Embed Size (px)
DESCRIPTION
CALCULO SÍSMICO DE ESTRUCTURAS
Citation preview
CONTENIDO Capítulo 1 CARACTERÍSTICAS DE LOS SISMOS Capítulo 2 SISMICIDAD Y AMENAZA REGIONAL Capítulo 3 CONCEPTOS GENERALES EN EL ANÁLISIS DINÁMICO Capítulo 4 VIBRACIÓN LIBRE Capítulo 5 VIBRACIÓN FORZADA CARGA ARMÓNICA Capítulo 6 MOVIMIENTO FORZADO CARGA IMPULSIVA Capítulo 7 RESPUESTA A CARGA DINÁMICA GENERAL Capítulo 8 RESPUESTA SÍSMICA A SISTEMAS LINEALES Capítulo 9 RESPUESTA SÍSMICA A SISTEMAS NO LINEALES Capítulo 10 SISTEMAS DE VARIOS GRADOS DE LIBERTAD Capítulo 11 CRITERIOS DE ESTRUCTURACIÓN SISMO RESISTENTE EN EDIFICIOS Capítulo 12 MÉTODO DE LA FUERZA HORIZONTAL EQUIVALENTE Capítulo 13 MÉTODO DINÁMICO SUPERPOSICIÓN MODAL Capítulo 14 DISEÑO SÍSMICO DE ESTRUCTURAS DE CONCRETO Inicio Capítulo 1 CARACTERÍSTICAS DE LOS SISMOS 1.1 Conceptos Básicos de Sismología 1.2 Causas de los Sismos
1.2.1 Tectónica de Placas 1.2.2 Sismos de Origen Tectónico
1.3 Fallas Geológicas 1.3.1 Definición 1.3.2 Tipos de Falla
1.4 Ondas Sísmicas 1.4.1 Ondas de Cuerpo 1.4.2 Ondas Superficiales
1.5 Instrumentos de Medición y Registros Sísmicos
Page 1 of 7Capítulo 1 CARACTERÍSTICAS DE LOS SISMOS
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/CONTENIDO.htm
1.5.1 Sismómetro 1.5.2 Acelerómetro
1.6 Medidas de los Sismos 1.6.1 Magnitud 1.6.2 Intensidad 1.6.3 Relación entre Escala de Intensidad y Medida
Capítulo 2 SISMICIDAD Y AMENAZA REGIONAL 2.1 Actividad Sísmica de una Región
2.1.1 Geología Regional 2.1.2 Mapas de Eventos Sísmicos 2.1.3 Estudios de Liberación de Energía 2.1.4 Estudios de Probabilidad Sísmica
2.2 Efectos de los Sismos 2.3 Respuesta del Sitio a Sismos 2.4 Historia de los Sismos 2.5 Consecuencias de los Sismos 2.6 Estudios de Riesgo Sísmico Local y Nacional 2.7 Sismo de Diseño Capítulo 3 CONCEPTOS GENERALES EN EL ANÁLISIS DINÁMICO 3.1 Estructura Simple 3.2 Grados de Libertad 3.3 Sistema Linealmente Elástico 3.4 Amortiguamiento
3.4.1 Mecanismos de Disipación 3.4.2 Fuerza de Amortiguamiento
3.5 Ecuación de Movimiento 3.5.1 Segunda ley de Newton 3.5.2 Equilibrio Dinámico 3.5.3 Componentes de Masa, Amortiguamiento y Rigidez
3.6 Ecuación de Movimiento: Excitación Sísmica Capítulo 4 VIBRACIÓN LIBRE
Page 2 of 7Capítulo 1 CARACTERÍSTICAS DE LOS SISMOS
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/CONTENIDO.htm
4.1 Teoría General de Vibraciones 4.2 Definición 4.3 Vibración Libre no Amortiguada 4.4 Vibración Libre con Amortiguamiento Viscoso
4.4.1 Tipos de Movimiento 4.4.2 Sistema Subamortiguado
Capítulo 5 VIBRACIÓN FORZADA CARGA ARMÓNICA 5.1 Justificación 5.2 Sistema no Amortiguado con Carga Armónica
5.2.1 Ecuación de Movimiento 5.2.2 Resonancia
5.3 Sistema Amortiguado con Carga Armónica 5.3.1 Ecuación de Movimiento 5.3.2 Resonancia 5.3.3 Deformación Máxima 5.3.4 Factores de Respuesta Dinámica 5.3.5 Frecuencia Resonante y Respuesta Resonante
Capítulo 6 MOVIMIENTO FORZADO CARGA IMPULSIVA 6.1 Introducción 6.2 Carga Impulsiva Rectangular 6.3 Carga Impulsiva Triangular 6.4 Carga Impulsiva Tipo Sinoidal 6.5 Respuesta al Movimiento del Suelo. 6.6 Análisis Aproximado de Respuesta para Carga Impulsiva. Capítulo 7 RESPUESTA A CARGA DINÁMICA GENERAL 7.1 Integral de Duhamel. 7.2 Integral de Duhamel para un Sistema no Amortiguado. 7.3 Integral de Duhamel para un Sistema Amortiguado. 7.4 Evaluación Numérica de la Respuesta Dinámica Capítulo 8 RESPUESTA SÍSMICA A SISTEMAS LINEALES 8.1 Movimiento del Suelo.
Page 3 of 7Capítulo 1 CARACTERÍSTICAS DE LOS SISMOS
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/CONTENIDO.htm
8.2 Respuesta Dinámica de la Estructura 8.3 Ecuación de Movimiento 8.4 Espectro de Respuesta
8.4.1 Cantidades de Respuesta 8.4.2 Histograma de Respuesta 8.4.3 Concepto del Espectro de Respuesta 8.4.4 Espectro de Respuesta de Deformación 8.4.5 Espectro de Respuesta de Seudo Velocidad 8.4.6 Espectro de Respuesta de Seudo Aceleración 8.4.7 Espectro de Respuesta Combinado D-V-A 8.4.8 Construcción del Espectro de Respuesta
8.5 Características del Espectro de Respuesta 8.6 Espectro Elástico de Diseño
8.6.1 Construcción del Espectro de Diseño Capítulo 9 RESPUESTA SÍSMICA A SISTEMAS NO LINEALES 9.1 Introduccion. 9.2 Relación Fuerza-Deformación
9.2.1 Idealización Elastoplástica 9.2.2 Sistema Lineal Correspondiente
9.3 Esfuerzo de Fluencia Normalizado, Factor de Reducción de Fluencia y Factor de Ductilidad. 9.4 Ecuación de Movimiento y Parámetros de Control 9.5 Efectos de Fluencia 9.6 Espectro de Respuesta para Deformación de Fluencia y Esfuerzo de Fluencia
9.6.1 Definiciones 9.6.2 Esfuerzo de Fluencia para una Ductilidad Especifica 9.6.3 Construcción del Espectro de Respuesta con Ductilidad Constante
9.7 Esfuerzo de Diseño y Deformación a partir del Espectro de Respuesta 9.8 Esfuerzo de Fluencia de Diseño Capítulo 10 SISTEMAS DE VARIOS GRADOS DE LIBERTAD 10.1 Introducción 10.2 Ecuación de Movimiento 10.3 Respuesta Dinámica: Análisis Modal 10.4 Método Matricial
10.4.1 Matriz Modal y Espectral 10.4.2 Ortogonalidad de los Modos 10.4.3 Normalización de los Modos 10.4.4 Factor de Participación
Page 4 of 7Capítulo 1 CARACTERÍSTICAS DE LOS SISMOS
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/CONTENIDO.htm
10.5 Método Numérico 10.6 Método Iterativo Capítulo 11 CRITERIOS DE ESTRUCTURACIÓN SISMO RESISTENTE EN EDIFICIOS 11.1 Introducción 11.2 Requisitos de Configuración
11.2.1 Configuración en Elevación 11.2.2 Configuración en Planta 11.2.3 Poco Peso 11.2.4 Hiperestaticidad 11.2.5 Columna Fuerte, Viga Débil
11.3 Sistemas Estructurales 11.3.1 Sistema de Muros Portantes 11.3.2 Sistemas de Estructuras de Edificación 11.3.3 Sistema de Pórtico Resistente a Momentos 11.3.4 Sistema Doble (Dual)
11.4 Selección del Método de Análisis Capítulo 12 MÉTODO DE LA FUERZA HORIZONTAL EQUIVALENTE 12.1 Determinación de las Fuerzas Laterales
12.1.1 Factor de Zona Sísmica 12.1.2 Coeficiente de Respuesta del Terreno 12.1.3 Tipo de Perfil del Suelo 12.1.4 Tipo de Lugar de Origen del Sismo 12.1.5 Factor de Cercanía a la Fuente de Origen 12.1.6 Periodo Fundamental 12.1.7 Amortiguamiento y Ductilidad 12.1.8 Factor de Modificación de Respuesta 12.1.9 Factor de Importancia 12.1.10 Coeficiente de Respuesta Sísmica 12.1.11 Carga Muerta Sísmica 12.1.12 Procedimiento de la Fuerza Lateral Equivalente
12.2 Estructuras de Varios Niveles 12.2.1 Distribución Vertical de la Fuerza Sísmica 12.2.2 Volcamiento 12.2.3 Efecto P-Delta 12.2.4 Desplazamientos de Piso 12.2.5 Cargas en los Diafragmas
12.3 Fuerza Cortante Basal para el Diseño Simplificado
Page 5 of 7Capítulo 1 CARACTERÍSTICAS DE LOS SISMOS
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/CONTENIDO.htm
12.3.1 Fuerza Cortante Basal 12.3.2 Distribución Vertical 12.3.3 Calculo de los Desplazamientos de Piso 12.3.4 Determinación de la Carga Sobre los Diafragmas
12.4 Combinaciones de Carga 12.4.1 Combinaciones de Carga Utilizando el Diseño por Resistencia 12.4.2 Combinaciones de Carga Utilizando el Diseño de Esfuerzo Admisible
12.5 Torsión 12.5.1 Momento Torsor 12.5.2 Centro de Masas y Centro de Rigideces 12.5.3 Efectos de la Torsión
12.6 Tablas Capítulo 13 MÉTODO DINÁMICO SUPERPOSICIÓN MODAL 13.1 Introducción 13.2 Ventajas del Análisis Modal 13.3 Procedimiento del Análisis Modal 13.4 Análisis Espectral
13.4.1 Numero de Modos 13.4.2 Combinación de Modos 13.4.3 Efectos de Dirección 13.4.4 Torsión 13.4.5 Sistemas Dobles
13.5 El Análisis por Historia del Tiempo (Cronológico) 13.6 Simulador Estructural.
13.6.1 Análisis de Eigenvectores 13.6.2 Análisis del Vector de Ritz 13.6.3 Resultados del Análisis Modal 13.6.4 Análisis del Espectro de Respuesta 13.6.5 Resultados del Análisis del Espectro de Respuesta
Capítulo 14 DISEÑO SÍSMICO DE ESTRUCTURAS DE CONCRETO 14.1 Introducción 14.2 Cargas de Diseño 14.3 Pórticos Especiales Resistentes a Momentos
14.3.1 Diseño por el Método de la Resistencia 14.3.2 Resistencia y Ductilidad de Secciones a Flexión 14.3.3 Detalles Sismorresistentes para Vigas 14.3.4 Detalles Sismorresistentes para Columnas
Page 6 of 7Capítulo 1 CARACTERÍSTICAS DE LOS SISMOS
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/CONTENIDO.htm

14.3.5 Unión Viga-Columna 14.4 Muros de Corte
14.4.1 Resistencia al Corte 14.4.2 Muros de Corte para Cargas a Flexión y Axiales
Principal
Page 7 of 7Capítulo 1 CARACTERÍSTICAS DE LOS SISMOS
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/CONTENIDO.htm
Capítulo 4 VIBRACIÓN LIBRE
4.1 TEORÍA GENERAL DE VIBRACIONES
El análisis de vibraciones es un tema muy amplio al cual se han dedicado estudios completos, esta introducción expone de forma resumida algunos aspectos teóricos de las vibraciones de los sistemas elásticos, que ayudarán a comprender los métodos de cálculo de la acción de los sismos sobre las estructuras basados en sus efectos dinámicos. El estudio de las vibraciones se refiere a los movimientos de los cuerpos y a las fuerzas asociadas con ellos. Todos los cuerpos que poseen masa y elasticidad, son capaces de vibrar. Una vibración mecánica es el movimiento de una partícula o cuerpo que oscila alrededor de una posición de equilibrio. La mayoría de las máquinas y estructuras experimentan vibraciones hasta cierto grado por lo que su diseño requiere la consideración de este efecto dinámico debido a que ocasiona un aumento en los esfuerzos y tensiones. Una vibración se produce cuando el sistema en cuestión es desplazado desde una posición de equilibrio estable, el sistema tiende a retornar a dicha posición, bajo la acción de fuerzas de restitución elásticas o gravitacionales, moviéndose de un lado a otro hasta alcanzar su posición de equilibrio. El intervalo de tiempo necesario para que el sistema efectúe un ciclo completo de movimiento se llama periodo de vibración, el número de ciclos por unidad de tiempo define la frecuencia y el desplazamiento máximo del sistema desde su posición de equilibrio se denomina amplitud de vibración. Los sistemas oscilatorios pueden clasificarse como lineales o no lineales. Para los sistemas lineales rige el principio de superposición y las técnicas matemáticas para su tratamiento están bien desarrolladas (Ley de Hooke). Por el contrario las técnicas para el análisis de sistemas no lineales son más complicadas y no muy conocidas. Existen dos clases de vibraciones, las libres y las forzadas. Cualquier sistema elástico puede tener una vibración libre a consecuencia de un impulso inicial, donde el movimiento es mantenido únicamente por las fuerzas de restitución inherentes al mismo. El sistema bajo vibración libre vibrará en una o más de sus frecuencias naturales, dependientes de la distribución de su masa y rigidez. Cuando al sistema se le aplica fuerzas perturbadoras externas, el movimiento resultante es una vibración forzada. Cuando la excitación es oscilatoria, ya sea periódica o no, como la de un sismo, el sistema es obligado a vibrar a la frecuencia de excitación, si ésta coincide con una de las frecuencias naturales del sistema se
Page 1 of 8Vibración Libre
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IV.htm
produce resonancia, en este estado tienen lugar oscilaciones peligrosamente grandes; así la falla por resonancia de estructuras como puentes o edificios es una dramática posibilidad que debe tenerse muy en cuenta. Por estemotivo el cálculo de las frecuencias naturales de vibración es de gran importancia en el diseño sísmico deestructuras.
4.2 DEFINICIÓN
Una estructura está en vibración libre cuando es perturbada de su posición estática de equilibrio y comienza avibrar sin la excitación de fuerza externa alguna (p(t) = 0).
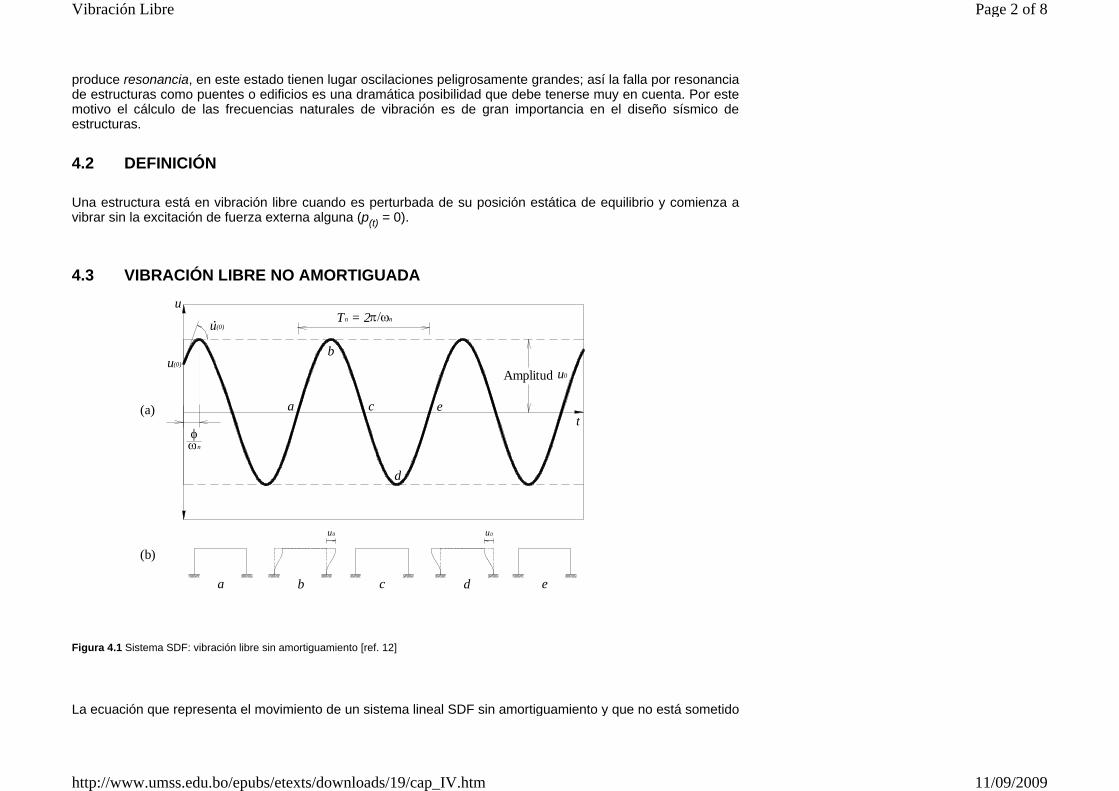
4.3 VIBRACIÓN LIBRE NO AMORTIGUADA
Figura 4.1 Sistema SDF: vibración libre sin amortiguamiento [ref. 12]
La ecuación que representa el movimiento de un sistema lineal SDF sin amortiguamiento y que no está sometido
Tn = 2π/ω n
Amplitud u0
u(0)·u
u(0)
a
b
c
d
et
u0
b a c d
u0
e
(a)
(b)
ω nφ
Page 2 of 8Vibración Libre
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IV.htm
a la acción de una fuerza externa es: (4.1)
(4.2)
donde ωn es la frecuencia natural en vibración libre del sistema y es igual a:
(4.3)
El desarrollo de la ecuación diferencial 4.1 se expone en el Apéndice I, y su solución es:
(4.4)
Las constantes A y B se hallan a partir de las condiciones iniciales: u(0) y , el desplazamiento y la velocidadiniciales respectivamente. Obteniéndose por lo tanto:
(4.5) Las Figuras 4.1(a) y 4.1(b) ilustran el movimiento de la masa durante un ciclo de vibración libre del sistema para la ecuación 4.5. A partir de estas figuras se observa que el tiempo requerido de un sistema no amortiguado paracompletar un ciclo de vibración libre es denominado periodo natural de vibración, Tn, y es:
(4.6) La frecuencia cíclica natural de vibración, fn, es definida como el número de ciclos que se repiten en 1 [s] detiempo y su valor es:
(4.7) Las propiedades de vibración natural, ωn, Tn y fn, dependen de la masa y rigidez de la estructura, y el término“natural” es utilizado para enfatizar el hecho de que éstas son propiedades naturales del sistema cuando ésteesta en estado de vibración libre. El movimiento representado por la ecuación 4.5 puede también ser expresado en la forma:
ukum 0=⋅+⋅ &&
uu n 02 =⋅+ω&&
mk
n =ω
tsenBtAu nnt ωω ⋅+⋅= cos)(
)0(u&
tsenu
tuu nn
nt ωω
ω )0()0()( cos
&+⋅=
nnT
ωπ2
=
nn T
f 1=
Page 3 of 8Vibración Libre
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IV.htm
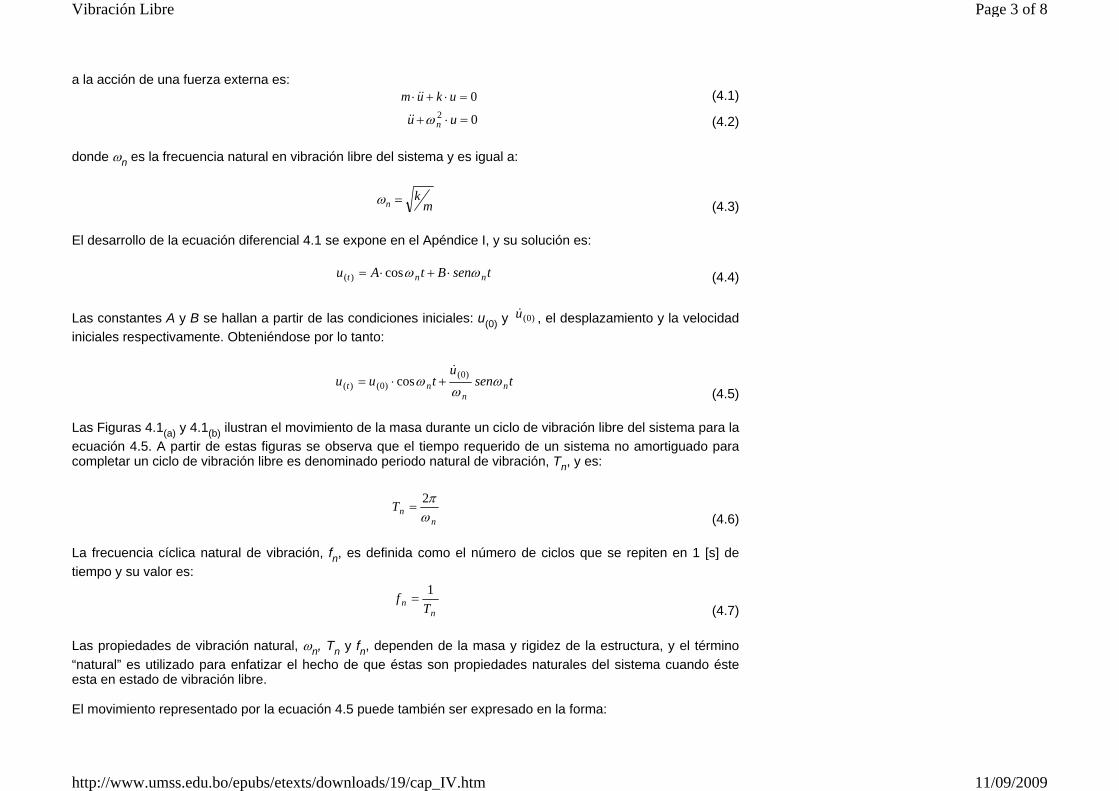
(4.8)
Figura 4.2 Vibración libre, representación vectorial [ref. 13]
Donde u0 es la magnitud del desplazamiento máximo y es llamada amplitud de movimiento, la cual esta dadapor:
(4.9)Y el ángulo de fase φ esta dado por:
(4.10)
En la Figura 4.2 esta representada vectorialmente la ecuación de movimiento, donde la respuesta esta dada porla parte real o proyección horizontal de los dos vectores de rotación; y el ángulo de fase representa la distancia
( )φω −= tuu nt cos0)(
2)0(2
)0(0⎥⎥⎦
⎤
⎢⎢⎣
⎡+=
n
uuu
ω
&
)0(
)0(
uu
artgnω
φ&
=
u(0)·
u0
u(0)
ωnt
ωnt
φ
ωn
ωn
u(0) cosωnt senωntωn
u(0)·u0 cos(ωnt-φ)
Imaginario
Real
Page 4 of 8Vibración Libre
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IV.htm
angular de retraso en la respuesta del término del coseno.
4.4 VIBRACIÓN LIBRE CON AMORTIGUAMIENTO VISCOSO
La ecuación de movimiento para un sistema lineal amortiguado en vibración libre es:
(4.11)
dividiendo la ecuación 4.11 por la masa se obtiene:
(4.12)
donde: (4.13)
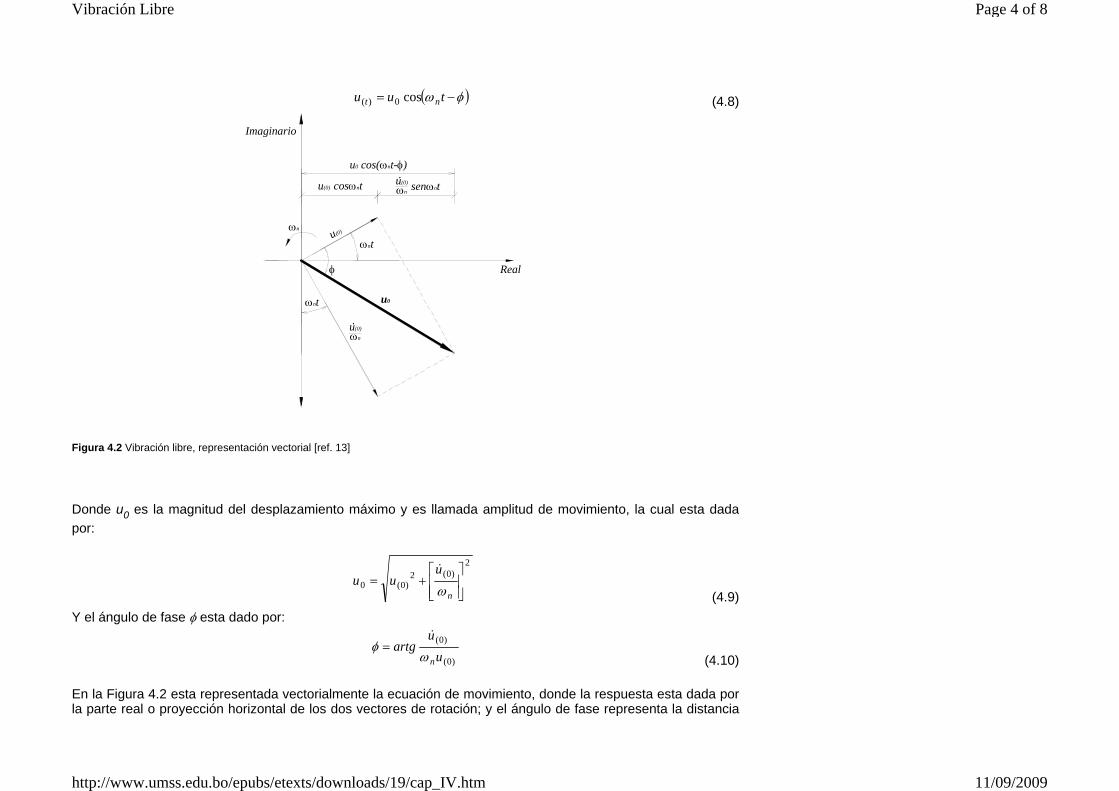
(4.14)El coeficiente de amortiguamiento crítico, ccr, y la razón o relación de amortiguamiento crítico, ξ, son parámetros que determinan el tipo de movimiento del sistema. 4.4.1 Tipos de Movimiento
0=⋅+⋅+⋅ ukucum &&&
02 2 =++ uuu nn ωξω &&&
crcc
=ξ
nncr
kkmmcω
ω 222 ===
u(t)/u(
0)
1/Tn
1
-1
0
1 2 3
subamortiguado, ξ=0.1
criticamente amortiguado, ξ=1
sobreamortiguado, ξ=2
Page 5 of 8Vibración Libre
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IV.htm
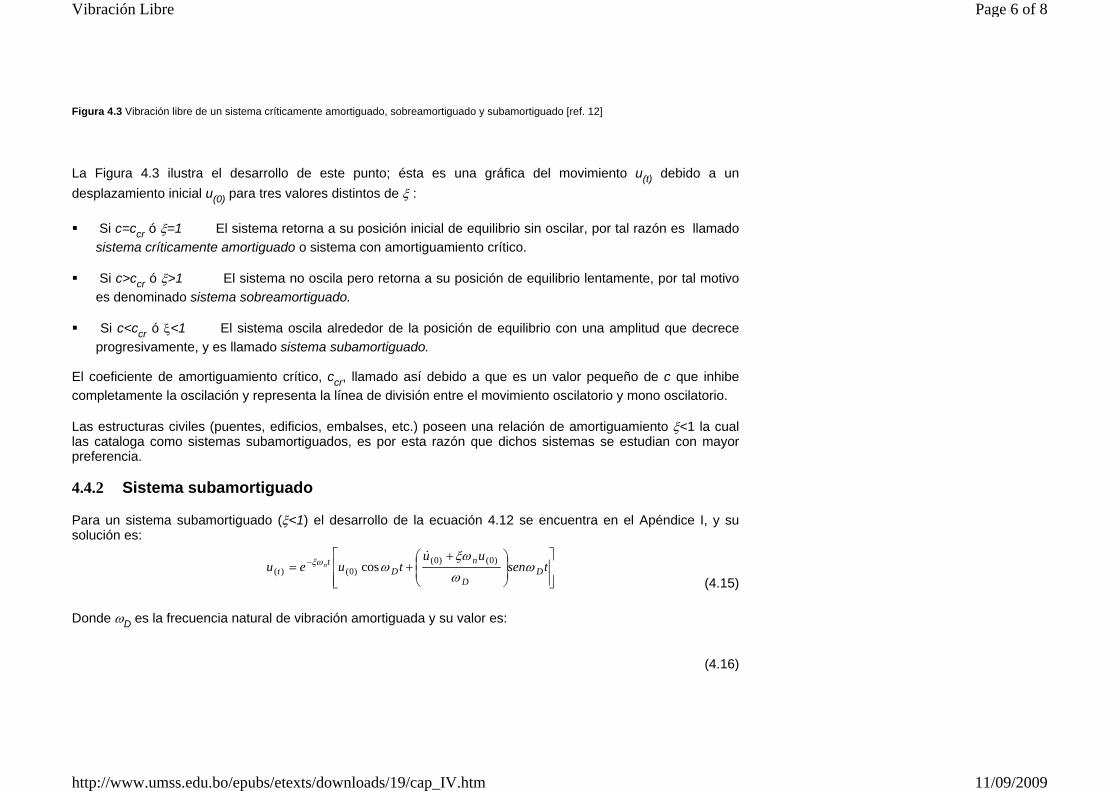
Figura 4.3 Vibración libre de un sistema críticamente amortiguado, sobreamortiguado y subamortiguado [ref. 12]
La Figura 4.3 ilustra el desarrollo de este punto; ésta es una gráfica del movimiento u(t) debido a un desplazamiento inicial u(0) para tres valores distintos de ξ :
Si c=ccr ó ξ=1 El sistema retorna a su posición inicial de equilibrio sin oscilar, por tal razón es llamado sistema críticamente amortiguado o sistema con amortiguamiento crítico.
Si c>ccr ó ξ>1 El sistema no oscila pero retorna a su posición de equilibrio lentamente, por tal motivo
es denominado sistema sobreamortiguado.
Si c<ccr ó ξ<1 El sistema oscila alrededor de la posición de equilibrio con una amplitud que decrece progresivamente, y es llamado sistema subamortiguado.
El coeficiente de amortiguamiento crítico, ccr, llamado así debido a que es un valor pequeño de c que inhibe completamente la oscilación y representa la línea de división entre el movimiento oscilatorio y mono oscilatorio. Las estructuras civiles (puentes, edificios, embalses, etc.) poseen una relación de amortiguamiento ξ<1 la cual las cataloga como sistemas subamortiguados, es por esta razón que dichos sistemas se estudian con mayorpreferencia. 4.4.2 Sistema subamortiguado Para un sistema subamortiguado (ξ<1) el desarrollo de la ecuación 4.12 se encuentra en el Apéndice I, y susolución es:
(4.15) Donde ωD es la frecuencia natural de vibración amortiguada y su valor es:
(4.16)
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ ++= − tsen
uutueu D
D
nD
tt
n ωω
ξωωξω )0()0(
)0()( cos&
Page 6 of 8Vibración Libre
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IV.htm
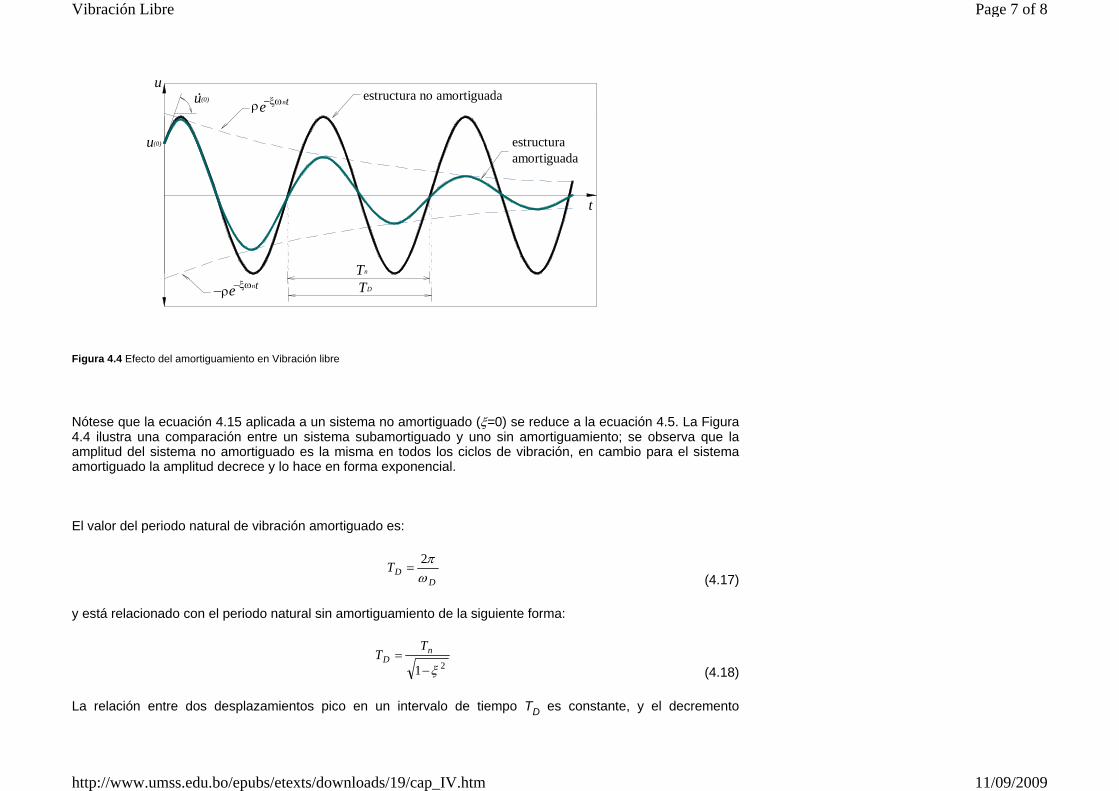
Figura 4.4 Efecto del amortiguamiento en Vibración libre
Nótese que la ecuación 4.15 aplicada a un sistema no amortiguado (ξ=0) se reduce a la ecuación 4.5. La Figura 4.4 ilustra una comparación entre un sistema subamortiguado y uno sin amortiguamiento; se observa que laamplitud del sistema no amortiguado es la misma en todos los ciclos de vibración, en cambio para el sistemaamortiguado la amplitud decrece y lo hace en forma exponencial. El valor del periodo natural de vibración amortiguado es:
(4.17) y está relacionado con el periodo natural sin amortiguamiento de la siguiente forma:
(4.18) La relación entre dos desplazamientos pico en un intervalo de tiempo TD es constante, y el decremento
DDT
ωπ2
=
21 ξ−= n
DT
T
u (0)·
u
u (0)
t
Tn
TD
estructura no amortiguada
estructura amortiguada
ρ e −ξω n t
−ξω n t −ρ e
Page 7 of 8Vibración Libre
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IV.htm
logarítmico está definido como el logaritmo natural de esta cantidad y está dado por:
(4.19) y la relación entre dos desplazamientos cuales quiera es:
(4.20)Capitulo 3 Capitulo 5 Contenido
πξξ
πξξωδ 2
1
2ln
21≈
−===
+Dn
i
i Tuu
πξδ 2ln1
1
1 ≈=+ju
uj
Page 8 of 8Vibración Libre
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IV.htm
Capítulo 5 VIBRACIÓN FORZADA CARGA ARMÓNICA
5.1 JUSTIFICACIÓN
El estudio de la respuesta del sistema de un solo grado de libertad (SDF) a la acción de una carga armónica establece bases para el entendimiento de la respuestade estructuras más complejas a excitaciones externas.
5.2 SISTEMA NO AMORTIGUADO CON CARGA ARMÓNICA
5.2.1 Ecuación de Movimiento Estableciendo p(t)=p0 · senωt en la ecuación 3.4 se obtiene la ecuación diferencial[1] que gobierna el movimiento forzado por carga armónica para un sistema noamortiguado:
(5.1) Donde p0 es la amplitud o valor máxima de la fuerza (Figura 5.1) y ω es la frecuencia de excitación. La solución particular a la ecuación diferencial 5.1 es:
(5.2) La solución complementaria de la ecuación 5.1 es:
(5.3) La solución total es la suma de ambas ecuaciones:
tsenpukum ω0=⋅+⋅ &&
( )tsen
kp
un
tp ωωω 2
0)(
11
−⋅=
tsenBtAu nntc ωω ⋅+⋅= cos)(
Page 1 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm
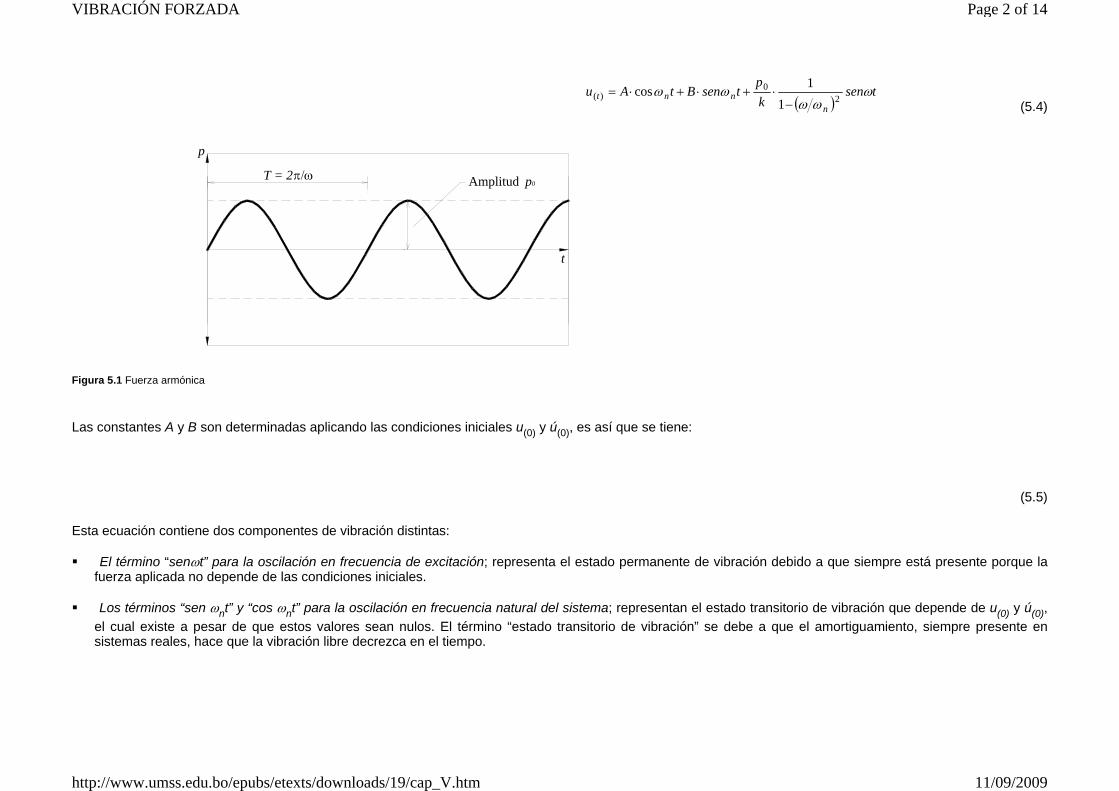
(5.4) Figura 5.1 Fuerza armónica
Las constantes A y B son determinadas aplicando las condiciones iniciales u(0) y ú(0), es así que se tiene:
(5.5) Esta ecuación contiene dos componentes de vibración distintas:
El término “senωt” para la oscilación en frecuencia de excitación; representa el estado permanente de vibración debido a que siempre está presente porque lafuerza aplicada no depende de las condiciones iniciales.
Los términos “sen ωnt” y “cos ωnt” para la oscilación en frecuencia natural del sistema; representan el estado transitorio de vibración que depende de u(0) y ú(0),
el cual existe a pesar de que estos valores sean nulos. El término “estado transitorio de vibración” se debe a que el amortiguamiento, siempre presente en sistemas reales, hace que la vibración libre decrezca en el tiempo.
( )tsen
kp
tsenBtAun
nnt ωωω
ωω2
0)(
11cos
−⋅+⋅+⋅=
T = 2π/ω p0
p
t
Amplitud
Page 2 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm
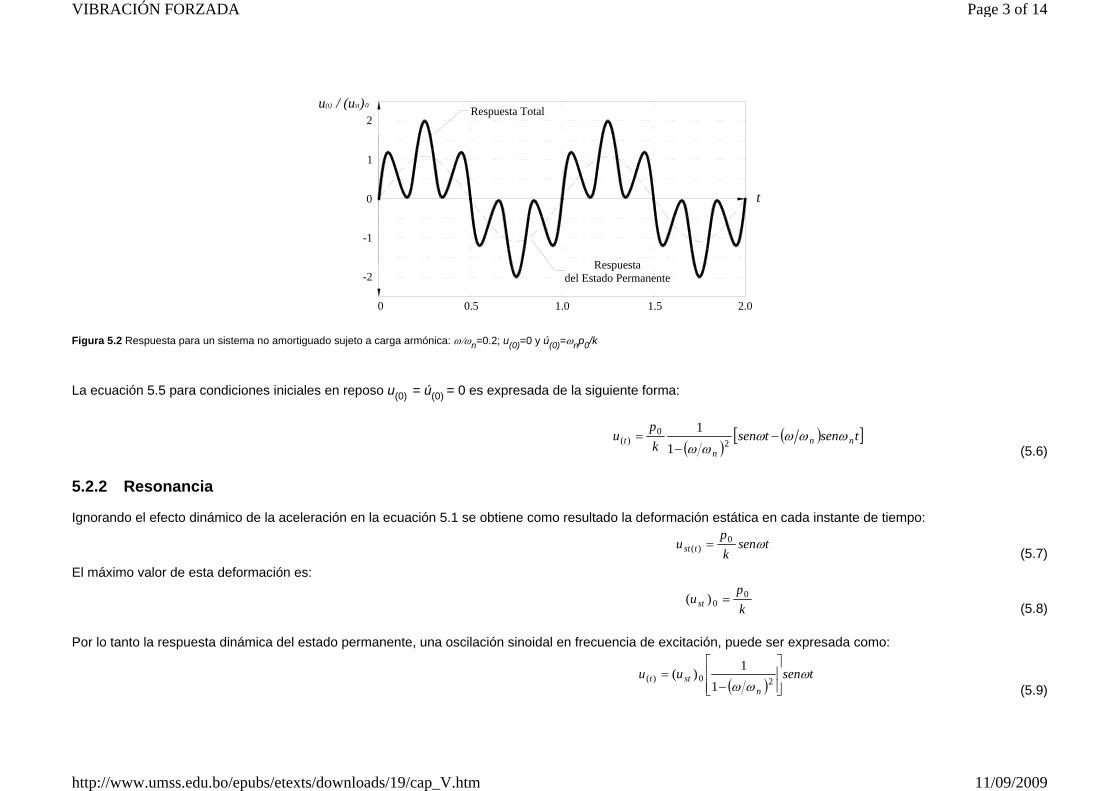
Figura 5.2 Respuesta para un sistema no amortiguado sujeto a carga armónica: ω/ωn=0.2; u(0)=0 y ú(0)=ωnp0/k
La ecuación 5.5 para condiciones iniciales en reposo u(0) = ú(0) = 0 es expresada de la siguiente forma:
(5.6) 5.2.2 Resonancia Ignorando el efecto dinámico de la aceleración en la ecuación 5.1 se obtiene como resultado la deformación estática en cada instante de tiempo:
(5.7)El máximo valor de esta deformación es:
(5.8) Por lo tanto la respuesta dinámica del estado permanente, una oscilación sinoidal en frecuencia de excitación, puede ser expresada como:
(5.9)
( )( )[ ]tsentsen
kp
u nnn
t ωωωωωω
−−
=2
0)(
11
tsenkp
u tst ω0)( =
kp
ust0
0)( =
( )tsenuu
nstt ω
ωω ⎥⎥⎦
⎤
⎢⎢⎣
⎡
−=
20)(1
1)(
2
1
0
-1
-2
0 0.5 1.0 1.5 2.0
u(t) / (ust)0
t
Respuesta Total
Respuesta del Estado Permanente
Page 3 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm
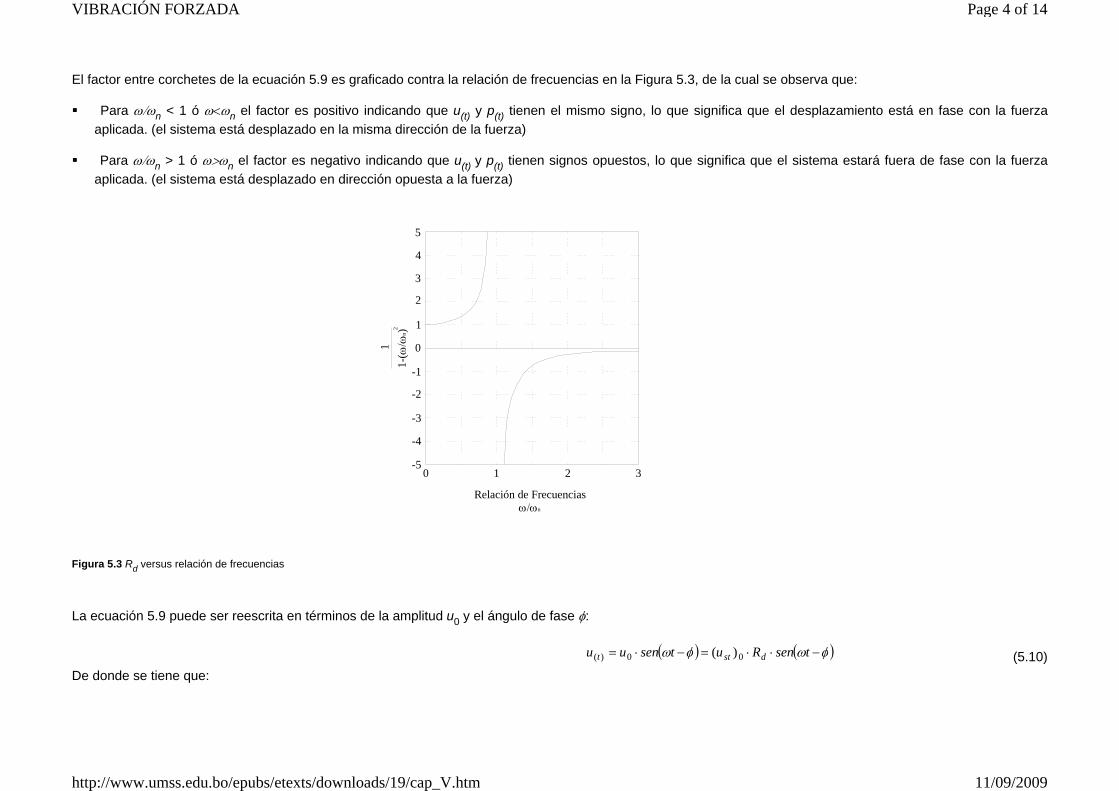
El factor entre corchetes de la ecuación 5.9 es graficado contra la relación de frecuencias en la Figura 5.3, de la cual se observa que:
Para ω/ωn < 1 ó ω<ωn el factor es positivo indicando que u(t) y p(t) tienen el mismo signo, lo que significa que el desplazamiento está en fase con la fuerzaaplicada. (el sistema está desplazado en la misma dirección de la fuerza)
Para ω/ωn > 1 ó ω>ωn el factor es negativo indicando que u(t) y p(t) tienen signos opuestos, lo que significa que el sistema estará fuera de fase con la fuerza
aplicada. (el sistema está desplazado en dirección opuesta a la fuerza)
Figura 5.3 Rd versus relación de frecuencias
La ecuación 5.9 puede ser reescrita en términos de la amplitud u0 y el ángulo de fase φ:
(5.10)De donde se tiene que:
( ) ( )φωφω −⋅⋅=−⋅= tsenRutsenuu dstt 00)( )(
5
4
3
2
1
0
-1
-2
-3
-4
-50 1 2 3
Relación de Frecuencias ω/ωn
1-(ω
/ωn)
12
Page 4 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm
(5.11) Donde el factor de deformación Rd es la relación de amplitud de deformación vibratoria u0 y la deformación estática (ust)0 debido a la fuerza p0. Consiguientemente se define la frecuencia resonante como aquella frecuencia de excitación para la cual Rd es máximo. Para un sistema no amortiguado la frecuencia resonante es ωn siendo Rd infinito para esta frecuencia y la deformación vibratoria crece indefinidamente, pero ésta se vuelve infinita sólo después de untiempo infinito. Para ω=ωn la ecuación 5.6 no es más válida; en este caso la función C·senωt, como elección de una solución particular a la ecuación diferencial[2], falla debido a que ésta ya forma parte de la solución complementaria, por tanto la solución particular ahora es:
(5.12)Y la solución total es:
(5.13) Las constantes A y B son determinadas aplicando las condiciones iniciales en reposo u(0)=ú(0)=0 es así que se tiene la ecuación de respuesta:
(5.14)ó:
( ) ⎩⎨⎧
>°<°
−==
180 0
uu
Rn
n
nstd ωω
ωωφ
ωω 20
0
1
1)(
nnntp ttk
pu ωωωω =⋅−= cos
20
)(
ttk
ptsenBtAu nnnnt ωωωω cos
2cos 0
)( ⋅−⋅+⋅=
Page 5 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm
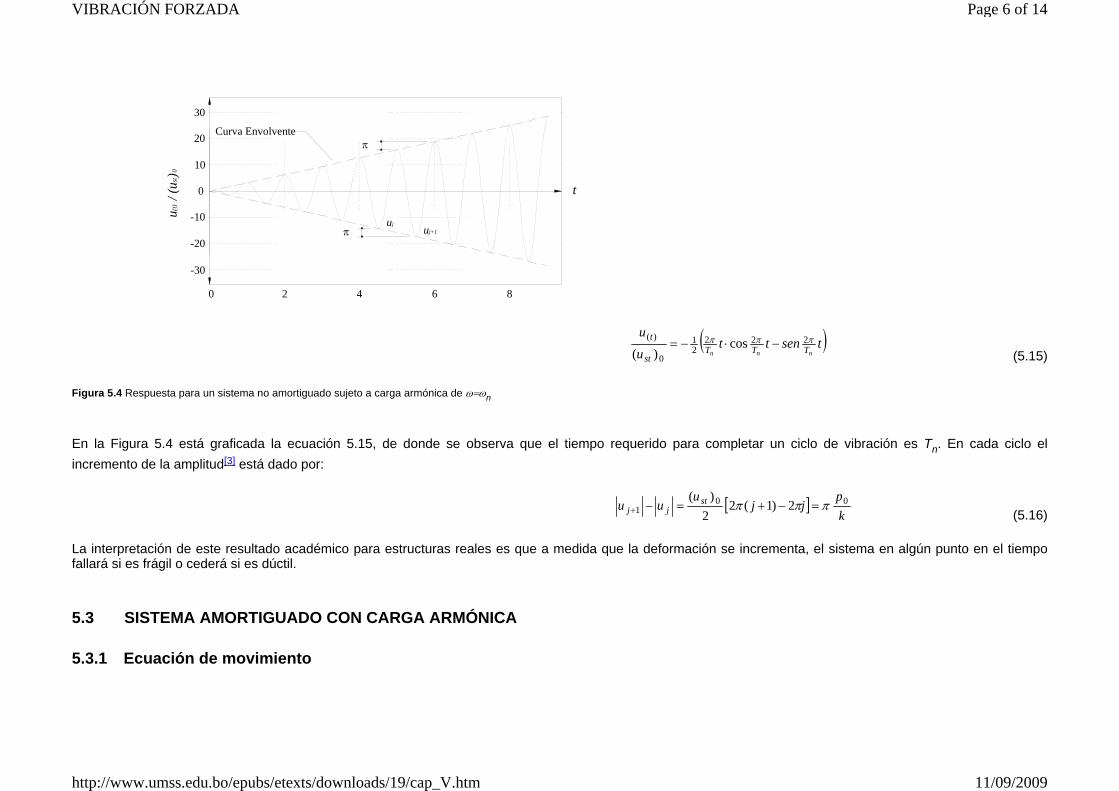
(5.15)
Figura 5.4 Respuesta para un sistema no amortiguado sujeto a carga armónica de ω=ωn
En la Figura 5.4 está graficada la ecuación 5.15, de donde se observa que el tiempo requerido para completar un ciclo de vibración es Tn. En cada ciclo el incremento de la amplitud[3] está dado por:
(5.16) La interpretación de este resultado académico para estructuras reales es que a medida que la deformación se incrementa, el sistema en algún punto en el tiempofallará si es frágil o cederá si es dúctil.
5.3 SISTEMA AMORTIGUADO CON CARGA ARMÓNICA
5.3.1 Ecuación de movimiento
( )tsenttuu
nnn TTTst
t πππ 22221
0
)( cos)(
−⋅−=
[ ]kp
jju
uu stjj
001 2)1(2
2)(
πππ =−+=−+
-20
0
10
-10u(t) /
(ust)0
0
20
t
42 6 8
30
-30
Curva Envolvente
π
π
ujuj+1
Page 6 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm
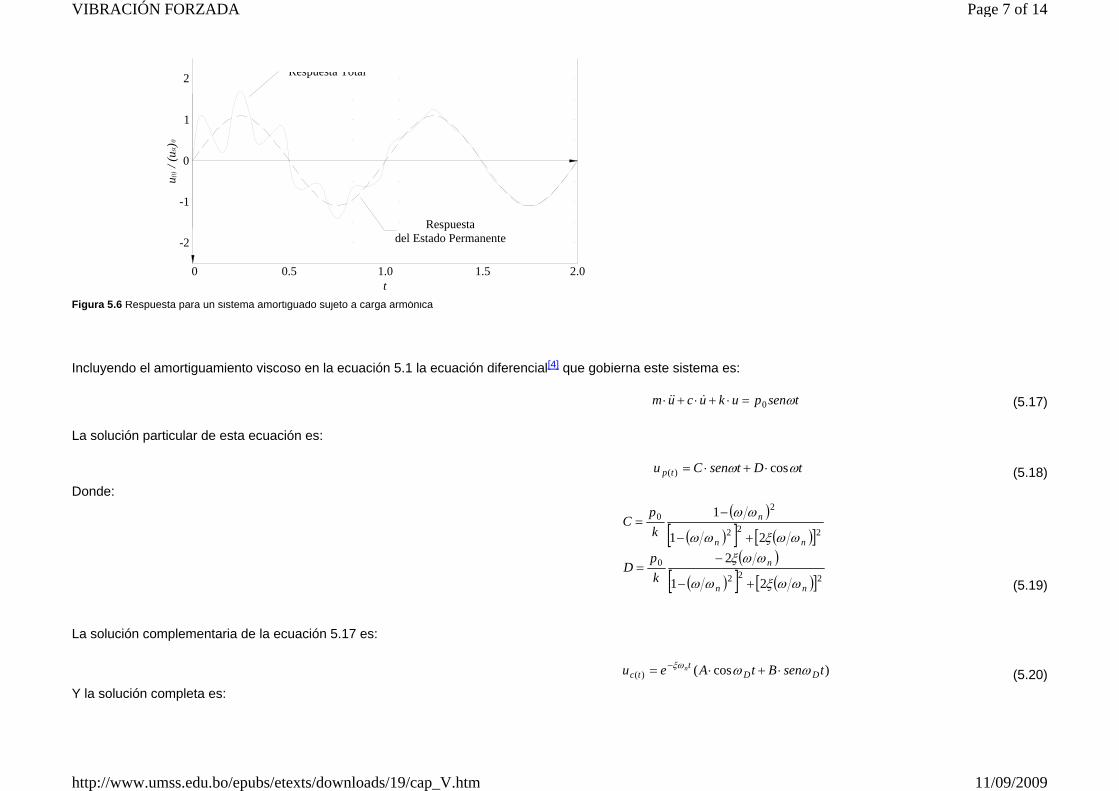
Figura 5.6 Respuesta para un sistema amortiguado sujeto a carga armónica
Incluyendo el amortiguamiento viscoso en la ecuación 5.1 la ecuación diferencial[4] que gobierna este sistema es:
(5.17) La solución particular de esta ecuación es:
(5.18)
Donde:
(5.19) La solución complementaria de la ecuación 5.17 es:
(5.20)Y la solución completa es:
tsenpukucum ω0=⋅+⋅+⋅ &&&
tDtsenCu tp ωω cos)( ⋅+⋅=
( )( )[ ] ( )[ ]
( )( )[ ] ( )[ ]222
0
222
20
21
221
1
nn
n
nn
n
kp
D
kp
C
ωωξωω
ωωξωωξωω
ωω
+−
−=
+−
−=
)cos()( tsenBtAeu DDt
tcn ωωξω ⋅+⋅= −
2
1
0
-1
-2
0 0.5 1.0 1.5 2.0
u(t) /
(ust)0
t
Respuesta del Estado Permanente
Respuesta Total
Page 7 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm

(5.21) Donde las constantes A y B pueden determinarse mediante procedimientos estándar en términos del desplazamiento u(0) y la velocidad ú(0). La Figura 5.5 muestra la ecuación 5.21 graficada para ω/ωn = 0.2 ξ = 0.05 u(0) = 0 y ú(0) =ωn p0 / k. La respuesta total es representada por una línea de trazo continuo y la respuesta del estado permanente por una línea discontinua, la diferencia entre ambas es la respuesta transitoria, la cual decae exponencialmente conel tiempo en un valor que depende de ω/ωn y ξ ; quedando únicamente la respuesta forzada y es por esta razón que es llamada respuesta del estado permanente. 5.3.2 Resonancia Para ω=ωn las constantes C y D de la ecuación 5.19 son:
Las constantes A y B se obtienen a partir de las condiciones iniciales en reposo u(0) = ú(0)=0 y para ω=ωn:
Entonces la respuesta para un sistema amortiguado sujeto a carga armónica para ω=ωn es:
(5.22) Esta ecuación de respuesta es graficada en la Figura 5.6, se observa que la magnitud de los desplazamientos es menor que los presentados por la Figura 5.4, y queel límite de respuesta está dado por:
(5.23) Para amortiguamientos pequeños el término del seno en la ecuación 5.22 es pequeño y , por lo que la ecuación 5.22 toma la forma de:
444 3444 21444444 3444444 21Permanente Estado
tDtsenCTemporal Estado
tsenBtAeu DDt
tn ωωωωξω cos)cos()( ⋅+⋅+⋅+⋅= −
ξ2)(
0 0stuD C −==
2
00
12
)(2
)(
ξξ −== stst u
B u
A
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−+= − ttsenteuu nDD
tstt
n ωωξ
ξω
ξξω cos
1cos
21)(
20)(
ξ2)( 0
0stu
u =
nD ωω ≈
Page 8 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm
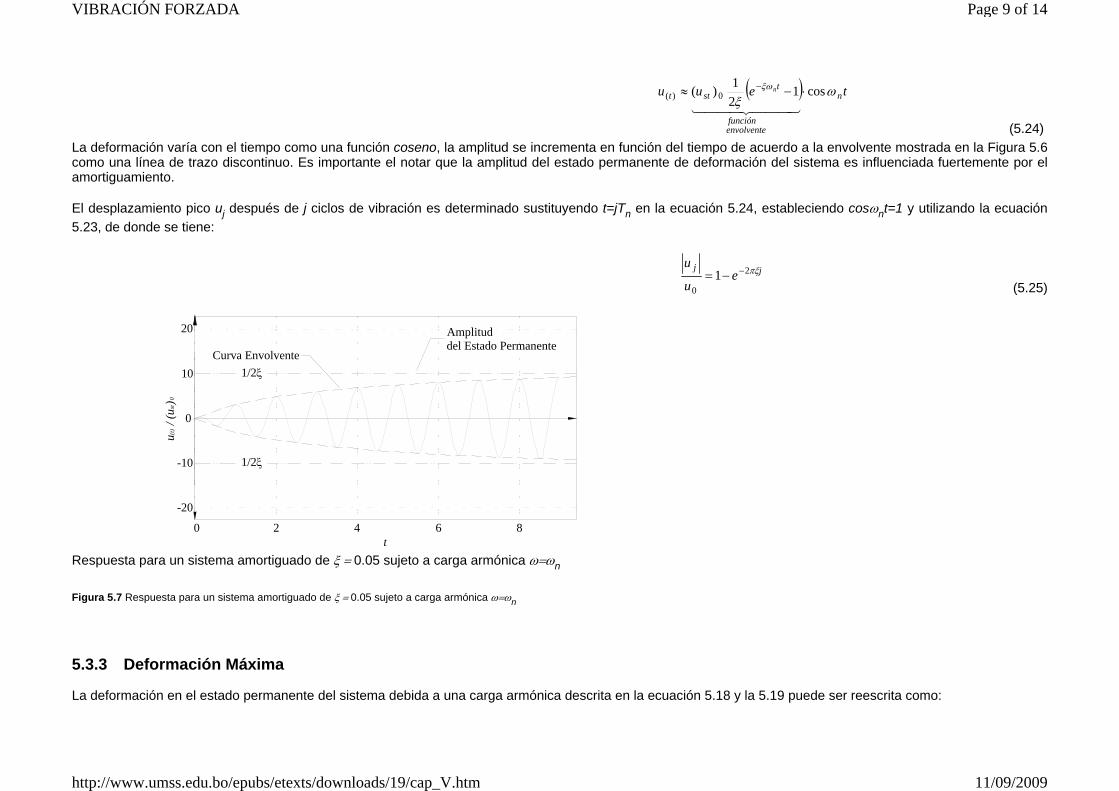
(5.24) La deformación varía con el tiempo como una función coseno, la amplitud se incrementa en función del tiempo de acuerdo a la envolvente mostrada en la Figura 5.6como una línea de trazo discontinuo. Es importante el notar que la amplitud del estado permanente de deformación del sistema es influenciada fuertemente por elamortiguamiento. El desplazamiento pico uj después de j ciclos de vibración es determinado sustituyendo t=jTn en la ecuación 5.24, estableciendo cosωnt=1 y utilizando la ecuación 5.23, de donde se tiene:
(5.25)
Respuesta para un sistema amortiguado de ξ = 0.05 sujeto a carga armónica ω=ωn
Figura 5.7 Respuesta para un sistema amortiguado de ξ = 0.05 sujeto a carga armónica ω=ωn
5.3.3 Deformación Máxima La deformación en el estado permanente del sistema debida a una carga armónica descrita en la ecuación 5.18 y la 5.19 puede ser reescrita como:
( ) teuu n
envolventefunción
tstt
n ωξ
ξω cos121)( 0)( ⋅−≈ −
444 3444 21
jje
u
uπξ2
01 −−=
-20
0
10
-10
u(t) /
(ust)0
0
20
t42 6 8
Curva Envolvente1/2ξ
1/2ξ
Amplitud del Estado Permanente
Page 9 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm

(5.26)
Donde y sustituyendo por C y D :
(5.27)
(5.28)
Rd es graficada en función de ω/ωn en la Figura 5.7(a) para algunos valores de ξ, notar que todas las curvas están por debajo de la curva correspondiente a ξ =0. El amortiguamiento reduce Rd y por consiguiente la amplitud de deformación también reduce. La magnitud de esta reducción depende de la frecuencia de excitación dela siguiente manera:
Si ω/ωn << 1 (la fuerza está variando lentamente) Rd es sólo levemente más grande que 1 y es esencialmente independiente del amortiguamiento.
(5.29)
Este resultado implica que la respuesta dinámica es esencialmente la misma que la deformación estática y es controlada por la rigidez del sistema.
Si ω/ωn >> 1 (la fuerza está variando rápidamente) Rd tiende a cero y no es afectada por el amortiguamiento. Para valores grandes de ω/ωn el término (ω/ωn)4 es dominante en la ecuación 5.27, la cual puede ser aproximada por:
(5.30)
Este resultado implica que la respuesta es controlada por la masa del sistema.
Si ω/ωn 1 (la frecuencia de excitación se acerca a la frecuencia natural del sistema) Rd es sensible al amortiguamiento, implicando que la deformación dinámica puede ser más grande que la estática. Si ω=ωn la amplitud máxima es la expresada por la ecuación 5.23:
(5.31)
( ) ( )φωφω −=−⋅= tsenRkp
tsenuu dt0
0)(
220 DCu += C
Dartg −=φ
( )[ ] ( )[ ]2220
0
21
1)(
nnst
d uu
Rωωξωω +−
==
( )( )21
2
n
nartgωω
ωωξφ
−=
kp
uu st0
00 )( =≅
20
2
2
00 )(ωω
ωm
puu n
st =≅
≈
n
st
cpu
uωξ
000 2
)(==
Page 10 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm
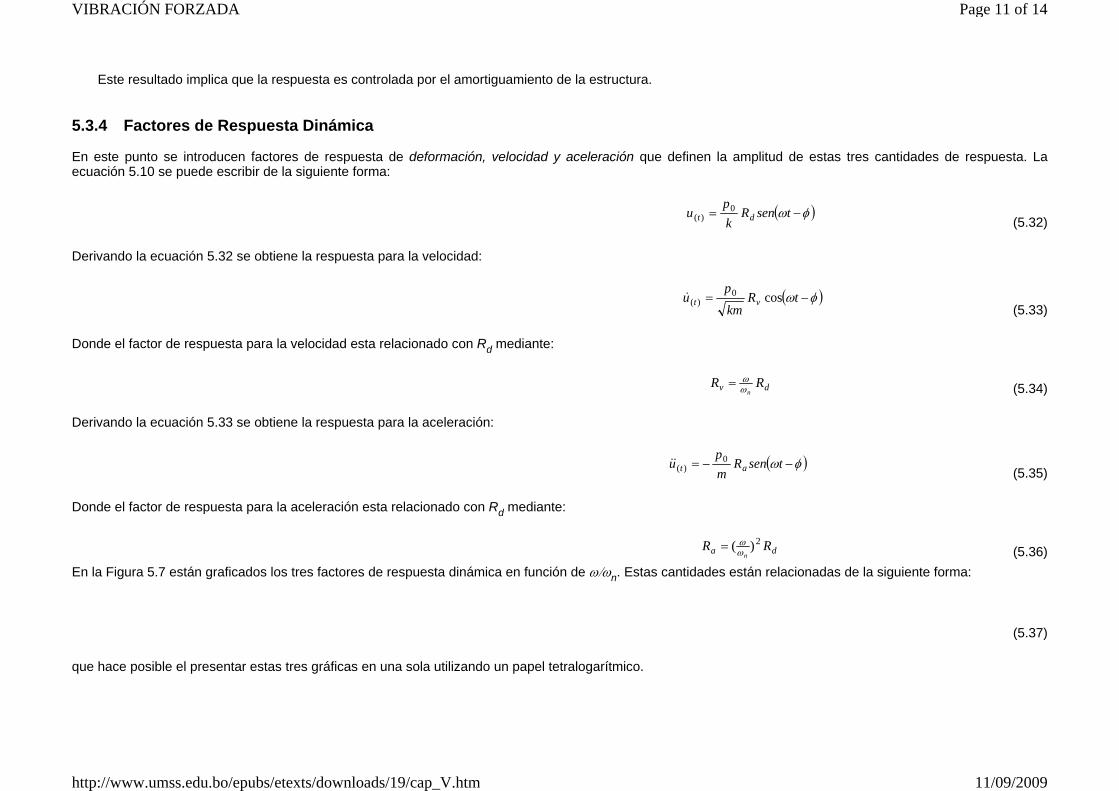
Este resultado implica que la respuesta es controlada por el amortiguamiento de la estructura. 5.3.4 Factores de Respuesta Dinámica En este punto se introducen factores de respuesta de deformación, velocidad y aceleración que definen la amplitud de estas tres cantidades de respuesta. Laecuación 5.10 se puede escribir de la siguiente forma:
(5.32)
Derivando la ecuación 5.32 se obtiene la respuesta para la velocidad:
(5.33) Donde el factor de respuesta para la velocidad esta relacionado con Rd mediante:
(5.34) Derivando la ecuación 5.33 se obtiene la respuesta para la aceleración:
(5.35) Donde el factor de respuesta para la aceleración esta relacionado con Rd mediante:
(5.36)En la Figura 5.7 están graficados los tres factores de respuesta dinámica en función de ω/ωn. Estas cantidades están relacionadas de la siguiente forma:
(5.37) que hace posible el presentar estas tres gráficas en una sola utilizando un papel tetralogarítmico.
( )φω −= tsenRkp
u dt0
)(
( )φω −= tRkm
pu vt cos0
)(&
dv RRnω
ω=
( )φω −−= tsenRmp
u at0
)(&&
da RRn
2)(ωω=
Page 11 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm
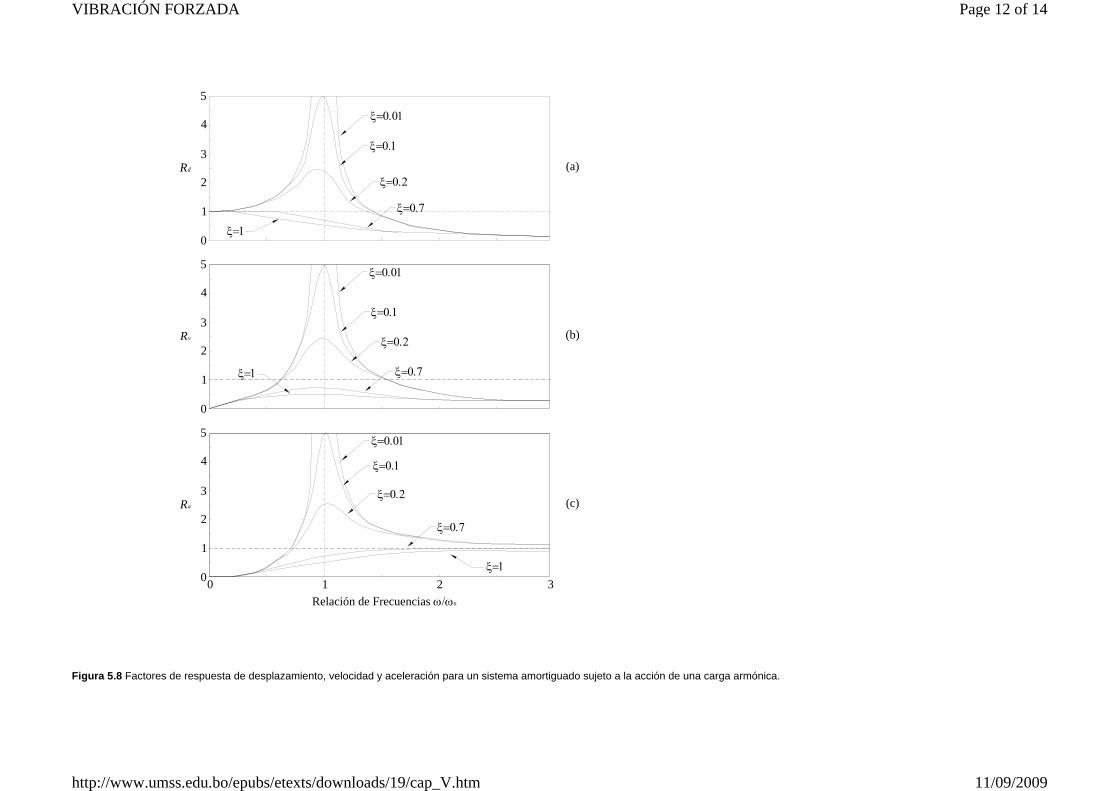
Figura 5.8 Factores de respuesta de desplazamiento, velocidad y aceleración para un sistema amortiguado sujeto a la acción de una carga armónica.
5
4
3
2
1
0
5
0
1
2
3
4
5
0
1
2
3
4
0 1 2 3
Rd
Rv
Ra
Relación de Frecuencias ω/ωn
(a)
(b)
(c)
ξ=0.01
ξ=0.1
ξ=0.2
ξ=0.7
ξ=1
ξ=1
ξ=0.01
ξ=0.1
ξ=0.2
ξ=0.7
ξ=1
ξ=0.01
ξ=0.1
ξ=0.2
ξ=0.7
Page 12 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm
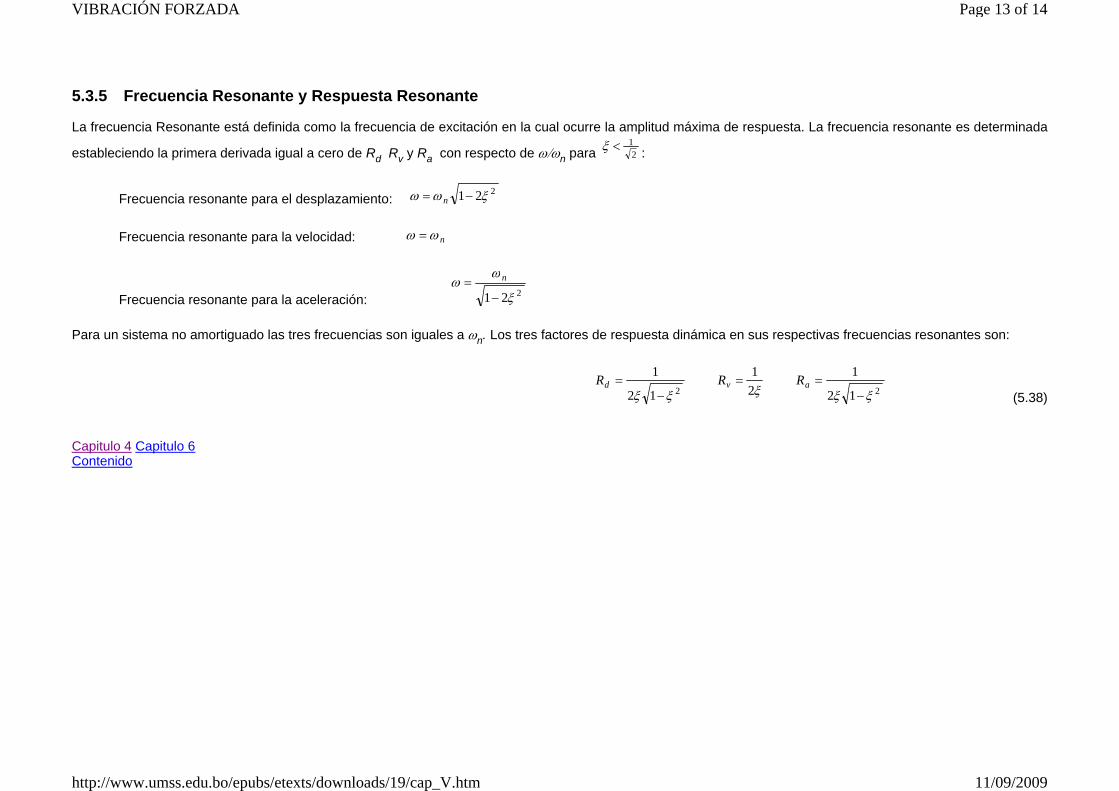
5.3.5 Frecuencia Resonante y Respuesta Resonante La frecuencia Resonante está definida como la frecuencia de excitación en la cual ocurre la amplitud máxima de respuesta. La frecuencia resonante es determinada
estableciendo la primera derivada igual a cero de Rd Rv y Ra con respecto de ω/ωn para :
Frecuencia resonante para el desplazamiento:
Frecuencia resonante para la velocidad:
Frecuencia resonante para la aceleración:
Para un sistema no amortiguado las tres frecuencias son iguales a ωn. Los tres factores de respuesta dinámica en sus respectivas frecuencias resonantes son:
(5.38) Capitulo 4 Capitulo 6 Contenido
21<ξ
221 ξωω −= n
nωω =
221 ξ
ωω
−= n
22 12
121
12
1
ξξξξξ −==
−= avd R R R
Page 13 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm
[1] La solución de esta ecuación se encuentra en el Apéndice I
[2] El desarrollo de esta expresión se encuentra en el Apéndice I
[3] Anil K. Chopra, pp 66 [ref. 12]
[4] La solución de esta ecuación se encuentra en el Apéndice I
Page 14 of 14VIBRACIÓN FORZADA
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_V.htm
Capítulo 6 MOVIMIENTO FORZADO CARGA IMPULSIVA 6.1 Introducción 6.2 Carga Impulsiva Rectangular 6.3 Carga Impulsiva Triangular 6.4 Carga Impulsiva Tipo Sinoidal 6.5 Respuesta al Movimiento del Suelo. 6.6 Análisis Aproximado de Respuesta para Carga Impulsiva
6.1 INTRODUCCIÓN
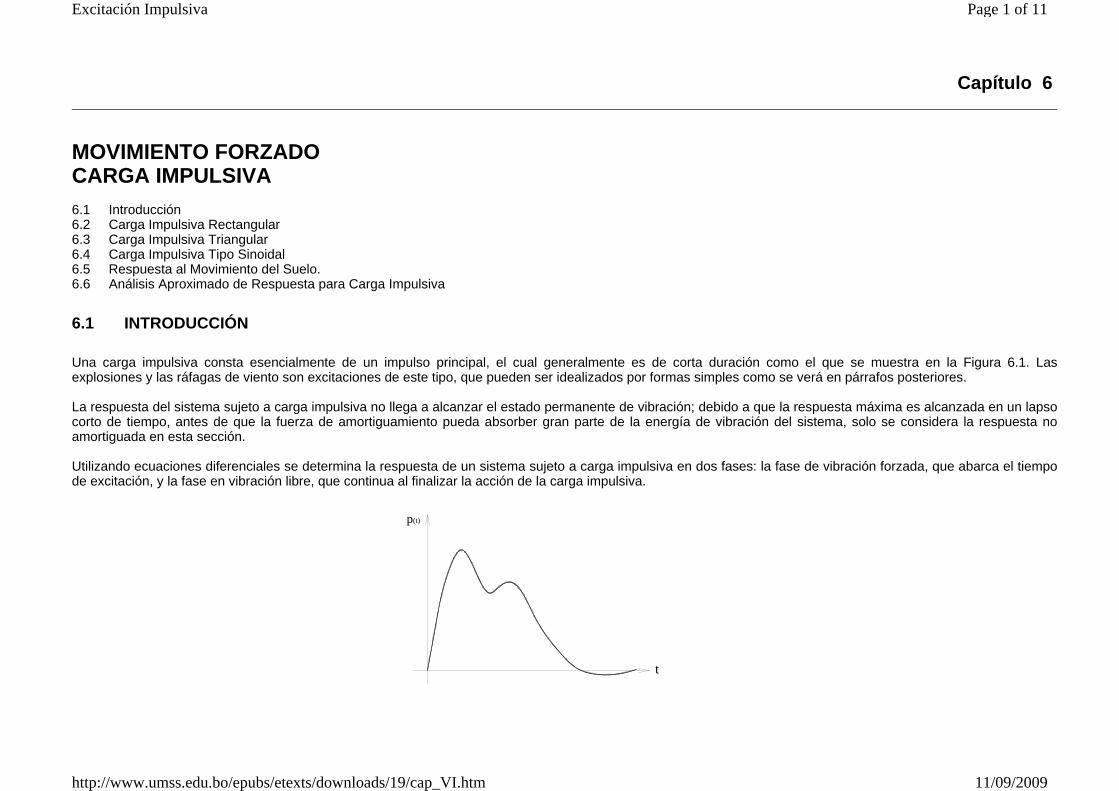
Una carga impulsiva consta esencialmente de un impulso principal, el cual generalmente es de corta duración como el que se muestra en la Figura 6.1. Lasexplosiones y las ráfagas de viento son excitaciones de este tipo, que pueden ser idealizados por formas simples como se verá en párrafos posteriores. La respuesta del sistema sujeto a carga impulsiva no llega a alcanzar el estado permanente de vibración; debido a que la respuesta máxima es alcanzada en un lapsocorto de tiempo, antes de que la fuerza de amortiguamiento pueda absorber gran parte de la energía de vibración del sistema, solo se considera la respuesta noamortiguada en esta sección. Utilizando ecuaciones diferenciales se determina la respuesta de un sistema sujeto a carga impulsiva en dos fases: la fase de vibración forzada, que abarca el tiempode excitación, y la fase en vibración libre, que continua al finalizar la acción de la carga impulsiva.
t
p(t)
Page 1 of 11Excitación Impulsiva
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VI.htm
Figura 6.1 Excitación del tipo carga impulsiva
6.2 CARGA IMPULSIVA RECTANGULAR
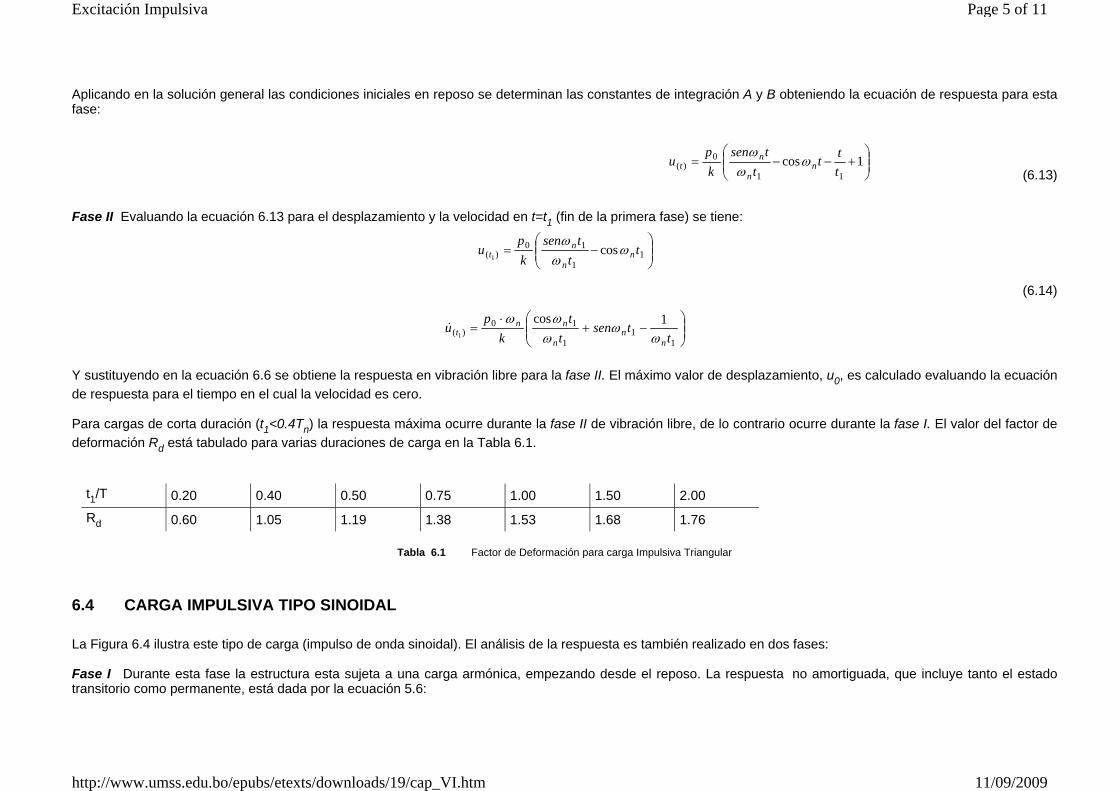
El primer caso en analizar es la respuesta de la estructura sujeta a una carga impulsiva de tipo rectangular como la que se muestra en la Figura 6.2. La ecuación aresolver es:
( 6.1)
Figura 6.2 Impulso Rectangular
Con las condiciones iniciales en reposo , el análisis es realizado en dos fases:
Fase I La fuerza es aplicada instantáneamente y permanece constante durante esta fase. La solución particular para la ecuación diferencial es:
(6.2)
Y la solución complementaria es:
)(tpkuum =+&& ⎩⎨⎧
≥≤
1
1
tt tt p
00
0)()( == tt uu &
kp
u tp0
)( =
t
p
1
0
Fase I Fase II1t-t
p(t)
t
Page 2 of 11Excitación Impulsiva
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VI.htm

(6.3)
Y la solución total es la suma de ambas soluciones:
(6.4)
Aplicando las condiciones iniciales a la ecuación 6.4 se determinan las constantes A y B, y la ecuación de respuesta para esta fase es:
Para: (6.5)
Fase II La ecuación de respuesta para la fase de vibración libre esta dada por la ecuación 4.5:
(6.6)
Para: (6.7)
Para este impulso rectangular es evidente que la respuesta máxima ocurrirá siempre en la fase I, si correspondiente a cargas de duración larga[1] y el factor derespuesta en este caso es Rd=2:
(6.8)
Para cargas de duración corta, la respuesta máxima ocurre en la fase de vibración libre y está dada por:
(6.9)
Con la velocidad final de la fase I y en la ecuación 6.9 se tiene:
tsenBtAu nntc ωω ⋅+⋅= cos)(
kptsenBtAu nnt
0̀)( cos +⋅+⋅= ωω
10 tt ≤≤ ( )tkp
u nt ωcos10)( −=
tsenu
tuu nn
nt ωω
ω )0()0()( cos
&+⋅=
01 ≥− tt)()(cos 1
)(1)()(
1
1ttsen
uttuu n
n
tntt −+−⋅= ω
ωω
&
21nTt ≥
kp
u 00 2=
2)(
2)(
0 1
1t
n
t uu
u +⎥⎥⎦
⎤
⎢⎢⎣
⎡=
ω
&
10
)( 1tsen
kp
u nnt ωω ⋅=&nTnπω 2=
Page 3 of 11Excitación Impulsiva
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VI.htm

Para: (6.10)
(6.11)
Por tanto se observa que el factor de respuesta dinámica varía como una función seno de la duración del impulso para , ver Figura 6.5.
6.3 CARGA IMPULSIVA TRIANGULAR
El segundo caso a analizar es el impulso triangular decreciente de la Figura 6.3, el análisis de la respuesta se realiza análogamente al análisis de la carga impulsivarectangular.
Figura 6.3 Impulso Triangular
Fase I La función que describe la carga durante esta fase es . La solución particular a la ecuación de movimiento para esta carga es:
(6.12)
21nTt ≤ nT
tsen
kp
u 100 2
⋅⋅=
π
nd T
tsenR 12
⋅⋅=
π
21nTt ≤
)1(10)( tt
t pp −⋅=
)1(1
0)( t
ttp k
pu −=
t
p
1
0
Fase I Fase II1t-t
p(t)
t
Page 4 of 11Excitación Impulsiva
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VI.htm
Aplicando en la solución general las condiciones iniciales en reposo se determinan las constantes de integración A y B obteniendo la ecuación de respuesta para estafase:
(6.13)
Fase II Evaluando la ecuación 6.13 para el desplazamiento y la velocidad en t=t1 (fin de la primera fase) se tiene:
(6.14)
Y sustituyendo en la ecuación 6.6 se obtiene la respuesta en vibración libre para la fase II. El máximo valor de desplazamiento, u0, es calculado evaluando la ecuaciónde respuesta para el tiempo en el cual la velocidad es cero. Para cargas de corta duración (t1<0.4Tn) la respuesta máxima ocurre durante la fase II de vibración libre, de lo contrario ocurre durante la fase I. El valor del factor dedeformación Rd está tabulado para varias duraciones de carga en la Tabla 6.1.
Tabla 6.1 Factor de Deformación para carga Impulsiva Triangular
6.4 CARGA IMPULSIVA TIPO SINOIDAL
La Figura 6.4 ilustra este tipo de carga (impulso de onda sinoidal). El análisis de la respuesta es también realizado en dos fases: Fase I Durante esta fase la estructura esta sujeta a una carga armónica, empezando desde el reposo. La respuesta no amortiguada, que incluye tanto el estadotransitorio como permanente, está dada por la ecuación 5.6:
⎟⎟⎠
⎞⎜⎜⎝
⎛+−−= 1cos
11
0)( t
ttt
tsenkp
u nn
nt ω
ωω
⎟⎟⎠
⎞⎜⎜⎝
⎛−= 1
1
10)( cos
1t
ttsen
kp
u nn
nt ω
ωω
⎟⎟⎠
⎞⎜⎜⎝
⎛−+
⋅=
11
1
10)(
1cos1 t
tsent
tk
pu
nn
n
nnt ω
ωωωω
&
t1/T 0.20 0.40 0.50 0.75 1.00 1.50 2.00
Rd 0.60 1.05 1.19 1.38 1.53 1.68 1.76
Page 5 of 11Excitación Impulsiva
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VI.htm
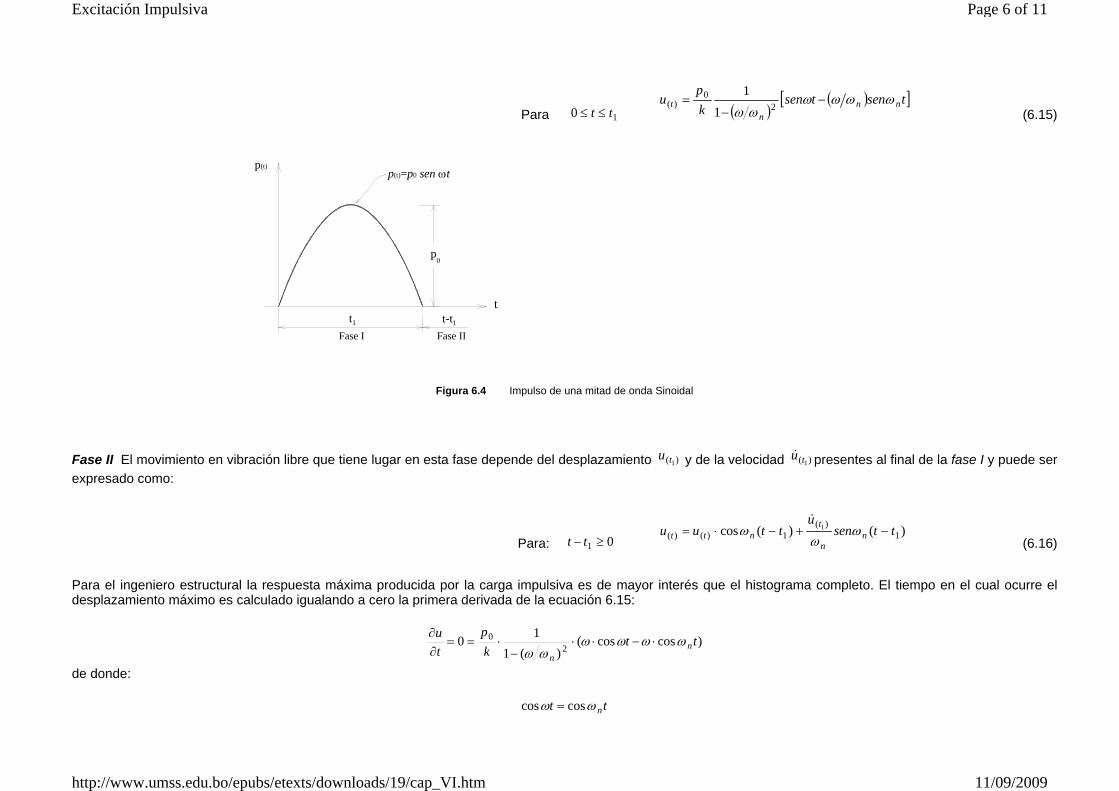
Para (6.15)
Figura 6.4 Impulso de una mitad de onda Sinoidal
Fase II El movimiento en vibración libre que tiene lugar en esta fase depende del desplazamiento y de la velocidad presentes al final de la fase I y puede serexpresado como:
Para: (6.16)
Para el ingeniero estructural la respuesta máxima producida por la carga impulsiva es de mayor interés que el histograma completo. El tiempo en el cual ocurre eldesplazamiento máximo es calculado igualando a cero la primera derivada de la ecuación 6.15:
de donde:
10 tt ≤≤ ( )( )[ ]tsentsen
kp
u nnn
t ωωωωωω
−−
=2
0)(
11
)( 1tu )( 1tu&
01 ≥− tt)()(cos 1
)(1)()(
1 ttsenu
ttuu nn
tntt −+−⋅= ω
ωω
&
)coscos()(1
102
0 ttkp
tu
nn
ωωωωωω
⋅−⋅⋅−
⋅==∂∂
tt nωω coscos =
t
p
1
0
Fase I Fase II1t-t
p(t)
t
p(t)=p0 sen ωt
Page 6 of 11Excitación Impulsiva
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VI.htm
y por tanto:
(6.17)
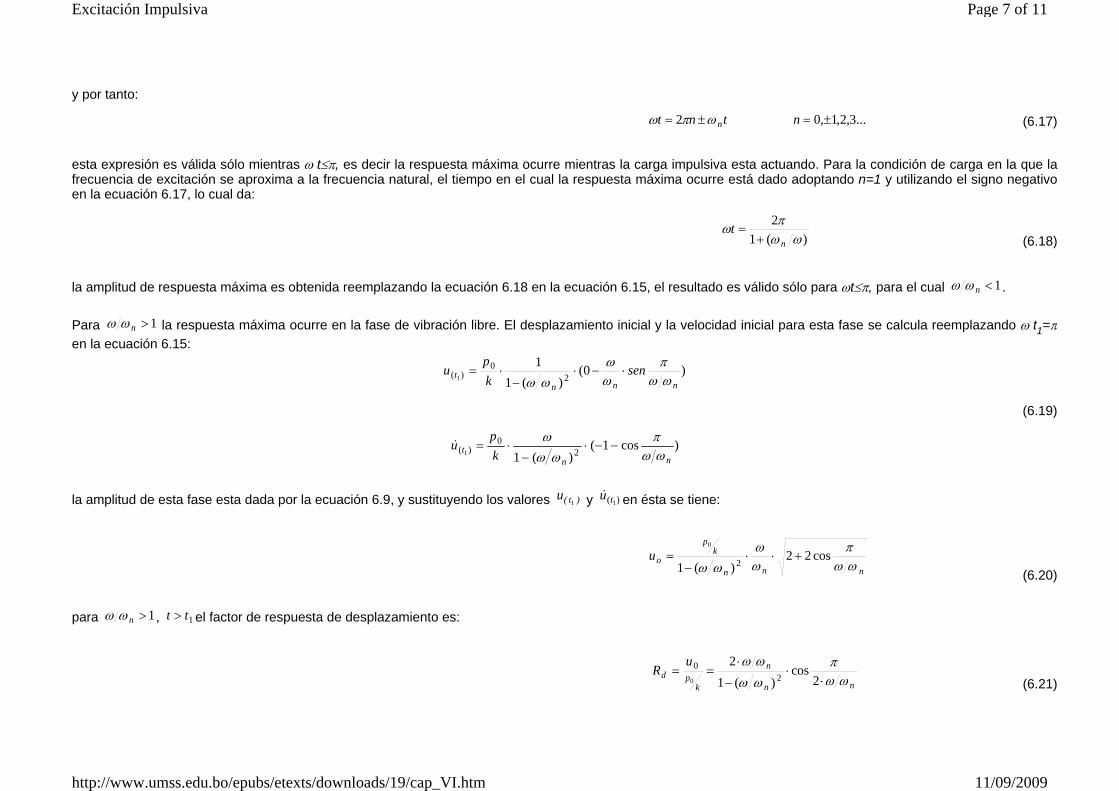
esta expresión es válida sólo mientras ω·t≤π, es decir la respuesta máxima ocurre mientras la carga impulsiva esta actuando. Para la condición de carga en la que lafrecuencia de excitación se aproxima a la frecuencia natural, el tiempo en el cual la respuesta máxima ocurre está dado adoptando n=1 y utilizando el signo negativoen la ecuación 6.17, lo cual da:
(6.18)
la amplitud de respuesta máxima es obtenida reemplazando la ecuación 6.18 en la ecuación 6.15, el resultado es válido sólo para ωt≤π, para el cual .
Para la respuesta máxima ocurre en la fase de vibración libre. El desplazamiento inicial y la velocidad inicial para esta fase se calcula reemplazando ω·t1=πen la ecuación 6.15:
(6.19)
la amplitud de esta fase esta dada por la ecuación 6.9, y sustituyendo los valores y en ésta se tiene:
(6.20)
para , el factor de respuesta de desplazamiento es:
(6.21)
...3,2,1,02 ±=±= n tnt nωπω
)(12
ωωπωn
t+
=
1<nωω
1>nωω
)0()(1
12
0)( 1
nnnt sen
kp
uωωπ
ωω
ωω⋅−⋅
−⋅=
)cos1()(1 2
0)( 1
nnt k
pu
ωωπ
ωωω
−−⋅−
⋅=&
)t(u1 )( 1tu&
nnn
kp
ouωωπ
ωω
ωωcos22
)(1 2
0
+⋅⋅−
=
1>nωω 1tt >
nn
n
kpdu
Rωω
πωω
ωω⋅
⋅−
⋅==
2cos
)(12
20
0
Page 7 of 11Excitación Impulsiva
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VI.htm
6.5 RESPUESTA AL MOVIMIENTO DEL SUELO.
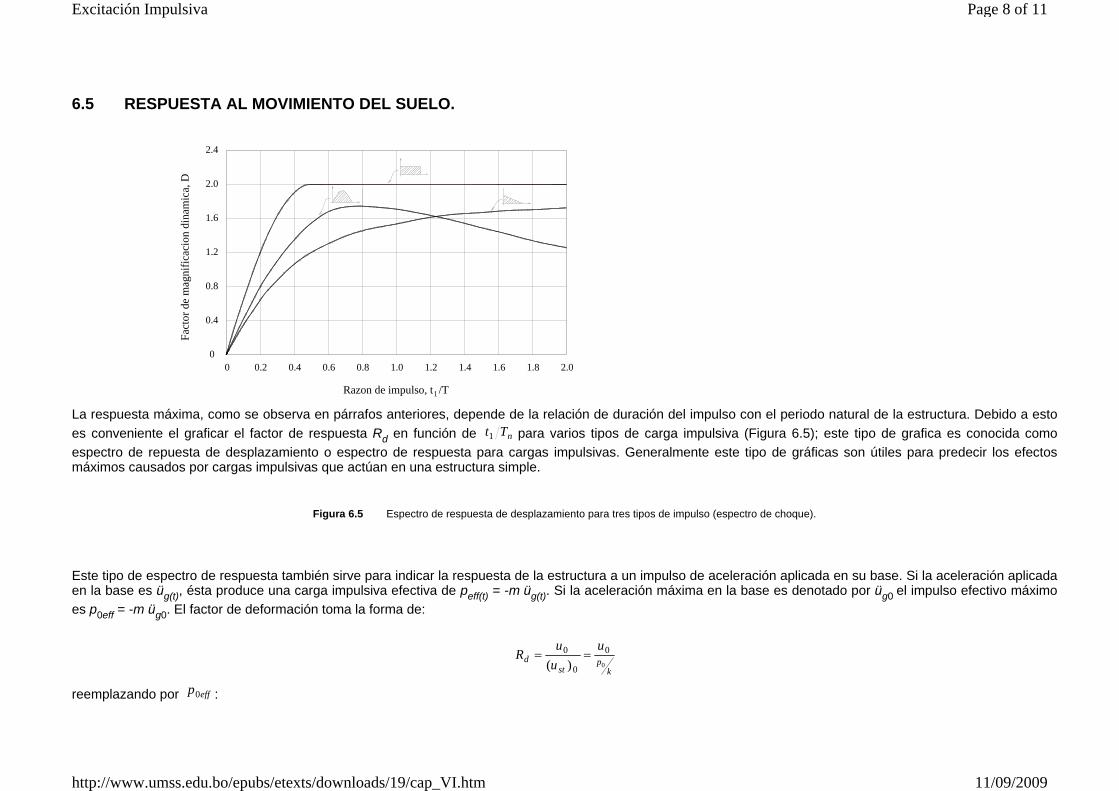
La respuesta máxima, como se observa en párrafos anteriores, depende de la relación de duración del impulso con el periodo natural de la estructura. Debido a estoes conveniente el graficar el factor de respuesta Rd en función de para varios tipos de carga impulsiva (Figura 6.5); este tipo de grafica es conocida comoespectro de repuesta de desplazamiento o espectro de respuesta para cargas impulsivas. Generalmente este tipo de gráficas son útiles para predecir los efectosmáximos causados por cargas impulsivas que actúan en una estructura simple.
Figura 6.5 Espectro de respuesta de desplazamiento para tres tipos de impulso (espectro de choque).
Este tipo de espectro de respuesta también sirve para indicar la respuesta de la estructura a un impulso de aceleración aplicada en su base. Si la aceleración aplicadaen la base es üg(t), ésta produce una carga impulsiva efectiva de peff(t) = -m·üg(t). Si la aceleración máxima en la base es denotado por üg0 el impulso efectivo máximoes p0eff = -m·üg0. El factor de deformación toma la forma de:
reemplazando por :
nTt1
kp
std
uuu
R0
0
0
0
)(==
effp0
0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.00
0.4
0.8
1.2
1.6
2.0
2.4
Razon de impulso, t /T
Fact
or d
e m
agni
ficac
ion
dina
mic
a, D
1
Page 8 of 11Excitación Impulsiva
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VI.htm
(6.22)
alternativamente esta ecuación puede ser reescrita como:
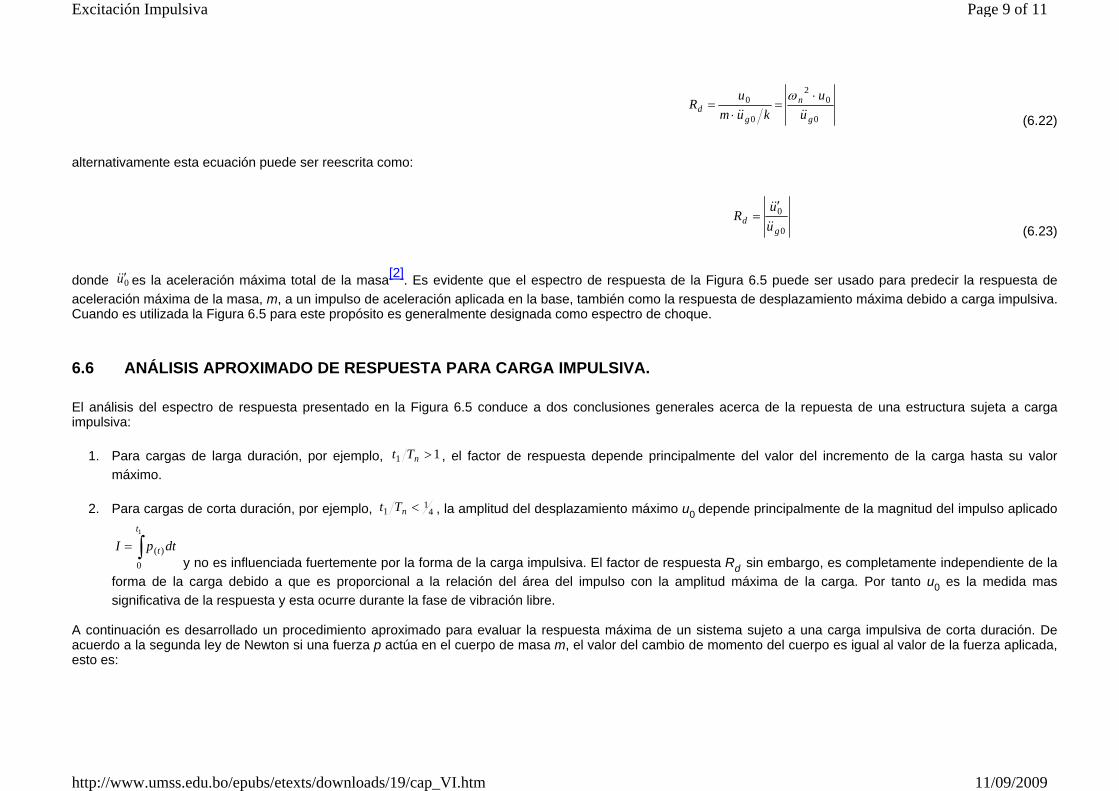
(6.23)
donde es la aceleración máxima total de la masa[2]. Es evidente que el espectro de respuesta de la Figura 6.5 puede ser usado para predecir la respuesta deaceleración máxima de la masa, m, a un impulso de aceleración aplicada en la base, también como la respuesta de desplazamiento máxima debido a carga impulsiva.Cuando es utilizada la Figura 6.5 para este propósito es generalmente designada como espectro de choque.
6.6 ANÁLISIS APROXIMADO DE RESPUESTA PARA CARGA IMPULSIVA.
El análisis del espectro de respuesta presentado en la Figura 6.5 conduce a dos conclusiones generales acerca de la repuesta de una estructura sujeta a cargaimpulsiva:
1. Para cargas de larga duración, por ejemplo, , el factor de respuesta depende principalmente del valor del incremento de la carga hasta su valormáximo.
2. Para cargas de corta duración, por ejemplo, , la amplitud del desplazamiento máximo u0 depende principalmente de la magnitud del impulso aplicado
y no es influenciada fuertemente por la forma de la carga impulsiva. El factor de respuesta Rd sin embargo, es completamente independiente de laforma de la carga debido a que es proporcional a la relación del área del impulso con la amplitud máxima de la carga. Por tanto u0 es la medida massignificativa de la respuesta y esta ocurre durante la fase de vibración libre.
A continuación es desarrollado un procedimiento aproximado para evaluar la respuesta máxima de un sistema sujeto a una carga impulsiva de corta duración. Deacuerdo a la segunda ley de Newton si una fuerza p actúa en el cuerpo de masa m, el valor del cambio de momento del cuerpo es igual al valor de la fuerza aplicada,esto es:
0
02
0
0
g
n
gd u
ukum
uR
&&&&
⋅=
⋅=
ω
0
0
gd u
uR
&&
&& ′=
0u′&&
11 >nTt
41
1 <nTt
dtpIt
t∫=1
0)(
Page 9 of 11Excitación Impulsiva
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VI.htm

(6.24)
para una masa constante esta ecuación es:
(6.25)
integrando ambos lados con respecto de t:
(6.26)
la integral en el lado izquierdo de esta ecuación es la magnitud del impulso, y el producto de la masa por la velocidad es el momento, esta ecuación establece que lamagnitud del impulso es igual al cambio de momento. Este resultado es aplicable a un sistema simple, y debido a que la fuerza actúa por un infinitésimo periodo de tiempo los componentes de elasticidad yamortiguamiento no tienen tiempo de responder; es así que se tiene la respuesta después de la fase de excitación, es decir la respuesta en vibración libre:
en la cual el termino es despreciable por ser extremadamente pequeño y la velocidad , por tanto la ecuación anterior se puede escribir como:
(6.27)
Capítulo 5 Capítulo 7 Contenido
pt
um=
∂⋅∂ )( &
pum =⋅ &&
∫ Δ⋅=−⋅=2
1
)( 12
t
t
umuumpdt &&&
)()(cos 1)(
1)()(1
1ttsen
uttuu n
n
tntt −+−⋅= ω
ωω
&
)( 1tu uu t && Δ=)( 1
)(11
0)()(
1
ttsendtpm
u n
t
tn
t −⋅⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛⋅
⋅= ∫ ω
ω
Page 10 of 11Excitación Impulsiva
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VI.htm
[1] Referirse a la sección 6.6 [2] Para mayor referencia ver ecuación 3.5
Page 11 of 11Excitación Impulsiva
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VI.htm
Capítulo 7 RESPUESTA A CARGA DINAMICA GENERAL
7.1 INTEGRAL DE DUHAMEL.
El procedimiento descrito en el Capítulo 6 para evaluar la respuesta de la estructura a impulsos de corta duración sirve de base para evaluar la respuesta a cargadinámica general. Considerar la carga dinámica general p(t) de la Figura 7.1, mas específicamente la intensidad de carga p(τ) actuando en el tiempo t=τ. Esta carga que actúa durante el intervalo corto de tiempo dτ produce un impulso de corta duración p(τ)dτ sobre la estructura y la ecuación 6.27 puede usarse para evaluar larespuesta de este impulso, se debe notar que aunque este procedimiento es aproximado se vuelve exacto cuando la duración de la carga se aproxima a acero. Portanto para un intervalo de tiempo dτ, la respuesta producida por la carga p(τ) es:
Para t >τ (7.1)
Page 1 of 8conceptos de dinámica
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VII.htm
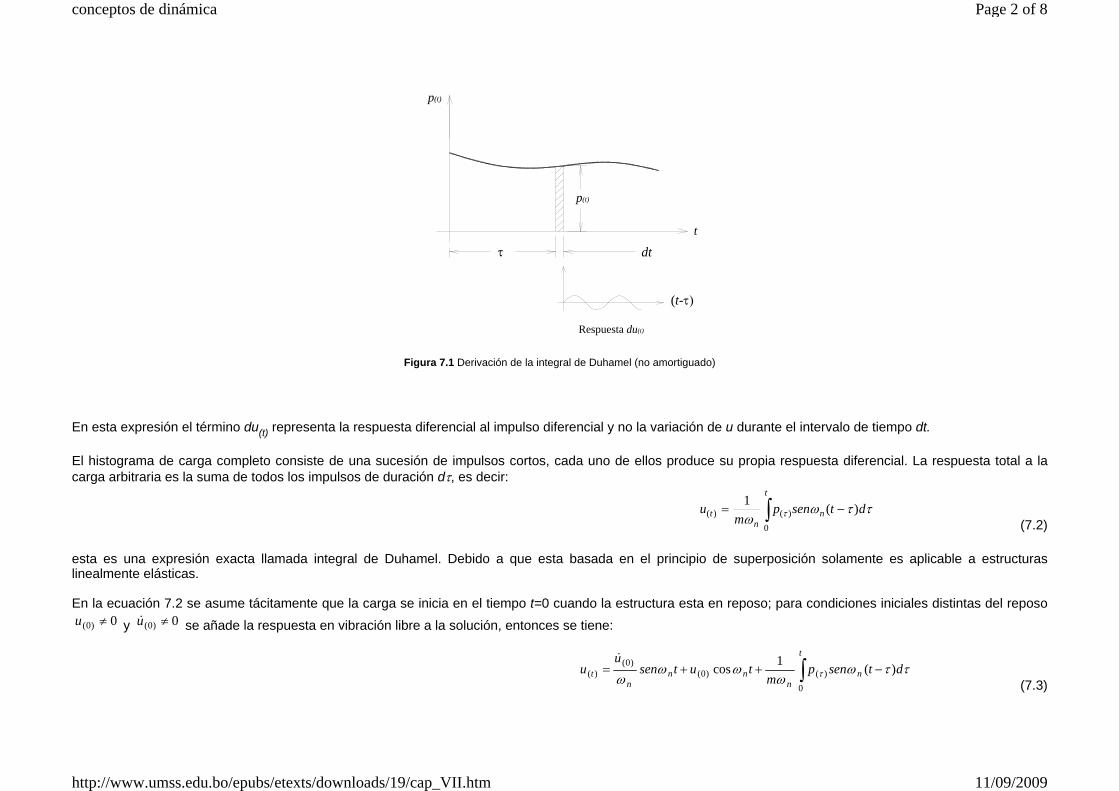
Figura 7.1 Derivación de la integral de Duhamel (no amortiguado)
En esta expresión el término du(t) representa la respuesta diferencial al impulso diferencial y no la variación de u durante el intervalo de tiempo dt. El histograma de carga completo consiste de una sucesión de impulsos cortos, cada uno de ellos produce su propia respuesta diferencial. La respuesta total a lacarga arbitraria es la suma de todos los impulsos de duración dτ, es decir:
(7.2) esta es una expresión exacta llamada integral de Duhamel. Debido a que esta basada en el principio de superposición solamente es aplicable a estructuraslinealmente elásticas. En la ecuación 7.2 se asume tácitamente que la carga se inicia en el tiempo t=0 cuando la estructura esta en reposo; para condiciones iniciales distintas del reposo
y se añade la respuesta en vibración libre a la solución, entonces se tiene:
(7.3)
∫ −=t
nn
t dtsenpm
u0
)()( )(1 ττωω τ
0)0( ≠u 0)0( ≠u&
∫ −++=t
nn
nnn
t dtsenpm
tutsenu
u0
)()0()0(
)( )(1cos ττωω
ωωω τ
&
dtt
p(t)
(t-τ)
Respuesta du(t)
τ
p(t)
Page 2 of 8conceptos de dinámica
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VII.htm
usando la integral de Duhamel para un SDF no amortiguado la repuesta se determina asumiendo condiciones iniciales en reposo para una fuerza p(t)=p0 y t>0, entonces la ecuación 7.2 es:
7.2 INTEGRAL DE DUHAMEL PARA UN SISTEMA NO AMORTIGUADO.
Si la función de carga es integrable, la respuesta dinámica de la estructura puede ser evaluada por integración formal de la ecuación 7.2 ó 7.3; sin embargo enmuchos casos la carga es conocida solo de datos experimentales, y la respuesta debe ser evaluada por procesos numéricos. Para el análisis es práctico utilizar laidentidad trigonométrica para reformular la ecuación 7.2:
ó
(7.4)donde:
(7.5)
7.3 INTEGRAL DE DUHAMEL PARA UN SISTEMA AMORTIGUADO.
El análisis para obtener la integral de Duhamel que expresa la respuesta de un sistema amortiguado a una carga general es similar al análisis para un sistema noamortiguado, con la única variante que la respuesta en vibración libre iniciada por un impulso diferencial p(τ)·dτ esta sujeta a un decremento exponencial. De este
)cos1()(cos
)( 0
0
0
0
0)( t
kpt
mp
dtsenmp
u n
t
n
n
n
t
nn
t ωω
τωω
ττωω
−=⎥⎦
⎤⎢⎣
⎡ −=−= ∫
τωωτωωτωω nnnnnn senttsentsen ⋅−⋅=− coscos)(
∫ ∫ ⋅⋅−⋅⋅=t t
nn
nnn
nt dsenpm
tdpm
tsenu0 0
)()()(1coscos1 ττωω
ωττωω
ω ττ
tBtsenAu ntntt ωω cos)()()( ⋅−⋅=
∫ ⋅⋅=t
nn
t dpm
A0
)()( cos1 ττωω τ
∫ ⋅=t
nn
t dsenpm
B0
)()(1 ττωω τ
Page 3 of 8conceptos de dinámica
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VII.htm
modo estableciendo u(0)=0 y en la ecuación 4.15 da:
(7.6)
la respuesta de la carga total arbitraria es:
(7.7)
para una evaluación numérica de la respuesta del sistema amortiguado la ecuación 7.7 puede ser escrita en forma similar a la ecuación 7.4:
(7.8)
donde en este caso:
(7.9)
Para la excitación dinámica debida a la aceleración del suelo, la fuerza p(τ) toma el valor de:
(7.10)
7.4 EVALUACIÓN NUMÉRICA DE LA RESPUESTA DINÁMICA[1]
La solución analítica de la ecuación de movimiento para un sistema simple no es posible si la excitación (fuerza aplicada p(t) o aceleración del suelo ) varía arbitrariamente con el tiempo, o si el sistema no es lineal. Un método más general de solución consiste en el cálculo iterativo de la respuesta a través de una serie de cálculos utilizando interpolación lineal, el cual es unprocedimiento numérico altamente eficiente que puede ser desarrollado para sistemas lineales. La Figura 7.2 muestra una función de excitación en forma general, la cual es aproximada a través de una serie de líneas rectas suficientemente cercanas, de tal
mdpu /)( )()0( ττ=&
⎥⎥⎦
⎤
⎢⎢⎣
⎡−= −− )()()(
)( τωω
τττξω tsenm
dpedu D
D
tt
n
∫ −= −−t
Dt
Dt dtsenep
mu n
0
)()()( )(1 ττω
ωτξω
τ
tBtsenAu DtDtt ωω cos)()()( ⋅−⋅=
∫
∫
⋅=
⋅=
t
DtD
t
t
DtD
t
dseneep
mB
deep
mA
n
n
n
n
0)()(
0)()(
1
cos1
ττωω
ττωω
ξω
τξω
τ
ξω
τξω
τ
)()( ττ gump &&⋅=
)(tgu&&
Page 4 of 8conceptos de dinámica
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VII.htm

forma que se asume una discrepancia muy pequeña, es decir, si el intervalo de tiempo es muy pequeño la interpolación lineal es satisfactoria. La función deexcitación para el intervalo de tiempo está dada por:
(7.11)
donde:
(7.12)
y la variable de tiempo τ varía de 0 a Δti. Para simplificar algebraicamente se considera primero a un sistema sin amortiguamiento. Para este caso la ecuación a serresuelta es:
(7.13)
Figura 7.2 Interpolación lineal
La respuesta u(τ) para es la suma de tres partes: (1) la vibración libre debido al desplazamiento inicial ui y velocidad para τ=0. (2) la respuesta para la
1+≤≤ ii ttt
ττi
ii t
ppp
ΔΔ
+=)(
iii ppp −=Δ +1
τi
ii t
ppukum
ΔΔ
+=⋅+⋅ &&
itΔ≤≤ τ0 iu&
t
p(t)
Real
Interpolado: p(τ)
ti ti+1
pi
pi+1
Δti
τ
Page 5 of 8conceptos de dinámica
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VII.htm

fuerza pi con condiciones iniciales de cero. (3) la respuesta para (Δpi/Δti)·τ con condiciones iniciales de cero. Adaptando las soluciones disponibles de los párrafosprecedentes para estos tres casos la respuesta total es:
y (7.14)
Evaluando estas ecuaciones para τ=Δti proporciona el desplazamiento ui+1 y la velocidad en el tiempo i+1:
(7.15)
Estas ecuaciones se pueden replantear después de sustituir la ecuación 7.12 como fórmulas recurrentes:
(7.16)
estas formulas también son aplicables para sistemas amortiguados, las cuales tienen sus respectivas expresiones para los coeficientes A, B,..., D’; y éstas están
dadas en la Tabla[2] 5.2.1 [ref .12] para sistemas subamortiguados.
Capítulo 6 Capítulo 8 Contenido
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛Δ⋅
−Δ
Δ+−++⋅=
in
n
i
in
in
n
ini t
sentk
pkp
senu
uuω
τωττωτωω
τωτ cos1cos)(&
)cos1(1cos)( τωω
τωτωω
τωωτ
nin
in
in
n
ini
n tkp
senkpu
senuu
−Δ⋅
Δ+++⋅−=
&&
1+iu&
[ ] [ ])(1)cos(1)()cos(1 ininin
iin
iin
n
iinii tsent
tkp
tkp
tsenu
tuu Δ⋅−Δ⋅Δ⋅
Δ+Δ⋅−+Δ⋅+Δ⋅=+ ωω
ωωω
ωω
&
[ ])cos(11)()cos()(1in
in
iin
iin
n
iini
n
i ttk
ptsen
kp
tu
tsenuu
Δ⋅−Δ⋅
Δ+Δ⋅+Δ⋅+Δ⋅−=+ ω
ωωω
ωω
ω&&
11 ++ ⋅+⋅+⋅+⋅= iiiii pDpCuBuAu &
11 ++ ⋅′+⋅′+⋅′+⋅′= iiiii pDpCuBuAu &&
Page 6 of 8conceptos de dinámica
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VII.htm

Page 7 of 8conceptos de dinámica
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VII.htm

[1] Anil K. Chopra, pp 155-185 [ref. 12]
[2] Anil K. Chopra, pp 159 [ref. 12]
Page 8 of 8conceptos de dinámica
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VII.htm
Capítulo 8 RESPUESTA SÍSMICA A SISTEMAS LINEALES <![endif]>
8.1 MOVIMIENTO DEL SUELO.
Las vibraciones del suelo producidos por movimiento sísmico en un sitio específico dependen de la proximidad de éste a la fuente de origen, de las característicasdel sitio y de la atenuación de la aceleración pico. La amplitud, frecuencia y el tiempo de duración son requeridos para clasificar el movimiento, y estos parámetrosse obtienen a partir de acelerogramas registrados en diferentes puntos. Estos registros son utilizados para demarcar áreas o zonas con similar potencial de riesgosísmico, tomando en cuenta la frecuencia de ocurrencia, la predicción de la magnitud máxima del sismo, la probabilidad de excedencia de esta magnitud, la distanciaal origen, la localización de la falla de origen y los detalles geológicos del área. Estas demarcaciones son presentadas como mapas de riesgo sísmico que contienenzonas correspondientes a aceleraciones pico del suelo.
8.2 RESPUESTA DINÁMICA DE LA ESTRUCTURA
Las cargas gravitatorias que actúan sobre la estructura son fuerzas estáticas, las cuales son independientes del tiempo; en cambio las fuerzas sísmicas que actúanen la estructura, por efecto de la vibración variable del suelo causan una respuesta dependiente del tiempo. La respuesta generada depende de la magnitud y duración de la excitación, de las propiedades dinámicas de la estructura y de las características de los depósitosde suelo en el lugar. La vibración del suelo se amplifica en la estructura dependiendo del periodo fundamental de ésta, en mayor o menor medida. El efecto delamortiguamiento o resistencia a la fricción de la estructura en la vibración impuesta influye en la magnitud y duración del movimiento inducido, y usualmente seasume para edificios normales un amortiguamiento del 5 % (ξ=0.05).
8.3 ECUACIÓN DE MOVIMIENTO
La ecuación que gobierna el movimiento de un sistema simple (Figura 8.1) sujeto a la aceleración del suelo üg(t) es la ecuación 4.8; dividiendo esta ecuación por la masa se obtiene:
(8.1)
Page 1 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
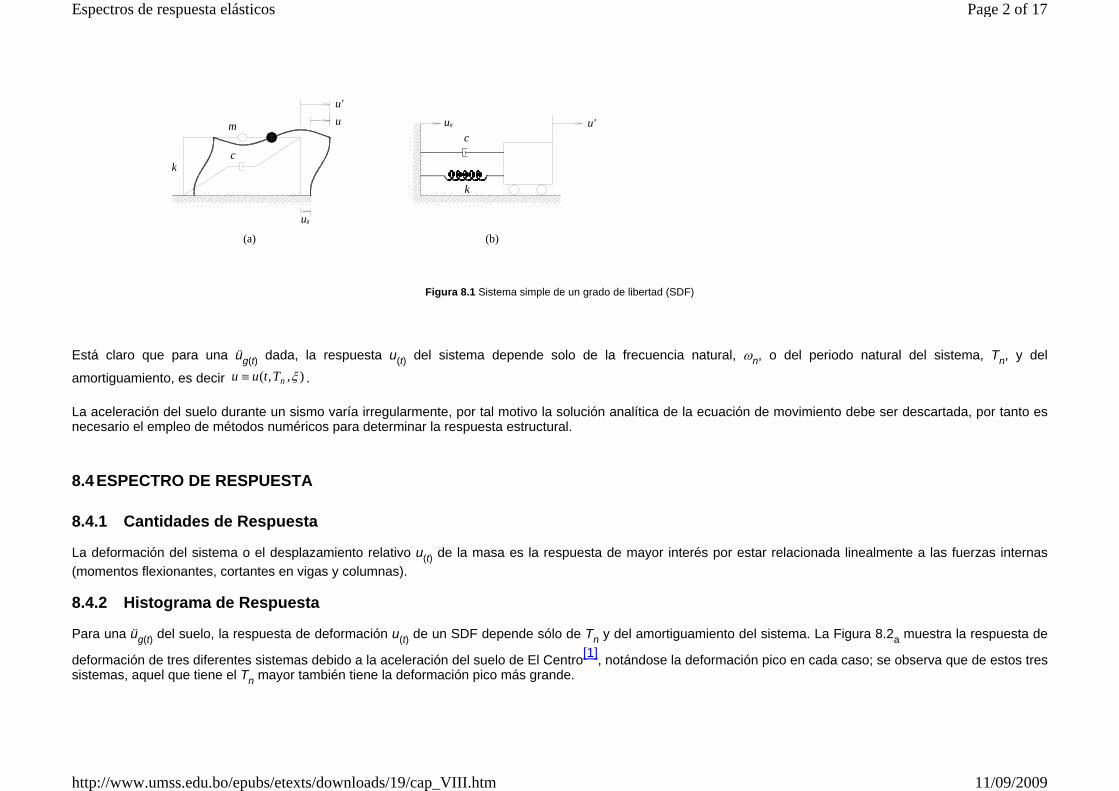
Figura 8.1 Sistema simple de un grado de libertad (SDF)
Está claro que para una üg(t) dada, la respuesta u(t) del sistema depende solo de la frecuencia natural, ωn, o del periodo natural del sistema, Tn, y del
amortiguamiento, es decir .
La aceleración del suelo durante un sismo varía irregularmente, por tal motivo la solución analítica de la ecuación de movimiento debe ser descartada, por tanto esnecesario el empleo de métodos numéricos para determinar la respuesta estructural.
8.4 ESPECTRO DE RESPUESTA
8.4.1 Cantidades de Respuesta La deformación del sistema o el desplazamiento relativo u(t) de la masa es la respuesta de mayor interés por estar relacionada linealmente a las fuerzas internas(momentos flexionantes, cortantes en vigas y columnas). 8.4.2 Histograma de Respuesta Para una üg(t) del suelo, la respuesta de deformación u(t) de un SDF depende sólo de Tn y del amortiguamiento del sistema. La Figura 8.2a muestra la respuesta de
deformación de tres diferentes sistemas debido a la aceleración del suelo de El Centro[1], notándose la deformación pico en cada caso; se observa que de estos tressistemas, aquel que tiene el Tn mayor también tiene la deformación pico más grande.
),,( ξnTtuu ≡
ug
kc
m uguu'
k
cu'
(a) (b)
Page 2 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
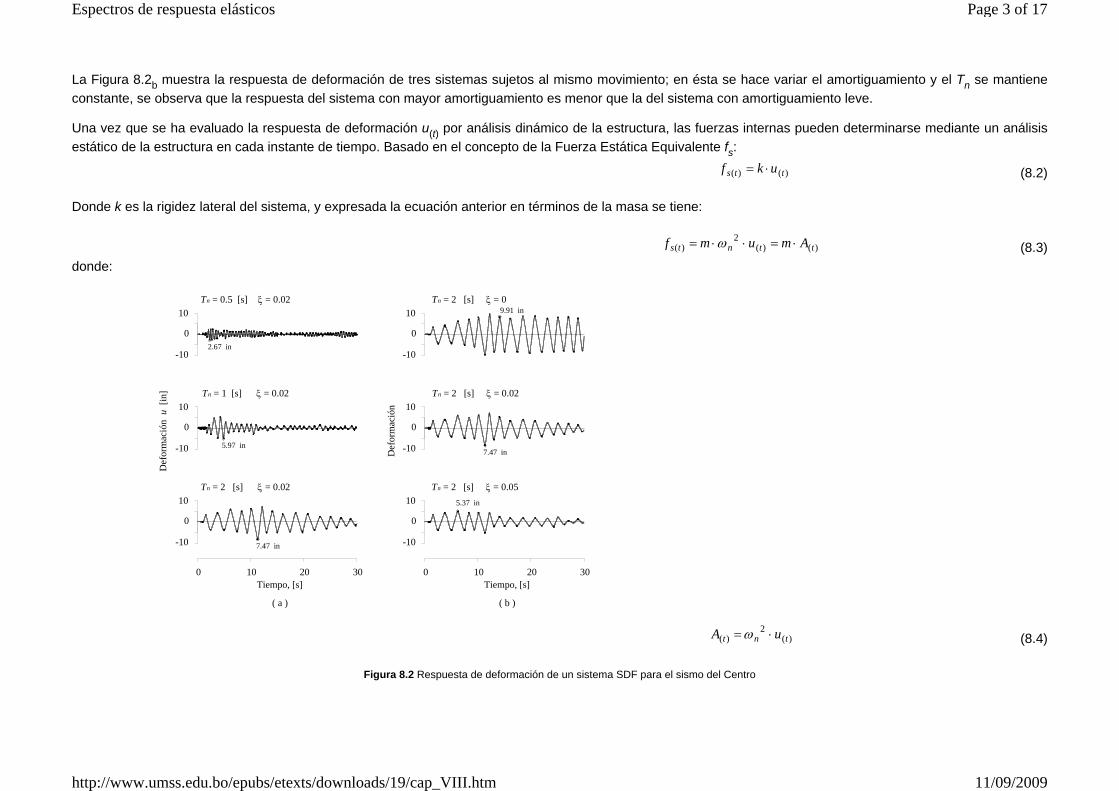
La Figura 8.2b muestra la respuesta de deformación de tres sistemas sujetos al mismo movimiento; en ésta se hace variar el amortiguamiento y el Tn se mantiene constante, se observa que la respuesta del sistema con mayor amortiguamiento es menor que la del sistema con amortiguamiento leve. Una vez que se ha evaluado la respuesta de deformación u(t) por análisis dinámico de la estructura, las fuerzas internas pueden determinarse mediante un análisisestático de la estructura en cada instante de tiempo. Basado en el concepto de la Fuerza Estática Equivalente fs:
(8.2) Donde k es la rigidez lateral del sistema, y expresada la ecuación anterior en términos de la masa se tiene:
(8.3)donde:
(8.4)
Figura 8.2 Respuesta de deformación de un sistema SDF para el sismo del Centro
)()( tts ukf ⋅=
)()(2
)( ttnts Amumf ⋅=⋅⋅= ω
)(2
)( tnt uA ⋅= ω
Def
orm
ació
n u
[in
]
0 10 20 30
2.67 in
10
0
-10
Tiempo, [s]
10
-10
0
-10
0
10
-10Def
orm
ació
n
0
0
-10
10
Tiempo, [s]10 20 30
10
0
-10
10
0
Tn = 0.5 [s] ξ = 0.02 Tn = 2 [s] ξ = 0
Tn = 1 [s] ξ = 0.02 Tn = 2 [s] ξ = 0.02
Tn = 2 [s] ξ = 0.02 Tn = 2 [s] ξ = 0.05
5.97 in
7.47 in
7.47 in
9.91 in
5.37 in
( b )( a )
Page 3 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
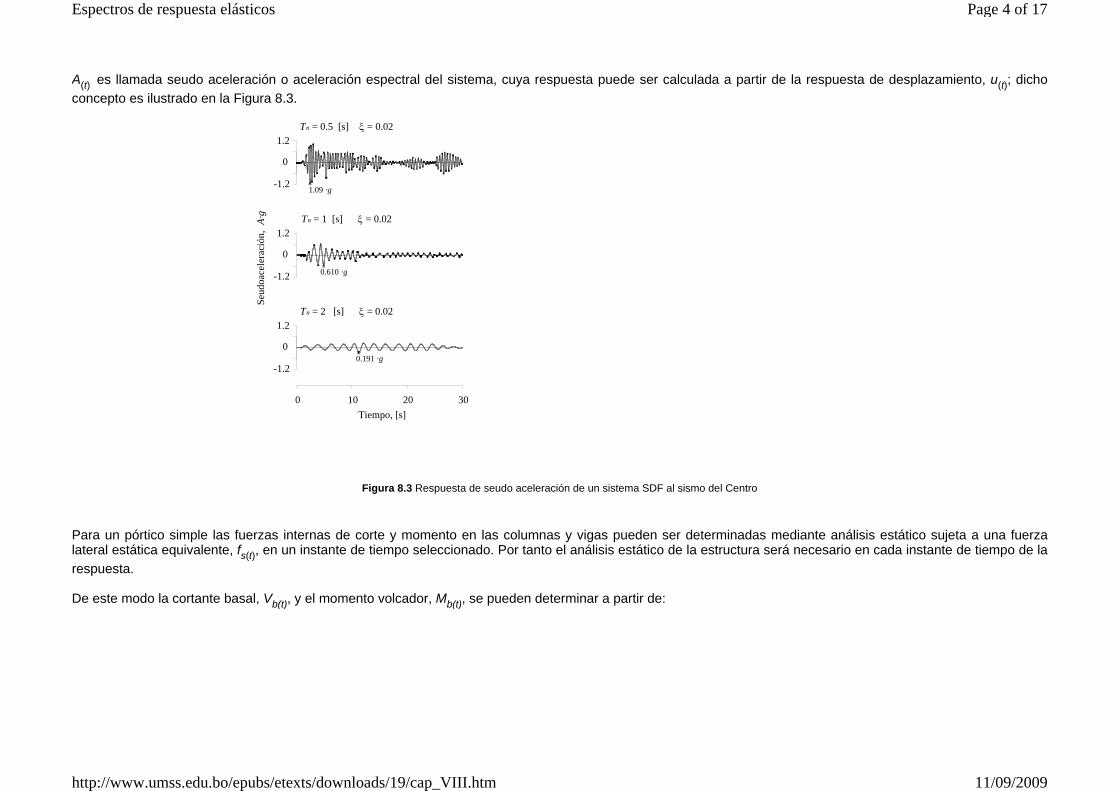
A(t) es llamada seudo aceleración o aceleración espectral del sistema, cuya respuesta puede ser calculada a partir de la respuesta de desplazamiento, u(t); dicho concepto es ilustrado en la Figura 8.3.
Figura 8.3 Respuesta de seudo aceleración de un sistema SDF al sismo del Centro
Para un pórtico simple las fuerzas internas de corte y momento en las columnas y vigas pueden ser determinadas mediante análisis estático sujeta a una fuerzalateral estática equivalente, fs(t), en un instante de tiempo seleccionado. Por tanto el análisis estático de la estructura será necesario en cada instante de tiempo de larespuesta. De este modo la cortante basal, Vb(t), y el momento volcador, Mb(t), se pueden determinar a partir de:
Seud
oace
lera
ción
, A·
g
0 10 20 30
1.09 ·g
1.2
0
-1.2
Tiempo, [s]
1.2
-1.2
0
-1.2
0
1.2
Tn = 0.5 [s] ξ = 0.02
Tn = 1 [s] ξ = 0.02
Tn = 2 [s] ξ = 0.02
0.610 ·g
0.191 ·g
Page 4 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
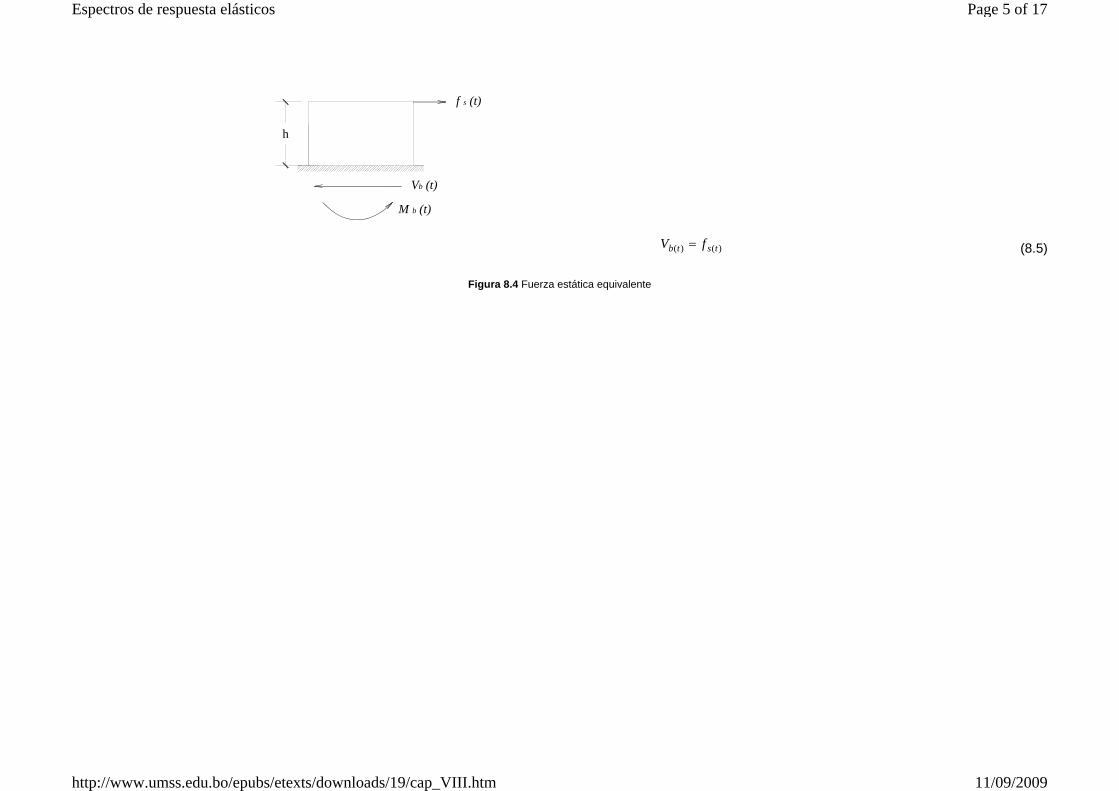
(8.5)
Figura 8.4 Fuerza estática equivalente
)()( tstb fV =
h
f s (t)
Vb (t)
M b (t)
Page 5 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
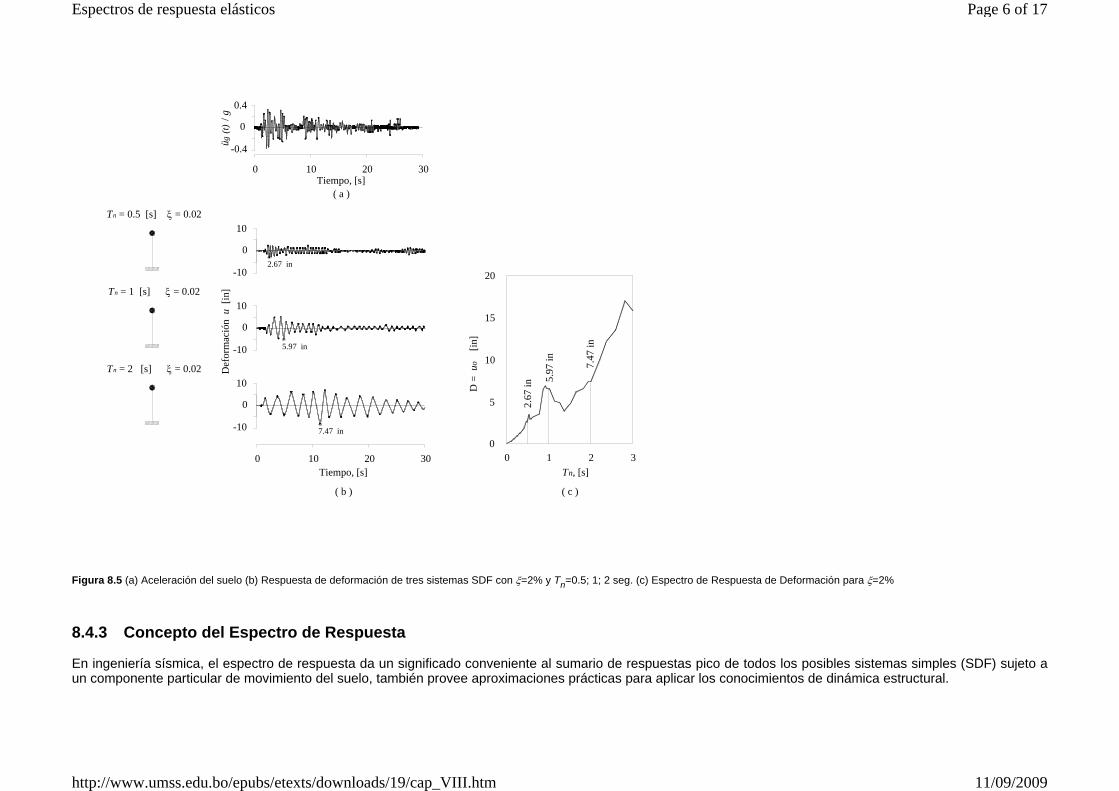
Figura 8.5 (a) Aceleración del suelo (b) Respuesta de deformación de tres sistemas SDF con ξ=2% y Tn=0.5; 1; 2 seg. (c) Espectro de Respuesta de Deformación para ξ=2%
8.4.3 Concepto del Espectro de Respuesta En ingeniería sísmica, el espectro de respuesta da un significado conveniente al sumario de respuestas pico de todos los posibles sistemas simples (SDF) sujeto aun componente particular de movimiento del suelo, también provee aproximaciones prácticas para aplicar los conocimientos de dinámica estructural.
Def
orm
ació
n u
[in
]
0 10 20 30
2.67 in
10
0
-10
Tiempo, [s]
10
-10
0
-10
0
10
Tn = 0.5 [s] ξ = 0.02
Tn = 1 [s] ξ = 0.02
Tn = 2 [s] ξ = 0.02
5.97 in
7.47 in
( b )
0Tiempo, [s]
( a )
10 20 30
0
-0.4
0.4
0 1 2 3
5
10
15
20
0
2.67
in
5.97
in 7.47
in
D =
uo
[in
]
( c )
Tn, [s]
üg (t
) / g
Page 6 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
Una gráfica de valores pico de respuesta de una cantidad como función del periodo natural de vibración del sistema o cualquier parámetro relacionado como ωn o fnes llamado espectro de respuesta para esa cantidad. 8.4.4 Espectro de Respuesta de Deformación Este espectro es una gráfica de u0 contra Tn para un ξ fijo. La Figura 8.5 muestra el procedimiento para determinar el espectro, dicho espectro es desarrollado para el movimiento sísmico de El Centro, Figura 8.5a. La variación de la deformación inducida por el movimiento del suelo es mostrada en la Figura 8.5b. Para cada sistema el valor pico de deformación es determinado del histograma de deformación. El valor de la amplitud u0 determinado para cada sistema provee una coordenada o punto en el espectro de respuesta de deformación. Repitiendo estos cálculos para un rango de valores de Tn, mientras ξ se mantiene constante, provee el espectro de respuesta de deformación, Figura 8.5c. 8.4.5 Espectro de Respuesta de Seudo Velocidad
Page 7 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm

Figura 8.6 Espectro de respuesta (ξ=2%) para el sismo de El Centro: (a) Espectro de respuesta de Deformación (b) Espectro de respuesta de Seudo Velocidad (c) Espectro de respuesta de SeudoAceleración. Considerar una cantidad V para un sistema simple con una frecuencia natural, ωn, relacionado con su deformación pico debido al movimiento del suelo por:
(8.6)
Donde V es llamada seudo velocidad pico, el prefijo seudo es usado porque aunque tengan las mismas unidades. Debido a esta relación es posible trazar elespectro de respuesta de seudo velocidad, como se muestra en la Figura 8.6.
0uD ≡
DT
DVn
nπω 2
=⋅=
0uV &≠
0 1 2 30
5
10
15
20
00
1 2 3
10
0 1 2 3
0.5
0
20
30
40
50
1
1.5
( a )
( b )
( c )
2.67
5.97
7.47
23
.5
37.5
33.7
0.19
1
0.61
0
1.09
D,
[in]
V ,
[in/s
]A
· g
Tn, [s]
Tn, [s]
Tn, [s]
Page 8 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
8.4.6 Espectro de Respuesta de Seudo Aceleración Considerar una cantidad A para un sistema simple con una frecuencia natural, ωn, relacionado con su deformación pico debido al movimiento del suelo por:
(8.7)
Donde A es llamada seudo aceleración pico; el prefijo seudo es usado porque . El espectro de respuesta de la seudo aceleración es trazado en función de Tnen la Figura 8.6. 8.4.7 Espectro de Respuesta Combinado D-V-A
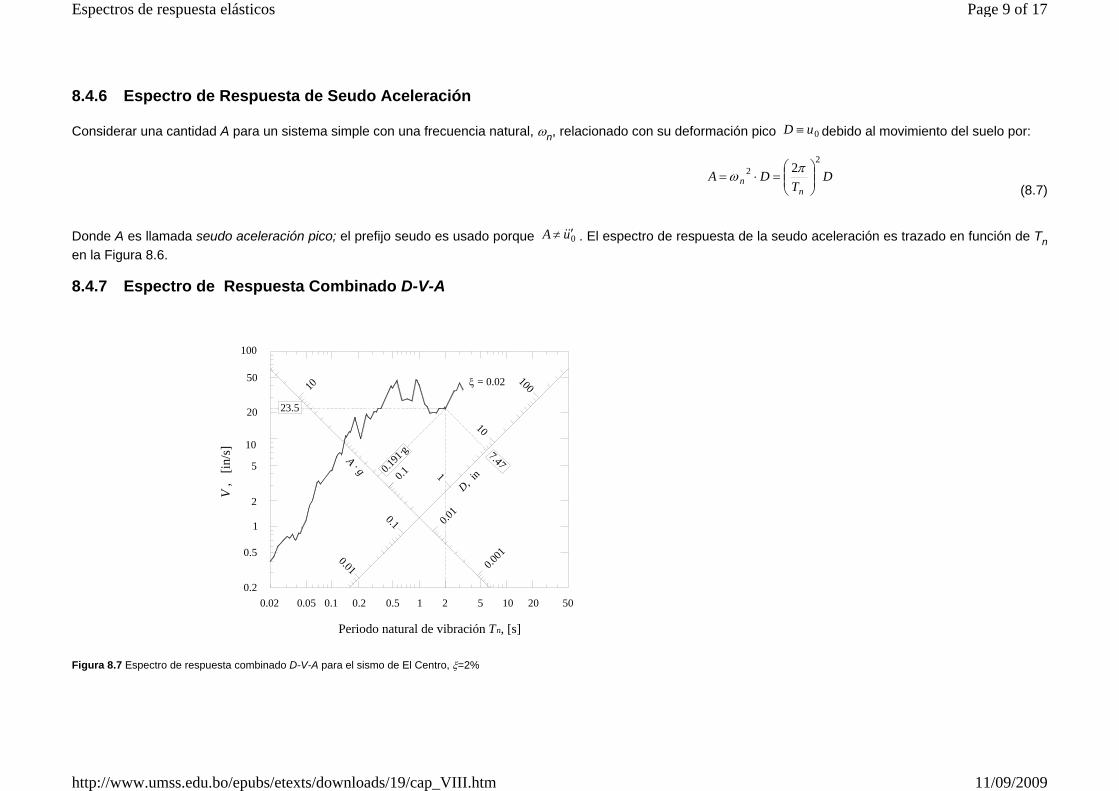
Figura 8.7 Espectro de respuesta combinado D-V-A para el sismo de El Centro, ξ=2%
0uD ≡
DT
DAn
n
22 2
⎟⎟⎠
⎞⎜⎜⎝
⎛=⋅=
πω
0uA ′≠ &&
0.10.02 0.05 50
Periodo natural de vibración Tn, [s]
0.50.2 1 2 105 20
V ,
[in/
s]
1
2
5
20
10
50
100
0.5
0.2100
0.1
10
1
0.1
0.01
10
0.01
0.001
D, in
A · g
ξ = 0.02
7.47
0.191
·g
23.5
Page 9 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
Los tres espectros proveen directamente cantidades físicas significativas, es por esta razón que son necesarios. El espectro de deformación provee la deformaciónpico del sistema; el espectro de seudo velocidad está relacionado directamente con la energía pico almacenada en el sistema durante un sismo; el espectro deseudo aceleración está relacionado directamente con el valor pico de la fuerza estática equivalente y el cortante basal. Para propósitos prácticos de diseño las tres cantidades espectrales pueden ser representados en un solo gráfico; esta representación es posible gracias a que lastres cantidades están interrelacionadas por las ecuaciones 8.6 y 8.7.
(8.8)
Debido a esta interrelación estas cantidades se pueden graficar en un papel tetralogarítmico[2], como se ve en la Figura 8.7.
8.4.8 Construcción del Espectro de Respuesta El espectro de respuesta para un componente üg(t) de movimiento del suelo puede ser desarrollado a partir de los siguientes pasos:
1. Definición numérica de la aceleración del suelo, üg(t): típicamente, las ordenadas del movimiento del suelo son definidas cada 0.02 segundos.
2. Seleccionar el periodo natural de vibración Tn y la relación de amortiguamiento ξ de un sistema SDF. 3. Calcular la respuesta de deformación u(t) de este sistema debido al movimiento del suelo üg(t) por cualquier método numérico. 4. Determinar la amplitud máxima, u0. 5. Las ordenadas espectrales son: D=u0, V=(2π/Tn)D, y A=(2π/Tn)2D. 6. Repetir los pasos del 2 al 5 para un rango de valores Tn y ξ. 7. Presentar los resultados de los pasos 2 al 6 gráficamente, ya sea por separado o combinados.
8.5 CARACTERÍSTICAS DEL ESPECTRO DE RESPUESTA
En la Figura 8.8 se muestra el espectro de respuesta para el movimiento sísmico de El Centro junto con los valores pico de , , del suelo correspondientes a dicho movimiento sísmico; dichos parámetros serán de utilidad para la construcción del espectro de diseño. La Figura 8.9 muestra el espectro de respuesta para 5
% de amortiguamiento usando escalas normalizadas: , y , junto con una versión idealizada del mismo.
Sobre la base de las Figuras 8.8 y 8.9 se estudian las propiedades del espectro de respuesta para varios rangos de periodos de vibración, los cuales estándelimitados por valores de periodos en a, b, c, d, e y f.
Para sistemas de periodos de muy corta duración Tn<Ta la aceleración espectral o seudo aceleración, A, para cualquier valor de amortiguamiento se aproxima
DT
VAT
n
n ππ
22
==
0gu 0gu& 0gu&&
0guD
0guV& 0gu
A&&
Page 10 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
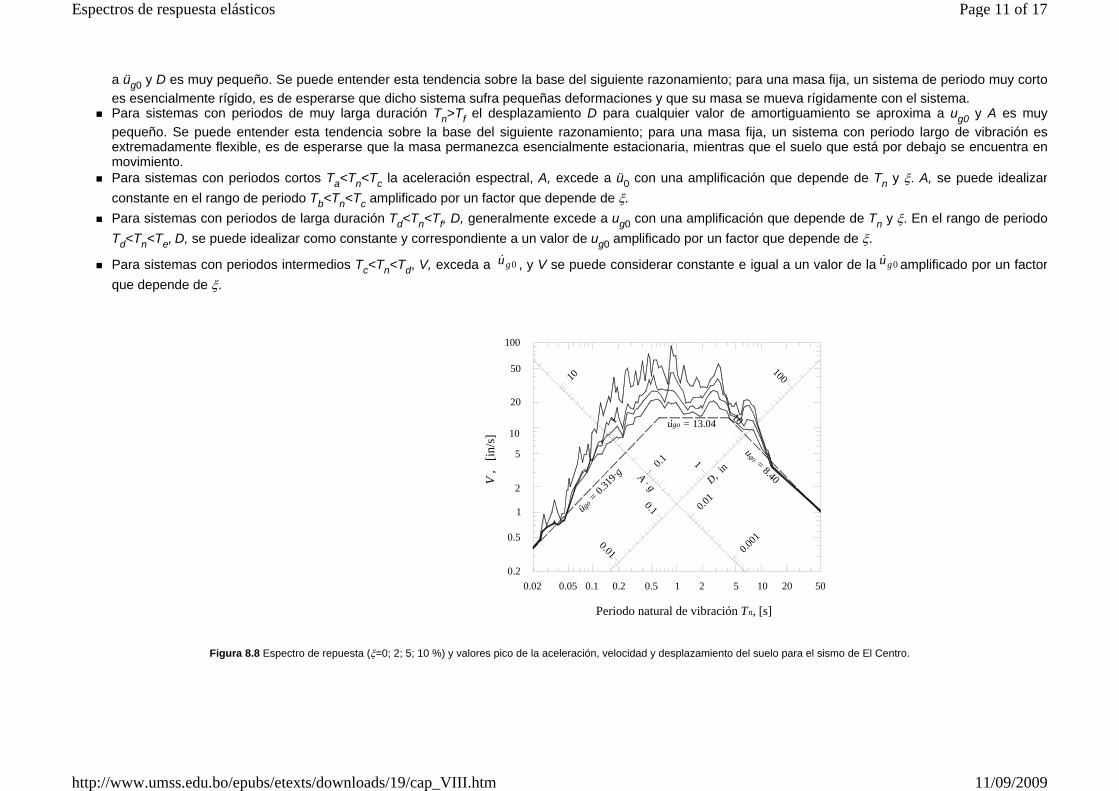
a üg0 y D es muy pequeño. Se puede entender esta tendencia sobre la base del siguiente razonamiento; para una masa fija, un sistema de periodo muy cortoes esencialmente rígido, es de esperarse que dicho sistema sufra pequeñas deformaciones y que su masa se mueva rígidamente con el sistema. Para sistemas con periodos de muy larga duración Tn>Tf el desplazamiento D para cualquier valor de amortiguamiento se aproxima a ug0 y A es muy pequeño. Se puede entender esta tendencia sobre la base del siguiente razonamiento; para una masa fija, un sistema con periodo largo de vibración esextremadamente flexible, es de esperarse que la masa permanezca esencialmente estacionaria, mientras que el suelo que está por debajo se encuentra enmovimiento. Para sistemas con periodos cortos Ta<Tn<Tc la aceleración espectral, A, excede a ü0 con una amplificación que depende de Tn y ξ. A, se puede idealizar constante en el rango de periodo Tb<Tn<Tc amplificado por un factor que depende de ξ. Para sistemas con periodos de larga duración Td<Tn<Tf, D, generalmente excede a ug0 con una amplificación que depende de Tn y ξ. En el rango de periodo Td<Tn<Te, D, se puede idealizar como constante y correspondiente a un valor de ug0 amplificado por un factor que depende de ξ.
Para sistemas con periodos intermedios Tc<Tn<Td, V, exceda a , y V se puede considerar constante e igual a un valor de la amplificado por un factor que depende de ξ.
Figura 8.8 Espectro de repuesta (ξ=0; 2; 5; 10 %) y valores pico de la aceleración, velocidad y desplazamiento del suelo para el sismo de El Centro.
0gu& 0gu&
0.10.02 0.05 50
Periodo natural de vibración Tn, [s]
0.50.2 1 2 105 20
V ,
[in/
s]
1
2
5
20
10
50
100
0.5
0.2
100
0.1
10
1
0.1
0.01
10
0.01
0.001
D, in
A · g
ugo = 13.04
ügo =
0.31
9·g
ugo = 8.40
1 ·
Page 11 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
En base a estas observaciones el espectro es dividido en tres rangos de periodo: La región en la cual Tn>Td es llamada región sensitiva de desplazamiento, debido a que la respuesta estructural esta más directamente relacionada con el desplazamiento del suelo. La región en la cual Tn<Tc es llamada región sensitiva de aceleración porque la respuesta esta relacionada directamente con la aceleración del suelo. Y la región intermedia en la cual Tc<Tn<Td es llamada región sensitiva de velocidad debido a que la respuesta parece relacionarse mejor con la velocidad del suelo que con otros parámetros de movimiento. Para un movimiento particulardel suelo los periodos Ta, Tb, Te y Tf en el espectro idealizado son independientes del amortiguamiento, pero Tc y Td varían con éste. El gran beneficio del espectro idealizado, aunque se note su imprecisión con relación al espectro de respuesta, esta en la construcción del espectro de diseño representativo de muchosmovimientos del suelo. Los valores de periodos asociados con los puntos Ta, Tb, Te, Td, Te y Tf y los factores de amplificación para los segmentos b-c, c-d y d-e no son únicos debido a que varían para cada movimiento del suelo. El amortiguamiento, como es de esperarse, reduce la respuesta de la estructura y esta reducción es diferente en las tres regiones espectrales. En el limite en el cual
el amortiguamiento no afecta a la respuesta debido a que la estructura se mueve rígidamente con el suelo. En el límite contrario donde el amortiguamiento tampoco afecta la respuesta porque la masa estructural permanece inmóvil mientras el suelo se mueve. El efecto del amortiguamiento tiende a sergrande en la región sensitiva de velocidad, en ésta dicho efecto depende de las características del movimiento del suelo. Si el movimiento del suelo se asemeja auna carga armónica de muchos ciclos, el efecto del amortiguamiento es grande para sistemas próximos a la resonancia; y si el movimiento del suelo es de cortaduración con solo unos pocos ciclos, la influencia del amortiguamiento es pequeño y hasta despreciable, como es el caso de cargas impulsivas.
0→nT
Page 12 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm

Figura 8.9 Espectro de respuesta para el sismo de El Centro mostrado por una línea continua, junto con una versión idealizada mostrada por una línea discontinua, para un ξ=5 %
8.6 ESPECTRO ELÁSTICO DE DISEÑO
Para propósitos de diseño el espectro de respuesta es inapropiado; la forma dentada en el espectro de respuesta es característico de una sola excitación, elespectro de respuesta para otro movimiento del suelo registrado en el mismo sitio durante un sismo diferente es también dentado, pero los picos y valles no sonnecesariamente en los mismos periodos; igualmente no es posible predecir el espectro de respuesta con todos sus detalles para un movimiento del suelo que puedaocurrir en el futuro. De este modo el espectro de diseño debe consistir de un grupo de curvas suavizadas o una serie de curvas rectas con una curva para cada nivelde amortiguamiento. El espectro de diseño debe ser representativo de movimientos del suelo registrados en el sitio durante sismos pasados, sino existe registrossísmicos en el lugar entonces el espectro de diseño se debe basar en movimientos del suelo registrados en otros sitios bajo condiciones similares. Los factores queinfluyen en esta selección son: la magnitud del sismo, la distancia del sitio a la falla sísmica, el mecanismo de falla, la geología presente en la trayectoria del viaje delas ondas sísmicas y las condiciones locales del suelo en el sitio.
0.10.02 0.05 50
Periodo natural de vibración Tn, [s]
0.50.2 1 2 105 20
V ,
[in/
s]
0.1
0.2
0.5
2
1
5
10
0.05
0.02
10
10
0.01
0.001
100
D, inA · g
1
0.1
0.01
1
0.1
AceleraciónSensitiva
DesplazamientoVelocidadSensitivaSensitiva
Regiones Espectrales
T f =
15
T e
= 1
0
T d
= 3
.0
T c
= 0
.5
T c
= 0
.125
T c
= 0
.035
a
b
c d
e
f
Page 13 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
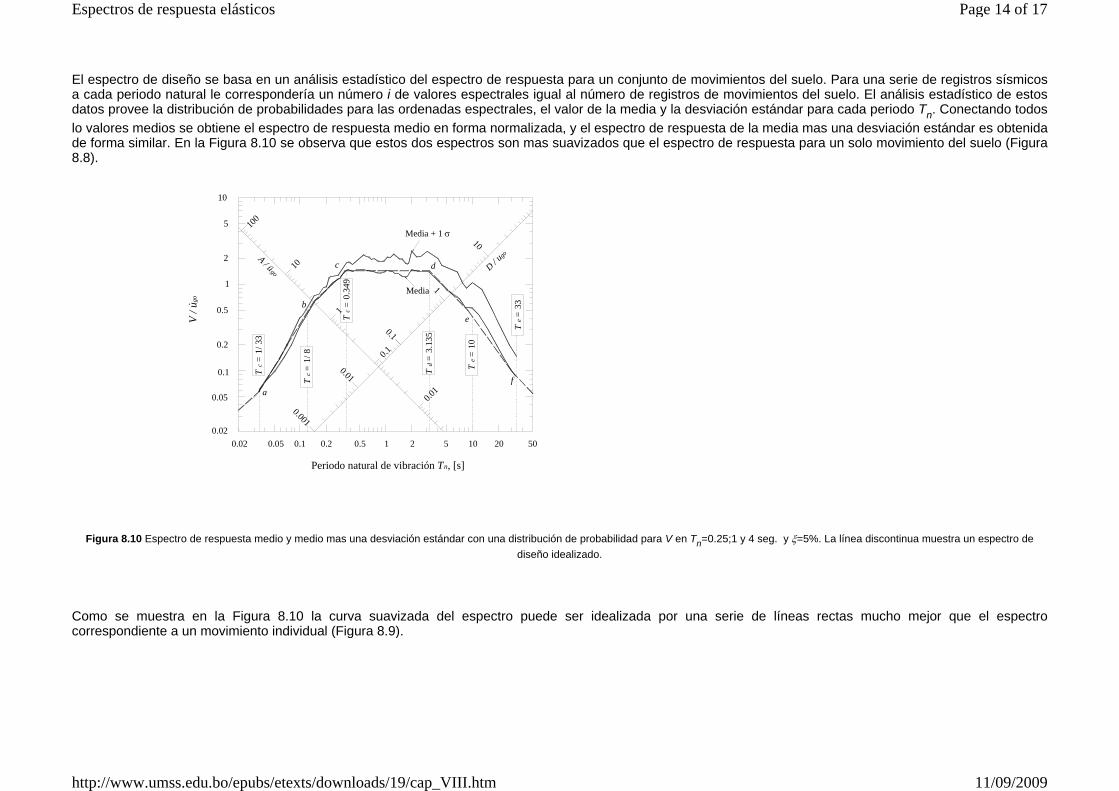
El espectro de diseño se basa en un análisis estadístico del espectro de respuesta para un conjunto de movimientos del suelo. Para una serie de registros sísmicosa cada periodo natural le correspondería un número i de valores espectrales igual al número de registros de movimientos del suelo. El análisis estadístico de estosdatos provee la distribución de probabilidades para las ordenadas espectrales, el valor de la media y la desviación estándar para cada periodo Tn. Conectando todos lo valores medios se obtiene el espectro de respuesta medio en forma normalizada, y el espectro de respuesta de la media mas una desviación estándar es obtenidade forma similar. En la Figura 8.10 se observa que estos dos espectros son mas suavizados que el espectro de respuesta para un solo movimiento del suelo (Figura8.8).
Figura 8.10 Espectro de respuesta medio y medio mas una desviación estándar con una distribución de probabilidad para V en Tn=0.25;1 y 4 seg. y ξ=5%. La línea discontinua muestra un espectro de diseño idealizado.
Como se muestra en la Figura 8.10 la curva suavizada del espectro puede ser idealizada por una serie de líneas rectas mucho mejor que el espectrocorrespondiente a un movimiento individual (Figura 8.9).
0.10.02 0.05 50
Periodo natural de vibración Tn, [s]
0.50.2 1 2 105 20
V / u
go
0.1
0.2
0.5
2
1
5
10
0.05
0.02
10
10
0.01
0.001
100
D / ugoA / ügo
1
0.1
0.01
1
0.1
T e
= 1
0
T d
= 3
.135
T c
= 0
.349
T c =
1/ 8
T c
= 1
/ 33
a
b
c d
e
f
Media + 1 σ
T e =
33
Media
·
Page 14 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
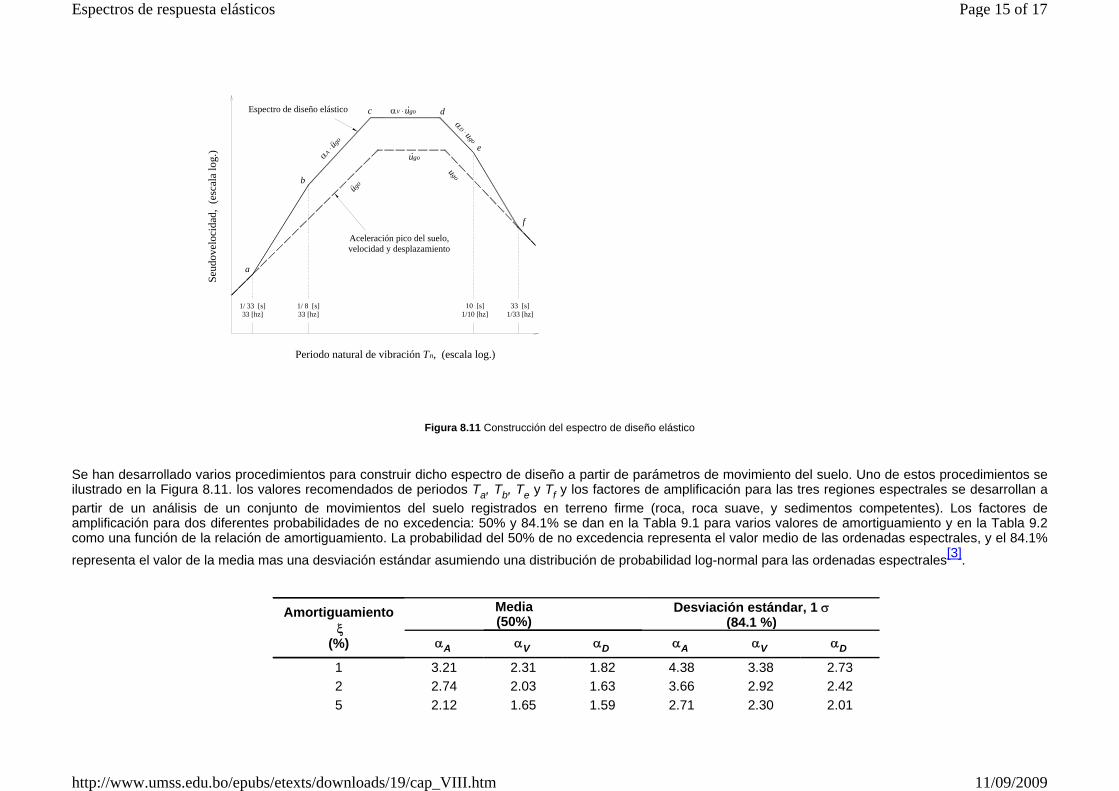
Figura 8.11 Construcción del espectro de diseño elástico
Se han desarrollado varios procedimientos para construir dicho espectro de diseño a partir de parámetros de movimiento del suelo. Uno de estos procedimientos seilustrado en la Figura 8.11. los valores recomendados de periodos Ta, Tb, Te y Tf y los factores de amplificación para las tres regiones espectrales se desarrollan apartir de un análisis de un conjunto de movimientos del suelo registrados en terreno firme (roca, roca suave, y sedimentos competentes). Los factores deamplificación para dos diferentes probabilidades de no excedencia: 50% y 84.1% se dan en la Tabla 9.1 para varios valores de amortiguamiento y en la Tabla 9.2como una función de la relación de amortiguamiento. La probabilidad del 50% de no excedencia representa el valor medio de las ordenadas espectrales, y el 84.1%
representa el valor de la media mas una desviación estándar asumiendo una distribución de probabilidad log-normal para las ordenadas espectrales[3].
Amortiguamiento ξ
(%)
Media (50%)
Desviación estándar, 1 σ (84.1 %)
αA αV αD αA αV αD
1 3.21 2.31 1.82 4.38 3.38 2.73 2 2.74 2.03 1.63 3.66 2.92 2.42 5 2.12 1.65 1.59 2.71 2.30 2.01
Periodo natural de vibración Tn, (escala log.)
Seud
ovel
ocid
ad,
(esc
ala
log.
)
a
b
c d
e
f
αV · ugo
αA · ügo
αD · ugo
ugo
ugo
ügo
1/ 33 [s] 33 [hz]
1/ 8 [s] 33 [hz]
10 [s] 1/10 [hz]
33 [s] 1/33 [hz]
Aceleración pico del suelo,velocidad y desplazamiento
Espectro de diseño elástico ·
·
Page 15 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
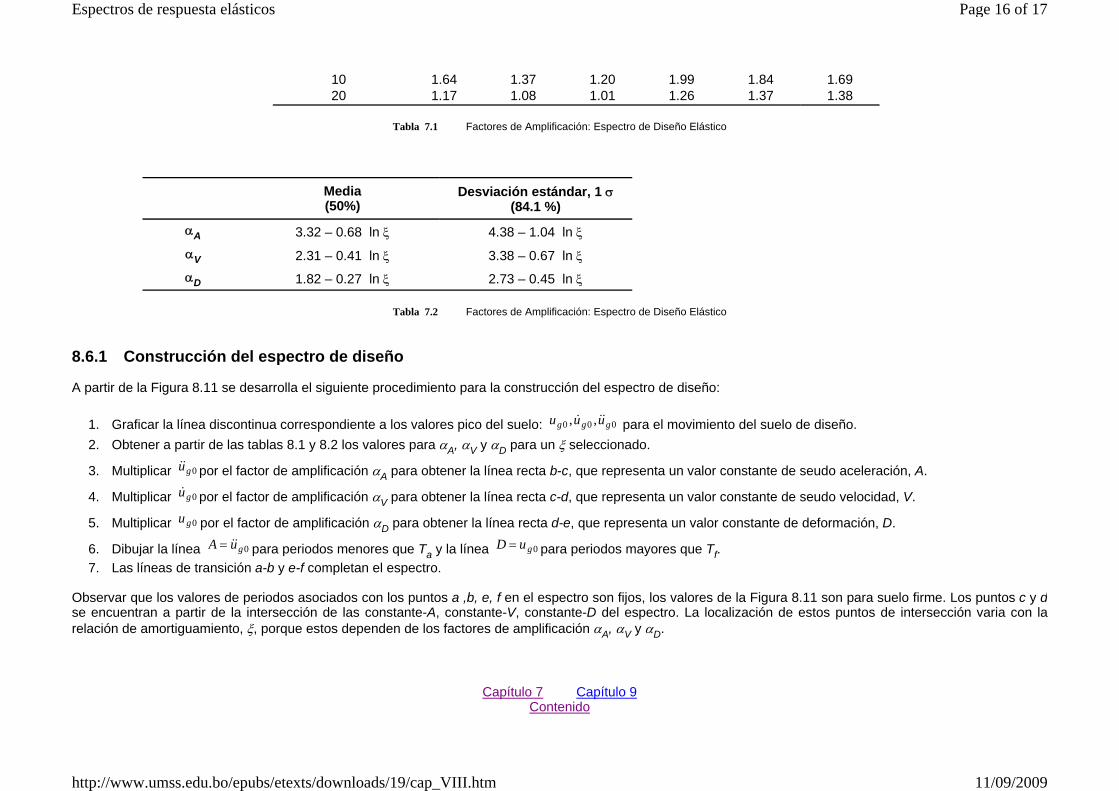
Tabla 7.1 Factores de Amplificación: Espectro de Diseño Elástico
Tabla 7.2 Factores de Amplificación: Espectro de Diseño Elástico
8.6.1 Construcción del espectro de diseño A partir de la Figura 8.11 se desarrolla el siguiente procedimiento para la construcción del espectro de diseño:
1. Graficar la línea discontinua correspondiente a los valores pico del suelo: para el movimiento del suelo de diseño.
2. Obtener a partir de las tablas 8.1 y 8.2 los valores para αA, αV y αD para un ξ seleccionado.
3. Multiplicar por el factor de amplificación αA para obtener la línea recta b-c, que representa un valor constante de seudo aceleración, A.
4. Multiplicar por el factor de amplificación αV para obtener la línea recta c-d, que representa un valor constante de seudo velocidad, V.
5. Multiplicar por el factor de amplificación αD para obtener la línea recta d-e, que representa un valor constante de deformación, D.
6. Dibujar la línea para periodos menores que Ta y la línea para periodos mayores que Tf.
7. Las líneas de transición a-b y e-f completan el espectro. Observar que los valores de periodos asociados con los puntos a ,b, e, f en el espectro son fijos, los valores de la Figura 8.11 son para suelo firme. Los puntos c y dse encuentran a partir de la intersección de las constante-A, constante-V, constante-D del espectro. La localización de estos puntos de intersección varia con larelación de amortiguamiento, ξ, porque estos dependen de los factores de amplificación αA, αV y αD.
Capítulo 7 Capítulo 9 Contenido
10 1.64 1.37 1.20 1.99 1.84 1.6920 1.17 1.08 1.01 1.26 1.37 1.38
Media (50%)
Desviación estándar, 1 σ (84.1 %)
αA 3.32 – 0.68 ln ξ 4.38 – 1.04 ln ξ αV 2.31 – 0.41 ln ξ 3.38 – 0.67 ln ξ αD 1.82 – 0.27 ln ξ 2.73 – 0.45 ln ξ
000 ,, ggg uuu &&&
0gu&&
0gu&
0gu
0guA &&= 0guD =
Page 16 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm

[1] Componente N-S del movimiento del suelo registrado durante el sismo del Centro, California; 18 de Mayo de1940
[2] Anil K. Chopra, pp 113-114 [ref. 12]
[3] Anil K. Chopra, pp 217-224 [ref. 12]
Page 17 of 17Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_VIII.htm
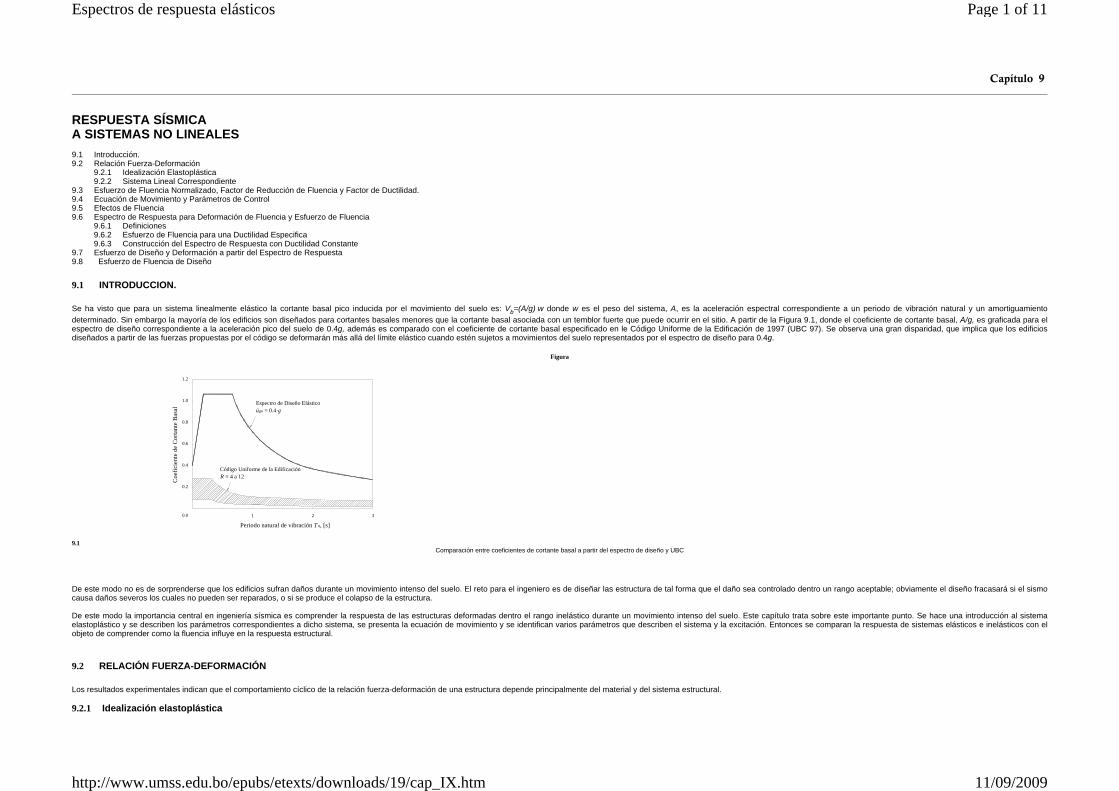
Capítulo 9 RESPUESTA SÍSMICA A SISTEMAS NO LINEALES 9.1 Introducción. 9.2 Relación Fuerza-Deformación
9.2.1 Idealización Elastoplástica 9.2.2 Sistema Lineal Correspondiente
9.3 Esfuerzo de Fluencia Normalizado, Factor de Reducción de Fluencia y Factor de Ductilidad. 9.4 Ecuación de Movimiento y Parámetros de Control 9.5 Efectos de Fluencia 9.6 Espectro de Respuesta para Deformación de Fluencia y Esfuerzo de Fluencia
9.6.1 Definiciones 9.6.2 Esfuerzo de Fluencia para una Ductilidad Especifica 9.6.3 Construcción del Espectro de Respuesta con Ductilidad Constante
9.7 Esfuerzo de Diseño y Deformación a partir del Espectro de Respuesta 9.8 Esfuerzo de Fluencia de Diseño
9.1 INTRODUCCION. Se ha visto que para un sistema linealmente elástico la cortante basal pico inducida por el movimiento del suelo es: Vb=(A/g)·w donde w es el peso del sistema, A, es la aceleración espectral correspondiente a un periodo de vibración natural y un amortiguamiento determinado. Sin embargo la mayoría de los edificios son diseñados para cortantes basales menores que la cortante basal asociada con un temblor fuerte que puede ocurrir en el sitio. A partir de la Figura 9.1, donde el coeficiente de cortante basal, A/g, es graficada para el espectro de diseño correspondiente a la aceleración pico del suelo de 0.4g, además es comparado con el coeficiente de cortante basal especificado en le Código Uniforme de la Edificación de 1997 (UBC 97). Se observa una gran disparidad, que implica que los edificiosdiseñados a partir de las fuerzas propuestas por el código se deformarán más allá del límite elástico cuando estén sujetos a movimientos del suelo representados por el espectro de diseño para 0.4g.
Figura
9.1 Comparación entre coeficientes de cortante basal a partir del espectro de diseño y UBC
De este modo no es de sorprenderse que los edificios sufran daños durante un movimiento intenso del suelo. El reto para el ingeniero es de diseñar las estructura de tal forma que el daño sea controlado dentro un rango aceptable; obviamente el diseño fracasará si el sismocausa daños severos los cuales no pueden ser reparados, o si se produce el colapso de la estructura. De este modo la importancia central en ingeniería sísmica es comprender la respuesta de las estructuras deformadas dentro el rango inelástico durante un movimiento intenso del suelo. Este capítulo trata sobre este importante punto. Se hace una introducción al sistemaelastoplástico y se describen los parámetros correspondientes a dicho sistema, se presenta la ecuación de movimiento y se identifican varios parámetros que describen el sistema y la excitación. Entonces se comparan la respuesta de sistemas elásticos e inelásticos con elobjeto de comprender como la fluencia influye en la respuesta estructural.
9.2 RELACIÓN FUERZA-DEFORMACIÓN
Los resultados experimentales indican que el comportamiento cíclico de la relación fuerza-deformación de una estructura depende principalmente del material y del sistema estructural. 9.2.1 Idealización elastoplástica
1
0.2
0.4
0.6
0.8
1.0
1.2
2 30.0
Coe
ficie
nte
de C
orta
nte
Bas
al
Espectro de Diseño Elásticoügo = 0.4·g
Código Uniforme de la EdificaciónR = 4 a 12
Periodo natural de vibración Tn, [s]
Page 1 of 11Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IX.htm
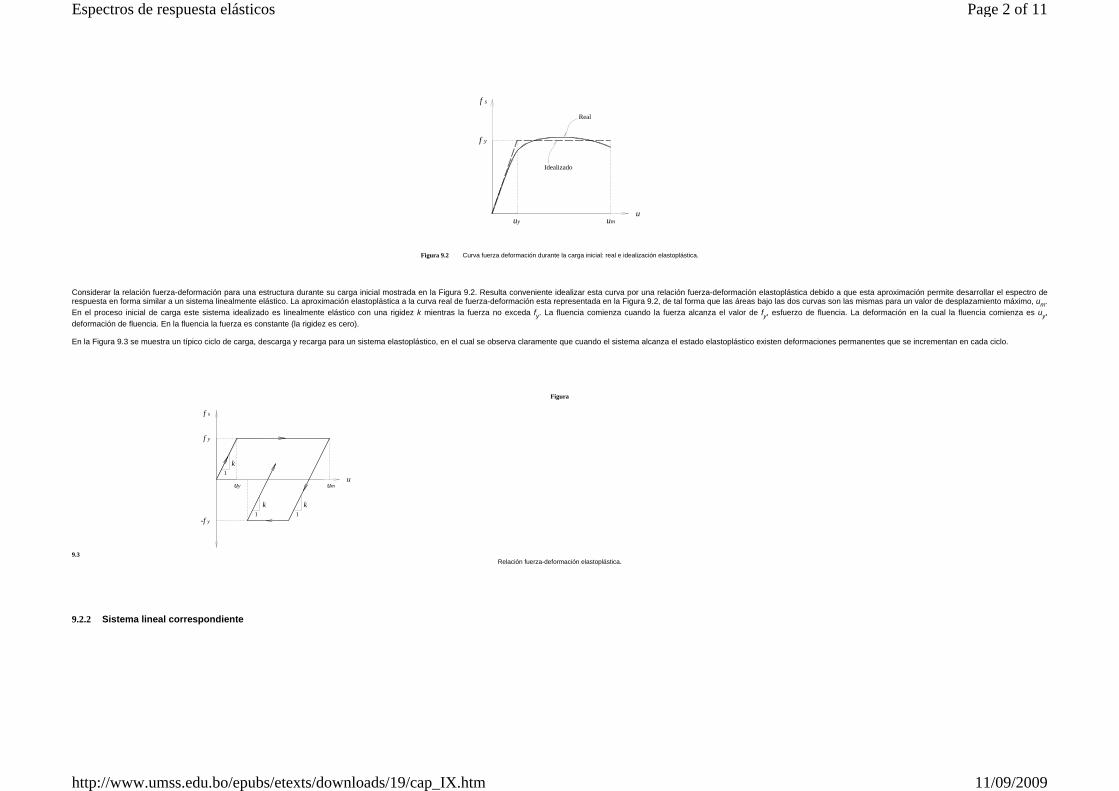
Figura 9.2 Curva fuerza deformación durante la carga inicial: real e idealización elastoplástica.
Considerar la relación fuerza-deformación para una estructura durante su carga inicial mostrada en la Figura 9.2. Resulta conveniente idealizar esta curva por una relación fuerza-deformación elastoplástica debido a que esta aproximación permite desarrollar el espectro de respuesta en forma similar a un sistema linealmente elástico. La aproximación elastoplástica a la curva real de fuerza-deformación esta representada en la Figura 9.2, de tal forma que las áreas bajo las dos curvas son las mismas para un valor de desplazamiento máximo, um.En el proceso inicial de carga este sistema idealizado es linealmente elástico con una rigidez k mientras la fuerza no exceda fy. La fluencia comienza cuando la fuerza alcanza el valor de fy, esfuerzo de fluencia. La deformación en la cual la fluencia comienza es uy, deformación de fluencia. En la fluencia la fuerza es constante (la rigidez es cero). En la Figura 9.3 se muestra un típico ciclo de carga, descarga y recarga para un sistema elastoplástico, en el cual se observa claramente que cuando el sistema alcanza el estado elastoplástico existen deformaciones permanentes que se incrementan en cada ciclo.
Figura
9.3 Relación fuerza-deformación elastoplástica.
9.2.2 Sistema lineal correspondiente
Real
Idealizado
uy
f y
f s
umu
11
1
uy um
f y
u
f s
-f y
kk
k
Page 2 of 11Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IX.htm
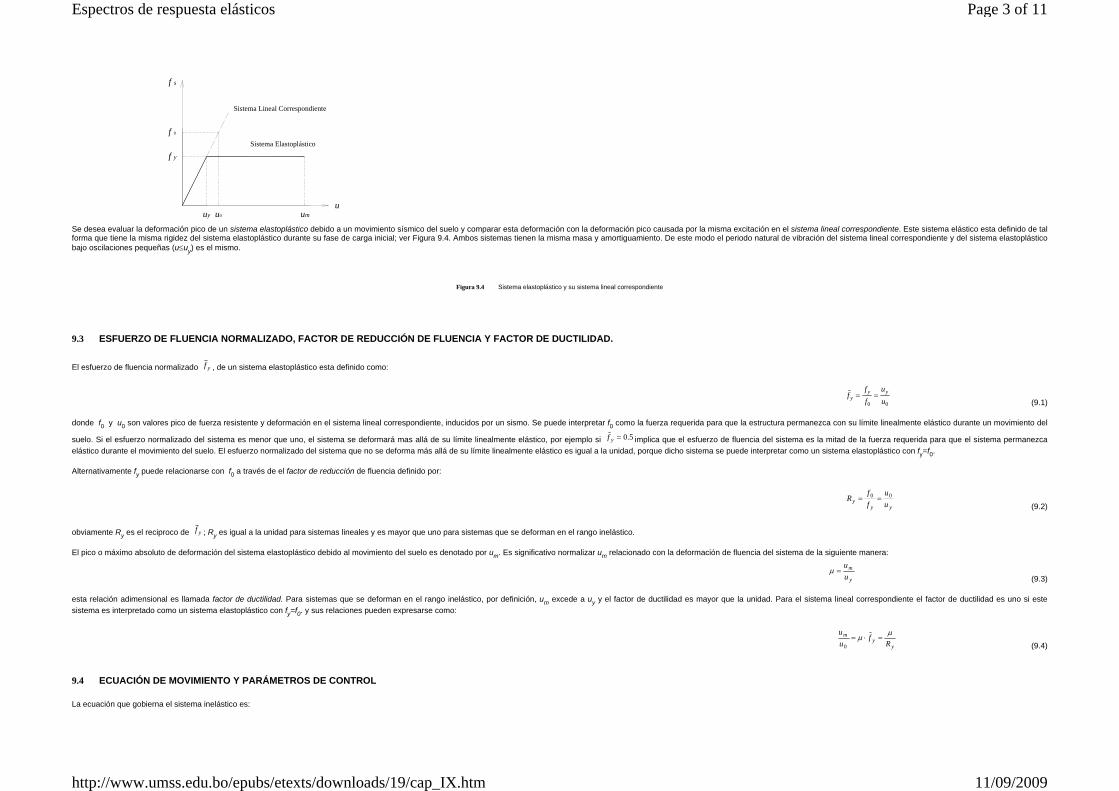
Se desea evaluar la deformación pico de un sistema elastoplástico debido a un movimiento sísmico del suelo y comparar esta deformación con la deformación pico causada por la misma excitación en el sistema lineal correspondiente. Este sistema elástico esta definido de tal forma que tiene la misma rigidez del sistema elastoplástico durante su fase de carga inicial; ver Figura 9.4. Ambos sistemas tienen la misma masa y amortiguamiento. De este modo el periodo natural de vibración del sistema lineal correspondiente y del sistema elastoplásticobajo oscilaciones pequeñas (u≤uy) es el mismo.
Figura 9.4 Sistema elastoplástico y su sistema lineal correspondiente
9.3 ESFUERZO DE FLUENCIA NORMALIZADO, FACTOR DE REDUCCIÓN DE FLUENCIA Y FACTOR DE DUCTILIDAD.
El esfuerzo de fluencia normalizado , de un sistema elastoplástico esta definido como:
(9.1) donde f0 y u0 son valores pico de fuerza resistente y deformación en el sistema lineal correspondiente, inducidos por un sismo. Se puede interpretar f0 como la fuerza requerida para que la estructura permanezca con su límite linealmente elástico durante un movimiento del
suelo. Si el esfuerzo normalizado del sistema es menor que uno, el sistema se deformará mas allá de su límite linealmente elástico, por ejemplo si implica que el esfuerzo de fluencia del sistema es la mitad de la fuerza requerida para que el sistema permanezcaelástico durante el movimiento del suelo. El esfuerzo normalizado del sistema que no se deforma más allá de su límite linealmente elástico es igual a la unidad, porque dicho sistema se puede interpretar como un sistema elastoplástico con fy=f0. Alternativamente fy puede relacionarse con f0 a través de el factor de reducción de fluencia definido por:
(9.2)
obviamente Ry es el reciproco de ; Ry es igual a la unidad para sistemas lineales y es mayor que uno para sistemas que se deforman en el rango inelástico.
El pico o máximo absoluto de deformación del sistema elastoplástico debido al movimiento del suelo es denotado por um. Es significativo normalizar um relacionado con la deformación de fluencia del sistema de la siguiente manera:
(9.3) esta relación adimensional es llamada factor de ductilidad. Para sistemas que se deforman en el rango inelástico, por definición, um excede a uy y el factor de ductilidad es mayor que la unidad. Para el sistema lineal correspondiente el factor de ductilidad es uno si estesistema es interpretado como un sistema elastoplástico con fy=f0. y sus relaciones pueden expresarse como:
(9.4)
9.4 ECUACIÓN DE MOVIMIENTO Y PARÁMETROS DE CONTROL
La ecuación que gobierna el sistema inelástico es:
yf
00 uu
ff
f yyy ==
5.0=yf
yyy u
uff
R 00 ==
yf
y
m
uu
=μ
yy
m
Rf
uu μ
μ =⋅=0
f s
f 0
uy
f y
u0 umu
Sistema Lineal Correspondiente
Sistema Elastoplástico
Page 3 of 11Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IX.htm
(9.5)
donde la fuerza resistente para un sistema elastoplástico es mostrado en la Figura 9.3. La ecuación 9.5 es resuelta por un procedimiento numérico[1]. Para identificar los parámetros del sistema que tienen influencia en la respuesta de deformación, la ecuaciónanterior es dividida por m para obtener:
(9.6) donde:
(9.7) La cantidad ωn es la frecuencia natural del sistema inelástico vibrando dentro el rango linealmente elástico (u≤uy); ésta también es la frecuencia natural del sistema lineal correspondiente. Similarmente, ξ es la razón de amortiguamiento del sistema basado en el
amortiguamiento crítico 2·m·ωn del sistema inelástico vibrando en su rango linealmente elástico; es también la razón de amortiguamiento del sistema lineal correspondiente. La función describe la relación fuerza-deformación en forma parcialmente adimensional como se muestra en la Figura 9.5a. La ecuación 9.6 indica que para üg(t), u(t) depende de tres parámetros del sistema: ωn, ξ y uy. La ecuación 9.6 es reescrita en términos de μ(t) ≅ u(t)/uy para identificar la influencia que tiene el factor de ductilidad μ; de la ecuación 9.3 sustituyendo u(t)=uy·μ(t), y en la ecuación 9.6 y dividiendo por uy se tiene:
(9.8) donde ay=fy/m puede ser interpretada como la aceleración de la masa para producir la fuerza de fluencia y es mostrada en la Figura 9.5b. La relación de aceleraciones üg(t)/ay es la razón entre la aceleración del suelo y la medida del esfuerzo de fluencia de la estructura.
Para üg(t) dada, el factor de ductilidad depende de tres parámetros del sistema: ωn, ξ y
Figura 9.5 Relación fuerza-deformación en forma normalizada
9.5 EFECTOS DE FLUENCIA
)(),( tgs umuufucum &&&&&& ⋅−=+⋅+⋅
),( uuf s &
)(2 ),(2 tgsynn uuuuuu &&&&&& −=⋅+⋅⋅⋅+ ωωξ
mk
n =ωnm
cω
ξ⋅⋅
=2 y
ss f
uufuuf
),(),(
&& =
),( uuf s &
)()( tyt uu μ&& ⋅= )()( tyt uu μ&&&& ⋅=
y
tgnsnn a
uf )(22 ),(2
&&&&&& ⋅−=⋅+⋅⋅⋅+ ωμμωμωξμ
),( μμ &sf
1
1
1
μ
(a) (b)
f s
u yu
f s
Page 4 of 11Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IX.htm
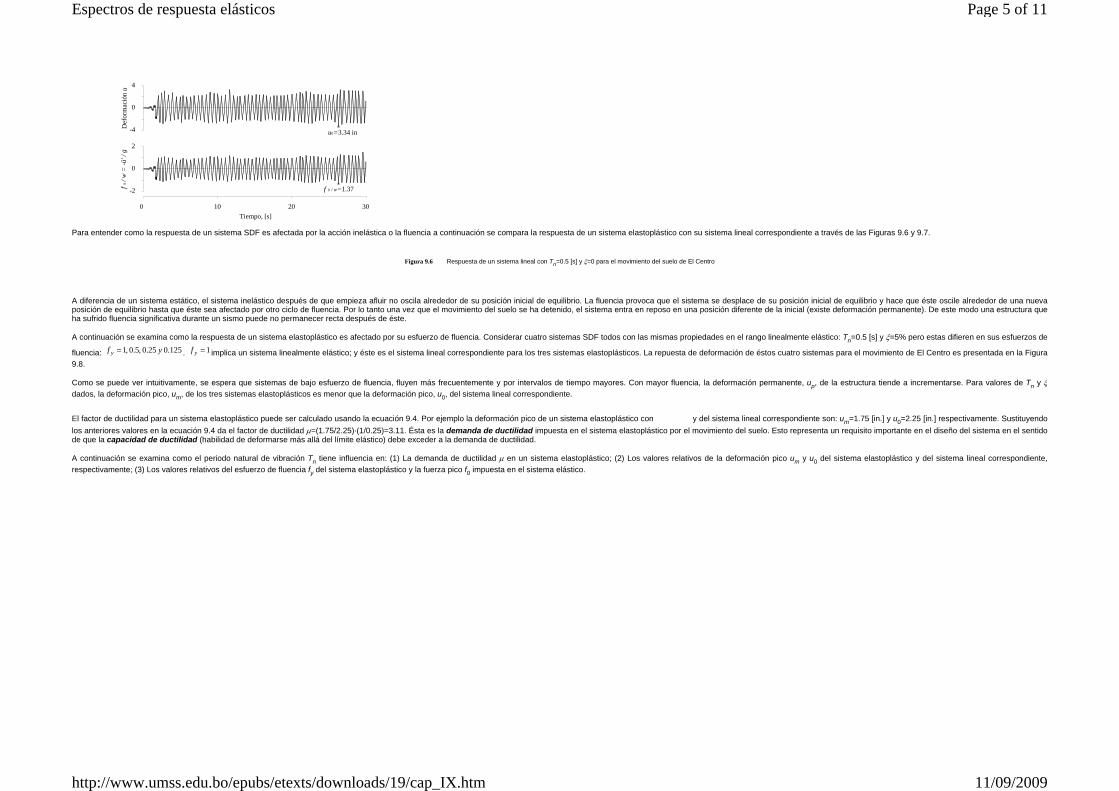
Para entender como la respuesta de un sistema SDF es afectada por la acción inelástica o la fluencia a continuación se compara la respuesta de un sistema elastoplástico con su sistema lineal correspondiente a través de las Figuras 9.6 y 9.7.
Figura 9.6 Respuesta de un sistema lineal con Tn=0.5 [s] y ξ=0 para el movimiento del suelo de El Centro
A diferencia de un sistema estático, el sistema inelástico después de que empieza afluir no oscila alrededor de su posición inicial de equilibrio. La fluencia provoca que el sistema se desplace de su posición inicial de equilibrio y hace que éste oscile alrededor de una nuevaposición de equilibrio hasta que éste sea afectado por otro ciclo de fluencia. Por lo tanto una vez que el movimiento del suelo se ha detenido, el sistema entra en reposo en una posición diferente de la inicial (existe deformación permanente). De este modo una estructura queha sufrido fluencia significativa durante un sismo puede no permanecer recta después de éste. A continuación se examina como la respuesta de un sistema elastoplástico es afectado por su esfuerzo de fluencia. Considerar cuatro sistemas SDF todos con las mismas propiedades en el rango linealmente elástico: Tn=0.5 [s] y ξ=5% pero estas difieren en sus esfuerzos de
fluencia: . implica un sistema linealmente elástico; y éste es el sistema lineal correspondiente para los tres sistemas elastoplásticos. La repuesta de deformación de éstos cuatro sistemas para el movimiento de El Centro es presentada en la Figura 9.8. Como se puede ver intuitivamente, se espera que sistemas de bajo esfuerzo de fluencia, fluyen más frecuentemente y por intervalos de tiempo mayores. Con mayor fluencia, la deformación permanente, up, de la estructura tiende a incrementarse. Para valores de Tn y ξdados, la deformación pico, um, de los tres sistemas elastoplásticos es menor que la deformación pico, u0, del sistema lineal correspondiente. El factor de ductilidad para un sistema elastoplástico puede ser calculado usando la ecuación 9.4. Por ejemplo la deformación pico de un sistema elastoplástico con y del sistema lineal correspondiente son: um=1.75 [in.] y u0=2.25 [in.] respectivamente. Sustituyendo los anteriores valores en la ecuación 9.4 da el factor de ductilidad μ=(1.75/2.25)·(1/0.25)=3.11. Ésta es la demanda de ductilidad impuesta en el sistema elastoplástico por el movimiento del suelo. Esto representa un requisito importante en el diseño del sistema en el sentidode que la capacidad de ductilidad (habilidad de deformarse más allá del límite elástico) debe exceder a la demanda de ductilidad. A continuación se examina como el periodo natural de vibración Tn tiene influencia en: (1) La demanda de ductilidad μ en un sistema elastoplástico; (2) Los valores relativos de la deformación pico um y u0 del sistema elastoplástico y del sistema lineal correspondiente, respectivamente; (3) Los valores relativos del esfuerzo de fluencia fy del sistema elastoplástico y la fuerza pico f0 impuesta en el sistema elástico.
125.025.0,5.0,1 y f y = 1=yf
0
4
-4Def
orm
ació
n u
f s /
w =
-ü' /
g
0
-2
2
u0=3.34 in
f 0 / w=1.37
10 20 300Tiempo, [s]
Page 5 of 11Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IX.htm
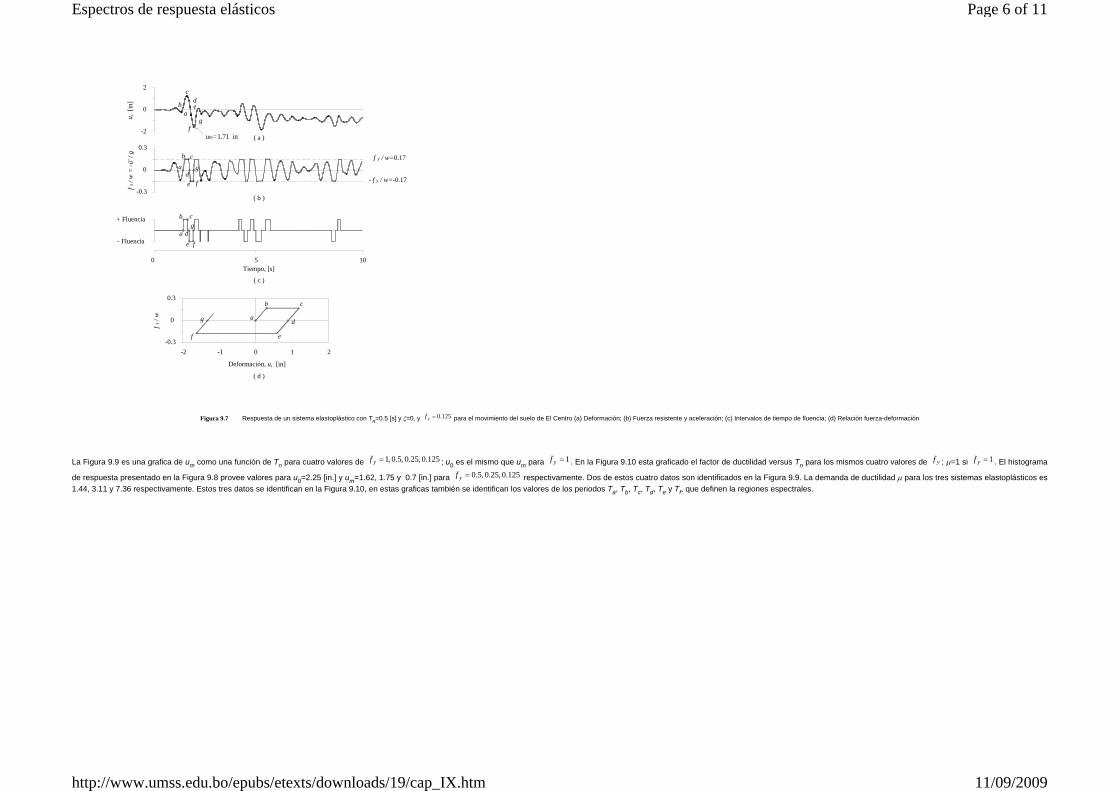
Figura 9.7 Respuesta de un sistema elastoplástico con Tn=0.5 [s] y ξ=0, y para el movimiento del suelo de El Centro (a) Deformación; (b) Fuerza resistente y aceleración; (c) Intervalos de tiempo de fluencia; (d) Relación fuerza-deformación
La Figura 9.9 es una grafica de um como una función de Tn para cuatro valores de ; u0 es el mismo que um para . En la Figura 9.10 esta graficado el factor de ductilidad versus Tn para los mismos cuatro valores de ; μ=1 si . El histograma
de respuesta presentado en la Figura 9.8 provee valores para u0=2.25 [in.] y um=1.62, 1.75 y 0.7 [in.] para respectivamente. Dos de estos cuatro datos son identificados en la Figura 9.9. La demanda de ductilidad μ para los tres sistemas elastoplásticos es 1.44, 3.11 y 7.36 respectivamente. Estos tres datos se identifican en la Figura 9.10, en estas graficas también se identifican los valores de los periodos Ta, Tb, Tc, Td, Te y Tf, que definen la regiones espectrales.
125.0=yf
125.0,25.0,5.0,1 f y = 1=yf yf 1=yf
125.0,25.0,5.0 f y =
5Tiempo, [s]
0
-0.3
f s /
w
0
0.3
0 1 2-1-2
10
ab
cde
f g
ab c
de f
g
a
b c
de f
g
a
b c
e
d
f
g
+ Fluencia
- Fluencia
f y / w=0.17
- f y / w=-0.17
Deformación, u, [in]
( a )
( b )
( c )
( d )
um=1.71 in
0
2
-2 u
, [in
]f s
/ w
= -ü
' / g
0
-0.3
0.3
Page 6 of 11Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IX.htm
Figura 9.8
Figura 9.9 Respuesta de deformación yfluencia de cuatro sistemas para el movimiento del suelo de El Centro;Tn=0.5[s] yξ=5%, y
125.0,25.0,5.0,1 f y =
Page 7 of 11Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IX.htm
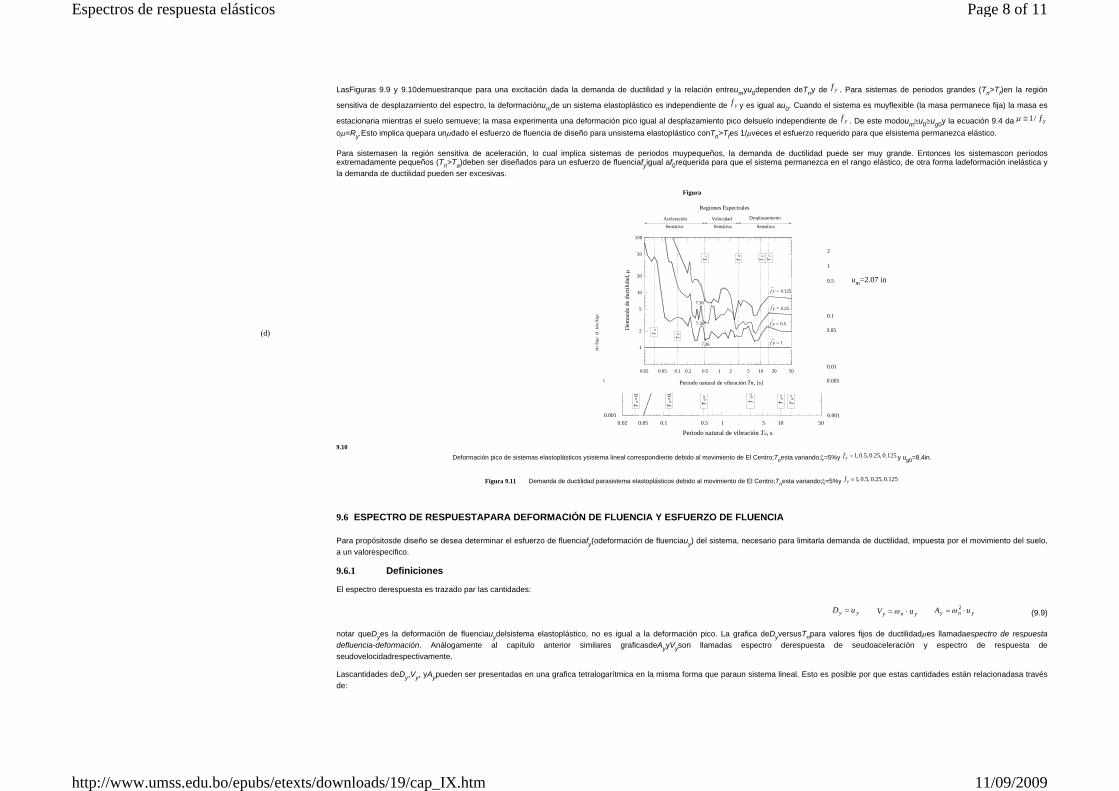
LasFiguras 9.9 y 9.10demuestranque para una excitación dada la demanda de ductilidad y la relación entreumyu0dependen deTny de . Para sistemas de periodos grandes (Tn>Tf)en la región
sensitiva de desplazamiento del espectro, la deformaciónumde un sistema elastoplástico es independiente de y es igual au0. Cuando el sistema es muyflexible (la masa permanece fija) la masa es
estacionaria mientras el suelo semueve; la masa experimenta una deformación pico igual al desplazamiento pico delsuelo independiente de . De este modoum≅u0≅ug0y la ecuación 9.4 daoμ=Ry.Esto implica quepara unμdado el esfuerzo de fluencia de diseño para unsistema elastoplástico conTn>Tfes 1/μveces el esfuerzo requerido para que elsistema permanezca elástico. Para sistemasen la región sensitiva de aceleración, lo cual implica sistemas de periodos muypequeños, la demanda de ductilidad puede ser muy grande. Entonces los sistemascon periodosextremadamente pequeños (Tn>Ta)deben ser diseñados para un esfuerzo de fluenciafyigual af0requerida para que el sistema permanezca en el rango elástico, de otra forma ladeformación inelástica y la demanda de ductilidad pueden ser excesivas.
Figura
9.10
Deformación pico de sistemas elastoplásticos ysistema lineal correspondiente debido al movimiento de El Centro;Tnesta variando;ξ=5%y y ug0=8.4in.
Figura 9.11 Demanda de ductilidad parasistema elastoplásticos debido al movimiento de El Centro;Tnesta variando;ξ=5%y
9.6 ESPECTRO DE RESPUESTAPARA DEFORMACIÓN DE FLUENCIA Y ESFUERZO DE FLUENCIA
Para propósitosde diseño se desea determinar el esfuerzo de fluenciafy(odeformación de fluenciauy) del sistema, necesario para limitarla demanda de ductilidad, impuesta por el movimiento del suelo, a un valorespecifico. 9.6.1 Definiciones El espectro derespuesta es trazado par las cantidades:
(9.9) notar queDyes la deformación de fluenciauydelsistema elastoplástico, no es igual a la deformación pico. La grafica deDyversusTnpara valores fijos de ductilidadμes llamadaespectro de respuesta defluencia-deformación. Análogamente al capítulo anterior similares graficasdeAyyVyson llamadas espectro derespuesta de seudoaceleración y espectro de respuesta de seudovelocidadrespectivamente. Lascantidades deDy,Vy, yAypueden ser presentadas en una grafica tetralogarítmica en la misma forma que paraun sistema lineal. Esto es posible por que estas cantidades están relacionadasa travésde:
yf
yf
yf yf/1≅μ
125.0,25.0,5.0,1 f y =
125.0,25.0,5.0,1 f y =
yy uD = yny uV ⋅= ω yny uA ⋅= 2ω
0.1 1 10 500.050.02 0.5 5
Periodo natural de vibración Tn, s
0.01
0.05
1
0.005
0.001
0.1
0.5
2 2
1
0.05
0.001
0.01
0.005
0.1
0.5
Regiones Espectrales
Aceleración Velocidad Desplazamiento
Sensitiva Sensitiva Sensitiva
T a=
0.03
5
T a=
0.12
5
T a=
3
T a=
15
T a=
0.5
T a=
10
uo /ugo f y=1f y=0.5
f y=0.25
f y=0.125um /ug0
u0 /u
g0 o
um
/ug0
_
_
_
_
0.1 1 10
1
2
5
10
20
50
100
0.2 20 500.050.02 20.5 5
Dem
anda
de
duct
ilida
d, μ
Periodo natural de vibración Tn, [s]
T b
f y = 1
f y = 0.5
f y = 0.25
f y = 0.125
T a
T c
T d
T e
T f
Aceleración Velocidad Desplazamiento
Sensitiva Sensitiva Sensitiva
Regiones Espectrales
7.36
7.36
7.36
_
_
_
_(d)
um=2.07 in
Page 8 of 11Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IX.htm
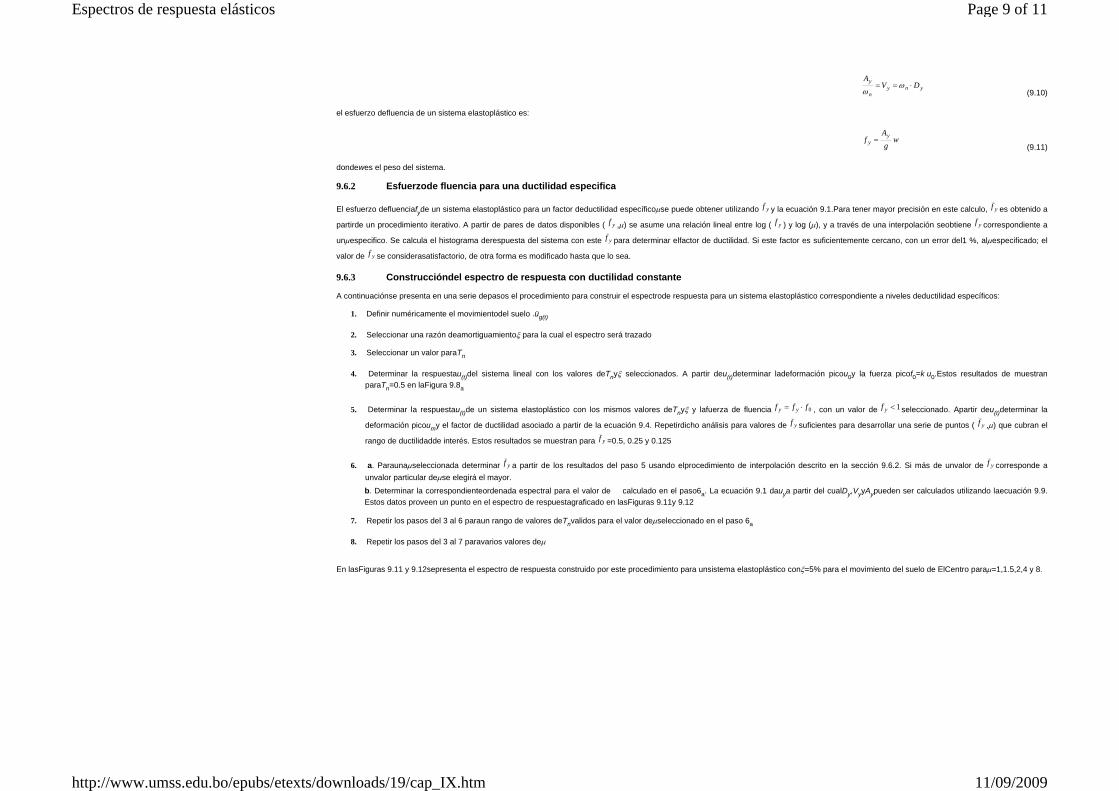
(9.10) el esfuerzo defluencia de un sistema elastoplástico es:
(9.11) dondewes el peso del sistema. 9.6.2 Esfuerzode fluencia para una ductilidad especifica El esfuerzo defluenciafyde un sistema elastoplástico para un factor deductilidad específicoμse puede obtener utilizando y la ecuación 9.1.Para tener mayor precisión en este calculo, es obtenido a
partirde un procedimiento iterativo. A partir de pares de datos disponibles ( ,μ) se asume una relación lineal entre log ( ) y log (μ), y a través de una interpolación seobtiene correspondiente a
unμespecifico. Se calcula el histograma derespuesta del sistema con este para determinar elfactor de ductilidad. Si este factor es suficientemente cercano, con un error del1 %, alμespecificado; el
valor de se considerasatisfactorio, de otra forma es modificado hasta que lo sea.
9.6.3 Construccióndel espectro de respuesta con ductilidad constante A continuaciónse presenta en una serie depasos el procedimiento para construir el espectrode respuesta para un sistema elastoplástico correspondiente a niveles deductilidad específicos:
1. Definir numéricamente el movimientodel suelo .üg(t) 2. Seleccionar una razón deamortiguamientoξ para la cual el espectro será trazado 3. Seleccionar un valor paraTn 4. Determinar la respuestau(t)del sistema lineal con los valores deTnyξ seleccionados. A partir deu(t)determinar ladeformación picou0y la fuerza picof0=k·u0.Estos resultados de muestran
paraTn=0.5 en laFigura 9.8a 5. Determinar la respuestau(t)de un sistema elastoplástico con los mismos valores deTnyξ y lafuerza de fluencia , con un valor de seleccionado. Apartir deu(t)determinar la
deformación picoumy el factor de ductilidad asociado a partir de la ecuación 9.4. Repetirdicho análisis para valores de suficientes para desarrollar una serie de puntos ( ,μ) que cubran el
rango de ductilidadde interés. Estos resultados se muestran para =0.5, 0.25 y 0.125
6. a. Paraunaμseleccionada determinar a partir de los resultados del paso 5 usando elprocedimiento de interpolación descrito en la sección 9.6.2. Si más de unvalor de corresponde a
unvalor particular deμse elegirá el mayor.
b. Determinar la correspondienteordenada espectral para el valor de calculado en el paso6a. La ecuación 9.1 dauya partir del cualDy,VyyAypueden ser calculados utilizando laecuación 9.9. Estos datos proveen un punto en el espectro de respuestagraficado en lasFiguras 9.11y 9.12
7. Repetir los pasos del 3 al 6 paraun rango de valores deTnvalidos para el valor deμseleccionado en el paso 6a 8. Repetir los pasos del 3 al 7 paravarios valores deμ
En lasFiguras 9.11 y 9.12sepresenta el espectro de respuesta construido por este procedimiento para unsistema elastoplástico conξ=5% para el movimiento del suelo de ElCentro paraμ=1,1.5,2,4 y 8.
ynyn
y DVA
⋅== ωω
wg
Af y
y =
yf yf
yf yf yf
yf
yf
0fff yy ⋅= 1<yf
yf yf
yf
yf yf
Page 9 of 11Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IX.htm
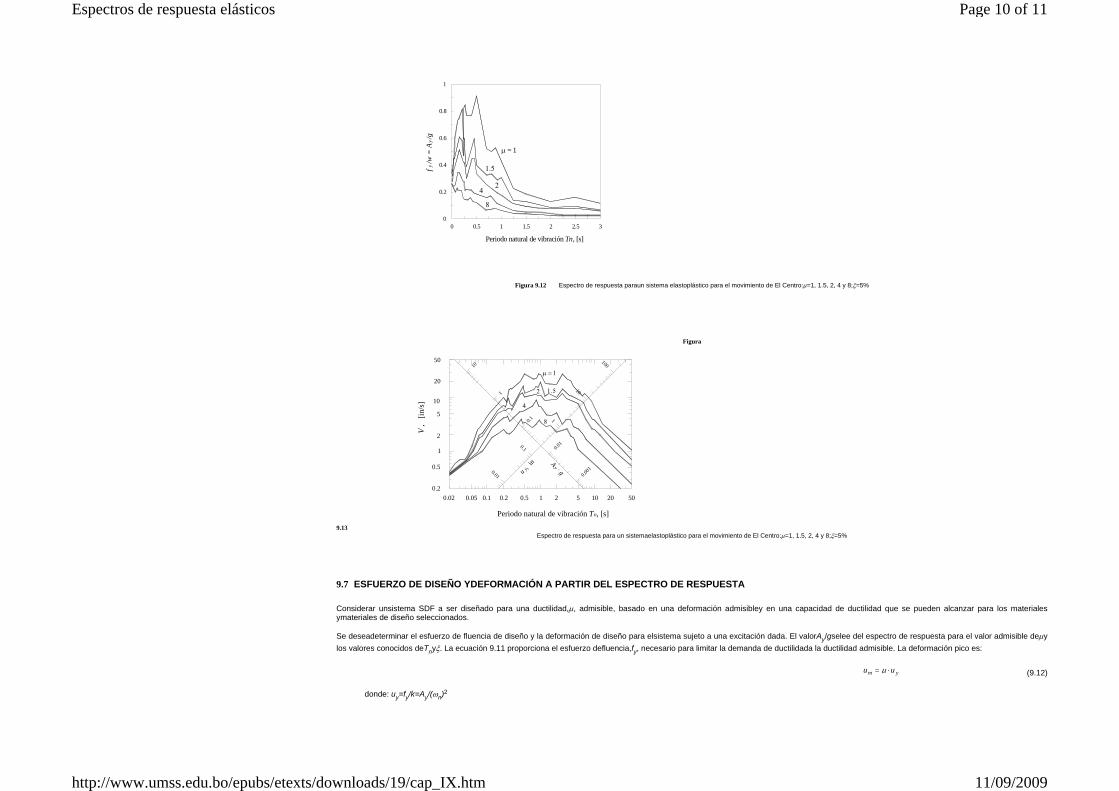
Figura 9.12 Espectro de respuesta paraun sistema elastoplástico para el movimiento de El Centro:μ=1, 1.5, 2, 4 y 8;ξ=5%
Figura
9.13 Espectro de respuesta para un sistemaelastoplástico para el movimiento de El Centro:μ=1, 1.5, 2, 4 y 8;ξ=5%
9.7 ESFUERZO DE DISEÑO YDEFORMACIÓN A PARTIR DEL ESPECTRO DE RESPUESTA
Considerar unsistema SDF a ser diseñado para una ductilidad,μ, admisible, basado en una deformación admisibley en una capacidad de ductilidad que se pueden alcanzar para los materialesymateriales de diseño seleccionados. Se deseadeterminar el esfuerzo de fluencia de diseño y la deformación de diseño para elsistema sujeto a una excitación dada. El valorAy/gselee del espectro de respuesta para el valor admisible deμy los valores conocidos deTnyξ. La ecuación 9.11 proporciona el esfuerzo defluencia,fy, necesario para limitar la demanda de ductilidada la ductilidad admisible. La deformación pico es:
(9.12)
donde: uy=fy/k=Ay/(ωn)2
ym uu ⋅= μ
f y /w
= A
y /g
0 0.5 1 1.5 2 32.50
0.2
0.4
0.6
0.8
1
μ = 1
1.5
24
8
Periodo natural de vibración Tn, [s]
μ = 1
Ay · gu y, i
n
10.0
1
2
Periodo natural de vibración Tn, [s]
2
0.20.050.02
1
0.5 0.01
0.20.1 10.5
0.1
10
5
10
V ,
[in/
s]
20
50
1
0.1
50
0.001
105 20
10
100
1.52
4
8
Page 10 of 11Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IX.htm
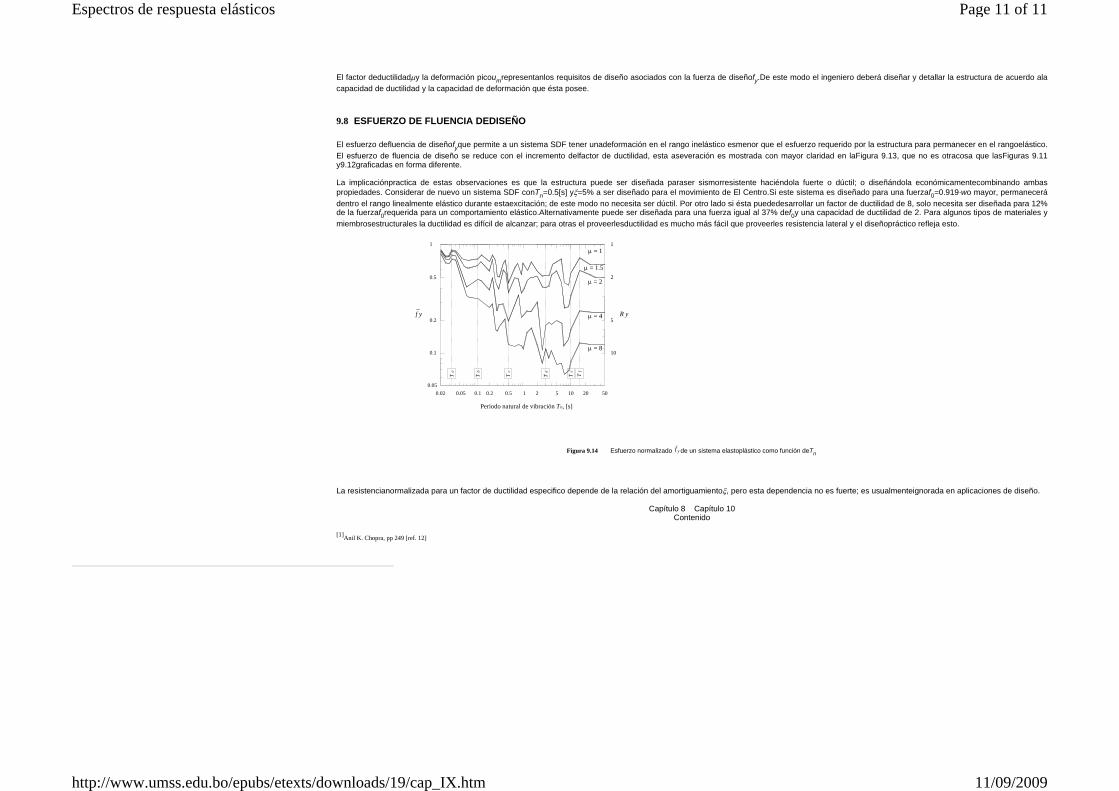
El factor deductilidadμy la deformación picoumrepresentanlos requisitos de diseño asociados con la fuerza de diseñofy.De este modo el ingeniero deberá diseñar y detallar la estructura de acuerdo ala capacidad de ductilidad y la capacidad de deformación que ésta posee.
9.8 ESFUERZO DE FLUENCIA DEDISEÑO
El esfuerzo defluencia de diseñofyque permite a un sistema SDF tener unadeformación en el rango inelástico esmenor que el esfuerzo requerido por la estructura para permanecer en el rangoelástico.El esfuerzo de fluencia de diseño se reduce con el incremento delfactor de ductilidad, esta aseveración es mostrada con mayor claridad en laFigura 9.13, que no es otracosa que lasFiguras 9.11 y9.12graficadas en forma diferente. La implicaciónpractica de estas observaciones es que la estructura puede ser diseñada paraser sismorresistente haciéndola fuerte o dúctil; o diseñándola económicamentecombinando ambaspropiedades. Considerar de nuevo un sistema SDF conTn=0.5[s] yξ=5% a ser diseñado para el movimiento de El Centro.Si este sistema es diseñado para una fuerzaf0=0.919·wo mayor, permanecerá dentro el rango linealmente elástico durante estaexcitación; de este modo no necesita ser dúctil. Por otro lado si ésta puededesarrollar un factor de ductilidad de 8, solo necesita ser diseñada para 12%de la fuerzaf0requerida para un comportamiento elástico.Alternativamente puede ser diseñada para una fuerza igual al 37% def0y una capacidad de ductilidad de 2. Para algunos tipos de materiales y miembrosestructurales la ductilidad es difícil de alcanzar; para otras el proveerlesductilidad es mucho más fácil que proveerles resistencia lateral y el diseñopráctico refleja esto.
Figura 9.14 Esfuerzo normalizado de un sistema elastoplástico como función deTn
La resistencianormalizada para un factor de ductilidad especifico depende de la relación del amortiguamientoξ, pero esta dependencia no es fuerte; es usualmenteignorada en aplicaciones de diseño.
Capítulo 8 Capítulo 10 Contenido
[1]Anil K. Chopra, pp 249 [ref. 12]
yf
0.1 1 100.2 20 500.050.02 20.5 5
Periodo natural de vibración Tn, [s]
T a
0.1
0.2
0.5
10
5
2
11
0.05
T b
T c
T d
T e
T f
f y
μ = 1
μ = 1.5
μ = 2
μ = 4
μ = 8
R y_
Page 11 of 11Espectros de respuesta elásticos
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IX.htm
Capítulo 10 SISTEMAS DE VARIOS GRADOS DE LIBERTAD
10.1 INTRODUCCIÓN
Resulta complejo elegir entre el análisis dinámico plano o tridimensional, éste último representado por sus dos componentes horizontales (cargas reversibles), lo cualno es posible en el plano. El análisis dinámico tridimensional, requerirá la evaluación de la estructura con varios grados de libertad por medio de métodossofisticados como el de los elementos finitos, que ayudaría a resolver las ecuaciones diferenciales de movimiento existentes por cada grado de libertad, es unaherramienta poderosa, sin embargo su modelación e interpretación de resultados no es sencilla y sólo se justificaría su uso en obras de magnitud. En una estructura tridimensional xyz tipo edificios, es útil y suficiente asumir la hipótesis del diafragma rígido de piso, lo cual acepta que las plantas o losas deentrepiso son indeformables en el plano xy, de esta forma el problema global se reduce a tres grados de libertad por piso, dos traslaciones horizontales (ux,uy) y una rotación vertical (rz), a estos se conocen como desplazamientos maestros de piso. Normalmente estos grados de libertad se concentran en un nudo denominadomaestro, al cual están constringidos o conectados rígidamente los nudos restantes, a estos nudos se los denomina dependientes y tienen los grados de libertadopuestos a los nudos maestros, es decir dos rotaciones horizontales (rx, ry) y una traslación vertical (uy)
10.2 ECUACIÓN DE MOVIMIENTO
Una estructura de varios niveles mostrada en la Figura 10.1, se puede idealizar como un pórtico de varios niveles con diafragma de cuerpo rígido asumiendo que lamasa está concentrada en cada nivel, las columnas se suponen axialmente inextensibles pero lateralmente flexibles. La respuesta dinámica del sistema estárepresentada por el desplazamiento lateral de las masas con el número de grados de libertad dinámica o n modos de vibración que son iguales al número de masas. La vibración resultante del sistema esta dada por la superposición de las vibraciones de cada masa. Cada modo individual de vibración tiene su propio periodo ypuede ser representado por un sistema simple del mismo periodo. La Figura 10.1 muestra tres modos de un sistema aporticado de tres niveles. El modo de vibración con periodo mayor (frecuencia baja) es llamado modofundamental de vibración; modos con periodos cortos son llamados modos armónicos (frecuencias altas). Para ilustrar el análisis correspondiente a varios grados de libertad considerar un edificio de tres pisos. Cada masa de piso representa un grado de libertad con unaecuación de equilibrio dinámico para cada una:
Page 1 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm
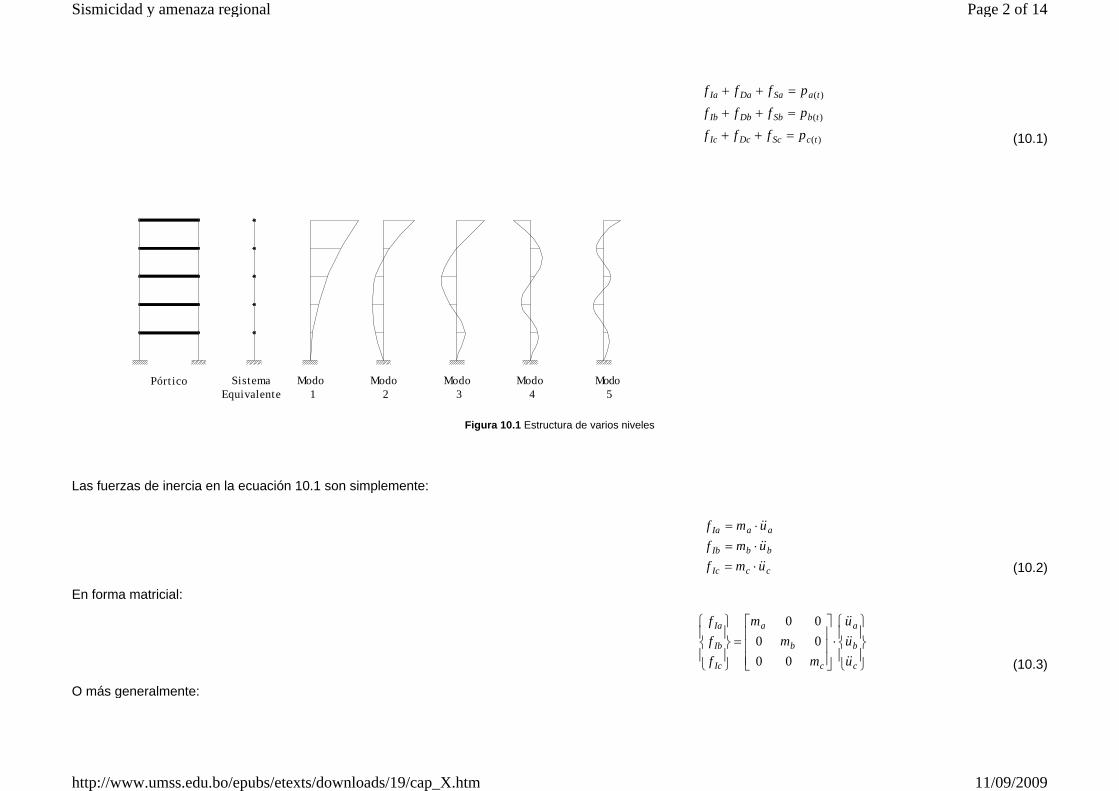
(10.1)
Figura 10.1 Estructura de varios niveles Las fuerzas de inercia en la ecuación 10.1 son simplemente:
(10.2)
En forma matricial:
(10.3)
O más generalmente:
)(
)(
)(
tcScDcIc
tbSbDbIb
taSaDaIa
pfff
pfff
pfff
=++
=++
=++
ccIc
bbIb
aaIa
umfumfumf
&&
&&
&&
⋅=⋅=⋅=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧⋅⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
c
b
a
c
b
a
Ic
Ib
Ia
uuu
mm
m
fff
&&
&&
&&
000000
Pórt ico Sistema Equivalente Modo
1 Modo 2
Modo 3
Modo 4
Modo 5
Page 2 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm

(10.4)
Donde {FI} es el vector de fuerzas de inercia, [M] es la matriz de masa y {Ü} es el vector de aceleraciones. Debe notarse que la matriz de masa es diagonal para unsistema de sumas agrupadas, sin considerar acoplamiento entre las masas. En sistemas de coordenadas de forma más generalizada, usualmente hay acoplamientoentre las coordenadas lo que complica la solución. Esta es una razón primordial para usar el método de masas concentradas. Las fuerzas de la ecuación 10.1 dependen de los desplazamientos y usando coeficientes de influencia de rigidez pueden expresarse como:
(10.5)
En forma matricial:
(10.6)
O más generalmente:
(10.7)
Donde {Fs} es el vector de fuerzas elásticas, [K] es la matriz de rigidez y {U} es el vector de desplazamientos. Por analogía, las fuerzas de amortiguamiento en la ecuación 10.1 pueden expresarse como:
(10.8)
Donde {FD} es el vector de fuerzas de amortiguamiento, [C] es la matriz de amortiguamiento y es el vector de velocidades. En general no es práctico determinar c y el amortiguamiento es expresado en términos del coeficiente de amortiguamiento (ξ). Aplicando las ecuaciones 10.4, 10.7 y 10.8 las ecuaciones de equilibrio dinámico (10.1) pueden escribirse generalmente como:
{FI}+{FD}+{FS}={p(t)} (10.9)
Lo cual es equivalente a:
{ } [ ] { }UMFI&&⋅=
cccbcbacaSc
cbcbbbabaSb
cacbabaaaSa
ukukukfukukukfukukukf
⋅+⋅+⋅=⋅+⋅+⋅=⋅+⋅+⋅=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧⋅⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
c
b
a
cccbca
bcbbba
acabaa
Sc
Sb
Sa
uuu
kkkkkkkkk
fff
{ } [ ] { }UKFs ⋅=
{ } [ ] { }UCFD&⋅=
{ }U&
Page 3 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm
(10.10)
10.3 RESPUESTA DINÁMICA: ANÁLISIS MODAL
Para determinar la respuesta dinámica de una estructura de varios grados de libertad se puede utilizar el procedimiento de análisis modal. Se obtiene la respuestamáxima por separado para cada modo, modelando cada uno de ellos como un sistema de simple grado de libertad. Debido a que los valores máximos no puedenocurrir simultáneamente, estos valores son combinados estadísticamente para obtener la respuesta total. El método de la raíz cuadrada de la suma de los cuadrados, SRSS, es aplicable para estructuras bidimensionales cuando la relación entre los periodos de cualquiermodo alto con cualquier modo bajo es 0.75 o menor, y la relación de amortiguamiento no excede el 5%. El análisis modal puede ser enfocado mediante métodosmatriciales, numéricos o métodos iterativos.
10.4 MÉTODO MATRICIAL
Como la respuesta dinámica de una estructura depende de la frecuencia o periodo de vibración y de la forma desplazada (forma modal), el primer paso en unanálisis de un sistema de varios grados de libertad es encontrar las frecuencias y las formas modales de vibración libre. En este caso no existen fuerzas externas yel amortiguamiento es considerado cero. Cada grado de libertad dinámico provee una ecuación de equilibrio dinámico, la vibración resultante del sistema consiste de n de éstas ecuaciones, y puede ser expresado en forma matricial para vibración libre no amortiguada como:
(10.11)
La vibración libre descrita gráficamente por las Figuras 10.2 y 10.3 de un sistema no amortiguado en uno de sus modos de vibración natural puede describirsematemáticamente por:
{ } { } { } { } { } { } { })(tpUKUCUM =⋅+⋅+⋅ &&&
Page 4 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm
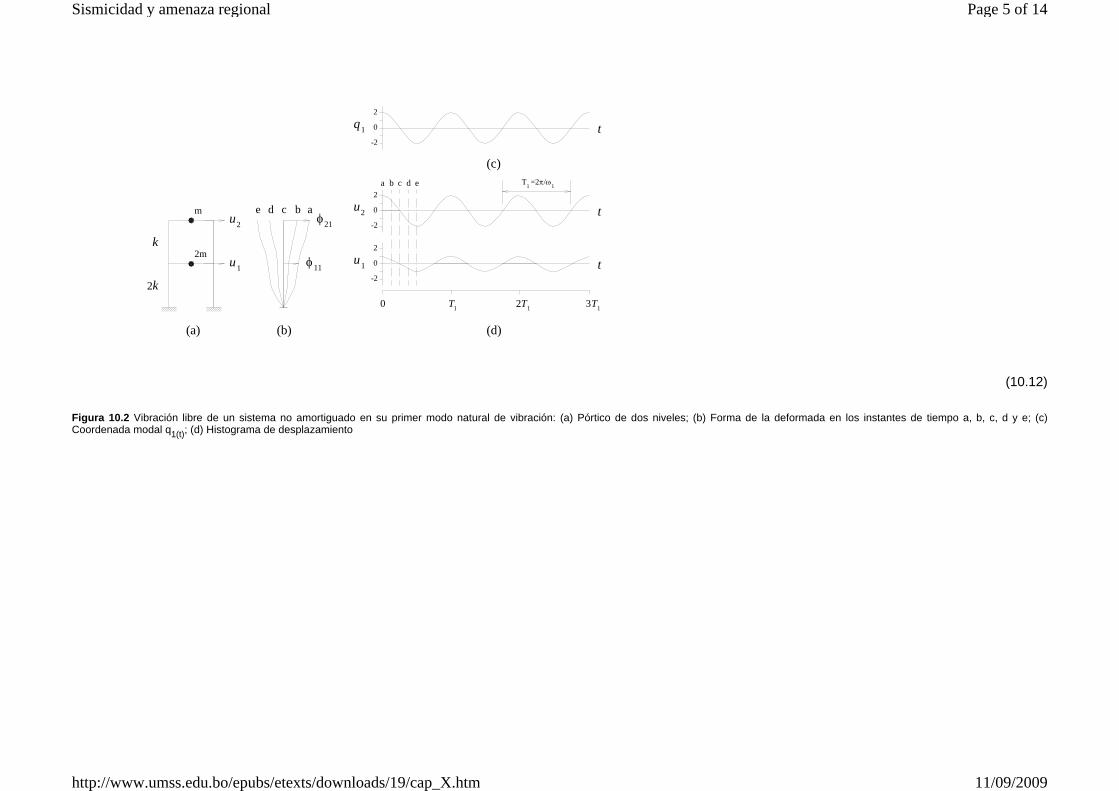
(10.12)
Figura 10.2 Vibración libre de un sistema no amortiguado en su primer modo natural de vibración: (a) Pórtico de dos niveles; (b) Forma de la deformada en los instantes de tiempo a, b, c, d y e; (c)Coordenada modal q1(t); (d) Histograma de desplazamiento
0
2
-2
0
2
-2
0
-2
2
e d c b a
b c d ea T =2π/ω
2m
m
φ11
21φu2
u1
k
2k
u2
u1
q1
0 1T 12T 13T
1 1
t
t
t
(a) (b) (d)
(c)
Page 5 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm
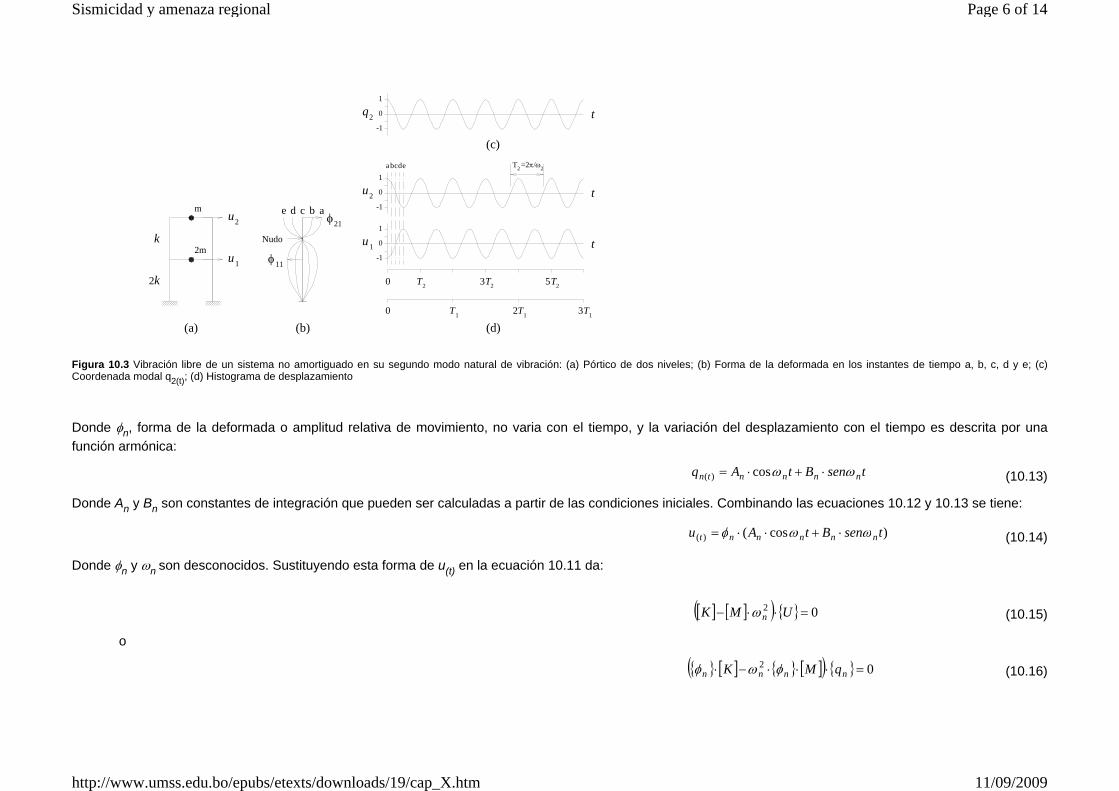
Figura 10.3 Vibración libre de un sistema no amortiguado en su segundo modo natural de vibración: (a) Pórtico de dos niveles; (b) Forma de la deformada en los instantes de tiempo a, b, c, d y e; (c)Coordenada modal q2(t); (d) Histograma de desplazamiento
Donde φn, forma de la deformada o amplitud relativa de movimiento, no varia con el tiempo, y la variación del desplazamiento con el tiempo es descrita por unafunción armónica:
(10.13)
Donde An y Bn son constantes de integración que pueden ser calculadas a partir de las condiciones iniciales. Combinando las ecuaciones 10.12 y 10.13 se tiene:
(10.14)
Donde φn y ωn son desconocidos. Sustituyendo esta forma de u(t) en la ecuación 10.11 da:
(10.15)
o
(10.16)
tsenBtAq nnnntn ωω ⋅+⋅= cos)(
)cos()( tsenBtAu nnnnnt ωωφ ⋅+⋅⋅=
[ ] [ ]( ) { } 02 =⋅⋅− UMK nω
{ } [ ] { } [ ]( ) { } 02 =⋅⋅⋅−⋅ nnnn qMK φωφ
0
1
-1
0
1
-1
0
-1
1
bcdea T =2π/ω
abcde
Nudo
u
um
2k
k2m
1
2 φ
11
21
φ
2
1u
u
t
t
tq2
2 2
T 2 3T 2 5T 2
1T 12T 13T
(a) (b) (d)
(c)
0
0
Page 6 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm

Esta expresión es una representación de la ecuación de eigenvalores; la cual tiene una solución no trivial sólo si el determinante de los coeficientes es igual a cero,es decir las frecuencias naturales ωn (escalar) y los modos φn (vector) deben satisfacer la siguiente ecuación:
(10.17)
(10.18)
El desarrollo del determinante conduce a un polinomio de grado n en (ωn)2, las raíces del cual son los eigenvalores. Sustituyendo éstos en la ecuación deeigenvalores (ecuación 10.17) se obtienen los eigenvalores para cada modo. A partir de los eigenvalores se obtienen los periodos naturales correspondientes y sepueden obtener las aceleraciones espectrales a partir de una curva de respuesta apropiada. 10.4.1 Matriz modal y espectral Los N eigenvalores y los N modos pueden ser acoplados en forma matricial. El modo natural o eigenvector φn correspondiente a la frecuencia natural ωn tiene elementos φjn, donde j indica el DOF. De este modo los N eigenvectores pueden presentarse o disponerse en una matriz cuadrada, de la cual cada columna es unmodo:
Donde [Φ] es llamada matriz modal. Los N eigenvalores ωn
2 pueden ser acoplados en una ,matriz diagonal Ω2, la cual es conocida como matriz espectral.
Cada eigenvalor y eigenvector satisfacen la ecuación 10.17 la cual puede ser reescrita como:
(10.19)
[ ] [ ]( ) { } 02 =⋅⋅− nn MK φω
[ ] [ ] 02 =⋅− MK nω
[ ] [ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
==Φ
NNNN
N
N
jn
φφφ
φφφφφφ
φ
L
MOMM
L
L
21
22221
11211
[ ]⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=Ω
2
22
21
2
Nω
ωω
O
[ ] { } [ ] { } 2nnn MK ωφφ ⋅⋅=⋅
Page 7 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm

Utilizando la matriz modal espectral es posible representar esta ecuación en una ecuación matricial simple:
(10.20)
Esta ecuación presenta en forma compacta las ecuaciones relacionando todos los eigenvalores y eigenvectores. 10.4.2 Ortogonalidad de los modos Los modos naturales correspondientes a diferentes frecuencias naturales se muestran a continuación para satisfacer la siguiente condición de ortogonalidad.Cuando ωn≠ωr.
(10.21)
La demostración de esta propiedad es la siguiente: la enésima frecuencia natural y el modo que satisfacen la ecuación 10.19 multiplicados por φr
T, la transpuesta de φr, da:
(10.22)
Análogamente se realiza lo mismo con la erésima frecuencia natural y el modo que satisface la ecuación 10.19; de este modo k·φr = φr
2·m·φr multiplicando por φnT da:
(10.23)
La transpuesta de la matriz en el lado izquierdo de la ecuación 10.22 es igual a la transpuesta de la matriz en el lado derecho de la ecuación; de este modo:
(10.24)
Donde se ha utilizado la propiedad de simetría de la matriz de masa y rigidez. Restando la ecuación 10.23 de la ecuación 10.24 se tiene:
[ ] [ ] [ ] [ ] [ ]2Ω⋅Φ⋅=Φ⋅ MK
0=⋅⋅ rTn k φφ 0=⋅⋅ r
Tn m φφ
nTnnn
Tr mk φφωφφ ⋅⋅⋅=⋅⋅ 2
rTnrr
Tn mk φφωφφ ⋅⋅⋅=⋅⋅ 2
rTnnr
Tn mk φφωφφ ⋅⋅⋅=⋅⋅ 2
0)( 22 =⋅⋅⋅− rTnrn m φωωω
Page 8 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm
De este modo la ecuación 10.21b es verdadera cuando ωn2≠ωr
2 los cuales para sistemas con frecuencia natural positiva implica que ωn≠ωr. Sustituyendo la ecuación 10.21b en la 10.23 señala que la ecuación 10.21a es verdadera cuando ωn≠ωr. Se ha establecido la relación de ortogonalidad entre modos con distintas frecuencias. La ortogonalidad de los modos naturales implica que las siguientes matricescuadradas son diagonales:
(10.25)
Donde los elementos de la diagonal son:
(10.26)
Debido a que m y k son definidos positivos, los elementos de la diagonal de K y M son positivos, y están relacionados por:
(10.27)
10.4.3 Normalización de los modos Si el vector {φn} es un modo natural, cualquier vector proporcional es en esencia el mismo modo natural porque satisface la ecuación 10.17. algunas veces se aplicafactores de escala a los modos naturales para estandarizar sus elementos asociándolos con sus amplitudes en varios grados de libertad. Este proceso es llamadonormalización; algunas veces es conveniente normalizar cada modo de tal forma que el elemento mayor sea la unidad. Otras veces es más ventajoso el normalizarcada modo de tal forma que el elemento correspondiente a algún grado de libertad en particular sea la unidad. En teoría y programas computacionales es comúnnormalizar los modos de tal manera que mn tenga valores unitarios:
o
(10.28)
Donde la matriz [I] es la matriz de identidad. Los componentes de la matriz modal normalizada están dados por:
[ ] [ ] [ ] [ ]Φ⋅⋅Φ≡ KK T [ ] [ ] [ ] [ ]Φ⋅⋅Φ≡ MM T
{ } [ ] { }nT
nn Kk φφ ⋅⋅= { } [ ] { }nT
nn Mm φφ ⋅⋅=
nnn mk ⋅= 2ω
[ ] [ ] [ ] 1=⋅⋅= nT
nn MM φφ
[ ] [ ] [ ] [ ]IMT =Φ⋅⋅Φ
Page 9 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm

(10.29)
donde: φjn= es el componente para el nudo j, de la forma modal normalizada asociada al modo n. mjj= masa concentrada en el nudo j. ujn= el componente, para el nudo j, del eigenvector asociado con el nudo n. 10.4.4 Factor de participación Las ecuaciones de movimiento para cada grado de libertad no dependen de los modos de vibración y tienen forma similar a la ecuación de movimiento de un
sistema de un solo grado de libertad. El factor de participación, para sistemas de varios grados de libertad esta definida en forma matricial por[1]:
(10.30)
donde [P]= vector de coeficientes de participación para todos los modos considerados {1}= vector unitario. Para un sistema en especifico, los factores de participación tienen las propiedades de:
(10.31)
donde Pn = es el factor de participación asociado con el modo n.
φ1n = es el componente, para el primer nudo del sistema del eigenvector asociado con el modo n. La matriz de máximos desplazamientos esta definida por:
(10.32)
donde [D] = matriz diagonal de desplazamiento espectral. [V] = matriz diagonal de velocidad espectral.
( ) 212
jnjj
jnjn
um
u
⋅Σ=φ
[ ] [ ] [ ] { }[ ] [ ] [ ]Φ⋅⋅Φ
⋅⋅Φ=
MMP
T
T 1
11 =⋅Σ nnP φ
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ] 12
1
−
−
Ω⋅⋅⋅Φ=
Ω⋅⋅⋅Φ=
⋅⋅Φ=
APU
VPU
DPU
Page 10 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm
[A] = matriz diagonal de aceleración espectral. La matriz de fuerzas laterales en cada nudo del sistema esta dada por la segunda ley de Newton:
(10.33)
El vector de fuerzas cortantes en la base esta dada por:
(10.34)
10.5 MÉTODO NUMÉRICO
Para facilitar el procedimiento del análisis modal se puede utilizar métodos numéricos. Para un modo de vibración dado el factor de participación está definido por:
(10.35)
Donde Mi = masa correspondiente al nivel i. φi = componente de la forma modal para el nudo i para un modo dado. M = masa modal = ΣMi·φi
2 Cuya sumatoria se extiende sobre todos los nudos de la estructura. La masa efectiva está definida por:
(10.36)
De forma similar el peso efectivo es definido por:
(10.37)
donde Wi = peso correspondiente al nivel i
[ ] [ ] [ ]UKF ⋅=
[ ] [ ] { }1⋅= TFV
MM
P ii φ⋅Σ=
( )2
2
ii
iiE
MM
Mφ
φ
⋅Σ
⋅Σ=
( )2
2
ii
iiE
WW
Wφ
φ
⋅Σ
⋅Σ=
Page 11 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm
La aceleración pico en el nudo está definida por:
(10.38)
El desplazamiento máximo en el nudo está definido por:
(10.39)
La fuerza lateral en el nudo está dada por la ley de Newton:
(10.40)
La cortante basal esta dada por:
(10.41)
La fuerza lateral en cada nudo puede también determinarse mediante la distribución de la cortante basal del modo siguiente:
(10.42)
Para eigenvectores normalizados estas expresiones se reducen a:
(10.43)
M = masa modal.
10.6 MÉTODO ITERATIVO
Para edificios de pocos niveles, que no excedan a cinco plantas, el análisis modal puede limitarse al modo fundamental. El sistema estructural puede ser modeladocomo un pórtico con losas de entre piso rígidas. Los desplazamientos laterales de los nudos son entonces el resultado de la flexión de las columnas sin incluirrotación en los nudos. La rigidez de un nivel en particular esta dada por:
APu i ⋅⋅= φ&&
DPu ii ⋅⋅= φ
uMF ii &&⋅=
AMV
AMPV
MAPVFV
E
ii
i
⋅=
⋅⋅=
⋅Σ⋅⋅=Σ=
2
φ
VMMFVMPMF
APMF
iiiii
iii
iii
⋅⋅Σ⋅=⋅⋅⋅=
⋅⋅⋅=
)/()/(φφ
φφ
12 =⋅Σ= iiMM φ
Page 12 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm
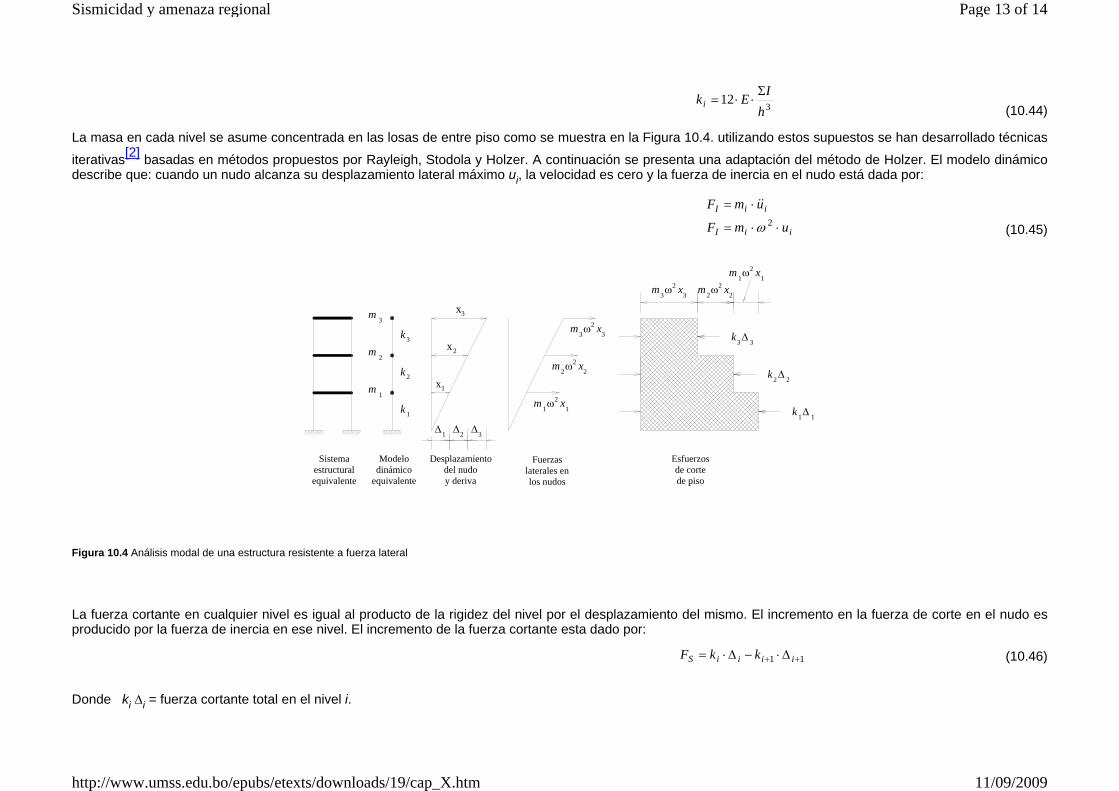
(10.44)
La masa en cada nivel se asume concentrada en las losas de entre piso como se muestra en la Figura 10.4. utilizando estos supuestos se han desarrollado técnicas
iterativas[2] basadas en métodos propuestos por Rayleigh, Stodola y Holzer. A continuación se presenta una adaptación del método de Holzer. El modelo dinámicodescribe que: cuando un nudo alcanza su desplazamiento lateral máximo ui, la velocidad es cero y la fuerza de inercia en el nudo está dada por:
(10.45)
Figura 10.4 Análisis modal de una estructura resistente a fuerza lateral
La fuerza cortante en cualquier nivel es igual al producto de la rigidez del nivel por el desplazamiento del mismo. El incremento en la fuerza de corte en el nudo esproducido por la fuerza de inercia en ese nivel. El incremento de la fuerza cortante esta dado por:
(10.46)
Donde ki·Δi = fuerza cortante total en el nivel i.
312
hIEki
Σ⋅⋅=
iiI
iiI
umF
umF
⋅⋅=
⋅=2ω
&&
11 ++ Δ⋅−Δ⋅= iiiiS kkF
x
x
x
k3
k 2
k 1
1
2
m 3
m
m
Δ1 Δ2 Δ3
m ω x12
1
m ω x2 22
m ω x3 32
3
2
1
k Δ 3 3
k Δ 2 2
k Δ 1 1
m ω x3 32 m ω x2
22
2m ω x11
Sistema estructural equivalente
Modelo dinámico
equivalente
Desplazamiento del nudo y deriva
Fuerzas laterales en los nudos
Esfuerzos de corte de piso
Page 13 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm
Igualando la fuerza de inercia y el incremento de la fuerza cortante se tiene:
(10.47)
La solución de esta ecuación se puede obtener asumiendo una forma modal inicial con un desplazamiento unitario en el nivel superior; a partir del cual se calcula lafuerza de inercia o el incremento de fuerza cortante en términos de la frecuencia natural, en cada nivel. Sumando el incremento de fuerza cortante a partir del nivelsuperior hacia abajo se tiene la fuerza cortante total en cada piso. Dividiendo este valor por la rigidez apropiada de cada nivel se obtiene el desplazamiento (deriva)de cada piso. Dividiendo estos desplazamientos por el desplazamiento en la parte superior de la estructura se obtiene la forma modal corregida. Esta forma modalcorregida puede ser usada como una nueva forma modal inicial en el proceso de iteración hasta que coincidan la forma modal corregida con la inicial. Capitulo 9 Capitulo 11 Contenido
[1] Alan Williams, pp 22-23 [ref. 4]
[2] Alan Williams, pp 35-40 [ref. 4]
112
++ Δ⋅−Δ⋅=⋅⋅
=
iiiiii
SI
kkum
FF
ω
Page 14 of 14Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_X.htm

Capítulo 11 CRITERIOS DE ESTRUCTURACIÓN SISMO RESISTENTE EN EDIFICIOS
11.1 INTRODUCCIÓN
La forma del edificio, tamaño, naturaleza y localización de los elementos resistentes, es decir: muros, columnas, pisos, núcleos de servicio, escaleras; y elementosno estructurales como: cantidad y tipo de divisiones interiores, la forma en que los muros exteriores se disponen sólidos o con aberturas para iluminación natural yventilación; es a lo que se denomina configuración. Predominan también: geometría, geología y clima del lugar de construcción, reglamentos de diseño urbano yaspectos arquitectónicos de estilo. Estas decisiones arquitectónicas, tal como se ha podido observar en las edificaciones dañadas por los efectos de los terremotos, unidas a decisiones de diseñoestructural y a las técnicas constructivas influyen determinantemente en el comportamiento sismo resistente de las edificaciones. Una adecuada selección delsistema estructural, del material y de los componentes no estructurales es de mayor importancia que un análisis complejo. A pesar, e independientemente de todo losofisticado que sea el método de análisis utilizado por el ingeniero, no se puede hacer que un sistema estructural may concebido se comporte satisfactoriamente enun terreno severo. Si se trabaja conjuntamente desde el inicio de esquema en un proyecto de edificación entre arquitecto e ingeniero, entendiendo de qué manera las decisionespueden afectar el comportamiento sismo resistente de ésta, escogiendo apropiadamente los materiales básicos a utilizarse, la configuración y la estructuración deledificio. El ingeniero estructural no tendrá que pasar por la desagradable situación de escoger entre proponer revisiones que pueden llevar hasta la reformulación delproyecto inicial, o tratar de usar soluciones estructurales muy complicadas para resolver el problema producido, a causa de concepciones arquitectónicasinadecuadas. Es decir, que se deben conocer los aspectos críticos a ser considerados para garantizar la seguridad sísmica del proyecto.
11.2 REQUISITOS DE CONFIGURACIÓN
Cada estructura debe designarse como regular o irregular desde el punto de vista estructural: Estructuras regulares. Las estructuras regulares no tienen discontinuidades físicas considerables en su configuración en planta y configuración vertical o en sussistemas resistentes a las fuerzas laterales. Estructuras irregulares. Las estructuras irregulares tienen discontinuidades físicas considerables en su configuración o en sus sistemas resistentes a las fuerzaslaterales. Las características irregulares incluyen, sin estar limitadas a ello, las descritas en la Tabla 11.1 y la Tabla 11.2. 11.2.1 Configuración en Elevación
Page 1 of 10Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_XI.htm

Figura 11.1 Irregularidades en elevación
F
E
D
C
B
A
A
D
C
B
E
F
A
D
C
B
E
F
A
D
C
B
E
F
A
D
C
B
E
F
a
b
b
a
Tipo 1A - Irregularidad de rigidez (piso blando)
Rigidez KC < 0.70 Rigidez KD
oRigidez KC < 0.80 (KD + KE + KF)/3
Tipo 2A - Irregularidad de peso (masa)
mD > 1.50 mE
omD > 1.50 mC
Tipo 3A - Irregularidad vertical geométrica
a > 1.30 b
Tipo 4A - Discontinuidad en el plano de los elementos verticales resistente a las fuerzas laterales
b > a
Tipo 1A - Discontinuidad en capacidad (piso débil)
Resistencia Piso B < 0.70 Resistencia Piso C
Page 2 of 10Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_XI.htm
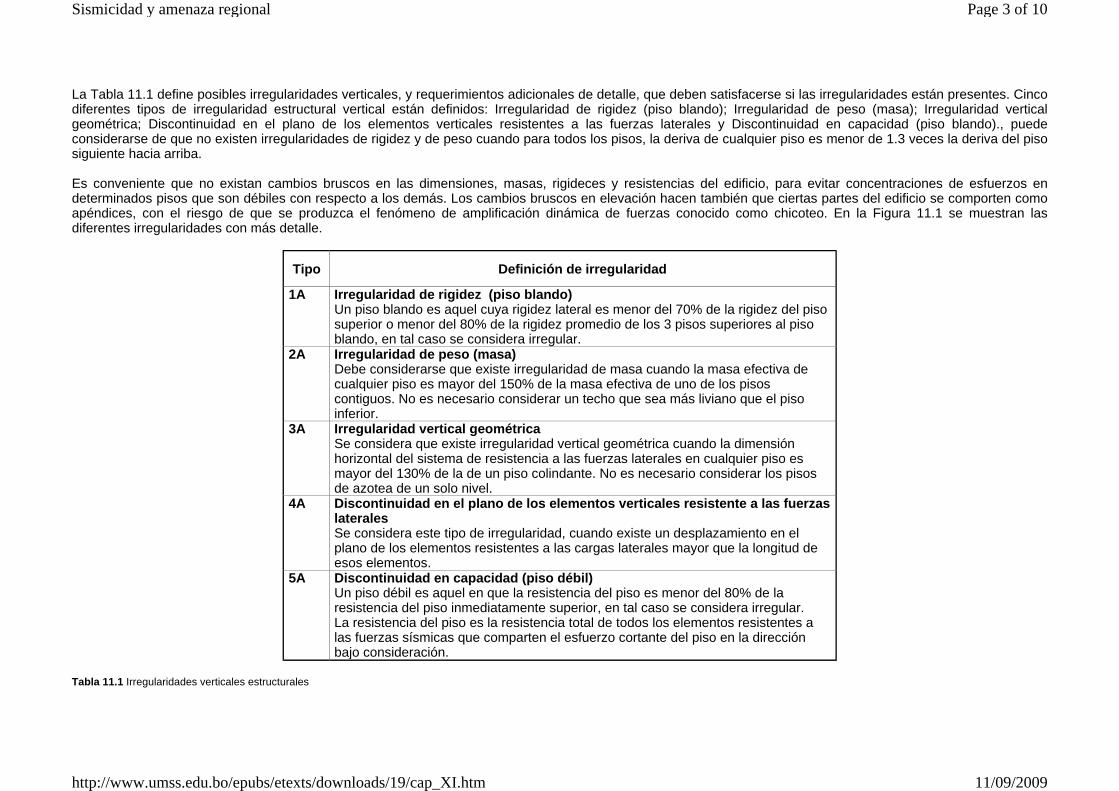
La Tabla 11.1 define posibles irregularidades verticales, y requerimientos adicionales de detalle, que deben satisfacerse si las irregularidades están presentes. Cincodiferentes tipos de irregularidad estructural vertical están definidos: Irregularidad de rigidez (piso blando); Irregularidad de peso (masa); Irregularidad verticalgeométrica; Discontinuidad en el plano de los elementos verticales resistentes a las fuerzas laterales y Discontinuidad en capacidad (piso blando)., puedeconsiderarse de que no existen irregularidades de rigidez y de peso cuando para todos los pisos, la deriva de cualquier piso es menor de 1.3 veces la deriva del pisosiguiente hacia arriba. Es conveniente que no existan cambios bruscos en las dimensiones, masas, rigideces y resistencias del edificio, para evitar concentraciones de esfuerzos endeterminados pisos que son débiles con respecto a los demás. Los cambios bruscos en elevación hacen también que ciertas partes del edificio se comporten comoapéndices, con el riesgo de que se produzca el fenómeno de amplificación dinámica de fuerzas conocido como chicoteo. En la Figura 11.1 se muestran lasdiferentes irregularidades con más detalle.
Tabla 11.1 Irregularidades verticales estructurales
Tipo Definición de irregularidad
1A Irregularidad de rigidez (piso blando) Un piso blando es aquel cuya rigidez lateral es menor del 70% de la rigidez del piso superior o menor del 80% de la rigidez promedio de los 3 pisos superiores al piso blando, en tal caso se considera irregular.
2A Irregularidad de peso (masa) Debe considerarse que existe irregularidad de masa cuando la masa efectiva de cualquier piso es mayor del 150% de la masa efectiva de uno de los pisos contiguos. No es necesario considerar un techo que sea más liviano que el piso inferior.
3A Irregularidad vertical geométrica Se considera que existe irregularidad vertical geométrica cuando la dimensión horizontal del sistema de resistencia a las fuerzas laterales en cualquier piso es mayor del 130% de la de un piso colindante. No es necesario considerar los pisos de azotea de un solo nivel.
4A Discontinuidad en el plano de los elementos verticales resistente a las fuerzas laterales Se considera este tipo de irregularidad, cuando existe un desplazamiento en el plano de los elementos resistentes a las cargas laterales mayor que la longitud de esos elementos.
5A Discontinuidad en capacidad (piso débil)Un piso débil es aquel en que la resistencia del piso es menor del 80% de la resistencia del piso inmediatamente superior, en tal caso se considera irregular. La resistencia del piso es la resistencia total de todos los elementos resistentes a las fuerzas sísmicas que comparten el esfuerzo cortante del piso en la dirección bajo consideración.
Page 3 of 10Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_XI.htm
11.2.2 Configuración en Planta
Tabla 11.2 Irregularidades estructurales en planta La Tabla 11.2 define posibles irregularidades en planta y requerimientos adicionales de detalles, que deben satisfacerse si las irregularidades están presentes. Cincodiferentes tipos de irregularidades en planta son definidos: Irregularidad torsional a ser considerado cuando los diafragmas no son flexibles; Esquinas reentrantes;Discontinuidad de diafragma; Desviación fuera del plano y Sistemas no paralelos. Las estructuras regulares son definidas como aquellas que no tienendiscontinuidades físicas significativas en su configuración en planta y vertical o en su sistema resistente a las fuerzas laterales. En la Figura 11.2 se muestra en forma gráfica detallada las irregularidades mencionadas en la Tabla 11.2.
Page 4 of 10Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_XI.htm
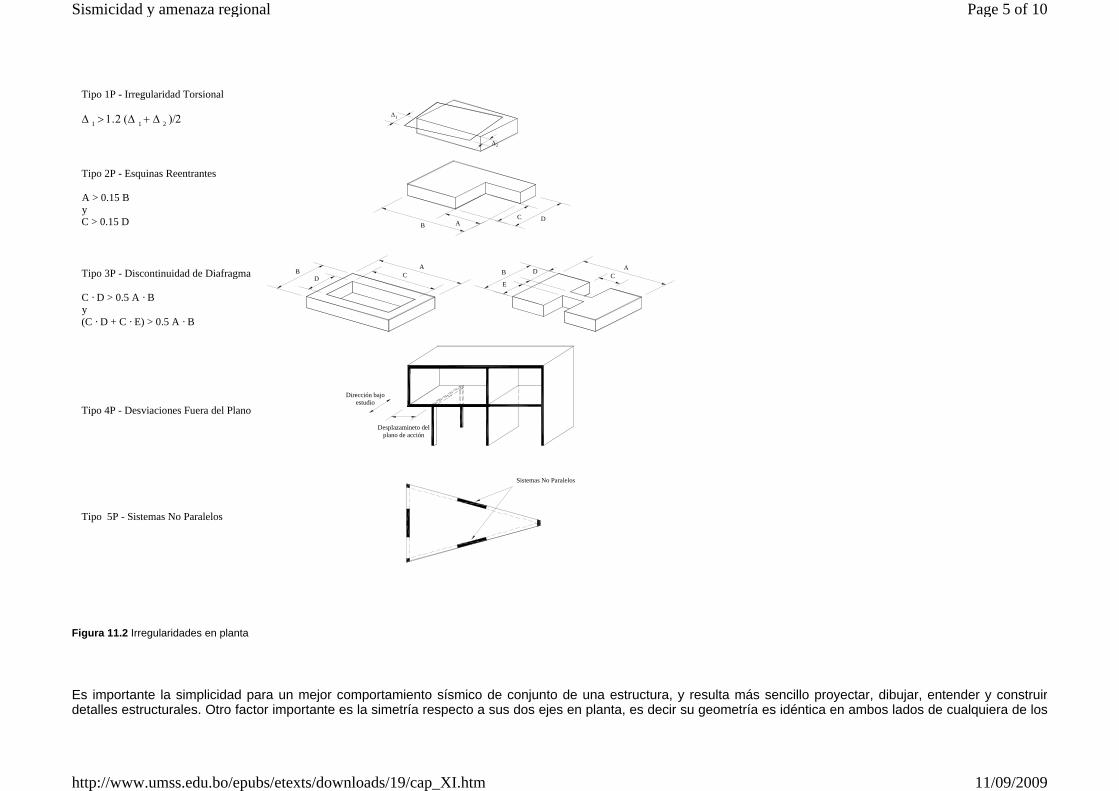
Figura 11.2 Irregularidades en planta
Es importante la simplicidad para un mejor comportamiento sísmico de conjunto de una estructura, y resulta más sencillo proyectar, dibujar, entender y construirdetalles estructurales. Otro factor importante es la simetría respecto a sus dos ejes en planta, es decir su geometría es idéntica en ambos lados de cualquiera de los
CAB
D
CA
DB
CAD
E
B
Tipo 1P - Irregularidad Torsional
Δ > 1.2 (Δ + Δ )/2
Tipo 2P - Esquinas Reentrantes
A > 0.15 ByC > 0.15 D
1 1 2
Tipo 3P - Discontinuidad de Diafragma
C · D > 0.5 A · By(C · D + C · E) > 0.5 A · B
Tipo 4P - Desviaciones Fuera del Plano
Tipo 5P - Sistemas No Paralelos
Dirección bajoestudio
Desplazamineto del plano de acción
Sistemas No Paralelos
Δ
Δ1
2
Page 5 of 10Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_XI.htm

ejes que se esté considerando. La falta de regularidad por simetría, masa, rigidez o resistencia en ambas direcciones en planta produce torsión, que no es fácil deevaluar con precisión. Es necesario mencionar que a pesar de tener una planta simétrica, puede haber irregularidades debido a una distribución excéntrica derigideces o masas ocasionando también torsión. En caso de que se tuviera entrantes y salientes, es decir plantas en forma de T, L, H, U, etc. es aconsejable utilizar juntas de construcción, dividiendo la planta globalen varias formas rectangulares y como segunda opción se puede restringir las mismas con limites máximos, como se indica en la Figura 11.2 Es preferible no concentrar elementos rígidos y resistentes, tales como muros de corte, en la zona central de las plantas, porque son menos efectivos para resistirtorsión, si bien los muros ubicados en la zona central tienen un comportamiento aceptable, las columnas estarán sujetas a un cortante por torsión mayor que aquélproporcionado por la ubicación de los muros en la periferia. No es nada recomendable colocar las escaleras y elevadores en las partes externas del edificio ya quetienden a actuar aisladamente ante los sismos, con concentraciones de fuerzas y torsiones difíciles de predecir sin llevar a cabo un análisis complicado. 11.2.3 Poco Peso Las fuerzas producidas por los sismos son de inercia, que es el producto de la masa por la aceleración, así las fuerzas de inercia son proporcionales a la masa, portanto al peso del edificio; por ello debe procurarse que la estructura y los elementos no estructurales tengan el menor peso posible y además sean resistentes. No serecomiendan voladizos debido a que producen fuerzas de inercia verticales de magnitud apreciable que sumadas a las fuerzas de gravedad llegarían a causar seriosproblemas. Debido al aumento de la cargas laterales la falla de los elementos verticales como columnas y muros podría ser por pandeo, es ahí que la masa ejerce un rolimportante; cuando la masa, empuja hacia abajo debido a la gravedad, ejerce su fuerza sobre un miembro flexionado o desplazado lateralmente por las fuerzaslaterales, a este fenómeno se conoce como el efecto P-delta. Cuando mayor sea la fuerza vertical mayor será el momento debido al producto de la fuerza P y laexcentricidad delta. 11.2.4 Hiperestaticidad
Page 6 of 10Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_XI.htm
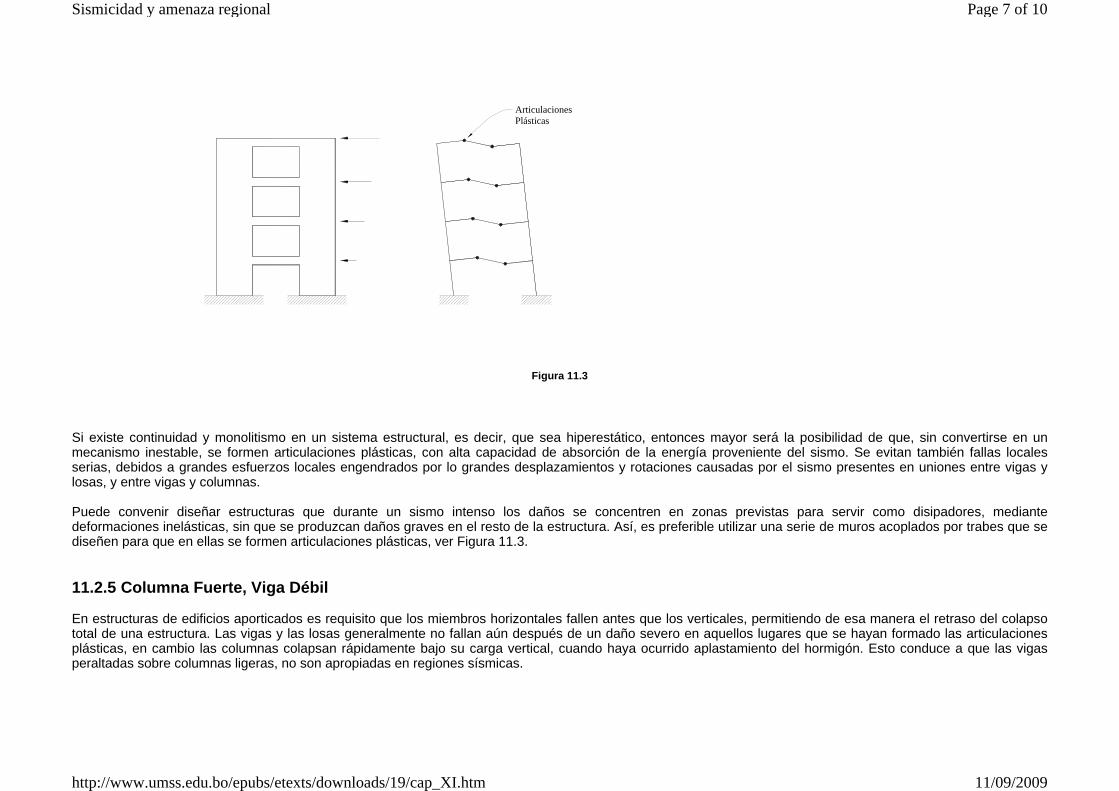
Figura 11.3
Si existe continuidad y monolitismo en un sistema estructural, es decir, que sea hiperestático, entonces mayor será la posibilidad de que, sin convertirse en unmecanismo inestable, se formen articulaciones plásticas, con alta capacidad de absorción de la energía proveniente del sismo. Se evitan también fallas localesserias, debidos a grandes esfuerzos locales engendrados por lo grandes desplazamientos y rotaciones causadas por el sismo presentes en uniones entre vigas ylosas, y entre vigas y columnas. Puede convenir diseñar estructuras que durante un sismo intenso los daños se concentren en zonas previstas para servir como disipadores, mediantedeformaciones inelásticas, sin que se produzcan daños graves en el resto de la estructura. Así, es preferible utilizar una serie de muros acoplados por trabes que sediseñen para que en ellas se formen articulaciones plásticas, ver Figura 11.3. 11.2.5 Columna Fuerte, Viga Débil En estructuras de edificios aporticados es requisito que los miembros horizontales fallen antes que los verticales, permitiendo de esa manera el retraso del colapsototal de una estructura. Las vigas y las losas generalmente no fallan aún después de un daño severo en aquellos lugares que se hayan formado las articulacionesplásticas, en cambio las columnas colapsan rápidamente bajo su carga vertical, cuando haya ocurrido aplastamiento del hormigón. Esto conduce a que las vigasperaltadas sobre columnas ligeras, no son apropiadas en regiones sísmicas.
Articulaciones Plásticas
Page 7 of 10Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_XI.htm
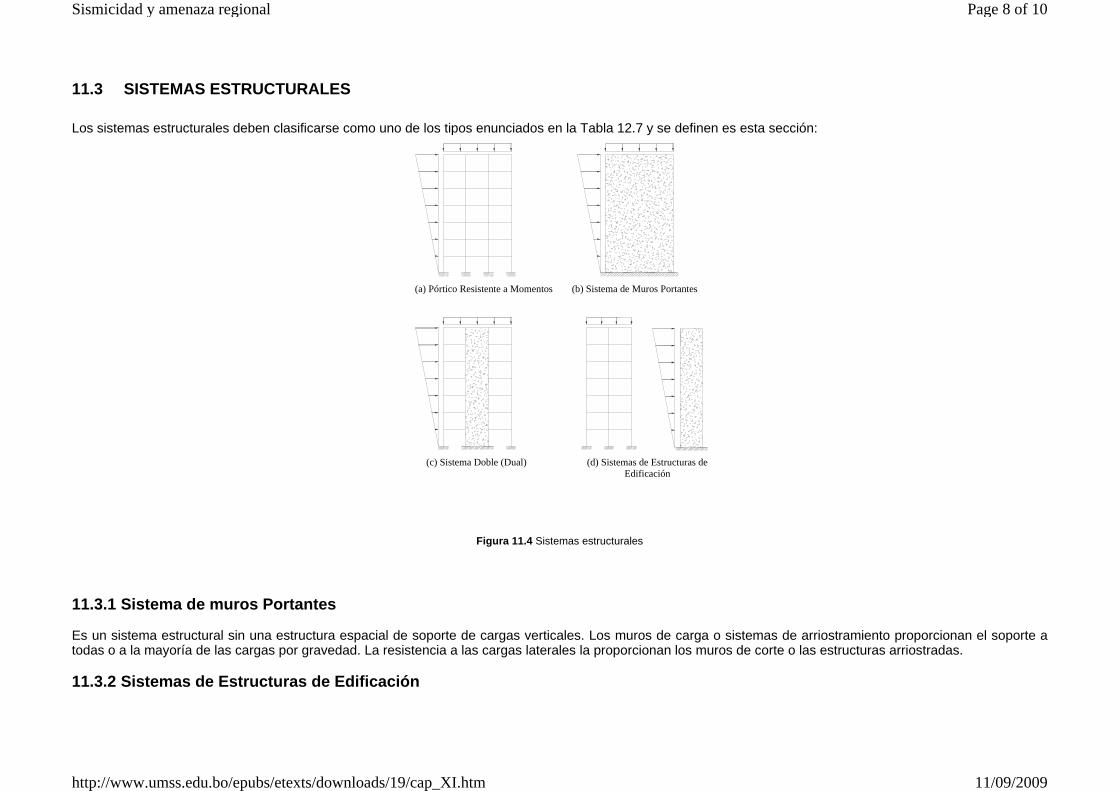
11.3 SISTEMAS ESTRUCTURALES Los sistemas estructurales deben clasificarse como uno de los tipos enunciados en la Tabla 12.7 y se definen es esta sección:
Figura 11.4 Sistemas estructurales
11.3.1 Sistema de muros Portantes Es un sistema estructural sin una estructura espacial de soporte de cargas verticales. Los muros de carga o sistemas de arriostramiento proporcionan el soporte atodas o a la mayoría de las cargas por gravedad. La resistencia a las cargas laterales la proporcionan los muros de corte o las estructuras arriostradas. 11.3.2 Sistemas de Estructuras de Edificación
(a) Pórtico Resistente a Momentos
(c) Sistema Doble (Dual)
(b) Sistema de Muros Portantes
(d) Sistemas de Estructuras de Edificación
Page 8 of 10Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_XI.htm
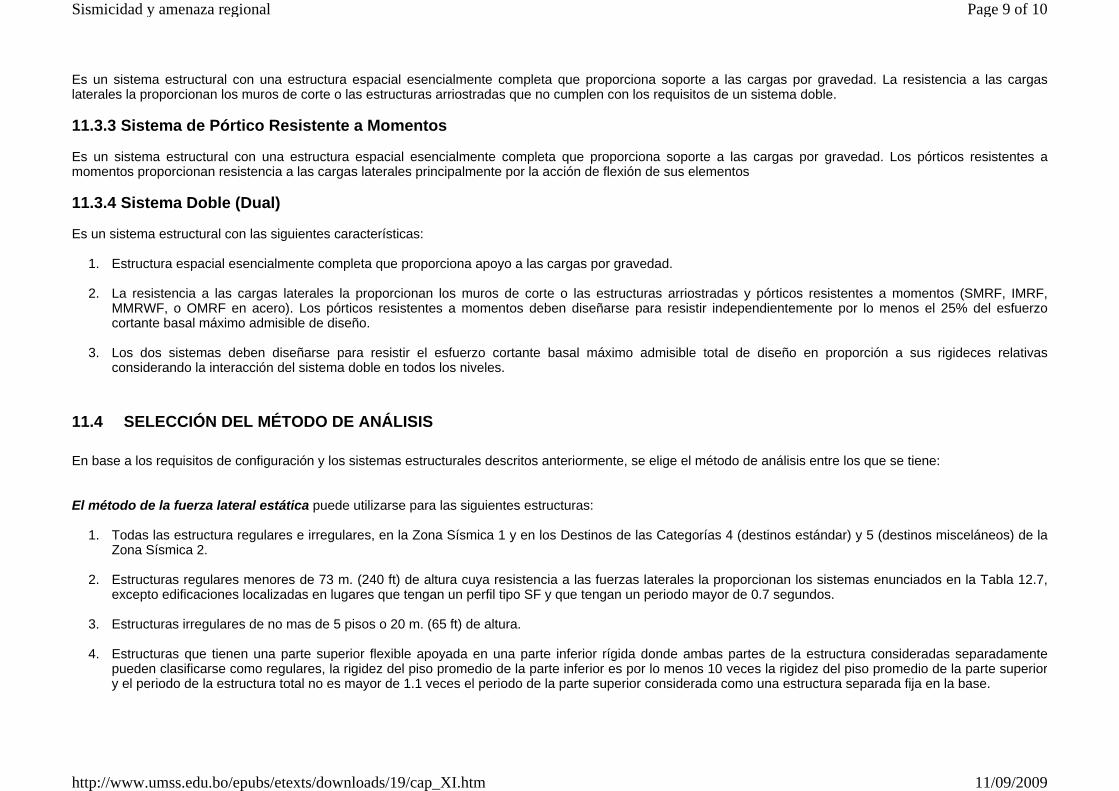
Es un sistema estructural con una estructura espacial esencialmente completa que proporciona soporte a las cargas por gravedad. La resistencia a las cargaslaterales la proporcionan los muros de corte o las estructuras arriostradas que no cumplen con los requisitos de un sistema doble. 11.3.3 Sistema de Pórtico Resistente a Momentos Es un sistema estructural con una estructura espacial esencialmente completa que proporciona soporte a las cargas por gravedad. Los pórticos resistentes amomentos proporcionan resistencia a las cargas laterales principalmente por la acción de flexión de sus elementos 11.3.4 Sistema Doble (Dual) Es un sistema estructural con las siguientes características:
1. Estructura espacial esencialmente completa que proporciona apoyo a las cargas por gravedad.
2. La resistencia a las cargas laterales la proporcionan los muros de corte o las estructuras arriostradas y pórticos resistentes a momentos (SMRF, IMRF,MMRWF, o OMRF en acero). Los pórticos resistentes a momentos deben diseñarse para resistir independientemente por lo menos el 25% del esfuerzocortante basal máximo admisible de diseño.
3. Los dos sistemas deben diseñarse para resistir el esfuerzo cortante basal máximo admisible total de diseño en proporción a sus rigideces relativas
considerando la interacción del sistema doble en todos los niveles.
11.4 SELECCIÓN DEL MÉTODO DE ANÁLISIS
En base a los requisitos de configuración y los sistemas estructurales descritos anteriormente, se elige el método de análisis entre los que se tiene: El método de la fuerza lateral estática puede utilizarse para las siguientes estructuras:
1. Todas las estructura regulares e irregulares, en la Zona Sísmica 1 y en los Destinos de las Categorías 4 (destinos estándar) y 5 (destinos misceláneos) de laZona Sísmica 2.
2. Estructuras regulares menores de 73 m. (240 ft) de altura cuya resistencia a las fuerzas laterales la proporcionan los sistemas enunciados en la Tabla 12.7,
excepto edificaciones localizadas en lugares que tengan un perfil tipo SF y que tengan un periodo mayor de 0.7 segundos.
3. Estructuras irregulares de no mas de 5 pisos o 20 m. (65 ft) de altura.
4. Estructuras que tienen una parte superior flexible apoyada en una parte inferior rígida donde ambas partes de la estructura consideradas separadamentepueden clasificarse como regulares, la rigidez del piso promedio de la parte inferior es por lo menos 10 veces la rigidez del piso promedio de la parte superiory el periodo de la estructura total no es mayor de 1.1 veces el periodo de la parte superior considerada como una estructura separada fija en la base.
Page 9 of 10Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_XI.htm
El método de las fuerzas laterales dinámicas debe utilizarse para todas las demás estructuras, incluyendo las siguientes:
1. Estructuras de 73 m. (240 ft) o más de altura con excepción de estructuras en la Zona Sísmica 1 y en estructuras de destinos estándar y estructurasmisceláneas como se define en la Tabla 12.8 de la Zona Sísmica 2.
2. Estructuras que tienen una irregularidad de rigidez, peso o irregularidad vertical geométrica de los Tipos 1, 2 ó 3 como se define en la Tabla 11.1 u 11.2 3. Estructuras de más de 5 pisos o 20 m. (65 ft) de altura en las Zonas Sísmicas 3 y 4 que no tengan el mismo sistema estructural a través de toda su altura. 4. Estructuras, regulares o irregulares, ubicadas en el Tipo de Perfil de Suelo SF que tengan un periodo mayor de 0.7 segundos. El análisis debe incluir los
efectos del suelo en el sitio Capitulo 10 Capitulo 12 Contenido
Page 10 of 10Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_XI.htm
Capítulo 12 MÉTODO DE LA FUERZA HORIZONTAL EQUIVALENTE
12.1 DETERMINACIÓN DE LAS FUERZAS LATERALES
12.1.1 Factor de Zona Sísmica Cada lugar o región está dividida en diferentes zonas sísmicas, las cuales están demarcadas según la aceleración pico del suelo expresada en función de laconstante de gravedad (g). Toda estructura a ser diseñada debe tener asignada un factor de zona sísmica Z de acuerdo con la Tabla 12.1. Estos valores se basan en registros históricos y datos geológicos y son también ajustados para proveer criterios de diseño consistentes con la región. Estos factores de zona sísmica sonusados, conjuntamente con el tipo de perfil de suelo, para determinar el coeficiente de respuesta sísmica Ca y Cv dados en la Tabla 12.2. los cuales se utilizan para graficar el espectro de respuesta ilustrado en la Figura 12.1.
Page 1 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
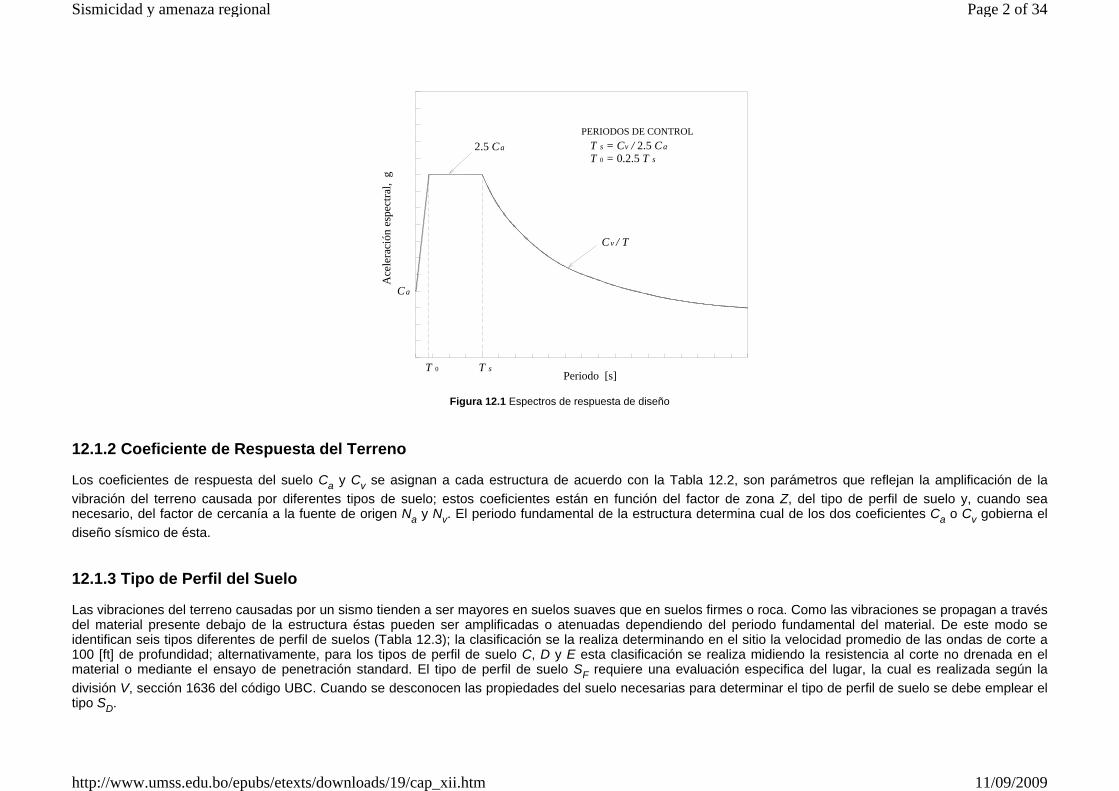
Figura 12.1 Espectros de respuesta de diseño 12.1.2 Coeficiente de Respuesta del Terreno Los coeficientes de respuesta del suelo Ca y Cv se asignan a cada estructura de acuerdo con la Tabla 12.2, son parámetros que reflejan la amplificación de lavibración del terreno causada por diferentes tipos de suelo; estos coeficientes están en función del factor de zona Z, del tipo de perfil de suelo y, cuando sea necesario, del factor de cercanía a la fuente de origen Na y Nv. El periodo fundamental de la estructura determina cual de los dos coeficientes Ca o Cv gobierna el diseño sísmico de ésta. 12.1.3 Tipo de Perfil del Suelo Las vibraciones del terreno causadas por un sismo tienden a ser mayores en suelos suaves que en suelos firmes o roca. Como las vibraciones se propagan a travésdel material presente debajo de la estructura éstas pueden ser amplificadas o atenuadas dependiendo del periodo fundamental del material. De este modo seidentifican seis tipos diferentes de perfil de suelos (Tabla 12.3); la clasificación se la realiza determinando en el sitio la velocidad promedio de las ondas de corte a100 [ft] de profundidad; alternativamente, para los tipos de perfil de suelo C, D y E esta clasificación se realiza midiendo la resistencia al corte no drenada en elmaterial o mediante el ensayo de penetración standard. El tipo de perfil de suelo SF requiere una evaluación especifica del lugar, la cual es realizada según ladivisión V, sección 1636 del código UBC. Cuando se desconocen las propiedades del suelo necesarias para determinar el tipo de perfil de suelo se debe emplear eltipo SD.
Periodo [s]A
cele
raci
ón e
spec
tral,
g
T 0
Ca
T s
Cv / T
2.5 Ca
PERIODOS DE CONTROLT s = Cv / 2.5 CaT 0 = 0.2.5 T s
Page 2 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
12.1.4 Tipo de Lugar de Origen del sismo Para clasificar el tipo de origen sísmico se toma en consideración la magnitud del momento máximo de la falla y su proporción de deslizamiento, se distinguen 5tipos, desde el tipo o clase de origen más activo (tipo A) hasta el menos activo (tipo C) en la Tabla 12.4. 12.1.5 Factor de Cercanía a la Fuente de Origen En regiones sujetas a magnitudes sísmicas considerables, como las que tienen lugar en la zona sísmica 4, regiones cerca de la falla de ruptura pueden experimentaruna elevación en la aceleración del suelo del doble en una distancia de 10 [km] a la redonda del origen. De acuerdo a esto, el código UBC introduce dos factores deamplificación en la Tabla 12.5, Na, el factor basado en la aceleración, para estructuras de periodo corto; y Nv, el factor basado en la velocidad para periodos que
exceden 1 [s]. El código UBC[1] limita a 1.1 el valor de Na para estructuras regulares localizadas en tipos de perfil de suelo SA, SB, SC, o SD, con un factor de redundancia de 1 (ρ=1). 12.1.6 Periodo fundamental Cada estructura posee un único periodo natural o fundamental de vibración, el cual es el tiempo requerido para completar un ciclo de vibración libre. La rigidez, la altura de la estructura son factores que determinan o influyen en el periodo fundamental, y éste puede variar desde 0.1 [s], para sistemas simples, hasta variossegundos para sistemas de varios niveles. Como primera aproximación el periodo fundamental puede ser asumido igual al numero de niveles dividido por 10. El valor del periodo fundamental de la edificación debe obtenerse a partir de las propiedades de su sistema de resistencia sísmica, en la dirección a considerar; esterequisito se puede suplir siguiendo los métodos presentados por el código UBC: Método A: Para todas las edificaciones el valor de T puede aproximarse mediante la siguiente fórmula:
(12.1)
donde: hn= altura en m. (ft), medida desde la base, del piso más alto del edificio. Ct= 0.0853 (0.035) para pórticos de acero resistentes a momento Ct= 0.0731 (0.030) para pórticos de hormigón armado resistente a momentos y estructuras arriostradas excéntricamente
Ct= 0.0488 (0.20) para todas las demás edificaciones
43
)( nt hCT ⋅=
Page 3 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
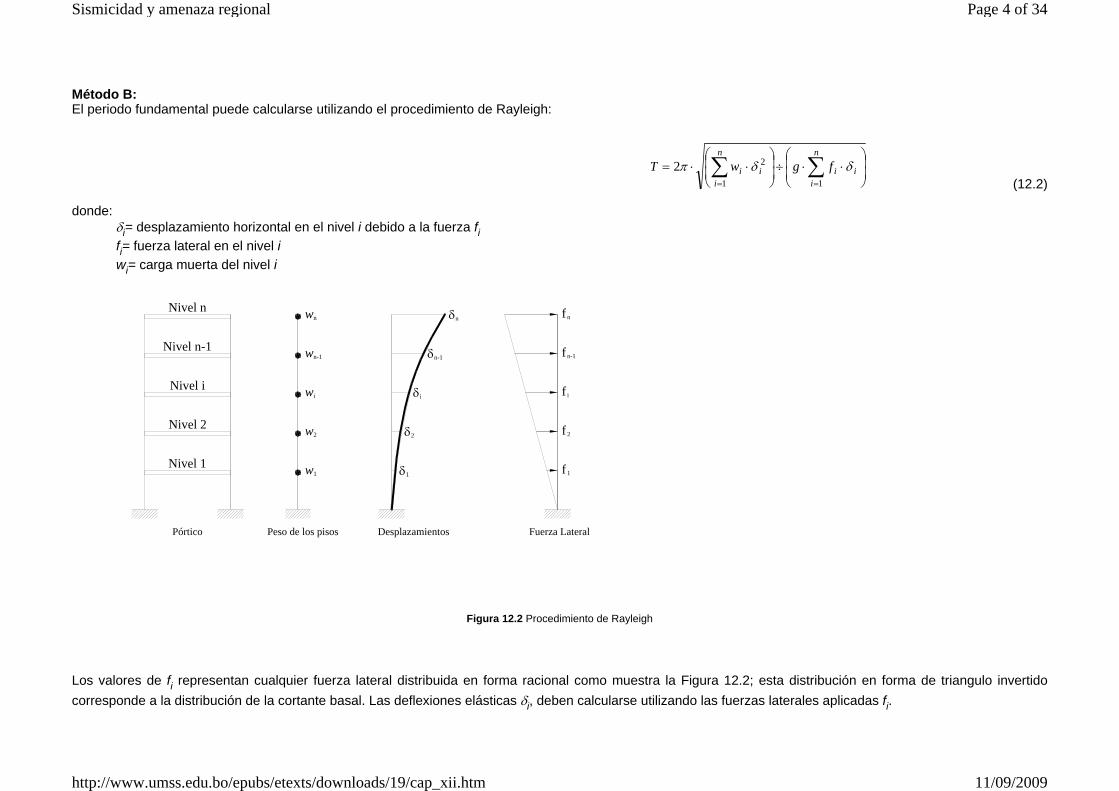
Método B: El periodo fundamental puede calcularse utilizando el procedimiento de Rayleigh:
(12.2)
donde: δi= desplazamiento horizontal en el nivel i debido a la fuerza fi fi= fuerza lateral en el nivel i wi= carga muerta del nivel i
Figura 12.2 Procedimiento de Rayleigh
Los valores de fi representan cualquier fuerza lateral distribuida en forma racional como muestra la Figura 12.2; esta distribución en forma de triangulo invertidocorresponde a la distribución de la cortante basal. Las deflexiones elásticas δi, deben calcularse utilizando las fuerzas laterales aplicadas fi.
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅÷⎟
⎟⎠
⎞⎜⎜⎝
⎛⋅⋅= ∑∑
==
n
iii
n
iii fgwT
11
22 δδπ
n
n-1
i
2
1 δ1
δ2
δi
δn-1
δn
f 1
2f
if
n-1f
nf
Nivel 1
Nivel 2
Nivel i
Nivel n-1
Nivel n
Pórtico Peso de los pisos Desplazamientos Fuerza Lateral
w
w
w
w
w
Page 4 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
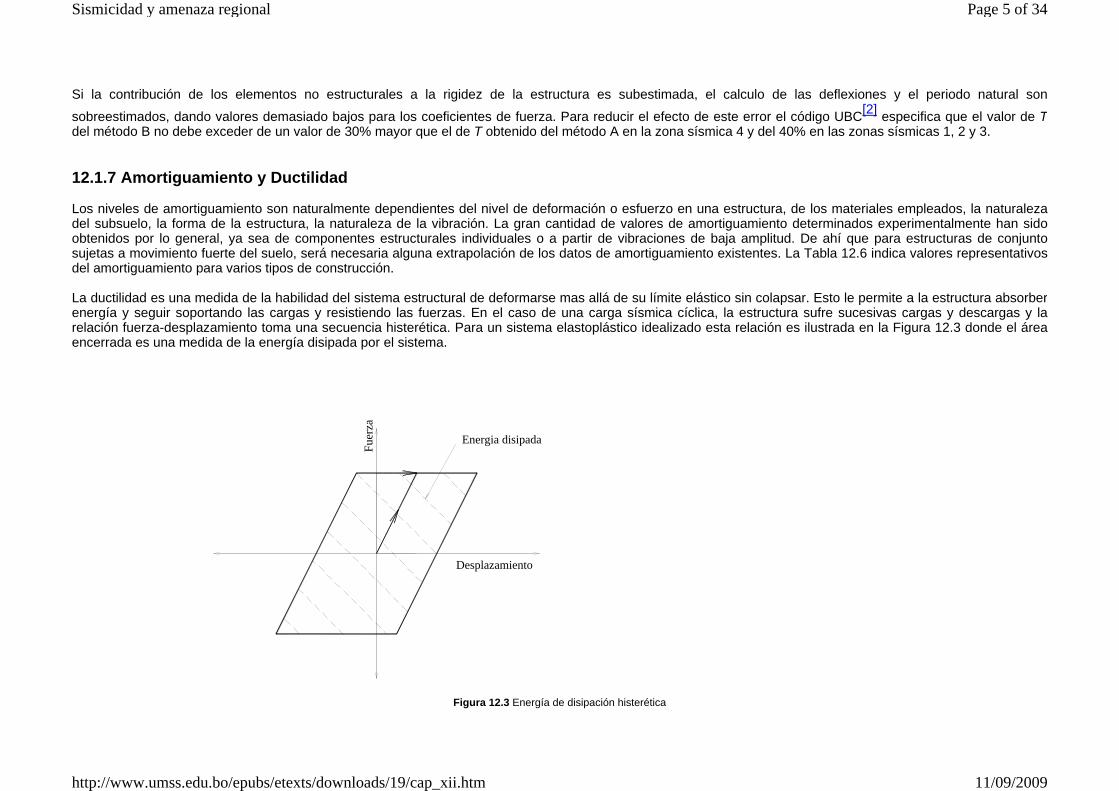
Si la contribución de los elementos no estructurales a la rigidez de la estructura es subestimada, el calculo de las deflexiones y el periodo natural son
sobreestimados, dando valores demasiado bajos para los coeficientes de fuerza. Para reducir el efecto de este error el código UBC[2] especifica que el valor de Tdel método B no debe exceder de un valor de 30% mayor que el de T obtenido del método A en la zona sísmica 4 y del 40% en las zonas sísmicas 1, 2 y 3. 12.1.7 Amortiguamiento y Ductilidad Los niveles de amortiguamiento son naturalmente dependientes del nivel de deformación o esfuerzo en una estructura, de los materiales empleados, la naturalezadel subsuelo, la forma de la estructura, la naturaleza de la vibración. La gran cantidad de valores de amortiguamiento determinados experimentalmente han sidoobtenidos por lo general, ya sea de componentes estructurales individuales o a partir de vibraciones de baja amplitud. De ahí que para estructuras de conjuntosujetas a movimiento fuerte del suelo, será necesaria alguna extrapolación de los datos de amortiguamiento existentes. La Tabla 12.6 indica valores representativosdel amortiguamiento para varios tipos de construcción. La ductilidad es una medida de la habilidad del sistema estructural de deformarse mas allá de su límite elástico sin colapsar. Esto le permite a la estructura absorberenergía y seguir soportando las cargas y resistiendo las fuerzas. En el caso de una carga sísmica cíclica, la estructura sufre sucesivas cargas y descargas y larelación fuerza-desplazamiento toma una secuencia histerética. Para un sistema elastoplástico idealizado esta relación es ilustrada en la Figura 12.3 donde el áreaencerrada es una medida de la energía disipada por el sistema.
Figura 12.3 Energía de disipación histerética
Desplazamiento
Fuer
za
Energia disipada
Page 5 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm

Cuando una estructura es sujeta a un movimiento sísmico, ésta tiene la capacidad de absorber gran parte de la energía sísmica; una parte sustancial de energía esalmacenada temporalmente por la estructura en forma de energía de deformación y energía cinética. Después de corto tiempo el movimiento sísmico puede ser tanfuerte que el punto de fluencia se excede en ciertas partes de la estructura y principia la disipación permanente de energía en forma de deformación inelástica(histerética). A través de todo el sismo la energía es disipada por amortiguamiento, el cual es, por supuesto, el medio por el cual la energía elástica es disipada unavez que cesa el movimiento del suelo. Es evidente que se requiere de una gran ductilidad para disipar en gran proporción la energía histerética generada por unsismo. Los factores de ductilidad para estructuras se utilizan en forma tal que implican una reducción en los valores espectrales de respuesta, por consiguiente se requiereuna estimación razonable del factor de ductilidad permisible. Para este propósito se debe estar conciente de las diferencias entre los diferentes tipos de factores deductilidad involucrados en la respuesta de las estructuras a carga dinámica. A este respecto debe hacerse una distinción entre el factor de ductilidad de un miembro,el factor de ductilidad de un entrepiso en un edificio y el factor de ductilidad global del edificio, para usarse en el cálculo del cortante basal a partir de los valoresespectrales de respuesta. El factor de ductilidad de un miembro, de un entrepiso o el factor de ductilidad global, están todos gobernados por el desarrollo de una relación fuerza-desplazamiento, en la que el desplazamiento es la deformación longitudinal en un miembro a tensión o a compresión, la rotación de una junta o conexión en unmiembro a flexión o la deformación por cortante en un muro de corte. El factor de ductilidad de entrepiso se define esencialmente por medio de una relación en laque el desplazamiento es la deflexión relativa entre el piso por encima y el piso por debajo del entrepiso que se trata. El factor de ductilidad global es, en general, unpromedio pesado de los factores de ductilidad de entrepiso, y la mejor manera de definirlo es considerando un patrón particular de desplazamiento que correspondaal modo preferible de deformación de la estructura, en una condición de respuesta que la energía inelástica sea absorbida de manera tan general como sea posiblepara desarrollar tal deformación por toda la estructura. El factor de ductilidad de miembro puede ser considerablemente más grande que el factor de ductilidad de entre piso, que a su vez puede ser algo más grande queel factor de ductilidad global. La asignación del factor de ductilidad global de la estructura deberá realizarse de manera conservadora y teniendo en cuenta que lasposibilidades de disipación de energía por deformaciones inelásticas dependen de muchos factores como por ejemplo: configuración estructural, distribución derigideces y resistencia, características de los componentes estructurales y uniones, materiales y otros. 12.1.8 Factor de Modificación de Respuesta Como resulta antieconómico el diseñar una estructura que permanezca dentro de su rango elástico durante un sismo; la capacidad de absorción de energía no linealdel sistema es una ventaja que permite limitar el daño estructural sin disminuir la capacidad de la estructura de soportar carga vertical. En adición, como ocurre lafluencia, el periodo natural y el coeficiente amortiguamiento se incrementan reduciendo de este modo la fuerza sísmica desarrollada en la estructura. El factor R de modificación de la respuesta es el coeficiente de la cortante basal sísmica, el cual debe desarrollarse en un sistema linealmente elástico, y es unamedida de la capacidad del sistema para absorber energía y mantener un comportamiento cíclico de deformación si colapsar. El código UBC proporciona una seriede valores para R, los cuales están tabulados en la Tabla 12.7; el valor de R se incrementa a medida que la ductilidad de la estructura aumenta y su capacidad dedisipación de energía aumenta; R es un coeficiente numérico representativo de la capacidad de ductilidad global de los sistemas resistentes a fuerzas laterales.
Page 6 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
12.1.9 Factor de Importancia Para propósitos de diseño resistente a movimientos sísmicos, cada estructura debe clasificarse de acuerdo a una de las categorías de destino enunciadas en laTabla 12.8, la cual asigna factores de importancia I. 12.1.10 Coeficiente de Respuesta Sísmica El coeficiente de respuesta esta definido por:
(12.3)
La forma de esta expresión indica que el coeficiente de respuesta se incrementa a medida que se incrementa el factor de importancia y a medida que se reducen elfactor de modificación de repuesta y el periodo natural. Las estructuras de amortiguamiento bajo construidas de material quebradizo son incapaces de tolerar deformaciones apreciables y para ellas se recomienda unvalor bajo de R; en cambio a las estructuras altamente amortiguadas construidas de materiales dúctiles se les asigna un valor mayor de R. Para periodos fundamentales que exceden aproximadamente al segundo de tiempo, la respuesta de aceleración de la estructura se atenúa proporcionalmente a superiodo, como se advierte en la forma de la expresión del coeficiente de respuesta sísmica. El coeficiente de respuesta sísmica no debe ser mayor que:
(12.4)
Esta expresión es valida para periodos cortos de hasta 1 [s] aproximadamente. Para periodos mayores, la ecuación 12.4 da valores conservadores. Para prevenirque valores demasiado bajos del coeficiente de respuesta sísmica sean adoptados para estructuras de periodos grandes, este coeficiente no debe ser menor que:
(12.5)
Además, para la zona sísmica 4, el valor mínimo del valor del coeficiente de respuesta sísmica es:
(12.6)
12.1.11 Carga Muerta Sísmica
TRIC
C vs ⋅
⋅=
RIC
C as
⋅⋅≤
5.2
ICC as ⋅⋅≥ 11.0
RINZ
C vs
⋅⋅⋅≥
8.0
Page 7 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
La carga muerta sísmica W, es la carga muerta total y las partes correspondientes a otras cargas que se enuncian a continuación:
En las bodegas y destinos de almacenamiento se debe aplicar un mínimo de 25% de la carga viva del piso. Cuando se utilice una carga de tabiques en el diseño del piso, se debe incluir una carga no menor de 0.48 kN/m2 (10 psf). La carga de diseño de nieve debe incluirse cuando ésta exceda los 1.44 kN/m2 (30 psf), pero puede reducirse hasta el 75 % dependiendo de la configuracióndel techo, las condiciones del lugar, duración de la carga. Debe incluirse el peso total del equipo permanente y accesorios.
12.1.12 Procedimiento de la Fuerza Lateral Equivalente Las fuerzas laterales producidas en la estructura por la vibración del terreno pueden determinarse mediante la estática o el procedimiento de la fuerza lateralequivalente, la cual utiliza la segunda ley de Newton para estimar la fuerza cortante en la base de la estructura.
(12.7)
esta formula esta basada en la suposición de que la estructura sufrirá varios ciclos de deformación inelástica y disipación de energía sin llegar a colapsar. Lasfuerzas y desplazamientos en la estructura se calculan asumiendo un comportamiento linealmente elástico. La relación fuerza-desplazamiento idealizada es mostrada en la Figura 12.3. Ésta ilustra que la cortante basal desarrollada en una estructura ideal completamenteelástica es:
(12.8)
con un valor máximo de:
(12.9)
La cual es modificada por el factor de modificación de respuesta y el coeficiente de importancia para el calculo de la cortante basal de diseño:
(12.10)
Si el desplazamiento calculado para este valor de diseño es ΔS y el factor de amplificación es 0.7·R se asume que el desplazamiento real es:
(12.11)
esta expresión representa un valor promedio para el desplazamiento inelástico; sin embargo varios estudios indican que la ecuación 12.11 puede subestimar el valor
WCV
WTRIC
V
s
v
⋅=
⋅⋅⋅
=
WTC
V vE ⋅=
WCV aE ⋅⋅= 5.2
RIVV ES ⋅=
SM R Δ⋅⋅=Δ 7.0
Page 8 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
real de algunas estructuras. En otros casos ΔM puede calcularse por análisis de historia de tiempo (cronológico) no lineal.
12.2 ESTRUCTURAS DE VARIOS NIVELES
12.2.1 Distribución Vertical de la Fuerza Sísmica La distribución de la cortante basal sobre la altura de la edificación se obtiene como la superposición de todos los modos de vibración de un sistema de variosgrados de libertad. La magnitud de la fuerza lateral que actúa sobre un nudo en particular depende de la masa del nudo, de la distribución de la rigidez sobre laaltura de la estructura y del desplazamiento nodal en un modo dado, y esta dada por:
(12.12)
donde: V’ = Cortante basal modal wi = Carga muerta sísmica localizada en el nivel i φi = Componente de la forma modal en el nivel i para un modo dado wx = Carga muerta sísmica localizada en el nivel x φx = Componente de la forma modal en el nivel x para un modo dado Para una estructura con una distribución de masas sobre su altura y asumiendo una forma modal lineal, como se observa en la Figura 12.4, la expresión anterior sereduce a:
(12.13)
donde: hi = Altura sobre la base hasta el nivel i hx = Altura sobre la base hasta el nivel x
ii
xxx w
wVF
φφ
⋅Σ⋅⋅′
=
Page 9 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm

Figura 12.4 Distribución vertical de la fuerza sísmica Si sólo se considera la forma modal fundamental, V1 representa la cortante basal de diseño para el modo fundamental y la distribución de la fuerza es lineal. Paratomar en cuenta el efecto de los modos altos en las edificaciones con periodos grandes, esto es cuando T excede a los 0.7 segundos, se debe añadir una fuerza Ften la parte superior de la estructura, la cual esta dada por:
(12.14)
donde:
(12.15)
donde : V = Cortante basal total de diseño que incluye la fuerza total adicional para tomar en cuenta el efecto de los modos altos
Entonces la fuerza lateral de diseño en el nivel x esta dado por:
(12.16)
VTFt ⋅⋅= 07.0
xt
t
FFVVFVΣ+=
+= 1
ii
xxtx hw
hwFVF
⋅Σ⋅⋅−
=)(
Nivel 1
Nivel 2
Nivel x
Nivel n-1
Nivel n
hw1
w2
wx
wn-1
wn
F1
F2
Fx
Fn-1
FnF t
Ø = h /Hx xH
x
V
Desplazamientode los pisos
Fuerza lateral
Cortante lateral
Peso delos pisos
Pórtico
Page 10 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
12.2.2 Volcamiento
De acuerdo al código UBC[3] las estructuras deben ser diseñadas para resistir los efectos de volcamiento causados por las fuerzas sísmicas, las cuales debentransmitirse hasta la cimentación. Cuando se hacen presentes discontinuidades verticales en los elementos resistentes a fuerzas laterales, los elementos quesoportan dichos sistemas discontinuos deben tener la resistencia de diseño para soportar las cargas combinadas que resultan de las combinaciones de cargassísmicas, las cuales son:
(12.17)
donde: D = Carga muerta L = Carga viva, con excepción de la carga viva de techo f1 = 1.0 para pisos de reunión publica, para cargas vivas que exceden de 4.79 kN/m2 (100 psf) y para
cargas vivas de garajes f1 = 0.5 para otras cargas vivas Em = Fuerza sísmica máxima que puede desarrollarse en la estructura Eh = Fuerza sísmica horizontal de diseño Ω0 = Factor de amplificación de la fuerza sísmica que se requiere para tomar en cuenta la
sobreresistencia estructural en el rango inelástico, esta tabulado en la Tabla 12.7 Cuando se determinan los esfuerzos en la interfase suelo-fundación puede omitirse la fuerza Ft en las estructuras regulares al determinar el momento de
volcamiento, debido a que Ft representa la fuerza lateral debido a los modos altos y las fuerzas en todos los niveles no alcanzan su punto máximo simultáneamente[4]. Adicionalmente puede incrementarse una tercera parte en la presión admisible del suelo[5]. La presión del suelo se debe obtener de la combinación de carga:
(12.18)
12.2.3 Efecto P-delta El efecto P-delta en un piso dado es causado por la excentricidad de la carga gravitatoria presente por encima del piso, la cual produce momentos secundariosaumentando las deflexiones horizontales y las fuerzas internas. Este efecto debe tenerse en cuenta cuando el índice de estabilidad (θi) excede a 0.1, ó en zonas sísmicas 3 y 4 cuando la relación de desplazamiento de piso excede a 0.02/R. El índice de estabilidad esta dado por:
m
h
EDELfD
⋅±⋅⋅Ω⋅+⋅+⋅
0.19.00.12.1 01
4.1/ESLD +++
Page 11 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
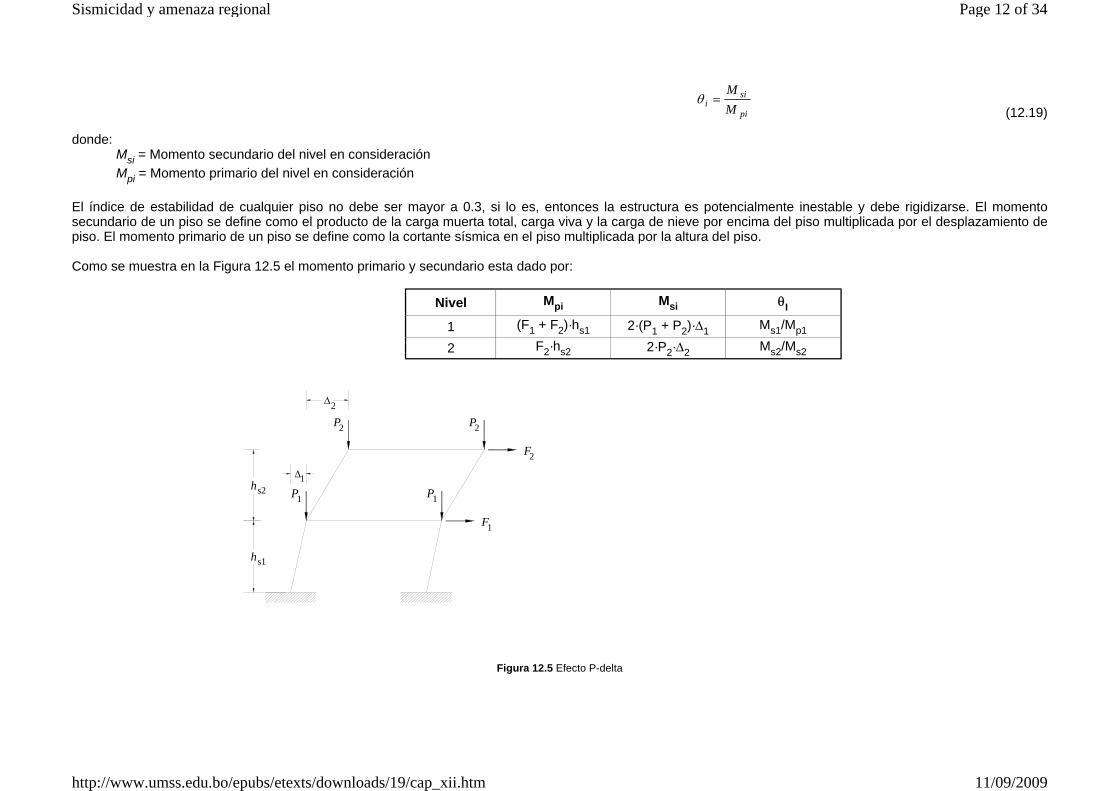
(12.19)
donde:
Msi = Momento secundario del nivel en consideración Mpi = Momento primario del nivel en consideración El índice de estabilidad de cualquier piso no debe ser mayor a 0.3, si lo es, entonces la estructura es potencialmente inestable y debe rigidizarse. El momentosecundario de un piso se define como el producto de la carga muerta total, carga viva y la carga de nieve por encima del piso multiplicada por el desplazamiento depiso. El momento primario de un piso se define como la cortante sísmica en el piso multiplicada por la altura del piso. Como se muestra en la Figura 12.5 el momento primario y secundario esta dado por:
Figura 12.5 Efecto P-delta
pi
sii M
M=θ
Nivel Mpi Msi θI
1 (F1 + F2)·hs1 2·(P1 + P2)·Δ1 Ms1/Mp1
2 F2·hs2 2·P2·Δ2 Ms2/Ms2
Δ
Δ
h
h
1F
F2
2PP2
P1 P1
2
1
s1
s2
Page 12 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
El efecto P-delta puede incluirse en el análisis elástico mediante el factor de amplificación, el cual esta dado por:
(12.20)
La cortante de nivel de cada piso es multiplicada por el factor (1-ad) correspondiente para ese nivel y las fuerzas internas y desplazamientos deben ser recalculadospara la estructura. El efecto P-delta debe evaluarse utilizando las cargas de diseño, es decir las fuerzas que producen los desplazamientos Δs, es decir las fuerzas derivadas de la estática o fuerza lateral equivalente. 12.2.4 Desplazamientos de Piso El desplazamiento de piso es el desplazamiento lateral de un piso relativo al piso inferior de una estructura de varios niveles. Para edificaciones con periodo naturalmenor a 0.7 segundos, la sección 1630.10.2 del código UBC limita el desplazamiento relativo o la deriva a una máximo de 0.025 veces la altura del piso. Y paraestructuras que tengan un periodo fundamental de 0.7 segundos o mayor, el desplazamiento relativo calculado del piso no debe exceder de 0.02 veces la altura delpiso. El propósito de estas limitaciones es el asegurar un mínimo de rigidez para así controlar la deformación inelástica y la posible inestabilidad. Los desplazamientos relativos de piso o derivas deben calcularse utilizando el desplazamiento de respuesta inelástica máxima dado como:
(12.21)
donde: Δs = Desplazamiento de respuesta del nivel de diseño Para el cálculo del desplazamiento del nivel de diseño se debe preparar un análisis elástico estático del sistema resistente a las fuerzas laterales utilizando lasfuerzas sísmicas de diseño; el modelo matemático debe cumplir con la sección 1630.1.2 del código UBC:
Las propiedades de rigidez de los elementos de hormigón y de mampostería reforzados deben considerar los efectos de las secciones agrietadas, y deacuerdo con la sección 1633.2.4 las propiedades de rigidez pueden asumirse igual a la mitad de las propiedades de la sección bruta a menos que se realiceun análisis racional de la sección agrietada. En los sistemas de pórticos de acero resistentes a momentos, debe incluirse la contribución de las deformaciones de la franja de tablero al desplazamientototal del piso.
Adicionalmente se debe considerar el efecto P-delta en el cálculo del desplazamiento de respuesta inelástica máxima cuando el caso así lo requiera. El valor del periodo fundamental calculado por el método B (ecuación 12.2) es más realista que aquel calculado por el método A (ecuación 12.1); en pero la sección1630.10.3 del código UBC afloja el requisito, para el cálculo de la deriva, en el cual TB puede no exceder el valor de TA por un 30% en la zona sísmica 4, y por un
i
ida
θθ−
=1
sM R Δ⋅⋅=Δ 7.0
Page 13 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
40% en zona sísmica 1,2,3. Y no debe imponerse límite de desplazamiento para estructuras de acero de un solo piso clasificados como destinos de los grupos B, F
y S o del grupo H división 4 o 5[6].
Cuando se diseña una estructura mediante el análisis dinámico, se debe utilizar el espectro de respuesta apropiado del terreno sin reducción por el factor demodificación de respuesta R. Esto da resultados de desplazamiento iguales a los valores elásticos correspondientes al espectro de respuesta elástico. Paraestructuras de periodo grande con un periodo fundamental dentro de la región sensitiva de velocidad del espectro de respuesta, este desplazamiento de respuestaelástico es aproximadamente igual al desplazamiento total inelástico. Para estructuras de periodo corto con un periodo fundamental dentro la región sensitiva deaceleración del espectro de respuesta, este desplazamiento de respuesta elástico usualmente subestima el desplazamiento inelástico total. Cuando el análisis dinámico, aplicado a una estructura regular, utiliza el espectro de respuesta construido de acuerdo a la Figura 12.1, la sección 1631.5.4 del códigoUBC permite que la respuesta de desplazamiento elástico se reduzca a un valor correspondiente a la cortante basal equivalente del 90% de la cortante basalderivada del análisis estático. Cuando el análisis dinámico, aplicado a una estructura regular utiliza el espectro de respuesta especifico del lugar, el código permiteque la respuesta de desplazamiento elástico se reduzca a una valor correspondiente a la cortante basal equivalente del 80% de la cortante basal derivada delanálisis estático. En ningún caso los desplazamientos pueden ser menores a los desplazamientos de respuesta elástica divididos por el factor de modificación derespuesta. 12.2.5 Cargas en los Diafragmas Los diafragmas de piso y techo deben diseñarse para resistir las fuerzas determinadas según la siguiente formula:
(12.22)
donde: Ft = Fuerza lateral concentrada en la parte superior de la estructura Fi = Fuerza lateral en el nivel i ΣFi = Fuerza cortante total en el nivel i wi = Carga muerta sísmica total localizada en el nivel i Σwi = Carga muerta sísmica total en el nivel i y por encima wpx = El peso del diafragma y el elemento tributario al mismo en el nivel x, no incluye muros paralelos
a la dirección de la carga sísmica Para una estructura simple ésta se reduce a:
pxi
itpx w
wFF
F ⋅ΣΣ+
=
pxapxpxa wICFwIC ⋅⋅⋅≤≤⋅⋅⋅ 0.15..0
Page 14 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
(12.23)
12.3 FUERZA CORTANTE BASAL PARA EL DISEÑO SIMPLIFICADO
Para pequeñas estructuras, la sección 1630.2.3 del código UBC permite un método de diseño alternativo. Este método provee resultados conservadores encomparación con el otro método disponible, pero permite un rápido y simple cálculo de la cortante basal sísmica. El método es aplicable a estructuras cuya categoríade destino corresponde a la 4 o 5 de la Tabla 12.8, de pórticos ligeros que no excedan los 3 niveles, o de cualquier construcción que no exceda los 2 pisos de altura. 12.3.1 Fuerza Cortante Basal La fuerza cortante basal de diseño en una dirección determinada debe calcularse según:
(12.24)
Cuando se desconoce los parámetros del suelo, para determinar el valor de Ca, debe utilizarse el tipo de perfil de suelo SD en zonas sísmicas 3 y 4, y el tipo SE en las demás. Para estructuras regulares ubicadas en la zona sísmica 4 el factor de cercanía a la fuente no necesita ser mayor de 1.3. 12.3.2 Distribución Vertical Las fuerzas en cada nivel deben calcularse utilizando la siguiente formula:
(12.25)
pv
p
pp
wTRIC
F
WwV
F
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅
=
⋅=
WR
CV a ⋅
⋅=
0.3
ix
ia
x
wWVF
wR
CF
=
⋅=
0.3
Page 15 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
12.3.3 Calculo de los Desplazamientos de Piso El efecto P-delta y los desplazamientos de piso no son normalmente requeridos cuando se utilice el método simplificado. Si es necesario, en sistemas estructuralesrelativamente flexibles, se puede considerar los efectos P-delta y los desplazamientos, y para ello el desplazamiento de respuesta inelástica máxima esta dada por:
(12.26)
donde: hs = La altura de piso 12.3.4 Determinación de la Carga Sobre los Diafragmas De acuerdo a la sección 1630.2.3.4 del código UBC, la carga actuante en el diafragma horizontal se determina a partir de la expresión:
(12.27)
(12.28)
donde :
12.4 COMBINACIONES DE CARGA
12.4.1 Combinaciones de Carga Utilizando el Diseño por Resistencia Llamado también diseño por factores de carga y de resistencia. Cuando se utiliza el principio de resistencias de diseño, el requerimiento básico es de asegurarseque la resistencia de diseño de un miembro no sea menor que la resistencia ultima requerida. Para la resistencia requerida se considera las cargas de serviciomultiplicadas por un factor de carga apropiado como los que indica el reglamento ACI y se presentan en la Tabla 12.9. No es necesario asumir que el viento y las cargas debidas al sismo actúan simultáneamente. La carga sísmica E es una función de ambas fuerzas sísmicas, horizontal y vertical, y esta dada por:
(12.29)
donde: Eh = carga sísmica debida al esfuerzo cortante en la base Ev = fuerza vertical debida a los efectos de la aceleración vertical del suelo
sM h⋅=Δ 01.0
pxa
px wR
CF ⋅
⋅=
0.3
pxpx wWVF ⋅=
pxapxpxa wCFwC ⋅⋅≤≤⋅⋅ 0.15.0
vh EEE +⋅= ρ
Page 16 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
Ev = es igual a añadir 0.5·Ca·I·D al efecto de la carga muerta para el diseño por resistencia Ev = 0, para el diseño por esfuerzos admisibles ρ = factor de confiabilidad o redundancia. y
(12.30)
donde: AB = area de la estructura en el nivel del suelo en m2 (ft2) rmax = máxima relación del esfuerzo cortante del elemento-piso El valor asumido para Ev representa la magnitud de la respuesta vertical debida a la aceleración vertical del suelo, la cual es considerada que tiene gran probabilidadde ocurrir simultáneamente con la respuesta horizontal máxima. Para una dirección determinada de carga, la relación del esfuerzo cortante del elemento-piso es la relación del esfuerzo cortante del piso de diseño en el elementoindividual de mayor carga dividido por el esfuerzo cortante total de diseño del piso. Para cualquier nivel esta relación se denomina ri. La relación máxima del esfuerzo cortante del elemento-piso rmax se define como la mayor de las relaciones ri que se da en cualquiera de los niveles de piso a un nivel igual a las 2/3 partes de laaltura de la edificación o a una altura inferior. Para proporcionar en la estructura varias trayectorias de resistencia a cargas laterales se provee de un cierto grado de redundancia al sistema. La fluencia de unelemento del sistema deriva en una redistribución de la carga en los elementos que todavía permanecen, de este modo se controla los desplazamientos y ladeterioración de la estructura y además se retarda la formación de mecanismos de colapso. De este modo para mejorar el rendimiento sismo resistente de lasedificaciones es necesario proporcionar múltiples trayectorias de carga para hacer de este modo el sistema resistente a fuerzas laterales lo mas redundante posible.Es así que el factor de redundancia ρ penaliza a las estructuras que tiene un grado de redundancia bajo con un incremento hasta del 50% de la fuerza horizontal dediseño. Y cuando se calcula el desplazamiento o cuando la estructura esta ubicada en las zonas sísmicas 0, 1 ó 2, ρ debe considerarse igual a 1.0 Para estructuras arriostradas, el valor de ri se determina como se muestra en la Figura 12.6. asumiendo que cada tirante o abrazadera resiste igual cortantesísmica, la máxima relación del esfuerzo cortante del elemento-piso es:
rmax = 0.5
[ ]
[ ]ingleasas unidades 202
SI 1.62
max
max
B
B
Ar
Ar
⋅−=
⋅−=
ρ
ρ
Page 17 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
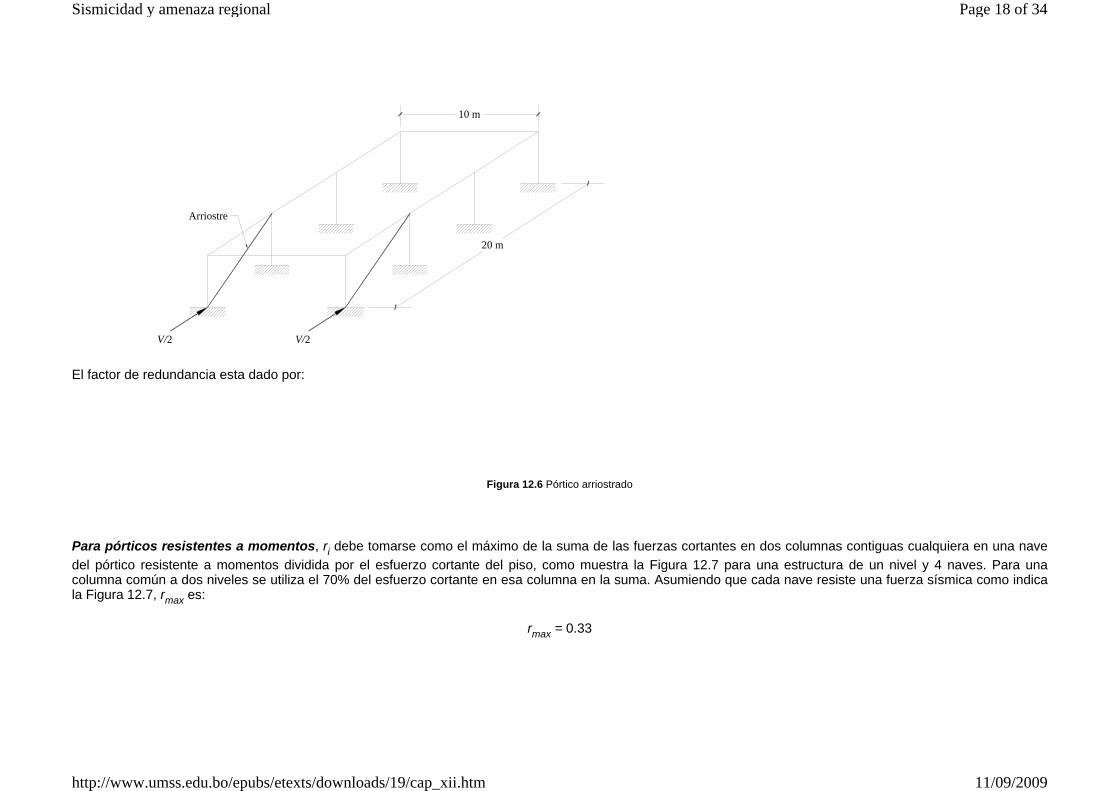
El factor de redundancia esta dado por:
Figura 12.6 Pórtico arriostrado
Para pórticos resistentes a momentos, ri debe tomarse como el máximo de la suma de las fuerzas cortantes en dos columnas contiguas cualquiera en una navedel pórtico resistente a momentos dividida por el esfuerzo cortante del piso, como muestra la Figura 12.7 para una estructura de un nivel y 4 naves. Para unacolumna común a dos niveles se utiliza el 70% del esfuerzo cortante en esa columna en la suma. Asumiendo que cada nave resiste una fuerza sísmica como indicala Figura 12.7, rmax es:
rmax = 0.33
V/2
20 m
V/2
Arriostre
10 m
Page 18 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
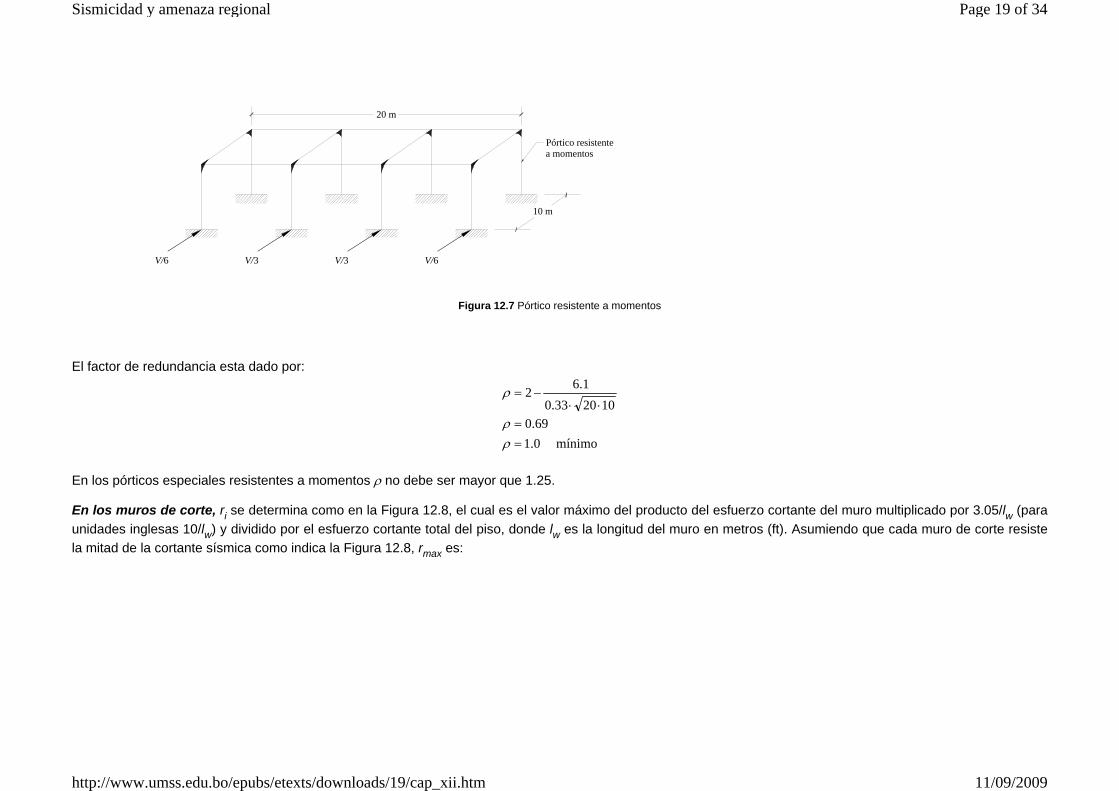
Figura 12.7 Pórtico resistente a momentos El factor de redundancia esta dado por:
En los pórticos especiales resistentes a momentos ρ no debe ser mayor que 1.25. En los muros de corte, ri se determina como en la Figura 12.8, el cual es el valor máximo del producto del esfuerzo cortante del muro multiplicado por 3.05/lw (para unidades inglesas 10/lw) y dividido por el esfuerzo cortante total del piso, donde lw es la longitud del muro en metros (ft). Asumiendo que cada muro de corte resistela mitad de la cortante sísmica como indica la Figura 12.8, rmax es:
mínimo 0.169.0
102033.01.62
==
⋅⋅−=
ρρ
ρ
V/6 V/3 V/3 V/6
10 m
20 m
Pórtico resistente a momentos
Page 19 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
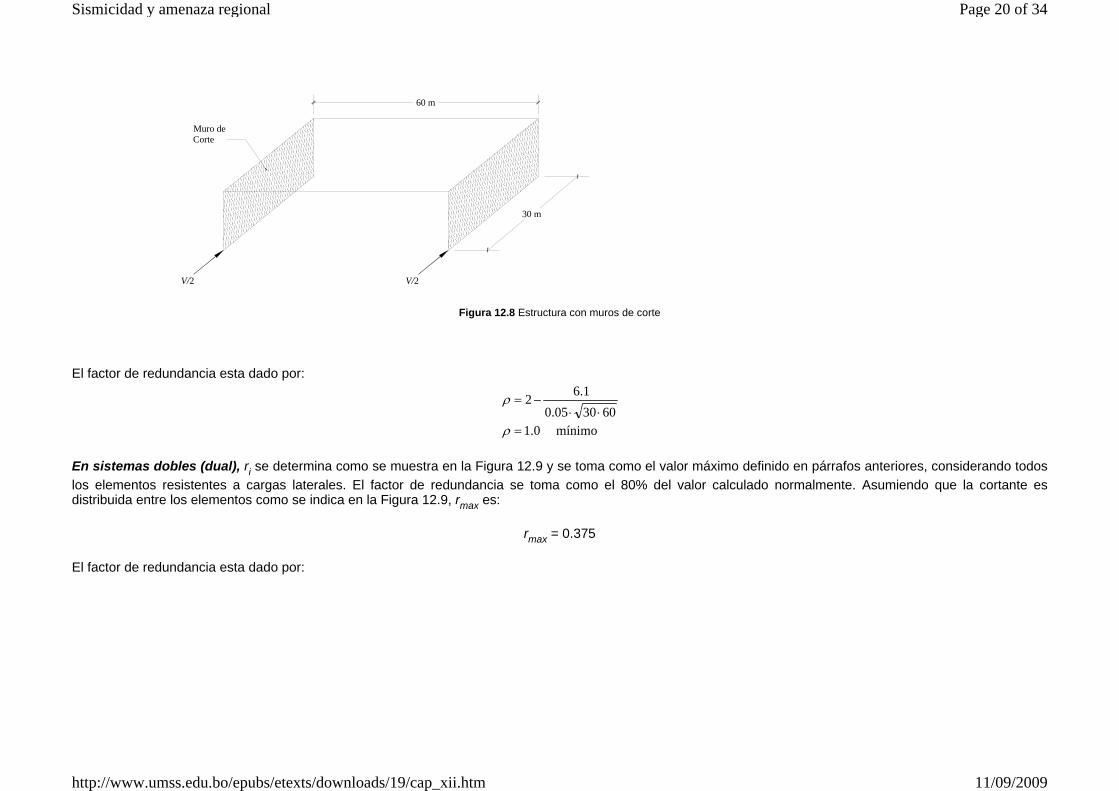
Figura 12.8 Estructura con muros de corte El factor de redundancia esta dado por:
En sistemas dobles (dual), ri se determina como se muestra en la Figura 12.9 y se toma como el valor máximo definido en párrafos anteriores, considerando todoslos elementos resistentes a cargas laterales. El factor de redundancia se toma como el 80% del valor calculado normalmente. Asumiendo que la cortante esdistribuida entre los elementos como se indica en la Figura 12.9, rmax es:
rmax = 0.375
El factor de redundancia esta dado por:
mínimo 0.1603005.0
1.62
=⋅⋅
−=
ρ
ρ
V/2V/2
60 m
30 m
Muro de Corte
Page 20 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
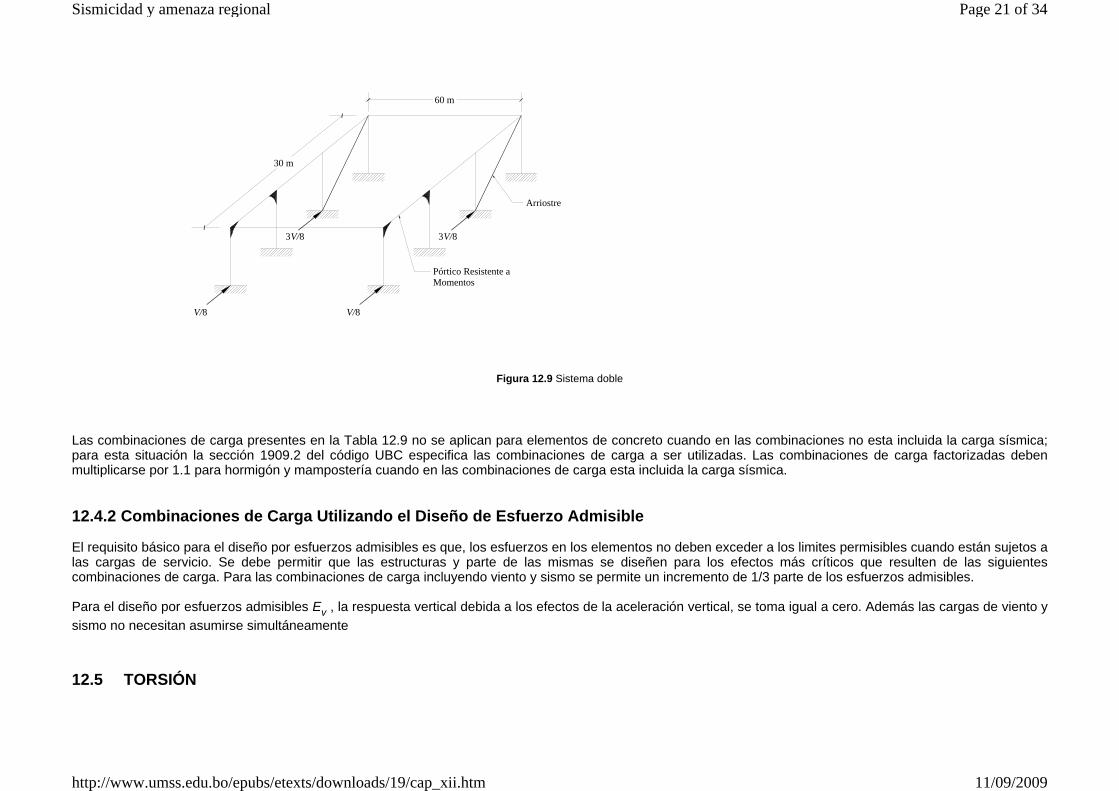
Figura 12.9 Sistema doble
Las combinaciones de carga presentes en la Tabla 12.9 no se aplican para elementos de concreto cuando en las combinaciones no esta incluida la carga sísmica;para esta situación la sección 1909.2 del código UBC especifica las combinaciones de carga a ser utilizadas. Las combinaciones de carga factorizadas debenmultiplicarse por 1.1 para hormigón y mampostería cuando en las combinaciones de carga esta incluida la carga sísmica. 12.4.2 Combinaciones de Carga Utilizando el Diseño de Esfuerzo Admisible El requisito básico para el diseño por esfuerzos admisibles es que, los esfuerzos en los elementos no deben exceder a los limites permisibles cuando están sujetos alas cargas de servicio. Se debe permitir que las estructuras y parte de las mismas se diseñen para los efectos más críticos que resulten de las siguientescombinaciones de carga. Para las combinaciones de carga incluyendo viento y sismo se permite un incremento de 1/3 parte de los esfuerzos admisibles. Para el diseño por esfuerzos admisibles Ev , la respuesta vertical debida a los efectos de la aceleración vertical, se toma igual a cero. Además las cargas de viento ysismo no necesitan asumirse simultáneamente
12.5 TORSIÓN
V/8
3V/8
V/8
3V/8
60 m
30 m
Pórtico Resistente a Momentos
Arriostre
Page 21 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
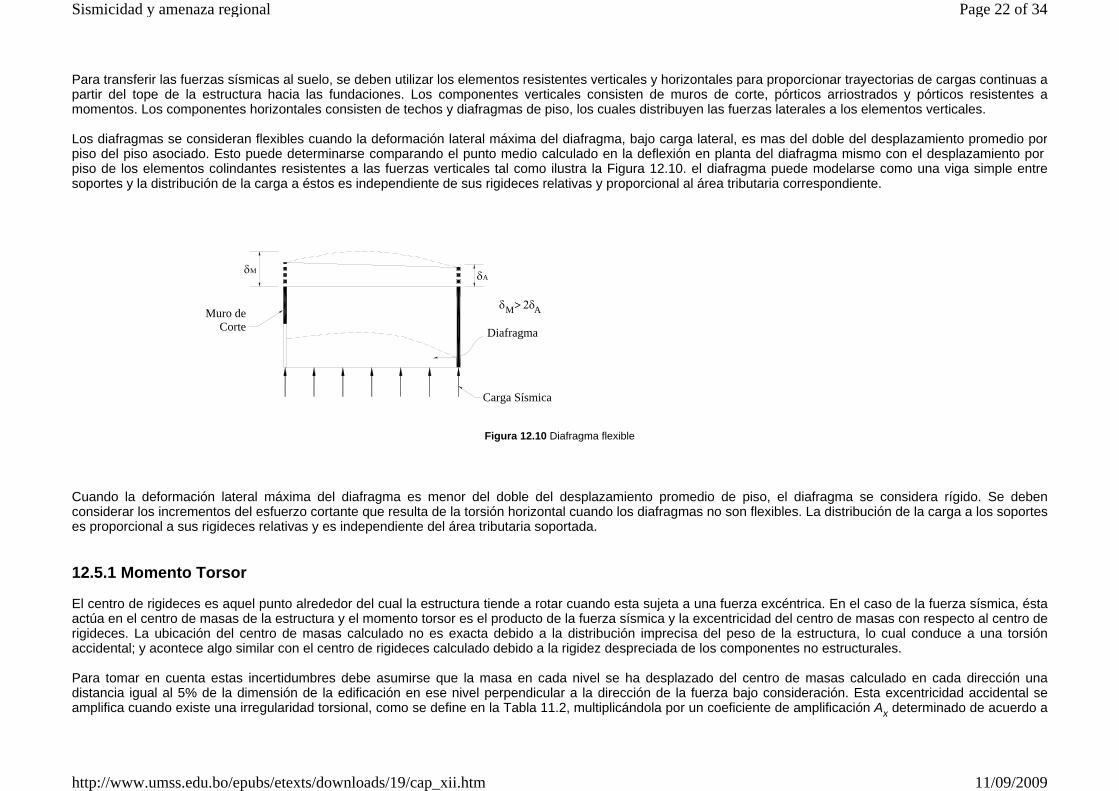
Para transferir las fuerzas sísmicas al suelo, se deben utilizar los elementos resistentes verticales y horizontales para proporcionar trayectorias de cargas continuas apartir del tope de la estructura hacia las fundaciones. Los componentes verticales consisten de muros de corte, pórticos arriostrados y pórticos resistentes amomentos. Los componentes horizontales consisten de techos y diafragmas de piso, los cuales distribuyen las fuerzas laterales a los elementos verticales. Los diafragmas se consideran flexibles cuando la deformación lateral máxima del diafragma, bajo carga lateral, es mas del doble del desplazamiento promedio porpiso del piso asociado. Esto puede determinarse comparando el punto medio calculado en la deflexión en planta del diafragma mismo con el desplazamiento por piso de los elementos colindantes resistentes a las fuerzas verticales tal como ilustra la Figura 12.10. el diafragma puede modelarse como una viga simple entresoportes y la distribución de la carga a éstos es independiente de sus rigideces relativas y proporcional al área tributaria correspondiente.
Figura 12.10 Diafragma flexible Cuando la deformación lateral máxima del diafragma es menor del doble del desplazamiento promedio de piso, el diafragma se considera rígido. Se debenconsiderar los incrementos del esfuerzo cortante que resulta de la torsión horizontal cuando los diafragmas no son flexibles. La distribución de la carga a los soporteses proporcional a sus rigideces relativas y es independiente del área tributaria soportada. 12.5.1 Momento Torsor El centro de rigideces es aquel punto alrededor del cual la estructura tiende a rotar cuando esta sujeta a una fuerza excéntrica. En el caso de la fuerza sísmica, éstaactúa en el centro de masas de la estructura y el momento torsor es el producto de la fuerza sísmica y la excentricidad del centro de masas con respecto al centro derigideces. La ubicación del centro de masas calculado no es exacta debido a la distribución imprecisa del peso de la estructura, lo cual conduce a una torsiónaccidental; y acontece algo similar con el centro de rigideces calculado debido a la rigidez despreciada de los componentes no estructurales. Para tomar en cuenta estas incertidumbres debe asumirse que la masa en cada nivel se ha desplazado del centro de masas calculado en cada dirección unadistancia igual al 5% de la dimensión de la edificación en ese nivel perpendicular a la dirección de la fuerza bajo consideración. Esta excentricidad accidental seamplifica cuando existe una irregularidad torsional, como se define en la Tabla 11.2, multiplicándola por un coeficiente de amplificación Ax determinado de acuerdo a
δAδM
Muro de Corte Diafragma
2δδ AM>
Carga Sísmica
Page 22 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
la siguiente ecuación:
(12.31)
donde: δavg = el promedio de los desplazamientos en los puntos extremos de la estructura en el nivel x δmax = el desplazamiento máximo en el nivel x 12.5.2 Centro de Masas y Centro de Rigideces
Page 23 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
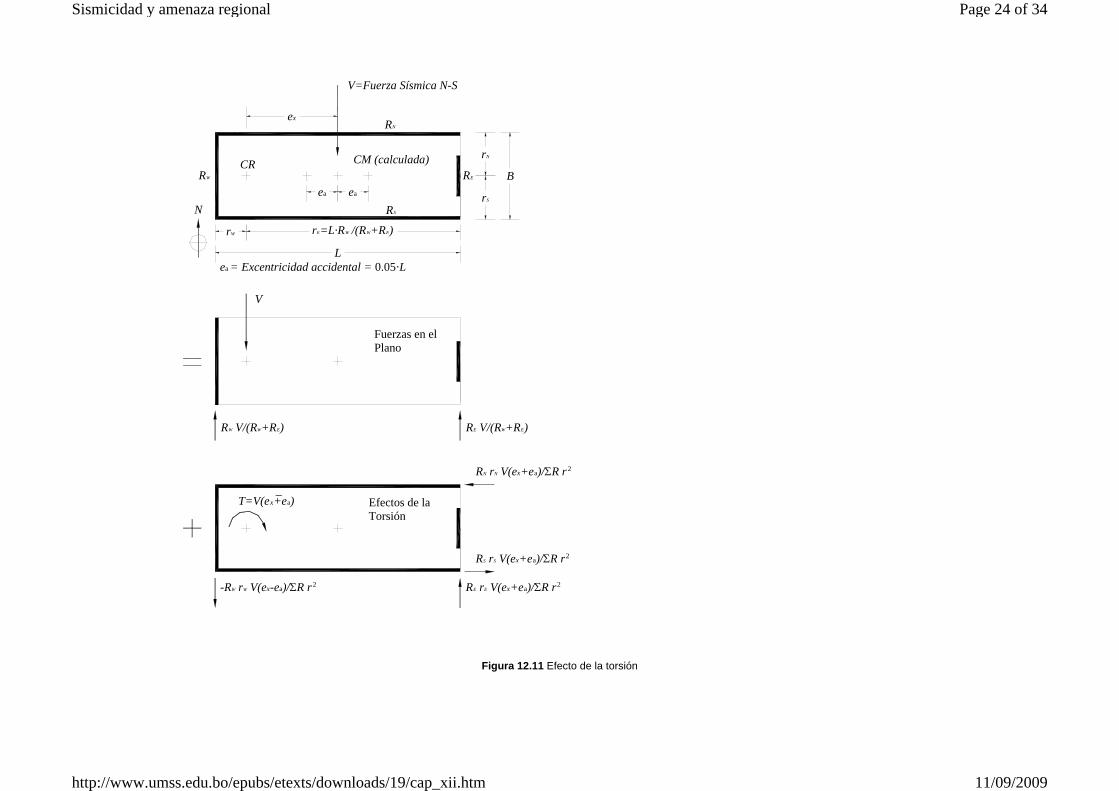
Figura 12.11 Efecto de la torsión
rN
rS
B
rW rE=L·RW /(RW+RE)
L
ex
ea ea
V=Fuerza Sísmica N-S
RW
CR CM (calculada)
RN
RS
RE
N
RW V/(RW+RE) RE V/(RW+RE)
Fuerzas en el Plano
-RW rW V(ex-ea)/ΣR r2 RE rE V(ex+ea)/ΣR r2
RS rS V(ex+ea)/ΣR r2
RN rN V(ex+ea)/ΣR r 2
Efectos de la Torsión
T=V(ex+ea)_
V
ea = Excentricidad accidental = 0.05·L
Page 24 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm

La ubicación del centro de rigideces se obtiene a partir de momentos estáticos alrededor de un origen conveniente. De la Figura 12.11 para la carga sísmica en ladirección Norte-Sur, los muros Norte y Sur, los cuales no tienen rigidez en esa dirección, se desprecian y sólo se consideran los muros Este y Oeste, es así que la ubicación del centro de rigideces con referencia al muroEste esta dada por:
La ubicación del centro de rigideces con referencia al muro Sur esta dado por:
El momento de inercia polar de los muros esta dado por:
De forma similar se calcula la ubicación del centro de masas, ⎯x, ⎯y. Y la fuerza cortante total en la base de los muros Este y Oeste esta dada entonces por la sumade la cortante debida a las fuerzas en ese plano y los momentos torsores. Es importante que el momento torsor de diseño en un piso determinado debe ser elmomento resultante de las excentricidades entre las fuerzas laterales de diseño aplicadas en los niveles por encima de ese piso y los elementos resistentes a lascargas verticales en ese piso más una torsión accidental. 12.5.3 Efectos de la Torsión La excentricidad entre el centro de masas y el centro de rigideces esta ilustrada en la Figura 12.11 como:
EW
WE
EW
EWE
y
yE
RRLR
r
RRRLR
r
RxR
r
+⋅
=
+⋅+⋅
=
Σ
⋅Σ=
0
SN
NS
SN
SNS
x
xS
RRBR
r
RRRBR
r
RyR
r
+⋅
=
+⋅+⋅
=
Σ⋅Σ
=
0
WWEESSNN RrRrRrRrJ
RrJ
⋅+⋅+⋅+⋅=
⋅Σ=2222
2
xre Ex −=
Page 25 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm

La excentricidad accidental esta dada por:
La excentricidad máxima es:
La excentricidad mínima es:
El momento torsor máximo para la carga sísmica Norte-Sur esta dado por:
El momento torsor mínimo para la carga sísmica Norte-Sur esta dado por:
La fuerza total en el muro Este, para la carga sísmica Norte-Sur es:
donde la fuerza cortante en la dirección considerada es:
La fuerza cortante debido al momento torsor más critico en el muro Este es:
Para el muro Oeste, debido a que el momento torsor actúa en sentido opuesto al plano de acción de las fuerzas, la fuerza cortante debido al momento torsor mas critico es:
Y la fuerza total de diseño es:
Lea ⋅= 05.0
axmaz eee +=
ax eee −=min
)(max
maxmax
ax eeVTeVT
+⋅=⋅=
)(min
minmin
ax eeVTeVT
−⋅=⋅=
(max)TS FFF +=
VRR
RF
WE
ES ⋅
+=
JRrT
F EET
⋅⋅= max
(max)
JRrT
F WWT
⋅⋅= min
(min)
Page 26 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
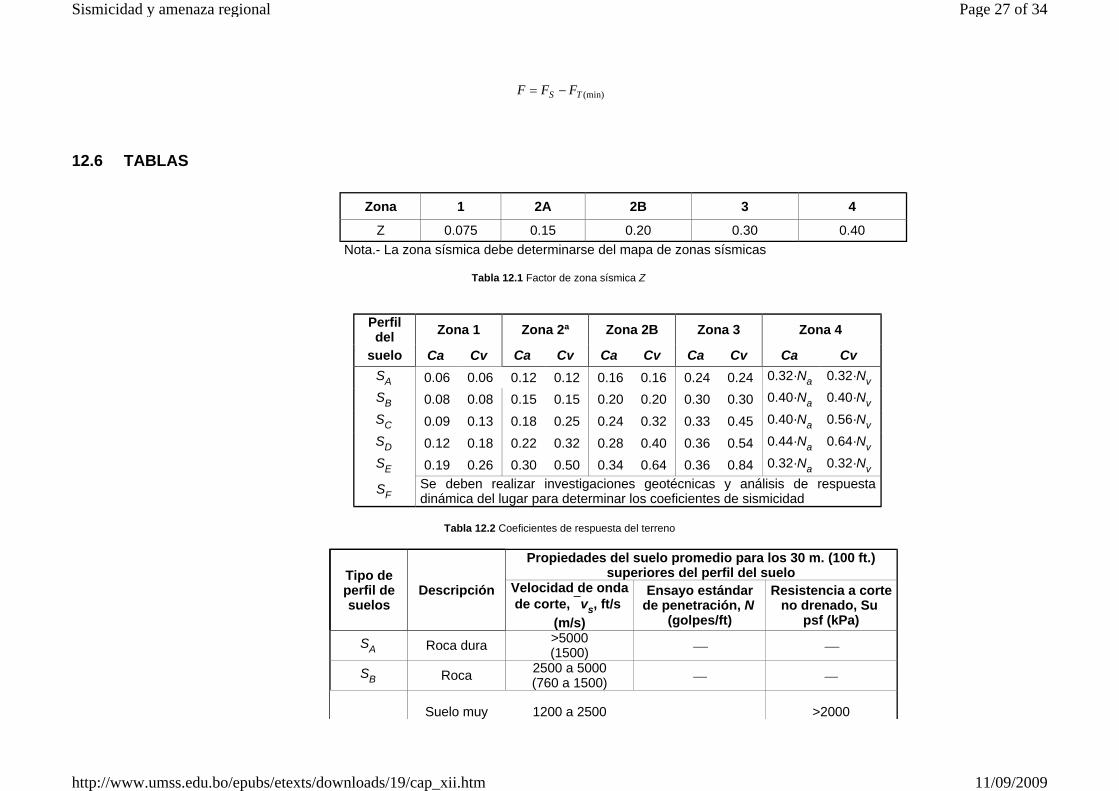
12.6 TABLAS
Tabla 12.1 Factor de zona sísmica Z
Tabla 12.2 Coeficientes de respuesta del terreno
(min)TS FFF −=
Zona 1 2A 2B 3 4
Z 0.075 0.15 0.20 0.30 0.40 Nota.- La zona sísmica debe determinarse del mapa de zonas sísmicas
Perfil del Zona 1 Zona 2ª Zona 2B Zona 3 Zona 4
suelo Ca Cv Ca Cv Ca Cv Ca Cv Ca Cv SA 0.06 0.06 0.12 0.12 0.16 0.16 0.24 0.24 0.32·Na 0.32·Nv SB 0.08 0.08 0.15 0.15 0.20 0.20 0.30 0.30 0.40·Na 0.40·Nv SC 0.09 0.13 0.18 0.25 0.24 0.32 0.33 0.45 0.40·Na 0.56·Nv SD 0.12 0.18 0.22 0.32 0.28 0.40 0.36 0.54 0.44·Na 0.64·Nv SE 0.19 0.26 0.30 0.50 0.34 0.64 0.36 0.84 0.32·Na 0.32·Nv
SF Se deben realizar investigaciones geotécnicas y análisis de respuesta dinámica del lugar para determinar los coeficientes de sismicidad
Tipo de perfil de suelos
Descripción
Propiedades del suelo promedio para los 30 m. (100 ft.) superiores del perfil del suelo
Velocidad de onda de corte, ⎯vs, ft/s
(m/s)
Ensayo estándar de penetración, N
(golpes/ft)
Resistencia a corte no drenado, Su
psf (kPa)
SA Roca dura >5000 (1500) ⎯ ⎯
SB Roca 2500 a 5000 (760 a 1500) ⎯ ⎯
Suelo muy 1200 a 2500 >2000
Page 27 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
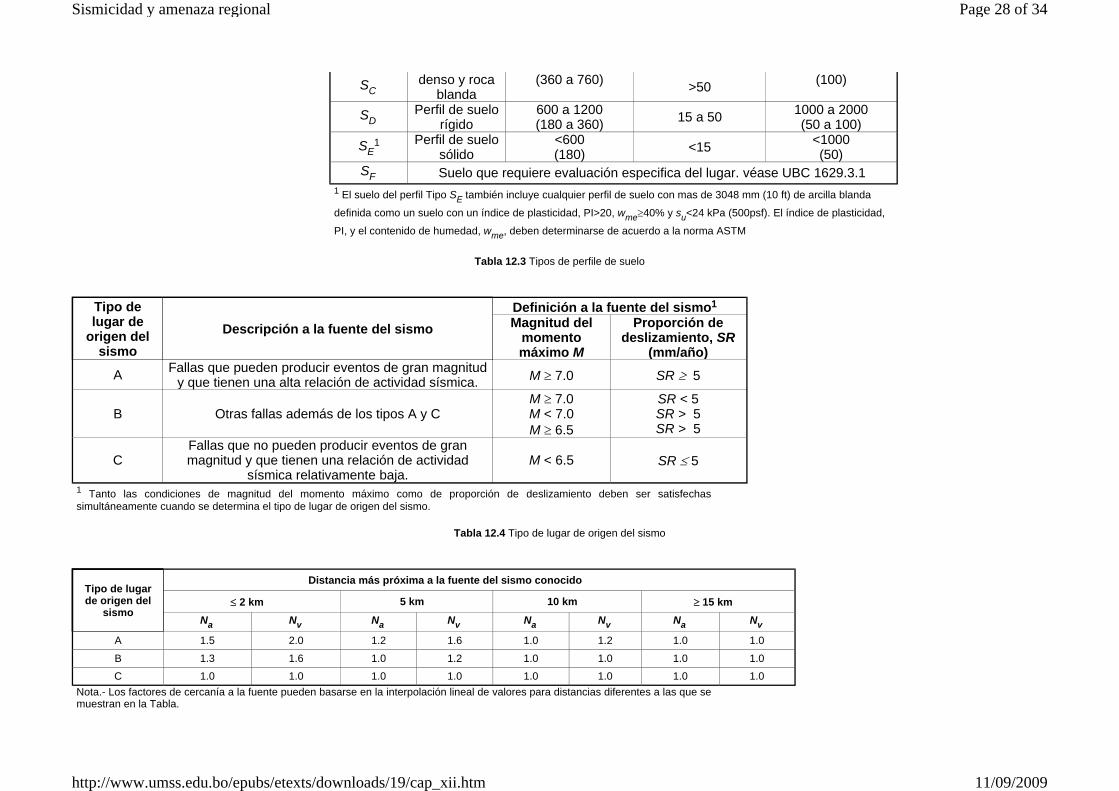
Tabla 12.3 Tipos de perfile de suelo
Tabla 12.4 Tipo de lugar de origen del sismo
SC denso y roca blanda
(360 a 760) >50 (100)
SD Perfil de suelo rígido
600 a 1200 (180 a 360) 15 a 50 1000 a 2000
(50 a 100)SE
1 Perfil de suelo sólido
<600 (180) <15 <1000
(50)SF Suelo que requiere evaluación especifica del lugar. véase UBC 1629.3.1
1 El suelo del perfil Tipo SE también incluye cualquier perfil de suelo con mas de 3048 mm (10 ft) de arcilla blanda
definida como un suelo con un índice de plasticidad, PI>20, wme≥40% y su<24 kPa (500psf). El índice de plasticidad,
PI, y el contenido de humedad, wme, deben determinarse de acuerdo a la norma ASTM
Tipo de lugar de
origen del sismo
Descripción a la fuente del sismo Definición a la fuente del sismo1 Magnitud del
momento máximo M
Proporción de deslizamiento, SR
(mm/año)A Fallas que pueden producir eventos de gran magnitud
y que tienen una alta relación de actividad sísmica. M ≥ 7.0 SR ≥ 5
B Otras fallas además de los tipos A y C M ≥ 7.0 M < 7.0 M ≥ 6.5
SR < 5 SR > 5 SR > 5
C Fallas que no pueden producir eventos de gran magnitud y que tienen una relación de actividad
sísmica relativamente baja.M < 6.5 SR ≤ 5
1 Tanto las condiciones de magnitud del momento máximo como de proporción de deslizamiento deben ser satisfechas simultáneamente cuando se determina el tipo de lugar de origen del sismo.
Tipo de lugar de origen del
sismo
Distancia más próxima a la fuente del sismo conocido
≤ 2 km 5 km 10 km ≥ 15 km
Na Nv Na Nv Na Nv Na Nv
A 1.5 2.0 1.2 1.6 1.0 1.2 1.0 1.0
B 1.3 1.6 1.0 1.2 1.0 1.0 1.0 1.0
C 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 Nota.- Los factores de cercanía a la fuente pueden basarse en la interpolación lineal de valores para distancias diferentes a las que se muestran en la Tabla.
Page 28 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
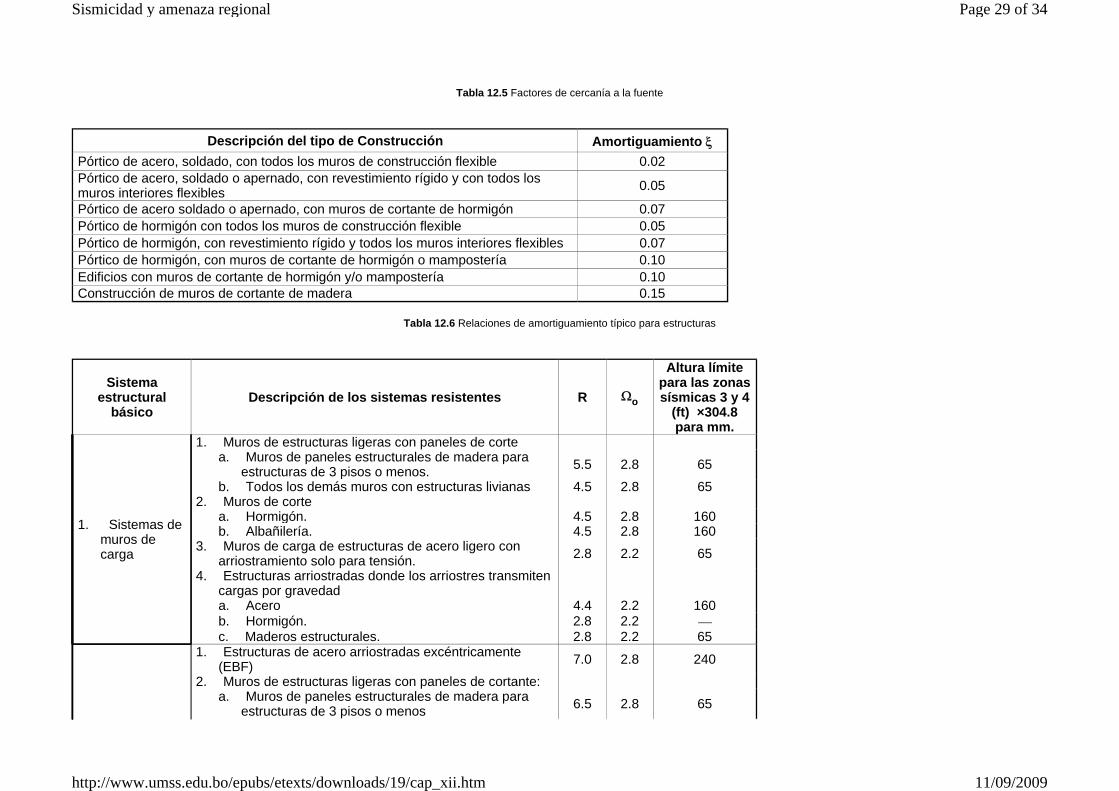
Tabla 12.5 Factores de cercanía a la fuente
Tabla 12.6 Relaciones de amortiguamiento típico para estructuras
Descripción del tipo de Construcción Amortiguamiento ξ Pórtico de acero, soldado, con todos los muros de construcción flexible 0.02 Pórtico de acero, soldado o apernado, con revestimiento rígido y con todos los muros interiores flexibles 0.05
Pórtico de acero soldado o apernado, con muros de cortante de hormigón 0.07 Pórtico de hormigón con todos los muros de construcción flexible 0.05 Pórtico de hormigón, con revestimiento rígido y todos los muros interiores flexibles 0.07 Pórtico de hormigón, con muros de cortante de hormigón o mampostería 0.10 Edificios con muros de cortante de hormigón y/o mampostería 0.10 Construcción de muros de cortante de madera 0.15
Sistema estructural
básico Descripción de los sistemas resistentes R Ωo
Altura límite para las zonas sísmicas 3 y 4
(ft) ×304.8 para mm.
1. Sistemas de muros de carga
1. Muros de estructuras ligeras con paneles de corte a. Muros de paneles estructurales de madera para
estructuras de 3 pisos o menos. 5.5 2.8 65
b. Todos los demás muros con estructuras livianas 4.5 2.8 652. Muros de corte
a. Hormigón. 4.5 2.8 160b. Albañilería. 4.5 2.8 160
3. Muros de carga de estructuras de acero ligero con arriostramiento solo para tensión. 2.8 2.2 65
4. Estructuras arriostradas donde los arriostres transmiten cargas por gravedad
a. Acero 4.4 2.2 160b. Hormigón. 2.8 2.2 ⎯ c. Maderos estructurales. 2.8 2.2 65
1. Estructuras de acero arriostradas excéntricamente (EBF) 7.0 2.8 240
2. Muros de estructuras ligeras con paneles de cortante: a. Muros de paneles estructurales de madera para
estructuras de 3 pisos o menos 6.5 2.8 65
Page 29 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
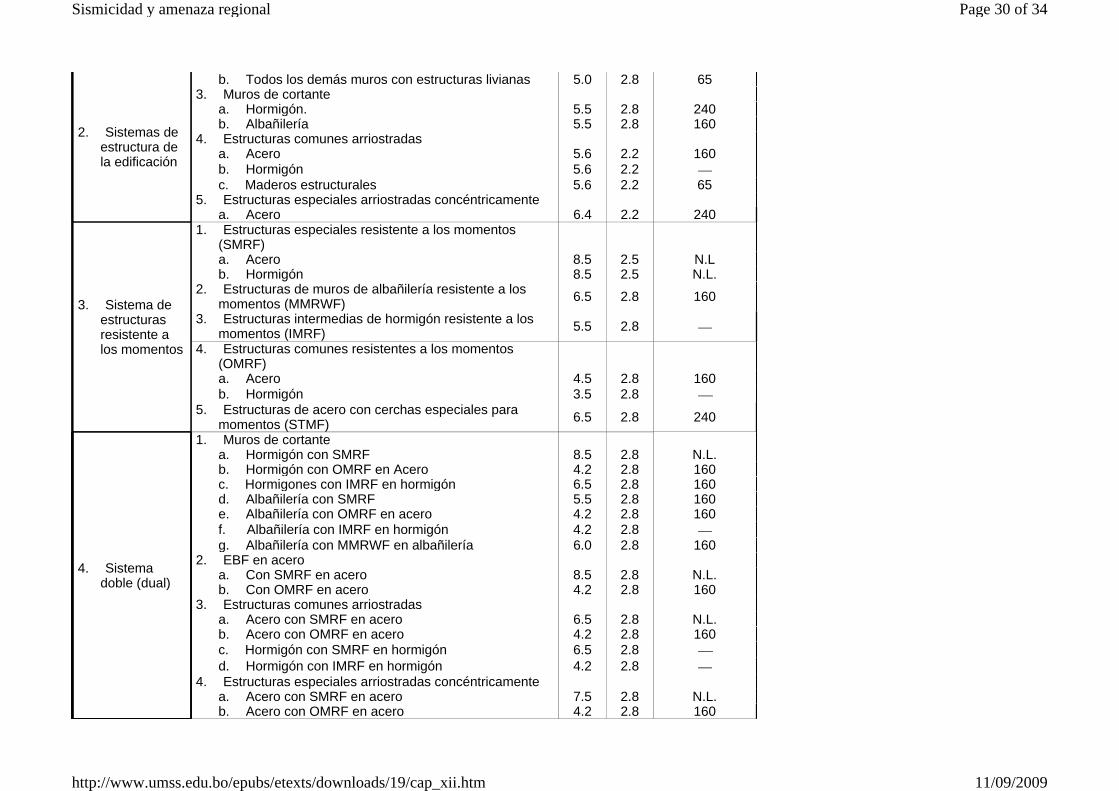
2. Sistemas de estructura de la edificación
b. Todos los demás muros con estructuras livianas 5.0 2.8 653. Muros de cortante
a. Hormigón. 5.5 2.8 240b. Albañilería 5.5 2.8 160
4. Estructuras comunes arriostradas a. Acero 5.6 2.2 160b. Hormigón 5.6 2.2 ⎯ c. Maderos estructurales 5.6 2.2 65
5. Estructuras especiales arriostradas concéntricamente a. Acero 6.4 2.2 240
3. Sistema de estructuras resistente a los momentos
1. Estructuras especiales resistente a los momentos (SMRF)
a. Acero 8.5 2.5 N.Lb. Hormigón 8.5 2.5 N.L.
2. Estructuras de muros de albañilería resistente a los momentos (MMRWF) 6.5 2.8 160
3. Estructuras intermedias de hormigón resistente a los momentos (IMRF) 5.5 2.8 ⎯
4. Estructuras comunes resistentes a los momentos (OMRF)
a. Acero 4.5 2.8 160b. Hormigón 3.5 2.8 ⎯
5. Estructuras de acero con cerchas especiales para momentos (STMF) 6.5 2.8 240
4. Sistema doble (dual)
1. Muros de cortante a. Hormigón con SMRF 8.5 2.8 N.L.b. Hormigón con OMRF en Acero 4.2 2.8 160c. Hormigones con IMRF en hormigón 6.5 2.8 160d. Albañilería con SMRF 5.5 2.8 160e. Albañilería con OMRF en acero 4.2 2.8 160f. Albañilería con IMRF en hormigón 4.2 2.8 ⎯ g. Albañilería con MMRWF en albañilería 6.0 2.8 160
2. EBF en acero a. Con SMRF en acero 8.5 2.8 N.L.b. Con OMRF en acero 4.2 2.8 160
3. Estructuras comunes arriostradas a. Acero con SMRF en acero 6.5 2.8 N.L.b. Acero con OMRF en acero 4.2 2.8 160c. Hormigón con SMRF en hormigón 6.5 2.8 ⎯ d. Hormigón con IMRF en hormigón 4.2 2.8 ⎯
4. Estructuras especiales arriostradas concéntricamente a. Acero con SMRF en acero 7.5 2.8 N.L.b. Acero con OMRF en acero 4.2 2.8 160
Page 30 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
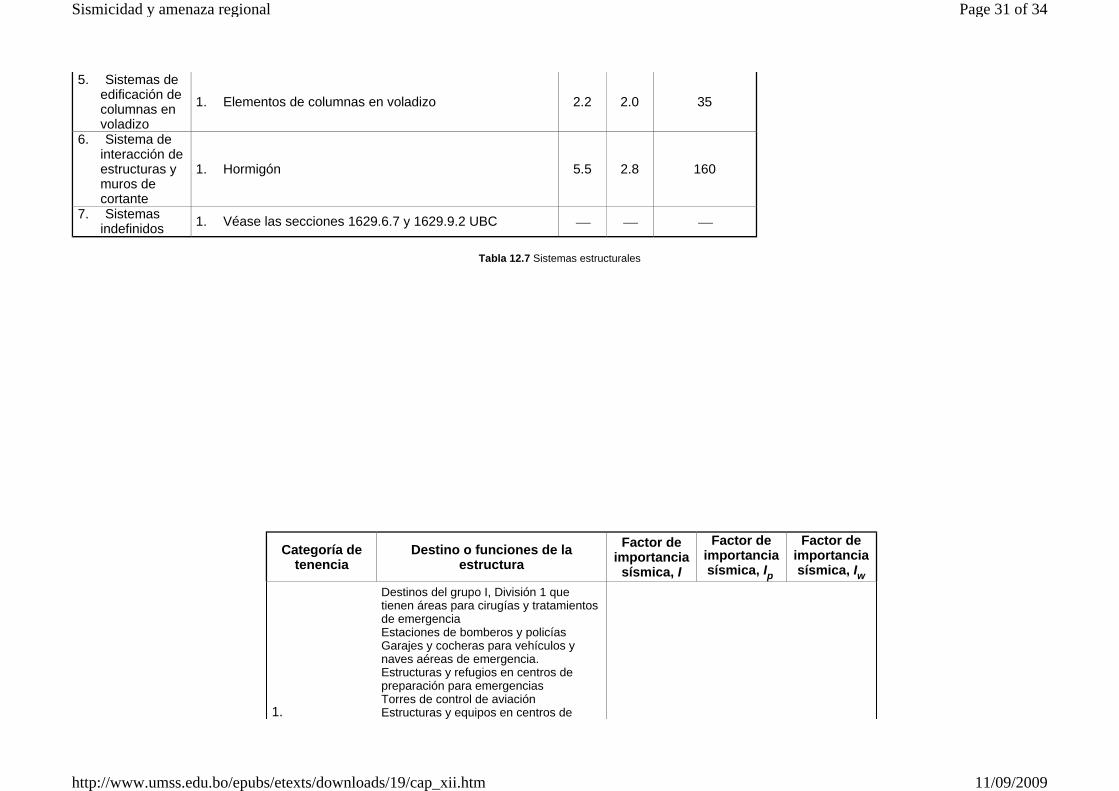
Tabla 12.7 Sistemas estructurales
5. Sistemas de edificación de columnas en voladizo
1. Elementos de columnas en voladizo 2.2 2.0 35
6. Sistema de interacción de estructuras y muros de cortante
1. Hormigón 5.5 2.8 160
7. Sistemas indefinidos 1. Véase las secciones 1629.6.7 y 1629.9.2 UBC ⎯ ⎯ ⎯
Categoría de tenencia
Destino o funciones de la estructura
Factor de importancia
sísmica, I
Factor de importancia sísmica, Ip
Factor de importancia sísmica, Iw
1.
Destinos del grupo I, División 1 que tienen áreas para cirugías y tratamientos de emergencia Estaciones de bomberos y policías Garajes y cocheras para vehículos y naves aéreas de emergencia. Estructuras y refugios en centros de preparación para emergencias Torres de control de aviación Estructuras y equipos en centros de
Page 31 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm

Instalaciones esenciales
comunicación del gobierno y otras instalaciones requeridas para respuestas de emergencia Equipos de generación de energía de reserva para instalaciones de la Categoría 1 Tanques u otras estructuras que albergan, contienen o soportan agua u otros materiales para combatir incendios o equipos requeridos para protección de estructuras de las Categorías 1, 2 ó 3
1.25 1.50 1.15
2. Instalaciones peligrosas
Destinos del grupo H, Divisiones 1, 2, 6 y 7 y las estructuras de las mismas que albergan o contienen productos químicos o sustancias toxicas o explosivas Estructuras que no forman parte de edificaciones que albergan, soportan o contienen cantidades de sustancias toxicas o explosivas de las cuales, si estuvieran contenidas dentro de una edificación, harían que dicha edificación se clasificara como Destino del Grupo H, Divisiones 1, 2 ó 7
1.25 1.5 1.15
3. Estructuras para destinos especiales
Destinos del Grupo A, Divisiones 1, 2 y 2.1 Edificaciones que contienen destinos del Grupo E, Divisiones 1 y 3 con capacidad mayor de 300 estudiantes. Edificaciones que contienen destinos del Grupo B utilizadas para educación superior o de adultos con capacidad mayor de 500 estudiantes. Destinos del Grupo I, Divisiones 1 y 2 con 50 o más pacientes residentes incapacitados, pero no incluidos en la categoría I. Destinos del Grupo I, División 3 Todas las estructuras con un número de ocupantes mayor de 5000 personas. Estructuras y equipo en estaciones de generación de energía y otras instalaciones de servicios públicos no incluidos en las categorías 1 ó 2 anteriores, pero requeridas para operación continua.
1.00 1.00 1.00
4. Estructuras para
Todas las estructuras que contiene destinos o tienen funciones no indicadas en las Categorías 1, 2 ó 3 y las torres de
1.00 1.00 1.00
Page 32 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
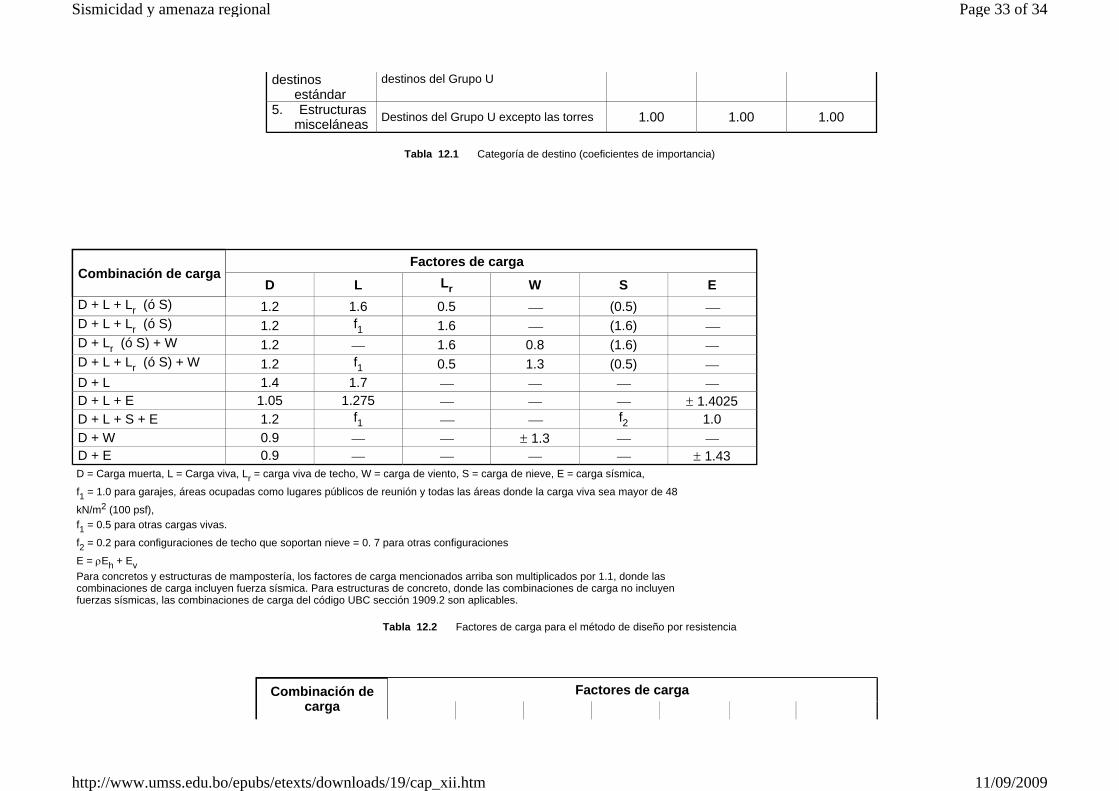
Tabla 12.1 Categoría de destino (coeficientes de importancia)
Tabla 12.2 Factores de carga para el método de diseño por resistencia
destinos estándar
destinos del Grupo U
5. Estructuras misceláneas Destinos del Grupo U excepto las torres 1.00 1.00 1.00
Combinación de carga Factores de carga
D L Lr W S E D + L + Lr (ó S) 1.2 1.6 0.5 ⎯ (0.5) ⎯ D + L + Lr (ó S) 1.2 f1 1.6 ⎯ (1.6) ⎯ D + Lr (ó S) + W 1.2 ⎯ 1.6 0.8 (1.6) ⎯ D + L + Lr (ó S) + W 1.2 f1 0.5 1.3 (0.5) ⎯ D + L 1.4 1.7 ⎯ ⎯ ⎯ ⎯ D + L + E 1.05 1.275 ⎯ ⎯ ⎯ ± 1.4025 D + L + S + E 1.2 f1 ⎯ ⎯ f2 1.0 D + W 0.9 ⎯ ⎯ ± 1.3 ⎯ ⎯ D + E 0.9 ⎯ ⎯ ⎯ ⎯ ± 1.43 D = Carga muerta, L = Carga viva, Lr = carga viva de techo, W = carga de viento, S = carga de nieve, E = carga sísmica, f1 = 1.0 para garajes, áreas ocupadas como lugares públicos de reunión y todas las áreas donde la carga viva sea mayor de 48
kN/m2 (100 psf), f1 = 0.5 para otras cargas vivas. f2 = 0.2 para configuraciones de techo que soportan nieve = 0. 7 para otras configuraciones E = ρEh + Ev Para concretos y estructuras de mampostería, los factores de carga mencionados arriba son multiplicados por 1.1, donde las combinaciones de carga incluyen fuerza sísmica. Para estructuras de concreto, donde las combinaciones de carga no incluyen fuerzas sísmicas, las combinaciones de carga del código UBC sección 1909.2 son aplicables.
Combinación de carga
Factores de carga
Page 33 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
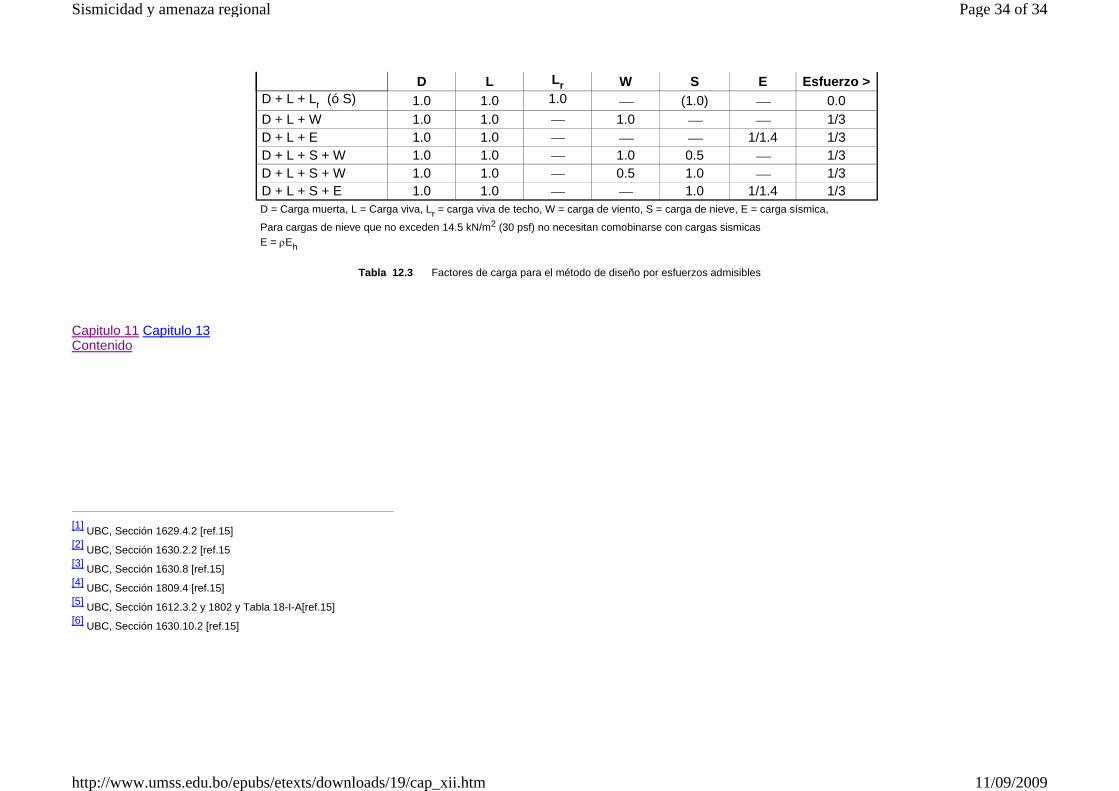
Tabla 12.3 Factores de carga para el método de diseño por esfuerzos admisibles
Capitulo 11 Capitulo 13 Contenido
[1] UBC, Sección 1629.4.2 [ref.15]
[2] UBC, Sección 1630.2.2 [ref.15
[3] UBC, Sección 1630.8 [ref.15]
[4] UBC, Sección 1809.4 [ref.15]
[5] UBC, Sección 1612.3.2 y 1802 y Tabla 18-I-A[ref.15]
[6] UBC, Sección 1630.10.2 [ref.15]
D L Lr W S E Esfuerzo > D + L + Lr (ó S) 1.0 1.0 1.0 ⎯ (1.0) ⎯ 0.0 D + L + W 1.0 1.0 ⎯ 1.0 ⎯ ⎯ 1/3 D + L + E 1.0 1.0 ⎯ ⎯ ⎯ 1/1.4 1/3 D + L + S + W 1.0 1.0 ⎯ 1.0 0.5 ⎯ 1/3 D + L + S + W 1.0 1.0 ⎯ 0.5 1.0 ⎯ 1/3 D + L + S + E 1.0 1.0 ⎯ ⎯ 1.0 1/1.4 1/3 D = Carga muerta, L = Carga viva, Lr = carga viva de techo, W = carga de viento, S = carga de nieve, E = carga sísmica, Para cargas de nieve que no exceden 14.5 kN/m2 (30 psf) no necesitan comobinarse con cargas sismicas E = ρEh
Page 34 of 34Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xii.htm
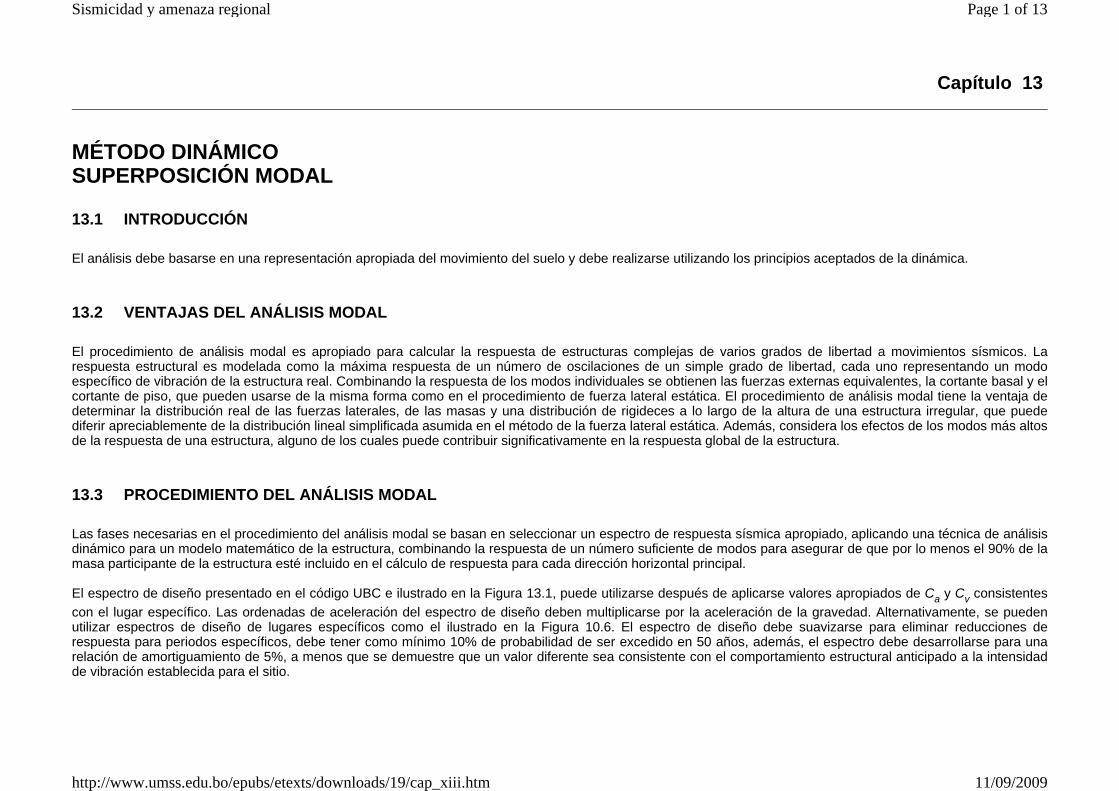
Capítulo 13 MÉTODO DINÁMICO SUPERPOSICIÓN MODAL
13.1 INTRODUCCIÓN
El análisis debe basarse en una representación apropiada del movimiento del suelo y debe realizarse utilizando los principios aceptados de la dinámica.
13.2 VENTAJAS DEL ANÁLISIS MODAL
El procedimiento de análisis modal es apropiado para calcular la respuesta de estructuras complejas de varios grados de libertad a movimientos sísmicos. Larespuesta estructural es modelada como la máxima respuesta de un número de oscilaciones de un simple grado de libertad, cada uno representando un modoespecífico de vibración de la estructura real. Combinando la respuesta de los modos individuales se obtienen las fuerzas externas equivalentes, la cortante basal y elcortante de piso, que pueden usarse de la misma forma como en el procedimiento de fuerza lateral estática. El procedimiento de análisis modal tiene la ventaja dedeterminar la distribución real de las fuerzas laterales, de las masas y una distribución de rigideces a lo largo de la altura de una estructura irregular, que puedediferir apreciablemente de la distribución lineal simplificada asumida en el método de la fuerza lateral estática. Además, considera los efectos de los modos más altosde la respuesta de una estructura, alguno de los cuales puede contribuir significativamente en la respuesta global de la estructura.
13.3 PROCEDIMIENTO DEL ANÁLISIS MODAL
Las fases necesarias en el procedimiento del análisis modal se basan en seleccionar un espectro de respuesta sísmica apropiado, aplicando una técnica de análisisdinámico para un modelo matemático de la estructura, combinando la respuesta de un número suficiente de modos para asegurar de que por lo menos el 90% de lamasa participante de la estructura esté incluido en el cálculo de respuesta para cada dirección horizontal principal. El espectro de diseño presentado en el código UBC e ilustrado en la Figura 13.1, puede utilizarse después de aplicarse valores apropiados de Ca y Cv consistentes con el lugar específico. Las ordenadas de aceleración del espectro de diseño deben multiplicarse por la aceleración de la gravedad. Alternativamente, se puedenutilizar espectros de diseño de lugares específicos como el ilustrado en la Figura 10.6. El espectro de diseño debe suavizarse para eliminar reducciones derespuesta para periodos específicos, debe tener como mínimo 10% de probabilidad de ser excedido en 50 años, además, el espectro debe desarrollarse para unarelación de amortiguamiento de 5%, a menos que se demuestre que un valor diferente sea consistente con el comportamiento estructural anticipado a la intensidadde vibración establecida para el sitio.
Page 1 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm
Figura 13.1 Espectro de respuesta de diseño Como se dijo anteriormente es necesario una cantidad suficiente de modos para asegurar que el 90% de la masa participante de la estructura este incluida en elcálculo. De este modo el peso total de la estructura está dado por:
(13.1)
y el peso efectivo para un modo dado esta definido por:
(13.2)
(13.3)
donde: P = Factor de participación para un modo dado = (Σwi·φi)/Σwi·φi
2
iwW Σ=
2
2)(
ii
iiE
ww
Wφφ⋅Σ⋅Σ
=
aE
iiE
iiE
SVgW
wPW
wPW
⋅=
⋅Σ⋅=
⋅Σ⋅=22 φ
φ
Periodo [s]
Ace
lera
ción
esp
ectra
l, g
T 0
Ca
T s
Cv / T
2.5 Ca
PERIODOS DE CONTROLT s = Cv / 2.5 CaT 0 = 0.2.5 T s
Page 2 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm

Para una forma modal normalizada, el factor de participación se reduce a:
(13.4)
Por tanto la ecuación 13.2 se reduce a:
(13.5)
La relación entre el peso efectivo y el peso total de la estructura está dado por:
(13.6)
donde: ΣWE = es la suma de los pesos efectivos para todos los modos. Por consiguiente, debe definirse un número suficiente de modos para asegurar que la suma de sus pesos efectivos sea:
(13.7)
Para asegurar consistencia con los principios básicos de diseño adoptados en el procedimiento de fuerza lateral estática, el código UBC estipula un valor mínimo delcortante basal calculado por un análisis dinámico, y todos los parámetros correspondientes de respuesta deben estar de acuerdo con:
Para una estructura regular, usando el espectro de respuesta que presenta el código UBC, el cortante basal determinado por un análisis dinámico no debe sermenor que 90% del obtenido por el procedimiento de fuerza lateral estática.
Para una estructura regular, usando un espectro de respuesta específico de un sitio, el cortante basal determinado por un análisis dinámico no debe sermenor que 80% del obtenido por el procedimiento de fuerza lateral estática.
Para una estructura irregular, el cortante basal adoptado no debe ser menor que el obtenido por el procedimiento de fuerza lateral estática.
Para cualquier estructura, el cortante basal adoptado no debe ser menor que el obtenido por un análisis dinámico dividido entre un valor apropiado de R.
El código UBC proporciona dos métodos de análisis dinámico: el análisis espectral y el análisis por historia del tiempo, que se describen a continuación.
13.4 ANÁLISIS ESPECTRAL[1]
gw
P ii φ⋅Σ=
gw
W iiE2)( φ⋅Σ
=
WW E =Σ
WW E ⋅≥Σ 9.0
Page 3 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm
Es un análisis dinámico elástico de una estructura que utiliza la respuesta dinámica máxima de todos los modos que tienen una contribución importante a larespuesta estructural total. Las respuestas modales máximas se calculan utilizando las ordenadas de la curva de espectro de respuesta apropiada que correspondaa los periodos modales. Las contribuciones modales máximas se combinan de manera estadística para obtener una respuesta estructural total aproximada. Los parámetros de respuesta correspondientes incluyendo fuerzas, momentos y desplazamientos, deben denominarse Parámetros de Respuesta Elástica. 13.4.1 Numero de Modos Debe satisfacerse el requisito de incluir todos los modos importantes, demostrando que en los modos considerados, por lo menos el 90% de la masa participante dela estructura este incluida en el cálculo de respuesta para cada dirección horizontal principal, ver la ecuación 13.7. Los modos de vibración deben obtenerse utilizando metodologías establecidas de dinámica estructural, tales como: el Análiis de Eigenvectores o el Análisis de losVectores de Ritz 13.4.2 Combinación de Modos Las fuerzas máximas del elemento, desplazamientos, fuerzas cortantes por piso y reacciones de base para cada modo, deben combinarse mediante métodosreconocidos, tales como: El método CQC, Combinación Cuadrática Completa, método descrito por Wilson, Der Kiureghian, y Bayo. (1981). El método GMC,Combinación Modal General, método descrito por Gupta (1990). El método SRSS, Raíz Cuadrada de la Suma de los Cuadrados. El método de La suma de valoresabsolutos, ABS Cuando se utilicen modelos tridimensionales para el análisis, los efectos de interacción modal deben considerarse cuando se combinen las máximas modales 13.4.3 Efectos de Dirección En las zonas sísmicas 2, 3 y 4, deben considerarse los efectos de las fuerzas sísmicas que actúan en direcciones diferentes a los ejes principales en cada una delas siguientes circunstancias:
La estructura tiene irregularidad de planta del Tipo 5 como se indica en la Tabla 11.2 La estructura tiene irregularidad de planta del Tipo 1 en ambos ejes principales como se indica en la Tabla 11.2 Cuando una columna de una estructura forma parte de dos o más sistemas interceptantes de resistencia a las fuerzas sísmicas
Los efectos ortogonales pueden tenerse en cuenta suponiendo la concurrencia simultanea del 100% de las fuerzas sísmicas en una dirección y el 30% de lasfuerzas sísmicas en la dirección perpendicular. Debe utilizarse la combinación que requiera la mayor resistencia del elemento. Alternativamente, los efectos de lasdos direcciones ortogonales pueden combinarse basándose en la Raíz Cuadrada de la Suma de los Cuadrados, SRSS. Cuando se utilice el método SRSS en lacombinación de los efectos direccionales, a cada término calculado se le debe asignar el signo del resultado más conservador.
Page 4 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm
13.4.4 Torsión El análisis debe considerar los efectos torsionales, incluyendo los efectos torsionales accidentales como se describe en la sección 12.5.1. Cuando se utilicenmodelos tridimensionales para el análisis, los efectos de torsión accidental deben incluirse haciendo los ajustes apropiados en el modelo, como ajustes deubicaciones de masas o mediante los procedimientos estáticos equivalentes. 13.4.5 Sistemas Dobles Cuando las fuerzas laterales son resistidas por un sistema doble, tal como se define en la sección 11.3.4, el sistema combinado debe tener capacidad para resistir elesfuerzo de corte basal que se obtiene por medio del análisis dinámico. El pórtico resistente a momentos debe diseñarse para resistir independientemente por lomenos el 25% del esfuerzo cortante basal máximo admisible de diseño, y puede llevarse a cabo por medio de un análisis dinámico apropiado o por medio de unanálisis de fuerza horizontal equivalente.
13.5 EL ANÁLISIS POR HISTORIA DEL TIEMPO (CRONOLÓGICO)[2]
Determina la respuesta de la estructura a través de una integración numérica sobre pequeños incrementos de tiempo, cuando la base está sujeta a una cronologíaespecífica del movimiento del suelo. La metodología de un análisis dinámico cronológico puede ser utilizada cuando a juicio del ingeniero diseñador ella describe adecuadamente las propiedadesdinámicas de la estructura y conduce a resultados representativos de los movimientos sísmicos de diseño. El modelo matemático empleado puede ser linealmenteelástico o inelástico.
13.6 SIMULADOR ESTRUCTURAL.
Esta sección describe los tipos básicos de análisis disponibles en el Programa SAP2000 Diferentes tipos de análisis son disponibles en el Programa:
Análisis estático Análisis P-delta Análisis Modal para los modos de vibración, usando eigenvectores o vectores de Ritz
Análisis del espectro de respuesta para una respuesta sísmica Análisis dinámico cronológico: lineal, no lineal y periódico.
Análisis de cargas móviles para cargas vivas de vehículos en puentes Estos diferentes tipos de análisis pueden desarrollarse en la misma ejecución del programa, con las siguientes excepciones:
Page 5 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm
El análisis modal requiere realizar un análisis espectral o un análisis dinámico cronológico. Solamente un análisis modal puede realizarse en una sola corrida: el análisis de eigenvectores o el análisis de vectores de Ritz
Cuando se realiza el análisis del efecto P-delta, afecta los resultados de todos los otros análisis realizados en la misma ejecución del programa. 13.6.1 Análisis de Eigenvectores El análisis de eigenvectores determina las formas modales para vibración libre no amortiguada y frecuencias del sistema. Estos modos naturales proporcionan unavisión excelente en el comportamiento de la estructura. Éstos también pueden usarse como base para el análisis del espectro de respuesta o el análisis dinámicocronológico, aunque se recomiendan los vectores de Ritz para este propósito. El análisis de Eigenvectores involucra la solución de la ecuación de eigenvalores generalizado dado por la ecuación 10.17:
donde: K = es la matriz de rigidez M = es la matriz diagonal de masa Ω = es la matriz diagonal de eigenvalores Φ = matriz de los correspondientes eigenvectores (formas modales) Cada par de Eigenvalor-Eigenvector es llamado modo de vibración natural de la estructura. Los Modos se identifican por los números del 1 al n, en el orden en que los modos son encontrados por el programa. El eigenvalor es el cuadrado de la frecuencia circular, ω, para ese modo, (a menos de que se utilice un cambio de frecuencia). La frecuencia cíclica, f, y periodo, T, del modo se relacionan con ω por medio de:
y
Se puede especificar el número de modos a ser encontrado, una tolerancia de la convergencia, y el rango de frecuencia de interés. Estos parámetros se describen acontinuación: Numero de Modos Se puede especificar el número de modos, n, a ser hallado. El programa busca los n Modos de frecuencias bajas (periodos largos). Si un cambio de frecuenciadiferente de cero ha sido especificado, el programa buscará los n modos más cercanos al cambio de frecuencia.
[ ] [ ]( ) { } 02 =Φ⋅⋅Ω− MK
fT 1=
πω⋅
=2
f
Page 6 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm
El número de modos realmente hallados, n, esta limitado por:
El numero de modos requerido, n, para un adecuado análisis dinámico, ver la sección 13.4.1 El número de modos presentes en el rango de frecuencias especificado. El número de grados de masa de libertad en el modelo.
Un grado de masa de libertad es cualquier grado activo de libertad que posee masa traslacional o el momento de masa rotacional de inercia. La masa puedeasignarse directamente a un nudo o puede venir de los elementos conectados. Sólo los Modos que realmente se encuentran estarán disponibles para cualquier subsecuente análisis del espectro de respuesta o el análisis dinámico cronológico. Rango de frecuencia Se puede especificar un rango de frecuencia restringido, en el que se buscarán los Modos de vibración, usando los parámetros:
Shift: centro del rango de frecuencias cíclico, conocido como la frecuencia de cambio cut: radio del rango de frecuencia cíclico.
El programa buscara sólo los modos con las frecuencias que satisfacen:
⏐ f − shift ⏐ ≤ cut
El valor por defecto de cut = 0 no restringe el rango de frecuencia de los modos. Los modos son hallados en el orden creciente de distancia de la frecuencia de cambio (shift). Esto continúa hasta alcanzar, cut , el número definido de modos, o el el número de grados de masa de libertad. Una estructura estable tendrá todas las frecuencias naturales positivas. Al realizar un análisis sísmico y más otros análisis dinámicos, los modos de bajas-frecuencia son normalmente de mayor interés. Es entonces apropiado usar un shift igual a cero, resultando en modos de frecuencias bajas de la estructura calculada. Si el programa detecta modos de frecuencias negativas, éste detendrá el análisis puesto que los resultados no tienen sentido. Para evitar problemas esrecomendable usar siempre valores positivos de shift con un análisis P-delta, es recomendable también que un análisis preliminar P-delta sea realizado usando shitigual a cero. Tolerancia de convergencia El SAP2000 resuelve para el par de Eigenvalor-Eigenvector usando un algoritmo de iteración. Durante la fase de solución, el programa proporciona un eigenvaloraproximado después de cada iteración. Para mayores detalles del algoritmo, ver Wilson y Tetsuji (1983).
Page 7 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm
Se puede especificar la tolerancia de la convergencia relativa, tol, para controlar la solución; el valor por defecto es tol =10-5, que es un valor aceptable, para obtener buenos resultados y relativa rapidez en la solución del modelo. Se puede establecer valores más pequeños de tol, para obtener mejores aproximaciones en los resultados del par de Eigenvalor-Eigenvector a costa de mayor tiempo de computo. 13.6.2 Análisis del Vector de Ritz Las investigaciones han indicado que las formas modales en vibración libre no son las mejores bases para el análisis de superpoción modal de estructuras sujetas acargas dinámicas. Ha sido demostrado (Wilson, Yuan, y Dickens, 1982) que el análisis dinámico basado en un juego especial de vectores de Ritz dependientes decarga, proporcionan resultados más exactos que el uso del mismo número de formas modales naturales. La razón de que los vectores de Ritz dan excelentes resultados, es que son generados tomando en cuenta la distribución espacial de la carga dinámica. 13.6.3 Resultados del Análisis Modal Varias propiedades de los modos de vibración son impresos en el archivo de resultados. Esta información es la misma independientemente si se usa un análisis deeigenvectores o un análisis de vectores de Ritz, y es descrito en las siguientes secciones: Periodos y Frecuencias Las siguientes propiedades de periodos y frecuencias son impresas para cada Modo:
El periodo T, en unidades de tiempo. La frecuencia cíclica, f, en unidades de ciclos por tiempo. La frecuencia circular, ω, en unidades de radianes por tiempo. El eigenvalor, ω2, en unidades de radianes por tiempo al cuadrado.
Éstos pueden hallarse en el archivo de resultados bajo el título de:
MODAL PERIODS AND FRECUENCIES Factor de Participación Los factores de participación para los n modos correspondientes, son referidos al sistema de coordenadas globales X, Y y Z, y puede hallarse en el archivo deresultados bajo el título de:
MODAL PARTICIPATION FACTORS
Page 8 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm

Las magnitudes reales y los signos de los factores de participación no son importantes. Lo que es importante es el valor relativo de los tres factores para un mododado. Relación masa participación La relación masa participación para un Modo dado es una medida de cómo de importante es el Modo para calcular la respuesta para una carga de aceleración encada una de las direcciones globales. Esto es útil para determinar la exactitud del análisis del espectro de respuesta y el análisis dinámico cronológico. La relaciónmasa participación no proporciona una información sobre la exactitud de análisis dinámico cronológico sujeta a otras cargas. La relación masa participación es expresada en porcentaje y puede hallarse en el archivo de resultados bajo el título de:
MODAL PARTICIPATING MASS RATIOS La suma acumulativa de la relación masa participación para todos los Modos hasta el Modo n es impreso con los valores individuales para cada Modo. Esto proporciona una medida simple de cuantos modos son requeridos para lograr un nivel dado de exactitud para una carga de aceleración del suelo. 13.6.4 Análisis del Espectro de Respuesta El análisis del espectro de respuesta busca la máxima respuesta probable. La aceleración sísmica del suelo en cada dirección es dada como una curva digitalizadadel espectro de respuesta de seudo aceleración espectral de respuesta versus el periodo de la estructura. Aunque pueden especificarse las aceleraciones en las tres direcciones, sólo un resultado positivo es producido para cada cantidad de respuesta. Las cantidades derespuesta incluyen: desplazamientos, fuerzas y esfuerzos. Cada cálculo del resultado representa una medida estadística de la máxima magnitud probable para unacantidad de respuesta. El análisis del espectro de respuesta es realizado usando el método de la superposición modal (Wilson y Button, 1982). Los Modos pueden calcularse usando un análisis de eigenvectores o un análisis de vectores de Ritz. Se recomiendan los vectores de Ritz, puesto que éstos dan resultados más exactos para el mismonumero de Modos. Cualquier número de análisis del espectro de respuesta puede realizarse en una sola ejecución del programa. Cada caso de análisis es llamado Spec, para el que se asigna una única etiqueta. Cada Spec puede diferir en el espectro de aceleración aplicado y la manera en que sus resultados son combinados. Los resultados decada Spec pueden imprimirse directamente o usados en combinaciones de carga. En las siguientes secciones se detallan los parámetros que se utilizan para definir cada Spec. Sistema de coordenadas locales Cada Spec tiene su propio sistema de coordenadas locales del espectro de respuesta usado para definir la dirección de la carga de aceleración del suelo. Losejes de este sistema local son denotados por: 1, 2 y 3, por defecto éstos corresponden a las direcciones globales X, Y y Z respectivamente. Se puede cambiar la orientación del sistema de coordenadas locales especificando:
Page 9 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm
Un sistema de coordenadas csys (por defecto es cero, indicando el sistema de coordenada global) Un ángulo de coordenada, ang (por defecto es cero)
El eje local 3 es siempre el mismo que el eje Z del sistema de coordenadas csys. Los ejes locales 1 y 2 coinciden con los ejes X y Y de csys si el ángulo ang es cero. Por otra parte, ang es el ángulo del eje X con el eje local 1, medido según la ley de la mano derecha. Curva del espectro de respuesta La curva del espectro de respuesta para una dirección dada se define por los puntos digitalizados de una respuesta de seudo aceleración espectral versus el periodode la estructura. Todos los valores para las abscisas y ordenadas de esta función deben ser mayores o iguales a cero. Se puede especificar un factor de escala, sf, para multiplicar las ordenadas (respuesta de seudoaceleración espectral) de la función. Esto es a menudo necesariopara convertir los valores dados en términos de la aceleración debido a la gravedad para las unidades consistentes al resto del modelo. La curva del espectro de respuesta debe reflejar el amortiguamiento presente en la estructura a ser modelada. Note que el amortiguamiento es esencial en estacurva del espectro. Éste no es afectado por la relación de amortiguamiento, damp, usado para el método CQC o GMC de combinación modal, aunque normalmenteestos dos valores de amortiguamiento deben ser el mismo. Combinación Modal Para una dirección dada de aceleración los desplazamientos máximos, las fuerzas, y los esfuerzos son calculados a lo largo de la estructura para cada uno de losModos de Vibración. Estos valores modales se combinan para una cantidad de respuesta dada para producir un solo resultado positivo para la dirección deaceleración dada utilizando uno de los siguientes métodos: Método CQC Se especifica modc=CQC para combinar los resultados modales por la técnica de Combinación Cuadrática Completa descrita por Wilson, Der Kiureghian, y Bayo(1981). Es el método presente por defecto en el programa. El método CQC toma en cuenta el acoplamiento estadístico entre modos estrechamente espaciados causados por el amortiguamiento. Incrementando elamortiguamiento modal, incrementa el acoplamiento entre modos estrechamente espaciados. Si el amortiguamiento es cero para todos los modos, este métododegenera en el método SRSS. Puede especificarse una relación de amortiguamiento modal para CQC, damp, medido como una fracción del amortiguamiento critico: 0≤damp≤1. Este amortiguamiento igualmente afecta a todos los modos, y debe reflejar el amortiguamiento presente de la estructura a ser modelada. Método GMC
Page 10 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm
SE especifica modc=CQC para combinar los resultados modales por la técnica de Combinación Modal General, descrito por Gupta (1990). Este método además detomar en cuenta el acople estadístico entre modos estrechamente espaciados, (CQC), también incluye las correlaciones entre los modos con respuesta rígida. Adicionalmente, este método requiere especificar dos frecuencias, f1 y f2 que definen la respuesta rígida. Éstos deben satisfacer: 0<f1<f2. Éste método asume respuesta no rígida debajo de la frecuencia f1, una respuesta completamente rígida encima de la frecuencia f2, y una cantidad interpolada de respuesta rígida para las frecuencias entre f1 y f2. Las frecuencias f1 y f2 son propiedades del sismo de diseño, no de la estructura. El valor por defecto de f2 es cero, que indica una frecuencia infinita. Para este valor por defecto, el método GMC da resultados similares al método CQC. Método SRSS Se especifica modc=SRSS para combinar los resultados modales por la técnica de la Raíz Cuadrada de la Suma de los Cuadrados. Este método no toma en cuentael amortiguamiento, ni ningún acople de modos, como lo hacen los métodos CQC y GMC. Método de la Suma Absoluta Se especifica modc=ABS para combinar los resultados modales tomando la suma absoluta de sus valores. Este método es normalmente muy conservador. 13.6.5 Resultados del Análisis del Espectro de Respuesta Los resultados para cada análisis del espectro de respuesta se encuentran en el archivo de resultados. Esta información es descrita en las siguientes secciones: Aceleraciones y amortiguamiento El amortiguamiento modal y las aceleraciones del suelo actuando en cada dirección son impresos para cada modo bajo el título de:
RESPONSE SPECTRUM ACCELERATIONS El valor del amortiguamiento para cada modo es el especificado para el Método CQC y GMC, más el amortiguamiento modal contribuido por el amortiguamientoefectivo en elementos no lineales, si es que hubiera. Las aceleraciones impresas para cada modo son los valores reales interpolados de la curva de espectro de respuesta para el periodo respectivo. Las aceleracionesson siempre referidos a los ejes locales del análisis del espectro de respuesta. Ellos son identificados en el archivo de resultados como U1, U2 y U3. Amplitudes Modales
Page 11 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm
Estos valores son impresos en el archivo de resultados bajo el título de:
RESPONSE SPECTRUM MODAL AMPLITUDES Factores de Correlación Modal Cuando el tipo de combinación modal CQC o GMC es definido, una matriz de correlación modal parcial es impreso en el archivo de resultados. Esta matriz muestrael acoplamiento asumido entre modos estrechamente-espaciados. Los factores de la correlación siempre están entre cero y uno. Los factores de correlación acoplando cada modo con los próximos nueve modos más altos son impresos en el archivo de resultados bajo el título de:
RESPONSE SPECTRUM MODAL CORRELATIONS Esta matriz de correlación es simétrica. Reacciones en la Base Las reacciones en la base son las fuerzas totales y momentos sobre los soportes (restricciones y resortes) para resistir las fuerzas de inercia debido a las cargas delespectro de respuesta (cargas laterales). Éstos son impresos en el archivo de resultados bajo el título de:
RESPONSE SPECTRUM BASE REACTIONS Éstos están separadamente impresos para cada Modo individual y cada dirección de cargar sin ninguna combinación. Las reacciones totales están impresasdespués de realizar la combinación modal y la combinación direccional. Las fuerzas de reacción y momentos son siempre referidos a los ejes locales del análisis del espectro de respuesta. Éstos se identifican en el archivo de resultadoscomo F1, F2, F3, M1, M2, y M3. Capitulo 12 Capitulo 14 Contenido
Page 12 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm

[1] UBC, Sección 16331.5 [ref.15]
[2] UBC, Sección 16331.6 [ref.15]
Page 13 of 13Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiii.htm
Capítulo 14 DISEÑO SÍSMICO DE ESTRUCTURAS DE CONCRETO
14.1 INTRODUCCIÓN
Este capítulo contiene especificaciones que se consideran como los requisitos mínimos para producir una estructura monolítica de concreto reforzado con los detallesy las dimensiones adecuadas que le permitan a ésta soportar una serie de oscilaciones dentro del campo inelástico de respuesta sin deterioro crítico de la resistencia.Como se vio con anterioridad, conforme una estructura apropiadamente detallada de concreto reforzado responde a fuertes movimientos del suelo, su rigidez efectivadecrece y se incrementa su capacidad de disipar energía. Por lo tanto, el empleo de fuerzas de diseño que representan efectos sísmicos demanda que el edificio esteequipado con un sistema resistente a fuerzas laterales que retenga una porción sustancial de su resistencia conforme se le somete a inversiones de losdesplazamientos dentro del campo inelástico. La elección práctica esta entre: (a) Un sistema con suficiente resistencia para responder al movimiento del suelo dentro del rango lineal o casi lineal de respuesta, y(b) Un sistema con disposiciones adecuados que permitan una respuesta no lineal sin perdida crítica de la resistencia. Este capítulo desarrolla una serie de requisitos relacionados con la segunda opción para su aplicación en zonas de elevado riesgo sísmico.
14.2 CARGAS DE DISEÑO
Las combinaciones de carga a ser utilizadas en el método de la resistencia para el diseño de los elementos de concreto están especificadas en la sección 9.2 delreglamento ACI y se dan a continuación:
1.4 D 1.4 D + 1.7 L 0.9 D ± 1.3 W 0.75 (1.4 D + 1.7 L ± 1.7 W) 0.9 D ± 1.3· 1.1 E 0.75 (1.4 D + 1.7 L ± 1.7· 1.1 E)
Page 1 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm
14.3 PÓRTICOS ESPECIALES RESISTENTES A MOMENTOS 14.3.1 Diseño por el Método de la Resistencia El requisito básico de este método es de asegurar que la resistencia de diseño de un elemento no sea menor que la resistencia última requerida. Para cargassísmicas, la resistencia requerida consiste de las cargas de servicio multiplicadas por un factor de carga especificado en la Sección 14.2. La resistencia de diseño deun elemento consiste de la resistencia nominal, o la resistencia teórica última, multiplicada por un factor de reducción de resistencia φ. De este modo se tiene:
φ (resistencia nominal) ≥ U
Los factores de reducción (φ) según el código UBC[1] son:
0.9 para flexión 0.85 para cortante y torsión 0.75 para miembros en compresión con refuerzo en espiral 0.70 para miembros en compresión con estribos
En zonas sísmicas 3 y 4 el factor de reducción de resistencia al cortante debe ser 0.6 para el diseño de muros, losas superiores y elementos estructurales con unaresistencia nominal al cortante menor que el corte correspondiente al desarrollo de su resistencia nominal a flexión. La resistencia nominal a flexión debe determinarsecorrespondiendo con las cargas axiales factorizadas más críticas incluyendo el efecto sísmico. El factor de reducción de resistencia al cortante para la unión viga-columna es 0.85. Consideraciones para el diseño de vigas: La resistencia nominal de un elemento se determina de acuerdo con los principios definidos en la Sección 19210.2.7 del código UBC y desarrollado con mayor
claridad por George Winter[2]. La capacidad nominal de un elemento a flexión con sólo refuerzo a tensión esta dado por:
(14.1)
donde: As = área de acero a tensión, [cm2]
fy = esfuerzo de fluencia del acero, [kg/cm2] ρ = cuantía =As/(b·d) f′c = resistencia del concreto a la compresión, [kg/cm2] d = peralte efectivo, [cm] b = ancho de la sección, [cm]
A consecuencia de las cargas sísmicas se pueden formar rótulas plásticas en ambos extremos de las columnas de un nivel determinado, produciendo un mecanismo
⎟⎟⎠
⎞⎜⎜⎝
⎛′
⋅⋅−⋅⋅⋅=c
yysn f
fdfAM ρ59.01
Page 2 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm
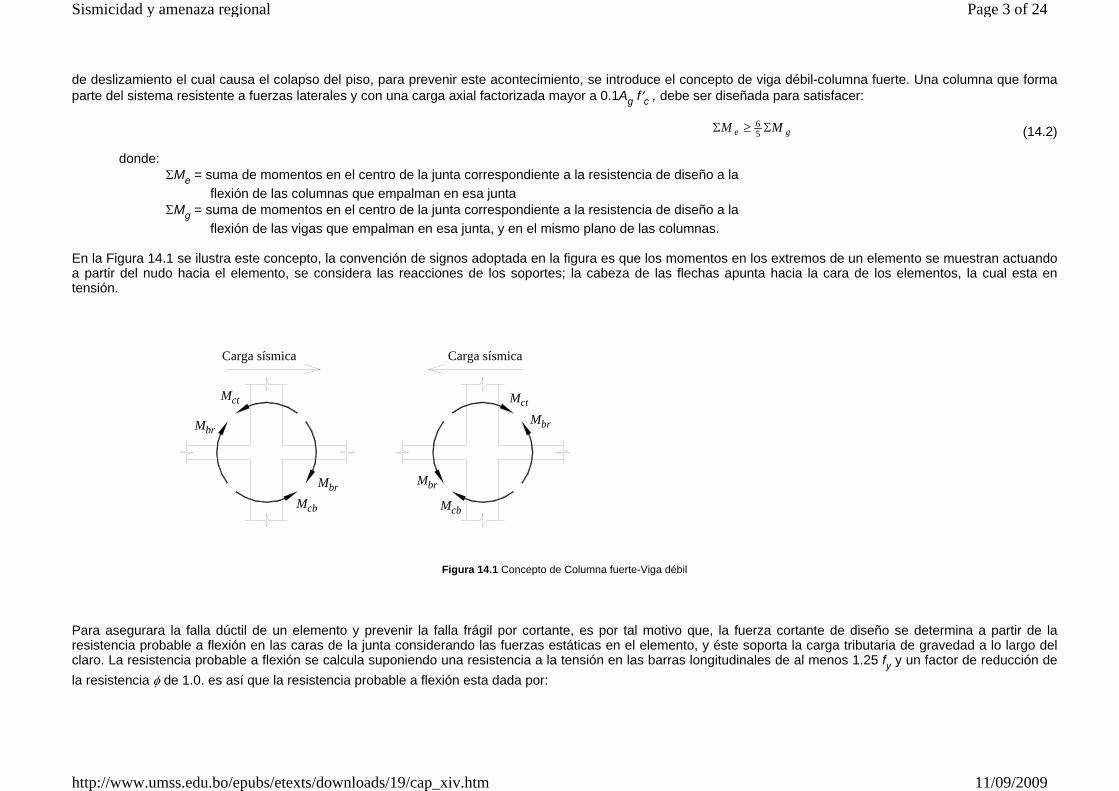
de deslizamiento el cual causa el colapso del piso, para prevenir este acontecimiento, se introduce el concepto de viga débil-columna fuerte. Una columna que formaparte del sistema resistente a fuerzas laterales y con una carga axial factorizada mayor a 0.1Ag·f′c , debe ser diseñada para satisfacer:
(14.2)
donde: ΣMe = suma de momentos en el centro de la junta correspondiente a la resistencia de diseño a la flexión de las columnas que empalman en esa junta ΣMg = suma de momentos en el centro de la junta correspondiente a la resistencia de diseño a la flexión de las vigas que empalman en esa junta, y en el mismo plano de las columnas.
En la Figura 14.1 se ilustra este concepto, la convención de signos adoptada en la figura es que los momentos en los extremos de un elemento se muestran actuandoa partir del nudo hacia el elemento, se considera las reacciones de los soportes; la cabeza de las flechas apunta hacia la cara de los elementos, la cual esta entensión.
Figura 14.1 Concepto de Columna fuerte-Viga débil Para asegurara la falla dúctil de un elemento y prevenir la falla frágil por cortante, es por tal motivo que, la fuerza cortante de diseño se determina a partir de laresistencia probable a flexión en las caras de la junta considerando las fuerzas estáticas en el elemento, y éste soporta la carga tributaria de gravedad a lo largo delclaro. La resistencia probable a flexión se calcula suponiendo una resistencia a la tensión en las barras longitudinales de al menos 1.25 fy y un factor de reducción dela resistencia φ de 1.0. es así que la resistencia probable a flexión esta dada por:
ge MM Σ≥Σ 56
Carga sísmica
ctM
brM
cbM
brM
Carga sísmica
ct
M
M
br
Mcb
brM
Page 3 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm

(14.3)
En la Figura 14.2, los momentos de signo opuesto actúan en los extremos de la viga sometida a doble curvatura y el sentido de los momentos cambia debido a lacaracterística reversible de la carga sísmica. De este modo se deben calcular ambos momentos probables resistentes (de ida y vuelta) en los extremos de la viga paradeterminar el valor del cortante crítico. La fuerza cortante de diseño en el extremo izquierdo de la viga para una carga sísmica que actúa de derecha a izquierda es:
(14.4)
donde: Ln = claro de la viga Vg = cortante debido a la carga de gravedad no factorizada
⎟⎟⎠
⎞⎜⎜⎝
⎛′
⋅⋅−⋅⋅⋅=
⎟⎟⎠
⎞⎜⎜⎝
⎛′
⋅⋅⋅−⋅⋅⋅=
c
yyspr
c
yyspr
ff
dfAM
ff
dfAM
ρ
ρ
92.025.1
)25.1(59.01)25.1(
Page 4 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm
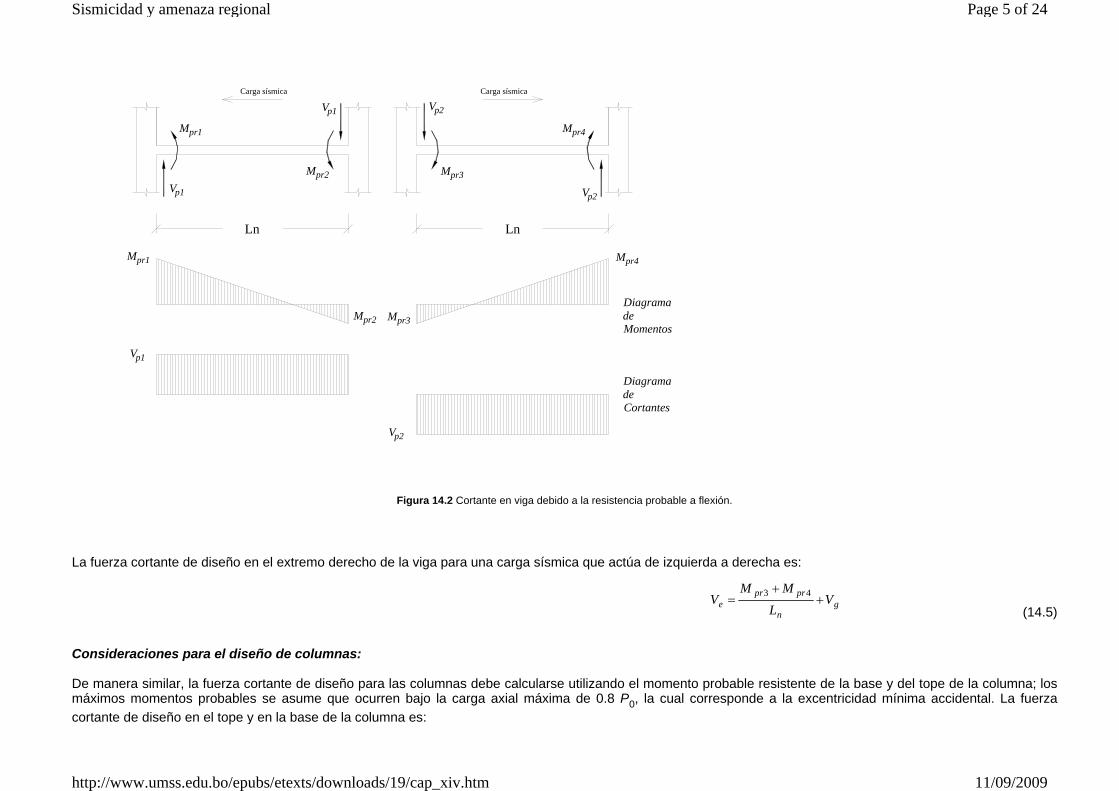
Figura 14.2 Cortante en viga debido a la resistencia probable a flexión.
La fuerza cortante de diseño en el extremo derecho de la viga para una carga sísmica que actúa de izquierda a derecha es:
(14.5)
Consideraciones para el diseño de columnas: De manera similar, la fuerza cortante de diseño para las columnas debe calcularse utilizando el momento probable resistente de la base y del tope de la columna; losmáximos momentos probables se asume que ocurren bajo la carga axial máxima de 0.8 P0, la cual corresponde a la excentricidad mínima accidental. La fuerzacortante de diseño en el tope y en la base de la columna es:
gn
prpre V
LMM
V ++
= 43
Carga sísmica
Mpr4
Vp2
pr3M
p2V
Carga sísmica
pr1M
Mpr2
p1V
p1V
Ln Ln
pr1M
pr2M Mpr3
Mpr4
p1V
Vp2
Diagrama de Momentos
Diagrama de Cortantes
Page 5 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm
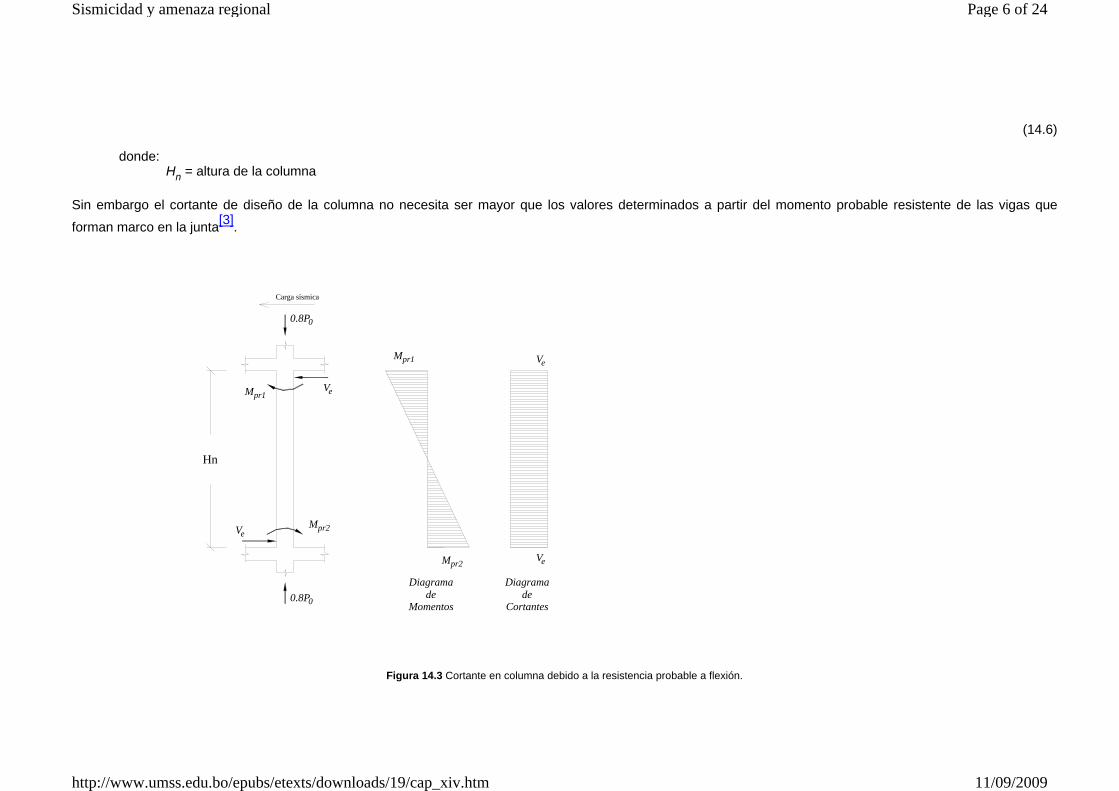
(14.6)
donde: Hn = altura de la columna
Sin embargo el cortante de diseño de la columna no necesita ser mayor que los valores determinados a partir del momento probable resistente de las vigas que
forman marco en la junta[3].
Figura 14.3 Cortante en columna debido a la resistencia probable a flexión.
Carga sísmica
0.8P0
pr1M eV
Hn
Mpr2
Diagrama de
Momentos
eV
00.8P
pr1M
Mpr2
Diagrama de
Cortantes
eV
Ve
Page 6 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm
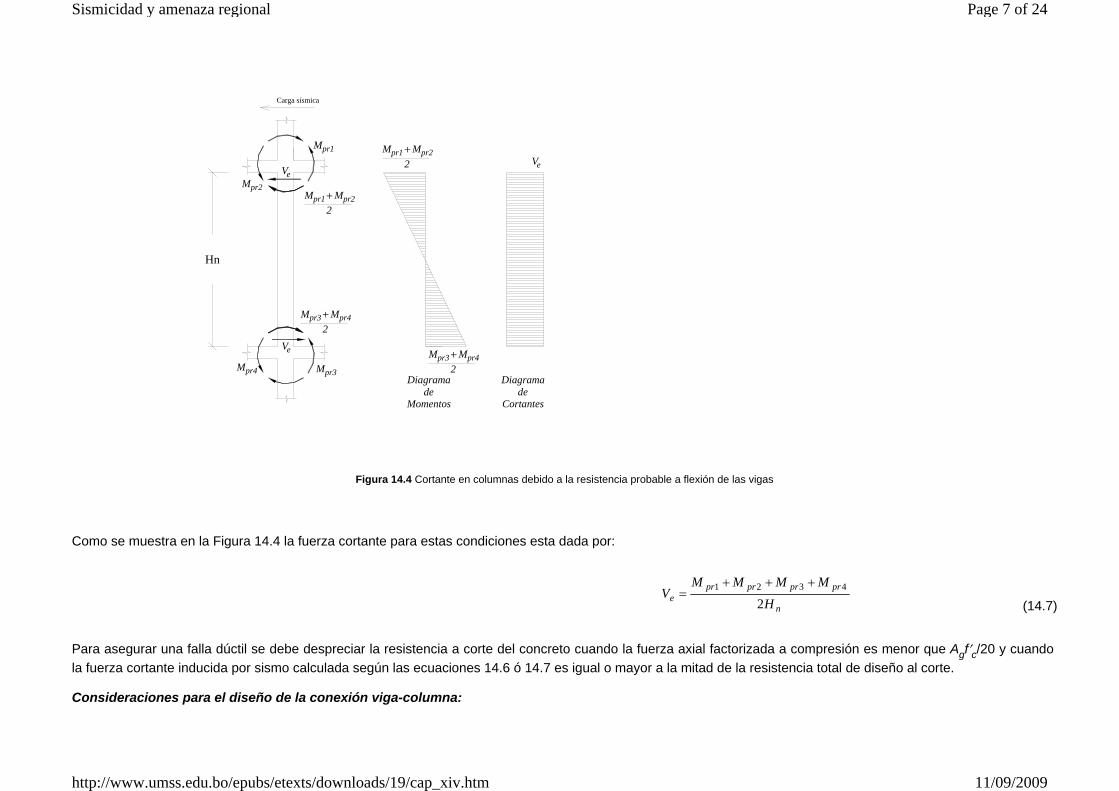
Figura 14.4 Cortante en columnas debido a la resistencia probable a flexión de las vigas
Como se muestra en la Figura 14.4 la fuerza cortante para estas condiciones esta dada por:
(14.7)
Para asegurar una falla dúctil se debe despreciar la resistencia a corte del concreto cuando la fuerza axial factorizada a compresión es menor que Agf′c/20 y cuando la fuerza cortante inducida por sismo calculada según las ecuaciones 14.6 ó 14.7 es igual o mayor a la mitad de la resistencia total de diseño al corte. Consideraciones para el diseño de la conexión viga-columna:
n
prprprpre H
MMMMV
24321 +++
=
Carga sísmica
pr1M
eV
Hn
Mpr3Diagrama
de Momentos
eV
Diagrama de
Cortantes
eV
Mpr2Mpr1 pr2M+
2
2pr4+Mpr3 M
pr4M
2pr2+Mpr1 M
2pr4pr3+ MM
Page 7 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm

En las uniones viga-columna la fuerza cortante horizontal de diseño se determina según la Figura 14.5.
Figura 14.5 Fuerzas que actúan en el nudo
La fuerza cortante producida en la columna por el momento probable resistente de la viga en el nudo es:
El esfuerzo probable en el refuerzo a tensión en la cara derecha del nudo correspondiente a la viga es:
T1 = 1.25·As1·fy La compresión probable en el concreto en la cara izquierda del nudo correspondiente a la viga es:
C2 = T2 = 1.25·As2·fy De este modo la cortante neta que actúa en el nudo es:
Ve = T1 + T2 – V
c
prpr
HMM
V 21 +=
pr2M
Mpr1
V
2C
V
2T=
2T = 1.25As2 fy
yf=1T 1.25As1
1C T1=
=Mpr1 + Mpr2
cH
Hc=
altu
ra d
e pi
so a
pis
o
punto de inflexión
Page 8 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm

Ve = 1.25·fy·(As1 + As2) − (Mpr1 + Mpr2)/Hc La resistencia nominal al cortante de la junta depende de la resistencia del concreto y del área efectiva del nudo, es así que está dada por:
para nudos confinados en sus 4 caras
para nudos confinados en 3 caras o en 2 caras opuestas
para las otras
donde:
Aj = área efectiva de sección transversal dentro de una junta En la Figura 14.6 se ilustra el área afectiva de la junta, donde las vigas están unidas a una columna de ancho considerable, donde el ancho efectivo del nudo es:
be = b + h ≤ b + 2x
donde: b = ancho de la viga h = profundidad de la columna x = menor de las distancias medidas desde el borde de la viga al borde de la columna
jcn AfV ′= 3.5
jcn AfV ′= 4
jcn AfV ′= 2.3
vigaárea efectiva del nudo
b x
profund. efectiva del nudo = hprofund. de la columna = h
be
ancho efectivo del nudo = = b+h < b+2x eb
Page 9 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm
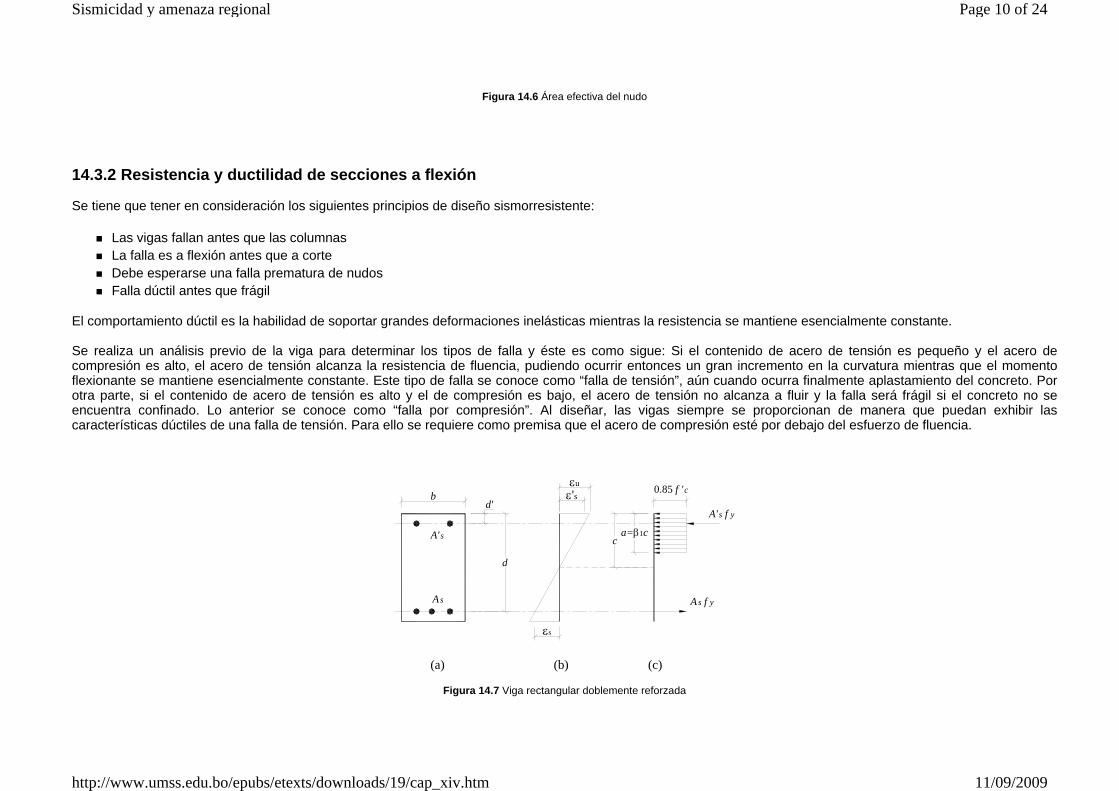
Figura 14.6 Área efectiva del nudo
14.3.2 Resistencia y ductilidad de secciones a flexión Se tiene que tener en consideración los siguientes principios de diseño sismorresistente:
Las vigas fallan antes que las columnas La falla es a flexión antes que a corte Debe esperarse una falla prematura de nudos Falla dúctil antes que frágil
El comportamiento dúctil es la habilidad de soportar grandes deformaciones inelásticas mientras la resistencia se mantiene esencialmente constante. Se realiza un análisis previo de la viga para determinar los tipos de falla y éste es como sigue: Si el contenido de acero de tensión es pequeño y el acero decompresión es alto, el acero de tensión alcanza la resistencia de fluencia, pudiendo ocurrir entonces un gran incremento en la curvatura mientras que el momentoflexionante se mantiene esencialmente constante. Este tipo de falla se conoce como “falla de tensión”, aún cuando ocurra finalmente aplastamiento del concreto. Porotra parte, si el contenido de acero de tensión es alto y el de compresión es bajo, el acero de tensión no alcanza a fluir y la falla será frágil si el concreto no seencuentra confinado. Lo anterior se conoce como “falla por compresión”. Al diseñar, las vigas siempre se proporcionan de manera que puedan exhibir lascaracterísticas dúctiles de una falla de tensión. Para ello se requiere como premisa que el acero de compresión esté por debajo del esfuerzo de fluencia.
Figura 14.7 Viga rectangular doblemente reforzada
b
d
d'
εs
ε'sεu
ca=β1c
0.85 f ' c
A's
As
A's f y
As f y
(a) (b) (c)
Page 10 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm

Es necesario, en consecuencia, desarrollar ecuaciones mas generales para tener en cuenta la posibilidad de que el refuerzo a compresión no fluya cuando la vigadoblemente reforzada falle en la flexión. A continuación se presenta el método para determinar si el acero a compresión fluye o no en la falla. Con referencia a la Figura 14.7b, y se toma como caso límite ε’s=εy, se obtiene por geometría:
o
Si se suman las fuerzas en la dirección horizontal (Figura 14.7c) se obtiene la cuantía de acero a tensión mínima⎯ρcy que asegurará la fluencia del acero acompresión en la falla:
(14.8)
Si la cuantía de acero a tensión es menor que este valor límite, el eje neutro esta suficientemente alto de manera que el esfuerzo del acero a compresión en la falla esmenor que el esfuerzo de fluencia. En este caso puede demostrarse fácilmente, en base a las Figuras 14.7b y 14.7c, que la cuantía balanceada de acero es:
(14.9)donde:
y ≤ fy (14.10)
de esta manera, la cuantía máxima de acero permitida por el código ACI 10.3.3 es:
(14.11)
Debe hacerse énfasis en que la ecuación 14.10 para el esfuerzo en el acero a compresión se aplica únicamente para una viga con la cuantía exacta balanceada deacero a tensión. Si la cuantía de acero a tensión es menor que ρb, de acuerdo con la ecuación 14.9, y es menor que⎯ρcy, entonces el acero a tensión se encuentra en el esfuerzo defluencia en la falla pero el acero de compresión no, y deben desarrollarse nuevas ecuaciones para el esfuerzo en el acero de compresión y para la resistencia aflexión. El esfuerzo en el acero a compresión puede expresarse en termino de la aún desconocida localización del eje neutro:
yu
u
dc
εεε−
=′
dcyu
u ′−
=εε
ε
ρβρ ′+−
′′=
yy
ccy fd
dff
6300630085.0 1
y
sbb f
f ′′+= ρρρ
⎥⎦⎤
⎢⎣⎡ +
′−=′=′ )( yuussss d
dEEf εεεε
y
sb f
f ′′+= ρρρ 75.0max
Page 11 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm

o (14.12)
donde del estudio del equilibrio de fuerzas horizontales se obtiene el valor de a:
o (14.13)
esta forma un sistema de ecuaciones con la ecuación de f’s, donde las incógnitas son: a y f’s; el valor de R es R=ρ’/ρ. La resistencia nominal a flexión se encuentrareaplazando el valor de a y f’s en la expresión:
(14.14)
esta capacidad nominal debe reducirse mediante el coeficiente φ=0.9 para obtener la resistencia de diseño.
Ductilidad de curvatura
Figura 14.8 Viga rectangular doblemente reforzada: (a) En la primera fluencia del acero de tensión (b) al alcanzarse la deformación unitaria última del concreto.
La ductilidad disponible de la sección puede expresarse mediante la relación de la curvatura última, ϕu, entre la curvatura en la primera fluencia, ϕy. La Figura 14.8representa el caso general de una sección doblemente reforzada en la primera fluencia del acero de tensión, y en la deformación unitaria última del concreto.
cdcEf sus′−
=′ εa
daf s
′−=′ 16300
β
bffAfA
ac
ssys
′
′′−=
85.0 bffRfd
ac
sy
′
′−=
85.0)(ρ
)(2
85.0 ddfAadabfM sscn ′−′′+⎟⎠⎞
⎜⎝⎛ −′=
b
d
d'
ε'sεc
kd
f c
A's
A s
f ' s
f y
(a) (b)εs = fy/Es εs > fy/Es
a=β1c
f y
f ' s
0.85 f ' c
c
ϕy
ϕu
εuε's
Page 12 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm

Cuando el acero de tensión alcanza por primera vez la resistencia de fluencia, la distribución de esfuerzos en el concreto aún puede ser lineal debido a que el máximoesfuerzo en el concreto es significativamente menor que su resistencia, y la profundidad del eje neutro, kd, puede calcularse utilizando la teoría elástica como:
T=Cc + Cs Asfy = kd·fc·b/2+A’s f’s ρ fy = k·fc /2+ρ’f’s
de la grafica de deformación se tiene:
y
entonces se tiene lo siguiente:
reemplazando los valores de ε’s y εc, y definiendo n=Es/Ec se tiene:
donde resolviendo para k se tiene:
(14.15)
La curvatura esta dada por la extensión por unidad de longitud del acero de tensión, en la primera fluencia (esto es, la deformación unitaria de fluencia), dividida entrela distancia que existe entre el acero de tensión y el eje neutro.
ss kdddkd εε
−′−
=′ sc kddkd εε−
=
ssccss EEkE ερερε ′′+= 2/
kdddkdn
kddkdkn
−′−′+
−= ρρ
2
⎟⎠⎞
⎜⎝⎛ ′
−′+=−
−
⎟⎠⎞
⎜⎝⎛ ′
−′+
−=
ddknkkn
kdddkd
nk
kn
ρρ
ρρ
2)1(
)1(11
22
2
⎟⎟⎠
⎞⎜⎜⎝
⎛ ′+−⎟⎟
⎠
⎞⎜⎜⎝
⎛ ′′++⎟⎟
⎠
⎞⎜⎜⎝
⎛ ′+=
ρρ
ρρρ
ρρρρ
ρ 1122
2 nddnnk
( ) ( )RnddRnRnk +−⎟⎠⎞
⎜⎝⎛ ′+++= 11222 ρρρρ
Page 13 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm

en forma similar la curvatura ultima esta dada por:
el factor de ductilidad de curvatura de la sección esta dada por:
(14.16)
es evidente que si se mantienen constantes otras variables, el factor disponible de ductilidad de curvatura aumenta al disminuir el contenido de acero de tensión, alaumentar el contenido de acero de compresión, con la disminución de la resistencia del acero y el aumento de la del concreto. Si la zona de compresión de unelemento se confina mediante estribos cerrados colocados a corta distancia, o espirales, se mejora notablemente la ductilidad del concreto. 14.3.3 Detalles Sismorresistentes para Vigas Los elementos a flexión en marcos se definen como aquellos elementos en los cuales la fuerza de compresión axial factorizada del elemento es menor que 0.1Agf′c yel claro libre para el elemento es mayor a 4 veces su peralte efectivo. Se impone las siguientes restricciones de geometría con el objetivo de dotar de seccióntransversal compacta con buena estabilidad durante los desplazamientos no lineales:
b/h ≥ 0.3 b ≥ 25 [cm] b ≤ bc + 0.75·h en cada lado de la columna
donde:
b = ancho de la viga h = altura de la viga bc = ancho de la columna
Las siguientes limitaciones en la cantidad de refuerzo longitudinal se dan para prevenir la congestión de acero, asegurar el comportamiento dúctil y proveer un mínimode capacidad de refuerzo mayor que la resistencia a tensión del concreto.
)1(/
kdEf sy
y −=ϕ
1βε
ϕac
u =
1/)1(
/ βε
ϕϕ
akd
Ef sy
c
y
u −=
yf14
min ≥ρy
c
ff ′
≥ 8.0minρ
025.0max ≤ρ
Page 14 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm
Además:
Un mínimo de 2 barras deben estar dispuestas en forma continua, tanto en el tope como en el fondo. La resistencia a los momentos positivos en la cara de la junta debe ser mayor o por lo menos igual a la mitad de la resistencia a los momentos negativosprovista en esa cara de la junta. En cualquier sección, a lo largo de la viga, ni la resistencia a los momentos negativos ni positivos debe ser menor que una cuarta parte de la resistencia almomento máximo provista en cualquier extremo de la viga.
No se permite empalmes localizados en regiones donde el análisis indica una fluencia a flexión causada por los desplazamientos laterales inelásticos de la estructura.No deben utilizarse empalmes:
Dentro de las juntas o nudos Dentro una distancia del doble de la altura de la viga medida a partir de la cara de la columna.
Para prevenir el descascaramiento del concreto que recubre las zonas de empalme es que el espaciamiento máximo del refuerzo transversal que envuelve las barrastraslapadas no debe exceder de d/4 ó 10 [cm]. La longitud de desarrollo, ldh, para una barra con un gancho estándar de 90º en hormigones con agregado de peso normal debe ser:
(14.17)
ldh ≥ 8 db
ldh ≥ 15 [cm] donde:
db = diámetro de la barra El gancho a 90º debe ubicarse dentro del núcleo confinado de la columna; para barras de diámetro de 9 [mm] a 35 [mm] (#3 al #11) la longitud de desarrollo, ld, parauna barra recta no debe ser menor a:
ld ≥ 2.5·ldh Y si la profundidad del hormigón vaciado en una operación por debajo de la barra excede de 30 [cm] entonces, ld, debe ser menor a:
ld ≥ 3.5·ldh Se requiere refuerzo transversal para proveer de resistencia al cortante y para proveer de confinamiento al concreto localizado dentro de la zona de rótula plástica ypara controlar el pandeo lateral de las barras longitudinales. Lazos cerrados, como se ve en la Figura 14.9, proveen de confinamiento al hormigón y también deresistencia al cortante. Los estribos sísmicos con ganchos a 135º sólo proveen resistencia al corte. En los elementos estructurales deben proveerse lazos en las
c
bydh
f
dfl
′
⋅=
2.17
Page 15 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm

siguientes zonas:
Sobre una distancia 2d a partir de la cara de la columna Sobre una distancia 2d a ambos lados de la sección sujeta a rótula plástica.
Figura 14.9 Lazos y estribos sísmicos
El primer lazo debe localizarse a no mas de 5 [cm] de la cara de la columna; el espaciamiento máximo entre los lazos no debe ser mayor a:
smax ≤ d/4 smax ≤ 8·db smax ≤ 24 dt smax ≤ 30 [cm]
donde: d = peralte efectivo db = diámetro de la barra longitudinal dt = diámetro de la barra del lazo.
Donde no se requieren lazos se pueden hacer usos de estribos sísmicos con ganchos a 135º, a través de la longitud del elemento en un espaciamiento máximo ded/2. El detalle de la disposición de lazos y estribos se muestra en la Figura 14.10.
135º6 db
bd
6 db
135º
b6 d b6 d b6 d
135º 135º 90º
ganchosísmico
estribosísmico
lazosimple
horquillas lazodoble (2 pz)
estribo sísmico
horquilla
Page 16 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm
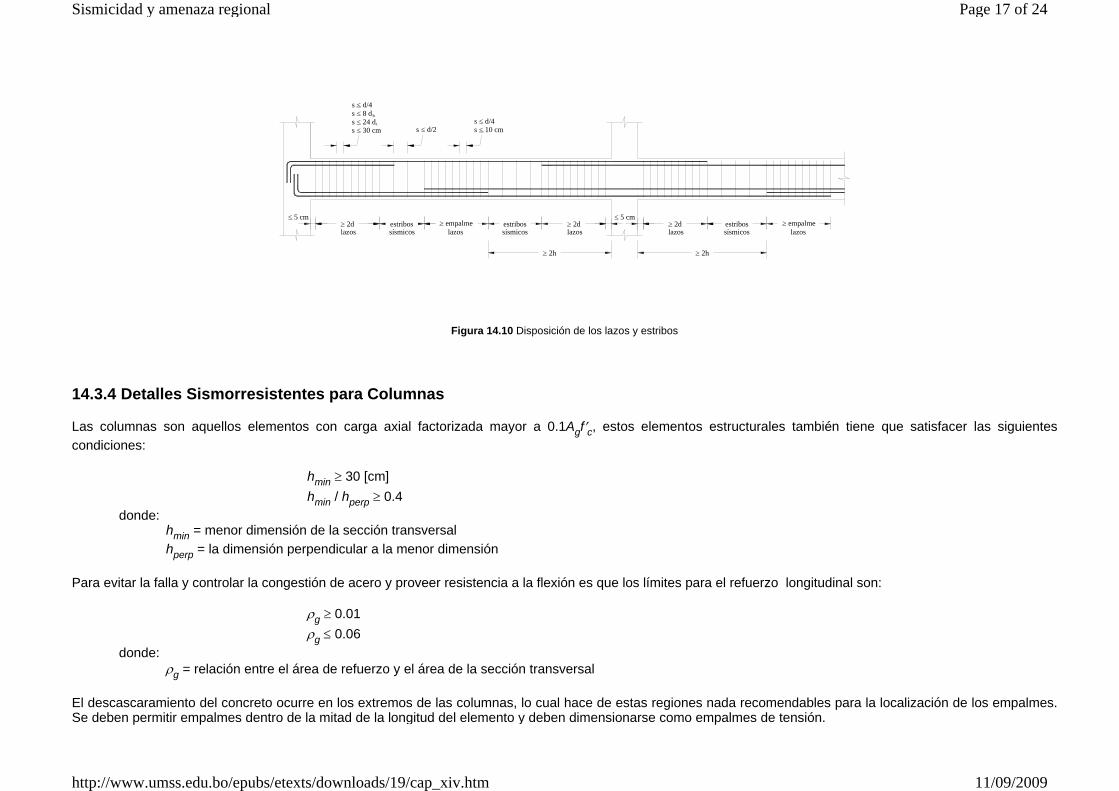
Figura 14.10 Disposición de los lazos y estribos
14.3.4 Detalles Sismorresistentes para Columnas Las columnas son aquellos elementos con carga axial factorizada mayor a 0.1Agf′c, estos elementos estructurales también tiene que satisfacer las siguientescondiciones:
hmin ≥ 30 [cm] hmin / hperp ≥ 0.4
donde: hmin = menor dimensión de la sección transversal hperp = la dimensión perpendicular a la menor dimensión
Para evitar la falla y controlar la congestión de acero y proveer resistencia a la flexión es que los límites para el refuerzo longitudinal son:
ρg ≥ 0.01 ρg ≤ 0.06
donde: ρg = relación entre el área de refuerzo y el área de la sección transversal
El descascaramiento del concreto ocurre en los extremos de las columnas, lo cual hace de estas regiones nada recomendables para la localización de los empalmes.Se deben permitir empalmes dentro de la mitad de la longitud del elemento y deben dimensionarse como empalmes de tensión.
> 2h > 2h
< 5 cm> 2dlazos
estribossísmicos
> empalmelazos
estribossísmicos
> 2dlazos
< 5 cm
sísmicoslazos> 2d estribos > empalme
lazos
s < d/4s < 8 ds < 24 ds < 30 cm
b
ts < d/2
s < d/4s < 10 cm
Page 17 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm

Figura 14.11 Refuerzo transversal en la columna
El refuerzo transversal, que consiste de lazos cerrados y horquillas, debe estar dispuesto en toda la altura de la columna para proporcionar resistencia al corte yconfinamiento. El espaciamiento máximo de los lazos debe ser:
smax ≤ 6 db smax ≤ 15 [cm]
< 35 cm < 35 cm < 35 cm
< 35
cm
< 35
cm
Page 18 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm

Figura 14.12 Detalle del refuerzo en columnas
En la Figura 14.11 se ilustran los lazos cerrados y las horquillas las cuales deben estar espaciadas en un máximo de 35 [cm]. En el extremo de la columna el árearequerida de refuerzo por confinamiento esta dada por el valor más grande de:
(14.18)
donde: s = espaciamiento entre lazos Ag = área bruta de la sección transversal de la columna Ach = área transversal medida de extremo a extremo del acero de refuerzo transversal hc = dimensión transversal del núcleo de la columna medida de centro a centro del refuerzo confinante
El refuerzo de confinamiento debe estar dispuesto a lo largo de una distancia, l0, a partir de la cara del nudo en ambos lados de cualquier sección donde pueda ocurrirfluencia a la flexión en conexión con los desplazamientos laterales no-elásticos de la estructura.
l0 ≥ h l0 ≥ Hn / 6 l0 ≥ 45 [cm]
donde: h = altura de la sección columna Hn = luz libre de la columna
El espaciamiento de refuerzo de confinamiento esta limitado a:
s ≤ hmin/4 s ≤ 10 [cm]
donde: hmin = dimensión menor de la columna
⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎟⎠
⎞⎜⎜⎝
⎛ ′⋅= 13.0
ch
g
y
ccsh A
Aff
hsA
y
ccsh f
fhsA
′⋅⋅⋅= 09.0
s < 10 cms < h/4
s/2
l 0
Page 19 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm
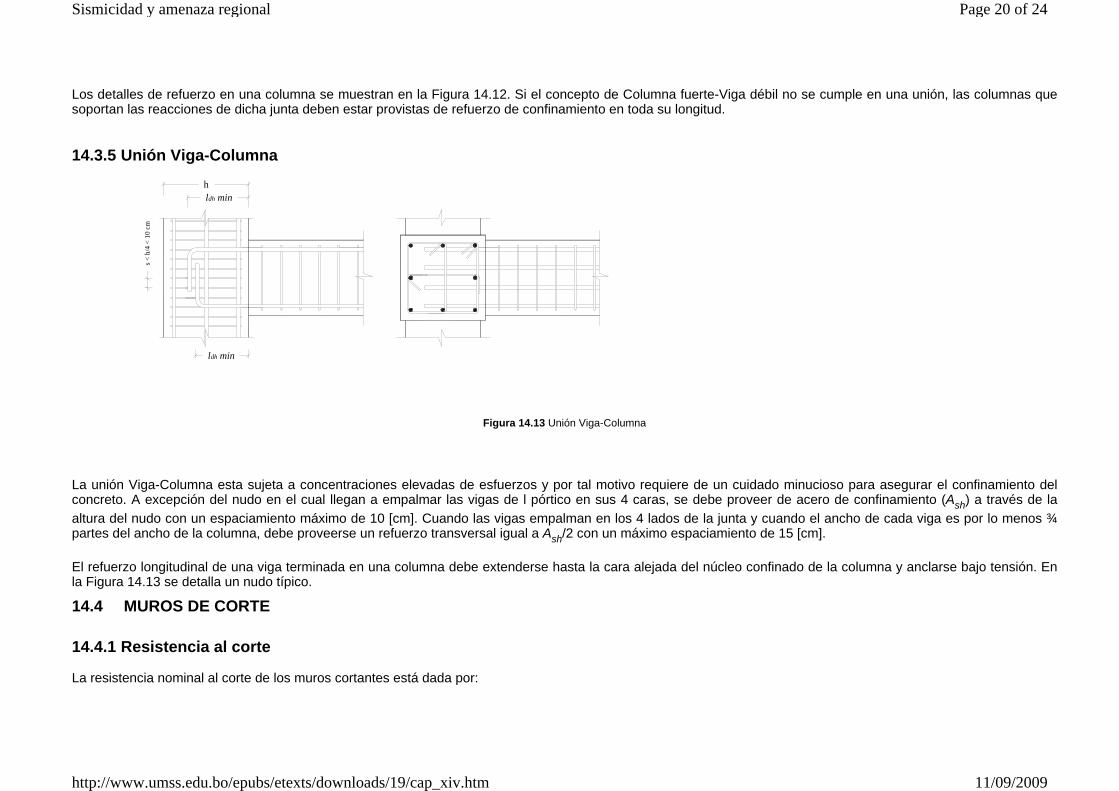
Los detalles de refuerzo en una columna se muestran en la Figura 14.12. Si el concepto de Columna fuerte-Viga débil no se cumple en una unión, las columnas quesoportan las reacciones de dicha junta deben estar provistas de refuerzo de confinamiento en toda su longitud. 14.3.5 Unión Viga-Columna
Figura 14.13 Unión Viga-Columna
La unión Viga-Columna esta sujeta a concentraciones elevadas de esfuerzos y por tal motivo requiere de un cuidado minucioso para asegurar el confinamiento delconcreto. A excepción del nudo en el cual llegan a empalmar las vigas de l pórtico en sus 4 caras, se debe proveer de acero de confinamiento (Ash) a través de laaltura del nudo con un espaciamiento máximo de 10 [cm]. Cuando las vigas empalman en los 4 lados de la junta y cuando el ancho de cada viga es por lo menos ¾partes del ancho de la columna, debe proveerse un refuerzo transversal igual a Ash/2 con un máximo espaciamiento de 15 [cm]. El refuerzo longitudinal de una viga terminada en una columna debe extenderse hasta la cara alejada del núcleo confinado de la columna y anclarse bajo tensión. Enla Figura 14.13 se detalla un nudo típico.
14.4 MUROS DE CORTE
14.4.1 Resistencia al corte La resistencia nominal al corte de los muros cortantes está dada por:
hldh min
ldh min
s < h
/4 <
10
cm
Page 20 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm

(14.19)
donde:
Acv = área neta de la sección de hormigón limitada por el espesor del alma y la longitud de la sección en la dirección de la fuerza cortante considerada. [mm2]. ρn = cuantía de refuerzo de corte distribuido en un plano perpendicular al plano Acv
La cuantía de refuerzo, ρv, para muros de corte no debe ser menor que 0.0025 a lo largo de los ejes longitudinales y transversales cuando Vu excede a:
esto es:
donde:
Asn = área del refuerzo horizontal sobre la longitud vertical considerada. Acn = área del alma sobre la longitud vertical considerada. Asv = área del refuerzo vertical sobre la longitud horizontal considerada.
El espaciamiento del refuerzo en cada sentido en los muros no debe exceder de 45 [cm]; además se deben disponer 2 cortinas de refuerzo en un muro si la fuerzacortante factorizada es mayor que:
Cuando la relación entre la altura del muro y la longitud de la base (hw/lw) es menor a 2, la resistencia nominal al cortante del muro debe determinarse a partir de:
(14.20) donde el coeficiente αc varía linealmente desde 3.0 para un valor de (hw/lw)=1.5 hasta un valor de 2.0 para (hw/lw)=2.0 14.4.2 Muros de Corte para cargas a flexión y axiales Por la gran área de concreto en los muros es difícil llegar a una falla balanceada, por tanto se aumenta la capacidad de momentos por fuerzas de gravedad en murosde corte. Debe tomarse en cuenta que la carga axial reduce la ductilidad.
)55.0( ynccvn ffAV ⋅+′= ρ
ccv fA ′265.0
0025.00025.0
≥=≥=
cvsvv
cnsnn
AAAA
ρρ
ccv fA ′53.0
)265.0( yncccvn ffAV ⋅+′= ρα
Page 21 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm
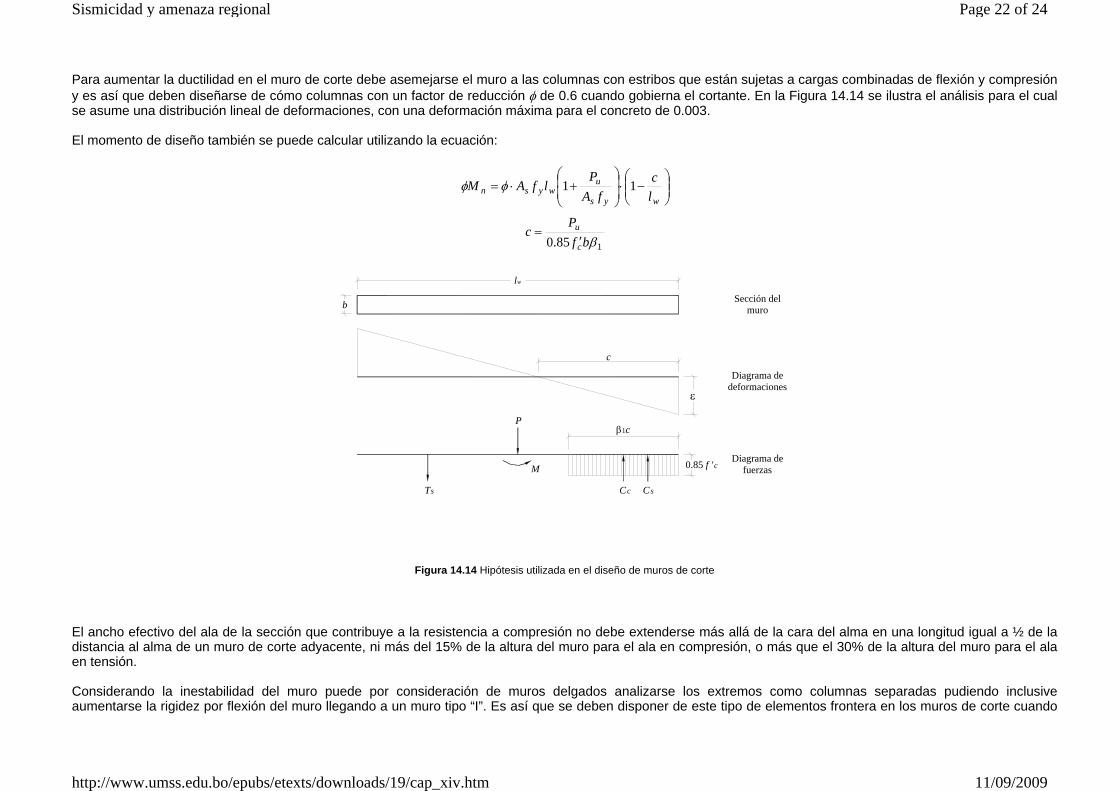
Para aumentar la ductilidad en el muro de corte debe asemejarse el muro a las columnas con estribos que están sujetas a cargas combinadas de flexión y compresióny es así que deben diseñarse de cómo columnas con un factor de reducción φ de 0.6 cuando gobierna el cortante. En la Figura 14.14 se ilustra el análisis para el cualse asume una distribución lineal de deformaciones, con una deformación máxima para el concreto de 0.003. El momento de diseño también se puede calcular utilizando la ecuación:
Figura 14.14 Hipótesis utilizada en el diseño de muros de corte
El ancho efectivo del ala de la sección que contribuye a la resistencia a compresión no debe extenderse más allá de la cara del alma en una longitud igual a ½ de ladistancia al alma de un muro de corte adyacente, ni más del 15% de la altura del muro para el ala en compresión, o más que el 30% de la altura del muro para el alaen tensión. Considerando la inestabilidad del muro puede por consideración de muros delgados analizarse los extremos como columnas separadas pudiendo inclusiveaumentarse la rigidez por flexión del muro llegando a un muro tipo “I”. Es así que se deben disponer de este tipo de elementos frontera en los muros de corte cuando
⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟
⎟⎠
⎞⎜⎜⎝
⎛+⋅=
wys
uwysn l
cfA
PlfAM 11φφ
185.0 βbfP
cc
u
′=
b
ε
c
β1c
0.85 f 'c
Cc Cs
P
M
Ts
lw
Sección del muro
Diagrama de deformaciones
Diagrama de fuerzas
Page 22 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm
el esfuerzo máximo de la fibra extrema, correspondiente a fuerzas factorizadas, incluyendo el efecto sísmico, sea mayor que 0.2 f’c. El cálculo del área de acero de este tipo de muros se lo realiza utilizando los criterios y los diagramas de interacción similares a los utilizadas para el cálculo decolumnas, o pueden confeccionarse con las ecuaciones respectivas de columnas para casos específicos.
El código UBC[4] impone un límite superior para la fuerza axial de diseño por encima del cual el muro ya no se considera efectivo para la resistencia a las fuerzaslaterales:
Pu = 0.35P0 donde:
P0 = resistencia nominal a carga axial con una excentricidad cero. P0 = 0.85·f′c(Ag – Ast) + fy·Ast
Ag = área total de la sección. Ast = área del refuerzo vertical. Con el objetivo de prevenir la falla frágil es que se adopta la carga axial balanceada de:
Pb = 0.35P0
Este es el punto en el diagrama de interacción para columnas en el cual se alcanzan simultáneamente la máxima deformación del concreto (0.003) y la fluencia delacero de refuerzo a tensión. Incrementando la carga axial factorizada más allá de este valor trae como resultado el modo de falla por compresión del concreto, la cuales frágil y repentina. Capitulo 13 Contenido
Page 23 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm
[1] UBC, Sección 1909.3.2 [ref.15]
[2] WINTER, George Cap. 1 pp. 11-15 [ref 19]
[3] ACI, Sección 21.4.5 [ref.20]
[4] UBC, Sección 1921.6.6.3 [ref.15]
Page 24 of 24Sismicidad y amenaza regional
11/09/2009http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_xiv.htm