
?. . .?([γn−1]Wln−1
? [ρn]−1Wln−1
)=
= [γ0]Wl0? . . . ? [γj]Wlj
? . . . ? [γn−1]Wln−1
en Π1(U, x0) •Π1(U∩V,x0) Π1(V, x0).Por tanto las palabras asociadas a H(t, i/n) y H(t, (i+1)/n) en Π1(U, x0)•Π1(U∩V,x0)
Π1(V, x0) se proyectan en el mismo elemento de Π1(U, x0) •Π1(U∩V,x0) Π1(V, x0). Por unprocedimiento inductivo, concluimos que la proyeccion a Π1(U, x0) •Π1(U∩V,x0) Π1(V, x0)de la palabra asociada en Π1(U, x0) • Π1(V, x0) a H(·, 0), esto es, de w = a1 . . . am,coincide con la correspondiente proyeccion de la palabra asociada en Π1(U, x0)•Π1(V, x0)a H(t, 1) = εx0 , esto es, con la proyeccion de la palabra trivial. Esto concluye la prueba.
Corolario 9.2 Bajo las mismas hipoteis del Teorema de Seifert-Van Kampen, si U ∩Ves simplemente conexo entonces Π1(X.x0) ∼= Π1(U, x0) • Π1(V, x0).
Corolario 9.3 Bajo las mismas hipoteis del Teorema de Seifert-Van Kampen, si V essimplemente conexo entonces Π1(X.x0) ∼= Π1(U, x0)/N
(i∗(Π1(U ∩ V, x0))
).
Ejercicio 9.4 Si X es un n-ciclo (ver Definicion 3.16) entonces Π1(X, x0) es isomorfoal grupo libre F (a1, . . . , an).
Como caso particular,
Ejercicio 9.5 Sea X un espacio topologico tal que X = ∪nj=1aj, donde
Cada aj es homeomorfo a S1 con la topologıa inducida por X.
Existe x0 ∈ X tal que aj ∩ ai = x0 para todo i 6= j.
Entonces Π1(X, x0) es isomorfo al grupo libre F (a1, . . . , an).
9.1. Aplicaciones y ejemplos
Veamos algunas aplicaciones sencillas del Teorema de Seifert-Van Kampen.
54

9.1.1. Espacios libro
Consideramos el semiplano Π1 := (x1, x2, x3) ⊂ R3 : x1 = 0, x2 ≥ 0 y sus giradosrespecto del eje x3
Πj := (e2π(j−1)ı/kz, x3) : (z, x3) ∈ Π1 ⊂ C× R ≡ R3, j = 1, . . . , k.
Por definicion Lk := ∪kj=1Πj, k ∈ N, es el espacio libro de k hojas. Notese que desdeel punto de vista topologico (o salvo homeomorfismos), el hecho de que la distribucionde semiplanos sea equiangular es irrelevante. Tambien es evidente que el espacio L2 eshomeomorfo a R2.
Proposicion 9.6 Los espacios Lk y Ls no son homeomorfos, k, s ∈ N, k 6= s.
Demostracion : Supongamos que k 6= 2 y Lk ∼= Ls, s 6= k. Tomemos F : Lk → Ls unhomeomorfismo. Sea X := Lk \ 0 e Y := F (X) = Ls \ F (0), donde 0 ≡ (0, 0, 0).
La aplicacion H : X × [0, 1] → X, H(p, s) := (1 − s)p + sp/‖p‖, deforma X en launion de curvas S2 ∩Lk, con retraccion asociada r : X → S2 ∩Lk, r(p) := p/‖p‖. Por el
Ejercicio 9.4, el grupo fundamental de X es libe con k − 1 generadores (si k = 1 es elgrupo trivial). Pero por razonamientos similares el grupo fundamental de Y es
libre con un generador si F (0) /∈ x1 = x2 = 0, o
libre con s− 1 generadores si F (0) ∈ x1 = x2 = 0.
Como k − 1 6= 1, s− 1, esto genera la contradiccion buscada.
Corolario 9.7 Si O ⊂ R3 es un abierto conteniendo al origen, entonces O ∩ Lk nopuede ser homeomorfo a un abieto de R2 para todo k 6= 2.
Demostracion : Supongamos que existen abiertos 0 ≡ (0, 0, 0) ∈ O ⊂ R3 y U ⊂ R2, yun homeomorfismo F : O ∩ Lk → U .
Discutamos primero el caso k > 2.Sea B2 ⊂ O una bola euclidiana abierta centrada en el origen, D ⊂ F (B2∩Lk) ⊂ U
un disco abierto centrado en F (0), y B1 una bola eclidiana abiera centrada en el origencon B1 ∩ Lk ⊂ F−1(D).
Las inclusiones i1 : (B1∩Lk)\0 → F−1(D)\0 e i2 : F−1(D)\0 → (B2∩Lk)\0inducen homomorfismos de grupos (i1)∗ : Π1
((B1 ∩ Lk) \ 0
)→ Π1
(F−1(D) \ 0
)e
(i2)∗ : Π1
(F−1(D) \ 0
)→ Π1
((B2 ∩ Lk) \ 0
).
De la demostracion de la Proposicion 9.6 se sigue que Π1
((B1∩Lk)\0
)y Π1
((B2∩
Lk)\0)
son grupos libres con k−1 6= 1 generadores. Por otro lado, Π1
(F−1(D)\0
) ∼=Π1
(D \ F (0
) ∼= Z es un grupo libre con un generador.Como i∗ = (i2)∗ (i1)∗, donde i : (B1 ∩ Lk) \ 0 → (B2 ∩ Lk) \ 0 es la inclusion,
deducirıamos que i∗(Π1((B1∩Lk)\0)
)tendrıa que ser un grupo cıclico. Pero i es una
55

equivalencia homotopica (compruebese como ejercicio), por lo que i∗(Π1((B1 ∩ Lk) \
0))
= Π1((B2 ∩ Lk) \ 0) es un grupo libre con k − 1 6= 1 generadores, generandouna contradiccion.
El caso k = 1 es analogo. Ahora se toman B2 ⊂ U una bola euclidiana abiertacentrada en F (0), D ⊂ F−1(B2) ⊂ O ∩ L1 un semidisco abierto centrado en 0, yB1 ⊂ F (D) una bola eclidiana abiera centrada en F (0). Se razona formalmente comoarriba, revirtiendo el sentido de las inclusiones, y generando una contradiccion similar.Omitimos los detalles.
9.1.2. El grupo fundamental de un esquema
Para lo que sigue, es conveniente tener presentes las construcciones y notacion in-troducidas en la Seccion 3.
Consideremos una relacion de equivalencia R0 en S1 = p ∈ R2 : ‖p‖ = 1 y ex-tendamosla a la relacion R
pRq ⇐⇒ p = q ∨(p, q ⊂ S1 ∧ pR0q
)en el disco unidad cerrado D = p ∈ R2 : ‖p‖ ≤ 1. Denotemos por σ : D → S := D/Ra la correspondiente proyeccion. Como siempre D := D \ S1 es el disco unidad abierto.
Tenemos la siguiente:
Proposicion 9.8 Si z0 := σ((1, 0)) ∈ σ(S1) y [α1] ∈ Π1(σ(S1), z0) es la clase determi-nada por α1 : [0, 1]→ σ(S1), α1(t) := σ(e2πıt), entonces
Π1(S) ∼= Π1(σ(S1), z0)/N([α1]).
Demostracion : Tomemos t0 ∈]0, 1[. Basta con demostrar que
Π1(S, σ(t0)) ∼= Π1(σ(S1), z0)/N([α1]).
Llamemos U = S \ σ(0) y V = σ(D) ⊂ S. Es claro que U , V y U ∩ V =σ(D) \ σ(0) son abiertos arcoconexos y no vacıos de S, siendo S = U ∪ V . Por tantoestan en las condiciones del Teorema de Seifert-Van Kampen.
Estudiemos Π1(U, σ(t0)), para lo cual sera crucial observar que σ(S1) es retractofuerte de deformacion de U . Con tal fin consideremos la retraccion
r : D \ 0 → S1, r(p) =p
‖p‖
y la deformacion
H : (D \ 0)× [0, 1]→ D \ 0, H(p, s) = (1− s)p+ sr(p)
que realizan S1 como retracto fuerte de deformacion de D \ 0.Tanto la retraccion r como la deformacion H pueden ser inducidas al cociente,
dando lugar respectivamente a una retraccion r : U → σ(S1) y a una deformacionH : U × [0, 1]→ U satisfaciendo
(σ|S1) r = r (σ|D\0) y (σ|D\0) H = H ((σ|D\0)× Id[0,1]
),
y que prueban que σ(S1) es retracto fuerte de deformacion de U . Como consecuenciadel Teorema 7.9, y teniendo en cuenta que r(σ(t0)) = σ(r(t0)) = σ((1, 0)) = z0,
r∗ : Π1(U, σ(t0))→ Π1(σ(S1), z0), es un isomorfismo de grupos.
56
Es claro que V = σ(D) ∼= D es simplemente conexo, por lo que el Corolario 9.3 garantizaque
Π1(S, σ(t0)) ∼= Π1(U, σ(t0))/N(i∗(Π1(U ∩ V, σ(t0)))
),
donde i∗ : Π1(U ∩ V, σ(x0))→ Π1(U, σ(x0)) es el morfismo inducido por i : U ∩ V → U .Usando que r∗ : Π1(U, σ(t0))→ Π1
(σ(S1), z0
)es un isomorfismo,
Π1(U, σ(t0))/N(i∗(Π1(U ∩V, σ(t0)))
) ∼= r∗
(Π1(U, σ(t0))
)/N((r∗ i∗)(Π1(U ∩V, σ(t0)))
),
esto es,
Π1(U, σ(t0))/N(i∗(Π1(U ∩V, σ(t0)))
) ∼= Π1(σ(S1), σ(1, 0))/N((r i)∗(Π1(U ∩V, σ(t0)))
).
Por otra parte Π1(U ∩ V, σ(t0)) es el grupo libre F ([γ]), donde γ : [0, 1] → U ∩ V,γ(t) = σ(t0e
2πıt). Ademas, (r i)∗([γ]) = [α1] ∈ Π1(σ(S1), z0). Deducimos pues que
r∗
(Π1(U, σ(t0))
)/N((r i)∗(Π1(U ∩ V, σ(t0)))
)= Π1(σ(S1), z0)/N([α1]),
lo que concluye la prueba.
El siguiente corolario, consecuencia inmediata de la Proposicion 9.8, nos calcula elgrupo fundamental del espacio asociado a un esquema. Es conveniente consultar lasDefiniciones 3.18 y 3.20 para la notacion implıcita.
Corolario 9.9 Sea ω un esquema, sea Sω su realizacion canonica, σω : D → Sω laidentificacion asociada a Sω y Γω = σ(S1) su grafo conexo borde.
Si z0 := σω((1, 0)) ∈ Γω y α1 : [0, 1]→ Γω, α1(t) := σω(e2πıt), entonces
Π1(Sω) ∼= Π1(Γω, z0)/N([α1]).
Como Γω es un grafo conexo, Π1(Γω, z0) es un grupo libre con una cantidad finita degeneradores (ver Observacion 3.17).
Definicion 9.10 (Esquemas binarios puros normales) Presentamos una lista basi-ca de esquemas binarios puros, que llamaremos normales, y sus correspondientes reali-zaciones (tengase en cuenta el Corolario 9.9).
El espacio S0 asociado al esquema binario puro w0 := aa−1 es homeomorfo a laesfera S2 y tiene grupo fundamental trivial 0.
El espacio Sn asociado al esquema binario puro wn :=∏n
j=1 ajcja−1j c−1
j , n ∈ N,tiene grupo fundamental isomorfo a
F (a1, c1, . . . , an, cn)/N(n∏j=1
ajcja−1j c−1
j ).
El espacio S∗n asociado al esquema binario puro w∗n :=∏n
j=1 ajaj, n ∈ N, tienegrupo fundamental isomorfo a
F (a1, . . . , an)/N(n∏j=1
a2j).
57

Corolario 9.11 (Realizaciones de esquemas binarios puros normales) La fami-lia de realizaciones de los esquemas binarios puros normales
Sn : n ∈ N ∪ 0 ∪ S∗n : n ∈ N
no contiene dos espacios homeomorfos entre sı.
Demostracion : Basta observar que
A(Π1(Sn)) ∼= Z2n, A(Π1(S∗n+1)) ∼= Z2 × Zn, n ∈ N ∪ 0
(para n = 0 entiendase Z0 ≡ 0).Por tanto la correspondiente lista de abelianizados no contiene dos de ellos homeo-
morfos entre sı, de donde se sigue el resultado.
Definicion 9.12 (Esquemas binarios mixtos normales) Fijado k ∈ N, la siguien-te lista de esquemas binarios mixtos, que llamaremos normales, y sus correspondientesrealizaciones (tengase en cuenta el Corolario 9.9) jugaran un papel relevante mas ade-lante:
Para cada n ∈ N∪0, denotaremos por Sn,k a la realizacion del esquema binario
wn,k :=( n∏j=1
ajcja−1j c−1
j
)( k∏j=1
djbjd−1j
)que tiene grupo fundamental isomorfo a
F (a1, c1, . . . , an, cn, e1, . . . , ek)/N(( n∏j=1
ajcja−1j c−1
j
)( n∏j=1
ej)),
donde ej ≡ djbjd−1j para todo j.
Para cada n ∈ N, denotaremos por S∗n,k a la realizacion del esquema binario
w∗n,k :=( n∏j=1
ajaj
)( k∏j=1
cjbjc−1j
)que tiene grupo fundamental isomorfo a
F (a1, . . . , an, e1, . . . , ek)/N(( n∏j=1
a2j
)( k∏j=1
ej)),
donde ej ≡ cjbjc−1j para todo j.
Ejercicio 9.13 Fijemos n ∈ N ∪ 0 y k ∈ N, y sea σ : X → Sn,k la identificacionasociada a una realizacion de wn,k en un disco topologico X. Llamemos lbj ⊂ Bd(X)al arco de Jordan correspondiente con el caracter bj ∈ sop(wn,k) en la representacionasociada, y con el mismo nombre bj a la curva de Jordan σ(lbj) en Γn,k := σ(Bd(X)),j = 1, . . . , k. Sean X1, . . . , Xk k discos topologicos compactos disjuntos dos a dos ydisjuntos con Sn,k y X, y sea h := hj : Bd(Xj) → bj, j = 1, . . . , k una familia de
58

homeomorfismos. Dotemos a Sn,k ∪ (∪kj=1Xk) de la topologıa suma, e introduzcamos lasiguiente relacion de equivalencia en Sn,k ∪ (∪kj=1Xk)
p ∼h q ⇐⇒ p = q o p, q = r, hj(r) para algun r ∈ Bd(Xj) y j ∈ 1, . . . , k.
Entonces el espacio cociente(Sn,k ∪ (∪kj=1Xk)
)/∼h es homeomorfo a Sn.
El enunciado analogo para S∗n,k, n, k ∈ N, tambien es cierto, probandose que(S∗n,k ∪ (∪kj=1Xk)
)/∼h es homeomorfo a S∗n.
En particular, Sn,k no es homeomorfo a S∗n′,k′ para cualesquiera n ∈ N ∪ 0, k ∈ N yn′, k′ ∈ N.
Demostracion : Tomemos como modelo de Xj la realizacion Sωj del esquema ωj :=mjb
′jm−1j . Escribamos como σj : Yj → Sωj ≡ Xj la identificacion asociada, denotemos
por lb′j ⊂ Bd(Yj) al arco de Jordan correpondiente con el caracter b′j en ωj, j = 1, . . . , k.Denotemos por
Y0 := X ∪ (∪kj=1Yj)
con la topologıa suma, y sea h′ := h′j : lb′j → lbj , j = 1, . . . , k una familia de homeo-morfismos. Introduzcamos en Y0 la relacion
p ∼h′ q ⇐⇒ p = q o p, q = r, h′j(r) para algun r ∈ lb′j y j ∈ 1, . . . , k.
No es difıcil comprobar que Y := Y0/∼h′ es un disco topologico compacto; tengase encuenta la Proposicion 3.10. Llamemos
σ0 : Y0 → Y
a la correspondiente proyeccion. Consideremos ahora los arcos lmj , lm−1j
en Bd(Yj) co-
rrespondientes a los caracteres mj y m−1j de ωj y el homeomorfismo gj : lmj → lm−1
j
que da lugar a la identificacion σj : Yj → Sωj . Analogamente, sean ldj , ld−1j
los ar-
cos en Bd(X) correspondientes a los caracteres dj y d−1j de wn.k y el homeomorfismo
fj : ldj → ld−1j
que da lugar al espacio identificacion Sn,k. Estos arcos y homeomorfismos
se proyectan vıa σ0 a arcos en Bd(Y ) y homeomorfismos entre ellos. Si se pegan los ci-tados arcos de Bd(Y ) siguiendo las leyes que definen esos homeomorfismos, generamosuna identificacion
σ1 : Y → Y1
que materializa Y1 como realizacion del esquema ω0 := a(∏k
j=1 mjdjd−1j m−1
j ). Por elEjercicio 3.13, Y1 es de nuevo un disco topologico compacto.
Por otra parte, escribamos
S := Sn,k ∪ (∪kj=1Xk),
y definamosσ : Y0 → S, σ|X = σ, σ|Yj = σj, j = 1, . . . , k.
Sea π : S → S/ ∼h la proyeccion al cociente. La unica aplicacion
f : Y1 → S/∼h tal que f (σ1 σ0) = π σ
59

es una identificacion que materializa S/∼h como realizacion del esquema wn en el discoY , justo lo que querıamos demostrar.
Finalmente, si existiese F : Sn,k → S∗n′,k′ homeomorfismo deducirıamos que k =k′, porque un tal F habrıa de aplicar las k curvas de Jordan bj’s de Sn,k en las k′
correspondientes de S∗n′,k′ ; tengase en cuenta que un entorno basicos alrededor de unpunto en esas curvas es un semidisco, no un disco como ocurre en el resto de puntosdel espacio, y utilıcese el Corolario 9.7. Pero Sn,k y S∗n′,k no pueden ser homeomorfos yaque los espacios que resultan al pegarles k discos, a saber Sn y S∗n respectivamente, noson homeomorfos por el Corolario 9.11.
Corolario 9.14 (Realizaciones de esquemas binarios mixtos normales) Para ca-da k ∈ N, la familia de realizaciones de los esquemas binarios mixtos normales
Sn,k : n ∈ N ∪ 0 ∪ S∗n,k : n ∈ N
no contiene dos espacios homeomorfos entre sı.
Demostracion : Basta discriminar espacios usando la lista de abelianizados
A(Sn,k) ∼= Z2n+k−1, A(S∗n+1,k)∼= Zn+k, n ∈ N ∪ 0
(para n = k − 1 = 0 entiendase Z0 ≡ 0) y el Ejercicio 9.13.
9.1.3. El grupo fundamental de los espacios proyectivos
Recordemos que un modelo topologico basico para el espacio proyectivo RPn, n ∈ N,es el cociente de la esfera Sn por la relacion de equivalencia inducida por la aplicacionantıpoda:
pRq ⇐⇒ p = ±q.Para n = 1 es inmediato que RP1 ∼= S1, y por tanto
Π1(RP1) ∼= Z.
Para n = 2, RP2 es homeomorfo al espacio definido por la palabra simple aa, por loque teniendo en cuenta la Definicion 9.10
Π1(RP2) ∼= F (a)/N(a2) ∼= Z2.
Probaremos el siguiente
Teorema 9.15 Π1(RPn) ∼= Z2, n ≥ 2.
Demostracion : Bastara con demostrar que
Π1(RPn+1) ∼= Π1(RPn), n ≥ 2.
El teorema se seguira por un proceso inductivo elemental, usando el hecho de queΠ1(RP2) ∼= Z2.
Escribamos π : Sn+1 → RPn+1 ≡ Sn+1/R la proyeccion natural, donde R es la re-lacion de equivalencia inducida por la antıpoda. Denotemos por en+2 = (0, . . . , 0, 1) ∈Rn+2. Es facil comprobar que
U := π(p ∈ Sn+1 : 〈p, en+2〉 > 0) y V := π(p ∈ Sn+1 : |〈p, en+2〉| < 1)
60

son abiertos arcoconexos de RPn+1 tales que RPn+1 = U ∪ V . Igualmente
U ∩ V = π(p ∈ Sn+1 : 0 < 〈p, en+2〉 < 1)
es un abierto arcoconexo. Nuestra intencion es aplicar el Teorema de Seifert-Van Kam-pen a la pareja U , V en RPn+1.
Probemos que U es simplemente conexo. En efecto, basta tener en cuenta queSn+1
+ := p ∈ Sn+1 : 〈p, en+2〉 > 0 es homeomorfo a la bola unidad cerrada Bn(0, 1) ⊂Rn+1 vıa la proyeccion ortogonal sobre xn+2 = 0 ≡ Rn+1, y que π|Sn+1
+: Sn+1
+ → U es
un homeomorfismo.Calculemos ahora el grupo fundamental de V .Para ello, observemos que es posible identificar topologicamente Sn ≡ Sn × 0 =
(Sn+1 ∩ xn+2 = 0), y escribamos W = p ∈ Sn+1 : 0 < |〈p, en+2〉| < 1. La aplicacion
r : W → Sn, r(p) :=p− 〈p, en+2〉en+2
‖p− 〈p, en+2〉en+2‖
es la retraccion asociada a la deformacion
H : W × [0, 1]→ W, H(p, s) :=(1− s)p+ sr(p)
‖(1− s)p+ sr(p)‖
que materializa Sn como retracto fuerte de deformacion de W .Si A : Sn+1 → Sn+1 es la aplicacion antıpoda, es inmediato comprobar que
r A = A r y H (A× Id[0,1]) = A H.
Por tanto existe una unica retraccion y deformacion
r : V → π(Sn), H : V × [0, 1]→ V
satisfaciendo que
r (π|W ) = (π|Sn) r y H ((π|W )× Id[0,1]
)= (π|W ) H,
lo que prueba que π(Sn) es un retracto fuerte de deformacion de V . En otras pala-bras, RPn es un retracto fuerte de deformacion de V ya que π(Sn) es naturalmentehomeomorfo a RPn ≡ Sn/R0, donde R0 es la relacion inducıda por la antıpoda en Sn.
Por ultimo, comprobemos que U ∩V es simplemente conexo. En efecto, si llamamosY := p ∈ Sn+1 : 0 < 〈p, en+2〉 < 1, la aplicacion π|Y : Y → U ∩ V es un homeomorfis-mo. Igualmente
Φ: Y → Sn×]0, 1[, φ(p) =(r(p), 〈p, en+2〉
),
es un homeomorfismo. Inferimos que U ∩ V es homeomorfo al espacio simplementeconexo Sn × [0, 1] (tengase en cuenta que n ≥ 2), y por tanto igualmente simplementeconexo.
El Corolario 9.2 garantiza que
Π1(RPn+1) ∼= Π1(U) • Π1(V ) ∼= 0 • Π1(RPn) ∼= Π1(RPn),
lo que concluye la prueba.
61

Ejercicios del Tema 1
1. Sea f : X → Y una aplicacion continua entre espacios topologicos. Tomamosdos puntos x1 y x2 en X. Denotamos por (f∗)1 y por (f∗)2 a los homomorfismosinducidos por f en los puntos x1 y x2. Dado γ ∈ Ωx1,x2(X), demostrar que (f∗)2 Uγ = Ufγ (f∗)1.
2. Probar que son grupos topologicos:
a) Rn con la suma y la topologıa usuales.
b) R∗ = R− 0 y C∗ = C− 0 con los productos y las topologıas usuales.
c) S1 ⊂ C con el producto de numeros complejos y la topologıa usual.
d) El grupo lineal general GL(n), el grupo ortogonal O(n) y el grupo especialortogonal SO(n) con el producto de matrices y la topologıa inducida porMn(R) ≡ Rn2
.
3. (Conjuntos estrellados). Sea X ⊆ Rn y x0 ∈ X. Se dice que X es estrelladorespecto de x0 si [x0, x] ⊆ X, para cada x ∈ X. Se pide lo siguiente:
a) Sean α, β ∈ Ωx0(X). Demostrar que α'β, construyendo una homotopıa deforma explıcita. Concluir que X es simplemente conexo.
b) Sean f, g : Y → X dos aplicaciones continuas, donde Y es cualquier espaciotopologico. Demostrar que f l g.
4. Toda aplicacion continua f : S1 → S1 admite una extension F : D → D, dondeD es el disco unidad cerrado.
5. Sea X un espacio topologico y f, g : X → Sn aplicaciones continuas con g(x) 6=−f(x), para cada x ∈ X. Demostrar que f l g. Deducir que:
a) si f : Sn → Sn es continua y no tiene puntos fijos, entonces f l −ISn ,
b) si f : Sn → Sn es continua y f(x) 6= −x, para cada x ∈ Sn, entonces f l ISn .
6. Demostrar que IS2n−1 l −IS2n−1 para cada n ∈ N. A partir de este hecho y delejercicio anterior deducir que si f : S1 → S1 es continua y nulhomotopa, entoncesexisten x1, x2 ∈ S1 tales que f(x1) = x1 y f(x2) = −x2.
7. Para cada espacioX probar que la seccion ecuatorial A = X×0 es un retracto dedeformacion de X×[−1, 1]. Deducir el tipo de homotopıa de la banda Rn×[−1, 1],el cilindro Sn × [−1, 1] y el cubo [−1, 1]n+1. Discutir que ocurre si sustituimos[−1, 1] por R.
8. Encontrar un retracto de deformacion de X = Sn−N,S y otro de X = Rn+1−B(0, 1), donde B(0, 1) es la bola unidad cerrada.
9. Sean x1, x2 ∈ R2 con x1 6= x2. Definimos A = C1∪C2, donde Ci es la circunferenciade centro xi y radio ‖x1 − x2‖/2. Demostrar graficamente que A es un retractode deformacion de R2 − x1, x2. Calcular explıcitamente la retraccion cuandox1 = (−1, 0) y x2 = (1, 0).
62

10. Sea α ∈ Ω(S1, 1) un lazo de clase C1. Demostrar que:
deg(α) =1
2π
∫ 1
0
⟨α′(u), J(α(u))
⟩du,
donde J : R2 → R2 es el giro de angulo π/2 dado por J(x, y) = (−y, x).
11. ¿Es cierto el teorema de Borsuk-Ulam si cambiamos S2 por el toro T = S1 × S1?
12. Probar que el teorema de Borsuk-Ulam es equivalente a los siguientes enunciados:
a) Si f : S2 → R2 es continua e impar, entonces existe x0 ∈ S2 tal que f(x0) = 0.
b) Si g1, g2 : S2 → R son continuas e impares, existe x0 ∈ S2 tal que g1(x0) =g2(x0) = 0.
13. Sea f : R→ R+ una funcion continua . Definimos el conjunto:
Sf = (x, y, z) ∈ R3 / x2 + y2 = f(z)2.
a) Estudiar el conjunto Sf ∩ z = z0 con z0 ∈ R. Esbozar un dibujo de Sf .
b) Demostrar que cualesquiera dos conjuntos Sf son homeomorfos entre sı.
c) Calcular el grupo fundamental de Sf .
14. Encontrar un retracto de deformacion de R3 − L, donde L es el eje z. ObtenerΠ1(R3 −R), siendo R cualquier recta combinatorio (intenta utilizar que hay unaretraccion de R2
∗ en S1).
15. Sea S un subespacio combinatorio de dimension k ≤ n−2 en Rn. Calcular Π1(Rn−S) encontrando para ello un retracto de deformacion.
16. Demostrar que un abierto de R2 no puede ser homeomorfo a un abierto de Rn sin 6= 2.
17. Demostrar que el sistema de ecuaciones:
x− arctg(x2 − y3) = 5,
cos(x) + sen(xy3) + ex + ey2
+1
y= −3.
tiene al menos una solucion en R2.
18. Sea A un retracto de un disco cerrado en R2. Demostrar que toda aplicacioncontinua f : A → A tiene al menos un punto fijo. Deducir que toda aplicacioncontinua f : X → X con X = B((−1, 0), 1)∪B((1, 0), 1) tiene al menos un puntofijo.
19. Sea f : D → D un homeomorfismo. Demostrar que f conserva el interior y lafrontera de D.
20. Calcular Π1(X) en estos casos:
a) X = S2 ∪ [N,S], donde N y S son el polo Norte y el polo Sur de S2.
63

b) X = S2 ∪ (x, y, 0) ∈ R3 / x2 + y2 ≤ 1,c) X = S2 ∪ C1 ∪ C2, donde C1 y C2 son circunferencias tangentes a S2 en los
puntos N y S, respectivamente.
d) X es la union de una esfera y de un toro tangentes en un unico punto.
e) X es la union de dos toros tangentes en un unico punto.
21. Calcular Π1(X), donde X es el espacio que se obtiene al identificar los n lados deun polıgono regular plano siguiendo los esquemas E siguientes:
a) n = 3, E = aaa. ¿Es X contractil?
b) n = 6, E = aa−1ba−1a−1b−1,
c) n = 6, E = ab−1bccc,
d) n = 7, E = abaaab−1a−1. Es Π1(X) el producto libre de dos grupos cıclicos?
e) n = 7, E = abcb−1a−1cc.
22. Sea X el espacio resultante al identificar los 8 lados de un polıgono regular planosiguiendo el esquema acadbcb−1d. Calcular el abelianizado del grupo fundamentalde X.
23. Sea X el espacio obtenido a partir de una corona circular plana cuando se iden-tifican puntos antıpodas en las dos circunferencias del borde. Calcular Π1(X).
24. Sea X el cociente de una corona circular donde el cırculo exterior se divide en seislados identificados por el esquema abca−1a−1c−1 y el cırculo exterior se divide entres lados identificados segun el esquema ddd. Calcular su grupo fundamental.
25. Resolver de forma razonada las siguientes cuestiones:
a) Sea f : A → Y una aplicacion continua con A ⊆ X y X simplementeconexo. Supongamos que existe F : X → Y continua con F|A = f . Probarque el homomorfismo inducido f∗ : Π1(A, x0) → Π1(Y, f(x0)) es trivial, conindependencia de x0 ∈ A.
b) Sean f, g : X → Y aplicaciones continuas con f(x0) = g(x0) = y0. Suponga-mos que f ∼ g por una homotopıa H : X× [0, 1]→ Y tal que H(x0, s) = y0,para cada s ∈ [0, 1]. Demostrar que los homomorfismos inducidos f∗ y g∗ enx0 son iguales.
c) Discutir si la bola unidad cerrada es un retracto de deformacion de Rn+1.
d) Sea X simplemente conexo y A ⊆ X un retracto de X. ¿Es A simplementeconexo?
e) Sea X ⊂ Rn un convexo compacto con interior no vacıo. Dado un puntox0 del interior de X, demostrar que la frontera Fr(X) es un retracto dedeformacion de X − x0.
f ) Discutir si S1 admite algun retracto de deformacion A 6= S1.
g) Sea f : S1 → S1 la aplicacion dada por f(z) = zn. Calcular el homomorfismoinducido f∗ en x0 = 1.
h) Sea X un espacio topologico y A ⊆ X. ¿Es (iA)∗ un monomorfismo? ¿Y siA es un retracto de X?
64

i) Supongamos que f : X → Y es continua y sobreyectiva con f(x0) = y0. ¿Escierto que f∗ : π(X, x0)→ Π1(Y, y0) es un epimorfismo?
j ) ¿Es todo retracto de un espacio X un retracto de deformacion de X?
k) Discutir si existe algun homeomorfismo de R2 que intercambie las dos com-ponentes conexas de R2 − S1.
65

TEMA 2: Espacios Recubridores
Francisco J. LopezDepartamento de Geometrıa y Topologıa
Universidad de [email protected]
En este tema vamos a tratar el concepto de espacio recubridor, una de las herramien-tas mas utiles en Topologıa y Geometrıa. Esta teorıa esta ıntimamente ligada con la delgrupo fundamental como iremos descubriendo mas adelante. A nivel intuitivo, la ideabasica para construir un espacio recubridor consiste en desenrollar una cantidad finitao infinita de veces lazos homotopicamente no triviales de un espacio base, para de estaforma generar otro de menor complejidad topologica (a nivel de grupo fundamental).
A lo largo de este tema, todos los espacios topologicos consideradosseran conexos y localmente arcoconexos (luego arcoconexos).
10. Definicion y ejemplos. Nociones basicas
Definicion 10.1 Sea X un espacio topologico. Un (espacio) recubridor de X es un par
(X, π), donde:
X es un espacio topologico.
π : X → X es una aplicacion continua y sobreyectiva.
Todo punto p ∈ X admite un entorno abierto y arcoconexo U en X tal queπ|U : U → U es un homeomorfismo para toda arcocomponente U de π−1(U).
Al abierto U se le llamara entorno fundamental o distinguido para el recubridor (X, π)(alrededor de p ∈ U , luego alrededor de cualquiera otro punto de U).
Algunos comentarios y notaciones al hilo de la Definicion 10.1:
A la aplicacion π la llamaremos aplicacion recubridora, al espacio X base delrecubridor (X, π), y al espacio X espacio recubridor (de X vıa π).
66

Dado p ∈ X, al conjunto π−1(p) ⊂ X le llamaremos fibra del punto p para el
recubridor (X, π). Un recubridor se dira finito ( y la aplicacion recubridora finita)cuando la fibra π−1(p) sea finita para todo p ∈ X. Mas adelante comprobaremosque el cardinal de π−1(p) no depende del punto p ∈ X; ver el Corolario 11.5 y laDefinicion 11.6.
La familia U := U ⊂ X : U es entorno distinguido para (X, π) es una basede la topologıa de X. En efecto, si X ∈ X y O ⊂ X es un abierto cualquieraconteniendo a x, consideremos un entorno distinguido U para π alrededor de x yla arcocomponente V de x en U ∩O. Claramente V ⊂ U y x ∈ V ⊂ U ∩O ⊂ O.
Cada arcocoponente U de π−1(U) es un subconjunto abierto de X: tengase en
cuenta π−1(U) es un abierto de X y que este espacio es localmente arcoconexo.Por tanto toda aplicacion recubridora es un homeomorfismo local.
π es un homeomorfismo local, luego una aplicacion abierta.
El conjunto de arcocomponentes de Π−1(U) esta en correspondencia uno a uno
con la fibra de p. En otras palabras, si Up representa la unica arcocomponente deπ−1(U) conteniendo a p ∈ π−1(p), el conjunto
Up : p ∈ π−1(p)
describe unıvocamente todas las arcocomponentes de π−1(U), copias homeomorfi-cas de U , y por tanto
π−1(U) =⋃
p∈π−1(p)
Up.
No todo homeomorfismo local sobreyectivo es una aplicacion recubridora. Sirva comocontraejemplo ρ|]0,2[ : ]0, 2[→ S1, donde ρ : R → S1 es la exponencial ρ(t) = e2πıt. Eneste caso el punto (1, 0) ∈ S1 no admite ningun entorno distinguido. En relacion a estepunto es recomendable consultar la Proposicion 10.3.
Destaquemos algunos ejemplos sencillos de recubridores.
Ejercicio 10.2 Las siquientes aplicaciones son recubridoras:
La aplicacion exponencial ρ : R→ S1 definida en (1).
La aplicacion πn : S1 → S1, πn(z) := zn (notacion compleja).
π1 × π2 : X1 ×X2 → Y1 × Y2, donde πj : Xj → Yj es recubridora, j = 1, 2.
ρ× ρ : R2 → S1 × S1.
ρ× IdR : R2 → S1 × R.
πn × πm : S1 × S1 → S1 × S1, m, n ∈ N.
πn × IdR : S1 × R→ S1 × R, n ∈ N.
La proyeccion canonica π : Sn → RPn, n ∈ N.
Un homeomorfismo f : X → Y .
Es natural preguntarse bajo que condiciones topologicas una aplicacion es recubridora.La proposicion siguiente es un ejemplo de ello.
67

Proposicion 10.3 Si f : Y → X es un homeomorfismo local sobreyectivo y propioentre espacios Hausdorff localmente compactos, entonces f es una aplicacion recubridorafinita.
Demostracion : Sea x ∈ X y consideremos el conjunto f−1(x). Como f es un homeo-morfismo local el conjunto f−1(x) es discreto. En efecto, para cada y ∈ f−1(X) existeun entorno V de y en Y tal que f(V ) es un entorno de x en X y f |V : V → f(V ) es unhomeomorfismo. De aquı que V contiene solo una preimagen por f de x y f−1(x) seadiscreto. Pero ademas f−1(x) es compacto al ser la imagen inversa por una aplicacionpropia de un compacto. Inferimos pues que f−1(x) es finito, y escribamos:
f−1(x) = y1, . . . , yn.
Como Y es Hausdorff podemos encontrar entornos abiertos Vj de yj, j = 1, . . . , n,disjuntos dos a dos. Salvo refinarlos podemos garantizar que, ademas, f |Vj : Vj → f(Vj)es un homeomorfismo, donde f(Vj) es un entorno abierto de x, j = 1, . . . , n. De aquıque ∩nj=1f(Vj) es un entorno abierto de x. Como X es localmente compacto y Hausdorff,
es posible encontrar un abierto W en X tal que x ∈ W , W (cierre en X) es compactoy W ⊂ ∩nj=1f(Vj).
Veamos queU := W \ f
(f−1(W ) \ (∪nj=1Vj)
)es el entorno distinguido buscado alrededor de x.
U es abierto: Como f es propia f−1(W ) es compacto, de donde f−1(W )\(∪nj=1Vj)
es igualmente compacto al ser un cerrado dentro de f−1(W ). Por tanto f(f−1(W )\
(∪nj=1Vj))
es compacto, luego cerrado en X ya que este espacio es Hausdorff. Deaquı que U sea abierto.
x ∈ U : Como f−1(x) ⊂ ∪nj=1Vj inferimos que f−1(W ) \ (∪nj=1Vj) es disjunto de
f−1(x). Por tanto x /∈ f(f−1(W ) \ (∪nj=1Vj)
), y como x ∈ W finalmente x ∈ U .
f−1(U) consiste de n abiertos disjuntos dos a dos homeomorfos vıa f a U : Como
f−1(U) = f−1(W ) \ f−1(f(f−1(W ) \ (∪nj=1Vj)
))⊂
⊂ f−1(W ) \(f−1(W ) \ (∪nj=1Vj)
)= ∪nj=1Vj,
deducimos que f−1(U) es la union disjunta de los abiertos f−1(U)∩Vi, i = 1, . . . , n,todos ellos homeomorfos a U vıa f ya que f |Vi : Vi → f(Vi) es un homeomorfismoy U ⊂ ∩nj=1f(Vj) ⊂ f(Vi) para todo i = 1, . . . , n.
Corolario 10.4 Supongamos que X e Y son espacios Hausdorff, Y compacto. Todohomeomorfismo local f : Y → X una aplicacion recubridora.
Demostracion : Como f es un homeomorfismo local es una aplicacion abierta. Tambienes cerrada por ir de un compacto en un Hausdorff. Por tanto f es sobreyectiva. En par-ticular X es compacto al ser la imagen continua de un compacto. Como todo compactoHausdorff es localmente compacto, el resultado se sigue de la Proposicion 10.3.
68

Otra cuestion de interes es saber si la composicion de aplicaciones recubridoras esuna aplicacion recubridora. Existen contraejemplos que demuestran la falsedad de esaafirmacion en general. Pero hay una situacion muy particular en la que es cierta.
Proposicion 10.5 Sean π1 : Y → Z y π2 : Z → X aplicaciones recubridoras. Si π2 esfinita entonces π2 π1 : Y → X es recubridora.
Demostracion : Sea x ∈ X un punto arbitrario, y consideremos un entorno distinguidoU en X para π2 alrededor de x. Llamemos π−1
2 (x) = z1, . . . , zn (tengase en cuantaque π2 es finito) y escribamos
π−12 (U) = ∪nj=1Vj,
donde π2|Vj : Vj → U es un homeomorfismo, j = 1, . . . , n.Consideremos un entorno distinguido Wj en Z alrededor de zj para el recubridor
π1, j = 1, . . . , n. Observese que la arcocomponente U0 de ∩nj=1π2(Wj ∩ Vj) conteniendoa x es un entorno distinguido para π2. Para ello tengase en cuenta que
U0 ⊂ ∩nj=1π2(Wj ∩ Vj) ⊂ U
y recuerdese que U era un entorno distinguido para π2. Por tanto, si Uj := Vj∩π−12 (U0),
j = 1, . . . , n, entonces
π−12 (U0) = ∪nj=1Uj con π2|Uj : Uj → U0 un homeomorfismo, j = 1, . . . , n.
Por otra parte, al ser Uj = Vj ∩ π−12 (U0) = (π2|Vj)−1(U0) ⊂ Wj ∩ Vj ⊂ Wj para cada j,
es claro que
π−11 (Uj) = ∪p∈π−1
1 (zj)Uj,p, con π1|Uj,p : Uj,p → Uj homeomorfismo, p ∈ π−1
1 (zj),
j = 1, . . . , n.Como conclusion,
(π2 π1)−1(U0) = π−11
(π−1
2 (U0))
= π−11
(∪nj=1 Uj)
)=
= ∪nj=1π−11 (Uj) = ∪nj=1
(∪p∈Π−1
1 (zj)Uj,p),
con (π2π1)|Uj,p = (π2|Uj)(π1|Uj,p) : Uj,p → U0 un homeomorfismo para todo p ∈ π−11 (zj)
y j = 1, . . . , n. Esto prueba que U0 es un entorno distinguido para π2 π1 alrededor dex y concluye la proposicion.
Uno de los instrumentos mas utiles para la construccion de recubrimientos son lasacciones de grupos de homeomorfismos sobre un espacio, que determinan de formanatural cocientes topologicos llamados espacios de orbitas. Precisemos el lenguaje.
Dado un espacio topologico X, denotaremos por
Hom(X) := f : X → X homeomorfismo
al grupo (con la composicion) de los homeomorfismos de X
Definicion 10.6 Sea X un espacio topologico, y sea G ⊂ Hom(X) un subgrupo. Con-sideremos la accion canonica de G sobre X:
µ : G×X → X, µ(g, x) := g(x).
Es habitual escribir g ·x en vez de µ(g, x) para todo g ∈ G y x ∈ X. La relacion binariaen X
x ∼ q ⇐⇒ ∃g ∈ G tal que g · x = y
es de equivalencia. El espacio topologico cociente X/∼ se denotara por X/G y serareferido como el espacio de orbitas asociado a la accion µ inducida por G.
69

Definicion 10.7 Sea X un espacio topologico, y sea G ⊂ Hom(X) un subgrupo.El subgrupo G se dira que actua de forma propia y discontınua sobre X (y la accion
µ : G × X → X inducida se dira propia y discontinua) si para todo x ∈ X existe unentorno abierto U de x en X tal que (g ·U)∩U = ∅ para todo g ∈ G\IdX (aquı g ·Udenota el conjunto g(U)). Al entorno U se le llamara entorno distinguido (alrededor dex) para la accion.
La conexion con la teorıa de recubridores la da el siguiente teorema.
Teorema 10.8 Sea X un espacio topologico, y sea G ⊂ Hom(X) un subgrupo actuandode forma propia y discontinua sobre X.
Entonces la proyeccion al espacio de orbitas π : X → X/G es recubridora.
Demostracion : Para cada x ∈ X denotemos por G · x = g · x : g ∈ G a la orbita dex. La continuidad y sobreyectividad de π : X → X/G, π(x) := G · x, es bien conocida.Tambien es obvio que π es abierta, observese que si O ⊂ X es un subconjunto abiertoentonces π−1(π(O)) = ∪g∈G g ·O es abierto por ser union de abiertos. Por la definicionde la topologıa cociente se sigue que π(O) es abierto.
Sea G · x ∈ X/G una orbita arbitraria. Consideremos el unico entorno abierto U dex ∈ X tal que (g · U) ∩ U = ∅ para todo g ∈ G \ IdX. Comprobemos que π(U) es unentorno distinguido de G · x para π.
Como π(U) es un abierto conteniendo a G · x y π−1(π(U)) = ∪g∈G g ·U , siendo estaunion disjunta (tengase en cuenta que U es un entorno distinguido para la accion de Gsobre X), es suficiente con garantizar que la aplicacion:
π|g·U : g · U → π(U)
es un homeomorfismo para todo g ∈ G.En efecto, esta aplicacion es continua y abierta ya que es la restriccion de la aplica-
cion continua y abierta π al abierto g ·U de X. Bastara con demostrar que es biyectiva.En efecto, si x, y ∈ U son tales que π(g · x) = G · (g · x) = G · (g · y) = π(g · y)entonces existe h ∈ G tal que h · (g · x) = g · y, esto es, tal que (g−1 h g) · x = y.Esto implicarıa que U 3 y ∈ (g−1 h g) · U . Al ser U un entorno distinguido parala accion µ, deducirıamos que g−1 h g = IdX , esto es, h g = g. De la identidad(h g)(x) = g(y) se conluye que x = y y la biyectividad de π|g·U : g · U → π(U).
Observese que los entornos distinguidos para la aplicacion recubridora π : X → X/Gcoinciden con los distinguidos para la accion propia y discontinua inducida por G.
Ejercicio 10.9 Ejemplos de acciones propias y discontinuas:
Si denotamos por τ : R→ R, τt(r) = r+1, el grupo de traslaciones G := τn : n ∈Z actua de forma propia y discontinua sobre R.
En este caso el espacio de orbitas R/G ∼= S1.
Si denotamos por θ : R2 → R2, θ(x, y) = (x + 1, y), el grupo de traslacionesG := θn : n ∈ Z actua de forma propia y discontinua sobre R2.
En este caso el espacio de orbitas R2/G ∼= S1 × R.
Si denotamos por θ0 : R2 → R2, θ0(x, y) = (x+ 1/2,−y), el grupo de traslacionesG := θn0 : n ∈ Z actua de forma propia y discontinua sobre R2.
En este caso el espacio de orbitas R2/G es conocido como la cinta de Mobiusinfinita.
70

Si denotamos por τm,n : R2 → R2, τm,n(x, y) = (x+m, y + n), el grupo de trasla-ciones G := τm,n : m, n ∈ Z actua de forma propia y discontinua sobre R2.
En este caso el espacio de orbitas R2/G ∼= S1 × S1 (el toro).
Si denotamos por θm,n : R2 → R2, θm,n(x, y) = (x + n, (−1)ny + m) el grupo detraslaciones G := θm,n : m, n ∈ Z actua de forma propia y discontinua sobreR2.
En este caso el espacio de orbitas R2/G es conocido como la botella de Klein.
Proposicion 10.10 Si X es un espacio topologico Hausdorff y G es un grupo finitode homomorfismos de X sin puntos fijos (esto es, tal que φ(x) 6= x para todo x ∈ X yφ ∈ G \ IdX), entonces G actua de forma propia y discontinua sobre X.
Demostracion : Escribamos G = φ1 = IdX , φ2, . . . , φk, elijamos x1 ∈ X y denotemosxj = φj(x1) para cada j = 1, . . . , k. De nuestras hipotesis xi 6= xj, i 6= j. Como Xes Hausdorff podemos tomar Uj entorno abierto de xj, j = 1, . . . , k, de forma queUj ∩ Ui = ∅, i 6= j. Finalmente definamos U = ∩kj=1φ
−1j (Uj). Por construccion U es un
abierto que contiene a x1 y satisface U ∩ φj(U) ⊂ U ∩ Uj = ∅ para todo j > 1, esto es,U es un entorno distinguido para la accion de G sobre X.
11. Levantamiento de aplicaciones al recubridor
La teorıa de recubridores se apoya de forma esencial sobre la nocion de grupo fun-damental. El ingrediente tecnico para comprender ese hecho son las propiedades delevantamiento de aplicaciones, en especial las de arcos y homotopıas, que vamos a estu-diar a continuacion. Comenzaremos con la siguiente proposicion, que expresa una idearecurrente en la teorıa de recubridores: fijada una condicion inicial, los levantamientosde aplicaciones a un recubridor de existir son unicos.
Proposicion 11.1 Sea (X, π) un recubridor de X, sea Y un espacio topologico conexo
y sean f1,f2 : Y → X dos aplicaciones continuas satisfaciendo π f1 = π f2.Si A := y ∈ Y : f1(y) = f2(y) 6= ∅ entonces f1 = f2.
Demostracion : Por la conexion de Y bastara con ver que A es abierto y cerrado en Y .Comprobemos que A es abierto. Sea y0 ∈ A y consideremos un entorno distinguido
U en X alrededor de x0 := π(f1(y0)) = π(f2(y0)). Llamemos U a la arcocomponente de
π−1(U) conteniendo a x0 := f1(y) = f2(y) ∈ π−1(x0). Como fj es continua, Vj := f−1j (U)
es un abierto en Y conteniendo a y0, j = 1, 2. Llamemos V := V1 ∩ V2, tambien abiertoen Y conteniendo a y0. Claramente fj(V ) ⊂ U , j = 1, 2, y
(π|U) (f1|V ) = (π f1)|V = (π f2)|V = (π|U) (f2|V ).
Como π|U : U → U es un homeomorfismo, f1|V = f2|V y V ⊂ A. Esto prueba que y0 esinterior a A, y por tanto que A es abierto en Y .
Para acabar veamos que A es cerrado, esto es, que Y \A es abierto. Sea y0 ∈ Y \A yconsideremos un entorno distinguido U en X alrededor de x0 := π(f1(y0)) = π(f2(y0)).
Como x1 := f1(y) 6= x2 := f2(y) ∈ π−1(x0), las arcocomponentes U1, U2 de π−1(U) tales
que xj ∈ Uj, j = 1, 2, son distintas (luego disjuntas). Como fj es continua, Vj := f−1j (Uj)
es un abierto en Y conteniendo a y0, j = 1, 2. Llamemos V := V1∩V2, tambien abierto enY conteniendo a y0. Claramente fj(V ) ⊂ Uj, j = 1, 2, y como U1∩U2 = ∅, f1(y) 6= f2(y)para todo y ∈ V . Por tanto V ⊂ Y \ A e y0 es interior a Y \ A. De aquı que Y \ A seaabierto, o equivalentemente, A es cerrado.
71

El siguiente lema de existencia de levantamientos sera fundamental para lo que sigue,como veremos mas adelante. Es una generalizacion del ya probado en el Tema 1 parael recubridor (R, ρ) de S1, ver Lema 6.1.
Lema 11.2 Sea (X, π) un recubridor de X, y sean x0 ∈ X y x0 ∈ π−1(x0). Dada
H : [0,1]2 → X continua con H(0, 0) = x0, existe una unica aplicacion H : [0,1]2 → X
continua tal que π H = H y H(0, 0) = x0.
Demostracion : La unicidad de H es evidente de la Proposicion 11.1. Probemos laexistencia de H.
Para cada x ∈ X consideremos un entorno (abierto) distinguido Ux ⊂ X para el
recubridor (X, π). Construyamos el recubrimiento por abiertos de X dado por
U =Ux : x ∈ X
.
Como C = [0, 1]2 es un espacio metrico compacto (con la distancia euclidiana in-ducida), existe el numero de Lebesgue ε > 0 para el recubrimiento abierto H−1(U) :=H−1(Ux) : x ∈ X de C. Esto significa que cualquier subconjunto A ⊂ C con diametroeuclidiano < ε satisface A ⊂ H−1(Ux) para algun x ∈ X. De aquı que podamos elegiruna particion 0 = t1 < . . . < tk < tk+1 = 1 de [0, 1] tal que
H([ti, ti+1]× [th, th+1]) ⊂ Uj,h para algun Ui,h ∈ U , i, h = 1, . . . , k (5)
Bastara con garantizar que |tj+1 − tj| < ε√2.
Ordenemos C1, . . . , CN la familia de N = k2 cuadrados [ti, ti+1]× [th, th+1] : i, h =1, . . . , k de acuerdo al siguiente criterio:
C1 = [t1, t2]× [t1, t2].
Kj := ∪i≤jCi es conexo, j = 1, . . . , N .
Lj := Kj ∩Cj+1 es arcoconexo y consiste en uno o dos lados borde comunes a lasregiones poliedricas Kj y Cj+1.
La construccion de H se hara por un procedimiento inductivo. Llamemos
Hj = H|Kj : Kj → X, j = 1, . . . , N.
Sabemos que H1(C1) ⊂ U1 para algun U1 ∈ U , y sea V1 la arcocomponente de π−1(U1) ⊂X conteniendo a x0. Recordemos que π|V1 : V1 → U1 es un homeomorfismo que aplicax0 ∈ V1 en x0 ∈ X. La aplicacion
H1 := (π|V1)−1 H1 : K1 ≡ C1 → X
es obviamente continua y satisface π H1 = H1 y H1(0, 0) = x0.
Supongamos construida Hj : Kj → X continua tal que π Hj = Hj y Hj(0, 0) = x0,1 ≤ j < N .
Procedamos a cerrar el proceso inductivo construyendo una aplicacion continuaHj+1 : Kj+1 → X satisfaciendo π Hj+1 = Hj+1 y Hj+1(0, 0) = x0. En efecto, primeroobservemos que Hj+1(Cj+1) = H(Cj+1) ⊂ Uj+1 para algun Uj+1 ∈ U ; ver la ecuacion(5). Como Hj(Lj) es arcoconexo y
π(Hj(Lj)) = Hj(Lj) ⊂ Hj+1(Cj+1) ⊂ Uj+1,
72
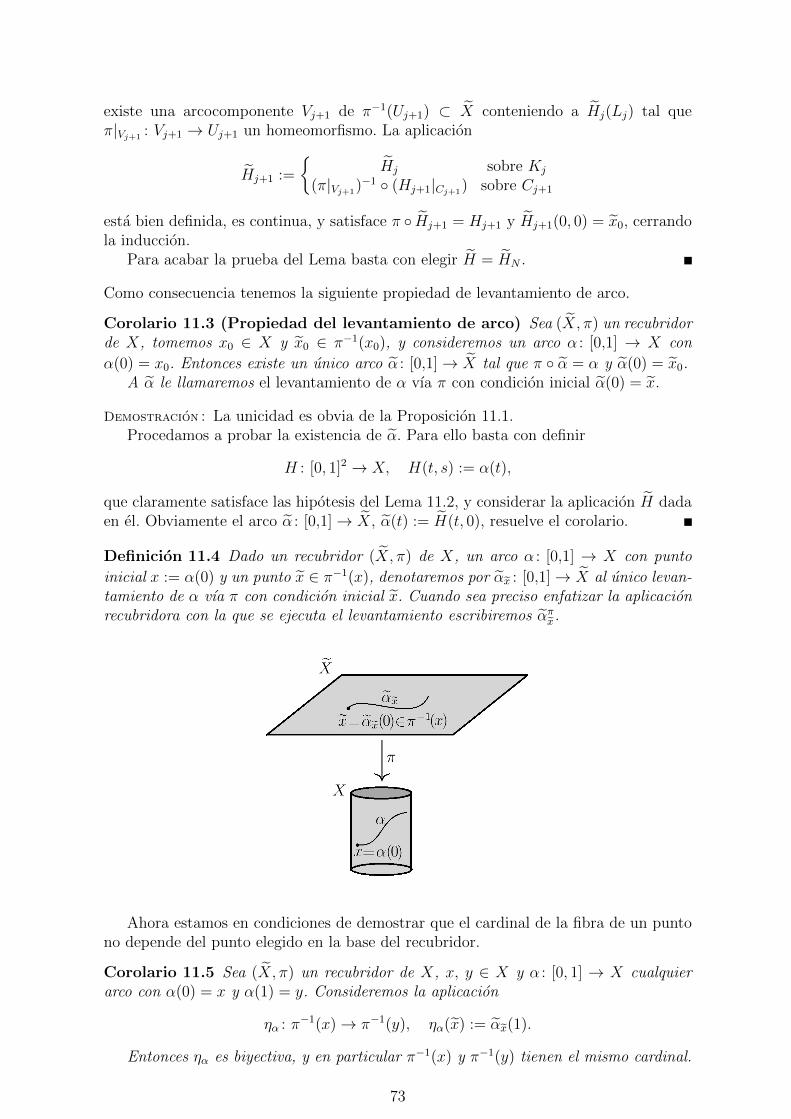
existe una arcocomponente Vj+1 de π−1(Uj+1) ⊂ X conteniendo a Hj(Lj) tal queπ|Vj+1
: Vj+1 → Uj+1 un homeomorfismo. La aplicacion
Hj+1 :=
Hj sobre Kj
(π|Vj+1)−1 (Hj+1|Cj+1
) sobre Cj+1
esta bien definida, es continua, y satisface π Hj+1 = Hj+1 y Hj+1(0, 0) = x0, cerrandola induccion.
Para acabar la prueba del Lema basta con elegir H = HN .
Como consecuencia tenemos la siguiente propiedad de levantamiento de arco.
Corolario 11.3 (Propiedad del levantamiento de arco) Sea (X, π) un recubridorde X, tomemos x0 ∈ X y x0 ∈ π−1(x0), y consideremos un arco α : [0,1] → X con
α(0) = x0. Entonces existe un unico arco α : [0,1]→ X tal que π α = α y α(0) = x0.A α le llamaremos el levantamiento de α vıa π con condicion inicial α(0) = x.
Demostracion : La unicidad es obvia de la Proposicion 11.1.Procedamos a probar la existencia de α. Para ello basta con definir
H : [0, 1]2 → X, H(t, s) := α(t),
que claramente satisface las hipotesis del Lema 11.2, y considerar la aplicacion H dadaen el. Obviamente el arco α : [0,1]→ X, α(t) := H(t, 0), resuelve el corolario.
Definicion 11.4 Dado un recubridor (X, π) de X, un arco α : [0,1] → X con punto
inicial x := α(0) y un punto x ∈ π−1(x), denotaremos por αx : [0,1]→ X al unico levan-tamiento de α vıa π con condicion inicial x. Cuando sea preciso enfatizar la aplicacionrecubridora con la que se ejecuta el levantamiento escribiremos απx.
Ahora estamos en condiciones de demostrar que el cardinal de la fibra de un puntono depende del punto elegido en la base del recubridor.
Corolario 11.5 Sea (X, π) un recubridor de X, x, y ∈ X y α : [0, 1] → X cualquierarco con α(0) = x y α(1) = y. Consideremos la aplicacion
ηα : π−1(x)→ π−1(y), ηα(x) := αx(1).
Entonces ηα es biyectiva, y en particular π−1(x) y π−1(y) tienen el mismo cardinal.
73
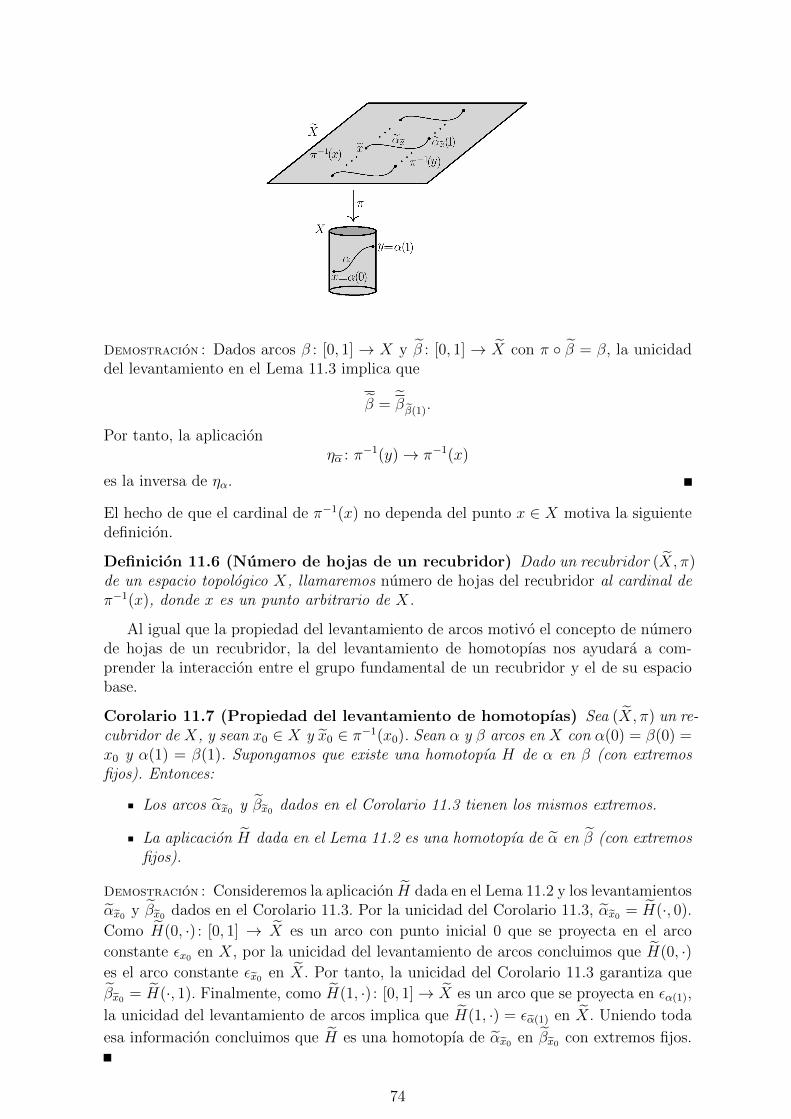
Demostracion : Dados arcos β : [0, 1] → X y β : [0, 1] → X con π β = β, la unicidaddel levantamiento en el Lema 11.3 implica que
β = ββ(1).
Por tanto, la aplicacionηα : π−1(y)→ π−1(x)
es la inversa de ηα.
El hecho de que el cardinal de π−1(x) no dependa del punto x ∈ X motiva la siguientedefinicion.
Definicion 11.6 (Numero de hojas de un recubridor) Dado un recubridor (X, π)de un espacio topologico X, llamaremos numero de hojas del recubridor al cardinal deπ−1(x), donde x es un punto arbitrario de X.
Al igual que la propiedad del levantamiento de arcos motivo el concepto de numerode hojas de un recubridor, la del levantamiento de homotopıas nos ayudara a com-prender la interaccion entre el grupo fundamental de un recubridor y el de su espaciobase.
Corolario 11.7 (Propiedad del levantamiento de homotopıas) Sea (X, π) un re-cubridor de X, y sean x0 ∈ X y x0 ∈ π−1(x0). Sean α y β arcos en X con α(0) = β(0) =x0 y α(1) = β(1). Supongamos que existe una homotopıa H de α en β (con extremosfijos). Entonces:
Los arcos αx0 y βx0 dados en el Corolario 11.3 tienen los mismos extremos.
La aplicacion H dada en el Lema 11.2 es una homotopıa de α en β (con extremosfijos).
Demostracion : Consideremos la aplicacion H dada en el Lema 11.2 y los levantamientosαx0 y βx0 dados en el Corolario 11.3. Por la unicidad del Corolario 11.3, αx0 = H(·, 0).
Como H(0, ·) : [0, 1] → X es un arco con punto inicial 0 que se proyecta en el arco
constante εx0 en X, por la unicidad del levantamiento de arcos concluimos que H(0, ·)es el arco constante εx0 en X. Por tanto, la unicidad del Corolario 11.3 garantiza que
βx0 = H(·, 1). Finalmente, como H(1, ·) : [0, 1]→ X es un arco que se proyecta en εα(1),
la unicidad del levantamiento de arcos implica que H(1, ·) = εα(1) en X. Uniendo toda
esa informacion concluimos que H es una homotopıa de αx0 en βx0 con extremos fijos.
74

El ultimo corolario expresa que arcos homotopicos en X se levantan a arcos homotopi-cos en X por la aplicacion recubridora π. Este enunciado es la clave del Teorema deMonodromıa, un resultado central para la teorıa, que refleja el hecho de que el grupofundamental del espacio recubridor se inyecta a traves del homomorfismo inducido porla aplicacion recubridora en el grupo fundamental del espacio base, siendo el subgrupoimagen unico salvo conjugacion.
Corolario 11.8 (Teorema de Monodromıa) Si (X, π) un recubridor de X, x ∈ Xy x ∈ π−1(x), entonces π∗ : Π1(X, x)→ Π1(X, x) es un monomorfismo de grupos.
Demostracion : Sea x ∈ π−1(x) y α un lazo en X con base x. Si π∗([α]) = [π α] = [εx],esto es, si π α'εx, entonces por el Corolario 11.7 inferimos que α'εx. Esto implicaque [α] = [εx], y por tanto que π∗ no tiene nucleo.
Corolario 11.9 Sea (X, π) un recubridor de X y sea x ∈ X. Sean x1, x2 ∈ π−1(x) y
α : [0, 1]→ X es un arco con α(0) = x1 y α(1) = x2. Entonces
π∗(Π1(X, x2)
)= [α]−1 ? π∗
(Π1(X, x1)
)? [α],
donde α es el lazo π α (con base x). Como consecuenciaπ∗(Π1(X, x)) : x ∈ π−1(x)
es una clase de conjugacion de subgrupos en Π1(X, x); ver Definicion 1.6.
Demostracion : Por la Proposicion 4.11 la aplicacion
Uα : Π1(X, x1)→ Π1(X, x2), Uα([β]) := [α]−1 ? [β] ? [α]
es un isomorfismo de grupos. Por tanto
π∗(Π1(X, x2)
)= π∗
([α]−1 ? Π1(X, x1) ? [α]
)= [α]−1 ? π∗
(Π1(X, x1)
)? [α].
De aquı que π∗(Π1(X, x2)
)y π∗
(Π1(X, x1)
)sean subgrupos conjugados de Π1(X, x)
para todo x1, x2 ∈ π−1(x). Por ultimo, si [α] ∈ Π1(X, x) es una clase de homotopıa ar-
bitraria, hemos probado que el subgrupo conjugado [α]−1π∗(Π1(X, x1)
)[α] coincide con
π∗(Π1(X, αx1(1))
). Por tanto
π∗(Π1(X, x)) : x ∈ π−1(x)
es una clase de conjugacion
de subgrupos en Π1(X, x) como querıamos demostrar.
Como consecuencia de este corolario tiene sentido la siguiente
Definicion 11.10 Denotemos por Rec(X) el conjunto de todos los recubridores de X,esto es,
Rec(X) := (X, π) : (X, π) es recubridor de X.Fijemos x ∈ X y consideremos el conjunto Sc(Π1(X, x)) de las clases de conjugacionde subgrupos de Π1(X, x); ver Definicion 1.6. Definiremos:
∆x : Rec(X)→ Sc(Π1(X, x)), ∆x(X, π) :=π∗(Π1(X, x)) : x ∈ π−1(x)
.
Ahora estamos en condiciones de enunciar el teorema mas general de existencia yunicidad de levantamientos de aplicaciones a un espacio recubridor, que contendra comocasos particulares a todos los hasta ahora vistos.
75

Teorema 11.11 (Levantamiento de aplicaciones) Sea π : X → X una aplicacionrecubridora, sea f : Y → X una aplicacion continua, y sean y0 ∈ Y , x0 := f(y0) ∈ X yx0 ∈ π−1(x0). Los siguientes enunciados son equivalentes:
(a) Existe f : Y → X continua tal que π f = f y f(y0) = x0 (la unicidad de una tal
f esta garantizada por la Propocicion 11.1 toda vez que todos nuestros espacios sesuponen siempre conexos y localmente arcoconexos).
(b) f∗(Π1(Y, y0)
)⊂ π∗
(Π1(X, x0)
).
Demostracion : La implicacion (a) =⇒ (b) es consecuencia inmediata de la identidad
πf = f y las propiedades de funtorialidad de los morfismos entre grupos fundamentalesinducidos por aplicaciones continuas; ver Proposicion 4.13.
Probemos que (b) =⇒ (a).
Definamos f : Y → X de la siguiente forma:Por la arcoconexion de Y (ya que es conexo y localmente arcoconexo), para cada
y ∈ Y existe un arco γy : [0, 1] → Y con γy(0) = y0 y γy(1) = y. Consideremos elarco f γy : [0, 1] → X, obviamente con (f γy)(0) = x0 y (f γy)(1) = f(y), y su
levantamiento (f γy)x0 : [0, 1]→ X a X. Por definicion,
f(y) := f γy(1).
Naturalmente esta defincion plantea algunos problemas. El mas inmediato es comprobarque f(y) no depende del arco γy utilizado. Para ello consideremos cualquiera otro arcoβy : [0, 1]→ Y con βy(0) = y0 y βy(1) = y y comprobemos que
˜(f γy)x0(1) = ˜(f βy)x0(1).
En efecto, γy ? βy es un lazo en Y con base el punto y0, y su clase de homotopıa[γy ? βy] ∈ Π1(Y, y0). Por tanto f (γy ? βy) = (f γy) ? (f βy) es un lazo en X conbase x0 y
[f (γy ? βy)] = f∗([(γy ? βy]) = [(f γy) ? (f βy)] ∈ f∗(Π1(Y, y0)
)⊆ π∗
(Π1(X, x0)
),
donde para la ultima inclusion hemos tenido en cuenta nuestras hipotesis.Del Corolario 11.7 deducimos que
((f γy) ? (f βy)
)∼x0
ha de ser un lazo con base x0. Por la unicidad del levantamiento de arcos (ver Coro-
lario 11.3), esto fuerza a que (f γy)x0 y ˜(f βy)x0 tengan los mismos extremos, y en
particular ˜(f γy)x0(1) = ˜(f βy)x0(1) como querıamos ver.
Ası pues f : Y → X esta bien definida. Es claro que f(y0) = ˜(f εy0)x0(1) = εx0(1) =
x0, por lo que para acabar resta probar que f es continua.En efecto, tomemos y ∈ Y y comprobemos la continuidad de f en y. Consideremos
un entorno arbitrario W alrededor de f(y) en X, y comprobemos que f−1(W ) es unentorno de y en Y . Como π es una aplicacion recubridora, siempre podremos encontrarun abierto arcoconexo U ⊂ W tal que
f(y) ⊂ U y
76

π|U : U → U := π(U) es un homeomorfismo.
Al ser f : Y → X continua en y y U es un entorno de f(y), f−1(U) es un entornode y. En consecuencia existe un abierto arcoconexo V ⊂ Y conteniendo a y tal queV ⊂ f−1(U).
Para concluir bastara con probar que
V ⊂ f−1(W ), o equivalentemente, f(V ) ⊂ W .
Para ello consideramos z ∈ V , un arco γ : [0, 1]→ V con γ(0) = y, γ(1) = z, y un arcoγ0 : [0, 1]→ Y con γ0(0) = y0, γ0(1) = y. Por definicion
f(z) =((f γ0) ? (f γ)
)∼x0(1) =
( ˜(f γ0)x0 ? (f γ)f(y)
)(1) = (f γ)f(y)(1).
Como la traza de f γ esta contenida en f(V ) ⊂ U , la unicidad del levantamiento
con condicion inicial f(y) nos dice que
(f γ)f(y) = (π|U)−1 (f γ),
ya que (π|U)−1(fγ) es un levantamiento de fγ con condicion inicial (π|U)−1(f(γ(1))
)=
(π|U)−1(f(y)
)= f(y). Esto nos permite concluir que
f(z) = (π|U)−1(f(γ(1))
)= (π|U)−1
(f(z)
)∈ U .
Como esto es valido para todo z ∈ V , f(V ) ⊂ U ⊂ W como querıamos demostrar.
Corolario 11.12 Sea (Y, π) un recubridor de X, sea A ⊂ X un subespacio topologi-co arcoconexo y denotemos por i : A → X a la aplicacion inclusion. Supongamos quei∗(Π1(A, x)) ⊂ π∗(Π1(Y, y)) para algunos x ∈ A e y ∈ π−1(x).
Entonces π|A : A → A es un homeomorfismo, donde A es la arcocomponente deπ−1(A) que contiene a y.
Demostracion : Llamemos i : A → X a la aplicacion inclusion. Por el Teorema 11.11existe una unica aplicacion continua i : A→ Y tal que π i = i e i(x) = y. Si denotamos
A = i(A) e igualmente i : A → A a la restriccion al codominio de i, inferimos que
i : A → A y π|A : A → A son biyectivas: tengase en cuenta que (π|A) i = IdA. LaProposicion 2.11-(d) implica que π|A es una identificacion, luego un homeomorfismo.
Esto tambien implica que i : A → A es un homeomorfismo (o de forma global, quei : A→ Y es un embebimiento topologico).
Para acabar bastara con ver que A (obviamente un arcoconexo conteniendo a y) esla arcocomponente de π−1(A) que contiene a y. En efecto, sea z ∈ π−1(A) un punto talque existe α : [0, 1]→ π−1(A) con α(0) = y y α(1) = z. El arco α := π α en X une lospuntos α(0) = x y α(1) = π(z) ∈ π(π−1(A)) = A, y i α es el levantamiento de α vıaπ con condicion inicial y, esto es, i α = αy. Por unicidad del levantamiento inferimos
que i α = α, y que en particular z = α(1) = i(α(1)) ∈ i(A) = A.
El Teorema 11.11 tiene una interesante aplicacion a la teorıa de Grupos Topologicos.
Proposicion 11.13 Sea (G, ·) un grupo topologico con elemento neutro e ∈ G, sea
π : G → G una aplicacion recubridora y elijamos e ∈ π−1(e). Entonces G admite unaestructura de grupo topologico con elementro neutro e que convierte a π en un homo-morfismo de grupos.
77

Demostracion : Por ser (G, ·) un grupo topologico, las aplicaciones
µ : G×G→ G, µ(g, h) = g · h, y λ : G→ G, λ(g) = g−1,
son continuas. Consideremos
µ : G× G→ G, µ(g, h) = π(g) · π(h), y λ : G→ G, λ(g) = π(g)−1.
Es claro que µ = µ (π × π) y λ = λ π. Por tanto µ y λ son continuas.Teniendo en cuenta los isomorfismos naturales
Π1(G× G, (e, e)) ∼= Π1(G, e)× Π1(G, e), Π1(G×G, (e, e)) ∼= Π1(G, e)× Π1(G, e),
es claro que
µ∗
(Π1
(G× G, (e, e)
))= µ∗
((π × π)∗(Π1
(G× G, (e, e)
)))
=
µ∗
((π∗ × π∗)
(Π1(G, e)× Π1(G, e)
))=
= µ∗
(π∗(Π1(G, e)
), π∗(Π1(G, e)
))= [α · β] : [α], [β] ∈ π∗
(Π1(G, e)
).
Al ser (G, ·) un grupo topologico, α · β'α ? β para cualesquiera lazos α y β basadosen e ∈ G, y por tanto [α · β] = [α ? β] (ver la prueba del Teorema 5.4). Finalmentededucimos que
µ∗
(Π1
(G× G, (e, e)
))= [α ? β] : [α], [β] ∈ π∗
(Π1(G, e)
) = π∗
(Π1(G, e)
),
donde para la ultima igualdad se ha tenido en cuenta que π∗(Π1(G, e)
)es un subgrupo
de Π1(G, e).Analogamente se probarıa que
λ∗
(Π1
(G, e
))= π∗
(Π1(G, e)
).
Como µ(e, e) = e y λ(e) = e, el Teorema 11.11 proporciona aplicaciones continuas
µ : G× G→ G tal que π µ = µ y µ(e, e) = e, y
λ : G→ G tal que π λ = λ y λ(e) = e.
Denotemos por p1 : G × G → G y p2 : G × G → G a la primera y segunda proyec-ciones, respectivamente.
De la unicidad en el Teorema 11.11 es facil comprobar que:
Si ce : G → G representa la aplicacion constante e, µ (IdG × ce) = p1 y µ (ce × IdG) = p2, esto es, µ(g, e) = µ(e, g) = g para todo g ∈ G. En efecto,estas aplicaciones aplican e 7→ e y satisfacen π
(µ (IdG × ce)
)= π p1,
π (µ (ce × IdG)
)= π p2.
Si ce : G× G → G representa la aplicacion constante e, µ (IdG × λ) = µ (λ×IdG) = ce, esto es, µ(g, λ(g)) = µ(λ(g), g) = e para todo g ∈ G. En efecto, estas
aplicaciones aplican e 7→ e y satisfacen π (µ (IdG × λ)
)= π
(µ (λ× IdG)
)=
ce = π ce, donde ce : G× G→ G denota la aplicacion constante e.
78

µ(g1, µ(g2, g3)
)= µ
(µ(g1, g2), g3
)para cualesquiera g1, g2, g3 ∈ G. En efecto, la
aplicacion f1 : G3 → G, f1(g1, g2, g3) := µ(µ(g1, g2), g3
), es continua y satisface
(π f1)(g1, g2, g3) =(π(g1) ·π(g2)
)·π(g3), y analogamente la aplicacion f2 : G3 →
G, f2(g1, g2, g3) := µ(g1, µ(g2, g3)
), es continua y satisface (π f2)(g1, g2, g3) =
π(g1) ·(π(g2) · π(g3)
). Como f1(e, e, e) = f2(e, e, e) = e se concluye que f1 = f2.
Por lo anterior se deduce que µ es una ley de composicion interna en G que lo dotade estructura de grupo algebraico, siendo e su elemento neutro y λ la aplicacion quelleva cada elemento a su inverso en el grupo. Ademas la identidad π µ = µ conviertea π : G→ G en un homomorfismo de grupos. Esto concluye la prueba.
12. La accion del grupo fundamental sobre la fibra
Vamos a comprobar que la fibra de un punto en un recubridor puede interpretarsecomo un cociente de grupos, y en ese sentido, naturalmente identificable con un espaciohomogeneo. Expiquemos los detalles.
Teorema 12.1 Sea (X, π) un espacio recubridor de X, y fijemos x ∈ X. La aplicacion
· : π−1(x)× Π1(X, x)→ π−1(x), y · [α] := αy(1)
es una accion transitiva por la derecha del grupo Π1(X, x) sobre la fibra π−1(x) de x.Ademas, para cada y ∈ π−1(x) el subgrupo de isotropıa asociado a la accion en
el punto y, que se define por Hy := [α] ∈ Π1(X, x) : y · [α] = y, coincide con
π∗(Π1
(X, y)
).
Demostracion : Lo primero que hemos de observar es que la accion esta bien definida,esto es, que si β ∈ [α] entonces βy(1) = αy(1). Esto es consecuencia inmediata, porejemplo, del Corolario 11.7.
Por definicion, · es una accion si satisface:
(a) y · [εx] = y para todo y ∈ Π1(X, x).
(b) y · ([α] ? [β]) = (y · [α]) · [β] para cualesquiera [α], [β] ∈ Π1(X, x).
La transividad de la accion hace referencia a la siguiente propiedad:
(c) Para cualesquiera y1, y2 ∈ π−1(X) existe [α] ∈ Π1(X, x) tal que y1 · [α] = y2.
En efecto, la propiedad (a) es consecuencia trivial del hecho (εx)y = εy (unicidad del
levantamiento de arcos). Para probar (b), observemos que αy ? βαy(1) es un arco en Xcon punto inicial y que se proyecta vıa π en α ? β. Por unicidad del levantamiento,
αy ? βαy(1) = α ? βy, y por tanto
y · ([α] ? [β]) = (α ? β)y(1) =(αy ? βαy(1)
)(1) = βαy(1)(1) = αy(1) · [β] = (y · [α]) · [β].
Finalmente, para probar (c) tomemos y1, y2 ∈ π−1(X). Consideremos un arco cualquiera
α : [0, 1] → X con α(0) = y1 y α(1) = y2. Si α := π α, es claro que α es un lazo enX con base el punto x y que y1 · [α] = α(1) = y2. Esto concluye la primera parte de laprueba.
Para la segunda parte, tomemos y ∈ π−1(x) y [α] ∈ Π1(X, x). Se tiene que [α] ∈ Hy si
y solo si αy(1) = y, esto es si y solo si αy es un lazo en X con base el punto y (y por tanto
[αy] ∈ Π1(X, y)). En consecuencia, [α] ∈ Hy si y solo si [α] = π∗([αy]) ∈ π∗(Π1
(X, y)
).
Esto pueba que Hy = π∗(Π1
(X, y)
)y concluye el teorema.
79

Como consecuencia trivial del Teorema 12.1 tenemos el siguiente
Corolario 12.2 Sea (X, π) un espacio recubridor de X, y fijemos x ∈ X.Entonces para cada y ∈ π−1(x) la aplicacion(
Π1(X, x)/π∗(Π1(X, y)
))dcha→ π−1(x), π∗
(Π1(X, y)
)? [α] 7→ αy(1),
es biyectiva.
Es interesante conocer la interaccion del concepto de recubridor con distintos inva-riantes topologicos como compacidad, axiomas de separacion, axiomas de numerabili-dad... Para nuestros intereses sera suficiente con los siguientes resultados elementales.
Corolario 12.3 Sea (X, π) un recubridor de X. Los siguientes enunciados son ciertos:
(a) Si X es compacto entonces (X, π) tiene un numero finito de hojas.
(b) Si X es simplemente conexo entonces Π1(X, x) es biyectivo con la fibra π−1(x) para
cualquiera x ∈ X. Si ademas X es compacto entonces Π1(X, x) es finito.
(c) Si X es compacto y (X, π) tiene un numero finito de hojas entonces X es compacto.
Demostracion : Para probar (a) consideremos un recubrimiento abierto U de X for-mado por entornos distinguidos para π, y denotemos por π−1(U) al recubrimiento
por abiertos de X definido por todas las arcocomponentes de π−1(U) para todos los
U ∈ U . La compacidad de X garantiza la existencia de una cantidad finita de abier-tos U1, . . . , Un ∈ π−1(U) tales que X = ∪nj=1Uj. Como X = π(X) = π
(∪nj=1 Uj
)=
∪nj=1π(Uj) y π|Uj : Uj → π(Uj) es biyectiva para todo j, cada punto x ∈ X tiene a lo
mas n preimagenes por π. Esto prueba (a).
Para demostrar (b), observemos que la simpleconexion de X y el Corolario 12.2garantizan que Π1(X, x) → π−1(x), [α] 7→ αy(1), es biyectiva. La segunda parte delitem (b) se sigue trivialmente de (a).
Por ultimo probemos (c). Llamemos k al numero de hojas de (X, π), y denotemospor U a la familia de los entornos distinguidos en X para π (obviamente una base de la
topologıa de X). Sea V un recubrimiento por abiertos arbitrario de X. Por ser π recubri-dora con k hojas, para cada x ∈ X existen V x
1 , . . . , Vxk ∈ V tales que π−1(x) ⊂ ∪kj=1V
xj
y x ∈ ∩ki=1π(V xi ). Elijamos Ux ∈ U tal que Ux ⊂ ∩ki=1π(V x
i ) y π−1(Ux) ⊂ ∪kj=1Vxj .
Como X es compacto y Ux : x ∈ X es un recubrimiento abierto de X (recorde-mos que π es abierta), existen x1, . . . , xm ∈ X tales que X =
⋃sj=1 Uxj . Por tanto
X =⋃mi=1
(∪kj=1 V
xij
), lo que prueba que V admite un subrecubrimiento finito y la
compacidad de X.
Proposicion 12.4 Sea (X, π) un recubridor de X. Entonces:
(i) X Hausdorff =⇒ X Hausdorff.
(ii) X II-Axioma de Numerabilidad =⇒ X II-Axioma de Numerabilidad.
(iii) Si (X, π) tiene una cantidad numerable de hojas,
X II-Axioma de Numerabilidad =⇒ X II-Axioma de Numerabilidad.
80

Demostracion : Probemos (i). Tomemos y1, y2 ∈ X, y1 6= y2, y llamemos xj = π(yj),j = 1,2. Si x := x1 = x2, tomemos un entorno distinguido U para π que contenga ax, y observemos que las arcocomponentes Uy1 y Uy2 de π−1(U) que continen a y1 e y2,respectivamente, son abiertos disjuntos que separan y1 e y2. En caso de que x1 6= x2,como X es Hausdorff podemos tomar entornos distinguidos disjuntos U1 y U2 para πde x1 y x2, respectivamente. En este caso las arcocomponentes Uy1 de de π−1(U1) y Uy2de π−1(U2) que continen a y1 e y2, respectivamente, son abiertos disjuntos que separany1 e y2.
Probemos (ii). Supongamos que X es II-Axioma de Numerabilidad y fijemos una
base numerable B de la topologıa de X. Como π es abierta, π(B) es abierto de X para
todo B ∈ B. DefinamosB := π(B) : B ∈ B.
Claramente B es una familia numerable de abiertos de X. Para acabar basta probarque B es una base de la topologıa de X. En efecto, sea x ∈ X y O un abierto arbitrarioen X conteniendo a x. Recordemos que la familia
U = U : U es entorno distinguido para π
es una base de la topologıa en X, por lo que podemos tomar U ∈ U tal que x ∈ U ⊂ O.Elijamos y ∈ π−1(x) y consideremos la arcocomponente U en π−1(U) que contiene a y.
Como B es base de la topologıa en X, existe B ∈ B tal que y ∈ B ⊂ U , y por tantox ∈ π(B) ⊂ U ⊂ O. Esto prueba que B es base de la topologıa en X.
Finalmente probemos (iii). Supongamos ahora que X es II-Axioma de Numerabili-dad y tomemos una base numerable B de la topologıa de X. Como U es una base de latopologıa en X, por lo que trivialmente
B0 = B ∈ B : B es entorno distinguido para π
es una base numerable de la topologıa de X. Para cada B ∈ B0 elijamos un puntoauxiliar xB ∈ B y escribamos π−1(B) como union disjunta y numerable de sus arco-
componentes de la siguiente forma π−1(B) = ∪y∈π−1(xB)By; tengase en cuenta que por
hipotesis el conjunto π−1(xB) es numerable. Definamos la familia de abiertos en X
B0 :=⋃B∈B0
By : y ∈ π−1(xB),
y observemos que B0 es numerable.Para acabar demostremos que B0 es una base de la topologıa de X. En efecto,
tomemos x ∈ X y un abierto arbitrario O en X conteniendo a x. Llamemos x =π(x) y consideremos un entorno distinguido U para π tal que x ∈ U . Denotemos por
W la arcocomponente de π−1(U) ∩ O conteniendo a x, obviamente un subconjunto
abierto de X. Como π es un homeomorfismo local, π(W ) es un abierto arcoconexoen X conteniendo a x, y como ademas U ∈ U es claro que π(W ) ∈ U . Por tantoπ|W : W → π(W ) es un homeomorfismo. Elijamos B ∈ B0 con x ∈ B ⊂ π(W ). Si
B ∈ By : y ∈ π−1(xB) ⊂ B0 es la arcocomponente de π−1(B) que contiene a x,
inferimos que B = (π|W )−1(B) ⊂ W ⊂ O. Esto prueba que B0 es base de la topologıa
de X y concluye la prueba.
Como consecuencia:
81

Corolario 12.5 Sea X un espacio topologico II-Axioma de Numerabilidad y con grupofundamental numerable.
Entonces todo recubridor de X es II-Axioma de Numerabilidad.
Demostracion : Sea (X, π) un recubridor de X. Fijados x ∈ X e y ∈ π−1(x), la aplica-cion
Π1(X, x)→(
Π1(X, x)/π∗(Π1(X, y)
))dcha
, [α] 7→ π∗(Π1(X, y)
)? [α],
es sobreyectiva. La numerabilidad de Π1(X, x) implica por tanto la numerabilidad de(Π1(X, x)/π∗
(Π1(X, y)
))dcha
es numerable. Pero por el Corolario 12.2(Π1(X, x)/π∗
(Π1(X, y)
))dcha→ π−1(x), π∗
(Π1(X, y)
)? [α] 7→ αy(1),
es biyectiva, de donde (X, π) tiene una cantidad numerable de hojas. El resultado sesigue de Proposicion 12.4-(iii).
13. Transformaciones de recubridores
Como ocurre en cualquiera categorıa matematica, es interesante establecer cualesson las transformaciones naturales para el concepto de recubridor. Esto nos llevarade forma natural al concepto de homomorfismo de recubridores, y por tanto, al deisomorfismo. Con este lenguaje podremos abordar de forma correcta el problema declasificacion de recubridores.
A modo de guion, los dos puntos centrales de esta seccion seran:
El estudio de los automorfismos de un recubridor, y como consecuencia, el de losrecubridores regulares.
Abordar el problema de clasificacion de recubridores de un espacio topologico.
Comenzaremos con la siguiente definicion fundamental.
Definicion 13.1 Sean (Xj, πj), j = 1, 2, dos espacios recubridores de X.
Un homomorfismo de recubridores Φ de (X1, π1) en (X2, π2) es una aplicacion
continua Φ: X1 → X2 satisfaciendo π2 Φ = π1.
Un homomorfismo de recubridores Φ de (X1, π1) en (X2, π2) se dira un isomorfis-mo de recubridores si Φ es un homeomorfismo.
Si (X, π) es un recubridor de X, a los isomorfismos de (X, π) en (X, π) les
llamaremos automorfismos de (X, π).
Dados recubridores (Xj, πj), j = 1, 2, deX, la expresion Φ: (X1, π1)→ (X2, π2) indicaraque Φ es un homomorfismo de recubridores entre ambos.
Observacion 13.2 Dado un espacio topologico X:
La composicion de dos homomorfismos entre recubridores de X es un homomor-fismo de recubridores de X.
82

El inverso de un isomorfismo entre dos recubridores de X es un isomorfismo derecubridores de X.
Si (X, π) es un recubridor de X entonces IdX es un automorfismo de (X, π).
Definicion 13.3 Si (X, π) es un recubridor de X, denotaremos por A(X, π) al grupo
(respecto de la composicion) de los automorfismos de (X, π).
Es natural preguntarse por las propiedades basicas de los homomorfismos de recu-bridores y abordar el problema de existencia. Los siguientes corolarios, consecuenciainmediata del Teorema 11.11, dan una cumplida respuesta a estas cuestiones.
Corolario 13.4 Sean (X1, π1) y (X2, π2) dos recubridores de X.
Si Φ, Ψ: (X1, π1)→ (X2, π2) son homomorfismos de recubridores distintos, entonces
Φ(y) 6= Ψ(y) para todo y ∈ X1.
Como consecuencia, si (X, π) es un recubridor de X y Φ ∈ A(X, π) es distinto de
IdX , entonces Φ(y) 6= y para todo y ∈ X.
Corolario 13.5 Sean (X1, π1), (X2, π2) dos recubridores de X, y sean x ∈ X e yj ∈π−1j (x), j = 1, 2.
(i) Existe un homomorfismo Φ: (X1, π1) → (X2, π2) con Φ(y1) = y2 si y solo si
(π1)∗(Π1(X1, y1)
)⊆ (π2)∗
(Π1(X2, y2)
).
(ii) Existe un isomomorfismo Φ: (X1, π1) → (X2, π2) con Φ(y1) = y2 si y solo si
(π1)∗(Π1(X1, y1)
)= (π2)∗
(Π1(X2, y2)
).
Una propiedad interesante a tener en cuenta es que cualquier homomorfismo de recu-bridores es una aplicacion recubridora.
Proposicion 13.6 Si (Xj, πj), j = 1, 2, son espacios recubridores de X y Φ: (X1, π1)→(X2, π2) un homomorfismo, entonces (X1,Φ) es un recubridor de X2.
Demostracion : Veamos que Φ es sobre. Para ello fijemos y ∈ X1 y tomemos z ∈ X2
arbitrario. Consideremos un arco α2 : [0, 1] → X2 con α2(0) = Φ(y) y α2(1) = z,y llamemos α := π2 α2. Observese que por ser Φ homomorfismo de recubridoresα(0) = π1(y) = π2(Φ(y)) ∈ X. Denotemos por α1 : [0, 1] → X1 al levantamiento de αvıa π1 con condicion inicial α1(0) = y. Por ser Φ un homomorfismo de recubridores,Φ α1 es un levantamiento de α vıa π2 con condicion inicial Φ(y). Por la unicidad dellevantamiento (ver Corolario 11.3), Φ α1 = α2. En particular Φ(α1(1)) = α2(1) = z,probando la sobreyectividad de Φ.
Solo resta garantizar la existencia de entornos distinguidos para Φ. Primero llama-remos la atencion sobre varios hechos
Φ es un homeomorfismo local: tengase en cuenta que π2 Φ = π1 y de que π1 yπ2 son homeomorfismos locales.
Para todo z ∈ X2, Φ−1(z) ⊂ π−11 (π2(z)): evidente por ser π2 Φ = π1.
83

Consideremos un punto arbitrario z ∈ X2, y llamemos x := π2(z). Por ser (Xj, πj) unespacio recubridor de X, j = 1, 2, podemos encontrar un entorno (abierto) U de x enX distinguido para ambas aplicaciones recubridoras π1 y π2. Como siempre escribamos
π−11 (U) = ∪y∈π−1
1 (x)Vy,
donde Vy : y ∈ π−11 (x) son las arcocomponentes de π−1
1 (U) y π1|Vy : Vy → U es unhomeomorfismo para todo y ∈ π−1
1 (x).Como (π2|Φ(Vy)) (Φ|Vy) = π1|Vy : Vy → U inferimos que Φ|Vy : Vy → Φ(Vy) es in-
yectiva. Ademas como Φ(Vy) es un arcoconexo (imagen continua de un arcoconexo)contenido en π−1
2 (U) que se proyecta vıa π2 sobre U , Φ(Vy) ha de ser una arcocompo-nente de π−1
2 (U) sobre la que π2 es un homeomorfismo. En resumen:
Φ(Vy) es una arcocomponente de π−12 (U),
X2, Φ|Vy : Vy → Φ(Vy) es un homeomorfismo y
π2|Φ(Vy) : Φ(Vy)→ U es un homeomorfismo
para todo y ∈ π−11 (x).
Recordemos que π1 = π2 Φ implica que Φ−1(z) ⊂ π−11 (x), y comprobemos que
W := Φ(Vy1) = Φ(Vy2) para cualesquiera y1, y2 ∈ Φ−1(z).
En efecto, tengase en cuenta que Φ(Vy1) y Φ(Vy2) son dos arcoconexos en X2 con inter-seccion no vacıa (comparten el punto z) proyectandose homeomorficamente vıa π2 en unabierto distinguido para π2 (a saber U), y por tanto han de ser iguales. Un argumentosimilar nos garantiza Φ(Vy) ∩W = ∅ para todo y ∈ π−1
1 (x) \ Φ−1(z).De todo lo anterior se deduce que
Φ−1(W ) = ∪y∈Φ−1(z)Vy,
siendo Φ|Vy : Vy → W un homeomorfismo para todo y ∈ Φ−1(z). Por tanto W es unentorno distinguido alrededor de z para Φ, lo que concluye la prueba.
Como consecuencia se tiene el siguiente
Corolario 13.7 Sean (X1, π1), (X2, π2) recubridores de un espacio X, y sean x ∈ X eyj ∈ π−1
j (x), j = 1, 2.
Si (π1)∗(Π1(X1, y1)
)⊆ (π2)∗
(Π1(X2, y2)
)entonces X1 recubre a X2.
Demostracion : Por Corolario 13.5 existe un homomorfismo Φ: (X1, π1)→ (X2, π2) con
Φ(y1) = y2, y la Proposicion 13.6 garantiza que (X1,Φ) es un recubridor de X2. Estoconcluye el corolario.
13.1. El grupo de automorfismos. Recubridores regulares
En esta seccion vamos a estudiar la accion natural del grupo de automorfismos deun recubridor sobre sobre el espacio recubridor. Haremos especial enfasis en la familiade los recubridores regulares, esto es, aquellos para los que tal accion es transitiva.
Los detalles estan contenidos en la siguiente
84

Proposicion 13.8 Sea (X, π) un recubridor de X. Entonces la accion
µ : Aut(X, π)× X → X, (Φ, y) 7→ Φ · y := Φ(y),
es propia y discontinua.
Demostracion : Sea y0 ∈ X un punto arbitrario y llamemos x = π(y0). Sea U ⊂ X unentorno distinguido de x para π, y como siempre escribamos π−1(U) como union de susarcocomponentes:
π−1(U) =⋃
y∈π−1(x)
Uy,
donde Uy1 ∩ Uy2 = ∅, y1 6= y2, y π|Uy : Uy → U es un homeomorfismo, y ∈ π−1(x).Comprobemos que la condicion de propia y discontinua para µ se satisface alrededor
de y0 con entorno distinguido Uy0 .
Para cada Φ ∈ Aut(X, π), Φ(Uy0) es un abierto arcoconexo en X homeomorfo vıaπ con U , luego una arcocomponente de π−1(U):
Φ(Uy0) ∈ Uy : y ∈ π−1(x) para todo Φ ∈ Aut(X, π).
Para acabar bastarıa con ver que si Φ1, Φ2 ∈ Aut(X, π) son distintos, entonces Φ1(Uy0)∩Φ2(Uy0) = ∅. En efecto, de otra forma las arcocomponentes Φ1(Uy0) y Φ2(Uy0) de π−1(U)
compartirıan un punto, luego Φ1(Uy0) = Φ2(Uy0) = Uy para algun y ∈ π−1(x), y portanto
Φ1|Uy0 = Φ2|Uy0 = (π|−1
Uy) (π|Uy0 )
ya que se trata de automorfismos. De aquı que Φ1 = Φ2, lo que acaba la proposicion.
Una consecuencia interesante de esta proposicion nos la proporciona el Teorema 10.8.Em el siguiente corolorario vamos a introducir una herramienta fundamental para laconstruccion de recubridores a partir de subgrupos del grupo de los automorfismos. Enefecto, sea G ≤ Aut(X, π) un subgrupo arbitrario, que obviamente actuara de forma
propia y discontınua sobre X por restriccion de la accion µ en la Proposicion 13.8.
Corolario 13.9 (Construccion de recubridores) Sea (X, π) un recubridor de X,
G ≤ Aut(X, π) un subgrupo y (X, π0) el recubridor asociado al espacio de orbitas X/G:
π0 : X → X/G, y 7→ G · y.
Entonces la unica aplicacion π : X/G→ X tal que π π0 = π, esto es, definida por
π(G · y
):= π(y) para todo G · y ∈ X/G,
es recubridora.
Demostracion : Claramente π es sobreyectiva al ser π sobreyectiva. Tambien es continuaya que la composicion π π0 es continua y X/G esta dotado de la topologıa cocientepara π0. Restarıa comprobar la existencia de entornos distinguidos para π.
Consideremos x ∈ X y tomemos un entorno distinguido U alrededor de x para elrecubridor (X, π). Veamos que U tambien es un entorno distinguido alrededor de x para
el recubridor (X/G, π) y habremos acabado.
85

Escribamos π−1(U) como union de sus arcocomponentes:
π−1(U) =⋃
y∈π−1(x)
Uy,
donde Uy1 ∩ Uy2 = ∅, y1 6= y2, y π|Uy : Uy → U es un homeomorfismo, y ∈ π−1(x).
Por ser Uy un entorno distinguido para la accion G × X → X, y ∈ π−1(x) (ver laprueba de la Proposicion 13.8), y π−1(U) = π−1
0
(π−1(U)
):
Vπ0(y) := π0(Uy) es abierto en X/G y π0|Uy : Uy → Vπ0(y) es un homeomorfismo
para todo y ∈ π−1(x).
Vπ0(y1) ∩ Vπ0(y2) = ∅ ⇐⇒ π0(y1) 6= π0(y2), y1, y2 ∈ π−1(x).
π−1(U) = ∪y∈π−1(x)Vπ0(y) ⊂ X/G.
En particular, Vπ0(y) : y ∈ π−1(x) puede parametrizarse 1-1 como Vz : z ∈ π−1(x).Como π−1(U) = ∪z∈π−1(x)Vz se ha expresado como union de abiertos arcoconexos disjun-tos dos a dos, solo resta garantizar que π|Vz : Vz → U es un homeomorfismo. Eligiendocualquiera y ∈ π−1
0 (z), observamos que π|Vz = (π|Uy) (π0|−1
Uy) es composicion de dos
homeomorfismos, lo que acaba la prueba.
13.1.1. Recubridores regulares
Existe una relacion ıntima entre el grupo de automorfismos de un recubridor (X, π)
de un espacio X y el normalizador del subgrupo π∗(Π1(X, y)) en Π1(X, x), donde x ∈ Xe y ∈ π−1(x) son arbitrarios; ver la Definicion 1.9. Este hecho motivara el conceptode recubridor regular, y sera la clave para el correcto tratamiento del problema deexistencia de recubridores de X como veremos mas adelante.
Obviamente, si Φ es un automorfismo de un recubridor (X, π) de un espacio Xentonces Φ respeta las fibras de los puntos, esto es, Φ(π−1(x)) = π−1(x) para todo x ∈X. La siguiente proposicion da una condicion necesaria y suficiente para la existenciade un automorfismo conectando dos puntos de la fibra de un punto.
Proposicion 13.10 Sea X un espacio topologico, sea (X, π) un recubridor de X y
fijemos x ∈ X e y1, y2 ∈ π−1(x). Tomemos α cualquier arco en X con α(0) = y1 yα(1) = y2, y llamemos α = π α. Entonces
∃ Φ ∈ Aut(X, π) con Φ(y1) = y2 ⇐⇒ [α] ∈ N0
(π∗(Π1(X, y1)
)).
Demostracion : Por el Corolario 11.9,
π∗(Π1(X, y2)
)= [α]−1 ? π∗
(Π1(X, y1)
)? [α].
Por otro lado, el Corolario 13.5 nos dice que existe Φ ∈ Aut(X, π) con Φ(y1) = y2 si y
solo si π∗(Π1(X, y1)
)= π∗
(Π1(X, y2)
). Por tanto
∃ Φ ∈ Aut(X, π) con Φ(y1) = y2 ⇐⇒ π∗(Π1(X, y1)
)= [α]−1 ? π∗
(Π1(X, y1)
)? [α],
esto es, si y solo sı [α] pertenece al normalizador N0
(π∗(Π1(X, y1)
))de π∗
(Π1(X, y1)
)en Π1(X, x).
86

Definicion 13.11 Fijados y ∈ π−1(x) y [α] ∈ N0
(π∗(Π1(X, y)
)), la Proposicion 13.10
garantiza que existe un automorfismo Φy([α]) de (X, π) con Φy([α])(y) = αy(1), queademas es unico por el Corolario 13.4. Denotaremos Υ a la aplicacion
Υ: N0
(π∗(Π1(X, y)
))→ Aut(X, π), Υ([α]) := Φy([α]).
El siguiente teorema explica con detalle la naturaleza de Υ, y como consecuencia nospermite interpretar el grupo Aut(X, π) en funcion de los grupos fundamentales delrecubridor y la base.
Teorema 13.12 Sean X un espacio topologico, (X, π) un recubridor de X, x ∈ X ey ∈ π−1(x). Entonces la aplicacion
Υ: N0
(π∗(Π1(X, y)
))→ Aut(X, π), [α] 7→ Φy([α]),
es un epimorfismo de grupos con Ker(Υ) = π∗(Π1(X, y)
).
En particular, por el primer teorema de isomorfıa para grupos
N0
(π∗(Π1(X, y)
))/π∗(Π1(X, y)
) ∼= Aut(X, π).
Demostracion : Probemos primero que Υ es un homomorfismo de grupos. Hemos de
ver que para cualesquiera [α], [β] ∈ N0
(π∗(Π1(X, y)
)),
Φy([α] ? [β]) = Φy([α]) Φy([β]).
Para ello consideremos el arco αy ? (Φy([α]) βy) en X, bien definido ya que αy(1) =
Φy([α])(y) = Φy([α])(βy(0)). Como
π (αy ? (Φy([α]) βy)
)= (π αy) ?
(π (Φy([α]) βy)
)= (π αy) ? (π βy) = α ? β
y(αy ? (Φy([α]) βy)
)(0) = αy(0) = y, inferimos que (α ? β)y = αy ? (Φy([α]) βy). De
aquı que
Φy([α]?[β])(y) = (α ? β)y(1) = Φy([α])(βy(1)) = Φy([α])(Φy([β])(y)) = (Φy([α])Φy([β]))(y),
y por tanto Φy([α] ? [β]) = Φy([α]) Φy([β]) por el Corolario 13.4.
Para acabar, veamos quer Υ es sobre. En efecto, sea Φ ∈ Aut(X, y) un automorfismo
arbitrario. Consideremos α : [0, 1] → X un arco con α(0) = y y α(1) = Φ(y). Por losCorolarios 13.5 y 11.9,
π∗(Π1(X, y)
)= π∗
(Π1(X,Φ(y))
)= [α]−1 ? π∗
(Π1(X, y)
)? [α],
donde α es el lazo π α (con base x ∈ X). Esto prueba que [α] ∈ N0
(π∗(Π1(X, y)
)),
y como claramente Υ([α]) = Φ, que Υ es sobreyectiva.
Observacion 13.13 Con la misma notacion del Teorema 13.12, si y1, y2 ∈ π−1(x) y[α] ∈ Π1(X, x) es tal que αy1(1) = y2, entonces
N0
(π∗(Π1(X, y2)
))= [α]−1 ? N0
(π∗(Π1(X, y1)
))? [α].
Ambos subgrupos conjugados de Π1(X, x) son isomorfos a Aut(X, π). Tengase en cuenta
que π∗(Π1(X, y2)
)= [α]−1 ? π∗
(Π1(X, y1)
)? [α].
87

Un caso paticular especialmente interesante es cuando, con la notacion anterior,
el normalizador N0
(π∗(Π1(X, y)
))coincide con Π1(X, x). En otras palabras, cuando
π∗(Π1(X, y)
)es un subgrupo normal de Π1(X, x). Esto nos llevara de forma natural al
concepto de recubridor regular.
Definicion 13.14 Un recubridor (X, π) de un espacio X se dira regular si existe x ∈ Xtal que la accion
µx : Aut(X, π)× π−1(x)→ π−1(x), (Φ, y) 7→ Φ · y := Φ(y).
es transitiva.
Observacion 13.15 µx es transitiva para algun x ∈ X si y solo si µx es transitiva paratodo x ∈ X. Por tanto (X, π) es regular si y solo si µx es transitiva para todo x ∈ X.
Demostracion : Si x1, x2 ∈ X y α : [0, 1]→ X es un arco con α(0) = x1 y α(1) = x2, elCorolario 11.5 proporcionaba la biyeccion ηα : π−1(x1)→ π−1(x2), ηα(y) := αy(1). Comolas fibras son invariantes por automorfismos y ηα Φ = Φ ηα para todo automorfismoΦ de (X, π), la transitividad de µx1 es equivalente a la transitividad de µx2 .
Proposicion 13.16 Sea (X, π) un recubridor de X. Son equivalentes:
(a) (X, π) es regular.
(b) Para todo x ∈ X e y ∈ π−1(x), π∗(Π1(X, y)
)es un subgrupo normal de Π1(X, x).
(c) Existen x ∈ X e y ∈ π−1(x) tales que π∗(Π1(X, y)
)es un subgrupo normal de
Π1(X, x).
Demostracion : (a) =⇒ (b). Supongamos que (X, π) es regular y tomemos x ∈ Xe y ∈ π−1(x). Sea [α] ∈ Π1(X, x) y llamemos z := αy(1). Por la transitividad de
la accion µx sabemos que existe Φ ∈ Aut(X, π) tal que Φ(y) = z, y por tanto [α] ∈N0
(π∗(Π1(X, y)
)); ver Proposicion 13.10. Esto prueba queN0
(π∗(Π1(X, y)
))= Π1(X, x),
esto es, (b).(b) =⇒ (c) es trivial.
(c) =⇒ (a). Tomemos x ∈ X e y ∈ π−1(x) tales que π∗(Π1(X, y)
)es un subgrupo
normal de Π1(X, x). Observemos que entonces π∗(Π1(X, z)
)es un subgrupo normal de
Π1(X, x) para todo z ∈ π−1(x) (ver el Corolario 11.9 o la Observacion 13.13).
Tomemos dos puntos y1, y2 ∈ π−1(x) y un arco α : [0, 1] → X con α(0) = y1
y α(1) = y2. Si denotamos α := π α y tenemos en cuenta que [α] ∈ Π1(X, x) =
N0
(π∗(Π1(X, y1)
)), la Proposicion 13.10 de nuevo nos dice que existe Φ ∈ Aut(X, π)
tal que Φ(y1) = y2. Esto prueba que µx es transitiva y por tanto (a).
Observacion 13.17 Si (X, π) es un recubridor regular de X y x ∈ X es un punto
arbitrario, el subgrupo π∗(Π1(X, y)) de Π1(X, x) no depende del punto y ∈ π−1(X).
En efecto, notese que de la Proposicion 13.16 el subgrupo π∗(Π1(X, y) de Π1(X, x)es normal para cualquier y ∈ π−1(X), y que cuando cambiamos de punto en la fibra dex este subgrupo cambia por conjugacion (luego permanece invariante).
88

Corolario 13.18 Si (X, π) es un recubridor regular de X, x ∈ X e y ∈ π−1(x), en-tonces:
(i) Υ : Π1(X, x)/π∗(Π1(X, y)
)→ Aut(X, π), π∗
(Π1(X, y)
)? [α] 7→ Φy([α]), es un
isomorfismo de grupos.
(ii) Si π0 : X → X/Aut(X, π) es la proyeccion al espacio de orbitas X/Aut(X, π),
existe un homeomorfismo π : X/Aut(X, π)→ X tal que π π0 = π.
Demostracion : Por la Proposicion 13.16 y la regularidad de (X, π), el normalizador
N0
(π∗(Π1(X, y)
))coincide con Π1(X, x). Item (i) se sigue del Teorema 13.12.
Para el item (ii), basta con probar que la aplicacion
π : X/Aut(X, π)→ X, Aut(X, π) · y 7→ π(y),
es un homeomorfismo. La identidad π π0 = π serıa evidente. En efecto, π es recu-bridora por el Corolario 13.9, y la transitividad de la accion µx para todo x ∈ Ximplica que Aut(X, π) · y = π−1(π(y)) . Por tanto π es biyectiva, y en consecuencia unhomeomorfismo.
Es interesante comparar el Corolario 13.9 y el Corolario 13.18.A modo de resumen, los recubridores regulares se caracterizan por ser los asociados
a los espacios de orbitas, siendo el grupo de automorfismos de los mismos identificableal grupo de homeomorfismos que define la accion. Ese es el contenido del suguiente:
Corolario 13.19 Si G es un grupo de homeomorfismos que actua de forma propia ydiscontınua sobre un espacio X y π : X → X/G es la proyeccion al espacio de orbitas,entonces (X, π) es un recubridor regular y Aut(X, π) = G.
Recıprocamente, si (X, π) es un recubrido regular de X entonces X es homeomorfo
al espacio de orbitas X/Aut(X, π), y salvo ese homeomorfismo la proyeccion recubridora
π no es sino la proyeccion al espacio de orbitas X → X/Aut(X, π).
13.2. No todo recubridor es regular
Ciertamente los recubridores regulares permiten un tratamiento y comprension masagradable. Sin embargo no todo recubridor es regular. En este apartado vamos a explicarcomo la variable compleja nos proporciona una familia muy amplia de recubridoresgenericamente no regulares, lo que nos ayudara a comprender que la regularidad nodeja de ser una excepcionalidad.
En lo que sigue C = C ∪ ∞ denotara la esfera de Riemann (compactificacionde Alexandrov del plano complejo C), topologicamente equivalente a la esfera S2 vıala proyeccion estereografica. Sea P : C → C una funcion polinomica de grado k ≥ 1,llamemos A al conjunto de puntos z ∈ C donde P presenta una ramificacion (esto es,donde P no es localmente invertible). Obviamente A = ∅ si k = 1, y si k ≥ 2 entoncesA coincide con z ∈ C : P ′(z) = 0 ∪ ∞.
Denotemos por X := C \ P (A) ⊂ C, y analogamente Y := C \ P−1(P (A)) ⊂ C alcomplemento en C de la P -saturacion de A. Definamos
π : Y → X, π(z) := P (z).
El hecho de que π sea un homeomorfismo local (de hecho biholomorfismo local) y elTeorema Fundamental del Algebra implican trivialmente que (Y, π) es un recubridor dek hojas de X.
89

Proposicion 13.20 Si Φ ∈ Aut(Y, π) entonces Φ es (la restriccion a Y de) una trans-formacion de Mobius.
Demostracion : Tomemos Φ ∈ Aut(Y, π). Como φ Φ = φ y φ es un biholomorfismolocal (esto es, una aplicacion holomorfa Y → X con derivada no nula en todo punto),inferimos que φ : Y → Y es un biholomorfismo global. En particular el Teorema deWeierstrass-Casorati nos dice que Φ no presenta singularidades esenciales en los puntosde P−1(P (A)), y por tanto por el Teorema de las singularidades evitables de Riemannextiende holomorficamente a los puntos de P−1(P (A)). Notese que este analisis se ex-tiende al comportamiento local de Φ alrededor de ∞, donde igualmente Φ no presentauna singularidad esencial. Por tanto Φ es la restriccion a Y de una funcion racionalC → C (cociente de polinomios), y como genericamente es 1-1 ya que es un automor-fismo de Y , inferimos que Φ ha de ser (la restriccion de) una transformacion de Mobius(de hecho de la forma z 7→ λz + µ, λ 6= 0, ya que fija ∞). Esto prueba el resultado.
Corolario 13.21 Existen polinomios P para los que el recubridor (Y, π) no es regular.
Demostracion : Recordemos que una transformacion de Mobius esta determinada uni-vocamente por la imagen de tres puntos, y en particular, tiene a lo mas 3 puntos fijos.Elijamos P para que:
A conste de al menos 3 puntos.
Las ramificaciones de P en los puntos de A sean distintas dos a dos.
Es facil encontrar polinomios satisfaciendo estas condiciones, por ejemplo P (z) = 3z4−4z3 o cualquier otra primitiva del polinomio z2(z − 1).
Veamos que bajo estas dos condiciones Aut(Y, π) = IdY , y por tanto, que (Y, π)no es regular (su grupo de automorfismos no actua de forma transitiva en la fibra de lospuntos!!) En efecto, consideremos un automorfismo Φ de (Y, φ) arbitrario. La condicionπ Φ = π implica que P Φ = P , y por tanto que Φ aplica puntos de ramificacion deP en puntos de ramificacion de P con la misma multiplicidad. Bajo nuestras hipotesisΦ ha de fijar todos los puntos de A. Como Φ es una transformacion de Mobius (ver laProposicion 13.20) y el cardinal ]A ≥ 3. deducimos que Φ = IdY .
14. Existencia y clasificacion de recubridores
Como consecuencia de los resultados anteriores podemos abordar el problema deexistencia y clasificacion de los recubridores de un espacio topologico. Para su correctotratamiento se requiere fijar alguna notacion.
En el conjunto Rec(X) de todos los recubridores de X consideremos la relacionde equivalencia ser isomorfo, que escribiremos por ∼=, y escribamos el correspondienteconjunto cociente por
R(X) := Rec(X)/ ∼= .
Aquı es conveniente tener in mente la notacion de la Definicion 11.10. En particular,recordar que dado un punto x ∈ X se introdujo la aplicacion
∆x : Rec(X)→ Sc(Π1(X, x)), ∆x(X, π) := [π∗(Π1(X, y)
)],
donde [π∗(Π1(X, y)
)] := π∗
(Π1(X, y)
): y ∈ π−1(x) es la clase de conjugacion del
subgrupo π∗(Π1(X, y)
)en Π1(X, x), y ∈ π−1(x). Como observamos en el Corolario
11.9, esta clase no dependıa del punto elegido y ∈ π−1(x).
90

El siguiente teorema prueba que ∆x puede ser inducida al cociente, y por tanto quela familia R(X) esta estrechamente determinada por Sc(Π1(X, x)).
Teorema 14.1 Sean (X1, π1) y (X2, π2) dos recubridores de X. Son equivalentes:
(i) (X1, π1) ∼= (X2, π2).
(ii) ∆x(X1, π1) = ∆x(X2, π2) para todo x ∈ X.
(iii) ∆x(X1, π1) = ∆x(X2, π2) para algun x ∈ X.
En particular, para todo x ∈ X la aplicacion
∆x : R(X)→ Sc(Π1(X, x)), ∆x
([X, π)]
):= ∆x(X, π),
inducida por ∆x en el cociente R(X) es inyectiva.
Demostracion : (i) =⇒ (ii). Supongamos que (X1, π1) y (X2, π2) son isomorfos y sea
Φ: (X1, π1)→ (X2, π2) un isomorfismo de recubridores. sea x ∈ X arbitrario, tomemosy1 ∈ π−1
1 (x) y consideremos y2 := Φ(y1) ∈ π−12 (x). Por el Corolario 13.5-(ii) inferimos
que (π1)∗(Π1(X1, y1)
)= (π2)∗
(Π1(X2, y2)
), de donde ∆x(X1, π1) = ∆x(X2, π2).
(ii) =⇒ (iii). Trivial.
(iii) =⇒ (i). Supongamos que ∆x(X1, π1) = ∆x(X2, π2) para algun x ∈ X. Es-to quiere decir que, dados cualesquiera z1 ∈ π−1
1 (x) e y2 ∈ π−12 (x), los subgrupos
(π1)∗(Π1(X1, z1)
)y (π2)∗
(Π1(X2, y2)
)son conjugados en Π1(X.x). Por tanto existe
[α] ∈ Π1(X.x) tal que
(π2)∗(Π1(X2, y2)
)= [α]−1 ? (π1)∗
(Π1(X1, z1)
)? [α].
Si llamamos y1 := απ1z1 (1), el Corolario 11.9 garantiza que
(π1)∗(Π1(X1, y1) = [α]−1 ? (π1)∗
(Π1(X1, z1)
)? [α],
y por tanto(π1)∗
(Π1(X1, y1) = (π2)∗
(Π1(X2, y2)
).
De nuevo el Corolario 13.5-(ii) nos permite concluir que existe un isomorfismo Φ: (X1, π1)→(X2, π2) con Φ(y1) = y2, como querıamos demostrar.
El problema general de existencia de recubridores para un espacio X pasa por es-tablecer bajo que condiciones la aplicacion ∆x : R(X) → Sc
(Π1(X, x)
)es biyectiva,
donde x ∈ X es un punto arbitrario. Nuestro principal objetivo sera demostrar quetal biyectividad dependera en exclusiva de la existencia de un recubridor simplementeconexo, esto es, de que la imagen ∆x(R(X)) contenga la clase del neutro [εx]. Ladefinicion central de esta seccion es la siguiente:
Definicion 14.2 Un recubridor (Y, π) de X se dira universal si Π1(Y ) ∼= 0, o equi-valentemente, si ∆x
([(Y, π)]
)= [εx] para algun (luego para todo) x ∈ X.
Como consecuencia del Teorema 14.1, el recubridor universal de X, de existir, estaunıvocamente determinado salvo isomorfismos. El siguiente corolario recopila algunas delas propiedades basicas del recubridor universal, entre ellas el porque de este calificativo(ver item (a)).
91

Corolario 14.3 Si X admite recubridor universal (Y, π0), entonces:
(a) Y recubre a X para cualquier recubridor (X, π) de X.
(b) (Y, π0) es un recubridor regular.
(c) Si x ∈ X e y ∈ π−10 (x), la aplicacion Υ : Π1(X, x) → Aut(Y, π0), [α] 7→ Φy([α]),
dada en el Corolario 13.18 es un isomorfismo de grupos.
Demostracion : Probemos (a). Si (Y, π0) es recubridor universal de X, (X, π) un recu-bridor de X, x ∈ X, x ∈ π−1(x) e y ∈ π−1
0 (x), la condicion
(π0)∗(Π1(Y, y)) = (π0)∗([εy]) = [εx] ⊂ π∗(Π1(X, x)),
requerida en Corolario 13.7 es inmediata, por lo que el resultado se sigue trivialmente.Item (b) se sigue trivialmente de la Proposicion 13.16, ya que (π0)∗
(Π1(Y, y)
)=
[εx] es un subgrupo normal de Π1(X, x) para cualesquiera x ∈ X e y ∈ π−10 (x).
El item (c) se sigue igualmente del Corolario 13.18.
Podemos ahora demostrar uno de los resultados centrales de este tema.
Teorema 14.4 Si un espacio topologico X admite recubridor universal sı y solo sı laaplicacion ∆x : R(X) → Sc(Π1(X, x)) es biyectiva para algun (luego para cualquier)x ∈ X.
Demostracion : Por el Teorema 14.1, la aplicacion ∆x es inyectiva para todo x ∈ X.Si existe x ∈ X tal que ∆x es bijectiva entonces la clase del neutro [εx] ∈
∆x(R(X)), y por tanto existe un recubridor universal (Y, π) de X. En particular,[εz] ∈ ∆z(R(X)) para todo z ∈ X.
Bastara con demostrar que si existe x ∈ X tal que [εx] ∈ ∆x(R(X)) entonces∆x es sobreyectiva (y por tanto biyectiva). En efecto, llamemos (Y, π) al recubridoruniversal de X y fijemos y ∈ π−1(x). Por el Corolario 14.3
Υ : Π1(X, x)→ Aut(Y, π), [α] 7→ Φy([α]),
es un isomorfismo de grupos.Tomemos un subgrupo arbitrario H ≤ Π1(X, x) y su clase de conjugacion [H] ∈
Sc(Π1(X, x)
). Consideremos el grupo de automorfismos G := Υ(H) ≤ Aut(Y, π), la
proyeccion al espacio de orbitas π0 : Y → X := Y/G y el recubrimiento π : X → Xsatisfaciendo π π0 = π; ver Corolario 13.9.
Nuestro objetivo es probar que ∆x(X, π) = [H], para lo que sera suficiente condemostrar que
π∗(Π1(X, π0(y))
)= H.
Usando que Υ es un isomorfismo y que G = Υ(H),
[α] ∈ H ⇐⇒ Φy([α]) ∈ G⇐⇒ απy (1) = Φ(y) para algun Φ ∈ G⇐⇒
⇐⇒ π0 απy = αππ0(y) es lazo con base π0(y) en X ⇐⇒ [αππ0(y)] ∈ Π1(X, π0(y))⇐⇒
⇐⇒ [α] = [π αππ0(y)] = π∗([αππ0(y)]
)∈ π∗
(Π1(X, π0(y))
).
Esto concluye la demostracion.
92

14.1. Existencia de recubridor universal
Una cuestion trascendental es conocer que condiciones topologicas garantizan laexistencia del recubridor universal. Este sera el contenido del teorema que abordaremosa continuacion. Necesitamos introducir alguna notacion.
Definicion 14.5 Un abierto arcoconexo U de un espacio topologico X se dice que sa-tisface la propiedad de semilocal simple conexion si el homomorfismo
i∗ : Π1(U, x)→ Π1(X, x)
inducido por la inclusion i : U → X es trivial (esto es, constante [εx] ∈ Π1(X, x)).Un espacio topologico X se dira semilocalmente simplemente conexo si todo punto
admite un entorno abierto arcoconexo y semilocalmente simplemente conexo.
Claramente un subconjunto abierto y arcoconexo dentro de un abierto semilocalmentesimplemente conexo es semilocalmente simplemente conexo. Por tanto,
Observacion 14.6 Si X es semilocalmente simplemente conexo entonces la familia deabiertos semilocalmente simplemente conexos en X son una base de la topologıa de X.
Observese tambien que si todo punto de un espacio admite un entorno abiertosimplemente conexo, entonces el espacio es semilocalmente simplemente conexo. Estoocurre, por ejemplo, para las variedades topologicas que introduciremos en el Tema 3.
Ejercicio 14.7 Hay espacios arcoconexos y localmente arcoconexos que no son semi-localmente simplemente conexos. El ejemplo mas sencillo es el siguiente subespaciotopologico del plano euclidiano:
X =⋃n∈N
Cn, donde Cn = (x, y) ∈ R2 : (x− 1/n)2 + y2 = 1/n2,
para el que falla la semilocal-simple-conexion en el punto (0, 0).
Teorema 14.8 Un espacio topologico X admite recubridor universal si y solo si essemilocamente simplemente conexo.
Demostracion : Supongamos que X admite recubridor universal (Y, π). Dado x ∈ X,consideremos un entorno distinguido U de x en X y la inclusion i : U → X para π.Tomemos una arcocomponente U de π−1(U), y recordemos que π|U : U → U es un
homeomorfismo. Llamemos j : U → Y a la aplicacion inclusion y
f := j (π|U)−1 : U → Y.
Claramente f es continua y πf = i, por lo que i∗ = π∗f∗ : Π1(U, x)→ Π(X, x). ComoΠ1(Y ) ∼= 0, f∗ es el homomorfismo trivial y lo mismo ocurre con i∗. Esto prueba queX es semilocalmente simplemente conexo.
Supongamos ahora que X es semilocalmente simplemente conexo y construyamossu recubridor universal.
Fijemos x0 ∈ X, y para cada x ∈ X consideremos la familia Ωx0,x(X) de los arcosγ : [0, 1] → X con γ(0) = x0 y γ(1) = x (ver Tema 1). Denotaremos tambien por ' larelacion de equivalencia en Ωx0,x(X) ser homotopico en X (siempre con extremos fijos).Construyamos el espacio cociente Ωx0,x/' para cada x ∈ X, y definamos
Y :=⋃x∈X
Ωx0,x/'.
93

Definamos tambien la aplicacion proyeccion
π : Y → X, π([γ]) := γ(1),
obviamente sobreyectiva ya que X es arcoconexo.Nuestro objetivo es construir una topologıa en Y que haga de π una aplicacion
recubridora. Lo haremos presentando una base B de la misma.Como X es semilocalmente simplemente conexo, sabemos que la familia U de los
abiertos semilocalmente simplemente conexos en X es una base de la topologıa de X.Para cada U ∈ U y [γ] ∈ Y con γ(1) ∈ U , pongamos
([γ], U) = [γ ? σ] : σ : [0, 1]→ U arco con σ(0) = γ(1)
y definamosB := ([γ], U) : [γ] ∈ Y, U ∈ U , γ(1) ∈ U.
Veamos que B es base de una (unica) topologıa en Y . En efecto, la condicion
Y = ∪([γ],U)∈B([γ], U)
es trivial toda vez que[γ] = [γ ? εγ(1)] ∈ ([γ], U)
para cualquier abierto semilocalmente simplemente conexo U conteniendo a γ(1). Porotra parte, si [γ] ∈ ([γ1], U1)∩([γ2], U2) entonces γ(1) ∈ U1∩U2. Denotando por U la ar-cocomponente (obviamente abierta) de U1∩U2 que contiene a γ(1), U es semilocalmentesimplemente conexo en X. Por tanto bastara con probar la inclusion
([γ], U) ⊂ ([γ1], U1) ∩ ([γ2], U2).
Para ello pongase [γ] = [γj ?σj] ∈ ([γj], Uj), y notese que para cualquier [γ ?σ] ∈ ([γ], U)se tiene [γ ? σ] = [γj ? (σj ? σ)] ∈ ([γj], Uj), j = 1, 2.
Por tanto existe una unica topologıa en Y admitiendo a B como base (en lo quesigue, Y se entendera dotado de la misma).
A continuacion veamos que π : Y → X es recubridora.Ya sabemos que π es sobreyectiva, probemos ahora su continuidad. Como U y B son
bases de las topologıas en X e Y , respectivamente, para ello bastara con garantizar lasiguiente identidad:
π−1(U) =⋃
([γ],U)∈BU
([γ], U), (6)
donde BU := ([γ], U) : γ(1) ∈ U ⊂ B. La inclusion⋃
([γ],U)∈BU ([γ], U) ⊆ π−1(U) es
trivial por definicion de π; en efecto, si [γ ?σ] ∈ ([γ], U) entonces π([γ ?σ]) = σ(1) ∈ U .Supongamos ahora que [γ0] ∈ π−1(U), esto es, que γ0(1) ∈ U . Entonces ([γ0], U) ∈ BU ,y como [γ0] ∈ ([γ0], U) ⊂
⋃([γ],U)∈BU ([γ], U) la otra inclusion se sigue. Esto prueba que
π es continua.Nuestro siguiente objetivo sera probar que π satisface la condicion de recubrimiento.
Para ello sera importante comprobar la identidad
π(([γ], U)) = U para cualquier ([γ], U) ∈ B
(que en particular implica que π es abierta). Para hacerlo, tomemos z ∈ U y un arco σen U conectando γ(1) y z. Claramente [γ ? σ] ∈ ([γ], U) y en consecuencia π([γ ? σ]) =
94

σ(1) = z ∈ π(([γ], U)). Esto prueba que U ⊂ π(([γ], U)), y como la otra inclusion estrivial la igualdad buscada.
Teniendo en cuenta (6), π es recubridora si y solo si
π|([γ],U) : ([γ], U)→ U es un homeomorfismo para todo ([γ], U) ∈ BU .
Al ser esta aplicacion continua, abierta y sobre, bastara con garantizar la inyectividad.Supongamos que [γ ? σj] ∈ ([γ], U), j = 1, 2, y σ1(1) = π([γ ? σ1]) = π([γ ? σ2]) = σ2(1).Como σ1(0) = σ2(0) = γ(1) y σ1([0, 1]), σ2([0, 1]) ⊂ U , la semilocal simpleconexion deU garantiza que σ := σ1 ? σ2'εγ(1) en X, y por tanto que
γ ? σ2'γ ? σ ? σ2'γ ? σ1.
Esto implica que [γ ? σ1] = [γ ? σ2] como querıamos ver, y que π es recubridora.Para finalizar el teorema resta demostrar que Y es simplemente conexo. Nuestra
estrategia sera probar que
π∗(Π1(Y, [εx0 ])
)= [εx0 ],
y concluir usando el Teorema de Monodromıa (Corolario 11.8).Con este objetivo consideremos un arco γ : [0, 1] → X con γ(0) = x0, y definamos
γt : [0, 1]→ X, γt(s) = γ(ts), para cada t ∈ [0, 1]. Comprobemos que el arco
c : [0, 1]→ Y, c(t) := [γt],
es el levantamiento γ[εx0 ] vıa π.Como c(0) = [γ0] = [εx0 ] y π c = γ, basta con probar la continuidad de c. Para
ello tomemos t0 ∈ [0, 1] y comprobermos que c es continua en t0. Teniendo en cuenta ladefinicion de la topologıa en Y , es facil comprobar que
βc(t0) := (c(t0), U) : U semilocalmente simplemente conexo, γt0(1) = γ(t0) ∈ U
es una base de entornos de c(t0) en Y . Por tanto la continuidad de c en t0 pasa porgarantizar que c−1
((c(t0), U)
)es un entorno de t0 en [0, 1] para todo (c(t0), U) ∈ βc(t0).
En efecto, como γ es continua en t0 existe δ > 0 tal que γ(]t0−δ, t0+δ[∩[0, 1]) ⊂ U . Paracada t ∈]t0 − δ, t0 + δ[∩[0, 1], denotemos por σt : [0, 1]→ X, σt(s) := γ((1− s)t0 + st),y observemos que γt'γt0 ? σt. Por tanto,
c(t) = [γt] = [γt0 ? σt] ∈ ([γt0 ], U) = (c(t0), U) para todo t ∈]t0 − δ, t0 + δ[∩[0, 1]
y c es continua en t0. Ası pues c : [0, 1]→ Y es continua y c = γ[εx0 ].Para acabar, tomemos un lazo arbitrario c en Y con base el punto [εx0 ] y denotemos
por γ := π c. Como c es el levantamiento de γ con condicion inicial [εx0 ], por lo queacabamos de demostrar
c(1) = [γ1] = [γ].
Pero c(1) = [εx0 ] ya que c es un lazo en Y con base [εx0 ]. Esto prueba que π∗([c]) =[π c] = [γ] = [εx0 ] para cualquiera [c] ∈ Π1(Y, [εx0 ]), y por el Teorema de Monodromıa,que Y es simplemente conexo como querıamos demostrar.
95

Ejercicios del Tema 2
1. Consideremos la aplicacion recubridora ρ : R → S1 dada por ρ(t) = e2π ti. De-mostrar que ρ|(0,2) : (0, 2) → S1 es continua, abierta y sobreyectiva pero no esrecubridora. ¿Existe alguna otra aplicacion recubridora ψ : (0, 2)→ S1?
2. Sean ρ : X → X y ψ : X → Y aplicaciones recubridoras. Demostrar que si todaslas fibras de ψ son finitas, entonces ψ ρ : X → Y es una aplicacion recubridora.
3. Construir explıcitamente una aplicacion recubridora ρ : X → X, donde:
X = (x, y, z) ∈ R3 / z = x2 + y2 y X = (x, y, z) ∈ R3 / x2 + y2 − z2 = 1.
¿Existe una aplicacion recubridora ψ : X → X?
4. Sea X un espacio topologico conexo y G ≤ Homeo(X). Demostrar que si laproyeccion al cociente p : X → X/G es recubridora, entonces G es propiamentediscontinuo.
5. Un ovaloide es una superficie compacta y conexa S ⊂ R3 con curvatura de Gausspositiva en cada punto. Demostrar que si S es un ovaloide y N : S → S2 es unaaplicacion de Gauss de S, entonces N es un difeomorfismo. En particular S ∼= S2
(esto nos indica que cierto comportamiento de la curvatura de Gauss implica unarestriccion topologica).
6. Construir una aplicacion recubridora de dos hojas ρ : T → K, donde T es el toroy K es la botella de Klein. Deducir que R2 es el recubridor universal de K.
7. Construir una aplicacion recubridora de dos hojas ρ : C → M , donde C es elcilindro y M es la cinta de Moebius infinita. Deducir que R2 es el recubridoruniversal de M .
8. Sea ρ : X → X una aplicacion recubridora, x0 ∈ X y x0 ∈ ρ−1(x0). Supongamos
que X es arco-conexo. Demostrar que:
a) Si Π1(X, x0) es finito, entonces el numero de hojas es finito.
b) Si X es compacto y simplemente conexo entonces Π1(X, x0) es finito.
9. Sea ρ : X → X una aplicacion recubridora donde X es arcoconexo. Dados puntosx0 ∈ X y x0 ∈ ρ−1(x0), probar que ρ∗ : Π1(X, x0)→ Π1(X, x0) es un isomorfismosi y solo si ρ es un homeomorfismo.
10. (Acciones de grupos sobre conjuntos). Sea Y un conjunto no vacıo y G un grupo.Se dice que G actua sobre Y por la derecha si existe una aplicacion · : Y ×G→ Ytal que:
a) y · e = y, para cada y ∈ Y ,
b) y · (g · h) = (y · g) · h, para cada y ∈ Y y cada g, h ∈ G.
Definimos en Y la siguiente relacion: y1 ∼ y2 si y solo si existe g ∈ G tal quey2 = y1 · g. Demostrar que ∼ es una relacion de equivalencia en Y y describir lasclases de equivalencia. Denotamos por Y/G al conjunto cociente.
96

Diremos que la accion es transitiva si para cada y1, y2 ∈ Y existe g ∈ G tal quey2 = y1 · g. Esto equivale a que Y/G contiene una unica clase de equivalencia.
Dado y ∈ Y , se define Gy = g ∈ G/y · g = y. Demostrar que Gy ≤ G (elllamado subgrupo de isotropıa en y).
Fijado y0 ∈ Y , definimos la aplicacion Ψ : G → Y dada por Ψ(g) = y0 · g.Demostrar que, si la accion es transitiva, entonces Ψ induce una biyeccion Ψ :G/Gy0 → Y .
11. Sea ρ : X → X una aplicacion recubridora y f : Y → X continua, siendo Yconexo y localmente arco-conexo. ¿Existen siempre levantamientos de f si X essimplemente conexo? ¿Y si X es simplemente conexo?
12. Sea ρn : S1 → S1 la aplicacion recubridora dada por ρn(z) = zn con n ∈ Z yn 6= 0. Demostrar que hay levantamientos de ρm mediante ρn si y solo si m = nkpara algun k ∈ Z. En tal caso, se cumple que ρm = ρk, donde ρm es el unicolevantamiento de ρm con ρm(1) = 1.
13. Sea X un espacio conexo y localmente arcoconexo con Π1(X) finito. Sean f, g :X → R funciones continuas tales que f(x)2 + g(x)2 = 1, para cada x ∈ X.Demostrar que existe una funcion continua h : X → R tal que cos(h(x)) = f(x)y sen(h(x)) = g(x), para cada x ∈ X. ¿Hasta que punto es h unica?
14. (El grupo fundamental de K). Para cada n,m ∈ Z se define fn,m : R2 → R2 como:
fn,m(x, y) = (x, (−1)n y) + (n,m).
Denotemos G = fn,m / n,m ∈ Z. Se pide lo siguiente:
a) Demostrar que cada aplicacion fn,m es una traslacion o una simetrıa desli-zante.
b) Probar que G ≤ Homeo(R2) y que G es propiamente discontinuo.
c) Deducir la existencia de una aplicacion recubridora p : R2 → K, donde K esla botella de Klein. Concluir que Π1(K) ∼= G.
15. (Un espacio con grupo fundamental Zn). Sea n ∈ N con n ≥ 2. Para cada k =0, . . . , n− 1 definimos el numero θk = (2πk)/n y la aplicacion fk : S3 → S3 dadapor:
fk(z, w) = (eθk i z, eθk iw).
Denotemos Gn = fk / k = 0, . . . , n− 1. Se pide lo siguiente:
a) Demostrar que Gn es un grupo isomorfo a Zn.
b) Probar que Gn ≤ Homeo(S3) y que G es propiamente discontinuo.
c) Construir una aplicacion recubridora p : S3 → S3/Gn y concluir que Π1(S3/Gn) ∼=Zn.
16. Resolver de forma razonada las siguientes cuestiones:
a) ¿Es toda equivalencia homotopica una aplicacion recubridora? ¿Y recıproca-mente?
b) ¿Es recubridora la aplicacion ρ : S1 → S1 dada por ρ(x, y) = (x2 − y2, 2xy)?
97

c) Sea ρ : X → X una aplicacion recubridora y α ∈ Ω(X, x0). ¿Es necesaria-
mente alguno de los levantamientos de α un lazo en X?
d) ¿Existe una aplicacion continua f : S1 → R tal que e2πf(z)i = z, para cadaz ∈ S1?
e) ¿Existen aplicaciones recubridoras ρ : S1 → S2 o ρ : S2 → S1?
f ) ¿Existen aplicaciones recubridoras ρ : RP2 → S1 o ρ : S1 → RP2?
g) ¿Existe G ≤ Homeo(T ) propiamente discontinuo tal que T/G ∼= RP2?
h) Demostrar que si f : S2 → S2 es una aplicacion continua e inyectiva, entonceses un homeomorfismo.
i) Sea X un espacio arco-conexo con Π1(X) finito. Demostrar que toda aplica-cion recubridora ρ : X → X es un homeomorfismo.
j ) Demostrar que toda aplicacion continua f : Sn → S1 con n ≥ 2 es nul-homotopa.
17. Determina el recubridor universal de D \ 0 y de p ∈ R2 : 1/2 ≤ ‖p‖ ≤ 2.
18. Determina todos los recubridores de S1 y S1 × R.
19. Determina todos los recubridores de la cinta de Mobius infinita.
20. Determina el grupo de automorfismos para los siguientes recubridores:
a) ρ : R→ S1, ρ(t) = e2πıt.
b) ρ× IdR : R× R→ S1 ×R.
c) πn : S1 → S1, πn(z) = zn, n ∈ N.
d) πn × πm : S1 × S1 → S1 × S1, n, m ∈ N.
e) ρ× πn : R× S1 → S1 × S1, n ∈ N.
f ) ρ× ρ : R× R→ S1 × S1.
98

TEMA 3: Superficies topologicas
Francisco J. LopezDepartamento de Geometrıa y Topologıa
Universidad de [email protected]
El ultimo tema del curso se dedicara a estudiar en profundidad una familia impor-tante de espacios topologicos: las superficies topologicas. Nuestro objetivo principal serapresentar el teorema de clasificacion para superficies topologicas compactas. Este resul-tado descansa sobre algunos de los pilares fundamentales de la topologıa en dimension2, como el Teorema de Invarianza del Dominio o el Teorema de Rado de existencia detriangulaciones sobre superficie topologicas. Ademas, requerira de conceptos trascen-dentales para la topologıa algebraica como el de orientabilidad o el de caracterıstica deEuler.
15. Variedades topologicas: Ejemplos
El concepto central de este tema es el de variedad topologica. Aunque nosotros noscentraremos en dimension dos, formularemos la definicion con toda generalidad.
Definicion 15.1 Un espacio topologico X se dira una variedad topologica de dimen-sion n ∈ N si:
X es conexo, Hausdorff y II-Axioma de numerabilidad.
Para todo x ∈ X existe un abierto U ⊂ X conteniendo a x homeomorfo a unabierto O ⊂ Rn o a un abierto de Rn+ := (x1, . . . , xn) : xn ≥ 0.
Si X es una variedad topologica n-dimensional, a los pares (U,Φ) formados por unabierto U de X y un homeomorfismo Φ: U → O sobre un abierto euclidiano O ⊂ Rn oRn+, se le llamara cartas o parametrizaciones en X.
Hay que hacer algunos comentarios y matizaciones a la anterior definicion. Supongamosque X es una variedad topologica n-dimensional.
Algunos autores no exigen conexion en la definicion de variedad topologica. Noobstante, salvo reducirnos a componentes conexas la formulacion es equivalente.
Existen espacios topologicos que satisfacen todas las propiedades explicitadas enla Definicion 15.1, excepto el II-Axioma de Numerabilidad. No seran consideradosvariedades topologicas.
Una carta (U,Φ) alrededor de un punto x ∈ X se dira centrada si Φ(x) = 0 ∈ Rn.
La restriccion de una carta a un abierto de su dominio es tambien una carta. Portanto, los dominios de las cartas son una base de la topologıa de X.
Todo punto x ∈ X admite una carta (U,Φ) de forma que Φ(U) es una bolaB euclidiana de Rn o una semibola abierta B ∩ Rn+ de Rn+. Salvo componer contraslaciones y homotecias, podemos asumir que Φ(U) es la bola unidad Bn(0, 1) ⊂Rn o la semibola Bn(0, 1) ∩ Rn+.
99

X es localmente arcoconexa, localmente compacta y localmente simplemente co-nexa (luego semilocalmente simplemente conexa), ya que ası es la topologıa eu-clidiana.
Toda variedad topologica admite recubridor universal; Teorema 14.8.
El grupo fundamental de una variedad topologica es numerable; Teorema 7.15.
Existen dos resultados avanzados de Topologıa Algebraica que nos ayudan a comprenderlas profundas implicaciones topologicas de la Definicion 15.1. Nos referimos al Teoremade Invarianza de la Dimension y al Teorema de Invarianza del Dominio. Los enuncia-remos a tıtulo informativo, ya que su prueba general esta fuera del alcance de estecurso.
Teorema 15.2 (Invarianza de la dimension) Sean U ⊂ Rn y V ⊂ Rm dos abiertoseuclidianos no vacıos. Si U es homeomorfo a V entonces n = m. El mismo enunciadoes valido para abiertos U ⊂ Rn+ y V ⊂ Rm+ .
El mensaje de este teorema es que los codominios euclidianos de las cartas en unavariedad topologica han de ser todos ellos abiertos del mismo espacio euclidiano. Portanto, en la Definicion 15.1 no hay necesidad de exigir que todas las cartas vayan almismo Rn, ya que este hecho esta garantizado. Redordemos que el Teorema 8.3 delTema 2 demuestra este resultado en el caso particular n = 1 o 2.
Teorema 15.3 (Invarianza del dominio) Sean X una variedad topologica n-dimensionaly U ⊂ X un subespacio topologico de X. Si U es homeomorfo a un abierto euclidianoO ⊂ Rn entonces U es un abierto de X.
Como consecuencia, si (U,Φ) es una carta en X y p ∈ U un punto tal que
Φ: U → Φ(U) = O ⊂ Rn+ y Φ(p) ∈∈ Bd(Rn+) := xn = 0,
entonces para toda carta (V,Ψ) en X con p ∈ V se tiene que
Ψ(V ) ⊂ Rn+ y Ψ(p) ∈ Bd(Rn+).
Este teorema expresa que todo subconjunto de una variedad topologica n-dimensionalhomeomorfo a un abierto euclidiano de Rn ha de ser abierto en la variedad. En particu-lar, la nada trivial propiedad de que que los subespacios euclidianos de Rn homeomorfosa abiertos de Rn han de ser abiertos de Rn. La principal y crucial consecuencia del Teo-rema de Invarianza del Dominio es que tiene sentido definir el borde de una variedad.Para entenderlo enunciemos el siguiente corolario.
Corolario 15.4 Sea X una variedad topologica n-dimensional y p ∈ X. Admitamosque existe una carta (U,Φ) en X de forma que
Φ: U → Φ(U) = O ⊂ Rn+ y Φ(p) ∈ Bd(Rn+).
Entonces para cualquiera carta (V, ψ) de x en X se tiene ψ(V ) = O ⊂ Rn+ y ψ(p) ∈Bd(Rn+). En ese caso p se dira un punto borde de X.
Observacion 15.5 Para dimension n = 2, el Corolario 15.4 es tambien consecuenciadel Corolario 9.7.
100

Definicion 15.6 Si Xes una variedad topologica n-dimensional, denotaremos por Bd(X) ⊂X al subconjunto cerrado formado por los puntos borde de X. Tambien diremos queInt(X) := X \ Bd(X) es el conjunto de los puntos interiores de X.
La siguiente proposicion es muy util.
Proposicion 15.7 Sea f : X → Y un homeomorfismo local sobreyectivo. Entonces
X es variedad topologica n-dimensional ⇐⇒ Y es variedad topologica n-dimensional.
En particular, la tesis es valida si f : X → Y es un recubridor.
Demostracion : Sean y ∈ Y y x ∈ f−1(y). Siempre podemos encontrar entornos abiertosU de x y V de y de forma que f |U : U → V es un homeomorfismo. Teniendo en cuentaque los dominios de las cartas en una varidedad son una base de la topologıa, no implicaperdida de generalidad suponer que U o V es homeomorfo a un abierto de Rn o Rn+,depeniendo de que sea X una variedad topologica o lo sea Y . Por tanto ambos abiertosson homeomorfos a un abierto de Rn, lo que concluye la prueba.
Ejercicio 15.8 Los siguientes espacios son variedades topologicas:
Un abierto de una variedad topologica n-dimensional es una variedad topologican-dimensional: basta restringir cartas a la interseccion con el abierto.
Rn, n ∈ N, es una variedad topologica n-dimensional recubierta por una solacarta: la aplicacion IdRn : Rn → Rn.
Rn+ es una variedad topologica n-dimensional con borde xn = 0 recubierta poruna sola carta: la aplicacion IdRn+.
El disco unidad cerrado D := p ∈ R2 : ‖p‖ ≤ 1 es una variedad topologica2-dimensional con borde S1.
S1 × [0, 1] es una variedad topologica 2-dimensional con borde S1 × 0, 1.
Sn, n ∈ N, es una variedad topologica n-dimensional recubierta por dos cartas:las proyecciones estereograficas desde el polo Norte y el polo Sur.
RPn, n ∈ N, es una variedad topologica n-dimensional. Tengase en cuenta queSn recubre a RPn.
El producto X × Y de variedades topologicas X e Y de dimensiones n y m, res-pectivamente, es una variedad topologica de dimension n+m con borde (Bd(X)×Y )∪(X×Bd(Y )): el producto de cartas de los factores es una carta en la variedadproducto.
Todas las superficies regulares en R3 son variedades topologicas 2-dimensionales.
El estudio de las variedade topologicas es uno de los ejes centrales de la Topologıa yla Geometrıa. Los resultados mas ambiciosos en este contexto son los de clasificacion, engeneral de bastante sofisticacion. Solo en dimensiones uno y dos las respuestas obtenidasestan a nuestro alcance. En este curso nos centraremos el el caso 2-dimensional bajo lahipotesis de compacidad.
La clasificacion de las variedades topologicas 1-dimensionales no requiere de granaparato matematico. Por falta de tiempo omitiremos los detalles de la misma y simple-mente enunciaremos el siguiente:
Teorema 15.9 Salvo homeomorfismos, las unicas variedades topologicas 1-dimensionalesson S1, R, R+ = [0,+∞[ y [0, 1].
101

16. Superficies topologicas
Los objetos que van a centrar nuestro estudio se presentan en la siguiente definicion.
Definicion 16.1 Una superficie topologica es una variedad topologica 2-dimensional.
Ejemplos de superficies topologicas son R2, S2, el Toro, el cilindro, la botella de Klein,la cinta de Mobius, todas las superficies regulares en R3,...
Observacion 16.2 Dada una superficie topologica S:
Bd(S) es cerrado en S, y en consecuencia el Int(S) es abierto en S.
Cada componente conexa de Bd(S) es una variedad topologica 1-dimensional sinborde, luego homeomorfa a S1 o R.
Si S es compacta entonces Bd(S) es compacto y consiste en una coleccion finitade curvas de Jordan en S disjuntas dos a dos.
Los homeomorfismos respetan el borde de las superficies. En particular, si dossuperficies son homeomorfas sus bordes son homeomorfos por restriccion del ho-meomorfismo global.
La compacidad es una propiedad topologica que hace mucho mas manejable la fa-milia de las superficies. Nuestra intencion es presentar una familia lo mas vasta posiblede ejemplos de superficies topologicas compactas. La siguiente proposicion es una he-rramienta bastante util para este objetivo. Vamos a trabajar con esquemas binariossobre un conjunto de ındices U infinito numerable. Es conveniente tener presentes lasconstrucciones de la Seccion 3.3.
Proposicion 16.3 La realizacion canonica Sω de un esquema binario ω = bε(1)1 . . . b
ε(k)k
es una superficie topologica compacta con Bd(Sω) = σω(Υ), donde σω : D → Sω es laidentificacion asociada a la representacion canonica de ω (ver Definicion 3.20) y Υ ⊂ S1
es el cierre topologico de p ∈ S1 : ]σ−1ω (σω(p)) = 1. En particular,
Bd(Sω) 6= ∅ ⇐⇒ ω es un esquema binario mixto.
Demostracion : De la Proposicion 3.21 se sigue que Sω es Hausdorff y II-Axioma deNumerabilidad. Resta comprobar que Sω es localmente euclidiano.
Sea p ∈ Sω, y llamemos Up(ε) al bierto σω-saturado de D dado por
x ∈ D : dist(x, σ−1ω (p)) < ε.
Llamemos Cp(ε) := x ∈ D : dist(x, σ−1ω (p)) = ε y Υp(ε) := Υ ∩ Up(ε).
La simetrıa de la representacion canonica y el hecho de que ω sea binario implican,para ε suficientemente pequeno, que:
(a) Si p ∈ σω(D) entonces Up(ε) es un disco abierto y σω|Up(ε) : Up(ε) → σω(Up(ε)) esun homeomorfismo.
(b) Si p ∈ σω(S1 \ Υ) entonces Up(ε) = ∪kj=1Xj, k > 1, donde X1, . . . , Xk son discos
topologicos compactos disjuntos dos a dos en D con:
∪kj=1Bd(Xj) = Cp(ε) ∪ (Up(ε) ∩ S1) y(∪kj=1 Xj
)∩Υ = ∅.
102

σω|Xj : Xj → σω(Xj) es un homeomorfismo, j = 1, . . . , k.
Salvo reordenacion,
γj := σω(Xj+1) ∩(∪ji=1 σω(Xi)
)= Bd
(σω(Xj+1)
)∩ Bd
(∪ji=1 σω(Xi)
)es un arco de Jordan que contiene a p para todo j = 1, . . . , k − 1, siendoademas p interior a γk−1.
Por tanto, la identificacion σω|Up(ε) : Up(ε)→ σω(Up(ε)
)realiza el pegado cıclico de
los k discos X1, . . . , Xk por los 2k − 2 arcos de Jordan borde ∪k−1j=1σ
−1ω (γj). De la
Proposicion 3.10 se infiere que: σω(Up(ε)
)es un disco topologico abierto.
(c) Si p ∈ σω(Υ) entonces Up(ε) = ∪kj=1Xj, donde X1, . . . , Xk son discos topologicos
compactos disjuntos dos a dos en D con:
∪kj=1Bd(Xj) = Cp(ε) ∪ (Up(ε) ∩ S1) y(∪kj=1 Xj
)∩Υ = Υp(ε).
σω|Xj : Xj → σω(Xj) es un homeomorfismo, j = 1, . . . , k.
Salvo reordenacion:
• Xj ∩Υ = p, j 6= 1, k.
• γ := X1 ∩ Υ = Bd(X1) ∩ Υ y γ′ := Xk ∩ Υ = Bd(Xk) ∩ Υ son arcos deJordan que se cortan en p como extremo comun, siendo Υp(ε) = γ ∪ γ′.• γj := σω(Xj+1) ∩
(∪ji=1 σω(Xi)
)= Bd
(σω(Xj+1)
)∩ Bd
(∪ji=1 σω(Xi)
)es
un arco de Jordan que tiene a p como extremo y unico punto en comuncon γ ∪ γ′, para todo j = 1, . . . , k − 1.
En este caso la identificacion σω|Up(ε) : Up(ε) → σω(Up(ε)
)realiza el pegado de
los k discos X1, . . . , Xk por los arcos de Jordan borde ∪k−1j=1σ
−1ω (γj) y existe un
homeomorfismo σω(Up(ε)
)→ D ∩ R2
+ que aplica σω(Υp(ε)) en ]− 1, 1[×0.
Esto prueba que Sω es localmente euclidiano, y por tanto, una superficie topologica.Solo cuando Υ 6= ∅, esto es, solo cuando ω sea mixto, puede darse la opcion (c) y lasurperficie Sω tiene por borde σω(Υ). Esto concluye la proposicion.
Como consecuencia del Corolarios 9.11 y 9.14 (ver las Definiciones 9.10 y 9.12), laProposicion 16.3, y el hecho de que el numero de componentes conexas del borde deuna superficie es un invariante topologico, tenemos el siguiente:
Corolario 16.4 Las superficies compactas en la siguiente lista son dos a dos no ho-meomorfas:
Sn : n ∈ N∪0∪ S∗n : n ∈ N∪ Sn,k : (n, k) ∈ (N∪0)×N∪ S∗n,k : (n, k) ∈ N2
16.1. Triangulaciones de superficies
Una vez conocida una familia amplia de ejemplos, es natural preguntarse por resul-tados de clasificacion de superficies topologicas compactas. La respuesta a este problemano es sencilla y requiere de cierta preparacion y lenguaje.
Definicion 16.5 Un triangulo topologico es un par formado por un disco topologicocompacto T y tres puntos distintos v1, v2, v3 destacados en la curva de Jordan Bd(T ).
Si (T, v1, v2, v3) es un triangulo topologico:
103

Los puntos vj, j = 1, 2, 3 se llamaran vertices de T .
Si i, j, h = 1, 2, 3 y h ∈ 1, 2, 3, el arco de Jordan lh en Bd(T ) uniendo losvertices vi, vj y no incidente con vh sera referido como el lado de T determinadopor vi y vj. Obviamente T tiene tres lados l1, l2, l3.
Si no hay ambiguedad en la determinacion de los vertices, T indicara indistintamentetanto al triangulo (T, v1, v2, v3) como al disco topologico compacto subyacente.
Si T es un trıangulo y l ⊂ T (v ∈ T ), la expresion l ≤ T (v ≤ T ) indicara que les un lado de T (v es un vertice de T ). Analogamente, si l es un lado de T y v ∈ l, laexpresion v ≤ l indicara que v es un vertice de T en l.
Denotaremos por
F (T ) := X al conjunto formado por la unica cara de T ,
E(T ) = l1, l2, l3 al conjunto formado por los lados de T , y
V (T ) = v1, v2, v3 al conjunto formado por los vertices de T .
Definicion 16.6 (Orientacion en un triangulo topologico) Dado un triangulo to-pologico (T, v1, v2, v3), una orientacion de T es una ordenacion cıclica de sus vertices.Hay dos orientaciones posibles, a saber:
v1 → v2 → v3 → v1, que se representara por (v1, v2, v3) ≡ (v2, v3, v1) ≡ (v3, v1, v2)
y
v2 → v1 → v3 → v2, que se representara por (v2, v1, v3) ≡ (v1, v3, v2) ≡ (v3, v2, v1).
Un triangulo orientado es el par formado por un triangulo (T, v1, v2, v3) junto conuna orientacion (vi, vj.vh) del mismo, y se denotara (T, (vi, vj.vh)).
Tambien podemos orientar los lados de T fijando una ordenacion de sus vertices oextremos, este concepto ya se introdujo en la Definicion 3.3.
Una orientacion (vi, vj.vh) de T induce de forma narual orientaciones en los ladosde T de acuerdo con el siguiente criterio:
(vj, vh) en li, (vh, vi) en lj, (vi, vj) en lh.
Estas orientaciones explicitadas de los lados de T se diran compatibles con la orienta-cion global (vi, vj.vh) de T y viceversa.
Dos triangulos orientados intersecandose en un lado comun l se diran compatible-mente orientados si inducen orientaciones opuestas sobre l.
Existe una alternativa topologica, que en algun momento nos dara ventaja, a la defini-cion combinatoria de orientacion para un triangulo.
En efecto, consideremos un disco topologico compacto arbitrario X y fijemos unpunto p0 ∈ Bd(X), que para lo que sigue jugara un papel meramente auxiliar. Paracada p ∈ Int(X), el grupo fundamental Π1(X \p) ≡ Π1(X \p), p0) es cıclico infinitoy por tanto tiene dos generadores, que con notacion adivitiva denotaremos ap y −ap:
Π1(X \ p) = Z(ap) = Z(−ap).
Podemos elegir como representante de la clase de homotopıa ap un lazo αp : [0, 1]→ Xbasado en p0 tal que:
104

αp([0, 1]) = Bd(X).
αp|[0,1[ es inyectiva.
Si el subındice indica el espacio donde se toma la clase de homotopıa, con este lenguajeap = [αp]X\p y [αp]X\p = −ap. Si tomamos otro punto q ∈ Int(X), es claro queαq = αp ya que [αp]X\q genera igualmente Π1(X \ q) ≡ Π1(X \ q, p0). En otraspalabras, existe un lazo (con base p0)
αX : [0, 1]→ Bd(X) ⊂ X
tal que [αX ]X\q genera Π1(X \ q) para todo q ∈ Int(X), y lo mismo ocurre con αX .
Definicion 16.7 Por definicion,
[αX ] := [αX ]X\q : q ∈ Int(X) y − [αX ] := −[αX ]X\q : q ∈ Int(X)
se diran lo generadores universales de la familia de grupos fundamentales
Π1(X∗) := Π1(X \ q) : q ∈ Int(X).
Supongamos ahora queX es un triangulo topologico T y elijamos un generador universal[α] de Π1(T ∗). Si V (T ) = α(tj) : j = 1, 2, 3 con 0 ≤ t1 < t2 < t3 < 1, convenimos que[α] determina la orientacion
(α(t1), α(t2), α(t3)
). Recıprocamente, una orientacion de T
determina unıvocamente un sentido de recorrido de Bd(T ) de acuerdo a ese criterio, ypor tanto un generador universal de la familia Π1(T ∗).
Definicion 16.8 Dado un triangulo topologico T , una orientacion en T es un genera-dor universal [α] de Π1(T ∗).
Redundando con estas ideas, es evidente que una orientacion de un subarco deJordan γ dentro de un arco de Jordan γ′ induce de forma canonica una orientacion enγ′ compatible. Basta observar que γ′ es homeomorfo a [0, 1] y entender esta idea sobreel intervalo [0, 1], donde la orientacion (ordenacion de extremos) se interpreta como unsentido de recorrido del intervalo vıa una parametrizacion. Por tanto, para orientar unlado l de un triangulo topologico T basta con orientar cualquier subarco de Jordan γde l. La unica orientacion en T compatible con esta orientacion inducida en l se dirala inducida por el subarco orientado γ en T , y recıprocamente una orientacion en Tinduce otra en cualquier subarco de Jordan de sus lados por ese criterio.
Definicion 16.9 Un triangulo geometrico en R2 es la envolvente convexa de tres puntosafinmente independientes. Si v1, v2, v3 son los vertices de un triangulo geometrico T enR2, la orientacion (v1, v2, v3) se dira positiva o contraria al sentido de recorrido de lasagujas del rejoj si
det(v2 − v1, v3 − v1) > 0.
En otro caso se dira negativa o a favor de las agujas del rejoj.
Si T1, T2 ⊂ R2 son dos triangulos geometricos orientados positivamente e incidentes enun lado l, el algebra lineal nos dice que T1 y T2 inducen orientaciones opuestas en l, ypor tanto, que T1 y T2 estan compatiblemente orientados.
Definicion 16.10 Dada una superficie topologica compacta S, una triangulacion T deS es una familia finita de triangulos topologicos satisfaciendo:
105

(i) T es un subespacio topologico de S para todo T ∈ T .
(ii) Si T1, T2 ∈ T son triangulos distintos, entonces T1 ∩ T2 es el vacıo, un verticecomun o un lado comun.
(iii) ∪T∈T T = S.
Dos triangulos distintos de una triangulacion de S que compartan solo un vertice sediran incidentes en ese vertice. De igual forma, si comparten un lado se diran contiguoso incidentes en ese lado.
Un par (S, T ) formado por una superficie compacta S y una triangulacion suya Tse le referira como una superficie (compacta) triangulada.
Si (S, T )es una superficie compacta triangulada, llamaremos:
F (T ) := ∪T∈T F (T ) al conjunto de todos las caras de T ,
E(T ) := ∪T∈TE(T ) al conjunto de todos los lados de T , y
V (T ) := ∪T∈T V (T ) al conjunto de todos los vertices de T .
Las triangulaciones se comportan bien respecto a los homeomorfismos, en el sentido deque si H : S1 → S2 es un homeomorfismo entre superficies topologicas compactas y Tes una triangulacion de S1, entonces
H(T ) := H(T ) : T ∈ T
es una triangulacion de S2. Ha de entenderse que los vertices de H(T ) son las imagenespor H de los vertices de T para todo T ∈ T , esto es, que H aplica unıvocamente loslados y vertices de T en los lados y vertices de H(T ).
El enunciado de la siguiente proposicion es muy natural, aunque su prueba no es enabsoluto trivial.
106

Proposicion 16.11 Si (S, T ) es una superficie compacta triangulada entonces:
(a) T \ Bd(T ) es un abierto de S para todo T ∈ T .
(b) Para todo l ∈ E(T ), existen a lo mas dos triangulos de T incidentes con l. Si solohay uno entonces l ⊂ Bd(S), y si hay dos entonces Int(l) ⊂ Int(S).
(c) Si v ∈ V (T ), la estrella de v, definida como el conjunto Est(v) := ∪v≤T∈T T ,es un disco topologico compacto (cuando sea necesario enfatizar la triangulacionescribiremos EstT (v)). Ademas, si lv(T ) denota al unico lado de T no incidentecon v para cada T ∈ T contenido en Est(v), entonces:
Est∗(v) := ∪kj=1
(Tj \ lv(Tj)
)es un abierto en S conteniendo a v.
v ∈ Int(S) si y solo sı todo lado l ∈ E(T ) con v ≤ l es incidente con dostriangulos distintos de Est(v).
Demostracion : Como T \ Bd(T ) es homeomorfo al disco abierto D, item (a) es conse-cuencia inmediata del Teorema de Invarianza del Dominio; ver Teorema 15.3.
Para probar (b), tomemos l ∈ E(T ) y consideremos la familia T1, . . . , Tk de todoslos triangulos de T incidentes con l. Hemos de comprobar que k ≤ 2.
Primero observemos que
A := Int(l) ∪(∪kj=1
(Tj \ Bd(Tj)
))es un abierto en S. En efecto, como por (a) el conjunto ∪kj=1
(Tj \ Bd(Tj)
)es abierto
en S, basta comprobar que cada punto de Int(l) es interior a A en S. De no ser ası,como S es II-Axioma de Numerabilidad podrıamos encontrar una sucesion de puntospnn∈N ⊂ S\A convergiendo a un punto de p0 ∈ Int(l). Teniendo en cuenta que S\A =⋃T /∈T1,...,Tk T es compacto, luego cerrado en S por ser esta Hausdorff, inferirıamos que
x0 ∈ S \A. Esto implicarıa que p0 ∈ T para algun T /∈ T1, . . . , Tk, y como T1, . . . , Tkson todos los triangulos de T conteniendo a l, que p0 /∈ Int(l), una contradiccion.
Por otra parte, si consideramos el triangulo ∆1 con vertices (0, 0, 1), (0, 0,−1),(0, 1, 0) en R3 y sus girados respecto del eje x3
∆j := (e2π(j−1)ı/kz, x3) : (z, x3) ∈ ∆ ⊂ C× R ≡ R3, j = 1, . . . , k,
es facil ver que A = ∪kj=1Tj∼= ∆ := ∪kj=1∆j; basta construir homeomorfismos Tj → ∆j
vıa el Corolario 3.6, j = 1, . . . , k, que coincidan sobre l, y fusionarlos topologicamentede forma natural para construir un homeomorfismo global entre A y ∆.
Concluimos que A ∼= ∆0 := Int(l0)∪(∪kj=1
(|∆j|\Bd(|∆j|)
)), donde l0 := (0, 0)×
[−1, 1]. Como A es un abierto de una superficie topologica, ∆0 dotado de la topologıaeuclidiana ha de ser una superficie topologica. El Corolario 9.7 implica que k ≤ 2,l ⊂ Bd(S) si k = 1 e Int(l) ⊂ Int(S) si k = 2. Esto prueba (b).
107

Para acabar demostremos (c). Consideremos v ∈ V (T ) y elijamos un trianguloT1 ∈ E(T ) incidente con v. Inductivamente elijamos Tj ∈ T de Est(v) y lj−1 ∈ E(Tj)tal que v ≤ lj−1 y lj−1 ∈
(∪j−1i=1 E(Ti)
)\ l1, . . . , lj−1. Tras un proceso necesariamente
finito generamos una secuencia maximal de triangulos T1, . . . , Tk1 y lados l1, . . . , lk1−1
satisfaciendo
(i) Tj esta en Est(v) para todo j.
(ii) v ≤ lj ∈ E(T ) y lj ⊂ Tj+1 ∩(∪ji=1 Ti
), j = 1, . . . , k1 − 1.
Por la Proposicion 3.10, C1 := ∪k1j=1Tj es un disco topologico compacto. Si cada l ∈∪k1j=1E(Tj) tal que v ≤ l es incidente con exactamente dos triangulos de la lista T1, . . . , Tk1,entonces v ∈ C∗1 := C1\Bd(C1). En caso contrario existiran dos triangulos en T1, . . . , Tk1,que salvo reindexacion podemos suponer son T1 y Tk1 , de forma que los lados v ≤ l0 ≤ T1
y v ≤ lk1 ≤ Tk1 distintos de l1 y lk1−1, respectivamente, no son incidentes a ningun otrotriangulo de la lista, y por tanto estan contenidos en Bd(S) por el item (b). En estecaso definiremos
C∗1 :=(C1 \ Bd(C1)
)∪ (Int(l0) ∪ Int(lk1)) ∪ v.
Si hubiese un triangulo T 21 ∈ T \T1, . . . , Tk1 incidente con v, repetirıamos formalmente
el argumento anterior. Teniendo en cuenta (b), podrıamos generar una nueva secuenciamaximal de triangulos T 2
1 , . . . , T2k2∈ T \ T1, . . . , Tk1 satisfaciendo (i) y (ii), de forma
que C2 := ∪k2j=1T2j es un disco topologico compacto, y definir C∗2 como antes. Este
proceso se repite cuantas veces sea necesario hasta agotar todos los triangulos incidentescon v y completar Est(v). La descripcion final serıa Est(v) = ∪rj=1Cr, donde cadaCj es un disco topologico compacto union de trıangulos de T incidentes con v conCj ∩ Ci = v, i 6= j. Razonando como en la prueba del item (b), E0 := ∪rj=1C
∗j es
un abierto de S conteniendo a v como punto interior. Omitimos los detalles. Si r > 1llegarıamos a contradiccion ya que E0 es una superficie topologica que se desconectalocalmente al eliminar un punto, a saber v, algo imposible al ser localmente euclidiana.
Por tanto r = 1, Est(v) = C1 es un disco topologico y C∗1 es un abierto en Sconteniendo a v. Ademas, si cada l ∈ ∪k1j=1E(Tj) con v ≤ l es incidente con exactamentedos triangulos de la lista T1, . . . , Tk1, entonces v ∈ Int(S) ya que v ∈ C∗1 = C1\Bd(C1)es un disco abierto. En caso contrario, y con la notacion de arriba, (Int(l0)∪ Int(lk1))∪v ⊂ Bd(S) por el item (b). Esto prueba (c) y la proposicion.
Definicion 16.12 Dadas dos triangulaciones T y T ′ de una superficie compacta S, sedira que T ′ es una subdivision de T , y se escribira T ′ ≺ T , si para todo T ′ ∈ T ′ existeT ∈ T tal que T ′ ⊂ T .
La siguiente proposicion muestra que no es difıcil construir subdivisiones de unatriangulacion.
Proposicion 16.13 Sea (S, T ) una superficie compacta triangulada, sea V un recubri-miento por abiertos de S y sea A ⊂ S un conjunto finito de puntos.
Entonces existe T0 ≺ T tal que
A ⊂ V (T0) y
para todo v ∈ V (T0) existe V ∈ V tal que EstT0(v) ⊂ V ,
donde EstT0(·) expresa estrella segun T0.
108

Demostracion : Tomemos T ∈ T , y reparemos en que como T ∼= D, podemos encontrarun homeomorfismo FT : T → ∆ := (x, y) ∈ [0, 1]2 : x+ y ≤ 1 que aplique los verticesde T en los vertices del triangulo geometrico ∆; tengase en cuenta el Corolario 3.6 y laProposicion 3.22.
Nuestro primer objetivo es construir una triangulacion T1 de S tal que
T1 ≺ T ,
para todo v ∈ V (T1) existe V ∈ V tal que EstT1(v) ⊂ V y
](A \ V (T1)) ≤ ]A− 1.
La construccion se hara en dos etapas.En la primera consiste en subdividir cada T ∈ T . Para ello realizamos una triangu-
lacion ∆T de ∆ por triangulos geometricos planos de forma que cada vertice v ∈ V (∆T )tenga su estrella Est∆T
(v) segun ∆T contenida en FT (V ∩ T ) para algun V ∈ V . Estose puede hacer por razonamientos geometricos elementales como las subdivisiones ba-ricentricas sucesivas, hasta logar que los triangulos de ∆T tengan diametro menor queε/2 con ε el numero de Lebesgue del recubrimiento abierto FT (V ∩ T ) : V ∈ V de ∆.La subdivision buscada de T no es sino F−1
T (∆T ).A continuacion llamemos T ′ a la coleccion de triangulos topologicos ∪T∈T F−1
T (ΘT )en S, que no es necesariamente una triangulacion de S.
En la segunda etapa, para cada triangulo T ∈ T ′ elijamos un punto vT ∈ Int(T )∩Ao cualquier vT ∈ Int(T ) si Int(T )∩A = ∅. Como antes, consideremos un homeomorfismoFT : T → ∆ respetando vertices, y tracemos segmentos dentro de ∆ que unan FT (vT )con los puntos en V (∆)∪FT
((A∪ V (T ′))∩Bd(T )
). Esta configuracion determina una
triangulacion ∆T de ∆ con vertices V (∆)∪FT((A∪V (T ′))∩Bd(T )
)∪FT (vT ). Defi-
namos T1 :=⋃T∈T ′ F
−1T (∆T ), que es una triangulacion de S de acuerdo a la Definicion
16.10. Claramente T1 ≺ T , todo triangulo de T1 esta contenido en un abierto de V y](A \ V (T1)) ≤ ]A− 1.
Si A\V (T1) 6= ∅ reiteramos el procedimiento para construir una subdivision T2 ≺ T1
tal que todo triangulo de T2 esta contenido en un abierto de V y ](A\V (T2)) ≤ ]A− 2.
Tras un numero finito de pasos llegarıamos a una subdivision T0 ≺ T satisfaciendo laspropiedades deseadas.
Definicion 16.14 (Caracterıstica de Euler de una triangulacion) Sea T una trian-gulacion de una superficie topologica S. Al numero entero
χT (S) := ]F (T )− ]E(T ) + ]V (T )
se le llamara la caracterıstica de Euler de la triangulacion T de S.
Reparemos en que cada punto v ∈ V (T ) puede ser vertice de varios triangulos de T , yanalogamente cada arco de Jordan l ∈ E(T ) puede ser lado de mas de un trıangulo deT . El calculo correcto de χT (S) no ha de tener en cuenta esas multiplicidades, y tantocada vertice v ∈ V (T ) como cada lado l ∈ E(T ) han de contarse una sola vez.
Definicion 16.15 (Orientabilidad de una triangulacion) Una triangulacion T deuna superficie S se dice orientable si es posible elegir una orientacion en cada uno desus triangulos de forma que cada para de ellos contiguos (con un lado comun) estencompatiblemente orientados, esto es, induzcan en su lado comun orientaciones opues-tas. Si T es orientable, una orientacion global en T sera una eleccion de orientaciones
109

en todos y cada uno de sus triangulos de T de forma que cada dos contiguos satisfaganla anterior condicion de compatibilidad. En ese caso tambien diremos que es posibleelegir una orientacion global compatible de los triangulos de T . Obviamente si T esorientable entonces admite dos orientaciones globales.
En caso de que no sea posible elegir una orientacion global compatible de los triangu-los de T se dira que T es no orientable.
Como veremos mas adelante cualquier superficie compacta admite una triangula-cion. Serıa deseable que dos triangulaciones distintas de una misma superficie compactacompartiesen caracterıstica de Euler y caracter de orientabilidad. No obstante, la prue-ba de este hecho requerira de bastante reflexion. Solo despues de superar este obstaculopodremos definir con propiedad la caracteristica de Euler y el concepto de orientabili-dad de una superficie topologica compacta como la de cualquiera de sus triangulaciones.Para discos topologicos sı que podemos probar el siguiente resultado:
Lema 16.16 Todo disco topologico compacto es triangulable. Si X es un disco to-pologico compacto y T = T1, . . . , Tk cualquiera triangulacion de X, entonces exis-te una coleccion de triangulos geometricos ∆1, . . . ,∆k en R2 y un homeomorfismoF : X → ∆ := ∪kj=1∆j tal que F (Tj) = ∆j para todo j = 1, . . . , k.
En particular, T es orientable y χT (X) = 1.
Demostracion : Un disco topologico compacto es homeomorfo a D, luego a cualquieratriangulo por la Proposicion 3.22 o el Teorema 3.23. Por tanto es triangulable.
Consideremos un disco topologico compacto X y una triangulacion T de X. Proba-remos el resultado por induccion en el numero k de triangulos en T .
Si k = 1 el resultado es trivial ya que, elejido un triangulo geometrico ∆1 en R2,siempre existe un homeomorfismo F : X = T1 → ∆1 con F (V (T1)) = V (∆1), ver Pro-posicion 3.22 y el Corolario 3.6. Supongamos que el resultado es cierto para cualquieratriangulacion de un disco topologico compacto con una cantidad de triangulos menor oigual que k − 1, k > 1.
Consideremos un disco topologico compacto X y una triangulacion T de X conk > 1 triangulos. Veamos que podemos ordenar la triangulacion T = T1, . . . , Tk deforma que
(i) Xj := ∪ji=1Ti es un disco topologico compacto y
(ii) lj−1 := Tj ∩Xj−1 es un arco de Jordan
para todo j = 1, . . . , k − 1 (item (ii) es vacıo para j = 1). En efecto, tomemos T1 untriangulo cualquiera con un lado en Bd(X). Supongamos que hemos elegido T1, . . . , Tjsatisfaciendo (i) y (ii), j < k. Observemos que Bd(X) * Xj. En efecto, como Xj ⊂ Xel Teorema de Invarianza del Dominio (ver Teorema 15.3) implica que Bd(X) ∩Xj ⊂Bd(Xj). Por tanto, si Bd(X) ⊆ Xj entonces Bd(X) serıa un subconjunto abierto ycerrado en Bd(Xj) ∼= S1, luego Bd(Xj) = Bd(X). Teniendo en cuenta de nuevo elTeorema 15.3 deducirıamos que Int(Xj) es igualmente abierto y cerrado en Int(X), ypor tanto que Xj = X, una contradiccion.
Ası pues Bd(X) * Xj y existe un triangulo Tj+1 ∈ T distinto de los Ti, i ≤ j, conalgun lado en Bd(X) y que comparte con Xj un arco de Jordan lj, ya sea un lado o launion de dos lados. La Proposicion 3.10 garantiza que Xj+1 = Xj ∪ Tj+1 es un discotopologico, lo que concluye el proceso.
110

Usando esta ordenacion T1, . . . , Tk de los triangulos de T , construyamos de formainductiva una secuencia
Fj : Xj → ∪ji=1∆i : j = 1, . . . , k
de aplicaciones satisfaciendo
∆1, . . . ,∆j son triangulos geometricos en R2,
Fj : Xj → ∪ji=1∆i es un homeomorfismo,
Fj(Ti) = ∆i y Fj(V (Ti)) = V (∆i), i = 1, . . . , j,
Fj|Xj−1= Fj−1,
para todo j = 1, . . . , k (la ultima condicion es vacıa para j = 1).En efecto, elijamos un triangulo geometrico ∆1 en R2, y construyamos vıa la Pro-
posicion 3.22 y el Corolario 3.6 un homeomorfismo F1 : T1 → ∆1 F1(V (T1)) = V (∆1).Supongamos construidos Fh : Xh → ∪hi=1∆i : h = 1, . . . j, j < k, satisfaciendo
las anteriores condiciones. Hemos de encontrar un nuevo triangulo geometrico ∆j+1 yun homeomorfismo Fj+1 : : Xj+1 → ∪j+1
i=1 ∆i extension de Fj tal que Fj+1(Ti) = ∆i yFj+1(V (Ti)) = V (∆i), i = 1, . . . , j + 1.
Si lj = Tj+1 ∩Xj es un lado de Tj+1, tomemos cualquier triangulo geometrico ∆j+1
en R2 con ∆j+1 ∩ (∪ji=1∆i) = Fj(lj) y cualquier homeomorfismo
H : Tj+1 → ∆j+1 con H|lj = Fj|lj y H(V (Tj+1)) = V (∆j+1)
construido vıa la Proposicion 3.22 y el Corolario 3.6. Para cerrar la induccion, pongamosFj+1 : Xj+1 → ∪j+1
i=1 ∆j como la unica extension de Fj satisfaciendo Fj+1|Tj+1= H.
El caso en que lj sea la union de dos lados l1j y l2j de Tj+1 es mas sutil. Llamemos Ri alunico triangulo en T1, . . . , Tj tal que lil ≤ Ri, i = 1, 2. Vamos a necesitar que el anguloque forman Fj(l
1j ) y Fj(l
2j ) en el vertice Fj(l
1j∩l2j ) externo a Fj(Xj) (esto es, el que abarca
la region angular disjunta localmente con Fj(Xj)) sea menor que π. En principio esapropiedad no ha de ser cierta, pero se puede garantizar modificando de forma apropiadalos homeomorfismos Fj|Ri , i = 1, 2, para ensanchar los triangulos Fj(R1) y F (R2). Unavez superado ese obstaculo, es claro que el unico triangulo geometrico ∆j+1 conteniendoa Fj(l
1j ) y Fj(l
2j ) como lados es disjunto de ∪ji=1∆j. Como antes, para cerrar la induccion
basta con construir un homeomorfismo H : Tj+1 → ∆j+1 con H|lij = Fj|lij , i = 1, 2, y
definir Fj+1 como la extension de Fj a Xj+1 satisfaciendo Fj+1|Tj+1= H.
El homeomorfismo F := Fk : X → ∆ := ∪ki=1∆j resuelve la primera parte de laproposicion.
La orientabilidad de T es trivial, basta con inducir vıa F las orientaciones positivasde los triangulos geometricos ∆1, . . . ,∆k para generar una orientacion global compati-ble. En relacion con la caracterıstica de Euler, se puede probar que χT (X) = 1 tambienpor induccion en k. Si k = 1 es trivial. Supongamos que χT (X) = 1 cuando la triangu-lacion del disco tenga k−1 triangulos, k > 1. Tomemos un disco X y una triangulacionT en el mismo con k triangulos. Construyamos la ordenacion T1, . . . , Tk de T y elhomeomorfismo F : X → ∆ := ∪ki=1∆i de la primera parte de la proposicion, y recorde-mos que Xk−1 := ∪k−1
j=1Tj es un disco topologico compacto y Tk−1 := T1, . . . , Tk−1 unatriangulacion suya con k − 1 triangulos. Por la hipotexis de induccion, χT (Xk−1) = 1.Pero para el calculo de χT (X) es claro que:
111

Si Tk ∩Xk−1 es un lado de Tk,
](F (T )) = ](F (Tk−1)) + 1, ](E(T )) = ](E(Tk−1)) + 2 y ](V (T )) = ](V (Tk−1)) + 1
Si Tk ∩Xk−1 es la union de dos lados de Tk:
](F (T )) = ](F (Tk−1)) + 1, ](E(T )) = ](E(Tk−1)) + 1 y ](V (T )) = ](V (Tk−1)).
Por tanto χT (X) = χT (Xk−1) = 1, lo que cierra la induccion y acaba la demostracion.
Corolario 16.17 (Caracterıstica de Euler del disco abierto) Sea X un disco to-pologico compacto y T una triangulacion suya. Denotemos por
E0(T ) := l ∈ E(T ) : l * Bd(X) y V0(T ) := v ∈ V (T ) : v /∈ Bd(X).
Entonces χT (Int(X)) := ]F (T )− ]E0(T ) + ]V0(T ) = χT (X) = 1.
Demostracion : Como Bd(X) es un ciclo, contiene la misma cantidad de lados que devertices de T . El resultado se sigue trivialmente de Lema 16.16.
Definicion 16.18 Dos superficies compactas trianguladas (Sj, Tj), j = 1, 2, se dirancombinatoriamente equivalentes si existen dos subdivisiones T ′j ≺ Tj, j = 1, 2, y unhomeomorfismo F : S1 → S2 tales que F (T ′1 ) = T ′2 . En particular,
F(E(T1)
)= E(T2) (esto es, F (l1) ∈ E(T2) para todo l1 ∈ E(T1)) y
F(V (T1)
)= V (T2).
En ese caso se dira que F : (S1, T1) → (S2, T2) es un homeomorfismo combinatorioentre (S1, T1) y (S2, T2).
Una consecuencia interesante de los anteriores resultados es la siguiente:
Proposicion 16.19 Si (Sj, Tj), j = 1, 2, son dos superficies compactas trianguladascombinatoriamente equivalentes entonces:
T1 es orientable ⇐⇒ T2 es orientable.
χT1 (S1) = χT2 (S2).
Demostracion : Sea F : (S1, T1) → (S2, T2) combinatorio, y sean T ′j ≺ Tj, j = 1, 2,subdivisiones de forma que F (T ′1 ) = T ′2 . Trivialmente T ′1 es orientable si y solo sı T ′2 esorientable y χ
T ′1(S) = χ
T ′2(S).
Por tanto, es suficiente con probar que dada una superficie compacta triangulada(S, T ) y T ′ ≺ T ,
(a) T ′ es orientable ⇐⇒ T es orientable.
(b) χT ′
(S) = χT (S).
112

Supongamos que T es orientable y fijemos una orientacion global compatible entodos los triangulos de T . Cada triangulo T ∈ T es un disco topologico, luego cualquiertriangulacion suya es orientable por el Lema 16.16. Los triangulos de T ′ en T ∈ Tdeterminan una triangulacion T ′
Tde T , que puede por tanto orientarse globalmente de
forma compatible. Elijamos la orientacion global en T ′T
para que aquellos triangulosde T ′
Tque tengan un lado en Bd(T ) induzcan sobre ese lado la misma orientacion que
induce la orientacion (ya fijada) de T . De esta forma se genera una orientacion globalcompatible en T ′.
Recıprocamente, si T ′ es orientable se fija una orientacion global compatible de sustriangulos, y cada triangulo de T se orienta de forma compatible con los triangulosorientados de T ′
Ttal y como hemos explicado arriba. De esta forma se genera una
orientacion global compatible en T .En relacion al calculo de las caracterısticas de Euler razonamos de la siguiente
manera. Cada triangulo T ∈ T aporta un +1 en la suma ]F (T ), el mismo valor numericoque χ
T ′T
(Int(T )) por el Corolario 16.17. Analogamente, cada lado l ∈ E(T ) aporta un
−1 en el calculo −]E(T ), lo mismo que la diferencia entre el numero de lados y verticesde T ′ en Int(l), que denotaremos por χ
T ′(l). Se deduce pues que
χT ′
(S) =(∑T∈T
χT ′T
(Int(T )))
+( ∑l∈E(T )
χT ′
(l))
+ ]V (T ) =
= ]F (T )− ]E(T ) + ]V (T ) = χT (S).
Estudiemos la orientabilidad y la caracterıstica de Euler para ciertas triangulaciones,que llamaremos adaptadas, de representaciones binarias.
Definicion 16.20 Sea ω = bε(1)1 . . . b
ε(k)k un esquema binario, sea (a = (γ1, . . . , γk), h)
una representacion suya en cualquiera disco topologico compacto X, y sea σω : X → Sωla identificacion asociada. Una triangulacion T de Sω se dira adaptada a ω si todoγj ∈ a es union de una cantidad finita de lados de E(T ), o equivalentemente, si
Γω ⊂ ∪l∈E(T )l,
donde como siempre Γω es el grafo conexo asociado a ω.
Proposicion 16.21 Dado un esquema binario ω, la superficie Sω admite triangulacio-nes adaptadas a ω. Ademas, si T es una triangulacion adaptada a ω se tiene que:
113

(a) χT (Sω) = 1 +χ(Γω), donde Γω es el grafo conexo borde de ω (ver Definicion 3.18).
(b) ω es orientable si y solo si T es orientable.
Demostracion : Sea (a = (γ1, . . . , γk), h) la representacion canonica de ω en el discounidad D (ver Definicion 3.20), y σω : D → Sω la identificacion asociada. Por el Lema16.16 podemos elegir una triangulacion T ′ de D. Tras subdividir convenientemente T ′de ser necesario y sin perdida de generalidad, podemos asumir que:
σω|T : T → σω(T ) es un homeomorfismo para todo T ∈ T ′.
σω(T ′) := σω(T ) : T ∈ T ′ es una triangulacion de Sω.
Todo arco γj ∈ a es union de lados de E(T ′).
La triangulacion T := σω(T ′) de Sω es adaptada a ω, lo que prueba la primera partede la proposicion.
Sea ahora T una triangulacion adaptada a ω.Para probar (a), observemos que el Corolario 16.17 y la Definicion 3.16 dan sentido
al siguiente calculo:
χT (Sω) = χT (Int(Sω)) + χ(Γω) = 1 + χ(Γω).
Probemos (b). Sea T ′ la unica triangulacion de D tal que σω(T ′) = T , esto es, tal queσω(T ′) ∈ T y σω|T ′ : : T ′ → σω(T ′) es un homeomorfismo para todo T ′ ∈ T ′. Por elLema 16.16 es posible elegir una orientacion global compatible en T ′. Traslademos estasorientaciones a los triangulos de T vıa σω, generando ası una orientacion en todos ycada uno de los triangulos de T . Obviamente T sera orientable si y solo si estas orienta-ciones determinan una orientacion global compatible en T , lo que es equivalente a decirque cada dos triangulos σω(T1) y σω(T2) contiguos a un lado l ∈ E(T ), l ⊂ Γω, estancompatiblemente orientados. Llamemos lj := (σω|Tj)−1(l) ∈ E(Tj), lj ⊂ S1, j = 1, 2.Es claro que las orientaciones compatibles de los triangulos de T ′ inducen en los ladosque descansan en S1 orientaciones compatibles. Por tanto, σω(T1) y σω(T2) induciranorientaciones opuestas en su lado comun l (y estaran compatiblemente orientados comotriangulos orientados) si y solo si el homeomorfismo (σω|l2)−1 (σω|l1) revierte las orien-taciones de los arcos de Jordan l1 y l2 en S1. Como lj ⊂ σ−1
ω (γij) para algun γij ∈ a,j = 1, 2, σω(T1) y σω(T2) estaran compatiblemente orientados si y solo si el homeo-morfismo (σω|γi2 )−1 (σω|γi1 ) ∈ h revierte las orientaciones de los arcos de Jordan γi1y γi2 en S1. En definitiva, concluimos que T es orientable si y solo si el esquema ω esorientable, probando (b).
16.2. El Teorema de Rado: Representacion poligonal
El ingrediente fundamental para la clasificiacion de las superficies topologicas com-pactas es el siguiente teorema clasico, que enunciaremos sin demostracion.
Teorema 16.22 (Teorema de Rado) Toda superficie topologica compacta admite unatriangulacion.
Este teorema tiene interesantes consecuencias. La mas relevante se enuncia en elsiguiente:
114

Teorema 16.23 (Representacion poligonal) Sea S una superficie toplogica com-pacta, y sea T una triangulacion cualquiera suya dada por el Teorema 16.22.
Entonces existe un esquema binario ωT , una triangulacion T ′ de su realizacion SωTadaptada a ωT y un homeomorfismo F : S → SωT tal que F (T ) = T ′ (en particular,(S, T ) y (SωT , T
′) son combinatoriamente equivalentes).
Demostracion : Nuestro programa de trabajo consistira en probar que existe un discotopologico compacto ∆ ⊂ R2 con borde poligonal, una triangulacion geometrica T0 de∆ y una identificacion topologica H : ∆→ S tal que
H(T0) ∈ T y H|T0 : T0 → H(T0) es un homeomorfismo para todo T0 ∈ T0.
Una vez superada esta primera etapa tendremos que S ∼= ∆/ ∼H , donde ∼H es larelacion inducida por H en ∆. En la segunda parte del argumento, llamaremos
a := s1, . . . , su a la secuencia cıclica orientada de lados de T0 en Bd(∆),
h := hi,j : si → sj : i, j = 1, . . . u a la familia de homeomorfismos definida porhi,j := (H|sj)−1 (H|si) para todo i, j, y
ωT = bε(1)1 . . . b
ε(u)u al esquema binario inducido por la biyeccion b
ε(j)j ←→ sj,
j = 1, . . . , u, con el criterio
ε(i)ε(j) = 1⇐⇒ bi = bj y hi,j preserva la orientacion.
La relacion ∼H coincidira con la inducida por la representacion (a, h) de ωT en ∆ y Ssera homeomorfa a la realizacion SωT ≡ ∆/∼H de ωT en ∆ asociada a (a, h). Ademas,
si σωT : ∆→ SωT es la proyeccion y H : SωT → S el unico homeomorfismo satisfaciendo
H σωT = H, la triangulacion T ′ := H−1(T ) de SωT sera adaptada a ωT . Definiendo
F := H : (S, T )→ (SωT , T′) acabaremos el teorema.
Para comenzar con el plan de trabajo, ordenemos T1, . . . , Tk los triangulos de Tde forma que Tj+1∩
(∪ji=1Ti
)contenga al menos un lado Tj+1, j = 1, . . . , k−1. Elijamos
un lado lj ⊂ Tj+1 ∩(∪ji=1 Ti
)∈ E(Tj+1), j = 1, . . . , k − 1.
Elijamos una coleccion de triangulos geometricos ∆1, . . . ,∆k en R2 con la propie-dad:
l′j := ∆j+1 ∩(∪ji=1 ∆i
)∈ E(∆j+1), j = 1, . . . , k − 1.
Usando inductivamente la Proposicion 3.22, es posible construir una sucesion de ho-meomorfismos Fj : Tj → ∆j : j = 1, . . . k tales que:
Si l := Ti ∩ Th ∈ l1, . . . , lk−1 =⇒ Fi|l = Fh|l, i, h ∈ 1, . . . , k.
Teniendo en cuenta la Proposicion 3.10, es facil comprobar que la region ∆ := ∪ki=1∆j
es un disco topologico compacto en R2 bordeado por una curva de Jordan poligonal y
T0 := ∆1, . . . ,∆k
una triangulacion geometrica suya. Definamos
H : ∆→ S, H|∆j:= F−1
j para todo j ∈ 1, . . . , k,
Es claro que H es una identificacion (continua y sobre de un compacto en un Hausdorff,ver Proposicion 2.11) que lleva homeomorficamente triangulos de T0 en triangulos deT , lo que prueba la primera parte de nuestro plan.
115

Por la Proposicion 2.9,
H : ∆/∼H → S, H([p]) := H(p),
es un homeomorfismo, donde ∼H es la relacion de equivalencia
p ∼H q ⇐⇒ H(p) = H(q).
Para completar la segunda parte del programa de trabajo, conectemos este cociente conla realizacion de un esquema binario.
DefinamosE0 := E(T ) \ l1, . . . , lk−1.
Por la definicion de H, si p 6= q y H(p) = H(q) entonces han de existir un lado e ∈ E0
y un punto x ∈ e tales que, si Ti(e) Th(e) son los dos triangulos de T con e := Ti(e)∩Th(e),entonces p = Fi(e)(x) ∈ Fi(e)(e) ⊂ Bd(∆) y q = Fh(e)(x) ∈ Fh(e)(e) ⊂ Bd(∆). Ademasen este caso
H−1(H(Fi(e)(e))) = H−1(H(Fh(e)(e))) = Fi(e)(e) ∪ Fh(e)(e),
por lo que ∼H identifica los puntos de los lados Fi(e)(e) y Fh(e)(e) ∈ E(T0) vıa el homeo-morfismo Fh(e) F−1
i(e). Notese que puede haber lados en Bd(∆) con interior H-saturado,
justo aquellos que se apliquen por H en un lado del borde de S (ver Proposicion 16.11-(b)). En definitiva, ∼H realiza el pagado de parejas de segmentos de Bd(∆) vıa homeo-morfismos, siendo trivial en el resto del disco topologico ∆.
Generemos el esquema binario asociado a este cociente. Para ello escribamos Bd(∆) =∪uj=1sj como union cıclica de lados orientados en E(T0) y llamemos a = s1, . . . , su.Siendo mas precisos, esto quiere decir que:
sj es lado de algun triangulo en ∆1, . . . ,∆k para todo j = 1, . . . , u.
sj ∩ sj+1 es un vertice comun a sj y sj+1 para todo j = 1, . . . , u, donde hemoshecho el convenio su+1 = s1.
Los lados sj estan orientados de forma compatible con la orientacion positiva delos triangulos gometricos de T0 incidentes con ellos.
Recuperemos el conjunto auxiliar U sobre el que se construıan nuestros esquemas y cons-truyamos cualquiera representacion inyectiva E0 → U , l 7→ a[l], del conjunto E0 en U .En la expresion formal s1 . . . su sustituyamos de forma ordenada en sentido creciente delındice cada sj por el sımbolo a[ej], donde ej := H(sj) ∈ E0. En el momento en que alcan-cemos un segmento sm tal que H(sm) = H(sj) = ej con j < m (solo puede haber uno alo mas), sustituyamos sm por a[em] := a[ej] si hi,j := Fh(ej) F−1
i(ej)respeta la orientacion
de los arcos de Jordan Fi(ej)(ej) y Fh(ej)(ej), o por a[ej]−1 si la revierte. De esta forma
generamos la familia de homeomorfismos h := hi,j : i, j = 1, . . . , u, donde hi,i = Idsipara todo i. De acuerdo a nuestras convenciones, asociamos a la sucesion s1 . . . su elesquema binario ωT =
∏uj=1 b
ε(j)j (donde sop(ωT ) = b1, . . . , bu = a[e1], . . . , a[eu]).
Claramente la relacion de equivalencia inducida en ∆ por la representacion (a, h) coin-cide con ∼H , por lo que la realizacion SωT ≡ ∆/∼H en ∆ de ωT es homeomorfa a S.
Por construccion, σω(T0) ≡ H−1(T ) es una triangulacion de Sω adaptada a ω, dondeσωT : ∆ → SωT es la proyeccion al conciente y H : SωT → S el unico homeomorfismo
satisfaciendo H σωT = H. Esto concluye la segunda parte del programa, y por tanto
el teorema para F := H.
116

Observacion 16.24 No solo el enunciado del Teorema 16.23 es informativo, sino tam-bien su prueba. Si (S, T ) es una superficie compacta triangulada y X ⊂ S un discotopologico compacto union de triangulos de T , el Lema 16.16 (y su demostracion) sepuede incorporar a la prueba del Teorema 16.23 para lograr que F (Int(X)) ∩ ΓωT = ∅.
17. Clasificacion de las superficies compactas
En esta seccion vamos a clasificar salvo equivalencias las realizaciones de esquemasbinarios, y como consecuencia de la representacion poligonal de superficies del Teorema16.23, todas las superficies topologicas compactas.
Definicion 17.1 Llamaremos K al conjunto de los pares (ω, T ), donde ω es un esque-ma binario y T una triangulacion de Sω adaptada a ω.
Dos parejas (ω1, T1), (ω2, T2) ∈ K, se diran equivalentes si existe un homeomorfismocombinatorio H : (Sω1 , T1) → (Sω2 , T2). En ese caso escribiremos (ω1, T1) ∼ (ω2, T2) o
(ω1, T1)H∼ (ω2, T2) si queremos enfatizar el homeomorfismo combinatorio.
Precisamos de algun lenguaje.Si ω = b
ε(1)1 . . . b
ε(k)k es un esquema escribiremos
ω−1 = b−ε(k)k . . . b
−ε(k)1 .
Si ω = bε(1)1 . . . b
ε(k)k es binario, (a = (γ1, . . . , γk), h) una representacion suya en un disco
topologico compacto X, y σω : X → Sω la identificacion asociada, por definicion diremosque
Vω := σω(p) : p ∈ ∪ki=1V (γi) ⊂ Γω
es el conjunto de los vertices de ω (aquı V (γj) refiere a los extremos del arco de Jordanorientado γj en Bd(X) para cada j). La expresion
bε(j)j
Qj∧ b
ε(j+1)j+1
indicara que Qj = σω(pj) ∈ Vω, con pj := γj ∩ γj+1 ∈ ∪ki=1V (γi), j = 1, . . . , k (hacemos
el convenio bε(k+1)k+1 = b
ε(1)1 y γk+1 = γ1). Tambien escribiremos
ω = bε(1)1
Q1∧ . . .Qk−1∧ b
ε(k)k
Qk∧≡Qk∧ b
ε(1)1
Q1∧ . . .Qk−1∧ b
ε(k)k
para enfatizar la lista de vertices de ω. Noterse que el cardinal ]Vω es menor o igual quek = Long(ω). En caso de que T sea una triangulacion de Sω adaptada a ω, es claro queVω ⊂ V (T ) ∩ Γω.
Para cada Q ∈ Vω el conjunto σ−1ω (Q) contiene aquellos extremos de arcos en a que
se proyectan por σω en Q. Al numero natural mω(Q) := ]σ−1ω (Q) lo referiremos como
la multiplicidad de Q en ω (o en Sω). Es claro que∑Q∈Vω
mω(Q) = Long(ω).
Por ultimo necesitaremos la siguiente:
117

Definicion 17.2 Sea ω = bε(1)1 . . . b
ε(k)k un esquema, y sea bε(i)i , b
ε(j)j un par de sılabas
en ω con i 6= j y bi = bj. El par bε(i)i , bε(j)j se dira de primera especie si ε(i)ε(j) = −1,
y de segunda especie si ε(i)ε(j) = 1.Como consecuencia, un esquema binario es orientable si y solo si todos sus pares
son de primera especie, y no orientable si tiene al menos un par de segunda especie.
El siguiente lema establece unas reglas basicas de transformacion por equivalenciaspara esquemas binarios.
Lema 17.3 (Reglas de transformacion) Sean νj, j = 1, . . . , 4, esquemas tales queν1ν2ν3ν4 es un esquema binario, y sean a, b /∈ ∪4
j=1sop(νj).
(a) Para los esquemas binarios ω1 y ω2 de la siguiente lista:
(i) ω1 = ν1ν2 y ω2 := ν2ν1,
(ii) ω1 = ν1 y ω2 := ν−11 ,
(iii) ω1 := ν1ν2aν3ν4a−1 y ω2 := ν2ν1bν4ν3b
−1, y
(iv) ω1 := ν1ν2aν3ν4a y ω2 := ν−13 ν1bν4ν
−12 b,
el siguiente enunciado es cierto:
Si T1 es adaptada a ω1 y Z ⊂ Sω1 \ Γω1 es un compacto (eventualmen-te vacıo), existe T2 adaptada a ω2 y un homeomorfismo combinatorioF : (Sω1 , T1)→ (Sω2 , T2) tal que F (Vω1) = Vω2 y F (Z) ⊂ Sω2 \ Γω2.
(b) Si (ω1 := aQ∧ a−1ν1, T1) ∈ K (y por tanto mω1(Q) = 1), Z ⊂ Sω1\Γω1 es un compacto
(eventualmente vacıo) y ω2 := ν1 6= 1, entonces existe T2 adaptada a ω2 y unhomeomorfismo combinatorio F : (Sω1 , T1) → (Sω2 , T2) tal que F (Vω1 \ Q) = Vω2
y F (Z) ⊂ Sω2 \ Γω2.
Ademas, en todos los casos ω1 y ω2 tienen el mismo caracter de orientabilidad y soloen (b) el homeomorfismo altera el numero de vertices del esquema en el el grafo bordereduciendolo en una unidad.
Observacion 17.4 La version del Lemma 17.3 con Z = ∅ sera suficiente para la cla-sificacion de las superficies compactas sin borde.
Demostracion : (del Lemma 17.3) Items (a)-(i) y (a)-(ii) son triviales ya que Sω1 y Sω2
son el mismo espacio.Para probar (b), tomemos un disco compacto X y la identificacion σω : X → Sω1
asociada a ω1. Notese que como ω1 es binario necesariamente mω1(Q) = 1. Pongamos
ω1 = aQ∧ a−1ν1, y (a, h) a la representacion de ω1 en X. Sean γa y γa−1 ∈ a los
arcos de Jordan en Bd(X) asociados a los caracteres a y a−1 de ω1, y h : γa → γa−1 elcorrespondiente homeomorfismo en h. Llamemos Y al disco topologico compacto X/∼h(ver el Ejercicio 3.13) y σ0 : X → Y a la proyeccion al cociente. La unica identificacionσ : Y → Sω1 tal que σ σ0 = σω1 expresa Y/ ∼σ como realizacion Sω2 de ω2 en Y .Si llamamos σ : Y/ ∼σ≡ Sω2 → Sω1 al homeomorfismo inducido por la identificacionσ, T2 := σ−1(T1) es una triangulacion de Sω2 adaptada a ω2 y Vω2 = σ−1
(Vω1 \ Q
).
Eligiendo F = σ se sigue (b).
118

Probemos (a)-(iii). Escribamos ω1 = ν1
Q1∧ ν2aν3
Q2∧ ν4a−1 y consideremos una
representacion (a, h) de ω1 en un disco topologico compacto X. Denotemos por aj ⊂ a lasecuencia ordenada de lados orientados en Bd(X) correspondientes a νj, j = 1, 2, 3, 4,y γa, γa−1 los lados orientados en a asociados a a y a−1, respectivamente. Con estanotacion,
a = a1 ∪ a2 ∪ γa ∪ a3 ∪ a4 ∪ γa−1reproduce la secuencia ordenada cıclica de lados de a.
Salvo tomar una subdivision suficientemente fina de T1, podemos suponer que laarcocomponente de Sω1 \(Γω1∪Z) que contiene a Γω1 en su frontera topologica contieneun arco de Jordan b ⊂ Sω1 con extremos Q1 y Q2, contenido en ∪l∈E(T1)l, con interiordisjunto de Γω1 ∪ Z, y que es proyeccion vıa σω1 de un arco de Jordan en X queparte el disco X en dos componentes conexas X+ y X−. Por conveniencia llamemosb+ ⊂ Bd(X+) al arco en Bd(X+) proyectandose por σω1 en b, y analogamente parab− ⊂ Bd(X−) (como subconjuntos de X, b+ = b−).
Fijemos en b+ la orientacion compatible con los arcos orientados de a2∪γa∪a3 deBd(X+), y hagamos lo propio en b− respecto de los arcos orientados de a4 ∪γa−1∪ a1
en Bd(X−). Consideremos las secuencias cıclicas ordenadas de arcos orientados
a2 ∪ γa ∪ a3 ∪ b+ en Bd(X+) y a4 ∪ γa−1 ∪ a1 ∪ b− de en Bd(X−).
Podemos pegar X+ y X− por los arcos de Jordan borde γa y γa−1 con ayuda delhomeomorfismo h : γa → γa−1 ∈ h tal que (σω1|γa−1 ) h = σω1|γa . De esta forma genera-
mos un disco topologico compacto X = (X+ ∪X−)/∼h ≡ X/∼h, ver Proposicion 3.10.Si g : X → X denota la proyeccion al cociente, la unica aplicacion
σ : X → Sω1 con σ g = σω1
es una identificacion, por lo que X/∼σ ∼= Sω1 . Si llamamos σ : X/∼σ → Sω1 al homeo-morfismo inducido por σ, la definicion de ∼σ implica que X/∼σ ≡ Sω2 es un realizacionde ω2 := ν2ν1bν4ν3b
−1, que T2 := σ−1(T1) es una triangulacion de Sω2 adaptada a ω2,y que Vω2 = σ−1
(Vω1
). De nuestra construccion tambien σ(Z) ⊂ Sω2 \ Γω2 . Eligiendo
F = σ se sigue (a)-(iii).
119

Finalmente probemos (a)-(iv). Como antes pongamos ω1 = ν1
Q1∧ ν2aν3
Q2∧ ν4a,consideremos una representacion (a, h) de ω1 en un disco topologico compacto X, yescribamos
a = a1 ∪ a2 ∪ γa ∪ a3 ∪ a4 ∪ γ′a
con los mismos convenios anteriores; aquı γa y γ′a representan los dos arcos en Bd(X)correspondientes al caracter a duplicado en ω1.
Razonando como en el caso anterior, podemos suponer que existe un arco de Jordanb ⊂ Sω1 con extremos Q1 y Q2, contenido en ∪l∈E(T1)l, con interior disjunto de Γω1 ∪Z,y que sea la proyeccion vıa σω1 de un arco de Jordan en X que parte el disco Xen dos componentes conexas X+ y X−. Llamemos b+ ⊂ Bd(X+) al arco en Bd(X+)proyectandose por σω1 en b, y analogamente para b− ⊂ Bd(X−), y orientemos estos arcoscompatiblemente con los arcos orientados en a2 ∪ γa ∪ a3 de Bd(X+) y a4 ∪ l′a ∪ a1
de Bd(X−), respectivamente. Consideremos las secuencias cıclicas ordenadas de arcosorientados
a2 ∪ γa ∪ a3 ∪ b+ en Bd(X+) y a4 ∪ l′a ∪ a1 ∪ b− de en Bd(X−).
Llamemos X∗+ = p∗ : p ∈ X+ a una copia topologica de X+ y s : X∗+ → X+ alhomeomorfismo p∗ 7→ p. Consideremos el homeomorfismo F : X+ → D que aplica loslados orientados de a2 ∪ γa ∪ a3 en arcos positivamente orientados en S1, y llamemosF ∗ : X∗+ → D a la composicion e F s, donde e : D → D es la simetrıa especulare(x, y) = (x,−y). Traslademos vıa (F ∗)−1 F la secuencia de arcos orientados a2 ∪γa ∪ a3 ∪ b+ en Bd(X+) para generar una secuencia (con ordenacion revertida) dearcos orientados:
b∗+ ∪ a∗3 ∪ γ∗a ∪ a∗2 en Bd(X∗+).
Podemos pegar X∗+ y X− por los arcos de Jordan borde γ∗a y γ′a con ayuda del ho-
meomorfismo h∗ = h (F−1 F ∗) : γ∗a → γ′a, donde h : γa → γ′a es el homeomorfismoen h. De esta forma generamos un disco topologico compacto X = (X
∗+ ∪ X−)/∼h∗ ,
ver Proposicion 3.10. Si g : X∗+ ∪ X− → X denota la proyeccion al cociente, la unica
aplicacion
σ : X → Sω1 con (σ g)|X− = σω1 |X− , (σ g)|X∗+ = σω1 ((F−1 F ∗)|X∗+
)es una identificacion, por lo que X/∼σ ∼= Sω1 . Si llamamos σ : X/∼σ → Sω1 al homeo-morfismo inducido por σ, la definicion de ∼σ implica que X/∼σ ≡ Sω2 es un realizacionde ω2 = ν−1
3 ν1bν4ν−12 b, que T2 := σ−1(T1) es una triangulacion de Sω2 adaptada a ω2 y
que Vω2 = σ−1(Vω1
). Como antes σ(Z) ⊂ Sω2 \ Γω2 . Eligiendo F = σ se sigue (a)-(iv),
concluyendo la demostracion.
120

17.1. Clasificacion de las superficies compactas sin borde
Para los siguientes resultados es conveniente tener presente el Corolario 16.4 y lanotacion implıcita en el.
Lema 17.5 Dado (ω, T ) ∈ K con ω binario puro, existe un esquema (ω0, T0) ∈ K talque:
]Vω0 = 1 o ω0 = w0, donde w0 es el esquema canonico aa−1.
(ω, T )F∼ (ω0, T0).
Ademas, si Z ⊂ Sω \ Γω es un compacto, el homeomorfismo combinatorio F se puedelograr para que F (Z) ⊂ Sw0 \ Γw0.
Demostracion : Si ω = aa−1 = w0 basta con elegir F = IdSω . El caso ω = aa = w1
tambien es trivial con F = IdSω , ya que en este caso Vω solo tiene un vertice.Como ω tiene un numero par de caracteres, podemos suponer que Long(ω) ≥ 4. Lo
primero que haremos es usar la regla Lema 17.3-(b) tantas veces cuantas sea posiblepara encontrar una pareja en K equivalente a (ω, T ) sin pares adyacentes de primeraespecie. En este camino logicamente perdemos vertices (uno cada vez que se apliquela regla), se reduce la longitud de ω y no se altera el caracter de orientabilidad delesquema. Este proceso nos podrıa dirigir de nuevo al caso del esquema de longitud 2 yadiscutido, en cuyo caso habrıamos acabado.
Por tanto, no supone perdida de generalidad admitir que ω no contiene pares ad-yacentes de primera especie, que Long(ω) ≥ 4 y que Vω tiene al menos dos verticesadyacentes distintos. Elijamos un vertice P ∈ Vω.
Vamos a demostrar que existe (µ1, T1) ∈ K tal que (ω, T ) ∼ (µ1, T1) y ]Vµ1 ≤ ]Vω−1.En efecto, consideremos una realizacion Sω de ω en un disco X y la identificacion
σω : X → Sω asociada. Como hay al menos dos vertices distintos, existe un caracter osılaba bε, ε ∈ 1,−1, en la secuencia que define a ω (salvo la reversion global Lema17.3-(a)-(ii), supondremos ε = 1) de forma que el arco de Jordan σω(γb) ⊂ Γω tiene porextremos a puntos P y Q ∈ Vω \ P, donde γb ⊂ Bd(X) es el arco asociado a b en larepresentacion de ω sobre X. El esquema ω puede adoptar las siguientes cuatro formas:
ζ1aP∧ ζ2
Q∧ b
P∧ a−1, ζ1P∧ aζ2a
−1 P∧ bQ∧, ζ1a
P∧ ζ2aP∧ b
Q∧, ζ1
P∧ aζ2
Q∧ b
P∧ a.
Pensemos en el caso ω = ζ1aP∧ ζ2
Q∧ b
P∧ a−1 (los otros son analogos).Aplicando el Lema 17.3-(a)-(iii) para ζ1 = ζ1, ζ2 = 1, ζ3 = ζ2 y ζ4 = b, inferimos que
(ω, T )F1∼ (ω1, T ′1 ) donde
ω1 = ζ1cQ1∧ b
P1∧ ζ2
Q1∧ c−1,
donde Q1 = F1(Q) y P1 = F1(P ). Claramente Long(ω1) = Long(ω) y
mω1(P1) = mω(P )− 1,
esto es, reducimos en una unidad entera la cantidad de puntos en σ−1ω1
(P1) respecto ala de σ−1
ω (P ). A continuacion sometemos a ω1 a la regla Lema 17.3-(b) tantas vecescuantas sea posible para encontrar una pareja equivalente en K, que abusando dellenguaje llamaremos tambien (ω1, T ′1 ) sin pares adyacentes de primera especie. En esteproceso eventualmente se podrıan perder vertices y reducir la longitud de ω1.
121

De persistir el (heredero del) vertice P1 tras estas reducciones y haber mas de unvertice en Vω1 , reiteramos el proceso anterior de forma inductiva. Ası construimos
(ω0, T ′0 ) = (ω, T )F1∼ (ω1, T ′1 )
F2∼ . . .Fj−1∼ (ωj−1, T ′j−1)
Fj∼ (ωj, T ′j ),
de forma que Long(ωi) ≤ Long(ωi−1), ]Vωi ≤ ]Vωi−1y mωi(Pi) = mωi−1
(Pi−1)−1, dondePi = Fi(Pi−1), para todo 1 ≤ i ≤ j (hemos hecho el convenio F0 = IdSω y P0 = P ).
En general, cuando ocurre la multiplicidad 1 para un vertice de un esquema estosignifica que este es incidente a un par de lados adyacentes de primera especie. Portanto en caso de persistencia y tras dar a lo mas m1 := mω(P )− 1 pasos, este procesonos dirigirıa a un esquema en el que el vertice Pmω(P )−1 se desvanece al aplicar la reglaLema 17.3-(b) para llegar a ωm1 , de donde necesariamente ]Vωm1
≤ Vω − 1. Basta pueselegir (µ1, T1) := (ωm1 , T ′m1
).Si µ1 6= w0 y tiene dos o mas vertices, reiteramos el proceso anteriormente seguido
para ω y construimos (µ2, T2) ∈ K) tal que (µ1, T1) ∼ (µ2, T2) y ]Vµ2 ≤ ]Vµ1 − 1, y asısucesivamente. Tras una cantidad finita de pasos alcanzaremos una pareja (ω0, T0) ∼(ω, T ) con ω0 = w0 o ]Vω0 = 1, lo que concluye la prueba.
La informacion extra en relacion al compacto Z en el enunciado se sigue del usoapropiado del Lema 17.3 dentro de la demostracion.
Teorema 17.6 (Representaciones binarias puras no orientables) Sea (ω, T ) ∈K, donde ω es binario puro y no orientable. Entonces existe n ∈ N y T0 triangulacion
de S∗n adaptada a w∗n tal que (ω, T )F∼ (w∗n, T0).
Ademas, si Z ⊂ Sω \Γω es un compacto el homeomorfismo combinatorio F se puedeelegir para que F (Z) ⊂ Sw∗n \ Γw∗n.
Demostracion : Por el Lema 17.5 podemos suponer sin perdida de generalidad que]Vω = 1, y en particular, que ω no tiene pares adyacentes de primera especie.
Como ω es no orientable ha de tener pares de segunda especie. Veamos que podemosencontrar (µ1, T1) ∈ K equivalente a (ω, T ) con Long(µ1) = Long(ω), con ]Vµ1 = 1 ycon todos los pares de segunda especie adyacentes.
En efecto, supongamos que hay un par de segunda especie no adyacente en ω consımbolo a1, y escribamos ω = ω1ω2a1ω3ω4a1 donde ω1, ω3 6= 1 y ω2 = ω4 = 1. Aplicandola regla Lema 17.3-(a)-(iv),
(ω, T ) ∼ (ω−13 ω1b1b1, T ′).
De esta forma sustituimos el par de segunda especie asociado a a1 en ω por el adya-cente con sımbolo b1 en el nuevo esquema ω′ := ω−1
3 ω1b1b1, manteniendo la longituddel esquema y el hecho de que ]Vω′ sea unitario. Observese que de haber un par desegunda especie adyacente en ω, obviamente con sımbolo distinto a a1, este ha de estar
122

necesariamente incluido en ω1 o en ω3, por lo que nuestro procedimiento traduce esepar adyacente en otro de igual naturaleza en ω′. Por tanto el procedimiento aplicadoes acumulativo y no deshace el trabajo previo. Si ω′ presentase pares de segunda es-pecie no adyacentes, se reiterarıa el procedimiento anterior hasta llegar a una pareja(µ1, T1) ∈ K satisfaciendo las propiedades deseadas.
Supongamos que µ1 tiene un par de primera especie, obviamente no adyacente.Veamos que entonces podemos encontrar (µ2, T2) ∈ K equivalente a (µ1, T1), luego a
(ω, T ), con Long(µ2) = Long(µ1), con ]Vµ2 = 1 y con mas pares de segunda especie queµ1, todos ellos adyacentes. En efecto, supongamos que existe un par de primera especieen µ1 con sılaba c1. Podemos escribir µ1 = ν1c1ν2c
−11 ν3a1a1 para ciertos subesquemas νj,
j = 1, 2, 3, y para cierto a1. Aplicando la regla (a)-(iv) del Lema 17.3 para las eleccionesν1 ; ν1c1, ν2 ; ν2c
−11 ν3, ν3 = ν4 ; 1, obtendrıamos que
(µ, T1) ∼ (ν1c1b1ν−13 c1ν
−12 b1, T ′1 ).
Como cada par de segunda especie de µ1, distinto del determinado por a1, esta contenidoen νj para algun j = 1, 2, 3, inferimos que el esquema µ′1 := ν1c1b1ν
−13 c1ν
−12 b1 tiene
un par de segunda especie mas que µ1, su misma longitud y ](Vµ′1) = 1. La pareja(µ′1, T ′1 ) ∈ K puede ser sometida al primer procedimiento aplicado a (ω, T ), lo que nosllevarıa a un par (µ2, T2) ∈ K satisfaciendo lo deseado.
Si µ2 tuviese de nuevo un par de primera especie, someterıamos a (µ2, T2) al mismoprocedimiento que acabamos de explicar para (µ1, T1), y ası sucesivamente. Tras unacantidad finita de pasos llegaremos a un par (µ, T0) ∈ K equivalente a (ω, T ), conn := Long(µ) = Long(ω), con todos los pares de segunda especie adyacentes, sin paresde primera especie y con ](Vµ) = 1. Necesariamente µ = w∗n, lo que completa la prueba.
La informacion extra en relacion al compacto Z en el enunciado es consecuenciainmediata del uso del Lema 17.3 dentro de la demostracion.
Teorema 17.7 (Representaciones binarias puras orientables) Sea (ω, T ) ∈ K,donde ω es binario puro y orientable. Entonces existe n ∈ N ∪ 0 y T0 triangulacion
de Sn adaptada a wn tal que (ω, T )F∼ (wn, T0).
Ademas, si Z ⊂ Sω \Γω es un compacto, el homeomorfismo combinatorio F se puedelograr para que F (Z) ⊂ Swn \ Γwn.
Demostracion : Como ω es orientable todos sus pares son de primera especie. Por elLema 17.5 podemos reducirnos al caso en que Vω contiene un solo vertice.
Introduzcamos el siguiente lenguaje. Dos pares de primera especie en ω, que repre-sentaremos con los sımbolos a y b, se diran en posicion enlazada si su disposicion en lasecuencia que define ω es la siguiente:
ω = ν1aν2bν3a−1ν4b
−1ν5.
Si adicionalmente ν2 = ν3 = ν4 = 1, esto es, si ω = ν1aba−1b−1ν5, entonces se dira que
la pareja de pares enlazados representada por a y b es adyacente.Primero observemos que toda pareja de primera especie en ω esta en posicion en-
lazada con alguna otra pareja de primera especie en ω. En efecto, en otro caso existeun par de primera especie en ω, representado por la letra a1, que no esta enlazadocon ningun otro par de primera especie en ω. Tengamos presente que las parejas aa−1
no ocurren en ω por nuestro trabajo previo (solo hay un vertice en Vω), y por tantoω = a1ν1a
−11 ν ′1, donde ν1, ν ′1 6= 1. Por nuestra suposicion, para cualquiera b ∈ sop(ν1)
necesariamente b−1 ∈ sop(ν1), y analogamente con ν ′1. Por tanto el conjunto de vertices
123

de Vω aportados por la secuencia ν1 ha de ser disjunto del asociado a la secuencia ν ′1,generando una contradiccion.
Vamos a explicar un procedimiento que generara una pareja adyacente de paresde primera especie enlazados extra a partir de una pareja no adyacente de pares deprimera especie enlazados en ω. Este metodo sera acumulativo, en el sentido de que siω contuviese k parejas adyacentes de pares enlazados, el resultado final serıa un esquemacon k + 1 parejas adyacentes de pares enlazados. Ademas preservara la propiedad deque el cojunto de vertices del esquema es unitario. Vayamos a los detalles.
Supongamos que ω contiene k ≥ 0 parejas adyacentes de pares enlazados y queLong(ω) > 4k. Veamos que existe un esquema binario µ1 y una triangulacion T1 de Sµ1adaptada a µ1 tales que:
(µ1, T1) es equivalente a (ω, T ).
Long(µ1) = Long(ω).
Vµ1 contiene un unico vertice.
µ1 tiene k + 1 parejas adyacentes de pares enlazados.
Como ω tiene una pareja de primera especie no adyacente de pares enlazados, po-demos escribir ω = ν1a1ν2a2ν3a
−11 ν4a
−12 para ciertos sımbolos a1 y a2. Por la regla Lema
17.3-(a)-(iii) aplicada para las elecciones ν1 ; ν1a1, ν2 ; ν2, a ; a2, ν3 ; ν3 yν4 ; a−1
1 ν4, obtenemos que
(ω, T ) ∼ (ω′, T ′), ω′ = ν2ν1a1b1a−11 ν4ν3b
−11 ≡ ν4ν3b
−11 ν2ν1a1b1a
−11 .
Por Lema 17.3-(a)-(iii) de nuevo aplicado en ω′ para ν1 ; ν4ν3b−11 , ν2 ; ν2ν1, a; a1,
ν3 ; b1 y ν4 ; 1, obtenemos que
(ω′, T ′) ∼ (ω′′, T ′′), ω′′ = ν2ν1ν4ν3b−11 d1b1d
−11 ≡ b−1
1 d1b1d−11 ν2ν1ν4ν3.
Notemos que por la naturaleza de la regla Lema 17.3-(a)-(iii) no se ha destruido ningunapareja adyacente de pares enlazados prexistente en ω. De igual modo el conjunto devertices tanto de ω′ como de ω′′ es unitario. Por conveniencia cambiaremos el sımbolob1 por c−1
1 , y por tanto b−11 por c1. Llamemos ω1 = ν2ν1ν4ν3 y definamos la pareja
(µ1 := c1d1c−11 d−1
1 ω1, T1 := T ′′) ∈ K,
obviamente equivalente a (ω, T ). Por su generacion, es claro tambien que µ1 es puro,orientable y con Long(µ1) = Long(ω). Por tanto la pareja (µ1, T1) satisface las propie-dades deseadas.
Si µ1 6= wn para algun n, ha de contener alguna pareja no adyacente de paresde primera especie enlazados y podemos reiterar el procedimiento anterior. Tras unacantidad finita de pasos llegaremos a una pareja (µ, T0) equivalente a (ω, T ) de formaque µ = wn para algun n, probando el resultado.
La informacion extra en relacion al compacto Z en el enunciado es consecuenciainmediata del uso del Lema 17.3 dentro de la demostracion.
Estamos en condiciones de probar el siguiente
124

Corolario 17.8 (Clasificacion de las superficies compactas sin borde) Si S esuna superficie topologica compacta sin borde, entonces S es homeomorfa a una superficiede la lista
S := Sn : n ∈ N ∪ 0 ∪ S∗n : n ∈ N =
=Sw : w ∈ wn : n ∈ N ∪ 0 ∪ w∗n : n ∈ N
,
en la que ningun par de superficies es homeomorfo entre sı. Al numero n en amboscasos se le llama genero de la superficie.
En particular, si T1 y T2 son dos triangulaciones de S entonces:
χT1 (S) = χT2 (S).
T1 y T2 tienen el mismo caracter de orientabilidad.
Demostracion : Recordemos que el Corolario 16.4 garantiza que en la lista de superficiesS no hay dos espacios homeomorfos.
Por el Teorema de Rado S admite una triangulacion T . Por el Teorema 16.23, existeun esquema ωT binario, una triangulacion T ′ de SωT adaptada a ωT y un homeomor-fismo combinatorio F : (S, T )→ (SωT , T
′). Por la Proposicion 16.19, T y T ′ reflejan elmismo valor para la caracterıstica de Euler y tienen el mismo caracter de orientabilidad.Por los Teoremas 17.6 y 17.7, (SωT , T
′) ∼ (Sw, T0) ∈ K para un unico esquema canonicow ∈ wn : n ∈ N ∪ 0 ∪ w∗n : n ∈ N. Esto prueba la primera parte del teorema.
Por otra parte, de las Proposiciones 16.21 y 16.19 deducimos que para cualquiertriangulacion T de S:
χT (S) = χωT (SωT ) = χT0 (Sw) = 1 + χ(Γw).
T y T0 tienen el mismo caracter de orientabilidad, a saber, el de Sw (o w).
Por tanto la caracterıstica de Euler y el caracter de orientabilidad no dependen de latriangulacion T de S elegida, solo de la unica superficie en la lista S a la que S eshomeomorfa. Esto concluye el Corolario.
Como consecuencia, la siguiente definicion es consistente.
Definicion 17.9 Sea S una superficie topologica compacta sin borde.Definiremos la caracterıstica de Euler de S como el numero entero
χ(S) := χT (S), T cualquiera triangulacion de S.
De igual forma, S se dira orientable (no orientable) si T es orientable (no orientable),donde T es cualquiera triangulacion de S.
Corolario 17.10 Sean S1 y S2 dos superficies topologicas compactas sin borde.
(I) S1∼= S2 ⇐⇒ χ(S1) = χ(S2) y tienen ambas el mismo caracter de orientabilidad.
(II) S1∼= S2 ⇐⇒ Π1(S1) ∼= Π1(S2).
Demostracion : Por calculo directo
χ(Swn) = 1 + χ(Γwn) = 2− 2n y χ(Sw∗n) = 1 + χ(Γw∗n) = 2− n.
Por tanto la caracterıstica de Euler y el caracter de orientabilidad discriminan todoslos objetos de la lista canonica de superficies S del Corolario 17.8. El item (I) se siguede forma trivial. Item (II) es consecuencia de la Definicion 9.10 y el Corolario 9.11.
125

17.2. Clasificacion de las superficies compactas con borde
La siguiente proposicion jugara un papel fundamental.
Proposicion 17.11 Sea (Sj, Tj) una superficie compacta triangulada con Bd(Sj) 6= ∅,j = 1, 2 con S1 ∩ S2 = ∅. Fijemos una componente conexa γj ⊂ Bd(Sj), j = 1, 2, y unhomeomorfismo h : γ1 → γ2. Consideremos en el espacio topologico suma X = S1 ∪ S2
la relacion de equivalencia:
p ∼h q ⇐⇒ p = q o p, q = r, h(r) para algun r ∈ γ1.
Entonces S := X/∼h es una superficie topologica compacta y γj es homeomorfa vıa σa γ := σ(γ1) = σ(γ2) ⊂ Int(S), j = 1, 2, donde σ : X → S es la proyeccion. Ademasexisten T ′j ≺ Tj, j = 1, 2, tales que σ|T : T → σ(T ) es un homeomorfismo para todoT ∈ T ′j , j = 1, 2, y T := σ(T ) : T ∈ T ′1 ∪T ′2 es una triangulacion de S. En particular,
(a) χT (S) = χT1 (S1) + χT2 (S2).
(b) T es orientable ⇐⇒ Tj es orientable, j = 1, 2.
Demostracion : No es difıcil comprobar de la Observacion 2.6 que S es Hausdorff yII-Axioma de Numerabilidad. Por tanto, para comprobar que S es superficie topologicabastara con garantizar que S es localmente euclidiana alrededor de los puntos en γ. Enefecto, tomemos p ∈ γ arbitrario y llamemos pj := σ−1(p)∩ Sj ∈ γj ⊂ Bd(Sj), j = 1, 2.Elijamos un abierto Dj ⊂ Sj conteniendo a pj y un homeomorfismo
Fj : Dj → D+ := (x, y) ∈ R2 : x2 + y2 < 1, y ≥ 0 con Fj(pj) = (0, 0), j = 1, 2.
Observese que βj := Dj∩Bd(Sj) = F−1j (]−1, 1[×0) es un arco de Jordan abierto en γj
conteniendo pj, y sin perdida de generalidad supongamos que h(β1) = β2. Claramente
D1 ∪ D2 es un abierto σ-saturado de X, por lo que D := σ(D1 ∪ D2) es abierto enS y la aplicacion σ|D1∪D2 : D1 ∪ D2 → D es una identificacion (continua, sobreyectivay abierta). Si escribimos σ0 := σ|D1∪D2 , la relacion de equivalencia ∼σ0 no es sino laque corresponde al pegado de los semidiscos abiertos D1 y D2 por el homeomorfismoh|β1 : β1 → β2, por lo que (D1∪D2)/∼σ0 ∼= D es homeomorfo al disco unidad abierto. Se
deduce que p ∈ S admite un abierto (a saber D) homeomorfo a un disco abierto plano.Esto prueba que S es una superficie y γ ⊂ Int(S). Claramente γj ∼= γ vıa σ, j = 1, 2.
Usando las ideas en la prueba de la Proposicion 16.13, es facil construir subdivisionesT ′j ≺ Tj, j = 1, 2, compatibles a lo largo de γ, esto es, con σ(V (T ′1 ))∩γ = σ(V (T ′2 ))∩γ.De hecho, esto se puede llevar a cabo de forma elemental subdividiendo exclusivamentelos triangulos de Tj con algun lado en γj de forma que V (T ′j )∩Int(Sj) = V (Tj)∩Int(Sj).Una vez hecho esto, la familia de triangulos
T := σ(T ) : T ∈ T ′1 ∪ T ′2
determina la triangulacion deseada de S.Como los lados y vertices de T ′j que descansan en la curva de Jordan γj aportan 0
al calculo de χT ′j
(Sj), j = 1, 2, de la Proposicion 16.19 inferimos que
χT (S) = χT ′1
(S1) + χT ′2
(S2) = χT1 (S1) + χT2 (S2).
Esto prueba (a).
126

Probemos (b). Por la Proposicion 16.19 sabemos que la orientabilidad de Tj esequivalente a la orientabilidad de T ′j . La implicacion =⇒) es trivial sin mas que levantara T ′j vıa σ las orientaciones de los triangulos compatiblemente orientados de T , j = 1, 2.Para la recıproca, supongamos que T ′j es orientable, j = 1, 2, y elijamos una orientacionglobal compatible en los triangulos de T ′j , j = 1, 2. La orientacion de los triangulos deT ′j con un lado en Bd(Sj) induce una orientacion de ese lado contenido en Bd(Sj), queglobalmente contemplada determina un sentido de recorrido de cada curva de Jordanen Bd(Sj), j = 1, 2. Si las orientaciones inducidas sobre los lados en γ1 y γ2 por T ′1 yT ′2 respectivamente fuesen coincidentes, cambiarıamos la orientacion global de T ′1 a suopuesta para lograr que sean opuestas. Una vez hecho esto, orientamos cada triangulode T proyectando vıa σ las orientaciones de los triangulos de T ′1 ∪ T ′2 , generando asıuna orientacion global compatible en T y probando que esta triangulacion de S esorientable.
Lema 17.12 Sea S una superficie, sea X1, . . . , Xk, k ≥ 1, una coleccion de discostopologicos compactos disjuntos dos a dos en Int(S), y sea γ1, . . . , γk−1 una coleccion dearcos de Jordan disjuntos dos a dos en Int(S). Admitamos que γj tiene punto inicial enBd(Xj) y punto final en Bd(Xj+1) e Int(γj)∩
((∪ki=1Xi)∪(∪i 6=jγi)
)= ∅, j = 1, . . . , k−1.
Supongamos que existe una triangulacion T de S de forma los discos Xj y los arcosγi sean uniones de triangulos de F (T ) y lados de E(T ), respectivamente.
Entonces, para todo abierto U ⊂ Int(S) conteniendo a X := ∪k−1j=1(Xj ∪ γj ∪Xj+1)
existen T ′ ≺ T y un disco topologico compacto Y0 en S tales que:
Y0 es union de triangulos de T ′.
X ⊂ Int(Y0) ⊂ Y0 ⊂ U .
Demostracion : Por conveniencia pongamos Bd(X) = ∪k−1j=1(Bd(Xj)∪ γj ∪Bd(Xj+1)) y
X0 := ∪kj=1Xk. Llamemos
TX = T ∈ T : T ∩ Bd(X) 6= ∅, T * X.
Salvo previamente realizar una apropiada subdivision de T (por ejemplo, asociada auna nube suficientemente densa de puntos y un recubrimiento abierto V suficientementefino de S; usar la Proposicion 16.13), podemos suponer que T ∩ Bd(X) consiste en unlado o un vertice de T para todo T ∈ TX y que
∪T∈TXT ⊂ U.
Para cada T ∈ TX elijamos un punto vT∈ Int(T ) y dos puntos x
l1,T∈ Int(l1), x
l2,T∈
Int(l2), donde l1 y l2 son los dos lados de T no contenidos en Bd(X). EscribamosAT = v
T, x
l1,T, x
l2,T. Hagamos estas elecciones de forma que si T1 y T2 ∈ TX comparten
un lado l entonces xl,T1
= xl,T2
.Llamemos A = ∪T∈TXAT y consideremos, vıa la Proposicion 16.13, una subdivision
T ′ ≺ T tal que A ⊂ V (T ′). Tracemos dentro de cada triangulo T ∈ TX un arco deJordan pasando por los tres puntos de AT , contenido en ∪l∈E(T ′)l y con Int(γT ) ⊂ Int(T )(luego disjunto de X). Como la configuracion de triangulos de T ′ en T admite unarealizacion por triangulos geometricos en el plano, el Teorema 3.23 nos permite concluirque γT parte T en dos componentes conexas que son discos topologicos compactos, unode ellos, que llamaremos DT , satisfaciendo DT ∩X = T ∩X y el otro disjunto de X. Amodo de resumen, por construccion:
127

Bd(DT ) ⊂ ∪l∈E(T ′)l, por lo que DT es union de triangulos de T ′.
DT1∩DT2 6= ∅ si y solo si T1∩T2 comparten un lado l no contenido en X e incidentecon un vertice v ∈ V (T )∩Bd(X), y en este caso DT1 ∩DT2 = Bd(DT1)∩Bd(DT2)es un arco de Jordan en l con punto inicial v ∈ Bd(X).
DT ∩X ⊂ Bd(X) y consiste o en un vertice de V (T ) o un lado de E(T ).
DT corta exactamente a dos discos de la familia DT ′ : T′ ∈ TX \ T.
Bd(DT ) \(X ∪
(⋃T ′∈TX\TDT ′
))6= ∅ es un arco de Jordan abierto.
LlamemosYj = Xj ∪
( ⋃T∈TX , T∩Xj 6=∅
DT
), j = 1, . . . , k.
Usando la Proposicion 3.10 es facil ver que Yj es un disco topologico compacto conte-niendo a Xj en su interior. En efecto, ordenemos cıclicamente D1, . . . , Dm los discosde la familia DT : T ∈ TX T ∩Xj 6= ∅ de forma que:
Dj ∩ Dj+1 6= ∅ es un arco de Jordan en el borde comun a ambos discos, j =1, . . . ,m, donde Dm+1 = D1, y por tanto
Dj ∩ Di 6= ∅ si y solo si i = j − 1, j, j + 1, j = 1, . . . ,m, donde D0 = Dm yDm+1 = D1.
Como Xj y D1 comparten un arco de Jordan β1 borde comun, Xj ∪ D1 es un disco.Por un proceso inductivo, como βi+1 := Di+1 ∩ (Xj ∪ (∪ia=1Di)) es un arco de Jordanborde comun a los discos Di+1 y Xj ∪ (∪ia=1Di), se concluye que Xj ∪ (∪i+1
a=1Di) es undisco, i = 1 . . . ,m− 1. Finalmente Yj = Xj ∪ (∪ma=1Di) es un disco. La Proposicion 3.10tambien garantiza durante el proceso inductivo que Bd(Xj) esta contenido en Int(Yj),por lo que Xj ⊂ Int(Yj).
Por un procedimiento similar, el conjunto
Zj =⋃
T∈TX , T∩X0=∅, T∩γj 6=∅
DT
es un disco topologico conteniendo a Int(γj) en su interior, j = 1, . . . , k − 1. En efecto,la familia T ∈ TX , T ∩X0 = ∅, T ∩ γj 6= ∅ se puede poner como union ordenada dedos familias de discos D+
i : i = 1, . . . , s y D−i : i = 1, . . . , s, de forma que
D+j ∩ D+
j+1 6= ∅ es un arco de Jordan en el borde comun a ambos discos, j =1, . . . , s,
DT ∩X ⊂ γj y consiste o en un vertice de V (T ) o un lado de E(T ).
D+j ∩D+
i 6= ∅ si y solo si i y j son enteros consecutivos,
y analogamente con los discos D−i : i = 1, . . . , s. Razonando como arriba, ∪sj=1D+j y
∪sj=1D−j son discos topologicos. Como
(∪sj=1D+j ) ∩ (∪sj=1D
−j ) = γj \
(Est∗T (vj) ∪ Est∗T (vj+1)
),
donde donde vj := Xj ∩ γj y vj+1 := Xj ∩ γj, la Proposicion 3.10 garantiza que Zj =(∪sj=1D
+j ) ∪ (∪sj=1D
−j ) es un disco topologico, j = 1, . . . k − 1.
128

Por construccion, Yj ∩Zj es un arco de Jordan en Bd(EstT (vj)), y de forma similarZj ∩ Yj+1 es un arco de Jordan en Bd(EstT (vj+1)), j = 1, . . . k − 1. Como Zj ∩ Zi = ∅,Yj ∩ Yi = ∅, i 6= j, y Zi ∩ Yj 6= ∅ si y solo si i y j son consecutivos, un razonamientocıclico ordenado usando la Proposicion 3.10 nos permite concluir que
Y0 := ∪k−1j=1(Yj ∪ Zj ∪ Yj+1)
es un disco topologico. Obviamente X ⊂ Int(Y0), Y0 es union de triangulos de T ′ eY0 ⊂ U , lo que concluye la proposicion.
Ahora podemos afrontar los teoremas centrales de esta seccion.
Corolario 17.13 (Clasificacion de las superficies compactas con borde) Si S esuna superficie topologica compacta con borde, entonces S es homeomorfa a una super-ficie de la lista
S∗ := Sn,k : n ∈ N ∪ 0, k ∈ N ∪ S∗n,k : n, k ∈ N =
=Sw : w ∈ wn,k : n ∈ N ∪ 0, k ∈ N ∪ w∗n,k : n, k ∈ N
,
donde ningun par de superficies es homeomorfo entre sı. Al numero n en ambos casosse le llama genero de la superficie.
En particular, para toda triangulacion T de S:
χT (S) = 2− 2n− k si S ∼= Sn,k y χT (S) = 2− n− k si S ∼= S∗n,k.
T es orientable si S ∼= Sn,k y no orientable si S ∼= S∗n,k.
Demostracion : Recordemos que el Corolario 16.4 garantiza que en la lista de superficiesS∗ no hay dos espacios homeomorfos.
Por el Teorema de Rado S es triangulable. Tomemos una triangulacion T de Sy escribamos Bd(S) = ∪kj=1γj, donde γj son curvas de Jordan disjuntas dos a dos.Elijamos X1, . . . , Xk discos topologicos compactos disjuntos dos a dos. Construyamosuna triangulacion Tj de Xj con la misma cantidad de lados en Bd(Xj) que T en γj,y a continuacion un homeomorfismo hj : γj → Bd(Xj) que lleve lados de T en ladosde Tj, j = 1, . . . , k. Aplicando inductivamente la Proposicion 17.11, podemos pegar losdiscos Xj a S usando los homeomorfismos hj, j = 1, . . . , k, para construir una superficie
topologica compacta S sin borde que salvo identificaciones canonicas contenga a S y aXj para todo j. Analogamente, T := T ∪ (∪kj=1Tj) es una triangulacion de S.
Del Lema 17.12, salvo tomar una subdivision de T , podemos suponer que existe undisco Y0 union de triangulos de T de forma que ∪kj=1Xj ⊂ Y0.
Por el Teorema 16.23 y la Observacion 16.24, existe un esquema binario puro ω, unatriangulacion T1 de Sω adaptada a ω, y un homeomorfismo combinatorio G : (S, T )→(Sω, T1) de forma que G(Int(Y0)) ⊂ Sω \ Γω, y en particular ∪nj=1G(Xj) ⊂ Sω \ Γω. Sin
perdida de generalidad (salvo tomar subdivisiones) suponderemos que G(T ) = T1.Por los Teoremas 17.6 y 17.7, existe H : (Sω, T1) → (Sw, T0) homeomorfismo com-
binatorio tal que ∪kj=1H(G(Xj)
)⊂ Sw \ Γw para algun w ∈ wn,k : n ∈ N ∪ 0, k ∈
N ∪ w∗n,k : n, k ∈ N. No supone perdida de fuerza admitir que H(T1) = T0, sal-vo tomar subdivisiones. Por simplicidad, en lo que sigue escribiremos Yj = H(G(Xj)),j = 1, . . . , k. Consideremos una region poligonal ∆ en R2, una triangulacion por triangu-los geometricos T ∗ de ∆, y una identificacion σ : ∆ → Sw tal que σ(T ∗) = T0 yσ(Bd(∆)) = Γw. La existencia de esta identificacion esta encerrada en el Lema 16.16y la Proposicion 16.21. Fijado P0 ∈ σ−1(Vw) y salvo subdividir convenientemente T ∗,existen arcos de Jordan γ1, . . . , γk en ∆ tales que:
129

γj tiene punto inicial P0, extremos en σ−1(Vw) y γj ⊂ ∪l∈E(T ∗)l para todo j.
Int(γj) ∩ Int(γi) = ∅, i 6= j, e Int(γj) ⊂ Int(∆) para todo j.
γj ∩ σ−1(Yi) = ∅, i 6= j, y γj ∩ σ−1(Yj) es un arco de Jordan para todo j.
Por el Teorema 3.23, es facil ver que las curvas ∪kj=1γj parten ∆\(∪kj=1σ−1(Yj)) en k+1
componentes conexas, cuyos cierres son discos topologicos compactos que denotaremospor ∆1, . . . ,∆k+1. Sea βj la componente conexa (subarco de Jordan) de γj \Int(σ−1(Yj))que no contiene a P0 para todo j, y observemos que βj descansa en el borde de dosdiscos de la anterior lista. Salvo anadirles una etiqueta que los distinga, podremos tratarlos ∆j’s como disjuntos dos a dos. De esa forma, si β ∈ βj : j = 1, . . . , k y ∆+
β y ∆−βson los dos discos en ∆j : j = 1, . . . , k + 1 incidentes en β (llamaremos β+ ⊂ ∆+
β
y β− ⊂ ∆−β a las dos copias de β en cada uno de ellos), la aplicacion hβ : β+ → β−,hβ := (σ|β−)−1 (σ|β+) es un homeomorfismo. Usando la Proposicion 3.10 para pegartodos los discos ∆1, . . . ,∆k+1 vıa los homeomorfismos h := hβ1 , . . . , hβk, generamosun nuevo disco topologico ∆∗ = (∪k+1
j=1∆j)/∼h). Si llamamos ρ : ∪k+1j=1 ∆j → ∆∗ a la
correspondiente proyeccion, la unica aplicacion
σ0 : ∆∗ → Sw \ (∪kj=1Yj), σ0 ρ = σ,
es una identificacion. Analizando la relacion ∼σ0 , esta identificacion materializa la su-perficie Sw \ (∪kj=1Yj) como realizacion en ∆∗ del esquema w′ := wn,k si w = wn, o delesquema w′ := w∗n,k si w = w∗n. Al ser F0 := (H G)|S : S → Sw \ (∪kj=1Yj) un homeo-morfismo, concluimos que S es homeomorfa a una superficie de la lista S∗. LlamandoT ′ = T ∈ T : T ⊂ S, que tras los procesos anteriores es una subdivision de T , denuestra construccion se sigue que T ′0 := F0(T ′) es una triangulacion de Sw′ adaptada aw′. Por las Proposiciones 16.19 y 16.21,
T es orientable ⇐⇒ T ′ es orientable ⇐⇒ Sw es orientable.
χT (S) = χT ′
(S) = χT ′0
(Sw′) = 1 + χ(Γw′) = 1 + χ(Γw)− k = χ(Sw)− k.
Finalmente, como las superficies en la lista S∗ no son homeomorfas dos a dos, cadapar de triangulaciones distintas T1 y T2 de S nos han de dirigir por el proceso anterior ahomeomorfismos sobre la misma realizacion canonica Sw′ , de forma que salvo subdivi-siones ambas triangulaciones se aplican vıa estos homeomorfismos en triangulaciones deSw′ adaptadas a w′. En consecuencia T1 y T2 han de tener el mismo caracter de orien-tabilidad (a saber el de Sw′) y la misma caraterıstica de Euler (a saber, 1 + χ(Γw′)).Esto concluye la demostracion.
Como consecuencia, la siguiente definicion es consistente.
Definicion 17.14 Sea S una superficie topologica compacta con borde.Definiremos la caracterıstica de Euler de S como el numero entero
χ(S) := χT (S), T cualquier triangulacion de S.
De igual forma, S se dira orientable (no orientable) si T es orientable (no orientable),donde T es cualquiera triangulacion de S.
Corolario 17.15 Sean S1 y S2 dos superficies topologicas compactas con borde.
130

(I) S1∼= S2 ⇐⇒ χ(S1) = χ(S2), S1 y S2 tienen el mismo caracter de orientabilidad
y S1 y S2 tienen la misma cantidad de componentes conexas en el borde.
(II) S1∼= S2 ⇐⇒ Π1(S1) ∼= Π1(S2) y S1 y S2 tienen la misma cantidad de componen-
tes conexas en el borde.
Demostracion : Probemos item (I).⇒) Sea H : S1 → S2 un homeomorfismo, y sea T1 una triangulacion de S1. La trian-
gulacion T2 := H(T1) de S2 tiene el mismo caracter de orientabilidad y caracterısticade Euler que T1, por lo que S1 y S2 tienen el mismo caracter de orientabilidad y ca-racterıstica de Euler. Como el numero de componentes en el borde es un invariantetopologico, S1 y S2 tienen la misma cantidad de componentes en el borde.⇐) La Proposicion 16.21 garantiza que Sn,k y S∗n,k admiten triangulaciones adap-
tadas a wn,k y w∗n,k, que puede ser utilizadas para calcular la caracterıstica de Euler ydeterminar el caracter de orirentabilidad. Por tanto, Sn,k es una superficie orientablecon k componentes en el borde y
χ(Sn,k) = 1 + χ(Γn,k) = 1 + χ(Γn)− k = χ(Sn)− k = 2− 2n− k.
Analogamente S∗n,k es una superficie no orientable con k componentes en el borde y
χ(S∗n,k) = χ(S∗n)− k = 2− n− k.
Por tanto, la caracterıstica de Euler, el caracter de orientabilidad y el numero de com-ponentes en el borde discriminan las superficies de S∗. Esto prueba (I).
El item (II) es analogo, ya que si dos superficies tienen el mismo caracter de orien-tabilidad y el mismo numero k de componentes en el borde, por el Corolario 17.13han de estar en la lista Sn,k : n ∈ N ∪ 0 si son orientables o en la lista la listaS∗n,k : n ∈ N ∪ 0 si no lo son. La Defincion 9.12 implica que son homeomorfas si ysolo tienen el mismo grupo fundamental.
17.3. Suma conexa de superficies
Consideremos dos superficies topologicas compactas y disjuntas S1 y S2, y tomemosdiscos topologicos compactos Kj ⊂ Int(Sj) satisfaciendo la siguiente condicion
S ′j := Sj \ Int(Kj) es una superficie y Bd(S ′j) = Bd(Sj) ∪ Bd(Kj), j = 1, 2.
Observacion 17.16 La condicion anterior es equivalente a la existencia de una trian-gulacion Tj de Sj de forma que Kj es union de triangulos de Tj. No obstante, estahipotesis es innecesaria y siempre se cumple como consecuencia del Teorema de Jordan-Schoenflies, que esta mas alla de las posibilidades de este curso.
Sea h : Bd(K1) → Bd(K2) un homeomorfismo, y ∼h la relacion de equivalencia depegado inducida en S ′1 ∪ S ′2. Como consecuencia de la Proposicion 17.11, (S ′1 ∪ S ′2)/∼hes una superficie. Como la caracterıstica de Euler y el caracter de orientabilidad de(S ′1 ∪ S ′2)/∼h estan determinados por los de S1 y S2 (ver los Corolarios 17.10 y 17.15),la superficie cociente (S ′1 ∪ S ′2)/∼h no depende de h.
Definicion 17.17 La superficie (S ′1 ∪ S ′2)/∼h es conocida como la suma conexa de S1
y S2, y denotada por S1]S2.
De la Proposicion 17.11,
131
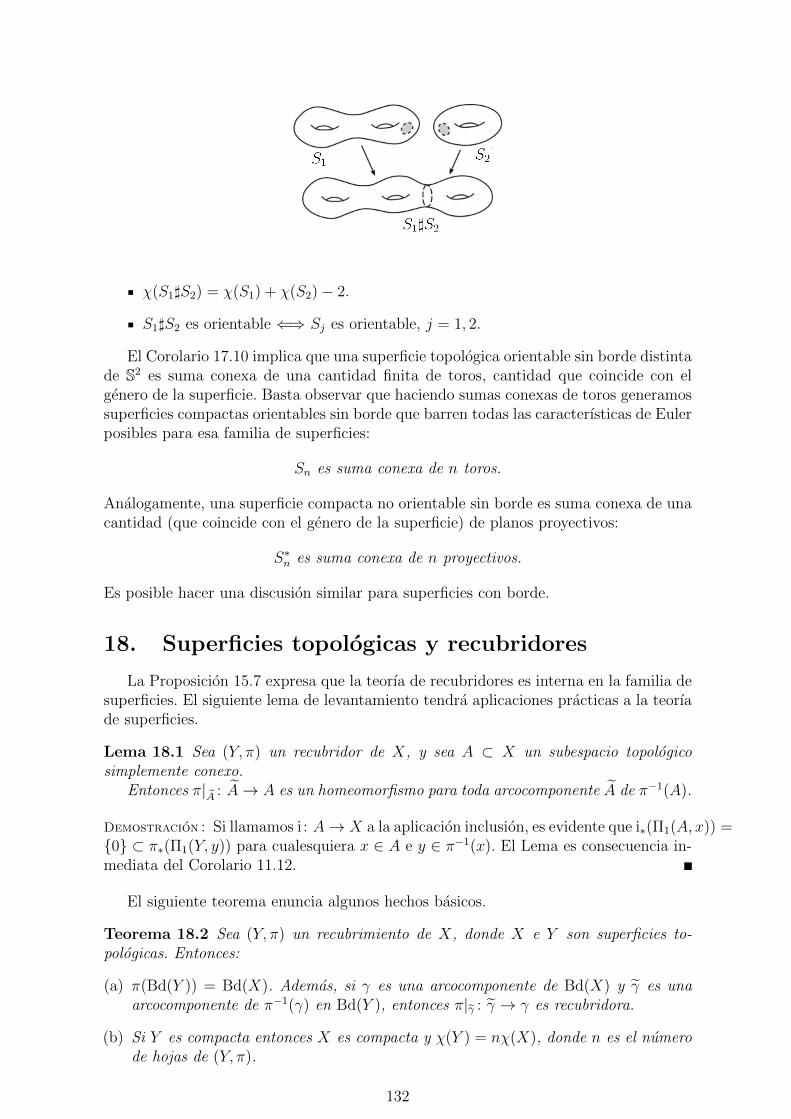
χ(S1]S2) = χ(S1) + χ(S2)− 2.
S1]S2 es orientable ⇐⇒ Sj es orientable, j = 1, 2.
El Corolario 17.10 implica que una superficie topologica orientable sin borde distintade S2 es suma conexa de una cantidad finita de toros, cantidad que coincide con elgenero de la superficie. Basta observar que haciendo sumas conexas de toros generamossuperficies compactas orientables sin borde que barren todas las caracterısticas de Eulerposibles para esa familia de superficies:
Sn es suma conexa de n toros.
Analogamente, una superficie compacta no orientable sin borde es suma conexa de unacantidad (que coincide con el genero de la superficie) de planos proyectivos:
S∗n es suma conexa de n proyectivos.
Es posible hacer una discusion similar para superficies con borde.
18. Superficies topologicas y recubridores
La Proposicion 15.7 expresa que la teorıa de recubridores es interna en la familia desuperficies. El siguiente lema de levantamiento tendra aplicaciones practicas a la teorıade superficies.
Lema 18.1 Sea (Y, π) un recubridor de X, y sea A ⊂ X un subespacio topologicosimplemente conexo.
Entonces π|A : A→ A es un homeomorfismo para toda arcocomponente A de π−1(A).
Demostracion : Si llamamos i : A→ X a la aplicacion inclusion, es evidente que i∗(Π1(A, x)) =0 ⊂ π∗(Π1(Y, y)) para cualesquiera x ∈ A e y ∈ π−1(x). El Lema es consecuencia in-mediata del Corolario 11.12.
El siguiente teorema enuncia algunos hechos basicos.
Teorema 18.2 Sea (Y, π) un recubrimiento de X, donde X e Y son superficies to-pologicas. Entonces:
(a) π(Bd(Y )) = Bd(X). Ademas, si γ es una arcocomponente de Bd(X) y γ es unaarcocomponente de π−1(γ) en Bd(Y ), entonces π|γ : γ → γ es recubridora.
(b) Si Y es compacta entonces X es compacta y χ(Y ) = nχ(X), donde n es el numerode hojas de (Y, π).
132

(c) X orientable =⇒ Y orientable (el recıproco no es cierto).
Demostracion : Para probar item (a), primero observemos que π(Bd(Y )) = Bd(X)como consecuencia de que π es un homeomorfismo local. Consideremos ahora una ar-cocomponente γ de Bd(X), que como bien sabemos es homeomorfa a R o S1. Si γ ∼= Rcualquiera arcocomponente de π−1(γ) es homeomorfa a γ por el Lema 18.1.
Supongamos que γ ∼= S1. Fijemos puntos x ∈ γ e y ∈ π−1(x). Sea α : [0, 1]→ γ unaparametrizacion de γ con α(0) = α(1) = x y α|[0,1[ inyectiva. Llamemos α1 : [0, 1] →Y al levantamiento de α con condicion inicial α1(0) = y. Inductivamente, definamosαj : [0, 1]→ Y como el levantamiento de α con condicion inicial αj(0) = αj−1(1), j ∈ N,donde por convenio α0(1) = y. La secuencia de arcos αjj∈N puede ser infinita y (siαj(1) 6= y para todo j) o contener solo una cantidad finita de k arcos (probar comoejercicio que k es divisor de n := numero de hojas de π) si k es el primer natural para elque αk(1) = y. En cualquier caso γ := ∪j∈Nαj([0, 1]) es una arcocomponente de Bd(Y ),y por construccion π|γ : γ → γ es recubridora. Esto prueba (a).
Para el item (b), consideremos una triangulacion T de X (Teorema de Rado). Si
T ∈ T y T es una arcocomponente de π−1(T ), el Lema 18.1 garantiza que π|T : T → Tes un homeomorfismo. Si definimos
T := T ⊂ Y : existe T ∈ T tal que π|T : T → T es un homeomorfismo,
entonces T determina una triangulacion de Y y χ(Y ) = χT
(Y ) = nχT (X) = nχ(X),donde n es el numero de hojas de (Y, π).
Por ultimo, para probar (c) consideremos una triangulacion T de X globalmente
orientada de forma compatible, y construyamos como antes la unica triangulacion Tde Y tal que π(T ) = T . La orientaciones de los triangulos T ∈ T se pueden levantar
vıa π de forma natural a orientaciones de los triangulos T ∈ T , y la compatibilidad delas orientaciones de los primeros garantiza la compatibilidad de las orientaciones de lossegundos.
Recordemos que el plano proyectivo RP2 = Sw1 es recubierto por S2 = Sw0 , por loque el recıproco de (c) no es cierto.
Para acabar, probaremos este interesante resultado.
Teorema 18.3 (Recubridor de dos hojas orientable) Sea X una superficie topologi-ca compacta no orientable.
Entonces existe un unıco (salvo isomorfismos) recubridor (X0, π0) de X satisfacien-do:
X0 es una superficie orientable.
(X0, π0) tiene dos hojas.
Ademas, si Bd(X) tiene k componentes entonces Bd(X0) tiene 2k componentes.
Demostracion : Notese que de existir un recubridor de dos hojas orientable (X0, π0) deX, X0 ha de ser compacta el Corolario 12.3.
Probemos primero el teorema en el caso Bd(X) = ∅.Llamemos U a la familia de parejas (U, [α]), donde
U es un disco topologico compacto en X.
[α] es un generador universal de Π1(U∗); ver Definicion 16.7.
133

Para cada p ∈ X llamemos Up := (U, [α]) ∈ U : p ∈ Int(U) (reparemos en queInt(U) = U \ Bd(U) coincide con el interior topologico de U en X por el Teorema deInvarianza del Dominio, ver Teorema 15.3).
Sean (U1, [α1]), (U2, [α2]) ∈ Up, y tomemos U0 ∈ Up tal que U0 ⊂ U1 ∩ U2. Fijemos[α0] generador universal de Π1(U∗0 ), y observemos que [αj] = (ij)∗(εj[α0]) para ciertoεj ∈ 1,−1, donde ij : U0 \ p → Uj \ p es la inclusion (equivalencia homotopica).
Las parejas (U1, [α1]), (U2, [α2]) ∈ Up se diran copatiblemente orientadas, y escri-biremos (U1, [α1]) ∼p (U2, [α2]), si ε1ε2 = 1. Obviamente, si (U, [α]) ∈ Up entonces(U,−[α]) ∈ Up y (U, [α]) p Up(U,−[α]). La relacion ∼p es de equivalencia en Up, y delo anterior es elemental el comprobar que el cociente Up/ ∼p tiene solo dos clases deequivalencia, que llamaremos o+
p y o−p . Denotemos por
op : Up → o+p , o
−p
a la correspondiente proyeccion. Consideremos el conjunto
X0 := ∪p∈Xo+p , o
−p .
Para dotar a X0 de topologıa, tomemos cualquier (U, [α]) ∈ U y definamos
[(U, [α])] := oq((U, [α])
): q ∈ Int(U) ⊂ X0.
Dotemos a X0 de la unica topologıa que contiene a⋃(U,[α])∈U
[(U, [α])]
como base.De la definicion es inmediato comprobar que X0 es T2 y II-Axioma de numerabilidad
(ya que X lo es). Ademas π0 es un homeomorfismo local, por lo que X0 es localmenteeuclidiano (ya que X lo es). Si X0 fuese arcoconexo, serıa una superficie topologica y
π0 : X0 → X, π0(o+p ) = π0(o−p ) := p,
un recubridor de dos hojas.Para comprobar la arcoconexion de X0, probemos primero que existe p ∈ X de
forma que o+p y o−p se pueden conectar por un arco en X0. En efecto, elijamos una
triangulacion T de X. Como X es no orientable, T es no orientable. Por tanto debeexistir una subsecuencia T1, . . . , Ta ⊂ T de forma que Tj y Tj+1 compartan un ladoy esten compatiblemente orientados, j = 1, . . . , a− 1, y T1 y Ta compartan un lado l yno esten compatiblemente orientados.
Llamemos Uj := Tj ∪ Tj+1 , j = 0, . . . , a, donde hemos hecho el convenio T0 = Ta yTa+1 = T1. En consecuencia,
U0 = Ua = T1 ∪ Ta.
Denotemos por [αj] el generador universal de Π1(U∗j ) inducido por la orientacion com-patible entre Tj y Tj+1, para todo j = 1, . . . , a− 1. Por la compatibilidad de las orien-taciones de los triangulos Tj y Tj+1, j = 1, . . . , a− 1, oq((Uj, [αj])) = oq((Uj+1, [αj+1]))para todo q ∈ Int(Uj ∩ Uj+1), j = 1, . . . , a− 2.
Llamemos [α0] el generador universal de Π1(U∗0 ) tal que oq((U0, [α0])) = oq((U1, [α1]))para todo q ∈ Int(U0∩U1), y analogamente [αa] al generador universal de Π1(U∗a ) tal queoq((Ua, [αa])) = oq((Ua−1, [αa−1])) para todo q ∈ Int(Ua ∩Ua−1). Como las orientacionesde T1 y Ta no son compatibles, de nuestra construccion [α0] = −[αa]. Por tanto, el
134

abierto conexo (luego arcoconexo) de X0 dado por V :=⋃aj=0[(Uj, [αj])] contiene a los
puntos o+q , o
−q : q ∈ Int(U0) = Int(Ua) = oq
((U0, [α0])
), oq((Ua, [αa])
): q ∈ Int(U0) =
Int(Ua) ⊂ V , y en particular cualesquiera dos de ellos se pueden conectar por un arcoen X0.
Ahora podemos probar la arcoconexion de X0. Fijemos p ∈ X0 tal que o+p y o−p se
puedan conectar por un arco en X0. Sin perdida de generalidad podemos suponer quep pertenece al interior de algun triangulo de T . Vamos a probar que cualquier puntoq ∈ X0 se conecta con alguno de los puntos o+
p , o−p . Es suficiente con demostrar estehecho para puntos q ∈ X0 de forma que q := π0(q) este contenido en el interior de untriangulo de T . Por la conexion de X existe una sucesion de triangulos T1, . . . , Ta ⊂ Tde forma que Tj∩Tj+1 consiste en un lado comun, j = 1, . . . , a, (hemos hecho el convenioTa+1 = T1) p ∈ Int(T1) y q ∈ Int(Ta). Llamando Uj := Tj ∪ Tj+1, j = 1, . . . , a − 1 ypor un argumento similar al anterior, podemos construir una secuencia (Uj, [αj]) : j =1, . . . , a − 1 ⊂ U de forma que [(Uj, [αj])] ∩ [(Uj+1, [αj+1])] 6= ∅, j = 1, . . . , a − 2.Como antes W :=
⋃a−1j=1 [(Uj, [αj])] es un abierto arcoconexo que contiene algun punto
de o+p , o
−p y algun punto de o+
q , o−q . De igual forma, W ∗ :=
⋃a−1j=1 [(Uj,−[αj])] es un
abierto conexo que contiene los puntos complementarios a los anteriormente senaladosen o+
p , o−p y o+
q , o−q . Teniendo en cuenta que o+
p y o−p se pueden conectar por un arcoen X0, se concluye.
Ası pues X0 es una superficie topologica.Resta garantizar que X0 es orientable. Para ello consideremos una triangulacion T
de X y su levantada T a X0 vıa el recubridor de dos hojas π0 : X0 → X; ver la pruebadel Teorema 18.2.
Para cada triangulo T ∈ T elijamos un punto pT∈ Int(T ), y consideremos en
T := π0(T ) ∈ T el generador universal [α] de Π1(T ∗) tal que pT
= opT
(T, [α]), dondepT
= π0(pT). La orientacion de Bd(T ) inducida por [α] determina unıvocamente una
ordenacion de los vertices de V (T ) de forma natural, y esta ordenacion de vertices sepuede levantar vıa π0 a una ordenacion de los vertices en V (T ) que orienta T . De estaforma orientamos todos y cada uno de los triangulos de T .
Veamos que esta orientacion global de T es compatible. Para ello consideremos dostriangulos T1, T2 ∈ T con un lado l en comun. Sabemos que K := T1∪ T2 es un disco to-pologico compacto que se proyecta vıa π0 en el disco topologico compacto K = T1 ∪T2,donde Tj = π0(Tj). Si elegimos p ∈ l, como antes p induce un sentido de recorridode Bd(K) que ha de coincidir con el sentido de recorrido de Bd(Tj) inducido por p
Tj
sobre el arco de Jordan Bd(K) ∩ Bd(Tj), j = 1, 2. Por tanto, los triangulos T1 y T2,con las orientaciones inducidas por p
T1y p
T2respectivamente, estan compatiblemen-
te orientados. Por la definicion de las orientaciones en T1 y T2, estos estan tambiencompatiblemente orientados. Esto prueba que T es orientable, luego X0 es orientable.
Para acabar el teorema (en el caso Bd(X) = ∅), resta demostrar que (X0, π0) es elunico recubridor de dos hojas orientable de X. En efecto, consideremos otro recubridorde dos hojas (Y, π) de X tal que Y sea una superficie orientable.
Tomemos una triangulacion T de X y llamemos T ′ a su levantada vıa π a Y . Seap ∈ X un punto arbitrario en el interior de un lado de E(T ), y sea α un lazo en X conbase p. Por conexion existe una secuencia de triangulos T1, . . . , Tk en T de forma que:
Tj ∩ Tj+1 conparten un lado. j = 1, . . . , j, donde Tk+1 = T1, y p ∈ T1 ∩ Tk.
La traza de α este contenida en ∪kj=1Tj.
Llamamos la atencion sobre el hecho de que podrıa haber triangulos de T repetidos enla secuencia. Elijamos orientaciones en T1, . . . , Tk de forma que Tj y Tj+1 esten compa-
135

tiblemente orientados para todo j = 1, . . . , k − 1. Fijemos q ∈ π−1(p) y la correspon-diente secuencia de triangulos levantados T ′1, . . . , T
′k en T ′ que satisface απq ⊂ ∪kj=1T
′j .
Levantemos la orientacion de Tj a T ′j para todo j, y observemos que T ′j y T ′j+1 estancompatiblemente orientados para todo j = 1, . . . , k − 1. Es claro que T ′k ∩ T ′1 6= ∅ si ysolo si απq es un lazo en Y , y como Y es orientable, si y solo si T ′k y T ′1 son triangu-los con un lado en comun y compatiblemente orientados. Pero esto es equivalente adecir que απ0q0 es un lazo en X0, donde q0 ∈ π−1
0 (p) es un punto arbitrario. Por tantoπ∗(Π1(Y, q)) = (π0)∗(Π1(X0, q0)), lo que por el Corolario 13.5 implica que existe un iso-morfismo de recubridores Φ: (Y, π)→ (X0, π0) con Φ(q0) = q. Esto concluye la pruebadel teorema para el caso Bd(X) = ∅.
Supongamos que Bd(X) 6= ∅ y X tiene k ∈ N componentes en el borde. Tal ycomo explicamos en la prueba del Corolario 17.13, la Proposicion 17.11 nos permitepegar a X por su borde k discos topologicos X1, . . . , Xk para generar una superficie sinborde X ′. La superficie X ′ admite recubridor orientable de dos hojas (X ′0, π
′0) por lo
ya demostrado. Ademas, como cada disco Xj ⊂ X ′ es simplemente conexo, (π′0)−1(Xj)es la union disjunta de dos discos X+
j y X−j , ambos copias homeomorficas de Xj vıa
π′0. Definiendo X0 := X ′0 \⋃kj=1(Int(X+
j ) ∪ Int(X−j )) y π0 := π′0|X0 : X0 → X, el par(X0, π0) es un recubridor de dos hojas orientable de X. Ademas resulta evidente queX0 tiene 2k componentes en el borde. La unicidad de este tipo de recubridor se pruebacomo arriba.
Corolario 18.4 El espacio recubridor de dos hojas orientable de S∗n,k es Sn−1,2k, n ∈ N,k ∈ N ∪ 0.
Demostracion : Por el Teorema 18.2, el recubridor de dos hojas orientable X0 de S∗n,kes una superficie compacta orientable con χ(X0) = 2χ(S∗n,k) = 2(2− n− k). Ademas elTeorema 18.3 nos dice que X0 tiene 2k componentes en el borde.
Como X0 es orientable, ha de coincidir con Sn′,2k para algun n′ ∈ N ∪ 0, verCorolarios 17.8 y 17.13. Pero χ(Sn′,2k) = 2− 2n′ − 2k, por lo que n′ = n− 1.
136

Ejercicios del Tema 3
1. Sea X = S2 ∪ x0, donde x0 ∈ R3 − S2. En X se considera la topologıa talque los entornos de los puntos de S2 son los usuales, y los de x0 son de la forma(V − N)∪ x0, donde N = (0, 0, 1) y V es un entorno de N en S2. Demostrarque cada punto de X tiene un entorno homeomorfo a un abierto de R2 pero Xno es T2.
2. Consideremos el espacio producto X = R2 × R, donde en R2 se considera latopologıa usual y en R la topologıa discreta. Demostrar que cada punto de Xtiene un entorno homeomorfo a un abierto de R2 pero X no es IIAN.
3. Demostrar que los siguientes espacios topologicos no son superficies:
a) S = (x, y, z) ∈ R3 / x2 + y2 − z2 = 0.b) Rn con n 6= 2.
c) S = (x, y) ∈ R2 / y ≥ 0.
¿Es la union o interseccion de dos superficies en R3 una superficie?
4. Sea ρ : S → S recubridora. Probar que S es una superficie si y solo si lo es S.
5. Sea S una superficie y f : S → R una funcion continua. Definimos el grafo de fcomo:
G(f) = (x, t) ∈ S × R / t = f(x)con la topologıa inducida por la topologıa producto en S × R. Probar que G(f)es una superficie, que ademas es compacta si y solo si lo es S.
6. Encontrar un atlas de RP2, esto es, una familia de sistemas de coordenadas enRP2 cuyos entornos coordenados recubran RP2.
7. Encontrar una triangulacion de la botella de Klein K.
8. En cada uno de los siguientes casos clasificar la superficie S con presentacionpoligonalQ/∼E, dondeQ es un polıgono cerrado de n lados identificados medianteel esquema E:
a) n = 6, E = abacb−1c−1,
b) n = 6, E = abca−1b−1c−1,
c) n = 8, E = abcdca−1bd−1,
d) n = 10, E = aba−1cdb−1c−1ed−1e−1,
e) n = 12, E = abcadb−1efce−1df−1.
Clasificar la suma conexa de las superficies representadas en los apartados a) yb).
9. ¿Que superficie esta representada por la union de 4 triangulos disjuntos cuyasaristas se etiquetan e identifican segun el esquema E = abc, bde, c−1df, e−1fa?
10. ¿Que superficie se obtiene cuando identificamos las aristas de un polıgono cerradode 2n lados con n ≥ 2 mediante el esquema E = a1 a2 a3 · · · an a−1
1 a−12 a−1
3 · · · a−1n ?
¿Y si cambiamos la ultima etiqueta por an?
137

11. Demostrar que toda superficie compacta y conexa es homeomorfa a una y solouna de las siguientes superficies:
S2,Tn,RP2, K,Tn #RP2,Tn #K.
12. Identificar, salvo homeomorfismos, las superficies compactas y conexas con carac-terıstica de Euler igual a −2.
13. Sea S una superficie compacta y conexa. Probar que χ(S) ≥ −2 si y solo si Stiene una presentacion poligonal Q/∼E donde Q es un octogono.
14. Discutir de forma razonada si cada par de las siguientes superficies compactas yconexas son o no homeomorfas entre sı:
a) S1∼= Q/∼E, donde Q es un octogono y E = abcdad−1cb−1,
b) S2 cumple χ(S2) ≥ 0 y Π1(S2) no es abeliano,
c) S3 cumple que Π1(S3) ∼= 〈A,B,C;ACBCBA−1〉.
Obtener tambien la presentacion poligonal canonica de S1 efectuando para ellolas transformaciones que sean necesarias.
15. Sea S la superficie compacta y conexa que admite una presentacion poligonalobtenida identificando los lados de un decagono mediante el esquema:
E = ab−1c− da−1ebc−1−,
donde cada guion − esta ocupado por una unica etiqueta. Completar el esquemapara que S sea homeomorfa a:
a) T2 = T #T ,
b) RP24 = RP2 #RP2 #RP2 #RP2,
c) la superficie modelo con primer grupo de homologıa isomorfo a Z2 × Z4.
16. Un poliedro regular en R3 es un subconjunto P ⊂ R3 dado por la union de unacantidad finita de polıgonos cerrados regulares (llamados caras de P ) tal que:
a) todas las caras tienen el mismo numero de lados,
b) a cada vertice llegan el mismo numero de aristas,
c) P ∼= S2.
Probar la formula de Euler dada por V − A + F = 2, donde V es el numero devertices del poliedro, A es el numero de aristas y F el numero de caras. A partirde aquı, deducir que hay solamente 5 poliedros regulares: tetraedros, octaedros,icosaedros, cubos y dodecaedros.
17. Se divide un balon de futbol en piezas homeomorfas a pentagonos o hexagonos(no todas las piezas han de ser homeomorfas al mismo tipo de polıgono) de modoque:
a) cada arista es compartida por exactamente dos piezas,
b) a cada vertice llegan exactamente tres aristas.
Demostrar que el numero de piezas pentagonales es 12.
138

18. Resolver de forma razonada las siguientes cuestiones:
a) Sea S una superficie. Demostrar que S#S2 ∼= S.
b) Si S1 y S2 son superficies compactas y conexas, ¿se cumple necesariamenteque Π1(S1 #S2) ∼= Π1(S1)∗Π1(S2)? ¿Y que H1(S1 #S2) ∼= H1(S1)×H1(S2)?
c) ¿Es cierto que RP23∼= RP2 #T ∼= RP2 #K?
d) ¿Existe S superficie compacta y conexa con χ(S) ≤ −7 y H1(S) ∼= Z2×Z7?
e) Sea Q una union finita de polıgonos cerrados disjuntos con el mismo numerode lados. Describir todas las posibles configuraciones de Q a partir de las quese puede obtener una presentacion poligonal con un unico vertice del 2-toroT2 = T #T .
19. Determina los espacios topologicos compactos Y para los que existe una aplicacionrecubridora π : Y → X en cada uno de los siguientes casos:
a) X = S2.
b) X = RP2.
c) X = RP2]RP2.
d) X = T, donde T := S1 × S1.
20. Determina los espacios topologicos X para los que existe una aplicacion recubri-dora π : Y → X en cada uno de los siguientes casos:
a) Y = RP2.
b) Y = RP2]RP2.
c) Y = T, donde T := S1 × S1.
d) Y = T]T.
21. Explicita el recubridor universal de
a) D \ 0.b) S2 ∪
((0, 0) × [−1, 1]
). Pista: observar que este espacio es homeomorfo a
S2 ∪ c, donde c es un arco de Jordan en el exterior de la bola unidad de R3
conectando los dos polos de la esfera.
139