Embed Size (px)
Citation preview
Università degli Studi di Roma “Tor Vergata”
Facoltà di Ingegneria
CORSO DI LAUREA SPECIALISTICA IN INGENERIA MEDICA
Tecnologie chirurgiche innovative
LA CAPSULA ENDOSCOPICA: UNA NUOVA FRONTIERA VERSO LA
CHIRURGIA NON-INVASIVA
A.A. 2006/2007 Dorina Brando
2
INDICE
1. Introduzione 3 2. Colonoscopia tradizionale 4
2.1. Il tratto gastrointestinale (TGI) 4 2.2. Colonscopia tradizionale 5
3. La videocapsula 8
3.1. La capsula endoscopica 8 3.2. Applicazione clinica dell’endocapsula 10 3.3. Vantaggi, indicazioni e controindicazioni della videocapsula 12
4. VECTOR – Versatile Endoscopic Capsule for gastrointestinal TumOr Recognition and therapy
4.1. VECTOR Project: approccio tecnologico ed economico 13 4.2. Locomozione e creazione dello spazio 15 4.3. Amministrazione dell’energia 18 4.4. Sistema visivo e illuminazione 19 4.5. Sviluppo dei circuiti integrati 21 4.6. Sensori per la diagnosi 22 4.7. Prelievo di campioni de tessuto e trattamento 22 4.8. Navigazione e localizzazione 23 4.9. Comunicazione e telemetria 24 4.10. Sistema di integrazione del prototipo 25 4.11. Valutazione medica, studi preclinici e clinici 25 4.12. Derivazioni e dispositivi secondari 26 4.13. Addestramento, diffusione e sfruttamento 26
5. Bibliografia 28
3
1. Introduzione
Molte metodologie di analisi prevedono l’utilizzo di dispositivi invasivi che si dimostrano,
oltre che fastidiosi ed a volte dolorosi per il paziente, insufficienti ad esplorare tutta la parte
che potrebbe essere interessata dalla malattia; in particolare, tra queste metodologie
diagnostiche, una delle più invasive è senza dubbio l’esame del tratto gastrointestinale (TGI)
eseguito mediante endoscopia. Questo tipo di esame consiste nell’introdurre dalla bocca
(gastroscopia, enteroscopia) o dall’ano (retto-sigmoidoscopia, colonscopia) un lungo tubo
flessibile dotato di organi di diagnosi e di intervento in loco. Tale tipo di esame è scarsamente
utilizzato da parte della popolazione (almeno come esame preventivo) a causa sia
dell’imbarazzo che comporta, sia soprattutto del fastidio e del dolore che il paziente prova nel
corso della diagnosi. Nonostante ciò l’endoscopia del TGI è di fondamentale importanza nella
medicina perché permette di rilevare in fase precoce un notevole numero di tumori che
possono colpire l’uomo. Per comprendere la rilevanza che hanno i tumori del TGI nel quadro
più generale delle neoplasie, può essere utile considerare alcune statistiche ufficiali. Secondo
la American Cancer Society negli Stati Uniti, dopo i tumori ai polmoni e ai bronchi, e dopo
quelli alla mammella per le donne ed alla prostata per gli uomini, i tumori colon-rettali si
collocano al terzo posto tra le neoplasie maligne più frequenti (pari al 10.67%). Al fine di
risolvere i problemi relativi alla endoscopia convenzionale, sono stati sviluppati diversi robot
per ispezione del tratto gastro-intestinale (TGI). Nell’ambito del progetto EMILOC
(Endoscopic MIcrocapsule LOcomotion and Control), frutto della collaborazione tra il
laboratorio CRIM ed il KIST, è stato possibile lo sviluppo di un sistema di locomozione
dedicato per una capsula endoscopica capace di muoversi autonomamente nel TGI mediante
zampe.
4
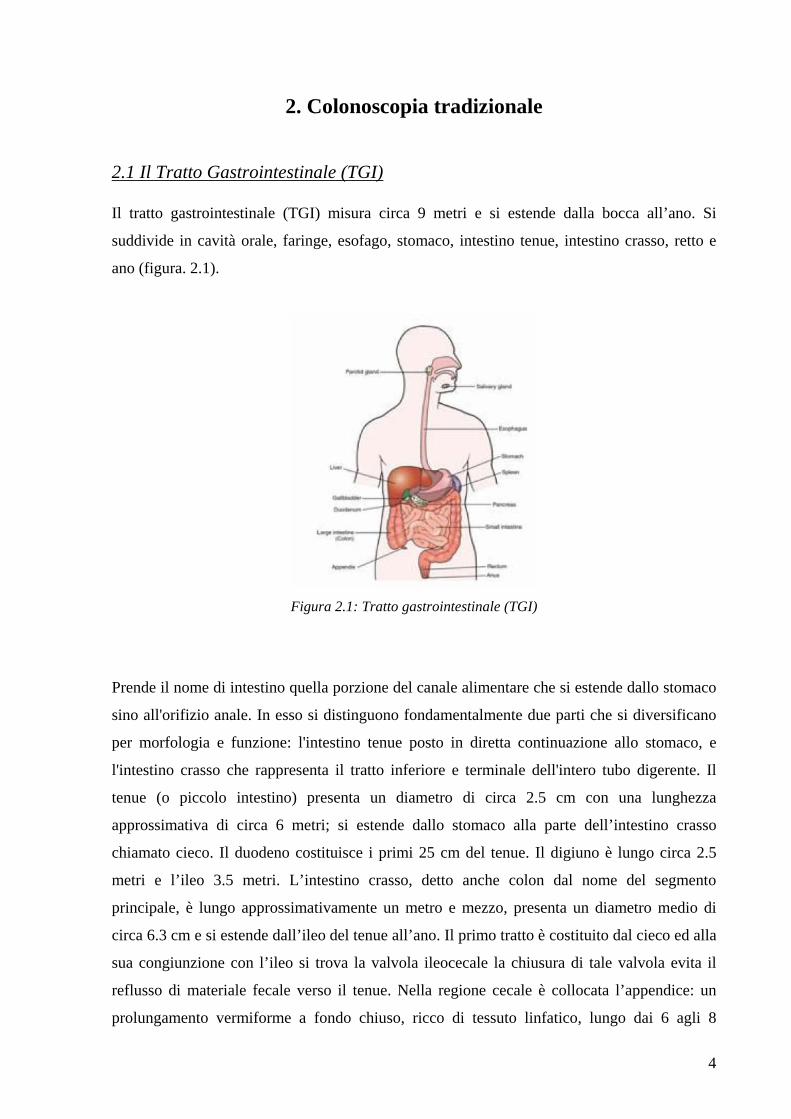
2. Colonoscopia tradizionale 2.1 Il Tratto Gastrointestinale (TGI) Il tratto gastrointestinale (TGI) misura circa 9 metri e si estende dalla bocca all’ano. Si
suddivide in cavità orale, faringe, esofago, stomaco, intestino tenue, intestino crasso, retto e
ano (figura. 2.1).
Figura 2.1: Tratto gastrointestinale (TGI)
Prende il nome di intestino quella porzione del canale alimentare che si estende dallo stomaco
sino all'orifizio anale. In esso si distinguono fondamentalmente due parti che si diversificano
per morfologia e funzione: l'intestino tenue posto in diretta continuazione allo stomaco, e
l'intestino crasso che rappresenta il tratto inferiore e terminale dell'intero tubo digerente. Il
tenue (o piccolo intestino) presenta un diametro di circa 2.5 cm con una lunghezza
approssimativa di circa 6 metri; si estende dallo stomaco alla parte dell’intestino crasso
chiamato cieco. Il duodeno costituisce i primi 25 cm del tenue. Il digiuno è lungo circa 2.5
metri e l’ileo 3.5 metri. L’intestino crasso, detto anche colon dal nome del segmento
principale, è lungo approssimativamente un metro e mezzo, presenta un diametro medio di
circa 6.3 cm e si estende dall’ileo del tenue all’ano. Il primo tratto è costituito dal cieco ed alla
sua congiunzione con l’ileo si trova la valvola ileocecale la chiusura di tale valvola evita il
reflusso di materiale fecale verso il tenue. Nella regione cecale è collocata l’appendice: un
prolungamento vermiforme a fondo chiuso, ricco di tessuto linfatico, lungo dai 6 agli 8
5
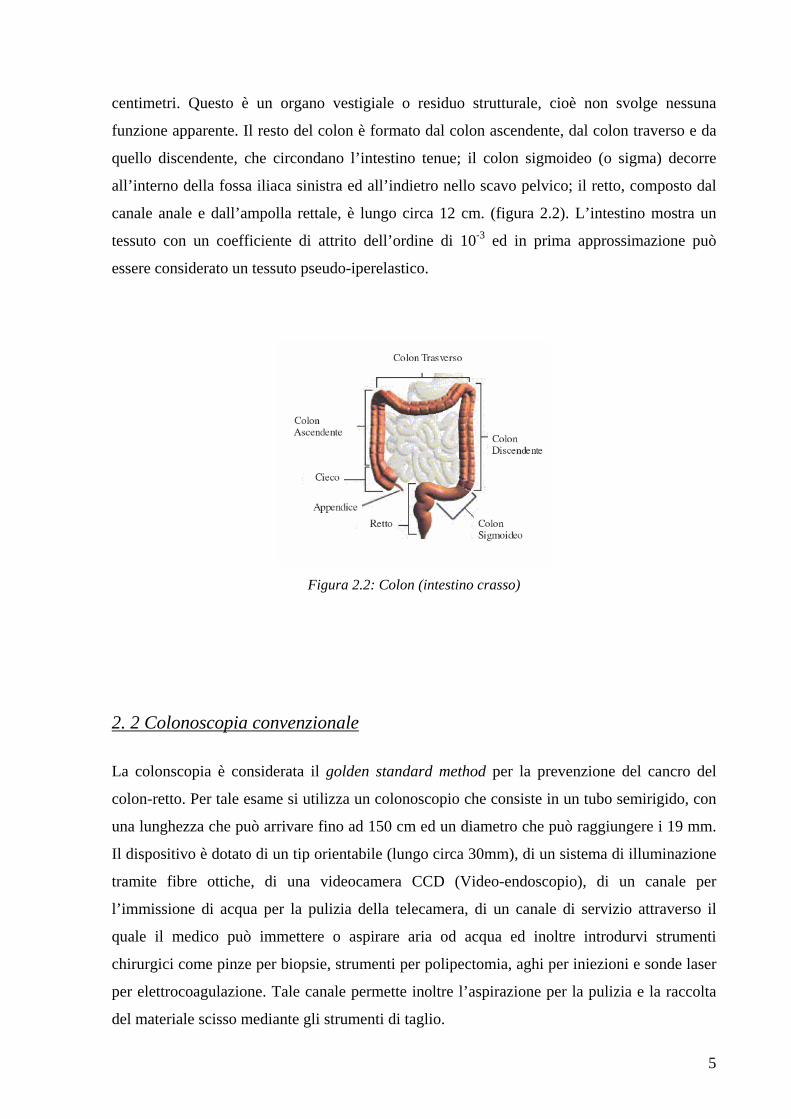
centimetri. Questo è un organo vestigiale o residuo strutturale, cioè non svolge nessuna
funzione apparente. Il resto del colon è formato dal colon ascendente, dal colon traverso e da
quello discendente, che circondano l’intestino tenue; il colon sigmoideo (o sigma) decorre
all’interno della fossa iliaca sinistra ed all’indietro nello scavo pelvico; il retto, composto dal
canale anale e dall’ampolla rettale, è lungo circa 12 cm. (figura 2.2). L’intestino mostra un
tessuto con un coefficiente di attrito dell’ordine di 10-3 ed in prima approssimazione può
essere considerato un tessuto pseudo-iperelastico.
Figura 2.2: Colon (intestino crasso)
2. 2 Colonoscopia convenzionale La colonscopia è considerata il golden standard method per la prevenzione del cancro del
colon-retto. Per tale esame si utilizza un colonoscopio che consiste in un tubo semirigido, con
una lunghezza che può arrivare fino ad 150 cm ed un diametro che può raggiungere i 19 mm.
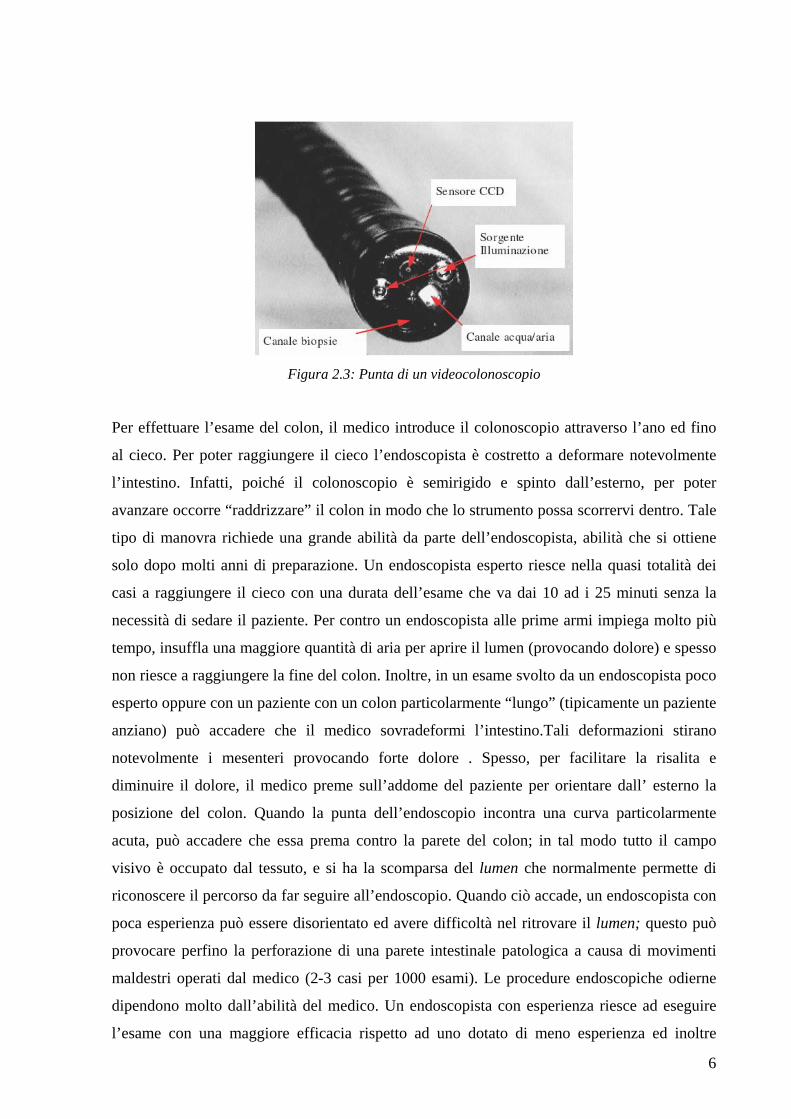
Il dispositivo è dotato di un tip orientabile (lungo circa 30mm), di un sistema di illuminazione
tramite fibre ottiche, di una videocamera CCD (Video-endoscopio), di un canale per
l’immissione di acqua per la pulizia della telecamera, di un canale di servizio attraverso il
quale il medico può immettere o aspirare aria od acqua ed inoltre introdurvi strumenti
chirurgici come pinze per biopsie, strumenti per polipectomia, aghi per iniezioni e sonde laser
per elettrocoagulazione. Tale canale permette inoltre l’aspirazione per la pulizia e la raccolta
del materiale scisso mediante gli strumenti di taglio.
6
Figura 2.3: Punta di un videocolonoscopio
Per effettuare l’esame del colon, il medico introduce il colonoscopio attraverso l’ano ed fino
al cieco. Per poter raggiungere il cieco l’endoscopista è costretto a deformare notevolmente
l’intestino. Infatti, poiché il colonoscopio è semirigido e spinto dall’esterno, per poter
avanzare occorre “raddrizzare” il colon in modo che lo strumento possa scorrervi dentro. Tale
tipo di manovra richiede una grande abilità da parte dell’endoscopista, abilità che si ottiene
solo dopo molti anni di preparazione. Un endoscopista esperto riesce nella quasi totalità dei
casi a raggiungere il cieco con una durata dell’esame che va dai 10 ad i 25 minuti senza la
necessità di sedare il paziente. Per contro un endoscopista alle prime armi impiega molto più
tempo, insuffla una maggiore quantità di aria per aprire il lumen (provocando dolore) e spesso
non riesce a raggiungere la fine del colon. Inoltre, in un esame svolto da un endoscopista poco
esperto oppure con un paziente con un colon particolarmente “lungo” (tipicamente un paziente
anziano) può accadere che il medico sovradeformi l’intestino.Tali deformazioni stirano
notevolmente i mesenteri provocando forte dolore . Spesso, per facilitare la risalita e
diminuire il dolore, il medico preme sull’addome del paziente per orientare dall’ esterno la
posizione del colon. Quando la punta dell’endoscopio incontra una curva particolarmente
acuta, può accadere che essa prema contro la parete del colon; in tal modo tutto il campo
visivo è occupato dal tessuto, e si ha la scomparsa del lumen che normalmente permette di
riconoscere il percorso da far seguire all’endoscopio. Quando ciò accade, un endoscopista con
poca esperienza può essere disorientato ed avere difficoltà nel ritrovare il lumen; questo può
provocare perfino la perforazione di una parete intestinale patologica a causa di movimenti
maldestri operati dal medico (2-3 casi per 1000 esami). Le procedure endoscopiche odierne
dipendono molto dall’abilità del medico. Un endoscopista con esperienza riesce ad eseguire
l’esame con una maggiore efficacia rispetto ad uno dotato di meno esperienza ed inoltre
7
esegue l’esame in minor tempo (generalmente dai 10 ai 25 minuti), e con conseguente minor
disagio per il paziente.
Il dolore percepito dal paziente durante una colonoscopia è causato in primo luogo dalla
deformazione del colon provocato dallo strumento ed in seconda istanza dall’aria insufflata
all’interno dello stesso per far avanzare il dispositivo e consentire la visione del lumen al
medico. Inoltre, dato che lo strumento avanza spinto dall’esterno, risulta chiaro che la
sollecitazione a carico dell’intestino permane anche quando un punto critico viene superato.
Perciò, maggiore è l’avanzamento del dispositivo all’interno del colon, tanto maggiore sarà il
tratto permanentemente deformato e, di conseguenza, il dolore.
8
3. La videocapsula
3.1 La capsula endoscopica
La capsula endoscopica nota anche con il nome di wireless endoscopy o capsula
enteroscopica, rappresenta uno dei più recenti sviluppi tecnologici in endoscopia. La capsula
endoscopica permette di aumentare l'incidenza diagnostica soprattutto per quanto riguarda la
patologia a carico dell'intestino tenue. La capsula è stata ideata nel 1981 da un ingegnere
israeliano, Gavriel Iddan, che lavorava in un centro di ricerca spaziale del ministero della
difesa israeliano. L’ingegnere Iddan, durante le fasi di progettazione di un missile, pensò di
ideare un piccolo vettore in miniatura in grado di attraversare tutto l'apparato gastrointestinale,
trasportato dai movimenti legati alla peristalsi con la possibilità di trasmettere in tempo reale
le immagini del suo percorso. Nel 1994, dopo lo sviluppo del prototipo e la verifica di
fattibilità, sono state registrate le prime immagini trasmesse dallo stomaco di maiale; a queste
fino al 1996, seguirono numerosi trials sempre sull'animale. Un ulteriore avanzamento
tecnologico del prototipo ha visto la riduzione delle dimensioni della capsula, aumento della
capacità di trasmissione e della durata di registrazione, maggiore risoluzione delle immagini;
questi miglioramenti tecnologici hanno portato all'impiego della capsula in soggetti umani.
Nel 2001 ha ricevuto l'approvazione della FDA (Food and Drug Administration) statunitense
ed è stata approvata per uso clinico.
Uno dei sistemi per endoscopia capsulare al momento disponibile, è stato brevettato dalla
Given Imaging, Ltd. con il nome di Given Diagnostic Imaging System worldwide (M2A), più
semplicemente Given Imagin.
Figura 3.1: Given Diagnostic Imaging System Worlwide
9
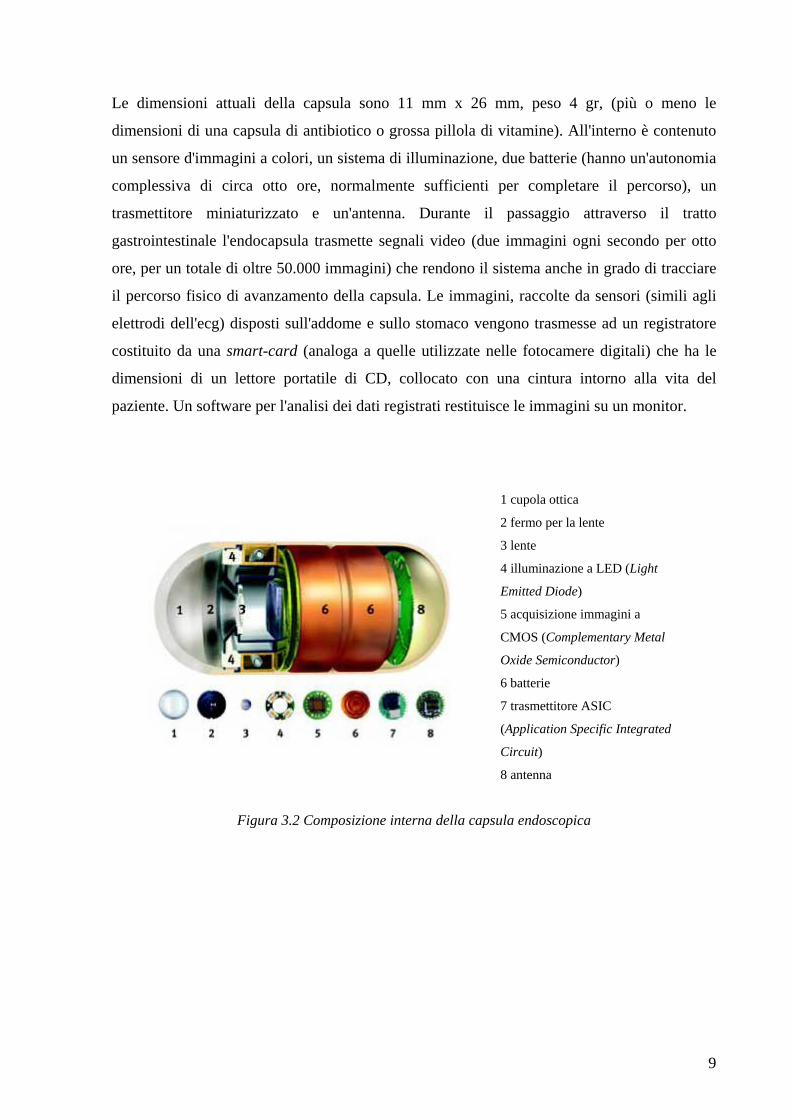
Le dimensioni attuali della capsula sono 11 mm x 26 mm, peso 4 gr, (più o meno le
dimensioni di una capsula di antibiotico o grossa pillola di vitamine). All'interno è contenuto
un sensore d'immagini a colori, un sistema di illuminazione, due batterie (hanno un'autonomia
complessiva di circa otto ore, normalmente sufficienti per completare il percorso), un
trasmettitore miniaturizzato e un'antenna. Durante il passaggio attraverso il tratto
gastrointestinale l'endocapsula trasmette segnali video (due immagini ogni secondo per otto
ore, per un totale di oltre 50.000 immagini) che rendono il sistema anche in grado di tracciare
il percorso fisico di avanzamento della capsula. Le immagini, raccolte da sensori (simili agli
elettrodi dell'ecg) disposti sull'addome e sullo stomaco vengono trasmesse ad un registratore
costituito da una smart-card (analoga a quelle utilizzate nelle fotocamere digitali) che ha le
dimensioni di un lettore portatile di CD, collocato con una cintura intorno alla vita del
paziente. Un software per l'analisi dei dati registrati restituisce le immagini su un monitor.
1 cupola ottica
2 fermo per la lente
3 lente
4 illuminazione a LED (Light
Emitted Diode)
5 acquisizione immagini a
CMOS (Complementary Metal
Oxide Semiconductor)
6 batterie
7 trasmettitore ASIC
(Application Specific Integrated
Circuit)
8 antenna
Figura 3.2 Composizione interna della capsula endoscopica

10
3.2 Applicazione clinica dell'endocapsula
Sono in corso numerosi studi sull'uomo ed i risultati disponibili ad oggi sono molto
promettenti dal punto di vista diagnostico, inoltre la compliance dei pazienti è risultata ottima.
Figura 3.3: Fotografia del registratore collegato al trasduttore che restituisce sul monitor l'immagine
ottenuta dall'analisi diagnostica.
La capsula (costituita di materiale biocompatibile sigillato in maniera speciale resistente ai
succhi gastrici), ingerita con l'aiuto di un sorso d'acqua, si sposta in maniera naturale
attraverso il tratto gastrointestinale sfruttando in movimenti peristaltici.
Mentre la videocapsula si muove naturalmente attraverso il tratto digestivo, il paziente può
svolgere la sua normale attività. Circa otto ore dopo l'ingestione, il paziente restituisce il
registratore al suo dottore o infermiere in modo che le immagini possano essere trasferite su
un computer e valutate.
La capsula endoscopica è a perdere e sarà espulsa naturalmente; nel caso raro che ciò non
avvenga (a livello mondiale la percentuale di non rilascio spontaneo della capsula è dello
0.5% circa), dovrà essere rimossa endoscopicamente o chirurgicamente.
11
le fasi dell'esame
• è necessario il digiuno almeno per otto ore prima dell'assunzione della capsula;
• arrivo al centro diagnostico tra le 8.00am and 8.30am;
• accettazione e posizionamento dei sensori e del registratore di dati;
• attivazione della capsula e sua ingestione con un po’ d'acqua;
• 2 ore dopo l'ingestione della capsula possono essere assunti liquidi quali succo di
frutta, tè, caffè (non latte né antiacidi in quanto possono oscurare la ripresa) ;
• uno spuntino leggero può essere consumato circa 4 ore dopo l'ingestione della
capsula;
• 8 ore dopo l'igestione della capsula può essere ripresa l'alimentazione normale.
A tutt'oggi le indicazioni dell'endoscopia con videocapsula sono ristrette alla diagnostica
dell'intestino tenue, che attualmente non è completamente raggiungibile con l'endoscopia, la
cui patologia è rara ma anche estremamente difficile da diagnosticare. La videocapsula non
può essere usata per eseguire prelievi bioptici o trattamenti locali e al momento non è idonea
per esplorare lo stomaco o l'intestino crasso (per studiare questi settori l'endoscopia
tradizionale resta al momento insostituibile). Il loro calibro infatti è troppo grande per
garantire una sufficiente illuminazione ed una visione ottimale in quanto ivi la capsula si
muove disordinatamente registrando in direzioni casuali e permettendo un'esplorazione solo
parziale. Al contrario, nell'intestino tenue, garantisce una completa visione delle pareti,
riprendendole in avanti o indietro a seconda dell'orientamento d'ingresso.
I futuri obiettivi consistono nel migliorare l'illuminazione (ancora insufficiente per le porzioni
del tubo digerente di calibro maggiore) e soprattutto rendere la capsula manovrabile
dall'esterno. Una volta raggiunti questi risultati (per i quali occorrerà apsttare fino al 1015)
l'endoscopia tradizionale sarà forse definitivamente superata.
12
3.3 Vantaggi, indicazioni e controindicazioni della videocapsula
I vantaggi teorici della capsula endoscopica sono notevoli. Un sistema che percorre da solo le
vie intestinali permette innanzitutto di esplorare alcune sezioni finora poco accessibili: la terza
porzione del duodeno e l'intestino tenue fino al confine con il colon. Oggi per scrutare le
pareti dell'intestino tenue si utilizzano endoscopi molto lunghi, che vengono introdotti per
bocca e fatti progredire per un metro o due dopo il duodeno. L'esame è comunque incompleto
e comporta forti disagi al paziente, tanto da richiedere l'anestesia generale. Un secondo
vantaggio è quindi la maggior compliance: per quanto l'endoscopia tradizionale, purché
eseguita correttamente, sia quasi sempre ben tollerata, è innegabile che la semplice ingestione
di una capsula sia preferibile. Anche i costi dovrebbero essere accettabili; infatti sebbene la
capsula sia a perdere, la spesa per ogni esame non è molto maggiore di quella di
un'endoscopia tradizionale.
Durante la registrazione è possibile svolgere le normali attività vi sono poche precauzioni da
ricordare, tra cui evitare campi elettromagnetici (andare in luoghi con metal detector,
utilizzare telefoni cellulari, personal computer).
Per il momento le sue applicazioni sono però limitate. Attualmente esiste un'unica indicazione
assoluta: le patologie dell'intestino tenue non occlusive. Si escludono per esempio il morbo di
Crohn e i tumori potenzialmente stenosanti. In sostanza, a trarre vantaggio da questo nuovo
strumento sono soprattutto le lesioni intestinali non rivelate dall'endoscopia convenzionale. La
capsula nella fase attuale ha quindi soltanto una funzione di completamento di quest'ultima.
La tecnica viene indicata per patologie infiammatorie, malassorbimento, diarrea cronica,
neoplasie, emorragie cosiddette occulte, malattia di Crohn con localizzazioni nell'intestino
tenue, qualora le altre metodiche diagnostiche abbiano fallito. L'indicazione è molto selettiva,
ma ha aperto la via all'endoscopia digestiva non invasiva.

13
4. VECTOR – Versatile Endoscopic Capsule for gastrointestinal TumOr Recognition and therapy
4.1 VECTOR Project: approccio tecnologico ed economico
L’obiettivo del Vector Project è quello di sviluppare capsule endoscopiche intelligenti
miniaturizzate impigeando le innovazioni della micro e nanotecnologia, per dare un contributo
significativo alla diagnosi e al trattamento del cancro all’intestino e ai suoi precursori,
rafforzando la competitività dell’industria biomedica europea attraverso tecnologie
innovative.
Il progetto è supportato dall’unione europea all’interno di un programma della durata di
quattro anni. Il laboratorio Crim coordina tutte le attività di progettazione e realizzazione
previste dal progetto, iniziato il 1 settembre 2006, finanziato dalla Commissione europea per
quasi 10 milioni di euro. Il consorzio include diciannove partners fra industrie e
organizzazioni di ricerca.
Figura 4.1: modello del VECTOR
Il mercato della pillola intelligente sarà guidato da diversi motivi, nati dall’incontro tra
esigenze mediche e opportunità di mercato:
1. riduzione del dolore e miglioramento del confort del paziente, attraverso l’impiego di
forze più basse durante l’endoscopia;
2. esclusione del rischio di trasmissione di malattie con dispositivi usa e getta;
3. integrazione di funzioni avanzate di diagnostica per supportare una diagnosi precisa;
14
4. opzioni terapeutiche avanzate che fanno uso di capacità diagnostiche crescenti per
trattamenti meno invasivi.
L’impatto economico sulla salute è un importante parametro per qualificare la fattibilità
medica della tecnologia. Questa è principalmente basata sull’analisi dei risultati medici e delle
risorse monetarie investite per la loro realizzazione. Perciò, il consorzio dedica una parte del
suo lavoro a questo proposito, con lo scopo di dimostrare i benefici delle capsule intelligenti
per il sistema sanitario.
Fondamentale è anche la cura dell’allineamento dei numerosi parametri tecnici relativi alla
capsula, quali l’assorbimento di energia, la compatibilità con i tessuti, le funzioni di base e
tutti i relativi vincoli.
Con la capsula oggi disponibile è possibile effettuare una endoscopia di screening ma sono
necessari degli avanzamenti tecnologici significativi per permettere alle capsule robot di
diagnosticare e trattare le malattie neoplasiche.
Le nuove sfide includono i problemi micromeccanici di integrazione e l'amministrazione
dell’energia per il funzionamento della capsula, sistemi per la creazione dello spazio e
successiva locomozione nel tratto digestivo.
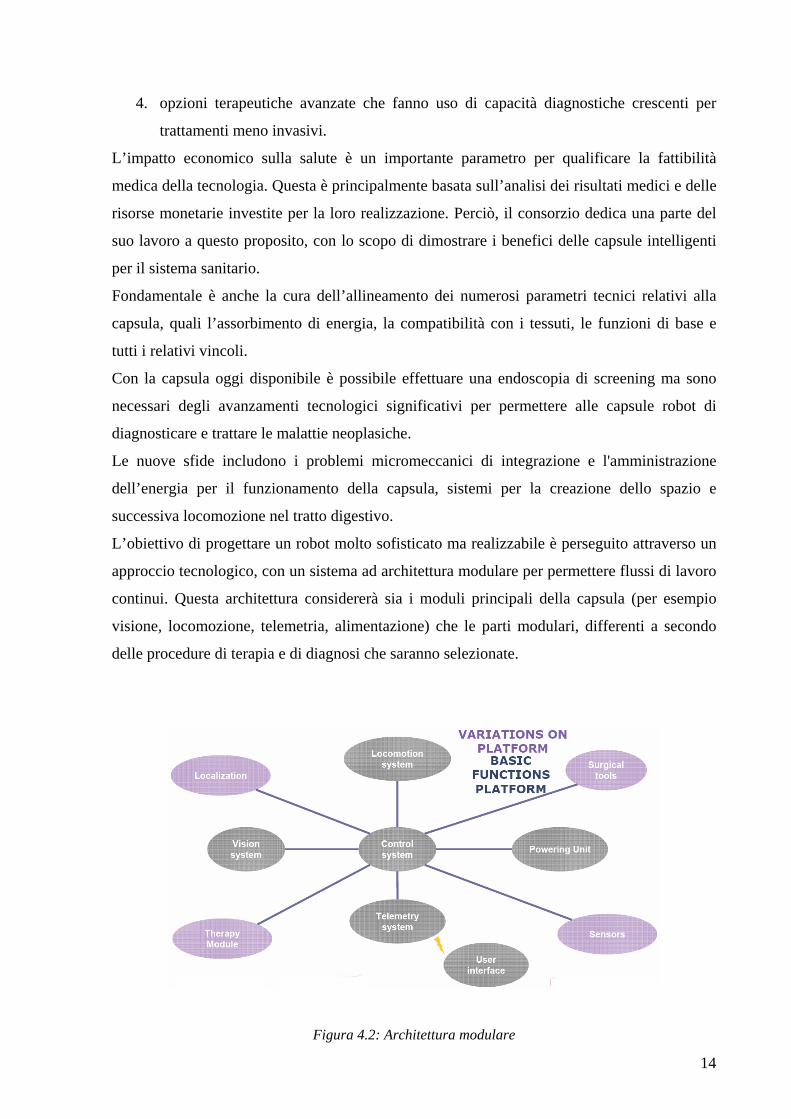
L’obiettivo di progettare un robot molto sofisticato ma realizzabile è perseguito attraverso un
approccio tecnologico, con un sistema ad architettura modulare per permettere flussi di lavoro
continui. Questa architettura considererà sia i moduli principali della capsula (per esempio
visione, locomozione, telemetria, alimentazione) che le parti modulari, differenti a secondo
delle procedure di terapia e di diagnosi che saranno selezionate.
Figura 4.2: Architettura modulare
15
4.2 Locomozione e creazione dello spazio
La locomozione attiva è una delle caratteristiche più importanti della capsula poiché permette
di effettuare la diagnosi e la terapia controllate in determinate aree dell’intestino. I sistemi
attivi per la creazione dello spazio sono essenziali per distendere il tessuto, per ottenere una
completa visualizzazione per una corretta diagnosi, e per creare un lume reale. Le capsule
commercialmente disponibili fanno affidamento sulla locomozione peristaltica o su sistemi
esterni di orientazione che non possiedono adeguata locomozione in ambienti tortuosi. In più,
nessun sistema disponibile include meccanismi attivi di creazione dello spazio, limitando
l’efficacia nel selezionare le aree dell’intestino, in particolare del tenue. Per questo motivo, si
sta studiando un sistema attivo che permetta alla capsula di muoversi indipendentemente dalla
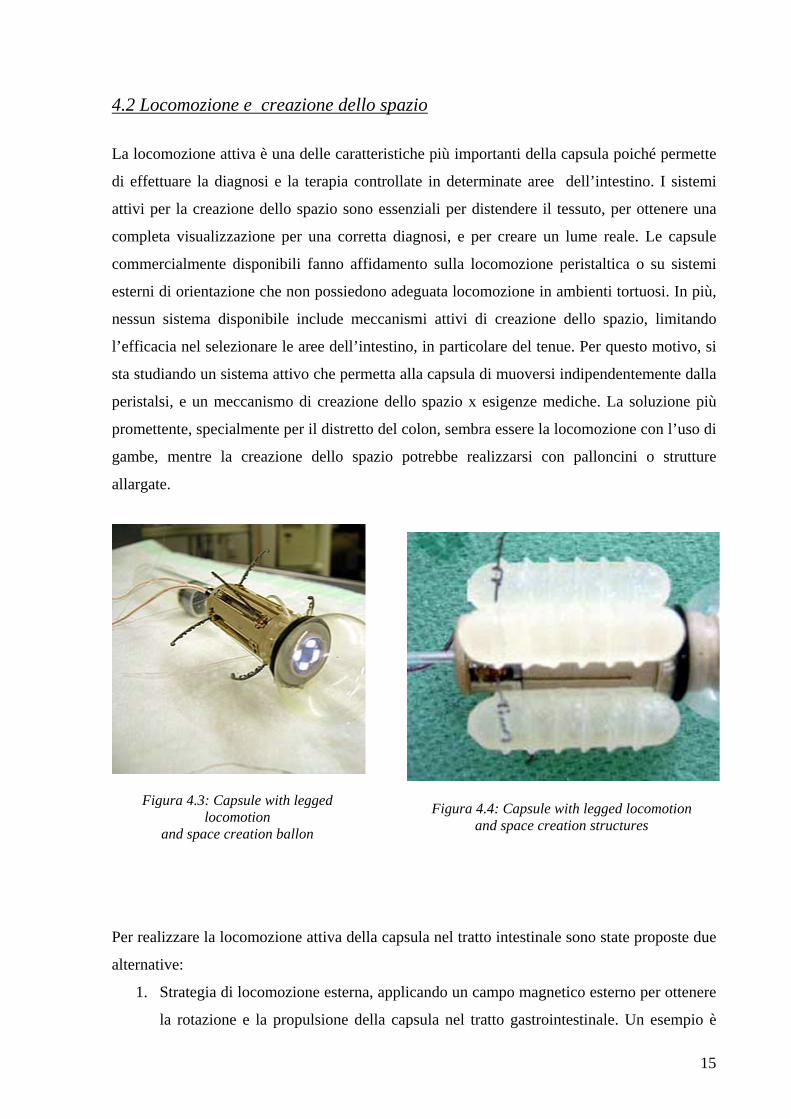
peristalsi, e un meccanismo di creazione dello spazio x esigenze mediche. La soluzione più
promettente, specialmente per il distretto del colon, sembra essere la locomozione con l’uso di
gambe, mentre la creazione dello spazio potrebbe realizzarsi con palloncini o strutture
allargate.
Figura 4.3: Capsule with legged
locomotion and space creation ballon
Figura 4.4: Capsule with legged locomotion
and space creation structures
Per realizzare la locomozione attiva della capsula nel tratto intestinale sono state proposte due
alternative:
1. Strategia di locomozione esterna, applicando un campo magnetico esterno per ottenere
la rotazione e la propulsione della capsula nel tratto gastrointestinale. Un esempio è
16
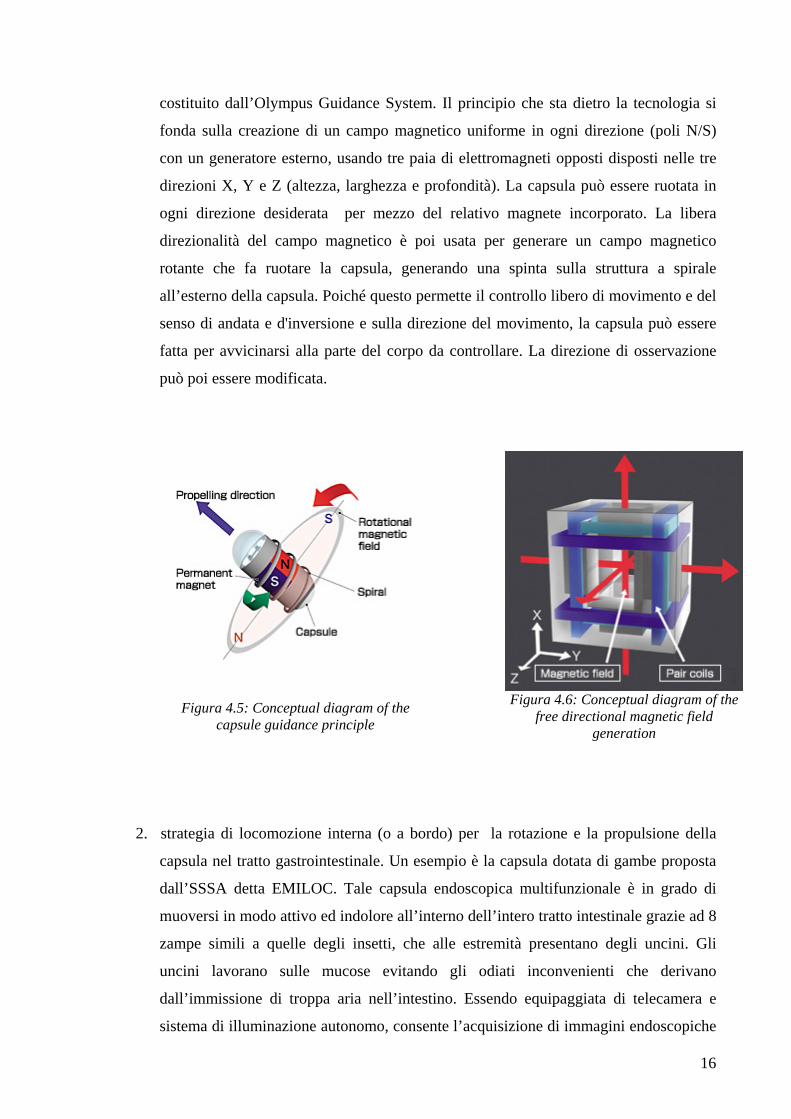
costituito dall’Olympus Guidance System. Il principio che sta dietro la tecnologia si
fonda sulla creazione di un campo magnetico uniforme in ogni direzione (poli N/S)
con un generatore esterno, usando tre paia di elettromagneti opposti disposti nelle tre
direzioni X, Y e Z (altezza, larghezza e profondità). La capsula può essere ruotata in
ogni direzione desiderata per mezzo del relativo magnete incorporato. La libera
direzionalità del campo magnetico è poi usata per generare un campo magnetico
rotante che fa ruotare la capsula, generando una spinta sulla struttura a spirale
all’esterno della capsula. Poiché questo permette il controllo libero di movimento e del
senso di andata e d'inversione e sulla direzione del movimento, la capsula può essere
fatta per avvicinarsi alla parte del corpo da controllare. La direzione di osservazione
può poi essere modificata.
Figura 4.5: Conceptual diagram of the capsule guidance principle
Figura 4.6: Conceptual diagram of the free directional magnetic field
generation
2. strategia di locomozione interna (o a bordo) per la rotazione e la propulsione della
capsula nel tratto gastrointestinale. Un esempio è la capsula dotata di gambe proposta
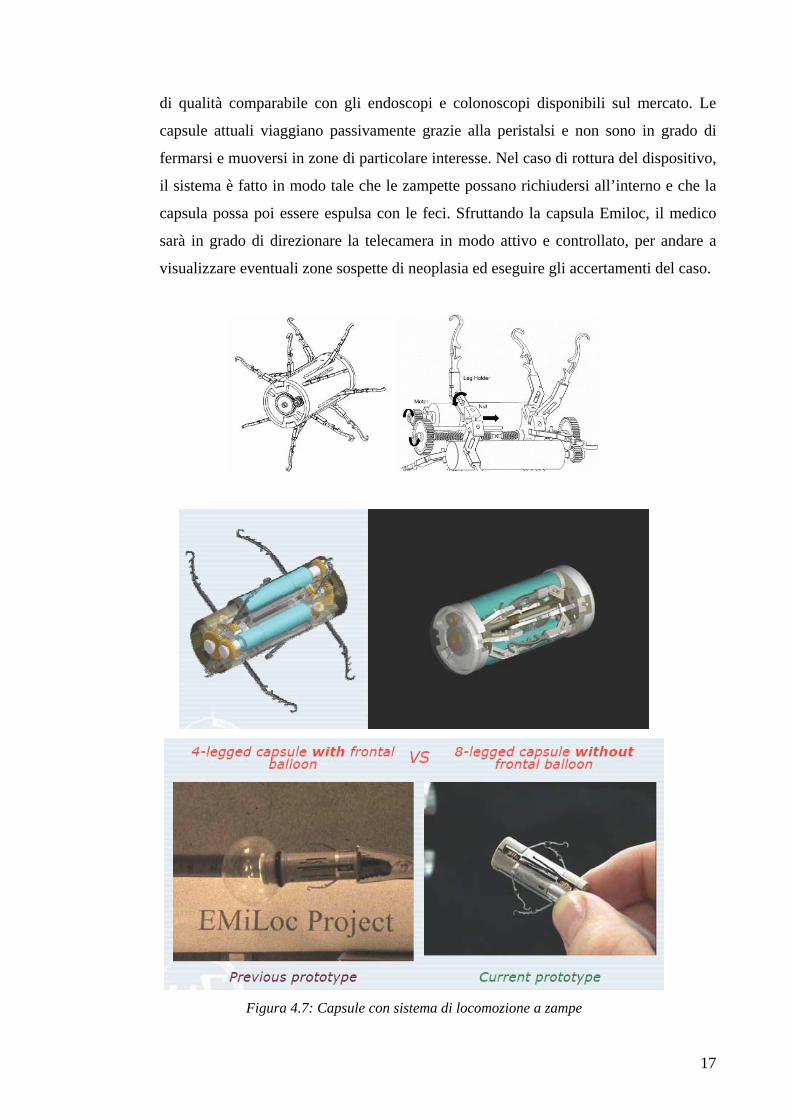
dall’SSSA detta EMILOC. Tale capsula endoscopica multifunzionale è in grado di
muoversi in modo attivo ed indolore all’interno dell’intero tratto intestinale grazie ad 8
zampe simili a quelle degli insetti, che alle estremità presentano degli uncini. Gli
uncini lavorano sulle mucose evitando gli odiati inconvenienti che derivano
dall’immissione di troppa aria nell’intestino. Essendo equipaggiata di telecamera e
sistema di illuminazione autonomo, consente l’acquisizione di immagini endoscopiche
17
di qualità comparabile con gli endoscopi e colonoscopi disponibili sul mercato. Le
capsule attuali viaggiano passivamente grazie alla peristalsi e non sono in grado di
fermarsi e muoversi in zone di particolare interesse. Nel caso di rottura del dispositivo,
il sistema è fatto in modo tale che le zampette possano richiudersi all’interno e che la
capsula possa poi essere espulsa con le feci. Sfruttando la capsula Emiloc, il medico
sarà in grado di direzionare la telecamera in modo attivo e controllato, per andare a
visualizzare eventuali zone sospette di neoplasia ed eseguire gli accertamenti del caso.
Figura 4.7: Capsule con sistema di locomozione a zampe

18
4.3 Amministrazione dell’energia
Tutte le funzioni del dispositivo richiedono una notevole quantità di energia, che non può
essere resa disponibile dall’interno della capsula; per cui, sono necessarie delle soluzioni più
adatte e a questo scopo sono state proposte due soluzioni:
1. trasmissione dell’energia attraverso sistemi wireless, con le seguenti caratteristiche:
• potenza disponibile di 150-180 mW;
• dimensioni di circa 700 mm3, la stessa di due batterie;
• rifornimento di energia continuato.
Questa tecnologia consiste in un rifornimento extracorporeo dell'energia richiesta per la
trasmissione dell’immagine compatta incorporata nel dispositivo. Le bobine poste
all’esterno del corpo usano l’induzione elettromagnetica per il rifornimento di energia
elettrica ricevuta dalle bobine poste all’interno della capsula. Questo fa sì che l’energia
elettrica necessaria sia disponibile per tutto il tempo di osservazione e fornisce anche
l’energia elettrica istantanea necessaria per l’alta definizione delle fotografie.
Figura 4.8: struttura interna della capsula
Confronto con il modello a batterie interne:
Operating time Instantaneous power
Wireless power supplì Unlimited 5 frames/second possible
Built-in battery 8 hours 2 frames/second possible
Figura 4.9: Dimensione del circuito interno
19
2. trasmissione dell’energia attraverso sistemi wireless accoppiato a supercapacità, con le
seguenti caratteristiche:
• potenza disponibile di circa 250mW;
• dimensioni inferiori a 1000 mm3;
• i supercapacitori hanno una maggiore densità di energia rispetto alle batterie
(più di 1 KW/Kg);
• l’alimentazione continua di energia contribuisce al raggiungimento di uno stato
stabile.
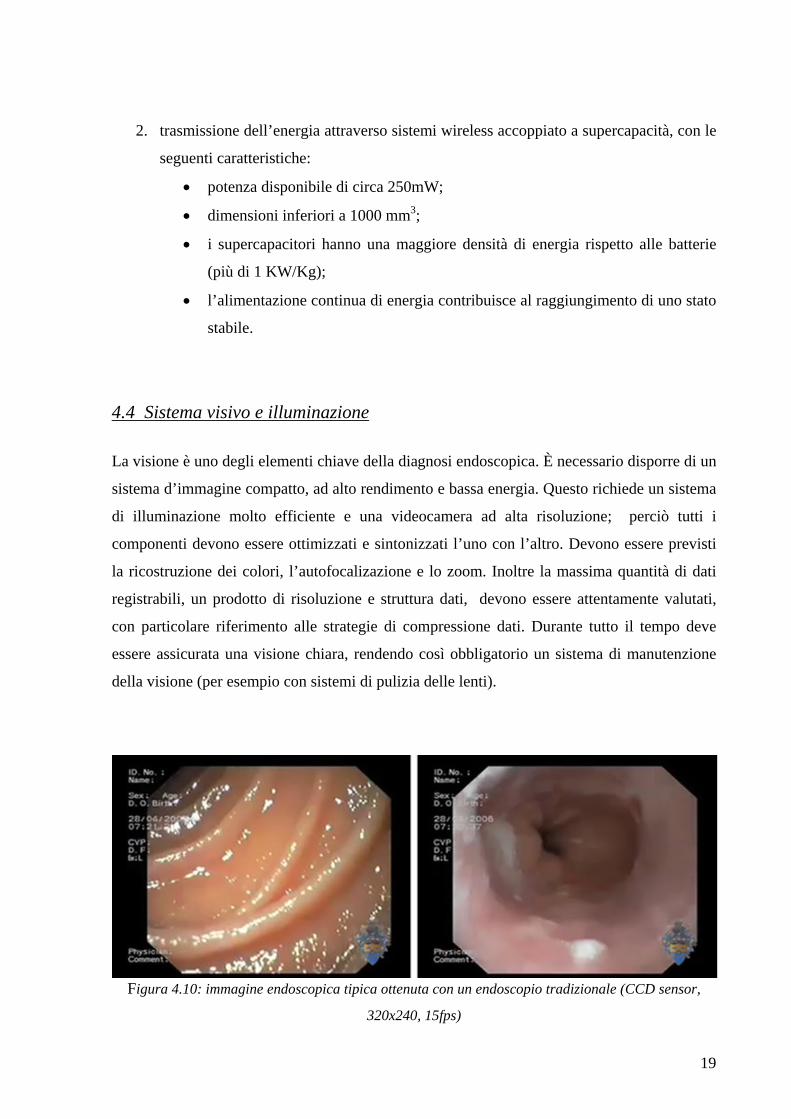
4.4 Sistema visivo e illuminazione
La visione è uno degli elementi chiave della diagnosi endoscopica. È necessario disporre di un
sistema d’immagine compatto, ad alto rendimento e bassa energia. Questo richiede un sistema
di illuminazione molto efficiente e una videocamera ad alta risoluzione; perciò tutti i
componenti devono essere ottimizzati e sintonizzati l’uno con l’altro. Devono essere previsti
la ricostruzione dei colori, l’autofocalizazione e lo zoom. Inoltre la massima quantità di dati
registrabili, un prodotto di risoluzione e struttura dati, devono essere attentamente valutati,
con particolare riferimento alle strategie di compressione dati. Durante tutto il tempo deve
essere assicurata una visione chiara, rendendo così obbligatorio un sistema di manutenzione
della visione (per esempio con sistemi di pulizia delle lenti).
Figura 4.10: immagine endoscopica tipica ottenuta con un endoscopio tradizionale (CCD sensor,
320x240, 15fps)
20
Per lo sviluppo di un sistema di visione ottimizzato per il tratto gastrointestinale, in un primo
prototipo viene implementato l’approccio con un’unica telecamera mentre nei successivi
prototipi sarà prevista una doppia telecamera. L’utilizzo di una sola telecamera, con un campo
di vista fisso e un sistema di illuminazione, ha diversi vantaggi:
• Efficacia provata nei sistemi attuali della pillola per la diagnosi;
• Occupa spazi limitati;
• Sistema semplice e passivo.
ma anche alcuni svantaggi:
• L’intera capsula deve essere mossa per cambiare il campo della visione;
• È necessario un compromesso tra campo di vista e risoluzione spaziale.
È quindi necessario un compromesso tra la qualità dell’immagine con l’energia necessaria, la
grandezza totale del sistema di visione e la larghezza della banda di trasmissione. Il raggio di
focalizzazione necessario varia da pochi cm nell’intestino, a circa 10cm nello stomaco.
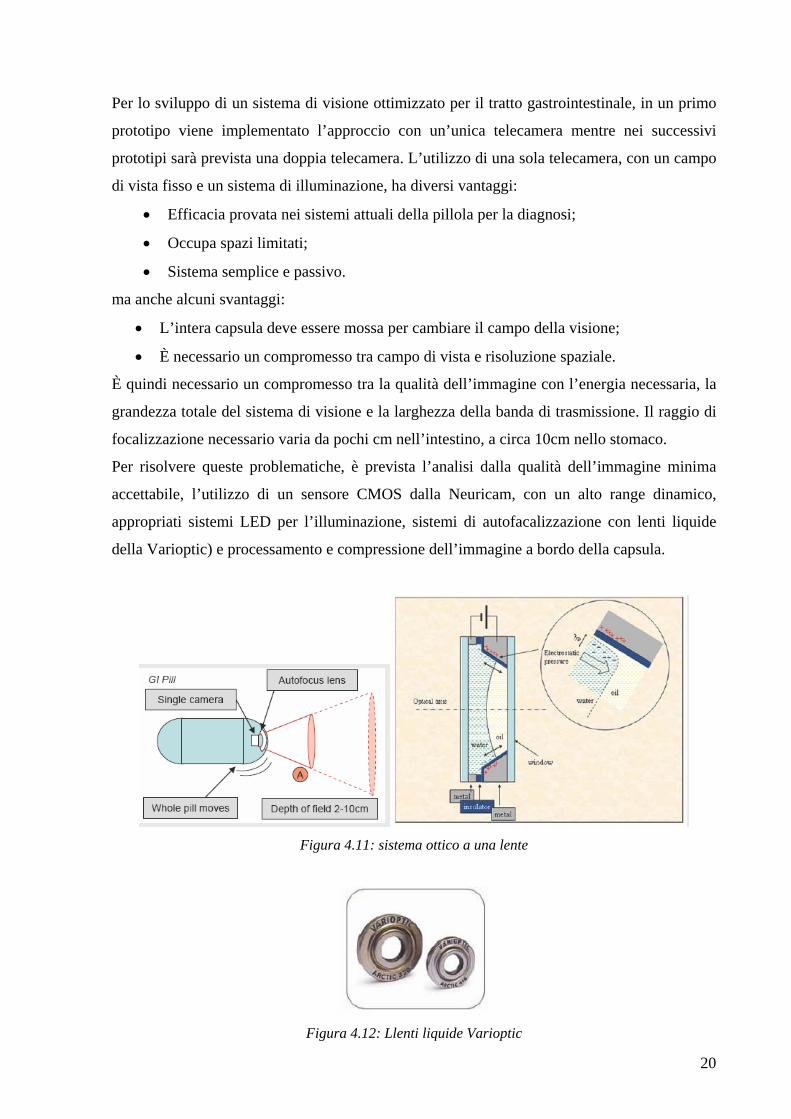
Per risolvere queste problematiche, è prevista l’analisi dalla qualità dell’immagine minima
accettabile, l’utilizzo di un sensore CMOS dalla Neuricam, con un alto range dinamico,
appropriati sistemi LED per l’illuminazione, sistemi di autofacalizzazione con lenti liquide
della Varioptic) e processamento e compressione dell’immagine a bordo della capsula.
Figura 4.11: sistema ottico a una lente
Figura 4.12: Llenti liquide Varioptic
21
“Sayaka”, una capsula endoscopica sviluppata dal laboratorio da RF System Lab a dicembre
2006, ha aumentato enormemente la qualità generale dell’immagine cambiando la posizione
della macchina fotografica e permettendo alla macchina stessa di ruotare. Mentre le capsule
convenzionali hanno normalmente le macchine fotografiche ad un'estremità della capsula, la
macchina fotografica del Sayaka è stata spostata di lato, dando una vista migliore delle pareti
intestinali. In più, un motore passo a passo molto piccolo ruota la macchina fotografica mentre
la capsula attraversa il tratto digestivo, permettendo che Sayaka blocchi le immagini da ogni
angolo. L'alimentazione del Sayaka è assicurata via wireless da una fonte esterna, soprattutto
in modo che nessuna sostanza nociva della batteria entri nel corpo. Su un tratto di otto ore
tipico (8 metri) di viaggio attraverso il tratto gastrointestinale, Sayaka scatta circa 870.000
foto, che sono trasmesse ad una ricevente situata vicino al corpo. La tecnologia di immagine
“mosaicking” (a mosaico) viene usata per unire insieme le immagini in una mappa
rettangolare piana e ad alta definizione degli intestini, che possono essere ingranditi fino a 75
volte. Oltre alla mappatura delle problematiche interne, i gastroenterologi possono confrontare
le immagini delle sessioni precedenti con le immagini successive al fine di monitorare i
cambiamenti successivi. Una precisione millimetrica che permette di ottenere un eccellente
foto dello stato del paziente.
4.5 Sviluppo dei circuiti integrati
Prendendo in considerazione le piccole dimensioni della capsula, l’intero circuito integrato
deve essere progettato e implementato per guidare correttamente e controllare la direzione del
robot. Perciò, il basso voltaggio dei circuiti integrati deve essere sviluppato con lo scopo di
aumentare il livello di integrazione e minimizzare la superficie finale del circuito. Ottenere un
ampio campo di energie di conversione è una grande sfida, considerata la piccola quantità di
energia disponibile nella capsula. La limitata capienza di energia della sorgente rende
indispensali tecniche di recupero dell’energia, usate per aumentare l’autonomia del robot. Le
tecniche di montaggio ed impacchettamento ad alta densità devono essere combinate per
adattare i moduli elettronici alla capsula.
Per avere un controllo del movimento, deve essere inclusa un certo numero di elementi
intelligenti, sormontando il comportamento non lineare del sistema di attuazione e
aumentando l'esattezza del movimento. I circuiti di alimentazione ed il sistema di controllo
numerico devono essere integrati in un circuito insieme con i circuiti di lettura e output del
22
sensore ed i ricetrasmettitori di comunicazione del segnale. Usando circuiti integrati multipli,
l'elettronica può essere inclusa a bordo della capsula e comprende: convertitori di potenza,
generazione del segnale di alimentazione, circuiti di controllo IR (o RF), protocollo di
interfaccia IR (o RF), ecc. In più, sono previsti diversi circuiti per differenti dispositivi
derivati al fine di consentire il movimento autonomo di ognuno di questi.
4.6 Sensori per la diagnosi
Le caratteristiche dei sensori sono critiche per realizzare le prestazioni diagnostiche nel campo
dell'endoscopia capsulare. Queste includono le funzioni dei sensori ottici, come la
floruescenza e la spettroscopia a luce diffusa, i trasduttori di ultrasuono per valutare le
proprietà del tessuto come infiammazioni, sensori meccanici per la valutazione delle proprietà
biomeccaniche del tessuto, e sensori biochimici o biosensori per l’identificazione di specifiche
sostanze tumorali.
Parametri importanti per la diagnosi avanzata sono la pressione (per verificare il lavoro
peristaltico dell’intestino), il pH ( per valutare il contenuto chimico dell’intestino) e i sensori
di temperatura. Il progetto include inoltre lo sviluppo e l'integrazione di un insieme di sensori
passivi per la misura di questi parametri, basati sul principio di un'interrogazione a distanza
(senza bisogno di un gruppo di alimentazione) in un dominio di frequenza di 433 o 866 MG.
4.7 Prelievo di campioni de tessuto e trattamento
L’estrazione di campioni cellulari e dei tessuti è un punto rilevante nella diagnosi del cancro.
Di conseguenza i mezzi di campionamento del tessuto sono importanti nell’ambito delle
capsule intelligenti per il tratto di gastrointestinale. Le funzioni di trattamento della capsula
sono strettamente associate al campionamento del tessuto, perciò è necessario prevedere
tecniche di rimozione del tessuto. Oltre a queste funzioni meccaniche, sono previste tecniche
di distruzione termica dei tessuti, così come il rilascio di fluidi con sostane ad azione locale,
coinvolgendo il concetto di terapia farmaceutica avanzata del tumore, come la terapia con
anticorpi.
23
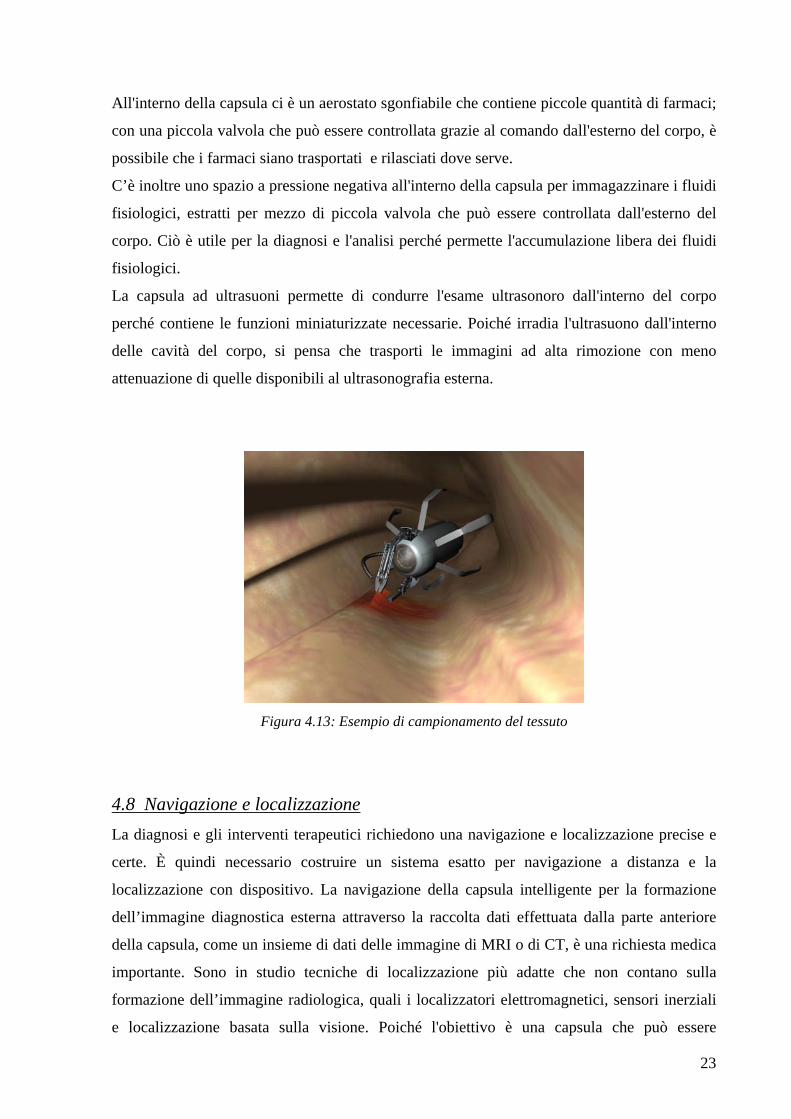
All'interno della capsula ci è un aerostato sgonfiabile che contiene piccole quantità di farmaci;
con una piccola valvola che può essere controllata grazie al comando dall'esterno del corpo, è
possibile che i farmaci siano trasportati e rilasciati dove serve.
C’è inoltre uno spazio a pressione negativa all'interno della capsula per immagazzinare i fluidi
fisiologici, estratti per mezzo di piccola valvola che può essere controllata dall'esterno del
corpo. Ciò è utile per la diagnosi e l'analisi perché permette l'accumulazione libera dei fluidi
fisiologici.
La capsula ad ultrasuoni permette di condurre l'esame ultrasonoro dall'interno del corpo
perché contiene le funzioni miniaturizzate necessarie. Poiché irradia l'ultrasuono dall'interno
delle cavità del corpo, si pensa che trasporti le immagini ad alta rimozione con meno
attenuazione di quelle disponibili al ultrasonografia esterna.
Figura 4.13: Esempio di campionamento del tessuto
4.8 Navigazione e localizzazione La diagnosi e gli interventi terapeutici richiedono una navigazione e localizzazione precise e
certe. È quindi necessario costruire un sistema esatto per navigazione a distanza e la
localizzazione con dispositivo. La navigazione della capsula intelligente per la formazione
dell’immagine diagnostica esterna attraverso la raccolta dati effettuata dalla parte anteriore
della capsula, come un insieme di dati delle immagine di MRI o di CT, è una richiesta medica
importante. Sono in studio tecniche di localizzazione più adatte che non contano sulla
formazione dell’immagine radiologica, quali i localizzatori elettromagnetici, sensori inerziali
e localizzazione basata sulla visione. Poiché l'obiettivo è una capsula che può essere
24
localizzata senza avere un esame radiologico di formazione immagine, si preferisce la
localizzazione magnetica.
4.9 Comunicazione e telemetria
La capsula endoscopica ha bisogno di una trasmissione di dati bidirezionale per il suo
funzionamento. Il downlink dalla capsula deve potere trasmettere al mondo esterno una
grande quantità di dati. La quantità di dati disponibile definirà la qualità di immagine
endoscopica. Tuttavia, ottenere un alto tasso di dati è necessario aumentare la radiofrequenza
dell'onda portante del segnale; ma più è alta la frequenza, più alto sarà l'assorbimento delle
onde da parte del corpo umano. Poiché l'energia disponibile per la trasmissione è limitata, sarà
necessario un trasmettitore adeguato. La definizione del protocollo fa parte inoltre della
trasmissione radio poiché sarà affetta da un errore di conversione del sistema. L’uplink,
dall'esterno del corpo alla capsula, non ha bisogno di alta quantità di dati poiché gli unici
comandi sono trasmessi con questo collegamento. Tuttavia deve esserci un elevato tasso di
sicurezza per evitare un comportamento inatteso della capsula mentre attraversa il corpo
umano. Di conseguenza il protocollo deve essere estremamente robusto per permettere al
medico di contare su di esso. Un'interfaccia di utente facile ed intuitiva, che sarà usata per
controllare la capsula.
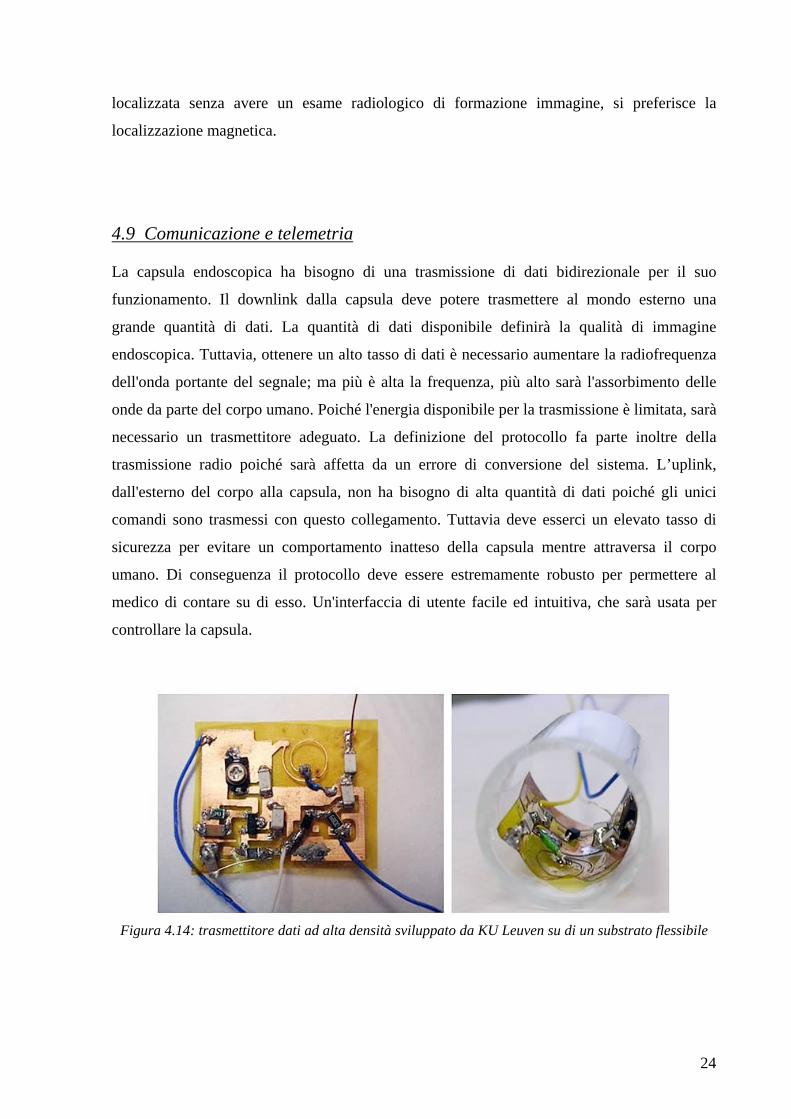
Figura 4.14: trasmettitore dati ad alta densità sviluppato da KU Leuven su di un substrato flessibile
25
4.10 Sistema di integrazione del prototipo
Dopo l'ottimizzazione di tutti i componenti del sistema, la fase di integrazione è molto critica,
in quanto rappresenta il collegamento fra tecnologia e applicazione medica. Il montaggio di
ogni strumentazione biomedica richiede la conoscenza delle interfacce meccaniche, elettriche,
termiche e biologiche. I vincoli medici riguardano problemi di sicurezza e biocompatibilità, la
scelta del materiale esterno, interfacce biologiche, ecc. La fase di integrazione di sistema non
deve necessariamente essere limitata alla parte finale del progetto: lo sviluppo dei prototipi
preliminari contribuirà a definire il processo di integrazione del sistema per gradi. La
certificazione medica, come l’amministrazione del rischio finale, saranno considerate a questo
punto del progetto poiché, può essere preparata solo dopo la ricezione delle certificazioni
necessarie riguardanti le linee guida, dopo il montaggio della prova preclinica e clinica.
4.11 Valutazione medica, studi preclinici e clinici
La valutazione medica delle tecnologie e dei dispositivi coinvolge non solo la valutazione dei
prototipi finali ma anche delle caratteristiche provvisorie dei dispositivi derivati, sviluppati
durante il progetto. L'obiettivo della valutazione medica è fornire le risposte mediche dirette a
quei soci del consorzio legati allo sviluppo della tecnologia. Ciò è non solo importante alla
conclusione del progetto per la convalida finale dei prototipi, ma anche durante il suo sviluppo
per accertare che le tecnologie siano sviluppate secondo i requisiti medici ed i presupposti.
Come target di pazienti, sono stati identificati tre gruppi medici identificativi:
1. Pazienti di sreening. Sono i pazienti che non hanno fattori di rischio particolari sono
clienti classici dei programmi di 'screening'. Questi individui, di più di 55 anni di età,
includono approssimativamente il 20% della popolazione dei paesi industrializzati che
hanno bisogno dell'endoscopia di screening una volta ogni 5-10 anni.
2. Pazienti con complicanze. Sono i pazienti che hanno sintomi indice di possibile
malattia. Sono conformi ad un'endoscopia diagnostica completa, non quella di
sreening. Un esempio per questa categoria paziente è la malattia di riflusso, e questo
gruppo paziente coinvolge fino a 10% della popolazione.
3. Pazienti con i fattori di rischio. Sono i pazienti con fattori di rischio particolari, che li
rendono inclini allo sviluppo del cancro colonrettale. Si dovrebbe prevedere
l’endoscopia per controllare la malattia e per rilevare precocemente la fase maligna.
26
Questa categoria include i pazienti con una storia particolare del cancro in famiglia o i
pazienti con passato di precancro, quali i pazienti con l'esofago di Barrett.
4.12 Derivazioni e dispositivi secondari
Per accertare un trasferimento adeguato della tecnologia sviluppata all'interno della portata del
progetto VECTOR nei prodotti futuri, i soci del progetto lavoreranno alle soluzioni derivative
della tecnologia della capsula intelligente che possono essere impiegate in medicina durante lo
sviluppo del programma di ricerca. A tal fine, le piattaforme della capsula, per esempio quelle
della tecnologia per la locomozione, la manipolazione del tessuto o il riconoscimento del
tumore, saranno valutate secondo la loro idoneità, la possibilità di impiego, i requisiti di uso
medico immediato e le indicazioni mediche per mezzo di prototipi dei dispositivi derivati. I
dispositivi derivati saranno adattati alle procedure ed ai metodi medici attualmente seguiti, per
ottenere le informazioni sulle funzioni dette, riguardanti la realtà medica. Questo processo
permette alle funzioni specifiche delle piattaforme tecnologiche della capsula intelligente di
essere testate e verificate nel mondo medico prima che il sistema completo della capsula sia
disponibile.
Queste informazioni aiutano i soci del progetto nell’orientazione continua del processo di
sviluppo verso i requisiti di base, imparando dalle esperienze raccolte con i dispositivi
derivati. Quindi, questo rappresenta un meccanismo e una guida di riferimento costruttivi di
per ottimizzare la ricerca, oltre alla principale funzione di rendere le piattaforme tecnologiche
del VETTORE disponibili per uso medico appena possibile.
4.13 Addestramento, diffusione e applicazione Il consorzio si occupa anche della diffusione dei risultati, dell'addestramento e
dell’applicazione della ricerca, in particolare la netMED AISBL, Belgio, effettua una perizia
su questi temi. Tutti i risultati, sia di analisi che di ricerca, di punta del progetto saranno
diffusi in primo luogo fra i soci del consorzio e poi alla Comunità scientifica con mezzi
specializzati, tra cui mercati selezionati, congressi, fiere, siti Web. Ciò contribuirà a far
conoscere le competenze del consorzio ed i risultati del VETTORE attraverso la società
medica, compreso i clinici considerati utenti e pazienti finali, attraverso le aziende biomediche
e microingegneristiche, le facoltà di ingegneria tecnologiche, ecc. La diffusione della nuova

27
tecnologia si basa anche sulle attività di addestramento con corsi previsti dalla Comunità
medica, alle università di ingegneria e alle aziende biomediche altamente specializzate.
28
5. BIBLIOGRAFIA
http://www.vector-project.com/
http://www.thechicagoproject.org/vector.htm
http://www.lswn.it/robotica?from=4
http://www.olympus-global.com/
M. Quirini, R. J. Webster III, A. Menciassi, and P. Dario “Design of a Pill-Sized 12-legged Endoscopic Capsule Robot,” IEEE International Conference on Robotics and Automation, 2007
http://youkoso-italia.blogspot.com/
http://notizia.repubblica.it
www.zadig.it/news2001/med/new-1125-1.htm
www.montag.it/sergio/blog/archives/001692.html
www.crim.sssup.it/