Embed Size (px)
DESCRIPTION
cc
Citation preview

Universitatea Politehnica Bucuresti
Facultatea de Inginerie Electrica
Proiect la Controlul Actionarilor Electrice
Sistem de comanda si reglare cu masina de curent continuu
Indrumator: Dragos Deaconu
Turbatu Alexandru
141 IA
05/1/2010

Cuprins
Scopul proiectului ............................................................................................................................3
Date nominale...............................................................................................3
1. Schema bloc a sistemului de reglare si comanda......................................3
2. Masina de curent continuu cu exicitatie independenta..............................4
3. Elementul de executie...............................................................................6
4. Traductoarele de viteza si de curent.......................................................7
4.1 Blocul traductor de curent..........................................................7
4.2 Blocul traductor de viteza.................................................................8
5. Proiectarea parti de comanda..................................................11
5.1 Regulatorul de curent.........................................................11
5.2 Regulatorul de viteza.........................................................13
6. Schema de reglare si control a masinii de curent continuu.........14
7. Observatii si concluzii...................................................................15
2

Scopul proiectului
Sa se proiecteze un sistem de reglare si comanda a unei actionari electrice, elaborand modele matematice corespunzatoare diverselor elemente componente: masina de curent continuu, convertorul cu tiristoare, traductoarele.
Date nominale:
Un Pn nn ηn IAn Mn RA LA m JV kW rpm % A Nm Ω mH kg kgm2
270 8.4 1150 78 38 70 0.7 7.5 125 0.09
1. Schema bloc a sistemului de reglare si comanda
Semnificatia elementelor de pe schema:
RΩ - reprezinta regulatorul de viteza;Ri - reprezinta regulatorul de curent;U*Ω - reprezinta o tensiune proportionala cu valoare impusa a vitezei;Ui - reprezinta o tensiune proportionala cu valoare impusa a curentului;UΩm - reprezinta o tensiune proportionala cu valoare masurata a vitezei;Uim - reprezinta o tensiune proportionala cu valoare masurata a curentului;EC - reprezinta elementul de comanda (dispozitivul de comanda pe grila – DCG - al celor doua convertoare statice cu stingere naturala complet comandate montate în antiparalel);EE - reprezinta elementul de executie (convertorul static);Fi - reprezinta filtrul de curent;FΩ reprezinta filtrul de viteza;
3

Avem o tensiune proportionala cu valoarea impusa a vitezei care intra in sumator impreuna cu o tensiune proportionala cu o tensiune proportionala cu valoarea masurata a vitezei, dar cu semnul minus. Rezulta o eroare de viteza care intra in regulatorul de viteza. Acesta va incerca sa anuleze aceasta eroare.
La iesirea din regulator vom avea o tensiune proportionala cu valoarea impusa a curentului care intra in sumator, impreuna cu o tensiune proportionala cu valoarea masurata a curentului, cu semnul minus. Va rezulta o eroare de curent care intra in regulatorul de curent. Si acesta va incerca sa anuleze eroarea respectiva.
La Ri avem o tensiune de comanda care se aplica la intrarea elementului de executie. Elementul de executie furnizeaza tensiunea de la bornele masinii de curent continuu.
Masina de curent continuu este impartita in doua deoarece avem nevoie de reactia de curent care este culeasa cu ajutorul traductorului de curent. Aceasta reactie este analizata de blocul traductor de curent, care va avea la iesire valoarea masurata a curentului. La iesirea blocului al doilea al masinii de curent continuu se obtine viteza masinii care este si ea introdusa in blocul traductor de viteza.
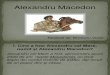
2. Masina de curent continuu cu exicitatie independenta
Modelul matematic
4

Schema bloc a unei masini de curent continuu cu excitatie independenta
Variatia vitezei masinii de la tunctionarea in gol la functionarea in sarcina nominala este toarte mica, asttel se poate neglija prezenta cuplului de sarcina. In schema avem parametrii masinii RA, LA si J, dar in schema de reglare vom folosi parametrii totali.
RA-> R=RA+Rbob
LA -> L = LA + Lbob J = Jm+Js =2Jm
JS =Jm
Motorul va fi integrat in schema de comanda si reglaj astfel:
5

3. Elementul de executie
Modelul matematic
Schema bloc echivalenta a elementului de comanda si executie.
Elementul de executie reprezinta defapt convertorul bidirectional considerat in cazul sistemului de actionare electrica.
Functia de transfer a elementului de executie este:
unde k0 este amplificarea semnalului, iar 1+sT este intarzierea acestuia.
Pe partea electronica vom avea tensiuni in gama ± 10V.
k 0=U An
U C=27010
=27
UC=±10
Timpul de intarziere care apare la aprinderea tiristoarelor are o valoare minima zero si una maxima egala cu perioada unui singur puls al tensiuniii redresate. In aceste conditii valoarea medie a timpului de intarziere a unui convertor trifazat complet comandat este data de relatia :
T μ=T μmin+T μmax2 =
0+Tp
2 =T2 p=
T2∗3 =
20ms6 =3.33ms
p=3
Rezulta ca functia de transfer va fi:
6
H EE=k0
1+sT μ

H EE=k0
1+sT μ=271+s∗0 .0033
4. Traductoarele de viteza si de curent
Blocurile traductoare au urmatoarele roluri :
transforms semnalul masurat intr-o tensiune proportionala cu el
adapteaza tensiunea de la traductor la nivelul partii electronice (±10V)
filtreaza armonicile semnalului de iesire
4.1 Blocul traductor de curent
Modelul matematic al traductorului de curent
Schema echivalenta a ansamblului traductor de curent - filtru de curent.
Pentru achizitionarea curentului continuu IA se folosesc sunturi.
Alegerea suntului se face pentru valoarea maxima a curentului dat prin tema de prolectare la care se adauga un plus de 10% datorita posibilei variatii a tensiunii retelei de alimentare.
I nsh≥2×1 .1×I An⇒ I nsh≥2×1 .1×38=83 .6 A
Din tabele se alege suntul care are curent nominal de 120A tensiunea de iesire nominala de 60mV .
Tensiunea maxima la iesirea suntului este :
7
U shmax=U nsh
Insh⋅I A max=
60⋅10−3
120=41 . 8mV

Valoarea maxima la iesirea schemei trebuie sa fie de 10V.
Constanta de timp a filtrului de curent Tfi trebuie sa tie mai mare decat valoarea constantei de timp corespunzatoare armonicii de ordin 12.
Tfi = 5ms
Se considera pentru filtrul de curent o constanta de circa 5 ms (cu cat valoarea
constantei de timp a filtrului este mai mica, cu atat raspunsul in timp al acestuia este mai bun).
Functia de transfer va fi:
H i=K Fi
1+sTFi= 0 .0961+s⋅0 .005
unde constanta de amplificare a ansamblului este:
K Fi=10I A max
=1083.6
=0 .119
4.2 Blocul traductor de vitezaModelul matematic al traductorului de viteza
Schema echivalenta a ansamblului traductor de viteza - filtru de viteza
Caracteristica statica a traductorului de viteza este liniara si definita de relatia:
Eo =kTG *n =10 *1870=18 700V
unde E0 este tensiunea electromotoare, iar n este turatia tahogeneratorului.
Pentru a avea erori minime trebuie ca rezistenta interna a tahogeneratorului sa fie toarte mica, mult mai mica decat rezistenta de sarcina a acestuia.
8

Pentru acest sistem de actionare se va considera utilizarea tahogeneratorului de curent continuu de tipTG5, care are urmatoarele caracteristici:
Introducerea filtrului duce la aparitia unei intarzieri pe calea de masura a vitezei. Usual, se accepa o constanta de timp globala in jurul valorii de 5 ms. Aceasta este data atat de constanta de timp a filtrului (TfΩ1), cat si de constanta de timp datorate intarzierilor pe calea mccanica (TfΩ2).
TfΩ = TfΩ1 + TfΩ2 = 5ms
Constanta de amplificare a filtrului este:
Functia de transfer a traductorului de viteza va fi:
Caracteristica Unitate demasura TG5
Turatia maxima nmax rot/min 3000
Tensiunea electromotoarela 1000 rot/min E1000
V 12
Rezistenta electrica RiTG % 175
Eroarea maxima deneliniaritate pentru
n > 500 rot/min% 0.8
Ondulatie rezidualamaxima pentrun > 500 rot/min
% 1
Eroare de reversibilitate la1000 rot/min % 1
Moment de inertie rotoricmaxim JTG
gcm2 75
Curent nominal ITGn mA 10
K FΩ=UΩm_max
Ωmax=102Π⋅nmax60
=102Π⋅300060
=0 .031Vs
H FΩ=K FΩ
1+sT f Ω= 0 .0311+s⋅0 .005

5. Proiectarea parti de comanda
Schema de comanda si reglare a sistemului de actionare electrica considerat este realizata in bucla inchisa.
Schema confine doua bucle, una de curent (interioara) si una de tensiune (exterioara). Caracteristic acestor structuri de scheme de comanda si de reglare este timpul de raspuns at buclei interioare semnificativ mai mic decat al celei exterioare.
Etapa de proiectare a partii de comanda consta in stabilirea unor relatii cantitative intre parametrii instalatiei de actionare electrica reglabila, parametrii sursei de alimentare ai convertorului complet comandat utilizat si al masinii de c.c.
5.1 Regulatorul de curent
Proiectarea regulatorului de curent Regulatorul de curent prelucreaza informatia de la intrare reprezentata de diferenta dintre marimea impusa U*
i si marimea masurata Uim.
Toate semnalele utilizate in aceste scheme reprezinta de fapt semnalele unificate de tensiune proportionate cu marimile respective.
10

Functia de transfer al acestui regulator este urmatoarea:
Acest regulator de curent este simulat in simulink folosind un
11
K ext i=27∗0 .0960 . 7
=3. 7
T Σ i=T μ+T Fi=3 .33ms+5ms=8 .33ms
H Ri(s )=
1+sT As⋅2K ext i⋅T Σ i
=1s⋅2K ext i⋅T Σ i
+T A2K ext i⋅T Σ i

regulator de tip PI. Primul termen al functiei de transfer este pus pe partea de integrare a schemei, iar celalalt termen este pus pe ramura fara integrare.
Schema arata in felul urmator:
5.2 Regulatorul de viteza
Proiectarea regulatorului de viteza
Din Fig. 4.1 se observa ca regulatorul de viteza prelucreaza informatia dela intrare reprezentata de diferenta dintre marimea impusa U*Ω si marimeamasurata UΩ . Aceste marimi sunt semnale unificate de tensiune proportionale cu viteza impusa si respectiv cu viteza masurata cu ajutorul tahogeneratorului de curent continuu.
Se obtine urmatoarea schema:
In schema de mai sus se folosesc urmatoarele relatii si notatii:
12

Funtia de transfer al acestui regulator de viteza este urmatoarea:
Regulatorul de viteza a fost simulat tot cu un regulator PI.
Aceasta schema este asemanatoare cu cea de la regulatorul de curent.
13
H RΩ( s )=
1+sT 1ΩsT 2Ω
=1sT 2Ω
+T 1Ω
T 2Ω
T 1Ω=4T ΣΩ=4⋅0 .016=0 .064
T 2Ω=8⋅K extΩ⋅T ΣΩ
2
T em=8⋅0 .090.016
2
352 .75 =5 . 2⋅10−7
T ΣΩ=2⋅T Σi−T Fi+T FΩ=2⋅0 .00833−0 .005+0 .005=0 .016
K extΩ=RA⋅K FΩ
KFi⋅(keΦe)=0 .7⋅0 .0310 .096⋅2.04
=0.110

6. Schema de reglare si control a masinii de curent continuu rezultata.
Forma de unda rezultata:
14

7. Observatii si concluzii:
15