Embed Size (px)
Citation preview

UNIVERSIDAD DE MAGALLANES
FACULTAD DE INGENIERIA
DEPARTAMENTO DE ELECTRICIDAD
SOFTWARE DIDÁCTICO DE APOYO A LA CÁTEDRA DE MÁQUINAS
ELÉCTRICAS.
José R. Alarcón Aguila
2008

UNIVERSIDAD DE MAGALLANES
FACULTAD DE INGENIERIA
DEPARTAMENTO DE ELECTRICIDAD
SOFTWARE DIDÁCTICO DE APOYO A LA CÁTEDRA DE MÁQUINAS
ELÉCTRICAS.
Trabajo de titulación presentado en conformidad
a los requisitos para obtener el título de Ingeniero
de Ejecución en Electricidad
Profesor Guía:
Sr. Sergio Núñez Lagos
José R. Alarcón Aguila
2008


Agradecimientos
Aquí, en este espacio, quiero dedicar con toda admiración, respeto y dar mi más sincero
agradecimiento:
A mis padres Agustina y José, por su apoyo incondicional, por los sacrificios realizados,
por sus palabras de aliento y consejos, me han motivado a seguir adelante.
A mis hermanas Ana y Evelyn, por sus buenas vibras, buenos deseos y disposición a
ayudar en todo lo posible a pesar de la distancia.
A Luis Fauré Navarro, por compartir sus ideas y conocimientos en programación.
A mi profesor guía Don Sergio Núñez Lagos, por sus conocimientos, experiencia y
tiempo invertido en este trabajo.
Y a mis buenos amigos.

i
Índice
Resumen
Capítulo I Introducción
1.1 Introducción
Capítulo II Estrategia para el diseño del software
2.1 Descripción de la metodología de trabajo
2.1.1 Identificación del problema y definición de objetivos
2.1.2 Selección del método de resolución
2.1.3 Descripción del algoritmo y concepción del flujograma
2.1.4 Codificación del programa
2.1.5 Compilación, carga del programa y corrección de errores
2.1.6 Carga, ejecución del programa y correcciones
2.1.7 Documentación del programa
Capitulo III Datos básicos y métodos de resolución
3.1 Objetivo general
3.2 Tipos de máquinas que se pueden analizar
3.3 Módulo de cálculo para transformadores
3.3.1 Selección de la máquina a analizar
3.3.2 Ingreso de datos necesarios para el análisis
3.3.2.1 Método 1: datos de placa + parámetros del circuito
equivalente
3.3.2.2 Método 2: datos de placa + datos de los ensayos de
vacío y cortocircuito
3.3.2.3 Método 3: solo datos de placa
3.3.3 Resultados
3.3.4 Análisis en carga
ix
1
2
4
5
5
5
5
6
6
7
7
9
10
11
11
13
13
13
13
14
14
14

ii
3.4 Módulo de cálculo para motores de inducción trifásicos
3.4.1 Selección del motor a analizar
3.4.2 Ingreso de datos necesarios para el análisis
3.4.2.1 Método 1: datos de placa + parámetros del circuito
equivalente
3.4.2.2 Método 2: datos de placa + datos de los ensayos de
vacío y rotor bloqueado
3.4.2.3 Método 3: solo datos de placa
3.4.3 Resultados
3.4.4 Tipos de análisis
3.5 Módulo de cálculo para motores de inducción monofásicos
3.5.1 Ingreso de datos necesarios para el análisis
3.5.1.1 Método 1: datos de placa + parámetros del circuito
equivalente
3.5.1.2 Método 2: datos de placa + datos de los ensayos de
vacío y rotor bloqueado
3.5.2 Resultados
3.5.3 Tipos de análisis
3.6 Módulo de cálculo para generadores síncronos
3.6.1 Selección de la máquina a analizar
3.6.2 Ingreso de datos necesarios para el análisis
3.6.2.1 Método 1: datos de placa + parámetros del circuito
equivalente
3.6.2.2 Método 2: datos de placa + ingreso de curvas
características
3.6.2.3 Método 3: datos de placa + estimación de curvas
15
16
16
17
17
17
17
18
18
19
19
20
20
20
20
21
21
22
22
22

iii
3.6.3 Resultados
3.6.4 Obtención de curvas características
3.7 Módulo de cálculo para motores síncronos
3.7.1 Selección de la máquina a analizar
3.7.2 Ingreso de datos necesarios para el análisis
3.7.2.1 Método 1: datos de placa + parámetros del circuito
equivalente
3.7.2.2 Método 2: datos de placa + ingreso de curvas
características
3.7.2.3 Método 3: datos de placa + estimación de curvas
3.7.3 Resultados
3.7.4 Obtención de curvas características
3.8 Productos generados por el software
Capitulo IV Construcción de algoritmos
4.1 Fundamentos de algoritmos
4.1.1 Partes de un algoritmo
4.1.2 Formas de representar un algoritmo
4.1.2.1 Pseudocódigo
4.1.2.2 Diagrama de flujo
4.2 Construcción de algoritmos para el análisis de las máquinas de
corriente alterna
4.2.1 Introducción
4.2.2 Construcción de algoritmos para el análisis de transformadores
4.2.2.1 Construcción de algoritmos para el análisis de
transformadores monofásicos
22
23
23
24
24
25
25
25
25
26
26
28
29
29
30
30
30
31
31
31
33

iv
4.2.2.1.1 Algoritmo para el análisis del transformador
monofásico considerando el ingreso de los
datos de los ensayos de vacío y cortocircuito
4.2.2.1.2 Algoritmo para el análisis del transformador
monofásico considerando el ingreso de los
parámetros del circuito equivalente
4.2.2.1.3 Algoritmo para el análisis del transformador
monofásico en condiciones de carga
4.2.2.2 Construcción de algoritmos para el análisis de
transformadores trifásicos
4.2.2.2.1 Algoritmo para el análisis del transformador
trifásico considerando el ingreso de los
datos de los ensayos de vacío y cortocircuito
4.2.2.2.2 Algoritmo para el análisis del transformador
trifásico considerando el ingreso de los
parámetros del circuito equivalente
4.2.2.2.3 Algoritmo para el análisis del transformador
trifásico en condiciones de carga
4.2.3 Algoritmo para el análisis de transformadores monofásicos y
Trifásicos considerando solo datos de placa
4.2.4 Construcción de algoritmos para el análisis de motores de
inducción trifásicos
4.2.4.1 Algoritmo para el análisis del motor de inducción
trifásico considerando el ingreso de los datos de los
ensayos de vacío y rotor bloqueado
35
37
40
43
44
47
50
53
58
60

v
4.2.4.2 Algoritmo para el análisis del motor de inducción
trifásico considerando el ingreso de los parámetros del
circuito equivalente
4.2.4.3 Algoritmo para el análisis del motor de inducción
trifásico considerando solo los datos de placa
4.2.4.4 Tipos de análisis implementados para el motor de
inducción trifásico
4.2.4.4.1 Características del motor variando la
velocidad
4.2.4.4.2 Características del motor incluyendo
resistencia externa
4.2.4.4.3 Método de partida del motor de inducción
4.2.5 Construcción de algoritmos para el análisis de motores de
inducción monofásicos
4.2.5.1 Algoritmo para el análisis del motor de inducción
monofásico considerando el ingreso de los datos de los
ensayos de vacío y rotor bloqueado
4.2.5.2 Algoritmo para el análisis del motor de inducción
monofásico considerando el ingreso de los parámetros
del circuito equivalente
4.2.5.3 Análisis de la velocidad del motor de inducción
monofásico variando la tensión de entrada
4.2.6 Construcción de algoritmos para el análisis de máquinas
síncronas
63
65
68
68
68
68
71
72
74
76
77

vi
4.2.6.1 Algoritmos para el análisis de la máquina síncrona
considerando el ingreso de los parámetros del circuito
equivalente
4.2.6.1.1 Tipo de análisis implementado cuando se
considera el ingreso de parámetros
4.2.6.2 Algoritmos para el análisis de la máquina síncrona
considerando el ingreso de las curvas de vacío y
cortocircuito
4.2.6.2.1 Tipo de análisis implementado cuando se
considera el ingreso de las curvas de vacío y
cortocircuito
Capitulo V Manual de usuario
5.1 Primeros pasos, utilización del sistema
5.1.1 Ingreso de la password
5.1.2 Pantalla principal
5.1.3 Esquema del menú principal
5.1.4 Opciones del menú desplegable
5.2 Menú utilidades y herramientas
5.2.1 Menú Microsoft ® Calculadora
5.2.2 Botón Microsoft ® Paint
5.2.3 Botón transformar coordenadas
5.3 Menú transformador monofásico
5.3.1 Botón Nuevo proyecto
5.3.2 Botón Ingresar parámetros
5.3.3 Botón Ingresar ensayos
5.3.4 Botón Estimar parámetros
79
81
84
93
96
97
97
97
98
99
100
100
100
101
102
103
104
106
107

vii
5.3.5 Botón Análisis con carga
5.4 Menú transformador trifásico
5.4.1 Botón Nuevo proyecto
5.4.2 Botón Ingresar parámetros
5.4.3 Botón Ingresar ensayos
5.4.4 Botón Estimar parámetros
5.4.5 Botón Análisis con carga
5.5 Menú motor de inducción trifásico
5.5.1 Botón Nuevo proyecto
5.5.2 Botón Ingresar parámetros
5.5.3 Botón Ingresar ensayos
5.5.4 Botón Estimar parámetros
5.5.5 Botón Tipo de análisis
5.5.5.1 Tipo de análisis en un motor de inducción trifásico
rotor bobinado
5.5.5.1.1 Características del motor variando la
velocidad
5.5.5.1.2 Características del motor incluyendo
resistencia externa
5.5.5.1.3 Método de partida del motor
5.5.5.2 Tipo de análisis en un motor de inducción trifásico
rotor jaula de ardilla
5.6 Menú motor de inducción monofásico
5.6.1 Botón Nuevo proyecto
5.6.2 Botón Ingresar parámetros
5.6.3 Botón Ingresar ensayos
107
110
111
112
114
115
115
118
119
120
121
122
122
122
122
123
124
125
126
127
127
129

viii
5.6.4 Botón Tipo de análisis
5.7 Menú generador síncrono
5.7.1 Botón Nuevo proyecto
5.7.2 Botón Ingreso de parámetros
5.7.2.1 Ingresar parámetros del generador síncrono rotor de
polos cilíndricos
5.7.2.2 Ingresar parámetros del generador síncrono rotor de
polos salientes
5.7.3 Botón Calcular impedancias
5.7.3.1 Ingresar curvas de vacío y cortocircuito
5.7.3.2 Estimar curvas
5.8 Menú motor síncrono
5.8.1 Botón Nuevo proyecto
5.8.2 Botón Ingreso de parámetros
5.8.2.1 Ingresar parámetros del motor síncrono rotor de polos
cilíndricos
5.8.2.2 Ingresar parámetros del motor síncrono rotor de polos
salientes
5.8.3 Botón Calcular impedancias
5.8.3.1 Ingresar curvas de vacío y cortocircuito
5.8.3.2 Estimar curvas
Capitulo VI Conclusiones
Bibliografía
130
131
131
132
133
133
134
134
135
136
137
138
138
139
139
140
140
141
144

ix
RESUMEN
El presente trabajo muestra la implementación de un Software didáctico de apoyo a la cátedra de
Máquinas Eléctrica de las Carreras de Ingeniería Eléctrica e Ingeniería Civil Eléctrica del
Departamento de Electricidad.
El software permite, conociendo algunos datos de entrada, determinar los parámetros del circuito
equivalente de las distintas máquinas de corriente alterna y evaluar su comportamiento en estado
permanente bajo distintas condiciones de carga.
El presente software ha sido desarrollado con el lenguaje de programación Visual-Basic;
herramienta de diseño de aplicaciones para Windows. Estas aplicaciones están formadas por una
parte de código puro, y otras partes asociadas a los objetos que forman la interfaz gráfica;
pudiendo incorporar todos los elementos de interacción de los que dispone Windows tales como:
ventanas, botones, cajas de diálogo y de texto, botones de opción y de selección, barras de
desplazamiento, gráficos, menús, etc.
Mediante una serie de pantalla y en forma interactiva permite al alumno obtener los valores de las
distintas variables y factores de las máquinas eléctricas, sean estas de entrada como de salida bajo
distintas situaciones de carga estando la máquina en estado permanente. Lo anterior sin duda, es
una gran ayuda para los alumnos que estudian ingeniería eléctrica, ya que el presente software,
no solo les permitiría verificar cálculos realizados en forma manual y verificar los resultados de
las guías de ejercicios, sino que también analizar el comportamiento de la máquina bajo distintas
condiciones que se plantean en el laboratorio de la misma cátedra.
El capítulo II, establece algunas estrategias para el diseño de un software para una aplicación
determinada.

x
El capítulo III, desarrolla las estrategias para el desarrollo de los módulos de software para cada
máquina que se podrá analizar en el software.
El capítulo IV, establece los algoritmos para cada módulo del software.
El capítulo V, desarrolla el manual para el usuario del software implementado y el capítulo VI,
establece las conclusiones del trabajo.

CAPITULO I
INTRODUCCION

2
1.1 Introducción
Las máquinas eléctricas se pueden representar por modelos matemáticos, de tal manera
que es posible obtener su comportamiento en estado transitorio, como también en su estado
permanente o estacionario. En los planes y programas de las Carreras de Ingeniería Eléctrica e
Ingeniería Civil Eléctrica del Departamento de Electricidad de la Universidad de Magallanes,
existe la Cátedra de Máquinas Eléctricas y Laboratorio de Máquinas Eléctricas, en estas
asignaturas se estudian las máquinas eléctricas en estado permanente, como así también existen
otras asignaturas que estudian las máquinas eléctricas en su estado transitorio.
En ciertos momentos resulta tedioso para el alumno, en su trabajo personal, analizar el
comportamiento de las máquinas eléctricas mediante el cálculo matemático manual, por no tener
un referente para comparar sus resultados. Es pues la función de este software, permitir al alumno
que en forma individual o grupal compare sus cálculos personales como respuesta a los
problemas planteados en las guías de ejercicios de la cátedra y de los temarios de laboratorio
antes indicado y lo más importante, permite al alumno, en forma autónoma, analizar las máquinas
bajo distintas condiciones de carga y evaluar por tanto, las variables de entrada y salida según
corresponda.

CAPITULO II
ESTRATEGIA PARA EL DISEÑO DEL SOFTWARE

5
2.1 Descripción de la metodología de trabajo
Cuando se quiere desarrollar un software para resolver un problema específico, hay que
seguir un cierto procedimiento que asegure al usuario un software final confiable. Por lo tanto,
actualmente, el desarrollo de software debe hacerse según una secuencia de pasos bien definidos.
Las etapas consecutivas en este proceso son las siguientes:
2.1.1 Identificación del problema y definición de objetivos
A este nivel, se debe saber claramente cuál es el problema que se quiere resolver, es
decir, cuales son los datos básicos del mismo y qué resultados se esperan, para establecer con
claridad cuál es el objetivo final que se persigue con el programa que se va a escribir.
2.1.2 Selección del método de resolución
Conociendo lo que se quiere, se hace necesario seleccionar el método de resolución que
mejor se adapte al problema, tomando en cuenta que el problema se va a resolver por medio del
computador y por un lenguaje de programación a determinar.
2.1.3 Descripción del algoritmo y concepción del flujograma
Cuando ya se conoce el método que se va a usar, entonces es necesario escribir el
algoritmo de resolución. Este consiste en una lista clara y sin ambigüedades de las operaciones
que se deben realizar, en forma de instrucciones elementales. Luego, a partir del algoritmo, se
realiza el flujograma o diagrama de flujo que es una representación grafica del algoritmo
elaborado. Esta representación grafica se hace en base a una serie de figuras geométricas

6
normalizadas. El diagrama de flujo consiste entonces en describir el algoritmo por una secuencia
de instrucciones incluidas dentro de esas figuras geométricas.
2.1.4 Codificación del programa
La codificación del programa consiste en la traducción en el lenguaje seleccionado de las
instrucciones descritas en el diagrama de flujo. En el presente caso, esta codificación se hace en
Visual Basic 6.0, y con un flujograma bien realizado y suficientemente detallado, la transcripción
en Visual Basic 6.0 de un programa no debe presentar muchas dificultades. De ahí la importancia
del flujograma en el desarrollo de programas.
También debe destacarse la importancia de intercalar comentarios en las instrucciones del
programa. Resultaran de mucha utilidad en el momento de modificar el programa o de volver a
usarlo después de algún tiempo
2.1.5 Compilación, carga del programa y corrección de errores
Al hacer la compilación se detectan los errores de sintaxis, es decir, los errores cometidos
en la codificación del programa al no respetar las reglas de escritura (caracteres equivocados,
falta de paréntesis, falta de operador, etc). Todos esos errores son detectados por el compilador y
se hace necesario corregirlos para seguir desarrollando el programa, o sea pasar a las etapas
siguientes.
Los programas diseñados en Visual Basic se dice que son interpretados y no compilados,
ya que el código no se convierte a código de máquina sino que hay otro programa que durante la
ejecución “interpreta” las líneas de código que ha escrito el programador. En general durante la

7
ejecución de cualquier programa, el código es cargado por el sistema operativo en la memoria
RAM.
2.1.6 Carga, ejecución del programa y correcciones
Para poder ser ejecutado, después de la compilación el programa se encontrará en forma
ejecutable. A este nivel se pueden detectar los errores de lógica del programa, tales como:
• División por cero.
• Logaritmo de un número negativo.
• Errores de formato de entrada o salida.
• Arreglos mal dimensionados
• Etc...
También se puede validar un programa para un caso cuya solución se conoce o haciendo
chequeos manuales de partes del mismo cuando es posible. Así se tendrá la seguridad de que el
programa escrito cumple con el objetivo inicial. Si no es el caso hay que reiniciar el
procedimiento del desarrollo del programa desde el principio y chequear cada uno de los pasos.
2.1.7 Documentación del programa
Teniendo el programa implementado, es indispensable tener también una documentación
precisa y completa del mismo. En efecto, cualquier usuario futuro de este programa que no ha
participado en la elaboración del mismo, no está enterado de cómo trabaja dicho programa.
Igualmente, cualquier modificación o mejora que se quiera hacer al programa se hace necesario
conocer perfectamente el programa original. Esa documentación debe incluir lo siguiente:

8
• Nombre y objetivo del programa.
• Fecha de elaboración y autor (para cualquier información adicional).
• Listado de variables y su significado.
• Formato de introducción de los datos.
• Formato de salida de los resultados.
• Un ejemplo de corrida con sus respectivos datos de entrada y resultados.
Cada una de estas etapas tiene sus objetivos específicos, los cuales al final facilitan el
diseño de un programa que cumpla con el objetivo inicial.

CAPITULO III
DATOS BASICOS Y METODOS DE RESOLUCION

10
3.1 Objetivo general
El objetivo general de este trabajo es el diseño e implementación de un software didáctico
que pretende ser una herramienta de apoyo e iniciación en el análisis de las máquinas eléctricas
de corriente alterna en estado estacionario, tales como: transformadores monofásicos y
trifásicos, motores de inducción monofásicos y trifásicos y máquinas sincronas configurada como
generador o motor. Por tratarse de un software didáctico, sólo considera las variables más
relevantes en el análisis.
Para lograr esto, se plantean los siguientes objetivos particulares:
a. Diseñar una estructura básica que muestre los tipos de máquinas que se pueden analizar.
b. Diseñar una estructura básica de análisis de cada máquina que sea común a todas ellas de
manera que resulte un manejo simple y didáctico del software, dicha estructura la
llamaremos de ahora en adelante módulo de cálculo.
c. Establecer los tipos de datos o métodos utilizados para obtener un modelo representativo
de cada máquina para posteriormente poder realizar su análisis en estado estacionario.
d. Definir los resultados que se quieren obtener.
La estructura básica de análisis común a todas las máquinas, consta de cuatro tipos de
datos de entrada, solo con uno de ellos, en combinación con los datos de placa de la máquina, dan
los resultados preliminares necesarios para poder hacer un análisis más completo del
comportamiento de la máquina en estado estacionario, los tipos de datos son: parámetros
conocidos, datos de ensayos, curvas características y método de estimación. El esquema que
muestra esta estructura básica de análisis se presenta en la figura 3.1

11
Figura 3.1. Estructura básica para el análisis de las máquinas.
3.2 Tipos de máquinas que se pueden analizar
En esta versión solo analizarán máquinas de corriente alterna, tales como motores de
inducción monofásicos, máquinas trifásicas divididas en motores de inducción trifásicos y
máquinas síncronas funcionando como generador o como motor y transformadores en sus dos
versiones ,vale decir, monofásicos y trifásicos como se muestran en el esquema de la figura 3.2.
Figura 3.2. Tipos de máquina que se pueden analizar.
3.3 Módulo de cálculo para transformadores
El módulo de cálculo para transformadores monofásicos y trifásicos consta básicamente
de cuatro partes:

12
• Selección de la máquina a analizar.
• Ingreso de datos necesarios para el análisis.
• Obtención de resultados (parámetros del circuito equivalente).
• Análisis en carga.
El esquema que representa las partes del módulo de cálculo para transformadores se
muestran en la figura 3.3 y figura 3.4.
Figura 3.3. Selección de la máquina y obtención de resultados.
Figura 3.4. Análisis en carga.

13
3.3.1 Selección de la máquina a analizar
Puede seleccionar dos tipos de máquina:
• Transformadores monofásicos.
• Transformadores trifásicos.
3.3.2 Ingreso de los datos necesarios para el análisis
Los datos más importantes para realizar un análisis son los datos de placa; estos
combinados con solo un método de los tres incluidos en el módulo de cálculo, mostrados en la
figura 3.3, se obtiene el circuito equivalente del transformador.
3.3.2.1 Método 1: datos de placa + parámetros del circuito equivalente
Al ser conocidos los parámetros del circuito equivalente, solo deben ser ingresados en el
software junto con los datos de placa y se está en condiciones de hacer un análisis del
transformador bajo distintas condiciones de carga.
3.3.2.2 Método 2: datos de placa + datos de los ensayos de vacío y cortocircuito
Al ser conocidos los datos de los ensayos, se ingresan con los datos de placa y el software
calcula los parámetros del circuito equivalente, ahora se está condiciones de analizar cualquier
condición normal de carga.

14
3.3.2.3 Método 3: solo datos de placa
Con solo ingresar los datos de placa y herramientas matemáticas de alto nivel incluidas en
el software, permite predecir en forma aproximada los parámetros del circuito equivalente para
posteriormente poder hacer un análisis de la maquina.
3.3.3 Resultados
Los resultados parciales obtenidos son los parámetros del circuito equivalente del
transformador monofásico o transformador trifásico según corresponda referidos al primario y
secundario. También se representan los valores en por unidad (p.u.).
3.3.4 Análisis en carga
Al obtener los parámetros del circuito equivalente, se está en condiciones de realizar el
análisis en distintas condiciones de carga.
Para el análisis en condiciones de carga, se necesita conocer las características de esta y
así usar la configuración del circuito equivalente adecuada. El módulo de cálculo posee cuatro de
las características más representativas de una carga conectada a un transformador:
• Factor de potencia, tensión y potencia en la carga.
• Impedancia de la carga y tensión en la carga.
• Impedancia de la carga y tensión de la red de alimentación.
• Tensión de la red de alimentación y corriente absorbida por la carga.

15
3.4 Módulo de cálculo para motores de inducción trifásicos
El módulo de cálculo para motores de inducción trifásicos consta básicamente de cuatro
partes:
• Selección del motor a analizar.
• Ingreso de datos necesarios para el análisis.
• Resultados (modelo representativo).
• Tipo de análisis.
El esquema que representa las partes del módulo de cálculo para motores de inducción
trifásicos se muestran en la figura 3.5 y figura 3.6.
Figura 3.5. Selección del motor a analizar y obtención de resultados.

16
Figura 3.6. Tipos de análisis que se pueden realizar.
3.4.1 Selección del motor a analizar
Puede seleccionar dos tipos según el tipo de rotor:
• Motor de inducción trifásico rotor bobinado.
• Motor de inducción trifásico rotor jaula de ardilla. Estos están subdivididos según la
norma NEMA en clase A,B,C,D.
3.4.2 Ingreso de datos necesarios para el análisis
Los datos más importantes para realizar un análisis son los datos de placa del motor. Estos
combinados con uno de los tres métodos implementados se obtiene el circuito equivalente del
motor de inducción trifásico.

17
3.4.2.1 Método 1: datos de placa + parámetros del circuito equivalente
Al ser conocidos los parámetros se ingresan directamente en el software junto con los
datos de placa y se esta en condiciones de realizar un análisis del motor.
3.4.2.2 Método 2: datos de placa + datos de los ensayos de vacío y rotor bloqueado
Conociendo estos datos se calculan los parámetros del circuito equivalente con la ayuda
de los ensayos de vacío y rotor bloqueado. Luego se calculan los parámetros y se esta en
condiciones de realizar un análisis del motor.
3.4.2.3 Método 3: solo datos de placa
Con solo los datos de placa y herramientas matemáticas implementadas en el software,
permite predecir en forma aproximada los parámetros del circuito equivalente; se hace una
estimación de los ensayos y se esta en condiciones de realizar un análisis.
3.4.3 Resultados
Los resultados obtenidos mediante uno de los tres métodos son: los parámetros del
circuito equivalente aproximado referido al estator considerando una estrella equivalente, el
circuito equivalente de Thevenin variables eléctricas y el diagrama de flujo de potencias
considerando el funcionamiento a plena carga.

18
3.4.4 Tipo de análisis
Al obtener los resultados se esta en condiciones de realizar el análisis del motor. El
software consta de tres tipos de análisis.
• Características del motor variando velocidad.
• Características del motor incluyendo resistencia externa.
• Método de partida del motor de inducción.
Para el motor de inducción rotor jaula de ardilla solo esta disponible el primer análisis y
en todos ellos se obtienen curvas características en función de la velocidad, curva de Torque,
Potencia, Corriente, Factor de potencia.
3.5 Módulo de cálculo para motores de inducción monofásicos
El módulo de cálculo para motores de inducción monofásicos consta básicamente de tres
partes:
• Ingreso de datos necesarios para el análisis.
• Resultados (modelo representativo).
• Tipo de análisis.
El esquema que representa las partes del módulo de cálculo para motores de inducción
monofásicos se muestran en la figura 3.7 y figura 3.8.

19
Figura 3.7. Ingreso de datos necesarios para el análisis
y obtención de resultados
Figura 3.8. Tipo de análisis que se puede realizar.
3.5.1 Ingreso de datos necesarios para el análisis
Los datos más importantes para realizar un análisis son los datos de placa del motor de
inducción monofásico. Estos combinados con uno de los dos métodos implementados se obtiene
el circuito equivalente del motor.
3.5.1.1 Método 1: datos de placa + parámetros del circuito equivalente
Al ser conocidos los parámetros se ingresan directamente en el software junto con los
datos de placa y se esta en condiciones de realizar un análisis del motor. Existe la posibilidad de

20
ingresar datos adicionales como deslizamiento y datos de pérdidas.
3.5.1.2 Método 2: datos de placa + datos de los ensayos de vacío y rotor bloqueado
Considerando estos datos se calculan los parámetros del circuito equivalente con la ayuda
de los ensayos de vacío y rotor bloqueado, y se esta en condiciones de realizar un análisis del
motor también se pueden ingresar datos adicionales como velocidad y deslizamiento.
3.5.2 Resultados
Los resultados obtenidos mediante uno de los dos métodos son los parámetros del circuito
equivalente variables eléctricas flujo de potencias impedancias equivalente.
3.5.3 Tipo de análisis
Se puede observar las características del motor variando la velocidad obteniendo la curva
característica de torque en función de la velocidad.
3.6 Módulo de cálculo para generadores síncronos
El módulo de cálculo para generadores síncronos consta básicamente de cuatro partes:
• Selección del generador a analizar.
• Ingreso de datos necesarios para el análisis.
• Resultados.

21
• Obtención de curvas características.
El esquema que representa las partes del módulo de cálculo para generadores síncronos se
muestra en la figura 3.9.
Figura 3.9. Selección del generador a analizar
y obtención de resultados.
3.6.1 Selección de la máquina a analizar
Puede ser seleccionada dos tipos de máquinas:
• Generador sincrono de polos cilíndricos.
• Generador sincrono de polos salientes.
3.6.2 Ingreso de datos necesarios para el análisis
Siempre se debe contar con datos de placa de la maquina y combinado con uno de los tres
métodos implementados, se obtienen resultados para el análisis de curvas características.

22
3.6.2.1 Método 1: datos de placa + parámetros del circuito equivalente
Al ser conocidos estos datos se ingresan directamente en el software y se obtienen los
resultados del análisis, otros datos adicionales que se pueden ingresar son las perdidas de la
máquina.
3.6.2.2 Método 2: datos de placa + ingreso de curvas características
Al ingresar estos datos se obtienen los parámetros del circuito equivalente considerando la
maquina funcionando con y sin saturación.
3.6.2.3 Método 3: datos de placa + estimación de curvas
Considerando solo los datos de placa, se busca la curva mas adecuada para el análisis, y
se obtienen los parámetros del circuito equivalente con y sin saturación.
3.6.3 Resultados
Los resultados que se obtienen, se logran, previamente con el ingreso de las características
de la carga considerada, vale decir, potencia y factor de potencia, los datos que se obtienen por
fase y/o trifásicos son:
• Tensión en terminales.
• Tensión inducida internamente en el estator.
• Corriente de línea.
• Potencias.

23
• Angulo de potencia.
• Regulación de tensión.
• Rendimiento.
• Diagrama de flujo de potencias.
Dependiendo del análisis que se elija, los cálculos son entregados considerando su
saturación o no saturación.
3.6.4 Obtención de curvas características
En este caso, se puede obtener dos tipos de curvas:
• Potencia v/s ángulo de potencia.
• Regulación v/s factor de potencia.
En ambos casos, se generan tablas que entregan los puntos de la curva, así como también
valores máximos.
3.7 Módulo de cálculo para motores sincronos
El módulo de cálculo para motores síncronos consta básicamente de cuatro partes:
• Selección del motor a analizar.
• Ingreso de datos necesarios para el análisis.
• Resultados.

24
• Obtención de curvas características.
El esquema que representa las partes del módulo de cálculo para motores síncronos se
muestra en la figura 3.10.
Figura 3.10. Selección del motor a analizar
y obtención de resultados.
3.7.1 Selección de la máquina a analizar
Puede ser seleccionada dos tipos de máquinas:
• Motor sincrono de polos cilíndricos.
• Motor sincrono de polos salientes.
3.7.2 Ingreso de datos necesarios para el análisis
Siempre se debe contar con datos de placa de la maquina y combinado con uno de los tres
métodos implementados, se obtienen resultados para el análisis de curvas características.

25
3.7.2.1 Método 1: datos de placa + parámetros del circuito equivalente
Al ser conocidos estos datos se ingresan directamente en el software y se obtienen los
resultados del análisis, otros datos adicionales que se pueden ingresar son las perdidas de la
maquina.
3.7.2.2 Método 2: datos de placa + ingreso de curvas características
Al ingresar estos datos se obtienen los parámetros del circuito equivalente considerando la
maquina funcionando con y sin saturación.
3.7.2.3 Método 3: datos de placa + estimación de curvas
Considerando solo los datos de placa, se busca la curva mas adecuada para el análisis, y
se obtienen los parámetros del circuito equivalente con y sin saturación.
3.7.3 Resultados
Los resultados que se obtienen, se logran, previamente con el ingreso de las características
de la carga considerada, vale decir, potencia y factor de potencia, los datos que se obtienen por
fase y/o trifásicos son:
• Tensión en terminales.
• Tensión inducida internamente en el estator.
• Corriente de línea.
• Potencias.

26
• Angulo de potencia.
• Rendimiento.
• Diagrama de flujo de potencias.
Dependiendo del análisis que se elija, los cálculos son entregados considerando su
saturación o no saturación.
3.7.4 Obtención de curvas características
En este caso, se puede obtener dos tipos de curvas:
• Potencia v/s ángulo de potencia.
• Torque v/s ángulo de potencia.
En ambos casos, se generan tablas que entregan los puntos de la curva, así como también
valores máximos.
3.8 Productos generados por el software
En términos simples, los tipos de datos generados por cada módulo de cálculo contenido
en el software, se presentan en forma numérica, cuando se espera tal resultado y en forma de
gráfica, cuando se desea obtener una curva (ver Anexo “Ejemplos resueltos utilizando el
software”); estos tipos de datos se agrupan en cinco partes:

27
• Resultados parciales: que consideran los parámetros del circuito equivalente de la
máquina analizada (variables eléctricas, valores en p.u. ,etc.)
• Resultados de análisis: para cualquier condición de carga ingresada, se muestra el
comportamiento de la máquina elegida representada por las distintas variables .
• Gráficos: dependiendo de la máquina, estos pueden ser de potencia, corriente, regulación,
y torque, según corresponda.
• Reporte de cálculos: contiene todos los resultados obtenidos y pueden ser llevados a la
impresora.
• Respaldo de datos: permite guardar los proyectos realizados y almacenarlos en su PC.

CAPITULO IV
CONSTRUCCION DE ALGORITMOS

29
4.1 Fundamentos de algoritmos
Los algoritmos son una serie de pasos que permiten obtener una solución teórica a un
problema, indicando las operaciones a realizar y el orden en que deben efectuarse.
Cuando un algoritmo debe ser ejecutado por un computador, se necesita expresar el
algoritmo en instrucciones comprensibles por el PC; para esto último, se utilizan los lenguajes de
programación. Al algoritmo expresado en un determinado lenguaje de programación, se le
denomina programa. Esto indica que de un determinado problema o situación dada, se elabora
un algoritmo con los pasos necesarios para su solución, y si se requiere sea ejecutado por un
computador, se traduce el algoritmo a instrucciones editadas en un lenguaje de programación. El
esquema general que representa la elaboración de un programa se presenta en la figura 4.1.
Figura 4.1.Esquema para elaborar un programa.
4.1.1 Partes de un algoritmo
Todo algoritmo debe obedecer a la estructura básica de un sistema como se muestra en la
figura 4.2, es decir; entrada, proceso y salida.
Figura 4.2.Partes de un algoritmo.

30
Donde:
Entrada: corresponde al insumo, a los datos necesarios que requiere el proceso
para ofrecer los resultados esperados.
Proceso: pasos necesarios para obtener la solución del problema o la situación
planteada.
Salida: resultados arrojados por el proceso como solución.
4.1.2 Formas de representar un algoritmo
4.1.2.1 Pseudocódigo
Significa escribir las instrucciones del algoritmo en lenguaje natural, tal y como lo
expresamos de manera cotidiana, este procedimiento facilita su escritura en los lenguajes de
programación.
4.1.2.2 Diagramas de flujo
Son representaciones gráficas de los pasos necesarios que conllevan a la solución
algorítmica de un problema. Para diseñarlos se utilizan determinados símbolos o figuras que
representan una acción dentro del procedimiento. Estos símbolos se han normalizado o
estandarizados para representar los pasos del algoritmo. Cada paso se representa a través del
símbolo adecuado, que se van uniendo con flechas, denominadas líneas de flujo, que a su vez
indican el orden en que los pasos deben ser ejecutados.

31
4.2 Construcción de algoritmos para el análisis de las máquinas eléctricas de
corriente alterna
4.2.1 Introducción
La estructura usada en la construcción de los algoritmos para el análisis de las máquinas
de corriente alterna, es la descrita en la sección 4.1.1, los tipos de datos necesarios para el análisis
de cada máquina fueron descritos en el Capítulo III. Ahora, la construcción del algoritmo se
centra en clasificar los tipos de datos para llegar a los resultados esperados.
En particular, si aplicamos los fundamentos de algoritmos en el análisis de las máquinas
de corriente alterna en estado estacionario, los datos de entrada más importantes y que no debe
faltar son los datos de placa de la máquina, existen más datos de entrada según sea el
dispositivo que se está analizando. El proceso, es comparable con la teoría usada en el análisis de
máquinas eléctricas en estado estacionario. La salida, son los resultados de la aplicación de la
teoría, como por ejemplo: circuitos equivalentes y sus parámetros, que para esquematizar
llamaremos modelo representativo, otros resultados como variables eléctricas, comportamiento
en condiciones de carga, etc. Luego, las partes del algoritmo para analizar máquinas de corriente
alterna se muestran en la figura 4.3.
Figura 4.3. Partes del algoritmo para analizar máquinas de corriente alterna.
En este trabajo, los algoritmos se representan con mayores detalles en forma de
pseudocódigos incluidos en los anexos, los cuales muestran la implementación de las ecuaciones

32
y las variables que se resuelven en cada máquina; y como diagramas de flujo, que muestran los
pasos a seguir en un análisis y que se desarrollan a continuación.
4.2.2 Construcción de algoritmos para el análisis de transformadores
Comenzamos por la definición de los datos de entrada indispensables para el análisis: los
datos de placa, tanto para transformadores monofásicos como para los trifásicos son cuatro:
• Potencia nominal expresada en [KVA].
• Voltaje devanado: primario si es monofásico pV , alta tensión si es trifásico ATV .
Expresado en [Volts].
• Voltaje devanado: secundario si es monofásico sV , baja tensión si es trifásico BTV .
Expresado en [Volts].
• Frecuencia expresada en [Hertz].
Otros datos de entrada que se complementan con los datos de placa y son excluyentes
entre sí y contribuyen al desarrollo del proceso son:
• Datos de las pruebas de vacío y corto circuito.
• Parámetros del circuito equivalente.
A continuación, se plantean por separado, los algoritmos implementados para el análisis
de transformadores monofásicos y transformadores trifásicos, representados como diagrama de
flujo.

33
4.2.2.1 Construcción de algoritmos para el análisis de transformadores monofásicos
De los datos de placa, que son los que no deben faltar, se pueden deducir cálculos que
ayudan en el análisis del transformador, tales como: razón de transformación a, corriente nominal
en el devanado primario pI , corriente nominal en el devanado secundario sI , potencia base
baseS , impedancia base en el primario bpZ e impedancia base en el secundario bsZ . Luego, estos
valores se pueden combinar con uno de los dos datos complementarios mencionados en la
sección 4.2.2.
El diagrama de flujo que representa el ingreso de los datos de placa y sus resultados
parciales se presenta en la figura 4.4.
Figura 4.4. Diagrama de flujo para el ingreso de datos de placa del transformador
monofásico.
Los cálculos obtenidos de los datos de placa, pasan a ser nuevos valores de entrada antes
de elegir uno de los datos complementarios, también bautizados como experimentos a realizar.
Inicio
Ingresar voltaje secundario Vs en [V]
Ingresar potencia
nominal en [KVA]
Ingresar voltaje primario Vp en [V]
Ingresar frecuencia en [Hz]
Calcular: Razón a Corriente primario IP
Corriente secundario IS Impedancia base primario Zbp Impedancia base secundario Zbs

34
Para su mayor comprensión, por cada dato de entrada complementario, ya sea datos de
ensayos o parámetros del circuito equivalente, se desarrolló un diagrama de flujo, en donde el
bloque que representa la entrada de datos de placa se desarrolló en la figura anterior (Figura 4.4).
35
4.2.2.1.1 Algoritmo para el análisis del transformador monofásico considerando el
ingreso de los datos de los ensayos de vacío y cortocircuito
Los datos de los ensayos de vacío y cortocircuito, son valores de voltaje, corriente y
potencia, que permiten obtener los parámetros del circuito equivalente, estos pueden ser referidos
al devanado primario y/o al devanado secundario, también pueden ser expresados en valores en
por unidad, estos datos son considerados como datos de salida.
Los valores de voltaje, corriente y potencia definidos para cada prueba se presentan en la
tabla 4.1.
Voltaje (V) Corriente (A) Potencia (W)
Prueba de vacío 0V 0I 0P
Prueba de corto circuito ccV ccI ccP
Tabla 4.1. Valores definidos para las pruebas de vacío y corto circuito.
Con la prueba de vacío se determinan los parámetros que representan el flujo mutuo y las
pérdidas en el núcleo, la prueba se realiza a voltaje nominal, es decir, debemos comparar 0V de la
prueba de vacío con los datos de placa pV y sV ; si pVV ≈0 , la prueba es realizada por el
devanado primario, y los parámetros estarán referidos al devanado primario, si sVV ≈0 , la prueba
es realizada por el secundario, estos parámetros estarán referidos al secundario.
Con la prueba de cortocircuito se determinan la resistencia equivalente y la reactancia de
fuga equivalente, la prueba se realiza a corriente nominal en forma análoga a la prueba de vacío,
se debe comparar ccI de la prueba con las corrientes de los devanados primario y secundario pI e
sI ; si pcc II ≈ , la prueba es realizada por el devanado primario, y los parámetros estarán

36
referidos al devanado primario, si scc II ≈ , la prueba es realizada por el secundario, y los
parámetros estarán referidos al secundario.
El diagrama de flujo, que representa la secuencia de pasos para determinar los parámetros
del circuito equivalente, se representa en la figura 4.5, la continuación de este es la figura 4.6 que
representa los datos de salida.
Figura 4.5. Diagrama de flujo que representa el uso de los datos de las pruebas de
vacío y cortocircuito en un transformador monofásico.
Inicio análisis
Ingreso datos de placa
Ingreso datos ensayo de vacío
Ingreso datos ensayo de cortocto.
Cortocto Por el
primario
Calcular referido al secundario
R2+R12 X2+X12
Referir al primario R1+R21= a2 (R2+R12) X1+X21= a2 (X2+X12)
Calcular referido al primario
R1+R21 X1+X21
Referir al secundario R2+R12= (R1+R21)/a2
X2+X12=(X1+X21)/ a2
Vacío Por el
primario
Calcular referido al secundario
Ro2 Xo2
Referir al primario Ro= a2 Ro2 Xo= a2 Xo2
Calcular referido al primario
Ro Xo
Referir al secundario Ro2= Ro/a2
Xo2=Xo2/ a2
1 2
No No
Si Si
1

37
Figura 4.6. Diagrama de flujo que representa los resultados o datos de salida.
El paso más destacado en este diagrama de flujo, son las estructuras condicionales dobles
implementadas en la prueba de vacío, y de cortocircuito. Donde, el ensayo de vacío está
condicionado al voltaje nominal y el ensayo de corto circuito condicionado por la corriente
nominal. Según el valor de estas magnitudes, se elige la instrucción siguiente.
4.2.2.1.2 Algoritmo para el análisis del transformador monofásico considerando el
ingreso de los parámetros del circuito equivalente
Cuando se trabaja con el circuito equivalente, y en vez de trabajar con dos circuitos,
primario y secundario y dos conjuntos de tensiones y corrientes, es preferible referir todas las
magnitudes a uno de los dos devanados. Con fines didácticos, aquí se definen cinco grupos de
datos de entrada complementarios a los datos de placa. Estos son:
1. Todos los parámetros conocidos: mm XRXRXR ,,,,, 2211 o 00 , XR
2. Solo los parámetros del devanado primario: mm XRXR ,,, 11 o 00 , XR
3. Solo los parámetros de devanado secundario: mm XRXR ,,, 22 o 00 , XR
2
Agrupar parámetros referidos al primario
Agrupar parámetros referidos al secundario
Calcular parámetros en p.u.
Fin análisis

38
4. Los parámetros del devanado secundario referidos al devanado primario:
mm XRXR ,,, 2121 o 00 , XR
5. Los parámetros del devanado primario referidos al devanado secundario:
mm XRXR ,,, 1212 o 00 , XR
Con respecto a la rama que representa las pérdidas en el núcleo y el flujo mutuo, esta se
puede representar como una rama serie usando los datos 0R y 0X o bien en paralelo usando los
datos mR y mX , según la configuración del circuito disponible.
Cada grupo de datos complementario, y en particular los datos de la rama que representa
las pérdidas en el núcleo y flujo mutuo, son excluyentes entre sí, es decir, solo con elegir uno de
ellos se puede llegar a los resultados o datos de salida.
Al conocer los parámetros del circuito equivalente, en cualquiera de sus formas descritas,
se pueden hacer estimaciones de los ensayos de vacío y cortocircuito aplicando las condiciones
que regulan estas pruebas, otros resultados que se pueden obtener son referir los parámetros,
expresarlos en cantidades en por unidad.
El diagrama de flujo que representa la secuencia de pasos para analizar el transformador
considerando los parámetros del circuito equivalente se muestran en las figuras 4.7 y la
continuación representada en la figura 4.8, corresponde a los resultados o datos de salida.

39
Figura 4.7. Diagrama de flujo que representa el uso de los parámetros conocidos del
circuito equivalente.
Inico analisis
Ingreso datos de
placa
Ingreso parámetros conocidos
Todos primario y secundario
Solo secundario referido al primario
Solo primario
referido al secundario
Solo secundario
Solo primario
1
1
1
1
1
2
2
Si
Si
Si
Si
Si
No
No
No
No
No
Ingresar R1 ,R2 X1, X2
Ingresar R1, X1
Ingresar R2 , X2
Ingresar R21 , X21
Ingresar R12 , X12

40
Figura 4.8. Diagrama de flujo que representa los resultados o datos de salida.
Para respetar la idea de elegir solo uno de los tipos de datos definidos, se implementaron
condicionales dobles que aseguran la elección de solo una alternativa, al igual en la elección de
los parámetros que representan las pérdidas en el núcleo y flujo mutuo.
4.2.2.1.3 Algoritmo para el análisis del transformador monofásico en condiciones de
carga
Utilizando cualquiera de las técnicas de análisis implementadas, se llegan a los mismos
resultados o datos de salida, que nos permiten continuar con el análisis, ahora considerando al
transformador funcionando en condiciones de carga.
1
Ingresar RO y XO
Ingresar Rm , Xm
Estimar ensayos de vacío y cortocircuito
Calcular parámetros referidos al primario
Calcular parámetros referidos al secundario
Calcular parámetros en p.u.
Si
No
Fin análisis

41
En este caso, se debe definir nuevos datos de entrada, que son las características
conocidas de la carga, estas se clasificaron en cuatro tipos de datos más representativos y que se
enumeran a continuación:
1. Factor de potencia de la carga ϕcos , voltaje en la carga LV y potencia en la carga
.LP
2. Impedancia de la carga LZ& y voltaje en la carga .LV
3. Impedancia de la carga LZ& y voltaje de la red de alimentación .redV
4. Voltaje de la red de alimentación .redV , factor de potencia ϕcos y corriente
absorbida por la carga .LI
La idea, es poder elegir una alternativa a la vez. Para ello fueron implementadas con
condicionales dobles que permiten una vez elegida una opción excluir las restantes.
Otro dato a considerar es la ubicación de la carga, es decir, en que devanado estará
conectada; información que permite usar la configuración del circuito equivalente adecuada para
el análisis.
El análisis en condiciones de carga permite encontrar los nuevos valores de las variables
en el devanado primario y devanado secundario para la condición elegida, otros valores
importantes que se pueden obtener son cálculo de pérdidas e indicadores como eficiencia y
regulación.
El diagrama de flujo que representa la secuencia de pasos para analizar el transformador
en condiciones de carga se muestran en las figuras 4.9 y la sección siguiente representada en la
figura 4.10, muestra los resultados del análisis.

42
Figura 4.9. Diagrama de flujo para realizar el análisis en carga de un transformador
monofásico.
Inico análisis
Ingreso características de la carga
Cos ϕ Tensión carga VL Potencia carga PL
3
Si
Si
Si
Si
No
No
No
Ingresar ubicación
Cos ϕ VL PL
Impedancia carga ZL
Tensión carga VL
Ingresar ubicación ZL VL
Impedancia carga ZL
Tensión red VR
Ingresar ZL VR
Tensión red VR
Cos ϕ Corriente carga IL
Ingresar ubicaciónVR
Cos ϕ IL
2
2
2
3
2
No

43
Figura 4.10. Diagrama de flujo que representa los resultados del análisis del
transformador monofásico en condiciones de carga.
4.2.2.2 Construcción de algoritmos para el análisis de transformadores trifásicos
Similar al caso del transformador trifásico, de los datos de placa se desprenden cálculos
importantes para continuar con el análisis tales como: razón de transformación a, corriente
nominal en el devanado de alta tensión ATI , corriente nominal en el devanado de baja tensión
BTI , potencia base baseS , impedancia base en el devanado de alta tensión bATZ e impedancia base
en el devanado de baja tensión bBTZ .
El diagrama de flujo que representa el ingreso de los datos de placa y sus resultados
parciales se presenta en la figura 4.11.
2
Calcular en devanado primario: VP, IP, cos ϕ SP, PP, QP Valores en p.u.
Calcular en devanado secundario:VS, IS, cos ϕ SS, PS, QS Valores en p.u.
Calcular pérdidas: Pérdidas en los devanados Pérdidas en el núcleo Pérdidas totales
Calcular indicadores: Eficiencia η Regulación de voltaje ξ
Fin análisis

44
Figura 4.11. Diagrama de flujo para el ingreso de datos de placa del transformador
trifásico.
Los cálculos realizados con los datos de placa, pasan a ser nuevos valores de entrada
antes de elegir uno de los datos complementarios.
Por cada dato de entrada complementario: datos de ensayos o parámetros del circuito
equivalente, se desarrolló un diagrama de flujo, en donde el bloque que representa la entrada de
datos de placa se desarrolló en la figura anterior (Figura 4.11).
4.2.2.2.1 Algoritmo para el análisis del transformador trifásico considerando el
ingreso de los datos de los ensayos de vacío y cortocircuito
A diferencia del transformador monofásico, los datos de los ensayos de vacío y
cortocircuito del transformador trifásico, son valores de línea: de voltaje, corriente y potencia.
Permiten obtener los parámetros del circuito equivalente por fase considerando una
conexión estrella, estos pueden ser expresados como una conexión equivalente delta, aplicando la
equivalencia de conexiones. Los parámetros de ambas conexiones pueden ser referidos al
Inicio
Ingresar voltaje devanado, B.T. VBT en [V]
Ingresar potencia nominal en [KVA]
Ingresar voltaje devanado A.T. VAT en [V]
Ingresar frecuencia en [Hz]
Calcular: Razón a Corriente A.T. IAT Corriente B.T. IBT Impedancia base A.T. ZbAT
Impedancia base B.T. ZbBT
Elegir experimento

45
devanado de alta tensión y/o al devanado de baja tensión, y ser expresados en valores en por
unidad. Todos estos valores nombrados son considerados como datos de salida.
Los valores de línea: voltaje, corriente y potencia definidos para cada prueba se muestran
en la tabla 4.2.
Voltaje (V) Corriente (A) Potencia (W)
Prueba de vacío 0LV 0LI 0LP
Prueba de corto circuito LccV LccI LccP
Tabla 4.2. Valores de línea definidos para las pruebas de vacío y
corto circuito.
Con la prueba de vacío se determinan los parámetros que representan el flujo mutuo y las
pérdidas en el núcleo, la prueba se realiza a voltaje nominal, es decir, debemos comparar 0LV de la
prueba de vacío con los datos de placa ATV y BTV ; si ATL VV ≈0 , la prueba es realizada por el
devanado de alta tensión, y los parámetros estarán referidos al mismo devanado, si BTVV ≈0 , la
prueba es realizada por el devanado de baja tensión, los parámetros estarán referidos al devanado
de baja tensión.
Con la prueba de cortocircuito se determinan la resistencia equivalente y la reactancia de
fuga equivalente, la prueba se realiza a corriente nominal , se debe comparar LccI de la prueba con
las corrientes nominales de los devanados de alta y baja tensión ATI e BTI ; si ATLcc II ≈ la
prueba es realizada por el devanado de alta tensión, y los parámetros estarán referidos a este
devanado, si BTLcc II ≈ la prueba es realizada por el devanado de baja tensión, y los parámetros
estarán referidos al devanado de baja tensión.

46
El diagrama de flujo, que representa la secuencia de pasos para determinar los parámetros
del circuito equivalente por fase considerando una conexión estrella, se representa en la figura
4.12, y los datos de salida en la figura 4.13.
Figura 4.12. Diagrama de flujo que representa el uso de los datos de las pruebas de
vacío y cortocircuito en un transformador trifásico.
Inicio análisis
Ingreso datos de placa
Ingreso datos ensayo de vacío
Ingreso datos ensayo de cortocto.
Cortocto Por el
lado A.T
Calcular referido a B.TR2f+R12f
X2f+X12f
Referir a A.T R1f+R21f= a2 (R2f+R12f) X1f+X21f= a2 (X2f+X12f)
Calcular referido a A.T R1f+R21f
X1f+X21f
Referir a B.T R2f+R12f= (R1f+R21f)/a2
X2f+X12f=(X1f+X21f)/ a2
Vacío Por el lado
A.T
Calcular referido a B.T Ro2f
Xo2f
Referir a A.T Rof= a2 Ro2f Xof= a2 Xo2f
Calcular referido a A.T Rof
Xof
Referir a B.T Ro2f= Rof/a2
Xo2f=Xo2f/ a2
1 2
No No
Si Si
1

47
Figura 4.13. Diagrama de flujo que representa los resultados o datos de salida.
El paso más destacado en este diagrama de flujo, son las estructuras condicionales dobles
implementadas en la prueba de vacío, y de cortocircuito. Donde, el ensayo de vacío está
condicionado al voltaje nominal y el ensayo de corto circuito condicionado por la corriente
nominal. Según el valor de estas magnitudes, se elige la instrucción siguiente.
4.2.2.2.2 Algoritmo para el análisis del transformador trifásico considerando el
ingreso de los parámetros del circuito equivalente
En un transformador trifásico se trabaja con el circuito equivalente por fase considerando
una conexión estrella equivalente, y al igual que en el transformador monofásico es preferible
referir todas las magnitudes a uno de los dos devanados. Con fines didácticos, aquí se definen
cinco grupos de datos de entrada complementarios a los datos de placa. Estos son:
1. Todos los parámetros conocidos: 002211 ,,,,, XRXRXR
2. Solo los parámetros del devanado de alta tensión: 0011 ,,, XRXR
2
Calcular parámetros del circuito equivalente aproximado por fase (Conexión equivalente en estrella).
• Referidos al lado de alta tensión
• Referidos al lado de baja tensión
• Parámetros en p.u.
Fin análisis
Calcular parámetros del circuito equivalente aproximado por fase (Conexión equivalente en delta).
• Referidos al lado de alta tensión
• Referidos al lado de baja tensión
• Parámetros en p.u.

48
3. Solo los parámetros de devanado de baja tensión: 0022 ,,, XRXR
4. Los parámetros del devanado de baja tensión referidos al devanado de alta tensión:
002121 ,,, XRXR
5. Los parámetros del devanado de alta tensión referidos al devanado de baja tensión:
001212 ,,, XRXR
Al conocer los parámetros del circuito equivalente por fase, en cualquiera de sus formas
descritas, se pueden hacer estimaciones de los ensayos de vacío y cortocircuito aplicando las
condiciones que regulan estas pruebas, otros resultados que se pueden obtener son: calcular los
parámetros del circuito equivalente por fase considerando una conexión delta, referir los
parámetros, expresarlos en cantidades en por unidad.
Cada grupo de datos complementario, son excluyentes entre sí, es decir, solo con elegir
uno de ellos se puede llegar a los resultados o datos de salida. Con el fin de elegir solo una opción
a la vez, se implementó la elección de los datos con condicionales dobles.
El diagrama de flujo que representa la secuencia de pasos para analizar el transformador
trifásico considerando los parámetros del circuito equivalente se muestran en las figuras 4.14 y su
continuación que se muestra en la figura 4.15, representa los resultados del análisis o datos de
salida.

49
Figura 4.14. Diagrama de flujo que representa el uso de los parámetros conocidos
del circuito equivalente.
Inico analisis
Ingreso datos de placa
Ingreso parámetros conocidos
Todos Alta tensión y
Baja tensión
Solo Baja tensión
referido a Alta
tensión
Solo Alta tensión
referido a Baja
tensión
Solo Baja tensión
Solo Alta tensión
1
1
1
1
2
2
Si
Si
Si
Si
Si
No
No
No
No
No
Ingresar R1f ,R2f X1f, X2f
Ingresar R1f, X1f
Ingresar R2f , X2f
Ingresar R21f , X21f
Ingresar R12f , X12f
1

50
Figura 4.15. Diagrama de flujo que representa los resultados o datos de salida.
4.2.2.2.3 Algoritmo para el análisis del transformador trifásico en condiciones de
carga
Utilizando cualquiera de las técnicas de análisis implementadas, se llegan a los mismos
resultados o datos de salida, que nos permiten continuar con el análisis, ahora considerando al
transformador funcionando en condiciones de carga.
En este caso, se debe definir nuevos datos de entrada, que son las características
conocidas de la carga, estas se clasificaron en cuatro tipos de datos más representativos y que se
enumeran a continuación:
1
Ingresar RO , XO
Estimar ensayos de vacío y cortocircuito
Calcular parámetros del circuito equivalente aproximado por fase (Conexión equivalente en estrella).
• Referidos al lado de alta tensión
• Referidos al lado de baja tensión
• Parámetros en p.u.
Fin análisis
Calcular parámetros del circuito equivalente aproximado por fase (Conexión equivalente en delta).
• Referidos al lado de alta tensión
• Referidos al lado de baja tensión
• Parámetros en p.u.

51
1. Factor de potencia de la carga ϕcos , voltaje en la carga LV y potencia en la carga
.LP
2. Impedancia de la carga LZ& , voltaje en la carga .LV , tipo de conexión de la carga:
estrella o delta.
3. Impedancia de la carga LZ& , voltaje de la red de alimentación .redV y tipo de
conexión de la carga: estrella o delta.
4. Voltaje de la red de alimentación .redV , factor de potencia ϕcos y corriente
absorbida por la carga .LI
La idea, es poder elegir una alternativa a la vez. Para ello fueron implementadas con
condicionales dobles que permiten una vez elegida una opción excluir las restantes.
Otro dato a considerar es la ubicación de la carga, es decir, en que devanado estará
conectada; información que permite usar la configuración del circuito equivalente adecuada para
el análisis.
El análisis en condiciones de carga permite encontrar los nuevos valores de las variables
en el devanado de alta tensión y devanado de baja tensión para la condición elegida, otros valores
importantes que se pueden obtener son: cálculo de pérdidas e indicadores como eficiencia y
regulación.
El diagrama de flujo que representa la secuencia de pasos para analizar el transformador
trifásico en condiciones de carga se muestran en las figuras 4.16 y la sección siguiente
representada en la figura 4.17, muestra los resultados del análisis.

52
Figura 4.16. Diagrama de flujo para realizar el análisis en carga de un
transformador trifásico.
Inico análisis
Ingreso características
de la carga
Cos ϕ Tensión carga VL Potencia carga PL
4
Si
Si
Si
Si
No
No
No
Ingresar ubicación
Cos ϕ VL (valor de fase o línea)PL (valor de fase o línea)
Impedancia carga ZL
Tensión carga VL
Ingresar ubicación ZL (tipo de conexión)
VL (valor de fase o línea)
Impedancia carga ZL
Tensión red VR
Ingresar ZL (tipo de conexión)
VR (valor de fase o línea) Tensión red VR
Cos ϕ Corriente carga IL
Ingresar ubicación VR (valor de fase o línea)
Cos ϕ IL
3
3
3
4
3
No

53
Figura 4.17. Diagrama de flujo que representa los resultados del análisis del
transformador trifásico en condiciones de carga.
4.2.3 Algoritmo para el análisis de transformadores monofásicos y trifásicos
considerando solo los datos de placa
Es conocido que cuando los parámetros, voltajes, pérdidas etc, de un transformador se
expresan en ohm, volts y watts, se aplican únicamente al transformador que esta siendo
considerado, por ello es que se utiliza el concepto de cálculo en por unidad de tal manera que
estas cantidades, aunque determinadas para un cierto caso, vengan a ser generales, esto es,
aplicables a una amplia gama de capacidades, voltajes, tamaños, etc.
3
Calcular pérdidas: Pérdidas en los devanados Pérdidas en el núcleo Pérdidas totales
Calcular indicadores: Eficiencia η Regulación de voltaje ξ
Fin análisis
Resultados por fase conexión Y-Y equivalente en devanado de alta tensión: VAT, IAT, cos ϕ SAT, PAT, QAT Valores en p.u.
Resultados por fase conexión Y-Y equivalente en devanado de baja tensión: VBT, IBT, cos ϕ SBT, PBT, QBT Valores en p.u.

54
La tabla 4.3 muestra los valores de los parámetros del transformador para un rango de
potencia entre 1 KVA y 400000 KVA. Si el transformador es trifásico, se usan los mismos
valores considerando un análisis por fase conexión equivalente en estrella.
Sn (KVA) 1 10 100 1000 400000
R1 (pu) 0.0101 0.009 0.0075 0.0057 0.00071
R2 (pu) 0.009 0.0079 0.0067 0.0053 0.00079
X1 (pu) 0.0056 0.0075 0.0251 0.0317 0.0588
X2 (pu) 0.0055 0.0075 0.025 0.0315 0.0601
Xm (pu) 34.7 50.3 96.5 106 966
Rm (pu) 69.4 88.5 141.5 90.7 666
Tabla 4.3. Valores de los parámetros del transformador
expresados en p.u. para un rango de 1 KVA a 400000 KVA.
Los valores intermedios de potencia se obtienen interpolando en el intervalo correcto. La
tabla 4.4 presenta el procedimiento general para determinar el valor de los parámetros en Ohm.
Valores en p.u Valores en Ohm
R1 (pu) 111 basepu ZRR ⋅=
R2 (pu) 222 basepu ZRR ⋅=
X1 (pu) 111 basepu ZXX ⋅=
X2 (pu) 222 basepu ZXX ⋅=
Xm (pu) 1basempum ZXX ⋅=
Rm (pu) 1basempum ZRR ⋅=
Tabla 4.4. Valores de los parámetros del transformador
expresados en Ohm.

55
Donde:
1baseZ : Corresponde a la impedancia base del devanado: primario si es un
transformador monofásico; alta tensión si es un transformador trifásico.
2baseZ : Corresponde a la impedancia base del devanado: secundario si es un
transformador monofásico; baja tensión si es un transformador trifásico.
El diagrama de flujo que representa la secuencia general de pasos para analizar el
transformador monofásico o trifásico considerando solo los datos de placa se muestran en las
figuras 4.18 está compuesto por cuatro intervalos de potencia extraídos de la tabla 4.3,
implementados con condicionales dobles con el fin de ubicarse en el intervalo correcto según la
potencia nominal del transformador.
En cuanto a los resultados o datos de salida figura 4.19, son los mismos implementados en
los casos anteriores para el transformador monofásico y trifásico.

56
Figura 4.18. Diagrama de flujo que representa los pasos generales para el análisis del transformador monofásico
o trifásico, considerando solo los datos de placa.
Inicio análisis
Ingreso datos de placa
1≤ SN ≤ 10
1
Si
Si
Si
Si
No
No
No
No
Calcular impedancia base: ZB1 ZB2
10< SN ≤ 100
100< SN ≤ 1000
SN > 1000
a1 = 0.01022 ; b1 = -0.00012 a2 = 0.00912 ; b2 = -0.00012 a3 = 0.00539 ; b3 = 0.00021 a4 = 0.00528 ; b4 = 0.00022 a5 = 32.97 ; b5 = 1.73 a6 = 67.28 ; b6 = 2.12
a1 = 0.00917 ; b1 = -0.000017 a2 = 0.00803 ; b2 = -0.000013 a3 = 0.00555 ; b3 = 0.000195 a4 = 0.00556 ; b4 = 0.000194 a5 = 45.17 ; b5 = 0.513 a6 = 82.6 ; b6 = 0.589
a1 = 0.0077 ; b1 = -0.000002 a2 = 0.006855 ; b2 = -0.00000155 a3 = 0.024367 ; b3 = 0.00000733 a4 = 0.024278 ; b4 = 0.00000722 a5 = 95.444 ; b5 = 0.01056 a6 = 147.14 ; b6 = -0.0564
a1 = 0.0057125 ; b1 = -0.0000000125 a2 = 0.0053113 ; b2 = -0.0000000113 a3 = 0.03163209 ; b3 = 0.00000006791 a4 = 0.03142833 ; b4 = 0.00000007167 a5 = 103.8446 ; b5 = 0.0021554 a6 = 89.258 ; b6 = 0.001442
1
2
2
2
2

57
Figura 4.19. Diagrama de flujo que representa los resultados o
datos de salida.
2
R1pu = a1 + b1 ⋅ SN
R2pu = a2 + b2 ⋅ SN
X1pu = a3 + b3 ⋅ SN
X2pu = a4 + b4 ⋅ SN
Xmpu = a5 + b5 ⋅ SN
Rmpu = a6 + b6 ⋅ SN
R1 = R1pu ⋅ ZBP
R2 = R2pu ⋅ ZBS
X1 = X1pu ⋅ ZBP
X2 = X2pu ⋅ ZBS
Xm = Xmpu ⋅ ZBP
Rm = Rmpu ⋅ ZBP
Calcular parámetros referidos al primario
Calcular parámetros referidos al secundario
Estimar ensayos de vacío y cortocircuito
Calcular parámetros en p.u.
Fin análisis

58
4.2.4 Construcción de algoritmos para el análisis de motores de inducción trifásicos
El primer paso en la construcción del algoritmo es definir los datos de placa como valores
de entrada, en el motor de inducción trifásico generalmente son cinco:
• Potencia nominal nomP , expresada en [Hp] o [KW].
• Voltaje nominal del estator estV , expresado en [Volts].
• Frecuencia nominal del estator f , expresada en [Hertz].
• Número de polos p .
• Tipo de rotor: jaula de ardilla o rotor bobinado.
De estos datos se desprenden otros valores necesarios para el análisis tales como:
estimación de la corriente nominal nI , velocidad síncrona sn , clase de motor jaula de ardilla
según su tipo constructivo estandarizados en las normas NEMA, esta implementación, posee
cuatro clases de motores según la norma, que para ser seleccionados se aplicaron condicionales
dobles con el fin de diferenciarlos en el momento del análisis. El diagrama de flujo que
representa el ingreso de datos de placa y selección de un motor de inducción trifásico, se muestra
en la figura 4.20.

59
Figura 4.20. Representación en diagrama de flujo del ingreso de datos de placa y
selección del motor de inducción.
Otros datos de entrada que se complementan con los datos de placa y contribuyen al
desarrollo del proceso son:
• Datos de las pruebas de vacío y rotor bloqueado.
• Parámetros del circuito equivalente.
Inicio
Ingresar tensión nominal del estator Vest [V]
Ingresar potencia nominal Pnom en [KW] o [HP]
Calcular ns
Ingresar frecuencia nominal [Hz]
Ingresar número de polos
Rotor bobinado
X1j= 0.5 X2j = 0.5
X1j= 0.5 X2j = 0.5
J.ardilla Clase A
J.ardilla Clase B
X1j= 0.4 X2j = 0.6
J.ardilla Clase C
Si No
Si
Si
X1j= 0.3 X2j = 0.7
Si
No
No
Clase D X1j= 0.5 X2j = 0.5
No 1 1
1
11
1
Elegir experimento

60
A continuación, se plantean por separado, los algoritmos implementados representados
como diagramas de flujo para el análisis de motores de inducción trifásicos.
4.2.4.1 Algoritmo para el análisis del motor de inducción trifásico considerando el
ingreso de los datos de los ensayos de vacío y rotor bloqueado
Los datos de los ensayos de vacío y rotor bloqueado del motor de inducción trifásico, son
valores de línea: de voltaje, corriente y potencia. Permiten obtener los parámetros del circuito
equivalente por fase referido al estator considerando una conexión estrella.
Los valores de línea: voltaje, corriente y potencia definidos para cada prueba se muestran
en la tabla 4.5.
Voltaje (V) Corriente (A) Potencia (W)
Prueba de vacío 0LV 0LI 0LP
Prueba de rotor bloqueado rbV rbI rbP
Tabla 4.5. Valores de línea definidos para las pruebas de vacío y
rotor bloqueado.
Otro dato de entrada adicional a las pruebas, es el valor de la resistencia del estator por
fase estR expresada en Ohm.
Con la prueba de vacío se determinan los parámetros del circuito equivalente que
representan la reactancia de magnetización y las pérdidas en el núcleo, la prueba se realiza a
voltaje nominal en el estator y la máquina se hace girar sin carga en el rotor, con un
deslizamiento 0≈s .

61
La prueba de rotor bloqueado determina los parámetros que representan la reactancia de
dispersión total y la resistencia de los devanados; se realiza frenando el rotor, es decir con un
deslizamiento 1≈s , de tal manera que circule la corriente nominal.
Nuestros primeros resultados o datos de salida son los parámetros del circuito equivalente
obtenidos a partir de los ensayos de la máquina. Con estos resultados parciales puede continuar el
análisis del motor, en este trabajo se consideró al motor funcionando a plena carga obteniendo
valores para: deslizamiento, factor de potencia, rendimiento, torque, corrientes, torque máximo y
el deslizamiento necesario, cálculo del flujo de potencias y parámetros del circuito equivalente de
Thevenin.
Como existen dos tipos de motores que se pueden analizar; con rotor bobinado y rotor
jaula de ardilla, la elección de uno u otro se implementó con una sentencia de control que asigna
el valor 1 a la variable tipo de rotor si la condición es verdadera, es decir, el motor es de rotor
bobinado, de lo contrario la variable toma valor cero que corresponde al motor con rotor jaula de
ardilla.
El diagrama de flujo, que representa la secuencia de pasos para analizar el motor de
inducción trifásico considerando los datos de los ensayos de vacío y rotor bloqueado, se
representa en la figura 4.21, y los datos de salida en la figura 4.22. El bloque que representa el
ingreso de los datos de placa se desarrolló con detalles en la sección 4.2.4 figura 4.20.

62
Figura 4.21.Diagrama de flujo que representa los pasos necesarios en el análisis del
motor de inducción considerando los datos de los ensayos de vacío y rotor bloqueado.
Figura 4.22.Diagrama de flujo que representa los resultados o datos de salida
del análisis.
Inico analisis
Ingreso datos de placa
Es un rotor bobinado
Si No (entonces es un rotor jaula de ardilla)
Ingresar valor resistencia
Asignar tipo de rotor = 0 Asignar tipo de rotor = 1
Ingresar datos ensayo de rotor bloqueado
Ingresar datos ensayo de vacío
1
Calcular valores nominales: Deslizamiento, Factor de potencia Rendimiento, Torque, I21, IO, I1
Calcular deslizamiento para torque máximo y velocidad correspondiente
Calcular flujo de potencias considerando funcionamiento a plena carga
Calcular circuito equivalente de Thévenin
Fin analisis
Calcular parámetros del circuito equivalente aproximado por fase referido al estator
1

63
4.2.4.2 Algoritmo para el análisis del motor de inducción trifásico considerando el
ingreso de los parámetros del circuito equivalente
En un motor de inducción trifásico se trabaja con el circuito equivalente por fase
considerando una conexión estrella equivalente, y al igual que en el transformador sus parámetros
pueden ser referidos, en este caso siempre se usan referidos al estator. Los parámetros que son
considerados datos de entrada son:
1. Resistencia del estator .1R
2. Reactancia del estator .1X
3. Resistencia del rotor referida al estator .21R
4. Reactancia del rotor referida al estator .21X
5. La rama que representa a la reactancia de magnetización y pérdidas en el núcleo,
puede ser expresada como.
a. Rama paralelo mX y .mR
b. Rama serie 0X y .0R
La elección de la rama, se implementó con un condicional doble con el fin de optar por
solo una; elección que depende del tipo de circuito que se use.
Conocer los parámetros del circuito equivalente por fase, permite con fines didácticos
obtener datos de salida como: la estimación de los valores de voltaje, corriente y potencia en los
ensayos de vacío y rotor bloqueado aplicando las condiciones que regulan estas pruebas, se
consideró al motor funcionando a plena carga obteniendo valores para: deslizamiento, factor de

64
potencia, rendimiento, torque, corrientes, torque máximo y el deslizamiento necesario, cálculo
del flujo de potencias y parámetros del circuito equivalente de Thevenin.
El diagrama de flujo que representa la secuencia de pasos para analizar el motor de
inducción trifásico considerando el ingreso de los parámetros del circuito equivalente por fase se
muestra en las figuras 4.23 y su continuación que se presenta en la figura 4.24, representa los
resultados del análisis o datos de salida.
Figura 4.23. Secuencia de pasos para analizar el motor de inducción trifásico,
considerando el ingreso de los parámetros del circuito equivalente por fase.
Inicio analisis
Ingreso datos de placa
Es un rotor bobinado
Si
Si
No (entonces es un rotor jaula de ardilla)
No
Ingresar R1, X1 R21, X21
Ingresar RO , XO Ingresar Rm , Xm
Asignar tipo de rotor = 0 Asignar tipo de rotor = 1
Elegir rama que representa la reactancia de magnetización y pérdidas en el núcleo.
RO y XO
1

65
Figura 4.24. Sección del diagrama de flujo que representa el cálculo de los
resultados o datos de salida.
4.2.4.3 Algoritmo para el análisis del motor de inducción trifásico considerando solo
los datos de placa
En este caso, solo se cuenta con los datos de placa como datos de entrada, es posible en un
primer paso obtener los datos de los ensayos como datos de salida aplicando las reglas que
condicionan estas dos pruebas y algunas condiciones que recomiendan algunos fabricantes.
La prueba de vacío se considera realizada a tensión nominal, es decir, estL VV =0 , con
valores de potencia 0LP del orden del 5% de la potencia nominal y corriente de vacío del orden de
30-50% de la corriente nonimal.
Calcular valores nominales: Deslizamiento, Factor de potencia Rendimiento, Torque, I21, IO, I1
Calcular deslizamiento para torque máximo y velocidad correspondiente
Estimar ensayos de vacío y rotor bloqueado
Calcular flujo de potencias considerando funcionamiento a plena carga
Calcular circuito equivalente de Thévenin
Fin analisis
1

66
La prueba de rotor bloqueado se considera realizada a corriente nominal nrb II = , con
valores de potencia del orden rbP del 10% de la potencia nominal y voltaje de rotor bloqueado del
orden de 25-40% del voltaje nominal.
Con la estimación de los ensayos, se calculan los parámetros del circuito equivalente por
fase como nuevos datos de salida. Si el motor elegido es con rotor jaula de ardilla, los parámetros
deben ser ajustados según la clase establecida en la norma NEMA.
Para los restantes datos de salida, se consideró al motor funcionando a plena carga
obteniendo valores para: deslizamiento, factor de potencia, rendimiento, torque, corrientes, torque
máximo y el deslizamiento necesario, cálculo del flujo de potencias y parámetros del circuito
equivalente de Thevenin.
El diagrama de flujo que representa la secuencia de pasos para analizar el motor de
inducción trifásico considerando solo los datos de placa se muestra en las figuras 4.25 y su
continuación que se presenta en la figura 4.26, representa los resultados del análisis o datos de
salida.
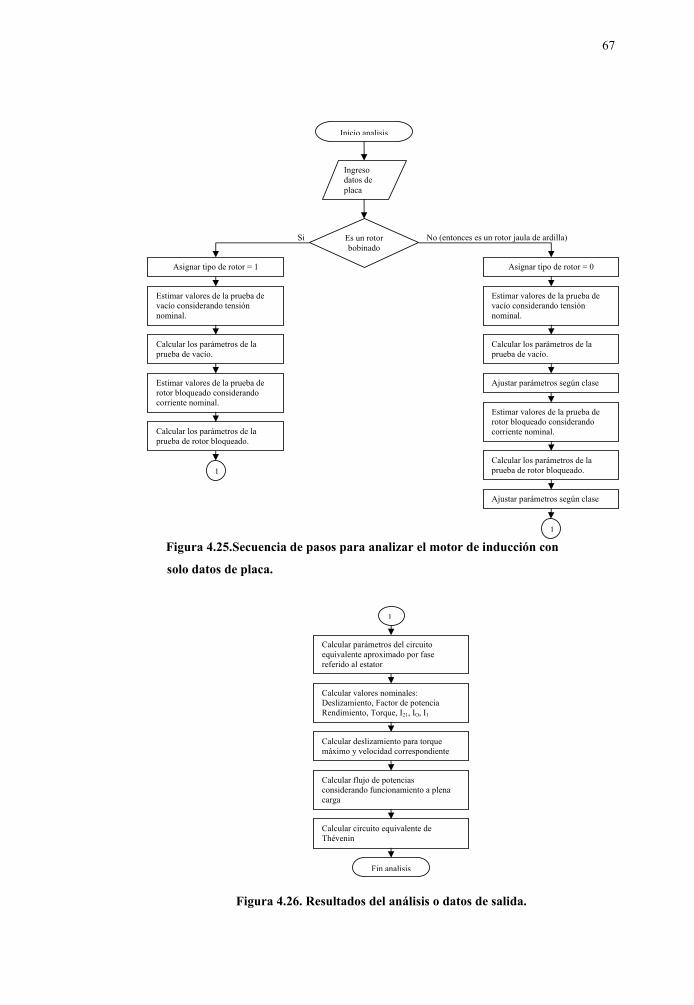
67
Figura 4.25.Secuencia de pasos para analizar el motor de inducción con
solo datos de placa.
Figura 4.26. Resultados del análisis o datos de salida.
Inicio analisis
Ingreso datos de placa
Es un rotor bobinado
Si No (entonces es un rotor jaula de ardilla)
Asignar tipo de rotor = 0 Asignar tipo de rotor = 1
Estimar valores de la prueba de vacío considerando tensión nominal.
Calcular los parámetros de la prueba de vacío.
Estimar valores de la prueba de rotor bloqueado considerando corriente nominal.
Calcular los parámetros de la prueba de rotor bloqueado.
Estimar valores de la prueba de vacío considerando tensión nominal.
Calcular los parámetros de la prueba de vacío.
Ajustar parámetros según clase
Estimar valores de la prueba de rotor bloqueado considerando corriente nominal.
Calcular los parámetros de la prueba de rotor bloqueado.
Ajustar parámetros según clase
1
1
Calcular valores nominales: Deslizamiento, Factor de potencia Rendimiento, Torque, I21, IO, I1
Calcular deslizamiento para torque máximo y velocidad correspondiente
Calcular flujo de potencias considerando funcionamiento a plena carga
Calcular circuito equivalente de Thévenin
Fin analisis
Calcular parámetros del circuito equivalente aproximado por fase referido al estator
1

68
4.2.4.4 Tipos de análisis implementados para el motor de inducción trifásico
Cualquiera de las técnicas de análisis implementadas, llegan a los mismos resultados o
datos de salida, que permiten continuar con el análisis del motor de inducción. En términos
generales, los tipos de análisis implementados para el motor de inducción trifásico consisten en
visualizar curvas características en función de la velocidad.
4.2.4.4.1 Características del motor variando la velocidad
Consiste en tomar como datos de entrada, el porcentaje deseado de voltaje nominal del
estator y el intervalo de velocidad que se quiere analizar, para obtener como datos de salida
curvas de torque, potencia, corriente y factor de potencia. Este caso es aplicable a motores de
inducción rotor bobinado y rotor jaula de ardilla.
4.2.4.4.2 Características del motor incluyendo resistencia externa
Disponible solo para motores de inducción rotor bobinado, necesita como datos de entrada
el valor de la resistencia por fase conectada al rotor, el porcentaje de voltaje nominal del estator
y el intervalo de velocidad en donde se quiere realizar el análisis; y tiene como resultado de salida
curvas de torque, potencia, corriente y factor de potencia.
4.2.4.4.3 Método de partida del motor de inducción
Implementado únicamente para motores de inducción rotor bobinado, consiste en el
control de la velocidad del motor mediante la inserción de resistencias rotóricas suplementarias,

69
ya que la velocidad y el deslizamiento de un motor de inducción de rotor bobinado son
proporcionales a la resistencia del rotor, el método de control de la velocidad mediante la
variación de la resistencia del rotor se denomina a veces control del deslizamiento. En
condiciones normales de funcionamiento, la resistencia adicional se elimina, con lo que la
velocidad aumenta, tambien es posible obtener el torque máximo a la velocidad más conveniente.
Los datos de entrada necesarios para este experimento son: el rango de variación de la
resistencia por fase conectada al rotor, su valor inicial es el valor total y el valor final se asume
como cero, que corresponde a la desconexión de las resistencias; y tambien se necesita el
intervalo de velocidad para realizar el análisis.
El resultado o dato de salida, es la curva de torque la cual se puede manipular
manualmente para distintos valores de resistencia en el rango ingresado.
La elección del tipo de análisis se implementó con la ayuda de condicionales dobles y de
la variable tipo de rotor descrita en la sección 4.2.4.1, (vale 1 si el rotor es bobinado y vale cero
si el rotor es jaula de ardilla) que controlan el flujo de los datos. El diagrama de flujo que
representa y resume la implementación de los análisis implementados se presenta en la figura
4.27.

70
Figura 4.27. Diagrama de flujo que representa los tipos de análisis implementados
para el motor de inducción trifásico.
Inicio análisis
Tipo de rotor = 1
Si
Si
Si
No
Si No
Ingresar valor resistencia
Variación de velocidad
Ingresar rango de variación de la resistencia
externa [Ri, Rf]3
Seleccionar análisis
3Incluir
resistencia externa
3
Ingresar porcentaje de tensión en el
estator
Ingresar valor inicial de velocidad
nRi
Ingresar valor final de velocidad nRf
Calcular Torque, Potencia, Corriente y factor de potencia para cada punto del intervalo [nRi, nRf]
Graficar Torque, Potencia, Corriente y factor de potencia en el intervalo [nRi, nRf]
Fin
Método de partida
No
Salir
Fin 2
2
3
No
Ingresar valor inicial de
velocidad nRi
Ingresar valor final de
velocidad nRf
No Si
Calcular torque en intervalo [nRi, nRf]
Graficar torque en intervalo [nRi, nRf]
Fin

71
4.2.5 Construcción de algoritmos para el análisis de motores de inducción
monofásicos
El primer paso en la construcción del algoritmo es definir los datos de placa como valores
de entrada, en el motor de inducción monofásico los más importantes son:
• Potencia nominal nomP , expresada en [Hp] o [KW].
• Voltaje nominal del estator estV , expresado en [Volts].
• Frecuencia nominal del estator f , expresada en [Hertz].
• Número de polos p .
Existen datos adicionales que se complementan con los datos de placa de la máquina tales
como:
• Datos de las pruebas de vacío y rotor bloqueado, en conjunto con valor de
deslizamiento o velocidad rotacional.
• Parámetros del circuito equivalente, deslizamiento y datos de pérdidas si se
conoce.
El ingreso de datos de placa representado en diagrama de flujo se presenta en la figura
4.28.

72
Figura 4.28. Representación del ingreso de datos de placa
con diagrama de flujo.
4.2.5.1 Algoritmo para el análisis del motor de inducción monofásico considerando
el ingreso de los datos de los ensayos de vacío y rotor bloqueado
Similar al caso del motor de inducción trifásico, los datos de los ensayos de vacío y rotor
bloqueado, son valores: de voltaje, corriente y potencia que permiten obtener los parámetros del
circuito equivalente referido al estator. Estos valores son considerados datos de entrada y
complementarios con los datos de placa y se definen en la tabla 4.6.
Voltaje (V) Corriente (A) Potencia (W)
Prueba de vacío 0LV 0LI 0LP
Prueba de rotor bloqueado rbV rbI rbP
Tabla 4.6. Valores definidos para las pruebas de vacío y
rotor bloqueado.
Inicio
Ingresar tension nominal del estator Vest [V]
Ingresar potencia nominal Pnom en [KW] o [HP]
Elegir experimento
Ingresar frecuencia nominal [Hz]
Ingresar número de polos

73
También, por el tipo de circuito equivalente, se hace necesario como dato de entrada
contar con información de deslizamiento o velocidad rotacional. Recopilando estos valores, es
posible obtener resultados o datos de salida. En primer lugar se obtienen los parámetros del
circuito equivalente, luego es posible obtener impedancias equivalentes: para el circuito del
campo directo, circuito del campo inverso e impedancia serie total del circuito equivalente y otros
valores como voltaje y corriente de entrada, asociada al campo directo y asociada al campo
inverso, potencias y pérdidas.
El diagrama de flujo que representa los pasos a seguir en un análisis de un motor de
inducción monofásico conociendo los datos de los ensayos se presenta en la figura 4.29 y el
bloque que representa al ingreso de datos de placa se describió en la figura 4.28.
Figura 4.29. Representación con diagrama de flujo de los pasos necesarios para el
análisis del motor de inducción monofásico con los datos de los ensayos.
Inicio analisis
Ingreso datos de placa
Fin analisis
Ingresar datos ensayo de rotor
bloqueado
Ingresar datos ensayo de vacío
Calcular impedancia: Para el circuito del campo directo. Para el circuito del campo inverso Serie total.
Calcular corriente: Asociada al campo directo. Asociada al campo inverso De entrada.
Calcular tensión: Asociada al campo directo. Asociada al campo inverso De entrada.
Calcular potencia: De entrada. Útil en el ele En el entrehierro asociada al campo directo e inverso. Mecánica desarrollada. Pérdidas.
Calcular variables: Torque útil en el eje. Factor de potencia. Rendimiento.
Ingresar datos adicionales velocidad rotacional o deslizamiento
Calcular parámetros del circuito equivalente

74
4.2.5.2 Algoritmo para el análisis del motor de inducción monofásico considerando
el ingreso de los parámetros del circuito equivalente
Los parámetros del circuito equivalente del motor de inducción monofásico que son
considerados datos de entrada se enumeran a continuación:
1. Resistencia del devanado del estator .1R
2. Reactancia del devanado del estator .1X
3. Resistencia del devanado del rotor referida al estator .21R
4. Reactancia del devanado del rotor referida al estator .21X
5. Reactancia de magnetización .mX
Otros datos que contribuyen en el análisis son datos de entrada como deslizamiento y/o
pérdidas. Al igual que en el caso del motor de inducción trifásico, conocer los parámetros del
circuito equivalente, permite con fines didácticos obtener datos de salida como: la estimación de
los valores de voltaje, corriente y potencia en los ensayos de vacío y rotor bloqueado, obtener
impedancias equivalentes: para el circuito del campo directo, circuito del campo inverso e
impedancia serie total del circuito equivalente y otros valores como voltaje y corriente de entrada,
asociada al campo directo y asociada al campo inverso, potencias y pérdidas.
El diagrama de flujo que representa la secuencia de pasos para analizar el motor de
inducción monofásico considerando el ingreso de los parámetros del circuito equivalente se
muestra en las figuras 4.30.

75
Figura 4.30. Diagrama de flujo que representa el análisis y datos de salida de un
motor de inducción monofásico considerando el ingreso de los parámetros del
circuito equivalente.
Inicio analisis
Ingreso datos de placa
Estimar valores de las pruebas de vacío y rotor bloqueado
Fin analisis
Ingresar R1, X1 R21, X21, Xm
Ingresar datos adicionales deslizamiento y/o pérdidas
Calcular impedancia: Para el circuito del campo directo. Para el circuito del campo inverso Serie total.
Calcular corriente: Asociada al campo directo. Asociada al campo inverso De entrada.
Calcular tensión: Asociada al campo directo. Asociada al campo inverso De entrada.
Calcular potencia: De entrada. Útil en el ele En el entrehierro asociada al campo directo e inverso. Mecánica desarrollada. Pérdidas.
Calcular variables: Torque útil en el eje. Factor de potencia. Rendimiento.

76
4.2.5.3 Análisis de la velocidad del motor de inducción monofásico variando la
tensión de entrada
El tipo de análisis implementado para el motor de inducción monofásico, permite
visualizar la curva de torque en función de la velocidad variando la tensión de entrada. Este
análisis consiste en tomar como datos de entrada, el porcentaje deseado de voltaje nominal del
estator y el intervalo de velocidad que se quiere analizar, para obtener como datos de salida la
curva de torque. . El diagrama de flujo que representa la manera de obtener la curva se muestra
en la figura 4.31.
Figura 4.31. Diagrama de flujo que representa la forma de obtener la curva de
torque en función de la velocidad para el motor de inducción monofásico.
Inicio análisis
Variación de velocidad
Ingresar porcentaje de tensión en el estator
Ingresar valor inicial de velocidad nRi
Ingresar valor final de velocidad nRf
Calcular Torque para cada punto del intervalo [nRi, nRf]
Graficar Torque, en el intervalo [nRi, nRf]
Fin

77
4.2.6 Construcción de algoritmos para el análisis de máquinas síncronas
La operación de máquina sincrona, por conveniencia, se analiza por separado;
funcionando como generador y como motor. En los datos de placa de la máquina, los valores que
más destacan y ayudan en el análisis en estado estacionario de la máquina son:
• Potencia nominal: en el generador expresada en (KVA) o (MVA); en el motor
expresada en [HP] o [KW].
• Voltaje del estator expresado en (V) o (KV).
• Frecuencia nominal del estator expresado en (Hz).
• Factor de potencia.
• Número de polos.
• Tipo de rotor (polos cilíndricos o polos salientes).
Considerados los datos de entrada más importantes para el análisis, el algoritmo
representado en diagrama de flujo implementado para el ingreso de estos datos se muestra en la
figura 4.32.
La elección de cómo opera la máquina se implementó con una sentencia de control que
asigna el valor 1 a la variable operación si la condición es verdadera, es decir, funciona como
generador; de lo contrario la variable toma valor cero que corresponde a la máquina funcionando
como motor.
De igual manera para la elección del tipo de rotor se implementó con una sentencia de
control que asigna el valor 1 a la variable Trotor cuando la condición es verdadera, es decir, el
rotor elegido es un rotor de polos cilíndricos; de lo contrario la variable toma el valor 0 que

78
corresponde a la elección de un rotor de polos salientes. El bloque “Elegir experimento” se
refiere al tipo de dato complementario a los datos de placa que permite continuar con el análisis.
Estos tipos de datos de entrada que ayudan en el análisis en estado estacionario de estas
máquinas, pueden ser:
• Parámetros por fase del circuito equivalente en conjunto con datos de pérdidas.
• Curvas de vacío y de corto circuito. Expresadas en valores de línea o fase.
Figura 4.32. Diagrama de flujo que representa el ingreso de datos de placa de
la máquina síncrona.
Inicio
Ingresar potencia nominal en [KVA] o [MVA]
Ingresar voltaje nominal del estator Vest en [V] o [KV]
Elegir experimento
Ingresar frecuencia nominal del estator f en [Hz]
Ingresar factor de potencia
Elegir tipo de rotor
Es un rotor de polos cilíndricos
Si
Asignar Trotor = 0
Asignar Trotor = 1
No
Tipo de operación
Como generador
Asignar operación = 1
Asignar operación = 0
Ingresar potencia nominal en [HP] o [KW]
Ingresar número de polos
Si No

79
4.2.6.1 Algoritmos para el análisis de la máquina síncrona considerando el ingreso
de los parámetros del circuito equivalente
Los parámetros ingresados en este tipo de análisis, dependen exclusivamente del tipo de
rotor de la máquina. Si es una máquina con rotor de polos cilíndrico estos son:
• Resistencia de armadura .aR
• Reactancia síncrona .sX
Si es una máquina con rotor de polos salientes, los parámetros ingresados deben ser:
• Resistencia de armadura .aR
• Reactancia síncrona del eje directo .dX
• Reactancia síncrona del eje en cuadratura .qX
En algunos análisis, se prefiere despreciar el valor de la resistencia de armadura aR , si es
así, se considera este valor igual a cero.
El análisis de la máquina comienza con el ingreso de las características de funcionamiento
deseadas de esta, estos nuevos datos de entrada son la potencia y el factor de potencia, los
resultados o datos de salida se presentan por fase, datos que posteriormente pueden ser
presentados como resultados trifásicos o totales. Entre los resultados o datos de salida que se
pueden obtener considerando el ingreso de los parámetros por fase de la máquina están: voltaje
en terminales; voltaje inducido internamente en el estator; corriente de línea del estator; potencias

80
activa, reactiva y aparente; ángulo de potencia; flujo de potencias; rendimiento y regulación de
voltaje en el caso del generador.
El diagrama de flujo que representa el análisis de la máquina síncrona considerando el
ingreso de sus parámetros se muestra en la figura 4.33, y la continuación en la figura 4.34,
muestra los resultados del análisis según el modo de operación elegido. El bloque que representa
el ingreso de los datos de placa es el descrito en la figura 4.32.
Figura 4.33. Diagrama de flujo que representa los pasos en el análisis de la máquina
síncrona considerando el ingreso de parámetros.
Inicio análisis
Ingresar datos de placa
Trotor = 1
Ingresar características de funcionamiento: Potencia y factor de potencia
Ingresar RA , XS
Calcular IL, nS
Ingresar datos adicionales pérdidas
Ingresar RA , Xd, Xq
No (entonces es de polos salientes) Si (es de polos cilíndricos)
operación = 1
1 2
Si (operando como generador) No (entonces opera como motor)

81
Figura 4.34. Diagrama de flujo que representa los resultados de la máquina síncrona
según el modo de operación elegido.
4.2.6.1.1 Tipo de análisis implementado cuando se considera el ingreso de
parámetros
En términos generales, el tipo de análisis implementado para la máquina síncrona consiste
en visualizar curvas características para los distintos modos de operación de esta. Como la
implementación de este caso no distingue entre un análisis con saturación de otro sin saturación,
queda a definición del usuario los resultados o datos de salida obtenidos.
Considerando a la máquina síncrona funcionando como generador, se pueden obtener dos
tipos de curvas:
1. Potencia desarrollada en función del ángulo de potencia, donde el primer paso es
calcular la potencia en cada valor del intervalo [0º, 180º], para luego trazar la
curva en el mismo rango.
Calcular resultados por fase: • voltaje en terminales • voltaje inducido internamente
en el estator • corriente de línea del estator • potencias activa, reactiva
y aparente • ángulo de potencia • regulación de voltaje • flujo de potencias • rendimiento
Fin análisis
Calcular resultados trifásicos
1 2
Calcular resultados por fase: • voltaje en terminales • voltaje inducido internamente
en el estator • corriente de línea del estator • potencias activa, reactiva
y aparente • ángulo de potencia • flujo de potencias • rendimiento
Calcular resultados trifásicos

82
2. Regulación de voltaje en función del factor de potencia, calculada y trazada en el
intervalo [0, 1] correspondiente al factor de potencia.
Si la máquina síncrona opera como motor, las curvas que se pueden obtener son:
1. Potencia desarrollada en función del ángulo de potencia, donde el primer paso es
calcular la potencia en cada valor del intervalo [0º, 180º], para luego trazar la
curva en el mismo rango.
2. Torque en función del ángulo de potencia, donde el torque se calcula en el
intervalo [0º, 180º] y se traza en el mismo rango.
El diagrama de flujo se implementó con la ayuda de condicionales dobles, los cuales
aseguran la elección de una opción a la vez; en este caso en particular, permite elegir el camino
correcto según el modo de operación de la máquina, que lleva a los tipos de curvas características
descritas anteriormente condicionadas también al tipo de operación.
La figura 4.35 presenta la sección del diagrama de flujo que corresponde a los tipos de
curvas cuando la máquina opera como generador.
La figura 4.36 muestra la continuación del diagrama de flujo correspondiente a los tipos
de curvas cuando la máquina funciona como motor.
La elección de curvas en ambas secciones también se implementó con condicionales
dobles, para elegir una a la vez; si so se elige ninguna, se sale del ciclo o se vuelve al inicio del
análisis de curvas.

83
Figura 4.35. Diagrama de flujo para la representación de curvas en la máquina
síncrona operando como generador.
Figura 4.36. Diagrama de flujo para la representación de curvas en la máquina
síncrona operando como motor.
Potencia desarrollada v/s
ángulo de potencia
Si
Si
No Si
No
No
Salir
Fin
Calcular potencia en el intervalo [0º,180º]
Graficar potencia en el intervalo [0º,180º]
Torque v/s
ángulo de potencia
Calcular Torque en el intervalo [0º, 180º]
Graficar Torqu en el intervalo [0º, 180º]
Fin
Fin
Elegir curva a trazar
1
2
Inicio análisis
Potencia desarrollada v/s
ángulo de potencia
Si
Si
No Si
No
No
Salir
Fin
Calcular potencia en el intervalo [0º,180º]
Graficar potencia en el intervalo [0º,180º]
Regulación de tensión v/s
factor de potencia
Calcular regulación de tensión en el intervalo [0,1]
Graficar regulación de tensión en el intervalo [0,1]
Fin
Fin
operación = 1
Elegir curva a trazar
Si (operando como generador)
No (entonces opera como motor)
1
2
2

84
4.2.6.2 Algoritmo para el análisis de la máquina síncrona considerando el ingreso de
las curvas de vacío y cortocircuito
El uso de las curvas de vacío y cortocircuito en el análisis de máquinas síncronas, permite
determinar el valor de la reactancia considerando o no la saturación de la máquina; estas curvas
nacen de los ensayos que llevan el mismo nombre. Aquí se implementó un método que permite
el ingreso de ambas curvas, o bien estimarlas tomando en cuenta el valor de la potencia nominal
de la máquina; se fabricó una “base de datos” que contiene los puntos que conforman las curvas
más comunes en ciertos intervalos de potencia; lo que lleva también a resultados estimativos de
los parámetros. Las curvas se definen como datos de entrada y deben conocerse los puntos que
las conforman, y se ingresan como pares ordenados. Los valores que conforman las curvas se
muestran en la tabla 4.7.
Ordenada Abscisa
Curva de vacío 0V fI
Curva de cortocircuito fI aI
Tabla 4.7. Valores de entrada que definen las curvas
de vacío y cortocircuito.
Donde:
0V : Es el voltaje de la máquina funcionando en vacío, registrado para la variación
de .fI
fI : Es la corriente de excitación registrada en la excitatriz de la máquina.
aI : Corriente de armadura o de la línea.

85
La curva de vacío se define como voltaje de línea o fase en función de la corriente de
excitación y queda expresada )(0 fIV ; y la curva de cortocircuito se define como corriente de
excitación en función de la corriente de línea o armadura expresada ).( af II
Como ambas curvas están conformadas por pares de puntos, se optó por implementar el
algoritmo con herramientas matemáticas de análisis numérico, específicamente el uso de
interpolación polinómica o también llamada diferencias divididas de Newton; que en resumen,
consiste en evaluar funciones en cualquier punto utilizando polinomios interpolantes.
En términos generales, y suponiendo que se trabaja con valores de línea; el uso de las
curvas requiere en primer lugar obtener la corriente de excitación necesaria cuando circula la
corriente de línea nominal, es decir evaluar la curva de cortocircuito representada por la función
)( af II cuando na II = que equivale a .)( 1fnf III = ; y luego para este valor de corriente de
excitación 1fI , se busca la tensión en vacío, que equivale a evaluar la curva de vacío representada
por la función )(0 fIV cuando 1ff II = que da como resultado un valor de voltaje en vacío dado
por 0110 )( VIV f = . Luego la determinación de la impedancia y reactancia síncrona no saturada por
fase se resume en la tabla 4.8.
Impedancia síncrona no saturada
por fase
Reactancia síncrona no saturada
por fase
Con resistencia de
armadura aR nsns I
VZ
⋅=
301 22
asnssns RZX −=
Sin resistencia de
armadura aR nsns I
VZ
⋅=
301 snssns ZX ≈
Tabla 4.8. Impedancia y reactancia síncrona no saturada por fase usando curvas.

86
Para el cálculo de la impedancia y reactancia síncrona por fase considerando saturación,
se considera una corriente de línea 1.5 veces la corriente de línea nominal, luego se realiza el
mismo procedimiento anterior: el primer paso es determinar la corriente de excitación necesaria
utilizando la curva de cortocircuito para la condición na II 5.1= , que entrega un resultado
2)5.1( fnf III = ; con este valor de corriente de excitación 2fI , se busca la tensión en vacío
necesaria, para ello se evalúa la curva de vacío en 2ff II = y da como resultado .0220 )( VIV f =
Luego la determinación de la impedancia y reactancia síncrona saturada por fase se resume en la
tabla 4.9.
Impedancia síncrona saturada
por fase
Reactancia síncrona saturada por
fase
Con resistencia de
armadura aR )5.1(302
nssat I
VZ⋅
= 22assatssat RZX −=
Sin resistencia de
armadura aR )5.1(302
nssat I
VZ⋅
= ssatssat ZX ≈
Tabla 4.9. Impedancia y reactancia síncrona saturada por fase usando curvas.
El concepto de impedancia y reactancia síncrona empleado en los dos casos descritos, son
válidos para la máquina con rotor de polos cilíndricos.
En la máquina de polos salientes es necesario conocer los valores tanto de dX como de
qX . Teóricamente sd XX = , por lo tanto, se puede determinar dX por las pruebas de vacío y
cortocircuito aplicando el mismo método descrito para la máquina de polos cilíndricos; y
asumiendo una relación 6.1/ ≈qd XX se determina dq XX ⋅≈ 65.0 . La determinación de la
impedancia y reactancia por fase no saturada del eje directo y del eje en cuadratura se resume en
las fórmulas mostradas en la tabla 4.10.

87
Con resistencia de armadura
aR
Sin resistencia de
armadura aR
Impedancia por fase no saturada
del eje directo nsnsdns I
VZZ
⋅==
301
nsnsdns I
VZZ
⋅==
301
Reactancia por fase no saturada del
eje directo 22
adnssnsdns RZXX −== dnsdns ZX ≈
Reactancia por fase no saturada del
eje en cuadratura dnsqns XX ⋅= 65.0 dnsqns XX ⋅= 65.0
Tabla 4.10.Impedancia y reactancia por fase no saturada del eje directo y del eje en
cuadratura.
La determinación de la impedancia y reactancia por fase considerando la saturación del
eje directo y del eje en cuadratura se resume en las fórmulas mostradas en la tabla 4.11.
Con resistencia de armadura
aR
Sin resistencia de armadura
aR
Impedancia por fase saturada
del eje directo )5.1(302
nssatdsat I
VZZ
⋅==
)5.1(302
nssatdsat I
VZZ
⋅==
Reactancia por fase saturada del
eje directo 22
adsatsnsdsat RZXX −== dsatdsat ZX ≈
Reactancia por fase saturada del
eje en cuadratura dsatqsat XX ⋅= 65.0 dsatqsat XX ⋅= 65.0
Tabla 4.11.Impedancia y reactancia por fase saturada del eje directo y del eje en
cuadratura.
Una vez determinadas las reactancias saturada y no saturada, con la utilización de las
curvas, se puede comenzar el análisis de la máquina, que comienza con el ingreso de las
características de funcionamiento deseadas de esta, estos nuevos datos de entrada son la potencia
y el factor de potencia, los resultados o datos de salida son de dos tipos: el primero es sin
considerar la saturación de la máquina, y el segundo es considerando la saturación de la máquina;

88
ambos resultados se presentan por fase, Entre los resultados o datos de salida que se pueden
obtener considerando reactancia saturada y no saturada de la máquina están:
1. Para la máquina sincrona de polos cilíndricos operando como generador o motor:
voltaje en terminales, voltaje inducido internamente en el estator, corriente de
línea del estator, potencias activa, reactiva y aparente, ángulo de potencia, flujo de
potencias, rendimiento; y regulación de voltaje si opera como generador.
2. Para la máquina sincrona de polos salientes operando como generador o motor:
voltaje en terminales, voltaje inducido internamente en el estator, corriente de
línea del estator, corriente del eje directo, corriente del eje en cuadratura, corriente
de excitación necesaria, potencias activa, reactiva y aparente, ángulo de potencia,
flujo de potencias, rendimiento; y regulación de voltaje si opera como generador.
El algoritmo representado en diagrama de flujo, implementado para el análisis de la
máquina síncrona está seccionado en cuatro partes para su mejor comprensión.
La primera sección, presentada en la figura 4.37, se destacan los datos de entrada
necesarios, tales como los datos de placa (descritos en la figura 4.32), datos de pérdidas y las
curvas obtenidas en los ensayos las que también pueden ser estimadas utilizando la “base de
datos”, el flujo de datos que corresponde al ingreso o estimación de las curvas se regula con la
implementación del condicional doble; que asegura elegir solo uno de los métodos. Ambos llevan
al mismo procedimiento desarrollado para primero calcular las impedancias sincronas saturada y
no saturada. Luego, el cálculo de las reactancias queda condicionado al tipo de rotor de la
máquina controlado por la variable Trotor evaluada en los datos de placa; si vale 1, es un rotor
de polos cilíndricos, de lo contrario es un rotor de polos salientes.
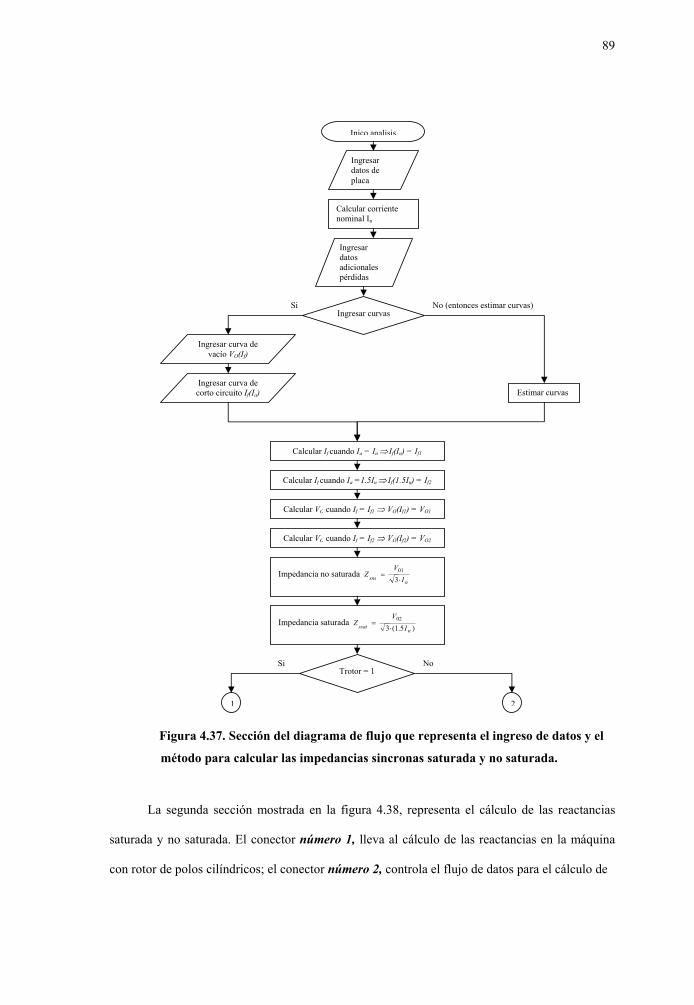
89
Figura 4.37. Sección del diagrama de flujo que representa el ingreso de datos y el
método para calcular las impedancias sincronas saturada y no saturada.
La segunda sección mostrada en la figura 4.38, representa el cálculo de las reactancias
saturada y no saturada. El conector número 1, lleva al cálculo de las reactancias en la máquina
con rotor de polos cilíndricos; el conector número 2, controla el flujo de datos para el cálculo de
Inico analisis
Ingresar datos de placa
Si
Ingresar curva de vacío VO(If)
Calcular If cuando Ia = In ⇒ If(In) = If1
Ingresar datos adicionales pérdidas
No (entonces estimar curvas)
Calcular corriente nominal In
Ingresar curva de corto circuito If(Ia)
Calcular If cuando Ia =1.5In⇒ If(1.5In) = If2
Calcular VO cuando If = If1 ⇒ VO(If1) = VO1
Calcular VO cuando If = If2 ⇒ VO(If2) = VO2
Impedancia no saturada n
sns IV
Z⋅
=3
01
Impedancia saturada )5.1(3
02
nssat I
VZ
⋅=
Trotor = 1
1 2
Si No
Ingresar curvas
Estimar curvas

90
reactancias en la máquina de polos salientes. Ambos conectores cuentan con una sentencia de
control que permite decidir si el análisis se realiza considerando o no la resistencia de armadura.
Terminado el procedimiento de cálculo de reactancias, se decide mediante condicionales
dobles como opera la máquina, si la variable operación evaluada en los datos de placa vale 1,
entonces la máquina funciona como generador, de lo contrario opera como motor.
Figura 4.38. Sección del diagrama de flujo que representa el cálculo de reactancias
saturada y no saturada según el tipo de rotor elegido.
Despreciar Ra
Si Si No
Reactancia síncrona no saturada:
22asnssns RZX −=
No
1
Despreciar Ra
2
Reactancia síncrona saturada:
22assatssat RZX −=
Reactancia síncrona no saturada:
snssns ZX =
Reactancia síncrona saturada:
ssatssat ZX =
Reactancia del eje directo no saturada:
22asnssnsdns RZXX −==
Reactancia del eje directo no saturada:
snsdns ZX =
Reactancia del eje en cuadratura no saturada:
dnsqns XX 65.0=
Reactancia del eje en cuadratura no saturada:
dnsqns XX 65.0=
Reactancia del eje directo saturada:
22assatssatdsat RZXX −==
Reactancia del eje en cuadratura saturada:
dsatqsat XX 65.0=
Reactancia del eje directo saturada:
ssatdsat ZX =
Reactancia del eje en cuadratura saturada:
dsatqsat XX 65.0=
3
operación = 1
4
Si No
operación = 1
5 6
Si No

91
La tercera sección se muestra en la figura 4.39, representa los datos de entrada necesarios
para el análisis y resultados para la máquina de polos cilíndricos. El conector número 3, controla
el flujo de datos para la máquina de polos cilíndricos funcionando como generador; el conector
número 4, controla el flujo de datos para la máquina de polos cilíndricos funcionando como
motor.
Figura 4.39. Sección del diagrama de flujo que representa el ingreso de las
características de funcionamiento para los modos de operación de la máquina
sincrona de polos cilíndricos.
Ingresar características de funcionamiento del generador: Potencia y
factor de potencia
Fin análisis
Calcular resultados por fase sin saturación: • voltaje en terminales • voltaje inducido internamente
en el estator • corriente de línea del estator • potencias activa, reactiva
y aparente • ángulo de potencia • flujo de potencias • rendimiento
Calcular resultados por fase sin saturación: • voltaje en terminales • voltaje inducido internamente
en el estator • corriente de línea del estator • potencias activa, reactiva
y aparente • ángulo de potencia • regulación de voltaje • flujo de potencias • rendimiento
Calcular resultados trifásicos sin saturación
Ingresar características de funcionamiento del
motor: Potencia y factor de potencia
Calcular resultados por fase con saturación: • voltaje en terminales • voltaje inducido internamente
en el estator • corriente de línea del estator • potencias activa, reactiva
y aparente • ángulo de potencia • regulación de voltaje • flujo de potencias • rendimiento
Calcular resultados trifásicos con saturación
Calcular resultados por fase con saturación: • voltaje en terminales • voltaje inducido internamente
en el estator • corriente de línea del estator • potencias activa, reactiva
y aparente • ángulo de potencia • flujo de potencias • rendimiento
Calcular resultados trifásicos sin saturación
Calcular resultados trifásicos con saturación
3 4

92
La cuarta sección se muestra en la figura 4.40 y representa los datos de entrada necesarios
para el análisis y resultados para la máquina de polos salientes. El conector número 5, controla el
flujo de datos para la máquina de polos salientes funcionando como generador; el conector
número 6, controla el flujo de datos para la máquina de polos salientes funcionando como motor.
Figura 4.40. Sección del diagrama de flujo que representa el ingreso de las
características de funcionamiento para los modos de operación de la máquina
sincrona de polos cilíndricos.
Ingresar características de funcionamiento del generador: Potencia y
factor de potencia
Fin análisis
Calcular resultados por fase sin saturación: • voltaje en terminales • voltaje inducido internamente
en el estator • corriente de línea del estator • corriente del eje directo • corriente del eje en cuadratura • corriente de excitación necesaria• potencias activa, reactiva
y aparente • ángulo de potencia • regulación de voltaje • flujo de potencias • rendimiento
Calcular resultados trifásicos sin saturación
Ingresar características de funcionamiento del
motor: Potencia y factor de potencia
Calcular resultados trifásicos con saturación
Calcular resultados trifásicos sin saturación
Calcular resultados trifásicos con saturación
5 6
Calcular resultados por fase con saturación: • voltaje en terminales • voltaje inducido internamente
en el estator • corriente de línea del estator • corriente del eje directo • corriente del eje en cuadratura • corriente de excitación necesaria• potencias activa, reactiva
y aparente • ángulo de potencia • regulación de voltaje • flujo de potencias • rendimiento
Calcular resultados por fase sin saturación: • voltaje en terminales • voltaje inducido internamente
en el estator • corriente de línea del estator • corriente del eje directo • corriente del eje en cuadratura • corriente de excitación necesaria • potencias activa, reactiva
y aparente • ángulo de potencia • flujo de potencias • rendimiento
Calcular resultados por fase con saturación: • voltaje en terminales • voltaje inducido internamente
en el estator • corriente de línea del estator • corriente del eje directo • corriente del eje en cuadratura • corriente de excitación necesaria • potencias activa, reactiva
y aparente • ángulo de potencia • flujo de potencias • rendimiento

93
4.2.6.2.1 Tipo de análisis implementado cuando se considera el ingreso de las curvas
de vacío y cortocircuito
El tipo de análisis implementado en este punto, es similar al desarrollado en la sección
4.2.6.1.1, y permite visualizar curvas características para los distintos modos de operación de la
máquina con el agregado de poder trazarlas considerando o no la saturación de esta y poder hacer
comparaciones.
Considerando a la máquina síncrona funcionando como generador, se pueden obtener dos
tipos de curvas:
1. Potencia desarrollada en función del ángulo de potencia, donde el primer paso es
calcular la potencia en cada valor del intervalo con y sin saturación [0º, 180º], para
luego trazar las curvas en el mismo rango.
2. Regulación de voltaje en función del factor de potencia, calculadas y trazadas en
el intervalo con y sin saturación [0 , 1] correspondiente al factor de potencia.
Si la máquina síncrona opera como motor, las curvas que se pueden obtener son:
1. Potencia desarrollada en función del ángulo de potencia, donde el primer paso es
calcular la potencia en cada valor del intervalo con y sin saturación [0º, 180º], para
luego trazar las curvas en el mismo rango.
2. Torque en función del ángulo de potencia, donde el torque se calcula en el
intervalo con y sin saturación [0º, 180º] y se trazan en el mismo rango.

94
El diagrama de flujo se implementó con la ayuda de condicionales dobles, los cuales
aseguran la elección de una opción a la vez; permiten elegir el camino correcto según el modo de
operación de la máquina, que lleva a los tipos de curvas características descritas anteriormente
condicionadas también al tipo de operación.
La figura 4.41 presenta la sección del diagrama de flujo que corresponde a la elección de
tipos de curvas cuando la máquina opera como generador y la figura 4.42 muestra la continuación
del diagrama de flujo correspondiente a la elección de los tipos de curvas cuando la máquina
funciona como motor.
Figura 4.41. Diagrama de flujo para la representación de curvas en la máquina
síncrona operando como generador.
Potencia desarrollada v/s
ángulo de potencia
Si
Si
No Si
No
No
Salir
Fin
Calcular potencia en el intervalo [0º,180º] sin considerar saturación
Graficar potencia en el intervalo [0º,180º] sin considerar saturación
Regulación de tensión v/s
factor de potencia
Calcular regulación de tensión en el intervalo [0,1] sin considerar saturación
Graficar regulación de tensión en el intervalo [0,1] sin considerar saturación
Fin
Fin
Calcular potencia en el intervalo [0º,180º]
considerando saturación
Graficar potencia en el intervalo [0º,180º]
considerando saturación
Calcular regulación de tensión en el intervalo [0,1]
considerando saturación
Graficar regulación de tensión en el intervalo [0,1]
considerando saturación
operación = 1
Inicio análisis
Elegir curva a trazar
2
2
1Si (operando como generador)
No (entonces opera como motor)

95
Figura 4.42. Diagrama de flujo para la representación de curvas en la máquina
síncrona operando como motor.
Potencia desarrollada v/s
ángulo de potencia
Si
Si
No Si
No
No
Salir
Fin
Torque v/s
ángulo de potencia
Elegir curva a trazar
1
2
Calcular potencia en el intervalo [0º,180º] sin considerar saturación
Graficar potencia en el intervalo [0º,180º] sin considerar saturación
Fin
Calcular potencia en el intervalo [0º,180º]
considerando saturación
Graficar potencia en el intervalo [0º,180º]
considerando saturación
Calcular Torque en el intervalo [0º,180º] sin considerar saturación
Graficar Torque en el intervalo [0º,180º] sin considerar saturación
Fin
Calcular Torque en el intervalo [0º,180º]
considerando saturación
Graficar Torque en el intervalo [0º,180º]
considerando saturación

CAPITULO V
MANUAL DE USUARIO

97
5.1 Primeros pasos, utilización del sistema
5.1.1 Ingreso de la password
Esta opción pide al usuario la clave para ingresar a la pantalla principal del software a
través de la ventana mostrada en la figura 5.1. Inicialmente la clave es maq2008 pero puede ser
modificada para dar exclusividad de acceso, tarea que se realiza en la opción “mantencion” a
explicar mas adelante.
Digitada la clave de acceso seleccionamos la opción “Entrar >” con ello accederá a la
pantalla principal de la aplicación.
Figura 5.1. Pantalla de inicio, ingreso de la password.
5.1.2 Pantalla principal
Ingresada y validada la clave de acceso accederá a la pantalla principal de la aplicación,
desde la cual se ingresa a las opciones del software. Consta de un menú desplegable en la parte
superior de la pantalla similar a los utilizados en cualquier aplicación del entorno Windows y otro
menú ubicado en la parte izquierda de la pantalla, el cual contiene 1 submenú por cada máquina
eléctrica de corriente alterna. El entorno de la pantalla principal se presenta en la figura 5.2.

98
Figura 5.2. Pantalla principal que contiene las opciones del software.
5.1.3 Esquema del menú principal
El menú principal que contiene las máquinas eléctricas que se pueden analizar posee las
opciones que se muestran en el esquema de la figura 5.3; cada submenú lleva el nombre de la
máquina, haciendo clic en cualquiera de ellos nos despliega sus opciones, estas también están
incluidas en el menú desplegable de la parte superior de la pantalla en la opción “Tipo de
máquina”.

99
Figura 5.3. Esquema del menú principal.
5.1.4 Opciones del menú desplegable
Es otra alternativa de ingreso a las distintas opciones del software, esta no se explicará en
detalle, la única opción no incluida en el menú principal es “Mantención” mostrada en la figura
5.4 que permite personalizar nuestra clave de ingreso o borrarla para un acceso libre al contenido.
Figura 5.4. Menú desplegable con la opción “Mantención”
para personalizar clave de ingreso.

100
5.2 Menú utilidades y herramientas
Esta opción muestra las utilidades y herramientas existentes, consta de tres botones cuya
función se resume en la tabla 5.1.
Botón Función
Muestra la calculadora de su sistema
Acceso a la utilidad de Windows Paint
Conversor de coordenadas polar-rectangular, rectangular-polar.
Tabla 5.1. Botones del menú Utilidades y herramientas.
5.2.1 Botón Microsoft ® calculadora
Acceso directo a la calculadora incluida en el sistema operativo Windows. Figura 5.5.
Figura 5.5. Calculadora del sistema operativo
Windows.
5.2.2 Botón Microsoft ® Paint
Acceso directo al programa editor Paint utilizada para editar cualquier gráfica generada
por el programa. Figura 5.6

101
Figura 5.6. Programa editor Paint.
5.2.3 Botón transformar coordenadas
Abre el conversor de coordenadas polar-rectangular, rectangular-polar que se muestra en
la figura 5.7, necesario para el análisis teórico de circuitos eléctricos. En la pantalla selecciona el
tipo de conversión se ingresan los datos y obtiene su resultado.
Figura 5.7. Herramienta para la conversión de coordenadas

102
5.3 Menú trasformador monofásico
El menú para el análisis de transformadores monofásicos consta de seis botones, la
función de cada uno se resume en la tabla 5.2.
Botón Función
Permite realizar un nuevo proyecto.
Abre un proyecto antiguo guardado en alguna unidad de almacenamiento.
Para ingresar los parámetros del transformador.
Para ingresar los datos de las pruebas de vacío y corto circuito.
El software estima los cálculos.
Permite realizar el análisis del transformador en condiciones de carga.
Tabla 5.2. Botones del menú transformadores monofásicos.
El esquema detallado del menú se representa en la figura 5.8.
Figura 5.8. Estructura del menú transformadores monofásicos.

103
5.3.1 Botón Nuevo proyecto
Despliega una ventana como la presentada en la figura 5.9, que pide los datos de placa de
su transformador monofásico, los más importantes son:
• Potencia nominal expresada en (KVA).
• Voltaje del devanado primario expresado en (Volts).
• Voltaje del devanado secundario expresado en (Volts).
• Frecuencia expresada en (Hertz).
Figura 5.9. Ventana para el ingreso de datos de placa
Una vez ingresados estos datos puede realizar tres tipos de experimentos para obtener los
parámetros del circuito equivalente, si ya contara con ellos puede ingresarlos y hacer un análisis
con carga de forma inmediata. Los tipos de experimentos son:
• Ingresar parámetros.
• Ingresar ensayos.
• Estimar parámetros.

104
5.3.2 Botón Ingresar parámetros
Muestra una ventana como la presentada en la figura 5.10, con cinco opciones, estas
representan las más comúnmente usadas para determinar las características del transformador. En
todos los casos la rama que representa el flujo mutuo y las perdidas en el núcleo puede ser en
serie (Ro y Xo) o en paralelo (Rm y Xm) según sea la configuración de circuito que se use.
Figura 5.10. Opciones de ingreso de parámetros.
• Opción 1: despliega una ventana, que se aprecia en la figura 5.11a, para el ingreso de
todos los parámetros conocidos: R1, X1, R2, X2, Rm, Xm o Ro, Xo.
• Opción 2: despliega una ventana, que se aprecia en la figura 5.11b, para el ingreso de los
parámetros del devanado primario: R1, X1, Rm, Xm o Ro, Xo.
• Opción 3: despliega una ventana, que se aprecia en la figura 5.11c, para el ingreso de los
parámetros del devanado secundario: R2, X2, Rm, Xm o Ro, Xo.
• Opción 4: despliega una ventana, que se aprecia en la figura 5.11d, para el ingreso de los
parámetros del devanado secundario referidos al primario: R21, X21, Rm, Xm o Ro, Xo.
• Opción 5: despliega una ventana, que se aprecia en la figura 5.11e, para el ingreso de los
parámetros del devanado primario referidos al secundario: R12, X12, Rm, Xm o Ro, Xo.

105
Figura 5.11a. Ingreso de todos los parámetros conocidos.
Figura 5.11b. Ingreso de los parámetros del primario.
Figura 5.11c. Ingreso de los parámetros del secundario.

106
Figura 5.11d. Ingreso de parámetros del secundario
referidos al primario
Figura 5.11e. Ingreso de parámetros del primario
referidos al secundario.
5.3.3 Botón Ingresar ensayos
Permite ingresar los datos de las pruebas de vacío y de corto circuito, con la opción de
elegir en cual devanado realizar la prueba, la ventana de ingreso de datos se aprecia en la figura
5.12.

107
Figura 5.12. Ventana para ingresar pruebas de vacío
y corto circuito.
5.3.4 Botón Estimar parámetros
Opción útil cuando no se cuenta con más información que los datos de placa, el software
mediante herramientas matemáticas implementadas estima todos los cálculos requeridos para un
análisis.
5.3.5 Botón Análisis con carga
Activa una ventana con cuatro opciones como la mostrada en la figura 5.13, que
representan las características más comunes de la carga conectada a un transformador
monofásico.
Figura 5.13. Características conocidas de la carga.

108
• Opción 1: la ventana de datos de la figura 5.13a tiene la opción de decidir en qué
devanado conectar la carga, factor de potencia inductivo o capacitivo, tensión y potencia
en la carga.
Figura 5.13a. Para las características conocidas:
factor de potencia tensión y potencia en la carga.
• Opción 2: la ventana de datos de la figura 5.13b tiene la opción de decidir en qué
devanado conectar la carga, tensión aplicada en la carga tipo de factor de potencia y
forma de representar la carga.
Figura 5.13b. Para las características conocidas:
impedancia de la carga y tensión en la carga.

109
• Opción 3: es similar a la opción 2 con la diferencia de que el software asume que la
carga esta conectada en el devanado secundario y se varía la tensión de la red de
alimentación. La ventana se aprecia en la figura 5.13c.
Figura 5.13c. Para las características conocidas:
impedancia de la carga y tensión de la red.
• Opción 4: la ventana de datos mostrada en la figura 5.13d nos pide la ubicación de la
carga, el tipo de factor de potencia de la carga, tensión de la red y corriente absorbida por
la carga. Incluye un cuadro de referencia que entrega la corriente nominal en ambos
devanados.
Figura 5.13d. Para las características conocidas:
Tensión de la red, factor de potencia y corriente
absorbida por la carga.
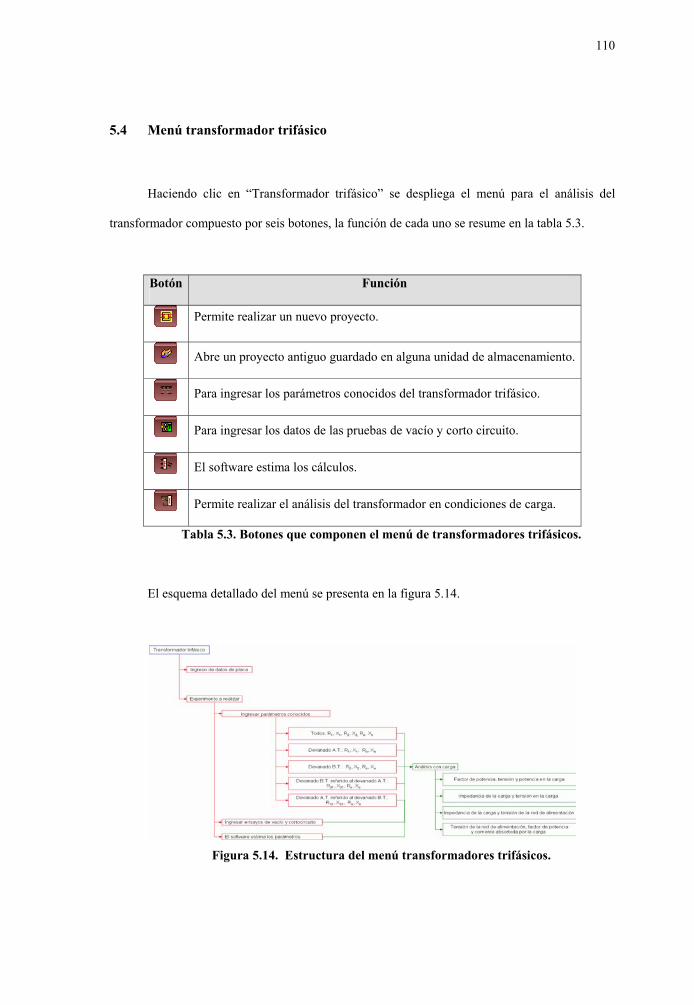
110
5.4 Menú transformador trifásico
Haciendo clic en “Transformador trifásico” se despliega el menú para el análisis del
transformador compuesto por seis botones, la función de cada uno se resume en la tabla 5.3.
Botón Función
Permite realizar un nuevo proyecto.
Abre un proyecto antiguo guardado en alguna unidad de almacenamiento.
Para ingresar los parámetros conocidos del transformador trifásico.
Para ingresar los datos de las pruebas de vacío y corto circuito.
El software estima los cálculos.
Permite realizar el análisis del transformador en condiciones de carga.
Tabla 5.3. Botones que componen el menú de transformadores trifásicos.
El esquema detallado del menú se presenta en la figura 5.14.
Figura 5.14. Estructura del menú transformadores trifásicos.

111
5.4.1 Botón Nuevo proyecto
Lleva a una ventana como la que se presenta en la figura 5.15 que pide los datos de placa
del transformador trifásico necesarios para realizar un análisis, los más importantes son:
• Potencia nominal expresada en (KVA).
• Voltaje del devanado de alta tensión expresado en (Volts).
• Voltaje del devanado de baja tensión expresado en (Volts).
• Frecuencia expresada en (Hertz).
Figura 5.15. Ventana para el ingreso de datos de placa.
Una vez ingresado los datos de placa y al igual que el transformador monofásico se
pueden realizar tres tipos de experimentos, estos son:
• Ingresar parámetros.
• Ingresar ensayos.
• Estimar parámetros.

112
5.4.2 Botón Ingresar parámetros
Muestra una ventana como la presentada en la figura 5.16, con cinco opciones, estas
representan las más comúnmente usadas para determinar las características del transformador
trifásico.
Figura 5.16. Opciones de ingreso de parámetros.
• Opción 1: despliega una ventana, que se aprecia en la figura 5.17a, para el ingreso de
todos los parámetros conocidos: R1, X1, R2, X2, Ro, Xo.
• Opción 2: despliega una ventana, que se aprecia en la figura 5.17b, para el ingreso de los
parámetros del devanado de alta tensión: R1, X1, Ro, Xo.
• Opción 3: despliega una ventana, que se aprecia en la figura 5.17c, para el ingreso de los
parámetros del devanado de baja tensión: R2, X2, Ro, Xo.
• Opción 4: despliega una ventana, que se aprecia en la figura 5.17d, para el ingreso de los
parámetros del devanado de baja tensión referidos al devanado de alta tensión: R21, X21,
Ro, Xo.
• Opción 5: despliega una ventana, que se aprecia en la figura 5.17e, para el ingreso de los
parámetros del devanado de alta tensión referidos al devanado de baja tensión: R12, X12,
Ro, Xo.

113
Figura 5.17a. Ingreso de todos los parámetros conocidos.
Figura 5.17b. Ingreso de los parámetros del devanado de
alta tensión.
Figura 5.17c. Ingreso de los parámetros del devanado de
baja tensión.

114
Figura 5.17d. Ingreso de los parámetros del devanado
de baja tensión referido al devanado de alta tensión.
Figura 5.17e. Ingreso de los parámetros del devanado
de alta tensión referido al devanado de baja tensión.
5.4.3 Botón Ingresar ensayos
Abre una ventana como la presentada en la figura 5.18 que permite en ingreso de los datos
de las pruebas de vacío y de corto circuito, con la opción de elegir en cual devanado realizar cada
prueba.

115
Figura 5.18. Ventana para el ingreso de las pruebas
de vacío y de corto circuito.
5.4.4 Botón Estimar parámetros
Opción útil cuando no se cuenta con más información que los datos de placa, el software
mediante herramientas matemáticas implementadas estima todos los cálculos necesarios para
realizar un análisis del transformador.
5.4.5 Botón Análisis con carga
Abre una ventana con cuatro opciones que representan las características más comunes de
la carga conectada a un transformador trifásico. La ventana se aprecia en la figura 5.19.
Figura 5.19. Características conocidas de la carga.

116
• Opción 1: la ventana de datos de la figura 5.19a tiene la opción de decidir en qué
devanado conectar la carga, factor de potencia inductivo o capacitivo, tensión y potencia
en la carga pueden ser ingresados como valores de línea o valores por fase.
Figura 5.19a. Para las características conocidas:
factor de potencia tensión y potencia en la carga.
• Opción 2: la ventana de datos de la figura 5.19b se configura la ubicación de la carga,
tipo de conexión y forma de presentarla en cuanto a la tensión aplicada en la carga puede
ser expresada como valor de línea o de fase.
Figura 5.19b. Para las características conocidas:
impedancia de la carga y tensión en la carga.
• Opción 3: es similar a la opción 2 con la diferencia de que se puede variar la tensión de
la red. La ventana se aprecia en la figura 5.19c.

117
Figura 5.19c. Para las características conocidas:
impedancia de la carga y tensión de la red.
• Opción 4: la ventana de datos mostrada en la figura 5.19d nos pide la ubicación de la
carga, el tipo de factor de potencia de la carga, tensión de la red por fase o valor de línea y
corriente absorbida por la carga.
Figura 5.19d. Para las características conocidas:
Tensión de la red, factor de potencia y corriente
absorbida por la carga.

118
5.5 Menú motor de inducción trifásico
Haciendo clic en “Motor de inducción trifásico” se despliega el menú para el análisis del
motor, formado por cinco botones cuya función se resume en la tabla 5.4.
Botón Función
Permite ingresar los datos de un nuevo motor de inducción trifásico.
Abre un proyecto antiguo guardado en alguna unidad de almacenamiento.
Permite ingresar los parámetros del circuito equivalente del motor.
Para ingresar los datos de las pruebas de vacío y rotor bloqueado.
El software estima los cálculos.
Tabla 5.4. Botones que componen el menú Motor de inducción trifásico.
El esquema detallado del menú se aprecia en la figura 5.20.
Figura 5.20. Estructura del menú Motor de inducción trifásico.

119
5.5.1 Botón Nuevo proyecto
Lleva a una ventana como la que se aprecia en la figura 5.21 que pide los datos de placa
del motor de inducción trifásico necesarios para realizar un análisis, los más importantes son:
• Potencia nominal expresada en (HP) o (KW).
• Voltaje del estator expresado en (Volts).
• Frecuencia nominal del estator expresado en (Hertz).
• Número de polos.
• Tipo de rotor.
Figura 5.21. Ventana para el ingreso de datos
de placa del motor de inducción trifásico.
El tipo de rotor se elige en una ventana que se muestra inmediatamente después de haber
ingresado los primeros cuatro datos, la ventana se presenta en la figura 5.21a, se observan de dos
tipos: rotor bobinado y rotor jaula de ardilla.

120
Figura 5.21a. Elección del tipo de rotor.
Si se opta por analizar un motor de inducción trifásico rotor jaula de ardilla se abre otra
ventana la que se muestra en la figura 5.21b, que posee cinco opciones, cuatro de las cuales
clasifican al motor según la norma NEMA y la quinta opción en que se asume que no se posee
información de la clasificación.
Figura 5.21b. Clasificación del motor según norma NEMA.
5.5.2 Botón Ingresar parámetros
Permite el ingreso de los parámetros del circuito equivalente por medio de la ventana que
se muestra en la figura 5.22, estos según la configuración de su circuito son:
• Resistencia del devanado del estator R1 expresada en (Ohm).
• Reactancia de fuga del devanado del estator X1 expresada en (Ohm).
• Resistencia del devanado del rotor referida al estator R21 expresada en (Ohm).
• Reactancia de fuga del rotor referida al estator X21 expresada en (Ohm).

121
Y la rama que representa a la reactancia de magnetización y pérdidas en el núcleo puede
ser ingresada como:
• Rama paralelo: Rm y Xm.
• Rama serie: Ro y Xo.
Figura 5.22. Ingreso de los parámetros del circuito equivalente
del motor de inducción trifásico.
5.5.3 Botón Ingresar ensayos
Opción para ingresa los datos de las pruebas de vacío y de rotor bloqueado, también como
dato adicional la resistencia del estator por fase a través de la ventada presentada en la figura
5.23.
Figura 5.23. Ventana para el ingreso de las pruebas
de vacío y de rotor bloqueado.

122
5.5.4 Botón Estimar parámetros
Opción útil cuando no se cuenta con más información que los datos de placa del motor, el
software se encarga de estimar todas las variables y parámetros.
5.5.5 Botón Tipo de análisis
Los tipos de análisis del motor de inducción trifásico se dividen según el tipo de rotor.
5.5.5.1 Tipo de análisis en un motor de inducción trifásico rotor bobinado
Se pueden realizar tres tipos de análisis los que se presentan en la figura 5.24 y se detallan
a continuación.
Figura 5.24. Elección del tipo de análisis en un motor
de inducción trifásico rotor bobinado.
5.5.5.1.1 Características del motor variando la velocidad
Para realizar este análisis se configura una ventana como la presentada en la figura 5.24a
que pide el porcentaje de tensión en el estator y el rango de velocidad deseado, como referencia
se da la tensión nominal del estator y como límite de velocidad la velocidad síncrona.

123
Figura 5.24a. Tipo de análisis: características del motor
variando la velocidad.
Una vez completado los datos se despliega una ventana como la que se aprecia en la
figura 5.24b que permite obtener cuatro tipos de curvas características.
Figura 5.24b. Tipo de curvas características que se pueden
obtener.
5.5.5.1.2 Características del motor incluyendo resistencia externa
Nos muestra una ventana que se aprecia en la figura 5.24c en donde se ingresa el valor de
la resistencia conectada al estator.
Figura 5.24c. Ingreso del valor de la resistencia
conectada al estator.

124
Luego se configuran los mismos datos que en 5.5.5.1.1 figura 5.24a y figura 5.24b.
5.5.5.1.3 Método de partida del motor
Lleva a una ventana que se presenta en la figura 5.25a en donde se configura el rango de
variación de la resistencia conectada al rotor y el rango de velocidad deseado.
Figura 5.25a. Configuración de los datos para el método
de partida
Luego de completar los datos se muestra una pantalla interactiva donde mediante un
control deslizante que podemos mover con el Mouse se observa la variación del torque,
resistencia externa y corriente, como se aprecia en la figura 5.25b.
Figura 5.25b. Ventana interactiva implementada para el
método de partida.

125
5.5.5.2 Tipo de análisis en un motor de inducción trifásico rotor jaula de ardilla
Se implementó un análisis que consiste en observar las características del motor variando
la velocidad el cual consiste en configurar una ventana como la presentada en la figura 5.26.
Figura 5.26. Tipo de análisis: características del motor
de inducción rotor jaula de ardilla variando la velocidad.
La configuración es similar al caso 5.5.5.1.1, después de completar los datos aparece una
ventana que presenta los tipos de curvas características que se pueden trazar la que se aprecia en
la figura 5.27.
Figura 5.27. Tipos de curvas características que se
pueden obtener.

126
5.6 Menú motor de inducción monofásico
Haciendo clic en “Motor de inducción monofásico” se despliega el menú para el análisis
de la máquina, que consta de cuatro botones. La función de cada uno de ellos se resume en la
tabla 5.5.
Botón Función
Permite ingresar los datos de un nuevo motor de inducción monofásico.
Abre un proyecto antiguo guardado en alguna unidad de almacenamiento.
Permite ingresar los parámetros del circuito equivalente del motor.
Para ingresar los datos de las pruebas de vacío y rotor bloqueado.
Tabla 5.5. Botones que componen el menú Motor de inducción monofásico.
El esquema detallado del menú se aprecia en la figura 5.28.
Figura 5.28. Estructura del menú Motor de inducción monofásico.

127
5.6.1 Botón Nuevo proyecto
Abre una ventana como la de la figura 5.29 que permite el ingreso de los datos de placa
del motor de inducción monofásico, necesarios para realizar un análisis. Los más importantes
son:
• Potencia nominal expresada en (HP) o (KW).
• Voltaje del estator expresado en (Volts).
• Frecuencia nominal del estator expresado en (Hertz).
• Número de polos.
Figura 5.29. Ventana para el ingreso de datos
de placa del motor de inducción monofásico.
5.6.2 Botón Ingresar parámetros
Abre una ventana, que se presenta en la figura 5.30, en donde se ingresan los parámetros
del circuito equivalente del motor de inducción monofásico entre ellos están:

128
• Resistencia del devanado del estator R1 expresada en (Ohm).
• Reactancia del devanado del estator X1 expresada en (Ohm).
• Resistencia del devanado del rotor referida al estator R21 expresada en (Ohm).
• Reactancia del rotor referida al estator X21 expresada en (Ohm).
• Reactancia de magnetización Xm expresada en (Ohm).
Figura 5.30. Ventana para el ingreso de los parámetros
del circuito equivalente.
Luego de ingresar los parámetros pueden agregarse al análisis datos adicionales como
deslizamiento y pérdidas por medio de la ventana que se aprecia en la figura 5.30a.
Figura 5.30a. Ingreso de datos adicionales.

129
5.6.3 Botón Ingresar ensayos
Abre una ventana que permite ingresar los datos de las pruebas de vacío y rotor
bloqueado, también pueden ingresarse datos adicionales como velocidad rotacional o
deslizamiento, todos estos datos se ingresan en las ventanas que se presentan en la figura 5.31a y
figura 5.31b.
Figura 5.31a. Ventana para el ingreso de las pruebas
de vacío y de rotor bloqueado.
Figura 5.31b. Ingreso de datos adicionales,
velocidad rotacional o deslizamiento.

130
5.6.4 Botón Tipo de análisis
Muestra una ventana que permite observar las características del motor variando su
velocidad, se configura ingresando el porcentaje de tensión nominal en el estator y el rango de
velocidad deseado, esto permite trazar la curva de torque en función de la velocidad. Incluye un
cuadro con valores de referencia de tensión y velocidad rotacional, la ventana para el ingreso de
estos datos se aprecia en la figura 5.32.
Figura 5.32.Configuración de datos para observar las características
del motor de inducción monofásico variando su velocidad.

131
5.7 Menú generador síncrono
Haciendo clic en “Generador síncrono” se despliega el menú para el análisis de la
máquina que se compone de cuatro botones, cuya función se resume en la tabla 5.6.
Botón Función
Permite ingresar los datos de un nuevo generador síncrono.
Abre un proyecto antiguo guardado en alguna unidad de almacenamiento.
Permite ingresar los parámetros del circuito equivalente del generador síncrono.
Permite calcular las impedancias usando curvas de vacío y corto circuito.
Tabla 5.6. Botones que componen el menú Generador síncrono.
El esquema detallado del menú se presenta en la figura 5.33.
Figura 5.33. Estructura del menú Generador síncrono.
5.7.1 Botón Nuevo proyecto
Lleva a una ventana como la que se aprecia en la figura 5.34 que pide los datos de placa
del generador síncrono necesarios para realizar un análisis, los más importantes son:

132
• Potencia aparente nominal expresada en (KVA) o (MVA).
• Voltaje del estator expresado en (V) o (KV).
• Frecuencia nominal del estator expresado en (Hertz).
• Factor de potencia.
• Número de polos.
• Tipo de rotor (polos cilíndricos o polos salientes).
Figura 5.34. Ventana para el ingreso de los datos de placa
del generador síncrono.
Existe la posibilidad de agregar datos de pérdidas en una ventana como se presenta en la
figura 5.34a.
Figura 5.34a. Ventana para el ingreso de datos de pérdidas.
5.7.2 Botón Ingreso de parámetros
Dependiendo del tipo de rotor escogido se muestra una de dos ventanas implementadas:

133
5.7.2.1 Ingresar parámetros del generador síncrono rotor de polos cilíndricos
Se despliega una ventana, que se aprecia en la figura 5.35a, que pide los datos del circuito
equivalente:
• Resistencia de armadura Ra expresada en (Ohm)
• Reactancia síncrona Xs expresada en (Ohm).
Figura 5.35a. Ingreso de parámetros para el generador síncrono
rotor de polos cilíndricos.
5.7.2.2 Ingresar parámetros del generador síncrono rotor de polos salientes
Se despliega una ventana, que se aprecia en la figura 5.35b, que pide los datos del circuito
equivalente:
• Resistencia de armadura Ra expresada en (Ohm)
• Reactancia síncrona del eje directo Xd expresada en (Ohm).
• Reactancia síncrona del eje en cuadratura Xq expresada en (Ohm).

134
Figura 5.35b. Ingreso de parámetros para el generador síncrono
rotor de polos salientes.
5.7.3 Botón Calcular impedancias
Tanto para el generador síncrono rotor de polos cilíndricos como para el generador
síncrono rotor de polos salientes, se abre una ventana de inicio con dos opciones como en la
figura 5.36a:
Figura 5.36a. Opciones para el cálculo de impedancias.
5.7.3.1 Ingresar curvas de vacío y cortocircuito
Esta opción muestra una ventana como la figura 5.36b que pide datos como:
• Resistencia de armadura Ra expresada en (Ohm)
• Número de datos de las curvas de vacío y de corto circuito. Cada dato puede ser
ingresado como valor de línea o fase.

135
Permite el ingreso de un mínimo de dos puntos por curva y un máximo de diez puntos por
curva.
Figura 5.36b. Ventana para el ingreso de datos de
la curva de vacío y de corto circuito.
5.7.3.2 Estimar curvas
Esta opción muestra una ventana como la figura 5.36c que permite la estimación de la
curva con valores de línea o de fase.
Figura 5.36c. Ventana para la estimación de curvas.

136
5.8 Menú motor síncrono
Haciendo clic en “Motor síncrono” se despliega el menú para el análisis de la máquina, el
cual está conformado por cuatro botones la función de cada uno de ellos se resume en la tabla
5.7.
Botón Función
Permite ingresar los datos de un nuevo motor síncrono.
Abre un proyecto antiguo guardado en alguna unidad de almacenamiento.
Permite ingresar los parámetros del circuito equivalente del motor síncrono.
Permite calcular las impedancias usando curvas de vacío y corto circuito.
Tabla 5.7. Botones que conforman el menú Motor síncrono.
El esquema detallado del menú se aprecia en la figura 5.37
Figura 5.37. Estructura del menú Motor síncrono.
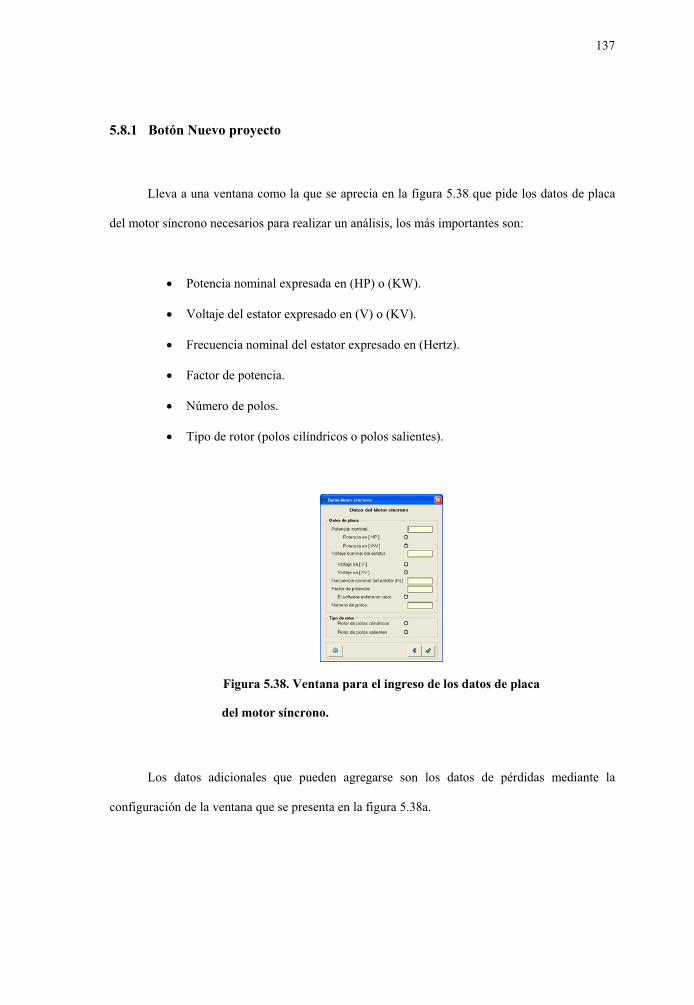
137
5.8.1 Botón Nuevo proyecto
Lleva a una ventana como la que se aprecia en la figura 5.38 que pide los datos de placa
del motor síncrono necesarios para realizar un análisis, los más importantes son:
• Potencia nominal expresada en (HP) o (KW).
• Voltaje del estator expresado en (V) o (KV).
• Frecuencia nominal del estator expresado en (Hertz).
• Factor de potencia.
• Número de polos.
• Tipo de rotor (polos cilíndricos o polos salientes).
Figura 5.38. Ventana para el ingreso de los datos de placa
del motor síncrono.
Los datos adicionales que pueden agregarse son los datos de pérdidas mediante la
configuración de la ventana que se presenta en la figura 5.38a.

138
Figura 5.38a. Ventana para el ingreso de datos adicionales.
5.8.2 Botón Ingreso de parámetros
Dependiendo del tipo de rotor elegido se muestran dos tipos de ventana:
5.8.2.1 Ingresar parámetros del motor síncrono rotor de polos cilíndricos
Se despliega una ventana, que se aprecia en la figura 5.39a, que pide los datos del circuito
equivalente:
• Resistencia de armadura Ra expresada en (Ohm)
• Reactancia síncrona Xs expresada en (Ohm).
Figura 5.39a. Ingreso de parámetros para el motor síncrono
rotor de polos cilíndricos.

139
5.8.2.2 Ingresar parámetros del motor síncrono rotor de polos salientes
Se despliega una ventana, que se aprecia en la figura 5.39b, que pide los datos del circuito
equivalente:
• Resistencia de armadura Ra expresada en (Ohm)
• Reactancia síncrona del eje directo Xd expresada en (Ohm).
• Reactancia síncrona del eje en cuadratura Xq expresada en (Ohm).
Figura 5.39b. Ingreso de parámetros para el motor síncrono
rotor de polos salientes.
5.8.3 Botón Calcular impedancias
Tanto para el motor sincrono rotor de polos cilíndricos como para el motor sincrono rotor
de polos salientes, se abre una ventana de inicio con dos opciones como en la figura 5.40a:
Figura 5.40a. Opciones para el cálculo de impedancias.

140
5.8.3.1 Ingresar curvas de vacío y cortocircuito
Esta opción muestra una ventana como la figura 5.40b que pide datos como:
• Resistencia de armadura Ra expresada en (Ohm)
• Número de datos de las curvas de vacío y de corto circuito. Cada dato puede ser
ingresado como valor de línea o fase.
Permite el ingreso de un mínimo de dos puntos por curva y un máximo de diez puntos por
curva.
Figura 5.40b. Ventana para el ingreso de datos de
la curva de vacío y de corto circuito.
5.8.3.2 Estimar curvas
Esta opción muestra una ventana como la figura 5.40c que permite la estimación de la
curva con valores de línea o de fase.
Figura 5.40c. Ventana para la estimación de curvas.

CAPITULO VI
CONCLUSIONES

142
De acuerdo al desarrollo y resultados del trabajo, se puede obtener algunas conclusiones
que contribuyen a complementar el trabajo realizado.
1. Los planes y programas de las carreras de Ingeniería del Departamento de Ingeniería
Eléctrica de la Universidad de Magallanes, específicamente el área de la informática,
permite a sus egresados diseñar y construir programas computacionales para distintas
aplicaciones.
2. Por lo antes indicado, el diseño de software, puede ser una alternativa más de trabajo a los
egresados de la carrera.
3. El uso de software relacionado con materias en las cuales pueden existir cálculos
repetitivos y por ende poco atractivos, resultar ser un incentivo para desarrollar
actividades complementarias, no solo a los ejercicios y problemas planteados en las
cátedras respectivas, sino que también como un medio de predecir resultados en las
diferentes actividades programadas en las experiencias de laboratorio de las respectivas
cátedras. En otras palabras, se recomienda diseñar e implementar software de aplicación
en las distintas cátedras, donde es necesario hacer cálculos matemáticos reiterativos, o
donde el alumno debe realizar cálculos en forma manual y necesita verificar sus
resultados.
4. El software diseñado permite al alumno, obtener el valor de las variables eléctricas e
indicadores tales como regulación de voltaje y rendimiento para distintas condiciones de
carga.

143
5. Por lo antes indicado, el presente software realiza cálculos de las distintas máquinas
eléctricas de corriente alterna en estado permanente para diferentes condiciones de carga.
Por lo tanto, es también posible continuar con el tema en cuanto a las máquinas de
corriente alterna, pero para estudiar el comportamiento en estado transitorio, que sin duda
es relevante en las instancia de un análisis complementario ya sea con fines de analizar el
impacto en el sistema en el cual está inserto o, desde el punto de vista del análisis
dinámico del mismo. Así mismo, es factible implementar un módulo para la máquina de
corriente contínua.
6. Comparando los resultados entregados por el software y los obtenidos en forma
tradicional, se llega a valores teóricos convergentes, ya que el modelo es el mismo, y las
diferencias que puedan existir son consecuencia del tipo de cálculo o el número de
decimales usado. Se sugiere distribuir la versión existente entre los alumnos y profesores
de la Cátedra de Máquinas Eléctricas, con el fin de probarlo y encontrar nuevos errores.
7. Esta primera versión puede ser un incentivo para crear aplicaciones aún más didácticas e
interactivas, como por ejemplo: simular un sistema de potencia a través de diagramas
unifilares en donde existe interconexión de las distintas máquinas y cargas.

BIBLIOGRAFIA

145
BIBLIOGRAFIA
[1] Sergio Núñez Lagos. Apuntes para Cátedra de Máquinas eléctricas. Universidad de
Magallanes 2007.
[2] Vincent Del Toro. Electromechanical Devices for Energy Conversion and Control
System, Prentice – Hall 1968.
[3] Michael Liwschitz - Garik y Clyde c. Whipple. Máquinas de corriente alterna, C.E.C.S.A.
1970.
[4] Theodore Wildi. Electrical Machines, Drives and Power Systems, Fourt edition, Prentice-
Hall,inc. 2000.
[5] Richard L. Burden y J. Douglas Faires. Análisis Numérico, Grupo editorial Iberoamérica
1985.
[6] David Schneider, UNIVERSITY OF PHOENIX college of information System and
Technology,Computer Programing Concepts and Visual Basic, Pearson Custom
Publishing 1999.
[7] Francisco. Javier Ceballos Sierra, Microsoft Visual Basic, Aplicaciones para Windows,
Addison – Wesley Iberoamericana 1993.
[8] MSDN Library Visual Studio 6.0, Información de programación técnica para
desarrolladores de aplicaciones.

146
[9] M.Angélica Pinninghoff J., Ricardo Contreras A., Andreas Polyméris P., Marcela Varas
C., Christian Weldt M. Una proposición para la enseñanza de lenguajes de programación
en Ingeniería, Depto. Ing. Informática y Ciencias de la Computación Facultad de
Ingeniería, U. de Concepción. 1995.






























