Embed Size (px)
Citation preview
Equation Chapter 1 Section 1
Trabajo Fin de Grado Grado en Ingeniería Civil
Simulación numérica del oleaje y su interacción con estructuras costeras
Autor: Joaquín Decena Gamero
Tutor: José Ángel González Pérez
Departamento de Ingeniería de la Construcción y Proyectos de Ingeniería
Universidad de Sevilla
Escuela Técnica Superior de Ingeniería
Sevilla, Julio de 2016
Trabajo Fin de Grado Grado en Ingeniería Civil
Simulación numérica del oleaje y su interacción con
estructuras costeras
Autor: Joaquín Decena Gamero
Tutor: José Ángel González Pérez
Departamento de ingeniería de la Construcción y
Proyectos de Ingeniería
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, Julio de 2016

Trabajo de Fin de Grado: Simulación numérica del oleaje y su interacción con estructuras costeras
Autor: Joaquín Decena Gamero
Tutor: José Ángel González Pérez
El tribunal nombrado para juzgar el Proyecto arriba indicado, compuesto por los siguientes miembros:
Presidente:
Vocales:
Secretario:
Acuerdan otorgarle la calificación de:
Sevilla, Julio de 2016
El Secretario del Tribunal
Simulación numérica del oleaje y su interacción con estructuras costeras
2
Agradecimientos
Quiero dedicar esta sección a agradecer a mi tutor José Ángel González Pérez la oportunidad que me dio de poder realizar este trabajo, dándome además un gran apoyo y ayuda durante toda la realización del mismo. Sin ti esto no hubiese sido posible, más allá de enseñarme a resolver unas ecuaciones complejas, quiero quedarme con la confianza y apoyo que siempre mostraste.
Me gustaría dedicarle este trabajo también a mis padres, por su apoyo incondicional y su entrega durante toda la carrera, para facilitármelo todo y que solo tuviera que centrarme en los estudios. Agradecerles que me han apoyado durante toda mi vida y sé que también lo harán en lo que me queda de ella. Ellos han sabido apoyarme y motivarme en cada momento, ayudándome en las decisiones más difíciles.
Al resto de mis familiares, principalmente mi hermana y mis abuelos. A mi hermana porque siempre ha estado a mi lado. A mis abuelos por todas esas tardes que pasaron conmigo ayudándome y apoyándome y las que nos quedan por estar juntos. Ellos siempre confiaron en mí.
Por todo ello, muchísimas gracias.
Tampoco quisiera olvidarme del resto de profesores que he tenido durante estos años. Ellos me han ayudado a crecer intelectualmente, pero sobre todo me han enseñado a esforzarme y a que siempre puedes dar un poco más de ti mismo. Algunos no los olvidaré nunca por su grandeza personal. Gracias.

Simulación numérica del oleaje y su interacción con estructuras costeras
3
A mi familia,
Simulación numérica del oleaje y su interacción con estructuras costeras
4
Índice general
Agradecimientos 2
Índice general 4
Índice de figuras 6
1. Introducción 7 1.1. Estudio y motivación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 1.2. Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 1.3. Estructura del trabajo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2. Conceptos fundamentales de oleaje 10
2.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 2.1.1. Características generales de una ola . . . . . . . . . . . . . . . . . 10 2.1.2. Propagación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2. El oleaje de viento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 2.3. Teorías de oleaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3.1. Teorías lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 2.3.2. Teoría lineal de Airy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3. Modelo de Zhao, Cheng y Teng para la propagación del oleaje 21
3.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 3.2. Ecuaciones del problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Simulación numérica del oleaje y su interacción con estructuras costeras
5
4. Formulación MEF del modelo de Zhao, Cheng y Teng 27 4.1. Problemas 1D. Resolución mediante el MEF . . . . . . . . . . . . . . . 27
4.1.1. Supuesto I: fondo constante . . . . . . . . . . . . . . . . . . . . . . . 28 4.1.2. Supuesto II: fondo variable . . . . . . . . . . . . . . . . . . . . . . . . 36
5. Ejemplos numéricos 41 5.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 5.2. Ejemplos de validación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.2.1. Problema 1 fondo constante 1D . . . . . . . . . . . . . . . . . . . . 42 5.2.2. Problema 2 fondo variable 1D . . . . . . . . . . . . . . . . . . . . . 45 5.2.3. Prblema 3 aplicación condiciones de contorno . . . . . . . . 48
6. Resumen y conclusiones 51 6.1. Resumen de los contenidos desarrollado . . . . . . . . . . . . . . . . . . . 51 6.2. Conclusión del trabajo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 6.3. Trabajo futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Bibliografía 54
Simulación numérica del oleaje y su interacción con estructuras costeras
6
Índice de figuras
2.1 Características generales de una ola . . . . . . . . . . . . . . . . . . . . . . . . 10 2.2 Ábaco de Kinsmann [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 2.3 Aplicabilidad de las teorías de oleaje . . . . . . . . . . . . . . . . . . . . . . . 15 2.4 Representación de las variables de la ecuación 2.7 . . . . . . . . . . . . 19
4.1 Representación gráfica de las funciones de forma. . . . . . . . . . . . . . 28 4.2 Código Matlab con definición de los parámetros del problema. . . . 31 4.3 Código Matlab para la definición de la malla . . . . . . . . . . . . . .. . . . 32 4.4 Código Matlab para el cálculo de las funciones eta y phi y las condiciones iniciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 4.5 Código Matlab para el vector solución inicial . . . . . . . . . . . . . . . . . 33 4.6 Código Matlab para la función “evaluate” . . . . . . . . . . . . . . . . . . . . 34 4.7 Código Matlab para la representación gráfica . . . . . . . . . . . . . . . . . 35 4.8 Código Matlab para el cálculo de la profundidad . . . . . . . . . . . . . . 39 4.9 Código Matlab para el cálculo de las matrices M, L y N . . . . . . . . 40 5.1 Representación de la altura de ola (eta) para varios instantes . . . . . 43 5.2 Representación del potencial de velocidades para los mismos
instantes de tiempo que los tomados en la figura 5.1 . . . . . . . . . . . . 44 5.3 Representación gráfica del dominio de estudio y las condiciones
inciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 5.4 Código Matlab para el cálculo de la profundidad . . . . . . . . . . . . . . 46 5.5 Arriba la solución obtenida mediante Matlab para eta en varios
instantes de tiempo. En la gráfica inferior las soluciones de eta que aparecen en [1] para similares instantes de tiempo . . . . . . 47
5.6 Soluciones Phi para varios instantes de tiempo . . . . . . . . . . . . . . . . 49 5.7 Soluciones Phi para varios instantes de tiempo . . . . . . . . . . . . . . . . 50
Simulación numérica del oleaje y su interacción con estructuras costeras
7
Capítulo 1
Introducción
1.1 Estudio y motivación
Este trabajo se inició con el objetivo de profundizar en el conocimiento de la asignaturas de Obras Marítimas y Métodos Matemáticos. Asimismo el uso de la herramienta Matlab y del Método de los Elementos Finitos, ambos ampliamente extendidos en la ingeniería, serán de gran ayuda en un futuro próximo. No obstante este trabajo se enmarca en un contexto mucho más amplio que el de resolver unas ecuaciones mediante Matlab. Se trata de comprender de donde proceden las ecuaciones que gobiernan la propagación 1D de una onda (ola), aplicar el MEF para ser capaces de resolverlas y posteriormente interpretar las soluciones y compararlas con lo estudiado en la asignatura de Obras Marítimas.
La historia del estudio del oleaje generado por el viento es relativamente reciente, podríamos decir que los estudios de formación, crecimiento y propagación del oleaje se realizaron durante la II Guerra Mundial (1939-1945) y como parte de los preparativos de la complicada operación militar conocida como "El Desembarco de Normandía".
La teoría básica del oleaje se nace de los trabajos de Airy (1845) y Stokes (1847).
Las actividades que se desarrollan en zonas costeras como la pesca, el transporte marítimo, la explotación petrolera, los estudios de erosión costera y la construcción de estructuras, entre otras, requieren de información del oleaje, que muchas veces no está disponible. Es por ello que el tema de modelos que permitan representar el fenómeno de la dinámica del oleaje han sido ampliamente estudiados por muchos autores.
Simulación numérica del oleaje y su interacción con estructuras costeras
8
1.2 Antecedentes
Este trabajo tiene como referencia fundamental un artículo de Zhao publicado en el año 2004 [2], incluidos en la bibliografía. En dicho artículo se recoge un nuevo grupo de ecuaciones de movimiento para la propagación de olas en aguas con profundidad variable. Otro documento de gran ayuda para la elaboración de este trabajo ha sido la tesis doctoral de Nuno [1]. Dicho estudio se estructura en cinco secciones en las que trata respectivamente: una introducción general, un repaso breve a las ecuaciones de mecánica de fluidos, la teoría lineal de Airy, deducciones de los modelos estudiados (modelo de Nwogu y modelo de Zhao, Teng, Cheng), y una última sección de implementación de las ecuaciones con ejemplos prácticos. Todos estos trabajos se recogen en la bibliografía.
No obstante, es importante destacar que estos trabajos se han empleado como apoyo para los complejos desarrollos matemáticos que se requieren hasta alcanzar un sistema de ecuaciones que permita calcular el potencial de velocidades y la altura de ola. Sin embargo dichos documentos no contenían ningún código de apoyo para Matlab ni en ningún otro lenguaje de programación.
Dentro de los documentos que he usado y que este trabajo tiene como referencia, me gustaría remarcar la importancia que ha tenido la tesis de Nuno [1] en el campo de la obtención de las ecuaciones. Asimismo el libro [4] ha sido fundamental para comprender el Método de los Elementos Finitos en elementos 1D.
1.3 Estructuración del trabajo
Este documento se ha estructurado de la siguiente forma. Tras un primer capítulo introductorio, el siguiente capítulo se ha dedicado a explicar los conceptos básicos del oleaje así como las teorías más relevantes desarrolladas hasta ahora sobre la propagación de las olas. También se describen en segundo capítulo las características generales de las ondas. En el tercer capítulo se trata de explicar y obtener las ecuaciones del de Zhao, Cheng y Teng, explicando el desarrollo seguido para su obtención. El cuarto capítulo se dedica a desarrollar la formulación e implementación de un código en Matlab que nos permita resolver problemas a partir de las ecuaciones de Zhao, Cheng y Teng para el caso de
Simulación numérica del oleaje y su interacción con estructuras costeras
9
dominios 1D. Es importante destacar que dentro de este capítulo se distinguen dos claras secciones, una dedicada al caso de fondo constante y otra al fondo variable. En el quinto capítulo se recogen todos los ejemplos numéricos de aplicación de los códigos desarrollados en capítulos anteriores, de modo que podamos validar que el modelo matemático implementado en Matlab proporciona resultados adecuados. El capítulo 6 incluye un resumen de los contenidos desarrollados en el trabajo, así como las conclusiones obtenidas y un pequeño apartado para tratar sobre el trabajo futuro en el marco de este documento.
Este trabajo solo trata el caso unidimensional de propagación del oleaje, pudiendo ampliarse en un futuro con un modelo 2D que permita tratar problemas más complejos.
Simulación numérica del oleaje y su interacción con estructuras costeras
10
Capítulo 2
Conceptos fundamentales de oleaje
2.1 Introducción
En este capítulo vamos a introducir los fundamentos del oleaje, desde su generación hasta su propagación, así como las magnitudes que nos permiten medir las características de una ola. De la radiación solar incidente sobre la superficie de la Tierra, una fracción se invierte en un calentamiento desigual de la misma, lo que provoca en la atmósfera zonas de altas y bajas presiones, generando desplazamientos del aire (viento) de mayor o menor intensidad. El oleaje es una consecuencia del rozamiento del aire sobre la superficie del mar. 2.1.1 Características generales de una ola
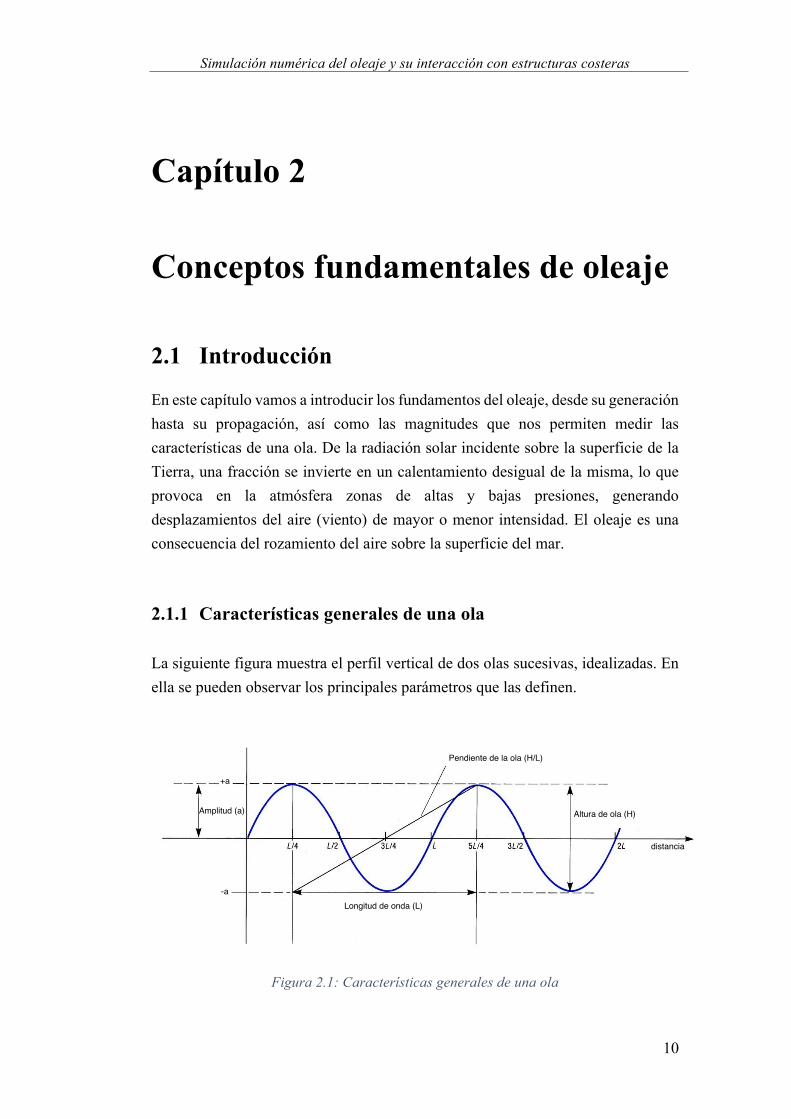
La siguiente figura muestra el perfil vertical de dos olas sucesivas, idealizadas. En ella se pueden observar los principales parámetros que las definen.
Figura 2.1: Características generales de una ola
Pendiente de la ola (H/L)
Longitud de onda (L)
Amplitud (a)
+a
-a
Altura de ola (H)
distancia

Simulación numérica del oleaje y su interacción con estructuras costeras
11
Estos parámetros son:
- Altura de ola (H): distancia vertical entre un seno y una cresta sucesivos.
- Amplitud (a): máxima desviación desde el nivel medio. - Longitud de onda (L): distancia horizontal entre dos crestas sucesivas. - Periodo (T): tiempo que tardan en pasar dos crestas sucesivas
por el mismo punto. - Frecuencia (f): número de crestas que pasan cada segundo por un
punto fijo (f = 1/T).
Otros parámetros importantes son los siguientes:
- Frecuencia angular (ω): es 2π veces la frecuencia (f). - Número de onda (k): es el inverso de la longitud de onda (L). - Celeridad c. Distinguimos dos tipos:
o Celeridad de la ola (c), que está relacionada con la velocidad a la que se propaga la ola.
o Celeridad de grupo (Cg), que es la velocidad a la que se transmite la energía de un sistema de olas.
- Profundidad relativa d/L - Altura de ola relativa H/d
Por otro lado, resulta importante recordar la llamada ecuación de dispersión, que relaciona la celeridad con la profundidad y la longitud de onda. El fenómeno de dispersión resulta fundamental para entender los fenómenos de agrupamiento del oleaje.
Recordemos que la celeridad, también denominada velocidad de fase, es la relación entre la longitud de onda (L) y el período (T). Es decir:
(2.1)
Como podemos observar en la ecuación (2.2), la velocidad de propagación (c) dependerá de la profundidad (d). La ecuación de dispersión se escribe como:
(2.2)

Simulación numérica del oleaje y su interacción con estructuras costeras
12
Relacionando las dos ecuaciones anteriores, podemos reescribir la celeridad de la onda de la siguiente forma:
(2.3)
Por tanto podemos concluir, de la ecuación anterior, que mientras mayor sea el período de una onda, más rápido viajará. Esto es fundamental comprender lo que se conoce como fenómeno de dispersión. Las olas son dispersivas en frecuencia.
Esto significa que las olas, cuando se propagar hacia la costa van separándose y ordenándose en grupos hacia la costa en función de sus períodos. Las de mayor período se adelantan, al tener mayor celeridad, y las de menor período se retrasan.
2.1.2 Propagación
Podríamos definir la propagación del oleaje como el conjunto de fenómenos que sufre el frente de oleaje desde su generación hasta alcanzar la costa. Entre estos fenómenos podríamos nombrar los siguientes: shoaling, refracción, difracción, reflexión y rotura. En el ámbito de este proyecto va a tomar una mayor relevancia el fenómeno de shoaling. Centrémonos inicialmente en cómo se genera el oleaje. El viento es el responsable de la generación del oleaje que se desplaza sobre la superficie del agua. Durante una tormenta en el mar se produce un mar revuelto e irregular (SEA), siendo difícil distinguir en él los diferentes trenes de olas que allí se generarán. En este mar de viento (SEA) existen una amplia gama de alturas de ola, períodos y direcciones. La superficie del agua presenta un aspecto caótico. Sin embargo, el SEA se se simplifica cuando sale de la zona de generación debido a los fenómenos de soldadura y filtrado:
- Fenómeno de soldadura: consiste en que fuera de la zona de generación, las olas de similar período y dirección se sueldan formando frentes de olas que simplifican el oleaje.
- Fenómeno de filtrado: las olas de mayor período (más de 20 segundos) se adelantan al grueso del temporal (al tener mayor celeridad). Aparecen en la costa como olas de período largo y baja altura (precursoras). Las olas de
Simulación numérica del oleaje y su interacción con estructuras costeras
13
menor período (menos de 5 segundos) se retrasan, transmiten mal la energía y terminan desapareciendo.
De modo que a la costa llega un oleaje simplificado y ordenado, conocido como SWELL, en el que viajan olas con un período comprendido entre 5 y 20 segundos. El aspecto más importante es que el oleaje SWELL transmite la energía del oleaje de forma muy eficiente.
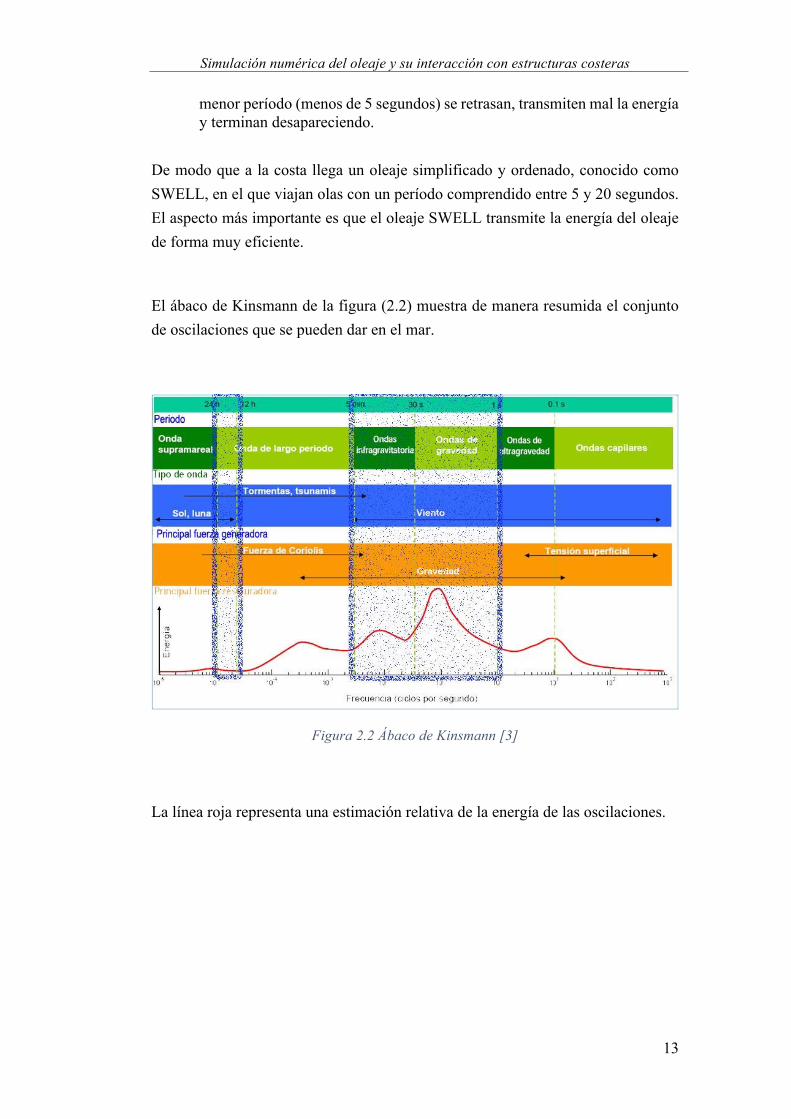
El ábaco de Kinsmann de la figura (2.2) muestra de manera resumida el conjunto de oscilaciones que se pueden dar en el mar.
Figura 2.2 Ábaco de Kinsmann [3]
La línea roja representa una estimación relativa de la energía de las oscilaciones.
Simulación numérica del oleaje y su interacción con estructuras costeras
14
2.2 El oleaje de viento
El oleaje es la oscilación de la superficie del agua que observamos en nuestras costas. No mueve masas de agua, excepto durante los procesos de rotura. Lo que se propaga es la perturbación, no la masa de agua. Como símil para entender mejor esto, se tiene el caso de una bandera, cuyas ondulaciones generadas por el viento se mueven desde el asta hacia su borde libre, pero la tela queda fija, no se desplaza.
En este nivel, se distinguen dos tipos fundamentales de oleaje de viento como hemos mencionado antes:
- El SEA, o mar de viento, que es el que se produce en la zona de generación (también denominada FETCH). Es un oleaje muy desordenado, con frentes pequeños y en muchas direcciones, aunque predomina la del viento.
- El SWELL, o mar de fondo (figura 3), que se da fuera de la zona de generación, con olas de diferentes periodos, pero más ordenadas y viajando en una misma dirección principal.
Otros tipos de ondas también muy importantes son: las mareas, las ondas largas, los seiches y los tsunamis. Sin embargo en el ámbito de este proyecto tienen menos relevancia y por tanto, no se van a describir.
La intensidad del oleaje de viento depende de la intensidad del viento, de su duración y de la longitud (fetch) sobre la cuál éste transmite energía a la ola. El mecanismo con que se generan las olas debidas al viento no está aun perfectamente esclarecido; se trata probablemente de la acción de oscilaciones de la presión atmosférica de período corto combinadas con la acción del viento. Por su turbulencia, una corriente de viento que fluye paralela a la superficie del mar se puede asimilar a una sucesión de oscilaciones de la presión atmosférica que actúan en un plano vertical, ortogonalmente a la dirección del viento. Tales oscilaciones, que incluso pueden superar la amplitud de un milibar, llegan a tener períodos del orden de uno a varios segundos, y se corresponden con auténticos golpes alternados con acciones de reflujo, que se desplazan con el avance del viento, por lo que la superficie aparece afectada por una agitación.
Simulación numérica del oleaje y su interacción con estructuras costeras
15
2.3 Teorías de oleaje
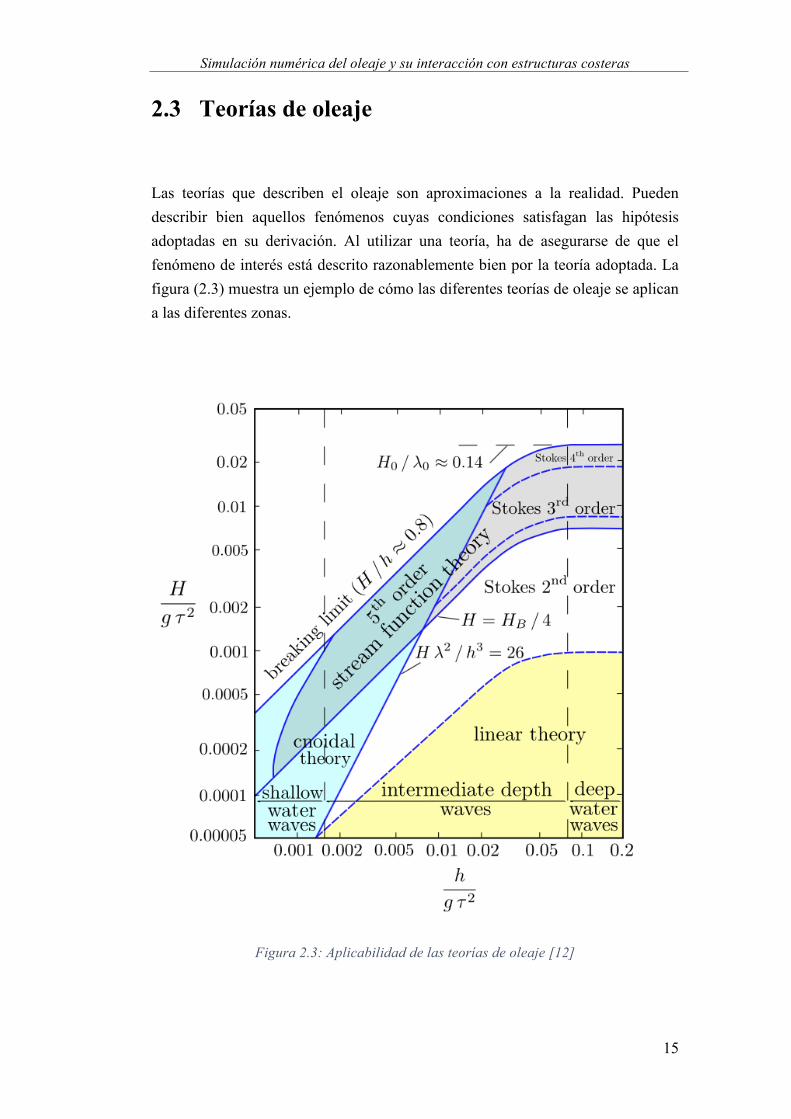
Las teorías que describen el oleaje son aproximaciones a la realidad. Pueden describir bien aquellos fenómenos cuyas condiciones satisfagan las hipótesis adoptadas en su derivación. Al utilizar una teoría, ha de asegurarse de que el fenómeno de interés está descrito razonablemente bien por la teoría adoptada. La figura (2.3) muestra un ejemplo de cómo las diferentes teorías de oleaje se aplican a las diferentes zonas.
Figura 2.3: Aplicabilidad de las teorías de oleaje [12]
Simulación numérica del oleaje y su interacción con estructuras costeras
16
2.3.1 Teorías lineales
Las teorías más simples que tratan de explicar como se propaga una onda son las teorías lineales. Dentro de ellas, la más destacada es la teoría de Airy. Aunque con ciertas limitaciones de aplicación, la teoría lineal de Airy puede ser muy útil siempre que se cumplan las hipótesis de partida. Enumeremos a continuación las hipótesis más destacables de la teoría lineal:
1. El agua es homogénea e incompresible y, por tanto, la densidad, ρ, es constante.
2. El efecto de Coriolis puede ser despreciado.
3. La tensión superficial del agua puede ser despreciada 4. En la superficie libre del mar, la presión es uniforme y constante.
5. Se desprecia la viscosidad del agua. 6. En el oleaje no interviene ningún otro movimiento marino.
7. Las ondas son de pequeña amplitud y la forma no varía en el tiempo. 8. Las ondas son planas (2D). Aunque en nuestro modelo asimilaremos
además que el frente de onda es infinito en dirección perpendicular al avance de la onda, por tanto solo nos queda una dimensión de estudio (modelo 1D).
9. El flujo es irrotacional.
10. El fondo del mar es un límite horizontal fijo e impermeable.
De la primera hipótesis mencionada podríamos concluir que las líneas de corriente de fluidos incompresibles son paralelas. De hecho la ecuación de conservación de la masa indica que:
(2.4)
Donde ρ es la densidad y u la velocidad.
Si el fluido es incompresible entonces la densidad es constante y la ecuación anterior se reescribe como:
(2.5)
Simulación numérica del oleaje y su interacción con estructuras costeras
17
Esto significa que la divergencia de la velocidad es nula. Lo que implica que las líneas de flujo son paralelas y, por tanto, queda demostrado.
También es conveniente recordar, puesto que nos será útil más adelante, que un flujo irrotacional implica que el campo de velocidades correspondiente deriva de un potencial. Si consideramos que u es la velocidad horizontal y w es la velocidad vertical, podemos expresarlo del siguiente modo:
(2.6)
Por tanto, si se conoce el potencial de velocidad Φ(x,y,z) se pueden conocer también las velocidades de las partículas.
También es conocido, de acuerdo a la segunda Ley de Newton, que todo cuerpo material sometido a una fuerza experimenta una aceleración en la misma dirección y sentido que actúa la fuerza y de módulo proporcional al módulo de la fuerza.
(2.7)
En un fluido debemos considerar dos tipos de fuerza.
Las fuerzas másicas. En el caso que estamos estudiando sólo debemos considerar la fuerza de la gravedad. F=(0,0,-g).
Las fuerzas locales. Como consideramos que el fluido es no viscoso la única fuerza local a considerar es la debida a la presión, que produce una fuerza normal que actúa en cada elemento del fluido.
Pensemos en un volumen V y un contorno S. La segunda ley de Newton para un fluido de volumen V se puede escribir como:
(2.8)
Aplicando el teorema de la divergencia y empleando la ecuación de conservación de la masa, podemos llegar a la integral:

Simulación numérica del oleaje y su interacción con estructuras costeras
18
(2.9)
Por la arbitrariedad de V y la regularidad del integrando, podemos escribir la ecuación vectorial de Euler del siguiente modo:
(2.10)
Tomando la ecuación (2.9) de Euler en forma vectorial, considerando flujo irrotacional (Rot u=0), ρ constante y F un campo conservativo F=-Ω, la ecuación de Euler se puede reescribir como:
(2.11)
Teniendo en cuenta que:
(2.12)
Como el gradiente de u es igual al rotacional de u y sabiendo que el flujo es irrotacional llegamos a que Rot u=0. Por otro lado sabemos que u es conservativo. Por tanto (2.11) se escribe como:
(2.13)
Y, por tanto, satisface la ecuación de Bernouilli:
(2.14)
Simulación numérica del oleaje y su interacción con estructuras costeras
19
z
2.3.2 Teoría lineal de Airy
El objetivo de esta sección es completar el desarrollo de la teoría lineal de Airy iniciado en los apartados anteriores, introduciendo algunos conceptos nuevos y las formulaciones a las que se llegan con dicha teoría. Vamos a exponer las características las ondas lineales de pequeña amplitud. El objetivo será deducir principalmente las fórmulas de: velocidad de fase y velocidad de grupo.
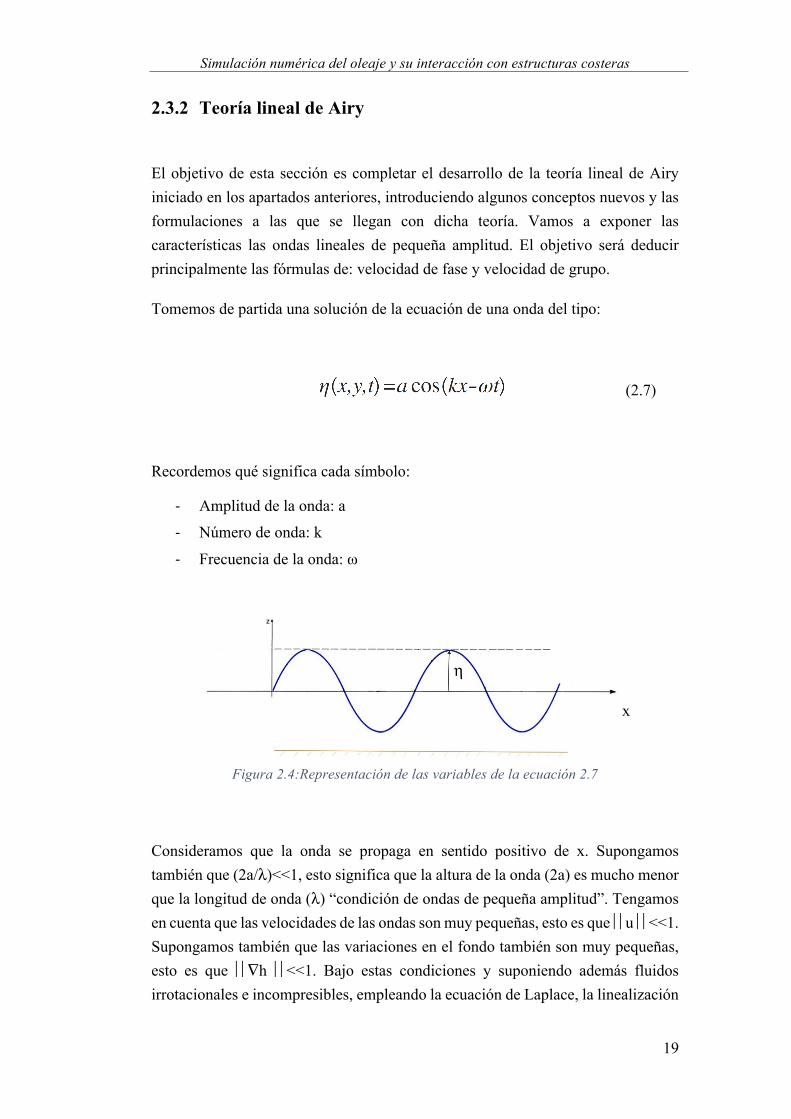
Tomemos de partida una solución de la ecuación de una onda del tipo:
(2.7)
Recordemos qué significa cada símbolo:
- Amplitud de la onda: a
- Número de onda: k
- Frecuencia de la onda: ω
η
x
Figura 2.4:Representación de las variables de la ecuación 2.7
Consideramos que la onda se propaga en sentido positivo de x. Supongamos también que (2a/λ)<<1, esto significa que la altura de la onda (2a) es mucho menor que la longitud de onda (λ) “condición de ondas de pequeña amplitud”. Tengamos en cuenta que las velocidades de las ondas son muy pequeñas, esto es que ⎜⎜u ⎜⎜<<1. Supongamos también que las variaciones en el fondo también son muy pequeñas, esto es que ⎜⎜∇h ⎜⎜<<1. Bajo estas condiciones y suponiendo además fluidos irrotacionales e incompresibles, empleando la ecuación de Laplace, la linealización
Simulación numérica del oleaje y su interacción con estructuras costeras
20
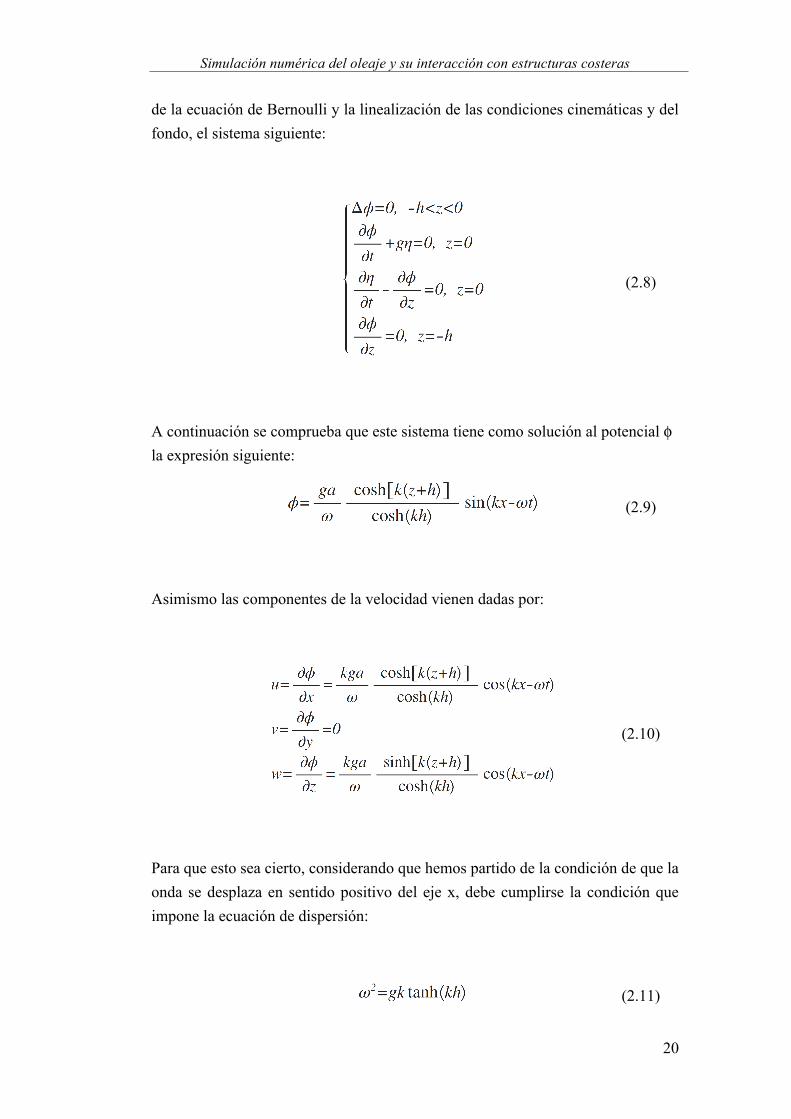
de la ecuación de Bernoulli y la linealización de las condiciones cinemáticas y del fondo, el sistema siguiente:
(2.8)
A continuación se comprueba que este sistema tiene como solución al potencial φ la expresión siguiente:
(2.9)
Asimismo las componentes de la velocidad vienen dadas por:
(2.10)
Para que esto sea cierto, considerando que hemos partido de la condición de que la onda se desplaza en sentido positivo del eje x, debe cumplirse la condición que impone la ecuación de dispersión:
(2.11)
Simulación numérica del oleaje y su interacción con estructuras costeras
21
Capítulo 3
Modelo de Zhao, Cheng y Teng para la propagación del oleaje
3.1 Introducción
Este capítulo cumple con el propósito de explicar un modelo matemático que permita resolver un conjunto de ecuaciones de movimiento para la propagación de las olas en aguas de profundidad variable. Para ello es necesario seleccionar inicialmente un modelo matemático de los múltiples que se han ido desarrollando a lo largo de la historia con el objetivo de explicar el movimiento de las olas. En este caso se decidió implementar la ecuaciones derivadas del estudio de Zhao, Cheng y Teng [2].
Estas ecuaciones están expresadas en función del potencial de velocidades y la altura de ola, siendo no lineales y de primer orden y con la misma dispersión que las ecuaciones extendidas de Boussinesq. No obstante, comparado con las ecuaciones extendidas de Boussinesq, sólo tienen dos incógnitas escalares y no contienen derivadas espaciales de orden mayor de dos. Las ecuaciones pueden ser resueltas usando el método de los elementos finitos. El modelo se aplica a varios ejemplos de propagación de las ondas en profundidad constante y variable.
Como se ha explicado anteriormente, las olas se propagan hacia la orilla o alrededor de estructuras marinas, transformándose debido a los efectos de shoaling, refracción, difracción y la reflexión. Las ecuaciones de Boussinesq se ha demostrado que son capaces de simular la difracción de la onda en aguas poco profundas. El primer conjunto de ecuaciones de Boussinesq para profundidad variable se obtuvo de Peregrine (1967) [5] y es conocido como ecuaciones clásicas de Boussinesq.
Simulación numérica del oleaje y su interacción con estructuras costeras
22
Puesto que los errores aumentan conforme la profundidad del agua aumenta, debido a la inexactitud de la relación de dispersión lineal, las ecuaciones clásicas de Boussinesq no se pueden aplicar en aguas profundas.
Para ampliar la aplicabilidad de las ecuaciones de Boussinesq en aguas profundas, se han hecho muchos esfuerzos para mejorar las propiedad de dispersión en las ecuaciones. Witting (1984) [6] presentó un nuevo conjunto de ecuaciones válidas para una sola dimensión horizontal. Madsen y Sørensen (1992) [7] y Beji y Nadaoka (1996) [8] introdujeron ecuaciones con las relaciones de dispersión mejoradas por la reordenación de los términos de dispersión. Nwogu (1993) [9] obtuvo un conjunto de ecuaciones usando la velocidad a una distancia arbitrario.
En definitiva, cada modelo conduce a unas ecuaciones que tratan de describir la propagación de las olas de un modo más exacto.
B.Teng y M.Zhao (2003) [10] obtuvieron un nuevo conjunto de ecuaciones de Boussinesq generalizadas no lineal para la propagación de olas en aguas de profundidad variable. Una función del potencial de velocidad y la elevación de la superficie se utilizan como variables dependientes en las ecuaciones.
Las nuevas ecuaciones tienen la misma no linealidad y la propiedad de dispersión como las ecuaciones de Boussinesq extendidas. Sin embargo, el nuevo conjunto de ecuaciones parece ser más eficiente para el cálculo de movimiento de las olas en tres dimensiones, ya que contienen sólo dos incógnitas escalares. Por otra parte, debido a que las presentes ecuaciones no contienen derivadas espaciales con un orden mayor que 2, no hay necesidad de introducir ningún variables auxiliares o utilizar la función de ponderación de mayor orden para resolver las ecuaciones usando el MEF Galerkin.

Simulación numérica del oleaje y su interacción con estructuras costeras
23
3.2 Ecuaciones del problema
Para el desarrollo matemático siguiente hemos tomado como apoyo el documento [2]. Consideremos un conjunto de olas propagándose sobre un fondo de profundidad variable. Elegimos un sistema de coordenadas cartesianas oxyz, con z apuntando hacia arriba y con origen en la superficie del agua en estado de calma (sin oleaje). El agua se supone que incompresible y no viscosa y el flujo irrotacional. No existe una función de potencial de velocidades que satisfaga la ecuación de Laplace. Empleamos variables adimensionales:
(3.1)
h0 : profundidad característica
L: longitud de onda característica
g: aceleración de la gravedad
Se definen la elevación de la superficie del agua y el potencial de velocidades adimensionales del siguiente modo:
(3.2)
A: Amplitud de ola característica
η: elevación superficie del agua adimensional
φ: potencial de velocidades adimensional
Debido a que Φ’ satisface la ecuación de Laplace, sabemos que Φ satisface las siguientes ecuaciones:

Simulación numérica del oleaje y su interacción con estructuras costeras
24
(3.3)
En la superficie de onda, los movimientos de las olas que satisface la condición de contorno cinemática:
(3.4)
Y la condición de contorno dinámica:
(3.5)
Donde los subíndices denotan derivación parcial con respecto a la variable indicada. Y además:
ε=A/h0
η=h0/L (3.6)
Las condiciones de contorno en el fondo del mar serían:
(3.7)
La función del potencial de velocidades se puede expresar mediante un desarrollo en serie de Taylor:
(3.8)
Donde:
(3.9)

Simulación numérica del oleaje y su interacción con estructuras costeras
25
Combinando las diferentes ecuaciones, incluyendo las condiciones de contorno y el desarrollo de Taylor, mediante un complejo desarrollo matemático se puede alcanzar la siguiente expresión:
(3.10)
Estas últimas ecuaciones son exactamente las mismas que las derivadas por Wu(1981) [11] y tienen la misma precisión que las ecuaciones clásicas de Boussinesq.
A continuación vamos a obtener un nuevo conjunto de ecuaciones generalizadas de Boussinesq con mayor orden de precisión de la relación de dispersión.
Asumiendo que la pendiente del fondo varía lentamente, despreciamos los términos de segundo y tercer orden de variación (derivadas) de la profundidad (h). Asimismo, en este estudio se introduce una variable φ que es función de φ0 del siguiente modo:
(3.11)
Usando las simplificaciones y aproximaciones anteriores, podemos llegar a este nuevo conjunto de ecuaciones:
(3.12)

Simulación numérica del oleaje y su interacción con estructuras costeras
26
Finalmente, seleccionando unos parámetros α y β, empleando las relaciones lineales en los términos no lineales (Peregrine, 1967 [5]; Beji and Nadaoka, 1996 [8]) y volviendo a las formas dimensionales, obtenemos las siguientes ecuaciones generalizadas de Boussinesq:
(3.13)
Estas dos ecuaciones tienen la misma relación de dispersión y no-linealidad que las ecuaciones extendidas de Boussinesq. Sin embargo, estas son más eficientes para el cálculo de propagación de oleaje y sólo contienen dos variables escalares desconocidas. Por tanto pueden ser implementadas sencillamente usando métodos numéricos.
Simulación numérica del oleaje y su interacción con estructuras costeras
27
Capítulo 4
Formulación MEF del modelo de Zhao, Cheng y Teng
4.1 Problemas 1D. Resolución mediante el MEF
El objetivo de este apartado es desarrollar un modelo matemático que permita implementar numéricamente en Matlab el caso unidimensional de las ecuaciones de Zhao, Cheng e Teng. Partimos del sistema de ecuaciones que definen el problema. Más adelante en este mismo trabajo se detallarán los pasos seguidos hasta la obtención de dicho sistema:
(4.1)
La primera ecuación corresponde a la elevación de la superficie. La segunda ecuación está relacionada con el potencial de velocidades. El sistema anterior se presenta en forma de formulación fuerte. El objetivo final será obtener un sistema de ecuaciones en forma matricial para cada uno de los elementos en los que se divide el dominio de estudio, que más adelanten se ensamblaran para su resolución.
Simulación numérica del oleaje y su interacción con estructuras costeras
28
4.1.1 Supuesto I: fondo constante
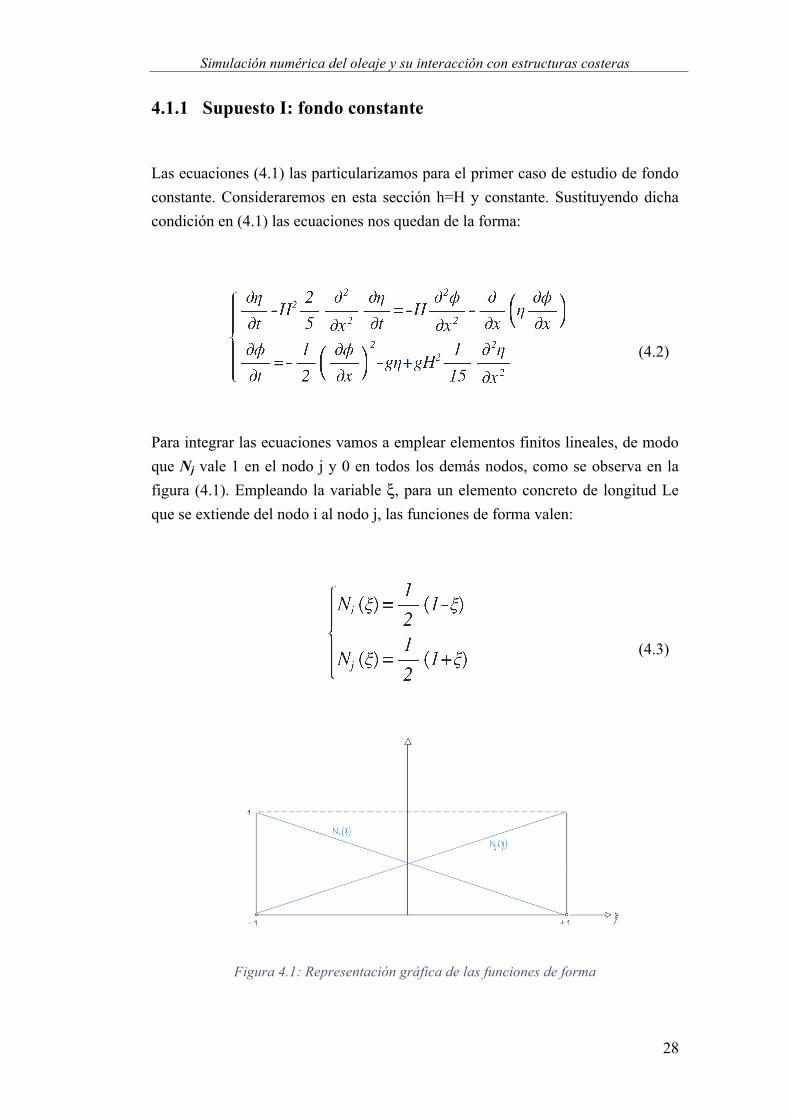
Las ecuaciones (4.1) las particularizamos para el primer caso de estudio de fondo constante. Consideraremos en esta sección h=H y constante. Sustituyendo dicha condición en (4.1) las ecuaciones nos quedan de la forma:
(4.2)
Para integrar las ecuaciones vamos a emplear elementos finitos lineales, de modo que Nj vale 1 en el nodo j y 0 en todos los demás nodos, como se observa en la figura (4.1). Empleando la variable ξ, para un elemento concreto de longitud Le que se extiende del nodo i al nodo j, las funciones de forma valen:
(4.3)
Figura 4.1: Representación gráfica de las funciones de forma

Simulación numérica del oleaje y su interacción con estructuras costeras
29
El primer paso será, de acuerdo al documento [1] usar una formulación variacional, empleando q y r como funciones de ponderación en un dominio limitado.
(4.4)
La elevación y el potencial son aproximados mediante las funciones de forma:
(4.5)
Posteriormente, de acuerdo al documento [1] aplicamos el método de Galerkin, usando integración por partes y discretizando, para un elemento que no tenga contacto con el contorno, nos queda:
(4.6)
El sistema anterior se puede reescribir en forma matricial del siguiente modo:
(4.7)
Siendo X el vector que contiene al conjunto de incógnitas X=[ηj , φj]T, es decir, existen dos incógnitas por nodo, la altura de ola y el potencial de velocidades. Llegados a este punto resulta necesario realizar cada una de las integrales que aparecen en el sistema de ecuaciones anterior para poder escribir explícitamente cada uno de los términos del sistema matricial.

Simulación numérica del oleaje y su interacción con estructuras costeras
30
En el proceso de integración en el elemento vamos a realizar un cambio de variable, de modo que nos resultará mucho más sencillo integrar en función de la variable ξ. Para ello es necesario tener en cuenta algunas consideraciones:
- Integrar en un elemento de longitud dx es equivalente a integrar entre [-1,1] en el dominio de ξ.
(4.8)
La primera integral la calculamos, teniendo en cuenta las consideraciones anteriores, del siguiente modo:
(4.9)
El procedimiento para el cálculo del resto de integrales sería el mismo. El sistema matricial que resulta de integrar todas las ecuaciones, para el caso de fondo constante, es el siguiente podemos y tomarlo directamente de [1]:

Simulación numérica del oleaje y su interacción con estructuras costeras
31
(4.9)
Una vez obtenido el sistema de ecuaciones anterior (4.9), el objetivo es desarrollar una herramienta matemática en Matlab que permita resolverlo. A continuación detallaremos los pasos seguidos hasta la resolución de dicho sistema.
Creamos en Matlab una función a la que llamaremos, en este caso “Fondoconstante( )”. Inicialmente será necesario definir y ordenar una serie de datos y constante que nos servirán más adelante. En definitiva, definir la geometría de nuestro problema:
Figura 4.2: Código Matlab con definición de los parámetros del problema
Simulación numérica del oleaje y su interacción con estructuras costeras
32
Como podemos observar en la figura (4.1) definimos inicialmente una longitud de estudio de propagación de la onda (L), la profundidad del fondo (H) y el número de elementos (Ne) en los que vamos a dividir nuestro dominio de propagación (L). Asimismo se definen una seria de constantes (g, a1, a2, a, b, C) que necesitaremos más adelante.
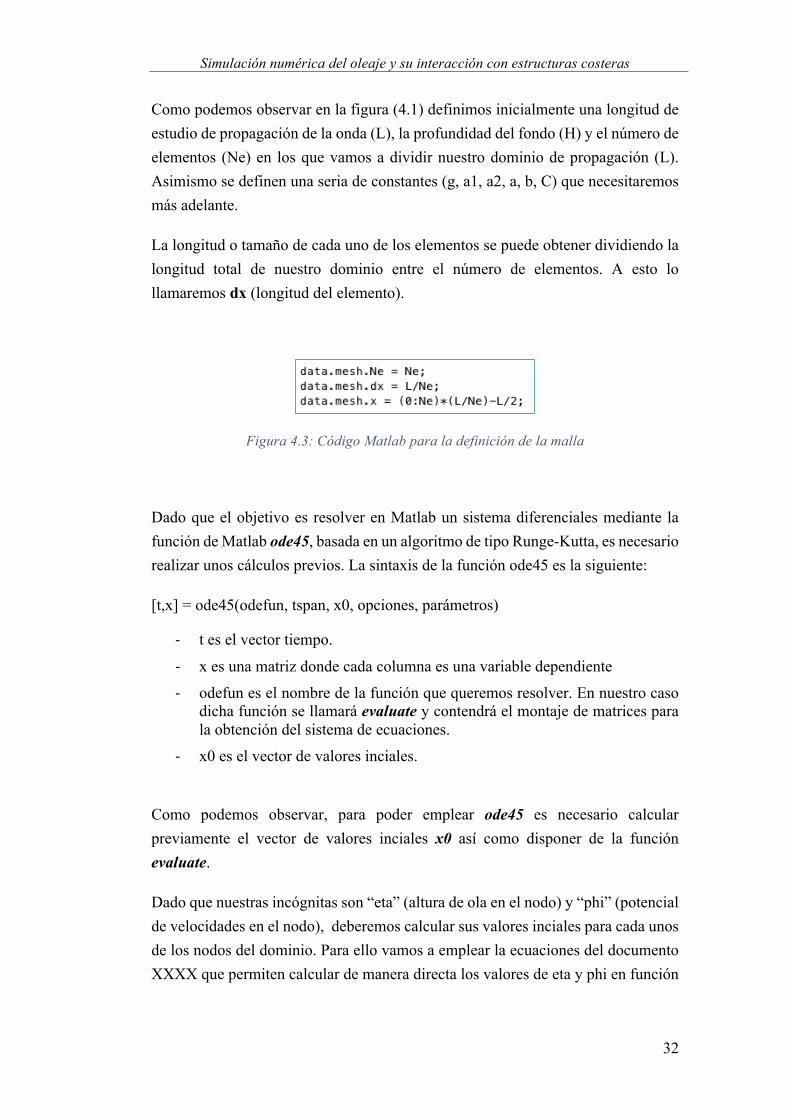
La longitud o tamaño de cada uno de los elementos se puede obtener dividiendo la longitud total de nuestro dominio entre el número de elementos. A esto lo llamaremos dx (longitud del elemento).
Figura 4.3: Código Matlab para la definición de la malla
Dado que el objetivo es resolver en Matlab un sistema diferenciales mediante la función de Matlab ode45, basada en un algoritmo de tipo Runge-Kutta, es necesario realizar unos cálculos previos. La sintaxis de la función ode45 es la siguiente:
[t,x] = ode45(odefun, tspan, x0, opciones, parámetros)
- t es el vector tiempo.
- x es una matriz donde cada columna es una variable dependiente
- odefun es el nombre de la función que queremos resolver. En nuestro caso dicha función se llamará evaluate y contendrá el montaje de matrices para la obtención del sistema de ecuaciones.
- x0 es el vector de valores inciales.
Como podemos observar, para poder emplear ode45 es necesario calcular previamente el vector de valores inciales x0 así como disponer de la función evaluate.
Dado que nuestras incógnitas son “eta” (altura de ola en el nodo) y “phi” (potencial de velocidades en el nodo), deberemos calcular sus valores inciales para cada unos de los nodos del dominio. Para ello vamos a emplear la ecuaciones del documento XXXX que permiten calcular de manera directa los valores de eta y phi en función
Simulación numérica del oleaje y su interacción con estructuras costeras
33
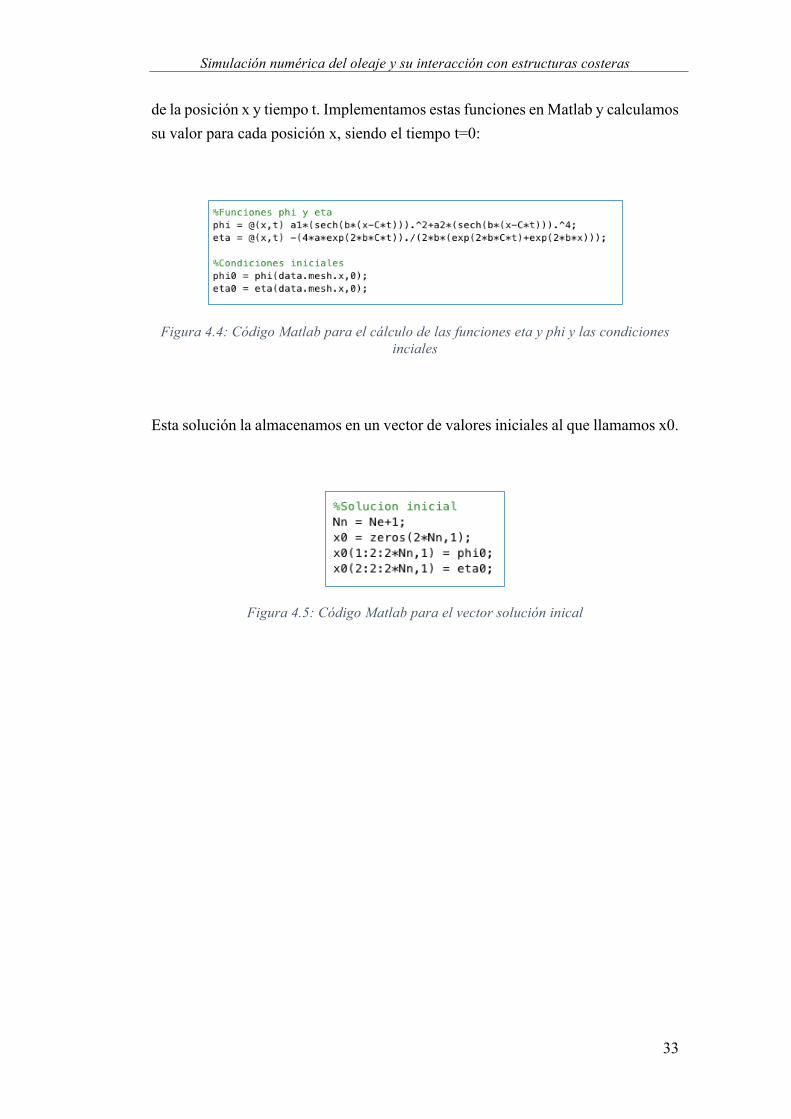
de la posición x y tiempo t. Implementamos estas funciones en Matlab y calculamos su valor para cada posición x, siendo el tiempo t=0:
Figura 4.4: Código Matlab para el cálculo de las funciones eta y phi y las condiciones inciales
Esta solución la almacenamos en un vector de valores iniciales al que llamamos x0.
Figura 4.5: Código Matlab para el vector solución inical
Simulación numérica del oleaje y su interacción con estructuras costeras
34
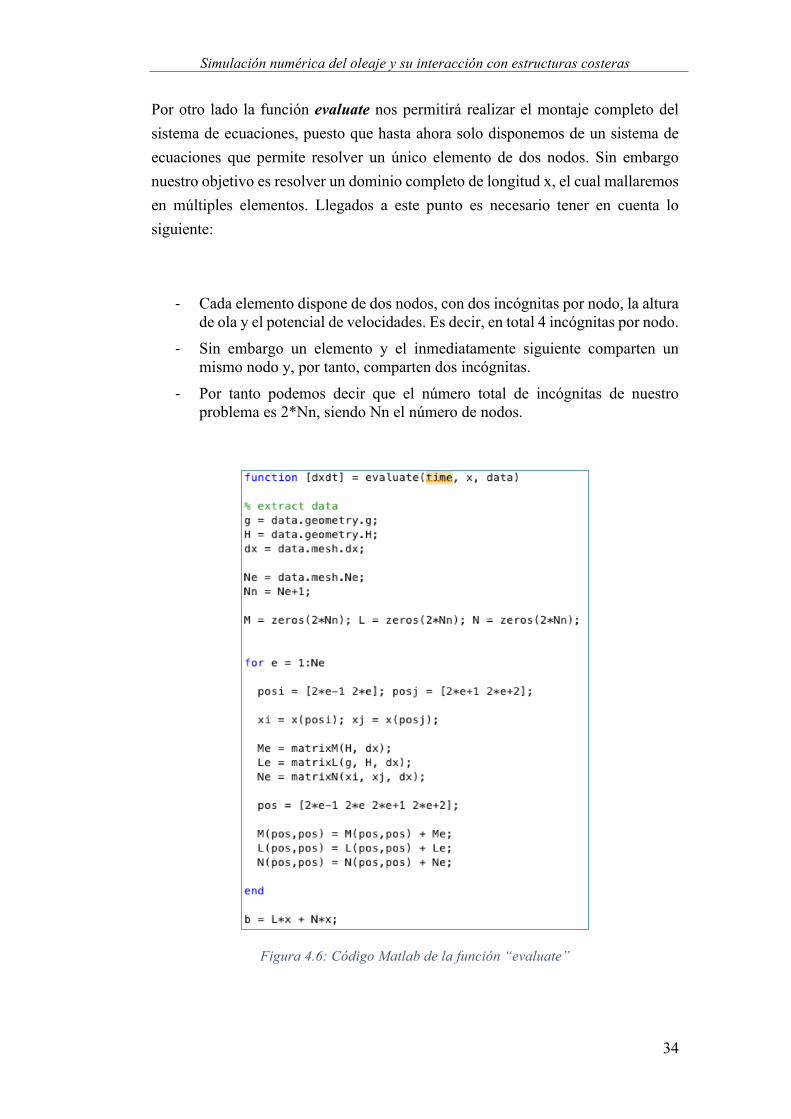
Por otro lado la función evaluate nos permitirá realizar el montaje completo del sistema de ecuaciones, puesto que hasta ahora solo disponemos de un sistema de ecuaciones que permite resolver un único elemento de dos nodos. Sin embargo nuestro objetivo es resolver un dominio completo de longitud x, el cual mallaremos en múltiples elementos. Llegados a este punto es necesario tener en cuenta lo siguiente:
- Cada elemento dispone de dos nodos, con dos incógnitas por nodo, la altura de ola y el potencial de velocidades. Es decir, en total 4 incógnitas por nodo.
- Sin embargo un elemento y el inmediatamente siguiente comparten un mismo nodo y, por tanto, comparten dos incógnitas.
- Por tanto podemos decir que el número total de incógnitas de nuestro problema es 2*Nn, siendo Nn el número de nodos.
Figura 4.6: Código Matlab de la función “evaluate”
Simulación numérica del oleaje y su interacción con estructuras costeras
35
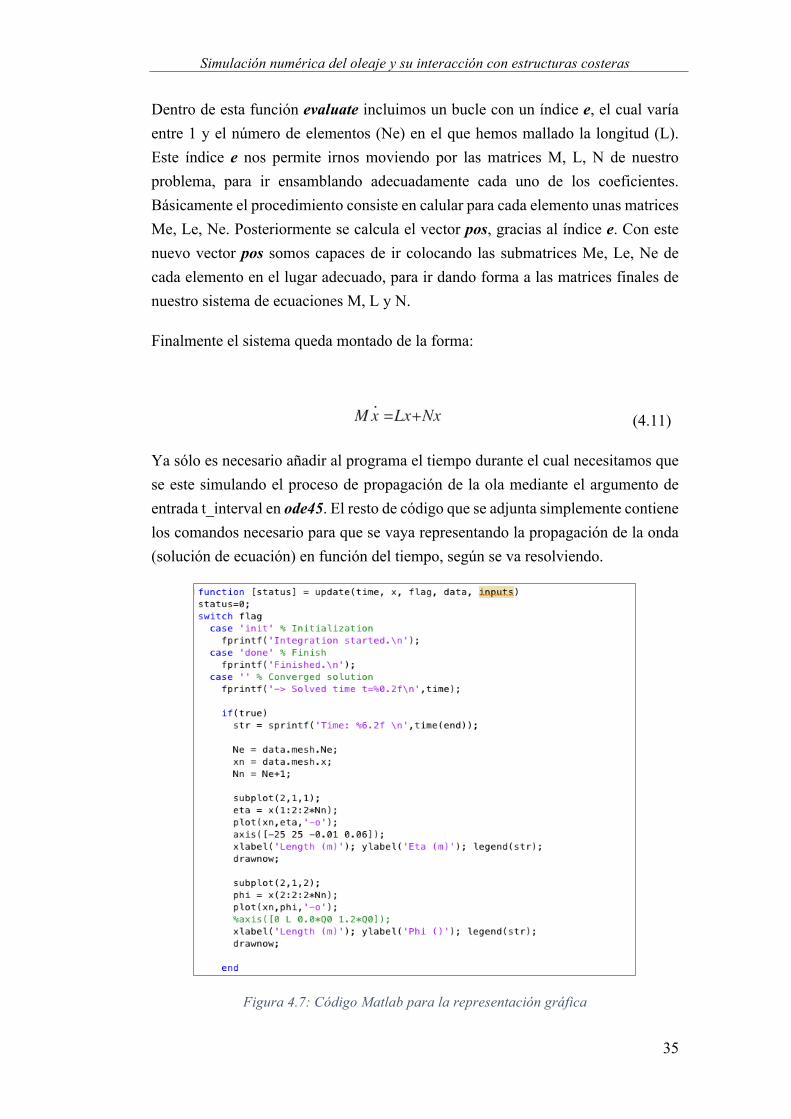
Dentro de esta función evaluate incluimos un bucle con un índice e, el cual varía entre 1 y el número de elementos (Ne) en el que hemos mallado la longitud (L). Este índice e nos permite irnos moviendo por las matrices M, L, N de nuestro problema, para ir ensamblando adecuadamente cada uno de los coeficientes. Básicamente el procedimiento consiste en calular para cada elemento unas matrices Me, Le, Ne. Posteriormente se calcula el vector pos, gracias al índice e. Con este nuevo vector pos somos capaces de ir colocando las submatrices Me, Le, Ne de cada elemento en el lugar adecuado, para ir dando forma a las matrices finales de nuestro sistema de ecuaciones M, L y N.
Finalmente el sistema queda montado de la forma:
(4.11)
Ya sólo es necesario añadir al programa el tiempo durante el cual necesitamos que se este simulando el proceso de propagación de la ola mediante el argumento de entrada t_interval en ode45. El resto de código que se adjunta simplemente contiene los comandos necesario para que se vaya representando la propagación de la onda (solución de ecuación) en función del tiempo, según se va resolviendo.
Figura 4.7: Código Matlab para la representación gráfica

Simulación numérica del oleaje y su interacción con estructuras costeras
36
4.1.2 Supuesto II: fondo variable
Partimos de las mismas ecuaciones de Zhao, Cheng y Teng (4.1) que definen nuestro problema:
(4.12)
La primera ecuación corresponde a la elevación de la superficie. La segunda ecuación está relacionada con el potencial de velocidades. El sistema anterior se presenta en forma de formulación fuerte. El objetivo final será obtener un sistema de ecuaciones en forma matricial para todos los elementos en los que se divide el dominio de estudio. A diferencia del caso de fondo constante, aquí no debemos particularizar las ecuaciones para un h=cte. Todo lo contrario, la profundidad h es ahora variable.
De acuerdo al documento [2], al igual que en el caso de fondo constante, el primer paso será usar una formulación variacional, empleando q y r como funciones de ponderación en un dominio limitado. Posteriormente usando integración por partes y discretizando, para un elemento que no tenga contacto con el contorno, nos queda:
(4.13)

Simulación numérica del oleaje y su interacción con estructuras costeras
37
Para calcular las matrices asociadas a cada elemento, vamos a considerar una variación lineal de h en cada elemento. Esto implica que h puede ser escrito como h=hi*Ni + hj*Nj. Si observamos las integrales podemos percatarnos de que los términos no lineales son los mismos que en el caso de fondo constante. Por tanto la matriz N está ya calculada.
A continuación se detallan los pasos necesarios para calcular las integrales que no aparecieron en el caso de fondo constante:
(4.14)
Otra de las integrales que es necesario resolver para el caso de fondo variable es la siguiente:
(4.15)
Finalmente, aparece una última matriz que podemos calcular del siguiente modo:
(4.16)

Simulación numérica del oleaje y su interacción con estructuras costeras
38
Para un elemento de longitud Le, las matrices que resultan tras integrar todas las ecuaciones, para el caso de fondo variable, son las siguientes:
(4.17)
(4.18)
(4.19)
Como comprobación, si hacemos h1=h2=H, nos quedan exactamente las mismas matrices que habíamos calculado para el caso de fondo constante. Podemos decir que estas matrices son las más generales del estudio. El caso de fondo constante sería una particularización de las ecuaciones de fondo variable, tal y como mencionamos al principio.
Simulación numérica del oleaje y su interacción con estructuras costeras
39
Una vez obtenidas las matrices (4.16), (4.17) y (4.18) el sistema de ecuaciones se puede escribir de la forma:
(4.20)
Basándonos en el código que ya habíamos desarrollado para el caso de fondo constante, vamos a proceder a resolverlo. Dado que ahora existe en nuestro dominio una profundidad variable h(x), será necesario introducir unos ciertos cambios en el código previo. A continuación detallaremos los pasos seguidos hasta la resolución de dicho sistema.
Creamos en Matlab una función a la que llamaremos, en este caso, “Fondovariable( )”.
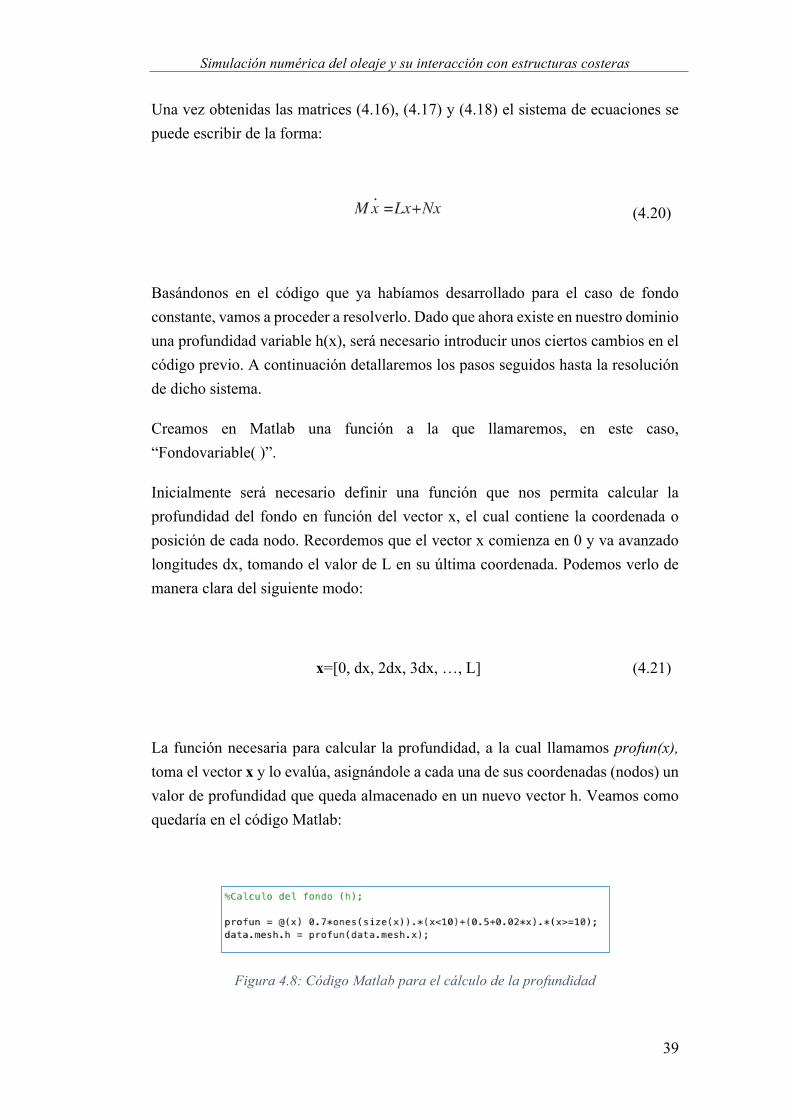
Inicialmente será necesario definir una función que nos permita calcular la profundidad del fondo en función del vector x, el cual contiene la coordenada o posición de cada nodo. Recordemos que el vector x comienza en 0 y va avanzado longitudes dx, tomando el valor de L en su última coordenada. Podemos verlo de manera clara del siguiente modo:
x=[0, dx, 2dx, 3dx, …, L] (4.21)
La función necesaria para calcular la profundidad, a la cual llamamos profun(x), toma el vector x y lo evalúa, asignándole a cada una de sus coordenadas (nodos) un valor de profundidad que queda almacenado en un nuevo vector h. Veamos como quedaría en el código Matlab:
Figura 4.8: Código Matlab para el cálculo de la profundidad

Simulación numérica del oleaje y su interacción con estructuras costeras
40
Otra modificación que es necesaria realizar en nuestro código, respecto al caso de fondo constante, es el cálculo de las matrices M y L. Ahora ya no disponemos de un valor constante de profundidad H, sino que existe una profundidad diferente en cada uno de los nodos.
Por tanto, las matrices M y L quedan definidas como funciones que dependen también de hi y hj, es decir la profundidad en los nodos i y j.
Figura 4.9: Código Matlab para el cálculo de las matrices M, L y N
El resto del código no sufre ninguna modificiación y puede interpretarse del mismo modo que se explicó para el caso de fondo constante.
Simulación numérica del oleaje y su interacción con estructuras costeras
41
Capítulo 5
Ejemplos numéricos
5.1 Introducción
En este capítulo se expondrán los resultados obtenidos de aplicar los distintos códigos que se han explicado anteriormente. Lo hemos dividido en dos partes. La primera, está dedicada a los ejemplos de validación de los distintos códigos programados para el caso de fondo constante 1D. Esta parte será la más extensa, puesto que este trabajo se desarrolló fundamentalmente partiendo de la hipótesis de fondo constante, lo cual supuso una gran simplificación de las ecuaciones originales (4.1). La segunda parte está enfocada a problemas de fondo variable 1D. En esta segunda parte se partió del código ya desarrollado para el caso de fondo constante pero incluyendo las modificaciones necesarias para adaptar las ecuaciones. Esta última parte será algo más breve puesto que los conceptos explicados en el caso de fondo constante son válidos en su mayoría. Para terminar la introducción es conveniente recordar que el estudio de la altura y propagación de las olas es muy frecuente en ingeniería civil, para el cálculo de escolleras en diques y otros sistemas de protección.
Se ha seleccionado la letra h para expresar la profundidad en el caso de “fondo variable” y la letra H para el caso de fondo constante. Asimismo se ha incluido en los códigos un valor de la aceleración de la gravedad simplificado: g = 9.81m/s2.

Simulación numérica del oleaje y su interacción con estructuras costeras
42
5.2 Ejemplos de validación
5.2.1 Problema 1 fondo constante 1D.
Onda solitaria en profundidad constante
En esta subsección se incluyen los resultados del problema correspondiente a una onda solitaria que se propaga en profundidad constante. Consideremos una onda solitaria dada por:
(5.1)
De acuerdo a [Wal99,p.86], tomemos una profundidad constante H = 0.45, con unos parámetros α = -0.4 y β = -1/15. Por lo tanto, se derivan los coeficientes siguientes:
a1 = 0.040179
a2 = 0.005187
a = 0.200227
b = 0.575005
! = 1.048809
Teniendo en cuenta que φ es el potencial de velocidades, podemos obtener:
(5.2)
Simulación numérica del oleaje y su interacción con estructuras costeras
43
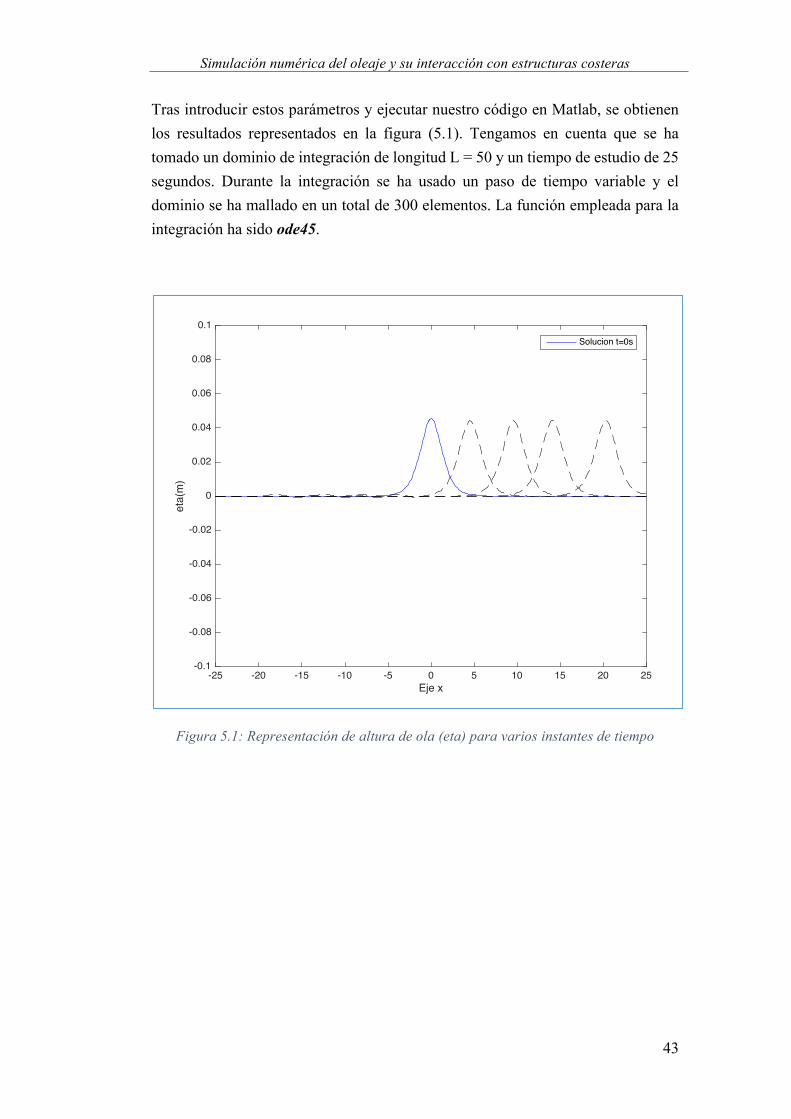
Tras introducir estos parámetros y ejecutar nuestro código en Matlab, se obtienen los resultados representados en la figura (5.1). Tengamos en cuenta que se ha tomado un dominio de integración de longitud L = 50 y un tiempo de estudio de 25 segundos. Durante la integración se ha usado un paso de tiempo variable y el dominio se ha mallado en un total de 300 elementos. La función empleada para la integración ha sido ode45.
Figura 5.1: Representación de altura de ola (eta) para varios instantes de tiempo
-25 -20 -15 -10 -5 0 5 10 15 20 25Eje x
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
eta(
m)
Solucion t=0s
Simulación numérica del oleaje y su interacción con estructuras costeras
44
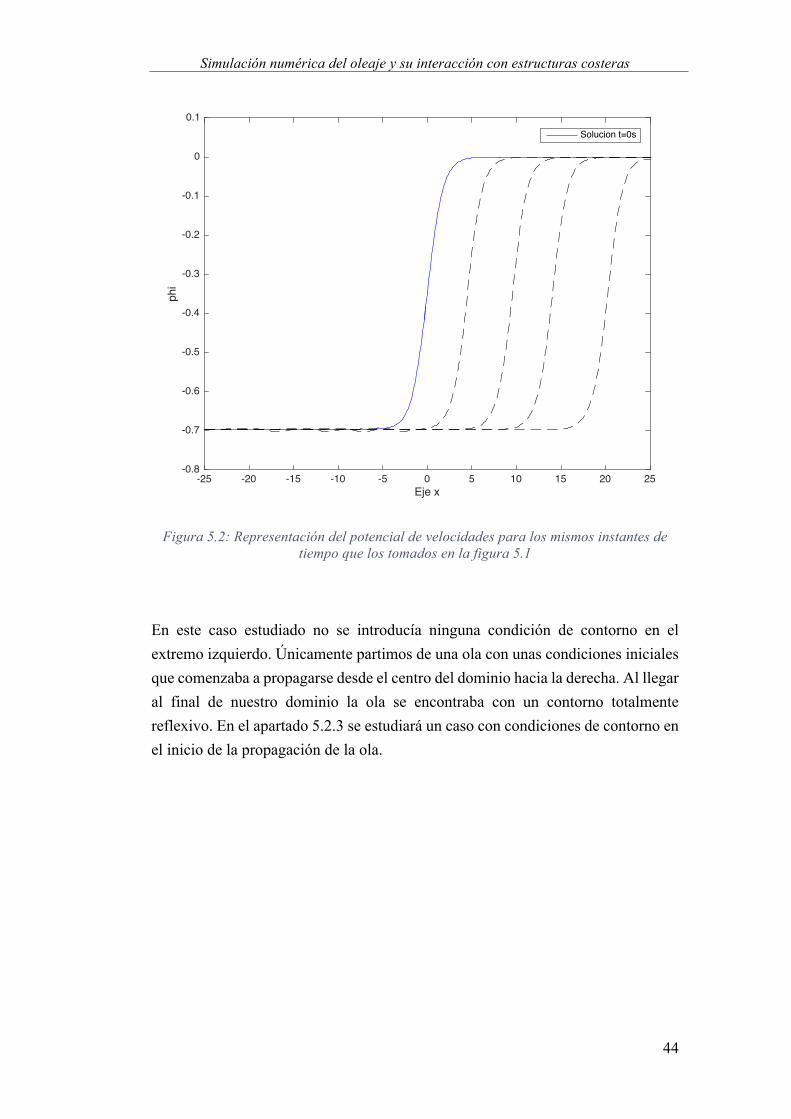
Figura 5.2: Representación del potencial de velocidades para los mismos instantes de tiempo que los tomados en la figura 5.1
En este caso estudiado no se introducía ninguna condición de contorno en el extremo izquierdo. Únicamente partimos de una ola con unas condiciones iniciales que comenzaba a propagarse desde el centro del dominio hacia la derecha. Al llegar al final de nuestro dominio la ola se encontraba con un contorno totalmente reflexivo. En el apartado 5.2.3 se estudiará un caso con condiciones de contorno en el inicio de la propagación de la ola.
-25 -20 -15 -10 -5 0 5 10 15 20 25Eje x
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
phi
Solucion t=0s
Simulación numérica del oleaje y su interacción con estructuras costeras
45
5.2.2 Problema 2 fondo variable 1D.
Onda solitaria en profundidad variable
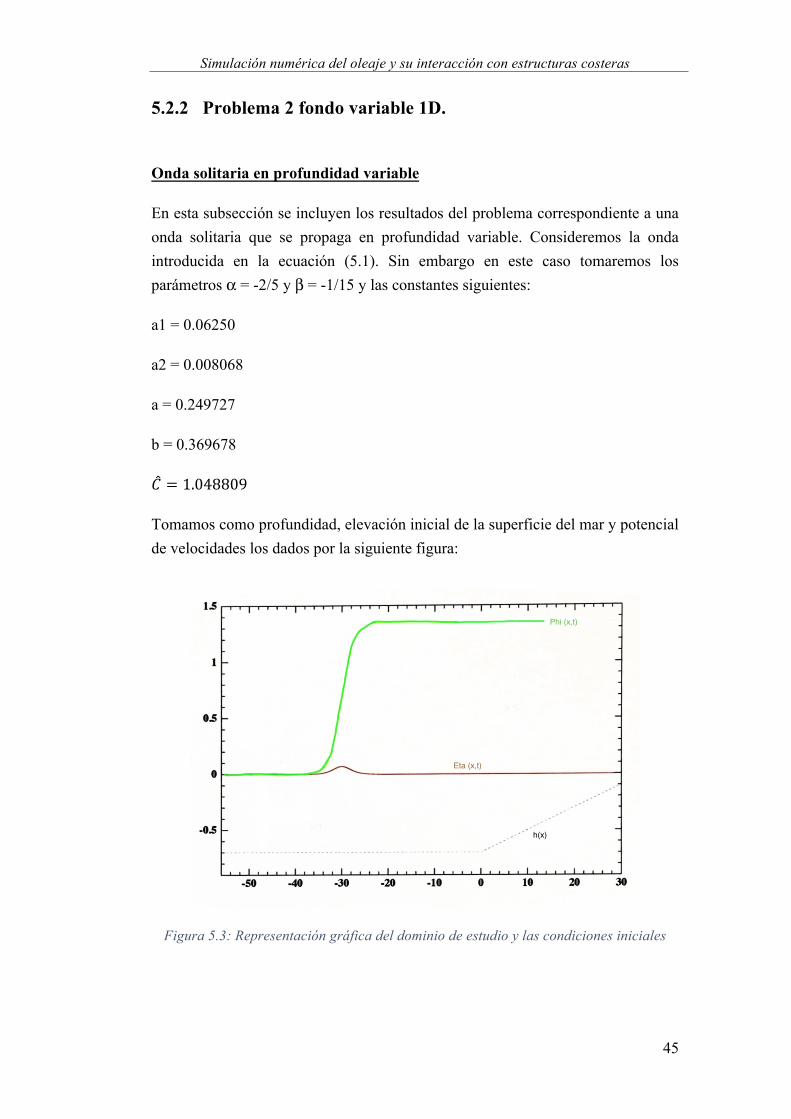
En esta subsección se incluyen los resultados del problema correspondiente a una onda solitaria que se propaga en profundidad variable. Consideremos la onda introducida en la ecuación (5.1). Sin embargo en este caso tomaremos los parámetros α = -2/5 y β = -1/15 y las constantes siguientes:
a1 = 0.06250
a2 = 0.008068
a = 0.249727
b = 0.369678
! = 1.048809
Tomamos como profundidad, elevación inicial de la superficie del mar y potencial de velocidades los dados por la siguiente figura:
Figura 5.3: Representación gráfica del dominio de estudio y las condiciones iniciales
h(x)
Eta (x,t)
Phi (x,t)
Simulación numérica del oleaje y su interacción con estructuras costeras
46
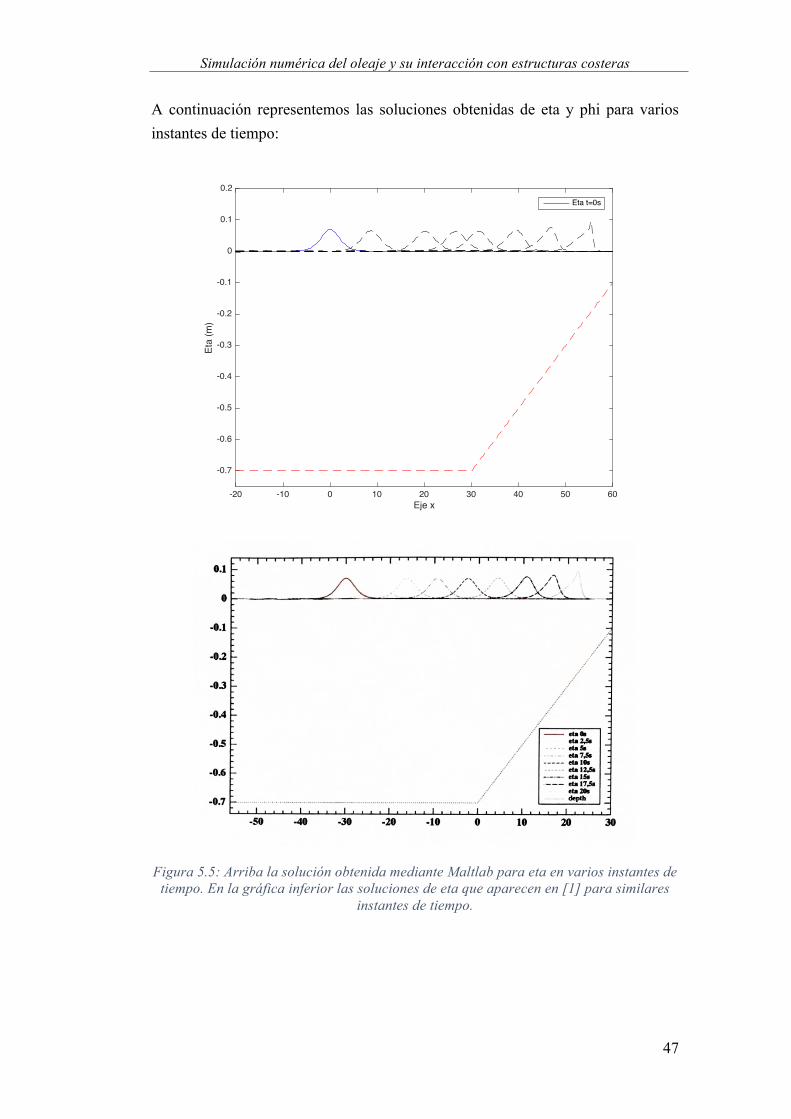
Tras introducir estos parámetros y ejecutar nuestro código en Matlab, se obtienen los resultados representados en la figura (5.5). Tengamos en cuenta que se ha tomado un dominio de integración de longitud L = 80 y un tiempo de estudio de 21 segundos. Durante la integración se ha usado un paso de tiempo variable y el dominio se ha mallado en un total de 300 elementos. La función empleada para la integración ha sido ode23t, puesto que presentaba menor disipación numérica .
Es necesario destacar también la necesidad de introducir una función que permitiese calcular el vector de profundidades h(x). La función profun(x), toma el vector x y lo evalúa, asignándole a cada una de sus coordenadas (nodos) un valor de profundidad que queda almacenado en un nuevo vector h. Recordemos el código Matlab de esta función:
Figura 5.4: Código Matlab para el cálculo de la profundidad
Simulación numérica del oleaje y su interacción con estructuras costeras
47
A continuación representemos las soluciones obtenidas de eta y phi para varios instantes de tiempo:
Figura 5.5: Arriba la solución obtenida mediante Maltlab para eta en varios instantes de tiempo. En la gráfica inferior las soluciones de eta que aparecen en [1] para similares
instantes de tiempo.
-20 -10 0 10 20 30 40 50 60Eje x
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
Eta
(m)
Eta t=0s

Simulación numérica del oleaje y su interacción con estructuras costeras
48
5.2.3 Problema 3 aplicación condiciones de contorno.
En los problemas anteriores no se introducía ninguna condición de contorno en la frontera izquierda del dominio. En este problema, que se desarrolla sobre fondo constante, vamos a incluir condiciones de contorno para el inicio de la propagación de la ola. Al llegar al extremo derecho de nuestro dominio la ola se encontrará con un contorno totalmente reflexivo, al igual que en casos anteriores.
Tomemos una ola periódica dad por:
(5.3)
Y, por tanto, un potencial de velocidades dado por:
(5.4)
A continuación se dan los parámetros considerados:
Si tenemos en cuenta la relación de dispersión introducida por Zhao (p.2053) [2]:
(5.5)
Simulación numérica del oleaje y su interacción con estructuras costeras
49
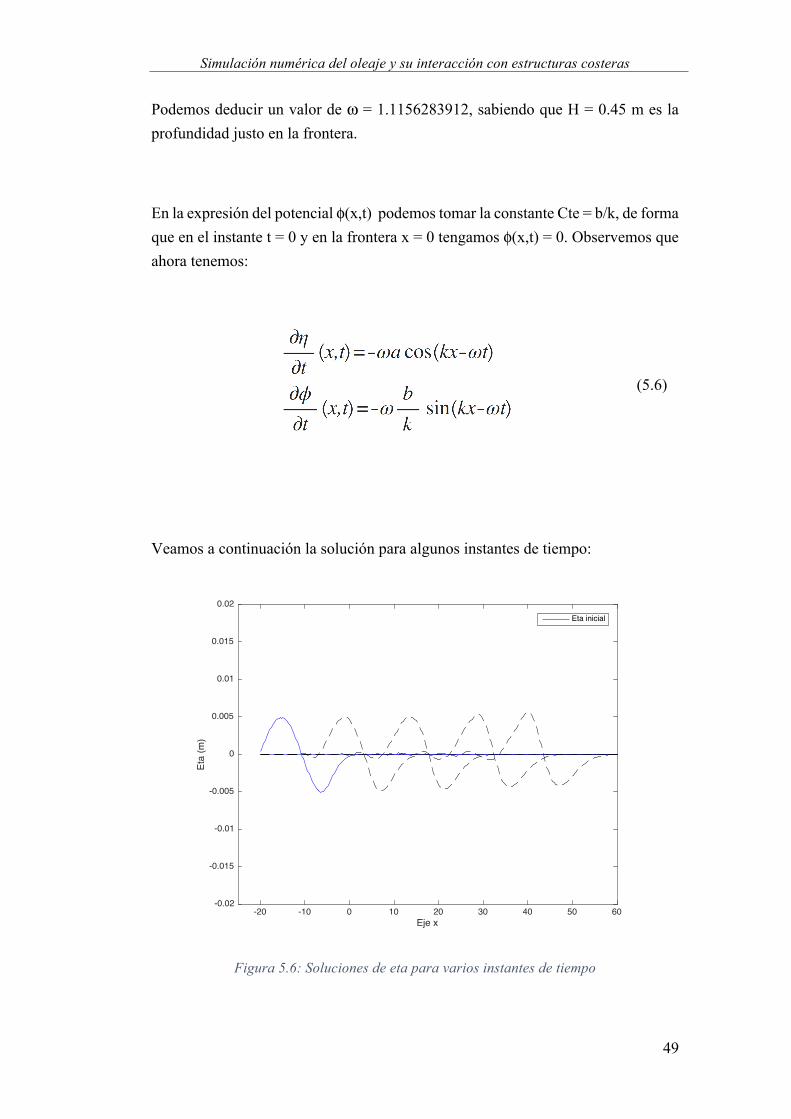
Podemos deducir un valor de ω = 1.1156283912, sabiendo que H = 0.45 m es la profundidad justo en la frontera.
En la expresión del potencial φ(x,t) podemos tomar la constante Cte = b/k, de forma que en el instante t = 0 y en la frontera x = 0 tengamos φ(x,t) = 0. Observemos que ahora tenemos:
(5.6)
Veamos a continuación la solución para algunos instantes de tiempo:
Figura 5.6: Soluciones de eta para varios instantes de tiempo
-20 -10 0 10 20 30 40 50 60Eje x
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
Eta
(m)
Eta inicial
Simulación numérica del oleaje y su interacción con estructuras costeras
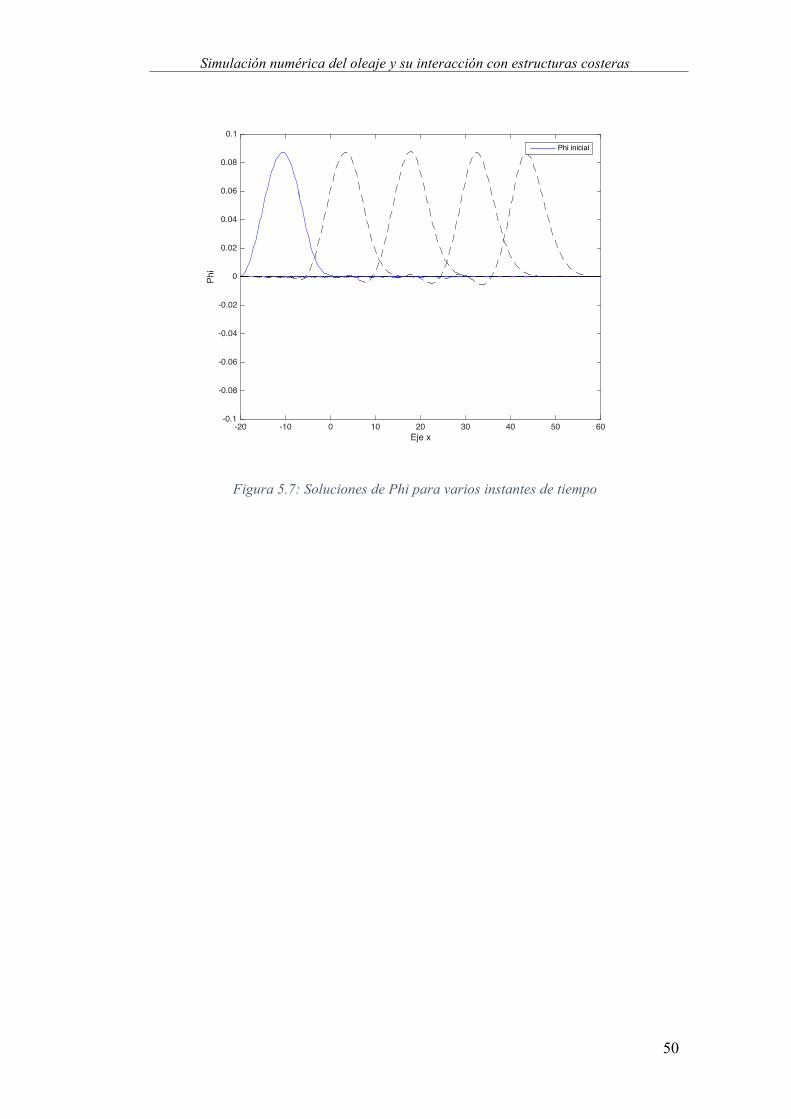
50
Figura 5.7: Soluciones de Phi para varios instantes de tiempo
-20 -10 0 10 20 30 40 50 60Eje x
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
Phi
Phi inicial
Simulación numérica del oleaje y su interacción con estructuras costeras
51
Capítulo 6
Resumen y conclusiones
6.1 Resumen del TFG
A lo largo de este trabajo se han recogido los principales planteamientos teóricos del problema propagación del oleaje. Nos hemos centrado en los desarrollos matemáticos descritos por Lopes en [1] para poder desarrollar un código en Matlab que permita resolver casos prácticos partiendo de la teoría que propuso Zhao en el año 2004 [2]. Asimismo se ha incluido al inicio del documento una introducción general sobre las características del oleaje. Los planteamientos teóricos de Zhao se han programado mediante códigos en lenguaje de Matlab y se han acompañado en todos los casos de ejemplos numéricos de validación para comprobar que los códigos funcionan correctamente. Estos ejemplos numéricos se han comparado con las soluciones que aparecen en [1]. Además para el caso fondo constante se ha añadido un ejemplo de aplicación práctica con condiciones de contorno a la entrada, el cual se aproxima más a las complejas simulaciones que se hacen en el mundo de la Ingeniería Civil. Destacar asimismo que se recogen explícitamente los pasos seguidos para la integración de las ecuaciones originales, incluyendo las simplificaciones necesarias hasta obtener un sistema de ecuaciones en forma matricial para su incorporación al código desarrollado en Matlab.
Simulación numérica del oleaje y su interacción con estructuras costeras
52
6.2 Conclusión del trabajo
Para poder analizar el oleaje es necesario utilizar un modelo que lo represente. Este modelo debe predecir con la suficiente fiabilidad el comportamiento de las olas que se generan en alta mar. Para ello es necesario realizar diversas hipótesis simplificativas de la realidad. Es decir, de partida asumimos que siempre existirá algún error.
La teoría lineal tiene un determinado rango de aplicación que depende la amplitud, del periodo y del la profundidad. Fuera de este rango las simplificaciones producen grandes errores y son necesarias teorías no lineales.
En general, en mar abierto y grandes profundidades, se asume que el oleaje es un proceso lineal donde es admisible el principio de superposición. No obstante, cerca de la costa los procesos no lineales del oleaje adquieren mayor relevancia.
En este trabajo se han descrito convenientemente los desarrollos matemáticos que llevaron a las ecuaciones obtenidas por Zhao en el documento [2]. Es importante ante todo conocer las limitaciones de los modelos que se emplean.
De igual modo la rotura del oleaje, la cual tiene una gran importancia en el estudio de los procesos litorales, aun requiere de estudios e investigaciones para alcanzar el nivel de conocimiento del que se dispone del oleaje en mar abierto.
Los modelos de simulación de la propagación de oleaje son unas de las herramientas más utilizadas hoy en día en la toma de decisiones ingenieriles. Pero también cada vez más en los estudios morfodinámicos y costeros relacionados con la evolución del litoral.
La gran variedad de modelos desarrollados a lo largo de la historia ponen de manifiesto la complejidad de los procesos e interacciones que sufre el oleaje en su viaje hacia las costas. Esto hace que sea muy complejo elegir un modelo universal, que sea válido en todas las situaciones. Esto es una pieza clave en cualquier modelización. La variedad de modelos, teorías y aproximaciones, la tipología del estudio y las características de la franja costera, la disponibilidad de datos de entrada (olas, viento y batimetría); así como el conocimiento del usuario y la calibración del modelo son algunos de los aspectos claves que garantizan el éxito en la utilización de este tipo de técnicas de análisis.
Simulación numérica del oleaje y su interacción con estructuras costeras
53
6.3 Trabajo futuro
Este trabajo recoge únicamente estudios unidimensionales sobre la propagación del oleaje. De modo que solo es posible estudiar cómo afecta el fenómeno de shoaling que sufre una ola cuando viaja sobre el fondo oceánico. Sin embargo el código es lo suficientemente consistente y estructurado para que, a partir de él, desarrollemos estudios en 2D. Las ecuaciones para el caso bidimensional son más complejas y difíciles de resolver, no obstante la metodología a seguir es la misma. Buscamos obtener un sistema de ecuaciones en forma matricial que convenientemente montado, nos permita obtener las incógnitas altura de ola y potencial de velocidades para cada uno de los nodos de nuestro dominio XY. El mallado del dominio en el caso bidimensional también es más complejo.
Asimismo, como trabajo futuro, podríamos usar otras herramientas informáticas para contrastar las soluciones obtenidas en el caso bidimensional. Un posibilidad sería emplear el modelo numérico MSP, el cual está basado en una aproximación elíptica de las ecuaciones de pendiente suave (mild slope equations) que propuso Berkhoff (1972, 1976).
Actualmente casi todos los modelos se basan en las ecuaciones elípticas de pendiente suave, ya que permiten evaluar con bastante exactitud la agitación de los puertos, considerando batimetrías complejas y oleaje irregular.
Estos modelos son capaces de resolver en un dominio 2D, los procesos lineales de difracción, shoaling, refracción, y reflexión, así como los procesos de disipación de energía del flujo por fricción y rotura del oleaje.
Simulación numérica del oleaje y su interacción con estructuras costeras
54
Bibliografía
[1] Nuno David de Jesus Lopes. “Métodos Analíticos e Numéricos de Tipo Elementos Finitos Contínuos e Contínuos/Discontínuos para o Estudo de Modelos de Boussinesq Melhorados para a propagação de Ondas”, Tesis Universidade Nova de Lisboa, 2014.
[2] M.Zhao, B.Teng y L.Cheng, “A new form of generalized Boussineq equation for varying wáter depth”, Ocean Engineering, pág. 2047-2072, 2004.
[3] Nautilus Ingeniería Marítima. Apuntes de Oleaje e Ingeniería de Costas. 2009
[4] Eugenio Oñate. Structural Analysis with the Finite Element Method. Linear Statics. Volume 1. Basis and Solids. Springer. March 2009
[5] Peregrine, D.H., 1967. Long waves on a beach. J. Fluid Mech. 27 (4), 815-827.�
[6] Witting, J.M., 1984. A unified model for the evolution of nonlinear water waves. J. Comput. Phys. 56, 203–236.�
[7] Madsen, P.A., Sørensen, O.R., 1992. A new form of the Boussinesq equations with improved linear dispersion characteristics. Part 2. A slowly-varying bathymetry. Coast. Eng. 18, 183–204.�
[8] Beji, S., Nadaoka, K., 1996. A formal derivation and numerical modeling of the improved Boussinesq equations for varying depth. Ocean Eng. 23 (8), 691–704.
[9] Nwogu, O., 1993. An alternative form of the Boussinesq equations for near shore wave propagation. J. Waterway Port Coast. Ocean Eng. 119 (6), 618–638.�
[10] Teng, B., Zhao, M., 2003. A new form of Boussinesq equations and its application to wave diffraction. In: The 13th International Offshore and Polar Engineering Conference, pp. 202–207.�
[11] Wu, T.Y., 1981. Long waves on ocean and coastal waters. J. Eng. Mech. Div. 107, 501–522.
[12] Le Méhauté (02/07/2016). Wikipedia. Recuperado de https://en.wikipedia.org/wiki/Stokes_wave

Simulación numérica del oleaje y su interacción con estructuras costeras
55
[13] Walkley, M.A. A Numerical Methos for Extended Boussinesq Shallow-Water Wave Equations, Phd. Thesis The U. Leeds S. Computer Studies 19999.





























