Embed Size (px)
Citation preview

UNIVIERSIDAD AUTÓNOMA DE NUEVO LEÓN
FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA
EVALUACIÓN DE MÉTRICAS DE DISPERSIÓN EN SISTEMAS TERRITORIALES
POR:
BRENDA AIDE PEÑA CANTÚ
COMO REQUISITO PARCIAL PARA OBTENER EL GRADO DE
INGENIERO MECÁNICO ADMINISTRADOR
SAN NICOLÁS DE LOS GARZA, NUEVO LEÓN OCTUBRE 2011

UNIVIERSIDAD AUTÓNOMA DE NUEVO LEÓN
FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA
EVALUACIÓN DE MÉTRICAS DE DISPERSIÓN EN SISTEMAS TERRITORIALES
POR:
BRENDA AIDE PEÑA CANTÚ
COMO REQUISITO PARCIAL PARA OBTENER EL GRADO DE
INGENIERO MECÁNICO ADMINISTRADOR
SAN NICOLÁS DE LOS GARZA, NUEVO LEÓN OCTUBRE 2011

UNIVERSIDAD AUTÒNOMA DE NUEVO LEÓN
FACULTAD DE INGIENIERÍA MECÁNICA Y ELÉCTRICA
Los miembros del Comité de Tesis recomendamos que la Tesis “Evaluación de
métricas de dispersión en sistemas territoriales”, realizada por la alumna Brenda
Aide Peña Cantú, con número de matrícula 1338639, sea aceptada para su defensa como
opción al grado de Ingeniero Mecánico Administrador.
El Comité de Tesis
_________________________
Dr. Roger Z. Ríos Mercado
Asesor
__________________________ __________________________
Dra. Ada M. Álvarez Socarrás Dr. Hugo Jair Escalante Balderas
Revisor Revisor
Vo. Bo.
________________________
Ing. Esteban Báez Villarreal
Director
San Nicolás de los Garza, Nuevo León, Septiembre 2011
iii

A mi madre, quien me dio
el más grande consejo:
Que te sirva de experiencia Laura Garza.
iv

Agradecimientos
A mi madre, quien fue mi hermana, mi mejor amiga, mi modelo a seguir como persona.
Por su incansable apoyo, su incondicional amor, por sus inolvidables consejos, por
convertirme en la persona que soy.
A mis padres por todos estos años de apoyo, paciencia y sacrificios. Por todos sus
desvelos, dolores de cabeza y angustias que les hice pasar.
A mi hermano y hermanas por ese cariño y amor que me muestran siempre, soporte y
apoyo en cada momento de mi vida.
A Ashanti por su cariño, apoyo, comprensión y por estar conmigo en todo momento.
A mis amigos de la Banquita de la Facultad de Ingeniería Mecánica y Eléctrica
(FIME) por brindarme su amistad, por todos los buenos momentos que compartí con
ustedes y sobre todos por su ánimo y su apoyo.
A mis grandes amigas del grupo 13, Gris, Paola, Sylvia y Lupita por su perdurable
amistad, por estar conmigo en las buenas y en las malas, y por todos los incontables
recuerdos a su lado.
v

Al Dr. Roger por aceptar ser mi asesor en la realización de esta tesis, por su paciencia,
tiempo, consejos y por compartir su conocimiento conmigo.
A la Dra. Ada y el Dr. Hugo por aceptar ser mis revisores, por la ayuda brindada y por
cada uno de sus consejos para el desarrollo de esta tesis.
A mis amigos de la DOS (Dead Optimizer Society) por siempre actuar tan amables,
comprensivos y serviciales conmigo, por brindarme su amistad y compañerismo
constantemente.
A los maestros y estudiantes del Programa de Posgrado de Sistemas (PISIS) de la
UANL por compartir conocimientos y experiencias en el desarrollo de mi tesis.
Al PISIS por permitirme hacer uso tanto de sus laboratorios como material de cómputo
para llevar a cabo los experimentos relacionados con el desarrollo de esta tesis.
A la Facultad de Ingeniería Mecánica y Eléctrica (FIME) que me acogió durante los
5 años de mi carrera, por otorgarme una beca para cursar y finalizar mi formación
profesional y por todos sus excelentes maestros que me impartieron clase y han dejado
una huella en mi.
A la UANL por ser la institución que me concedió la oportunidad de contar con una
beca para concluir mi carrera satisfactoriamente.
vi

Resumen
En esta tesis se trata la comparación de dos modelos formulados para la solución de un
problema de diseño de territorios comerciales donde se desea minimizar la dispersión
territorial. El problema es motivado por un caso práctico de una compañía distribuidora
de bebidas embotelladas. El primer modelo utiliza como medida de dispersión la
métrica del problema de localización del p-centro, y el segundo la métrica del problema
de la p-mediana. En el primero se mide la dispersión territorial en base a la distancia de
la unidad más alejada del centro territorial, en el segundo se mide en base a la sumatoria
de las distancias de las unidades con respecto al centro.
En este trabajo se incluye una evaluación empírica donde se evalúa el desempeño de
cada modelo tomando muestras de datos reales de diversos tamaños. Los resultados
experimentales revelan que el modelo de la medida de dispersión del p-centro es
consistentemente más robusto aunque empleando en promedio un tiempo de cómputo
mayor.
vii

Índice
1. Introducción 1
1.1 Descripción del problema . . . . . . . . . . . . . . . 2
1.2 Objetivo general . . . . . . . . . . . . . . . . . . 5
1.3 Contribución . . . . . . . . . . . . . . . . . . . 5
1.4 Justificación . . . . . . . . . . . . . . . . . . . 6
1.5 Hipótesis . . . . . . . . . . . . . . . . . . . . 6
1.6 Estructura de la tesis . . . . . . . . . . . . . . . . 6
2. Antecedentes 8
2.1 Optimización . . . . . . . . . . . . . . . . . . . . . 8
2.2 Modelo matemático . . . . . . . . . . . . . . . . . . . . 9
2.3 Diseño de territorios . . . . . . . . . . . . . . . . . . . 12
2.3.1 Diseño de territorios comerciales . . . . . . . . . . 13
2.3.2 Diseño de territorios con métrica p-centro . . . . . . . 14
2.3.3 Diseño de territorios con métrica p-mediana . . . . . . 15
2.3.4 Robustez de un modelo . . . . . . . . . . . . 16
3. Definición del problema 18
3.1 Desarrollo del problema . . . . . . . . . . . . . . . . . . 18
3.2 Modelación matemática . . . . . . . . . . . . . . . . . . 19
3.2.1 Modelo p-centro . . . . . . . . . . . . . . . 21
3.2.2 Modelo p-mediana . . . . . . . . . . . . . . 23
viii

4. Metodología de estudio 24
4.1 Motivación . . . . . . . . . . . . . . . . . . . . . . 24
4.2 Método de solución de los modelos . . . . . . . . . . . . . . 25
5. Experimentación 27
5.1 Objetivos de experimentación . . . . . . . . . . . . . . . . 27
5.2 Características y parámetros de prueba . . . . . . . . . . . . . 27
5.3 Diseño de experimentos . . . . . . . . . . . . . . . . . . 28
5.4 Análisis de resultados . . . . . . . . . . . . . . . . . . . 29
5.5 Conclusiones de los experimentos . . . . . . . . . . . . . . . 43
6. Conclusiones 45
6.1 Aportaciones del trabajo . . . . . . . . . . . . . . . . . . 46
A. Prueba estadística para conjuntos de datos DRM y DRC 48
Bibliografía 54
ix

Índice de figuras
1. Ejemplo de un modelo de programación lineal . . . . . . . . . . . 11
2. Ejemplo de un modelo de programación lineal entera mixta . . . . . . . 12
3. Robustez de un modelo . . . . . . . . . . . . . . . . . . . 17
4. Procedimiento de solución empleado . . . . . . . . . . . . . . 25
5. Comparación de diferencias relativas en instancias
de 60 nodos, 4 territorios y 5 % de tolerancia . . . . . . . . . . . . .31
6. Representación gráfica de DU60-04-05-04 . . . . . . . . . . . . 32
7. Comparación de soluciones óptimas para DU60-04-05-04 . . . . . . . . 33
8. Comparación de diferencias relativas en instancias
de 80 nodos, 5 territorios y 5 % de tolerancia . . . . . . . . . . . . .35
9. Representación gráfica de DU80-05-05-15 . . . . . . . . . . . . 36
10. Comparación de soluciones óptimas para DU80-05-05-15 . . . . . . . 47
11. Comparación de diferencias relativas en instancias
de 100 nodos, 6 territorios y 5 % de tolerancia . . . . . . . . . . . . 39
12. Representación gráfica de DU100-06-05-18 . . . . . . . . . . . . 40
13. Comparación de soluciones óptimas para DU100-06-05-18 . . . . . . . 41
x

Índice de tablas
1. Datos de experimentación . . . . . . . . . . . . . . . . . . 28
2. Resultados para instancias de 60 nodos, 4 territorios
y 5 % de tolerancia . . . . . . . . . . . . . . . . . . . . . 30
3. Resultados para instancias de 80 nodos, 5 territorios
y 5 % de tolerancia . . . . . . . . . . . . . . . . . . . . . 34
4. Resultados para instancias de 100 nodos, 6 territorios
y 5 % de tolerancia . . . . . . . . . . . . . . . . . . . . . 38
5. Tiempos de solución para instancias de 100 nodos,
6 territorios y 5 % de tolerancia . . . . . . . . . . . . . . . . . 42
6. Hipótesis nula contra alternativa para estadísticos de prueba . . . . . . . 48
7. Desviaciones relativas para instancias de 60 nodos . . . . . . . . . . 49
8. Datos de desviación relativa para cálculo de t para
instancias de 60 nodos. . . . . . . . . . . . . . . . . . . . .49
9. Valor αt . . . . . . . . . . . . . . . . . . . . . . .
50
10. Criterio de rechazo para instancias de 60 nodos . . . . . . . . . . . 50
11. Desviaciones relativas para instancias de 80 nodos . . . . . . . . . .51
12. Datos de desviación relativa para cálculo de t para
instancias de 80 nodos . . . . . . . . . . . . . . . . . . . . 51
13. Criterio de rechazo para instancias de 80 nodos . . . . . . . . . . .52
14. Desviaciones relativas para instancias de 100 nodos . . . . . . . . . 52
15. Datos de desviación relativa para cálculo de t para
instancias de 100 nodos . . . . . . . . . . . . . . . . . . . 53

16. Criterio de rechazo para instancias de 100 nodos . . . . . . . . . . 53

1 Introducción
El problema que se aborda en esta tesis proviene de una empresa embotelladora de bebidas
ubicada en la ciudad de Monterrey, N.L. México. Esta organización necesita dividir un
determinado conjunto de unidades geográficas básicas (manzanas) en un número
determinado de territorios en base a ciertos requerimientos de planeación dados. Para
solucionar este problema existen dos modelos matemáticos diseñados con las métricas de
dispersión de territorios conocidas como p-centro y p-mediana por lo que se desea saber cual
de estos dos modelos propuestos es mejor en base a ciertos criterios.
La investigación de operaciones (IO) es una rama de las matemáticas que consiste en el uso
de modelos matemáticos, estadísticas y algoritmos con objeto de realizar un proceso sobre
toma de decisiones que se aplica a problemas y coordinación de operaciones, o actividades
dentro de una organización. La IO tiene aplicaciones muy extensas en áreas diversas como
manufactura, transporte, construcción, telecomunicación, planeación financiera, cuidado de la
salud, milicia y servicios públicos, por mencionar algunos.
La parte de investigación significa que se usa un enfoque similar a la manera en que se lleva
a cabo la investigación en los campos científicos establecidos. En gran magnitud se usa el
método científico para investigar el problema en cuestión. Particularmente el proceso
comienza por la observación cuidadosa y la formulación del problema que incluye la
recolección de los datos necesarios. El paso siguiente es la construcción de un modelo
matemático en el que se intenta abstraer la esencia del problema real. Se procede a proponer
1

una hipótesis de que el modelo es una representación suficientemente precisa de las
características esenciales de la situación para que las soluciones obtenidas sean válidas
también para el problema real. Posteriormente se llevan a cabo los experimentos adecuados
para probar el modelo matemático propuesto, modificarlo y verificarlo. Entonces en cierto
modo la IO se ocupa también de la administración práctica de la organización. Así para tener
éxito deberá proveer conclusiones claras que pueda usar el tomador de decisiones cuando las
necesite. Una característica importante de la IO es que se intenta encontrar una mejor
solución, llamada solución óptima, para el problema en consideración (Hillier y Lieberman,
2001).
La importancia de emplear la investigación de operaciones es que ha tenido un impacto
impresionante en el mejoramiento de la eficiencia de numerosas organizaciones en todo el
mundo y en el proceso la IO ha realizado contribuciones significativas al incremento de la
productividad dentro de la economía de varios países (Hillier y Lieberman, 2001).
1.1 Descripción del problema
El diseño territorial se puede ver como el problema de agrupar pequeñas áreas geográficas
llamadas unidades básicas, en grupos geográficos llamados territorios, de forma que éstos
satisfagan un conjunto de criterios de planeación (Kalcsics, Nickel y Schröder, 2005). El
diseño territorial tiene diversas aplicaciones como territorios políticos, distritos escolares,
servicios de emergencias y distritos policíacos. De éstas, las aplicaciones más importantes
son las de diseño de territorios de venta (Fleischmann y Paraschis, 1988; Zoltners y Sinha,
2

1983) y de diseño de territorios políticos (Bozkaya, Erkut y Laporte, 2003; George, Lamar y
Wallace, 1997; Grilli di Cortona et al., 1999; Williams, 1995).
Como lo explica Segura Ramiro (2008), la mayoría de las compañías que tienen una venta
considerable y una gran área de mercado se ven en la necesidad de diseñar territorios de
ventas, con fines administrativos o comerciales. El problema de diseño de territorios
comerciales es muy similar ya que su finalidad es atender a los clientes de la mejor manera
posible tratando de minimizar ciertos costos. Comúnmente existen una gran cantidad de
razones por las que es necesario rediseñar un área de ventas o servicios. Puede suceder, por
ejemplo, por un decremento o incremento en el número de ventas o clientes, lo que hace
inevitable un ajuste en el diseño territorial. Otras de las frecuentes razones suelen ser la
administración del personal de atención a las áreas de una mejor manera o balancear la carga
en los territorios, donde carga se refiere a las actividades que se llevan dentro del territorio
como son ventas y número de clientes.
En particular, el problema de interés consiste en que la empresa desea dividir el total de sus
puntos de venta ubicados en el área comprendida por la ciudad en un cierto número de
territorios de atención comercial de acuerdo a ciertas características de planeación como lo
son el balanceo de cada uno de éstos con respecto a las actividades de demanda del producto
y número de clientes, asimismo los territorios deben de ser compactos y contiguos con el fin
de facilitar la administración de sus puntos de venta y el abastecimiento de la mercancía.
Dentro del problema planteado se cuenta con dos modelos matemáticos pertenecientes al
diseño de territorios comerciales, con diferentes métricas de dispersión para resolver el
problema: el modelo desarrollado por Caballero Hernández (2008) utilizando la medida de
3

p-centro, y el modelo que utiliza la medida de p-mediana diseñado por Segura Ramiro
(2008). Lo que se desea realizar es comparar ambos modelos para definir cuál de ambos es
preferible utilizar.
Entonces el problema que se tiene es el de comparar y evaluar las métricas de dispersión en
territorios comerciales, ambas planteadas para minimizar dispersión y determinar cuál de
éstas es mejor utilizar. Un trabajo similar es el desarrollado por Erkut y Neuman (1991), en
el cual se contrastan cuatro diferentes modelos para maximizar la dispersión en territorios.
Es importante mencionar que este tipo de comparación no se había elaborado antes en los
trabajos realizados, por lo cual constituye la contribución principal de la presente tesis.
Una breve explicación de la medida de dispersión llamada p-centro que emplea Caballero
Hernández (2008) en su modelo es localizar los centros territoriales y asignar un conjunto de
clientes a dichos centros de manera que se minimice la máxima distancia entre un cliente y el
centro al que esta asignado. En el caso de la medida de dispersión denominada p-mediana
que usa el modelo desarrollado por Segura Ramiro (2008), se asignan los clientes de manera
que se minimice la sumatoria de todas las distancias con respecto al centro territorial. Estas
medidas de dispersión son las más comunes y más utilizadas en problemas de localización
(Kalcsics, Nickel y Schröder, 2005).
4

1.2 Objetivo general
El propósito de esta tesis es la comparación de dos modelos de IO relacionados al diseño de
territorios comerciales, ambos enfocados a la división o partición de un conjunto de unidades
geográficas en un número de territorios en base a ciertas medidas de desempeño. El objetivo
es proporcionar evidencia sobre cuál de ambos modelos es más apropiado basado en criterios
de robustez y eficiencia computacional, donde robustez se puede definir como tener la menor
variación en la función objetivo si la solución óptima que se obtiene compite con el valor de
la función objetivo de otro modelo sustituto. Se toma como parámetros el número de nodos a
analizar, el número de territorios en que se va a dividir y por último la tolerancia de
desviación respecto a cada una de las actividades a realizar.
1.3 Contribución
La contribución del presente trabajo radica en realizar un estudio que, hasta donde se tiene
conocimiento, no se había desarrollado previamente. Se pretende contrastar modelos de
dispersión de territorios con las métricas de p-centro y p-mediana para el problema de diseño
de territorial planteado en esta tesis. Esto es de suma importancia, ya que llevando a cabo este
estudio se podrá dar evidencia de cuál de ambos modelos es preferible utilizar.
Además se desarrolló una herramienta de interfaz gráfica de usuario para mostrar las gráficas
presentadas en la Sección 5.4.
5

1.4 Justificación
El trabajo de esta tesis es útil ya que no se ha desarrollado anteriormente una comparación
con estos dos tipos de modelos de diseño de territorios. Esto tiene como fin el dar una
evidencia, con base en la experimentación, acerca de cuál de éstos es preferible utilizar.
Además es de suma importancia contar con una base sobre el comportamiento de los dos
modelos estudiados.
1.5 Hipótesis
Para el problema de diseño territorial planteado la hipótesis de esta tesis establece que el
modelo basado en la medida p-centro proporciona soluciones más robustas que el modelo
basado en la métrica de p-mediana.
1.6 Estructura de la tesis
En el Capítulo 2 se abordan todos los antecedentes que sirven para el desarrollo de este
trabajo. Además se presentan detenidamente conceptos básicos para comprender el problema
y cada uno de los modelos en estudio. En el Capítulo 3 se presentan ambos modelos a
estudiar de una forma general describiendo cada una de sus características particulares. En el
Capítulo 4 se explica la metodología de estudio, es decir, se presenta la forma en que se
desarrolló el estudio de comparación de ambos modelos. En el Capítulo 5 se presenta el
6

trabajo empírico sobre la comparación de los modelos. En el Capítulo 6 se establecen las
conclusiones del trabajo y se comenta el trabajo futuro.
7

2 Antecedentes
El presente capítulo describe conceptos y definiciones básicas utilizadas a lo largo del
desarrollo de éste trabajo.
2.1 Optimización
La optimización es una de las ramas más antiguas de la ciencia investigada por los seres
humanos. Surge como una disciplina científica hasta la Segunda Guerra Mundial y como
disciplina académica a finales de los 70's con publicaciones de libros de texto sobre esta
especialización (Caballero Hernández, 2008).
El concepto en el que se basa la optimización es el mejor desempeño posible de recursos,
sistemas, procesos y tiempo. En un problema de optimización existe una medida de
desempeño cuantificable, que se desea llevar hasta su límite. Un modelo de optimización se
compone de variables, parámetros y ecuaciones matemáticas. Además lo conforman criterios
que representan medidas de desempeño del modelo a estudiar (Murty, 1995).
Como lo menciona Caballero Hernández (2008), una variable representa una decisión que se
realiza y afecta directamente el sistema, es por eso que se les llama “variables de decisión”.
Los parámetros simbolizan valores de operación que definen íntegramente el estado del
sistema. Otros elementos sumamente importantes son las restricciones, que tienen la tarea de
8

formar interacciones entre las variables de decisión, parámetros y límites del sistema,
mediante igualdades y desigualdades.
El modelo se elabora dependiendo de las necesidades del sistema. En éste se pueden
presentar variables de tipo enteras o continúas, la función objetivo y las restricciones a las
que se sujeta pueden ser del tipo lineal o no lineal (Hillier y Lieberman, 2001).
2.2 Modelo matemático
Los modelos, o representaciones idealizadas, son parte integral de nuestra vida diaria. Entre
los ejemplos más comunes pueden citarse aeromodelos, retratos, globos terráqueos, entre
otros. Los modelos interpretan un papel de suma importancia en la ciencia y los negocios,
como lo hacen los modelos del átomo, de estructuras genéticas, ecuaciones matemáticas que
describen las leyes de la física o reacciones químicas, las gráficas, los organismos, y los
sistemas contables dentro de la industria (Hillier y Lieberman, 2001).
Los modelos matemáticos son representaciones idealizadas, pero expresadas en términos de
símbolos y expresiones matemáticas. En forma parecida, el modelo matemático de un
problema industrial es el sistema de ecuaciones y expresiones matemáticas relacionadas que
describen la esencia del problema. En la investigación de operaciones los modelos son
abstractos, es decir, que se utilizan símbolos algebraicos para representar las relaciones del
objeto de estudio que se desean modelar (Hillier y Lieberman, 2001).
9

Un modelo matemático está compuesto por relaciones matemáticas como ecuaciones,
desigualdades, dependencias lógicas que corresponden a determinadas relaciones
características en el mundo real entre los objetos que se están modelando. Así, si se deben
tomar n decisiones cuantificables relacionadas entre sí se representan como variables de
decisión (x1, x2,…, xn) para las que se deben de determinar los valores respectivos. La medida
de desempeño adecuada se expresa entonces como una función matemática de estas variables
de decisión (por ejemplo F(x1, x2) = (3x1 + 2x2) la cual se llama función objetivo. Además se
expresan en términos matemáticos todas las limitaciones que se pueden imponer sobre los
valores de las variables de decisión (como x1 + 3x2 ≤ 10). Este tipo de expresiones matemáticas
por lo general se les denomina restricciones (Hillier y Lieberman, 2001).
Los modelos matemáticos tienen múltiples ventajas sobre una descripción verbal, ya que
describen el problema de una forma mucho más concisa. Esto tiende a hacer más
comprensible toda la estructura del problema y ayuda a revelar las relaciones importantes
causa-efecto. Indica con más claridad qué datos adicionales son importantes para el análisis.
Además facilita el manejo del problema en su totalidad y al mismo tiempo el estudio de sus
interrelaciones. (Hillier y Lieberman, 2001).
Como lo mencionan Hillier y Lieberman (2001) la programación lineal utiliza un modelo
matemático para describir el problema. El adjetivo lineal significa que todas las funciones
matemáticas del modelo deben ser funciones lineales. En el caso de la palabra programación
no se refiere a programación en computadoras; en esencia es un sinónimo de planeación. Así
la programación lineal trata la planeación de las actividades para obtener un resultado
óptimo; esto es, el resultado que mejor alcance la meta especificada (según el modelo
10

matemático) entre todas las alternativas de solución. En un modelo de programación lineal se
requiere además que las variables sean continuas. En la Figura 1 se presenta un ejemplo de un
modelo de programación lineal.
Maximizar ( ) 21 53 xxxf +=
Sujeta la las restricciones:
103 21 ≤+ xx
51 ≤x
133 2 ≤x
01 ≥x , 02 ≥x
Figura 1. Ejemplo de un modelo de programación lineal.
Existen situaciones que al representarse con modelos lineales, solo tienen sentido aquellas
soluciones en que algunas o todas la variables de decisión sean números enteros. Si todas las
variables de decisión deben ser enteras, tenemos un problema de programación lineal entera.
Si solo algunas de las variables de decisión son enteras tenemos un problema de
programación lineal entera mixta. En algunos casos algunas variables solo pueden tomar los
valores de 0 o 1. A estas variables se les llama variables binarias. Este tipo de problemas se
resuelven con la técnica conocida como Ramificación y Acotamiento (Hillier y Lieberman,
2001). El problema estudiado en esta tesis utiliza principalmente está herramienta de
solución. En la Figura 2 se presenta un ejemplo de un problema de programación lineal
entera mixta.
11

Maximizar ( ) 321 2114 xxxxf ++=
Sujeta a las restricciones:
560495432 321 ≤++ xxx
354312 321 ≤+− xxx
32321 0 x,x;x,x,x ≥ enterasFigura 2. Ejemplo de un modelo de programación lineal entera mixta.
2.3 Diseño de Territorios
Los problemas de diseño de territorios han sido ampliamente estudiados por personas
especializadas en investigación de operaciones como también por especialistas como
geógrafos, políticos, mercadológos, administradores y demás áreas en la que está involucrado
el diseño de territorios (Kalcsics, Nickel y Schröder, 2005).
El diseño territorial puede verse como la acción de agrupar un conjunto de unidades básicas
de una región geográfica en territorios o agrupaciones con propósitos, ya sea
organizacionales, administrativos o comerciales (Segura Ramiro, 2008). La aplicación de este
tipo de problemas es excesivamente variada, las más conocidas son por ejemplo el diseño de
territorios políticos (Bozkaya, Erkut y Laporte, 2003; George, Lamar y Wallace, 1997; Grilli
di Cortona et al., 1999; Williams, 1995), territorios de ventas (Zoltners y Sinha, 1983), zonas
de servicio (Fleischmann y Paraschis, 1988), por ejemplo.
12

El problema aquí estudiado cae en el campo de diseño de territorios comerciales. Como se ha
comentado anteriormente, Este problema consiste en encontrar una partición de n unidades
básicas, en p agrupaciones, donde p es el número de territorios a formar, atendiendo un
conjunto de restricciones como por ejemplo compacidad o dispersión, contigüidad, balanceo,
etc. Éstos se definen a continuación.
• Áreas básicas: Representa a una entidad geográfica. Suele ser una manzana, código
postal o incluso una ciudad, dependiendo del contexto.
• Número de territorios: Es un número predeterminado que establece la cantidad de
territorios a ser formados.
• Compacidad: Significa que las unidades básicas pertenecientes al mismo territorio se
encuentren relativamente cerca entre sí. Este criterio es de suma importancia, ya que
obteniendo territorios compactos disminuyen los costos de transporte.
• Contigüidad: Los territorios deben ser conexos, es decir que se pueda viajar de un
nodo a otro dentro de un mismo territorio sin salir de éste.
• Balanceo: Es necesario que actividades que están relacionadas con las unidades
básicas tengan un balance en los distintos territorios.
2.3.1 Diseño de territorios comerciales
Una tarea importante surge cuando las empresas operan una fuerza de ventas y se necesita
subdividir el área de mercado en pequeñas regiones. Este tipo de diseños surgen cuando se
tiene la necesidad de agrupar clientes, cuando se tiene un aumento o disminución en el
13

número de ventas, para lograr una mejor cobertura con el personal existente, o para equilibrar
la carga de trabajo de manera uniforme, con el fin de operar de una forma eficaz (Kalcsics,
Nickel y Schröder, 2005). Los modelos que se analizan en esta tesis pertenecen a esta
categoría.
Es importante mencionar que existe una gran variedad de aplicaciones como se menciona en
el trabajo de Kalcsics, Nickel y Schröder (2005).
En relación al diseño de territorios comerciales existe abundante trabajo reciente. Se han
desarrollado métodos aproximados de solución a diferentes variantes del problema como los
desarrollados por Vargas Suárez (2005), por Ríos-Mercado y Fernández (2009), Caballero
Hernández (2008) y Segura Ramiro (2008). Después Salazar Acosta (2009) incorporó costos
de ruteo junto con el diseño de territorios. Posteriormente Salazar Aguilar (2010) estudió el
problema de forma multiobjetivo. Más recientemente Elizondo Amaya (2010) calculó cotas
duales para una variación del problema.
2.3.2 Diseño de territorios con métrica p-centro
La función objetivo del primer modelo planteado en este texto es tomada del conocido
Problema de p-Centro (Handler, 1990). Esta métrica mide la dispersión territorial en base a la
máxima de las distancias de los nodos al centro del territorio al que pertenecen.
14

En particular, en los problemas de localización del tipo p-centro se requiere localizar p
centros de servicio, y asignar un conjunto de clientes a dichos centros de manera que se
minimice la máxima distancia entre un cliente y el centro al que está asignado. En la versión
capacitada del problema a cada cliente se le asocia una demanda. Se requiere por lo tanto
encontrar una partición del conjunto de clientes en p grupos de forma que la demanda de
éstos no exceda la capacidad del centro al que están asignados, que el radio de cobertura de
cada grupo sea mínimo (Caballero Hernández, 2008).
En el problema de p-centro de diseño territorial existe una limitación para los territorios, la
diferencia es que esta acotada por ambos extremos y que existen medidas de actividad con
distintas limitaciones de capacidad, es decir las ventas, carga de trabajo y el número de
clientes (Caballero Hernández, 2008).
2.3.3 Diseño de territorios con métrica p-mediana
La función objetivo del segundo modelo se toma del conocido Problema de p-Mediana
(Mirchandani, 1990). Esta métrica mide la dispersión territorial en base a la suma total de las
distancias de cada nodo al centro del territorio al cuál fue asignado. Una de las principales
motivaciones para el uso de esta métrica es que su correspondiente modelo matemático se
resuelve más eficazmente con la técnica de localización-asignación, planteada por Segura
Ramiro (2008).
15

2.3.4 Robustez de un modelo
En general, el término robustez de un modelo se refiere a qué tan sensible el modelo es a
pequeñas variaciones en sus parámetros de entrada. En el caso en que se comparan dos
modelos diferentes para un mismo problema, el término de robustez se refiere a qué tanto se
alejan las soluciones óptimas de cada modelo al evaluarlas en un mismo modelo. Por
ejemplo, para medir qué tan lejos se encuentra la solución óptima del modelo B (xB) de la
solución óptima del modelo A (xA) se calcula la desviación relativa con respecto al modelo A
(DRA).
DRA
( ) ( )( )AA
AABA
xF
xFxF −=
Un valor pequeño de DRA implica menor sensibilidad, es decir mayor grado de robustez,
mientras que un valor grande muestra mayor sensibilidad a pequeñas variaciones. En otras
palabras un valor pequeño de DRA implica que la solución obtenida con el modelo B (xB) esta
relativamente cerca del óptimo del modelo A y por lo tanto implica que el modelo B es más
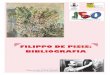
robusto. La Figura 3 ilustra este cálculo para un problema de minimización.
16

36.0534
534729 =−=ADR
Figura 3. Robustez de un modelo.
Como se puede apreciar en la gráfica el valor de la función objetivo del modelo A, evaluada
en el punto óptimo de A tiene un valor menor que la función objetivo de A evaluada en el
punto óptimo de B, teniendo una desviación relativa de 0.36, es decir que se desvía un 36%
del óptimo del modelo A.
17

3 Definición del problema
El tema central de este capítulo es el describir detalladamente el problema, los modelos y la
comparación que se desea realizar entre ellos, así como una visión precisa de las
características tales como su notación, parámetros y variables, con el propósito de distinguir
cada una de las diferencias y similitudes entre ambos modelos.
3.1 Desarrollo del problema
Como lo describe Caballero Hernández (2008) se sabe que se desea dividir el conjunto de
unidades básicas que conforman la red de distribución de la empresa en un conjunto de
territorios adecuados para sus propósitos comerciales. Para desarrollar este plan territorial se
hicieron las siguientes suposiciones:
• La manzana geográfica es la unidad básica de la que se conforman los territorios.
• Se asocian a cada territorio medidas de demanda de producto y número de clientes las
cuales denominamos actividades nodales. El tamaño de cada actividad en un
territorio dado se define como la suma aritmética de los valores correspondientes a la
medida de actividad de las unidades básicas que lo conforman.
La empresa considera ciertos criterios de planeación que se traducen en un conjunto de
requerimientos que el diseño territorial debe cumplir:
18

• Cada unidad básica se debe asignar únicamente a un solo territorio. Esto quiere decir
que los territorios definen conjuntos distintos de unidades básicas.
• Los territorios deben ser geográficamente compactos. Esto significa que la distancia
entre las unidades básicas dentro de un mismo territorio debe ser lo más pequeña
posible.
• Es de suma importancia que los territorios estén balanceados con respecto a cada
medida de actividad. Lo anterior representa que para cada territorio, los tamaños de
las medidas de actividad estén dentro de un rango pre-establecido.
• Cada territorio debe ser contiguo. Esto implica la conexión geográfica entre las
unidades básicas, es decir, que para cada par de unidades básicas pertenecientes al
territorio existe una ruta que las comunique compuesta exclusivamente por unidades
básicas colindantes entre sí y pertenecientes al mismo territorio.
• El diseño territorial debe contar con un número fijo de territorios previamente
establecido.
Los modelos desarrollados para resolver este problema, que serán objeto de estudio en esta
tesis, cumplen con los criterios que se han mencionado con anterioridad.
3.2 Modelación matemática
A continuación se presenta la formulación de ambos modelos como programas enteros
lineales mixtos. Para los dos modelos se manejan los mismos índices y conjuntos, parámetros
y variables de decisión, ya que como se puede observar la diferencia entre el modelo que
19

utiliza la medida de dispersión de p-centro y el modelo que utiliza la medida de p-mediana
radica solamente en la función objetivo.
Índices y conjuntos
V conjunto de unidades básicas
E conjunto de aristas que existen entre las unidades básicas
A conjunto de actividades en las unidades básicas
n número de manzanas (unidades básicas)
p número de territorios
ji, índices de las manzanas; { }n=Vji 1,2,...,, ∈
a índice de las actividades; { }1,2=Aa ∈
( ) ( ){ }( )EijEjiVjN j ∈∨∈∈= ,,: conjunto de nodos que son adyacentes al nodo
Vii; ∈
Parámetros
aiw valor de la actividad a en el nodo AaV,ii; ∈∈
ijd distancia euclidiana entre i y j Vji,; ∈
aτ tolerancia relativa respecto a la actividad [ ]0,1∈∈ aτA,aa;
Parámetros calculados
20

( )
=∑
∈Bj
aj
a wBw tamaño del conjunto B con respecto a VBA,aa; ⊂∈
( )( )pVwμ aa /= valor promedio (meta) de la actividad Aaa; ∈
Variables de decisión
1 si la unidad j es asignada al territorio con centro en Vji,i ∈;
ijx = 0 de otro modo
3.2.1 Modelo basado en p-centro
En este espacio ya se presenta el modelo desarrollado por Caballero Hernández (2008)
utilizando p-centro como métrica, con su función objetivo y cada una de sus restricciones.
Modelo TDPC
Minimizar ( ) { }ijij xd=xf max (3.1)
21

∑∈
=Vi
ijx 1 Vj ∈
(3.2)
∑∈Vj
ii p=x
(3.3)
( ) iiaa
ijVj
aj xμτ+xw 1≤∑
∈ AaV;i ∈∈
(3.4)
( ) iiaa
ijVj
aj xμτxw −≥∑
∈
1 AaV;i ∈∈
(3.5)
Sxx
v
SvNj Sj
ijij −≥−∑ ∑∈∪∈ ∈
1S\ VSVi ⊂∈ , (3.6)
{ }0,1∈ijx Vji ∈,
(3.7)
La función objetivo (3.1) en el modelo TDPC busca minimizar la dispersión. Las
restricciones (3.2) aseguran la asignación de cada unidad básica a un solo centro. La
restricción (3.3) establece el número de centros a elegir y por consecuencia el número de
territorios a formar. Las restricciones (3.4) y (3.5) aseguran que para cada actividad el tamaño
de los territorios este dentro del rango definido por aτ alrededor de su tamaño promedio
definido por aµ . Las restricciones (3.6) garantizan la conexidad de los territorios. Por último
las restricciones (3.7) se utilizan para variables binarias.
22

3.2.2 Modelo basado en p-mediana
Se presenta el modelo desarrollado por Segura Ramiro (2008) con sus restricciones
correspondientes utilizando como medida la p-mediana. En este caso para minimizar la
dispersión se utiliza la p-mediana por lo que la función objetivo es expresada en (3.8). El
conjunto de restricciones es el mismo que para el modelo anterior.
Modelo TDPM
Minimizar ( ) ∑∑∈ ∈Vi Vj
ijij xd=xf
(3.8)
Sujeto a: (3.2), (3.3), (3.4), (3.5), (3.6) y (3.7).
Se sabe que tanto TDPC como TDPM son clasificados como NP-duros, es decir, que no se
puede resolver de manera exacta en tiempo polinomial para instancias relativamente grandes.
Ambas demostraciones se pueden analizar más detenidamente en los trabajos de Caballero
Hernández (2008) y Segura Ramiro (2008), respectivamente.
23

4 Metodología de estudio
En el capítulo anterior se explicaron en una forma general ambos modelos planteados. Ya
habiendo definido ambos modelos, procedemos a plantear el estudio de robustez que se desea
realizar, es decir, evaluar ambos modelos y concluir cuál de los dos modelos estudiados es
más robusto. En el presente capítulo se analiza la motivación principal de este escrito, además
se explica el método empleado para llevar a cabo este estudio y su implementación.
4.1 Motivación
Una de las principales motivaciones de este estudio, es contribuir a cubrir la necesidad que
existe en cuanto a saber cual de los modelos planteados es preferible utilizar, ya que esto no
se ha desarrollado con anterioridad. La idea es dar una visión del comportamiento de éstos y
poder llegar a la conclusión de cual presenta mayor robustez.
Para llevar a cabo este estudio se utiliza una metodología muy similar a la presentada por
Erkut y Neuman (1991) donde se contrastan cuatro modelos diferentes para un problema de
p-dispersión. No se puede dar por hecho el comportamiento que tendrán los modelos con
métricas de p-mediana y p-centro, entonces es de suma importancia llevar a cabo este tipo de
experimentación exhaustiva que nos ayude a predecir éste, y así tener una referencia de cuál
de los modelos presentados se desvía en menor proporción del óptimo.
24

En general la metodología empleada en este estudio consistió en:
• Obtener instancias reales de 60, 80 y 100 nodos para probar los modelos matemáticos
que se desean comparar.
• Realizar un estudio comparativo exhaustivo, además de agregar gráficas para ilustrar
las diferencias y similitudes de las soluciones obtenidas.
• En base a los resultados obtenidos concluir de una forma precisa cual de los modelos
planteados es más robusto.
4.2 Método de solución de los modelos
El método empleado para la solución de ambos modelos es el propuesto por Salazar-Aguilar
et al. (2010), en los que se pueden resolver de forma óptima modelos de hasta 150 unidades
básicas y formando 8 territorios tanto para TDPC como para TDPM.
Input:
P :=Instancia del problema TDP
MedidaDisp:= TDPC o TDPM
Output: X = (X1 , X2 , . . . , Xp ):= Una p-partición factible de V
Cortes ← φ {Conjunto de cortes}
Modelo ← GeneraModeloRelajado (P, MedidaDisp)
While(Cortes ≠ φ)
X←ResolverModelo (MedidaDisp)
Cortes ← ResolverProblemaSeparacion (P ,X)
AgregarCortes(Modelo, Cortes)
25

EndWhile
Return XFigura 4. Procedimiento de solución empleado.
En la Figura 4 se muestra cómo trabaja el procedimiento de solución empleado para este
análisis. Como se puede apreciar dentro de la formulación, se necesita como datos de entrada
la instancia, esto es, un archivo donde se guarda información de los nodos, territorios a
formar y tolerancia de cada actividad; además de especificar si se trata de medida p-mediana
o p-centro. Enseguida el método de solución realiza un procedimiento iterativo usando el
método de Ramificación y Acotamiento, donde internamente se relajan las restricciones de
conectividad (ya que crecen exponencialmente) y se resuelve la relajación. Posteriormente se
lleva a cabo una prueba de conectividad mediante una búsqueda en anchura (BFS, por sus
siglas en inglés), que es un algoritmo utilizado para recorrer o buscar elementos en un grafo
(Cormen et al., 2001) para verificar si alguna restricción de conectividad no se cumplió. Si
ese es el caso, se identifican aquellas desigualdades violadas y se agregan al modelo relajado
como cortes y continúa el procedimiento hasta que no haya desigualdades sin cumplir. Por
último, el método retorna la solución óptima. El procedimiento descrito en la Figura 4,
facilitado para realizar este estudio, fue codificado en el lenguaje C++ y compilado con el
compilador Sun C++ 8.0. Todos los experimentos fueron realizados en un ordenador SunFire
V440, con el sistema operativo Solaris 9, donde se utilizaron bibliotecas de optimización para
C++ de CPLEX en su versión 11.2.
26

5 Experimentación
En este apartado se describe la experimentación realizada bajo las características y
condiciones mencionadas con anterioridad.
5.1 Objetivos de experimentación
En este estudio de manera general se buscan los siguientes objetivos:
• Realizar comparación con las soluciones obtenidas.
• Mostrar soluciones gráficas de los modelos.
• Establecer cuál modelo es más robusto en base a un análisis estadístico.
5.2 Características y parámetros de prueba
Para llevar a cabo los experimentos se adquirieron varios conjuntos de casos de pruebas con
diferentes características a fin de analizar el comportamiento de ambos modelos variando
cada uno de los parámetros. Cada caso de prueba es llamado instancia. Estas fueron
27

construidas a partir de información real facilitada por el especialista de la empresa
(Caballero-Hernández et al., 2007).
Dentro del estudio realizado se evaluaron 20 instancias con cada uno de los siguientes datos
mostrados en la Tabla 1.
Tabla 1. Datos de experimentación.
Sufijo de instancia N p aτ (%)
DU60-04-05 60 4 5.00
DU80-05-05 80 5 5.00
DU100-06-05 100 6 5.00
A las instancias se les identificó de la forma en que se muestra en la Tabla 1 para facilitar su
clasificación por número de nodos (n), número de territorios a formar (p) y tolerancia para
cada actividad ( aτ ).
Como se ha mencionado con anterioridad, lo que se pretende es evaluar cuál de los modelos
previamente estudiados es el que tiene un comportamiento más robusto.
5.3 Diseño de experimentos
28

Los resultados experimentales deben depender de un conjunto de condiciones experimentales
que deben documentarse con el fin de que el experimento pueda ser replicado por otra
persona.
La experimentación llevada a cabo se puede definir en las siguientes etapas:
Etapa 1: Obtener soluciones óptimas utilizando cada uno de los modelos para cada una de las
20 instancias de los tres tamaños del territorio indicados anteriormente.
Etapa 2: Estudio comparativo exhaustivo mediante un análisis estadístico entre las diferencias
relativas obtenidas de las soluciones óptimas de ambos modelos para definir cuál es más
robusto.
Etapa 3: Comparación gráfica de las soluciones obtenidas con los modelos en estudio.
5.4 Análisis de resultados
Como se ha mencionado a lo largo de este estudio, el criterio con el que se compara el
modelo TDPC y el modelo TDPM es denominado robustez, es decir que si compiten los dos
modelos se requiere que exista la menor variación de una solución factible con respecto a la
solución óptima.
Se llevó a cabo la solución mediante cada uno de los modelos de las 20 instancias con los
diferentes datos mencionados en la Sección 5.2. A continuación se presentan los resultados
29

para los datos de 60 nodos, 4 territorios y una tolerancia de 5 % para cada una de las
actividades.
Tabla 2. Resultados para instancias de 60 nodos, 4 territorios y 5 % de tolerancia.
nombre instancia
xm xc
fm(xm) fc(xm) fm(xc) fc(xc)DU60-04-05-01 5460.17 234.24 6160.43 168.66 12.82 38.88DU60-04-05-02 5451.68 201.45 5976.66 176.14 9.63 14.37DU60-04-05-03 5597.87 184.87 5874.58 165.38 4.94 11.78DU60-04-05-04 5935.66 258.21 6278.13 188.14 5.77 37.24DU60-04-05-05 5303.19 213.08 5962.00 179.98 12.42 18.39DU60-04-05-06 5253.94 159.68 5647.49 158.72 7.49 0.60DU60-04-05-07 5460.17 234.24 6247.44 168.36 14.42 39.13DU60-04-05-08 5309.96 228.86 5862.49 178.56 10.41 28.16DU60-04-05-09 5224.51 181.89 6344.72 173.73 21.44 4.70DU60-04-05-10 5350.15 181.06 5607.09 152.34 4.80 18.86DU60-04-05-11 5150.91 222.50 6910.35 183.90 34.16 20.99DU60-04-05-12 5597.50 232.53 6193.97 178.87 10.66 29.99DU60-04-05-13 5731.98 199.75 6731.70 184.35 17.44 8.35DU60-04-05-14 5462.95 212.61 5887.73 181.29 7.78 17.28DU60-04-05-15 5332.77 221.40 6105.17 164.14 14.48 34.89DU60-04-05-16 5399.54 214.09 6083.78 173.37 12.67 23.49DU60-04-05-17 5602.85 209.10 6096.18 173.74 8.80 20.35DU60-04-05-18 5773.95 232.96 6494.64 189.28 12.48 23.08DU60-04-05-19 5543.44 200.15 6215.93 177.99 12.13 12.44DU60-04-05-20 5543.44 200.15 6565.13 181.45 18.43 10.30
Media 12.66 20.66
En la primera columna de la Tabla 2 se señala el nombre con el que se identifica cada
instancia. La siguiente columna muestra los valores de la función objetivo al optimizar el
modelo TDPM. En la tercera columna se tiene el valor de la función objetivo de TDPC
evaluado con la solución óptima del modelo de TDPM. El valor de la cuarta columna
30

representa lo opuesto a la tercera, ya que se evalúa la solución óptima del modelo TDPC
dentro del modelo de TDPM. En la columna número cinco se tiene el valor óptimo de la
función objetivo del modelo TDPC. Las ultimas dos columnas reflejan las diferencias
relativas del modelo TDPM y TDPC, respectivamente, tal como se definió en la Sección
2.3.4.
Se analizaron y contrastaron los valores de las últimas dos columnas de la Tabla 2. En la
Figura 5 se aprecia la gráfica para los conjuntos de datos DRM y DRC. En el Apéndice A se
describe a detalle la prueba estadística realizada a los datos revelados en este estudio,
utilizando el estadístico de prueba conocido como t de student (Walpole, Myers y Myers
1999) teniendo como hipótesis nula que DRM = DRC y como hipótesis alternativa que DRM <
DRC. Se concluyó que el conjunto de datos DRM es significativamente menor que el conjunto
DRC con un nivel de confianza de 01.0=α .
Figura 5. Comparación de diferencias relativas en instancias de 60 nodos, 4 territorios y 5 % de tolerancia.
31

Como se puede apreciar en la Tabla 2, en la instancia DU-04-05-04 en particular se tiene una
gran diferencia entre los valores de las columnas correspondientes a DRM y DRC, ya que
muestra una cifra de 5.77 % contra un 37.24 %, es decir una diferencia de 31.47 %.
En la Figura 6 se muestra la representación visual de la ubicación del conjunto de nodos
pertenecientes a la instancia antes mencionada. Cada vértice corresponde a un nodo, y cada
línea corresponde a una arista, es decir a la conexión que existe entre un nodo y otro.
Figura 6. Representación gráfica de DU60-04-05-04.
Tanto para el modelo TDPM como para el TDPC se desea mostrar su solución gráfica para
visualizar ambas soluciones óptimas y las diferencias que existen en cada una de estas.
32

Solución óptima TDPM
Valor de la función objetivo evaluada con el modelo
TDPC: 258.21
Solución óptima TDPC
Valor óptimo de la función objetivo en el modelo TDPC:
188.14
Figura 7. Comparación de soluciones óptimas para DU60-04-05-04.
En la parte izquierda de la Figura 7 se observa la solución óptima para la instancia
DU60-04-05-04 utilizando el modelo TDPM. Dentro de esta gráfica se aprecian los nodos
distribuidos en cuatro territorios de tal forma que se cumple con la conexidad entre cada uno
de los nodos pertenecientes al territorio al igual que el balance de éste. Cada territorio está
marcado con un color y tipo de línea diferente, cada nodo se encuentra señalado con un
círculo, que representa el promedio de los pesos de cada una de las actividades. Los círculos
marcados con una cruz roja son los centros de cada uno de los territorios formados. Los
círculos señalados con una cruz negra son los nodos más alejados al centro de cada territorio.
Como se aprecia en la gráfica, se ha señalado con una flecha a la mayor de estas distancias
con un valor de 258.21. En la parte derecha de la Figura 7 se muestra la gráfica
correspondiente a la solución óptima del modelo TDPC para misma instancia, donde se
aprecia la distribución de los territorios respecto al la medida de dispersión p-centro y
33

asimismo se indica con una flecha la mayor distancia a la cual le corresponde un valor de
188.14. Como se contempla en la Figura 7, la distancia del centro al nodo más alejado
mostrado en la solución del modelo TDPC es menor a la máxima distancia del centro del
territorio al nodo más lejano para el modelo con métrica TDPM, esto muestra una gran
disimilitud respecto a la configuración de las soluciones de ambos modelos.
Se repitió la metodología de experimentación para las instancias de 80 nodos, 5 territorios y 5
% de tolerancia con respecto a cada actividad. En la Tabla 3 se presentan los resultados de tal
experimentación.
Tabla 3. Resultados para instancias de 80 nodos, 5 territorios y 5 % de tolerancia.
Nombre instancia
xm xc
fm(xm) fc(xm) fm(xc) fc(xc)DU80-05-05-01 6600.56 230.40 7297.67 162.88 10.56 41.45DU80-05-05-02 6408.82 192.30 7183.43 150.83 12.09 27.50DU80-05-05-03 6958.05 194.84 7886.62 153.26 13.35 27.13DU80-05-05-04 6900.16 209.30 7848.35 159.54 13.74 31.19DU80-05-05-05 6280.58 184.85 6825.27 142.96 8.67 29.31DU80-05-05-06 6521.08 238.58 7302.45 163.86 11.98 45.60DU80-05-05-07 6455.97 187.40 7048.03 147.06 9.17 27.43DU80-05-05-08 6680.28 213.98 7525.30 165.50 12.65 29.29DU80-05-05-09 6650.20 177.37 7410.03 155.44 11.43 14.11DU80-05-05-10 6534.77 179.28 7461.49 156.74 14.18 14.38DU80-05-05-11 6539.55 191.00 7119.01 152.76 8.86 25.03DU80-05-05-12 6703.55 186.52 7604.56 165.08 13.44 12.98DU80-05-05-13 6285.66 181.63 6565.02 149.62 4.44 21.39DU80-05-05-14 6615.80 199.70 7215.14 150.87 9.06 32.37DU80-05-05-15 6990.43 239.15 7732.07 158.22 10.61 51.15DU80-05-05-16 6391.66 201.13 6960.89 147.27 8.91 36.57DU80-05-05-17 6766.01 227.49 7781.65 167.25 15.01 36.02DU80-05-05-18 6808.45 175.54 7676.38 164.14 12.75 7.20DU80-05-05-19 6643.17 183.33 7713.52 167.64 16.11 9.36DU80-05-05-20 6873.61 185.17 7257.61 149.03 5.59 24.25
Media 11.13 27.18
34

En el Apéndice A se describe a detalle la prueba estadística realizada a los datos de igual
forma que los datos de 60 nodos mostrados anteriormente.
Al igual que en la Tabla 2, se analizaron y contrastaron los valores de las últimas dos
columnas, para la Tabla 3. En la Figura 8 se observan gráficamente los valores para cada par
de datos.
Figura 8. Comparación de diferencias relativas en instancias de 80 nodos, 5 territorios y 5 % de tolerancia.
Como se puede apreciar en la Tabla 3 en la instancia DU80-05-05-15 en particular se tiene
una diferencia entre los valores de las desviaciones relativas de ambos modelos, ya que por
un lado muestra una cifra de 10.61 % contra un 51.15 %, es decir una diferencia de 40.54 %.
35

En la Figura 9 se muestra la representación visual de la ubicación del conjunto de nodos
pertenecientes a la instancia antes mencionada, donde cada vértice corresponde a un nodo, y
cada línea corresponde a una arista, es decir a la conexión que existe entre un nodo y otro.
Figura 9. Representación gráfica de DU80-05-05-15.
Como se ha planteado anteriormente, tanto para el modelo TDPM como para el TDPC se
desea mostrar su solución gráfica para visualizar ambas soluciones óptimas y las diferencias
que existen en cada uno de éstas con 80 nodos, 5 territorios y 5 % de tolerancia para cada
actividad.
Al igual que en la Figura 7, la Figura 10 presenta una comparación grafica entre las dos
soluciones óptimas correspondientes a cada uno de los modelos estudiados. En la parte
izquierda se muestra la solución óptima para la instancia utilizando el modelo TDPM. Dentro
36

de esta gráfica se aprecia los nodos distribuidos en cinco territorios de tal forma que se
cumple con la conexidad entre cada uno de los nodos pertenecientes al territorio al igual que
el balance del éste. Como se aprecia en la gráfica, se ha señalado con una flecha a la mayor
de estas distancias con un valor de 239.15. En la parte derecha de la Figura 10 se muestra la
gráfica correspondiente a la solución óptima del modelo TDPC y asimismo se ha indicado
con una flecha la distancia del centro del territorio al nodo más alejado, la cual le corresponde
un valor de 158.22. Como se contempla en la Figura 10, la distancia respecto el centro del
territorio al nodo más alejado para la solución del modelo TDPM es mayor que la distancia
del centro al nodo más alejado del modelo diseñado con métrica TDPC.
Solución óptima TDPM para
DU80-05-05-15.
Valor de la función objetivo evaluada con el modelo
p-centro: 239.15
Solución óptima TDPC para
DU80-05-05-15.
Valor óptimo de la función objetivo en el modelo p-centro:
158.22
Figura 10. Comparación de soluciones óptimas para DU80-05-05-15.
37

Posteriormente se llevo a cabo la experimentación con una cantidad de 100 nodos, formando
6 territorios y con una tolerancia por actividad de 5 %. En la Tabla 4 se muestran los
resultados del experimento.
Tabla 4. Resultados 100 nodos, 6 territorios y 5 % de tolerancia.
Nombre instancia xm xc
fm(xm) fc(xm) fm(xc) fc(xc)DU100-06-05-01 7370.14 191.15 8309.21 144.85 12.74 31.96DU100-06-05-02 7278.42 164.07 8782.35 145.59 20.66 12.70DU100-06-05-03 7508.51 189.95 8426.37 139.96 12.22 35.72DU100-06-05-04 7581.56 171.51 8168.55 145.77 7.74 17.66DU100-06-10-05* 7609.49 154.91 8362.21 139.45 9.89 11.09DU100-06-05-06 7242.99 215.87 8409.74 145.38 16.11 48.48DU100-06-05-07 7432.68 167.94 8649.67 137.24 16.37 22.37DU100-06-05-08 7052.89 193.20 7622.25 139.78 8.07 38.22DU100-06-10-09* 7181.50 186.67 8077.48 130.65 11.76 37.88DU100-06-05-10 7432.88 155.24 8026.26 135.38 4.65 19.08DU100-06-05-11 6829.47 166.54 7778.81 130.36 13.90 27.75DU100-06-05-12 7461.20 184.80 8269.36 139.79 10.83 32.20DU100-06-05-13 7061.61 178.02 8556.59 145.10 21.17 22.69DU100-06-05-14 7825.61 150.44 8172.43 142.82 4.43 5.34DU100-06-05-15 7158.74 153.46 7780.01 134.11 8.68 14.43DU100-06-05-16 7653.15 246.00 8103.65 137.25 5.89 79.24DU100-06-05-17 6880.47 157.11 7799.50 139.10 13.36 12.94DU100-06-05-18 7438.50 260.75 8517.43 141.00 14.50 85.12DU100-06-05-19 7152.04 186.88 8158.47 139.97 14.07 33.51DU100-06-05-20 7590.09 222.65 8236.56 149.78 8.52 48.65
media 11.78 31.85
Como se puede apreciar en la Tabla 4, las instancias señaladas con (*), DU100-06-10-05 y
DU100-06-10-09 tienen un valor de tolerancia de 10 %. Esto se debe que para una tolerancia
del 5 % ambas instancias resultaron infactibles, por lo que no tenían solución. Por tal motivo
en estos dos casos se incrementó la tolerancia a una cifra de 10 %. En la Figura 11 se
observan gráficamente los valores para cada par de datos. En el Apéndice A se describe a
detalle la prueba estadística realizada a los datos de manera similar a los datos anteriores.
38

Figura 11. Comparación de diferencias relativas en instancias 100 nodos, 6 territorios y 5 %
de tolerancia.
Como se puede apreciar en la Tabla 4, en la instancia DU100-06-05-18 se tiene una gran
diferencia entre los valores de las desviaciones relativas de ambos modelos, ya que por un
lado muestra una cifra de 14.50 % contra un 85.12 %, es decir una diferencia de alrededor de
70 %.
En la Figura 12 se muestra la representación visual de la ubicación del conjunto de nodos
pertenecientes a la instancia antes mencionada. Cada vértice corresponde a un nodo, y cada
línea corresponde a una arista, es decir a la conexión que existe entre un nodo y otro.
39

Figura 12. Representación gráfica de DU100-06-05-18.
En la Figura 13 se desea mostrar la solución gráfica tanto para el modelo TDPM como para el
TDPC para visualizar ambas soluciones óptimas y las diferencias que existen en cada uno
con la instancia DU100-06-05-18.
40

Solución óptima TDPM para
DU100-06-05-18.
Valor de la función objetivo evaluada con el modelo p-centro: 260.75
Solución óptima TDPC para
DU100-06-05-18.
Valor óptimo de la función objetivo en el modelo p-centro: 140.85
Figura 13. Comparación de soluciones óptimas para DU100-06-05-18.
En la Figura 13 se muestra una comparación grafica entre las dos soluciones óptimas
correspondientes a cada uno de los modelos estudiados. En el lado izquierda se muestra la
solución óptima para la instancia utilizando el modelo TDPM. Dentro de esta gráfica se
aprecia los nodos distribuidos en seis territorios. Como se aprecia en la gráfica, se ha
señalado con una flecha a la mayor de estas distancias con un valor de 260.75. En la parte
derecha se muestra la gráfica correspondiente a la solución óptima del modelo TDPC y
asimismo se ha indicado con una flecha la distancia del centro del territorio al nodo más
alejado, la cual le corresponde un valor de 140.85. Como se observa en la Figura 13, la
distancia respecto el centro del territorio al nodo más alejado para la solución del modelo
TDPM es mayor que la distancia del centro al nodo más alejado del modelo diseñado con
métrica TDPC. Es decir, que el valor de la solución óptima del modelo TDPM evaluada en la
función objetivo del modelo TDPC tiene un valor aceptable, pero no óptimo.
En el análisis realizado con los las instancias de 100 nodos, 6 territorios y 5 % de tolerancia
es de sumo interés tener en cuenta los tiempos de solución que requiere cada modelo
estudiado. En la Tabla 5 se muestra el tiempo empleado, en segundos, para resolver cada una
de las instancias. La primera columna indica el nombre de la instancia, seguido por la
41

columna que indica el tiempo de solución del modelo TDPM y por último la columna en
donde se observa el tiempo requerido para solucionar el modelo TDPC.
Tabla 5. Tiempos de solución para instancias de 100 nodos, 6 territorios y 5 % de tolerancia.
nombre instancia Tiempos de solución (seg)TDPM TDPC
DU100-06-05-01 444 31084DU100-06-05-02 138 13520DU100-06-05-03 72 10394DU100-06-05-04 25 76985DU100-06-10-05* 144 11871DU100-06-05-06 62 16548DU100-06-05-07 19 28889DU100-06-05-08 18 61194DU100-06-10-09* 43 76113DU100-06-05-10 45 12663DU100-06-05-11 21 19713DU100-06-05-12 22 22894DU100-06-05-13 19 13779DU100-06-05-14 19 64787DU100-06-05-15 155 76161DU100-06-05-16 423 21519DU100-06-05-17 111 12208DU100-06-05-18 52 11845DU100-06-05-19 20 17639DU100-06-05-20 100 19683Media 97.6 30974.45
Como se aprecia en la Tabla 5, existe una diferencia considerable entre los tiempos de un
modelo y otro, ya que el tiempo de solución promedio del modelo TDPM es de 97.6
segundos, en cambio para el modelo TDPC se estima un tiempo promedio de 30,974.45
segundos.
5.5 Conclusiones de los experimentos
42

Como se vio en los resultados, se obtienen los valores óptimos para cada modelo estudiado.
Asimismo, en las Figuras E2, F2 y G2 se observan las soluciones óptimas obtenidas con una
instancia específica para cada uno de los tamaños analizados. Se aprecia cómo la
configuración de los territorios formados cambia completamente de un modelo a otro.
Además, se observa una considerable diferencia entre cada una de las desviaciones relativas
obtenidas para cada modelo estudiado en este experimento; visualizándose en todos los casos
valores menores en la columna con los valores DRM, es decir, la columna que muestra los
valores del cociente:
DRM
( ) ( )( )mm
mmcm
xf
xfxf −=
Esta ecuación denota que tenemos la función del modelo TDPM evaluada con la solución de
TDPC menos la función objetivo TDPM con su solución óptima entre la función objetivo
TDPM con su solución óptima correspondiente.
De tal modo se concluye que, si se selecciona la solución del modelo TDPM y al final resulta
que el modelo TDPC fuera el más apropiado, las soluciones obtenidas con el modelo TDPM
se desviarán en promedio 20.66 %, 27.18 % y 31.85 % para las instancias de 60, 80 y 100
nodos, respectivamente, del óptimo del modelo TDPC. Por otra parte, si se selecciona la
solución del modelo TDPC y posteriormente resulta que el modelo de dispersión TDPM es
más conveniente, las soluciones obtenidas con el modelo TDPC se desviarán del óptimo del
modelo TDPM en promedio un 12.66 %, 11.13 % y 11.78 % para las instancias de 60, 80 y
100 nodos, respectivamente, es decir que el modelo TDPC resulta ser más robusto. Al mismo
43

tiempo es de suma importancia declarar que los tiempos de solución del modelo denominado
TDPC son considerablemente mayores a los del modelo TDPM, es decir, que se cuenta con
un beneficio por ser más robusto pero con mayores tiempos de solución.
6 Conclusiones
En este capítulo se presentan las conclusiones en base a los resultados obtenidos en los
experimentos presentados en el capítulo anterior, las conclusiones en general y las
aportaciones que tiene este trabajo.
44

La comparación de este par de modelos de diseño de territorios es imprescindible, ya que se
sabe que ambos dan soluciones óptimas con su modelo respectivamente para instancias de
tamaño relativamente pequeño que se estudiaron, es decir de 60, 80 y 100 nodos. El tema en
cuestión era determinar cuál de los dos modelos era preferible utilizar, analizando cuál tenia
un comportamiento más robusto.
Al llevar a cabo un experimento exhaustivo se demostró y se avaló la hipótesis expresada en
la Sección 1.5. Este análisis nos da una perspectiva clara en la que se sabe con seguridad que
el modelo de dispersión TDPC muestra resultados superiores a los obtenidos con el modelo
TDPM, ya que en los tres tamaños de instancias utilizados se demuestra que si se hace una
transición del modelo TDPC al modelo TDPM es mejor a un cambio del modelo TDPM a
TDPC, es decir si se toma una solución hallada con el modelo TDPC y se evalúa en el TDPM
se tendrá una menor desviación relativa. Conforme se incrementa el tamaño de las instancias,
se advierte como hay un incremento en la diferencia entre los intervalos de optimalidad
calculados para ambos modelos matemáticos. Esto quiere decir que se tiene una superioridad
en el modelo de p-centro con respecto al modelo diseñado con la métrica de p-mediana. Pero
también se observa cómo los tiempos de solución se vuelven cada vez más grandes, es decir,
mientras se va aumentando el tamaño del territorio el tiempo de solución se ve afectado. En
conclusión, el modelo TDPC es más robusto que el TDPM pero con tiempos de solución
significativamente mayores para instancias de 100 nodos.
6.1 Aportaciones del trabajo
45

La aportación principal de esta tesis es el estudio comparativo de dos medidas de desempeño
más populares para medir dispersión en diseño de territorios. Anteriormente no se había
profundizado sobre cual de los dos modelos presentados por Segura Ramiro (2008) y
Caballero Hernández (2008) poseía superioridad respecto al otro. La misión de este análisis
es proporcionar la mejor alternativa entre estos dos modelos enfocados al diseño de territorios
comerciales.
Asimismo se incluyen imágenes para representar de forma visual las distintas soluciones que
se tiene y compararlas no solo numéricamente, sino gráficamente, para así tener un juicio
más acertado en relación a las soluciones tanto para el modelo p-mediana como para
p-centro.
Al realizar este análisis se puede determinar las ventajas y desventajas respecto a los modelos
estudiados, ya que se establece cuál de los modelos es más robusto y por ende preferible
utilizar. Posteriormente se pueden realizar estudios de este tipo pero con distintos modelos de
optimización con el fin de saber su desempeño respecto a sus similares. Además es de mucha
ayuda mostrar soluciones gráficas porque sirven para percibir de una forma más fácil las
soluciones obtenidas.
Además se creó una interfaz gráfica de usuario, desarrollada en Matlab para desplegar los
gráficos presentados en la Sección 5.4. En ésta se puede visualizar tanto la métrica de
dispersión utilizada, ya sea TDPC o TDPM, el número de nodos, las coordenadas de cada
uno de los centros y el valor de la solución objetivo.
46

Apéndice A
Prueba estadística para conjuntos de datos DRM y DRC
En este Apéndice se presentan los resultados obtenidos de las pruebas estadísticas realizadas
a los conjuntos de datos DRM y DRC con los diferentes tamaños de territorios.
47

Se llevo a cabo un estudio estadístico con el propósito de presentar de una forma concreta y
precisa que los valores DRM son menores que los valores DRC. Teniendo como hipótesis nula
que ambos valores son iguales y como hipótesis alternativa que los valores obtenidos de DRM
son mayores a los de DRC como se muestra en la Tabla 6, donde µ(DRM) y µ(DRC)
representan las medias de los conjuntos de datos DRM y DRC, respectivamente. Se aplicó la
prueba de t de student (Walpole, Myers y Myers, 1999) a ambas muestras.
Tabla 6. Hipótesis nula contra alternativa para estadísticos de prueba.
En la Tabla 7 se presentan los valores de las desviaciones relativas para cada una de las
instancias de 60 nodos estudiadas.
Tabla 7. Desviaciones relativas para instancias de 60 nodos.
Instancia DRM (%) DRC (%)DU60-04-05-01 12.82 38.88DU60-04-05-02 9.63 14.37DU60-04-05-03 4.94 11.78DU60-04-05-04 5.77 37.24DU60-04-05-05 12.42 18.39DU60-04-05-06 7.49 0.60DU60-04-05-07 14.42 39.13
48
H0: µ (DRM)= µ (DRC)H1: µ (DRM)< µ (DRC)

DU60-04-05-08 10.41 28.16DU60-04-05-09 21.44 4.70DU60-04-05-10 4.80 18.86DU60-04-05-11 34.16 20.99DU60-04-05-12 10.66 29.99DU60-04-05-13 17.44 8.35DU60-04-05-14 7.78 17.28DU60-04-05-15 14.48 34.89DU60-04-05-16 12.67 23.49DU60-04-05-17 8.80 20.35DU60-04-05-18 12.48 23,08DU60-04-05-19 12.13 12,44DU60-04-05-20 18.43 10,3
Tabla 8. Datos de desviación relativa para cálculo de t para instancias de 60 nodos.
Cálculo de t DRM DRC
α 0.01media 12.66 20.66
Varianza 44.99 127.88Desv. Std 6.71 11.31
1/n1 0.05 -1/n2 - 0.05sp2 86.43sp 9.30t0 -2.72
En la Tabla 8 se muestran los datos necesarios para el estadístico de prueba que se calcula
con la siguiente fórmula:
21
0210
11
~~
nns
xxt
p +
∆−−=
Tabla 9. Valor αt .
Cálculo de αt
Con:
49

Α 0.01n1+n2-2 38.00 2.43
En la Tabla 9 vemos el valor de t con el valor de α junto con el de 221 −+ nn . El criterio de
rechazo de esta prueba es el que se muestra en la Tabla 10.
Tabla 10. Criterio de rechazo para instancias de 60 nodos.
Criterio de rechazo de H0t0 <
-tα
-2.72 -2.43
Como se aprecia en la Tabla 10, se cumple el criterio de rechazo, ya que 72.20 −=t <
43.2−=− αt , por lo tanto se se rechaza H0, y por lo tanto se acepta H1: DRM es
significativamente menor que DRC.
En la Tabla 11 se presentan los valores de las desviaciones relativas para cada una de las
instancias de 80 nodos estudiadas.
Tabla 11. Desviaciones relativas para instancias de 80 nodos.
Instancia DRM (%) DRC (%)DU80-05-05-01 10.56 41.45DU80-05-05-02 12.09 27.50DU80-05-05-03 13.35 27.13DU80-05-05-04 13.74 31.19DU80-05-05-05 8.67 29.31DU80-05-05-06 11.98 45.60DU80-05-05-07 9.17 27.43DU80-05-05-08 12.65 29.29
50

DU80-05-05-09 11.43 14.11DU80-05-05-10 14.18 14.38DU80-05-05-11 8.86 25.03DU80-05-05-12 13.44 12.98DU80-05-05-13 4.44 21.39DU80-05-05-14 9.06 32.37DU80-05-05-15 10.61 51.15DU80-05-05-16 8.91 36.57DU80-05-05-17 15.01 36.02DU80-05-05-18 12.75 7.20DU80-05-05-19 16.11 9.36DU80-05-05-20 5.59 24.25
En la Tabla 12 se muestran los datos necesarios para el cálculo del estadístico de prueba t.
Tabla 12. Datos de desviación relativa para cálculo de t para instancias de 80 nodos.
Cálculo de t DRM DRC
α 0.01Media 11.13 27.19
Varianza 9.12 138.72Desv. Std 3.02 11.78
1/n1 0.05 -1/n2 - 0.05sp2 73.92sp 8.60t0 -5.91
En la Tabla 13 se aprecia el criterio de rechazo, ya que se tiene el mismo valor para αt
calculado en la Tabla 9, por lo tanto 91.50 −=t < 43.2−=− αt , es decir se rechaza H0 y se
acepta H1: DRM es significativamente menor que DRC.
Tabla 13. Criterio de rechazo para instancias de 80 nodos.
Criterio de rechazo de H0t0 < -tα
-5.91 -2.43
51

En la Tabla 14 se presentan los valores de las desviaciones relativas para cada una de las
instancias de 100 nodos estudiadas.
Tabla 14. Desviaciones relativas para instancias de 100 nodos.
Instancia DRM (%) DRC (%)DU100-06-05-01 12.74 31.96DU100-06-05-02 20.66 12.70DU100-06-05-03 12.22 35.72DU100-06-05-04 7.74 17.66DU100-06-05-05 9.89 11.09DU100-06-05-06 16.11 48.48DU100-06-05-07 16.37 22.37DU100-06-05-08 8.07 38.22DU100-06-05-09 11.76 37.88DU100-06-05-10 4.65 19.08DU100-06-05-11 13.90 27.75DU100-06-05-12 10.83 32.20DU100-06-05-13 21.17 22.69DU100-06-05-14 4.43 5.34DU100-06-05-15 8.68 14.43DU100-06-05-16 5.89 79.24DU100-06-05-17 13.36 12.94DU100-06-05-18 14.50 85.12DU100-06-05-19 14.07 33.51DU100-06-05-20 8.52 48.65
Tabla 15. Datos de desviación relativa para cálculo de t para instancias de 100 nodos.
Cálculo de t DRM DRC
α 0.01Media 11.78 31.85
Varianza 22.21 444.93Desv. Std 4.71 21.09
1/n1 0.05 -1/n2 - 0.05Sp2 233.57Sp 15.28t0 -4.15
52

En la Tabla 15 se muestran los datos necesarios para el cálculo del estadístico de prueba t.
En la Tabla 16 se aprecia el criterio de rechazo, ya que se tiene el mismo valor para αt
calculado en la Tabla 9, por lo tanto 91.50 −=t < 43.2−=− αt , es decir se rechaza H0 y se
acepta H1: DRM es significativamente menor que DRC.
Tabla 16. Criterio de rechazo para instancias de 100 nodos.
Criterio de rechazo de H0t0 < tα
-4.15 -2.43
Bibliografía
B. Bozkaya, E. Erkut y G. Laporte (2003). A tabu search heuristic and adaptive memory
procedure for political districting. European Journal of Operational Research, 144(1):12-26.
S. I. Caballero-Hernández, R. Z. Ríos-Mercado, F. López y S. E. Schaeffer (2007). Empirical
evaluation of a metaheuristic for commercial territory design with joint assignment
53

constrains. En J. E. Fernández, S. Noriega, A. Mital, S. E. Butt y T. K. Fredericks, editores,
Proceedings of the 12th Annual International Conference of Industrial Engineering Theory.
Applications & Practice (IJIE), pp. 422-427, Cancún, México, Noviembre.
S. I. Caballero Hernández (2008). Un procedimiento de búsqueda voraz, aleatorizado y
adaptativo para el diseño eficiente de territorios de atención comercial con requerimientos
de asignación conjunta. Tesis de maestría, FIME, UANL, San Nicolás de los Garza, México,
Mayo.
T. H. Cormen, C. E. Leiserson, R. L. Rivest y C. Stein (2001). Introduction to Algorithms. 2ª
Edición. McGraw-Hill, Cambridge, EUA.
M. G. Elizondo Amaya (2010). Un esquema de acotamiento dual para un problema de
diseño territorial. Tesis de maestría, FIME, UANL, San Nicolás de los Garza, México, Julio.
E. Erkut y S. Neuman (1990). Comparison of models for dispersing facilities. INFOR,
29(2):68-83.
B. Fleischmann y J. N. Paraschis (1988). Solving a large scale districting problem: A case
report. Computers and Operations Research, 15(6):521-533.
J. A. George, B. W. Lamar y C. A. Wallace (1997). Political district determination using
large-scale network optimization. Socio-Economic Planning Sciences, 31(1):11-28.
54

P. Grilli di Cortona, C. Manzi, A. Pennisi, F. Ricca y B. Simeone (1999). Evaluation and
Optimization of Electoral Systems. SIAM Monographs on Discrete Mathematics and
Aplications. SIAM, Philadelphia, EUA.
G. Y. Handler (1990). p-Centers Problems. En P. B. Mirchandani y R. L. Francis, editores,
Discrete Location Theory, Capítulo 7, pp. 305-347. Wiley, New York, EUA.
F. S. Hillier y G. I. Liberman (2001) Investigación de operaciones. 7ª Edición.
McGraw-Hill. México, D.F.
ILOG, S.A. CPLEX 11.2 Online documentation, 2003.
ftp://ftp.software.ibm.com/software/websphere/ilog/docs/optimization/cplex/ps_usrmancplex
J. Kalcsics, S. Nickel y M. Schröder. (2005). Toward a unified territorial design approach:
Applications, algorithms and GIS integration. TOP, 13(1):1-56.
P. B. Mirchandani (1990). The p-Median problem and generalizations. En P. B. Mirchandani
y L. Francis, editores, Discrete Location Theory, Capítulo 2, pp. 55-117. Wiley, New York,
EUA.
K. G. Murty (1995). Operations Research: Deterministic Optimization Models. Prentice
Hall, Englewood Cliffs, EUA.
55

R. Z. Ríos-Mercado y E. Fernández (2009). A reactive GRASP for a commercial territory
design problem with multiple balancing requirements. Computers & Operations Research,
36(3):755-776.
J. C. Salazar Acosta (2009). Diseño de territorios comerciales con costos de ruteo. Tesis de
maestría, FIME, UANL, San Nicolás de los Garza, México, Julio.
M. A. Salazar Aguilar (2010). Models, algorithms, and heuristics for multiobjective
commercial territory design. Tesis de doctorado, FIME, UANL, San Nicolás de los Garza,
México, Abril.
M. A. Salazar-Aguilar, R. Z. Ríos-Mercado y M. Cabrera-Ríos (2010). New models for
commercial territory design. Networks and Spatial Economics (aceptado,
doi:10.1007/s11067-010-9151-6).
J. A. Segura Ramiro (2008). Un algoritmo de localización-asignación para el diseño
eficiente de planes territoriales de uso comercial. Tesis de maestría, FIME, UANL, San
Nicolás de los Garza, México, Junio.
L. G. Vargas Suárez (2005). Un procedimiento de búsqueda miope, adaptativa y
aleatorizada para la definición de territorios de atención comercial. Tesis de maestría,
FIME, UANL, San Nicolás de los Garza, México, Junio.
56

R. E. Walpole, R. H. Myers y S. H. Myers (1999) Probabilidad y estadística para
ingenieros. 6ª Edición. Prentice Hall, México, D.F.
J. C. Williams Jr. (1995). Political redistricting: A review. Papers in Regional Science,
74(1):13-40.
A. A. Zoltners y P. Sinha (1983). Sales territory alignment: A review and model. Magnament
Science, 29(11):1237-1256.
57