Embed Size (px)
Citation preview
UNIVERSIDADE FEDERAL DO CEARÁ CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
CONVERSOR ESTÁTICO DE BAIXO CUSTO E ALTO
RENDIMENTO PARA SISTEMAS EÓLICOS DE
PEQUENO PORTE
Eduardo Façanha de Oliveira
Fortaleza
Novembro de 2010

ii
EDUARDO FAÇANHA DE OLIVEIRA
CONVERSOR ESTÁTICO DE BAIXO CUSTO E ALTO
RENDIMENTO PARA SISTEMAS EÓLICOS DE
PEQUENO PORTE
Trabalho submetido à Universidade
Federal do Ceará como parte dos
requisitos para obtenção do grau de
Bacharel em Engenharia Elétrica.
Orientador: Prof. Dr. Demercil de Souza
Oliveira Jr.
Fortaleza
Novembro de 2010
iv
Oliveira, E. F. de, “Conversor Estático de Baixo Custo e Alto Rendimento para
Sistemas Eólicos de Pequeno Porte”, Universidade Federal do Ceará – UFC, 2010.
Este trabalho apresenta uma inovadora topologia para um sistema de conversão
eólica com um eficiente controle da potência de saída para satisfazer as condições de
carga de baterias. O projeto atende as especificações requeridas no IFEC 2009 (the 2009
International Future Energy Challenge). As topologias clássicas são brevemente
apresentadas, ressaltando-se suas vantagens e desvantagens. No âmbito do projeto, são
discutidas duas possíveis topologias, um retificador PWM trifásico semicontrolado em
modo de condução contínua (MCC) associado a um conversor Buck e uma outra
topologia semelhante, entretanto, em modo de condução descontínua (MCD). As
características, o princípio de funcionamento e os modos de operação do sistema são
detalhadamente apresentados, ressaltando-se suas vantagens e desvantagens. Os
conversores escolhidos são regulados por sistemas compostos de malhas de controle que
limitam corrente e tensão de saída e tensão sobre o barramento CC. Há também o
algoritmo de MPPT (Maximum Power Point Tracking), que visa à maximização da
potência extraída do gerador eólio-elétrico. O conversor proposto é capaz de suportar e
proteger o funcionamento do sistema sob todas as condições de operação, obtendo a
máxima transferência de energia no carregamento de baterias, sem sobrecarga ou danos,
sob uma ampla faixa de velocidades do vento. Além de operar confiavelmente sem
intervenção do usuário por muitos anos e ser uma solução de ponta nas áreas de
performance, confiabilidade e segurança e ter design com peso mínimo, baixo custo e
quantidade mínima de componentes, para conseguir reduzir custos de produção em
grande volume. Essa topologia foi desenvolvida no laboratório de pesquisa e
desenvolvimento do Grupo de Processamento de Energia e Controle (GPEC) do
Departamento de Engenharia Elétrica da Universidade Federal do Ceará. Por fim, são
apresentados os resultados experimentais estáticos e dinâmicos do protótipo
desenvolvido, necessários para validar a funcionalidade do estudo proposto.
Palavras-chave: Energia Eólica, Retificador Semicontrolado, Conversor Buck,
Carregamento de Bateria, Algoritmo de MPPT

v
Oliveira, E. F. de, “Low Cost and High Efficiency Static Converter for Small
Wind Systems”, Federal University of Ceará – UFC, 2010.
This work introduces an innovative low cost topology for a wind conversion
system with an efficient output power control in order to meet the battery charge
requirements. The project is in accord with the specifications required at IFEC 2009 (the
2009 International Future Energy Challenge, sponsored by IEEE). The classic
topologies are briefly presented, emphasizing their advantages and disadvantages. Two
possible topologies are discussed, a PWM continuous conduction mode three-phase
semi-controlled rectifier associated with buck converter and another similar, but in
discontinuous mode. The characteristics, operation principle and operating modes of the
system are given in detail. The converter is controlled by a system composed of three
loops, which limit the current and the voltage to the maximum values allowed by the
batteries and the voltage over the DC bus. There is also a MPPT (Maximum Power
Point Tracking) algorithm that intends to maximize the power extracted from the wind
generator. The proposed converter supports and protects the system operation under all
operating conditions, achieves maximum energy transfer over a wide range of wide
speeds, without overcharging or damaging the battery. Besides operating reliably
without significant user support over many years of use and being a leading edge
solution in the areas of performance, reliability, and safety and designed for minimum
weight, minimum component cost and count, to achieve reduced high volume
manufacturing cost. This topology has been developed in the research and development
laboratory of the Control and Energy Processing Group (GPEC) of Electrical
Engineering Department at Federal University of Ceará. Finally, the static and dynamic
experimental results of the developed prototype are presented, needed to validate the
functionality of the proposed study.
Keywords: Wind Energy, Semi-Controlled Rectifier, Buck Converter, Battery
Charging, MPPT Algorithm.
vi
SUMÁRIO
LISTA DE FIGURAS ................................................................................................... IX
LISTA DE TABELAS ................................................................................................ XII
LISTA DE ABREVIATURAS E SIGLAS .............................................................. XIII
INTRODUÇÃO GERAL ............................................................................................... 1
CAPÍTULO 1 .................................................................................................................. 4
ANÁLISE DAS SOLUÇÕES TRADICIONAIS .......................................................... 4
1.1. Retificador Trifásico não Controlado Associado a um Conversor Buck ............ 4
1.2. Retificador Trifásico não Controlado Associado a um Conversor Boost .......... 4
1.3. Retificador Trifásico não Controlado Associado a um Conversor Buck-Boost . 5
1.4. Considerações Finais .......................................................................................... 6
CAPÍTULO 2 .................................................................................................................. 7
SOLUÇÕES PROPOSTAS ........................................................................................... 7
2.1. Retificador Trifásico Semicontrolado em Modo de Condução Contínua
Associado a um Conversor Buck ................................................................................. 7
2.2. Retificador Trifásico Semicontrolado em Modo de Condução Descontínua
Associado a um Conversor Buck ................................................................................. 8
2.3. Escolha da Topologia ......................................................................................... 9
2.4. Características da Topologia Escolhida ........................................................... 10
2.5. Considerações Finais ........................................................................................ 12
CAPÍTULO 3 ................................................................................................................ 13
ANÁLISE DO SISTEMA PROPOSTO ..................................................................... 13
3.1. Retificador Boost .............................................................................................. 13
3.1.1. Princípio de Funcionamento .............................................................. 13
3.2. Conversor Buck ................................................................................................ 17
3.2.1. Princípio de Funcionamento .............................................................. 17
vii
3.3. Dinâmica do Sistema de Controle .................................................................... 18
3.3.1. Modo 1: Malha de Tensão .................................................................. 19
3.3.2. Modo 2: Malha de Corrente ............................................................... 19
3.3.3. Modo 3: MPPT ................................................................................... 19
3.3.4. FT da Tensão de Entrada )(svi pela Razão Cíclica )(sd .................. 21
3.3.5. FT da Tensão de Saída )(svo pela Razão Cíclica )(sd ..................... 22
3.3.6. FT da Corrente de Saída )(sio pela Razão Cíclica )(sd ................... 23
3.4. Considerações Finais ........................................................................................ 24
CAPÍTULO 4 ................................................................................................................ 25
CARGA DA BATERIA ............................................................................................... 25
4.1. Carga em Tensão Constante ............................................................................. 25
4.2. Carga em Corrente Constante........................................................................... 25
4.3. Carga em Dois Estágios ................................................................................... 26
4.4. Carga em Três Estágios .................................................................................... 27
4.5. Considerações Finais ........................................................................................ 27
CAPÍTULO 5 ................................................................................................................ 29
EXEMPLO DE PROJETO.......................................................................................... 29
5.1. Especificações de Projeto ................................................................................. 29
5.2. Dimensionamento do Retificador Boost........................................................... 30
5.2.1. Dimensionamento dos Indutores L1, L2 e L3 ...................................... 30
5.2.2. Dimensionamento dos Interruptores S1, S2 e S3 ................................. 31
5.2.3. Dimensionamento dos Diodos D1, D2 e D3 ........................................ 31
5.2.4. Dimensionamento do Capacitor C4 .................................................... 32
5.3. Dimensionamento do Conversor Buck ............................................................. 34
5.3.1. Dimensionamento do Indutor L4 ........................................................ 34
5.3.2. Dimensionamento do Interruptor S4 ................................................... 34
5.3.3. Dimensionamento do Diodo D4 ......................................................... 35
5.3.4. Dimensionamento do Capacitor C5 .................................................... 35
viii
5.4. Projeto de Controle ........................................................................................... 36
5.4.1. Controle da Corrente de Saída Io ........................................................ 36
5.4.2. Controle da Tensão de Saída Vo ......................................................... 39
5.4.3. Controle da Tensão de Entrada Vi ...................................................... 43
5.4.4. Controle Digital do Vbus pelo Retificador Boost ................................. 47
5.4.5. Algoritmo de MPPT Sensorless ......................................................... 47
5.5. Proteção contra Sobrevelocidade ..................................................................... 49
5.6. Considerações Finais ........................................................................................ 49
CAPÍTULO 6 ................................................................................................................ 51
RESULTADOS EXPERIMENTAIS .......................................................................... 51
6.1. Modo 1: Malha de Tensão ................................................................................ 51
6.2. Modo 2: Malha de Corrente ............................................................................. 52
6.3. Modo 3: MPPT ................................................................................................. 53
6.4. Transição entre os modos ................................................................................. 54
6.5. Proteção contra Curto-circuito na Saída ........................................................... 55
6.6. Considerações Finais ........................................................................................ 56
CAPÍTULO 7 ................................................................................................................ 57
CUSTO DE MATÉRIA PRIMA ................................................................................. 57
CONCLUSÃO GERAL ............................................................................................... 58
PATENTE, PUBLICAÇÕES E PRÊMIOS OBTIDOS ............................................ 60
REFERÊNCIAS ........................................................................................................... 61
ix
LISTA DE FIGURAS
Figura 1.1 – Retificador trifásico associado a um conversor Buck. ................................. 4
Figura 1.2 – Retificador trifásico associado a um conversor Boost. ................................ 5
Figura 1.3 – Retificador trifásico associado a um conversor Buck-Boost. ....................... 5
Figura 2.1 – Retificador trifásico semicontrolado em MCC associado a um conversor
Buck. ................................................................................................................................. 8
Figura 2.2 – Retificador trifásico semicontrolado em MCD associado a um conversor
Buck. ................................................................................................................................. 8
Figura 2.3 – Tensão de fase e corrente em um dos indutores do retificador Boost. ......... 9
Figura 2.4 – Corrente de fase............................................................................................ 9
Figura 2.5 – Retificador trifásico semicontrolado em MCD associado a um conversor
Buck. ............................................................................................................................... 11
Figura 3.1 – Formas de onda teóricas das tensões Va, Vb, e Vc. ...................................... 14
Figura 3.2 – Estados topológicos associados ao setor 1. ................................................ 14
Figura 3.3 – Circuitos equivalentes associados ao setor 1. ............................................ 15
Figura 3.4 – Correntes de linha Ia, Ib e Ic. ....................................................................... 17
Figura 3.5 – Correntes de linha Ia, Ib e Ic. ....................................................................... 17
Figura 3.6 – Corrente de linha Ia durante T/2. ................................................................ 17
Figura 3.7 – Forma de onda da corrente de entrada filtrada. .......................................... 17
Figura 3.8 – Topologia do conversor Buck..................................................................... 18
Figura 3.9 – Etapas de operação do conversor Buck em MCC. ..................................... 18
Figura 3.10 – Fluxograma de operação do sistema. ....................................................... 19
Figura 3.11 – Lógica de comando e controle. ................................................................ 20
Figura 3.12 – Malha de controle da tensão e da corrente na bateria. ............................. 20
Figura 3.13 – Malha de controle da tensão no barramento. ........................................... 21
Figura 3.14 – Topologia do Buck ................................................................................... 21
Figura 3.15 - Modelo completo da chave PWM do Buck. ............................................. 21
Figura 3.16 – Modelo da chave PWM do Buck para vo = 0. ........................................ 22
Figura 3.17 – Modelo da chave PWM do Buck para vi = 0. ......................................... 22
Figura 3.18 – Simplificação do modelo.......................................................................... 23
Figura 3.19 – Modelo da chave PWM do Buck para vi = vo =0. ................................ 23
Figura 3.20 – Simplificação do modelo.......................................................................... 24
Figura 4.1 – Carga em tensão constante. ........................................................................ 25
x
Figura 4.2 - Carga em dois estágios. .............................................................................. 26
Figura 4.3 – Carga em três estágios. ............................................................................... 27
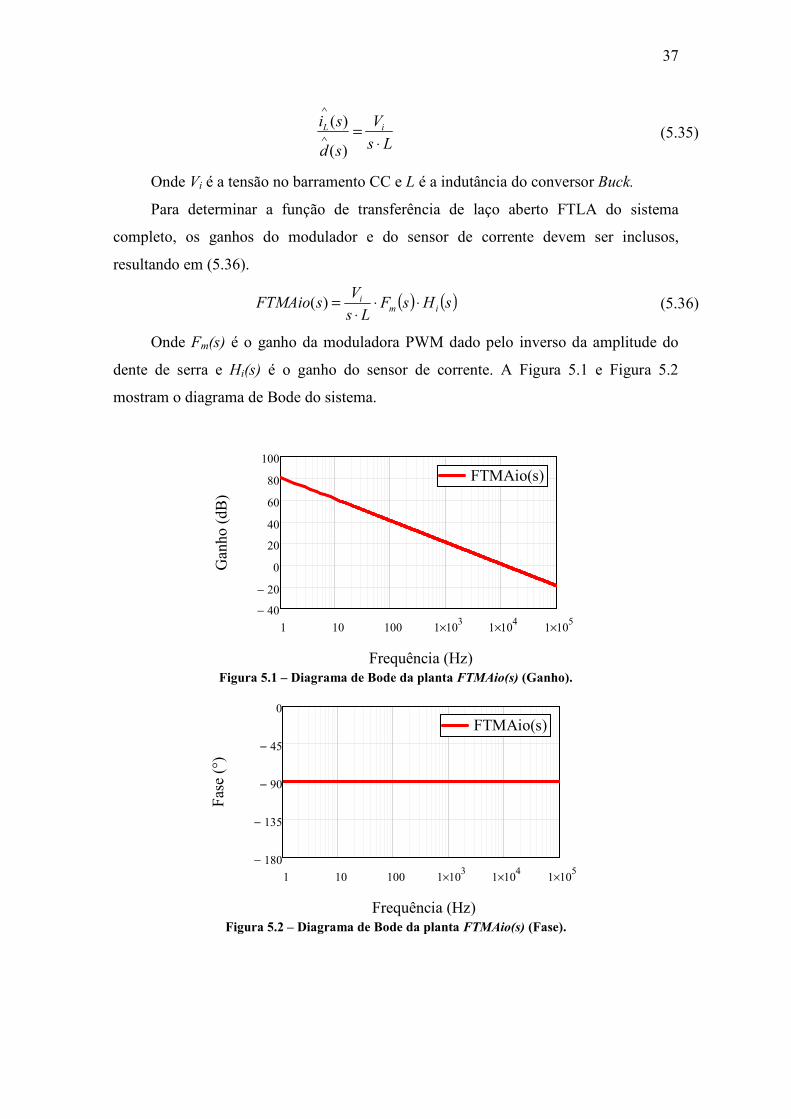
Figura 5.1 – Diagrama de Bode da planta FTMAio(s) (Ganho). .................................... 37
Figura 5.2 – Diagrama de Bode da planta FTMAio(s) (Fase). ....................................... 37
Figura 5.3 – Circuito do controlador PI. ......................................................................... 38
Figura 5.4 – Diagrama de Bode da FTLAio(s) e do Ci(s) (Ganho). ............................... 39
Figura 5.5 – Diagrama de Bode da FTLAio(s) e do Ci(s) (Fase).................................... 39
Figura 5.6 – Diagrama de Bode da planta FTMAvo(s) (Ganho). ................................... 40
Figura 5.7 – Diagrama de Bode da planta FTMAvo(s) (Fase). ....................................... 41
Figura 5.8 – Topologia do compensador PID................................................................. 41
Figura 5.9 – Diagrama de Bode da FTLAvo(s) e do Cv(s) (Ganho). .............................. 43
Figura 5.10 – Diagrama de Bode da FTLAvo(s) e do Cv(s) (Fase). ............................... 43
Figura 5.11 – Diagrama de Bode da planta FTMAvi(s). ................................................ 44
Figura 5.12 – Diagrama de Bode da planta FTMAvi(s). ................................................ 44
Figura 5.13 – Circuito do compensador PID .................................................................. 45
Figura 5.14 – Diagrama de Bode da FTLAvi(s) e do Cb(s) (Ganho). ............................. 46
Figura 5.15 – Diagrama de Bode da FTLAvi(s) e do Cb(s) (Fase). ................................ 47
Figura 5.16 – Fluxograma do algoritmo de MPPT. ........................................................ 48
Figura 6.1 - Forma de onda do conversor Buck operando no modo 1 para uma bateria na
saída. ............................................................................................................................... 51
Figura 6.2 - Forma de onda do conversor Buck operando no modo 1 para duas baterias
na saída. .......................................................................................................................... 51
Figura 6.3 – Forma de onda do conversor Buck operando no modo 2 para uma bateria na
saída. ............................................................................................................................... 52
Figura 6.4 – Forma de onda do conversor Buck operando no modo 2 para duas baterias
na saída. .......................................................................................................................... 52
Figura 6.5 – Forma de onda do conversor Boost. ........................................................... 52
Figura 6.6 – Corrente e tensão em um interruptor do conversor Boost. ......................... 52
Figura 6.7 – Forma de onda do modo 3 (LL
V aumentando). ............................................ 53
Figura 6.8 – Forma de onda do modo 3 (LL
V diminuindo). ............................................. 53
Figura 6.9 – Degrau negativo de carga. .......................................................................... 54
Figura 6.10 – Transição do modo 1 para o 2. ................................................................. 55
Figura 6.11 – Transição do modo 2 para o 1. ................................................................. 55

xi
Figura 6.12 – Formas de onda do teste de curto-circuito. .............................................. 55
Figura 6.13 – Foto do protótipo desenvolvido. .............................................................. 56
Figura 6.14 – Package final do protótipo. ...................................................................... 56
xii
LISTA DE TABELAS
Tabela 3.1 – Possíveis combinações das correntes de entrada. ...................................... 13
Tabela 3.2 - Especificações e parâmetros do retificador. ............................................... 16
Tabela 5.1 – Especificações e considerações do retificador Boost................................. 29
Tabela 5.2 – Especificações das baterias. ....................................................................... 29
Tabela 5.3 – Especificações e considerações do conversor Buck................................... 30
Tabela 5.4 – Especificações dos interruptores do retificador Boost ............................... 31
Tabela 5.5 – Especificações dos diodos do retificador Boost......................................... 32
Tabela 5.6 – Especificações do banco capacitivo do barramento. ................................. 33
Tabela 5.7 – Especificações dos capacitores de polipropileno. ...................................... 33
Tabela 5.8 – Especificações do diodo do conversor Buck .............................................. 35
Tabela 5.9 – Especificações do capacitor de filtro do Buck ........................................... 36
Tabela 6.1 – Valores de saída de corrente, tensão e potência antes e depois do degrau de
carga................................................................................................................................ 54
Tabela 7.1 – Estimativa do custo de manufatura. ........................................................... 57
xiii
LISTA DE ABREVIATURAS E SIGLAS
AD Analógico/Digital
APEC Applied Power Electronics Conference and Exposition
CBENS Congresso Brasileiro de Energia Solar
CNPq Conselho Nacional de Desenvolvimento Científico e Tecnológico
COBEP Congresso Brasileiro de Eletrônica de Potência
CC Corrente Contínua
FT Função de Transferência
FTLA Função de Transferência de Laço Aberto
FTMA Função de Transferência de Malha Aberta
IECON Annual Conference of the IEEE Industrial Electronics Society
IEEE Institute of Electrical and Electronic Engineers
IFEC International Future Energy Challenge
INPI Instituto Nacional de Propriedade Industrial
MCC Modo de Condução Contínua
MCD Modo de Condução Descontínua
MPPT Maximum Power Point Tracking – Rastreamento do Ponto de Máxima
Potência
PI Proporcional – Integral
PID Proporcional – Integral – Derivativo
PMSG Permanent Magnetic Synchronous Generator – Gerador Síncrono de
Imã Permanente
PWM Pulse Width Modulation – Modulação por Largura de Pulso
SEPP Sistema Eólico de Pequeno Porte
THD Total Harmonic Distortion – Taxa de Distorção Harmônica
ZCS Zero Current Switching – Comutação sob Corrente Nula
INTRODUÇÃO GERAL
Várias formas de fontes renováveis de energia têm sido usadas pela humanidade
desde os tempos mais remotos. Na antiguidade, os egípcios e fenícios utilizavam a força
dos ventos para movimentar suas embarcações. Os primeiros moinhos de ventos foram
usados na Pérsia no século VII e na Europa no início do século XII para moer grãos ou
extrair água do solo. A pioneira a utilizar energia eólica para geração de energia eólica
foi a Dinamarca com suas primeiras tentativas no final do século XIX. A partir da
década de 1930 nos Estados Unidos iniciou-se uma ampla utilização de pequenos
aerogeradores para carregamento de baterias, o que favoreceu o acesso à energia elétrica
para populações rurais [1].
Com a revolução industrial e a chegada das máquinas a vapor, infelizmente esse
recurso caiu em desuso. Somente após a Crise do Petróleo de 1973-74 que o mundo
começou a dar mais atenção aos limites das reservas globais de recursos, pelo menos no
que se refere à energia. Conseqüentemente, foi em meados da década de 70 que essa
área de pesquisa atraiu investimentos e que foram coordenados esforços para o
desenvolvimento de meios tecnológicos através dos quais fontes renováveis
anteriormente inexploradas puderam ser utilizadas em larga escala como possíveis
substitutos para os combustíveis fósseis [2]. Além disso, a indisponibilidade de energia
hidráulica em muitos países e a opinião pública que contraria a utilização da energia
nuclear levou alguns países a optar por uma matriz energética baseada em fontes
alternativas renováveis [3] [4].
Devido ao grande potencial hidráulico disponível no país, o Brasil só deu a devida
importância a tais alternativas após o racionamento de energia ocorrido em 2001. Desde
então, houve um crescimento dos investimentos governamentais para pesquisa na área
de geração alternativa.
Devido ao alto nível de radiação solar [4] e ao extraordinário potencial eólico
[5], a região nordeste tem-se confirmado como o maior pólo gerador de energia
proveniente de fontes alternativas do Brasil. O desenvolvimento da energia eólica, em
particular, é de grande importância para o país, devido à complementaridade das
velocidades médias dos ventos com a estação das chuvas [6].
Apesar de todo esse potencial, o Brasil não possui tecnologia nacional
comercialmente disponível para o aproveitamento da energia eólica. Particularmente os
conversores eletrônicos para sistemas eólicos de pequeno porte disponíveis
2
comercialmente no Brasil e no exterior não possuem a robustez necessária às condições
extremas de operação, não protegendo a turbina contra esforços mecânicos causados por
ventos muito fortes e não suportando os esforços elétricos nestas condições de operação.
Deste modo, iniciativas no sentido de desenvolver tecnologias nacionais para o
aproveitamento eólico são de grande relevância para o desenvolvimento econômico
nacional, além de ser uma oportunidade única para pesquisadores e novos
empreendedores.
Turbinas eólicas de baixa potência são usadas em uma larga variedade de
aplicações, abrangendo desde alimentação de sistemas remotos e estações de
telecomunicação a bombeamento em zonas rurais. Comumente, são usados em sistemas
de carregamento de baterias de 12 V ou 24 V, freqüentemente em conjunto com
instalação de painéis fotovoltaicos e (para sistemas de maior porte) geradores a diesel.
Mais recentemente, turbinas eólicas têm sido também aplicadas, ainda que em pequena
escala, em ambientes domésticos/urbanos. Estas turbinas são operadas de forma similar
a painéis fotovoltaicos domésticos para prover energia elétrica renovável para
complementar o fornecimento das fontes convencionais.
O maior desafio para um sistema eólico é como gerenciar a larga variação da
velocidade do vento que ocorre devido às mudanças climáticas. Os grandes parques
eólicos escolhem cuidadosamente suas localizações para reduzir estas influências e
incorporam complexos sistemas de interface de controle e potência que conduzem a
condição de operação da turbina de acordo com a disponibilidade do vento para
maximizar a energia extraída. Infelizmente, estas opções não são usualmente viáveis
para turbinas de baixa potência - a localização da turbina é usualmente determinada por
fatores diferentes da disponibilidade do vento, os geradores são normalmente de imã
permanente com características de geração fixas e o custo é sempre um fator
determinante para sistemas de geração a partir de fontes renováveis.
Diante deste contexto, este trabalho apresenta uma topologia inovadora de baixo
custo para Sistemas Eólicos de Pequeno Porte (SEPP) com um eficiente controle da
potência de saída para satisfazer as condições de carga da bateria. A proposta foi
finalista do IFEC 2009 (the 2009 International Future Energy Challenge) e recebeu o
prêmio “INNOVATIVE TECHNICAL APPROACH”, concedido pelo IEEE, o que
ressalta a característica inovadora do mesmo. Além de ter sido congratulado com o
primeiro lugar do Prêmio Santander de Ciência e de Inovação 2009 na categoria
3
Indústria e com o Prêmio Geração Inova 2009, concedidos pelo grupo Santander e pela
Coelce, respectivamente. E ainda, mais recentemente, o projeto foi parte integrante da
proposta contemplada com o primeiro lugar na XXIV edição do Prêmio Jovem Cientista
realizado pelo CNPq em parceria com a Fundação Roberto Marinho e com a Gerdau.
O trabalho foi dividido em sete capítulos e a descrição de cada um deles é feita a
seguir.
Capítulo I – Através de uma revisão bibliográfica, são apresentadas algumas das
soluções tradicionais já utilizadas em SEPP para carregamento de baterias, mostrando
suas vantagens e desvantagens.
Capítulo II – É apresentada a topologia proposta operando nos modos de
condução contínua e descontínua, mostrando suas vantagens e desvantagens. A partir de
uma análise, é escolhido o modo de operação a ser adotado, citando as principais
características da topologia escolhida.
Capítulo III – É realizada uma análise teórica e matemática dos conversores
utilizados no presente trabalho. São apresentadas e demonstradas as expressões
matemáticas necessárias para a obtenção das funções de transferência das plantas a
serem compensadas, de acordo com o esquema de controle sugerido.
Capítulo IV – São expostas várias estratégias de carga de baterias existentes,
mostrando suas principais características.
Capítulo V – É feito um exemplo de projeto, mostrando a elaboração do projeto
dos circuitos de potência e controle dos conversores, bem como do algoritmo de MPPT
utilizado.
Capítulo VI – São apresentados os resultados experimentais em regime
estacionário e transitório do protótipo desenvolvido.
Capítulo VII – É feita uma estimativa do custo de manufatura do protótipo, a
partir do preço dos principais componentes utilizados, cotados em importantes
distribuidoras e fábricas.
Conclusão Geral – São expostas as principais contribuições deste trabalho e
sugestões para posteriores continuidades.
4
CAPÍTULO 1
ANÁLISE DAS SOLUÇÕES TRADICIONAIS
1.1. RETIFICADOR TRIFÁSICO NÃO CONTROLADO ASSOCIADO A UM CONVERSOR
BUCK
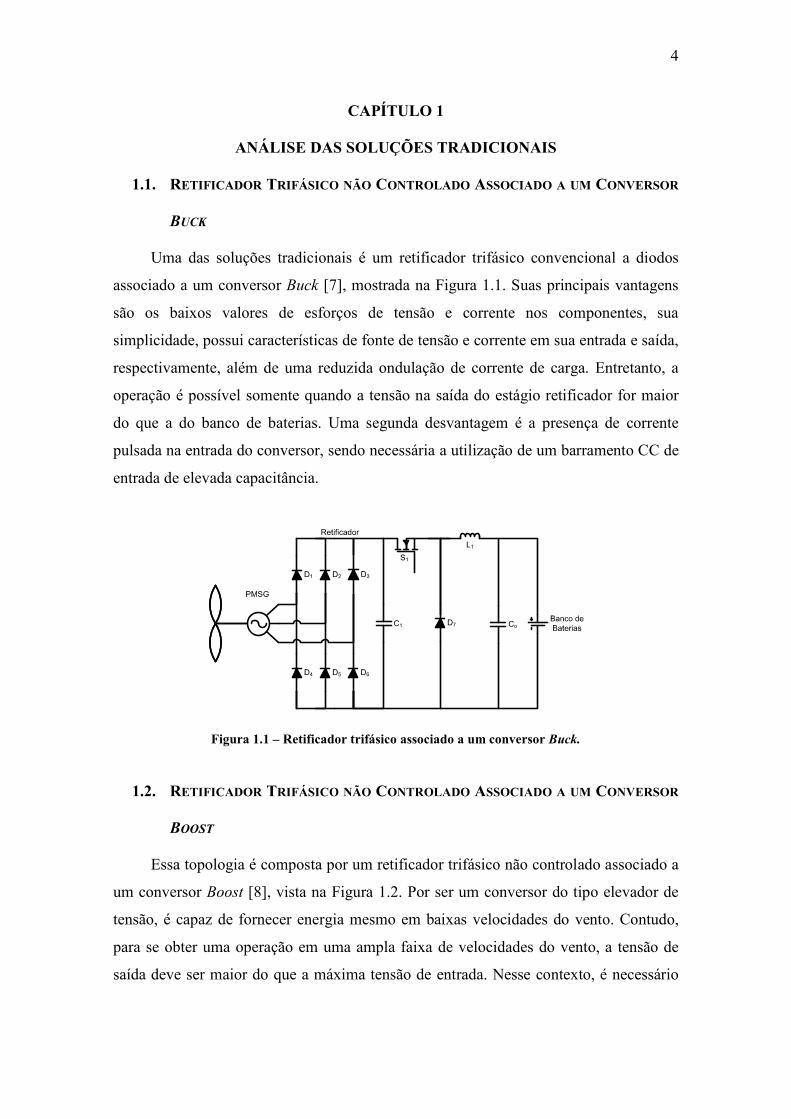
Uma das soluções tradicionais é um retificador trifásico convencional a diodos
associado a um conversor Buck [7], mostrada na Figura 1.1. Suas principais vantagens
são os baixos valores de esforços de tensão e corrente nos componentes, sua
simplicidade, possui características de fonte de tensão e corrente em sua entrada e saída,
respectivamente, além de uma reduzida ondulação de corrente de carga. Entretanto, a
operação é possível somente quando a tensão na saída do estágio retificador for maior
do que a do banco de baterias. Uma segunda desvantagem é a presença de corrente
pulsada na entrada do conversor, sendo necessária a utilização de um barramento CC de
entrada de elevada capacitância.
Figura 1.1 – Retificador trifásico associado a um conversor Buck.
1.2. RETIFICADOR TRIFÁSICO NÃO CONTROLADO ASSOCIADO A UM CONVERSOR
BOOST
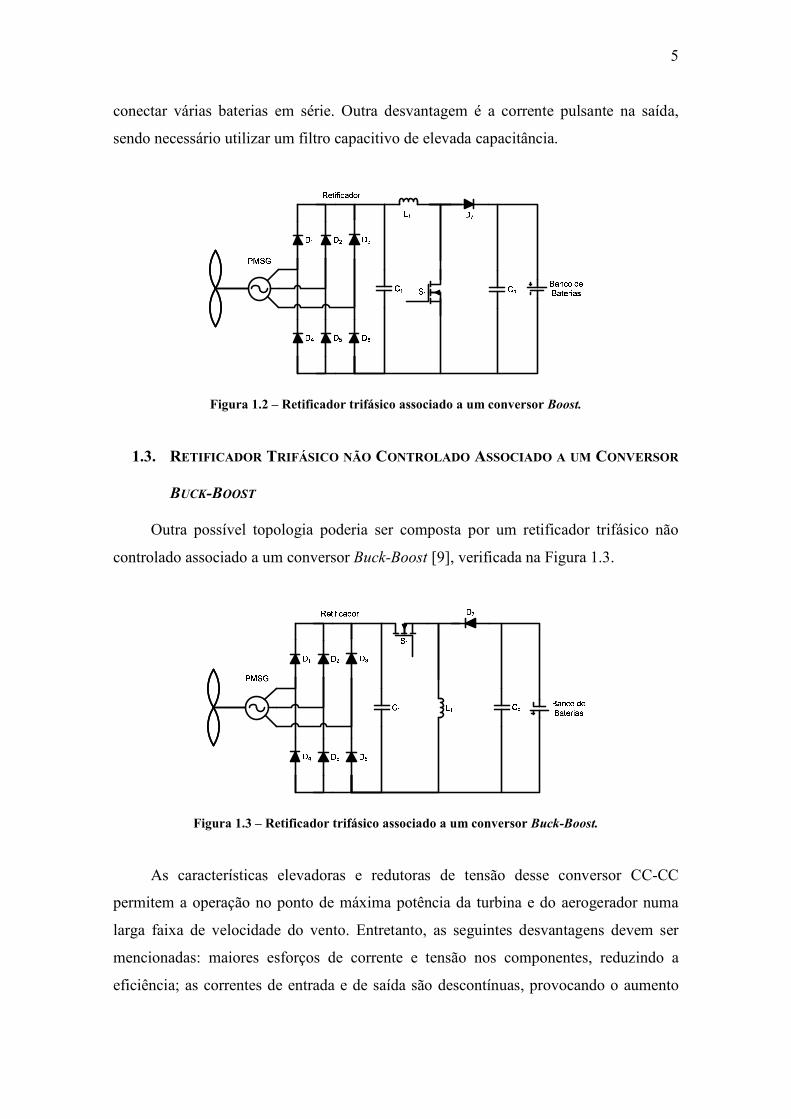
Essa topologia é composta por um retificador trifásico não controlado associado a
um conversor Boost [8], vista na Figura 1.2. Por ser um conversor do tipo elevador de
tensão, é capaz de fornecer energia mesmo em baixas velocidades do vento. Contudo,
para se obter uma operação em uma ampla faixa de velocidades do vento, a tensão de
saída deve ser maior do que a máxima tensão de entrada. Nesse contexto, é necessário
5
conectar várias baterias em série. Outra desvantagem é a corrente pulsante na saída,
sendo necessário utilizar um filtro capacitivo de elevada capacitância.
Figura 1.2 – Retificador trifásico associado a um conversor Boost.
1.3. RETIFICADOR TRIFÁSICO NÃO CONTROLADO ASSOCIADO A UM CONVERSOR
BUCK-BOOST
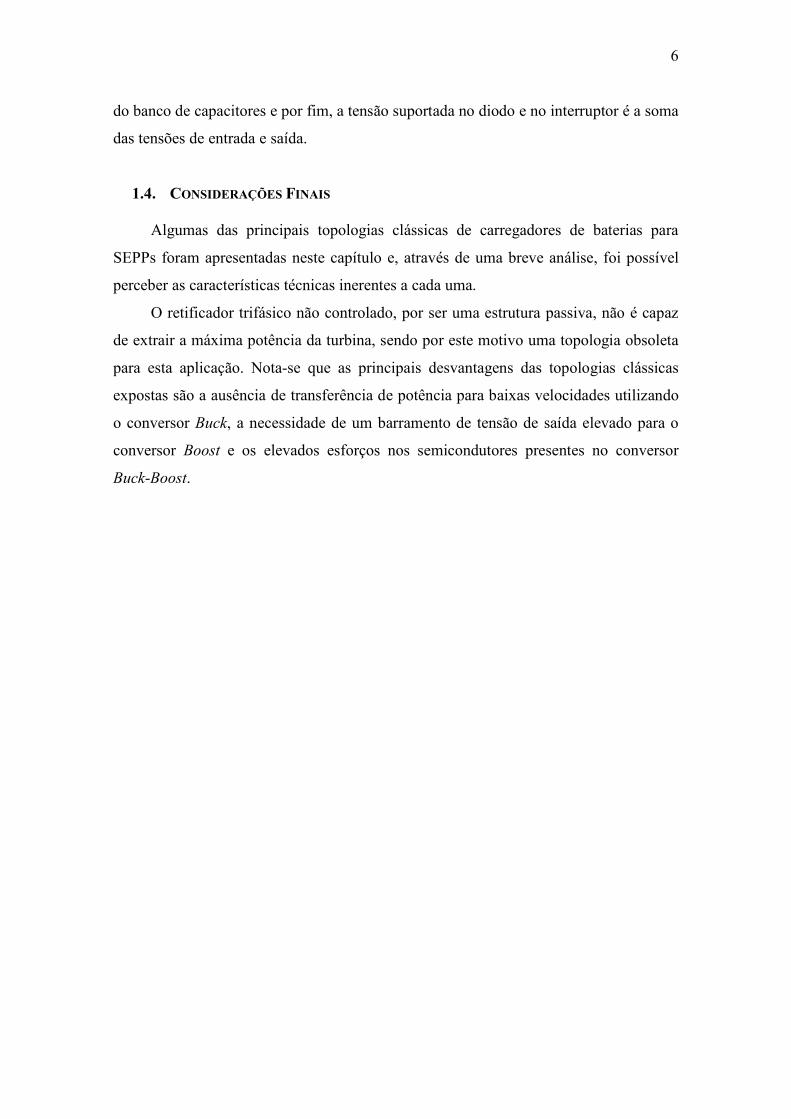
Outra possível topologia poderia ser composta por um retificador trifásico não
controlado associado a um conversor Buck-Boost [9], verificada na Figura 1.3.
Figura 1.3 – Retificador trifásico associado a um conversor Buck-Boost.
As características elevadoras e redutoras de tensão desse conversor CC-CC
permitem a operação no ponto de máxima potência da turbina e do aerogerador numa
larga faixa de velocidade do vento. Entretanto, as seguintes desvantagens devem ser
mencionadas: maiores esforços de corrente e tensão nos componentes, reduzindo a
eficiência; as correntes de entrada e de saída são descontínuas, provocando o aumento
6
do banco de capacitores e por fim, a tensão suportada no diodo e no interruptor é a soma
das tensões de entrada e saída.
1.4. CONSIDERAÇÕES FINAIS
Algumas das principais topologias clássicas de carregadores de baterias para
SEPPs foram apresentadas neste capítulo e, através de uma breve análise, foi possível
perceber as características técnicas inerentes a cada uma.
O retificador trifásico não controlado, por ser uma estrutura passiva, não é capaz
de extrair a máxima potência da turbina, sendo por este motivo uma topologia obsoleta
para esta aplicação. Nota-se que as principais desvantagens das topologias clássicas
expostas são a ausência de transferência de potência para baixas velocidades utilizando
o conversor Buck, a necessidade de um barramento de tensão de saída elevado para o
conversor Boost e os elevados esforços nos semicondutores presentes no conversor
Buck-Boost.
7
CAPÍTULO 2
SOLUÇÕES PROPOSTAS
2.1. RETIFICADOR TRIFÁSICO SEMICONTROLADO EM MODO DE CONDUÇÃO
CONTÍNUA ASSOCIADO A UM CONVERSOR BUCK
Essa topologia é composta por um retificador PWM trifásico semicontrolado
associado a um conversor Buck [10].
As vantagens resultantes dessa topologia são:
• Melhoria do fator de potência e da distorção harmônica, visto que a corrente
em cada fase pode ser controlada independentemente uma da outra;
• O controle da tensão do barramento e as características elevadoras de tensão
permitem uma operação tanto em baixas quanto em altas velocidades de rotação do
aerogerador;
• O retificador semicontrolado em alta freqüência não representa um estágio
adicional, já que substitui o estágio retificador passivo, com as vantagens já
mencionadas, o que aumenta a eficiência do sistema;
• Os interruptores controlados permitem o controle eletrônico da frenagem sem o
uso de resistências adicionais ou relés. É preciso ser mencionado que o curto-circuito
através das saídas dos diodos retificadores pode não ser suficiente para frenar a turbina
eólica devido à impedância interna do gerador.
As desvantagens dessa topologia são:
• Requer uma maior quantidade de componentes em relação às soluções
tradicionais para reduzir a distorção harmônica de corrente em cada fase. Para isso, é
necessário o uso de sensores de corrente em cada fase e de circuitos adicionais a fim de
obter as referências das malhas a partir das tensões de fase do aerogerador. Entretanto,
pode-se descartar parcialmente a correção da THD e o uso dos sensores de corrente,
tendo em vista a redução do custo do sistema.
8
Figura 2.1 – Retificador trifásico semicontrolado em MCC associado a um conversor Buck.
2.2. RETIFICADOR TRIFÁSICO SEMICONTROLADO EM MODO DE CONDUÇÃO
DESCONTÍNUA ASSOCIADO A UM CONVERSOR BUCK
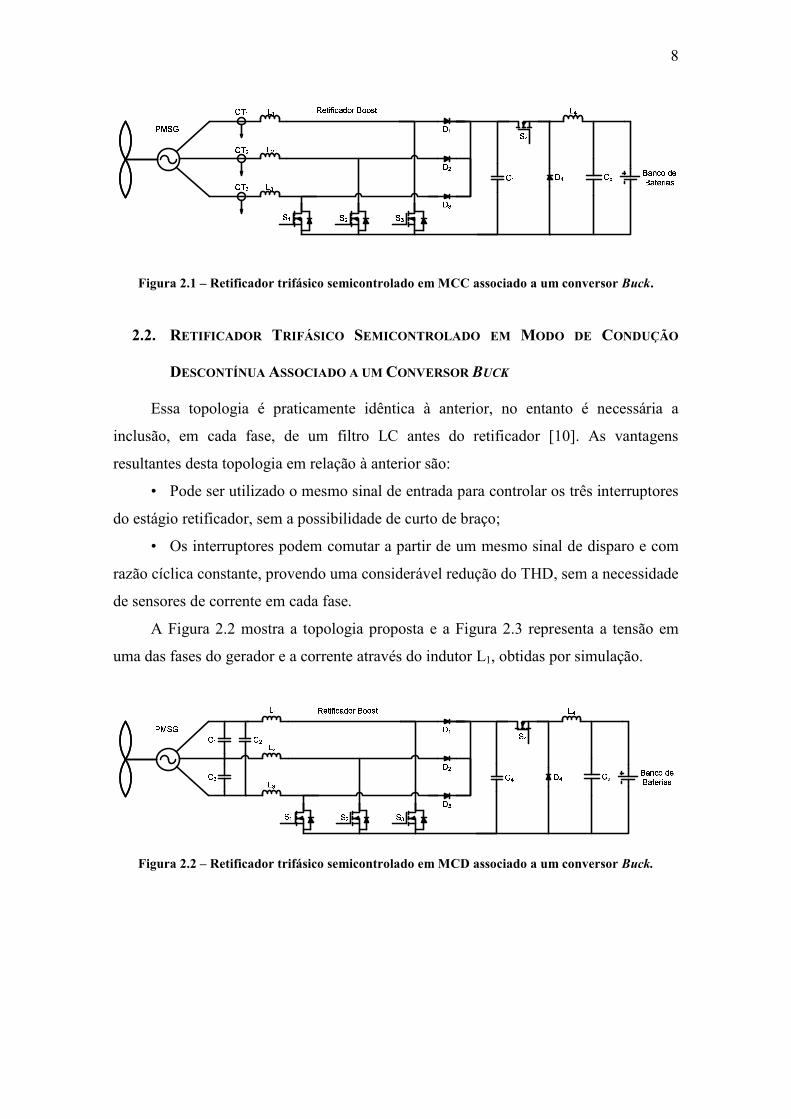
Essa topologia é praticamente idêntica à anterior, no entanto é necessária a
inclusão, em cada fase, de um filtro LC antes do retificador [10]. As vantagens
resultantes desta topologia em relação à anterior são:
• Pode ser utilizado o mesmo sinal de entrada para controlar os três interruptores
do estágio retificador, sem a possibilidade de curto de braço;
• Os interruptores podem comutar a partir de um mesmo sinal de disparo e com
razão cíclica constante, provendo uma considerável redução do THD, sem a necessidade
de sensores de corrente em cada fase.
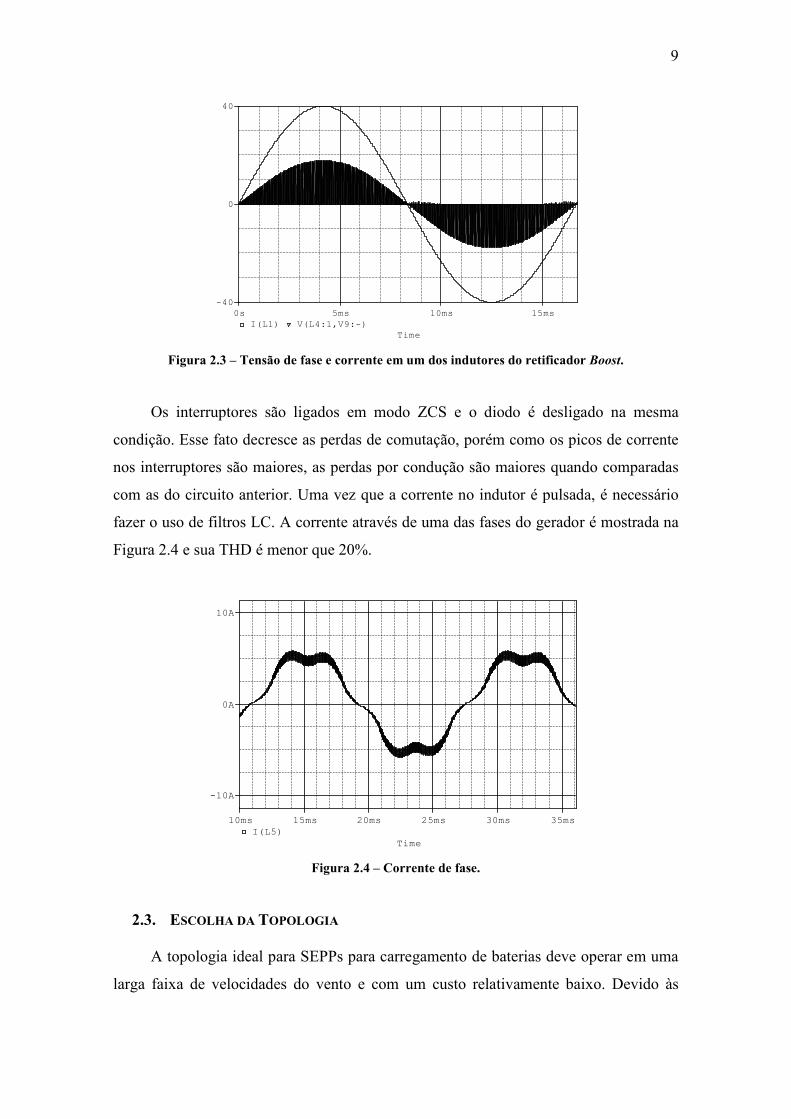
A Figura 2.2 mostra a topologia proposta e a Figura 2.3 representa a tensão em
uma das fases do gerador e a corrente através do indutor L1, obtidas por simulação.
Figura 2.2 – Retificador trifásico semicontrolado em MCD associado a um conversor Buck.
9
Time
0s 5ms 10ms 15ms
I(L1) V(L4:1,V9:-)
-40
0
40
Figura 2.3 – Tensão de fase e corrente em um dos indutores do retificador Boost.
Os interruptores são ligados em modo ZCS e o diodo é desligado na mesma
condição. Esse fato decresce as perdas de comutação, porém como os picos de corrente
nos interruptores são maiores, as perdas por condução são maiores quando comparadas
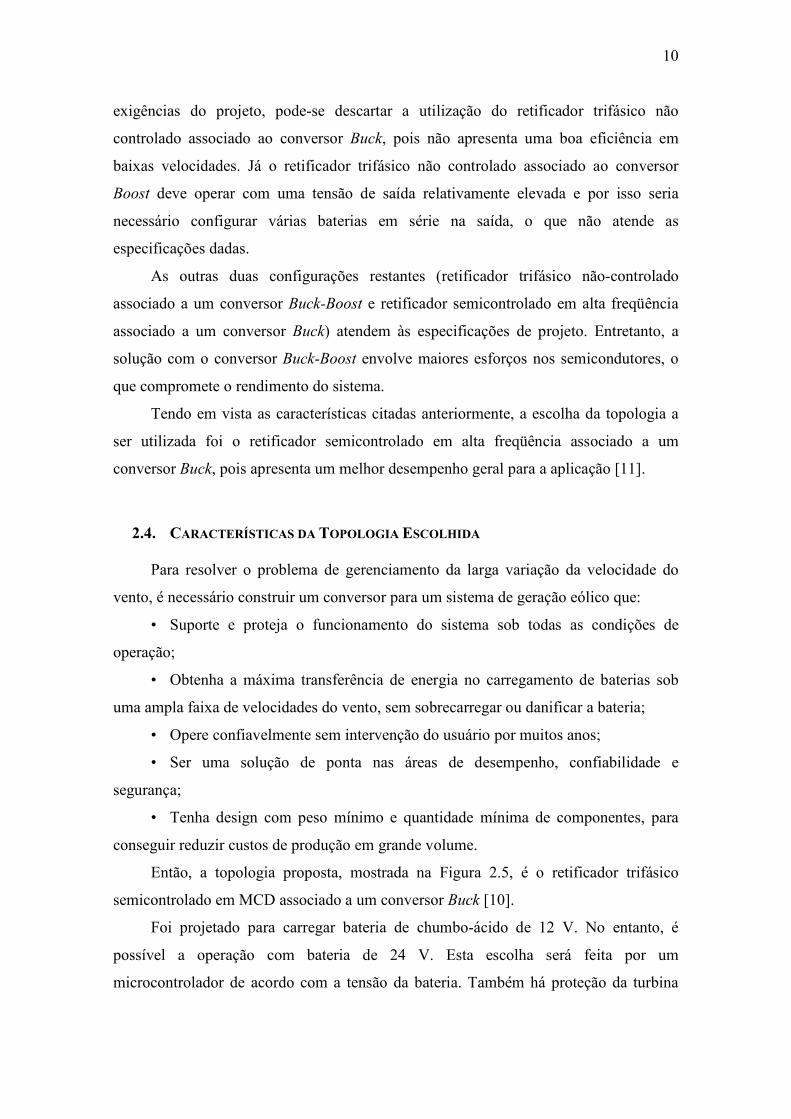
com as do circuito anterior. Uma vez que a corrente no indutor é pulsada, é necessário
fazer o uso de filtros LC. A corrente através de uma das fases do gerador é mostrada na
Figura 2.4 e sua THD é menor que 20%.
Time
10ms 15ms 20ms 25ms 30ms 35ms
I(L5)
-10A
0A
10A
Figura 2.4 – Corrente de fase.
2.3. ESCOLHA DA TOPOLOGIA
A topologia ideal para SEPPs para carregamento de baterias deve operar em uma
larga faixa de velocidades do vento e com um custo relativamente baixo. Devido às
10
exigências do projeto, pode-se descartar a utilização do retificador trifásico não
controlado associado ao conversor Buck, pois não apresenta uma boa eficiência em
baixas velocidades. Já o retificador trifásico não controlado associado ao conversor
Boost deve operar com uma tensão de saída relativamente elevada e por isso seria
necessário configurar várias baterias em série na saída, o que não atende as
especificações dadas.
As outras duas configurações restantes (retificador trifásico não-controlado
associado a um conversor Buck-Boost e retificador semicontrolado em alta freqüência
associado a um conversor Buck) atendem às especificações de projeto. Entretanto, a
solução com o conversor Buck-Boost envolve maiores esforços nos semicondutores, o
que compromete o rendimento do sistema.
Tendo em vista as características citadas anteriormente, a escolha da topologia a
ser utilizada foi o retificador semicontrolado em alta freqüência associado a um
conversor Buck, pois apresenta um melhor desempenho geral para a aplicação [11].
2.4. CARACTERÍSTICAS DA TOPOLOGIA ESCOLHIDA
Para resolver o problema de gerenciamento da larga variação da velocidade do
vento, é necessário construir um conversor para um sistema de geração eólico que:
• Suporte e proteja o funcionamento do sistema sob todas as condições de
operação;
• Obtenha a máxima transferência de energia no carregamento de baterias sob
uma ampla faixa de velocidades do vento, sem sobrecarregar ou danificar a bateria;
• Opere confiavelmente sem intervenção do usuário por muitos anos;
• Ser uma solução de ponta nas áreas de desempenho, confiabilidade e
segurança;
• Tenha design com peso mínimo e quantidade mínima de componentes, para
conseguir reduzir custos de produção em grande volume.
Então, a topologia proposta, mostrada na Figura 2.5, é o retificador trifásico
semicontrolado em MCD associado a um conversor Buck [10].
Foi projetado para carregar bateria de chumbo-ácido de 12 V. No entanto, é
possível a operação com bateria de 24 V. Esta escolha será feita por um
microcontrolador de acordo com a tensão da bateria. Também há proteção da turbina
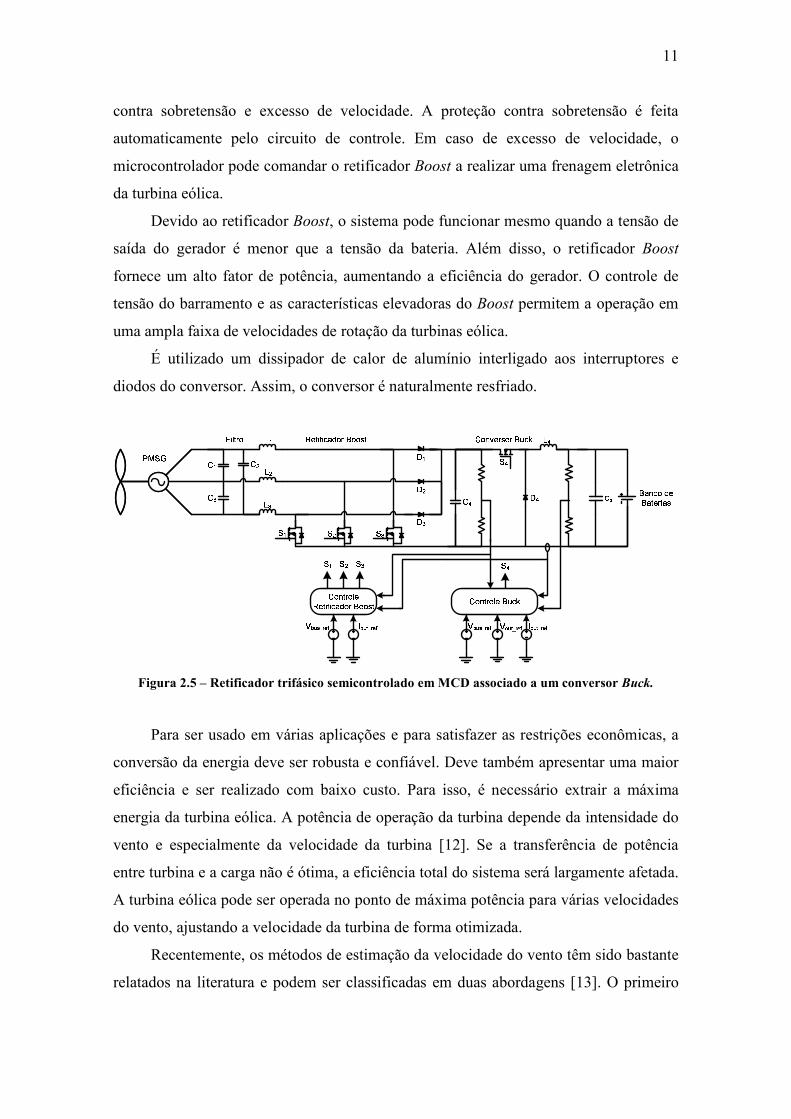
11
contra sobretensão e excesso de velocidade. A proteção contra sobretensão é feita
automaticamente pelo circuito de controle. Em caso de excesso de velocidade, o
microcontrolador pode comandar o retificador Boost a realizar uma frenagem eletrônica
da turbina eólica.
Devido ao retificador Boost, o sistema pode funcionar mesmo quando a tensão de
saída do gerador é menor que a tensão da bateria. Além disso, o retificador Boost
fornece um alto fator de potência, aumentando a eficiência do gerador. O controle de
tensão do barramento e as características elevadoras do Boost permitem a operação em
uma ampla faixa de velocidades de rotação da turbinas eólica.
É utilizado um dissipador de calor de alumínio interligado aos interruptores e
diodos do conversor. Assim, o conversor é naturalmente resfriado.
Figura 2.5 – Retificador trifásico semicontrolado em MCD associado a um conversor Buck.
Para ser usado em várias aplicações e para satisfazer as restrições econômicas, a
conversão da energia deve ser robusta e confiável. Deve também apresentar uma maior
eficiência e ser realizado com baixo custo. Para isso, é necessário extrair a máxima
energia da turbina eólica. A potência de operação da turbina depende da intensidade do
vento e especialmente da velocidade da turbina [12]. Se a transferência de potência
entre turbina e a carga não é ótima, a eficiência total do sistema será largamente afetada.
A turbina eólica pode ser operada no ponto de máxima potência para várias velocidades
do vento, ajustando a velocidade da turbina de forma otimizada.
Recentemente, os métodos de estimação da velocidade do vento têm sido bastante
relatados na literatura e podem ser classificadas em duas abordagens [13]. O primeiro
12
método utiliza uma equação de potência em função do coeficiente de potência Cp e da
relação entre a velocidade do vento e da turbina [14]. Partindo do fato de que a ordem
do polinômio pode ser maior do que sete para estimativas precisas, o cálculo em tempo
real das raízes do polinômio é uma tarefa demorada. O outro método, chamado de tabela
de pesquisa, consiste em usar uma tabela contendo a curva de potência da turbina [15].
Este método pode exigir o uso de memória externa para estimativas de alta precisão.
Além disso, o tempo de execução e precisão da estimativa depende do tamanho da
tabela.
É proposto um método de algoritmo MPPT [16] utilizado para alcançar o controle
da extração máxima de potência da turbinas eólica, onde a curva de potência máxima da
turbina eólica e as informações sobre a velocidade do vento não são necessárias. A
eficácia do algoritmo proposto foi verificada pelos resultados experimentais.
2.5. CONSIDERAÇÕES FINAIS
A idéia de se utilizar um retificador Boost neste trabalho surge no intuito de
aproveitar as vantagens inerentes ao conversor elevador de tensão em conjunto com o
retificador em um só estágio, evitando a utilização de vários conversores em série,
aumentando o rendimento global do sistema. Assim, o sistema proposto é capaz de
operar em uma ampla faixa de velocidade do vento, extraindo a máxima potência
disponível no vento e protegendo a bateria contra sobrecarga. Já as características
abaixadoras do conversor Buck garantem a flexibilidade quanto ao número de baterias a
serem carregadas, tornando-o viável tecnicamente. Além de apresentar baixa ondulação
na corrente de carga, ideal para carregamento de baterias.
13
CAPÍTULO 3
ANÁLISE DO SISTEMA PROPOSTO
3.1. RETIFICADOR BOOST
O retificador trifásico semicontrolado faz a ligação do gerador ao barramento CC,
onde é conectado o conversor Buck. O retificador Boost tem a função de adequar o nível
de tensão gerado pela turbina ao nível desejado no barramento e fazer com que a turbina
opere seguindo o seu ponto de máxima potência.
3.1.1. Princípio de Funcionamento
O retificador opera como um conversor Boost no modo de condução descontínua.
Quando os interruptores S1, S2 e S3 estão fechados, o fluxo de corrente através deles e
por meio do seu indutor correspondente irá incrementar, enquanto os diodos D1, D2 e D3
estão reversamente polarizados e o capacitor C fornece energia para o inversor.
Quando os interruptores S1, S2 e S3 estão abertos, os diodos D1, D2 ou D3 podem
estar diretamente polarizados dependendo da direção da corrente e a energia é
transferida para a carga.
As correntes de entrada Ia, Ib e Ic podem assumir dois estados: positivo (+) ou
negativo (-), resultando em oito combinações. Contudo, somente seis combinações são
fisicamente pertinentes, como mostrado na Tabela 3.1.
Tabela 3.1 – Possíveis combinações das correntes de entrada.
Setor IA IB IC
1 + - +
2 + - -
3 + + -
4 - + -
5 - + +
6 - - +
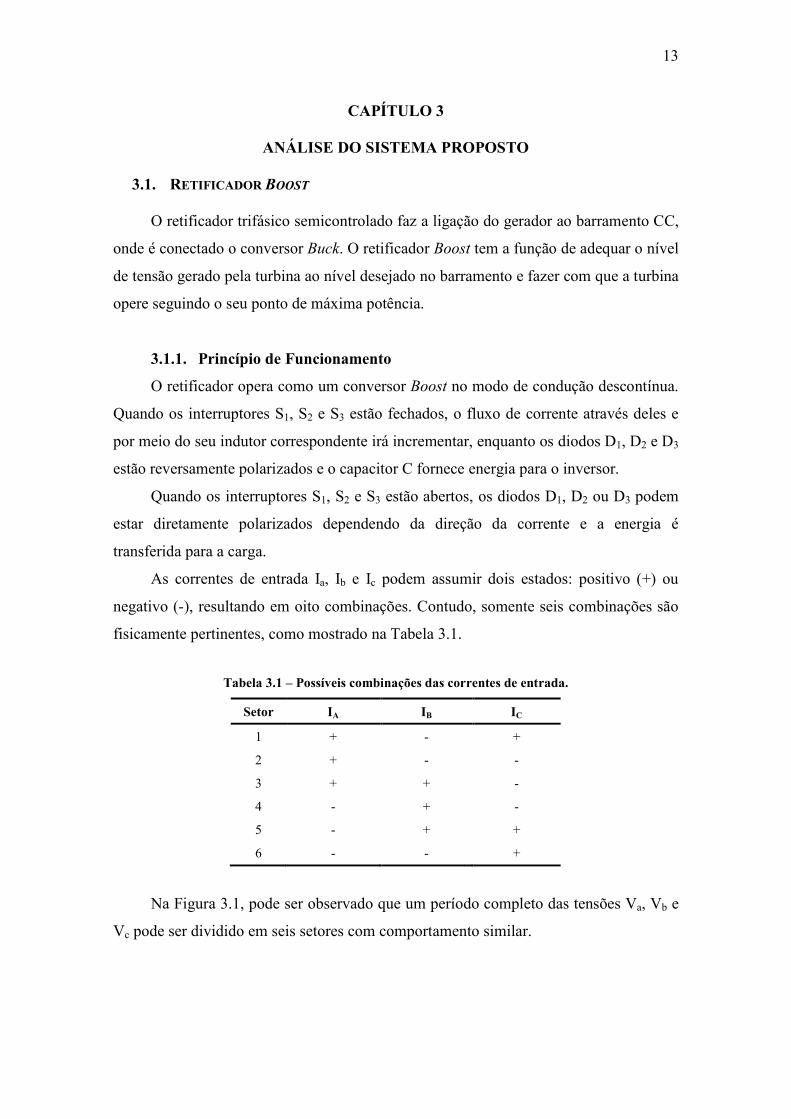
Na Figura 3.1, pode ser observado que um período completo das tensões Va, Vb e
Vc pode ser dividido em seis setores com comportamento similar.
14
Figura 3.1 – Formas de onda teóricas das tensões Va, Vb, e Vc.
Analisando o setor 1, as tensões Va e Vc são positivas, e a tensão Vb é negativa.
Considerando o curto período de comutação, quando os interruptores S1, S2 e S3 estão
fechados, as correntes de linha Ia e Ic incrementam linearmente fluindo através dos
interruptores S1 e S3 e a corrente de linha Ib decrementa linearmente fluindo através do
diodo antiparalelo do interruptor S2, como mostrado na Figura 3.2(a), Figura 3.3 (a) e
Figura 3.4.
Quando os interruptores S1, S2 e S3 são abertos, as correntes de linha Ia e Ic
decrementam linearmente fluindo através dos diodos D1 e D3, e a corrente Ib incrementa
linearmente fluindo através do diodo antiparalelo do interruptor S2, como mostrado na
Figura 3.2(b) e Figura 3.3(b).
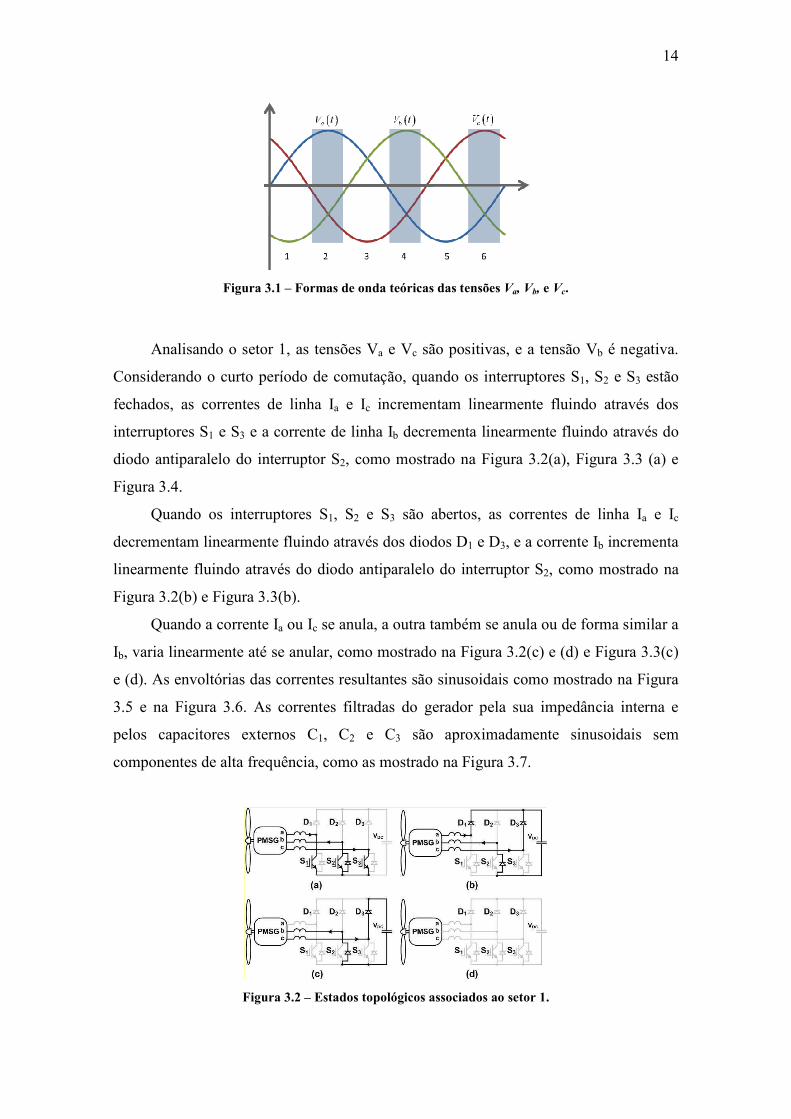
Quando a corrente Ia ou Ic se anula, a outra também se anula ou de forma similar a
Ib, varia linearmente até se anular, como mostrado na Figura 3.2(c) e (d) e Figura 3.3(c)
e (d). As envoltórias das correntes resultantes são sinusoidais como mostrado na Figura
3.5 e na Figura 3.6. As correntes filtradas do gerador pela sua impedância interna e
pelos capacitores externos C1, C2 e C3 são aproximadamente sinusoidais sem
componentes de alta frequência, como as mostrado na Figura 3.7.
Figura 3.2 – Estados topológicos associados ao setor 1.

15
Figura 3.3 – Circuitos equivalentes associados ao setor 1.
O modelo do retificador Boost trifásico semicontrolado operando no modo de
condução descontínua foi implementado no MATLAB considerando os quatro estados
de operação no primeiro setor. O primeiro estágio ocorre com S1, S2 e S3 fechados, o
segundo estágio ocorre quando os interruptores são abertos e a magnitude das correntes
está decrementando. Nos terceiro e quarto estágios, as correntes vão se anulando até
chegar a zero, caracterizando o MCD.
3.1.1.1. Primeiro Estágio
1 1
2 1
3 1
i = cos( ) cos( )
i = cos cos3 3
i = cos cos3 3
p p
s
p p
s
p p
s
V Vwt wT
wL wL
V Vwt wT
wL wL
V Vwt wT
wL wL
3.1.1.2. Segundo Estágio
0 11 1
0 12 1
0 13 1
3 3( ( )i = cos( ) cos( ( ))
33 32 ( ( )
i = cos cos ( )3 3 3
3 3( ( )i = cos cos ( )
3 3 3
p ps ss s
p ps ss s
p ps ss s
V VV t T DTwt w T DT K
L w w
V VV t T DTwt w T DT K
L w w
V VV t T DTwt w T DT K
L w w

16
3.1.1.3. Terceiro Estágio
1
2 3
3 2 0 2
i =0
i = -i
1i = cos cos
2 2 2
p pV Vwt wt V t t K
L w w
1 2 0 2
2 1
3
1i = cos cos
2 3 3
i = -i
i =0
p pV Vwt wt V t t K
L w w
3.1.1.4. Quarto Estágio
{i1 = i2 = i3 = 0
As seguintes formas de onda foram obtidas usando os valores da Tabela 3.2 como
exemplo.
Tabela 3.2 - Especificações e parâmetros do retificador.
Parâmetros Especificações
Tensão eficaz de entrada 160 V
Frequência da tensão de entrada 60 Hz
Tensão de saída 400 V
Frequência de chaveamento 50 kHz
Indutores da entrada 57 H
17
Figura 3.4 – Correntes de linha Ia, Ib e Ic.
0 0.5 1 1.5 2 2.5 3
x 10-3
-15
-10
-5
0
5
10
15
Figura 3.5 – Correntes de linha Ia, Ib e Ic.
0 1 2 3 4 5 6 7 8 9
x 10-3
-5
0
5
10
15
20
25
30
35
40
Figura 3.6 – Corrente de linha Ia durante T/2.
0 0.00 0.0 0.01-
-
-
0
2
4
6
Figura 3.7 – Forma de onda da corrente de
entrada filtrada.
3.2. CONVERSOR BUCK
O conversor Buck interliga o barramento CC ao banco de baterias na saída. O
conversor Buck é encarregado por três tarefas no sistema: adequar o nível de tensão no
barramento enquanto o retificador Boost realiza o MPPT, limitar a tensão máxima
permitida, evitando sobretensão na bateria e limitar a corrente máxima na bateria,
evitando sobrecarga do sistema.
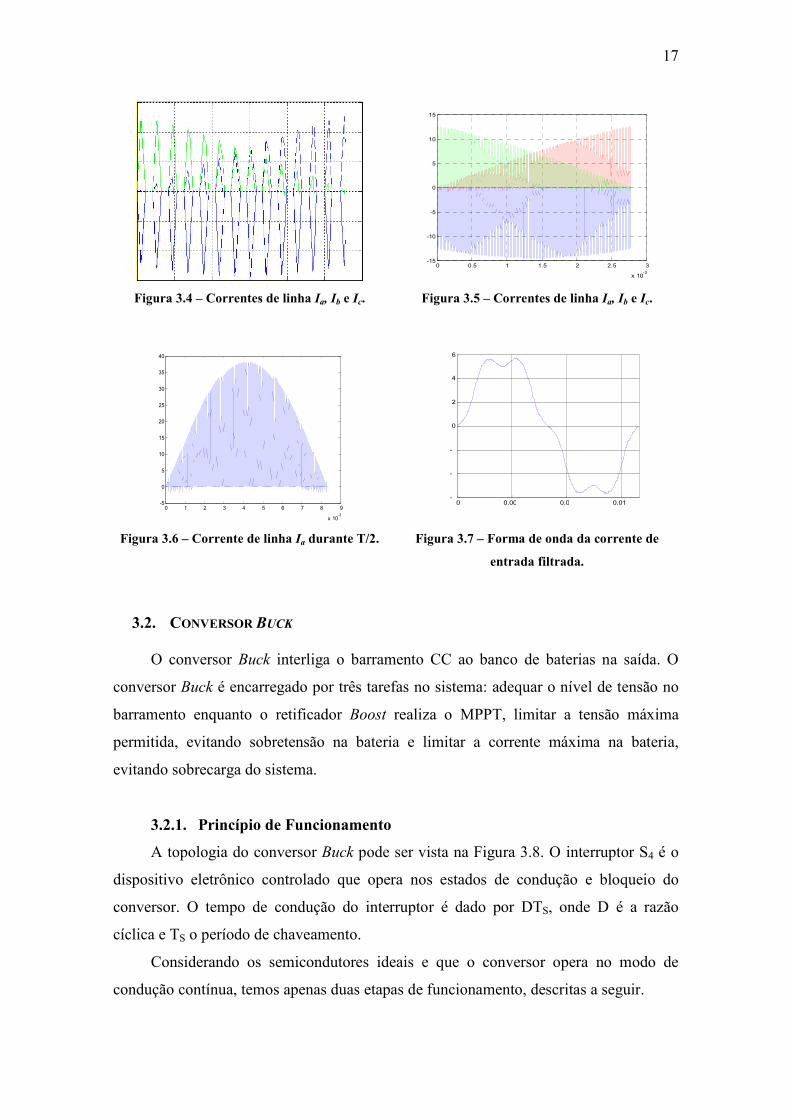
3.2.1. Princípio de Funcionamento
A topologia do conversor Buck pode ser vista na Figura 3.8. O interruptor S4 é o
dispositivo eletrônico controlado que opera nos estados de condução e bloqueio do
conversor. O tempo de condução do interruptor é dado por DTS, onde D é a razão
cíclica e TS o período de chaveamento.
Considerando os semicondutores ideais e que o conversor opera no modo de
condução contínua, temos apenas duas etapas de funcionamento, descritas a seguir.
18
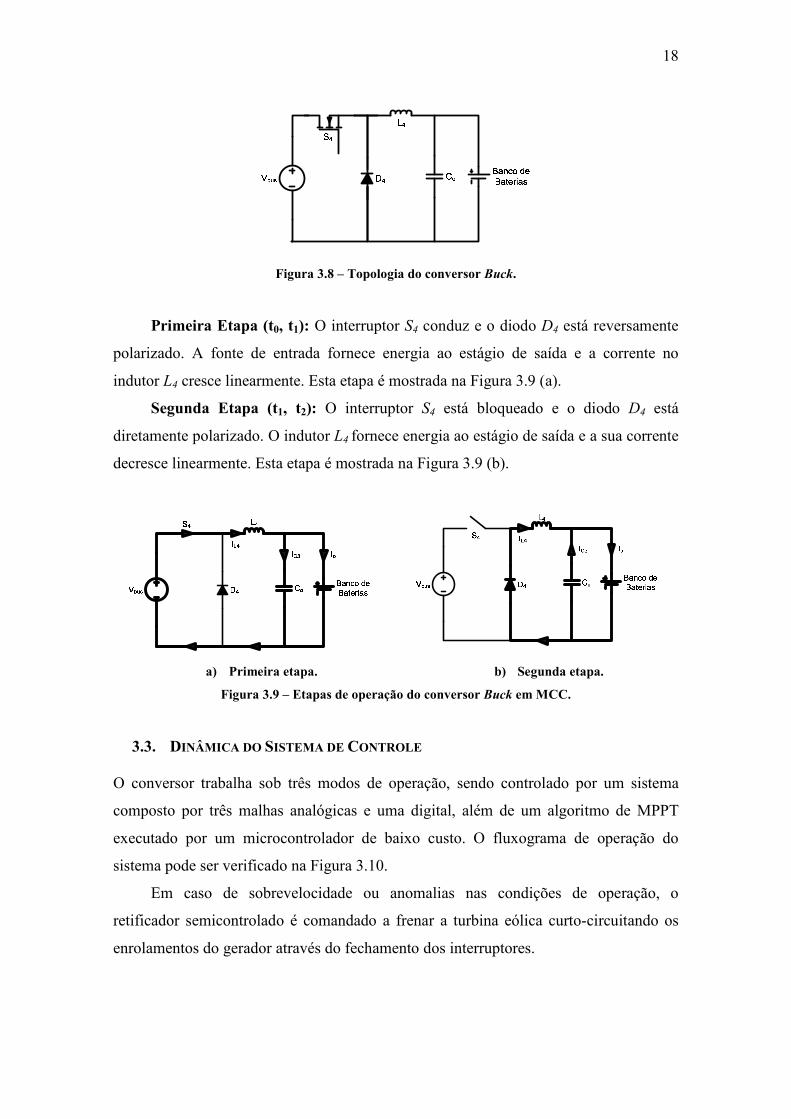
Figura 3.8 – Topologia do conversor Buck.
Primeira Etapa (t0, t1): O interruptor S4 conduz e o diodo D4 está reversamente
polarizado. A fonte de entrada fornece energia ao estágio de saída e a corrente no
indutor L4 cresce linearmente. Esta etapa é mostrada na Figura 3.9 (a).
Segunda Etapa (t1, t2): O interruptor S4 está bloqueado e o diodo D4 está
diretamente polarizado. O indutor L4 fornece energia ao estágio de saída e a sua corrente
decresce linearmente. Esta etapa é mostrada na Figura 3.9 (b).
a) Primeira etapa.
b) Segunda etapa.
Figura 3.9 – Etapas de operação do conversor Buck em MCC.
3.3. DINÂMICA DO SISTEMA DE CONTROLE
O conversor trabalha sob três modos de operação, sendo controlado por um sistema
composto por três malhas analógicas e uma digital, além de um algoritmo de MPPT
executado por um microcontrolador de baixo custo. O fluxograma de operação do
sistema pode ser verificado na Figura 3.10.
Em caso de sobrevelocidade ou anomalias nas condições de operação, o
retificador semicontrolado é comandado a frenar a turbina eólica curto-circuitando os
enrolamentos do gerador através do fechamento dos interruptores.
19
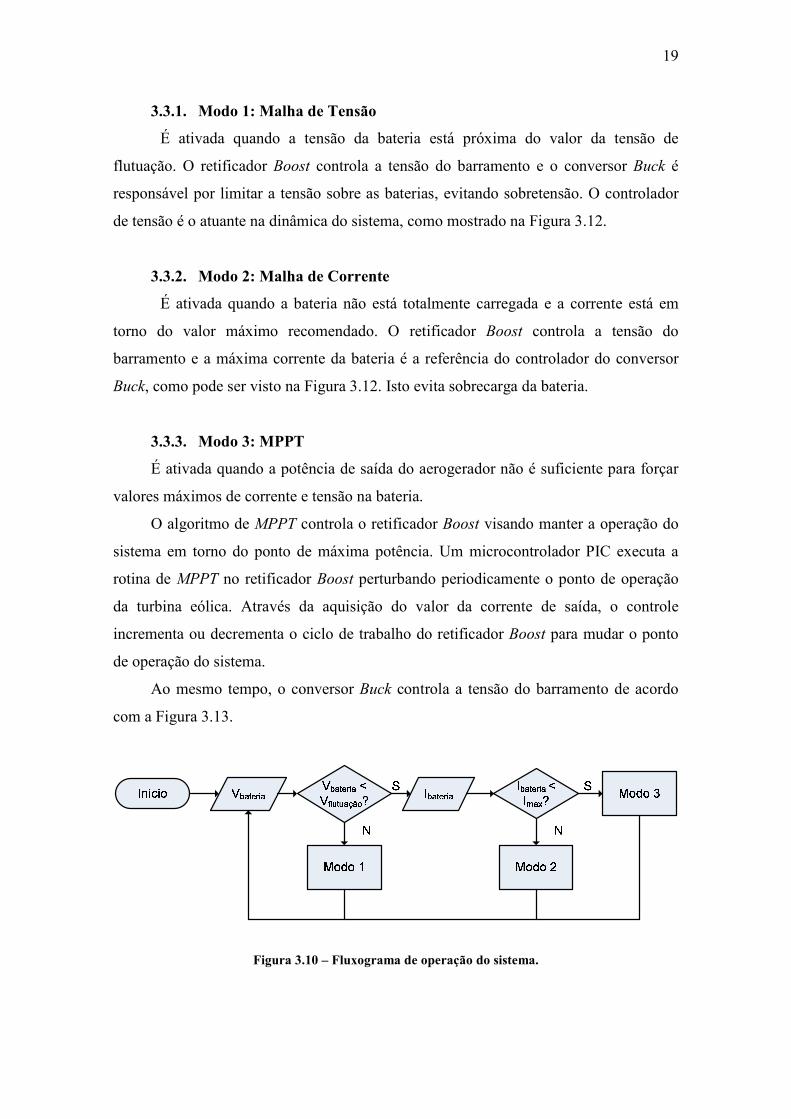
3.3.1. Modo 1: Malha de Tensão
É ativada quando a tensão da bateria está próxima do valor da tensão de
flutuação. O retificador Boost controla a tensão do barramento e o conversor Buck é
responsável por limitar a tensão sobre as baterias, evitando sobretensão. O controlador
de tensão é o atuante na dinâmica do sistema, como mostrado na Figura 3.12.
3.3.2. Modo 2: Malha de Corrente
É ativada quando a bateria não está totalmente carregada e a corrente está em
torno do valor máximo recomendado. O retificador Boost controla a tensão do
barramento e a máxima corrente da bateria é a referência do controlador do conversor
Buck, como pode ser visto na Figura 3.12. Isto evita sobrecarga da bateria.
3.3.3. Modo 3: MPPT
É ativada quando a potência de saída do aerogerador não é suficiente para forçar
valores máximos de corrente e tensão na bateria.
O algoritmo de MPPT controla o retificador Boost visando manter a operação do
sistema em torno do ponto de máxima potência. Um microcontrolador PIC executa a
rotina de MPPT no retificador Boost perturbando periodicamente o ponto de operação
da turbina eólica. Através da aquisição do valor da corrente de saída, o controle
incrementa ou decrementa o ciclo de trabalho do retificador Boost para mudar o ponto
de operação do sistema.
Ao mesmo tempo, o conversor Buck controla a tensão do barramento de acordo
com a Figura 3.13.
Figura 3.10 – Fluxograma de operação do sistema.
20
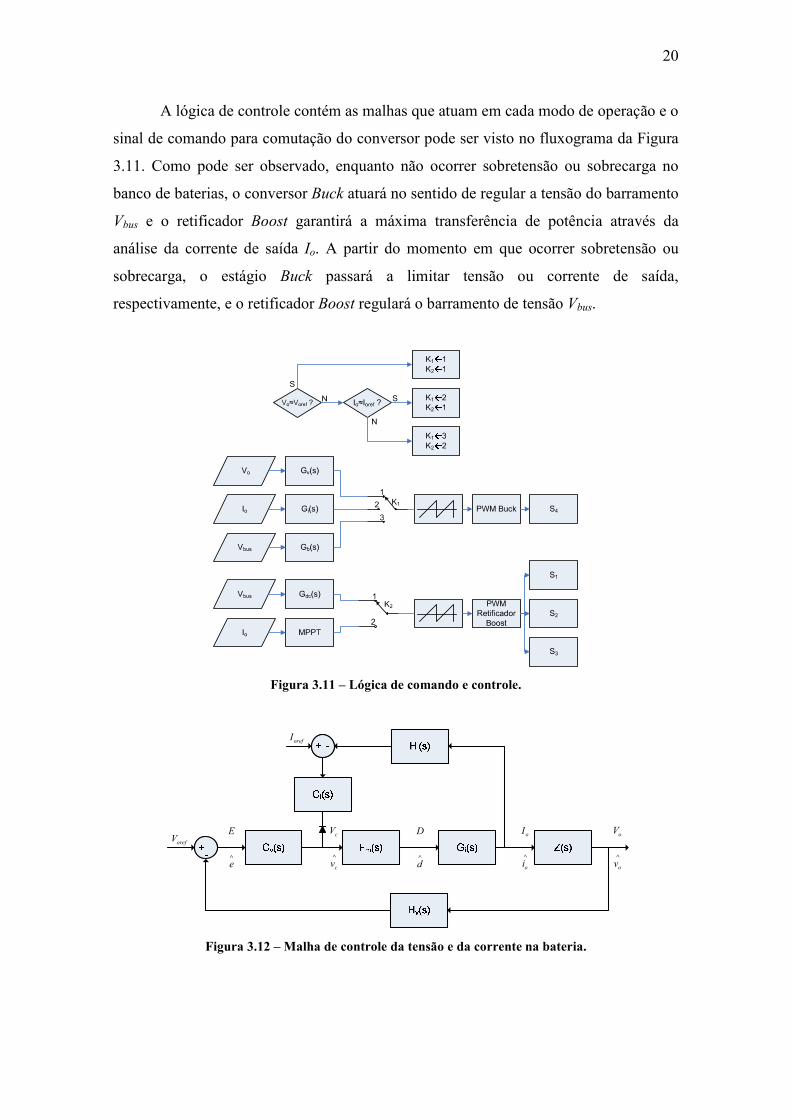
A lógica de controle contém as malhas que atuam em cada modo de operação e o
sinal de comando para comutação do conversor pode ser visto no fluxograma da Figura
3.11. Como pode ser observado, enquanto não ocorrer sobretensão ou sobrecarga no
banco de baterias, o conversor Buck atuará no sentido de regular a tensão do barramento
Vbus e o retificador Boost garantirá a máxima transferência de potência através da
análise da corrente de saída Io. A partir do momento em que ocorrer sobretensão ou
sobrecarga, o estágio Buck passará a limitar tensão ou corrente de saída,
respectivamente, e o retificador Boost regulará o barramento de tensão Vbus.
Figura 3.11 – Lógica de comando e controle.
e
E
c
c
v
V
d
D
o
o
i
I
o
o
v
VorefV
orefI
Figura 3.12 – Malha de controle da tensão e da corrente na bateria.
21
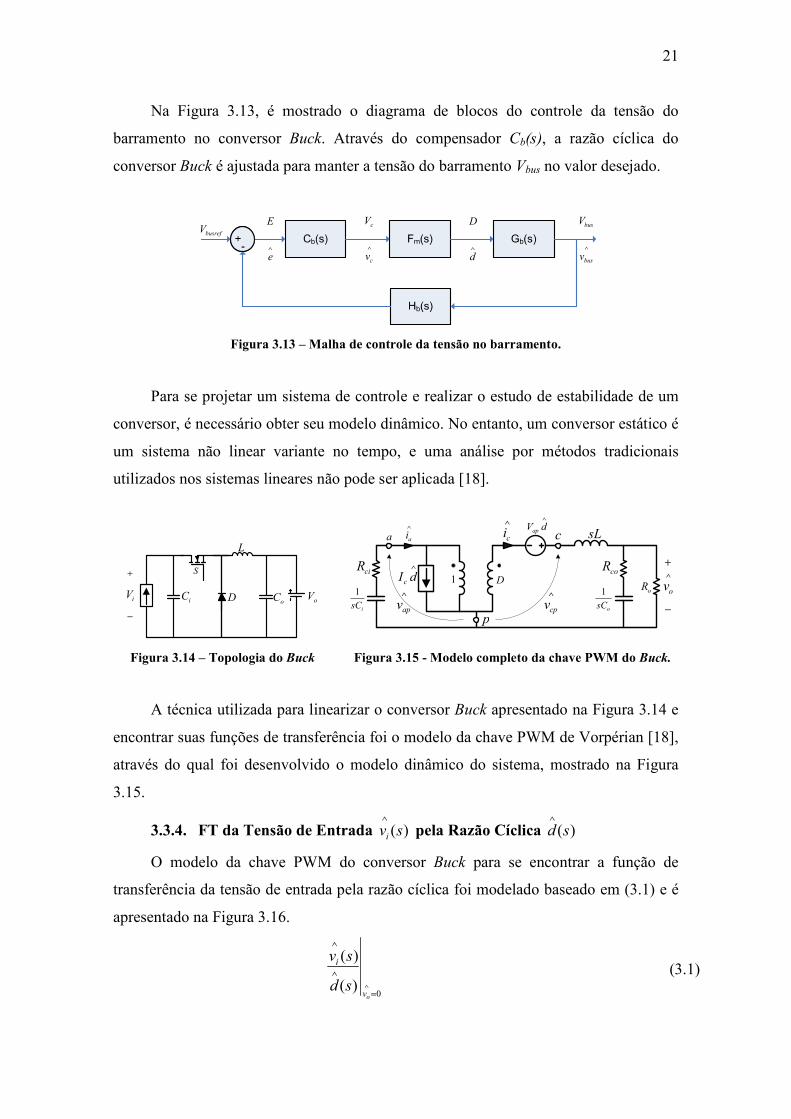
Na Figura 3.13, é mostrado o diagrama de blocos do controle da tensão do
barramento no conversor Buck. Através do compensador Cb(s), a razão cíclica do
conversor Buck é ajustada para manter a tensão do barramento Vbus no valor desejado.
e
E
c
c
v
V
d
D
bus
bus
v
VbusrefV
Figura 3.13 – Malha de controle da tensão no barramento.
Para se projetar um sistema de controle e realizar o estudo de estabilidade de um
conversor, é necessário obter seu modelo dinâmico. No entanto, um conversor estático é
um sistema não linear variante no tempo, e uma análise por métodos tradicionais
utilizados nos sistemas lineares não pode ser aplicada [18].
iCoC
L
S
D oViV
Figura 3.14 – Topologia do Buck
ai
dIc D1
sL
coR
oR
osC
1
cidVap
ov
a c
pcpvapv
ciR
isC
1
Figura 3.15 - Modelo completo da chave PWM do Buck.
A técnica utilizada para linearizar o conversor Buck apresentado na Figura 3.14 e
encontrar suas funções de transferência foi o modelo da chave PWM de Vorpérian [18],
através do qual foi desenvolvido o modelo dinâmico do sistema, mostrado na Figura
3.15.
3.3.4. FT da Tensão de Entrada )(svi pela Razão Cíclica )(sd
O modelo da chave PWM do conversor Buck para se encontrar a função de
transferência da tensão de entrada pela razão cíclica foi modelado baseado em (3.1) e é
apresentado na Figura 3.16.
0)(
)(
ov
i
sd
sv (3.1)
22
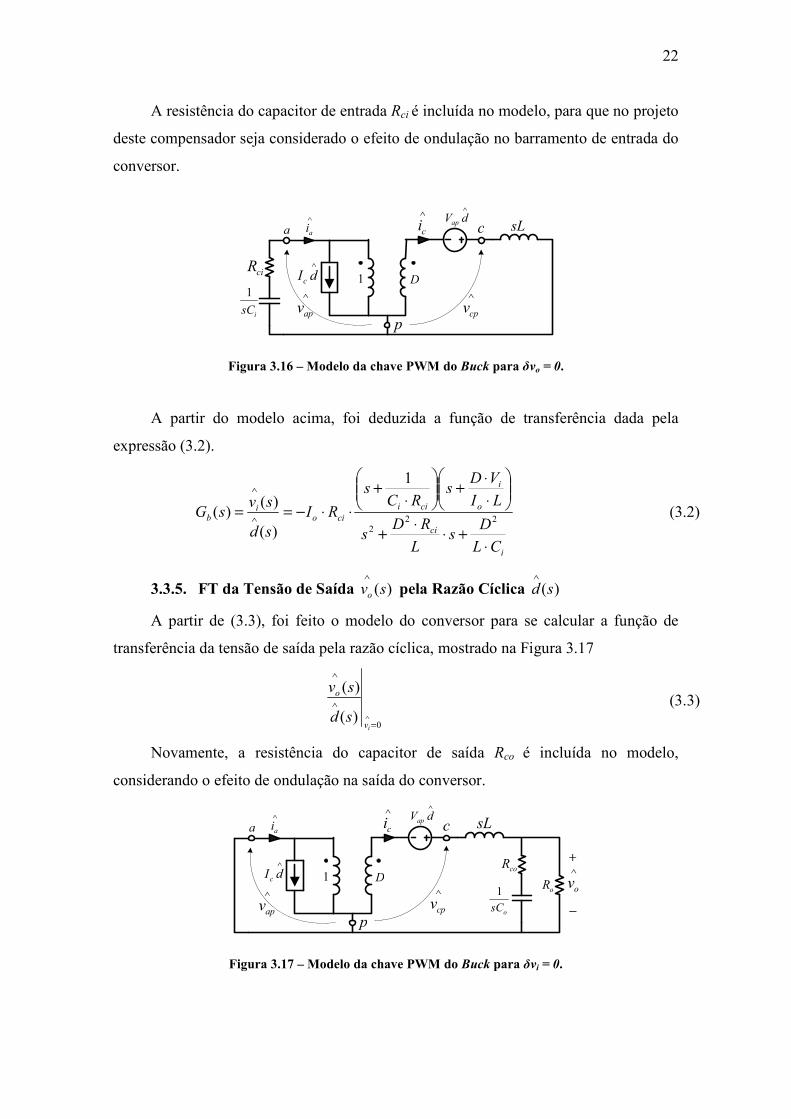
A resistência do capacitor de entrada Rci é incluída no modelo, para que no projeto
deste compensador seja considerado o efeito de ondulação no barramento de entrada do
conversor.
cidVap
ai
dIc D1
sLa c
pcpvapv
ciR
isC
1
Figura 3.16 – Modelo da chave PWM do Buck para vo = 0.
A partir do modelo acima, foi deduzida a função de transferência dada pela
expressão (3.2).
i
ci
o
i
cii
cioi
b
CL
Ds
L
RDs
LI
VDs
RCs
RI
sd
svsG
222
1
)(
)()( (3.2)
3.3.5. FT da Tensão de Saída )(svo pela Razão Cíclica )(sd
A partir de (3.3), foi feito o modelo do conversor para se calcular a função de
transferência da tensão de saída pela razão cíclica, mostrado na Figura 3.17
0)(
)(
iv
o
sd
sv (3.3)
Novamente, a resistência do capacitor de saída Rco é incluída no modelo,
considerando o efeito de ondulação na saída do conversor.
ai
dIc D1
sL
coR
oR
osC
1
cidVap
ov
a c
papv cpv
Figura 3.17 – Modelo da chave PWM do Buck para vi = 0.

23
Nota-se que, com o curto-circuito da entrada, a fonte de corrente entra em roda
livre e os enrolamentos do transformador podem ser retirados. Desta forma, o modelo
simplificado é mostrado na Figura 3.18.
sL
coR
oR
osC
1
ci
ov
c
Figura 3.18 – Simplificação do modelo.
A partir daí, foi encontrada a função de transferência dada por (3.4).
o
o
cooco
o
ocoiov
CLR
RsCR
R
Ls
CRsV
sd
svsG
11
1
)(
)()(
2
(3.4)
3.3.6. FT da Corrente de Saída )(sio pela Razão Cíclica )(sd
Para este modelo do conversor foi feita uma simplificação, considerando as
tensões de entrada e de saída ideais e constantes, bem como foi desprezada a resistência
no indutor, pois sua influência torna-se apreciável apenas para razões cíclicas próximas
da unidade [1]. A função de transferência da corrente de saída pela razão cíclica é dada
por (3.5), e o modelo simplificado é mostrado na Figura 3.19
0)(
)(
oi vv
o
sd
si (3.5)
cidVap
ai
dIc D1
sLa c
papv cpv
Figura 3.19 – Modelo da chave PWM do Buck para vi = vo =0.
24
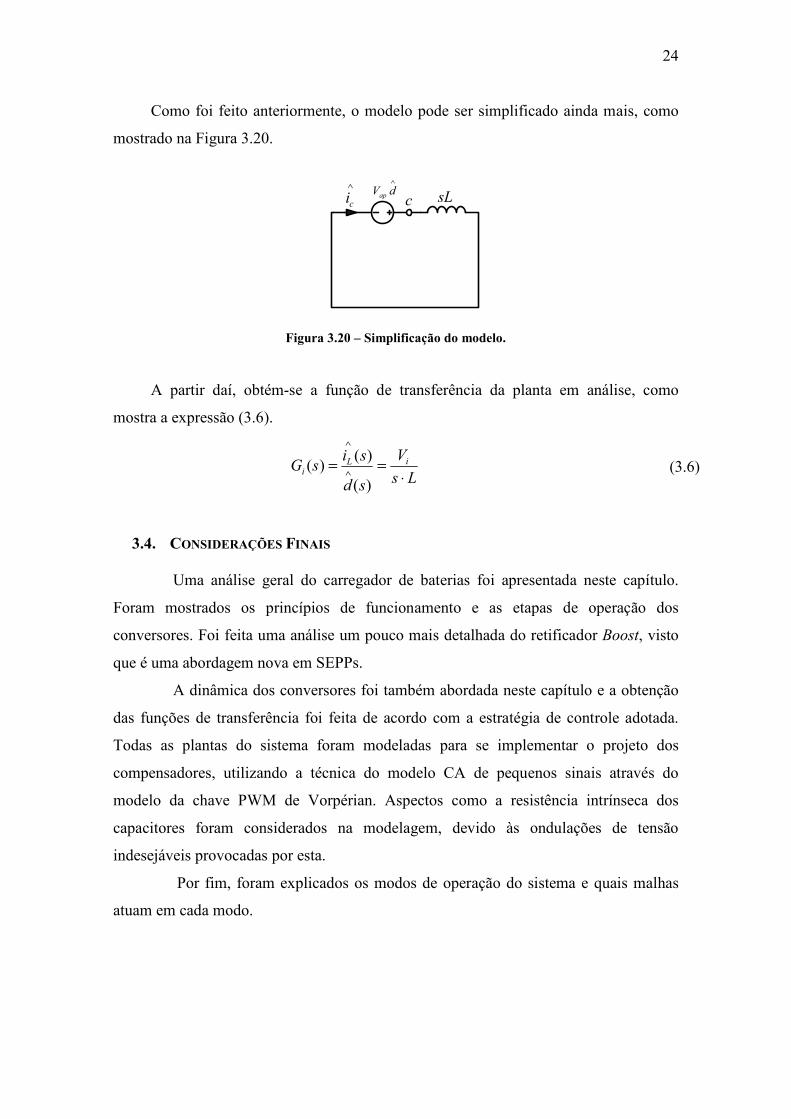
Como foi feito anteriormente, o modelo pode ser simplificado ainda mais, como
mostrado na Figura 3.20.
sLci
dVapc
Figura 3.20 – Simplificação do modelo.
A partir daí, obtém-se a função de transferência da planta em análise, como
mostra a expressão (3.6).
Ls
V
sd
sisG iL
i
)(
)()( (3.6)
3.4. CONSIDERAÇÕES FINAIS
Uma análise geral do carregador de baterias foi apresentada neste capítulo.
Foram mostrados os princípios de funcionamento e as etapas de operação dos
conversores. Foi feita uma análise um pouco mais detalhada do retificador Boost, visto
que é uma abordagem nova em SEPPs.
A dinâmica dos conversores foi também abordada neste capítulo e a obtenção
das funções de transferência foi feita de acordo com a estratégia de controle adotada.
Todas as plantas do sistema foram modeladas para se implementar o projeto dos
compensadores, utilizando a técnica do modelo CA de pequenos sinais através do
modelo da chave PWM de Vorpérian. Aspectos como a resistência intrínseca dos
capacitores foram considerados na modelagem, devido às ondulações de tensão
indesejáveis provocadas por esta.
Por fim, foram explicados os modos de operação do sistema e quais malhas
atuam em cada modo.
25
CAPÍTULO 4
CARGA DA BATERIA
Alguns métodos convencionais de carga de baterias são apresentados brevemente
abaixo. São abordadas as características, as vantagens e as desvantagens de cada
técnica.
4.1. CARGA EM TENSÃO CONSTANTE
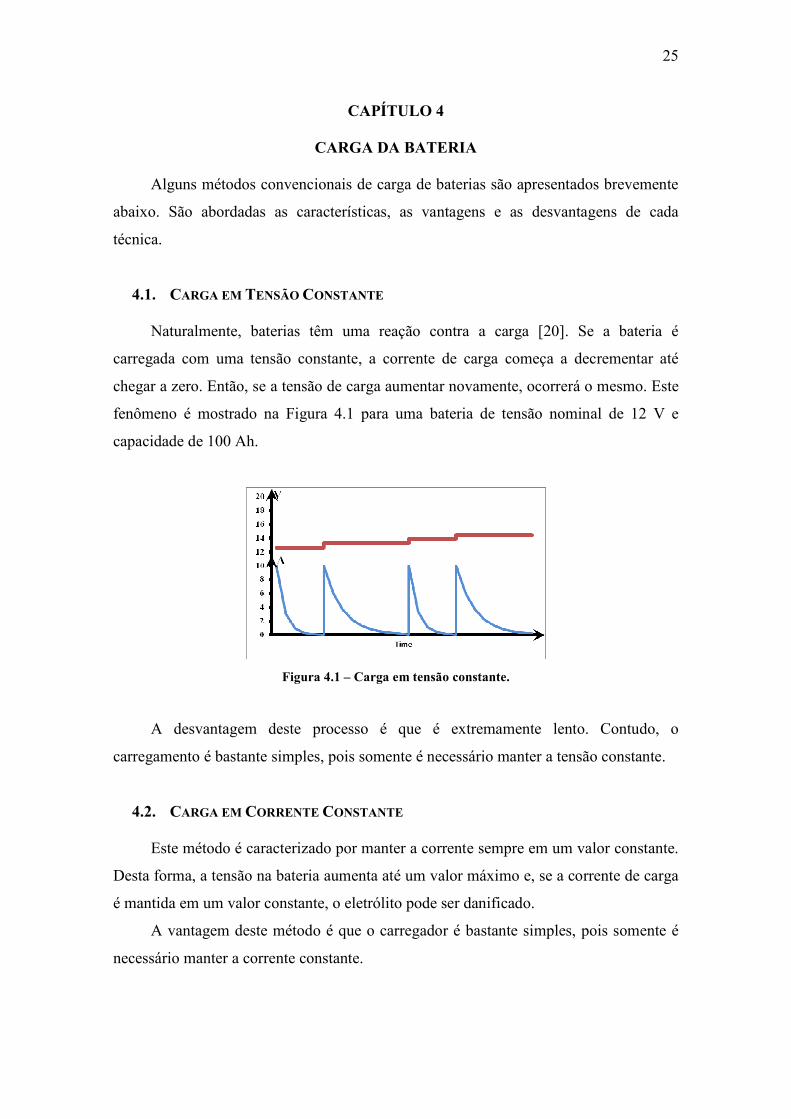
Naturalmente, baterias têm uma reação contra a carga [20]. Se a bateria é
carregada com uma tensão constante, a corrente de carga começa a decrementar até
chegar a zero. Então, se a tensão de carga aumentar novamente, ocorrerá o mesmo. Este
fenômeno é mostrado na Figura 4.1 para uma bateria de tensão nominal de 12 V e
capacidade de 100 Ah.
Figura 4.1 – Carga em tensão constante.
A desvantagem deste processo é que é extremamente lento. Contudo, o
carregamento é bastante simples, pois somente é necessário manter a tensão constante.
4.2. CARGA EM CORRENTE CONSTANTE
Este método é caracterizado por manter a corrente sempre em um valor constante.
Desta forma, a tensão na bateria aumenta até um valor máximo e, se a corrente de carga
é mantida em um valor constante, o eletrólito pode ser danificado.
A vantagem deste método é que o carregador é bastante simples, pois somente é
necessário manter a corrente constante.
26
Por outro lado, o carregador precisa ser desligado, manualmente ou por circuitos
adicionais, antes que o eletrólito ferva. Em adição, a máxima capacidade obtida por este
método é de cerca de 70% da nominal.
4.3. CARGA EM DOIS ESTÁGIOS
Também conhecido como método de carga IU. Os dois estágios deste método são:
• Estágio de corrente constante
• Estágio de flutuação
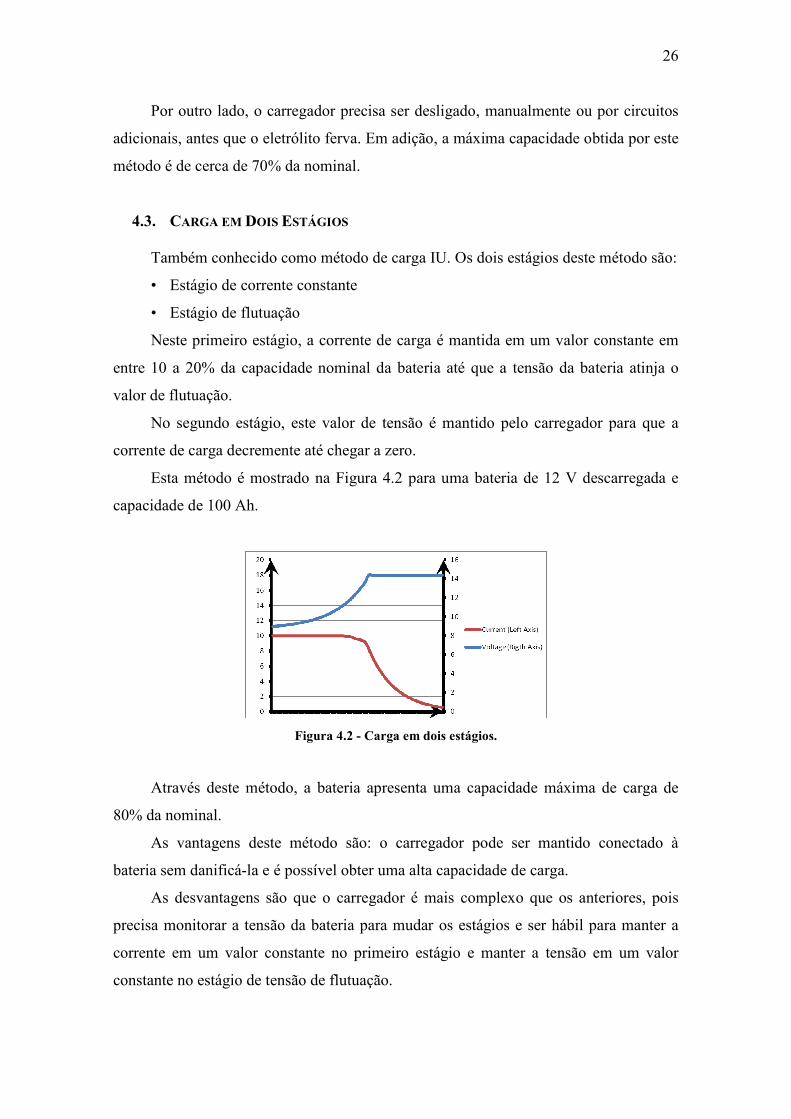
Neste primeiro estágio, a corrente de carga é mantida em um valor constante em
entre 10 a 20% da capacidade nominal da bateria até que a tensão da bateria atinja o
valor de flutuação.
No segundo estágio, este valor de tensão é mantido pelo carregador para que a
corrente de carga decremente até chegar a zero.
Esta método é mostrado na Figura 4.2 para uma bateria de 12 V descarregada e
capacidade de 100 Ah.
Figura 4.2 - Carga em dois estágios.
Através deste método, a bateria apresenta uma capacidade máxima de carga de
80% da nominal.
As vantagens deste método são: o carregador pode ser mantido conectado à
bateria sem danificá-la e é possível obter uma alta capacidade de carga.
As desvantagens são que o carregador é mais complexo que os anteriores, pois
precisa monitorar a tensão da bateria para mudar os estágios e ser hábil para manter a
corrente em um valor constante no primeiro estágio e manter a tensão em um valor
constante no estágio de tensão de flutuação.
27
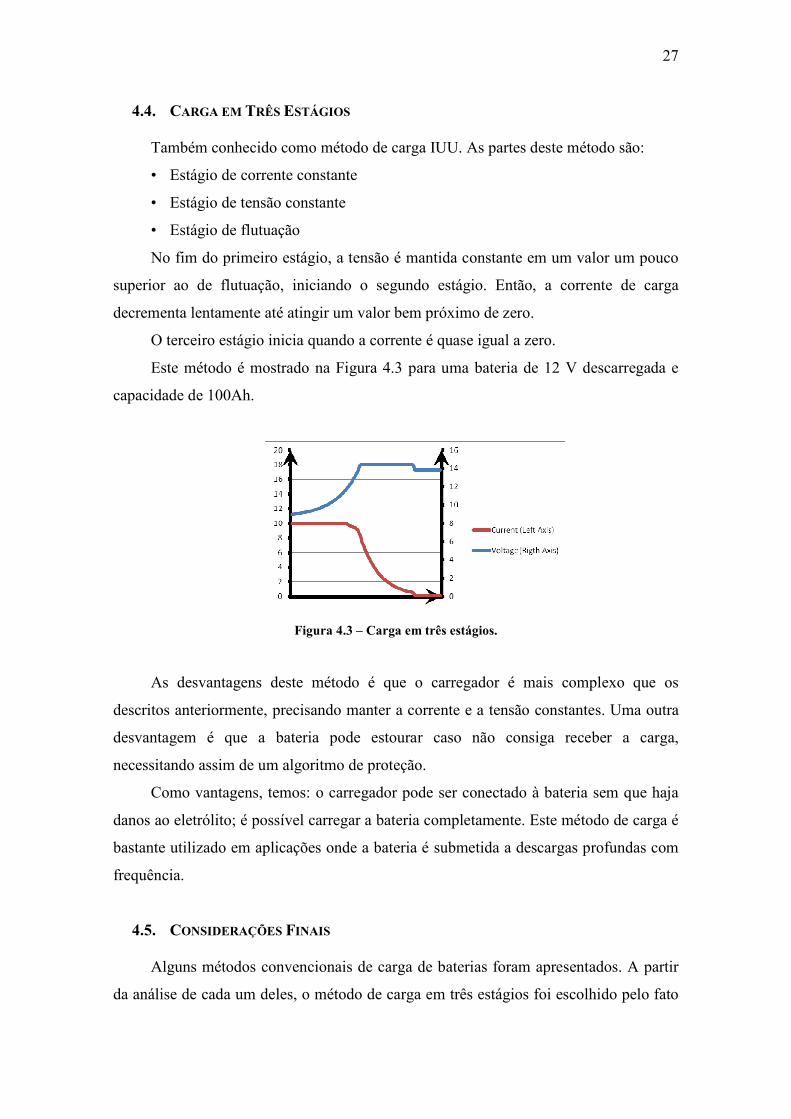
4.4. CARGA EM TRÊS ESTÁGIOS
Também conhecido como método de carga IUU. As partes deste método são:
• Estágio de corrente constante
• Estágio de tensão constante
• Estágio de flutuação
No fim do primeiro estágio, a tensão é mantida constante em um valor um pouco
superior ao de flutuação, iniciando o segundo estágio. Então, a corrente de carga
decrementa lentamente até atingir um valor bem próximo de zero.
O terceiro estágio inicia quando a corrente é quase igual a zero.
Este método é mostrado na Figura 4.3 para uma bateria de 12 V descarregada e
capacidade de 100Ah.
Figura 4.3 – Carga em três estágios.
As desvantagens deste método é que o carregador é mais complexo que os
descritos anteriormente, precisando manter a corrente e a tensão constantes. Uma outra
desvantagem é que a bateria pode estourar caso não consiga receber a carga,
necessitando assim de um algoritmo de proteção.
Como vantagens, temos: o carregador pode ser conectado à bateria sem que haja
danos ao eletrólito; é possível carregar a bateria completamente. Este método de carga é
bastante utilizado em aplicações onde a bateria é submetida a descargas profundas com
frequência.
4.5. CONSIDERAÇÕES FINAIS
Alguns métodos convencionais de carga de baterias foram apresentados. A partir
da análise de cada um deles, o método de carga em três estágios foi escolhido pelo fato
28
de ser uma técnica consolidada e que garante um carregamento em torno de 100% da
capacidade da bateria e consequentemente, uma elevada autonomia ao sistema que
porventura utilizar o banco de baterias como fonte de energia elétrica [1].
29
CAPÍTULO 5
EXEMPLO DE PROJETO
A topologia a ser utilizada foi escolhida no Capítulo 2, a partir de um
levantamento bibliográfico realizado no Capítulo 1 para se obter um conversor
apropriado que garanta a máxima transferência de potência em uma ampla faixa de
velocidade do vento, além de regular o fluxo de energia para bateria, protegendo-a
contra sobretensão e sobrecarga, e proteger a turbina eólica contra danos causados por
ventos muito fortes.
O projeto dos conversores utilizados no carregador será detalhado neste capítulo.
São apresentadas inicialmente as especificações gerais do circuito de potência e as
características de cada conversor. Na sequência, são apresentados os critérios adotados
para o projeto das malhas de controle do sistema, juntamente como o seu projeto. Por
fim, é mostrado o algoritmo de MPPT sensorless implementado.
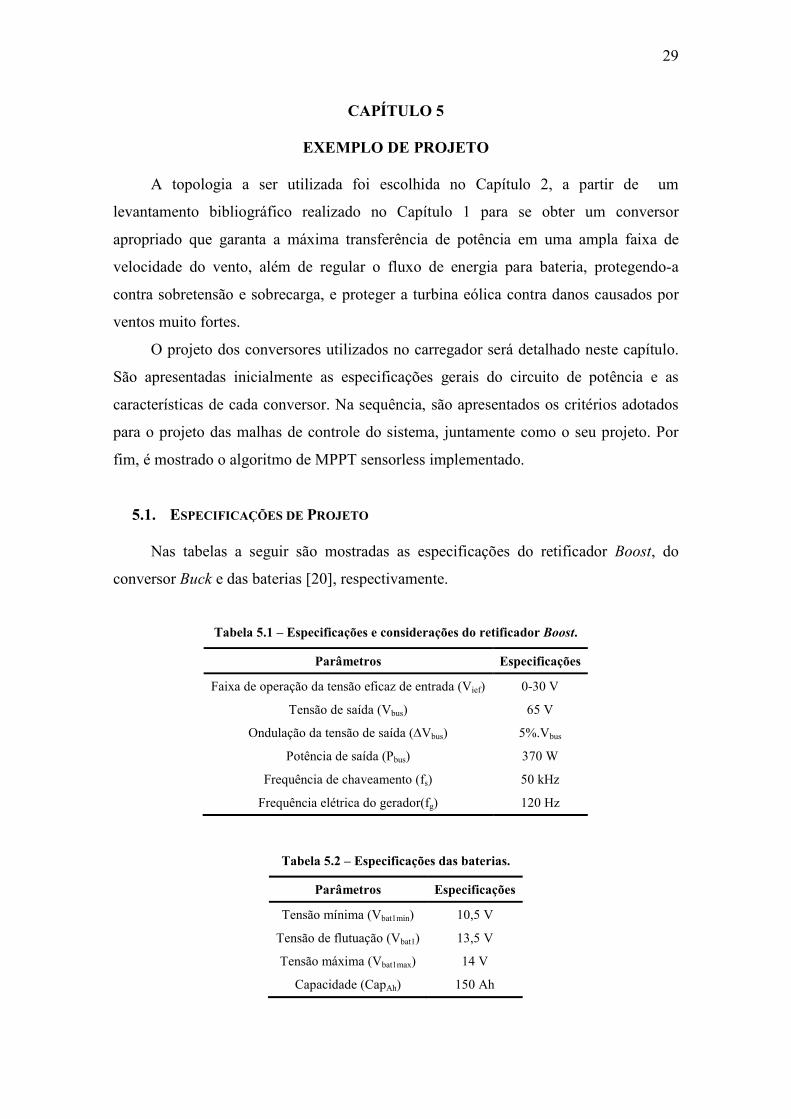
5.1. ESPECIFICAÇÕES DE PROJETO
Nas tabelas a seguir são mostradas as especificações do retificador Boost, do
conversor Buck e das baterias [20], respectivamente.
Tabela 5.1 – Especificações e considerações do retificador Boost.
Parâmetros Especificações
Faixa de operação da tensão eficaz de entrada (Vief) 0-30 V
Tensão de saída (Vbus) 65 V
Ondulação da tensão de saída ( Vbus) 5%.Vbus
Potência de saída (Pbus) 370 W
Frequência de chaveamento (fs) 50 kHz
Frequência elétrica do gerador(fg) 120 Hz
Tabela 5.2 – Especificações das baterias.
Parâmetros Especificações
Tensão mínima (Vbat1min) 10,5 V
Tensão de flutuação (Vbat1) 13,5 V
Tensão máxima (Vbat1max) 14 V
Capacidade (CapAh) 150 Ah

30
Tabela 5.3 – Especificações e considerações do conversor Buck.
Parâmetros Especificações
Tensão de entrada (Vbus) 65 V
Faixa de operação da tensão de saída (Vo) 10,5-28 V
Potência de saída (Po) 350 W
Ondulação da tensão de saída ( Vo) 4%.Vo
Ondulação da corrente através do indutor ( IL4) 10%.IL4
Frequência de chaveamento (fs) 50 kHz
5.2. DIMENSIONAMENTO DO RETIFICADOR BOOST
De acordo com as especificações adotadas na Tabela 5.1, são dimensionados os
componentes que constituem o conversor Boost.
5.2.1. Dimensionamento dos Indutores L1, L2 e L3
A máxima tensão de linha eficaz de entrada do conversor é igual a VVi 30
sendo a tensão de linha de pico igual a VVpi
230 .
As correntes eficaz e de pico de entrada são dadas por (5.1) e (5.2),
respectivamente.
.12,7303
370
3AI
V
PI
ef
ef
ef i
i
busi (5.1)
.10212,72 AIIIpefp iii (5.2)
Para que o retificador opere sempre em MCD, a razão cíclica máxima adotada é
de 32,0maxD . A corrente de pico no indutor pode ser calculada por (5.3).
.5,3132,0
101
max1 AI
D
II
p
p
p L
i
L (5.3)
A corrente eficaz no indutor é dada por (5.4).
.5,122
32,05,31
21
max1
1 AIDI
Ief
p
ef L
L
L (5.4)
Os indutores de entrada L1, L2 e L3 do retificador Boost são calculados a partir de
(5.5).
31
.51050103
32,0230
33,2,13
22max
3,2,1 HLfI
DVL
Si
i
p
p (5.5)
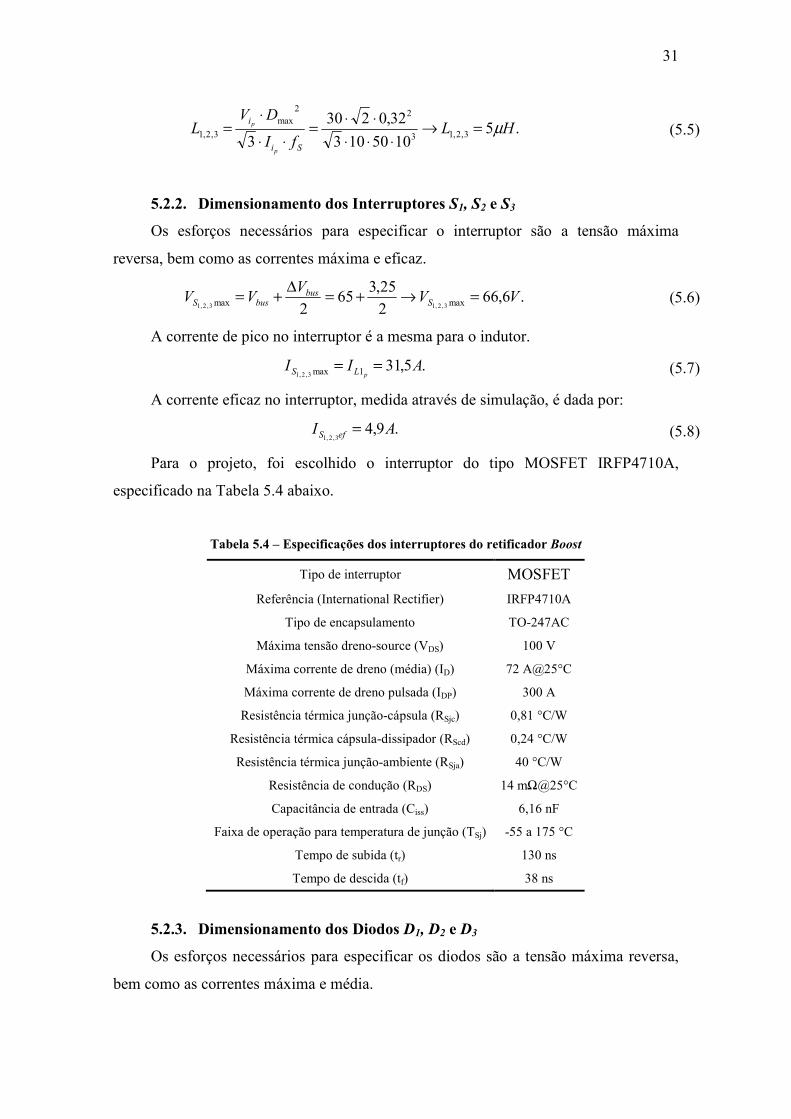
5.2.2. Dimensionamento dos Interruptores S1, S2 e S3
Os esforços necessários para especificar o interruptor são a tensão máxima
reversa, bem como as correntes máxima e eficaz.
.6,662
25,365
2 maxmax 3,2,13,2,1VV
VVV S
busbusS (5.6)
A corrente de pico no interruptor é a mesma para o indutor.
.5,311max3,2,1AII
pLS (5.7)
A corrente eficaz no interruptor, medida através de simulação, é dada por:
.9,43,2,1
AI efS (5.8)
Para o projeto, foi escolhido o interruptor do tipo MOSFET IRFP4710A,
especificado na Tabela 5.4 abaixo.
Tabela 5.4 – Especificações dos interruptores do retificador Boost
Tipo de interruptor MOSFET
Referência (International Rectifier) IRFP4710A
Tipo de encapsulamento TO-247AC
Máxima tensão dreno-source (VDS) 100 V
Máxima corrente de dreno (média) (ID) 72 A@25°C
Máxima corrente de dreno pulsada (IDP) 300 A
Resistência térmica junção-cápsula (RSjc) 0,81 °C/W
Resistência térmica cápsula-dissipador (RScd) 0,24 °C/W
Resistência térmica junção-ambiente (RSja) 40 °C/W
Resistência de condução (RDS) 14 m @25°C
Capacitância de entrada (Ciss) 6,16 nF
Faixa de operação para temperatura de junção (TSj) -55 a 175 °C
Tempo de subida (tr) 130 ns
Tempo de descida (tf) 38 ns
5.2.3. Dimensionamento dos Diodos D1, D2 e D3
Os esforços necessários para especificar os diodos são a tensão máxima reversa,
bem como as correntes máxima e média.
32
.6,66maxmax 3,2,13,2,1VVV SD (5.9)
AII SD 5,31maxmax 3,2,13,2,1 (5.10)
A corrente eficaz nos diodos, medida através de simulação, é dada por:
.3,53,2,1
AI efD (5.11)
São utilizados diodos Schottky SB5100, capazes de suportar toda a corrente média
estipulada no projeto. Suas especificações podem ser vista na Tabela 5.5.
Tabela 5.5 – Especificações dos diodos do retificador Boost
Tipo de diodo Schottky
Referência (Fairchild) SB5100
Tipo de encapsulamento DO-201AD
Máxima tensão reversa (VR) 100 V
Corrente média máxima (IF) 5 A@25°C
Máxima corrente de pico não repetitiva (IFM) 150 A@25°C
Resistência térmica junção-ambiente (RDja) 25 °C/W
Faixa de operação para temperatura de junção (TDj) -50 a 150 °C
Queda de tensão em condução direta (Vf) 0,85 V@25°C
5.2.4. Dimensionamento do Capacitor C4
A potência de saída do retificador Boost, pode ser vista na Tabela 5.1 e é dada por
(5.12).
WPbus 370 (5.12)
Sobre o capacitor aparece uma tensão com ondulação desejada de 5% da tensão
nominal, apresentada em (5.13). Assim, as tensões mínima e máxima são dadas por
(5.14) e (5.15), respectivamente.
.65VVbus (5.13)
.4,632
25,365
2 minmin VVV
VV busbus
busbus (5.14)
.6,662
25,365
2 maxmax VVV
VV busbus
busbus (5.15)
Aproximando os cálculos para um retificador em ponte completa, tem-se a
seguinte equação (5.16).
33
FCVVf
PC
busbusg
bus 12354,636,661206
370
64222
min2
max
4 (5.16)
Apesar de os capacitores eletrolíticos do retificador serem calculados em função
de uma determinada ondulação de tensão desejada, a especificação do componente
comercial é realizada principalmente através de sua corrente eficaz máxima.
A saída do retificador Boost está conectada diretamente à entrada do conversor
Buck, que tem como característica uma corrente pulsante. A corrente eficaz medida
através de simulação é um pouco elevada, chegando em torno de 6 A. O banco
capacitivo deve suportar essa corrente, por isso são associados capacitores em paralelo.
Além dos capacitores eletrolíticos, são utilizados quatro capacitores de
polipropileno para assegurar que possíveis correntes mais elevadas sejam supridas e
para auxiliar na comutação dos interruptores. As características dos capacitores
eletrolíticos e dos capacitores de polipropileno podem ser vistas na Tabela 5.6 e na
Tabela 5.7, respectivamente.
Tabela 5.6 – Especificações do banco capacitivo do barramento.
Tipo de capacitor Eletrolítico
Referência (Epcos) B41851
Capacitância (Celet4) 220 µF
Corrente eficaz 0,61 A
Tensão máxima 100 V
Resistência série equivalente (RCelet4) 0,75
Tabela 5.7 – Especificações dos capacitores de polipropileno.
Tipo de capacitor Polipropileno
Referência (Epcos) B32601L
Capacitância (Celet5) 470 nF
Tensão máxima 400 V
A capacitância equivalente C4 obtida é dada por (5.17):
.220010 444 FCCC elet (5.17)
A resistência série equivalente RC4 é dada por (5.18).
.075,010
75,0
10 5
5
5 C
Celet
C RR
R (5.18)

34
5.3. DIMENSIONAMENTO DO CONVERSOR BUCK
De acordo com as especificações adotadas na Tabela 5.3, são dimensionados os
componentes que constituem o conversor Buck.
5.3.1. Dimensionamento do Indutor L4
A tensão de entrada do conversor é constante e igual a 65 V, porém a tensão de
saída depende da quantidade de baterias conectadas ao carregador. O caso mais extremo
ocorre quando apenas uma bateria totalmente descarregada está conectada à saída [1].
Portanto a tensão para este caso é a mostrada em (5.19) e a razão cíclica é obtida em
(5.20).
.5,10min1
VVbat (5.19)
16,065
5,10min1 D
V
VD
bus
bat (5.20)
Para este caso mais crítico, a corrente será máxima. A obtenção desta corrente é
feita através da relação entre essa tensão mínima e a potência de saída do conversor. A
corrente máxima é dada por (5.21).
AIV
PI bat
bat
obat 3,33
5,10
350max
min1
max (5.21)
A indutância de filtro L4 do conversor Buck é dada pela expressão (5.22).
.8,52105033,3
84,05,10'344
4
min1 HLfI
DVL
SL
bat (5.22)
Onde 'D é o complemento da razão cíclica D .
5.3.2. Dimensionamento do Interruptor S4
Os esforços necessários para especificar o interruptor são a tensão máxima
reversa, bem como as correntes máxima e eficaz.
.625,66maxmax 44VVV CS (5.23)
.352
33,33,33
2 maxmaxmax 4
4
444AI
IIII S
L
LLS (5.24)
.4,1316,03,334max4
AIDII efSbatefS (5.25)
Para o projeto, foi escolhido o interruptor do tipo MOSFET IRFP4710A, o mesmo
utilizado no retificador Boost.

35
5.3.3. Dimensionamento do Diodo D4
Os esforços necessários para especificar o diodo são a tensão máxima reversa,
bem como as correntes máxima e média.
.625,66maxmax 44VVV CD (5.26)
.352
33,33,33
2 maxmaxmax 4
4
444AI
IIII D
L
LLD (5.27)
.2884,03,33'444
AIDII medDLmedD (5.28)
São utilizados dois diodos Schottky MBR20100CT em paralelo, capazes de
suportar toda a corrente média estipulada no projeto. Suas especificações podem ser
vista na Tabela 5.8.
Tabela 5.8 – Especificações do diodo do conversor Buck
Tipo de diodo Schottky
Referência (International Rectifier) MBR20100CT
Tipo de encapsulamento TO-220
Máxima tensão reversa (VR) 100 V
Corrente média máxima (IF) 20 A@85°C
Máxima corrente de pico repetitiva (IFM) 40 A@25°C
Resistência intrínseca (rav) 15,8 m
Resistência térmica junção cápsula (RDjc) 2 °C/W
Resistência térmica cápsula dissipador (RDcd) 0,5 °C/W
Faixa de operação para temperatura de junção (TDj) -65 a 150 °C
Queda de tensão em condução direta (Vf) 0,65 V@25°C
5.3.4. Dimensionamento do Capacitor C5
Os valores ideais obtidos para capacitor Buck, através de equacionamentos
matemáticos, são mostrados a seguir.
A capacitância de filtro é calculada para ondulação máxima de saída e é dada por:
.6,1812,110208
33,3
8 3454 FLVf
IC
oS
L (5.29)
A tensão máxima sobre o capacitor será máxima quando duas baterias carregadas
estiverem ligadas em série na saída do carregador
.56,282
12,128
2 maxmax 55VV
VVV C
ooC (5.30)
36
Calculando as expressões (5.31) é possível encontrar o valor da corrente eficaz
através do capacitor C5.
dtIID
It
TD
IdtIIt
TD
I
TI
S
S
S T
DT
oL
L
S
L
DT
oL
S
L
S
efC 962,0''
12
maxmin
0
2
maxmin 4
44
4
4
5
(5.31)
A resistência série equivalente máxima permitida no capacitor é:
.336,033,3
12,1555
4
CC
L
oC RR
I
VR (5.32)
Foram utilizados capacitores eletrolíticos, cuja especificação é mostrada na Tabela
5.9
Tabela 5.9 – Especificações do capacitor de filtro do Buck
Tipo de capacitor Eletrolítico
Referência (Epcos) B41821
Capacitância (Celet5) 1000 µF
Corrente eficaz 1,15 A
Tensão máxima 35 V
Resistência série equivalente (RCelet5) 0,23
A capacitância equivalente C5 obtida é dada por (5.33):
.20002 555 FCCC elet (5.33)
A resistência série equivalente RC5 é dada por (5.34).
.115,02
23,0
2 5
5
5 C
Celet
C RR
R (5.34)
5.4. PROJETO DE CONTROLE
5.4.1. Controle da Corrente de Saída Io
Para estabelecer um limite de corrente constante através das baterias, um
compensador apropriado deve ser projetado.
5.4.1.1. Modelo Matemático
A seguinte equação apresenta a função de transferência simplificada da variação
da corrente no indutor como função da perturbação no ciclo de trabalho.
37
Ls
V
sd
si iL
)(
)( (5.35)
Onde Vi é a tensão no barramento CC e L é a indutância do conversor Buck.
Para determinar a função de transferência de laço aberto FTLA do sistema
completo, os ganhos do modulador e do sensor de corrente devem ser inclusos,
resultando em (5.36).
sHsFLs
VsFTMAio im
i)( (5.36)
Onde Fm(s) é o ganho da moduladora PWM dado pelo inverso da amplitude do
dente de serra e Hi(s) é o ganho do sensor de corrente. A Figura 5.1 e Figura 5.2
mostram o diagrama de Bode do sistema.
1 10 100 1 103
1 104
1 105
40
20
0
20
40
60
80
100
FTMAio(s)
Frequência (Hz)
Gan
ho (
dB)
Figura 5.1 – Diagrama de Bode da planta FTMAio(s) (Ganho).
1 10 100 1 103
1 104
1 105
180
135
90
45
0
FTMAio(s)
Frequência (Hz)
Fas
e (°
)
Figura 5.2 – Diagrama de Bode da planta FTMAio(s) (Fase).

38
5.4.1.2. Projeto do Compensador
Para compensar o sistema, um controlador PI foi usado. A Figura 5.3 mostra o
circuito do controlador PI.
Figura 5.3 – Circuito do controlador PI.
A equação (5.37) seguinte mostra a função transferência do controlador PI.
s
CRs
R
R
sV
sVsCi
a
c 22
1
2
1
)(
)()(
(5.37)
Adotando a frequência de cruzamento como :
kHzf
f sc 5,12
4 (5.38)
O zero do compensador é alocado em metade da frequência de cruzamento.
kHzf
f cz 25,6
21 (5.39)
As expressões que definem o ganho do compensador são dadas por (5.40) e
(5.41):
.917,02log20 dBHfFTMAioH c (5.40)
.111,110 20 KK
H
(5.41)
O sistema de equações que foram usados para determinar os parâmetros do
compensador pode ser visto abaixo.
Um valor para R2 é definido e R1 e C2 são calculados a partir daí.
212 2
1
RfC
z
(5.42)
K
RR 2
1 (5.43)
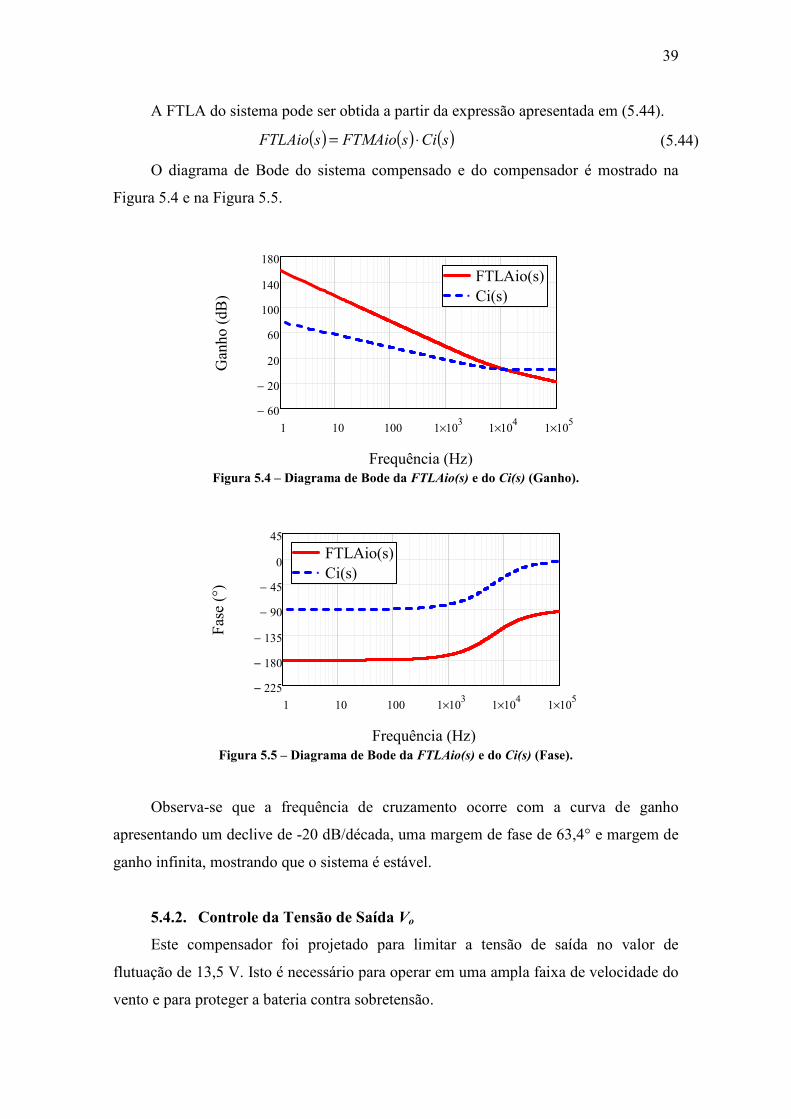
39
A FTLA do sistema pode ser obtida a partir da expressão apresentada em (5.44).
sCisFTMAiosFTLAio (5.44)
O diagrama de Bode do sistema compensado e do compensador é mostrado na
Figura 5.4 e na Figura 5.5.
1 10 100 1 103
1 104
1 105
60
20
20
60
100
140
180
FTLAio(s)Ci(s)
Frequência (Hz)
Gan
ho (
dB)
Figura 5.4 – Diagrama de Bode da FTLAio(s) e do Ci(s) (Ganho).
1 10 100 1 103
1 104
1 105
225
180
135
90
45
0
45
FTLAio(s)Ci(s)
Frequência (Hz)
Fas
e (°
)
Figura 5.5 – Diagrama de Bode da FTLAio(s) e do Ci(s) (Fase).
Observa-se que a frequência de cruzamento ocorre com a curva de ganho
apresentando um declive de -20 dB/década, uma margem de fase de 63,4° e margem de
ganho infinita, mostrando que o sistema é estável.
5.4.2. Controle da Tensão de Saída Vo
Este compensador foi projetado para limitar a tensão de saída no valor de
flutuação de 13,5 V. Isto é necessário para operar em uma ampla faixa de velocidade do
vento e para proteger a bateria contra sobretensão.
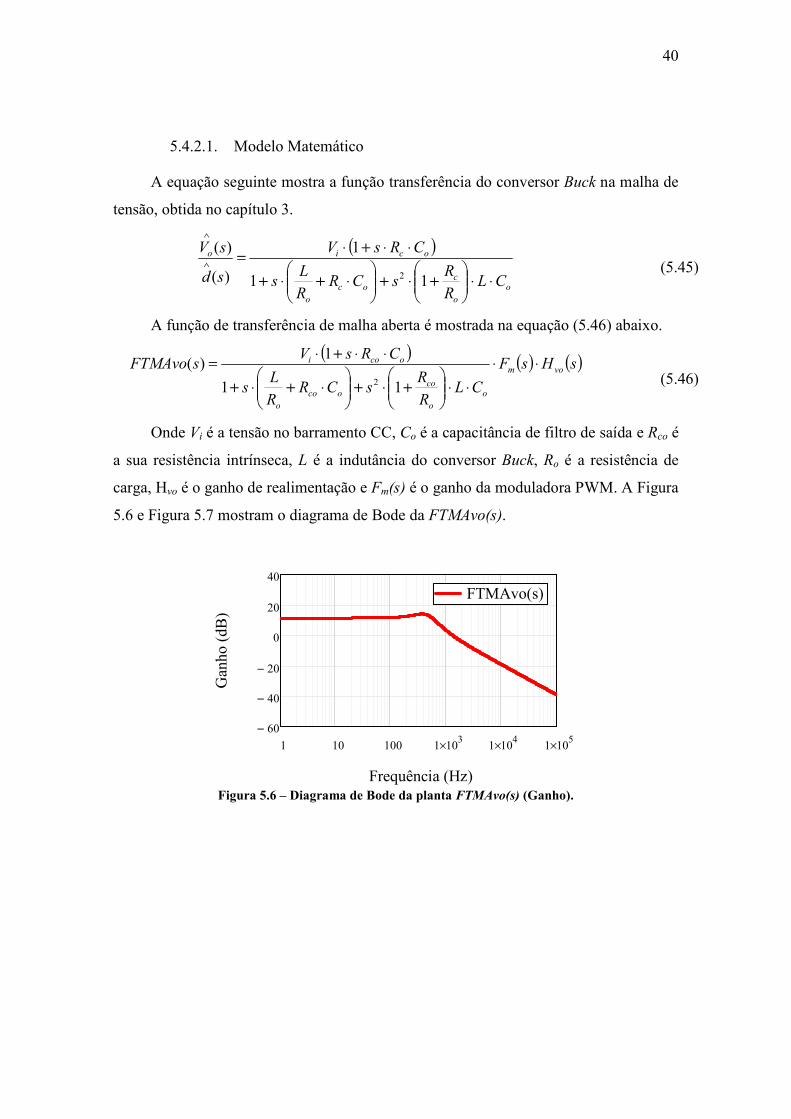
40
5.4.2.1. Modelo Matemático
A equação seguinte mostra a função transferência do conversor Buck na malha de
tensão, obtida no capítulo 3.
o
o
coc
o
ocio
CLR
RsCR
R
Ls
CRsV
sd
sV
11
1
)(
)(
2
(5.45)
A função de transferência de malha aberta é mostrada na equação (5.46) abaixo.
sHsF
CLR
RsCR
R
Ls
CRsVsFTMAvo vom
o
o
cooco
o
ocoi
11
1)(
2
(5.46)
Onde Vi é a tensão no barramento CC, Co é a capacitância de filtro de saída e Rco é
a sua resistência intrínseca, L é a indutância do conversor Buck, Ro é a resistência de
carga, Hvo é o ganho de realimentação e Fm(s) é o ganho da moduladora PWM. A Figura
5.6 e Figura 5.7 mostram o diagrama de Bode da FTMAvo(s).
1 10 100 1 103
1 104
1 105
60
40
20
0
20
40
FTMAvo(s)
Frequência (Hz)
Gan
ho (
dB)
Figura 5.6 – Diagrama de Bode da planta FTMAvo(s) (Ganho).
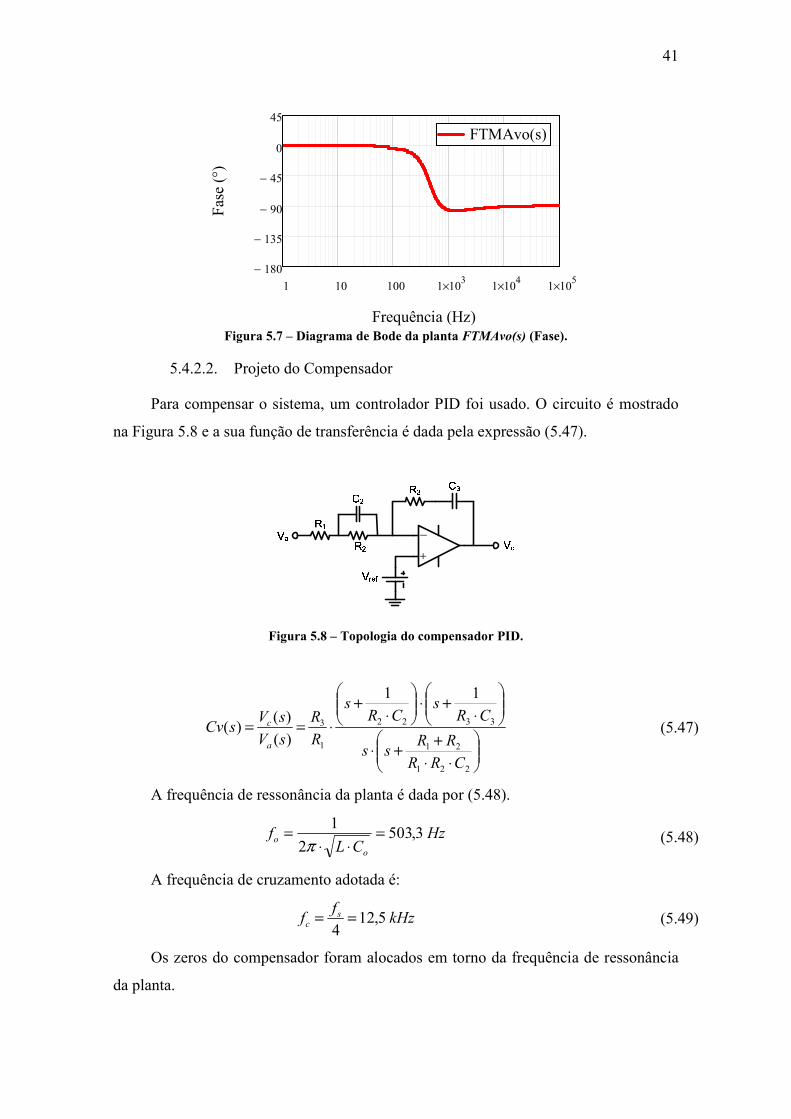
41
1 10 100 1 103
1 104
1 105
180
135
90
45
0
45
FTMAvo(s)
Frequência (Hz)
Fas
e (°
)
Figura 5.7 – Diagrama de Bode da planta FTMAvo(s) (Fase).
5.4.2.2. Projeto do Compensador
Para compensar o sistema, um controlador PID foi usado. O circuito é mostrado
na Figura 5.8 e a sua função de transferência é dada pela expressão (5.47).
Figura 5.8 – Topologia do compensador PID.
221
21
3322
1
3
11
)(
)()(
CRR
RRss
CRs
CRs
R
R
sV
sVsCv
a
c (5.47)
A frequência de ressonância da planta é dada por (5.48).
HzCL
fo
o 3,5032
1 (5.48)
A frequência de cruzamento adotada é:
kHzf
f sc 5,12
4 (5.49)
Os zeros do compensador foram alocados em torno da frequência de ressonância
da planta.

42
Hzfff ozz 3,50321 (5.50)
Um dos pólos do compensador é alocado na origem para minimizar o erro estático
e a frequência do outro pólo é ajustada para compensar o zero devido à resistência
intrínseca do capacitor de saída. Portanto, esta frequência é alocada na frequência do
zero da planta gerado por Rco.
.01 Hzf p (5.51)
.0,6922
12 Hz
CRf
oco
p (5.52)
O ganho do compensador é dado por (5.53):
.01,212log20 dBHfFTMAvoH c (5.53)
.236,1110 20 KK
H
(5.54)
O sistema de equações que foram usados para determinar os parâmetros do
compensador pode ser visto abaixo. Um valor para R2 é definido e então os outros
componentes são calculados a partir daí.
212 2
1
RfC
z
(5.55)
12 222
21
CRf
RR
p
(5.56)
13 RKR (5.57)
323 2
1
RfC
z
(5.58)
A FTLA do sistema pode ser obtida a partir da expressão apresentada em (5.59).
sCvsFTMAvosFTLAvo (5.59)
O diagrama de Bode do sistema compensado e do compensador é mostrado na
Figura 5.9 e Figura 5.10. Observa-se que a frequência de cruzamento ocorre com a
curva de ganho apresentando um declive de -20 dB/década, uma margem de fase de
91,2° e margem de ganho infinita, mostrando que o sistema é estável.
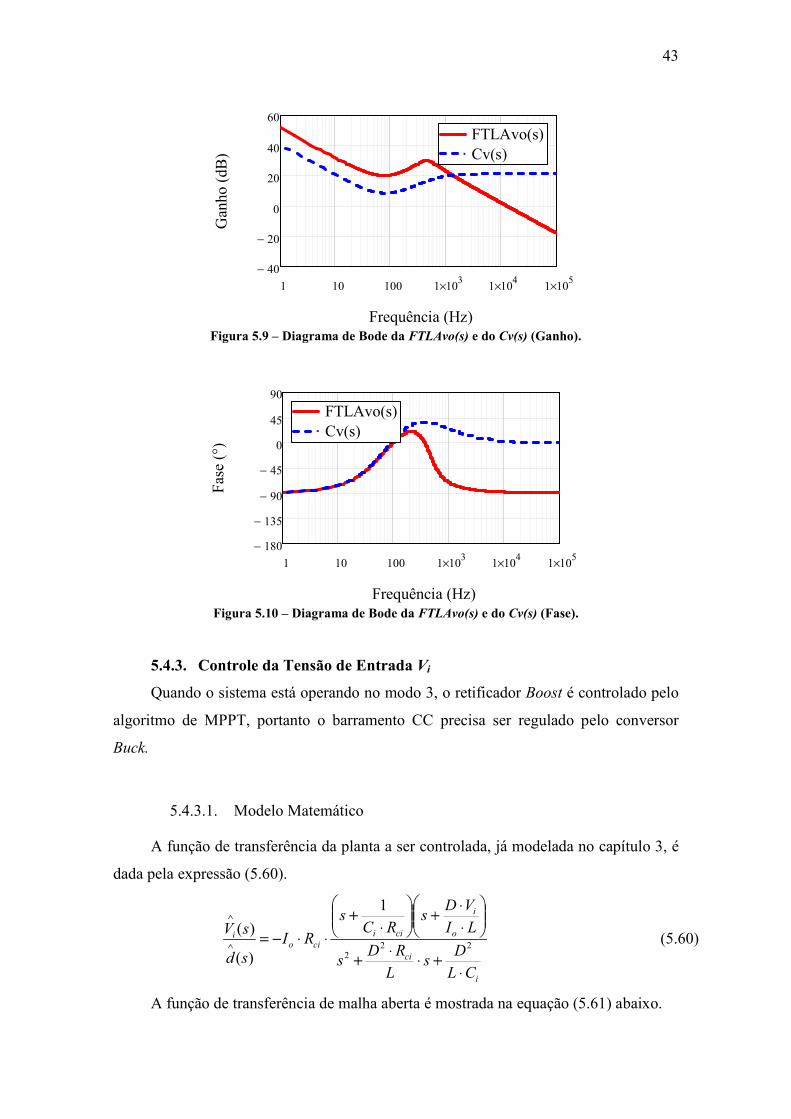
43
1 10 100 1 103
1 104
1 105
40
20
0
20
40
60
FTLAvo(s)Cv(s)
Frequência (Hz)
Gan
ho (
dB)
Figura 5.9 – Diagrama de Bode da FTLAvo(s) e do Cv(s) (Ganho).
1 10 100 1 103
1 104
1 105
180
135
90
45
0
45
90
FTLAvo(s)Cv(s)
Frequência (Hz)
Fas
e (°
)
Figura 5.10 – Diagrama de Bode da FTLAvo(s) e do Cv(s) (Fase).
5.4.3. Controle da Tensão de Entrada Vi
Quando o sistema está operando no modo 3, o retificador Boost é controlado pelo
algoritmo de MPPT, portanto o barramento CC precisa ser regulado pelo conversor
Buck.
5.4.3.1. Modelo Matemático
A função de transferência da planta a ser controlada, já modelada no capítulo 3, é
dada pela expressão (5.60).
i
ci
o
i
cii
cioi
CL
Ds
L
RDs
LI
VDs
RCs
RI
sd
sV22
2
1
)(
)( (5.60)
A função de transferência de malha aberta é mostrada na equação (5.61) abaixo.
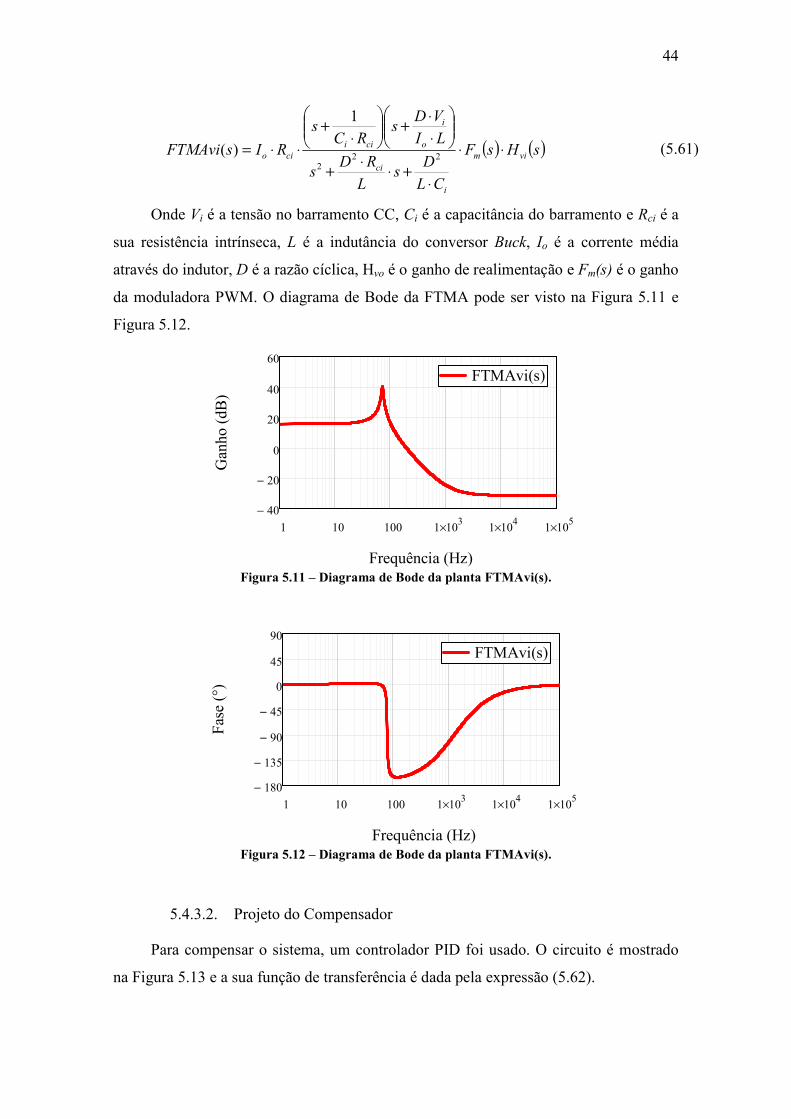
44
sHsF
CL
Ds
L
RDs
LI
VDs
RCs
RIsFTMAvi vim
i
ci
o
i
cii
cio 222
1
)( (5.61)
Onde Vi é a tensão no barramento CC, Ci é a capacitância do barramento e Rci é a
sua resistência intrínseca, L é a indutância do conversor Buck, Io é a corrente média
através do indutor, D é a razão cíclica, Hvo é o ganho de realimentação e Fm(s) é o ganho
da moduladora PWM. O diagrama de Bode da FTMA pode ser visto na Figura 5.11 e
Figura 5.12.
1 10 100 1 103
1 104
1 105
40
20
0
20
40
60
FTMAvi(s)
Frequência (Hz)
Gan
ho (
dB)
Figura 5.11 – Diagrama de Bode da planta FTMAvi(s).
1 10 100 1 103
1 104
1 105
180
135
90
45
0
45
90
FTMAvi(s)
Frequência (Hz)
Fas
e (°
)
Figura 5.12 – Diagrama de Bode da planta FTMAvi(s).
5.4.3.2. Projeto do Compensador
Para compensar o sistema, um controlador PID foi usado. O circuito é mostrado
na Figura 5.13 e a sua função de transferência é dada pela expressão (5.62).
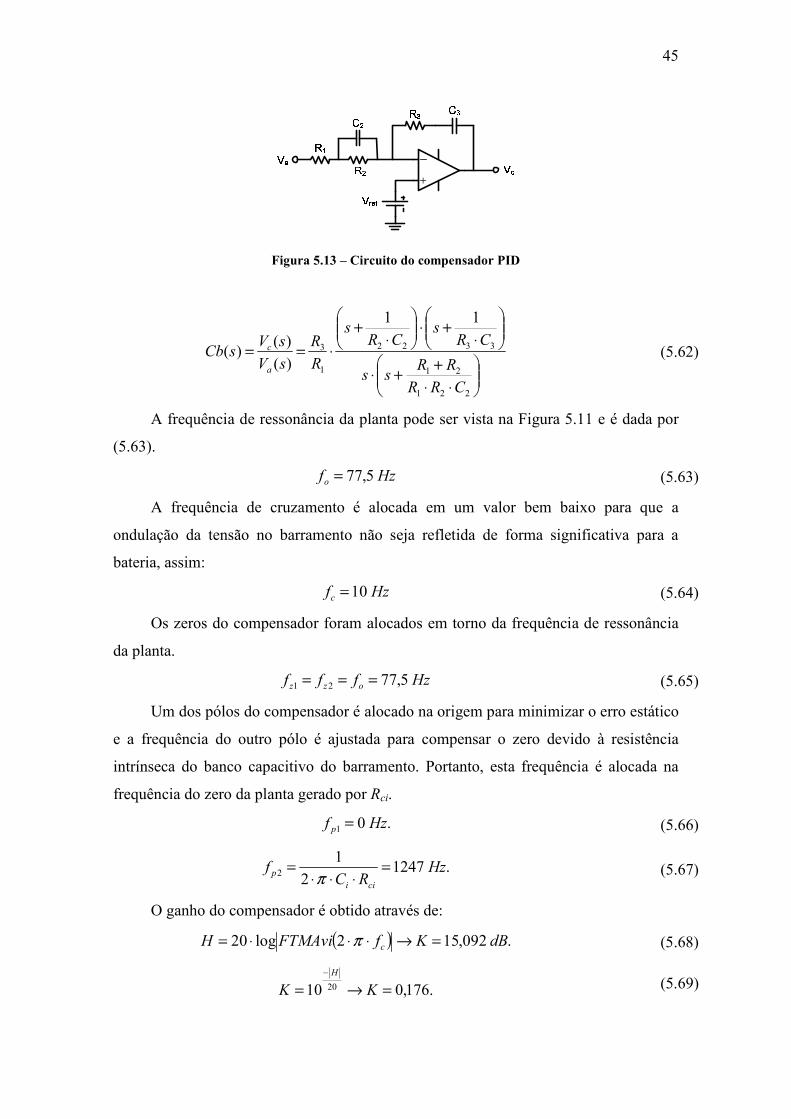
45
Figura 5.13 – Circuito do compensador PID
221
21
3322
1
3
11
)(
)()(
CRR
RRss
CRs
CRs
R
R
sV
sVsCb
a
c (5.62)
A frequência de ressonância da planta pode ser vista na Figura 5.11 e é dada por
(5.63).
Hzfo 5,77 (5.63)
A frequência de cruzamento é alocada em um valor bem baixo para que a
ondulação da tensão no barramento não seja refletida de forma significativa para a
bateria, assim:
Hzfc 10 (5.64)
Os zeros do compensador foram alocados em torno da frequência de ressonância
da planta.
Hzfff ozz 5,7721 (5.65)
Um dos pólos do compensador é alocado na origem para minimizar o erro estático
e a frequência do outro pólo é ajustada para compensar o zero devido à resistência
intrínseca do banco capacitivo do barramento. Portanto, esta frequência é alocada na
frequência do zero da planta gerado por Rci.
.01 Hzf p (5.66)
.12472
12 Hz
RCf
cii
p (5.67)
O ganho do compensador é obtido através de:
.092,152log20 dBKfFTMAviH c (5.68)
.176,010 20 KK
H
(5.69)
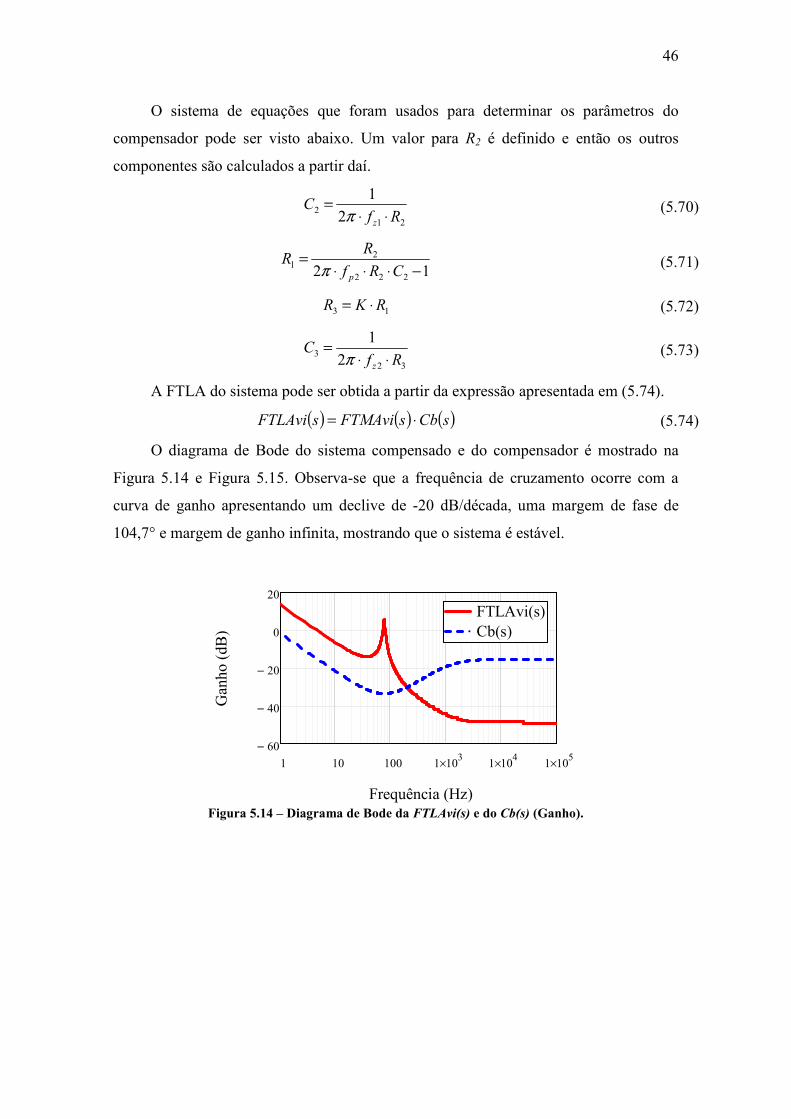
46
O sistema de equações que foram usados para determinar os parâmetros do
compensador pode ser visto abaixo. Um valor para R2 é definido e então os outros
componentes são calculados a partir daí.
212 2
1
RfC
z
(5.70)
12 222
21
CRf
RR
p
(5.71)
13 RKR (5.72)
323 2
1
RfC
z
(5.73)
A FTLA do sistema pode ser obtida a partir da expressão apresentada em (5.74).
sCbsFTMAvisFTLAvi (5.74)
O diagrama de Bode do sistema compensado e do compensador é mostrado na
Figura 5.14 e Figura 5.15. Observa-se que a frequência de cruzamento ocorre com a
curva de ganho apresentando um declive de -20 dB/década, uma margem de fase de
104,7° e margem de ganho infinita, mostrando que o sistema é estável.
1 10 100 1 103
1 104
1 105
60
40
20
0
20
FTLAvi(s)Cb(s)
Frequência (Hz)
Gan
ho (
dB)
Figura 5.14 – Diagrama de Bode da FTLAvi(s) e do Cb(s) (Ganho).
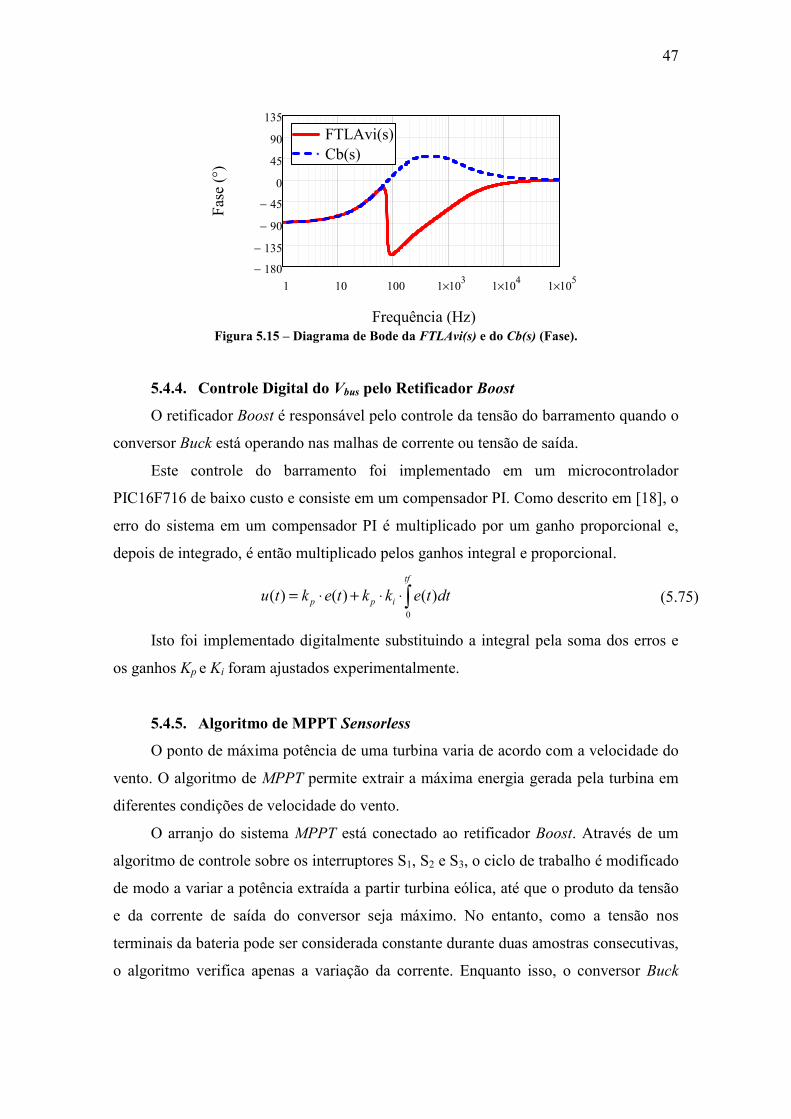
47
1 10 100 1 103
1 104
1 105
180
135
90
45
0
45
90
135
FTLAvi(s)Cb(s)
Frequência (Hz)
Fas
e (°
)
Figura 5.15 – Diagrama de Bode da FTLAvi(s) e do Cb(s) (Fase).
5.4.4. Controle Digital do Vbus pelo Retificador Boost
O retificador Boost é responsável pelo controle da tensão do barramento quando o
conversor Buck está operando nas malhas de corrente ou tensão de saída.
Este controle do barramento foi implementado em um microcontrolador
PIC16F716 de baixo custo e consiste em um compensador PI. Como descrito em [18], o
erro do sistema em um compensador PI é multiplicado por um ganho proporcional e,
depois de integrado, é então multiplicado pelos ganhos integral e proporcional.
0
( ) ( ) ( )tf
p p iu t k e t k k e t dt (5.75)
Isto foi implementado digitalmente substituindo a integral pela soma dos erros e
os ganhos Kp e Ki foram ajustados experimentalmente.
5.4.5. Algoritmo de MPPT Sensorless
O ponto de máxima potência de uma turbina varia de acordo com a velocidade do
vento. O algoritmo de MPPT permite extrair a máxima energia gerada pela turbina em
diferentes condições de velocidade do vento.
O arranjo do sistema MPPT está conectado ao retificador Boost. Através de um
algoritmo de controle sobre os interruptores S1, S2 e S3, o ciclo de trabalho é modificado
de modo a variar a potência extraída a partir turbina eólica, até que o produto da tensão
e da corrente de saída do conversor seja máximo. No entanto, como a tensão nos
terminais da bateria pode ser considerada constante durante duas amostras consecutivas,
o algoritmo verifica apenas a variação da corrente. Enquanto isso, o conversor Buck
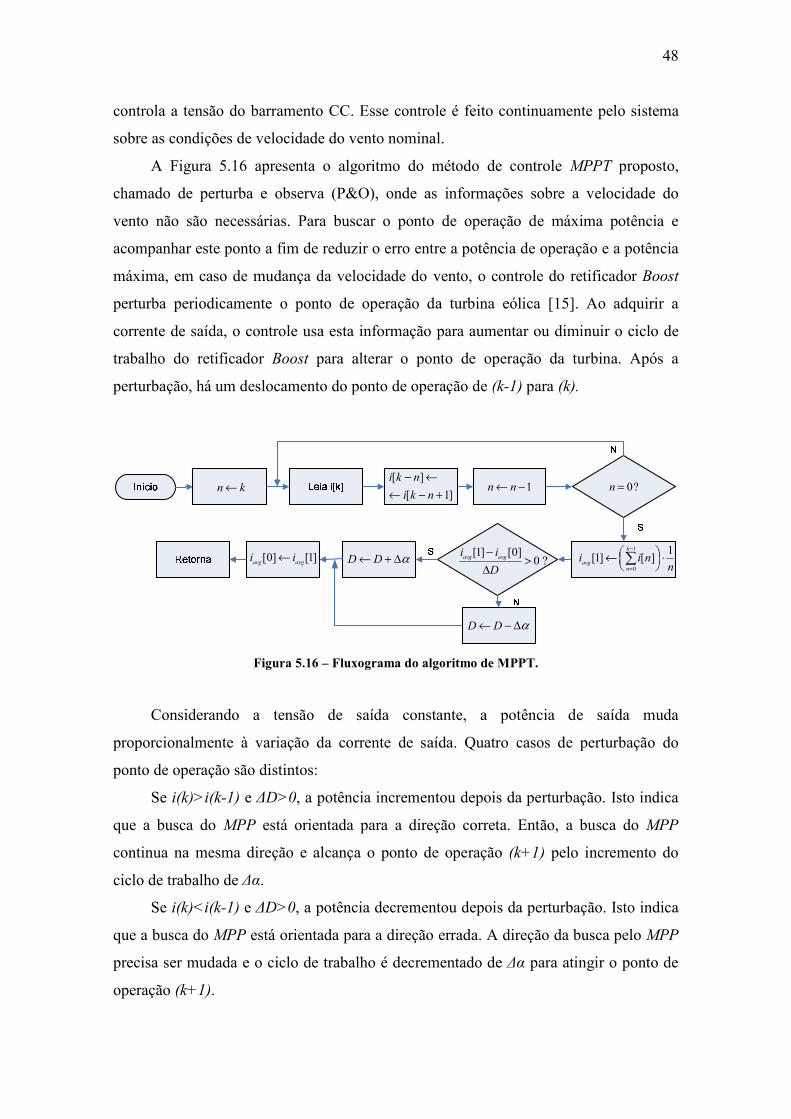
48
controla a tensão do barramento CC. Esse controle é feito continuamente pelo sistema
sobre as condições de velocidade do vento nominal.
A Figura 5.16 apresenta o algoritmo do método de controle MPPT proposto,
chamado de perturba e observa (P&O), onde as informações sobre a velocidade do
vento não são necessárias. Para buscar o ponto de operação de máxima potência e
acompanhar este ponto a fim de reduzir o erro entre a potência de operação e a potência
máxima, em caso de mudança da velocidade do vento, o controle do retificador Boost
perturba periodicamente o ponto de operação da turbina eólica [15]. Ao adquirir a
corrente de saída, o controle usa esta informação para aumentar ou diminuir o ciclo de
trabalho do retificador Boost para alterar o ponto de operação da turbina. Após a
perturbação, há um deslocamento do ponto de operação de (k-1) para (k).
[1] [0]0 ?avg avg
i i
DD D[0] [1]
avg avgi i
1
0
1[1] [ ]
k
avgn
i i nn
D D
1n n[ ]
[ 1]
i k n
i k n0?nn k
Figura 5.16 – Fluxograma do algoritmo de MPPT.
Considerando a tensão de saída constante, a potência de saída muda
proporcionalmente à variação da corrente de saída. Quatro casos de perturbação do
ponto de operação são distintos:
Se i(k)>i(k-1) e D>0, a potência incrementou depois da perturbação. Isto indica
que a busca do MPP está orientada para a direção correta. Então, a busca do MPP
continua na mesma direção e alcança o ponto de operação (k+1) pelo incremento do
ciclo de trabalho de .
Se i(k)<i(k-1) e D>0, a potência decrementou depois da perturbação. Isto indica
que a busca do MPP está orientada para a direção errada. A direção da busca pelo MPP
precisa ser mudada e o ciclo de trabalho é decrementado de para atingir o ponto de
operação (k+1).
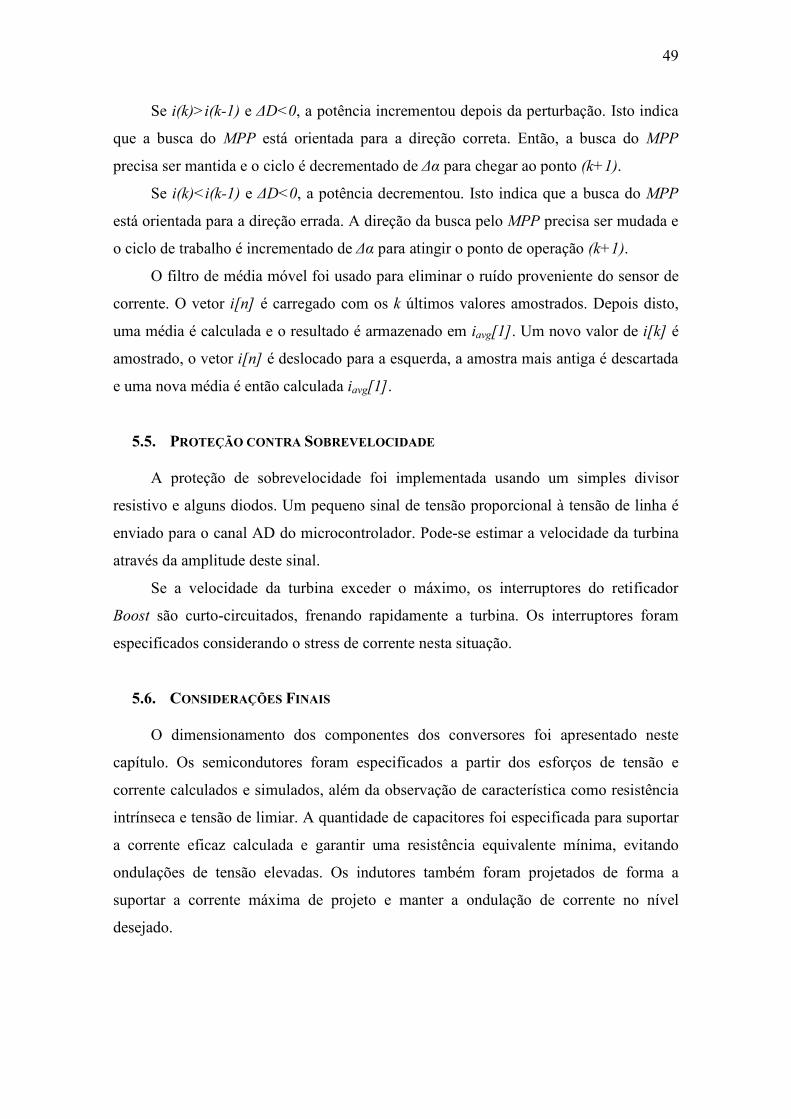
49
Se i(k)>i(k-1) e D<0, a potência incrementou depois da perturbação. Isto indica
que a busca do MPP está orientada para a direção correta. Então, a busca do MPP
precisa ser mantida e o ciclo é decrementado de para chegar ao ponto (k+1).
Se i(k)<i(k-1) e D<0, a potência decrementou. Isto indica que a busca do MPP
está orientada para a direção errada. A direção da busca pelo MPP precisa ser mudada e
o ciclo de trabalho é incrementado de para atingir o ponto de operação (k+1).
O filtro de média móvel foi usado para eliminar o ruído proveniente do sensor de
corrente. O vetor i[n] é carregado com os k últimos valores amostrados. Depois disto,
uma média é calculada e o resultado é armazenado em iavg[1]. Um novo valor de i[k] é
amostrado, o vetor i[n] é deslocado para a esquerda, a amostra mais antiga é descartada
e uma nova média é então calculada iavg[1].
5.5. PROTEÇÃO CONTRA SOBREVELOCIDADE
A proteção de sobrevelocidade foi implementada usando um simples divisor
resistivo e alguns diodos. Um pequeno sinal de tensão proporcional à tensão de linha é
enviado para o canal AD do microcontrolador. Pode-se estimar a velocidade da turbina
através da amplitude deste sinal.
Se a velocidade da turbina exceder o máximo, os interruptores do retificador
Boost são curto-circuitados, frenando rapidamente a turbina. Os interruptores foram
especificados considerando o stress de corrente nesta situação.
5.6. CONSIDERAÇÕES FINAIS
O dimensionamento dos componentes dos conversores foi apresentado neste
capítulo. Os semicondutores foram especificados a partir dos esforços de tensão e
corrente calculados e simulados, além da observação de característica como resistência
intrínseca e tensão de limiar. A quantidade de capacitores foi especificada para suportar
a corrente eficaz calculada e garantir uma resistência equivalente mínima, evitando
ondulações de tensão elevadas. Os indutores também foram projetados de forma a
suportar a corrente máxima de projeto e manter a ondulação de corrente no nível
desejado.
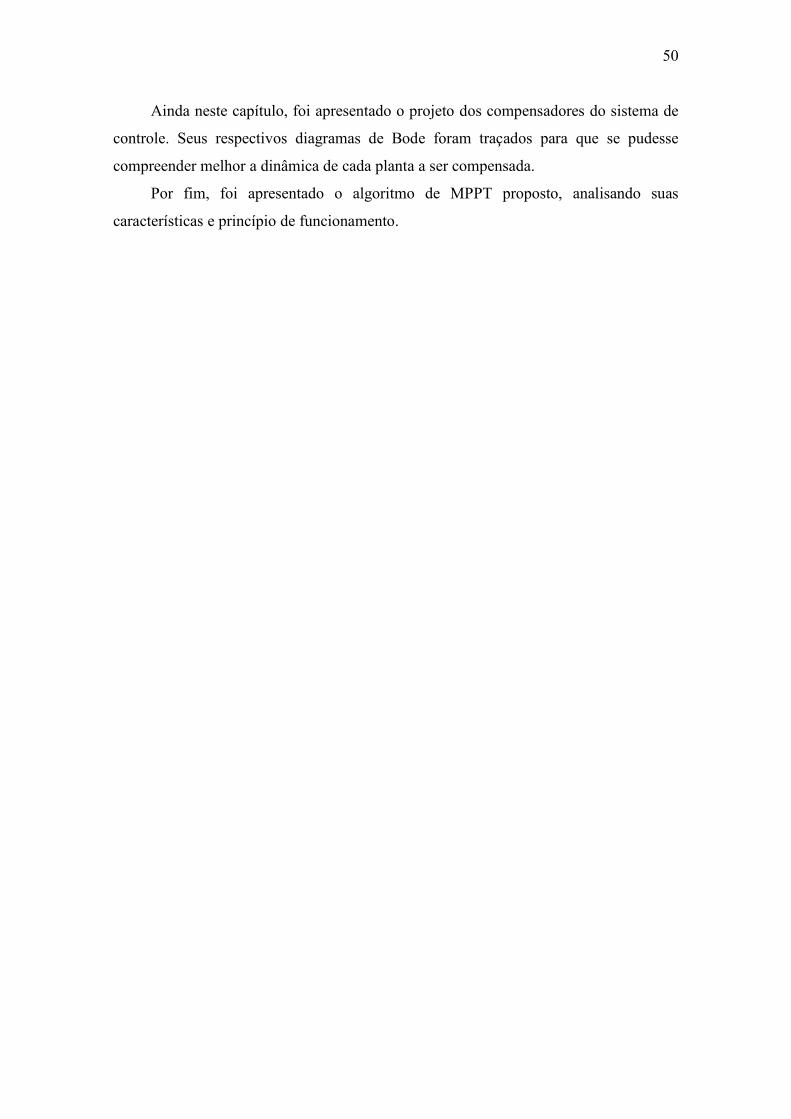
50
Ainda neste capítulo, foi apresentado o projeto dos compensadores do sistema de
controle. Seus respectivos diagramas de Bode foram traçados para que se pudesse
compreender melhor a dinâmica de cada planta a ser compensada.
Por fim, foi apresentado o algoritmo de MPPT proposto, analisando suas
características e princípio de funcionamento.
51
CAPÍTULO 6
RESULTADOS EXPERIMENTAIS
Alguns testes foram realizados a fim de verificar as características de operação do
conversor. O sistema de controle é responsável por controlar a corrente do indutor, a
tensão de saída e a tensão do barramento, de acordo com três modos de operação. Os
resultados destes três modos são apresentados a seguir.
6.1. MODO 1: MALHA DE TENSÃO
Neste teste, a tensão do barramento é Vbus = 65 V. A Figura 6.1 mostra as formas
de onda para saída conectada a uma bateria, enquanto a Figura 6.2 para duas baterias em
série.
Figura 6.1 - Forma de onda do conversor Buck
operando no modo 1 para uma bateria na saída.
(Tensão de saída – 10V/div – canal 1)
(Tensão sobre o interruptor – 50V/div – canal 2)
(Corrente através do indutor – 10A/div – canal 3)
Figura 6.2 - Forma de onda do conversor Buck
operando no modo 1 para duas baterias na saída.
(Tensão de saída – 10V/div – canal 1)
(Tensão sobre o interruptor – 50V/div – canal 2)
(Corrente através do indutor – 5A/div – canal 3)
No canal 1, pode-se observar a forma de onda da tensão de saída. As tensões
médias são Vout = 14,3 V e Vout = 28,1 V. No canal 2, as formas de onda de tensão sobre
o interruptor do conversor Buck são mostradas e possuem 65 V de amplitude. As
correntes através do indutor do conversor Buck podem ser vistas no canal 3, tendo como
valores médios 13,7 A e 11,4 A, respectivamente. Pode-se perceber a presença de uma
baixa ondulação, o que é recomendado para carregamento de baterias.
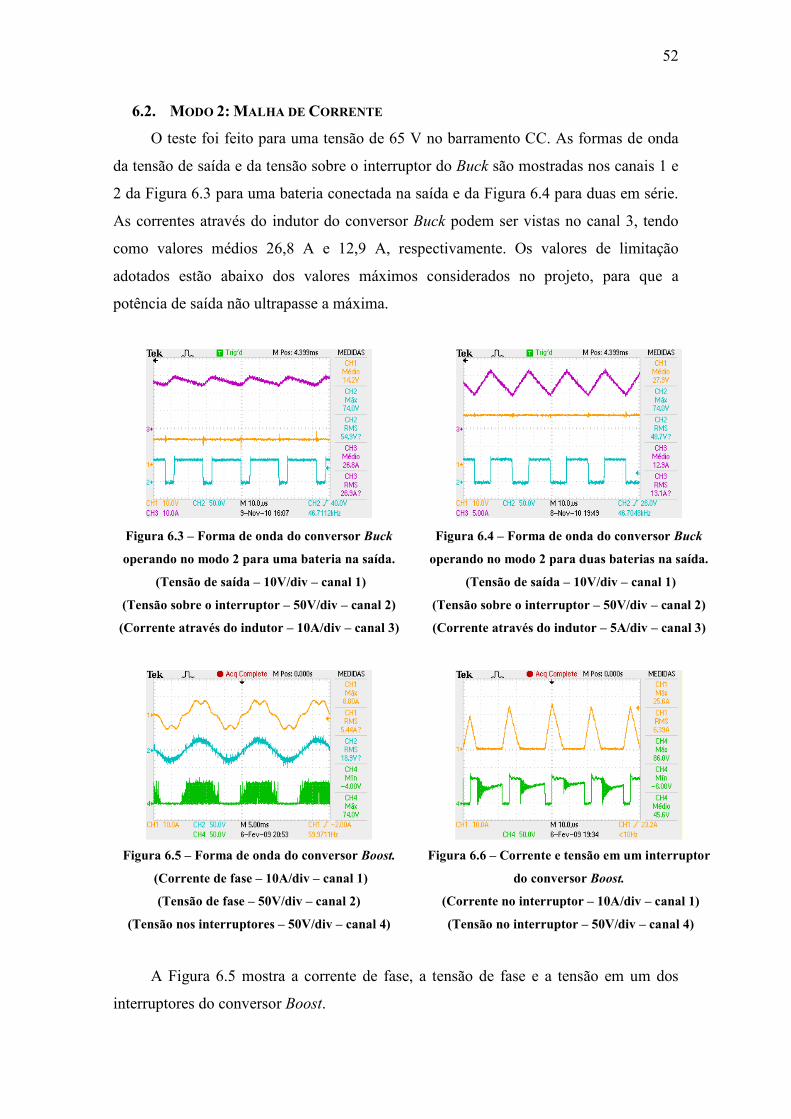
52
6.2. MODO 2: MALHA DE CORRENTE
O teste foi feito para uma tensão de 65 V no barramento CC. As formas de onda
da tensão de saída e da tensão sobre o interruptor do Buck são mostradas nos canais 1 e
2 da Figura 6.3 para uma bateria conectada na saída e da Figura 6.4 para duas em série.
As correntes através do indutor do conversor Buck podem ser vistas no canal 3, tendo
como valores médios 26,8 A e 12,9 A, respectivamente. Os valores de limitação
adotados estão abaixo dos valores máximos considerados no projeto, para que a
potência de saída não ultrapasse a máxima.
Figura 6.3 – Forma de onda do conversor Buck
operando no modo 2 para uma bateria na saída.
(Tensão de saída – 10V/div – canal 1)
(Tensão sobre o interruptor – 50V/div – canal 2)
(Corrente através do indutor – 10A/div – canal 3)
Figura 6.4 – Forma de onda do conversor Buck
operando no modo 2 para duas baterias na saída.
(Tensão de saída – 10V/div – canal 1)
(Tensão sobre o interruptor – 50V/div – canal 2)
(Corrente através do indutor – 5A/div – canal 3)
Figura 6.5 – Forma de onda do conversor Boost.
(Corrente de fase – 10A/div – canal 1)
(Tensão de fase – 50V/div – canal 2)
(Tensão nos interruptores – 50V/div – canal 4)
Figura 6.6 – Corrente e tensão em um interruptor
do conversor Boost.
(Corrente no interruptor – 10A/div – canal 1)
(Tensão no interruptor – 50V/div – canal 4)
A Figura 6.5 mostra a corrente de fase, a tensão de fase e a tensão em um dos
interruptores do conversor Boost.
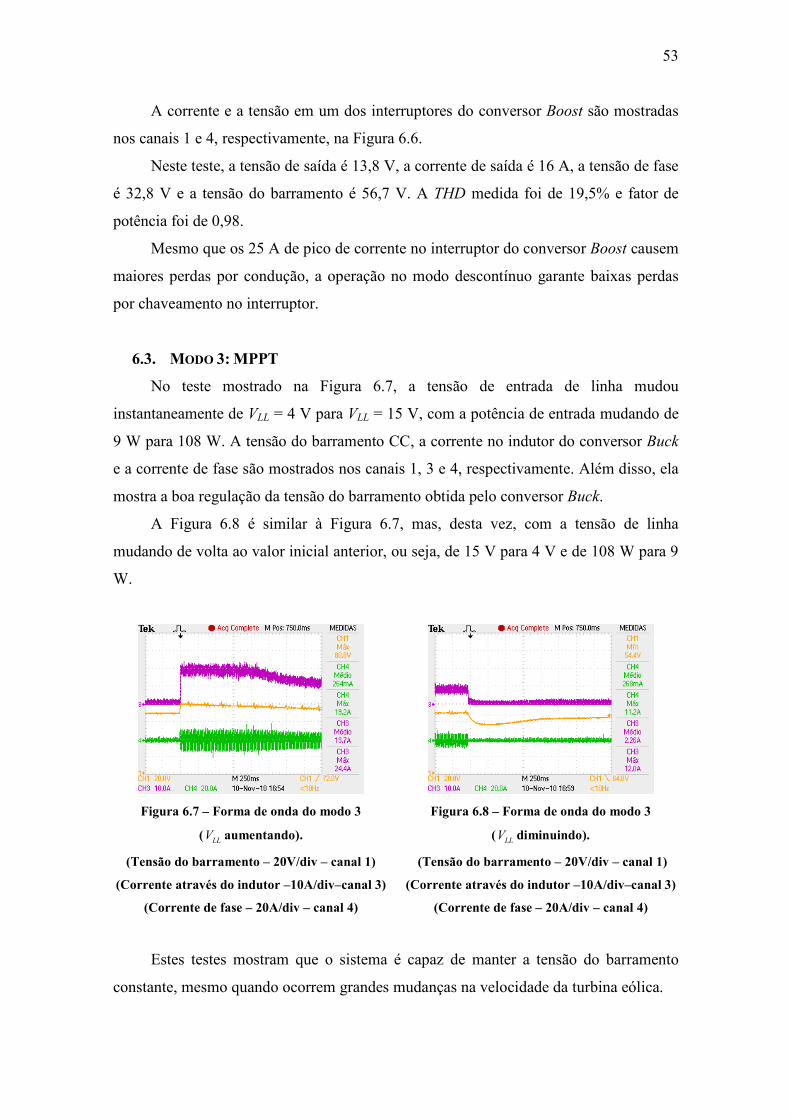
53
A corrente e a tensão em um dos interruptores do conversor Boost são mostradas
nos canais 1 e 4, respectivamente, na Figura 6.6.
Neste teste, a tensão de saída é 13,8 V, a corrente de saída é 16 A, a tensão de fase
é 32,8 V e a tensão do barramento é 56,7 V. A THD medida foi de 19,5% e fator de
potência foi de 0,98.
Mesmo que os 25 A de pico de corrente no interruptor do conversor Boost causem
maiores perdas por condução, a operação no modo descontínuo garante baixas perdas
por chaveamento no interruptor.
6.3. MODO 3: MPPT
No teste mostrado na Figura 6.7, a tensão de entrada de linha mudou
instantaneamente de VLL = 4 V para VLL = 15 V, com a potência de entrada mudando de
9 W para 108 W. A tensão do barramento CC, a corrente no indutor do conversor Buck
e a corrente de fase são mostrados nos canais 1, 3 e 4, respectivamente. Além disso, ela
mostra a boa regulação da tensão do barramento obtida pelo conversor Buck.
A Figura 6.8 é similar à Figura 6.7, mas, desta vez, com a tensão de linha
mudando de volta ao valor inicial anterior, ou seja, de 15 V para 4 V e de 108 W para 9
W.
Figura 6.7 – Forma de onda do modo 3
(LL
V aumentando).
(Tensão do barramento – 20V/div – canal 1)
(Corrente através do indutor –10A/div–canal 3)
(Corrente de fase – 20A/div – canal 4)
Figura 6.8 – Forma de onda do modo 3
(LL
V diminuindo).
(Tensão do barramento – 20V/div – canal 1)
(Corrente através do indutor –10A/div–canal 3)
(Corrente de fase – 20A/div – canal 4)
Estes testes mostram que o sistema é capaz de manter a tensão do barramento
constante, mesmo quando ocorrem grandes mudanças na velocidade da turbina eólica.
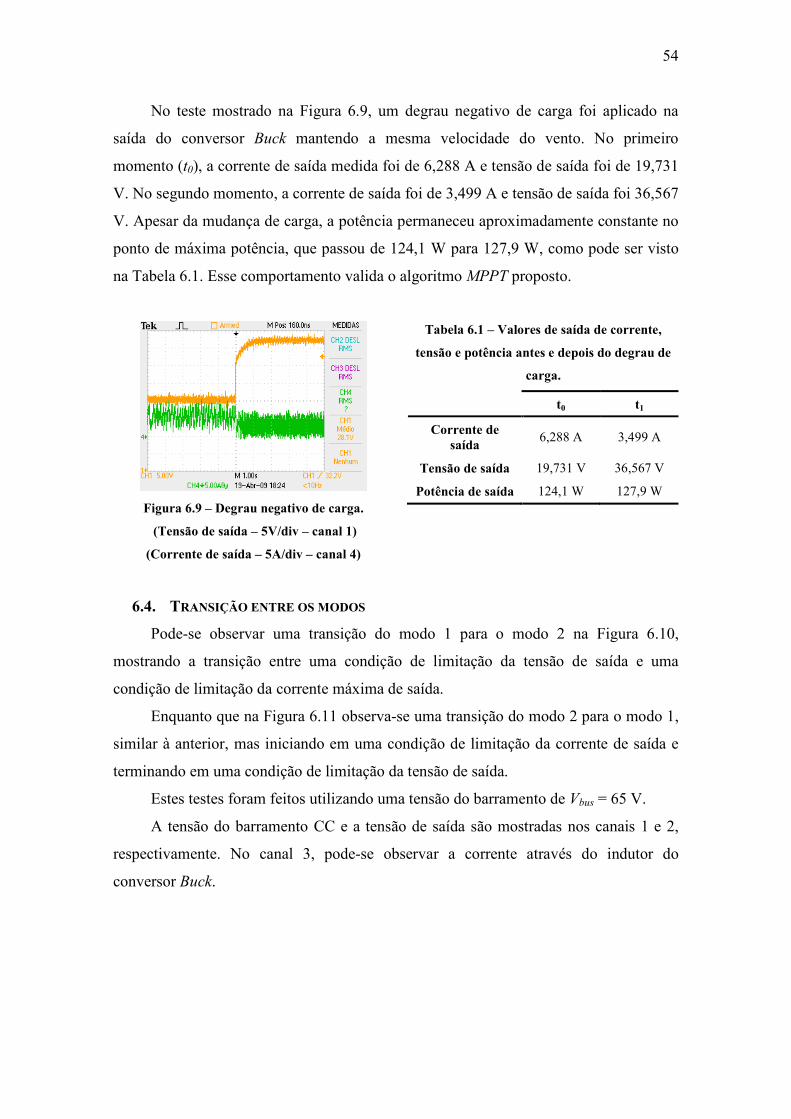
54
No teste mostrado na Figura 6.9, um degrau negativo de carga foi aplicado na
saída do conversor Buck mantendo a mesma velocidade do vento. No primeiro
momento (t0), a corrente de saída medida foi de 6,288 A e tensão de saída foi de 19,731
V. No segundo momento, a corrente de saída foi de 3,499 A e tensão de saída foi 36,567
V. Apesar da mudança de carga, a potência permaneceu aproximadamente constante no
ponto de máxima potência, que passou de 124,1 W para 127,9 W, como pode ser visto
na Tabela 6.1. Esse comportamento valida o algoritmo MPPT proposto.
Figura 6.9 – Degrau negativo de carga.
(Tensão de saída – 5V/div – canal 1)
(Corrente de saída – 5A/div – canal 4)
Tabela 6.1 – Valores de saída de corrente,
tensão e potência antes e depois do degrau de
carga.
t0 t1
Corrente de saída
6,288 A 3,499 A
Tensão de saída 19,731 V 36,567 V
Potência de saída 124,1 W 127,9 W
6.4. TRANSIÇÃO ENTRE OS MODOS
Pode-se observar uma transição do modo 1 para o modo 2 na Figura 6.10,
mostrando a transição entre uma condição de limitação da tensão de saída e uma
condição de limitação da corrente máxima de saída.
Enquanto que na Figura 6.11 observa-se uma transição do modo 2 para o modo 1,
similar à anterior, mas iniciando em uma condição de limitação da corrente de saída e
terminando em uma condição de limitação da tensão de saída.
Estes testes foram feitos utilizando uma tensão do barramento de Vbus = 65 V.
A tensão do barramento CC e a tensão de saída são mostradas nos canais 1 e 2,
respectivamente. No canal 3, pode-se observar a corrente através do indutor do
conversor Buck.
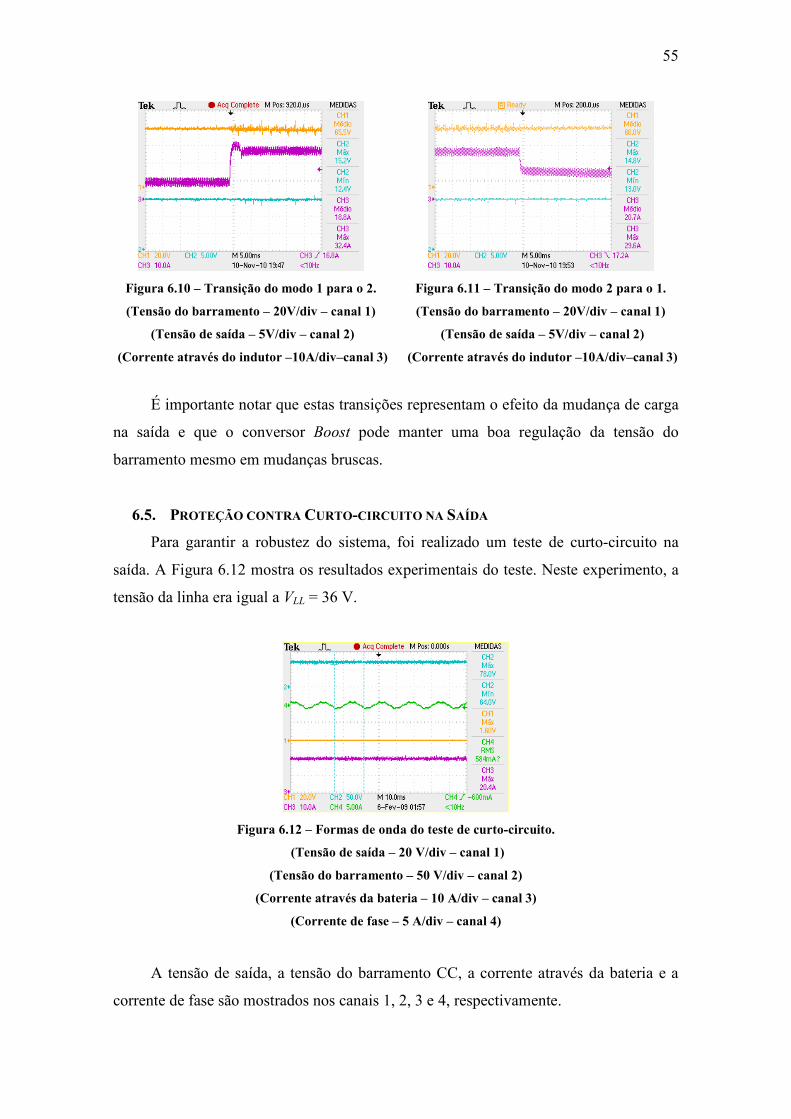
55
Figura 6.10 – Transição do modo 1 para o 2.
(Tensão do barramento – 20V/div – canal 1)
(Tensão de saída – 5V/div – canal 2)
(Corrente através do indutor –10A/div–canal 3)
Figura 6.11 – Transição do modo 2 para o 1.
(Tensão do barramento – 20V/div – canal 1)
(Tensão de saída – 5V/div – canal 2)
(Corrente através do indutor –10A/div–canal 3)
É importante notar que estas transições representam o efeito da mudança de carga
na saída e que o conversor Boost pode manter uma boa regulação da tensão do
barramento mesmo em mudanças bruscas.
6.5. PROTEÇÃO CONTRA CURTO-CIRCUITO NA SAÍDA
Para garantir a robustez do sistema, foi realizado um teste de curto-circuito na
saída. A Figura 6.12 mostra os resultados experimentais do teste. Neste experimento, a
tensão da linha era igual a VLL = 36 V.
Figura 6.12 – Formas de onda do teste de curto-circuito.
(Tensão de saída – 20 V/div – canal 1)
(Tensão do barramento – 50 V/div – canal 2)
(Corrente através da bateria – 10 A/div – canal 3)
(Corrente de fase – 5 A/div – canal 4)
A tensão de saída, a tensão do barramento CC, a corrente através da bateria e a
corrente de fase são mostrados nos canais 1, 2, 3 e 4, respectivamente.
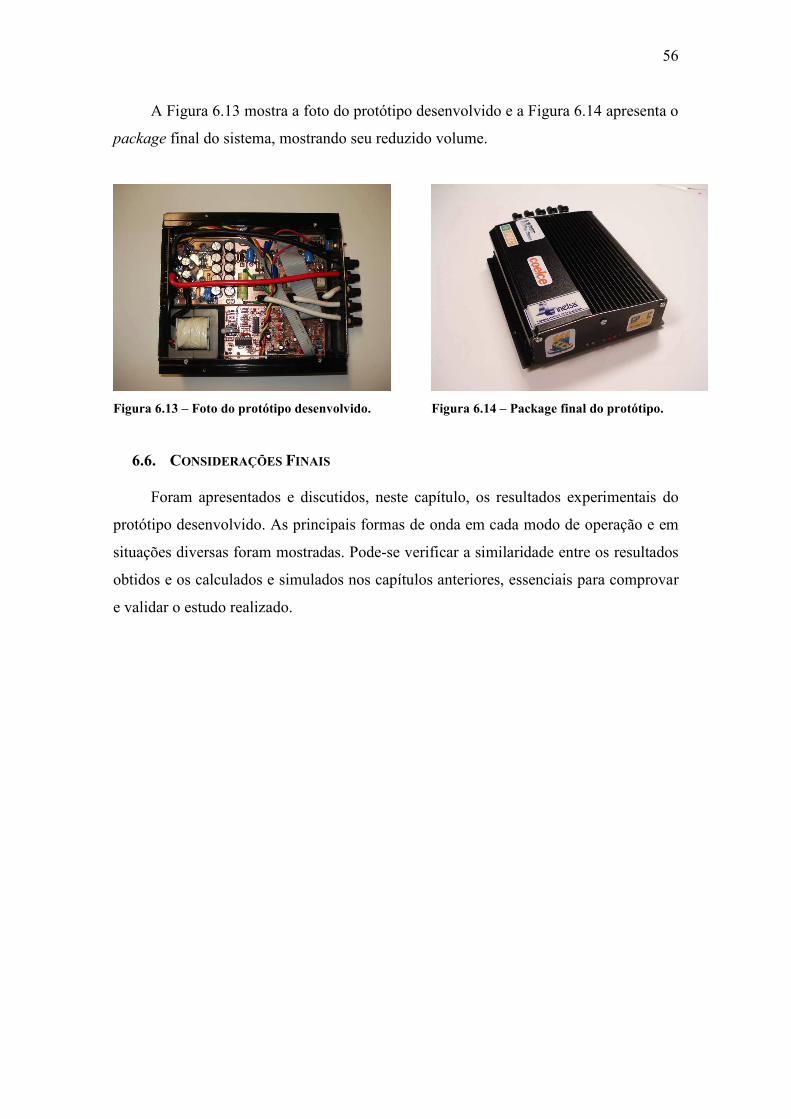
56
A Figura 6.13 mostra a foto do protótipo desenvolvido e a Figura 6.14 apresenta o
package final do sistema, mostrando seu reduzido volume.
Figura 6.13 – Foto do protótipo desenvolvido.
Figura 6.14 – Package final do protótipo.
6.6. CONSIDERAÇÕES FINAIS
Foram apresentados e discutidos, neste capítulo, os resultados experimentais do
protótipo desenvolvido. As principais formas de onda em cada modo de operação e em
situações diversas foram mostradas. Pode-se verificar a similaridade entre os resultados
obtidos e os calculados e simulados nos capítulos anteriores, essenciais para comprovar
e validar o estudo realizado.
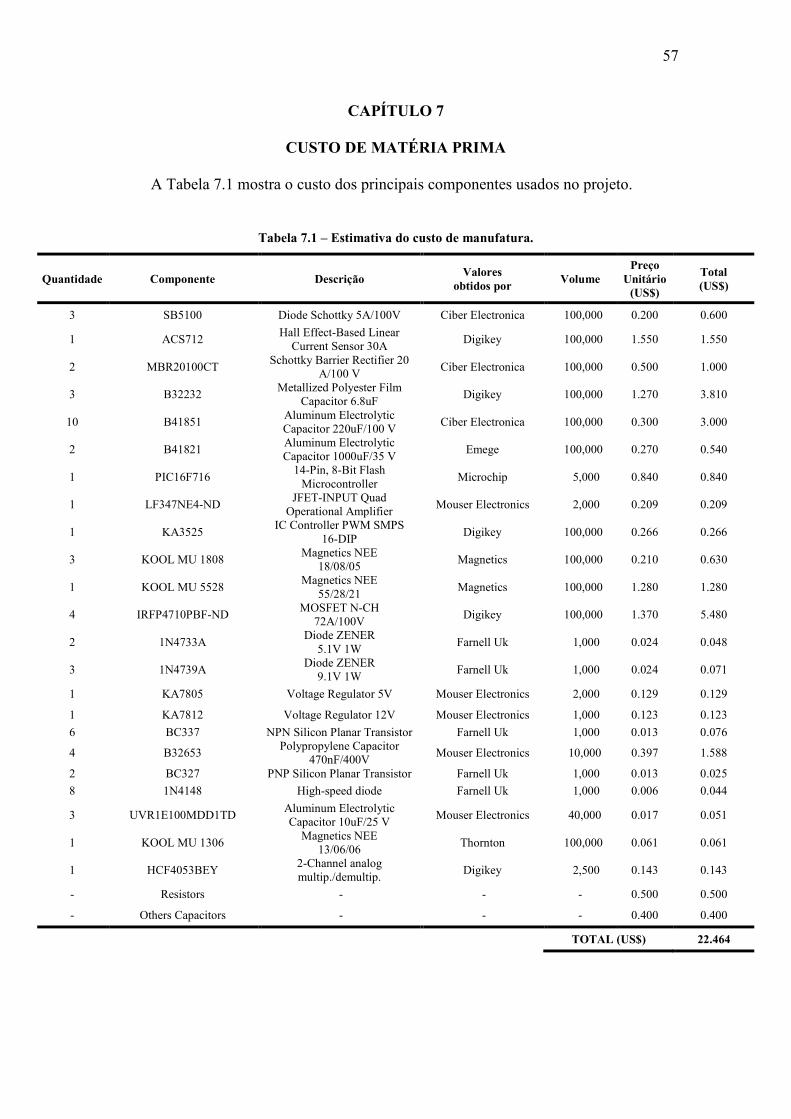
57
CAPÍTULO 7
CUSTO DE MATÉRIA PRIMA
A Tabela 7.1 mostra o custo dos principais componentes usados no projeto.
Tabela 7.1 – Estimativa do custo de manufatura.
Quantidade Componente Descrição Valores
obtidos por Volume
Preço Unitário (US$)
Total (US$)
3 SB5100 Diode Schottky 5A/100V Ciber Electronica 100,000 0.200 0.600
1 ACS712 Hall Effect-Based Linear
Current Sensor 30A Digikey 100,000 1.550 1.550
2 MBR20100CT Schottky Barrier Rectifier 20
A/100 V Ciber Electronica 100,000 0.500 1.000
3 B32232 Metallized Polyester Film
Capacitor 6.8uF Digikey 100,000 1.270 3.810
10 B41851 Aluminum Electrolytic Capacitor 220uF/100 V
Ciber Electronica 100,000 0.300 3.000
2 B41821 Aluminum Electrolytic Capacitor 1000uF/35 V
Emege 100,000 0.270 0.540
1 PIC16F716 14-Pin, 8-Bit Flash
Microcontroller Microchip 5,000 0.840 0.840
1 LF347NE4-ND JFET-INPUT Quad
Operational Amplifier Mouser Electronics 2,000 0.209 0.209
1 KA3525 IC Controller PWM SMPS
16-DIP Digikey 100,000 0.266 0.266
3 KOOL MU 1808 Magnetics NEE
18/08/05 Magnetics 100,000 0.210 0.630
1 KOOL MU 5528 Magnetics NEE
55/28/21 Magnetics 100,000 1.280 1.280
4 IRFP4710PBF-ND MOSFET N-CH
72A/100V Digikey 100,000 1.370 5.480
2 1N4733A Diode ZENER
5.1V 1W Farnell Uk 1,000 0.024 0.048
3 1N4739A Diode ZENER
9.1V 1W Farnell Uk 1,000 0.024 0.071
1 KA7805 Voltage Regulator 5V Mouser Electronics 2,000 0.129 0.129
1 KA7812 Voltage Regulator 12V Mouser Electronics 1,000 0.123 0.123
6 BC337 NPN Silicon Planar Transistor Farnell Uk 1,000 0.013 0.076
4 B32653 Polypropylene Capacitor
470nF/400V Mouser Electronics 10,000 0.397 1.588
2 BC327 PNP Silicon Planar Transistor Farnell Uk 1,000 0.013 0.025
8 1N4148 High-speed diode Farnell Uk 1,000 0.006 0.044
3 UVR1E100MDD1TD Aluminum Electrolytic Capacitor 10uF/25 V
Mouser Electronics 40,000 0.017 0.051
1 KOOL MU 1306 Magnetics NEE
13/06/06 Thornton 100,000 0.061 0.061
1 HCF4053BEY 2-Channel analog multip./demultip.
Digikey 2,500 0.143 0.143
- Resistors - - - 0.500 0.500
- Others Capacitors - - - 0.400 0.400
TOTAL (US$) 22.464
58
CONCLUSÃO GERAL
Neste trabalho, foi apresentado um carregador de baterias composto por dois
conversores estáticos associados, tendo como fonte primária de energia um gerador
eólio-elétrico.
Foi feita uma breve revisão bibliográfica, apresentando as topologias clássicas
aplicadas à geração eólica de pequeno porte e suas principais características. A partir
das necessidades encontradas nestas topologias, como a ausência de transferência de
potência para baixas velocidades do vento ou a necessidade de um barramento de tensão
de saída elevado, foi proposto um sistema capaz de suprir esses pontos, além de
apresentar uma série de características positivas para a aplicação.
Os testes em laboratório mostraram que este conversor pode processar a potência
requerida com alto rendimento, alto fator de potência e baixo THD de corrente, o que
incrementa a eficiência do sistema. O circuito permite controlar a tensão e corrente na
bateria, permitindo o desenvolvimento de uma boa estratégia de controle e evitando
sobretensão e sobrecarga da bateria.
O retificador Boost permite operar em uma ampla faixa de velocidades do vento,
até mesmo em baixas velocidades, permite que o sistema não necessite de cargas de
emergência para proteger a turbina eólica contra rajadas de vento (acima de 12,5 m/s),
como as topologias convencionais requerem. O sistema pode operar com tensões de
saída de 12 V ou 24 V, através da ação do microcontrolador.
O package do sistema funciona como um dissipador dos semicondutores do
conversor. Assim, ele é naturalmente resfriado. Os modos de operação podem ser
identificados pelo usuário através dos leds de interface.
A transferência da máxima potência disponível no vento foi feita por um
algoritmo de MPPT sensorless do tipo P&O implementado no retificador Boost. Foi
proposto um método de controle otimizado, onde o conhecimento prévio da curva de
máxima potencia da turbina eólica e a medida da velocidade do vento não são
requeridos. A única informação necessária é o valor da corrente de saída.
Apesar das várias qualidades aqui apresentadas, algumas melhorias ainda
necessitam ser implementadas. Portanto, como proposta de trabalhos futuros, sugere-se:
Implementar todo o sistema de controle de forma discreta, para que seja
possível aumentar e consequentemente, melhorar o desempenho dinâmico
do sistema.
59
Implementar um controle de tensão do barramento com referencia
variável. Para baixas velocidades do vento, a referência do compensador
seria decrementada, diminuindo o ganho estático e assim, reduzindo as
perdas totais do sistema.
A pesquisa realizada durante o período de execução do projeto foi detalhada
qualitativamente neste relatório de modo a garantir a consistência do tema proposto.
Durante o projeto, foram desenvolvidas as análises qualitativas e quantitativas, bem
como a implementação do protótipo experimental.
60
PATENTE, PUBLICAÇÕES E PRÊMIOS OBTIDOS
Em função das informações obtidas pelas análises e ensaios do protótipo, o
trabalho teve aceitação em grandes congressos nacionais, tais como CBENS 2008
(Congresso Brasileiro de Energia Solar 2008) e COBEP 2009 (Congresso Brasileiro de
Eletrônica de Potência 2009) e internacionais como IECON 2009 (35th Annual
Conference of the IEEE Industrial Electronics Society) e APEC 2009 (The 2009
Applied Power Electronics Conference and Exposition - Washington, D.C. – EUA).
Além disso, o protótipo recebeu o prêmio “INNOVATIVE TECHNICAL
APPROACH AWARD”, concedido pelo IEEE, o que ressalta a característica inovadora
do mesmo. Além de ter sido congratulado com o primeiro lugar do Prêmio Santander de
Ciência e de Inovação 2009 na categoria Indústria e com o Prêmio Geração Inova 2009,
concedidos pelo grupo Santander e pela Coelce, respectivamente. E ainda, mais
recentemente, o projeto foi parte integrante da proposta contemplada com o primeiro
lugar na XXIV edição do Prêmio Jovem Cientista realizado pelo CNPq em parceria com
a Fundação Roberto Marinho e com a Gerdau.
Foi feito o pedido de depósito de patente no INPI e espera-se, com a pesquisa
desenvolvida, a viabilização do uso extensivo de sistemas aerogeradores de pequeno
porte para geração distribuída. Além do ganho ambiental, a comercialização de tais
sistemas é uma ótima oportunidade para indústria nacional e para geração de empregos
no país.
61
REFERÊNCIAS
[1] Oliveira Filho, H. M., “Conversor Estático de Três Estágios para Carregamento de
Baterias a partir de Sistemas Eólicos”, Universidade federal do Ceará – UFC, 2010,
165p.
[2] Nunes, M.A.V., “Combustíveis e Recursos Renováveis”, Conferência proferida na
Câmera dos Deputados, Simpósio Nacional sobre Fontes Convencionais e
Alternativas de Energia, 5-28 de junho de 1979, Brasília, pp. 530-547.
[3] R.P.S. Leão, T. Degner, F.L.M. Antunes, “An overview on the integration of large-
scale wind power into the electric power system”, in "International Conference on
Renewable Energies And Power Quality (ICREPQ'07), Sevilla, Spain, Paper
number 338, 2007.
[4] Atlas Solarimétrico do Brasil, CRESESB.
[5] Atlas do Potencial Eólico Brasileiro, CRESESB.
[6] http://www.ambientebrasil.com.br/composer.php3?base=./energia/index.html&cont
eudo=./energia/artigos/energiaeolica_eletricidade.html, último acesso em 10 de
setembro de 2009.
[7] de Freitas, L.C.G.; Simoes, M.G.; Canesin, C.A.; de Freitas, L.C. “Performance
Evaluation of a Novel Hybrid Multipulse Rectifier for Utility Interface of Power
Electronic Converters”. Eletrônica de Potência - Vol.54 , issue 6, December, 2007,
pp 3030-3041.
[8] Mohan, Ned; Undeland, Tore M. & Robbins, William P."Power Eletronics:
Converters, Applications and Design". 2nd Edition. John Wiley and Sons, Inc.
1995.
[9] Demercil S. Oliveira Jr. & Luis C. Tomaselli. “Estudo de um conversor CC-CC
buck-boost”. Instituto de Eletrônica de Potência – INEP. Universidade Federal de
Santa Catarina – UFSC.
[10] Oliveira, D. S.; Rangel, A. R.; Queiroz, D. L.; de Oliveira, E. F.; de Sousa, G. J.
M.; dos Santos, L. P. C.; Fontenele, L. F. A.; Bezerra, P. A. M. “Low Cost and
High Efficiency Static Converter for Small Wind Systems” in Industrial
Electronics, 2009. IECON '09. 35th Annual Conference of IEEE, pp. 601-608,
Porto, Nov. 2009.
62
[11] D. Oliveira; R. Bascopé; M. Reis; L. Barreto; B. Soares; E. Freitas. "A Variable
Speed Wind Energy Conversion System Connected To The Grid For Small Wind
Generator". The Applied Power Electronics Conference and Exposition, 2008.
[12] C.L. Kana; M. Thamodharan and A. Wolf; “System management of a wind-energy
converter”, IEEE Tran. Power Elec, Vol.16, Issue 3, pp. 375 – 381, May 2001.
[13] Abo-Khalil, Ahmed G. and Lee, Dong-Choon, “MPPT Control of Wind Generation
Systems Based on Estimated Wind Speed Using SVR”, IEEE Trans. Ind. Appl.,vol.
55, no. 3, pp. 1489-1490, Mar. 2008.
[14] K. Tan and S. Islam, “Optimum control strategies in energy conversion of PMSG
wind turbine system without mechanical sensors,” IEEE Trans. Energy Convers.,
vol. 19, no. 2, pp. 392–399, Jun. 2004.
[15] S. Bhowmik, R. Spee, and J. H. R. Enslin, “Performance optimization for doubly
fed wind power generation systems,” IEEE Trans. Ind. Appl.,vol. 35, no. 4, pp.
949–958, Jul./Aug. 1999.
[16] T. Tafticht, K. Agbossou and A. Chériti, “DC bus control of variable speed wind
turbine using a Buck-Boost converter”, Power Engineering Society (PES) - IEEE,
vol. X, Montreal (Quebec), Canada, June 18-20, 2006.
[17] Daher, S. "Um Sistema Baseado em Gerador de Indução Trifásico para
Aproveitamento da Energia Eólica". Universidade Federal do Ceará. 1997.
[18] Mello, L. F. P., “Análise e Projeto de Fontes Chaveadas”, 1ª Ed., São Paulo: Érica,
1996.
[19] D. S. Oliveira Jr.; I. R. Machado; M. M. Reis; L. H. S. C. Barreto; H. M. Oliveira
Filho. "A Small Size Wind Generation System For Battery Charging", in
International Conference on Renewable Energies and Power Quality, ICREPQ'07,
2007 March, Number 303, 4 pages.
[20] Baterias Moura, “Manual de operação do acumulador Moura Clean”,
http://www.moura.com.br, acesso em 01/10/2009.