Embed Size (px)
Citation preview
Traite automatique des vaches
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 1/15
CHAÎNE D’INFORMATION
ACQUERIR TRAITER COMMUNIQUER
CHAÎNE D’ENERGIE
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTRE
ACTI
ON
Traire les vaches est une opération pénible et répétitive. Cette opération doit se faire dans le respect des animaux et elle est soumise à des horaires contraignants. Les agriculteurs souhaitent maintenant disposer de plus de temps pour gérer leur exploitation agricole et pouvoir concilier vie professionnelle et personnelle. Dans cette optique, des sociétés ont développé des systèmes de traite automatique. Certaines performances de de système font l’objet de ce TD.
A - ANALYSERA - ANALYSERA - ANALYSER
A3 : Analyse fonctionnelle, structurelle, comportementale
Identifier la structure d'un système asservi : chaîne directe, capteur, commande (fonction différences, correction)A3 : Analyse fonctionnelle, structurelle,
comportementale Identifier et positionner les perturbations
A4 : Caractériser les écarts Quantifier des écarts entre des valeurs attendues et des valeurs obtenues par simulation
A5 : Apprécier la pertinence et la validité des résultats Prévoir l’ordre de grandeur et l’évolution de la simulation
B - MODELISERB - MODELISERB - MODELISER
B2 : Proposer un modèle de connaissance et de comportement
Paramétrer les mouvements d’un solide indéformable
B2 : Proposer un modèle de connaissance et de comportement
Etablir le schéma bloc du système
B2 : Proposer un modèle de connaissance et de comportement
Déterminer les fonctions de transfert à partir d’équations physiques (modèle de connaissance)Déterminer les fonctions de transfert en boucle ouverte et boucle ferméeB2 : Proposer un modèle de connaissance et
de comportement Identifier les paramètres caractéristiques d’un modèle du premier ou du second ordre à partir de sa réponse indicielle
B2 : Proposer un modèle de connaissance et de comportement
Identifier les paramètres d’un modèle de comportement à partir d’un diagramme de Bode
B2 : Proposer un modèle de connaissance et de comportement
Associer un modèle de comportement (premier et second ordre, dérivateur, intégrateur) à partir d’un diagramme de Bode
C - RESOUDREC - RESOUDREC - RESOUDRE
C2 : Procéder à la mise en oeuvre d’une démarche de résolution analytique
Proposer une démarche permettant de déterminer une loi de mouvement
C2 : Procéder à la mise en oeuvre d’une démarche de résolution analytique
Prévoir les réponses temporelles des systèmes linéaires du premier et second ordreC2 : Procéder à la mise en oeuvre d’une
démarche de résolution analytique Prévoir les performances de rapidité et de précision d’un SLCIC2 : Procéder à la mise en oeuvre d’une démarche de résolution analytique
Déterminer des paramètres permettant d’assurer la stabilité, en s’appuyant sur les tracés fréquentiels dans le plan de Bode
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Présentation Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 2/15
SommaireA. ___________________________________________________________Mise en situation! 4
A.1.Description du système 4
A.2.Cahier des charges 5A.2.1. Fonction FT141 : « Détecter la position de la vache »A.2.2. Fonction FT142 : « Asservir en position le bras automatisé »
B. _________________________________________________________Etude cinématique! 8
C. __________________________________________________Etude de l’asservissement ! 9
C.1.Description du système 9
C.2.Modélisation du moteur à courant continu 10
C.3.Etude de la stabilité du système 12
C.4.Etude du temps de réponse du système 14
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Sommaire Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 3/15

A. Mise en situationL’objectif de ce TD est de quantifier les performances du système afin de conclure sur le respect du cahier des
charges. Nous étudierons dans ce TD les performances de la mise en position du bras de traite, en étudiant d’abord la cinématique du bras, puis son asservissement en position
A.1. Description du système
Le robot est composé :• d’une zone (box où la vache est installée lors de la traite) composée d’une structure tubulaire
mécanosoudée, équipée de 2 portes (entrée et sortie), d’un tapis de pesée et d’une auge réservée à l’alimentation solide (granulés) ;• d’un système de bras articulé, permettant au système de traite de se positionner au mieux pour traire
la vache ;• d’une interface homme/machine, écran de contrôle tactile, qui permet au personnel agricole d’obtenir
des renseignements sur le processus en cours et de gérer d’éventuelles opérations de maintenance.
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Mise en situation Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 4/15
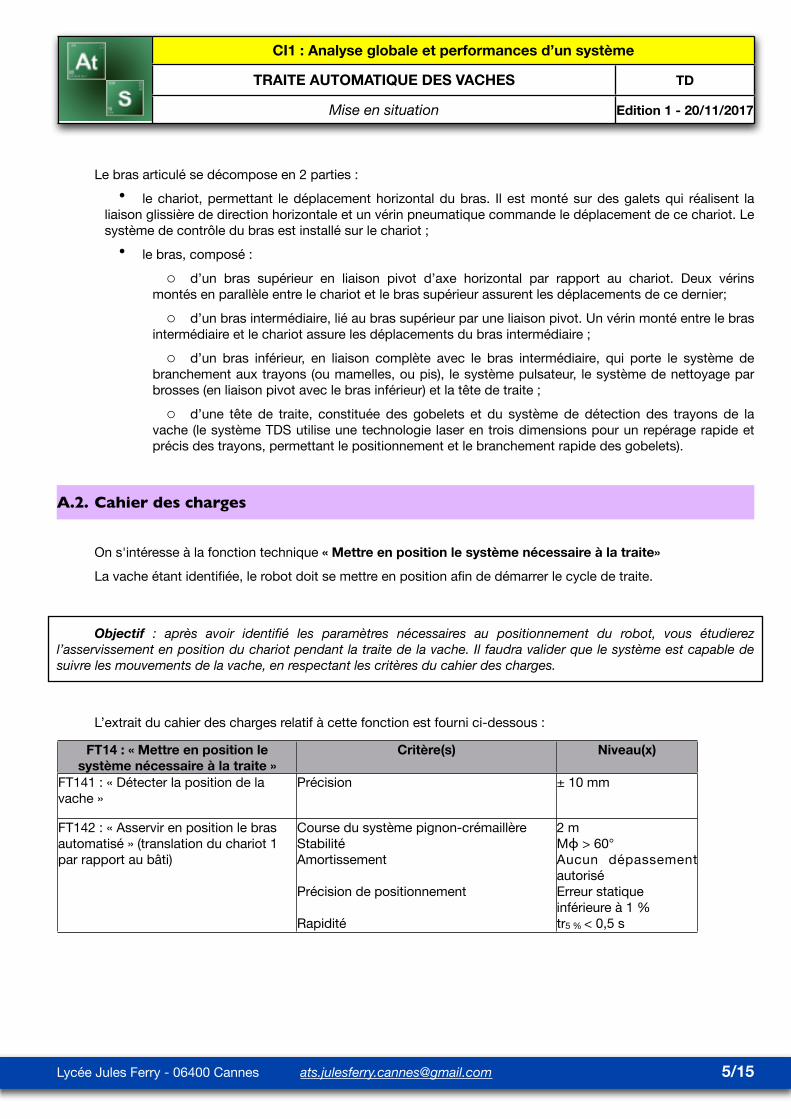
Le bras articulé se décompose en 2 parties :• le chariot, permettant le déplacement horizontal du bras. Il est monté sur des galets qui réalisent la
liaison glissière de direction horizontale et un vérin pneumatique commande le déplacement de ce chariot. Le système de contrôle du bras est installé sur le chariot ;• le bras, composé :
o d’un bras supérieur en liaison pivot d’axe horizontal par rapport au chariot. Deux vérins montés en parallèle entre le chariot et le bras supérieur assurent les déplacements de ce dernier;o d’un bras intermédiaire, lié au bras supérieur par une liaison pivot. Un vérin monté entre le bras
intermédiaire et le chariot assure les déplacements du bras intermédiaire ;o d’un bras inférieur, en liaison complète avec le bras intermédiaire, qui porte le système de
branchement aux trayons (ou mamelles, ou pis), le système pulsateur, le système de nettoyage par brosses (en liaison pivot avec le bras inférieur) et la tête de traite ;o d’une tête de traite, constituée des gobelets et du système de détection des trayons de la
vache (le système TDS utilise une technologie laser en trois dimensions pour un repérage rapide et précis des trayons, permettant le positionnement et le branchement rapide des gobelets).
A.2. Cahier des charges
On s'intéresse à la fonction technique « Mettre en position le système nécessaire à la traite»
La vache étant identifiée, le robot doit se mettre en position afin de démarrer le cycle de traite.
Objectif : après avoir identifié les paramètres nécessaires au positionnement du robot, vous étudierez l’asservissement en position du chariot pendant la traite de la vache. Il faudra valider que le système est capable de suivre les mouvements de la vache, en respectant les critères du cahier des charges.
L’extrait du cahier des charges relatif à cette fonction est fourni ci-dessous :
FT14 : « Mettre en position le système nécessaire à la traite »
Critère(s) Niveau(x)
FT141 : « Détecter la position de la vache »
Précision ± 10 mm
FT142 : « Asservir en position le bras automatisé » (translation du chariot 1 par rapport au bâti)
Course du système pignon-crémaillèreStabilitéAmortissement
Précision de positionnement
Rapidité
2 mMϕ > 60°Aucun dépassement autoriséErreur statique inférieure à 1 % tr5 % < 0,5 s
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Mise en situation Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 5/15

A.2.1. Fonction FT141 : « Détecter la position de la vache »
Lorsque la vache arrive sur le tapis de pesée, les informations délivrées par les capteurs permettent non seulement d’avoir l’information de la masse de la vache, mais ils permettent également d’obtenir la position du centre de gravité de la vache.
A.2.2. Fonction FT142 : « Asservir en position le bras automatisé »
Lorsque la vache est identifiée, la tête de traite (comprenant les gobelets trayeurs, le système de détection des trayons et le système de nettoyage escamotable) est positionnée sous la vache, dans une position telle que les gobelets trayeurs soient au plus proche des trayons. La position de la tête de traite est définie par G4, son centre de gravité (la tête de traite 4 est en liaison encastrement avec le bras intermédiaire 3 et elle n’est pas représentée sur la figure page suivante).
On donne le paramétrage géométrique lié au schéma cinématique de la page suivante :
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Mise en situation Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 6/15
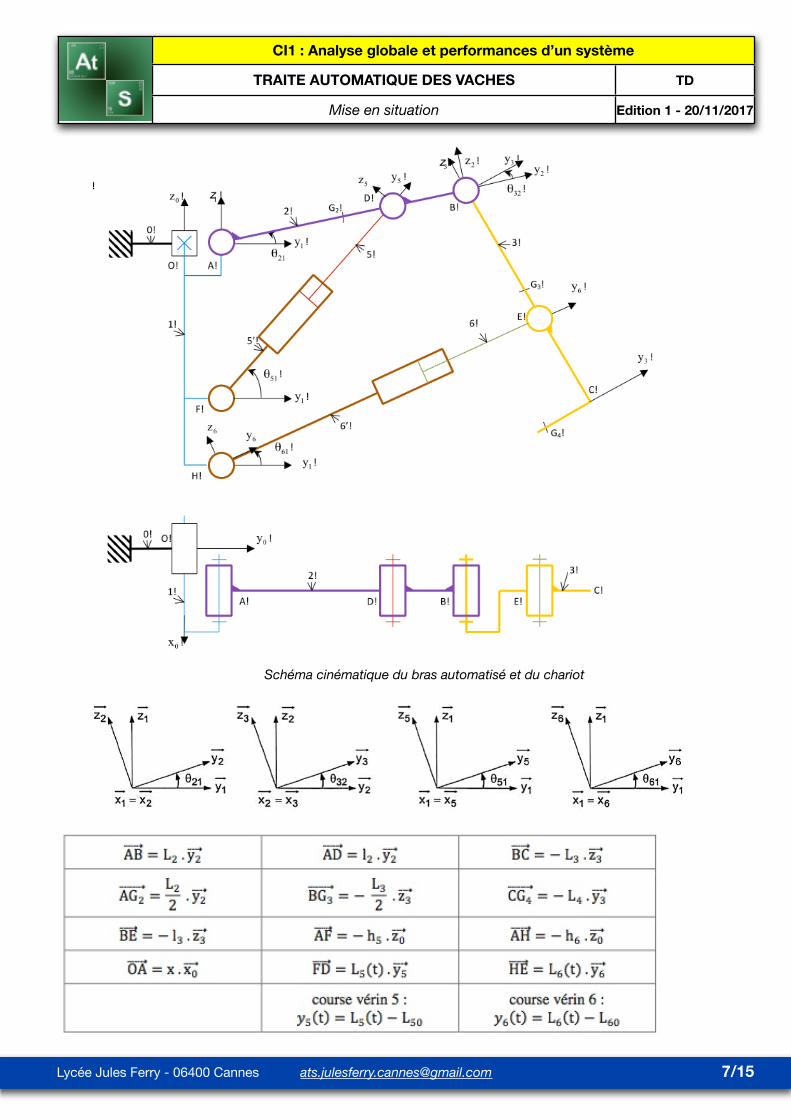
Schéma cinématique du bras automatisé et du chariot
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Mise en situation Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 7/15
B. Etude cinématique
Question 1
Quels sont les paramètres géométriques permettant de piloter les mouvements du bras robotisé ?
Question 2
A partir du schéma cinématique, écrire le graphe des liaisons. Vous noterez Lij la liaison entre un solide i et un solide j. Vous définirez leurs caractéristiques.
Question 3
Etablir les relations géométriques liant le centre de gravité G4 de la tête de traite 4 défini par les coordonnées xG4 , yG4 , zG4( ) dans le repère R0, les paramètres géométriques x, θ21 et θ32 et les longueurs L2, L3 et L4.
Question 4
Donner l’expression de VG4∈4/0! "!!!!!
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Etude cinématique Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 8/15
C. Etude de l’asservissement
C.1. Description du système
Le système de traite étant positionné suivant y0!"!
et suivant z0!"
, nous allons nous intéresser plus
particulièrement au mouvement du chariot 1, suivant la direction x0!"!
, lorsque le robot est en phase de traite de la vache (gobelets trayeurs positionnés sur la vache et en mode extraction du lait).
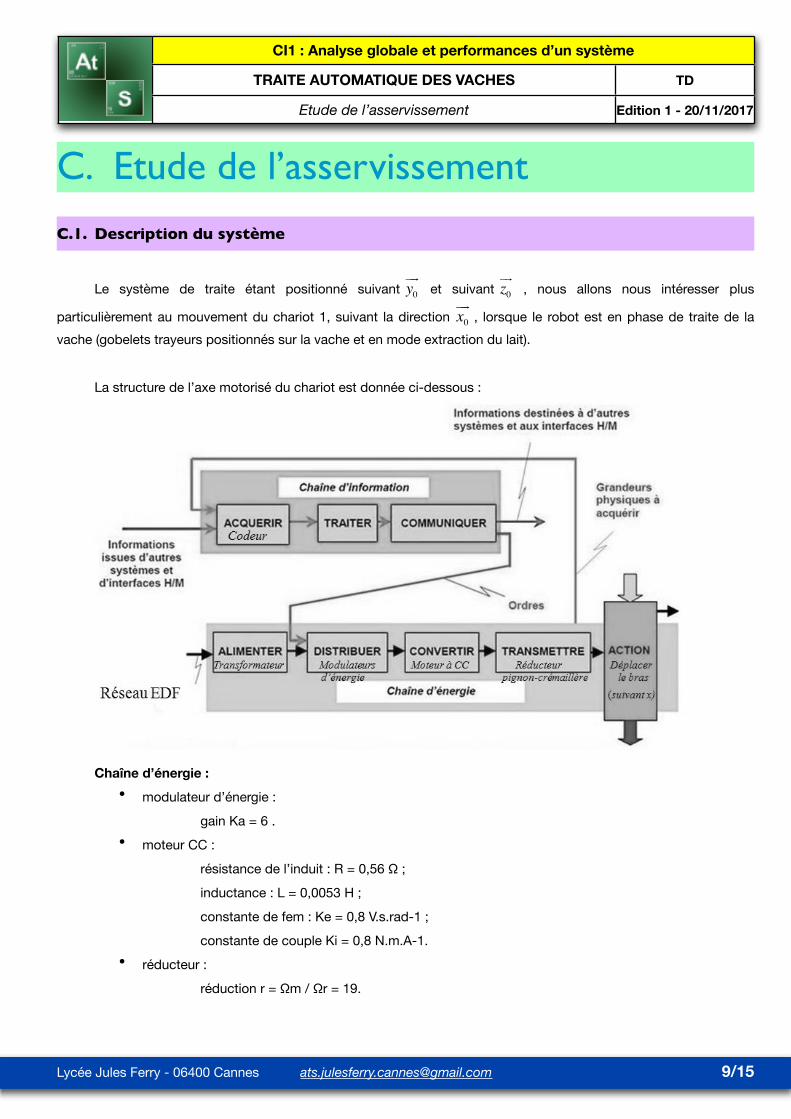
La structure de l’axe motorisé du chariot est donnée ci-dessous :
Chaîne d’énergie :• modulateur d’énergie :
gain Ka = 6 .• moteur CC :
résistance de l’induit : R = 0,56 Ω ;
inductance : L = 0,0053 H ;
constante de fem : Ke = 0,8 V.s.rad-1 ;
constante de couple Ki = 0,8 N.m.A-1.• réducteur :
réduction r = Ωm / Ωr = 19.
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Etude de l’asservissement Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 9/15

• pignon-crémaillère :
diamètre du pignon : ∅p = 50 mm.• dynamique du chariot 1 dans son mouvement par rapport au bâti :
F(t)−Fp (t)=MeqΓchariot 1/bâti
F(t) est l’effort transmis pour le déplacement du chariot (en N) ;
Fp(t) est un effort qui représente la perturbation que peut subir le système (en N) ;
Masse équivalente (en déplacement) : Meq = 50 kg ;
Γchariot 1/bâti est l’accélération du chariot par rapport au bâti (en m.s-2).
Chaîne d’information :• codeur absolu et CNA : Kc = 0,055 V/mm.
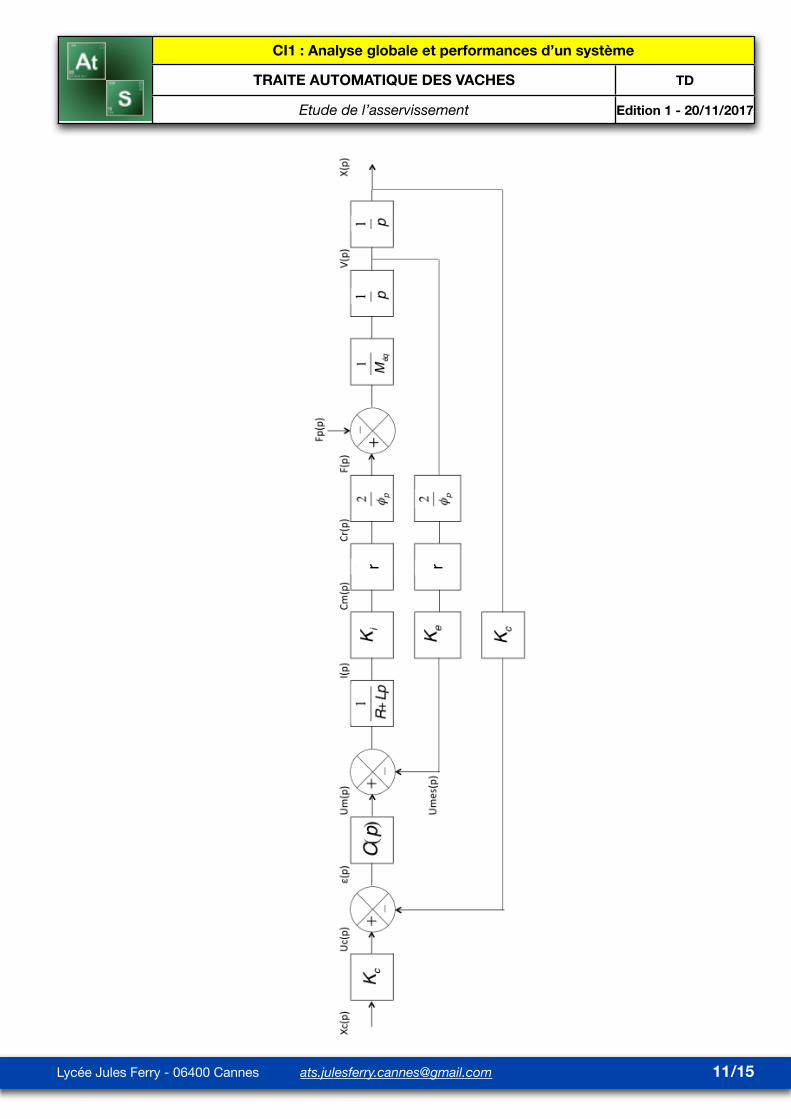
La modélisation (schéma-bloc du déplacement du chariot en translation par rapport au bâti) est donnée sur le schéma en annexe 1.
Hypothèses de travail :
- il n’y a pas de perturbation extérieure, donc Fp(p) = 0 ;
- la valeur du correcteur est C(p) = 1.
C.2. Modélisation du moteur à courant continu
Question 5
Déterminer la fonction de transfert H (p)= V (p)Um (p)
en fonction des paramètres de l’énoncé.
Question 6
Ecrire la fonction de transfert H(p) sous la forme H (p)= G
1+ 2zωn
p+ 1ωn2 p
2 puis :
• donner les expressions du facteur d’amortissement z, de la pulsation propre ωn et le gain G en fonction des paramètres de l’énoncé ;• faire les applications numériques ;
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Etude de l’asservissement Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 10/15
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Etude de l’asservissement Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 11/15
r r
Question 7
Calculer la valeur de la pseudo-période de la réponse indicielle du système seul.
A l’aide de l’abaque du temps de réponse réduit fourni en annexe, calculer le temps de réponse du système seul à une entrée en échelon.
En déduire le nombre d’oscillations du système avant d’atteindre le temps de réponse. Quelle conclusion sur la stabilité pouvez-vous en tirer ?
C.3. Etude de la stabilité du système
Après avoir modélisé le comportement du moteur, nous allons étudier la stabilité du système d’asservissement de position du chariot et son respect vis-à-vis du cahier des charges.
Question 8
Déterminer maintenant la fonction de transfert en boucle ouverte (FTBO) du système d’asservissement de
position du chariot : FTBO(p)= Xm (p)ε(p)
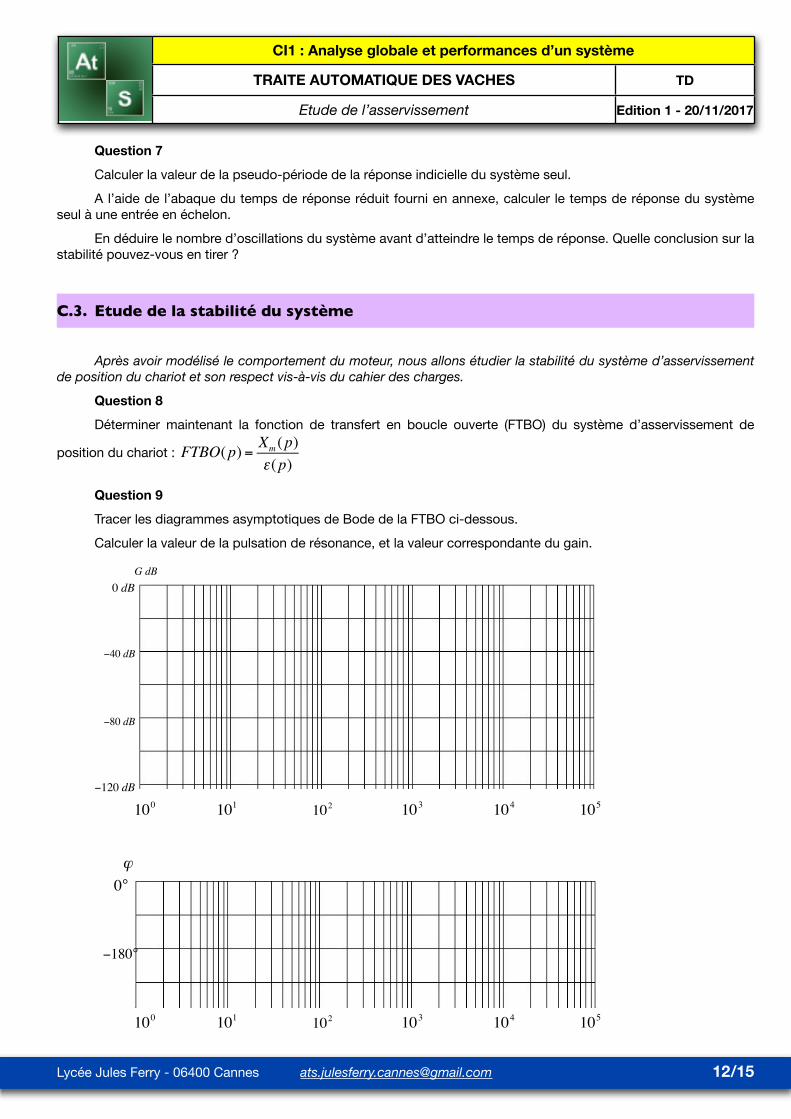
Question 9
Tracer les diagrammes asymptotiques de Bode de la FTBO ci-dessous.
Calculer la valeur de la pulsation de résonance, et la valeur correspondante du gain.
102 103 104
0 dB
−40 dB
−80 dB
101
−180°
0°ϕ
105100
G dB
102 103 104101 105100
−120 dB
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Etude de l’asservissement Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 12/15
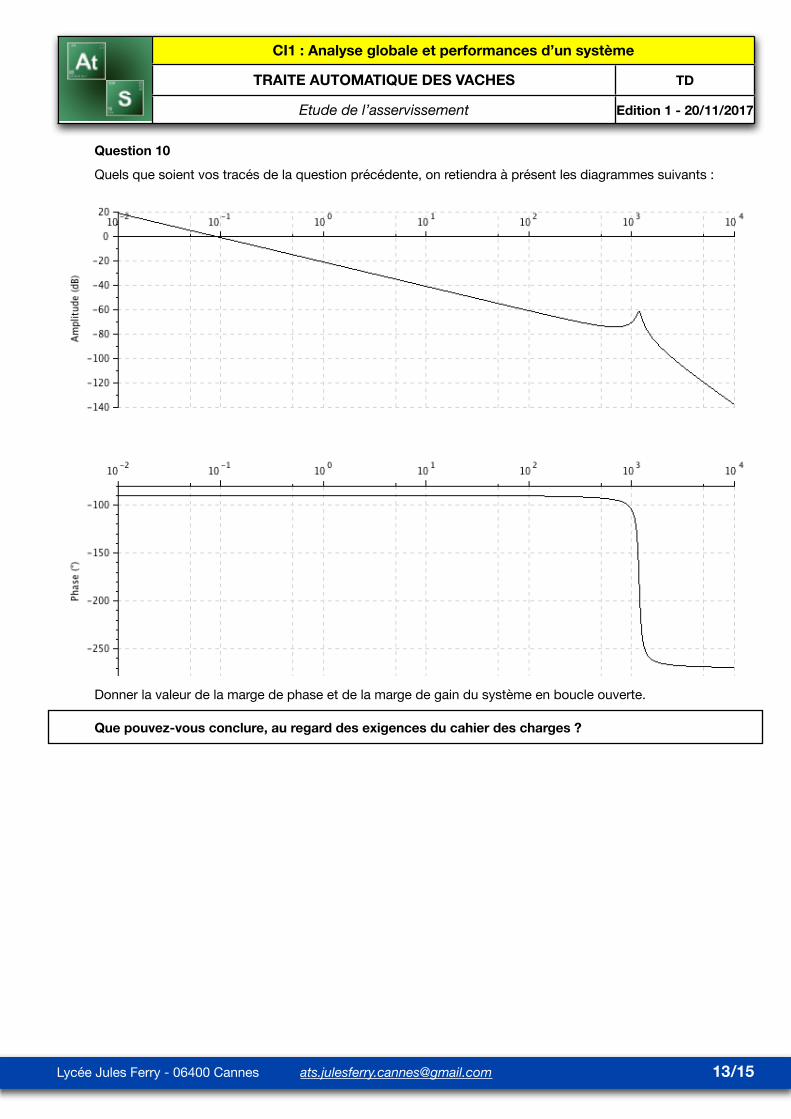
Question 10
Quels que soient vos tracés de la question précédente, on retiendra à présent les diagrammes suivants :
Donner la valeur de la marge de phase et de la marge de gain du système en boucle ouverte.
Que pouvez-vous conclure, au regard des exigences du cahier des charges ?
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Etude de l’asservissement Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 13/15
C.4. Etude du temps de réponse du système
Il reste à présent à vérifier le temps de réponse du système bouclé, avec l’hypothèse d’un correcteur C(p)=1
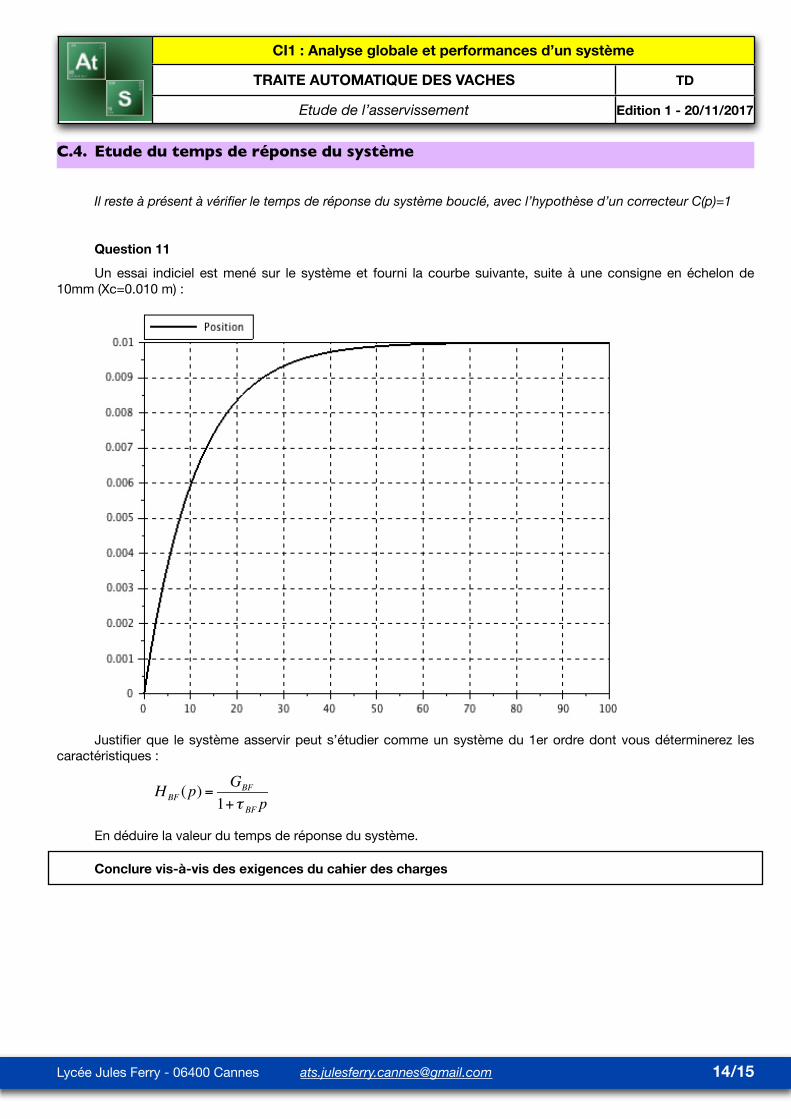
Question 11
Un essai indiciel est mené sur le système et fourni la courbe suivante, suite à une consigne en échelon de 10mm (Xc=0.010 m) :
Justifier que le système asservir peut s’étudier comme un système du 1er ordre dont vous déterminerez les caractéristiques :
HBF (p)=GBF
1+τ BF p
En déduire la valeur du temps de réponse du système.
Conclure vis-à-vis des exigences du cahier des charges
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Etude de l’asservissement Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 14/15
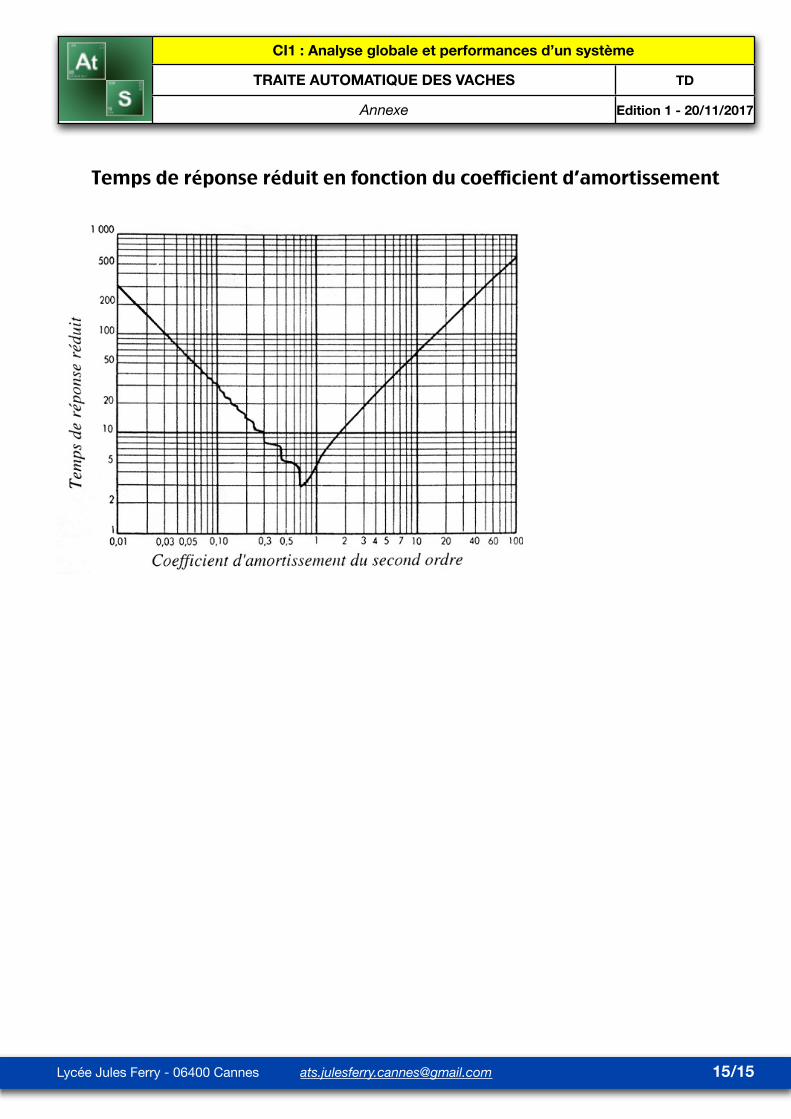
Temps de réponse réduit en fonction du coefficient d’amortissement
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
TRAITE AUTOMATIQUE DES VACHES TD
Annexe Edition 1 - 20/11/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 15/15

























![Costa rica [enregistrement automatique] [enregistrement automatique]](https://img.pdfslide.tips/doc/110x75/557d7c91d8b42a2c428b4ffd/costa-rica-enregistrement-automatique-enregistrement-automatique.jpg)


