Embed Size (px)
Citation preview

UNIVERSIDAD DE BUENOS AIRES
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE ESTABILIDAD
TESIS DE INGENIERÍA CIVIL
ANÁLISIS DE LAMINADOS COMPUESTOS MEDIANTE EL
MÉTODO DE LOS ELEMENTOS FINITOS
JOAQUÍN MARÍA GUTIÉRREZ
2007

64.00 Tesis de Ingeniería Civil
Análisis de laminados compuestos mediante el método de los
elementos finitos
Autor:
Joaquín María Gutiérrez
Padrón N° 80.565
jgutierrez@ fi.uba.ar
Director:
Ing. Roberto Sergio Carnicer
Co‐Director:
Ing. Alejandro Verri Kozlowski
DEPARTAMENTO DE ESTABILIDAD
FACULTAD DE INGENIERÍA
UNIVERSIDAD DE BUENOS AIRES
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………

V
DEDICATORIA
A mi abuelo Jorge, que falleció hace unos pocos meses y no voy a poder compartir con él este
momento tan esperado.

VII
AGRADECIMIENTOS
Quiero agradecer al Ing. Roberto Carnicer por haber aceptado ser el director de esta tesis, por
haber delineado el camino a seguir y haberme orientado cada vez que no supe cómo
continuar.
Al Ing. Alejandro Verri, quien me ha recibido innumerables veces en su oficina para discutir
sobre materiales compuestos, elementos finitos, programación y muchos otros temas
relacionados con esta tesis.
A la Universidad de Buenos Aires y a sus profesores, donde realicé mi formación secundaria
en la Escuela Superior de Comercio Carlos Pellegrini y mi formación universitaria en esta
Facultad.
A Ignacio Delfante, Joaquín Fernández Bugna, Martín Llavallol y Sergio Muñoz, amigos y
compañeros de estudio, quienes nunca dejaron de alentarme para llevar adelante este
trabajo.
A toda mi familia: mis padres, mi hermana, abuelas, tías y primos, quienes siempre me han
acompañado.
Por último, a Sofi, la mujer con quien deseo compartir el resto de mi vida. Sin su amor,
apoyo y paciencia nunca hubiese podido completar esta tesis.
IX
RESUMEN
En el presente trabajo se estudia la modelización de materiales compuestos mediante el
método de los elementos finitos. En particular se tratan las placas constituidas por laminados
compuestos.
Se implementan dos elementos distintos (CLPT y Layerwise) y se comparan sus resultados
con las soluciones analíticas para algunos casos particulares. También se comparan los
resultados con el software comercial de elementos finitos ABAQUS/CAE.
Además se evalúa la aplicabilidad de cada uno de los elementos y se analizan los problemas
inherentes al método empleado.
XI
ÍNDICE
Dedicatoria.................................................................................................................................................................. V Agradecimientos .......................................................................................................................................................VII Resumen .................................................................................................................................................................... IX Índice ......................................................................................................................................................................... XI Listado de Figuras....................................................................................................................................................XIII Listado de Tablas......................................................................................................................................................XV Notación ................................................................................................................................................................XVII
1 INTRODUCCIÓN...................................................................................................................................... 19
2 REVISIÓN DE LAS TEORÍAS DE PLACAS LAMINADAS ............................................................... 21
3 TEORÍA CLÁSICA DE PLACAS LAMINADAS .................................................................................. 23
3.1 HIPÓTESIS DE LA TEORÍA ...................................................................................................................... 23 3.2 CAMPO DE DESPLAZAMIENTOS ............................................................................................................. 23 3.3 RELACIONES CINEMÁTICAS .................................................................................................................. 24 3.4 RELACIONES CONSTITUTIVAS............................................................................................................... 26
3.4.1 Relación constitutiva de la lámina .................................................................................................. 26 3.4.2 Relación constitutiva del laminado ................................................................................................. 28
3.5 ECUACIONES DE EQUILIBRIO ................................................................................................................ 29 3.6 MODELO DE ELEMENTOS FINITOS ......................................................................................................... 36
3.6.1 Interpolación del campo de desplazamientos.................................................................................. 38 3.7 IMPLEMENTACIÓN NUMÉRICA.............................................................................................................. 41
3.7.1 Problema 1. Placa cuadrada con laminados particulares.............................................................. 41 3.7.2 Problema 2. Placa cuadrada con laminado arbitrario................................................................... 47
4 TEORÍA MULTICAPA............................................................................................................................. 53
4.1 HIPÓTESIS DE LA TEORÍA ...................................................................................................................... 53 4.2 CAMPO DE DESPLAZAMIENTOS ............................................................................................................. 53 4.3 ECUACIONES DE EQUILIBRIO ................................................................................................................ 55 4.4 DISCRETIZACIÓN DE ELEMENTOS FINITOS ............................................................................................ 57 4.5 RELACIONES CINEMÁTICAS .................................................................................................................. 58 4.6 RELACIONES CONSTITUTIVAS............................................................................................................... 61
4.6.1 Relación constitutiva de la lámina .................................................................................................. 61 4.6.2 Relación constitutiva del laminado ................................................................................................. 62
4.7 MODELO DE ELEMENTOS FINITOS ......................................................................................................... 65 4.8 IMPLEMENTACIÓN NUMÉRICA.............................................................................................................. 67
4.8.1 Problema 3. Placa rectangular resuelta por Pagano ..................................................................... 67 4.8.2 Problema 4. Placa rectangular resuelta por Pagano ..................................................................... 70 4.8.3 Problema 5. Fenómeno de locking.................................................................................................. 77 4.8.4 Problema 6. Comparación de los elementos CLPT y Layerwise .................................................... 79
XII
4.8.5 Problema 7. Placa sándwich........................................................................................................... 81
5 ANÁLISIS DE LOS RESULTADOS OBTENIDOS............................................................................... 87
6 CONCLUSIONES...................................................................................................................................... 91
7 REFERENCIAS ......................................................................................................................................... 93
XIII
LISTADO DE FIGURAS
FIGURA 3.1 GEOMETRÍA DE UN BORDE DE PLACA ANTES Y DESPUÉS DE LA DEFORMACIÓN ................................... 24 FIGURA 3.2 VARIACIÓN DE LAS DEFORMACIONES Y TENSIONES EN EL ESPESOR .................................................... 26 FIGURA 3.3 GEOMETRÍA DE LA PLACA CON BORDE CURVO .................................................................................... 30 FIGURA 3.4 RESULTANTES DE FUERZAS Y MOMENTOS EN UN ELEMENTO DE PLACA .............................................. 31 FIGURA 3.5 COSENOS DIRECTORES ........................................................................................................................ 37
FIGURA 3.6 RESULTANTES ,x yp p (IZQ.) Y nQ (DER.) ......................................................................................... 40
FIGURA 3.7 TENSIÓN ADIMENSIONALIZADA ( )x zσ PARA LAS DISTINTAS SECUENCIAS DE LAMINADO ............... 45
FIGURA 3.8 TENSIÓN ADIMENSIONALIZADA ( )y zσ PARA LAS DISTINTAS SECUENCIAS DE LAMINADO ............... 45
FIGURA 3.9 TENSIÓN ADIMENSIONALIZADA ( )xy zτ PARA LAS DISTINTAS SECUENCIAS DE LAMINADO ............... 46
FIGURA 3.10 MALLA EMPLEADA EN ABAQUS ..................................................................................................... 48 FIGURA 3.11 SECUENCIA DE LAMINADO ................................................................................................................ 48 FIGURA 3.12 DESPLAZAMIENTOS TOTALES ........................................................................................................... 49 FIGURA 3.13 DESPLAZAMIENTOS TRANSVERSALES (W)......................................................................................... 49 FIGURA 3.14 DESPLAZAMIENTOS EN EL EJE X (U) .................................................................................................. 50 FIGURA 3.15 DESPLAZAMIENTOS EN EL EJE Y (V) .................................................................................................. 50 FIGURA 4.1 PLACA MULTICAPA ............................................................................................................................. 53 FIGURA 4.2 CAMPO DE DESPLAZAMIENTOS LAYERWISE.......................................................................................... 55 FIGURA 4.3 RESULTANTES DE FUERZAS Y MOMENTOS EN UN ELEMENTO DE PLACA .............................................. 56 FIGURA 4.4 FUNCIONES DE INTERPOLACIÓN ANTES DE LA ELIMINACIÓN DE LAS VARIABLES DEL PLANO MEDIO ... 64 FIGURA 4.5 FUNCIONES DE INTERPOLACIÓN DESPUÉS DE LA ELIMINACIÓN DE LAS VARIABLES DEL PLANO MEDIO 65 FIGURA 4.6 NOTACIÓN DE LA PLACA Y NUMERACIÓN DE LOS ELEMENTOS DE LA MALLA ...................................... 70
FIGURA 4.7 ( ), / 2,xz a b zτ PARA A/H=4 ............................................................................................................. 73
FIGURA 4.8 ( )/ 2, ,yz a b zτ PARA A/H=4 ............................................................................................................. 73
FIGURA 4.9 ( ), / 2,u a b z PARA A/H=4................................................................................................................ 74
FIGURA 4.10 ( )/ 2, / 2,x a b zσ PARA A/H=4...................................................................................................... 74
FIGURA 4.11 ( )/ 2, / 2,y a b zσ PARA A/H=4...................................................................................................... 75
FIGURA 4.12 ( ), ,xy a b zτ PARA A/H=4 ................................................................................................................ 75
FIGURA 4.13 DEFLEXIÓN MÁXIMA ADIMENSIONALIZADA...................................................................................... 77
FIGURA 4.14 ( )x zσ ............................................................................................................................................ 80
XIV
FIGURA 4.15 ( )xy zτ ............................................................................................................................................ 80
FIGURA 4.16 NÚCLEO TIPO PANAL DE ABEJA DE NOMEX ....................................................................................... 81
FIGURA 4.17 ( )/ 2, / 2,x a b zσ .......................................................................................................................... 83
FIGURA 4.18 ( )/ 2, / 2,xz a b zτ .......................................................................................................................... 83
FIGURA 4.19 ( )/ 2, / 2,y a b zσ .......................................................................................................................... 84
FIGURA 4.20 ( ),0,xz a zτ .................................................................................................................................... 84
FIGURA 5.1 EQUILIBRIO DE LAS TENSIONES INTERLAMINARES .............................................................................. 88
XV
LISTADO DE TABLAS
TABLA 3.1 DEFLEXIONES Y TENSIONES MÁXIMAS ADIMENSIONALIZADAS (CLPT) ............................................... 43 TABLA 3.2 DEFLEXIONES....................................................................................................................................... 51 TABLA 4.1 COMPARACIÓN DE RESULTADOS EJEMPLO1 MALLA 2X2..................................................................... 69 TABLA 4.2 COMPARACIÓN DE RESULTADOS EJEMPLO1 MALLA 6X6..................................................................... 69 TABLA 4.3 RESULTADOS MALLA 6X6.................................................................................................................... 71 TABLA 4.4 RESULTADOS PAGANO ......................................................................................................................... 71 TABLA 4.5 RELACIÓN ENTRE LAYERWISE / ANALÍTICA ......................................................................................... 72 TABLA 4.6 DEFLEXIONES MÁXIMAS ADIMENSIONALIZADAS.................................................................................. 77 TABLA 4.7 SECUENCIA DE LAMINADO ................................................................................................................... 82

XVII
NOTACIÓN
a,b Dimensiones de la placa en el plano
h Espesor de la placa
x,y,z Coordenadas rectangulares
n,s,r Coordenadas normal, tangencial y fuera del plano
u,v,w Desplazamientos en las direcciones de las coordenadas x, y, z
j Índice referente a la interfaz
k Índice referente a la capa
N Número de capas
q Carga transversal distribuida
0q Carga transversal uniforme
U Energía potencial elástica
V Trabajo de las fuerzas exteriores
Γ Borde o contorno del dominio
ξ η, Coordenadas en el dominio del elemento
Ω Dominio
θ Orientación de la lámina
σ Tensión normal
τ Tensión tangencial
ε Deformación específica
γ Distorsión angular
δ Variación
[ ]Q Matriz de rigideces de la lámina
[ ]S Matriz de flexibilidades de la lámina
[ ]T Matriz de transformación

1 INTRODUCCIÓN
El objetivo de este trabajo es estudiar la modelización de materiales compuestos. Dentro de
los distintos tipos de materiales compuestos, nos dedicaremos a un grupo en particular
formado por los laminados compuestos.
Estos materiales presentan ciertos fenómenos que no se manifiestan en los materiales
isótropos y homogéneos, como por ejemplo los distintos tipos de acoples que existen y su
alta deformabilidad ante esfuerzos de corte. Estos fenómenos hacen que el diseño y/o análisis
de una estructura hecha a partir de materiales compuestos sea más dificultosa que para el
caso de materiales isótropos y homogéneos.
A pesar de estas complicaciones, los materiales compuestos presentan numerosos beneficios,
por lo que poder analizar el comportamiento de los mismos es importante.
El empleo de estos materiales empezó a crecer vertiginosamente a partir de los años 60. En
sus comienzos fueron aplicados fundamentalmente a la industria aeroespacial. Con el
desarrollo de las técnicas de manufactura y reducción de los costos de la materia prima, la
aplicación de los materiales compuestos se masificó y hoy en día están presentes en muchas
industrias. Dentro de las distintas aplicaciones podemos nombrar: fabricación de turbinas
eólicas, industria aeronáutica, industria naval, industria automotriz, bienes de consumo
masivo (bicicletas, raquetas, etc.) y refuerzo de estructuras entre otros.
El beneficio comúnmente más conocido de estos materiales es el ahorro de peso. El ahorro de
peso se debe a dos motivos:
a) Elevada relación entre resistencia y peso específico
b) Elevada relación entre rigidez y peso específico
La posibilidad de reducir la masa es de gran importancia en muchos casos. Por ejemplo en la
industria aeronáutica, permite reducir el consumo del avión disminuyendo el costo de
operación y aumentando la autonomía.
Otro ámbito donde se emplean materiales compuestos es en la fabricación de satélites. El
costo aproximado para poner un kilogramo de satélite en órbita ronda entre U$S 6600 y U$S
11000, por lo que cualquier ahorro en el peso del mismo implica un ahorro significativo en su
puesta en marcha.
INTRODUCCIÓN
20
Reducciones en la masa ayudan a hacer diseños más eficientes donde las fuerzas inerciales
son importantes (por ejemplo brazos robóticos usados en la industria automotriz).
Otras veces el objetivo al reducir el peso no es una reducción en los costos sino que lo que se
busca es mejorar la performance (automovilismo, embarcaciones de regata, etc.).
Pero el ahorro de peso no es el único beneficio que presentan los materiales compuestos.
Además podemos nombrar: elevada resistencia a fatiga, bajos coeficientes de dilatación,
buena resistencia a la corrosión, transparencia electromagnética, facilidad para conformar
geometrías complejas (dependiendo del proceso de manufactura), etc.
Un laminado genérico puede exhibir un comportamiento particular que no se manifiesta en
los materiales isótropos y homogéneos, por ejemplo un esfuerzo de tracción puede hacer que
un laminado se flexione y/o se revire. Este comportamiento se debe a lo que se conoce como
acoples, tema que será tratado durante el desarrollo de este trabajo. Los acoples que pueden
existir en un laminado muchas veces pueden ser problemáticos y se busca evitarlos, pero en
otros casos puede sacarse provecho de este fenómeno. Como ejemplo se puede citar el
control pasivo de generadores eólicos. El objetivo es limitar la potencia producida por el
generador, para que no sobrepase la potencia de diseño [10]. El laminado de las aspas se
diseña de manera tal que haya un acople entre flexión y giro (bending – twisting). De esta
manera, cuando las aspas se flexionan debido a la presión dinámica del viento, éstas giran
aumentando el ángulo de incidencia. A medida que la presión aumenta también crece el
ángulo de incidencia. Cuando al ángulo de incidencia se vuelve grande, el perfil
aerodinámico entra en pérdida (stall), limitando así la potencia producida por el generador.
Estas son sólo algunas de las particularidades de estos materiales que motivan al estudio y
análisis de los mismos.
2 REVISIÓN DE LAS TEORÍAS DE PLACAS LAMINADAS
Dentro de los distintos tipos de materiales compuestos, los laminados compuestos son los
que están formados por el apilado de capas de distintos materiales y/o orientación de fibras.
Por su construcción los laminados compuestos tienen dos dimensiones prevalecientes frente
a la tercera (el espesor). Por lo que es habitual el análisis de los mismos empleando teorías de
placas y cáscaras.
Existen varias teorías para el análisis de placas laminadas. Estas pueden ser clasificadas en
dos grandes grupos. Uno de los enfoques es analizar la placa homogeneizando las
propiedades de las distintas capas y considerando la placa como una única capa equivalente
(ESL – Equivalent Single Layer). Dentro de este grupo se encuentran la teoría clásica de placas
laminadas (CLPT – Classical Laminated Composite Plates Theory) y algunas teorías de placas
deformables por corte. Hay diferentes teorías que tienen en cuenta la deformación por corte
y habitualmente se las conoce por el orden de expansión que emplean para describir el
campo de desplazamientos en el espesor. La teoría ESL más elemental que contempla
deformación por corte es la del primer grado (FSDT – First Order Shear Deformation Theory).
Esta teoría presenta la desventaja que necesita emplear un factor de corrección por corte para
computar correctamente la rigidez a corte de la placa. Para materiales compuestos este
coeficiente de corrección depende de la secuencia de laminado (stacking sequence) y de las
propiedades de la lámina. Teorías de orden más elevado describen mejor la cinemática del
problema y en algunos casos prescinden del factor de corrección de corte [01].
El otro grupo de teorías está formado por las que se conocen como multicapa (Layerwise). A
diferencia de las teorías ESL, los modelos multicapa permiten el alabeo de las secciones. De
esta manera se cumplen las ecuaciones de equilibrio ya que las tensiones de corte pueden ser
continuas en las interfaces [02]. Dentro de las teorías multicapa hay algunas que asumen
desplazamientos transversales constantes en el espesor (partial layerwise theories) [03] y [04]
mientras que otras teorías relajan esta hipótesis, permitiendo la extensibilidad de las
normales (full layerwise theories) [02].


3 TEORÍA CLÁSICA DE PLACAS LAMINADAS
3.1 HIPÓTESIS DE LA TEORÍA
La teoría clásica de placas laminadas (CLPT) es una extensión de la teoría clásica de placas a
los laminados compuestos, por lo que se mantienen las hipótesis de Love‐Kirchhoff:
1. Las normales permanecen rectas luego de la deformación.
2. Las normales son inextensibles.
3. Las normales rotan, de manera tal que permanecen perpendiculares al plano medio
luego de la deformación.
Las primeras dos hipótesis implican que el desplazamiento transversal es independiente de
la posición en el espesor y que la deformación específica transversal zzε es cero. La última
hipótesis resulta en que las deformaciones por corte son nulas, 0xzε = , 0yzε = (Ver Figura
3.1).
3.2 CAMPO DE DESPLAZAMIENTOS
Como consecuencia de las hipótesis el campo de desplazamientos se plantea de la siguiente
forma (Ver Figura 3.1):
( ) ( )
( ) ( )
( ) ( )
00
00
0
, , ,
, , ,
, , ,
wu x y z u x y zx
wv x y z v x y zy
w x y z w x y
∂= −
∂
∂= −
∂
=
(3.1)
donde ( )0 0 0, ,u v w son los desplazamientos del plano medio. Una vez que éstos se conocen, se
pueden determinar los desplazamientos de cualquier punto arbitrario.

TEORÍA CLÁSICA DE PLACAS LAMINADAS
24
Figura 3.1 Geometría de un borde de placa antes y después de la deformación
3.3 RELACIONES CINEMÁTICAS
Las deformaciones asociadas al campo de desplazamientos (3.1) pueden ser computadas
usando las relaciones lineales entre deformaciones y desplazamientos (3.2).
12
1212
xx
yy
xy
xz
yz
zz
uxvy
u vy x
u wz xv wz y
wz
ε
ε
ε
ε
ε
ε
∂=∂∂
=∂
⎛ ⎞∂ ∂= +⎜ ⎟∂ ∂⎝ ⎠
∂ ∂⎛ ⎞= +⎜ ⎟∂ ∂⎝ ⎠⎛ ⎞∂ ∂
= +⎜ ⎟∂ ∂⎝ ⎠∂
=∂
(3.2)
Para el campo de desplazamientos asumido en la ecuación (3.1), 0wz
∂=
∂. Por lo que las
deformaciones de la ecuación (3.2), se reducen a

TEORÍA CLÁSICA DE PLACAS LAMINADAS
25
20 0
2
20 0
2
20 0 0
0 0
0 0
12
1 02
1 020
xx
yy
xy
xz
yz
zz
u wzx xv wzy y
u v wzy x x yw wx xw wy y
ε
ε
ε
ε
ε
ε
∂ ∂= −∂ ∂∂ ∂
= −∂ ∂
⎛ ⎞∂ ∂ ∂= + −⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠
∂ ∂⎛ ⎞= − + =⎜ ⎟∂ ∂⎝ ⎠⎛ ⎞∂ ∂
= − + =⎜ ⎟∂ ∂⎝ ⎠=
(3.3)
La ecuación (3.4) nos permite expresar las distorsiones angulares en función de la
deformación tangencial tensorial
2
0 0 02 2xy xyu v wzy x x y
γ ε⎛ ⎞∂ ∂ ∂
= = + −⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠ (3.4)
En la teoría clásica de placas las deformaciones transversales ( ), ,xz yz zzε ε ε son nulas. Las tres
componentes del vector de deformaciones (3.3) no nulas pueden expresarse de la siguiente
forma:
( )
( )
( )
( )
( )
( )
0 1
0 1
0 1
xx xxxx
yy yy yy
xy xy xy
z
ε εε
ε ε ε
γ γ γ
⎧ ⎫ ⎧ ⎫⎧ ⎫⎪ ⎪ ⎪ ⎪⎪ ⎪
⎪ ⎪ ⎪ ⎪ ⎪ ⎪= +⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩ ⎭
(3.5)
{ }
( )
( )
( )
{ }
( )
( )
( )
200
20 1
20 110 0
2
0 12
0 0 0
,
2
xx xx
yy yy
xy xy
wuxx
v wy y
u v wy x x y
ε ε
ε ε ε ε
γ γ
0
⎧ ⎫⎧ ⎫ ∂∂ −⎪ ⎪⎪ ⎪ ∂∂⎧ ⎫ ⎧ ⎫ ⎪ ⎪⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪∂ ∂⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪= = = = −⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬∂ ∂⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭∂ ∂ ∂⎪ ⎪ ⎪ ⎪+ −⎪ ⎪ ⎪ ⎪∂ ∂ ∂ ∂⎩ ⎭ ⎩ ⎭
(3.6)
TEORÍA CLÁSICA DE PLACAS LAMINADAS
26
Donde ( ) ( ) ( )( )0 0 0, ,xx yy xyε ε γ son las deformaciones membranales y ( ) ( ) ( )( )1 1 1, ,xx yy xyε ε γ son las
curvaturas.
Una vez conocidos los desplazamientos del plano medio ( )0 0 0, ,u v w , las deformaciones en
cualquier punto ( ), ,x y z de la placa pueden ser calculados empleando las ecuaciones (3.5) y
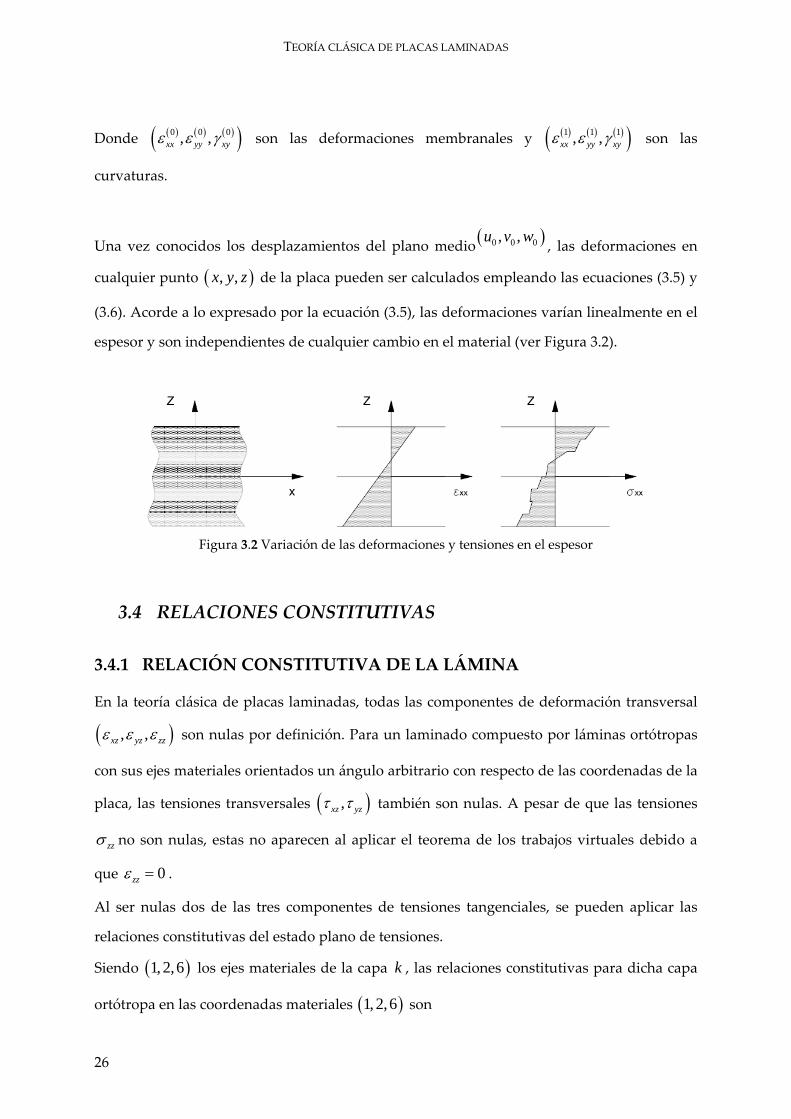
(3.6). Acorde a lo expresado por la ecuación (3.5), las deformaciones varían linealmente en el
espesor y son independientes de cualquier cambio en el material (ver Figura 3.2).
Figura 3.2 Variación de las deformaciones y tensiones en el espesor
3.4 RELACIONES CONSTITUTIVAS
3.4.1 RELACIÓN CONSTITUTIVA DE LA LÁMINA
En la teoría clásica de placas laminadas, todas las componentes de deformación transversal
( ), ,xz yz zzε ε ε son nulas por definición. Para un laminado compuesto por láminas ortótropas
con sus ejes materiales orientados un ángulo arbitrario con respecto de las coordenadas de la
placa, las tensiones transversales ( ),xz yzτ τ también son nulas. A pesar de que las tensiones
zzσ no son nulas, estas no aparecen al aplicar el teorema de los trabajos virtuales debido a
que 0zzε = .
Al ser nulas dos de las tres componentes de tensiones tangenciales, se pueden aplicar las
relaciones constitutivas del estado plano de tensiones.
Siendo ( )1, 2,6 los ejes materiales de la capa k , las relaciones constitutivas para dicha capa
ortótropa en las coordenadas materiales ( )1, 2,6 son
TEORÍA CLÁSICA DE PLACAS LAMINADAS
27
( )1 111 12
2 12 22 2
666 6
00
0 0
kQ QQ Q
Q
σ ε
σ ε
σ ε
⎧ ⎫ ⎧ ⎫⎡ ⎤⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥=⎨ ⎬ ⎨ ⎬⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎣ ⎦⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
(3.7)
Donde los coeficientes ( )kijQ se expresan en función de las constantes elásticas de la capa k
de la siguiente manera:
1 12 2 21 1 211 12 22 66 12
12 21 12 21 12 21 12 21
, , ,1 1 1 1
E E E EQ Q Q Q Gν νν ν ν ν ν ν ν ν
= = = = =− − − −
(3.8)
Como el laminado está compuesto de varias capas donde los ejes materiales ( )1, 2,6 de cada
una pueden estar orientados arbitrariamente con respecto a las coordenadas del laminado
( ), ,x y z , las relaciones constitutivas de cada capa deben ser transformadas a las coordenadas
del laminado ( ), ,x y z .
( )11 12 16
12 22 26
16 26 66
kxx xx
yy yy
xy xy
Q Q Q
Q Q Q
Q Q Q
σ ε
σ ε
σ γ
⎧ ⎫ ⎧ ⎫⎡ ⎤⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪= ⎢ ⎥⎨ ⎬ ⎨ ⎬⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎣ ⎦⎩ ⎭ ⎩ ⎭
(3.9)
Donde ( )k
ijQ son las rigideces reducidas para una lamina rotada un ángulo θ arbitrario entre
los ejes materiales ( )1, 2,3 y los ejes del problema ( ), ,x y z .
[ ] [ ] [ ]1 TQ T Q T− −⎡ ⎤ = ⋅ ⋅⎣ ⎦ (3.10)
Siendo [ ]T la matriz de transformación definida como

TEORÍA CLÁSICA DE PLACAS LAMINADAS
28
[ ]2 2
2 2
2 2
cos sen 2sen cossen cos 2sen cos
sen cos sen cos cos senT
θ θ θ θθ θ θ θ
θ θ θ θ θ θ
⎡ ⎤⎢ ⎥= −⎢ ⎥⎢ ⎥− −⎣ ⎦
(3.11)
3.4.2 RELACIÓN CONSTITUTIVA DEL LAMINADO
Las hipótesis cinemáticas planteadas en la ecuación (3.1) determinan, como puede verse en
las ecuaciones (3.3) y (3.5), que el campo de deformaciones es lineal y continuo en el espesor.
A pesar de que las deformaciones son continuas en el espesor, las tensiones no lo son debido
al cambio de las propiedades elásticas de cada lámina. Por ello, al integrar las tensiones en el
espesor se deben sumar las integrales parciales de cada lámina de:
( ) ( ) ( )
( ) ( )
( ) ( )
0 1
11 12 160 1
12 22 261 11 1
0 116 26 66
kxx xxxx xx
N Nk k
yy yy yy yyk kk k
xy xy xy xy
zN Q Q Q
N dz Q Q Q z dz
Q Q QN z
ε εσ
σ ε ε
σ γ γ
− −= =
⎧ ⎫+⎧ ⎫ ⎧ ⎫ ⎡ ⎤ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪= = +⎢ ⎥⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎣ ⎦ +⎩ ⎭ ⎩ ⎭ ⎩ ⎭
∑ ∑∫ ∫ (3.12)
( ) ( ) ( )
( ) ( )
( ) ( )
0 1
11 12 160 1
12 22 261 11 1
0 116 26 66
kxx xxxx xx
N Nk k
yy yy yy yyk kk k
xy xy xy xy
zM Q Q Q
M z dz Q Q Q z z dz
Q Q QM z
ε εσ
σ ε ε
σ γ γ
− −= =
⎧ ⎫+⎧ ⎫ ⎧ ⎫ ⎡ ⎤ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪= = +⎢ ⎥⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎣ ⎦ +⎩ ⎭ ⎩ ⎭ ⎩ ⎭
∑ ∑∫ ∫ (3.13)
Reemplazando las resultantes de las integrales,
( )
( )
( )
( )
( )
( )
0 1
11 12 16 11 12 160 1
12 22 26 12 22 26
16 26 66 16 26 660 1
xx xxxx
yy yy yy
xy xy xy
N A A A B B BN A A A B B B
A A A B B BN
ε ε
ε ε
γ γ
⎧ ⎫ ⎧ ⎫⎧ ⎫⎪ ⎪ ⎪ ⎪⎡ ⎤ ⎡ ⎤⎪ ⎪
⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎢ ⎥= +⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩ ⎭
(3.14)

TEORÍA CLÁSICA DE PLACAS LAMINADAS
29
( )
( )
( )
( )
( )
( )
0 1
11 12 16 11 12 160 1
12 22 26 12 22 26
16 26 66 16 26 660 1
xx xxxx
yy yy yy
xy xy xy
M B B B D D DM B B B D D D
B B B D D DM
ε ε
ε ε
γ γ
⎧ ⎫ ⎧ ⎫⎧ ⎫⎪ ⎪ ⎪ ⎪⎡ ⎤ ⎡ ⎤⎪ ⎪
⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎢ ⎥= +⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩ ⎭
(3.15)
donde los términos ijA se conocen como rigideces extensionales, ijD rigideces flexionales y ijB
son los coeficientes de acople entre extensión y flexión, los que se definen en términos de las
rigideces reducidas de cada lámina ( )k
ijQ de la siguiente manera:
( ) ( ) ( ) ( )12 22
12
, , 1, , 1, ,k
k
h N z khij ij ij ijij z
k
A B D Q z z dz Q z z dz+
−=
= =∑∫ ∫ (3.16)
( ) ( ) ( ) ( ) ( ) ( )2 2 3 3
1 1 11 1 1
1 1, ,2 3
N N Nk k k
ij k k ij k k ij k kij ij ijk k k
A Q z z B Q z z D Q z z+ + += = =
= − = − = −∑ ∑ ∑ (3.17)
Las ecuaciones (3.14) y (3.15) pueden escribirse en forma compacta de la siguiente manera
{ }
{ }[ ] [ ][ ] [ ]
{ }
{ }
0
1
N A BB DM
ε
ε
⎧ ⎫⎧ ⎫ ⎡ ⎤⎪ ⎪ ⎪ ⎪=⎨ ⎬ ⎨ ⎬⎢ ⎥⎣ ⎦⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
(3.18)
3.5 ECUACIONES DE EQUILIBRIO
El principio de los trabajos virtuales indica que
0 U Vδ δ= − (3.19)
donde la energía potencial elástica Uδ se expresa como
U dxdydzδ σ δε= ⋅∫∫∫ (3.20)

TEORÍA CLÁSICA DE PLACAS LAMINADAS
30
Reemplazando σ δε⋅ por los términos donde la deformación virtual no es nula (ver ecuación
(3.3)) llegamos a
( ) ( )( ) ( ) ( )( ) ( ) ( )( )
2
2
0 1 0 1 0 12
2
2h
h xx xx yy yy xy xy
h
h xx xx xx yy yy yy xy xy xy
U dz dxdy
z z z dz dxdy
δ σ δε σ δε σ δε
σ δε δε σ δε δε σ δγ δγ
0
0
Ω −
Ω −
⎧ ⎫⎡ ⎤= + +⎨ ⎬⎣ ⎦
⎩ ⎭⎧ ⎫⎡ ⎤= + + + + +⎨ ⎬⎣ ⎦⎩ ⎭
∫ ∫
∫ ∫(3.21)
y el trabajo de las fuerzas exteriores Vδ
20 0
2
0
0 020 0 0
2
h
nn ns nrh n s
h
nn ns nrh n s
V q w dxdy u u w dz ds
q w dxdy
w wu z u z w dz dsn s
σ
σ
δ δ σ δ σ δ σ δ
δ
δ δσ δ σ δ σ δ
0
0
Ω −Γ
Ω
−Γ
⎧ ⎫⎡ ⎤= + + +⎨ ⎬⎣ ⎦⎩ ⎭
= +
⎧ ⎫⎡ ∂ ∂ ⎤⎛ ⎞ ⎛ ⎞− + − +⎨ ⎬⎜ ⎟ ⎜ ⎟⎢ ⎥∂ ∂⎝ ⎠ ⎝ ⎠⎣ ⎦⎩ ⎭
∫ ∫ ∫
∫
∫ ∫
(3.22)
donde q es la carga distribuida, ( ), ,nn ns nrσ σ σ son las tensiones ortogonales en la porción
σΓ del borde Γ y ( ),n su uδ δ son los desplazamientos virtuales en las direcciones normal y
tangencial, respectivamente, al borde Γ . (Figura 3.3).
Figura 3.3 Geometría de la placa con borde curvo

TEORÍA CLÁSICA DE PLACAS LAMINADAS
31
Figura 3.4 Resultantes de fuerzas y momentos en un elemento de placa
Reemplazando (3.21) y (3.22) en (3.19) e integrando en el espesor, obtenemos
( ) ( ) ( ) ( ){( ) ( ) }
0 1 0 1
0 10
0 00 0 0
0 xx xx xx xx yy yy yy yy
xy xy xy xy
nn nsnn nsn s n
N M N M
N M q w dxdy
w wN u M N u M Q w dsn s
σ
δε δε δε δε
δγ δγ δ
δ δδ δ δ
0Ω
Γ
= + + + +
+ − −
∂ ∂⎡ ⎤− + − +⎢ ⎥∂ ∂⎣ ⎦
∫
∫
(3.23)
donde
2
2
2
2
2
2
2
2
2
2
( , , ) ( , , )
( , , ) ( , , )
( , ) ( , )
( , ) ( , )
h
hxx yy xy x y xy
h
hxx yy xy x y xy
h
nn ns nn nsh
h
nn ns nn nsh
h
nrhn
N N N dz
M M M z dz
N N dz
M M z dz
Q d z
σ σ σ
σ σ σ
σ σ
σ σ
σ
−
−
−
−
−
=
=
=
=
=
∫
∫
∫
∫
∫
(3.24)
Empleando las relaciones cinemáticas (3.6), se expresan las variaciones de las deformaciones
en función de los desplazamientos en la ecuación (3.23). Además, integrando por partes para
que los desplazamientos virtuales ( )0 0 0, ,u v wδ δ δ no aparezcan derivados en 0Ω ,
obtenemos

TEORÍA CLÁSICA DE PLACAS LAMINADAS
32
{}
, 0 , 0 , 0 , 0 , 0 , 0
, 0 0
0 00 , 0 0
0 0, 0 , 0 , 0
0
2
xx x xx xx yy y yy yy xy y xy x
xy xy
xx x xx x xx x x yy y yy y
yy y y xy x xy x y xy y xy y x
x
N u M w N v M w N u N v
M w q w dxdy
w wN n u M n M n w N n v M nx y
w wM n w M n M n w M n M n wy x
N
δ δ δ δ δ δ
δ δ
δ δδ δ δ
δ δδ δ δ
0Ω
Γ
= − − − − − −
− − +
⎡ ∂ ∂+ + + + +⎢ ∂ ∂⎣
∂ ∂− + − + +
∂ ∂
∫
∫
0 0
0 00 0 0
y y xy x
nn nsnn nsn s n
n u N n v ds
w wN u M N u M Q w dsn s
σ
δ δ
δ δδ δ δΓ
⎤+ ⎦∂ ∂⎡ ⎤− − + − +⎢ ⎥∂ ∂⎣ ⎦∫
(3.25)
donde una coma seguida por un subíndice indica diferenciación con respecto a dicho
subíndice ( ) ( ),x x
∂=
∂.
Agrupando los coeficientes de cada uno de los desplazamientos virtuales ( )0 0 0, ,u v wδ δ δ ,
obtenemos
( ){( )( ) }
( ){( )( )
( ) ( )
, , 0
, , 0
, , , 0
0
0
, , , , 0
0 0
00 0
0
2
xx x xy y
xy x yy y
xx xx xy xy yy yy
xx x xy y
xy x yy y
xx x x yy y y xy x y xy y x
xx x xy y xy x yy y
nnnn nsn s
N N u
N N v
M M M q w dxdy
N n N n u
N n N n v
M n M n M n M n w
w wM n M n M n M n dsx y
wN u N u Mn
δ
δ
δ
δ
δ
δ
δδ δ
0Ω
Γ
= − +
− +
− + + +
+ +
+ +
+ + + +
⎫∂ ∂− + − + ⎬∂ ∂ ⎭
∂− + − −
∂
∫
∫
00ns n
wM Q w dss
σ
δ δΓ
∂⎡ ⎤+⎢ ⎥∂⎣ ⎦∫
(3.26)
Las ecuaciones de Euler‐Lagrange de la teoría se obtienen haciendo 0 0 0,u v y wδ δ δ nulos, ya
que la ecuación (3.26) tiene que ser válida para toda variación.

TEORÍA CLÁSICA DE PLACAS LAMINADAS
33
0
0
2 22
0 2 2
0 : 0
0 : 0
0 : 2 0
xyxx
xy yy
xy yyxx
NNux y
N Nv
x yM MMw q
x x y y
δ
δ
δ
∂∂= + =
∂ ∂∂ ∂
= + =∂ ∂
∂ ∂∂= + + + =
∂ ∂ ∂ ∂
(3.27)
A continuación obtenemos las condiciones de borde de la teoría de la ecuación (3.26). Para
poder agrupar los coeficientes de los desplazamientos virtuales y sus derivadas en el borde,
debemos expresar ( )0 0,u vδ δ en términos de ( )0 0,n su uδ δ . Si el versor n forma un ángulo θ
con el eje x , entonces sus cosenos directores son cosxn θ= y senyn θ= .
Entonces, los desplazamientos ( )0 0,n su uδ δ están relacionados con ( )0 0,u vδ δ por
0 0 0 0 0 0,x n y s y n x su n u n u v n u n u= − = − (3.28)
De la misma manera, las derivadas normales y tangenciales ( )0, 0,,n sw w están relacionadas
con las derivadas ( )0, 0,,x yw w por
0 0 0 0 0 0,x y y xw w w w w wn n n nx n s y n s
∂ ∂ ∂ ∂ ∂ ∂= − = −
∂ ∂ ∂ ∂ ∂ ∂ (3.29)
Ahora se pueden reescribir las expresiones de los bordes en términos de ( )0 0,n su uδ δ y
( )0, 0,,n sw w .
( ) ( )( )( ) ( )( )( ) ( ) ( )
0 0
0 0 0 0
2 2 2 20 02
xx x xy y xy x yy y
xx x xy y x n y s xy x yy y y n x s
xx x xy x y yy y n yy xx x y xy x y s
N n N n u N n N n v
N n N n n u n u N n N n n u n u
N n N n n N n u N N n n N n n u
δ δ
δ δ δ δ
δ δ
+ + +
= + − + + −
⎡ ⎤= + + + − + −⎣ ⎦
(3.30)

TEORÍA CLÁSICA DE PLACAS LAMINADAS
34
Los coeficientes encerrados entre paréntesis que multiplican a 0nuδ y 0suδ en (3.30), son nnN
y nsN respectivamente. Esto se desprende del hecho que las tensiones ( ),nn nsσ σ están
relacionadas a ( ), ,xx yy xyσ σ σ por la siguiente transformación:
2 2
2 2
2xx
nn x y x yyy
x y x y x yns
xy
n n n nn n n n n n
σσ
σσ
σ
⎧ ⎫⎪ ⎪⎧ ⎫ ⎡ ⎤⎪ ⎪ ⎪ ⎪= ⎢ ⎥⎨ ⎬ ⎨ ⎬− −⎢ ⎥⎪ ⎪ ⎪ ⎪⎣ ⎦⎩ ⎭⎪ ⎪⎩ ⎭
(3.31)
Por lo tanto
2 2
2 2
2 2
2 2
2
2
xx
nn x y x yyy
x y x y x yns
xy
xx
nn x y x yyy
x y x y x yns
xy
NN n n n n
Nn n n n n nN
N
MM n n n n
Mn n n n n nM
M
⎧ ⎫⎪ ⎪⎧ ⎫ ⎡ ⎤⎪ ⎪ ⎪ ⎪= ⎢ ⎥⎨ ⎬ ⎨ ⎬− −⎢ ⎥⎪ ⎪ ⎪ ⎪⎣ ⎦⎩ ⎭⎪ ⎪⎩ ⎭
⎧ ⎫⎪ ⎪⎧ ⎫ ⎡ ⎤⎪ ⎪ ⎪ ⎪= ⎢ ⎥⎨ ⎬ ⎨ ⎬− −⎢ ⎥⎪ ⎪ ⎪ ⎪⎣ ⎦⎩ ⎭⎪ ⎪⎩ ⎭
(3.32)
Teniendo en cuenta estas relaciones, las integrales de borde de la ecuación (3.26) pueden ser
escritas como
( ) ( )
( )
( ) ( )
0 0
, , , , 0
0 0
0 nn nsnn n ns s
xx x x yy y y xy x y xy y x n
nn nsnn ns
N N u N N u
M n M n M n M n Q w
w wM M M M dsn s
σ
δ δ
δ
δ δ
Γ
⎡= − + −⎣
+ + + + −
∂ ∂ ⎤− − − − ⎥∂ ∂ ⎦
∫
(3.33)
Las condiciones de borde naturales están dadas por

TEORÍA CLÁSICA DE PLACAS LAMINADAS
35
0, 0, 0
0, 0
nn nsnn ns n n
nn nsnn ns
N N N N Q Q
M M M M
− = − = − =
− = − = (3.34)
en σΓ , donde
( ) ( ), , , ,n xx x xy y x yy y xy x yQ M M n M M n≡ + + + (3.35)
Por lo que las variables primarias (desplazamientos generalizados) y las variables
secundarias (fuerzas generalizadas) de la teoría son
0 0
0variables primarias , , , ,
variables secundarias , , , ,
n s
nn ns n nn ns
w wu u wn s
N N Q M M
∂ ∂∂ ∂ (3.36)
Las ecuaciones (3.27) presentan un orden de diferenciación total igual a ocho. Si se
reemplazan las resultantes de tensión en función de los desplazamientos, los
desplazamientos en el plano ( )0 0,u v aparecerían sus derivadas segundas mientras que para
los desplazamientos transversales ( )0w , aparecerían sus derivadas cuartas. Esto implica que
deberían existir sólo ocho condiciones de borde, mientras que en la ecuación (3.36) aparecen
diez en total. Para eliminar esta inconsistencia, se integra la derivada tangencial por partes
para obtener el término del borde
[ ]00 0
nsns ns
w MM ds w ds M ws s
δ δ δΓΓ Γ
∂ ∂− = −
∂ ∂∫ ∫ (3.37)
El término entre corchetes es nulo, ya que los extremos de una curva cerrada coinciden. Este
término debe ser agregado a nQ , ya que es un coeficiente de 0wδ :
nsn n
MV Qs
∂≡ +
∂ (3.38)

TEORÍA CLÁSICA DE PLACAS LAMINADAS
36
el cual debe ser balanceado por la fuerza aplicada nQ . Esta condición de borde n nV Q= , es
conocida como condición de borde libre de Kirchhoff. Entonces las condiciones de borde de la
teoría clásica de placas laminadas son
0
0
Geometricas Fuerzas(Esenciales) (Naturales)
n nn
n ns
n
nn
u Nv Nw V
w Mn
∂∂
(3.39)
3.6 MODELO DE ELEMENTOS FINITOS
Multiplicando las tres ecuaciones (3.27) por 0 0 0,u v y wδ δ δ , respectivamente, e integrando
por partes en el dominio del elemento se obtiene
0
0
2 22
02 2
0
0
0 2
xyxx
xy yy
xy yyxx
NN u dxdyx y
N Nv dxdy
x y
M MM q w dxdyx x y y
ε
ε
ε
δ
δ
δ
Ω
Ω
Ω
∂⎡ ⎤∂= − −⎢ ⎥∂ ∂⎣ ⎦
∂ ∂⎡ ⎤= − −⎢ ⎥∂ ∂⎣ ⎦
⎡ ⎤∂ ∂∂= − − − −⎢ ⎥
∂ ∂ ∂ ∂⎢ ⎥⎣ ⎦
∫
∫
∫
(3.40)
Las fuerzas y momentos resultantes ( ), ,xx xxN M etc son conocidos en términos de los
desplazamientos ( )0 0 0, ,u v w por medio de la ecuación (3.18). Integrando por partes,

TEORÍA CLÁSICA DE PLACAS LAMINADAS
37
( )
( )
0 00
0 00
2 2 20 0 0
02 2
, , , ,
0
0
0 2
e
e
xx xy xx x xy y
xy yy xy x yy y
xx xy yy
xx x x yy y y xy x y xy y
u uN N dxdy N n N n u dsx y
v vN N dxdy N n N n v dsx y
w w wM M M q w dxdyx x y y
M n M n M n M
ε
ε
ε
δ δ δ
δ δ δ
δ δ δ δ
Ω Γ
Ω Γ
Ω
⎡ ⎤∂ ∂= − − − +⎢ ⎥∂ ∂⎣ ⎦
⎡ ⎤∂ ∂= − − − +⎢ ⎥∂ ∂⎣ ⎦
⎡ ⎤∂ ∂ ∂= − − − −⎢ ⎥∂ ∂ ∂ ∂⎣ ⎦
− + + +
∫ ∫
∫ ∫
∫
( ){
( ) ( )
0
0 0
ex
xx x xy y xy x yy y
n w
w wM n M n M n M n dsx y
δΓ
⎫∂ ∂+ + − + ⎬∂ ∂ ⎭
∫
(3.41)
En los términos correspondientes al contorno εΓ
⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠∫ se observa que 0 0
0 0 0, , , w wu v w yx y
∂ ∂∂ ∂
son
las variables primarias (o desplazamientos generalizados), y
,
,
x xx x xy y y xy x yy y
x xx x xy y y xy x yy y
xy xy yyxxn x y
p N n N n p N n N n
T M n M n T M n M n
M M MMQ n nx y x y
≡ + ≡ +
≡ + ≡ +
∂ ∂ ∂⎛ ⎞ ⎛ ⎞∂≡ + + +⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠
(3.42)
Figura 3.5 Cosenos directores
son los grados de libertad secundarios (o fuerzas generalizadas). Por ende, los elementos
finitos basados en la teoría clásica de placas requieren la continuidad de los desplazamientos
transversales y su derivada normal entre los bordes de los elementos.

TEORÍA CLÁSICA DE PLACAS LAMINADAS
38
3.6.1 INTERPOLACIÓN DEL CAMPO DE DESPLAZAMIENTOS
Las resultantes de fuerzas y momentos contienen derivadas de primer orden de ( )0 0,u v y
derivadas de segundo orden de 0w con respecto a las coordenadas x e y . Además, las
variables primarias 0 00 0 0, , , w wu v w y
x y∂ ∂∂ ∂
deben ser usadas como variables nodales para
asegurar su continuidad entre elementos. Por ello los desplazamientos ( )0 0,u v deben ser
aproximados empleando funciones de interpolación de Lagrange ( )0C , mientas que 0w
debe ser aproximado usando funciones de interpolación de Hermite ( )1C en el dominio del
elemento eΩ .
( ) ( )
( ) ( )
( ) ( )
01
01
01
, ,
, ,
, ,
me ej j
j
me ej j
j
ne ek k
k
u x y u x y
v x y v x y
w x y x y
ψ
ψ
ϕ
=
=
=
≈ ⋅
≈ ⋅
≈ Δ ⋅
∑
∑
∑
(3.43)
donde ( ),e ej ju v son los valores de ( )0 0,u v en el nodo j del elemento de Lagrange, e
kΔ son
los valores de 0w y sus derivadas con respecto a x e y en el nodo k , y ( ),e ej kψ ϕ son las
funciones de interpolación de Lagrange y Hermite, respectivamente.
Reemplazando las aproximaciones del campo de desplazamientos (3.43) y la función de
interpolación i por el desplazamiento virtual ( )0 0 0, , ,i i iu v wδ ψ δ ψ δ ϕ∼ ∼ ∼ en las
ecuaciones (3.41),

TEORÍA CLÁSICA DE PLACAS LAMINADAS
39
( )
( )
( )
11 12 13 1
1 1
21 22 23 2
1 1
31 32 33 3
1 1
0
0
0
m ne e e
ij j ij j ik k ij k
m ne e e
ij j ij j ik k ij k
m ne e e
kj j kj j kl l kj l
K u K v K F
K u K v K F
K u K v K F
= =
= =
= =
= + + Δ −
= + + Δ −
= + + Δ −
∑ ∑
∑ ∑
∑ ∑
(3.44)
donde 1,2, , ; 1, 2, ,i m k n= =… … . Los coeficientes de la matriz de rigidez ij jiK Kαβ βα= están
definidos de la siguiente manera:
( )
( )
1111 16 66
1212 16 26 66
2266 26 22
1311 12 26 16 26 66
2316
2 2
xx xy yx yyij ij ij ij ij
xy xx yy yxij ij ij ij ij
xx xy yx yyij ij ij ij ij
xxx xyy xxy yxx yyy yxyik ik ik ik ik ik ik
xxik ik
K A S A S S A S
K A S A S A S A S
K A S A S S A S
K B R B R B R B R B R B R
K B R
= + + +
= + + +
= + + +
= − − − − − −
= −
( ) ( ) ( )26 66 12 22 26
3311 12 16 26
66 22
1
2
3
2 2
2 2
4
e
e
e
x xyy xxy yxx yyy yxyik ik ik ik ik
xxxx xxyy yyxx xxxy xyxx xyyy yyxykl kl kl kl kl kl kl kl
xyxy yyyykl kl
ei x i
ei y i
ek k n
B R B R B R B R B R
K D T D T T D T T D T T
D T D T
F p ds
F p ds
F q dxdy Q
ψ
ψ
ϕ ϕ
Γ
Γ
Ω
− − − − −
= + + + + + +
+ +
=
=
= +
∫
∫
∫e
e ee k kk x yT T ds
x yϕ ϕ
Γ
⎛ ⎞∂ ∂+ +⎜ ⎟∂ ∂⎝ ⎠
∫ (3.45)

TEORÍA CLÁSICA DE PLACAS LAMINADAS
40
Figura 3.6 Resultantes ,x yp p (izq.) y nQ (der.)
donde
2
2 2
e
e
e
eeji
ij
e ei k
ik
e ek l
kl
S dxdy
R dxdy
T dxdy
ξη
ξηζ
ξηζμ
ψψξ η
ψ ϕξ η ζ
ϕ ϕξ η ζ μ
Ω
Ω
Ω
∂∂=
∂ ∂
∂ ∂=
∂ ∂ ∂
∂ ∂=
∂ ∂ ∂ ∂
∫
∫
∫
(3.46)
y , , yξ η ζ μ pueden ser iguales a x ó y .
Los vectores 1 2,i iF F son los vectores de fuerzas que realizarán trabajo virtual con los
desplazamientos en las direcciones x e y respectivamente. El vector 3kF es el vector de
fuerzas que realizará trabajo virtual con los desplazamientos en la dirección z y los giros con
respecto a los ejes x e y.
En notación matricial, la ecuación (3.44) puede ser expresada como
{ }
{ }
{ }
{ }
{ }
{ }
111 12 13
12 22 23 2
13 23 33 3
e
T e
T Te
u FK K K
K K K v F
K K K F
⎧ ⎫ ⎧ ⎫⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎡ ⎤ ⎡ ⎤ ⎡ ⎤ =⎨ ⎬ ⎨ ⎬⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎢ ⎥⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎪ ⎪ ⎪ ⎪⎢ ⎥ Δ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎩ ⎭ ⎩ ⎭
(3.47)
La ecuación (3.47) es la ecuación constitutiva del laminado en términos de los
desplazamientos.
TEORÍA CLÁSICA DE PLACAS LAMINADAS
41
3.7 IMPLEMENTACIÓN NUMÉRICA
3.7.1 PROBLEMA 1. PLACA CUADRADA CON LAMINADOS
PARTICULARES
Se analizan placas cuadradas de lados a , con cuatro secuencias de laminado distintas
sometidas a cargas uniformemente distribuidas. Se emplean tres mallas distintas para
estudiar la convergencia de la formulación al aumentar la densidad de la malla (refinamiento
H). Las secuencias de laminado estudiadas son:
a) Capa única ortótropa, con la dirección “1” de la lámina orientada a 0º del eje “x” de la
placa [0º].
b) Laminado cruzado (Cross Ply) [0º/90º].
c) Laminado antisimétrico de dos capas (Angle Ply) [‐45º/+45º].
d) Laminado antisimétrico de ocho capas (Angle Ply) [‐45º/+45º]4 a.
Los tres tipos de laminado analizados en este ejemplo (capa única ortótropa, laminado
cruzado y laminado antisimétrico) presentan ciertas propiedades en su secuencia de
laminado que anulan algunos de los coeficientes de acople entre esfuerzos. Al desacoplarse
las ecuaciones, el problema puede ser analizado analíticamente mediante series dobles. Si las
cargas son armónicas la solución tiene una cantidad finita de términos. Para el caso de carga
distribuida las series tienen infinitos términos y sólo se puede obtener una aproximación de
la serie ya que estará truncada.
Las propiedades elásticas del material considerado son las siguientes:
6 6
1 26 6 6
12 13 23
25 10 1 10 0.25
0.5 10 0.5 10 0.2 10
E E
G G G
ν12= ⋅ = ⋅ =
= ⋅ = ⋅ = ⋅
a El subíndice n que sigue a los corchetes indica que dicha expresión se repite n veces. Para este caso
en particular, la secuencia de laminado se puede expandir de la siguiente manera [+45º/‐45º/+45º/‐
45º/+45º/‐45º/+45º/‐45º]. Ver [06].
TEORÍA CLÁSICA DE PLACAS LAMINADAS
42
El espesor de cada capa /nh h n= donde h es el espesor total de la placa y n es el número de
capas.
Para cada una de estas secuencias de laminado se emplearon discretizaciones de 2 2× , 4 4×
y 6 6× . En todos los casos se aprovechó la simetría del problema, modelándose sólo un
cuadrante de la placa. Cabe destacar que las condiciones de simetría no son las mismas para
los laminados a y b que para los antisimétricos (c y d).
Los elementos empleados son rectangulares lineales de Lagrange (cuatro nodos) y se utilizó
una formulación hermítica no conforme para la interpolación de los desplazamientos fuera
del plano ( )0w .
Los resultados se adimensionalizan y se comparan con la solución analíticab de la teoría
CLPT. Cabe destacar que las tensiones se evalúan en el centro de elemento más cercano al
punto que se desea. Por ello, al refinar la malla, la precisión de los resultados aumenta por
estar empleando una malla más densa y aparte porque el centro del elemento donde se
evalúan las tensiones en el modelo de elementos finitos se acerca al punto donde se evalúan
las tensiones de la solución analítica.
Los resultados se presentan adimensionalizados de la siguiente manera:
( ) ( )
32
40
2
0
100
1, , , ,xx yy xy xx yy xy
E hw wq a
ha q
σ σ τ σ σ τ
=
⎛ ⎞= ⎜ ⎟⎝ ⎠
donde E2 es el módulo de elasticidad del material en la dirección ”2”, h es el espesor total de
la placa, a es el lado de la placa alineado con el eje “x” y q0 es la carga uniforme distribuida.
Las tensiones ,xx yyσ σ y el desplazamiento transversal w se analizan en el centro de la placa,
mientras que la tensión xyτ se analiza en el medio de uno de los lados de la placa. Para
calcular las tensiones del modelo de elementos finitos con más precisión, estas se evalúan en
los ( ) ( )1 1N N− × − puntos de Gauss, donde N N× es la cuadratura de Gauss empleada
b Los resultados analíticos de la teoría CLPT se transcriben de [01], Tabla 10.5‐3.

TEORÍA CLÁSICA DE PLACAS LAMINADAS
43
para integrar las rigideces. Estos puntos donde se evalúan las tensiones se conocen como
puntos de Barlow. Para este ejemplo se emplearon 2 x 2 nodos para evaluar las integrales,
por lo que para cada elemento queda un único punto de Barlow, ubicado en el centro del
mismo. Al refinar la malla las tensiones obtenidas a partir del modelo de elementos finitos se
acercan a la solución analítica por dos motivos. El primero motivo es una mejor
representación del dominio analizado al aumentarse la cantidad de elementos empleados
para la discretización y el segundo motivo es que al haber más elementos los puntos de
Barlow se acercan más al punto donde se evalúan las tensiones de la solución analítica.
Las deflexiones se evalúan en ,2 2a a⎛ ⎞
⎜ ⎟⎝ ⎠
(son independientes de la posición en el espesor). Las
tensiones ,x yσ σ se evalúan en , ,2 2 2a a h⎛ ⎞
⎜ ⎟⎝ ⎠
, xyτ en , ,2ha a⎛ ⎞−⎜ ⎟
⎝ ⎠.
Los resultados obtenidos para los doce modelos de elementos finitos se resumen en la Tabla
3.1.
Tipo de Placa
2x2 4x4 6x6 Sol.
Analítica CLPT
w 0,7082 0,6635 0,6558 0,6497
xσ 0,7148 0,7709 0,7798 0,7866
yσ 0,0296 0,0253 0,0248 0,0244
Ortótropa (0
º)
xyσ 0,0337 0,0421 0,0442 0,0463
w 1,7938 1,7203 1,7065 1,6955
xσ 0,1108 0,1230 0,1251 0,1268
yσ 0,9448 1,0443 1,0622 1,0761
Cross‐Ply
[0º/9
0º]
xyσ 0,0751 0,0871 0,0902 0,0933
w 1,0527 1,0342 1,0312 1,028
xσ = yσ 0,2621 0,3249 0,3362 0,3504
Ang
le‐Ply
[‐45º/45º]
xyσ 0,3944 0,4302 0,4391 0,4421
w 0,4045 0,3905 0,3879 0,3858
xσ = yσ 0,1506 0,1879 0,1947 0,2006
Ang
le‐Ply
[‐45º/45º] 4
xyσ 0,2499 0,2614 0,2634 0,2637
Tabla 3.1 Deflexiones y tensiones máximas adimensionalizadas (CLPT)
TEORÍA CLÁSICA DE PLACAS LAMINADAS
44
Se observa una buena convergencia de los resultados al refinar la malla. Como es de esperar
en un modelo de elementos finitos en que sólo se plantean incógnitas cinemáticas, los
resultados de magnitudes cinemáticas (en este caso 0w ) son más precisos que los de
magnitudes estáticas (en este caso las tensiones , ,x y xyσ σ τ ). Esto se debe a que para obtener
las tensiones se debe derivar el campo de desplazamientos interpolado.
La convergencia más lenta de las tensiones para el laminado antisimétrico de dos capas [‐
45º/+45º] que para el de ocho capas [‐45º/+45º]4, se debe al mayor acople entre flexiones y
estiramientos para el primero de los casos.
A continuación se presentan los gráficos de las tensiones ,x y xyyσ σ τ para los cuatro
laminados estudiados.

TEORÍA CLÁSICA DE PLACAS LAMINADAS
45
sx (a/2,a/2,zº)
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
-1.5 -1 -0.5 0 0.5 1 1.5
zº
[0º][0º/90º][-45º/+45º][-45º/+45º]4
Figura 3.7 Tensión adimensionalizada ( )x zσ para las distintas secuencias de laminado
sy (a/2,a/2,zº)
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
-1.5 -1 -0.5 0 0.5 1 1.5
zº
[0º][0º/90º][-45º/+45º][-45º/+45º]4
Figura 3.8 Tensión adimensionalizada ( )y zσ para las distintas secuencias de laminado
TEORÍA CLÁSICA DE PLACAS LAMINADAS
46
txy (a,a,zº)
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
-0.6 -0.4 -0.2 0 0.2 0.4 0.6
zº
[0º][0º/90º][-45º/+45º][-45º/+45º]4
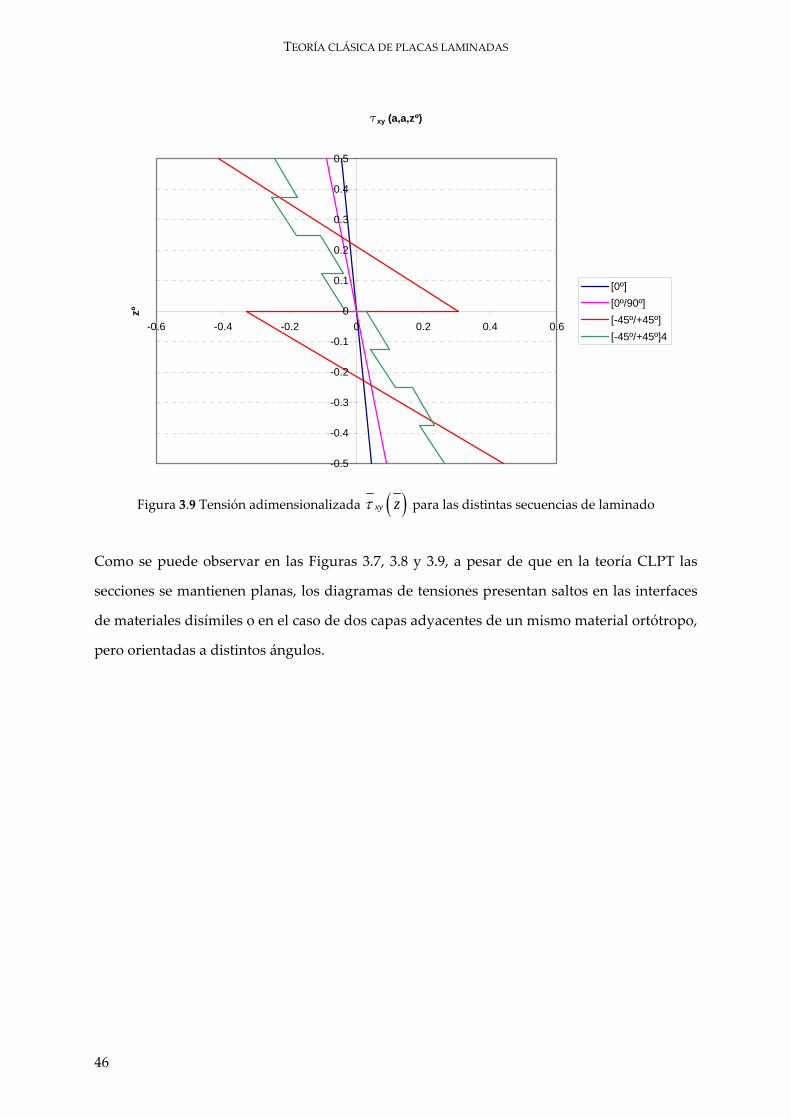
Figura 3.9 Tensión adimensionalizada ( )xy zτ para las distintas secuencias de laminado
Como se puede observar en las Figuras 3.7, 3.8 y 3.9, a pesar de que en la teoría CLPT las
secciones se mantienen planas, los diagramas de tensiones presentan saltos en las interfaces
de materiales disímiles o en el caso de dos capas adyacentes de un mismo material ortótropo,
pero orientadas a distintos ángulos.
TEORÍA CLÁSICA DE PLACAS LAMINADAS
47
3.7.2 PROBLEMA 2. PLACA CUADRADA CON LAMINADO
ARBITRARIO
Aquí se comparan los resultados para un laminado arbitrario (donde la resolución analítica
por series no es posible, ya que ninguno de los coeficientes de acople se anulan) obtenidos a
partir de la implementación del elemento CLPT con los resultados obtenidos empleando el
software comercial de elementos finitos ABAQUS/CAE Student Edition 6.7‐2.
La secuencia de laminado analizado es [0°/+45°/‐45°/90°]. Cada capa tiene un espesor de 0.25
mm, siendo el espesor total 1 mm. La placa es cuadrada (0.24 m x 0.24 m), simplemente
apoyada en sus cuatro bordes y la carga es distribuida uniformemente (1000 Pa).
Las propiedades elásticas del material considerado son las siguientes:
1 2
12 13 23
100 10 0.254 4 2
E GPa E GPaG GPa G GPa G GPa
ν12= ⋅ = ⋅ == ⋅ = ⋅ = ⋅
A pesar de que la geometría y la carga presentan simetría, en este caso no se puede modelar
sólo un cuadrante de la placa debido a que el laminado no es ni ortótropo, ni antisimétrico.
Cabe destacar que en ambos casos se empleó la misma malla (6x6) y que el elemento
empleado en ABAQUS es el “S4R” [09].
A continuación se presentan los resultados obtenidos empleando el programa de elementos
finitos ABAQUS y luego se procederá a comparar los resultados con los obtenidos con el
elemento CLPT implementado en este trabajo.
TEORÍA CLÁSICA DE PLACAS LAMINADAS
48
Figura 3.10 Malla empleada en ABAQUS
Figura 3.11 Secuencia de laminado
TEORÍA CLÁSICA DE PLACAS LAMINADAS
49
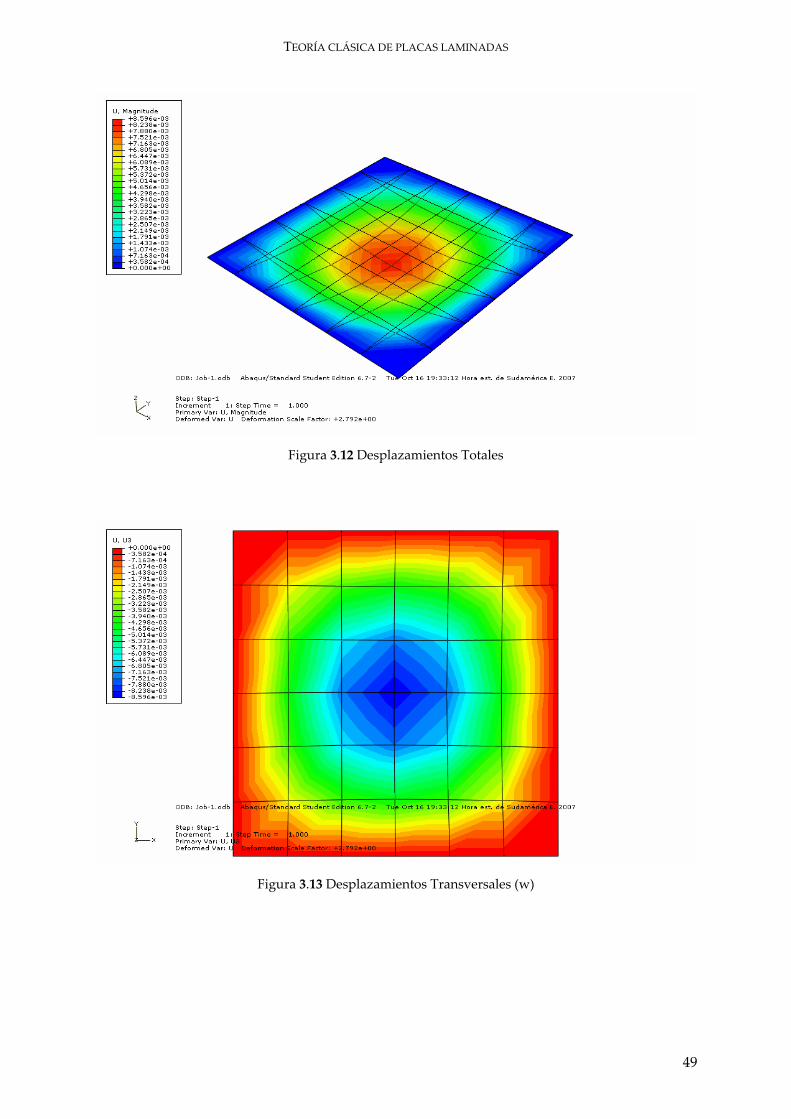
Figura 3.12 Desplazamientos Totales
Figura 3.13 Desplazamientos Transversales (w)

TEORÍA CLÁSICA DE PLACAS LAMINADAS
50
Figura 3.14 Desplazamientos en el eje x (u)
Figura 3.15 Desplazamientos en el eje y (v)
En las Figuras 3.12 a 3.15 puede observarse que los desplazamientos no son simétricos. Por
ello, si se hubiese analizado sólo un cuadrante de la placa empleando condiciones de
simetría, se hubiese llegado a resultados erróneos.
TEORÍA CLÁSICA DE PLACAS LAMINADAS
51
Esta es una clara diferencia con los materiales isótropos, ya que a pesar de que la geometría
de la placa, las condiciones de borde y las cargas son simétricas, el campo de
desplazamientos no lo es.
A continuación se compararán los resultados obtenidos empleando el software comercial
ABAQUS con los obtenidos a partir del elemento CLPT implementado en este trabajo.
w K76 ABAQUS Ratio
(a/2,a/2,0) 0.00862 0.00860 100.3% (a/3,a/3,0) 0.00657 0.00652 100.8% (a/6,a/6,0) 0.00229 0.00225 102.0%
Tabla 3.2 Deflexiones
Como puede observarse en la Tabla 3.2 la diferencia en el cálculo de la deflexión máxima de
la placa es tan sólo 0.3%.

4 TEORÍA MULTICAPA
En este capítulo se presenta la teoría multicapa (layerwise) desarrollada por Reddy en [01],
[02] y [03]. El elemento implementado es el propuesto por Barbero en [04].
Se considera una placa laminada compuesta por N láminas de uno o más materiales
ortótropos, donde cada una está orientada un ángulo arbitrario con respecto a las
coordenadas de la placa. Las coordenadas de la placa se consideran en el plano medio del
laminado.
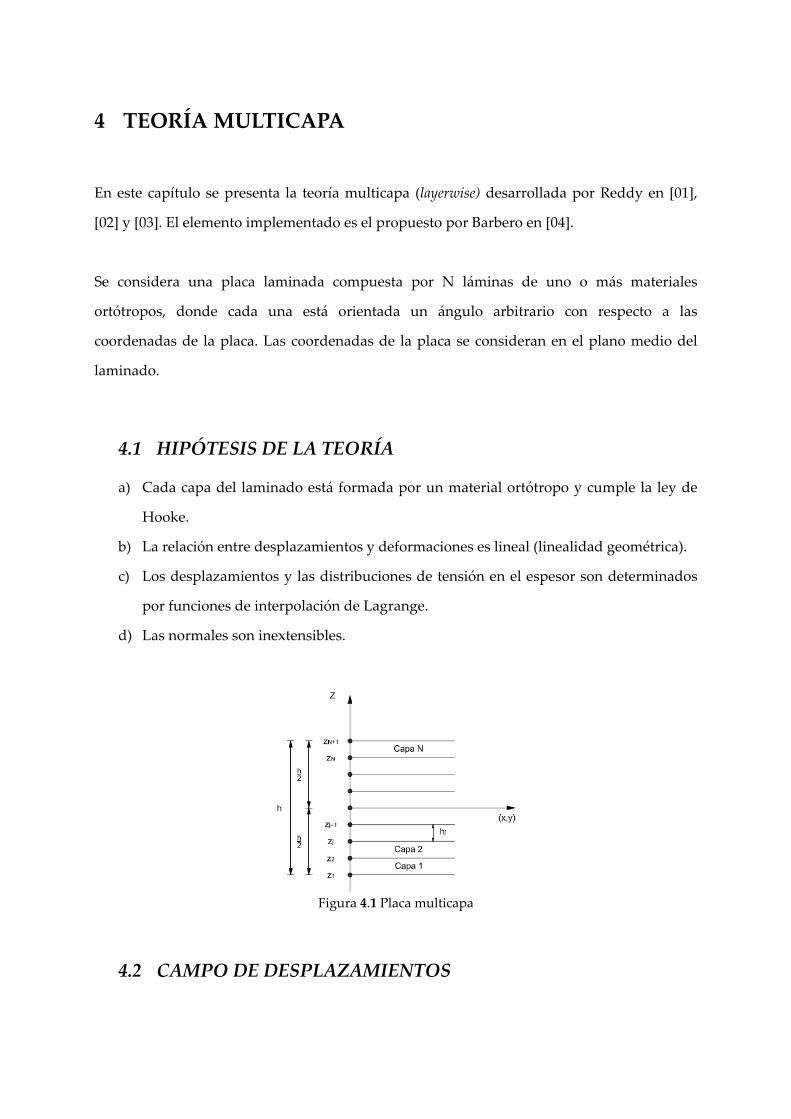
4.1 HIPÓTESIS DE LA TEORÍA
a) Cada capa del laminado está formada por un material ortótropo y cumple la ley de
Hooke.
b) La relación entre desplazamientos y deformaciones es lineal (linealidad geométrica).
c) Los desplazamientos y las distribuciones de tensión en el espesor son determinados
por funciones de interpolación de Lagrange.
d) Las normales son inextensibles.
Figura 4.1 Placa multicapa
4.2 CAMPO DE DESPLAZAMIENTOS

TEORÍA MULTICAPA
54
1
2
3
( , , ) ( , ) ( , , )( , , ) ( , ) ( , , )( , , ) ( , )
u x y z u x y U x y zu x y z v x y V x y zu x y z w x y
= += +=
(4.1)
Donde ( ), ,u v w son los desplazamientos del plano de referencia ( ), ,0x y , U y V son
funciones que se anulan en el plano de referencia:
( , ,0) ( , ,0) 0U x y V x y= = (4.2)
Discretización de los desplazamientos en el espesor
( ) ( ) ( )
( ) ( ) ( )
1
1
, , ,
, , ,
nj j
j
nj j
j
U x y z u x y z
V x y z v x y z
φ
φ
=
=
= ⋅
= ⋅
∑
∑ (4.3)
Donde jφ son las funciones globales de interpolación en el espesor para cada capa y ju y jv
son los valores en los nodos de U y V a través del espesor del laminado.
Si se emplean funciones lineales de interpolación en cada capa, el espesor de la placa queda
discretizado en 1n N= + nodos, siendo N el número de capas. Cabe destacar que el número
de capas del modelo de elementos finitos puede ser mayor, igual o menor al número de
capas materiales que presenta el laminado.
Las funciones globales de interpolación lineal en el espesor están definidas por:
( )
( ) ( )( )
( ) ( )
12 1
1 1
1, 2, ,
kk k
k
kk k
z z z z
z k N
z z z z
φ
−−
+
⎧Ψ ≤ ≤⎪⎪= =⎨⎪Ψ ≤ ≤⎪⎩
… (4.4)
TEORÍA MULTICAPA
55
Donde ( ) ( )1,2ki iΨ = es la función de interpolación de Lagrange local (en el espesor), asociada
al nodo i de la capa k .
Empleando funciones de interpolación lineal:
( ) ( )
( ) ( )
1
2
sup
1k
k
k
k
kerior
zzh
zzh
z z z
Ψ = −
Ψ =
= −
(4.5)
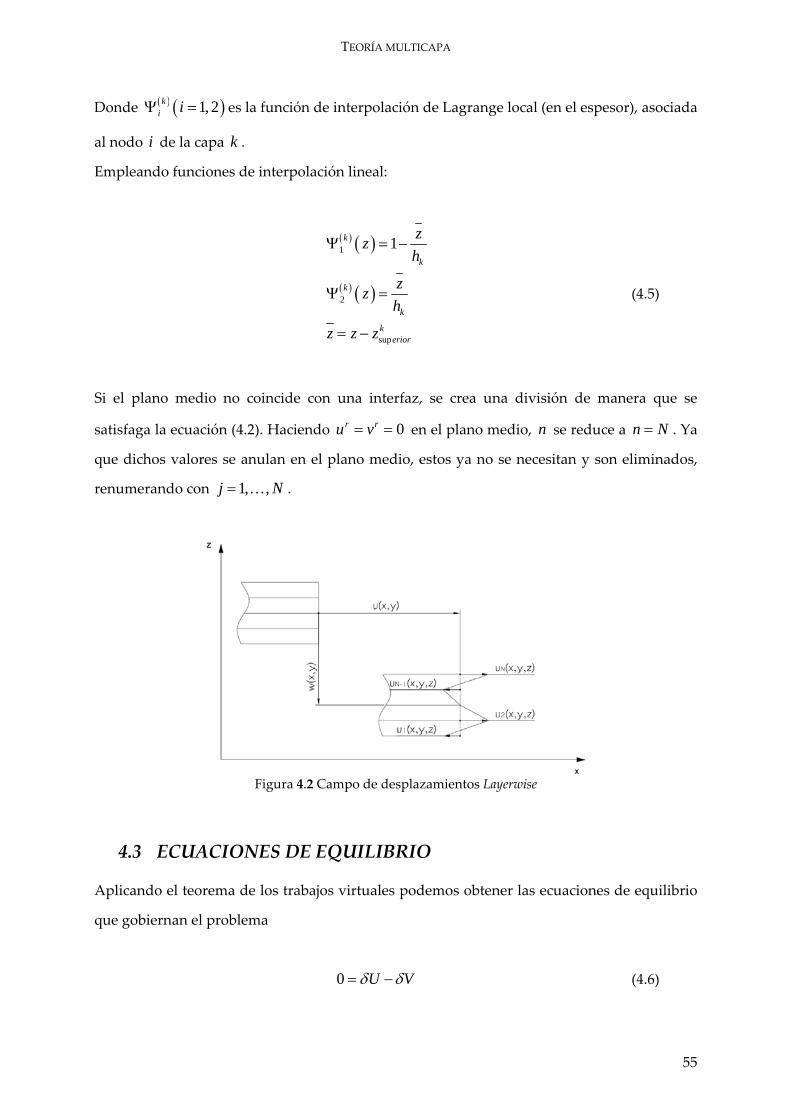
Si el plano medio no coincide con una interfaz, se crea una división de manera que se
satisfaga la ecuación (4.2). Haciendo 0r ru v= = en el plano medio, n se reduce a n N= . Ya
que dichos valores se anulan en el plano medio, estos ya no se necesitan y son eliminados,
renumerando con 1, ,j N= … .
Figura 4.2 Campo de desplazamientos Layerwise
4.3 ECUACIONES DE EQUILIBRIO
Aplicando el teorema de los trabajos virtuales podemos obtener las ecuaciones de equilibrio
que gobiernan el problema
0 U Vδ δ= − (4.6)
TEORÍA MULTICAPA
56
donde la energía potencial elástica Uδ y el trabajo de las fuerzas exteriores Vδ están
expresados por
2
2
1
h
h xx xx yy yy xy xy xz xz yz yz
x y xy x y
j j j jNCj j j j j j j
x y xy x yj
U dz dxdy
u v u v w wN N N Q Qx y y x x y
u v u vN N N Q u Q vx y y x
δ σ δε σ δε σ δγ σ δγ σ δγ
δ δ δ δ δ δ
δ δ δ δ δ δ
0
0
Ω −
Ω
=
⎧ ⎫⎪ ⎪⎡ ⎤= + + + +⎨ ⎬⎣ ⎦⎪ ⎪⎩ ⎭⎧ ⎛ ⎞∂ ∂ ∂ ∂ ∂ ∂
= + + + + +⎨ ⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠⎩
⎡ ⎤⎛ ⎞∂ ∂ ∂ ∂+ + + + + +⎢ ⎥⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠⎣ ⎦
∫ ∫
∫
∑ dxdy⎫⎪⎬⎪⎭
(4.7)
2
2
1
h
nn ns nrh n s
NCj j
nn nsn s nj
V q wdxdy u u w dz ds
q wdxdy N u N u Q w ds
δ δ σ δ σ δ σ δ
δ δ δ δ
0
0
Ω Γ −
Ω Γ=
⎧ ⎫⎡ ⎤= + + +⎨ ⎬⎣ ⎦⎩ ⎭⎧ ⎫⎡ ⎤= + + +⎨ ⎬⎣ ⎦⎩ ⎭
∫ ∫ ∫
∑∫ ∫ (4.8)
( )
( )
2
2
2
2
2
2
2
2
( , , , , ) ( , , , , )
( , , ) ( , , )
( , ) ( , )
( , , ) ( , , )
h
hx y xy x y x y xy xz yz
hj j j j
hx y xy x y xy
h jj j
hx y xz yz
h
nn ns nn ns nrhn
N N N Q Q dz
N N N z dz
dQ Q z dzdz
N N Q dz
σ σ σ σ σ
σ σ σ φ
φσ σ
σ σ σ
−
−
−
−
=
=
=
=
∫
∫
∫
∫
(4.9)
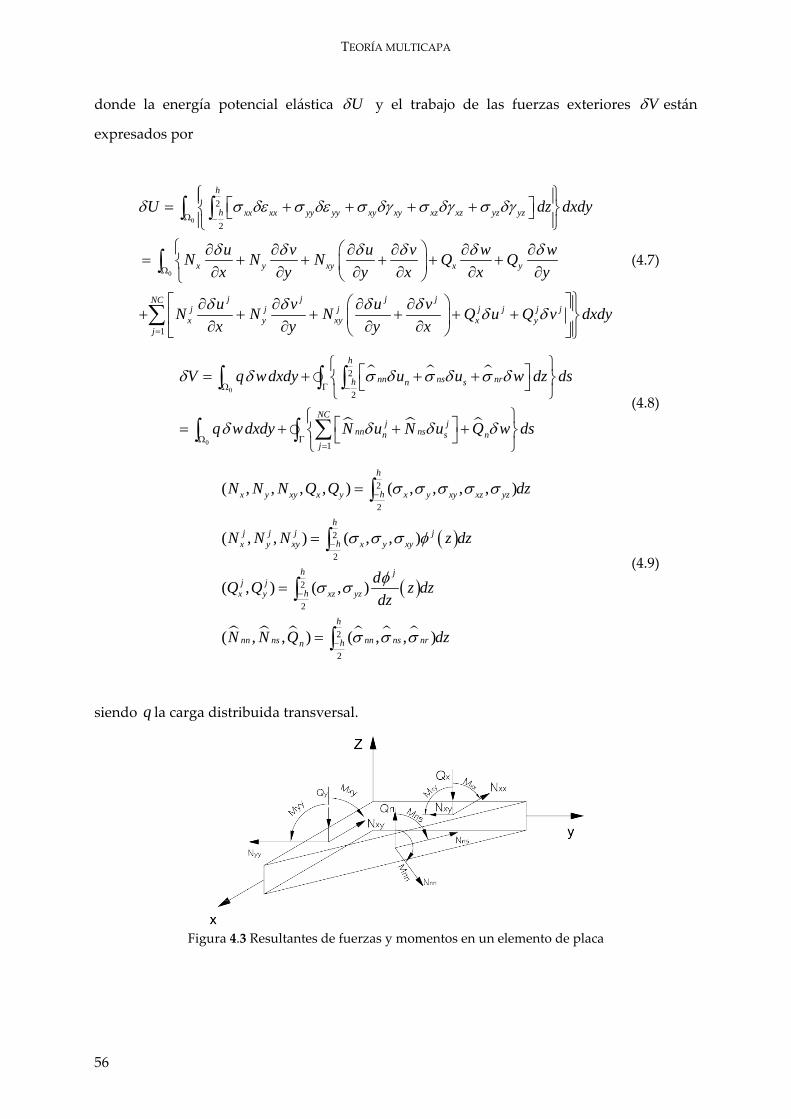
siendo q la carga distribuida transversal.
Figura 4.3 Resultantes de fuerzas y momentos en un elemento de placa
TEORÍA MULTICAPA
57
Reemplazando las ecuaciones (4.7) y (4.8) en (4.6), derivando con respecto a las variables
variacionadas e integrando por partes obtenemos las ecuaciones de Euler – Lagrange del
problema,
0 : 0
0 : 0
0 : 0
0 : 0
0 : 0
xyx
xy y
yx
jjxyj jx
x
j jxy yj j
y
NNux y
N Nv
x yQQw q
x yNNu Q
x yN N
v Qx y
δ
δ
δ
δ
δ
∂∂= + =
∂ ∂∂ ∂
= + =∂ ∂
∂∂= + + =
∂ ∂
∂∂= + − =
∂ ∂
∂ ∂= + − =
∂ ∂
(4.10)
para 1,2, ,j N= … . Por lo que hay ( )2 3N⋅ + ecuaciones diferenciales en ( )2 3N⋅ +
variables ( , , , , )j ju v w u v con las siguientes condiciones de borde:
Geometricas Fuerzas(Esenciales) (Naturales)
nnx x xy y
nsxy x y y
x x y y n
j j jx x xy y
j j jxy x y y
u N n N n N
v N n N n N
w Q n Q n Q
u N n N n
v N n N n
+ −
+ −
+ −
+
+
(4.11)
donde ,x yn n son los cosenos directores a Γ .
4.4 DISCRETIZACIÓN DE ELEMENTOS FINITOS
TEORÍA MULTICAPA
58
El campo de desplazamientos propuesto puede ser expresado como una combinación lineal
de funciones de interpolación bidimensionales iϕ y sus valores en los nodos de la siguiente
manera:
( ) ( )1
, , , , , , , ,m
j j j ji
i
u v w u v u v w u v ψ=
= ⋅∑ (4.12)
Donde m es el número de nodos por elemento.
4.5 RELACIONES CINEMÁTICAS
Las relaciones lineales entre deformaciones y desplazamientos son:
1
2
1 2
31
32
xx
yy
xy
xz
yz
uxuyu uy x
uuz x
uuz y
ε
ε
γ
γ
γ
∂=∂∂
=∂∂ ∂
= +∂ ∂
∂∂= +∂ ∂
∂∂= +∂ ∂
(4.13)
Reemplazando en el campo de desplazamientos propuesto,

TEORÍA MULTICAPA
59
( ) ( )
( ) ( )
( ) ( ) ( ) ( )
( ) ( )
( ) ( )
1
1
1 1
1
1
,
,
, ,
,
,
nj j
xxj
nj j
yyj
n nj j j j
xyj j
nj j
xzj
nj j
yzj
u u x y zx x
v v x y zy y
u v u x y z v x y zy x y x
wu x y zz x
wv x y zz y
ε φ
ε φ
γ φ φ
γ φ
γ φ
=
=
= =
=
=
∂ ∂ ⎡ ⎤= + ⋅⎣ ⎦∂ ∂
∂ ∂ ⎡ ⎤= + ⋅⎣ ⎦∂ ∂
∂ ∂ ∂ ∂⎡ ⎤ ⎡ ⎤= + + ⋅ + ⋅⎣ ⎦ ⎣ ⎦∂ ∂ ∂ ∂
∂ ∂⎡ ⎤= ⋅ +⎣ ⎦∂ ∂
∂ ∂⎡ ⎤= ⋅ +⎣ ⎦∂ ∂
∑
∑
∑ ∑
∑
∑
(4.14)
y reemplazando las funciones de interpolación elegidas (4.12) para la discretización de
elementos finitos obtenemos
( ) ( ) ( )
( ) ( ) ( )
( ) ( )
( ) ( ) ( )
1 1 1
1 1 1
1
, ,
, ,
, ,
, ,
m n mj j
xx i i i ii j i
m n mj j
yy i i i ii j i
m
xy i i i ii
j j ji i i i
u x y u x y zx x
v x y v x y zy y
u x y v x yy x
u x y v x y zy x
ε ψ ψ φ
ε ψ ψ φ
γ ψ ψ
ψ ψ φ
= = =
= = =
=
∂ ∂= ⋅ + ⋅ ⋅⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦∂ ∂
∂ ∂= ⋅ + ⋅ ⋅⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦∂ ∂
⎧ ⎫∂ ∂= ⋅ + ⋅⎡ ⎤ ⎡ ⎤⎨ ⎬⎣ ⎦ ⎣ ⎦∂ ∂⎩ ⎭
⎧ ⎫∂ ∂+ ⋅ + ⋅ ⋅⎡ ⎤ ⎡ ⎤⎨ ⎬⎣ ⎦ ⎣ ⎦∂ ∂⎩ ⎭
∑ ∑∑
∑ ∑∑
∑
( ) ( ) ( )
( ) ( ) ( )
1 1
1 1 1
1 1 1
, ,
, ,
n m
j i
n m mj j
xz i i i ij i i
n m mj j
yz i i i ij i i
u x y z w x yz x
v x y z w x yz y
γ ψ φ ψ
γ ψ φ ψ
= =
= = =
= = =
∂ ∂⎡ ⎤= ⋅ ⋅ + ⋅ ⎡ ⎤⎣ ⎦⎣ ⎦∂ ∂
∂ ∂⎡ ⎤= ⋅ ⋅ + ⋅ ⎡ ⎤⎣ ⎦⎣ ⎦∂ ∂
∑∑
∑∑ ∑
∑∑ ∑
(4.15)
Usando la ecuación (4.12) las deformaciones especificas pueden expresarse como
{ } [ ] { }
{ } { }L
j jL
e B
e B
= ⋅ Δ
⎡ ⎤= ⋅ Δ⎣ ⎦
(4.16)
TEORÍA MULTICAPA
60
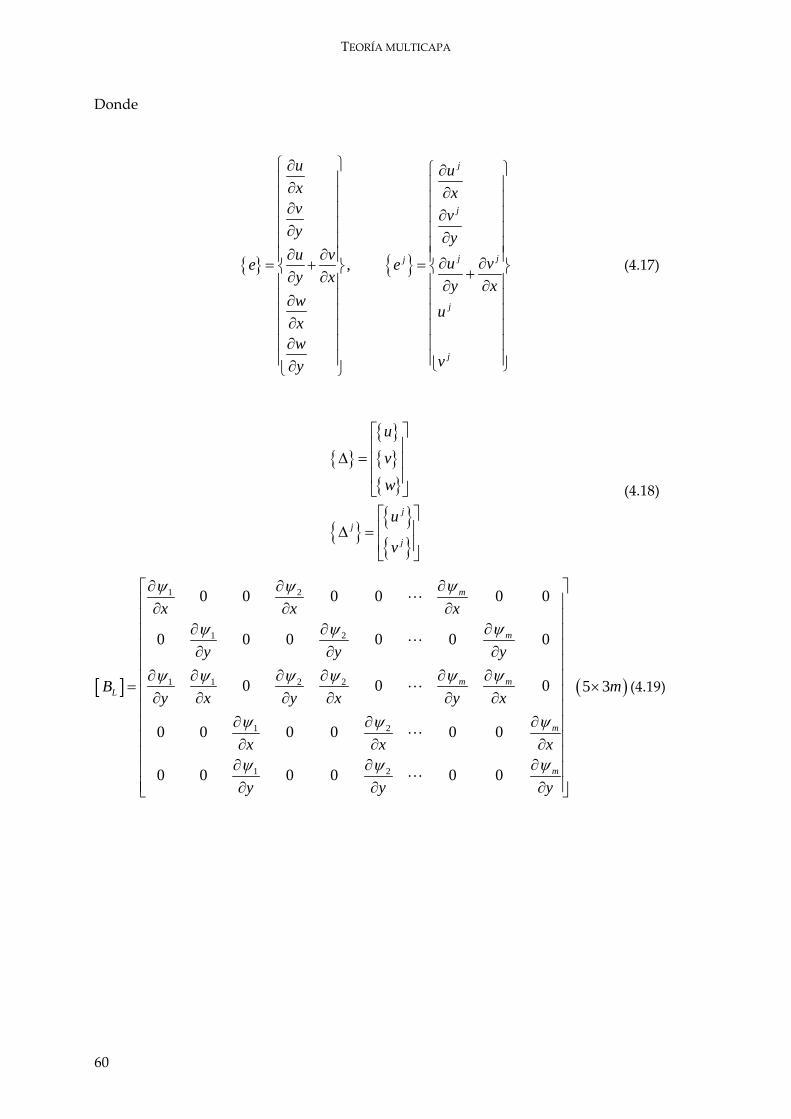
Donde
{ } { },
j
j
j jj
j
j
u ux xv vy yu v u ve ey x y xw
uxw
vy
⎧ ⎫∂ ⎧ ⎫∂⎪ ⎪ ⎪ ⎪∂ ∂⎪ ⎪ ⎪ ⎪∂⎪ ⎪ ∂⎪ ⎪⎪ ⎪ ⎪ ⎪∂ ∂⎪ ⎪ ⎪ ⎪∂ ∂⎪ ⎪ ⎪ ⎪∂ ∂= + =⎨ ⎬ ⎨ ⎬+∂ ∂⎪ ⎪ ⎪ ⎪∂ ∂⎪ ⎪ ⎪ ⎪∂⎪ ⎪ ⎪ ⎪∂⎪ ⎪ ⎪ ⎪∂⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎪ ⎪⎩ ⎭∂⎩ ⎭
(4.17)
{ }{ }{ }{ }
{ }{ }{ }
j
j
j
u
v
w
u
v
⎡ ⎤⎢ ⎥
Δ = ⎢ ⎥⎢ ⎥⎣ ⎦⎡ ⎤⎢ ⎥Δ =⎢ ⎥⎣ ⎦
(4.18)
[ ] ( )
1 2
1 2
1 1 2 2
1 2
1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 5 3
0 0 0 0 0 0
0 0 0 0 0 0
m
m
m mL
m
m
x x x
y y y
B my x y x y x
x x x
y y y
ψψ ψ
ψψ ψ
ψ ψψ ψ ψ ψ
ψψ ψ
ψψ ψ
∂∂ ∂⎡ ⎤⎢ ⎥∂ ∂ ∂⎢ ⎥
∂∂ ∂⎢ ⎥⎢ ⎥∂ ∂ ∂⎢ ⎥
∂ ∂∂ ∂ ∂ ∂⎢ ⎥= ×⎢ ⎥∂ ∂ ∂ ∂ ∂ ∂⎢ ⎥
∂∂ ∂⎢ ⎥⎢ ⎥∂ ∂ ∂⎢ ⎥∂∂ ∂⎢ ⎥⎢ ⎥∂ ∂ ∂⎣ ⎦
(4.19)

TEORÍA MULTICAPA
61
( )
1 2
1 2
1 1 2 2
1 2
1 2
0 0 0
0 0 0
5 2
0 0 00 0 0
m
m
Lm m
m
m
x x x
y y yB m
y x y x y x
ψψ ψ
ψψ ψ
ψ ψψ ψ ψ ψδ
ψ ψ ψψ ψ ψ
∂∂ ∂⎡ ⎤⎢ ⎥∂ ∂ ∂⎢ ⎥
∂∂ ∂⎢ ⎥⎢ ⎥∂ ∂ ∂⎢ ⎥⎡ ⎤ = ×⎣ ⎦ ∂ ∂∂ ∂ ∂ ∂⎢ ⎥⎢ ⎥∂ ∂ ∂ ∂ ∂⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.20)
Donde m es el número de nodos por elemento.
4.6 RELACIONES CONSTITUTIVAS
Las relaciones entre tensiones y deformaciones se definen para la lámina y para el laminado.
4.6.1 RELACIÓN CONSTITUTIVA DE LA LÁMINA
( ) ( ) ( )11 12 16
12 22 26
16 26 66
55 45
45 44
0 0
0 0
0 0
0 0 0
0 0 0
kk k
x x
y y
xy xy
xz xz
yz yz
Q Q Q
Q Q Q
Q Q Q
Q Q
Q Q
σ εσ ε
σ γ
σ γσ γ
⎡ ⎤⎧ ⎫ ⎧ ⎫⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎪ ⎪⎢ ⎥= ⋅⎨ ⎬ ⎨ ⎬⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎩ ⎭ ⎩ ⎭⎣ ⎦
(4.21)
Donde ( )k
ijQ son las rigideces reducidas para una lamina rotada un ángulo θ arbitrario entre
los ejes materiales ( )1, 2,3 y los ejes del problema ( ), ,x y z .
[ ] [ ] [ ]1 TQ T Q T− −⎡ ⎤ = ⋅ ⋅⎣ ⎦ (4.22)
Siendo [ ]T la matriz de transformación definida como

TEORÍA MULTICAPA
62
[ ]
2 2
2 2
2 2
cos sen 2sen cos 0 0sen cos 2sen cos 0 0
sen cos sen cos cos sen 0 00 0 0 cos sen0 0 0 sen cos
T
θ θ θ θθ θ θ θ
θ θ θ θ θ θθ θθ θ
⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥= − −⎢ ⎥⎢ ⎥⎢ ⎥−⎣ ⎦
(4.23)
Siendo [ ]Q la matriz de constantes elásticas en coordenadas materiales tal que
( ) ( ) ( )
{ }( ) [ ]( ) { }( )
1 111 12 16
2 212 22 26
12 16 26 66 12
55 4513 13
45 4423 23
0 00 00 0
0 0 00 0 0
k kk
kk k
Q Q QQ Q QQ Q Q
Q QQ Q
Q
σ εσ εσ γσ γσ γ
σ ε
⎧ ⎫ ⎧ ⎫⎡ ⎤⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥= ⋅⎨ ⎬ ⎨ ⎬
⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎣ ⎦⎩ ⎭ ⎩ ⎭
= ⋅
(4.24)
( )( )
( )
{ }( ) [ ]( ) { }( )
1 11 1
2 21 2
12 1212
13 1313
23 2323
1 0 0 0
1 0 0 0
10 0 0 0
10 0 0 0
10 0 0 0
kk k
kk k
E E
E E
G
G
G
S
νε σ
νε σ
γ σ
γ σ
γ σ
ε σ
12
12
−⎡ ⎤⎧ ⎫ ⎧ ⎫⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪−⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪= ⋅⎨ ⎬ ⎨ ⎬⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎩ ⎭ ⎩ ⎭⎣ ⎦
= ⋅
(4.25)
4.6.2 RELACIÓN CONSTITUTIVA DEL LAMINADO
Las relaciones entre esfuerzos y deformaciones del laminado están dadas por

TEORÍA MULTICAPA
63
{ } [ ]{ } { }
{ } { } { }1
1
Nk k
k
Nj jk k
k
N A e B e
N e D e
=
=
⎡ ⎤= + ⎣ ⎦
⎡ ⎤ ⎡ ⎤= +⎣ ⎦ ⎣ ⎦
∑
∑jB (4.26)
siendo
{ } { }{ } { }
T
x y xy x y
Tk k k k k kx y xy x y
N N N N Q Q
N N N N Q Q
=
= (4.27)
Y las matrices constitutivas [ ], ,k jkA B D⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦ se definen como:
( )
( )
( )
( )
( )
1
1
1
1
1
1
1
1
1
1
, 1, 2,6;4,5
, 1, 2,6
, 4,5
, 1, 2,6
, 4,5
k
k
k
k
k
k
k
k
k
k
N z k
pq pqzk
N z kj jpq pqz
k
jN z kjpq pqz
k
N z kji j ipq pqz
k
j iN z kjipq pqz
k
A Q dz p q
B Q dz p q
dB Q dz p qdz
D Q dz p q
d dD Q dz p qdz dz
φ
φ
φ φ
φ φ
+
+
+
+
+
=
=
=
=
=
= =
= ⋅ =
= ⋅ =
= ⋅ ⋅ =
= ⋅ ⋅ =
∑∫
∑∫
∑∫
∑∫
∑∫
(4.28)
para todo , 1, 2, , 1i j N= +… .
Como se ve en la definición de la ecuación (4.28), los coeficientes de la matriz [ ]A no
dependen de la funciones ( )j zφ empleadas y son los mismos de la Teoría Clásica de Placas
Laminadas (CLPT):
[ ]1
N k kpq
k
A Q h=
= ⋅∑ (4.29)
Donde N es el número de capas del laminado y kh es el espesor de la capa k .

TEORÍA MULTICAPA
64
Figura 4.4 Funciones de interpolación antes de la eliminación de las variables del plano medio
Cuando las funciones ( )j zφ son lineales en cada capa, encontramos que para la ubicación j
en el espesor, ( ) 0j zφ ≠ sólo para las capas adyacentes k j= y 1k j= − (ver Figura 4.4).
Entonces,
( )11
, 1, 2,62 2
j jj jjpq pq pq
h hB Q Q p q−
−= ⋅ + ⋅ = (4.30)
Además
11
1
1
1
0
j jj
j
j jj
para z z zh
d para z z zdz h
para el resto
φ−−
+
⎧ < <⎪⎪−⎪= < <⎨⎪⎪⎪⎩
(4.31)
Por lo que
( )1, 4,5
j jjpq pq pqB Q Q p q
−= − = (4.32)
Los mismos argumentos son válidos para los coeficientes de las matrices jkD⎡ ⎤⎣ ⎦ . Si i j= ,
( )11
, 1, 2,63 3
i ii iiipq pq pq
h hD Q Q p q−
−= ⋅ + ⋅ = (4.33)
y
( )1
1 , 4,5i i
pq pqiipq i i
Q QD p q
h h
−
−= + = (4.34)

TEORÍA MULTICAPA
65
Si i j≠ sólo las capas donde ( )i zφ y ( )j zφ se solapan contribuirán a la integral, por lo que
( ) ( ) 0i jz zφ φ⋅ ≠ sólo si 1j i= ± (ver Figura 4.4). Entonces,
( )( 1)
6 , 1,2,6
iiij jipq pq pq
j ihD D Qp q
= += = ⋅
= (4.35)
y
( )
( 1)
, 4,5
i
pqij jipq pq i
j iQD D
h p q
= += = −
= (4.36)
Todos los coeficientes ,j ijpq pqB D con , 1, , 1i j N= +… son computados usando todo el
conjunto de funciones de interpolación ( )j zφ incluyendo las correspondientes al plano
medio, como se ilustra en la Figura 4.4. Luego se procede a la eliminación de los coeficientes
, ,r rj irpq pq pqB D D , siendo r la ubicación del plano medio. Los coeficientes restantes de
renumeran con , 1, ,i j N= … como se ilustra en la Figura 4.5.
Figura 4.5 Funciones de interpolación después de la eliminación de las variables del plano medio
4.7 MODELO DE ELEMENTOS FINITOS
Empleando las ecuaciones (4.12) en el funcional de energía (4.6), obtenemos el modelo de
elementos finitos

TEORÍA MULTICAPA
66
{ }{ }
{ }
{ }{ }
{ }
11 12 121
121 221 11
21 22
0
0
N
NN N N
k k k qk k
k k
⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎧ Δ ⎫⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎧ ⎫⎢ ⎥ ⎪ ⎪ ⎪ ⎪Δ⎢ ⎥⎡ ⎤ ⎡ ⎤ ⎪ ⎪ ⎪ ⎪⎣ ⎦ ⎣ ⎦ =⎢ ⎥ ⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪Δ ⎩ ⎭⎡ ⎤⎡ ⎤⎢ ⎥ ⎩ ⎭⎣ ⎦ ⎣ ⎦⎣ ⎦
(4.37)
donde
[ ] [ ] [ ]
[ ]
11
12 21
22
e
e
e
TL L e
T T ii i L L e
T ijij L L e
k B A B d
k k B B B d
k B D B d
Ω
Ω
Ω
⎡ ⎤ = ⋅ ⋅ Ω⎣ ⎦
⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤= = ⋅ ⋅ Ω⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤= ⋅ ⋅ Ω⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦
∫
∫
∫
(4.38)
En la ecuación (4.37) está expresada la relación constitutiva del laminado en términos de los
desplazamientos.

TEORÍA MULTICAPA
67
4.8 IMPLEMENTACIÓN NUMÉRICA
En los siguientes ejemplos se analizan distintos casos, comparando los resultados con los de
la bibliografía. Además se estudia el rango de aplicación de la formulación Layerwise
implementada
4.8.1 PROBLEMA 3. PLACA RECTANGULAR RESUELTA POR PAGANO
El objetivo del primer ejemplo es analizar si la solución por elementos finitos del tipo
Layerwise converge hacia la solución de la teoría de la elasticidad al refinar la malla. La
deflexión en el centro de la placa se evaluará para distintas relaciones de lado y espesor.
Se considera una placa laminada simplemente apoyada en sus cuatro lados de dimensiones
,a b en las direcciones ,x y respectivamente, espesor total h y con una secuencia de
laminado (stacking sequence) [0º/90º/0º].
Cada capa material tiene un espesor 3ihh = .
Para este ejemplo se considera una carga con distribución bi armónica
0( , ) sen senq x y q x ya bπ π
=
y una relación de lados 3b a= ⋅ .
Las propiedades del material son:
6 6
1 26 6 6
12 13 23
25 10 1 10 0.25
0.5 10 0.5 10 0.2 10
E E
G G G
ν12= ⋅ = ⋅ =
= ⋅ = ⋅ = ⋅
Por la simetría del problema sólo se modeló un cuadrante de la placa. Se emplearon mallas
de 2 2× y 6 6× para analizar la convergencia. El espesor se discretizó en cuatro (4) capas
para la malla de 2 2× y en seis (6) capas para la malla de 6 6× . Se emplearon elementos
rectangulares de 4 nodos. Las condiciones de borde empleadas son:

TEORÍA MULTICAPA
68
( )( )( )( )
, / 2 : 0
/ 2, : 0
, : 0
, : 0
i
i
i
i
x b v v
a y u u
x b w u
a y w v
= =
= =
= =
= =
Las deflexiones se evalúan en ,2 2a b⎛ ⎞
⎜ ⎟⎝ ⎠
.
Los resultados se presentan adimensionalizados de la siguiente manera:
( ) ( )
( ) ( )
32
40
2
0
0
100
1, , , ,
1, ,
xx yy xy xx yy xy
xz yz xz yz
E hw wq a
ha q
ha q
σ σ τ σ σ τ
τ τ τ τ
=
⎛ ⎞= ⎜ ⎟⎝ ⎠
⎛ ⎞= ⎜ ⎟⎝ ⎠
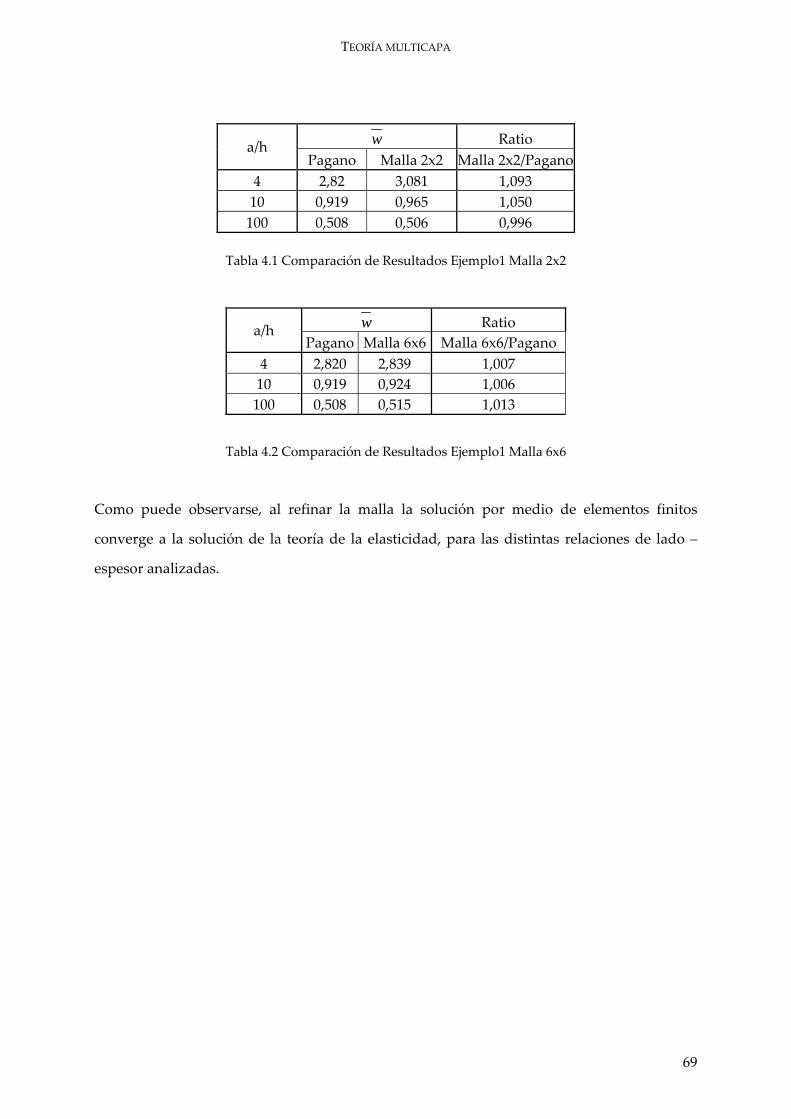
TEORÍA MULTICAPA
69
Tabla 4.1 Comparación de Resultados Ejemplo1 Malla 2x2
w Ratio a/h Pagano Malla 6x6 Malla 6x6/Pagano
4 2,820 2,839 1,007 10 0,919 0,924 1,006 100 0,508 0,515 1,013
Tabla 4.2 Comparación de Resultados Ejemplo1 Malla 6x6
Como puede observarse, al refinar la malla la solución por medio de elementos finitos
converge a la solución de la teoría de la elasticidad, para las distintas relaciones de lado –
espesor analizadas.
w Ratio a/h Pagano Malla 2x2 Malla 2x2/Pagano
4 2,82 3,081 1,093 10 0,919 0,965 1,050 100 0,508 0,506 0,996
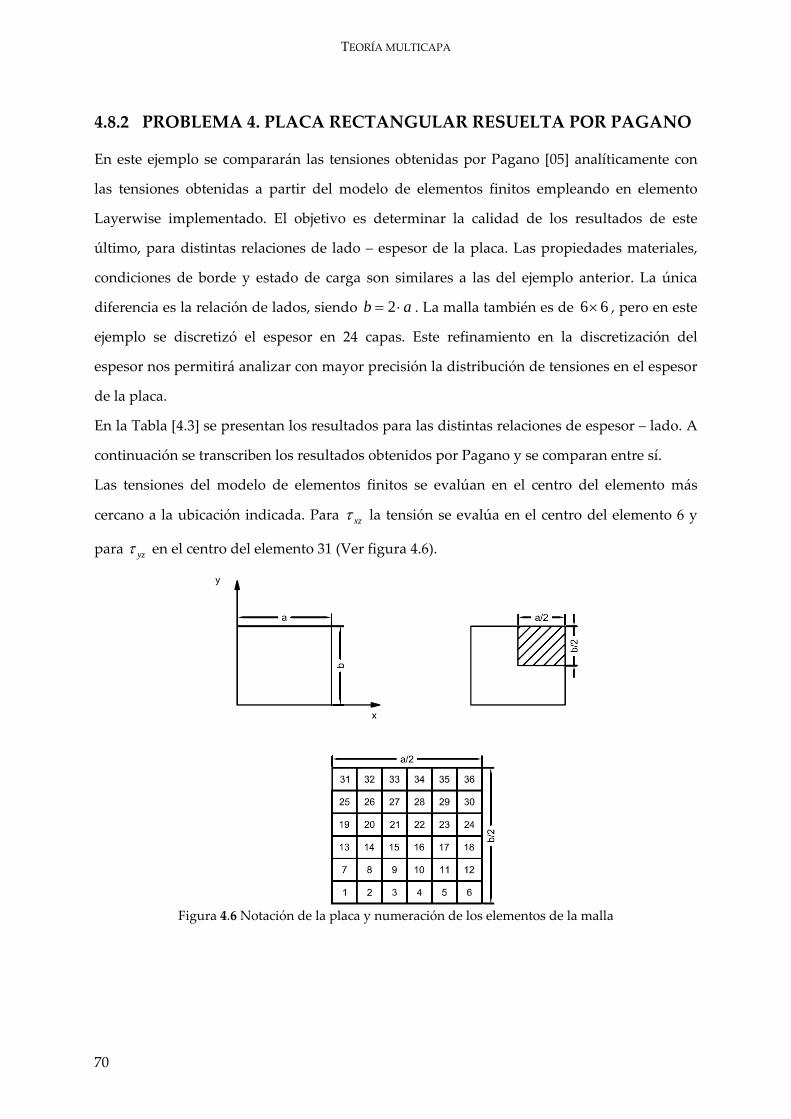
TEORÍA MULTICAPA
70
4.8.2 PROBLEMA 4. PLACA RECTANGULAR RESUELTA POR PAGANO
En este ejemplo se compararán las tensiones obtenidas por Pagano [05] analíticamente con
las tensiones obtenidas a partir del modelo de elementos finitos empleando en elemento
Layerwise implementado. El objetivo es determinar la calidad de los resultados de este
último, para distintas relaciones de lado – espesor de la placa. Las propiedades materiales,
condiciones de borde y estado de carga son similares a las del ejemplo anterior. La única
diferencia es la relación de lados, siendo 2b a= ⋅ . La malla también es de 6 6× , pero en este
ejemplo se discretizó el espesor en 24 capas. Este refinamiento en la discretización del
espesor nos permitirá analizar con mayor precisión la distribución de tensiones en el espesor
de la placa.
En la Tabla [4.3] se presentan los resultados para las distintas relaciones de espesor – lado. A
continuación se transcriben los resultados obtenidos por Pagano y se comparan entre sí.
Las tensiones del modelo de elementos finitos se evalúan en el centro del elemento más
cercano a la ubicación indicada. Para xzτ la tensión se evalúa en el centro del elemento 6 y
para yzτ en el centro del elemento 31 (Ver figura 4.6).
Figura 4.6 Notación de la placa y numeración de los elementos de la malla
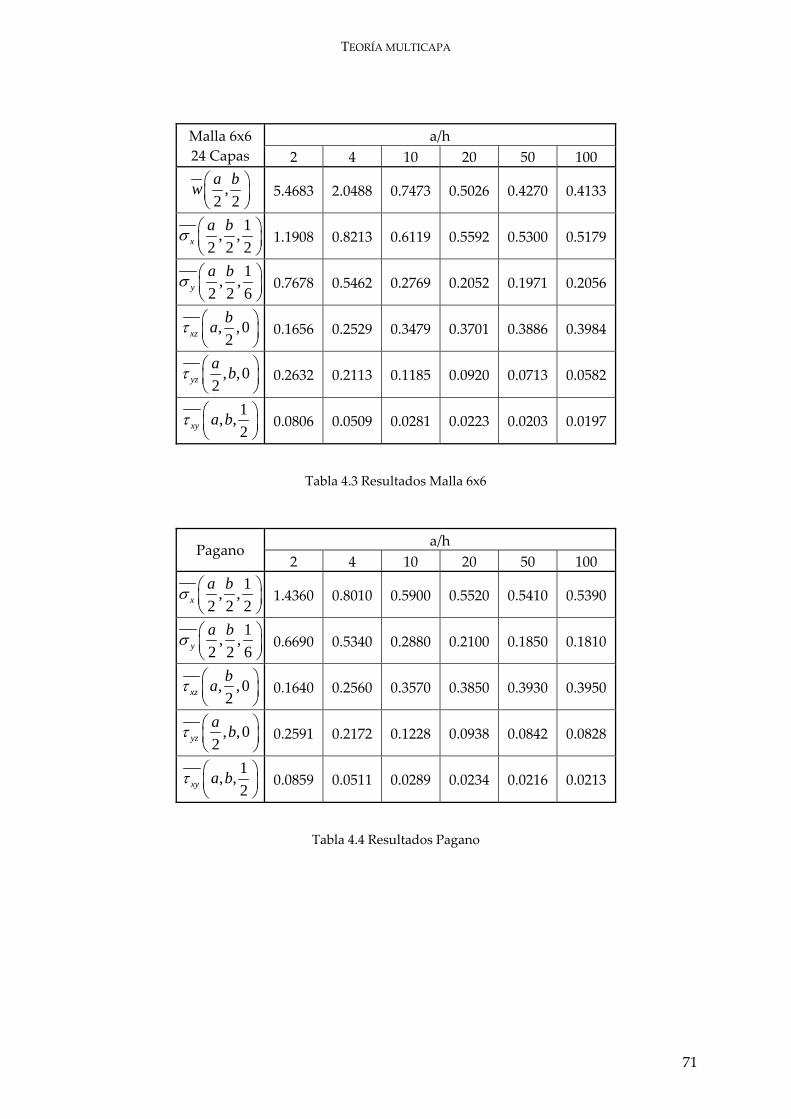
TEORÍA MULTICAPA
71
a/h Malla 6x6 24 Capas 2 4 10 20 50 100
,2 2a bw⎛ ⎞
⎜ ⎟⎝ ⎠
5.4683 2.0488 0.7473 0.5026 0.4270 0.4133
1, ,2 2 2xa bσ ⎛ ⎞
⎜ ⎟⎝ ⎠
1.1908 0.8213 0.6119 0.5592 0.5300 0.5179
1, ,2 2 6ya bσ ⎛ ⎞
⎜ ⎟⎝ ⎠
0.7678 0.5462 0.2769 0.2052 0.1971 0.2056
, ,02xzbaτ ⎛ ⎞
⎜ ⎟⎝ ⎠
0.1656 0.2529 0.3479 0.3701 0.3886 0.3984
, ,02yza bτ ⎛ ⎞
⎜ ⎟⎝ ⎠
0.2632 0.2113 0.1185 0.0920 0.0713 0.0582
1, ,2xy a bτ ⎛ ⎞
⎜ ⎟⎝ ⎠
0.0806 0.0509 0.0281 0.0223 0.0203 0.0197
Tabla 4.3 Resultados Malla 6x6
a/h Pagano 2 4 10 20 50 100
1, ,2 2 2xa bσ ⎛ ⎞
⎜ ⎟⎝ ⎠
1.4360 0.8010 0.5900 0.5520 0.5410 0.5390
1, ,2 2 6ya bσ ⎛ ⎞
⎜ ⎟⎝ ⎠
0.6690 0.5340 0.2880 0.2100 0.1850 0.1810
, ,02xzbaτ ⎛ ⎞
⎜ ⎟⎝ ⎠
0.1640 0.2560 0.3570 0.3850 0.3930 0.3950
, ,02yza bτ ⎛ ⎞
⎜ ⎟⎝ ⎠
0.2591 0.2172 0.1228 0.0938 0.0842 0.0828
1, ,2xy a bτ ⎛ ⎞
⎜ ⎟⎝ ⎠
0.0859 0.0511 0.0289 0.0234 0.0216 0.0213
Tabla 4.4 Resultados Pagano
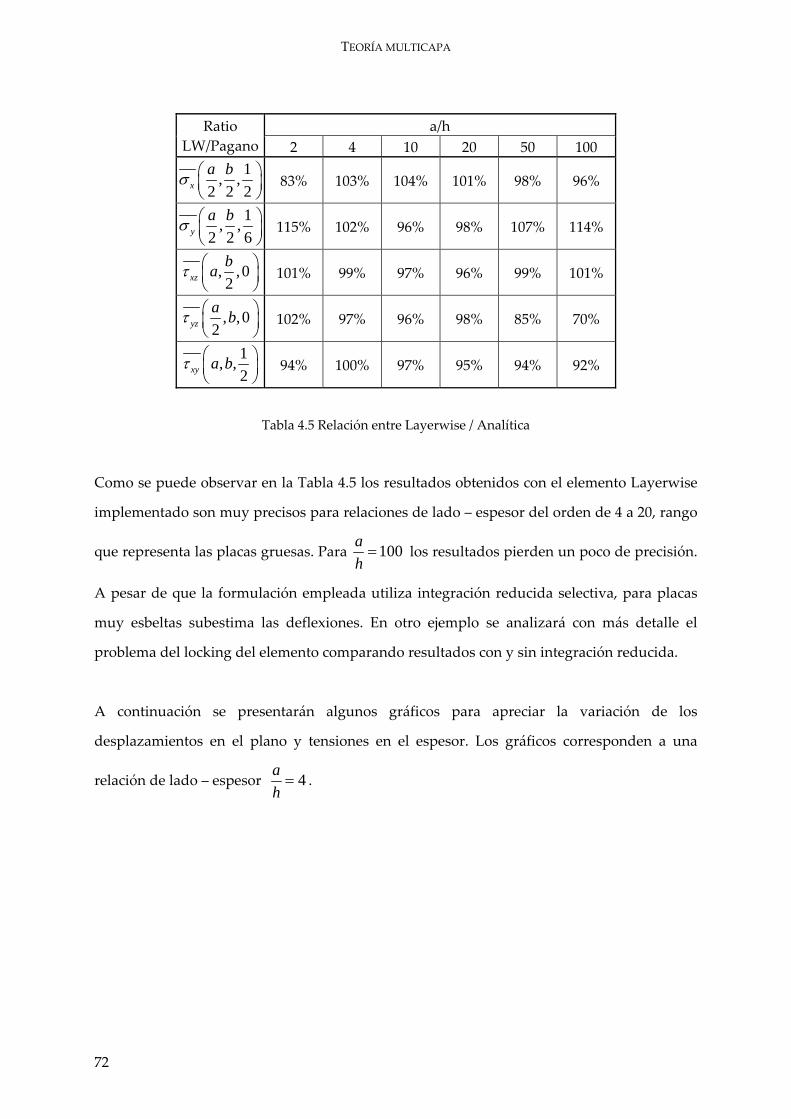
TEORÍA MULTICAPA
72
a/h Ratio
LW/Pagano 2 4 10 20 50 100 1, ,
2 2 2xa bσ ⎛ ⎞
⎜ ⎟⎝ ⎠
83% 103% 104% 101% 98% 96%
1, ,2 2 6ya bσ ⎛ ⎞
⎜ ⎟⎝ ⎠
115% 102% 96% 98% 107% 114%
, ,02xzbaτ ⎛ ⎞
⎜ ⎟⎝ ⎠
101% 99% 97% 96% 99% 101%
, ,02yza bτ ⎛ ⎞
⎜ ⎟⎝ ⎠
102% 97% 96% 98% 85% 70%
1, ,2xy a bτ ⎛ ⎞
⎜ ⎟⎝ ⎠
94% 100% 97% 95% 94% 92%
Tabla 4.5 Relación entre Layerwise / Analítica
Como se puede observar en la Tabla 4.5 los resultados obtenidos con el elemento Layerwise
implementado son muy precisos para relaciones de lado – espesor del orden de 4 a 20, rango
que representa las placas gruesas. Para 100ah= los resultados pierden un poco de precisión.
A pesar de que la formulación empleada utiliza integración reducida selectiva, para placas
muy esbeltas subestima las deflexiones. En otro ejemplo se analizará con más detalle el
problema del locking del elemento comparando resultados con y sin integración reducida.
A continuación se presentarán algunos gráficos para apreciar la variación de los
desplazamientos en el plano y tensiones en el espesor. Los gráficos corresponden a una
relación de lado – espesor 4ah= .
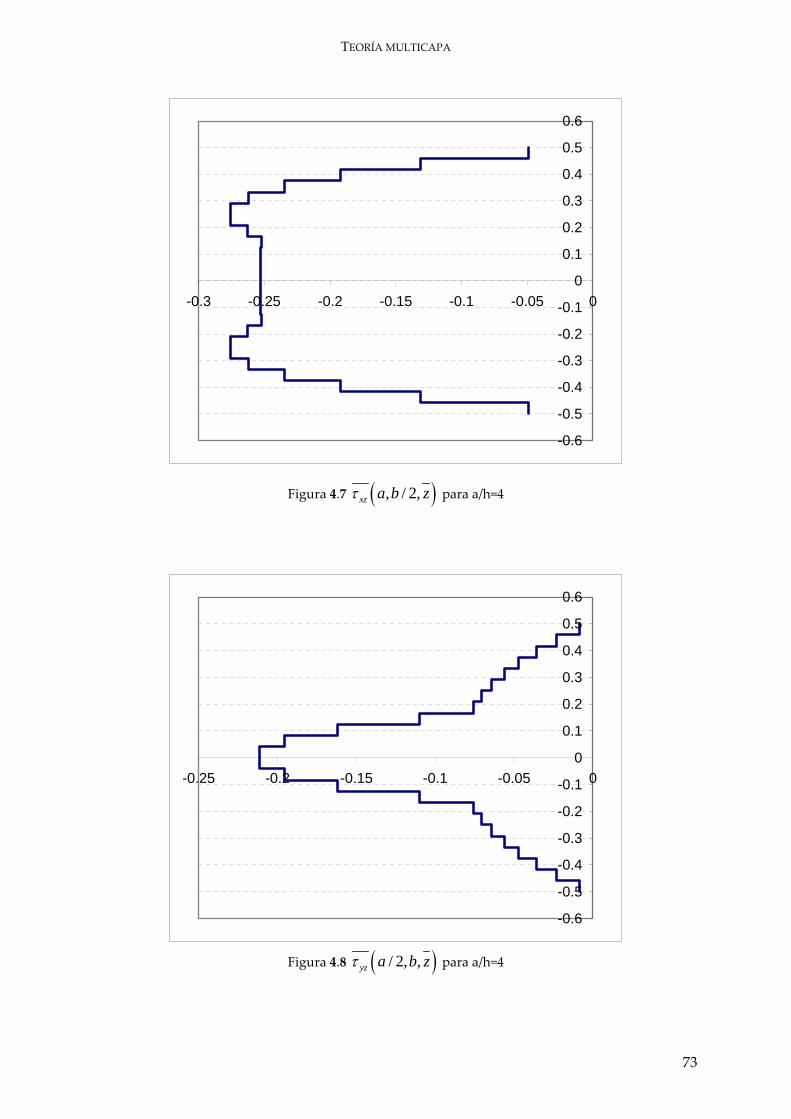
TEORÍA MULTICAPA
73
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
-0.3 -0.25 -0.2 -0.15 -0.1 -0.05 0
Figura 4.7 ( ), / 2,xz a b zτ para a/h=4
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
-0.25 -0.2 -0.15 -0.1 -0.05 0
Figura 4.8 ( )/ 2, ,yz a b zτ para a/h=4
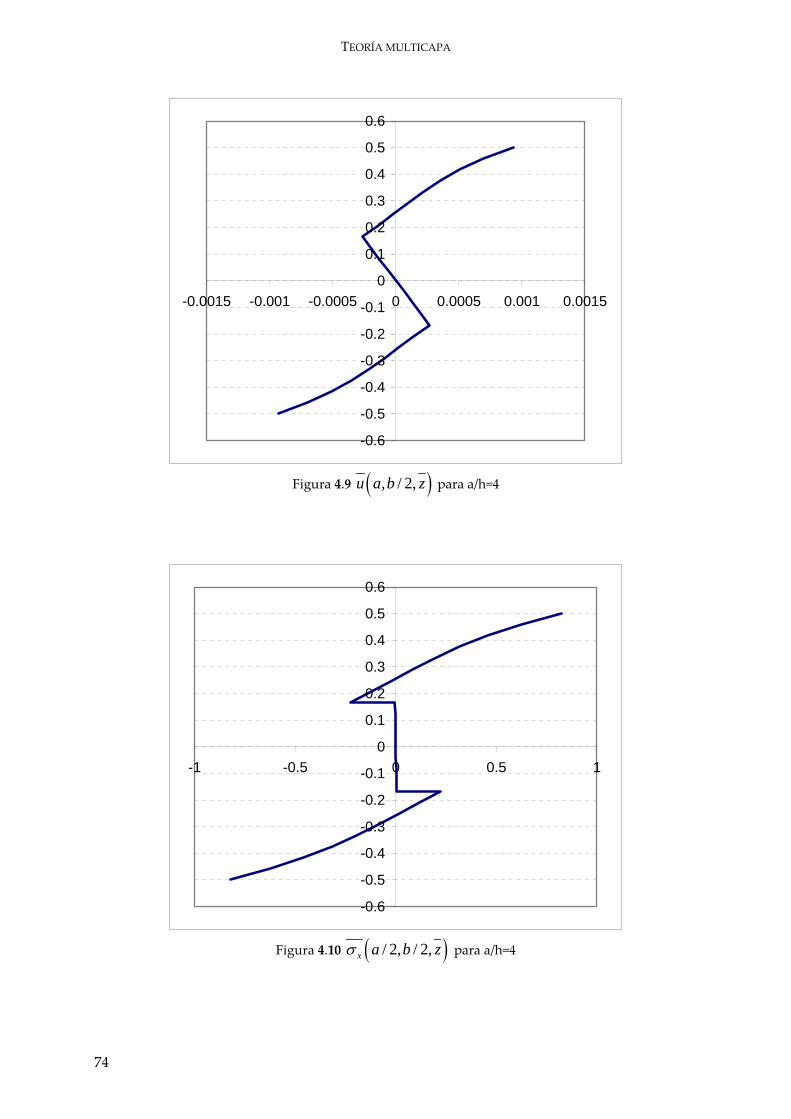
TEORÍA MULTICAPA
74
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
-0.0015 -0.001 -0.0005 0 0.0005 0.001 0.0015
Figura 4.9 ( ), / 2,u a b z para a/h=4
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
-1 -0.5 0 0.5 1
Figura 4.10 ( )/ 2, / 2,x a b zσ para a/h=4
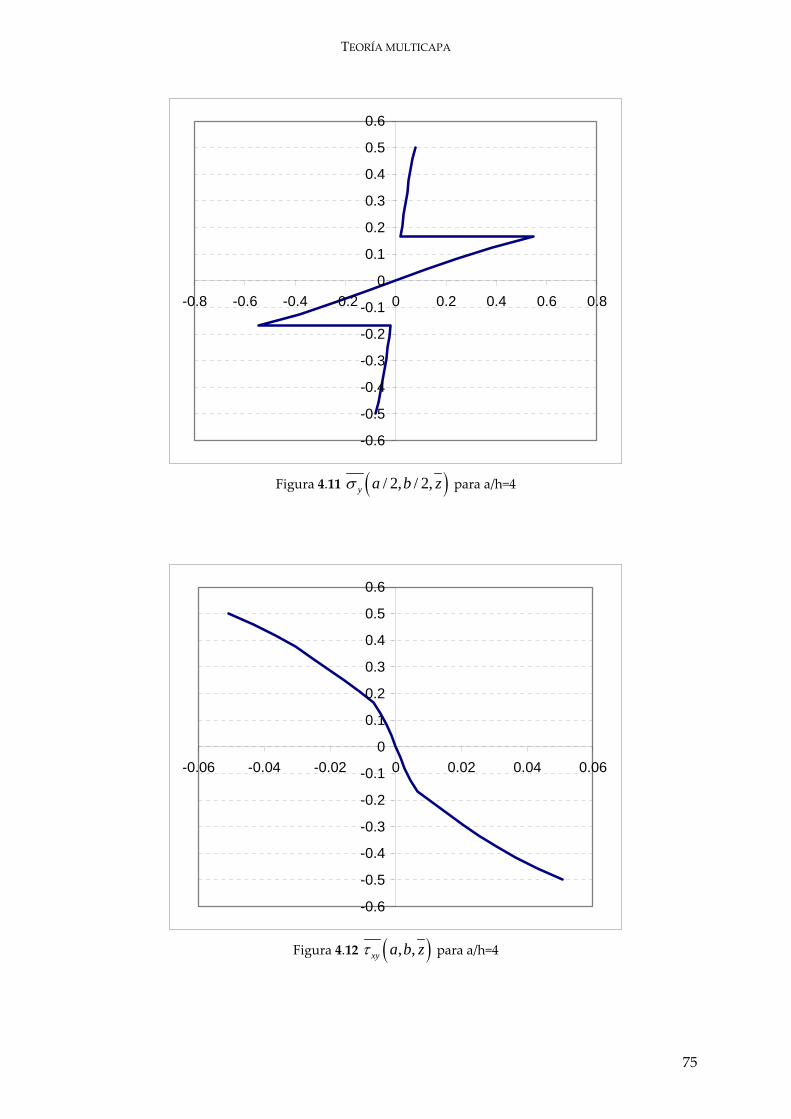
TEORÍA MULTICAPA
75
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
Figura 4.11 ( )/ 2, / 2,y a b zσ para a/h=4
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
-0.06 -0.04 -0.02 0 0.02 0.04 0.06
Figura 4.12 ( ), ,xy a b zτ para a/h=4
TEORÍA MULTICAPA
76
Cabe destacar que las tensiones de corte fuera del plano ( ),xz yzτ τ obtenidas en este análisis
representan el promedio de las tensiones dentro de una determinada capa. Por ello dichos
gráficos (Figuras 4.7 y 4.8) se ven escalonados. A pesar de estas discontinuidades en las
tensiones se corrobora que la forma de la distribución es consistente con las soluciones
analíticas obtenidas por Pagano a través de la teoría de la elasticidad [05].
Se observa que las tensiones de corte tienden a cero en las superficies libres y aumentan
hacia la mitad del espesor. A diferencia de los materiales isótropos, la tensión máxima de
corte puede no estar en la mitad del espesor, debido a la ortotropía de las láminas.
En la Figura 4.9 se observa el alabeo de la sección. Aquí se pone en evidencia que si se
emplea una teoría que parta de la hipótesis de secciones planas, podría llegarse a resultados
erróneos para este problema.
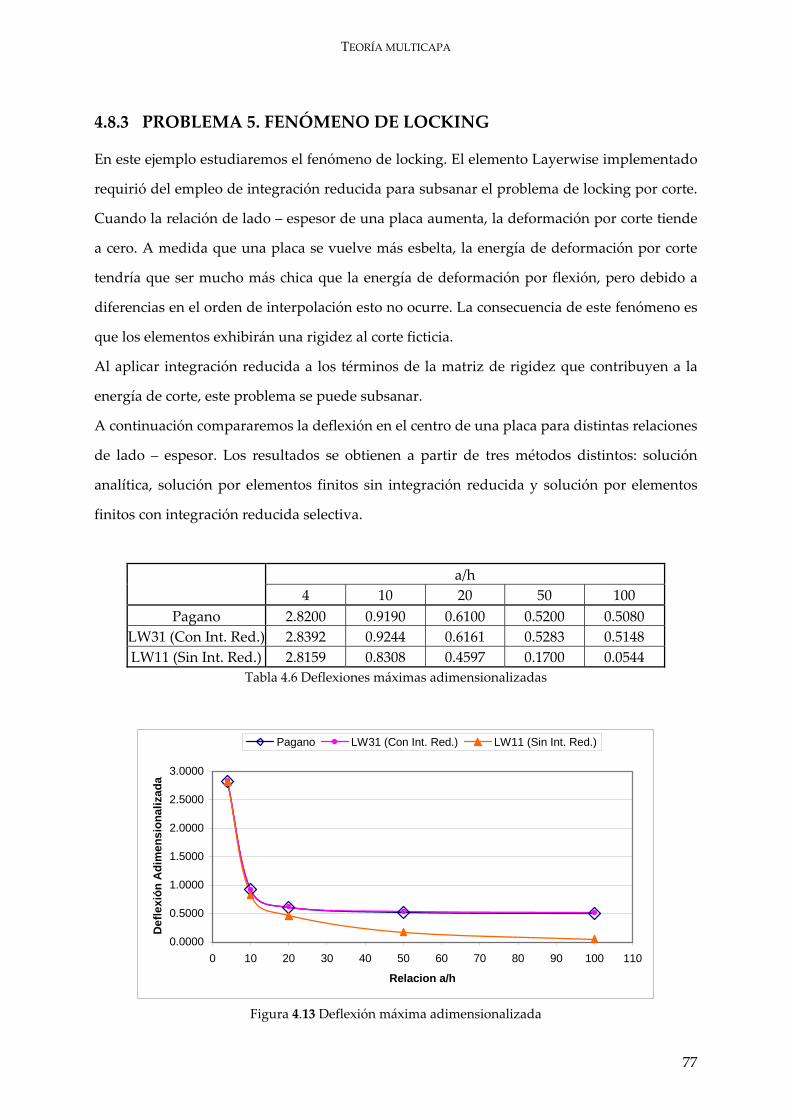
TEORÍA MULTICAPA
77
4.8.3 PROBLEMA 5. FENÓMENO DE LOCKING
En este ejemplo estudiaremos el fenómeno de locking. El elemento Layerwise implementado
requirió del empleo de integración reducida para subsanar el problema de locking por corte.
Cuando la relación de lado – espesor de una placa aumenta, la deformación por corte tiende
a cero. A medida que una placa se vuelve más esbelta, la energía de deformación por corte
tendría que ser mucho más chica que la energía de deformación por flexión, pero debido a
diferencias en el orden de interpolación esto no ocurre. La consecuencia de este fenómeno es
que los elementos exhibirán una rigidez al corte ficticia.
Al aplicar integración reducida a los términos de la matriz de rigidez que contribuyen a la
energía de corte, este problema se puede subsanar.
A continuación compararemos la deflexión en el centro de una placa para distintas relaciones
de lado – espesor. Los resultados se obtienen a partir de tres métodos distintos: solución
analítica, solución por elementos finitos sin integración reducida y solución por elementos
finitos con integración reducida selectiva.
a/h 4 10 20 50 100
Pagano 2.8200 0.9190 0.6100 0.5200 0.5080 LW31 (Con Int. Red.) 2.8392 0.9244 0.6161 0.5283 0.5148 LW11 (Sin Int. Red.) 2.8159 0.8308 0.4597 0.1700 0.0544
Tabla 4.6 Deflexiones máximas adimensionalizadas
0.0000
0.5000
1.0000
1.5000
2.0000
2.5000
3.0000
0 10 20 30 40 50 60 70 80 90 100 110
Relacion a/h
Def
lexi
ón A
dim
ensi
onal
izad
a
Pagano LW31 (Con Int. Red.) LW11 (Sin Int. Red.)
Figura 4.13 Deflexión máxima adimensionalizada

TEORÍA MULTICAPA
78
Como puede observase en la Figura 4.13, la solución LW31 que emplea integración reducida
es casi idéntica a la solución analítica de Pagano para todo el rango de relaciones de lado –
espesor analizadas.
La solución LW11 que no emplea integración reducida, da resultados parecidos para
relaciones de lado – espesor menores a 10. Pero a medida que la placa se vuelve más delgada
la solución se aleja de la analítica. Debido al efecto de locking, las deflexiones calculadas sin
integración reducida son menores a las previstas por la solución analítica.
TEORÍA MULTICAPA
79
4.8.4 PROBLEMA 6. COMPARACIÓN DE LOS ELEMENTOS CLPT Y
LAYERWISE
El objetivo de este ejemplo es determinar para un problema en particular, la relación de lado
– espesor a partir de donde la soluciones de elementos finitos basadas en los elementos CLPT
y Layerwise implementados dan resultados semejantes.
La placa se encuentra simplemente apoyada en sus cuatro bordes y la carga transversal tiene
una distribución uniforme 0( , )q x y q= .
Las propiedades materiales son las mismas que las del Ejemplo 1 y la secuencia de laminado
es [0°/90°/0°]. La relación entre los lados de la placa es 2b a= ⋅ . Todos los resultados se
presentan adimensionalizados. Es importante aclarar que al adimensionalizar, los resultados
obtenidos por medio de la teoría CLPT son idénticos para cualquier relación lado – espesor.
Se modeló un cuadrante de la placa, empleando en todos los casos mallas de 6 6× . Para los
elementos Layerwise se discretizó el espesor en 24 capas.
Las tensiones xσ se evalúan en ,2 2a a⎛ ⎞
⎜ ⎟⎝ ⎠
, xyτ en ( ),a a .
A continuación se presentan dos gráficos con las tensiones xσ y xyτ en función de
z (coordenada en el espesor adimensionalizada). Para cada una de las tensiones se
representan tres relaciones de lado – espesor distintas para la solución layerwise y la
solución CLPT.
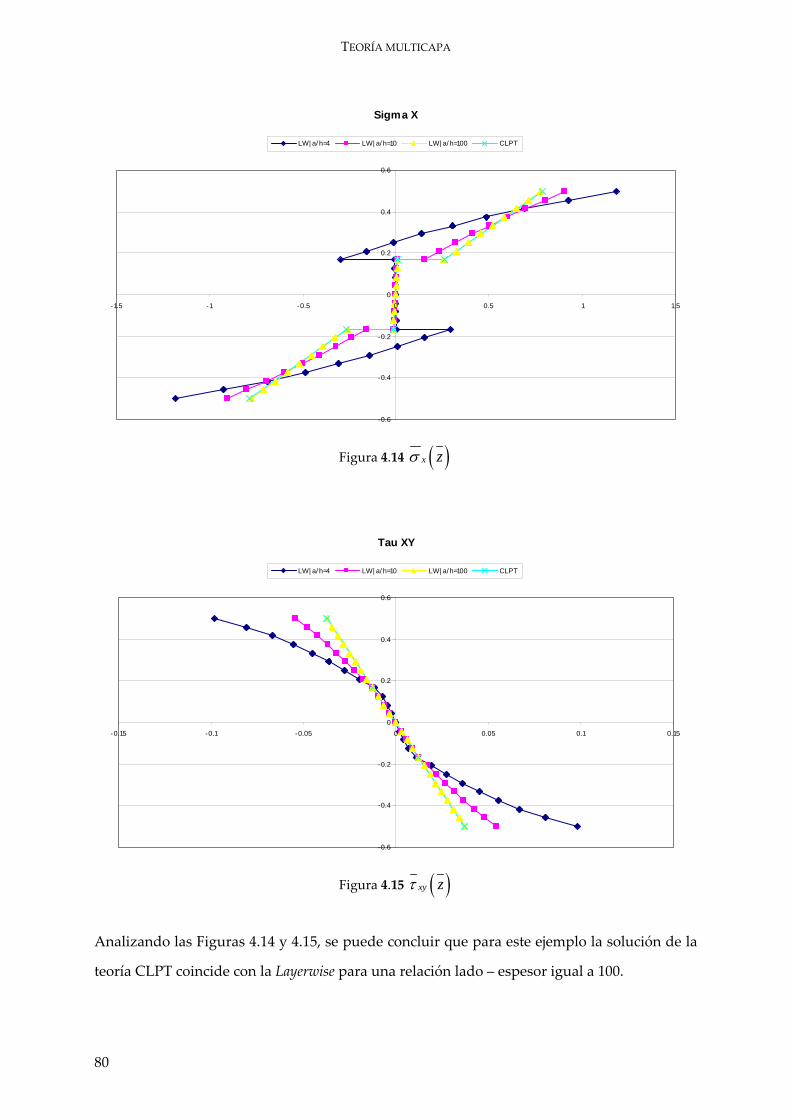
TEORÍA MULTICAPA
80
Sigma X
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
-1.5 -1 -0.5 0 0.5 1 1.5
LW | a/ h=4 LW | a/ h=10 LW | a/ h=100 CLPT
Figura 4.14 ( )x zσ
Tau XY
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
-0.15 -0.1 -0.05 0 0.05 0.1 0.15
LW | a/ h=4 LW | a/ h=10 LW | a/ h=100 CLPT
Figura 4.15 ( )xy zτ
Analizando las Figuras 4.14 y 4.15, se puede concluir que para este ejemplo la solución de la
teoría CLPT coincide con la Layerwise para una relación lado – espesor igual a 100.
TEORÍA MULTICAPA
81
4.8.5 PROBLEMA 7. PLACA SÁNDWICH
Un caso particular de los laminados compuestos son las placas sándwich. En este tipo de
laminados se emplea un núcleo de menor densidad para aumentar el brazo interno entre las
pieles (láminas exteriores). De esta manera se aumenta notablemente la rigidez y resistencia
de la placa, con un leve aumento en el peso.
Las pieles resisten las tensiones normales debidas a la flexión mientras que el núcleo toma las
tensiones de corte. Por ello las propiedades mecánicas más importantes de los núcleos son la
resistencia al corte y el módulo de elasticidad transversal. Asiendo una analogía con un perfil
“doble T”, las pieles del sándwich actúan como las alas del doble T y el núcleo actúa como el
alma del mismo.
Hay diversos tipos de materiales usados como núcleo: madera balsa, espuma (PVC, SAN,
poliuretano, etc.), panal de abeja (aluminio, Nomex).
En el caso particular de los núcleos del tipo panal de abeja es sumamente importante prestar
atención a la tensión de corte en la interfaz, ya que el pegado entre las pieles y el panal de
abeja se da sólo en los bordes de cada celda.
Figura 4.16 Núcleo tipo panal de abeja de Nomex
Las placas sándwich son ampliamente utilizadas. Entre algunos ejemplos se pueden citar
pisos y mamparos de aeronaves, partes de satélites, cascos de embarcaciones, etc.
A continuación modelaremos un panel de la cubierta de un velero de competición. Las
dimensiones del mismo son 1.80 metros x 2.20 metros. Para analizar el problema se empleará
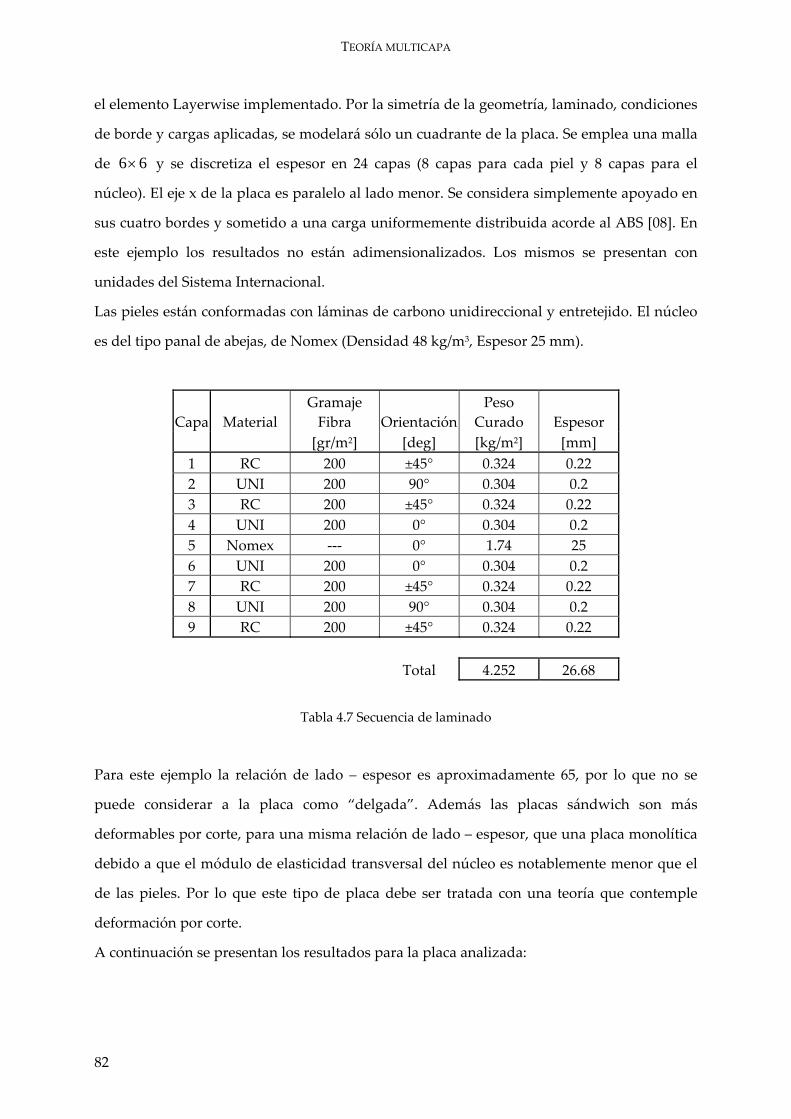
TEORÍA MULTICAPA
82
el elemento Layerwise implementado. Por la simetría de la geometría, laminado, condiciones
de borde y cargas aplicadas, se modelará sólo un cuadrante de la placa. Se emplea una malla
de 6 6× y se discretiza el espesor en 24 capas (8 capas para cada piel y 8 capas para el
núcleo). El eje x de la placa es paralelo al lado menor. Se considera simplemente apoyado en
sus cuatro bordes y sometido a una carga uniformemente distribuida acorde al ABS [08]. En
este ejemplo los resultados no están adimensionalizados. Los mismos se presentan con
unidades del Sistema Internacional.
Las pieles están conformadas con láminas de carbono unidireccional y entretejido. El núcleo
es del tipo panal de abejas, de Nomex (Densidad 48 kg/m3, Espesor 25 mm).
Capa Material Gramaje Fibra Orientación
Peso Curado Espesor
[gr/m2] [deg] [kg/m2] [mm] 1 RC 200 ±45° 0.324 0.22 2 UNI 200 90° 0.304 0.2 3 RC 200 ±45° 0.324 0.22 4 UNI 200 0° 0.304 0.2 5 Nomex ‐‐‐ 0° 1.74 25 6 UNI 200 0° 0.304 0.2 7 RC 200 ±45° 0.324 0.22 8 UNI 200 90° 0.304 0.2 9 RC 200 ±45° 0.324 0.22 Total 4.252 26.68
Tabla 4.7 Secuencia de laminado
Para este ejemplo la relación de lado – espesor es aproximadamente 65, por lo que no se
puede considerar a la placa como “delgada”. Además las placas sándwich son más
deformables por corte, para una misma relación de lado – espesor, que una placa monolítica
debido a que el módulo de elasticidad transversal del núcleo es notablemente menor que el
de las pieles. Por lo que este tipo de placa debe ser tratada con una teoría que contemple
deformación por corte.
A continuación se presentan los resultados para la placa analizada:
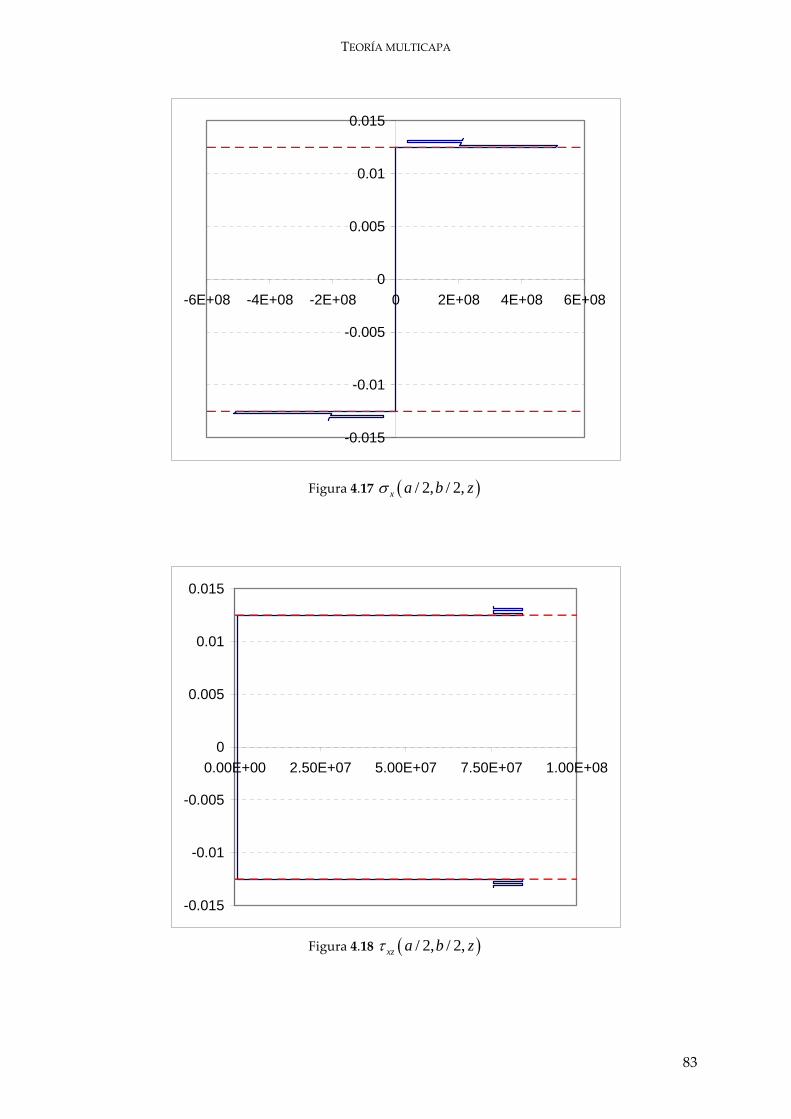
TEORÍA MULTICAPA
83
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
-6E+08 -4E+08 -2E+08 0 2E+08 4E+08 6E+08
Figura 4.17 ( )/ 2, / 2,x a b zσ
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.00E+00 2.50E+07 5.00E+07 7.50E+07 1.00E+08
Figura 4.18 ( )/ 2, / 2,xz a b zτ
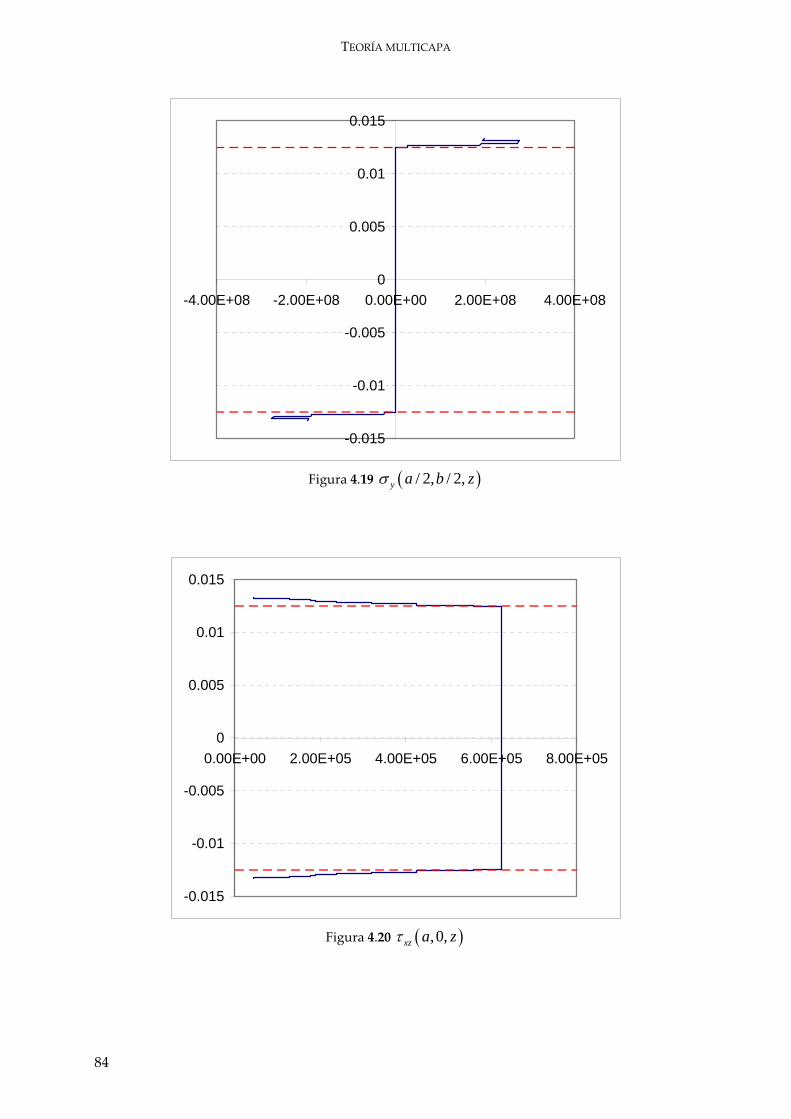
TEORÍA MULTICAPA
84
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
-4.00E+08 -2.00E+08 0.00E+00 2.00E+08 4.00E+08
Figura 4.19 ( )/ 2, / 2,y a b zσ
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.00E+00 2.00E+05 4.00E+05 6.00E+05 8.00E+05
Figura 4.20 ( ),0,xz a zτ
TEORÍA MULTICAPA
85
Como puede verse en las Figuras 4.17 y 4.19, las tensiones normales son casi nulas en el
núcleo y tienen sus valores máximos en las pieles. Las discontinuidades que aparecen en las
tensiones en las pieles se deben a las diferencias de módulo entre las capas que están a 0°,
45° y 90°.
En la Figura 4.20 está graficado el punto el esfuerzo de corte es máximo ( ),0a . Allí se puede
comprobar que casi todo el esfuerzo de corte lo toma el núcleo.
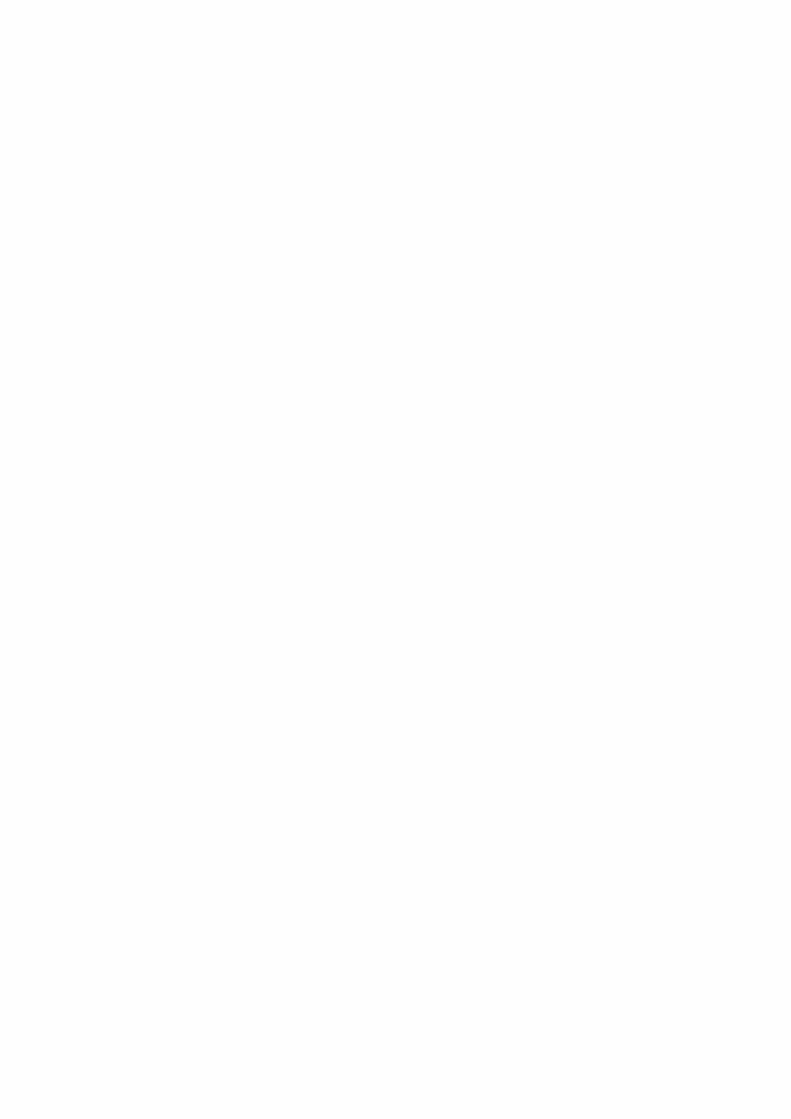

5 ANÁLISIS DE LOS RESULTADOS OBTENIDOS
En este trabajo se implementaron dos tipos de elementos distintos. En el desarrollo de los
ejemplos se comparan las soluciones obtenidas con los elementos implementados por medio
del método de los elementos finitos con las soluciones obtenidas por medio de la teoría
clásica de placas laminadas (CLPT) y de la teoría de la elasticidad. Es sumamente importante
destacar que las soluciones por medio de la teoría clásica de placas laminadas y la teoría de
la elasticidad sólo son posibles para algunos casos particulares de geometría, condiciones de
borde y esquemas de laminado. Geometrías irregulares, laminados arbitrarios, etc. no
admiten este tipo de solución y es por ello que los métodos aproximados como el método de
los elementos finitos cobran importancia.
En esta sección se compararán los dos elementos implementados. Se evaluarán sus
diferencias y se estudiarán los límites de aplicabilidad, indicando las ventajas comparativas
de cada uno.
Las placas de laminados compuestos suelen exhibir deformación por corte significativa a
relaciones de espesor ‐ luz más bajas que en el caso de placas homogéneas e isótropas.
Esto se debe a que habitualmente los materiales que constituyen las distintas capas de un
laminado tienen relaciones entre los módulos de elasticidad transversal y longitudinal
( )1 13 1 23/ /E G y E G mucho menores que en el caso de un material isótropo.
Además, a pesar de que las tensiones de corte ( ),xz yzτ τ son de un orden de magnitud menor
que las tensiones membranales ( ), ,x y xyσ σ τ , las tensiones de rotura del material para los
esfuerzos de corte también son mucho menores que las tensiones de rotura para esfuerzos
membranales [07]. Por lo que es imperante poder evaluar con precisión dichas tensiones para
evitar fallas por corte.
Estos son algunos de los motivos para emplear teorías más refinadas cuando las tensiones de
corte no son despreciables. En términos generales, la teoría clásica de placas laminadas es
adecuada en los casos donde el espesor de la placa es dos órdenes de magnitud más pequeño
a las otras dos dimensiones de la placa (ver 4.8.4 Ejemplo 4).
Si bien la teoría clásica de placas laminadas no computa las tensiones transversales de corte,
estas pueden ser calculadas a posteriori a través de la integración de las ecuaciones de
ANÁLISIS DE LOS RESULTADOS OBTENIDOS
88
elasticidad. Pero este procedimiento no es simple y puede llevar a obtener resultados
erróneos cuando la placa se vuelve relativamente gruesa ( )/ 20a h < .
De las ecuaciones de equilibrio se deduce que las tensiones interlaminares entre dos capas
adyacentes deben ser iguales en la interfase (ver Figura 5.1):
( ) ( )1k k
xz xz
yz yz
zz zz
σ σσ σ
σ σ
+⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪=⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
(5.1)
Pero en todas las teorías de capa equivalente (ESL) las deformaciones son continuas en el
espesor, lo que lleva a tener un campo de tensiones interlaminares discontinuo debido al
cambio de los coeficientes elásticos en las interfaces ( ) ( )1k k
Q Q+⎡ ⎤ ⎡ ⎤≠⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
. Esto viola las
condiciones de equilibrio (5.1).
Figura 5.1 Equilibrio de las tensiones interlaminares
En cambio, las teorías layerwise permiten el alabeo de las secciones donde los
desplazamientos en el plano pueden tener una variación tipo “zig‐zag” (ver Figura 4.2) en el
espesor del laminado. Esta forma de zig‐zag, asegura la continuidad de los desplazamientos
ANÁLISIS DE LOS RESULTADOS OBTENIDOS
89
pero no de sus derivadas con respecto al espesor. Así se abre la posibilidad a que las
tensiones interlaminares entre dos capas de materiales distintos sean iguales, cumpliéndose
la condición de equilibrio planteada en (5.1).
Otra de las ventajas del elemento Layerwise, es la facilidad para evaluar las tensiones de
corte en un laminado empleando las relaciones constitutivas en vez de su obtención a partir
de la integración de las ecuaciones diferenciales de equilibrio.
En el presente trabajo se implementó un elemento layerwise parcial, que emplea una
descripción layerwise para los desplazamientos en el plano pero no para los
desplazamientos transversales. Una formulación layerwise total da un paso más al emplear
también una descripción layerwise para los desplazamientos fuera del plano. Las teorías full
layerwise relajan la hipótesis de normales inextensibles, permitiendo evaluar las
deformaciones zzε y las tensiones zzσ . Por tener en cuenta las seis componentes del vector
de deformaciones, son teorías que tienen capacidad de análisis tridimensional, pudiendo
describir con precisión las tensiones interlaminares ( ), ,xz yz zzτ τ σ en zonas cercanas a
discontinuidades como agujeros, bordes libres de tracción y frentes de deslaminación [01].
La primera desventaja que presenta la formulación layerwise frente a la CLPT es el costo
computacional. El elemento layerwise implementado posee ( )3 2·NC+ grados de libertad
por nodo, mientras que el CLPT solo tiene 5 grados de libertad por nodo. El costo
computacional del primero es mucho mayor que para el segundo. Por ejemplo, si se tiene en
cuenta que el espesor típico de una lámina de fibras pre‐impregnadas (prepreg) varía entre
0,15mm y 0,4mm, un laminado de 6mm puede estar compuesto por 20 capas de 0,3mm. En
tal caso cada elemento layerwise emplearía ( )4· 3 2·20 172+ = grados de libertad, mientras
que el CLPT 4·5 20= . Claramente la diferencia aumenta con la cantidad de capas del
laminado.
Si bien hoy en día la capacidad de cálculo no es un impedimento importante, hay otros
motivos por los cuales en algunos casos es conveniente emplear la formulación CLPT antes
que la layerwise. Uno de ellos es el fenómeno de locking por corte transversal. Cuando la
relación entre la luz de la placa y su espesor, tienden al límite de placa delgada, la
deformación por corte debe tender a cero en relación a la deformación por flexión. Debido a
una inconsistencia en la interpolación de la deformación por corte, no tiende a cero ya que

ANÁLISIS DE LOS RESULTADOS OBTENIDOS
90
aparece una rigidez a corte ficticia. Para subsanar este problema se debe recurrir a la
integración reducida selectiva.
91
6 CONCLUSIONES
Se implementaron dos elementos finitos: uno cuya cinemática se basa en la Teoría Clásica de
Placas Laminadas (CLPT) y otro Multicapa (Layerwise).
Se compararon los resultados obtenidos con soluciones analíticas, otros resultados obtenidos
a través de otras formulaciones y con el software comercial de elementos finitos
ABAQUS/CAE. Todas las comparaciones mostraron una muy buena correlación entre los
resultados obtenidos en este trabajo y los resultados disponibles en la bibliografía.
Se investigó la aplicabilidad de cada uno de los elementos implementados. Y se tuvieron en
cuenta los problemas inherentes a cada uno de los elementos implementados.
Se concluyó que para el análisis de placas delgadas por el método de los elementos finitos es
recomendable el empleo de la formulación CLPT debido a su bajo costo computacional,
facilidad de interpretación de resultados y por no presentar problemas de locking.
Mientras que al estudiar placas relativamente gruesas, gruesas o en el caso de placas muy
deformables por corte (laminados sándwich) es necesario el empleo de una teoría más
refinada como la Layerwise parcial implementada en este trabajo. Además en los casos donde
se requiera evaluar las tensiones de corte, el empleo de la teoría Layerwise resulta sumamente
útil ya que permite obtener las mismas a partir de las ecuaciones constitutivas y sin la
necesidad de emplear ningún factor de corrección.

93
7 REFERENCIAS
[01] Reddy, J. N., Mechanics of Laminated Composite Plates: Theory and Analysis, CRC
Press, 1997.
[02] Robbins, D. H. and Reddy, J. N., “Modelling of thick composites using a layerwise
laminate theory”, International Journal for Numerical Methods in Engineering, Vol. 36, 655‐677
(1993).
[03] Reddy, J. N., “A generalization of two‐dimensional theories of laminated composite
plates”, Communications in Applied Numerical Methods, Vol. 3, 173‐180 (1987).
[04] Barbero, E. J., On a generalized laminate plate theory with application to bending,
vibration, and delamination buckling in composite laminates, Tésis de Doctorado, Virginia
Polytechnic Institute and State University Blacksburg, Virginia, 1989.
[05] Pagano, N. J., “Exact Solutions for Rectangular Bidirectional Composites and Sandwich
Plates”, Journal of Composite Materials, Vol. 4, 20‐34 (1970).
[06] Jones, R. M., Mechanics of Composite Materials, 2nd Ed, Taylor and Francis, 1998.
[07] Ochoa, O.O. and Reddy, J.N., Finite Element Analysis of Composite Laminates, Kluwer
Academic Publishers, 1992.
[08] “Guide for Building and Classing Offshore Racing Yachts”, American Bureau of
Shipping, 1994.
[09] ABAQUS/CAE User’s Manual (v6.7), Dassault Systèmes, 2007.
[10] Otero, A. D., “Aplicación de laminados compuestos a la construcción de aspas de
generadores eólicos de alta potencia”, Grupo ISEP Facultad de Ingeniería UBA, 2006