Embed Size (px)
Citation preview

Trabajos Resueltos del Curso 2004-05.
Fundamentos Matemáticos de la Ingeniería.Ingeniería Técnica Industrial. Especialidad Mecánica.

Índice General
Trabajo 1. Curso 2004-05 2
Trabajo 2. Curso 2004-05 10
Trabajo 3. Curso 2004-05 22
Trabajo 4. Curso 2004-05 34
Trabajo 5. Curso 2004-05 40
Trabajo 6. Curso 2004-05 47
Trabajo 7. Curso 2004-05 56
Trabajo 8. Curso 2004-05 72
1

Trabajo 1. Curso 2004-05
Problema 1
Dado el sistema de ecuaciones [S] ≡
2x1 + 4x2 − 6x4 = −8
−x1 − 2x2 + x3 + 3x4 = 43x1 + ax2 + 5x3 = 2−x3 + ax4 = 3a
, se pide:
a) ¿Para qué valores del parámetro real a tiene solución el sistema?
b) Resolver el sistema, si es posible, por el método de Gauss-Jordan para a = 6.
c) Resolver el sistema, si es posible, por el método de Gauss para a = 7.
Solución:
a) Aplicamos el método de Gauss para estudiar la compatibilidad del sistema2 4 0 −6−1 −2 1 33 a 5 00 0 −1 a
−8423a
F1( 12)−→
1 2 0 −3−1 −2 1 33 a 5 00 0 −1 a
−4423a
F21(1)−→F31(−3)
1 2 0 −30 0 1 00 a− 6 5 90 0 −1 a
−40143a
P23−→a−66=0
1 2 0 −30 a− 6 5 90 0 1 00 0 −1 a
−41403a
F2( 1a−6)−→
1 2 0 −30 1 5
a−69a−6
0 0 1 00 0 −1 a
−414a−603a
F43(1)−→
1 2 0 −30 1 5
a−69a−6
0 0 1 00 0 0 a
−414a−603a
F4( 1a)−→a6=0
1 2 0 −30 1 5
a−69a−6
0 0 1 00 0 0 1
−414a−603
.Si a 6= 6 y a 6= 0, entonces la matriz escalonda tiene cuatro unos principales y, como el sistemaposee cuatro incongnitas, hay solución única; es decir, el sistema es compatible determinado.
Analizamos por separado los casos a = 6 y a = 0.
Si a = 6, volvemos a la matriz ampliada en el momento anterior al que suponíamos a 6= 6. Asíobtenemos:
1 2 0 −30 0 1 00 0 5 90 0 −1 6
−401418
F32(−5)−→F42(1)
1 2 0 −30 0 1 00 0 0 90 0 0 6
−401418
F3( 19)−→
1 2 0 −30 0 1 00 0 0 10 0 0 6
−4014918
F43(−6−→
2

Trabajo 1. Curso 2004-05 3
1 2 0 −30 0 1 00 0 0 10 0 0 0
−40149263
F4( 326)−→
1 2 0 −30 0 1 00 0 0 10 0 0 0
−401491
.En este caso el sistema es incompatible (no posee solución).
Si a = 0, volvemos al momento anterior al suponer a 6= 0 y se tiene la matriz ampliada1 2 0 −30 1 5
−69−6
0 0 1 00 0 0 0
−414−610
.Luego, el sistema es compatible indeterminado (tiene infinitas soluciones).
b) Según hemos estudiado en el apartado a), el sistema es incompatible para a = 6.
c) Para a = 7, sabemos por los cálculos realizados en el apartado a) que el sistema es compatibledeterminado. Aprovechamos dichos cálculos para ver que el sistema inicial es equivalente alsistema con matriz ampliada
1 2 0 −30 1 5 90 0 1 00 0 0 1
−41403
.
Esto nos conduce al sistema triangular
x1 + 2x2 − 3x4 = −4x2 + 5x3 + 9x4 = 14x3 = 0x4 = 3
y aplicando el método de subida
obtenemos la única solución
x1 = 31x2 = −13x3 = 0x4 = 3
Problema 2
Dadas las matrices A =
1 2 −10 a −30 0 2− a
y B =
1 2 −12 0 3−1 b −4
, se pide:a) ¿Para qué valores del parámetro a tiene inversa la matriz A?
b) ¿Para qué valores del parámetro b tiene inversa la matriz B?
c) Calcular A−1 para a = 1 y B−1 para aquel valor de b que hace que B sea simétrica.
d) Calcular
1 2 −10 1 −30 0 1
1 2 −12 0 3−1 3 −4
−1.
e) Calcular
1 0 02 1 0−1 −3 1
−1.

Trabajo 1. Curso 2004-05 4
Solución:
a) Aplicamos el método de Gauss-Jordan (aunque puede decidirse también de otra forma). 1 2 −10 a −30 0 2− a
1 0 00 1 00 0 1
F2( 1a)−→a6=0
1 2 −10 1 −3a0 0 2− a
1 0 00 1
a 00 0 1
F2( 12−a)−→
a−26=0 1 2 −10 1 −3a0 0 1
1 0 00 1
a 00 0 1
2−a
F23( 3a)−→F13(1)
1 2 00 1 00 0 1
1 0 12−a
0 1a
32a−a2
0 0 12−a
F12(−2)−→
1 0 00 1 00 0 1
1 − 2a a−62a−a2
0 1a
32a−a2
0 0 12−a
.Vemos que si a 6= 0 y a 6= 2, entonces existe matriz inversa, ya que en este caso la matrizescalonada reducida de A es la identidad. Cuando a = 0 o a = 2, la forma escalonada reducidade A no es la identidad y por tanto la matriz A no tiene inversa. Además, la inversa de A es
A−1 =
1 −2a a−62a−a2
0 1a
32a−a2
0 0 12−a
.Observar que la inversa de A es una matriz triangular superior. Como sabemos, esto es asíporque A es triangular superior.
b) Realizamos cálculos similares a los hechos en el apartado a) pero en este caso para la matriz B. 1 2 −12 0 3−1 b −4
1 0 00 1 00 0 1
F21(−2)−→F31(1)
1 2 −10 −4 50 b+ 2 −5
1 0 0−2 1 01 0 1
F2(− 14)−→
1 2 −10 1 −540 b+ 2 −5
1 0 024 −14 01 0 1
F32(−b−2)−→ 1 2 −1
0 1 −540 0 5b−10
4
1 0 024 −14 0
−2b4 b+24 1
F3( 45b−10)−→
5b−106=0 1 2 −10 1 −540 0 1
1 0 024 −14 0
− 2b5b−10
b+25b−10
45b−10
F13(1)−→F23( 54)
1 2 00 1 00 0 1
3b−105b−10
b+25b−10
45b−10−5
5b−105
5b−105
5b−10− 2b5b−10
b+25b−10
45b−10
F12(−2)−→
1 0 00 1 00 0 1
3b5b−10
b−85b−10
−65b−10
− 55b−10
55b−10
55b−10
− 2b5b−10
b+25b−10
45b−10
.Con un razonamiento similar al anterior, vemos que existe inversa de B si y sólo si b 6= 2 y suinversa es
B−1 =
3b5b−10
b−85b−10
−65b−10
− 55b−10
55b−10
55b−10
− 2b5b−10
b+25b−10
45b−10
(1)
c) Para a = 1, del apartado a) tenemos que existeA−1 yA−1 =
1 2 −10 1 −30 0 1
−1 = 1 −2 −50 1 30 0 1
.

Trabajo 1. Curso 2004-05 5
El valor de b que hace B simétrica es b = 3. Para este valor de b, a partir del apartado b),sabemos que existe la inversa de B y se obtiene sustituyendo b = 3 en la expresión (1); es decir,
B−1 =
1 2 −12 0 3−1 3 −4
−1 = 9
5 −1 −65−1 1 1−65 1 4
5
Observar que B−1 es simétrica. Esto es así, porque B lo es.
d) Si observamos las matrices de las que tenemos que calcular el producto y su inversa, vemos questas matrices son las matrices A, para a = 1, y B, para b = 3. Así, haciendo uso de la propiedadpara la inversa del producto de matrices regulares, se tiene que 1 2 −1
0 1 −30 0 1
1 2 −12 0 3−1 3 −4
−1 = (AB)−1 = B−1A−1 = 9
5 −1 −65−1 1 1−65 1 4
5
1 −2 −50 1 30 0 1
= 95 −235 −665−1 3 9−65 17
5495
.e) En este apartado nos están pidiendo la inversa de la traspuesta de A para a = 1. Así, 1 0 0
2 1 0−1 −3 1
−1 = ¡AT ¢−1 = ¡A−1¢T = 1 0 0−2 1 0−5 3 1
.Problema 3
Dada la matriz A =
2 1 30 4 −12 3 2
a) Obtener, si es posible, la descomposición LU de la matriz A. Obtener L−1, U−1 y A−1
b) Resolver el sistema Ax =
0−2−2
de la siguiente forma
b.1) por el método LU.
b.2) por el método de Gauss.
b.3) por el método de Gauss-Jordan.
b.4) utilizando la inversa de A.
c) Resolver los sistemas Ax =
053
y Ax =
0−13−7
por el método LU. Resolver la ecuación
matricial AX =
0 0 0−2 5 −13−2 3 −7
.Solución:

Trabajo 1. Curso 2004-05 6
a) Para comprobar si es posible obtener la descomposición LU de la matriz A debemos ver si esposible llegar a la forma escalonada de A sin necesidad de realizar intercambios de filas: 2 1 30 4 −12 3 2
F1( 12)−→ 1 1
232
0 4 −12 3 2
F31(−2)−→ 1 1
232
0 4 −10 2 −1
F2( 14)−→ 1 1
232
0 1 −140 2 −1
F31(−2)−→
1 12
32
0 1 −140 0 −12
F3(−2)−→ 1 1
232
0 1 −140 0 1
. Por lo tanto, A admite descomposición LU ,
siendo
U =
1 12
32
0 1 −140 0 1
y L =
2 0 00 4 02 2 −12
Ahora obtenemos las inversa de L y de U por el método de Gauss-Jordan. 2 0 0
0 4 02 2 −12
1 0 00 1 00 0 1
F1( 12)−→ 1 0 0
0 4 02 2 −12
12 0 00 1 00 0 1
F31(−2)−→ 1 0 0
0 4 00 2 −12
12 0 00 1 0−1 0 1
F2( 14)−→
1 0 00 1 00 2 −12
12 0 00 1
4 0−1 0 1
F31(−2)−→ 1 0 0
0 1 00 0 −12
12 0 00 1
4 0−1 −12 1
F3(−2)−→
1 0 00 1 00 0 1
12 0 00 1
4 02 1 −2
, luego la inversa de L es L−1 = 1
2 0 00 1
4 02 1 −2
. (Observar quees triangular inferior). 1 1
232
0 1 −140 0 1
1 0 00 1 00 0 1
F13(−32)−→
F23( 14)
1 12 0
0 1 00 0 1
1 0 −320 1 1
40 0 1
F12(− 12)−→
1 0 00 1 00 0 1
1 −12 −1380 1 1
40 0 1
, luego la inversa de la matiz U es U−1 =
1 −12 −1380 1 1
40 0 1
.(Observar que es triangular superior con unos en la diagonal).
Ahora, para calcular la inversa de A no hace falta utilizar de nuevo el método de Gauss-Jordan,
ya que A−1 = (LU)−1 = U−1L−1 =
1 −12 −1380 1 1
40 0 1
12 0 00 1
4 02 1 −2
=
−114 −74 134
12
12 −12
2 1 −2
.b) Resolvemos el sistema Ax = b por cada uno de los métodos que nos piden:
b.1) Como A = LU , el método LU consiste en resolver en primer lugar el sistema triangularinferior Ly = b por el método de bajada:
Ly = b =⇒2y1 = 04y2 = −22y1 + 2y2 − 1
2y3 = −2=⇒
y1 = 0y2 = −12y3 = 2
A continuación resolvemos el sistema triangular superior Ux = y por el método de subida
Ux = y =⇒x1 +
12x2 +
32x3 = 0
x2 − 14x3 = −12
x3 = 2=⇒
x1 = −3x2 = 0x3 = 2

Trabajo 1. Curso 2004-05 7
b.2) Resolvemos por el método de Gauss. Para ello, realizamos transformaciones elementales enla matriz ampliada hasta que obtengamos la forma escalonada. 2 1 3
0 4 −12 3 2
0−2−2
−→ 1 1
232
0 4 −12 3 2
0−2−2
−→ 1 1
232
0 4 −10 2 −1
0−2−2
−→ 1 1
232
0 1 −140 2 −1
0−24−2
−→ 1 1
232
0 1 −140 0 −12
0−24−1
−→ 1 1
232
0 1 −140 0 1
0−242
=⇒
x1 +
12x2 +
32x3 = 0
x2 − 14x3 = −24
x3 = 2=⇒
x1 = −3x2 = 0x3 = 2
Nota: De hecho, para llegar al sistema triangular superior sólo hace falta realizar las trans-formaciones elementales del apartado a) sobre el término independiente.
b.3) Para resolver el sistema por el método de Gauss-Jordan, seguimos realizando transfor-maciones elementales hasta que obtengamos la forma escalonada reducida de la matrizampliada. 1 1
232
0 1 −140 0 1
0−242
−→ 1 1
2 00 1 00 0 1
−302
−→ 1 0 0
0 1 00 0 1
−302
=⇒x1 = −3x2 = 0x3 = 2
b.4) Podemos despejar x de la ecuación Ax = b, ya que A tiene inversa. Multiplicando a la
izquierda por A−1 obtenemos x = A−1b =
−114 −74 134
12
12 −12
2 1 −2
0−2−2
=
−302
c) Para resolver estos dos sistemas podemos aplicar el método utilizado en el apartado b.1). Parael primero de los sistemas obtenemos:
Ly = b =⇒2y1 = 04y2 = 52y1 + 2y2 − 1
2y3 = 3=⇒
y1 = 0y2 =
54
y3 = −1
Ux = y =⇒x1 +
12x2 +
32x3 = 0
x2 − 14x3 =
54
x3 = −1=⇒
x1 = 1x2 = 1x3 = −1
Para el segundo:
Ly = b =⇒2y1 = 04y2 = −132y1 + 2y2 − 1
2y3 = −7=⇒
y1 = 0y2 = −134y3 = 1
Ux = y =⇒x1 +
12x2 +
32x3 = 0
x2 − 14x3 = −134
x3 = 1=⇒
x1 = 0x2 = −3x3 = 1
Por último, si llamamos x01,x02 y x03 a las columnas de la matriz X, entonces buscar una matriz X
tal que AX =
0 0 0−2 5 −13−2 3 −7
es lo mismo que resolver los tres sistemas anteriores (todos con

Trabajo 1. Curso 2004-05 8
la misma matriz de coeficientes y con distinto término independiente). Por tanto, la respuesta
es X =
−3 1 00 1 −32 −1 1
.Otra forma de resolverlo es despejando X (ya que A tiene inversa) de la ecuación AX = 0 0 0−2 5 −13−2 3 −7
. Asi,X = A−1
0 0 0−2 5 −13−2 3 −7
=
−114 −74 134
12
12 −12
2 1 −2
0 0 0−2 5 −13−2 3 −7
= −3 1 00 1 −32 −1 1
.Problema 4
Dadas las matrices A =
2 0 4−1 1 −21 1 1
y B =
4 −1 3−1 1 03 0 3
, se pide:a) Calcular, si es posible, A−1, B−1, (AB)−1 y (BA)−1.
b) Descomponer cada una de las matrices A y B en producto de matrices elementales.
c) ¿Qué condiciones debe verificar la matriz b =
b1b2b3
para que el sistema Ax = b tenga solución?y ¿Qué condiciones debe verificar la matriz b =
b1b2b3
para que el sistema Bx = b tenga
solución?
Solución:
a) Intentamos, en cada caso, calcular la inversa aplicando el método de Gauss-Jordan. 2 0 4−1 1 −21 1 1
1 0 00 1 00 0 1
F1( 12)−→ 1 0 2−1 1 −21 1 1
12 0 00 1 00 0 1
F21(1)−→F31(−1)
1 0 20 1 00 1 −1
12 0 012 1 0−12 0 1
F32(−1)−→ 1 0 2
0 1 00 0 −1
12 0 012 1 0−1 −1 1
F3(−1)−→ 1 0 2
0 1 00 0 1
12 0 012 1 01 1 −1
F13(−2)−→
1 0 00 1 00 0 1
−32 −2 212 1 01 1 −1
, luego A es regular y su inversa es A−1 = −32 −2 2
12 1 01 1 −1
.Para la matriz B tenemos 4 −1 3−1 1 03 0 3
1 0 00 1 00 0 1
F1( 14)−→ 1 −14 3
4−1 1 03 0 3
14 0 00 1 00 0 1
F21(1)−→F31(−3)
1 −14 34
0 34
34
0 34
34
14 0 014 1 0−34 0 1
F2( 43)−→ 1 −14 3
40 1 10 3
434
14 0 013
43 0
−34 0 1
F32(− 34)−→ 1 −14 3
40 1 10 0 0
14 0 013
43 0
−1 1 1
, luego la ma-triz B no tiene inversa, ya que su forma escalonada posee una fila nula.

Trabajo 1. Curso 2004-05 9
La matriz AB no es regular. En efecto, si AB fuera regular , tendríamos que B = A−1 (AB)sería producto de dos matrices regulares y por consiguiente, regular, en contra de lo que hemosprobado más arriba.
El mismo razonamiento prueba que (BA)−1 tampoco existe.
b) Si tenemos en cuenta los cálculos realizados antes y considerando que realizar una tranformaciónequivale a premultiplicar por la correspondiete matriz elemental obtenemos:
F13 (−2)F3 (−1)F32 (−1)F21 (1)F31 (−1)F1¡12
¢A = I, luegoA = F1 (2)F31 (1)F21 (−1)F32 (1)F3 (−1)F13 (2
es decir, A =
2 0 00 1 00 0 1
1 0 00 1 01 0 1
1 0 0−1 1 00 0 1
1 0 00 1 00 1 1
1 0 00 1 00 0 −1
1 0 20 1 00 0 1
.La matriz B no puede descomponerse en producto de matrices elementales, ya que si así fuesenecesariamente tendría inversa y ya hemos visto que no tiene.
c) Como la matriz A tiene inversa, para cualquier matriz columna
b1b2b3
el sistema Ax = b tiene
solución (y ésta es única), luego esta columna no debe verificar condiciones adicionales.
Como la matriz B no tiene inversa, la solución del sistema Bx = b dependerá de la columna b.Veamos que condiciones debe verificar para que el sistema tenga solución: 4 −1 3−1 1 03 0 3
b1b2b3
F1( 14)−→ 1 −14 3
4−1 1 03 0 3
b14b2b3
F21(1)−→F31(−3)
1 −14 34
0 34
34
0 34
34
b14
b1+4b24
4b3−3b14
F2( 43)−→
1 −14 34
0 1 10 3
434
b14
b1+4b23
4b3−3b14
F32(− 34)−→ 1 −14 3
40 1 10 0 0
b14
b1+4b23
b3 − b2 − b1
.Luego, el sistema Bx = b tiene solución si y sólo si b3 − b2 − b1 = 0.

Trabajo 2. Curso 2004-05
Problema 1Considérese el sistema de ecuaciones lineales Ax = b, donde
A =
1 a −12 1 −a1 −1 −1
y b =
12
a− 1
.Se pide:
a) Para aquellos valores de a que hagan incompatible al sistema, resolverlo por el método de losmínimos cuadrados.
b) Encontrar, en función del parámetro real a, bases para el subespacio R(A) y para R(A)⊥.(Recordar que R(A) denota el espacio columna de la matriz A). ¿Para qué valores del parámetroreal a el espacio nulo de A N(A) es el subespacio trivial nulo?
c) Determinar, según los valores del parámetro a, la proyeccción ortogonal del vector b sobre lossubespacios R(A), R(A)⊥, N(A) y N(A)⊥.
Solución:
a) Estudiamos la compatibilidad del sistema en función del parámetro a, obteniendo la matrizescalonada correspondiente a la matriz ampliada del sistema: 1 a −1
2 1 −a1 −1 −1
12
a− 1
F21(−2)−→F31(−1)
1 a −10 1− 2a −a+ 20 −1− a 0
10
a− 2
Si 1−2a6=0−→F2( 1
1−2a) 1 a −10 1 −a+2
1−2a0 −1− a 0
10
a− 2
F32(1+a)−→ 1 a −1
0 1 −a+21−2a
0 0 (−a+2)(1+a)1−2a
10
a− 2
Si (−a+2)(1+a)1−2a 6=0−→
F3³(−a+2)(1+a)
1−2a´
1 a −10 1 −a+2
1−2a0 0 1
10
−(1−2a)1+a
. Así, obtenemos:• Si a 6= −1, a 6= 2 y a 6= 1
2 , el sistema es compatible determinado. Ahora analizamos cadauno de los casos singulares.
• Para a = 12 , obtenemos (volviendo al instante en el que supusimos a 6= 1
2): 1 12 −1
0 0 32
0 −32 0
10−32
P32−→ 1 1
2 −10 −32 00 0 3
2
1−320
F2(−2/3)−→F3(2/3)
1 12 −1
0 1 00 0 1
110
,por lo que el sistema es compatible determinado.
10

Trabajo 2. Curso 2004-05 11
• Para a = 2, obtenemos (volviendo al instante en el que supusimos a 6= 2): 1 2 −10 1 00 0 0
100
, por lo que el sistema es compatible indeterminado.• Para a = −1, obtenemos (volviendo al instante en el que supusimos a 6= −1): 1 −1 −1
0 1 10 0 0
10−3
, por lo que el sistema es incompatible.
Tenemos por lo tanto que resolver el sistema incompatible
1 −1 −12 1 11 −1 −1
x = 1
2−2
(sis-
tema anterior con a = −1) por el método de los mínimos cuadrados. Para ello, resolveremos
el sistema normal asociado de Gauss, ATAx = ATb.
1 2 1−1 1 −1−1 1 −1
1 −1 −12 1 11 −1 −1
x = 1 2 1−1 1 −1−1 1 −1
12−2
=⇒ 6 0 00 3 30 3 3
x = 333
. Este último sistema lo resolvemospor el método de Gauss: 6 0 0
0 3 30 3 3
333
F1(1/6)−→ 1 0 0
0 3 30 3 3
1233
F2(1/3)−→ 1 0 0
0 1 10 3 3
1213
F32(−3)−→ 1 0 0
0 1 10 0 0
1210
=⇒x1 =
12
x2 = 1− tx3 = t
Por lo tanto, las pseudosoluciones (o soluciones en el sentido de los mínimos cuadrados) del
sistema
1 −1 −12 1 11 −1 −1
x = 1
2−2
son
x1 =
12
x2 = 1− tx3 = t
b) • Si a 6= −1, a 6= 2, la matriz A es regular (ya que el sistema es cuadrado y compatible deter-minado), por lo tanto las tres columnas son independientes y en este caso el espacio columnaR(A) = R3. Tres vectores cualesquiera linealmente independientes de R3 constituyen unabase, en particular, las tres columnas de la matriz A.Como el único vector que es ortogonal a todos los vectores de R3 es el cero tenemos queR(A)⊥ = {(0, 0, 0)}, (en este caso se suele decir que una base está formada por el conjuntovacío).Además, en este caso N(A) = {(0, 0, 0)} y N(A)⊥ = R3.
• Para a = −1, obtenemos, teniendo los cálculos realizados en el apartado anterior, quelas dos primeras columnas de A, son linealmente independientes, por lo tanto una basede R(A) es la formada por los vectores {(1, 2, 1) , (−1, 1,−1)}. Para obtener una base deR(A)⊥, obtenemos previamente sus ecuaciones implícitas; sabemos que
R(A)⊥ =½(x1, x2, x3) :
x1 + 2x2 + x3 = 0−x1 + x2 − x3 = 0
¾.
A continuación, resolviendo el sistema anterior realizando t.e. en su matriz ampliada

Trabajo 2. Curso 2004-05 12
µ1 2 1−1 1 −1
00
¶F21(1)−→
µ1 2 10 3 0
00
¶F3(1/3)−→
µ1 2 10 1 0
00
¶=⇒
x1 = −tx2 = 0x3 = t
,
obtenemos que una base de R(A)⊥ es la formada por el vector (−1, 0, 1) .Aunque en este apartado no se solicita el cálculo de N(A), la obtención de una base paraeste subespacio nos permitirá calcular la proyección ortogonal de b solicitada el apartadoc). Para el cálculo de una base de N(A) aprovechamos los cálculos hechos previamente yobtenemos: 1 −1 −1
2 1 −11 −1 −1
000
F21(−2)−→F31(−1)
1 −1 −10 1 10 0 0
000
=⇒x1 = 0x2 = −tx3 = t
, luego una
base de N(A) es la formada por el vector (0,−1, 1)• Para a = 2, obtenemos, teniendo los cálculos realizados en el apartado anteior, que lasdos primeras columnas de A, son linealmente independientes, por lo tanto una base deR(A) es la formada por los vectores {(1, 2, 1) , (2, 1,−1)}. Para obtener una base de R(A)⊥,obtenemos previamente sus ecuaciones implícitas; sabemos que
R(A)⊥ =½(x1, x2, x3) :
x1 + 2x2 + x3 = 02x1 + x2 − x3 = 0
¾
A continuación resolviendo el sistema cuya matriz ampliada esµ
1 2 12 1 −1
00
¶F21(−2)−→µ
1 2 10 −3 −3
00
¶F3(−1/3)−→
µ1 2 10 1 1
00
¶=⇒
x1 = tx2 = −tx3 = t
, luego una base
de R(A)⊥ es la formada por el vector {(1,−1, 1)} .Para calcular N(A) aprovechamos los cálculos hechos previamente y obtenemos: 1 2 −1
2 1 −21 −1 −1
000
F21(−2)−→F31(−1)
1 2 −10 1 00 0 0
000
=⇒x1 = tx2 = 0x3 = t
, luego una base
de N(A) es la formada por el vector (1, 0, 1)
Por último, sabemos que el espacio nulo N(A) es el espacio trivial si y sólo si la matriz de loscoeficientes es regular. Con los cálculos hechos previamente ésto ocurre si y sólo si a 6= −1 ya 6= 2.
c) • Si a 6= −1 y a 6= 2, entonces el espacio R(A) es R3 y de aquí que la proyección del vectorb sobre R(A) sea el propio vector b y la proyección de b sobre R(A)⊥ sea el vector ~0. Esclaro también que proyN(A) (b) = ~0 y que proyN(A)⊥ (b) = b.
• Cuando a = −1 ó a = 2 tendremos en cuenta que es más sencillo calcular la proyecciónortogonal de un vector sobre un subespacio de dimensión uno que sobre uno de dimensióndos, de aquí que empezamos calculando las proyecciones del vector b sobre R(A)⊥.
— Para a = −1, la proyección de b = (1, 2,−2) sobre R(A)⊥ = lin ({(−1, 0, 1)}) es
proyR(A)⊥ (b) = −3
2(−1, 0, 1) =
µ3
2, 0,−3
2
¶,
y la proyección de b sobre R(A) es
proyR(A) (b) = b− proyR(A)⊥ (b) = (1, 2,−2)−µ3
2, 0,−3
2
¶=
µ−12, 2,−1
2
¶.

Trabajo 2. Curso 2004-05 13
La proyección de b = (1, 2,−2) sobre N(A) = lin ({(0,−1, 1)}) es
proyN(A) (b) = −4
2(0,−1, 1) = (0, 2,−2) ,
y la proyección de b sobre N(A)⊥ es
proyN(A)⊥ (b) = b− proyN(A) (b) = (1, 2,−2)− (0, 2,−2) = (1, 0, 0) .
— Para a = 2, la proyección de b = (1, 2, 1) sobre R(A)⊥ = lin ({(1,−1, 1)}) es
proyR(A)⊥ (b) =0
3(1,−1, 1) = (0, 0, 0) ,
y la proyección de b sobre R(A) es
proyR(A) (b) = b− proyR(A)⊥ (b) = (1, 2, 1) .La proyección de b = (1, 2,−2) sobre N(A) = lin ({(1, 0, 1)}) es
proyN(A) (b) =2
2(1, 0, 1) = (1, 0, 1) ,
y la proyección de b sobre N(A)⊥ es
proyN(A)⊥ (b) = b− proyN(A) (b) = (1, 2,−2)− (1, 0, 1) = (0, 2, 0) .
Problema 2
Dada la matriz A =
1 2 −13 1 0−2 1 −1
se pide:
a) Calcular bases y ecuaciones implícitas para los subespacios R(A), N(A), R(A)⊥ y N(A)⊥.
b) Obtener bases y ecuaciones implícitas para R(At), N(At), R(At)⊥ y N(At)⊥.
Repetir los apartados a) y b) para la matriz A =µ1 0 −1 22 0 −2 4
¶.
Solución:
a) Sabemos que el espacio columna R(A) está generado por las columnas de la matriz A, por lotanto para encontrar una base debemos analizar la independencia de dichos vectores.
A =
1 2 −13 1 0−2 1 −1
F21(−3)→F31(2)
1 2 −10 −5 30 5 −3
F1(1/5)→ 1 2 −10 1 −350 5 −3
F32(−5)→ 1 2 −10 1 −350 0 0
.Como la matriz escalonada de A tiene unos principales en la primera y en la segunda columna,obtenemos que las dos primeras columnas de la matriz A son independientes y por lo tanto, unabase del espacio R(A) es la formada por los vectores {(1, 3,−2) , (2, 1, 1)} . Una vez obtenida la
base obtenemos unas ecuaciones implícitas:
1 23 1−2 1
x1x2x3
F21(−3)→F31(2)
1 20 −50 5
x1x2 − 3x1x3 + 2x1
F1(1/5)→ 1 20 10 5
x1−x2−3x15x3 + 2x1
F32(−5)→ 1 2
0 10 0
x1−x2−3x15
−x1 + x2 + x3
, por lo tanto una ecuaciónimplícita de R (A) es −x1 + x2 + x3 = 0.

Trabajo 2. Curso 2004-05 14
Observar que ésta ecuación nos dice que el vector (−1, 1, 1) es ortogonal a todos los vectores deR (A). Como R (A) es un subespacio de R3 de dimensión 2, la dimensión de R (A)⊥ es uno. Esdecir, R (A)⊥ = lin {(−1, 1, 1)} y {(−1, 1, 1)} constituye una base de R (A)⊥ . Ahora obtenemoslas ecuaciones implícitas de R (A)⊥: −1
11
x1x2x3
F1(−1)→ 1
11
−x1x2x3
F21(−1)→F31(−1)
100
−x1x1 + x2x1 + x3
, luego unas ecua-ciones implíctas de R (A)⊥ son
½x1 + x2 = 0x1 + x3 = 0
Nótese que otras ecuaciones implícitas de R (A)⊥ pueden obtenerse directamente a partir de la
base de R (A) = lin {(1, 3,−2) , (2, 1, 1)} y serían½x1 + 3x2 − 2x3 = 0,2x1 + x2 + x3 = 0.
Para obtener una base de N(A) debemos resolver el sistema homogéneo Ax = 0. Con los cálculos
realizados previamente se tiene que las soluciones del sistema homogéneo son:
x1 = −tx2 = 3tx3 = 5t
luego
N (A) = lin {(−1, 3, 5)} y {(−1, 3, 5)} constituye una base de N (A) .Obtenemos las ecuaciones implícitas de N (A) : −1
35
x1x2x3
F1(−1)→ 1
35
−x1x2x3
F21(−3)→F31(−5)
100
−x13x1 + x25x1 + x3
, luego unas ecua-ciones implíctas de N (A) son
½3x1 + x2 = 05x1 + x3 = 0
Una vez obtenidoN (A), razonando ahora como hemos hecho anteriormente para obtenerR (A)⊥,obtenemos que N (A)⊥ = lin {(3, 1, 0) , (5, 0, 3)}. Ahora, obtenemos ecuaciones implícitas deN (A)⊥ : 3 5
1 00 1
x1x2x3
P12→ 1 0
0 13 5
x2x3x1
F31(−3)→ 1 0
0 10 5
x2x3
x1 − 3x2
F32(−5)→
1 00 10 0
x2x3
x1 − 3x2 − 5x3
, luegoN (A)⊥ ≡ x1−3x2−5x3 = 0.Obsérvese que esta ecuaciónse puede obtener directamente sabiendo que N (A) = lin {(−1, 3, 5)}.
b) Repetimos ahora todas las cuentas realizadas en el apartado a) pero para la matriz At = 1 3 −22 1 1−1 0 −1
. (Realizamos las cuentas pero sin incluir los comentarios y justificaciones). 1 3 −2
2 1 1−1 0 −1
→ 1 3 −20 −5 50 3 −3
→ 1 3 −20 1 −10 3 −3
→ 1 3 −20 1 −10 0 0
, por lo tanto unabase del espacio R(At) es la formada por los vectores {(1, 2,−1) , (3, 1, 0)} . 1 3 x1
2 1 x2−1 0 x3
→ 1 3 x10 −5 x2 − 2x10 3 x3 + x1
→ 1 2 x10 1 −x2−2x150 3 x3 + x1
→ 1 2 x10 1 −x2−2x150 0 5x3+3x2−x1
5
,por lo tanto una ecuación implícita de R
¡At¢es −x1 + 3x2 + 5x3 = 0. Observando la última
ecuación se obtiene R¡At¢⊥= lin {(−1, 3, 5)} y {(−1, 3, 5)} constituye una base de R (A)⊥ .

Trabajo 2. Curso 2004-05 15
−1 x13 x25 x3
→ 1 −x13 x25 x3
→ 1 −x10 3x1 + x20 5x1 + x3
, luego unas ecuaciones implíctas de R ¡At¢⊥son
½3x1 + x2 = 05x1 + x3 = 0
Para obtener una base de N(At) debemos resolver el sistema homogéneo Atx = 0. Con los cálcu-
los realizados previamente se tiene que las soluciones del sistema homogéneo son:
x1 = −tx2 = tx3 = t
,
luego N¡At¢= lin {(−1, 1, 1)} y {(−1, 1, 1)} constituye una base de NAt. Obtenemos las ecua-
ciones implícitas de N¡At¢: −1 x1
1 x21 x3
→ 1 −x11 x21 x3
→ 1 −x10 x1 + x20 x1 + x3
luego unas ecuaciones implíctas de N¡At¢
son½x1 + x2 = 0x1 + x3 = 0
Razonando ahora como hemos hecho anteriormente obtenemos queN¡At¢⊥= lin {(1, 1, 0) , (1, 0, 1)}.
Ahora obtenemos ecuaciones implícitas de N¡At¢⊥: 1 1 x1
1 0 x20 1 x3
→ 1 0 x20 1 x31 1 x1
→ 1 0 x20 1 x30 0 x1 − x2−3
, luego N ¡At¢⊥ ≡ x1−x2−x3 = 0.Ra) Repetimos los cálculos (sin los comentarios) para la matriz A =
µ1 0 −1 22 0 −2 4
¶. Como el
rango de A es uno tenemos que R(A) = lin {(1, 2)} y una base de R(A) es la formada por elvector {(1, 2)} .µ1 x12 x2
¶→µ1 x10 x2 − 2x1
¶y unas ecuaciones implícitas de R(A) son x2 − 2x1 = 0.
R(A)⊥ = lin {(−2, 1)} y una base de R(A)⊥ es la formada por el vector {(−2, 1)} .µ −2 x11 x2
¶→µ1 −x121 x2
¶→µ1 −x120 x2 +
x12
¶, luego unas ecuaciones implícitas de R(A) son
x1 + 2x2 = 0.
La solución del sistemaAx = 0 es
x1 = s− 2tx2 = rx3 = sx4 = t
por lo tantoN(A) = lin {(1, 0, 1, 0) , (0, 1, 0, 0) , (−2, 0, 0, 1)} .
Y una base de N(A) está formada por los vectores {(1, 0, 1, 0) , (0, 1, 0, 0) , (−2, 0, 0, 1)} .1 0 −2 x10 1 0 x21 0 0 x30 0 1 x4
→1 0 −2 x10 1 0 x20 0 2 x3 − x10 0 1 x4
→1 0 −2 x10 1 0 x20 0 1 x3−x1
20 0 1 x4
→
1 0 −2 x10 1 0 x20 0 1 x3−x1
20 0 0 x4 − x3−x1
2
por lo tanto unas ecuaciones implícitas de N(A) son x1 − x3 +
2x4 = 0.
N(A)⊥ = lin {(1, 0,−1, 2)} y una base de N(A)⊥ está formada por el vector {(1, 0,−1, 2)} .

Trabajo 2. Curso 2004-05 16
1 x10 x2−1 x32 x4
→1 x10 x20 x3 + x10 −2x1 + x4
luego unas ecuaciones implícitas deN(A)⊥ sonx2 = 0x1 + x3 = 0−2x1 + x4 = 0
Rb) Ahora hay que repetir todos los cálculos hechos antes para la matriz At =µ1 0 −1 22 0 −2 4
¶t=
1 20 0−1 −22 4
. Como el rango de At es uno tenemos que R(At) = lin {(1, 0− 1, 2)} y una basede R(At) es la formada por el vector {(1, 0− 1, 2)} .
1 x10 x2−1 x32 x4
→
1 x10 x2−1 x32 x4
→1 x10 x20 x3 + x10 −2x1 + x4
luego unas ecuaciones implícitas de R(At)
son
x2 = 0
x1 + x3 = 0−2x1 + x4 = 0
R(At)⊥ = lin {(1, 0, 1, 0) , (0, 1, 0, 0) , (−2, 0, 0, 1)} y una base de R(At)⊥ es la formada por losvectores {(1, 0, 1, 0) , (0, 1, 0, 0) , (−2, 0, 0, 1)} .1 0 −2 x10 1 0 x21 0 0 x30 0 1 x4
→1 0 −2 x10 1 0 x20 0 2 x3 − x10 0 1 x4
→1 0 −2 x10 1 0 x20 0 1 x3−x1
20 0 1 x4
→
1 0 −2 x10 1 0 x20 0 1 x3−x1
20 0 0 x4 − x3−x1
2
por lo tanto unas ecuaciones implícitas de R(At)⊥ son x1−x3+
2x4 = 0.
La solución del sistema Atx = 0 es½x1 = −2tx2 = t
. Por lo tanto N(At) = lin {(−2, 1)} y una basede N(At) es la formada por el vector {(−2, 1)} .µ −2 x1
1 x2
¶→
µ1 −x121 x2
¶→
µ1 −x120 x2 +
x12
¶y unas ecuaciones implícitas de N(At) son
x1 + 2x2 = 0.
N(At)⊥ = lin {(1, 2)} y una base de N(At)⊥ es la formada por el vector {(1, 2)} .µ1 x12 x2
¶→µ1 x10 x2 − 2x1
¶y las ecuaciones implícitas de N(At)⊥ son x2 − 2x1 = 0
Nota: Observar que para las dos matrices del ejercicio se verifica que R¡At¢= N (A)⊥ y
N(At) = R (A)⊥. Esta propiedad es cierta para todas las matrices y se conoce como TeoremaFundamental del Álgebra Lineal.
Problema 3
a) Calcular la proyección ortogonal del vector b = (2,−1, 4) sobre el subespacioW de R3 de ecuaciónx1 + x2 − x3 = 0.

Trabajo 2. Curso 2004-05 17
b) Dado el sistema
x1 + x3 = 2
x1 + x2 = −12x1 + x2 + x3 = 4
se pide:
b.1) Encontrar la relación que existe entre el subespacioW del apartado a) y el espacio columnade la matriz de los coeficientes.
b.2) Resolver el sistema por el método de los minímos cuadrados, por dos caminos: utilizando elsistema normal asociado de Gauss y utilizando la proyección ortogonal de b sobre el espaciocolumna.
Solución:
a) Teniendo en cuenta que el subespacio W es de dimensión dos, la forma más sencilla de obtenerla proyección de b sobre W es obtener la proyección de b sobre W⊥. Las ecuaciones implícitasde W nos dicen que (x1, x2, x3) ∈W si y sólo si (x1, x2, x3) . (1, 1,−1) = 0. Por lo tanto el vector(1, 1,−1) es ortogonal a todos los vectores de W . Teniendo en cuenta que la dim ¡W⊥¢ = 1,obtenemos que W⊥ = lin {(1, 1,−1)} . Una vez encontrada una base de W⊥, la proyección de bsobre W⊥ es:
proyW⊥ (b) = −33(1, 1,−1) = (−1,−1, 1) .
Ahora,
proyW (b) = b− proyW⊥ (b) = (2,−1, 4)− (−1,−1, 1) = (3, 0, 3) .
b.1) Obtenemos las ecuaciones implícitas del espacio columna de la matriz de los coeficientes. Enprimer lugar obtenemos una base de dicho de espacio; para ello, averiguamos cuáles de ellos sonindependientes: 1 0 11 1 02 1 1
−→ 1 0 10 1 −10 1 −1
−→ 1 0 10 1 −10 0 0
. Como los unos principales se encuen-tran en la primera y en la segunda columna tenemos que las dos primeras columnas constituyenuna base de R (A) . Es decir, R (A) = lin {(1, 1, 2) , (0, 1, 1)} . Ahora calculamos las ecuacionesimplícitas de R (A). 1 0 x11 1 x22 1 x3
−→ 1 0 x10 1 x2 − x10 1 x3 − 2x1
−→ 1 0 x10 1 x2 − x10 0 x1 − x2 + x3
, luego R (A) ≡ x1−x2+x3 = 0.
Comprobamos entonces que el subespacio W del apartado anterior y el subespacio R (A) son enrealidad el mismo subespacio(tienen las mismas ecuaciones implícitas).
b.2) Resolvemos el sistema por el método de los minímos cuadrados (buscamos la pseudosolución ópseudosoluciones), utilizando el sistema normal asociado de Gauss ATAx = AT b. 1 1 20 1 11 0 1
1 0 11 1 02 1 1
x1x2x3
=
1 1 20 1 11 0 1
2−14
=⇒
6 3 33 2 13 1 2
x1x2x3
=
936
.Este último sistema lo resolvemos por el método de Gauss

Trabajo 2. Curso 2004-05 18
6 3 3 93 2 1 33 1 2 6
→ 1 1
212
32
3 2 1 33 1 2 6
→ 1 1
212
32
0 12 −12 −32
0 −12 12
32
→ 1 1
212
32
0 12 −12 −32
0 0 0 0
→ 1 1
212
32
0 1 −1 −30 0 0 0
=⇒x1 = −t+ 3x2 = t− 3x3 = t
La pseudosolución del sistema Ax = b también puede obtenerse resolviendo el sistema Ax =proyR(A) (b). Como el vector proyR(A) (b) lo tenemos calculado en el apartado a), resolvemosahora el sistema 1 0 11 1 02 1 1
x1x2x3
=
303
por el método de Gauss.
1 0 1 31 1 0 02 1 1 3
→ 1 0 1 30 1 −1 −30 1 −1 −3
→ 1 0 1 30 1 −1 −30 0 0 0
=⇒x1 = −t+ 3x2 = t− 3x3 = t
.
Nota: Como podemos comprobar las pseudosoluciones son las mismas. Observar que hayinfinitas pseudosoluciones pero que la proyección del vector b sobre el espacio columna R(A) esúnica.
Problema 4
a) Encontrar la recta y la parábola que mejor se ajusta a la nube de puntos
P1 (−2, 0) , P2 (−1,−3) , P3 (0,−2) , P4 (1, 3) .
¿Cuál de las dos gráficas crees que se ajusta mejor a esta nube de puntos?
b) Repetir el apartado a) con la nube de puntos P1 (−2,−2) , P2 (−1,−1) , P3 (0,−1) , P4 (1, 2)
Solución
a) Buscamos en primer lugar la recta y = mx + n que mejor se “ajusta” a la nube de puntos.
Para ello debemos resover el sistema sobre determinado
−2m+ n = 0−m+ n = −3
n = −2m+ n = 3
por el método de los
mínimos cuadrados. Usamos el sistema normal asociado de Gauss ATAx = AT b.µ −2 −1 0 11 1 1 1
¶−2 1−1 10 11 1
µ mn
¶=
µ −2 −1 0 11 1 1 1
¶0−3−23
=⇒
µ6 −2−2 4
¶µmn
¶=
µ6−2
¶; ahora resolvemos este sistema por el método de Gauss
µ6 −2 6−2 4 −2
¶−→µ
1 −13 1−2 4 −2
¶−→
µ1 −13 10 10
3 0
¶=⇒
½m = 1n = 0
, luego la recta de de mjor ajuste (recta
de regresión) es y = x.

Trabajo 2. Curso 2004-05 19
Ahora buscamos la parábola y = ax2 + bx+ c que mejor se “ajusta” a la nube de puntos. Para
ello debemos resolver el sistema sobre determinado
4a− 2b+ c = 0a− b+ c = −3
c = −2a+ b+ c = 3
por el método de los
mínimos cuadrados. Usamos el sistema normal asociado de Gauss ATAx = AT b. 4 1 0 1−2 −1 0 11 1 1 1
4 −2 11 −1 10 0 11 1 1
abc
=
4 1 0 1−2 −1 0 11 1 1 1
0−3−23
=⇒
18 −8 6−8 6 −26 −2 4
abc
=
06−2
ahora resolvemos este sistema por el método de Gauss
18 −8 6 0−8 6 −2 66 −2 4 −2
−→ 1 −49 1
3 0−8 6 −2 66 −2 4 −2
−→ 1 −49 1
3 00 22
923 6
0 23 2 −2
−→
1 −49 13 0
0 1 311
5422
0 23 2 −2
−→ 1 −49 1
3 00 1 3
115422
0 0 2011 −4011
−→ 1 −49 1
3 00 1 3
115422
0 0 1 −2
=⇒a = 2b = 3c = −2
luego la parábola de mejor ajuste (parábola de regresión) es y = 2x2 + 3x− 2.El error que cometemos al aproximar con la pseudosolución, en el caso de la recta y de la parábolaes, respectivamente,
— para la recta:
kAx0 − bk =
°°°°°°°°−2 1−1 10 11 1
µ 10
¶−
0−3−23
°°°°°°°°
=
°°°°°°°°−222−2
°°°°°°°° =
q(−2)2 + (2)2 + (2)2 + (−2)2 = 4
— para la parábola:
kAx0 − bk =
°°°°°°°°4 −2 11 −1 10 0 11 1 1
2
3−2
−
0−3−23
°°°°°°°° =
°°°°°°°°0000
°°°°°°°° = 0.
Vemos que en este caso la parábola se aproxima mucho mejor que la recta a esta nube de puntos.En realidad, la parábola pasa por todos los puntos.
b) Repetimos el ejercicio para la segunda nube de puntos: Buscamos en primer lugar la rectay = mx + n que mejor se “ajusta” a la nube de puntos. Para ello debemos resover el sistema

Trabajo 2. Curso 2004-05 20
sobre determinado
−2m+ n = −2−m+ n = −1
n = −1m+ n = 2
por el método de los mínimos cuadrados. Usamos el
sistema normal asociado de Gauss ATAx = AT b.µ −2 −1 0 11 1 1 1
¶−2 1−1 10 11 1
µ mn
¶=
µ −2 −1 0 11 1 1 1
¶−2−1−12
=⇒
µ6 −2−2 4
¶µmn
¶=
µ7−2
¶; ahora resolvemos este sistema por el método de Gaussµ
6 −2 7−2 4 −2
¶−→
µ1 −13 7
2−2 4 −2
¶−→
µ1 −13 7
20 10
313
¶=⇒
½m = 12
10n = 1
10
, luego la recta
de regresión es y = 1210x+
110 .
Ahora buscamos la parábola y = ax2 + bx+ c que mejor se “ajusta” a la nube de puntos. Para
ello debemos resover el sistema sobre determinado
4a− 2b+ c = −2a− b+ c = −1
c = −1a+ b+ c = 2
por el método de los
mínimos cuadrados. Usamos el sistema normal asociado de Gauss ATAx = AT b. 4 1 0 1−2 −1 0 11 1 1 1
4 −2 11 −1 10 0 11 1 1
abc
=
4 1 0 1−2 −1 0 11 1 1 1
−2−1−12
=⇒
18 −8 6−8 6 −26 −2 4
abc
=
−77−2
Ahora resolvemos este sistema por el método de Gauss: 18 −8 6 −7−8 6 −2 76 −2 4 −2
−→ 1 −49 1
3−718
−8 6 −2 76 −2 4 −2
−→ 1 −49 1
3 − 718
0 229
23
7018
0 23 2 1
3
−→ 1 −49 1
3118
0 1 311
3522
0 2 6 1
− 1 −49 13
118
0 1 311
3522
0 0 24044 −9644
−→ 1 −49 1
3118
0 1 311
3522
0 0 1 −25
=⇒
a = 12
b = 1710
c = −25, luego la parábola de regre-
sión es y = 12x2 + 17
10x− 25 .
El error que cometemos al aproximar con la pseudosolución, en el caso de la recta y de la parábolaes, respectivamnente,
— para la recta.
kAx0 − bk =
°°°°°°°°−2 1−1 10 11 1
µ 1210110
¶−
−2−1−12
°°°°°°°°
=
°°°°°°°°− 310− 1101110− 710
°°°°°°°° =
sµ− 310
¶2+
µ−110
¶2+
µ11
10
¶2+
µ− 710
¶2=3
5
√5

Trabajo 2. Curso 2004-05 21
— para la parábola:
kAx0 − bk =
°°°°°°°°4 −2 11 −1 10 0 11 1 1
5
101710− 410
−−2−1−12
°°°°°°°°
=
°°°°°°°°
210− 610610−210
°°°°°°°° =
sµ2
10
¶2+
µ− 610
¶2+
µ6
10
¶2+
µ− 210
¶2=2
5
√5
Vemos que la parábola se aproxima mejor que la recta a esta nube de puntos.

Trabajo 3. Curso 2004-05
Problema 1Decidir cuáles de las siguientes matrices son diagonalizables (en R):
A =
3 −8 8−4 7 −8−4 8 −9
, B =
3 1 1−2 2 11 0 2
, C =
3 0 83 −1 6−2 0 −5
.D =
µ −2 −2−5 1
¶, E =
1 0 01 1 02 3 2
, F =
5 1 −12 4 −21 −1 3
, G =
1 −1 0−1 1 00 0 5
.Para aquellas que lo sean encontrar un matriz de paso P y la correspondiente matriz diagonal D.
Para las que sean ortogonalmente diagonalizables encontrar una matriz de paso ortogonal.Solución:Para decidir sobre la diagonalización de estas matrices determinaremos, en primer lugar, sus au-
tovalores y seguidamente, las multiplidades algebraicas y geométricas de éstos.
Comenzamos con la matriz A. Para determinar los autovalores de A =
3 −8 8−4 7 −8−4 8 −9
, calcu-lamos previamente su polinomio característico:
pA (λ) = det (A− λI) =
¯¯ 3− λ −8 8−4 7− λ −8−4 8 −9− λ
¯¯ =F32(−1)
¯¯ 3− λ −8 8−4 7− λ −80 1 + λ −1− λ
¯¯ =C23(1)
=
¯¯ 3− λ 0 8−4 −1− λ −80 0 −1− λ
¯¯ = (−1− λ)
¯3− λ 0−4 −1− λ
¯= (−1− λ)2 (3− λ).
Por consiguiente, los autovalores de A son λ1 = −1, con multiplicidad algebraica m1 = 2 (doble),y λ2 = 3 con m2 = 1 (simple). Recordar que la multiplicidad geométrica satistace: 1 6 µ2 6 m2 = 1;así, µ2 = 1 y por tanto, para decidir sobre la diagonalización de A debemos conocer la multiplicidadgeométrica del primer autovalor:
µ1 = dim (V (λ1)) = dim (N (A− λ1I)) = n− rg (A− λ1I) = 3− rg (A− λ1I) .
Puesto que
A− λ1I = A+ I =
4 −8 8−4 8 −8−4 8 −8
F21(1)−→F31(1)
4 −8 80 0 00 0 0
F1(1/4)−→ 1 −2 20 0 00 0 0
(2)
deducimos que rg (A− λ1I) = 1 y por consiguiente, µ1 = 3 − 1 = 2. Luego, µ1 = m1 = 2 y así, lamatriz A es diagonalizable.
Para obtener una matriz de paso, vamos a determinar una base para cada uno de los subespaciospropios.
22

Trabajo 3. Curso 2004-05 23
• Como V (λ1) =N(A− λ1I) =nv ∈ R3 : (A− λ1I) v = ~0
o, teniendo en cuenta las transforma-
ciones elementales realizadas (2) se deduce que V (λ1) ≡ x1 − 2x2 + 2x3 = 0 y de aquí que, elconjunto
{v1 = (2, 1, 0) ; v2 = (−2, 0, 1)}
forma una base del subespacio propio V (λ1).
• Para obtener una base de V (λ2) =N(A− λ2I) =nv ∈ R3 : (A− λ2I) v = ~0
ovamos a llevar la
matriz A− λ2I a su forma escalonada reducida:
A−λ2I = A−3I = 0 −8 8−4 4 −8−4 8 −12
P12−→ −4 4 −8
0 −8 8−4 8 −12
F1(−1/4)−→ 1 −1 2
0 −8 8−4 8 −12
F31(4)−→
1 −1 20 −8 80 4 −4
F1(−1/8)−→ 1 −1 20 1 −10 4 −4
F32(−4)−→ 1 −1 20 1 −10 0 0
F12(1)−→ 1 0 10 1 −10 0 0
. Portanto, V (λ2) ≡
½x1 + x3 = 0x2 − x3 = 0 y así, V (λ2) = lin ({v3}), siendo v3 = (−1, 1, 1).
En consecuencia, una matriz de paso que diagonalizaA es P =¡v1 v2 v3
¢=
2 −2 −11 0 10 1 1
y la matriz diagonal es D =
λ1λ1
λ2
=
−1 −13
, verificando P−1AP = D (o
AP = PD).
Ahora, hacemos lo propio con la matriz B =
3 1 1−2 2 11 0 2
. El polinomio característico de B es
pB (λ) = det (B − λI) =
¯¯ 3− λ 1 1−2 2− λ 11 0 2− λ
¯¯ = −λ3 + 7λ2 − 17λ + 15 = − (λ− 3) ¡λ2 − 4λ+ 5¢
y los autovalores son las soluciones de las ecuaciones λ− 3 = 0 y λ2 − 4λ+ 5 = 0. De la primera deellas se deduce que un autovalor es λ1 = 3 y de la segunda que
λ =4±√16− 4 · 5
2=4±√−4
2/∈ R.
Luego, la matriz B no tiene, contando sus multiplicicades algebraicas, tres autovalores en R y porconsiguiente, B es no diagonalizable (en R).
A continuación, estudiamos la diagonalización de la matriz C =
3 0 83 −1 6−2 0 −5
. De nuevo,comenzamos por el cálculo de su polinomio característico:
pC (λ) = det (C − λI) =
¯¯ 3− λ 0 8
3 −1− λ 6−2 0 −5− λ
¯¯ = (−1− λ)
¯3− λ 8−2 −5− λ
¯=
= (−1− λ) [(3− λ) (−5− λ) + 16] = (−1− λ)£2λ+ λ2 − 15 + 16¤ = (−1− λ)
£λ2 + 2λ+ 1
¤=
− (λ+ 1)3. Así, los autovalores de C son λ1 = −1 con multiplicidad algebraica m1 = 3. Por con-siguiente la matriz C no puede ser diagonalizable, pues si lo fuera, existiría un matriz P regular de

Trabajo 3. Curso 2004-05 24
forma que P−1CP = D =
λ1λ1
λ1
= λ1I, de donde, deduciríamos que C = P (λ1I)P−1 =
λ1PIP−1 = λ1I = −I y evidentemente C 6= −I.
El polinomio caracterítico de D =
µ −2 −2−5 1
¶es
pD (λ) = det (D − λI) =
¯ −2− λ −2−5 1− λ
¯= (−2− λ) (1− λ)− 10 = λ2+ λ− 12 y sus raíces son
λ =−1±√1 + 48
2=−1± 72
=
½ −43
Es decir, los autovalores de D son λ1 = −4 con multiplicidad algbráica m1 = 1 y λ2 = 3 con m2 = 1.Así, D es diagonalizable (en R), pues es de orden dos y posee dos autovalores (reales) diferentes. Paracalcular una matriz de paso, determinaros bases para cada uno de sus subespacios propios.
• V (λ1) =N(D − λ1I) =nv ∈ R2 : (D − λ1I) v = ~0
o. Puesto queD−λ1I = D+4I =
µ2 −2−5 5
¶,
deducimos que V (λ1) ≡ {x1 − x2 = 0 y de aquí, {v1 = (1, 1)} es base del subespacio propioV (λ1).
• V (λ2) =N(D − λ2I) =nv ∈ R2 : (D − λ2I) v = ~0
oy como D− λ2I = D− 3I =
µ −5 −2−5 −2
¶,
tenemos que V (λ2) ≡ {−5x1 − 2x2 = 0 y {v2 = (2,−5)} es base del segundo subespacio propioV (λ2).
Luego, una matriz de paso para la matriz D es P =¡v1 v2
¢=
µ1 21 −5
¶y P−1DP = D1 =µ
λ1λ2
¶=
µ −43
¶.
Puesto que la matriz E =
1 0 01 1 02 3 2
es triangular, sus autovalores son los elementos de la
diagonal, es decir, λ1 = 1 con m1 = 2 y λ2 = 2 con m2 = 1. Nótese que la multiplicidad geométricadel segundo autovalor es µ2 = 1 = m2. Seguidamente, obtendremos la multiplicidad geométrica delprimer autovalor λ1 = 1:
µ1 = dim (V (λ1)) = dim (N (E − λ1I)) = n− rg (E − λ1I) = 3− rg (E − λ1I)
Puesto que E − λ1I = E − I = 0 0 01 0 02 3 1
, se deduce que rg (E − λ1I) = 2 y por tanto,
µ1 = 3− 2 = 1 6= 2. En consecuencia, la matriz E es no diagonalizable.
El polinomio característico de la matriz F =
5 1 −12 4 −21 −1 3
es
pF (λ) = det (F − λI) =
¯¯ 5− λ 1 −1
2 4− λ −21 −1 3− λ
¯¯ C13(1)=C23(1)
¯¯ 4− λ 0 −1
0 2− λ −24− λ 2− λ 3− λ
¯¯ F31(−1)=
¯¯ 4− λ 0 −1
0 2− λ −20 2− λ 4− λ
¯¯ F
=
¯¯ 4− λ 0 −1
0 2− λ −20 0 6− λ
¯¯ = (4− λ) (2− λ) (6− λ) y por tanto, los autovalores de la matriz F son
λ1 = 4,λ2 = 2 y λ3 = 6. Así, dicha matriz es diagonalizable (en R), pues es de orden tres y posee

Trabajo 3. Curso 2004-05 25
tres autovalores (reales) diferentes. Para calcular una matriz de paso debemos obtener una base paracada subespacio propio. Para ello, debemos resolver los sistemas homogéneos (F − λiI) v = ~0, parai = 1, 2, 3. Resolveremos estos sistemas llevando sus matrices de coeficientes a la forma escalonada.
• F −λ1I = F −4I = 1 1 −12 0 −21 −1 −1
F21(−2)−→F31(−1)
1 1 −10 −2 00 −2 0
F32(−1)−→ 1 1 −10 −2 00 0 0
F2(−1/2)−→
1 1 −10 1 00 0 0
. Por tanto, el subespacio propio V (λ1) tiene de ecuaciones implícitas½ x1 + x2 − x3 = 0x2 = 0
y así, una base de V (λ1) es {v1 = (1, 0, 1)}.
• F − λ2I = F − 2I = 3 1 −12 2 −21 −1 1
P31−→ 1 −1 12 2 −23 1 −1
F21(−2)−→F31(−3)
1 −1 10 4 −40 4 −4
F32(−1)−→
1 −1 10 4 −40 0 0
F2(1/4)−→ 1 −1 10 1 −10 0 0
. Así, V (λ1) ≡½x1 − x2 + x3 = 0x2 − x3 = 0 y V (λ2) =
lin ({v2}), siendo v2 = (0, 1, 1).
• F−λ3I = F−6I = −1 1 −1
2 −2 −21 −1 −3
F21(2)−→F31(1)
−1 1 −10 0 −40 0 −4
F32(−1)−→ −1 1 −1
0 0 −40 0 0
F2(−1/4)−→F1(−1) 1 −1 1
0 0 10 0 0
. Luego, V (λ3) tiene por ecuaciones implícitas ½ x1 − x2 + x3 = 0x3 = 0
y una base
para este subespacio la forma el conjunto {v3 = (1, 1, 0)}.
En resumen, la matriz de paso P =¡v1 v2 v3
¢=
1 0 10 1 11 1 0
satisface P−1FP = D, siendoD =
λ1λ2
λ3
=
426
.Para decidir sobre la diagonalización de la matriz G =
1 −1 0−1 1 00 0 5
debemos tener en cuenta
que dicha matriz es simétrica y por consiguiente, es diagonalizable. Es más, esta matriz es ortogo-nalmente diagonalizable y de hecho, es la única matriz simétrica del enunciado, es decir, la única delenunciado ortogonalmente diagonalizable.
A continuación, calcularemos los autovalores de G. Comenzamos con el cálculo de su polinomiocaracterístico:
pF (λ) = det (F − λI) =
¯¯ 1− λ −1 0−1 1− λ 00 0 5− λ
¯¯ = (5− λ)
¯1− λ −1−1 1− λ
¯= (5− λ) [(1− λ) (1− λ)− 1] =
= (5− λ)¡λ2 − 2λ¢ = λ (λ− 2) (5− λ)
Los autovalores de G son λ1 = 0, λ2 = 2 y λ3 = 5. Ahora, determinaremos una base para cadasubespacio propio de la matriz G.

Trabajo 3. Curso 2004-05 26
• Como G− λ1I = G− 0 · I = G = 1 −1 0−1 1 00 0 5
, es directo ver que una base de V (λ1) estáformada por {v1 = (1, 1, 0)}.
• Puesto que G − λ2I = G − 2I = −1 −1 0−1 −1 00 0 3
, es directo ver que una base de V (λ2) estáformada por {v2 = (1,−1, 0)}.
• Por último, la matriz G−λ3I = G− 5I = −4 −1 0−1 −4 00 0 0
y así, el conjunto {v3 = (0, 0, 1)} es
una base de V (λ3).
Nótese que el conjunto {v1, v2, v3} forma una base ortogonal de R3.
Consecuentemente, una matriz de paso es P =¡v1 v2 v3
¢=
1 1 01 −1 00 0 1
y satisface
P−1GP = D =
λ1λ2
λ3
=
025
.Finalmente, para encontrar una matriz de paso ortogonal sólo debemos determinar una base or-
tornormal para cada uno de los subespacios propios. En este caso, el cálculo de las bases ortonormaleses bastante simple, pues cada subespacio propio tiene dimensión uno y sólo debemos normalizar losvectores de las bases encontradas:
• Puesto que v1 = (1, 1, 0), se tiene kv1k =√2 y
nu1 =
v1kv1k
o=nu1 =
³1√2, 1√
2, 0´o
es una base
ortonormal del subespacio propio V (λ1).
• Análogamente,nu2 =
³1√2, −1√
2, 0´o
es una base ortonormal del subespacio propio V (λ2).
• Y por último, {v3 = (0, 0, 1)} es una base ortonormal del subespacio propio V (λ3).
Así, la matriz Q =¡u1 u2 v3
¢=
1√2
1√20
1√2
−1√20
0 0 1
es una matriz de paso ortogonal y se
satisface
Q−1GQ = QtGQ = D =
λ1λ2
λ3
=
025
.Problema 2
Determinar cuáles de las siguientes matrices son ortogonalmente diagonalizables. Para las quelo sean encontrar una matriz de paso ortogonal y la matriz diagonal correspondiente. Para las queademás sean regulares, calcular su inversa.
A =
µ3 44 −3
¶, B =
µ1 −1−1 1
¶, C =
3 −8 8−4 7 −8−4 8 −9
,

Trabajo 3. Curso 2004-05 27
D =
3 2 22 2 02 0 4
, E =
4 0 −10 3 0−1 0 4
.Solución:Recordemos que una matriz es ortogonalmente diagonalizable si y sólo si es simétrica. Por tanto,
las matrices ortogonalmente diagonalizables son las matrices A,B,D y E.
El polinomio característico de la matriz A =µ3 44 −3
¶es
pA (λ) = det (A− λI) =
¯3− λ 44 −3− λ
¯= (3− λ) (−3− λ)− 16 = λ2 − 25 = (λ− 5) (λ+ 5)
y por consiguiente, los autovalores de A son λ1 = 5 y λ2 = −5. Seguidamente, obtendremos basesortonormales para cada subespacio propio:
• Para encontrar una base de V (λ1) =N(A− λ1I) =nv ∈ R2 : (A− λ1I) v = ~0
odebemos resolver
el sistema (A− λ1I) v = ~0. Puesto que A−λ1I = A−5I =µ −2 4
4 −8¶, poniendo v =
µxy
¶,
el sistema (A− λ1I) v = ~0 es½ −2x+ 4y = 0
4x− 8y = 0 y una base de V (λ1) la forma el conjunto
{v1 = (2, 1)}. Una base ortonormal de este subespacio se consigue normalizando el vector v1, esdecir,
nu1 =
v1kv1k =
³2√5, 1√
5
´oforma una base ortonormal de V (λ1).
• Para determinar una base del segundo subespacio propio podemos tener en cuenta que los au-tovectores de una matriz simétrica asociados a autovalores diferentes son ortogonales Así, unabase asociada al subespacio propio V (λ2) la forma el conjunto {v2 = (1,−2)} y en consecuencia,nu2 =
³1√5, −2√
5
´oes una base ortonormal de V (λ2).
Con los vectores u1 y u2 formamos una matriz de paso ortogonal Q =¡u1 u2
¢=
Ã2√5
1√5
1√5
−2√5
!y de esta forma
Q−1AQ = QtAQ = D =
µλ1
λ2
¶=
µ5−5
¶. (3)
Obsérvese que la matriz A =
µ3 44 −3
¶es regular, pues λ = 0 no es uno de sus autovalores
(también puede verse teniendo en cuenta que det(A) = −25 6= 0) y su inversa se puede calcular apartir de (3):
A−1 = QD−1Q−1 = QD−1Qt = Qµ5−5
¶−1Qt =
Ã2√5
1√5
1√5
−2√5
!µ15 00 −1
5
¶Ã 2√5
1√5
1√5
−2√5
!=
=
µ325
425
425 − 3
25
¶.
El polinomio característico de la matriz B =µ
1 −1−1 1
¶, es
pB (λ) = det (B − λI) =
¯1− λ −1−1 1− λ
¯= (1− λ)2 − 1 = λ2 − 2λ = λ (λ− 2)

Trabajo 3. Curso 2004-05 28
y sus autovalores son λ1 = 0 y λ2 = 2. Nótese que B es no regular, ya que uno de sus autovalores esnulo.
Para determinar una matriz de paso ortogonal debemos encontrar bases ortonormales para cadauno de los subespacios propios y para esto, debemos, previamente, resolver las sistemas (B − λ1I) v = ~0y (B − λ2I) v = ~0.
Tomando v =µxy
¶, el primer sistema es
½x− y = 0−x+ y = 0 y por tanto, V (λ1) = lin ({v1}), donde
v1 = (1, 1); es decir,nu1 =
³1√2, 1√
2
´oes una base ortonormal del subespacio propio V (λ1).
Puesto que B − λ2I = B − 2I =µ −1 −1−1 −1
¶, el sistema (B − λ2I) v = ~0 es
½ −x− y = 0−x− y = 0 y
así, V (λ2) = lin ({v2}), donde v2 = (1,−1). De aquí,nu2 =
³1√2, −1√
2
´oes una base ortonormal del
segundo subespacio propio V (λ2). Nótese que v1 ⊥ v2 (y u1 ⊥ u2).La matriz de paso ortogonal es Q =
¡u1 u2
¢=
Ã1√2
1√2
1√2
−1√2
!y verifica
Q−1BQ = QtBQ = D =
µλ1
λ2
¶=
µ02
¶.
Para la matriz D =
3 2 22 2 02 0 4
, comenzamos, como hasta ahora, calculando su polinomiocaracterístico
pD (λ) = det (D − λI) =
¯¯ 3− λ 2 2
2 2− λ 02 0 4− λ
¯¯ = −λ3 + 9λ2 − 18λ = −λ (λ− 3) (λ− 6) .
Así, los autovalores de D son λ1 = 0, λ2 = 3 y λ3 = 6. Nótese que D no es regular, porque uno de susautovalores es nulo.
Para el cálculo de la matriz de paso ortogonal, vamos a resolver los sistemas homogéneos (D − λiI) v =~0, para i = 1, 2, 3, realizando transformaciones elementales en sus matrices de coeficientes:
• Puesto queD−λ1I = D−0I = 3 2 22 2 02 0 4
F1(1/3)−→ 1 2/3 2/32 2 02 0 4
F21(−2)−→F31(−2)
1 2/3 2/30 2/3 −4/30 −4/3 8/3
F2(3/2)−→ 1 2/3 2/30 1 −20 −4/3 8/3
F32(4/3)−→ 1 2/3 2/30 1 −20 0 0
F12(−2/3)−→ 1 0 20 1 −20 0 0
, deducimos que V (λ1) ≡½x1 + 2x3 = 0x2 − 2x3 = 0 y por tanto, V (λ1) = lin ({(−2, 2, 1)}). De aquí, ©u1 = ¡−23 , −23 , 13¢ª es base
ortonormal de V (λ1).
• Ahora, realizando transformaciones elementales sobre la matrizD−λ2I = D−3I = 0 2 22 −1 02 0 1
: 0 2 22 −1 02 0 1
P12−→ 2 −1 00 2 22 0 1
F31(−1)−→ 2 −1 00 2 20 1 1
F2(1/2)−→ 2 −1 00 1 10 1 1
F2(1/2)−→ 2 −1 00 1 10 0 0
deducimos que V (λ2) ≡
½2x1 − x2 = 0,x2 + x3 = 0.

Trabajo 3. Curso 2004-05 29
Por consiguiente, {(1, 2,−2)} es una base de V (λ2) y normalizando, {¡13 ,23 ,−23
¢} es base ortonor-mal de V (λ2).
• Para el último sistema, comoD−λ3I = D−6I = −3 2 2
2 −4 02 0 −2
F1(−1/3)−→ 1 −2/3 −2/32 −4 02 0 −2
F21(−2)−→F31(−2) 1 −2/3 −2/3
0 −8/3 4/32 4/3 −2/3
F2(−3/8)−→ 1 −2/3 −2/30 1 −1/20 4/3 −2/3
F32(−4/3)−→ 1 −2/3 −2/30 1 −1/20 0 0
F12(2/3)−→
1 0 −10 1 −1/20 0 0
, se tiene que V (λ3) ≡ ½x1 − x3 = 0,
x2 − x3/2 = 0. y así, V (λ3) = lin ({(2, 1, 2)}).
Luego, el conjunto©¡
23 ,13 ,23
¢ªforma una base ortonormal de V (λ3).
Uniendo las tres bases de cada subespacio propio, tenemos que©u1 =
¡−23 ,
−23 ,
13
¢, u2 =
¡13 ,23 ,−23
¢, u3 =
¡23 ,13 ,23
¢es base ortonormal de R3, la matriz Q =
¡u1 u2 u3
¢=
−23
13
23−2
323
13
13
−23
23
es una matriz de paso
ortogonal y se satisface
Q−1DQ = QtDQ =
λ1λ2
λ3
=
036
.
Para la matriz E =
4 0 −10 3 0−1 0 4
tenemos que
pE (λ) = det (E − λI) =
¯¯ 4− λ 0 −1
0 3− λ 0−1 0 4− λ
¯¯ = (3− λ)
¯4− λ −1−1 4− λ
¯= (3− λ) [(4− λ) (4− λ)− 1] =
= (3− λ)¡15− 8λ+ λ2
¢= (3− λ) (λ− 3) (λ− 5) = − (λ− 3)2 (λ− 5) y así, los autovalores de E
son λ1 = 3 con multiplicidad algebraica m1 = 2 y λ1 = 5 con multiplicidad algebraica m2 = 1. Apartir del conocimiento de los autovalores podemos deducir que E es regular, pues no posee autovaloresnulos.
Para la obtención de la matriz de paso ortogonal debemos encontar base ortonormales para cadauno de los subespacio propios.
• Comenzamos por V (λ1) =N(E − λ1I) =nv ∈ R3 : (E − λ1I) v = ~0
oobservando que E−λ1I =
E − 3I = 1 0 −1
0 0 0−1 0 1
y deduciendo directamente que V (λ1) ≡ {x− z = 0. Así, V (λ1) =
lin ({v1 = (0, 1, 0), v2 = (1, 0, 1)}) y como v1 ⊥ v2, normalizando, tenemos quenv1 = (0, 1, 0), u2 =
³1√2, 0, 1√
2
´es una base ortonormal de V (λ1).
• Para encontrar una base ortonormal del segundo subespacio propio, debemos tener en cuentaque E es una matriz simétrica y por tanto, a partir de los cáculos anteriores, se tiene V (λ2) =
V (λ1)⊥. De aquí, V (λ2) = lin ({v3 = (1, 0,−1)}) y normalizando
nu3 =
³1√2, 0, −1√
2
´oes base
ortonormal de V (λ2).

Trabajo 3. Curso 2004-05 30
Por consiguiente, Q =¡v1 u2 u3
¢=
0 1√2
1√2
1 0 00 1√
2−1√2
es una matriz de paso ortogonal y
satisface
Q−1EQ = QtEQ = D =
λ1λ1
λ2
=
335
.De esta forma, la inversa de E puede obtenerse del siguiente modo
E−1 = QD−1Qt =
0 1√2
1√2
1 0 00 1√
2−1√2
1/3 0 0
0 1/3 00 0 1/5
0 1 0
1√20 1√
21√20 −1√
2
=
415 0 1
150 1
3 0115 0 4
15
.Problema 3
Calcular una expresión de las potencias An de la matriz A =
0 1 11 0 11 1 0
.Solución:Para resolver este problema , en primer lugar, diagonalizaremos la matriz A. Nótese que A es
diagonalizable, pues es simétrica, y así, existe una matriz P regular y una matriz D diagonal de formaque P−1AP = D. Por tanto, A = PDP−1, en consecuencia,
A2 = AA = PDP−1PDP−1 = PDDP−1 = PD2P−1, A3 = A2A = PD2P−1PDP−1 = PD2DP−1 = PD3P−1
y puede deducirse con facilidad que An = PDnP−1 para todo n > 1.Para encontrar la matriz de paso P y la forma diagonal D debemos calcular previemente el poli-
nomio característico de A:
pA (λ) = det (A− λI) =
¯¯ −λ 1 1
1 −λ 11 1 −λ
¯¯ C12(1)=
¯¯ 1− λ 1 11− λ −λ 12 1 −λ
¯¯ C13(1)=
¯¯ 2− λ 1 12− λ −λ 12− λ 1 −λ
¯¯ F21(−1)=F31(−1)
=
¯¯ 2− λ 1 1
0 −λ− 1 00 0 −λ− 1
¯¯ = (2− λ) (λ+ 1)2. Por consiguiente, los autovalores de A son λ1 =
−1 y λ2 = 2.Seguidamente calculamos bases para los subespacios propios.
• Como A − λ1I = A + I =
1 1 11 1 11 1 1
, se tiene que V (λ1) ≡ {x+ y + z = 0 y así, V (λ1) =lin ({v1 = (1, 0,−1), v2 = (0, 1,−1)})
• Por otra parte, es inmediato ver que V (λ2) = V (λ1)⊥ y por tanto, V (λ2) = lin ({v3 = (1, 1, 1)})
En consecuencia, una matriz de paso es P =¡v1 v2 v3
¢=
1 0 10 1 1−1 −1 1
y la correspon-
diente matriz diagonal es D =
λ1λ1
λ2
=
−1 −12
.

Trabajo 3. Curso 2004-05 31
Para finalizar la resolución, debemos calcular la inversa de P . Aplicando el método de Gauss-
Jordan decucimos que P−1 =
23 −13 −13−13 2
3 −1313
13
13
y por consiguiente,
An = PDnP−1 =
1 0 10 1 1−1 −1 1
(−1)n(−1)n
2n
23 −13 −13−13 2
3 −1313
13
13
=
=
(−1)n 0 2n
0 (−1)n 2n
− (−1)n − (−1)n 2n
23 −13 −13−13 2
3 −1313
13
13
=
=
23 (−1)n + 1
32n −13 (−1)n + 1
32n −13 (−1)n + 1
32n
−13 (−1)n + 132n 2
3 (−1)n + 132n −13 (−1)n + 1
32n
−13 (−1)n + 132n −13 (−1)n + 1
32n 2
3 (−1)n + 132n
.Nota: Puesto que A es simétrica, sabemos que es posible elegir una matriz de paso ortogonal.
Calculando una matriz de paso con este característica podemos evitarnos el cálculo de su inversa.
Problema 4Determinar una matriz A ∈M3 sabiendo que:
(a) Los vectores v1 = (0, 1, 1), v2 = (1,−1, 0) y v3 = (1, 0,−1) son autovectores de A.
(b) La primera columna de A es
123
.Solución:
Como la primera columna de A es
123
, dicha matriz debe tener la estructura
A =
1 a12 a132 a22 a233 a32 a33
.Por otra parte, como v1, v2 y v3 son autovectores de A, deben existir λ1,λ2,λ3 ∈ R de forma queAv1 = λ1v1, Av2 = λ2v2 y Av3 = λ3v3. La primera de las relaciones se escribe en la forma 1 a12 a13
2 a22 a233 a32 a33
011
= λ1
011
y de aquí, se deduce que
a12 + a13 = 0a22 + a23 = λ1a32 + a33 = λ1
(4)
Análogamente, las relaciones Av2 = λ2v2 y Av3 = λ3v3 nos conducen a las igualdades1− a12 = λ22− a22 = −λ23− a32 = 0
(5)

Trabajo 3. Curso 2004-05 32
y 1− a13 = λ32− a23 = 03− a33 = −λ3
(6)
De la tercera ecuación de (5) se deduce que a32 = 3 y de la segunda ecuación de (6) conseguimosa23 = 2. Por tanto, de la última ecuación de (4) tenemos a33 = λ1 − 3 y de la última ecuación de (6)a33 = 3 + λ3. Es decir, λ1 − 3 = 3 + λ3. De forma similiar, podemos deducir que 1− λ2 = −(1− λ3)y λ1 − 3 = 2 + λ2.
Uniendo las tres relaciones encontradas para los autovalores, podemos notar que éstos satisfacenel sistema de ecuaciones lineales
λ1 − λ3 = 6λ2 − λ3 = −2λ1 − λ2 = 4
y realizando transformaciones elementales en su matriz ampliada deducimos que los tres autovaloresde A son λ1 = 6,λ2 = 2 y λ3 = 0. Por tanto, A es diagonalizable (posee tres autovalores diferentes) y
tomando P =¡v1 v2 v3
¢=
0 −1 11 1 01 0 −1
y D =
λ1λ2
λ3
=
620
se tiene
que P es regular y la matriz A es
A = PDP−1 =
0 −1 11 1 01 0 −1
6 0 00 2 00 0 0
12
12
12
−12 12 −12
12
12 −12
=
1 −1 12 4 23 3 3
.Problema 5
Determinar una matriz simétrica A ∈M3 sabiendo que:
(a) Los únicos autovalores de A son λ1 = 0 y λ2 = 9.
(b) El subespacio propio asociado a λ2 es V (λ2) = lin ({(2,−1, 2)}).Solución:Puesto que la matriz A es simétrica, se deduce que es diagonalizable y por tanto, las multiplici-
dades algebraicas y geométricas de cada auotvalor coinciden. A partir del apartado (b) se tiene quela multiplicidad geométrica del segundo autovalor es µ2 = dim (V (λ2)) = 1 y por consiguiente, lamultiplicidad algebraica del segundo autovalor es m2 = µ2 = 1. En consecuencia, las multiplicidadesdel primero son m1 = µ1 = dim (V (λ2)) = 2 y, como los subespacios propios asociados a autoval-ores diferentes son ortogonales, deducimos que V (λ1) = V (λ2)⊥ y así, V (λ1) ≡ {2x1 − x2 + 2x3 = 0.
Por lo tanto, V (λ1) = lin ({(1, 2, 0) , (0, 2, 1)}), la matriz P =
1 0 22 2 −10 1 2
es regular y toman-
do D =
λ1λ1
λ2
=
009
deducimos que la matriz que buscamos es A = PDP−1.
Aplicando el método de Gauss-Jordan se encuentra que P−1 =
59
29 −49
−49 29
59
29 −19 2
9
y de aquí,
A = PDP−1 =
1 0 22 2 −10 1 2
0 0 00 0 00 0 9
59
29 −49
−49 29
59
29 −19 2
9
=
4 −2 4−2 1 −24 −2 4
.

Trabajo 3. Curso 2004-05 33
También podemos determinar la matriz A obteniendo una matriz de paso ortogonal (en tal caso,no tendríamos que calcular la inversa de la matriz de paso). Para ello, tenemos que encontrar una baseortonormal para cada subespacio propio. Como V (λ2) = lin ({(2,−1, 2)}), normalizando, el conjunto©¡
23 ,−13 ,
23
¢ªes base ortonormal de V (λ2). Para el cálculo de una base ortonormal para el primer
subescio propio V (λ1) podemos proceder del siguiente modo. Puesto que V (λ1) tiene por ecuaciónimplícita 2x1−x2+2x3 = 0 es inmedianto ver que v1 = (1,−2,−2) ∈ V (λ1). Ahora vamos a determinarun vector de V (λ1) ortogonal a v1. Denominando v2 = (x, y, z) a dicho vector, éste debe satisfacer2x− y + 2z = 0, por pertenecer a V (λ1), y también debe satisfacer x− 2y − 2z = 0, ya que pedimosque sea ortogonal a v1 = (1,−2,−2). De aquí, v2 debe satisfacer el sistema
½2x− y + 2z = 0,x− 2y − 2z = 0.
Resolviéndolo, podemos elegir v2 = (−2,−2, 1). De esta forma, {(1,−2,−2) , (−2,−2, 1)} es baseortogonal de V (λ1) y normalizando,
©¡13 ,−23 ,
−23
¢,¡−23 ,
−23 ,
13
¢ªes base ortonormal de dicho subespacio.
Finalmente, la matriz Q =
13
−23
23−2
3−23
−13−2
313
23
es ortogonal y
A = QDQt =
13
−23
23−2
3−23
−13−2
313
23
0 0 00 0 00 0 9
13 −23 −23−23 −23 1
323 −13 2
3
=
4 −2 4−2 1 −24 −2 4
.

Trabajo 4. Curso 2004-05
Problema 1La medición del radio de un cilindro de longitud l está sujeta a un posible error del 5%.
(a) Estimar el máximo porcentaje de error al calcular su volumen.
(b) Estimar el máximo porcentaje de error al calcular el área superfical del cilindro incluyendo lastapas del cilindro y sabiendo que l = 12 cm. y el radio del cilindro resultó medir 5 cm.
Solución:
(a) Puesto que el volumen de un cilindro de radio r y longitud l viene dado por V = πr2l, elporcentaje de error en su cálculo puede aproximarse mediante diferenciales de la siguiente forma:
∆V
V' dV
V=2πrl
πr2ldr = 2
dr
r= 2 · 5% = 10%.
(b) El área superficial del cilindro incluyendo sus tapas viene dada por S = 2πrl+2πr2. Por tanto,podemos aproximar el máximo error según:
∆S
S' dS
S=
2πl + 4πr
2πrl + 2πr2dr =
l + 2r
l + r
dr
r=12 + 2 · 512 + 5
· 0.05 = 22
17· 0.05 = 0.06470588.
Es decir, el máximo porcentaje de error es del 6.470588%.
Problema 2Se sabe que la ecuación y3 − xy2 + cos(xy) = 2 define a y como función implícita de x (y = f (x))
y que para x = 0 se tiene y = 1 (esto es, f(0) = 1). Calcular:
(a)dy
dx(0);
d2y
dx2(0) (es decir, y0(0) e y00(0)).
(b) La recta tangente a la curva de ecuación y3 − xy2 + cos(xy) = 2 en el punto (0, 1).(c) El polinomio de MacLaurin de orden dos de la función y = f (x) y utilizarlo para obtener aprox-
imadamente el valor f (−0.03).
Solución:
(a) Derivando implícitamente con respecto a x en la ecuación y3 − xy2 + cos(xy) = 2 obtenemos
3y2y0 − y2 − 2xyy0 − (y + xy0) sen(xy) = 0. (7)
Sustituyendo x = 0 e y = 1 se tiene 3y0 − 1 = 0 y por tanto, y0 = 1/3, es decir, f 0(0) = 1/3.
34

Trabajo 4. Curso 2004-05 35
Derivando respecto de x en la ecuación (7) se obtiene1
6y¡y0¢2+ 3y2y00 − 2yy0 − 2yy0 − 2x(yy0)0 − ¡y + xy0¢0 sen(xy)− (y + xy0)2 cos(xy) = 0
Eligiendo x = 0, y = 1 e y0 = 1/3 tenemos
6
µ1
3
¶2+ 3y00 − 4 · 1
3− 1 = 0
y por consiguiente y00 = 5/9. Esto es, f 00(0) = 5/9.
(b) La recta tangente tiene de ecuación y− f(0) = f 0(0)(x− 0). Puesto que f(0) = 1 y f 0(0) = 1/3,la ecuación de la recta tangente queda
y = 1 +x
3
(c) El polinomio de Maclaurin de orden dos viene dado por P2(x) = f(0) + f 0(0)x +f 00(0)2! x
2. Uti-lizando, a partir del apartado (a), que f(0) = 1, f 0(0) = 1/3 y f 00(0) = 5/9, este polinomioes
P2(x) = 1 +x
3+5
18x2
Sabiendo que f(x) ' P2(x) si x ' 0, resulta que
f(−0.03) ' P2(−0.03) = 1− 0.033+5
18(−0.03)2 = 0.99025
Problema 3La masa de un objeto con velocidad v viene dada, según la teoría de la relatividad, por
m =m0q1− ¡vc ¢2
donde m0 es la masa del objeto en reposo y c es la velocidad de la luz.Explique cómo obtienen los físicos la aproximación
m ' m0 +m02
³vc
´2.
Solución:Entendiendo que la masa del objeto depende de su velocidad,
m(v) =m0q1− ¡vc ¢2
El polinomio de Maclaurin de grado dos de la función m(v) es P2(v) = m(0)+m0(0)v+ 12!m
00(0)v2.Puesto que m(0) = m0,
m0(v) = m02¡vc2
¢2q1− ¡vc ¢2 =
m0c2
vq1− ¡vc ¢2 =⇒ m0(0) = 0
1Nótese que no es necesario desarrollar las derivadas (yy0)0 e (y + xy0)0 porque al sustituir x = 0 quedan multiplicadaspor cero.

Trabajo 4. Curso 2004-05 36
y
m00(v) =m0c2
q1− ¡vc ¢2 − v 2
³vc2
´2q1−( vc )
2
1− ¡vc ¢2 =m0
c21− 2 ¡vc ¢2³
1− ¡vc ¢2´q1− ¡vc ¢2 =⇒ m00(0) =m0c2
el polinomio de Maclaurin es P2(v) = m0 +12m0c2v2 y así podemos escribir
m(v) ' P2(v) = m0 +m02
³vc
´2si v ' 0.
Problema 4Determinar el polinomio de Maclaurin de grado 3 de f(x) = x2 + senx. Con ayuda de dicho
polinomio aproximar f(0.01) acotando el error que se comete.Solución:Teniendo en cuenta que
f(0) = 0
f 0(x) = 2x+ cosx =⇒ f 0(0) = 1f 00(x) = 2− senx =⇒ f 00(0) = 2f 000(x) = − cosx =⇒ f 000(0) = −1
el polinomio de Maclaurin de grado tres de f viene dado por
P3(x) = f(0) + f0(0)x+
f 00(0)2!
x2 +f 000(0)3!
x3 = x+ x2 − 16x3
y así, f(0.01) puede aproximarse mediante f(0.01) ' 0.01 + 0.012 − 16 (0.01)
3 = 0.0100998333.A continuación acotaremos el error cometido. Utilizando la siguiente fórmula para el resto
|f(x)− P3(x)| = |R3(x)| =¯f IV (z)
4!x4¯
donde z está entre x y cero,
observamos que para acotar el error debemos calcular y acotar la cuarta derivada. En este caso, estoes fácil ya que
¯fIV (x)
¯= |senx| 6 1 y por tanto,
|f(0.01)− P3(0.01)| =¯sen z4!
0.014¯6 0.014
24= 4.16666667 · 10−10.
Problema 5¿Cuántos puntos de corte tiene las gráficas de y = ex e y = senx con abscisas en el intervalo
[−4, 0]? Encuentre todos ellos con un error menor que 10−3 y tomando como punto inicial x1 = −3.Solución:Para determinar los puntos de corte de las gráficas de las funciones y = ex e y = senx debemos
resolver el sistema de ecuaciones ½y = ex
y = senx
Estos nos conduce a la ecuación ex = senx; es decir, a la ecuación ex − senx = 0.

Trabajo 4. Curso 2004-05 37
Ahora bien, puesto que estamos interesados en los puntos de corte con abscisas en el intervalo[−4, 0], tendremos que analizar las soluciones de dicha ecuación en ese intervalo. Para ello, denomi-namos f(x) = ex − senx y teniendo en cuenta que f es continua en [−4, 0] (de hecho es continua entoda la recta real), f(0) = 1 > 0 y f(−4) = e−4−sen(−4) = −0.73849 < 0, deducimos que la ecuaciónf(x) = 0 posee al menos una solución x∗ ∈ (−4, 0). Seguidamente probaremos que esta solución esúnica.
En primer lugar, nótese que senx 6 0 para todo x ∈ [−π, 0) y ex es siempre positivo. Por tanto,la ecuación ex − senx = 0 no puede tener soluciones en el intervalo [−π, 0). Por otra parte, al serg(x) = ex una función estrictamente creciente en todo R y h(x) = senx una función estrictamentedecreciente en el intervalo (−4,−π), se deduce que f(x) = g(x) − h(x) es estrictamente creciente en(−4,−π) y por consiguiente, la ecuación f(x) = 0 posee a lo sumo una solución en dicho intervalo.Resumiendo, la ecuación ex − senx = 0 tiene una única solución x∗ en el intervalo (−4, 0).
Para encontrar de forma aproximada dicha solución aplicaremos el método de Newton con puntoinicial x1 = −1 y detendremos el método cuando el error sea menor que 10−3. Las sucesivas iteradasson colocadas en la siguiente tabla
n xn f (xn) f 0 (xn)f (xn)
f 0 (xn)xn+1 = xn − f (xn)
f 0 (xn)1 −3 0.190907076 1.03977956 0.183603412 −3.1836034122 −3.183603412 −0.000562328 1.04055375 −0.000540412 −3.183063000
y puesto que |x3 − x2| = 0.000540412 < 10−3 resulta que el valor x∗ ' x3 = −3.183063000 y enconsecuencia, el único punto punto de corte es
¡x∗, ex∗
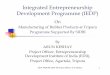
¢ ' (−3.183063000, 0.041458473).En la Figura 1 se encuentran representadas las gráficas de las funciones y = ex e y = senx, donde
se observa un único punto de corte con abscisa en el intervalo[−4, 0].
0-1-2-3-4
1
0.5
0
-0.5
-1
x
y
x
y
Figura 1: Gráficas de las funciones y = ex e y = senx con x ∈ [−4, 0].
Problema 6Determine los extremos absolutos de f(x) = 3x2 − sen(2x) + 1 en el intervalo [−1, 2]. Si necesita
aplicar el método de Newton, tome como iteración inicial x1 = 0.3 y detenga el método cuando|xn+1 − xn| < 10−4.
Solución:Al ser f(x) = 3x2 − sin(2x) + 1 una función derivable, sus puntos críticos son aquellos que anulan
a su derivada, esto es, buscamos las soluciones, en el intervalo (−1, 2), de la ecuación f 0(x) = 6x −2 cos(2x) = 2(3x − cos(2x)) = 0. Seguidamente, demostraremos que esta ecuación posee una únicasolución en el intervalo (−1, 2). Denominando g(x) = 3x − cos(2x), tenemos que g(−1) = −3 −

Trabajo 4. Curso 2004-05 38
cos(−2) < 0, g(2) = 6 − cos(4) > 0 (ya que | cosx| 6 1 para todo x real) y como g es continua sededuce que la ecuación g(x) = 3x − cos(2x) = 0 posee al menos una solución x∗ ∈ (−1, 2). Por otrolado, g0(x) = 3 + 2 sen(2x) > 0 (pues | sen a| 6 1 para todo a ∈ R), luego g es estrictamente crecientey así, la ecuación 3x − cos(2x) = 0 posee una única solución x∗, que pertenece al intervalo (−1, 2).Además, podemos deducir fácilmente que g(x) < 0 para x ∈ (−1, x∗) y g(x) > 0 si x ∈ (x∗, 2). En laFigura 2 podemos contemplar un esbozo de la gráfica de la función g restringida el intervalo [−1, 2].
21.510.50-0.5-1
5
2.5
0
-2.5
x
y
x
y
Figura 2: Gráfica de g(x) = 3x− cos(2x) para x ∈ [−1, 2].
Ahora, utilizando que f 0(x) = 2g(x) > 0 para x ∈ (x∗, 2) y f 0(x) = 2g(x) < 0 en el intervalo(−1, x∗) se deduce que f es estrictamente decreciente en el intervalo (−1, x∗) y estrictamente crecienteen el intervalo (x∗, 2). Por tanto, la función f , restringida al intervalo [−1, 2] toma su mínimo absolutoen el punto x∗. Para ver en qué punto del intervalo [−1, 2] la función f toma su máximo, debemosevaluarla en los extremos del intervalo. Puesto que f(−1) = 4 + sen(−2) y f(2) = 13 − sen(4), esfácil ver que f(−1) < f(2) y así, tenemos que f alcanza su máximo absoluto en x = 2 y el valor delmáximo es f(2) = 13− sen(4). En la Figura 3 hemos representado la función f(x) = 3x2− sen(2x)+1restringida intervalo [−1, 2].
21.510.50-0.5-1
15
12.5
10
7.5
5
2.5
0
x
y
x
y
Figura 3: Esbozo de la gráfica de f(x) = 3x2 − sen(2x) + 1 en el intervalo [−1, 2].
Para finalizar, sólo nos queda obtener el valor x∗ donde se alcanza el mínimo. Este valor es laúnica solución de la ecuación g(x) = 3x − cos(2x) = 0 y para resolverla utilizaremos el método deNewton con un error menor que 10−4 y tomando como punto inicial x1 = 0.3. Las datos se recogenen la siguiente tabla:

Trabajo 4. Curso 2004-05 39
n xn g (xn) g0 (xn)g (xn)
g0 (xn)xn+1 = xn − g (xn)
g0 (xn)1 0.3 0.0746643851 4.1292849468 0.0180816742 0.2819183258
2 0.2819183258 0.0005440735 4.0688658062 0.00013371625 0.2817846095
3 0.2817846095 3.02265086293 · 10−8 4.0684136943 7.42955630886 · 10−9 0.2817846021
De ella, deducimos que |x4 − x3| = 7.42955630886 · 10−9 < 10−4 y por tanto, x∗ ' x4 = 0.2817846021y el valor del mínimo es f(x∗) ' f(x4) = 0.7040008514.

Trabajo 5. Curso 2004-05
Problema 1Escribir en forma polar y en forma exponencial los siguientes números complejos:z1 = −i, z2 = 8, z3 = 3−3i, z4 = 2+2
√3i, z5 = −6−6i, z6 = 8−8
√3i, z7 = −5+5i,
z8 = 4 + 4i.Solución:
• El afijo del número complejo z1 = −i se encuentra en la parte negativa del eje imaginario. Así,z1 = −i = 1 3π
2= ei
3π2 .
• Análogamente, el afijo de z2 = 8 está en el semieje real positivo y por tanto, z2 = 8 = 80 = 8ei·0.• El módulo de z3 = 3− 3i es |z3| =
p3 + (−3)2 = 3√2 y su argumento θ3 satisface tg θ3 = −3
3 =−1. Como el afijo de z3 está en el cuarto cuadrante, deducimos que θ3 = −π
4 (o θ3 = 2π− π4 =
7π4 )
y así, z3 =¡3√2¢−π4=¡3√2¢7π4= 3√2e
7π4i.
• El número complejo z4 = 2 + 2√3i tiene por módulo r4 = |z4| =
q22 +
¡2√3¢2= 4 y su
argumento es θ4 = π3 , ya que tg θ4 =
2√32 =
√3 y el afijo de z4 está en el primer cuadrante. Por
tanto, z4 = 4π3= 4e
π3i.
• La forma polar de z5 = −6 − 6i es z5 =¡6√2¢5π4, pues |z5| =
q(−6)2 + (−6)2 = 6
√2, su
argumento θ5 satisface tg θ5 = −6−6 = 1 y el afijo de z5 está en el tercer cuadrante. Su forma
exponencial es z5 = 6√2e
5π4i.
• El módulo de z6 = 8 − 8√3i es |z5| =q82 +
¡−8√3¢2 = 16 y su argumento es θ6 = −π3 (o
θ6 = 2π − π3 =
5π3 ), ya que tg θ6 =
−8√38 = −√3 y el afijo de z6 está en el cuarto cudrante. Así,
z6 = 16 5π3= 16e
5π3i.
• El afijo del número complejo z7 = −5 + 5i está en el segundo cuadrante..Así, su argumento esθ7 = π − π
4 =3π4 , pues tg θ7 =
5−5 = −1. Puesto que |z7| =
p(−5)2 + 52 = 5
√2 resulta que
z7 =¡5√2¢3π4= 5√2e
3π4i.
• Para z8 = 4 + 4i tenemos que |z8| =√42 + 42 = 4
√2 y tg θ8 = 1. Por tanto, z8 =
¡4√2¢π4=
4√2e
π4i.
Problema 2Escribir en forma binómica (cartesiana) los siguientes números complejos:
40

Trabajo 5. Curso 2004-05 41
z1 = 2π, z2 = 3 3π2, z3 =
¡6√3¢π/4, z4 = 3e
π2i, z5 =
¡2√2¢3π/4
, z6 = 6 7π6, z7 =
3 5π3, z8 = e
2π3i.
Solución:Para la resolución de este problema utilizaremos la siguientes relaciones:
rθ = r (cos θ + i sen θ) = reiθ.
• z1 = 2π = 2 (cosπ + i senπ) = 2(−1 + 0 · i) = −2.• z2 = 3 3π
2= 3
¡cos 3π2 + i sen
3π2
¢= 3 (0− i) = −3i.
• z3 =¡6√3¢π/4
= 6√3¡cos π4 + i sen
π4
¢= 6√3³√
22 +
√22 i´= 3√6 + 3
√6i.
• z4 = 3eπ2 i = 3π2= 3
¡cos π2 + i sen
π2
¢= 3 (0 + i) = 3i.
• z5 =¡2√2¢3π/4
= 2√2¡cos 3π4 + i sen
3π4
¢= 2√2¡− cos π4 + i sen π
4
¢= 2√2³−√22 +
√22 i´=
−2 + 2i.• z6 = 6 7π
6= 6
¡cos 7π6 + i sen
7π6
¢= 6
³−√32 − 1
2 i´= −3√3− 3i.
• z7 = 3 5π3= 3
¡cos 5π3 + i sen
5π3
¢= 3
³12 −
√32 i´= 3
2 − 3√32 i.
• z8 = e 2π3 i = 1 2π3= cos 2π3 + i sen
2π3 = −12 +
√32 i.
Problema 3Dados los números complejos z1 = 5 + 5i y z2 = 3 + 3
√3i, calcular su producto y los cocientes
z1/z2 y z2/z1 utilizando las formas binómicas y polar.Repitir los cálculos con los número complejos z1 = 3e
π4i y z2 = 2π
2.
Solución:
• Realizamos en primer lugar los cálculos en forma binómica para los complejos z1 = 5 + 5i yz2 = 3 + 3
√3i:
z1 · z2 = (5 + 5i) ·¡3 + 3
√3i¢= 15 + 15
√3i+ 15i+ 15
√3i2 = 15− 15√3 + ¡15√3 + 15¢ i.
z1z2= 5+5i
3+3√3i=
(5+5i)·(3−3√3i)
(3+3√3i)·(3−3
√3i)
= 15−15√3i+15i−15√3i29+9·3 =
15+15√3+(−15
√3+15)i
36 = 5+5√3
12 +
−5√3+512 i.
z2z1= 3+3
√3i
5+5i =(3+3
√3i)·(5−5i)
(5+5i)·(5−5i) = 15−15i+15√3i−15√3i252+52
=15+15
√3+(15
√3−15)i
50 = 3+3√3
10 + 3√3−310 i.
Puesto que |z1| =√52 + 52 = 5
√2 y su argumento es θ1 = π/4 (el afijo de z1 está en el primer
cuadrante), resulta que z1 =¡5√2¢π/4. Además, es fácil probar que la forma polar de z2 es
z2 = 6π3. Luego, los cálculos en forma polar son los que siguen:
z1 · z2 =¡5√2¢π4· 6π
3=¡30√2¢7π12
z1z2=(5√2)π
46π3
=³5√26
´π4−π3
=³5√26
´− π12
=³5√26
´23π12
z2z1=
6π3
(5√2)π
4
=³
65√2
´π3−π4
=³
65√2
´π12

Trabajo 5. Curso 2004-05 42
• Para los cálculos con los números complejos z1 = 3eπ4i y z2 = 2π
2, transformamos éstos a las
formas polar y binómica. Es inmediato ver que z1 = 3eπ4i = 3π
4= 3
¡cos π4 + i sen
π4
¢= 3
√22 +
3√22 i
y z2 = 2π2= 2i. Por consiguiente, los cálculos en forma polar son:
z1 · z2 = 3π4· 2π
2= 6π
4+π2= 6 3π
4
z1z2=
3π42π2
=¡32
¢π4−π2=¡32
¢−π4=¡32
¢7π4
z2z1=
2π23π4
=¡23
¢π2−π4=¡23
¢π4
Y en forma binómica:
z1 · z2 =³3√22 + 3
√22 i´· (2i) = −3√2 + 3
√22 i.
z1z2=
3√2
2+ 3√2
2i
2i =
³3√2
2+ 3√2
2i´·(−i)
2i(−i) =
³3√2
2− 3√2
2i´
2 = 3√24 − 3
√24 i.
z2z1= 2i
3√2
2+ 3√2
2i=
2i·³3√2
2− 3√2
2i´
³3√2
2+ 3√2
2i´·³3√2
2− 3√2
2i´ = 3
√2+3
√2i
92+ 92
= 3√2+3
√2i
9 =√23 +
√23 i.
Problema 4Calcular las siguientes potencias:
i3, i6, i18, i3420, (2 + 2√3i)8,
³7e
π6
´12, (3− 3i)6 , ¡−4√3 + 4i¢4.
Solución:Para el cálculo de la potencias de la unidiad imaginaria sólo debemos tener en cuenta el resto de
la división del exponente entre 4.
• i3 = i2 · i = (−1) · i = −i.• i6 = ¡i3¢2 = (−i)2 = i2 = −1.• i18 = i4·2+2 = ¡i4¢2 · i2 = 12 · i2 = i2 = −1.• i3420 = i4·855 = ¡i4¢855 = 1855 = 1.• Para el cálculo del número complejo (2+2√3i)8, transformamos z = 2+2√3i a su forma polar.Puesto r = |z| =
q22 +
¡2√3¢2= 4 y su argumento θ satisface tg θ =
√3, tenemos que z = 4π
3,
pues el afijo de z está en el primer en el primer cuadrante. Por lo tanto,
(2 + 2√3i)8 =
³4π3
´8=¡48¢8π3=¡48¢2π3= 48
µcos
2π
3+ i sen
2π
3
¶= 48
Ã−12+
√3
2i
!=
= −48
2+48
2
√3i = −32768 + 32768
√3i.
• Nótese que el número 7eπ6 es real y por tanto³7e
π6
´12= 712e2π = 13841287201e2π.
• La potencia sexta del número 3−3i se realizará escribiendo éste en su forma polar. Es inmediantodeducir que 3− 3i = ¡3√2¢ 7π
4y por tanto,
(3− 3i)6 =
·³3√2´7π4
¸6=
·³3√2´6¸
6· 7π4
=¡36 · 23¢ 21π
2=¡36 · 23¢π
2=
= 36 · 23³cos
π
2+ i sen
π
2
´= 5832.

Trabajo 5. Curso 2004-05 43
• La determinación de la potencia ¡−4√3 + 4i¢4 se realizará de forma análoga. Puesto que −4√3+4i = 8 5π
6, deducimos que
³−4√3 + 4i
´4=
³8 5π6
´4=¡84¢4· 5π
6= 4096 10π
3= 4096 4π
3= 4096
µcos
4π
3+ i sen
4π
3
¶=
= 4096
Ã−12−√3
2i
!= −2048− 2048
√3i
Problema 5Expresar sen (3θ) y cos (3θ) en función de sen θ y cos θ.Solución:La fórmula de Moivre nos muestra que
(cos θ + i sen θ)n = cos (nθ) + i sen (nθ) para n ∈ N.Así, haciendo n = 3 en dicha fórmula tenemos que
(cos θ + i sen θ)3 = cos (3θ) + i sen (3θ) . (8)
Ahora, desarrollando el primer miembro de (8) conseguimos
(cos θ + i sen θ)3 = cos3 θ − 3 cos θ sen2 θ + ¡3 cos2 θ sen θ − sen3 θ¢ i,es decir,
cos (3θ) + i sen (3θ) = cos3 θ − 3 cos θ sen2 θ + ¡3 cos2 θ sen θ − sen3 θ¢ i,de donde, igualando partes reales e imaginarias, se deduce que
cos (3θ) = cos3 θ − 3 cos θ sen2 θ y sen (3θ) = 3 cos2 θ sen θ − sen3 θ.
Problema 6Determinar las siguientes raíces de números complejos:√−1, 3
√27eπi, 3
qi7−i−72i , 4
√16,
p−1 +√3i,
Expresar todos los resultados en forma binómica.Solución:Para el cálculo de todas las raíces escribiremos los radicandos en forma polar.
• Puesto que −1 = 1π, las raíces cuadradas de −1 son√−1 = √1π =
¡√1¢π+2kπ
2= 1π+2kπ
2para
k = 0, 1. Es decir,
√−1 =(1π2= i,
1 3π2= −i.
• 3√27eπi = 3
√−27 = 3√27π =
¡3√27¢π+2kπ
3= 3π+2kπ
3para k = 0, 1, 2. Por tanto,
3√27eπi =
3π3= 3
¡cos π3 + i sen
π3
¢= 3
2 + 3√32 i,
3π = −3,3 5π3= 3
¡cos 5π3 + i sen
5π3
¢= 3
2 − 3√32 i.

Trabajo 5. Curso 2004-05 44
• Para la determinación de 3
qi7−i−72i escribiremos, en primer lugar, el número complejo i7−i−7
2i enforma binómica:
i7 − i−72i
=i7 − 1
i7
2i=−i+ 1
i
2i=−i2 + 12i2
=2
−2 = −1
Por consiguiente, 3
qi7−i−72i = 3
√−1 = 3√1π = 1π+2kπ
3para k = 0, 1, 2. Esto es,
3
ri7 − i−72i
= 3√−1 =
1π3= cos π3 + i sen
π3 =
12 +
√32 i,
1π = −1,1 5π3= cos 5π3 + i sen
5π3 =
12 −
√32 i.
• 4√16 = 4
√160 =
¡4√16¢2kπ4= 2kπ
2para k = 0, 1, 2, 3. Así,
4√16 =
20 = 2,2π2= 2i,
2π = −2,2 3π2= −2i.
• Teniendo en cuenta que −1 +√3i = 2 2π3deducimos que
p−1 +√3i =
q2 2π3=¡√2¢2π/3+2kπ
2
para k = 0, 1. Por tanto,
q−1 +
√3i =
¡√2¢π3=√2¡cos π3 + i sen
π3
¢=√22 +
√62 i,¡√
2¢4π3=√2¡cos 4π3 + i sen
4π3
¢= −
√22 −
√62 i.
Problema 7
Con ayuda de la calculadora obtener (1− 2i)14, 5√3 + 3i y
eiπ3
2eiπ4
, expresando todos los resultados
en forma binómica.Solución:
• Para el cálculo de (1− 2i)14 transformamos, utilizando la calculadora, el número complejo z =1 − 2i en forma polar. El módulo de z es |z| =
q12 + (−2)2 = √5 y su argumento θ satisface
tg θ = −21 = −2. Ahora, con ayuda de la calculadora y sabiendo que el afijo de z está en el
cuarto cuadrante deducimos que θ = 2π− arctg (2) = 5.176036 (o θ = arctg (−2) = −1.107148).Por tanto,
(1− 2i)14 =h³√
5´5.176036
i14=¡57¢14·5.176036 = 7812572.464504 =
= 78125 (cos 72.464504 + i sen 72.464504) = 78125 · (−0.97847− 0.20638i)= −76442.96− 16123.43i.
• Como 3 + 3i = ¡√18¢π4=¡3√2¢π4, tenemos que 5
√3 + 3i = 5
q¡3√2¢π4=³
5p3√2´
π/4+2kπ5
con
k = 0, 1, 2, 3, 4. Por tanto,

Trabajo 5. Curso 2004-05 45
5√3 + 3i =
³5p3√2´
π20
= 10√18¡cos π
20 + i senπ20
¢= 1.335141 · (0.987688 + 0.156434i) = 1.318 702 + 0.208861³
5p3√2´9π20
= 10√18¡cos 9π20 + i sen
9π20
¢= 1.335141 · (0.156434 + 0.987688i) = 0.208861 + 1.318 70³
5p3√2´17π20
= 10√18¡cos 17π20 + i sen
17π20
¢= 1.335141 · (−0.891006 + 0.4539904i) = −1.189619 + 0³
5p3√2´5π4
= 10√18¡cos 5π4 + i sen
5π4
¢= 1.335141 ·
³−√22 −
√22 i´= −0.944087− 0.944 087i,³
5p3√2´33π20
= 10√18¡cos 33π20 + i sen
33π20
¢= 1.335141 · (0.4539904− 0.891006i) = 0.606141− 1.18
• Por último,ei
π3
2eiπ4
=1
2ei(
π3−π4 ) =
1
2ei
π12 =
1
2
³cos
π
12+ i sen
π
12
´= 0.482962 + 0.129409i
Naturalmente, podemos proceder también del siguiente modo:
eiπ3
2eiπ4
=1
2· cos
π3 + i sen
π3
cos π4 + i senπ4
=1
2·12 +
√32 i√
22 +
√22 i
=1
2· 1 +
√3i√
2 +√2i=
=1
2·¡1 +√3i¢ · ¡√2−√2i¢¡√
2 +√2i¢ · ¡√2−√2i¢ =
√2 +√6
8+
√6−√28
i = 0.482962 + 0.129409i.
Problema 8Calcular todas las soluciones complejas de las siguientes ecuaciones:z2 + 1 = 0, z2 − 8z + 17 = 0, z4 − 27z = 0, z2 − 3z + 3− i = 0.Solución:
• Las raíces del polinomio z2 + 1 son z = ±i.• Las soluciones de la ecuación de segundo grado z2 − 8z + 17 = 0 son
z =8±√82 − 4 · 17
2=8±√−4
2=8±√4√−1
2=8± 2i2
=
½4 + i,4− i.
• Factorizando, obtenemos que z4−27z = z ¡z3 − 27¢ = 0 y por tanto, las soluciones de z4−27z = 0se deducen resolviendo las ecuaciones z = 0 y z3 − 27 = 0. De la primera, claro está, sólo seobtiene z = 0 y de la segunda, z3 = 27, esto es, z = 3
√27. A continuación calculamos las tres
raíces cubicas de 27.
3√27 = 3
√270 =
30 = 3,
3 2π3= 3
¡cos 2π3 + i sen
2π3
¢= −32 + 3
√32 i,
3 4π3= 3
¡cos 4π3 + i sen
4π3
¢= −32 − 3
√32 i.
En resumen, las cuatro raíces del polinomio z4 − 27z, son z1 = 0, z2 = 3, z3 = −32 + 3√32 i y
z4 = −32 − 3√32 i.
• Las soluciones de z2 − 3z + 3− i = 0 se obtienen mediante
z =3±p9− 4 · (3− i)
2=3±√−3 + 4i
2(9)
y para su determinación sólo debemos calcular las raíces cuadradas de −3 + 4i. Para ello,podemos utilizar dos procedimientos:

Trabajo 5. Curso 2004-05 46
Primera forma. Pongamos que√−3 + 4i = a+bi, con a, b ∈ R. Entonces, (a+ bi)2 = −3+4i
y por tanto,
a2 − b2 + 2abi = −3 + 4i
Igualando partes reales e imaginarias se deduce que a y b deben satisfacer el sistema deecuaciones ½
a2 − b2 = −3,2ab = 4.
Despejando de la segunda de las ecuaciones se obtiene b = 2/a (nótese que a nunca puedeanularse) y sustituyendo en la primera ecuación se deduce a2 − ¡ 2a¢2 = −3, de dondellegamos a la ecuación bicuadrada a4 + 3a2 − 4 = 0. Haciendo t = a2, conseguimos laecuación de segundo grado t2 + 3t− 4 = 0 y de aquí,
t =−3±p9− 4 · (−4)
2=−3± 52
=
½1,−4.
Luego, a2 = t = 1 y así, a = ±1, pues de la relación a2 = −4 no podemos deducirningún valor de a, ya que hemos supuesto que a es un número real. Finalmente, obtenemosb = 2/a = ±2 y concluimos que
√−3 + 4i = ± (1 + 2i) .
Segunda forma. El número complejo w = −3 + 4i tiene módulo r = |w| =q(−3)2 + 42 = 5
y su argumento θ satisface tg θ = 4−3 . Por tanto, teniendo en cuenta que el afijo de w
está en el segundo cuadrante podemos deducir que θ = π − arctg ¡43¢ = 2.214297436 y enconsecuancia,
√−3 + 4i = √52.214297436 =½ ¡√
5¢1.107148718
=√5 (cos 1.107148718 + i sen 1.107148718) = 1.0 + 2.0i¡√
5¢4.248741371
=√5 (cos 4.248741371 + i sen 4.248741371) = −(1.0 + 2.0
Ahora, volviendo a (9) se tiene
z =3±√−3 + 4i
2=3± (1 + 2i)
2=
½2 + i,1− i.

Trabajo 6. Curso 2004-05
Problema 1Calcular las siguientes integrales indefinidas:Zlnx
x2dx;
Ze−2x cos(3x)dx;
Z1
1 + exdx;
Z3x3 + 2x2 + 2x+ 3
x4 + 2x3 + 3x2dx;
Zsen4 xdx;Z
1
5 + 3 cosxdx;
Z √x2 − 1x
dx;
Zsen(2x) cos(6x)dx.
Solución:
1.Zlnx
x2dx
Aplicamos el método de integración por partes.Zlnx
x2dx =
u = lnx u0 =1
x
v0 =1
x2v = −1
x
= − lnxx+
Z1
x2dx = − lnx
x− 1x+C = −1
x(lnx+ 1)+C
2.Ze−2x cos(3x)dx
Aplicamos el método de integración por partes.Ze−2x cos(3x)dx =
"u = e−2x du = −2e−2xdxdv = cos(3x)dx v =
1
3sen(3x)
#=e−2x
3sen(3x)+
2
3
Ze−2x sen(3x)dx =
=
·u = e−2x du = −2e−2xdxdv = sen(3x)dx v = −13 cos(3x)
¸=e−2x
3sen(3x)+
2
3
µ−e
−2x
3cos(3x)− 2
3
Ze−2x cos(3x)dx
¶=
=e−2x
3sen(3x)− 2e
−2x
9cos(3x)− 4
9
Ze−2x cos(3x)dx.
Luego, denominando I =Ze−2x cos(3x)dx, hemos llegado a la igualdad
I =e−2x
3sen(3x)− 2e
−2x
9cos(3x)− 4
9I
lo que nos conduce directamente a
I =e−2x (3 sen (3x)− 2 cos (3x))
13
esto es, Ze−2x cos(3x)dx =
e−2x (3 sen (3x)− 2 cos (3x))13
+ C
47

Trabajo 6. Curso 2004-05 48
3.Z
1
1 + exdx
Para resolver esta integral utilzamos el método de sustitución realizando el cambio de variable:t = 1 + ex, de donde dt = exdx = (t− 1) dx. Sustituyendo en la integral obtenemos:Z
1
1 + exdx =
Zdt
(t− 1)t . Esta última integral es racional. Por tanto, descompondremos lafunción racional en suma de fracciones simples.Z
dt
(t− 1)tdt =Z µ
1
t− 1 −1
t
¶du = ln
µ¯t− 1t
¯¶+ C = ln
µex
ex + 1
¶+ C
4.Z3x3 + 2x2 + 2x+ 3
x4 + 2x3 + 3x2dx
Descomponemos la función racional en suma de fracciones simples: Teniendo en cuenta quex4 + 2x3 + 3x2 = x2
¡x2 + 2x+ 3
¢y que las raices de x2 + 2x+ 3 = 0 son complejas buscamos
una descomposición de la función de la forma:
3x3 + 2x2 + 2x+ 3
x4 + 2x3 + 3x2=A
x+B
x2+
Cx+D
x2 + 2x+ 3. Realizando cuentas obtenemos A = 0, B = 1,
C = 3 y D = 1. Por lo tantoZ3x3 + 2x2 + 2x+ 3
x4 + 2x3 + 3x2dx =
Z1
x2dx +
Z3x+ 1
x2 + 2x+ 3dx = −1
x+Z
3x+ 1
x2 + 2x+ 3dx. Ahora calculamos esta última integralZ
3x+ 1
x2 + 2x+ 3dx =
3
2
Z2x+ 2
3
x2 + 2x+ 3dx =
3
2
Z2x+ 2− 2 + 2
3
x2 + 2x+ 3dx =
3
2
µZ2x+ 2
x2 + 2x+ 3dx− 4
3
Z1
x2 + 2x+ 3dx
¶=3
2ln¡x2 + 2x+ 3
¢− 2Z 1
x2 + 2x+ 3dx =
3
2ln¡x2 + 2x+ 3
¢− 2Z 1
(x+ 1)2 + 2dx =
3
2ln¡x2 + 2x+ 3
¢− Z 1µx+ 1√2
¶2+ 1
dx =
3
2ln¡x2 + 2x+ 3
¢−√2 arctanµx+ 1√2
¶. Finalmente:Z
3x3 + 2x2 + 2x+ 3
x4 + 2x3 + 3x2dx = −1
x+3
2ln¡x2 + 2x+ 3
¢−√2 arctanµx+ 1√2
¶+C.
5.Zsen4 xdx
Para calcular esta integral tenemos en cuenta las fórmulas trigonométricas sen2 x =1− cos(2x)
2
y cos2 x =1 + cos(2x)
2.Z
sen4 xdx =
Z µ1− cos(2x)
2
¶2dx =
1
4
Z ¡1− 2 cos(2x) + cos2(2x)¢ dx =
1
4
µx− sen (2x) +
Zcos2(2x)dx
¶=1
4
µx− sen (2x) + 1
2
Z(1 + cos(4x)dx)
¶=
1
4
µx− sen (2x) + 1
2
µx+
sen (4x)
4
¶¶=3x
8− 14sen (2x) +
sen (4x)
32+ C.
6.Z
1
5 + 3 cosxdx

Trabajo 6. Curso 2004-05 49
Para calcular esta integral realizamos el cambio: tgx
2= t. De donde obtenemos dx =
2dt
1 + t2y
cos t =1− t21 + t2
. Sustituyendo en la integral conseguimos:
Z1
5 + 3 cosxdx =
Z 2dt
1 + t2
5 + 31− t21 + t2
=
Z2dt
5 + 5t2 + 3− 3t2 =Z
2dt
8 + 2t2=
Zdt
4 + t2=1
4
Zdt
1 +
µt
2
¶2 = 1
2arctan
µt
2
¶+ C =
1
2arctan
tgx22
+ C
7.Z √
x2 − 1x
dx
Para hacer esta integral realizamos el cambio trigonométrico x = sec t, de donde obtenemos
dx =sen tdt
cos2 t. Sustituyendo en la integral se obtiene:Z √
x2 − 1x
dx =
Z √sec2 t− 1sec t
sen tdt
cos2 t=
Ztg t
sec t
sen tdt
cos2 t=
Ztg2 tdt =
Zsen2 t
cos2 tdt =Z
1− cos2 tcos2 t
dt =
Z µ1
cos2 t− 1¶dt = tg t− t+ C = √x2 − 1− arccos
µ1
x
¶+ C.
8.Zsen(2x) cos(6x)dx
Para calcular esta integral debemos tener en cuenta la siguiente fórmula trigonométrica: sen(a) cos(b) =1
2(sen(a+ b) + sen(a− b)). Aplicando dicha fórmula obtenemos:Zsen(2x) cos(6x)dx =
1
2
Z(sen(8x) + sen(−4x)) dx = 1
2
Z(sen(8x)− sen(4x)) dx =
1
2
µ−cos(8x)
8+cos(4x)
4
¶+ C = −cos(8x)
16+cos(4x)
8+ C
Problema 2Calcular las siguientes integrales definidas:Z 5
1
e1x
x2dx;
Z 3
3√2
√9− x2dx;
Z e2
1x2 lnxdx;
Z 4
1
(1 +√x)4
√x
dx;
Solución:
1.Z 5
1
e1x
x2dx
Realizamos el cambio de variable t =1
x(aunque la integral puede resolverse de forma inmediata),
de donde obtenemos dt = − 1x2y los límites de integración
(x = 1→ t = 1
x = 5→ t =1
5
. Sustituyendo en
la integral se obtiene:Z 5
1
e1x
x2dx = −
Z 15
1etdt =
Z 1
15
etdt =£et¤115= e− 5
√e

Trabajo 6. Curso 2004-05 50
2.Z 3
3√2
√9− x2dx
Realizamos el cambio de variable x = 3 sen t, de donde obtenemos dx = 3 cos tdt y los límites de
integración
x =
3√2→ t =
π
4
x = 3→ t =π
2
. Sustituyendo en la integral se obtiene:
Z 3
3√2
√9− x2dx =
Z π2
π4
√9 cos2 t3 cos tdt = 9
Z π2
π4
cos2 tdt = 9
·t
2+sen (2t)
4
¸π2
π4
= 9π − 28
.
3.Z e2
1x2 lnxdx
Utilizamos el método de integración por partes:Z e2
1x2 lnxdx =
u = lnx du =1
xdx
dv = x2dx v =x3
3
=2e6
3− 13
Z e2
1x2dx =
2e6
3− 19
£x3¤e21=2e6
3− e
6
9+1
9=5e6 + 1
9.
4.Z 4
1
(1 +√x)4
√x
dx
Realizamos el cambio de variable u = 1 +√x (aunque la integral puede resolverse de forma
inmediata), de donde obtenemos du =1
2√xdx y los límites de integración
½x = 1→ u = 2x = 4→ u = 3
.
Sustituyendo en la integral se obtiene:Z 4
1
(1 +√x)4
√x
dx = 2
Z 3
2u4du =
·2u5
5
¸32
=422
5.
Problema 3Sean las siguientes regiones, determinadas por las gráficas que se indican:R1: región comprendida entre las curvas y = 2
√x− 1, y = 0, x = 2, x = 5. Obtener el área de
dicha región, el volumen cuando la región gira alrededor del eje OX, alrededor del eje OY y alrededorde la recta x = 5.
R2: región comprendida entre las curvas y = √x, y = x3. Obtener el área de dicha región, elvolumen cuando la región gira alrededor del eje OX, alrededor del eje OY y alrededor de la recta y = 5.
R3: región comprendida entre las curvas y = x lnx, y = 0, x = e. Obtener el área de dicha región,el volumen cuando la región gira alrededor del eje OX, alrededor del eje OY y alrededor de la rectax = e.
Solución:
1. a) El área de la regiónR1 viene determinada por la integralA = 2Z 5
2
√x− 1dx =
4q(x− 1)33
52
=
28
3.
b) Calculamos el volumen cuando la región R1 gira entorno del eje OX por el método de losdiscos:
V1 = π
Z 5
24 (x− 1) dx = 4π
·x2
2− x
¸52
= 30π.

Trabajo 6. Curso 2004-05 51
c1) Calculamos el volumen cuando la región R1 gira entorno del eje OY por el método de lascapas
V2 = 2π
Z 5
2x2√x− 1dx = 4π
Z 5
2x√x− 1dx = 4π
Z 4
1(t+ 1)
√tdt =
4π
Z 4
1
³√t3 +
√t´dt = 4π
"2√t5
5− 2√t3
3
#41
=1024
15π.
c2) Calculamos el volumen cuando la región R1 gira entorno del eje OY por el método de losdiscos
V2 = π
Z 4
052dy − π
Z 2
022dy − π
Z 4
2
µy2
4+ 1
¶2dy = 100π − 8π − π
Z 4
2
µy4
16+y2
2+ 1
¶dy =
92π −·y5
80+y3
6+ y
¸42
=1024
15π.
d1) Calculamos el volumen cuando la región R1 gira entorno de la recta x = 5 por el métodode las capas
V3 = 2π
Z 5
2(5− x) 2√x− 1dx = 20π
Z 5
2
√x− 1dx− 4π
Z 5
2x√x− 1dx =
20π
·2√x− 13
¸52
− 102415
π =280
3π − 1024
15π =
376
15π
d2) Calculamos el volumen cuando la región R1 gira entorno de la recta x = 5 por el métodode los discos
V3 = π
Z 2
032dy+π
Z 4
2
µ4− y
2
4
¶2dy = 18π+π
Z 4
2
µ16− 2y2 + y
4
16
¶dy = 18π+π
·16y − 2y
3
3+y5
80
¸42
=
376
15π.
2. a) El área de la regiónR2 viene determinada por la integralA =Z 1
0
¡√x− x3¢ dx = "2√x3
3− x
4
4
#10
=
5
12.
b1) Calculamos el volumen cuando la región R2 gira entorno del eje OX por el método de losdiscos:
V1 = π
Z 1
0xdx− π
Z 1
0x6dx = π
·x2
2− x
7
7
¸10
=5
14π.
b2) Calculamos el mismo volumen cuando la región R2 gira entorno del eje OX pero por elmétodo de las capas:
V1 = 2π
Z 1
0y¡3√y − y2¢ dy = 2π Z 1
0
³3py4 − y3
´dy = 2π
"3 3py7
7− y
4
4
#10
=5
14π.
c1) Calculamos el volumen cuando la región R2 gira entorno del eje OY por el método de losdiscos
V2 = π
Z 1
0
3py2dy − π
Z 1
0y4dy = π
"3 3py5
5− y
5
5
#10
=2
5π.
c2) Calculamos el volumen cuando la región R2 gira entorno del eje OY por el método de lascapas

Trabajo 6. Curso 2004-05 52
V2 = 2π
Z 1
0x¡√x− x3¢ dx = 2π Z 1
0
³√x3 − x4
´dx = 2π
"2√x5
5− x
5
5
#10
=2
5π.
d1) Calculamos el volumen cuando la región R2 gira entorno de la recta y = 5 por el métodode los discos
V3 = π
Z 1
0
¡5− x3¢2 dx−π Z 1
0(5−√x)2 dx = π
Z 1
0
¡25− 10x3 + x6¢ dx−π Z 1
0(25− 10√x+ x) dx =
π
·25x− 10x
4
4+x7
7
¸10
− π
"25x− 20
√x3
3+x2
2
#10
=80π
21
d2) Calculamos el volumen cuando la región R2 gira entorno de la recta y = 5 por el métodode las capas
V3 = 2π
Z 1
0(5− y) ¡ 3
√y − y2¢ dy = 2π Z 1
0
³5 3√y − 3
py4 − 5y2 + y3
´dy =
2π
"15 3py4
4− 3
3py7
7− 5y
3
3+y4
4
#10
=80π
21.
3. Antes de determinar la región conviene analizar brevemente la función. Observemos que sudominio es D = (0,+∞), que la derivada es y0 = lnx + 1, por lo tanto tiene un único punto
crítico en el punto Aµ1
e,−1e
¶. Ya que la derivada segunda y00 =
1
x, verifica que y00
µ1
e
¶=
e > 0, se tiene que el punto A es un mínimo relativo. Además limx→0+
(x lnx) = limx→0+
lnx
1/x=
limx→0+
µ− 1/x1/x2
¶= 0 y limx→∞ (x lnx) =∞. De aquí que un esbozo de la gráfica sea el mostrado
en la Figura 4. Nótese por tanto, que la función está acotada en su dominio y que en x = 0posee una discontinuidad de tipo evitable. No obstante, aunque las integrales que aparecerána continuación no son impropias, se tratará como impropias para su cálculo (se puede definirf(x) = x lnx en x = 0 como cualquier número real y los cálculos no cambiarían).
Figura 4: Representación gráfica de la función y = x lnx.
a) El área de la región R3 viene determinada por la integral A =Z 1
0−x lnxdx+
Z e
1x lnxdx
Calculamos por separado las dos integrales:Z 1
0−x lnxdx = − lim
a→0
Z 1
ax lnxdx = − lim
a→0
µa2 ln a
2
¶+1
2
Z 1
0xdx =
1
4

Trabajo 6. Curso 2004-05 53
Z e
1x lnxdx =
e2
2− 12
Z e
1xdx =
e2
2− 12
·x2
2
¸e1
=e2
4+1
4.
Por lo tanto A =Z 1
0−x lnxdx+
Z e
1x lnxdx =
e2
4+1
2.
b) Calculamos el volumen cuando la región R3 gira entorno del eje OX por el método de losdiscos:
V1 = π
Z e
0x2 ln2 xdx = π lim
a→0
Z e
ax2 ln2 xdx = π
µe3
3− lima→0
a3 ln2 a
3
¶− π
2
3
Z e
0x2 lnxdx =
πe3
3− 2π3
µe3
3− lima→0
a3 ln a
3− 13
Z e
0x2dx
¶=
πe3
3− 2πe
3
9+2π
9
·x3
3
¸e0
=πe3
3− 2πe
3
9+2πe3
27=
5πe3
27c) Calculamos el volumen cuando la región R3 gira entorno del eje OY por el método de lascapas
V2 = −2πZ 1
0xx lnxdx + 2π
Z e
1xx lnxdx = −2π
Z 1
0x2 lnxdx + 2π
Z e
1x2 lnxdx. Calculamos
por separado las dos integrales:
−2πZ 1
0x2 lnxdx = −2π lim
a→0
Z 1
ax2 lnxdx = −2π
·− lima→0
a3 ln a
3− 13
Z 1
0x2dx
¸=2π
9
£x3¤10=
2π
9.
2π
Z e
1x2 lnxdx =
2π
3e3 − 2π
3
Z e
1x2dx =
2π
3e3 − 2π
3
·x3
3
¸e1
=4π
9e3 +
2π
9.
Por lo tanto V2 = −2πZ 1
0x2 lnxdx+ 2π
Z e
1x2 lnxdx =
4π
9e3 +
4π
9.
d) Calculamos el volumen cuando la región R3 gira entorno de la recta x = e por el método delas capas
V3 = 2π
·−Z 1
0(e− x)x lnxdx+
Z e
1(e− x)x lnxdx
¸=
2π
·−eZ 1
0x lnxdx+
Z 1
0x2 lnxdx+ e
Z e
1x lnxdx−
Z e
1x2 lnxdx
¸. Calculamos las integralesZ 1
0x lnxdx = − lim
a→0a2 ln a
2− 1
2
Z 1
0xdx = −1
4yZ e
1x lnxdx =
e2
2− 1
2
Z e
1xdx =
e2
4+1
4.
Sustituyendo obtenemos
V3 = 2π
·e
4− 19+e3
4+e
4− 29e3 − 2
9
¸= 2π
µ18e− 12 + e3
36
¶.
Problema 4a) La base de un sólido es la región del plano xy acotada por las parábolas y = x2 y x = y2.
Determinar el volumen de este sólido si cada sección transversal perpendicular al eje x es un cuadradocuya base está en el plano xy.
b) La base de un sólido es la región del plano acotada por la curva de ecuación x2 + y2 = 9.Determinar el volumen de este sólido si cada sección transversal perpendicular al eje x es un triánguloequilátero cuya base está en el plano xy.
Solución:

Trabajo 6. Curso 2004-05 54
1. La sección transversal del sólido perpendicular al eje está determinada por A(x) =¡√x− x2¢2,
con x ∈ [0, 1]. Por lo tanto el volumen es V =Z 1
0
¡√x− x2¢2 dx = Z 1
0
¡x− 2x2√x+ x4¢ dx ="
x2
2− 4√x7
7+x5
5
#10
=9
70.
2. La sección transversal del sólido perpendicular al eje está determinada por A(x) =√3¡9− x2¢,
x ∈ [−3, 3]. Por lo tanto el volumen es V = 2√3Z 3
0
¡9− x2¢ dx = 2√3 ·9x− x3
3
¸30
= 36√3.
Problema 5Averiguar cuáles de las siguientes integrales impropias son convergentes. Cuando lo sean obtener
su valor.Z ∞
1xe−x2dx;
Z ∞
e
1
x lnxdx;
Z 1
−∞1
(2x− 3)3dx;Z ∞
−∞x√x2 + 9
dx;Z 10
3
1√10− xdx;
Z 0
−4x
16− x2dx;Z 5
−51
x23
dx;
Solución
1.Z ∞
1xe−x2dx;
Ya queZxe−x2dx = −1
2e−x2 , obtenemos que:Z ∞
1xe−x2dx = lim
b→∞
Z b
1xe−x2dx = −1
2limb→∞
he−b2 − e−1
i=1
2ey la integral es convergente.
2.Z ∞
e
1
x lnxdx;
ComoZ
1
x lnxdx = ln(lnx), obtenemos que:Z ∞
e
1
x lnxdx = lim
b→∞
Z b
e
1
x lnxdx = lim
b→∞[ln(ln b)] = +∞, por lo tanto la integral es divergente.
3.Z 1
−∞1
(2x− 3)3dx;
ComoZ
1
(2x− 3)3dx = −1
4 (2x− 3)2 , obtenemos queZ 1
−∞1
(2x− 3)3dx = lima→−∞
Z 1
a
1
(2x− 3)3dx = −1
4lim
a→−∞
·1− 1
(2a− 3)2¸= −1
4y la integral es
convergente.
4.Z ∞
−∞x√x2 + 9
dx =
Z 0
−∞x√x2 + 9
dx +
Z ∞
0
x√x2 + 9
dx. Ahora calculamos por separado cada
una de las dos integrales:
ComoZ
x√x2 + 9
dx =√x2 + 9, obtenemos que
Z ∞
0
x√x2 + 9
dx = limb→∞
Z b
0
x√x2 + 9
dx =
limb→∞
h√b2 + 9− 3
i= +∞. Por lo tanto, la integral pedida es divergente.

Trabajo 6. Curso 2004-05 55
5.Z 10
3
1√10− xdx = − lim
b→10−
Z b
3
1√10− xdx = −2 lim
b→10−£√10− b−√7¤ = 2
√7 y la integral es
convergente.
6.Z 0
−4x
16− x2dx = lima→−4+
Z 0
a
x
16− x2dx = −1
2lim
a→−4+£ln 16− ln ¡16− a2¢¤ = ∞, luego la inte-
gral es divergente.
7.Z 5
−51
x23
dx =
Z 0
−51
x23
dx+
Z 5
0
1
x23
dx. Ahora calculamos cada una de las integrales por separado.Z 5
0
1
x23
dx = lima→−0+
Z 5
a
1
x23
dx = 3 lima→−0+
£3√5− 3√a¤= 3 3√5Z 0
−51
x23
dx = limb→−0−
Z b
−51
x23
dx = 3 limb→−0−
h3√b− 3√−5
i= −3 3
√−5.Por lo tanto, la integral pedida es convergente y su valor es
5Z−5
1
x23
dx =
0Z−5
1
x23
dx+
5Z0
1
x23
dx = 33√5− 3 3
√−5 = 6 3√5.

Trabajo 7. Curso 2004-05
Problema 1Determine y realice un esbozo del dominio de definición de las siguientes funciones:
(a) f(x, y) =x− yp
x2 + y2 − 9 .
(b) g(x, y) = arcsen³ yx2
´.
(c) h(x, y) =ln¡y − x3 + x¢y − 3x .
(d) k(x, y) =y + cosx
sen y
Solución:
(a) Es inmediato observar que el dominio de la función f es el exterior, sin incluir su frontera, delcirculo de centro el origen y radio 3; esto es, Df =
©(x, y) ∈ R2 : x2 + y2 > 9ª. En la Figura 5
hemos representado este dominio.
(b) Puesto que el dominio de definición de la función p(α) = arcsenα es el intervalo [−1, 1], eldominio de la función g viene dado por
Dg =n(x, y) ∈ R2 : x 6= 0,
¯ yx2
¯6 1
o=n(x, y) ∈ R2 : x 6= 0,−1 6 y
x26 1
o=
=©(x, y) ∈ R2 : x 6= 0,−x2 6 y 6 x2ª .
Es decir, el dominio la función g lo conforman los puntos de plano que se encuentran entre lasparábolas y = x2 e y = −x2. Evidentemente, incluye a estas parábolas, salvo al origen (véase laFigura 6).
(c) El domino de la función h(x, y) =ln¡y − x3 + x¢y − 3x está dado por
Dh =©(x, y) ∈ R2 : y − 3x 6= 0, y − x3 + x > 0ª .
Es decir, son los puntos del plano R2 que se encuentran por encima de la cúbica y = x3 − x yque además no están sobre la recta y = 3x. Nótese, como es de fácil demostración, que la rectay = 3x tiene partes por encima de la cúbica y = x3 − x (véase la Figura 7).
56

Trabajo 7. Curso 2004-05 57
x
y
x2+y2=9
Figura 5: Dominio de definición de la función f(x, y) =x− yp
x2 + y2 − 9 .
(d) El dominio de la función k(x, y) =y + cosx
sen yes
Dk =©(x, y) ∈ R2 : sen y 6= 0ª = ©(x, kπ) ∈ R2 : k ∈ Zª .
Así, este dominio lo conforma todo R2 salvo las rectas horizontales . . . , y = −2π, y = −π, y =0, y = π, y = 2π, . . . .En la Figura 8 puede contemplarse un esbozo del dominio de la función k.
Problema 2Calcular, cuando existan, los siguientes límites y establecer (y esbozar) el conjunto de R2 para el
cuál la función correspondiente es continua.
(a) lim(x,y)→(1,−2)
x2 + 2y2.
(b) lim(x,y)→(−3,1)
x+ 2y2
y − x .
(c) lim(x,y)→(0,0)
2xy
3x2 + y2.
(d) lim(x,y)→(1,−π/2)
2xy
sen(xy).
Solución:En todos los apartados, la función dada es continua en todo su dominio definición.
(a) lim(x,y)→(1,−2)
x2 + 2y2 = 12 + 2(−2)2 = 9.
La función f(x, y) = x2+2y2 está definida y es continua en todo R2, por tratarse de una funciónpolinómica.

Trabajo 7. Curso 2004-05 58
x
y y=x2
y=-x2
Figura 6: Esbozo del dominio de defnición de la función g(x, y) = arcsen³ yx2
´.
(b) lim(x,y)→(−3,1)
x+ 2y2
y − x =−3 + 2 · 121− (−3) = −1
4.
Naturalmente, el dominio de la función f(x, y) =x+ 2y2
y − x es©(x, y) ∈ R2 : y 6= xª. En la Figura
9 puede verse un esbozo de tal dominio.
(c) A continuación probaramos que el límite propuesto no existe. Para ello, dirigiéndonos al origensiguiendo las rectas y = mx encontramos que
limx→0
2xmx
3x2 + (mx)2= limx→0
2mx2
(3 +m2)x2=
2m
(3 +m2)
y así, puesto que el límite anterior depende de m, deducimos que no existe lim(x,y)→(0,0)
2xy
3x2 + y2.
Por último, la función f(x, y) =2xy
3x2 + y2está definida en R2 \ {(0, 0)}.
(d) lim(x,y)→(1,−π/2)
2xy
sen(xy)=
1 · (−π/2)sen(1 · (−π/2)) =
−π/2sen(−π/2) =
π
2.
Por otra parte, puesto que sen(α) = 0 ⇐⇒ α = kπ, con k ∈ Z, el dominio de la funciónf(x, y) =
2xy
sen(xy)viena dado por
©(x, y) ∈ R2 : xy 6= kπ, con k ∈ Zª.
Para k = 0, el conjunto©(x, y) ∈ R2 : xy = 0ª lo forma las rectas x = 0 e y = 0. Para k 6= 0, el
conjunto©(x, y) ∈ R2 : xy = kπ, con k ∈ Zª son hipérbolas que comparten las asíntotas x = 0
e y = 0. El dominio de la función f(x, y) =2xy
sen(xy)está esbozado en la Figura 10.
Problema 3

Trabajo 7. Curso 2004-05 59
x
y
y=3x
y=x3-x
Figura 7: Representación gráfica del dominio de la función h(x, y) =ln¡y − x3 + x¢y − 3x .
Determinar las derivadas parciales de primer y segundo orden para las siguientes funciones:
f(x, y) = x4 − 3x2y2 + y4, g(x, y) = ex tg y, h(x, y) =xypx2 + y2
Solución:
• Las derivadas parciales de primer y segundo orden de las función f(x, y) = x4 − 3x2y2 + y4 son∂f
∂x(x, y) = 4x3 − 6xy2 ∂f
∂y(x, y) = 4y3 − 6x2y
∂2f
∂x2(x, y) = 12x2 − 6y2 ∂2f
∂y2(x, y) = 12y2 − 6x2 ∂2f
∂x∂y(x, y) =
∂2f
∂y∂x(x, y) = −12xy
• Para la función g(x, y) = ex tg y tenemos∂g
∂x(x, y) = ex tg y
∂g
∂y(x, y) = ex
¡1 + tg2 y
¢∂2g
∂x2(x, y) = ex tg y
∂2g
∂y2(x, y) = 2ex tg y
¡tg2 y + 1
¢ ∂2g
∂x∂y(x, y) =
∂2g
∂y∂x(x, y) = ex
¡1 + tg2 y
¢
• Las derivadas parciales para la función h(x, y) = xypx2 + y2
quedan, después de simplificar, como
∂h
∂x(x, y) =
y3
(x2 + y2)3/2∂h
∂y(x, y) =
x3
(x2 + y2)3/2
∂2h
∂x2(x, y) =
−3xy3(x2 + y2)5/2
∂2h
∂y2(x, y) =
−3yx3(x2 + y2)5/2
∂2h
∂x∂y(x, y) =
∂2h
∂y∂x(x, y) =
3x2y2
(x2 + y2)5/2

Trabajo 7. Curso 2004-05 60
y=0
y=π
y=-π
y=-2π
y=2π
Figura 8: Esbozo del dominio de la función k(x, y) =y + cosx
sen y.
Problema 4Demostrar que la función z = e−t cos
¡xc
¢, donde c es una constante real no nula, satisfacen la
ecuación del calor
∂z
∂t= c2
∂2z
∂x2. (10)
Solución:
Puesto que la derivadas parciales de z = e−t cos³xc
´son
∂z
∂t= −e−t cos
³xc
´,∂z
∂x= −1
ce−t sen
³xc
´y∂2z
∂x2= − 1
c2e−t cos
³xc
´, se tiene que c2
∂2z
∂x2= c2
µ− 1c2e−t cos
³xc
´¶= −e−t cos
³xc
´=
∂z
∂t; es decir,
la función z = e−t cos¡xc
¢satisface la ecuación del calor (10).
Problema 5Demostrar que las funciones z = sen(x− ct) y z = sen (wct) sen (wx) (con c y w constantes reales)
satisfacen la ecuación de ondas
∂2z
∂t2= c2
∂2z
∂x2. (11)
Solución:
• Las derivadas parciales de la función z = sen(x− ct) vienen dadas por∂z
∂x= cos (x− ct) ∂z
∂t= −c cos (x− ct)
∂2z
∂x2= − sen (x− ct) ∂2z
∂t2= −c2 sen (x− ct)
Luego, es inmediato probar que∂2z
∂t2= c2
∂2z
∂x2.

Trabajo 7. Curso 2004-05 61
x
y y=x
Figura 9: Esbozo del dominio de f(x, y) =x+ 2y2
y − x .
• La función z = sen (wct) sen (wx) posee las siguientes derivadas pariciales∂z
∂x= w sen (wct) cos (wx)
∂z
∂t= wc cos (wct) sen (wx)
∂2z
∂x2= −w2 sen (wct) sen (wx) ∂2z
∂t2= −w2c2 sen (wct) sen (wx)
y por tanto, también satisface la ecuación de ondas (11).
Problema 6El periodo de un péndulo T de longitud L viene dado por T = 2π
qLg , donde g es la aceleración de
la gravedad. El péndulo se traslada de un punto donde la gravedad es g = 9.8 m/s2 a otro donde lagravedad vale 9.98 m/s2. Debido al cambio de la temperatura, la longitud del péndulo varía de 0.25a 0.23 metros. Estimar, usando diferenciales, el cambio en el periodo del péndulo.
Solución:En el primer punto, la gravedad vale g = 9.8 m/s2 y la longitud del péndulo 0.25 m. En el
segundo punto, la gravedad cambia a 9.98 m/s2 y la longitud del péndulo es de 0.23 metros. Portanto, ∆g = dg = 9.8− 9.98 = −0.18 y ∆L = dL = 0.25− 0.23 = 0.02. Así, utilizando diferenciales,el periodo del péndulo sufre un cambio de
∆T ' dT =∂T
∂gdg +
∂T
∂LdL = −π
sL
g3dg + π
r1
LgdL =
= −πr0.25
9.83(−0.18) + π
r1
0.25 · 9.80.02 = 4.9358× 10−2
Nota: En este caso, podemos determinar de forma exacta el cambio en el periodo:
∆T = 2π
r0.25
9.8− 2π
r0.23
9.98= 4.9698× 10−2
Problema 7 Calcular, utilizando la regla de la cadena:

Trabajo 7. Curso 2004-05 62
x
y
Figura 10: El dominio de la función f(x, y) =2xy
sen(xy)lo conforma todo el plano salvo las curvas
punteadas.
(a)dz
dt, siendo z = x2y, x = sen t, y = 2 cos t.
(b)∂z
∂ty∂z
∂s, siendo z = cos(x− y), x = s+ t, y = s2t.
Solución:
(a) Aplicando la regla de la cadena tenemos
dz
dt=
∂z
∂x· ∂x∂t+
∂z
∂y· ∂y∂t= 2xy cos t+ x2(−2 sen t)¯
x=sen t,y=2cos t=
= 2 sen t · 2 cos t cos t+ sen2 t(−2 sen t) = 4 sen t cos2 t− 2 sen3 t
(b) Cuando z = cos(x− y), x = s+ t, y = s2t obtemos, aplicando la regla de la cadena,∂z
∂s=
∂z
∂x· ∂x∂s+
∂z
∂y· ∂y∂s= sen(x− y) · 1− sen(x− y) · 2st|x=s+t, y=s2t =
= sen(s+ t− s2t)− 2st sen(s+ t− s2t).
∂z
∂t=
∂z
∂x· ∂x∂t+
∂z
∂y· ∂y∂t= sen(x− y) · 1− sen(x− y) · s2¯
x=s+t, y=s2t=
= sen(s+ t− s2t)− s2 sen(s+ t− s2t).
Problema 8Se sabe que las funciones z = f(x, y) y w = g(x, y) satisfacen las ecuaciones de Cauhcy-Riemann
∂z
∂x=
∂w
∂yy
∂z
∂y= −∂w
∂x

Trabajo 7. Curso 2004-05 63
Demostrar que el cambio a polares x = r cos θ, y = r sen θ permite deducir que las funciones z y w(ahora, como funciones de r y θ) satisfacen
∂z
∂r=1
r
∂w
∂θy
∂w
∂r= −1
r
∂z
∂θ
Solución:
Si x = r cos θ e y = r sen θ, aplicando la regla de la cadena y teniendo en cuenta que∂z
∂x=
∂w
∂yy
∂z
∂y= −∂w
∂xobtenemos
∂z
∂r=
∂z
∂x· ∂x∂r+
∂z
∂y· ∂y∂r=
∂w
∂ycos θ +
µ−∂w∂x
¶sen θ.
Por otra parte,
∂w
∂θ=
∂w
∂x· ∂x∂θ+
∂w
∂y· ∂y∂θ=
∂w
∂x(−r sen θ) + ∂w
∂yr cos θ,
luego,
1
r
∂w
∂θ=1
r
µ∂w
∂x(−r sen θ) + ∂w
∂yr cos θ
¶=
∂w
∂ycos θ +
µ−∂w∂x
¶sen θ =
∂z
∂r
por lo que hemos probado la primera de las igualdades.
De forma análoga, puede probarse la segunda igualdad∂w
∂r= −1
r
∂z
∂θProblema 9
Dada la función f(x, y) = 9− x2 − y2 se pide:
(a) Determinar el vector gradiente a f en el punto (1,−3) (∇f(1,−3)).(b) Encontrar la derivada direccional Duf(1,−3) en la dirección del vector u = 4
5 i− 35 j.
(c) ¿En qué dirección crece más rápidamente en el punto (2, 2) la función f?
(d) Determinar la curva de nivel de la superficie z = f(x, y) que pasa por el punto (2, 2) y encontrarla recta tangente a dicha curva de nivel en ese punto.
(e) Calcular las ecuaciones del plano tangente y la recta normal a la superficie z = f(x, y) en elpunto (2, 2, 1).
Solución:
(a) Puesto que las derivadas parciales de f(x, y) = 9−x2− y2 son fx(x, y) = −2x y fy(x, y) = −2y,el vector gradiente pedido es ∇f(1,−3) = (fx(1,−3), fy(1,−3)) = (−2, 6).
(b) Al ser f una función diferenciable, la derivada direccional viene dada por
Duf(1,−3) = ∇f(1,−3) · u = (−2, 6) ·µ4
5,3
5
¶= −2 · 4
5+ 6 · 3
5= 2.
(c) La dirección de máximo crecimiento la proporciona el vector gradiente. Por tanto, la dirección enla que más rápidamente crece la función f en el punto (2, 2) es ∇f(2, 2) = (fx(2, 2), fy(2, 2)) =(−4,−4).

Trabajo 7. Curso 2004-05 64
(d) Para determinar la curva de nivel de la superficie z = f(x, y) que pasa por el punto (2, 2) sólodebemos conocer la imagen del punto (2, 2) mediante f : f(2, 2) = 1. Por consiguiente, la curvade nivel tiene de ecuación 9− x2 − y2 = 1; esto es, x2 + y2 = 8.Por otra parte, como los vectores gradientes son ortogonales a las curvas de nivel, la rectatangente a la curva de ecuación x2+y2 = 8 en el punto (2, 2) tiene al vector ∇f(2, 2) = (−4,−4)como vector ortogonal y así, su ecuación es −4(x− 2)− 4(y − 2) = 0; es decir, x+ y − 4 = 0.
(e) El plano tangente a la superficie z = f(x, y) en el punto (2, 2, 1) tiene por ecuación general
∂f
∂x(2, 2)(x− 2) + ∂f
∂y(2, 2)(y − 2)− (z − 1) = 0.
Sabiendo que ∂f∂x(2, 2) =
∂f∂y (2, 2) = −4, la ecuación del plano queda 4x+4y+ z− 17 = 0 y unas
ecuaciones paramétricas de la recta normal a la superficie z = f(x, y) en el punto (2, 2, 1) vienendadas por
x = 2− 4ty = 2− 4tz = 1− t
con t ∈ R.
Problema 10Demostrar que el plano tangente a la superficie cónica z2 = a2x2 + b2y2 (a y b constantes reales)
en el cualquiera de sus puntos (salvo el origen) siempre pasa por el origen.Solución:Denominando F (x, y, z) = a2x2+b2y2−z2, la ecuación del plano tangente a la superficie F (x, y, z) =
0 en el punto (x0, y0, z0) está dada por
∂F
∂x(x0, y0, z0)(x− x0) + ∂F
∂y(x0, y0, z0)(y − y0) + ∂F
∂z(x0, y0, z0)(z − z0) = 0.
Las derivadas parciales de la función F son
∂F
∂x(x0, y0, z0) = 2a
2x0,∂F
∂y(x0, y0, z0) = 2b
2y0,∂F
∂z(x0, y0, z0) = −2z0
y por tanto, la ecuación del pano tangente queda
2a2x0(x− x0) + 2b2y0(y − y0)− 2z0(z − z0) = 0.
Después de operar, esta ecuación se convierte en a2x0x + b2y0y − z0z − a2x20 − 2b2y20 + z20 = 0 ycomo el punto (x0, y0, z0) está sobre la superficie z2 = a2x2 + b2y2 se verifica que z20 = a2x20 + b
2y20,por lo que la ecuación del plano tangente es
a2x0x+ b2y0y − z0z = 0
y es inmediato observar que pasa por el origen.Problema 11
El coste de la construcción de la base de un depósito abierto en forma rectangular es de 3 eurospor metro cuadrado y la construcción de los laterales cuesta 2 euros/m2. Disponemos de 90000 eurospara las construcción del depósito. Determimar las dimensiones de éste para que puede contener elmáximo volumen.
Solución:

Trabajo 7. Curso 2004-05 65
Denominemos x, y > 0 a las dimensiones de la base del depósito y sea z > 0 la altura del mismo(todas dadas en metros). Entonces, el coste de construcción es
3xy + 4xz + 4yz = 90000 (12)
y el volumen del depósito V = xyz.
Despejando z de la relación (12) se tiene z =90000− 3xy4(x+ y)
y sustituyendo en la expresión del
volumen del depósito nos encontramos con la función
V (x, y) =90000xy − 3x2y2
4(x+ y)
Nótese que z debe ser positivo y esto nos obliga a tomar 90000 − 3xy > 0 (ya que x > 0, y > 0); esdecir, xy < 30000.
Por consiguiente, el problema se reduce a encontrar el máximo de la función V sujeta a las restric-ciones x > 0, y > 0, xy < 30000 (en la Figura 11 hemos esbozado este conjunto admisible).
xy=30000
x
y
Figura 11: Esbozo del conjunto admisible©(x, y) ∈ R2 : x > 0, y > 0, xy < 30000ª.
Para localizar el (los) punto(s) donde la función V alcanza su máximo absoluto debemos encontrarsus puntos críticos. Esto es, debemos resolver el sistema de ecuaciones
∂V
∂x(x, y) = −3
¡2xy + x2 − 30000¢ y2
4 (x+ y)2= 0
∂V
∂y(x, y) = −3
¡2xy + y2 − 30000¢x2
4 (x+ y)2= 0
Teniendo en cuenta que nos movemos en valores x, y > 0, el sistema anterior se reduce a½2xy + x2 − 30000 = 0,2xy + y2 − 30000 = 0. (13)

Trabajo 7. Curso 2004-05 66
Restando las dos ecuaciones de (13) obtenemos x2−y2 = 0 y puesto que x e y deben ser positivos,econtramos x = y. Así, volviendo, por ejemplo, a la primera ecuación de (13) deducimos que 3x2 −30000 = 0, de donde, al ser x > 0, se tiene x = 100 y en consecuencia, y = x = 100.
Por tanto, (x, y) = (100, 100) es el único punto crítico de la función V y se ecuentra en la regiónabierta R =
©(x, y) ∈ R2 : x > 0, y > 0, xy < 30000ª.
A continuación, estudiaremos la naturaleza de este punto crítico. Para ello, debemos conocer lasderivadas pariciales de segundo orden de la función V :
∂2V
∂x2(x, y) = −3
¡y2 + 30 000
¢y2
2 (x+ y)3∂2V
∂y2(x, y) = −3
¡x2 + 30 000
¢x2
2 (x+ y)3∂2V
∂x∂y(x, y) = −3
¡3xy + x2 + y2 − 30 0
2 (x+ y)3
De esta forma, la matriz hessiana de V en el punto (100, 100) es
H =
∂2V
∂x2(100, 100)
∂2V
∂x∂y(100, 100)
∂2V
∂x∂y(100, 100)
∂2V
∂y2(100, 100)
=
µ −75 −752−752 −75
¶
y entonces, en el punto (x, y) = (100, 100) la función V presenta un máximo relativo, pues∂2V
∂x2(100, 100) =
−75 < 0 y det(H) = 168754 > 0.
En resumen, las dimensiones del depósito de mayor capacidad son x = 100, y = 100, z =90000− 3xy4(x+ y)
= 75 y la máxima capacidad es V = 100 · 100 · 75 = 750000Nota: Puede demostrarse, aunque nosotros no lo haremos aquí, que la función V alcanza en el el punto
(100, 100) su máximo absoluto (véase la Figura 12).
0 50 100 150 200 0 50 100 150 2000
1
2
3
4
5
6
7
8
x 105
(100,100,750000)
Figura 12: Representación gráfica de la superficie denifida por la función V (x, y) =90000xy − 3x2y2
4(x+ y).
Problema 12Encontrar y clasificar los puntos críticos de las siguientes funciones:

Trabajo 7. Curso 2004-05 67
(a) f(x, y) = x3 − 3xy + y3.(b) g(x, y) = (x2 + 4y2)e1−x2−y2 .
(c) h(x, y) = e−x sen y.
Solución:
(a) Los puntos críticos de la función f(x, y) = x3 − 3xy + y3 son las soluciones del sistema deecuaciones
∂f
∂x(x, y) = 3x2 − 3y = 0,
∂f
∂y(x, y) = −3x+ 3y2 = 0.
De la primera de las ecuaciones se obtiene y = x2 y sustituyendo este valor en la segunda sededuce −3x+3(x2)2 = 0; esto es, −x+x4 = 0. De aquí, x = 0, x = 1 y por tanto, sustituyendoen y = x2, los puntos críticos de f son (x1, y1) = (0, 0) y (x2, y2) = (1, 1).
La derivadas pariciales de segundo orden de la función f son
∂2f
∂x2(x, y) = 6x,
∂2f
∂y2(x, y) = 6y,
∂2f
∂x∂y(x, y) = −3
y por tanto, la matriz hessiana de f en el punto (x1, y1) = (0, 0) es H(x1, y1) =µ
0 −3−3 0
¶.
Así, el origen es punto de silla para f , ya que det (H(x1, y1)) = −9 < 0.Por otra parte, la matriz hessiana de f en el punto (x2, y2) = (1, 1) esH(x2, y2) =
µ6 −3−3 6
¶y
puesto que∂2f
∂x2(1, 1) = 6 > 0 y det (H(x2, y2)) =
¯6 −3−3 6
¯= 27 > 0, resulta quel punto crítico
(x2, y2) = (1, 1) es un mínimo relativo para la función f . En la Figura 13 hemos representado lasuperficie definida por la función f(x, y) = x3 − 3xy + y3.
(b) Los puntos críticos de la función g(x, y) = (x2 + 4y2)e1−x2−y2 se obtiene resolviendo el sistemade ecuaciones
∂g
∂x(x, y) = −2x ¡x2 + 4y2 − 1¢ e1−y2−x2 = 0,
∂g
∂y(x, y) = −2y ¡x2 + 4y2 − 4¢ e1−y2−x2 = 0.
Como la función exponencial nunca se anula, el sistema anterior es equivalente a½ −2x ¡x2 + 4y2 − 1¢ = 0,−2y ¡x2 + 4y2 − 4¢ = 0.
Resolviendo este último sistema encontramos los siguientes puntos críticos para la función g:
(x1, y1) = (0, 0), (x2, y2) = (0, 1), (x3, y3) = (0,−1), (x4, y4) = (1, 0), (x5, y5) = (−1, 0).La matriz hessiana de g en el punto (x, y) viene dada por
H(x, y) =
∂2g
∂x2(x, y)
∂2g
∂x∂y(x, y)
∂2g
∂x∂y(x, y)
∂2g
∂y2(x, y)
=
2³e1−y2−x2
´ ¡2x4 − 4y2 − 5x2 + 8x2y2 + 1¢ 4yx
³e1−y2−x2
´ ¡x2 + 4y2 − 5¢
4yx³e1−y2−x2
´ ¡x2 + 4y2 − 5¢ 2
³e1−y2−x2
´ ¡8y4 − 20y2 − x2 + 2x2y2 + 4¢

Trabajo 7. Curso 2004-05 68
-2-1
01
23
4 -2-1
01
23
-20
-10
0
10
20
30
40
(1,1,-1)(0,0,0)
Figura 13: Superficie dada por la ecuación z = x3 − 3xy + y3.
Y por tanto:
— La matriz hessiana de g en el punto (x1, y1) = (0, 0) es H1 =µ2e 00 8e
¶y en consecuencia,
el punto (0, 0) es un mínimo relativo.
— La matriz hessiana de g en el punto (x2, y2) = (0, 1) es H2 =µ −6 0
0 −16¶y en conse-
cuencia, el punto (0, 1) es un maximo relativo.
— La matriz hessiana de g en el punto (x3, y3) = (0,−1) es H3 =µ −6 0
0 −16¶y en conse-
cuencia, el punto (0,−1) es un maximo relativo.— La matriz hessiana de g en el punto (x4, y4) = (1, 0) es H4 =
µ −4 00 6
¶y en consecuencia,
el punto (1, 0) es un punto de silla.
— La matriz hessiana de g en el punto (x5, y5) = (−1, 0) es H4 =µ −4 0
0 6
¶y en consecuen-
cia, el punto (−1, 0) es un punto de silla.
En la Figura 14 hemos representado la superficie que define la función g(x, y) = (x2+4y2)e1−x2−y2 .
• La función h(x, y) = e−x sen y no posee puntos críticos, pues el sistema∂h
∂x(x, y) = −e−x sen y = 0
∂h
∂y(x, y) = e−x cos y = 0
no tiene soluciones. En efecto, al ser −e−x 6= 0 ∀x ∈ R, el sistema anterior se convierte en½sen y = 0cos y = 0

Trabajo 7. Curso 2004-05 69
-2
0
2
-2-1.5-1-0.500.511.520
0.5
1
1.5
2
2.5
3
3.5
4
Máx. rel. Máx. rel.
Mín. rel.
Puntos desilla
Figura 14: Superficie definida por z = (x2 + 4y2)e1−x2−y2 .
que no posee soluciones, ya que sen2 y + cos2 y = 1 para todo número real y. En la Figura 15podemos ver un esbozo de la superificie que define la función h.
Problema 13Encontrar los extremos absolutos de la función f(x, y) = 3x2 + 2y2 − 4y restringida a la región
acotada por las gráficas de y = x2 e y = 4.Solución:En primer lugar observamos que el problema propuesto posee solución, pues la función f(x, y) =
3x2 + 2y2 − 4y es continua (es una función polinómica) y la región R que acota las gráficas de y = x2e y = 4 es una región cerrada y acotada (ver Figura 16).
Seguidamente, calcularemos los puntos críticos de f que se encuentran en el interior de la regiónR. El sistema de ecuaciones
∂f
∂x(x, y) = 6x = 0
∂f
∂y(x, y) = 4y − 4 = 0
posee una única solución (x, y) = (0, 1) que, además, se encuentra en el interior de la región R (véasela Figura 16).
Ahora, analizaremos la función f en la frontera de la región. Para tal cometido dividimos dichafrontera en dos partes: F1 = {(x, 4) ∈ R2 : x ∈ [−2, 2]} y F1 = {(x, y) ∈ R2 : y = x2, x ∈ [−2, 2]}.
La función f(x, y) = 3x2+2y2−4y restringida a la frontera F1 se reduce a la función g(x) = 3x2+16definida para x ∈ [−2, 2]. Puesto que g0(x) = 6x = 0 ⇐⇒ x = 0, los puntos en la frontera F1 dondepueden localizarle los extremos absolutos de f restringida a R son los puntos (0, 4), (−2, 4) y (2, 4).
Análogamente, la función f(x, y) = 3x2 + 2y2 − 4y restringida la conjunto F2 adopta la expresiónh(x) = −x2 + 2x4. Los puntos críticos de h en el intervalo abierto (−2, 2) son las soluciones de laecuación h0(x) = −2x+8x3 = 0 en dicho intervalo; esto es, x = −12 , x = 0 y x = 1
2 . Luego, los puntosen la frontera F2 candidatos para extremos absolutos son: (2, 4),
¡−12 , 14¢,(0, 0), ¡12 , 14¢ y (2, 4).Por último sólo nos queda evaluar f en todos los puntos encontrados:

Trabajo 7. Curso 2004-05 70
-10
-5
0
5
10
-8-6-4-202468-3000
-2000
-1000
0
1000
2000
3000
Figura 15: Superficie definida por z = h(x, y) = e−x sen y.
f(0, 1) = 3 · 02 + 2 · 12 − 4 · 1 = −2f(−2, 4) = 3 · (−2)2 + 2 · 42 − 4 · 4 = 28f(2, 4) = 3 · 22 + 2 · 42 − 4 · 4 = 28f(0, 4) = 3 · 02 + 2 · 42 − 4 · 4 = 16f¡−12 , 14¢ = 3 · ¡−12¢2 + 2 · ¡14¢2 − 4 · ¡14¢ = −18
f¡12 ,14
¢= 3 · ¡12¢2 + 2 · ¡14¢2 − 4 · ¡14¢ = −18
f(0, 0) = 0.Así, el máximo absoluto de la función f(x, y) = 3x2 + 2y2 − 4y restringida a la región R acotada
por y = 4 e y = x2 es 28 y se alcanza simultáneamente en los puntos (−2, 4) y (2, 4); y su mínimoabsoluto se toma en el punto (0, 1) y este valor mínimo es f(0, 1) = −2.

Trabajo 7. Curso 2004-05 71
-2 2x
y
y=x2
y=4
(0,1)
F1
F2
Figura 16: Esbozo de la región R acotada por las gráficas de y = 4 e y = x2.

Trabajo 8. Curso 2004-05
Problema 1Calcular las siguientes integrales iteradas:
1.−Z π
2
0
Z e
1
³sen yx
´dxdy; 2.−
Z 2
1
Z 3
1
µy
x+x
y
¶dydx; 3.−
Z 1
0
Z x3
0ey/xdydx; 4.−
Z π
0
Z senx
0ydydx;
5.−Z 2
0
Z 1
y/2yex
3dxdy; 6.−
Z 2
0
Z √4−x2
0
Z 8−x2−y2
x2+y2
¡x2 + y2
¢3/2dzdydx; 7.−
Z 0
−1
Z √1−x2
−√1−x2
Z 4
0xdydzdx
En todos los ejercicios esbozar la región de integración.Solución
1.-Z π
2
0
Z e
1
³sen yx
´dxdy =
Z π2
0sen y [lnx]e1 dy =
Z π2
0sen ydy = [− cos y]
π20 = 1
2.-Z 2
1
Z 3
1
µy
x+x
y
¶dydx =
Z 2
1
·y2
2x+ x ln y
¸31
dx =
Z 2
1
µ4
x+ (ln 3)x
¶dx =·
4 lnx+ (ln 3)x2
2
¸21
= 4 ln 2 +3 ln 3
2.
3.-Z 1
0
Z x3
0ey/xdydx =
Z 1
0
£xey/x
¤x30dx =
Z 1
0
³xex
2 − x´dx =
"ex
2
2− x
2
2
#10
=e
2− 1.
4.-Z π
0
Z senx
0ydydx =
Z π
0
·y2
2
¸senx0
dx =1
2
Z π
0sen2 xdx =
1
4
Z π
0(1− cos (2x)) dx =
1
4
·x− 1
2sen (2x)
¸π0
=π
4.
5.-Z 2
0
Z 1
y/2yex
3dxdy =
Z 1
0
Z 2x
0yex
3dydx =
Z 1
0
·ex
3 y2
2
¸2x0
dx = 2
Z 1
0ex
3x2dx =
2
3
hex
3i10=2
3(e− 1) .
6.-Z 2
0
Z √4−x2
0
Z 8−x2−y2
x2+y2
¡x2 + y2
¢3/2dzdydx =
Z π2
0
Z 2
0
Z 8−r2
r2r3rdzdrdθ =
Z π2
0
Z 2
0r4 [z]8−r
2
r2 drdθ =
Z π2
0
Z 2
0
¡8r4 − 2r6¢ drdθ = Z π
2
0
·8r5
5− 2r
7
7
¸20
dθ =28
35
Z π2
0dθ =
27
35π.
7.-Z 0
−1
Z √1−x2
−√1−x2
Z 4
0xdydzdx =
Z 0
−1
Z √1−x2
−√1−x2[xy]40 dzdx = 4
Z 0
−1
Z √1−x2
−√1−x2xdzdx =
4
Z 0
−1[xz]
√1−x2
−√1−x2 dx = 8Z 0
−1x√1− x2dx = −4
·2
3
q(1− x2)3
¸0−1= −8
3.
72

Trabajo 8. Curso 2004-05 73
Problema 2Calcular las siguientes integrales:
1. −ZZ
Rxy2dA, donde R es la región del primer cuadrante acotada por las curvas de ecuación
x = y2 e y = x3
2.−ZZ
R
¡6x+ 2y2
¢dA, donde R es la región del plano acotada por las curvas de ecuación x = y2
e y + x = 2.
3. −ZZ
R
1
1 + x2 + y2dA, donde R es la región del primer cuadrante acotada por la curva de
ecuación x2 + y2 = 1.
4. −ZZ
R
px2 + y2dA, donde R es la región acotada por las curvas de ecuación y = 0 e y =
√2x− x2.
5.−ZZZ
Txy sen zdV , siendo T el cubo determinado por T =
(x, y, z) :0 ≤ x ≤ π0 ≤ y ≤ π0 ≤ z ≤ π
6.−
ZZZQx2dV , siendo Q el tetraedro acotado por los planos coordenados y la parte del primer
octante del plano de ecuación x+ y + z = 1.
7. −ZZZ
Q
px2 + y2 + z2dV , siendo Q el conjunto el sólido acotado por la superficie esférica de
centro el origen y radio dos.Solución
1.-ZZ
Rxy2dA =
Z 1
0
Z √x
x3xy2dydx =
Z 1
0
·xy3
3
¸√xx3dx =
1
3
Z 1
0
³x52 − x10
´dx =
1
3
·2x7
7− x
11
11
¸=
5
77.
2.-ZZ
R
¡6x+ 2y2
¢dA =
Z 1
−2
Z 2−y
y2
¡6x+ 2y2
¢dxdy =
Z 1
−2
£3x2 + 2y2x
¤2−yy2
dy =
Z 1
−2
¡12− 12y + 7y2 − 2y3 − 5y4¢ dy = ·12y − 6y2 + 7y3
3− y
4
2− y5
¸1−2=99
2.
3.-ZZ
R
1
1 + x2 + y2dA =
Z 1
0
Z √1−x2
0
1
1 + x2 + y2dydx =
Z π2
0
Z 1
0
r
1 + r2drdθ =
1
2
Z π2
0
£ln(1 + r2)
¤10dθ =
ln 2
2
Z π2
0dθ =
π ln 2
4.
4.-ZZ
R
px2 + y2dA =
Z 2
0
Z √2x−x2
0
px2 + y2dydx =
Z π2
0
Z 2 cos θ
0r2drdθ =
1
3
Z π2
0
£r3¤2 cos θ0
dθ =
8
3
Z π2
0cos3 θdθ =
8
3
Z π2
0
¡1− sen2 θ¢ cos θdθ = 8
3
·sen θ − sen
3 θ
3
¸π2
0
=16
9.
5.-ZZZ
Txy sen zdV =
Z π
0
Z π
0
Z π
0xy sen zdzdydx =
Z π
0
Z π
0xy [− cos z]π0 dydz = 2
Z π
0
Z π
0xydydx =
2
Z π
0x
·y2
2
¸π0
dx = π2Z π
0xdx = π2
·x2
2
¸π0
=π4
2.

Trabajo 8. Curso 2004-05 74
6.-ZZZ
Qx2dV =
Z 1
0
Z 1−x
0
Z 1−x−y
0x2dzdydx =
Z 1
0
Z 1−x
0x2 [z]1−x−y0 dydx =
Z 1
0
Z 1−x
0
¡x2 − x3 − x2y¢ dydx =
Z 1
0
·x2y − x3y − x2 y
2
2
¸1−x0
dx =
Z 1
0
µx2
2− x3 + x
4
2
¶dx =
·x3
6− x
4
4+x5
10
¸10
=1
60.
7.-ZZZ
Q
px2 + y2 + z2dV =
Z 2
−2
Z √4−x2
−√4−x2
Z √4−x2−y2−√4−x2−y2
px2 + y2 + z2dzdydx =
Z 2π
0
Z π
0
Z 2
0ρρ2 senφdρdφdθ =
Z 2π
0
Z π
0
·ρ4
4
¸20
senφdφdθ = 4
Z 2π
0
Z π
0senφdφdθ =
4
Z 2π
0[− cosφ]π0 dθ = 8
Z 2π
0dθ = 8 [θ]2π0 = 16π.
Problema 3Calcular el volumen de los siguientes sólidos1.−Sólido limitado por las superficies de ecuación z = 0, z = x y x2 + y2 = 4.2.−Sólido limitado por las superficies de ecuación z = 0 y z = 25− x2 − y2.3.−Sólido limitado por las superficies de ecuación z = x2 + y2 y z = 4− 3x2 − 3y2.4.−Sólido limitado por las superficies de ecuación x2 + y2 = 1 y x2 + y2 + z2 = 45.−Sólido interior a las superficies de ecuación x2 + y2 + z2 = 16 y z =
px2 + y2 y exterior a la
superficie de ecuación x2 + y2 + z2 = 4.6.−Sólido limitado por las superficies de ecuación z = 2x2 + y2 y z = 12− x2 − 2y2.7.−Sólido interior a las superficies de ecuación z =p3 (x2 + y2) y x2 + y2 + z2 = 1.Solución
1.- V =
ZZRxdA, donde R es la región del plano limitada por la semicircunferencia de ecuación
x =p4− y2 y el eje de la y.
V =
ZZRxdA =
Z 2
−2
Z √4−y20
xdxdy =1
2
Z 2
−2
£x2¤√4−y20
dy =1
2
Z 2
−2
¡4− y2¢ dy = 1
2
·4y − y
3
3
¸2−2=
16
3.
2.- V =
ZZR
¡25− x2 − y2¢ dA, donde R es la región del plano limitada por la circunferencia de
ecuación x2 + y2 = 25.
V =
ZZR
¡25− x2 − y2¢ dA = Z 5
−5
Z √25−x2
−√25−x2¡25− x2 − y2¢ dydx = Z 2π
0
Z 5
0
¡25− r2¢ rdrdθ =Z 2π
0
Z 5
0
¡25r − r3¢ drdθ = Z 2π
0
·25r2
2− r
4
4
¸50
dθ =54
4
Z 2π
0dθ =
54
2π.
3.- V =
ZZZQdV , siendo Q el sólido comprendido entre las superficies de ecuación z = x2 + y2 y
z = 4− 3x2 − 3y2.

Trabajo 8. Curso 2004-05 75
V =
ZZZQdV =
Z 1
−1
Z √1−x2
−√1−x2
Z 4−3x2−3y2
x2+y2dzdydx =
Z 2π
0
Z 1
0
Z 4−3r2
r2rdzdrdθ =
Z 2π
0
Z 1
0[z]4−3r
2
r2 rdrdθ =Z 2π
0
Z 1
0
¡4r − 4r3¢ drdθ = Z 2π
0
£2r2 − r4¤1
0dθ = 2
Z 2π
0dθ = 4π.
4.- V =
ZZZQdV , aunque no se menciona, entenderemos que Q es el sólido interior al cilindro de
ecuación x2 + y2 = 1 e interior a la esfera de ecuación x2 + y2 + z2 = 4.
V =
ZZZQdV =
Z 1
−1
Z √1−x2
−√1−x2
Z √4−x2−y2−√4−x2−y2
dzdydx =
Z 2π
0
Z 1
0
Z √4−r2
−√4−r2rdzdrdθ =
Z 2π
0
Z 1
0r [z]
√4−r2
−√4−r2 drdθ = 2Z 2π
0
Z 1
0r√4− r2drdθ = −
Z 2π
0
·2
3
q(4− r2)3
¸10
dθ =
16
3
µ16
3− 2√3
¶Z 2π
0dθ = 2
µ16
3− 2√3
¶π.
5.- V =ZZZ
QdV , siendo Q el sólido exterior a la superficie de ecuación x2 + y2 + z2 = 4, e interior
a las suprficies de ecuación x2 + y2 + z2 = 16 y z =px2 + y2
V =
ZZZQdV = 4
Z √2
0
Z √2−x2
0
Z √16−x2−y2√4−x2−y2
dzdydx+ 4
Z √2
0
Z √8−x2
√2−x2
Z √16−x2−y2x2+y2
dzdydx
+4
Z √8
√2
Z √8−x2
0
Z √16−x2−y2x2+y2
dzdydx = 4
Z π2
0
Z π4
0
Z 4
2ρ2 senφdρdφdθ =
4
Z π2
0
Z π4
0
·ρ3
3
¸42
senφdφdθ =112
3
Z π2
0
Z π4
0senφdφdθ =
112
3
Z π2
0[− cosφ]
π40 dθ =
112
3
Ã1−√2
2
!Z π2
0dθ =
56
3
Ã1−√2
2
!π.
6.- V =
ZZZQdV , siendo Q el sólido comprendido entre las superficies de ecuación z = 2x2 + y2y
z = 12− x2 − 2y2.
V =
ZZZQdV =
Z 2
−2
Z √4−x2
−√4−x2
Z 12−x2−2y2
2x2+y2dzdydx =
Z 2
−2
Z √4−x2
−√4−x2¡12− 3x2 − 3y2¢ dydx =Z 2π
0
Z 2
0r¡12− 3r2¢ drdθ = Z 2π
0
£6r2 − r3¤2
0dθ = 16
Z 2π
0dθ = 32π.
7.- V =
ZZZQdV , siendo Q el sólido interior a las superficies de ecuación z =
p3 (x2 + y2) y
x2 + y2 + z2 = 1.
V =
ZZZQdV =
Z 12
− 12
Z q14−x2
−q
14−x2
Z √1−x2−y2√3(x2+y2)
dzdydx =
Z 2π
0
Z π6
0
Z 1
0ρ2 senφdρdφdθ =
1
3
Z 2π
0
Z π6
0senφdφdθ =
1
3
Z 2π
0[− cosφ]
π60 dθ =
2−√36
Z 2π
0dθ =
¡2−√3¢π
3.