Embed Size (px)
Citation preview
PROYECTO FIN DE CARRERA
UN NUEVO MODELO DE SIMULACIÓN PARA VEHÍCULOS
CON 4 RUEDAS MOTRICES Y DIRECTRICES BASADO EN
LA DINÁMICA DE FRICCIÓN DE LA RUEDA CON EL
PAVIMENTO/ A NEW SIMULATION MODEL FOR 4WS
VEHICLES BASED ON DYNAMIC TIRE FRICTION MODEL
Autor: Ignacio Helguera Sánchez
MADRID Junio 2009
2
Resumen
Cada vez son más los avances electrónicos que se incorporan a los
vehículos para la mejora de la seguridad en la carretera así como el
confort.
El documento que exponemos a continuación forma parte de un
proyecto llevado a cabo por la universidad de Arizona (EEUU) en el cual
se pretende automatizar un vehículo off-road con posibles fines de
salvamento en lugares remotos de difícil acceso, expediciones lunares... Mi
contribución a este proyecto consiste en la implementación de un modelo
informático que simule la dinámica del vehículo ante las distintas
situaciones de la conducción a la que se va a ver sometido.
El modelo que propongo ha sido desarrollado con el programa
informático MATLAB, SIMULINK. A través de diagramas de bloques se
representan las funciones de transferencia que definen la dinámica de
movimiento de este vehículo.
El vehículo que se pretende desarrollar presenta la peculiaridad de
tener 4 ruedas directrices, con independencia de movimiento todas ellas.
Es decir, el ángulo girado por la rueda delantera derecha no tiene porque
ser el mismo que el ángulo girado por la rueda delantera izquierda. El
programa informático encargado de su movimiento analizara la situación
del terreno, así como los obstáculos existentes y determinará los ángulos
3
que giran las ruedas, los pares de frenada o de aceleración, la rigidez de la
suspensión…
El modelo desarrollado combina las teorías más punteras sobre la
fricción existente entre las ruedas y el pavimento junto con la dinámica del
chasis de un coche con 4 ruedas directrices y motrices. El modelo viene
estructurado en distintas secciones a las que llamaremos subsistemas,
representando cada una de ellas una parte del modelo del vehículo. Se
busca una modularidad en el desarrollo de nuestro modelo que permita
futuros desarrollos en cada uno de los distintos subsistemas de que
disponemos sin tener que realizar para ello una remodelación completa de
nuestro modelo. De este modo, por ejemplo, podremos incorporar avances
específicos en el subsistema que trata de las ruedas según nuevas teorías
sean desarrolladas. Decimos por tanto que nuestro modelo pretende ser
una base para futuros modelos de automatización de vehículos.
Para el modelo de fricción existente entre la rueda y el pavimento
me he basado en las teorías de ‘Lugre-model’ y ‘The Magic Formula for
Tire-road’. Teorías que pretenden describir el deslizamiento que se
produce entre una rueda y la superficie sobre la que circula de una forma
experimental, calculando ecuaciones que simulan las curvas obtenidas
experimentalmente de la forma más precisa posible. El éxito de estas dos
teorías, en especial ‘Lugre-model’ es el grado de exactitud que adquieren
con el bajo nivel de análisis que requieren. Algo innovador en el modelo
que ofrezco en este proyecto con respecto al ‘Lugre-model’, es la
4
incorporación de un parámetro (θ en el documento) que pretende
representar las diferentes superficies sobre las que circulara el vehículo.
Otras teorías más exactas en lo que se refiere al hacer coincidir la curva
modelo con la curva experimental, han fracasado debido al elevado
número de operaciones matemáticas que requieren para su utilización,
resultando inviables en un modelo de tiempo real como en el que nos
encontramos. El desarrollo de la técnica existente quizás de lugar al
rechazo de las teorías que ahora utilizamos por las otras teorías más
exactas que ahora rechazamos. Como vemos son teorías que evolucionan
con el tiempo, de ahí nuestra preocupación por crear un modelo que
permita la fácil inclusión de dichas variaciones.
Para la ejecución de este proyecto he realizado un estudio de las
tecnologías disponibles hoy en día en tema de seguridad activa y pasiva
dirigidas principalmente a la actuación directa sobre las ruedas,
controlando el par de frenada y de aceleración que en cada momento el
motor les suministra. He buscado información sobre las nuevas teorías a
cerca de dicha fricción, de la que he hablado anteriormente, en artículos
publicados en conferencias de sistemas de control dirigidas a la
automoción. Una vez desarrollado el modelo matemáticamente llegó el
turno de la implementación del modelo en SIMULINK, así como su
posterior validación a través de distintos ensayos. Por último realizo unas
conclusiones sobre los datos obtenidos y aporto una ligera opinión sobre
futuros desarrollos en esta materia.
5
En los ensayos realizados se estudia el comportamiento del coche ante
distintas situaciones cotidianas de la conducción así como situaciones
extremas tales como giros bruscos ante un obstáculo o conducción en
hielo. Siendo entradas para mi modelo de simulación, los valores de
ángulo de giro, par motor, par de frenada… Valores que en el modelo
completo del automóvil, serán salidas a su vez del subsistema encargado
de calcular las necesidades de cada momento.
6
Summary
Day by day there are more electronic advances incorporated to the
vehicles, in order to increase the safety on the road and the comfort.
The document that we expose later forms part of a project carried out by
the university of Arizona (USA) in which they try to automate an off-road
vehicle with possible rescue purposes in remote places with difficult
access, lunar expeditions... My contribution to this project consists of the
implementation of a computer model that simulates the dynamics of the
vehicle during the different situations of driving to which it is going to be
submitted.
The model that I propose has been developed in the computer program
MATLAB, SIMULINK. Using block diagrams there are represented the
transfer functions that define the dynamics of movement of this vehicle.
The vehicle that we are trying to develop presents the peculiarity of 4
directives wheels, with independence of movement between all of them.
That means, the angle turned by the front right wheel does not have to be
the same that the angle turned by the front left wheel. The computer
program in charge of its movement analyze the environment, as well as
the existing obstacles and it determines the angles that the wheels should
turn, the brake force or the engine torque, the stiffness of the suspension…
The developed model combines the most top theories on the existing
friction between the wheels and the pavement with the dynamics of the
7
chassis of a car with 4 directives and motive wheels. The model is
structured in different sections to which we will call subsystems,
representing each of them a part of the vehicle’s model. The modularity of
this model has been looked in order to allow future developments in each
of the different subsystems which we have without having to realize for it
a complete remodeling of our model. Thus, for example, we will be able to
incorporate specific advances in the subsystem that treats of the wheels
according to new theories they are developed. We say therefore that our
model tries to be a base for future models of automation of vehicles.
For the tire/road model I have based on the theories of 'Lugre-model' and
' The Magic Formula'. Theories that try to describe the slide between a
wheel and the road in an experimental form, calculating equations that
simulate the curves obtained experimentally as accurate as possible. The
success of these two theories, especially 'Lugre-model' is the degree of
accuracy that they acquire with the low level of analysis that they require.
Slightly innovative in the model that I offer in this project with regard to
the 'Lugre-model', is the incorporation of a parameter (θ in the document)
that tries to represent the different surfaces on which the vehicle
circulates. Other more accurate theories regarding to match the theoretical
curve with the experimental curve, have failed due to the high number of
mathematical operations that they need for working, turning out to be
unviable in a model of real time as in the one we are. The development of
the existing technology probably will end with the rejection of the theories
8
that now we use for other theories more accurate that now we reject. As
we see they are theories that are evolving day by day, that is where our
worry for creates a model who allows the easy incorporation of the above
mentioned variations comes from.
For the execution of this project I have realized a study of the available
current technologies in topics of active and passive safety directed
principally to the direct control of the wheels, controlling the brake force
and the engine torque that in every moment the engine gives them. I have
looked for information about the new theories regarding the above
mentioned friction, about which I have spoken previously, in articles
published in conferences of systems of control directed to the vehicles.
Once developed the model mathematically came the shift of the
implementation of the model in SIMULINK, as well as its validation
across different tests. Finally I realize a few conclusions of the obtained
information and contribute with a slight opinion about future
developments in this matter.
In the realized tests the behavior of the car is studied before different daily
situations of the conduction as well as such extreme situations as sudden
drafts before an obstacle or driving in ice. Being inputs for my model of
simulation, the angle values of draft, driving torque, engine torques …
Values that in the complete model of the car will be bulging in turn of the
subsystem entrusted to calculate the needs of every moment.
9
Índice/Index
1. Un nuevo modelo de simulación para vehículos con 4 ruedas
motrices y directrices basado en la dinámica de fricción de la rueda
con el pavimento pag. 10
2. A new simulation model for 4WS vehicles based on dynamic tire
friction model page 92
3. Anexos pag 164
4. Bibliografía/Bibliography pag 186
10
UN NUEVO MODELO DE SIMULACIÓN PARA
VEHÍCULOS CON 4 RUEDAS MOTRICES Y
DIRECTRICES BASADO EN LA DINÁMICA DE
FRICCIÓN DE LA RUEDA CON EL PAVIMENTO
11
Índice
1.1 Introducción……………………………………………………...pag 13
1.1.1 Seguridad activa……………………………………………..pag 13
1.1.2 Seguridad pasiva……………………………………………..pag 14
1.1.3 ABS…………………………………………………………….pag 15
1.1.4 BAS…………………………………………………………….pag 26
1.1.5 ESC…………………………………………………………….pag 28
1.1.6 Sobreviraje/subviraje………………………………………..pag 40
1.1.7 Diferenciales autoblocantes…………………………………pag 52
1.2 Motivación del proyecto………………………………..……….pag 60
1.3 Objetivos………………………………………………….………pag 62
1.4 Metodología……………………………………………..………..pag 63
1.4.1 Diseño modular de la dinámica del vehículo……………...pag 64
1.4.2 Desarrollo de los subsistemas……………………………….pag 69
1.4.2.1 Modelo del chasis…………………………………………….pag 69
1.4.2.2 Modelo de la rueda…………………………………………...pag 71
1.4.2.2.1 Dinámica longitudinal……………………………………pag 71
1.4.2.2.2 Dinámica lateral…………………………………………..pag 73
1.4.2.2.3 Modelo 2D de la rueda…………………………………..pag 74
1.4.2.2.4 El modelo 2D aplicado a nuestro diseño modular……pag 75
1.4.2.3 Fuerza del viento……………………………………………..pag 77
1.4.2.4 Cálculo de la fuerza normal………………………………….pag 77
12
1.4.3 Diagrama de bloques…………………………………………pag 79
1.5 Resultados/Experimentos……………………………………….pag 81
1.6 Conclusiones…………………………………………………...….pag 90
1.7 Futuros desarrollos………………………………………………..pag 91
13
1.1 INTRODUCCIÓN
En los días en los que vivimos la seguridad en los vehículos es un
tema de vital importancia en el desarrollo de los mismos. Cada vez son
más los avances de que se dispone tales como ABS (Anti-Lock Brake
system), TCS (Traction control system) y una larga lista de sistemas de
este estilo. Debemos empezar diferenciando entre seguridad pasiva y
seguridad activa.
1.1.1 Seguridad activa podríamos definirla como aquella que se encarga
de la prevención de accidentes. La misma está compuesta por un
equipamiento específico que confiere estabilidad a los turismos y
disminuye el riesgo de colisión. Esto englobaría los dispositivos sobre los
que el conductor puede actuar directamente:
Sistema de frenado: Detiene el vehículo y evita el bloqueo de las
ruedas (ABS).
Sistema de suspensión: Garantiza la estabilidad durante la
conducción.
Sistema de dirección: Hace girar las ruedas de acuerdo al giro del
volante.
Sistema de climatización: Proporciona la temperatura adecuada
durante la marcha.
14
Neumáticos: su dibujo es garantía de agarre, incluso en situaciones
climatológicas adversas.
Sistema de iluminación: permite al conductor ver y ser visto.
Motor y caja de cambios: hacen posible adaptar la velocidad a las
circunstancias de la carretera.
Sistema de control de estabilidad: evita el vuelco del vehículo
gracias al denominado sistema ESP.
La seguridad activa está pensada para garantizar el buen
funcionamiento de un vehículo en movimiento y responder a las órdenes
del conductor. Precisamente, la pericia al volante de éste y la precaución
son las claves para evitar un siniestro, siempre y cuando el automóvil
responda como le pide el usuario
1.1.2 Seguridad pasiva sería a su vez definida como aquella
dirigida a disminuir las consecuencias y los daños sufridos por el
conductor en el caso de que se produzca un accidente. Esta seguridad
pasiva está compuesta por un amplio grupo de elementos tales como:
Cinturón de seguridad: imprescindible en caso de impacto, evita
que los ocupantes salgan despedidos fuera del vehículo.
Airbag: bolsa de aire que se infla en milésimas de segundo y
disminuye el contacto de los ocupantes del vehículo con los elementos del
interior.
15
Reposacabezas: frena el movimiento del cuello en caso de accidente
y evita lesiones cervicales. Debe estar colocado a un máximo de cuatro
centímetros de la cabeza.
Interiores ergonómicos: consiguen que el conductor circule de una
manera más cómoda y esté más atento a lo que ocurre en la carretera.
1.1.3 ABS
En la era de la electrónica como podría ser definida la época en la
que vivimos la gran mayoría de las investigaciones se dirigen al desarrollo
de sistemas que actúen por si solos en la seguridad activa y pasiva del
coche sin la necesidad de la actuación directa del conductor, sistemas tales
como luces que se encienden automáticamente al entrar en un túnel o
hacerse de noche, limpiaparabrisas que se activan al detectar la presencia
de gotas de agua en el parabrisas, luces inteligentes que giran su haz de
luz para adaptarse mejor a la superficie que deben iluminar al tomar una
curva, el conocido ABS y un sinfín de sistemas de este estilo componen los
distintos sistemas de seguridad activa de que disponemos hoy en día.
Si bien estos sistemas ayudan a disminuir la mortalidad de los
accidentes y el número de los mismos, el factor humano sigue siendo el
máximo responsable de dichos accidentes, de nada me serviría a mi
disponer en mi coche de la última generación de ABS, ESP, y sistemas de
seguridad pasiva como una carrocería que absorba la energía del
accidente si estrello de frente mi coche a 150 Km/h contra una columna.
16
De este modo podríamos decir que la máxima seguridad la
conseguimos cuanta más responsabilidad le quitamos al conductor. Por
supuesto que no se puede dar un 100% de autonomía a las maquinas,
puesto que como su propio nombre indica son maquinas, y por tanto en
ningún caso tendrán la capacidad de respuesta a situaciones inesperadas
que no han sido estudiadas antes en un laboratorio como podría tener un
ser humano. Dicho esto nuestro reto consiste en desarrollar automóviles
que sean capaces de responder ante la mayor posibilidad de situaciones de
una forma eficiente y segura.
Todavía se encuentra muy lejos de nuestras manos la existencia de
automóviles que se puedan desplazar sin conductor en núcleos urbanos,
en los que se encontrarían dispuestos a infinitud de peligros e imprevistos
tales como peatones cruzando a destiempo, niños, animales, atascos…
Esto es posible en sistemas de trenes que se mueven sobre raíles y realizan
siempre las mismas rutas. Además de las dificultades tecnológicas nos
encontramos con el obstáculo que supone la opinión pública, ya que a
mucha gente le infunde mucho menos respeto una maquina que se mueve
sin conductor aunque las estadísticas digan que esta crea menos
accidentes que una gobernada por un conductor humano.
Dicho esto de momento debemos centrarnos en el avance de estos
sistemas electrónicos dirigidos a la seguridad activa y pasiva.
El ABS supone probablemente el elemento de seguridad activa más
popular dentro de los automóviles de la nueva era electrónica en la que
17
vivimos. Su función consiste en evitar el bloqueo de la ruedas ante
situaciones de frenadas bruscas, debido a que en el momento en que una
rueda se bloquea esta empieza a deslizar sobre el pavimento
prolongándose por tanto la distancia de frenado al ser menor la fuerza de
rozamiento que experimenta la rueda con el suelo. El coeficiente de
rozamiento dinámico y por consiguiente la fuerza de rozamiento es menor
que el coeficiente de rozamiento estático. Por otro lado una rueda que se
encuentra rodando permite un mayor control al conductor al realizar
giros, permitiéndole por tanto un mayor control del vehículo para evitar
obstáculos. No obstante mientras el ABS ofrece avances significativos en el
control del vehículo en determinadas circunstancias, también puede
presentar una serie de desventajas, incluyendo el aumento de la distancia
de frenado en superficies deslizantes como hielo, nieve compacta, grava,
puentes, superficies metálicas o cualquier otra superficie distinta a
pavimento seco. Se ha demostrado además que el ABS crea una falsa
sensación de seguridad en los conductores, incitando a algunos de ellos a
conducir de una forma más agresiva.
Desde que se inicio la producción de estos sistemas de antibloqueo
en los automóviles, han evolucionado considerablemente. Versiones
recientes de estos sistemas no solo previenen el bloqueo de las ruedas ante
frenadas, sino que controlan electrónicamente la proporción de fuerza de
frenado que se reparte entre el eje delantero y trasero. Esta función
dependiendo de sus implementaciones y capacidades especificas es
18
conocida como ‘Electronic Brakeforce Distribution’ (EBD), ‘Traction
Control System’ (TCS), Emergency Brake Assist, or Electronic Stability
Control.
A continuación vamos a realizar un resumen de la historia de
evolución del sistema ABS.
Primeras versiones: Los primeros sistemas de antibloqueo fueron
desarrollados en 1929, por el pionero productor de automóviles y aviones,
Gabriel Voisin. Fueron primero diseñados para aviones, ante la necesidad
de resolver el problema que presenta la gran dificultad de detener un
avión al aterrizar, siendo necesario una fuerza de frenado muy elevada y
que casi siempre acababa bloqueando las ruedas. Un primer sistema fue el
denominado ‘Dunlop’s Maxaret’, introducido en los años 50 y todavía en
uso en algunos modelos de aviones.
En 1958 se utilizo una motocicleta de competición por el ‘Road
Research Laboratory’ para comprobar el funcionamiento del ‘Maxaret’
antibloqueo sistema. El sistema funciona detectando rápidas
deceleraciones de la rueda que causarían el bloqueo de la misma,
actuando sobre la presión del freno de la misma, relajando y volviendo a
aplicar presión hidráulica sobre el freno varias veces por segundo,
manteniendo el esfuerzo medio de frenada al máximo que puede ser
usado para cada tipo de combinación entre rueda y superficie. Los
experimentos demostraron que estos sistemas de antibloqueo pueden ser
de gran valor en motocicletas, donde el deslizamiento está presente en
19
gran mayoría de los accidentes. Las distancias de frenado fueron
reducidas en prácticamente todos los test, comparadas con sistemas que
no disponían de antibloqueo, pero particularmente en superficies
deslizantes, donde la mejora pudo llegar a ser de incluso un 30%.
En los años sesenta se introdujo un sistema completamente mecánico en el
coche de carreras ‘Ferguson P99’, el ‘Jensen FF’ y el experimental ‘all Wheel
drive Ford Zodiac’ pero no tuvo gran éxito en posteriores modelos debido a
la poca fiabilidad que ofrecía y a los costes elevados que suponía. Sin
embargo, una forma limitada de antibloqueo, utilizando una válvula que
podía ajustar la distribución de la fuerza de frenado entre el eje delantero
y trasero cuando una rueda se bloqueaba fue asignada al ‘Austin 1800’ en
1964.
‘Chrysler’, junto con ‘Bendix Corporation’ introdujo un sistema
computarizado de 3 canales de antibloqueo de todas las ruedas
denominado ‘Sure Brake’ en 1971. Estuvo disponible durante varios años
después, funcionando como se esperaba y con fiabilidad probada. ‘General
Motors’ introdujo ‘The Trackmaster’ ABS para las ruedas traseras como una
opción en sus modelos de 1971 ‘Cadillac’ de tracción trasera.
Versiones modernas del ABS: En 1975 ‘Robert Bosch’ adquirió todos los
patentes y derechos registrados sobre estos sistemas y adquirió ventaja
fuera de esta adquisición para construir la base del sistema introducido en
el mercado años después. Las firmas alemanas ‘Bosch’ y ‘Mercedes Benz’
20
han estado colaborando juntas en el desarrollo de la tecnología de
antibloqueo desde los años 70, e introdujeron el primer sistema ABS
completamente electrónico multicanal para las 4 ruedas en camiones y la
‘clase S de Mercedes Benz’ en 1978. El ‘Honda NSX’ fue el primero en usar el
moderno sistema ABS de cuatro canales usado en los Estados Unidos y
Japon que aplica una presión de frenado diferente y de manera individual
a cada una de las 4 ruedas.
En 1988 ‘BMW’ se convirtió en la primera marca constructora de
motocicletas en incluir un sistema de ABS hidráulico/electrónico, en su
‘BMW K100’. En 1992 ‘Honda’ lanzo su primer sistema de ABS en su
‘ST1100’. En 1997 ‘Suzuki’ lanzo su ‘GSF1200SA’ con ABS.
Modo de funcionamiento.
El controlador del antibloqueo sistema es conocido como CAB (Controller
Anti-Lock Brake).
Un sistema de ABS típico está compuesto por una central de control
electrónico llamada ECU (Electronic Control Unit), 4 sensores de
velocidad para cada rueda, y dos o más válvulas hidráulicas entre los
frenos hidráulicos. El ECU monitoriza constantemente la velocidad de
rotación de cada rueda, y cuando detecta que una de ellas se encuentra
girando significativamente más despacio que el resto – una condición
indicativa de bloqueo de una rueda- actúa las válvulas para reducir la
presión hidráulica de los frenos sobre la rueda afectada, reduciéndose por
tanto la fuerza de frenado sobre dicha rueda. La rueda entonces gira más
21
deprisa; cuando el ECU detecta que esta rueda se encuentra girando
significativamente más rápido que el resto de ruedas aplica de nuevo la
presión hidráulica de frenado sobre dicha rueda y por tanto esta
disminuye de nuevo su velocidad de rotación. Este proceso se repite
continuamente, y puede ser detectado por el conductor a través de las
pulsaciones que se producen en el pedal de freno. Un sistema de
antibloqueo típico puede aplicar y relajar presión de frenado por encima
incluso de 20 veces por segundo.
El ECU está programado para desechar diferencias de velocidad de
rotación por debajo de un umbral límite, debido a que cuando un coche
toma una curva, las dos ruedas más cercanas al centro de la curca giran
más despacio que las otras dos. Por esta misma razón, un diferencial es
usado en prácticamente todos los vehículos.
Ante cualquier fallo en algún elemento del ABS, generalmente se
iluminara un testigo en el panel de instrumentos del vehículo, y el ABS
será deshabilitado hasta que el problema sea solucionado.
Avances adicionales:
Sistemas modernos de control electrónico de estabilidad (ESP o ESC) son
una evolución del concepto de ABS. Aquí, un mínimo de 2 sensores
adicionales son añadidos para ayudar al sistema a funcionar: Estos son el
sensor de ángulo de giro del volante, y un sensor giroscópico. La teoría de
operación es simple: Cuando el sensor giroscópico detecta que la dirección
cogida por el automóvil no coincide con la que el sensor de ángulo del
22
volante proporciona, el software del ESC frenara automáticamente y de
forma individual lo necesario en cada rueda o ruedas (más de 3 con los
sistemas más sofisticados), de tal manera que el vehículo siga la
trayectoria requerida por el conductor. El sensor del volante también
ayuda en la operación del ‘Cornering Brqke Control’ (CBC), puesto que este
informara al ABS de que las ruedas del interior de la curva deberán frenar
más que las del exterior, y cuán grande ha de ser está diferencia.
Control de tracción: El equipamiento del ABS es usado también para la
implementación del sistema de control de tracción (TCS, ASR) en la
aceleración del vehículo. Si, mientras aceleramos, la rueda pierde tracción,
el controlador del ABS puede detectar la situación y actuar en
consecuencia.
Los fabricantes a menudo ofrecen esto como una opción separada aún
cuando la infraestructura utilizada es compartida en su mayoría con el
sistema de ABS. Versiones más sofisticadas de estos sistemas pueden
incluso controlar los niveles de aceleración y de frenado simultáneamente.
Eficiencia: En 2003 un estudio de ‘Monash Univeristy Accident Research
Centre’ determino que el ABS:
• Reduce el riesgo de accidentes múltiples en un 18%.
• Reduce el riesgo de accidentes off-road en un 35%
En superficies de elevada tracción como ‘bitumen’ o cemento, muchos
autos equipados con ABS son capaces de alcanzar distancias de frenado
mejores, es decir menores, que aquellas que pueden conseguirse sin ABS.
23
En el mundo real en condiciones incluso de alerta, conductores
experimentados en el manejo de coches sin ABS encontrarían difícil,
incluso con técnicas de frenado relativo, el alcanzar o mejorar los
resultados obtenidos por un conductor cualquiera con un auto equipado
con un moderno sistema de ABS. El ABS reduce las posibilidades de
accidente, y/o la gravedad del impacto. La técnica recomendada para
conductores no expertos conduciendo un coche equipado con ABS, en una
típica situación de frenado de emergencia, es presionar el pedal de freno
lo máximo posible, y en la medida de lo posible, girar evitando obstáculos.
En dichas situaciones, el ABS, reducirá significativamente las
posibilidades de patinaje y por tanto de pérdida de control.
Sobre grava, arena, o nieve compacta, el ABS tiende a incrementar las
distancias de frenado. En dichas superficies, el bloqueo de ruedas produce
que estás se hundan en el terreno y de esta forma el vehículo se detenga
más rápidamente. El ABS previene que esto ocurra y por tanto contribuye
negativamente al frenado del vehículo. Algunos sistemas de ABS reducen
este problema calibrando el programa de tal manera que se ralenticen los
tiempos de ciclo, permitiendo de esta manera que las ruedas se bloqueen y
desbloqueen repetidamente. Algunos fabricantes permiten deshabilitar la
función de ABS manualmente para situaciones de conducción off-road. El
beneficio principal del ABS en dichas superficies es el incremento de la
habilidad del conductor para mantener el control del coche en lugar de
derrapar. Dicha pérdida de control es más probable en superficies con
24
grava, hielo o nieve. En una superficie excesivamente deslizante es posible
bloquear más de una rueda de forma simultánea, pudiendo suponer esto
la derrota del ABS, cuyo funcionamiento se basa en la diferencia de
velocidad de una rueda con respecto a las otras 3).
En Junio de 1999 un estudio realizado por ‘National Highway Traffic Safety
Administration’ (NHTSA) demostró que el ABS incrementaba la distancia
de frenado en pavimento de grava en aproximadamente un 22% de media.
De acuerdo con el estudio de NHTSA,
"ABS works with your regular braking system by automatically pumping them.
In vehicles not equipped with ABS, the driver has to manually pump the brakes to
prevent wheel lockup. In vehicles equipped with ABS, your foot should remain firmly
planted on the brake pedal, while ABS pumps the brakes for you so you can concentrate
on steering to safety."
Algunos de los primeros sistemas de ABS provocaban al activarse una pulsación
suficientemente notable al activarse. Dado que muchos conductores raramente o
nunca frenan con la suficiente fuerza como para causar el bloqueo de las ruedas,
y una gran mayoría de ellos ni siquiera se molestan en leer el manual del
automóvil, esto puede no notarse hasta que nos presentamos en una situación de
emergencia. Cuando los conductores se encontraban ante esta situación de
emergencia que les obligaba a frenan de forma contundente, activándose el
sistema de ABS y por tanto produciéndose dicha pulsación citada anteriormente,
muchos de ellos reducen instintivamente la presión sobre el pedal de freno,
alargándose de esta forma la distancia de frenado, contribuyendo por tanto a
elevar el nivel de accidentes. Algunos fabricantes han desarrollado un asistente
para la frenada que detecta esta situación y asume que el conductor se encuentra
25
ante una situación de ‘panic stop’, actuando el sistema automáticamente sobre los
frenos incrementando la presión de los mismos cuando es requerida. Fuertes
frenadas en terrenos con baches o socavones, pueden provocar el accionamiento
del sistema ABS, debido a que dichos baches provocan que la velocidad de las
ruedas se vuelva errática. En cualquier caso, el ABS ha sido probado como un
sistema que incrementa la seguridad y ayuda al conductor en el control del
automóvil en la mayoría de las situaciones a las que esté se encuentra.
Compensación de riesgo: Los sistemas de antibloqueo son sujeto de diversos
estudios centrados en la teoría de compensación de riesgo, según la cual los
conductores que disponen de ABS en su vehículo adaptan su forma de
conducción, haciéndola más agresiva, compensándose los beneficios que supone
el ABS con los perjuicios que supone el conducir de una forma más agresiva. En
la ciudad alemana de Munich se realizo un estudio en el cual, la mitad de una
flota de taxis se equipaban con sistemas ABS mientras que la otra mitad disponía
de frenos convencionales. La tasa de accidentes fue esencialmente la misma para
los dos tipos de taxis, concluyendo que esto era debido a que los conductores que
disponían de ABS asumían más riesgos a la hora de conducir, esperando que el
sistema de ABS solucionara los problemas, mientras que los conductores sin ABS
conducían de una forma más cautelosa, ya que no disponían de un sistema que
pudiese ayudarles ante una situación de peligro. Un estudio similar fue llevado a
cabo, concluyendo con resultados similares.
26
1.1.4 BAS
Como hemos dichos líneas arriba, muchos conductores raramente
pisan el pedal de freno con la fuerza suficiente para provocar el bloqueo
de las ruedas y por tanto la activación del ABS. En 1992 un estudio
realizado por Mercedes-Benz demostró que el 90% de los conductores no
aplicaban la fuerza suficiente al sistema de frenado en situaciones de
emergencia. Ante esta situación, se prolonga la distancia de frenado de
forma considerable, al no aplicarse al máximo el poder de frenado de los
frenos. Para evitar esto, ‘Mercedes Benz’ desarrollo en 1996 un sistema de
asistencia a la frenada, conocido como BAS (‘Brake assist system’), el cual
incrementa la presión de frenado en situaciones de emergencia. El BAS
detecta circunstancias en las que un frenado de emergencia es necesario
midiendo la velocidad con la que el pedal de freno es presionado. Algunos
sistemas adicionales, toman en consideración la rapidez con la que el
pedal del acelerador se suelta, pre-tensionando los frenos cuando el
acelerador se suelta demasiado rápido, indicando esto una situación de
pánico. Cuando el freno es accionado por el conductor en situación de
emergencia, el asistente de frenada automáticamente desarrolla la máxima
fuerza posible de tal manera que se evita la tendencia de los conductores
de no frenar con la suficiente fuerza. Según esto, se ha demostrado que el
BAS reduce la distancia de frenado en incluso un 20% en algunos casos.
En diciembre de 1996 el BAS apareció en el mercado en los ‘Mercedes-Benz
clase S’ y ‘Mercedes-Benz clase SL’. En 1998 ‘Mercedes-Benz’ se convirtió en la
27
primera compañía en fabricar asistente en la frenada como equipo de serie
en todos sus modelos, otras marcas incluyendo ‘Volvo’ y ‘BMW’ siguieron
su ejemplo rápidamente.
El sistema CWAB de ‘Volvo’ (‘Collision Warning with Auto Brake’) utiliza un
radar para detectar cuando una colisión es probable y pre-tensa los frenos
de manera que cuando el conductor los activa, aunque sea ligeramente, el
sistema aplica toda la presión posible. El sistema además advierte al
conductor con un testigo luminoso o una alarma sonora, en el caso de que
el conductor no responda a dichos avisos, en el punto en el cual la colisión
no puede ser evitada el sistema aplicara los frenos de forma
automáticamente reduciendo drásticamente la velocidad del vehículo.
Otros sistemas similares a este se encuentran también disponibles en otras
marcas, como puede ser el ejemplo del ‘Mercedes-Benz Brake Assist Plus’ el
cual actúa de forma similar al sistema CWAB pero no frena
automáticamente como el anterior ante la situación de que el conductor no
reaccione. El BAS Plus reduce significativamente los alcances traseros, y
por tanto es muy importante en el desarrollo de las ayudas a los
conductores que incrementan la seguridad en la carretera.
Los automóviles Volvo vienen también equipados con el ‘City Safety
System’ el cual frena automáticamente en una situación de tráfico denso en
la cual se arranca y para constantemente, evitando de esta manera
alcances a poca velocidad por despistes del conductor. Mercedes cuenta
con un sistema similar conocido como ‘Distronic Plus’
28
Los sistemas de radar de Volvo tanto como los de Mercedes son también
empleados para regular la distancia de seguridad aplicable a cada
velocidad cuando el ‘cruise control’ se utiliza.
En octubre de 2007 la comisión Europea anuncio que quería requerir como
norma la inclusión del BAS como equipamiento de serie en todos los
modelos vendidos en la unión Europea en el año 2009.
1.1.5 ESC
Hemos hablado anteriormente del ESC (Electronic Stability Control), el
cual conforma junto con el ABS uno de los sistemas de seguridad activa
más popular de los automóviles de hoy en día. Este sistema dispone de
una tecnología computarizada que ayuda a incrementar la seguridad de
los vehículos detectando y previendo derrapes en los mismos. Cuando el
ESC detecta una pérdida del control de dirección, el sistema aplica
automáticamente presión de frenado de forma individual a las ruedas de
manera que ayude al vehículo a ir hacía donde el conductor quiere ir. De
esta manera se frena la rueda exterior delantera cuando se produce
sobreviraje, o la rueda interior trasera cuando se produce subviraje.
Algunos sistemas de ESC reducen incluso la potencia del motor hasta que
se recupera el control del vehículo.
Al igual que con el sistema ABS, vamos a repasar la historia de este
sistema de control de tracción.
29
En 1987 los primeros innovadores de este sistema de control de tracción,
‘Mercedes Benz’, ‘BMW’ y ‘Toyota’ introdujeron su primer sistema de ESC.
En 1990, ‘Mitsubishi’ desarrollo en Japón ‘Mitsubishi Diamante’. Esté incluía
un nuevo sistema electrónico de control activo de trayectoria y tracción (la
primera vez que se integraban estos dos sistemas juntos en el mundo) que
había sido desarrollado por la misma compañía ‘Mitsubishi’. Desde que en
1990 este sistema conocido como TCL fuera introducido ha ido
evolucionando hasta el moderno sistema ASTC (‘Active Skid and Traction
Control’) o ESC. Desarrollado para ayudar al conductor a mantener una
línea intencionada al tomar una curva; un ordenador de abordo
monitoriza diversos parámetros de la operación del vehículo a través de
varios sensores. Cuando se ha acelerado demasiado al tomar una curva, el
motor es automáticamente regulado a una potencia adecuada al mismo
tiempo que se activa la presión necesaria en los frenos para asegurar que
la trayectoria seguida por el automóvil es la adecuada para tomar dicha
curva, así como para abastecer la cantidad adecuada de tracción ante
diversas condiciones de pavimento. Mientras que los sistemas
convencionales de tracción solo proporcionan una función de control de
derrape, el nuevo control de tracción TCL desarrollado por ‘Mitsubishi’
tiene una función de seguridad preventiva (seguridad activa) la cual
mejora el desarrollo de la trayectoria a través de un ajuste automático de
la fuerza de tracción, restringiendo de este modo el exceso de aceleración
lateral durante un giro. En superficies deslizantes o durante los giros la
30
función de control de deslizamiento TCL de cada rueda activa una mejor
tracción.
‘BMW’, en colaboración con ‘Robert Bosch GmbH’ y ‘Continental Automotive
Systems’ desarrollo un sistema de reducción de par motor para prevenir la
pérdida de control y lo aplico a toda la línea BMW de 1992. Desde 1987 a
1992, ‘Mercedes Benz’ y ‘Robert Bosch GmbH’ co-desarrollaron un sistema
llamado ‘Elektronisches Stabilitätsprogramm’ (programa electrónico de
estabilidad), un sistema de control del deslizamiento lateral, el control
electrónico de estabilidad (ESC).
En 1995 las primeras marcas productoras introdujeron sistemas de control
de estabilidad en sus automóviles, ‘Mercedes Benz’ recibiendo material de
‘Bosch’ fue el primero con su ‘W140 S-Class’. Ese mismo año ‘BMW’
recibiendo también material de ‘Bosch’ y ‘Volvo’ comenzaron a ofrecer ESC
en algunos de sus modelos mientras que ‘Toyota’ introducía su propio
sistema de control de estabilidad (también en 2004), un sistema preventivo
llamado VDIM). Mientras tanto otros investigaban y desarrollaban sus
propios sistemas.
En 1996 mientras se realizaba un test de conducción conocido como ‘moose
test’ consistente en esquivar obstáculos, un periodista volcó un ‘Mercedes-
Benz Clase A’ a la velocidad de 37Km/h. Debido a que ‘Mercedes-Benz’
promovía una reputación de coches seguros, un total de 130000 ‘Clases A’
fueron recomprados y sustituidos por otros con ESC. Esto produjo una
reducción notable en la tasa de accidentes y el número de vehículos con
31
ESC creció. Hoy en día prácticamente todas las marcas ‘premium’
incluyen sistemas ESC de forma estándar en todos sus vehículos, y el
número de modelos con ESC continua creciendo. ‘Ford’ y ‘Toyota’ han
anunciado que todos sus vehículos Norteamericanos vendrán con ESC
como equipamiento de serie para el final de este año (2009). ‘General
Motors’ ha hecho un anuncio similar para finales del año 2010. El ‘NHTSA’
exige que todos los vehículos de pasajeros deberán ir equipados con ESC
para 2011 y estima que esto supondrá que una media de entre 5300 y 9600
accidentes podrán ser evitados una vez se alcance dicho requisito.
Funcionamiento: Durante una conducción normal, ESC realiza una labor
de fondo, monitorizando continuamente la dirección tanto del vehículo
como del volante. El ESC compara la dirección intencionada del conductor
(midiendo el ángulo del volante) con la dirección actual del volante
(midiendo para ello la aceleración lateral del vehículo, el ángulo de
rotación con respecto al eje vertical que pasa por el centro de gravedad del
vehículo, y la velocidad individual de rotación de cada rueda).

32
El ESC solo interviene si detecta una perdida en el control del giro del
vehículo. Esto puede ocurrir por ejemplo, cuando se derrapa durante una
evasiva maniobra de emergencia para esquivar algún objeto, sobreviraje o
subviraje en curvas pobremente juzgadas en superficies deslizantes, o
aquaplanning. El sistema ESC mide la dirección del derrape, y actúa sobre
los frenos de las ruedas de forma individual de forma asimétrica con la
intención
de crear un
torque en
la dirección
vertical del
vehículo
con sentido
opuesto al sentido de giro del derrape, devolviendo por tanto al vehículo a
una posición de control, en línea con la dirección intencionada por el
conductor. Adicionalmente, el sistema puede requerir reducir la potencia
del motor o una actuación sobre el sistema de transmisión del vehículo
para reducir la velocidad del mismo.
El sistema ESC puede trabajar en cualquier superficie, desde pavimento
seco hasta lagos helados. Reacciona ante los derrapes y los corrige de
manera mucho más rápida y eficiente que un conductor normal, a
menudo el conductor incluso es aterrorizado ante una situación de
pérdida de control inminente. De hecho, esto puede desembocar en una
33
sobreestimación de la eficiencia del ESC por parte del conductor,
adoptando situaciones de mayor riesgo. Por esta razón, los sistemas ESC
típicamente informan al conductor cuando estos intervienen, de manera
que el conductor sepa cuando los límites de acción del sistema están
siendo alcanzados. Muchos activan un testigo de luz en el salpicadero o
un tono de alerta; algunos sistemas dejan intencionadamente que la
dirección corregida del vehículo se desvié ligeramente de la dirección
intencionada del conductor, incluso cuando es posible conseguir una
mayor precisión.
De hecho, todos los fabricantes de ESC enfatizan que el sistema no
garantiza la seguridad del conductor ante cualquier tipo de práctica de
conducción, sino que es un sistema que ayuda a recuperar el control en
situaciones peligrosas. El ESC no incrementa la tracción, por tanto no
permite tomar las curvas a mayor velocidad (aunque puede facilitar el
control del vehículo en las mismas). Más generalmente, el ESC trabaja
entre unos límites de tracción entre las ruedas y el pavimento. Una
maniobra imprudente puede exceder estos límites, resultando en una
pérdida de control. Por ejemplo, en una situación de hidroplanning
acentuada, la rueda o ruedas que el ESC usaría para corregir puede que
incluso no estén ni siquiera en contacto en un principio con el suelo,
reduciéndose por tanto su efectividad.
En Julio de 2004, Toyota ofreció un sistema de control integrado de la
dinámica del vehículo (VDIM) que incorporaba sistemas independientes
34
incluyendo el ESC y trabajaba no solo después de que el derrape fuese
detectado sino también previendo el mismo antes de que tuviese lugar.
Usando un ratio para determinar la relación de marchas adecuada a cada
situación este sistema aplicaba los niveles de par adecuados en cada
situación para ayudar al conductor en maniobras evasivas.
Eficiencia: Numerosos estudios alrededor de todo el mundo han
confirmado que el ESC es altamente efectivo al ayudar al conductor a
mantener el control del coche y salvando vidas al reducir la dureza de los
accidentes. En el otoño de 2004 en los EEUU, el organismo ‘NHTSA’
confirmo todos estos estudios, basándose en un estudio realizado en
EEUU acerca de la efectividad del ESC. ‘NHTSA’ concluyo que el ESC
reduce los accidentes en un 35%. Además, ‘Sport utility vehicles’ (SUVs) con
control de estabilidad se ven involucrados en un 67% menos de accidentes
que SUVs sin estos sistemas. El organismo ‘Insurance Institute for Highway
Safety’ (IIHS) determino a través de un estudio propio realizado en Junio
de 2006 que más de 10000 accidentes fatales podrían ser evitados
anualmente en EEUU si todos los vehículos estuvieran equipados con
ESC. Este estudio del IIHS concluyo que el sistema ESC reduce la
probabilidad de todos los accidentes fatales en un 43%, los accidentes
fatales en los que un solo vehículo se ve involucrado en un 56%, y los
vuelcos de vehículos en un porcentaje comprendido entre un 77 y 80%.
El sistema ESC está considerado por muchos expertos como el avance más
importante en cuanto a seguridad en el vehículo se refiere desde que se
35
invento el cinturón de seguridad. Entre sus defensores nos encontramos
con Nicole Nason, administrador de NHTSA, Max Mosley de la FIA, así
como otras personalidades del mundo del automóvil.
El IIHS impone como requisito el que un coche tenga ESC para poder
acceder al nivel de ‘Top Safety Pick’ de seguros de protección de accidente.
Componentes y diseño: ESC incorpora un sistema de control de giro en el
eje vertical del vehículo en el sistema de antibloqueo (ABS). El mecanismo
del ABS permite al sistema ESC aplicar presión de frenado de forma
individual a cada una de las ruedas. Muchos sistemas ESC incorporan
también un sistema de control de tracción (TCS o ASR) el cual detecta
deslizamientos de las ruedas directrices durante la aceleración y actúa
individualmente sobre los frenos de dichas ruedas o bien reduce la
potencia transmitida por el motor hasta que el control de la tracción es
recuperado. Sin embargo, el ESC tiene un propósito diferente al ABS o al
control de tracción.
El sistema ESC utiliza varios sensores para determinar la dirección a la
que el conductor se quiere dirigir (entrada). Otros sensores indican el
estado actual del vehículo (respuesta). El algoritmo de control compara la
entrada que recibe el vehículo con la respuesta que este devuelve (25 veces
por segundo) y decide, siempre que sea necesario) aplicar presión de
frenada o reducir la aceleración del vehículo en la cantidad que ha sido
calculada.
36
Los sensores usados por el ESC tienen que enviar información en todo
momento con el fin de detectar los posibles defectos lo antes posible.
Tienen que ser resistentes a posibles interferencias tales como: lluvia,
socavones en la carretera, etc…
Los sensores más importantes son:
• Sensor de posición del volante de dirección: determina la dirección
requerida por el conductor. Este tipo de sensores están
generalmente basados en ‘AMR-elements’.
• ‘Yaw rate sensor’: mide la rotación del coche con respecto al eje
vertical del mismo. La información obtenida por este sensor es
comparada con la obtenida por el sensor del volante para
determinar la acción de regulación.
• Sensor de aceleración lateral: Generalmente basados en ‘Hall effect’.
Mide la aceleración lateral del vehículo.
• Sensor de velocidad de rotación de la rueda.
ESC usa un modulador hidráulico para asegurar que cada rueda recibe la
fuerza de frenado adecuada. Un sistema similar es usado en el sistema
ABS. El ABS solamente necesita reducir la presión durante el frenado. El
ESC además necesita incrementar la presión en determinadas
circunstancias.
El corazón del sistema ESC es la unidad de control electrónico. (ECU).
Distintas técnicas de control electrónico están incluidas en el. A menudo,
el mismo ECU es usado para diversos sistemas al mismo tiempo (ABS,
37
Sistema de control de tracción, control de climatización…) Las señales de
entrada son enviadas a través de señales digitales. El estado del vehículo
deseado es determinado basándose en el ángulo del volante, su gradiente
y la velocidad de las ruedas. Simultáneamente, los sensores de ‘YAW’
miden el estado actual del vehículo. El controlador calcula la fuerza de
frenado o de aceleración necesaria para cada rueda y controla a través de
los circuitos electrónicos las válvulas hidráulicas del modulador.
Muchos sistemas ESC tienen un interruptor que permite deshabilitar el
sistema manualmente, lo cual puede ser conveniente al quedarse atascado
en situaciones de nieve, o al conducir en la playa, o al usar una rueda de
repuesto de menor tamaño y que pueda interferir en el funcionamiento de
los sensores. Sin embargo, el ESC se reactiva automáticamente al re-
arrancarse el automóvil. Algunos ESC que carecen de este interruptor para
apagar el sistema como ocurre en muchos de los vehículos nuevos de
‘Lexus’ o ‘Toyota’, puede ser deshabilitado temporalmente a través de una
combinación de pulsaciones en el pedal de freno y operaciones en el freno
de mano.
Disponibilidad y coste: El ESC está construido sobre el sistema de ABS, y
todos los vehículos equipados con ESC con control de tracción. De
acuerdo con un estudio del NHTSA, un sistema de ABS viene costando
una media de US$368 (año 2005) y un sistema de ESC supone un coste
adicional de US$111. El ESC raramente se ofrece como una opción
independiente, y generalmente no hay disponibilidad de instalación pos-
38
venta. Sin embargo es envuelto frecuentemente con otras características u
otros sistemas más costosos, de manera que el costo de la inclusión del
ESC puede suponer varios miles de dólares. De cualquier modo, el ESC
está considerado altamente rentable, en relación eficiencia-precio, incluso
supone en algunas ocasiones descuentos en los seguros de accidentes,
amortizándose por tanto de forma indirecta.
La disponibilidad de este sistema en vehículos de pasajeros varía
dependiendo de los fabricantes y de los países. En 2007, el ESC estaba
disponible en aproximadamente el 50% de los vehículos Norteamericanos,
mientras que en Suecia alcanzaban el 75%. Sin embargo, el
desconocimiento de los compradores afecta a las conductas de compra, de
modo que el 45% de los vehículos vendidos en Norteamérica y el Reino
Unido incluían ESC, en contraste con el porcentaje tan elevado de otros
países europeos como Alemania, Dinamarca o Suecia en el que se
alcanzaban tasas de entre el 78 y el 96%. Mientras que pocos vehículos
incluían ESC antes del 2004, un aumento en la búsqueda de seguridad por
parte de los compradores está haciendo elevar este número.
El ESC se encuentra disponible en coches, SUV’s, y pickup trucks en la
gran mayoría de las marcas fabricantes de automóviles. Coches de lujo,
deportivos, SUV’s y crossovers vienen generalmente equipados con ESC.
Los coches medianos van introduciéndolo gradualmente, el modelo de
2008 del ‘Toyota Camry’, ‘Nissan Altima’ y ‘Ford Fusion’ solo lo ofrecen en
sus modelos V6. Mientras ESC incluye control de tracción, hay otros
39
vehículos como el modelo 2008 de ‘Chevrolet Malibu LS’ y el ‘Mazda6’ que
tienen control de tracción pero no ESC. Este sistema raramente se
encuentra en coches compactos. El modelo 2009 del ‘Toyota Corolla’ en los
EEUU (pero no en Canadá) tiene control de estabilidad como una opción
extra en todos los modelos fuera del XRS que lo tienen como estándar. En
Canadá, para el Mazda3 2010, el ESC es una opción de rango medio, y es
estándar en la gama GT. El Ford Focus 2009 tiene ESC como una opción
para los modelos S y SE, y viene de serie para los modelos SEL y SES.
La pagina Web del IIHS muestra la disponibilidad del ESC en algunos
modelos individuales de EEUU y la Web del NHTSA incluye una lista de
los modelos americanos con ESC. ‘The National Roads And Motorists’
Association NRMA muestra la disponibilidad del ESC en los modelos
australianos.
Futuro: El mercado del ESC está creciendo a un ritmo considerable,
especialmente en países europeos como Suecia, Dinamarca o Alemania.
Por ejemplo en Suecia en el año 2003, la venta de vehículos nuevos con
ESC fue del 15% del total. La administración sueca de seguridad en la
carretera realizo una fuerte campaña de apoyo al ESC en septiembre de
2004, 16 meses después, dicha tasa había ascendido al 58%. Una mayor
recomendación se realizo en diciembre de 2004, subiendo la tasa citada al
69% y en el año 2008 ha subido hasta el 96%. Los abogados del ESC
alrededor del mundo están promoviendo un aumento del uso del mismo a
40
través de una legislación pública y campañas de concienciación y para el
año 2012 la mayoría de los vehículos deberían ir equipados con ESC.
Al igual que el ESC está fundamentado en el sistema de antibloqueo ABS,
este es a su vez la base de partida de nuevos sistemas tales como ‘roll
stability control’ (RSC) que trabaja en el plano vertical del mismo modo que
el ESC lo hace en el plano horizontal. Cuando el RSC detecta vuelco
inminente (usualmente en camiones de transporte o SUV’s) este aplica
frenos, reduce aceleración, induce al subviraje, y/o detiene el vehículo.
El poder computacional del ESC ayuda a los sistemas de seguridad activa
y pasiva, identificando otras causas de accidentes. Por ejemplo, los
sensores pueden detectar cuando un vehículo está siguiendo muy de cerca
a otro y reducir la velocidad del mismo, aderezar los asientos traseros, y
tensar los cinturones de seguridad, evitando el accidente o preparando al
coche para el mismo.
1.1.6 Sobreviraje/subviraje
Hemos hablado de sobreviraje y subviraje, pero… ¿Qué significa esto?
Sobreviraje es un fenómeno que puede ocurrir cuando un automóvil está
a punto de tomar una curva o se encuentra dentro de ella. Se dice que el
coche ha sufrido el fenómeno de sobreviraje cuando las ruedas traseras no
siguen la trayectoria de las delanteras sino que patinan hacia fuera de la
curva. El sobreviraje puede desencadenar en el fenómeno popularmente
conocido como trompo.
41
Subviraje por el contrario ocurre cuando el radio de curvatura de la
trayectoria seguida por el coche es mayor que el indicado por la dirección
de las ruedas del mismo. El efecto es el contrario al producido por el
sobreviraje. En pocas palabras subviraje es la condición en la cual el
vehículo no sigue la trayectoria que el conductor intenta imponer al tomar
una curva porque el ‘slip angle’ (ángulo existente entre la dirección que
apuntan las ruedas y la que realmente toman) es mayor en las ruedas
delanteras que en las traseras, tomando por tanto una trayectoria menos
curvada. Subviraje cubre diferentes fenómenos, en particular, no hay gran
diferencia entre el rango lineal de subviraje, y el subviraje al límite del
manejo, el cual sucede al darse grandes aceleraciones laterales, y es del
cual hablan los conductores de carreras cuando usan este término.
Este segundo caso se conoce generalmente como empuje, o rechazo a
tomar la curva. Esto sucede puesto que el coche se encuentra en posición
estable en línea recta y rehúsa la opción de girar.
La tendencia que tiene un coche a sobrevirar o subvirar se ve afectada por
muchos motivos como tracción mecánica, aerodinámica y suspensión, así
como el control del conductor, pudiéndose aplicar a cualquier nivel de
aceleración lateral. Generalmente sobreviraje es la condición en la cual el
‘slip angle’ de las ruedas traseras es mayor que el de las ruedas delanteras,
incluso cuando ambos son pequeños. El límite del sobreviraje ocurre
cuando las ruedas traseras alcanzan el límite de tracción lateral que son
capaces de resistir, mientras que las delanteras no lo han alcanzado,

42
causando esto que la parte trasera del vehículo salga hacía fuera de la
curva. La técnica conocida como ‘opposite lock’ (consistente en dirigir las
ruedas en la dirección opuesta a la curva) es utilizada para retomar el
control del coche en esta circunstancia. ‘Trailing Throttle Oversteer’ (TTO)
viene inducido por el balance del peso en el coche, al cambiar este de la
parte delantera a la trasera, esto puede ocurrir si el coche se encuentra
tomando la curva acelerando, causando que el coche se asiente en su parte
trasera, si se reduce la aceleración (por ejemplo por una reducción del
radio de la curva) puede suceder que el balance de pesos se dirija ahora de
la parte trasera a la delantera, dando por tanto menos tracción a las ruedas
traseras, si el coche se encontraba ya en el límite de tracción lateral antes
de que esto ocurriese es bastante probable que se dé el fenómeno de TTO.
Los automóviles de tracción trasera son más propensos a sobrevirar,
particularmente al aplicar potencia en una curva cerrada. Esto ocurre
porque las ruedas traseras deben soportar la aceleración lateral al mismo
tiempo que el par producido por el motor.
Velocidad crítica
Los coches sobrevirados tienen asociado un modo de inestabilidad, el
ocurre a la denominada velocidad crítica. Según nos acercamos a esta
velocidad, con el coche en una dirección aproximadamente recta, el
volante se hace progresivamente más sensible. A dicha velocidad crítica la
ganancia del ángulo ‘yaw’ se hace infinita, esto significa que el coche
responderá con un giro violento a la más mínima variación del volante o
43
ante una perturbación externa. Por encima de dicha velocidad crítica el
análisis muestra que el coche responderá de forma opuesta a la entrada
que el conductor introduzca a través del volante, es decir, girara a la
izquierda cuando el volante este girado a la derecha. Esto es una
sobresimplicación, puesto que el modelo es linearizado en muchos
aspectos de vital importancia. Los coches subvirados no sufren este
fenómeno, siendo esto una de las razones por las cuales los autos de alta
velocidad tienden a ser diseñados subvirados.
En ‘road cars’
Contrariamente a la opinión popular, los coches modernos con tracción
trasera son mucho más sencillos de manejar en cuanto a sobreviraje se
refiere. Su suspensión no es demasiado fuerte con el propósito de
dirigirlos hacía el subviraje, de hecho con la experiencia de la que
disponen hoy en día los fabricantes de automóviles, estos tratan de
neutralizar la configuración de los coches, de manera que sean capaces de
sobrevirar cuando el conductor busque este efecto a propósito.
La reacción natural de la mayoría de conductores al percibir la perdida de
control durante el sobreviraje es levantar inmediatamente el pedal del
acelerador, pudiendo provocar esto un mayor sobreviraje incluso,
conocido como ‘lift-off oversteer’. La reacción correcta ante dicho efecto es
corregir el volante con cuidado en la dirección del derrape. El hecho de
frenar después de entrar en una curva, puede inducir al sobreviraje al
quitar peso de las ruedas traseras, independientemente de que el coche sea
44
de tracción delantera, trasera, o con tracción a las 4 ruedas. La mayoría de
los coches modernos disponen de sistemas de freno que tienden a
enderezar el coche. Sin embargo, existen 2 factores que trabajan en contra
de esto. La mayoría de los conductores cambian el pie del acelerador al
freno ante estas situaciones, induciendo el giro como hemos explicado
anteriormente. El segundo factor es que los frenos transmiten el reparto de
peso hacia el tren delantero, lo cual provoca unas incluso peores
condiciones para el sobreviraje. De cualquier forma, dichos sistemas de
frenado deberían ser suficientes para ayudar en estas situaciones o al
menos no hacerlas peores.
En coches de carreras
Un coche que no tiende a sobrevirar ni a subvirar al ser puesto al límite se
dice que tiene una distribución neutra. Parece intuitivo que los
conductores de carreras preferirían una ligera inducción hacia el
sobreviraje al tomar una curva, pero esta no es generalmente la situación
debido a dos razones. Acelerar pronto en cuanto el coche pasa el centro
geométrico de la curva proporciona velocidad extra en la siguiente recta.
El conductor que acelera antes o más rápido tiene una gran ventaja sobre
el resto. Las ruedas traseras necesitan una tracción extra para acelerar el
coche en dicha fase crítica de la curva, mientras que las delanteras pueden
aplicar toda su tracción al girar. Por tanto el coche debe ser diseñado con
una ligera tendencia al subviraje. También cabe decir, que los coches
sobrevirados suelen ser muy temperamentales, facilitando esto que el
45
conductor pueda perder el control del mismo durante la carrera. Carroll
Smith, en su libro ‘Drive to Win’ introduce una serie de detalles
explicativos de porque un coche de carreras rapidas debe ser diseñados
con una ligera predisposición al subviraje. Debemos anotar que esto se
aplica a la carrera sobre asfalto. Carreras sobre tierra, tales como rallyes es
una situación diferente.
Incluso teniendo esto en cuenta, algunos conductores de carreras prefieren
un poco de sobreviraje en sus coches, buscando un coche que sea mas
propenso a girar en las curvas (por dentro de sus oponentes). Se debe
entender que esto es a juicio de cada conductor, no existiendo una
solución objetiva. El estilo de conducción es el factor predominante en el
balance de un coche. Por esto es que dos conductores con coches idénticos
en el mismo equipo a menudo definen un balance distinto el uno del otro.
Estabilidad aerodinámica.
La importancia de la posición del centro de presión aerodinámico de un
vehículo con relación a la estabilidad direccional no fue entendída hasta
finales de los años 50, época en la cual coches como el ‘Jaguar 3.4-litre’ que
alcanzaba las 120mph, (200Km/h aprox) resultaban inestables a dichas
velocidades.
Simples aerodinámicas que presionaban la parte trasera del vehículo,
disminuyendo la fuerza de empuje vertical existente en las ruedas
delanteras, resultaban en sobreviraje. La aerodinámica además mueve el
46
centro de presión hacía delante, causando inestabilidad ante viento
cruzado.
En un principio, este sobreviraje debido a la aerodinámica fue
contrarrestado regulando los coches con un fuerte subviraje mecánico,
resultando en un excesivo subviraje a velocidades lentas. Diversas líneas
de acción se han estudiado para alcanzar estabilidad aerodinámica, tales
como alerones para mover el centro de presión más atrás, ‘the kamm tail’ y
‘the spoiler’ para reducir la elevación, alerones traseros para generar una
fuerza de presión hacía abajo, así como presas de aire para reducir la
presión de este debajo del coche, causando una fuerza de atracción debida
al conocido ‘efecto suelo’. La mayoría de estos avances mejoraban la
estabilidad pero reducían la velocidad máxima del vehículo al igual que
incrementaban el consumo del mismo.
Dispositivos mecánicos tales como una masa pesada pueden reducir el
sobreviraje de forma efectiva. Un peso en la parte posterior posterior del
vehículo hará que las ruedas traseras estén más en contacto con el
pavimento. Esto incrementara la resistencia del coche al vuelvo y su
tendencia al sobreviraje. Este principio era usado para estabilizar la parte
trasera del bólido de Formula 1 ‘McLaren MP4-22’ y como resultado
calentaba sus ruedas traseras más rápido que el resto de contrincantes.
En coches de carreras modernos, especialmente en los coches ‘open-wheel’
el sobreviraje en giros a velocidades elevadas es causado principalmente
por la configuración aerodinámica. Una carga aerodinámica mas pesada
47
en la parte anterior del vehículo que en la trasera le induce a este a
sobrevirar. El sobreviraje en giros a poca velocidad es generalmente
eliminado o al menos reducido electrónicamente a través del control de
tracción (en el caso de que este permitido su uso). El balance antero-
posterior requerido para hacer los coches rapidos en el paso por curva es
obtenido diseñando la aerodinámica y regulando la suspensión. La
tendencia del coche para el sobreviraje es generalmente incrementada
aligerando la suspensión anterior o endureciendo la suspensión trasera
Al igual que el sobreviraje, el subviraje tiene una serie de causas tales
como tracción mecánica, aerodinámica y suspensión.
Clásicamente, el subviraje ocurre cuando las ruedas delanteras tienen una
reducción de tracción al tomar una curva, causando que la parte delantera
del vehículo tenga menos agarre volviéndose por tanto incapaz de seguir
la trayectoria en la curva.
En los modernos de carreras, especialmente en los conocidos ‘open-wheels’,
el subviraje es causado principalmente debido a la aerodinámica. En este
caso, la falta de una fuerte carga aerodinámica en la parte delantera
impide que las ruedas delanteras adquieran agarre suficiente. Al mismo
tiempo el subviraje puede ser causado al tener una fuerte carga
aerodinámica trasera dando más tracción a las ruedas traseras que a las
delanteras. Además el balance de suspensión debe tener en cuenta los
distintos tipos de terreno sobre los que se va a conducir, puesto que los
diferentes niveles de fricción de cada superficie pueden influenciar el

48
posible efecto de subviraje. El ángulo de peralte, presión de las ruedas y el
centro de gravedad son factores importantes que determinar las
condiciones de sobreviraje/subviraje.
Práctica común
Es una práctica común entre los fabricantes de automóviles el configuran
la producción de coches deliberadamente para que tengan un ligero
subviraje por defecto. Si un coche subvira ligeramente, este tiende a ser
más estable si un cambio de dirección brusco ocurre, incrementando por
tanto la seguridad.
Rango lineal del subviraje
Al circular en una línea recta, o cuando tomamos una curva de forma
suave o moderada nos encontramos en lo que conocemos como rango
lineal de subviraje. Esta es una característica difícil de detectar
directamente, pero es la responsable de muchos de los aspectos
importantes del manejo en este régimen, incluyendo respuesta en
frecuencia. Generalmente esto es desarrollado usando un análisis de
‘Bundorf’.
Límite para el subviraje
Cualquier vehículo subvira o sobrevira en tiempos diferentes basándose
en las condiciones de la carretera, velocidad, tracción disponible, y manejo
del conductor. El límite para el subviraje es el régimen del vehículo en el
cual las ruedas alcanzan sus respectivos límites de agarre. Aunque esta
situación no se usa en la conducción en vías públicas, es el estado usual en
49
el que se encuentra un coche de carreras excepto cuando circula a
velocidades muy elevadas en líneas rectas. Puesto que al tomar las curvas
las cargas del vehículo se redistribuyen este tendera a entrar en una
condición conocida como ‘Terminal understeer’. Refiriéndose a un vehículo
el cual, como función de su diseño, tiende a subvirar cuando al tomar una
curva las cargas exceden la tracción de que las ruedas disponen.
El balance para el manejo en dichas situaciones ‘Terminal’ viene definido
como una función entre la resistencia relativa al vuelco entre los ejes
traseros y delanteros, la distribución de pesos en el vehículo, y la tracción
de las ruedas delanteras y traseras. Un vehículo con carga pesada en el
tren delantero y con baja dureza de la suspensión trasera tendrá tendencia
hacía el subviraje terminal: sus ruedas delanteras, estando más cargadas
incluso en una condición estática, alcanzaran su límite de adhesión al
pavimento antes que las ruedas traseras, dando por tanto lugar a unos ‘slip
angles’ mayores en las ruedas delanteras. Coches con tracción delantera
tienden también al subviraje puesto que no solo están cargados en el eje
delantero, y además la transmisión de par a través de las ruedas
delanteras también reduce el agarre disponible para las curvas. Se
convierte esto en una lucha para las ruedas delanteras, en las que la
tracción de las mismas cambia rápidamente de ser usada para recibir el
par del motor a ser usada para girar. Por esto los coches con tracción
trasera suelen manejar mejor este fenómeno, puesto que la única función
50
de las ruedas traseras es recibir el par motor mientras que la de las
delanteras es girar.
Aunque el subviraje y sobreviraje pueden causar cada uno de ellos
pérdida de control, muchos fabricantes de automóviles diseñan sus
vehículos para subviraje terminal debido a que la experiencia demuestra
que es más sencillo para la mayoría de los conductores de controlar que el
sobreviraje terminal. Al contrario que el sobreviraje terminal el cual a
menudo requiere muchas correcciones de volante, el subviraje puede ser
reducido generalmente con una simple reducción de velocidad. Un ligero
peligro para algunos coches tradicionalmente subvirados es el sobreviraje:
por ejemplo, si un coche circula a gran velocidad y subvira, el conductor
se verá tentado a levantar el pie del acelerador (incrementando la
efectividad de giro de las ruedas delanteras, puesto que no habrá par
motor con el que lidiar) lo cual puede causar que el coche sobrevire y haga
un trompo, con muy poco aviso. Muy pocos coches reaccionan de esta
manera, dado que no es una característica deseable. Sin embargo, en
ciertos coches y ante determinadas circunstancias el subviraje puede ser
reducido aplicando aceleración total en lugar de frenando.
El subviraje no se encuentra presente solo en la aceleración al tomar una
curva, puede aparecer también en una frenada brusca. Si la distribución
de frenado proporciona mucha más potencia en las ruedas delanteras
puede causar el subviraje del vehículo. Esto sería causado debido al
bloqueo de las ruedas delanteras provocando que estas pierdan su
51
efectividad. El efecto contrario podría ser verdad si los frenos traseros son
excesivamente fuertes causando que la parte trasera del coche derrape.
Los conductores de carreras, en superficies de asfalto, generalmente
prefieren una condición neutra (con una ligera tendencia al sobreviraje o
subviraje, dependiendo del trazado y de la preferencia del conductor)
porque tanto el sobreviraje como el subviraje disminuirán la velocidad al
tomar las curvas. En un coche de tracción trasera el subviraje es
generalmente más rápido en un circuito porque las ruedas traseras
necesitan tener más agarre para poder acelerar el vehículo fuera de la
curva.
52
1.1.7 Diferenciales autoblocantes
Otro aspecto importante sobre el que merece la pena hablar en este
documento es el de los diferenciales autoblocantes. En conducción off-
road es frecuente el uso de diferenciales autoblocantes y bloqueo de los
diferenciales para evitar situaciones de riesgo.
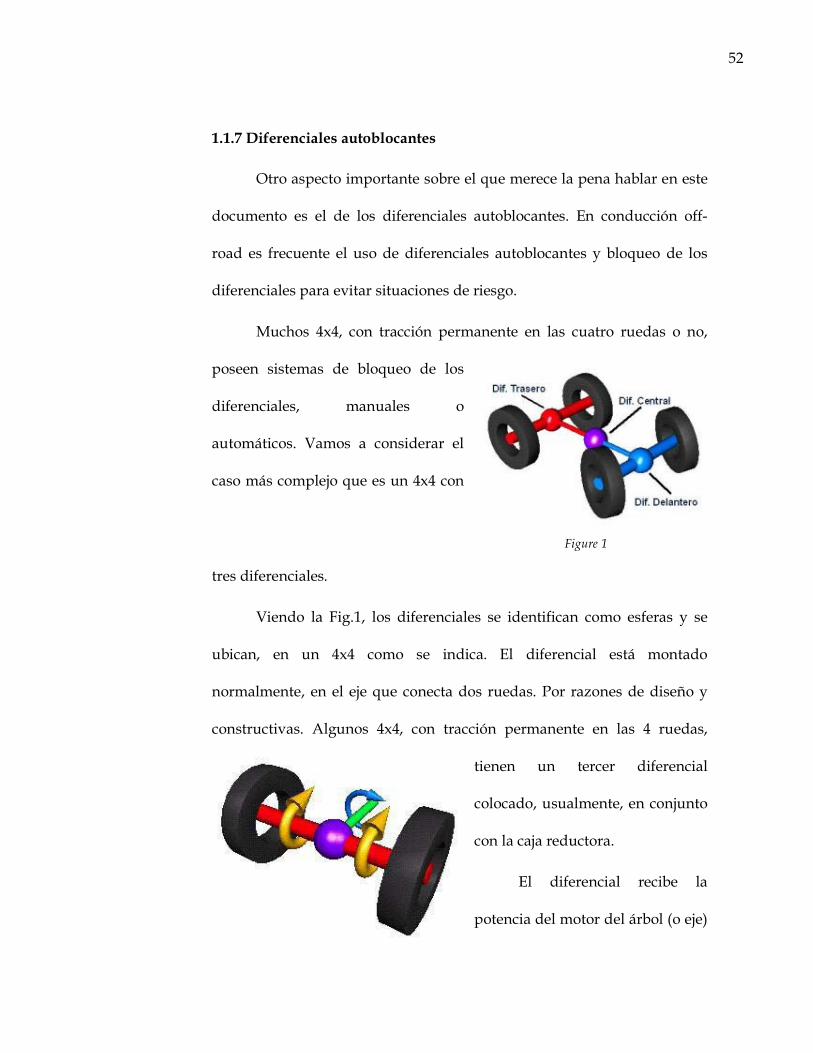
Muchos 4x4, con tracción permanente en las cuatro ruedas o no,
poseen sistemas de bloqueo de los
diferenciales, manuales o
automáticos. Vamos a considerar el
caso más complejo que es un 4x4 con
tres diferenciales.
Viendo la Fig.1, los diferenciales se identifican como esferas y se
ubican, en un 4x4 como se indica. El diferencial está montado
normalmente, en el eje que conecta dos ruedas. Por razones de diseño y
constructivas. Algunos 4x4, con tracción permanente en las 4 ruedas,
tienen un tercer diferencial
colocado, usualmente, en conjunto
con la caja reductora.
El diferencial recibe la
potencia del motor del árbol (o eje)
Figure 1

53
de transimisión y la transmite a las ruedas a través de los dos semiejes.
Lo que hace un diferencial
algo especial es que permite que las
ruedas de un mismo eje giren a
velocidades diferentes y
transmitiendo a ellas,
aproximadamente, la misma fuerza.
Cuando se recorre una curva,
la rueda del lado interior de la
curva recorre una distancia notablemente inferior a la de la rueda externa.
Si no existiera el diferencial para compensar esta diferencia, el
resultado sería que las dos ruedas tendrían que girar a la misma velocidad
haciendo que la del lado de adentro terminara por patinar y así perder
tracción, terminando por patinar. El diferencial permite que las dos ruedas
recorran distancias
iguales manteniendo
la tracción en ambas.
El diferencial
central, que en la
Fig.2 se muestra
como una esfera de
color violeta, permite
que tanto el eje Figure 2
54
delantero como el trasero, giren a velocidades diferentes manteniendo las
cuatro ruedas en movimiento y sin patinar.
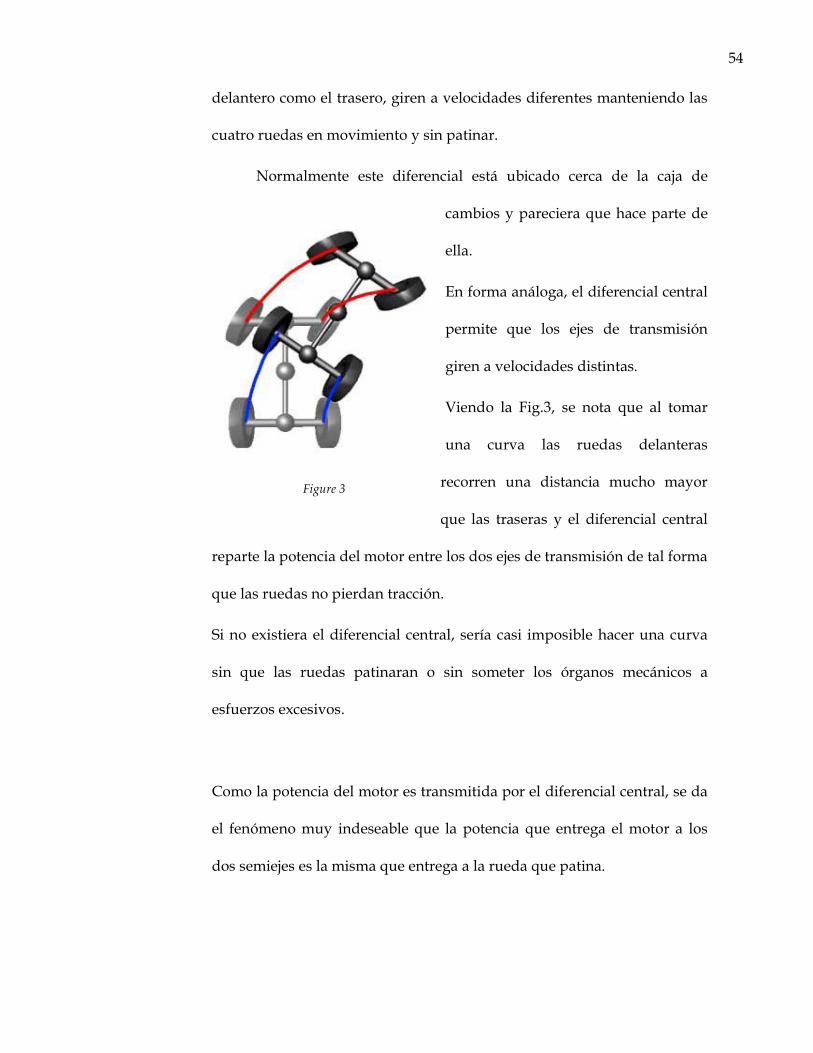
Normalmente este diferencial está ubicado cerca de la caja de
cambios y pareciera que hace parte de
ella.
En forma análoga, el diferencial central
permite que los ejes de transmisión
giren a velocidades distintas.
Viendo la Fig.3, se nota que al tomar
una curva las ruedas delanteras
recorren una distancia mucho mayor
que las traseras y el diferencial central
reparte la potencia del motor entre los dos ejes de transmisión de tal forma
que las ruedas no pierdan tracción.
Si no existiera el diferencial central, sería casi imposible hacer una curva
sin que las ruedas patinaran o sin someter los órganos mecánicos a
esfuerzos excesivos.
Como la potencia del motor es transmitida por el diferencial central, se da
el fenómeno muy indeseable que la potencia que entrega el motor a los
dos semiejes es la misma que entrega a la rueda que patina.
Figure 3
55
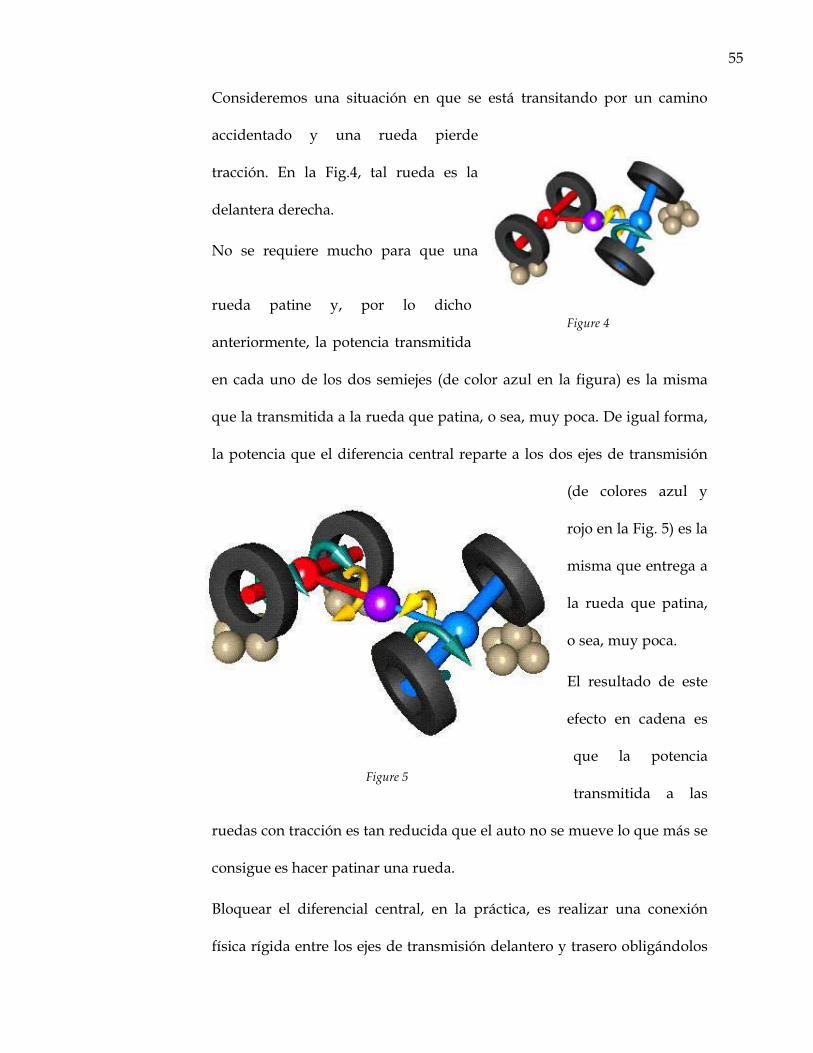
Consideremos una situación en que se está transitando por un camino
accidentado y una rueda pierde
tracción. En la Fig.4, tal rueda es la
delantera derecha.
No se requiere mucho para que una
rueda patine y, por lo dicho
anteriormente, la potencia transmitida
en cada uno de los dos semiejes (de color azul en la figura) es la misma
que la transmitida a la rueda que patina, o sea, muy poca. De igual forma,
la potencia que el diferencia central reparte a los dos ejes de transmisión
(de colores azul y
rojo en la Fig. 5) es la
misma que entrega a
la rueda que patina,
o sea, muy poca.
El resultado de este
efecto en cadena es
que la potencia
transmitida a las
ruedas con tracción es tan reducida que el auto no se mueve lo que más se
consigue es hacer patinar una rueda.
Bloquear el diferencial central, en la práctica, es realizar una conexión
física rígida entre los ejes de transmisión delantero y trasero obligándolos
Figure 5
Figure 4
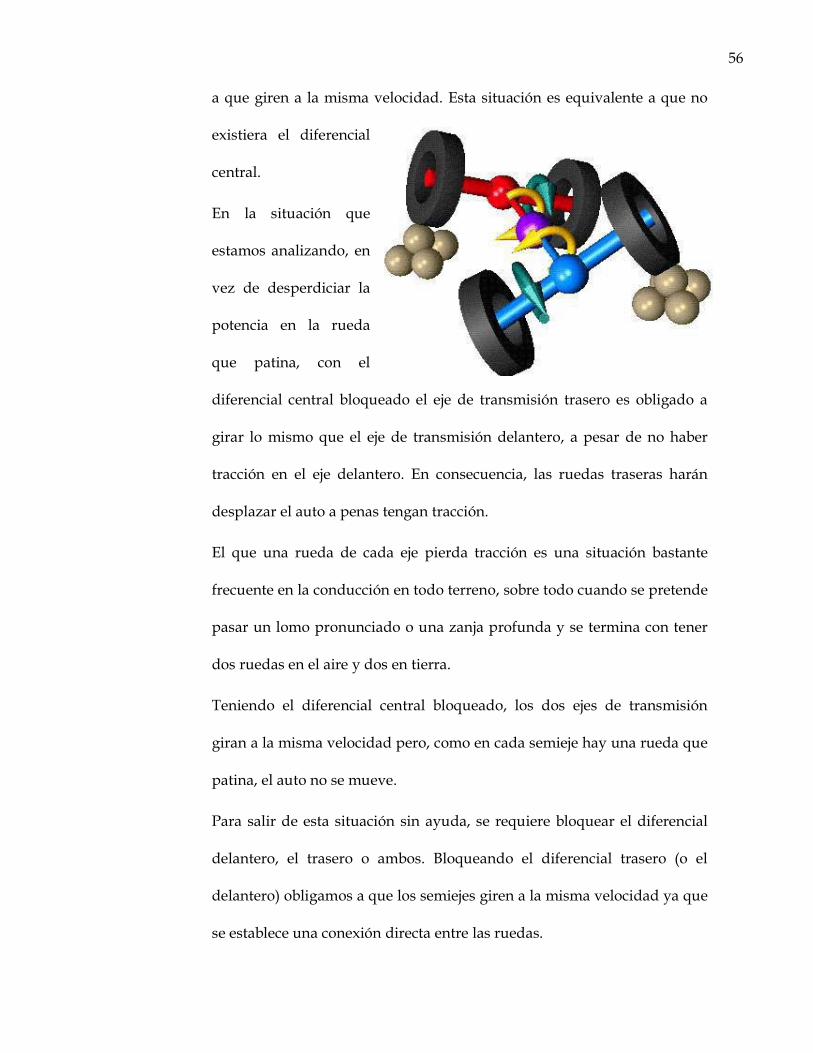
56
a que giren a la misma velocidad. Esta situación es equivalente a que no
existiera el diferencial
central.
En la situación que
estamos analizando, en
vez de desperdiciar la
potencia en la rueda
que patina, con el
diferencial central bloqueado el eje de transmisión trasero es obligado a
girar lo mismo que el eje de transmisión delantero, a pesar de no haber
tracción en el eje delantero. En consecuencia, las ruedas traseras harán
desplazar el auto a penas tengan tracción.
El que una rueda de cada eje pierda tracción es una situación bastante
frecuente en la conducción en todo terreno, sobre todo cuando se pretende
pasar un lomo pronunciado o una zanja profunda y se termina con tener
dos ruedas en el aire y dos en tierra.
Teniendo el diferencial central bloqueado, los dos ejes de transmisión
giran a la misma velocidad pero, como en cada semieje hay una rueda que
patina, el auto no se mueve.
Para salir de esta situación sin ayuda, se requiere bloquear el diferencial
delantero, el trasero o ambos. Bloqueando el diferencial trasero (o el
delantero) obligamos a que los semiejes giren a la misma velocidad ya que
se establece una conexión directa entre las ruedas.
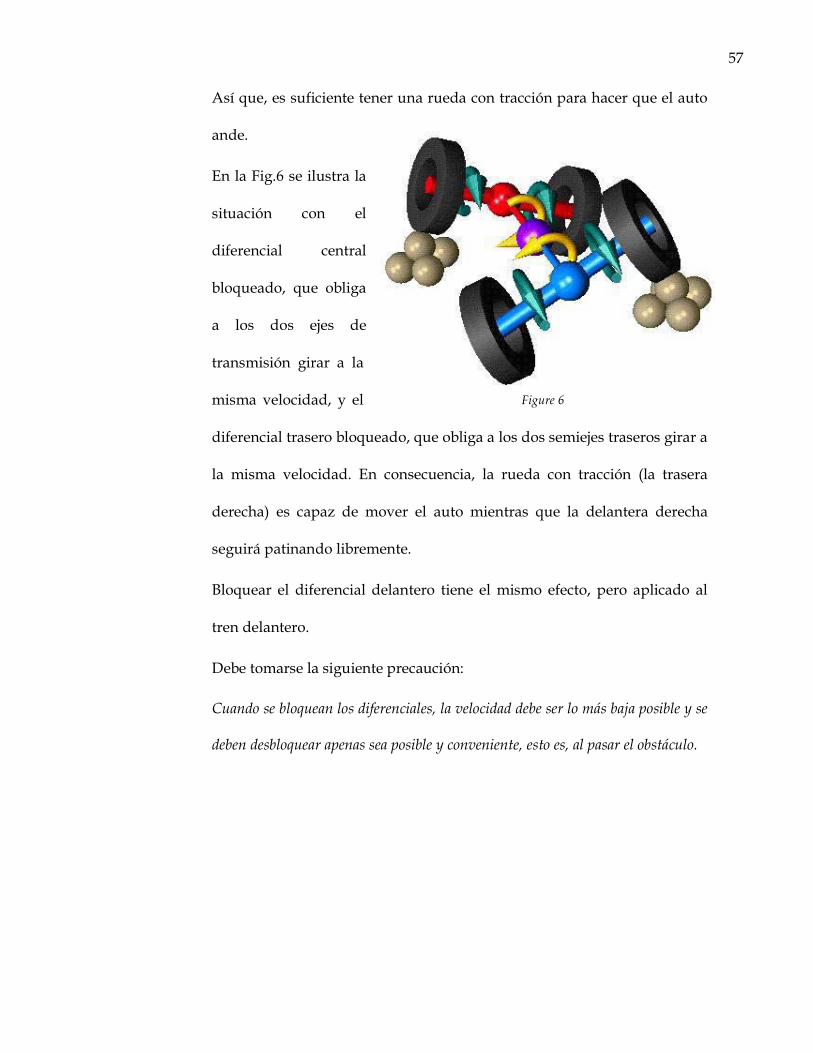
57
Así que, es suficiente tener una rueda con tracción para hacer que el auto
ande.
En la Fig.6 se ilustra la
situación con el
diferencial central
bloqueado, que obliga
a los dos ejes de
transmisión girar a la
misma velocidad, y el
diferencial trasero bloqueado, que obliga a los dos semiejes traseros girar a
la misma velocidad. En consecuencia, la rueda con tracción (la trasera
derecha) es capaz de mover el auto mientras que la delantera derecha
seguirá patinando libremente.
Bloquear el diferencial delantero tiene el mismo efecto, pero aplicado al
tren delantero.
Debe tomarse la siguiente precaución:
Cuando se bloquean los diferenciales, la velocidad debe ser lo más baja posible y se
deben desbloquear apenas sea posible y conveniente, esto es, al pasar el obstáculo.
Figure 6
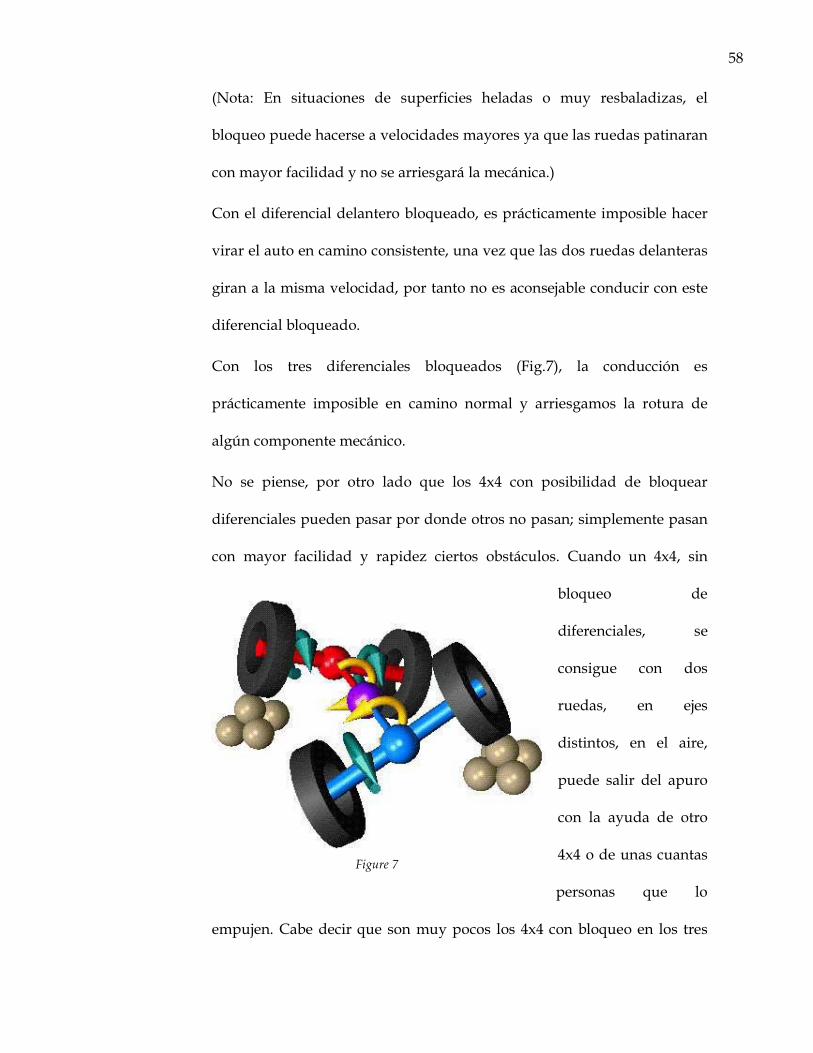
58
(Nota: En situaciones de superficies heladas o muy resbaladizas, el
bloqueo puede hacerse a velocidades mayores ya que las ruedas patinaran
con mayor facilidad y no se arriesgará la mecánica.)
Con el diferencial delantero bloqueado, es prácticamente imposible hacer
virar el auto en camino consistente, una vez que las dos ruedas delanteras
giran a la misma velocidad, por tanto no es aconsejable conducir con este
diferencial bloqueado.
Con los tres diferenciales bloqueados (Fig.7), la conducción es
prácticamente imposible en camino normal y arriesgamos la rotura de
algún componente mecánico.
No se piense, por otro lado que los 4x4 con posibilidad de bloquear
diferenciales pueden pasar por donde otros no pasan; simplemente pasan
con mayor facilidad y rapidez ciertos obstáculos. Cuando un 4x4, sin
bloqueo de
diferenciales, se
consigue con dos
ruedas, en ejes
distintos, en el aire,
puede salir del apuro
con la ayuda de otro
4x4 o de unas cuantas
personas que lo
empujen. Cabe decir que son muy pocos los 4x4 con bloqueo en los tres
Figure 7
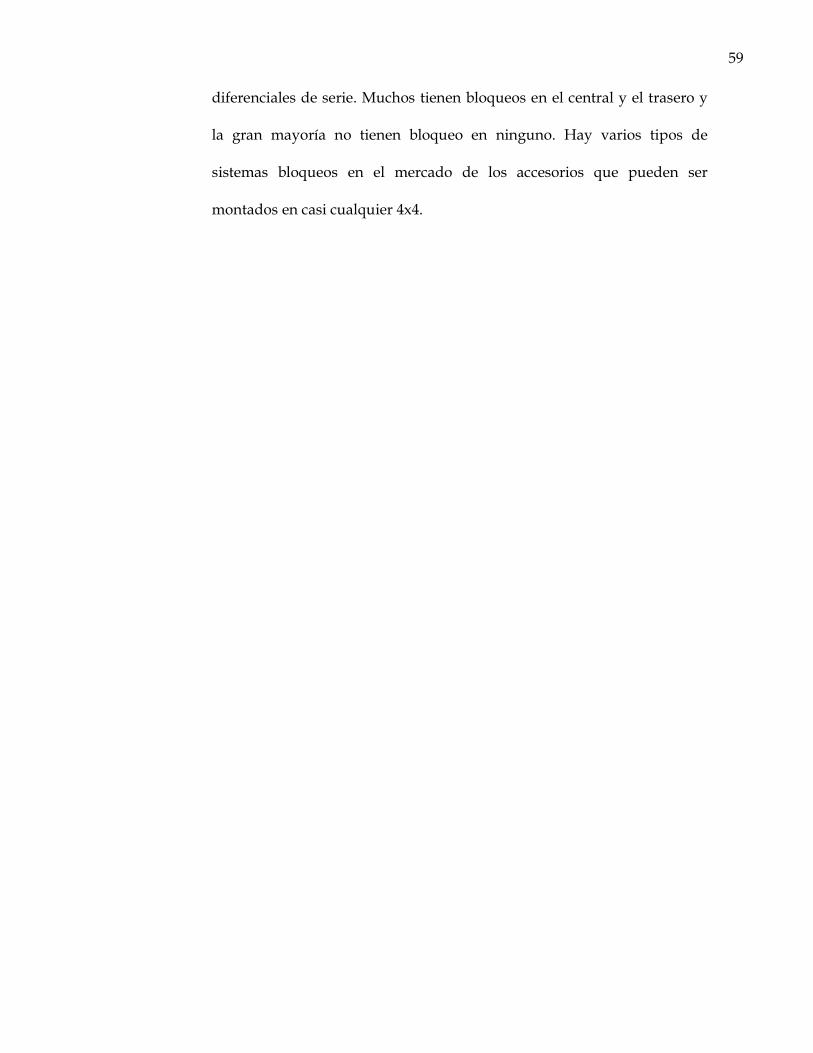
59
diferenciales de serie. Muchos tienen bloqueos en el central y el trasero y
la gran mayoría no tienen bloqueo en ninguno. Hay varios tipos de
sistemas bloqueos en el mercado de los accesorios que pueden ser
montados en casi cualquier 4x4.
60
1.2 Motivación del proyecto
El proyecto que vamos a desarrollar a continuación forma parte de
un ambicioso proyecto de amplísimas dimensiones en el cual la
universidad estadounidense “University of Arizona” en coordinación con
empresas como “Scorpion 4x4” pretende desarrollar un vehículo off-road
que sea capaz de acceder a lugares de difícil acceso con posibles fines de
rescate en situaciones de
emergencia, realizándose dicho
acceso de una forma
completamente autónoma en la
que no exista una persona física
que se encuentre en el coche
conduciendo el mismo. “Scorpion4x4” es una empresa revolucionaria en
automóviles off-road, comenzó hace aproximadamente unos 12 años en
1997 cuando Soni Honegger llevo a cabo una idea que rondaba en su
mente desde hacía varios años, la cual
consistía en un sistema revolucionario
de suspensión en el cual unas barras
ecualizadoras y puntos de articulación
unían los ejes trasero y delantero
Figure 8
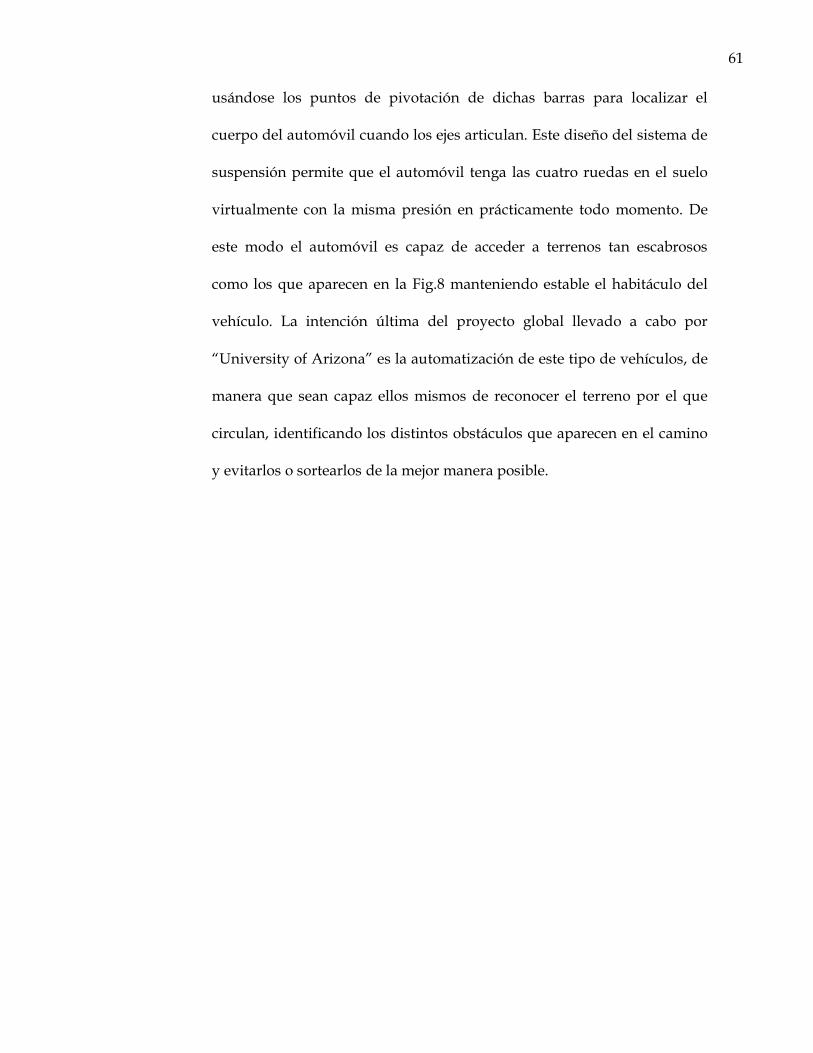
61
usándose los puntos de pivotación de dichas barras para localizar el
cuerpo del automóvil cuando los ejes articulan. Este diseño del sistema de
suspensión permite que el automóvil tenga las cuatro ruedas en el suelo
virtualmente con la misma presión en prácticamente todo momento. De
este modo el automóvil es capaz de acceder a terrenos tan escabrosos
como los que aparecen en la Fig.8 manteniendo estable el habitáculo del
vehículo. La intención última del proyecto global llevado a cabo por
“University of Arizona” es la automatización de este tipo de vehículos, de
manera que sean capaz ellos mismos de reconocer el terreno por el que
circulan, identificando los distintos obstáculos que aparecen en el camino
y evitarlos o sortearlos de la mejor manera posible.
62
1.3 Objetivos
El desarrollo de un modelo integrado de vehículo en el cual los modelos
de chasis y rueda son combinados para incrementar la eficiencia de los
avanzados sistemas de control de seguridad. En este documento vamos a
combinar el ‘Lugre-model’ para el modelo rueda-carretera con un modelo
de chasis basado en un vehículo de 4 ruedas directrices.
En nuestros días la seguridad en los vehículos y los avances en el confort
están adquiriendo cada vez más importancia en el diseño de automóviles.
Esta mejora tiene lugar en la mayoría de los casos gracias al desarrollo de
sistemas tales como ‘Anti-Lock Brake System’ (ABS), ‘Traction control System’
(TCS), y una larga lista de sistemas todos ellos basados en programas
electrónicos capaces de analizar las condiciones de conducción y actuar
cuando es necesario. Quizás en un futuro lleguemos a ver coches
completamente automáticos conduciendo en situaciones de extrema
dificultad como tráfico en ciudades y demás. De momento podemos
debemos conformarnos con el diseño de automóviles que son capaces de
conducir sin conductor, siguiendo determinadas balizas y reconociendo
barreras del entorno tales como muros, líneas, bordillos u otros obstáculos.
63
1.4 Metodología
En este documento vamos a desarrollar un modelo de vehículo que
combina un sistema revolucionario de 4 ruedas motrices y directrices con
otras hipótesis referentes a la fricción existente entre la rueda y el
pavimento como ‘the Lugre-model’ [1] o ‘The Magic Formula’ [2].
De acuerdo con [3] el modelo de control de un vehículo puede ser descrito
como aparece en la Fig.1 en la cual mediante sensores el vehículo analiza
los datos del entorno, y el programa toma decisiones de cómo manejar el
vehículo para alcanzar las metas que le han sido impuestas. En este
documento nos centraremos en la respuesta que ofrece el vehículo a
perturbaciones tales como cambios en el ángulo de dirección, par de
frenada, condiciones de la carretera… creando subsistemas dentro del
modelo completo descrito en la Fig.9. A la hora de la validación del
programa esas decisiones que el vehículo debe tomar por si mismo serán
las entradas de nuestro modelo.
Algo completamente revolucionario en este modelo es la independencia
que existe entre las cuatro ruedas, las cuales pueden girar distintos
ángulos, aplicar distinto nivel de frenada o de aceleración, así como la
combinación entre este modelo de chasis y el modelo de fricción entre
rueda y pavimento.
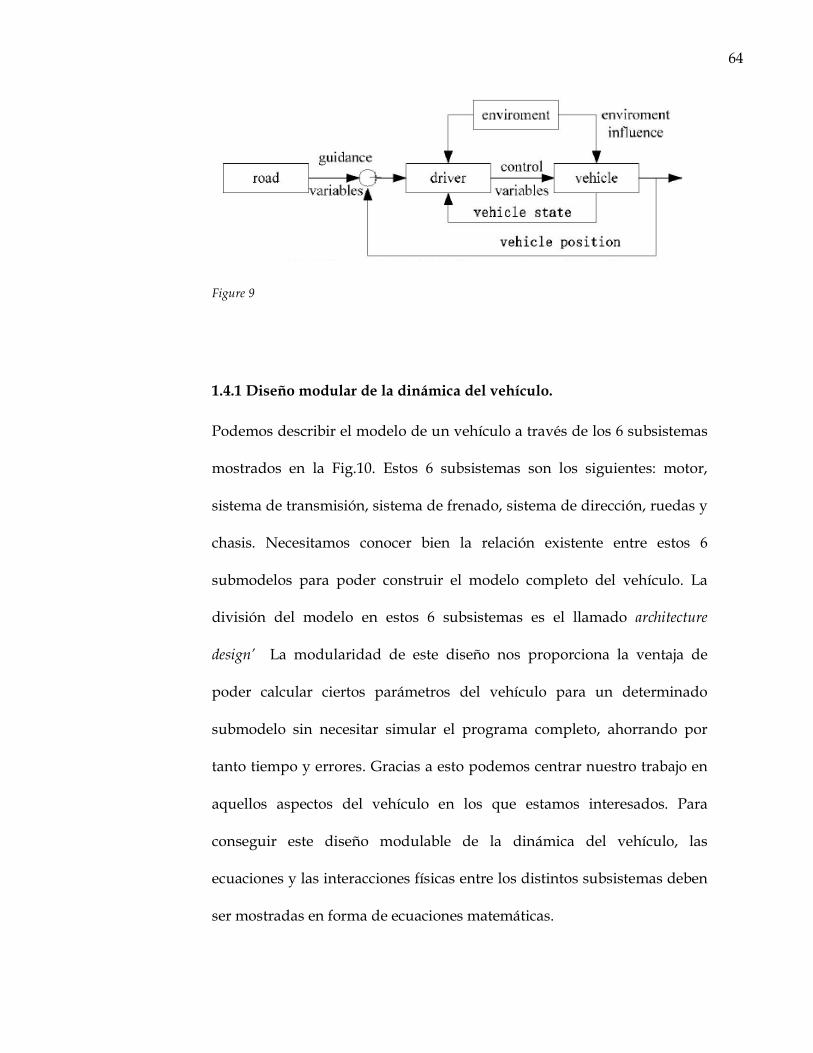
64
Figure 9
1.4.1 Diseño modular de la dinámica del vehículo.
Podemos describir el modelo de un vehículo a través de los 6 subsistemas
mostrados en la Fig.10. Estos 6 subsistemas son los siguientes: motor,
sistema de transmisión, sistema de frenado, sistema de dirección, ruedas y
chasis. Necesitamos conocer bien la relación existente entre estos 6
submodelos para poder construir el modelo completo del vehículo. La
división del modelo en estos 6 subsistemas es el llamado architecture
design’ La modularidad de este diseño nos proporciona la ventaja de
poder calcular ciertos parámetros del vehículo para un determinado
submodelo sin necesitar simular el programa completo, ahorrando por
tanto tiempo y errores. Gracias a esto podemos centrar nuestro trabajo en
aquellos aspectos del vehículo en los que estamos interesados. Para
conseguir este diseño modulable de la dinámica del vehículo, las
ecuaciones y las interacciones físicas entre los distintos subsistemas deben
ser mostradas en forma de ecuaciones matemáticas.
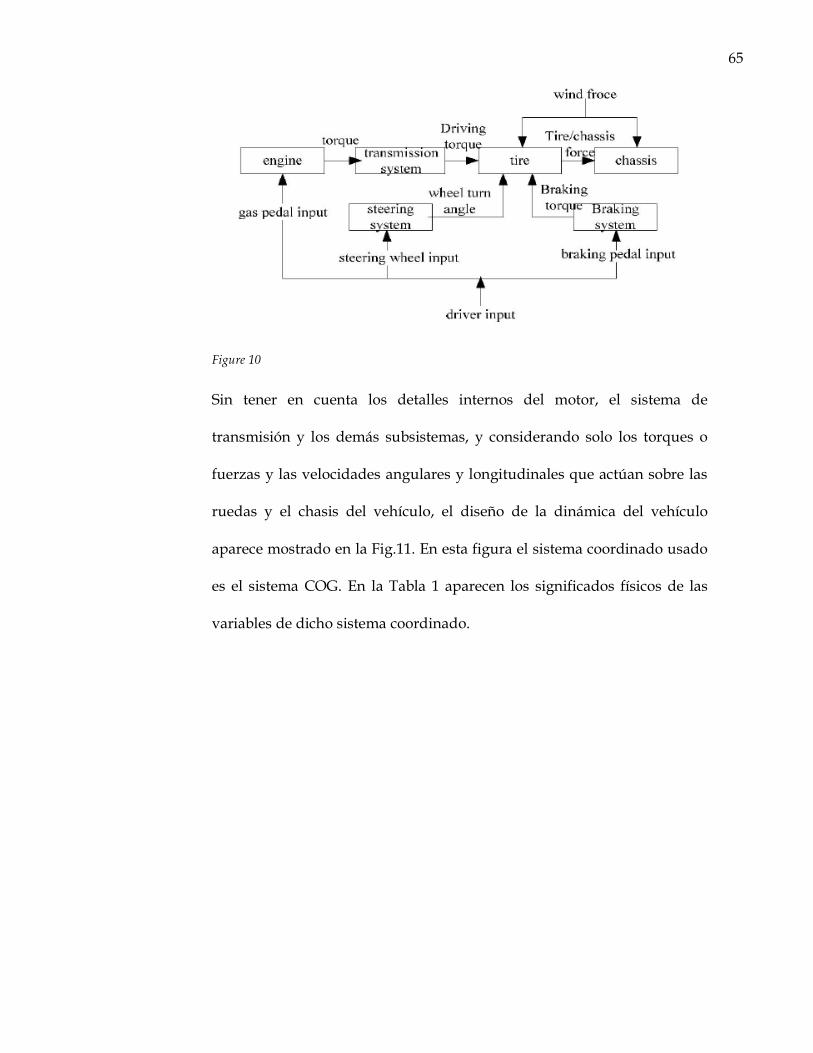
65
Figure 10
Sin tener en cuenta los detalles internos del motor, el sistema de
transmisión y los demás subsistemas, y considerando solo los torques o
fuerzas y las velocidades angulares y longitudinales que actúan sobre las
ruedas y el chasis del vehículo, el diseño de la dinámica del vehículo
aparece mostrado en la Fig.11. En esta figura el sistema coordinado usado
es el sistema COG. En la Tabla 1 aparecen los significados físicos de las
variables de dicho sistema coordinado.
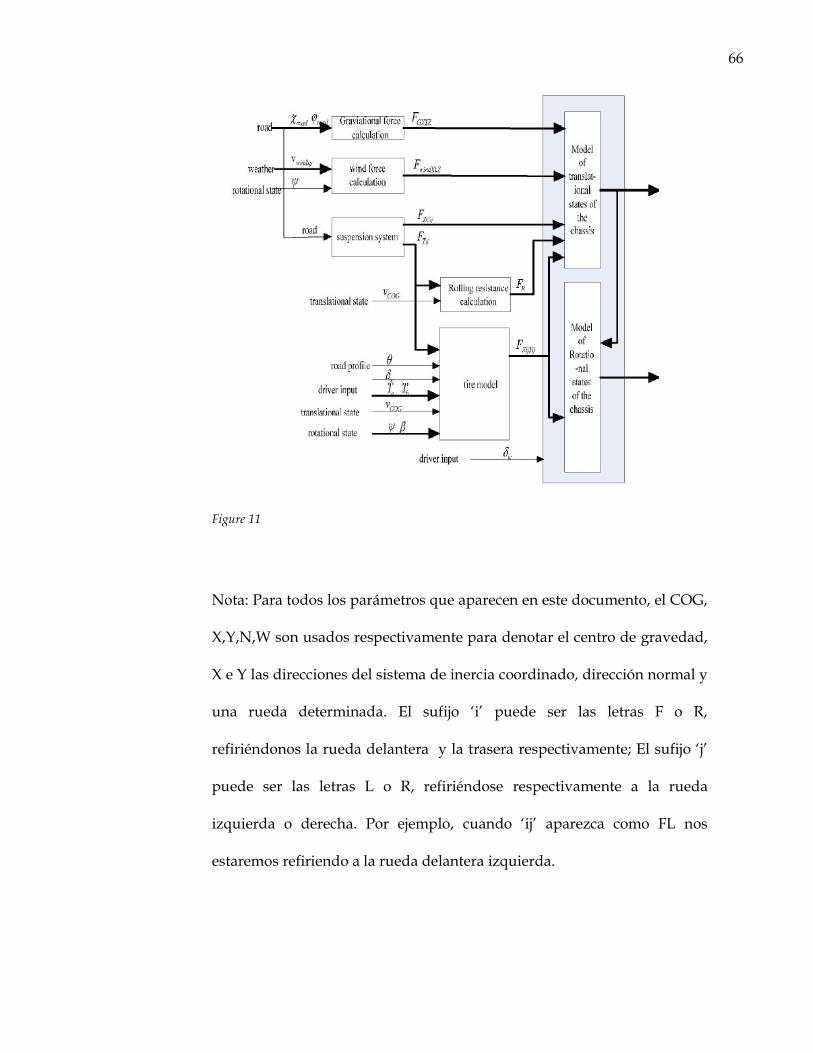
66
Figure 11
Nota: Para todos los parámetros que aparecen en este documento, el COG,
X,Y,N,W son usados respectivamente para denotar el centro de gravedad,
X e Y las direcciones del sistema de inercia coordinado, dirección normal y
una rueda determinada. El sufijo ‘i’ puede ser las letras F o R,
refiriéndonos la rueda delantera y la trasera respectivamente; El sufijo ‘j’
puede ser las letras L o R, refiriéndose respectivamente a la rueda
izquierda o derecha. Por ejemplo, cuando ‘ij’ aparezca como FL nos
estaremos refiriendo a la rueda delantera izquierda.
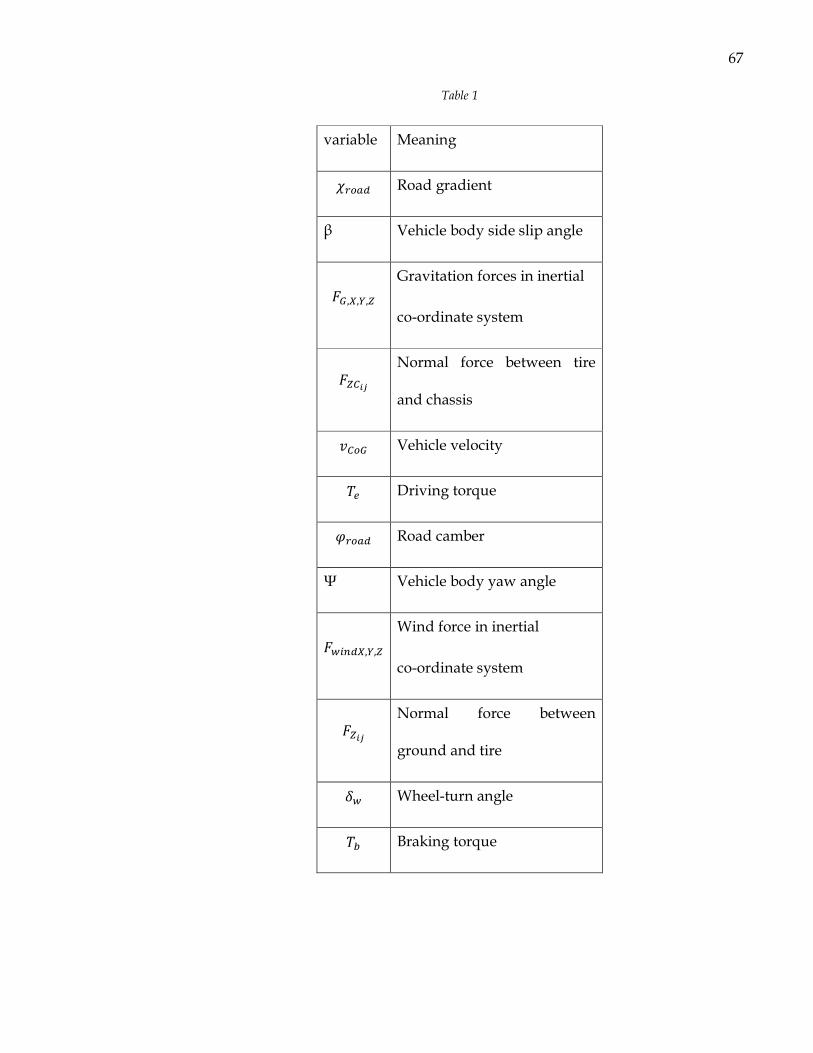
67
Table 1
variable Meaning
����� Road gradient
β Vehicle body side slip angle
��,,,� Gravitation forces in inertial
co-ordinate system
��� � Normal force between tire
and chassis
���� Vehicle velocity
�� Driving torque
����� Road camber
Ψ Vehicle body yaw angle
�����,,� Wind force in inertial
co-ordinate system
�� � Normal force between
ground and tire
�� Wheel-turn angle
�� Braking torque

68
En la siguiente sección, haremos ciertas suposiciones tratando de
implementar todos los subsistemas que vamos a usar en nuestro modelo.
69
1.4.2 Desarrollo de los subsistemas.
Tratando de obtener un modelo eficiente vamos a intentar simplificarlo y
con ello reducir el tiempo respuesta lo máximo posible. Cuando nos
centramos en el estudio de sistemas de control tales como el ABS,
Adaptive Cruise Control System (ACC), la dinámica vertical puede ser
despreciada con el fin de centrarnos en el desarrollo de la dinámica lateral
y longitudinal del vehículo. Siguiendo el mismo proceso en este
documento proponemos un diseño en el cual nos centraremos solo en la
dinámica horizontal, considerando horizontal el plano sobre el que el
vehículo reposa.
1.4.2.1 Modelo del chasis:
Puesto que solo estamos considerando un plano en la dinámica del
vehículo, este tendrá solo 3 grados de libertad, siendo estos la dirección
longitudinal y lateral y el eje perpendicular al plano. La Fig.4 muestra un
pequeño esquema de la dinámica del vehículo con Xcog –Ycog
determinando el sistema coordinado COG, Xin – Yin determinando el
sistema inercial y Xw – Yw el sistema coordinado de la rueda.
Para el sistema COG obtenemos las siguientes ecuaciones no lineales.

70
����� = ��� ��� ! "�#$ + �#& + �&$ + �&& − �����( + ��� ��� ! "�#$ + �#& +�&$ + �&&(
)� = ��� ��� !∙+� ! "�#$ + �#& + �&$ + �&&( − ��� ��� !∙+� ! "�#$ + �#& +�&$ + �&& − �����( − ,�
-.,/ = "�#$ + �#&( ∙ 0# − "�&$ + �&&( ∙ 0& + "�&& + �&$( ∙ �12 +"�#& + �#$( ∙ �32
Donde Fxij determinan la fuerza de fricción en la dirección de Xcog, Fyij la
fuerza de fricción en la dirección Ycog. El significado físico de las otras
variables y los valores del modelo de simulación están representados en la
Tabla 2.
71
1.4.2.2. Modelo de la rueda:
Una parte esencial de nuestro modelo es la determinación de la fricción
existente entre las ruedas y la superficie. La Fig.4 muestra la separación de
dicha fricción en dinámica lateral y longitudinal.
1.4.2.2.1 Dinámica longitudinal
Para la dinámica longitudinal de dicha fricción vamos a utilizar el diseño
usado en el ‘Lugre-model’, descrito en [1],[5],[6],[7], y [8]. Este modelo fue
propuesto por primera vez en [1], y [7] hizo una serie de modificaciones
posteriores, en las cuales usaban el parámetro θ para determinar las
condiciones de la superficie. Θ = 1 se refiere a asfalto seco, y se aproxima a
4 para condiciones de nieve. En [5] aparecen algunos experimentos para
determinar el valor de dicho parámetro. Para nuestro modelo será un
valor de entrada.
456|��|ℎ"��( 9� = �� − 9
:� = 1-� "� − �$ ∙ <(
�$ = "569 + 5=9� + 52��(�>

72
Existen diferentes ecuaciones para la función h() dependiendo del autor,
pero todas ellas son prácticamente similares. Nosotros usaremos la
siguiente:
ℎ"��( = ?� + "?� − ?�(@ABCDCEBF GH
Finalmente definiremos ‘T’ y ‘��’ como:
�� = : ∙ < − ��
� = �� − ��
Donde �$ y �>son las fuerzas longitudinales y normales respectivamente.
Z es una variable de estado interno que determina la desviación media
longitudinal de os filamentos microscópicos de la rueda. (Véase la figura)
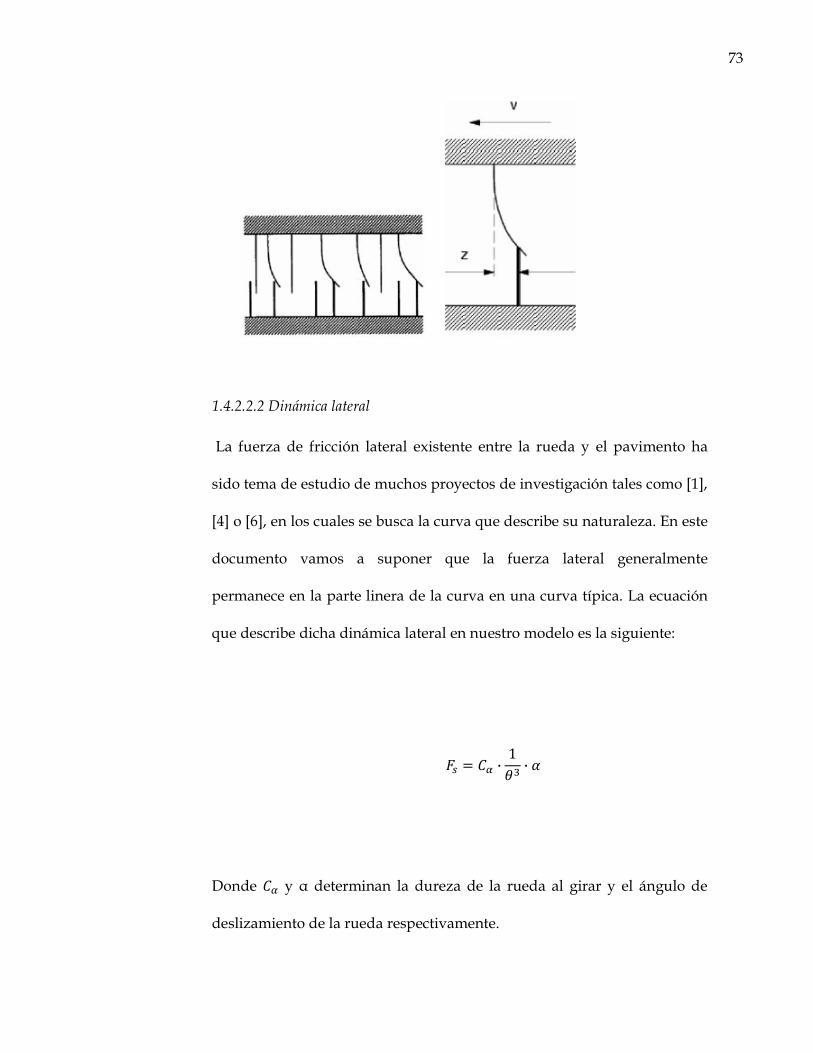
73
1.4.2.2.2 Dinámica lateral
La fuerza de fricción lateral existente entre la rueda y el pavimento ha
sido tema de estudio de muchos proyectos de investigación tales como [1],
[4] o [6], en los cuales se busca la curva que describe su naturaleza. En este
documento vamos a suponer que la fuerza lateral generalmente
permanece en la parte linera de la curva en una curva típica. La ecuación
que describe dicha dinámica lateral en nuestro modelo es la siguiente:
�� = IJ ∙ 14K ∙ L
Donde IJ y α determinan la dureza de la rueda al girar y el ángulo de
deslizamiento de la rueda respectivamente.

74
1.4.2.2.3 Modelo 2D de la rueda
Extendiendo las formulas arriba descritas a un automóvil con 4 ruedas
obtenemos el siguiente modelo donde ‘ij’ describe la posición de la rueda
según especificamos líneas arriba.
9��M = �� � − 456 N�� �Nℎ O�� �P 9��M
:� �M = 1-� �O��M − �$ � ∙ <�MP
�Q�M,$ = O569�M + 5=9��M + 52�� �P �> �
�Q�M,R = IJ ∙ 14K ∙ L�M
ℎ O�� �P = ?� + "?� − ?�(@ABCD �CE BF GH
�� � = :�M ∙ < − �� �

75
��M = ���M − ���M
1.4.2.2.4 El modelo en 2D aplicado a nuestro diseño modular
Finalmente necesitamos hacer algunos cambios en nuestro modelo para
poder usarlo en nuestro ‘modular architecture’. Buscamos la relación entre
la velocidad y las fuerzas sobre el chasis de nuestro coche con las
velocidades y fuerzas de cada rueda.
��M = �Q�M,$ ∙ cos ��M − �Q�M,R ∙ sin ��M
��M = �Q�M,$ ∙ sin ��M − �Q�M,R ∙ cos ��M
�Q3X = Y���� 2 + ,� 2 Z[\]2 _2 + 0]2` + ����,� a−\] cos ) + 20] sin )b
�Q31 = Y���� 2 + ,� 2 Z[\]2 _2 + 0]2` + ����,� a\] cos ) + 20] sin )b
�Q1X = Y����2 + ,� 2 cd\�2 e2 + 0�2f + ����,� "−\� cos ) − 20� sin )(

76
�Q11 = Y���� 2 + ,� 2 cd\�2 e2 + 0�2f + ����,� "\� cos ) − 20� sin )(
El ángulo de deslizamiento lateral se puede calcular con la siguiente
ecuación:
L�M = ��M − g�M
Siendo g�M el ángulo existente entre la velocidad de cada rueda �� � y el eje
h���. Generalmente las ruedas delanteras suelen tener el mismo ángulo de giro
al igual que sucede con las ruedas traseras, por tanto:
�#$ = �#& = �#
�&$ = �&& = �&
Finalmente definiremos la velocidad del coche (����) y la posición del mismo en términos de sistema de coordenadas inercial.
� = ���� cos") + ,(
�i = ���� sin") + ,(

77
h = j �klm
n = j �ilm
1.4.2.3 Fuerza del viento
La fuerza de rozamiento del viento es proporcional al cuadrado de la
velocidad relativa existente entre el viento y el vehículo. Despreciaremos
la velocidad del viendo asumiendo en este proyecto que es nula en el
momento de los experimentos. La ecuación que describe esta fuerza sería
la siguiente:
����� = I��� ∙ p$ ∙ q2 ∙ a���r − �����b2 ≈ I��� ∙ p$ ∙ q2 ∙ a���rb2
Donde I��� es el coeficiente de rozamiento del aire y p$ es el are afronta efectiva del vehículo.
1.4.2.4 Cálculo de la fuerza normal
Para el cálculo de las fuerzas normales asumiremos que la diferencia
existente entre los lados derecho e izquierdo del vehículo debido a la
distribución de pesos en el vehículo puede ser despreciada para nuestro

78
modelo, por tanto solo diferenciaremos entre fuerza normal delantera y
fuerza normal trasera. Usando la segunda ley de Newton para el eje
vertical y aplicando un balance de momentos obtenemos las siguientes
ecuaciones:
�>#$ = �>#& = �># = 0�2"0# + 0&( t���u
�>&$ = �>&& = �>& = 0#2"0# + 0&( t���u

79
1.4.3 Diagrama de bloques
En el anexo I aparecen las ecuaciones del modelo representadas como
diagrama de bloques en simulink.
La tabla 2 muestra los diferentes valores de los parámetros que hemos
usado en las simulaciones.
Table 2
Variable Meaning Value
56 Normalized rubber longitudinal
stiffness 320
5= Normalized rubber longitudinal
damping 1.5
52 Normalized viscous relative damping 0.0002
?� Normalized coulomb friction 0.6
?� Normalized static friction 1.0
�� Stribeck relative velocity 7.5
-� Moment of inertial of the wheel 2.2 vt2
r Equivalent wheel radius 0.3 m
I��� Drag coefficient 0.5
pw Effective front area 4 t2
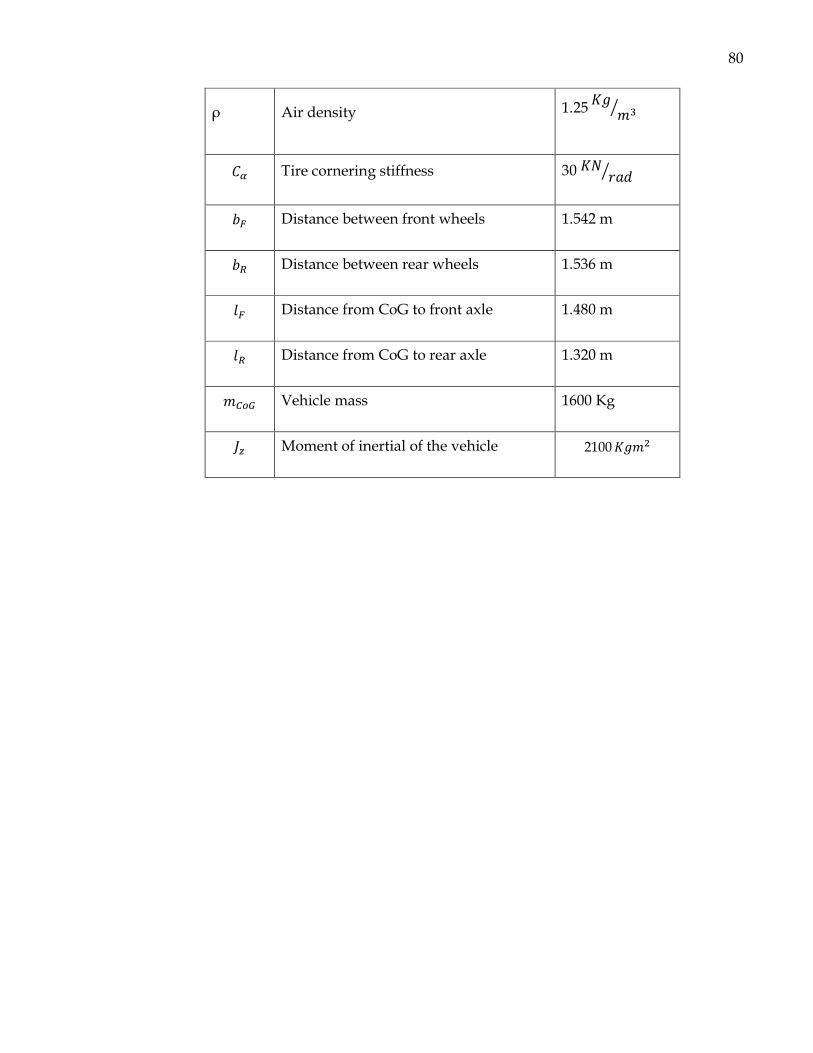
80
ρ Air density 1.25 xu tKH
IJ Tire cornering stiffness 30 xv <ylH
\# Distance between front wheels 1.542 m
\& Distance between rear wheels 1.536 m
0# Distance from CoG to front axle 1.480 m
0& Distance from CoG to rear axle 1.320 m
t��� Vehicle mass 1600 Kg
-. Moment of inertial of the vehicle 2100 xut2

81
1.5 RESULTADOS/EXPERIMENTOS
Para la validación de nuestro modelo hemos realizado una serie de
simulaciones con matlab en las cuales experimentamos con la respuesta
que ofrece el vehículo ante diferentes entradas de par motor, par de
frenada, diferentes situaciones del pavimento, así como diferentes ángulos
de giro.
Empecemos con algunas simulaciones para ver cómo responde nuestro
modelo. Para nuestra primera simulación supondremos que conducimos
en una carretera en línea recta en la cual aceleramos durante 5 segundos y
luego dejamos al coche continuar sin ningún par motor.
En este caso hemos introducido un momento de 175 Nm en las ruedas
traseras y vemos como el coche alcanza una velocidad máxima de 3.5 m/s
que es aproximadamente unos 12 km/h Se observa lo importante de
introducir la fuerza de rozamiento en nuestro modelo ya que incluso
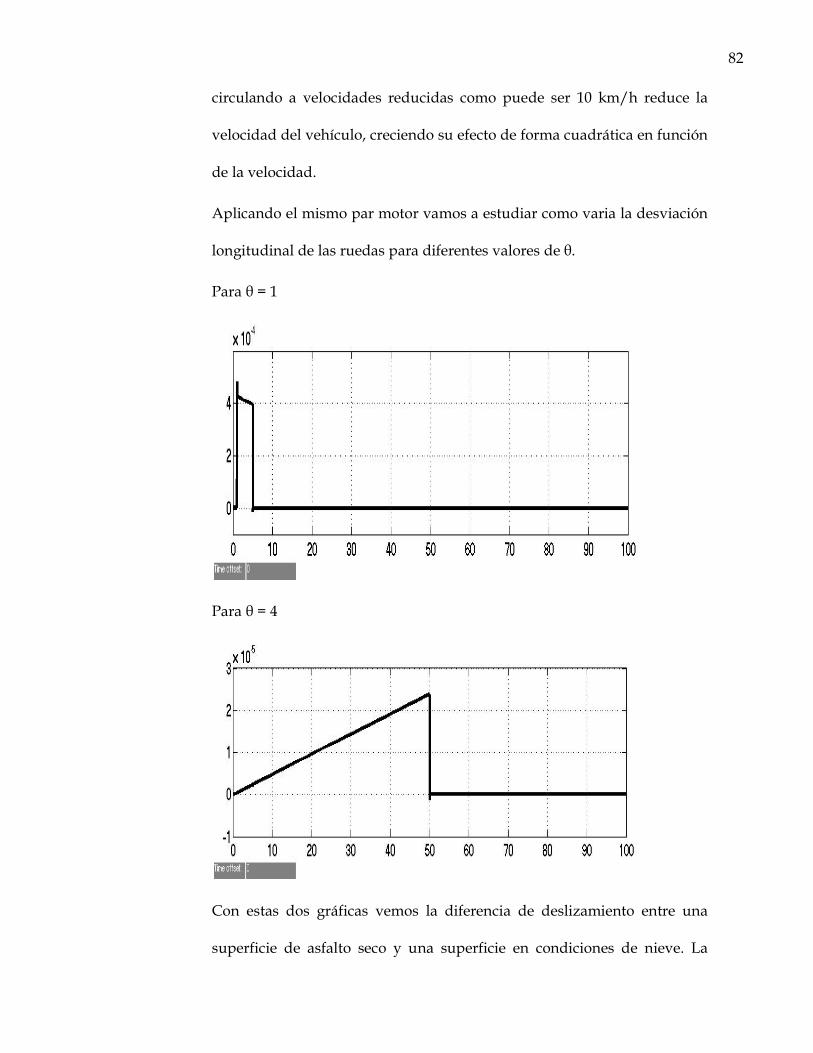
82
circulando a velocidades reducidas como puede ser 10 km/h reduce la
velocidad del vehículo, creciendo su efecto de forma cuadrática en función
de la velocidad.
Aplicando el mismo par motor vamos a estudiar como varia la desviación
longitudinal de las ruedas para diferentes valores de θ.
Para θ = 1
Para θ = 4
Con estas dos gráficas vemos la diferencia de deslizamiento entre una
superficie de asfalto seco y una superficie en condiciones de nieve. La
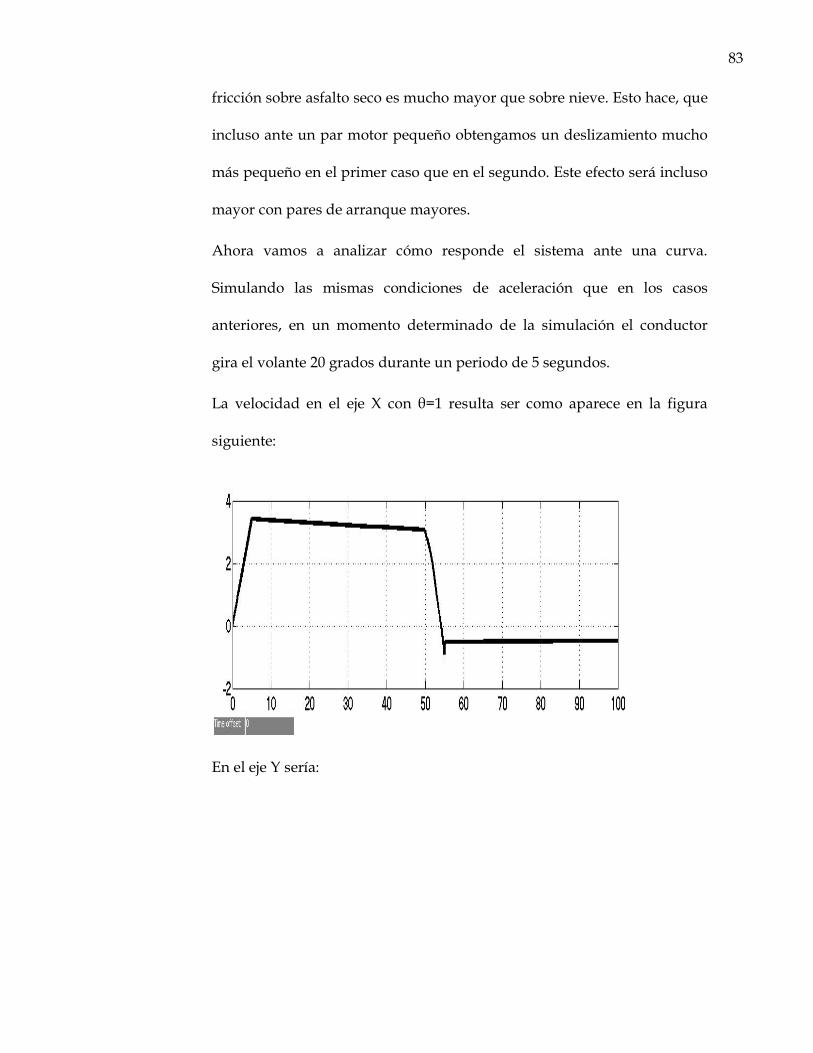
83
fricción sobre asfalto seco es mucho mayor que sobre nieve. Esto hace, que
incluso ante un par motor pequeño obtengamos un deslizamiento mucho
más pequeño en el primer caso que en el segundo. Este efecto será incluso
mayor con pares de arranque mayores.
Ahora vamos a analizar cómo responde el sistema ante una curva.
Simulando las mismas condiciones de aceleración que en los casos
anteriores, en un momento determinado de la simulación el conductor
gira el volante 20 grados durante un periodo de 5 segundos.
La velocidad en el eje X con θ=1 resulta ser como aparece en la figura
siguiente:
En el eje Y sería:
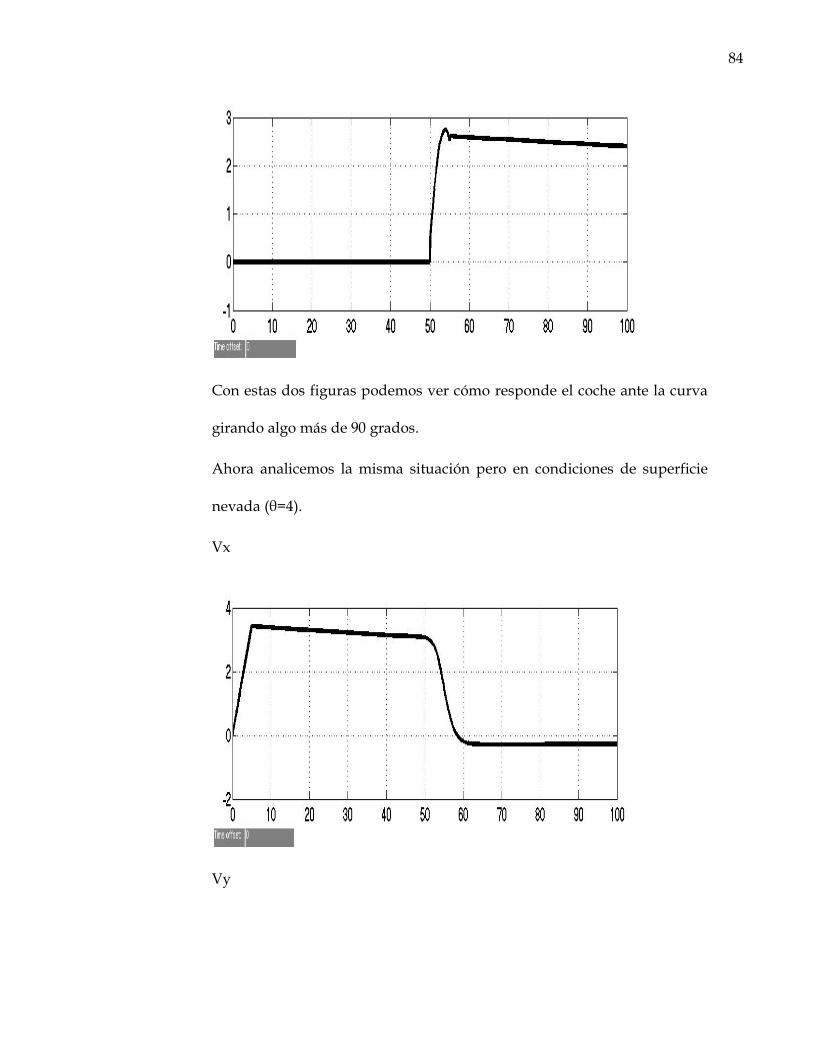
84
Con estas dos figuras podemos ver cómo responde el coche ante la curva
girando algo más de 90 grados.
Ahora analicemos la misma situación pero en condiciones de superficie
nevada (θ=4).
Vx
Vy
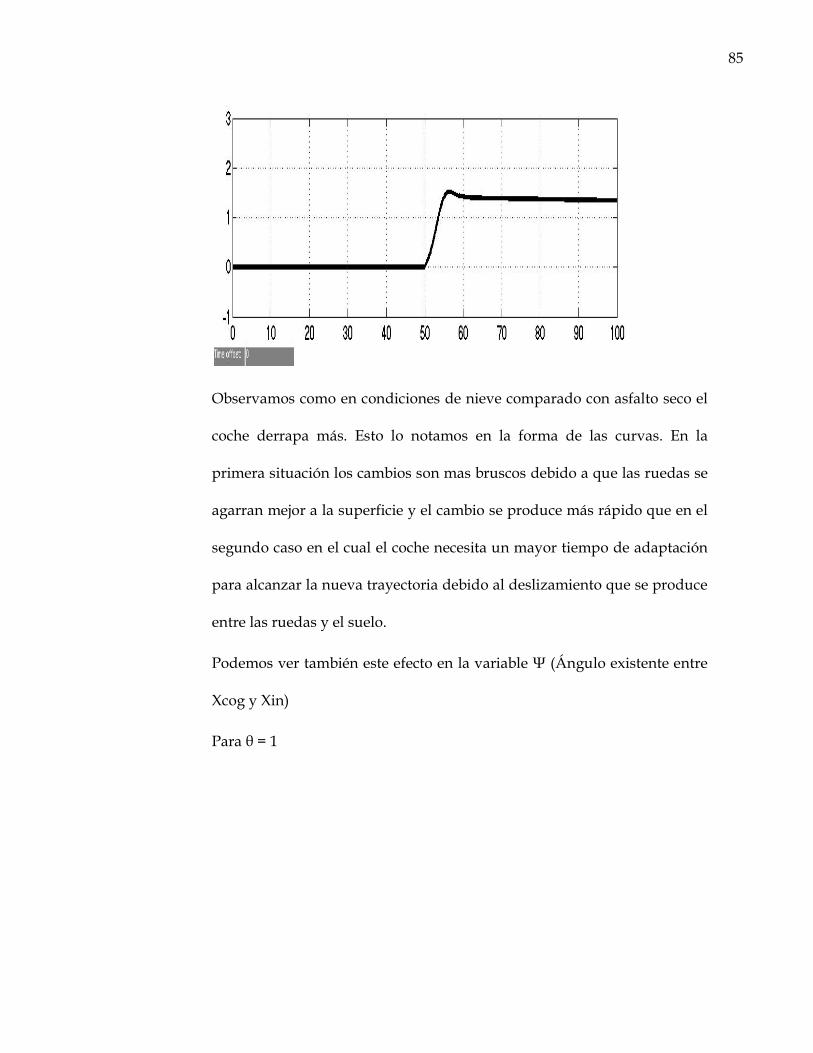
85
Observamos como en condiciones de nieve comparado con asfalto seco el
coche derrapa más. Esto lo notamos en la forma de las curvas. En la
primera situación los cambios son mas bruscos debido a que las ruedas se
agarran mejor a la superficie y el cambio se produce más rápido que en el
segundo caso en el cual el coche necesita un mayor tiempo de adaptación
para alcanzar la nueva trayectoria debido al deslizamiento que se produce
entre las ruedas y el suelo.
Podemos ver también este efecto en la variable Ψ (Ángulo existente entre
Xcog y Xin)
Para θ = 1
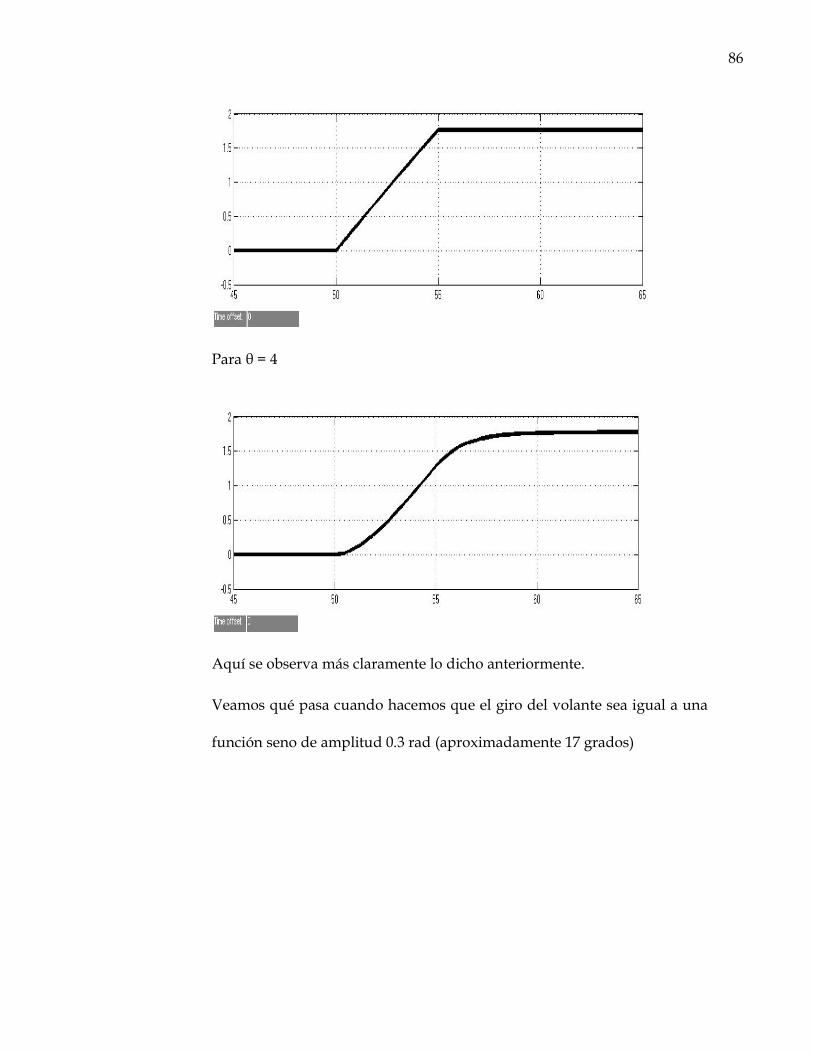
86
Para θ = 4
Aquí se observa más claramente lo dicho anteriormente.
Veamos qué pasa cuando hacemos que el giro del volante sea igual a una
función seno de amplitud 0.3 rad (aproximadamente 17 grados)
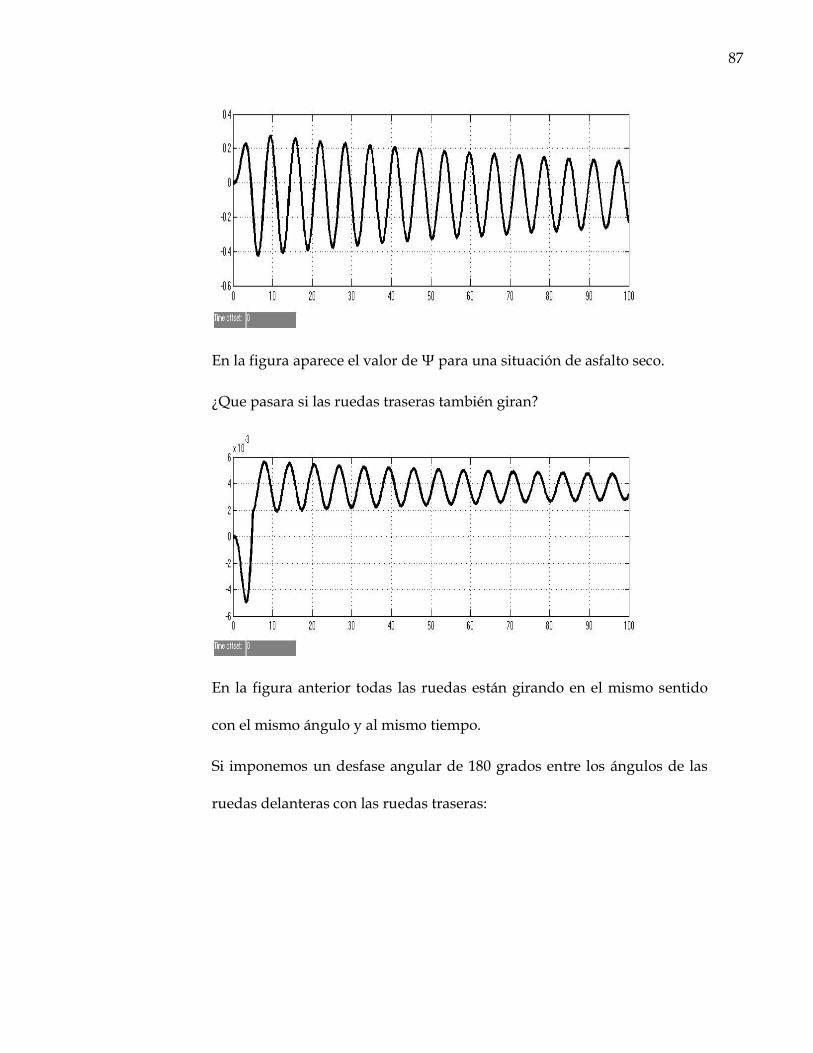
87
En la figura aparece el valor de Ψ para una situación de asfalto seco.
¿Que pasara si las ruedas traseras también giran?
En la figura anterior todas las ruedas están girando en el mismo sentido
con el mismo ángulo y al mismo tiempo.
Si imponemos un desfase angular de 180 grados entre los ángulos de las
ruedas delanteras con las ruedas traseras:
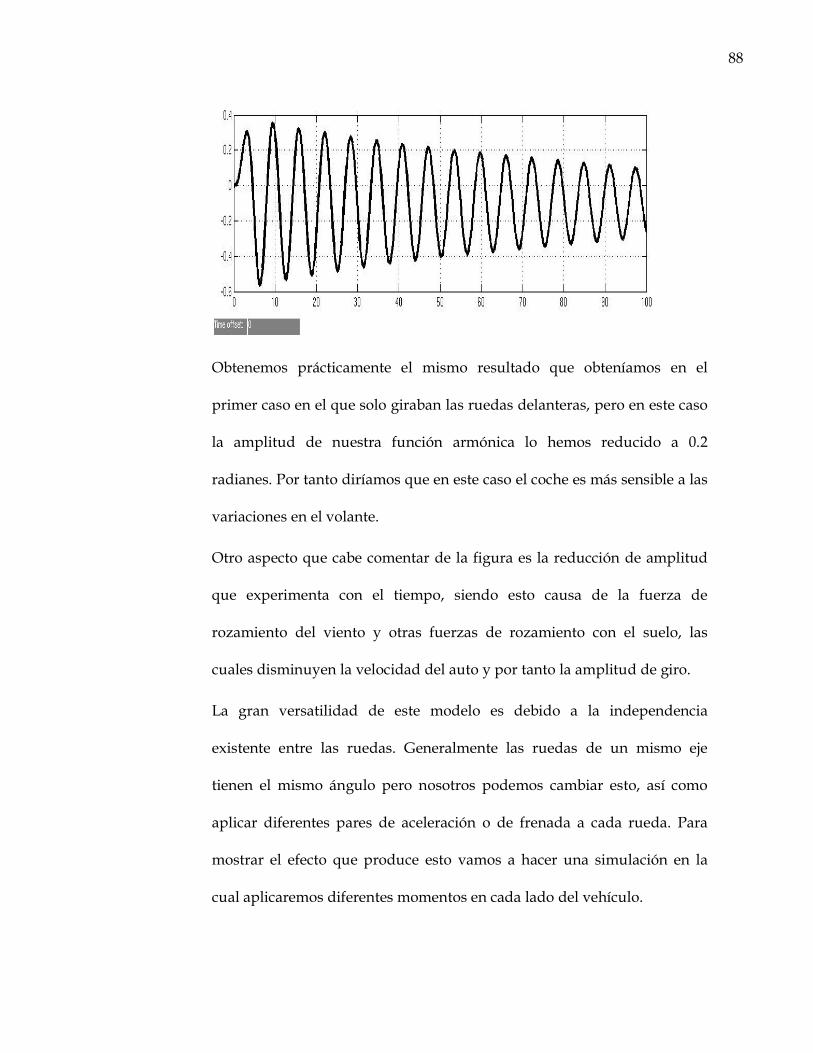
88
Obtenemos prácticamente el mismo resultado que obteníamos en el
primer caso en el que solo giraban las ruedas delanteras, pero en este caso
la amplitud de nuestra función armónica lo hemos reducido a 0.2
radianes. Por tanto diríamos que en este caso el coche es más sensible a las
variaciones en el volante.
Otro aspecto que cabe comentar de la figura es la reducción de amplitud
que experimenta con el tiempo, siendo esto causa de la fuerza de
rozamiento del viento y otras fuerzas de rozamiento con el suelo, las
cuales disminuyen la velocidad del auto y por tanto la amplitud de giro.
La gran versatilidad de este modelo es debido a la independencia
existente entre las ruedas. Generalmente las ruedas de un mismo eje
tienen el mismo ángulo pero nosotros podemos cambiar esto, así como
aplicar diferentes pares de aceleración o de frenada a cada rueda. Para
mostrar el efecto que produce esto vamos a hacer una simulación en la
cual aplicaremos diferentes momentos en cada lado del vehículo.
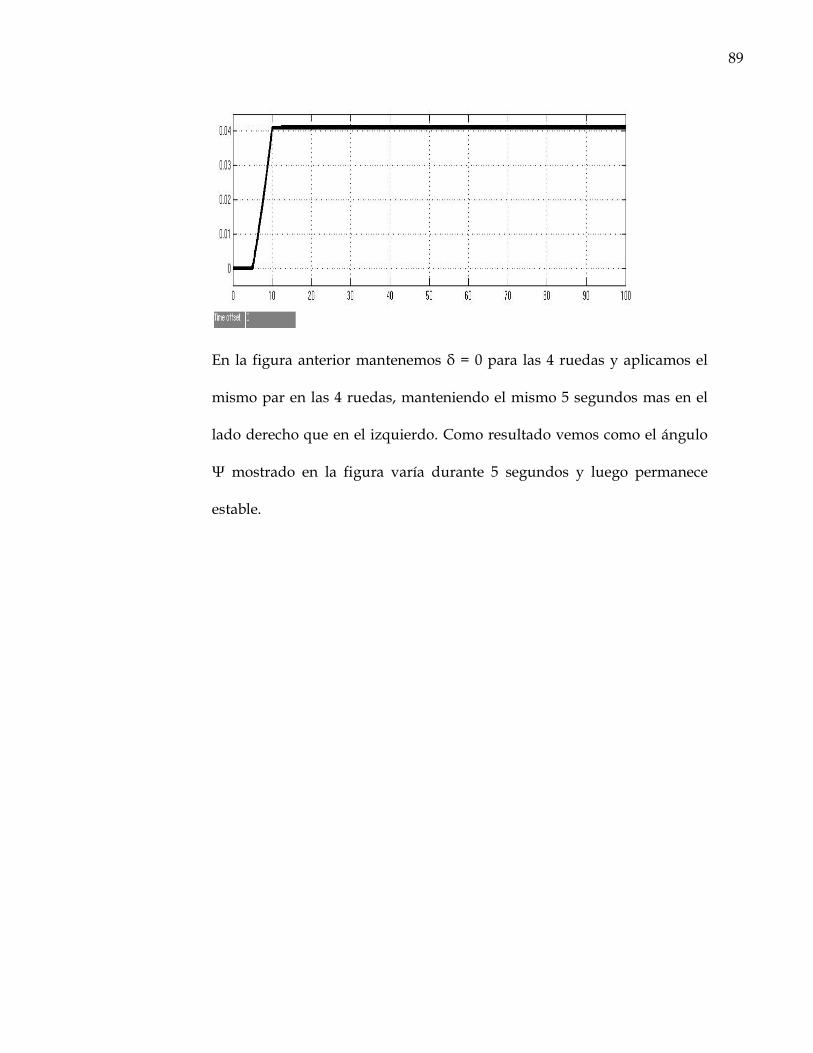
89
En la figura anterior mantenemos δ = 0 para las 4 ruedas y aplicamos el
mismo par en las 4 ruedas, manteniendo el mismo 5 segundos mas en el
lado derecho que en el izquierdo. Como resultado vemos como el ángulo
Ψ mostrado en la figura varía durante 5 segundos y luego permanece
estable.
90
1.6 CONCLUSIONES
En este documento hemos visto la importancia de desarrollar un sistema
modulable para facilitar la eficiencia de los modelos dinámicos. Hemos
obtenido una buena combinación al incluir la dinámica de fricción entre
rueda/pavimento en el diseño de un modelo de la dinámica de un
vehículo. El punto principal de este proyecto es encontrar un modelo que
pueda incluir o combinar fácilmente avances y estudios en cada uno de los
subsistemas del modelo del vehículo, permitiendo que el modelo
completo funcione correctamente, obteniendo por tanto todos los
beneficios de cada uno de los submodelos sin la necesidad de crear un
modelo completo nuevo cada vez que un aspecto determinado es
desarrollado o cambiado en alguno de los subsistemas.
91
1.7 Futuros desarrollos
El modelo desarrollado en nuestro proyecto para la simulación del
movimiento del automóvil es un modelo pionero en el sentido de
incorporar nuevas teorías sobre la fricción existente entre la rueda y el
pavimento así como en sentido de la modularidad que ofrece. Nuevos
modelos serán necesarios a medida que se desarrollen nuevas teorías,
nuevos parámetros que ofrezcan más precisión en el modelo. A medida
que se desarrollen ordenadores más potentes seremos capaces de
desarrollar modelos más amplios, introduciendo cada vez menos
simplificaciones al poder procesar de una manera rápida y eficiente los
datos que recibe el programa. Un parámetro importantísimo en el
desarrollo de nuestro modelo es el deslizamiento existente entre la rueda y
el pavimento. El estudio de dicha fricción es clave en el desarrollo de
sistemas de control como el ABS o el ESC.

92
A NEW SIMULATION MODEL FOR 4WS VEHICLES BASED
ON DYNAMIC TIRE FRICTION MODEL
93
Index
2.1 Introduction page 95
2.1.1 Active safety page 95
2.1.2 Passive safety page 96
2.1.3 ABS page 97
2.1.4 BAS page 106
2.1.5 ESC page 108
2.1.6 Oversteer/understeer page 121
2.2 Project’s motivation page 132
2.3 Goals page 134
2.4 Methodology page 135
2.4.1 The modular design architecture for vehicle dynamics modeling
Page 136
2.4.2 Model development of the subsystems page 141
2.4.2.1 Chassis model page 141
2.4.2.2 Tire model page 143
2.4.2.2.1 Longitudinal dynamics page 143
2.4.2.2.2 Lateral dynamics page 145
94
2.4.2.2.3 2D Tire model page 145
2.4.2.2.4 The 2D Tire model for the modular architecture
page 146
2.4.2.3 Wind Force page 148
2.4.2.4 Normal Force calculation model page 149
2.4.3 Block-diagram system in SIMULINK page 150
2.5 Experiments/Results page 153
2.6 Conclusions page 162
2.7 Future developments page 163
95
2.1 INTRODUCTION
In recent years, a significant amount of research has been focused on
vehicle’s control in order to increase driving safety and improve driving
confort. This results in a number of vehicle safety control systems, such as
Anti-Lock Brake system (ABS), Traction control system (TCS), Electronic
Stability Program (ESP).
We have to distinguise between the active safety and the passive safety
2.1.1 Active safety refers to safety systems that help avoid accidents, such
as good steering and brakes. It has different systems:
Brakes system: Stop the vehicle and prevent the wheels to lock.
Suspension system: It makes the vehicle be stable while driving.
Direction system: Fits the angle of the wheels with the angle of the
steering wheel .
Air conditioning system: Controls the temperature of the vehicle.
Tires: They assure the grip of the vehicle.
Lights: To see and be seen.
However, Active Safety is increasingly being used to describe systems that
use an understanding of the state of the vehicle to both avoid and
minimize the effects of a crash. These include braking systems, like brake
96
assist, traction control systems and electronic stability control systems,
that interpret signals from various sensors to help the driver control the
vehicle. Additionally, forward-looking, sensor-based systems such as
Advanced Driver Assistance Systems including adaptive cruise control
and collision warning/avoidance/mitigation systems are also considered
as active safety systems under this definition.
These forward-looking technologies are expected to play an increasing
role in collision avoidance and mitigation in the future. Most major
component suppliers, such as Delphi and Bosch, are developing such
systems. However, as they become more sophisticated, questions will
need to be addressed regarding driver autonomy and at what point these
systems should intervene if they believe a crash is likely.
2.1.2 Passive safety devices and systems are those — such as air bags —
which operate without any input or action from the vehicle occupant.
Terminological conflict arises from the fact that passive safety devices and
systems — those requiring no input or action by the vehicle occupant —
can themselves operate in an active manner. An example is active head
restraints, which move to a position optimal for preventing neck injury
when a collision is imminent.
97
2.1.3 ABS
The ABS is the most popular system of those safety systems design
for the vehicles.
An anti-lock braking system, or ABS (from the German, Antiblockiersystem) is
a safety system which prevents the wheels on a motor vehicle from locking while
braking.
A rotating road wheel allows the driver to maintain steering control under heavy
braking by preventing a skid and allowing the wheel to continue interacting
tractively with the road surface as directed by driver steering inputs. While ABS
offers improved vehicle control in some circumstances, it can also present
disadvantages including increased braking distance on slippery surfaces such as
ice, packed snow, gravel, steel plates and bridges, or anything other than dry
pavement. ABS has also been demonstrated to create a false sense of security in
drivers, who may drive more aggressively as a result.
Since initial widespread use in production cars, anti-lock braking systems have
evolved considerably. Recent versions not only prevent wheel lock under braking,
but also electronically control the front-to-rear brake bias. This function,
depending on its specific capabilities and implementation, is known as electronic
brakeforce distribution (EBD), traction control system, emergency brake assist, or
electronic stability control.
Early ABS
Anti-lock braking systems were first developed for aircraft in 1929, by the French
automobile and aircraft pioneer, Gabriel Voisin, as threshold braking an airplane
98
is nearly impossible. An early system was Dunlop's Maxaret system, introduced in
the 1950s and still in use on some aircraft models.
In 1958 a Royal Enfield Super Meteor motorcycle was used by the Road Research
Laboratory to test the Maxaret anti-lock brake. The Maxaret works by detecting
rapid decelerations of the wheel that may cause it to lock and releases and re-
appllies hydraulic pressure to the brake several times a second, keeping the
average braking effort at the maximum that can be used by the road surface and
tyre combination. The experiments demonstrated that anti-lock brakes could be of
great value on motorcycles, where skidding is involved in a high proportion of
accidents. Stopping distances were reduced in almost all the tests, compared with
locked wheel braking, but particularly on slippery surfaces, where the
improvement could be as much as 30 per cent. Enfield's Technical Director at the
time, Tony Wilson-Jones saw little future in the system, however, and it was not
put into production by the company.
A fully mechanical system saw limited automobile use in the 1960s in the
Ferguson P99 racing car, the Jensen FF and the experimental all wheel drive Ford
Zodiac, but saw no further use; the system proved expensive and, in automobile
use, somewhat unreliable. However, a limited form of anti-lock braking, utilizing
a valve which could adjust front to rear brake force distribution when a wheel
locked, was fitted to the 1964 Austin 1800.
Chrysler, together with the Bendix Corporation, introduced a true computerized
three-channel all-wheel antilock brake system called "Sure Brake" on the 1971
Imperial. It was available for several years thereafter, functioned as intended, and
proved reliable. General Motors introduced the "Trackmaster" rear-wheel (only)
ABS as an option on their Rear-wheel drive Cadillac models in 1971.
99
Modern ABS
In 1975, Robert Bosch took over a European company called Teldix (contraction
of Telefunken and Bendix) and all the patents registered by this joint-venture and
took advantage out of this acquisition to build the base of the system introduced
on the market some years later. The German firms Bosch and Mercedes-Benz had
been co-developing anti-lock braking technology since the 1970s, and introduced
the first completely electronic 4-wheel multi-channel ABS system in trucks and
the Mercedes-Benz S-Class in 1978. The Honda NSX was the first to use the
modern 4-channel ABS system uses in the United States and Japan which applies
individual brake pressure to each of the four wheels.
In 1988 BMW became the world's first motorcycle manufacturer to introduce an
electronic/hydraulic ABS system, this on their BMW K100. In 1992 Honda
launched its first ABS system, this on the ST1100 Pan European. In 1997 Suzuki
launched its GSF1200SA (Bandit) with ABS.
In addition, ABS is now gaining popularity on Heavy-duty trucks.
Operation
The anti-lock brake controller is also known as the CAB (Controller Anti-lock
Brake).
A typical ABS is composed of a central electronic control unit (ECU), four wheel
speed sensors — one for each wheel — and two or more hydraulic valves within
the brake hydraulics. The ECU constantly monitors the rotational speed of each
wheel, and when it detects a wheel rotating significantly slower than the others —
a condition indicative of impending wheel lock — it actuates the valves to reduce
hydraulic pressure to the brake at the affected wheel, thus reducing the braking
force on that wheel. The wheel then turns faster; when the ECU detects it is
100
turning significantly faster than the others, brake hydraulic pressure to the wheel
is increased so the braking force is reapplied and the wheel slows. This process is
repeated continuously, and can be detected by the driver via brake pedal pulsation.
A typical anti-lock system can apply and release braking pressure up to 20 times a
second.
The ECU is programmed to disregard differences in wheel rotative speed below a
critical threshold, because when the car is turning, the two wheels towards the
center of the curve turn slower than the outer two. For this same reason, a
differential is used in virtually all roadgoing vehicles.
If a fault develops in any part of the ABS, a warning light will usually be
illuminated on the vehicle instrument panel, and the ABS will be disabled until
the fault is rectified.
Additional developments
Modern Electronic Stability Control (ESC or ESP) systems are an evolution of the
ABS concept. Here, a minimum of two additional sensors are added to help the
system work: these are a steering wheel angle sensor, and a gyroscopic sensor.
The theory of operation is simple: when the gyroscopic sensor detects that the
direction taken by the car does not coincide with what the steering wheel sensor
reports, the ESC software will brake the necessary individual wheel(s) (up to three
with the most sophisticated systems), so that the vehicle goes the way the driver
intends. The steering wheel sensor also helps in the operation of Cornering Brake
Control (CBC), since this will tell the ABS that wheels on the inside of the curve
should brake more than wheels on the outside, and by how much.
Traction control
101
The ABS equipment may also be used to implement traction control system (TCS,
ASR) on acceleration of the vehicle. If, when accelerating, the tire loses traction,
the ABS controller can detect the situation and take suitable action so that traction
is regained. Manufacturers often offer this as a separately priced option even
though the infrastructure is largely shared with ABS. More sophisticated versions
of this can also control throttle levels and brakes simultaneously.
Effectiveness
A 2003 Australian study by Monash University Accident Research Centre found
that ABS:
• Reduced the risk of multiple vehicle crashes by 18 percent,
• Reduced the risk of run-off-road crashes by 35 percent.
On high-traction surfaces such as bitumen, or concrete, many (though not all)
ABS-equipped cars are able to attain braking distances better (i.e. shorter) than
those that would be easily possible without the benefit of ABS. In real world
conditions even an alert, skilled driver without ABS would find it difficult, even
through the use of techniques like threshold braking, to match or improve on the
performance of a typical driver with a modern ABS-equipped vehicle. ABS
reduces chances of crashing, and/or the severity of impact. The recommended
technique for non-expert drivers in an ABS-equipped car, in a typical full-braking
emergency, is to press the brake pedal as firmly as possible and, where
appropriate, to steer around obstructions. In such situations, ABS will
significantly reduce the chances of a skid and subsequent loss of control.
In gravel, sand and deep snow, ABS tends to increase braking distances. On these
surfaces, locked wheels dig in and stop the vehicle more quickly. ABS prevents
this from occurring. Some ABS calibrations reduce this problem by slowing the
102
cycling time, thus letting the wheels repeatedly briefly lock and unlock. Some
vehicle manufacturer provides an "off-road" button to turn ABS function off. The
primary benefit of ABS on such surfaces is to increase the ability of the driver to
maintain control of the car rather than go into a skid — though loss of control
remains more likely on soft surfaces like gravel or slippery surfaces like snow or
ice. On a very slippery surface such as sheet ice or gravel, it is possible to lock
multiple wheels at once, and this can defeat ABS (which relies on comparing all
four wheels, and detecting individual wheels skidding). Availability of ABS
relieves most drivers from learning threshold braking.
A June 1999 National Highway Traffic Safety Administration (NHTSA) study
found that ABS increased stopping distances on loose gravel by an average of 22
percent.
According to the NHTSA,
"ABS works with your regular braking system by automatically pumping them. In
vehicles not equipped with ABS, the driver has to manually pump the brakes to prevent
wheel lockup. In vehicles equipped with ABS, your foot should remain firmly planted on
the brake pedal, while ABS pumps the brakes for you so you can concentrate on steering
to safety."
When activated, some earlier ABS systems caused the brake pedal to pulse
noticeably. As most drivers rarely or never brake hard enough to cause brake
lock-up, and a significant number rarely bother to read the car's manual,] this may
not be discovered until an emergency. When drivers do encounter an emergency
that causes them to brake hard, and thus encounter this pulsing for the first time,
many are believed to reduce pedal pressure, and thus lengthen braking distances,
contributing to a higher level of accidents than the superior emergency stopping
103
capabilities of ABS would otherwise promise. Some manufacturers have therefore
implemented a brake assist system that determines that the driver is attempting a
"panic stop" and the system automatically increases braking force where not
enough pressure is applied. Hard or panic braking on bumpy surfaces, because of
the bumps causing the speed of the wheel(s) to become erratic may also trigger
the ABS. Nevertheless, ABS significantly improves safety and control for drivers
in most on-road situations.
Risk compensation
Anti-lock brakes are the subject of some experiments centred around risk
compensation theory, which asserts that drivers adapt to the safety benefit of ABS
by driving more aggressively. In a Munich study, half a fleet of taxicabs were
equipped with anti-lock brakes, while the other half had conventional brake
systems. The crash rate was substantially the same for both types of cab, and
Wilde concludes this was due to drivers of ABS-equipped cabs taking more risks,
assuming that ABS would take care of them, while the non-ABS drivers drove
more carefully since ABS would not be there to help in case of a dangerous
situation. A similar study was carried out in Oslo, with similar results.
Design and selection of components
Given the required reliability, it is illustrative to see the choices made in the
design of the ABS system. Proper functioning of the ABS system is considered of
the utmost importance, for safeguarding both the passengers within, and people
outside of the car. The system is therefore built with some redundancy, and is
designed to monitor its own working and report failures. The entire ABS system
is considered to be a hard real-time system, while the sub-system that controls the
self diagnosis is considered soft real-time. As stated above, the general working of
104
the ABS system consists of an electronic unit, also known as ECU (electronic
control unit), which collects data from the sensors and drives the hydraulic control
unit (HCU), mainly consisting of the valves that regulate the braking pressure for
the wheels.
The communication between the ECU and the sensors must happen quickly and at
real time. A possible solution is the use of the CAN bus system, which has been,
and is still in use in many ABS systems today (in fact, this CAN standard was
developed by Robert Bosch GmbH, for connecting electronic control units). This
allows for an easy combination of multiple signals into one signal, which can be
sent to the ECU. The communication with the valves of the HCU is usually not
done this way. The ECU and the HCU are generally very close together. The
valves, usually solenoid valves, are controlled directly by the ECU. To drive the
valves based on signals from the ECU, some circuitry and amplifiers are needed
(which would also have been the case if the CAN-bus was used). Due to the fact,
most of the Automotive ECUs use 500K baud rate, it provides sufficient
bandwidth for real time communication between ECUs, many Engine ECU now
rely wholly on the ABS ECU for speed information, especially when the USA
government requires all 2008 and later automotive sold in USA must equip CAN
bus.
The sensors measure the position of the tires, and are generally placed on the
wheel-axis. The sensor should be robust and maintenance free, not to endanger its
proper working, for example an inductive sensor. These position measurements
are then processed by the ECU to calculate the differential wheel rotation.
The hydraulic control unit is generally integrated with the ECU (or the other way
around), and consists of a number of valves that control the pressure in the
105
braking circuits. All these valves are placed closely together, and packed in a solid
aluminium alloy block. This makes for a very simple layout, and is thus very
robust.
The central control unit generally consists of two microcontrollers, both active
simultaneously, to add some redundancy to the system. These two
microcontrollers interact, and check each other's proper working. These
microcontrollers are also chosen to be power-efficient, to avoid heating of the
controller which would reduce durability.
The software which runs in the ECU has a number of functions. Most notably, the
algorithms that drive the HCU as a function of the inputs, or control the brakes
depending on the recorded wheel spin. This is the obvious main task of the entire
ABS-system. Apart from this, the software also needs to process the incoming
information, e.g. the signals from the sensors. There is also some software that
constantly tests each component of the ABS system for its proper working. Some
software for interfacing with an external source to run a complete diagnosis is also
added.
As mentioned before the ABS system is considered hard real-time. The control
algorithms, and the signal processing software, certainly fall in this category, and
get a higher priority than the diagnosis and the testing software. The requirement
for the system to be hard real-time can therefore be reduced to stating that the
software should be hard real-time. The required calculations to drive the HCU
have to be done in time. Choosing a microcontroller that can operate fast enough
is therefore the key, preferably with a large margin. The system is then limited by
the dynamic ability of the valves and the communication, the latter being
106
noticeably faster. The control system is thus comfortably fast enough, and is
limited by the valves.
2.1.4 BAS
As we have said, most drivers rarely brakes hardly enough to lock the
wheels and then active the ABS. Research conducted in 1992 at the
Mercedes-Benz driving simulator in Berlin revealed that more than 90%
percent of drivers fail to brake with enough force in emergency situations.
Brake Assist detects circumstances in which emergency braking is
required by measuring the speed with which the brake pedal is depressed.
Some systems additionally take into account the rapidity of which the gas
pedal is released, pre-tensioning the brakes when a "panic release" of the
gas is noted. When panic braking is detected, the Brake Assist system
automatically develops maximum brake boost in order to mitigate a
driver’s tendency to brake without enough force. In doing so, Brake Assist
has been shown to reduce stopping distance by a significant margin; up to
20% in some studies. In December 1996 BAS premiered to the world on
the Mercedes-Benz S-Class and SL-Class. In 1998 Mercedes-Benz became
the first company to make Brake Assist standard equipment on all its
models; other brands including Volvo and BMW soon followed suit.
The Volvo system Collision Warning with Auto Brake 'CWAB' uses a
radar to detect when a collision is likely and will pre-charge the brakes so
that when the driver uses the brakes, however lightly, full braking is
107
applied. The system will also flash a light and make a warning sound, if
the driver does not respond to the warning at the point where a collision
cannot be avoided the system will apply the brakes automatically and
dramatically reduce the speed of the collision. Other systems like the
Volvo CWAB are also available such as the Mercedes-Benz Brake Assist
Plus (BAS Plus) was first made standard equipment on the W221 (2006
onwards) S-Class Mercedes-Benz. This system works much like the Volvo
system with a warning and precharging of the brakes but will not
automatically brake for you. The BAS Plus system has been shown to
significantly reduce the incidence of rear-end collisions, and so is very
significant in the development of driver aids that improve road safety.
Volvo cars can also be equipped with the CITY SAFETY SYSTEM which
automatically brakes in stop start traffic. Mercedes-Benz also has a similar
system called Distronic Plus.
Both the Volvo and the Mercedes-Benz radar systems are also used for the
speed/distance regulated cruise control systems used by both
manufacturers.
In October 2007 the European Commission announced that it wanted
Brake Assist to be included on all new models sold in the EU as standard
by 2009
108
2.1.5 ESC
We have talked about the ESC that with the ABS is one of the most
popular safety systems nowadays. Electronic stability control (ESC) is a
computerized technology that improves the safety of a vehicle's handling
by detecting and preventing skids. When ESC detects loss of steering
control, ESC automatically applies individual brakes to help "steer" the
vehicle where the driver wants to go. Braking is automatically applied to
individual wheels, such as the outer front wheel to counter oversteer, or
the inner rear wheel to counter understeer. Some ESC systems also reduce
engine power until control is regained.
In 1987 the earliest innovators for ESC, Mercedes-Benz, BMW and Toyota
introduced their first traction control systems. Traction control works by
applying individual wheel braking and throttle to keep traction while
accelerating but unlike ESC it is not designed to aid in steering.
In 1990, Mitsubishi released the Diamante (Sigma) in Japan. It featured a
new electronically controlled active trace & traction control system (the
first integration of these two systems in the world) that Mitsubishi
developed. Simply named TCL in 1990, the system has since evolved into
Mitsubishi's modern Active Skid and Traction Control (ASTC) system or
ESC. Developed to help the driver maintain the intended line through a
corner; an onboard computer monitored several vehicle operating
parameters through various sensors. When too much throttle has been
109
used when taking a curve, engine output and braking are automatically
regulated to ensure the proper line through a curve and to provide the
proper amount of traction under various road surface conditions. While
conventional traction control systems at the time featured only a slip
control function, Mitsubishi's newly developed TCL system had a
preventive (active) safety function which improved the course tracing
performance by automatically adjusting the traction force (called "trace
control") thereby restraining the development of excessive lateral
acceleration while turning. Although not a ‘true’ modern stability control
system, trace control monitors steering angle, throttle position and
individual wheel speeds although there is no yaw input. The TCL system's
standard wheel slip control function enables better traction on slippery
surfaces or during cornering. In addition to the TCL system's individual
effect, it also works together with Diamante's electronic controlled
suspension and four-wheel steering that Mitsubishi had equipped to
improve total handling and performance.
BMW, working with Robert Bosch GmbH and Continental Automotive
Systems, developed a system to reduce engine torque to prevent loss of
control and applied it to the entire BMW model line for 1992. From 1987 to
1992, Mercedes-Benz and Robert Bosch GmbH co-developed a system
called Elektronisches Stabilitätsprogramm (Ger. "Electronic Stability
Programme" trademarked as ESP) a lateral slippage control system, the
electronic stability control (ESC).
110
Introduction
In 1995 the first automobile manufactures introduced electronic stability
control systems, Mercedes-Benz supplied by Bosch was the earliest with
their W140 S-Class model. That same year BMW also supplied by Bosch
and Volvo began offering ESC on some of their models while Toyota's
own Vehicle Stability Control system (also in 2004, a preventive system
called VDIM) appeared on the Crown Majesta. Meanwhile others
investigated and developed their own systems.
During a moose test (swerving to avoid an obstacle) which became
famous in Germany as "the Elk test" a journalist during 1996 rolled a
Mercedes-Benz A-Class (without ESC) at 37 km/h. Because Mercedes-
Benz promotes a reputation for safety, they recalled and retrofitted
130,000 A-Class cars with ESC. This produced a significant reduction in
crashes and the number of vehicles with ESC rose. Today virtually all
premium brands have made ESC standard on all vehicles, and the number
of models with ESC continues to increase. Ford and Toyota have
announced that all their North American vehicles will be equipped with
ESC standard by the end of 2009 (Toyota SUVs standard in 2004, Toyota
has yet fit the the Scion tC and Yaris). General Motors has made a similar
announcement for the end of 2010. The NHTSA requires all passenger
vehicles be equipped with ESC by 2011 and estimates it will prevent 5,300-
9,600 annual fatalities once all passenger vehicles are equipped with the
system.
111
Operation
During normal driving, ESC works in the background, continuously
monitoring steering and vehicle direction. ESC compares the driver's
intended direction (by measuring steering angle) to the vehicle's actual
direction (by measuring lateral acceleration, vehicle rotation (yaw), and
individual road wheel speeds).
ESC only intervenes when it detects loss of steering control, i.e. when the
vehicle is not going where the driver is steering. This may happen, for
example, when skidding during emergency evasive swerves, understeer
or oversteer during poorly judged turns on slippery roads, or
hydroplaning. ESC measures the direction of the skid, and then applies
the brakes to individual wheels asymmetrically in order to create torque
about the vehicle's vertical axis, opposing the skid and bringing the
vehicle back in line with the driver's commanded direction. Additionally,
the system may reduce engine power or operate the transmission to slow
the vehicle down.
ESC can work on any surface, from dry pavement to frozen lakes. It reacts
to and corrects skidding much faster and more effectively than the typical
human driver, often before the driver is even aware of any imminent loss
of control. In fact, this led to some concern that ESC could allow drivers to
become overconfident in their vehicle's handling and/or their own
driving skills. For this reason, ESC systems typically inform the driver
when they intervene, so that the driver knows that the vehicle's handling
112
limits have been approached. Most activate a dashboard indicator light
and/or alert tone; some intentionally allow the vehicle's corrected course
to deviate very slightly from the driver-commanded direction, even if it is
possible to more precisely match it.
Indeed, all ESC manufacturers emphasize that the system is not a
performance enhancement nor a replacement for safe driving practices,
but rather a safety technology to assist the driver in recovering from
dangerous situations. ESC does not increase traction, so it does not enable
faster cornering (although it can facilitate better-controlled cornering).
More generally, ESC works within inherent limits of the vehicle's handling
and available traction between the tires and road. A reckless maneuver
can still exceed these limits, resulting in loss of control. For example, in a
severe hydroplaning scenario, the wheel(s) that ESC would use to correct
a skid may not even initially be in contact with the road, reducing its
effectiveness.
In July 2004, on the Crown Majesta, Toyota offered a Vehicle Dynamics
Integrated Management (VDIM) system that incorporated formerly
independent systems including ESC and worked not only after the skid
was detected but also worked to prevent the skid from occurring in the
first place. Using electric variable gear ratio steering power steering this
more advanced systems could also alter steering gear ratios and steering
torque levels to assist the driver in evasive maneuvers.
Effectiveness
113
Numerous studies around the world confirm that ESC is highly effective
in helping the driver maintain control of the car and saving lives and
reducing the severity of crashes. In the fall of 2004 in the U.S., the
National Highway and Traffic Safety Administration confirmed the
international studies, releasing results of a field study in the U.S. of ESC
effectiveness. The National Highway Traffic Safety Administration in
United States concluded that ESC reduces crashes by 35%. Additionally,
Sport utility vehicles (SUVs) with stability control are involved in 67%
fewer accidents than SUVs without the system. The United States
Insurance Institute for Highway Safety (IIHS) issued its own study in June
2006 showing that up to 10,000 fatal US crashes could be avoided annually
if all vehicles were equipped with ESC The IIHS study concluded that ESC
reduces the likelihood of all fatal crashes by 43%, fatal single-vehicle
crashes by 56%, and fatal single-vehicle rollovers by 77-80%.
ESC is described as the most important advance in auto safety since the
seat belt by many experts. including Nicole Nason, Administrator of the
NHTSA, Jim Guest and David Champion of Consumers Union Max
Mosley of the Fédération Internationale de l'Automobile (FIA), E-Safety
Aware, Csaba Csere, editor of Car and Driver, and Bill Kozyra, CEO of
Continental Automotive Systems The European New Car Assessment
Program (EuroNCAP) "strongly recommends" that people buy cars fitted
with stability control.
114
The IIHS requires that a vehicle must have ESC available in order for it to
qualify for their Top Safety Pick award for occupant protection and
accident avoidance.
Components and design
ESC incorporates yaw rate control into the anti-lock braking system (ABS).
Yaw is rotation around the vertical axis; i.e. spinning left or right. Anti-
lock brakes enable ESC to brake individual wheels. Many ESC systems
also incorporate a traction control system (TCS or ASR), which senses
drive-wheel slip under acceleration and individually brakes the slipping
wheel or wheels and/or reduces excess engine power until control is
regained. However, ESC achieves a different purpose than ABS or
Traction Control.
The ESC system uses several sensors to determine what the driver wants
(input). Other sensors indicate the actual state of the vehicle (response).
The control algorithm compares driver input to vehicle response (25 times
per second) and decides, when necessary, to apply brakes and/or reduce
throttle by the amounts calculated through the state space (set of
equations used to model the dynamics of vehicle).
The sensors used for ESC have to send data at all times in order to detect
possible defects as soon as possible. They have to be resistant to possible
forms of interference (rain, holes in the road, etc.). The most important
sensors are:
115
• Steering wheel angle sensor: determines the driver's intended rotation; i.e.
where the driver wants to steer. This kind of sensor is often based on
AMR-elements.
• Yaw rate sensor : measures the rotation rate of the car; i.e. how much the
car is actually turning. The data from the yaw sensor is compared with the
data from the steering wheel angle sensor to determine regulating action.
• Lateral acceleration sensor: often based on the Hall effect. Measures the
lateral acceleration of the vehicle.
• Wheel speed sensor : measures the wheel speed.
ESC uses a hydraulic modulator to assure that each wheel receives the
correct brake force. A similar modulator is used in ABS. ABS needs to
reduce pressure during braking, only. ESC additionally needs to increase
pressure in certain situations.
The heart of the ESC system is the Electronic Control Unit (ECU). The
various control techniques are embedded in it. Often, the same ECU is
used for diverse systems at the same time (ABS, Traction control system,
climate control, etc.). The input signals are sent through the input-circuit
to the digital controller. The desired vehicle state is determined based
upon the steering wheel angle, its gradient and the wheel speed.
Simultaneously, the yaw sensor measures the actual state. The controller
computes the needed brake or acceleration force for each wheel and
directs via the driver circuits the valves of the hydraulic modulator. Via a
116
CAN interface the ECU is connected with other systems (ABS, etc.) in
order to avoid giving contradictory commands.
Many ESC systems have an "off" override switch so the driver can disable
ESC, which may be desirable when badly stuck in mud or snow, or
driving on a beach, or if using a smaller-sized spare tire which would
interfere with the sensors. However, ESC defaults to "On" when the
ignition is re-started. Some ESC systems that lack an "off switch", such as
on many recent Toyota and Lexus vehicles, can be temporarily disabled
through an undocumented series of brake pedal and handbrake
operations.
Availability and cost
ESC is built on top of an anti-lock brake (ABS) system, and all ESC-
equipped vehicles are fitted with traction control. The ESC components
include a yaw rate sensor, a lateral acceleration sensor, a steering wheel
sensor, and an upgraded integrated control unit. According to National
Highway Traffic Safety Administration research, ABS costs an estimated
US$368 (in 2005) and ESC costs an additional US$111. The retail price of
ESC varies; as a stand-alone option it retails for as little as $250 USD.
However, ESC is rarely offered as a sole option, and is generally not
available for aftermarket installation. Instead, it is frequently bundled it
with other features or more expensive trims, so the cost of a package that
includes ESC could be several thousand of dollars. Nonetheless, ESC is
117
considered highly cost-effective and it might pay for itself in reduced
insurance premiums.
Availability of ESC in passenger vehicles varies between manufacturers
and countries. In 2007, ESC was available in roughly 50% of new North
American models, whereas that figure is about 75% in Sweden. However,
consumer awareness affects buying patterns so that roughly 45% of
vehicles sold in North America and the UK are purchased with ESC,
contrasting with 78-96% in other European countries such as Germany,
Denmark, and Sweden. While few vehicles had ESC prior to 2004,
increased awareness will increase the number of vehicles with ESC on the
used car market.
ESC is available on cars, SUV's, and pickup trucks from all major auto
makers. Luxury cars, sports cars, SUVs, and crossovers are usually
equipped with ESC. Midsize cars are also gradually catching on, though
the 2008 model years of the Toyota Camry, Nissan Altima and Ford
Fusion only offered ESC on their V6 engine-equipped cars. While ESC
includes traction control, there are vehicles such as the 2008 Chevrolet
Malibu LS and 2008 Mazda6 that have traction control but not ESC. ESC is
rare among subcompact cars as of 2008. The 2009 Toyota Corolla in the
United States (but not Canada) has stability control as a $250 option on all
trims outside the XRS which has it standard. In Canada, for the 2010
Mazda3, ESC is as an option on the midrange GS trim as part of the
moonroof package, and is standard on the top-of-the-line GT version. The
118
2009 Ford Focus has ESC as an option for the S and SE models, and
standard on the SEL and SES models
ESC is also available on some motor homes. Elaborate ESC and ESP
systems (including Roll Stability Control (RSC)) are available for many
commercial vehicles, including transport trucks, trailers, and buses from
manufacturers such as Bendix Corporation, WABCO Daimler, Scania AB,
and Prevost
The Insurance Institute for Highway Safety (IIHS) website shows
availability of ESC in individual US models and the National Highway
Traffic Safety Administration (NHTSA website lists US models with ESC.
The National Roads and Motorists' Association NRMA shows availability
of ESC in Australian models. CHOOSE ESC! shows availability of ESC in
European countries
Future
The market for ESC is growing at a very robust rate, especially in
European countries such as Sweden, Denmark, and Germany. For
example, in Sweden, in 2003, the purchase rate on new cars with ESC was
15%. The Swedish road safety administration issued a strong ESC
recommendation and in September 2004, 16 months later, the purchase
rate was 58%. A stronger ESC recommendation was then given and in
December 2004, the purchase rate on new cars had reached 69%and by
2008 it had grown to 96%. ESC advocates around the world are promoting
119
increased ESC use through legislation and public awareness campaigns
and by 2012, most new vehicles should be equipped with ESC.
Just as ESC is founded on the Anti-lock braking system (ABS), ESC is the
foundation for new advances such as roll stability control (RSC) that
works in the vertical plane much like ESC works in the horizontal plane.
When RSC detects impending rollover (usually on transport trucks or
SUVs), RSC applies brakes, reduces throttle, induces understeer, and/or
slows down the vehicle.
The computing power of ESC facilitates the networking of active and
passive safety systems, addressing other causes of crashes. For example,
sensors may detect when a vehicle is following too closely and slow down
the vehicle, straighten up seat backs, and tighten seat belts, avoiding
and/or preparing for a crash.
Laws
While Sweden used public awareness campaigns to promote ESC use,
others implemented or proposed legislation. The Province of Quebec was
the first jurisdiction to implement an ESC law, making it mandatory for
carriers of dangerous goods (without data recorders) in 2005. The United
States was next, mandating ESC for all passenger vehicles under 10,000
pounds (4536 kg), phasing in the regulation starting with 55% of 2009
models (effective September 1, 2008), 75% of 2010 models, 95% of 2011
models, and 100% of 2012 models. Canada will require 100% of passenger
vehicles to have ESC on September 1, 2011. The United Nations Economic
120
Commission for Europe has passed a Global Technical Regulation to
harmonize ESC standards. This prompted the Australian Federal
Government to consider mandating ESC as early as 2009. The European
Parliament has also called for the accelerated introduction of ESC. The
European Commission has confirmed a proposal for the mandatory
introduction of ESC on all new cars and commercial vehicle models sold
in the EU from 2012, with all new cars being equipped by 2014.
121
2.1.6 Oversteer/understeer
We have talked about oversteer and understeer, but…What does it mean?
Oversteer is a phenomenon that can occur in an automobile while
attempting to corner or while already cornering. The car is said to
oversteer when the rear wheels do not track behind the front wheels but
instead slide out toward the outside of the turn. Oversteer can throw the
car into a spin.
Understeer is a term for a car handling condition in which during
cornering the circular path of the vehicle's motion is of a greater radius
than the circle indicated by the direction its wheels are pointed. The effect
is opposite to that of oversteer. In simpler words understeer is the
condition in which the vehicle does not follow the trajectory the driver is
trying to impose while taking the corner because the effective slip angle at
the front is larger than that at the rear, instead following a less curved
trajectory. Understeer covers several different phenomena, in particular,
there is a big difference between linear range understeer, and limit
handling understeer, which is at higher lateral accelerations, and is what
racing drivers are talking about when they use the term.
The latter is also often referred to as pushing, plowing, or refusing to turn
in. The car is referred to as being "tight" because it is stable and far from
wanting to spin.
122
The tendency of a car to oversteer or understeer is affected by several
factors such as mechanical traction, aerodynamics and suspension, and
driver control, and may be applicable at any level of lateral acceleration.
Generally, oversteer is the condition when the slip angle of the rear tires
exceeds that of the front tires, even when they are both small. Limit
oversteer occurs when the rear tires reach the limits of their lateral traction
during a cornering situation but the front tires have not, thus causing the
rear of the vehicle to head towards the outside of the corner. The driving
technique called opposite lock (the steering wheel is turned in the
opposite direction to that of the bend.) is meant to cope in this
circumstance. Trailing Throttle Oversteer (TTO) is induced by the weight
balance of the car shifting from the front to the rear, this may happen if the
car is cornering under throttle, causing the car to settle on the rear, if the
throttle application would be removed -- e.g. as to reduce the radius of the
turn -- the balance would suddenly shift to the front, giving less traction
on the rear, if the car was already at the traction limit before the driver
lifted the throttle it is very likely to cause a TTO. Rear wheel drive cars are
more prone to oversteer, in particular when applying power in a tight
corner. This occurs because the rear tires must handle both the lateral
cornering force and engine torque. An oversteering car is alternatively
referred to as 'loose' or 'tail happy'.

123
Critical speed
Oversteering cars have an associated instability mode, which occurs at
and above the critical speed. As this speed is approached, with the car on
an approximately straight course, the steering becomes progressively
more sensitive. At the critical speed the yaw velocity gain becomes
infinite, that is, the car will turn violently in response to the slightest
steering input or external disturbance. Above the critical speed analysis
shows that the yaw response will be reversed for a given steering wheel
input, such as a car turning left in response to turning the wheel to the
right. This is an oversimplification, however, as the model used is
linearised in many important ways. Understeering cars do not suffer from
this, which is one of the reasons why high speed cars tend to be set up to
understeer.

124
In road cars
Contrary to popular opinion, modern rear-wheel-drive cars are much
more user-friendly in regard to oversteer. Their suspension is not balanced
heavily toward understeer, in fact with today's experience in making cars,
most manufacturers try to achieve neutrality from the respective
configurations so that they are largely capable of oversteering especially
when the driver attempts to invoke it on purpose.
The natural reaction of most drivers to the perception of loss of control
during oversteer is to immediately lift their foot off the gas pedal. Cutting
the power mid-corner can induce more oversteer, known as lift-off
oversteer. The correct reaction to oversteer is to gently steer into the slide
and take the power away as needed without pitching the car forward.
Indeed, "Trail braking", or continuing to apply brake pressure after
turning into a curve, can induce oversteer by transferring weight off the
rear tires, regardless of whether the car is front, rear or all-wheel drive.
Braking may or may not improve the situation. Most modern cars have a
brake bias which tends to straighten out the car. However, there are two
factors working against this. Most drivers must lift their foot from the gas
125
pedal in order to press the brake, inducing the spin as described above.
The second is that braking transfers more of the vehicle's weight forward
which tends to worsen oversteer. Even so, the brake bias may be enough
to help or at least not make it worse.
In race cars
A car that tends neither to oversteer nor understeer when pushed to the
limit is said to have neutral handling. It seems intuitive that race drivers
would prefer a slight oversteer condition to rotate the car around a corner,
but this isn't usually the case for two reasons. Accelerating early as the car
passes the apex of a corner allows it to gain extra speed down the
following straight. The driver who accelerates sooner and/or harder has a
large advantage. The rear tires need some excess traction to accelerate the
car in this critical phase of the corner, while the front tires can devote all
their traction to turning. So the car must be set up with a slight understeer
or "tight" tendency. Also, an oversteering car tends to be twitchy and ill
tempered, making a race car driver more likely to lose control during a
long race or when reacting to sudden situations in traffic.
Carroll Smith, in his book "Drive to Win", provides a detailed explanation
of why a fast race car must have a bit of understeer. Note that this applies
only to road racing. Dirt racing is a different matter.
Even so, some successful race car drivers do prefer a bit of oversteer in
their cars, preferring a car which is less sedate and more willing to turn
into corners (or inside their opponents). It should be noted that the
126
judgement of a car's handling balance is not an objective one. Driving style
is a major factor in the apparent balance of a car. This is why two drivers
with identical cars on the same race team often run with rather different
balance settings from each other. And both may call the balance of their
cars 'neutral'.
Aerodynamic stability
The importance of the position of a fast car's aerodynamic centre of
pressure to its directional stability was not understood at first. In the late
1950s, cars such as the 120mph Jaguar 3.4-litre saloon / sedan were
reported to feel directionally unstable at high speeds, and were badly
affected by gusts.
Simple streamlining tends to lift the back of a car, reducing the downforce
on its back wheels relative to the front wheels, resulting in oversteer.
Streamlining also moves the centre of pressure well forward, causing
directional instability in cross winds.
At first, aerodynamic oversteer was counteracted by setting the cars up
with strong mechanical understeer, resulting in excessive understeer at
lower speeds. Various means of achieving aerodynamic stability have
since been developed, such as tail fins to move the centre of pressure back,
the Kamm tail and the spoiler to reduce lift, rear wings to generate
downward acting lift force, and air dams and skirts to reduce air pressure
under the car, causing down force due to ground effect. Most of those
features improve stability but increase drag, reducing top speed and
127
increasing fuel consumption. However an early example of a fin used for
directional stability without reducing top speed is provided by the Jaguar
D-Type.
Mechanical devices such as a mass damper can reduce oversteer very
effectively. A finely tuned mass damper at the rear end of the car will keep
its rear tyres longer in contact with the road. Thus it will increase the car's
rolling resistance and thereby reduce its tendency to oversteer. This
principle was used to stabilise the rear end of the McLaren MP4-22
Formula 1 car, and as a result it could heat up its rear tyres faster than
most of the others on the grid.
In modern race cars, especially open-wheel race cars, oversteering in high
speed turns is caused mainly by aerodynamic configuration. A heavier
aerodynamic load on the front of the car relative to the rear causes it to
oversteer. Oversteer in low speed turns is often reduced or eliminated
electronically through traction control (if the sanctioning body allows their
use). The front/rear balance required to make the cars fast through
corners is obtained by setting up the aerodynamics and balancing the
suspension. The car's tendency toward oversteer is generally increased by
softening the front suspension or stiffening the rear suspension in roll. The
suspension's roll stiffness may be adjusted independently of pitch stiffness
by means of adjustable or interchangeable anti-roll bars at one or both
ends of the car. Camber angle, ride height, and tire pressures can also be
used to tune the balance of the car.
128
As with oversteer, understeer has a variety of sources such as mechanical
traction, aerodynamics and suspension.
Classically, understeer happens when the front tires have a reduction in
traction during a cornering situation, thus causing the front-end of the
vehicle to have less mechanical grip and become unable to follow the
trajectory in the corner.
In modern race cars, especially open wheel cars, understeering is caused
mainly due to the aerodynamic configuration. In this respect, the lack of a
heavy aerodynamic load (downforce) in the front side prevents the front
tires from gaining enough traction. At the same time understeer can be
caused by having a heavier aerodynamic load at the rear end of the car
giving the rear tires more traction than the front tires. Also, suspension
balance should take into account the types of surfaces being driven—
differing levels of friction in each surface influence the potential
understeer behavior. Camber angles, ride height, tire pressure and centre
of gravity are important factors that determine the understeer/oversteer
handling condition.
Common practice
It is common practice among automobile manufacturers to configure
production cars deliberately to have a slight linear range understeer by
default. If a car understeers slightly, it tends to be more stable (within the
realms of a driver of average ability) if a violent change of direction
occurs, improving safety.
129
Linear range understeer
In a straight line, or when cornering gently or moderately (typically up to
0.4g) the characteristic is called linear range understeer. This is a difficult
characteristic to sense directly, but is responsible for many important
facets of the handling in this regime, including step steer response,
frequency response, and yaw gain linearity. Usually this is developed
using a Bundorf analysis.
Limit Handling Understeer
Any vehicle may understeer or oversteer at different times based on road
conditions, speed, available traction, and driver input. Limit handling is
the regime of vehicle performance where the tire(s) are approaching the
limits of their grip. While not often used on public roads by most drivers,
it is the usual state for a racing car except when traveling at high speeds in
a straight line. As cornering loads increase further the vehicle will tend to
go into a particular "terminal" condition. "Terminal understeer" refers to a
vehicle which, as a function of its design, tends to understeer when
cornering loads exceed tire traction.
Terminal handling balance is a function of front/rear relative roll
resistance (suspension stiffness), front/rear weight distribution, and
front/rear tire traction. A front-heavy vehicle with low rear roll stiffness
(from soft springing and/or undersized or nonexistent rear anti-roll bars)
will have a tendency to terminal understeer: its front tires, being more
heavily loaded even in the static condition, will reach the limits of their
130
adhesion before the rear tires, and thus will develop larger slip angles.
Front-wheel drive cars are also prone to understeer because not only are
they usually front-heavy, the transmitting of power through the front
wheels also reduces the grip available for cornering. This often leads to a
"shuddering" action in the front wheels which can be felt in the car as
traction quickly shifts between being used for turning and motor torque.
This is why rear wheel drive cars tend to handle better as the rear wheels'
main job is to handle the motor's torque and the front wheels' job is to
steer.
Although understeer and oversteer can each cause a loss of control, many
automakers design their vehicles for terminal understeer due to the
experience that it is easier for the average driver to control than terminal
oversteer. Unlike terminal oversteer, which often requires several steering
corrections, understeer can often be reduced simply by reducing speed. A
slight danger in some cars which traditionally understeer is actually
sudden oversteer: for example if a car is moving fast and understeering,
the driver will be tempted to take his foot off the accelerator (increasing
the steering effectiveness of the front wheels as there is no engine torque
to deal with) which can cause the car to snap oversteer and spin, with very
little warning. Not many current production cars react like this, as it is not
a desirable characteristic. However, in certain cars and under certain
circumstances (e.g. when there is a small amount of grip still available) the
131
understeer can be reduced by applying full power to the wheels rather
than braking.
Understeer is not just present during acceleration through a corner, it can
also be found during heavy braking. If the brake balance (the strength of
the brakes in terms of the front and rear wheels) is too heavy at the front
this can cause understeer. This is caused by the front wheels locking and
losing any effective steering. The opposite is true if the brake balance is
too strong towards the rear wheels causing the rear end to spin out (like a
child skidding on a bicycle). In ordinary road cars a safe brake balance
(tending towards slight understeer) must be found.
Racing drivers, on asphalt surfaces, generally prefer a neutral condition
(with a slight tendency toward understeer or oversteer, depending on the
track and driver preference) because both understeer and oversteer
conditions will scrub off speed while cornering. In rear wheel drive cars
understeer is generally faster on a circuit because the rear wheels need to
have some grip available to accelerate the vehicle out of the turn.
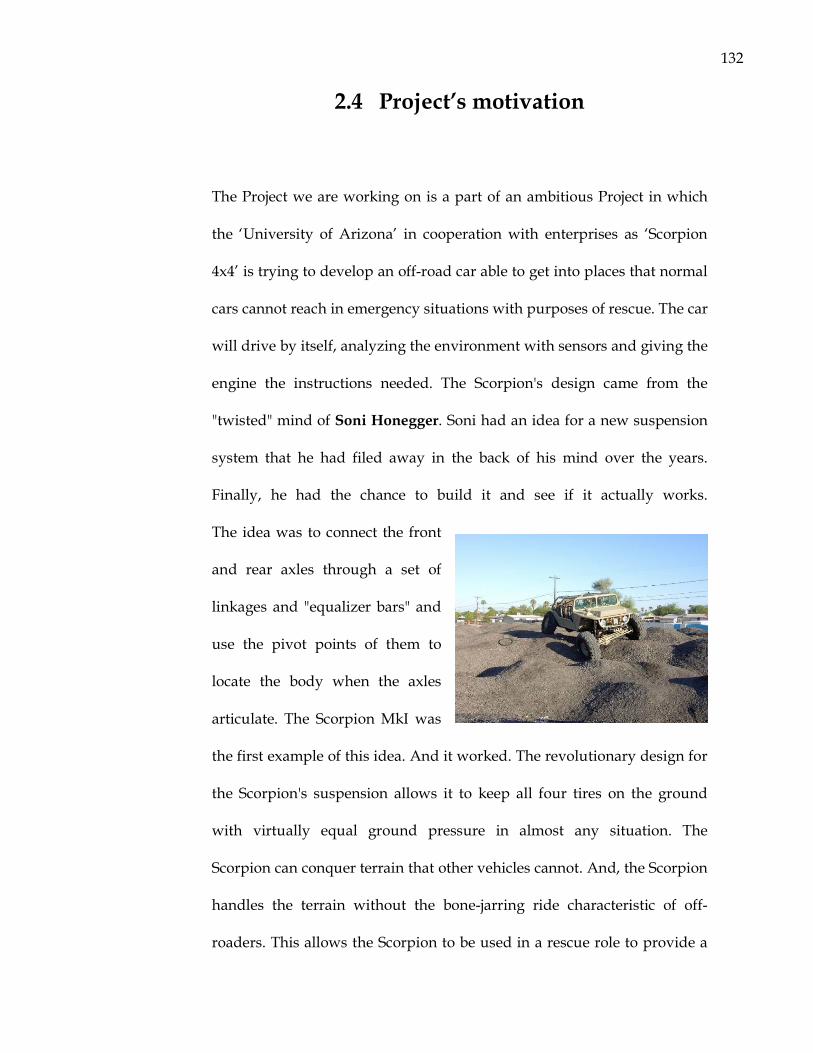
132
2.4 Project’s motivation
The Project we are working on is a part of an ambitious Project in which
the ‘University of Arizona’ in cooperation with enterprises as ‘Scorpion
4x4’ is trying to develop an off-road car able to get into places that normal
cars cannot reach in emergency situations with purposes of rescue. The car
will drive by itself, analyzing the environment with sensors and giving the
engine the instructions needed. The Scorpion's design came from the
"twisted" mind of Soni Honegger. Soni had an idea for a new suspension
system that he had filed away in the back of his mind over the years.
Finally, he had the chance to build it and see if it actually works.
The idea was to connect the front
and rear axles through a set of
linkages and "equalizer bars" and
use the pivot points of them to
locate the body when the axles
articulate. The Scorpion MkI was
the first example of this idea. And it worked. The revolutionary design for
the Scorpion's suspension allows it to keep all four tires on the ground
with virtually equal ground pressure in almost any situation. The
Scorpion can conquer terrain that other vehicles cannot. And, the Scorpion
handles the terrain without the bone-jarring ride characteristic of off-
roaders. This allows the Scorpion to be used in a rescue role to provide a
133
soft ride for injured persons extracted from rough terrain. The terrain
benefits, as well, as the Scorpion is gentle on the ground it traverses.
Scorpion Company is a strong supporter of the "Tread Lightly"
philosophy. They observe proper trail etiquette to preserve nature and the
comfort and safety of those people and animals sharing the trails. It
respects vegetation and works to keep the environment clean and
undisturbed.
As with any vehicle used off-road, extreme care must be exercised when
traversing uneven or rough terrain. Although the Scorpion is designed
and built to be stable and safe, you must rely on your common sense,
good judgment, and caution. Safety is YOUR responsibility. This applies
to any vehicle, of course.
134
2.3 Goals
The development of an integrated vehicle model in which tow-track
chassis model with tire model is combined to increase the efficiency of
advanced vehicle safety control systems. In this paper we will combine the
Lugre-model for the tire-road model with a chassis model based in a 4WS
vehicle.
Nowadays the safety in the vehicles and improvements in driving comfort
are taking more and more importance in the design of these vehicles. This
improvement is taking place in most of the cases with the implementation
of electronic systems such as Anti-Lock Brake system (ABS), traction
control system (TCS) and a large list of system based in computer
programs capable to read the driving situation and managing some factors
of the conduction. Maybe in the future we will see cars completely
automatic driving in hard situations like traffic jams and so. By our time
we can design automobiles that can drive without a driver simply
following paths and recognizing environmental barriers such walls, lines
or other obstacles.
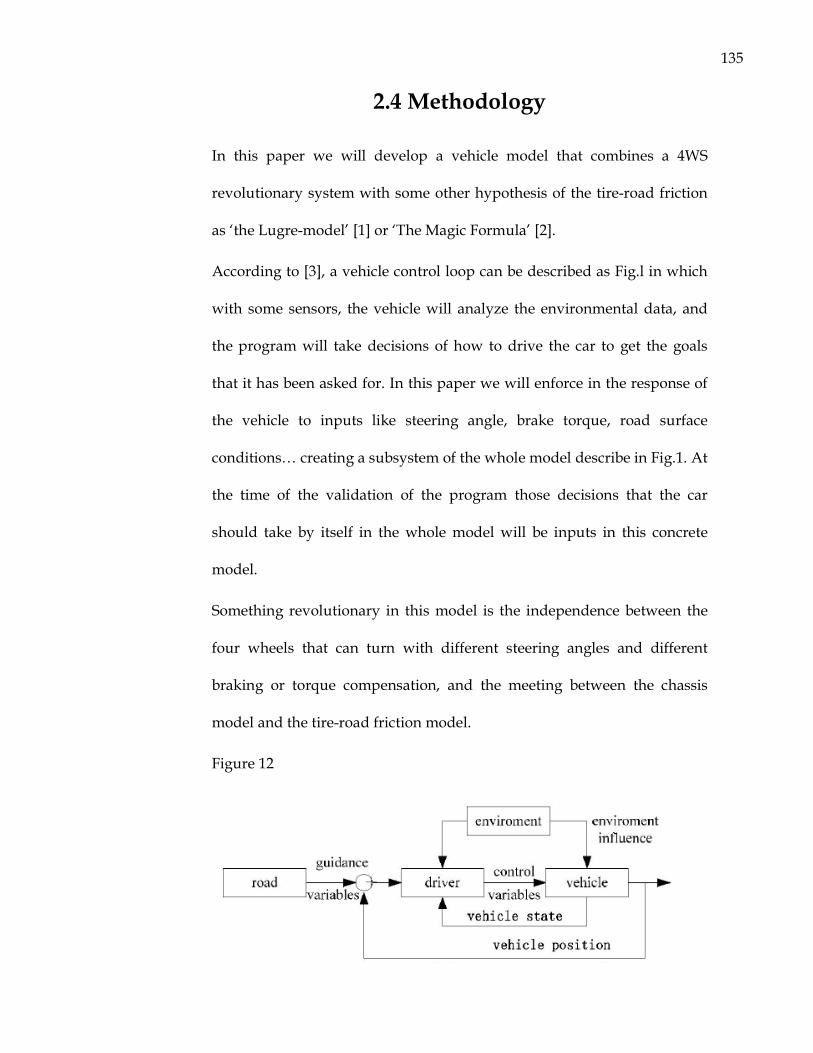
135
2.4 Methodology
In this paper we will develop a vehicle model that combines a 4WS
revolutionary system with some other hypothesis of the tire-road friction
as ‘the Lugre-model’ [1] or ‘The Magic Formula’ [2].
According to [3], a vehicle control loop can be described as Fig.l in which
with some sensors, the vehicle will analyze the environmental data, and
the program will take decisions of how to drive the car to get the goals
that it has been asked for. In this paper we will enforce in the response of
the vehicle to inputs like steering angle, brake torque, road surface
conditions… creating a subsystem of the whole model describe in Fig.1. At
the time of the validation of the program those decisions that the car
should take by itself in the whole model will be inputs in this concrete
model.
Something revolutionary in this model is the independence between the
four wheels that can turn with different steering angles and different
braking or torque compensation, and the meeting between the chassis
model and the tire-road friction model.
Figure 12
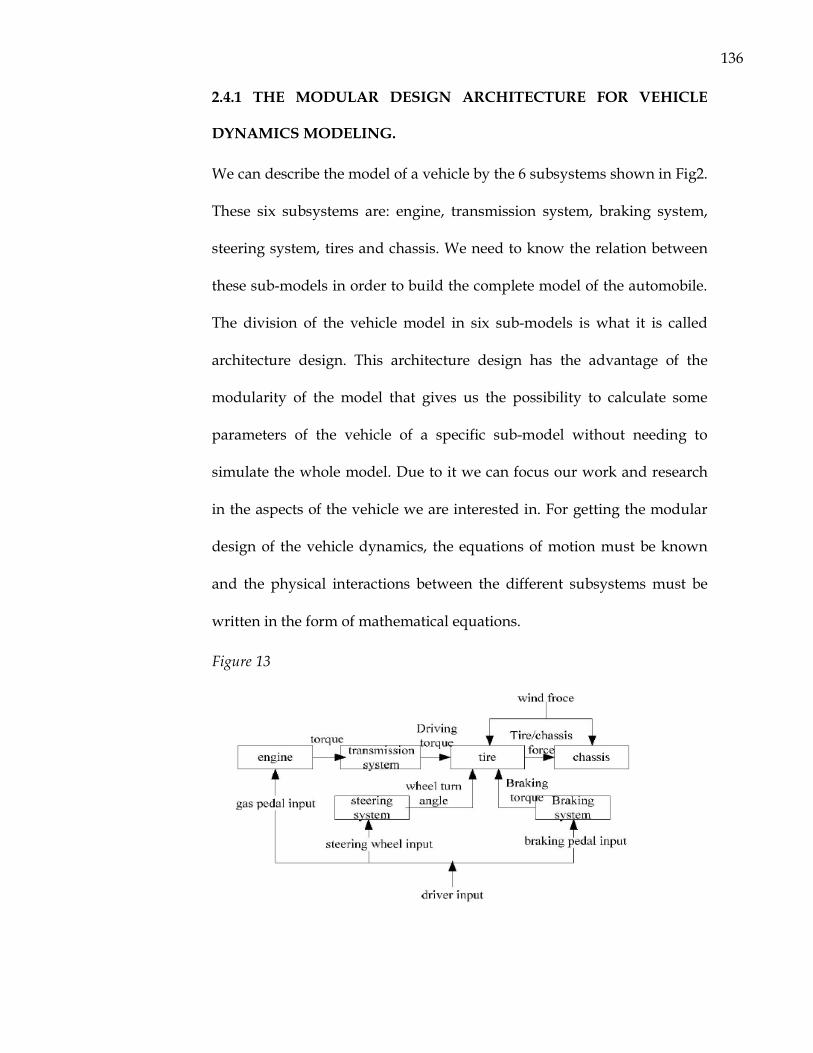
136
2.4.1 THE MODULAR DESIGN ARCHITECTURE FOR VEHICLE
DYNAMICS MODELING.
We can describe the model of a vehicle by the 6 subsystems shown in Fig2.
These six subsystems are: engine, transmission system, braking system,
steering system, tires and chassis. We need to know the relation between
these sub-models in order to build the complete model of the automobile.
The division of the vehicle model in six sub-models is what it is called
architecture design. This architecture design has the advantage of the
modularity of the model that gives us the possibility to calculate some
parameters of the vehicle of a specific sub-model without needing to
simulate the whole model. Due to it we can focus our work and research
in the aspects of the vehicle we are interested in. For getting the modular
design of the vehicle dynamics, the equations of motion must be known
and the physical interactions between the different subsystems must be
written in the form of mathematical equations.
Figure 13
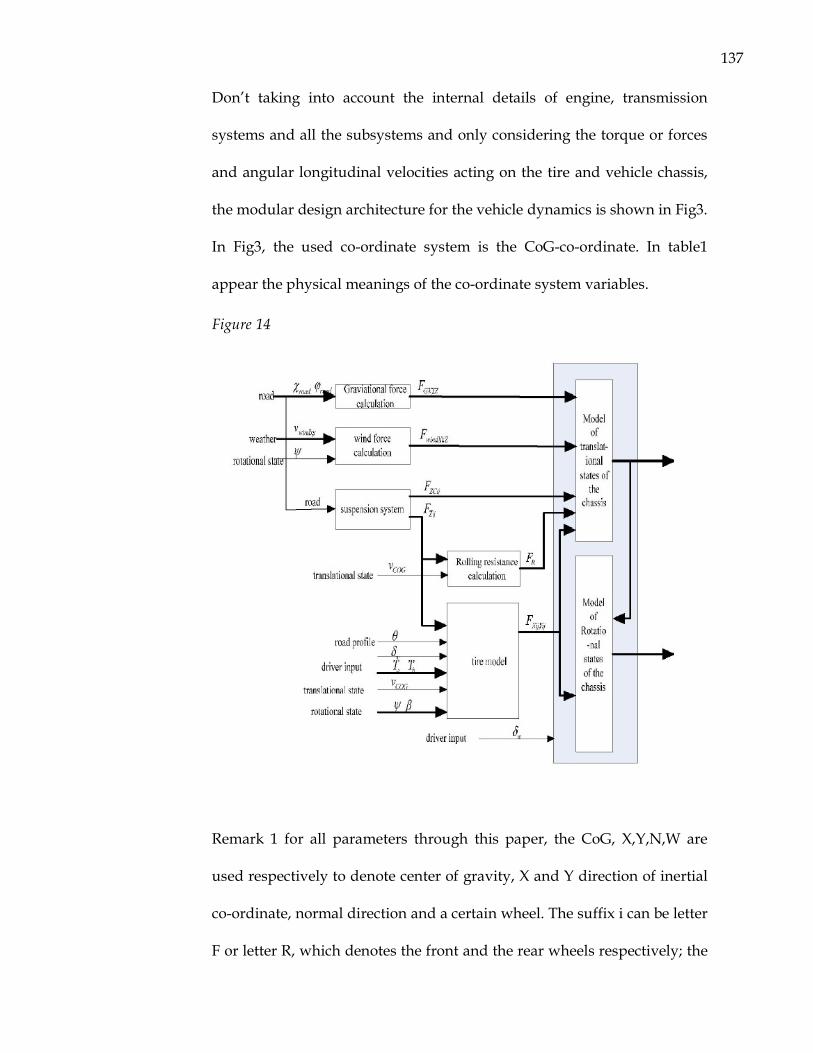
137
Don’t taking into account the internal details of engine, transmission
systems and all the subsystems and only considering the torque or forces
and angular longitudinal velocities acting on the tire and vehicle chassis,
the modular design architecture for the vehicle dynamics is shown in Fig3.
In Fig3, the used co-ordinate system is the CoG-co-ordinate. In table1
appear the physical meanings of the co-ordinate system variables.
Figure 14
Remark 1 for all parameters through this paper, the CoG, X,Y,N,W are
used respectively to denote center of gravity, X and Y direction of inertial
co-ordinate, normal direction and a certain wheel. The suffix i can be letter
F or letter R, which denotes the front and the rear wheels respectively; the

138
suffix j can be letter L or R, which denotes the left and the right wheels
respectively. For example, when ij equals FL, it denotes the front and left
wheel.
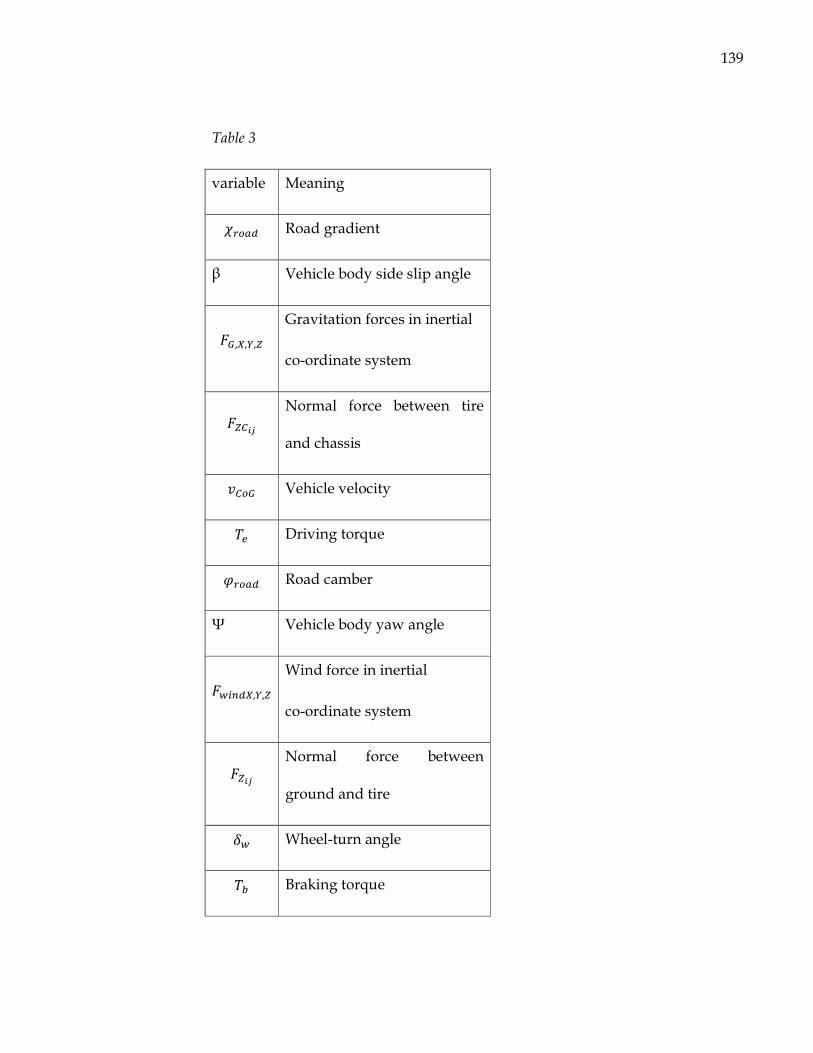
139
Table 3
variable Meaning
����� Road gradient
β Vehicle body side slip angle
��,,,� Gravitation forces in inertial
co-ordinate system
��� � Normal force between tire
and chassis
���� Vehicle velocity
�� Driving torque
����� Road camber
Ψ Vehicle body yaw angle
�����,,� Wind force in inertial
co-ordinate system
�� � Normal force between
ground and tire
�� Wheel-turn angle
�� Braking torque

140
In the following section, we will do some ideal assumptions trying to get
all the subsystems models which can be used in this modular architecture.
141
2.4.2 MODEL DEVELOPMENT OF THE SUBSYSTEMS.
In order to make a model efficient we will try to simplify it and minimize
the computing-time as much as possible. When focusing on the study of
control systems as Anti-Block system (ABS), Adaptive Cruise Control
System (ACC), the vertical dynamics can be neglected to enforce in the
development of the lateral and longitudinal dynamics of the vehicle.
Following the same process in this paper we are proposing a modular
architecture design in which we only focus in the horizontal dynamics,
considering the horizontal dynamics the plane in which the vehicle is
lying.
2.4.2.1 Chassis Model
As we only are considering one plane for the dynamics of the vehicle, this
will have only 3 degrees of freedom, being those the longitudinal and
lateral directions and the normal axis. Fig 4 shows a little sketch of the
dynamics of the vehicle with Xcog – Ycog denoting the CoG co-ordinate,
Xin – Yin denoting the fixed inertial co-ordinate and Xw – Yw denoting
the wheel co-ordinate.
For the CoG co-ordinate system we derive the following nonlinear
formulas.

142
����� = ��� ��� ! "�#$ + �#& + �&$ + �&& − �����( + ��� ��� ! "�#$ + �#& +�&$ + �&&(
)� = ��� ��� !∙+� ! "�#$ + �#& + �&$ + �&&( − ��� ��� !∙+� ! "�#$ + �#& + �&$ +�&& − �����( − ,�
-.,/ = "�#$ + �#&( ∙ 0# − "�&$ + �&&( ∙ 0& + "�&& + �&$( ∙ �12 +"�#& + �#$( ∙ �32
Where Fxij denotes the frictional force in the direction of the Xcog, Fyij
denotes the frictional force in the direction of Ycog. The other variables’
physical meaning and value in the simulation model are shown later in
Table 2.
Figure 15
143
2.4.2.2 Tire model
An essential part in our model is to determine the exact friction between
the wheels and road surface. Fig 4 shows the separation of this friction in
lateral and longitudinal dynamics.
2.4.2.2.1 Longitudinal dynamics
For the longitudinal dynamics of this friction we will use the LuGre model
design, described in [1], [5],[6],[7],[8]. This model was first proposed in [1]
and [7] made some modifications to it, which used the parameter θ to
denote the road conditions. Θ=1 denotes dry asphalt road, and it
approaches 4 at snow conditions. In [5] appear some experiments to
determine the value of this parameter. For our model it will be an input.
456|��|ℎ"��( 9� = �� − 9 :� = 1-� "� − �$ ∙ <(
�$ = "569 + 5=9� + 52��(�>
There are different equations for the h() function depending the author,
but all of them are pretty similar. We will use:
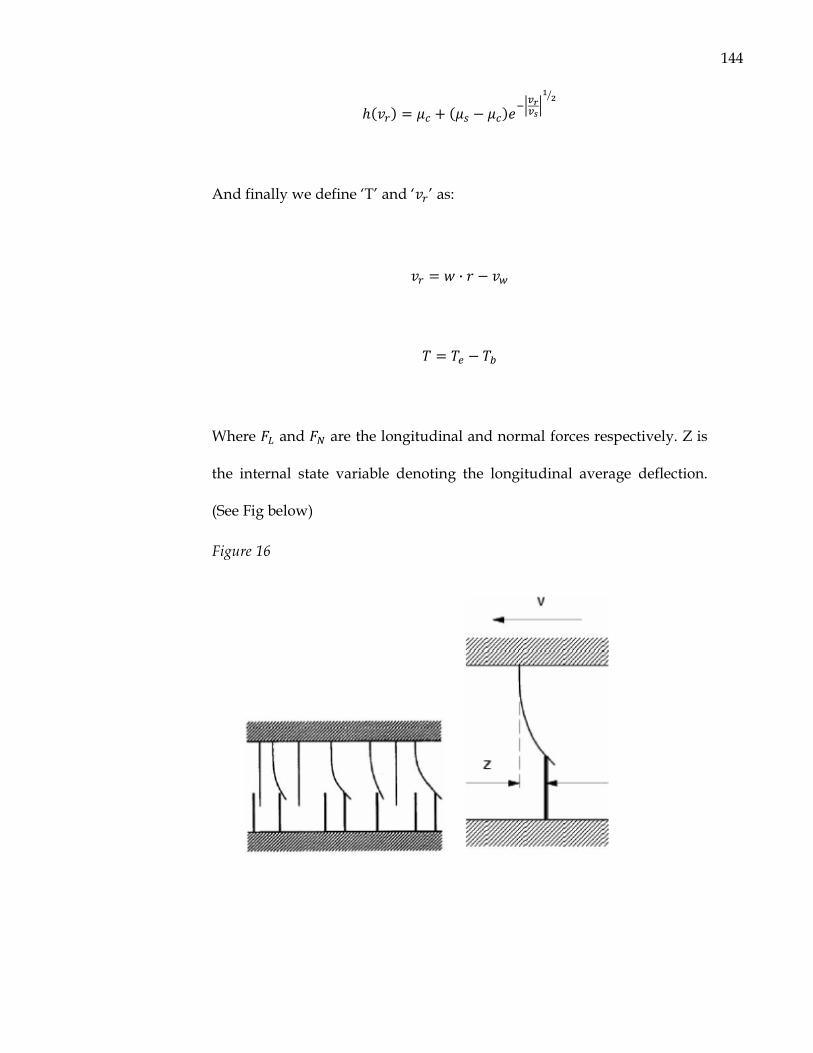
144
ℎ"��( = ?� + "?� − ?�(@ABCDCEBF GH
And finally we define ‘T’ and ‘��’ as:
�� = : ∙ < − ��
� = �� − ��
Where �$ and �> are the longitudinal and normal forces respectively. Z is
the internal state variable denoting the longitudinal average deflection.
(See Fig below)
Figure 16

145
2.4.2.2.2 Lateral dynamics:
The lateral tire/road friction force has been the topic of lot of research
projects like [1], [4] or [6], in which they look for the curve that describes
its nature. In this paper we will suppose that the lateral force usually
remains in the linear area of the curve for a typical cornering situation,
which is exactly what we will study. So far the equation that describes the
lateral dynamics in our model is as follows:
�� = IJ ∙ 14K ∙ L
Where IJ and α denotes the tire cornering stiffness and tire side slip angle respectively.
2.4.2.2.3 2D Tire model:
Extending the formulas above described to an automobile of 4 wheels we
get the following model where ‘ij’ describe the position of the wheel as
specified at the beginning before.
9��M = �� � − 456 N�� �Nℎ O�� �P 9��M
:� �M = 1-� �O��M − �$ � ∙ <�MP

146
�Q�M,$ = O569�M + 5=9��M + 52�� �P �> �
�Q�M,R = IJ ∙ 14K ∙ L�M
ℎ O�� �P = ?� + "?� − ?�(@ABCD �CE BF GH
�� � = :�M ∙ < − �� �
��M = ���M − ���M
2.4.2.2.4 The 2D Tire model for the modular architecture
Finally we need to make some changes in our model to use it in the
modular architecture, finding the relation of the velocity and forces of the
car’s chassis with the velocities and forces of each wheel.
��M = �Q�M,$ ∙ cos ��M − �Q�M,R ∙ sin ��M
��M = �Q�M,$ ∙ sin ��M − �Q�M,R ∙ cos ��M

147
�Q3X = Y���� 2 + ,� 2 Z[\]2 _2 + 0]2` + ����,� a−\] cos ) + 20] sin )b
�Q31 = Y���� 2 + ,� 2 Z[\]2 _2 + 0]2` + ����,� a\] cos ) + 20] sin )b
�Q1X = Y����2 + ,� 2 cd\�2 e2 + 0�2f + ����,� "−\� cos ) − 20� sin )(
�Q11 = Y���� 2 + ,� 2 cd\�2 e2 + 0�2f + ����,� "\� cos ) − 20� sin )(
The tire side slip angle can be calculated as follows:
L�M = ��M − g�M
Being g�M the angle between the velocity of each wheel �� � and the h��� axis.
Usually the front wheels will have the same turn angles and the rear will
have the same angle too, then:
�#$ = �#& = �#

148
�&$ = �&& = �&
Finally we will define the velocity of the car (����) and the position of the vehicle in terms of the inertial co-ordinate axis’ system:
� = ���� cos") + ,(
�i = ���� sin") + ,(
h = j �klm
n = j �ilm
2.4.2.3 Wind force calculation
The force of the wind is proportional to the square of the velocity of the
vehicle minus the velocity of the wind. We will neglect the velocity of the
wind in this project assuming that is null in the moment of our
experiments. The equation that describes this force is:
����� = I��� ∙ p$ ∙ q2 ∙ a���r − �����b2 ≈ I��� ∙ p$ ∙ q2 ∙ a���rb2
149
Where I��� is the drag coefficient and p$ is the effective front area of the vehicle.
2.4.2.4 The normal force calculation model
For the calculation of the normal forces we will assume that the difference
between the right side and left side can be neglected, so we’ll only
differentiate between front and rear normal force. Using the 2nd Newton’s
law for the vertical axis and the torque balances we obtain these equations:
�>#$ = �>#& = �># = 0�2"0# + 0&( t���u �>&$ = �>&& = �>& = w32"w3zw1( t���u
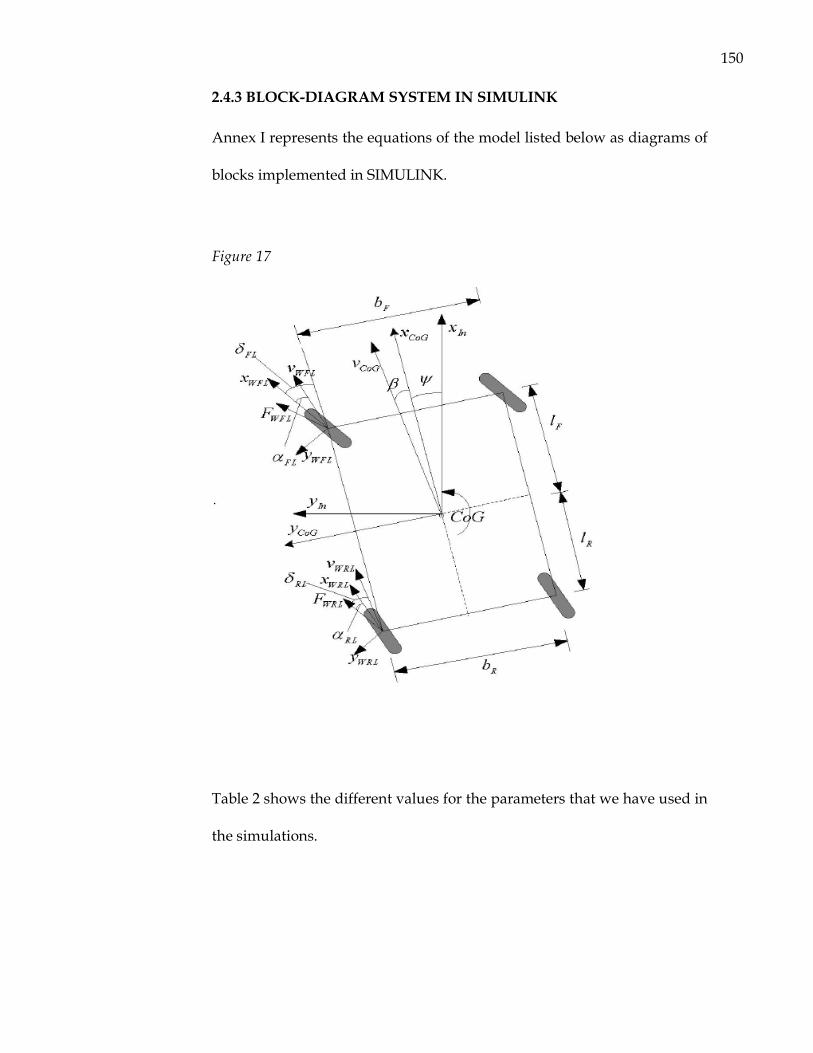
150
2.4.3 BLOCK-DIAGRAM SYSTEM IN SIMULINK
Annex I represents the equations of the model listed below as diagrams of
blocks implemented in SIMULINK.
Figure 17
Table 2 shows the different values for the parameters that we have used in
the simulations.
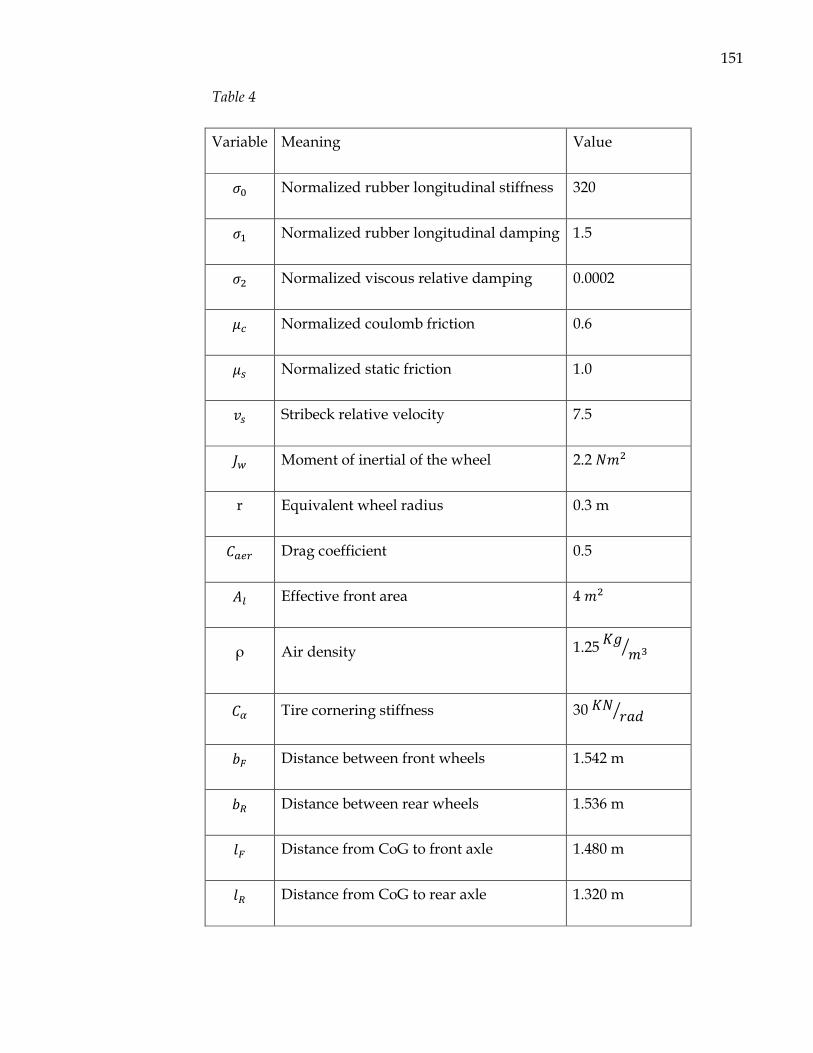
151
Table 4
Variable Meaning Value
56 Normalized rubber longitudinal stiffness 320
5= Normalized rubber longitudinal damping 1.5
52 Normalized viscous relative damping 0.0002
?� Normalized coulomb friction 0.6
?� Normalized static friction 1.0
�� Stribeck relative velocity 7.5
-� Moment of inertial of the wheel 2.2 vt2
r Equivalent wheel radius 0.3 m
I��� Drag coefficient 0.5
pw Effective front area 4 t2
ρ Air density 1.25 xu tKH
IJ Tire cornering stiffness 30 xv <ylH
\# Distance between front wheels 1.542 m
\& Distance between rear wheels 1.536 m
0# Distance from CoG to front axle 1.480 m
0& Distance from CoG to rear axle 1.320 m
152
t��� Vehicle mass 1600 Kg
-. Moment of inertial of the vehicle 2100 xut2
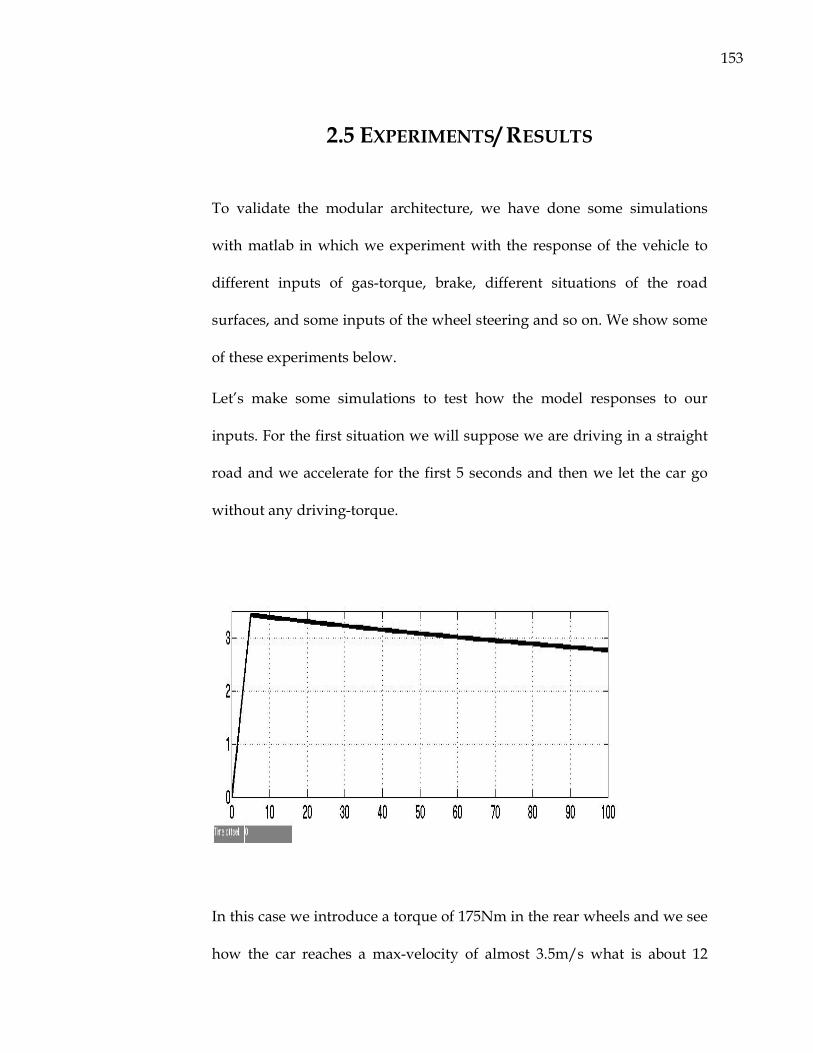
153
2.5 EXPERIMENTS/ RESULTS
To validate the modular architecture, we have done some simulations
with matlab in which we experiment with the response of the vehicle to
different inputs of gas-torque, brake, different situations of the road
surfaces, and some inputs of the wheel steering and so on. We show some
of these experiments below.
Let’s make some simulations to test how the model responses to our
inputs. For the first situation we will suppose we are driving in a straight
road and we accelerate for the first 5 seconds and then we let the car go
without any driving-torque.
In this case we introduce a torque of 175Nm in the rear wheels and we see
how the car reaches a max-velocity of almost 3.5m/s what is about 12
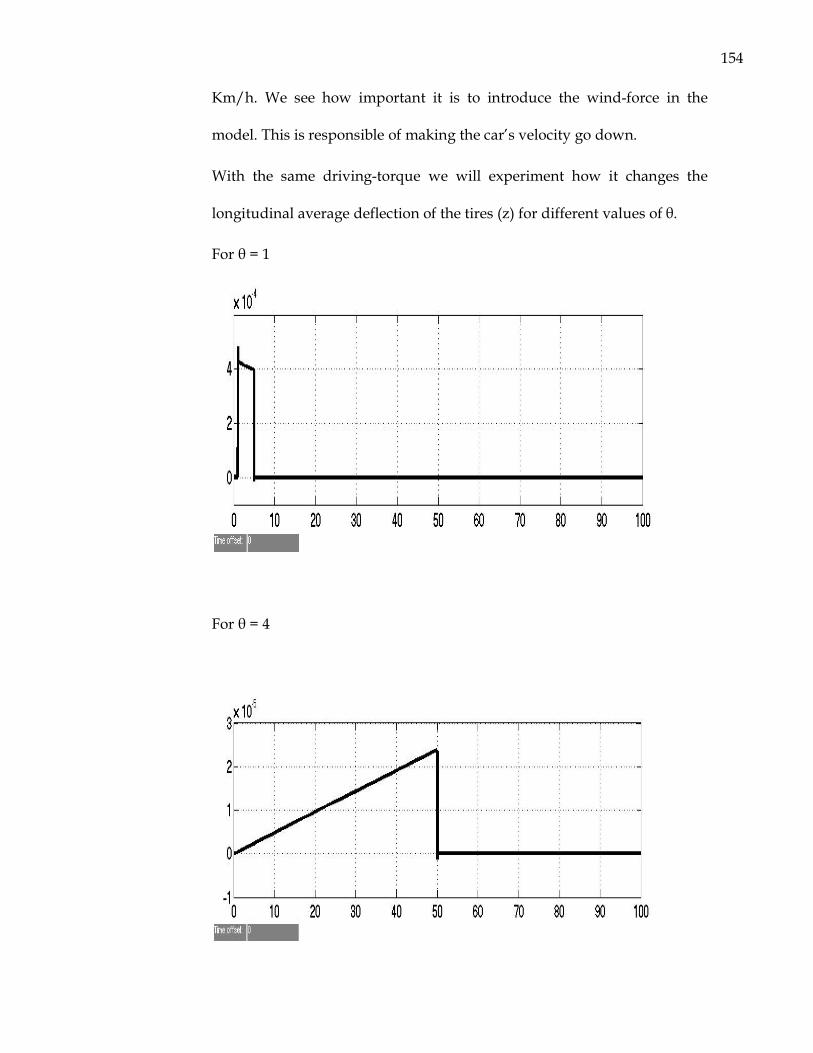
154
Km/h. We see how important it is to introduce the wind-force in the
model. This is responsible of making the car’s velocity go down.
With the same driving-torque we will experiment how it changes the
longitudinal average deflection of the tires (z) for different values of θ.
For θ = 1
For θ = 4
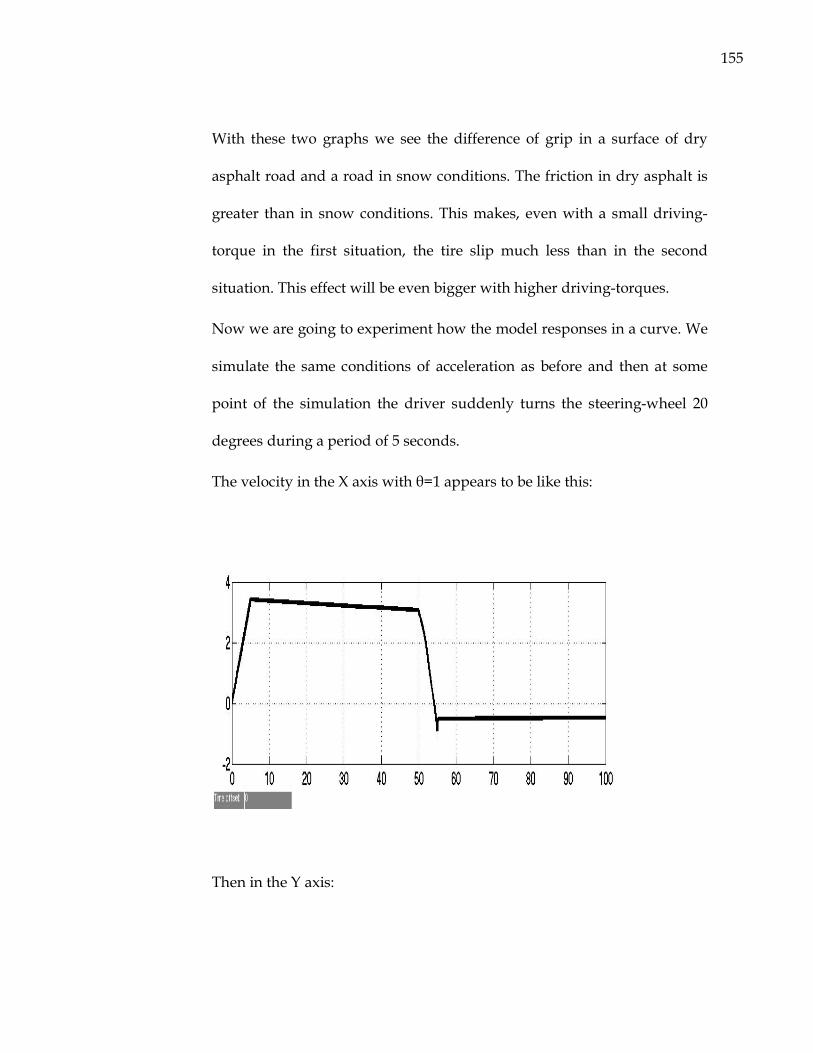
155
With these two graphs we see the difference of grip in a surface of dry
asphalt road and a road in snow conditions. The friction in dry asphalt is
greater than in snow conditions. This makes, even with a small driving-
torque in the first situation, the tire slip much less than in the second
situation. This effect will be even bigger with higher driving-torques.
Now we are going to experiment how the model responses in a curve. We
simulate the same conditions of acceleration as before and then at some
point of the simulation the driver suddenly turns the steering-wheel 20
degrees during a period of 5 seconds.
The velocity in the X axis with θ=1 appears to be like this:
Then in the Y axis:
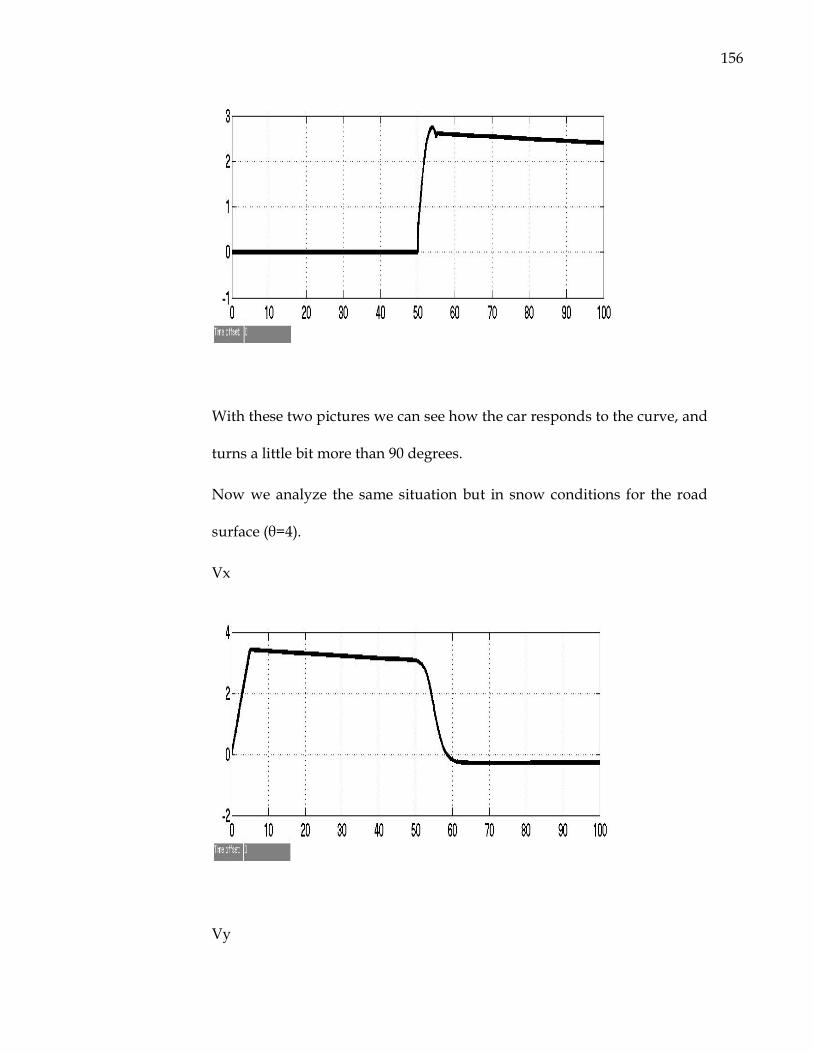
156
With these two pictures we can see how the car responds to the curve, and
turns a little bit more than 90 degrees.
Now we analyze the same situation but in snow conditions for the road
surface (θ=4).
Vx
Vy
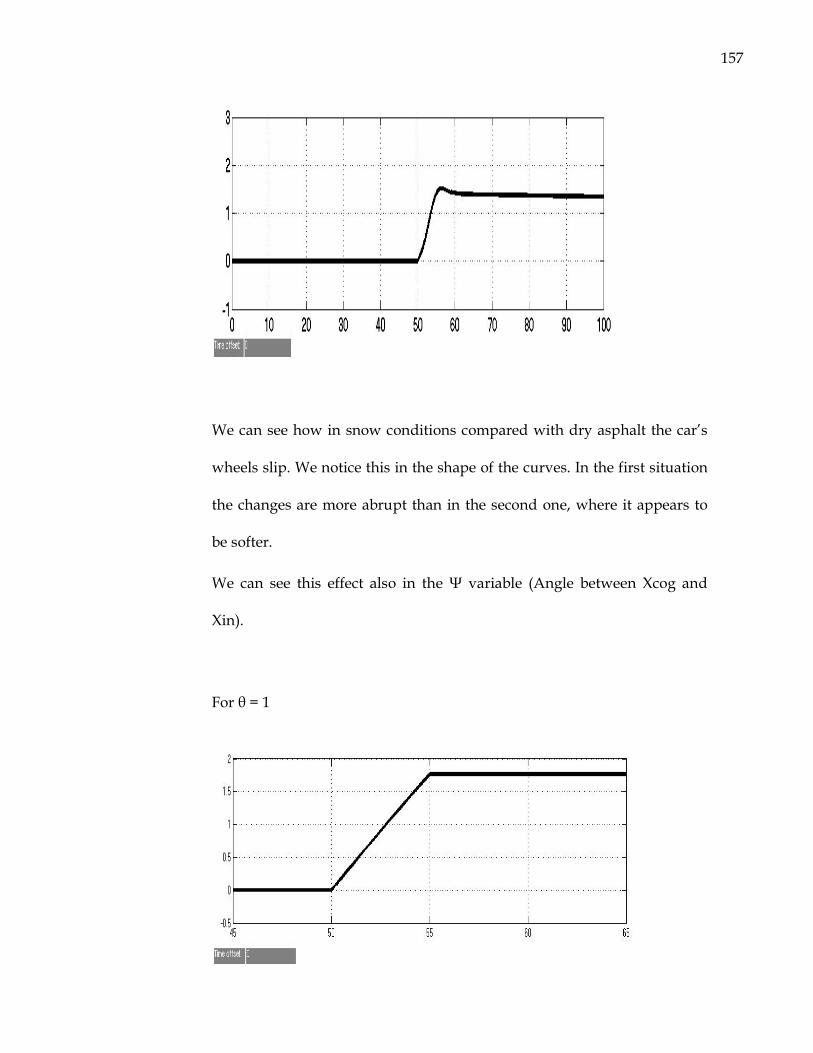
157
We can see how in snow conditions compared with dry asphalt the car’s
wheels slip. We notice this in the shape of the curves. In the first situation
the changes are more abrupt than in the second one, where it appears to
be softer.
We can see this effect also in the Ψ variable (Angle between Xcog and
Xin).
For θ = 1
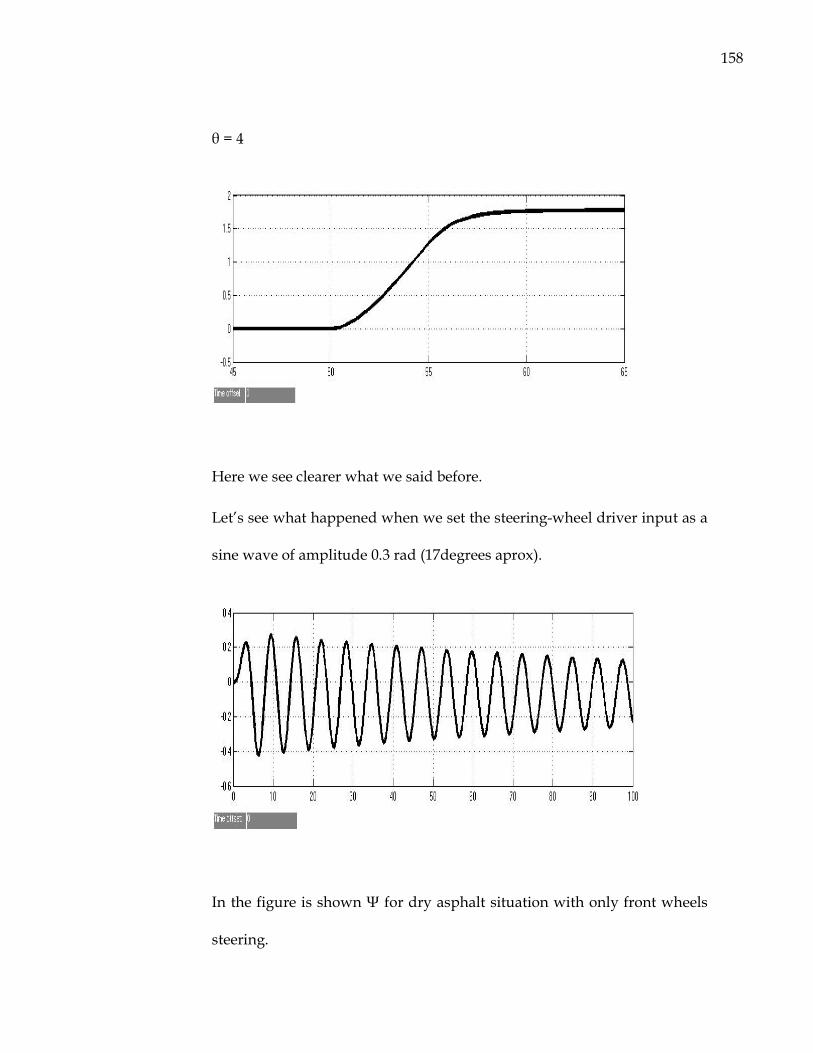
158
θ = 4
Here we see clearer what we said before.
Let’s see what happened when we set the steering-wheel driver input as a
sine wave of amplitude 0.3 rad (17degrees aprox).
In the figure is shown Ψ for dry asphalt situation with only front wheels
steering.
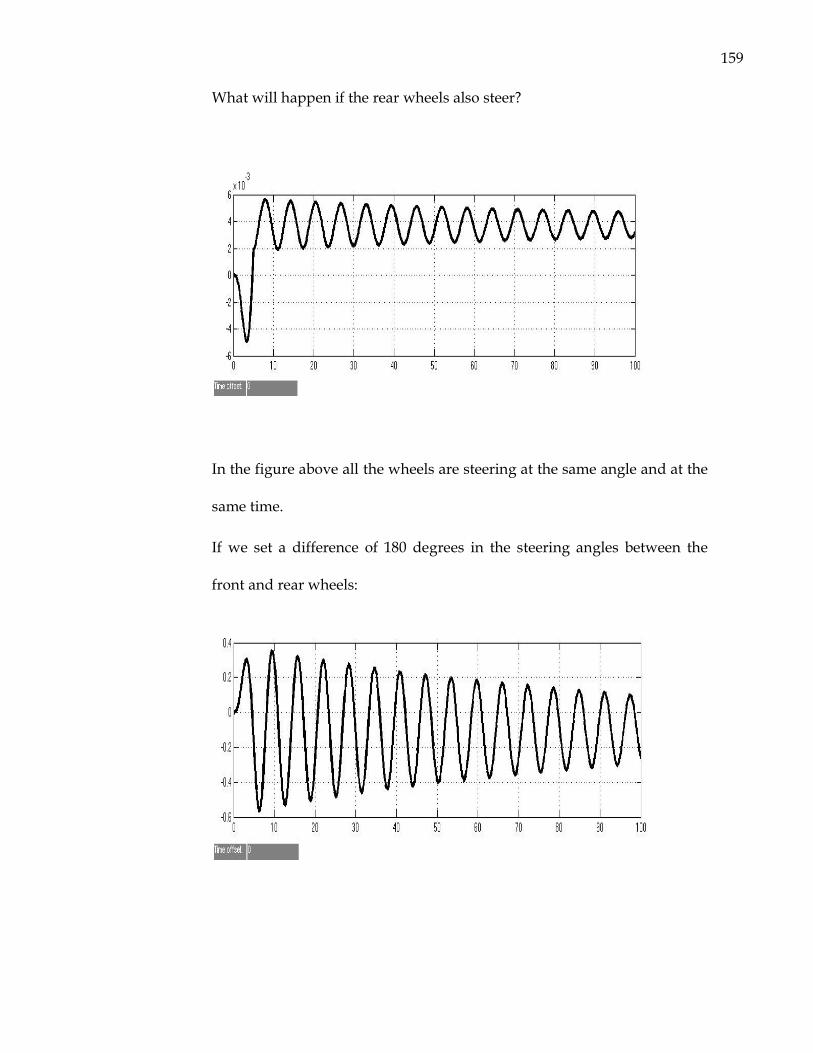
159
What will happen if the rear wheels also steer?
In the figure above all the wheels are steering at the same angle and at the
same time.
If we set a difference of 180 degrees in the steering angles between the
front and rear wheels:
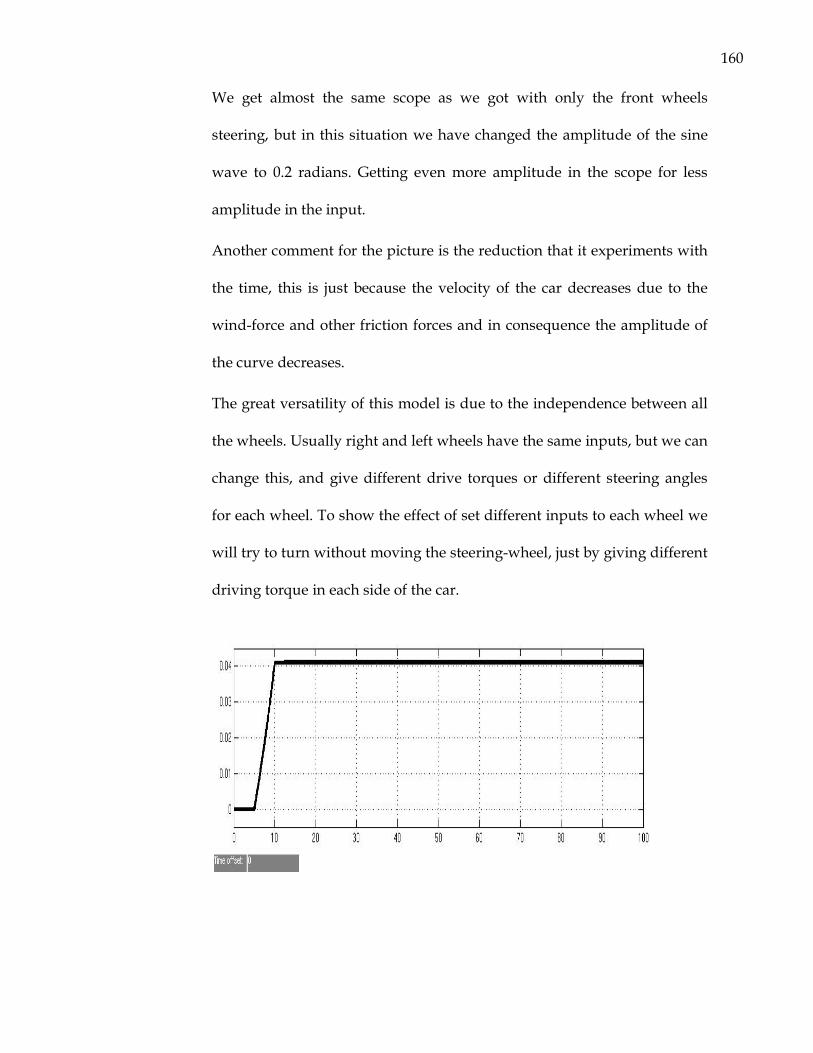
160
We get almost the same scope as we got with only the front wheels
steering, but in this situation we have changed the amplitude of the sine
wave to 0.2 radians. Getting even more amplitude in the scope for less
amplitude in the input.
Another comment for the picture is the reduction that it experiments with
the time, this is just because the velocity of the car decreases due to the
wind-force and other friction forces and in consequence the amplitude of
the curve decreases.
The great versatility of this model is due to the independence between all
the wheels. Usually right and left wheels have the same inputs, but we can
change this, and give different drive torques or different steering angles
for each wheel. To show the effect of set different inputs to each wheel we
will try to turn without moving the steering-wheel, just by giving different
driving torque in each side of the car.
161
In the figure above we maintain δ = 0 for all the wheels and we keep the
driving torque in the right-rear wheel for 5 more seconds than in the left
one. As a result we see how the Ψ angle shown in the graph changes
during 5 seconds and then it remains steady.
162
2.6 CONCLUSIONS
In this paper we show the importance of developing a modular
architecture design in order to facilitate the efficiency for the dynamics
models. We’ve got a good combination with the inclusion of the dynamic
tire/road friction in the design of the vehicles dynamic model. The main
point of this project is to find a model which can easily include or combine
the researches in the different sub-models of the vehicle, which in turn
will provide a final global model that works properly, getting all the
benefits of the different sub-models without needing to create a whole
new model every time an aspect is developed or changed in one of the
sub-models will be a great accomplishment.
163
2.7 FUTURE DEVELOPMENTS
The model we have developed in our Project for the simulation of the
dynamics of an automobile is pioneer introducing new theories for the
friction between the tire-road and giving modularity to our model. New
models will be necessary as soon as new theories will be developed, new
parameters that will give more precision to the model. As new computers,
more powerful will be developed; new models more accurate will be
programmed. The friction force in the tire/road interface is the main
mechanism for converting wheel angular acceleration (due to the motor
torque) to forward acceleration (longitudinal force). Therefore, the study
of friction force characteristics at the road/tire interface is essential of the
development of new models of control such ABS or ESC
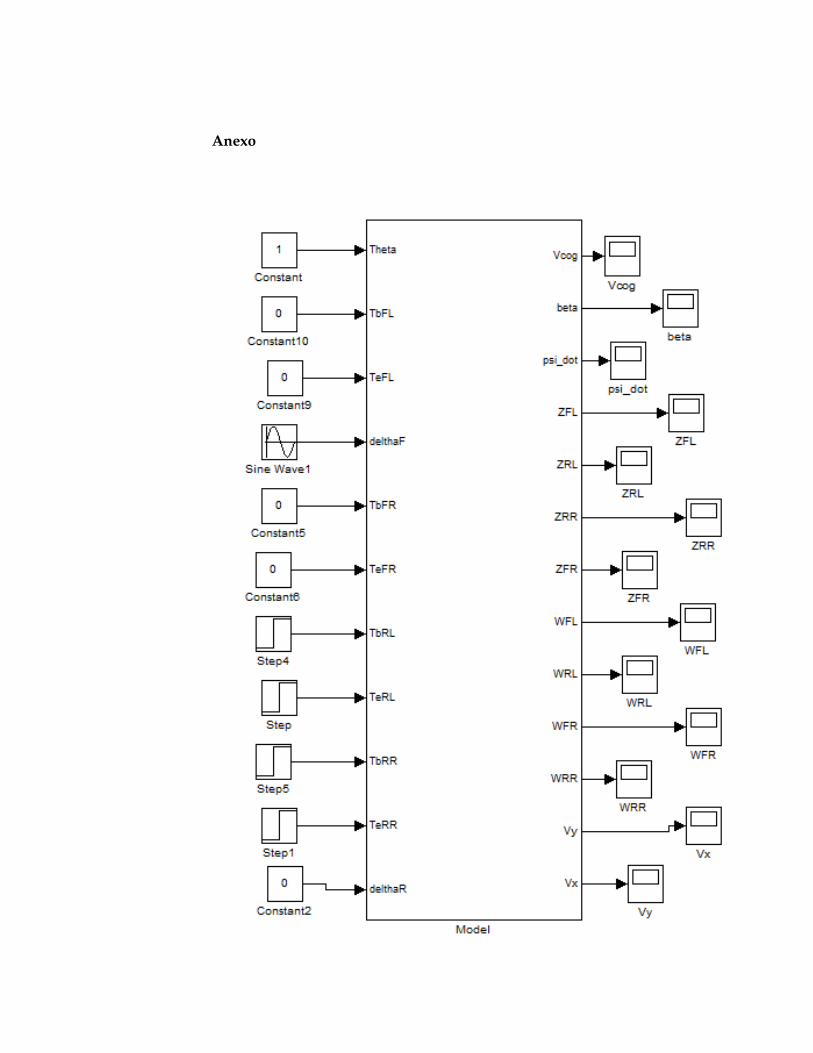
Anexo
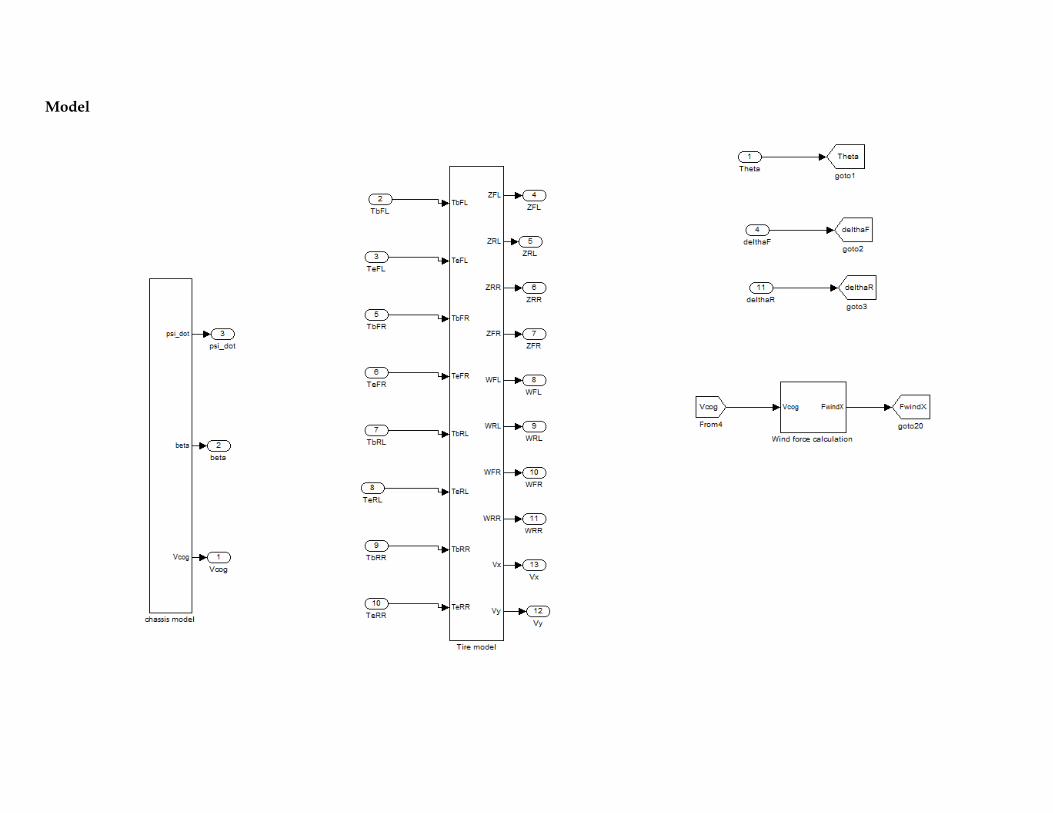
Model
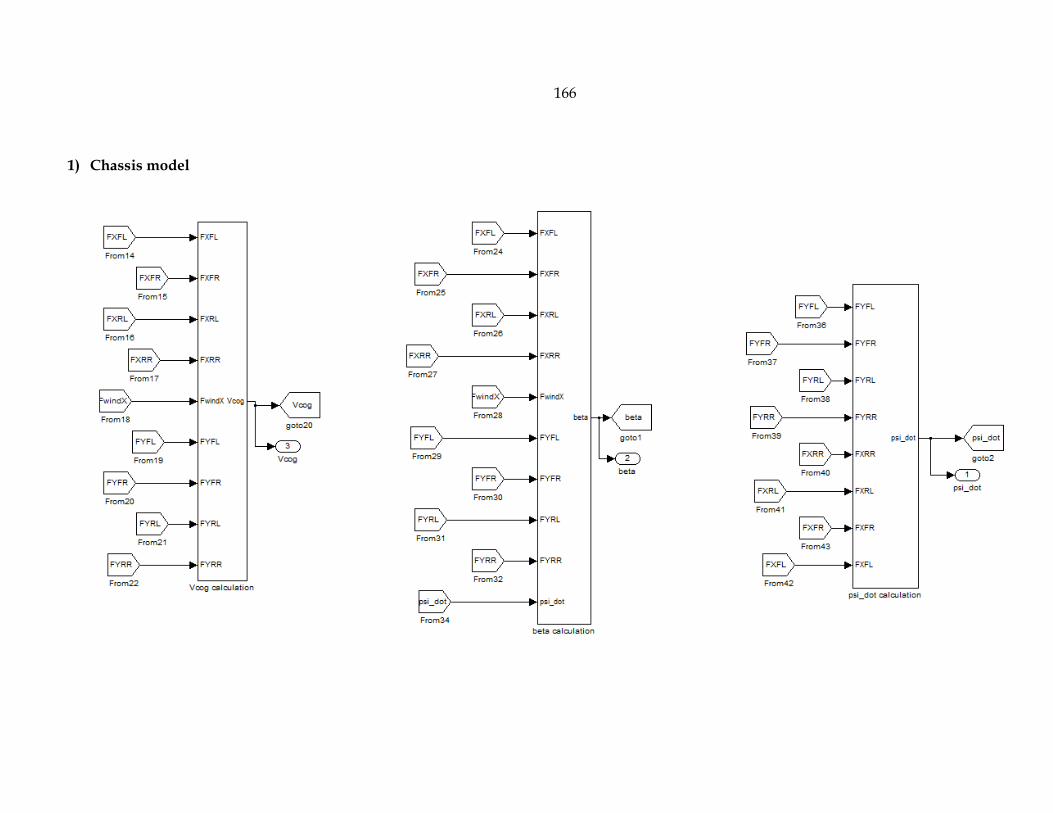
166
1) Chassis model
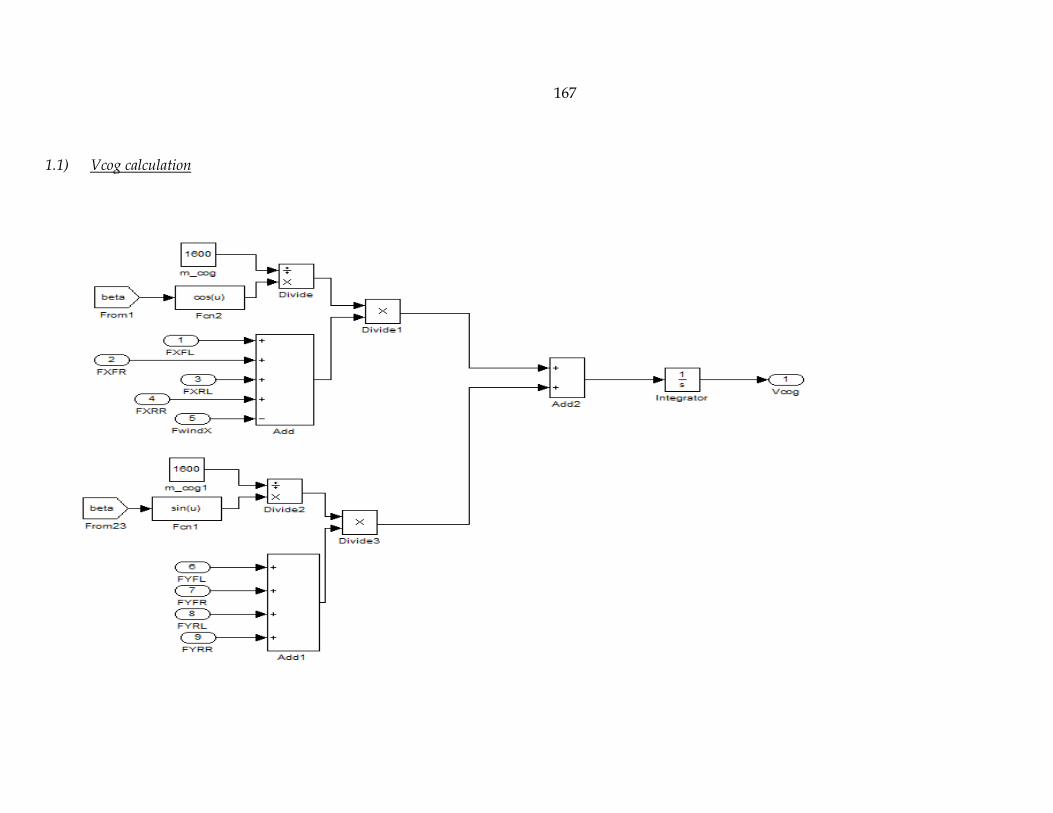
167
1.1) Vcog calculation
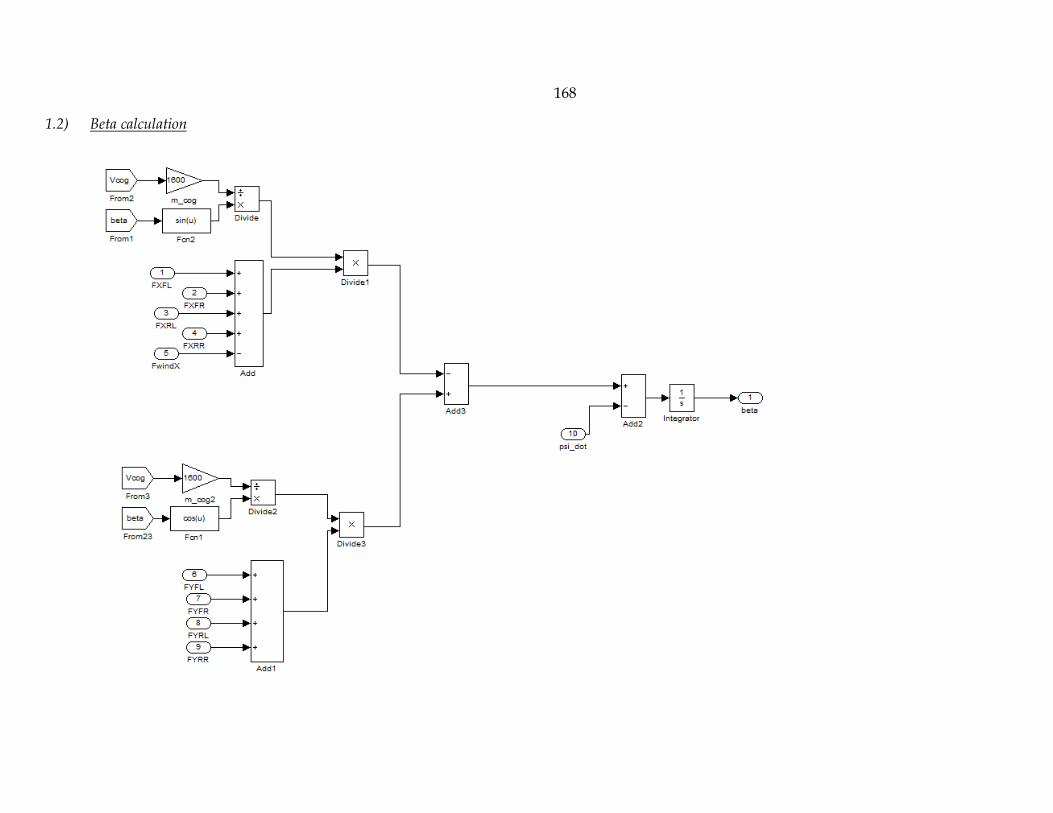
168
1.2) Beta calculation
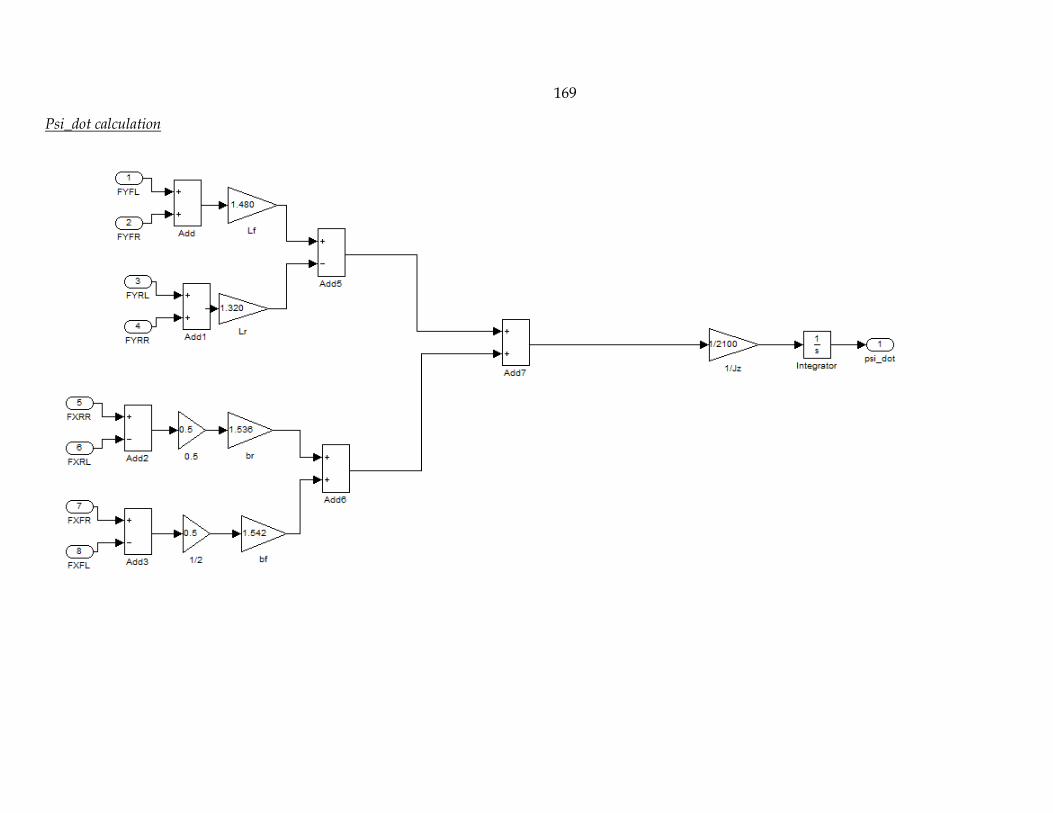
169
Psi_dot calculation
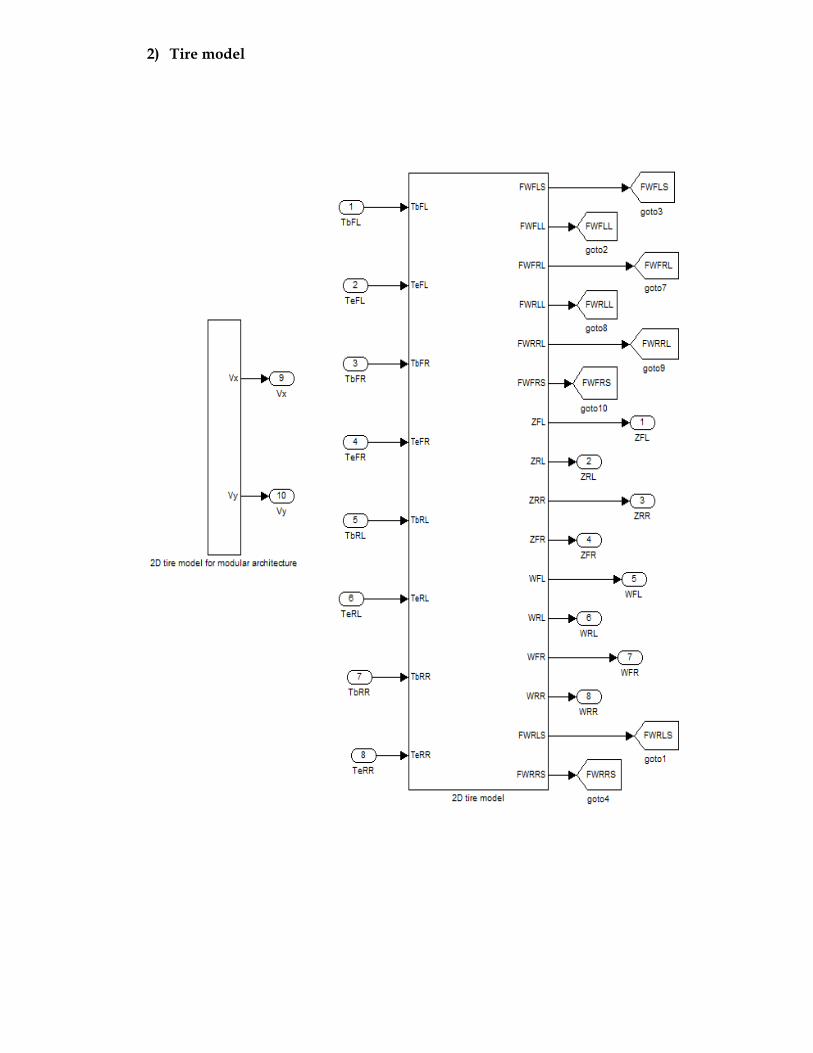
2) Tire model
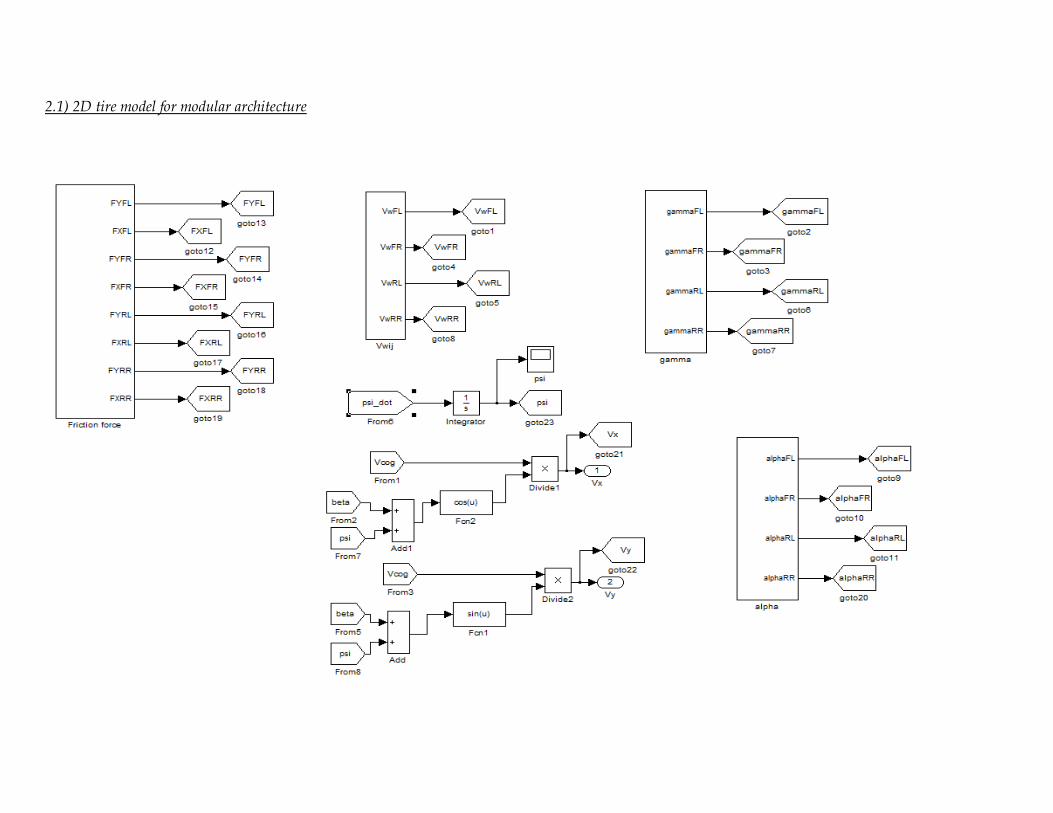
2.1) 2D tire model for modular architecture
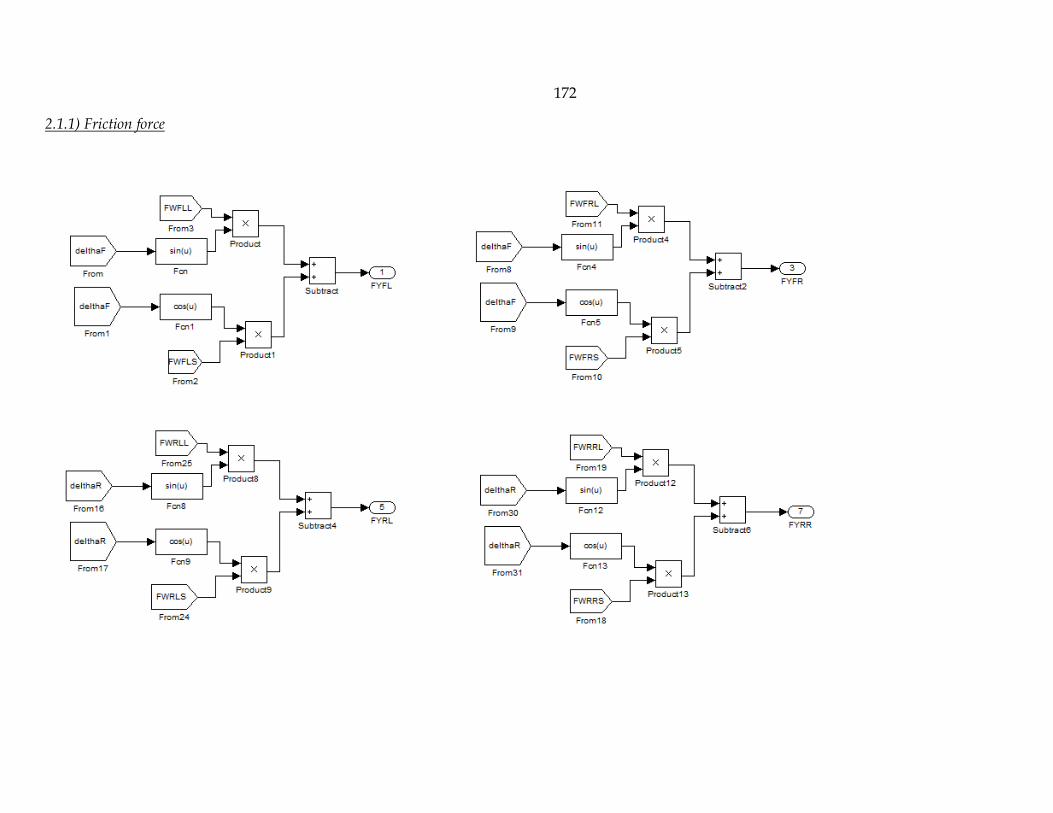
172
2.1.1) Friction force
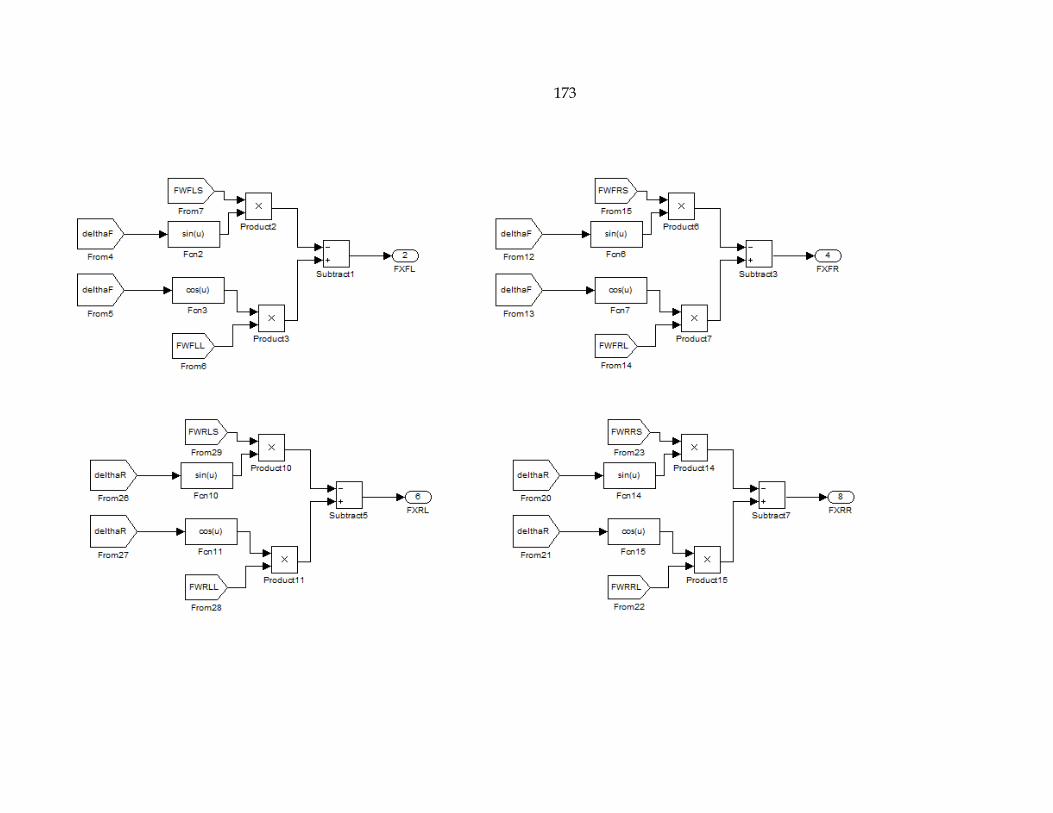
173
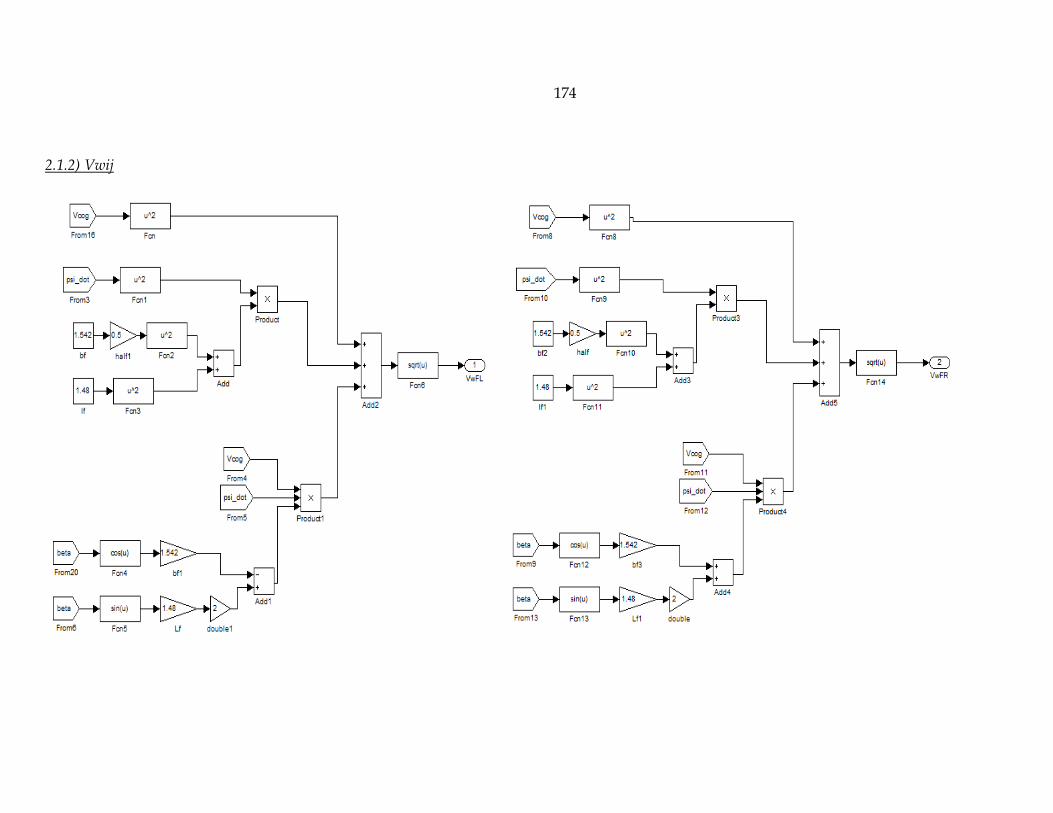
174
2.1.2) Vwij
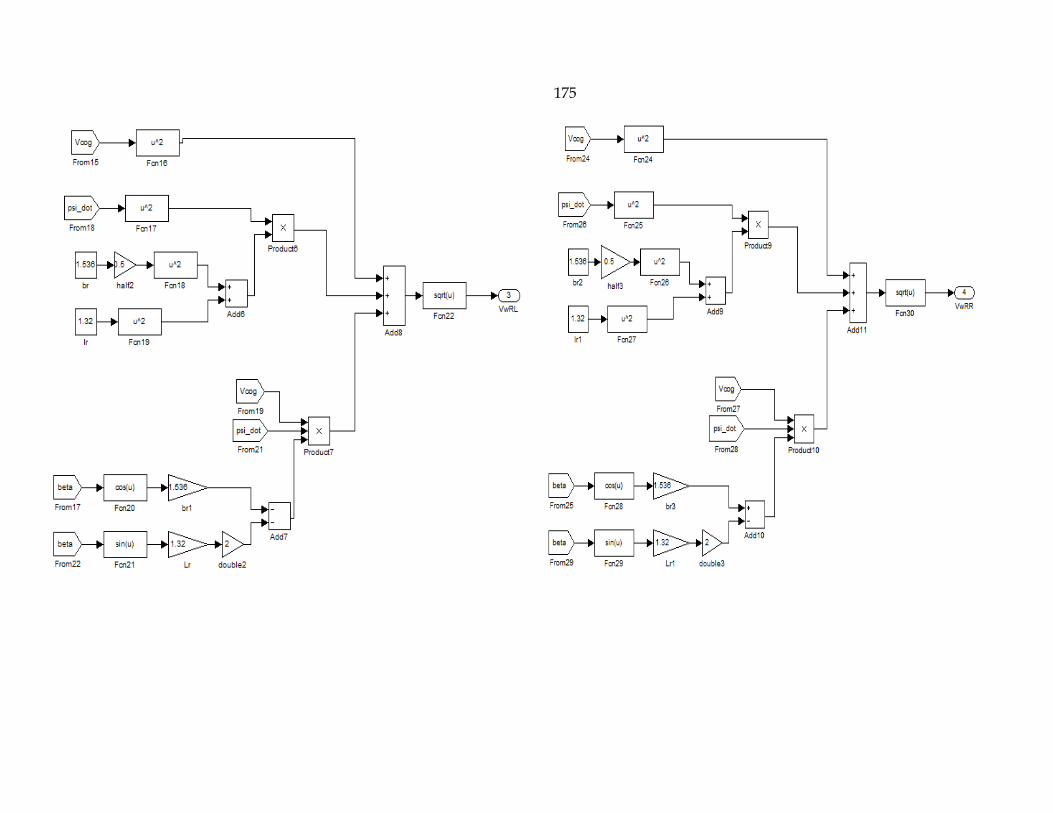
175
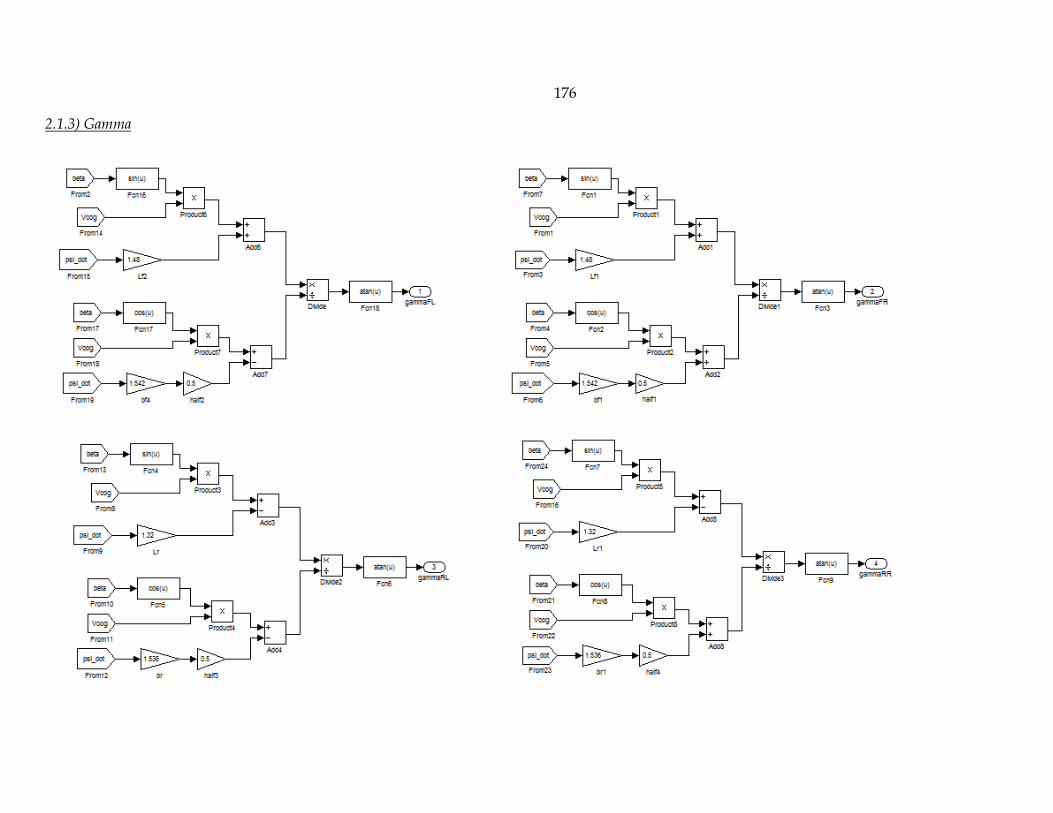
176
2.1.3) Gamma
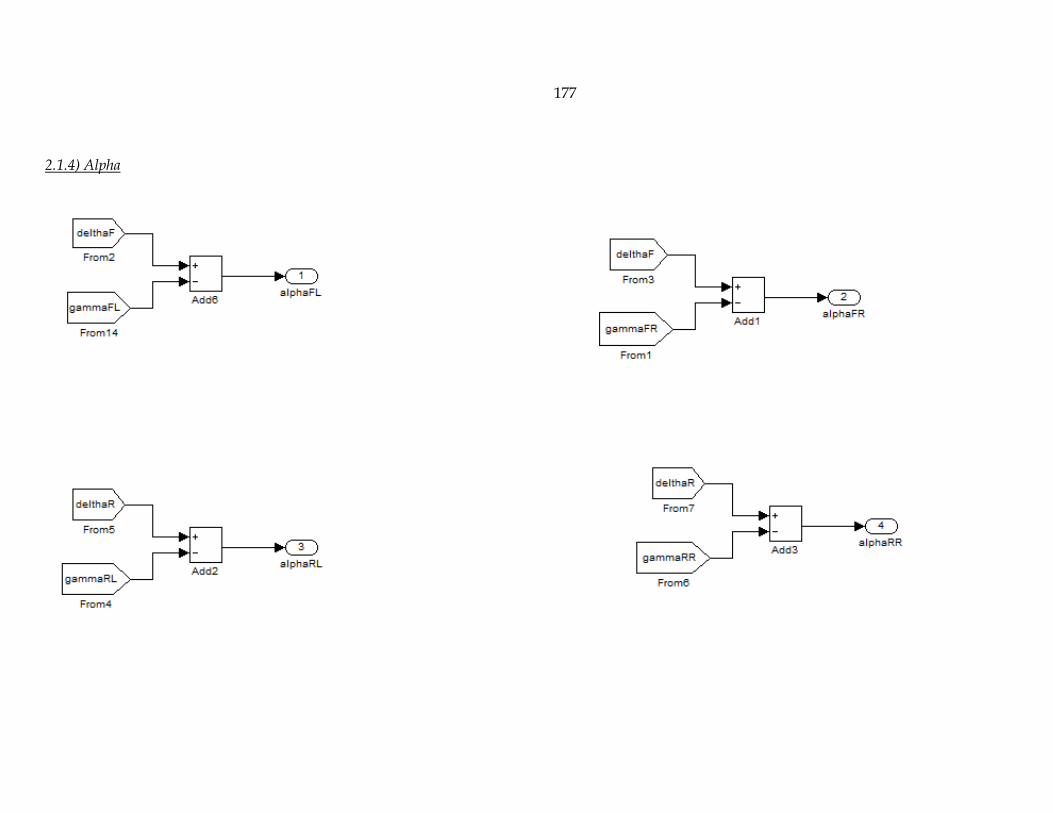
177
2.1.4) Alpha
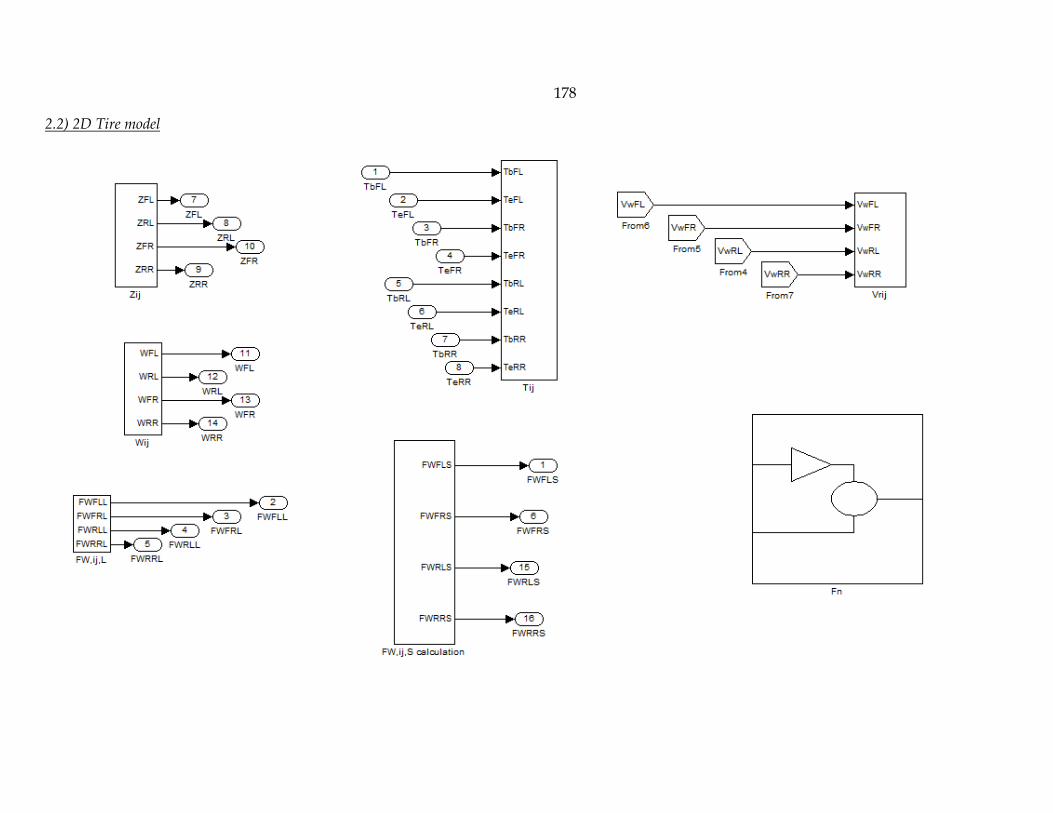
178
2.2) 2D Tire model
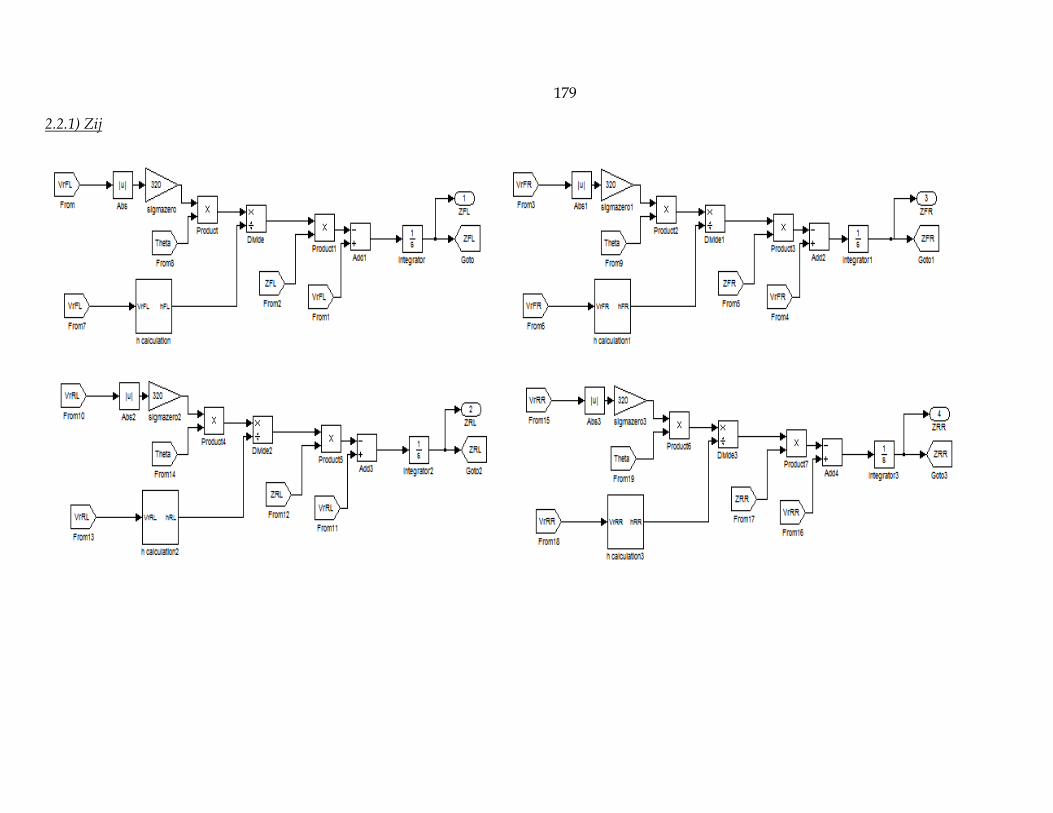
179
2.2.1) Zij
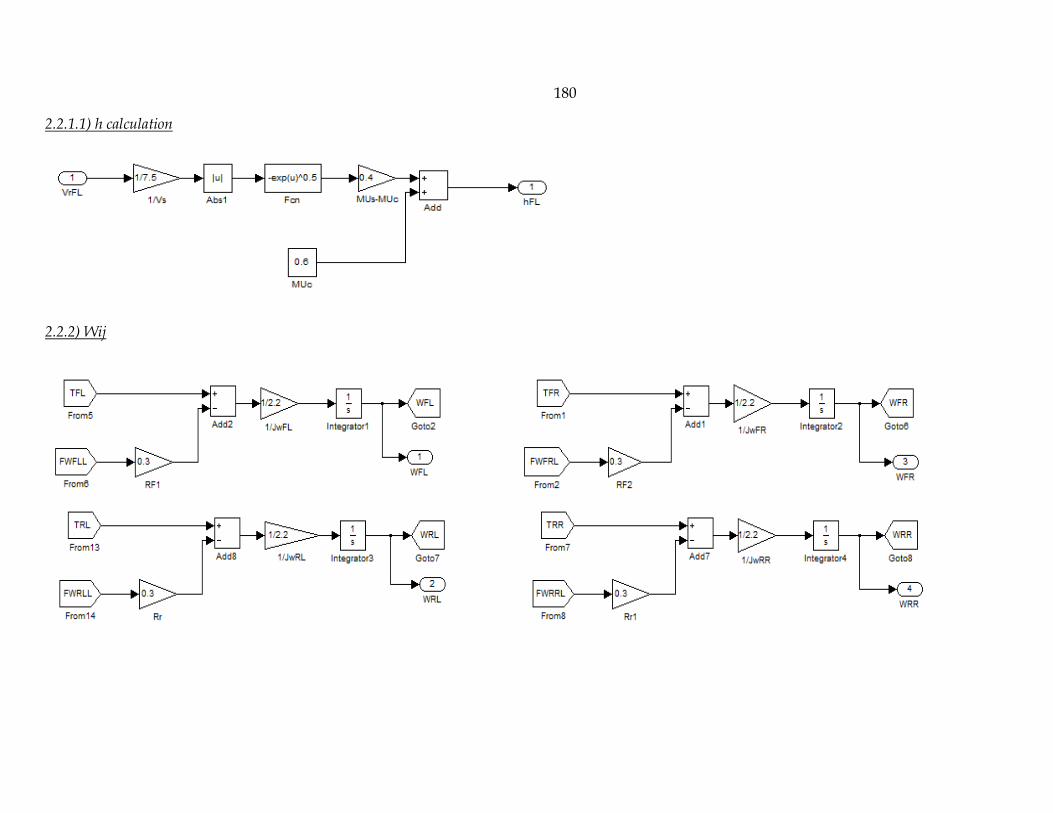
180
2.2.1.1) h calculation
2.2.2) Wij
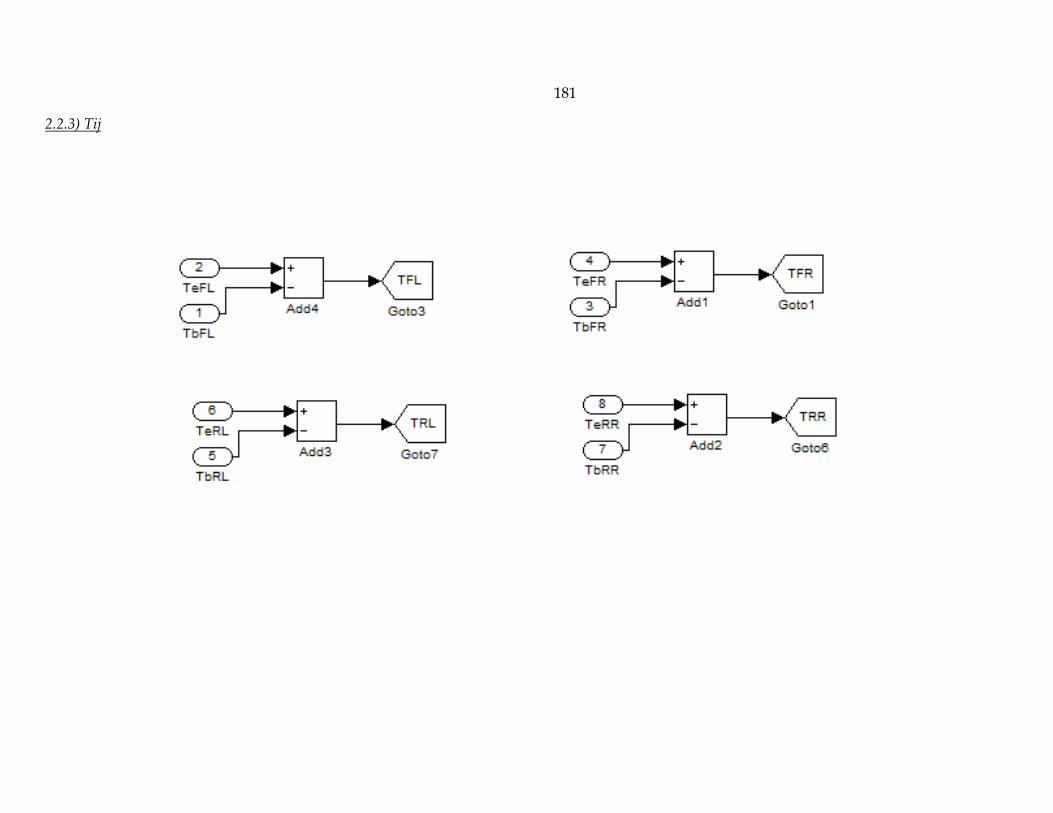
181
2.2.3) Tij
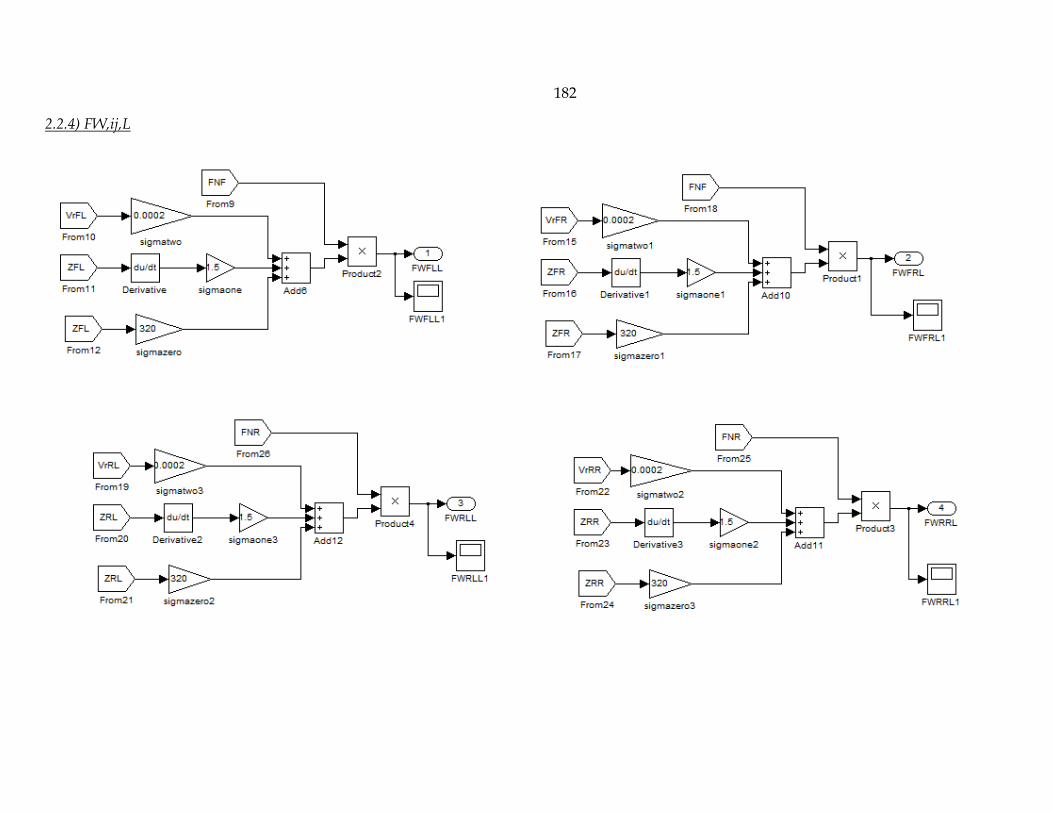
182
2.2.4) FW,ij,L
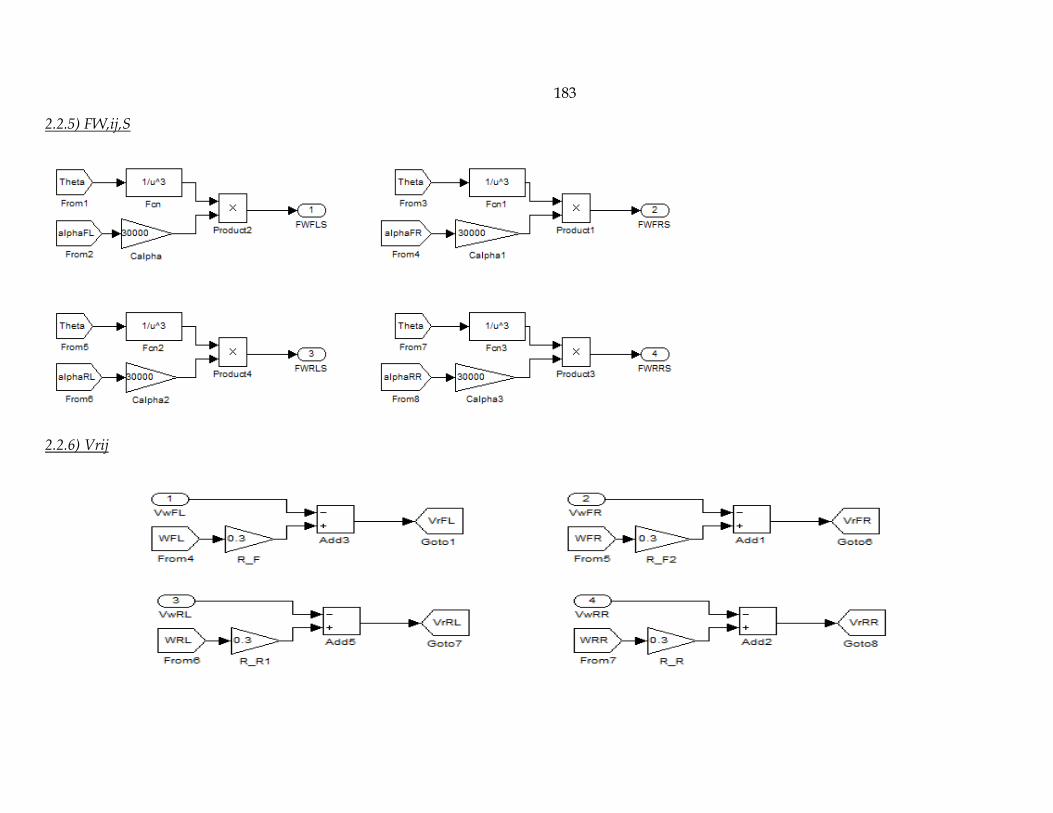
183
2.2.5) FW,ij,S
2.2.6) Vrij
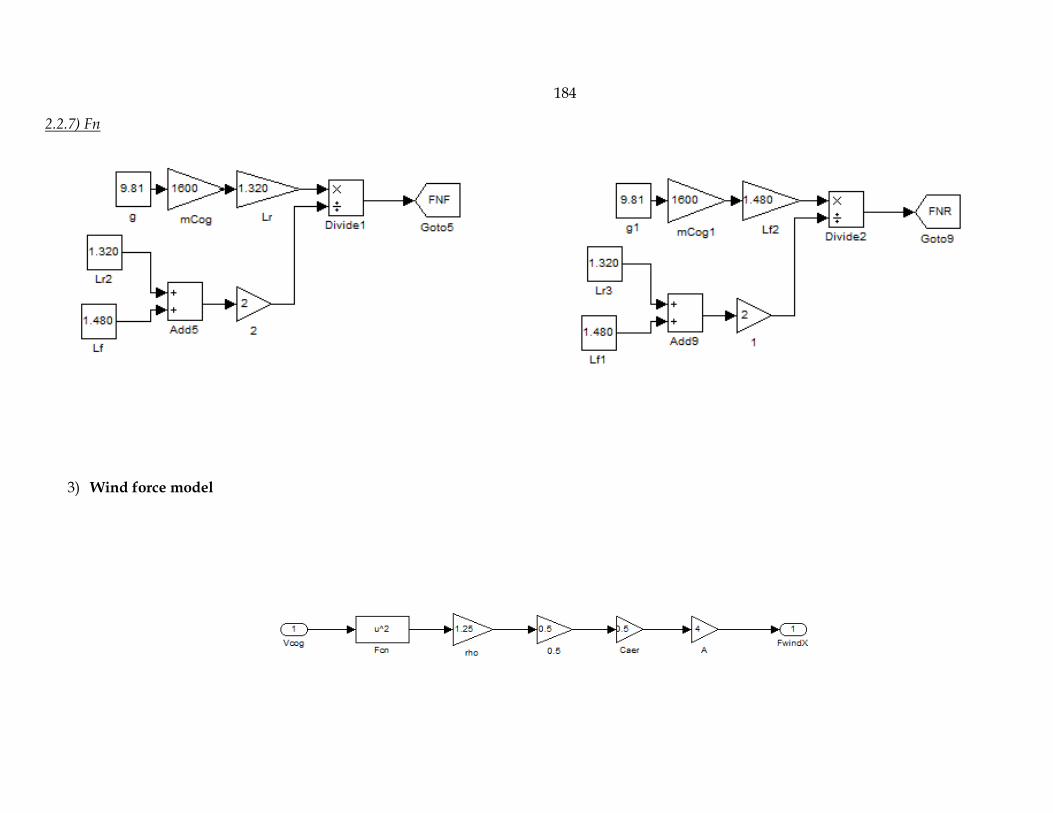
184
2.2.7) Fn
3) Wind force model
185
1.9 BIBLIOGRAFÍA
[1] Carlos Canudas de Wit, Panagiotis Tsiotras, “Dynamics Tire Friction
Models for Vehicle Traction Control”, In proceedings of 38th IEEE
Conference of Decision and Control, Phoenix, AS, 1999
[2] Egbert Bakker, Lars Nyborg, and Hans B. Pacejka, “Tyre Modeling for
Use in Vehicle Dynamics Studies”, SAE Transactions, (87042): 190-204,
1987.
[3] U. Kiencke, L, Nielsen, “Automotive Control Systems” New York
America, Springer-verlag Press, 2000.
[4] Qunzhi Zhou, Yungfeng Ai, Haojun Bao, “A Hybrid Vehicle Model for
Advanced Cruise Control”, Proceedings of 6th IEEE Conference on
Intelligent Transportation Systems, Shangai, China, 2003.
[5] Li li, Fei-Yue Wang, Qunzhi Zhou, “ Integrated longitudinal and lateral
tire/road friction modeling and monitoring for vehicle motion control”
IEEE transactions on Intelligent Transportation Systems, Volume 7, Issue
1, 2006.
[6] X. Claeys, J. Yi, L. Alvarez, R. Horowitz, C. Canudas de Wit, “ A
Dynamic Tire/Road Friction Model for 3D Vehicle Control and
Simulation”, In proceedings of 4th IEEE Conference of Intelligent
Transportation Systems, Oakland, USA, 2001.
187
[7] Carlos Canudas de Wit and R. Horowitz, “Observers for Tire/Road
Contact Friction using only Wheel angular velocity information”, In
Proceedings of 38th IEEE Conference of Decision and Control, Phoenix,
AZ, 1999.
[8] Li li, Fei-yue Wang, Guoling Shan and Qunzhi Zhou, “Design of Tire
Fault Observer Based on Estimation of Tire/Road Friction Conditions” to
be published in ACTA AUTOMATICA SINICA.