-
UNIVERSITÀ DEGLI STUDI DI PAVIAFACOLTÀ DI SCIENZE MM. FF.
NN.
Dipartimento di Matematica
Alcuni risultati sulla
Teoria di Morse
Relatore:
Dott.ssa Paola Frediani
Tesi di Laurea di
Luca Calatroni
Anno Accademico 2008/2009
-
Indice
Introduzione 2
1 Concetti e risultati preliminari 41.1 Omotopia e gruppo
fondamentale . . . . . . . . . . . . . . . . . . . . . . 4
1.1.1 Omotopia di applicazioni continue . . . . . . . . . . . .
. . . . . 41.1.2 Il gruppo fondamentale . . . . . . . . . . . . . .
. . . . . . . . . 6
1.2 Omologia . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 81.2.1 Omologia singolare . . . . . . . . . . . .
. . . . . . . . . . . . . . 91.2.2 Sequenze esatte e scissione . .
. . . . . . . . . . . . . . . . . . . . 12
1.3 CW-complessi . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 131.3.1 De�nizione, esempi e prime proprietà . .
. . . . . . . . . . . . . . 131.3.2 Omologia cellulare e
CW-complessi . . . . . . . . . . . . . . . . . 15
2 Punti critici, funzioni di Morse e di�eomor�smi 192.1
De�nizioni preliminari . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 192.2 Un primo risultato: il lemma di Morse . . . . . .
. . . . . . . . . . . . . 212.3 Esistenza di funzioni di Morse . .
. . . . . . . . . . . . . . . . . . . . . . 232.4 Gruppi ad un
parametro di di�eomor�smi . . . . . . . . . . . . . . . . . 28
3 Omotopia e valori critici 303.1 Funzioni di Morse e omotopia .
. . . . . . . . . . . . . . . . . . . . . . . 303.2 Equivalenza a
CW-complessi . . . . . . . . . . . . . . . . . . . . . . . . 36
4 Le disuguaglianze di Morse 394.1 Disuguaglianze in forma
debole . . . . . . . . . . . . . . . . . . . . . . . 414.2
Disuguaglianze in forma forte . . . . . . . . . . . . . . . . . . .
. . . . . 41
5 Applicazioni ed esempi 445.1 Teorema di Reeb . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 445.2 Gruppi di
omologia di CPn . . . . . . . . . . . . . . . . . . . . . . . . .
455.3 Studio della funzione altezza de�nita sul Toro . . . . . . .
. . . . . . . . 46
Bibliogra�a 49
1
-
Introduzione
In questo breve lavoro cercheremo di descrivere alcuni dei
risultati più importanti dellaTeoria di Morse, un ambito molto
vasto della geometria di�erenziale che deve il suonome al
matematico americano Marston Morse il quale, tra le altre cose, si
occupòdelle relazioni esistenti tra la topologia di una generica
varietà di�erenziabile M e lecaratteristiche di particolari punti
critici di una funzioni di classe C∞ de�nite sullavarietà.L'idea
cardine della Teoria di Morse è la seguente: considerata una
funzione f : M → Rdi classe C∞ e avente solo punti critici non
degeneri, se nell'intervallo della retta reale[a, b] non ci sono
valori critici di f , allora gli insiemi di livello fa = f−1(−∞, a]
e f b =f−1(−∞, b] sono omeomor�; se, invece, esiste un valore
critico per f che chiamiamoc ∈ (a, b), allora possiamo ottenere f b
da fa 'attaccando', per ogni punto criticodell'insieme f−1(c), una
cella la cui dimensione sia uguale all'indice di tale punto.Poichè
tale operazione di attaccamento di una cella ha conseguenze
sull'omologia dellospazio topologico f b, la presenza e la quantità
di punti critici aventi un dato indicepuò essere valutata studiando
i gruppi di omologia della varietà M . Possiamo quindipensare alla
Teoria di Morse come ad un potente strumento in grado di fornirci
unnuovo modo di studiare la topologia di una varietà M dalla sola
analisi degli insiemidi livello prima nominati.
Le applicazioni di tale Teoria sono molteplici: Topologia
Algebrica, Algebra Omo-logica, Geometria Di�erenziale, Analisi
Reale e Funzionale e molti altri ambiti ancora.Uno di questi,
particolarmente interessante e reale, riguarda l'elaborazione e il
tratta-mento di immagini. Per dare un'idea di tale applicazione
dobbiamo immaginare che,attraverso opportuni usi di tale teoria, è
possibile ricostruire una super�cie o, gen-eralmente parlando, una
varietà di�erenziale tramite la sola analisi di funzioni
liscede�nite su essa. Come vedremo più nel dettaglio nel presente
lavoro, infatti, l'analisidei punti critici di tali funzione,
permette di ricavare informazioni algebriche e, so-prattutto,
topologiche sulla natura della varietà, ricostruendola qualora essa
sia unasemplice immagine acquisita da uno scanner.
Nel capitolo 1 di questo lavoro introdurremo i concetti di
Topologia Algebricamaggiormente coinvolti nella Teoria di Morse.
De�niremo e analizzeremo, infatti, leproprietà dell'omotopia,
dell'omologia e costruiremo dei nuovi spazi topologici, i CW
-complessi, che ricorreranno quando entreremo nel vivo della
trattazione. Di questivaluteremo l'omologia e de�niremo il concetto
di caratteristica di Eulero che, insiemea quello di numero di Betti
si rivelerà importante nelle sezioni successive.
Nel capitolo 2 daremo dapprima alcune de�nizioni caratteristiche
della teoria, pri-ma tra le altre quella di punto critico non
degenere. In seguito poi enunceremo edimostreremo alcuni lemmi
fondamentali che descrivono il comportamento di una fun-zione
avente solo punti critici non degeneri (detta in quest'ambito
funzione di Morse)in prossimità di uno di questi punti. Mostreremo
poi alcuni risultati di esistenza di
2
-
Introduzione 3
funzioni di Morse, mettendo in evidenza come queste siano un
sottoinsieme denso del-l'insieme delle funzioni C∞ e, a �ne
sezione, enunceremo e dimostreremo un teoremariguardante una
speciale classe di di�eomor�smi.
Il capitolo 3 racchiude i teoremi cardine della teoria:
formalizzeremo l'idea accen-nata poco sopra a proposito dello
studio degli insiemi di livello e dei punti critici nondegeneri e
mostreremo come sia possibile creare un'equivalenza omotopica tra
una va-rietà di�erenziabile e un opportuno CW -complesso la cui
struttura cellulare sia legatasolo ai punti critici non degeneri di
un'opportuna funzione di Morse e al loro indice.
Il capitolo 4 si occupa delle cosiddette disuguaglianze di Morse
che legano i punticritici di una funzione di Morse su una varietà
ai gruppi di omologia della stessa.Vedremo le due versioni, una
debole e l'altra forte, di tali disuguaglianze mostrandonele
relazioni con i concetti di numero di Betti e caratteristica di
Eulero prima nominati.
In�ne, il capitolo 5 vuole dare alcuni esempi signi�cativi di
applicazione di tale Teo-ria. Mostreremo il teorema di Reeb, di
interesse essenzialmente geometrico, studieremopoi, servendoci dei
risultati mostrati nelle sezioni precedenti, i gruppi di omologia
diCPn e, per concludere, daremo un esempio di studio della
topologia di una varietà dif-ferenziabile (il toro di rivoluzione
in R3) a partire dalla funzione altezza de�nita sullavarietà, dando
un'analisi qualitativa del cambio di topologia nel passaggio da
punticritici non degeneri, fornendo dunque un signi�cativo esempio
di come sia possibilela ricostruzione di una varietà di�erenziale a
partire dall'analisi dei punti degeneri diun'opportuna funzione di
Morse de�nita su essa.
-
Capitolo 1
Concetti e risultati preliminari
Questo primo capitolo contiene tutte le nozioni necessarie alla
comprensione dei con-cetti principali di topologia algebrica
coinvolti nella Teoria di Morse.Richiameremo infatti le principali
de�nizioni e proprietà riguardanti l'omotopia el'omologia (dando
maggior rilievo alla omologia singolare), e de�niremo poi i
CW-complessi, fornendo alcuni esempi e mettendo in evidenza le loro
caratteristiche prin-cipali.
1.1 Omotopia e gruppo fondamentale
1.1.1 Omotopia di applicazioni continue
Ci occupiamo in questa sezione dell'omotopia, una relazione di
equivalenza tra appli-cazioni continue di importanza fondamentale
in topologia. Denoteremo con I l'inter-vallo chiuso [0, 1] di
R.
De�nizione 1.1.1. Siano X e Y due spazi topologici e f0, f1 : X
→ Y due applicazionicontinue; f0 e f1 sono dette omotope se esiste
un'applicazione continua:
F : X × I→ Y
tale che F (x, 0) = f0(x) e F (x, 1) = f1(x) per ogni x ∈ X. Se
un'omotopia esistediciamo che f0 è omotopa a f1 e scriviamo f0 '
f1.
Figura 1.1: Omotopia di applicazioni continue
4
-
1.1. Omotopia e gruppo fondamentale 5
Introduciamo un concetto più generale di omotopia: quello di
omotopia relativa adun sottoinsieme A, per la quale si richiede che
l'omotopia lasci �ssi tutti i punti di A.
De�nizione 1.1.2. Sia X uno spazio topologico e sia A un
sottoinsieme di X. Sianoinoltre f0, f1 : X → Y due applicazioni
continue. Diciamo che f0 e f1 sono omotoperelativamente ad A se
esiste un'omotopia F : X × I → Y tra f0 e f1 tale che, sea ∈ A, F
(a, t) non dipende da t; in altre parole, F (a, t) = f0(a) per ogni
a ∈ A e perogni t ∈ I.
Dalla de�nizione 1.1.2 segue subito che si ha, per ogni a ∈ A,
f0(a) = f1(a). Se unatale omotopia esiste, scriviamo f0 'relA f1.
Ovviamente, se A = ∅, i due concetti diomotopia e di omotopia
relativa coincidono. Consideriamo dunque l'omotopia de�nitain 1.1.1
come un caso particolare di omotopia relativa in cui A = ∅.
Enunciamo ora, senza dimostrarlo, il seguente risultato che
stabilisce che la re-lazione di omotopia tra funzioni continue,
induce una relazione di equivalenza traspazi topologici:
Lemma 1.1.3. Siano X e Y due spazi topologici e A ⊆ X.
Nell'insieme delle ap-plicazioni continue di X in Y la relazione
'relA è una relazione di equivalenza. Inparticolare dunque,
l'omotopia è una relazione di equivalenza.
Possiamo ora introdurre la nozione di equivalenza omotopica:
De�nizione 1.1.4. Due spazi X e Y si dicono omotopicamente
equivalenti seesistono due applicazioni continue f : X → Y, g : Y →
X tali che:
g ◦ f ' 1X , f ◦ g ' 1Y .
In tal caso le applicazioni f e g sono chiamate equivalenze
omotopiche.
Esempio 1.1.5. Il cilindro è omotopicamente equivalente alla
circonferenza S1.
Se X e Y sono omeomor�1 allora X e Y sono anche omotopicamente
equivalenti,ma non vale il viceversa. Ad esempio Rn, n ≥ 1, non è
omeomorfo ad un punto {p},ma è ad esso omotopicamente equivalente.
Basta infatti considerare come funzioni fe g nelle condizioni della
de�nizione 1.1.4:
i) f : {p} → Rn, ponendo f(p) = 0;
ii) g : Rn → {p}.Si veri�ca che g ◦ f = 1{p} e f ◦ g ' 1Rn .Gli
spazi che risultano omotopicamente equivalenti ad un punto hanno un
nomeparticolare:
De�nizione 1.1.6. Uno spazio topologico X è detto contraibile se
è omotopicamenteequivalente ad un punto.
Osservazione 1.1.7. Abbiamo prima notato che Rn è contraibile.
Una dimostrazioneanaloga può essere fatta per Dn (il disco chiuso
unitario n-dimensionale) e per ognisottoinsieme convesso di Rn.
Essi sono dunque spazi contraibili. Intuitivamente pos-siamo
pensare ad uno spazio contraibile come uno spazio che può essere
'schiacciato'su un suo singolo punto in modo continuo. In
quest'ottica appare dunque chiaro cheuna circonferenza non è
contraibile perché non può essere schiacciata su un suo puntocon
continuità.
1Ricordiamo che due spazi topologici sono detti omeomor� se
esiste un'applicazione continua,invertibile e con inversa continua
detta omeomor�smo de�nita dall'uno all'altro. Gli
omeomor�smipreservano le proprietà topologiche.
-
1.1. Omotopia e gruppo fondamentale 6
De�nizione 1.1.8. Un sottoinsieme A di uno spazio topologico X è
chiamato unretratto di X se esiste una funzione continua r : X → A
tale che r ◦ i = Id : A→ A(equivalentemente r|A = Id), dove i : A
↪→ X è l'inclusione. La funzione r è chiamataretrazione.
De�nizione 1.1.9. Un sottoinsieme A di uno spazio topologico X è
un retratto dideformazione di X se esiste una retrazione r : X → A
tale che i ◦ r ' Id : X → X.
Dalla de�nizione segue che A è un retratto di deformazione di X
se esiste un'omo-topia F : X× I→ X tale che F (x, 0) = x per ogni x
∈ X, F (x, 1) ∈ A per ogni x ∈ Xe F (a, 1) = a per ogni a ∈ A.
Dall'esempio 1.1.5 deduciamo che la circonferenza è unretratto di
deformazione del cilindro. Notiamo che X è omotopicamente
equivalentead ogni suo retratto di deformazione.
De�nizione 1.1.10. Un sottoinsieme B di uno spazio topologico X
è detto retrattoforte di deformazione se esiste una retrazione r :
X → B tale che i ◦ r 'relB Id :X → X.
Naturalmente un retratto forte di deformazione è un retratto di
deformazione. In-tuitivamente si può pensare che un sottospazio B è
un retratto forte di deformazione diX se X può essere deformato con
continuità �no a farlo coincidere con B, mantenendoB �sso durante
il processo di deformazione.
1.1.2 Il gruppo fondamentale
Vogliamo ora vedere come, utilizzando la nozione di omotopia,
sia possibile associaread ogni spazio topologico un gruppo le cui
proprietà algebriche ri�ettano le proprietàtopologiche dello
spazio.
De�nizione 1.1.11. Sia X uno spazio topologico. Un arco (o
cammino) nello spazioX è un'applicazione continua f : I → X; f(0) è
detto punto iniziale e f(1) punto�nale dell'arco; diremo che f è un
arco da f(0) a f(1).
Siano ora f e g due archi tali che f(1) = g(0). Il prodotto di f
per g, che indicheremocon f ∗ g, è l'arco così de�nito:
(f ∗ g)(t) =
{f(2t) 0 ≤ t ≤ 1/2
g(2t− 1) 1/2 ≤ t ≤ 1.(1.1)
Vediamo ora come, in termini di omotopia relativa all'insieme
{0, 1}, possiamostudiare le proprietà di questo prodotto e renderlo
un'operazione di gruppo.
De�nizione 1.1.12. Due archi f0, f1 in X sono equivalenti, e
scriveremo f0 ∼ f1se sono omotopi relativamente a {0, 1} (ovvero f0
'rel {0,1} f1).
Grazie al lemma 1.1.3 siamo sicuri che ∼ è una relazione di
equivalenza sugli insiemidegli archi di X; indichiamo d'ora in poi
con [f ] la classe di equivalenza dell'arco f .
-
1.1. Omotopia e gruppo fondamentale 7
Figura 1.2: Equivalenza di archi
Ponendo ora:[f ][g] = [f ∗ g] (1.2)
de�niamo un prodotto su tale insieme. Questo prodotto è ben
de�nito come a�ermail seguente Lemma che ci limitiamo ad
enunciare:
Lemma 1.1.13. Siano f0, f1, g0, g1 degli archi in X, con f0(1) =
g0(0) e f1(1) =g1(0). Se f0 ∼ f1 e g0 ∼ g1, allora f0 ∗ g0 ∼ f1 ∗
g1.
Il prossimo lemma, anch'esso enunciato senza dimostrazione,
asserisce che taleprodotto è associativo, ovvero che vale:
([f ][g])[h] = [f ]([g][h]) (1.3)
a patto che il prodotto sia de�nito (f(1) = g(0) e g(1) =
h(0)).
Lemma 1.1.14. Siano f, g, h tre archi in X tali che f(1) = g(0)
e g(1) = h(0); allora(f ∗ g) ∗ h ∼ f ∗ (g ∗ h).
Mostriamo ora che il gruppo che ci apprestiamo a de�nire è
dotato di elementoneutro. Per farlo, ricordiamo che dato un punto x
∈ X, εx denota l'arco costantein x (ovvero εx(t) = x per ogni t ∈
I). Il lemma seguente a�erma che la classe diequivalenza dell'arco
costante si comporta come elemento neutro destro e sinistro peril
prodotto de�nito. Ciò signi�ca che:
[εx ∗ f ] = [εx][f ] = [f ] = [f ][εy] = [f ∗ εy] (1.4)
Lemma 1.1.15. Se f è un arco in X con punto iniziale x e punto
�nale y. Alloraεx ∗ f ∼ f e f ∗ εy ∼ f.
Consideriamo in�ne il problema dell'esistenza dell'inverso
moltiplicativo per unaclasse di equivalenza. Dato un arco f
de�niamo l'arco f come f(t) = f(1 − t). Illemma seguente asserisce
che la classe di equivalenza di f si comporta come
inversomoltiplicativo per la classe di equivalenza di f ; in altre
parole
[f ][f ] = [εx] [f ][f ] = [εy] (1.5)
per ogni arco f che inizia in x e termina in y.
Lemma 1.1.16. Se f è un arco in X con punto iniziale x e punto
�nale y, alloraf ∗ f ∼ εx e f ∗ f ∼ εy.
-
1.2. Omologia 8
In base a quanto visto sembra dunque che gli assiomi di gruppo
siano soddisfatti.Notiamo però due di�coltà: una è che il prodotto
di due classi non è sempre de�nito(i due archi si devono
'incollare') e l'altra è che l'elemento neutro non è �sso
poichédipende dal punto x ∈ X. Quello che dobbiamo fare è
introdurre la nozione di laccio,o arco chiuso.
De�nizione 1.1.17. Un arco f è detto laccio (o arco chiuso) se
f(0) = f(1). Sef(0) = f(1) = x ∈ X, diremo che f è un laccio di
base x.
Il prodotto f ∗g risulta de�nito per ogni coppia di lacci con la
stessa base. L'insiemedelle classi di equivalenza di lacci di base
il punto x ∈ X, munito dell'operazionede�nita in 1.2 è, grazie ai
lemmi 1.1.13, 1.1.14, 1.1.15 e 1.1.16, un gruppo chiamatogruppo
fondamentale o primo gruppo di omotopia di X con punto base x
eusualmente indicato con π1(X,x).
Ora che abbiamo de�nito π1(X,x) elenchiamo qui alcune sue
proprietà che rendonointeressante e utile la costruzione appena
fatta:
• Se esiste un arco in X che congiunge i punti x, y ∈ X, allora
i gruppi π1(X,x)e π1(X, y) sono isomor�. In ogni spazio connesso
per archi dunque π1(X,x) eπ1(X, y) sono gruppi isomor� per ogni
coppia di punti x, y ∈ X.
• Se due spazi topologici X e Y sono omeomor� tramite
un'applicazione φ i gruppiπ1(X,x) e π1(Y, φ(x)) sono isomor�.
• Se due spazi topologici X e Y sono omotopicamente equivalenti
tramite l'omo-topia ψ, i gruppi π1(X,x) e π1(Y, ψ(x)) sono isomor�.
Il gruppo fondamentaledi uno spazio contraibile, dunque, è il
gruppo banale.
Possiamo quindi considerare il gruppo fondamentale come un mezzo
per passaredalla topologia all'algebra, idea che sta alla base
della topologia algebrica, disciplinanella quale si cerca di
sostituire alcune nozioni topologiche con nozioni algebriche inmodo
da utilizzare conoscenze algebriche note per dedurre dei risultati
d'interessetopologico.
1.2 Omologia
Le proprietà di π1(X) sono molto utili nello studio di spazi
topologici di dimensioneperlopiù bassa: la stessa de�nizione di
gruppo fondamentale abbiamo visto che coin-volge solo applicazioni
de�nite da spazi di dimensioni basse in uno spazio topologicoX,
precisamente lacci de�niti da I ⊂ R a valori in X e omotopie di
lacci, ovvero ap-plicazioni continue I× I ⊂ R× R in X. Tale
caratteristica si mostra essere limitativanello studio di spazi di
dimensione alta: un esempio illuminante è che il gruppo
fonda-mentale non è in grado di 'distinguere' le sfere Sn con n ≥ 2
(si ha infatti π1(Sn) = 0per ogni n ≥ 2). Ciò che sembra naturale
fare è considerare gli analoghi multidimen-sionali di π1(X), ovvero
i gruppi di omotopia πn(X), de�niti in termini di applicazionidal
cubo n-dimensionale In a valori in X e le relative omotopie. Si può
mostrare cheessi si comportano come vorremmo: tali gruppi di
omotopia riescono per esempio adistinguere le sfere di ogni
dimensione (si mostra che: πi(Sn) = 0 per i < n e Z peri = n).
Il problema è che questi gruppi sono, in generale, molto di�cili da
costruireanche per spazi topologici apparentemente semplici. Il
problema si aggira introducen-do i gruppi di omologia Hn(X). Tali
gruppi sono profondamente legati alla struttura
-
1.2. Omologia 9
geometrica dello spazio topologico studiato, precisamente alla
sua cosiddetta strutturacellulare e in particolare a come ogni
elemento ad essa appartenente è 'attaccato' aglialtri. In questo
risiede il grosso vantaggio di questa teoria e contemporaneamente
lagrande di�erenza esistente con i gruppi di omotopia prima citati:
questi ultimi infattisono in generale slegati dalla struttura
cellulare dell'oggetto studiato.
1.2.1 Omologia singolare
L'obiettivo di questa sezione è quello di de�nire i gruppi di
omologia singolare di unospazio topologico. Ci sono diversi modi di
associare gruppi abeliani ad uno spaziotopologico, e ognuna di
queste procedure viene etichettata con il nome di 'teoria
diomologia'; molte di queste teorie, però, hanno il limite di
basarsi su spazi topologici'fatti bene'. L'omologia singolare da
questo punto di vista presenta due vantaggi: èinnanzitutto forse la
teoria d'omologia più semplice e, inoltre, essa ha senso per
tuttigli spazi topologici.
De�nizione 1.2.1 (n-simplesso). Un n-simplesso [v0, · · · , vn]
di vertici vi in unospazio euclideo Rm è il più piccolo
sottoinsieme convesso contenente n + 1 puntiv0, · · · , vn che non
appartengono a un iperpiano di dimensione minore di n.
De�nizione 1.2.2 (n-simplesso standard). Il simplesso standard
di dimensionen è il seguente sottoinsieme di Rn+1:
∆n =
{(x0, x1, · · · , xn) ∈ Rn+1 |
n∑i=0
xi = 1, xi ≥ 0 ∀i = 0, · · · , n
}(1.6)
i cui vertici sono i vettori unitari lungo gli assi
coordinati.
Osservazione 1.2.3. Precisiamo che l'ordine dei vertici di un
simplesso risulteràimportante, e pertanto con 'n-simplesso'
intenderemo in realtà 'n-simplesso con verticiordinati'.
Un'immediata conseguenza di tale ordine è l'orientazione di ogni
segmento[vi, vj ] quando i < j, come mostrato nelle �gure
sottostanti.
Figura 1.3: Esempi di simplessi
Dalla de�nizione 1.2.2 segue che ∆0 è un singolo punto, ∆1 è un
segmento di retta,∆2 è una regione triangolare e ∆3 è un tetraedro
solido.
-
1.2. Omologia 10
De�nizione 1.2.4 (n-simplesso singolare). Un n-simplesso
singolare (o simplessosingolare di dimensione n) in uno spazio
topologico X è un'applicazione continua σ :∆n → X.
Dalla de�nizione 1.2.4 segue che uno 0-simplesso singolare è
semplicemente unpunto di X, mentre un 1-simplesso singolare è
essenzialmente un cammino in X:a partire da un 1-simplesso
singolare σ possiamo de�nire un arco da σ(v0) a σ(v1)ponendo f(t) =
σ(t, 1− t); viceversa a partire da un arco f : I→ X possiamo
de�nireun 1-simplesso singolare σ : ∆1 → X ponendo σ(x0, x1) =
f(x1).
De�nizione 1.2.5 (n-catena singolare). Una n-catena singolare in
X è una serieformale �nita
∑α nασα i cui coe�cienti nα ∈ Z e i σα sono n-simplessi
singolari.
De�nizione 1.2.6. L'insieme Cn(X) delle n-catene singolari in X
forma un gruppoabeliano libero, generato dalle n-catene singolari,
con l'operazione (scritta in notazioneadditiva) de�nita da: ∑
α
nασα +∑α
mασα =∑α
(nα +mα)σα
L'elemento neutro è∑α 0σα e l'inverso additivo di
∑α nασα è
∑α(−nα)σα
Introduciamo ora la de�nizione di mappa di bordo:
De�nizione 1.2.7 (mappa di bordo). La mappa di bordo ∂n : Cn(X)→
Cn−1(X)è l'omomor�smo de�nito nel modo seguente:
∂n(σ) =∑i
(−1)iσ|[v0,··· ,v̂i,··· ,vn] (1.7)
D'ora in poi scriveremo, quando non ci sarà ambiguità, ∂ anzichè
∂n. Mostriamoora un'importante proprietà dell'omomor�smo di
bordo:
Teorema 1.2.8. La composizione Cn(X)∂n−→ Cn−1(X)
∂n−1−→ Cn−2(X) è zero.
Dimostrazione. E' su�ciente dimostrare che tale composizione si
annulla su ungenerico n-simplesso. Dalla de�nizione 1.2.7 discende
direttamente che
∂n−1∂n(σ) =∑ji
(−1)i(−1)j−1σ|[v0,··· ,v̂i,··· ,v̂j ,··· ,vn] = 0
dove l'ultima uguaglianza si ottiene scambiando gli indici i e j
nella seconda somma-toria che diventa l'opposto della prima.
La proprietà del precedente teorema viene solitamente scritta in
maniera più com-patta nel seguente modo: ∂2 = 0. Otteniamo dunque
una sequenza di omomor�smi digruppi abeliani del tipo:
· · · → Cn+1∂n+1−→ Cn
∂n−→ Cn−1 → · · · → C1∂1−→ C0
∂0−→ 0
con ∂n∂n+1 = 0 per ogni n. Una tale sequenza (che abbiamo esteso
tramite ∂0 = 0a destra) è chiamata un complesso di catene.
Arriviamo ora alla de�nizione deigruppi di omologia di complesso di
catene, introducendo le seguenti de�nizioni:
-
1.2. Omologia 11
De�nizione 1.2.9.
(i) Una n-catena singolare c ∈ Cn(X) è detta un n-ciclo se ∂c =
0; l'insieme deglin-cicli di X viene denotato con Zn(X).
(ii) Una n-catena singolare d ∈ Cn(X) è detta un n-bordo se d =
∂e per qualchee ∈ Cn+1(X); l'insieme degli n-bordi viene denotato
con Bn(X).
In altri termini:Zn(X) = ker {∂ : Cn(X)→ Cn−1(X)}
Bn(X) = Im {∂ : Cn+1 → Cn(X)}Zn(X) e Bn(X) sono entrambi
sottogruppi di Cn(X).
Il teorema 1.2.8 implica che Bn(X) è un sottogruppo di Zn(X), e
quindi un sot-togruppo normale perché Zn(X) è abeliano; ha senso
dunque considerare il gruppoquoziente Zn(X)/Bn(X):
De�nizione 1.2.10 (gruppi di omologia singolare). L'n-esimo
gruppo di omologiadi uno spazio topologico X è de�nito come:
Hn(X) = Zn(X)/Bn(X) = ker∂n/Im∂n+1
Gli elementi di Hn(X) sono classi di omologia, ossia classi di
equivalenza di ciclirispetto alla relazione di equivalenza
c ∼ c′ ⇐⇒ c− c′ ∈ Bn(X)
dove c, c′ ∈ Zn(X). Se c ∼ c′, diremo che c e c′ sono cicli
omologhi.
Conviene introdurre una de�nizione leggermente modi�cata di
omologia che citornerà comoda in seguito.
De�nizione 1.2.11 (gruppi di omologia ridotta). Con gruppi di
omologia ridottaintendiamo i gruppi di omologia H̃n(X) del seguente
complesso di catene esteso:
· · · → C2(X)∂2→ C1(X)
∂1→ C0(X)ε→ Z→ 0
dove ε(∑i niσi) =
∑i ni.
Osservazione 1.2.12. Nella de�nizione appena data, poiché ε ◦ ∂1
= 0, ε si annullasu Im∂1 e induce dunque una mappa ψ : H0(X) → Z,
con ker(ψ) = H̃0(X), dunqueH0(X) ∼= H̃0(X)⊕ Z. Ovviamente, per n
> 0 si ha Hn(X) ∼= H̃n(X).
Diamo ora qualche esempio di calcolo di gruppi di omologia e di
proprietà che licontraddistinguono.
Proposizione 1.2.13. Se X è uno spazio topologico non vuoto e
connesso per archi,allora H0(X) ∼= Z. In generale, per ogni spazio
topologico X, H0(X) è la sommadiretta di Z tante volte quante sono
le componenti connesse per archi di X.
Proposizione 1.2.14. Se X è un punto, allora Hn(X) = 0 per n
> 0 e H0(X) ∼= Z.Vale inoltre H̃n(X) = 0 per ogni n ≥ 0.
Teorema 1.2.15. Se X e Y sono spazi topologici omeomor�, Hn(X)
∼= Hn(Y ) perogni n ≥ 0.
Teorema 1.2.16 (invarianza omotopica). Se X e Y sono spazi
omotopicamenteequivalenti, Hn(X) ∼= Hn(Y ) per ogni n ≥ 0.
-
1.2. Omologia 12
1.2.2 Sequenze esatte e scissione
Vogliamo ora trovare qualche relazione tra i gruppi di omologia
di uno spazio topologicoX, un sottospazio A, e lo spazio quoziente
X/A. Sarebbe in questo modo possibilecostruire e comprendere i
gruppi di omologia di spazi come i CW -complessi (vedisottosezione
seguente), costruiti induttivamente da sottospazi sempre più
complessi.Per fare ciò ci servono alcune de�nizioni
preliminari.
De�nizione 1.2.17 (successione esatta). Una sequenza di
omomor�smi
· · · −→ An+1αn+1−→ An
αn−→ An−1 −→ · · ·
è detta esatta se e solo se Kerαn =Imαn+1 per ogni n.
Caratterizziamo ora alcune proprietà tipicamente algebriche in
termini di sequenzeesatte:
(i) 0→ A α→ B è esatta se e solo se Kerα = 0, ovvero se α è
iniettiva.
(ii) Aα→ B → 0 è esatta se e solo se Imα = B, ovvero se α è
suriettiva.
(iii) 0→ A α→ B → 0 è esatta se e solo se α è un isomor�smo, da
(i) e (ii).
(iv) 0 → A α→ B β→ C → 0 è esatta se e solo se α è iniettiva, β
è suriettiva eKerβ=Imα.
De�nizione 1.2.18 (sequenza esatta corta). Una sequenza esatta 0
→ A → B →C → 0 come quella in (iv) è chiamata sequenza esatta
corta.
Troveremo ora delle sequenze esatte legate a coppie (X,A) dove X
è spazio topo-logico e A è un sottospazio, tramite l'introduzione
dei gruppi di omologia relativa.
Dato uno spazio X e un sottospazio A ⊂ X, sia Cn(X,A) il gruppo
quozienteCn(X)/Cn(A). Le n-catene di A sono dunque banali in
Cn(X,A). Poiché la mappadi bordo ∂ : Cn(X)→ Cn−1(X) manda Cn(A) in
Cn−1(A), essa induce una mappa dibordo al quoziente ∂ : Cn(X,A) →
Cn−1(X,A). Lasciando variare n otteniamo unasequenza di mappe di
bordo:
· · · → Cn(X,A)∂→ Cn−1(X,A)→ · · · (1.8)
La relazione ∂2 = 0 sussiste per queste mappe di bordo poiché
come abbiamo visto nel1.2.8 sussiste prima di passare al quoziente.
Abbiamo dunque ottenuto una complessodi catene.
De�nizione 1.2.19 (gruppi di omologia relativa). I gruppi di
omologia del complessodi catene de�nito in 1.8 sono detti gruppi di
omologia relativa e vengono indicaticon Hn(X,A).
E' possibile dimostrare un importante risultato per questi
gruppi di omologia:
Teorema 1.2.20. La sequenza di gruppi di omologia:
· · · → Hn(A)i∗−→ Hn(X)
j∗−→ Hn(X,A)∂−→ Hn−1(A)
i∗−→ Hn−1(X)→ H0(X,A)→ 0
dove:
-
1.3. CW-complessi 13
• i∗ è la mappa indotta in omologia dall'inclusione i : A ↪→
X;
• j∗ è la mappa quoziente indotta in omologia dalla proiezione j
: X → X/A;
• ∂ è una mappa di bordo così descritta: se una classe [α] ∈
Hn(X,A) è rappre-sentata da un ciclo α, allora ∂[α] è la classe del
ciclo ∂α in Hn−1(A).
è una sequenza esatta.
Osservazione 1.2.21. Il teorema 1.2.20 ci dà un'idea precisa di
quello che rappre-sentano i gruppi Hn(X,A): essi infatti misurano
la di�erenza tra i gruppi Hn(X) eHn(A). In particolare la proprietà
di esattezza implica che se Hn(X,A) = 0 per ognin, allora
l'inclusione i induce isomor�smi Hn(A) ∼= Hn(X) per ogni n, grazie
allaproprietà (iii) derivante dalla de�nizione 1.2.17.
Ci accingiamo ora a descrivere una proprietà fondamentale dei
gruppi di omologiarelativa: la escissione. Essa descrive i casi in
cui i gruppi Hn(X,A) non risentonodalla cancellazione di un
sottoinsieme Z ⊂ A.
Teorema 1.2.22 (di escissione). Dati due sottospazi Z,A, tali
che Z ⊂ A ⊂ X etali che Z ⊂Int(A), allora l'inclusione (X − Z,A −
Z) ↪→ (X,A) induce isomor�smiHn(X − Z,A− Z)→ Hn(X,A) per ogni
n.
Possiamo ora ricondurci ai gruppi di omologia non relativi,
premettendo una de�nizione:
De�nizione 1.2.23 (coppia con collare). Se X è uno spazio
topologico e A è unsottospazio non vuoto chiuso che sia un retratto
di deformazione di qualche aperto diX. Chiamiamo la coppia (X,A)
coppia con collare o buona coppia.
Proposizione 1.2.24. Per ogni coppia con collare (X,A), la mappa
quoziente q :(X,A)→ (X/A,A/A) induce isomor�smi q∗ : Hn(X,A)→
Hn(X/A,A/A) ∼= H̃n(X/A)per ogni n.
Diamo ora due de�nizioni che, nei capitoli successivi,
risulteranno fondamentalinell'esposizione della teoria di
Morse.
De�nizione 1.2.25 (numero di Betti). Se un gruppo di omologia
Hn(X) è sommadiretta di gruppi ciclici, allora il numero intero di
addendi uguali a Z è de�nito comel'n-esimo numero di Betti di X.
Esso è quindi il rango di Hn(X).
1.3 CW-complessi
1.3.1 De�nizione, esempi e prime proprietà
Un CW-complesso è uno spazio topologico X dotato di una
decomposizione particolareche ci permette di studiarne i gruppi di
omologia singolare. Tale decomposizionesi trova valutando una
partizione di X in sottospazi più piccoli omeomor� a palleaperte di
Rk, con k opportuno. Questi sottospazi sono chiamati celle aperte
delladecomposizione. Tali celle sono incollate tra di loro lungo i
loro bordi e la loro unioneforma l'intero spazio X.
De�nizione 1.3.1. Sia n ≥ 0, n ∈ Z. Una cella di dimensione n o
n-cella en èuno spazio topologico omeomorfo al disco chiuso
unitario di Rn, ovvero all'insieme:
Dn = {x ∈ Rn : ‖ x ‖≤ 1}
-
1.3. CW-complessi 14
Una cella aperta di dimensione n o n-cella aperta è uno spazio
topologicoomeomorfo alla palla aperta unitaria n-dimensionale
ovvero all'insieme:
Bn = Dn \ ∂Dn = {x ∈ Rn : ‖ x ‖< 1}
Diamo ora una de�nizione di CW -complesso di tipo
induttivo-costruttivo.
De�nizione 1.3.2. Un CW-complesso è uno spazio topologico X
costruito comesegue:
1. X0 è un insieme discreto di partenza i cui punti sono
considerati come 0-celle.
2. Induttivamente, si costruisce l'n-scheletro Xn a partire da
Xn−1 attaccando len-celle Dnα tramite le applicazioni continue ϕα :
S
n−1 → Xn−1 dette mappe diattaccamento. Ciò signi�ca che Xn è lo
spazio ottenuto quozientando l'unionedisgiunta Xn−1 tα Dnα con
l'identi�cazione x ∼ ϕα(x) per tutti gli x ∈ ∂Dnα. Lacella enα è
l'immagine omeomorfa di D
n \ ∂Dn tramite l'azione della proiezionea quoziente.
3. Se per qualche n
-
1.3. CW-complessi 15
otteniamo una struttura cellulare CPn = e0 ∪ e2 ∪ · · · ∪ e2n
con celle dunque solo indimensioni pari. Analogamente CP∞ ha una
struttura cellulare con una cella in ognidimensione pari.
Estendiamo ora la nozione dimappa di attaccamento data al punto
2 della de�nizione1.3.2.
De�nizione 1.3.6. Ogni cella enα del CW-complesso X possiede una
mappa carat-teristica φα : Dnα → X che estende la mappa di
attaccamento ϕα, relativa allo stessoα, ed è omeomor�smo
dall'interno di Dnα su e
nα. Possiamo considerare φα come la
composizione Dnα ↪→ Xn−1 tα Dnα → Xn ↪→ X dove la mappa centrale
è la proiezionea quoziente che de�nisce Xn.
Osservazione 1.3.7. La mappa caratteristica è una funzione
continua in quantocomposizione di applicazioni continue. Notiamo
infatti che l'applicazione Xn ↪→ X ècontinua grazie al punto 3
della de�nizione 1.3.2.
De�nizione 1.3.8. Un sottocomplesso di un CW-complesso X è un
sottospaziochiuso A ⊂ X che è unione di celle di X tali che la
chiusura di ogni cella in A ècontenuta in A.
Da questa de�nizione notiamo che, poiché A è chiuso, la mappa
caratteristica diogni cella in A ha immagine contenuta in A, e in
particolare l'immagine della mappadi attaccamento di ogni cella in
A è contenuta in A, ovvero A è esso stesso un
CW-complesso.Enunciamo qui un teorema sui sottocomplessi cellulari
di cui ci serviremo in seguito:
Proposizione 1.3.9. Un sottospazio compatto di un CW complesso è
contenuto inun sottocomplesso �nito-dimensionale.
De�nizione 1.3.10. Una coppia (X,A) dove X è un CW-complesso e A
è un sotto-complesso è chiamata coppia CW.
Elenchiamo ora, senza dimostrarle, alcune proprietà topologiche
dei CW-complessi:
• Ogni CW-complesso è uno spazio topologico normale2, ed in
particolare, diHausdor�3.
• Ogni punto in un CW-complesso possiede intorni aperti
contraibili arbitraria-mente piccoli. Ogni CW-complesso è dunque
localmente contraibile.
• Ogni CW-complesso è localmente connesso per archi. Ogni
CW-complesso èconnesso per archi se e solo se è connesso.
1.3.2 Omologia cellulare e CW-complessi
L'omologia cellulare è uno strumento molto utile per valutare i
gruppi di omologiadei CW-complessi. Prima di de�nire esattamente di
che cosa si tratta premettiamo ilseguente lemma:
2Uno spazio topologico X è normale se: i) I punti sono
sottoinsiemi chiusi (lo spazio è T1). ii) Perogni F1, F2 ⊂ X chiusi
e tali che F1 ∩ F2 = ∅, esistono aperti U1, U2 tali che: F1 ⊂ U1,
F2 ⊂ U2,U1 ∩ U2 = ∅
3Uno spazio topologico si dice di Hausdor� (o spazio T2) se: per
ogni coppia di punti distintiu, v ∈ X esistono due aperti U, V di X
tali che u ∈ U , v ∈ V e U ∩ V = ∅
-
1.3. CW-complessi 16
Lemma 1.3.11. Se X è un CW-complesso allora:
(a) Hk(Xn, Xn−1) = 0 per k 6= n ed è abeliano libero per k = n,
con una base incorrispondenza biunivoca con le n-celle di X.
(b) Hk(Xn) = 0 per k > n. In particolare, se X è
�nito-dimensionale, alloraHk(X) = 0 per k >dimX.
(c) L'inclusione i : Xn ↪→ X induce un isomor�smo i∗ : Hk(Xn)→
Hk(X) se k < n.
Sia ora X un CW-complesso. Usando il lemma 1.3.11, parti delle
sequenze esattelunghe delle coppie (Xn+1, Xn), (Xn, Xn−1) e (Xn−1,
Xn−2) si adattano al seguentediagramma dove dn+1 e dn sono de�nite
rispettivamente come la composizione jn◦∂n+1e jn−1 ◦ ∂n:
Figura 1.4: Schema per l'omologia cellulare
La composizione dn ◦ dn+1 è composta da due successive
applicazioni in una dellesequenze esatte, dunque è 0. La riga
centrale del diagramma è un complesso di catene,chiamato complesso
di catene cellulare di X. Gli elementi di Hn(Xn, Xn−1),grazie al
punto (a) del lemma 1.3.11 possono essere pensati come combinazioni
linearidi n-celle di X. I gruppi di omologia di questo complesso di
catene sono chiamatigruppi di omologia cellulare di X e indicati
con HCWn (X).
Teorema 1.3.12. Vale l'isomor�smo: HCWn (X) ∼= Hn(X).
Vediamo ora un'importante risultato riguardante i CW -complessi
che tornerà utilein un punto cardine della teoria di Morse.
Premettiamo la seguente:
De�nizione 1.3.13. Siano X e Y due CW -complessi e sia f : X → Y
. Diciamo chef è una mappa cellulare se e solo se per ogni n vale
f(Xn) ⊂ Y n ovvero ogni cellan-dimensionale viene mappata in una
cella di dimensione minore o uguale di n.
Ogni applicazione tra due CW -complessi può essere 'deformata'
�no a farla di-ventare una mappa cellulare. Questo è quanto a�erma
il seguente importante:
Teorema 1.3.14 (approssimazione cellulare). Siano X,Y due CW
-complessi. Ognimappa f : X → Y è omotopa a una mappa cellulare.
Inoltre, se f è già cellulare incorrispondenza di un sottocomplesso
A ⊂ X, si può scegliere l'omotopia in modo chelasci �sso A.
-
1.3. CW-complessi 17
Dimostrazione. Supponiamo per induzione che la mappa f : X → Y
sia cellularesull'(n − 1)-scheletro Xn−1 di X e sia en una n-cella
di X. Poiché en è l'immaginedella mappa caratteristica per en, essa
è compatta: f dunque manda en in un insiemecompatto di Y . Poiché
un insieme compatto di un CW -complesso può intersecaresolo un
numero �nito di celle (cfr. teorema 1.3.9), segue subito che f(en)
intersecasolo un numero �nito di celle di Y . Sia ek ⊂ Y una delle
celle di dimensione piùalta che f(en) interseca. Se k ≤ n allora f
è cellulare su en, dunque supponiamo chek > n. Ciò che si può
mostrare è che è possibile deformare f|Xn−1∪en , tenendo �ssoXn−1,
in modo tale che l'immagine di en tramite f non contenga tutta la
cella ek,ma lasci fuori almeno un punto p ∈ ek. E' poi possibile
fare in modo che f(en) nonintersechi l'intera cella ek utilizzando
la retrazione di Y k \{p} su Y k \ek. Iterando taleprocedimento è
quindi chiaro che possiamo fare in modo che f(en) non intersechi
tuttele celle di dimensione maggiore di n. Facendo questo per tutte
le n-celle e restando �ssisulle n-celle di A sulle quali f è già
cellulare, otteniamo un'omotopia di f|Xn ad unamappa cellulare
relativamente all'insieme Xn−1 ∪ An. Possiamo ora estendere
questaomotopia, insieme all'omotopia costante su A, ad un'omotopia
de�nita su tutto lospazio X: in questo modo il passo induttivo è
dunque completato. Facendo tendere nall'∞, la sequenza risultante
(eventualmente in�nita) di omotopie può essere realizzatausando una
sola omotopia sfruttando l'n-esima omotopia scelta tra quelle
trovate, ognivolta che t varia nell'intervallo [1 − 1/2n, 1 −
1/2n+1]. Ogni punto di X giace infattiin un qualche scheletro Xn,
che è eventualmente stazionario nella catena in�nita diomotopie.
Per ultimare la dimostrazione serve dunque dare una de�nizione di
taleomotopia. Per farlo si usa un lemma che enunciamo senza
dimostrare qui sotto checi permette di 'deformare' delle
applicazioni in modo tale da dar loro una qualchelinearità. Prima
di enunciarlo occorre de�nire due concetti:
(i) Un poliedro in Rn è un sottospazio che è l'unione di un
numero �nito di poliedriconvessi, ognuno compatto.
(ii) Una mappa lineare a tratti de�nita su un poliedro in Rn è
un'applicazione cherisulta lineare se ristretta ad ogni poliedro
convesso che compone una possibiledecomposizione del poliedro in
questione.
Il lemma annunciato è il seguente:
Lemma 1.3.15. Sia f : In → Z un'applicazione in cui Z è ottenuto
da unsottospazio W tramite attaccamento di una cella ek. Allora f è
omotopa relati-vamente a f−1(W ) ad un'applicazione f1 per la quale
esiste un poliedro K ⊂ Inche abbia le seguenti proprietà:
� f1(K) ⊂ ek e f1|K è lineare a tratti tramite una qualche
identi�cazione diek con Rk.
� K ⊃ f−11 (U) per qualche insieme aperto non vuoto U ⊂ ek.
Per concludere la dimostrazione del teorema serviamoci dunque di
tale lemma. Com-ponendo la mappa data f : Xn−1 ∪ en → Y k con una
mappa caratteristica In → Xper la cella en otteniamo una funzione
che gioca il ruolo della f del lemma, operandole sostituzioni Z = Y
k e W = Y k \ ek. L'omotopia data dal lemma è �ssa su ∂In einduce
dunque un'omotopia ft di f|Xn−1∪en stazionaria su Xn−1. L'immagine
dellamappa f1 interseca l'insieme aperto U ⊂ ek in un insieme
contenuto nell'unione di unnumero �nito di sottospazi di dimensione
al più n, dunque se n < k ci saranno puntip ∈ U non contenuti
nell'immagine di f1.
-
1.3. CW-complessi 18
L'ultima de�nizione preliminare che ci serve è quella di
caratteristica di Eulero, unconcetto che ritornerà nelle sezioni
successive.
De�nizione 1.3.16. Sia X un CW-complesso �nito. La
caratteristica di Euleroχ(X) è de�nita come segue:
χ(X) =∑n
(−1)ncn (1.9)
dove cn è il numero delle n-celle di X.
Il risultato seguente mostra che χ(X) può essere de�nito
esclusivamente in terminidi omologia. Inoltre, χ(X) è indipendente
dalla scelta dalla struttura cellulare di X.
Teorema 1.3.17. χ(X) =∑n(−1)nrankHn(X)
-
Capitolo 2
Punti critici, funzioni di Morse e
di�eomor�smi
Iniziamo a presentare la Teoria di Morse, introducendo le
nozioni principali di cui ciserviremo e dimostrando un importante
risultato che utilizzeremo in seguito: il lemmadi Morse.
Premettiamo che d'ora in poi avremo a che fare con varietà
di�erenziabililisce, intendendo con tale aggettivo che le varietà
sono di classe C∞. Chiameremonello stesso modo anche funzioni
ugualmente regolari de�nite da tali varietà a valoriin esse.
Indicheremo con Tp(M) lo spazio tangente ad una varietà liscia M
nel puntop ∈M . Inoltre, seM e N sono due varietà lisce ed è
assegnata una mappa g : M → Ncon g(p) = q, indicheremo il
di�erenziale di g, ovvero la mappa lineare indotta tra glispazi
tangenti, con dgp : Tp(M)→ Tq(M).
2.1 De�nizioni preliminari
Ripensando al caso di funzioni lisce de�nite da un aperto U ⊂ Rn
a valori in R,generalizziamo qui la nozione di punto critico per
funzioni de�nite su una genericavarietà M .
De�nizione 2.1.1 (punto e valore critico). Sia M una varietà
liscia, f una funzioneliscia: M → R. Un punto p ∈ M si dice punto
critico di f se il di�erenzialedfp : Tp(M)→ Tf(p)R è la mappa
nulla. Questa condizione si traduce col dire che p èun punto
critico se e solo se, scelto un sistema di coordinate locali (x1,
x2, · · · , xn) inun aperto U contenente il punto p, vale:
∂f
∂x1(p) = · · · = ∂f
∂xn(p) = 0 (2.1)
Il numero reale f(p) viene chiamato valore critico di f .Se a ∈
R è tale che per ogni q ∈ f−1(a), q non è un punto critico, a viene
detto valoreregolare.
Notiamo che tale de�nizione rispecchia in tutto e per tutto
quella di 'punto critico'per funzioni de�nite in aperti di Rn:
questo perché il di�erenziale df risulta ben de�nitoquando si ha a
che fare con varietà di�erenziabili. Tale corrispondenza si perde
quandosi vuole introdurre l'hessiana della funzione f in un
generico punto x ∈M . É possibile
19
-
2.1. De�nizioni preliminari 20
però dare una de�nizione ben posta di hessiana di f in
corrispondenza di un puntocritico p della varietà, de�nendola come
un opportuno funzionale:
De�nizione 2.1.2 (funzionale hessiano). Sia f : M → R una
funzione liscia de�nitasulla varietà liscia M . Sia p ∈ M un punto
critico di f . L'hessiano di f nel puntop è il funzionale bilineare
e simmetrico così de�nito:
Hessfp : TpM × TpM → R
Hessfp(v,w) = Vp(W (f))(p) (2.2)
dove v e w sono vettori di Tp(M) e V,W sono le rispettive
estensioni a campi vettoriali(e si ha ovviamente Vp(p) = v,Wp(p) =
w).
La veri�ca che il funzionale 2.2 appena introdotto è simmetrico
deriva dal fatto chep è un punto critico. In questo caso vale
infatti l'identità:
Vp(W (f))(p)−Wp(V (f))(p) = [V,W ]p(f) = dfp([V,W ]) = 0
dove [V,W] è la parentesi di Poisson tra i campi V e W .Esso è
anche ben de�nito in quanto i valori della funzione Vp(W (f)) = v(W
(f)) sonoindipendenti dall'estensione V di v scelta e così pure lo
sono i valori di Wp(V (f)) =w(V (f)), rispetto ad ogni scelta
dell'estensione W di w.
Sia ora (x1, · · · , xn) un sistema di coordinate locali. Usando
la base coordinata diTp(M) associata a tale sistema, possiamo
scrivere:
v =n∑i=1
ai∂
∂xi|p, w =
n∑j=1
bj∂
∂xj|p
dove gli ai e i bj sono numeri reali e considerare poi:
W =n∑j=1
bj∂
∂xj
dove stavolta le bj rappresentano funzioni costanti. Possiamo
allora trovare unarappresentazione per il funzionale hessiano nella
base coordinata. Si ha infatti:
Hessfp(v,w) = v(W (f))(p) = v(n∑j=1
bj∂f
∂xj)(p) =
∑i,j
aibj∂2f
∂xi∂xj(p) (2.3)
e dunque la matrice ( ∂2f
∂xi∂xj(p)) è quella che dà la rappresentazione cercata. Dopo
queste considerazioni, grazie alla 2.3 ha senso la seguente
de�nizione:
De�nizione 2.1.3 (punto critico non degenere). Un punto critico
p è detto nondegenere se e solo se la matrice (
∂2f
∂xi∂xj(p))
è non-singolare.
De�nizione 2.1.4 (funzione di Morse). Una funzione liscia f : M
→ R de�nita suuna varietà di�erenziabile liscia M che presenti
soltanto punti critici non degeneriviene detta funzione di
Morse.
-
2.2. Un primo risultato: il lemma di Morse 21
Richiamiamo ora due concetti che saranno ricorrenti nelle
sezioni successive.
De�nizione 2.1.5 (indice). Sia V uno spazio vettoriale reale
(anche di dimensionein�nita) e sia B : V × V → R un funzionale
bilineare e simmetrico de�nito su V .L'indice di B, chiamato anche
indice di Morse e indicato con n−(B), è de�nito come:
n−(B) = sup {dim(W ) : W è sottospazio di V in cui B è de�nita
negativa} (2.4)
ovvero come la massima dimensione (eventualmente in�nita) del
sottospazio su cui Bè de�nita negativa;
De�nizione 2.1.6 (nullità). Sia V uno spazio vettoriale reale
(anche di dimensionein�nita) e sia B : V × V → R un funzionale
bilineare e simmetrico de�nito su V . Lanullità di B è de�nita come
la dimensione del nucleo dell'applicazione φ : V → V ∗de�nita
da:
φ(v) = B(v, ·) ∀v ∈ V (2.5)
Chiameremo d'ora in poi indice (nullità) di f in p l'indice (la
nullità) di Hessfp suTp(M).
Osservazione 2.1.7. Grazie alla 2.5 possiamo dire che p ∈M è un
punto critico nondegenere per f se e solo se la nullità di f in p è
uguale a 0.
2.2 Un primo risultato: il lemma di Morse
Dimostreremo in questa sezione il lemma di Morse, un risultato
importante di cuisi farà uso anche nei capitoli seguenti. A livello
intuitivo esso a�erma che esiste unintorno di un punto critico non
degenere, nel quale una funzione f può essere espressatramite
un'opportuna forma quadratica dipendente solo dal suo
indice.Premettiamo il seguente:
Lemma 2.2.1. Sia V un intorno convesso di 0 ∈ Rn e sia f : V → R
una funzioneliscia con f(0) = 0. Vale allora l'espressione:
f(x1, · · · , xn) =n∑i=1
xigi(x1, · · · , xn) (2.6)
dove le gi sono funzioni lisce de�nite su V e tali che gi(0) =
∂f∂xi (0).
Dimostrazione. Applicando il teorema fondamentale del calcolo
insieme all'ipotesif(0) = 0 e derivando usualmente rispetto a t,
otteniamo subito:
f(x1, · · · , xn) =∫ 1
0
df(tx1, · · · , txn)dt
dt =∫ 1
0
n∑i=1
∂f
∂xi(tx1, · · · , txn) · xi dt
Possiamo allora prendere come gi(x1, · · · , xn) =∫ 1
0∂f∂xi
(tx1, · · · , txn)dt.
Lemma 2.2.2 (Lemma di Morse). Sia f : M → R una funzione di
Morse, p ∈ Mun suo punto critico non degenere e λ l'indice di f in
p. Esiste allora un sistema dicoordinate locali (y1, · · · , yn) in
un intorno U di p con yi(p) = 0 per ogni i e tale
chel'uguaglianza:
f(q) = f(p)− (y1(q))2 − · · · − (yλ(q))2 + (yλ+1(q))2 + · · ·+
(yn(q))2 (2.7)
valga per tutti i punti q ∈ U .
-
2.2. Un primo risultato: il lemma di Morse 22
Dimostrazione. Mostriamo come prima cosa che se esiste
un'espressione di f comequella data dalla formula 2.7, λ deve
necessariamente essere l'indice di f in p ∈M .Per ogni sistema di
coordinate (z1, · · · , zn), se vale la rappresentazione di f
analoga aquella del teorema:
f(q) = f(p)− (z1(q))2 − · · · − (zλ(q))2 + (zλ+1(q))2 + · · ·+
(zn(q))2
si ha immediatamente:
∂2f
∂zi∂zj(p) =
−2 se i = j ≤ λ,
2 se i = j > λ,0 altrimenti
il che mostra che la matrice H che rappresenta Hessfp rispetto
alla base coordinata∂∂z1|p, · · · , ∂∂zn |p è:
H =
−2. . . 0
−22
0 . . .2
Esiste pertanto un sottospazio di Tp(M) di dimensione λ nel
quale Hessfp è de�nitonegativo, e un sottospazio V di dimensione
n−λ dove Hessfp è invece de�nito positivo.Se esistesse un
sottospazio di Tp(M) di dimensione maggiore di λ su cui Hessfp
fossede�nito negativo, allora l'intersezione di tale sottospazio
con V non sarebbe vuota,il che è impossibile perché in tale
intersezione Hessfp sarebbe contemporaneamentede�nito positivo e
de�nito negativo. Pertanto λ è la massima dimensione del
sot-tospazio in cui Hessfp è de�nita negativa, ovvero l'indice di f
in p.Mostriamo ora che esiste un sistema di coordinate locali che
soddisfa alle richiestedella tesi. Possiamo assumere che il punto p
sia l'origine di Rn e che f(p) = f(0)= 0.Grazie al lemma 2.2.1
sappiamo che esiste un intorno dell'origine in cui vale:
f(x1, · · · , xn) =n∑j=1
xjgj(x1, · · · , xn)
Poiché 0 è un punto critico non degenere possiamo scrivere
inoltre:
gj(0) =∂f
∂xj(0) = 0
Applicando nuovamente il lemma 2.2.1, stavolta alle funzioni gj
(siamo nelle ipotesi dipoterlo fare) troviamo:
gj(x1, · · · , xn) =n∑i=1
xihij(x1, · · · , xn)
per certe funzioni lisce hij . Ne segue subito che:
f(x1, · · · , xn) =n∑
i,j=1
xixjhij(x1, · · · , xn)
-
2.3. Esistenza di funzioni di Morse 23
Osserviamo ora che è sempre possibile scrivere h̃ij = 12 (hij +
hji) e avere h̃ij = h̃ji equindi f =
∑xixj h̃ij . Inoltre, la matrice (h̃ij(0)) è uguale a ( 12
∂2f∂xi∂xj
(0)) e quindiessa è non-singolare se e solo se è non singolare
H. Possiamo da subito supporre quindiche hij = hji.
Vogliamo ora trovare una trasformazione delle funzioni
coordinate tramite la qualesia possibile ottenere l'espressione
cercata per f in un aperto opportunamente piccolodell'origine. Per
farlo, procediamo ricalcando il ragionamento di diagonalizzazione
delleforme quadratiche. Supponiamo per induzione che esistano
coordinate (u1, · · · , un) diun aperto U1 3 0 dove valga, per
opportune matrici simmetriche (Hij(u1, · · · , un)),
f(q) = ±(u1(q))2 ± · · · ± (ur−1(q))2 +∑i,j≥r
ui(q)uj(q)Hij(u1, · · · , un)(q)
per tutti i punti q ∈ U1. Possiamo assumere che Hrr(0) 6= 0,
operando eventualmenteun cambio di coordinate lineare nelle ultime
n− r + 1 coordinate. Sia ora:
g(u1, · · · , un)def=√|Hrr(u1, · · · , un)|.
La funzione g è sicuramente non nulla e liscia in qualche
intorno U2 ⊂ U1 di 0.Introduciamo un nuovo sistema di coordinate
locali così de�nito:{
vi = ui i 6= rvr(u1, · · · , un) = g(u1, · · · , un)
[ur +
∑i>r ui
Hir(u1,··· ,un)Hrr(u1,··· ,un)
]Dal teorema della funzione inversa segue che il sistema di
coordinate (v1, · · · , vn) potràessere utilizzato come sistema di
coordinate locali in un intorno su�cientemente piccolodi 0 che
chiameremo U3. E' immediato veri�care che, per ogni q ∈ U3, f ha la
seguenteespressione:
f(q) =∑i≤r
±(vi(q))2 +∑i,j>r
vi(q)vj(q)H ′ij(v1, · · · , vn)(q)
il che completa il ragionamento per induzione e dimostra il
lemma di Morse.
Come immediata conseguenza del lemma 2.2.2 abbiamo il
seguente:
Corollario 2.2.3. Data una funzione f : M → R liscia, i punti
critici non degeneridi f sulla varietà M sono isolati1.
Dimostrazione. Basta scegliere, per ogni punto critico non
degenere, l'intorno dentrocui vale l'identità enunciata nel lemma
di Morse.
2.3 Esistenza di funzioni di Morse
Abbiamo �nora considerato funzioni senza punti critici degeneri,
senza però mai mostrareche tali funzioni esistano davvero. Senza
addentrarci nei particolari, in questa sezionedaremo alcuni
risultati di esistenza di tali funzioni per varietà immerse in Rn,
perqualche n. Tale condizione non è limitativa visto che, grazie al
teorema di Whitney,ogni varietà di�erenziabile può essere immersa
in uno spazio Rn, con n opportuno.
1Ricordiamo che con la dizione 'punto critico isolato'
intendiamo un punto critico per cui esisteun intorno su�cientemente
piccolo da non contenere altri punti critici oltre a se stesso.
-
2.3. Esistenza di funzioni di Morse 24
Sia M ⊂ Rn una varietà di�erenziabile di dimensione k < n
immersa in mododi�erenziabile in Rn. Per ogni punto p∈ Rn, de�niamo
la funzione Lp : M → R comeLp(q) =‖ p − q ‖2. Ciò che dimostreremo
è che la funzione Lp è una funzione diMorse. Per dimostrare tale
importante risultato introduciamo alcune de�nizioni:
De�nizione 2.3.1. Lo spazio totale del �brato normale di M è il
sottoinsiemeN ⊂M × Rn così de�nito:
N = {(q,v) : q ∈M,v ⊥M nel punto q}
Osservazione 2.3.2. Si veri�ca facilmente che N è una varietà
di�erenziabile didimensione n, immersa in maniera di�erenziabile in
R2n.
De�nizione 2.3.3. La mappa di punto �nale è l'applicazione E : N
→ Rn de�nitacome segue:
E(q,v) = q + v
per ogni q ∈M e ogni v ∈ Rn.
De�nizione 2.3.4. Un punto e ∈ Rn è detto punto focale di (M,q)
con moltepli-cità µ, se e solo se e = q + v = E(q,v) dove (q,v) ∈ N
e la matrice jacobiana diE valutata in (q,v) ha nullità µ > 0.
Il punto e sarà invece chiamato semplicementepunto focale di M se e
è un punto focale di (M,q), per qualche q ∈M .
Possiamo pensare intuitivamente ad un punto focale di una
varietà M come unpunto di Rn in prossimità del quale le normali si
intersecano.Per procedere nella trattazione occorre ora utilizzare,
tra le altre cose, una versionedel lemma di Sard che esponiamo
senza dimostrazione.
Teorema 2.3.5 (di Sard). Data una funzione liscia f : M → N
de�nita tra duevarietà di�erenziabili, l'insieme dei valori critici
di f ha misura nulla in N .
Sfruttando questo risultato possiamo subito enunciare e
dimostrare il seguentecorollario il quale a�erma che i punti focali
di una varietà M sono un insieme trascu-rabile:
Corollario 2.3.6. Per q.o. x ∈ Rn, il punto x non è un punto
focale di M .
Dimostrazione. Ricordandoci dell'osservazione 2.3.2 e sfruttando
la de�nizione dipunto focale di M , notiamo che x è un punto focale
di M se e solo se esso è unvalore critico della funzione E.
Applicando quindi la versione 2.3.5 del lemma di Sard,abbiamo
subito la tesi.
Per spiegare meglio cosa intendiamo per punto focale,
richiamiamo qui di segui-to le de�nizioni di prima e seconda forma
fondamentale di una varietà di�erenzia-bile immersa in uno spazio
euclideo sfruttando un sistema di coordinate locali cheimmaginiamo
�ssato.
Sia dunque U ⊂M un aperto sulla varietà e indichiamo con (u1, ·
· · , uk) un sistemadi coordinate locali de�nito su U e centrato in
un punto p ∈ M ⊂ Rn. L'immersionedella varietà M nello spazio
euclideo Rn fornisce n funzioni lisce:
x1(u1, · · · , uk), · · · , xn(u1, · · · , uk).
Esse possono essere più brevemente riunite nell'espressione di
un'unica funzione vet-toriale liscia che scriveremo come:
−→x = −→x (u1, · · · , uk) = (x1(u1, · · · , uk), · · · , xn(u1,
· · · , uk)).
-
2.3. Esistenza di funzioni di Morse 25
Diamo ora la de�nizione di prima forma fondamentale di una
varietà sfruttando quantodetto:
De�nizione 2.3.7. La prima forma fondamentale di una varietà M
associata adun sistema di coordinate scelto, è la matrice così
de�nita:
(gij) =(∂−→x∂ui· ∂−→x∂uj
)Essa è una matrice simmetrica e de�nita positiva, costituita da
funzioni reali e l'o-perazione indicata è l'ordinario prodotto
scalare.
La matrice che invece rappresenta la seconda forma fondamentale
è costituita dafunzioni vettoriali. Vediamo come arrivare ad una
sua possibile de�nizione.Un qualsiasi vettore della forma ∂
2−→x∂ui∂uj
ammette la seguente decomposizione:
∂2−→x∂ui∂uj
=−→tij +
−→lij
nella quale−→tij è un vettore tangente alla varietà nel punto
considerato, mentre
−→lij è un
vettore normale ad essa.
De�nizione 2.3.8. Scelto un sistema di coordinate locali, la
seconda forma fon-damentale della varietà M è la matrice simmetrica
(lij) costituita dalle funzioni avalori vettoriali
−→lij il cui valore in ogni punto è la componente normale di
∂2−→x∂ui∂uj
in
quel punto. Inoltre dato un vettore v, ‖ v ‖= 1, normale a M nel
punto q, la matricedi numeri reali: (
v · ∂2−→x
∂ui∂uj(q))
=(v ·−→lij(q)
)è chiamata seconda forma fondamentale di M in q nella direzione
di v.
D'ora in poi assumiamo che il sistema di coordinate locali sia
scelto in modo taleche la matrice (gij), valutata nel punto q sia
l'identità.
De�nizione 2.3.9. Gli autovalori λ1, · · · , λk della matrice(v
·−→lij(q)
)sono chiamati
curvature principali di M in q nella direzione normale v. I
reciproci λ−11 , · · · , λ−1k
delle curvature principali sono invece detti raggi principali di
curvatura. Potrebbe
accadere che la matrice(v ·−→lij(q)
)sia singolare. In questo caso una o più curvature
principali λi saranno nulle e quindi alcuni raggi principali di
curvatura non sarannode�niti.
Consideriamo adesso la linea normale ` costituita da tutti i
punti della forma q+tv,dove v è un vettore unitario �ssato
ortogonale a M nel punto q.
Lemma 2.3.10. I punti focali di (M,q) lungo la linea ` sono
precisamente i puntiq+λ−1i v, dove 1 ≤ i ≤ k, λi 6= 0. Ci sono
dunque al massimo k punti focali di (M,q)lungo la linea `, contando
ognuno con la propria molteplicità.
Dimostrazione. Scegliamo n−k funzioni vettoriali de�nite su M ,
in modo tale che ivettori w1(u1, · · · , uk), · · · ,wn−k(u1, · · ·
, uk), ossia i valori assunti in ogni punto dellavarietà siano tali
che:
‖ wi ‖= 1, wi ⊥ wj , wi ⊥M ∀i, j.
-
2.3. Esistenza di funzioni di Morse 26
Introduciamo un sistema di coordinate locali sulla varietà N .Le
coordinate (u1, · · · , uk, t1, · · · , tn−k) corrispondano al
punto(
−→x (u1, · · · , uk),n−k∑α=1
tαwα(u1, · · · , uk)
)∈ N
Allora la funzione E : N → Rn crea una corrispondenza che
chiamiamo −→e :
−→e : (u1, · · · , uk, t1, · · · , tn−k) 7→ −→x (u1, · · · , uk)
+n−k∑α=1
tαwα(u1, · · · , uk)
le cui derivate parziali:∂−→e∂ui
=∂−→x∂ui
+n−k∑α=1
tα∂wα∂ui
per i = 1, · · · , k
∂−→e∂tβ
= wβ per β = 1, · · · , n− k
Consideriamo ora i prodotti scalari dei vettori considerati con
i vettori linearmenteindipendenti ∂
−→x∂u1
, · · · , ∂−→x
∂uk,w1, · · · ,wn−k. Quello che otteniamo è una matrice n×
n,
avente per rango quello della jacobiana di E valutata nel punto
corrispondente. Lamatrice ha la seguente forma: (∂−→x∂ui · ∂−→x∂uj
+∑n−kα=1 tα ∂wα∂ui · ∂−→x∂uj ) (∑n−kα=1 tα ∂wα∂ui ·wβ)
0 Id
dove il blocco in basso a sinistra rappresenta la matrice nulla
e quello in basso a destrala matrice identità, entrambe di ordine
n−k. La nullità della matrice scritta è dunqueuguale a quella del
suo blocco in alto a sinistra. Usando l'identità:
0 =∂
∂ui
(wα ·
∂−→x∂uj
)=∂wα∂ui
· ∂−→x∂uj
+ wα ·∂2−→x∂ui∂uj
notiamo che il blocco che ci interessa non è nient'altro che la
matrice:(gij −
n−k∑α=1
tαwα ·−→l ij
)
Possiamo dunque a�ermare che q+tv è un punto focale di (M,q) con
molteplicità µ sela matrice
(gij(q)− tv ·
−→l ij(q)
)è singolare con nullità µ. Per ipotesi sappiamo che la
matrice (gij(q)) è l'identità e dunque abbiamo che(gij(q)− tv
·
−→l ij(q)
)è singolare
se e solo se 1/t è un autovalore della matrice(v ·−→l ij(q)
). Inoltre, la molteplicità di
µ è uguale alla molteplicità algebrica di 1/t come
autovalore.
Fissiamo ora il punto p ∈ Rn e poniamo per comodità f := Lp : M
→ R.
Lemma 2.3.11. Un punto q ∈M è un punto critico degenere della
funzione f = Lpse e solo se p è un punto focale di (M,q) e la
nullità di q come punto critico è ugualealla molteplicità di p come
punto focale.
-
2.3. Esistenza di funzioni di Morse 27
Dimostrazione. Ricordando la de�nizione della funzione Lp,
possiamo esprimere lafunzione f come segue:
f(−→x (u1, · · · , uk)) =‖ −→x (u1, · · · , uk)− p ‖2= −→x · −→x
− 2−→x · p + p · p.
Abbiamo dunque:∂f
∂ui= 2
∂−→x∂ui· (−→x − p)
Pertanto q è un punto critico per f se e solo se q− p è
ortogonale ad M in q.Per quanto riguarda le derivate seconde,
invece, notiamo che esse sono date da:
∂2f
∂ui∂uj= 2
(∂−→x∂ui· ∂−→x∂uj
+∂2−→x∂ui∂uj
· (−→x − p)). (2.8)
Facendo ora la posizione p = −→x + tv, la 2.8, valutata nel
punto q diventa:
∂2f
∂ui∂uj(q) = 2(gij(q)− tv ·
−→lij(q))
da cui si ha subito la tesi.
Riunendo ora quanto a�ermato con il corollario 2.3.6 otteniamo
subito il seguenteteorema che a�erma che la funzione Lp è un
esempio di funzione di Morse.
Teorema 2.3.12. Per quasi ogni p ∈ Rn, la funzione Lp : M → R
non ha punticritici degeneri.
Il precedente teorema ha un interessantissimo corollario, il
quale a�erma sostanzial-mente che le funzione di Morse sono un
insieme denso nell'insieme delle funzioniC∞:
Corollario 2.3.13 (densità delle funzioni di Morse). Ogni
funzione liscia limitataf : M → R può essere approssimata nel senso
della convergenza uniforme da unafunzione liscia g priva di punti
critici degeneri. Inoltre, la funzione g può essere sceltain modo
tale che, scelto un insieme compatto K ⊂M all'interno del quale si
è �ssatoun sistema di coordinate locali (u1, · · · , uk), la
derivata ∂g∂ui approssimi nel senso dellaconvergenza uniforme la
derivata ∂f∂ui , per ogni i ≤ k.
Dimostrazione. Scegliamo un'immersione h : M → Rn in modo tale
che la varietàM venga mappata in un sottoinsieme limitato di
qualche spazio euclideo e che la primacoordinata h1 coincida
esattamente con la funzione f . Scegliamo ora un numero c ∈
Rsu�cientemente grande e delle quantità ε1, ε2, · · · , εn tutte
positive e arbitrariamentepiccole tali che, scegliendo p = (−c +
ε1, ε2, · · · , εn) ∈ Rn, la funzione Lp : M → Rsia non degenere.
De�niamo ora la funzione g come segue:
g(x) =Lp(x)− c2
2cLa funzione g è non degenere e con un breve calcolo otteniamo
che:
g(x) = f(x)− ε1 +n∑i=1
(hi(x))2
2c−
n∑i=1
εihi(x)c
+n∑i=1
ε2i2c
Da questa scrittura è chiaro che, scegliendo c abbastanza grande
e gli εi abbastanzapiccoli, si può fare in modo che g e le sue
derivate approssimino rispettivamente f e lesue derivate nel senso
della convergenza uniforme.
-
2.4. Gruppi ad un parametro di di�eomor�smi 28
2.4 Gruppi ad un parametro di di�eomor�smi
Concludiamo questo capitolo introducendo e dando un risultato di
esistenza e unicitàper i gruppi ad un parametro di di�eomor�smi,
nozione tramite la quale, nel capitoloseguente, enunceremo e
dimostreremo un teorema cardine della Teoria di Morse.
De�nizione 2.4.1. Un gruppo ad un parametro di di�eomor�smi
de�nito suuna varietà M è un'applicazione liscia ϕ : R × M → M che
soddisfa le seguentiproprietà:
1. per ogni t ∈ R la mappa ϕt : M → M de�nita da ϕt(q) = ϕ(t, q)
è undi�eomor�smo2 di M su se stessa;
2. per ogni t, s ∈ R si ha ϕt+s = ϕt ◦ ϕs.
Dato un gruppo ad un parametro di di�eomor�smi è sempre
possibile de�nire uncampo vettoriale X su M nel modo seguente. Per
ogni funzione reale liscia f e sceltoun punto q ∈M , si
consideri
Xq(f)def= lim
h→0
f(ϕh(q))− f(q)h
(2.9)
Diciamo che il campo vettoriale de�nito in 2.9 genera il gruppo
ϕ.Il teorema seguente ci dà una condizione su�ciente perché un
campo vettoriale asse-gnato generi un unico gruppo ad un parametro
di di�eomor�smi.
Teorema 2.4.2. Sia X un campo vettoriale liscio a supporto
compatto de�nito su unavarietà M . Allora X genera un unico gruppo
a un parametro di di�eomor�smi su M .
Dimostrazione. Data una qualunque curva liscia t 7→ c(t) ∈M ,
de�niamo il vettorevelocità dcdt ∈ Tc(t)(M) come:
dc
dt(f)
def= lim
h→0
f(c(t+ h))− f(c(t))h
Sia ora ϕt un gruppo ad un parametro di di�eomor�smi, generato
dal campo vettorialeX. Allora, per ogni punto q ∈ M �ssato, la
curva t 7→ ϕt(q) soddisfa il problema diCauchy: {
dϕt(q)dt = Xϕt(q)ϕ0(q) = q
(2.10)
La prima delle due equazioni è vera poiché:
dϕt(q)dt
(f) = limh→0
f(ϕt+h(q))− f(ϕt(q))h
= limh→0
f(ϕh(p))− f(p)h
= Xp(f)
dove p = ϕt(q). Come sappiamo però, un problema di�erenziale del
tipo 2.10 che, intermini delle coordinate locali u1, · · · , un
assume la forma più familiare
duidt
= xi(u1, · · · , un), i = 1, · · · , n
possiede, localmente, un'unica soluzione che dipende in maniera
C∞ dalle condizioniiniziali. Per ogni punto di M , pertanto, esiste
un intorno U del punto stesso ed un
2Ricordiamo che un di�eomor�smo tra due varietà di�erenziabili è
una funzione di�erenziabile,invertibile e con inversa
di�erenziabile.
-
2.4. Gruppi ad un parametro di di�eomor�smi 29
numero ε > 0 per i quali il problema di�erenziale 2.10 ha
un'unica soluzione liscia perogni q ∈ U e | t |< ε.
Grazie alla proprietà di compattezza, inoltre, K può essere
ricoperto da un numero�nito di tali intorni U . Sia ora ε0 > 0
il più piccolo degli ε corrispondenti a questiintorni e poniamo
ϕt(q) = q per q 6∈ K. Segue allora subito che questa
equazionedi�erenziale ha un'unica soluzione ϕt(q) per tutti i t, |
t |< ε0 e per q ∈ M . Talesoluzione è liscia vista come funzione
di due variabili ed è inoltre chiaro che ϕt+s =ϕt ◦ ϕs ogni volta
che | t |, | s |, | t+ s |< ε0. Inoltre ogni ϕt è un
di�eomor�smo.Quello che dobbiamo fare per completare la
dimostrazione è de�nire ϕt per tutti it, | t |≥ ε0. Ogni t ∈ R può
essere espresso come un multiplo di ε0/2 più un resto r,con | r
|< ε0/2. Se dunque t = k(ε0/2) + r, k ≥ 0, poniamo:
ϕ = ϕε0/2 ◦ ϕε0/2 ◦ · · · ◦ ϕε0/2︸ ︷︷ ︸kvolte
◦ϕr
Se invece k < 0 sostituiamo nella de�nizione di ϕt il
di�eomor�smo ϕε0/2 con ϕ−ε0/2 eiterare la trasformazione −k volte.
In questo modo ϕt risulta de�nito per tutti i valoridi t. Si mostra
facilmente che ϕt è ben de�nito, di classe C∞ e soddisfa la
condizioneϕt+s = ϕt ◦ ϕs.
Osservazione 2.4.3. L'ipotesi che il campo vettoriale X abbia un
supporto compattoè essenziale. Si consideri il caso in cui M è
l'intervallo unitario aperto (0, 1) ⊂ R, esia X il campo vettoriale
standard ddt su M . Esso non ha supporto compatto e nongenera alcun
gruppo ad un parametro di di�eomor�smi su M .
-
Capitolo 3
Omotopia e valori critici
Nel seguente capitolo ci serviremo del Lemma di Morse 2.2.2 per
studiare come cambiala topologia di una varietà di�erenziabile
tramite l'analisi dei valori critici di funzionidi Morse. I teoremi
presentati costituiscono la parte centrale della Teoria di Morse
edi questo breve lavoro.
3.1 Funzioni di Morse e omotopia
Prima di enunciare il primo importante teorema del capitolo,
diamo due ulterioride�nizioni di cui ci serviremo. Muniamo d'ora in
poi M di una metrica riemannianae indichiamo con < v,w > il
prodotto scalare associato da tale metrica a due vettoritangenti v
e w.
De�nizione 3.1.1. Per ogni a ∈ R poniamo:
Madef= f−1(−∞, a] = {p ∈M : f(p) ≤ a}
De�nizione 3.1.2. Il gradiente di una funzione f : M → R è un
campo vettorialeindicato con ∇f e de�nito su M dall'identità:
< X,∇f >= X(f)
per ogni campo vettoriale liscio X de�nito su M . Scelto un
sistema di coordinate locali(u1, · · · , un), il gradiente di f ha
componenti:
(∇f)i =n∑j=1
gij∂f
∂uji = 1, · · · , n
dove le gij sono le componenti del tensore metrico.
Osservazione 3.1.3. Per come è stato de�nito, il campo
vettoriale ∇f si annullaesattamente in corrispondenza dei punti
critici di f . Se il campo vettoriale X dellade�nizione 3.1.2 è il
campo vettoriale velocità dαdt di una curva α : R → M ,
valel'identità:
<dα
dt,∇f >= d(f ◦ α)
dt
30
-
3.1. Funzioni di Morse e omotopia 31
Teorema 3.1.4. Sia f : M → R una funzione liscia de�nita sulla
varietà M . Pera, b ∈ R tali che a < b si supponga che l'insieme
f−1[a, b] = {p ∈M : a ≤ f(p) ≤ b}sia compatto e non contenga punti
critici. Allora Ma è di�eomorfo a M b. Inoltre,Ma è un retratto di
deformazione di M b, dunque la mappa di inclusione i : Ma ↪→M bè
un'equivalenza omotopica.
Dimostrazione. Sia g : M → R la funzione liscia così
de�nita:
g(x)def=
−1
< ∇f(x),∇f(x) >se x ∈ f−1[a, b]
0 se x ∈M \K
dove K ⊂M è un intorno compatto contenente l'insieme f−1[a, b].
De�niamo ora, perun generico q ∈M il campo vettoriale:
Xqdef= g(q)(∇f)q
e notiamo che esso soddisfa le ipotesi del Teorema 2.4.2.
Applicandolo possiamo quindidedurre cheX genera un unico gruppo ad
un parametro di di�eomor�smi ϕt : M →M .Fissiamo ora q ∈ M e
consideriamo la funzione t 7→ f(ϕt(q)). Se ϕt(q) è
contenutonell'insieme f−1[a, b], allora:
df(ϕt(q))dt
=〈dϕt(q)dt
, (∇f)ϕt(q)〉
=〈Xϕt(q), (∇f)ϕt(q)
〉= −1.
Se invece f(ϕt(q)) 6∈ K si ha df(ϕt)dt = 0 perché X è nullo
fuori da K. La funzione:t 7→ f(ϕt(q)) è dunque lineare con derivata
uguale a -1 quando f(ϕt(q)) ∈ [a, b],ovvero, detto in altre parole:
f(ϕt(q)) = f(q)− t se f(q) ∈ [a, b] e se a ≤ f(q)− t ≤ b.Si ha
allora che ϕt(f−1(c)) = f−1(c − t) per c ∈ [a, b] e a ≤ c − t ≤ b.
Il �ussoϕt scambia quindi gli insiemi di livello di f . Ciò
signi�ca che ϕb−c mappa f−1(b)di�eomor�camente in f−1(c) per ogni c
∈ [a, b] e, per ogni t, ϕt è l'identità fuorida f−1(K). Abbiamo
quindi dimostrato la prima parte del teorema considerando
ildi�eomor�smo ϕb−a : M → M che porta M b di�eomor�camente su Ma.
Inoltre,de�nendo la famiglia di applicazioni rt, dove rt : M b →M
b, tramite:
rt(q) =
{q se f(q) ≤ aϕt(f(q)−a)(q) se a ≤ f(q) ≤ b
si ha che r0 è l'identità e r1 è una retrazione da M b a Ma.
Dunque Ma è un retrattodi deformazione di M b.
Osservazione 3.1.5. La condizione che f−1[a, b] sia un insieme
compatto è essen-ziale. Immaginiamo di considerare una varietà M
cui togliamo un punto p ∈ f−1[a, b].Ovviamente non è possibile
retrarre con continuità M b su Ma e pertanto il teoremanon
vale.
Il seguente teorema precisa invece cosa succede alla topologia
di una varietà inprossimità di un punto critico.
Teorema 3.1.6. Sia f : M → R una funzione liscia de�nita sulla
varietà liscia Me sia p ∈ M un punto critico non degenere di indice
λ. Sia c il valore critico di fassunto in corrispondenza di p e si
supponga che, per un ε > 0 opportunamente scelto,f−1[c − ε, c +
ε] sia compatto e non contenga altri punti critici diversi da p.
Alloral'inseme M c+ε è omotopicamente equivalente a M c−ε con una
λ−cella attaccata.
-
3.1. Funzioni di Morse e omotopia 32
Dimostrazione. Come prima cosa applichiamo il lemma di Morse
2.2.2 alla funzionef e al punto p, trovando un intorno U di p e un
sistema di coordinate locali (y1, · · · , yn)tali che, per ogni q ∈
U valga l'identità:
f(q) = c− (y1(q))2 − · · · − (yλ(q))2 + (yλ+1(q))2 + · · ·+
(yn(q))2 (3.1)
e si abbia y1(p) = · · · = yn(p) = 0.Scegliamo ora ε > 0
abbastanza piccolo in modo tale che si abbiano veri�cate leseguenti
proprietà:
(i) L'insieme f−1[c− ε, c+ ε] sia compatto e non contenga altri
punti critici oltre a p.
(ii) Considerata l'immersione liscia ψ : U → Rn, data dalla
scelta delle coordinatelocali, si abbia che ψ(U) ⊃ B√2ε ovvero la
palla chiusa n-dimensionale di raggio√
2ε e centro l'origine de�nita da:
B√2ε =
(y1, · · · , yn) :n∑j=1
(yj)2 ≤ 2ε
De�niamo ora la n-cella eλ come segue:
eλ ={
(y1, · · · , yn) : (y1)2 + · · ·+ (yλ)2 ≤ ε, yλ+1 = · · · = yn =
0}
Diamo una rappresentazione gra�ca della situazione che ci
aiuterà a capire comemuoverci:
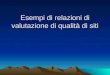
Figura 3.1: Rappresentazione della situazione in prossimità del
punto critico p
Gli assi coordinati rappresentano rispettivamente i piani yλ+1 =
· · · = yn = 0 e
-
3.1. Funzioni di Morse e omotopia 33
y1 = · · · = yλ = 0; la circonferenza rappresenta il bordo di
B√2ε; le iperboli sono levarietà f−1(c− ε) e f−1(c+ ε). Sostituendo
infatti f = c− ε nella 3.1 si ottiene:
c− ε = c− (y1(q))2 − · · · − (yλ(q))2 + (yλ+1(q))2 + · · ·+
(yn(q))2
e si ricava quindi:
ε =λ∑i=1
y2i −n∑
i=λ+1
y2i = X2 − Y 2
ovvero proprio l'equazione di un'iperbole nel piano XY , dove X
=| (y1, · · · , yλ) | eY =| (yλ+1, · · · , yn) |. In modo analogo
si può procedere imponendo le condizionif = c+ ε e f = ε, trovando
rispettivamente:
−X2 + Y 2 = ε −X2 + Y 2 = 0
La regione M c−ε è quella colorata in modo più scuro, la regione
f−1[c− ε, c] è quellapuntinata e la regione f−1[c, c + ε] è quella
colorata in modo più chiaro. La lineaorizzontale scura passante per
p rappresenta la cella eλ. Dalla �gura è chiaro che:eλ∩M c−ε = ∂eλ,
e dunque la λ-cella eλ è attaccata aM c−ε come richiesto.
Mostriamoora che M c−ε ∪ eλ è un retratto di deformazione di M
c+ε.
Per fare ciò consideriamo una funzione liscia γ : R→ R con le
seguenti caratteris-tiche:
γ(0) > εγ(t) = 0 se t ≥ 2ε
−1 < γ′(t) ≤ 0 per tutti i t
Figura 3.2: Andamento qualitativo della funzione γ de�nita
L'ultima condizione signi�ca che la funzione γ è non crescente
nell'intervallo [0, 2ε]e ivi non può assumere massimi relativi.
Notiamo, inoltre, che in questo intervallo lafunzione γ è sempre
non negativa (vedi �gura 3.2).
Per tutti i punti q ∈ U , l'intorno precedentemente trovato,
de�niamo le due funzioniξ, η : M → [0,∞) come segue:
ξ(q) = (y1(q))2 + · · ·+ (yλ(q))2
-
3.1. Funzioni di Morse e omotopia 34
η(q) = (yλ+1(q))2 + · · ·+ (yn(q))2
Notiamo che, tramite queste posizioni, l'identità 3.1 può essere
scritta come:f(q) =c − ξ(q) + η(q). De�niamo ora una funziona
liscia F : M → R, F ≤ f nel modoseguente:
F (q)def=
{f(q) se q ∈M \ Uc− ξ(q) + η(q)− γ(ξ(q) + 2η(q)) se q ∈ U
Analizziamo ora nel dettaglio la funzione F appena
de�nita.Occupiamoci, per prima cosa, di studiare com'è fatto
l'insieme:
F−1(−∞, c+ ε] = {q ∈M : F (q) ≤ c+ ε} .
Consideriamo un generico punto q ∈ M : se vale ξ(q) + 2η(q) >
2ε (ovvero se siamofuori dall'ellissoide ξ+2η ≤ 2ε), si ha che
γ(ξ(q)+2η(q)) = 0, pertanto per de�nizionedi F si ha che essa
coincide con f dato che vale: F (q) = c − ξ(q) + η(q) = f(q).
Seinvece ci troviamo dentro l'ellissoide allora vale:
F (q) ≤ f(q) = c− ξ(q) + η(q) ≤ c+ 12ξ(q) + η(q) ≤ c+ ε
Pertanto deduciamo che
F−1(−∞, c+ ε] = f−1(−∞, c+ ε] = M c+ε. (3.2)
Vediamo ora come sono fatti i punti critici di F . Ricordandoci
la condizione su γ′
possiamo scrivere:
∂F
∂ξ= −1− γ′(ξ + 2η) < 0
∂F
∂η= 1− 2γ′(ξ + 2η) ≥ 1
e banalmente si ha che:
dF =∂F
∂ξdξ +
∂F
∂ηdη.
I due vettori dξ e dη sono nulli solamente in corrispondenza del
punto p e da questosegue che l'unico punto critico di F all'interno
di U è il punto p stesso. Tale ragiona-mento può essere ripetuto
per tutti i punti critici di f e concludiamo pertanto che Fe f
hanno gli stessi punti critici.
Studiamo ora l'insieme: F−1[c − ε, c + ε]. Grazie alla 3.2 e
alla disuguaglianzasempre vera F ≤ f , abbiamo che vale:
F−1[c− ε, c+ ε] ⊂ f−1[c− ε, c+ ε]
L'insieme f−1[c− ε, c+ ε] è compatto per ipotesi e, poiché
F−1[c− ε, c+ ε] è chiuso,deduciamo che è anche compatto. Inoltre,
per quanto detto, non può contenere altripunti critici eccetto,
eventualmente, p. Vediamo però che p non appartiene a
questoinsieme, dal momento che: F (p) = c − γ(0) < c − ε. Siamo
quindi nelle condizionidi poter applicare il teorema 3.1.4 e
concludere dunque che F−1(−∞, c − ε] è unretratto di deformazione
di M c+ε. Possiamo pensare all'insieme F−1(−∞, c− ε] come
-
3.1. Funzioni di Morse e omotopia 35
all'unione tra M c−ε e un 'manico' attaccato. Scriveremo d'ora
in poi, al posto diF−1(−∞, c− ε], M c−ε ∪H dove H è la chiusura di
F−1(−∞, c− ε] \M c−ε.
Osserviamo ora che la cella eλ consta di tutti i punti q tali
che ξ(q) ≤ ε e η(q) = 0ed è contenuta in H. Questo perché, come
abbiamo visto, ∂F∂ξ < 0 e dunque, per tuttii punti q ∈ eλ,
valgono:
F (q) ≤ F (p) < c− εf(q) ≥ c− ε
Mostriamo ora cheM c−ε∪eλ è un retratto di deformazione diM
c−ε∪H. La retrazioneche consideriamo rt : M c−ε∪H →M c−ε∪H è
de�nita come l'identità fuori dall'apertoU , mentre per i punti
appartenenti a questo aperto, dobbiamo distinguere alcuni casi.
• Come primo caso consideriamo l'insieme dei punti in cui ξ ≤ ε:
per questi puntirt agisce in questo modo:
(y1, · · · , yn)rt7→ (y1, · · · , yλ, tyλ+1, · · · , tyn)
Con una tale de�nizione r1 risulta essere l'identità e r0 mappa
l'insieme consid-erato in eλ.
• Come secondo insieme consideriamo quello in cui: ε ≤ ξ ≤ η +
ε. Al suo internode�niamo rt in modo tale che agisca come
segue:
(y1, · · · , yn)rt7→ (y1, · · · , yλ, styλ+1, · · · , styn)
dove st è un numero reale dell'intervallo [0, 1] de�nito tramite
il t dell'omotopiacome:
st = t+ (1− t)
√ξ − εη
Notiamo allora che r1 è ancora l'identità mentre r0 mappa tutto
l'insieme con-siderato nella regione f−1(c− ε).
• L'ultimo insieme da considerare è quello dei punti in cui η+ε
≤ ξ (ovvero dentroM c−ε). Per questi punti basta de�nire rt come
l'identità per tutti i t ∈ [0, 1].Notiamo che tale de�nizione ha
anche il vantaggio di essere coerente con quellaprecedentemente
data non appena ξ = η + ε.
Quanto detto mostra cheM c−ε∪eλ è un retratto di deformazione di
F−1(−∞, c+ε]e completa la dimostrazione del teorema.
Osservazione 3.1.7. I due teoremi appena visti dicono quindi
che, data una funzionedi Morse f , se l'insieme f−1[a, b] è
compatto, la topologia tra Ma e M b cambia nonappena esistono
valori critici nell'intervallo [a, b]. La richiesta che il punto
critico sianon degenere è essenziale: consideriamo il controesempio
in cui M è la retta reale e lafunzione in esame è f(x) = x3.
Scegliamo un a < 0: si ha che 0 è un punto critico, mala
topologia di Ma non cambia quando a passa per 0.
Osservazione 3.1.8. Tramite una dimostrazione simile a quella
vista è possibile di-mostrare il risultato più generale secondo cui
se nell'insieme f−1(c) ci sono k punticritici non degeneri p1, · ·
· , pk con indici rispettivamente λ1, · · · , λk, allora M c+ε
èomotopicamente equivalente a M c−ε ∪ eλ1 ∪ · · · ∪ eλk .
-
3.2. Equivalenza a CW-complessi 36
Osservazione 3.1.9. E' possibile mostrare, modi�cando
leggermente la dimostrazionedel teorema 3.1.6, che anche l'insieme
M c è un retratto di deformazione di M c+ε.L'insieme M c è infatti
un retratto di deformazione di F−1(−∞, c] il quale è a suavolta un
retratto di deformazione di M c+ε. Quanto detto, insieme al teorema
3.1.6 cipermette di concludere che M c−ε ∪ eλ è un retratto di
deformazione di M c.
3.2 Equivalenza a CW-complessi
L'ultimo teorema che ci accingiamo ad enunciare e dimostrare
richiede due lemmipreliminari riguardanti un generico spazio
topologico X con una cella attaccata.
Lemma 3.2.1 (di Whitehead). Siano ϕ0, ϕ1 : ∂eλ → X due mappe
omotope def-inite sulla sfera Sλ−1. Allora la mappa identica su X
si estende ad un'equivalenzaomotopica:
k : X ∪ϕ0 eλ → X ∪ϕ1 eλ
Dimostrazione. Scelto un sistema di coordinate locali (u1, · · ·
, un) : eλ → Rn per lacella eλ, de�niamo k come segue:
k(x) = x se x ∈ Xk(tu) = 2tu se 0 ≤ t ≤ 1/2 e u ∈ ∂eλ
k(tu) = ϕ2−2t(u) se 1/2 ≤ t ≤ 1 e u ∈ ∂eλ
dove ϕt indica l'omotopia tra ϕ0 e ϕ1. Si veri�ca che k è ben
de�nita. Si puòanalogamente de�nire un'applicazione:
l : X ∪ϕ1 eλ → X ∪ϕ0 eλ
tramite: l(x) = x se x ∈ X
l(tu) = 2tu se 0 ≤ t ≤ 1/2 e u ∈ ∂eλ
l(tu) = ϕ2t−1(u) se 1/2 ≤ t ≤ 1 e u ∈ ∂eλ
Non è ora di�cile mostrare che le composizioni k◦l e l◦k sono
omotope rispettivamenteall'identità suX∪ϕ1eλ e suX∪ϕ0eλ. La
funzione k è dunque un'equivalenza omotopica.
Lemma 3.2.2. Sia ϕ : ∂eλ → X una mappa di attaccamento di una
λ-cella sullospazio topologico X. Allora ogni equivalenza omotopica
f : X → Y si estende adun'equivalenza omotopica:
F : X ∪ϕ eλ → Y ∪f◦ϕ eλ
Dimostrazione. De�niamo F in modo tale che:
F (x)def=
{f(x) se x ∈ X
x se x ∈ eλ
Sia ora g : Y → X l'inversa omotopica di f e de�niamo G come
segue:
G : Y ∪f◦ϕ eλ → X ∪g◦f◦ϕ eλ
-
3.2. Equivalenza a CW-complessi 37
G(y)def=
{g(y) se y ∈ Yy se y ∈ eλ
La composizione g ◦ f ◦ ϕ è omotopa a ϕ e grazie al lemma 3.2.1
ricaviamo l'esistenzadi un'equivalenza omotopica k : X ∪g◦f◦ϕ eλ →
X ∪ϕ eλ.Come prima cosa mostriamo che la composizione k ◦ G ◦ F : X
∪ϕ eλ → X ∪ϕ eλ èomotopa alla mappa identica.
Sia ht un'omotopia tra g ◦ f e l'identità. Usando le de�nizioni
di k,G e F notiamoche:
(k ◦G ◦ F )(x) = (g ◦ f)(x) se x ∈ X(k ◦G ◦ F )(tu) = 2tu se 0 ≤
t ≤ 1/2 e u ∈ ∂eλ
(k ◦G ◦ F )(tu) = (h2−2t ◦ ϕ)(u) se 1/2 ≤ t ≤ 1 e u ∈ ∂eλ.
De�niamo ora l'omotopia cercata come:
qτ (x) : X ∪ϕ eλ → X ∪ϕ eλqτ (x) = hτ (x) se x ∈ X
qτ (tu) = 2tu/(1 + τ) se 0 ≤ t ≤ (1 + τ)/2, u ∈ ∂eλ
qτ (tu) = (h2−2t+τ ◦ ϕ)(u) se (1 + τ)/2 ≤ t ≤ 1, u ∈ ∂eλ
La funzione F ha, pertanto, un'inversa omotopica sinistra. Per
concludere ricordiamoil risultato seguente: se una generica
funzione α ammette sia un'inversa omotopicasinistra L, sia
un'inversa omotopica destra R, allora α è un'equivalenza omotopica
edR (o L) è un'inversa omotopica bilatera. Notiamo infatti che la
relazione k◦G◦F ∼ Idasserisce l'esistenza per F di un'inversa
omotopica sinistra e analogamente si puòmostrare che anche G
ammette un'inversa omotopica sinistra. Per concludere oranotiamo
che:
• Poiché k ◦ (G ◦ F ) ∼ Id e k è supposta avere un'inversa
sinistra, segue che(G ◦ F ) ◦ k ∼ Id.
• Poiché G ◦ (F ◦ k) ∼ Id e G è supposta avere un'inversa
sinistra, segue che(F ◦ k) ◦G ∼ Id.
• Poiché F ◦ (k ◦ G) ∼ Id e F ha k ◦ G come inversa sinistra,
segue che F èun'equivalenza omotopica.
Enunciamo e dimostriamo ora l'ultimo importante teorema di
questa sezione ilquale asserisce che, sotto particolari ipotesi,
una qualsiasi varietà di�erenziabile èomotopicamente equivalente ad
un opportuno CW -complesso.
Teorema 3.2.3. Sia f : M → R una funzione liscia de�nita su una
varietà compattaM . Se f non ha punti critici degeneri allora M è
omotopicamente equivalente ad unCW -complesso �nito dimensionale
tale che, per ogni λ = 1, · · · , dim(M), il numerodelle λ-celle è
uguale al numero dei punti critici di f aventi indice uguale a
λ.
Dimostrazione. Siano c1, c2, · · · i valori critici di f .
Possiamo supporre, a menodi riordinamento, che c1 < c2 < c3
< · · · . La successione {cn} non ha punti diaccumulazione dal
momento che, grazie alla compattezza di M , anche ogni Ma ècompatto
e Ma = ∅ per a < c1. Procediamo per induzione: supponiamo che
per
-
3.2. Equivalenza a CW-complessi 38
a 6= c1, c2, · · · la sottovarietàMa sia omotopicamente
equivalente ad un CW -complessoY tramite la mappa F ′ : Ma → Y .
Sia c̄ il più piccolo dei ci tale che ci > a. Grazieai teoremi
3.1.4, 3.1.6 e all'osservazione 3.1.8, troviamo che, per ε
su�cientementepiccolo:
• c'è un'equivalenza omotopica F : M c̄−ε →Ma;
• M c̄+ε è omotopicamente a M c̄−ε ∪ϕ1 eλ1 ∪ · · · ∪ϕj(c̄)
eλj(c̄) per opportune mappedi attaccamento ϕi il cui numero dipende
dal numero c̄.
Applichiamo ora il teorema di approssimazione cellulare 1.3.14
ad ogni composizioneF ′ ◦F ◦ϕi per i = 1, · · · , j(c̄). Troviamo
allora che ognuna di queste mappe è omotopaa una mappa:
ψi : ∂eλi → Y λi−1
dove ricordiamo che con Y λi−1 indichiamo il (λi − 1)-scheletro
di Y . Usiamo ora ilemmi prima dimostrati. Grazie al lemma di
Whitehead 3.2.1 troviamo che:
Y ∪ψ1 eλ1 ∪ · · · ∪ψj(c̄) eλj(c̄) ' Y ∪F ′◦F◦ϕ1 eλ1 ∪ · · · ∪F
′◦F◦ϕj(c̄) e
λj(c̄)
E grazie al lemma 3.2.2, applicato operando le sostituzioni f =
F ′ ◦ F e (X,Y ) =(M c−ε, Y ), troviamo proprio che:
M c+ε ' Y ∪ψ1 eλ1 ∪ · · · ∪ψj(c̄) eλj(c̄)
Per induzione possiamo in�ne concludere la dimostrazione: ogni
Ma′e quindi anche
M è equivalente ad un opportuno CW -complesso.
Osservazione 3.2.4. Lo stesso risultato può essere dimostrato
anche nel caso in cuila varietà M non è compatta, ma