Embed Size (px)
Citation preview

1
UJI MANUVER KAPAL MELALUI AUTOPILOT FUZZY STUDI KASUS DI LABORATORIUM HIDRODINAMIKA INDONESIA
(Bima Herlambang P., Aulia Siti Aisyah, A. A. Masroeri)
Jurusan Teknik Fisika – Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
Kampus ITS, Keputih – Sukolilo, Surabaya 60111 Email : [email protected]
Abstrak
Kestabilan dinamika kapal merupakan aspek yang penting, sehingga perlu dilakukan uji terhadap parameter yang terkait dengan kestabilan dinamika. Salah satu parameter untuk uji adalah analisa terhadap dinamika manuver.. Pada penelitian ini digunakan kendali berbasis logika fuzzy dengan masukan yaitu error yaw, yawrate dan keluaran berupa sinyal command rudder. Berdasarkan hasil simulasi dari uji turning, tracking setpoint, manuver zig-zag dan turning circle yang telah dilakukan, memperlihatkan bahwa kapal tangki mampu melakukan maneuver sesuai dengan setpoint yang diberikan dan telah memenuhi kriteria dari International Maritime Organization (IMO). Untuk validasi, pada uji turning circle terdapat perbedaan nilai Tactical Diameter dan Advanced Diameter sebesar 3,75 % dan 3,21 %, sedangkan pada uji manuver zig-zag terdapat perbedaan nilai overshoot angle dan overshoot time sebesar 93 % dan 7,84 % dengan hasil uji dari Laboratorium Hidrodinamika Indonesia (LHI).
Kata kunci : Model Nomoto, logika fuzzy, manuver zig-zag, turning circle . 1. PENDAHULUAN 1.1 Latar Belakang
Sebagian besar wilayah Indonesia terdiri dari perairan yang menyebabkan Indonesia disebut sebagai negara maritim. Luas wilayah perairan Indonesia adalah sebesar 2/3 dari seluruh luas wilayah negara Indonesia. Kondisi ini yang menunjang transportasi barang dan orang antar pulau dilakukan melalui laut [4]. Dari beberapa jenis transportasi laut yang sering dugunakan, salah satunya yaitu kapal tangki. Kapal tangki adalah jenis kapal yang digunakan untuk mengangkut bahan-bahan kimia atau minyak [5]. Berdasar data yang ada, pada kurun waktu tahun 2000-2009, di dunia telah terjadi tumpahan minyak dari kapal tangki sebanyak 33 kejadian [6]. Salah satu hal yang menyebabkannya adalah ketidak-stabilan kapal.
Ketidak-stabilan kapal kadang-kadang terjadi disebabkan oleh ombak yang telalu besar dan juga biasanya terjadi karena kelebihan muatan ( overload ) yang menyebabkan tingkat kestabilan kapal menjadi berkurang. Hal tersebut membuat kestabilan merupakan aspek yang penting dalam kapal. Kestabilan bukan saja mempengaruhi keselamatan kapal ketika di laut tetapi juga mempunyai hubungan keselamatan terhadap penumpang dan anak buah kapal.
Sistem pengendali gerak kapal merupakan bagian dari sistem yang terdapat pada kapal, sehingga faktor kestabilan dan kenyamanan merupakan salah satu faktor penting dalam suatu perancangan sistem kapal laut. Analisis suatu sistem pengendalian arah gerak kapal dapat dilakukan dengan cara menguji sistem tersebut dari berbagai tinjauan. Salah satunya dengan memodelkan kapal yang diperoleh dari sistem dinamika gerak yang selanjutnya digunakan untuk menganalisa kestabilan. Berdasarkan simulasi yang dilakukan, kemudian dilakukan analisis dan uji kestabilan sistem pengendali arah gerak kapal.
Selama ini metode perancangan sistem kendali pada manuver kapal menggunakan model Nomoto dalam memodelkan suatu kapal. Sedangkan metode tersebut
merupakan linierisasi terhadap persamaan gaya – gaya yang terjadi pada dinamika kapal. Beberapa kelemahan dari linierisasi adalah sifat nonlinieritas menjadi diabaikan. Selain itu diantaranya sistem kendali tidak mampu bekerja bila diluar range error masukan kendali (Moh Aries Efendi, 2010). Alasan berikutnya bahwa penelitian ini perlu dilakukan adalah terdapat beberapa sistem rancang kontrol yang dikembangkan bertumpu pada model matematis ( Davidson, 1946, Nomoto, 1957, Abkowitz, 1964, Norrbin, 1970 dan Blanke, 1981), sedangkan model matematis dalam penurunannya tidak mampu mengakomodasi seluruh keadaan sistem yang dikontrol. Meskipun ada beberapa penelitian berupaya mengakomodasi seluruh komponen yang mempengaruhi kinerja sebuah kontroler (Amerongen,1981, Son-Nomoto, 1981 dan Blanke, 1981) tetapi tidak menghasilkan performansi sesuai yang di harapkan (Aulia SA, 2007). Oleh karena itu dalam penelitian tugas akhir ini dilakukan uji manuver kapal berdasarkan model Nomoto dan hasil numerik di Laboratorium Hidrodinamika Indonesia (LHI) untuk dapat mengetahui apakah pemodelan Nomoto dapat mewakili seluruh model kapal dalam perancangan sistem kendali otomatis.
1.2 Permasalahan
Permasalahan dalam penelitian tugas akhir ini adalah bagaimana merancang Autopilot Fuzzy untuk mengendalikan manuver kapal dengan studi kasus di Laboratorium Hidrodinamika Indonesia (LHI)
1.3 Batasan Masalah
Batasan permasalahan dalam penelitian ini adalah:
1. Obyek yang diteliti adalah kapal tangki (Oil Tangker)
2. Data yang digunakan adalah data koefisien hidrodinamika kapal tangki

2
3. Uji manuver yang digunakan yaitu uji turning, circle dan zig-zag
4. Sistem kendali yang digunakan mengacu pada rancangan peneliti sebelumnya
5. Variabel yang dikendalikan adalah sudut yaw (heading) kapal
6. Pemodelan pada komponen gyroscope dan kompas diasumsikan dalam kondisi ideal sehinga nilai fungsi alihnya adalah 1.
7. Perancangan sistem disimulasikan dengan Matlab
1.4 Tujuan dan Manfaat Penelitian Tujuan dari tugas akhir ini adalah untuk dapat merancang Autopilot Fuzzy untuk mengendalikan manuver kapal dengan studi kasus di Laboratorium Hidrodinamika Indonesia (LHI) Manfaat dari penelitian tugas akhir ini adalah untuk perancangan model kapal pada penelitian selanjutnya akan didasarkan pada model yang sudah divalidasi 2. TEORI PENUNJANG 2.1 Manuver Kapal
Manuver kapal (Ship Manoeuvrability) adalah kemampuan kapal untuk berbelok dan berputar saat berlayar. Keseluruhan gerakan yang dialami oleh kapal, antara lain gerakan yaw adalah gerakan memutar ke samping, gerakan heave adalah gerakan ke atas, gerakan roll adalah gerakan memutar ke bawah, gerakan surge adalah gerakan maju, gerakan sway adalah gerakan ke samping dan gerakan pitch adalah gerakan memutar ke depan.
2.2 Model Dinamika Kapal
Model dinamika kapal didapatkan dari pendekatan yang dilakukan oleh Nomoto (1957) sebagai bentuk matematis orde 2. Di bawah ini adalah fungsi transfer dari model Nomoto :
( ) ( )( )( )sTsTs
sTKs R
R 21
3
11
1
+++
=δψ
(2.1)
Parameter – parameter dari fungsi transfer diatas diperoleh dari
( )( )N
MTT
det
det21 = (2.2)
)det(1221211211222211
21 N
mnmnmnmnTT
−−+=+ (2.3)
)det(211121
N
bnbnK R
−= (2.4)
)det(211121
3 N
bmbmTKR
−= (2.5)
Dimana elemen mij, nij dan bi ( i = 1,2 dan j = 1,2) didapatkan dari matriks berikut :
M=
−−−−
rzvG
rGv
NINmx
YmxYm
&&
&& N(uo)=
−−−
rG
r
NumxN
YmuY
0
0
υ
υ (2.6)
Data masukan yang digunakan untuk menyusun simulasi uji manuver adalah dari kapal tangki berupa spesifikasi koefisien hidrodinamika yang dibangkitkan dari
spesifikasi fisik yang dimiliki oleh kapal yaitu: panjang (L) = 99 m, lebar (B) = 18.8 m, kedalaman (T) = 6.048 m , koefisien blok (CB) = 0.773, kecepatan 7.20216 m/s, pusat gravitasi (XG) = 6.2, dan displacement (m) = 9196 ton. Sehingga fungsi transfer kapal tangki adalah : (2.7) 2.3 Rudder Kapal
Aktuator yang digunakan pada sistem pengendalian adalah rudder. Pada kapal terpasang rudder tipe Van Amorengen, yang mempunyai spesifikasi kemampuan kerja antara -350 sampai dengan 350, dan laju kerja rudder 21/3 – 7o. Masukan pada sistem servo rudder berasal dari keluaran autopilot KLF dikatakan sebagai sinyal command rudder (δc) dan keluaran dari sistem rudder adalah defleksi rudder aktual (δ) [2]. Spesifikasi parameter untuk sistem rudder ini sesuai dengan sistem kemudi dengan laju rudder minimum 2,30/dtk dan maksimum PB = 70/dtk, Vcc rudder adalah 380 volt dan time constant sebesar 0.05. maka fungsi transfer dari aktuator kapal adalah:
105.0
380/6.0)(
+=
ssδ (2.8)
2.4 Standart Manueverability Dalam maneuvering sebuah kapal, prosedur yang digunakan mengacu kepada peraturan standar kemampuan manuver kapal yang direkomendasikan oleh International Maritime Organization (IMO) yakni resolusi MSC.137 (76) annex.6 tertanggal 4 Desember 2002 dan mulai diterapkan sejak tanggal 1 Januari 2004, yang mana resolusi ini merupakan amandemen terhadap resolusi sebelumnya yakni A.751 (18) mengenai standar kemampuan manuver kapal. IMO telah merekomendasikan beberapa kriteria standar untuk manuverabilitas kapal. Kriteria tersebut harus dipenuhi oleh sebuah kapal saat beroperasi baik di perairan yang dalam (deep water) maupun di perairan terbatas atau beroperasi di sekitar pelabuhan atau di perairan yang dangkal (restricted and shallow water). Manuver yang digunakan dalam percobaan di laut mengikuti rekomendasi dari maneuvering trial code of ITTC (1975) dan IMO circular MSC 389 (1985). Standar pengujian yang diperlukan dalam manuver kapal disyaratkan dalam IMO Resolusi MSC 137 (76) (2002) antara lain: 2.4.1 Uji Manuver Zig-Zag
Sebuah tes manuver zig-zag harus dimulai untuk kedua bagian starboard dan portside dengan menerapkan sudut kemudi 20o/20o yaitu menggunakan sudut kemudi 20o pada kedua sisi dengan heading 20o. Dalam menganalisa performansi manuver kapal maka pengujian manuver baik ke arah portside maupun
sss
ss
R ++
+= 2
8387,213
1310346,126
77,12655065,219)(
δ
ϕ
3
starboard harus dilaksanakan dengan kondisi sebagai berikut:
• Pengujian dilakukan pada perairan dalam (deep water) atau perairan tak terbatas (unrestricted water).
• Kondisi perairan atau linkungan yang tenang (calm environment).
• Kondisi sarat penuh (sesuai dengan garis air pada musim panas) atau even keel.
• Steady approach pada saat speed test. 2.4.2 Uji Turning Circle
Turning cycle test, dimulai dari gerak lurus dengan laju konstan, rudder dihidupkan dengan kecepatan maksimum ke sudut δ (sudut kemudi maksimum) dan ditahan pada sudut tersebut, sampai kapal telah melakukan turning cyrcle paling kurang 540o. Percobaan dilakukan untuk bagian port dan starboard. Informasi penting yang diperoleh dari manuver tersebut umumnya dengan menggunakan GPS.
Beberapa parameter yang digunakan untuk mendefenisikan kinerja kapal pada saat berputar adalah:
• Drift angel (sudut drift), adalah sudut antara haluan kapal dan arah gerakan. Sudut tersebut bervariasi sepanjang kapal.
• Advanced, merupakan jarak dari pelaksanaan awal ke sumbu x pada kapal ketika telah berbelok 90o.
• The transfer, merupakan jarak dari jalur ke awal mula kapal ketika sumbu x pada kapal telah berbelok 90o.
• The tactical diameter, merupakan jarak dari jalur awal ke sumbu x pada kapal ketika kapal telah berbelok 180o.
• The diameter of the steady turning circle, diameter dari lingkaran yang terus-menerus berputar. Kondisi tetap biasanya dihubungkan pada beberapa titik antara perubahan 90o dan 180o dari perubahan posisi.
2.5 Logika Fuzzy
Fuzzy secara bahasa diartikan sebagai kabur atau samar-samar. Suatu nilai dapat bernilai besar atau salah secara bersamaan. Dalam fuzzy dikenal derajat keanggotaan yang memiliki rentang nilai 0 (nol) hingga 1 (satu). Berbeda dengan himpunan tegas yang memiliki nilai 1 atau 0 (ya atau tidak).
Logika Fuzzy merupakan seuatu logika yang memiliki nilai kekaburan atau kesamaran (fuzzyness) antara benar atau salah. Dalam teori logika fuzzy suatu nilai bias bernilai benar atau salah secara bersama. Namun berapa besar keberadaan dan kesalahan suatu tergantung pada bobot keanggotaan yang dimilikinya. Beberapa kelebihan dari logika fuzzy, antara lain:
• Konsep logika fuzzy mudah dimengerti. Konsep matematis yang mendasari penalaran fuzzy sangat sederhana dan mudah dimengerti.
• Logika fuzzy sangat fleksibel. • Logika fuzzy memiliki toleransi terhadap data-
data yang tidak tepat.
• Logika fuzzy mampu memodelkan fungsi-fungsi nonlinear yang sangat kompleks.
• Logika fuzzy dapat membangun dan mengaplikasikan pengalaman-pengalaman para pakar secara langsung tanpa harus melalui proses pelatihan.
• Logika fuzzy dapat bekerjasama dengan teknik-teknik kendali secara konvensional.
• Logika fuzzy didasarkan pada bahasa alami.
2.6 Kendali Logika Fuzzy Kendali Logika Fuzzy merupakan sistem
kendali yang berdasar pada basis pengetahuan manusia di dalam melakukan kendali terhadap suatu proses. Hal-hal yang perlu diperhatikan dalam merancang sebuah pengendali berdasarkan logika Fuzzy adalah masukan dan keluaran aktual (crisp) serta, faktor skala dari variabel masukan dan keluaran, fungsi keanggotaan yang digunakan untuk masukan dan keluaran, dan aturan Fuzzy yang digunakan.
Struktur dasar pengendali Fuzzy terdiri dari empat komponen utama, yaitu Unit Fuzzifikasi (Fuzzification Unit), Basis Pengetahuan (Knowledge Base), Mekanisme Penalaran Fuzzy (Inferensi Fuzzy), dan Unit Defuzzifikasi (Defuzzification Unit). Struktur dasar pengendali fuzzy ditunjukkan pada gambar 2.1
Gambar 2.1 Struktur Dasar Logika Fuzzy
Fungsi bagian pada Gambar 2.1 adalah sebagai berikut: • Unit fuzzifikasi berfungsi untuk mengubah
data masukan crisp ke dalam bentuk himpunan Fuzzy (derajat keanggotaan).
• Basis pengetahuan berisi basis data dan aturan dasar yang mendefinisikan himpunan fuzzy atas daerah – daerah masukan dan keluaran dan menyusunnya dalam perangkat aturan kontrol.
• Logika pengambil keputusan merupakan inti dari logika fuzzy yang mempunyai kemampuan seperti manusia dalam mengambil keputusan. Aksi atur fuzzy disimpulkan dengan menggunakan implikasi fuzzy dan mekanisme inferensi fuzzy.
• Defuzzifikasi berfungsi untuk mentransformasikan kesimpulan tentang aksi atur yang bersifat fuzzy menjadi sinyal sebenarnya yang bersifat crisp dengan menggunakan operator defuzzifikasi.

4
3. METODOLOGI PENELITIAN
Metodologi untuk menyelesaikan Tugas Akhir ini dilakukan melalui tahapan yang dinyatakan pada Gambar 3.1 di bawah ini.
Gambar 3.1 Flowchart Penelitian
3.1 Perancangan Kendali
Sistem pengendalian ini dirancang untuk mengendalikan manuver kapal agar mampu berbelok sesuai dengan yang diharapkan. Pengendalian pada sistem ini menggunakan Kendali Logika Fuzzy (KLF). Masukan KLF berupa error yaw (e) dan yaw rate (r). Sedangkan keluaran KLF berupa sinyal command rudder (δc). Di bawah ini merupakan diagram blok sistem pengendalian sudut heading kapal tangki :
Gambar 3.2 Diagram Blok Sistem Pengendalian Arah
Kapal
Sistem pengendalian pada penelitian ini adalah Logika Fuzzy. Jenis fuzzy yang digunakan adalah fuzzy Sugeno. Hal ini mengacu pada penelitian sebelumnya. Masukan KLF berupa selisih sudut heading kapal dengan
setpoint atau error yaw (e) dan turunan pertama dari sudut heading kapal yaitu yaw rate (r). Basis aturan yang digunakan adalah 49 aturan. Pada gambar 3.3 dibawah ini, merupakan flowchart perancangan kendali logika fuzzy :
Gambar 3.3 Flowchart Perancangan KLF
3.1.1 Fuzzifikasi
Masukan pada pengendali logika fuzzy KLF adalah error yaw dan laju yaw (yaw rate). Keluaran dari sistem kendali logika fuzzy adalah sudut rudder yang mengendalikan manuvering kapal.
Fungsi keanggotaan untuk variabel error heading dan yaw rate pada KLF menggunakan 7 fungsi keanggotaan yaitu NB (Negatif Big), NM (Negatif Medium), NS (Negatif Small), ZE (Zero), PS (Positif Small), PM (Positif Medium), dan PB (Positif Big).
Gambar 3.4 Fungsi keanggotaan error heading KLF
Fungsi keanggotaan untuk keluaran KLF dibagi
menjadi 7 fungsi keanggotaan yaitu NB (Negatif Big), NM (Negatif Medium), NS (Negatif Small), ZE (Zero), PS (Positif Small), PM (Positif Medium), dan PB

5
(Positif Big). Keluaran KLF berupa sudut rudder yang mengendalikan manuvering kapal, sehingga fungsi keanggotaannya sama dengan fungsi error heading dan yaw rate yang juga berupa sudut manuvering.
Gambar 3.5 Fungsi keanggotaan keluaran KLF
3.1.2 Basis Aturan
perhitungan oleh basis aturan. Dimana pada pengendalian arah ini mempunyai 49 aturan. Karena pada masukan terdapat dua variabel yang masing-masing mempunyai tujuh fungsi keanggotaan. Basis aturan yang digunakan dalam penelitian ini mengacu dari hasil penelitian sebelumnya (Arief Rakhmad Fajri,2011) yang telah dilakukan penyempurnaan dalam penggunaannya.
Basis aturan merupakan salah satu basis pengetahuan pada logika fuzzy. Basis aturan (rule base) terdiri dari beberapa aturan yang mendasari sistem pengendalian menggunakan logika fuzzy karena basis aturan menghubungkan antara masukan yang diterima KLF dengan hasil keluaran yang diinginkan agar sesuai dengan tujuan yang hendak dicapai. Penyusunan rule base ini berdasarkan pada pendekatan sistem manuver kapal.
Prinsip – prinsip dasar dalam perancangan basis aturan kendali logika fuzzy dapat digeneralisasikan menjadi 2 yaitu pertama jika variabel proses (yaw/sudut kapal) telah mencapai nilai yang diinginkan dan error yaw; yaw rate bernilai mendekati nol, maka keluaran sinyal kendali logika fuzzy dipertahankan agar konstan. Dan yang kedua adalah jika variabel proses (yaw/sudut kapal) menyimpang dari nilai yang diinginkan, maka keluaran sinyal kendali tergantung pada tanda nilai error yaw, yaw rate dan besarnya keluaran sinyal kendali logika fuzzy akan berubah sesuai dengan besarnya nilai error dan yaw rate yang dihasilkan.
Tabel 3.1 Basis Aturan Pengendali Fuzzy Arah Kapal
Error
Yaw Rate
NB NM NS ZE PS PM PB
NB ZE PS PM PB PB PB PB
NM NS ZE PS PM PB PB PB NS NM NS ZE PS PM PB PB ZE NB NM NS ZE PS PM PB PS NB NB NM NS ZE PS PM PM NB NB NB NM NS ZE PS PB NB NB NB NB NM NS ZE
3.1.3 Inferensi Fuzzy Proses inferensi fuzzy adalah proses
pengambilan keputusan untuk mendapatkan sinyal kendali logika fuzzy berdasarkan rancangan rule base. Nilai masukan (error yaw dan yaw rate) yang teramati diolah untuk diidentifikasi aturan mana yang digunakan. Pada Tugas Akhir ini, teknik pengambilan keputusan yang digunakan adalah metode Sugeno. Proses pengambilan keputusan Sugeno dapat dilukiskan seperti pada Gambar 3.6.
Gambar 3.6 Inferensi Fuzzy Sugeno
Berdasarkan Gambar 3.8 jika masukan fuzzy error yaw (e) = 0,1 dan yaw rate (r) = 0, maka keluaran fuzzy yaitu aksi kendali rudder sebesar 0,145. Nilai keluaran fuzzy ini mengacu pada basis aturan yang telah dirancang. Selain itu dapat dijelaskan bahwa keluaran maksimum terjadi ketika masukan error bernilai sangat positif sedangkan masukan yaw rate bernilai sangat negatif. Dan keluaran paling kecil terjadi ketika masukan error bernilai sangat negatif dan masukan yaw rate bernilai sangat positif.
3.1.4 Defuzzifikasi
Defuzzifikasi adalah langkah terakhir dalam suatu sistem kendali logika fuzzy dimana tujuannya adalah mengkonversi setiap hasil dari inferensi fuzzy yang diekpresikan dalam bentuk fuzzy set ke satu bilangan real (tegas). Hasil konversi tersebut merupakan aksi yang diambil oleh sistem kendali logika fuzzy. Karena itu, pemilihan metode defuzzifikasi yang sesuai juga turut mempengaruhi sistem kendali logika fuzzy dalam menghasilkan respon yang optimum. Dalam Tugas Akhir ini, metode defuzzifikasi yang digunakan adalah center of area.
3.2. Perancangan Simulasi
Pada penelitian ini akan dirancang simulasi untuk uji open loop, uji turning, uji tracking setpoint, uji manuver zig-zag dan uji turning circle. Simulasi dilakukan dengan menggunakan Matlab 2010(a). Sebelum dilakukan perancangan pengendali logika fuzzy, maka akan dilakukan terlebih dahulu simulasi pada kapal ketika tanpa pengendali (sistem open loop). Uji open loop ini digunakan untuk mengetahui karakterstik sistem kapal Oil Tanker apabila tanpa diberi kendali. Pada pengujian ini, sistem diberikan

6
sinyal uji berupa sinyal step yang mempresentasikan arah sudut heading sebesar 20o dan 30o. Model simulink sistem open loop pada kapal Oil Tanker adalah sebagai berikut :
Gambar 3.7 Model Simulink plant Kapal Oil Tanker
Tanpa Kendali (sistem open loop)
Selanjutnya, dirancang model simulasi uji turning pada kapal tanker. Seperti pada gambar 3.8 setpoint sistem berupa sinyal step. Pada uji turning ini digunakan initial value sebesar 20o. Uji turning ini dilakukan untuk mengetahui karakteristik sistem pada saat kondisi closed loop atau dengan kendali. Kendali yang digunakan yaitu kendali logika fuzzy dengan menggunakan basis aturan yang mengacu pada hasil penelitian sebelumnya.
Gambar 3.8 Model Simulink Uji Turning plant kapal Oil
Tanker Untuk uji tracking setpoint pada perancangannya hampir sama dengan perancangan untuk uji turning, tapi terdapat perbedaan yaitu pada inputannya atau setpoint yang diberikan. Pada uji tracking setpoint ini digunakan initial value sebesar 20o yang pada detik ke 250 nilai masukannya dirubah menjadi 30o. Pengujian ini dilakukan untuk mengetahui karakteristik sistem pada saat diberi perubahan inputan. Perancangan simulasi untuk uji tracking setpoint ini dapat dilihat pada gambar 3.9.
Gambar 3.9 Model simulink Uji Tracking Setpoint plant
kapal Oil Tanker Pada uji manuver berikutnya dilakukan uji zig-zag. Perancangan simulasi untuk uji ini dapat dilihat seperti pada gambar 3.10. Untuk uji manuver zig-zag digunakan inputan berupa signal builder yang dirancang sesuai dengan inputan standart untuk uji manuver zig-zag. Pada perancangan simulasi ini digunakan inputan sebesar 20o Kapal akan diberikan inputan sudut heading sebesar 20o, pada saat kapal mampu mencapai nilai tersebut maka inputan dirubah menjadi -20o atau dengan kata lain merubah arah kapal menjadi berlawanan, seperti itu sampai 3 kali periode. Sistem kendali yang digunakan pada uji manuver zig-zag ini tidak berbeda dengan perancangan simulasi pada uji turning dan tracking setpoint. Yang membedakan hanya terletak pada setpoin atau inputan yang diberikan.
Gambar 3.10 Model simulink Uji Zig-Zag plant kapal
Oil Tanker
Pada tahapan selanjutnya dilakukan perancangan simulasi untuk uji turning circle. Seperti pada gambar 3.11 perancangan simulasi ini menggunakan setpoint berupa nilai konstan sebesar 35o. Hal ini disesuaikan dengan standart IMO ( International Maritime Organization) pada uji turning circle yaitu merubah sudut kendali rudder ke maksimum dan dipertahankan sampai kapal mencapai turning circle minimal 540o. Pada perancangan simulasi ini digunakan sistem GPS untuk memonitor gerakan pada kapal tanker yang akan diuji.
Gambar 3.11 Model simulink Uji Turning Circle plant
kapal Oil Tanker
4. ANALISA DATA DAN PEMBAHASAN 4.1 Analisa Uji Manuver Kapal Berdasarkan
Model Nomoto Perancangan pengendali logika fuzzy ini digunakan untuk uji manuvering kapal berdasarkan model Nomoto dan hasik numerik di Laboratorium Hidrodinamika Indonesia (LHI). Variabel proses dalam sistem berupa sudut yaw (derajat) dan variabel yang diubah (variabel manipulasi) adalah perintah sinyal rudder (rudder command). Tahap awal penyusunan pengendali logika fuzzy adalah tahap fuzzifikasi. Tahap fuzzifikasi adalah perubahan nilai sebenarnya menjadi nilai masukan fuzzy. Tahap ini dilakukan berdasarkan nilai fungsi keanggotan masukan yang ada pada KLF serta metode fuzzy yang digunakan. Masukan logika fuzzy berupa error yaw (e) dan yaw rate (r). Fungsi keanggotaan dari error yaw dan yaw rate adalah 7, yaitu NB (Negatif Big), NM (Negatif Medium), NS (Negatif Small), ZE (Zero), PS (Positif Small), PM (Positif Medium), dan PB (Positif Big). Perbedaan dari keduan masukan ini terletak pada range-nya. Untuk masukan error heading (e) memiliki rentang antara -35 hingga 35. Hal ini sesuai dengan rentang yang dimiliki rudder tipe Van Amorengen yaitu sebesar -
7
35o hingga 35o. Sedangkan untuk yaw rate (r), memiliki rentang antara -7 hingga 7. Hal ini sesuai dengan laju rudder yaitu antara -7 o/s hingga 7 o/s. Pada tahap fuzzifikasi, masukan berupa error sistem (setpoint dikurangi sudut heading kapal) akan disesuaikan dengan fungsi keanggotaan error yaw. Begitu pula dengan hasil perhitungan derivative sudut heading kapal, akan disesuaikan dengan fungsi keanggotaan yaw rate.
Setelah nilai masukan diubah menjadi sinyal crisp, maka dilakukan perhitungan oleh basis aturan. Dimana pada pengendalian arah ini mempunyai 49 aturan. Karena pada masukan terdapat dua variabel yang masing-masing mempunyai tujuh fungsi keanggotaan. Basis aturan yang digunakan dalam penelitian ini mengacu dari hasil penelitian sebelumnya (Arief Rakhmad Fajri,2011) yang telah dilakukan penyempurnaan dalam penggunaannya. Fungsi keanggotaan dari keluaran fuzzy sebanyak 7 fungsi, yaitu NB (Negative Big), NM (Negative Medium), NS (Negative Small), ZE (Zero), PS (Positive Small), PM (Positive Medium), dan PB (Positive Big). Karena jenis fuzzy yang digunakan adalah fuzzy Sugeno, maka nilai keanggotaan dari masing-masing fungsi adalah nilai yang tegas. Nilai-nilai tersebut adalah NB = -3, NM = -2, NS = -1, ZE = 0, PS = 1, PM = 2 dan PB = 3. Metode pengambilan keputusan yang digunakan adalah AND(min). Hasil simulasi menunjukkan bahwa basis aturan ini mampu mengatasi perintah turning yang diberikan (kapal dapat dikendalikan sesuai perintah), berbeda ketika sistem dalam kondisi open loop. Hal ini mengindikasikan keberhasilan dalam perancangan kontoler logika fuzzy.
Proses selanjutnya adalah inferensi yang sering disebut sebagai proses pengambilan keputusan, merupakan prosedur untuk mendapatkan aksi kendali logika fuzzy berdasarkan basis aturan yang ada. Nilai masukan yang teramati diolah untuk diidentifikasi aturan mana yang digunakan sesuai dengan basis aturan yang telah dibuat. Pada Tugas Akhir ini, teknik pengambilan keputusan yang digunakan adalah metode Sugeno. Secara sistematis, langkah awal proses pengambilan keputusan pada logika fuzzy adalah mengubah nilai masukan yang berupa crisp error yaw dan yaw rate ke dalam nilai fuzzy berdasarkan fungsi keanggotaan masing – masing dan disesuaikan dengan variabel linguistiknya. Mengacu pada basis aturan yang telah dibuat, diperoleh keluaran nilai fuzzy aksi pengendali (aksi S) dalam bentuk singletone dan dikeluarkan berupa fungsi berdasarkan besarnya nilai fuzzy error yaw dan yaw rate. Pada saat simulasi, proses pengambilan keputusan mampu bekerja sesuai dengan basis aturan yang ada.
Defuzzifikasi merupakan langkah akhir dari logika fuzzy. Dimana defuzzifikasi berfungsi mengubah besaran fuzzy yang disajikan dalam bentuk himpunan - himpunan fuzzy keluaran dengan fungsi keanggotaannya untuk mendapatkan kembali bentuk data crisp (nilai sebenarnya/ nilai tegas). Poses pengubahan data fuzzy menjadi data crisp diperlukan karena plant hanya mengenal nilai tegas sebagai besaran sebenarnya untuk regulasi prosesnya. Metode defuzzifikasi yang digunakan adalah metode centroid. Metode centroid ini juga dikenal sebagai metode COA (Center of Area). Pada metode ini nilai crisp keluarannya diperoleh berdasarkan titik berat
dari kurva hasil proses pengambilan keputusan. Nilai keluaran yang dihasilkan akan menjadi masukan untuk aktuator yang berupa rudder (kemudi kapal) yang dimodelkan menjadi fungsi transfer orde satu. Hasil keluaran dari rudder, akan menjadi masukan bagi model dinamika kapal yang merupakan fungsi transfer orde dua. Keluaran dari rudder inilah yang nantinya membuat kapal berbelok ke kanan atau ke kiri sebesar yang ditentukan oleh sistem berdasar pada sudut heading yang dihasilkan oleh kapal.
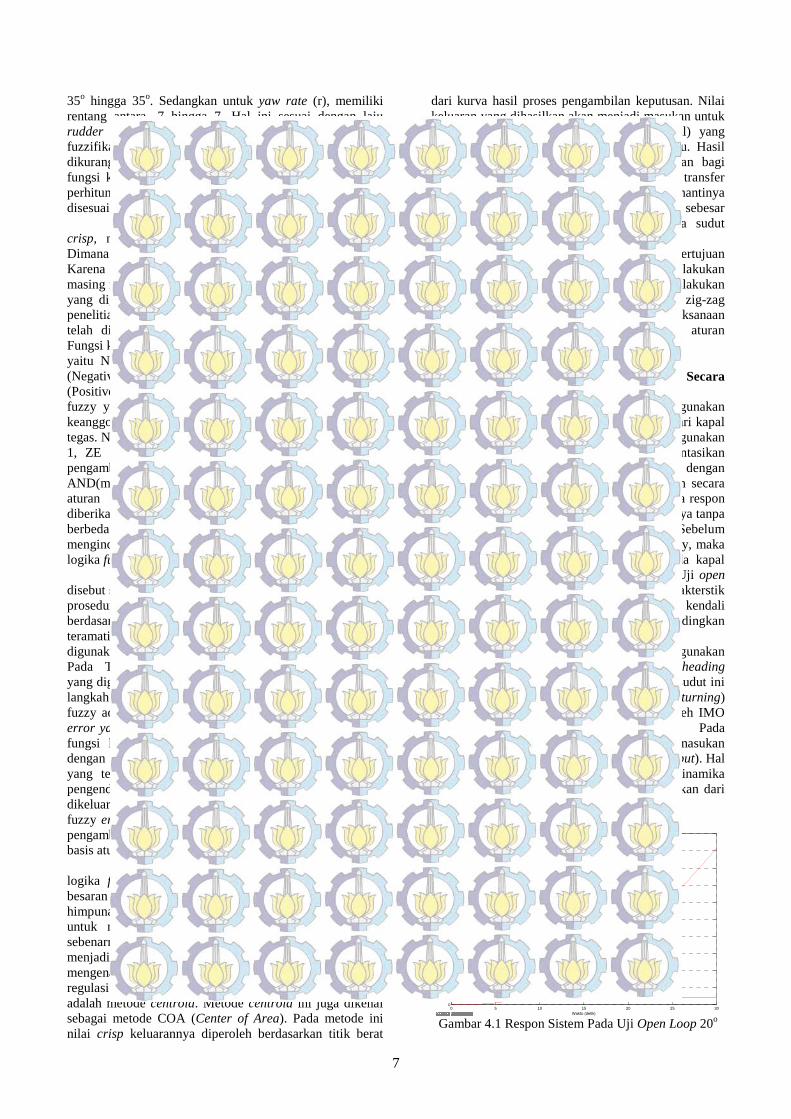
Pada prinsipnya Tugas Akhir ini bertujuan untuk melakukan validasi model dengan melakukan uji manuver kapal. Dalam tahapan ini, akan dilakukan tiga jenis pengujian manuver yaitu uji turning, zig-zag dan turning circle. Semua prosedur pelaksanaan pengujian akan disesuaikan dengan aturan International Maritime Organization (IMO). 4.2 Pengujian Dinamika Kapal Tangki Secara Loop Terbuka Simulasi dilakukan dengan menggunakan simulink Matlab 2010(a). Model matematis dari kapal tangki dibuat pada simulink dengan menggunakan toolbox yang ada sehingga mampu merepresentasikan manuver pada kapal. Tujuan dari pemodelan dengan simulink adalah untuk mensimulasikan sistem secara real dalam komputer agar bisa didapatkan data respon yang merepresentasikan sistem kapal sebenarnya tanpa harus membuat hardware secara nyata. Sebelum dilakukan perancangan pengendali logika fuzzy, maka akan dilakukan terlebih dahulu simulasi pada kapal ketika tanpa pengendali (sistem open loop). Uji open loop ini digunakan untuk mengetahui karakterstik sistem kapal Oil Tanker apabila tanpa diberi kendali sehingga performansi sistem dapat dibandingkan ketika menggunakan kendali maupun tidak. Pada simulasi open loop ini digunakan inputan berupa sinyal step dengan sudut heading sebesar 20 dan 30 derajat. Pemberian kedua sudut ini dilakukan untuk memenuhi standart uji belok (turning) kapal sesuai dengan yang telah ditetapkan oleh IMO (International Maritime Organization). Pada prinsipnya simulasi ini akan mengambil data masukan sistem (setpoint) dan keluaran dari sistem (output). Hal ini bertujuan untuk mengetahui hasil respon dinamika kapal. Berikut ini adalah respon yang dihasilkan dari uji step tanpa pengendalian.
Gambar 4.1 Respon Sistem Pada Uji Open Loop 20o
0 5 10 15 20 25 300
50
100
150
200
250
300
350
400
450
500
Waktu (detik)
Sud
ut H
eadi
ng
(deg
)
Uji Open Loop 20o
Respon
Setpoint

8
Dari hasil simulasi pada turning 20o seperti pada gambar 4.1, dapat diketahui bahwa perubahan sudut heading terus bertambah cepat seiring bertambahnya waktu. Pada saat detik ke 7,9808 hasil simulasi menunjukkan sistem mencapai set point, namun tidak dapat mempertahankan posisi tetap pada keadaan stabil, dengan kata lain perubahan sudut heading terus meningkat melampaui set point. Begitu juga pada saat turning 30o, dapat dilihat pada gambar 4.2, respon mencapai set point saat detik 7,9809 namun perubahan sudut heading semakin naik. Hal ini dikarenakan tidak ada kendali yang mampu menjaga keadaan tetap steady.
Gambar 4.2 Respon Sistem Pada Uji Open Loop 30o
4.3 Pengujian Dinamika Kapal Tangki Secara Loop
Tertutup 4.3.1 Uji Turning Bagian ini menjelaskan tentang hasil pengujian sistem pengendalian logika fuzzy pada manuvering kapal tangki dengan setpoint sudut heading konstan/tetap. Pada pengujian ini diberikan sudut heading sebesar 20o dan 30o. Respon sistem pada uji turning 20o dan 30o masing-masing dapat dilihat pada gambar 4.3 dan gambar 4.4. Gambar 4.3 merupakan respon heading ketika sistem diberikan turning 20o.
Gambar 4.3 Respon Sistem Pada Uji Turning 20o
Dapat dilihat pada gambar, bahwa keluaran sistem dapat mendekati nilai setpoint dengan error yang cukup kecil. Error steady state dari hasil respon di atas cukup kecil yaitu 0,02. Dari gambar terlihat bahwa respon dapat mencapai settling time pada 209,2 detik, overshoot 0,7 derajat, rise time 58 detik, peak time 72,14 detik. Hal
ini menunjukkan bahwa pada saat sistem diberikan uji turning 20o maka pengendali akan memberikan sinyal perintah pada rudder untuk bergerak sesuai heading yang diinginkan. Rudder akan bergerak 20o yang menyebabkan kapal juga akan berbelok sebesar 20o. Kapal dapat berbelok sesuai heading yang diinginkan pada 58 detik namun kapal tidak dapat langsung berbelok sebesar 20o tetapi berbelok hingga mencapai 20,7o kemudian setelah detik ke 72.14 kapal mulai menuju 20o dan pada detik 209.2 kapal dapat stabil pada arah heading 20o sesuai yang diharapkan atau dalam kondisi steady. Parameter-parameter di atas menjadi gambaran awal respon sistem pengendalian fuzzy sebelum melakukan pengujian dengan menggunakan nilai setpoint yang berubah-ubah pada tiap satuan waktu. Gambar 4.4 merupakan respon heading ketika sistem diberikan turning 30o.
Gambar 4.4 Respon Sistem Pada Uji Turning 30o
Dapat dilihat pada gambar, bahwa keluaran sistem dapat mendekati nilai setpoint dengan error yang cukup kecil. Error steady state dari hasil respon di atas cukup kecil yaitu 0,108. Dari gambar terlihat bahwa respon dapat mencapai settling time pada 202,3 detik, overshoot 1,06 derajat, rise time 59,96 detik, peak time 72,14 detik. Hal ini menunjukkan bahwa pada saat sistem diberikan uji turning 30o maka pengendali akan memberikan sinyal perintah pada rudder untuk bergerak sesuai heading yang diinginkan. Rudder akan bergerak 30o yang menyebabkan kapal juga akan berbelok sebesar 30o. Kapal dapat berbelok sesuai heading yang diinginkan pada 59,96 detik namun kapal tidak dapat langsung berbelok sebesar 30o tetapi berbelok hingga mencapai 21,06o kemudian setelah detik ke 72,14 kapal mulai menuju 30o dan pada detik 202,3 kapal dapat stabil pada arah heading 30o sesuai yang diharapkan atau dalam kondisi steady. Dari uji turning yang telah dilakaukan maka dapat dilihat bahwa kapal mampu menghasilkan sudut overshoot lebih kecil ketika diberi masukan sudut heading 20o dibandingkan ketika diberi masukan 30o tetapi membutuhkan waktu yang lebih lama ketika mencapai kondisi steady.
4.3.2 Uji Tracking Setpoint Pada tahapan ini akan dilakukan uji tracking setpoint untuk mengetahui respon sistem pada saat diberikan target setpoint yang berubah-ubah. Uji ini dilakukan dengan memberikan inputan sinyal step
0 5 10 15 20 25 300
100
200
300
400
500
600
700
Waktu (detik)
Su
dut
Hea
ding
(de
g)
Uji Open Loop 30o
Respon
Setpoint
0 50 100 150 200 250 300 350 400 450 5000
5
10
15
20
25
Waktu (detik)
Sud
ut H
eadi
ng (
deg)
Uji Turning 20o
Respon
Setpoint
0 50 100 150 200 250 300 350 400 450 5000
5
10
15
20
25
30
35
Waktu (detik)
Su
dut
Hea
ding
(de
g)
Uji Turning 30o
Respon
Setpoint
9
sebesar 20o saat respon dapat mengikuti setpoint, setpoint diubah sebesar 30o. Dari hasil pengujian tracking setpoint didapatkan respon sistem seperti pada gambar 4.5.
Gambar 4.5 Respon Sistem Pada Uji Tracking Setpoint
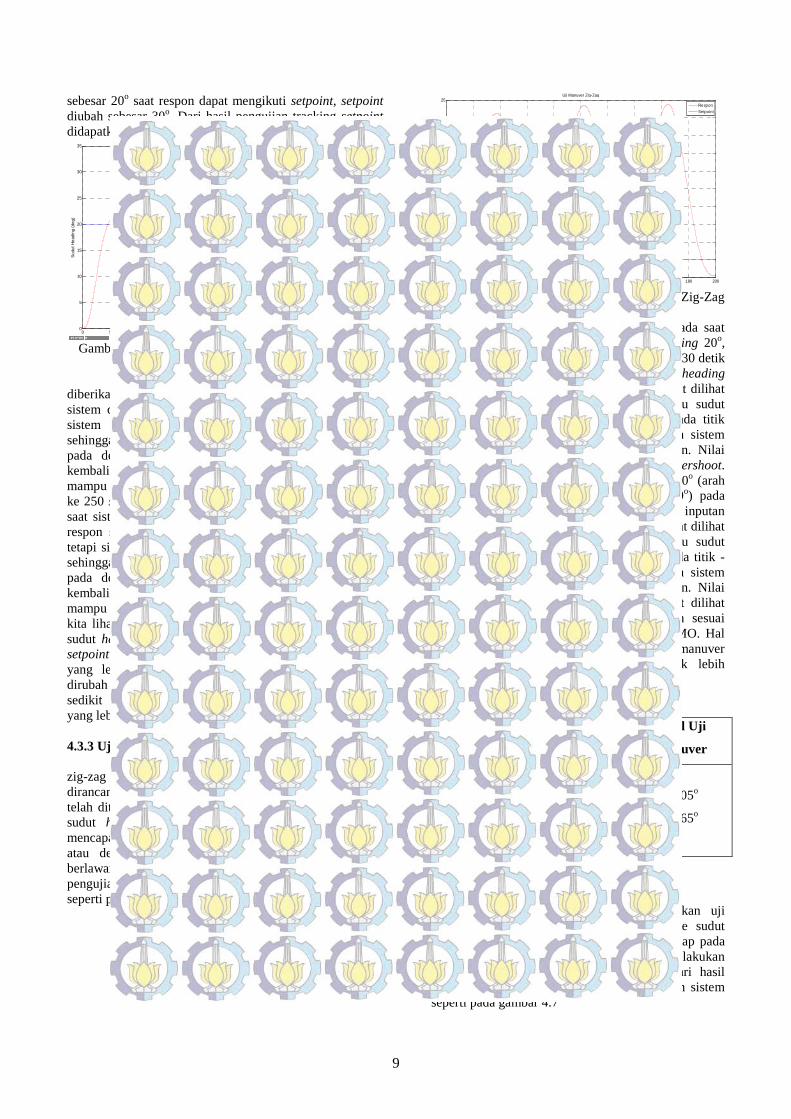
Pada gambar dapat dilihat bahwa pada saat sistem diberikan inputan setpoint sudut heading 20o, respon sistem dapat mencapai nilai 20o pada 43,64 detik tetapi sistem tidak mampu mempertahankan nilai tersebut sehingga menghasilkan overshoot sebesar 1,25 derajat pada detik ke 55,33. Kemudian respon sistem mulai kembali ke arah 20o sampai pada detik ke 158 respon mampu mencapai kondisi steady. Selanjutnya pada detik ke 250 setpoint dirubah menjadi 30o. Terlihat bahwa pada saat sistem diberikan inputan setpoint sudut heading 30o, respon sistem dapat mencapai nilai 30o pada 294 detik tetapi sistem tidak mampu mempertahankan nilai tersebut sehingga menghasilkan overshoot sebesar 0,62 derajat pada detik ke 304,7. Kemudian respon sistem mulai kembali ke arah 30o sampai pada detik ke 409,4 respon mampu mencapai kondisi steady. Dari kondisi ini dapat kita lihat bahwa pada saat sistem diberikan nilai setpoint sudut heading 20o, respon sistem mampu mencapai nilai setpoint lebih cepat tetapi menghasilkan sudut overshoot yang lebih besar. Sedangkan pada saat nilai setpoint dirubah menjadi 30o, respon sistem membutuhkan waktu sedikit lebih lama tetapi menghasilkan sudut overshoot yang lebih kecil. 4.3.3 Uji Manuver Zig-Zag Pada uji manuver ini, sistem kapal diberikan uji zig-zag dengan menggunakan signal builder yang telah dirancang sesuai dengan standart uji manuver zig-zag yang telah ditetapkan oleh IMO. Kapal akan diberikan inputan sudut heading sebesar 20o, pada saat kapal mampu mencapai nilai tersebut maka inputan dirubah menjadi -20o atau dengan kata lain merubah arah kapal menjadi berlawanan, seperti itu sampai 3 kali periode. Dari hasil pengujian manuver zig-zag didapatkan respon sistem seperti pada gambar 4.6
Gambar 4.6 Respon Sistem Pada Uji Manuver Zig-Zag Pada gambar dapat dilihat bahwa pada saat sistem diberikan inputan setpoint sudut heading 20o, respon sistem mampu mencapai nilai 20o pada 30 detik dan pada saat yang bersamaan inputan sudut heading dirubah ke arah yang berlawanan. Disini dapat dilihat bahwa respon sistem tidak langsung menuju sudut yang diinginkan tetapi terus naik sampai pada titik 21,05 derajat pada detik ke 33,97 kemudian sistem baru berubah ke arah yang telah di tentukan. Nilai 21,05 derajat merupakan nilai 1st overshoot. Selanjutnya sistem mampu mencapai sudut -20o (arah berlawanan tetapi besarnya sama dengan 20o) pada waktu 59,2 detik. pada saat yang bersamaan inputan sudut heading dirubah ke arah 20o. Disini dapat dilihat bahwa respon sistem tidak langsung menuju sudut yang diinginkan tetapi terus turun sampai pada titik -22,65 derajat pada detik ke 63,89 kemudian sistem baru berubah ke arah yang telah di tentukan. Nilai 22,65 merupakan nilai 2nd overshoot. Dapat dilihat bahwa hasil dari uji manuver zig-zag telah sesuai dengan kriteria yang telah ditetapkan oleh IMO. Hal ini menunjukkan bahwa kapal mampu bermanuver dengan baik pada lintasan zig-zag. Untuk lebih jelasnya dapat dilihat pada tabel 4.1 berikut : Tabel 4.1 Hasil Uji Manuver Zig-Zag Manuver Zig-
Zag Kriteria IMO
Hasil Uji
Manuver
1st Overshoot
2nd Overshoot
< 25o
< 40o
21,05o
22,65o
4.3.4 Uji Turning Circle Pada uji ini, sistem kapal diberikan uji turning circle dengan merubah sudut rudder ke sudut δ (sudut kemudi maksimum atau 35o) dan tetap pada sudut tersebut, sampai kapal telah melakukan turning cycle paling kurang 540o. Dari hasil pengujian manuver zig-zag didapatkan respon sistem seperti pada gambar 4.7
0 50 100 150 200 250 300 350 400 450 5000
5
10
15
20
25
30
35
Waktu (detik)
Sud
ut H
ead
ing
(deg
)
Uji Tracking Setpoint
Respon
Setpoint
0 20 40 60 80 100 120 140 160 180 200-25
-20
-15
-10
-5
0
5
10
15
20
25
Waktu (detik)
Sud
ut H
eadi
ng (
deg)
Uji Manuver Zig-Zag
Respon
Setpoint

10
Gambar 4.7 Respon Sistem Pada Uji Turning Circle
Pada gambar dapat dilihat bahwa kapal mampu melakukan turning circle ketika rudder dipertahankan pada sudut maksimum atau 35o. Dari hasil uji tersebut didapatkan bahwa sistem kapal menghasilkan Tactical Diameter (DT) sebesar 202 meter dan Advanced Diameter (AD) sebesar 206,4 meter. Dapat dilihat bahwa hasil dari uji turning circle telah sesuai dengan kriteria yang telah ditetapkan oleh IMO. Hal ini menunjukkan bahwa kapal mampu melakukan manuver melingkar ketika berada di laut. Untuk lebih jelasnya dapat dilihat pada tabel 4.2 berikut : Tabel 4.2 Hasil Uji Turning Circle
Turning Circle Kriteria IMO Hasil Uji
Advanced Diameter
(AD)
Tactical Diameter
(DT)
4,5 Lpp (445,5
m)
5,0 Lpp (495 m)
206,4 m
202 m
4.4 Pengujian Kapal Tangki di Laboratorium
Hidrodinamika Indonesia (LHI) 4.4.1 Pengujian Turning Circle
Pengujian turning circle dilakukan untuk sudut kemudi 35 derajat (sudut maksimum yang diizinkan) pada arah kiri (portside) dan arah kanan (starboard). Pada pengujian turning circle, putaran propeller kapal diatur sedemikian rupa hingga mencapai gaya dorong dan kecepatan yang telah ditentukan. Kemudian kapal akan berakselerasi dan melaju hingga mencapai kecepatan yang dikehendaki. Bila kecepatan telah mencapai kecepatan uji maka akselerasi menjadi nol, dan pengukuran dapat mulai dilakukan.
Berselang beberapa waktu, kemudi kapal bergerak pada sudut yang telah ditentukan dan kapal mulai berputar. Saat kapal mulai berputar, putaran propeller dan sudut kemudi tetap konstan sampai beberapa putaran tercapai (dalam hal ini minimal 2 putaran). Bila dua
putaran atau lebih sudah tercapai maka pengujian dapat dihentikan.
Informasi yang dibutuhkan pada pengujian tersebut adalah tactical diameter, advance diameter serta waktu yang digunakan.
Gambar 4.8 Prosedur Pengujian Turning Circle di LHI
[7] Dari hasil pengujian yang telah dilakukan oleh Laboratorium Hidrodinamika Indonesia untuk Kapal Tangki di dapatkan hasil uji seperti pada tabel 4.3 berikut : Tabel 4.3. Hasil Uji Turning Circle oleh LHI
PARAMETER RUDDER ANGLE
35 deg PS Advance/Lpp 2.02 Lpp (199,98 m) Tactical diameter/Lpp 2.12 Lpp (209,88 m) 4.4.2 Pengujian Manuver Zig-zag
Zig-zag test dilakukan untuk sudut kemudi 10/10 dan 20/20 (to portside and starboard). Pada pengujian zig-zag, putaran propeller kapal diatur sedemikian rupa hingga mencapai gaya dorong dan kecepatan yang telah ditentukan. Kemudian kapal akan berakselerasi dan melaju hingga mencapai kecepatan yang dikehendaki. Bila kecepatan telah mencapai kecepatan uji maka akselerasi menjadi nol, dan pengukuran dapat mulai dilakukan.
Berselang beberapa waktu, kemudi kapal bergerak pada sudut yang telah ditentukan dan kapal mulai merubah arah (zig-zag), dan bila sudah mencapai kondisi steady (zero yaw rate) maka kemudi digerakkan ke arah yang berlawanan dengan putaran propeller konstan. Uji zig-zag tersebut dilakukan sampai beberapa gerakan (dalam hal ini minimal 3 gerakan zig-zag).
Informasi yang dibutuhkan pada pengujian tersebut adalah overshoot angle, initial turning time to second execute dan the time to check yaw.
0 50 100 150 200 250-250
-200
-150
-100
-50
0
X Axis
Y A
xis
Uji Turning Circle
Lintasan Kapal
Arah Kapal

11
Gambar 4.9 Prosedur Pengujian Manuver Zig-Zag di LHI
[7] Dari hasil pengujian yang telah dilakukan oleh
Laboratorium Hidrodinamika Indonesia untuk Kapal Tangki di dapatkan hasil uji manuver zig-zag seperti pada tabel 4.4 berikut : Tabel 4.4. Hasil Uji Manuver Zig-Zag oleh LHI
No Designation
Unit Magnitude
Draft Ta/Tf 11.2/9.40
1 2
Over shoot angle Overshoot time
deg sec
15.00 31.50
4.5 Analisa Uji Manuver Kapal Berdasarkan Model
Nomoto Dan Hasil Numerik Di Laboratorium Hidrodinamika Indonesia (LHI)
Berdasarkan data hasil uji pada tabel 4.5, dapat dilihat terdapat perbedaan nilai hasil uji pada penelitian ini dengan yang di lakukan oleh LHI. Pada penelitian ini, nilai hasil uji untuk overshoot angle sebesar 1,05 derajat. Sedangkan nilai hasil uji dari LHI didapatkan nilai overshoot angle sebesar 15,00 derajat. Dari sini diketahui terdapat selisih nilai sebesar 13,98 derajat atau 93 % dari nilai hasil uji di LHI. Selanjutnya untuk nilai overshoot time pada penelitian ini di dapatkan nilai hasil uji sebesar 33,97 detik. Sedangkan nilai hasil uji dari LHI didapatkan nilai overshoot time sebesar 31,5 detik. Dari sini diketahui terdapat selisih nilai sebesar 2,47 detik atau 7,84 % dari nilai hasil uji di LHI.
Tabel 4.5. Komparasi Hasil Uji Manuver Zig-Zag
Manuver Zig-Zag Hasil Uji Hasil LHI Overshoot Angle Overshoot Time
1,05o 33,97 detik
15o 31,5 detik
Berdasarkan data hasil uji pada tabel 4.6, dapat
dilihat terdapat perbedaan nilai hasil uji pada penelitian ini dengan yang di lakukan oleh LHI. Pada penelitian ini, nilai hasil uji untuk advanced diameter sebesar 206,4 m atau 2,084 Lpp. Sedangkan nilai hasil uji dari LHI didapatkan nilai advanced diameter sebesar 199,98 m atau 2,02 Lpp. Dari sini diketahui terdapat selisih nilai sebesar 6,42 m atau 3,21 % dari nilai hasil uji di LHI. Selanjutnya untuk nilai tactical diameter pada penelitian ini di dapatkan nilai hasil uji sebesar 202 m atau 2,04 Lpp. Sedangkan nilai
hasil uji dari LHI didapatkan nilai tactical diameter sebesar 209,88 m atau 2,12 Lpp. Dari sini diketahui terdapat selisih nilai sebesar 7,88 m atau 3,75 % dari nilai hasil uji di LHI. Tabel 4.6. Komparasi Hasil Uji Turning Circle
Turning Circle Kriteria IMO Hasil Uji
Hasil LHI
Advanced Diameter Tactical Diameter
4,5Lpp (445,5 m) 5,0 Lpp (495 m)
206,4 m 202 m
199,98 m 209,88 m
Ada beberapa faktor yang dapat mempengaruhi terjadinya perbedaan hasil uji manuver pada penelitian ini dengan yang dilakukan oleh Laboratorium Hidrodinamika Indonesia (LHI). Salah satunya yaitu bahwa pada penelitian ini metode perancangan sistem kendali pada manuver kapal menggunakan model Nomoto dalam memodelkan suatu kapal. Sedangkan metode tersebut merupakan linierisasi terhadap persamaan gaya – gaya yang terjadi pada dinamika kapal. Beberapa kelemahan dari linierisasi adalah sifat nonlinieritas menjadi diabaikan.
Pada persamaan non-linier, gaya-gaya yang terjadi pada dinamika kapal dapat dinyatakan dalam persamaan seperti berikut : X = m[(ú – νr + wq –xG(q2+r2) + yG(pq–ŕ) + zG (pr+q)]
Y = m[(ν& – wp + ur – yG(r2+p2) + zG(qr–ṗ) + xG (qp+ ŕ)]
N = Iz ŕ + (Iy-Ix)pq + m[xG (ν& -wp+ úr) - yG(ú–vr +wq)] Sedangkan pada model Nomoto, persamaan sistem kemudi kapal akan sesuai berdasarkan beberapa asumsi, sehingga dapat dinyatakan dalam persamaan seperti berikut :
Surge : m(ú – νr – xGr2) = X
Sway : m(ν& + ur + xG ŕ) = Y Yaw : Iz ŕ + mxG (v + ur) = N
Dapat dilihat bahwa ada beberapa variabel yang dihilangkan, sehingga menyebabkan model dinamika kapal tidak mampu mengakomodasi seluruh keadaan sistem yang dikontrol Selain itu pada pengujian manuver yang dilakukan oleh Laboratorium Hidrodinamika Indonesia (LHI) mengacu pada standart uji IMO Resolusi MSC 137 (76) (2002) dimana terdapat beberapa kriteria uji antara lain :
• Pengujian dilakukan pada perairan dalam (deep water) atau perairan tak terbatas (unrestricted water).
• Kondisi perairan atau linkungan yang tenang (calm environment).
• Kondisi sarat penuh (sesuai dengan garis air pada musim panas) atau even keel.
• Steady approach pada saat speed test. Sedangkan pada simulasi uji manuver yang dilakukan pada penelitian ini kriteria-kriteria tersebut diabaikan. Hal inilah yang dapat menyebabkan adanya perbedaan hasil uji yang dilakukan pada penelitian ini dengan Laboratorium Hidrodinamika Indonesia (LHI).

12
5. KESIMPULAN DAN SARAN 5.1 Kesimpulan
Berdasarkan penelitian yang telah dilakukan, diperoleh kesimpulan sebagai berikut :
1. Dari hasil simulasi uji turning yang telah dilakukan, memperlihatkan bahwa kapal tangki mampu melakukan maneuver sesuai dengan setpoint yang diberikan dengan nilai settling time pada 209,2 detik, overshoot 0,7 derajat, rise time 58 detik, peak time 72,14 detik dan error sebesar 0,02 %.
2. Dari hasil simulasi uji manuver zig-zag yang telah dilakukan, diperoleh nilai overshoot angle sebesar 1,05o dan overshoot time sebesar 33,97 detik dan telah memenuhi kriteria dari International Maritime Organization (IMO) Resolusi MSC 137 (76) (2002).
3. Dari hasil simulasi uji turning circle yang telah dilakukan, memperlihatkan bahwa kapal tangki mampu bermanuver memutar dengan nilai Advanced Diameter sebesar 206,4 m dan Tactical Diameter sebesar 202 m, dan telah memenuhi kriteria dari International Maritime Organization (IMO) Resolusi MSC 137 (76) (2002).
4. Pada uji turning circle terdapat perbedaan nilai Tactical Diameter dan Advanced Diameter sebesar 3,75 % dan 3,21 % dengan hasil uji dari Laboratorium Hidrodinamika Indonesia (LHI).
5. Pada uji manuver zig-zag terdapat perbedaan nilai overshoot angle dan overshoot time sebesar 93 % dan 7,84 % dengan hasil uji dari Laboratorium Hidrodinamika Indonesia (LHI).
5.2 Saran
Saran yang perlu disampaikan untuk pengembangan penelitian ini adalah dilakukan perancangan sistem pengendalian yang mampu menentukan sendiri basis aturan Kendali Logika Fuzzy (KLF) mana yang akan digunakan pada setiap pengujian manuver yang dilakukan.
DAFTAR PUSTAKA
[1] [1]. Fossen, T. I. 1994. “Guidance and Control of Ocean Vehicle”. John Willy and Son.
[2] Lewis, Edwards V. 1989. “Principles of Naval Architecture Second Revision - Volume III Motions in Waves and Controllability”, The Society of Naval Architecture and Marine Engineers, Jersey City.
[3] Saelan, Athia.2009.” Logika Fuzzy”.Program Studi Teknik Informatika.ITB
[4] Aisjah, A.S. 2009. “Design of Tracking Ship Control System Using Fuzzy Logic for Shipping Effisiensi Case : Karang Jamuang-Tanjung Perak”
[5] Chia-Han Lin, Ling-Ling Wang. 1996. “ Intelligent Collision Avoidance by Fuzzy Logic Control”
[6] http://www.itopf.com/information- services/data-and-statistics
[7] Laboratorium Hidrodinamika Indonesia (LHI) – BPPT Surabaya
[8] Hamidah Maratul, Aisjah, A.S, Masroeri, A.A. 2010. “Perancangan Kendali Cerdas Berbasis Logika Fuzzy Untuk Peningkatan Performansi Manuvering Kapal”, Surabaya
[9] Rodliyah Dinayati, Aisjah, A.S, Masroeri, A.A. 2010. “Perancangan Sistem Kendali Optimal Multivariabel Linear Quadratic Gaussian (LQG) Pada Kapal FPB 38 Untuk Meningkatkan Performansi Manuvering”, Surabaya
[10] Aisjah, A.S, Masroeri, A.A., Djatmiko, E.B, dan Aryawan, D.Wasis. 2007. “Analisis Performansi Sistem Kendali Pada Manuvering Kapal”, Jurnal Teknik Fisika Vol.2, No.1, Februari 2007.
[11] Aisjah, A.S, Masroeri, A.A. 2007. “Kontrol Manuvering Kapal Tanker Berbasis Logika Fuzzy”, Jurnal Teknik Fisika Vol.2 No.3 Oktober 2007.
[12] Ogata, Katsuhiko. 1997. “ Teknik Kontrol Automatik Jilid I”.Jakarta : Erlangga.
BIODATA PENULIS :
Nama : Bima Herlambang Prasetyo TTL : Jombang, 2 Juni 1988 Alamat : JL. Kawi 66-A Ngoro - Jombang Email : [email protected] Pendidikan : • SDN 2 Ngoro-Jombang (1994-2000) • SLTPN 2 Jombang (2000-2003) • SMAN 2 Jombang (2003-2006) • S-1 Teknik Fisika FTI ITS (2006-sekarang)





























