Embed Size (px)
Citation preview
UNIVERSIDA DE ESTA DUA L DE CA MPINA S
FA CUL DA DE DE ENGENHA RIA MECÂ NICA
(/(0(1726 � '( � 0É48,1$6 � , , �
$ 3 2 6 7 , / $ � 3 $ 5 $ � 2 � & 8 5 6 2 � �
1o Semestre de 2002
Engrenagens Helicoidais
A U T O R :
P R O F . D R . A U T E L I A N O A N T U N E S D O S S A N T O S J Ú N I O R
D E P A R T A M E N T O D E P R O J E T O ME C Â N I C O - FEM - UNICAMP
���
5 H V X P R � � �
(V V D � D S R V W L O D � W U D W D � G R V � F R Q F H L W R V � E i V L F R V � S D U D � D � D Q i O L V H � G H � H Q J U H Q D J H Q V � F L O t Q G U L F D V �
G H � G H Q W H V � L Q F O L Q D G R V � � R X � K H O L F R L G D L V � � F R Q I R U P H � D E R U G D G R � Q D � 'L V F L S O L Q D � (0� � � � � ��
(O H P H Q W R V � G H � 0i T X L Q D V � ,,� � 'H V F U H Y H � D � J H R P H W U L D � G H V V H � W L S R � G H � H Q J U H Q D J H P � � D V �
V R O L F L W D o } H V � D V � T X D L V � R V � G H Q W H V � H V W m R � V X M H L W R V � � D � U H V L V W r Q F L D � G R V � G H Q W H V � H � R V � I D W R U H V �
T X H � G H Y H P � V H U � O H Y D G R V � H P � F R Q W D � Q R � S U R M H W R � � 7U D W D �V H � G H � X P � U H V X P R � � V H Q G R �
Q H F H V V i U L D � D � F R Q V X O W D � D � W H [ W R V � H V S H F L D O L ] D G R V � S D U D � D S U R I X Q G D P H Q W R �
1
1. Introdução e Relações Geométr icas
Engrenagens cilíndricas de dentes inclinados, ou helicoidais, são construídas com
dentes que não são alinhados com a direção axial dos elementos de transmissão. São
utilizadas quando é necessário construir reduções que ocupem menor espaço axial e que
gerem menor ruído. A primeira característica vem do fato de que a largura efetiva dos dentes
é maior do que a de engrenagens cilíndricas de dentes retos e a segunda é devida ao
engrenamento gradual dos dentes.
A figura 1 mostra um conjunto de redução com esse tipo de engrenamento. As
engrenagens têm os dentes inclinados em sentido oposto uma da outra, para permitir o
engrenamento sem que os dentes se cruzem. Se imaginarmos o conjunto em movimento, é
fácil observar o engrenamento gradual. Considere a engrenagem da direita movendo a da
esquerda: a parte do dente mais próxima da face frontal das engrenagens entra em contato
primeiro e o restante do dente vai gradualmente entrando em contato com o resto do dente
conjugado. Também é possível observar que o rolamento entre os dentes ocorre num plano
inclinado em relação à face do conjunto. Assim, o perfil envolvente deve ser gerado em torno
de um cilindro que também está inclinado em relação aos eixos das engrenagens.
Engrenagens de dentes inclinados geram esforços axiais, já que o contato ocorre em
um plano inclinado em relação ao eixo dos elementos. Para suportar esses esforços deve-se
prever a utilização de mancais de escora ou mancais radiais, como os rolamentos de contato
Figura 1. Engrenagens Cilíndricas de Dentes Inclinados (Helicoidais)

2
angular. Uma providência de projeto bastante comum é a montagem de uma redução com dois
pares de engrenagens, cada conjunto gerando esforços axiais em uma direção. Com
engrenagens semelhantes, os esforços axiais resultantes serão mínimos. A figura 2 mostra
esse tipo de montagem.
Um esquema dos dentes e das variáveis envolvidas no estudo das engrenagens
helicoidais é mostrado na figura 3. Nessa figura, � é o ângulo de hélice, que define a
inclinação dos dentes em relação ao eixo das engrenagens; p é o passo; pn é o passo normal ou
ortogonal; pa é o passo axial e b é a largura da engrenagem. A variável b’ , não mostrada, é
utilizada para a largura efetiva dos dentes, que em engrenagens helicoidais depende do ângulo
de hélice.
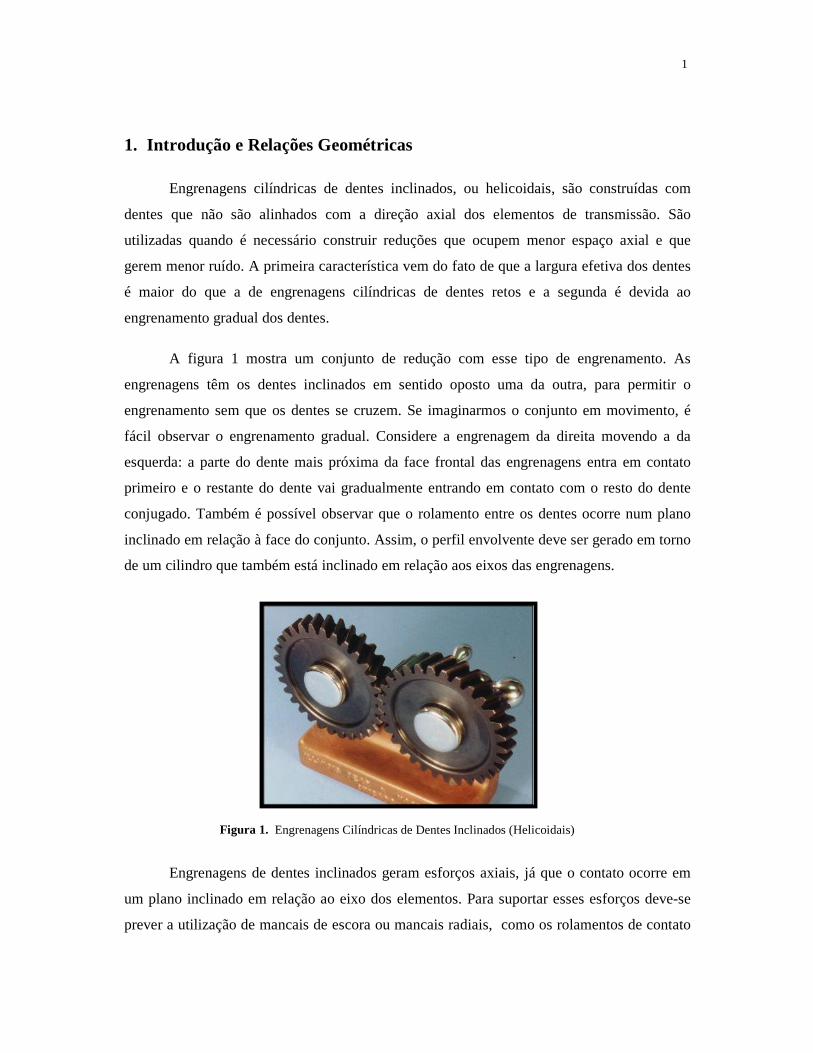
A figura 3 também mostra os planos ��� e ��� . O primeiro é o plano perpendicular ao
eixo da engrenagem e o segundo é perpendicular aos dentes. A visão dos dentes em cada
plano é diferente. A figura 4 mostra os dentes em ambos os planos. Nessa figura, � n é o
Figura 2. Montagem de um Par de Engrenagens Helicoidais para evitar Esforço Axial
Figura 3. Vista Superior de uma Engrenagem Helicoidal mostrando as designações mais importantes
3
�cos.ppn �
�cos.tantan n
�cos.mmn �
ângulo de pressão normal ou ortogonal e � é o ângulo de pressão. Pode-se notar que os
ângulos são diferentes. O ângulo normal é o que realmente está no plano de rolamento e é
normalizado. Embora o perfil dos dentes deva ser envolvental nesse plano, dificuldades de
fabricação impedem que isso ocorra. Pequenas diferenças são levadas em conta no
dimensionamento através da modificação dos fatores geométricos.
Com as figuras 3 e 4 é possível descrever as relações entre as diversas variáveis.
Assim, o passo normal pode ser calculado por:
[ 1 ]
O ângulo de pressão normal é dado por:
[ 2 ]
E o módulo normal, que é diretamente proporcional ao passo normal, é dado por:
[ 3 ]
2. Análise de Forças em Engrenagens Helicoidais
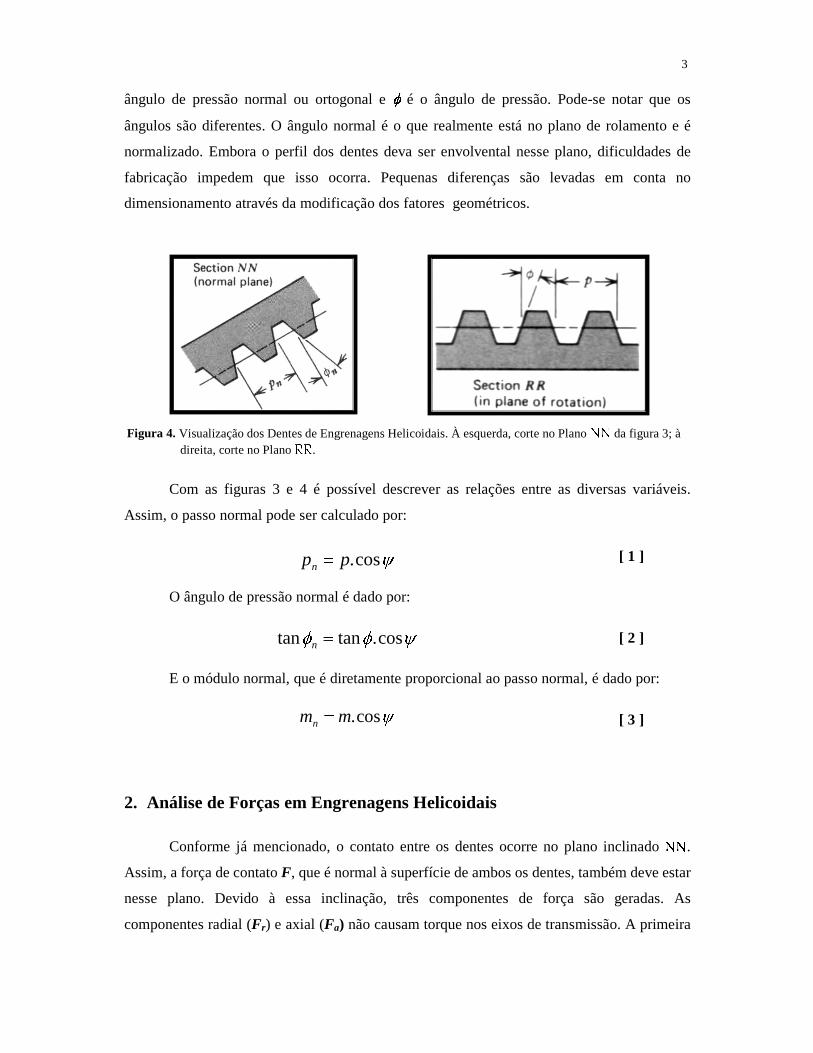
Conforme já mencionado, o contato entre os dentes ocorre no plano inclinado � � .
Assim, a força de contato F, que é normal à superfície de ambos os dentes, também deve estar
nesse plano. Devido à essa inclinação, três componentes de força são geradas. As
componentes radial (Fr) e axial (Fa) não causam torque nos eixos de transmissão. A primeira
Figura 4. Visualização dos Dentes de Engrenagens Helicoidais. À esquerda, corte no Plano ��� da figura 3; à direita, corte no Plano ��� .
4
causa flexão e a segunda apenas tensão axial. Embora sejam importantes no dimensionamento
da transmissão com um todo (eixos, engrenagens, selos, mancais, ...) aparecem apenas
indiretamente nos cálculos das tensões nos dentes. De fato, uma vez que os ângulos de hélice
e pressão para um conjunto de redução são fixos e definem a relação entre as forças, o efeito
de cada uma pode ser incluído na força tangencial (F t), que é a que define o torque que está
sendo transmitido.
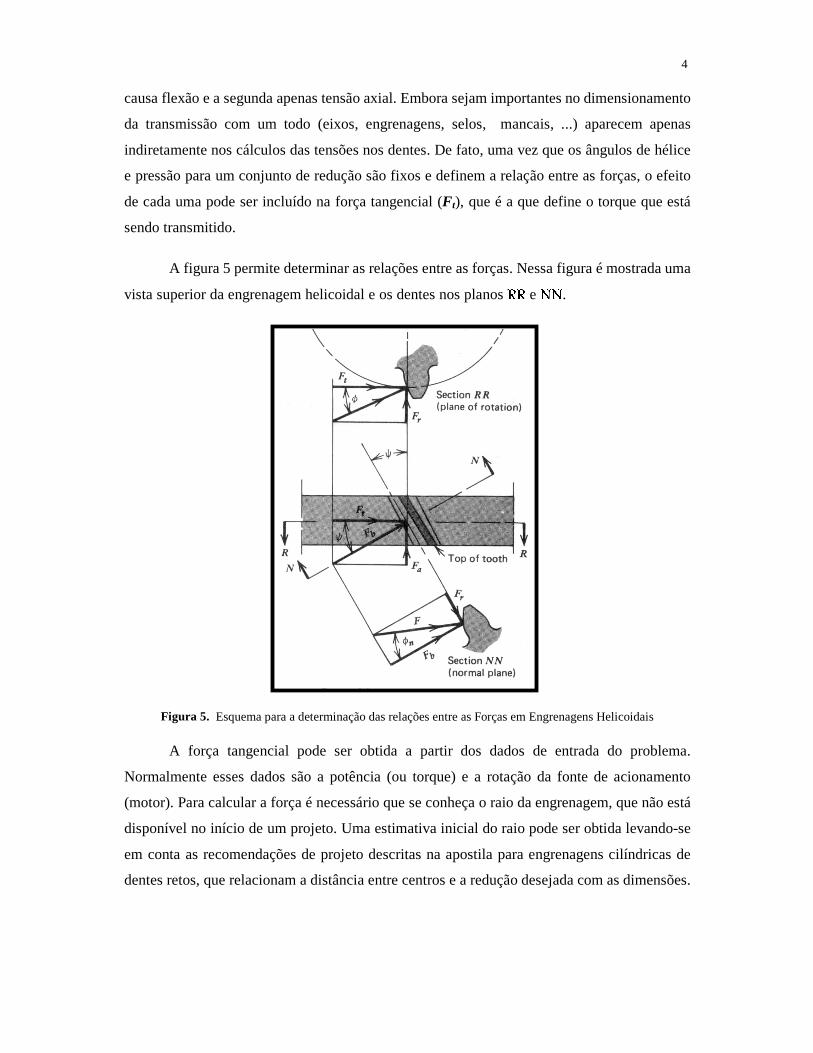
A figura 5 permite determinar as relações entre as forças. Nessa figura é mostrada uma
vista superior da engrenagem helicoidal e os dentes nos planos ��� e ��� .
A força tangencial pode ser obtida a partir dos dados de entrada do problema.
Normalmente esses dados são a potência (ou torque) e a rotação da fonte de acionamento
(motor). Para calcular a força é necessário que se conheça o raio da engrenagem, que não está
disponível no início de um projeto. Uma estimativa inicial do raio pode ser obtida levando-se
em conta as recomendações de projeto descritas na apostila para engrenagens cilíndricas de
dentes retos, que relacionam a distância entre centros e a redução desejada com as dimensões.
Figura 5. Esquema para a determinação das relações entre as Forças em Engrenagens Helicoidais

5
V
WFt
.
�
�tan.ta FF �
n
t
n
b FFF ���
cos.coscos��
Supondo o raio conhecido, pode-se obter a velocidade e, com a potência, calcular a força
tangencial conforme a equação:
[ 4 ]
A figura 5 mostra que a relação entre F t e Fr é dada por:
[ 5 ]
A força axial Fa, gerada pela inclinação dos dentes e pelo contato no plano inclinado,
depende do ângulo de hélice conforme a equação 5. A relação mostrada nessa equação pode
ser vista no esquema de forças no centro da figura. Nesse esquema também pode ser vista a
força que causa flexão no pé do dente, cujo símbolo é Fb e cuja relação com a força tangencial
é mostrada na equação 7.
[ 6 ]
[ 7 ]
A força no contato entre os dentes é composta das componentes axial, tangencial e
radial e pode ser obtida por:
[ 8 ]
3. Tensões e Resistência em Engrenagens Helicoidais
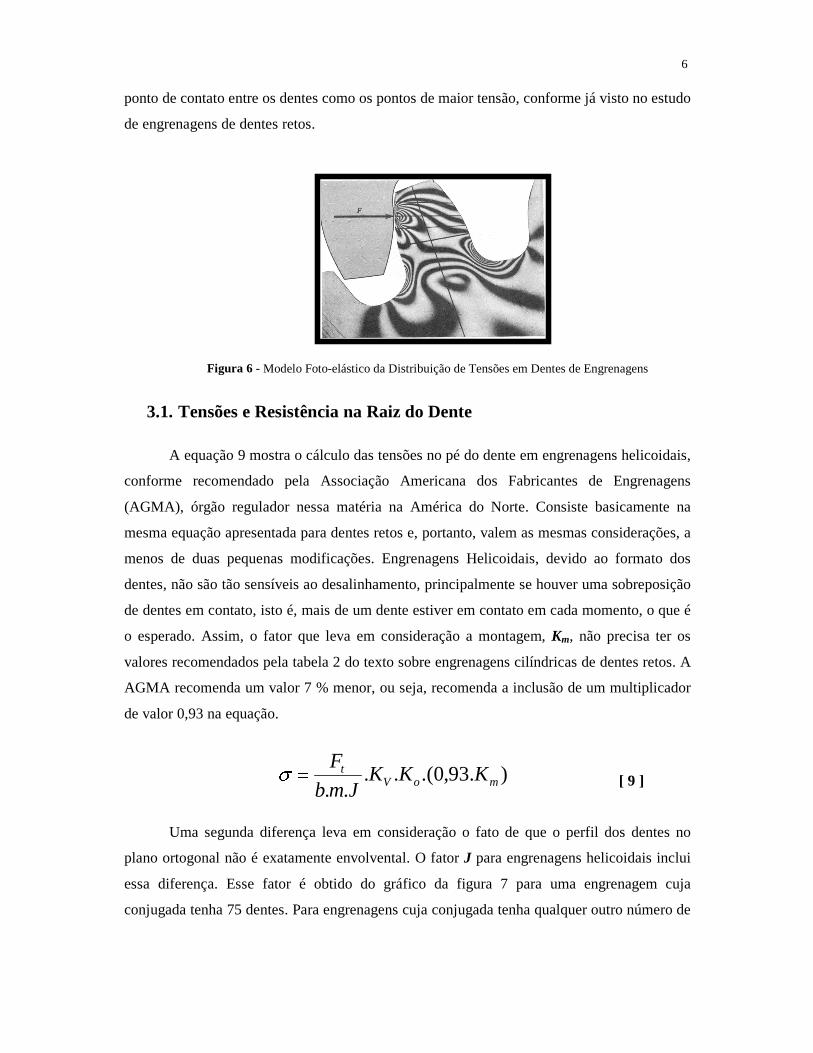
Da mesma forma que para engrenagens cilíndricas de dentes retos, as tensões
relevantes para o dimensionamento dos dentes são geradas pela força a ser transmitida. A
figura 6 mostra um modelo foto-elástico de um dente em pexiglass em contato com outro de
um material metálico. Por essa técnica é possível visualizar as linhas de deformação (ou
tensão) geradas pelos esforços. A diminuição do espaçamento dessas linhas significa uma
maior concentração de tensões. Observando a figura é possível identificar a raiz do dente e o
�tan.tr FF �
�cost
b
FF �
6
).93,0.(.... moVt KKKJmb
F��
ponto de contato entre os dentes como os pontos de maior tensão, conforme já visto no estudo
de engrenagens de dentes retos.
3.1. Tensões e Resistência na Raiz do Dente
A equação 9 mostra o cálculo das tensões no pé do dente em engrenagens helicoidais,
conforme recomendado pela Associação Americana dos Fabricantes de Engrenagens
(AGMA), órgão regulador nessa matéria na América do Norte. Consiste basicamente na
mesma equação apresentada para dentes retos e, portanto, valem as mesmas considerações, a
menos de duas pequenas modificações. Engrenagens Helicoidais, devido ao formato dos
dentes, não são tão sensíveis ao desalinhamento, principalmente se houver uma sobreposição
de dentes em contato, isto é, mais de um dente estiver em contato em cada momento, o que é
o esperado. Assim, o fator que leva em consideração a montagem, Km, não precisa ter os
valores recomendados pela tabela 2 do texto sobre engrenagens cilíndricas de dentes retos. A
AGMA recomenda um valor 7 % menor, ou seja, recomenda a inclusão de um multiplicador
de valor 0,93 na equação.
[ 9 ]
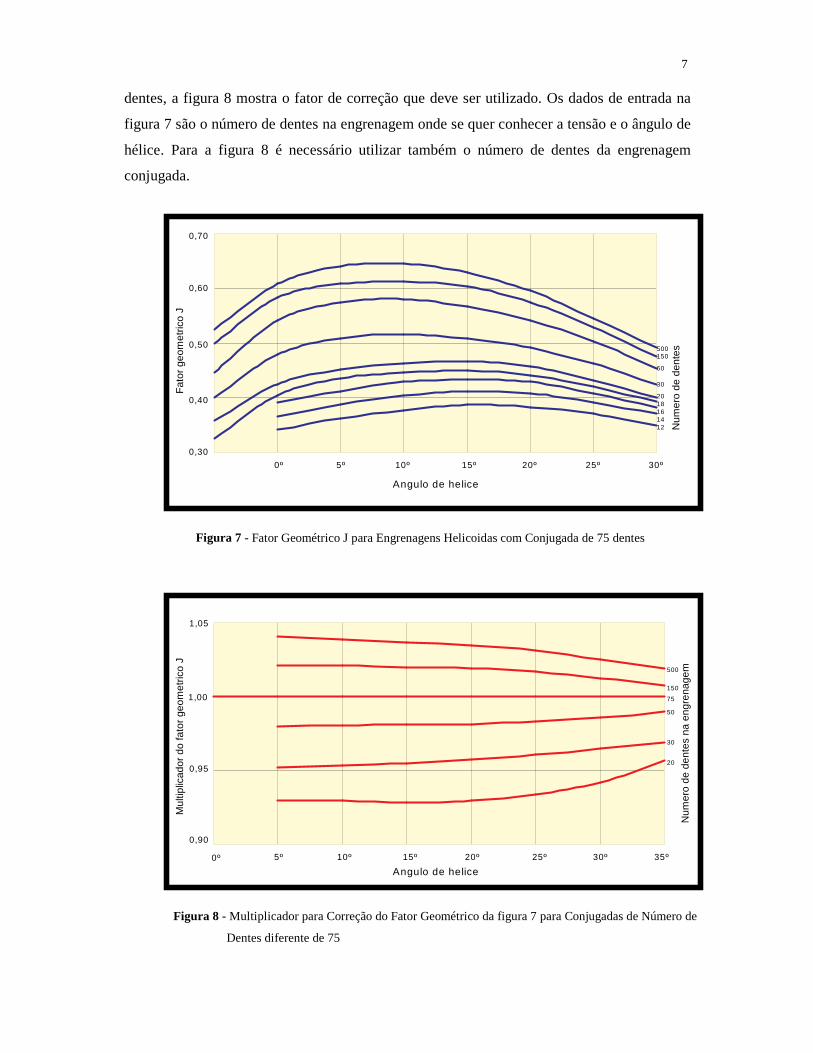
Uma segunda diferença leva em consideração o fato de que o perfil dos dentes no
plano ortogonal não é exatamente envolvental. O fator J para engrenagens helicoidais inclui
essa diferença. Esse fator é obtido do gráfico da figura 7 para uma engrenagem cuja
conjugada tenha 75 dentes. Para engrenagens cuja conjugada tenha qualquer outro número de
Figura 6 - Modelo Foto-elástico da Distribuição de Tensões em Dentes de Engrenagens
7
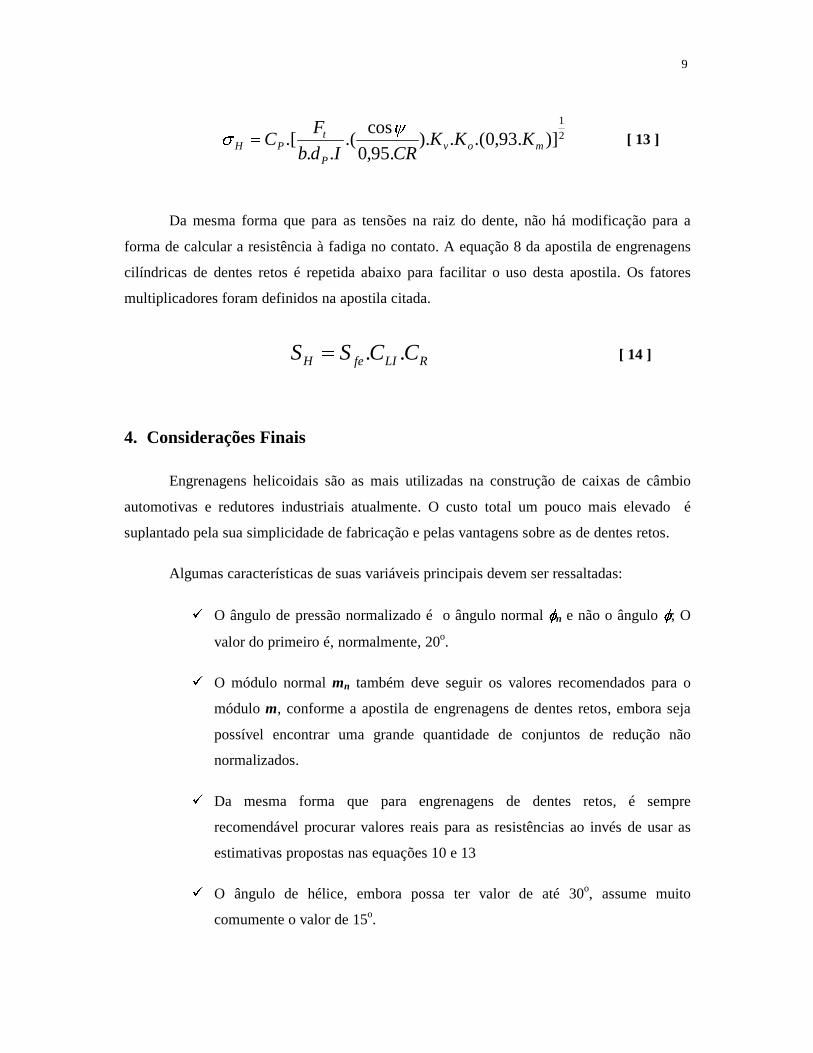
dentes, a figura 8 mostra o fator de correção que deve ser utilizado. Os dados de entrada na
figura 7 são o número de dentes na engrenagem onde se quer conhecer a tensão e o ângulo de
hélice. Para a figura 8 é necessário utilizar também o número de dentes da engrenagem
conjugada.
Figura 7 - Fator Geométrico J para Engrenagens Helicoidas com Conjugada de 75 dentes
Figura 8 - Multiplicador para Correção do Fator Geométrico da figura 7 para Conjugadas de Número de
Dentes diferente de 75
1,05
1,00
0,95
0,90
0º 5º 10º 15º 20º 25º 30º
Angulo de helice
Mul
tiplic
ador
do
fato
r ge
omet
rico
J
50
30
20
Num
ero
de d
ente
s na
eng
rena
gem
35º
75
150
500
0,70
0,60
0,50
0,40
0,30
0º 5º 10º 15º 20º 25º 30º
Angulo de helice
Fat
or g
eom
etric
o J
500150
60
30
2018161412 N
umer
o de
den
tes

8
mstrSGLnn kkkCCCSS ......'�
A resistência à flexão no pé do dente é calculada exatamente da mesma maneira que
para engrenagens de dentes retos. A equação 5 da apostila que trata desse tipo de engrenagem
é repetida aqui, na equação 10. Todos os fatores e variáveis estão descritos na apostila citada.
[ 10 ]
3.2. Tensões e Resistência no Contato entre os Dentes
As tensões no contato entre os dentes de engrenagens helicoidais também são
calculadas basicamente da mesma forma que para dentes retos. Novamente, a recomendação
da AGMA para o fator montagem deve ser incluída. Uma segunda recomendação leva em
consideração o número médio de dentes em contato, representado pelo valor CR na equação.
O valor de CR é chamado também de razão de contato e pode ser calculado pela equação 11.
[ 11 ]
O termo r ij na equação anterior representa um raio: quando i é substituído por a,
representa o raio da cabeça do dente; quando i é substituído por b, representa o raio de base;
quando j é substituído por p, representa o pinhão; quando j é substituído por c, representa a
coroa. Assim, rap é o raio da cabeça do dente do pinhão, e assim por diante. O termo C é a
distância entre centros, ou a soma dos raios primitivos dos dois elementos. O passo da base pb
é dado pela equação 12.
���cos.
cos..p
N
dpb [ 12 ]
No cálculo da tensão no contato também deve ser incluída a largura real b’ , já que o
contato ocorre no plano normal, ao longo de toda a largura. Essa largura pode ser calculada
dividindo a largura do denteado b pelo cosseno do ângulo de hélice. Assim, a equação para o
cálculo da tensão fica:
b
bcacbpap
p
CrrrrCR
]sen.)()[( 222222 !""#"$
9
2
1
)].93,0.(.)..95,0
cos.(
...[ mov
P
tPH KKK
CRIdb
FC %& '
[ 13 ]
Da mesma forma que para as tensões na raiz do dente, não há modificação para a
forma de calcular a resistência à fadiga no contato. A equação 8 da apostila de engrenagens
cilíndricas de dentes retos é repetida abaixo para facilitar o uso desta apostila. Os fatores
multiplicadores foram definidos na apostila citada.
[ 14 ]
4. Considerações Finais
Engrenagens helicoidais são as mais utilizadas na construção de caixas de câmbio
automotivas e redutores industriais atualmente. O custo total um pouco mais elevado é
suplantado pela sua simplicidade de fabricação e pelas vantagens sobre as de dentes retos.
Algumas características de suas variáveis principais devem ser ressaltadas:
(O ângulo de pressão normalizado é o ângulo normal ) n e não o ângulo ) ; O
valor do primeiro é, normalmente, 20o.
(O módulo normal mn também deve seguir os valores recomendados para o
módulo m, conforme a apostila de engrenagens de dentes retos, embora seja
possível encontrar uma grande quantidade de conjuntos de redução não
normalizados.
(Da mesma forma que para engrenagens de dentes retos, é sempre
recomendável procurar valores reais para as resistências ao invés de usar as
estimativas propostas nas equações 10 e 13
(O ângulo de hélice, embora possa ter valor de até 30o, assume muito
comumente o valor de 15o.
RLIfeH CCSS ..*





























