Embed Size (px)
Citation preview

Wol. 16, 1 9 6 5 TransversaIschwingungen durchstr6mter Saiten 201
Zusammen[assung Es wird gezeigt, dass Tensorgeschwindigkeiten ~materiell objektiv,, sind, wenn sie yon
den Geschwindigkeiten ihrer Abbildung in einer festen Konfiguration abgeleitet sind. H6here Geschwindigkeiten werden formuliert, und eine h6here ,~Jaumanngeschwindig- keit,, wird definiert, die gegeniiber der yon PRAGER kiirzlich eingefiihrten Definition ge- wisse Vorteile aufweist.
Bekannte StabilitAtskriterien fiir K6rper, deren Randbedingungen gegebene KrAfte enthalten, werden auf Grund des Druckerschen Postulats bestAtigt, und neue Kriterien werden fiir K6rper unter anderen Randbedingungen entwickelt.
Allgemeine bewegliche ,crAumliche,, Koordinatsysteme werden schliesslich eingefiihrt. und die zugeh6rigen Tensorgeschwindigkeitskomponenten werden mit Riicksicht auf gr6sste Einfachheit abgeleitet.
(Received: September 15, 1964.)
Transversalschwingungen durchstr6mter Saiten Yon WERNER ROTH, Karlsruhe, Deutschland
1. E in l e i tung
Bei einer sehwingenden Saite bilden sich stehende Transversalwellen aus. Solche Wellen weisen mit der niedersten Schwingungsfrequenz der Saite keinen und ffir h6here Frequenzen mehrere Schwingungsknoten auf. Die Ausschl~ge der Saite k6nnen stets durch Superposition zweier mit entgegengesetzten Geschwindigkeiten laufenden Transversalwellen dargestellt werden. Die Beschreibung der L6sung ftir die schwin- gende Saite ist bekannt EI~ 1), und die Schwingungsbilder der Transversalausschl~ige der Saite sind mit einfachen Modellen darstellbar. Sehr einpr~gsam sind auch die im technischen Museum in Mfinchen zu sehenden beweglichen Wellenbilder verschiedener Transversalschwingungen yon Saiten. Die Integrale, welche fortschreitende Wellen- zfige darstellen, erf~llen zwar die Differentialgleichung der schwingenden Saite, nicht aber die Randbedingungen ftir eine in ihren Endpunkten festgehaltene Saite. Eine fortschreitende Transversalwelle kann also niemals die L6sung ftir eine endlich ]ange, in ihren Endpunkten festgehaltene Saite sein. Das trifft nicht ftir eine durchstr6mte Saite oder einen durchstr6mten Schlauch zu. Die Bewegungsgleichung einer solchen Saite ist
(S + p F + v~/ZF) y,~ + 2 V #F yx, + # y , , + e Y, + Ky : 0 . (1)
In dieser Gleichung stellt S die unmittelbar auf den Saiten- oder Schlauchmantel ein- wirkende L~tngskraft dar, sie soll positiv als Druckkraft gerechnet werden, p F i s t die durch den Innendruck des fliessenden Mediums fiber den ]ichten Querschnitt F der Saite oder des Schlauches erzeugte statische Druckkraft, und v 2 #F stellt den Strahl- druck des fliessenden Mediums dar. Durch die Coriolisbeschleunigung wird das Tr~tg- heitsglied 2 v #F Yx t verursacht, wobei die Relativbewegung des Mediums zur Saite mit der Str6mungsgeschwindigkeit v erfolgt. Die Masse des Mediums bezogen auf die
1) Die Ziffern in eekigen Klammern verweisetl auf das Literaturverzeichnis, Seite 214.

202 WERNER ROTH ZAMP
L~ingeneinheit der Saite ist mit #F bezeichnet. Die Gesamtmasse # = #R + #~ setzt sich additiv aus der Saitenmasse/z R des Saitenmantels und dem Massenanteil #F des Mediums zusammen. Die D~mpfung sei dutch die DRmpfungsziffer Q beschrieben, und um eine zus~ttzliche, gewisse Verallgemeinerung zu erhalten, sei auch eine elasti- sche Bettung der Saite mit der Bettungsziffer K in die Rechnung aufgenommen. Die Gleichung (1) kann den Bewegungsgleichungen ffir durchstrSmte Rohre. wie sie in der Arbeit ~2] zu finden sind, entnommen werden.
2. L6sungsansatz
Es soll versucht werden, die Gleichung (1) fiber einen L6sungsansatz der Form
y(x, t) = / ( x ) F (a x + b t)~) (2)
zu 16sen. Diese L6sung ffir den Ausschlag y(x, t) der Saite stellt eine Funktion dar, welche ein Produkt aus einer reinen Ortsfunktionf(x) und einer fortschreffenden, mit der Geschwindigkeit w = - b/a laufenden Transversalwelle F (a x + b t) ist. Die Ortsfunktionf(x) deformiert also gewissermassen nur 6rtlich die Amplituden und die Wellenform der fortschreitenden Transversalwelle F (a x + b t), ohne jedoch zu ver- hindern, dass eine solche mit der Geschwindigkeit w laufende Welle vorhanden ist. Es wird sich zeigen, dass die Funktion f(x) so bestimmbar ist, dass die Randbedin- gungen ffir die durchstr6mte, in ihren Endpunkten x = 0 und x = 1 (Figur 1) festge-
�9 ~ t
S
Figur 1
In ihren E n d p u n k t e n fes tgehal tene und du rchs t r6mte Saite.
haltene Saite erffillt sind. Setzt man nXmlich (2) in (1) ein, dann erh~lt man, wenn Ableitungen der Funktion f(x) nach x mit Strichen und Ableitungen der Funktion F (a x + b t) nach z = a x + b t mit Punkten bezeichnet werden
f " F S~+ f [ F (Sxa~ + 2 V l ~ s a b + l~b ~) + F e b + F K] (3)
+ f ' i72 [Sxa + v~Fb] = O, wobei
S x = S + p F + v ~#F (4)
darstellt. W~hlt man ffir den Quotienten a/b die Beziehung a/b = -- v #s/S ~, dann ver- schwindet der letzte Term in (3), und die Wellengeschwindigkeit der Transversalwelle
~) Dieser Ansatz lfisst s ich auch auf du rchs t r6mte , biegesteJte Rohre anwenden, wie ill e iner anderen Arhe i t gezeigt werden wird.

Vol. 16, 1 9 6 5 Transversalschwingungen durchstrSmter Saiten 203
ist damit b S �9
-- (5) a v #e
Die gekiirzte Gleichung
[/7 - ~ * S K] = 0 , (3a) f " F S ~ + f [ S ~ # b 2 + l ~ o b +
welche die Gr6sse
S x ~ = S + p F + v 2 ~r ~ (4a) # entNilt , kann nun mit
�9 J g n P ;
f (x) = s m - - ~ - - (n = 1; 2; 3; ... oo)
in eine gew6hnliche Differentialgleichung zweiter Ordnung far die Funkt ion F (ax + b t) ~ F(z)
2ff+/~ #~b- S -x~ + F --b~Sx ~ K - S x = 0 (3b) #
umgeformt werden. Der LSsungsansatz F(z) = exp i r z fiir diese Gleichung fiihrt auf die charakteristische Gleichung
i q S x S x [ ( ~ n ) ~ ] 7 2 _ ~" ~ 0 /~b S xx /~b2Sx x K - - S x - - 1
welche die Wurzeln
rln, 2 n - - b S ~x 2_~__. ~_ ( ~ _ _ ~ _ ( ~ n _ ) + K /~sx ] (6)
besitzt. Damit liegt die allgemeinere L6sung
oo . 0"g $r X �9 .
y = ~_~ s l n - ~ - - (cln e*'l,,z + c2 n e, r2,,z) (2a) n = l
der Differentialgleichung (1) vor, welche bereits schon den Randbedingungen y(O, t) = 0 und y(l, t) = 0 geniigt, da die Funkt ion f (x) = sin (~ n x/l) Nullstellen in den Endpunk ten x = 0 und x = 1 der Saite aufweist. Die beliebigen Kons tan ten c 1 ~ und c 2. ergeben sich aus den Anfangsbedingungen oder Anfangsst6rungen y(x, 0) = ~0(x) und yt(x, 0) = #(x) nach den Gleichungen
�9 ~ n X g i r l n a X e i r2naX) y(x, 0) = 9(x) : s l n ~ - ( q , + c~n ,
oo
~-~ . ~ n X i r l n a x e i r 2 n a X ) yt(x, O) = q)(x) = i o 2.~ s l n ~ - - (qn r l , e + c~n ten 6
n = l
/ (7)
3. D i s k u s s i o n d e r L 6 s u n g
Ftir die Art der sich einstellenden Bewegung der Saite, dafiar, ob sie stabil oder instabil verlAuft, also mit der Zeit exponentiell ab- oder aufklingt, ist der Fak to r i r b des zeitabNingigen Gliedes des Exponen ten i r z entscheidend. Der Aufbau dieses

204 WERNER ROTtI ZAMP
Faktors 0
el* S xx - 4 - ~ , - ~ f i + - ~ - - - K /~ Sx (6a)
ltisst erkennen, dass bei nichtvorhandener oder verschwindender Dt/mpfung Q = 0 Instabilit/it vermieden wird, wenn die Bedingungen
oder (8)
und
Da aber immer
erftillt sind. Da die Forderungen (8) ffir alle Werte von n (n = 1; 2; 3; ... co) erftillt sein mfissen weil in der L6sung (2a) eben alle Partikularintegrale keinen instabiten Bewegungsablauf der Saite beschreiben dtirfen, k6nnen sie versch~irft werden zu
K 1 = Ia) S ~ * < 0 und S * < O oder S * > ~
(8a) IIa) S * * > 0 und S x = + 0 .
S ~ - S . . . . (9)
ist, also stets die Ungleichung S* -- S** > 0 besteht, ist die Bedingung I I a von (8a) zur Vermeidung der Instabilittit der Bewegung der Saite sinnlos, und es bleibt I a fibfig. Diese Forderung I a besteht aber eigentlich aus zwei wahlweise zur Verffigung stehenden Kriterien; die erste Aussage S** < 0 und S* < 0 kann wegen (9), da S** < 0 immer von selbst schon erfiillt ist, wenn nur S* < 0 ist, in dem Kritefium
S x = S Jv p F ~- 73 2/z F < 0 (10)
zusammengefasst werden. Es wird sich zeigen, wie die Rechnung weiter unten ergeben wird, dass dieses Kriterium (10) bei Beriicksichtigung einer Dttmpfungsziffer ~ ~ 0' mit oder ohne Bettungsziffer K ebenfalls zustande kommt. Die zweite Aussage S xx < 0 und S x > Kl2/~ ~ der Forderung I a kann wieder wegen Bestehens der Beziehung (9) in dem Kriterium
K 1' v2 tt~ ~ < S x < - - (11)
tt
zur Vermeidung der Instabilit/it der Saite zusammengefasst werden. Damit (11) aber i iberhaupt erst sinnvoll sein kann, muss v 2 > K 13 tt/j # At } sein. Aus dieser in der technischen Anwendung keineswegs immer erfiillten und erfiillbaren Beziehung zwischen den wesentlichen Gr6ssen v und K ergibt sich eine gewisse Fragwiirdigkeit des Kriteriums (11).
Wenn die/3ettungsziffer K = 0 ist, dann reduziert sich die Bedingung I yon (8) yon vornherein auf
S ~ x = S + p F + v 2 / ~ F ~ n _ < 0 , (12) #
und dieses Kriterium zur Vermeidung der Instabilit/it der Saite wurde schon in der Arbeit [3] angegeben; Bedingung I I wird sinnlos.

Vol. 16, 1 9 6 5 Transversalschwingungen durchstr/Smter Saiten 205
Andere Aussagen fiber die Stabilit~it oder Instabilit~it der durchstr6mten Saite liegen vor, wenn die D~impfungsziffer 0 > 0 und also vorhanden ist. Zun~ichst sind wegen (9) nur die drei Vorzeichenkombinationen
I I I ) S x > 0 , S x x > 0 ; IV) S ~ > 0 , S ~ < 0 ; V) S ~ < 0 , S x x < 0 ; (13)
m6glich und sinnvoll. Die Kombination I I I ffihrt zur Instabilit~it der Saite, da hier ffir alle Werte von
n > - -~ l Vf f ,
positive Realteile in dem Faktor i r b (6 a) enthalten sind und demnach diese Partiku- larintegrale in der Zeit aufklingende Transversalausschl~ige der Saite beschreiben. Zur Diskussion der Stabilit~t oder Instabilit~it der Bewegung mfissen aber alle Partikularintegrale in Betracht gezogen werden, da sie zum Aufbau der L6sung (2a), welche den Anfangsbedingungen (7) genfigen soll, erforderlich sind. Die Vorzeichen- kombination IV von (13) ffihrt ebenfalls zur Instabilit~tt, da nun ffir alle hinreichend grosse Werte von n, n~tmlich ftir alle
S x S~
der Realteil des Faktors i r b, - ~ S*/2 # S �9 �9 posit ivist , w/ihrend der Wert der Wurzel in (6 a) imagin~ir wird. Diese Partikularintegrale beschreiben also auch wieder zeitlich aufklingende Ausschl/ige der Saite. Endlich ffihrt die Kombination V der Vorzeichen der KrMte S x und S x* zu einer stabilen Bewegung der Saite. Wenn n/imlich der Wert der Wurzel in (6a) nun fiberhaupt reell ist, dann ist er seinem Betrag nach jedenfalls stets kleiner als ~ S ~ / 2 # S ~ , so dass der Faktor i r b immer nega t iv i s t . Sind die Wurzelwerte in (6 a) abet imagin/ir, dann ist der Realteil von i r b gleich -- ~ S~/2 # S x ~, also ebenfalls immer negativ. Daraus folgt, dass in beiden F~illen und ffir alle Werte von n (n = 1; 2; 3; ... eo) die Partikularintegrale der L6sung (2a) zeitlich abklingen. Da stets S x* < 0 wegen (9) immer dann erfiillt ist, wenn nur S* < 0, kann zusammen- fassend ausgesagt werden, dass Instabilit~tt der durchstr6mten, elastisch gebetteten Saite dann vermieden wird oder Stabilit~tt dann eintritt, wenn
S x = S -~- p F + V 2 # F ~ 0 (14)
ist. Dieses Kriterium besitzt die einem nichtkonservativen System zukommende Eigenschaft, dass es sich nicht ffir Q --~ 0 bei verschwindender Bettungsziffer K = 0 stetig in das Kriterium (12) fiberffihren l~isst. Verursacht wird diese Unstetigkeit in den Stabilit/itskriterien durch die Str6mungsgeschwindigkeit v. Die Str6mungsge- schwindigkeit ist auch die Ursache ffir die nichtkonservative Eigenschaft der durch- str6mten Saite. Ahnlich wie das durchstr6mte Rohr geh6rt auch die durchstr6mte Saite deshalb zu den nichtkonservativen Systemen, weil ihr durch das Fliessen des Mediums fortw~thrend Energie in beliebigen Massen zum Aufbau der Transversal- schwingungen zugeffihrt werden kann und eine Aussage auf Grund des Energiesatzes fiber das Verhalten des Systems nicht mehr m6glich ist. Die D/impfung wirkt aber destabilisierend auf die Saite. Ffir ein System mit zwei Freiheitsgraden hat schon H. ZIEGLER E4] zum ersten Mal die destabilisierende Wirkung der D~tmpfung und die

206 WERNER ROTH ZAMP
Unstetigkeit in den StabilitXtskriterien beziiglich der D~mpfung nachgewiesen. Fiir ein System mit unendlich vielen Freiheitsgraden, dem unendlich langen elastisch ge- betteten und durchstr6mten Rohr ist in der Arbeit [2] dieselbe Erscheinung ebenfalls nachgewiesen worden. Auch ftir die durchstr6mte Saite gilt diese Feststellung. Be- t rachtet man zun~chst den Fall, dass die Bettungsziffer K = 0 ist, dann liefert das Kriterium (12), welches ohne D~mpfung gewonnen wurde, ftir die kritische Str6mungs- geschwindigkeit
/
V ~ (S + p F) (15) X X
Vk ~ ~F IgR
und das Kriterium (14), welches mit Berticksichtigur apfung gewonnen wurde, liefert den Wert
--V -1 ( S + p F ) (15a) X
Vk = ~ F
Wegen/~//zR > 1 ist aber v~" > v~, und dieses Ergebnis sagt aus, dass die D~mpfung die kritische Geschwindigkeit vermindert und also destabilisierend wirkt. Dem Kriterium (14) muss auch deshalb Richtigkeit zuerkannt werden, well es sich anschau- lich deutbar aus den Kr~ften S, p F und v 2 #F additiv zusammensetzt. Diese Zusam- mensetzung kann allein schon mit auf den Grundlagen der Statik beruhenden 0ber - legungen erkl~rt werden. Legt man zwei Kontrollschnitte I und I I durch die Saite, Figur 2, dann ist die resultierende Druckkraft auf den Schnitt I gleich der Summe der
I D I . . . . . . . . . . . . . . . . . . . . . . . . . . 1
&ff+VZ~f .... i . . . . . . . . . . . . . . . . . . . . . . iJ'~8+#F+V211F
8aitenmantel F i g u r 2
U n t e r d e r D r u c k k r a f t S x = S + p F + v z/*F s tehendes d u r c h s t r 6 m t e s Sai tens t f ick .
Kr~fte S, p F und v 2/@. Auf den Schnitt I I wirkt dieselbe Resultierende jedoch in entgegengesetzter Richtung zeigend ein. Die Kraft v ~ #F stellt hierbei ftir den Schnitt I den Stossdruck und ftir den Schnitt I I den Rfickstossdruck des Flfissigkeits- oder Mediumstrahles dar. Da die durchstr6mte Saite aber keinerlei Biegesteifigkeit be- sitzt, muss die resultierende Druckkraft S x = S + p F + v 2 #~ < 0 sein, und damit ist auch schon das Stabilit~tskriterium (14) gewonnen. Eine entsprechende Betrachtung l~sst sich auch ftir das durchstr6mte Rohr mit Biegesteifigkeit durchftihren. Ange- wandt auf den Treibriemen ergeben sich Stabilit~tskriterien, welche in der Arbeit [5] zu finden sind.
In gewisser Weise l~sst sich die Notwendigkeit der Hinzunahme einer D~mpfung in die Rechnung aus der ersten Methode von LJAPUNOW [6] zur Untersuchung der Stabilit~t einer Bewegung verstehen. Nach der ersten Methode yon ]~JAPUNOW kann tiber die Stabilit/~t oder Instabilit/it eines linearisiert gerechneten Systems ffir den kritischen Fall, also daftir, dass ein station~rer, mit endlichen Amplituden erfolgender Schwingungszustand vorliegt, nichts mehr ausgesagt werden. Die geringsten Nicht- linearit/iten, welche beim Aufstellen der Bewegungsgleichung ausser acht blieben und bei der Rechnung vernachl~ssigt wurden, k6nnen zu StabilitAt oder Instabilit~t
Vol. 16, 1965 Transversalschwingungen durchstrSmter Saiten 207
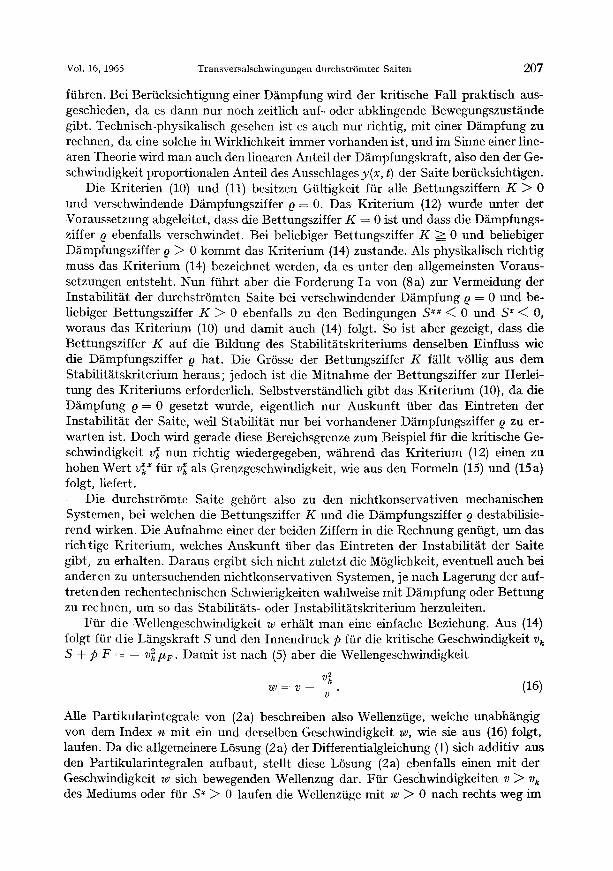
ftihren. Bei Berticksiehtigung einer D~impfung wird der kritische Fall praktisch aus- geschieden, da es dann nur noch zeitlich auf- oder abklingende Bewegungszustiinde gibt. Technisch-physikalisch gesehen ist es auch nur richtig, mit einer D~impfung zu rechnen, da eine solche in Wirklichkeit immer vorhanden ist, und im Sinne einer line- aren Theorie wird man auch den linearen Anteil der D~impfungskraft, also den der Ge- schwindigkeit proportionalen Anteil des Ausschlages y ( x , t) der Saite berticksichtigen.
Die Kriterien (10) und (11) besitzen Gtiltigkeit ftir alle Bettungsziffern K ~ 0 und verschwindende D~mpfungsziffer ~ = 0. Das Kriterium (12) wurde unter der Voraussetzung abgeleitet, dass die Bettungsziffer K = 0 ist und dass die D/impfungs- ziffer ~ ebenfalls verschwindet. Bei beliebiger Bettungsziffer K ~ 0 und beliebiger D~impfungsziffer 9 ~ 0 kommt das Kriterium (14) zustande. Als physikalisch richtig muss das Kri terium (14) bezeichnet werden, da es unter den allgemeinsten Voraus- setzungen entsteht. Nun ftihrt abet die Forderung I a v o n (8 a) zur Vermeidung der Instabilit~t der durchstr6mten Saite bei verschwindender D~impfung ~ = 0 und be- liebiger Bettungsziffer K ~ 0 ebenfalls zu den Bedingungen S xx ~ 0 und S x ~ 0, woraus das Kriterium (10) und damit auch (14) folgt. So ist aber gezeigt, dass die Bettungsziffer K auf die Bildung des Stabilit~itskriteriums denselben Einfluss wie die D~impfungsziffer 0 hat. Die GrSsse der Bettungsziffer K f~illt v611ig aus dem Stabilit~itskriterium heraus; jedoch ist die Mitnahme der Bettungsziffer zur Herlei- tung des Kriteriums erforderlich. Selbstverstiindlich gibt das Kriterium (10), da die D~impfung 9 = 0 gesetzt wurde, eigentlich nur Auskunft tiber das Eintreten der Instabilit~it der Saite, well Stabilit~it nut bei vorhandener D~impfungsziffer ~ zu er- warten ist. Doch wird gerade diese Bereichsgrenze zum Beispiel ftir die kritische Ge- schwindigkeit v~ nun richtig wiedergegeben, w~ihrend das Kriterium (12) einen zu hohen Weft v~ x fiir v~ als Grenzgeschwindigkeit, wie aus den Formeln (15) und (15a) folgt, liefert.
Die durchstr6mte Saite gehSrt also zu den nichtkonservativen mechanischen Systemen, bei welchen die Bettungsziffer K und die D~impfungsziffer Q destabilisie- rend wirken. Die Aufnahme einer der beiden Ziffern in die Rechnung gentigt, um das richtige Kriterium, welches Auskunft tiber das Eintreten der Instabilit~it der Saite gibt, zu erhalten. Daraus ergibt sich nicht zuletzt die M6glichkeit, eventuell auch bei anderen zu untersuchenden nichtkonservativen Systemen, je nach Lagerung der auf- t retenden rechentechnischen Schwierigkeiten wahlweise mit D~impfung oder Bet tung zu rechnen, um so das Stabilit~its- oder Instabilit~itskriterium herzuleiten.
Ftir die Wellengeschwindigkeit w erh~ilt man eine einfache Beziehung. Aus (14) folgt ftir die L~ingskraft S und den Innendruck p ftir die kritische Geschwindigkeit v k S + p F ~ -- v~ # F , Damit ist nach (5) aber die Wellengeschwindigkeit
d w ~ v -- (16) v
Alle Partikularintegrale von (2a) beschreiben also Wellenztige, welche unabh~ingig von dem Index n mit ein und derselben Geschwindigkeit w, wie sie aus (16) folgt, laufen. Da die allgemeinere L6sung (2a) der Differentialgleichung (1) sich additiv aus den Partikularintegralen aufbaut, stellt diese L6sung (2a) ebenfalls einen mit der Geschwindigkeit w sich bewegenden Wellenzug dar. Ftir Geschwindigkeiten v > v k des Mediums oder ftir S ~ > 0 laufen die Wellenztige mit w > 0 nach rechts weg im

208 W~RNER ROT~ ZAMP
Richtungssinne der Geschwindigkeit v des Mediums, jedoch nfit stets kleiner bleiben- den Geschwindigkeit als die des Mediums oder der Flfissigkeit. Die Wellenziige bewegen sich hingegen mit einer Geschwindigkeit w < 0 nach links, also entgegen dem Richtungssinne der Mediumgeschwindigkeit v, wenn v < v~ oder S x < 0 ist. Wenn die Str6mungsgeschwindigkeit v mit der kritischen Geschwindigkeit v~ fiber- einstimmt, ist w = 0, und die Wellenzfige bleiben stehen. Auf diesen speziellen Fa l l wird welter unten in Verbindung mit den (3berlegungen zu den Schwingungen eines Treibriemens eingegangen werden.
Die L6sung (2a) enth~ilt verschiedene Schwingungsformen, die noch genauer ange- geben werden k6nnen. Setzt man
~ln, 2n-- 2~tt [/ ,2 /A] + ~ - aS* ' (17)
und beachtet man (4), dann ist (2a) auch
. ~ n x y -= s i n - - / - - [Cln e-(1/w)(s~/s*~)~l, (x-wO + c2, e-(l/~l(sx/s~*la~#~-~O] . (2b) n - - 1
Die Form dieser L6sung variiert noch etwas, je nachdem, ob der Wert der Wurzel in (17) reell oder rein imagin/ir ist, und je nachdem, welcher Fall yon (13) vorliegt. Die Vorzeichenkombinat ion I I I ffihrt zu der Unterscheidung, ob die Wurzel in (17) schon fiir n = 1 und dann also ftir alle Werte yon n, oder erst ftir n > n 1 reell ist. Die ganze Zahl n~ ist dann dutch das Verschwinden des Radikanten durch
S~ S~ ~ < n~ + 1 (18)
bestimint. Im ersten Fall ist (2b) die L6sung; im zweiten Fall n immt (2b) die Form
" / y = ~ S l n - - ~ e (l/w) (Sxlsxx)(~/2~)(x-wt)
• q , cos ~ - ~ (x -- w t) + c~ ~ sin ~ ; v (x -- w t) (2 c)
w - ~ . Jl: n .~g + 2 ~ s m - - / ~ ICon e (1/~) (s~/s~xl ~ ~(~ ~tl + c2 ~ e - (1/wl (s~/s,~) ~2~l~-wtl]
an, wobei nun
+
ist. Die Kons tan ten q , und c2~ sind jeweils reell und ergeben sich aus den Anfangs- bedingungen (7). Die Kombinat ion IV von (13) fiihrt zu einer/thnlichen Entscheidung. Falls der Wert der Wurzel in (17) schon imagin~ir ist f i i r n = 1, stellt
. 71: n X ( l / w ) ( 0 / 3 / * ) (x--wt) y = sln-- / - - e (SXlSxx) n=l (2d)
- s ~ ; (x - w t) + c2. w ~ ; ; ( x - t)]

Vol. 16, 1965 Transversalschwingungen durchstrSmter Saiten 209
die L6sung von (1) dar. Fails aber der Wert der Wurzel in (17) erst fiir n > n I imaginltr wird, wobei die ganze Zahl n 1 wieder aus der Ungleichung (18) folgt, ist
nx y = 2_,~ s l n - - ~ ' ~z ~ x [c 1 n e - (l/w) (SXlSX x) 21n(X-Wt ) + C2 n e-(l/w)(sx/sxx).~2n(X-wt)l
2 . ~rnx (2e) + s l n - - / ~ - e (llw)(Sxlsxx)(o/2l~)(x wt)
n=n t
(x -- w t) + c2n s m ~ ~ (x --
die L6sung der Differentialgleichung (1). In beiden L6sungsf0rmen (2d) und (2e) sind die Konstanten cln und czn wieder reell. Endlich ftihrt bei Stabilit/it, also daftir, dass (14) erfiillt ist oder beide Forderungen V yon (13), die genauere Bestimmung der Form der L6sung (2a) wieder auf zwei F/ille. Entweder ist der Wurzelwert in (17) ftir alle n-Werte imagin/ir, dann ist (2d) die L6sung, oder der Zahlenwert der Wurzel in (17) ist nur ftir a l len > n 1 imagin~r und also ftir a l len < n 1 reell. Die zweite M6glichkeit ftihrt wieder auf (2e) als L6sung von (1). Alle diese L6sungen (2b), (2c), (2d) und (2e) mit den Substitutionen (17), (18) und (19) lassen erkennen, dass ft~r v < v k oder S x < 0 die Amplituden der Transversalwellen der Saite mit x nach rechts exponentiell abklingen und gleichzeitig bei negativer Wellengeschwindigkeit w < 0 ein 6rtliches Abklingen der Ausschl/ige dieser Wellen exponentiell mit der Zeit erfolgt. Wenn v > v~ oder S x > 0 ist, bewegen sich die durch die einzelnen Partikularintegrale dar- gestellten Transversalwellen mit der Geschwindigkeit w > 0 nach rechts, und die Amplituden klingen mit x im allgemeinen teils nach rechts und tells nach links ex- ponentiell ab. Gleichzeitig erfolgt ein 6rtliches, mit der Zeit exponentielles Aufklingen einiger durch die Partikularintegrale dargestellter Ausschl/ige dieser Wellen.
4. A n w e n d u n g auf den T r e i b r i e m e n
Ein Sonderfall der durchstr6mten Saite, welcher besondere Bedeutung in der Technik besitzt, ist in den obigen Gleichungen enthalten. Eliminiert man gleichsam den Saiten- oder Schlauchmantel, indem man S = 0 und #R = 0 setzt, dann kommt man zu dem Modell des Riementriebes (Figur 3). Zweckm~ssigerweise wird man noch p F = - - P setzen, wenn P die Zugkraft im Treibriemen darstellt. Das Stabilit~tts- kriterium (14) geht dann tiber in das Kriterium ffir die kritische Geschwindigkeit des
Y~
0
l .I Figur 3
Anordnung eines Treibriemens.
ZAMP 16114

210 W~RNEg ROT~ ZAMP
Treibriemens
V2 v k = , (20)
welches die Abh~ngigkeit der kritischen Geschwindigkeit v k des Riemens v o n d e r Vorspannung P beschreibt. Dieses Kriterium stellt ftir den Konstrukteur ein Hilfs- mittel zur richtigen Auslegung von Ketten- oder Riementrieben dar. Alle oben ge- zogenen Folgerungen aus den verschiedenen Formen (2b), (2c), (2d) und (2e) der LSsung (2a) ftir die Bewegungsgleichung (1) der durchstr6mten Saite, welche als speziellen Fall auch die Bewegungsgleichung des Treibriemens enth~ilt, bleiben er- halten; insbesondere dtirfte der Treibriemen sogar elastisch gebettet sein, was aller- dings technisch weniger yon Bedeutung ist, es sei denn, man stelle sich vor, dass der Riemen gleichsam durch ein elastisches Medium gleite. Die jedoch mSglicherweise weitertragende Bedeutung der elastischen Bettung zur Herleitung des Instabilit~its- kriteriums wurde schon erw~ihnt.
Mit Hilfe eines Modells fiir den Riementrieb (Figur 4) wurde versucht, die kritische Geschwindigkeit v k des Treibriemens, wie sie sich aus Formel (20) ergibt, experimentell
Figur 4
Modell eines Riementr iebes zur exper imentel len Nachpr t i fung der kri t ischen Geschwindigkei t v k.
nachzuweisen. Die Riemenscheiben hatten einen Achsabstand y o n / = 51,5 cm und einen Radius von R = 4,0 cm. Der endlose Treibriemen mit dem Gewicht G = 0,2 kp hatte eine Massendichte bezogen auf die L~tngeneinheit yon #F = 1,59.10 -6 kpcm -2 sec ~ . Ftir die Vorspannung P muss in der Formel (20) die geringere Vorspannung von beiden Trumstticken, also die Zugkraft im gezogenen Trum eingesetzt werden. Da die lose mitlaufende Scheibe auf der Abtriebsseite auf Kugellagern aber nahezu reibungsfrei

Vol. 16, 1 9 6 5 Transversalschwingungen durchstr6mter Saiten 211
gelagert war, konnte angenommen werden, dass die Vorspannungen von geringen Differenzen abgesehen im ziehenden und gezogenen Trum P1 und P2 auch nahezu gleich waren. Uber ein angeh~ingtes Gewicht konnten sie zu P1 = P2 = P = 0,6 kp gew~thlt werden. Das Einstellen der Instabilit/it des Treibriemens, welches sich da- durch bemerkbar machte, dass der Riemen heftige Transversalschwingungen auszu- fiihren begann, welche auch durch/iussere Einwirkungen wie zum Beispiel durch An- sehlagen oder Halten nicht zur Ruhe gebracht werden konnten, trat bei einer Dreh- zahl von n = 1630 U/min oder bei einer Riemengeschwindigkeit von v = 6,8 m/sec ein. Der nach Formel (20) errechnete Wert f0r die kritische Geschwindigkeit ist aber v k = 6,1m/sec. Die kritische Umdrehungszahl zu diesem Wert betr~igt n k = 1470 U/min.
~ Y ___
Figur 5 Typische Wellenform des Treibriemens bei instabilem Lauf mit v > v k und positiver Wellengeschwindigkeit
w > 0 nach L6sung (2 d).
V
Figur 6 Geschlossenes, krgftefrei umlaufendes Seil.
Wenn diese errechneten Werte etwas kleiner sind als die gemessenen Werte, so liegt das daran, dass der zwar sehr flache Treibriemen doch etwas Biegesteifigkeit besass, welche sich aber erh6hend auf die kritische Geschwindigkeit v k auswirkt. Hierzu wurde schon in der Arbeit [5] berichtet. Der Modellversuch zeigte auch sehr deutlich, dass die Instabilit~it des Riemens for Geschwindigkeiten, die tiber der kritischen Ge- schwindigkeit v k lagen, beibehalten wurde. Auch konnte bei sehr schlappem Riemen die typische Wellenform nach Figur 5 beobachtet werden, wie~sie durch die oben ange- gebenen Formeln flit y(x, t) beschrieben wird. Solche Wellenbilder sind allerdings nur bei instabilem Lauf des Treibriemens und also auch nur bei geringer Vorspannung P zu erkennen. Bei gr6sserer Vorspannung bilden sich mehrere Schwingungsb~iuche aus und die Amplituden werden kleiner, so dass mit blossem Auge die Riemenschwingun- gen nur noch als ein Zittern des Riemens erkannt werden k6nnen.
Die Aussage des Kriteriums (20) steht nicht in Widerspruch zu den von G. HAMEL [7~ gezogenen Folgerungen tiber ein bewegtes, umlaufendes geschlossenes Seil, welches mit zunehmender Geschwindigkeit v quasi steifer oder stabiler gegen eine Ver- formung der urspriinglichen Gestalt des Seiles wird (Figur 6). Das trifft ffir Riemen- oder Kettentriebe, so wie sie in der Technik Verwendung finden, nicht zu. Die yon G. HAMEL aufgestellten Schlussfolgerungen beziehen sich auf ein geschlosse- nes Seil, welches kr~iftefrei uml~uft und bei welchem die Seilscheibe lediglich die Funktion zur Erzeugung der Umlaufgeschwindigkeit v iibernimmt. Die in einem solchen Seil sich einstellende Seilkraft ist abet immer P = v 2 #~, also direkt abh~ingig v o n d e r Geschwindigkeit v des Seiles. Bei einem Riemen- oder Kettentrieb nach

212 WERN~R ROTH ZAMP"
Figur 3, welcher eine Leistung tibertragen soll und bei welchem mittels konstrukt iver Vorkehrungen far eine gewisse Vorspannung des Treibriemens gesorgt wird, liegen ganz andere Verh~iltnisse vor. Die Vorspannungen P1 und P2 im ziehenden und ge- zogenen Trum werden bei einem Riementrieb im wesentliehen in Abhiingigkeit yon dem zu tibertragenden Moment errechnet und gewiihlt. Sind diese Vorspannungen bekannt , dann ist v k nach (20) aber die kritische Geschwindigkeit, wenn in dieser Formel (20) die Zugkraft P durch die kleinere der KrMte P1 und P2, im allgemeinen also durch die Zugkraft P2 im gezogenen Trum, ersetzt wird. Wenn der Treibriemen: mit der kritischen Geschwindigkeit v = v k liiuft oder unter der Zugkraf t P = v 2 #F steht, besteht jedoch eine gewisse Ahnlichkeit mit dem von G. HAMEL E7J untersuchten Seil.
Um fiber das Verhalten des Treibriemens ftir den Grenzfall v = v k oder P = v ~ tZF mehr zu erfahren, betrachte man die Bewegungsgleichung (1) der durchst r6mten Saite. Bei der durchs t r6mten Saite entspricht allgemeiner der Grenzfall S x = S + p F + v ~ #F = 0 dem Grenzfall P -- v ~ #F = 0 ftir den Treibriemen. Nun reduziert sicba aber die Gleichung (1) mit S x = 0 auf die Gleichung
2 V l~FY, t + # Ytt + 0 Yt + K y -- 0 ,
und der Ansatz (2) liefert ftir diese speziellere Bewegungsgleichung die L6sungen- y ( x , t) = O, wenn K 4= 0 ist, u n d y ( x , t) = h(x) mit einer beliebigen Funkt ion h(x) , wenn K = 0 ist. Falls die Bettungsziffer also vorhanden ist, kSnnen t iberhaupt keine Anfangsbedingungen ftir die Auslenkung und die Geschwindigkeit der Saite erftillt werden; falls iedoch die Bettungsziffer verschwindet, kann ftir y ( x , t) die Anfangs- bedingung oder Anfangsst6rung y ( x , O) = 9(x ) = h(x) vorgegeben und erftillt werden, wenn die Funkt ion h(x) entsprechend der Anfangsbedingung y ( x , 0) = q~(x) gew~thlt wird. Dasselbe gilt fiir den Treibriemen. Daraus folgt aber, dass der Treibriemen jede ihm anfangs aufgezwungene Auslenkung beibehiilt. So ist es auch zu verstehen, dass nach Formel (16) die Wellengeschwindigkeit w = 0 ist, wenn dort v = v k eingesetzt wird. Ffir den Grenzfall v = v k ist die zweite Anfangsbedingung y t ( x , 0) = ~(x) eben nicht mehr erftillbar. Pr~zisere Aussagen k6nnte die Rechnung hier nur liefern, wenn grSssere Auslenkungen der durchstrSmten Saite bzw. des Treibriemens in Betracht gezogen wfirden, was voraussetzen wtirde, dass also auch Nichtlinearit~tten beim Auf- stellen der Bewegungsgleichung (1) berticksichtigt werden mtissten.
Der Grenzfall v = v k ffir den Treibriemen oder allgemeiner S x = 0 ftir die durch- s t r6mte Saite entspricht also dem von G. HAMEL [7] untersuchten geschlossenen und umlaufenden Seil nach Figur 6, bei welchem sich abh~tngig v o n d e r Geschwindigkeit v die Zugkraft P = v 2 #F im Seil einstellt. Die durchstrSmte Saite oder der Treib- riemen n immt ftir diesen Grenzfall eine m6gliche, v o n d e r ursprfinglichen Geraden y -= 0 nur wenig abweichende beliebige station~ire Kurvenform y ( x , t) = oF(x) = h(x) an, die dem Sinne nach der beliebigen Kurvenform des umlaufenden Seiles (Figur 6) entspricht. Erst bei gr6sseren Auslenkungen, die bei der hier durchgeftihrten lineari- sierten Rechnung nicht beriicksichtigt wurden, ents tanden Rfickstellkr/ifte, wie zum Beispiel die im Treibriemen durch die gr6ssere Auslenkung bedingte Vergr6sserung der Zugkraft P, welche im Zusammenwirken mit den fibrigen KrMten zu einer ge- naueren, aber nichtlinearen Bewegungsgleichung ffihren und deren L6sung dann Aus-

Vol. 16, 1965 Transversa l schwingungen du rchs t r6mte r Sai ten 213
kunft tiber das zeitliche Verhalten der Auslenkung y(x , t) ftir den beschriebenen Grenz- falI geben kann.
Erg/inzend zu den hier angestellten Betrachtungen sei noch auf eine gewisse mathematische Besonderheit beztiglich des Aufbaus der L6sungen (2 b), (2 c), (2 d) und (2e) ftir die durchstr6mte Saite und speziell auch ftir den Treibriemen hingewiesen. Geht man yon der Aufgabenstellung aus, eine N~therungsl6sung ftir die durchstrSmte Saite aufzustellen, so wird man sich ftir das Galerkinsche Verfahren entschliessen, da dieses sich ftir nichtkonservative Systeme als geeignetes N/iherungsverfahren erweist. An Stelle der Bewegungsgleichung (1) tr i t t dann die Ausgangsgleichung
t, l
jJ e z y . . . . + (s + p + v2 F/yxx + 2 , , F y x , + , y , , + e y , + K y? ya, at=o :,1 0 (21)
wenn hier noch erg~inzend, um auch durchstrSmte Rohre zu erfassen, wie dies in der Arbeit [21 mitgeteilt ist, die Biegesteifigkeit E I in die Rechnung mit aufgenommen wird. Denkt man sich ftir y (x , t) einen mehrgliedrigen Ritz-Ansatz der Form
y(x, t) = wl(x) 91(t) + w~(x) ~( t ) + . . - wn(x) 9dr) (22)
mit gew~ihlten, den Randbedingungen gentigenden Funktionen wi(x ) (i = 1 ; 2; 3; .... n) unterstellt, und setzt man y (x , t) nach (22) als auch
dr(x, t) = w~(x) d~o~(t) + w2(x ) ~92(t) + . . . w~(x) O%(t)
in (21) ein, dann erhiilt man n gekoppelte gewShnliche Differentialgleichungen ftir die n Zeitfunktionen ~i(t) (i = 1; 2; 3; ... n), aus deren Aufbau dann folgt, ob Stabilit/it oder Instabilit~it vorliegt. Es muss nun als recht merkwtirdig bezeichnet werden, dass mit einem eingliedrigen Ritz-Ansatz y (x , t) ~ w~(x) �9 q~(t) ohne D~impfung und ohne elastische Bettung bereits schon das richtige Stabilit~itskriterium erhalten werden kann, welches v o n d e r strengen L6sung der Gleichung (1) mit Berticksichtigung der D~tmpfung oder der Bettung geliefert wird. Das eigentlich falsche Kriterium ohne D~impfung und ohne Bettung kann hingegen erst mit einem zweigliedrigen Ritz-An- satz y (x , t) = wl (x ) �9 q~l(t) + w~(x) �9 qz~(t) erhalten werden. Auf diesen Sachverhalt wurde ftir den Treibriemen, dessen Bewegungsgleichung in der Gleichung (1) enthalten ist, an Hand der strengen LSsung schon in der Arbeit [5] hingewiesen. Allgemeiner ist aus dem Aufbau der LSsungen (2b), (2c), (2d) und (2e) ft~r die durchstrSmte Saite zu erkennen, dass auch hier erst ein zweigliedriger Ritz-Ansatz die richtigen Verh~iltnisse treffen kann, da die Partikularintegrale der L6sung (2 d) einen zweigliedrigen und die der L6sungen (2c) und (2e) einen teils zweigliedrigen Aufbau haben. Nur die Partiku- larintegrale der L6sung (2b), welche aber einen instabilen Bewegungszustand der Saite beschreiben, sind eingliedrig aufgebaut. Letztlich k6nnen die Unstetigkeiten in den Stabilit~itskriterien auf den Aufbau der Wurzeln einer algebraischen Glei- chung vierten Grades, auf welche der zweigliedrige Ritz-Ansatz ftihrt, zurtickgeftihrt werden. Auch beim unendlich langen durchstrSmten Rohr [2], bei welchem das Stabilit~ttskriterium beztiglich der D/impfung ebenfalls unstetig ist und die D~impfung labilisierend wirkt, sind die charakteristischen Exponenten der strengen L6sung die Wurzeln einer Gleichung vierten Grades. Der eingliedrige Ritz-Ansatz ftihrt auf eine

2 1 4 MOHEB AZIZ ABDEL-MEssIH ZAMP
algebraische Gleichung zweiten Grades ftir die charakteristischen Exponenten, und der Aufbau der Wurzeln einer Gleichung zweiten Grades ist eben weit einfacher als die Zusammensetzung der Wurzeln einer Gleichung vierten Grades. Beachtet man, dass aber schon der eingliedrige Ritz-Ansatz das richtige Stabilit/itskriterium liefert, so muss dieser Sachverhalt doch als sehr gtinstig bezeichnet werden; kommt doch die Mathematik hier dem Ingenieur gewissermassen entgegen, und liefert sie ihm doch bei geringerem Aufwand eher ein richtiges als ein falsches Ergebnis. Die aus den L6sungen ftir die durchstr6mte Saite und den Treibriemen so gewonnenen Ergebnisse lassen sich auf nichtkonservative Stabprobleme iibertragen. Von H. LEIPHOLZ wurde die Durchfiihrung der Rechnung mit einem mehrgliedrigen Ritz-Ansatz in Verbindung init dem Galerkin-Verfahren, in Hinblick auf den Einfluss der D/ilnpfung auf nicht- konservative Stabprobleme in einer neueren Arbeit [8] angegeben.
LITERATUR
[i] J . w . RAYLEIGH, Die Theorie des Schalles (Braunschweig 1880). [2] W. ROTH, Ing.-Archiv 33, 236 (1964). [3] W. ROTH, 0sterr. Ing.-Archiv 18, 114 (1964). [4] H. ZIEGLER, Ing.-Archiv 20, 49 (1952). [5] W. ROTH, Antriebstechnik 3, 48 (1964). [6] J. G. MALKIN, Theorie der Stabilittit einer Bewegung Miinchen 1959). [7] G. HAMEL, Elementare Mechanik, 2. Aufl. (Leipzig-Berlin 1922). [8] H. LEIPHOLZ, Ing.-Archiv 33, 308 (1964).
Summary
The paper investigates the stability of flexible tubes under conditions of internal flow.
Eingegangen: 31. August 1964.)
Grid Structure os a Ballistic Function and a Computing Instrument with Linear Potentiometers for its Generation
By MOHEB AZlZ ABDEL-MESSlH, Faculty of Engineering, Alexandria University, Alexandria, Egypt
I n t r o d u c t i o n
Grid Geometry plays a significant part in the generation of functions with two independent variables in computers [2, 3] 1). If a given function z(x, y) has, within a certain domain of the variables, 'ideal grid Structure' ([1], Chap. 1), then there exists a topological transformation of the variables
such that X(x ) , Y (y ) , Z(z) (1)
Z(z) = X(x) + Y (y ) . (2)
1) Numbers in brackets refer to References, page 224.