Embed Size (px)
Citation preview

TUGAS MANDIRI KELOMPOKINTERFACING
TUGAS KELOMPOK
Penyusun :
Nama Nim
Alexander Guntur 13071260
Ade Ibrahim 13071258
Jon Tohonan 13071245
Jurusan Teknik Komputer
Akademi Manajemen Informatika dan Komputer Bina Sarana Informatika
Jatiwaringin
2009

DAFTAR ISI
Halaman
BAB I PENDAHULUAN……………………………………………………............. 1
BAB II PEMBAHASAN………………………………………………………........... 2
BAB III PENUTUP…………………………………………………………………….23
Vii

BAB I
PENDAHULUAN
Sebuah sistem komputer pada prinsipnya terdiri atas 4 bagian penting, yaitu: CPU (Central Processing Unit), memori, alat I/O(Input/Output), dan interkoneksi Diantara semua bagian tersebut yang sering disebut dengan Bus. Bagian-bagian Tersebut saling bekerja sama dalam satu kesatuan untuk melaksanakan perintah-perintah yang diberikan oleh manusia atau programmer untuk menyelesaikan suatu masalah tertentu.
Bagian-bagian tersebut masing-masing memiliki fungsi yang beragam dan saling terkait satu dengan yang lainnya. CPU(Central Processing Unit) merupakan tempat pemrosesan instruksi-instruksi program. CPU terdiri dari dua bagian utama, yaitu unit kendali(control unit) dan unit arithmatika dan logika (arithmetic and logic unit). Disamping dua bagian utama tersebut, CPU memiliki beberapa memori internal yang berukuran kecil yang disebut dengan register.
Sedangkan memori dibutuhkan untuk proses pengolahan dan penyimpanan data. CPU hanya dapat menyimpan data dan instruksi di register yang ukurannya kecil, sehingga tidak dapat menyimpan semua informasi yang dibutuhkan untuk keseluruhan proses dari program. Dibutuhkan memori baik yang bersifat internal memori seperti RAM dan ROM maupun eksternal memori seperti harddisk untuk memaksimalkan fungsi-fungsi pengolahan data yang dilakukan oleh CPU.
Selain itu untuk memberikan masukan atau input dan melihat hasil atau output dari sebuah hasil pemrosesan komputer dibutuhkan kemampuan untuk dapat mengakomodir semua hal tersebut maka dalam sistem komputer dikenal sebuah fasilitas yang dinamakan alat input/output (I/O). Terakhir kesemuanya bagian tersebut dalam sebuah sistem komputer dihubungkan atau diinterkoneksikan dengan sebuah fasilitas yang disebut dengan Bus. Dalam sistem komputer kita mengenal ada tiga macam bus yaitu: bus alamat, bus kontrol, dan bus data.
Pada tulisan kali ini akan dibahas lebih dalam tentang hal-hal yang berhubungan dengan alat I/O sistem komputer. Terutama yang menyangkut bagaimana proses menghubungkan alat-alat yang berada di luar sistem komputer agar dapat berkomunikasi dan berinteraksi dengan sistem komputer sehingga dapat memaksimalkan kemampuan dari sistem komputer tersebut.
1

BAB II
PEMBAHASAN
INTERFACING
A. Pengertian Interfacing
Interfacing adalah bagian dari disiplin ilmu komputer yang mempelajari yang mempelajari teknik-teknik menghubungkan komputer dengan perangkat alat elektronika lain.
Sistem komputer yang berpusat pada pemroses utama memiliki kemampuan yang besar dalam memecahkan masalah tetapi tidak ada manfaatnya tanpa menghubungkan dengan peralatan lainnya.
Kita tidak dapat langsung menghubungkan pemroses utama dengan peralatan tersebut, disebabkan oleh hal–hal berikut :
1. Terdapat beraneka ragam peralatan / piranti yang memiliki metode operasi beragam.
2. Laju transfer data dalam piranti seringkali lebih lambat dibandingkan dengan laju transfer data dengan pemroses utama (Mikroprosessor).
3. Piranti seringkali menggunakan format data yang berbeda dengan pemroses Utama.
Jadi tidaklah praktis untuk menghubungkan mikroprosessor secara langsung dengan piranti yang ingin dijalankannya. Diperlukan suatu teknik untuk mem”perantarakan”kan pemroses utama dengan dunia luar. Teknik ini dapat dijalankan melalui :
1. Perangkat lunak Berupa Program
a. Yaitu suatu prosedur tertentu untuk menjalankan piranti. Dalam dunia komputer program ini lebih dikenal dengan Drive / Installer.
2. Perangkat Keras Berupa IC, Chipsets- Onboard, Card.
2

3
B. Ruang Lingkup Interface
Interface bukanlah disiplin ilmu yang berdiri sendiri tetapi berkaitan dengan disiplin ilmu komputer lainnya. Disiplin ilmu komputer ini adalah:
1. Elektronika Analog dan Digital
2. Mikroprosessor
3. Organisasi
4. Arsitek computer
5. Komunikasi Data
6. Bahasa Pemrograman.
OPERASI OPERASI I/O
Sistem komputer tidak akan berguna tanpa adanya peralatan input dan output (I/O). Diperlukan suatu moduli I/O yang menghubungkan peralatan ini kedalam system komputer. Modul ini menjalankandua fungsi utama yaitu :
1. Sebagai interface dari dan ke CPU (Mikroprosessor) dan memori melaui bus system sentral.
2. Sebagai interface sebuah perangkat peripheral atau lebih menggunakan sambungan data tertentu.
Perangkat eksternal dihubungkan dengan komputer oleh suatu sambungan dengan modul I/O. Sambungan (link) digunakan untuk pertukaran control, status dan data antar modul I/O dengan perangkat eksternal. Perangkat eksternal sering disebut dengan peripheral. Signal–signal yang dipertukarkan dalam bentuk control, status dan data.
Ada dua metode interfacing I/O yang berbeda dalam system berbasis mikroprosessor yaitu yang terisolasi dan I/O yang dipetakan dalam memory. Pada masukan keluaran berdasarkan I/O yang terisolasi, prosessor mengirim sinyal pengendali yang menunjukkan bahwa siklus sekarang ini hanya untuk mengakses alat-alat I/O. masukan keluaran yang dipetakan dalam memori memungkinkan prosessor menggunakan intruksi yang sama untuk alih memori seperti yang digunakan untuk alih masukan keluaran.

4
TEKNIK PENGENDALIAN
Ada tiga metode pengendalian masukan keluaran yang dibahas dalam bagian ini:
1. Programmed I/O
2. Interrupt driven I/O
3. DMA (Direct Memori Access)
A. Programmed I/O
Tehnik ini disebut juga pemilihan saluran dimana semua pengalihan ke dalam diri alat diselenggarakan oleh program. Prosessor mengirim dan meminta data, semua operasi masukkan dan keluaran berada dibawah kendali program. Pengalihan harus dikoordinasi oleh suatu proses handshaking.
Program terus berjalan lewat sejumlah pengetesan untuk menentukan apakah masukan atau keluaran dapat / harus diselenggarakan. Bila ditemukan alat yang memerlukan pelayanan, rutin pelayanan yang sesungguhnya diaktifkan dan pemilihan saluran berlangsung lagi setelah pelayanan selesai dilakukan. Dua metode dasar penginderaan isyarat alat siap yang dipakai adalah pemakaian pintu status masukan pengkode prioritas.
B. Interrupt Driven I/O
Teknik pemilihan saluran memiliki dua keterbatasan yaitu pemborosan waktu prosessor waktu dan lambat. Diperlukan suatu cara agar alat yang membutuhkan pelayanan dapat segera dilayani tanpa menunggu gilirannya tiba. Prosedur ini dinamakan interrupt.
C. DMA / Direct Memory Access
Teknik interupsi menjamin tanggapan paling cepat yang mungkin terhadap alat masukan – keluaran. Akan tetapi pelayanan ini masih melibatkan perangkat lunak. Hal inidirasa masih kurang cepat bagi pengolahan yang membutuhkan transfer data langsung dari memori seperti Disk drive dan CRT.

5
INTERFACE INTERNAL
Bus merupakan lintasan komunkasi yang menghubungkan dua atau lebih piranti. Karakteristik penting sebuah bus adalah bahwa bus merupakan media transmisi yang dapat digunakan bersama.
A. Struktur dari Bus meliputi :
1.Bus Data
Saluran data diawali dengan Dxx Memberikan lintasan bagi perpindahan data antara dua modul system.
2. Bus Alamat
Saluran alamat diawali dengan Axx Menandakan sumber atau tujuan data pada bus data.
3.Bus Kontrol
Saluran control Mengontrol akses pada saluran alamat dan penggunaan Data.
B. Sistem Bus Ekspansi
1.System Bus
Adalah komponen fungsional independent dari computer yang memiliki rangkaian control yang disebut bus controller dan bus arbiter.
2. Local Bus
Komponen ini sam dengan system bus, hanya saja bersifat local, dalam artian clock CPU dalam rangkaian pewaktu mengaturnya, diantaranya:
a. IBM Mikro Channel Architecture (MCA) b. Video Electronics Standards Association Local Bus (VL Bus) c. Peripheral Component Interconnect (PCI) d. Acceleted Graphicc Port (AGP)

6
Bus – bus yang lain adalah :
a. IDE (Integrated Drive Electroniccs) b. SATA ( Serial ATA)
c. InsiniBand
PROGRAMMABLE PERIPHERAL INTERFACE (PPI) 8255
IC 8255 adalah sebuah antarmuka yang dapat menggerakkan piranti/peralatan/peripheral berbentuk Integrated Circuit (IC) yang dapat diprogram dan bekerja pada Mikroprosessor intel dan kompatibelnya.
8255 menyediakan 3 buah port I/O yang masing masing berisi 8 bit dan masing - masing portnya saling berdiri sendiri.
IC 8255 adalah peralatan yang berkenaan dengan operasi data paralel input maupun output (Paralel I/O = PIO). Fungsi dari 3 buah port I/O yang ada adalah sebagai berikut :
– Port A : Terdiri dari bagian Input 8 bit atau Output 8 bit. – Bagian input disediakan untuk menahan data (latching data). Bagian output disediakan untuk menahan (latch) dan buffer data; yang berarti output dapat langsung menjalankan rangkaian luar (TTL). – Write/menulis adalah mengirim data ke bagian output ; sedangkan Read/ membaca adalah mengirim data dari unit/ bagian output ke input. – Port B : terdiri dari sebuah bagian I/O yang terdiri dari 8 bit dan sebuah Input buffer data 8 bit. Unit I/O disediakan untuk menahan dan buffer data. – Port C : Terdiri dari satu bagian output 8 bit dan satu bagian input 8 bit. – Unit output menyediakan latch dan buffer data sedangkan unit input menyediakan fungsi buffer data. – Pada mode 1 dan 2; Port C dibagi atas dua bagian yang masing - masing mempunyai lebar 4 bit yang dioperasikan dengan Port A dan B dikhususkan sebagai sinyal kontrol output atau sinyal status input.

7
PPI 8255 mempunyai 3 mode kerja.
1. MODE 0 sebagai BASIC INPUT OUTPUT. Semua Port I/O dipakai sebagai Input dan Output. Tidak diperlukan sinyal “ Handshake “. Data langsung ditulis atau dibaca dari port yang bersangkutan. Fungsi dasar dari 8255 mode 0 adalah :
– Dua Port-8 bit (Port A & B) serta 2 Port - 4 bit (Port c). – Setiap Port dapat dipakai sebagai input atau output. – Output di-latch (ditahan); input tidak di-latch (ditahan). – Menyediakan 16 kombinasi konfigurasi input/output pada mode ini. (Dapat dilihat dari control wordnya ).
2.MODE 1 sebagai STROBE INPUT/OUTPUT. Sebagai penyalur data I/O dari atau ke port yang dimaksud yang berhubungan dengan sinyal strobe (sinyal kontrol) memakai aturan “Handshake”. Port A dan Port B dipakai untuk jalur transfer data. Port C untuk menghasilkan atau menerima sinyal “Handshake” tersebut. Definisi fungsional dari mode 1 adalah :
– 2 kelompok sinyal kontrol dengan Handshake. – Tiap kelompok terdiri dari satu buah port data 8 bit (port A atau B) dan satu buah port kontrol/data 4 bit. – Port data-8 bit dapat digunakan sebagai input ataupun output. Keduanya dapat di- latch. – 4 Port lainnya (4 bit) dipakai untuk port kontrol/status dari port data 8 bit. 1 bit lagi dipakai untuk port data input/output
3. MODE 2 sebagai STROBED BIDIRECTIONAL BUS I/O. Mode ini setiap data port membutuhkan 5 sinyal kontrol sehingga hanya kontrol grup A yang terdapat pada mode ini.Fungsinya mirip dengan mode 1, hanya arah datanya Bidirectional (Dua arah). Fungsi dasar dari mode 2 :
– Digunakan hanya dalam grup A. – Sebuah port bus 8 bit Bidirectional (port A) dan 5 bit port kontrol (port c). – Data input dan output di-latch.
PROGRAMMABLE COMMUNICATION INTERFACE (PCI) 8251A – IC 8251 adalah sebuah antarmuka komunikasi berbentuk Integrated Circuit
(IC) yang dapat diprogram dan dirancang untuk menghubungkan ke suatu tipe interface serial secara virtual. – 8251 merupakan Universal Syncronous/ Asyncronous Receiver Transmitter

8
(USART). Menyediakan 2 mode komunikasi yaitu :
1. Mode Asyncronous Pada Mode ini data berbentuk Asinkron dimana informasi dikirim dan diterima
tanpa adanya clock atau sinyal pewaktu. Data dikirim perbingkai (frame) yang terdiri atas : start bit, tujuh bit data , paritas dan satu stop bit. Data umumnya berisi satu karakter ASCII.
2. Mode Syncronous Pada Mode ini data tidak mempunyai start bit dan stop bit dan hanya berisi bit
data. Data disinkronisasikan dengan sinyal clock. Awaol frame diindikasikan dengan menggunakan karakter SYNC dan umumnya digunakan 2 karakter SYNC yang disebut BYSYNC.
PROGRAMMABLE KEYBOARD/ DISPLAY INTERFACE 8279 IC 8279 adalah sebuah antarmuka papan ketik (keyboard) dan display berbentuk Integrated Circuit (IC) yang dapat diprogram dan dirancang untuk men-scan dan meng-encode sampai dengan 64 kunci (tuts) dan 16 digit kode numerik. CATHODE RAY TUBE CONTROLLER (CRTC) 8275 IC 8275 adalah sebuah antarmuka layar (CRT) yang dapat diprogram dan dirancang untuk men-scan dan meng-encode sampai dengan 64 kunci (tuts) dan 16 digit kode numerik.
CATHODE RAY TUBE CONTROLLER (CRTC) 8275 IC 8275 adalah sebuah antarmuka layar (CRT) yang dapat diprogram dan dirancang untuk men-scan dan meng-encode sampai dengan 64 kunci (tuts) dan 16 digit kode numerik. FLOPPY-DISK CONTROLLER (FDC) 8272A IC 8272A adalah sebuah antarmuka floppy berbentuk Integrated Circuit (IC) yang dapat diprogram dan dirancang untuk men-scan dan meng-encode sampai dengan 64 kunci (tuts) dan 16 digit kode numerik.

9
DIRECT MEMORY ACCESS CONTROLLER (DMAC) 8237 IC 8279 adalah sebuah antarmuka papan ketik (keyboard) dan display berbentuk Integrated Circuit (IC) yang dapat diprogram dan dirancang untuk men-scan dan meng-encode sampai dengan 64 kunci (tuts) dan 16 digit kode numerik.
DAC & ADC DIGITAL TO ANALOG CONVERTER (DAC) Digital To Analog Converter (DAC) adalah pengubah kode/ bilangan digital menjadi tegangan keluaran analog. DAC banyak digunakan sebagai rangkaian pengendali (driver) yang membutuhkan input analog; seperti motor AC maupun DC, tingkat kecerahan pada lampu, Pemanas (Heater) dan sebagainya.
Umumnya DAC digunakan untuk mengendalikan peralatan aktuator. ANALOG TO DIGITAL CONVERTER (ADC) ADC adalah proses pengubahan sinyal analog menjadi sinyal digital. Proses pengubahan terjadi pada konverter/pengubah yang dikenal dengan analog to digital converter. Proses pengubahan ini dikenal juga dengan nama sistem akusisi data. Terdapat empat macam ADC yang memenuhi standar industri, yaitu integrating, tracking converter, successive approximation dan flash/paralel. Keempat jenis ADC tersebut mewakili beberapa macam pertimbangan diantaranya resolusi, kecepatan konversi dan biaya. Menurut cara pengkonversiannya, ADC dapat dikelompokkan kedalam beberapa jenis yaitu :
1.Tipe Integrating Tipe Integrating menawarkan resolusi tertinggi dengan biaya terendah. ADC tipe ini tidak dibutuhkan rangkaian sample hold. Tipe ini memiliki kelemahan yaitu waktu konversi yang agak lama, biasanya beberapa milidetik.
2.Tipe Tracking Tipe tracking menggunakan prinsip up down counter (pencacah naik dan turun). Binary counter (pencacah biner) akan mendapat masukan clock secara kontinyu dan hitungan akan bertambah atau berkurang tergantung pada kontrol dari pencacah apakah sedang naik (up counter) atau sedang turun (down counter). ADC tipe ini tidak menguntungkan jika dipakai pada sistem yang memerlukan waktu konversi masukan keluaran singkat, sekalipun pada bagian masukan pada tipe ini tidak memerlukan rangkaian sample hold. ADC tipe ini

10
sangat tergantung pada kecepatan clock pencacah, semakin tinggi nilai clock yang digunakan, maka proses konversi akan semakin singkat.
3.Tipe flash / paralel Tipe ini dapat menunjukkan konversi secara lengkap pada kecepatan 100 MHz dengan rangkaian kerja yang sederhana. Sederetan tahanan mengatur masukan inverting dari tiap-tiap konverter menuju tegangan yang lebih tinggi dari konverter sebelumnya, jadi untuk tegangan masukan Vin, dengan full scale range, komparator dengan bias dibawah Vin akan mempunyai keluaran rendah. Keluaran komparator ini tidak dalam bentuk biner murni. Suatu dekoder dibutuhkan untuk membentuk suatu keluaran yang biner. Beberapa komparator berkecepatan tinggi, dengan waktu tunda (delay) kurang dari 6 ns banyak digunakan, karena itu dihasilkan kecepatan konversi yang sangat tinggi. Jumlah komparator yang dibutuhkan untuk suatu konversi n bit adalah 2^n – 1.
4.Tipe successive approximation Tipe successive approximation merupakan suatu konverter yang paling sering ditemui dalam desain perangkat keras yang menggunakan ADC. Tipe ini memiliki kecepatan konversi yang cukup tinggi, meskipun dari segi harga relatif mahal. Prinsip kerja konverter tipe ini adalah, dengan membangkitkan pertanyaan-pertanyaan yang pada intinya berupa tebakan nilai digital terhadap nilai tegangan analog yang dikonversikan.
TEKNIK MERANCANG ANTARMUKA ADDRESS DECODER Ada dua jenis perancangan antarmuka pada personal komputer : 1. Menggunakan Bus Ekspansi sehingga diperlukan sebuah prototype kartu ekspansi, terdapat beberapa keuntungan :
a. Tidak tergantung pada aspek – aspek yang mengikat dan lebih fleksibel b. Dapat secara bebas menggunakan kemampuan bus data yang lebar c. Memiliki jangkauan alamat yang luas (address range)
Tetapi ada beberapa kerugian bila menggunakan bus ekspansi :
a. Harus membuka rangka/ casing komputer. b. Bila terdapat kesalahan maka tidak menutup kemungkinan sistim akan rusak total, misalnya mencabut kartu ekspansi pada saat sistim komputer hidup atau salah menentukan sisi solder dan sisi komponen.

11
c. Menentukan alamat dari kartu ekspansi dengan menggunakan address decoder.
Menggunakan Port-port yang telah tersedia, hanya diperlukan rangkaian pengendali saja.
Dengan menggunakan Port terdapat beberapa keuntungan :
– Tidak harus membuka rangka/ casing komputer – Cukup aman bila digunakan sebagai percobaan apabila terjadi salah pemasangan (Hal ini kecil kemungkinannya, karena port memiliki jenis konektor yang unik).
TEKNIK PEMROGRAMAN ANTARMUKA Bahasa pemrograman yang dapat digunakan untuk rangkaian antarmuka :
1. Berbasis Grafik/ Visual (Visual based)– Visual Basic – Delphi – Visual C
2. Berbasis Teks (Text Based) – BAHASA RAKITAN – BAHASA C
Bahasa pemrograman di atas tentunya sudah sangat familiar bagi seorang programmer, walaupun tidak tertutup kemungkinan bahasa pemrograman lainnya dapat digunakan.
Ciri utama bahasa pemrograman yang dapat digunakan bagi pemrograman antarmuka adalah :
• Memiliki perintah IN dan OUT. • Memiliki perintah akses PORT • Bila hal diatas tidak ditemui, carilah fungsi library yang mengarah dalam
mengakses PORT.
BAHASA RAKITAN Bahasa rakitan merupakan bahasa yang banyak ditemui bagi pemrograman antarmuka. Kecepatan dan tergantung pada mesin yang digunakan merupakan kekuatan utama bahasa rakitan. Bahasa rakitan dipakai pula dalam antarmuka berbasis mikrokontroller dan programmable logic devices.

12
Bentuk Umum : OUT DX,AX dan OUT DX,AL.Penggunaan : Mengeluarkan data dari Mikropro-sesor ke Alat. DX : Alamat Port AL : Data port
BAHASA C Bahasa C merupakan bahasa yang fleksibel, tidak tergantung pada mesin yang digunakan dan multiplatform merupakan keunggulan dari bahasa pemrograman ini. Seorang programmer dapat membuat pemrograman antarmuka dengan bahasa C dilingkungan UNIX/ Linux. Yang patut diingat adalah bahwa bahasa C berformat case sensitif (Membedakan huruf besar dan huruf kecil).
BAHASA BASIC Bahasa Basic adalah bahasa pemrograman yang cukup mudah digunakan, fleksibel dan tidak membutuhkan pemrograman yang terstruktur. BAHASA PASCAL Hampir sama dengan bahasa Basic; bahasa PASCAL termasuk bahasa pemrograman yang cukup mudah digunakan dan banyak dipelajari di sebagian besar perguruan tinggi walaupun memiliki program yang terstruktur.
SERPIH-SERPIH (IC) INTERFACE DASAR PADA PC PROGRAMMABLE PERIPHERAL INTERFACE (PPI) 8255 IC 8255 adalah sebuah antarmuka yang dapat menggerakkan piranti/peralatan/peripheral berbentuk Integrated Circuit (IC) yang dapat diprogram dan bekerja pada Mikroprosessor intel dan kompatibelnya. 8255 menyediakan 3 buah port I/O yang masing masing berisi 8 bit dan masing -masing portnya saling berdiri sendiri. IC 8255 adalah peralatan yang berkenaan dengan operasi data paralel input maupun output (Paralel I/O = PIO). Fungsi dari 3 buah port I/O yang ada adalah sebagai berikut :
Port A: Terdiri dari bagian Input 8 bit atau Output 8 bit. Bagian input disediakan untuk menahan data (latching data). Bagian output disediakan untuk menahan (latch) dan buffer data; yang berarti output dapat langsung menjalankan rangkaian luar (TTL). Write/menulis adalah mengirim data ke bagian output; sedangkan Read/membaca adalah mengirim data dari unit/ bagian output ke input.

13
Port B: Terdiri dari sebuah bagian I/O yang terdiri dari 8 bit dan sebuah Input buffer data 8 bit. Unit I/O disediakan untuk menahan dan buffer data.
Port C: Terdiri dari satu bagian output 8 bit dan satu bagian input 8 bit. Unit output menyediakan latch dan buffer data sedangkan unit input menyediakan fungsi buffer data.
Pada mode 1 dan 2; Port C dibagi atas dua bagian yang masing - masing mempunyai lebar 4 bit yang dioperasikan dengan Port A dan B dikhususkan sebagai sinyal kontrol output atau sinyal status input.
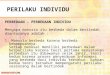
Gambar. Blok Diagram 8255
Data Bus Bufer 8 bit data bus buffer (D0..D7) berhubungan dengan 3 state bi-directional 8 bit buffer (Port A, Port B dan Port C). Data yang diterima di data bus buffer akan tersimpan di buffer (tempat penyimpanan sementara) sebelum sebelum di eksekusi oleh mikroprosesor. Control word dan status informasi juga di transfer melalui data bus buffer ini.

14
Gambar. Group Control 8255
Group Control Group control dibagi menjadi 2 group, yaitu group A dan group B. Broup tersebut menerima Read/Write Control.
Group Control A digunakan : a. Mengatur port A yang bias diseting sebagai input/output latch buffer. b. Mengatur 4 upper bit (C4..C7), port C sebagai input buffer atau output latch/buffer jika bekerja pada mode 0. c. Mengatur 4 upper bit (C4..C7), port C sebagai control group A jika bekerja pada mode 1 atau 2.
Group Control B digunakan : a. Mengatur port B yang bias disetting sebagai input/output latch buffer. b. Mengattur 4 lower bit (C0..C3), port C sebagai input buffer atau output latch/buffer jika
bekerja pada mode 0.c. Mengatur 4 lower bit (C0..C3), port C sebagai control group B jika bekerja pada mode 1
atau 2.

15
Mode/Protokol komunikasi Transfer data pada PPI 8255 dibagai menjadi 3 protokol komunikasi:
1. Mode 0 (Simple protocol)/Basic input-output Transfer data yang tidak memerlukan sinyal khusus yang menandakan apakah telah
terjadi transfer data atau belum. Semua Port I/O dipakai sebagai Input dan Output. Tidak diperlukan sinyal“Handshake“. Data langsung ditulis atau dibaca dari port yang bersangkutan. Fungsi dasar dari 8255 mode 0 adalah :
– Dua Port-8 bit (Port A & B) serta 2 Port - 4 bit (Port c). – Setiap Port dapat dipakai sebagai input atau output. – Output di-latch (ditahan); input tidak di-latch (ditahan). – Menyediakan 16 kombinasi konfigurasi input/output pada mode ini. (Dapat dilihat dari control wordnya).
2. Mode 1 (Single handshaking protocol)/Strobed input-output
Metode pentransferan data parallel dimana data tidak siap setiap saat. Untuk memberikan tanda dari/ke mikroprosesor, maka PPI akan memberi sinyal “strobe” yang meyatakan data telah siap dikirim/diterima. Sebagai penyalur data I/O dari atau ke port yang dimaksud yang berhubungan dengan sinyal strobe (sinyal kontrol) memakai aturan “Handshake”. PortA dan PortB dipakai untuk jalur transfer data. Port C untuk menghasilkan atau menerima sinyal “Handshake” tersebut. Definisi fungsional dari mode 1 adalah :
– 2 kelompok sinyal kontrol dengan Handshake. – Tiap kelompok terdiri dari satu buah port data 8 bit (port A atau B) dan satu buah port kontrol/data 4 bit. – Port data-8 bit dapat digunakan sebagai input ataupun output. Keduanya dapat di- latch.– 4 Port lainnya (4 bit) dipakai untuk port kontrol/status dari port data 8
bit. 1 bit lagi dipakai untuk port data input/output. Transfer data semacam ini bias kita lihat
pada printer. Cara kerjanya sebagai berikut: Mikroprosesor mengeluarkan sinyal strobe ke printer seolah-olah
memberitahukan ini ‘ada data untukmu, terimalah’. Jika printer telah menerima data maka printer memberikan sinyal acknowledge ke mikroprosesor, seolah-olah memberitahukan ‘data sudah saya terima’.
3. Mose 2 (Double handshaking protocol)/Bi-directional bus Metode pentransferan data parallel yang menggunakan data handshaking, dimana
mikroprosesor dan PPI akan saling berkomunikasi dengan memberi sinyal yang menyatakan bahwa data telah siap dikirim dan dta telah diterima. Mode ini setiap data port membutuhkan 5 sinyal kontrol sehingga hanya control grup A yang terdapat pada mode

16
ini.Fungsinya mirip dengan mode 1, hanya arah datanya Bidirectional (Dua arah). Fungsi dasar dari mode 2 :
• Digunakan hanya dalam grup A. • Sebuah port bus 8 bit Bidirectional (port A) dan 5 bit port kontrol (port c). • Data input dan output di-latch.
Transfer data semacam ini menggunakan aturan sebagai berikut: Mikroprosesor sebagai pengirim mengeluarkan sinyal strobe low seolah-olah
mengatakan ke printer ‘anda siap dikirim data?’ Jika printer siap maka printer sebagai penerima data mengeluarkan sinyal acknowledge high seolah-olah mengatakan ke mikroprosesor ‘ya saya siap!’ Setelah ada persetujuan, mikroprosesor mengeluarkan sinyal strobe high diikuti dengan pengiriman data seolah-olah mengatakan ‘ini dta untukmu!’ Jika data telah ditansfer printer mengeluarkan sinyal acknowledge low seolah-olah mengatakan ‘data sudah siap di terima’. Terdapat 2 format control word register, yaitu format definisi mode (mode definition format) dan formatset/reset bit (bit set/reset bit format). Perbedaan kedua format tersebut adalah pada MSB control word register (D7). Format definisi mode apabila D7 bernilai 1 dan format set/reset bit apabila D7 bernilai 0. Format definisi mode digunakan untuk mendefinisikan mode pengoperasian port PPI. Format set/reset bit digunakan untuk memberikan nulai low atau high pada bit-bit port C.
Gambar. Diagram Control Word
Port pada Programmable Peripheral Interface 8255 Programmable Peripheral Interface 8255 tersiri dari 4 port, yaitu Port A, Port B, Port C dan Control Word Port.

17
Pada mode 0, Port A, B, C adalah port yang digunakan sebagai I/O data Pada mode 1, Pert A,B adalah port yang digunakan sebagai I/O data sedangkan port C bisa digunakan sebagai sinyal control (strobe dan acknowledge) atau sebagai I/O data.Pada mode 2, Port A,C adalah port yang digunakan sebagai I/O data sedangkan port B, 5 bit pada MSB digunakan sebagai sinyal control dan 3 bit pada LSB digunakan sebagai I/O data. Control Word Port diguankan untuk inisialisasi awal yang menentukan PPI 8255 bekerja pada mode 0, 1, 2 dan menentukan port-port mana saja yang digunakan sebagai input dan output serta sebagai sinyal control.
Set/Reset Bit PAda PPI 8255 terdapat port untuk set dan reset sebuah bit, dimana jika terjadi Set atau Reset hanya salah satu port pada Port C. Contoh: 1. Jika Port C saat ini datanya adalah FFH (1111 1111), jika kita akan mereset Port C 5
(PC5) maka port C hasilnya adalah EFH (1101 1111).2. Jika Port C saat ini datanya adalah 1FH (0001 1111), jika kita akan me-set Port C
7 (PC7) maka Port C hasilnya adalah 9FH (1001 1111).
Format Data Set/ResetD7 D6 D5 D4 D3 D2 D1 D00 X X X Bit Selector 1=Set
0=Reset
Penjelasan: Bit selector adalah bit yang diinginkan untuk di set/reset, Contoh: jika set PC3 maka datanya adalah 0xxx0111 (angaka yang tebal artinya adalah set). Pengalamatan Telah dijelaskan sebelumnya bahwa PPI 8255 memiliki tiga butah port parallel masing-masing diberi nama port A, port B dan port C. Disamping itu PPI 8255 memiliki satu register control (control register word). Ketiga port dan register tersebut dapat diakses dengan alamat sebagai berikut: Alamat port A, B dan C berturut-turut adalah 00h, 01h, 02h. sedangkan alamat register control adalah 03h. Hal ini berhubungan dengan pemberian sinyal pada kaki A0 dan A1. A0 dan A1 : Port select 0 dan port select 1. untuk menentukan hubungan antara data bus dengan port yang aktif. Karena data bus dari 8255 hanya terdiri dari satu bus 8 bit maka transfer data pada semua port tidak dapat dilakukan secara bersama-sama. Sesuai dengan table di bawah ini.

18
Tabel. Port Select
Dalam suatu program, alamat port A adalah 00h ditambah dengan alamat aktif. Alamat port B adalah 01h detambah alamat aktif. Demikian pula untuk port C dan register control. Misalnya, jika PPI 8255 dirancang untuk aktif pada alamat 200h, alamat ketiga port berturut-turut adalah 200h,201h dan 202h. Dan alamat register control adalah 203h. Penuliasan bahasa pemrograman assembler pada mikroprosesor intel ¾ (Output data) menulis atau mengeluarkan data ke devie Mov DX, 300h Mov AL, FCh Out DX, AL Penjelasan: Register DX mikroprosesor menuju alamat 300h Register AL mikroprosesor diisi data FCh dalam bentuk bit (1111 1100) Mikroprosesor mengeluarkan data FCh ke alamat 300h
¾ (Input data) membaca data dari device / memasukkan data ke mikroprosesor Mov DX, 301h In AL, DX Penjelasan: Register DX mikroprosesoe menunjuk alamat 301h Mikroprosesor memasukkan data dari alamat 301h
MOTOR STEPPER
MOTOR STEPPER
A0 A1 Sinyal Control0 0 Data Bus = Port A0 1 Data Bus = Port B1 0 Data Bus = Port C1 1 Data Bus = Control Word

19
Motor stepper merupakan salah satu komponen elektronika yang gerakan rotor-nya dapat dikontrol dengan memberikan pulsa-pulsa yang dihasilkan dari sistem digital seperti mikroprosesor dan komputer. Motor stepper ini dirancang untuk aplikasi-aplikasi pengontrolan digital seperti penggerak lengan robot, printer, pintu elektronik dan lain sebagainya. Tidak seperti motor ac dan dc konvensional yang berputar secara kontinyu, perputaran motor stepper adalah secara incremental atau langkah per langkah (step by step). Gerakan motor stepper sesuai dengan pulsa-pulsa digital yang diberikan. Seperti halnya motor konvensional dc biasa, motor stepper juga dapat berputar dalam dua arah yaitu searah jarum jam (CW) atau berlawanan arah jarum jam (CCW) yaitu dengan memberikan polaritasyang berbeda. Pada prinsipnya motor mengkonversi tenaga elektris ke dalam daya mekanis. Suatu motor stepper mengkonversi sinyal elektrik ke dalam pergerakan (putaran) spesifik. Pergerakan yang diciptakan oleh sinyal masing-masing dapat diulang dengan tepat, itulah sebabnya mengapa motor stepper sangat efektif untuk aplikasi pergerakan posisi.
Magnet permanen motor stepper terhubung dengan magnet tetap rotor, kumparan yang melilit dan secara magnetis menginduksi stator. Energi dari kumparan yang melilit ini menciptakan suatu medan elektromagnetis dengan posisi kutub utara dan kutub selatan Stator membawa medan magnet yang menyebabkan rotor untuk menata posisinya sendiri dengan medan magnet tersebut. Medan magnet dapat diubah secara sekuen oleh energi atau “stepper” kumparan stator yang akan menghasilkan gerak berputar.
Half Stepping Motor dapat juga dibuat menjadi setengah langkah, dengan cara memasukkan state off antara setiap 2 phase (phase A dan B), sehingga pada langkah 90? disisipi langkah 45?. Namun hal iniakan mengurangi torsi sebesar 15 % - 30 %.
Tipe Motor Stepper Motor stepper dibedakan menjadi dua macam berdasarkan magnet yang digunakan,
yaitu tipe permanen magnet dan variabel reluktansi. Pada umumnya motor stepper saat ini yang digunakan adalah motor stepper yang mempunyai variabel relukatansi. Cara yang paling mudah untuk membedakan antara tip motor stepper di atas adalah dengan cara memutar rotor dengan tangan ketika tidak dihubungkan ke suplai. Pada motor stepper yang mempunyai permanen magnet maka ketika diputar dengan tangan akan terasa lebih tersendat karena adanya gaya yang ditimbulkan oleh permanen magnet. Tetapi ketika menggunakan motor dengan variabel reluktansi maka ketika diputar akan lebih halus karena sisa reluktansinya cukup kecil.

20
Variabel Reluktansi Motor Pada motor stepper yang mempunyai variabel reluktansi maka terdapat 3 buah
lilitan yang pada ujungnya dijadikan satu pada sebuah pin common. Untuk dapat menggerakkan motor ini maka aktivasi tiap-tiap lilitan harus sesuai urutannya.
Unipolar Motor Stepper Motor stepper dengan tipe unipolar adalah motor stepper yang mempunyai 2 buah
lilitan yang masing-masing lilitan ditengah-tengahnya diberikan sebuah tap.Motor ini mempunyai step tiap 30? dan mempunyai dua buah liliatan yang didistribusikan berseberangan 180? di antara kutub pada stator. Sedangkan pada rotonya menggunakan magnet permanen yang berbentuk silinder dengan mempunyai 6 buah kutub, 3 kutub selatan dan 3 buah kutub utara. Sehingga dengan konstrusi seperti ini maka jika dibutuhkan ke presisiandari motor stepper yang lebih tinggi dibutuhkan pula kutub-kutub pada stator dan rotor yang semakin banyak pula. Ketelitian dari magnet permanen di rotor dapat sampai 1.8? untuk tiap stepnya. Ketika arus mengalir melalui tap tengah pada lilitan pertama akan menyebabkan kutub pada stator bagian atas menjadi kutub utara sedangkan kutub stator pada bagian bawah menjadi kutub selatan. Kondisi akan menyebabkan rotor mendapat gaya tarik menuju kutub-kutub ini. Dan ketika arus yang melalui lilitan 1 dihentikan dan lilitan 2 diberi arus maka rotor akan mengerak lagi menuju kutub-kutub ini. Sampai di sini rotor sudah berputar sampai 30? atau 1 step.
Bipolar Motor Stepper Motor dengan tipe bipolar ini mempunyai konstruksi yang hampir sama dengan motor stepper tipe unipolar namun tidak terdapat tap pada lilitannya.Penggunaan motor dengan tipe bipolar ini membutuhkan rangkaian yang sedikit lebih rumit untuk mengatur agar motor ini dapat berputar dalam dua arah. Biasanya untuk menggerakkan motor stepper jenis ini membutuhkan sebuah driver motoryang sering dikenal sebagai H Bridge. Rangkaian ini akan menontrol tiap-tiap lilitan secara independen termasuk dengan polaritasnya untuk tiap-tiap lilitan. Untuk mengontrol agar motor ini dapat berputar satu step maka perlu diberikan arus untuk tiap-tiap lilitan dengan polaritas tertentu pula.
Motor stepper memiliki beberapa kebutuhan standar yang harus dipenuhi agar dapat bekerja dengan baik, antara lain:
a) Tegangan/arus yang memadai untuk setiap lilitan untuk langkah tiap step. b) Lama tegangan/arus harus diberikan untuk setiap langkah atau step.
Hal ini diperlukan untuk memberikan waktu yang cukup bagi torsi untuk memindahkan posisi ke kutub ke posisi yang paling dekat dengan kutub stator
(lilitan).

21
Beberapa keunggulan motor stepper antara lain adalah : 1. Sudut rotasi motor proporsional dengan pulsa masukkan sehingga mudah diatur. 2. Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak. 3. Posisi dan pergerakkan dapat ditenukan secara presisi. 4. Memiliki respon yang sangat baik terhadap segala kondisi putaran. 5. Tidak ada sikat yang bersentuhan dengan rotor seperti pada motor dc.
Komponen Motor Stepper Motor Stepper merupakan motor penggerak yang bergerak tiap-tiap langkah, Power driver berfungsi sebagai penyuplai tegangan pada input motor stepper, Translator berfungsi untuk mengendalikan power driver agar bekerja sesuai dengan kehendak pemakai. Pemakaian rangkaian pencacah dapat menggerakkan motor langkah demi langkah. Nilai 1 sebagai keluaran dari pencacah diumpankan sebagai masukkan ke transistor atau darlington. Kerja transistor seperti halnya saklar on-off yang pada prinsipnya akan mensuplai arus ke motor stepper jika transistor dalam kondisi ON dan akan memutus arus jika dalam kondisi OFF. Fungsi dioda bertindak sebagai proteksi terjadinya arus balik yang dihasilkan oleh motor stepper (EMF). Contoh rangkaian driver penggerak motor stepper dengan menggunakan ULN2003 yang digunakan sebagai penggerak Robot Avoidance.
Robot Avoidance (robot penjelajah) menggunakan motor stepper berjenis unipolar yang terdapat pada disk-drive komputer, yaitu pada disk-drive berukuran 5 ¼ Inchi. Motor stepper ini berimpedensi antara ground dengan masing-masing pin adalah 75 Ohm, arus yang diperlukan sebesar 60 mA pada tegangan +5 Volt. Rangkaian penggerak motor stepper banyak ragamnya. Secara manual penggerak ini dapat dilakukan melalui paralel port dengan mengubah output yang kita masukan ke paralel port. Hal ini sangat tidak ekonomis dan praktis. Untuk lebih praktis digunakan rangkaian driver penggerak motor stepper yang sudah terintegrasi dalam satu chip IC, yaitu ULN 2803 keluaran dari Allegro. Dimana ULN2003 ini sudah terintegrasi transistor penguat arus sehingga tidak memerlukan tambahan rangkaian luar lagi.
Prinsip Kerja Pengoperasian motor jenis ini berdasarkan pulsa-pulas listrik. Setiap kali mengirim pulsa ke pengontrol elektronik, maka motor akan bergerak ‘selangkah’, yaitu satu putaran sudut kecil. Ukuran langkah tergantung pada perancangan motor dan dapat sekecil 1,5 derajat atau maksimal 30 derajat. Kecepatan pengiriman pulasa maksimum 2000 pulsa per detik. Sudut Langkah Untuk memperoleh sudut langkah yang lebih kecil, diperlukan kutub stator dan rotor yang lebih banyak pula. Gambar berikut menggambarkan plat kutub suatu motor 7.5° pada suatu pandangan setengah bagian. Motor memiliki 12 pasang kutub dan masing-masing kutub memiliki 12 sikat.

22
Torsi Torsi yang dihasilkan oleh motor stepper adalah fungsi dari : • Banyaknya langkah (step rate) • Arus pada kumparan • Type dari alat yang digunakan (beban) (Gaya yang dihasilkan juga terpengaruh oleh hal-hal tersebut).
Torsi merupakan penjumlahan dari Torsi friksi (Tf) dan inisial torsi (Ti). T= Tf + Ti Torsi friksi (ons-inches atau gram-cm) adalah Gaya (F), dalam ons atau gram, yang dibutuhkan unutk memindahkan beban dikali dengan panjang lengan, dalam inches atau cm.

23
BAB III
PENUTUP
4.1 Kesimpulan
Setelah menjelaskan secara terperinci sejauh mana teknik INTERFACE yang telah
di pelajari, tentunya banyak hal yang bisa disimpulkan, diantaranya:
1. Interfacing adalah bagian dari disiplin ilmu komputer yang mempelajari
yang mempelajari teknik-teknik menghubungkankomputer dengan perangkat
alat elektronika lain. Yang artinya kita harus memiliki ilmu inteface disaat kita
akan menghubungkan alat elektronik lain dengan komputer.
2. Jadi tidaklah praktis untuk menghubungkan mikroprosessor secara langsung
dengan piranti yang ingin dijalankannya. Diperlukan suatu teknik untuk
mem”perantarakan”kan pemroses utama dengan dunia luar.