Embed Size (px)
Citation preview

2
Estudio de la Unidad Polaroid de Medición por Ultrasonido
2.1. INTRODUCCIÓN
Dados los antecedentes, se requiere un dispositivo sensor, capaz de transmitir y recibir señales de ultrasonido, y un circuito electrónico que controle la operación de este sensor. Este circuito electrónico debe ser capaz de generar la señal pulsante de frecuencia superior a la del sonido (ultrasónica), activar al sensor como transmisor de esta señal, habilitar al sensor como receptor del rebote o eco de la señal emitida, y finalmente procesar la diferencia de tiempos entre transmisión y recepción, para que posteriormente sirva como parámetro que se traducirá en una distancia estimada del objeto detectado.
Para lograr esto se ha seleccionado un cierto tipo dentro de la gran variedad de sensores que operan en el rango del ultrasonido, bajo los principios del sonar. Se recurre a un transductor de grado electrostático y un módulo electrónico (Ranging Circuit Board) que es utilizado para transmitir la señal y recibir el eco, desarrollados por PolaroidTM Corpora-tion[8], ambos componentes se denomina "Unidad Polaroid de Medición por Ultrasonido" (Polaroid Ultrasonic Ranging Unit), o simplemente UPMU. Esta compañía ha desarrollado una gran variedad de unidades de ultrasonido, útiles en diferentes aplicaciones, y en nuestro caso se ha empleado el de la serie 6500, que por sus características como se

CAPITULO 2 Estudio de la Unidad Polaroid de Medición por Ultrasonido
17
analizará posteriormente es suficiente para nuestra aplicación.
2.2. DESCRIPCIÓN GENERAL
Determinar distancias por medio de ecos ultrasónicos es un proceso muy simple. Una corta irrupción de energía ultrasónica es generada electrónicamente, amplificada y transmitida por un transductor. La señal viaja a través del medio, en este caso el aire; es reflejada por el objetivo
(obstáculo) y retorna al transductor. Estos pasos se pueden llevar a cabo gracias a la UPMU. Este módulo cuenta con dispositivos electrónicos integrados y discretos que en conjunto logran procesar una diferencia de tiempo entre transmisión-recepción; el tiempo de retardo puede entonces ser determinado y entregar a la salida una señal lógica cuya duración en estado alto es proporcional a esta diferencia. Esta señal lógica recibida se aprovecha de múltiples maneras. Por ejemplo, se puede introducir a una PC y conociendo la velocidad correcta del sonido ejecutar un programa que muestre en forma numérica una distancia expresada en metros.
Figura 2.1. Forma física del transductor electrostático.
Figura 2.2. Dimensiones en cm del sensor electrostático

CAPITULO 2 Estudio de la Unidad Polaroid de Medición por Ultrasonido
18
Dos componentes primarios consti-tuyen la Unidad Polaroid de Medición por Ultrasonido
♦ Transductor acústico (figura de encabezado)
♦ Módulo electrónico (figura 2.1)
Con ambos componentes se pueden detectar la presencia y distancias de objetos con un rango de aproxima-damente 16 cm a 10 m.
2.3. EL TRANSDUCTOR ELECTROSTÁTICO
El principal componente de este sistema es el único transductor electrostático que actúa como: un potente altavoz y un micrófono de forma alternada. Este es diseñado para transmitir la señal saliente y también para funcionar como un micrófono electrostático para recibir la señal reflejada (el eco). Las dimensiones reales del sensor se aprecian en la figura 2.2, es de 4 cm de diámetro y pesa 8 gramos aproximadamente.
2.3.1. Manufactura del transductor
Una manufactura especial del transductor realizada por Polaroid, consiste en un diafragma que se muestra en la figura 2.3. Este diafragma consiste de una lámina fina plateada que constituye la parte móvil que transforma la energía eléctrica en ondas sonoras y viceversa. Esta lamilla es un plástico cubierto por un conductor (oro) sobre la parte frontal, y esto forma el electrodo negativo. A esto se le adiciona por la parte inferior el electrodo positivo, que consiste en un platillo metálico de aluminio, que también provee resonancia a la estructura del diafragma. El ensamble se muestra en la figura 2.4.
Figura 2.3. Diafragma que compone el transductor electrostático.
Figura 2.4. Ensamble del transductor Electrostático.

CAPITULO 2 Estudio de la Unidad Polaroid de Medición por Ultrasonido
19
2.3.2. Mecanismo de funcionamiento
La presencia del platillo metálico y la laminilla superior forman un capacitor eléctrico. Cuando este capacitor es cargado una fuerza electrostática es aplicada sobre la laminilla. Un voltaje de CA a una frecuencia determinada obliga a la laminilla a moverse a la misma frecuencia y provoca una perturbación sobre el medio, generando así la transmisión de una onda sonora. Debido a
que el sensor se debe alternar entre transmisor y receptor (“altavoz y micrófono”) un voltaje de CD es aplicado extremadamente, para alcanzar la estabi-lizado en el menor tiempo posible. Mediante una lámina de acero inoxidable se transfiere el alto voltaje al plato inferior y así mantener a la laminilla superior en una tensión constante. Una cubierta metálica perforada cubre y protege al diafragma ocasionando pequeñas pérdidas a las señales fuertes.
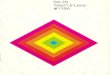
Figura 2.5. Respuesta del voltaje de transmisión.
Figura 2.6. Respuesta del voltaje de recepción.

CAPITULO 2 Estudio de la Unidad Polaroid de Medición por Ultrasonido
20
2.3.3 Especificaciones técnicas
La respuesta de transmisión se observa en la figura 2.5, en la cual se aprecia el comportamiento hasta 100 KHz. De acuerdo a esta gráfica se cuenta con su mayor alcance desde 50 KHz hasta 60 KHz. Esto es un factor muy importante para ya que se debe enviar con fuerza suficiente las ondas ultrasonoras. El amplio ancho de banda y extrema-damente alta ganancia permite al sistema operar un rango grande de distancia. Con una sensibilidad de recepción de –45 dB (referidos a 1 V/µPa) el transductor provee suficiente salida para operar a un máximo rango de 10 m. Esta respuesta de recepción se observa en la figura 2.6, donde se aprecia que la máxima recepción se tiene entre 45 KHz y 65 KHz. El transductor tiene 4 cm de diámetro, esto permite cubrir 15º radiales, trabajando con una frecuencia de 50 KHz. Los objetos que se encuentran fuera de este ángulo no los
logra captar, por esta razón es necesario que nuestro dispositivo gire de tal manera que cubra el mayor campo posible. En la figura 2.7 se muestra el lóbulo patrón para este transductor.
Para diseñar el sistema propuesto se requiere conocer la mayoría de las especificaciones dadas por el fabricante. En la tabla 2.1 se muestra una lista de las principales especificaciones a tomar en cuenta.
2.4. MÓDULO ELECTRÓNICO
El circuito electrónico, controla los modos de operación transmisión y recepción del transductor. Este se compone de tres secciones, que controlan la operación del transductor. En consecuencia, las sec-ciones son[9]:
Tabla 2.1. Especificaciones técnicas del transductor electrostático Características electroacústicas
Sensibilidad mínima de transmisión a 50 KHz, 300 VCAp-p, 150 VCD
110 dB (dB referidos a 20 µPa a 1 m)
Sensibilidad mínima de recepción a 50 KHz, 150 VCD
-42 dB (dB referidos a 1 V/Pa)
Voltaje sugerido para la polarización de rejillas (CD )
150 V
Voltaje de conducción sugerido de CAp-p 150 V Voltaje máximo combinado 400 V Capacitancia a 1 KHz (típica) y 150 VCD
400-500 pF
Características ambientales de operación Rango de temperatura -30ºC a 70ºC Humedad relativa 5% a 96%
Características mecánicas Protección Enrollado con acero frío Diafragma Oro 24k sobre laminilla

CAPITULO 2 Estudio de la Unidad Polaroid de Medición por Ultrasonido
21
♦ Circuito Analógico ♦ Circuito Digital ♦ Sección de Potencia
En la figura 2.8 se muestra un
diagrama a bloques que muestra como interactúan cada una de estas etapas.
En la figura 2.9 se observa el diagrama del circuito electrónico completo. De modo general el funcionamiento de este circuito es el siguiente.
Un reloj cerámico resonador contro-lado en el circuito digital genera los pulsos transmitidos por el transductor. Después de generar la emisión el modo de operación del transductor cambia; en efecto, de un altavoz potente a un micrófono para detectar el retorno del eco. Al recibir el eco, el transductor convierte la energía sonora en energía eléctrica, que es amplificada por el circuito analógico, entonces detectada por el circuito digital para producir la señal de recepción de eco.
2.4.1. Circuito Analógico
Básicamente consiste en un circuito integrado comercial, el SN28784, que se encarga de capturar la señal de eco, que proviene del sensor, pasando por un circuito de control de ganancia.
2.4.1.1. El amplificador
El voltaje que produce el transductor al recibir el ECO es del orden de lo microvolts a Volts, dependiendo de la distancia, composición, y orientación de la superficie del objeto. La ganancia del sistema electrónico del sonar es controlado por un circuito integrado comercial, el cual opera con un voltaje de 4.5 a 7 Vcd. Como un resultado de un rango dinámico requerido (aproxima-damente 60 dB), el circuito fue diseñado con tres amplificadores en cascada, dos de los cuales cambian su ganancia en función del tiempo. La alimentación a suministrar, de 6 Vcd, debe ser capaz de soportar 1 ms de sobrecorriente a menos de 2.5 A, un circuito de disparo apropiado hace la transmisión de un pulso ultrasónico por medio del transductor.
Debido a que la potencia de la señal de retorno (eco) se debilita a partir de distancias grandes (la potencia de la señal
Figura 2.7. Lóbulo patrón del transductor electrostático

CAPITULO 2 Estudio de la Unidad Polaroid de Medición por Ultrasonido
22
de retorno a 10 m es casi una milésima parte que a 30 cm), una doble función es realizada por el amplificador con el circuito analógico. además del procesa-miento del eco, el amplificador también desempeña la función de mantener una sensibilidad a partir del rango de operación completa (distancia completa) del sistema. Baja amplificación es necesaria para ecos cerrados, mientras que una amplificación alta es necesaria para ecos distantes. El cambio en amplificación es logrado por el incremento de la ganancia y por tanto la Q del amplificado. Estos incrementos se llevan a cabo en ocho intervalos, cuando se trata de distancias menores a 10 m,.y en cuatro cuando son mayores a 10 m. Para un óptimo funcionamiento, un ajuste de sensibilidad a partir de rangos completos de operación es necesario. En los intervalos donde se presenta la mayor ganancia, el circuito electrónico es muy susceptible al ruido.
2.4.1.2. Control lógico de ganancia
Cuatro señales lógicas controlan la ganancia del sistema y el ancho de banda como función del tiempo. El tiempo y la eficiencia están relacionadas entre las señales lógicas, ganancia y ancho de banda.
El control lógico de ganancia puede ser observado en los siguientes puntos:
♦ GCA en el pin 14 de U1. ♦ GCB en el pin 13 de U1. ♦ GCC en el pin 12 de U1. ♦ GCD en el pin 15 de U1. Los cambios de ganancia pueden ser
hechos por el cambio del resistor R1 en la tarjeta (ver figura 2.9).
La ganancia se varía de manera digital, ya que conforme se incrementa el tiempo el circuito digital genera un conteo de tres bits (23 = 8) y esto sirve para variar
Figura 2.8. Diagrama a bloques de la Unidad Polaroid de Medición por Ultrasonido (UPMU).

CAPITULO 2 Estudio de la Unidad Polaroid de Medición por Ultrasonido
23
el ancho de banda como se muestra en la figura 2.10. Cada diagrama de tiempo corresponde al control de ganancia (Gain Control Terminal) representado por las terminales A, B, C y D. Dentro de este rango se capturan los valores del primer eco que llega al sonar. Según la propagación del tiempo, aumenta la ganancia, interpretando una distancia correspondiente al eco de llegada.
2.4.2. Circuito Digital
La complejidad de la lógica es integrada con la tecnología de circuitos integrados. En el diagrama de la figura 2.9 se localiza con la nomenclatura TL851, prácticamente es el encargado de recibir y enviar las señales hacia el dispositivo que controlará el modulo, como se verá más adelante se trata de un microcontrolador. Este circuito integrado genera el conteo necesario para incrementar en forma logarítmica la
ganancia del amplificador; ese conteo se observan en los terminales GCA, GCB, GCC y GCD. También se encarga de producir el pulso cuyo ancho es proporcional a la distancia medida y se puede observar en el terminal ECHO.
2.4.3. Sección de Potencia
Entre las características importantes para la emisión de señal se requiere entre las terminales del sensor un voltaje de 200 Volts de corriente alterna, en forma de pulsos cuadrados con frecuencia superior a 20 KHz.. Considerando que la alimentación con que se cuenta es de 6 Volts de corriente directa, se requiere un circuito que pueda incrementar el voltaje hasta el nominal durante la emisión. Esto se logra mediante un circuito Fly-Back como el que se presentan en los televisores. La etapa de potencia está referida al circuito del transmisor, y se
Figura 2.9. Diagrama completo del circuito electrónico.

CAPITULO 2 Estudio de la Unidad Polaroid de Medición por Ultrasonido
24
localiza en el diagrama de la figura 2.9 por el transformador T1, los diodos zeners D1 y D2, el capacitor C5 y el transistor Q1.
El principio de funcionamiento de este circuito se basa en la inversión de cd-cd de las fuentes conmutadas. Se tiene el transformador T1 de ferrita que es alimentado por un voltaje que es conmutado por el transistor Q1 npn. Aquí es importante la correcta polaridad del transformador.
La secuencia de 16 pulsos se entregan a la base del transistor de tal forma que este se manda a corte o a saturación. Primero cuando el transistor es encendido, polariza al primario del transformador con la fuente de 6 V y por inducción transfiere y aumenta la cantidad de diferencia de potencial, con polaridad dada con respecto a la marca del secundario, dando un valor exacto de 210 V. El valor nominal para el sensor es de 210 V para cada ciclo, debido a esto se colocan los diodos zeners, para recortar el voltaje al nominal, de esta forma también se protege al sensor. El comportamiento posterior se produce cuando se apaga el transistor, dejando el primario desconec-tado, en este tiempo se invierte la polaridad del devanado (de igual forma sucede con el secundario), produciéndose un ciclo negativo que se descarga mediante un diodo zener y el sensor; así
se descarga el núcleo de flujo magnético y el devanado primario por inducción.
2.5 MODOS DE OPERACIÓN
Existen dos modos básicos de operación para la UPMU, serie 6500:
♦ Modo de eco único ♦ Modo de eco múltiple
La aplicación de la alimentación (Vcc),
la activación de la entrada inicio (INIT), la salida de transmisión resultante y el uso de la entrada Inhibición de Blanco (BINH) son básicamente las mismas para ambos modos de operación.
Se aplica la alimentación (Vcc) un mínimo de 5 ms preferentemente antes de que la entrada INIT sea puesta en alto. Durante este tiempo todos los circuitos internos son reseteados y el oscilador interno estabilizado. Cuando el INIT toma el estado alto, se polariza el transductor electrostático y ocurre una salida. Dieciséis pulsos a 49.4 KHz con 400V de amplitud excitan al transductor cuando ocurre la emisión. Hacia el final de los 16
INIT
GCA
GCB
GCC
GCD
0 1 2 3 4 5 6 7 8 9 10 11 Paso No.
Figura 2.10. Formas de onda del control digital de ganancia.

CAPITULO 2 Estudio de la Unidad Polaroid de Medición por Ultrasonido
25
pulsos transmitidos un voltaje fijo de CD de 200 V permanecerá en el transductor, recomendado para una operación óptima.
En consecuencia para eliminar falsos ecos que llegan al inicio de la señal que retorna, la entrada REC (Receive) del Circuito Integrado analógico es inhibido por el blanco interno (Internal Blanking) por 2.38 ms después de iniciar la señal INIT. Esto restringe a que el sistema sólo detecte en forma óptima objetos situados a 0.408 m que es lo correspondiente a 2.38 ms. Si embargo si se requiere un TOF mayor, o lo que es igual detectar objetos más cercanos, se modifica este valor de blanco interno por medio de la activación de la entrada BINH. Esta entrada puede ser puesta en alto en cualquier tiempo, inclusive antes de los 2.38 ms, y de esta forma se controla el término del blanco interno que inhibe a la entrada REC.
2.5.1. Modo de eco único
En la figura 2.11 se muestra este modo de operación. Las señales son activadas y se espera el retorno. La señal de retorno es amplificada y aparece como un nivel
lógico alto a la salida de ECHO. El tiempo entre INIT dado como nivel alto y la salida del ECHO dado también como nivel alto es proporcional a la distancia desde el transductor al obstáculo. Si se desea el ciclo puede ser nuevamente repetido, entonces INIT vuelve a su estado bajo y tomando un nivel alto para la siguiente transmisión.
2.5.2. Modo de eco múltiple
Si existe más de un obstáculo u objetivo y una única transmisión detecta múltiples ecos, entonces el ciclo es ligeramente diferente, como se muestra en la figura 2.12. Después de recibir la primer señal de retorno que causa la salida de ECHO para dar un alto, la entrada BLNK (Blanking) es puesta en alto y nuevamente en bajo para resetear la salida de ECHO y así captar el siguiente retorno de señal. La señal de BLNK debe ser menos de 0.44 ms para asegurar que los 16 pulsos regresen del primer blanco y permita todos los retardos internos. Esto quiere decir que el otro obstáculo debe estar a partir de 7.62 cm en relación al primero.
Figura 2.11. Modo de operación de eco múltiple.

CAPITULO 2 Estudio de la Unidad Polaroid de Medición por Ultrasonido
26
2.5.3. Condiciones de operación recomendadas
Algunas condiciones de operación recomendadas dadas por el fabricante se muestran en la tabla 2.2.
2.6. CONSIDERACIONES DE DISEÑO EN ULTRASONIDOS
El terminal ECHO es de colector abierto y por tal motivo hay que incluir la llamada resistencia pull-up, o resistencia entre Vcc y ECHO con valor de 4.7 kΩ. Esta resistencia se aprecia en el diagrama de la figura 4.11.
2.6.1. Características generales
Algunas características generales a tomar en cuenta para el correcto uso de del UPMU son las siguientes:
♦ Rango de precisión del sonar de 6 pulgadas a 35 pies.
♦ Transductor electrostático con disparos de 50 KHz sin interface adicional.
♦ Opera con un sólo suministro de energía.
♦ Cuenta con una salida de reloj de precisión para uso externo.
♦ Exclusión de eco selectivo. ♦ Compatible con tecnología TTL. ♦ Capacidad para múltiples medi-
ciones. ♦ Utiliza los circuitos integrados
para sonares TI TL851 y el Polaroid 614906.
♦ Potenciómetro para el control de ganancia variable.
Figura 2.12. Modo de operación de eco único.

CAPITULO 2 Estudio de la Unidad Polaroid de Medición por Ultrasonido
20
Tabla 2.2. Condiciones de operación recomendadas. Mínimos Máximos Unidades Suministro de Energía, VCD 4.5 6.8 V Voltaje de entrada en Niveles Altos, VIH
BLNK, BINH, INIT 2.1 V
Voltaje de entrada en Niveles Bajos
BLNK, BINH, INIT 0.6 V
Voltaje de salida de ECHO y OSC 6.8 V Tiempo de retardo, para INIT en Nivel Alto 5 ms Periodo de reciclo 80 ms Temperatura de operación al aire libre, TA 0 40 ºC